Rumore Rumore Sistema in prova di misura - Home ...martines/didattica/SME/AnalisiSegnale.pdf ·...
63
Analisi di segnale pag. 1 G. Martines Appunti di Strumentazione e Misure Eelettroniche ANALISI DI SEGNALE Nel campo delle misure elettroniche questo tema deve essere visto non solo dal punto di vista delle misure necessarie per conoscere le caratteristiche di un segnale presente nel sistema in prova ma anche dal punto di vista del sistema di misura. Il sistema di misura è infatti un sistema elettronico, anche molto complesso, che elabora il segnale di ingresso, generalmente fornito da un sensore o un trasduttore, per fornire una indicazione in uscita (la misura) che deve avere una precisa e nota relazione con i valori che la grandezza che si vuole misurare può assumere. La indicazione in uscita costituisce quindi la risposta del sistema di misura alla sollecitazione costituita dalla grandezza da misurare. Il concetto di segnale nelle misure elettroniche Il generico sistema per la analisi di segnale può sempre ricondursi allo schema a blocchi seguente: Sistema in prova Sistema di misura Rumore Rumore Per capire le problematiche legate alle misure orientate all’analisi di segnale, bisogna tenere sempre presente che: 1.Il segnale oggetto della analisi non è mai presente da solo, nel mondo reale, ma associato a rumore e a disturbi. Per disturbo qui possiamo intendere l’effetto di un qualsiasi fattore esterno al processo di generazione del segnale stesso. 2.Il sistema di misura non è ideale e quindi: a) esso stesso genera rumore ed è soggetto ai disturbi; la influenza di questi fattori sulla risposta costituisce l’insieme dei cosiddetti errori casuali. b) la sua funzione di trasferimento non può essere esattamente quella desiderata qualunque sia l’ampiezza e la frequenza del segnale di ingresso; cioè il sistema di misura reale non può essere, ad esempio, perfettamente lineare né può avere una banda infinita (quest’ultima condizione non è nemmeno auspicabile nel mondo reale per la presenza del rumore). La influenza di questi fattori sulla risposta rientra in quelli che abbiamo definito errori sistematici. c) esiste sempre una interazione fra il sistema di misura e quello in prova (ad esempio l’impedenza finita del voltmetro nelle misure di tensione in continua o la presenza di una linea di trasmissione all’ingresso di un oscilloscopio) che perturba il funzionamento del sistema e/o il trasferimento del segnale al sistema di misura. L’effetto di questa interazione rientra generalmente nella categoria degli errori sistematici. NOTA: Un sistema di trasmissione si dice lineare (distortionless) se per esso vale il principio di sovrapposizione degli effetti e se la sua risposta è invariante rispetto ad una traslazione del tempo; in formule, indicando con f(t) il generico ingresso e con g(t) la corrispondente uscita nel dominio del tempo, si ha: g af (t) (t t) = − 0 dove a (fattore di scale) e t 0 (ritardo) sono delle costanti corrispondentemente nel dominio della frequenza: G K F ae F j t ( ) ( ) ( ) ( ) ω ω ω ω ω = = − 0 quindi la funzione di trasferimento di un sistema lineare dovrebbe avere, in tutto il campo di frequenza di interesse, modulo costante a e fase lineare ϑ ω = t 0 .
Transcript of Rumore Rumore Sistema in prova di misura - Home ...martines/didattica/SME/AnalisiSegnale.pdf ·...
Analisi di segnale pag. 1
G. Martines Appunti di Strumentazione e Misure Eelettroniche
ANALISI DI SEGNALE
Nel campo delle misure elettroniche questo tema deve essere visto non solo dal punto di vista delle misure necessarie per conoscere le caratteristiche di un segnale presente nel sistema in prova ma anche dal punto di vista del sistema di misura.
Il sistema di misura è infatti un sistema elettronico, anche molto complesso, che elabora il segnale di ingresso, generalmente fornito da un sensore o un trasduttore, per fornire una indicazione in uscita (la misura) che deve avere una precisa e nota relazione con i valori che la grandezza che si vuole misurare può assumere. La indicazione in uscita costituisce quindi la risposta del sistema di misura alla sollecitazione costituita dalla grandezza da misurare.
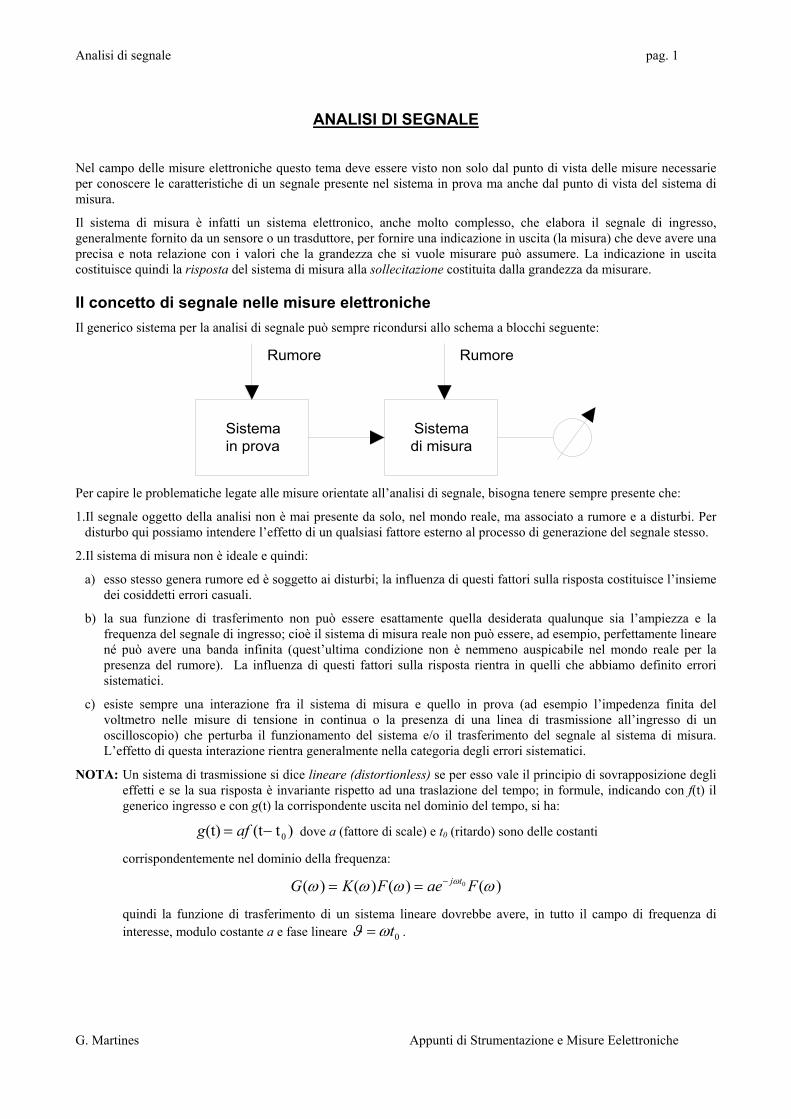
Il concetto di segnale nelle misure elettroniche Il generico sistema per la analisi di segnale può sempre ricondursi allo schema a blocchi seguente:
Sistema in prova
Sistema di misura
Rumore Rumore
Per capire le problematiche legate alle misure orientate all’analisi di segnale, bisogna tenere sempre presente che:
1.Il segnale oggetto della analisi non è mai presente da solo, nel mondo reale, ma associato a rumore e a disturbi. Per disturbo qui possiamo intendere l’effetto di un qualsiasi fattore esterno al processo di generazione del segnale stesso.
2.Il sistema di misura non è ideale e quindi:
a) esso stesso genera rumore ed è soggetto ai disturbi; la influenza di questi fattori sulla risposta costituisce l’insieme dei cosiddetti errori casuali.
b) la sua funzione di trasferimento non può essere esattamente quella desiderata qualunque sia l’ampiezza e la frequenza del segnale di ingresso; cioè il sistema di misura reale non può essere, ad esempio, perfettamente lineare né può avere una banda infinita (quest’ultima condizione non è nemmeno auspicabile nel mondo reale per la presenza del rumore). La influenza di questi fattori sulla risposta rientra in quelli che abbiamo definito errori sistematici.
c) esiste sempre una interazione fra il sistema di misura e quello in prova (ad esempio l’impedenza finita del voltmetro nelle misure di tensione in continua o la presenza di una linea di trasmissione all’ingresso di un oscilloscopio) che perturba il funzionamento del sistema e/o il trasferimento del segnale al sistema di misura. L’effetto di questa interazione rientra generalmente nella categoria degli errori sistematici.
NOTA: Un sistema di trasmissione si dice lineare (distortionless) se per esso vale il principio di sovrapposizione degli effetti e se la sua risposta è invariante rispetto ad una traslazione del tempo; in formule, indicando con f(t) il generico ingresso e con g(t) la corrispondente uscita nel dominio del tempo, si ha:
g af(t) (t t )= − 0 dove a (fattore di scale) e t0 (ritardo) sono delle costanti
corrispondentemente nel dominio della frequenza:
G K F ae Fj t( ) ( ) ( ) ( )ω ω ω ωω= = − 0
quindi la funzione di trasferimento di un sistema lineare dovrebbe avere, in tutto il campo di frequenza di interesse, modulo costante a e fase lineare ϑ ω= t0 .

Analisi di segnale pag. 2
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Equivalenza delle rappresentazioni nel dominio del tempo e della frequenza Significato della trasformata di Fourier Il barone Jean Baptiste FOURIER (1768-1830) dimostrò, quasi duecento anni fa, che una qualsiasi forma d’onda
esistente in natura (cioè con potenza normalizzata ( )v t2 finita ed energia normalizzata del segnale in un intervallo T0 pure finita) può essere generata semplicemente sommando onde sinusoidali di opportuna frequenza, ampiezza e fase e che la combinazione di queste onde, cioè lo spettro di frequenza, è unica per ciascuna forma d’onda.
Inoltre definì l’algoritmo matematico, la trasformata ed anti-trasformata di Fourier, che permette di passare dal dominio del tempo a quello della frequenza e viceversa.
( ) ( )
( ) ( )
X f x t d
x t X f d
=
=
−
−∞
∞
−∞
∞
∫
∫
e t
e f
j ft
j ft
2
2
π
π
Per un segnale periodico, lo spettro di frequenza é discreto, cioè costituito da un numero infinito di singole linee spettrali, corrispondenti a frequenze multipli interi della frequenza fondamentale ( f T= 1 ) e quindi equispaziate di 1/T.
Un segnale non periodico può vedersi come un segnale periodico con periodo T = ∞, e quindi ha uno spettro continuo (1/T = 0).
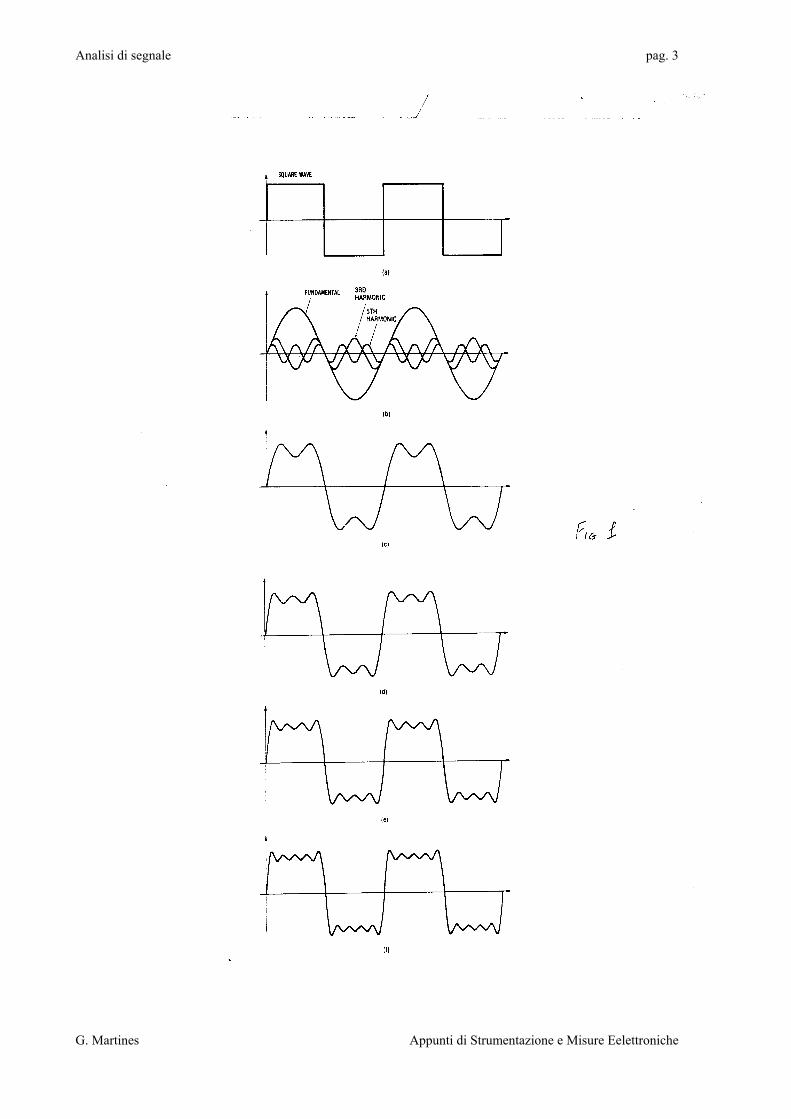
Una onda quadra di periodo T, ad esempio, ha uno spettro costituito dalla fondamentale, dalle armoniche pari tutte di ampiezza nulla e dalle armoniche dispari di ampiezza monotonicamente decrescente con la frequenza con la legge 4 nπ per n dispari e fase nulla.
