SISTEMI DINAMICI - people.sissa.itberti/sistdinamici/LectureSD.pdf · Note del corso di SISTEMI...
182
Note del corso di SISTEMI DINAMICI Massimiliano Berti 16 Dicembre 2011 Versione preliminare
Transcript of SISTEMI DINAMICI - people.sissa.itberti/sistdinamici/LectureSD.pdf · Note del corso di SISTEMI...
Note del corso di
SISTEMI DINAMICI
Massimiliano Berti
16 Dicembre 2011Versione preliminare

Introduzione
Va sotto il nome “Sistemi Dinamici la teoria delle equazioni differenzialiordinarie, cioe di equazioni la cui incognita e una funzione x(t) che soddisfaun’equazione che coinvolge la variabile indipendente t, la funzione x(t) stessae le sue derivate Dkx, k = 1, . . . , n,
F (t , x ,D1x , . . . , Dnx) = 0 . (1)
Una equazione differenziale si dice ordinaria quando la funzione incognitax(t) dipende da una sola variable scalare t ∈ R (se t ∈ Rn, n > 1, una equa-zione differenziale come (1) si chiama alle derivate parziali). La equazionedifferenziale (1) si dice di ordine n in quanto la derivata di ordine piu altoche compare e Dn.
Storicamente, lo studio sistematico delle equazioni differenziali si imposecon la meccanica di Newton. La equazione fondamentale della dinamicaNewtoniana, F = ma, e una equazione differenziale: dato un campo diforze F : R3 → R3 bisogna trovare una funzione x(t) (posizione del puntomateriale) tale che
mx(t) = F (x(t)) , x(t) ∈ R3 ,
dove x(t) = a(t) e la accellerazione del punto di massa m all’istante t. New-ton risolse tale equazione differenziale quando F e la forza gravitazionale,inversamente proporzionale al quadrato della distanza (1684), trovando chei moti possibili descrivono o una ellisse, o un’iperbole, o una parabola.
Newton trasmise l’importanza di studiare le equazioni differenziali espri-mendosi cosı:
Data aequatione quotcunque fluentes quantitae involventes fluxiones inveni-re et viceversa
che, in linguaggio moderno, si potrebbe tradurre “e utile risolvere le equazionidifferenziali. Ora come ora tutte le scienze esatte si basano su modelli diequazioni differenziali.
2

3
Vediamo alcuni esempi elementari di equazioni differenziali.
Esempio 1. E un fatto sperimentale che la velocita di decadimento di unamateria radioattiva e proporzionale alla quantita di materia stessa x(t), ossiavale
x(t) = −σx(t) .
Domanda: se e nota la quantita di materia radioattiva x0 all’istante t = 0,quanta sara la quantita x(t) al generico istante di tempo t?
Esempio 2. La velocita di crescita della popolazione di batteri cresceproporzionalmente al numero di batteri N(t), ossia vale
N(t) = σN(t) .
Domanda: se e noto il numero di batteri N0 all’istante t = 0, quanta saraN(t) nel tempo?
Esempio 3. La velocita di crescita della popolazione di batteri cresceproporzionalmente al numero dei batteri ma, a causa di un fattore di mortesoddisfa,
N(t) = σN(t)− kDomanda: quale sara N(t) nel tempo al variare di k e σ? A cosa tendera alcrescere del tempo?
Esempio 4. La velocita di crescita della popolazione di batteri cresceproporzionalmente al numero delle coppie, ossia vale
N(t) = σN2(t)
Domanda: la popolazione N(t) cresce piu o meno rapidamente che negliesempi precedenti?
Esempio 5. L’angolo formato da un pendolo di lunghezza l rispetto allaverticale evolve secondo la equazione differenziale
lθ + g sin θ = 0 (2)
dove g e la accellerazione di gravita. Che soluzioni ha?Nel caso le oscillazioni abbiano piccola ampiezza (sin θ ≈ θ), queste
possono essere descritte da
θ + ω2θ = 0 , ω2 :=g
l(3)
di cui alcune soluzioni sono ben note sin(ωt), cos(ωt). Sono tutte? Quanto so-no vicine le soluzioni della equazione lineare (3) alle soluzioni della equazionenonlineare (2)?

4
Considereremo piu avanti solo equazioni in forma normale, ossia in cui laderivata di grado piu alto si esprime mediante le derivate di ordine inferiore
Dnx = g(t , x ,D1x , . . . , D(n−1)x) (4)
come in tutti gli esempi precedenti.
Tutte le equazioni di ordine n in forma normale (4) si possono vederecome sistemi di equazioni del primo ordine in forma normale
y = f(t , y) , y ∈ Rn (5)
ponendoy0 := x , y1 := D1x , . . . , yn−1 := Dn−1x
e, quindi,y := (y0, y1, . . . , yn−1) ∈ Rn
soddisfa un sistema della forma (5) con
f(t, y) := (y1, y2, . . . , g(t, y)) .
Nei prossimi capitoli impareremo a rispondere a queste domande.
Referenze
N. Fusco, P. Marcellini, C. Sbordone: Analisi Matematica due, Liguori edi-tore.
E. Giusti, Analisi Matematica 2, Bollati Boringhieri.
V. I. Arnold, Equazioni differenziali ordinarie, Edizioni Mir.
E. Acerbi, L. Modica, S. Spagnolo, Problemi scelti di Analisi Matematica II,Liguori editore.
S. Salsa, A. Squellati, Esercizi di analisi matematica 2, volume 3, Equazionidifferenziali ordinarie.
Ringrazio vivamente Marco Natale per i disegni di queste note.

Indice
Index 5
1 Il problema di Cauchy 71.1 Il teorema di esistenza e unicita locale . . . . . . . . . . . . . 71.2 Il teorema delle contrazioni . . . . . . . . . . . . . . . . . . . . 141.3 Appendice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2 Equazioni differenziali scalari autonome 20
3 Estendibilita delle soluzioni 293.1 Prolungamento delle soluzioni . . . . . . . . . . . . . . . . . . 293.2 Campi vettoriali definiti per ogni x . . . . . . . . . . . . . . . 353.3 Integrali primi . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4 Studio qualitativo delle soluzioni 434.1 Teoremi del confronto . . . . . . . . . . . . . . . . . . . . . . . 504.2 Soluzioni esplicite . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2.1 Equazioni a variabili separabili . . . . . . . . . . . . . 564.2.2 Equazioni esatte . . . . . . . . . . . . . . . . . . . . . 584.2.3 Equazioni omogenee . . . . . . . . . . . . . . . . . . . 62
4.3 Esercizi di ricapitolazione . . . . . . . . . . . . . . . . . . . . 63
5 Equazioni lineari 645.1 Equazioni omogenee . . . . . . . . . . . . . . . . . . . . . . . 645.2 Equazioni non-omogenee . . . . . . . . . . . . . . . . . . . . . 675.3 Equazioni lineari di ordine n . . . . . . . . . . . . . . . . . . . 725.4 Equazioni a coefficienti costanti . . . . . . . . . . . . . . . . . 725.5 I sistemi a coefficienti costanti . . . . . . . . . . . . . . . . . . 81
5.5.1 Caso 1: le radici λi sono reali e distinte . . . . . . . . 825.5.2 Caso 2: una radice λ = α + iβ e complessa . . . . . . . 85
5.6 Esponenziale di una matrice . . . . . . . . . . . . . . . . . . . 905.6.1 Il caso di radici multiple . . . . . . . . . . . . . . . . . 94
5

INDICE 6
6 Dipendenza da dati iniziali e parametri 976.1 Il lemma di Gronwall . . . . . . . . . . . . . . . . . . . . . . . 976.2 Dipendenza continua rispetto ai dati iniziali . . . . . . . . . . 1006.3 Dipendenza continua rispetto ai parametri . . . . . . . . . . . 101
7 Studi qualitativi nel piano 104
8 Il teorema della funzione implicita 1128.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1128.2 Operatori lineari . . . . . . . . . . . . . . . . . . . . . . . . . 1138.3 Richiami di calcolo differenziale . . . . . . . . . . . . . . . . . 1168.4 Il teorema della funzione implicita . . . . . . . . . . . . . . . . 118
8.4.1 Il caso F : R×R→ R . . . . . . . . . . . . . . . . . . 1238.4.2 Il caso F : R3 → R . . . . . . . . . . . . . . . . . . . . 1278.4.3 Il caso F : R3 → R2 . . . . . . . . . . . . . . . . . . . 1288.4.4 Il caso F : Rn → Rm, n ≥ m . . . . . . . . . . . . . . . 129
8.5 Il teorema della mappa inversa . . . . . . . . . . . . . . . . . . 1308.6 Appendice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
9 Analisi complessa 1349.1 Funzioni olomorfe . . . . . . . . . . . . . . . . . . . . . . . . . 1349.2 Funzioni analitiche . . . . . . . . . . . . . . . . . . . . . . . . 1379.3 Integrali lungo cammini . . . . . . . . . . . . . . . . . . . . . 1429.4 Formula di Cauchy . . . . . . . . . . . . . . . . . . . . . . . . 1469.5 Proprieta delle funzioni olomorfe . . . . . . . . . . . . . . . . 1499.6 Singolarita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
9.6.1 Serie di Laurent . . . . . . . . . . . . . . . . . . . . . . 1549.6.2 Singolarita rimovibili, poli, essenziali . . . . . . . . . . 156
9.7 Calcolo dei residui . . . . . . . . . . . . . . . . . . . . . . . . 160
10 Temi d’esame 163

Capitolo 1
Il problema di Cauchy
Il problema che vogliamo studiare e sapere se il sistemax = f(t, x)x(t0) = x0
(1.1)
ha soluzioni, se queste, qualora esistano, siano uniche, se siano regolari, sedipendano in modo regolare dal dato iniziale x0, etc...
Questo problema (1.1) “ai dati iniziali si chiama problema di Cauchy.Chiamiamo f(x, t) il “campo vettoriale ed Rn lo “spazio delle fasi.
1.1 Il teorema di esistenza e unicita locale
Daremo adesso delle condizioni sufficienti per garantire l’esistenza e l’unicitadi una soluzione di (1.1) almeno in un intorno di t = t0 (soluzione locale).
Assumiamo che
(H1) (continuita) Il campo vettoriale f(t, x) sia definito e continuo nel-l’insieme
I × J := [t0 − a, t0 + a]× |x− x0| ≤ b(con a > 0, b > 0) contenente il dato iniziale (t0, x0).
(H2) (Lipschitzianita in x) Esiste una constante L > 0 tale che
|f(t, x1)− f(t, x2)| ≤ L|x1 − x2| , ∀t ∈ I , ∀x1, x2 ∈ J .
Teorema 1.1.1 (Cauchy) Se il campo vettoriale f soddisfa (H1)-(H2), al-lora esiste una unica soluzione di (1.1) definita in un intorno di t0 (soluzionelocale). Precisamente esiste una unica funzione di classe C1,
x : (t0 − δ, t0 + δ)→ J ,
7

CAPITOLO 1. IL PROBLEMA DI CAUCHY 8
Figura 1.1: Il dominio del campo vettoriale f(t, x)
che soddisfa (1.1) con
δ < min b
M,
1
L, a
(1.2)
dove M := maxI×J |f(t, x)|.
Dimostrazione. Consideriamo l’equazione integrale (di Volterra)
x(t) = x0 +∫ t
t0f(τ, x(τ)) dτ . (1.3)
Se troviamo una funzione continua che risolve (1.3) allora, x(t) e di classeC1, x(t0) = x0, e, derivando, abbiamo una soluzione del problema di Cauchy(1.1).
Cerchiamo una soluzione di (1.3) in
X :=x : [t0 − δ, t0 + δ]→ J ⊂ Rn , x continua
⊂ C([t0 − δ, t0 + δ],Rn)
con δ ≤ a.E ben noto che quest’ultimo spazio C([t0 − δ, t0 + δ],Rn), munito della
“norma del sup‖x‖∞ := sup
t∈[t0−δ,t0+δ]
|x(t)| ,
e uno spazio di Banach (spazio normato completo), vedi l’Appendice e adesempio il libro di Analisi Matematica due di Fusco-Marcellini-Sbordone,cap. 2; o di Giusti, cap. 1). Essendo J un sottoinsieme chiuso in Rn si vedefacilmente che X e chiuso in C([t0− δ, t0 + δ],Rn), ossia che (X, ‖ · ‖∞) e uno

CAPITOLO 1. IL PROBLEMA DI CAUCHY 9
spazio metrico completo.
Esercizio Dimostrare la affermazione precedente.
Soluzione Sia xn ∈ X una successione di funzioni continue convergenteuniformemente ad x ∈ C([t0 − δ, t0 + δ],Rn). Bisogna provare che x ∈ X,ossia x(t) ∈ J , ∀t ∈ [t0−δ, t0+δ] (gia sappiamo che x e una funzione continuain quanto limite uniforme di funzioni continue). Essendo, ∀t ∈ [t0− δ, t0 + δ],xn(t) ∈ J , xn(t)→ x(t) e J chiuso, si deduce che x(t) ∈ J .
Esercizio Un sottoinsieme chiuso X ⊂ Y di uno spazio metrico completoY e completo.
Soluzione Una successione di Cauchy xn ∈ X, essendo di Cauchy pure inY , convergera in Y ad un elemento x ∈ Y . Essendo X chiuso si deduce chex ∈ X.
Definiamo l’operatore nonlineare
Φ(x)(t) := x0 +∫ t
t0f(τ, x(τ)) dτ .
Per provare il teorema basta che dimostriamo che
i) Φ : X → X.
ii) Φ : X → X e una contrazione.
i). Naturalmente se x(t) e una funzione continua, pure Φ(x)(t) e una funzionecontinua. Bisogna provare che Φ(x) ha immagine in J , ossia Φ(x)(t) ∈ J ,∀t ∈ [t0 − δ, t0 + δ]. Questo e garantito da
|Φ(x)(t)− x0| ≤∣∣∣ ∫ t
t0|f(τ, x(τ))| dτ
∣∣∣ ≤Mδ ≤ b
dove M := maxI×J |f(t, x)| < +∞ essendo f(t, x) una funzione continua sulcompatto I × J .
La prima condizione su δ e dunque
δ ≤ b
M.
ii). ∀x1, x2 ∈ X abbiamo
‖Φ(x1)− Φ(x2)‖∞ = supt∈[t0−δ,t0+δ]
∣∣∣ ∫ t
t0f(τ, x1(τ))− f(τ, x2(τ)) dτ
∣∣∣≤ sup
t∈[t0−δ,t0+δ]
∣∣∣ ∫ t
t0|f(τ, x1(τ))− f(τ, x2(τ))| dτ
∣∣∣

CAPITOLO 1. IL PROBLEMA DI CAUCHY 10
(H2)
≤ supt∈[t0−δ,t0+δ]
∣∣∣ ∫ t
t0L|x1(τ)− x2(τ)| dτ
∣∣∣≤ sup
t∈[t0−δ,t0+δ]
|t− t0|L ‖x1 − x2‖∞ (1.4)
≤ δL‖x1 − x2‖∞ (1.5)
e quindi Φ e una contrazione assumendo
δ <1
L.
Pertanto, assumendo che δ soddisfi (1.2), dal teorema delle contrazioni de-duciamo che Φ ha uno ed un solo punto fisso in X.
Esercizio Dimostrare che se il campo vettoriale f e definito in I×Rn alloraesiste una unica soluzione locale di (1.1) in (t0 − δ, t0 + δ) con
δ < min 1
L, a. (1.6)
Suggerimento: la prima condizione δ ≤ b/M non c’ e poiche f(t, ·) e definitosu tutto Rn.
Notiamo che abbiamo anche di piu dalla dimostrazione del teorema dellecontrazioni (vedi teorema 1.2.1): la successione di funzioni
x0(t) := x0
x1(t) := x0 +∫ t
t0f(τ, x0) dτ
x2(t) := x0 +∫ t
t0f(τ, x1(τ)) dτ
. . .
xn(t) := x0 +∫ t
t0f(τ, xn−1(τ)) dτ
detta “successione delle approssimazioni successive di Picard converge uni-formemente alla soluzione x(t) in [t0 − δ, t0 + δ].
Esempio Costruire la successione delle “approssimazioni successive di Picardper il problema di Cauchy
x = x , x ∈ Rx(0) = 1 .
(1.7)
Notiamo chex0(t) := 1

CAPITOLO 1. IL PROBLEMA DI CAUCHY 11
x1(t) := 1 +∫ t
01 dτ = 1 + t
x2(t) := 1 +∫ t
0(1 + τ) dτ = 1 + t+
t2
2. . .
xn(t) := 1 + t+t2
2+ . . .+
tn
n!=
n∑k=0
tk
k!
che converge uniformemente alla soluzione et di (1.7). Eulero introdussel’esponenziale proprio come soluzione dell’equazione (1.7).
Esercizio Provare che lo spazio C1([a, b]), munito della norma
‖f‖C1 := ‖f‖∞ + ‖f ′‖∞ (1.8)
e uno spazio di Banach.
Soluzione Sia fn ∈ C1 una successione di Cauchy rispetto alla norma ‖·‖C1 .Quindi fn ed f ′n sono successioni di Cauchy in C[a, b] rispetto alla norma‖ · ‖∞. Gia sappiamo che (C[a, b], ‖ · ‖∞) e completo e, pertanto, esistono
f, g ∈ C[a, b] tali che fn‖·‖∞→ f , f ′n
‖·‖∞→ g uniformemente. Allora, per ilcriterio di derivazione delle successioni, la funzione f e derivabile e la suaderivata coincide con il limite delle derivate, cioe f ′ = g. Abbiamo provato
che fnC1
→ f .
Esercizio Dimostrare che (C1[−1, 1], ‖ ‖∞) non e completo.
Suggerimento: La successione di funzioni fn(t) :=√t2 + n−1 e di Cauchy
in ‖ ‖∞ ma non converge ad una funzione di classe C1.
Domanda La successione delle “approssimazioni successive di Picard dell’esempio (1.7) converge alla soluzione et anche in C1([−T, T ]), ∀T > 0?
Risposta Si. Perche?
L’esempio (1.7) ci dice anche che ci dovremmo aspettare di poter mi-gliorare la stima (1.6) sull’intervallo di esistenza della soluzione. Infattiin questo esempio il procedimento del teorema di Cauchy ci garantirebbela convergenza e la soluzione solo sull’intervallo (−1/L, 1/L) (notando chea = +∞).
In effetti la stima di δ si puo migliorare senza aggiungere ipotesi al teoremadi Cauchy.
Teorema 1.1.2 Nelle stesse ipotesi del teorema 9.4.1 la soluzione di (1.1)esiste in (t0 − δ, t0 + δ) con
δ < min b
M, a. (1.9)

CAPITOLO 1. IL PROBLEMA DI CAUCHY 12
Dimostrazione. Basta mostrare che, se δ soddisfa solo (1.9), allora esistealmeno una iterata di Φ, Φn, che e una contrazione, vedi teorema 1.2.2.
Questo si basa sul seguente lemma
Lemma 1.1.1 ∀x1, x2 ∈ X vale, ∀t ∈ I
|Φn(x1)(t)− Φn(x2)(t)| ≤ Ln|t− t0|n
n!‖x1 − x2‖∞ . (1.10)
Dimostrazione. Per induzione. Per n = 1 lo abbiamo gia provato in(1.4). Se (1.10) e vera per n allora dobbiamo provare che sia vera per n+ 1.Abbiamo
|Φn+1(x1)(t)− Φn+1(x2)(t)| = |Φ(Φnx1)(t)− Φ(Φn(x2))(t)|
=∣∣∣ ∫ t
t0f(τ,Φn(x1)(τ))− f(τ,Φn(x2)(τ)) dτ
∣∣∣≤
∣∣∣ ∫ t
t0f(τ,Φn(x1)(τ))− f(τ,Φn(x2)(τ)) dτ
∣∣∣(H2)
≤∣∣∣ ∫ t
t0L|Φn(x1)(τ)− Φn(x2)(τ)| dτ
∣∣∣(1.10)
≤∣∣∣ ∫ t
t0LLn|τ − t0|n
n!‖x1 − x2‖∞ dτ
∣∣∣=
Ln+1|t− t0|n+1
(n+ 1)!‖x1 − x2‖∞
provando il lemma.
Dal lemma precedente si ottiene
‖Φn(x1)− Φn(x2)‖∞ ≤Lnδn
n!‖x1 − x2‖∞
ed essendo
limn→∞
Lnδn
n!= 0
deduciamo che, per ogni δ che verifica (1.9), esiste un n tale che Φn e unacontrazione. Quindi Φ ha uno ed un solo punto fisso.
Osservazione 1.1.1 Se ∂xf(t, x) e continua in I×J , allora l’ipotesi di Lip-schitzianita (H2) e soddisfatta, per il teorema del valor medio, con L :=maxI×J |∂xf(t, x)|.
Teorema 1.1.3 (Regolarita) Se f(t, x) e di classe Ck, k ≥ 0 (nelle varia-bili (t, x)) allora la soluzione x(t) e una funzione di classe Ck+1 (in t). Sef ∈ C∞ allora x(t) ∈ C∞.

CAPITOLO 1. IL PROBLEMA DI CAUCHY 13
Dimostrazione. Sappiamo gia che x(t) e C1 in t. Se k = 0 abbiamo giafinito. Supponiamo allora k ≥ 1. Quindi f(t, x(t)) e C1. Inoltre, poichex(t) = f(t, x(t)), deduciamo che x(t) e C1, cioe x(t) ∈ C2. Iterando questoprocedimento k volte si conclude.
Una dimostrazione formale puo essere fatta con il principio di induzione.Farlo per esercizio.
Esercizio Supponiamo che f : Rn → Rn soddisfi l’ipotesi di Lipschitzianitaglobale: esiste L > 0 tale che
|f(x)− f(y)| ≤ L|x− y| , ∀x, y ∈ Rn . (1.11)
Dimostrare che esiste una soluzione dix = f(x)x(0) = x0
definita per tutti i tempi t ∈ R.
Suggerimento: una possibile soluzione dell’esercizio e dimostrare che perogni intervallo [−T, T ] esiste una unica soluzione seguendo il procedimentodel teorema 1.1.2 (cio che capita con l’esponenziale).
Un’altra soluzione consiste nell’estendere indefinitamente la soluzione (ve-di il capitolo 3) notando che l’intervallo di esistenza locale non dipende daldato iniziale (provarlo).
Infine un’altra e dimostrare che nello spazio di Banach
X := x : R→ Rn : x continua, ‖x‖ := supt∈R|x(t)|e−k|t| ,
se k > L, l’operatore di Volterra e una contrazione.Per provare che X e completo si puo seguire il procedimento simile per
dimostrare che (C([a, b],R), ‖ · ‖∞) e completo. Per provare che l’operatoreintegrale di Volterra mappa X in se si usa che, da (1.11), la funzione f(x)cresce al piu linearmente, ossia, |f(x)| ≤ |f(0)| + L|x|. Per provare chel’operatore integrale di Volterra e una contrazione in X si usa nuovamente(1.11) e la condizione k > L.
Esercizio Provare che la soluzione di x =t x3
1 + x2+ t2
x(t0) = x0
e definita per tutti i tempi t ∈ R.
Suggerimento: mostrare che f(t, x) :=t x3
1 + x2+t2 e Lipschitziana rispetto

CAPITOLO 1. IL PROBLEMA DI CAUCHY 14
alla variabile x in ogni intervallo di tempo t ∈ [−M,M ] e ragionare comeall’esercizio precedente.
La ipotesi (1.11) e naturalmente sufficiente a garantire l’esistenza di unasoluzione per tutti i tempi, ma non e necessaria. Vedremo (cfr. equazione(3.11)) che, ad esempio,
x = x4 sinxx(0) = x0
ha tutte le soluzioni limitate anche se, ovviamente, non soddisfa l’ipotesi diLipschitzianita globale (1.11).
1.2 Il teorema delle contrazioni
Sia (X, d) una spazio metrico. Una mappa
Φ : X → X
si dice una contrazione se e Lipschitz di constante di Lipschitz λ ∈ (0, 1),cioe se esiste λ ∈ (0, 1), tale che
d(Φ(x),Φ(y)) ≤ λd(x, y) ∀x, y ∈ X . (1.12)
Esercizio Provare che, se f ∈ C1(R,R) ha derivata |f ′(x)| ≤ λ < 1,∀x ∈ R, allora f e una contrazione di R. Si puo concludere che f e unacontrazione assumendo solo |f ′(x)| < 1, ∀x ∈ R?
Teorema 1.2.1 (Banach-Caccioppoli) Sia (X, d) uno spazio metrico com-pleto. Allora Φ ha uno ed un solo punto fisso x ∈ X, ossia Φ(x) = x.
Comunque si prenda x0 ∈ X, tale punto fisso x e il limite
x = lim Φn(x0) .
La velocita di convergenza di Φn(x0) verso x puo essere stimata da
d(x,Φn(x0)) ≤ d(Φ(x0), x0)λn
1− λ
che tende a zero esponenzialmente per n→ +∞.
Dimostrazione. Prendo un qualunque x0 ∈ X e considero l’orbita
xn := Φn(x0) ∈ X , n = 1, 2, . . . ,

CAPITOLO 1. IL PROBLEMA DI CAUCHY 15
generata da Φ, cioe
xn = Φ(xn−1), n = 1, 2, . . . ,
Dico che xn e di Cauchy. Infatti
d(xn+1, xn) = d(Φ(xn),Φ(xn−1))(1.12)
≤ λd(Φ(xn−1),Φ(xn−2))
e quindi, iterando,d(xn+1, xn) ≤ λnd(x1, x0) . (1.13)
Da questa stima si deduce
d(xn, xn+k) ≤n+k−1∑j=n
d(xj, xj+1)
(1.13)
≤n+k−1∑j=n
λjd(x1, x0)
≤ d(x1, x0)+∞∑j=n
λj
= d(x1, x0)λn
1− λ. (1.14)
Quindi xn e una successione di Cauchy. Essendo X uno spazio completo,esiste x ∈ X tale che
xn → x ∈ X .
Essendo xn+1 = Φ(xn), ∀n, passando al limite, si ottiene, x = Φ(x), cioe xe un punto fisso di Φ. Inoltre, sempre da (1.14), passando al limite in k siottiene
d(xn, x) ≤ d(x1, x0)λn
1− λche mi stima la velocita di convergenza.
La unicita del punto fisso x e ovvia essendo Φ una contrazione: se x1 =Φ(x1), x2 = Φ(x2), allora
d(x1, x2) = d(Φ(x1),Φ(x2))(1.12)
≤ λd(x1, x2)
e, quindi, d(x1, x2) = 0, i.e. x1 = x2.
Esempio La mappa f : R→ R definita da
f(x) :=√
1 + x2

CAPITOLO 1. IL PROBLEMA DI CAUCHY 16
ha in ogni punto |f ′(x)| < 1 ma non ha punti fissi. L’ipotesi di strettacontrazione non puo essere rimossa.
Vale la seguente generalizzazione del teorema delle contrazioni in cui siottiene lo stesso risultato di esistenza con ipotesi piu deboli.
Teorema 1.2.2 Sia (X, d) uno spazio metrico completo. Se existe un n0
tale per cui Φn0 e una contrazione allora Φ ha uno ed un solo punto fisso.Inoltre, comunque si prenda x0 ∈ X si ha che Φn(x0) tende all’unico
punto fisso di Φ.Qui
Φn := Φ . . . Φ : X → X
indica la mappa ottenuta componendo n volte la mappa Φ.
Dimostrazione. Dal teorema di Banach-Cacioppoli Φn0 ha un unico puntofisso x:
x = Φn0(x) .
PertantoΦ(x) = Φ(Φn0(x)) = Φn0(Φ(x)) ,
ossia Φ(x) e anch’esso un punto fisso di Φn0 . Quindi Φ(x) deve coinciderecon x (unico punto fisso di Φn0), cioe Φ(x) = x.
Infine, essendo la mappa Φn0 una contrazione, le successioni
(Φn0)k(x0) = (Φkn0)(x0)→ x per k → +∞ ,
(Φn0)k(Φ(x0)) = (Φkn0+1)(x0)→ x per k → +∞ ,
. . .
(Φn0)k(Φn0−1(x0)) = (Φkn0+(n0−1))(x0)→ x per k → +∞ .
Pertanto tutta la successione (Φn)(x0)→ x.L’unicita del punto fisso di Φ e ovvia poiche ogni punto fisso di Φ e pure
punto fisso della contrazione Φn0 .
Esercizio 1. Sia (X, d) uno spazio metrico completo, x ∈ X, r > 0,
f : D := B(x, r)→ X
tale che per λ ∈ (0, 1)
d(f(x), f(y)) ≤ λd(x, y) , ∀x, y ∈ X .
Dimostrare che, se d(x, f(x)) ≤ r(1− k), allora f ha un unico punti fisso.

CAPITOLO 1. IL PROBLEMA DI CAUCHY 17
Esercizio 2. Dimostrare che esiste un’unica funzione continua f : [0, 1] →[0, 1] tale che
f(x) =1
2
∫ 1
0sin(x+ f(y)) dy
per ogni x ∈ [0, 1].
Esercizio 3. SiaK ∈ C([0, 2],R+), decrescente, K(0) = 1 ed h ∈ C([0, 1],R).Provare che esiste un’unica u ∈ C([0, 1],R) tale che
u(x) = h(x) +∫ 1
0K(x+ y)u(y) dy .
Esercizio 4. Provare che lo spazio C([−1, 1]), munito della norma
‖f‖2 :=
√∫[−1,1]
|f(x)|2 dx
(si provi dapprima che ‖ · ‖2 e una norma) NON e completo.
Suggerimento. Si consideri la successione di funzioni continue
fn(x) :=
−1 x ∈ [−1, 1/n]nx x ∈ [−1/n, 1/n]+1 x ∈ [1/n, 1]
che e di Cauchy nella norma ‖ · ‖2 ma non converge in L2 ad una funzione diC([−1, 1]).
Esercizio 5. Sia (X, d) uno spazio metrico completo. Si consideri unafamiglia di contrazioni
Tλ : X → X d(Tλ(x), Tλ(y)) ≤ 1
2d(x, y)
per λ ∈ [0, 1].Chiamiamo xλ l’unico punto fisso di Tλ. Supponiamo che
limλ→0
Tλ(x) = T0(x) , ∀x ∈ X . (1.15)
Provare che limλ→0 xλ = x0.
Provare che la stessa conclusione si ottiene anche se (1.15) vale solo ∀x ∈ Ddove D e un insieme denso in X, cioe D = X.

CAPITOLO 1. IL PROBLEMA DI CAUCHY 18
1.3 Appendice
Dato un insieme X, una funzione d : X ×X → [0,+∞) si chiama “distanzasu X se, ∀x, y, z ∈ X:
• d(x, y) = 0 ⇐⇒ x = y
• (Simmetrica) d(x, y) = d(y, x)
• (Disuguaglianza triangolare) d(x, y) ≤ d(x, z) + d(z, y).
La coppia (X, d) si chiama spazio metrico.
Definizione 1.3.1 (Successione di Cauchy) Una successione xn ∈ X sidice di Cauchy se ∀ε > 0, ∃N ∈ N tale che ∀n,m ≥ N risulta d(xn, xm) < ε.
Lemma 1.3.1 Ogni successione convergente e di Cauchy.
Dimostrazione. Sia limn→+∞ xn = x. Allora, ∀ε > 0 esiste N ∈ N taleche, ∀n ≥ N , d(xn, x) < ε/2. Pertanto, ∀n,m ≥ N risulta
d(xn, xm) ≤ d(xn, x) + d(x, xm) <ε
2+ε
2= ε .
Definizione 1.3.2 (Spazio metrico completo) Uno spazio metrico (X, d)si dice completo se ogni successione di Cauchy e convergente.
Dato uno spazio vettoriale X su R (o su C), una funzione ‖ ‖ : X →[0,+∞) si chiama “norma su X se, ∀x, y ∈ X
• ‖x‖ = 0 ⇐⇒ x = 0
• ‖λx‖ = |λ|‖x‖, ∀λ ∈ R (o in C)
• (Disuguaglianza triangolare) ‖x+ y‖ ≤ ‖x‖+ ‖y‖.
La coppia (X, ‖ ‖) si chiama spazio vettoriale normato. Ogni spazio normatoe uno spazio metrico con la distanza indotta
d(x, y) := ‖x− y‖ , ∀x, y ∈ X .
Definizione 1.3.3 (Spazio di Banach) Uno spazio vettoriale normato (X, ‖ ‖)completo si chiama di Banach.

CAPITOLO 1. IL PROBLEMA DI CAUCHY 19
Consideriamo lo spazio vettoriale1 delle funzioni
C([a, b],Rd) :=f : [a, b] ⊂ R→ Rd , continua
con la “norma del sup
‖f‖∞ := maxt∈[a,b]
|f(t)| .
La norma ‖ ‖∞ e detta anche “norma della convergenza uniforme perche se
fn‖ ‖∞→ f significa che fn converge a f uniformemente.
Esercizio Dimostrare l’ultima affermazione.
Esercizio Dimostrare che ‖ ‖∞ e una norma.
Teorema 1.3.1 (C([a, b],Rd), ‖ ‖∞) e di Banach.
Dimostrazione. Dobbiamo dimostrare che ogni successione di funzionicontinue fn ∈ C([a, b],Rd) che sia di Cauchy rispetto alla norma ‖ ‖∞, ossia
∀ε > 0, ∃N ∈ N, tale che ∀n,m ≥ N, |fn(t)−fm(t)| < ε, ∀t ∈ [a, b], (1.16)
converge uniformemente a una funzione f ∈ C([a, b],Rd).Da (1.16) si vede che, ∀t ∈ [a, b], la successione fn(t) ∈ Rd e di Cauchy in
Rd. Essendo Rd completo, esiste il limite limn→+∞ fn(t) =: f(t). Passandoal limite per m→∞ in (1.16) si deduce che
∀ε > 0, ∃N ∈ N, tale che ∀n ≥ N, |fn(t)− f(t)| < ε, ∀t ∈ [a, b] ,
ossia ‖fn− f‖∞ → 0. La funzione limite f e in C([a, b],Rd) in quanto limiteuniforme di funzioni continue, vedi teorema 1.3.2.
Teorema 1.3.2 Se fn ∈ C([a, b],Rd) convergono uniformemente ad f , i.e.
fn‖ ‖∞→ f , allora f ∈ C([a, b],Rd).
Dimostrazione. Vogliamo provare che la funzione f(t) e continua in ognit0 ∈ [a, b]. Si ha
|f(t)− f(t0)| ≤ |f(t)− fn(t)|+ |fn(t)− fn(t0)|+ |fn(t0)− f(t0)|≤ 2‖f − fn‖∞ + |fn(t)− fn(t0)| . (1.17)
Poiche ‖f − fn‖∞ → 0, ∀ε > 0 esiste N ∈ N tale che 2‖f − fN‖∞ < 2ε/3.Inoltre, essendo fN(t) una funzione continua, esiste δ > 0 tale che ∀|t−t0| < δsi ha |fN(t) − fN(t0)| < ε/3. Da (1.17) si deduce che |f(t) − f(t0)| ≤ ε,∀|t− t0| < δ. Cioe f e continua in t0.
1Somma e moltiplicazione per uno scalare sono definite puntualmente (f + g)(t) :=f(t) + g(t), (λf)(t) := λf(t).

Capitolo 2
Equazioni differenziali scalariautonome
Studiamo adesso le equazioni differenziali autonome
x = f(x) , x ∈ R (2.1)
il cui spazio delle fasi e la retta R e il cui campo vettoriale f(x) e indipendentedal tempo.
Assumeremo sempre che f(x) sia una funzione continua.
Per equazioni della forma (2.1) si ha addirittura una rappresentazioneesplicita “per quadrature delle soluzioni, cioe le soluzioni possono essereottenute mediante calcolo di integrali ed inversioni di funzioni.
Ci domandiamo cosa fa la soluzione del problema di Cauchyx = f(x) ,x(0) = x0 .
(2.2)
Esiste? E unica? In che intervalli di tempo esiste? Come si scrive?
Osservazione 2.0.1 Essendo il campo f(x) autonomo, cioe indipendentedal tempo, non e restrittivo considerare il problema di Cauchy con condizioneiniziale per t0 = 0. Infatti se x(t) e soluzione di (2.1) allora tutte le traslatex(t− τ), τ ∈ R, sono soluzioni di (2.1).
Consideriamo dapprima l’insieme degli equilibri
E := f(x) = 0 .
L’insieme E e chiuso, essendo f continua.
20

CAPITOLO 2. EQUAZIONI DIFFERENZIALI SCALARI AUTONOME21
Figura 2.1: Il campo vettoriale f(x) ha tre equilibri. Le frecce indicano chedove il campo vettoriale f(x) > 0 (risp. < 0) le soluzioni t 7→ x(t) sonomonotone crescenti (risp. decrescenti).
Se x0 ∈ E allora f(x0) = 0 e, quindi, la funzione constante x(t) = x0,∀t, e una soluzione della equazione differenziale (2.1) soddisfacente il datoiniziale x(t0) = x0.
Consideriamo poi l’insieme
E+ := f(x) > 0 .
L’insieme E+ e aperto poiche f e continua. Quindi risulta che
E+ =⋃n
(xn, xn+1)
e un’unione finita o, al piu, numerabile, di intervalli aperti (xn, xn+1), even-tualmente illimitati.
Analogamente consideriamo l’aperto
E− := f(x) < 0 =⋃n
(bn, bn+1) .
Teorema 2.0.3 Sia f continua. Sia f(x0) 6= 0. Allora il problema diCauchy
x = f(x) ,x(t0) = x0 .

CAPITOLO 2. EQUAZIONI DIFFERENZIALI SCALARI AUTONOME22
ha sempre una ed una sola soluzione x(t) definita almeno localmente attornoa t = t0. Essa soddisfa ∫ x(t)
x0
du
f(u)= t− t0 . (2.3)
Dimostrazione. Supponiamo ad esempio che x0 ∈ E+, cioe f(x0) > 0.
a) Sia x(t) una soluzione di (2.2). Per t vicini a t0, si ha f(x(t)) > 0. Quindi
x(t)
f(x(t))= 1 .
Integrando nel tempo∫ t
t0
x(τ)
f(x(τ))dτ =
∫ t
t01 dτ = t− t0 .
La funzione x(t) e localmente invertibile poiche x(t) = f(x(t)) 6= 0. Quindiposso cambiare variable
y := x(t)
ottenendo ∫ x(t)
x(t0)
dy
f(y)= t− t0 ,
cioe (2.3). Notiamo che la funzione
Ψ(z) :=∫ z
x0
dy
f(y)(2.4)
e localmente invertibile poiche la sua derivata Ψ′(z) = 1/f(z) > 0. Quindila x(t) e univocamente determinata come soluzione di
Ψ(z) = t− t0 , x(t) = Ψ−1(t− t0) . (2.5)
Abbiamo provato l’unicita locale della soluzione.
b) Viceversa. La funzione
x(t) = Ψ−1(t− t0)
e una funzione di classe C1 che risolve (2.3). Quindi x(t) e soluzione delproblema di Cauchy (2.2). Abbiamo provato l’esistenza.
Il metodo di sopra si chiama il metodo di “separazione delle variabili. Loritroveremo alla sezione 4.2.

CAPITOLO 2. EQUAZIONI DIFFERENZIALI SCALARI AUTONOME23
Esercizio Trovare le soluzioni dei problemi di Cauchyx = xx(0) = x0
ed x = x2
x(0) = x0 .
Risposta: x(t) = x0et, x(t) = x0/(1 − x0t). Notiamo che nel primo caso la
soluzione e definita per tutti i tempi, nel secondo caso no, cessando di esistereall’istante t := 1/x0.
Vogliamo, in generale, capire in quale intervallo di tempo esiste la solu-zione definita dalla (2.3).
Vista la formula (2.5) tutto sta a capire com’e fatta la funzione Ψ(z) cheesprime il “tempo di percorrenza per andare dal punto x0 al punto z.
( ))
Figura 2.2: La funzione Ψ(z) che descrive il tempo di percorrenza tra x0 e z.Se i limz→x± Ψ(z) = ±∞ allora la soluzione x(t) esiste per tutti i tempi.
Sia x0 ∈ (x−, x+) dove (x−, x+) e la componente connessa di E+ checontiene x0 e consideriamo la funzione
Ψ : (x−, x+)→ R
(che e ben definita poiche f(z) > 0 in tutto (x−, x+)). Ψ e monotonacrescente ed esistono i limiti
limz→x±
Ψ(z) = limz→x±
∫ z
x0
dy
f(y):= l±

CAPITOLO 2. EQUAZIONI DIFFERENZIALI SCALARI AUTONOME24
(integrali impropri). Tutto dipende se tali limiti sono finiti o infiniti.
Se l± sono infiniti allora Ψ e surgettiva su R e, quindi, per ogni t ∈ Resiste una ed una sola soluzione x(t).
Se, invece, l± sono finiti, allora all’istante l+ la soluzione x(t) ha raggiuntol’equilibrio x+ e, analogamente, x(l−) = x−.
t
z
l
l
+
-
Figura 2.3: Se limz→x± Ψ(z) = l± con l± finiti, allora, in tempo finito lasoluzione raggiunge l’equilibrio x = 0. Si perde la unicita delle soluzioni.
In questo secondo caso, abbiamo perso l’unicita delle soluzioni. Infat-ti abbiamo almeno 2 soluzioni dell’equazione (2.1) che all’istante t = l±
coincidono nel punto x+ (quali? ce ne sono altre? quante?).
Poiche sappiamo che, se f e Lipschitziana, si ha sempre unicita dellesoluzioni (teorema di Cauchy), significa che, se f e Lipschitz (anche sololocalmente Lipschitz) si puo verificare solo l± = ±∞.
Infatti dalla condizione di Lipschtzianita si ha
|f(y)| = |f(y)− f(x+)| ≤ L|y − x+|
e quindi1
L|y − x+|≤ 1
f(y)
(essendo f(y) > 0) che, integrata, da∫ z
x0
dy
L|y − x+|≤∫ z
x0
dy
f(y).

CAPITOLO 2. EQUAZIONI DIFFERENZIALI SCALARI AUTONOME25
Ora, l’integrale improprio
limz→x+
∫ z
x0
dy
L|y − x+|= +∞
e, quindi, pure l+ = +∞.
Questo esempio mostra per quale motivo si possa avere perdita dell’uni-cita delle soluzioni: se f(x) non e Lipschitz nell’intorno dell’equilibrio puoaccadere che il campo vettoriale f(x) sia troppo grande in un intorno dell’equilibrio per cui la soluzione raggiunge, in un tempo finito, l’equilibrio (lafunzione 1/f(y) non tende abbastanza rapidamente all’infinito da avere in-tegrale improprio divergente).
Esercizio In quanto tempo la soluzione dix = 2
√|x|
x(0) = −1
raggiunge l’equilibrio x = 0 ? Quante soluzioni ha questo problema diCauchy?
Figura 2.4: La funzione f(x) = 2√|x| non e Lipschitz in nessun intorno
dell’origine.
Esercizio Provare che tutte e sole le soluzioni del problema di Cauchyx = 2
√|x|
x(0) = 0(2.6)

CAPITOLO 2. EQUAZIONI DIFFERENZIALI SCALARI AUTONOME26
sono, al variare di a < 0 < b (eventualmente infiniti), date da
x(t) =
−(t− a)2 t < a0 a < t < b(t− b)2 t > b
t
x(t)
Figura 2.5: Disegno delle soluzioni di (2.6). Il problema di Cauchy
Esercizio Trovare tutte e sole le soluzioni del problema di Cauchyx = (2k + 1)|x|2k/(2k+1)
x(0) = 0
dove k ∈ N.Provare che la funzione f(x) := |x|2k/(2k+1) non e Lipschitz, ma che e
Holderiana, cioe che esistono costanti α ∈ (0, 1), L > 0, tale che
|f(x1)− f(x2)| ≤ L|x1 − x2|α , ∀x1, x2 ∈ R .
α := 2k/2k + 1. Piu precisamente vale, per α ∈ (0, 1),∣∣∣|x1|α − |x2|α∣∣∣ ≤ |x1 − x2|α , ∀x1, x2 ∈ R
(ossia L = 1).Suggerimento Questo discende dal provare che la funzione ϕ(x) := xα e,per x > 0, sub-additiva, ossia
ϕ(a+ b) ≤ ϕ(a) + ϕ(b) , ∀a, b ≥ 0 .

CAPITOLO 2. EQUAZIONI DIFFERENZIALI SCALARI AUTONOME27
Per dimostrare questa ultima affermazione si puo dividere per b ambo imembri ottenendo, per t := b/a (omogeneita)
(1 + t)α ≤ 1 + tα , ∀t ≥ 0 .
Questa disequazione e vera poiche ψ(t) := 1 + tα− (1 + t)α soddisfa ψ(0) = 0e ψ′(t) ≤ 0 per t ≥ 0, essendo α ∈ (0, 1).
Esercizio Disegnare le soluzioni dix = 2x− x2
x(0) = x0
al variare di x0 ∈ R. Calcolarle esplicitamente.
Esercizio Disegnare la soluzione dix = (x− t)3
x(0) = 0
mostrando, in particolare, che la soluzione esiste per tutti i tempi negativi.Calcolarla.
Suggerimento: si faccia il cambio di variabile y = x− t per ricondursi ad unaequazione autonoma.
Esercizio Sia f : R→ R+ una funzione positiva e continua. Provare che ilproblema di Cauchy
x = f(x)x(t0) = x0
ha sempre una ed una sola soluzione locale.
Abbiamo dimostrato in questo caso esistenza ed unicita solo con la con-tinuita della f . In generale, proveremo esistenza locale di una soluzionein generale del problema di Cauchy con solo l’ipotesi di continuita della f(teorema di Peano).
Esercizio Sia f : R → R una funzione continua tale che f(0) = 0 edf(x) > 0, ∀x 6= 0. Si supponga che
∃x+ > 0 limz→0+
∫ x+
z
dy
f(y)= +∞
ed, analogamente
∃x− < 0 limz→0−
∫ z
x−
dy
f(y)= +∞ .

CAPITOLO 2. EQUAZIONI DIFFERENZIALI SCALARI AUTONOME28
Provare che la soluzione x(t) = 0 e l’unica soluzione dix = f(x)x(0) = 0
Esercizio Studiare le soluzioni del sistemau = v − uv = u− v (2.7)
con i dati iniziali u(0) = a, v(0) = b.Suggerimento: che equazione differenziale soddisfa x := u− v? che equa-
zione differenziale soddisfa y := u + v? Nota: (2.7) e un sistema lineare acoefficienti costanti che impareremo a risolvere in generale nella sezione 5.5.Qui lo possiamo fare con i metodi elementari sinora svolti.

Capitolo 3
Estendibilita delle soluzioni
Consideriamo il problema di Cauchyx = f(t, x)x(t0) = x0
(3.1)
assumendo che il campo vettoriale
f : A ⊂ R×Rn → Rn
sia continuo nel dominio aperto A e sia localmente Lipschitziano in x (cioeper ogni punto (t0, x0) ∈ A esiste un intorno dove f e Lipschitziana in x).
Per il teorema di esistenza ed unicita locale abbiamo che, per ogni datoiniziale (t0, x0) ∈ A, esiste una ed una sola soluzione di (3.1) definita almenolocalmente in un intorno di t = t0.
Da esempi nel capitolo precedente sappiamo che talvolta la soluzione esi-ste su tutto R, talvolta no. Vogliamo capire in quali casi le soluzioni possonoessere estese.
3.1 Prolungamento delle soluzioni
Definizione 3.1.1 (Definizione di prolungamento) Data una soluzione x(t)in (a, b) di x = f(t, x), diciamo che y(t) ne e un prolungamento se y e unasoluzione della stessa equazione differenziale y = f(t, y), y e definita in unintervallo (a1, b1), con (a, b) ⊂ (a1, b1), e y(t) coincide con x(t) sull’intervallocomune (a, b).
Definizione 3.1.2 (Soluzione massimale) Una soluzione si dice massimalese non ammette alcun prolungamento.
29

CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 30
Nelle ipotesi sopra assunte per f che garantiscono l’unicita locale dellesoluzioni abbiamo che:
Lemma 3.1.1 Se 2 soluzioni coincidono ad un instante allora coincidonosu tutto l’intervallo comune.
Dimostrazione. Siano x(t), y(t) due soluzioni della stessa equazione dif-ferenziale definite nell’intervallo di tempo (a, b). Supponiamo che ad un certoistante t0 esse coincidano, cioe x(t0) = y(t0). Proviamo che x(t) ≡ y(t) intutto (a, b).
Mostriamo dapprima che x(t) ≡ y(t) in tutto (t0, b). Se no, l’insieme
E :=t ∈ [t0, b) : x(t) 6= y(t)
e non vuoto. Chiamiamo
τ := inf E ≥ t0 .
Per la continuita di x(t) e y(t), si ha
x(τ) = y(τ)
(altrimenti per il teorema della permanenza del segno si avrebbe x(t) 6= y(t)in tutto un intorno destro e sinistro di τ , contraddicendo la definizione diestremo inferiore).
Allora le x(t), y(t) soddisfano lo stesso problema di Cauchy con lo stessodato iniziale x(τ) = y(τ) e, per il teorema di unicita, coincidono in tutto uninterno destro e sinistro di τ , contraddicendo nuovamente la definizione diestremo inferiore.
Teorema 3.1.1 Ogni soluzione ammette un prolungamento massimale.
Dimostrazione. Sia x(t) una soluzione definita in (a, b). Consideriamol’insieme di tutti i suoi prolungamenti
P :=y e′ un prolungamento di x definito in (a1, b1), (a, b) ⊂ (a1, b1)
.
Definiamo il prolungamento massimale z(t) di x(t) nell’intervallo (T−, T+)dove
T− := infy∈P
a1 , T+ := supy∈P
b1
nel modo seguente. Se t ∈ (T−, T+) allora t ∈ (a1, b1) per un qualche in-tervallo (a1, b1) su cui e definito un prolungamento y(t) di x(t). Poniamodunque
z(t) := y(t)

CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 31
e notiamo che tale definizione non dipende dal prolungamento scelto grazieal lemma precedente.
Tale prolungamento e massimale. Se, infatti, z ammettesse un altro pro-lungamento in senso stretto verrebbe contraddetta la definizione di (T−, T+).
Chiamiamo l’intervallo massimale di una qualsiasi soluzione (T−, T+).
Quando possiamo estendere una soluzione x(t) di x = f(t, x) definitain un intervallo (a, b)? Dimostriamo alcuni criteri di estendibilita di unasoluzione.
Teorema 3.1.2 Supponiamo che la soluzione x(t) soddisfi
limt→b−
x(t) = v0 (3.2)
e che (b, v0) ∈ A sia interno al dominio di definizione del campo. Allora x(t)e prolungabile a destra di b.
Dimostrazione. Per il teorema di esistenza ed unicita locale sappiamoche esiste una unica soluzione ϕ del problema
ϕ(t) = f(t, ϕ(t))ϕ(b) = v0
definita in un intervallo (b− δ, b+ δ).Si verifica facilmente che la funzione
y(t) :=
x(t) se a < t < bv0 se t = bϕ(t) se b < t < b+ δ
e una soluzione y(t) = f(t, y(t)) che prolunga la x(t) oltre b. Infatti y(t) =x(t) e soluzione in (a, b) ed y(t) = ϕ(t) e soluzione in (b, b + δ). Rimane daprovare che y(t) e derivabile in t = b e y(b) = f(b, y(b)). Sappiamo che y(t) =x(t) = f(t, x(t))→ f(b, v0) per t→ b− ed y(t) = ϕ(t) = f(t, ϕ(t))→ f(b, v0)per t→ b+. Quindi y(t) e derivabile in t = b e y(b) = f(b, v0) (quale teoremasi usa?).
Esempio Proviamo che le soluzioni dix = 2x− x2
x(0) = x0(3.3)
con 0 < x0 < 2 sono prolungabili per tutti i tempi, cioe (T−, T+) = (−∞,+∞).

CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 32
Sappiamo che x(t) = 0 e x(t) = 2 sono 2 soluzioni (di equilibrio). Ilcampo vettoriale 2x− x2 e una funzione di classe C∞ e quindi sappiamo cheesiste una soluzione x(t) definita localmente. Inoltre, sempre in virtu delteorema di esistenza ed unicita locale, la soluzione x(t) ∈ (0, 2) per tutti itempi di (T−, T+).
Proviamo che, ad esempio, T+ = +∞. Per assurdo, supponiamo che T+
sia finito. In tutto il suo intervallo massimale si ha
x(t) = 2x(t)− x2(t) > 0
e quindi la x(t) e monotona. Quindi esiste sicuramente finito
limt→T+
x(t) = l ≤ 2
e, per il teorema precedente, la soluzione x(t) sarebbe prolungabile a destradi T+.
2
0 t
x(t)
Figura 3.1: Le soluzioni di (3.3)
Analogamente si prova che T− = −∞.
Domanda: Quanto vale il limt→+∞ x(t)?
Esercizio Sia f : R → R una funzione Lipschitziana e siano x1 < x2 dueequilibri consecutivi (cioe f(x) 6= 0, ∀x1 < x < x2). Provare che le soluzionidi
x = f(x)x(0) = x0
con x0 ∈ (x1, x2) sono prolungabili per tutti i tempi, cioe (T−, T+) = (−∞,+∞).
E utile il seguente indebolimento della condizione (3.2).

CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 33
Teorema 3.1.3 Supponiamo che esista una successione tn → b− tale che
limn→+∞
x(tn) = v0 (3.4)
e che (b, v0) ∈ A sia interno al dominio di definizione del campo. Allora
limt→b−
x(t) = v0
e, dunque, x(t) e prolungabile a destra di b.
Dimostrazione. Sia I × J := [b− α, b + α]× |x− v0| ≤ ρ ⊂ A, α > 0,ρ > 0, un intorno compatto di (b, v0) tutto contenuto in A (esiste poiche(b, v0) e un punto interno all’aperto A).
Da (3.4), per n abbastanza grande, x(tn) ∈ int(J) = |x − v0| < ρ.Affermiamo che
∃ n tale che ∀t ∈ (tn, b) ⊂ [b− α, b] =⇒ x(t) ∈ J . (3.5)
Prima di dimostrare (3.5) mostriamo come discenda la tesi.∀t ∈ (tn, b) abbiamo che (t, x(t)) ∈ I × J e quindi
|x(t)| = |f(t, x(t))| ≤ maxI×J|f(t, x)| =: M < +∞
essendo f continua sul compatto I × J .Pertanto x(t) soddisfa il criterio di convergenza di Cauchy:
∀ε > 0 ∃δ > 0 tale che ∀b− δ < t1 < t2 < b =⇒ |x(t1)− x(t2)| ≤ ε . (3.6)
Infatti|x(t1)− x(t2)| = |x(ξ)| |t2 − t1| ≤Mδ ≤ ε
non appena δ < ε/M .Pertanto x(t) ammette limite per t → b−. Essendo, lungo la successione
tn, limn→+∞ x(tn) = v0, deduciamo che limt→b− x(t) = v0.
Dimostriamo adesso la (3.5). Se non fosse vera, ∀n, esiste almeno unistante t ∈ (tn, b), in cui x(t) /∈ J , ossia l’insieme
En := t ∈ (tn, b) | |x(t)− v0| > ρ
e non vuoto.Considero τn := inf En. Per la definizione di inf ed essendo x(t) continua,
|x(τn)− v0| = ρ (3.7)

CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 34
(perche?). Quindi, in particolare, tn < τn (essendo |x(tn)− v0| < ρ). Inoltre,sempre per la definizione di inf,
∀t ∈ (tn, τn) , |x(t)− v0| ≤ ρ . (3.8)
Allora, per un qualche ξn ∈ (tn, τn), si ha
|x(tn)− x(τn)| = |x(ξn)||tn − τn| = |f(ξn, x(ξn))||tn − τn| ≤M |tn − b|
(poiche (ξn, x(ξn)) ∈ I × J e M := maxI×J |f(t, x)|). Quindi
|v0 − x(τn)| ≤ |v0 − x(tn)|+ |x(tn)− x(τn)| ≤ |v0 − x(tn)|+M(tn − b) .
Passando al limite per n → +∞, il membro di destra tende a zero poichex(tn)→ v0 e tn → b. Invece, per la (3.7), il membro a sinistra |v0 − x(τn)| =ρ > 0, ∀n. Questo e assurdo.
Esercizio Dimostrare che se vale il criterio di Cauchy (3.6) allora esiste illimt→b− x(t) ∈ R.
Suggerimento: provare che per ogni successione tn → b− la successionex(tn) ∈ R e di Cauchy, e quindi esiste limn→+∞ x(tn). Provare che lungo duequalunque successioni tn, τn → b− i limiti limn→+∞ x(tn) ed limn→+∞ x(τn)coincidono.
Esercizio Sia x : (a, b)→ R una funzione uniformemente continua. Dimo-strare che
lim inft→b−
x(t) = lim supt→b−
x(t)
e, quindi, esiste limt→b− x(t). Come si potrebbe applicare al ragionamentonel teorema precedente?
Un importante corollario e il seguente:
Teorema 3.1.4 Sia x(t) una soluzione massimale di x = f(t, x) e chiamia-mo (T−, T+) il suo dominio massimale di definizione. Per ogni compattoK ⊂ A esistono T− < T1 < T2 < T+ tale che
(t, x(t)) /∈ K , ∀t ∈ (T−, T1) ∪ (T2, T+) .
Dimostrazione. Proviamo, ad esempio, che da un certo istante T2 in poila soluzione x(t) e tale che (t, x(t)) non sta in K. Altrimenti, esisterebbeuna successione di tempi tn → T+ tale che (tn, x(tn)) ∈ K. Pertanto, perla compattezza di K a meno di sottosuccessioni, (tn, x(tn)) → (T+, x) ∈ Kper un qualche x. Poiche il punto (T+, x) ∈ K ⊂ A e interno ad A, per ilteorema precedente, la soluzione sarebbe estendibile oltre T+.
CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 35
Il teorema precedente ci dice che una soluzione massimale deve “accumu-larsi alla frontiera ∂A del dominio del campo A. In altre parole la soluzionepuo smettere di esistere solo se va verso la frontiera ∂A del dominio.
Notiamo bene che il teorema precedente non ci dice che la soluzione tendea qualche punto della frontiera del dominio, come mostra l’esempio seguente.
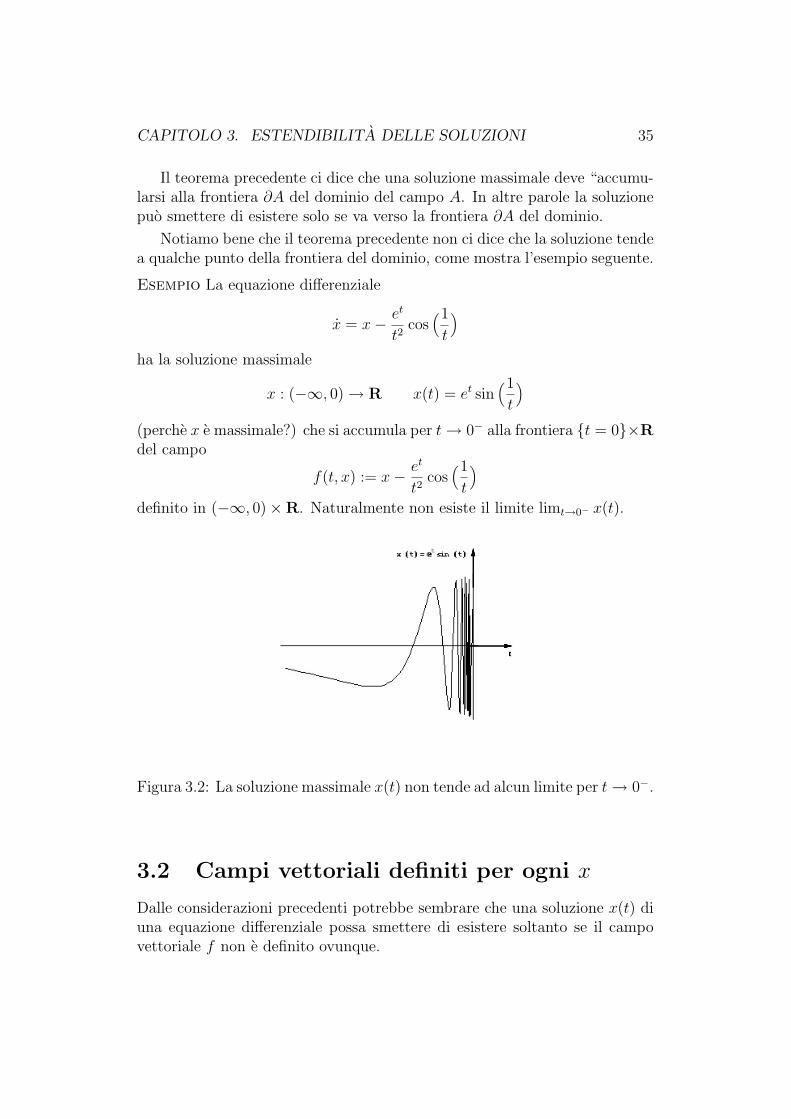
Esempio La equazione differenziale
x = x− et
t2cos
(1
t
)ha la soluzione massimale
x : (−∞, 0)→ R x(t) = et sin(1
t
)(perche x e massimale?) che si accumula per t→ 0− alla frontiera t = 0×Rdel campo
f(t, x) := x− et
t2cos
(1
t
)definito in (−∞, 0)×R. Naturalmente non esiste il limite limt→0− x(t).
t
Figura 3.2: La soluzione massimale x(t) non tende ad alcun limite per t→ 0−.
3.2 Campi vettoriali definiti per ogni x
Dalle considerazioni precedenti potrebbe sembrare che una soluzione x(t) diuna equazione differenziale possa smettere di esistere soltanto se il campovettoriale f non e definito ovunque.
CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 36
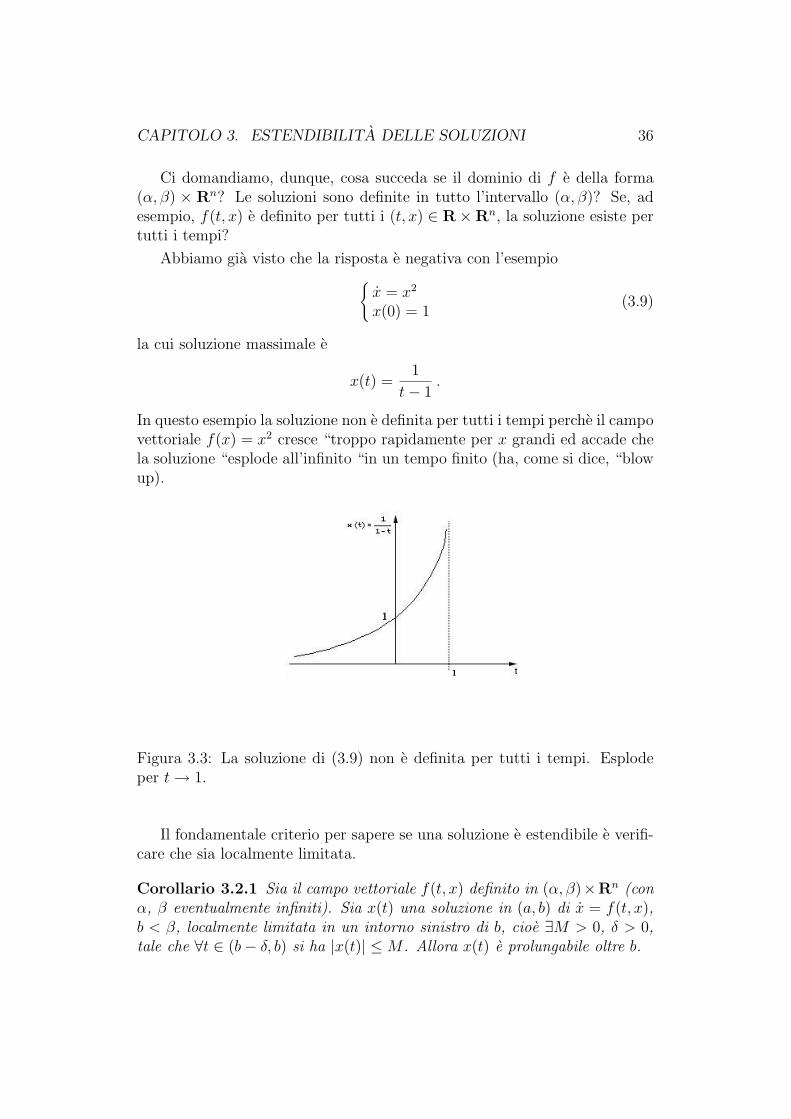
Ci domandiamo, dunque, cosa succeda se il dominio di f e della forma(α, β) × Rn? Le soluzioni sono definite in tutto l’intervallo (α, β)? Se, adesempio, f(t, x) e definito per tutti i (t, x) ∈ R×Rn, la soluzione esiste pertutti i tempi?
Abbiamo gia visto che la risposta e negativa con l’esempiox = x2
x(0) = 1(3.9)
la cui soluzione massimale e
x(t) =1
t− 1.
In questo esempio la soluzione non e definita per tutti i tempi perche il campovettoriale f(x) = x2 cresce “troppo rapidamente per x grandi ed accade chela soluzione “esplode all’infinito “in un tempo finito (ha, come si dice, “blowup).
1
Figura 3.3: La soluzione di (3.9) non e definita per tutti i tempi. Esplodeper t→ 1.
Il fondamentale criterio per sapere se una soluzione e estendibile e verifi-care che sia localmente limitata.
Corollario 3.2.1 Sia il campo vettoriale f(t, x) definito in (α, β)×Rn (conα, β eventualmente infiniti). Sia x(t) una soluzione in (a, b) di x = f(t, x),b < β, localmente limitata in un intorno sinistro di b, cioe ∃M > 0, δ > 0,tale che ∀t ∈ (b− δ, b) si ha |x(t)| ≤M . Allora x(t) e prolungabile oltre b.

CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 37
Dimostrazione. Essendo |x(t)| ≤M , ∀t ∈ (b−δ, b), esiste, per compattez-za, una successione tn → b, tale che x(tn)→ v0 per qualche v0 con |v0| ≤M .Dal teorema 3.1.3 esiste limt→b x(t) = v0 e, poiche (b, v0) ∈ (α, β) × Rn, lasoluzione x(t) e estendibile oltre b.
Naturalmente la conclusione segue anche dal teorema 3.1.4.
Utilizzando il criterio del teorema precedente dimostriamo un teorema diestensione globale in questo caso.
Teorema 3.2.1 (Teorema di estensione globale) Supponiamo che f siadefinita su tutto R×Rn, e sia
(H1) continua;
(H2) localmente Lipschitziana;
(H3) (crescita al piu lineare di f) |f(t, x)| ≤ A(t)+B(t)|x| dove A(t) ≥0, B(t) ≥ 0 sono due funzioni continue.
In queste ipotesi esiste una unica soluzione di (3.1) definita su tutto R.
Dimostrazione. Proviamo che, ad esempio, T+ = +∞. Supponiamo perassurdo che T+ < +∞. In virtu del corollario 3.2.1, bastera dimostrare chele soluzioni restano limitate in ogni intervallo di tempo finito.
Affermiamo che vale la seguente “stima a priori:
Lemma 3.2.1 Poniamo A := maxt∈[t0,T+] A(t), B := maxt∈[t0,T+] B(t). Lasoluzione x(t) di (3.1) soddisfa
|x(t)| ≤(AB
+ |x(t0)|)eB|t−t0| − A
B, ∀t ∈ [t0, T
+] ,
se B 6= 0. Se B = 0, |x(t)| ≤ |x(t0)|+ A(T+ − t0).
Dimostrazione. Considero, ∀σ > 0, la funzione
z(t) :=√σ + |x(t)|2
che e di classe C1, z(t) > 0, z(t) > |x(t)|, e la cui derivata e
z(t) =x(t) · x(t)√σ + |x(t)|2
.

CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 38
Consideriamo il caso B 6= 0. Si ha
|z(t)| ≤∣∣∣ x(t) · x(t)√σ + |x(t)|2
∣∣∣ ≤ |x(t)|√σ + |x(t)|2
|x(t)| < |x(t)|
= |f(t, x(t))| ≤ A(t) +B(t)|x(t)| ≤ A+B|x(t)|≤ A+Bz(t) (3.10)
e, pertanto,
−1 ≤ z(t)
A+Bz(t)≤ 1 .
Integrando quest’ultima disequazione in [t0, t] abbiamo
−(t− t0) ≤∫ t
t0
z(s)
A+Bz(s)ds ≤ (t− t0)
ossia, calcolando esplicitamente l’integrale,
−(t− t0) ≤ 1
Bln( A+Bz(t)
A+Bz(t0)
)≤ (t− t0)
da cui, elevando a potenza,
−eB(t−t0) ≤ A+Bz(t)
A+Bz(t0)≤ eB(t−t0)
che porta facilmente alla tesi.Infine, se B = 0, da (3.10), si ha subito |z(t)| ≤ |z(t0)| + AT+ e, quindi,
al limite per σ → 0, |x(t)| ≤ |x(t0)|+ AT+.
A questo punto l’assurdo e che la soluzione massimale sarebbe estendibileoltre T+. Infatti
|x(t)| ≤ K+ :=(AB
+ |x(t0)|)eBT
+
, ∀t ∈ [t0, T+] ,
e, quindi, esiste una successione tn → T+, tale che x(tn)→ v0 per qualche v0
con |v0| ≤ K+. Dal teorema 3.1.3 esiste limt→T+ x(t) = v0, (T+, v0) ∈ R×Rn
e la soluzione sarebbe estendibile oltre T+.
Esercizio Provare che la tesi del teorema precedente sussiste anche sosti-tuendo l’ipotesi (H3) con l’ipotesi
(H3)′ |f(x, t)| ≤ ϕ(|x|)

CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 39
dove ϕ(·) e una funzione continua, positiva, crescente e∫ +∞
0
dz
ϕ(z)= +∞ .
Esercizio Provare che le soluzioni dix = sin t− xx(0) = a
sono definite per tutti i tempi (sai calcolare la soluzione?)
Si dimostra in modo del tutto analogo al teorema 3.2.1 (farlo per eserci-zio) il seguente teorema (in effetti il teorema 3.2.1 e un caso particolare delteorema 3.2.2 per (α, β) = R).
Teorema 3.2.2 (Teorema di estensione globale) Supponiamo che f siadefinita in (α, β)×Rn, e sia (H1) continua; (H2) localmente Lipschitziana;(H3) |f(t, x)| ≤ A(t) + B(t)|x| dove A(t) ≥ 0, B(t) ≥ 0 sono due funzionicontinue. In queste ipotesi esiste una unica soluzione di (3.1) definita sututto (α, β).
Esercizio Trovare il dominio massimale di definizione dei seguenti problemidi Cauchy
x = sin(t2x2)x(0) = 1
x = x+ t2 sin(x2)x(0) = 1
x = x2 + 1x(0) = 1 .
Naturalmente le ipotesi del teorema 3.2.1 (e del teorema 3.2.2) sonosolamente sufficienti a garantire l’estendibilita delle soluzioni su tutto R.
Esempio Provare che tutte le soluzioni del problema di Cauchyx = x4 sinxx(0) = x0
(3.11)
sono definite su tutto R. Il problema ha infinite soluzioni di equilibrio xk :=kπ, k ∈ Z ottenute quando x4 sinx = 0. Pertanto, ogni soluzione x(t) e, ocostante nel tempo, o rimane confinata tra due equilibri per tutti i tempi.Avendo stabilito “a priori che, laddove esiste, la soluzione x(t) e limitata, neconcludiamo che x(t) e prolungabile indefinitamente per il corollario 3.2.1.
Naturalmente, in questo esempio il campo f(x) non soddisfa la ipotesi dicrescita lineare (H3) e neppure la (H3)′.
Maggiorazioni a-priori delle soluzioni possono essere ottenute medianteteoremi del confronto come vedremo alla sezione 4.1 e mediante il lemma diGronwall alla sezione 6.1.
Un altro caso importante in cui si riescono ad avere maggiorazioni a prioridelle soluzioni e rappresentato dalle equazioni che ammettono integrali primi.

CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 40
3.3 Integrali primi
Consideriamo il seguente sistema nonlineare
Esempio Provare che tutte le soluzioni del problema di Cauchyx = −y + xzy = x+ yzz = −x2 − y2
x(0) = x0, y(0) = y0, z(0) = z0
sono definite su tutto R.Il campo vettoriale
f(x, y, z) = (−y + xz, x+ yz,−x2 − y2) ∈ R3
non soddisfa l’ipotesi di crescita al piu lineare del teorema precedente. No-nostante cio si vede che una qualsiasi soluzione (x(t), y(t), z(t)) soddisfa
x(t)2 + y(t)2 + z(t)2 = x20 + y2
0 + z20 , ∀t ∈ (T−, T+) .
Infatti, derivando rispetto al tempo,
d
dt(x(t)2 + y(t)2 + z(t)2) = 2x(t)x(t) + 2y(t)y(t) + 2z(t)z(t)
= 2x(−y + xz) + 2y(x+ yz)− 2z(x2 + y2)
= 0
e quindi x(t)2 + y(t)2 + z(t)2 si mantiene costante nel tempo lungo una so-luzione. Quindi ogni soluzione (x(t), y(t), z(t)) e limitata e, pertanto, e in-definitamente prolungabile sia in avanti che indietro sempre per il corollario3.2.1.
L’esempio precedente ci dice che ogni soluzione e vincolata a stare sullecurve di livello della funzione g(x, y, z) = x2 +y2 +z2. Si dice, in tal caso, cheg e un integrale primo (o “quantita conservata) dell’equazione differenziale.
Definizione 3.3.1 Una funzione G ∈ C1(Rn,R) si dice un integrale primo(indipendente dal tempo) di un sistema di equazioni differenziali
x = f(x) , x ∈ Rn (3.12)
se e solo se G(x(t)) e costante lungo ogni soluzione x(t) di (3.12). Equiva-lentemente
∇G(x) · f(x) = 0 , ∀x ∈ Rn . (3.13)

CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 41
x
x
x(0)
x(t)
G(x)=G(x(0))
Figura 3.4: Ogni traiettoria e confinata nel livello G(x) = G(x(0)).
In altre parole ogni traiettoria evolve stando nel livello G(x) = G(x(0)),vedi la figura 3.4.
Un esempio fondamentale di equazioni differenziali che possiedono unintegrale primo e l’equazione della meccanica di Newton
x = −∇V (x) (3.14)
in un campo di forze F (x) = −∇V conservativo (V si chiama l’energiapotenziale).
Scriviamo (3.14) come un sistema del primo ordinex = vv = −∇V (x) .
(3.15)
E ben noto che la energia meccanica del sistema, data dalla somma dell’e-nergia cinetica e potenziale, rimane costante nel tempo. Verifichiamo infattiche la funzione
E(x, v) =v2
2+ V (x) (dove v2 := v · v = |v|2) (3.16)
e un integrale primo di (3.15).
Esercizio Mostrare che il seguente sistema di equazioni differenziali
(HS) x = J∇H(x) , x ∈ R2n
dove H ∈ C1(R2n,R) e
J :=
(0 I−I 0
)∈ Mat(2n× 2n)

CAPITOLO 3. ESTENDIBILITA DELLE SOLUZIONI 42
ha l’integrale primo H.Suggerimento: si ha che
d
dtH(x(t)) = (∇H(x(t)), J∇H(x(t))) = 0
per la antisimmetria di J (il sistema (HS) si chiama Hamiltoniano, H lafunzione Hamiltoniana, e J la matrice simplettica standard). In vari esempiH e la energia del sistema.
Abbiamo il seguente teorema
Teorema 3.3.1 Supponiamo che il sistema
x = f(x) , x ∈ Rn
abbia un integrale primo G : Rn → R. Se la superficie di livello G(x) =G(x0) e un sottoinsieme limitato di Rn, allora il problema di Cauchy
x = f(x)x(0) = x0
ha una soluzione definita per tutti i tempi.
Dimostrazione. La soluzione x(t) sta sempre nell’insieme limitatoG−1(G(x0))e, quindi, per il corollario 3.2.1, e prolungabile indefinitamente.
Teorema 3.3.2 Supponiamo che l’energia potenziale V (x) ≥ −h sia limi-tata inferiormente. Allora tutte le soluzioni dell’equazione di Newton (3.14)sono definite per tutti i tempi.
Dimostrazione. Dalla conservazione dell’energia meccanica
E =v2(t)
2+ V (x(t)) ≥ v2(t)
2− h
e quindix2(t) = v2(t) ≤ 2(E + h) .
Pertanto
|x(t)| ≤ 2(E + h) ed |x(t)− x(0)| ≤ 2(E + h)|t| .
Quindi (x(t), v(t)) e localmente limitata e, dal corollario 3.2.1, ne deduciamoche la soluzione e estendibile per tutti i tempi.
Esercizio. Se V (x) ≥ −c x2, c > 0, le soluzioni dell’equazione di Newtonsono definite per tutti i tempi? E se V (x) = −x4?

Capitolo 4
Studio qualitativo dellesoluzioni
Sono pochi i casi in cui le soluzioni di una equazione differenziale possonoessere scritte analiticamente. Oltre al caso delle equazioni scalari sulla ret-ta esaminato nel capitolo 2, studieremo alcune altre classi di equazioni cheammettono una formula risolutiva nella sezione 4.2. In ogni caso, quandoanche cio si possa fare, spesso la sua espressione non risulta particolarmenteesplicativa del comportamento delle soluzioni.
Cio che, invece, e veramente importante e descrivere il comportamentoqualitativo delle soluzioni.
Esempio Gia sappiamo come integrare (addirittura per quadrature) la equa-zione differenziale
x = sin(x)x(0) = π
2
(4.1)
con i metodi del capitolo 2.Vediamo come si possano ricavare subito tutte le informazioni qualitative
importanti di tale soluzione. Intanto la soluzione x(t) di (4.1) e definita pertutti i tempi dovendo essere 0 < x(t) < π, ∀t ∈ (T−, T+). Infatti x(t) = 0 ex(t) = π sono due soluzioni di equilibrio e 2 soluzioni distinte non si possonointersecare per l’unicita delle soluzioni di ogni problema di Cauchy, essendosin(x) una funzione Lipschitz (oppure, poiche | sin(x)| ≤ 1, dal teorema diestensione globale 3.2.1, si ricava che la soluzione e definita per tutti i tempi).
I limiti limt→±∞ x(t) = l± esistono essendo x(t) monotona, e risulta cheπ/2 < l+ ≤ π, 0 ≤ l− < π/2. Affermiamo che
limt→+∞
x(t) = π , limt→−∞
x(t) = 0 . (4.2)
43

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 44
Metodo 1). Se fosse limt→+∞ x(t) = l+ < π allora
limt→+∞
x(t) = limt→+∞
sin(x(t)) = sin l+ > 0
e, quindi, dalla definizione di limite, per un certo t > 0 abbastanza grande,si avrebbe
sin(x(t)) ≥ sin l+
2∀t ≥ t .
Quindi
x(t) ≥ x(t) +∫ t
tx(τ) dτ ≥ x(t) +
∫ t
t
sin l+
2dτ
≥ x(t) +sin l+
2(t− t)→ +∞
per t→ +∞, contraddicendo x(t) < π, ∀t.Analogamente si dimostra che limt→−∞ x(t) = 0.
La situazione precedente si presenta spesso. Pertanto scriviamo il seguen-te teorema.
Teorema 4.0.3 (Teorema dell’asintoto) Sia x(t) una funzione di classeC1 tale che esista
limt→+∞
x(t) = l ∈ R
finito ed esista purelimt→+∞
x(t) = β .
Allora β = 0.
Dimostrazione. In ogni intervallo (n, n+ 1) esiste un punto ξn tale che
x(n+ 1)− x(n) = x(ξn)
per il teorema del valor medio. Poiche il primo membro tende a zero, lungola successione ξn → +∞ si ha x(ξn)→ 0 e quindi β = 0.
Esercizio Dimostrare il teorema dell’asintoto anche come al metodo 1 delprecedente esercizio e con il ragionamento seguente: sappiamo che
limt→∞
x(t)
t= 0
e che il limite del rapporto delle derivate limt→∞ x(t) esiste. Concludere dalteorema dell’Hopital.

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 45
Esercizio Dimostrare la seguente generalizzazione del teorema dell’asin-toto: se esiste finito il limite limt→+∞ x(t) = l, allora lim inft→+∞ |x(t)| =0.
Metodo 2) per provare (4.2). Poiche sappiamo che esistono finiti entrambi ilimiti
limt→+∞
x(t) = l+ e limt→+∞
x(t) = sin l+ ,
applicando il teorema dell’asintoto si conclude sin l+ = 0, cioe l+ = π.Analogamente si conclude che l− = 0. Farlo per esercizio.
Esercizio Sia f : R→ R di classe C1. Provare chex = e−[f(x)]2
x(0) = x0
ha una ed una soluzione definita per tutti i tempi, provare che esistono ilimiti
limt→±∞
x(t) = l±
e calcolarli.
Esercizio Studiare le soluzioni dell’equazione differenziale
x = 1− log(t+ x)
e tracciarne un grafico approssimativo. Si calcoli la soluzione e si confrontinole informazioni qualitative con la formula esplicita.
Suggerimento: si faccia il cambio di variabili y := x+ t.
Esercizio Sia f : R→ R, f ∈ C1, crescente ed f(0) = 0. Provare che tuttele soluzioni sono definite in un intervallo del tipo (−∞, a). Si puo ottenerela risposta con i metodi del capitolo 2?
Vediamo come si puo procedere per campi non autonomi.
Esercizio Si descriva qualitativamente la soluzione del problema di Cauchy x =t− x
1 + t2 + x2
x(1) = 1 .(4.3)
La funzione f(t, x) e C∞ e quindi si ha esistenza ed unicita locale dellasoluzione di (4.3) in un intorno di t = 1. Inoltre, poiche
|f(t, x)| ≤ |t|+ |x| ,

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 46
per il teorema di estensione globale la soluzione puo essere estesa per tutti itempi. Poi
f(t, x) risulta
< 0 per x > t= 0 per t = x> 0 per x < t .
1
1
x(t)
t
x(t)=t
)(
Figura 4.1: Il campo vettoriale di (4.3)
Step 1) Si ha che 1 < x(t) < t per tutti i tempi t ∈ (1,+∞). Essendox(t) > 0, per t > 1, la x(t) e monotona crescente per t > 1 e, quindi,x(t) > 1 per tutti i tempi t ∈ (1,∞).
Si dimostra per assurdo che x(t) < t per tutti i tempi t ∈ (1,∞). Se no,l’insieme
E := t > 1 | x(t) ≥ t 6= ∅
sarebbe non vuoto. Si consideri τ := inf E. Si ha τ > 1 (perche?), x(τ) = τ(perche?), e x(t) < t, ∀t ∈ (1, τ) (perche?). Quindi
x(t)− x(τ)
t− τ> 1 ∀t < τ
e passando al limite x(τ) ≥ 1. Questo e assurdo perche x(τ) = f(τ, x(τ)) =f(τ, τ) = 0.
Step 2) Esiste limt→+∞ x(t) essendo x(t) monotona. Questo limite einfinito. Infatti, supponendo per assurdo che
limt→+∞
x(t) = l < +∞

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 47
si deduce dalla definizione di limite che, per un certo t > 0 abbastanzagrande,
x(t) ≥ t− 2l
1 + t2 + 4l2∀t ≥ t
ma
x(t) ≥ x(t) +∫ t
tx(τ) dτ ≥ x(t) +
∫ t
t
τ − 2l
1 + τ 2 + 4l2dτ → +∞
per t→ +∞, contraddicendo x(t)→ l.
Step 3) Per t ∈ (−∞, 1) la soluzione x(t) e decrescente, e, quindi, x(t) > 1.Sempre per monotonia esiste il limite limt→−∞ x(t) che si dimostra essereuguale a +∞ con un ragionamento analogo al precedente.
Domanda: Puo essere x(t) asintotica ad x(t) = t per t→∞?
Risposta: No. Dimostrarlo.
Consideriamo nel prossimo esempio un campo vettoriale non definito sututto R2.
Esercizio Si descriva qualitativamente la soluzione di x =et − xex + t
x(0) = 0 .(4.4)
Il campo f(t, x) e definito per ex+t 6= 0. La soluzione x(t) rimarra nell’apertoA := x > ln(−t). In questo dominio abbiamo che f(t, x) si annulla peret = x. Poi f(t, x) > 0 se x < et ed f(t, x) > 0 se x > et.Step 1) Si ha che 0 < x(t) < et per tutti i tempi t ∈ (0, T+). Si dimostra conragionamenti analoghi all’esercizio precedente. Farlo per esercizio. QuindiT+ = +∞ (perche?).
Domanda: si potrebbe dedurre l’esistenza della soluzione x(t) per tutti itempi (0,+∞) dal teorema 3.2.2?
Step 2) Esiste limt→+∞ x(t) essendo x(t) monotona. Questo limite e infinito.Infatti, supponendo per assurdo che
limt→+∞
x(t) = l < +∞
si deduce dalla definizione di limite che, per un certo t > 0 abbastanzagrande,
x(t) ≥ et − 2l
e2l + t∀t ≥ t

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 48
-1 t
x(t)
Figura 4.2: Il campo vettoriale di (4.4)
ma
x(t) ≥ x(t) +∫ t
tx(τ) dτ ≥ x(t) +
∫ t
t
eτ − 2l
e2l + τdτ → +∞
per t→ +∞, contraddicendo x(t)→ l. Un altro modo, anche piu veloce, diprocedere e come nella dimostrazione del teorema dell’asintoto:
x(n)− x(n+ 1) = x(ξn)
per un qualche ξn ∈ (n, n + 1). Al limite per n → +∞ il primo membrotende a zero, mentre il secondo diverge. AssurdoStep 3) T− > −∞ perche altrimenti la x(t) intersecherebbe necessariamentela curva ex + t = 0 dove il campo non e definito. Si ha necessariamente
limt→T−
x(t) = ln(−x(T−)) .
La soluzione smette di esistere perche ha raggiunto la frontiera di A. Con-fronta con il teorema 3.1.4.
Esercizio Si descriva qualitativamente la soluzione di x =1
x− t
x(1) = 1 .(4.5)
Suggerimenti:
Step 1) Si ha che 1/t < x(t) < 1 per tutti i tempi t ∈ (1, T+). Quindi

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 49
T+ = +∞.
Step 2) T− > −∞. Un modo per dimostrarlo e notare che, per monotonia,
x(t) < 1 , ∀t ∈ (T−, 1) ,
e, derivando l’equazione,
x(t) = − x(t)
x2(t)− 1
da cui si deducex(t) ≤ −1 ∀t ∈ (T−, 1) .
Pertanto x(t) e strettamente concava in (T−, 1) e, dalla formula di Taylor,∀t ∈ (T−, 1),
x(t) = x(1) + x(1)(t− 1) +1
2x(ξ)(t− 1)2
= 1 +1
2x(ξ)(t− 1)2 ≤ 1− 1
2(t− 1)2
e quindi si trova anche la stima T− > 1−√
2.Si puo ragionare anche per assurdo: se T− = −∞ allora la soluzione
verificherebbe 0 < x(t) < 1, ∀t ∈ (−∞, 1). Allora x(t) = (1/x(t)) − t ≥−t→ +∞ per t→ −∞. Si concluda il ragionamento trovando un assurdo.
Il vantaggio del metodo precedente e che ci fornisce anche una stima perT−.
t
x(t)
Figura 4.3: Il campo vettoriale di (4.5)

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 50
Esercizio Si descriva qualitativamente la soluzione dix = x2 − (arctan t)2
x(1) = 0 .
Si provi che e definita per tutti i tempi e si calcolino i limiti
limt→±∞
x(t) .
Analogamente si studi la soluzione con condizione iniziale x(0) = 0. Si proviche quest’ultima soluzione e una funzione dispari del tempo.
4.1 Teoremi del confronto
Uno strumento molto efficace nell’analisi qualitativa di un problema di Cau-chy e confrontare la soluzione di una equazione differenziale con un’altra checi sceglieremo, di caso in caso, da essere piu semplice da studiare.
Teorema 4.1.1 (Teorema del confronto) Siano
f1, f2 : R×R→ R
due funzioni continue soddisfacenti
f1(t, x) < f2(t, x) ∀(t, x) ∈ R×R . (4.6)
Consideriamo i due problemi di Cauchyx = f1(t, x)x(t0) = x0
x = f2(t, x)x(t0) = x0
e chiamiamo ϕ1(t), ϕ2(t) due rispettive soluzioni. Allora risultaϕ1(t) < ϕ2(t) , ∀t > t0ϕ1(t) > ϕ2(t) , ∀t < t0 .
(4.7)
Notiamo che, avendo supposto i campi vettoriali f1, f2 solamente continui,le soluzioni ϕ1, ϕ2 potrebbero non essere uniche.
Osservazione 4.1.1 Il teorema del confronto afferma una cosa ovvia: se 2signori si trovano in un istante t0 nello stesso posto x0 ed il primo signoreva sempre piu lento del secondo signore, egli rimarra sempre piu indietrorispetto al secondo signore per t > t0. Invece, per t < t0, lui stava sempredavanti al secondo signore.

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 51
Dimostrazione. Proviamo il teorema per t > t0. Supponiamo per assurdoche l’insieme
E :=t > t0 : ϕ1(t) ≥ ϕ2(t)
sia non vuoto. Consideriamone τ := inf E. Si ha che τ > t0 (perche ?),ϕ1(τ) = ϕ2(τ) =: x (perche ?), ϕ1(t) < ϕ2(t) per t < τ (perche ?).
Allora i rapporti incrementali verificano
ϕ2(t)− ϕ2(τ)
t− τ<ϕ1(t)− ϕ1(τ)
t− τ, t < τ
e, passando al limite,ϕ2(τ) ≤ ϕ1(τ) .
Ma questo e assurdo perche
ϕ2(τ) = f2(τ, x) > f1(τ, x) = ϕ1(τ) .
Vi sono tante varianti del teorema del confronto. Dimostriamo ad esempio
Teorema 4.1.2 (Teorema del confronto) Supponiamo che f1, f2 sianofunzioni Lipschitziane. Se in (4.6) si sostituisce il simbolo < con ≤, vale lostesso risultato del teorema del confronto 4.1.1, sostituendo in (4.7) il segno< (risp. >) con ≤ (risp. ≥).
Dimostrazione La funzione w(t) := ϕ1(t)− ϕ2(t) soddisfa
w(t) = ϕ1(t)− ϕ2(t) = f1(t, ϕ1(t))− f2(t, ϕ2(t))
= (f1(t, ϕ1(t))− f2(t, ϕ1(t))) + f2(t, ϕ1(t))− f2(t, ϕ2(t))
≤ |f2(t, ϕ1(t))− f2(t, ϕ2(t))|≤ L|ϕ1(t)− ϕ2(t)| = L|w(t)| (4.8)
ed w(t0) = ϕ1(t0)− ϕ2(t0) = 0.Ne deduciamo che w(t) ≤ 0, ∀t ≥ t0. Se non fosse cosi, esisterebbe t1 > t0
tale che w(t1) > 0. Consideriamo l’insieme
F :=t ∈ [t0, t1) : w(t) ≤ 0
ed τ := supF . Si ha, ragionando come al solito, τ < t1 (perche?), w(τ) = 0(perche?) e w(t) > 0 per t ∈ (τ, t1) (perche?). Ma, allora, da (4.8), ∀t ∈(τ, t1), si deduce
w(t) ≤ Lw(t)

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 52
e, quindi,
d
dt(e−Ltw(t)) = −Le−Ltw(t) + e−Ltw(t)
≤ −Le−Ltw(t) + e−LtLw(t) = 0
Essendo w(τ) = 0 si deduce la contraddizione w(t) ≤ 0 per t > τ .
Esercizio Un’altra possibile dimostrazione e la seguente. Si consideri lasuccessione di campi vettoriali
Fn(t, x) := f2(t, x) +1
n
e la successione yn(t) delle soluzioni diyn = Fn(t, yn(t))yn(t0) = x0 .
Essendo Fn(t, x) > f1(t, x) ed Fn(t, x) < Fn−1(t, x) una succesione di funzionistrettamente decrescente, per il teorema del confronto 4.1.1 si ha
ϕ1(t) < . . . < yn(t) < yn−1(t) < . . . < y1(t) . (4.9)
La successione di funzioni continue yn(t) converge puntualmente ad unafunzione y(t) ≥ ϕ1(t) per monotonia. Passando al limite in
yn(t) = x0 +∫ t
t0Fn(τ, yn(τ)) dτ
si deduce
y(t) = x0 +∫ t
t0f2(τ, y(τ)) dτ .
Per unicita (essendo f2 Lipschitziana) abbiamo che y coincide con la soluzioneϕ2 e, quindi,
ϕ2(t) = y(t) ≥ ϕ1(t) .
Esercizio importante Consideriamo i due problemi di Cauchyx =
√|x|
x(0) = 0
x = 2
√|x|
x(0) = 0
e chiamiamo ϕ1(t), ϕ2(t) due rispettive soluzioni. Naturalmente il campo
vettoriale√|x| ≤ 2
√|x|. Possiamo concludere che risulta
ϕ1(t) ≤ ϕ2(t) , ∀t > 0?

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 53
Risposta: no. Questo indica che non basta la sola ipotesi di continuita deicampi vettoriali f1 ed f2 per la validita del teorema del confronto 4.1.2.
Esercizio Sia x ∈ C1(R,R) tale che
x(t) ≥ 1
1 + (x(t))2.
Provare che x(R) = R.
Utilizzando il tipo di ragionamento esposto precedentemente provare peresercizio le seguenti formulazioni:
Teorema 4.1.3 (Teorema del confronto) Siano f1, f2 : R × R → Rdue funzioni Lipschitziane soddisfacenti f1(t, x) ≤ f2(t, x), ∀(t, x) ∈ R×R.Consideriamo i due problemi di Cauchy
x = f1(t, x)x(t0) = x1
x = f2(t, x)x(t0) = x2
con x1 < x2 e chiamiamo ϕ1(t), ϕ2(t) le due rispettive soluzioni. Allorarisulta
ϕ1(t) < ϕ2(t) , ∀t > t0 .
Domanda Basterebbe l’ipotesi di sola continuita di f1, f2 per avere la stessaconclusione?
Teorema 4.1.4 (Disequazione differenziale) Sia f(t, x) una funzioneLipschitziana e sia ϕ(t) una funzione C1 soddisfacente
ϕ(t) < f(t, ϕ(t))ϕ(t0) = x0
(4.10)
(si dice che ϕ e una sottosoluzione). Allora risulta
ϕ(t) < x(t) , ∀t > t0 (4.11)
dove x(t) e la soluzione del problema di Cauchyx(t) = f(t, x(t))x(t0) = x0
Cosa si puo concludere per t < t0?Se in (4.10) si sostituisce il < con ≤ provare che in (4.11) si deve
sostituire il < con il ≤.

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 54
Applichiamo questi argomenti nello studio qualitativo di un problema diCauchy.
Esercizio Si descriva qualitativamente la soluzione dix = x2 + t2
x(0) = 1 .
Dimostrare, in particolare, che T+ ∈ (π/4, 1). Dimostrare inoltre che T− >−∞.
Suggerimenti: x(t) e sempre monotona. Confrontando con la soluzione dix = x2
x(0) = 1 ,
che e x(t) = 1/(1 − t), si prova che T+ < 1. Poi confrontando, per 0 ≤ t <T+ < 1, con la soluzione di
x = x2 + 1x(0) = 1 ,
che e x(t) = tan(π/4 + t), si prova che T+ > π/4.Per t < 0, confrontando con la soluzione di
x = t2
x(0) = 1
che e x(t) = 1 + (t3/3) si prova che x(t) < 1 + (t3/3) per tutti t ∈ (T−, 1). Inparticolare esiste un t∗ in cui x(t∗) = −1. Allora si confronti con la soluzionedi
x = x2
x(t∗) = −1
per provare che T− > −∞.
Esercizio Sia f(t, x) una funzione di classe C1(R2,R) tale che f(t, 0) = 0,∀t, ed
(∂xf)(t, x) ≤ −h , ∀(t, x) ∈ R2
per un qualche h > 0. Dimostrare che tutte le soluzioni di x = f(t, x)decadono a zero per t→ +∞ almeno esponenzialmente.
Soluzione: Per x > 0, dal teorema del valor medio, esiste ξ ∈ (0, x) tale che
f(t, x) = f(t, 0) + (∂xf)(t, ξ)x = (∂xf)(t, ξ)x ≤ −hx

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 55
mentre, per x < 0,
f(t, x) = f(t, 0) + (∂xf)(t, ξ)x ≥ −hx .
La funzione x(t) = 0 e soluzione dell’equazione differenziale x = f(t, x)e, quindi, ogni soluzione x(t) non nulla di x = f(t, x) e o sempre positivao sempre negativa (esistenza ed unicita locale di tutte le soluzioni essendof ∈ C1).
Consideriamo ad esempio ogni soluzione dix = f(t, x)x(t0) = x0
con x0 > 0. Essa sara sempre positiva e, confrontandola con la soluzionedell’equazione
x = −hxx(t0) = x0
otteniamo dal teorema del confronto che
0 < x(t) < x0e−h(t−t0) ∀t > t0 .
Si faccia per esercizio il ragionamento se x0 < 0.
Esercizio Se, in aggiunta alle ipotesi precedenti, si assume che
(∂xf)(t, x) ≥ −k , ∀(t, x) ∈ R2
per un qualche k > 0, allora tutte le soluzioni di x = f(t, x) non decadono azero piu rapidamente di un esponenziale per t→ +∞.
Conviene fare pratica di questi ragionamenti su vari esercizi.
Esercizio Disegnare la soluzione dix = log(x)− tx(1) = e .
Si provi in particolare che e definita in (−∞, T+) con T+ < +∞ e si stimiT+ (per questo puo essere utile osservare che x(t) ≤ −1 per t ∈ (1, T+)). Sicalcoli limt→−∞ x(t).
Esercizio Disegnare la soluzione di x =1
(1 + t2)2− x2
x(0) = a

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 56
al variare della condizione iniziale a.
Esercizio Sia f ∈ C1(R,R) una funzione dispari (i.e. f(−x) = −f(x), ∀x),con f ′(x) > 0, e con limx→+∞ f(x) = l < +∞.
Si consideri il problema di Cauchyx = f(t x)x(0) = a
al variare della condizione iniziale a.Suggerimenti. Provare che: (i) ogni soluzione e definita per tutti i tempi;
(ii) la x(t) = 0 e una soluzione di equilibrio; (iii) una qualsiasi altra soluzionex(t) non cambia mai segno; (iv) se x(t) e soluzione con x(0) = a alloray(t) := −x(t) e soluzione con y(0) = −a e quindi basta studiare le soluzionicon a > 0; (v) x(t) > 0 per t > 0; (vi) x(t) e pari; (vii) x(t) ≥ a, ∀t ∈ R;(viii) limt→+∞ x(t) = +∞.
4.2 Soluzioni esplicite
4.2.1 Equazioni a variabili separabili
Una classe di equazioni che ammettono una soluzione esplicita sono le equa-zioni a variabili separabili quali
x = f(t)g(x)x(t0) = x0
che abbiamo gia studiato se f(t) ≡ 1 al capitolo 2.
Anche qui conviene distinguere i punti dove g(x) = 0. Se infatti g(x0) =0, allora la funzione costante x(t) = x0, ∀t, e una soluzione. Se, invece,g(x0) 6= 0, allora almeno localmente posso dividere per g(x) e quindi
∫ t
t0
x(τ)
g(x(τ))dτ =
∫ t
t0f(τ) dτ
da cui, cambiando variabile y = x(t) (perche e un buon cambio di variabili?)
∫ x(t)
x0
dy
g(y)=∫ t
t0f(τ) dτ . (4.12)
Calcolando gli integrali ed invertendo la funzione z →∫ zx0
dyg(y)
si ottiene la
espressione di x(t).

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 57
Per interpretare correttamente il risultato conviene sempre integrare laespressione analitica con le argomentazioni qualitative della sezione prece-dente. Se, ad esempio, x1 < x0 < x2 dove g(x1) = g(x2) = 0, e g(x) e unafunzione Lipschtiz, allora la soluzione x(t) sara confinata per tutti i tempitra x1 < x(t) < x2 (perche?). Quindi x(t) esiste per tutti i tempi (perche?).Poi se g(x) 6= 0, ∀x ∈ (x1, x2), allora la soluzione x(t) tendera a x1 o a x2
per t→ ±∞ (a seconda del segno di g(x) in (x1, x2)).
In sintesi, per capire bene la formula (4.12) bisogna sempre fare l’analisiqualitativa della soluzione.
Esercizio Disegnare la soluzione dix = t2 cosxx(0) = 0 .
(4.13)
Si provi in particolare che x(t) e definita per tutti i tempi e si calcolino ilimt→±∞ x(t). Si dimostri che x(t) e dispari.
Infine scrivere esplicitamente la soluzione analitica mediante la tecnica diseparazione delle variabili.
Soluzione Il campo f(t, x) := t2 cosx e di classe C∞(R2,R). Si ha pertantoesistenza ed unicita locale di tutti i problemi di Cauchy. Inoltre x(t) = −π/2 e x(t) = π/2 sono 2 soluzioni dell’equazione differenziale, e, quindi, lasoluzione x(t) del problema (4.13) soddisfa la stima a priori −π/2 < x(t) <π/2, ∀t ∈ (T−, T+). Pertanto x(t) e prolungabile per tutti i tempi (si puoanche osservare che |f(t, x)| ≤ t2 ed applicare il teorema di esistenza globaledelle soluzioni su R).
La funzione f(t, x) > 0 per x ∈ (−π/2, π/2) e t 6= 0. Pertanto x(t) emonotona crescente e, dal teorema dell’asintoto (con ragionamenti oramainoti), si ricava limt→±∞ x(t) = ±π/2.
Dimostriamo che x(t) e una funzione dispari. Infatti la funzione y(t) :=−x(−t) soddisfa la stessa equazione diffenziale
y(t) = x(−t) = (−t)2 cosx(−t) = t2 cos y(t)
con la medesima condizione iniziale y(0) = −x(0) = 0. Quindi y(t) sod-disfa lo stesso problema di Cauchy (4.13) e, per l’unicita, y(t) ≡ x(t), cioe−x(−t) = x(t), ∀t, i.e. x(t) e dispari.
Infine, essendo (4.13) a variabili separabili troviamo che x(t) soddisfa
∫ x(t)
0
dy
cos(y)=∫ t
0τ 2 dτ =
t3
3.

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 58
Si puo calcolare esplicitamente∫ x
0dy
cos(y)e trovare x(t) in forma implicita.
Farlo per esercizio. Questo esempio mostra come la formula analitica dellasoluzione possa essere di scarsa utilita.Domanda: Definendo la funzione
Ψ(z) :=∫ z
0
dy
cos(y)
quanto valgono i limz→±π/2 Ψ(z)? Che rilevanza dinamica hanno questilimiti?
Esercizio Disegnare le soluzioni di x = − x t
1 + t2x(0) = a .
Si dimostri che sono funzioni pari. Si trovi la espressione esplicita dellasoluzione.
Esercizio Dire se le soluzioni di
x = − t2
1 + x2
sono definite per tutti i tempi. Si trovi il comportamento asintotico dellasoluzione per t→ +∞. Si trovi la espressione esplicita della soluzione.
4.2.2 Equazioni esatte
Un’altra classe di equazioni che si possono integrare esplicitamente e quelladelle equazioni esatte, cioe della forma
x = −M(t, x)
N(t, x)(4.14)
dove il campo vettoriale piano (M(t, x), N(t, x)) e conservativo, ossia esisteuna funzione potenziale W : R2 → R tale che
M(t, x) = ∂tW (t, x) , N(t, x) = ∂xW (t, x) .
(equivalentemente si dice che la 1-forma differenziale
ω := M(t, x)dt+N(t, x)dx

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 59
e esatta). In questo caso le curve integrali stanno nelle linee di livello di Wessendo W (t, x(t)) = costante lungo la soluzione. Infatti
d
dtW (t, x(t)) = ∂tW + ∂xW x = M(t, x)−N(t, x)
M(t, x)
N(t, x)= 0 .
Per verificare che (M(t, x), N(t, x)) sia conservativo, e sufficiente, in unaregione semplicemente connessa del dominio di f(t, x) := −M(t, x)/N(t, x),che le derivate parziali miste siano uguali
∂xM = ∂tN (4.15)
(lemma di Poincare). La (9.3.1) dice che il rotore di (M(t, x), N(t, x)) e nulloo, equivalentemente, che ω e chiusa.
Esempio Studiare il problema di Cauchy x =e2t − tx2
t2xx(1) = 1 .
La soluzione sta in t > 0, x > 0. La equazione
x =e2t − tx2
t2x
e esatta, essendo ∂xM = 2tx = ∂tN . Un potenziale e
W (t, x) =1
2(t2x2 − e2t) .
La soluzione sta nell’insieme di livello
W (t, x) = W (1, 1) =1
2(1− e2)
e quindi la soluzione e
x =
√1− e2 + e2t
tper t >
1
2ln(e2 − 1) =: T− .
Equazioni scritte nella forma (4.14) emergono naturalmente nello studiodi sistemi di equazioni differenziali autonomi nel piano
x = A(x, y)y = B(x, y)
(4.16)

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 60
che vedremo meglio al capitolo 7. La soluzione di (4.16) e una curva t →(x(t), y(t)) ∈ R2. La equazione per le traiettorie di questo campo e, almenolocalmente dove sono queste orbite sono esplicitabili come un grafico y(x)(cioe dove A(x, y) 6= 0),
dy(x)
dx=B(x, y)
A(x, y)
che e della forma (4.14). Si scrive anche cosı
A(x, y)dy −B(x, y)dx = 0
che e una scrittura preferibile in quanto non si richiede che le traiettorie sianoesplicitabili come grafici in x (o in y).
Esempio Trovare le traiettorie del sistema differenzialex = bx+ cyy = −ax− by . (4.17)
dove a, b, c sono costanti. La equazione per le traiettorie si scrive
(ax+ by)dx+ (bx+ cy)dy = 0
il cui potenziale e
W (x, y) =1
2(ax2 + 2bxy + cy2) + costante .
Le traiettorie sono dunque un fascio di coniche omotetiche. Impareremo astudiare in modo piu naturale un sistema lineare come (4.17) nella sezione5.5.
Esercizio Provare che W (x, y) e un integrale primo del sistema (4.17).
Esercizio Provare che tutte le soluzioni del sistema (4.17) esistono per tuttii tempi.
Talvolta per ottenere una equazione esatta basta moltiplicare numeratoree denominatore per una funzione µ(t, x) detto “fattore integrante.
Esempio Disegnare la soluzione dix = 1 + 3x tan tx(0) = 0 .
(4.18)
Si provi in particolare che e definita in (−π/2, π/2) e si calcolino limt→±π/2 x(t).Si provi che x(t) e dispari.
Si scriva la soluzione analitica della soluzione.

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 61
Soluzione La funzione f(t, x) := 1 + 3x tan t e di classe C∞ per (t, x) ∈(−π/2, π/2)×R e soddisfa le ipotesi del teorema di esistenza globale. Quindiesiste una unica soluzione x(t) di (4.18) definita per t ∈ (−π/2, π/2).
Si ha x(0) = 1 e, quindi, almeno localmente vicino a t = 0, se t > 0la soluzione e positiva, mentre, se t < 0, la soluzione e negativa. Inoltrela funzione f(t, x) > 0 e positiva nella regione (0, π/2) × R e nella regione(−π/2, 0)×R.
Si deduce che x(t) e monotona su (−π/2, π/2) e
limt→−π/2
x(t) = −∞ , limt→+π/2
x(t) = +∞ .
Verifichiamo, ad esempio, il secondo limite. Poiche x(t) ≥ 1, si deduce chex(t) ≥ t per t > 0. Poi
x(t) = x(1) +∫ t
1x(τ) dτ ≥ 1 +
∫ t
1(1 + tan τ) dτ → +∞
per t→ +∞.Per calcolare esplicitamente la soluzione scriviamo
x(t) = 1 + 3x tan t = −−(cos t+ 3x sin t)
cos t.
Questa equazione non e esatta. Ma, moltiplicando per cos2 t (fattore inte-grante) numeratore e denominatore, otteniamo
x(t) = −−(cos t+ 3x sin t) cos2 t
cos3 t= −M(t, x)
N(t, x)
che e esatta, essendo
∂xM = −3 sin t cos2 t = ∂tN .
Un potenziale e
W (t, x) = x cos3 t− sin t+sin3 t
3e, tutte le soluzioni dell’equazione differenziale sono descritte da W (t, x) = cal variare di c ∈ R.
Il valore della constante c e determinato dalla condizione iniziale x(0) = 0,ossia
W (t, x) = W (0, 0) = 0 .
In conclusione la soluzione di (4.18) risulta
x(t) =−(1/3) sin3 t+ sin t
cos3 t.
Verificare, per esercizio, le informazioni qualitative sulla soluzione che ave-vamo trovato precedentemente.

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 62
4.2.3 Equazioni omogenee
Un’altra classe di equazioni che puo essere integrata esplicitamente e formatadalle equazioni omogenee. Consideriamo ad esempio
x = f(t, x) (4.19)
dove il campo vettoriale f(t, x) e una funzione omogenea di grado 0
f(t, x) = f(λt, λx) , ∀λ > 0 .
In questo caso riusciamo a risolvere l’ equazione (4.19) sfruttandone la sim-metria: notiamo che se x(t) e una soluzione, allora, la soluzione “omoteticaλx(t/λ) e una soluzione per ogni λ 6= 0. Sotto il cambio di variabili
y :=x
t
la equazione diventa
y =tx− xt2
=tf(t, x)− x
t2=tf(1, x/t)− x
t2=tf(1, y)− x
t2
=f(1, y)− y
t
che e a variabili separabili.
Esercizio Si disegni la soluzione del problema di Cauchy x =t2 + x2
txx(1) = 1 .
Si trovi la espressione esplicita della soluzione.
Procedendo come sopra dobbiamo risolvere y =1
tyy(1) = 1
da cuiy2 = 2 ln t+ 1
e, quindi,x(t) = t
√2 ln t+ 1 .

CAPITOLO 4. STUDIO QUALITATIVO DELLE SOLUZIONI 63
4.3 Esercizi di ricapitolazione
In conclusione di questo capitolo si possono fare i seguenti esercizi:
Esercizio Si dimostri che una soluzione dell’equazione
x = −x(x2 + t)
non puo assumere valori di segno opposto.
Esercizio Disegnare la soluzione x(t) dix = t2 + x2 − 1x(0) = 0 .
Si dimostri, in particolare, che x(t) non e definita per tutti i tempi e che euna funzione dispari.
Esercizio Studiare le soluzioni dell’equazione differenzialex = sin(x− t)x(0) = a
e tracciarne un grafico approssimativo.
Esercizio Dimostrare che esiste una unica soluzione su R dix = e−x
2
+ arctan |t|x(0) = 0 .
Mostrare che x(t) e dispari. Mostrare che esistono limt→±∞ x(t) e calcolarli.
Esercizio Disegnare la soluzione di x = − x2
1− txx(0) = 1 .
Esercizio Si disegni la soluzione del problema di Cauchy x =x
t+x2
t2x(1) = 1 .
Si trovi la espressione esplicita della soluzione.
Esercizio Studiare qualitativamente le soluzioni dell’equazione
x = arctan(λx
t
)per λ = 4/π. In particolare si dimostri che le soluzioni esistono per ognit > 0 e che sono limitate. Ci si ponga lo stesso problema per λ = 1.

Capitolo 5
Equazioni lineari
Una classe di equazioni differenziali per cui c’e una teoria sufficientementesviluppata e costituita dalle equazioni differenziali lineari
x = A(t)x+ b(t) , x ∈ Rn
dove A(t) e una matrice n× n.
5.1 Equazioni omogenee
Una equazione differenziale della forma
x = A(t)x (5.1)
si dice lineare omogenea.Assumiamo che
A(·) := (α, β)→ Mat(n× n)
sia una funzione continua. Allora, per il teorema di esistenza globale 3.2.1,tutte le soluzioni di (5.1) sono definite per tutto (α, β). In particolare, se A(t)e definita e continua su tutto R tutte le soluzioni di (5.1) sono prolungabiliindefinitamente.
Il teorema fondamentale della teoria delle equazioni lineari e il seguente.
Teorema 5.1.1 L’insieme delle funzioni
X :=ϕ : (α, β)→ Rn , soluzioni di (5.1)
e uno spazio vettoriale di dimensione n.
Fissato un istante arbitrario t ∈ (α, β), la mappa Bt : X → Rn definitada
Bt(ϕ) := ϕ(t) , ∀ϕ ∈ Xe un isomorfismo tra X ed Rn.
64

CAPITOLO 5. EQUAZIONI LINEARI 65
Dimostrazione. Se ϕ1, ϕ2 ∈ X, cioe
ϕ1 = A(t)ϕ1 , ϕ2 = A(t)ϕ2 ,
si deduce che
d
dt(ϕ1 + ϕ2) = ϕ1 + ϕ2 = A(t)ϕ1 + A(t)ϕ2 = A(t)(ϕ1 + ϕ2) ,
cioe ϕ1 + ϕ2 ∈ X.Analogamente si verifica che se ϕ ∈ X allora λϕ ∈ X, ∀λ ∈ R. Questo e
il “principio di sovrapposizione degli effetti per le equazioni lineari.
Proviamo adesso che, fissato un istante t ∈ (α, β) arbitrario, la mappaBt : X → Rn e un isomorfismo. Questo implica, in particolare, che X hadimensione n.
La mappa Bt e ovviamente lineare, poiche per ϕ1, ϕ2 ∈ X, λ1, λ2 ∈ R,si ha
Bt(λ1ϕ1 + λ2ϕ2) = (λ1ϕ1 + λ2ϕ2)(t)
= λ1ϕ1(t) + λ2ϕ2(t)
= λ1Bt(ϕ1) + λ2Bt(ϕ2) .
(i) Bt e suriettiva. Infatti, dal teorema di Cauchy, per ogni y ∈ Rn esisteuna soluzione ϕ di (5.1) soddisfacente il dato iniziale ϕ(t) = y.
(i) Bt e iniettiva. Infatti, dal teorema di Cauchy, se ϕ1, ϕ2 sono soluzioni di(5.1) con Bt(ϕ1) = Bt(ϕ2), cioe con ϕ1(t) = ϕ2(t), allora ϕ1 e ϕ2 coincidonoper tutti i tempi (unicita della soluzione del problema di Cauchy).
Corollario 5.1.1 Ogni soluzione ϕ di (5.1) e combinazione lineare di nsoluzioni linearmente indipendenti, ϕ1, . . . , ϕn di (5.1), cioe
ϕ = λ1ϕ1 + . . .+ λnϕn
per opportuni λ1, . . . , λn ∈ R.
Dimostrazione. n soluzioni linearmente indipendenti, ϕ1, . . . , ϕn di (5.1)formano una base nello spazio vettoriale n-dimensionale X.
Corollario 5.1.2 n soluzioni ϕ1, . . . , ϕn di (5.1) sono linearmente indipen-denti in X se e solo se, ad ogni istante t ∈ (α, β), i vettori
ϕ1(t), . . . , ϕn(t) ∈ Rn
sono linearmente indipendenti in Rn.

