02 - Elementi Beam
23
Politecnico di Milano Dipartimento di Meccanica ELEMENTI 1D: BEAM Mario Guagliano Il metodo degli Elementi Finiti per l’analisi dei prodotti industriali
-
Upload
gabriele-simino -
Category
Documents
-
view
87 -
download
5
Transcript of 02 - Elementi Beam

Politecnico di Milano Dipartimento di
Meccanica
ELEMENTI 1D: BEAM
Mario Guagliano
Il metodo degli Elementi Finiti per l’analisi dei prodotti industriali

Elementi 1D: Beam 2
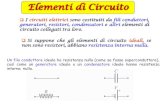
Elementi 1D
Gli elementi finiti 1D sono caratterizzati da geometria mono-dimensionale (ma applicazione spaziale) e sono particolarmente adatti a rappresentare componenti dove una dimensione è prevalente sulle altre due. Da questo punto di vista, la geometria corrisponde all’asse baricentrico del componente stesso BAR (barra o biella): presentano la sola azione assiale
“Struttura reticolare”
BEAM (trave): presentano azione assiale, taglio, flessione e torsione
“Telaio”
gdl: solo traslazioni
gdl: traslazioni e rotazioni

Elementi 1D: Beam 3
Elementi 1D

Elementi 1D: Beam 4
Beam nel piano
Elemento trave 2D
Solo momento nel piano e forza trasversale
4 gdl: v1, θ1, v2, θ2
v = v(x)
Per forze e momenti applicati agli estremi, la v(x) di una trave con EJ costante è cubica

Elementi 1D: Beam 5
Rigidezza col metodo diretto
I termini di [K] sono uguali alle forze e momenti nodali che generano (o mantengono) la deformata corrispondente all’attivazione di un gdl unitario (gli altri 0): c’è una somiglianza col metodo degli spostamenti … Le corrispondenti deformate sono le funzioni di forma Ni

Elementi 1D: Beam 6
Rigidezza col metodo diretto
F = 1
θ=-L2/2EJ
v=L3/3EJ
+
M = 1
θ=-L/EJ
v=L2/2EJ
Soluzioni semplici da linea elastica , PLV o metodi affini

Elementi 1D: Beam 7
Rigidezza col metodo diretto
3 2
1 11 21
2
1 11 21
L Lv 1 k k 13EJ 2EJL L0 k k 02EJ EJ
= − =
ϑ = − + =
y 11 31
y 11 41 21
F 0 k k 0
M 0 k L k k 0
= + =
= − + + =
∑∑
Deformata della trave da espressioni note: definiamo k11 e k21 in modo che la deflessione sia unitaria e la rotazione nulla
Equilibrio della trave

Elementi 1D: Beam 8
Rigidezza col metodo diretto
3 2
1 11 21
2
1 11 21
11 3
21 2
L Lv 1 k k 13EJ 2EJL L0 k k 02EJ EJ
soluzione:12EJkL6EJkL
⎧= − =⎪⎪
⎨⎪ϑ = − + =⎪⎩
=
=
11 31
11 41 21
31 3
41 2
k k 0k L k k 0
soluzione:12EJkL
6EJkL
+ =⎧⎨− + + =⎩
= −
=
• I valori k sono funzione di E, J e L (materiale e geometria) • alcuni valori di k sono negativi (per garantire l’equilibrio) • la soluzione trovata rappresenta una colonna (in questo caso la prima) della matrice [K]

Elementi 1D: Beam 9
Rigidezza col metodo diretto
Procedendo allo stesso modo con gli altri gdl
[ ]
3 2 3 2
2 2
3 2 3 2
2 2
12EJ 6EJ 12EJ 6EJL L L L6EJ 4EJ 6EJ 2EJL L L LK12EJ 6EJ 12EJ 6EJL L L L6EJ 2EJ 6EJ 4EJL L L L
⎡ ⎤−⎢ ⎥
⎢ ⎥⎢ ⎥−⎢ ⎥
= ⎢ ⎥⎢ ⎥− − −⎢ ⎥⎢ ⎥⎢ ⎥−⎣ ⎦
{ }
1
1
2
2
v
uv
⎧ ⎫⎪ ⎪ϑ⎪ ⎪
= ⎨ ⎬⎪ ⎪⎪ ⎪ϑ⎩ ⎭

