
TCE Centralina elettronica in rimorchioinform.wabco-auto.com/intl/pdf/815/000/403/815_403t1.pdf ·...
68
TCE Centralina elettronica per rimorchio 1. Edizione Copyright WABCO 2002 Vehicle Control Systems An American Standard Company Con riserva di modifiche Versione 002/03.02
Transcript of TCE Centralina elettronica in rimorchioinform.wabco-auto.com/intl/pdf/815/000/403/815_403t1.pdf ·...
TCECentralina elettronica per rimorchio
1. Edizione
� Copyright WABCO 2002
Vehicle Control SystemsAn American Standard Company
Con riserva di modificheVersione 002/03.02
2
Indice
1. Obiettivi 1.1 L'idea e la sua realizzazione 4
2. Generalità 2.1 Possibilità di comunicazione esterna 52.2 Norme 6
3. Descrizione degli attacchi 3.1 Panoramica del funzionamento 73.2 La centralina 446 122 000 0 83.2.1 TCE - Vista dall'alto con la codifica degli attacchi 93.3 Attacchi 10
4. Panoramica dei cablaggi 4.1 Il sistema di connessione TCE con i cavi di collegamento e l'assegnazione dei pin 144.1.1 Panoramica dei connettori e dei relativi cavi 14
5. Funzioni secondo i punti di connessione 5.1 Visualizzazione elettrica dei valori fnali 345.2 Alimentazione elettrica 355.2.1 Motrici standardizzate -Connettori 355.2.2 Alimentazione 365.3 Diagnostica e funzione delle spie 375.3.1 Gateway ISO7638 / / ISO 12098 � Bus dati rimorchio 375.3.1.1 Gateway - apparecchio di diagnostica � Bus dati rimorchio 375.3.1.2 Diagnostica TCE 375.3.2 Funzione delle spie 385.4 I/O programmabili (FPIO) 385.4.1 Funzioni di sorveglianza 385.5 Trailer EBS e attacco RGE 385.5.1 Trailer EBS 385.5.2 Attacco RGE 395.6 Scatola di derivazione sull'paraincastro posteriore 395.7 Ausiliario avvicinamento rampa 405.8 Regolazione elettronica del livello (ECAS) nella TCE 415.8.1 Componenti 415.8.1.1 Telecomando 415.8.2 Sensore(i) di livello e batteria rimorchio 455.8.2.1 Sensore di livello 455.8.2.2 Alimentazione batteria 465.8.2.3 Elettrovalvole 475.8.2.4 Sensore(i) della pressione 505.9 Componenti pneumatici e tipo di montaggio 51
6. Messa in funzione e diagnostica6.1 Messa in funzione e diagnostica 536.1.1 La calibratura 53
7. Diagnostica con PC7.1 Menu di start e di diagnostica 567.2 Definizione del veicolo 577.2.1 Carenatura & impianto di illuminazione 587.2.2 Parametri ECAS 597.3 Parametri speciali 617.4 Targhetta 657.5 Protocollo End Of Line 66
8. Appendice 698.1 Abbreviazioni utilizzate 708.2 Panoramica dei disegni d'offerta 71
TCE
3
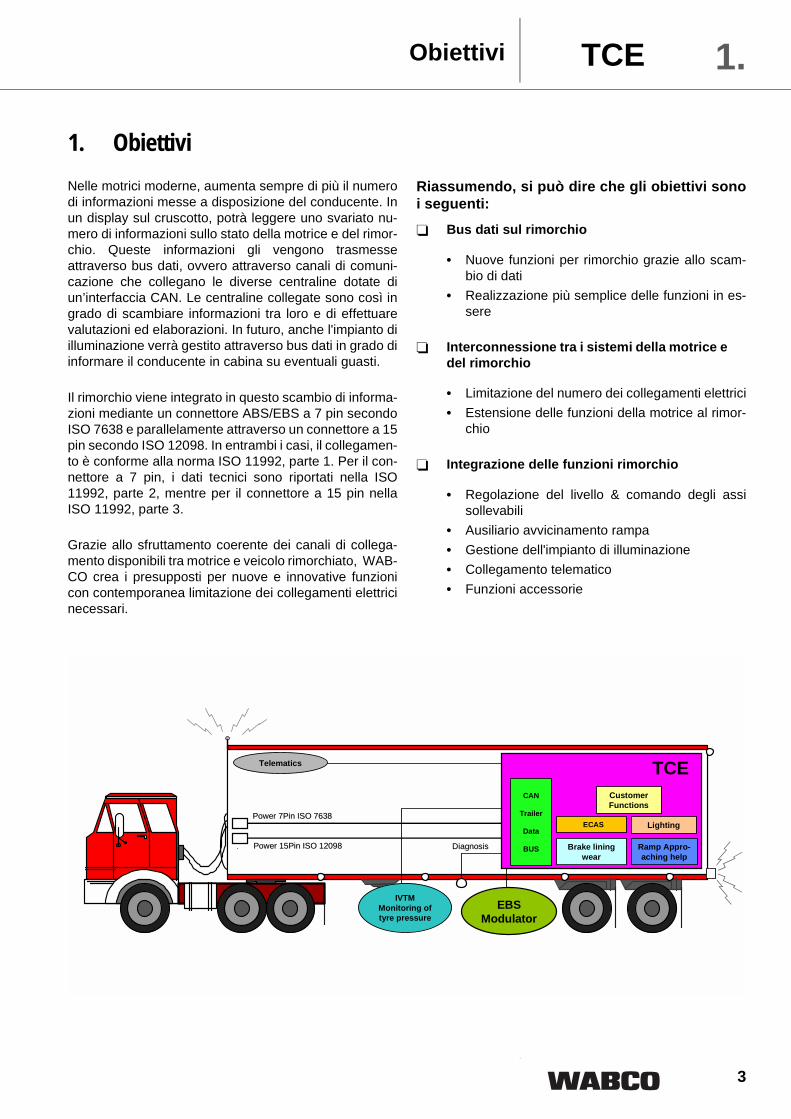
1. ObiettiviNelle motrici moderne, aumenta sempre di più il numerodi informazioni messe a disposizione del conducente. Inun display sul cruscotto, potrà leggere uno svariato nu-mero di informazioni sullo stato della motrice e del rimor-chio. Queste informazioni gli vengono trasmesseattraverso bus dati, ovvero attraverso canali di comuni-cazione che collegano le diverse centraline dotate diun’interfaccia CAN. Le centraline collegate sono così ingrado di scambiare informazioni tra loro e di effettuarevalutazioni ed elaborazioni. In futuro, anche l'impianto diilluminazione verrà gestito attraverso bus dati in grado diinformare il conducente in cabina su eventuali guasti.
Il rimorchio viene integrato in questo scambio di informa-zioni mediante un connettore ABS/EBS a 7 pin secondoISO 7638 e parallelamente attraverso un connettore a 15pin secondo ISO 12098. In entrambi i casi, il collegamen-to è conforme alla norma ISO 11992, parte 1. Per il con-nettore a 7 pin, i dati tecnici sono riportati nella ISO11992, parte 2, mentre per il connettore a 15 pin nellaISO 11992, parte 3.
Grazie allo sfruttamento coerente dei canali di collega-mento disponibili tra motrice e veicolo rimorchiato, WAB-CO crea i presupposti per nuove e innovative funzionicon contemporanea limitazione dei collegamenti elettricinecessari.
Riassumendo, si può dire che gli obiettivi sonoi seguenti:� Bus dati sul rimorchio
• Nuove funzioni per rimorchio grazie allo scam-bio di dati
• Realizzazione più semplice delle funzioni in es-sere
� Interconnessione tra i sistemi della motrice edel rimorchio
• Limitazione del numero dei collegamenti elettrici• Estensione delle funzioni della motrice al rimor-
chio
� Integrazione delle funzioni rimorchio
• Regolazione del livello & comando degli assisollevabili
• Ausiliario avvicinamento rampa• Gestione dell'impianto di illuminazione• Collegamento telematico• Funzioni accessorie
Obiettivi 1.
DiagnosisDiagnosis
Power 7Pin ISO 7638Power 7Pin ISO 7638
Power 15Pin ISO 12098Power 15Pin ISO 12098
TCE
EBSModulator
ECAS Lighting
Ramp Appro-aching help
IVTMMonitoring oftyre pressure
Brake liningwear
CustomerFunctions
Telematics
CAN
Trailer
Data
BUS
TCE
4
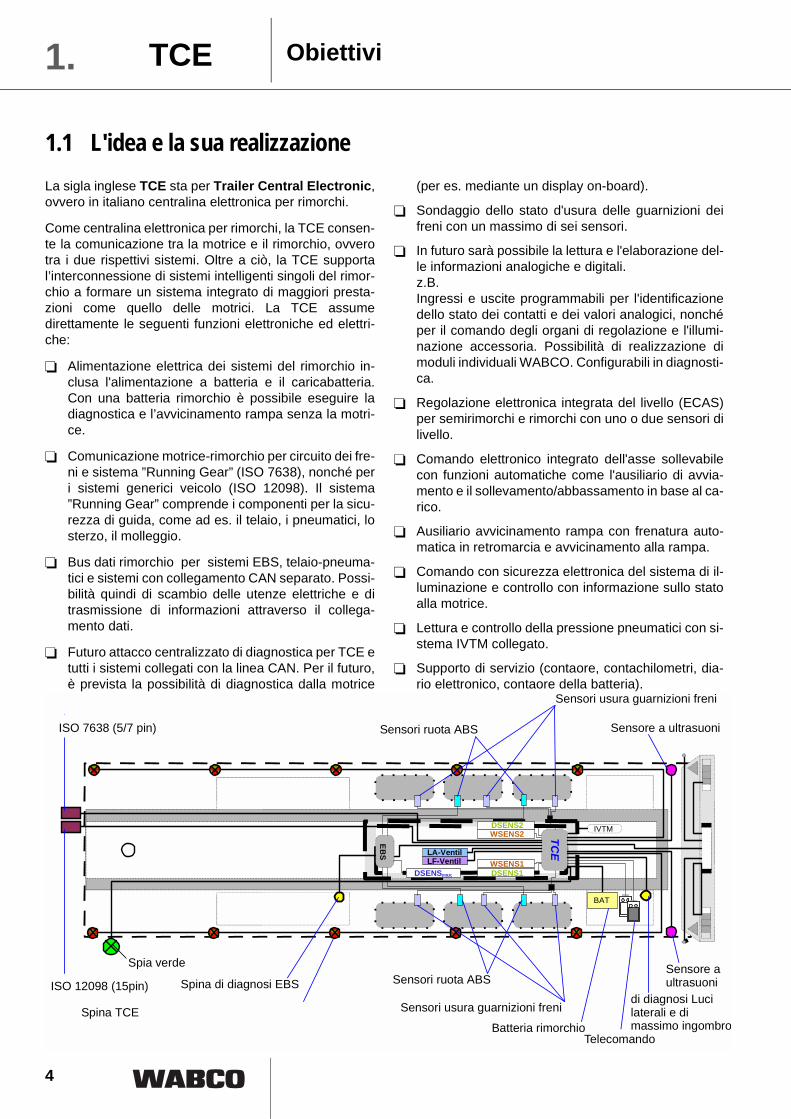
1.1 L'idea e la sua realizzazioneLa sigla inglese TCE sta per Trailer Central Electronic,ovvero in italiano centralina elettronica per rimorchi.
Come centralina elettronica per rimorchi, la TCE consen-te la comunicazione tra la motrice e il rimorchio, ovverotra i due rispettivi sistemi. Oltre a ciò, la TCE supportal’interconnessione di sistemi intelligenti singoli del rimor-chio a formare un sistema integrato di maggiori presta-zioni come quello delle motrici. La TCE assumedirettamente le seguenti funzioni elettroniche ed elettri-che:
� Alimentazione elettrica dei sistemi del rimorchio in-clusa l'alimentazione a batteria e il caricabatteria.Con una batteria rimorchio è possibile eseguire ladiagnostica e l’avvicinamento rampa senza la motri-ce.
� Comunicazione motrice-rimorchio per circuito dei fre-ni e sistema ”Running Gear” (ISO 7638), nonché peri sistemi generici veicolo (ISO 12098). Il sistema”Running Gear” comprende i componenti per la sicu-rezza di guida, come ad es. il telaio, i pneumatici, losterzo, il molleggio.
� Bus dati rimorchio per sistemi EBS, telaio-pneuma-tici e sistemi con collegamento CAN separato. Possi-bilità quindi di scambio delle utenze elettriche e ditrasmissione di informazioni attraverso il collega-mento dati.
� Futuro attacco centralizzato di diagnostica per TCE etutti i sistemi collegati con la linea CAN. Per il futuro,è prevista la possibilità di diagnostica dalla motrice
(per es. mediante un display on-board).
� Sondaggio dello stato d'usura delle guarnizioni deifreni con un massimo di sei sensori.
� In futuro sarà possibile la lettura e l'elaborazione del-le informazioni analogiche e digitali.z.B.Ingressi e uscite programmabili per l'identificazionedello stato dei contatti e dei valori analogici, nonchéper il comando degli organi di regolazione e l'illumi-nazione accessoria. Possibilità di realizzazione dimoduli individuali WABCO. Configurabili in diagnosti-ca.
� Regolazione elettronica integrata del livello (ECAS)per semirimorchi e rimorchi con uno o due sensori dilivello.
� Comando elettronico integrato dell'asse sollevabilecon funzioni automatiche come l'ausiliario di avvia-mento e il sollevamento/abbassamento in base al ca-rico.
� Ausiliario avvicinamento rampa con frenatura auto-matica in retromarcia e avvicinamento alla rampa.
� Comando con sicurezza elettronica del sistema di il-luminazione e controllo con informazione sullo statoalla motrice.
� Lettura e controllo della pressione pneumatici con si-stema IVTM collegato.
� Supporto di servizio (contaore, contachilometri, dia-rio elettronico, contaore della batteria).
Obiettivi1.
EBS
TCE
IVTM
BAT
LF-VentilLA-Ventil
WSENS1
WSENS2
DSENSEBS DSENS1
DSENS2
Sensori ruota ABS
Sensori ruota ABS
Sensori usura guarnizioni freni
Sensori usura guarnizioni freni
Sensore a ultrasuoni
Sensore aultrasuoni
di diagnosi Luci laterali e di
TelecomandoBatteria rimorchio
Spina TCE
ISO 12098 (15pin)
ISO 7638 (5/7 pin)
Spina di diagnosi EBS
Spia verde
massimo ingombro
TCE
5
Generalità 2.
900Mhz
1800Mhz
GSMGlobal System for
Mobile Communication(D1, D2, ...)
Tele-communicationsCompany
ISDN
Internet(TCP/IP)
Carrier Park ManagementServices Provider
WWW Server)
Data
433 Mhz
868 Mhz
Short waveCommunication
(Blue Tooth, DECT, ..)
Satellite
SatelliteSatellite
GPSGlobal Positioning System
Carrier owner
Local Server
Satellite
Satellite Antenna
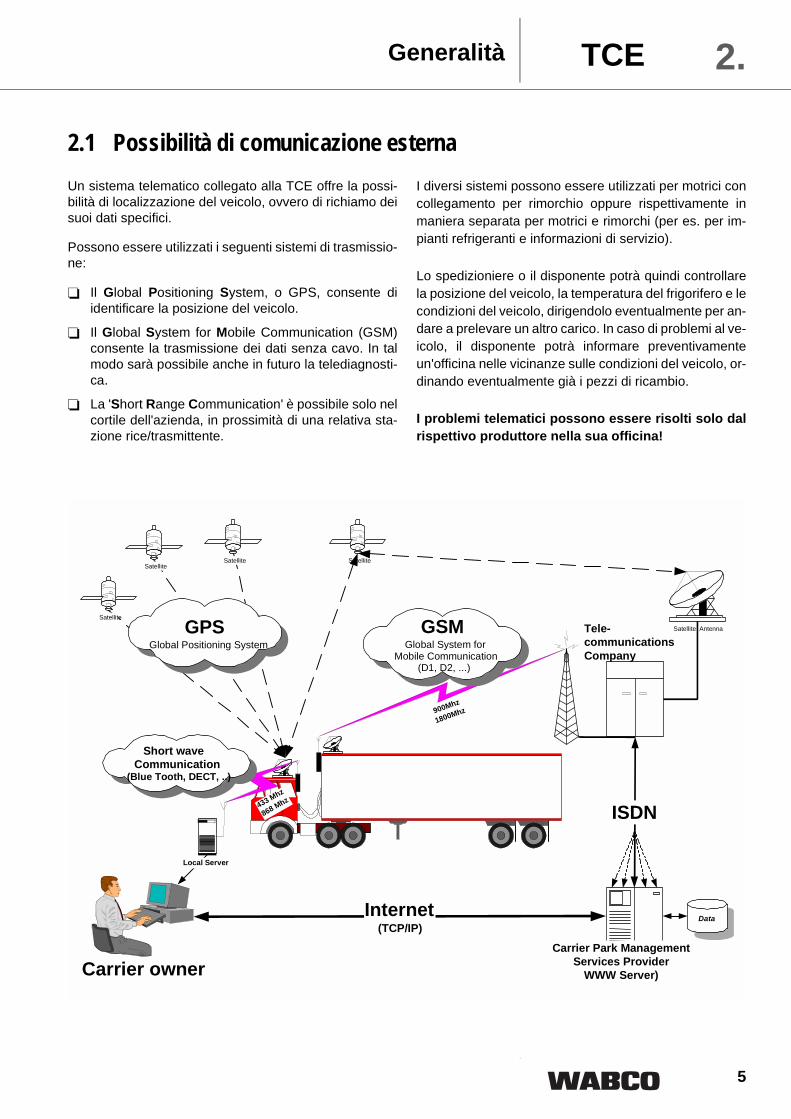
2.1 Possibilità di comunicazione esternaUn sistema telematico collegato alla TCE offre la possi-bilità di localizzazione del veicolo, ovvero di richiamo deisuoi dati specifici.
Possono essere utilizzati i seguenti sistemi di trasmissio-ne:
� Il Global Positioning System, o GPS, consente diidentificare la posizione del veicolo.
� Il Global System for Mobile Communication (GSM)consente la trasmissione dei dati senza cavo. In talmodo sarà possibile anche in futuro la telediagnosti-ca.
� La 'Short Range Communication' è possibile solo nelcortile dell'azienda, in prossimità di una relativa sta-zione rice/trasmittente.
I diversi sistemi possono essere utilizzati per motrici concollegamento per rimorchio oppure rispettivamente inmaniera separata per motrici e rimorchi (per es. per im-pianti refrigeranti e informazioni di servizio).
Lo spedizioniere o il disponente potrà quindi controllarela posizione del veicolo, la temperatura del frigorifero e lecondizioni del veicolo, dirigendolo eventualmente per an-dare a prelevare un altro carico. In caso di problemi al ve-icolo, il disponente potrà informare preventivamenteun'officina nelle vicinanze sulle condizioni del veicolo, or-dinando eventualmente già i pezzi di ricambio.
I problemi telematici possono essere risolti solo dalrispettivo produttore nella sua officina!
TCE
6
2.2 NormeIl sistema TCE è conforme alle seguenti normative:
� ISO 11992 definisce le interfacce dati tra motrice e rimorchio
• Parte 1: Protocollo di trasmissione, interfaccia• Parte 2: Dati sui freni e ”Running Gear Equip-
ment” - • Parte 3: ”General Purpose Messages”• Parte 4: Diagnostica (in preparazione)
� ISO 7638, collegamento elettrico motrice-rimorchio a 7 pin per sistemi frenanti e Running Gear
• Telaio, pneumatici e freni• Viene tassativamente escluso l'impiego per im-
pianti di illuminazione e sistemi di carenatura.
� ISO 12098, collegamento elettrico motrice-rimorchio a 15 pin per impianti di illuminazionee sistemi di carenatura
• Illuminazione, gestione tradizionale dell'assesollevabile e di quello sterzante
• Alimentazione elettrica e collegamento dati persistemi non frenanti e ”Running-Gear”.
� ECE - R 13
• Alimentazione di equipaggiamenti Brake e Run-ning Gear
• Disinserimento di sistemi Running Gear /funzioni in caso di sovraccarico elettrico.
Generalità2. TCE
7
Descrizione del collegamento 3.
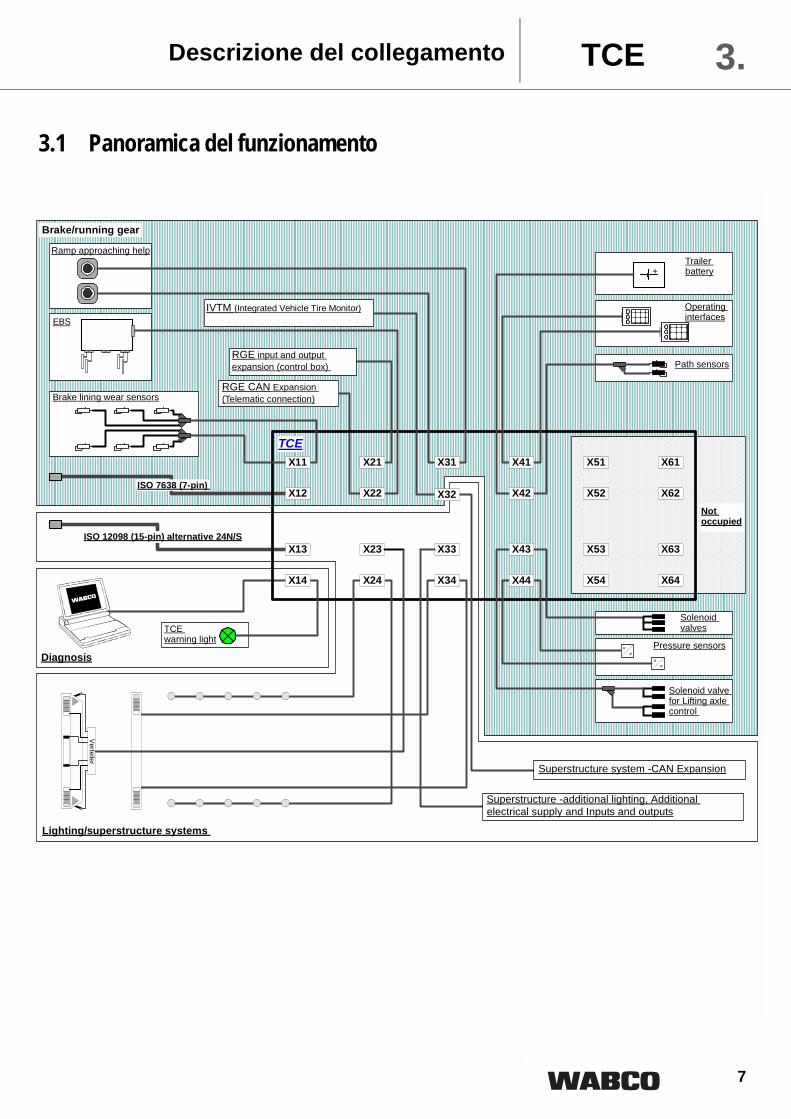
3.1 Panoramica del funzionamento
Bremse / Fahrwerk
Diagnose
Magnetventil fürLiftachssteuerung
Nichtbelegt
Drucksensor(en)
Bedieneinheit(en)
Wegsensor(en)
TCE-Warnlampe
Anhänger-batterie
Beleuchtung / Aufbausysteme
Rampenanfahrhilfe
Magnetventile
ISO 7638 (7-pol.)
RGE CAN-Erweiterung(Telematikanschluss)
P
U
ISO 12098 (15-pol.), alternativ 24N/S
TCE
Verteiler
+
EBS
P
U
Bremsbelagverschleißsensoren
Aufbausystem - CAN-Erweiterung
Aufbau - Zusatzbeleuchtung, zusätzl. elektr.Versorgung und Ein- und Ausgänge
RGE Ein- und Ausgangs-erweiterung (Bedienbox)
X12
X31X21
X22 X42
X41 X61
X62
X51
X52X32
X11
X43 X63X53
X44 X64X54
X13
X14 X34X24
X23 X33
IVTM (Integrated Vehicle Tire Monitor)System zur Reifendrucküberwachung
Brake/running gear
Ramp approaching helpTrailer battery
Operating interfaces
Path sensorsRGE input and output expansion (control box)
RGE CAN Expansion (Telematic connection)Brake lining wear sensors
ISO 7638 (7-pin)
Not occupied
ISO 12098 (15-pin) alternative 24N/S
TCE warning light
Solenoid valves
Pressure sensors
Solenoid valve for Lifting axle control
Superstructure system -CAN Expansion
Superstructure -additional lighting, Additional electrical supply and Inputs and outputs
Diagnosis
Lighting/superstructure systems
TCE
8
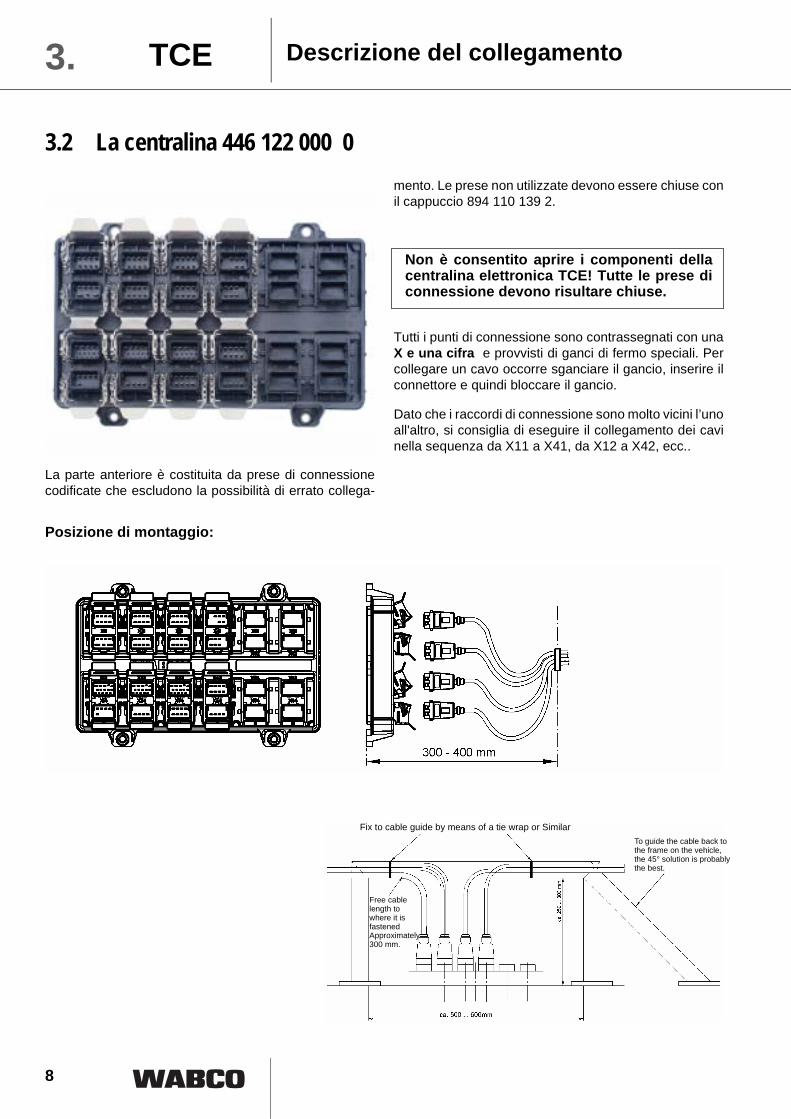
3.2 La centralina 446 122 000 0
La parte anteriore è costituita da prese di connessionecodificate che escludono la possibilità di errato collega-
mento. Le prese non utilizzate devono essere chiuse conil cappuccio 894 110 139 2.
Non è consentito aprire i componenti dellacentralina elettronica TCE! Tutte le prese diconnessione devono risultare chiuse.
Tutti i punti di connessione sono contrassegnati con unaX e una cifra e provvisti di ganci di fermo speciali. Percollegare un cavo occorre sganciare il gancio, inserire ilconnettore e quindi bloccare il gancio.
Dato che i raccordi di connessione sono molto vicini l’unoall'altro, si consiglia di eseguire il collegamento dei cavinella sequenza da X11 a X41, da X12 a X42, ecc..
Descrizione del collegamento3.
Posizione di montaggio:
TCE
To guide the cable back tothe frame on the vehicle, the 45° solution is probably the best.
Fix to cable guide by means of a tie wrap or Similar
Free cable length to where it isfastened Approximately 300 mm.
9
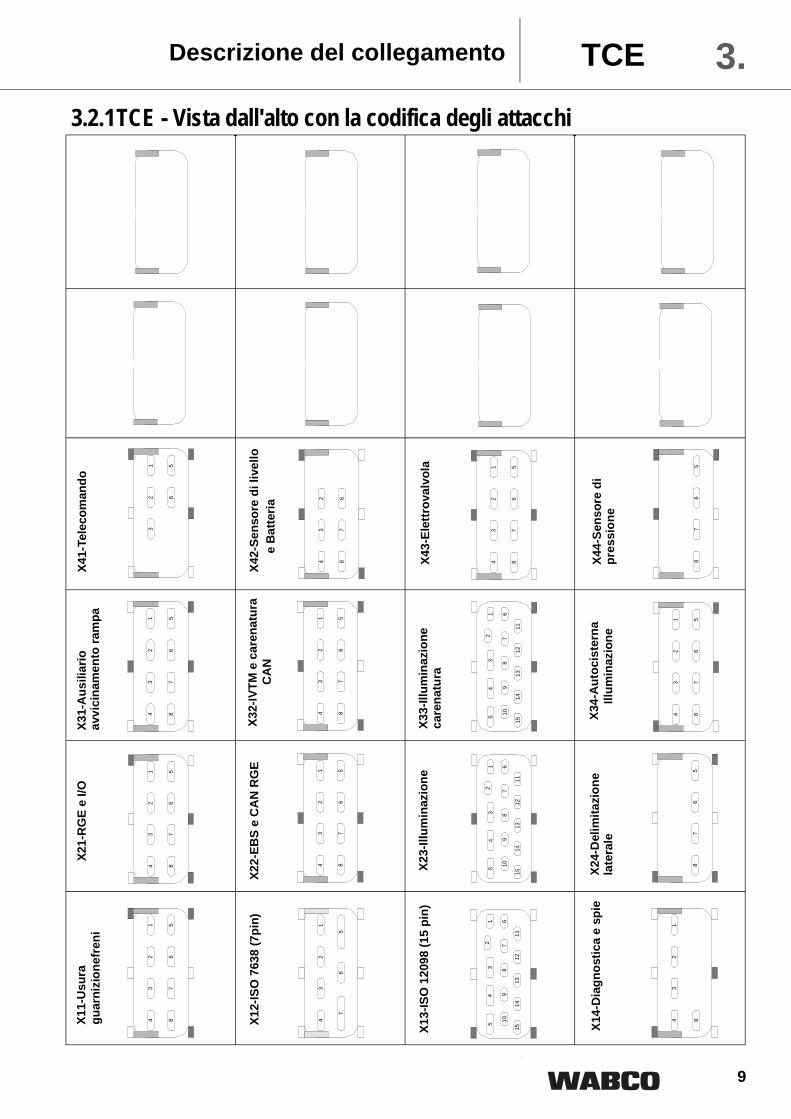
3.2.1TCE - Vista dall'alto con la codifica degli attacchi
Descrizione del collegamento 3.
87
65
43
21
87
65
43
2
87
6
32
1
65
43
21
87
65
43
21
1211
5
97
6
13
108
1415
43
21
87
65
43
21
87
65
87
65
43
21
1211
5
97
6
13
108
1415
43
21
87
65
43
21
87
65
32
14 8
43
21
1211
5
97
6
13
108
1415
43
21
76
5
43
21
87
65
X11-
Usu
ra
X12-
ISO
763
8 (7
pin)
X13-
ISO
120
98 (1
5 pi
n)
X14-
Dia
gnos
tica
e sp
ie
X21-
RG
E e
I/O
X22-
EBS
e C
AN
RG
E
X23-
Illum
inaz
ione
X24-
Del
imita
zion
e
X31-
Aus
iliar
io
X32-
IVTM
e c
aren
atur
a
X33-
Illum
inaz
ione
X34-
Aut
ocis
tern
aIll
umin
azio
ne
CA
Ne
Bat
teria
X42-
Sens
ore
di li
vello
X43-
Elet
trov
alvo
la
X44-
Sens
ore
di
X41-
Tele
com
ando
guar
nizi
onef
reni
late
rale
avvi
cina
men
to ra
mpa
care
natu
ra
pres
sion
e
TCE
10
3.3 Attacchi
Connettori TCE in sequenza numerica 1. Riga
Attacco X11 (optional)Sensori usura guarnizioni freniPossibilità di collegare fino a sei sensori usura guarnizio-ni freni o fino a sei indicatori di fine usura (ponte a filo).Lo spessore delle guarnizioni dei freni viene letto daisensori solo in stato di frenatura. Montando indicatori difine usura viene effettuata un'attualizzazione dello spes-sore delle guarnizioni in stato di frenatura e non. Se peres. tutti gli indicatori segnalano 0 volt, viene identificatouno scollegamento della spina.
Il cavo Y è contrassegnato con un colore. Sotto alla spinasi trova una striscia rossa o blu. La spina contrasse-gnata in rosso deve essere collegata sulla parte de-stra, quella in blu sulla parte sinistra. L'assegnazionedegli assi è inltre indicata dietro alla spina (L1 = 1° assesx).
Attacco X12Connettore motrice secondo ISO 7638Attacco connettore motrice 7 pin (o 5 pin senza collega-mento CAN) secondo ISO 7638 con sistema di collega-mento dati motrice-rimorchio secondoISO/ 11992, parte 1 e 2.
� Comunicazione motrice-rimorchio secondo ISO11992. Supporto del modulo ABS nella motrice
� Controllo del collegamento a massa per verificare uneventuale scollegamento
� Identificazione di sotto/sovralimentazione
� Identificazione di sovraccarico (misurazione dellacorrente e della tensione) e disinserimento dei siste-mi Running Gear.
� Comando attivo della spia rimorchio (pin 5) con:
• relativo errore TCE (per es. guasto del modula-tore EBS)
• Accensione del quadro (morsetto 15)• Interruzione di un collegamento a massa
(pin 3 e 4).
Attacco X13
Connettore motrice secondo ISO 12098(15 pin)Attacco linee di alimentazione corrente e di illuminazionecon collegamento dati secondo ISO 12098 (15 pin). Ilbus dati contiene informazioni sul sistema di illuminazio-ne e della carenatura.
Di norma, con la diagnostica PC i pin 10, 11 e 12 dellaspina non vengono controllati. Questi ultimi possono co-munque essere riparametrizzati con la diagnostica PCnel modo seguente:
� Comunicazione motrice-rimorchio secondo ISO11992. Supporto identificazione rimorchio mediantelinea indicatori di direzione e/o illuminazione impian-to freni ��Max.resistenza d'ingresso � 2 kOhm.
� Controllo mediante sensori/sorveglianza delle lineedell'impianto di illuminazione
� Identificazione di sotto/sovralimentazione dell'im-pianto elettrico
� Collegamento dati motrice-rimorchio secondo ISO11992, parte 1 e 3 (solo con connettori ISO 12098)
� Ingressi/uscite programmabili (FPIO; solo con con-nettori ISO 12098)
Attacco X14
Attacco di diagnostica
Pin 10
Pin 11Pin 12
Sensore guarnizione freniliberoDisp. sollevamento asse
secondo ISO 12098 / 1994
Pin 10
Pin 11Pin 12
liberoAusiliario di avviamentoDisp. sollevamento asse
secondo ISO 12098 / 2001Nuova norma
Pin 10, 11, 12 non sorvegliati
Standard, se non è richiesta la gestione dalla motrice del rimorchio o dell'asse sollevabile
Descrizione del collegamento3. TCE
11
Attacco centrale per un apparecchio di diagnostica e at-tacco opzionale di una spia per rimorchio (spia verde).
Attacco per apparecchio di diagnostica� Alimentazione elettrica secondo ISO 7638 KL30 (pin
1). Senza motrice, la diagnostica è consentita conuna batteria per il rimorchio. Durante la diagnosi èpossibile anche il sollevamento/abbassamento me-diante il telecomando.
Attacco di una spia� Come optional, sul veicolo può essere installata una
spia di controllo verde.
� Alimentazione elettrica secondo ISO 7638 KL30 (PIN 1).
Sono disponibili i seguenti modi di visualizza-zione:Stato spia– lampeggiante: Visualizzazione di errore generico
TCE
– accesa: rimorchio fuori dal livello di guida
– spenta: il veicolo è entro il livello di guida,non sono stati riscontrati errori e l'accensione è spenta.
2. Riga
Attacco X21 (optional)Estensione Running Gear / frenoAttacco di utenze 24V e/o sensori 24V. L'alimentazioneavviene attraverso il connettore della motrice secondoISO 7638. L'assegnazione delle funzioni è programmabi-le.
Avvertenza: Dato che l'alimentazione viene attuata conconnessione ISO 7638, possono essere collegati solo isistemi/componenti conformi al circuito frenante del vei-colo o che rientrano nella categoria 'Running Gear'!Ovvero sistemi/componenti finalizzati alla sicurezza,come per es. telaio, pneumatici, sterzo, sospensioni
Attacco X22EBS trailer & sistemi Running GearAttacco per EBS trailer e un sistema esterno RunningGear.
� Alimentazione elettrica attraverso ISO 7638 KL30(pin 1) con protezione contro il sovraccarico.
� Comunicazione CAN attraverso bus dati rimorchiosecondo ISO 11898 a 250 kBaud.
� In caso di disturbi, il collegamento esterno dati CANpuò essere scollegato autonomamente.
Informazioni sull'attacco X23/X24/X33/X34Impianto di illuminazione rimorchioLa parte destra e sinistra dell'impianto di illuminazionesono protette separatamente nella TCE.
Avvertenza:Gli errori vengono visualizzati solo al momento dell'ac-censione dell'impianto di illuminazione.
Collegare tutte le lampade da comandare direttamente alrispettivo cavo.I cavi non devono essere separati o prolungati!Per evitare anomalie di funzionamento le utenze impie-gate non devono mai superare il numero consentito. Èquindi vietato per es. applicare lampeggianti supplemen-tari sull'paraincastro (per es. Hella)! Osservare sempre leistruzioni del produttore.
Il comando, la trasmissione dei segnali di comando el'alimentazione elettrica dell'impianto di illuminazione delrimorchio e l'estensione per altre funzioni di carenaturasono avvengono tramite connessione ISO 12098 (15pin.).
� Comando elettronico / protezione secondo i segnalidi comando attraverso ISO 12098.
� Identificazione errore per cortocircuito e interruzione,se attivata.
Attacco X23Illuminazione standard sull'paraincastro poste-riore� Luci freni (21 W)
� Segnalatori di direzione (21 W)
� Luci posteriori (30 W)
� Luci di retromarcia inclusa (21 W)Illuminazione della targa
� Luci antinebbia posteriori (21 W)
� Luci di tenuta direzione/di massimo ingombro (10 W)
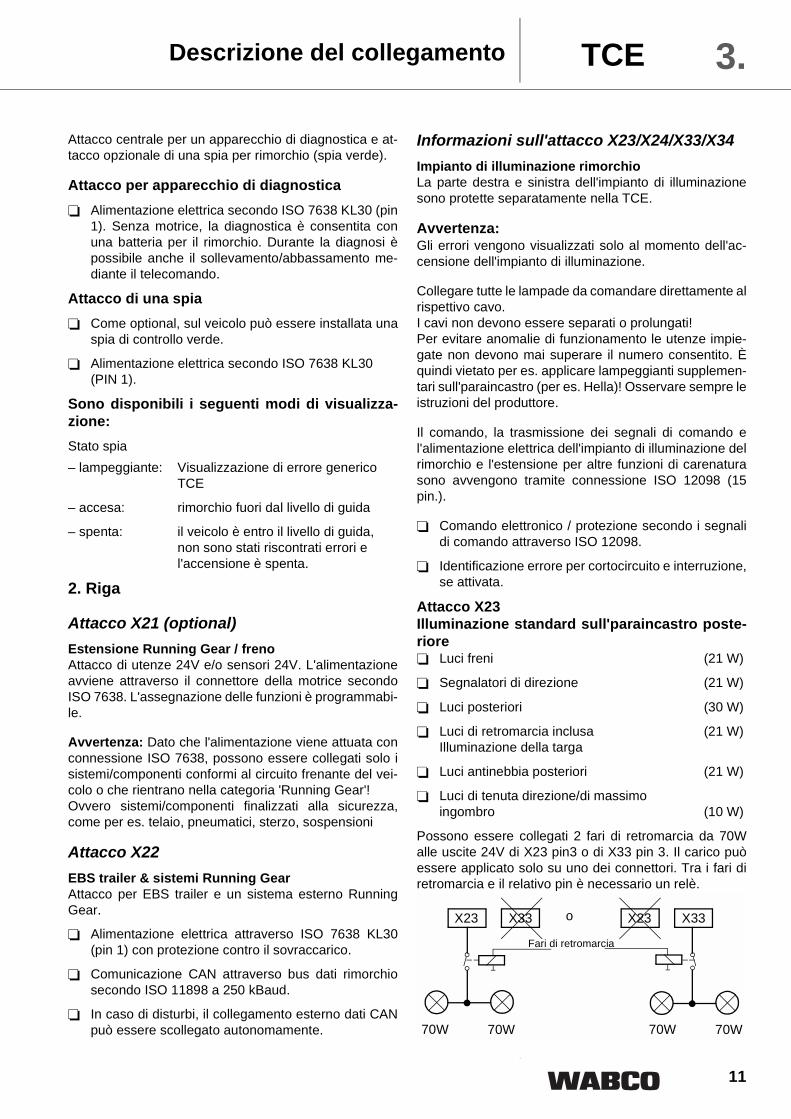
Possono essere collegati 2 fari di retromarcia da 70Walle uscite 24V di X23 pin3 o di X33 pin 3. Il carico puòessere applicato solo su uno dei connettori. Tra i fari diretromarcia e il relativo pin è necessario un relè.
X23 X33 X23 X33
70W 70W70W 70W
o
Fari di retromarcia
Descrizione del collegamento 3.TCE
12
Attacco X24Delimitazione lateraleIl cavo Y è contrassegnato con un colore. Sotto alla spinasi trova una striscia rossa o blu. La spina rossa deve es-sere collegata sulla parte destra, quella blu sulla par-te sinistra del veicolo.
� Luci di delimitazione laterale (25 W)
3. Riga
Attacco X31 (optional)Ausiliario avvicinamento rampa (RAH)Attacco di due sensori a ultrasuoni per la misurazionedella distanza tra il veicolo e la rampa di carico in retro-marcia.
� Alimentazione elettrica attraverso generazione sepa-rata 8V nella TCE, con collegamento attraverso con-nettore motrice ISO 7638
� Linee trasmissione/ricezione segnale separate perciascun sensore
Il cavo Y è contrassegnato con un colore. Sotto alla spinasi trova una striscia rossa o blu. La spina rossa deve es-sere collegata sulla parte destra, quella blu sulla par-te sinistra del veicolo.
Attacco X32 (optional)Controllo pressione pneumatici & sistemi in genera-leAttacco per controllo pressione pneumatici e sistemi ge-nerali (non circuito freni e Running Gear) con collega-mento dati CAN.
Sistemi generali:� Alimentazione elettrica per IVTM attraverso ISO
7638; alimentazione elettrica per sistemi generali at-traverso ISO 12098
� Disinserimento separato (collegamento CAN) incaso di anomalie della comunicazione CAN
Avvertenza: Con la separazione dell'alimentazione elet-trica ISO 7638, i sistemi collegati non sottostanno al di-sinserimento per sovraccarico dei sistemi non frenanti.
Attacco X33 (optional)Illuminazione supplemantare per carenature a cas-sone, come per es. luci di massimo ingombro eestensioni per carenatura
� Possono essere collegate utenze 24V e/o sensori24V.
� L'assegnazione delle funzioni degli ingressi/usciteprogrammabili può essere effettuata mediante il PCdi diagnostica.
Le uscite sono protette contro il cortocircuito o il sovrac-carico con autoresettaggio elettrico. Il cortocircuito amassa/nell'alimentazione o una rottura viene identificatacome errore. Possono essere collegati 2 fari di retromar-cia da 70 W su X23 pin3 o su X33 pin 3. Il carico può es-sere applicato solo su uno dei connettori. Vedi la fig.Attacco X23 a pag. 11.
� Luci posteriori (21 W)
Attacco X34 (optional)
Illuminazione supplementare per autocisterne
Per supporti luci elevati con
� Luci freni (21 W)
� Segnalatori di direzione (21 W)
� Luci posteriori (21 W)
Il cavo Y è contrassegnato con un colore. Sotto alla spinasi trova una striscia rossa o blu. La spina rossa deve es-sere collegata sulla parte destra, quella blu sulla par-te sinistra del veicolo.
Descrizione del collegamento3. TCE
13
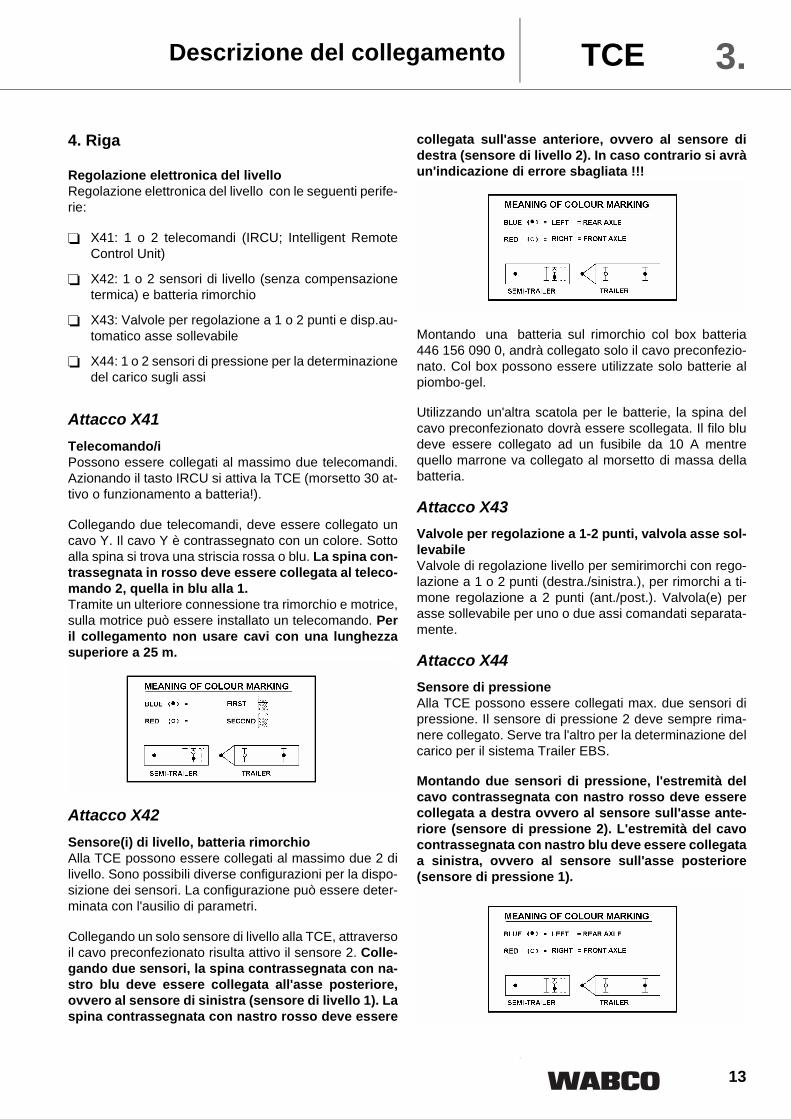
4. Riga
Regolazione elettronica del livelloRegolazione elettronica del livello con le seguenti perife-rie:
� X41: 1 o 2 telecomandi (IRCU; Intelligent RemoteControl Unit)
� X42: 1 o 2 sensori di livello (senza compensazionetermica) e batteria rimorchio
� X43: Valvole per regolazione a 1 o 2 punti e disp.au-tomatico asse sollevabile
� X44: 1 o 2 sensori di pressione per la determinazionedel carico sugli assi
Attacco X41Telecomando/iPossono essere collegati al massimo due telecomandi.Azionando il tasto IRCU si attiva la TCE (morsetto 30 at-tivo o funzionamento a batteria!).
Collegando due telecomandi, deve essere collegato uncavo Y. Il cavo Y è contrassegnato con un colore. Sottoalla spina si trova una striscia rossa o blu. La spina con-trassegnata in rosso deve essere collegata al teleco-mando 2, quella in blu alla 1.Tramite un ulteriore connessione tra rimorchio e motrice,sulla motrice può essere installato un telecomando. Peril collegamento non usare cavi con una lunghezzasuperiore a 25 m.
Attacco X42Sensore(i) di livello, batteria rimorchioAlla TCE possono essere collegati al massimo due 2 dilivello. Sono possibili diverse configurazioni per la dispo-sizione dei sensori. La configurazione può essere deter-minata con l'ausilio di parametri.
Collegando un solo sensore di livello alla TCE, attraversoil cavo preconfezionato risulta attivo il sensore 2. Colle-gando due sensori, la spina contrassegnata con na-stro blu deve essere collegata all'asse posteriore,ovvero al sensore di sinistra (sensore di livello 1). Laspina contrassegnata con nastro rosso deve essere
collegata sull'asse anteriore, ovvero al sensore didestra (sensore di livello 2). In caso contrario si avràun'indicazione di errore sbagliata !!!
Montando una batteria sul rimorchio col box batteria446 156 090 0, andrà collegato solo il cavo preconfezio-nato. Col box possono essere utilizzate solo batterie alpiombo-gel.
Utilizzando un'altra scatola per le batterie, la spina delcavo preconfezionato dovrà essere scollegata. Il filo bludeve essere collegato ad un fusibile da 10 A mentrequello marrone va collegato al morsetto di massa dellabatteria.
Attacco X43Valvole per regolazione a 1-2 punti, valvola asse sol-levabileValvole di regolazione livello per semirimorchi con rego-lazione a 1 o 2 punti (destra./sinistra.), per rimorchi a ti-mone regolazione a 2 punti (ant./post.). Valvola(e) perasse sollevabile per uno o due assi comandati separata-mente.
Attacco X44Sensore di pressioneAlla TCE possono essere collegati max. due sensori dipressione. Il sensore di pressione 2 deve sempre rima-nere collegato. Serve tra l'altro per la determinazione delcarico per il sistema Trailer EBS.
Montando due sensori di pressione, l'estremità delcavo contrassegnata con nastro rosso deve esserecollegata a destra ovvero al sensore sull'asse ante-riore (sensore di pressione 2). L'estremità del cavocontrassegnata con nastro blu deve essere collegataa sinistra, ovvero al sensore sull'asse posteriore(sensore di pressione 1).
Descrizione del collegamento 3.TCE
14
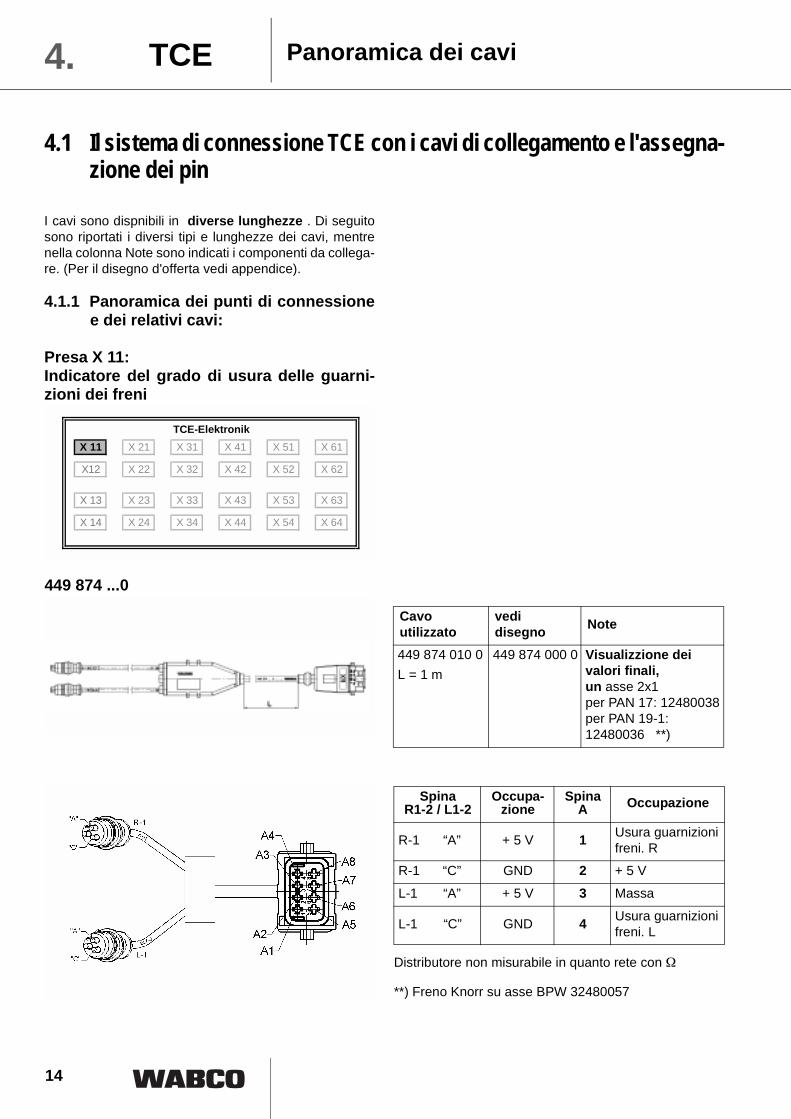
4.1 Il sistema di connessione TCE con i cavi di collegamento e l'assegna-zione dei pin
I cavi sono dispnibili in diverse lunghezze . Di seguitosono riportati i diversi tipi e lunghezze dei cavi, mentrenella colonna Note sono indicati i componenti da collega-re. (Per il disegno d'offerta vedi appendice).
4.1.1 Panoramica dei punti di connessionee dei relativi cavi:
Presa X 11: Indicatore del grado di usura delle guarni-zioni dei freni
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Panoramica dei cavi4.
449 874 ...0
Cavoutilizzato
vedidisegno Note
449 874 010 0L = 1 m
449 874 000 0 Visualizzione dei valori finali, un asse 2x1per PAN 17: 12480038per PAN 19-1: 12480036 **)
Distributore non misurabile in quanto rete con �
**) Freno Knorr su asse BPW 32480057
SpinaR1-2 / L1-2
Occupa-zione
SpinaA Occupazione
R-1 “A” + 5 V 1 Usura guarnizioni freni. R
R-1 “C” GND 2 + 5 V
L-1 “A” + 5 V 3 Massa
L-1 “C” GND 4 Usura guarnizioni freni. L
TCE
15
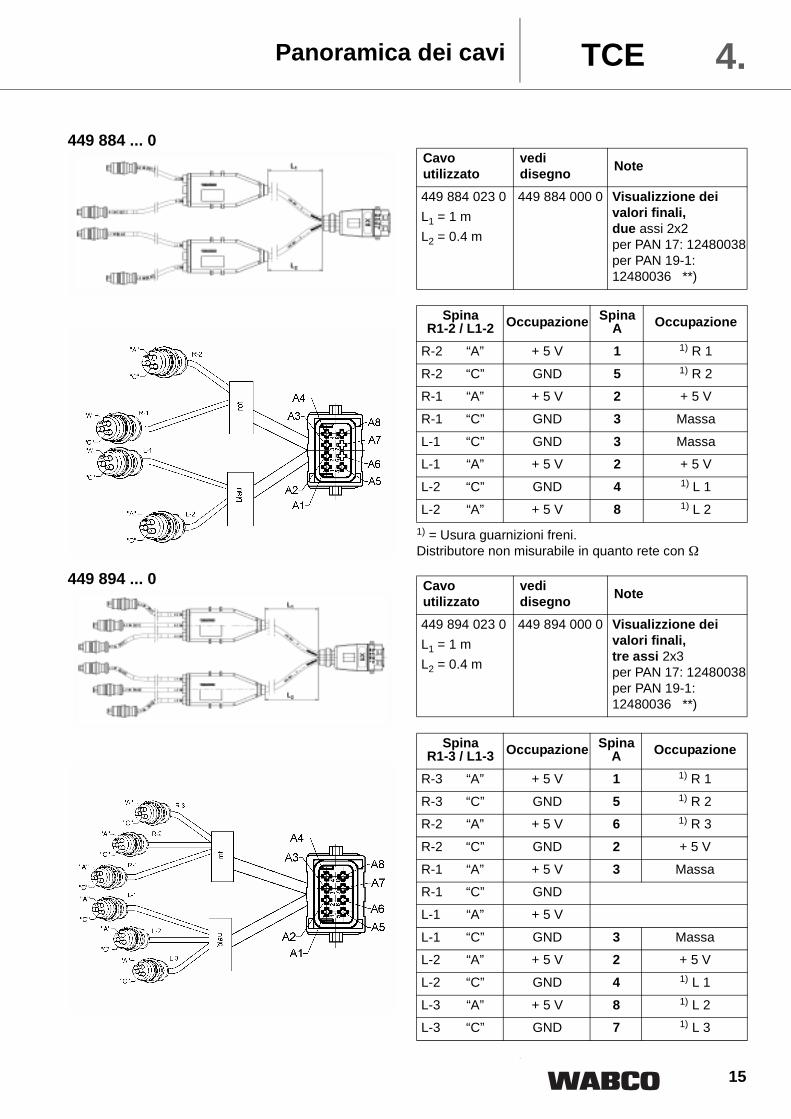
449 884 ... 0
449 894 ... 0
1) = Usura guarnizioni freni.Distributore non misurabile in quanto rete con �
Cavoutilizzato
vedidisegno Note
449 884 023 0L1 = 1 mL2 = 0.4 m
449 884 000 0 Visualizzione dei valori finali, due assi 2x2per PAN 17: 12480038per PAN 19-1: 12480036 **)
SpinaR1-2 / L1-2 Occupazione Spina
A Occupazione
R-2 “A” + 5 V 1 1) R 1
R-2 “C” GND 5 1) R 2R-1 “A” + 5 V 2 + 5 V
R-1 “C” GND 3 Massa
L-1 “C” GND 3 MassaL-1 “A” + 5 V 2 + 5 V
L-2 “C” GND 4 1) L 1
L-2 “A” + 5 V 8 1) L 2
Cavoutilizzato
vedidisegno Note
449 894 023 0L1 = 1 mL2 = 0.4 m
449 894 000 0 Visualizzione dei valori finali, tre assi 2x3per PAN 17: 12480038per PAN 19-1: 12480036 **)
SpinaR1-3 / L1-3 Occupazione Spina
A Occupazione
R-3 “A” + 5 V 1 1) R 1
R-3 “C” GND 5 1) R 2R-2 “A” + 5 V 6 1) R 3
R-2 “C” GND 2 + 5 V
R-1 “A” + 5 V 3 MassaR-1 “C” GND
L-1 “A” + 5 V
L-1 “C” GND 3 MassaL-2 “A” + 5 V 2 + 5 V
L-2 “C” GND 4 1) L 1
L-3 “A” + 5 V 8 1) L 2L-3 “C” GND 7 1) L 3
Panoramica dei cavi 4.TCE
16
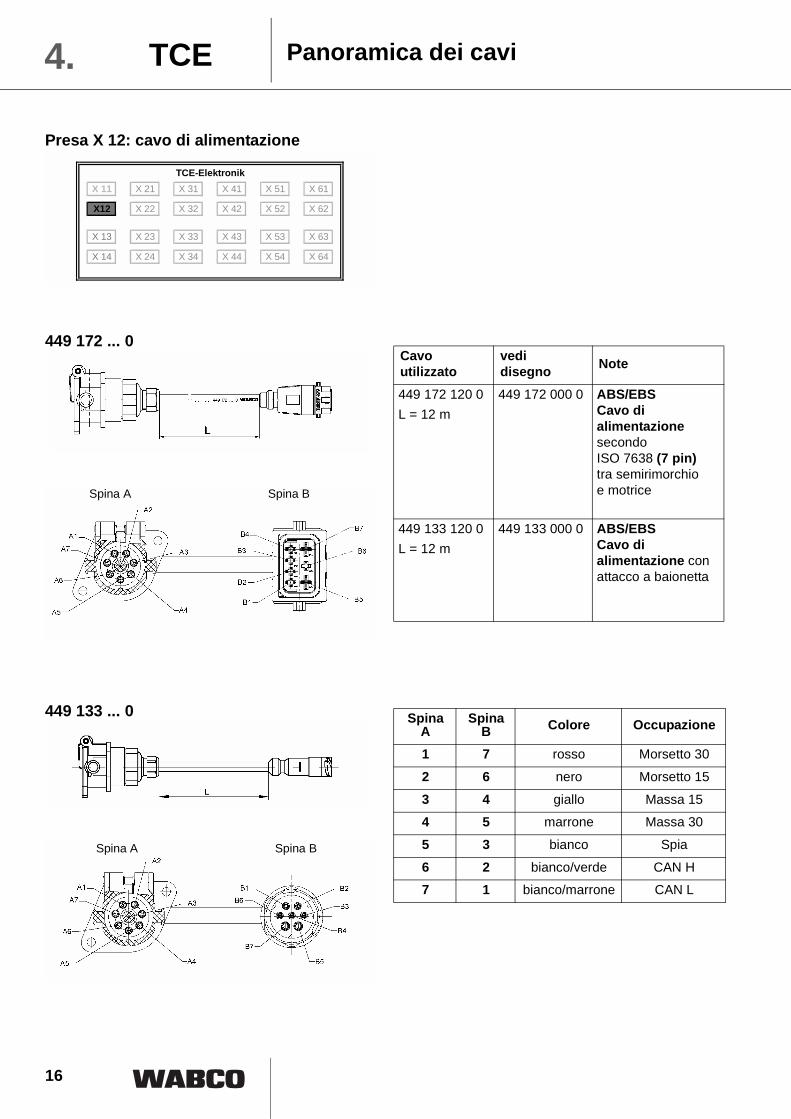
Presa X 12: cavo di alimentazione
449 172 ... 0
449 133 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina A Spina B
Spina A Spina B
Cavoutilizzato
vedidisegno Note
449 172 120 0L = 12 m
449 172 000 0 ABS/EBSCavo di alimentazione secondoISO 7638 (7 pin)tra semirimorchioe motrice
449 133 120 0L = 12 m
449 133 000 0 ABS/EBSCavo di alimentazione conattacco a baionetta
SpinaA
SpinaB Colore Occupazione
1 7 rosso Morsetto 30
2 6 nero Morsetto 15
3 4 giallo Massa 154 5 marrone Massa 30
5 3 bianco Spia
6 2 bianco/verde CAN H7 1 bianco/marrone CAN L
Panoramica dei cavi4. TCE
17
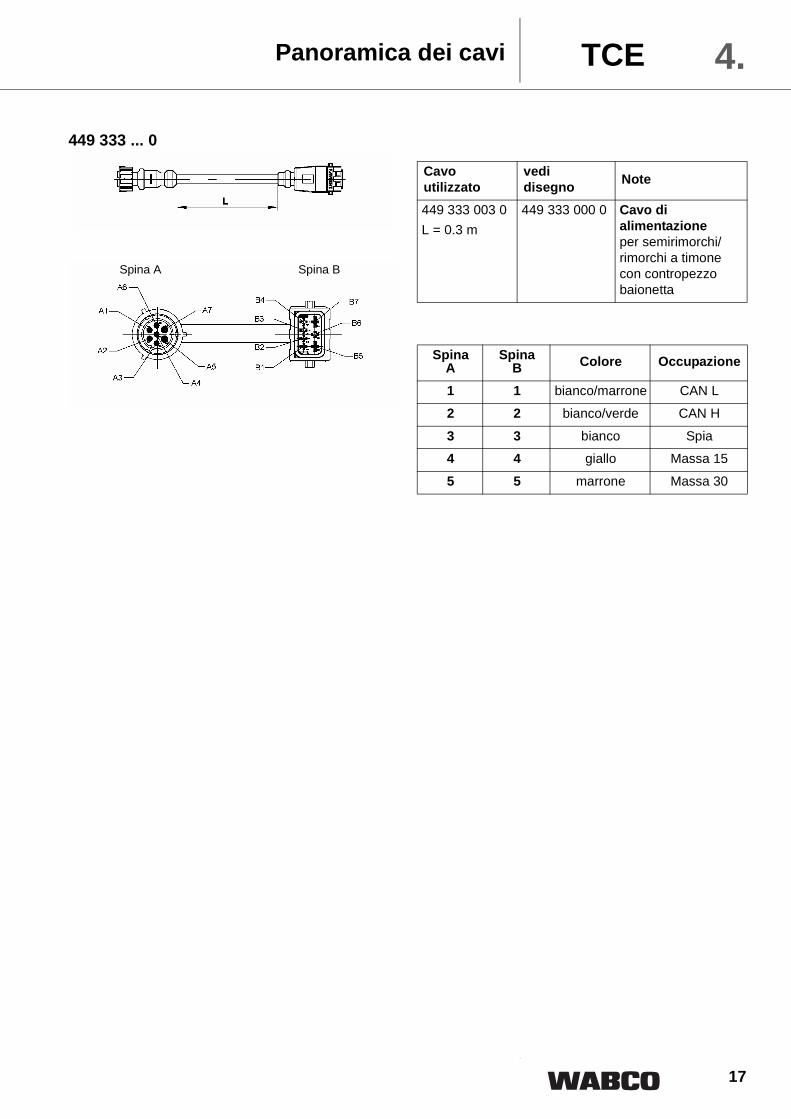
449 333 ... 0
Spina A Spina B
Cavoutilizzato
vedidisegno Note
449 333 003 0L = 0.3 m
449 333 000 0 Cavo di alimentazioneper semirimorchi/rimorchi a timonecon contropezzo baionetta
SpinaA
SpinaB Colore Occupazione
1 1 bianco/marrone CAN L
2 2 bianco/verde CAN H
3 3 bianco Spia4 4 giallo Massa 15
5 5 marrone Massa 30
Panoramica dei cavi 4.TCE
18
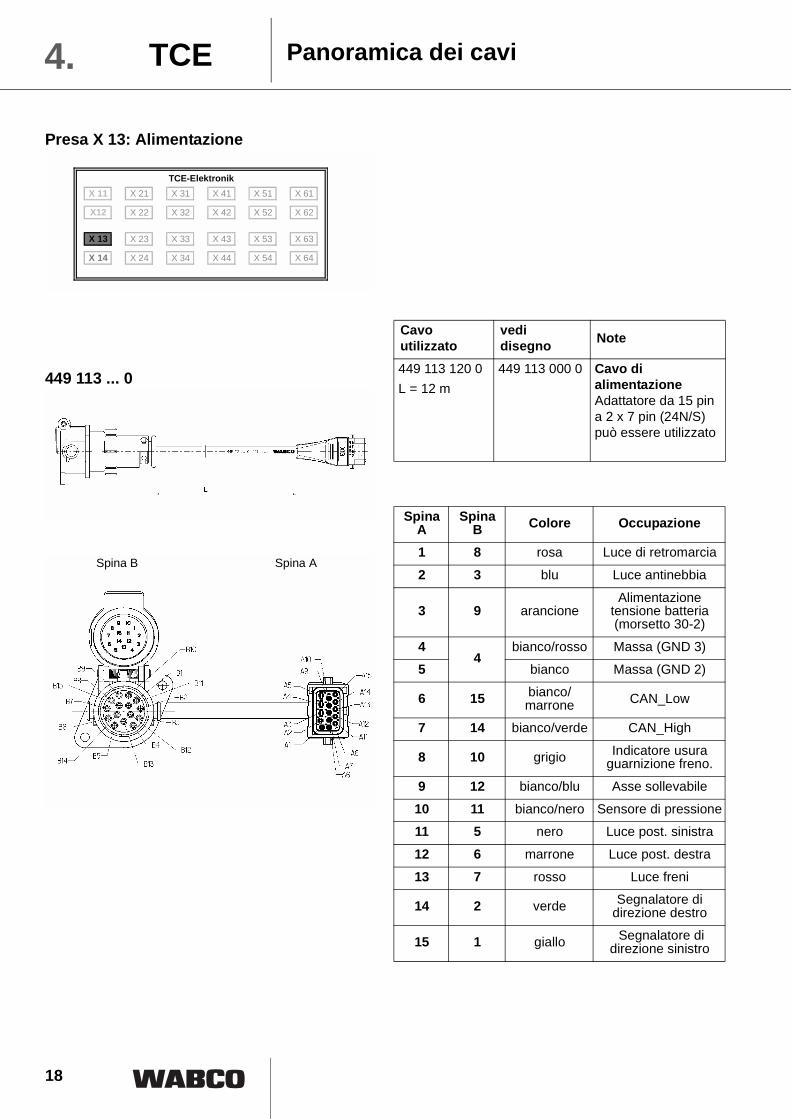
Presa X 13: Alimentazione
449 113 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina B Spina A
Cavoutilizzato
vedidisegno Note
449 113 120 0L = 12 m
449 113 000 0 Cavo di alimentazioneAdattatore da 15 pin a 2 x 7 pin (24N/S)può essere utilizzato
SpinaA
SpinaB Colore Occupazione
1 8 rosa Luce di retromarcia
2 3 blu Luce antinebbia
3 9 arancioneAlimentazione
tensione batteria (morsetto 30-2)
44
bianco/rosso Massa (GND 3)
5 bianco Massa (GND 2)
6 15 bianco/marrone CAN_Low
7 14 bianco/verde CAN_High
8 10 grigio Indicatore usura guarnizione freno.
9 12 bianco/blu Asse sollevabile
10 11 bianco/nero Sensore di pressione11 5 nero Luce post. sinistra
12 6 marrone Luce post. destra
13 7 rosso Luce freni
14 2 verde Segnalatore di direzione destro
15 1 giallo Segnalatore di direzione sinistro
Panoramica dei cavi4. TCE
19
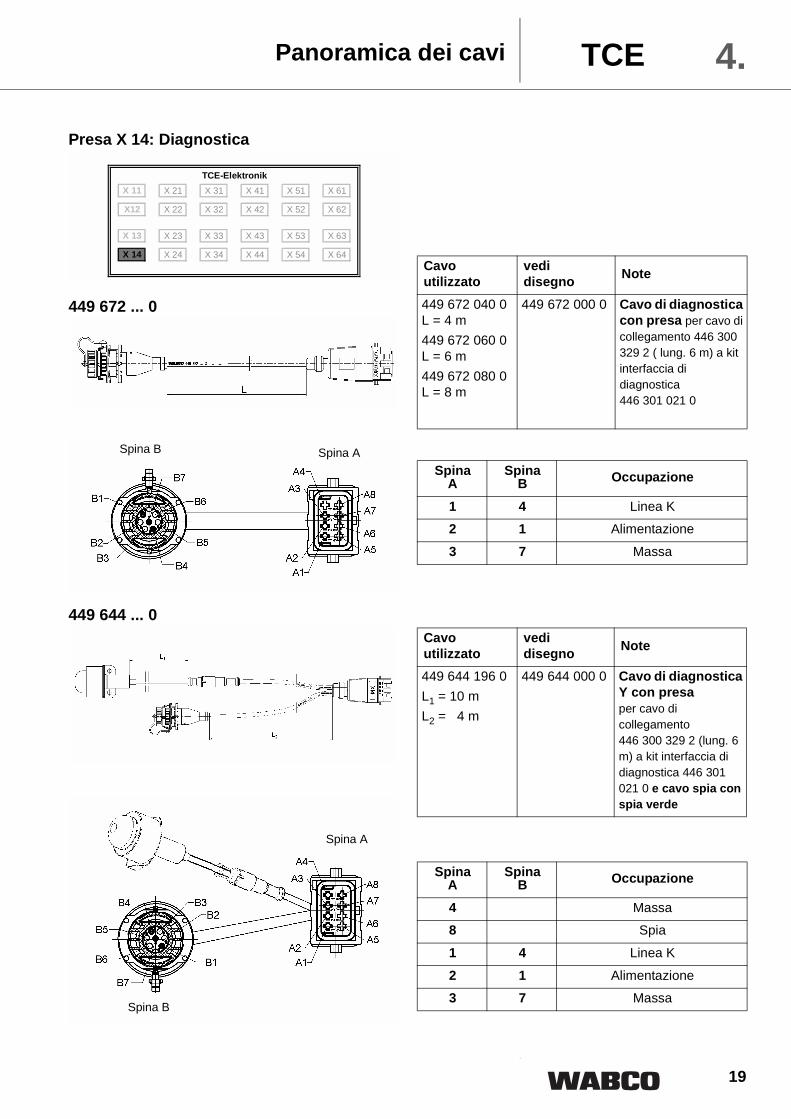
Presa X 14: Diagnostica
449 672 ... 0
449 644 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina B Spina A
Spina B
Spina A
Cavoutilizzato
vedidisegno Note
449 672 040 0L = 4 m449 672 060 0L = 6 m449 672 080 0L = 8 m
449 672 000 0 Cavo di diagnostica con presa per cavo di collegamento 446 300 329 2 ( lung. 6 m) a kit interfaccia di diagnostica 446 301 021 0
SpinaA
SpinaB Occupazione
1 4 Linea K2 1 Alimentazione
3 7 Massa
Cavoutilizzato
vedidisegno Note
449 644 196 0L1 = 10 mL2 = 4 m
449 644 000 0 Cavo di diagnostica Y con presaper cavo di collegamento446 300 329 2 (lung. 6 m) a kit interfaccia di diagnostica 446 301 021 0 e cavo spia con spia verde
SpinaA
SpinaB Occupazione
4 Massa8 Spia
1 4 Linea K
2 1 Alimentazione3 7 Massa
Panoramica dei cavi 4.TCE
20
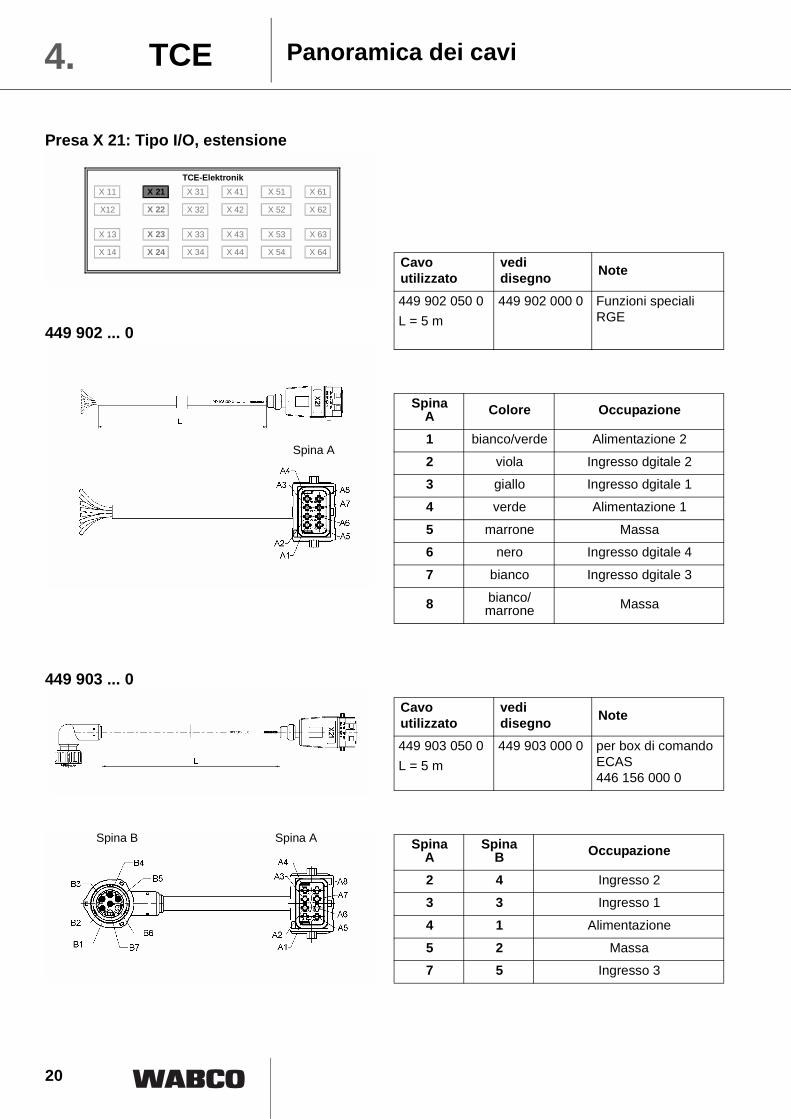
Presa X 21: Tipo I/O, estensione
449 902 ... 0
449 903 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina A
Spina B Spina A
Cavoutilizzato
vedidisegno Note
449 902 050 0L = 5 m
449 902 000 0 Funzioni speciali RGE
SpinaA Colore Occupazione
1 bianco/verde Alimentazione 2
2 viola Ingresso dgitale 23 giallo Ingresso dgitale 1
4 verde Alimentazione 1
5 marrone Massa6 nero Ingresso dgitale 4
7 bianco Ingresso dgitale 3
8 bianco/marrone Massa
Cavoutilizzato
vedidisegno Note
449 903 050 0L = 5 m
449 903 000 0 per box di comando ECAS446 156 000 0
SpinaA
SpinaB Occupazione
2 4 Ingresso 23 3 Ingresso 1
4 1 Alimentazione
5 2 Massa7 5 Ingresso 3
Panoramica dei cavi4. TCE
21
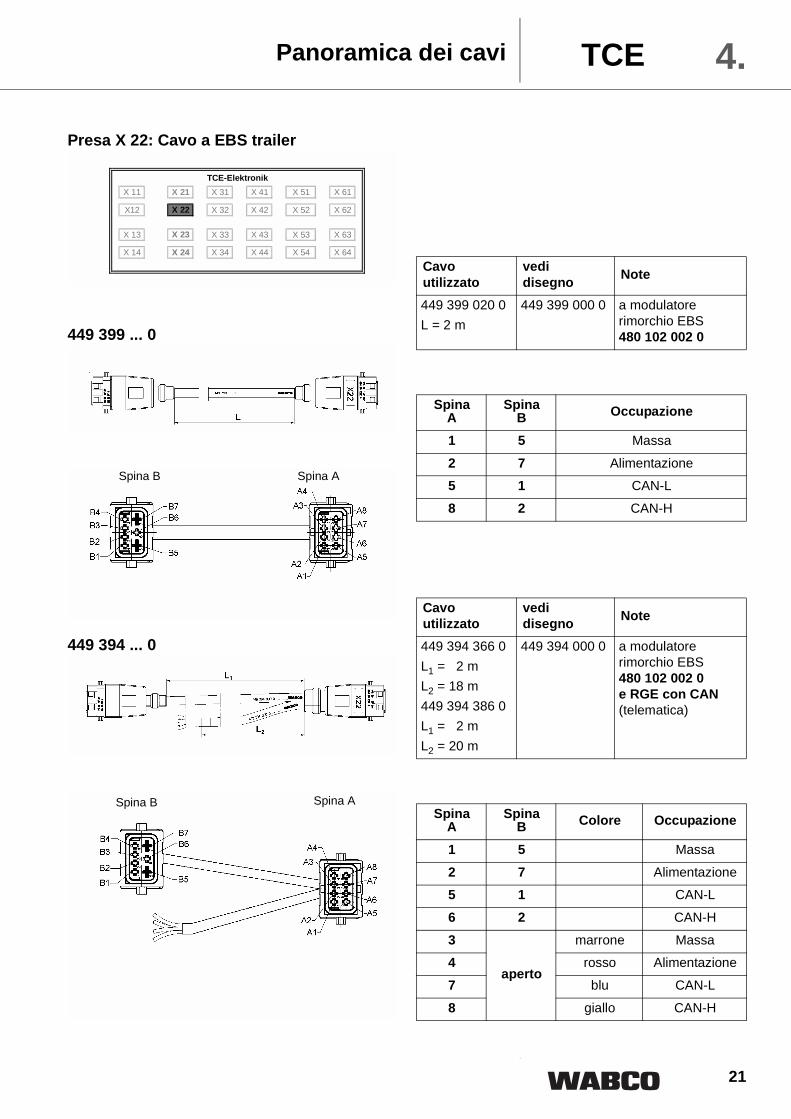
Presa X 22: Cavo a EBS trailer
449 399 ... 0
449 394 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina B Spina A
Spina B Spina A
Cavoutilizzato
vedidisegno Note
449 399 020 0L = 2 m
449 399 000 0 a modulatore rimorchio EBS480 102 002 0
SpinaA
SpinaB Occupazione
1 5 Massa
2 7 Alimentazione5 1 CAN-L
8 2 CAN-H
Cavoutilizzato
vedidisegno Note
449 394 366 0L1 = 2 mL2 = 18 m449 394 386 0L1 = 2 mL2 = 20 m
449 394 000 0 a modulatore rimorchio EBS480 102 002 0e RGE con CAN (telematica)
SpinaA
SpinaB Colore Occupazione
1 5 Massa
2 7 Alimentazione5 1 CAN-L
6 2 CAN-H
3
aperto
marrone Massa4 rosso Alimentazione
7 blu CAN-L
8 giallo CAN-H
Panoramica dei cavi 4.TCE
22
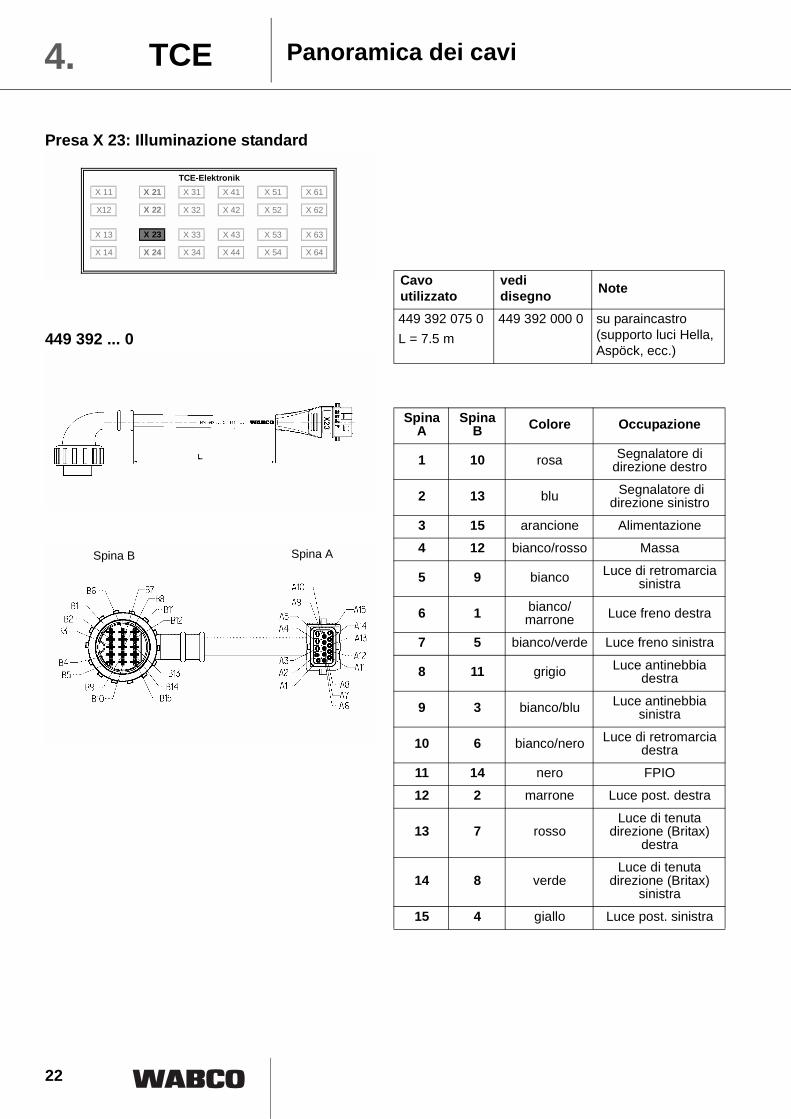
Presa X 23: Illuminazione standard
449 392 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina B Spina A
Cavoutilizzato
vedidisegno Note
449 392 075 0L = 7.5 m
449 392 000 0 su paraincastro (supporto luci Hella, Aspöck, ecc.)
SpinaA
SpinaB Colore Occupazione
1 10 rosa Segnalatore di direzione destro
2 13 blu Segnalatore di direzione sinistro
3 15 arancione Alimentazione4 12 bianco/rosso Massa
5 9 bianco Luce di retromarcia sinistra
6 1 bianco/marrone Luce freno destra
7 5 bianco/verde Luce freno sinistra
8 11 grigio Luce antinebbia destra
9 3 bianco/blu Luce antinebbia sinistra
10 6 bianco/nero Luce di retromarcia destra
11 14 nero FPIO12 2 marrone Luce post. destra
13 7 rossoLuce di tenuta
direzione (Britax) destra
14 8 verdeLuce di tenuta
direzione (Britax) sinistra
15 4 giallo Luce post. sinistra
Panoramica dei cavi4. TCE
23
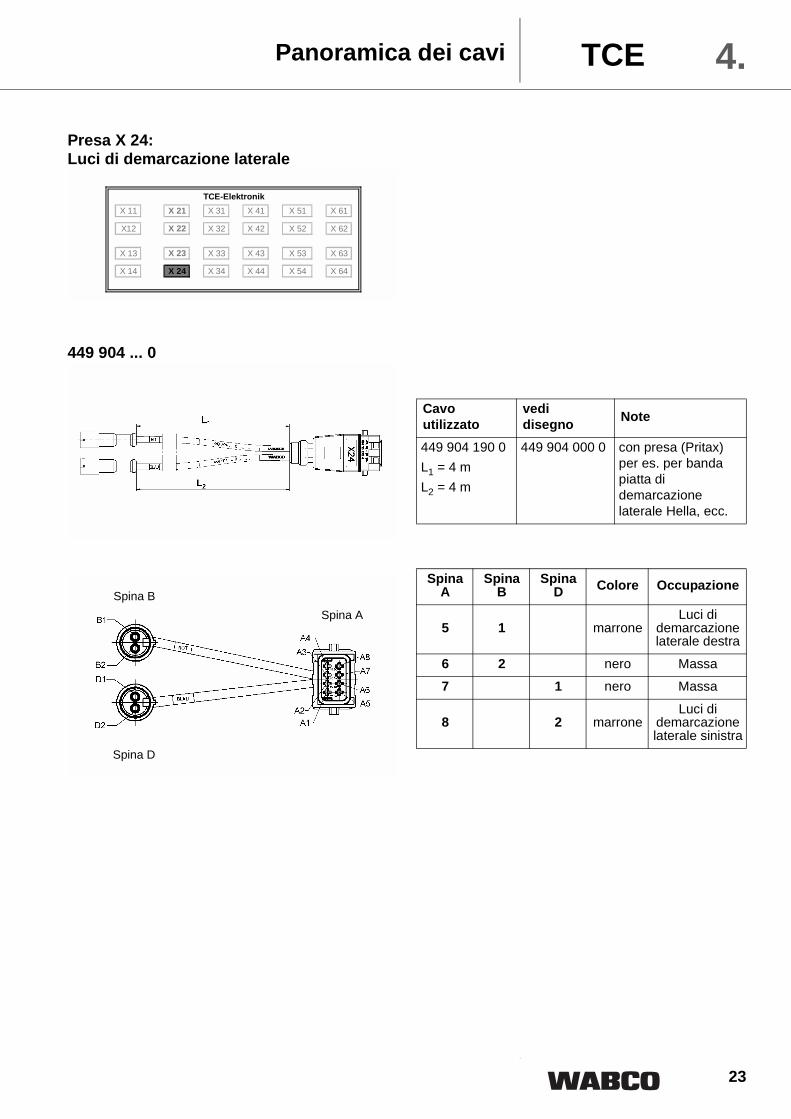
Presa X 24: Luci di demarcazione laterale
449 904 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina BSpina A
Spina D
Cavoutilizzato
vedidisegno Note
449 904 190 0L1 = 4 mL2 = 4 m
449 904 000 0 con presa (Pritax) per es. per banda piatta di demarcazione laterale Hella, ecc.
SpinaA
SpinaB
SpinaD Colore Occupazione
5 1 marroneLuci di
demarcazione laterale destra
6 2 nero Massa7 1 nero Massa
8 2 marroneLuci di
demarcazione laterale sinistra
Panoramica dei cavi 4.TCE
24
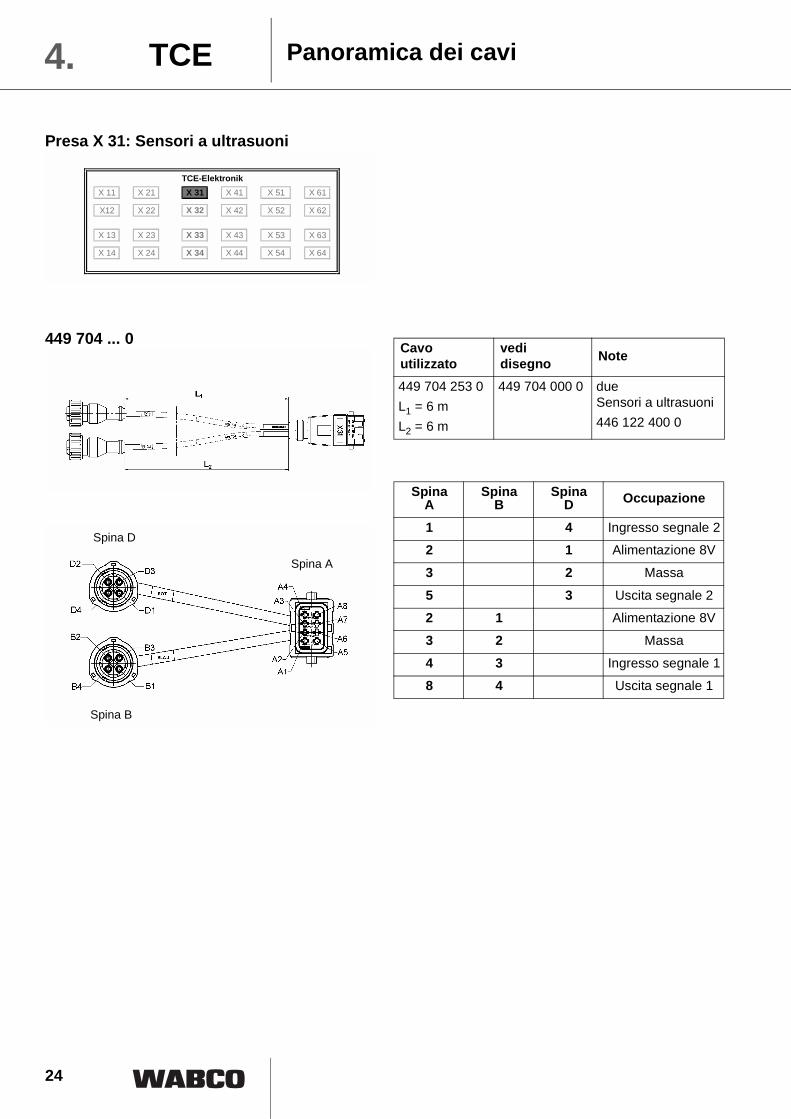
Presa X 31: Sensori a ultrasuoni
449 704 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina D
Spina A
Spina B
Cavoutilizzato
vedidisegno Note
449 704 253 0L1 = 6 mL2 = 6 m
449 704 000 0 dueSensori a ultrasuoni446 122 400 0
SpinaA
SpinaB
SpinaD Occupazione
1 4 Ingresso segnale 22 1 Alimentazione 8V
3 2 Massa
5 3 Uscita segnale 22 1 Alimentazione 8V
3 2 Massa
4 3 Ingresso segnale 18 4 Uscita segnale 1
Panoramica dei cavi4. TCE
25
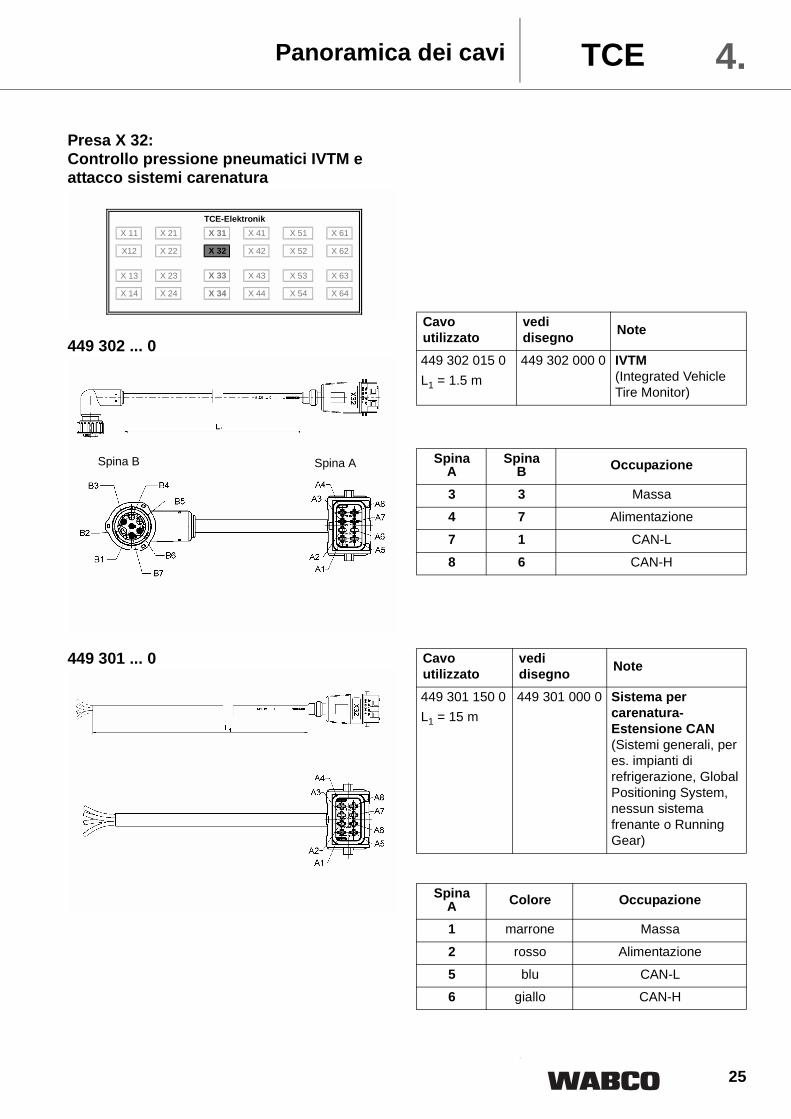
Presa X 32: Controllo pressione pneumatici IVTM eattacco sistemi carenatura
449 302 ... 0
449 301 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina B Spina A
Cavoutilizzato
vedidisegno Note
449 302 015 0L1 = 1.5 m
449 302 000 0 IVTM(Integrated Vehicle Tire Monitor)
SpinaA
SpinaB Occupazione
3 3 Massa4 7 Alimentazione
7 1 CAN-L
8 6 CAN-H
Cavoutilizzato
vedidisegno Note
449 301 150 0L1 = 15 m
449 301 000 0 Sistema per carenatura-Estensione CAN(Sistemi generali, per es. impianti di refrigerazione, Global Positioning System, nessun sistema frenante o Running Gear)
SpinaA Colore Occupazione
1 marrone Massa
2 rosso Alimentazione
5 blu CAN-L6 giallo CAN-H
Panoramica dei cavi 4.TCE
26
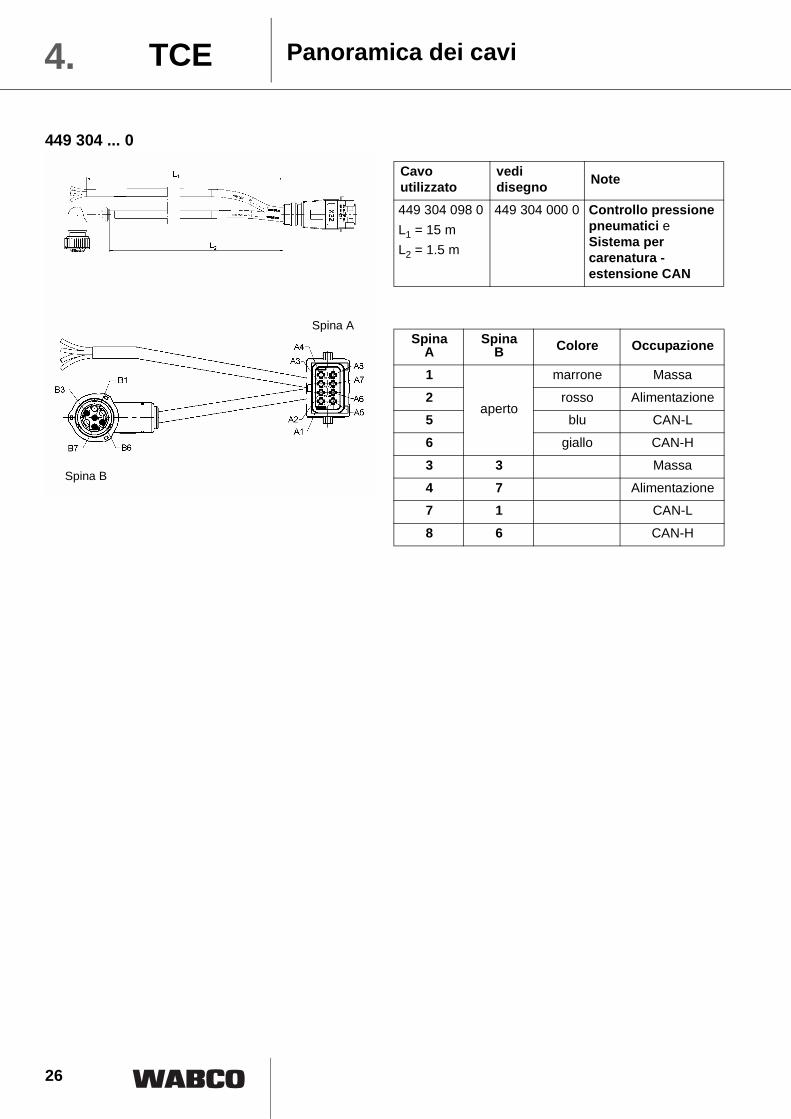
449 304 ... 0
Spina B
Spina A
Cavoutilizzato
vedidisegno Note
449 304 098 0L1 = 15 mL2 = 1.5 m
449 304 000 0 Controllo pressione pneumatici eSistema per carenatura - estensione CAN
SpinaA
SpinaB Colore Occupazione
1
aperto
marrone Massa
2 rosso Alimentazione5 blu CAN-L
6 giallo CAN-H
3 3 Massa
4 7 Alimentazione7 1 CAN-L
8 6 CAN-H
Panoramica dei cavi4. TCE
27
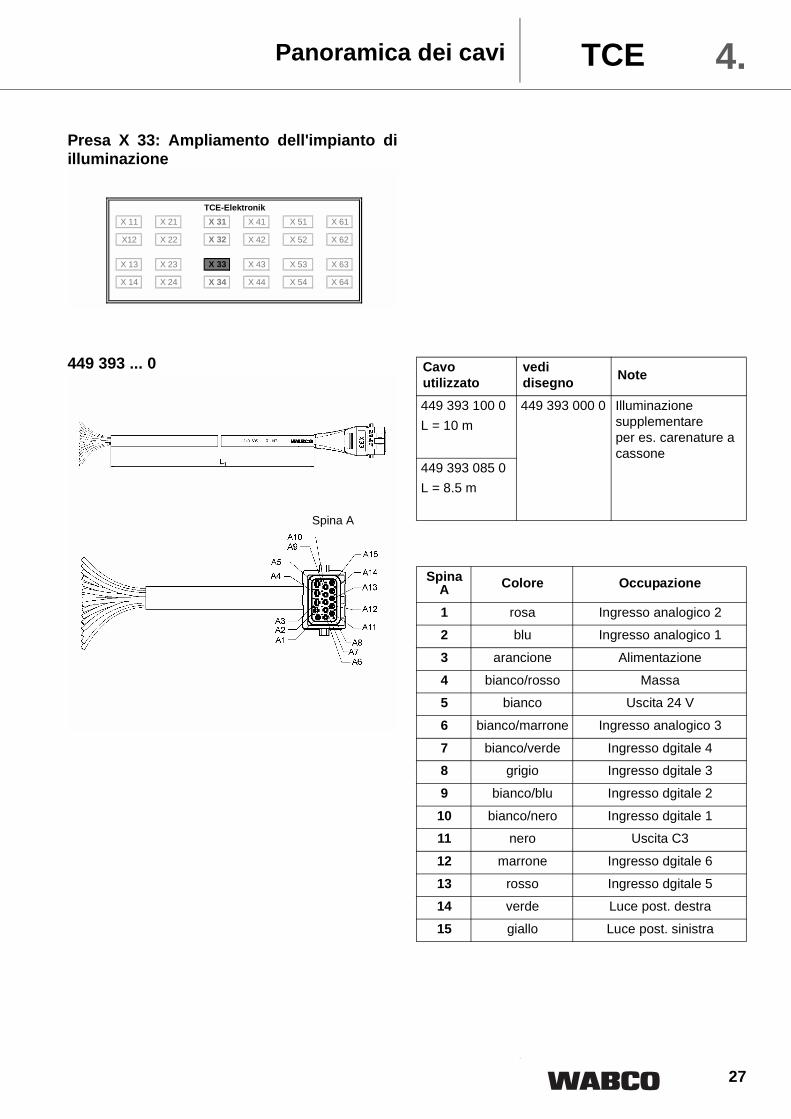
Presa X 33: Ampliamento dell'impianto diilluminazione
449 393 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina A
Cavoutilizzato
vedidisegno Note
449 393 100 0L = 10 m
449 393 000 0 Illuminazione supplementareper es. carenature a cassone
449 393 085 0L = 8.5 m
SpinaA Colore Occupazione
1 rosa Ingresso analogico 22 blu Ingresso analogico 1
3 arancione Alimentazione
4 bianco/rosso Massa5 bianco Uscita 24 V
6 bianco/marrone Ingresso analogico 3
7 bianco/verde Ingresso dgitale 48 grigio Ingresso dgitale 3
9 bianco/blu Ingresso dgitale 2
10 bianco/nero Ingresso dgitale 111 nero Uscita C3
12 marrone Ingresso dgitale 6
13 rosso Ingresso dgitale 514 verde Luce post. destra
15 giallo Luce post. sinistra
Panoramica dei cavi 4.TCE
28
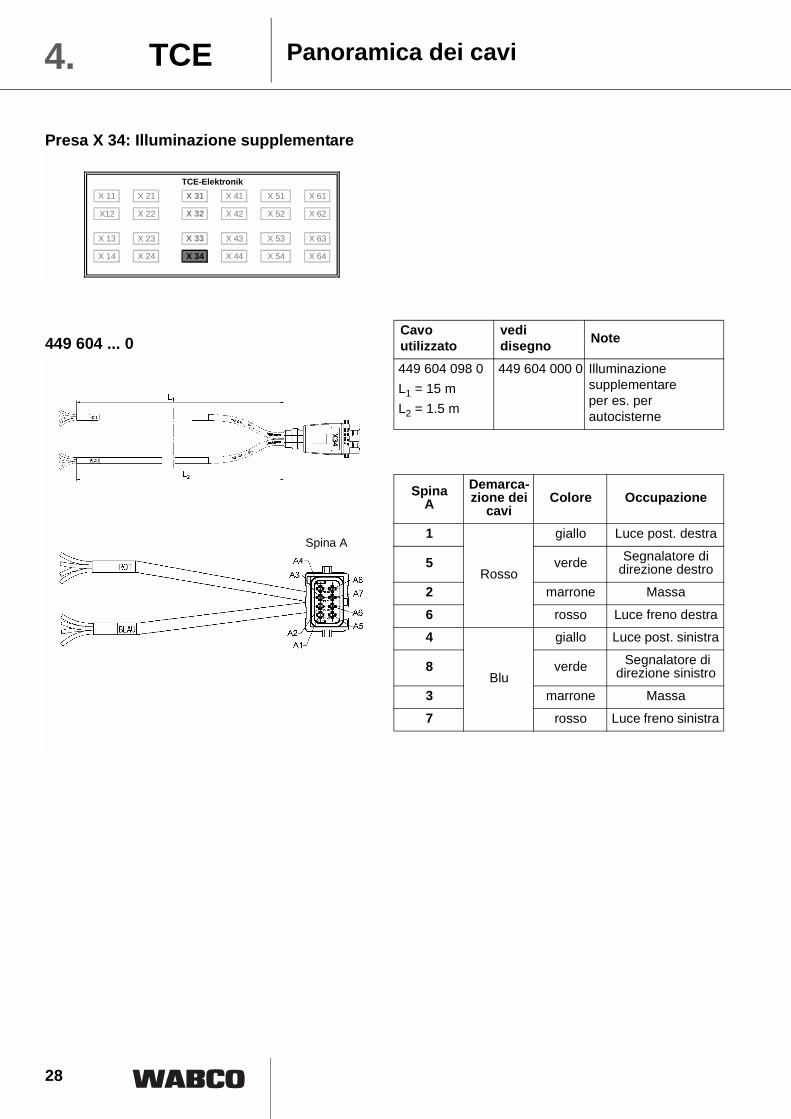
Presa X 34: Illuminazione supplementare
449 604 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina A
Cavoutilizzato
vedidisegno Note
449 604 098 0L1 = 15 mL2 = 1.5 m
449 604 000 0 Illuminazione supplementareper es. per autocisterne
SpinaA
Demarca-zione dei
caviColore Occupazione
1
Rosso
giallo Luce post. destra
5 verde Segnalatore di direzione destro
2 marrone Massa
6 rosso Luce freno destra 4
Blu
giallo Luce post. sinistra
8 verde Segnalatore di direzione sinistro
3 marrone Massa
7 rosso Luce freno sinistra
Panoramica dei cavi4. TCE
29
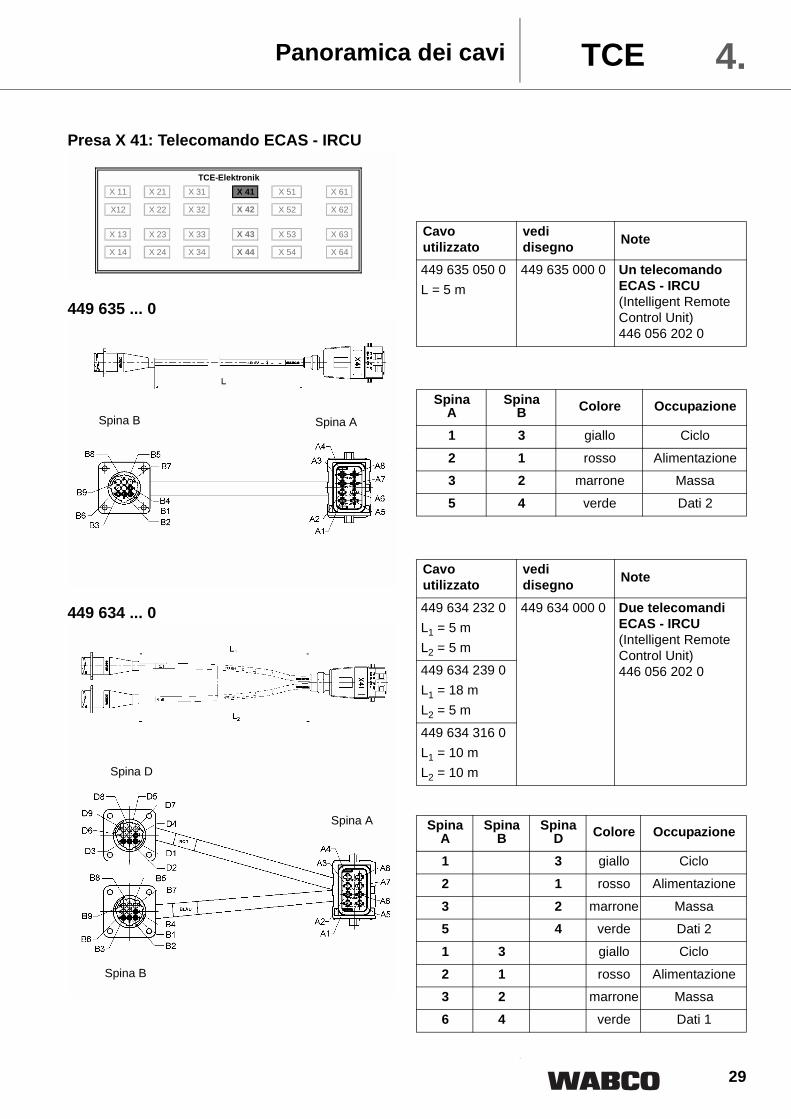
Presa X 41: Telecomando ECAS - IRCU
449 635 ... 0
449 634 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina B Spina A
Spina D
Spina A
Spina B
Cavoutilizzato
vedidisegno Note
449 635 050 0L = 5 m
449 635 000 0 Un telecomando ECAS - IRCU(Intelligent Remote Control Unit)446 056 202 0
SpinaA
SpinaB Colore Occupazione
1 3 giallo Ciclo
2 1 rosso Alimentazione3 2 marrone Massa
5 4 verde Dati 2
Cavoutilizzato
vedidisegno Note
449 634 232 0L1 = 5 mL2 = 5 m
449 634 000 0 Due telecomandi ECAS - IRCU(Intelligent Remote Control Unit)446 056 202 0449 634 239 0
L1 = 18 mL2 = 5 m
449 634 316 0L1 = 10 mL2 = 10 m
SpinaA
SpinaB
SpinaD Colore Occupazione
1 3 giallo Ciclo
2 1 rosso Alimentazione
3 2 marrone Massa5 4 verde Dati 2
1 3 giallo Ciclo
2 1 rosso Alimentazione3 2 marrone Massa
6 4 verde Dati 1
Panoramica dei cavi 4.TCE
30
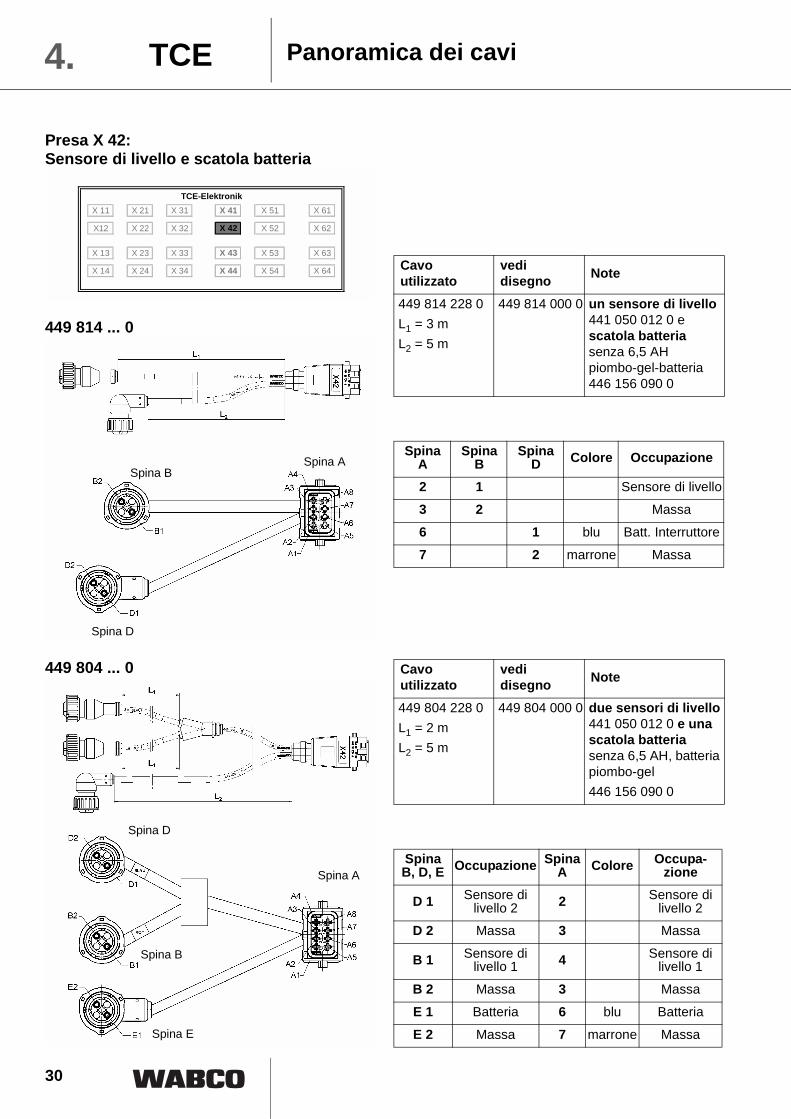
Presa X 42: Sensore di livello e scatola batteria
449 814 ... 0
449 804 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina D
Spina ASpina B
Spina D
Spina A
Spina B
Spina E
Cavoutilizzato
vedidisegno Note
449 814 228 0L1 = 3 mL2 = 5 m
449 814 000 0 un sensore di livello441 050 012 0 e scatola batteria senza 6,5 AH piombo-gel-batteria 446 156 090 0
SpinaA
SpinaB
SpinaD Colore Occupazione
2 1 Sensore di livello
3 2 Massa
6 1 blu Batt. Interruttore
7 2 marrone Massa
Cavoutilizzato
vedidisegno Note
449 804 228 0L1 = 2 mL2 = 5 m
449 804 000 0 due sensori di livello441 050 012 0 e una scatola batteria senza 6,5 AH, batteria piombo-gel446 156 090 0
SpinaB, D, E Occupazione Spina
A Colore Occupa-zione
D 1 Sensore di livello 2 2 Sensore di
livello 2D 2 Massa 3 Massa
B 1 Sensore di livello 1 4 Sensore di
livello 1
B 2 Massa 3 Massa
E 1 Batteria 6 blu Batteria
E 2 Massa 7 marrone Massa
Panoramica dei cavi4. TCE
31
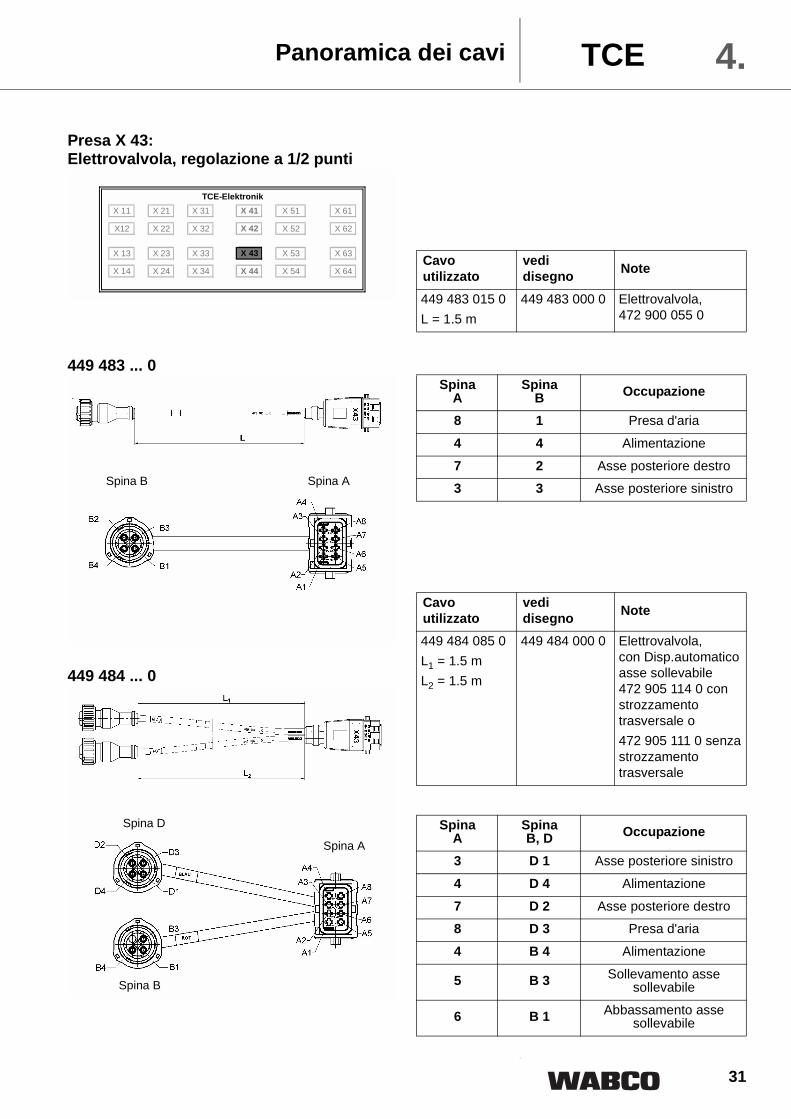
Presa X 43: Elettrovalvola, regolazione a 1/2 punti
449 483 ... 0
449 484 ... 0
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina ASpina B
Spina B
Spina A
Spina D
Cavoutilizzato
vedidisegno Note
449 483 015 0L = 1.5 m
449 483 000 0 Elettrovalvola,472 900 055 0
SpinaA
SpinaB Occupazione
8 1 Presa d'aria
4 4 Alimentazione
7 2 Asse posteriore destro 3 3 Asse posteriore sinistro
Cavoutilizzato
vedidisegno Note
449 484 085 0L1 = 1.5 mL2 = 1.5 m
449 484 000 0 Elettrovalvola,con Disp.automatico asse sollevabile472 905 114 0 con strozzamento trasversale o472 905 111 0 senza strozzamento trasversale
SpinaA
SpinaB, D Occupazione
3 D 1 Asse posteriore sinistro
4 D 4 Alimentazione
7 D 2 Asse posteriore destro 8 D 3 Presa d'aria
4 B 4 Alimentazione
5 B 3 Sollevamento asse sollevabile
6 B 1 Abbassamento asse sollevabile
Panoramica dei cavi 4.TCE
32
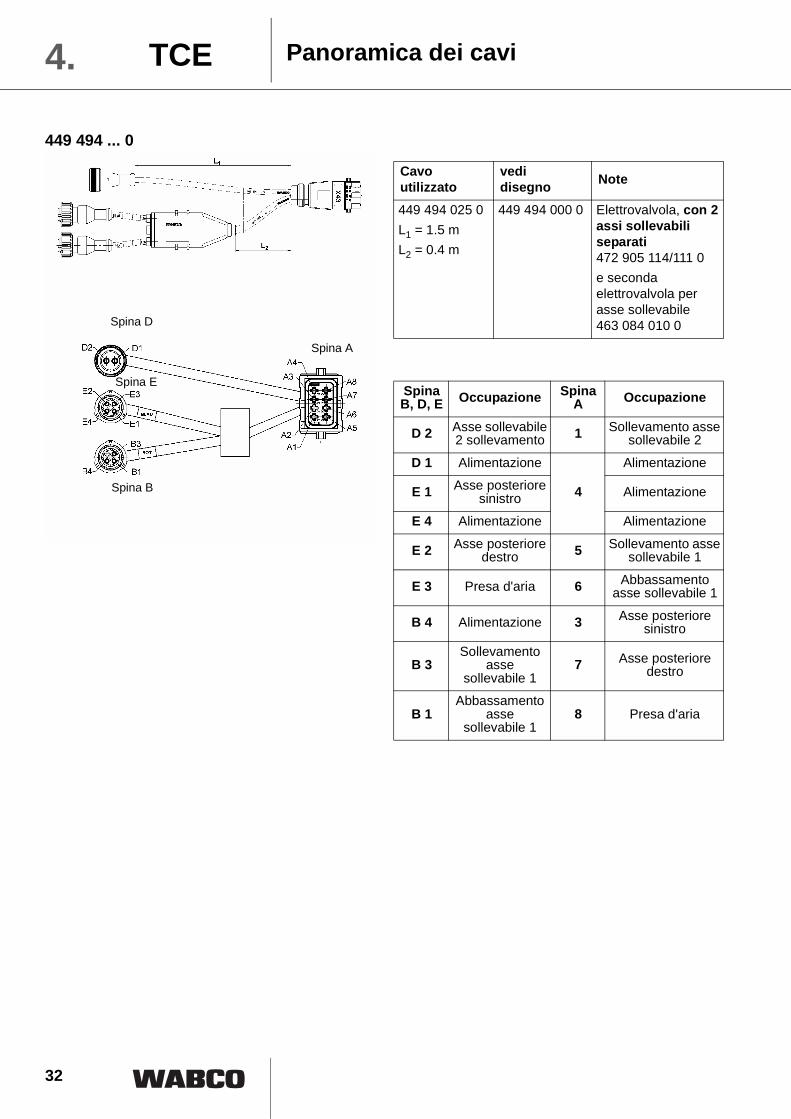
449 494 ... 0
Spina D
Spina A
Spina B
Spina E
Cavoutilizzato
vedidisegno Note
449 494 025 0L1 = 1.5 mL2 = 0.4 m
449 494 000 0 Elettrovalvola, con 2 assi sollevabiliseparati472 905 114/111 0e seconda elettrovalvola per asse sollevabile 463 084 010 0
SpinaB, D, E Occupazione Spina
A Occupazione
D 2 Asse sollevabile 2 sollevamento 1 Sollevamento asse
sollevabile 2
D 1 Alimentazione
4
Alimentazione
E 1 Asse posteriore sinistro Alimentazione
E 4 Alimentazione Alimentazione
E 2 Asse posteriore destro 5 Sollevamento asse
sollevabile 1
E 3 Presa d'aria 6 Abbassamento asse sollevabile 1
B 4 Alimentazione 3 Asse posteriore sinistro
B 3Sollevamento
asse sollevabile 1
7 Asse posteriore destro
B 1Abbassamento
asse sollevabile 1
8 Presa d'aria
Panoramica dei cavi4. TCE
33
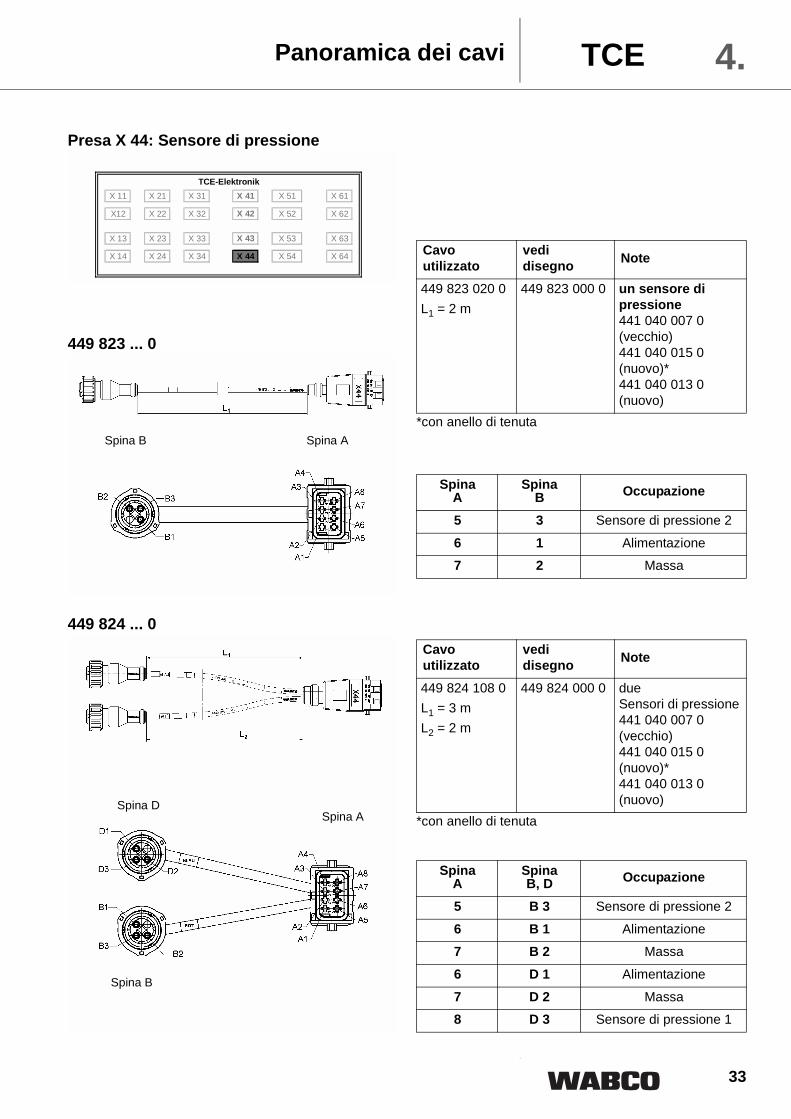
Presa X 44: Sensore di pressione
449 823 ... 0
449 824 ... 0
*con anello di tenuta
*con anello di tenuta
X 11 X 21 X 31 X 41 X 51 X 61
X12 X 22 X 32 X 42 X 52 X 62
X 13 X 23 X 33 X 43 X 53 X 63
X 14 X 24 X 34 X 44 X 54 X 64
TCE-Elektronik
Spina ASpina B
Spina DSpina A
Spina B
Cavoutilizzato
vedidisegno Note
449 823 020 0L1 = 2 m
449 823 000 0 un sensore di pressione441 040 007 0 (vecchio)441 040 015 0 (nuovo)*441 040 013 0 (nuovo)
SpinaA
SpinaB Occupazione
5 3 Sensore di pressione 2
6 1 Alimentazione7 2 Massa
Cavoutilizzato
vedidisegno Note
449 824 108 0L1 = 3 mL2 = 2 m
449 824 000 0 dueSensori di pressione441 040 007 0 (vecchio)441 040 015 0 (nuovo)*441 040 013 0 (nuovo)
SpinaA
SpinaB, D Occupazione
5 B 3 Sensore di pressione 2
6 B 1 Alimentazione7 B 2 Massa
6 D 1 Alimentazione
7 D 2 Massa8 D 3 Sensore di pressione 1
Panoramica dei cavi 4.TCE
34
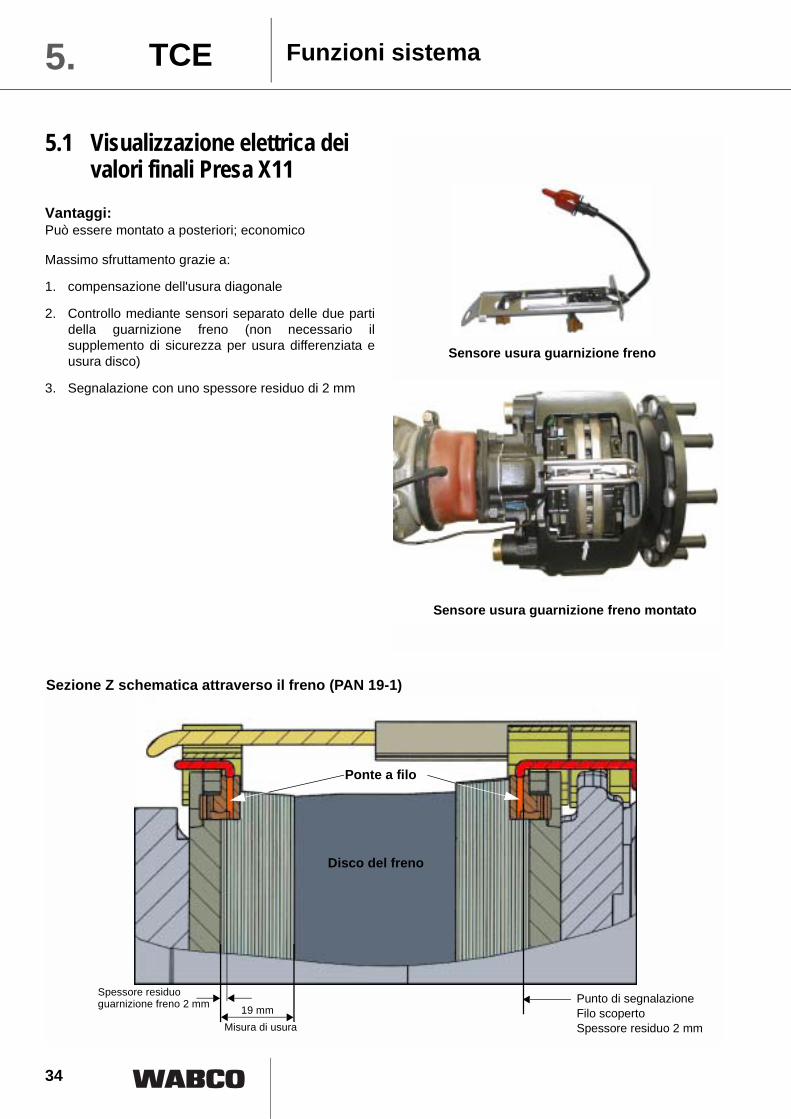
5.1 Visualizzazione elettrica dei valori finali Presa X11
Vantaggi:Può essere montato a posteriori; economico
Massimo sfruttamento grazie a:
1. compensazione dell'usura diagonale
2. Controllo mediante sensori separato delle due partidella guarnizione freno (non necessario ilsupplemento di sicurezza per usura differenziata eusura disco)
3. Segnalazione con uno spessore residuo di 2 mm
Funzioni sistema5.
Sensore usura guarnizione freno
Sensore usura guarnizione freno montato
Sezione Z schematica attraverso il freno (PAN 19-1)
Disco del freno
Ponte a filo
Punto di segnalazioneFilo scoperto Spessore residuo 2 mm
19 mmMisura di usura
Spessore residuo guarnizione freno 2 mm
TCE

35
5.2 Alimentazione elettrica5.2.1 Connettori motrice standarizzati
Prese X12 e X13La prima tabella offre una panoramica dei punti di con-nessione secondo la loro finalità, la seconda illustra l'oc-cupazione dei contatti.
Funzioni sistema 5.
ISO 3731 (24S)
Ground
Reversing lampElectricity supply (KL 30)Control via groundElectricity supply (KL 15)Fog lamp
Not connected 234
1
567
ISO 1185 (24N)
Ground
Travelling direction indicator leftBrake lightTravelling direction indicator rightRear light rightControl trailer brake
Rear light left 234
1
567
ISO/DIS 12098 (15-pin)
91011
8
121314
23
Ground 4
1
567
Brake lining wear sensorPressure sensor spring memoryLifting axle position
Data line number #1Data line number #2
Ground data lines
15
Travelling direction indicator right
Rear light leftRear light rightBrake light
Travelling direction indicator left
Electricity supply (KL 30)Reversing light
Fog lamp
ISO 7836 (ABS 7-pin)
Solenoid valve +
Electronics supply -Regulating solenoid valve -Warning equipmentCAN High 1)CAN Low 1)
Electronics supply + 234
1
567
1) Data connection according to ISO/DIS 11992
31/1 58L/2L/354/4 R/558R/654g/7
31/1 58L/2L/354/4 R/558R/654g/7
(1994) (2001)
liberoAusiliario di
Disp. solleva-
ISO 7638 (ABS a 7 pin)
Presa X13 con un adattatore può essere collegato a 15 pin (2 x 7). manca comunquepoi il collegamento CAN tra motrice e rimorchio.
CAN HighCAN Low
avviamento
mento asse
1) Collegamento dati secondo ISO 11992
Figura: Connettori rimorchio-motrice standardizzati
Presa X12 Presa X13
Denominazione Norma NotaABS/EBS -Connessione
ISO 7638 Alimentazione e comunicazione dati 1)
ABS/EBS, sistemi Running Gear
collegamento a 15 pin ISO 12098 Illuminazione, alimentazione rimorchio, funzioni specialie collegamento dati 1)
24 N ISO 1185 In alternativa a ISO 12098, illuminazione ealimentazione rimorchio
24 S ISO 3731 In alternativa a ISO 12098 illuminazione, funzioni speciali e alimentazione rimorchio
TCE
36
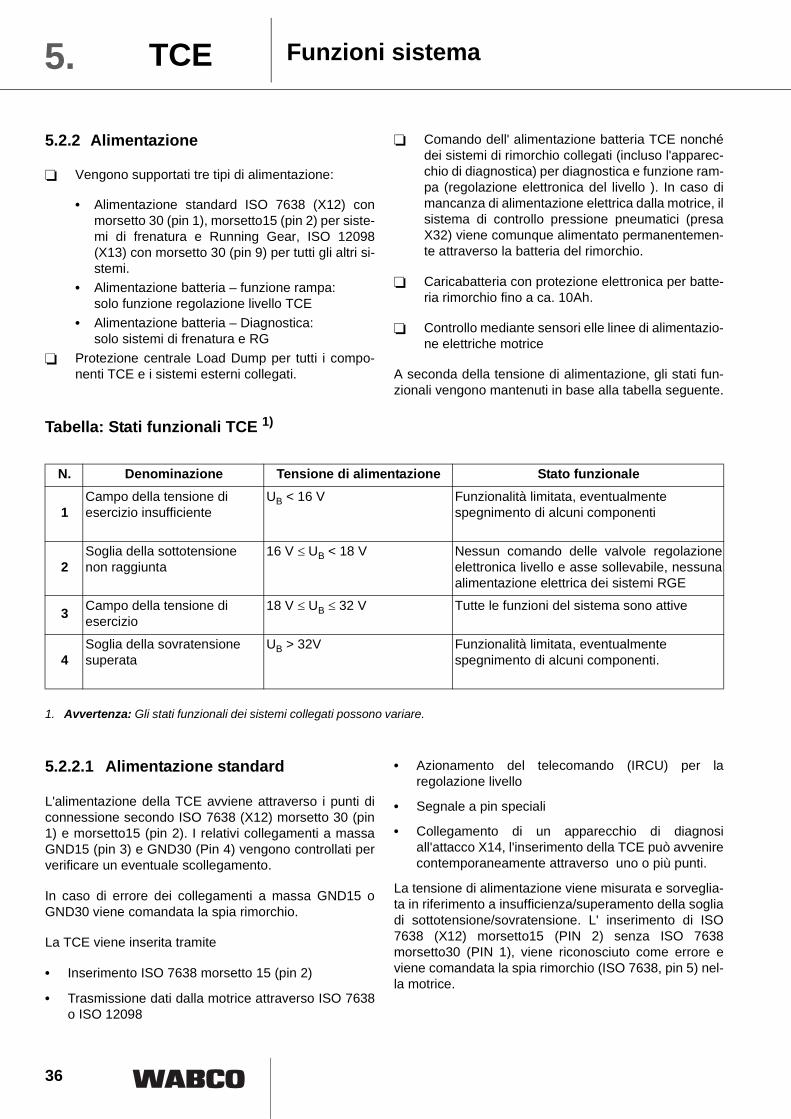
5.2.2 Alimentazione
� Vengono supportati tre tipi di alimentazione:
• Alimentazione standard ISO 7638 (X12) conmorsetto 30 (pin 1), morsetto15 (pin 2) per siste-mi di frenatura e Running Gear, ISO 12098(X13) con morsetto 30 (pin 9) per tutti gli altri si-stemi.
• Alimentazione batteria – funzione rampa:solo funzione regolazione livello TCE
• Alimentazione batteria – Diagnostica:solo sistemi di frenatura e RG
� Protezione centrale Load Dump per tutti i compo-nenti TCE e i sistemi esterni collegati.
� Comando dell' alimentazione batteria TCE nonchédei sistemi di rimorchio collegati (incluso l'apparec-chio di diagnostica) per diagnostica e funzione ram-pa (regolazione elettronica del livello ). In caso dimancanza di alimentazione elettrica dalla motrice, ilsistema di controllo pressione pneumatici (presaX32) viene comunque alimentato permanentemen-te attraverso la batteria del rimorchio.
� Caricabatteria con protezione elettronica per batte-ria rimorchio fino a ca. 10Ah.
� Controllo mediante sensori elle linee di alimentazio-ne elettriche motrice
A seconda della tensione di alimentazione, gli stati fun-zionali vengono mantenuti in base alla tabella seguente.
Funzioni sistema5.
Tabella: Stati funzionali TCE 1)
1. Avvertenza: Gli stati funzionali dei sistemi collegati possono variare.
N. Denominazione Tensione di alimentazione Stato funzionale
1Campo della tensione di esercizio insufficiente
UB < 16 V Funzionalità limitata, eventualmente spegnimento di alcuni componenti
2Soglia della sottotensionenon raggiunta
16 V � UB < 18 V Nessun comando delle valvole regolazioneelettronica livello e asse sollevabile, nessunaalimentazione elettrica dei sistemi RGE
3 Campo della tensione di esercizio
18 V � UB � 32 V Tutte le funzioni del sistema sono attive
4Soglia della sovratensione superata
UB > 32V Funzionalità limitata, eventualmente spegnimento di alcuni componenti.
5.2.2.1 Alimentazione standard
L'alimentazione della TCE avviene attraverso i punti diconnessione secondo ISO 7638 (X12) morsetto 30 (pin1) e morsetto15 (pin 2). I relativi collegamenti a massaGND15 (pin 3) e GND30 (Pin 4) vengono controllati perverificare un eventuale scollegamento.
In caso di errore dei collegamenti a massa GND15 oGND30 viene comandata la spia rimorchio.
La TCE viene inserita tramite
• Inserimento ISO 7638 morsetto 15 (pin 2)
• Trasmissione dati dalla motrice attraverso ISO 7638o ISO 12098
• Azionamento del telecomando (IRCU) per laregolazione livello
• Segnale a pin speciali
• Collegamento di un apparecchio di diagnosiall'attacco X14, l'inserimento della TCE può avvenirecontemporaneamente attraverso uno o più punti.
La tensione di alimentazione viene misurata e sorveglia-ta in riferimento a insufficienza/superamento della sogliadi sottotensione/sovratensione. L' inserimento di ISO7638 (X12) morsetto15 (PIN 2) senza ISO 7638morsetto30 (PIN 1), viene riconosciuto come errore eviene comandata la spia rimorchio (ISO 7638, pin 5) nel-la motrice.
TCE
37
5.3 Diagnostica e funzione spia; presa X14
Nel momento in cui un tester effettua l'inizializzazionedella trasmissione attraverso la linea K, l'EBS e tutti gli al-tri moduli collegati si attivano. Per evitare il sovraccarico,ai moduli e sistemi alimentati viene comunicato il tipo dialimentazione ”alimentazione batteria - diagnostica” at-traverso il bus dati del rimorchio. Con questo tipo di ali-mentazione devono essere disinserite le funzioni chenon sono da controllare. Questo modo di esercizio vieneterminato automaticamente se non avviene nessuna co-municazione tra tester e la TCE o se la diagnosi vieneterminata esplicitamente dal tester.
5.3.1 Gateway ISO 7638 / ISO 12098� Bus dati rimorchio
La TCE crea un Gateway bidirezionale tra il collegamen-to dati dell'ISO 7638, rispettivamente, l’ISO 12098 e ilbus CAN dati rimorchio. I messaggi ricevuti vengono fil-trati in base a una tabella programmata e trasmessi ai si-stemi/componenti rimorchio collegati. I messaggivengono elaborati per evento e temporalmente. I mes-saggi dalla motrice che devono essere trasmessi al busdati rimorchio e i messaggi dal bus dati rimorchio che de-vono essere trasmessi alla motrice, vengono elaboratiper evento. I messaggi che devono essere trasmessi dal-la TCE alla motrice oppure al bus dati rimorchio, vengo-no elaborati temporalmente.
In caso di contemporanea ricezione su entrambe le inter-facce dati, l'interfaccia motrice ha la priorità. Per la tra-smissione, i messaggi vengono messi in coda suentrambe le linee di trasmissione in base alle priorità.
5.3.1.1 Apparecchio di diagnosi Gateway �Bus dati rimorchio
La TCE crea un Gateway bidirezionale tra il collegamen-to dati per un apparecchio di diagnosi secondo ISO14230 e il bus dati rimorchio CAN. I messaggi ricevutivengono filtrati in base agli indirizzi di destinazione e tra-smessi ai sistemi del rimorchio collegati. L'elaborazionedei messaggi avviene per evento. In caso di ricezionecontemporanea di messaggi su entrambe le interfaccedati, il collegamento dati all'apparecchio di diagnosi ha lapriorità. Per la trasmissione, i messaggi di diagnosi sullelinee dati CAN vengono messi in coda in base alla priori-tà. La TCE è responsabile per il mantenimento della co-municazione con il tester e per il rispetto del timing, inparticolare in caso di risposte ritardate.
5.3.1.2 Diagnosi TCE
Per la parametrizzazione, inclusa la messa in funzionePer la calibratura è richiesto un addestramento WABCO!Per l'iscrizione e le date dei corsi di addestramento: tel.0511 922 2971
La diagnosi della TCE e dei sistemi collegati avviene at-traverso l'attacco dell'apparecchio di diagnosi X14. Lefunzioni di diagnosi TCE sono conformi alle raccomanda-zioni VDA e alla direttiva WABCO KWP2000; esse ri-guardano i seguenti campi:
• Parametrizzazione, messa in funzione
• Memorizzazione errori e accesso alla memoria errori
• Controllo del sistema / assitenza
La diagnosi è possibile solo tramite PC Ciò vale per lamessa in funzione presso il costruttore e per la ricerca dierrori in officina.
La diagnosi può essere effettuata con un'alimentazionedella TCE attraverso il connettore a 7pin + 15pin del ri-morchio. È anche possibile effettuare la diagnosi con ilfunzionamento a batteria. In questo modo di esercizio, ilcollegamento diagnosi viene interrotto 5 min dopo l'ulti-ma interrogazione, per non scaricare eccessivamente labatteria. La nuova diagnosi è possibile collegando/scol-legando l'interruttore di diagnosi al/dal veicolo.Durante l'esercizio di diagnosi, il veicolo può essere sol-levato e abbassato mediante il telecomando. Solo nelmodo di calibratura ciò non è possibile.
Requisito sistema• Notebook/portatile o PC
• Processore Pentium
• 32 MB memoria principale, display a colori 800x600
• ca. 10 MB di memoria libera sul disco rigido,Floppy drive 3 ½''
• Interfaccia COM (attacco a 9 pin ) perl'interfaccia diagnosi WABCO
• Windows 95/98, Windows NT
Cod. art. del software446 301 680 0 Tedesco
Per il collegamento tra la centralina e il computer occorreinoltre un'interfaccia di diagnosi nonché un cavo di colle-gamento diagnosi:
Funzioni sistema 5.TCE
38
446 301 021 0 Kit interfaccia diagnosi (costituito da in-terfacia diagnosi + cavo di collegamen-to al computer)
446 300 329 2 Cavo di diagnosi rimorchio, lunghezza 6 m (Cavo di collegamento tra l'interfac-cia diagnosi + presa di diagnosi ester-na tonda).
5.3.2 Funzione spia
Alla TCE può essere collegata una spia di sistema verde.Questa indica i seguenti stati:
Stato spia
– lampeggiante: Visualizzazione di errore genericoTCE
– accesa: rimorchio fuori dallivello di guida
– spenta: il veicolo è entro il livello di guida,non sono stati riscontrati errori e l'ac-
censioneè spenta.
5.4 I/O programmabile (FPIO) Presa X21Realizzazione delle funzioni specifiche per veicolo eequipaggiamento
• Lettura di informazioni analogiche e digitali
• Comando di impianti elettrici
• Trasmissione di informazioni attraverso icollegamenti dati CAN
• Ricezione e valutazione dei dati di comando CAN
Dopo il reset tutte le entrate/uscite sono altamente ohmi-che. Tutte le entrate/uscite sono resistenti al corto circui-to per quanto riguarda la tensione di alimentazione e lamassa.
5.4.1 Funzioni di sorveglianza
Watchdog (sorveglianza tempo di esecuzioneprogramma)
La funzione del microcontrollore ovvero dell'elaborazio-ne software viene controllata da un watchdog esterno.
Test della memoriaLa memoria parametri viene verificata al momentodell'inizializzazione del sistema, mentre le memorie RAMe ROM vengono controllare ciclicamente durante l'eser-cizio.
Controllo della tensione di esercizioLa tensione di esercizio viene misurata, e in caso di va-lore insufficiente o fuori campo, si passa al corrisponden-te modo di esercizio.
Controllo/disinserimento del sovraccaricoSecondo ECE-R 13, la tensione elettrica e quella di eser-cizio vengono sorvegliate dalla connessione ISO 7638 ein caso di sovraccarico i sistemi/ le utenze elettrici/chenon frenanti vengono disinseriti/e.
5.5 EBS Trailer e attacco RGE Presa X22
5.5.1 EBS Trailer
L'EBS trailer lavora indipendentemente dalla TCE ed èdotato di un proprio attacco di diagnosi. Vedi anche lanostra documentazione ”EBS Trailer - sistema di frenatu-ra elettronico per rimorchi”, Wabco 815 000 280 3.
Importante:In collegamento con la TCE, deve essere impiegato ilmodulatore rimorchio EBS 480 102 002 0 . In questaconfigurazione, gli attacchi del sensore carico asse (at-tacco 1) e del sensore usura guarnizione freno (attacco2) sono chiusi con dei tappi.
In caso di impiego di un modulatore rimorchio EBS diver-so, ciò sarà indicato come errore dalla TCE al momento
della messa in funzione. Motivo: I valori dei sensori dipressione o di carico asse e i valori usura guarnizionefreno vengono già forniti dalla centralina TCE.
Avvertenze per la messa in funzione Modulatore EBS • Usare solo il modulatore 480 102 002 0 (il sensore
di pressione 1 e l'entrata del sensore usura guar-nizione freno devono essere e rimanere chiusi).
• Collegare il cavo di alimentazione tensione allaECU TCE .
• Riparametrizzare il modulatore. cliccando ”Uscitaelettrica 1+2” come ”non disponibile" e l'indicatoreusura guarnizione freno come ”non presente”.
Funzioni sistema5. TCE
39
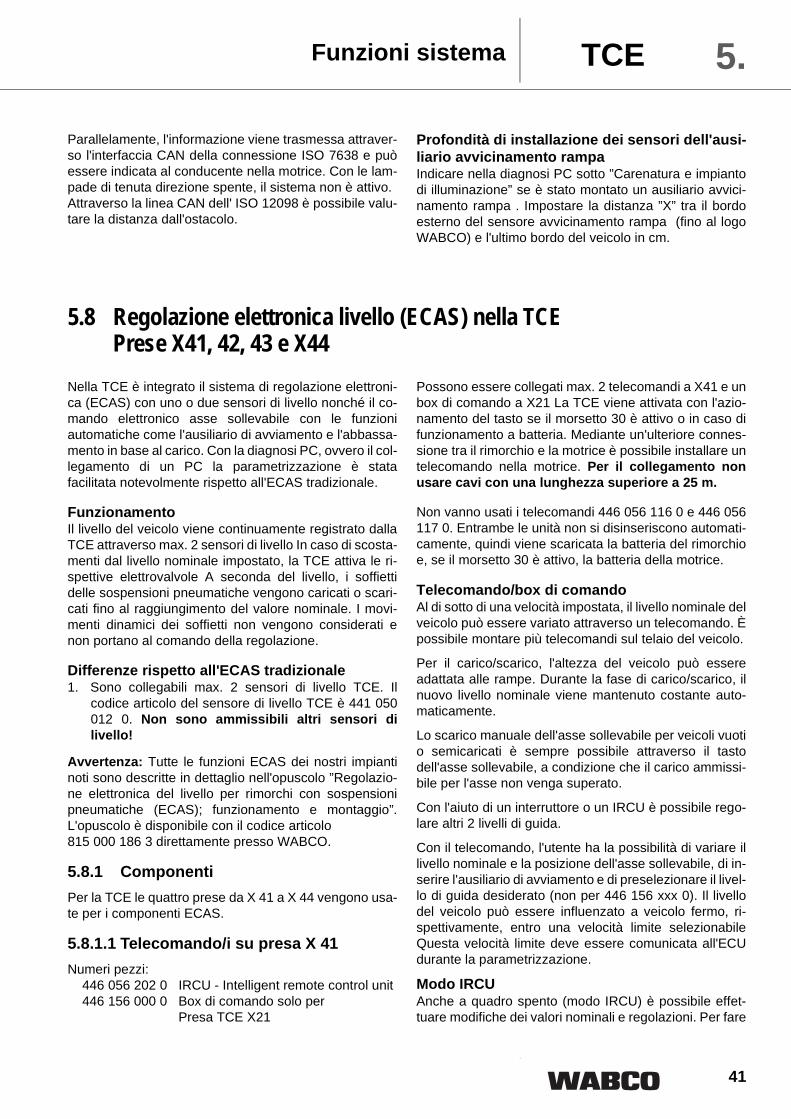
EBS• L'ordine della messa in funzione deve essere prima
EBS, e poi TCE
5.5.2 Attacco RGE
Se nella funzione di diagnostica viene attivato l'attacco”Funzione supplementare”, il bus dati del rimorchio e latensione di alimentazione vengono resi disponibili.
L'attacco può essere utilizzato per un sistema telematicoo un sistema frenante o di chassis. L'alimentazione elet-trica avviene attraverso la TCE.
Funzioni sistema 5.
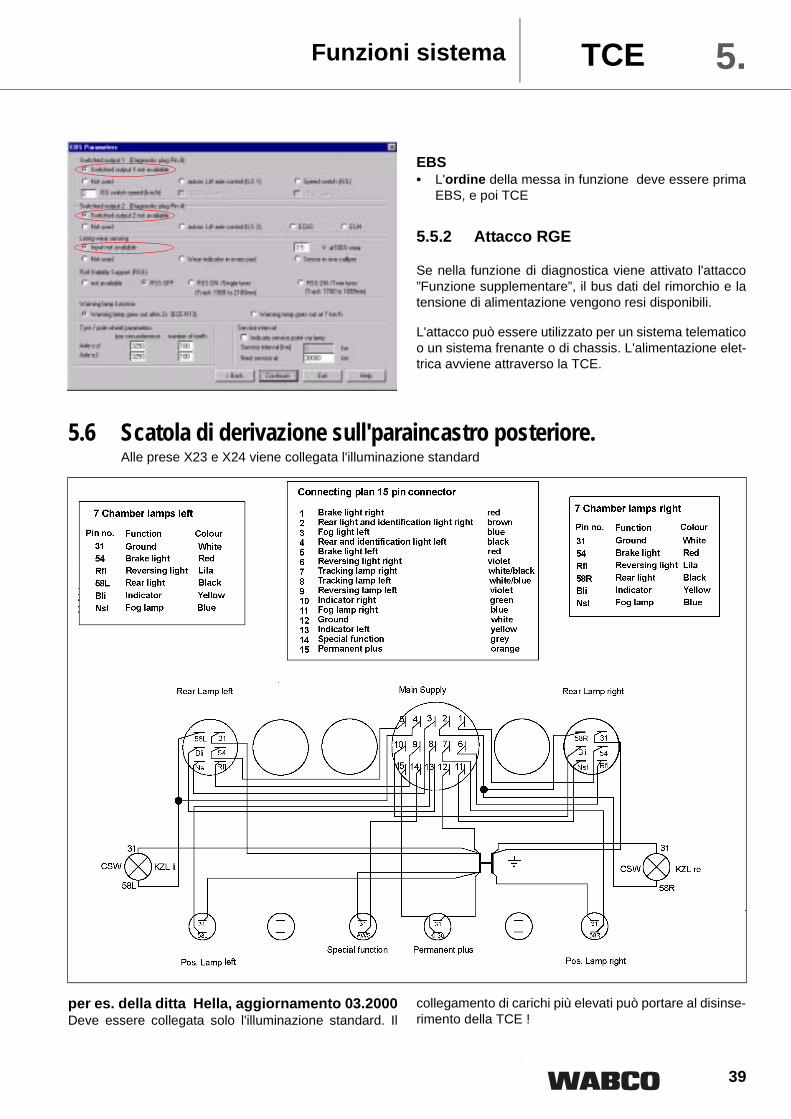
per es. della ditta Hella, aggiornamento 03.2000Deve essere collegata solo l'illuminazione standard. Il
collegamento di carichi più elevati può portare al disinse-rimento della TCE !
5.6 Scatola di derivazione sull'paraincastro posteriore.Alle prese X23 e X24 viene collegata l'illuminazione standard
TCE
40
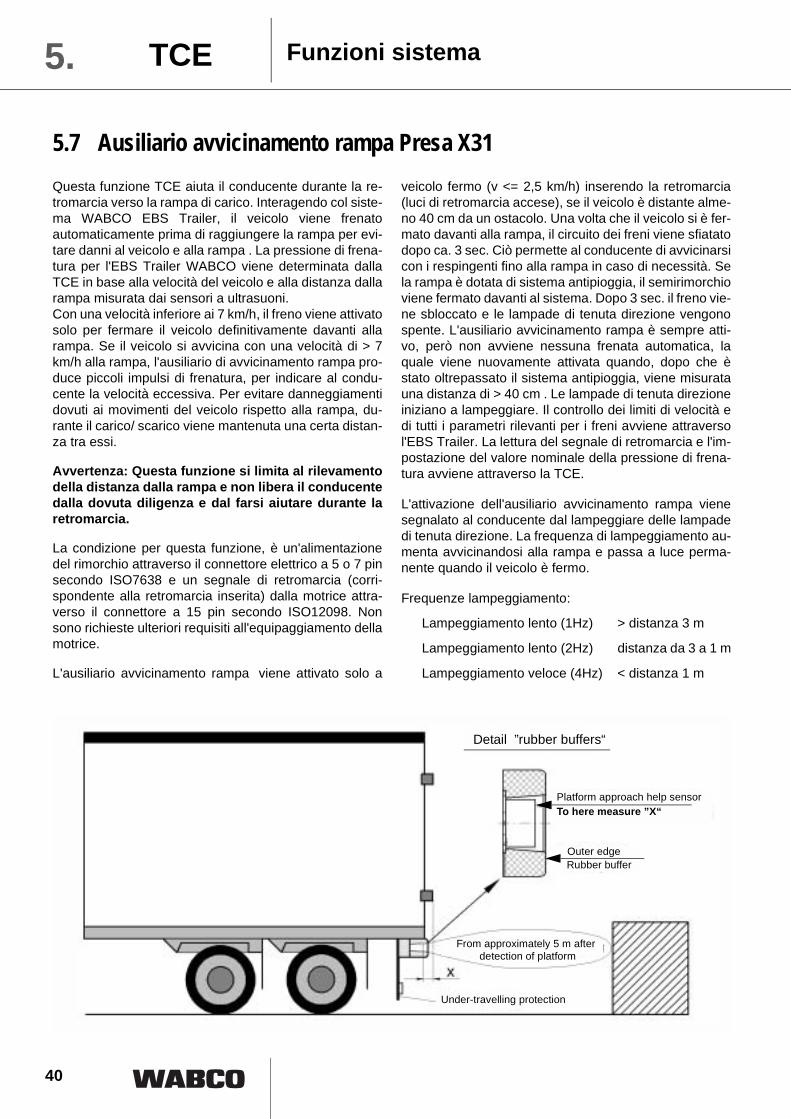
5.7 Ausiliario avvicinamento rampa Presa X31Questa funzione TCE aiuta il conducente durante la re-tromarcia verso la rampa di carico. Interagendo col siste-ma WABCO EBS Trailer, il veicolo viene frenatoautomaticamente prima di raggiungere la rampa per evi-tare danni al veicolo e alla rampa . La pressione di frena-tura per l'EBS Trailer WABCO viene determinata dallaTCE in base alla velocità del veicolo e alla distanza dallarampa misurata dai sensori a ultrasuoni. Con una velocità inferiore ai 7 km/h, il freno viene attivatosolo per fermare il veicolo definitivamente davanti allarampa. Se il veicolo si avvicina con una velocità di > 7km/h alla rampa, l'ausiliario di avvicinamento rampa pro-duce piccoli impulsi di frenatura, per indicare al condu-cente la velocità eccessiva. Per evitare danneggiamentidovuti ai movimenti del veicolo rispetto alla rampa, du-rante il carico/ scarico viene mantenuta una certa distan-za tra essi.
Avvertenza: Questa funzione si limita al rilevamentodella distanza dalla rampa e non libera il conducentedalla dovuta diligenza e dal farsi aiutare durante laretromarcia.
La condizione per questa funzione, è un'alimentazionedel rimorchio attraverso il connettore elettrico a 5 o 7 pinsecondo ISO7638 e un segnale di retromarcia (corri-spondente alla retromarcia inserita) dalla motrice attra-verso il connettore a 15 pin secondo ISO12098. Nonsono richieste ulteriori requisiti all'equipaggiamento dellamotrice.
L'ausiliario avvicinamento rampa viene attivato solo a
veicolo fermo (v <= 2,5 km/h) inserendo la retromarcia(luci di retromarcia accese), se il veicolo è distante alme-no 40 cm da un ostacolo. Una volta che il veicolo si è fer-mato davanti alla rampa, il circuito dei freni viene sfiatatodopo ca. 3 sec. Ciò permette al conducente di avvicinarsicon i respingenti fino alla rampa in caso di necessità. Sela rampa è dotata di sistema antipioggia, il semirimorchioviene fermato davanti al sistema. Dopo 3 sec. il freno vie-ne sbloccato e le lampade di tenuta direzione vengonospente. L'ausiliario avvicinamento rampa è sempre atti-vo, però non avviene nessuna frenata automatica, laquale viene nuovamente attivata quando, dopo che èstato oltrepassato il sistema antipioggia, viene misuratauna distanza di > 40 cm . Le lampade di tenuta direzioneiniziano a lampeggiare. Il controllo dei limiti di velocità edi tutti i parametri rilevanti per i freni avviene attraversol'EBS Trailer. La lettura del segnale di retromarcia e l'im-postazione del valore nominale della pressione di frena-tura avviene attraverso la TCE.
L'attivazione dell'ausiliario avvicinamento rampa vienesegnalato al conducente dal lampeggiare delle lampadedi tenuta direzione. La frequenza di lampeggiamento au-menta avvicinandosi alla rampa e passa a luce perma-nente quando il veicolo è fermo.
Frequenze lampeggiamento:
Lampeggiamento lento (1Hz) > distanza 3 m
Lampeggiamento lento (2Hz) distanza da 3 a 1 m
Lampeggiamento veloce (4Hz) < distanza 1 m
Funzioni sistema5.
Detail ”rubber buffers“
Platform approach help sensorTo here measure ”X“
Outer edgeRubber buffer
From approximately 5 m after detection of platform
Under-travelling protection
TCE
41
Parallelamente, l'informazione viene trasmessa attraver-so l'interfaccia CAN della connessione ISO 7638 e puòessere indicata al conducente nella motrice. Con le lam-pade di tenuta direzione spente, il sistema non è attivo.Attraverso la linea CAN dell' ISO 12098 è possibile valu-tare la distanza dall'ostacolo.
Profondità di installazione dei sensori dell'ausi-liario avvicinamento rampaIndicare nella diagnosi PC sotto ”Carenatura e impiantodi illuminazione” se è stato montato un ausiliario avvici-namento rampa . Impostare la distanza ”X” tra il bordoesterno del sensore avvicinamento rampa (fino al logoWABCO) e l'ultimo bordo del veicolo in cm.
5.8 Regolazione elettronica livello (ECAS) nella TCE Prese X41, 42, 43 e X44
Nella TCE è integrato il sistema di regolazione elettroni-ca (ECAS) con uno o due sensori di livello nonché il co-mando elettronico asse sollevabile con le funzioniautomatiche come l'ausiliario di avviamento e l'abbassa-mento in base al carico. Con la diagnosi PC, ovvero il col-legamento di un PC la parametrizzazione è statafacilitata notevolmente rispetto all'ECAS tradizionale.
FunzionamentoIl livello del veicolo viene continuamente registrato dallaTCE attraverso max. 2 sensori di livello In caso di scosta-menti dal livello nominale impostato, la TCE attiva le ri-spettive elettrovalvole A seconda del livello, i soffiettidelle sospensioni pneumatiche vengono caricati o scari-cati fino al raggiungimento del valore nominale. I movi-menti dinamici dei soffietti non vengono considerati enon portano al comando della regolazione.
Differenze rispetto all'ECAS tradizionale1. Sono collegabili max. 2 sensori di livello TCE. Il
codice articolo del sensore di livello TCE è 441 050012 0. Non sono ammissibili altri sensori dilivello!
Avvertenza: Tutte le funzioni ECAS dei nostri impiantinoti sono descritte in dettaglio nell'opuscolo ”Regolazio-ne elettronica del livello per rimorchi con sospensionipneumatiche (ECAS); funzionamento e montaggio”.L'opuscolo è disponibile con il codice articolo815 000 186 3 direttamente presso WABCO.
5.8.1 ComponentiPer la TCE le quattro prese da X 41 a X 44 vengono usa-te per i componenti ECAS.
5.8.1.1 Telecomando/i su presa X 41Numeri pezzi:
446 056 202 0 IRCU - Intelligent remote control unit446 156 000 0 Box di comando solo per
Presa TCE X21
Possono essere collegati max. 2 telecomandi a X41 e unbox di comando a X21 La TCE viene attivata con l'azio-namento del tasto se il morsetto 30 è attivo o in caso difunzionamento a batteria. Mediante un'ulteriore connes-sione tra il rimorchio e la motrice è possibile installare untelecomando nella motrice. Per il collegamento nonusare cavi con una lunghezza superiore a 25 m.
Non vanno usati i telecomandi 446 056 116 0 e 446 056117 0. Entrambe le unità non si disinseriscono automati-camente, quindi viene scaricata la batteria del rimorchioe, se il morsetto 30 è attivo, la batteria della motrice.
Telecomando/box di comandoAl di sotto di una velocità impostata, il livello nominale delveicolo può essere variato attraverso un telecomando. Èpossibile montare più telecomandi sul telaio del veicolo.
Per il carico/scarico, l'altezza del veicolo può essereadattata alle rampe. Durante la fase di carico/scarico, ilnuovo livello nominale viene mantenuto costante auto-maticamente.
Lo scarico manuale dell'asse sollevabile per veicoli vuotio semicaricati è sempre possibile attraverso il tastodell'asse sollevabile, a condizione che il carico ammissi-bile per l'asse non venga superato.
Con l'aiuto di un interruttore o un IRCU è possibile rego-lare altri 2 livelli di guida.
Con il telecomando, l'utente ha la possibilità di variare illivello nominale e la posizione dell'asse sollevabile, di in-serire l'ausiliario di avviamento e di preselezionare il livel-lo di guida desiderato (non per 446 156 xxx 0). Il livellodel veicolo può essere influenzato a veicolo fermo, ri-spettivamente, entro una velocità limite selezionabileQuesta velocità limite deve essere comunicata all'ECUdurante la parametrizzazione.
Modo IRCU Anche a quadro spento (modo IRCU) è possibile effet-tuare modifiche dei valori nominali e regolazioni. Per fare
Funzioni sistema 5.TCE
42
ciò, la centralina può essere ”svegliata" con l'alimenta-zione del morsetto 30/batteria.La ”sveglia” può essere effettuata mediante un teleco-mando o con il box di comando.La durata del modo IRCU è attualmente impostata a 15sec. Si tratta del tempo in cui la TCE è attiva e attende lerichieste dell'utente tramite il telecomando/box di coman-do. Se entro 15 sec non viene azionato nessun tasto, lelampade del telecomando/box di comando lampeggiano5 volte al ritmo del battito cardiaco. Se il telecomando/box di comando lampeggia più veloce del battito cardia-co, esiste un problema di comunicazione tra il teleco-mando/box di comando e la TCE. Con Ogni volta cheviene azionato un tasto, il tempo si riavvia.
Sveglia della TCEIl sistema può essere "svegliato" premendo uno dei tasti”STOP”, ”�” ”�” o livello di guida sul box di comando, ov-vero premendo un qualsiasi tasto del telecomando
Se uno dei tasti sopra nominati viene azionato per alme-no 100 ms il sistema viene ”svegliato” e la spia ECAS -se montata - si accende. Prima di tutto viene effettuatoun autotest (durata attualmente 5 sec). Solo al termine gliimpulsi dei tasti vengono accettati e le elettrovalvoleECAS possono essere comandate.
Un asse sollevabile sollevato o un asse portante scarica-to viene abbassato ovvero caricato automaticamente.
Il periodo di ritardo nel modo IRCUNel modo IRCU, il livello viene regolato allo scadere deltempo di ”Ritardo regolazione a veicolo fermo”. Le modi-fiche del livello nominale vengono iniziate senza ritardo.
Tolleranze nel modo IRCUValgono le tolleranze ”normali” come per quadro acceso.
Uscita dal modo IRCUSe una delle seguenti condizioni viene soddisfatta, tuttele regolazioni vengono interrotte e l'esercizio stand-byterminato:
– Avvio del modo di stand-by con l'azionamento del ta-sto STOP dell' IRCU per almeno 2 sec
– Accensione del quadro
– Tempo (15 sec) scaduto.
Telecomando
Il telecomando 446 056 202 0 va sistemato preferibil-mente in una scatola sul veicolo. Il collegamento allaECU viene realizzato attraverso un cavo flessibile e unapresa sul telaio.
In base alla configurazione del sistema, sono disponibilidiversi telecomandi. Nella figura a pagina 43 è raffiguratoil telecomando 446 056 202 0 Questo telecomando ha leseguenti funzioni:
– Contemporaneo abbassamento e sollevamento dellacarenatura attraverso tutti gli assi, comando separatoper asse anteriore e posteriore e, con sistema idoneo,della parte destra e sinistra
– Abbassamento e sollevamento dell'asse sollevabile econtemporaneo disinserimento o inserimento di un di-sp. automatico asse sollevabile presente ovvero sca-rico e carico dell'asse portante
– Attivazione della funzione ausiliario di avviamento
– Preselezione possibile fino a 3 livelli di guida e rego-lazione del livello di guida attuale, cioè preselezionato
– Memorizzazione possibile fino a 2 livelli preferiti (cioèlivelli di memoria) e regolazione dei livelli attraversoun breve azionamento del relativo tasto
– Regolazione del veicolo sull'esercizio STAND BY
– Immediata interruzione di tutti i processi di abbassa-mento e sollevamento mediante il tasto STOP
Il telecomando può eseguire solo le funzioni disponibilisul telecomando e che sono state impostate attraverso iparametri nella TCE . Ciò significa che il tasto per la fun-zione asse sollevabile rimane senza significato per unveicolo senza asse sollevabile.
Nella riga superiore della superficie di comando del tele-comando si trovano 3 spie che indicano all'utente qualeasse è stato preselezionato per la modifica.
Nella riga inferiore si trovano i 3 tasti di preselezione.Ogni tasto si trova sotto la spia corrispondente Se vienepremuto uno di questi tasti, la spia corrispondente si ac-cende e segnala all'utente che sull'asse preselezionatopuò essere effettuato un comando.
Premendo di nuovo il tasto di preselezione, si spegne an-che la spia corrispondente. Indica così all'utente l'interru-zione del modo di immissione del telecomando Non è piùpossibile la modifica attraverso il telecomando. Per lemodifiche del livello nominale sul veicolo completo, de-vono essere premuti i tasti di preselezione dell'asse an-teriore e posteriore. Di seguito si devono accendereentrambe le spie corrispondenti per segnalare l'appron-tamento dell'azionamento.
ATTENZIONE ! Le immissioni attraverso il teleco-mando iniziano di solito con la preselezione dell'as-se /degli assi desiderato/i e terminano conl'interruzione del modo di immissione.
Funzioni sistema5. TCE
43
Sollevamento e abbassamento della carenaturaCon i tasti ”HEBEN” (Sollevamento) e ”SENKEN” (Ab-bassamento) viene impostata sulla centralina una modi-fica del livello nominale attraverso gli assi preselezionati.Ora la carenatura modifica senza ritardo la distanzadall'asse finché il rispettivo tasto rimane premuto. La mo-difica del valore nominale termina rilasciando il tasto, l'ul-timo valore nominale al momento del rilascio del tastoviene accettato come nuovo valore nominale.
Abbassamento e sollevamento dell'asse solle-vabileCon l'asse sollevabile preselezionato, premendo breve-mente i tasti ”HEBEN” (Sollevamento) e ”SENKEN” (Ab-bassamento), l'asse sollevabile viene alzato oabbassato, rispettivamente, l'asse portante viene carica-to/scaricato. Il sollevamento ovvero lo scaricamento èammissibile solo se la pressione nei soffietti dell'asseprincipale non supera il valore max. ammissibile prescrit-to. L'abbassamento dell'asse sollevabile ovvero il carica-mento dell'asse portante porta al disinserimento del disp.automatico asse sollevabile/asse portante eventualmen-te parametrizzato.
Disinserimento/inserimento del disp. automati-co asse sollevabileCome già descritto, premendo il tasto ”Senken” (abbas-samento), il disp. automatico dell'asse sollevabile/asseportante può essere disinserito, se almeno un asse sol-levabile/asse portante è stato alzato/scaricato automati-camente in seguito al carico ridotto. Il disinserimento deldisp. automatico asse sollevabile, significa che l'asse/gliassi sollevabile/i prima automaticamente sollevato/i ora
viene/vengono abbassato/i, rispettivamente, l'assale/gliassali portante/i scarico/chi viene/vengono caricato/i
Il reinserimento del disp. automatico avviene attraverso:
– il telecomando(Preselezione asse sollevabile, tasto ”Heben” (solle-vamento).In caso di disp. automatico asse sollevabile parame-trizzato, l'asse di abbassa in base alla pressione. Ilsollevamento dell'asse sollevabile è possibile attra-verso il telecomando o l'interruttore.
– Disinserimento/inserimento dell'accensione
Ausiliario di avviamentoCon l'asse sollevabile preselezionato, col tasto ”M1" vie-ne attivato l'ausiliario di avviamento (solo con il disp. au-tomatico asse sollevabile/asse portante parametrizzato!)). L' ausiliario di avviamento viene terminato premendo iltasto STOP o in caso di superamento della velocità pa-rametrizzata Rispettare le indicazioni del costruttoredegli assi. L'ausiliario di avviamento non può essere avviato attra-verso il box di comando.
Ausiliario di manovraCon l'asse sollevabile preselezionato, col tasto ”M2” vie-ne attivato l'ausiliario di manovra (solo con il disp. auto-matico separato asse sollevabile/asse portanteparametrizzato con l'ausiliario di manovra) L'ausiliario dimanovra viene terminato premendo il tasto STOP o conv > 10 km/h. L'ausiliario di manovra non può essere av-viato con il box di comando.
Funzioni sistema 5.
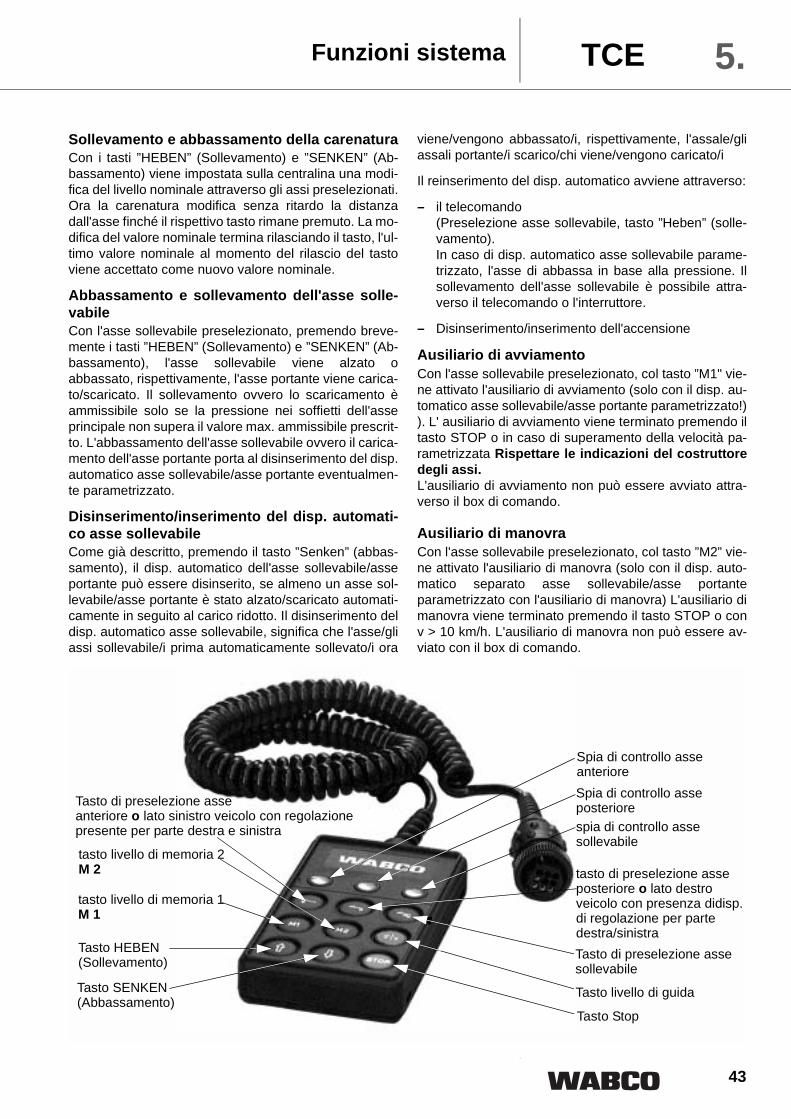
Tasto di preselezione asse anteriore o lato sinistro veicolo con regolazione
tasto livello di memoria 2 M 2
tasto livello di memoria 1 M 1
Tasto HEBEN
Tasto SENKEN
Spia di controllo asse
Spia di controllo asse
spia di controllo asse
tasto di preselezione asse posteriore o lato destro
Tasto di preselezione asse
Tasto livello di guida
Tasto Stop
presente per parte destra e sinistra
veicolo con presenza didisp. di regolazione per parte
anteriore
posteriore
sollevabile
destra/sinistra
sollevabile(Sollevamento)
(Abbassamento)
TCE
44
Livello di guidaCon una idonea parametrizzazione, i livelli di guida I, II eIII possono essere regolati mediante il telecomando (solocon il telecomando 446 056 202 0). Per la regolazione diun altro livello di guida deve essere attivato il telecoman-do. Per fare ciò azionare un tasto per selezionare un'as-se. Di seguito, attraverso una combinazione di tasti, puòessere attivato un altro livello di guida. Questo livello ri-mane attivo finché non viene selezionato un altro livellodi guida attraverso il telecomando. Azionando il tasto FNviene regolato continuamente il nuovo livello di guida se-lezionato. Selezionare il livello di guida attivo con la se-guente combinazione di tasti:Premere il tasto verde del livello di guida e contempora-neamente
– ll tasto ”M1” perper il livello di guida I
– il tasto ”M2” per per il livello di guida II
– il tasto ” � ” per per il livello di guida III
Livelli di memoria (solo con il telecomando 446 056 202 0) Se un determinato livello deve essere regolato più volteper il carico/scarico, esso potrà essere memorizzato equindi impostato a piacere premendo il tasto.
Premendo il tasto ”STOP” e premendo contemporanea-mente uno dei tasti di memoria ”M1” o ”M2”, un livello no-minale esistente può essere memorizzato come livellopreferito (anche: di memoria).
