ANNO III - AGOSTO - M infor locale D M M - .gior. - S Cart ...
Upload
gian-mauro-mussoCategory
view
165download
8Progettazione, realizzazione e controllo di unsistema Cart and Beam
Gian Mauro Musso
Universit degli Studi di TriesteDipartimento di Ingegneria e Architettura
Corso di laurea in Ingegneria dellInformazione
Relatoreprof. ing. Gianfranco Fenu
Correlatoreprof. ing. Felice Andrea Pellegrino
4 dicembre 2015
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 1 / 13
Sommario
Lo scopo di questo progetto la progettazione, costruzione econtrollo di un sistema Cart and Beam. Il sistema
caratterizzato da un vagoncino che libero di scorrere soprauna barra, la quale, collegata ad un motore elettrico, pu
inclinarsi orizzontalmente.
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 2 / 13
Introduzione
Schema a blocchi del sistema
x + e1 C1(s) + e2 C2(s)
u2 A2(s)
Tr
+
Tm G2(s)m
G1(s)
xm
H(s)
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 3 / 13
Strumenti
Principali componenti necessari
AzionamentoI Motore DCI Motore passo-passo
Sensore di posizione lineare del carrelloI Sensore resistivoI Sensore ottico ad infrarossiI Sensore ultrasonico
Sensore di posizione angolare del motoreI PotenziometroI Encoder
MicrocontrolloreMotor Driver
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 4 / 13
Strumenti
Sensore ultrasonicoHC-SR04
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 5 / 13
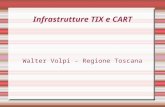
Test
Caratterizzazione sensore ultrasonico
Serie di misurazioni a distanza fissa confrontate con una opportunascala graduata disegnataEsportazione dati su MATLABIdentificazione della retta di regressione lineare attraverso il metododei minimi quadrati mediante il Curve Fitting Toolbox
I Errore di guadagnoI Errore di offset
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 6 / 13
Test
Caratterizzazione sensore ultrasonico
Scala [cm]5 10 15 20 25 30 35 40 45 50
Se
nso
re [
cm
]
5
10
15
20
25
30
35
40
45
50
Sensore vs. ScalaRegressione lineare
Scala [cm]5 10 15 20 25 30 35 40 45 50
Se
nso
re [
cm
]
-0.6
-0.4
-0.2
0
0.2
0.4
0.6Regressione lineare - residuals
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 7 / 13
Controllo
Controllo del motore passo-passo: AccelStepper
Software che fornisce la corretta sequenza di impulsi e il segnale dicomando di direzioneGenerazione di una rampa di velocit per il controllo della posizione
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 8 / 13
Controllo
Progettazione del regolatore PID
Taratura dei coefficienti del PID affinch vi sianoErrore statico nullo a regimeBuona velocit di rispostaBasso overshoot
Taratura empirica sperimentale
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 9 / 13
Controllo
Progettazione del regolatore PID
Taratura dei coefficienti del PID affinch vi sianoErrore statico nullo a regimeBuona velocit di rispostaBasso overshoot
Taratura empirica sperimentale
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 9 / 13
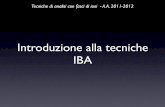
Controllo
Progettazione del regolatore PID
Tempo [s]0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Posiz
ione [
cm
]
0
5
10
15
20
25
30
35
40Risposta allo scalino con Kp = 10, Ki = 0.001, Kd = 0.001
PPIPID
X: 1.755Y: 24.92
Tempo [s]0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Posiz
ione [cm
]
10
15
20
25
30
35Reiezione del disturbo con Kp = 10, Ki = 0.001, Kd = 0.001
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 10 / 13
Demo
Video Demo
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 11 / 13
Next Up
Sviluppi futuri ed eventuali
Taratura PID mediante simulazione Hardware-In-The-LoopMetodi di taratura PID empiriciControllo su base statoControllo FuzzyControllo adattativo
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 12 / 13
FineGrazie per lattenzione!
Gian Mauro Musso Progettazione, realizzazione e controllo di un sistema Cart and Beam 13 / 13
fd@myVidPlayer: