Sistemi di attuazione del moto - TIM e Telecom in un unico … · 2015-09-10 · di armatura ed e...
29
Capitolo 3 Sistemi di attuazione del moto Un attuatore ` e un dispositivo che provvede a modificare la variabile di controllo (manipolabile) in base ad un segnale fornito dal regolatore, dato dalla variazione di una grandezza fisica adatta per la trasmissione dell’informazione (ad esempio, una tensione o una corrente elettrica o una pressione pneumatica), operando nel contempo un’adeguata amplificazione di potenza [5]. Nello schema canonico di un controllo di processo rappresentato in Fig. 3.1, ` e evidenziato il blocco funzionale degli attuatori, cui ` e dedicato il presente capitolo. PSfrag replacements y d y z d c A S E T z T d Bassa Potenza Potenza Alta Figura 3.1: Schema del controllo di processo, con evidenziato il blocco degli attuatori. 3.1 Motori in Corrente Continua Il motore in corrente continua (cc), si basa sulla legge di Amp` ere ~ F = i ~ l ∧ ~ B essendo ~ l la lunghezza orientata di un conduttore rettilineo percorso da corrente i e disposto normalmente alle linee di forza di un campo magnetico uniforme di induzione costante ~ B; ~ F 69
Transcript of Sistemi di attuazione del moto - TIM e Telecom in un unico … · 2015-09-10 · di armatura ed e...

Capitolo 3
Sistemi di attuazione del moto
Un attuatore e un dispositivo che provvede a modificare la variabile di controllo (manipolabile)
in base ad un segnale fornito dal regolatore, dato dalla variazione di una grandezza fisica
adatta per la trasmissione dell’informazione (ad esempio, una tensione o una corrente elettrica
o una pressione pneumatica), operando nel contempo un’adeguata amplificazione di potenza
[5].
Nello schema canonico di un controllo di processo rappresentato in Fig. 3.1, e evidenziato il
blocco funzionale degli attuatori, cui e dedicato il presente capitolo.
PSfrag replacements
yd y
z
d
cA SE
Tz
Td
BassaPotenzaPotenzaAlta
Figura 3.1: Schema del controllo di processo, con evidenziato il blocco degli attuatori.
3.1 Motori in Corrente Continua
Il motore in corrente continua (cc), si basa sulla legge di Ampere
~F = i~l ∧ ~B
essendo ~l la lunghezza orientata di un conduttore rettilineo percorso da corrente i e disposto
normalmente alle linee di forza di un campo magnetico uniforme di induzione costante ~B; ~F
69

70 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
e la forza magnetoelettrica che sposta il conduttore normalmente alla direzione della corrente
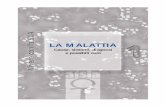
e a quella del campo, con un verso definito dalla regola del prodotto vettoriale. Nelle Figure
3.2 e 3.3 e riportato lo schema costruttivo di una macchina in corrente continua: lo stesso
Figura 3.2: Motore in corrente continua.
schema e valido sia per i motori che per i generatori. Si distinguono le espansioni polari dello
statore, normalmente realizzato in ferro omogeneo, in cui si genera un campo magnetico per
la presenza di induttanze percorse dalla corrente di eccitazione ic (circuito di campo), e il
rotore, normalmente in ferro laminato, nelle cui cave e situato l’avvolgimento, costituito da
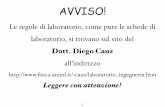
piu matasse (o bobine) disposte come in Fig. 3.3, i cui estremi sono collegati alle lame del
V
Vc
Figura 3.3: Motore in corrente continua e collettore con matasse.
collettore, dove avviene la commutazione tramite delle spazzole. Nel circuito di rotore, detto
anche circuito di armatura, una volta immerso nel campo magnetico statorico e percorso dalla

3.2. CLASSIFICAZIONE DEI MOTORI IN CC 71
corrente i, si manifesta per la legge di Ampere una coppia motrice che lo porta in rotazione.
Facendo cambiare tramite il collettore le connessioni delle matasse al circuito esterno, si fa
in modo che il campo magnetico di armatura rimanga sempre ortogonale al campo statorico
(combinazione di massima coppia).
Il principio di funzionamento dei generatori a dinamo e duale: viene fornita energia meccanica
e trasformata in energia elettrica secondo la legge di Faraday
~e = l~v ∧ ~B.
I motori in corrente continua trovano largo uso nella regolazione e nei servomeccanismi perche
tramite la tensione di armatura si agisce sulla coppia motrice in modo diretto e tramite la
tensione di eccitazione si varia il flusso statorico; in questo modo entrambe le caratteristiche
possono essere sfruttate indipendentemente per influenzare la coppia motrice agente sul rotore.
3.2 Classificazione dei motori in cc
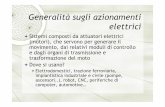
I motori in cc si classificano in base al modo di eccitazione degli avvolgimenti di campo:
• Motore in cc con eccitazione indipendente. Il circuito di campo viene alimentato in
maniera separata rispetto al circuito di armatura, e il flusso di campo e spesso costante
e con valori prossimi alla saturazione (Fig. 3.4).
• Motore in cc con eccitazione serie. Il circuito di campo e collegato in serie al circuito
di armatura ed e quindi percorso dalla stessa corrente di armatura. In questo motore
il flusso di campo aumenta con il carico e viene utilizzato laddove si richiedono forti
sovraccarichi di coppia (trazione elettrica) (Fig. 3.5).
• Motore in cc con eccitazione in derivazione. Il circuito di campo e alimentato con la
stessa tensione del circuito di armatura (Fig. 3.6).
• Motore in cc con eccitazione compound. In questo caso il circuito di campo e alimentato
in serie e in parallelo rispetto al circuito di armatura per poter sfruttare i vantaggi di
entrambe le configurazioni (Fig. 3.7).
3.3 Motore in cc ad eccitazione indipendente
In questa sezione, verra ricavato il modello matematico di un motore in cc e la relativa funzione
di trasferimento. In Fig. 3.8 e riportato lo schema di un motore con eccitazione indipendente
sul cui albero agisce una coppia resistente Cr; em indica la forza controelettromotrice, prodotta
dalla rotazione dei conduttori di armatura alla velocita Ω, in presenza di flusso di campo Φc.