CAPITOLO 5. EQUAZIONI LINEARI 66
Dimostrazione. Per ogni t, la mappa Bt e un isomorfismo tra X ed Rn.
Esempio La generica soluzione della equazione lineare omogena scalare
x = a(t)x , x ∈ R
e data (applicando il metodo della separazione delle variabili) da
x(t) = λe∫ t0a(τ)dτ , λ ∈ R .
La soluzione ϕ(t) := e∫ t0a(τ)dτ e una base di X.
Definizione 5.1.1 Date n soluzioni ϕ1, . . . , ϕn di (5.1) il determinante
W (t) := detM(t) ∈ R
della matriceM(t) := (ϕ1(t), . . . , ϕn(t)) ∈ Mat(n× n) (5.2)
si chiama “determinante Wronskiano.
Dal Corollario 5.1.2 segue che, se le soluzioni ϕ1, . . . , ϕn di (5.1) sonolinearmente indipendenti, allora il Wronskiano W (t) e diverso da zero pertutti i tempi t. In questo caso, la matrice M(t) definita in (5.2) si chiama“matrice fondamentale. Se, invece, le soluzioni ϕ1, . . . , ϕn sono linearmentedipendenti, allora W (t) ≡ 0, ∀t.
La matrice
M(t) := (ϕ1(t), . . . , ϕn(t)) ∈ Mat(n× n)
soddisfa l’equazione differenziale
d
dtM(t) = A(t)M(t) .
Infatti,
M(t) = (ϕ1(t), . . . , ϕn(t)) = (A(t)ϕ1(t), . . . , A(t)ϕn(t))
= A(t)(ϕ1(t), . . . , ϕn(t)) = A(t)M(t) .
Definizione 5.1.2 La matrice M(t) soluzione del problema di CauchyM(t) = A(t)M(t)M(0) = Id
(5.3)
si chiama la matrice risolvente di (5.1).

CAPITOLO 5. EQUAZIONI LINEARI 67
Notiamo cheM(t) = (ϕ1(t), . . . , ϕn(t))
dove ϕi sono le soluzioni dei problemi di Cauchyϕi(t) = A(t)ϕiϕi(0) = ei
ed ei ∈ Rn e l’i-esimo elemento della base standard di Rn.
Il motivo per cui la matrice M(t) soluzione dell’equazione matriciale (5.3)si chiama matrice risolvente e fornito dal seguente corollario
Corollario 5.1.3 La soluzione del problema di Cauchyx(t) = A(t)xx(0) = x0
si scrive x(t) = M(t)x0, dove M(t) e la soluzione di (5.3).Le trasformazioni lineari
M(t) : Rn → Rn
sono, ∀t, isomorfismi.
La famiglia di trasformazioni M(t), t ∈ R, sono dette il “flusso dell’equazione lineare (5.1) poiche trasformano il dato iniziale x0 nell’evolutox(t) = M(t)x0 al tempo t.
5.2 Equazioni non-omogenee
Una equazione differenziale della forma
x = A(t)x+ b(t) (5.4)
si dice lineare non-omogenea.Assumendo che
A(·) := (α, β)→ Mat(n× n) , b(·) : (α, β)→ Rn
siano funzioni continue, per il teorema di esistenza globale 3.2.1, tutte lesoluzioni di (5.4) sono definite su tutto (α, β).
Il teorema fondamentale e il seguente.

CAPITOLO 5. EQUAZIONI LINEARI 68
Teorema 5.2.1 L’insieme delle funzioni
Y :=ϕ : (α, β)→ Rn , soluzioni di (5.4)
e uno spazio affine, cioe
Y = xp +X
dove xp e una soluzione particolare di (5.4) ed X e lo spazio vettoriale dellesoluzioni della equazione omogenea associata (5.1).
Dimostrazione. Ogni funzione della forma xp + ϕ con ϕ ∈ X soluzionedi ϕ = A(t)ϕ, e una soluzione di (5.4), poiche
d
dt(xp + ϕ) = xp + ϕ = A(t)xp + b(t) + A(t)ϕ = A(t)(xp + ϕ) + b(t) .
Viceversa, se x e una soluzione di (5.4), la funzione differenza x− xp appar-tiene ad X, poiche soddisfa la equazione omogenea associata (5.1):
d
dt(x− xp) = x− xp = (A(t)x+ b)− (A(t)xp + b) = A(t)(x− xp) .
Esempio Si trovi la soluzione del problema di Cauchy della equazione diffe-renziale non omogenea x =
x
t+ t2
x(1) = 2 .(5.5)
La soluzione generale della equazione omogenea associata e data da
x(t) = λt , t 6= 0, λ ∈ R .
Cerchiamo una soluzione particolare di (5.5) della forma xp(t) = αt3 perqualche α ∈ R da trovare. Abbiamo che
xp(t) = 3αt2 =xpt
+ t2 = αt2 + t2
se e solo se α = 1/2. Pertanto la soluzione generale della equazione non-omogenea e data da
x(t) =1
2t3 + λt, t 6= 0, λ ∈ R .

CAPITOLO 5. EQUAZIONI LINEARI 69
La condizione iniziale x(1) = 2 problema di Cauchy e soddisfatta se 2 = (1/2)+λ, cioe per λ = 3/2. In conclusione, la soluzione del problema di Cauchy(5.5) e data da
x(t) =1
2t3 +
3
2t , t > 0
(domanda: perche solo per t > 0?)
Un procedimento generale per trovare una soluzione particolare e datodal metodo di “variazione delle costanti arbitrarie. Lo illustriamo dapprimaper le equazioni scalari
x = a(t)x+ b(t) , x ∈ R . (5.6)
Cerchiamo una soluzione particolare di (5.6) nella forma
xp(t) = c(t)e∫ t0a(s) ds .
Ricordiamo che e∫ t0a(s) ds e una soluzione fondamentale della omogenea asso-
ciata x = a(t)x. Abbiamo che
xp(t) = c(t) e∫ t0a(s) ds + c(t)e
∫ t0a(s) dsa(t) = c(t) e
∫ t0a(s) ds + a(t)xp(t)
e pertanto xp e una soluzione di (5.6) se
c(t) e∫ t0a(s) ds = b(t)
ossiac(t) = b(t) e−
∫ t0a(s) ds.
Integrando troviamo
c(t) =∫ t
0b(τ) e−
∫ τ0a(s) ds dτ
e, pertanto, una soluzione particolare e data da
xp(t) = e∫ t0a(s) ds
∫ t
0b(τ) e−
∫ τ0a(s) ds dτ.
La soluzione generale di (5.6) e data da
x(t) = e∫ t0a(s) ds
(λ+
∫ t
0b(τ) e−
∫ τ0a(s) ds dτ
), λ ∈ R.

CAPITOLO 5. EQUAZIONI LINEARI 70
Esercizio Si provi che qualunque soluzione di
x+ ax = f(t) , a > 0 (5.7)
dove f ∈ C(R,R) soddisfa
limt→+∞
f(t) = L
soddisfa
limt→+∞
x(t) =L
a.
Soluzione. Scrivendo ogni soluzione di (5.7) mediante il metodo di “variazionedelle costanti arbitrarie si trova
x(t) =(x0 +
∫ t
0f(s)eas ds
)e−at
Dal teorema dell’Hopital
limt→+∞
x(t) = limt→+∞
x0 +∫ t0 f(s)eas
eat= lim
t→+∞
f(t)eat
aeat=L
a.
Esercizio Disegnare la soluzione di x =1
t− x
x(0) = 0 .
Si provi in particolare che e definita in (0,+∞) e si calcolino limt→0 x(t),limt→+∞ x(t) . Si scriva la soluzione analitica.
Metodo di “variazione delle costanti arbitrarie in Rn. Cerchia-mo una soluzione di (5.4) della forma
xp(t) = M(t)c(t)
dove M(t) e una matrice fondamentale per l’equazione omogenea associata.Abbiamo che
xp(t) = M(t)c(t) +M(t)c(t) = A(t)M(t)c(t) +M(t)c(t)
= A(t)xp(t) +M(t)c(t)
e pertanto xp e una soluzione di (5.4) se
M(t)c(t) = b(t) (5.8)

CAPITOLO 5. EQUAZIONI LINEARI 71
ossia, ricordando che M(t) e invertibile per tutti i t,
c(t) = M−1(t)b(t) .
Integrando troviamo
c(t) =∫ t
0M−1(τ)b(τ) dτ
e, pertanto, una soluzione particolare e data da
xp(t) = M(t)∫ t
0M−1(τ)b(τ) dτ .
La soluzione generale di (5.6) e data da
x(t) = M(t)(x0 +
∫ t
0M−1(τ)b(τ) dτ
), x0 ∈ Rn .
Esercizio Si consideri il problemax = |x− t|x(0) = a .
Discutere al variare di a, esistenza ed unicita locale e globale della soluzione.Scrivere esplicitamente la soluzione. Dire per quali valori di a si ha che
limt→+∞
x(t)
t= 1 .
Esercizio Risolvere il problemax = maxt, xx(0) = x0 < 0
Suggerimento Il campo vettoriale maxt, x = t se t ≥ x ed maxt, x = xse x ≥ t. Essendo x0 < 0 la soluzione e descritta da x = t, ossia x(t) = x0+t2/2, fino a che x(t) ≤ t. Poi sara descritta da x = x.
Esercizio Sia g ∈ C1(R) una funzione tale che g(t) > et, ∀ t > 0. Provareche la soluzione x(t) del problema di Cauchy
x+ g(t)x = et
x(0) = 1
soddisfa x(t) < 1 per ogni t > 0.

CAPITOLO 5. EQUAZIONI LINEARI 72
5.3 Equazioni lineari di ordine n
Ad una equazione differenziale lineare omogenea di ordine n della forma
Dnx+ a1(t)Dn−1x+ . . .+ an−1(t)Dx+ an(t)x = 0 (5.9)
dove l’operatore di derivazione e indicato con
D :=d
dt
si applicano tutti i risultati della sezione precedente, una volta scritta la (5.9)in forma di sistema: ponendo
(y1, y2, . . . , yn) := (x,Dx, . . . , Dn−1x)
si ottiene il sistema del primo ordiney1 = y2
. . .yn = −a1(t)yn − . . .− an(t)y1
con una matrice A associata.
In particolare l’insieme delle soluzioni di (5.9) e uno spazio vettoriale didimensione n e, per trovare la soluzione generale di (5.9) basta trovarne nsoluzioni linearmente indipendenti.
Una classe di equazioni in cui e possibile trovare esplicitamente le soluzionie quando i coefficienti sono costanti.
5.4 Equazioni a coefficienti costanti
Iniziamo dalle equazioni di ordine n a coefficienti costanti.
Dnx+ a1Dn−1x+ . . .+ an−1Dx+ anx = 0 (5.10)
che scriviamo comeP (D)x = 0
definendo l’operatore differenziale
P (D) := Dn + a1Dn−1 + . . .+ an−1D + an I .
Cerchiamo soluzioni di (5.10) della forma particolare
x(t) = eλt .

CAPITOLO 5. EQUAZIONI LINEARI 73
La funzione eλt e soluzione di (5.10) se e solo se
P (D)eλt = (λn + a1λn−1 + . . .+ an−1λ+ an)eλt = 0
cioe se λ e la radice del polinomio caratteristico associato
P (λ) := λn + a1λn−1 + . . .+ an−1λ+ an .
Sianoλ1 , . . . , λn ∈ C
le n radici complesse del polinomio caratteristico p(λ).
Caso 1: le radici λi sono reali e distinte In questo caso abbiamo nsoluzioni reali linearmente indipendenti di (5.10)
eλ1t , . . . , eλnt
e, quindi, la soluzione generale di (5.10) e data da
x(t) = c1eλ1t + . . .+ cne
λnt , ci ∈ R .
Esempio Trovare la soluzione dix− 3x+ 2x = 0x(0) = 0 , x(0) = 1 .
(5.11)
Il polinomio caratteristico p(λ) = λ2−3λ+2 ha le radici reali λ1 = 1, λ2 = 2,quindi la soluzione generale e
x(t) = c1et + c2e
2t , ci ∈ R .
Imponendo le condizioni iniziali
0 = x(0) = c1 + c2
ed x(t) = c1et + c22e2t da cui
1 = x(0) = c1 + c22
si trova c1 = −1 e c2 = 1. In conclusione la soluzione di (5.11) e
x(t) = −et + e2t .
Caso 2: una radice λ = α + iβ e complessa In questo caso, essendoil polinomio caratteristico reale (ai ∈ R, ∀i = 1, . . . , n) pure la complessa

CAPITOLO 5. EQUAZIONI LINEARI 74
coniugata λ∗ = α− iβ e radice del polinomio caratteristico. Abbiamo cosi 2soluzioni di (5.10) (complesse) indipendenti date da
eλt = eαteiβt = eαt(cos βt+ i sin βt) , eλ∗t = eαte−iβt = eαt(cos βt− i sin βt) .
Sommandole e sottraendole troviamo 2 soluzioni reali indipendenti
eλt + eλ∗t
2= eαt cos βt ,
eλt − eλ∗t
2i= eαt sin βt .
Esempio 1: l’oscillatore armonico Trovare le soluzioni di
x+ ω2x = 0 , ω ∈ R . (5.12)
Il polinomio caratteristico p(λ) = λ2 + ω2 ha le radici complesse ±iω, e,quindi, ha le soluzioni indipendenti cosωt, sinωt. La soluzione generale di(5.12) e
x(t) = c1 cosωt+ c2 sinωt , ci ∈ R .
t
Figura 5.1: L’oscillatore armonico
Esempio 2: l’oscillatore armonico con attrito Trovare le soluzionidi
x+ µx+ ω2x = 0 , µ > 0 , ω ∈ R . (5.13)
Il polinomio caratteristico p(λ) = λ2 + µλ+ ω2 ha le radici
λ1,2 :=−µ±
√µ2 − 4ω2
2.

CAPITOLO 5. EQUAZIONI LINEARI 75
Bisogna distinguere casi diversi.
Caso (i): 0 < µ < 2ω (debole attrito).
Si hanno 2 soluzioni complesse
λ1,2 :=−µ± i
√4ω2 − µ2
2
e quindi tutte le soluzioni di (5.13) sono
x(t) = c1e−µt/2 cos(
t
2
√4ω2 − µ2) + c2e
−µt/2 sin(t
2
√4ω2 − µ2)
con c1, c2 ∈ R. Tutte le soluzioni x(t) tendono a zero in modo esponenzial-mente veloce, oscillando (oscillazioni smorzate).
t
Figura 5.2: L’oscillatore armonico con debole attrito
Caso (ii): µ > 2ω (forte attrito).
Si hanno 2 soluzioni reali distinte
λ1,2 :=−µ±
√µ2 − 4ω2
2
e, quindi, tutte le soluzioni di (5.13) sono
x(t) = c1e−(µ+√µ2−4ω2)t/2 + c2e
−(µ−√µ2−4ω2)t/2
con c1, c2 ∈ R. Tutte le soluzioni x(t) tendono a zero in modo esponenzial-mente veloce, senza oscillazioni.

CAPITOLO 5. EQUAZIONI LINEARI 76
t
Figura 5.3: L’oscillatore armonico con forte attrito
Caso (iii): rimane il casoµ = 2ω
in cui le 2 soluzioni λ1 = λ2 = −µ/2 = −ω coincidono. In questo casotroviamo solo la soluzione reale
e−ωt .
Come trovare un’altra soluzione di (5.13) linearmente indipendente? Verifi-chiamo che
x(t) = te−ωt
e un’altra soluzione di (D2 + 2ωD + ω2)x = 0 che possiamo scrivere come
(D + ω)2 x := (D + ω) (D + ω)x = 0 .
Si ha
(D + ω)2(te−ωt) = (D + ω)(e−ωt − tωe−ωt + ωte−ωt
)= (D + ω)(e−ωt) = −ωe−ωt + ωe−ωt = 0 .
Osservazione 5.4.1 Lagrange ed Eulero per trovare quest’altra soluzioneragionavano cosi: se λ1 6= λ2 lo spazio delle soluzioni e lo spazio vetto-riale bidimensionale X := 〈eλ1t , eλ2t〉. Un’altra base di X e data da eλ1t,eλ2t − eλ1t. Quando λ2 → λ1 questo secondo elemento della base tende aeλ2t−eλ1t ≈ (λ2−λ1)teλ1t. Questo suggerisce che, per λ1 = λ2, due soluzioniindipendenti siano eλ1t, teλ1.

CAPITOLO 5. EQUAZIONI LINEARI 77
Dimostriamo in generale che
Teorema 5.4.1 Siano λ1 = λ2 = . . . = λm radici coincidenti del polinomiocaratteristico p(λ) associato alla equazione differenziale lineare (5.10). Allora
eλ1t , teλ1t , . . . , tm−1eλ1t
sono m soluzioni linearmente indipendenti di (5.10).
Dimostrazione. Il polinomio caratteristico si decompone come
p(λ) = q(λ)(λ− λ1)m
dove q(λ) e un polinomio di grado n−m. Scriviamo la equazione P (D)x = 0come
q(D) (D − λ1I)mx = 0 .
Basta provare che
(D − λ1I)m[tkeλ1t
]= 0 , k = 0, 1, . . . ,m− 1 .
Si ha
(D − λ1I)m[tkeλ1t
]= (D − λ1I)m−1
[(D − λ1I)tkeλ1t
]= (D − λ1I)m−1
[ktk−1eλ1t + tkλ1e
λ1t − λ1tkeλ1t
]= k(D − λ1I)m−1(tk−1eλ1t)
e, quindi, per ricorrenza
(D − λ1Id)m[tkeλ1t
]= k(k − 1) . . . (k −m+ 1)tk−meλ1t .
Per k = 1, . . . ,m−1 il fattore k(k−1) . . . (k−m+ 1) = 0 e, quindi, ciascunatkeλ1t, k = 1, . . . ,m− 1, e soluzione di (5.10).
Riassumendo, sianoλ1 , . . . , λp
le soluzioni del polinomio caratteristico p(λ) associato alla (5.10), di molte-plicita algebrica rispettivamente
m1 , . . . ,mp
(si ha m1 + . . . + mp = n). Allora si hanno le n soluzioni (possibilmentecomplesse) indipendenti
eλ1t , teλ1t , . . . , tm1−1eλ1t
. . .eλpt , teλpt , . . . , tmp−1eλpt

CAPITOLO 5. EQUAZIONI LINEARI 78
della equazione (5.10)1 . Se un λi = α + iβ (di molteplicita mi) e un auto-valore, anche il complesso coniugato λ∗i e autovalore (di molteplicita mi) e sipossono ottenere 2mi soluzioni indipendenti reali della forma
tkeαt cos(βt) , tkeαt sin(βt) , k = 0, 1, . . . ,mi − 1 .
Esempio Trovare la soluzione generale di
D4x− 2D3x+ 2D2x− 2Dx+ x = 0 .
Il polinomio associato e p(λ) = λ4−2λ3 +2λ2−2λ+1 ha le radici 1 (doppia)e ±i. Quindi 4 soluzioni linearmente indipendenti sono
cos t , sin t , et , tet
e la soluzione generale e
x(t) = c1 cos t+ c2 sin t+ et(c3 + c4t) , c1 , c2 , c3 , c4 ∈ R .
Esempio Trovare la soluzione generale di
D4x+ 2D2x+ x = 0 .
Il polinomio associato p(λ) = λ4 + 2λ2 + 1 ha le radici ±i doppie. Quindi 4soluzioni linearmente indipendenti sono
cos t , sin t , t cos t , t sin t
e la soluzione generale e
x(t) = (c1 + c2t) cos t+ (c3 + c4t) sin t , c1 , c2 , c3 , c4 ∈ R .
Esercizio Dato b > 0 trovare la costante a ∈ R tale che la soluzione delproblema di Cauchy
x+ ax+ bx = 0x(0) = 1 , x(0) = 0
tenda a zero il piu rapidamente possibile per t→ +∞.
Le oscillazioni forzate: il fenomeno delle risonanze Trovare lasoluzione generale di
x+ ω2x = cos(νt) (5.14)
1Che si scrive P (D)x = (D − λ1)m1 . . . (D − λp)mpx = 0.

CAPITOLO 5. EQUAZIONI LINEARI 79
(oscillatore armonico con una forzante periodica di frequenza ν).
Le soluzioni della equazione omogenea associata x+ ω2x = 0 (oscillatorelibero) sono
x(t) = α cos(ωt+ θ) , α ∈ R , θ ∈ R .
Cerco una soluzione particolare di (5.14) del tipo
x(t) = A cos(νt) .
Sostituendo trovo che x(t) e soluzione se A = 1/(ω2 − ν2). In conclusione lasoluzione generale di (5.14) e, se ν 6= ω,
x(t) =1
ω2 − ν2cos(νt) + α cos(ωt+ θ) , α ∈ R , θ ∈ R
(oscillazione forzata + oscillazione libera). Vedo che l’ampiezza della oscil-lazione forzata cresce se ν → ω, cioe se la frequenza forzante si avvicina allafrequenza propria dell’oscillatore armonico.
Se ν = ω la forzante e in “risonanza con l’oscillatore armonico. Cerchiamouna soluzione particolare come
x(t) = At sin(ωt) .
Sostituendo trovo che x(t) e soluzione se A = 1/2ω. In conclusione lasoluzione generale di (5.14) e, se ν = ω,
x(t) =t
2ωsin(ωt) + α cos(ωt+ θ) , α ∈ R , θ ∈ R .
Vedo che la ampiezza della oscillazione forzata aumenta indefinitamente.
Esercizio (oscillazioni forzate con attrito) Trovare la soluzione generale di
x+ kx+ ω2x = cos(νt) . (5.15)
Si veda che l’attrito impedisce che l’ampiezza della oscillazione forzata au-menti indefinitamente anche per ν = ω. Da un punto di vista “fisico: all’au-mentare dell’ampiezza dell’ oscillazione, aumenta anche la dissipazione dienergia dovuta all’attrito, fino a raggiungere un bilanciamento tra l’energiafornita dalla forzante e l’energia dissipata.
Specifichiamo il metodo di variazione delle costanti arbitrarie per equa-zioni del secondo ordine
x+ a1(t)x+ a2(t)x = f(t) (5.16)

CAPITOLO 5. EQUAZIONI LINEARI 80
Siano x1(t), x2(t) due soluzioni linearmente indipendenti della equazioneomogenea associata
x+ a1(t)x+ a2(t)x = 0 .
Cerchiamo una soluzione di (5.16) della forma
x(t) = c1(t)x1(t) + c2(t)x2(t) . (5.17)
Derivando, si ha
x(t) = c1(t)x1(t) + c2(t)x2(t) + c1(t)x1 + c2(t)x2(t) .
Imponendoc1(t)x1(t) + c2(t)x2(t) = 0 (5.18)
si deducex(t) = c1(t)x1(t) + c2(t)x2(t) (5.19)
e, quindi, derivando ulteriormente,
x(t) = c1(t)x1(t) + c2(t)x2(t) + c1(t)x1(t) + c2(t)x2(t) . (5.20)
Usando (5.17), (5.19), (5.20) e il fatto che x1, x2 risolvono la equazioneomogenea associata, si ha che, x(t) data in (5.17) risolve l’equazione (5.16)se e solo se
c1(t)x1(t) + c2(t)x2(t) = f(t) .
Ricordando anche (5.18) i coefficienti c1, c2 devono soddisfarec1(t)x1(t) + c2(t)x2(t) = 0c1(t)x1(t) + c2(t)x2(t) = f(t) .
ossia, in forma matriciale,(x1 x2
x1 x2
)(c1
c2
)=
(0f(t)
)
(si noti che e il sistema (5.8)). Si ricavano quindi c1, c2, e, poi, c1, c2.
Esercizio Si provi che la soluzione dix+ x = a(t)xx(0) = 1x(0) = 0
(5.21)
dove a(·) ∈ C([0,+∞),R) soddisfa∫ +∞
0|a(t)| dt < +∞ , (5.22)

CAPITOLO 5. EQUAZIONI LINEARI 81
e limitata in [0,+∞).
Suggerimento: ponendo f(t) = a(t)x(t) si usi la formula di variazioni dellecostanti arbitrarie per scrivere la soluzione di
x+ x = f(t)x(0) = 1x(0) = 0 .
Si ottiene per la soluzione x(t) di (5.21) una equazione integrale da cui siriesce ad ottenere, usando (5.21), una maggiorazione per |x(t)|.
Esercizio Sia f ∈ C(R2,R) tale che |f(t, x)| < 1 per ogni (t, x) ∈ R2. Siprovi che la soluzione del problema di Cauchy
x+ 3x+ 2x = f(t, x)x(0) = x(0) = 0
soddisfa |x(t)| < 1, ∀t > 0.
Suggerimento: si usi anche qui la formula di variazioni delle costanti arbitra-rie come sopra.
5.5 I sistemi a coefficienti costanti
Consideriamo adesso il caso generale dei sistemi
x = Ax , x ∈ Rn (5.23)
dove A ∈ Mat(n× n) e una matrice con coefficienti indipendenti dal tempo.
Cerchiamo una soluzione particolare di (5.23) della forma
x(t) = eλtv , v ∈ Rn .
Inserendo nella equazione troviamo che eλtv e soluzione di (5.23) se e solo se
x(t) = λeλtv = Ax(t) = eλtAv ,
cioe se e solo seAv = λv
ossia v ∈ Rn e autovettore di A di autovalore λ.

CAPITOLO 5. EQUAZIONI LINEARI 82
5.5.1 Caso 1: le radici λi sono reali e distinte
In questo caso abbiamo n soluzioni reali linearmente indipendenti di (5.23)
eλ1tv1 , . . . , eλntvn
(essendo indipendenti gli autovettori vi corrispondenti ad autovalori distintiλi). Quindi, la soluzione generale di (5.23) e data da
x(t) = c1eλ1tv1 + . . .+ cne
λntvn , ci ∈ R .
Esempio 1: la “sella. Il sistemax1 = x1
x2 = −x2(5.24)
che, in forma matriciale si scrive,
d
dt
(x1
x2
)=
(1 00 −1
)(x1
x2
)(5.25)
e disaccoppiato. Tutte le soluzioni sono
x1(t) = x1(0)et , x2(t) = x2(0)e−t (5.26)
ossia (x1
x2
)(t) = c1e
t
(10
)+ c2e
−t(
01
).
Possiamo ricavare dalla rappresentazione parametrica delle orbite in (5.26)la equazione delle traiettorie
x1 x2 = const = x1(0)x2(0) .
Le traiettorie del sistema formano dei rami di iperbole equilatera, vedi figura5.4. Per questo il ritratto in fase di (5.24) si chiama “sella.
Esempio 2 (repulsore armonico) Il sistemax1 = x2
x2 = x1(5.27)
si scrive, in forma matriciale,
d
dt
(x1
x2
)=
(0 11 0
)(x1
x2
). (5.28)

CAPITOLO 5. EQUAZIONI LINEARI 83
x2
x1
Figura 5.4: La sella
Gli autovalori della matrice
A =
(0 11 0
)
sono ±1 con autovettori rispettivamente
v+ =
(11
), v− =
(1−1
).
La soluzione generale di (5.27) e data da(x1
x2
)(t) = c1e
−t(
1−1
)+ c2e
t
(11
).
Tutte le traiettorie con dato iniziale sullo spazio lineare 〈v−〉 rimangonoin 〈v−〉 per tutti i tempi e convergono a zero con velocita esponenziale pertempi positivi. Analogamente lo spazio lineare 〈v+〉 e invariante per tutti itempi e le soluzioni convergono a zero con velocita esponenziale per tempinegativi.
Si noti che (5.28) corrisponde all’equazione del secondo ordine x = xdetta “repulsore armonico.Problema: provare che (5.28) possiede quale integrale primo la funzione
G(x1, x2) = x21 − x2
2 .
Dunque le traiettorie di (5.28) descrivono rami di iperbole x21−x2
2 = cost.

CAPITOLO 5. EQUAZIONI LINEARI 84
x2
x1
Figura 5.5: Il repulsore armonico
Domanda: nelle coordinate
y1 = x1 + x2 , y2 = x1 − x2
come si trasforma il sistema (5.28)?
Risposta: nel sistema (5.25). Infatti nella base degli autovettori il sistemadiventa disaccoppiato.
Quest’ultima osservazione e un fatto generale. Se A e diagonalizzabile, ilsistema
x = Ax
si trasforma, nella base dei suoi autovettori v1, . . . , vn, nel sistema disaccop-piato
y1 = λ1y1
. . .yn = λnyn
ossiay = ∆y
con matrice diagonale
∆ =
λ1 0 . . . 00 λ2 . . . 00 . . . 00 0 . . . λn

CAPITOLO 5. EQUAZIONI LINEARI 85
Infatti, col cambio di coordinate
x = V y
dove V = (v1, . . . , v) e la matrice degli autovettori di A (ossia x = y1v1 +. . .+ ynvn), si ha
y = V −1x = V −1Ax = V −1AV y = ∆y .
Esercizio Disegnare le traiettorie del sistemax1 = x1
x2 = x2(5.29)
nello spazio delle fasi, mostrando che sono semirette di centro l’origine.Provare che il sistema (5.29) non possiede nessun integrale primo diverso
da una costante.
Soluzione: un integrale primo e una funzione costante lungo ogni semirettadi centro l’origine. Per continuita deve essere constante in tutto il piano.
Esempio 1 Disegnare le traiettorie dix1 = x1
x2 = 2x2(5.30)
e provare che formano rami di parabole, vedi figura 5.6.
Suggerimento Le soluzioni sonox1(t) = x1(0)et
x2(t) = x2(0)e2t
da cui, eliminando il tempo, x2/x21 = cost, ∀t.
Domanda: Il sistema (5.30) possiede qualche integrale primo non costante?
Risposta: no. Perche?
5.5.2 Caso 2: una radice λ = α + iβ e complessa
La soluzione di (5.23) si scrive sempre in forma complessa
x(t) = ceαteiβtv , c ∈ C . (5.31)
Esempio Si scriva in forma complessa la soluzione diz = λzz(0) = ρeiγ ∈ C ,

CAPITOLO 5. EQUAZIONI LINEARI 86
x2
x1
Figura 5.6: Le traiettorie dell’Esempio 1 formano rami di parabola.
z = x+ iy ∈ C. La soluzione e
z(t) = z(0)eλt = ρeαtei(βt+γ), .
Il modulo di z(t) e |z(t)| = ρeαt e la sua fase e βt+ γ. Questo esempio mettein luce la semplicita della notazione complessa.
La funzione Re(x(t)) e soluzione in forma reale di x = Ax (essendo lamatrice A reale).
Per scrivere la soluzione solo con vettori e numeri reali, si consideri l’autovettore complesso v = ξ + iη, ξ ∈ Rn, η ∈ Rn, associato all’autovalorecomplesso λ = α + iβ,
Av = λv .
Scrivendo c = ρeiγ, ρ, γ ∈ R, si ha
x(t) = ρeαtei(βt+γ)(ξ + iη) = ρeαt(
cos(βt+ γ) + i sin(βt+ γ))(ξ + iη) ,
e, pertanto, la soluzione generale e
Re(x(t)) = ρeαt cos(βt+ γ)ξ − ρeαt sin(βt+ γ) η
al variare di ρ, γ ∈ R. Si vede che questa la soluzione vive nel pianobidimensionale reale
E := 〈ξ, η〉 .
Il piano E = 〈ξ, η〉 e invariante per la equazione differenziale, ossia partendocon un dato iniziale in E la soluzione rimane in E per tutti i tempi.

CAPITOLO 5. EQUAZIONI LINEARI 87
Geometricamente, si vede che il piano bidimensionale reale
E := 〈ξ, η〉
e invariante per A, ossia A(E) ⊂ E. Infatti, si ha
Aξ + iAη = A(ξ + iη) = (α + iβ) (ξ + iη) = (αξ − βη) + i(βξ + αη)
e, pertanto,Aξ = αξ − βη , Aη = βξ + αη .
Domanda: Qual’e la matrice che rappresenta A|E nella base ξ, η?
Risposta:
A =
(α β−β α
)
Per capire, quindi, il caso generale in cui c’e un autovalore complessobasta studiare il sistema in “forma normale:
d
dt
(xy
)=
(α β−β α
)(xy
)
L’andamento qualitativo delle soluzioni e il seguente: se α < 0 le soluzionitendono a zero per tempi positivi spiraleggiando (“fuoco stabile), vedifigura 5.7; se α > 0 le soluzioni tendono a zero spiraleggiando per tempinegativi (“fuoco instabile) vedi figura 5.8; se α = 0 oscillano attorno azero (“centro).
Figura 5.7: Il fuoco stabile.

CAPITOLO 5. EQUAZIONI LINEARI 88
Figura 5.8: Il fuoco instabile.
Questa e la situazione che abbiamo gia incontrato con l’oscillatore armo-nico con debole attrito
x+ kx+ x = 0 , 0 < k < 2 ,
che, scritto come sistema, e dato dax = yy = −x− ky . (5.32)
Per esercizio si trovino gli autovalori e della matrice
A =
(0 1−1 −k
)
e si disegnino le orbite di (5.32). Per k = 0 si trova l’oscillatore armonicox = yy = −x .
Problema Provare che (5.32) non possiede integrali primi non costanti sek 6= 0. Per k = 0 c’e’ l’integrale primo
G(x1, x2) = x21 + x2
2
le cui curve di livello sono circonferenze (per cui il ritratto in fase dellesoluzioni si chiama centro).

CAPITOLO 5. EQUAZIONI LINEARI 89
Domanda: Qual’e il legame tra G e l’integrale primo dell’energia definitoin (3.16)?
In conclusione, nel caso gli autovalori di A (reali o complessi) siano tuttidistinti la equazione x = Ax si decompone in equazioni disaccoppiate conspazio delle fasi o 1 o 2 dimensionale. Su questi sottospazi invarianti ilsistema si puo comportare come abbiamo visto negli esempi precedenti.
Il seguente esempio e di fondamentale importanza nelle applicazioni.
Piccole oscillazioni di un sistema meccanico conservativo Con-sideriamo un sistema lineare del secondo ordine
x = −Ax , x ∈ Rn (5.33)
dove A e una matrice simmetrica reale (queste equazioni si ottengono linea-rizzando attorno ad un equilibrio l’equazione di Netwon x = −∇V (x)).
La matrice simmetrica reale A ha una base di autovettori (ortonorma-li) v1, . . . , vn ∈ Rn con corrispondenti autovalori λ1, . . . , λn reali (anchemultipli).
Col cambio di coordinate (unitario)
x = Uy
dove U = (v1, . . . , vn) e la matrice degli autovettori di A (ossia x = y1v1 +. . .+ ynvn), l’equazione (5.33) diventa
y = U−1x = −U−1Ax = −U−1AUy = −Dy
con matrice diagonale
D =
λ1 0 . . . 00 λ2 . . . 00 . . . 00 0 . . . λn
In altre parole il sistema (5.33) si e disaccoppiato in n equazioni scalari delsecondo ordine
y1 + λ1y1 = 0. . .yn + λnyn = 0
dove, per λk > 0, si ha l’equazione dell’oscillatore armonico, mentre, perλk < 0, si ha l’equazione del repulsore armonico, che abbiamo gia studiato.

CAPITOLO 5. EQUAZIONI LINEARI 90
Gli autovalori λk sono detti “frequenze caratteristiche di oscillazione e gliautovettori vk sono detti “modi di vibrazione normali.
Esercizio Trovare tutti i numeri reali a ∈ R tali che tutte le soluzionidel sistema
x = −∇V (x) , x = (x1, x2) ∈ R2
siano periodiche nei due seguenti casi
V (x) = x21 + ax2
2 , V (x) = x21 + x2
2 + ax1x2 .
Prima di discutere il caso di radici multiple trattiamo la soluzione generaledelle soluzioni.
5.6 Esponenziale di una matrice
Nello spazio vettoriale delle matrici quadrate A ∈ Mat(n × n) (linearmenteisomorfo ad Rn2
) considero la norma matriciale
‖A‖ := sup|x|=1
|Ax|
dove | · | denota la norma di Rn.
Esercizio Verificare che ‖ · ‖ e una norma.
Esercizio Provare che
‖A‖ := supx6=0
|Ax||x|
= sup|x|≤1|Ax| .
Lo spazio delle matrici e anche un’algebra rispetto al prodotto di compo-sizione, ossia ∀A,B ∈Mat(n× n) si ha
‖AB‖ ≤ ‖A‖ ‖B‖ . (5.34)
Esercizio Dimostrare (5.34).
Soluzione Per ogni x ∈ Rn si ha |ABx| ≤ ‖A‖|Bx| ≤ ‖A‖‖B‖|x|.
Data una matrice A ∈Mat(n× n) definisco
eA :=+∞∑n=0
An
n!. (5.35)

CAPITOLO 5. EQUAZIONI LINEARI 91
La serie in (5.35) converge totalmente, e, quindi, uniformemente, su ogniinsieme ‖A‖ ≤ a, ∀a > 0. Infatti, usando (5.34), si ha
+∞∑n=0
‖An‖n!≤
+∞∑n=0
‖A‖n
n!≤
+∞∑n=0
an
n!= ea < +∞ .
Consideriamo la famiglia di matrici
eAt =+∞∑n=0
tnAn
n!.
Si ha e0 = I.
Teorema 5.6.1 Si had
dteAt = AeAt (5.36)
Dimostrazione. La serie delle derivate di eAt,
+∞∑n=1
ntn−1An
n!= A
+∞∑n=1
tn−1 An−1
(n− 1)!= AeAt ,
converge totalmente. Per il criterio della derivazione per serie ne segue cheeAt e derivabile e vale (5.36).
Esercizio Si considerino le successioni di funzioni fn : R→ R definite da
fn(x) =
√x2 +
1
n, fn(x) =
x
1 + nx2.
Si dica se fn converge uniformente, se la successione delle derivate Dfnconverge uniformemente, e se vale
D limnfn = lim
nDfn .
Il teorema fondamentale delle equazioni lineari a coefficienti costanti e
Teorema 5.6.2 La soluzione del problema di Cauchyx = Axx(0) = x0
(5.37)
risultax(t) = eAtx0 . (5.38)

CAPITOLO 5. EQUAZIONI LINEARI 92
Notiamo che, formalmente, (5.38) e la stessa formula che si ha per leequazioni scalari.
Dimostrazione. Dal teorema precedente
d
dteAtx0 = A(eAtx0)
ed e0 = I.
La matrice eAt e, nel caso di sistemi a coefficienti costanti, la matricerisolvente definita in (5.3).
Teorema 5.6.3 La famiglia a 1-parametro di trasformazioni
eAt , t ∈ R
forma un gruppo di isomorfismi di Rn, ossia
eA(t+s) = eAteAs . (5.39)
L ’inversa di ciascun etA e (ponendo s = −t in (5.39))
(etA)−1 = e−At .
Dimostrazione. Una dimostrazione puo essere fatta moltiplicando secon-do Cauchy le serie totalmente convergenti
eAt =+∞∑n=0
tnAn
n!, eAs =
+∞∑n=0
snAn
n!.
Diamo qui, invece, la seguente dimostrazione rapidissima. Per ogni s ∈ R lafunzione matriciale
t→M(t) := eAteAs
risolve il problema di CauchyddtM(t) = AeAteAs = AM(t)
M(0) = eAs .
La funzione matricialet→ N(t) := eA(t+s)
risolve lo stesso problema di CauchyddtN(t) = AeA(t+s) = AN(t)
N(0) = eAs

CAPITOLO 5. EQUAZIONI LINEARI 93
per cui, dall’unicita della soluzione, M(t) = N(t), ∀t ossia vale (5.39).
Domanda: E vero o falso che per ogni matrice A, B, si ha
eA+B = eAeB . (5.40)
Risposta: falso.
Problema Dimostrare che se AB = BA (le matrici commutano) allora(5.40) vale.
Suggerimento Usando che A , B commutano si puo usare la stessa dimo-strazione per le serie numeriche.
Esercizio Dare un’altra dimostrazione che se AB = BA allora (5.40) vale:usare che sia eAteBt, sia et(A+B) risolvono il problema di Cauchy
ddtM(t) = (A+B)M(t)
M(0) = I .
Dall’unicita della soluzione vale (5.40).
La formula (5.38) ci da una espressione molto elegante per la soluzionedi (5.37). Ma, per fornire la soluzione esplicita di una soluzione dobbiamosapere calcolare l’esponenziale di una matrice.
Esempio (Matrice diagonale) L’esponenziale della matrice diagonale
D =
λ1 0 . . . 00 λ2 . . . 00 . . . 00 0 . . . λn
risulta
eD =
eλ1 0 . . . 00 eλ2 . . . 00 . . . 00 0 . . . eλn
Infatti, per ogni k, si ha
Dk =
λk1 0 . . . 00 λk2 . . . 00 . . . 00 0 . . . λkn
e il risultato si ottiene sommando la serie.