In Fig. 1 viene mostrato come l’effetto della somma nel dominio del tempo della fondamentale e delle singole armoniche (3a, 5a, 7 a, 9 a) dello spettro approssimi via via sempre meglio l’onda quadra.
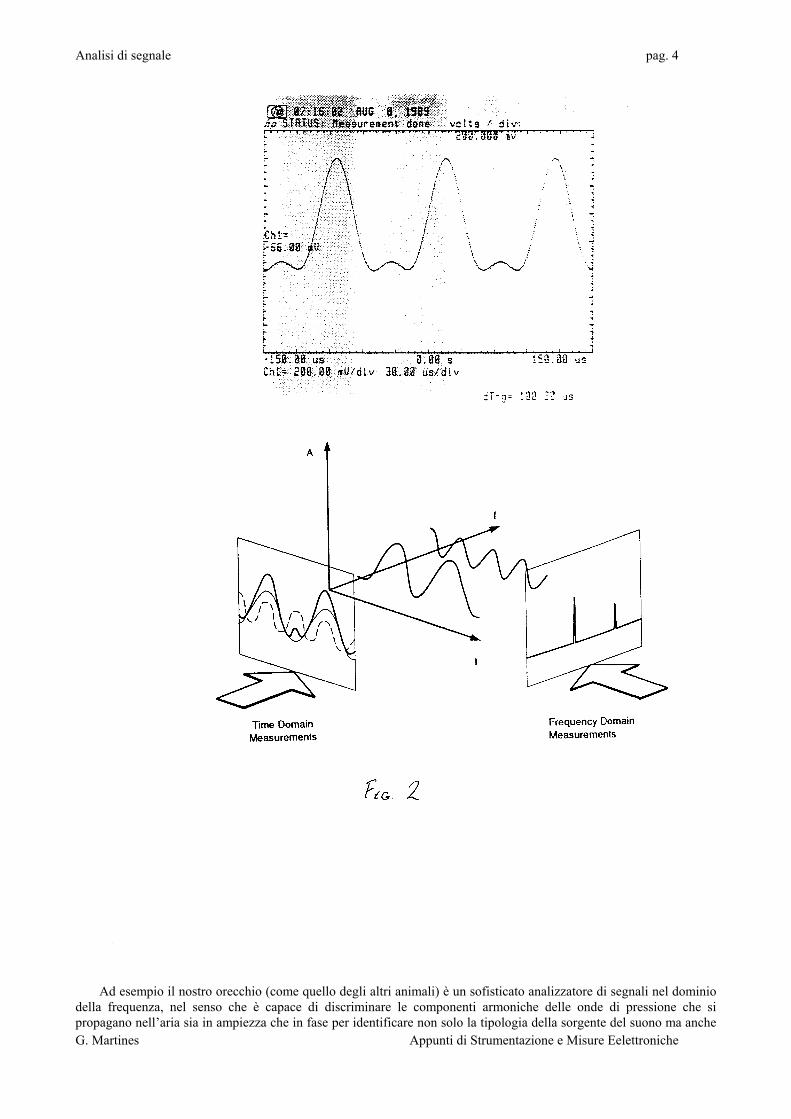
Dominio del tempo e della frequenza: un problema di prospettiva Consideriamo adesso il caso, mostrato in Fig. 2, della rappresentazione nel dominio del tempo e della frequenza di una forma d’onda molto semplice di tipo impulsivo, il cui spettro è costituito solo dalla fondamentale e da una seconda armonica di opportuna ampiezza e fase.
Da questo modo di visualizzare il segnale risulta evidente che il dominio del tempo e della frequenza rappresentano la stessa informazione (il segnale) in due distinte prospettive l’asse dei tempi e l’asse delle frequenze. Quindi non si ha un incremento di informazione nel considerare entrambi i domini ma semplicemente, grazie al cambio di punto di vista, si evidenziano o si mascherano alcuni aspetti del fenomeno.
NOTA: In figura il dominio della frequenza viene rappresentato solo in termini di ampiezza delle armoniche e non di fase delle stesse. Questo significa che bisogna considerare un secondo diagramma in termini di fase. RICORDA: la trasformata di Fourier garantisce che ad una forma d’onda corrisponde un unico spettro di frequenza in termini di ampiezza e fase delle armoniche e quindi ad uno spettro di frequenza in termini di sola ampiezza delle armoniche possono corrispondere forme d’onda diverse (caratterizzate da una diversa combinazione delle fasi).
Nel dominio del tempo viene facile apprezzare le caratteristiche della forma d’onda, ad esempio l’escursione dell’ampiezza complessiva del segnale, la velocità di variazione (tempi di salita e di discesa o pendenza massima) mentre nel dominio della frequenza risultano evidenti le caratteristiche della distribuzione dell’energia (e quindi dell’informazione) nello spettro, ad esempio l’occupazione di banda (quale parte dello spettro può essere cancellata senza significativa perdita di informazione o su quale banda è concentrata l’informazione nel caso di segnali modulati), la distorsione (effetti di non linearità), i disturbi (energia cui non è associata informazione utile).
Dominio della frequenza in natura Il dominio della frequenza non deve considerarsi un puro esercizio matematico per meglio studiare le proprietà dei segnali, ma un modo naturale di raccogliere informazione dall’ambiente che ci circonda. Infatti se da un canto siamo abituati ad analizzare il nostro ambiente in termini di evoluzione nel tempo di un qualsiasi fenomeno, e ne siamo coscienti ed abbiamo familiarità con le rappresentazioni grafiche in funzione del tempo, d’altro canto non ci rendiamo conto di come sfruttiamo il dominio della frequenza per acquisire le informazioni dal nostro ambiente.
Analisi di segnale pag. 3
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 4
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Ad esempio il nostro orecchio (come quello degli altri animali) è un sofisticato analizzatore di segnali nel dominio della frequenza, nel senso che è capace di discriminare le componenti armoniche delle onde di pressione che si propagano nell’aria sia in ampiezza che in fase per identificare non solo la tipologia della sorgente del suono ma anche

Analisi di segnale pag. 5
G. Martines Appunti di Strumentazione e Misure Eelettroniche
la sua posizione nello spazio in termini di distanza e direzione. Tutti noi sperimentiamo coscientemente il dominio della frequenza quando ascoltiamo la musica e possiamo renderci conto dei vantaggi dell’analisi nel dominio della frequenza quando riusciamo a percepire le parole e riconoscere le voci in ambienti con elevata rumorosità di fondo o quando dal rumore prodotto da un motore siamo in grado di determinare se funziona correttamente o meno.
Il decibel Uno dei principali vantaggi offerti dalla analisi nel dominio della frequenza consiste nella possibilità di evidenziare la presenza di segnali di piccola ampiezza in presenza di segnali di grande ampiezza. Tale vantaggio risulta notevolmente ridotto se tentiamo di rappresentare le ampiezze nello spettro su una scala lineare. Ad esempio una componente di distorsione dell’ordine dello 0.1% della fondamentale viene rappresentata su uno schermo da 10 cm., in scala lineare, da un tratto di 0.1 mm.
La scala logaritmica ha la proprietà di comprimere i valori elevati e di espandere quelli bassi e quindi si presta meglio a rappresentare le ampiezze nel dominio della frequenza.
Alexander Graham Bell, proprio studiando la risposta dell’orecchio umano, scoprì che questi ha una risposta logaritmica alle differenze di potenza e quindi introdusse il “Bel” come unità di misura per classificare l’udito delle persone.
Il deciBel, cioè il decimo di un Bel, è l’unità di misura oggi comunemente adottata nell’analisi dei segnali nel dominio della frequenza. Dalla genesi di questa unità di misura, risulta evidente che il decibel è definito sulla base del rapporto di due potenze:
dB log=
10 10
2
1
PP
[dal Bel = log10(P2/P1)]
Inoltre, assumendo valori efficaci per la tensione e resistenze di carico uguali, essendo P VR
=2
si ottiene:
dB log=
20 10
2
1
VV
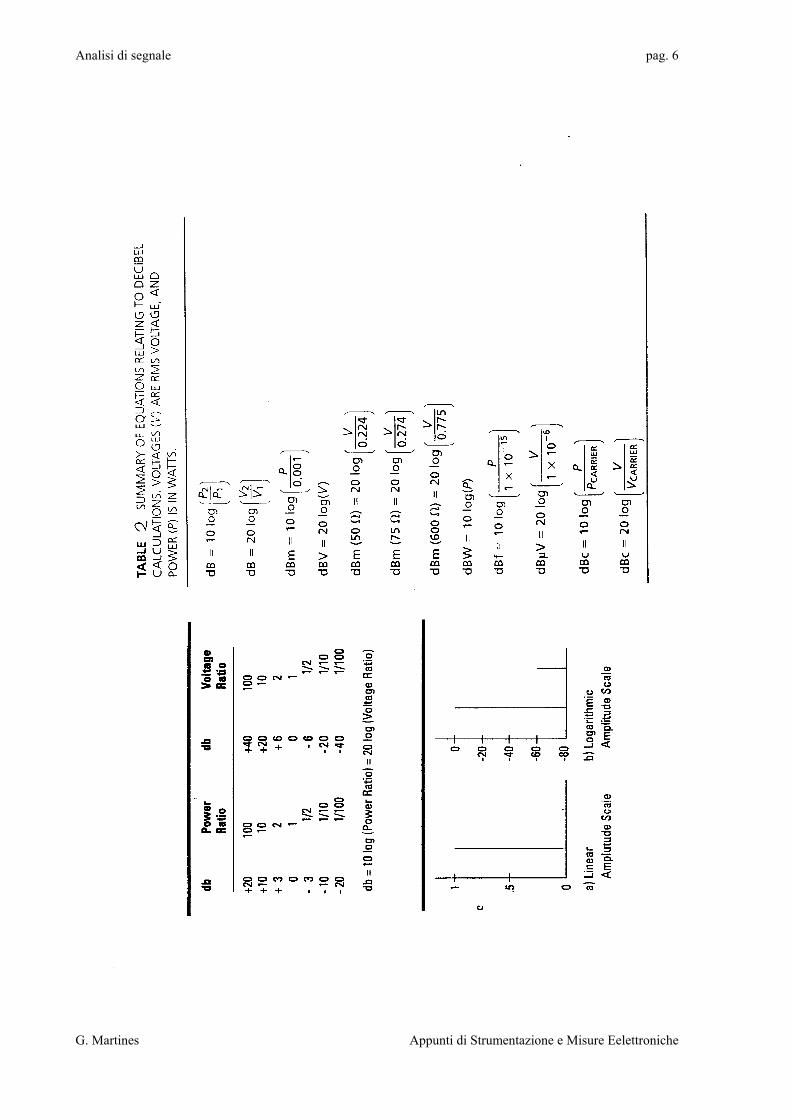
NOTA: due potenze nel rapporto di 1/100,000,000 (1/108 ,ad es. 1 µW/100 W) possono essere rappresentate nella scala da 0 da -80 dB. Nello slide della Tabella 2 viene mostrata la corrispondenza fra valori in dB e valori in scala lineare per i rapporti di potenza e di tensione e la capacità di rappresentazione della scala logaritmica rispetto a quella lineare (nei due grafici il secondo segmento rappresenta 30 mV in scala lineare e 1 mV in scala logaritmica oppure 30 mW in scala lineare e 1 µW in scala logaritmica).