72 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
Figura 3.4: Motore in cc con eccitazione indipendente.
Figura 3.5: Motore in cc con eccitazione serie.
Figura 3.6: Motore in cc con eccitazione in derivazione.
Figura 3.7: Motore in cc con eccitazione compound.

3.3. MOTORE IN CC AD ECCITAZIONE INDIPENDENTE 73
Figura 3.8: Motore in cc e carico esterno.
Le equazioni che regolano la dinamica meccanica basate sul principio di equivalenza delle
coppie sono:
JdΩ
dt= Cm − Cr − Cd, (3.1)
dove Cm e la coppia motrice, Cr la coppia resistente e Cd la coppia dissipativa (cuscinetti,
ventilazione interna). La dinamica elettrica e ottenuta dall’equazione di equilibrio al circuito
di armatura
Ldi
dt+ Ri + em = V. (3.2)
Lavorando a flusso di eccitazione costante e ragionevole ritenere che la coppia motrice Cm sia
proporzionale alla corrente di armatura secondo una costante KT :
Cm = KT Φci, (3.3)
mentre la forza controelettromotrice em sara proporzionale (legge di Faraday) alla velocita di
rotazione Ω dell’albero motore tramite la costante Kc:
em = KcΦcΩ. (3.4)
Per le applicazioni nei servo-controlli dei motori in corrente continua e indispensabile conoscere
l’andamento della coppia motrice Cm in funzione della velocita di rotazione Ω. Questo e
ottenibile dalle caratteristiche statiche dei motori in cc dopo aver sostituito la (3.2) nella
(3.3) ed aver esplicitato em:
Cm = KT Φci = KT Φc
(V − em
R
)
=KT ΦcV
R− KT KcΦ
2cΩ
R. (3.5)
La coppia motrice e una funzione lineare della velocita angolare come risulta nella Fig. 3.9,
e il punto di intersezione con la coppia resistente Cr fornisce la velocita di regime. Nella
equazione (3.5), la quantitaKT ΦcV
Rrappresenta la coppia a velocita nulla, detta coppia di
spunto, mentre il coefficiente angolareKT KcΦ
2c
Rcostituisce la costante di regolazione della

74 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
velocita. Dall’equazione (3.3) si osserva che la coppia motrice e proporzionale alla corrente
di armatura, la quale e limitata dalla massima corrente sopportabile a regime dal motore
[2, 4, 5].
Cm
Figura 3.9: Caratteristica coppia-velocita.
La regolazione dei motori in cc ad eccitazione indipendente puo essere fatta in uno dei seguenti
modi:
• Controllo sul flusso di campo. In questo caso si diminuisce il flusso di eccitazione Φc dal
momento che in condizione di regime si lavora con valori prossimi a quello di saturazione.
La caratteristica coppia-velocita di conseguenza si modifica come in Fig. 3.10. La coppia
massima, essendo proporzionale al flusso, diminuisce, mentre si ottiene un incremento
della velocita raggiungibile a parita di tensione di alimentazione nominale.
Figura 3.10: Caratteristica coppia-velocita con regolazione di flusso.
• Controllo sulla tensione di armatura. Si varia la tensione di armatura V modificando la
coppia motrice Cm; la velocita di regime, come si vede in Fig. 3.11, assume nuovi valori.

3.3. MOTORE IN CC AD ECCITAZIONE INDIPENDENTE 75
Cm
Figura 3.11: Caratteristica coppia-velocita al variare della tensione di armatura.
• Controllo sulla resistenza del circuito di armatura. Si inserisce un reostato in serie
al circuito di armatura, per cui la caratteristica coppia-velocita si modifica come in
Fig. 3.12. In questo modo si diminuisce la coppia di spunto, compromettendo pero il
rendimento, in quanto la potenza dissipata sulla resistenza aggiuntiva e notevole. Per
questo motivo, a regime la resistenza aggiuntiva viene gradualmente esclusa.
Cm
Figura 3.12: Caratteristica coppia-velocita al variare della resistenza del circuito di armatura.
3.3.1 Funzione di trasferimento di un motore in corrente continua a con-
trollo di armatura
Ai fini di una corretta regolazione e essenziale risalire alla funzione di trasferimento (f.d.t.)
per motori in cc ad eccitazione indipendente, esprimendo la velocita angolare Ω in funzione
della tensione di alimentazione V . La trasformata di Laplace delle equazioni della dinamica

76 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
elettrica e di quella meccanica fornisce le equazioni:
(Ls + R)I(s) + Em(s) = V (s) (3.6)
JsΩ(s) = Cm(s)− Cr(s)− Cd(s). (3.7)
Esplicitando la corrente I(s) dalla (3.6) e sostituendola nella trasformata di Laplace della
(3.3), si ottiene:
Cm(s) =KT Φc
R(1 + τes)V (s)− KT Φc
R(1 + τes)Em(s), (3.8)
dove con τe ,L
Re stata indicata la costante di tempo elettrica del motore.
Sfruttando l’equazione della dinamica meccanica, dopo avervi sostituito l’equazione (3.8) e la
trasformata di Laplace della (3.4), si perviene dopo una serie di passaggi alla relazione
Ω(s) =KT Φc
RJs(1 + τes)V (s)− KT KcΦ
2c
RJs(1 + τes)Ω(s)− Cr(s) + Cd(s)
Js(3.9)
da cui e possibile ricavare lo schema a blocchi del motore rappresentato nella Fig. 3.13. Vale
la pena notare come il motore in cc in esame presenti una controreazione intrinseca (termine
KcΦc) tendente a stabilizzare la velocita Ω.
Figura 3.13: Schema a blocchi del motore in cc a controllo di armatura.
Raccogliendo a primo membro i termini comprendenti la velocita angolare Ω(s), dopo una
serie di semplificazioni si perviene alla seguente equazione:
Ω(s) =KT Φc
R[Js(1 + τes) + KT KcΦ2c
R ]V (s)− (Cr(s) + Cd(s))(1 + τes)
[Js(1 + τes) + KT KcΦ2c
R ]
ovvero:
Ω(s) =1
KcΦc[1 + RJKT KcΦ2
cs(1 + τes)]
V (s)− R(Cr(s) + Cd(s))(1 + τes)
KT KcΦ2c [1 + RJs(1+τes)
KT KcΦ2c
].