CAPITOLO 5. EQUAZIONI LINEARI 94
Esercizio (Matrice diagonalizzabile) Supponiamo che A sia diagonalizzabi-le, ossia esiste V invertibile tale che
A = V −1DV
con D diagonale. Provare che
eA = V −1eDV .
Suggerimento: Ak = V −1DkV , ∀k.
Per quanto visto nel paragrafo precedente, per risolvere i sistemi linearinel caso ci sia un autovalore complesso, bisogna sapere calcolare la matriceesponenziale eA dove
A =
(α β−β α
)Esercizio Provare che l’esponenziale
eA = eα(
cos β sin β− sin β cos β
)
(il calcolo e immediato conoscendo la soluzione di x = Ax come gia sappiamo,oppure si puo calcolare l’esponenziale in modo diretto calcolando A2, A3, etc).
5.6.1 Il caso di radici multiple
Per una matrice A in cui un autovalore λ compare con molteplicita sappiamoche si puo usare la forma canonica di Jordan e trovare una base in cui A sidecompone in blocchi di Jordan
A =
λ 1 . . . 00 λ . . . 00 . . . 10 0 . . . λ
Calcoliamo in questo caso la matrice esponenziale etA. Scriviamo
A = λI +N
dove
N :=
0 1 . . . 00 0 . . . 00 . . . 10 0 . . . 0

CAPITOLO 5. EQUAZIONI LINEARI 95
e una matrice nilpotente, ossia
Nn = 0 .
Infatti si ha che
Nk :=
0 . . . 1 0 0
. . . . . .. . . 0 1
0 . . . . . .0 . . . 0 0
Poiche λI commuta con qualsiasi matrice, si ha
etA = et(λI+N) = eλtIetN = etλetN .
Calcolando la somma finita
eNt = I +Nt+ t2N2
2!+ . . .+ tn−1 Nn−1
(n− 1)!
si vede che
etN =
1 t t2/2 . . . tn−1/(n− 1)!0 1 t . . .0 . . . 1
t0 0 . . . 1
e, quindi,
etA = eλt
1 t t2/2 . . . tn−1/(n− 1)!0 1 t . . .0 . . . 1
t0 0 . . . 1
Esercizio Nello spazio vettoriale dei polinomi di grado n con base
X :=⟨1, x,
x2
2!. . . ,
xn
n!
⟩si consideri l’operatore di derivazione
D : X → X , D :=d
dx.
Provare che D e nilpotente e che la matrice che rappresenta D e proprio N .Provare che
etN = H t

CAPITOLO 5. EQUAZIONI LINEARI 96
doveH t : X → X , H tp(x) := p(x+ t)
e l’operatore di traslazione di t.
Quindi etN e la matrice che rappresenta l’operatore di traslazione H t.
Suggerimento Scrivere lo sviluppo di Taylor del polinomio p nel punto xcon incremento t.
Ci sono poi altri modi per calcolare l’esponenziale di una matrice, basatisul teorema di Caley-Hamilton secondo cui p(A) = 0 dove p(λ) e il polino-mio caratteristico della matrice A. Quindi An si puo esprimere mediante lepotenze di A di ordine inferiore.
Non procederemo in questi conti: la analisi qualitativa delle soluzioni diun sistema lineare x = Ax e gia completamente chiara.

Capitolo 6
Dipendenza da dati iniziali eparametri
Di fondamentale importanza nelle applicazioni e sapere se cambiando pocoil dato iniziale x0 la soluzione di una equazione differenziale
x = f(t, x)x(t0) = x0
cambia poco (continuita rispetto ai dati iniziali); e sapere, qualora si modi-fichi poco il campo vettoriale f , se la soluzione della equazione differenzialesi modifichi poco.
6.1 Il lemma di Gronwall
Iniziamo enunciando a parte un utile lemma (abbiamo gia provato enunciatisimili nel lemma 3.2.1 e nei teoremi del confronto al capitolo 4).
Lemma 6.1.1 (Lemma di Gronwall) Supponiamo che
y(·), z(·) : [a, b)→ R ,
z(t) ≥ 0, siano funzioni continue soddisfacenti la disequazione integrale
y(t) ≤ A+∫ t
ay(s)z(s) ds , ∀t ∈ [a, b) . (6.1)
Alloray(t) ≤ Ae
∫ taz(s) ds , ∀t ∈ [a, b) .
97

CAPITOLO 6. DIPENDENZA DA DATI INIZIALI E PARAMETRI 98
Dimostrazione. Si consideri la funzione di classe C1 definita da ϕ(t) :=∫ ta y(s)z(s) ds. Si ha ϕ(a) = 0 e
ϕ(t) = y(t)z(t)(6.1)
≤ z(t)(A+
∫ t
ay(s)z(s) ds
)= z(t)(A+ ϕ(t)) .
Se ne deduce, usando il teorema del confronto 4.1.4, che ϕ(t) ≤ η(t) doveη(t) = z(t)(A+ η(t))η(a) = 0 .
La soluzione di questo problema e η(t) = −A+Ae∫ taz(s) ds e, quindi, otteniamo
la maggiorazione
ϕ(t) ≤ −A+ Ae∫ taz(s) ds .
In conclusione
y(t)(6.1)
≤ A+ ϕ(t) ≤ Ae∫ taz(s) ds .
Esercizio In aggiunta alle ipotesi precedenti supponiamo anche che A ≥ 0e y(t) ≥ 0. Dimostrare nel seguente modo il Lemma di Gronwall. Per A > 0si consideri la funzione ϕ(t) := A +
∫ ta y(s)z(s) ds, ϕ(t) > 0 per t > a, e
soddisfacente ϕ(a) = A. Differenziando
ϕ(t) = y(t)z(t)(6.1)
≤ z(t)(A+
∫ t
ay(s)z(s) ds
)= z(t)ϕ(t)
da cuiϕ(t)
ϕ(t)≤ z(t)
e, integrando,
ln(ϕ(t)
A
)= ln
(ϕ(t)
ϕ(a)
)=∫ t
a
ϕ(τ)
ϕ(τ)dτ ≤
∫ t
az(τ) dτ
da cui la tesi. Se A = 0, prendiamo una successione An > 0, An → 0. Allora
y(t) ≤ An +∫ t
ay(s)z(s) ds , ∀t ∈ [a, b) ,
e, quindi, dal passo precedente, y(t) ≤ Ane∫ taz(s) ds. Andando al limite per
An → 0, si trova y(t) ≡ 0.
Il lemma di Gronwall e un utile strumento per trovare ad esempio lemaggiorazioni a priori per soluzioni di equazioni differenziali che garantiscono

CAPITOLO 6. DIPENDENZA DA DATI INIZIALI E PARAMETRI 99
l’estendibilita delle soluzioni.
Esercizio Dimostrare il lemma 3.2.1, e, quindi il teorema 3.2.1, dal Lemmadi Gronwall.
Esercizio Sia f : R×Rn → Rn una funzione continua soddisfacente
|f(t, x1)− f(t, x2)| ≤ h(t)|x1 − x2| , ∀x1, x2 ∈ Rn
dove h(t) ≥ 0 soddisfa ∫Rh(t) dt < +∞ .
Si supponga, inoltre, che esista x ∈ Rn tale che∫R|f(t, x)| dt < +∞ .
Dimostrare che tutte le soluzioni di x = f(t, x) sono definite per tutti i tempi.
Soluzione La soluzione massimale x : (T−, T+)→ Rn dix = f(t, x)x(t0) = x0
verifica
x(t) = x0 +∫ t
t0f(τ, x(τ)) dτ ,
da cui
|x(t)| ≤ |x0|+∣∣∣ ∫ t
t0|f(τ, x(τ))− f(τ, x)| dτ
∣∣∣+ ∣∣∣ ∫ t
t0|f(τ, x)| dτ
∣∣∣≤ |x0|+
∣∣∣ ∫ t
t0h(τ)|x(τ)− x| dτ
∣∣∣+ ∫R|f(t, x)| dt
≤ |x0|+∣∣∣ ∫ t
t0h(τ)|x(τ)| dτ
∣∣∣+ |x| ∫Rh(t) dt+
∫R|f(t, x)| dt .
Applicando il Lemma di Gronwall troviamo, per t > t0,
|x(t)| ≤ Ae∫ tt0h(τ) dτ
< +∞
con A := |x0|+ |x|∫R h(t) dt+
∫R |f(t, x)| dt, e, quindi, T+ = +∞. Analoga-
mente troviamo T− = −∞.

CAPITOLO 6. DIPENDENZA DA DATI INIZIALI E PARAMETRI 100
6.2 Dipendenza continua rispetto ai dati ini-
ziali
Teorema 6.2.1 Sia f : R×Rn → Rn una funzione continua, Lipschtzianarispetto alla seconda variabile uniformemente per t ∈ R, i.e. esiste L > 0tale che, ∀t ∈ R,
|f(t, y1)− f(t, y2)| ≤ L|y1 − y2| , ∀y1, y2 ∈ Rn . (6.2)
Siano ϕ1(t) := ϕ(t, x1) e ϕ2(t) := ϕ(t, x2) le soluzioni di x = f(t, x) concondizioni iniziali rispettivamente
ϕ1(t0) = x1 , ϕ2(t0) = x2 .
Allora|ϕ(t, x1)− ϕ(t, x2)| ≤ |x1 − x2|eL|t−t0| . (6.3)
Dimostrazione. Notiamo che ϕ1(t), ϕ2(t) sono definite per tutti i tempi.Si ha
ϕ1(t) = x1 +∫ t
t0f(τ, ϕ1(τ)) dτ
e
ϕ2(t) = x2 +∫ t
t0f(τ, ϕ2(τ)) dτ
da cui, sottraendo,
ϕ1(t)− ϕ2(t) = (x1 − x2) +∫ t
t0f(τ, ϕ1(τ))− f(τ, ϕ2(τ)) dτ .
Usando (6.2) si ha
|ϕ1(t)− ϕ2(t)| ≤ |x1 − x2|+∣∣∣ ∫ t
t0|f(τ, ϕ1(τ))− f(τ, ϕ2(τ))| dτ
∣∣∣≤ |x1 − x2|+
∣∣∣ ∫ t
t0L|ϕ1(τ)− ϕ2(τ)| dτ
∣∣∣ .Consideriamo dapprima t > t0. Applicando il Lemma di Gronwall alla fun-zione w(t) := |ϕ1(t) − ϕ2(t)| si deduce (6.3). Analogamente si ragiona pert < t0. Farlo per esercizio.
Corollario 6.2.1 (Dipendenza continua rispetto ai dati iniziali) Sela condizione iniziale x2 tende a x1, allora la soluzione ϕ(·, x2) convergeuniformemente ad ϕ(·, x1) su ogni intervallo di tempo limitato [t0−T, t0 +T ].

CAPITOLO 6. DIPENDENZA DA DATI INIZIALI E PARAMETRI 101
Dimostrazione. Da (6.3) si ha
‖ϕ(·, x1)− ϕ(·, x2)‖∞ := supt∈[t0−T,t0+T ]
|ϕ1(t)− ϕ2(t)| ≤ |x1 − x2|eLT .
Si trova anche un’altra dimostrazione della unicita della soluzione.
Corollario 6.2.2 (Unicita) Se x2 = x1 allora ϕ(·, x2) = ϕ(·, x1).
Se una equazione non ha unicita delle soluzioni del problema di Cauchyallora non ci si puo aspettare la dipendenza continua dai dati iniziali.
Esercizio Si provi la affermazione precedente confrontando, ad esempio, le
soluzioni di x =√|x| con dati iniziali x(0) = 0 ed x(0) = ε.
Concludiamo notando la ottimalita della stima (6.3). Ad esempio,le soluzioni di x = Lx con dati iniziali x(0) = x1 e x(0) = x2, sono daterispettivamente da
ϕ(t, x1) = x1eLt , ϕ(t, x1) = x2e
Lt
e, quindi,ϕ(t, x1)− ϕ(t, x2) = (x1 − x2)eLt .
Questo mostra che la stima (6.3) e ottimale.
Si potrebbe anche dimostrare, ma lo omettiamo, che se il campo vetto-riale f ∈ Ck, k ≥ 1, allora la soluzione ϕ(t, ·) e una funzione di classe Ck
(dipendenza Ck dai dati iniziali).
6.3 Dipendenza continua rispetto ai parame-
tri
Teorema 6.3.1 Siano f1, f2 : R×Rn → Rn funzioni continue, Lipschtizia-ne rispetto alla seconda variabile uniformemente per t ∈ R, i.e. soddisfano(6.2), e, per un qualche ε > 0,
|f1(t, x)− f2(t, x)| ≤ ε , ∀(t, x) ∈ R×Rn . (6.4)
Siano ϕ1(t) e ϕ2(t) le soluzioni rispettivamente diϕ1 = f1(t, ϕ1)ϕ1(t0) = x0
ϕ2 = f2(t, ϕ2)ϕ2(t0) = x0
Allora|ϕ1(t)− ϕ2(t)| ≤ ε
L
(eL|t−t0| − 1
). (6.5)

CAPITOLO 6. DIPENDENZA DA DATI INIZIALI E PARAMETRI 102
Dimostrazione. Notiamo che ϕ1(t), ϕ2(t) sono definite per tutti i tempi.Si ha
ϕ1(t) = x0 +∫ t
t0f1(τ, ϕ1(τ)) dτ
e
ϕ2(t) = x0 +∫ t
t0f2(τ, ϕ2(τ)) dτ
da cui, sottraendo,
ϕ1(t)− ϕ2(t) =∫ t
t0f1(τ, ϕ1(τ))− f2(τ, ϕ2(τ)) dτ .
Si ha
|ϕ1(t)− ϕ2(t)| ≤∣∣∣ ∫ t
t0|f1(τ, ϕ1(τ))− f1(τ, ϕ2(τ))| dτ
∣∣∣+
∣∣∣ ∫ t
t0|f1(τ, ϕ2(τ))− f2(τ, ϕ2(τ))| dτ
∣∣∣≤
∣∣∣ ∫ t
t0L|ϕ1(τ)− ϕ2(τ)|dτ
∣∣∣+ ∣∣∣ ∫ t
t0εdτ
∣∣∣ . (6.6)
Facciamo il caso t > t0. Ponendo
w(t) := ε+ L|ϕ1(t)− ϕ2(t)|
si deduce da (6.6),
w(t)− εL
= |ϕ1(t)− ϕ2(t)| ≤∫ t
t0L|ϕ1(τ)− ϕ2(τ)|+ ε =
∫ t
t0w(τ) dτ
ossia
w(t) ≤ ε+ L∫ t
t0w(τ) dτ .
Dal lemma di Gronwall,w(t) ≤ εeL(t−t0)
da cui si ricava (6.5). Analogamente si ragiona per t < t0.
Corollario 6.3.1 (Dipendenza continua rispetto ai parametri) Se f2
converge a f1 uniformemente su R ×Rn, allora la soluzione ϕ2(·) convergeuniformemente a ϕ1(·) su ogni intervallo di tempo limitato [t0 − T, t0 + T ].

CAPITOLO 6. DIPENDENZA DA DATI INIZIALI E PARAMETRI 103
Notiamo anche qui la ottimalita della stima (6.5). Ad esempio, lesoluzioni di
x = Lx+ εx(0) = x0
x = Lxx(0) = x0
sono date rispettivamente da
ϕ1(t) = x0eLt +
ε
L(eLt − 1) , ϕ2(t) = x0e
Lt
(la prima equazione e lineare, non omogenea) e, quindi,
ϕ1(t)− ϕ2(t) =ε
L(eLt − 1) .
Questo mostra che la stima (6.5) e ottimale.

Capitolo 7
Studi qualitativi nel piano
Per concludere vediamo come procedere per lo studio qualitativo di sisteminon lineari nel piano
x = f(x, y)y = g(x, y) .
(7.1)
Le soluzioni piu semplici da trovare sono le soluzioni costanti nel tempo(x(t), y(t)) = (x0, y0), cioe gli equilibri, dove
f(x0, y0) = 0g(x0, y0) = 0 .
Poi e conveniente studiare il sistema linearizzato ai punti di equilibriox = ∂xf(x0, y0)(x− x0) + ∂yf(x0, y0)(y − y0)y = ∂xg(x0, y0)(x− x0) + ∂yg(x0, y0)(y − y0)
che dara indicazioni sulla dinamica di (7.1) vicino agli equilibri. Con latraslazione degli assi
X = x− x0 , Y = y − y0
si ottiene il sistema lineare del primo ordine a coefficienti costanti
d
dt
(XY
)= A
(XY
)(7.2)
dove
A =
(∂xf ∂yf∂xg ∂yg
)e la matrice Jacobiana calcolata in (x0, y0). Si calcolano gli autovalori di A ele traiettorie di (7.2) saranno o fuochi, o centri, o selle, etc..., come descrittonella sezione 5.5.
104

CAPITOLO 7. STUDI QUALITATIVI NEL PIANO 105
Un importante teorema di Hartmann-Grobmann (di cui non daremo ladimostrazione) afferma che, se la parte reale degli autovalori di A e diversada zero, allora il sistema non lineare (7.1) e ben descritto, in un intorno delpunto di equilibrio, dal sistema lineare (7.2). Piu precisamente le traiettoriedel sistema lineare (7.2) e del sistema non lineare (7.1) sono topologicamenteequivalenti e questo permette di disegnare localmente vicino agli equilibri lesoluzioni del sistema non lineare (7.1).
Si studia poi il luogo dove f(x, y) = 0 in cui il campo vettoriale e verticalee il luogo dove g(x, y) = 0 in cui il campo vettoriale e orizzontale.
Infine, la equazione delle traiettorie sara descritta dalla equazione scalarenon autonoma
dy
dx=g(x, y)
f(x, y)
dove g(x, y) 6= 0 e dadx
dy=f(x, y)
g(x, y)
dove f(x, y) 6= 0. Avevamo gia incontrato questo procedimento in (4.16).
Esempio (Sistema di Lotka-Volterra) Si studino le traiettorie dix = kx− axyy = −ly + bxy
(7.3)
con a, b, k, l > 0 nella regione x > 0, y > 0.Gli equilibri sono (0, 0) e (x, y) = (k/a, l/b). (Per esercizio, si linearizzi il
sistema (7.3) in questo secondo equilibrio e si provi che il sistema linearizzatoe un centro).
La equazione delle traiettorie di (7.3) e data da
dy
dx=
(−l + bx)y
x(k − ay)
che e esatta e a variabili separabili. Integrata da
bx− l lnx+ ay − k ln y = C .
Le soluzioni di (7.3) vivono dunque sulle curve di livello dell’integrale primo
I(x, y) := (bx− l lnx) + (ay − k ln y)
(si verifichi direttamente dalle equazioni che I e un integrale primo di (7.3)).Bisogna capire il grafico di I(x, y). La funzione di una variabile q(x) :=

CAPITOLO 7. STUDI QUALITATIVI NEL PIANO 106
bx − l lnx e strettamente convessa, ha un unico punto di minimo in x = l/b, e tende a +∞ sia per x → 0+, sia per x → +∞. Analogamente lafunzione p(y) := by− l ln y. Pertanto la funzione I(x, y) = q(x) + p(y) ha ununico punto di minimo in (x, y) = (l/b, k/a), e strettamente convessa e tendeall’infinito per |(x, y)| → +∞. Le sue curve di livello di I sono curve chiuse,in particolare compatte. Quindi tutte le soluzioni di (7.3) esistono per tuttii tempi e sono funzioni periodiche nel tempo.
Si puo’ da queste informazioni disegnare l’andamento qualitativo di tuttele traiettorie (ritratto in fase).
Esercizio Si studino le traiettorie dix = x(y2 − 1)y = y(x2 − 1) .
(7.4)
Per simmetria basta studiarlo in x ≥ 0, y ≥ 0. In questa regione i punti diequilibrio sono (x, y) = (0, 0) ed (x, y) = (1, 1).
Per esercizio, si linearizzi il sistema (7.4) in (0, 0) e in (1, 1). Si proviche entrambi i sistemi linearizzati sono selle. Si calcolino gli autovalori e gliautovettori e si disegni il grafico qualitativo delle soluzioni di questi sistemilineari.
Notiamo poi che y = 0 e un sottospazio invariante per (7.4), ossia chese parto con dato iniziale (x0, y0) = (x0, 0), allora la soluzione rimane iny = 0 per tutti i tempi. Infatti (x(t), y(t)) = (x(t), 0) e soluzione di (7.4)con x = −x, ossia x(t) = x0e
−t.Analogamente x = 0 e un sottospazio invariante per (7.4). Provarlo.
Quale e la soluzione con dato iniziale (x0, y0) = (0, y0)?Risposta: (x(t), y(t)) = (0, y0e
−t).La equazione delle traiettorie risulta
dy
dx=
(x2 − 1)y
x(y2 − 1)
che e a variabili separabili. Integrata da
y2
2− ln y +
x2
2− lnx = C .
Le soluzioni di (7.4) vivono dunque sulle curve di livello dell’integrale primo
I(x, y) := q(y)− q(x) :=(y2
2− ln y
)−(x2
2− lnx
)(si verifichi direttamente dalle equazioni che I e un integrale primo di (7.4)).Bisogna capire il grafico di I(x, y). La funzione di una variabile q(x) e stret-tamente convessa, ha un unico punto di minimo in x = 1, e tende a +∞ sia

CAPITOLO 7. STUDI QUALITATIVI NEL PIANO 107
per x→ 0+, sia per x→ +∞. Pertanto la funzione I(x, y) = q(y)− q(x) haun unico punto critico in (x, y) = (1, 1) che e di sella. Le curve di livello diI sono topologicamente delle iperboli.
Infine notiamo che la bisettrice x = y e anch’essa un sottospazio invarianteper (7.4) (contenuto in I(x, y) = 0).
Si puo’ da queste informazioni disegnare l’andamento qualitativo di tuttele traiettorie (ritratto in fase).
Esercizio Provare che ogni soluzione (x(t), y(t)) dix = x(1− x− y)y = y(1− x− y) .
(7.5)
con dati iniziali x(0) := x0 > 0, y(0) := y0 > 0, e definita per tutti i tempi[0,+∞) e risulta x(t) > 0, y(t) > 0, ∀t ∈ [0,+∞).
Suggerimento Notiamo che i sottospazi x = 0 e y = 0 sono invariantiper (7.5). Trovare gli equilibri del campo. Vedere che, se y > x−1, allora siaf(x, y) := x(1−x−y) < 0, sia g(x, y) := y(1−x−y) < 0. Queso mostra chesia x(t) sia y(t) sono limitate per tutti i tempi (0, T+). Perche? Concludereche T+ = +∞.
Come ulteriore esempio consideriamox = y + x(1− x2 − y2)y = −x+ y(1− x2 − y2) .
(7.6)
Si prova che l’unico equilibrio e (x, y) = (0, 0). Farlo per esercizio. Provareanche che il sistema linearizzato in (0, 0) ossia
x = y + xy = −x+ y
(7.7)
risulta un fuoco instabile (autovalori 1± i).La forma del campo suggerisce l’uso delle coordinate polari
ρ :=√x2 + y2 , θ := arctan
(yx
).
Il campo si trasforma in
ρ =xx+ yy√x2 + y2
= ρ(1− ρ2)
e
θ =1
1 + (y2/x2)
y x− yxx2
= −1

CAPITOLO 7. STUDI QUALITATIVI NEL PIANO 108
con facili calcoli. La soluzione di questa seconda equazione risulta
θ(t) := θ(0)− t
(l’angolo θ gira con velocita angolare costante). La prima equazione e unaequazione scalare autonoma che sappiamo studiare bene. Ha per equilibriρ = 0 e ρ = 1. Tutte le soluzioni con ρ(0) ∈ (0, 1) sono monotone crescentie tendono a 1 per t → +∞ mentre tendono a 0 per t → −∞ (perche sonodefinite per tutti i tempi?).
Tutte le soluzioni con ρ(0) > 1 sono monotone decrescenti e tendono a 1per t→ +∞. Non sono definite per tutti i tempi negativi. Provarlo. Si troviper esercizio anche la formula esplicita.
Tornando alla descrizione delle traiettorie di (7.6) si deduce che:
(i) Se ρ(0) = 1 la soluzione risulta ρ(t) = 1, ∀t, ed θ(t) = θ0 − t. Il sistema(7.6) ha un’orbita periodica di periodo 2π (ciclo limite).
(ii) Se 0 < ρ(0) < 1 la soluzione soddisfa ρ(t)→ 1 per t→ +∞, e ρ(t)→ 0per t → −∞. La soluzione spiraleggia (con periodo 2π) e si accumulasul ciclo limite.
(iii) Se ρ(0) > 1 la soluzione soddisfa ρ(t) → 1 per t → +∞ mentreρ(t)→ −∞ in tempo finito. La soluzione spiraleggia (con periodo 2π)accumulandosi sul ciclo limite.
Figura 7.1: Il ciclo limite.
L’andamento delle soluzioni di (7.6) e perfettamente chiaro.

CAPITOLO 7. STUDI QUALITATIVI NEL PIANO 109
Esercizio Si disegni il ritratto in fase delle soluzioni dix = y + x(a− x2 − y2)y = −x+ y(a− x2 − y2)
(7.8)
al variare del parametro a ∈ R.
Suggerimento: Procedendo come nell’esercizio precedente si vede che, sea > 0, il sistema (7.8) ha un ciclo limite. Per a ≤ 0 tutte le soluzionispiraleggiano verso l’origine.
Esercizio Disegnare la soluzione didy
dx=x− y − 2
x+ yy(1) = 1 .
(7.9)
Cercarne una formula analitica esplicita.
Suggerimento Un modo consiste nel vedere (7.9) come la equazione delletraiettorie del sistema piano
x = x+ yy = x− y − 2 .
L’unico equilibrio e (1,−1). Traslando gli assi X = x−1, Y = y+1, troviamoil sistema lineare a coefficienti costanti
X = X + YY = X − Y
di cui sappiamo ben disegnare l’andamento delle soluzioni.Naturalmente un altro modo e studiare (7.9) direttamente con i metodi
del capitolo 4. In particolare l’equazione (7.9) e esatta. Si riveda anchel’esercizio (4.17). Farlo per esercizio.
In generale, e conveniente vedere un’equazione del primo ordine come
dy
dx=ax+ by + c
dx+ ey + f
come la equazione delle traiettorie del sistema pianox = dx+ ey + fy = ax+ by + c .
Esercizio Si consideri il sistemax = −x2 − xy + xy = −y2 − xy + y

CAPITOLO 7. STUDI QUALITATIVI NEL PIANO 110
con condizioni iniziali x(0) = x0 > 0, y(0) = y0 > 0. Provare che la soluzione(x(t), y(t)) e definita per tutti i tempi e x(t) > 0, y(t) > 0, ∀t ≥ 0.
Suggerimento Si provi che i sottospazi x = 0 e y = 0 sono invarianti.Gli equilibri del sistema formano la retta 1 − x = y. Si trovi dove ambeduele componenti del campo (−x − y + 1)x e (−y − x + 1)y sono negative. Sene deduca che la soluzione (x(t), y(t)) e confinata a priori in alcune regioni.
Alcune equazioni del secondo ordine si possono risolvere in questo modo,dopo averle ricondotte ad un sistema di equazioni differenziali nel piano.
Esercizio Risolvere il problema di Cauchyx = 2xxx(0) = 0 , x(0) = 1
(7.10)
e dire in quale intervallo di tempo e definita la soluzione.
Soluzione Ponendo y(t) := x(t) trasformiano la equazione del secondoordine (7.10) nel sistema di equazioni differenziali del primo ordine nel piano
x = y ,y = 2xyx(0) = 0 , y(0) = 1 .
(7.11)
E particolaremente facile scrivere la equazione delle traiettorie
dy
dx= 2x
che integrata da y(x) = x2 + c. La costante c e determinata dalle condizioniiniziali. Le orbite di (7.11) vivono sulla parabola y = x2 + 1.
Ma ora ci domandiamo se le soluzioni di (7.11) tracciano tutta tale pa-rabola. Ebbene la equazione soddisfatta e x = x2 + 1 le cui soluzioni, comeben sappiamo, divergono in tempo finito. Qual’e l’intervallo massimale didefinizione della soluzione x(t) di (7.11)?
Esercizio Dimostrare che tutte le soluzioni di
x = e−x2 − ln t (7.12)
sono definite per tutti i tempi t > 0. Provare che limt→+∞ x(t) = −∞.
Suggerimento Scrivendo il sistema del primo ordine equivalentex = vv = e−x
2 − ln t

CAPITOLO 7. STUDI QUALITATIVI NEL PIANO 111
si vede che si puo applicare il teorema di estensione globale 3.2.2. Poi, si hax ≤ 1− ln(t), ∀t, ed integrando si vede che limt→+∞ x(t) = −∞.
Esercizio Dimostrare che le soluzioni non nulle di
x = x2 + (x)2 (7.13)
non sono definite per tutti i tempi t.
Suggerimento Scriviamo il sistema del primo ordine equivalentex = vv = x2 + v2 .
Nell’intervallo massimale di definizione di ciascuna soluzione si ha v ≥ v2.Applicando il teorema del confronto si concluda.
Esercizio Dimostrare che la soluzione dell’equazione di Newtonx = −x3
x(0) = 1x(0) = 0
(7.14)
e definita per tutti i tempi t ed e una funzione periodica.
Suggerimento Il sistema del primo ordine associatox = vv = −x3 (7.15)
ha l’integrale primo della energia
E(x, v) =v2
2+x4
4
L’unico equilibrio di (7.15) e (0, 0) e tutte le curve di livello E(x, v) = cost > 0sono compatte e topologicamente dei cerchi. Si concluda.
Capitolo 8
Il teorema della funzioneimplicita
8.1 Introduzione
Il problema della funzione implicita e il seguente. Data una equazione deltipo
F (x, y) = 0 (8.1)
dove F e una mappa regolare vogliamo sapere se, localmente attorno ad unasoluzione (x0, y0) (ossia F (x0, y0) = 0), l’insieme delle soluzioni (x, y) di (8.1)sia esplicitabile come il grafico di una funzione y = y(x) o x = x(y).
Esempio 1 L’insieme delle soluzioni di F (x, y) = 2y−x2 = 0 e il grafico dellaparabola y = x2/2, abbiamo, cioe, esplicitato y in funzione di x. In un intornodi (0, 0) lo stesso insieme F (x, y) = 0 non e il grafico di nessuna funzione nellavariabile y (perche?), ossia non possiamo esplicitare x in funzione di y.
Esempio 2 L’insieme delle soluzioni di F (x, y) = x2 + y2 − 1 = 0 e lacirconferenza di centro l’origine e raggio 1. In un intorno (quale?) del punto(1, 0) possiamo esplicitare tale insieme come x =
√1− y2, ma non possiamo
esplicitare y in funzione di x (perche?). In un intorno (quale?) del punto(0, 1) possiamo esplicitare l’insieme F (x, y) = 0 come y =
√1− x2, ma
non come il grafico di una funzione di y.
Esempio 3 L’insieme delle soluzioni di F (x, y) = x2 − y2 = 0 e l’unionedelle bisettrici y = ±x. In nessun intorno di (0, 0) l’insieme F (x, y) = 0 erappresentabile come il grafico di una funzione ne di x ne di y.
Un problema assai collegato e il problema della invertibilita locale di unafunzione.
112

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 113
Nel caso che f : R→ R sia una funzione di classe C1 e
f ′(x0) 6= 0 ,
allora e ben noto che la funzione f(·) e localmente monotona, e, dunque,invertibile. Inoltre la funzione inversa f−1(·), definita in un intorno di y0, edi classe C1 e la derivata della funzione inversa e
Df−1(y0) =1
f ′(x0)6= 0 .
Il problema che ci poniamo e stabilire la invertibilita locale di una funzionef : Rn → Rn e di una funzione f : X → Y definita tra 2 spazi di Banacheventualmente di dimensione infinita.
La dimostrazione dei teoremi sia della funzione implicita sia della mappainversa e la medesima quando gli spazi siano finiti o infinito dimensionali. Ladaremo quindi nel caso generale.
8.2 Operatori lineari
Considereremo nel seguito spazi vettoriali normati X, Y , Z con norme rispet-tivamente ‖ · ‖X , ‖ · ‖Y , ‖ · ‖Z . Se non c’e’ rischio di confusione ometteremoil simbolo a pedice e indicheremo la norma solo con ‖ · ‖.
Teorema 8.2.1 Sia A : X → Y una applicazione lineare. Sono equivalentile seguenti affermazioni
i) A e continuo in ogni punto x ∈ X
ii) A e continuo in 0
iii) supx 6=0
‖Ax‖‖x‖
= sup‖x‖=1
‖Ax‖ < +∞
Dimostrazione. i) ⇒ ii) e ovvio. Proviamo che ii) ⇒ i). ∀ε > 0 esisteδ > 0 tale che ∀‖h‖ ≤ δ si ha ‖Ah‖ ≤ ε. Sia x ∈ X qualsiasi. Per la linearitadi A abbiamo
‖A(x+ h)− Ax‖ = ‖Ah‖ ≤ ε
per ‖h‖ ≤ δ, provando la continuita di A in x.
iii) ⇒ ii). Se x 6= 0, ‖Ax‖ ≤ ‖x‖C dove C := supx 6=0 ‖Ax‖/‖x‖ < +∞.Questo implica la continuita di A in 0.
ii)⇒ iii). Per ogni ε > 0 esiste δ > 0 tale che ∀‖h‖ ≤ δ si ha ‖Ah‖ ≤ ε. Per

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 114
un qualsiasi x 6= 0 considero l’elemento h := δx/‖x‖ avente norma uguale aδ. Per quanto sopra ∥∥∥A( δx
‖x‖)∥∥∥ ≤ ε
da cui, per la linearita di A,
‖Ax‖‖x‖
≤ ε
δe, quindi, sup
x 6=0
‖Ax‖‖x‖
≤ ε
δ< +∞ .
Definiamo lo spazio vettoriale
L(X, Y ) :=A : X → Y , lineari e continui
con la norma
‖A‖ := supx 6=0
‖Ax‖‖x‖
= sup‖x‖=1
‖Ax‖
Esercizio Dimostrare che ‖A‖ e una norma (confronta con la norma matri-ciale introdotta alla sezione 5.6).
Se A ∈ L(X, Y ) e B ∈ L(Y, Z) allora BA ∈ L(X,Z) e
‖BA‖ ≤ ‖B‖‖A‖ . (8.2)
Definizione 8.2.1 Diremo che una applicazione A ∈ L(X, Y ) e invertibilese esiste C ∈ L(Y,X) tale che
A C = IY , C A = IX .
dove IX , IY indicano la mappa identita rispettivamente in X e in Y . Laapplicazione lineare C =: A−1 si dice l’inversa di A.
Indicheremo con GL(X, Y ) ⊂ L(X, Y ) l’insieme delle applicazioni lineariinvertibili da X in Y .
Teorema 8.2.2 Sia A ∈ GL(X, Y ) un operatore invertibile. Per ogni B ∈L(X, Y ) tale che
‖B‖ < 1
‖A−1‖(8.3)
l’operatore A + B e invertibile. L’ operatore inverso si puo rappresentaremediante la serie di potenze
(A+B)−1 =( ∞∑n=0
(−1)n(A−1B)n)A−1 (8.4)

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 115
(detta “serie di Neumann). Infine si ha
‖(A+B)−1‖ ≤ ‖A−1‖1− ‖A−1‖‖B‖
. (8.5)
Dimostrazione. La serie in (8.4) e totalmente convergente poiche
∥∥∥ ∞∑n=0
(−1)n(A−1B)n∥∥∥ ≤
∞∑n=0
‖(A−1B)n‖ ≤∞∑n=0
(‖A−1‖‖B‖)n
(8.3)=
1
1− ‖A−1‖‖B‖(8.6)
Scriviamo A+B = A(I + A−1B). Per ogni N , si ha
(I + A−1B)N∑n=0
(−1)n(A−1B)n = I + (−1)N(A−1B)N+1
e, andando al limite per N → +∞,
(I + A−1B)∞∑n=0
(−1)n(A−1B)n = I ,
ossia
(I + A−1B)−1 =∞∑n=0
(−1)n(A−1B)n ,
da cui (8.4). La (8.5) infine discende da (8.4) and (8.6) (usando la (8.2)).
Corollario 8.2.1 GL(X, Y ) e un sottoinsieme aperto di L(X, Y ) .
Esercizio Un’altra dimostrazione del teorema 8.2.2 che usa la comple-tezza di X e la seguente. Vogliamo provare che per ogni y ∈ Y esiste un’unicox ∈ X tale che
(A+B)x = y .
Questa equazione e equivalente a
x = A−1y − A−1Bx
ossia a trovare un unico punto fisso della mappa Φ : X → X definita da
Φ(x) := A−1y − A−1Bx .
Proviamo che Φ e una contrazione. Poiche
‖Φ(x1)− Φ(x2)‖ = ‖A−1B(x1 − x2)‖(8.2)
≤ ‖A−1‖‖B‖‖x1 − x2‖ ,

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 116
se vale (8.3), Φ e una contrazione ed ammette, per il teorema di BanachCaccioppoli, un unico punto fisso x := (A+B)−1y. Inoltre
‖x‖ = ‖Φ(x)‖ ≤ ‖A−1y‖+ ‖A−1Bx‖ ≤ ‖A−1‖‖y‖+ ‖A−1‖‖B‖‖x‖
da cui‖x‖
(1− ‖A−1‖‖B‖
)≤ ‖A−1‖‖y‖
ossia
‖(A+B)−1y‖ ≤ ‖A−1‖1− ‖A−1‖‖B‖
‖y‖ .
L’applicazione lineare inversa B e continua e vale (8.5).
8.3 Richiami di calcolo differenziale
Una funzione f : U ⊂ X → Y definita in un sottoinsieme aperto U di X sidice differenziabile in x0 ∈ U se esiste A ∈ L(X, Y ) tale che
‖f(x0 + h)− f(x0)− Ah‖Y‖h‖X
→ 0 per ‖h‖X → 0 . (8.7)
Tale mappa A si chiama derivata di f in x0 e si indica con Df(x0), f ′(x0),∂f(x0).
Esercizio Dimostrare l’unicita del differenziale.
Esercizio Dimostrare che se f e differenziabile in x0 allora f e anche con-tinua in x0.
Esercizio Dimostrare che la mappa f : C([0, 1]) → C([0, 1]) che trasfor-ma una funzione continua g(x) nel suo quadrato g2(x) e differenziabile inogni punto g ∈ C([0, 1]) e che Df(g) : C([0, 1]) → C([0, 1]) e l’operatore di“moltiplicazione
h(x)→ 2g(x)h(x) .
Soluzione Si ha ‖(g + h)2 − g2 − 2gh∥∥∥∞
= ‖h2‖∞ ≤ ‖h‖2∞.
Diremo che f ∈ C1(U, Y ) se f e differenziabile in ogni punto di U e
Df : U → L(X, Y )
e continua. Analogamente possiamo definire le derivate successive di f .
Dato v ∈ X diciamo che f e derivabile in x0 ∈ U nella direzione v seesiste finito
limt→0
f(x0 + tv)− f(x0)
t,

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 117
ossia se la funzione t→ f(x0 + tv) e derivabile in t = 0.
Se f e differenziabile in x0 secondo la definizione (8.7) allora f e derivabile inogni direzione v ∈ X e la derivata di f in x0 nella direzione v vale Df(x0)[v](dimostrarlo per esercizio). Il viceversa e falso come mostra il seguente clas-sico controesempio.
Esercizio Dimostrare che la funzione f : R2 → R definita da
f(x, y) =
x3y
x4 + y2se (x, y) 6= (0, 0)
0 se (x, y) = (0, 0)
ha tutte le derivate direzionali in (0, 0) ma non e differenziabile in (0, 0).
Faremo uso ripetuto del teorema della media integrale: se f ∈ C1(U, Y )ed U e un insieme convesso, allora ∀x1, x2 ∈ U ,
f(x2)− f(x1) =∫ 1
0
d
dtf(x1 + t(x2 − x1)) dt
=∫ 1
0Df(x1 + t(x2 − x1))[x2 − x1] dt .
Lemma 8.3.1 La mappa [ · ]−1 : GL(X, Y )→ GL(Y,X) definita da
A→ A−1 (8.8)
e di classe C∞.
Dimostrazione. Sia A ∈ GL(X, Y ). Per ‖H‖ < 1/‖A−1‖ la mappainversa e definita dalla serie di potenze (8.4)
(A+H)−1 =( ∞∑n=0
(−1)n(A−1H)n)A−1
che converge totalmente. Notiamo che anche le serie di tutte le derivateconverge totalmente in ‖H‖ < 1/‖A−1. Per il criterio di derivazione perserie la mappa H → (A+H)−1 e di classe C1. Come tutte le serie di potenzeposso derivare per serie un numero artibrario di volte, dato che la serie dellederivate converge per ‖H‖ < 1/‖A−1.