Il decibel è una unità di misura relativa (rapporto di due potenze), ma viene spesso usato nel dominio della frequenza anche come unità di misura assoluta definendo il denominatore del rapporto. Nascono così le unità di grandezza riassunte nella Tabella 2 dello slide.
dBm potenza riferita a 1 mW
dBW potenza riferita a 1 W
dBV tensione riferita a 1 V
dBm a 50, 75 e 600 Ω (impedenze caratteristiche dei più comuni cavi coassiali e del doppino telefonico) tensione ai capi del carico per una potenza di 1 mW (V Z PREF REF= 0 )
dBc potenza o tensione riferiti a quelli della portante
Analisi di segnale pag. 6
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 7
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Esempi di spettri di frequenza
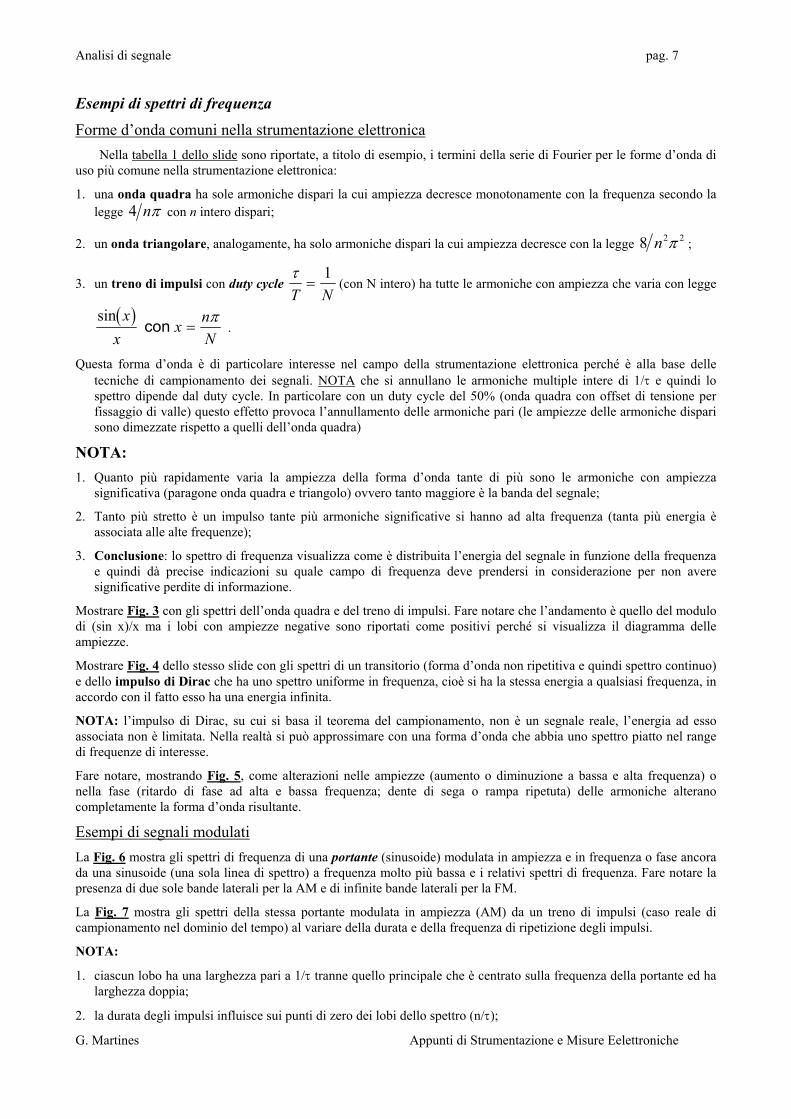
Forme d’onda comuni nella strumentazione elettronica Nella tabella 1 dello slide sono riportate, a titolo di esempio, i termini della serie di Fourier per le forme d’onda di uso più comune nella strumentazione elettronica:
1. una onda quadra ha sole armoniche dispari la cui ampiezza decresce monotonamente con la frequenza secondo la legge 4 nπ con n intero dispari;
2. un onda triangolare, analogamente, ha solo armoniche dispari la cui ampiezza decresce con la legge 8 2 2n π ;
3. un treno di impulsi con duty cycle τT N
=1
(con N intero) ha tutte le armoniche con ampiezza che varia con legge
( )sin xx
x nN
con =π
.
Questa forma d’onda è di particolare interesse nel campo della strumentazione elettronica perché è alla base delle tecniche di campionamento dei segnali. NOTA che si annullano le armoniche multiple intere di 1/τ e quindi lo spettro dipende dal duty cycle. In particolare con un duty cycle del 50% (onda quadra con offset di tensione per fissaggio di valle) questo effetto provoca l’annullamento delle armoniche pari (le ampiezze delle armoniche dispari sono dimezzate rispetto a quelli dell’onda quadra)
NOTA: 1. Quanto più rapidamente varia la ampiezza della forma d’onda tante di più sono le armoniche con ampiezza
significativa (paragone onda quadra e triangolo) ovvero tanto maggiore è la banda del segnale;
2. Tanto più stretto è un impulso tante più armoniche significative si hanno ad alta frequenza (tanta più energia è associata alle alte frequenze);
3. Conclusione: lo spettro di frequenza visualizza come è distribuita l’energia del segnale in funzione della frequenza e quindi dà precise indicazioni su quale campo di frequenza deve prendersi in considerazione per non avere significative perdite di informazione.
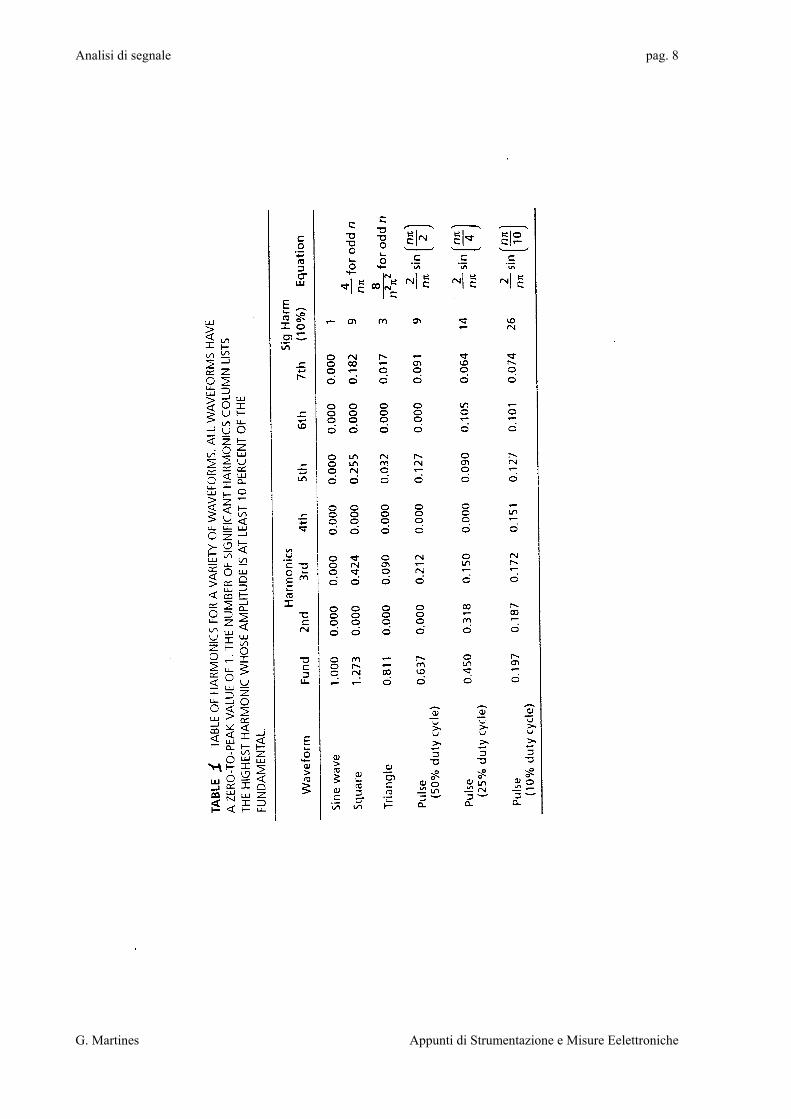
Mostrare Fig. 3 con gli spettri dell’onda quadra e del treno di impulsi. Fare notare che l’andamento è quello del modulo di (sin x)/x ma i lobi con ampiezze negative sono riportati come positivi perché si visualizza il diagramma delle ampiezze.
Mostrare Fig. 4 dello stesso slide con gli spettri di un transitorio (forma d’onda non ripetitiva e quindi spettro continuo) e dello impulso di Dirac che ha uno spettro uniforme in frequenza, cioè si ha la stessa energia a qualsiasi frequenza, in accordo con il fatto esso ha una energia infinita.
NOTA: l’impulso di Dirac, su cui si basa il teorema del campionamento, non è un segnale reale, l’energia ad esso associata non è limitata. Nella realtà si può approssimare con una forma d’onda che abbia uno spettro piatto nel range di frequenze di interesse.
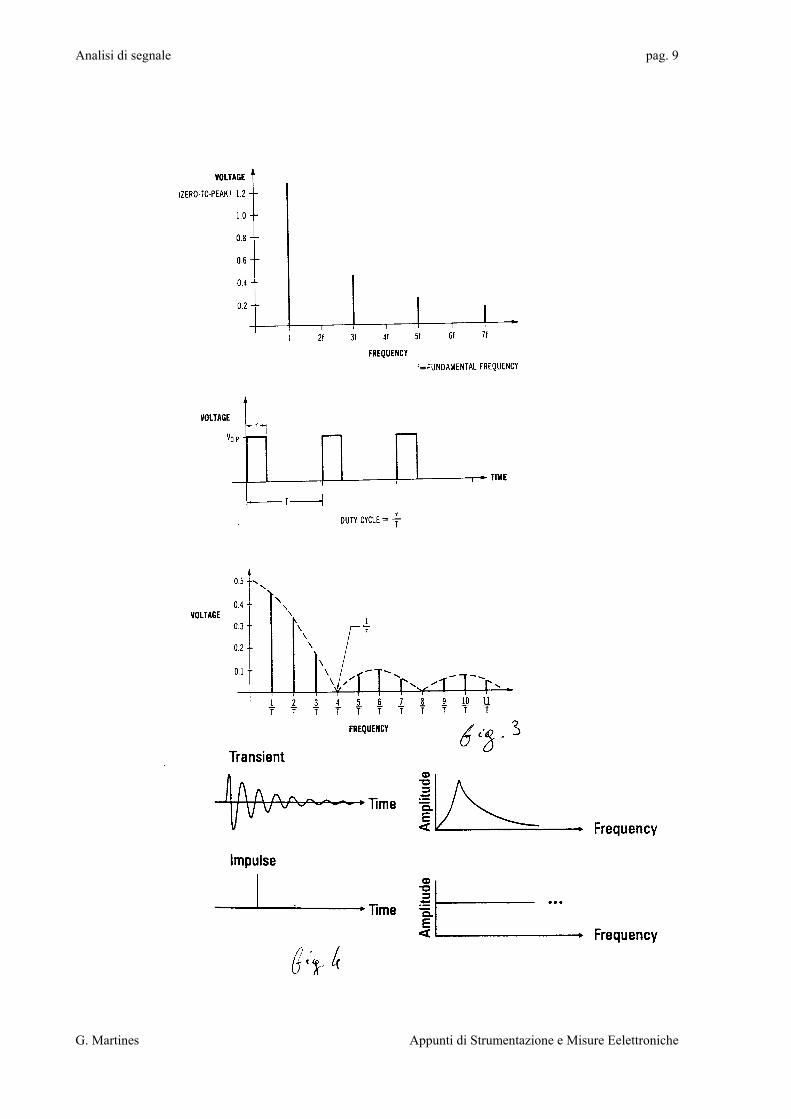
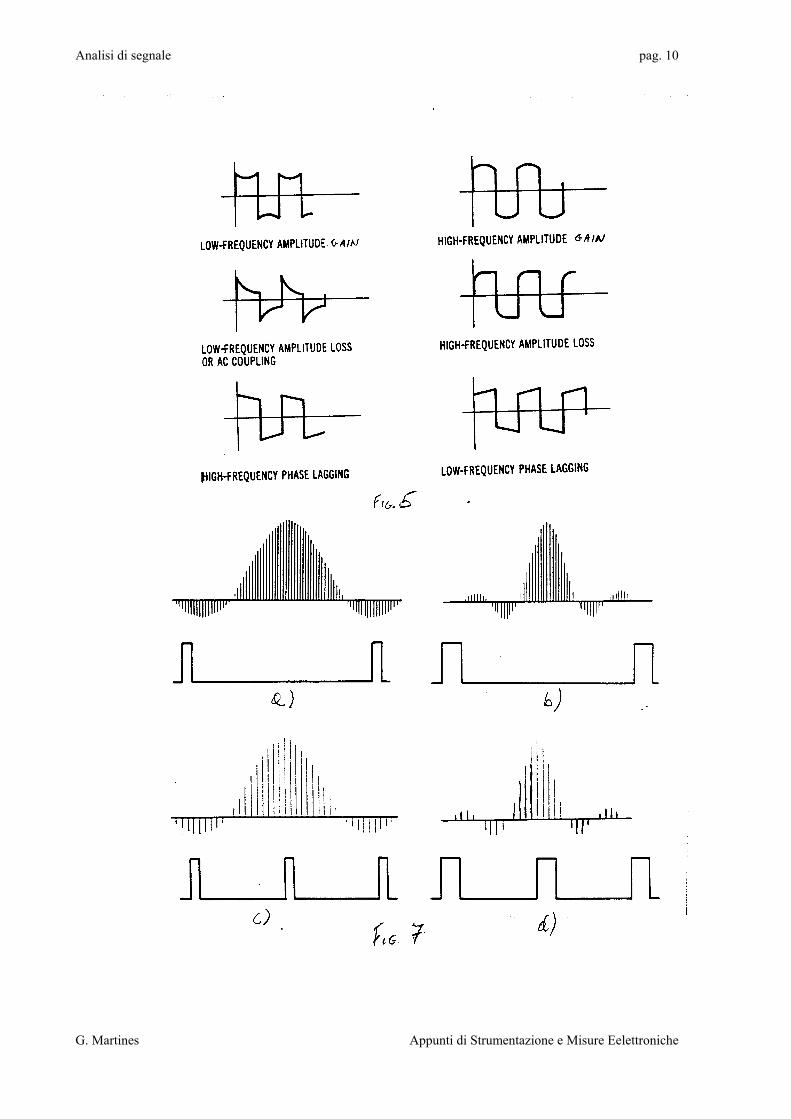
Fare notare, mostrando Fig. 5, come alterazioni nelle ampiezze (aumento o diminuzione a bassa e alta frequenza) o nella fase (ritardo di fase ad alta e bassa frequenza; dente di sega o rampa ripetuta) delle armoniche alterano completamente la forma d’onda risultante.
