Tesina emissione acustica
26
Politecnico di Torino I Facoltà di Ingegneria Corso di Plasticità e Frattura A.A. 2011/12
-
Upload
claudia-marino -
Category
Documents
-
view
75 -
download
2
description
Tesina del Corso di Plasticità e Frattura sulla tecnica delle Emissioni acustiche
Transcript of Tesina emissione acustica

Politecnico di Torino
I Facoltà di Ingegneria
Corso di Plasticità e Frattura
A.A. 2011/12

Introduzione
Quando un solido è soggetto ad uno stress di una certa intensità, onde elastiche
impulsive sono generate al suo interno e possono essere rilevate attraverso un
trasduttore posto in contatto col solido stesso. Tale fenomeno, chiamato Emissione
Acustica (AcousticEmission - AE) o in alternativa onde di ”stress”, interessa una vasta
gamma di materiali come il metallo, la ceramica, la plastica ma anche cemento, vetro e
legno. Le onde elastiche generate coprono uno spettro in frequenza molto ampio, che va
dagli infrasuoni agli ultrasuoni. Un esempio familiare in cui il fenomeno può essere
udito anche dall’orecchio umano è il ”crack” del legname causato da tensioni interne,
o quando esso è soggetto a carichi ingenti che ne provocano la rottura. L’insorgenza di
tale fenomeno si riscontra in situazioni di svariata natura: deformazioni meccaniche e
fratture, trasformazioni di fase, corrosione, attrito, così come in processi di natura
magnetica.
L’analisi dell’emissione acustica come mezzo diagnostico per la caratterizzazione
dei materiali soggetti a sollecitazioni meccaniche ebbe un forte impulso durante gli
anni ’60, quando la disponibilità di idonea strumentazione scientifica e di trasduttori
sufficientemente sensibili permisero l’applicazione su larga scala di tali tecniche. Da
quel momento tali onde elastiche sono state ampiamente osservate in numerose
applicazioni, ed al termine Emissione Acustica è stato associato una normativa da parte
dell’ American Society for Testing and Materials (ASTM E 1316-99, ANSI/ASTM E
610-77).
Joseph Kaiser con i suoi collaboratori, nei primi anni ’50, è generalmente
accreditato di aver iniziato in modo sistematico la comprensione del fenomeno di AE;
sua è, ad esempio, l’osservazione che l’attività di AE non si ripresenta durante i
successivi cicli di carico di un materiale, fin quando non venga superata la precedente
soglia (effetto Kaiser).

1. Emissione acustica
La tecnica dell’Emissione Acustica appartiene al più generale ambito delle
diagnostiche non distruttive (NDT), ed è per questo che il termine Emissione Acustica o
AcousticEmission (AE), è generalmente utilizzato sia per ilfenomeno fisico, che per la
tecnica da esso derivata.Se all’interno di un solido si ha un repentino rilascio energetico,
a causa peresempio della crescita di una frattura, parte di tale energia viaggia sotto
forma di onde elastiche che si propagano nel solido verso la superficie. Qui esse
vengono rilevate da sensori posti sulla superficie del solido, ovvero trasduttori in grado
di convertire le onde elastiche in onde elettriche mediante dei cristalli piezoelettrici
posti al loro interno. Eventi rapidi e localizzati generano segnali acustici con spettro di
frequenza nel campodegli ultrasuoni, che possono essere misurati da trasduttori
elettromeccaniciposti sulla superficie del solido, a patto che il segnale sia di intensità
sufficiente. L’applicazione di questa tecnica è assai ampia, e riguarda tutti i sistemi che
simodificano nel tempo a causa di vari meccanismi, come crescita di difetti,diffusione di
fratture, usura, corrosione, deformazioni plastiche e inclusioni,oppure nei processi
meccanici di taglio come tornitura, fresatura, foraturaecc.Questa tecnica di indagine è
quindi candidata nelle applicazioni di monitoraggio di processi chimici o chimico-
fisici, oppure nel controllo dello stato distrutture edili, nel campo minerario e geologico,
in quello geofisico per lo studio della sismicità, nonchè nel controllo di qualità dei
processi di lavorazioneindustriali, oggetto della presente dissertazione, prova ne sia
l’impressionantemole di articoli scientifici su questo argomenti.
2. Sensori Piezoelettrici (PZT)
La maggior parte dei sensori utilizzati nelle misurazioni AE sono fatti di materiali
come la ceramica piezoelettrica. Questo tipo di sensore è risonante e quindi molto
sensibile alla sua frequenza di risonanza. Le ceramiche piezoelettriche sono i
responsabili dieffetti piezoelettrici diretti e inversi. Se i materiali sono sottoposti a forze
meccaniche, essi sviluppano cariche elettriche sulla loro superficie (effetto
piezoelettrico diretto); viceversa, se sottoposti ad un campo elettrico, esibiscono una
deformazione meccanica (effetto piezoelettrico inverso).I materiali piezoelettrici,
qualisale Rochellee il quarzo, sono da tempo noti come piezoelettrici monocristallini.
Tuttavia, queste sostanze hanno avuto una gamma di applicazioni relativamente limitata