Elementi 1D: Beam 10
Osservazioni
Limitazioni L’ipotesi di v(x) cubica fa riferimento alla deformata di una trave ad asse rettilineo, sezione costante, caricata agli estremi. Un carico distribuito comporta una v(x) di quarto grado. La soluzione fornita dagli elementi beam sotto l’azione di carichi distribuiti è approssimata, ma l’approssimazione migliora all’aumentare del numero degli elementi (infittimento della mesh)
Sforzi Gli sforzi sono espressi dalla relazione σx=My/J, dove M è legato alla curvatura espressa in funzione degli spostamenti nodali {u}
[ ]{ }2
2
d vM EJ EJ B udx
= =
Essendo i termini di [B] lineari, M varia linearmente con la coordinata x lungo ogni elemento

Elementi 1D: Beam 11
Beam nel piano + azione assiale
In questo caso, si hanno sei gdl
u1 u2
[ ]{ }
13 2 3 2
12 2
1
23 2 3 2
22 2
2
uAE L 0 0 AE L 0 0v0 12EJ L 6EJ L 0 12EJ L 6EJ L
0 6EJ L 4EJ L 0 6EJ L 2EJ LK u
uAE L 0 0 AE L 0 0v0 12EJ L 6EJ L 0 12EJ L 6EJ L
0 6EJ L 2EJ L 0 6EJ L 4EJ L
− ⎧ ⎫⎡ ⎤⎪ ⎪⎢ ⎥− ⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥ θ− ⎪ ⎪
= ⎨ ⎬⎢ ⎥− ⎪ ⎪⎢ ⎥
⎪ ⎪⎢ ⎥− − −⎪ ⎪⎢ ⎥θ− ⎪ ⎪⎣ ⎦ ⎩ ⎭

Elementi 1D: Beam 12
Beam nello spazio
y, Jy
z, Jz
12 gdl (3 traslazioni e 3 rotazioni per ogni nodo) Per il gdl θx bisogna considerare la rigidezza torsionale
tx
t
Mk
θ =
pt
GJk
L=
tGkLΚ
=
per sezione circolare
con Κ< Jp per sezione generica
Sezioni generiche si torcono maggiormente …

Elementi 1D: Beam 13
Beam nello spazio
T=Torque=Mt

Elementi 1D: Beam 14
Beam nello spazio
[ ]{ }
1
11 2 1 2
11 2 1 2
x1
y13 2 4
3 2 4 z1
2
1 2 2
1 2 2
x2
3 y2
3 z2
uX 0 0 0 0 0 X 0 0 0 0 0vY 0 0 0 Y 0 Y 0 0 0 YwZ 0 Z 0 0 0 Z 0 Z 0
S 0 0 0 0 0 S 0 0Z 0 0 0 Z 0 Z 0
Y 0 Y 0 0 0 YK u
X 0 0 0 0 0 uY 0 0 0 Y v
Z 0 Z 0 wsym S 0 0
Z 0Y
⎧ ⎫−⎡ ⎤⎪⎢ ⎥− ⎪⎢ ⎥⎪⎢ ⎥− − −⎪⎢ ⎥ θ− ⎪⎢ ⎥⎪⎢ ⎥ θ⎪⎢ ⎥
− θ⎪⎢ ⎥= ⎨⎢ ⎥⎪⎢ ⎥⎪−⎢ ⎥⎪⎢ ⎥⎪⎢ ⎥⎪⎢ ⎥ θ⎪⎢ ⎥θ⎪⎢ ⎥⎪⎢ ⎥ θ⎣ ⎦ ⎩
i i y zZ come Y, ma con J al posto di J
S GK / L (rigidezza torsionale)
⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎭
=
Servono molte caratteristiche geometriche e del materiale …

Elementi 1D: Beam 15
Coordinate globali
[ ] [ ] [ ][ ]TK T K Tʹ′=
[ ]
[ ][ ]
[ ][ ]
0 0 00 0 0
T0 0 00 0 0
⎡ ⎤Λ⎢ ⎥
Λ⎢ ⎥=⎢ ⎥Λ⎢ ⎥
Λ⎢ ⎥⎣ ⎦
[ ]1 1 1
2 2 2
3 3 3
l m nl m nl m n
⎡ ⎤⎢ ⎥Λ = ⎢ ⎥⎢ ⎥⎣ ⎦

Elementi 1D: Beam 16
Riduzione dei carichi distribuiti
N.B. I carichi concentrati possono essere applicati solo ai nodi che possiedano il gdl corrispondente al carico generalizzato (es.: non è possibile applicare un momento ad un nodo di un elemento bar)
I carichi sono da intendersi generalizzati (forze e momenti)
Carichi distribuiti: • carichi per unità di lunghezza (travi, elementi piani) o di area (shell, solidi) • forze di massa (peso, inerzia) I carichi concentrati devono essere applicati ai nodi I carichi distribuiti agiscono invece tra i nodi
{u} = [K]-1{f}, con {f} forze nodali => è necessario definire una procedura di riduzione dei carichi distribuiti ai nodi