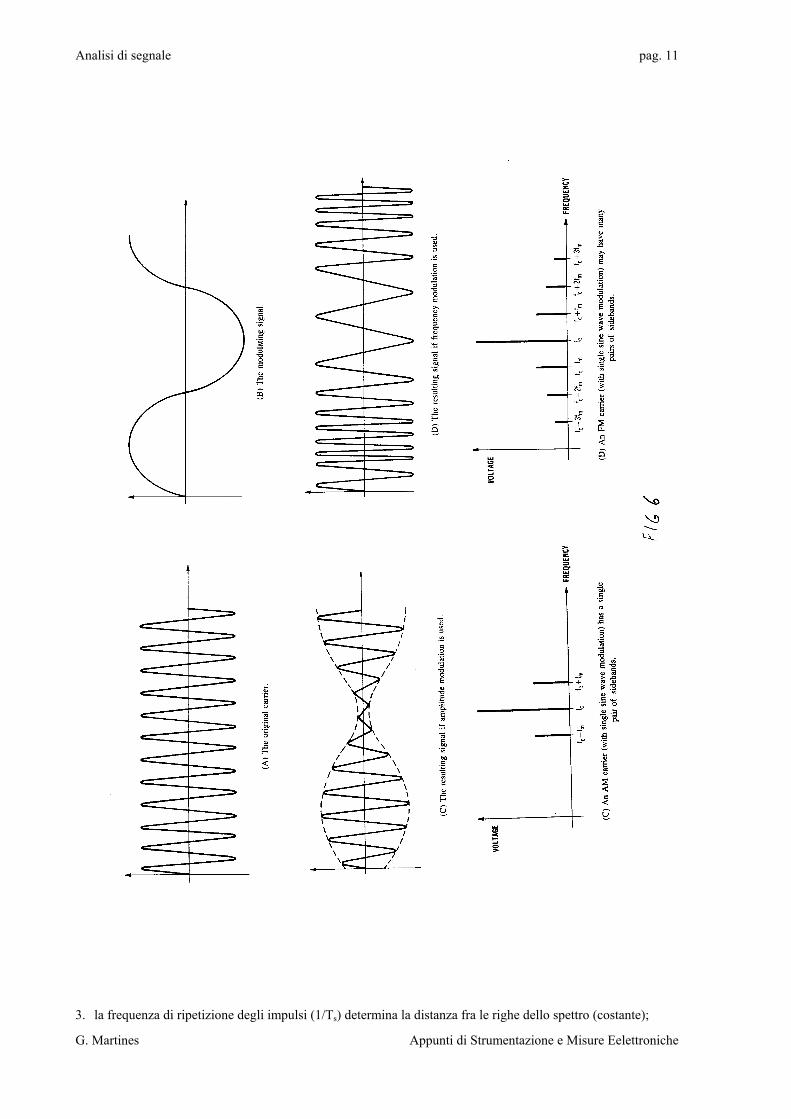
Esempi di segnali modulati La Fig. 6 mostra gli spettri di frequenza di una portante (sinusoide) modulata in ampiezza e in frequenza o fase ancora da una sinusoide (una sola linea di spettro) a frequenza molto più bassa e i relativi spettri di frequenza. Fare notare la presenza di due sole bande laterali per la AM e di infinite bande laterali per la FM.
La Fig. 7 mostra gli spettri della stessa portante modulata in ampiezza (AM) da un treno di impulsi (caso reale di campionamento nel dominio del tempo) al variare della durata e della frequenza di ripetizione degli impulsi.
NOTA:
1. ciascun lobo ha una larghezza pari a 1/τ tranne quello principale che è centrato sulla frequenza della portante ed ha larghezza doppia;
2. la durata degli impulsi influisce sui punti di zero dei lobi dello spettro (n/τ);
Analisi di segnale pag. 8
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 9
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 10
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 11
G. Martines Appunti di Strumentazione e Misure Eelettroniche
3. la frequenza di ripetizione degli impulsi (1/Ts) determina la distanza fra le righe dello spettro (costante);
Analisi di segnale pag. 12
G. Martines Appunti di Strumentazione e Misure Eelettroniche
4. a parità di frequenza di ripetizione (1/Ts), se aumenta la durata τ degli impulsi (confronta Fig. 7 a e b) gli zeri dell’inviluppo si avvicinano e quindi diminuisce il numero di linee spettrali contenute in ciascun lobo;
5. a parità di durata τ degli impulsi, se aumenta la frequenza di ripetizione (1/Ts) aumenta la distanza fra le linee dello spettro (confronta Fig. 7 a e c) e quindi ancora si ha una diminuzione delle linee spettrali contenute in ciascun lobo;
Al diminuire della durata degli impulsi, il lobo principale si allarga e se la durata tende a 0 (impulso di Dirac) il lobo principale tende ad una larghezza infinita e quindi l’ampiezza tende a divenire costante.
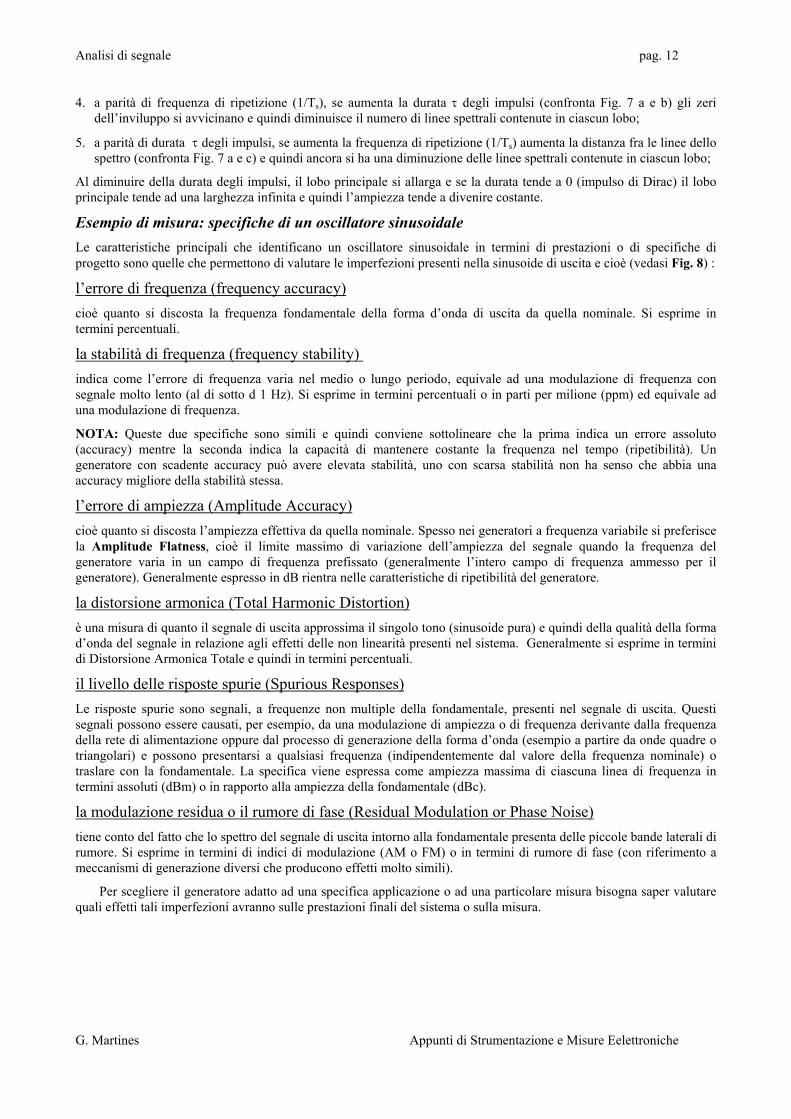
Esempio di misura: specifiche di un oscillatore sinusoidale Le caratteristiche principali che identificano un oscillatore sinusoidale in termini di prestazioni o di specifiche di progetto sono quelle che permettono di valutare le imperfezioni presenti nella sinusoide di uscita e cioè (vedasi Fig. 8) :
l’errore di frequenza (frequency accuracy) cioè quanto si discosta la frequenza fondamentale della forma d’onda di uscita da quella nominale. Si esprime in termini percentuali.
la stabilità di frequenza (frequency stability) indica come l’errore di frequenza varia nel medio o lungo periodo, equivale ad una modulazione di frequenza con segnale molto lento (al di sotto d 1 Hz). Si esprime in termini percentuali o in parti per milione (ppm) ed equivale ad una modulazione di frequenza.
NOTA: Queste due specifiche sono simili e quindi conviene sottolineare che la prima indica un errore assoluto (accuracy) mentre la seconda indica la capacità di mantenere costante la frequenza nel tempo (ripetibilità). Un generatore con scadente accuracy può avere elevata stabilità, uno con scarsa stabilità non ha senso che abbia una accuracy migliore della stabilità stessa.
l’errore di ampiezza (Amplitude Accuracy) cioè quanto si discosta l’ampiezza effettiva da quella nominale. Spesso nei generatori a frequenza variabile si preferisce la Amplitude Flatness, cioè il limite massimo di variazione dell’ampiezza del segnale quando la frequenza del generatore varia in un campo di frequenza prefissato (generalmente l’intero campo di frequenza ammesso per il generatore). Generalmente espresso in dB rientra nelle caratteristiche di ripetibilità del generatore.
la distorsione armonica (Total Harmonic Distortion) è una misura di quanto il segnale di uscita approssima il singolo tono (sinusoide pura) e quindi della qualità della forma d’onda del segnale in relazione agli effetti delle non linearità presenti nel sistema. Generalmente si esprime in termini di Distorsione Armonica Totale e quindi in termini percentuali.
il livello delle risposte spurie (Spurious Responses) Le risposte spurie sono segnali, a frequenze non multiple della fondamentale, presenti nel segnale di uscita. Questi segnali possono essere causati, per esempio, da una modulazione di ampiezza o di frequenza derivante dalla frequenza della rete di alimentazione oppure dal processo di generazione della forma d’onda (esempio a partire da onde quadre o triangolari) e possono presentarsi a qualsiasi frequenza (indipendentemente dal valore della frequenza nominale) o traslare con la fondamentale. La specifica viene espressa come ampiezza massima di ciascuna linea di frequenza in termini assoluti (dBm) o in rapporto alla ampiezza della fondamentale (dBc).
la modulazione residua o il rumore di fase (Residual Modulation or Phase Noise) tiene conto del fatto che lo spettro del segnale di uscita intorno alla fondamentale presenta delle piccole bande laterali di rumore. Si esprime in termini di indici di modulazione (AM o FM) o in termini di rumore di fase (con riferimento a meccanismi di generazione diversi che producono effetti molto simili).