dovuto principalmente alla scarsa stabilità dei cristalli di sale di Rochelle ed il limitato
grado di libertà delle caratteristiche del quarzo. Successivamente, l’utilizzo del titanato
di bario (BaTiO3) come ceramica piezoelettricaampliò il campo di
applicazionepertrasduttori ad ultrasuoni. Più recentemente l’avvento del piombo titanato
e lo zirconato di piombo (PbTiO3 PbZrO3), ha comportato un’elevata efficienza e
stabilità della trasformazione elettromeccanica (caratteristiche termiche incluse), di gran
lunga superiore alle sostanze esistenti. Questo ha notevolmente ampliato la gamma delle
applicazioni delle ceramiche piezoelettriche. Se confrontaticon altre sostanze
piezoelettriche, come BaTiO3 e PbTiO3 PbZrO3, queste presentano i seguenti
vantaggi:
- elevata efficienza di trasformazione elettromeccanica;
- elevata lavorabilità,
- elevato grado di libertà in caratteristiche di progettazione;
- elevata stabilità;
- economico, adatto alla produzione di massa.
3. Proprietà delle ceramiche piezoelettriche
La ceramica piezoelettricaè un dielettrico policristallino con costante dielettrica
elevata; questa viene formata da due processi: prima si ha una cottura ad alta
temperatura,dopo cottura, questo presenta la struttura caratteristica cristallina mostrato
nella fig. 1 (a), ma non presenta ancora le proprietà piezoelettriche perché i dipoli
elettrici interni ai cristalli sono orientati in modo casuale e il complessivo momento dei
dipoli viene annullato. Per fargli acquisire proprietà piezoelettriche il materiale
dev’essere polarizzato. Un campo elettrico in corrente continua di diversi kV/mm viene
applicato al pezzo di ceramica per allineare i dipoli elettrici interni secondo un unico
orientamento (vedi fig. 1 (b)). A causa delle forti proprietà dielettriche della ceramica, il
momento di dipolo rimane invariato dopo che il campo elettrico viene rimosso, e la
ceramica così esibisce una forte proprietà piezoelettrica (vedi fig. 1 (c)). Quando un
segnale in corrente alternata viene applicata allaceramica piezoelettricain una frequenza
corrispondente alla frequenza specifica elastica della ceramica (che dipende dalla forma
della materiale), la ceramica mostra risonanza. Poiché la ceramica possiede una elevata

efficienzaalla trasformazione elettromeccanica al punto di risonanza, molte applicazioni
vengono usate al punto di risonanza.
Inoltre, quando questa viene modellata in determinate forme, può avere più di un punto
di risonanza a seconda della modalità di vibrazione.
Le applicazioni dei prodotti dei piezoelettrici ceramici sono i seguenti :
- fonti di energia meccanica ( trasduttori elettrici- meccanici);
- sensori ( trasduttori elettrici- meccanici);
- componenti di circuiti elettrici (trasduttori).
4. Frequenza di risonanza e modi di vibrazione
Se una tensione alternata di frequenza variabile viene applicata ad una ceramica
piezoelettrica di una certa forma, si può vedere che vi è una specifica frequenza alla
quale la ceramica produce una vibrazione molto forte. Questa frequenza viene chiamato
la frequenza di risonanza,fr, e dipende dalla frequenza di vibrazione specifica elastica
della ceramica (risonanza), che è in funzione della forma del materiale. Le ceramiche
piezoelettriche presentano vari modi di vibrazione (modi di risonanza), che dipendono
dalla loro forma, orientamento di polarizzazione e la direzione del campo elettrico.
Ciascuno di questi modi di vibrazione ha un’ unica frequenza di risonanza.InFig. 2 sono
mostrati dei modi di vibrazione tipici in relazione alla Forme di materiali ceramici, la
frequenza di risonanza a ciascun modo di vibrazione, ed i simboli delle costanti del
materiale.

In Fig. 2, i simboli delle costanti piezoelettriche dei materiali hanno i seguenti
significati:
N: Costante di Frequenza
d: Costante di distorsione dielettrica
g: Coefficiente di tensione in uscita
k: Coefficiente di accoppiamento elettromeccanico
YE: Modulo di Young
εT: Costante dielettrica

5. Caratteristiche delle ceramiche piezoelettriche
Quando un materiale piezoelettrico viene sottoposto a delle sollecitazioni
meccaniche T, produce una polarizzazione P che è funzione lineare di T stessa:
P = dT
con d: costante di sforzo piezoelettrico.
Questo effetto è chiamato effetto piezoelettricodiretto.
Al contrario, quando ad un materiale piezoelettrico viene applicato un campo
elettrico attraverso i suoi elettrodi, produce una deformazione S che è, a sua volta,
funzione lineare di il campo elettrico:
S = dE
Questo effetto è chiamato effetto piezoelettrico inverso.
Per un materiale elastico, la relazione tra la deformazione S e la sollecitazione T è
data dunque da:
S = SET;
per materiale dielettrico, la relazione tra gli spostamenti elettrici D e l’intensità del
campo elettrico è data da:
D = eE.
Per una ceramica piezoelettrica, queste relazioni sono date dalle seguenti equazioni,
essendo entrambe associate alle costanti deformazione piezoelettrica:
Queste equazioni sono chiamate equazioni piezoelettriche di base (type d), dove il
campo elettrico E e lo spostamento elettrico D sono rappresentati come grandezze
vettoriali, laddove la sollecitazione T e la deformazione S sono dati in grandezze
tensoriali simmetriche. Quando la simmetria del cristallo viene presa in conto,
l’equazione 1 si semplifica poiché alcune costanti dell’equazione si annullano, mentre
altre diventano pari ad un terzo insieme di costanti.
Con le ceramiche piezoelettriche, quando gli assi di polarizzazione si trovano lungo
l’asse z (3) e due assi ortogonali arbitrari (i quali sono anche ortogonali all’asse z e
scelti come asse x (1) e y (2)), la struttura cristallina della ceramica può essere
rappresentata come quella di cristalli da 6mm, nel caso in cui gli unici coefficienti non-
nulli sono le dieci costanti seguenti:

Per esempio, le equazioni piezoelettriche di base per le vibrazioni longitudinali di
una striscia rettangolare di ceramica sono date dalle seguenti equazioni:
Una ceramica piezoelettrica può essere rappresentata attraverso un circuito
equivalente derivato dalle equazioni piezoelettriche di base rappresentando il suo
comportamento vibrante. Il circuito è chiamato circuito equivalente di Maison. Più in
generale, il circuito equivalente, così come è mostrato in Fig. 3, può essere utilizzato per
rappresentare una ceramica piezoelettrica.
In questo circuito equivalente, la frequenza di risonanza in serie fs, e la frequenza di
risonanza parallele fp sono date dalle seguenti equazioni:
Le costanti fs e fp sono necessarie per determinare il coefficiente di accoppiamento
elettromeccanico k.
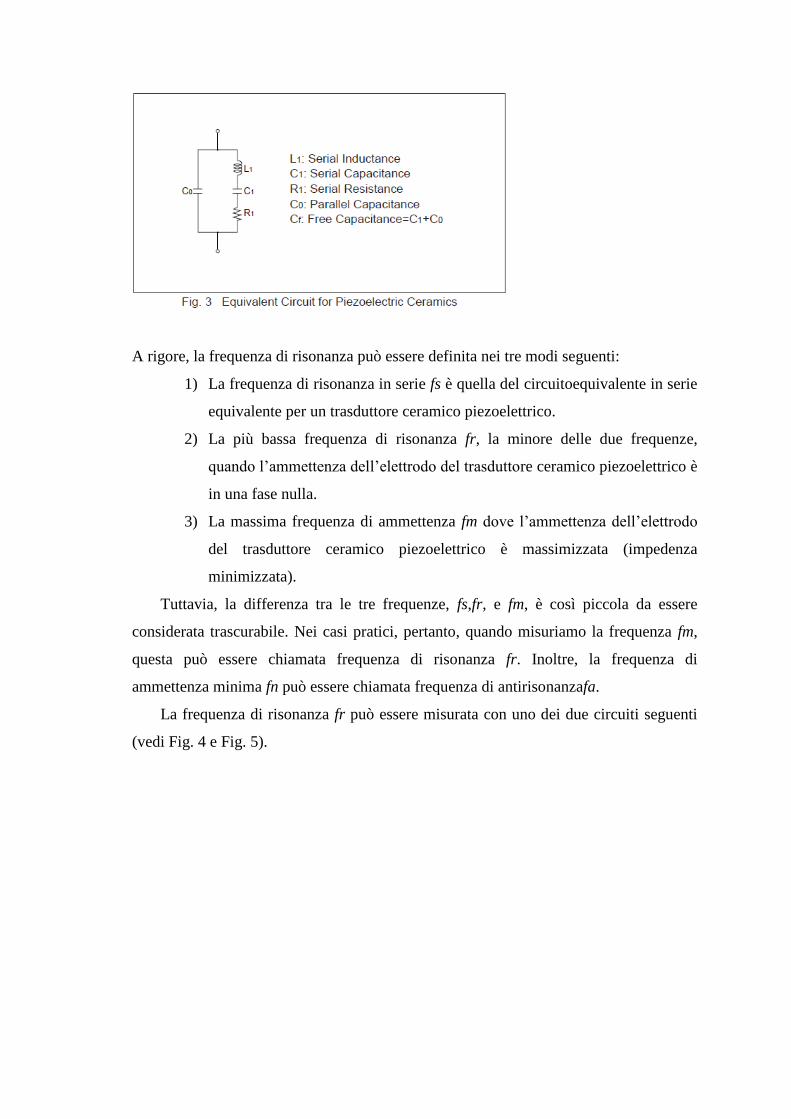
A rigore, la frequenza di risonanza può essere definita nei tre modi seguenti:
1) La frequenza di risonanza in serie fs è quella del circuitoequivalente in serie
equivalente per un trasduttore ceramico piezoelettrico.
2) La più bassa frequenza di risonanza fr, la minore delle due frequenze,
quando l’ammettenza dell’elettrodo del trasduttore ceramico piezoelettrico è
in una fase nulla.
3) La massima frequenza di ammettenza fm dove l’ammettenza dell’elettrodo
del trasduttore ceramico piezoelettrico è massimizzata (impedenza
minimizzata).
Tuttavia, la differenza tra le tre frequenze, fs,fr, e fm, è così piccola da essere
considerata trascurabile. Nei casi pratici, pertanto, quando misuriamo la frequenza fm,
questa può essere chiamata frequenza di risonanza fr. Inoltre, la frequenza di
ammettenza minima fn può essere chiamata frequenza di antirisonanzafa.
La frequenza di risonanza fr può essere misurata con uno dei due circuiti seguenti
(vedi Fig. 4 e Fig. 5).
6. Metodo di misura attraverso un circuito a tensione
costante
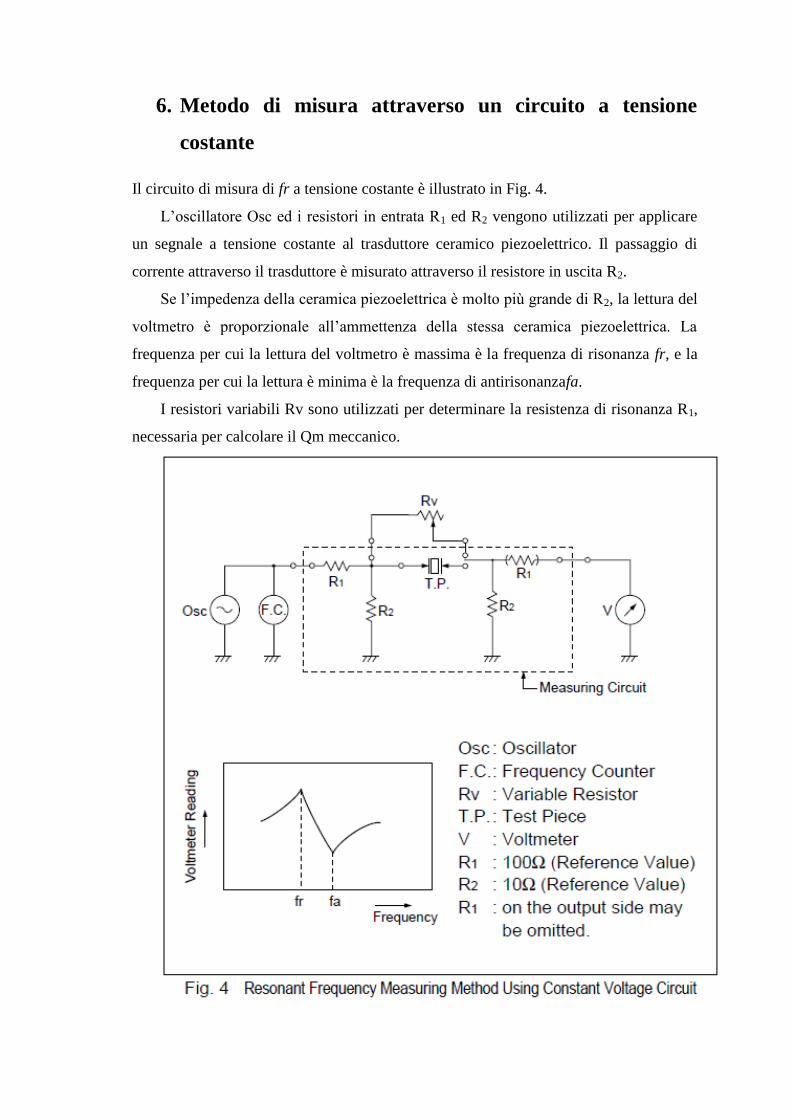
Il circuito di misura di fr a tensione costante è illustrato in Fig. 4.
L’oscillatore Osc ed i resistori in entrata R1 ed R2 vengono utilizzati per applicare
un segnale a tensione costante al trasduttore ceramico piezoelettrico. Il passaggio di
corrente attraverso il trasduttore è misurato attraverso il resistore in uscita R2.
Se l’impedenza della ceramica piezoelettrica è molto più grande di R2, la lettura del
voltmetro è proporzionale all’ammettenza della stessa ceramica piezoelettrica. La
frequenza per cui la lettura del voltmetro è massima è la frequenza di risonanza fr, e la
frequenza per cui la lettura è minima è la frequenza di antirisonanzafa.
I resistori variabili Rv sono utilizzati per determinare la resistenza di risonanza R1,
necessaria per calcolare il Qm meccanico.