Elementi 1D: Beam 17
Riduzione dei carichi distribuiti
Elemento bar
Il carico totale distribuito su un elemento vale qL e viene applicato in parti uguali e concentrato (qL/2 in questo caso) su ogni nodo
Nel caso di più elementi, ad un nodo comune viene applicato un carico concentrato che è la somma dei contributi dei singoli elementi adiacenti al nodo stesso

Elementi 1D: Beam 18
Riduzione dei carichi distribuiti
Elemento beam
In questo caso, è necessario aggiungere anche momenti flettenti che sono le reazioni vincolari del problema iperstatico, cambiate di segno (ovvero applicate al nodo). Esempio:
Le forze si sommano e, se gli elementi hanno ugual lunghezza, i momenti si elidono

Elementi 1D: Beam 19
Riduzione dei carichi distribuiti
θz1
v1
θz2
v2
M2
F2 F1
M1
I carichi concentrati sostitutivi di quelli distribuiti si dicono cinematicamente equivalenti e producono lo stesso lavoro del carico distribuito stesso.
L
1 1 1 z1 2 2 2 z2 0
2 31 2 3 4
Fv M F v M qv(x)dx
conv(x) x x x
− − θ − + θ = −
= β +β +β +β
∫
Per calcolare F1, F2, M1 e M2 bisogna introdurre le funzioni di forma

Elementi 1D: Beam 20
Riduzione dei carichi distribuiti
( )
1 1 2 z1 3 2 4 z2
1 1 1 z1 2 2 2 z2L
1 1 2 z1 3 2 4 z20
2 3L L
1 1 2 30 0
2 3L L
2 3 2 30 0
L
1 20
v(x) N (x)v N (x) N (x)v N (x)Fv M F v M
q N (x)v N (x) N (x)v N (x) dx
3x 2x qLF qN (x)dx q 1 dxL L 2
3x 2x qLF qN (x)dx q dxL L 2
M qN (x)dx
= + θ + + θ
+ θ + − θ =
= + θ + + θ
⎛ ⎞= = − + =⎜ ⎟
⎝ ⎠
⎛ ⎞= = − =⎜ ⎟
⎝ ⎠
=
∫
∫ ∫
∫ ∫
∫2 3 2L
20
3 2 2L L
2 4 20 0
2x x qLq x dxL L 12
x 2x qLM qN (x)dx q dxL L 12
⎛ ⎞= − − =⎜ ⎟
⎝ ⎠
⎛ ⎞= − = − + =⎜ ⎟
⎝ ⎠
∫
∫ ∫

Elementi 1D: Beam 21
Riduzione dei carichi distribuiti
I carichi concentrati che producono lo stesso lavoro del carico distribuito si dicono anche staticamente equivalenti perché le loro risultati coincidono con quelle del carico distribuito stesso. Si può rinunciare a questa proprietà, ad esempio, concentrando solo i carichi trasversali e trascurando i momenti
Quest’approccio è tipicamente preferito per gli elementi che possiedono gdl rotazionali
I momenti nodali agli appoggi A e B non dovrebbero essere presenti … Inoltre se gli elementi fossero di lunghezza differente, si creerebbero dei momenti netti ai nodi che in realtà non ci sono e quindi si perderebbe in accuratezza del risultato
Entrambe le metodologie (con e senza equivalenza sul lavoro) garantiscono la convergenza alla soluzione esatta infittendo il modello

Elementi 1D: Beam 22
Riduzione dei carichi distribuiti
In generale, i gdl nodali calcolati col FEM non sono esatti
Nel caso particolare di elementi bar e beam uniformi (geometria e materiale) con carichi lavoro-equivalenti invece i gdl nodali calcolati sono esatti
Ciò non significa che gli spostamenti siano esatti tra i nodi, né che lo siano gli sforzi nodali
Se i carichi nodali non sono lavoro-equivalenti, anche i gdl nodali non sono esatti, però, a seconda delle situazioni, gli sforzi calcolati possono risultare più accurati

Elementi 1D: Beam 23
Riduzione dei carichi distribuiti
Un software FEM determina gli spostamenti locali e da questi gli sforzi: σx=Eεx=E[B]{u}
Usualmente gli spostamenti son più accurati degli sforzi perché questi ultimi sono proporzionali alle deformazioni e queste sono derivate degli spostamenti (e la derivata genera differenze significative tra le funzioni) I valori più accurati degli sforzi sono solitamente quelli di centro elemento, però i valori più alti (e ricercati) sono quelli al bordo. Un problema tipico del FEM Nel caso di elementi beam, si parte dal momento flettente (ricavato dalla curvatura), ma la procedura, a volte, può generare momenti dove in realtà non ce ne sono