Per scegliere il generatore adatto ad una specifica applicazione o ad una particolare misura bisogna saper valutare quali effetti tali imperfezioni avranno sulle prestazioni finali del sistema o sulla misura.
Analisi di segnale pag. 13
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 14
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 15
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Se si vogliono valutare allora le prestazioni di un oscillatore risulta evidente che:
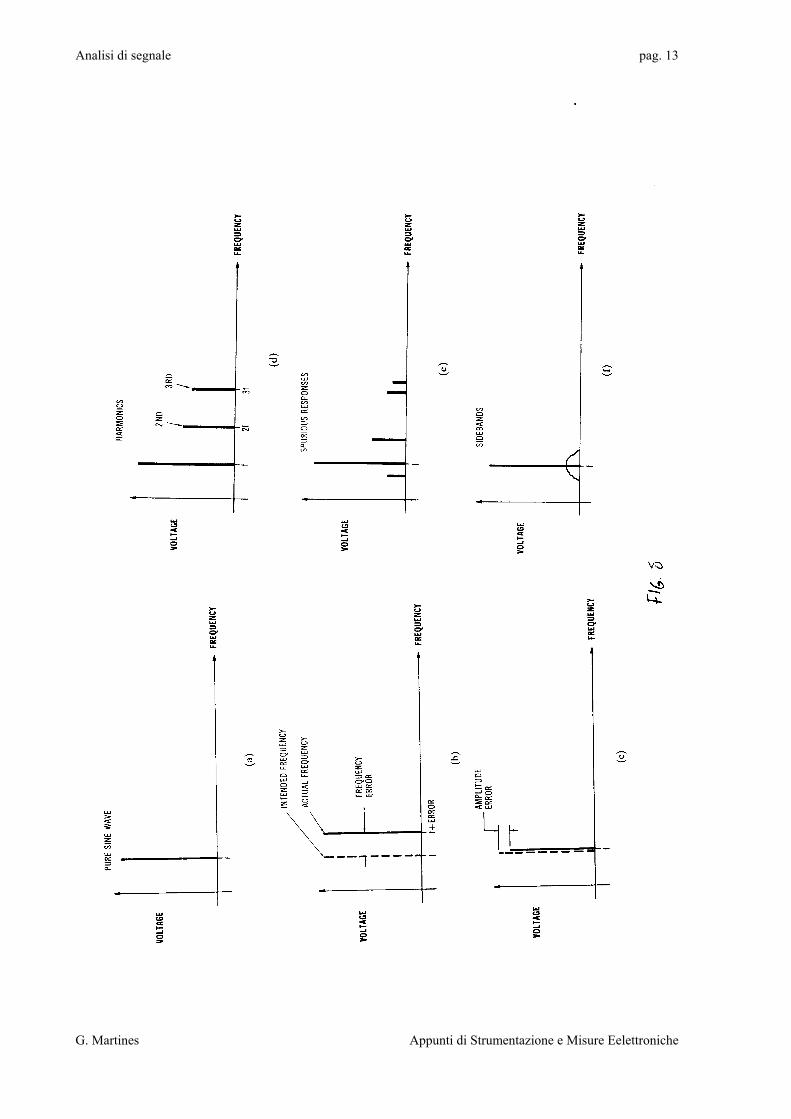
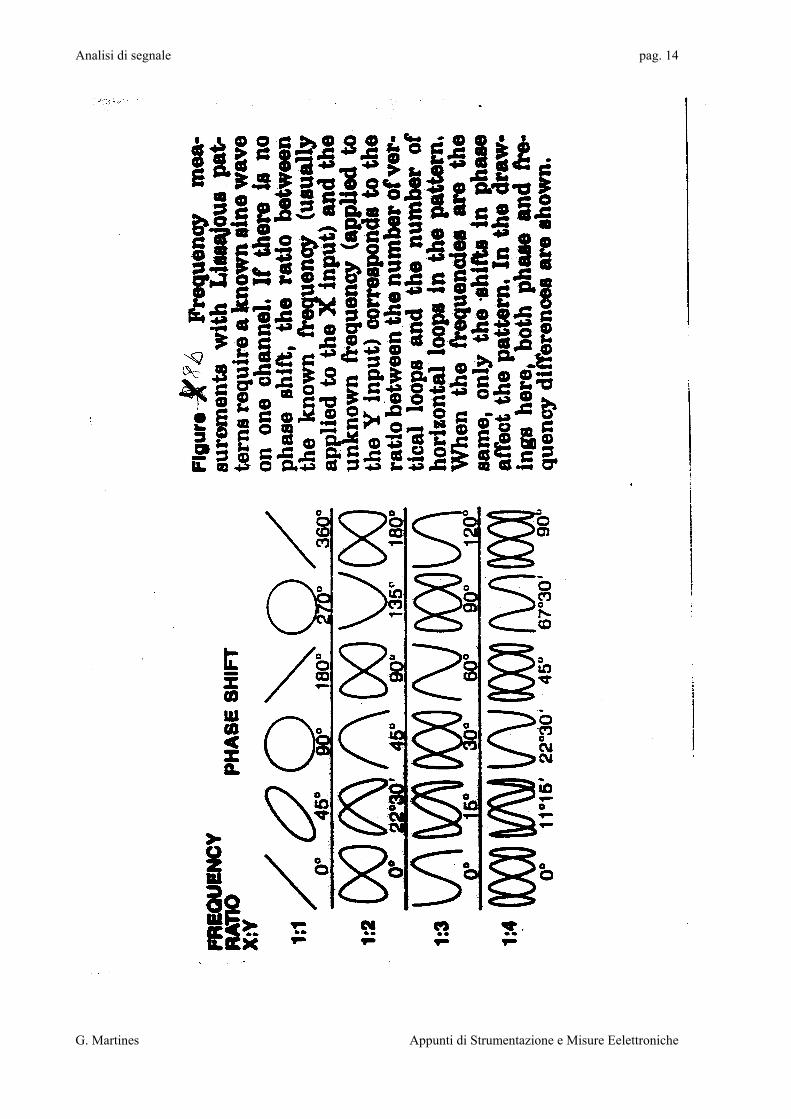
• la precisione di frequenza può essere valutata bene sia nel domino del tempo che della frequenza. Ad esempio la frequenza può essere misurata, nel dominio del tempo, con un contatore di frequenza (paragone con oscillatore di riferimento con un metodo di coincidenza) o con un rivelatore di fase (paragone con oscillatore di riferimento con un metodo di confronto indiretto). L’oscilloscopio può essere utilizzato come rivelatore di fase (si ricordino le figure di
Lissajou mostrate in Fig. 8b). Nel dominio della frequenza si può invece fare uso di un metodo di risonanza utilizzando risonatori a Q elevato (ad esempio le cavità accordabili che si utilizzano a microonde).
• la stabilità di frequenza può valutarsi meglio nel dominio del tempo, in quanto si tratta di rilevare la modulazione di frequenza risultante da una modulante a frequenza molto bassa (qualche Hz e spesso <<1 Hz). Nel dominio della frequenza bisognerebbe apprezzare righe si spettro molto vicine (selettività elevatissima del sistema di misura).
• la precisione di ampiezza deve essere valutata nel dominio del tempo, ad esempio, con un oscilloscopio o un misuratore di potenza (power meter), e così pure la piattezza della risposta, ad esempio con un oscilloscopio in cui la scansione dell’asse x è pilotata dallo stesso dente di sega o rampa che genera la variazione di frequenza nell’oscillatore.
• la distorsione armonica ed il livello di risposte spurie possono essere valutate solo nel dominio della frequenza (ad esempio con un analizzatore di spettro);
• la modulazione residua o il rumore di fase richiedono metodologie di misura più complesse perché si tratta di misurare una grandezza con andamento casuale (il rumore) e bisogna tenere in conto anche il rumore del sistema di misura.
Campionamento e quantizzazione I segnali reali sono per natura di tipo analogico, nel dominio del tempo, in quanto la loro ampiezza varia con continuità (banda limitata ovvero energia finita) in funzione del tempo.
Come già detto nella introduzione, il grande sviluppo che si è avuto negli ultimi venti anni nelle prestazioni dei circuiti integrati digitali sia in termini di velocità e complessità che in termini di riduzione dei costi ha portato a preferire l’elaborazione numerica del segnale alla tradizionale elaborazione analogica anche nella strumentazione elettronica.
La elaborazione numerica del segnale offre infatti vantaggi non solo dal punto di vista del costo (oggi a parità di classe uno strumento digitale costa generalmente meno di uno strumento analogico ed è più semplice da usare) ma soprattutto nelle prestazioni della strumentazione; a titolo di esempio citiamo, con riferimento a misure statiche o su segnali stazionari, cioè le cui caratteristiche sono costanti nel tempo (o meglio variano molto lentamente rispetto al tempo di misura, ad esempio misure DC = direct current o CW = continue wave):
• miglioramento della precisione, nel senso che:
⇒ la quantizzazione, necessaria per esprimere l’ampiezza istantanea del segnale in forma numerica, introduce errori noti e prevedibili riconducibili sostanzialmente all’errore di quantizzazione vero e proprio, cioè all’ampiezza del unità di misura adottata (legato al numero dei bit e alla dinamica del convertitore A/D) ed all’errore di linearità della conversione;
⇒ la elaborazione numerica vera e propria introduce errori molto limitati sostanzialmente riconducibili agli errori di troncamento ed arrotondamento nei calcoli o prevedibili in termini di algoritmi di calcolo numerico adottati;
⇒ la presentazione in forma numerica dei risultati della misura, sempre possibile, elimina gli errori di lettura caratteristici ed inevitabili nella strumentazione analogica;
⇒ la possibilità di elaborazioni numeriche complesse sui dati sperimentali permette di implementare tecniche di correzione degli errori sistematici del sistema di misura, in tempo reale o quasi, basate su opportune procedure di calibrazione (in generale basate sulla misura di grandezze note o di riferimento e sulla estrazione dei parametri del modello di errore proprio del sistema relativamente al tipo di misura che si vuole eseguire); un esempio può essere quello di eliminare le regolazioni sui circuiti in fase di taratura periodica dello strumento (un voltmetro, un multimetro, un oscilloscopio, etc.);
• estensione delle prestazioni, nel senso che, in tempo reale, è possibile:
Analisi di segnale pag. 16
G. Martines Appunti di Strumentazione e Misure Eelettroniche
⇒ visualizzare la grandezza o il parametro di interesse al posto della sola grandezza direttamente misurata dallo strumento (esempio: la tensione di picco, il valore RMS, il valore medio o il valore relativo riferito ad un valore memorizzato in termini di differenza o di rapporto, la potenza normalizzata, etc.);
⇒ eseguire operazioni di filtraggio numerico o di elaborazione statistica dei dati misurati;
⇒ memorizzare per tempi illimitati i dati acquisiti nel corso della misura e/o i risultati della stessa (dopo le elaborazioni necessarie sia per eliminare l’effetto degli errori sistematici che per determinare la grandezza di interesse nel caso di misure indirette);
⇒ presentare i dati sia in forma numerica che analogica ma anche in forme grafiche complesse;
⇒ eseguire misure a distanza, cioè raccogliere dati di misura da punti fisicamente distanti (servizi di distribuzione a rete, postazioni non presidiate, sistemi di controllo, etc.);
⇒ realizzare sistemi automatici di misura, gestiti da calcolatore, per complesse procedure di misura o di collaudo.
Questi vantaggi possono risultare ancora più rilevanti nel campo della strumentazione elettronica per l’analisi dei segnali nel dominio del tempo e della frequenza (oscilloscopi, analizzatori di spettro, analizzatori di reti, generatori di forme d’onda, etc.) al punto di ottenere prestazioni non ottenibili con la strumentazione analogica. Questo è il caso degli strumenti che oggi usano la FFT (resa disponibile in tempo reale dalla potenza dei microprocessori e co-processori dedicati) per ottenere analizzatori di spettro e riflettometri nel dominio del tempo in bande di frequenza in cui la strumentazione analogica non era praticamente realizzabile.