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 118
8.4 Il teorema della funzione implicita
Teorema 8.4.1 Siano X, Y , Z spazi di Banach. Sia
F : U ⊂ X × Y → Z
una funzione definita in un aperto U e (x0, y0) ∈ U tale che
F (x0, y0) = 0 . (8.9)
Supponiamo che
• a) F sia continua in U .
• b) ∀(x, y) ∈ U esiste ∂yF (x, y) ∈ L(Y, Z), continua in U .
• c) ∂yF (x0, y0) ∈ GL(Y, Z).
Allora
• i) Esiste r > 0, δ > 0, ed una unica funzione continua
f : Br(x0) :=x ∈ X | ‖x− x0‖ ≤ r
→ Bδ(y0) ⊂ Y
tale che f(x0) = y0 edF (x, f(x)) = 0 .
Viceversa, per ogni soluzione (x, y) ∈ Br(x0) × Bδ(y0) di F (x, y) = 0,si ha y = f(x).
• ii) Se F ∈ C1(U) allora f(x) e derivabile in int(Br(x0)) e
Dxf(x) = −[∂yF (x, y)]−1∂xF (x, y) dove y = f(x) .
• iii) Infine, se F ∈ Ck(U), k ≥ 1, allora f ∈ Ck.
Osservazioni 8.4.1 1) Notiamo che se Y , Z hanno dimensione finita allorala ipotesi c) puo essere verificata solo se Y e Z hanno la stessa dimensione,i.e. Y = Rn = Z per qualche n ∈ N.
2) Naturalmente, se ∂xF (x0, y0) ∈ GL(X,Z) possiamo esprimere x comefunzione di y.

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 119
Dimostrazione. Per semplicita di notazione sia (x0, y0) = (0, 0).Scriviamo
F (x, y) = F (0, 0) + ∂yF (0, 0)y +R(x, y) = Ay +R(x, y) (8.10)
dove, per brevita,A := ∂yF (0, 0)
edR(x, y) = F (x, y)− Ay . (8.11)
Dalla scrittura (8.10)
F (x, y) = 0 ⇐⇒ y = −A−1R(x, y) .
Lemma 8.4.1 Esistono r, δ > 0 tale che, ∀x ∈ Br(0) l’operatore
Φ(x, ·) := −A−1R(x, ·)
e una contrazione in una palla Bδ(0) := y ∈ Y | ‖y‖ ≤ δ.
Dimostrazione. Fissiamo
ε :=1
2‖A−1‖.
Per la continuita di ∂yF (x, y) in (0, 0), esistono δ > 0, r1 > 0 tali che∀‖x‖ ≤ r1, ∀y1, y2 ∈ Bδ(0), ∀t ∈ [0, 1], vale∥∥∥∂yF (x, ty2 + (1− t)y1)− ∂yF (0, 0)
∥∥∥ ≤ ε . (8.12)
Poiche F (0, 0) = 0 ed F (x, y) e continua in (0, 0) esiste 0 < r ≤ r1 tale che
‖F (x, 0)‖ ≤ δ
2‖A−1‖. (8.13)
Verifichiamo la affermazione del lemma con questi δ, r > 0 appena trovati.
In primo luogo, ∀x ∈ Br(0), ∀y1, y2 ∈ Bδ(0),
R(x, y2)−R(x, y1) = F (x, y2)− Ay2 − F (x, y1) + Ay1
= F (x, y2)− F (x, y1)− ∂yF (0, 0)[y2 − y1]
=∫ 1
0
(∂yF (x, ty2 + (1− t)y1)− ∂yF (0, 0)
)[y2 − y1] dt
usando il teorema della media integrale.

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 120
Quindi, da (8.12),
‖R(x, y2)−R(x, y1)‖ ≤ ε‖y2 − y1‖
e, pertanto, ∀x ∈ Br(0), ∀y1, y2 ∈ Bδ(0),
‖Φ(x, y2)− Φ(x, y1)‖ ≤ ‖A−1‖‖R(x, y2)−R(x, y1)‖≤ ε‖A−1‖ ‖y2 − y1‖
=1
2‖y2 − y1‖ . (8.14)
Mostriamo adesso che
∀x ∈ Br(0) =⇒ Φ(x, ·) : Bδ(0)→ Bδ(0) . (8.15)
∀y ∈ Bδ(0) abbiamo
‖Φ(x, y)‖ ≤ ‖Φ(x, 0)‖+ ‖Φ(x, y)− Φ(x, 0)‖(8.14)
≤ ‖Φ(x, 0)‖+1
2‖y‖
≤ ‖Φ(x, 0)‖+δ
2. (8.16)
OraΦ(x, 0) := −A−1R(x, 0) = −A−1F (x, 0)
da cui
‖Φ(x, 0)‖ ≤ ‖A−1F (x, 0)‖≤ ‖A−1‖ ‖F (x, 0)‖ (8.17)
(8.13)
≤ δ
2. (8.18)
Da (8.16) e (8.18) si ricava che ∀x ∈ Br(0), ∀y ∈ Bδ(0) si ha ‖Φ(x, y)‖ ≤ δ,ossia (8.15). Inoltre, da (8.14), la mappa Φ(x, ·) e una contrazione in Bδ(0)e il lemma rimane dimostrato.
Dal teorema delle Contrazioni deduciamo che ∀x ∈ Br(0) esiste un unicopunto fisso y := f(x) ∈ Bδ(0) di
y = Φ(x, y) (8.19)
ossia una unica soluzione y = f(x) di F (x, y) = 0. Poiche F (0, 0) = 0deduciamo, per l’unicita del punto fisso, che f(0) = 0.

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 121
Inoltre, se (x, y) ∈ Br(0) × Bδ(0) e una soluzione di F (x, y) = 0, alloray ∈ Bδ(0) e un punto fisso di Φ(x, ·) : Bδ(0) → Bδ(0) e, per l’unicita delpunto fisso, y = f(x).
Continuita di f(x). Abbiamo, ∀x1, x2 ∈ Br(0),
‖f(x1)− f(x2)‖ (8.19)= ‖Φ(x1, f(x1))− Φ(x2, f(x2))‖≤ ‖Φ(x1, f(x1))− Φ(x1, f(x2))‖+ ‖Φ(x1, f(x2))− Φ(x2, f(x2))‖
(8.14)
≤ 1
2‖f(x1)− f(x2)‖+ ‖Φ(x1, f(x2))− Φ(x2, f(x2))‖
da cui
1
2‖f(x1)− f(x2)‖ ≤ ‖Φ(x1, f(x2))− Φ(x2, f(x2))‖
≤ ‖A−1‖ ‖R(x1, f(x2))−R(x2, f(x2))‖= ‖A−1‖ ‖F (x1, f(x2))− F (x2, f(x2))‖ (8.20)
ricordando la definizione di R(x, y). Da (8.20) e dalla continuita di F (x, y)segue che
x1 → x2 ⇒ ‖f(x1)− f(x2)‖ → 0
ossia la continuita di f(x) nel generico punto x2. Il punto (i) del teorema ecompletamente dimostrato.
Per provare il punto (ii) del teorema dobbiamo provare la derivabilita dif(x) in x ∈ int(Br(0)). Piu precisamente dobbiamo mostrare che, denotando
Λ := −[∂yF (x, y)]−1∂xF (x, y) ∈ L(X, Y )
con y = f(x), si ha
‖f(x+ h)− f(x)− Λh‖‖h‖
→ 0 per ‖h‖ → 0 . (8.21)
Prendiamo h piccolo in modo tale che x + h ∈ Br(0). Per la continuita dif(·) in x,
k := f(x+ h)− f(x)→ 0 per h→ 0 .
Poiche F e differenziabile in (x, y) := (x, f(x)), ∀ε > 0 esiste η > 0 tale che∀‖h‖ ≤ η si ha∥∥∥F (x+ h, y + k)− F (x, y)− ∂xF (x, y)h− ∂yF (x, y)k
∥∥∥ ≤ ε(‖h‖+ ‖k‖)

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 122
e, quindi, essendo F (x+ h, f(x) + k) = 0, F (x, f(x)) = 0,∥∥∥∂xF (x, y)h+ ∂yF (x, y)k∥∥∥ ≤ ε(‖h‖+ ‖k‖) . (8.22)
Poiche∂yF (x, f(x))→ ∂yF (0, 0) per x→ 0 ,
essendo ∂yF (0, 0) ∈ GL(Y, Z), dal lemma 8.2.2, si ha che ∂yF (x, f(x)) einvertibile e 1
∥∥∥[∂yF (x, f(x))]−1∥∥∥ ≤ 2
∥∥∥[∂yF (0, 0)]−1∥∥∥ = 2‖A−1‖ (8.23)
per tutti ‖x‖ ≤ r, prendendo eventualmente un r piu piccolo di quanto fattonel lemma 8.4.1.
Scrivendo
f(x+ h)− f(x)− Λh = k + [∂yF (x, y)]−1∂xF (x, y)h
= [∂yF (x, y)]−1[∂yF (x, y)k + ∂xF (x, y)h
],
da (8.22) e (8.23), abbiamo
‖f(x+ h)− f(x)− Λh‖ ≤ ‖∂yF (x, y)−1‖‖∂yF (x, y)k + ∂xF (x, y)h‖≤ 2‖A−1‖ ε(‖h‖+ ‖k‖)≤ 2‖A−1‖ ε(‖h‖+ ‖k − Λh‖+ ‖Λh‖)
da cui, ricordando che k := f(x+ h)− f(x), e abbreviando C := 2‖A−1‖,
(1− Cε)‖f(x+ h)− f(x)− Λh‖ ≤ Cε(‖h‖+ ‖Λh‖)≤ Cε(1 + ‖Λ‖)‖h‖ .
Abbiamo provato che ∀ε < 1/2C, esiste η > 0 tale che ∀‖h‖ < η,
‖f(x+ h)− f(x)− Λh‖‖h‖
≤ ε2C(1 + ‖Λ‖)
ossia, per la arbitrarieta di ε, la (8.21).
1Infatti si scrive
∂yF (x, f(x)) = ∂yF (0, 0) + (∂yF (x, f(x))− ∂yF (0, 0)) = A+B
con A := ∂yF (0, 0) e B := ∂yF (x, f(x))− ∂yF (0, 0). Usando la continuita di ∂yF (x, y) in(0, 0) e che, per x→ 0, si ha f(x)→ 0, si sceglie ‖x‖ ≤ r sufficientemente piccolo tale che‖B‖‖A−1‖ ≤ 1/2 (si veda la (8.3)) Quindi, dalla (8.5), si deduce la (8.23).

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 123
Proviamo l’ultimo punto (iii). Se F ∈ C2, dalla identita
Dxf(x) = −[∂yF (x, f(x))]−1∂xF (x, f(x))
deduciamo che Dxf(x) e di classe C1 (usando che la mappa A→ A−1 definitain (8.8) e di classe C∞). Quindi f(x) ∈ C2. Se F ∈ Ck allora, ragionandoper induzione, si ottiene f ∈ Ck.
8.4.1 Il caso F : R×R→ R
Studiamo l’insieme di livello di una funzione F ∈ C1(R × R,R) (ossia glispazi X, Y, Z = R). Se
F (x0, y0) = 0 e ∇F (x0, y0) 6= 0 (8.24)
allora l’insieme F (x, y) = 0 e localmente una curva semplice e regolare diclasse C1, esprimibile come un grafico o nella variabile x o nella variabile y.Se vale (8.24) il punto (x0, y0) si dice regolare.
Se, infatti, ad esempio ∂yF (x0, y0) 6= 0, l’insieme F (x, y) = 0 e rappre-sentabile, localmente vicino al punto (x0, y0), come il grafico di una funzionef : (x0 − r, x0 + r)→ R di classe C1, con f(x0) = y0.
Un vettore tangente alla curva e
(1, f ′(x0)) =(1,−∂xF (x0, y0)
∂yF (x0, y0)
).
Un vettore normale alla curva e
∇F (x0, y0) =(∂xF (x0, y0), ∂yF (x0, y0)
).
La retta tangente ad F (x, y) = 0 in (x0, y0) e
(x− x0) ∂xF (x0, y0) + (y − y0) ∂yF (x0, y0) = 0 .
Esercizio Consideriamo la funzione F : R2 → R definita da
F (x, y) := ex−y + x2 − y2 − e(x+ 1) + 1 .
Provare che l’insieme F (x, y) = 0 e rappresentabile, localmente vicino alpunto (0,−1), come il grafico di una funzione f : (−r, r)→ R di classe C∞,con f(0) = −1 ed avente un minimo locale in x = 0.
Soluzione Si ha F (0,−1) = 0 e
∂yF (x, y) = −ex−y − 2y

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 124
per cui ∂yF (0,−1) = 2−e 6= 0. Essendo F ∈ C∞, dal teorema della funzioneimplicita esiste f : (−r, r)→ R di classe C∞ con f(0) = −1, tale che
F (x, f(x)) = ex−f(x) + x2 − [f(x)]2 − e(x+ 1) + 1 = 0 .
Derivando questa relazione in x, otteniamo
ex−f(x)(1− f ′(x)) + 2x− 2f(x)f ′(x)− e = 0 (8.25)
e pertanto, per x = 0,
e(1− f ′(0)) + 2f ′(0)− e = 0
ossia f ′(0) = 0. Derivando ulteriormente (8.25) troviamo
ex−f(x)(1− f ′(x))2 − ex−f(x)f ′′(x) + 2− 2[f ′(x)]2 − 2f(x)f ′′(x) = 0
che, calcolata in x = 0, da
e− ef ′′(0) + 2 + 2f ′′(0) = 0
da cui f ′′(0) = (e + 2)/(e− 2) > 0. La funzione f(x) ha dunque un minimolocale in x = 0.
Esercizio Consideriamo la funzione F : R2 → R definita da
F (x, y) := x2y + ex+y .
Provare che l’insieme F (x, y) = 0 e il grafico di una funzione f : R\0 → Rdi classe C∞. Disegnare la curva F (x, y) = 0.
Soluzione Per ogni x 6= 0 la funzione
y → F (x, y) = x2y + ex+y
e strettamente monotona essendo
∂yF (x, y) = x2 + ex+y > 0 (8.26)
e risultalim
y→±∞F (x, y) = ±∞ .
Ne segue che, ∀x 6= 0, esiste un unico y := f(x) tale che F (x, y) = 0.Notiamo che F (0, y) = ey > 0 e quindi non vi sono zeri di F (x, y) sulla
retta x = 0. Abbiamo definito una funzione
f : R \ 0 → R

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 125
il cui grafico coincide con gli zeri di F (x, y) = 0.Poi, notando che F (x, y) > 0 nel semipiano y ≥ 0 deduciamo che
f(x) < 0, ∀x 6= 0.Da (8.26), essendo F ∈ C∞, applicando il teorema della funzione impli-
cita, f(x) risulta una funzione di classe C∞.Calcoliamo la derivata f ′(x). Differenziando l’identita
x2f(x) + ex+f(x) = 0 (8.27)
troviamo, con facili calcoli,
2xf(x) + ex+f(x) + f ′(x)(x2 + ex+f(x)) = 0
e, dalla identita (8.27),
x(2− x)f(x) + f ′(x)(x2 + ex+f(x)) = 0
per cui
f ′(x) = −x(2− x)f(x)
x2 + ex+f(x).
Essendo f(x) < 0, ∀x 6= 0, si deduce che
f ′(x) => 0 per x ∈ (0, 2)< 0 per x < 0, x > 2 .
La f(x) e decrescente in (−∞, 0), (2,+∞) e crescente in (0, 2). In x = 2 lafunzione f(x) ha un punto di massimo relativo.
Per monotonia esiste il limite
limx→−∞
f(x) = l ≤ 0 .
Proviamo che l = 0. Infatti, se fosse l < 0, dedurremmo
limx→−∞
x2f(x) + ex+f(x) = −∞
che contraddice (8.27). Analogamente si puo provare che
limx→0
f(x) = −∞ limx→+∞
f(x) = −∞ .
Farlo per esercizio. Si disegni il grafico di f(x) ossia l’insieme F (x, y) = 0.
In un intorno di un punto (x0, y0) non-regolare (singolare) ossia dove
∇F (x0, y0) = 0

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 126
l’insieme F (x, y) = 0 puo essere assai complicato (sara determinato dallosviluppo di Taylor di F agli ordini superiori).
Esempio L’insieme di livello F (x, y) = 0 della funzione
F (x, y) = y2 − x2
e l’unione delle 2 bisettrici y = ±x. In particolare un intorno del puntocritico (0, 0) non e una curva.
Esempio L’insieme di livello F (x, y) = 0 della funzione
F (x, y) = y2 + x2
si riduce al solo punto (0, 0).Consideriamo la funzione F : R2 → R definita da
F (x, y) := ex−y + x2 − y2 − e(x+ 1) + 1 .
Provare che l’insieme F (x, y) = 0 e rappresentabile, localmente vicino alpunto (0,−1), come il grafico di una funzione f : (−r, r)→ R di classe C∞,con f(0) = −1 ed avente un minimo locale in x = 0.
Esercizio Dire se l’equazione
F (x, y) = y3 − x2 = 0
definisce implicitamente una unica funzione y = f(x) in un intorno di x = 0.
Soluzione Il teorema della funzione implicita non si applica essendo∇F (0, 0) =0, ma
y3 − x2 = 0 ⇐⇒ y = (x2)1/3 ,
ossia F (x, y) = 0 e il grafico della funzione f : R→ R, f(x) := (x2)1/3.
Esercizio Consideriamo un polinomio reale di grado n nella variabile xdipendente da un parametro µ
P (µ, x) = a0(µ) + a1(µ)x+ . . .+ an(µ)xn , an 6= 0
in modo C1, ossia a0, . . . an ∈ C1(R,R). Supponiamo che per ogni µ ilpolinomio P (µ, x) = 0 abbia n radici reali e distinte
x1(µ) < x2(µ) < . . . < xn(µ) .
Provare che x1, x2, . . . , xn sono funzioni C1 da R in R.

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 127
Suggerimento Consideriamo ad esempio x1(µ). Sappiamo che P (µ, x1(µ))= 0. Per provare la regolarita basta applicare il teorema della funzione im-plicita. Per questo bisogna provare che (∂xP )(µ, x1(µ)) 6= 0. Decomponendoil polinomio
P (µ, x) = an(µ)(x− x1(µ)) . . . (x− xn(µ))
se fosse (∂xP )(µ, x1(µ)) = 0, quale contraddizione si trova?
(questo mostra che autovalori semplici di matrici dipendenti da parametrisono funzioni regolari dei parametri).
8.4.2 Il caso F : R3 → R
Studiamo l’insieme di livello di una funzione F ∈ C1(R3,R). Se
F (x0, y0, z0) = 0 e ∇F (x0, y0, z0) 6= 0 (8.28)
allora l’insieme F (x, y, z) = 0 e localmente una superficie semplice e regolaredi classe C1, esprimibile come il grafico di una funzione di 2 variabili.
Se, infatti, ad esempio ∂zF (x0, y0, z0) 6= 0, l’insieme F (x, y, z) = 0 erappresentabile, localmente vicino al punto (x0, y0, z0), come il grafico di unafunzione z := f(x, y) di classe C1, con f(x0, y0) = z0.
Un vettore normale alla superficie e ∇F (x0, y0, z0) e il piano tangente adF (x, y, z) = 0 in (x0, y0, z0) e
(x−x0) ∂xF (x0, y0, z0)+(y−y0) ∂yF (x0, y0, z0)+(z−z0) ∂zF (x0, y0, z0) = 0 .
Esercizio Consideriamo la funzione F : R3 → R definita da
F (x, y, z) := sinh(z − 1)− ex + ey + xz − y .
Provare che l’insieme F (x, y, z) = 0 e rappresentabile, localmente vicino alpunto (0, 0, 1), come il grafico di una funzione z(x, y) di classe C∞, conz(0, 0) = 1 ed avente un minimo locale in x = 0. Si calcoli lo sviluppo diTaylor di z(x, y) in (0, 0).
Soluzione Si ha F (0, 0, 1) = 0 e ∂zF = cosh(z − 1) + x che, calcolata in(0, 0, 1), da
∂zF (0, 0, 1) = 1 .
Dal teorema della funzione implicita esiste z(x, y) come affermato. Differen-ziando
sinh(z(x, y)− 1)− ex + ey + x z(x, y)− y = 0

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 128
in x e y si trovacosh(z(x, y)− 1)∂xz − ex + z(x, y) + x ∂xz(x, y) = 0 ,cosh(z(x, y)− 1)∂yz + ey + x ∂yz(x, y)− 1 = 0
(8.29)
e, calcolando in (x, y) = (0, 0),
∂xz(0, 0) = 0 , ∂yz(0, 0) = 0 .
Il piano tangente ad F (x, y, z) = 0 e z = 1.Derivando ulteriormente la prima equazione in (8.29) rispetto a x si trova
sinh(z − 1)[∂xz]2 + cosh(z − 1)∂xxz − ex + 2∂xz + x ∂xz = 0
e, calcolando in (x, y) = (0, 0),
∂xxz(0, 0) = 1 .
Analogamente si trova
∂yyz(0, 0) = −1 , ∂xyz(0, 0) = 0
e, pertanto, lo sviluppo di Taylor di z(x, y) al secondo ordine in (0, 0) e
z(x, y) = 1 +1
2x2 − 1
2y2 + o(x2 + y2) .
Il grafico di z(x, y) e tipo una sella vicino a (0, 0).
8.4.3 Il caso F : R3 → R2
Studiamo l’insieme di livello di una funzione F := (F1, F2) ∈ C1(R3,R2),ossia l’insieme
F1(x, y, z) = 0F2(x, y, z) = 0 .
Se F (x0, y0, z0) = 0 e ∇F1(x0, y0, z0) 6= 0 l’insieme definito dalla prima equa-zione e localmente una superficie semplice e regolare di classe C1 con vettorenormale ∇F1(x0, y0, z0).
Analogamente, se ∇F2(x0, y0, z0) 6= 0 l’insieme definito dalla secondaequazione e localmente una superficie semplice e regolare di classe C1 convettore normale ∇F2(x0, y0, z0).
Se ∇F1(x0, y0, z0) e ∇F2(x0, y0, z0) sono indipendenti queste 2 superfici siintersecheranno transversalmente lungo una curva semplice.

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 129
Verifichiamolo applicando il teorema della funzione implicita. Se∇F1(x0, y0, z0)e ∇F2(x0, y0, z0) sono indipendenti, la matrice jacobiana 3× 2 definita da(
∇F1(x0, y0, z0)T ,∇F2(x0, y0, z0)T)
ha rango 2 e pertanto ha un minore 2 × 2 invertibile. Dal teorema dellafunzione implicita posso esplicitare 2 variabili in funzione dell’altra.
La retta tangente alla curva F (x, y, z) = 0 in (x0, y0, z0) e l’intersezionedei 2 piani tangenti a F1 = 0 e F2 = 0, ossia
(x− x0) ∂xF1 + (y − y0) ∂yF1 + (z − z0) ∂zF1 = 0(x− x0) ∂xF2 + (y − y0) ∂yF2 + (z − z0) ∂zF2 = 0 .
Esercizio Provare che il sistemaF1 = ez + 3x− cos y + y = 0F2 = ex − x− z + y − 1 = 0
(8.30)
definisce una curva regolare in un intorno del punto (0, 0, 0) esplicitabileparametricamente come (x, y(x), z(x)). Si scrivano le equazioni della rettatangente e del piano normale alla curva in (0, 0, 0).
Soluzione Si ha
∇F1(0, 0, 0) = (3, 1, 1) , ∇F2(0, 0, 0) = (0, 1,−1) .
Il minore della matrice Jacobiana
∂(F1, F2)
∂(y, z)=
(1 11 −1
)
ınvertibile. Quindi posso localmente esprimere l’insieme (8.30) come (x, y(x), z(x)).
Domanda Posso esprimere anche (x, y)(z)? E (x, z)(y)?
Un vettore tangente e (1, y′(0), z′(0)). Derivando in (8.30) trovo y′(0) =−3/2 e z′(0) = −3/2. Il piano normale e 2x− 3y − 3y = 0
8.4.4 Il caso F : Rn → Rm, n ≥ m
Studiamo l’insieme di livello di una funzione F := (F1, . . . , Fm) ∈ C1(Rn,Rm),n ≥ m ossia l’insieme definito dal sistema di m equazioni
F1(x1, . . . , xn) = 0. . .Fm(x1, . . . , xn) = 0 .
(8.31)

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 130
Ragionando come al punto precedente, se F (x) = 0 ed
∇F1(x) , . . . ,∇Fm(x)
sono indipendenti, ossia la matrice
(∇F1(x) , . . . ,∇Fm(x))
ha rango m, allora il sistema (8.31) definisce m equazioni indipendenti, os-sia puo essere risolto esplicitando m variabili in funzione delle altre n − mvariabili.
Esercizio (Un caso F : R2 ×R2 → R2) Sia F : R4 → R2 definito da
F (x, y, z, v) =
((y + 3)z − tan(z + v) + 2xsin(z + v) + 3y − x(v + 3)
)
Provare che il sistema F = 0 si puo risolvere trovando (z, v)(x, y) in unintorno di 0.
8.5 Il teorema della mappa inversa
Definizione 8.5.1 Una mappa f : U ⊂ X → Y e invertibile tra U e V ⊂ Yse esiste una mappa g : V → U tale che
f(g(y)) = y , ∀y ∈ V ,
g(f(x)) = x , ∀x ∈ U .La mappa g := f−1 : V → U ⊂ X si chiama applicazione inversa di f .
Definizione 8.5.2 Una mappa f : U ⊂ X → Y e un diffeomorfismo tra Ue V ⊂ Y se f e invertibile e sia f che f−1 sono differenziabili.
Definizione 8.5.3 Una mappa f : U ⊂ X → Y e localmente invertibile inx0 ∈ U se esiste un intorno U(x0) e un intorno V (y0) dove y0 := f(x0), tracui f e invertibile.
Definizione 8.5.4 Una mappa f : U ⊂ X → Y e un diffeomorfismo localein x0 ∈ U se f e un diffeomorfismo tra un intorno U(x0) e un intorno V (y0)dove y0 := f(x0).
Teorema 8.5.1 (Teorema dell invertibilita locale) Sia f := U ⊂ X →Y una mappa di classe C1(U, Y ). Sia x0 ∈ U tale che Df(x0) ∈ GL(X, Y ).Allora

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 131
• f e localmente invertibile in x0
• l’ inversa f−1 : V → X e di classe C1, f−1(y0) = x0 e Df−1(y0) =[Df(x0)]−1 (f e un diffeomorfismo locale in x0)
• se f ∈ Ck(U, Y ), k > 1, allora f−1 ∈ Ck(V,X).
Dimostrazione. Consideriamo la mappa F : X × Y → Y definita da
F (x, y) = f(x)− y .
Abbiamo che F (x0, y0) = 0 ed F ∈ C1 in un intorno di (x0, y0). Si ha∂xF (x0, y0) = Df(x0) ∈ GL(X, Y ).
Dal teorema della funzione implicita esiste r, δ > 0 e una mappa
f−1 : Bδ(y0)→ X
di classe C1 tale che tutte e sole le soluzioni (x, y) ∈ Br(x0) × Bδ(y0) diF (x, y) = 0 sono date da x = f−1(y)
Esercizio importante. Si consideri la funzione f : R→ R definita da
f(x) :=x+ 2x2 sin(1/x) se x 6= 00, se x = 0
.
Provare che f e continua e derivabile su tutto R e la derivata f ′(0) 6=0. La funzione f non e iniettiva in nessun intorno dell’origine (e quindinon e localmente invertibile in 0). Quale ipotesi del teorema 8.5.1 non esoddisfatta?
Esercizio Provare che f : R2 → R2 definita da
f(x, y) := (x2 − y2, 2xy)
e localmente invertibile per ogni (x, y) 6= (0, 0). Provare che f non e global-mente invertibile.Soluzione Il determinante Jacobiano di f(x, y) e
det
(2x −2y2y 2x
)= 4(x2 + y2) 6= 0
se (x, y) 6= (0, 0). Per vedere che f non e globalmente invertibile osserva che,indicato z = x+ iy, si ha x2−y2 = Re(z2) e 2xy = Im(z2). La mappa z → z2
e iniettiva?
Esercizio Sia A : Rn → L(Rn) una mappa C1 tale che A(0) ∈ GL(Rn).Provare che la mappa f : Rn → Rn definita da f(x) = A(x)x e localmenteinvertibile.

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 132
8.6 Appendice
Diamo adesso solo un accenno alla portata di queste tecniche in spazi infini-to dimensionali. La trattazione di questi argomenti fa parte della cosidetta“analisi non-lineare i cui scopi sono assai al di la di questo corso. Ma ritenia-mo utile inserirli per suscitare curiosita e far intuire l’ampiezza dei possibilisviluppi di questa materia.
Come primo esempio proviamo il seguente teorema.
Teorema 8.6.1 Differenziabilita rispetto ai dati iniziali Consideriamouna equazione differenziale
x = f(t, x)x(t0) = x0
(8.32)
dove il campo vettoriale f ∈ C1(R1+n,Rn). Le soluzioni x(t;x0) dipendonoin modo C1 dai dati iniziali x0 ∈ Rn.
Dimostrazione. Consideriamo la mappa
F : C1([t0 − a, t0 + a])×Rn → C1([t0 − a, t0 + a])
(per un certo intervallo di tempo [t0 − a, t0 + a] in cui la soluzione x(t) di(8.32) esiste) definita da
F (ϕ, x0)(t) := ϕ(t)− x0 −∫ t
t0f(τ, ϕ(τ)) dτ ,
dove C1 e uno spazio di Banach con la norma definita in (1.8), come provatoal Capitolo 1. Essendo F ∈ C1(R1+n,Rn) si vede che, se ϕ(t) ∈ C1 alloraF (ϕ, x0)(·) ∈ C1, e la funzione F e ben definita.
Si ha F (x(·), x0) = 0 e la derivata risulta
∂ϕF (ϕ, x0)[h] := h(t)−∫ t
t0(∂xf)(τ, ϕ(τ))h(τ) dτ .
(dimostrarlo per esercizio) ed F e di classe C1 (dimostrarlo per esercizio).Inoltre ∂ϕF (ϕ, x0) risulta invertibile con continuita. Infatti per ogni g(t) ∈C1 la equazione
h(t)−∫ t
t0(∂xf)(τ, ϕ(τ))h(τ) dτ = g(t)
ha una ed una sola soluzione equivalendo al sistema lineareh(t)− A(t)h(t) = g(t) , A(t) := (∂xf)(t, ϕ(t)) .h(t0) = g(t0)

CAPITOLO 8. IL TEOREMA DELLA FUNZIONE IMPLICITA 133
Si verifichi, usando ad esempio la formula esplicita della soluzione h ricavabilecome in (5.6), che la mappa inversa ∂ϕF (ϕ, x0)−1 e continua.
Esercizio Provare che se f ∈ Ck, k > 1, allora x0 → x(t, x0) e di classe Ck.
Come secondo esempio consideriamo l’equazione differenziale (di Duffing)che rappresenta un oscillatore forzato periodicamente nel tempo,
x+ x+ ε(x3 + f(t)) = 0 (8.33)
dove ε e un parametro ed f(t) una funzione continua, periodica, di periodo
T 6= 2πn , ∀n ∈ N (8.34)
(condizione di non risonanza).
Teorema 8.6.2 Dimostriamo che, se vale (8.34), per ε sufficientementepiccolo esiste una ed una sola soluzione T -periodica di (8.33) di piccolaampiezza.
Dimostrazione. Consideriamo la mappa F : R× C2T → C0
T dove
C2T :=
x(t) = x(t+ T ) , x ∈ C2 , con ‖x‖C2 := ‖x‖∞ + ‖x‖∞ + ‖x‖∞
C0T :=
x(t) = x(t+ T ) con norma ‖x‖∞
sono spazi di Banach (dimostrarlo per esercizio), definita da
F (ε, x) := x+ x+ ε(x3 + f(t)) .
La mappa F ∈ C1(R× C2T , C
0T ) (dimostrarlo per esercizio) ed
F (0, 0) = 0 .
Per applicare il teorema della funzione implicita consideriamo la derivata
h→ (∂xF )(0, 0)[h] := h+ h , ∀h ∈ C2T .
Per la ipotesi (8.34) l’equazione
h+ h = g(t)
ha una ed una sola soluzione h ∈ C2T per ogni g ∈ C0
T (dimostrarlo peresercizio) e, cosi’, si ha (∂xF )(0, 0)−1 ∈ GL(C0
T , C2T ).
Dal teorema della funzione implicita, per ogni ε abbaistanza piccolo, esisteuna ed una sola soluzione T -periodica x(t; ε) di (8.33) con x(t; ε) → 0 perε→ 0.