I Disinserendo l'accensione, i valori memorizzati nonvanno persi. Valgono per tutto il veicolo, ciòè al richiamodella regolazione occorre solo la preselezione di un'as-se. Toccando leggermente il relativo tasto di memoria”M1” o ”M2” la carenatura viene portata senza ritardi al li-vello memorizzato.
Il box di comando non dispone di nessun livello di memo-ria.
StopMediante il tasto ”Stop” tutti i processi di regolazione dellivello, sia a veicolo fermo che in marcia, vengono termi-nati senza ritardo e il livello attuale viene riconosciutocome livello nominale. Con questa funzione l'utente è ingrado di interrompere le modifiche automatiche del livello(memoria, livello di guida), se riconosce un pericolo nellacontinuazione della regolazione.
Se l'accensione viene disinserita con il tasto STOP pre-muto, il veicolo passa nel modo STAND BY.
Funzionamento in base alla velocitàLe funzioni ”Sollevamento e abbassamento carenatura”e ”Livello memoria” sono possibili solo a veicolo fermo o
al di sotto una velocità selezionabile. Le regolazioni av-viate al di sotto di questa velocità, vengono terminate an-che oltre la stessa.Il comando manuale dell'asse sollevabile/asse portanteattraverso il telecomando viene accettato dalla centralinasolo al di sotto di un'ulteriore velocità da impostare.
Esercizio Stand-byL'esercizio Stand-by è un modo di esercizio in cui il livellodi guida viene mantenuto costante per un periodo sele-zionato (max. 63 ore) con l'accensione spenta.
Il modo Stand-by può essere attivato nel seguente modo:Se l'accensione viene disinserita con il tasto Stop aziona-to, l'esercizio Stand-by viene attivato per un periodo de-terminato.Se la TCE è alimentata solo attraverso il morsetto 30 oda una batteria, l'esercizio Stand-by può essere attivatoazionando il tasto Stop per più di 2 sec.
L'asse sollevabile alzato ovvero l'asse portante scaricatoviene abbassato o caricato automaticamente.Il tempo di ritardo nell'esercizio Stand-by viene impostatoattraverso un parametro nella diagnosi PC . Lo stessovale per le tolleranze durante l'esercizio Stand-by . Incaso di elevata e frequente variazione del carico (per es.entrata e uscita di un elevatore a forca) il consumodell'aria viene così minimizzato. L'esercizio Stand-by viene terminato inserendo l'accen-sione, azionando due volte un tasto del telecomando, atempo Stand-by scaduto o in presenza di errore.
Contemporaneo azionamento di più tastiSe sono stati premuti contemporaneamente più tasti chenon fanno parte di una combinazione logica, volendomodificare il livello non viene accettato nessun comandoe viene eseguita la funzione di Stop.
Contemporaneo azionamento di entrambi i tele-comandiAzionando contemporaneamente entrambi i telecoman-di, viene attuata la funzione di Stop. In seguito sono pos-sibili ulteriori modifiche dell'altezza solo se nel frattemponon è stato azionato nessun altro tasto.
Sgancio del telecomandoSe il telecomando viene sganciata durante il processo diabbassamento/sollevamento, viene attuata la funzioneStop.
PrioritàImpostando un ordine di sollevamento/abbassamentoattraverso il telecomando con la funzione livello di scari-co attivata, viene eseguito l'ordine del telecomando.
Il telecomando ha un'alta priorità di sistema. Attraverso lafunzione "Sollevamento e abbassamento", in caso diguasto del sistema di regolazione, la carenatura può es-
Funzioni sistema5. TCE
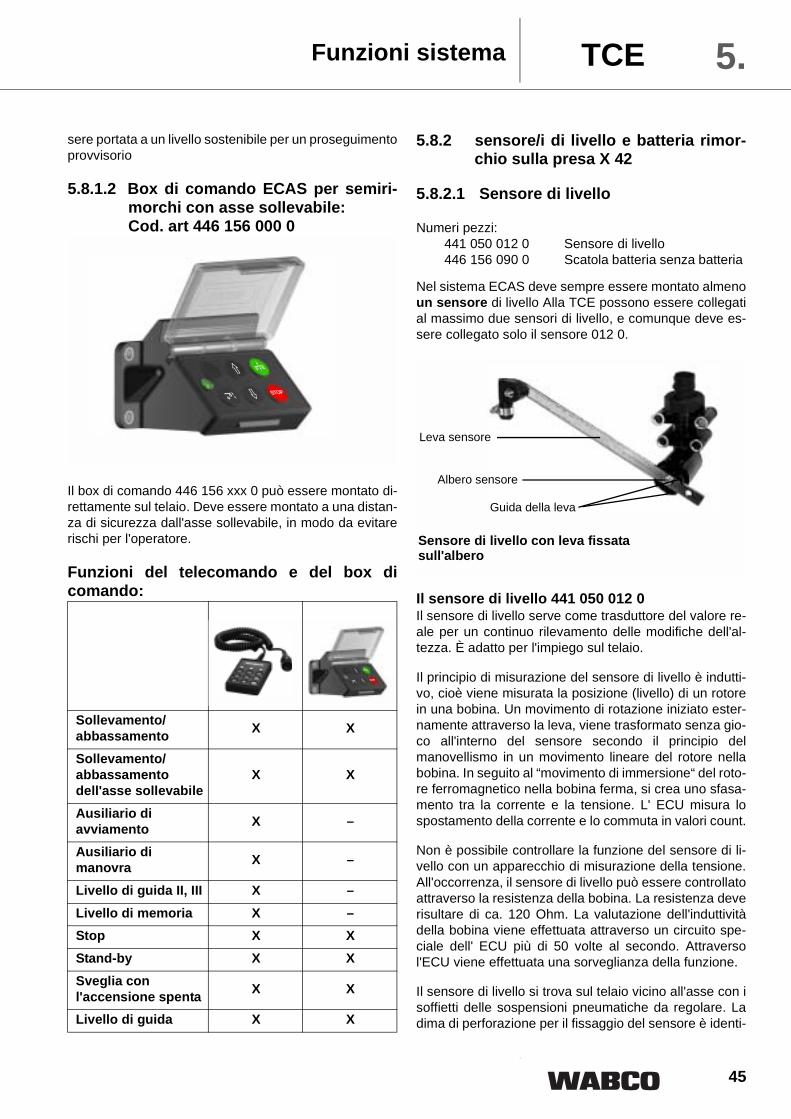
45
sere portata a un livello sostenibile per un proseguimentoprovvisorio
5.8.1.2 Box di comando ECAS per semiri-morchi con asse sollevabile: Cod. art 446 156 000 0
Il box di comando 446 156 xxx 0 può essere montato di-rettamente sul telaio. Deve essere montato a una distan-za di sicurezza dall'asse sollevabile, in modo da evitarerischi per l'operatore.
Funzioni del telecomando e del box dicomando:
5.8.2 sensore/i di livello e batteria rimor-chio sulla presa X 42
5.8.2.1 Sensore di livello
Numeri pezzi:441 050 012 0 Sensore di livello 446 156 090 0 Scatola batteria senza batteria
Nel sistema ECAS deve sempre essere montato almenoun sensore di livello Alla TCE possono essere collegatial massimo due sensori di livello, e comunque deve es-sere collegato solo il sensore 012 0.
Il sensore di livello 441 050 012 0Il sensore di livello serve come trasduttore del valore re-ale per un continuo rilevamento delle modifiche dell'al-tezza. È adatto per l'impiego sul telaio.
Il principio di misurazione del sensore di livello è indutti-vo, cioè viene misurata la posizione (livello) di un rotorein una bobina. Un movimento di rotazione iniziato ester-namente attraverso la leva, viene trasformato senza gio-co all'interno del sensore secondo il principio delmanovellismo in un movimento lineare del rotore nellabobina. In seguito al “movimento di immersione“ del roto-re ferromagnetico nella bobina ferma, si crea uno sfasa-mento tra la corrente e la tensione. L' ECU misura lospostamento della corrente e lo commuta in valori count.
Non è possibile controllare la funzione del sensore di li-vello con un apparecchio di misurazione della tensione.All'occorrenza, il sensore di livello può essere controllatoattraverso la resistenza della bobina. La resistenza deverisultare di ca. 120 Ohm. La valutazione dell'induttivitàdella bobina viene effettuata attraverso un circuito spe-ciale dell' ECU più di 50 volte al secondo. Attraversol'ECU viene effettuata una sorveglianza della funzione.
Il sensore di livello si trova sul telaio vicino all'asse con isoffietti delle sospensioni pneumatiche da regolare. Ladima di perforazione per il fissaggio del sensore è identi-
Sollevamento/abbassamento X X
Sollevamento/abbassamento dell'asse sollevabile
X X
Ausiliario di avviamento X –
Ausiliario di manovra X –
Livello di guida II, III X –Livello di memoria X –Stop X XStand-by X XSveglia conl'accensione spenta X X
Livello di guida X X
Leva sensore
Albero sensore
Guida della leva
Sensore di livello con leva fissatasull'albero
Funzioni sistema 5.TCE
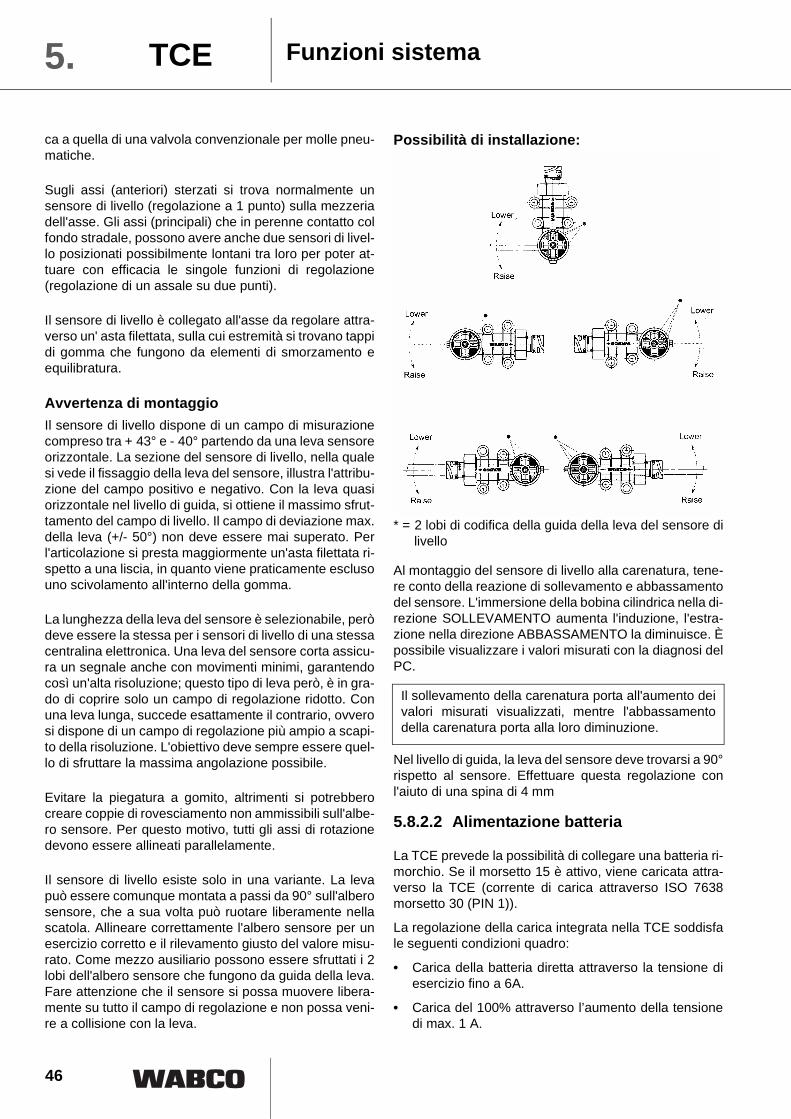
46
ca a quella di una valvola convenzionale per molle pneu-matiche.
Sugli assi (anteriori) sterzati si trova normalmente unsensore di livello (regolazione a 1 punto) sulla mezzeriadell'asse. Gli assi (principali) che in perenne contatto colfondo stradale, possono avere anche due sensori di livel-lo posizionati possibilmente lontani tra loro per poter at-tuare con efficacia le singole funzioni di regolazione(regolazione di un assale su due punti).
Il sensore di livello è collegato all'asse da regolare attra-verso un' asta filettata, sulla cui estremità si trovano tappidi gomma che fungono da elementi di smorzamento eequilibratura.
Avvertenza di montaggioIl sensore di livello dispone di un campo di misurazionecompreso tra + 43° e - 40° partendo da una leva sensoreorizzontale. La sezione del sensore di livello, nella qualesi vede il fissaggio della leva del sensore, illustra l'attribu-zione del campo positivo e negativo. Con la leva quasiorizzontale nel livello di guida, si ottiene il massimo sfrut-tamento del campo di livello. Il campo di deviazione max.della leva (+/- 50°) non deve essere mai superato. Perl'articolazione si presta maggiormente un'asta filettata ri-spetto a una liscia, in quanto viene praticamente esclusouno scivolamento all'interno della gomma.
La lunghezza della leva del sensore è selezionabile, peròdeve essere la stessa per i sensori di livello di una stessacentralina elettronica. Una leva del sensore corta assicu-ra un segnale anche con movimenti minimi, garantendocosì un'alta risoluzione; questo tipo di leva però, è in gra-do di coprire solo un campo di regolazione ridotto. Conuna leva lunga, succede esattamente il contrario, ovverosi dispone di un campo di regolazione più ampio a scapi-to della risoluzione. L'obiettivo deve sempre essere quel-lo di sfruttare la massima angolazione possibile.
Evitare la piegatura a gomito, altrimenti si potrebberocreare coppie di rovesciamento non ammissibili sull'albe-ro sensore. Per questo motivo, tutti gli assi di rotazionedevono essere allineati parallelamente.
Il sensore di livello esiste solo in una variante. La levapuò essere comunque montata a passi da 90° sull'alberosensore, che a sua volta può ruotare liberamente nellascatola. Allineare correttamente l'albero sensore per unesercizio corretto e il rilevamento giusto del valore misu-rato. Come mezzo ausiliario possono essere sfruttati i 2lobi dell'albero sensore che fungono da guida della leva.Fare attenzione che il sensore si possa muovere libera-mente su tutto il campo di regolazione e non possa veni-re a collisione con la leva.
Possibilità di installazione:
* = 2 lobi di codifica della guida della leva del sensore dilivello
Al montaggio del sensore di livello alla carenatura, tene-re conto della reazione di sollevamento e abbassamentodel sensore. L'immersione della bobina cilindrica nella di-rezione SOLLEVAMENTO aumenta l'induzione, l'estra-zione nella direzione ABBASSAMENTO la diminuisce. Èpossibile visualizzare i valori misurati con la diagnosi delPC.
Il sollevamento della carenatura porta all'aumento deivalori misurati visualizzati, mentre l'abbassamentodella carenatura porta alla loro diminuzione.
Nel livello di guida, la leva del sensore deve trovarsi a 90°rispetto al sensore. Effettuare questa regolazione conl'aiuto di una spina di 4 mm
5.8.2.2 Alimentazione batteria
La TCE prevede la possibilità di collegare una batteria ri-morchio. Se il morsetto 15 è attivo, viene caricata attra-verso la TCE (corrente di carica attraverso ISO 7638morsetto 30 (PIN 1)).
La regolazione della carica integrata nella TCE soddisfale seguenti condizioni quadro:
• Carica della batteria diretta attraverso la tensione diesercizio fino a 6A.
• Carica del 100% attraverso l’aumento della tensionedi max. 1 A.
Funzioni sistema5. TCE
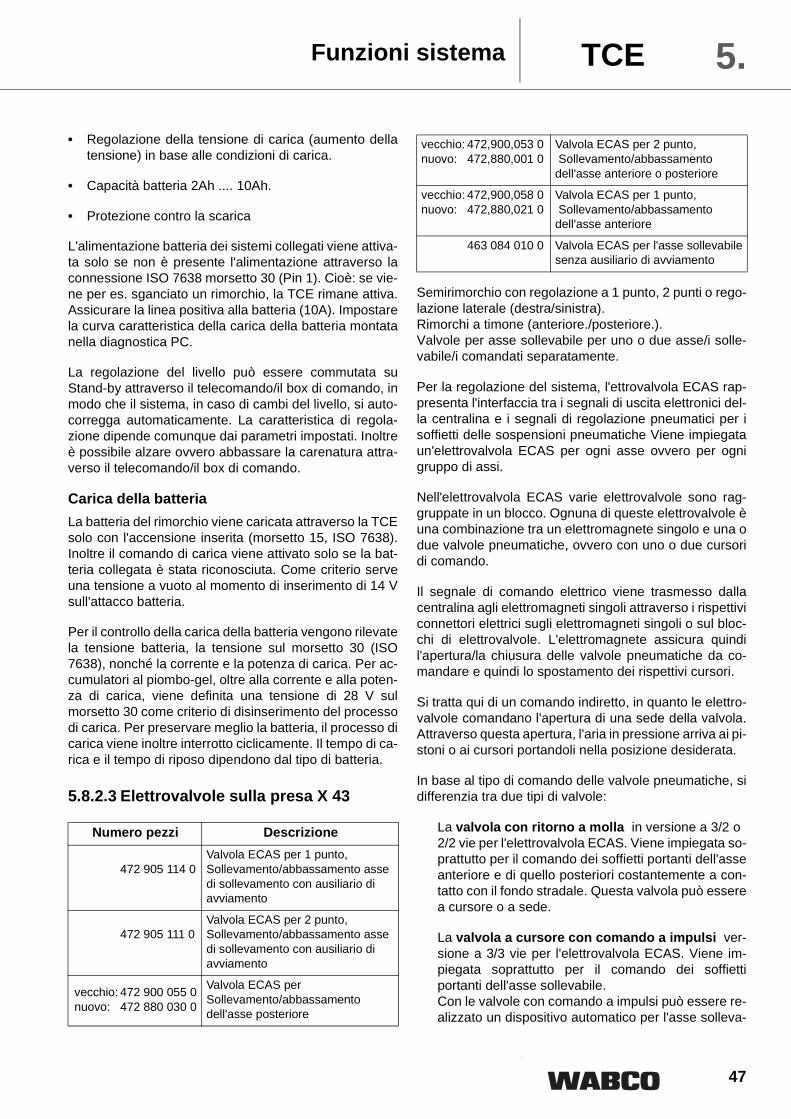
47
• Regolazione della tensione di carica (aumento dellatensione) in base alle condizioni di carica.
• Capacità batteria 2Ah .... 10Ah.
• Protezione contro la scarica
L'alimentazione batteria dei sistemi collegati viene attiva-ta solo se non è presente l'alimentazione attraverso laconnessione ISO 7638 morsetto 30 (Pin 1). Cioè: se vie-ne per es. sganciato un rimorchio, la TCE rimane attiva.Assicurare la linea positiva alla batteria (10A). Impostarela curva caratteristica della carica della batteria montatanella diagnostica PC.
La regolazione del livello può essere commutata suStand-by attraverso il telecomando/il box di comando, inmodo che il sistema, in caso di cambi del livello, si auto-corregga automaticamente. La caratteristica di regola-zione dipende comunque dai parametri impostati. Inoltreè possibile alzare ovvero abbassare la carenatura attra-verso il telecomando/il box di comando.
Carica della batteriaLa batteria del rimorchio viene caricata attraverso la TCEsolo con l'accensione inserita (morsetto 15, ISO 7638).Inoltre il comando di carica viene attivato solo se la bat-teria collegata è stata riconosciuta. Come criterio serveuna tensione a vuoto al momento di inserimento di 14 Vsull'attacco batteria.
Per il controllo della carica della batteria vengono rilevatela tensione batteria, la tensione sul morsetto 30 (ISO7638), nonché la corrente e la potenza di carica. Per ac-cumulatori al piombo-gel, oltre alla corrente e alla poten-za di carica, viene definita una tensione di 28 V sulmorsetto 30 come criterio di disinserimento del processodi carica. Per preservare meglio la batteria, il processo dicarica viene inoltre interrotto ciclicamente. Il tempo di ca-rica e il tempo di riposo dipendono dal tipo di batteria.
5.8.2.3 Elettrovalvole sulla presa X 43
Semirimorchio con regolazione a 1 punto, 2 punti o rego-lazione laterale (destra/sinistra).Rimorchi a timone (anteriore./posteriore.).Valvole per asse sollevabile per uno o due asse/i solle-vabile/i comandati separatamente.
Per la regolazione del sistema, l'ettrovalvola ECAS rap-presenta l'interfaccia tra i segnali di uscita elettronici del-la centralina e i segnali di regolazione pneumatici per isoffietti delle sospensioni pneumatiche Viene impiegataun'elettrovalvola ECAS per ogni asse ovvero per ognigruppo di assi.
Nell'elettrovalvola ECAS varie elettrovalvole sono rag-gruppate in un blocco. Ognuna di queste elettrovalvole èuna combinazione tra un elettromagnete singolo e una odue valvole pneumatiche, ovvero con uno o due cursoridi comando.
Il segnale di comando elettrico viene trasmesso dallacentralina agli elettromagneti singoli attraverso i rispettiviconnettori elettrici sugli elettromagneti singoli o sul bloc-chi di elettrovalvole. L'elettromagnete assicura quindil'apertura/la chiusura delle valvole pneumatiche da co-mandare e quindi lo spostamento dei rispettivi cursori.
Si tratta qui di un comando indiretto, in quanto le elettro-valvole comandano l'apertura di una sede della valvola.Attraverso questa apertura, l'aria in pressione arriva ai pi-stoni o ai cursori portandoli nella posizione desiderata.
In base al tipo di comando delle valvole pneumatiche, sidifferenzia tra due tipi di valvole:
La valvola con ritorno a molla in versione a 3/2 o 2/2 vie per l'elettrovalvola ECAS. Viene impiegata so-prattutto per il comando dei soffietti portanti dell'asseanteriore e di quello posteriori costantemente a con-tatto con il fondo stradale. Questa valvola può esserea cursore o a sede.
La valvola a cursore con comando a impulsi ver-sione a 3/3 vie per l'elettrovalvola ECAS. Viene im-piegata soprattutto per il comando dei soffiettiportanti dell'asse sollevabile.Con le valvole con comando a impulsi può essere re-alizzato un dispositivo automatico per l'asse solleva-
Numero pezzi Descrizione
472 905 114 0Valvola ECAS per 1 punto,Sollevamento/abbassamento asse di sollevamento con ausiliario di avviamento
472 905 111 0Valvola ECAS per 2 punto,Sollevamento/abbassamento asse di sollevamento con ausiliario di avviamento
vecchio: 472 900 055 0nuovo: 472 880 030 0
Valvola ECAS perSollevamento/abbassamento dell'asse posteriore
vecchio: 472,900,053 0nuovo: 472,880,001 0
Valvola ECAS per 2 punto, Sollevamento/abbassamento dell'asse anteriore o posteriore
vecchio: 472,900,058 0nuovo: 472,880,021 0
Valvola ECAS per 1 punto, Sollevamento/abbassamento dell'asse anteriore
463 084 010 0 Valvola ECAS per l'asse sollevabilesenza ausiliario di avviamento
Funzioni sistema 5.TCE
48
bile. In genere, il blocco elettrovalvole per il comandodel soffietto portante è flangiato al blocco elettroval-vole per il comando dell'asse principale.
Attraverso gli elettromagneti singoli non possono esseregenerati carichi parziali sulle sedi delle valvole. Le 3 po-sizioni:
• Generazione della pressione
• Tenuta della pressione
• Riduzione della pressione
si ottengono con la combinazione delle singole funzionidell’elettromagnete. Le modifiche dell'equilibrio del siste-ma di ammortizzamento pneumatico vengono rilevatedal sensore di livello, interpretate dalla centralina e i re-lativi comandi trasmessi all'elettrovalvola ECAS.
L'elettrovalvola ECAS si trova sul telaio, preferibilmentesu una traversa, sopra l'asse ovvero il gruppo di assi daregolare. Le tubazioni in uscita dei soffietti dovrebberoessere simmetriche, vale a dire, avere la stessa lunghez-za e la stessa sezione. Osservare la corretta assegna-zione degli attacchi elettrici e di quelli pneumaticisecondo la numerazione.
Secondo le finalità d'impiego, si differenzia tra 3 gruppi dielettrovalvole ECAS:
• Valvola asse anteriore (detta anche: valvola VA)
• Valvola asse posteriore (detta anche: valvola HA)
• Valvola asse posteriore/asse sollevabile (detta anche: valvola HA/LA)
La valvola VA si trova vicino all'asse anteriore e coman-da i soffietti portanti di quell'asse. La valvola VA di solitoè dotata solo di un distributore direzionale 2/2 vie perl'asse anteriore (sterzante) - con 1 punto di regolazione.Le funzioni di presa e scarico dell'aria sono assolte dallavalvola direzionale 3/2 dell'asse posteriore.
La valvola HA rappresenta il cuore del sistema ECASsenza il dispositivo automatico di sollevamento asse. Èsituata nella zona dell’asse posteriore e comanda i sof-fietti portanti di quest’ultimo. Attraverso un'ulteriore presapneumatica, può essere realizzata la presa/lo scaricod'aria di utenze situate a valle, come ad es. una valvolaVA per rimorchi a timone.
In genere, la valvola HA è dotata di un distributore dire-zionale a 3/2 vie per la presa e lo scarico dell'aria e - aseconda dell'allestimento ECAS - di una o due valvole di-rezionali a 2/2 vie per il comando dei soffietti portanti con1 o 2 punti di regolazione.
La valvola HA/LA rappresenta il cuore del sistema
ECAS con dispositivo automatico di sollevamento asse.Questa valvola è costituita da un blocchetto per l'asseposteriore, con funzioni conformi a quelle della valvoladell'asse posteriore, e da un blocchetto per l'asse solle-vabile.
È situata nella zona dell'asse posteriore e comanda, oltreai soffietti portanti di quest'ultimo, anche il soffietto di sol-levamento e i soffietti portanti del 1° asse sollevabile. At-traverso un ulteriore presa pneumatica sul blocchetto perl'asse posteriore, può essere realizzata la presa/lo scari-co d'aria di utenze situate a valle, come ad es. una val-vola VA per rimorchi a timone.
In genere, la valvola HA/LA del blocchetto per l'asse po-steriore è dotata di un distributore direzionale a 3/2 vieper la presa e lo scarico dell'aria e - a seconda dell'alle-stimento ECAS - di una – nel caso di un asse con 1 puntodi regolazione – o – nel caso di un asse a 2 punti di rego-lazione - di due valvole direzionali a 2/2 vie per il coman-do dei soffietti portanti dell'asse posteriore. Sulblocchetto valvole dell'asse sollevabile sono situate 3valvole direzionali a 3/3 vie pilotate da due magneti e checomandano il soffietto di sollevamento e i soffietti portantidel 1° asse sollevabile.
Mentre per il circuito elettrico i collegamenti non sonouniformi e per una chiara assegnazione bisogna ricorrereallo schema elettrico (vedi in appendice), per il collega-mento pneumatico può essere applicata la seguente di-rettiva:
Attacco 1 Dal serbatoio per le utenze a valle (solo pervalvole HA/LA)
Attacco 11 Dal serbatoio per le utenze a valle (solo pervalvole VA e HA)
Attacco 12 Pressione dal serbatoio per il pilotaggiodegli elementi di comandodell'elettrovalvola ECAS (solo per valvoleVA e HA)
Attacco 13 nessun significato pratico
Attacco 14 Attacco sul serbatoio in arrivo dalla valvolaHA (solo per valvole VA)
Attacco 21 solo per valvole HA: Uscita verso l'attacco14 della valvola VAper valvole HA/LA: Uscita verso il soffiettoportante (sinistro) dell'asse/degli assi acontatto con il fondo stradale
Attacco 22 Uscita verso il soffietto portante (destro)dell'asse/degli assi a contatto con il fondostradale
Attacco 23 solo per valvole VA o HA: Uscita verso ilsoffietto portante (sinistro) dell'asse/degli
Funzioni sistema5. TCE
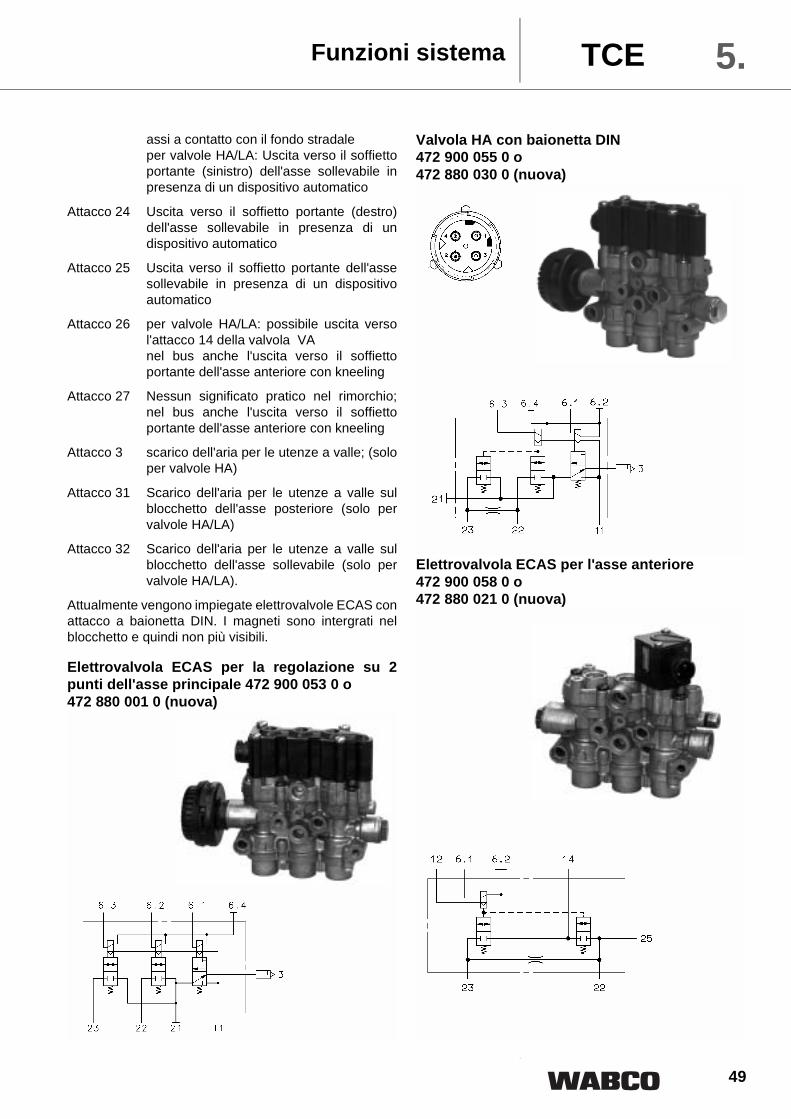
49
assi a contatto con il fondo stradaleper valvole HA/LA: Uscita verso il soffiettoportante (sinistro) dell'asse sollevabile inpresenza di un dispositivo automatico
Attacco 24 Uscita verso il soffietto portante (destro)dell'asse sollevabile in presenza di undispositivo automatico
Attacco 25 Uscita verso il soffietto portante dell'assesollevabile in presenza di un dispositivoautomatico
Attacco 26 per valvole HA/LA: possibile uscita versol'attacco 14 della valvola VAnel bus anche l'uscita verso il soffiettoportante dell'asse anteriore con kneeling
Attacco 27 Nessun significato pratico nel rimorchio;nel bus anche l'uscita verso il soffiettoportante dell'asse anteriore con kneeling
Attacco 3 scarico dell'aria per le utenze a valle; (soloper valvole HA)
Attacco 31 Scarico dell'aria per le utenze a valle sulblocchetto dell'asse posteriore (solo pervalvole HA/LA)
Attacco 32 Scarico dell'aria per le utenze a valle sulblocchetto dell'asse sollevabile (solo pervalvole HA/LA).
Attualmente vengono impiegate elettrovalvole ECAS conattacco a baionetta DIN. I magneti sono intergrati nelblocchetto e quindi non più visibili.
Elettrovalvola ECAS per la regolazione su 2punti dell'asse principale 472 900 053 0 o472 880 001 0 (nuova)
Valvola HA con baionetta DIN472 900 055 0 o472 880 030 0 (nuova)
Elettrovalvola ECAS per l'asse anteriore472 900 058 0 o472 880 021 0 (nuova)
Funzioni sistema 5.TCE
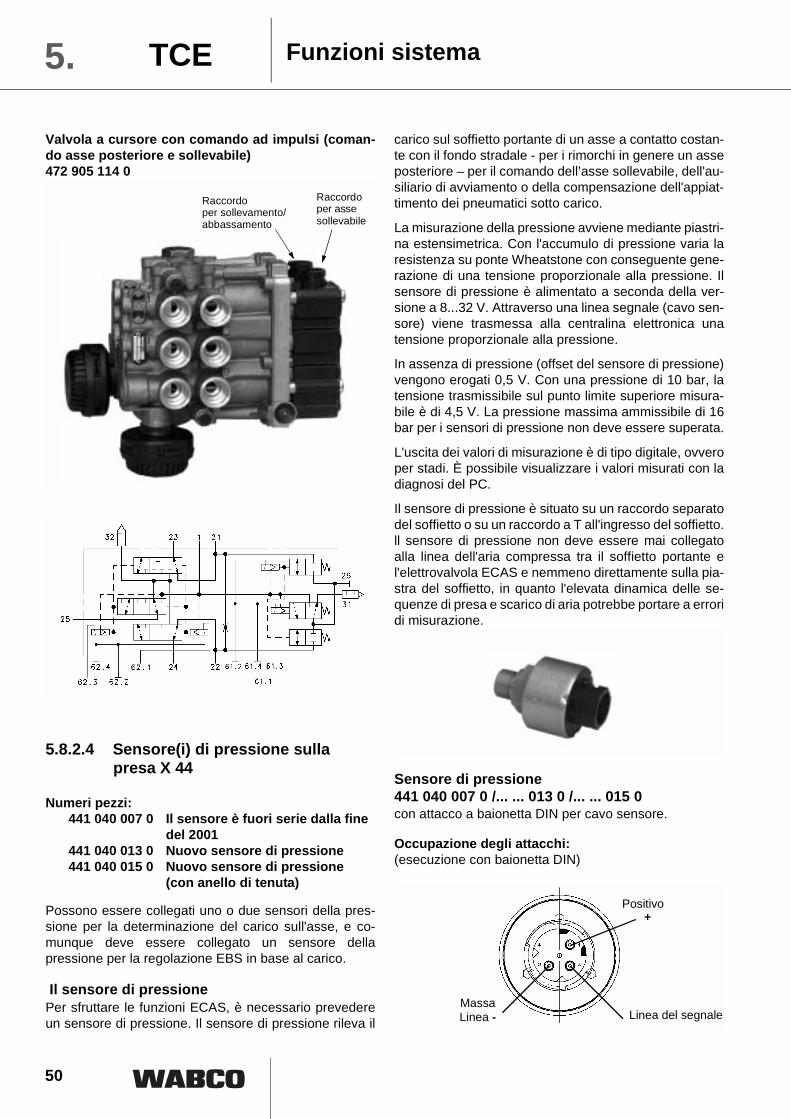
50
Valvola a cursore con comando ad impulsi (coman-do asse posteriore e sollevabile)472 905 114 0
5.8.2.4 Sensore(i) di pressione sullapresa X 44
Numeri pezzi:441 040 007 0 Il sensore è fuori serie dalla fine
del 2001441 040 013 0 Nuovo sensore di pressione 441 040 015 0 Nuovo sensore di pressione
(con anello di tenuta)
Possono essere collegati uno o due sensori della pres-sione per la determinazione del carico sull'asse, e co-munque deve essere collegato un sensore dellapressione per la regolazione EBS in base al carico.