Lo svantaggio principale resta legato al fatto che è necessario “conoscere” il segnale da elaborare per poter applicare correttamente la teoria dei segnali ed essere sicuri che la rappresentazione matematica del segnale sia “fedele” (ossia approssimi bene) il segnale reale; solo in questa ipotesi, infatti, gli errori introdotti sono noti e prevedibili. Purtroppo questo non è sempre possibile nel caso delle misure elettroniche, soprattutto nelle applicazioni di ricerca dei guasti o di verifica delle prestazioni di dispositivi e apparati elettronici e quindi capita spesso che la rappresentazione “virtuale” del segnale non evidenzi, come nel caso della strumentazione analogica, gli effetti di mal funzionamenti o la presenza di disturbi imprevisti. Ovviamente, in questi casi, è possibile adottare particolari procedure di misura e/o modi di funzionamento della strumentazione digitale che, a scapito di alcune prestazioni proprie della elaborazione numerica del segnale, permettono di simulare il comportamento della strumentazione analogica equivalente.
Per applicare le tecniche numeriche è necessario non solo quantizzare il segnale, e questo introduce un errore che non è presente nella strumentazione analogica, ma anche renderlo discreto nel tempo, cioè campionarlo e questo introduce ulteriori errori noti e prevedibili, per portarlo nella forma di una sequenza finita di quantità discrete (segnale digitale). (Vedasi Fig. 9)
In conclusione, la strumentazione digitale ha molti vantaggi che ne hanno determinato l’affermazione, ma per usarla correttamente è necessario conoscere i principi fondamentali su cui si basa (campionamento e quantizzazione) per poter prevedere, calcolare o evitare gli errori che queste tecniche introducono.
NOTA:
⇒ per segnale discreto si intende una sequenza di valori discreti nel tempo ma continui nell’ampiezza (campionamento del segnale analogico);
⇒ per segnale digitale si intende una sequenza di valori discreti nel tempo e quantizzati nell’ampiezza (campionamento e quantizzazione del segnale analogico);
⇒ la FFT è un algoritmo per il calcolo numerico della DFT (discrete Fourier Trasform) e quindi si applica solo a segnali digitali.
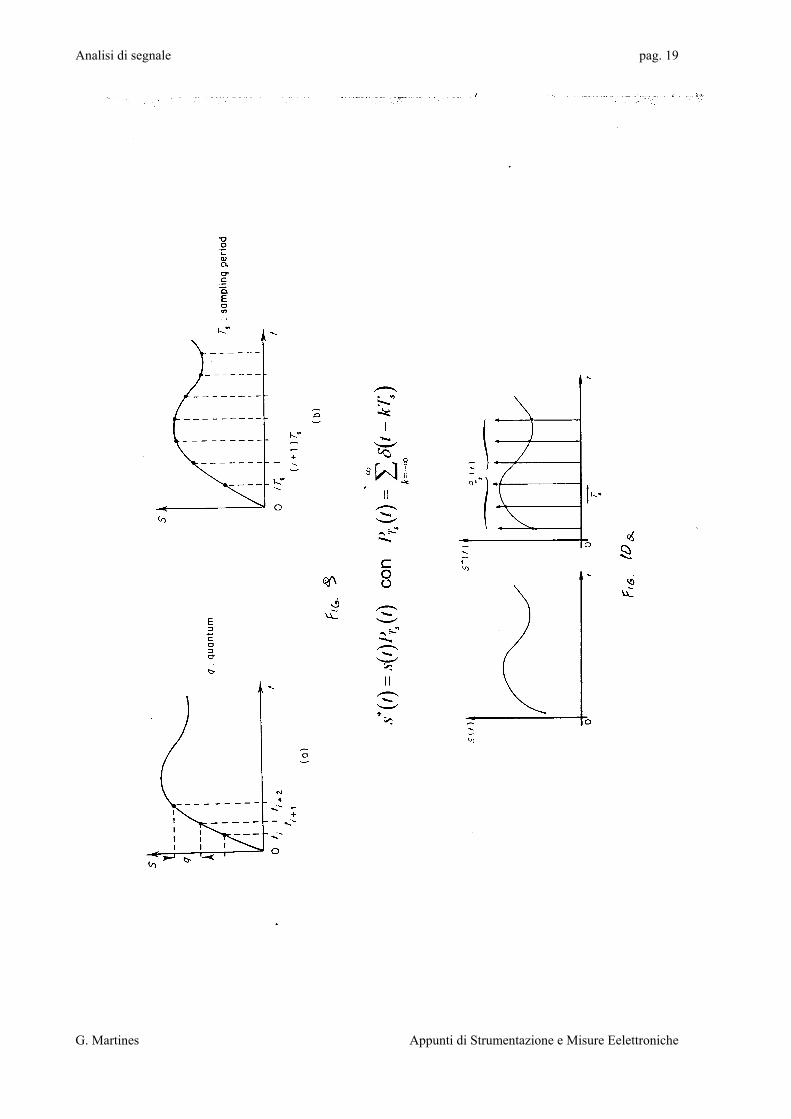
Il teorema del campionamento Dal punto di vista matematico, il segnale discreto s*(t) si ottiene come prodotto del segnale analogico s(t) con una funzione PTs(t) costituita da una serie di impulsi di Dirac che può essere posta nella forma:
( ) ( ) ( ) ( ) ( )s t s t P t P t t kTT T sk
s s
* = = −=−∞
∞
∑ con δ
allora la trasformata di Fourier del segnale discreto avrà la forma:

Analisi di segnale pag. 17
G. Martines Appunti di Strumentazione e Misure Eelettroniche
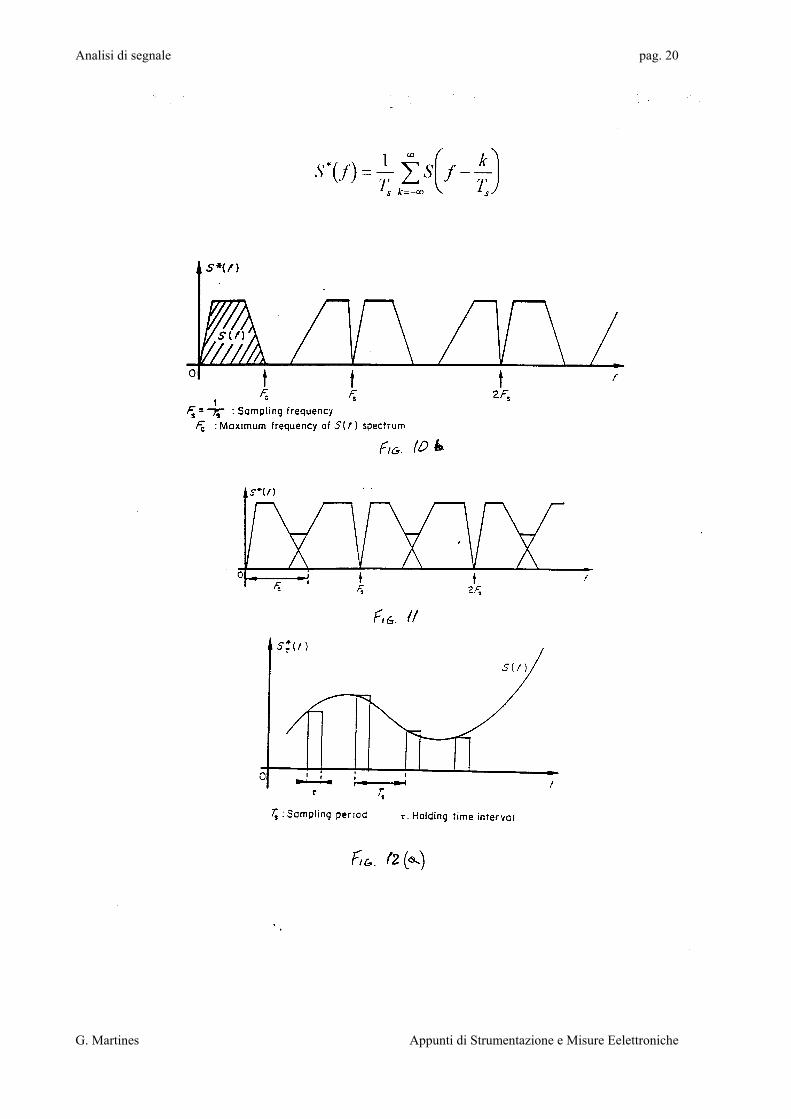
( )S fT
S f kTs sk
* = −
=−∞
∞
∑1
e quindi lo spettro è una funzione periodica nel dominio della frequenza con periodo pari alla frequenza di campionamento F Ts s= 1 come mostrato in Fig. 10. Se con Fc indichiamo la frequenza massima nella banda del segnale analogico, analizzando lo spettro del segnale discreto ci accorgiamo che le bande laterali sono repliche traslate dello spettro del segnale analogico originario ed in particolare per k = 0, cioè per -Fc ≤ f ≤ Fc , questi coincide con lo spettro S(f) del segnale analogico.
Ovviamente questa situazione si ha solo se Fs > 2Fc (condizione di Nyquist), in caso contrario, per effetto della sovrapposizione delle bande laterali, si ha una alterazione dello spettro come mostrato in Fig. 11, e la perdita di equivalenza con lo spettro del segnale analogico. Questa situazione non sarebbe evitabile se il segnale analogico non fosse a banda limitata (Fc infinita).
Infine per ricostruire il segnale analogico basterà eliminare tutte le componenti a frequenza maggiore di Fc, cioè filtrare il segnale discreto con un filtro passa-basso con frequenza di taglio pari a Fc.
Queste considerazioni esprimono semplicemente quanto affermato dal ben noto teorema di Shannon per il campionamento.
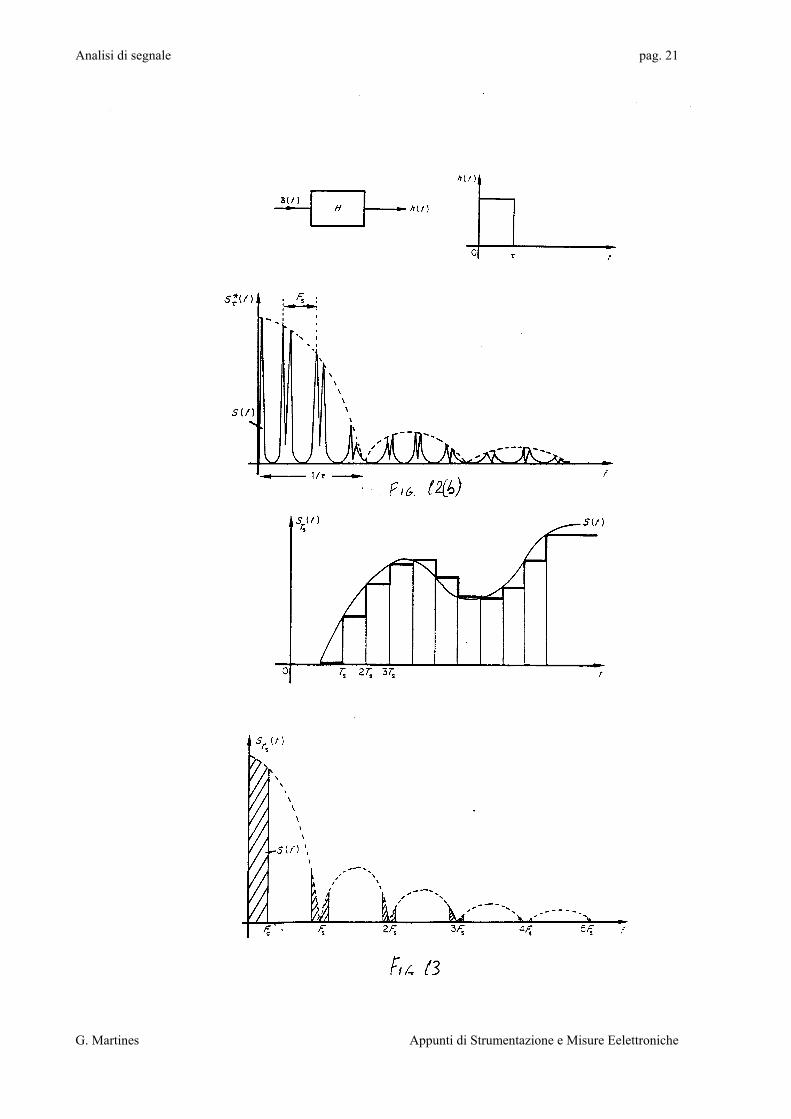
Effetti del campionamento con funzioni reali Nella pratica non è possibile realizzare l’impulso di Dirac (banda illimitata) ma solo approssimarlo con impulsi di durata τ finita (vedasi Fig. 12) che fisicamente rappresenta il tempo necessario per acquisire il segnale con il circuito Sample-and-Hold o il tempo di conversione del convertitore A/D, e viene indicato con il nome di tempo di apertura (aperture time).