3.3. MOTORE IN CC AD ECCITAZIONE INDIPENDENTE 77
Definendo τm ,RJ
KT KcΦ2c
(costante di tempo meccanica del motore), la f.d.t. tra la velocita
angolare Ω e la tensione V diviene:
Ω(s)
V (s)=
1
KcΦc[1 + τms(1 + τes)], (3.10)
mentre quella tra la velocita angolare e la coppia resistente e dissipativa:
Ω(s)
(Cr(s) + Cd(s))=
τm(1 + τes)
J [1 + τms(1 + τes)]. (3.11)
La costante di tempo meccanica τm per un motore in cc ad eccitazione indipendente general-
mente vale 0.2 ÷ 0.4 sec, ed e notevolmente superiore a quella elettrica τe che assume valori
di 0.03÷ 0.06 sec. Dunque, il denominatore dell’equazione (3.10) puo ragionevolmente essere
riscritto in questa forma:
[1 + τms(1 + τes)] ' (1 + τms)(1 + τes),
che caratterizza un sistema del secondo ordine con poli reali distinti e negativi.
La costante di tempo elettrica, rappresenta la rapidita di variazione della corrente di armatura
in risposta ad un cambio del riferimento della tensione di ingresso a gradino, quando e costante
la velocita del motore.
La costante di tempo meccanica fornisce invece una indicazione sulla rapidita di risposta
della velocita, quando viene applicata una variazione a gradino nella tensione di ingresso,
nell’ipotesi di trascurare la costante di tempo elettrica (variazione istantanea della corrente
di armatura) [3, 4, 5].
Nella Tabella 3.1 sono riportati a scopo indicativo i parametri caratteristici di tre servomotori:
3.3.2 Funzione di trasferimento di un motore in corrente continua a con-
trollo di campo
I motori a corrente continua ad eccitazione indipendente, possono anche essere controllati
tramite una variazione del flusso prodotto dal circuito statorico (controllo di campo), mentre il
circuito di armatura viene alimentato a tensione costante o a corrente costante come illustrato
in Fig. 3.14.
Le equazioni di equilibrio del motore con il circuito di armatura alimentato a corrente costante
a regime sono:
Vc = Rcic + Lcdicdt
(3.12)
per quanto riguarda la dinamica elettrica, mentre per la dinamica meccanica:
JdΩ
dt= Cm −Cr −BΩ. (3.13)

78 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
Potenza massima PL(W ) 30 75 180
Tensione nominale Va(V ) 32 75 32
Velocita a vuoto ω0 1650 2600 4100
Coppia di spunto Cs(Nm) 0.70 1.12 1.77
Resistenza di armatura Ra(Ω) 8 3.18 1.27
Induttanza di armatura La(mH) 13.68 5.49 2.19
Costante di tensione KE(V/rads−1) 0.186 0.1194 0.0754
Costante di coppia KT (Nm/A) 0.186 .01194 0.0754
Costante elettrica τe(ms) 1.72 1.72 1.72
Costante meccanica τm(ms) 10.6 10.6 10.6
Corrente di spunto Iamax(A) 4 10.1 21.2
Tensione di spunto Vas(V ) 0.95 0.60 0.40
Momento di inerzia Jm(kgm2) 0.473 0.473 0.473
Peso (Kg) 1.42 1.42 1.42
Tabella 3.1: Parametri caratteristici di tre servomotori.
Figura 3.14: Motore in cc a controllo di campo.
La prima e ottenuta dall’equazione di equilibrio alla maglia del circuito di eccitazione, mentre
nella seconda la coppia dissipativa Cd e espressa in funzione del coefficiente di attrito viscoso
B. Facendo lavorare il motore a corrente di armatura costante e ragionevole ritenere la coppia
motrice Cm proporzionale alla corrente di campo ic secondo una costante Km:
Cm = Kmic. (3.14)
Volendo come nel caso precedente ricavare la f.d.t. del motore in cc ad eccitazione di campo
si passa alle trasformate di Laplace delle relazioni precedenti. Sostituendo poi le trasformate
di Laplace delle equazioni (3.12) e (3.14) nella (3.13) si ottiene:
Ω(s) =Km
(B + Js)(Rc + Lcs)Vc(s)−
1
B + JsCr(s)

3.3. MOTORE IN CC AD ECCITAZIONE INDIPENDENTE 79
o anche
Ω(s) =Km/BRc
(1 + τms)(1 + τes)Vc(s)−
1
B(1 + τms)Cr(s)
in cui si e posto τm = JB (costante di tempo meccanica) e τe = Lc
Rc(costante di tempo elettrica).
Nel caso di controllo di campo, la funzione di trasferimento presenta poli reali entrambi non
trascurabili data la notevole costante di tempo del circuito di eccitazione. In Fig. 3.15 viene
rappresentato lo schema a blocchi per tale motore, dove si osserva la mancanza totale di
retroazione tra la velocita angolare Ω e la tensione di comando Vc.
1B(1+s )
Figura 3.15: Schema a blocchi motore cc a controllo di campo.
Dai dati di targa dei motori si riscontrano in generale valori per la costante di tempo mec-
canica, nel caso di controllo di armatura, notevolmente inferiori rispetto a quelli a controllo
di campo; infatti nel primo caso il motore e meno sensibile alla variazione di carico e riesce
a compensarle con una maggiore reattivita. Tipicamente si sceglie di variare la tensione di
armatura (in condizioni di flusso massimo ΦcN) fino al valore VN raggiunto in corrispondenza
della velocita nominale ΩN ; ogni ulteriore aumento della velocita si puo ottenere “deflus-
sando” il motore (cioe diminuendone il flusso) con un controllo di campo, come illustrato in
Fig. 3.16 [2, 4, 5].
Figura 3.16: Caratteristica flusso-tensione-velocita.
Quando il circuito di armatura viene alimentato a tensione costante, si inserisce in serie
durante la fase di avviamento una resistenza per limitare la forte corrente che si sviluppa per
la mancanza di una adeguata forza controelettromotrice, successivamente cortocircuitata ad
avviamento ottenuto.