Il sensore di pressione Per sfruttare le funzioni ECAS, è necessario prevedereun sensore di pressione. Il sensore di pressione rileva il
carico sul soffietto portante di un asse a contatto costan-te con il fondo stradale - per i rimorchi in genere un asseposteriore – per il comando dell’asse sollevabile, dell'au-siliario di avviamento o della compensazione dell'appiat-timento dei pneumatici sotto carico.
La misurazione della pressione avviene mediante piastri-na estensimetrica. Con l'accumulo di pressione varia laresistenza su ponte Wheatstone con conseguente gene-razione di una tensione proporzionale alla pressione. Ilsensore di pressione è alimentato a seconda della ver-sione a 8...32 V. Attraverso una linea segnale (cavo sen-sore) viene trasmessa alla centralina elettronica unatensione proporzionale alla pressione.
In assenza di pressione (offset del sensore di pressione)vengono erogati 0,5 V. Con una pressione di 10 bar, latensione trasmissibile sul punto limite superiore misura-bile è di 4,5 V. La pressione massima ammissibile di 16bar per i sensori di pressione non deve essere superata.
L'uscita dei valori di misurazione è di tipo digitale, ovveroper stadi. È possibile visualizzare i valori misurati con ladiagnosi del PC.
Il sensore di pressione è situato su un raccordo separatodel soffietto o su un raccordo a T all'ingresso del soffietto.ll sensore di pressione non deve essere mai collegatoalla linea dell'aria compressa tra il soffietto portante el'elettrovalvola ECAS e nemmeno direttamente sulla pia-stra del soffietto, in quanto l'elevata dinamica delle se-quenze di presa e scarico di aria potrebbe portare a erroridi misurazione.
Sensore di pressione 441 040 007 0 /... ... 013 0 /... ... 015 0con attacco a baionetta DIN per cavo sensore.
Occupazione degli attacchi: (esecuzione con baionetta DIN)
Raccordoper sollevamento/
Raccordoper asse sollevabileabbassamento
Positivo+
Linea del segnaleMassaLinea -
Funzioni sistema5. TCE

51
5.9 Componenti pneumatici e avvertenzeper l'installazione
Come le sospensioni pneumatiche tradizionali, anchequelle con controllo elettronico comprendono una seriedi componenti pneumatici, come il serbatoio, le valvole li-mitatrici della pressione, le tubazioni in plastica e la rac-corderia. Come per tutti i sistemi di sospensionepneumatica, il circuito secondario delle utenze è assicu-rato rispetto al circuito del freno di servizio mediante unavalvola limitatrice della pressione antiritorno da 6,0 bar(per es. 434 100 125 0). La capacità del serbatoiodell’aria dipende dal numero di assi e dai requisiti del si-stema. Per veicoli senza assi sollevabili, sono sufficienti60-80 litri, solo per gli impianti con assi sollevabili il ser-batoio dovrebbe avere una capacità di 80-120 litri. Ciògarantisce sufficienti riserve per l'esecuzione delle rego-lazioni durante l'esercizio di rampa e l’uso ripetutodell'asse sollevabile senza alimentazione dalla motrice.In questo contesto, il sistema ECAS non si distingue daaltri sistemi di sospensione pneumatica!
Per la posa del tubo in plastica, a parità di dimensioni delsistema, con ECAS si evidenzia un notevole risparmio.Per un veicolo con comando asse sollevabile e valvolaper molle pneumatiche con limitazione dell’altezza sonopiù di 30m. Il diametro nominale del tubo in plastica tral’elettrovalvola e i soffietti è di 10-12mm ed è dovuto aglielevati diametri delle valvole. Se non diversamente spe-cificato dal costruttore di assi o negli schemi WABCO, siconsiglia di optare per il diametro di 12mm. La linea delserbatoio non deve essere inferiore a 12mm. Per evitarel’abbassamento o il sollevamento troppo rapido dell’assedi sollevamento ed eventuali danni ai pneumatici, si con-siglia di utilizzare un tubo con diametro di 8 mm per il sof-fietto di sollevamento.
Come protezione contro pressioni troppo elevate nei sof-fietti di sollevamento e contro i raggrinzimenti, neglischemi WABCO è previsto in via opzionale l’impiego dilimitatori e valvole limitatrici di pressione. Le indicazionidel produttore relative aa soffietto di sollevamento sonovincolanti.
La maggior parte dei costruttori di veicoli impiegano rac-cordi ad innesto, disponibili presso WABCO sotto il nomeAnoflex . Con ECAS si può risparmiare anche sulla rac-corderia. Per il telecomando e il sensore di livello vengo-no meno il raccordo sulla valvola di registro e sullavalvola delle sospensioni pneumatiche. Con ECAS si ri-duce di molto anche il dispendio per i supporti. Da un’in-dagine effettuata tra i produttori che montano il sistemaECAS di serie, è risultato che i tempi di montaggio risul-tano più ridotti rispetto agli impianti convenzionali.
Per il servizio di assistenza, i raccordi di prova sonoun’assoluta necessità, per consentire una rapida localiz-
zazione dei guasti. Per poter assicurare il sollevamentoe l’abbassamento del sistema anche nel caso estremo diun guasto totale del veicolo vuoto o carico, dovrebberoessere previsti almeno due raccordi esterni di prova peril freno di servizio e l soffietto portante per i sistemi con 1punto di regolazione. In tal modo, il veicolo può essereabbassato (raccordo di prova premuto) e sollevatodall’esterno. (Collegare i due raccordi con un tubo di pro-va e gonfiare con l’aria del circuito del freno di servizio).Dopo aver levato il tubo di prova, l’aria rimane imprigio-nata nelle sospensioni pneumatiche, in quanto un siste-ma ECAS senza corrente blocca tutti i raccordi. Solo lanormale perdita porta col tempo ad un abbassamentodella carenatura. Controllando il livello di guida, in questecondizioni è generalmente possibile effettuare un brevetragitto fino alla più vicina officina di assistenza.
Per i punti di montaggio dei singoli componenti, oltre aquello indicato per l’apparecchio (vedi il disegno d’offer-ta), non ci sono indicazioni particolari. Come parametrodi riferimento, vale quello di una facile accessibilità e pra-ticità d’uso. In particolare:
Il telecomando:Viene posizionato in maniera differenziata a seconda delsistema e del veicolo. In ogni caso, dovrebbe essere pre-visto un attacco esterno con cappuccio in un punto benaccessibile e protetto dall’acqua. Nelle autocisterne si ri-corre spesso alle parti laterali della carrozzeria.
L'elettrovalvola:Il criterio principale è qui sicuramente una buona acces-sibilità per il personale di assistenza, in quanto tutte le tu-bazioni in entrata devono essere smontate in questopunto. Il blocchetto per l’asse sollevabile è costituito dadue unità valvole avvitate tra loro. Con ”anteriore” vienedenominata la parte dotata degli attacchi pneumatici.Con "posteriore" rispettivamente la parte della valvola ri-volta verso il telaio. La lunghezza dei tubi di plastica ver-so i soffietti portanti dovrebbe essere uniforme.
Funzioni sistema 5.TCE

52
Il sensore di pressione:È situato vicino al soffietto portante e per la simulazionedella pressione si consiglia di collegarlo a una valvola diprova (463 710 998 0). In caso di controlli, per es. delcomportamento dell'asse sollevabile, in tal modo può es-sere simulato e controllato il completo campo di regola-zione indipendentemente dalle condizioni di carico delveicolo. Per questo motivo, il sensore deve essere mon-tato in una posizione facilmente accessibile. Le punte dipressione vengono soppresse dall'ECU.
Il sensore di pressione con attacco di prova
Il sensore di livello:Al posto della valvola convenzionale per molle pneuma-tiche viene montato il sensore di livello. La dima di perfo-razione per l'installazione è identica, lo stesso vale per ilpunto di fissaggio. Deve essere assicurato che in tutto ilcampo di regolazione la leva non possa andare a sbatte-re o ribaltarsi. Poiché durante la marcia si hanno spessocorse di molleggio maggiori, è necessario prevederespazio sufficiente per i punti di battuta di finecorsa. Sce-gliere possibilmente un luogo protetto contro la proiezio-ne di pietrisco e gli spruzzi d'acqua. Per i sistemi a duesensori di livello sull’asse posteriore, i sensori devonoessere montati alla massima distanza possibile tra loro.Tutti gli assi di rotazione devono essere posti in una dire-zione per evitare le forze trasversali. Evitare la piegaturaa gomito della leva. Per l'articolazione della leva sull'asseimpiegare un'asta filettata. Facendo così viene pratica-mente escluso uno scivolamento involontario. La leva èdotata di tre fori per la regolazione della lunghezza. Piùè lunga la leva, maggiore è il campo di regolazione. Peruna migliore risoluzione del sensore, optare nel livellocalibrato ovvero in quello di guida principale, per una po-sizione di 90° della leva rispetto al sensore. Questo statosi può realizzare con facilità spostando e serrando la levasull'asta filettata nel livello di guida.
Sensore di livello
Sensore di livello sull'asse posteriore
Le linee di alimentazione elettrica:come noto per l’ABS, le lunghezze eccessive delle lineedei sensori e dei magneti devono essere posate a Z. Fis-sare i cavi che devono essere posati su corpi permanen-temente oscillanti con la fascetta doppia 894 326 012 4.Nel lungo periodo, le oscillazioni portano all'incrudimentoe di conseguenza alla rottura precoce. Tirare le fascettesolo di quel tanto che basta per fissare bene il cavo. In talmodo si evita una rottura precoce dei cavi e quindi deiconduttori elettrici.
Funzioni sistema5. TCE
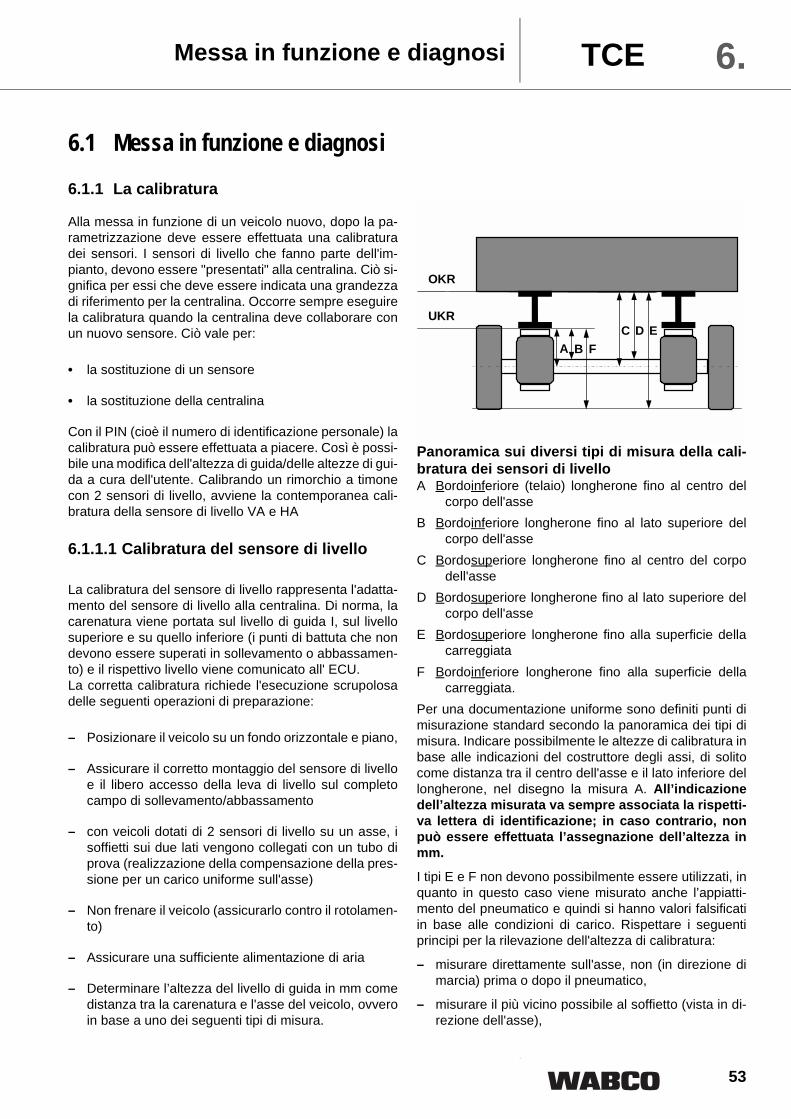
53
6.1 Messa in funzione e diagnosi
6.1.1 La calibratura
Alla messa in funzione di un veicolo nuovo, dopo la pa-rametrizzazione deve essere effettuata una calibraturadei sensori. I sensori di livello che fanno parte dell'im-pianto, devono essere "presentati" alla centralina. Ciò si-gnifica per essi che deve essere indicata una grandezzadi riferimento per la centralina. Occorre sempre eseguirela calibratura quando la centralina deve collaborare conun nuovo sensore. Ciò vale per:
• la sostituzione di un sensore
• la sostituzione della centralina
Con il PIN (cioè il numero di identificazione personale) lacalibratura può essere effettuata a piacere. Così è possi-bile una modifica dell'altezza di guida/delle altezze di gui-da a cura dell'utente. Calibrando un rimorchio a timonecon 2 sensori di livello, avviene la contemporanea cali-bratura della sensore di livello VA e HA
6.1.1.1 Calibratura del sensore di livello
La calibratura del sensore di livello rappresenta l'adatta-mento del sensore di livello alla centralina. Di norma, lacarenatura viene portata sul livello di guida I, sul livellosuperiore e su quello inferiore (i punti di battuta che nondevono essere superati in sollevamento o abbassamen-to) e il rispettivo livello viene comunicato all' ECU.La corretta calibratura richiede l'esecuzione scrupolosadelle seguenti operazioni di preparazione:
– Posizionare il veicolo su un fondo orizzontale e piano,
– Assicurare il corretto montaggio del sensore di livelloe il libero accesso della leva di livello sul completocampo di sollevamento/abbassamento
– con veicoli dotati di 2 sensori di livello su un asse, isoffietti sui due lati vengono collegati con un tubo diprova (realizzazione della compensazione della pres-sione per un carico uniforme sull'asse)
– Non frenare il veicolo (assicurarlo contro il rotolamen-to)
– Assicurare una sufficiente alimentazione di aria
– Determinare l’altezza del livello di guida in mm comedistanza tra la carenatura e l'asse del veicolo, ovveroin base a uno dei seguenti tipi di misura.
Panoramica sui diversi tipi di misura della cali-bratura dei sensori di livelloA Bordoinferiore (telaio) longherone fino al centro del
corpo dell'asseB Bordoinferiore longherone fino al lato superiore del
corpo dell'asseC Bordosuperiore longherone fino al centro del corpo
dell'asseD Bordosuperiore longherone fino al lato superiore del
corpo dell'asseE Bordosuperiore longherone fino alla superficie della
carreggiataF Bordoinferiore longherone fino alla superficie della
carreggiata.Per una documentazione uniforme sono definiti punti dimisurazione standard secondo la panoramica dei tipi dimisura. Indicare possibilmente le altezze di calibratura inbase alle indicazioni del costruttore degli assi, di solitocome distanza tra il centro dell'asse e il lato inferiore dellongherone, nel disegno la misura A. All’indicazionedell’altezza misurata va sempre associata la rispetti-va lettera di identificazione; in caso contrario, nonpuò essere effettuata l’assegnazione dell’altezza inmm.
I tipi E e F non devono possibilmente essere utilizzati, inquanto in questo caso viene misurato anche l’appiatti-mento del pneumatico e quindi si hanno valori falsificatiin base alle condizioni di carico. Rispettare i seguentiprincipi per la rilevazione dell'altezza di calibratura:
– misurare direttamente sull'asse, non (in direzione dimarcia) prima o dopo il pneumatico,
– misurare il più vicino possibile al soffietto (vista in di-rezione dell'asse),
A B F
UKRC D E
OKR
Messa in funzione e diagnosi 6.TCE
54
Registrare le altezze di calibratura rilevate, per poterleconsultare subito in caso di necessità.
Per un veicolo con più assi effettuare solo un processo dimisurazione. L'indicazione delle altezze avviene nell'or-dine livello di guida, livello max., livello min.
Esempio di una denominazione completa:Tipo di misura A, V 250/390/202, HL 273/420/210, HR275/422/213 (HL= Posteriore Sinistra, misura in millime-tri).
In caso di sostituzione della centralina senza conoscerei dati di calibratura del veicolo, i dati di calibratura per isensori di livello della vecchia centralina possono esserevisualizzati nel menu ”Sistema, dati di calibratura sensoridi livello”. Se non dovesse essere più possibile, ci si puòaiutare con la seguente supposizione:
Nel livello di guida I la leva del sensore di livello sitrova quasi in posizione orizzzontale.Regolare il livello superiore e quello inferiore, finoa che la carenatura non si può più alzare o abbas-sare.
6.1.1.2 Calibratura del sensore di livellocon il PC
Per la calibratura di 3 livelli di calibratura, regolare conl'aiuto del PC ogni livello da calibrare nel seguente ordi-ne: livello di guida I, livello di battuta superiore e livello dibattuta inferiore.
Avvertenza: Rispettare per la calibratura l'aumentodi altezza del livello di guida con l'asse sollevabile al-zato nonché la compensazione dell’appiattimentodei pneumatici.
a) Portare innanzitutto il veicolo al livello di guida I rile-vato (rispettivamente per l'asse anteriore e posterio-re). Attivare la calibratura (i livelli effettivi vengonomemorizzati come livelli di guida).
b) Portare il veicolo al livello di battuta superiore. Attiva-re nuovamente la calibratura. (I livelli effettivi vengo-no memorizzati come livelli di battuta superiori.) Perpreservare le battute, la centralina riduce automatica-mente il valore della battuta superiore3 counts indietro.
c) Portare il veicolo al livello di battuta inferiore. Attivarenuovamente la calibratura. (I livelli effettivi vengonomemorizzati come livelli di battuta inferiore.)
Avvertenza: Durante la calibratura con il PC, non è pos-sibile effettuare modifiche del livello mediante il teleco-mando/box di comando.
Al termine di ogni fase di calibratura e mediante verificadella memoria errori, il PC indica se la calibratura è stataeseguita correttamente o meno.
Per concludere positivamente la calibratura, osservare iseguenti principi per i valori WSW dei sensori di livello:
– I valori del sensore di livello immessi devono esseresuperiori a 4 counts e inferiori a 255 counts.4 counts < WSW < 255 counts
– Il livello di battuta superiore ON deve essere superio-re alla somma del livello di guida FN aumentato di 3counts e del triplo della tolleranza del livello nominale.
– Il livello di battuta inferiore UN deve risultare inferiorealla differenza del livello di guida FN meno il doppiodella tolleranza del livello nominale.
Un’altra possibilità consiste nella calibratura di un livellodi guida e nell'immissione manuale del livello di battutasuperiore e inferiore. Questo tipo di calibratura ha sensose si vuole far arrivare la carenatura fino ai punti di battu-ta. In tal modo si può aggirare lo scarico della battuta nellivello superiore.
Rispettare sempre le regole di calibratura. Partendo dallivello di guida posteriore sinistro e destro, i valori di cali-bratura ”livello di battuta superiore/inferiore posteriore”possono essere stabiliti come segue:
1. Calcolare le differenze ”livello di battuta superiore po-steriore sinistro” – ”livello di guida posteriore sinistro”e ”livello di battuta superiore posteriore destro” – ”li-vello di guida posteriore destro”.
2. Addizionando quindi la differenza minore al valore dicalibratura presumibile ”livello di guida posteriore si-nistro” risulterà il valore di calibratura da registrare ”li-vello di battuta superiore posteriore”.
3. Calcolare le differenze ”livello di guida posteriore si-nistro” – ”livello di battuta posteriore sinistro” e ”livellodi guida posteriore destro” – ”livello di battuta inferio-re posteriore destro”
4. Sottraendo quindi la differenza minore dal valore dicalibratura presumibile ”livello di guida posteriore si-nistro” risulterà il valore di calibratura da registrare ”li-vello di battuta inferiore posteriore”.
Immettere i dati rilevati nel PC durante il processo di ca-libratura.
Al termine di ogni fase di calibratura e mediante verificadella memoria errori, il PC indica se la calibratura è stataeseguita correttamente o meno.
Messa in funzione e diagnosi6. TCE

55
La terza possibilità di comunicare i valori di calibraturaalla centralina è l'immissione diretta dei valori del senso-re di livello. Si può effettuare solo con il PIN. I valori delsensore di livello devono essere noti. L'immissione diret-ta avviene con il programma di diagnosi del PC sotto Si-stema/Dati di calibratura sensori di livello.
Se per questi parametri sono già iscritti dei valori, la cali-bratura potrebbe portare a risultati indesiderati. Per la ca-libratura di un veicolo semicaricato, abbassare l'assesollevabile. Se durante la calibratura di un veicolo semi-caricato l’asse sollevabile è alzato, si avrà un livello diguida eccessivamente rialzato. L’altezza del veicolo avuoto con l’asse sollevabile alzato risulterebbe superiorea quella ammissibile.
Per i veicoli semicarichi o a pieno carico, rispettare lacompensazione dell'appiattimento dei pneumatici. Ciò si-gnifica che il veicolo deve essere calibrato semicarico oa pieno carico meno la compensazione dell'appiattimen-to dei pneumatici!
Messa in funzione e diagnosi 6.TCE
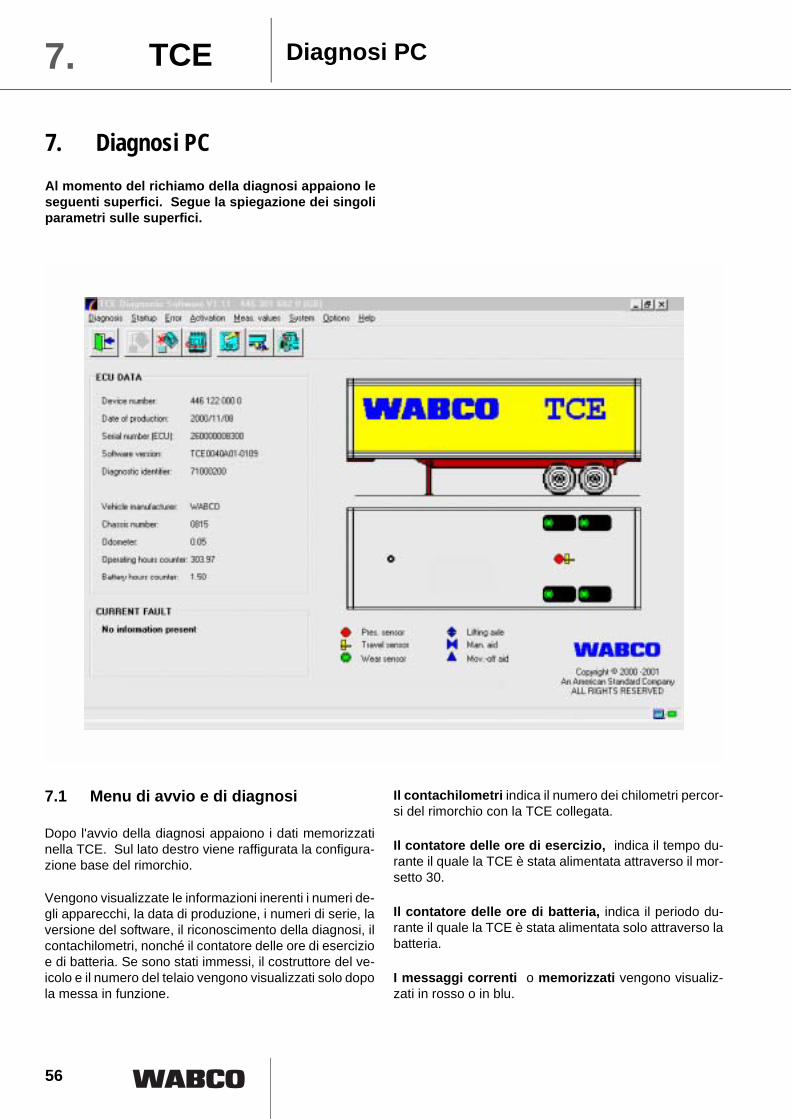
56
7.1 Menu di avvio e di diagnosi
Dopo l'avvio della diagnosi appaiono i dati memorizzatinella TCE. Sul lato destro viene raffigurata la configura-zione base del rimorchio.
Vengono visualizzate le informazioni inerenti i numeri de-gli apparecchi, la data di produzione, i numeri di serie, laversione del software, il riconoscimento della diagnosi, ilcontachilometri, nonché il contatore delle ore di esercizioe di batteria. Se sono stati immessi, il costruttore del ve-icolo e il numero del telaio vengono visualizzati solo dopola messa in funzione.
Il contachilometri indica il numero dei chilometri percor-si del rimorchio con la TCE collegata.
Il contatore delle ore di esercizio, indica il tempo du-rante il quale la TCE è stata alimentata attraverso il mor-setto 30.
Il contatore delle ore di batteria, indica il periodo du-rante il quale la TCE è stata alimentata solo attraverso labatteria.
I messaggi correnti o memorizzati vengono visualiz-zati in rosso o in blu.
Diagnosi PC7.
7. Diagnosi PCAl momento del richiamo della diagnosi appaiono leseguenti superfici. Segue la spiegazione dei singoliparametri sulle superfici.
TCE
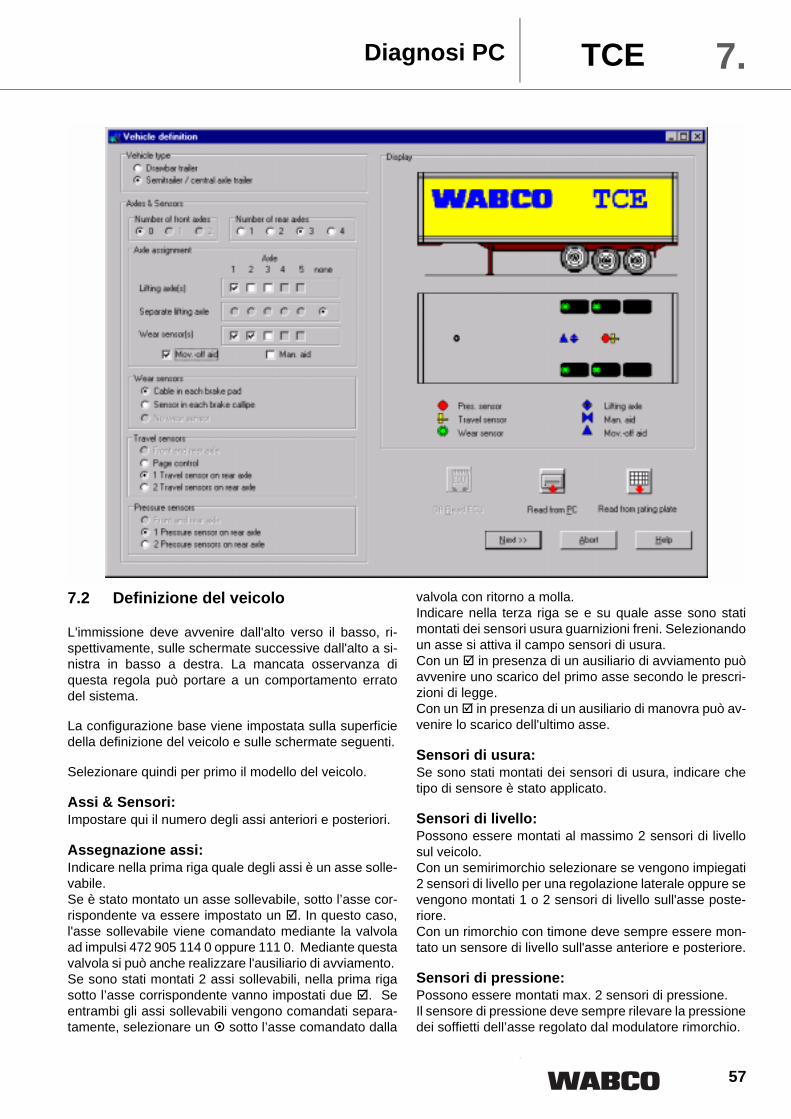
57
7.2 Definizione del veicolo
L'immissione deve avvenire dall'alto verso il basso, ri-spettivamente, sulle schermate successive dall'alto a si-nistra in basso a destra. La mancata osservanza diquesta regola può portare a un comportamento erratodel sistema.
La configurazione base viene impostata sulla superficiedella definizione del veicolo e sulle schermate seguenti.
Selezionare quindi per primo il modello del veicolo.
Assi & Sensori:Impostare qui il numero degli assi anteriori e posteriori.
Assegnazione assi:Indicare nella prima riga quale degli assi è un asse solle-vabile. Se è stato montato un asse sollevabile, sotto l’asse cor-rispondente va essere impostato un �. In questo caso,l'asse sollevabile viene comandato mediante la valvolaad impulsi 472 905 114 0 oppure 111 0. Mediante questavalvola si può anche realizzare l'ausiliario di avviamento. Se sono stati montati 2 assi sollevabili, nella prima rigasotto l’asse corrispondente vanno impostati due �. Seentrambi gli assi sollevabili vengono comandati separa-tamente, selezionare un � sotto l’asse comandato dalla
valvola con ritorno a molla. Indicare nella terza riga se e su quale asse sono statimontati dei sensori usura guarnizioni freni. Selezionandoun asse si attiva il campo sensori di usura.Con un � in presenza di un ausiliario di avviamento puòavvenire uno scarico del primo asse secondo le prescri-zioni di legge.Con un � in presenza di un ausiliario di manovra può av-venire lo scarico dell'ultimo asse.
Sensori di usura:Se sono stati montati dei sensori di usura, indicare chetipo di sensore è stato applicato.
Sensori di livello:Possono essere montati al massimo 2 sensori di livellosul veicolo. Con un semirimorchio selezionare se vengono impiegati2 sensori di livello per una regolazione laterale oppure sevengono montati 1 o 2 sensori di livello sull'asse poste-riore. Con un rimorchio con timone deve sempre essere mon-tato un sensore di livello sull'asse anteriore e posteriore.
Sensori di pressione:Possono essere montati max. 2 sensori di pressione. Il sensore di pressione deve sempre rilevare la pressionedei soffietti dell’asse regolato dal modulatore rimorchio.
Diagnosi PC 7.TCE
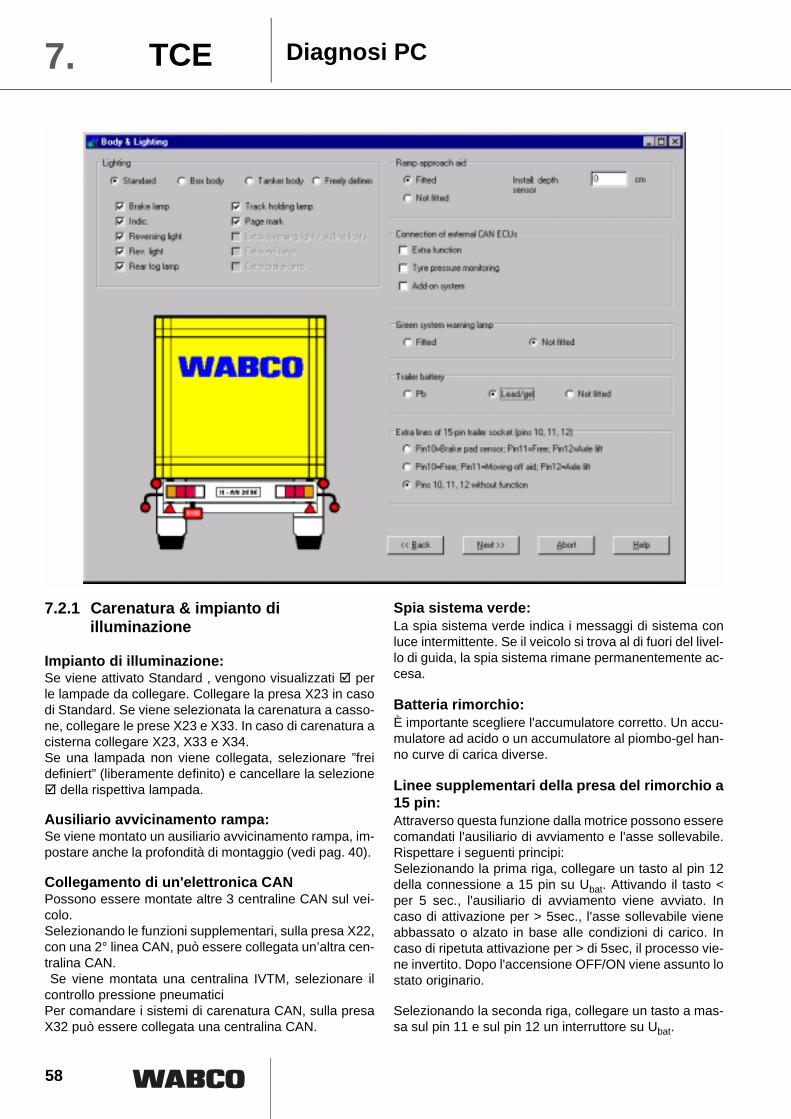
58
7.2.1 Carenatura & impianto di illuminazione
Impianto di illuminazione: Se viene attivato Standard , vengono visualizzati � perle lampade da collegare. Collegare la presa X23 in casodi Standard. Se viene selezionata la carenatura a casso-ne, collegare le prese X23 e X33. In caso di carenatura acisterna collegare X23, X33 e X34. Se una lampada non viene collegata, selezionare ”freidefiniert” (liberamente definito) e cancellare la selezione� della rispettiva lampada.
Ausiliario avvicinamento rampa: Se viene montato un ausiliario avvicinamento rampa, im-postare anche la profondità di montaggio (vedi pag. 40).
Collegamento di un'elettronica CANPossono essere montate altre 3 centraline CAN sul vei-colo. Selezionando le funzioni supplementari, sulla presa X22,con una 2° linea CAN, può essere collegata un’altra cen-tralina CAN. Se viene montata una centralina IVTM, selezionare ilcontrollo pressione pneumaticiPer comandare i sistemi di carenatura CAN, sulla presaX32 può essere collegata una centralina CAN.
Spia sistema verde:La spia sistema verde indica i messaggi di sistema conluce intermittente. Se il veicolo si trova al di fuori del livel-lo di guida, la spia sistema rimane permanentemente ac-cesa.
Batteria rimorchio:È importante scegliere l'accumulatore corretto. Un accu-mulatore ad acido o un accumulatore al piombo-gel han-no curve di carica diverse.