7. Metodo di misura attraverso un circuito a corrente
costante
Il circuito di misura di fr a tensione costante è illustrato in Fig. 5.
Il resistore R3 regola il passaggio di corrente attraverso la ceramica piezoelettrica.
Se R3 è molto più grande dell’impedenza del trasduttore, la lettura del voltmetro è
proporzionale all’impedenza della ceramica piezoelettrica. La frequenza per cui la
lettura del voltmetro è minima è la frequenza di risonanza fr, mentre la frequenza per
cui la lettura è massima è la frequenza di antirisonanza.
8. Localizzazione dei difetti tramite AE
La propagazione di una fessura viene considerata come un susseguirsi di step nei quali
si creano di volta in volta superfici di frattura molto limitate. Ogni avanzamento della
fessura è immaginato come una sorgente di AE che si può considerare puntiforme in
virtù dell’esigua estensione delle superfici di frattura ad ogni passo.
Nel processo di propagazione delle onde elastiche rilevate dai sensori, il solido viene
visto come un mezzo omogeneo e isotropo, da cui segue una propagazione rettilinea dei
fronti d’onda a velocità costante. Quest’ultima è stimata in modo ragionevole
considerando ad esempio che la formazione di fessure nel calcestruzzo è accompagnata
da onde meccaniche ultrasonore che viaggiano ad una velocità di 3500÷4500 m/s.
Le suddette considerazioni permettono di considerare i fronti d’onda come superfici
sferiche.
A seconda del solido preso in considerazione la tipologia di localizzazione dei difetti
può rivelarsi più o meno complessa e richiedere l’utilizzo di due o più sensori.
Localizzazione con due sensori:
La localizzazione di una sorgente mediante l’utilizzo di due sensori si rivela possibile
qualora il solido in esame presenti una dimensione dominante rispetto alle altre,
permettendo così di schematizzare il problema a unidimensionale. I sensori e la sorgente
verranno perciò immaginati come appartenenti allo stesso asse, coincidente con quello
del solido e il segnale emesso si muoverà lungo lo stesso alla velocità costante v.
Affinché la sorgente venga rilevata è altresì necessario che i sensori vengano posizionati
alle estremità del solido in modo che la sorgente sia sicuramente compresa tra le
posizioni degli stessi. In questo modo il problema è completamente risolto conoscendo
gli istanti di rilevamento del segnale da parte dei due sensori (t1 e t2) e le loro posizioni
(x1 e x2).