80 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
3.4 Motori in cc ad eccitazione serie
In questi motori, come indica la Fig. 3.17, la corrente di alimentazione attraversa sia il circuito
di armatura di resistenza R, che quello di campo di resistenza Rc. A regime valgono le seguenti
Figura 3.17: Motore in cc ad eccitazione serie.
equazioni:
V = em + (R + Rc)i
em = KcΦΩ
Φ = f(i)
Cm = KT Φi .
Sino a che il ferro costituente lo statore non e saturo, il flusso Φ risulta proporzionale alla
corrente i, secondo la costante Kϕ:
Φ = Kϕi (3.15)
come evidenziato in Fig. 3.18. La coppia motrice diviene quindi
Cm = KT Kϕi2.
Quando la corrente raggiunge una intensita tale da saturare il circuito magnetico, il flusso
rimane costante al valore Φsat, e la coppia e proporzionale alla corrente i. Per valori maggiori
Figura 3.18: Andamento approssimato del flusso Φ.
della corrente, inizia a farsi sentire l’effetto della reazione di armatura che diminuisce il flusso
utile, cosı la coppia motrice cresce piu lentamente rispetto alla corrente assorbita.

3.5. MOTORI IN CC BRUSHLESS 81
Ricavando la corrente i in funzione della tensione di armatura e sostituendola nell’equazione
(3.15) si ottiene la relazione coppia-velocita nel tratto dove il flusso e proporzionale alla
corrente:
Cm =KT KϕV 2
(R + Rc + KcKϕΩ)2. (3.16)
Figura 3.19: Caratteristica coppia-velocita.
Nell’intervallo lontano dalla saturazione, la coppia motrice Cm varia in ragione inversa del
quadrato della velocita Ω e la caratteristica coppia-velocita di Fig. 3.19 assume un andamento
parabolico. A carichi maggiori, per effetto della saturazione e della reazione di indotto, il
flusso tende a rimanere sostanzialmente costante e la caratteristica si inflette verso l’asse
delle ordinate, assumendo un andamento pressoche rettilineo e andando a intersecare l’asse
delle coppie nel puntoKT KϕV 2
(R + Rc)(coppia allo spunto). Anche in questo caso viene utilizzato
un reostato alla partenza, per limitare la corrente ad un valore pari a 1.5 ÷ 2 volte quella
nominale.
Questo motore, quando funziona a vuoto, raggiunge velocita elevate al punto da compromet-
tere la sua integrita, percio viene utilizzato in quei tipi di azionamenti che per loro natura
escludono il funzionamento a vuoto (trazione elettrica, ascensori e simili).
Va notato infine che i motori autoeccitati in serie non cambiano il senso di rotazione invertendo
la polarita ai morsetti di alimentazione, in quanto la corrente si inverte contemporaneamente
nel circuito di eccitazione e in quello di armatura, facendo rimanere costante il segno della
coppia motrice [4, 7].
3.5 Motori in cc brushless
I motori in corrente continua utilizzano un sistema collettore-spazzole per portare corrente al
circuito di armatura. Tuttavia, quando ci sono alte coppie in velocita, nascono per fenomeni
induttivi degli archi elettrici nello scorrimento relativo tra le spazzole e le lamelle del collettore,
causando, se il motore esegue un ciclo di lavoro ripetitivo, un’usura eccessiva solo di certe
lamelle. Cio compromette il funzionamento ottimale del motore.
Un altro inconveniente che si manifesta nei motori in cc ad alta velocita e la crescita del
termine Ldiadt
, dovuto alla reazione di armatura, per l’abbandono rapido di una lamella del

82 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
collettore nel passaggio alla successiva, col risultato di una minore corrente assorbita dal
motore che produce una diminuzione della coppia motrice.
Nei motori brushless non essendo presente il collettore non esistono tali problemi. Infat-
ti un motore brushless e costituito da uno statore in cui trovano alloggiamento le tre fasi
(A,B,C), da un rotore a magneti permanenti, da un commutatore elettronico e da una logica
di commutazione, come illustrato in Fig. 3.20.
Figura 3.20: Struttura di un motore brushless.
Nei motori in cc il commutatore meccanico (collettore) provvede ad attivare la fase del rotore
che di volta in volta e posizionata in modo da generare un campo magnetico perpendicolare a
quello dello statore. Nei motori brushless questo compito e riservato al commutatore elettro-
nico, che rilevando istante per istante la posizione del rotore, attiva la fase dello statore che
in quel momento e in grado di generare un campo magnetico ortogonale a quello del rotore.
Cio consente di eliminare la presenza di dispositivi in movimento da alimentare. In Fig. 3.21
e illustrato schematicamente il funzionamento del motore. Quando la fase A e alimentata,
Figura 3.21: Attivazione delle diverse fasi di un brushless.
essa crea un campo magnetico con le polarita indicate all’esterno del cerchio (Nord in basso,

3.5. MOTORI IN CC BRUSHLESS 83
Sud in alto) e rimane attiva finche il rotore, con le polarita indicate, non ha ruotato in senso
orario dell’angolo da 00 a 1200. Successivamente viene attivata la fase B, per una rotazione
del magnete da 1200 a 2400, poi ancora la fase C per una rotazione da 2400 a 3600. Il rotore
sottoposto all’azione dei tre campi magnetici che si attivano in sequenza viene portato in
rotazione; in un certo senso il motore brushless e una macchina sincrona, in quanto i campi
di rotore e di statore sono sempre mantenuti sincroni e sfasati tra loro per creare una coppia
motrice.
In Fig. 3.22 sono indicate le sequenze di attivazione delle fasi, e il relativo andamento delle
Figura 3.22: Diagrammi di attivazione e corrente in un brushless.
correnti (queste non sono perfettamente regolari per via dei transitori dovuti alla componente
induttiva degli avvolgimenti). In Fig. 3.23 sono rappresentati l’andamento delle funzioni di
coppia C(I) rispetto all’angolo del rotore, quando la corrispondente fase e alimentata dalla
corrente di armatura.
Figura 3.23: Andamento della coppia di rotore in un brushless.