Dal punto di vista matematico questo equivale a far passare il segnale discreto attraverso un sistema che ha una risposta all’impulso, nel dominio del tempo, di tipo rettangolare (Fig. 13) per cui lo spettro del segnale campionato è dato da:
( ) ( ) ( ) ( ) ( )S f H f S f H ff
fτ τπ τ
π τ* * sin
= = con
In conclusione lo spettro del segnale campionato risulta essere quello del segnale discreto moltiplicato per quello di tipo (sin x)/x tipico dei treni di impulsi (vedi Fig. 12) e quindi con una sensibile attenuazione delle componenti ad alta frequenza.
Un caso particolarmente interessante, perché comune nella strumentazione elettronica, è quello in cui la durata dell’impulso coincide con il periodo di campionamento, cioè quando si ha τ = TS e quindi il segnale campionato coincide con la scalinata che insegue l’ampiezza del segnale analogico come in Fig. 13. Questa condizione si ottiene, ad esempio, quando si utilizzano convertitori A/D del tipo a gradinata continua in cui si sfrutta l’ultimo valore misurato come punto di partenza del processo di conversione e quindi realizzano ottime velocità di conversione se il segnale varia poco rispetto alla risoluzione ma si prestano poco all’uso in multiplex.(vantaggioso per frequenze di campionamento dello stesso ordine di grandezza del tempo di conversione A/D in cui non ci sono margini per il multiplex).
Lo spettro di un tale segnale è ancora mostrato nella stessa Fig. 13 ed è espresso da:
( ) ( )S TfT
fTS fT s
s
ss
* *sin=
ππ
Si noti che in questo caso:
1. le bande laterali centrate a multipli interi di Fs cadono nell’intorno dei punti in cui si annulla la funzione (sin x)/x e quindi sono fortemente attenuate;
2. la funzione (sin x)/x provoca una forte attenuazione già per frequenze dell’ordine di Fs/2 (l’ampiezza si riduce al 64%) e quindi per non alterare molto lo spettro del segnale analogico conviene scegliere F Fs c≈ 5 (per frequenze dell’ordine di Fs/5 l’ampiezza si riduce solo al 94%);
3. praticamente, con queste scelte, si ha il vantaggio di realizzare automaticamente il filtraggio di tipo passa-basso del segnale campionato, necessario per limitarne la banda a quella del segnale analogico, e lo svantaggio di dovere

Analisi di segnale pag. 18
G. Martines Appunti di Strumentazione e Misure Eelettroniche
usare frequenze di campionamento più elevate e di introdurre un errore nello spettro (6%) rispetto a quello del segnale analogico.
4. quest’ultimo errore può essere compensato con una opportuna progettazione del filtro passa-basso (guadagno maggiore per frequenze prossime alla frequenza di taglio Fc ) che come vedremo è sempre necessario quando si usano tecniche di campionamento per l’analisi del segnale.
Analisi di segnale pag. 19
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 20
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 21
G. Martines Appunti di Strumentazione e Misure Eelettroniche

Analisi di segnale pag. 22
G. Martines Appunti di Strumentazione e Misure Eelettroniche
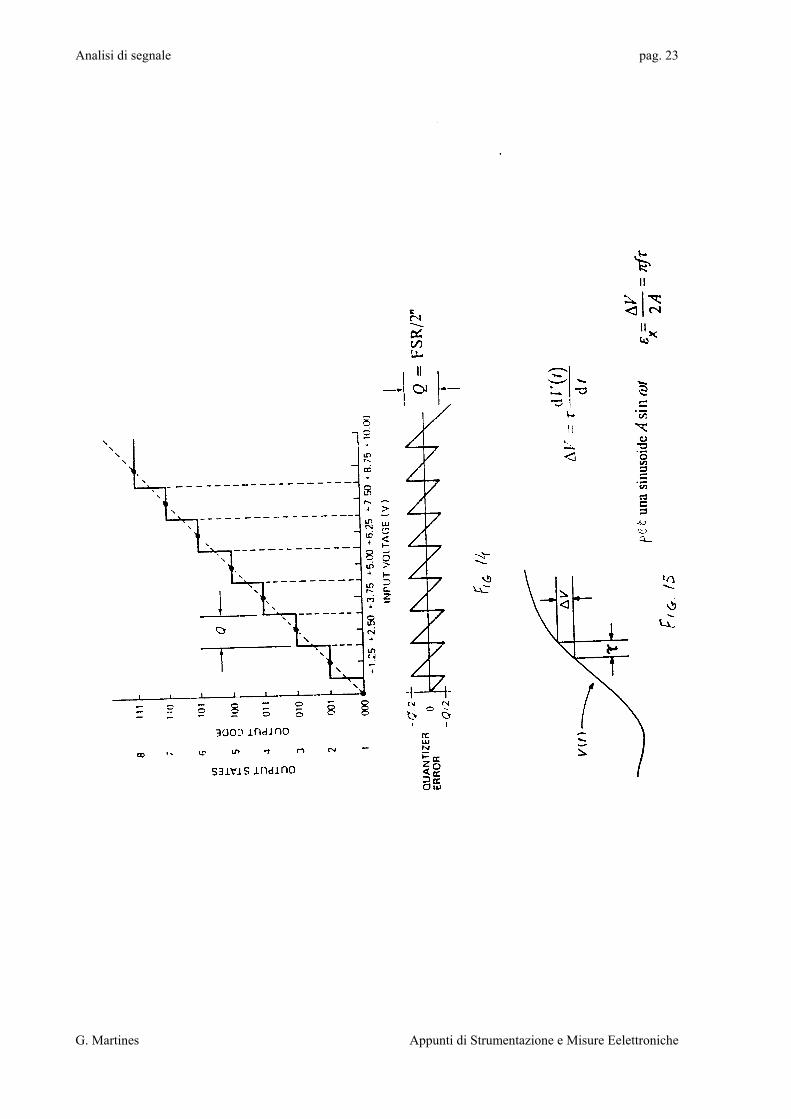
Effetti della quantizzazione del segnale campionato La quantizzazione (conversione A/D) del segnale discreto (o di quello campionato) può indurre errori significativi nella elaborazione numerica del segnale analogico. Infatti tale processo, oltre ad introdurre un errore legato alla risoluzione, necessita di un tempo finito, legato alla velocità di conversione o al circuito di campionamento e tenuta, che introduce non solo gli errori già visti nello spettro del segnale digitale ma anche incertezze sullo istante di campionamento e sulla misura del valore del campione.
Il quantum (o risoluzione della quantizzazione o ampiezza relativa al bit meno significativo del codice) viene definito come:
Q FSR n= 2 (FSR = Full Scale Range, n = numero di bit di codice del convertitore A/D)
e rappresenta la più piccola differenza nel segnale analogico che può essere risolta (distinta) dal processo di quantizzazione; per il principio stesso della quantizzazione la risoluzione non può essere infinita.
In Fig. 14 si vede quale errore si commette facendo variare il segnale analogico all’ingresso di un convertitore A/D ideale (a 3 bit nell’esempio) a causa della risoluzione finita Q (dente di sega di ampiezza Q/2). Tale inevitabile errore viene detto errore di quantizzazione o meglio rumore di quantizzazione (quantization noise) per le caratteristiche simili ad altri tipi di rumore, cioè:
◊ inevitabilità;
◊ valore medio nullo con ampiezza non nulla (pari a Q/2);
◊ valore quadratico medio (RMS) diverso da zero [pari a Q/(2√3) (calcolato dal dente di sega)].
NOTA: ◊ Un convertitore A/D reale è affetto oltre che dall’errore di quantizzazione anche da un errore di linearità dovuto al
fatto che i (2n-1) livelli di soglia (o punti di decisione), evidenziati per il caso ideale dalla rampa tratteggiata in Fig. 14, non risultano in realtà perfettamente allineati. Per un convertitore A/D ben progettato l’errore di linearità non dovrebbe superare l’ampiezza del rumore di quantizzazione (≤ Q/2).
◊ L’errore di linearità ha le caratteristiche di un errore sistematico (accuracy).
A questo errore dovuto alla risoluzione, si sommano gli errori dovuti al tempo di apertura τ. Infatti, se nell’intervallo τ il segnale analogico varia, allora si avrà una incertezza (pari a τ) sull’istante a cui il valore misurato si riferisce (timing error) e una incertezza ∆V sul valore dell’ampiezza del segnale. (Vedasi Fig. 15). Ovviamente questi due errori sono legati dalla relazione:
( )∆V
V tt
= τd
d
dove la derivata indica la pendenza o la velocità di variazione del segnale nell’istante di campionamento considerato.
Allora, se si vuole che l’errore ∆V dovuto al tempo di apertura sia paragonabile alla risoluzione della quantizzazione, sarà necessario scegliere opportunamente il tempo di apertura in funzione della massima velocità di variazione del segnale analogico.
Considerando al solito una sinusoide A tsin ω (per cui la massima velocità di variazione si ha in corrispondenza dell’attraversamento dello zero e vale Aω), l’errore ε massimo sul valore del segnale, dovuto al tempo di apertura, è dato da:
ε ωτ π τmax = = =∆V
AA
Af
2 2
Ad esempio, se vogliamo digitalizzare una sinusoide a frequenza di 1 KHz con un convertitore A/D 10 bit (che deve avere un campo di conversione pari a ±A) mantenendo l’errore dovuto al tempo di apertura pari a quello di quantizzazione (1/210 = 1/1024 = 0.001) dovremo utilizzare un circuito di campionamento e tenuta con un tempo di apertura τ non superiore a
τ επ
= = =f
0 0013140
318. nsec
Analisi di segnale pag. 23
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 24
G. Martines Appunti di Strumentazione e Misure Eelettroniche
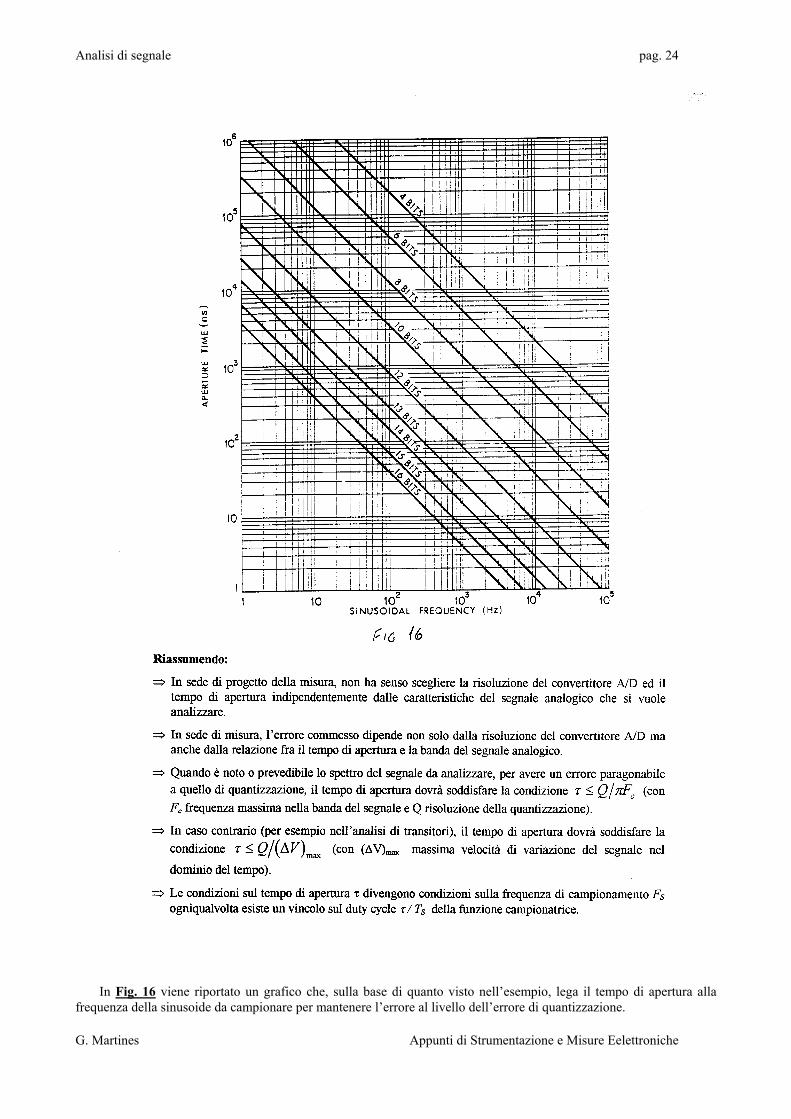
In Fig. 16 viene riportato un grafico che, sulla base di quanto visto nell’esempio, lega il tempo di apertura alla frequenza della sinusoide da campionare per mantenere l’errore al livello dell’errore di quantizzazione.