Scrivendo le equazioni del moto si ha infatti:
x – x1 = v (t1 – t0)
x2 – x = v (t2 – t0)
con t0 istante di emissione.
Risolvendo:
x = 0,5 (x2 + x1) – 0,5v (t2 – t1)
posizione della sorgente.
Se la sorgente non si trovasse al centro dei due sensori la sua posizione risulterebbe
funzione anche dell’istante di emissione t0 e la soluzione sarebbe di fatto indeterminata.
x – x2 = v (t2 – t0)
x – x1 = v (t1 – t0)
da cui
2x = 2( t1 + t2 – 2t0) + (x1 + x2)
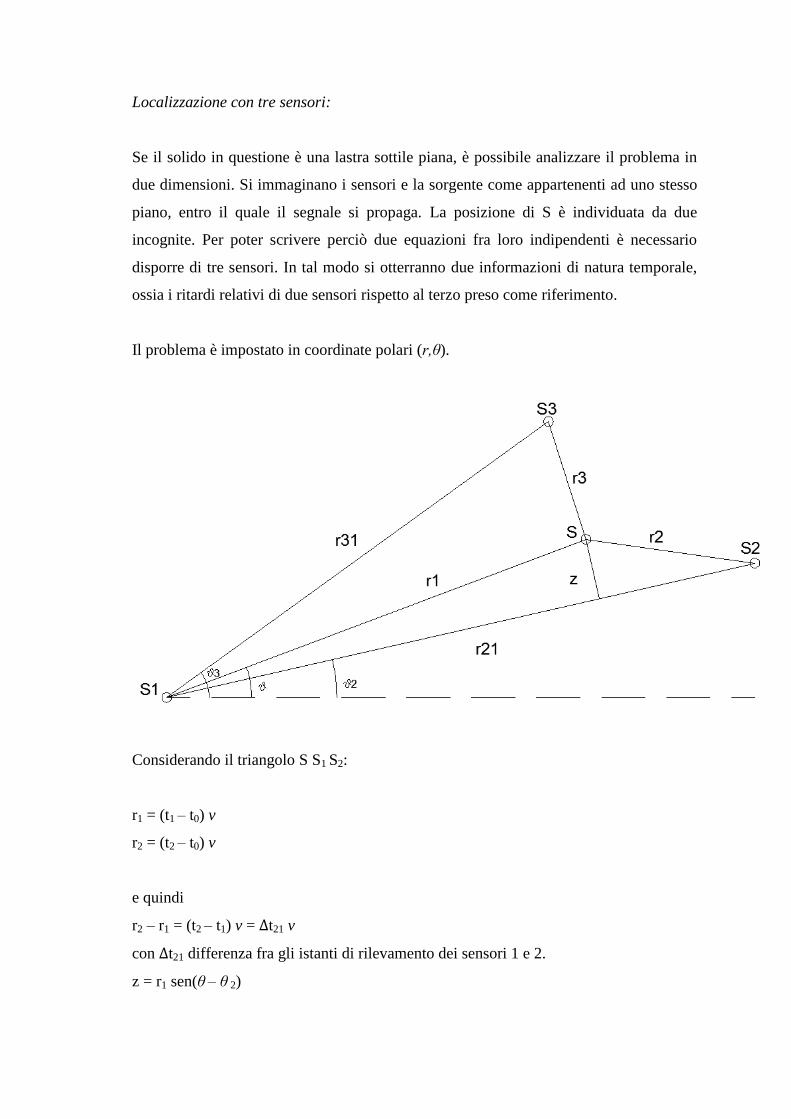
Localizzazione con tre sensori:
Se il solido in questione è una lastra sottile piana, è possibile analizzare il problema in
due dimensioni. Si immaginano i sensori e la sorgente come appartenenti ad uno stesso
piano, entro il quale il segnale si propaga. La posizione di S è individuata da due
incognite. Per poter scrivere perciò due equazioni fra loro indipendenti è necessario
disporre di tre sensori. In tal modo si otterranno due informazioni di natura temporale,
ossia i ritardi relativi di due sensori rispetto al terzo preso come riferimento.
Il problema è impostato in coordinate polari (r,θ).
Considerando il triangolo S S1 S2:
r1 = (t1 – t0) v
r2 = (t2 – t0) v
e quindi
r2 – r1 = (t2 – t1) v = t21 v
con t21 differenza fra gli istanti di rilevamento dei sensori 1 e 2.
z = r1 sen(θ – θ 2)