84 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
Nel caso della fase A, la coppia C(Ia) rimane costante per un angolo da 00 a 1200 corrispon-
dente alla sua attivazione, per poi invertire il segno quando il rotore e ruotato di mezzo giro,
cioe fra 1800 e 3000, assumendo un tipico andamento trapezoidale.
Tuttavia, poiche le correnti vengono mantenute in ciascuna fase per i soli 1200 corrispondenti
al valore costante e positivo della coppia (zona tratteggiata), quella risultante agente sul rotore
risulta sostanzialmente costante, e costituita da C(Ia) per i primi 1200, da C(Ib) nell’intervallo
da 1200 a 2400, da C(Ic) nell’intervallo da 2400 a 3600.
Durante l’attivazione di una fase, la posizione reciproca dei campi magnetici (quello generato
dalla fase e quello prodotto dal magnete) cambia, andando ad influenzare il valore della coppia
risultante. Per evitare cio, nei brushless vengono adottate opportune soluzioni costruttive in
modo da mantene la coppia pressoche costante per tutti i 1200 di attivazione della fase.
Le forze controelettromotrici indotte in ciascuna fase dalla rotazione del magnete permanente
sono proporzionali alla velocita di rotazione e pertanto presentano lo stesso andamento delle
funzioni di coppia. A causa delle commutazioni da una fase all’altra, dai morsetti di ingresso
del motore si vede una forza controelettromotrice risultante praticamente costante e, analo-
gamente al motore in cc, proporzionale alla velocita. Per il motore brushless valgono pertanto
le stesse equazioni del motore in cc a controllo di armatura, opportunamente riadattate:
va = Raia + Ladiadt
+ eg
eg = KeΩ
Cm = KT ia
dove:
ia e la corrente che scorre nella fase attiva;
Ra e la resistenza di una fase;
La e l’induttanza di una fase;
Ke e la costante di tensione;
KT e la costante di coppia;
Ω e la velocita angolare.
Affinche la coppia motrice sia regolare, in pratica si realizzano rotori con due coppie di poli.
Le fasi dei motori brushless generalmente sono collegate a stella ed alimentate a ponte, come
in Fig. 3.24, dove i transistor BJT lavorano da interruttori e i diodi sono quelli di libera
circolazione.
Il controllo della velocita del motore puo essere realizzato agendo sul valore dell’alimentazione
con tecnica lineare o con tecnica impulsiva PWM. Un’altra soluzione recentemente adottata
nei motori brushless di fascia alta consiste nell’intervenire con tecnica PWM direttamente
sulle singole fasi quando queste sono attive. Le frequenze di commutazione, grazie ai valori
bassi delle induttanze delle fasi, sono normalmente piu alte rispetto ai motori tradizionali in
cc (16÷20 kHz).
Per ottenere una coppia risultante costante, si richiede un andamento trapezoidale per quanto

3.6. MOTORI PASSO-PASSO (STEPPER MOTOR) 85
Figura 3.24: Collegamento e alimentazione di un brushless.
riguarda la funzione di coppia C(I) di ogni singola fase, andando cosı a limitare l’efficienza
del motore. Per questo motivo, i motori brushless forniscono normalmente basse potenze
(fino a qualche centinaia di watt). Per potenze maggiori si preferisce privilegiare l’efficienza
del motore a scapito dell’uniformita della coppia, lasciando che questa assuma un andamento
sinusoidale, col risultato che l’andamento della coppia risultante, composto dai tratti superiori
delle sinusoidi, presenta una marcata ondulazione. Si riesce a ridurre notevolmente questo
inconveniente controllando la corrente Ia mediante un anello di retroazione, stabilizzando
cosı la coppia. A fronte di una maggiore complessita rispetto al tradizionale motore in cc, il
brushless presenta numerosi vantaggi: maggiore affidabilita, rendimento piu elevato, minore
manutenzione. La coppia di spunto piu elevata e il momento di inerzia minore fanno sı che la
sua velocita di risposta e la banda passante siano notevolmente superiori a quelli del motore
in cc tradizionale [2, 3, 5].
3.6 Motori passo-passo (stepper motor)
I motori passo-passo (stepper motor) sono attuatori realizzati appositamente per il controllo di
posizione. Essi sono pilotati da segnali elettrici digitali e ruotano di un angolo fisso chiamato
passo ad ogni commutazione dei segnali di comando. Durante il loro funzionamento possono
trovarsi in tre condizioni diverse: disattivati, attivati ma fermi, in rotazione. I motori passo-
passo hanno il vantaggio della precisione, di poter essere usati nei sistemi di controllo ad
anello aperto e rispetto al motore in cc presentano una maggiore robustezza, non avendo parti
soggette ad usura come le spazzole. Gli svantaggi sono costituiti dalla maggiore complessita
dei circuiti di azionamento e da un rapporto potenza/volume piu sfavorevole. Generalmente
vengono usati nelle periferiche degli elaboratori e nell’azionamento dei robot.
Il principio di funzionamento dei motori passo-passo e quello della minima riluttanza: quando
la corrente di eccitazione percorre l’avvolgimento statorico, il rotore si dispone in modo da
offrire la minima riluttanza magnetica (ovvero la massima induttanza e il massimo flusso).
Quando l’eccitazione dell’avvolgimento statorico cambia, anche la posizione di minima rilut-