Linee supplementari della presa del rimorchio a15 pin:Attraverso questa funzione dalla motrice possono esserecomandati l'ausiliario di avviamento e l'asse sollevabile.Rispettare i seguenti principi:Selezionando la prima riga, collegare un tasto al pin 12della connessione a 15 pin su Ubat. Attivando il tasto <per 5 sec., l'ausiliario di avviamento viene avviato. Incaso di attivazione per > 5sec., l'asse sollevabile vieneabbassato o alzato in base alle condizioni di carico. Incaso di ripetuta attivazione per > di 5sec, il processo vie-ne invertito. Dopo l'accensione OFF/ON viene assunto lostato originario.
Selezionando la seconda riga, collegare un tasto a mas-sa sul pin 11 e sul pin 12 un interruttore su Ubat.
Diagnosi PC7. TCE
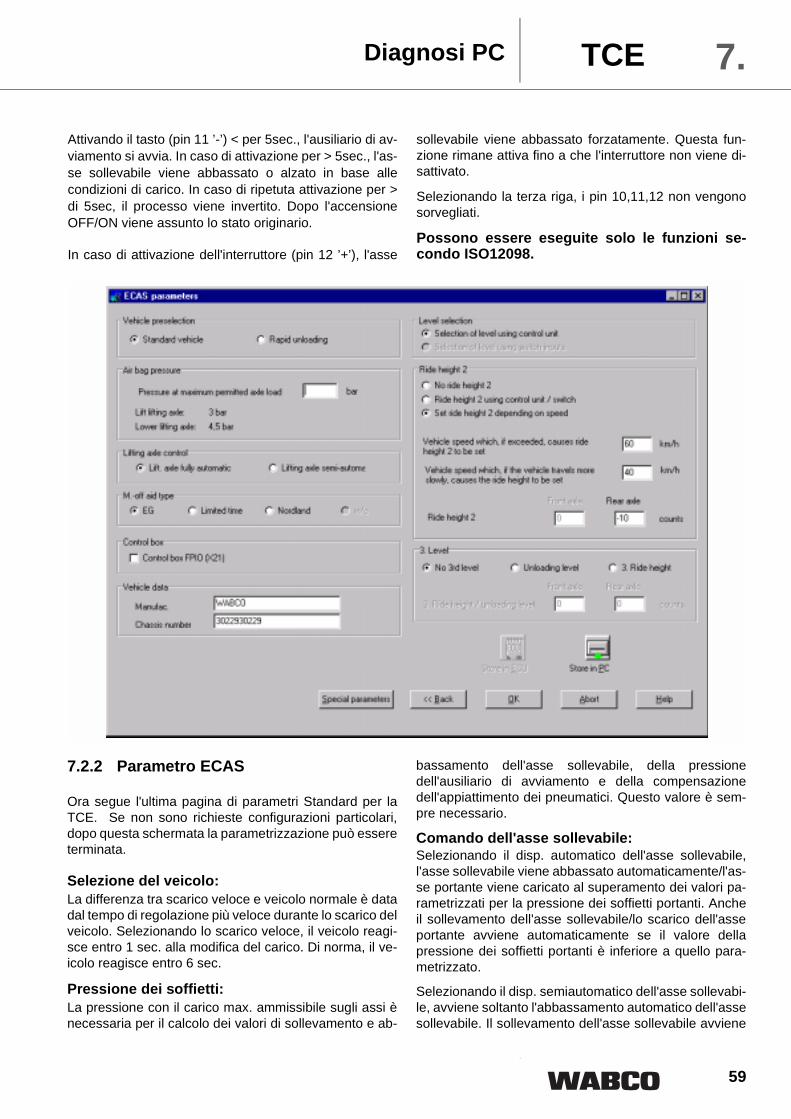
59
Attivando il tasto (pin 11 ’-’) < per 5sec., l'ausiliario di av-viamento si avvia. In caso di attivazione per > 5sec., l'as-se sollevabile viene abbassato o alzato in base allecondizioni di carico. In caso di ripetuta attivazione per >di 5sec, il processo viene invertito. Dopo l'accensioneOFF/ON viene assunto lo stato originario.
In caso di attivazione dell'interruttore (pin 12 ’+’), l'asse
sollevabile viene abbassato forzatamente. Questa fun-zione rimane attiva fino a che l'interruttore non viene di-sattivato.
Selezionando la terza riga, i pin 10,11,12 non vengonosorvegliati.
Possono essere eseguite solo le funzioni se-condo ISO12098.
Diagnosi PC 7.
7.2.2 Parametro ECAS
Ora segue l'ultima pagina di parametri Standard per laTCE. Se non sono richieste configurazioni particolari,dopo questa schermata la parametrizzazione può essereterminata.
Selezione del veicolo:La differenza tra scarico veloce e veicolo normale è datadal tempo di regolazione più veloce durante lo scarico delveicolo. Selezionando lo scarico veloce, il veicolo reagi-sce entro 1 sec. alla modifica del carico. Di norma, il ve-icolo reagisce entro 6 sec.
Pressione dei soffietti:La pressione con il carico max. ammissibile sugli assi ènecessaria per il calcolo dei valori di sollevamento e ab-
bassamento dell'asse sollevabile, della pressionedell'ausiliario di avviamento e della compensazionedell'appiattimento dei pneumatici. Questo valore è sem-pre necessario.
Comando dell'asse sollevabile:Selezionando il disp. automatico dell'asse sollevabile,l'asse sollevabile viene abbassato automaticamente/l'as-se portante viene caricato al superamento dei valori pa-rametrizzati per la pressione dei soffietti portanti. Ancheil sollevamento dell'asse sollevabile/lo scarico dell'asseportante avviene automaticamente se il valore dellapressione dei soffietti portanti è inferiore a quello para-metrizzato.
Selezionando il disp. semiautomatico dell'asse sollevabi-le, avviene soltanto l'abbassamento automatico dell'assesollevabile. Il sollevamento dell'asse sollevabile avviene
TCE
60
Diagnosi PC7.
manualmente attraverso un telecomando o un interrutto-re, per es. nella cabina di guida.
Ausiliario di avviamento:Regolare l'ausiliario di avviamento in base alle prescri-zioni di legge o le indicazioni del costruttore degli assi.
Sono presenti le seguenti differenti preimpostazioni:
Per tutti e 3 i tipi di ausiliario di avviamento, il carico max.sugli assi a contatto con il terreno aumenta al max. del30%.
Ausiliario di avviamento secondo CEL'ausiliario di avviamento secondo ”CE” fino a 30 km/h, èattivo con un sovraccarico del 30% . L'ausiliario di avvia-mento può essere attivato fino a una velocità di 25 km/h.Entrambi i valori possono essere ridotti con l'aiuto delladiagnosi. Un incremento non è possibile.
Ausiliario di avviamento limitato temporalmenteL'ausiliario di avviamento”limitato temporalmente” rima-ne attivo per 90 secondi con un sovraccarico max. del30%. Dopo una pausa forzata di 50 secondi l'ausiliario diavviamento può essere riavviato se non sono stati supe-rati i 20 km/h . Se vengono superati i 30 km/h l'ausiliariodi avviamento si disinserisce automaticamente.
Ausiliario di avviamento secondo NordlandL'ausiliario di avviamento secondo ”Nordland” può esse-re inserito fino a una velocità di 25 km/h e rimane attivofino al disinserimento, indipendentemente dalla velocità.
Box di comando:Collegando un box di comando 446 156 000 0 alla presaX21 deve essere selezionata questa funzione.
Dati del veicolo:Impostare qui il produttore e il numero del telaio. Se man-cano, questi dati non possono essere visualizzati nei di-versi protocolli o sulla prima pagina di diagnosi.
Selezione del livello:È possibile impostare se il secondo e terzo livello di guidadevono essere avviati attraverso il telecomando/il box dicomando oppure attraverso un interruttore. Attualmentecomunque, non è possibile comandare i livelli di guida at-traverso un interruttore.
Livello di guida 2Volendo avviare il secondo livello di guida attraverso uninterruttore/il telecomando, dopo la selezione della fun-zione immettere la differenza di altezza rispetto al livellodi guida in +/- counts. La scelta se regolare il secondolivello di guida mediante l'interruttore o il telecomando /ilbox di comando, dipende dall’impostazione della selezio-ne livello.
Volendo comandare il 2° livello di guida secondo veloci-tà, impostare oltre alla differenza di altezza in +/-countsanche le velocità per il primo e il secondo livello di guida.
3. Livello:Si può selezionare se il terzo livello è un livello di scarico,cioè attivo solo a veicolo fermo, oppure se è un livello diguida In entrambi i casi la differenza di altezza rispetto allivello di guida calibrato deve essere impostata in +/-counts.
TCE
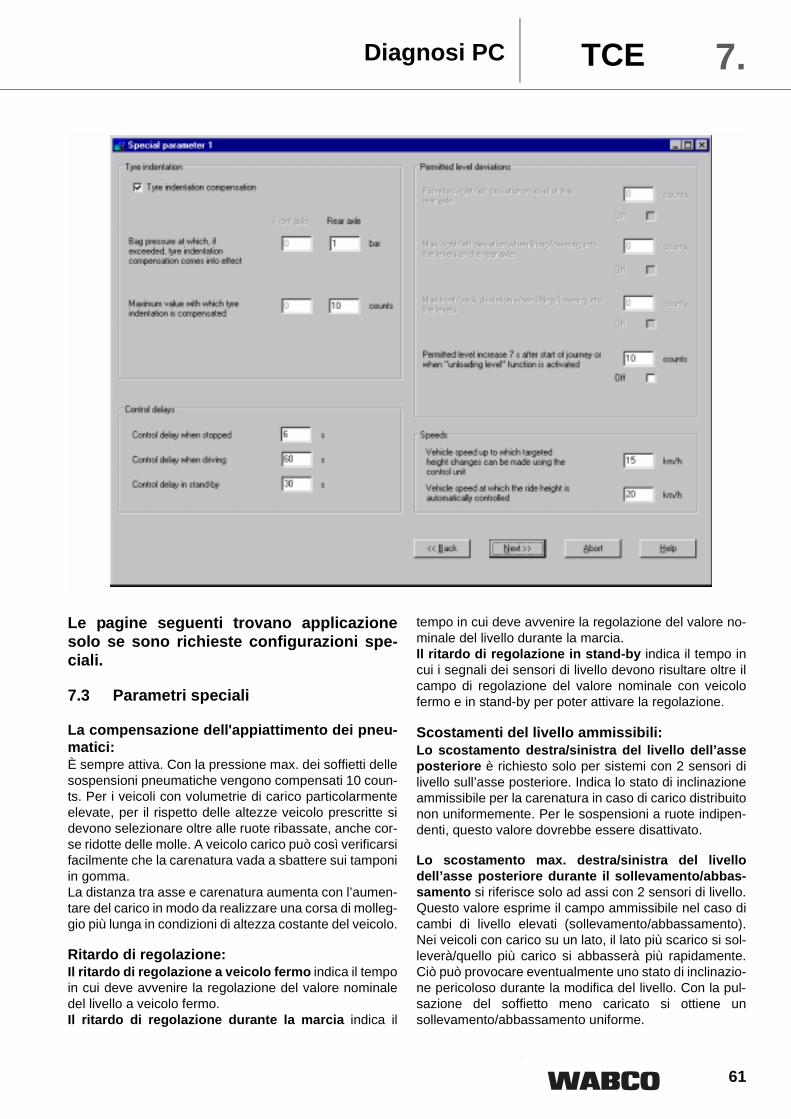
61
Diagnosi PC
2
7.
Le pagine seguenti trovano applicazionesolo se sono richieste configurazioni spe-ciali.
7.3 Parametri speciali
La compensazione dell'appiattimento dei pneu-matici:È sempre attiva. Con la pressione max. dei soffietti dellesospensioni pneumatiche vengono compensati 10 coun-ts. Per i veicoli con volumetrie di carico particolarmenteelevate, per il rispetto delle altezze veicolo prescritte sidevono selezionare oltre alle ruote ribassate, anche cor-se ridotte delle molle. A veicolo carico può così verificarsifacilmente che la carenatura vada a sbattere sui tamponiin gomma.La distanza tra asse e carenatura aumenta con l’aumen-tare del carico in modo da realizzare una corsa di molleg-gio più lunga in condizioni di altezza costante del veicolo.
Ritardo di regolazione:Il ritardo di regolazione a veicolo fermo indica il tempoin cui deve avvenire la regolazione del valore nominaledel livello a veicolo fermo. Il ritardo di regolazione durante la marcia indica il
tempo in cui deve avvenire la regolazione del valore no-minale del livello durante la marcia. Il ritardo di regolazione in stand-by indica il tempo incui i segnali dei sensori di livello devono risultare oltre ilcampo di regolazione del valore nominale con veicolofermo e in stand-by per poter attivare la regolazione.
Scostamenti del livello ammissibili:Lo scostamento destra/sinistra del livello dell’asseposteriore è richiesto solo per sistemi con 2 sensori dilivello sull’asse posteriore. Indica lo stato di inclinazioneammissibile per la carenatura in caso di carico distribuitonon uniformemente. Per le sospensioni a ruote indipen-denti, questo valore dovrebbe essere disattivato.
Lo scostamento max. destra/sinistra del livellodell’asse posteriore durante il sollevamento/abbas-samento si riferisce solo ad assi con 2 sensori di livello.Questo valore esprime il campo ammissibile nel caso dicambi di livello elevati (sollevamento/abbassamento).Nei veicoli con carico su un lato, il lato più scarico si sol-leverà/quello più carico si abbasserà più rapidamente.Ciò può provocare eventualmente uno stato di inclinazio-ne pericoloso durante la modifica del livello. Con la pul-sazione del soffietto meno caricato si ottiene unsollevamento/abbassamento uniforme.
TCE

62
Lo scostamento max. anteriore/posteriore durante ilsollevamento/abbassamento si riferisce ai veicoli consistema totale di sospensione pneumatica. Al cambio dilivello, la carenatura si porta anteriormente e posterior-mente contemporaneamente sul nuovo livello nominale.L’asse con la corsa minore viene alzato/abbassato diconseguenza più lentamente. Anche il minimo scosta-mento ha come conseguenza un pulsare ininterrotto del-le elettrovalvole durante la regolazione e dovrebbequindi essere evitato.
Sollevamento livello ammissibile 7sec. dopo l’iniziodella marcia, o con funzione ’Entladeniveau‘ (Livellodi scarico) attivata si riferisce alle operazioni scarico.Questa opzione consente un superamento del livello no-minale della distanza tra carenatura e assi. Se dopo 7sec. dall’inizio della marcia o con livello di scarico attivatoviene riconosciuto un superamento del livello nominale +i valori count di questa opzione su tutti i sensori di livello,la ECU riconosce una condizione di scaricamento. Vieneeseguita immediatamente una regolazione sul livello no-minale + il valore count indicato.
Con la funzione livello di scarico attivata, in caso di unamodifica dell’altezza maggiore del valore livello nominale+ valore count indicato, viene regolato anche il comando
del freno. La regolazione viene eseguita fino a che il ve-icolo non ha superato la velocità di 10 km/h dopo l’iniziodella marcia. Una volta che il veicolo ha superato la ve-locità di 10 km/h questa regolazione viene disattivata peressere ripristinata di nuovo dopo la fermata.
Velocità:Velocità fino alla quale possono essere eseguite mo-difiche dell’altezza mediante telecomando /box di co-mando indica la velocità limite entro la quale con iltelecomando/il box di comando rimangono attivati i tastidurante la marcia. Questa funzione è stata pensata peril montaggio sulla motrice di un telecomando. Così pos-sono essere eseguiti i livelli di memoria, sollevamento,abbassamento ecc. Dopo il superamento della velocitàimpostata, il telecomando si spegne. Un livello diversoda quello di guida viene regolato fino al raggiungimentodella velocità prevista per la regolazione automatica dellivello di guida.
La velocità di marcia alla quale viene regolato auto-maticamente il livello di guida. In caso di superamentodella velocità impostata viene regolato automaticamenteil livello di guida corrente. Il livello di guida corrente di-pende dalla posizione dell'interruttore del livello di guidaovvero dalla preselezione del livello di guida attraverso il
Diagnosi PC7. TCE
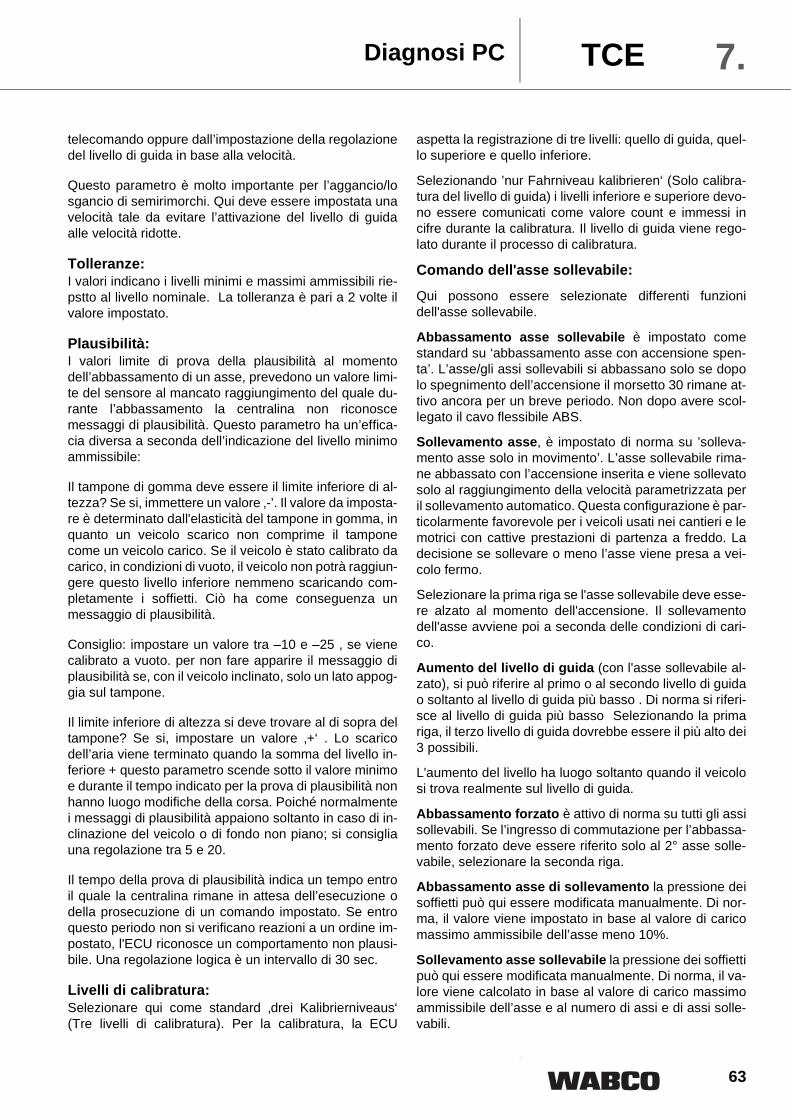
63
Diagnosi PC 7.
telecomando oppure dall’impostazione della regolazionedel livello di guida in base alla velocità.
Questo parametro è molto importante per l’aggancio/losgancio di semirimorchi. Qui deve essere impostata unavelocità tale da evitare l’attivazione del livello di guidaalle velocità ridotte.
Tolleranze:I valori indicano i livelli minimi e massimi ammissibili rie-pstto al livello nominale. La tolleranza è pari a 2 volte ilvalore impostato.
Plausibilità:I valori limite di prova della plausibilità al momentodell’abbassamento di un asse, prevedono un valore limi-te del sensore al mancato raggiungimento del quale du-rante l’abbassamento la centralina non riconoscemessaggi di plausibilità. Questo parametro ha un’effica-cia diversa a seconda dell’indicazione del livello minimoammissibile:
Il tampone di gomma deve essere il limite inferiore di al-tezza? Se si, immettere un valore ‚-’. Il valore da imposta-re è determinato dall'elasticità del tampone in gomma, inquanto un veicolo scarico non comprime il tamponecome un veicolo carico. Se il veicolo è stato calibrato dacarico, in condizioni di vuoto, il veicolo non potrà raggiun-gere questo livello inferiore nemmeno scaricando com-pletamente i soffietti. Ciò ha come conseguenza unmessaggio di plausibilità.
Consiglio: impostare un valore tra –10 e –25 , se vienecalibrato a vuoto. per non fare apparire il messaggio diplausibilità se, con il veicolo inclinato, solo un lato appog-gia sul tampone.
Il limite inferiore di altezza si deve trovare al di sopra deltampone? Se si, impostare un valore ‚+‘ . Lo scaricodell’aria viene terminato quando la somma del livello in-feriore + questo parametro scende sotto il valore minimoe durante il tempo indicato per la prova di plausibilità nonhanno luogo modifiche della corsa. Poiché normalmentei messaggi di plausibilità appaiono soltanto in caso di in-clinazione del veicolo o di fondo non piano; si consigliauna regolazione tra 5 e 20.
Il tempo della prova di plausibilità indica un tempo entroil quale la centralina rimane in attesa dell’esecuzione odella prosecuzione di un comando impostato. Se entroquesto periodo non si verificano reazioni a un ordine im-postato, l'ECU riconosce un comportamento non plausi-bile. Una regolazione logica è un intervallo di 30 sec.
Livelli di calibratura:Selezionare qui come standard ‚drei Kalibrierniveaus‘(Tre livelli di calibratura). Per la calibratura, la ECU
aspetta la registrazione di tre livelli: quello di guida, quel-lo superiore e quello inferiore.
Selezionando ’nur Fahrniveau kalibrieren‘ (Solo calibra-tura del livello di guida) i livelli inferiore e superiore devo-no essere comunicati come valore count e immessi incifre durante la calibratura. Il livello di guida viene rego-lato durante il processo di calibratura.
Comando dell'asse sollevabile:Qui possono essere selezionate differenti funzionidell'asse sollevabile.
Abbassamento asse sollevabile è impostato comestandard su ‘abbassamento asse con accensione spen-ta’. L’asse/gli assi sollevabili si abbassano solo se dopolo spegnimento dell’accensione il morsetto 30 rimane at-tivo ancora per un breve periodo. Non dopo avere scol-legato il cavo flessibile ABS.
Sollevamento asse, è impostato di norma su ’solleva-mento asse solo in movimento’. L’asse sollevabile rima-ne abbassato con l’accensione inserita e viene sollevatosolo al raggiungimento della velocità parametrizzata peril sollevamento automatico. Questa configurazione è par-ticolarmente favorevole per i veicoli usati nei cantieri e lemotrici con cattive prestazioni di partenza a freddo. Ladecisione se sollevare o meno l’asse viene presa a vei-colo fermo.
Selezionare la prima riga se l'asse sollevabile deve esse-re alzato al momento dell'accensione. Il sollevamentodell'asse avviene poi a seconda delle condizioni di cari-co.
Aumento del livello di guida (con l'asse sollevabile al-zato), si può riferire al primo o al secondo livello di guidao soltanto al livello di guida più basso . Di norma si riferi-sce al livello di guida più basso Selezionando la primariga, il terzo livello di guida dovrebbe essere il più alto dei3 possibili.
L'aumento del livello ha luogo soltanto quando il veicolosi trova realmente sul livello di guida.
Abbassamento forzato è attivo di norma su tutti gli assisollevabili. Se l’ingresso di commutazione per l’abbassa-mento forzato deve essere riferito solo al 2° asse solle-vabile, selezionare la seconda riga.
Abbassamento asse di sollevamento la pressione deisoffietti può qui essere modificata manualmente. Di nor-ma, il valore viene impostato in base al valore di caricomassimo ammissibile dell’asse meno 10%.
Sollevamento asse sollevabile la pressione dei soffiettipuò qui essere modificata manualmente. Di norma, il va-lore viene calcolato in base al valore di carico massimoammissibile dell’asse e al numero di assi e di assi solle-vabili.
TCE
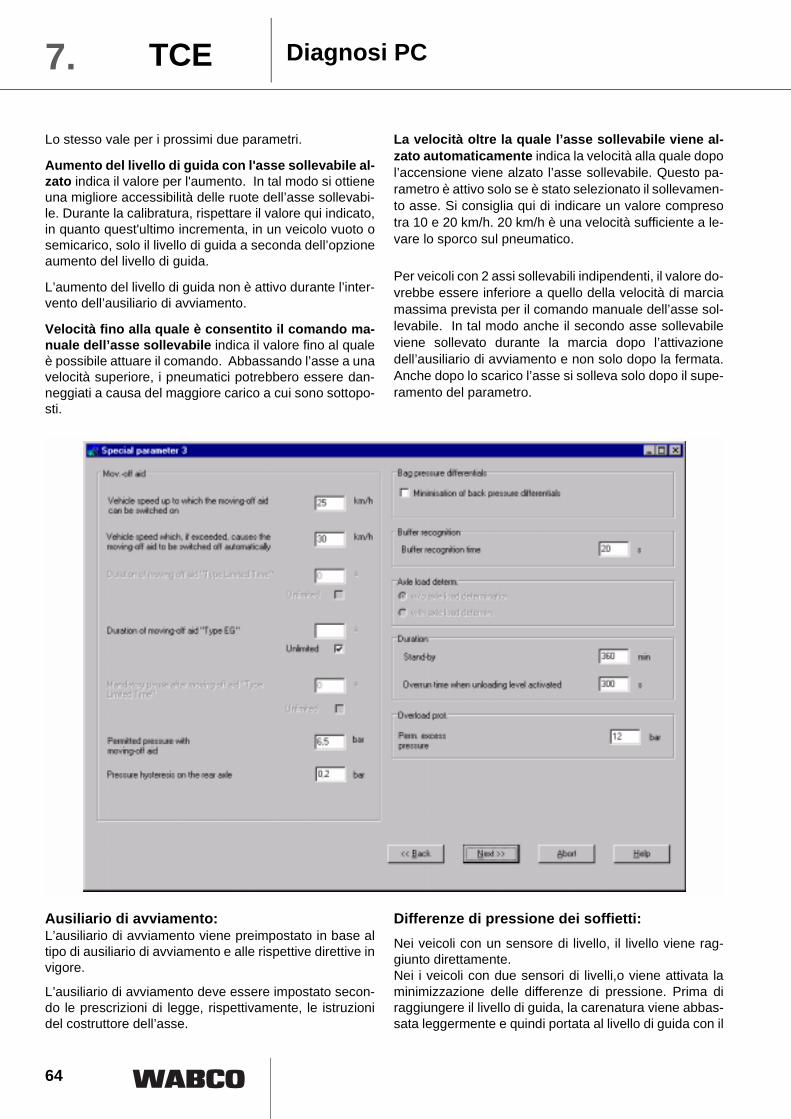
64
Diagnosi PC7.
Lo stesso vale per i prossimi due parametri.
Aumento del livello di guida con l'asse sollevabile al-zato indica il valore per l'aumento. In tal modo si ottieneuna migliore accessibilità delle ruote dell’asse sollevabi-le. Durante la calibratura, rispettare il valore qui indicato,in quanto quest'ultimo incrementa, in un veicolo vuoto osemicarico, solo il livello di guida a seconda dell’opzioneaumento del livello di guida.
L’aumento del livello di guida non è attivo durante l’inter-vento dell’ausiliario di avviamento.
Velocità fino alla quale è consentito il comando ma-nuale dell’asse sollevabile indica il valore fino al qualeè possibile attuare il comando. Abbassando l’asse a unavelocità superiore, i pneumatici potrebbero essere dan-neggiati a causa del maggiore carico a cui sono sottopo-sti.
La velocità oltre la quale l’asse sollevabile viene al-zato automaticamente indica la velocità alla quale dopol’accensione viene alzato l’asse sollevabile. Questo pa-rametro è attivo solo se è stato selezionato il sollevamen-to asse. Si consiglia qui di indicare un valore compresotra 10 e 20 km/h. 20 km/h è una velocità sufficiente a le-vare lo sporco sul pneumatico.
Per veicoli con 2 assi sollevabili indipendenti, il valore do-vrebbe essere inferiore a quello della velocità di marciamassima prevista per il comando manuale dell’asse sol-levabile. In tal modo anche il secondo asse sollevabileviene sollevato durante la marcia dopo l’attivazionedell’ausiliario di avviamento e non solo dopo la fermata.Anche dopo lo scarico l’asse si solleva solo dopo il supe-ramento del parametro.
Ausiliario di avviamento:L’ausiliario di avviamento viene preimpostato in base altipo di ausiliario di avviamento e alle rispettive direttive invigore.
L’ausiliario di avviamento deve essere impostato secon-do le prescrizioni di legge, rispettivamente, le istruzionidel costruttore dell’asse.
Differenze di pressione dei soffietti:Nei veicoli con un sensore di livello, il livello viene rag-giunto direttamente.Nei i veicoli con due sensori di livelli,o viene attivata laminimizzazione delle differenze di pressione. Prima diraggiungere il livello di guida, la carenatura viene abbas-sata leggermente e quindi portata al livello di guida con il
TCE
65
Diagnosi PC 7.
contemporaneo gonfiaggio dei soffietti. Ciò assicura unacompensazione della pressione tra la parte sinistra equella destra dei soffietti.
Identificazione tampone:Il tempo di identificazione tampone indica il tempo entroil quale la ECU deve riconoscere la battuta inferiore (tam-pone in gomma). Se al momento dell'emissione del co-mando ’Aufbau senken‘ (Abbassamento carenatura)entro questo tempo non si hanno variazioni della corsa ela distanza carenatura-asse è su un livello al di sotto del-la regolazione "Limite identificazione errore di plausibili-tà", le pulsazioni dell'elettrovalvola ECAS vengonointerrotte.
Rilevazione del carico sugli asssi:Non ancora attivabile.
Durata:La durata del tempo di stand-by può essere indicata quia passi di 15 min.
Tempo d’inerzia con livello di scarico inserito indicaun tempo d’inerzia dopo lo spegnimento dell’accensione.Se con l’accensione spenta la carenatura è sul punto dimassima battuta, l’ECAS abbassa la carenatura al livellodi battuta inferiore con la tensione di alimentazione delmorsetto 30 . I soffietti vengono scaricati fino a che la bat-tuta dell’ammortizzatore non è più sottoposta a carico.
Questa funzione è utile in caso di scaricamento repenti-
no del veicolo. Dato che la ECAS richiede un determina-to tempo per la regolazione al livello di scarico previsto, isoffietti in compressione premono la carenatura contro lefuni. In mancanza di funi gli ammortizzatori possono es-sere caricati al massimo. Ciò porterebbe ad una solleci-tazione fortissima. La conseguenza sarebbe che laECAS dovrebbe scaricare i soffietti per regolare il livellodi scarico. Se a questo punto l’accensione viene spenta,la ECAS interrompe la regolazione. In seguito alla man-canza di alimentazione elettrica, la carenatura rimarreb-be nella posizione superiore per un determinato periodocon conseguente sovraccarico sulle battute.
Gli stessi effetti di sovraccarico si potrebbero presentarequando un’autocisterna con sistema di regolazioneECAS venisse vuotata mediante una pompa esterna conl’accensione spenta. Anche in questo caso, col livello discarico impostato, mediante questo parametro può esse-re evitato un sovraccarico delle battute.
Protezione contro il sovraccarico:La pressione massima ammissibile indica il valore dipressione dei soffietti che non deve essere superato. Alsuperamento di questo valore il caricamento dei soffiettiviene interdetto e la carenatura abbassata sui tamponi.
Al comparire di questa situazione, per ripristinare le nor-mali condizioni è necessario ridurre il carico sugli assi espegnere/riaccendere l’accensione.
7.4 Targhette
TCE
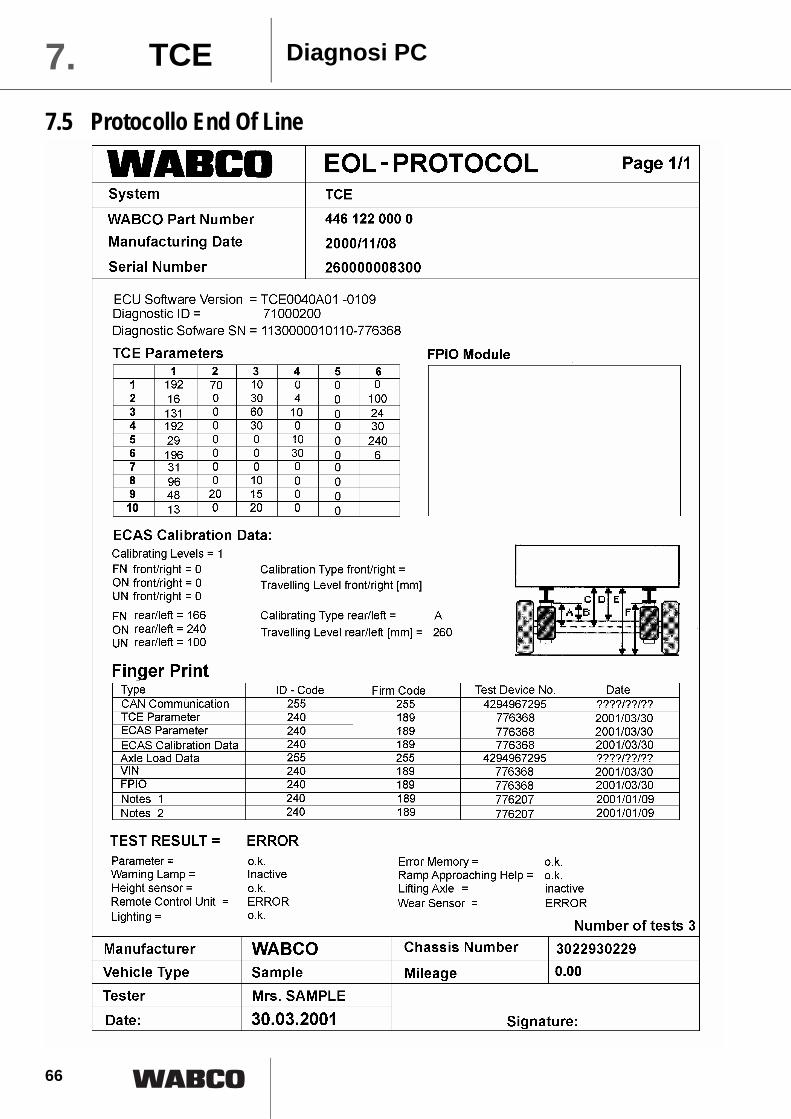
66
Diagnosi PC7.7.5 Protocollo End Of Line
TCE

67
Spiegazioni:
Moduli FPIO (moduli ingresso & uscita programmabili)Nell’esempio precedente non sono stati impiegati moduliFPIO. I moduli vengono indicati con cifre, per es. ”2; 3”
Dati di calibratura ECAS:FN – Livello di guidaON – Livello superioreUN – Livello inferiore
Nel protocollo è stato selezionata la regolazione su 1punto (posteriore sinistra).
FingerprintFingerprint indica quali settori elettronici sono stati modi-ficati col PC di diagnostica. La data ???? / ?? / ?? dopo la trasmissione CAN, i datidel carico sugli assi, note1 e note 2; indica che questi set-tori non sono stati modificati dopo la produzione dellaECU.
Risultato del test = o.k.
o.k. – parametrizzato e testatoinattivo – non parametrizzato
Ulteriori indicazioni possibili:non testato – parametrizzato ma non testato
Diagnosi PC 7.

68
TCE


