Il triangolo rettangolo di lati z, r2 e r1 cos(θ – θ 2):
z2 = r2
2 – [r21 – r1 cos(θ – θ 2)]
2
r12 = r2
2 – r21
2 + r21 r1 cos (θ – θ 2)
sostituendo r2 = t21 v + r1
r1 = (r212 – t21
2 v
2) / 2 ( t21 v + r21 cos(θ – θ 2))
In modo analogo, considerando il triangolo S S1 S3
r3 – r1 = (t3 – t1) v = t31 v
r1 = (r312 – t31
2 v
2) / 2 ( t31 v + r31 cos(θ3 – θ))
Le due equazioni trovate nelle incognite r1 e , messe a sistema, consentono di
localizzare S.
Dal punto di vista geometrico la sorgente rappresenta l’intersezione tra due iperboli la
prima con fuochi in S1 e S2 e la seconda in S1 e S3.
Si ha infatti che è costante la differenza delle distanze di due sensori S1 e S2 da una
sorgente qualsiasi. Se al posto della sorgente S considerata pocanzi, si prendesse in
considerazione un’altra sorgente S’ si avrebbe:

r1’ = (t1 – t0’) v
r2’ = (t2 – t0’) v
con t0’ istante di emissione della sorgente S’.
Quindi:
r2’ – r1’ = (t2 – t1) v = t21 v = r2 – r1
Poiché l’iperbole è il luogo geometrico dei punti per i quali è costante la differenza delle
distanze da due punti fissi detti fuochi, ne consegue che i sensori rappresentano i fuochi
e la sorgente si troverà sicuramente nel ramo d’iperbole individuato dagli stessi.
Quindi all’atto pratico due sensori non risultano sufficienti a localizzarla ma solo ad
individuare il luogo geometrico dei punti cui appartiene.
E’ necessario posizionare un altro sensore S3 così da trovare un altro ramo d’iperbole
con fuochi in S1 e S3. L’intersezione dei due rami fornirà la posizione esatta di S.
Vi è inoltre la possibilità che l’iperbole sia doppia. In questo caso l’intersezione non è
unica e il problema va affrontato caso per caso in base alla geometria del sistema.

Localizzazione con quattro sensori:
Avendo a disposizione quattro sensori è possibile localizzare la sorgente nello spazio
tridimensionale. La posizione di S è individuata quindi da tre incognite x, y,z.
Si consideri la terna S S1 S2, si ha che:
d(S,S2) – d(S,S1) = r2 – r1 = v(t2 – t0) – v(t1 – t0) = v t21
ripetendo il ragionamento per le terne S S1 S3 e S S1 S4 e usando un sistema di
riferimento cartesiano le coordinate di S (x,y,z) sono soluzione del sistema:
– = v t21
–
= v t31
– = v t41
Dal sistema di tre equazioni si ricavano le tre incognite x,y e z.
Grazie alla linearità delle equazioni rispetto al caso precedente, la posizione di S è
determinata in modo univoco.

Localizzazione con cinque sensori:
Nell’ipotesi che una AE avvenuta in S all’istante t0 abbia colpito i cinque sensori, si
deducono le seguenti equazioni (ponendo ti = ti – t0, con i = 1,…,5)
v2( t1)
2 =
v2( t2)
2 =
v2( t3)
2 =
v2( t4)
2 =
v2( t5)
2 =
da cui, svolgendo i quadrati e sottraendo la prima dalle altre, si arriva ad un sistema
lineare nelle quattro incognite x,y,z e t1.
=
Con bj = (xj2 + yj
2 + zj
2) – (x1
2 – y1
2 – z1
2) – v
2 (tj – t1)
2, con j = 2,..,5.
Il sistema risolto determina la posizione (x,y,z) e l’istante di emissione t0 di S.
Per avere una soluzione univocamente determinata bisogna evitare di allineare tre
sensori o disporli in maniera complanare. Infatti se fossero ad esempio disposti tutti alla
medesima z, si avrebbe la terza colonna nulla e il sistema sarebbe soddisfatto per ogni
valore di quest’ultima.

Limiti del modello:
Il modello omogeneo e isotropo è un’approssimazione poiché nella realtà i fronti d’onda
non si propagano lungo raggi perfettamente rettilinei. Il cammino del raggio dalla
sorgente reale Sreale si discosta di conseguenza da quello del modello e non è quindi
possibile determinare l’esatta posizione della sorgente.
Questo approccio inoltre come visto, considera la velocità come una costante, fissata in
modo ragionevole all’inizio del problema. Una stima errata di come le onde si
propagano nel materiale può portare ad errori considerevoli.
Se anche poi fosse stata stimata correttamente, il modello ha comunque il limite di non
tenere conto in alcun modo di eventuali gradienti locali della velocità delle onde.
9. Localizzazione con il metodo dei minimi quadrati
Il metodo dei minimi quadrati è usato quando il numero di dati sperimentali non è
quello necessario e sufficiente per determinare geometricamente la soluzione del
problema, al crescere del numero dei dati cresce l’attendibilità della soluzione trovata.
Il tempo di arrivo ti di un’onda nel sito del sensore Si è pari allo somma dell’istante di
emissione to, il “tempo di volo” effettivo t e il contributo introdotto dagli errori di
misura. Il tempo ti è esprimibile mediante la seguente relazione:
dove si ricorda che s è la variabile curvilinea lungo la traiettoria effettiva del
raggio,generalmente non rettilinea.
Sia Ti il corrispettivo tempo di arrivo teorico dell’onda in Si; esso dipenderà di
parametri utilizzati dal modello teorico per descrivere il mezzo. Questo è espresso da :
dove è il tempo di volo teorico previsto dal modello.