86 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
tanza cambia, obbligando il rotore a spostarsi. Da un punto di vista costruttivo, questi motori
si dividono in:
• motori a magnete permanente;
• motori a riluttanza variabile;
• motori ibridi.
3.6.1 Motori passo-passo a magnete permanente
I motori a magnete permanente sono ulteriormente classificati in bipolari e unipolari, a se-
conda del tipo di alimentazione degli avvolgimenti.
Motori bipolari. Lo schema semplificato e riportato in Fig. 3.25. Lo statore presenta due
avvolgimenti, facenti capo ai terminali AB e CD, percorsi dalla corrente nei due sensi. Il
rotore a sua volta e costituito da un magnete permanente, solitamente di materiale ceramico.
Sono possibili tre diversi tipi di pilotaggio.
Figura 3.25: Motore passo passo bipolare.
Azionamento ad una fase per volta (one phase-on oppure wave driver). Si attiva un avvol-
gimento alla volta secondo la sequenza indicata in Fig. 3.26. Inizialmente viene attivata la
fase AB con la polarita positiva su A, mentre la fase CD rimane disattivata. Si crea allora
Figura 3.26: Azionamento ad una fase per volta.
una campo magnetico diretto verticalmente nel disegno, con il Nord dalla parte di B ed il
Sud dalla parte di A. Il rotore per effetto del campo di statore, si posiziona anch’esso verti-
calmente. Successivamente viene attivata la fase CD, con la polarita positiva su C. Il campo
magnetico generato risulta ora diretto orizzontalmente, con il Nord dalla parte di D e il Sud
dalla parte di C; il rotore compie allora una rotazione di 900 in senso orario, allineandosi al

3.6. MOTORI PASSO-PASSO (STEPPER MOTOR) 87
Figura 3.27: Azionamento a due fasi per volta.
campo magnetico di statore. La sequenza completa, come illustrato dalla figura, prevede altre
due attivazioni: in questo caso il passo di rotazione e di 900.
Azionamento a due fasi alla volta (two phase-on drive). Si attivano in contemporanea due
fasi e i campi magnetici risultanti sono diretti obliquamente come indicato in Fig. 3.27. Ad
esempio, nella prima fase della sequenza il Nord si viene a trovare a meta strada fra B e D,
mentre il Sud e a meta strada fra A e C. Il passo e ancora di 900, tuttavia la coppia risulta
piu elevata rispetto al caso precedente, essendo prodotta contemporaneamente da due fasi.
Questo e il tipo di pilotaggio piu usato, comunemente detto a passo intero.
Azionamento a mezzo passo (half step drive). La sequenza, illustrata in Fig. 3.28, consta ora
di otto fasi e il passo di rotazione risulta dimezzato rispetto a prima. La coppia fornita pero
Figura 3.28: Sequenza di pilotaggio a mezzo passo.
e meno regolare che nei casi precedenti, passando da un minimo quando e attiva una sola fase
ad un massimo quando le fasi attive sono due. Invertendo la sequenza di comando e possibile
cambiare il verso di rotazione. I motori reali presentano sia sullo statore che sul rotore un
numero di poli ben maggiore, di modo che l’ampiezza del passo di rotazione risulta molto piu
piccola, ma il numero delle fasi e le sequenze di comando restano invariate.
Motori unipolari. La differenza rispetto al tipo precedente consiste nel fatto che gli avvol-
gimenti vengono percorsi dalla corrente in un solo verso. Lo statore contiene quindi quattro
avvolgimenti, come indicato in Fig. 3.29, che devono essere di filo piu sottile a parita di
grandezza del motore, essendo avvolti in coppia sulle espansioni polari.

88 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
Figura 3.29: Motore unipolare.
Attivando la fase A, che e avvolta sia sull’espansione superiore che su quella inferiore, si
genera un campo magnetico con il Sud, ad esempio, sull’espansione superiore ed il Nord su
quella inferiore. La fase B viceversa, quando e attiva, genera il Sud sull’espansione inferiore
ed il Nord su quella superiore. Le altri fasi si comportano in maniera analoga e le sequenze
di azionamento sono identiche a quelle viste precedentemente.
Lo svantaggio rispetto al motore bipolare di uguali dimensioni e una minore coppia motrice,
perche la sezione degli avvolgimenti statorici (e quindi la corrente) e ridotta. Il vantaggio e
costituito per contro da una maggiore semplicita del circuito di pilotaggio [1, 2].
3.6.2 Motori passo-passo a riluttanza variabile
Nei motori passo passo con rotore a magnete permanente il campo magnetico rotorico non
consente di raggiungere velocita elevate, che viceversa possono essere raggiunte con i motori
a riluttanza variabile schematicamente rappresentati in Fig. 3.30. Lo statore contiene le fasi
unipolari, mentre il rotore realizzato in ferro dolce presenta un numero di espansioni polari
(o denti) inferiori a quelle dello statore. Anche con questo motore sono possibili i tre tipi di
Figura 3.30: Motore a riluttanza variabile.
azionamenti visti in precedenza. L’azionamento ad una fase per volta richiede la sequenza A C
B D e la Fig. 3.30 illustra la posizione del rotore con la fase A attiva. Quando viene attivata la
fase C il rotore ruota in modo da rendere minima la riluttanza del percorso magnetico; il dente
2, piu vicino alla fase attiva, si allinea al polo ruotando in senso orario di 150. L’attivazione

3.6. MOTORI PASSO-PASSO (STEPPER MOTOR) 89
della fase B fa ruotare il rotore di altri 150, in modo che il dente 3 si venga ad allineare al
nuovo polo attivo, e cosı via [1].
3.6.3 Motori passo-passo ibridi
Questo motore si differenzia da quello a riluttanza variabile perche il rotore e costituito da un
magnete permanente con denti in ferro dolce. Presenta i vantaggi dei due motori precedenti:
velocita e coppia molto alte, angoli piccoli, inerzia bassa, precisione angolare elevata a fronte
di un elevato costo.
Lo statore e a poli salienti. Ogni polo contiene un avvolgimento di eccitazione con denti
longitudinali. Il rotore contiene un magnete permanente cilindrico assiale con due poli e
porta su ogni meta un sistema di denti; i due sistemi sono sfasati tra di loro di mezzo dente
come illustrato in Fig. 3.31. In assenza di eccitazione, il campo magnetico residuo sui poli
Figura 3.31: Motore passo-passo ibrido.
statorici interagisce con quello rotorico creando una piccola coppia di ritenzione utile a tenere
fermo il motore [1].
3.6.4 Caratteristiche e parametri
Il tipo di motore passo-passo piu usato e quello a magnete permanente, mentre quello ibrido
viene generalmente preferito a quello a riluttanza variabile e viene usato quando si richiedono
elevate prestazioni. I valori piu comuni del passo di rotazione sono 1.80, 3.60, 7.50, 90, 150
gradi. La frequenza dei passi, normalmente qualche centinaio per secondo, puo raggiunge-
re valori elevati, anche oltre gli 800 passi/sec, ed arrivare in certi motori per applicazioni
specialistiche fino a 2000 passi/sec.
In Fig. 3.32 sono riportate le caratteristiche di coppia del motore passo-passo in funzione
della frequenza di passo. La curva A indica l’andamento della massima coppia di carico
che puo essere applicata al motore senza che questo perda il passo. La curva B, analoga
alla precedente, e valida in fase di avviamento del motore. Ovviamente, a parita di coppia