Capitolo 9
Analisi complessa
9.1 Funzioni olomorfe
Sia Ω un sottoinsieme aperto di C. Denoteremo z = x + iy ∈ C un numerocomplesso e z = x − iy il suo complesso coniugato. Denoteremo anche conx = Re(z) e y = Im(z) la parte reale ed immaginaria del numero complessoz. Si ha
Re(z) =z + z
2, Im(z) =
z − z2i
.
Denoteremo il modulo di un numero complesso z = x+ iy come
|z| =√x2 + y2 =
√zz .
Ogni numero complesso puo essere scritto in forma polare
z = ρeiθ = ρ(cos θ + i sin θ) ,
dove ρ e il modulo di z e θ e detto il suo argomento.
Esercizio. Si descrivano nel piano complesso il luogo dei punti dove
1
z= z , Re(z) = 3 , |z| = Re(z) + 1 , Re(az + b) > 0 , a, b ∈ C .
Definizione 9.1.1 Una funzione f : Ω ⊂ C → C si dice differenziabile inz0 ∈ Ω (in senso complesso) se esiste il limite del rapporto incrementale
limz→z0
f(z)− f(z0)
z − z0
=: f ′(z0) ∈ C
che si chiama derivata (complessa) della funzione in z0.
134

CAPITOLO 9. ANALISI COMPLESSA 135
Dalla definizione precedente si ha che f(z) e derivabile in z0 ∈ C se e solose esiste un numero complesso a ∈ C tale che
f(z) = f(z0) + a(z − z0) + o(|z − z0|) per z → z0 .
Tale numero a e unico ed e la derivata f ′(z0) = a.
Esempio 1. La funzione f(z) = z2 e derivabile in ogni punto z0 ∈ C erisulta f ′(z) = 2z. Infatti
limz→z0
z2 − z20
z − z0
= limz→z0
(z − z0)(z + z0)
z − z0
= limz→z0
z + z0 = 2z0 .
Esempio 2. La funzione z 7→ zn e derivabile in C con derivata z 7→ nzn−1.
Esempio 3. La funzione f(z) = 1/zn, n ∈ N, e definita e derivabile in ognipunto di C \ 0 con derivata f ′(z) = −nz−n−1.
Esempio 4. La funzione z 7→ z non e derivabile in nessun punto di C. Infattiil rapporto incrementale
z0 + h− z0
h=h
h=
1 se h ∈ R−1 se h ∈ iR
non ha limite per h→ 0.
Definizione 9.1.2 Una funzione f(z) definita e derivabile in Ω con derivataprima f ′(z) continua in Ω si dice olomorfa in Ω. Denoteremo
H(Ω) := C1(Ω,C) =f : Ω→ C olomorfa
lo spazio delle funzioni olomorfe.
Osservazione 9.1.1 Si potrebbe definire una funzione olomorfa anche as-sumendo solo che f sia derivabile in Ω (e provando che f ′ e continua). Conla definizione 9.1.2 la teoria si semplifica considerevolmente perche possiamousare direttamente la teoria delle 1-forme differenziali, vedi sezione 9.3.
Naturalmente le regole di derivazione per somma, differenza, prodotto,quoziente e composizione di funzioni complesse sono le stesse che per lefunzioni reali.
Identificando il piano complesso C con R2 mediante
z = x+ iy ∈ C , (x, y) ∈ R2 ,

CAPITOLO 9. ANALISI COMPLESSA 136
possiamo rivedere f come una mappa da R2 in R2 evidenziando la partereale e la parte immaginaria della funzione a valori complessi
f(x+ iy) = u(x, y) + iv(x, y) , z = x+ iy ∈ Ω .
Qual’e il legame tra la nozione di derivabilita complessa di f e la differenzia-bilita della mappa (u, v) : R2 → R2?
Teorema 9.1.1 Una funzione f e differenziabile in senso complesso in z0 =x0 + iy0 ∈ Ω se e solo se la mappa
R2 3 (x, y) 7→ (u(x, y), v(x, y)) ∈ R2
e differenziabile in (x0, y0), e le derivate parziali delle parti reale e immagi-naria (u, v) soddisfano le identita di Cauchy-Riemann
∂xu = ∂yv , ∂yu = −∂xv , (9.1)
in (x0, y0). Si ha
f ′(z0) = (∂xf)(z0) =(ux + ivx
)(x0, y0)
=1
i(∂yf)(z0) =
1
i
(uy + ivy
)(x0, y0) .
Dimostrazione. Se (u, v) e differenziabile in (x0, y0) significa che(uv
)(x, y) =
(uv
)(x0, y0) +
(∂xu ∂yu∂xv ∂yv
)(x0, y0)
(x− x0
y − y0
)+ o(|x− x0|+ |y − y0|) (9.2)
per (x, y)→ (x0, y0). Le relazioni di Cauchy-Riemann (9.1) implicano che lamatrice Jacobiana ha la forma(
∂xu ∂yu∂xv ∂yv
)(x0, y0) =
(A −BB A
)(9.3)
conA := ∂xu = ∂yv , B := −∂yu = ∂xv ,
calcolate in (x0, y0). Una matrice siffatta rappresenta l’operatore di moltipli-cazione per il numero complesso A+ iB, essendo
(A+ iB)(x+ iy) = (Ax−By) + i(Bx+ Ay) .

CAPITOLO 9. ANALISI COMPLESSA 137
Quindi (9.2) implica
f(z) = f(z0) + (A+ iB)(z − z0) + o(|z − z0|) (9.4)
ossia che f e derivabile in senso complesso ed f ′(z0) = A+ iB. Viceversa, sevale (9.4), la mappa (u, v) e differenziabile in (x0, y0) e la matrice Jacobianaha la forma (9.3).
La dimostrazione del teorema evidenzia bene il rapporto tra la derivatacomplessa e la differenziabilita della corrispondente funzione vista da R2
in R2: la matrice Jacobiana deve rappresentare la moltiplicazione per unoscalare complesso.
Esercizio. Provare che la funzione
ez := ex(
cos(y) + i sin(y))
e olomorfa.Esercizio. Dire se le funzioni
f(x, y) = x2 + y2 + i2xy , f(x, y) = sin(x) cosh(y) + i cos(x) sinh(y)
sono olomorfe.
Esercizio. Mostrare che la applicazione f(x + iy) =√|x||y| soddisfa le
equazioni di Cauchy-Riemann in (0, 0) ma non e olomorfa. Perche?
Esercizio. Scrivere la mappa lineare R2 → R2 che corrisponde alla appli-cazione z 7→ z.
Esercizio. Provare che la funzione z 7→ |z|2 non e olomorfa.
Esercizio. Piu in generale, mostrare che non esiste nessuna funzione olo-morfa non costante che assuma sempre valori reali in un aperto connessoΩ.
Suggerimento: Se v ≡ 0 si dedurrebbe ux = uy = 0. Quindi u ≡ 0.
Esercizio. Sia f una funzione olomorfa in un aperto connesso Ω. Se Ref ,o Imf , e costante allora f e costante.
9.2 Funzioni analitiche
Ad ogni serie di potenze
f(z) =∑n≥0
anzn , an ∈ C , (9.5)
associamo il raggio di convergenza R definito come
1
R:= lim sup
n→+∞|an|1/n ∈ [0,+∞] . (9.6)

CAPITOLO 9. ANALISI COMPLESSA 138
Teorema 9.2.1 Per ogni r ∈ [0, R) la serie di potenze∑n≥0 anz
n
1. converge totalmente in |z| ≤ r.
2. diverge per ogni |z| > R.
Dimostrazione.
1. Consideriamo il caso in cui R sia diverso da 0 o +∞. Scegliamo ε > 0tale che ( 1
R+ ε
)r < 1 (9.7)
(che esiste poiche r < R). Dalla definizione (9.6) segue che, definitivamente,per n ≥ n0 sufficientemente grande,
|an|1/n ≤1
R+ ε =⇒ |an| ≤
( 1
R+ ε
)n.
Di conseguenza per ogni |z| ≤ r si ha
∑n≥n0
|an||z|n ≤∑n≥n0
( 1
R+ ε
)nrn < +∞ (9.8)
poiche vale (9.7). La (9.8) implica che la serie di potenze (9.5) convergetotalmente in |z| ≤ r.
2. Sia |z| > R. Da (9.6) esiste una sottosuccessione tale che
|ank |1nk → 1
R>
1
|z|,
(perche?) quindi, per k ≥ k0 sufficientemente grande,
|z||ank |1nk > 1 =⇒ |ank ||z|nk > 1 .
Pertanto la serie (9.5) diverge (i termini della serie di potenze non sonoinfinitesimi).
Esercizio. Fare la dimostrazione nei casi in cui R = 0, R = +∞.
Esercizio. Data la serie∑n≥0 anz
n, provare che, se esiste il limite
limn→+∞
|an||an+1|
,
allora tale limite coincide con il raggio di convergenza R.
Nulla si puo dire, in generale, sul comportamento della serie di potenze(9.5) sulla frontiera |z| = R del dominio di convergenza.

CAPITOLO 9. ANALISI COMPLESSA 139
Esempio 1. La serie di potenze ∑n≥0
zn
n2
ha raggio di convergenza R = 1 (provarlo) e converge totalmente su |z| ≤ 1.
Esempio 2. La serie di potenze ∑n≥0
zn
ha raggio di convergenza R = 1 e non converge in nessun punto del cerchio|z| = 1 (il termine zn non e infinitesimo per n→∞).
Esempio 3. La serie di potenze ∑n≥0
zn
n
ha raggio di convergenza R = 1 e converge puntualmente in ogni z 6= 1. Perdimostrarlo si puo usare la formula di sommatoria per parti (9.9).
Esercizio. Determinare il raggio di convergenza delle serie di potenze
∑n≥1
n2n
(2n)!zn ,
∑n≥1
(−z)n
3n+ lnn,
∑n≥1
2n−log2 nzn .
Esercizio (Sommatoria per parti) Date due successioni an, bn ∈ C, poniamo
An :=n∑k=0
ak se n ≥ 0 , A−1 := 0 .
Allora, per 0 ≤ p ≤ q si ha
q∑n=p
anbn = Aqbq − Ap−1bp +q−1∑n=p
An(bn − bn+1) . (9.9)
Suggerimento:
q∑n=p
anbn =q∑
n=p
(An − An−1)bn =q∑
n=p
Anbn −q−1∑
n=p−1
Anbn+1 .
Esercizio. Determinare il raggio di convergenza della serie di potenze∑n≥0
(2 + sinn)nzn .
Risposta: 1/3.

CAPITOLO 9. ANALISI COMPLESSA 140
Teorema 9.2.2 Una serie di potenze f(z) =∑n≥0 anz
n di raggio di conver-genza R e derivabile in |z| < R e la derivata risulta
f ′(z) =∑n≥0
nanzn−1 =
∑n≥0
(n+ 1)an+1zn . (9.10)
La f(z) e f ′(z) hanno lo stesso raggio di convergenza.
Dimostrazione. Il raggio di convergenza della serie delle derivate∑n≥0
nanzn−1 = z−1
∑n≥0
nanzn
risulta R poiche
lim supn→+∞
(|n||an|)1n = lim sup
n→+∞|an|
1n =
1
R.
Per il teorema di derivazione per serie f(z) =∑n≥0 anz
n e derivabile in|z| < R e la derivata risulta
f ′(z) =∑n≥0
nanzn−1 .
La funzione f ′(z) e continua in |z| < R poiche la serie (9.10) convergetotalmente per ogni |z| ≤ r < R.
Il teorema precedente mostra che ogni serie di potenze e una funzioneolomorfa all’interno del raggio di convergenza. Inoltre, iterando il teorema9.2.2 si trova che:
Corollario 9.2.1 Una serie di potenze f(z) =∑n≥0 anz
n di raggio di con-vergenza R e di classe C∞ in |z| < R e la derivata k-esima di f(z) risulta
f (k)(z) =∑n≥0
(n+ k) . . . (n+ 1)an+kzn .
Tutte le f (k)(z) hanno lo stesso raggio di convergenza R.
Definiamo le funzioni analitiche.
Definizione 9.2.1 (funzione analitica) Una funzione f : Ω ⊂ C → Csi dice analitica in Ω se, in un opportuno intorno di ogni punto di Ω, f(z)risulta sviluppabile in serie di potenze, ossia se, ∀z0 ∈ Ω, esiste un intornoU(z0) ⊂ Ω tale che
f(z) =∑n≥0
an(z − z0)n , an ∈ C .

CAPITOLO 9. ANALISI COMPLESSA 141
Se f e sviluppabile in serie di potenze in un intorno di z0, deduciamo, dalCorollario 9.2.1, che i coefficienti
an =f (n)(z0)
n!, ∀n ≥ 0 . (9.11)
Dunque, una funzione analitica f(z) coincide con la sua serie di Taylor
∑n≥0
f (n)(z0)
n!(z − z0)n
in un intorno di ogni punto z0 ∈ Ω.
Esercizio. Provare che le serie di potenze
ez :=+∞∑n=0
zn
n!
cos z :=+∞∑n=0
(−1)nz2n
(2n)!, sin z :=
+∞∑n=0
(−1)nz2n+1
(2n+ 1)!(9.12)
hanno raggio di convergenza R = +∞.
Esercizio. Provare che
ln(1 + x) =+∞∑n=0
(−1)nxn+1
n+ 1, |x| < 1
arctan(x) =+∞∑n=0
(−1)nx2n+1
2n+ 1, |x| < 1
Esercizio. Una serie di potenze f(z) =∑n≥0 anz
n di raggio di convergenzaR > 0 e analitica in |z| < R.
Suggerimento: Per ogni z0 ∈ C, |z0| < R, la f(z) e sviluppabile come unaserie di potenze
∑n≥0 bn(z − z0)n convergente per |z − z0| < R − |z0|: usare
il binomio di Newton per sviluppare
zn = (z0 + (z − z0))n =n∑k=0
(nk
)zk0 (z − z0)n−k .
Esercizio. Sia f : Ω ⊂ C→ C una funzione di classe C∞ tale che, per ogniz0 ∈ Ω, esistono costanti c, C, r > 0 (dipendenti in generale da z0) tali che
|(dkf)(z0)| ≤ Ck!
Rk, ∀|z − z0| < r . (9.13)

CAPITOLO 9. ANALISI COMPLESSA 142
Provare che f(z) e analitica in Ω.
Suggerimento. Usare lo sviluppo di Taylor di f(z) in z0 per mostrare chef(z) coincide, in un intorno di z0, con la serie di Taylor
∑n≥0
f (k)(z0)
k!(z − z0)k .
Esercizio. Sia f analitica in Ω. Allora, per ogni compatto K ⊂ Ω, esistonocostanti C,R > 0 tali che, ∀k ∈ N,
|(dkf)(z)| ≤ Ck!
Rk, ∀z ∈ K .
Suggerimento. Si ricopra il compatto K con un numero finito di palleB(z0; r). Poi usare gli esercizi precedenti.
Gli esercizi precedenti mostrano che le condizioni di crescita delle derivatein (9.13) “caratterizzano le funzioni analitiche.
Esercizio. Studiare la convergenza delle serie di potenze
∑n≥1
(−z)n
3n+ lnn,
∑n≥1
2n−2 log2 nzn .
Esercizio. Provare che
(1 + x)α =+∞∑n=0
(αn
)xn , |x| < 1 , α > 0 ,
dove (αn
):=
α(α− 1) . . . (α− n+ 1)
n!.
Il teorema 9.2.2 implica che ogni funzione analitica e olomorfa. Uno deirisultati piu importanti della teoria delle funzioni di variabile complessa eprovare che anche il viceversa e vero. Questo richiede un po’ di preparazione.
9.3 Integrali lungo cammini
In questa sezione useremo la teoria degli integrali curvilinei e delle 1-formedifferenziali svolta nel corso di Analisi 2. Sia Ω ⊂ C un aperto connesso.
Dato un camminoγ : [a, b]→ Ω ,

CAPITOLO 9. ANALISI COMPLESSA 143
C1-a tratti, definiamo l’integrale∫γf(z)dz :=
∫ b
af(γ(t))γ(t)dt .
Se γ(a) = γ(b) il cammino si chiama circuito o cammino chiuso.
Esempio. Lungo il cammino γ(t) = t2 + it, t ∈ [0, 1], l’integrale∫γz2dz =
∫ 1
0(t2 + it)2(2t+ i)dt = −2
3+
2
3i . (9.14)
Esercizio. Calcolare lungo il cammino γ(t) = t5 + it3, t ∈ [0, 1], l’integrale∫γz2dz .
Risposta: −23
+ 23i come in (9.14).
Esempio. L’integrale di 1/z lungo il circuito
γ(t) = reit , t ∈ [0, 2π],
che descrive il bordo della palla Br(0) di centro 0 e raggio r percorso unasola volta in senso anti-orario, risulta∫
γ
dz
z=∫ 2π
0
ireit
reitdt = 2πi .
Esercizio. Provare che lungo il circuito γ(t) = reint, n ∈ N, t ∈ [0, 2π],
1
2πi
∫γ
dz
z= n .
Esercizio. Provare che lungo il circuito γ(t) = reit, t ∈ [0, 2π], l’integrale∫γ
dz
zn= 0 con n ≥ 2 .
Scomponendo f(z) in parte reale ed immaginaria si trova∫γf(z)dz =
∫γudx− vdy + i
∫γvdx+ udy , (9.15)
che scriveremo anche come la forma differenziale (a valori complessi)
f(z)dz = (udx− vdy) + i(vdx+ udy) . (9.16)
Dalle identita di Cauchy Riemann (9.1) si deduce che:

CAPITOLO 9. ANALISI COMPLESSA 144
Teorema 9.3.1 Sia f ∈ H(Ω) olomorfa. Allora la forma differenziale f(z)dze chiusa, ossia ciascuna forma differenziale in (9.16),
udx− vdy , vdx+ udy ,
e chiusa in Ω.
Dal lemma di Poincare si deduce che
Teorema 9.3.2 Se f ∈ H(Ω) e olomorfa in un dominio semplicemente con-nesso Ω, allora la forma differenziale f(z)dz e esatta, ossia ciascuna formadifferenziale in (9.16),
udx− vdy , vdx+ udy ,
e esatta in Ω.
In un dominio non semplicemente connesso non tutte le forme chiuse sonoesatte: ad esempio la forma chiusa
dz
z=xdx+ ydy
x2 + y2+ i
xdy − ydxx2 + y2
non e esatta in C \ 0.
Osservazione 9.3.1 La 1-forma
xdx+ ydy
x2 + y2
e esatta in R2 \ 0, infatti il corrispondente campo vettoriale( x
x2 + y2,
y
x2 + y2
)e centrale. Mentre
xdy − ydxx2 + y2
non e esatta. Il corrispondente campo
( −yx2 + y2
,x
x2 + y2
)e il campo magnetico generato da un filo rettilineo infinito.

CAPITOLO 9. ANALISI COMPLESSA 145
Il teorema 9.3.2 e la teoria delle forme differenziali1 implicano in partico-lare che
Corollario 9.3.1 Se f e olomorfa in un dominio semplicemente connessoΩ, l’integrale ∫
γf(z)dz = 0 ,
lungo ogni cammino chiuso γ.
Piu in generale si ha che
Teorema 9.3.3 Una funzione f(z) olomorfa in un dominio Ω semplicemen-te connesso ammette una primitiva, ossia una funzione olomorfa F ∈ H(Ω)tale che
F ′(z) = f(z) , ∀z ∈ Ω . (9.17)
Inoltre se Ω e connesso tutte le primitive sono date dalla formula
F (z) = c+∫γ(z0,z)
f(ζ)dζ , c ∈ C , (9.18)
dove γ(z0, z) e un cammino in Ω che congiunge un punto arbitrario z0 ∈ Ωcol punto z ∈ Ω. Si ha dF (z) = f(z)dz.
Dimostrazione. Dal teorema 9.3.2 esistono le primitive U, V in Ω di
udx− vdy = dU , vdx+ udy = dV ,
(le U, V sono di classe C1) e, quindi,
u = Ux = Vy , v = −Uy = Vx .
Pertanto la funzioneF (z) = U + iV
e olomorfa (soddisfa le equazioni di Cauchy-Riemann) e
F ′(z) = Fx(z) = Ux + iVx = u+ iv = f(z) .
1Usiamo le formule di Gauss-Green: se la 1-forma differenziale Fdx+Gdy e C1 allora∫∂B
Fdx+Gdy =∫
B
(∂xG− ∂yF
)dxdy .

CAPITOLO 9. ANALISI COMPLESSA 146
Infine, dalla teoria delle 1-forme differenziali, si ha che
U = c1 +∫γ(z0,z)
udx− vdy , V = c2 +∫γ(z0,z)
vdx+ udy ,
ossia (9.18).Naturalmente si puo dimostrare (9.17) anche direttamente. Prendendo
come cammino che congiunge z a z + h il segmento
t 7→ z + th , t ∈ [0, 1] ,
ed usando il corollario 9.3.1 si trova che il rapporto incrementale e
1
h
(F (z + h)− F (z)
)=
1
h
∫ 1
0f(z + th)hdt =
∫ 1
0f(z + th)dt .
Essendo f continua in z si deduce che
F ′(z) = limh→0
F (z + h)− F (z)
h= f(z) ,
ossia (9.17).
Il fatto che Ω sia semplicemente connesso e una condizione sufficientema non necessaria affinche una funzione olomorfa ammetta primitiva. Adesempio
f(z) =1
z2
e olomorfa in C \ 0, che non e semplicemente connesso, ma ammette laprimitiva
−1
z.
Esercizio. Mostrare che la funzione 1/z non ammette primitiva.
Esercizio. Sia Ω ⊂ C una regione semplicemente connessa tale che 1 ∈ Ωe 0 /∈ Ω. Allora esiste una funzione olomorfa F : Ω → C tale che eF (z) = z,∀z ∈ Ω, F (x) = lnx, se x ∈ R ∩ Ω.
Osservazione: Quando Ω = C \ (−∞, 0] tale funzione F (z) si chiama labranca principale del logaritmo di z.
9.4 Formula di Cauchy
Dimostriamo adesso la formula di Cauchy che e la chiave per provare laequivalenza tra le funzioni analitiche e le funzioni olomorfe.
Nel seguito denoteremo Br(z0) := z ∈ C : |z − z0| < r.

CAPITOLO 9. ANALISI COMPLESSA 147
Teorema 9.4.1 (Formula di Cauchy) Sia f ∈ H(Ω). Se la chiusura dellapalla Br(z0) e contenuta in Ω allora
f(z) =1
2πi
∫γ
f(ζ)
ζ − zdζ , ∀z ∈ Br(z0) , (9.19)
dove γ(t) = z0 + reit, t ∈ [0, 2π].
Dimostrazione. Sia z ∈ Br(z0). Per ogni 0 < ρ < r− |z− z0| si consideriil circuito attorno a z descritto da
γρ(t) = z + ρeit , t ∈ [0, 2π] .
Poiche la funzione
ζ 7→ f(ζ)
ζ − ze olomorfa in Ω \ z, si deduce che
∫γ
f(ζ)
ζ − zdζ =
∫γρ
f(ζ)
ζ − zdζ =
∫ 2π
0f(z + ρeit)idt . (9.20)
Facendo tendere ρ→ 0 in (9.20) si deduce, dalla continuita di f in z, che
∫γ
f(ζ)
ζ − zdζ = 2πif(z) ,
ossia (9.19).
Da (9.19) e dal teorema di derivazione sotto il segno di integrale si deducela regolarita C∞ di ogni funzione olomorfa:
Teorema 9.4.2 Sia f ∈ H(Ω). Allora f e di classe C∞(Ω) e, per ogniz ∈ Ω, la derivata ennesima risulta
f (n)(z) =n!
2πi
∫γ
f(ζ)
(ζ − z)n+1dζ , (9.21)
dove γ(t) = z0 + reit, t ∈ [0, 2π]. Ciascuna f (n)(z) e olomorfa.
Possiamo finalmente provare il risultato fondamentale che ogni funzioneolomorfa e una funzione analitica.
Teorema 9.4.3 Una funzione olomorfa f ∈ H(Ω) e analitica in Ω.

CAPITOLO 9. ANALISI COMPLESSA 148
Dimostrazione. Dobbiamo provare che f(z) e sviluppabile, in un intornodi ciascun punto z0 ∈ Ω, in serie di potenze. Si ha
1
ζ − z=
1
(ζ − z0)− (z − z0)=
1
(ζ − z0)
1(1− z − z0
ζ − z0
)=
1
(ζ − z0)
∞∑n=0
(z − z0
ζ − z0
)n=∞∑n=0
(z − z0)n
(ζ − z0)n+1(9.22)
che converge totalmente per
|z − z0| < |ζ − z0| .
Dalla formula di Cauchy (9.19), (9.22) e dal teorema di integrazione per seriesi deduce che
f(z) =1
2πi
∫γ
f(ζ)
ζ − zdζ =
1
2πi
∞∑n=0
(z − z0)n∫γ
f(ζ)
(ζ − z0)n+1dζ ,
dove γ(t) = z0 + reit, t ∈ [0, 2π], ossia
f(z) =∞∑n=0
an(z − z0)n con an :=1
2πi
∫γ
f(ζ)
(ζ − z0)n+1dζ .
In altre parole abbiamo sviluppato f(z) in una serie di potenze totalmenteconvergente in un intorno di z0. Osserviamo che il valore degli integrali
an :=1
2πi
∫γ
f(ζ)
(ζ − z0)n+1dζ
non dipende dal raggio (piccolo) del circuito su cui integriamo, e che (9.11)implica an = f (n)(z0)/n!.
Il teorema precedente mostra una grande diversita tra la teoria dellefunzioni di variabile reale e quelle di variabile complessa. Ad esempio lafunzione
f(x) :=
e−1/x2
per x 6= 00 per x = 0
e di classe C∞(R,R), tutti i coefficienti dello sviluppo in serie di Taylor sononulli, dato che
f (n)(0) = 0 , ∀n ≥ 0 ,
(provarlo), e, pertanto, f(x) non e sviluppabile in serie di potenze in nessunintorno di x = 0.

CAPITOLO 9. ANALISI COMPLESSA 149
Notiamo che la formula (9.21) permette di esprimere tutte le derivate diuna funzione olomorfa f(z) in termini della funzione stessa f(z). Le disu-guaglianze di Cauchy stimano le derivate di una funzione olomorfa f ∈ H(Ω)in un dominio ristretto
Ωr :=z ∈ Ω : dist(z, ∂Ω) ≥ r
, r > 0 ,
in termini della norma del sup della f stessa.
Teorema 9.4.4 (Disuguaglianze di Cauchy) Sia f ∈ H(Ω). Pertanto
supΩr
|f (n)(z)| ≤ n!
rnsup
Ω|f(z)| . (9.23)
Dimostrazione. Sia z ∈ Ωr e γ(t) = z + ρeit, con 0 < ρ < r. Da (9.21) sideduce che
f (n)(z) =n!
2πi
∫γ
f(ζ)
(ζ − z)n+1dζ =
n!
2πi
∫ 2π
0
f(z + ρeit)
ρn+1ei(n+1)tρ i eitdt
e, quindi, ponendo ‖f‖∞ := supΩ |f(z)|,
|f (n)(z)| ≤ n!
2π
∫ 2π
0
‖f‖∞ρn+1
ρdt =n!
ρn‖f‖∞ . (9.24)
Dato che (9.24) vale per ogni ρ < r si deduce (9.23).
9.5 Proprieta delle funzioni olomorfe
Mostriamo adesso alcune proprieta qualitative delle funzioni olomorfe.
Teorema 9.5.1 (Liouville) Una funzione f olomorfa su C e limitata ecostante.
Dimostrazione. Da (9.21) si deduce che, per ogni z ∈ C, r > 0,
f ′(z) =1
2πi
∫γr
f(ζ)
(ζ − z)2dζ
doveγr(t) = z + reit , t ∈ [0, 2π) .
Quindi
|f ′(z)| ≤ ‖f‖∞2πr
dove ‖f‖∞ := supz∈C|f(z)|

CAPITOLO 9. ANALISI COMPLESSA 150
Poiche f e limitata si ha che ‖f‖∞ < +∞ e, pertanto, facendo tenderer →∞, deduciamo che f ′(z) = 0, ∀z ∈ C. Quindi f(z) e costante su C.
Una funzione olomorfa su tutto C si chiama intera.
Esercizio. Una funzione intera f(z) soddisfacente
|f(z)| ≤ A+B|z|k , ∀z ∈ C , (9.25)
e un polinomio.
Suggerimento: la derivata f (k+1)(z) e intera e da (9.25), ragionando comenella dimostrazione del teorema di Liouville, si deduce f (k+1)(z) = 0,∀z ∈ C.
Teorema 9.5.2 (Fondamentale dell’algebra) Un polinomio P (z) di gra-do n ≥ 1 ha almeno uno zero in C.
Dimostrazione. Supponiamo per assurdo che P (z) 6= 0, ∀z ∈ C. Allorala funzione
f(z) :=1
P (z)
risulta olomorfa in C (perche ?). Il polinomio
P (z) = anzn + an−1z
n−1 + . . .+ a1z + a0 , an 6= 0 ,
soddisfa
|P (z)| ≥ |an||z|n − |an−1||z|n−1 − . . .− |a1||z| − |a0|
e, dunque, |P (z)| → +∞ per |z| → +∞. In particolare
|P (z)| ≥ 1 , ∀|z| ≥ R1 . (9.26)
Inoltremin|z|≤R1
|P (z)| = β > 0 (9.27)
(perche?) e si deduce da (9.26)-(9.27) che f(z) = 1/P (z) e limitata. Dalteorema di Liouville ne segue che f(z) e costante, da cui l’ assurdo.
Un altro risultato strabiliante della teoria delle funzioni olomorfe (in nettocontrasto con la teoria delle funzioni di variabile reale) e il seguente.
Teorema 9.5.3 Siano fn(z) una successione di funzioni olomorfe in Ω con-vergenti uniformemente a una funzione f(z) su ogni sottoinsieme compattodi Ω. Allora f(z) e olomorfa.

CAPITOLO 9. ANALISI COMPLESSA 151
Dimostrazione. Per ogni z ∈ Ω sia K un sottoinsieme compatto di Ωcontenente z e γ(t) = z + reit, t ∈ [0, 2π], un circuito contenuto in K.Essendo le fn(z) funzioni olomorfe in Ω vale la formula integrale di Cauchy
fn(z) =1
2πi
∫γ
fn(ζ)
ζ − zdζ .
Dato che fn convergono a f uniformemente su K, per il teorema di passaggioal limite sotto il segno di integrale, si deduce che
f(z) =1
2πi
∫γ
f(ζ)
ζ − zdζ
e, quindi, f(z) e olomorfa.
Esercizio. Lo spazio
A :=f : Ω→ C : f olomorfa e limitata
con la norma del sup ‖f‖∞ := supΩ |f(z)| e uno spazio di Banach.
Suggerimento. Una successione di Cauchy in A converge uniformementea una funzione limitata. Basta provare che tale funzione limite e olomorfa.
Le funzioni olomorfe hanno una struttura molto rigida.
Teorema 9.5.4 (Principio di continuazione analitica) Sia Ω ⊂ C unaperto e connesso. Se una funzione olomorfa f : Ω ⊂ C → C si annulla inun aperto W ⊂ Ω non vuoto, allora f e identicamente nulla.
Dimostrazione. Definiamo l’insieme
V :=z ∈ Ω : f (n)(z) = 0 ,∀n = 0, 1, . . .
=⋂n≥0
z ∈ Ω : f (n)(z) = 0
.
L’insieme V e chiuso essendo intersezione numerabile di chiusi (ogni funzionederivata f (n)(z) e continua). Affermiamo che V e anche aperto. Infatti, sez0 ∈ V , poiche la funzione f e analitica, essa coincide con la sua serie diTaylor in un intorno di z0. Pertanto
f(z) =∑n≥0
f (n)(z0)
n!(z − z0)n = 0
in un intorno di z0. In ogni punto di tale intorno tutte le derivate di f sononulle, e, dunque, tale intorno sta in V . Essendo V un sottoinsieme aperto,chiuso, e non vuoto, di un insieme connesso, deduciamo che V ≡ Ω, ossia chef ≡ 0 in Ω.

CAPITOLO 9. ANALISI COMPLESSA 152
Corollario 9.5.1 Non esistono funzioni olomorfe f(z) in Ω, che non sianola funzione nulla, aventi supporto
suppf := z ∈ Ω : f(z) 6= 0
compatto.
Si dice zero di una funzione olomorfa f : Ω→ C un punto z0 ∈ Ω dove
f(z0) = 0 .
Teorema 9.5.5 Sia z0 uno zero di una funzione f ∈ H(Ω) non nulla. Alloraesiste un intero m ≥ 1 e una funzione olomorfa g(z) con g(z0) 6= 0, tale che
f(z) = (z − z0)mg(z) . (9.28)
Tale m si chiama l’ordine dello zero di f .
Dimostrazione. Essendo f(z) analitica, in un intorno di z0 si ha
f(z) =∑n≥1
an(z − z0)n .
O tutti gli an = 0, e, dunque, f(z) ≡ 0 in tutto un intorno di z0, e, quindi,in tutto Ω, oppure esiste m ∈ N tale che
a1 = . . . = am−1 = 0 , am 6= 0 .
Allora scriviamo
f(z) =∑n≥m
an(z − z0)n = (z − z0)m∑n≥m
an(z − z0)n−m = (z − z0)mg(z)
e la funzioneg(z) =
∑k≥0
am+k(z − z0)k
e analitica con g(z0) = am 6= 0.
Corollario 9.5.2 Gli zeri di una funzione olomorfa in Ω non identicamentenulla sono isolati.
Dimostrazione. Da (9.28) segue che
|f(z)| = |(z − z0)m||g(z)| ≥ |z − z0|m|g(z0)|
2> 0
per z 6= z0 in un intorno sufficientemente piccolo di z0.

CAPITOLO 9. ANALISI COMPLESSA 153
Corollario 9.5.3 Se una funzione olomorfa ha una successione di zeri chein accumula in z0 ∈ Ω, allora f ≡ 0 in Ω.
Corollario 9.5.4 Se due funzioni olomorfe f, g : Ω → C coincidono in unsottoinsieme di Ω avente un punto non isolato, allora f ≡ g in Ω.
Esercizio. Provare che, ∀z ∈ C,
eiz = cos z + i sin z , e−iz = cos z − i sin z
e pertanto
sin(z) =eiz − e−iz
2i, cos(z) =
eiz + e−iz
2.
Inoltresin2(z) + cos2(z) = 1 .
Altre importanti proprieta delle funzioni olomorfe sono le seguenti:
Teorema 9.5.6 La parte reale ed immaginaria di una funzione olomorfaf ∈ H(Ω) sono funzioni armoniche, ossia
∆u = ∆v = 0 in Ω . (9.29)
Dimostrazione. Le funzioni u(x, y), v(x, y) sono C∞(Ω) e soddisfano leequazioni di Cauchy Riemann (9.1) differenziando le quali si ottiene (9.29).
Vale anche una sorta di proposizione inversa
Teorema 9.5.7 Sia u una funzioni armonica in Ω semplicemente connesso.Allora esiste una funzione armonica v(x, y) in Ω tale che
u+ iv
e olomorfa. Tale v e detta armonica coniugata a u.
Dimostrazione. Si deve cercare v(x, y) che soddisfa le condizioni diCauchy-Riemann
(vx, vy) = (−uy, ux) . (9.30)
Dato che ∆u = 0 si ha che
∂y(−uy) = ∂x(ux)
e, pertanto esiste un potenziale v(x, y) in Ω che soddisfa (9.30).

CAPITOLO 9. ANALISI COMPLESSA 154
Esercizio. Sia Ω un aperto connesso. Le uniche funzioni f : Ω → Colomorfe aventi modulo |f(z)| costante sono le f(z) = c costanti.
Suggerimento: Si differenzi 2 volte rispetto a x e rispetto a y la relazione|f(z)|2 = u2 + v2 = c. Si deduca che |∇u|2 + |∇v|2 = 0.
Esercizio. Sia u, v le parti reali ed immaginarie di una funzione olomorfa.Allora le curve di livello u(x, y) = c, v(x, y) = d sono ortogonali.
Esercizio. Se f : C → C e olomorfa e f ′(z0) 6= 0, allora f e localmenteinvertibile e l’inversa e localmente olomorfa.
Esercizio. Trovare l’immagine di Im z < 0 sotto la mappa z 7→ ez.
9.6 Singolarita
Sia Ω ⊂ C un aperto e z0 ∈ C. Sia f(z) una funzione definita ed olomorfain Ω \ z0. In tal caso diremo che f(z) ha una singolarita isolata in z0.
Come si comporta f(z) attorno a z0?
9.6.1 Serie di Laurent
Consideriamo una “serie di potenze generalizzate con esponenti negativi,
+∞∑n=−∞
anzn =
∞∑n=0
anzn +
∞∑n=1
a−nz−n , an ∈ C , (9.31)
che, per definizione, converge se e solo se le due serie a destra di (9.31)convergono. La funzione in (9.31) si chiama una “serie di Laurent.
Dal Teorema 9.2.1 la prima serie in (9.31) converge se
|z| < R1 dove1
R1
:= lim supn→+∞
|an|1/n .
Analogamente la serie
∞∑n=1
a−nz−n =
∞∑n=1
a−n(1
z
)nconverge se ∣∣∣1
z
∣∣∣ < ρ2 dove1
ρ2
:= lim supn→+∞
|a−n|1/n
ossia se|z| > R2 := lim sup
n→+∞|a−n|1/n .

CAPITOLO 9. ANALISI COMPLESSA 155
Ne segue che, se R2 < R1, la serie di Laurent
+∞∑n=−∞
anzn converge per R2 < |z| < R1 .
Se, invece, R2 > R1 la serie di Laurent (9.31) non converge in nessun punto.
Esempio. La serie di Laurent
+∞∑n=0
z−2n
n!
converge per ogni z 6= 0. Ricordando lo sviluppo in serie di Taylor dell’espo-nenziale
ew =∞∑n=0
wn
n!
(che converge per ogni w ∈ C) notiamo che
+∞∑n=0
z−2n
n!= e−
1z2 , ∀z 6= 0 .
Un risultato importante della teoria delle funzioni di variabile complessa eche ogni funzione olomorfa in una corona circolare ammette uno sviluppo inserie di Laurent.
Teorema 9.6.1 Sia f ∈ H(Ω), z0 ∈ Ω e supponiamo che, per 0 < r1 < r2,si abbia
Br2(z0) \Br1(z0) ⊂ Ω .
Allora la serie di Laurent
+∞∑n=−∞
cn(z − z0)n (9.32)
con coefficienti
cn :=1
2πi
∫γr
f(ζ)
(ζ − z0)n+1dζ dove γr(t) := z0 + reit , r ∈ [r1, r2] , (9.33)
converge alla f(z) uniformemente in Br2(z0) \Br1(z0).
Osserviamo che i coefficienti cn in (9.33) non dipendono da r ∈ [r1, r2]dato che la funzione f(ζ)/(ζ − z0)n+1 e olomorfa in Br2(z0) \Br1(z0).