In questa relazione, per descrivere la propagazione delle onde viene adottato il modello
teorico più semplice possibile, che è quello fondato sulle ipotesi di omogeneità e
isotropia del solido. In questo modello i parametri sono soltanto le coordinate della
sorgente di EA e la velocità di propagazione di EA. Quindi adesso è
e:
per adesso non sono noti:essi sono le incognite del problema.
Nel caso ideale, cioè in assenza di errori da cui sono affette le misure e se il modello
omogeneo e isotropo descrivesse esattamente la realtà,sarebbe e quindi da
quanto visto prima si ritroverebbe la relazione che lega le distanze
e le differenza fra i tempi di rilevamento
dove:
A causa degli inevitabili errori di natura sperimentale e di modellazione, ci sarà un
residuo,o errore, ei fra i valori rilevati sperimentalmente e i corrispondenti valori
teorici .
Il residuo è definito nel seguente modo:
dove N è il numero di sensori che hanno rilevato l’emissione della sorgente S.
La scelta che vien fatta è di stimare i parametri del modello con i valori che
minimizzano la somma dei quadrati dei residui ei, estesa agli N sensori che hanno
rilevato l’evento. L’ideo di minimizzare la somma dei quadrati dei residui sembra che
abbia avuto origine con L. Geiger attorno al 1910 allo scopo di localizzare gli ipocentri
dei terremoti). Quindi, prima di tutto, si esegue la somma:

La quantità ottenuta viene considerata come una funzione delle quattro variabili
. Dopodichè viene imposta la condizione di minimo per :
[2.9]
la soluzione contiene una stima non solo delle coordinate della sorgente
ma anche la velocità con cui le onde si sono propagate dalla sorgente ai sensori: questa
stima più realistica della velocità consenti di ridurre l’errore nella localizzazione Sreale
che comunque continua ad essere incognita.
In sostanza con questo metodo si continua a considerare il solido come localmente
omogeneo e isotropo, caratterizzato da un valore v che in qualche modo media le
proprietà del solido nella regione compresa fra i sensori e la sorgente. Quindi, in
generale, i valori trovati delle velocità relativi a sorgenti localizzate in punti differenti
del solido non sono gli stessi e possono essere utilizzati per caratterizzare il materiale
(zone caratterizzate da valori maggiori di v sono presumibilmente più compatte di
altre); la dispersione dei valori delle velocità così ottenuti può essere considerata una
misura di quanto il solido reale (in cui il campo della velocità ha evidentemente
gradiente ) si discosta dal modello omogeneo e isotropo.
La [2.9] rappresenta in forma compatta il seguente sistema di equazioni:

Questo sistema di equazioni può essere risolta impiegando metodi numerici, come il
metodo seguente, che può essere considerato l’estensione a funzioni di più variabili del
metodo delle tangenti (o di Newton) per trovare una radice di un’equazione non lineare.
Sia l’approssimazione iniziale della soluzione del problema, e si consideri lo
sviluppo di Taylor al primo ordine centrato in di
:
Lo sviluppo rappresenta la parte lineare di
in (in una direzione si parlerebbe
di retta tangente). A questo punto, si prende come nuova (e migliore) approssimazione
di il punto in cui si annulla. Quando si ha:
Risolto questo sistema lineare nelle quattro incognite (
), si trova così lo zero
di . Si riparte poi dal nuovo punto
, con la retta tangente, e si determina il
punto in cui essa si annulla;e così via.
Alla i-esima iterazione, il sistema consente di trovare le incognite utilizzando i valori
di
noti dalla iterazione precedente. In sostanza, ad ogni iterazione si linearizza
localmente il problema dei minimi quadrati: piuttosto che considerare la funzione
completa
, in cui le variabili compaiono in forma non lineare,si considera ad ogni
iterazione la funzione nella forma linearizzata. In questo modo si converge alla
soluzione di [2.9].
Si sottolinea ancora l’importanza delle scelta delle condizioni iniziali : il rischio è
quello di convergere su un minimo locale della funzione . Una scelta possibile,
peraltro non se ne conoscono di più ragionevoli, è quella di usare i valori ottenuti con
una delle tecniche descritte precedentemente.
Una difficoltà di natura numerica può nascere dal fatto che spesso la matrice (hessiana)
dei coefficienti del sistema [2.13] è quasi singolare, e il calcolo della sua inversa