90 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
Figura 3.32: Caratteristiche coppia-frequenza.
di carico la velocita che il motore puo sopportare senza perdere passi e minore in fase di
avviamento, a causa dell’inerzia, che non a regime.
Nella zona di grafico compresa tra le due curve, detta slew-range, il motore non perde il passo
a patto che la velocita non vari bruscamente.
Di seguito sono elencate brevemente caratteristiche e terminologia dei motori passo-passo.
• Step angle (angolo di passo): e l’angolo di cui ruota l’albero ad ogni commutazione
delle fasi.
• Step per revolution (passi per giro): fornisce il numero di passi perche l’albero ruoti
di 3600.
• Holding Torque (coppia di tenuta): e la massima coppia che puo essere applicata
all’albero di un motore alimentato, senza causarne la rotazione.
• Residual torque (coppia residua): la stessa definizione precedente ma con motore non
alimentato.
• Pull-out rate: la massima frequenza a cui un motore puo ruotare con un dato carico,
senza perdere passi.
• Pull-out torque: la massima coppia che puo essere applicata ad una data frequenza
senza perdere i passi.
• Pull-in rate: la massima frequenza a cui un motore con un dato carico puo partire
senza perdere passi.
• Pull-in torque: la massima coppia con cui un motore puo partire ad una data frequenza
senza perdere passi.
• Response range (campo di risposta): e la gamma di frequenze entro cui un motore
puo partire, fermarsi, invertire la rotazione, senza perdere passi.

3.7. MOTORI IN CORRENTE ALTERNATA 91
• Overshoot: e l’entita della sovraoscillazione che il rotore compie dopo ogni passo
intorno alla sua posizione finale. Un eccessivo overshoot alle basse frequenze di fun-
zionamento crea disturbi e tende a logorare le ruote dentate dei gruppi di trasmissione
collegati al motore.
3.7 Motori in corrente alternata
I motori in corrente alternata possono classificarsi in due gruppi:
• Motori a singola fase;
• Motori polifasi.
Nell’ambito di ciascun gruppo si puo fare una ulteriore suddivisione:
• Motori sincroni;
• Motori asincroni o a induzione.
I motori a singola fase vengono utilizzati in applicazioni di piccola potenza, mentre i motori
polifasi vengono usati per potenze rilevanti.
3.7.1 Motori asincroni
Il motore asincrono e una macchina rotante la cui velocita non e rigidamente legata a quella
del campo magnetico rotante esistente dentro la macchina, (da cio deriva il nome asincrono),
e viene denominata ad induzione in quanto il rotore e sede di corrente indotte indispensabili
per il suo funzionamento.
Lo statore di una macchina asincrona e costituito da lamierini in Fe-Si aventi forma cir-
colare, all’interno del quale trovano alloggiamento in cave opportune conduttori costituenti
l’avvolgimento di statore.
Il rotore puo essere di due tipi differenti:
• Rotore avvolto con collettori ad anelli;
• Rotore in cortocircuito.
Nel primo caso il rotore e costituito da tre avvolgimenti collegati a stella o a triangolo, i cui
terminali fanno capo a tre anelli isolati tra di loro, calettati sull’asse di rotazione. Su di essi
appoggiano tre spazzole per permettere la richiusura delle tre fasi rotoriche su un circuito
esterno (ad esempio reostato di avviamento), al fine di limitare le correnti allo spunto (vedi
Fig. 3.33).
L’altro tipo di avvolgimento rotorico e quello in cortocircuito, detto anche a gabbia di scoiat-
tolo, che alloggia delle barre conduttrici collegate tra di loro da anelli di materiale conduttore
(Fig. 3.34).

92 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
Figura 3.33: Rotore avvolto.
Figura 3.34: Rotore a gabbia di scoiattolo.
Motore asincrono trifase. Il principio di funzionamento del motore asincrono trifase si basa
sul campo magnetico rotante, generato dalla terna di correnti circolanti negli avvolgimenti
di statore, che determinano per induzione una coppia motrice sulla parte mobile. Il campo
magnetico rotante e generato da tre bobine fisse uguali, aventi gli assi disposti a 1200 gradi
l’uno rispetto all’altro, alimentate da tre correnti alternate della stessa frequenza e intensita,
ma sfasate tra di loro di un terzo di periodo come in Fig. 3.35.
Il rotore e sottoposto all’azione del campo magnetico rotante e diviene sede di correnti indotte
(Legge di Faraday-Lenz ) che lo mettono in movimento. Tuttavia, la sua velocita di rotazione
non puo raggiungere quella del campo rotante, perche in tal caso, venendo meno il moto
relativo fra i due campi, non si potrebbero piu generare le correnti indotte alla cui presenza
e legato il movimento. Il motore e “asincrono”, infatti il rotore puo solo inseguire il campo
rotante in modo da mantenere un moto relativo di scorrimento che garantisce l’esistenza delle
correnti indotte sufficienti a generare la coppia motrice.
La differenza tra la velocita effettiva del rotore e la velocita sincrona e detta scorrimento (s),
e indica il numero di giri per unita di tempo che il rotore perde rispetto al campo rotante
s =ns − nr
n− s=
ωs − ωr
ωs.
Tralasciando i vari passaggi matematici, la Fig. 3.36 fornisce la caratteristica statica coppia-
velocita di un motore asincrono alimentato con frequenza e tensione nominale. Questa
caratteristica si compone di tre zone A,B,C.
Nel tratto decrescente della curva relativa alla zona A (tratto dove lo scorrimento s e compreso
tra 0 e 1), ad un rallentamento del motore corrisponde un aumento della coppia motrice, di

3.7. MOTORI IN CORRENTE ALTERNATA 93
Figura 3.35: Schema di principio di un motore trifase.
Figura 3.36: Caratteristica statica coppia-velocita del motore asincrono.