CAPITOLO 9. ANALISI COMPLESSA 156
Dimostrazione. Sia r1 < |z| < r2. Dalla formula di Cauchy e dal fattoche f(z)/(ζ − z) e olomorfa nella corona circolare Br2(z0) \Br1(z0) si ha che
f(z) =1
2πi
∫γr2
f(ζ)
ζ − zdζ − 1
2πi
∫γr1
f(ζ)
ζ − zdζ . (9.34)
Da (9.22), che converge per ζ ∈ ∂Br2(z0), si deduce che
1
2πi
∫γr2
f(ζ)
ζ − zdζ =
∑n≥0
(z − z0)n1
2πi
∫γr2
f(ζ)
(ζ − z0)n+1dζ . (9.35)
Invece, sviluppiamo in serie
− 1
ζ − z=
1
(z − z0)
1(1− ζ−z0
z−z0
) =1
z − z0
∑k≥0
(ζ − z0)k
(z − z0)k
=∑k≥0
(ζ − z0)k
(z − z0)k+1=∑k≥1
(ζ − z0)(k−1)
(z − z0)k
=∑n≤−1
(z − z0)n
(ζ − z0)(n+1)(9.36)
convergente nel dominio ∣∣∣ζ − z0
z − z0
∣∣∣ < 1 .
Inserendo (9.36) nel secondo integrale di (9.34) si trova
− 1
2πi
∫γr1
f(ζ)
ζ − zdζ =
∑n≤−1
(z − z0)n1
2πi
∫γr1
f(ζ)
(ζ − z0)(n+1)dζ . (9.37)
Da (9.34), (9.35), (9.37) si deduce lo sviluppo in serie di Laurent di f(z).
Notiamo che il Teorema 9.6.1 implica anche il Teorema 9.4.3. Infatti sef(z) e olomorfa in tutto un intorno contenente z0 allora tutti i coefficienti cnin (9.33) sono nulli per n ≤ −1, come si puo dimostrare facendo tendere in(9.33) il raggio r → 0 (vedi la dimostraziomne del teorema 9.6.2).
9.6.2 Singolarita rimovibili, poli, essenziali
Data una funzione olomorfa f(z) in Ω\z0 il suo sviluppo in serie di Laurent
+∞∑n=−∞
cn(z − z0)n
permette di classificare rapidamente il comportanto delle sue singolarita.

CAPITOLO 9. ANALISI COMPLESSA 157
Definizione 9.6.1 La singolarita di f in z0 si dice
1. rimovibile, se cn = 0, ∀n ≤ −1.
2. polo di ordine m ∈ N, se esiste c−m 6= 0 e cn = 0, ∀n < −m.Un polo di ordine 1 si dice anche semplice, un polo di ordine 2 si diceanche doppio, etc...
3. essenziale se cn 6= 0 per infiniti n ≤ −1.
1. Notiamo che, se f(z) ha una singolarita rimovibile in z0, allora la funzione
+∞∑n=0
cn(z − z0)n
ne e una continuazione analitica anche in z0. In particolare f(z) e limitatain un intorno di z0.
Esempio. La funzione
f(z) =sin z
z
ha una singolarita rimovibile in z = 0 (usare lo sviluppo di Taylor (9.12)).
2. Se f(z) ha in z0 un polo di ordine m, allora si puo scrivere
f(z) =+∞∑n=−m
cn(z − z0)n =g(z)
(z − z0)m(9.38)
doveg(z) =
∑n≥0
cn−m(z − z0)n
e una funzione olomorfa in un intorno di z0 e g(z0) = c−m 6= 0. Ne discendein particolare che
limz→z0|f(z)| = +∞ . (9.39)
Lemma 9.6.1 La funzione f(z) ha un polo di ordine m in z0 se e solo se lafunzione reciproca 1/f(z) ha uno zero di grado m in z0 (vedi la definizionenel Teorema 9.5.5).
Dimostrazione. Da (9.38) si ha
1
f(z)= (z − z0)m
1
g(z).
Dato che g(z0) 6= 0 la funzione 1/f(z) ha uno zero di grado m.

CAPITOLO 9. ANALISI COMPLESSA 158
Esempio. La funzionef(z) =
cos z
z2
ha un polo di ordine 2 in z = 0. La funzione
f(z) =sin z
z2
ha un polo di ordine 1 in z = 0 (usare lo sviluppo di Taylor (9.12)).3. La funzione e1/z ha una singolarita essenziale in z = 0. Si ha
e1/z =∞∑n=0
z−n
n!.
Notiamo che e1/z ha un comportamento molto irregolare per z → 0.
Nei prossimi teoremi diamo una diversa caratterizzazione delle singolarita.
Teorema 9.6.2 Sia f(z) una funzione olomorfa in Ω \ z0. La singolaritaz0 e rimovibile se e solo se f(z) e limitata in un intorno Br(z0).
Dimostrazione. Gia sappiamo che se z0 e una singolarita rimovibile alloraf(z) e limitata in un intorno Br(z0). Proviamo il viceversa, mostrando che,essendo f(z) limitata in un intorno Br(z0), tutti i coefficienti cn, n ≤ −1, delsuo sviluppo di Laurent (9.32) sono nulli. Infatti, da (9.33) si ha
|cn| =∣∣∣ ∫ 2π
0
f(z0 + reit)
rn+1ei(n+1)tireit dt
∣∣∣ ≤ ∫ 2π
0|f(z0 + reit)|r−n dt . (9.40)
Dato che f e limitata in un intorno Br(z0), si deduce da (9.40) che, se r → 0,per n ≤ −1, tutti i cn = 0.
Esercizio. Dimostrare il teorema precedente nel seguente modo. Conside-riamo la funzione
h(z) :=
(z − z0)2f(z) z 6= z0
0 z = z0 .
Essendo f(z) limitata in un intorno di z0 si verifica che h(z) e differenziabilein z0 = 0 ed h′(z0) = 0 (perche?). Inoltre si prova che h′(z) e continua in Ω,ossia h(z) e olomorfa. Allora h(z) e sviluppabile in serie di potenze
h(z) =∑n≥2
an(z − z0)n = (z − z0)2f(z)
e f(z) :=∑n≥0 an+2(z− z0)n e una estensione di f(z) olomorfa in un intorno
di z0.
Il seguente teorema da una caratterizzazione dei poli.

CAPITOLO 9. ANALISI COMPLESSA 159
Teorema 9.6.3 Sia f(z) una funzione olomorfa in Ω \ z0. La singolaritaz0 e un polo di f(z) se e solo se
limz→z0|f(z)| = +∞ . (9.41)
Dimostrazione. Gia sappiamo che se z0 e un polo di f(z) allora vale(9.41), vedi (9.39). Supponiamo adesso che valga (9.41). In tal caso lafunzione
g(z) =1
f(z)
e olomorfa e limitata in un intorno in z0. Dal teorema precedente esiste unaestensione analitica g(z) di g(z) in z0. Poiche
limz→z0
g(z) = limz→z0
1
f(z)
(9.41)= 0
si deduce che g(z0) = 0. Pertanto la funzione f(z) ha un polo in z0 (dallemma 9.6.1).
Se una singolarita non e ne rimovibile ne un polo, ossia e essenziale, lafunzione f(z) ha un comportamento assai irregolare attorno a z0. Si ha che:
Teorema 9.6.4 Sia f(z) una funzione olomorfa in Ω\z0. Se la singolaritaz0 non e eliminabile e neanche un polo, allora, ∀r > 0 (tale che Br(z0) ⊂ Ω)la immagine
f(Br(z0) \ z0)e densa in C.
Dimostrazione. Per assurdo, supponiamo che esista w ∈ C, δ > 0, taleche
|f(z)− w| ≥ δ , ∀z ∈ Br(z0) \ z0 .Allora la funzione
g(z) :=1
f(z)− w, ∀z ∈ Br(z0) \ z0 ,
e limitata. Pertanto dal Teorema 9.6.2 la funzione g(z) ha una estensioneg(z) analitica in z0. Se g(z0) 6= 0 la funzione
f(z) = w +1
g(z)
sarebbe una estensione analitica di f(z) in tutto Br(z0) e, pertanto, la sin-golarita z0 di f(z) risulterebbe eliminabile. Se g(z0) = 0 si avrebbe che|f(z)| → +∞ per z → z0 e, pertanto, dal Teorema 9.6.3, la singolarita z0
risulterebbe un polo.

CAPITOLO 9. ANALISI COMPLESSA 160
9.7 Calcolo dei residui
Data una funzione olomorfa in Ω \ z0 si definisce residuo di f(z) in z0 ilcoefficiente
Res(f ; z0) = c−1 (9.42)
del suo sviluppo in serie di Laurent (9.32).Esercizio. Se
f(z) =g(z)
z − z0
con g(z0) 6= 0 ,
e g(z) olomorfa in un intorno di z0, allora
Res(f ; z0) = g(z0) .
Il teorema fondamentale, che generalizza il teorema di Cauchy 9.4.1 per unafunzione avente una singolarita, e il seguente.
Teorema 9.7.1 Sia f(z) una funzione olomorfa in Ω \ z0. Allora∫γf(z)dz = 2πi Res(f ; z0) (9.43)
dove γ(t) = z0 + reit, t ∈ [0, 2π] ed Br(z0) ⊂ Ω.
Dimostrazione. Dato che la serie di Laurent (9.32) converge uniforme-mente a f(z) in una corona circolare attorno a z0 si ha che∫
γf(z)dz =
+∞∑n=−∞
cn
∫γ(z − z0)ndz . (9.44)
Si ha ∫γ(z − z0)ndz =
∫ 2π
0(reit)nrieitdt =
0 per n 6= −12πi per n = −1
e (9.44) implica (9.43) (vedi (9.42)).
Il risultato si applica immediatamente al caso vi siano piu di una singo-larita. Dal Teorema 9.7.1 e dal teorema 9.3.1 si deduce (con le formule diGauss-Green) che:
Teorema 9.7.2 Sia f(z) una funzione olomorfa in un aperto Ω\z1, . . . , zNe γ un cammino chiuso in Ω (orientato positivamente) al cui interno stannole singolarita z1, . . . , zN. Allora
∫γf(z)dz = 2πi
N∑k=1
Res(f ; zk) .

CAPITOLO 9. ANALISI COMPLESSA 161
Il teorema precedente e uno strumento molto utile nel calcolo di integrali.Come esempio di applicazione calcoliamo
∫ +∞
−∞
x2 + 1
x4 + 1dx .
Integriamo la funzione
f(z) =z2 + 1
z4 + 1
sulla curva γR data dall’unione dell’intervallo [−R,R] e della semicirconfe-renza
C+R := Reiθ , θ ∈ [0, π] .
La funzione f(z) e olomorfa su
C \eiπ
4 , ei 3π4 , ei 5π
4 , ei 7π4
.
La curva γR racchiude i poli P1 = eiπ4 , P2 = ei 3π
4 . Si ha∫γRf(z)dz =
∫ +R
−Rf(x)dx+
∫C+R
f(z)dz = 2πi(Res(f, eiπ
4 ) + Res(f, ei 3π4 )).
(9.45)I residui sono
Res(f, eiπ4 ) =
−i√
2
4, Res(f, ei 3π
4 ) =−i√
2
4. (9.46)
Dato che
∣∣∣ ∫C+R
f(z)dz∣∣∣ =
∣∣∣ ∫ 2π
0
R2ei2θ + 1
R4ei4θ + 1iReiθdθ
∣∣∣ ≤ πR2 + 1
R4 − 1R
Si deduce da (9.45)-(9.46) che
limR→+∞
∫C+R
f(z)dz = 0
e, da (9.45)-(9.46), che
∫ +∞
−∞
x2 + 1
x4 + 1dx = π
√2 .
Esercizio. Calcolare ∫ π
0
dt
a+ cos t, a > 1 .

CAPITOLO 9. ANALISI COMPLESSA 162
Suggerimento: Considerando la sostituzione
cos t =1
2
(z +
1
z
), z = eit ,
si ricava che ∫ π
0
dt
a+ cos t=
1
2
∫ 2π
0
dt
a+ cos t=
1
i
∫γ
dz
z2 + 2az + 1
dove γ(t) = eit, t ∈ [0, 2π]. La funzione integranda ha poli semplici in
α± = −a±√a2 − 1 .
L’unico polo contenuto nel disco unitario e α+. Dal teorema dei residui sideduce ∫ π
0
dt
a+ cos t=
π√a2 − 1
.
Esercizio Provare che, per a 6= 0,
∫ +∞
0
cosx
x2 + a2dx =
π
2|a|e−|a| .
Suggerimento: Considerare la
f(z) =eiz
z2 + a2
ed integrarla sul cammino
γR = |z| = R, Imz ≥ 0 ∪ −R ≤ x ≤ R .
Fare tendere R→ +∞.

Capitolo 10
Temi d’esame
Prova del 06-02-07
Esercizio 1) Si consideri il problema di Cauchy x =t− xx2 + 1
x(0) = 0 .
Provare che
• (i) ogni soluzione e definita per tutti i tempi t ∈ R
• (ii) esistono limt→±∞ x(t) e calcolarli
• (iii) Disegnare il grafico della soluzione.
Esercizio 2) Si consideri la funzione F : R2 → R definita da
F (x, y) := y5 + y − xex .
Si dimostri che l’equazioneF (x, y) = 0
definisce implicitamente un’unica funzione y = f(x), f ∈ C∞(R,R), tale che
F (x, f(x)) = 0 .
Si verifichi inoltre che
• (i) f(0) = 0 ed xf(x) > 0 per ogni x 6= 0
• (ii) limx→+∞ f(x) = +∞
163

CAPITOLO 10. TEMI D’ESAME 164
• (iii) limx→−∞ f(x) = 0−
• (iv) x = −1 e un punto di minimo per f(x)
• (v) Disegnare il grafico qualitativo della funzione y = f(x).
Prova del 16-02-07
Esercizio 1) Si consideri il problema di Cauchy x =t− xx2 + 1
x(0) = 0 .
Provare che
• (i) la soluzione e definita per tutti i tempi t ∈ R
• (ii) esistono limt→±∞ x(t) e calcolarli
• (iii) Disegnare il grafico della soluzione.
Esercizio 2) Si consideri la funzione F : R4 → R definita da
F (x, y, u, z) = ln(xy) + z(x− y) + u2 + z2 − 1 .
Si dimostri che l’equazione
F (x, y, u, z) = 0 (10.1)
definisce implicitamente, in un intorno del punto p = (1, 1, 0, 1), un’unicafunzione
z = f(x, y, u) ,
di classe C∞, tale che
F (x, y, u, f(x, y, u)) = 0 .
• (i) Quanto vale f(1, 1, 0)?
• (ii) Si calcoli ∇f(1, 1, 0)
• (iii) Si puo risolvere l’equazione (10.1) trovando u in funzione di (x, y, z)in un intorno del punto p?

CAPITOLO 10. TEMI D’ESAME 165
Prova del 06-03-07
Esercizio 1) Data la equazione differenziale
x =(x2 + 1
t4 + 1
)1/3
si dimostri che tutte le soluzioni esistono in R e che hanno due asintotiorizzontali, ossia, esistono finiti i limt→±∞ x(t).
Esercizio 2) Provare che, in un intorno del punto p = (0, 0, 1, 1) il sistemax2 + y2 + z2 + zvex = 2xez + yev − z + v = 0
definisce una unica funzione (z(x, y), v(x, y)). Se ne calcoli la matrice Jaco-biana.
Prova del 26-03-07
Esercizio 1) Si studi il problema di Cauchyx = 1 + tx2
x(0) = 0
e si disegni il grafico qualitativo della soluzione.
Esercizio 2) Si consideri la funzione F : R2 → R definita da
F (x, y) = xey − y .
Si dimostri che l’equazione F (x, y) = 0 definisce implicitamente, in un intornodi (0, 0), un’unica funzione y = f(x) di classe C∞, tale che F (x, f(x)) = 0.
Si calcolino le derivate f ′(0), f ′′(0), f ′′′(0) e si scriva lo sviluppo di Taylordel terzo ordine di f(x) in x = 0.
Prova del 02-05-07
Esercizio 1) Disegnare la soluzione di x = − x t
t2 + 1x(0) = a
al variare del parametro a.

CAPITOLO 10. TEMI D’ESAME 166
Esercizio 2) Provare che il sistemaez + 3x− cos y + y = 0ex − x− z + y − 1 = 0
definisce una curva regolare in un intorno del punto (0, 0, 0) esplicitabilecome (x, y(x), z(x)). Si scriva la equazione della retta tangente alla curva in(0, 0, 0).
Prova del 04-06-07
Esercizio 1) Si studi il problema di Cauchy x =t− x
x2 + t2 + 1x(0) = 0
e si disegni il grafico qualitativo della soluzione.
Esercizio 2) Provare che il sistemax+ y + z + u = 6x2 + y2 + z2 + u2 = 14x3 + y3 + z3 + u3 = 36
definisce una curva regolare in un intorno di x = 3, un’unica funzione(y(x), z(x), u(x)), di classe C∞ tale che (y(3), z(3), u(3)) = (2, 1, 0). Sicalcolino le derivate (∂xy(x), ∂xz(x), ∂xu(x)) in x = 3.
Prova del 04-07-07
Esercizio 1) Studiare il problema di Cauchy x =1
x− t
x(1) = 1 .
Esercizio 2) Sia f : R→ R, continua, con f(0) = 0. Provare che il sistemay2 − z2 +
∫ x0 f(t) dt = 0
log y − 2 log z + x = 0
definisce univocamente y = y(x) e z = z(x) in un intorno di p = (0, 1, 1).Si scriva l’equazione della retta tangente e del piano normale in p alla curvadefinita implicitamente.

CAPITOLO 10. TEMI D’ESAME 167
Prova del 24-09-07
Esercizio 1) Studiare qualitativamente la soluzione del problema di Cauchy x =1
x2 + t2x(0) = 1 .
Esercizio 2) Provare che
ex−y + x2 − y2 − e(x+ 1) + 1 = 0
definisce univocamente y = y(x) in un intorno di x = 0 con y(0) = −1. Siprovi che x = 0 e un punto di minimo relativo per y(x).
Prova del 12-11-07
Esercizio 1) Si scriva esplicitamente e si disegni la soluzione del problemadi Cauchy
x = max|x|, |t|x(0) = 0 .
Esercizio 2) Provare che l’equazione
z + ez−1 − (x2 + y2) = 0
definisce ∀(x, y) ∈ R2 una sola funzione z = z(x, y) avente un minimoassoluto in (x, y) = (0, 0).
Prova del 17-12-07
Esercizio 1) Si studi il problema di Cauchy x =t2x3
1 + x2
x(0) = 1 .
Esercizio 2) Provare che l’equazione
x2 + 2x+ ey + y − 2z3 = 0 (10.2)

CAPITOLO 10. TEMI D’ESAME 168
definisce in un intorno di P := (−1, 0, 0) una superficie y := g(x, z). Scrivernel’equazione del piano tangente in P . L’equazione (10.2) definisce z in funzionedi (x, y)?
Prova del 25-01-08
Esercizio 1) Si studi il problema di Cauchy x =ex − t2
ex + t2x(1) = 0 .
Esercizio 2) Provare che l’equazione
∫ x
0
et − 1
t+ 1dt+ z2y + ez+y − y − 1 = 0
definisce univocamente z := z(x, y) in un intorno di P := (0, 0) e z(0, 0) = 0.Si provi che la superficie di equazione z := z(x, y) risulta tangente in P alpiano x-y.
Prova del 15-02-08
Esercizio 1) Si studi il problema di Cauchy x = arctanx− 1
tx(1) = tan 1 .
Esercizio 2) Si consideri la funzione F : R2 → R definita da F (x, y) =x3 + y3 − 2(x2 + y2) e si consideri
S :=
(x, y) ∈ R2 \ 0 | F (x, y) = 0.
Si dimostri che:
a) S e simmetrico rispetto alla bisettrice y = x ed e contenuto in(x, y) ∈ R2 | x ≥ 2, y ≤ 2
⋃(x, y) ∈ R2 | x ≤ 2, y ≥ 2
b) S definisce in (−∞, 2] una unica funzione y := f(x) di classe C∞ aventein x = 0 un minimo relativo e in x = 4/3 un massimo relativo.
c) Si disegni S.

CAPITOLO 10. TEMI D’ESAME 169
Prova del 04-03-08
Esercizio 1) Si studi il problema di Cauchyx = arctan((2− x2)(t2 + tx))x(0) = 0 .
Esercizio 2) Sia f : R2 → R2 definita da
f(x, y) := (ex cos y, ex sin y) .
a) Quali sono le immagini tramite f delle rette parallele agli assi coordinati?Trovare l’immagine f(R2).
b) Provare che lo jacobiano di f e diverso da zero in tutti i punti. Tuttaviaf non e iniettiva su R2.
c) Posto A := (0, π/3), B := f(A), sia g l’inversa continua di f definita in unintorno di B con g(B) = A. Si trovi una formula esplicita per g. Si calcolinole matrici jacobiane Df(A), Dg(B) e si verifichi che Dg(B) = [Df(A)]−1.
Prova del 07-04-08
Esercizio 1) Si studi il problema di Cauchyx = ex
2 − et2
x(0) = 0 .
Esercizio 2) Sia f : R2 → R2 definita da
f(x, y) :=(x(x2 + y2)α, y(x2 + y2)α
)α > 0.
Provare che:
a) f e C1(R2,R2).
b) ∀(u, v) ∈ R2 esiste un’unica coppia (x, y) ∈ R2 tale che f(x, y) = (u, v),cioe f e globalmente invertibile.
c) f non e un diffeomorfismo locale in un intorno di (0, 0).
Prova del 15-05-08

CAPITOLO 10. TEMI D’ESAME 170
Esercizio 1) Si studi il problema di Cauchyx = e−x
2
+ arctan |t|x(0) = 0 .
Esercizio 2) Si consideri la funzione F : R4 → R2 definita da
F (x, y, u, z) =((y + 3)z − tan(z + v) + 2x, sin(z + v) + 3y − x(v + 3)
).
Si dimostri che l’equazione F (x, y, z, v) = 0 definisce implicitamente, in unintorno di (0, 0, 0, 0), un’unica funzione (z, v)(x, y) di classe C∞. Determinarela jacobiana D(z, v)(x, y).
Prova del 03-06-08
Esercizio 1) Si studi il problema di Cauchyx = t2 cosxx(0) = 0 .
Esercizio 2) Si consideri la funzione F : R3 → R definita da
F (x, y, z) = sinh(z − 1)− ex + ey + xz − y .
Si dimostri che F (x, y, z) = 0 e rappresentabile vicino a (0, 0, 1) come ilgrafico di una funzione z(x, y) di classe C∞. Si scriva lo sviluppo di Taylordi z(x, y) in (0, 0) fino al secondo ordine.
Possiamo esprimere anche x = x(y, z)? E y = y(x, z)?
Prova del 15-07-08
Esercizio 1) Si consideri il problema di Cauchy x =(sin t)2
1 + t2e−x
2
x(0) = 0 .
Provare che la soluzione:
a) e definita per tutti i tempi.
b) e limitata
c) e dispari.
Se ne disegni il grafico.

CAPITOLO 10. TEMI D’ESAME 171
Esercizio 2) Provare che in un intorno di (0, 1, 1) il sistemax2 + y2 + z2 − 2 = 0x2 + y2 − z2 − 2x = 0
definisce una curva regolare. Trovarne la retta tangente.
Prova del 11-12-08
Esercizio 1) Si consideri il problema di Cauchy x =sinx
t+ xx(0) = 1 .
Se ne disegni il grafico.Esercizio 2) Si provi che il sistema
3x+ y − z + u2 = 0x− y + 2z + u = 02x+ 2y − 3z + 2u = 0
puo essere risolto esprimendo (y, z, u) in funzione di x. Si puo esprimere(x, y, u) in funzione di z? Si puo esprimere (x, y, z) in funzione di u?
Prova del 30-1-09
Esercizio 1) Si consideri il problema di Cauchyx = x|x| − t2x(1) = 0 .
Se ne disegni il grafico.Esercizio 2) Si provi che l’equazione
y3 + y + x+ x2 = 0
definisce implicitamente y = f(x) in un intorno di (0, 0). Si scriva lo sviluppodi Taylor di f(x) in x = 0 al grado 2. Si verifichi che f(x) e definita su tuttoR. Si disegni il grafico qualitativo di y = f(x).
Prova del 10-3-09

CAPITOLO 10. TEMI D’ESAME 172
Esercizio 1) Si consideri il problema di Cauchyx = (log x)− tx(1) = e .
Se ne disegni il grafico.Esercizio 2) Si consideri la funzione f : R2 → R2 definita da
f(x, y) = (ex + αy, x+ e−αy) .
Trovare i valori di α ∈ R per cui tale f e un diffeomorfismo locale tra unintorno di (x0, y0) ed un intorno di f(x0, y0), ∀(x0, y0) ∈ R2. Per tali valori diα si provi che l’inversa e definita in un intorno di (1, 1) e si calcoli la matriceJacobiana dell’inversa in (1,1).
Prova del 15-5-09
Esercizio 1) Si consideri il problema di Cauchyx = sin(x− t)x(0) = 0 .
Se ne disegni il grafico.Esercizio 2) Si provi che f : R2 → R2 definita da
f(x, y) = (x2 − y2, 2xy)
e localmente invertibile ∀(x, y) 6= (0, 0). Provare che f non e globalmenteinvertibile.
Prova del 12-6-09
Esercizio 1) Si consideri il problema di Cauchyx = x(x2 + t)x(0) = 1 .
Se ne disegni il grafico.Esercizio 2) Provare che il sistema
ez + 3x− cos y + y = 0ex + y − x− z − 1 = 0
definisce una curva regolare in un intorno di (0, 0, 0). Si scrivano le equazionidella retta tangente e del piano normale.

CAPITOLO 10. TEMI D’ESAME 173
Prova del 11-9-09
Esercizio 1) Si consideri il problema di Cauchyx = (x− t)3
x(0) = 0 .
Se ne disegni il grafico.Esercizio 2) Si consideri la funzione f : R2 ×R3 → R2 definita da
f(x, y) = (f1(x, y), f2(x, y)) , x = (x1, x2) ∈ R2 , y = (y1, y2, y3) ∈ R3
ed
f1(x, y) = 2ex1 + x2y1 − 4y2 + 3 , f2(x, y) = x2 cosx1 − 6x1 + 2y1 − y3 .
Provare che esiste una funzione g di classe C1, definita in un intorno di (3, 2, 7)con g(3, 2, 7) = (0, 1) ed f(g(y), y) = 0. Calcolare la matrice Jacobiana(Dyg)(3, 2, 7).
Prova del 20-10-09
Esercizio 1) Si consideri il problema di Cauchyx = arctan(tx)x(0) = 1 .
Se ne disegni il grafico.Esercizio 2) Si consideri la funzione f : R2 → R2 definita da
f(x, y) = (x2 − y2, 2xy) .
Provare che:i) La f risulta invertibile tra un intorno di un qualsiasi (x, y) 6= (0, 0) e
un intorno della sua immagine f(x, y).ii) f mappa il cerchio x2 + y2 = ρ2 nel cerchio di centro 0 e raggio ρ2
iii) f e suriettiva ma non e iniettiva. Quindi f non e un diffeomorfismoglobale.
Prova del 10-11-09
Esercizio 1) Si consideri il problema di Cauchyx = x2 − t2x(0) = 0 .

CAPITOLO 10. TEMI D’ESAME 174
Se ne disegni il grafico.Esercizio 2) Si consideri la funzione f : R4 → R2 definita da
f(x, y, z, t) = (x2 + z2 − 2yt, x5 + z5 − 2yt) .
Provare che esistono funzioni ϕ, ψ, definite in un intorno di (1, 1), di classeC∞, con ϕ(1, 1) = 1, ψ(1, 1) = 1, tali che
f(x, ϕ(x, t), ψ(x, t), t) = 0 .
Calcolare la Jacobiana
∂(ϕ, ψ)
∂(x, t)in (x, t) = (1, 1) .
Gli zeri di f vicino a (1, 1, 1, 1) sono anche il grafico di una funzione (x, z) =(h(y, t), k(y, t))? Sono il grafico di una funzione (z, t) = (p(x, y), q(x, y))?
Prova del 4-12-09
Esercizio 1) Si consideri il problema di Cauchyx = 1− (x− t)(x− 2− t)x(0) = 1 .
Se ne disegni il grafico.Esercizio 2) Provare che l’equazione
ex2y2z − x2 − y2 + z = 1
definisce implicitamente una sola funzione z = f(x, y) definita su tutto R2
di classe C∞. Provare che f ha in (x, y) = (0, 0) un minimo assoluto.
Prova del 22-1-10
Esercizio 1) Si consideri il problema di Cauchy x =x2 − t
1 + x2 + t2x(0) = 0
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Si consideri la funzione F : R3 → R2 definita da
F (x, y, z) =(x+ log y + z − 2, 2x− y2 + z − 1
).

CAPITOLO 10. TEMI D’ESAME 175
Provare che il luogo degli zeri di F (x, y, z) = 0 e, in un intorno di (x, y, z) =(0, 1, 2), il grafico di una funzione (y, z)(x) di classe C∞. Si clacoli la derivata
d
dx(y, z)(x)|x=0 .
Provare che F (x, y, z) = 0 e il grafico di una funzione (x, z)(y), definitaper y > 0, ed
limy→+∞
|(x, z)(y)| = +∞ .
Prova del 4-3-10
Esercizio 1) Si consideri il problema di Cauchyx = x|x| − t2x(0) = −1
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Provare che la funzione f : R2 → R2 definita da
f(x, y) =(x3 − 3xy2,−y3 + 3x2y
)e localmente invertibile tra un intorno di un qualsiasi punto (x0, y0) 6= (0, 0)ed un intorno di f(x0, y0).
f e suriettiva? f e globalmente iniettiva? f e un diffeomorfismo globale?
Suggerimento: si scriva la mappa come una trasformazione di C → Cponendo z = x+ iy.
Prova del 7-5-10
Esercizio 1) Si consideri il problema di Cauchyx = sin(x) sin(t) + sin(3x) sin(3t)x(0) = a.
Provare che per tutti i valori di a ∈ R la soluzione x(t) e:1) definita su tutto R,2) pari,3) 2π-periodica.
Suggerimento: provare che x(t− π) = x(t+ π), ∀t ∈ R.Esercizio 2) Si consideri la funzione
f : I :=
(x, y) ∈ R2 : x ∈ R , 0 < y < 2π→ R2

CAPITOLO 10. TEMI D’ESAME 176
definita daf(x, y) =
(ex cos y, ex sin y
).
Provare che1) f e iniettiva2) f e localmente invertibile3) Trovare l’immagine f(I).
Prova del 28-6-10
Esercizio 1) Si disegnino tutte le soluzioni di
x = x(1− x)(x− 1
2
).
Esercizio 2) Si verifichi che l’applicazione
F : (0,∞)×R×R→ R3 \ (0, 0, 0)
definita daF (ρ, θ, ϕ) =
(ρ sin θ cosϕ, ρ sin θ sinϕ, ρ cos θ
)e localmente invertibile nel punto (1, π/4, 3π) e se ne scriva l’inversa in unintorno del punto F (1, π/4, 3π).
Prova del 16-07-10
Esercizio 1) Si studi il problema di Cauchyx = x3 − t3x(0) = 0
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Provare che la funzione f : R2 → R2 definita da
f(x, y) =(5x+ sin y, 5y + arctanx
)e un diffeomorfismo globale da R2 in R2.
Prova del 24-09-10
Esercizio 1) Si studi il problema di Cauchy x =x
t+x2
t2x(1) = 1
e si disegni il grafico qualitativo della soluzione.

CAPITOLO 10. TEMI D’ESAME 177
Esercizio 2) Si consideri la funzione F : R2 → R definita da
F (x, y) = 2y + y3 − exx3 .
Provare che il luogo degli zeri di F (x, y) = 0 risulta il grafico di unafunzione y = f(x) con f definita su tutto R e di classe C∞. Si disegni talegrafico.
Prova del 8-10-10
Esercizio 1) Si studi il problema di Cauchyx = (x2 + t2)2 − 1x(0) = 0
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Si dica se la funzione f : R3 → R3 definita da
f(x, y, z) =(
sinx+ y2, eyx+ sin y, x2 + y2 + z3)
e localmente invertibile tra un intorno di (0, 0, 0) e un intorno di f(0, 0, 0) =(0, 0, 0).
Prova del 16-11-10
Esercizio 1) Si studi il problema di Cauchyx = ex
4 − et4
x(0) = 0
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Dire se la funzione f : R2\0 → R2 definita da
f(x, y) =( x
x2 + y2,− y
x2 + y2
)e localmente invertibile tra un intorno di (x0, y0) 6= (0, 0) e un intorno dif(x0, y0). Trovare la immagine f(R2\0). Dire se f e iniettiva tra R2\0e f(R2\0). Dire se f e un diffeomorfismo globale tra R2\0 e f(R2\0).
Prova del 21-12-10
Esercizio 1) Si studi il problema di Cauchyx = (x− et)(1− etx2
)x(0) = 1

CAPITOLO 10. TEMI D’ESAME 178
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Data la funzione F : R3 → R definita da
F (x, y, z) = x4 + 3y5 + 6y + z2 − 1 ,
verificare che, in un intorno del punto (1, 0, 0), l’insieme F (x, y, z) = 0,e una superficie esplicitabile come il grafico di una funzione y = ϕ(x, z).Scrivere l’equazione del piano tangente a tale superficie in (1, 0, 0). Si puoanche esplicitare z in funzione di (x, y)?
Prova del 28-1-11
Esercizio 1) Si studi il problema di Cauchy x =x2 − t2
1 + x2
x(0) = 0
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Data la funzione F : R2 → R definita da
F (x, y) = y3 + y − x3ex ,
provare che F (x, y) = 0 definisce implicitamente una funzione y = f(x),di classe C∞(R,R). Disegnare il grafico di y = f(x).Esercizio 3) Calcolare l’integrale
∫ +∞
0
x2
(x2 + a2)3dx , a 6= 0 .
Prova del 15-2-11
Esercizio 1) Si studi il problema di Cauchyx = 1− ln(x+ t)x(0) = 1
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Data la funzione F : R2 → R2 definita da
F (x, y) =(
coshx cos y, sinhx sin y),
provare che F e localmente invertibile in ogni (x0, y0) ∈ R2 \ 0, ma non eglobalmente invertibile.

CAPITOLO 10. TEMI D’ESAME 179
Esercizio 3) Determinare e disegnare l’anello di convergenza della serie diLaurent ∑
n∈Z3−|n|(z − 1)n .
Prova del 02-3-11
Esercizio 1) Si studi il problema di Cauchy x =ex − |t|ex + |t|
x(1) = 0
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Data la funzione f : R2 → R definita da
f(x, y) = −xey + 2y − 1 ,
e l’insieme S := (x, y) ∈ R2 : f(x, y) = 0. Provare che:
a) S e il grafico di una funzione x = g(y), definita per tutti gli y ∈ R. Sidisegni l’insieme S,
b) in un intorno di (0, 1/2) l’insieme S e pure rappresentabile come il graficodi una funzione y = h(x) di cui si scriva lo sviluppo di Taylor al secondoordine in x = 0,
c) per quali punti di S tale insieme non e rappresentabile, in alcun lorointorno, come grafico y = h(x)?
Esercizio 3) Calcolare l’integrale∫ 2π
0
dt
3 + sin t.
Prova del 03-5-11
Esercizio 1) Si studi il problema di Cauchyx = e
1t− 1x
x(1) = 2
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Si studi il luogo degli zeri di f : R2 → R definita da
f(x, y) =1
2arctan(x+ y) + y − x .

CAPITOLO 10. TEMI D’ESAME 180
Esercizio 3) Calcolare l’integrale∫ +∞
0
x2
x4 + 5x2 + 6dx .
Prova del 27-6-11
Esercizio 1) Si studi il problema di Cauchyx = t− x2
x(1) = 1
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Si mostri che in un intorno di (x, y, z, v) = (0, 0, 1, 1) il sistema
x2 + y2 + z2 + zvex − 2 = 0xez + yev − z + v = 0
definisce un’unica funzione (z(x, y), v(x, y)). Di tale funzione si calcoli lamatrice Jacobiana in (0, 0).Esercizio 3) Determinare tutte le funzioni ϕ : R→ R tale per cui ϕ(x) sin ye la parte reale di una funzione olomorfa.
Prova del 19-7-11
Esercizio 1) Si studi il problema di Cauchyx = 1 + cosx+ t2
x(0) = 0
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Si mostri che in un intorno di (x, y, z) = (0, 0, 0) il sistema
sin(xey) + ey cos z − 1 = 0x2 − exz − z + 1 = 0
definisce una curva regolare di cui si scriva la retta tangente nell’origine.Esercizio 3) Siano
∑n≥1 anz
n,∑n≥1 bnz
n, due serie di potenze con raggio diconvergenza rispettivamente R1, R2 > 0. Provare che il raggio di convergenzadi ∑
n≥1
anbnzn
e maggiore uguale a R1R2.
Prova del 21-9-11

CAPITOLO 10. TEMI D’ESAME 181
Esercizio 1) Si studi il problema di Cauchy x =x
1 + t2− x2
x(0) = 1
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Si consideri la funzione f : R2 → R2 definita da
f(x, y) = (x+ y, x2 + y2) .
Determinare per quali punti (x0, y0) ∈ R2 la f e localmente invertibile.Trovare l’immagine di f . Calcolare (Df−1)(0, 1).Esercizio 3) Calcolare con il metodo dei residui∫ +∞
−∞
x2 − x+ 2
x4 + 10x2 + 9dx .
Prova del 21-10-11
Esercizio 1) Si studi il problema di Cauchy x =t− x2
1 + (sin x)2
x(0) = 0
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Si consideri la funzione
F (x, y, z, u) = ln(xy) + z(x− y) + u4 + z4 − 1 .
Dire se in un intorno di P = (1, 1, 1, 0) l’insieme degli zeri di F e il graficodi una funzione z = f(x, y, u). E il grafico di una funzione u = h(x, y, z)?Scrivere il piano tangente in P .Esercizio 3) Calcolare∫ +∞
−∞
cosx
x2 + a2dx = π
e−a
a, a > 0 .
Prova del 18-11-11
Esercizio 1) Si studi il problema di Cauchyx = arctan(x/t)x(1) = 1

CAPITOLO 10. TEMI D’ESAME 182
e si disegni il grafico qualitativo della soluzione.Esercizio 2) Provare che il luogo degli zeri di F : R2 → R definita da
F (x, y) = x4y + ex3+y
e il grafico di una funzione y = f(x), f ∈ C∞(R \ 0,R). Se ne disegni ilgrafico.Esercizio 3) Calcolare ∫
γ
sin z
z10dz
dove γ : [0, 2π)→ C, γ(t) = eit.