potrebbe quindi non essere accurato. Un modo per risolvere questa difficoltà è scegliere
opportunamente le unità di misura delle grandezze in gioco (tempi e velocità);
effettuando cosi un rescaling degli elementi della matrice H, si può migliorare il numero
di condizionamento, che rappresenta la distanza relativa di H dall’insieme di tutte le
matrici singolari di ordine 4.
Un’altra strategia è quella di mantenere fissate ad ogni iterazione alcune componenti di
, ad esempio si potrebbe risolvere il sistema mantenendo fissa la velocità, e quindi
eliminare la quarta equazione. Ovviamente bisogna conoscere con buona stima la
velocità delle onde del materiale.
Un ulteriore strategia, alternativa al metodo di Newton, è il metodo di Cauchy, detto
anche di massima pendenza, che corrisponde alla scelta
La convergenza di questo metodo è più lenta, rilevante ai fini di una analisi dei dati che
deve essere eseguita in tempo reale. In compenso, esso è interpretabile come il metodo
di Newton in cui l’hessiana è sostituita dalla matrice identità I, la quale non crea
evidentemente i problemi che si possono verificare nel calcolo di H-1
.
10. Valutazione della fessurazione usando l’analisi del
b-value
10.1 La magnitudo
La magnitudo è la prima misura quantitativa dell’intensità di un terremoto. Sulla base
delle teorie sismiche per lo studio dei terremoti (Richter,1958), la magnitudine in
termini di tecniche di emissioni acustiche è definita in tal modo:
(eq. 1)
Dove:
- è l’ampiezza in microvolts
- è un fattore correttivo che tiene conto della diminuzione dell’ampiezza in
funzione della distanza r tra la sorgente e il sensore
La magnitudo è così un numero che caratterizza i fenomeni di emissione acustica ed è
indipendente dalla posizione dei sensori di registrazione.

Andando in particolare a considerare il calcestruzzo, in esso le attenuazioni di emissione
acustiche sono dovute alla dissipazione di energia di deformazione dovuti a processi di
natura irreversibile all’interno del materiale stesso e considerando una propagazione di
onde sferiche si può concludere nel ne fattore correttivo ci sono anche contributi
geometrici.
In accordo con Uomoto (1987), per strutture di grandi dimensioni, questo fattore
correttivo può essere assunto pari a , dove è una misura in metri e è
uguale a cinque magnitudo per metro.
10.2 Relazione frequenza – magnitudo
In sisimica, i terremoti di grande magnitudo si verificano meno frequentemente rispetto
quelli di piccola magnitudo. Questo può essere quantificato con una relazione
frequenza-amgnitudo, proposta in maniera sperimentale da Gutenberg e Richter (1958):
in alternativa (eq. 2)
Dove:
- N: numero di terremoti di magnitudo maggiore o uguale ad , in una area e in
un tempo specifici
- b e a: sono costanti positive
La precedente relazione ci dice che eventi di magnitudo sono volte più
frequenti di eventi di magnitudo , qualunque sia m. Tale proprietà della
relazione di Gutenberg-Richter è chiamata invarianza di scala.
Questa relazione di Gutenberg e Richter è stata testata successivamente al campo delle
emissioni acustiche (Sammonds et al.1994,Colombo et al.2003), che hanno confermato
la somiglianza tra la zona di processo in una struttura e l’attività sismica in una zona
della terra, allo stesso tempo, da un’ampia caratterizzazione dell’universalità della
relazione stessa.
In base a quanto detto, è possibile realizzare un diagramma che mette in relazione il
numero cumulativo di eventi di emissione acustica con magnitudo maggiore di m in
funzione di m; la lettura di un singolo sensore è trovata usando l’eq 1.

Assumendo che la magnitudo di un evento di emissione acustica e la fessura da cui ha
origine siano proporzionali, la pendenza negativa della distribuzione dell’ampiezza è
coerente con il modo in cui avviene il processo di fessurazione: formazione di molte
micro fessure, inizialmente distribuite e che si accumulano nella zona dove si formerà la
frattura, e ci sarà la propagazione della macrofessura. In accordo con le precedenti
assunzioni, la formazione di microfessure distribuite genera un largo numero di eventi
di piccola magnitudo, mentre la propagazione di macrofessure genera meno eventi ma
di maggiore magnitudo.
Queste osservazioni hanno suggerito ad alcuni autori (Colombo et al. Sammonds et al.)
un criterio per valutare i danni basato sull’analisi del b-value: quando il danno è
interamente caratterizzato dalla formazioni di microfessure, ci si aspetta un b-value alto,
mentre per la propagazione di macrofessure il b-value si prevede essere basso.
Da dei test eseguiti da Carpinteri et al. ,si vede una variazione del b-value sulla base
delle seguenti relazioni:
o
Dove D=2 per superfici, D=3 per volumi.
Questi risultati sono leggermente differenti da quelli ottenuti dai test eseguiti da
Colombo su travi in calcestruzzo armato che mostravano un sistematica variazione del
b-value con i diversi intervalli di crescita del danno:
- b>1.7 microfessure sono dominanti;
- 1.2<b<1.7 iniziano a formarsi le macrofessure;
- 1<b<1.2 le macrofessure tendono a creare la rottura.

In conclusione, questi test sul calcestruzzo hanno confermato che il b-value è correlato
con i livelli di localizzazione della frattura.
La tecnica di emissione acustica ha la potenzialità di effettuare un effettivo
monitoraggio dell’integrità di strutture di grande dimensione, per mezzo di un limitato
numero di sensori. Inoltre in aggiunta alla localizzazione della frattura, durante la fase
di carico del test è stato inoltre quantifica l’ammontare del danno nella struttura usando
la tecnica del b-value ,che è ben nota in sismica.