94 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
modo che si ristabilisce l’equilibrio tra la coppia motrice e la coppia resistente (funzionamento
stabile).
Nella zona B la velocita del rotore e discorde da quella del campo magnetico rotante, (scor-
rimento maggiore di 1). In queste condizioni, il rotore e trascinato da una coppia esterna
antagonista e la macchina funziona da freno con dissipazione di energia al suo interno.
Nella zona C la velocita del campo magnetico rotante e inferiore a quella del rotore (scorri-
mento negativo). Il rotore e trascinato in rotazione da una causa esterna, quindi la macchina
immette energia attiva nella rete e funziona da generatore [2, 7].
3.8 Motore monofase ad induzione
Il motore monofase ad induzione e costituito da uno statore provvisto di un avvolgimento
principale e di un avvolgimento ausiliario di avviamento, disposti come in Fig. 3.37 e connessi
ai morsetti di alimentazione.
Figura 3.37: Motore ad induzione.
Il rotore e analogo a quello dei motori trifasi e puo essere del tipo a gabbia di scoiattolo
oppure ad anelli.
Il campo magnetico statorico, prodotto dall’avvolgimento principale percorso da corrente
alternata, e alternativo e di direzione fissa nello spazio, per cui il rotore rimane fermo, ma
la presenza dell’avvolgimento ausiliario e del condensatore crea una corrente sfasata di 900
rispetto a quella dell’avvolgimento principale. Di conseguenza il campo magnetico risultante

3.9. ATTUATORI NON ELETTRICI 95
si trasforma in rotante andando ad esercitare una coppia motrice sull’albero del motore,
permettendone l’avviamento.
In Fig. 3.37 e riportata anche la caratteristica coppia-velocita per diversi valori della tensione
di alimentazione. Generalmente si preferisce far lavorare il motore nella zona discendente
delle caratteristiche, vicino alla velocita no di sincronismo. Se la coppia resistente presenta
un andamento simile a quello tratteggiato in figura, si puo ottenere una regolazione della
velocita variando la tensione di alimentazione (punti P1 P2 P3).
Questi motori trovano largo uso in applicazioni di piccola potenza (da qualche watt a qualche
decina di watt) come elettrodomestici o macchine utensili di ridotte dimensioni [5, 7].
3.9 Attuatori non elettrici: pneumatici e oleodinamici
La pneumatica si occupa dell’attivazione e modulazione tramite un flusso gassoso di valvole
di regolazione, le quali sono parti essenziali dei circuiti idraulici presenti nei processi indu-
striali. Le pompe sono un componente fondamentale della pneumatica, in quanto forniscono
al fluido il carico idrostatico necessario al movimento e dissipato negli attriti interni e lungo
le tubature.
Gli attuatori pneumatici a membrana rappresentati in Fig. 3.38 sono i piu diffusi nelle valvole
di regolazione, per il basso costo e la semplicita di utilizzo.
Figura 3.38: Valvola di regolazione con attuatore pneumatico.
L’aria compressa proveniente dal regolatore agisce sulla membrana deformandola e spingendo
cosı verso il basso lo stelo dell’otturatore sino a una posizione di chiusura. Questo movi-
mento e contrastato da una molla antagonista in compressione sul lato superiore, che riporta
l’otturatore nella posizione iniziale quando la pressione di comando e interdetta.
Un altro attuatore pneumatico, solitamente utilizzato in presenza di basse pressioni e portate

96 CAPITOLO 3. SISTEMI DI ATTUAZIONE DEL MOTO
elevate, e la valvola a farfalla (Fig. 3.39), in cui un diaframma metallico parzializza la portata
di un fluido dentro un condotto, in presenza di un segnale proveniente dal regolatore.
Figura 3.39: Valvola a farfalla.
Si usa il termine di attuatori oleodinamici per indicare dei dispositivi in cui il fluido e un
liquido in pressione. Questi attuatori vengono usati nei servomeccanismi di posizione dove
sono richieste grande potenza, scarsa sensibilita ai carichi e un’elevata precisione, come ad
esempio nelle macchine utensili automatiche. Si preferiscono in genere ad altri tipi di attuatori
quando si vogliono ottenere dei movimenti lineari. La Fig. 3.40 rappresenta lo schema di
principio di un attuatore oleodinamico, dove un fluido incomprimibile a forte pressione giunge
ad un distributore a cassetti e a un attuatore a pistone. Uno spostamento dello stelo della
valvola pilota, rispetto alla posizione centrale, causa il collegamento di una delle due sezioni
del cilindro all’alimentazione e dell’altra allo scarico, producendo il moto del pistone [5, 6].
Figura 3.40: Attuatore oleodinamico.

Bibliografia
[1] P.P. Acarnley. Stepping Motors. Peter Peregrinus, London 1996.
[2] W. Bolton. Mechatronics: electronic control systems in mechanical engineering Addison
Wesley Longman, Edimburgh 1999.
[3] K.G. Bush. Electrical variable speed drives. Blackwell, Oxford 1995.
[4] W. Leonhard. Control of Electrical Drives. Springer-Verlag, Berlin/Heidelberg 1997.
[5] G. Marro. Componenti dei sistemi di controllo. Zanichelli, Bologna 1987.
[6] G. Magnani. Tecnologie dei sistemi di controllo. McGraw-Hill, Milano 2000.
[7] M. Pezzi. Macchine elettriche. Zanichelli, Bologna 1985.
97