Analisi di segnale pag. 25
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Nel caso particolare in cui il tempo di apertura coincide con il periodo della frequenza di campionamento (τ = TS), da queste considerazioni discende immediatamente un vincolo per la scelta della frequenza di campionamento; ad esempio con riferimento alla sinusoide si ha:
Q fTS≥ =ε π e quindi F fQS ≥π
per l’esempio numerico precedente FS ≥ =31400 001
314.
. MHz .
Mentre per il caso più generale, la scelta della frequenza di campionamento Fs dovrà soddisfare anche la condizione:
( )F
VQs ≥
∆ max
dove (∆V)max [V/sec.] rappresenta la massima velocità di variazione del segnale in esame.
Riassumendo:
⇒ In sede di progetto della misura, non ha senso scegliere la risoluzione del convertitore A/D ed il tempo di apertura indipendentemente dalle caratteristiche del segnale analogico che si vuole analizzare.
⇒ In sede di misura, l’errore commesso dipende non solo dalla risoluzione del convertitore A/D ma anche dalla relazione fra il tempo di apertura e la banda del segnale analogico.
⇒ Quando è noto o prevedibile lo spettro del segnale da analizzare, per avere un errore paragonabile a quello di quantizzazione, il tempo di apertura dovrà soddisfare la condizione τ π≤ Q Fc (con Fc frequenza massima nella banda del segnale e Q risoluzione della quantizzazione).
⇒ In caso contrario (per esempio nell’analisi di transitori), il tempo di apertura dovrà soddisfare la condizione ( )τ ≤ Q V∆ max (con (∆V)max massima velocità di variazione del segnale nel dominio del tempo).
⇒ Le condizioni sul tempo di apertura τ divengono condizioni sulla frequenza di campionamento FS ogniqualvolta esiste un vincolo sul duty cycle τ / TS della funzione campionatrice.
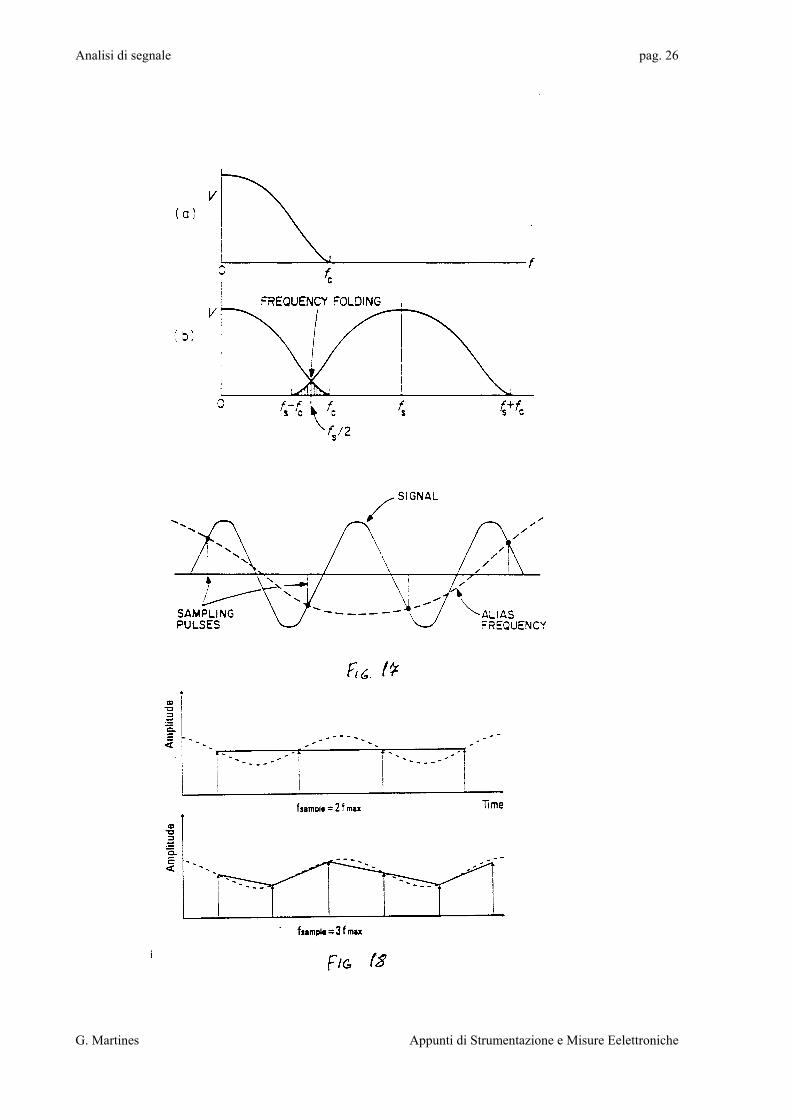
Aliasing (or fold-over or mixing) distortion È la principale distorsione che si può presentare in tutti i sistemi che usano le tecniche di conversione di frequenza sia nella elettronica analogica (miscelazione o eterodina), che in quella digitale (campionamento) e consiste nella generazione, nella banda del segnale e quindi non eliminabili con tecniche di filtraggio, di frequenze non presenti nello spettro del segnale.
Tale distorsione si può spiegare con facilità nel dominio della frequenza e può avere diverse cause.
Limitandoci al caso del campionamento, una prima causa di questa distorsione è il venire meno della condizione di Nyquist (FS > 2FC) con conseguente sovrapposizione delle bande laterali (vedasi Fig. 11) e conseguente alterazione dello spettro in banda base del segnale. Da questa condizione discende l’uso dei termini alternativi: Folding o Fold-over distortion.
SI NOTI che:
◊ la sovrapposizione delle bande laterali porta o ad una alterazione delle ampiezze delle armoniche, se la frequenza di campionamento FS è un multiplo intero della massima frequenza FC presente nello spettro del segnale analogico, o alla inserzione di linee di frequenza non armoniche nello spettro del segnale in banda base, nel caso più probabile in cui la. FS non è un multiplo intero della FC . In Fig. 17 si riporta una rappresentazione nel dominio del tempo della distorsione dovuta a questa causa;
◊ la sovrapposizione delle bande laterali si può verificare sia per una imperfetta conoscenza della banda del segnale analogico (linee di frequenza di ampiezza significativa a f > FC) che per una scelta della frequenza di campionamento troppo vicina la limite teorico della condizione di Nyquist (errore associato alla generazione della FS ed alla misura della FC );
Analisi di segnale pag. 26
G. Martines Appunti di Strumentazione e Misure Eelettroniche

Analisi di segnale pag. 27
G. Martines Appunti di Strumentazione e Misure Eelettroniche
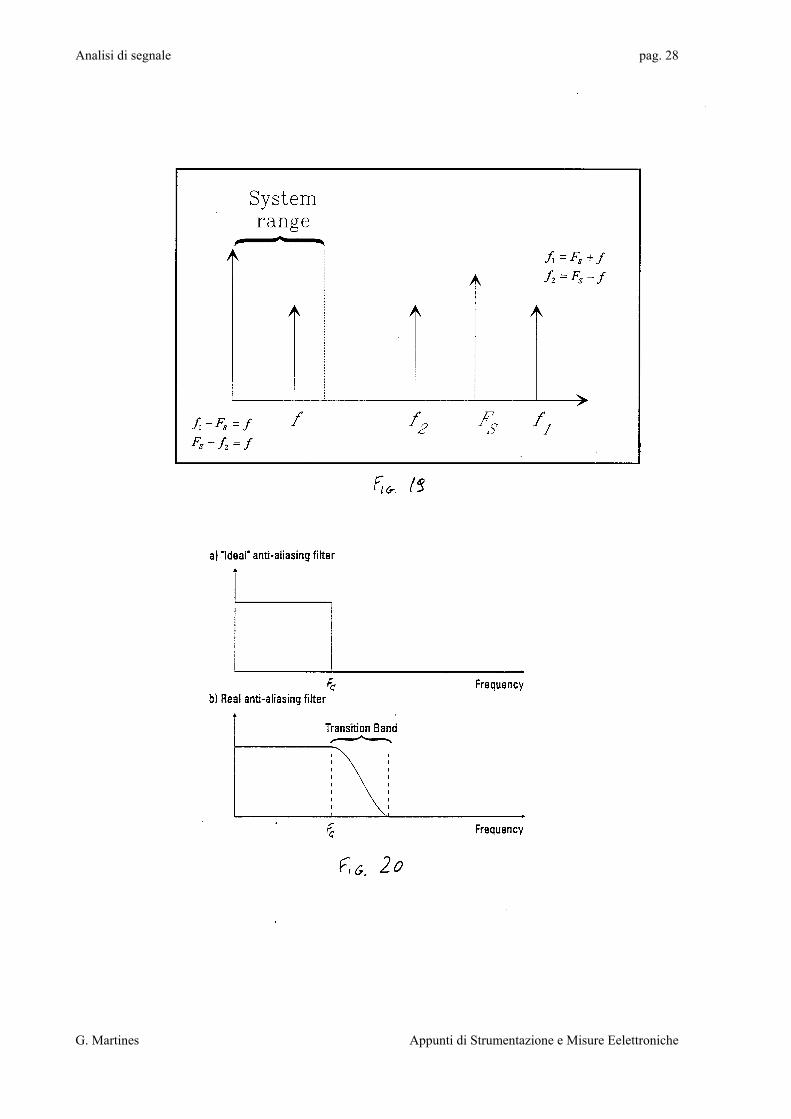
◊ in particolare per FS = 2 FC (limite della condizione di Nyquist che garantisce 2 campioni per periodo della frequenza massima presente nello spettro del segnale analogico) esiste una possibilità che la sinusoide a frequenza FC risulti di ampiezza nulla (nel dominio del tempo, vedasi Fig. 18, equivale alla situazione in cui il segnale viene campionato esattamente negli istanti di attraversamento dello zero).
Una seconda causa che dà luogo a questo tipo di distorsione è la frequenza immagine o alias (da cui discende termine di aliasing distortion), che (come mostrato in Fig. 19) nasce dal fatto che in un sistema che usa un processo eterodina la generica frequenza f della banda base corrisponde a due distinte frequenze dello spettro:
f F ff F f
S
S
1
2
= += −
entrambi questi valori di frequenza, infatti, soddisfano la legge della conversione di frequenza:
f F fF f f
S
S
1
2
− =− =
Questo significa che la aliasing distortion può nascere da segnali o disturbi a frequenza maggiore della frequenza di campionamento.
In questo caso un aumento della frequenza di campionamento non può eliminare il problema (anche se può ridurne gli effetti perché le frequenze alias si spostano a valori più elevati e quindi risultano ragionevolmente più attenuate dalla risposta in frequenza del sistema stesso), che si elimina solo annullando tutte le linee dello spettro a frequenza maggiore di FC con un filtro passa basso ideale.
Filtro Anti-alias e sistemi con frequenza di campionamento variabile Per evitare la distorsione da aliasing è necessario che all’ingresso del sistema di campionamento e quantizzazione del segnale analogico sia posto un filtro passa basso ideale (detto filtro anti-alias) con frequenza di taglio FC < FS/2. Questo elimina sia il problema delle frequenze immagine che quello della esatta conoscenza della frequenza massima presente nello spettro del segnale analogico.
Come è ben noto, un filtro anti-alias ideale non può essere fisicamente realizzato ma può essere approssimato con un filtro passa basso reale che è caratterizzato da una banda di transizione e da una reiezione finita dei segnali nella banda proibita (attenuazione finita fuori banda) come mostrato in Fig. 20. Questo significa che per evitare la distorsione di aliasing, la frequenza di campionamento deve essere scelta maggiore del doppio della frequenza estrema della banda di transizione del filtro e quindi (considerato le pendenze ottenibili dai filtri) da 2.5 a 4 volte la FC e che comunque sarà presente una distorsione da aliasing per le frequenze che cadono nella banda di transizione del filtro (questa banda dovrebbe quindi essere la più ristretta possibile compatibilmente con le prestazioni del sistema).
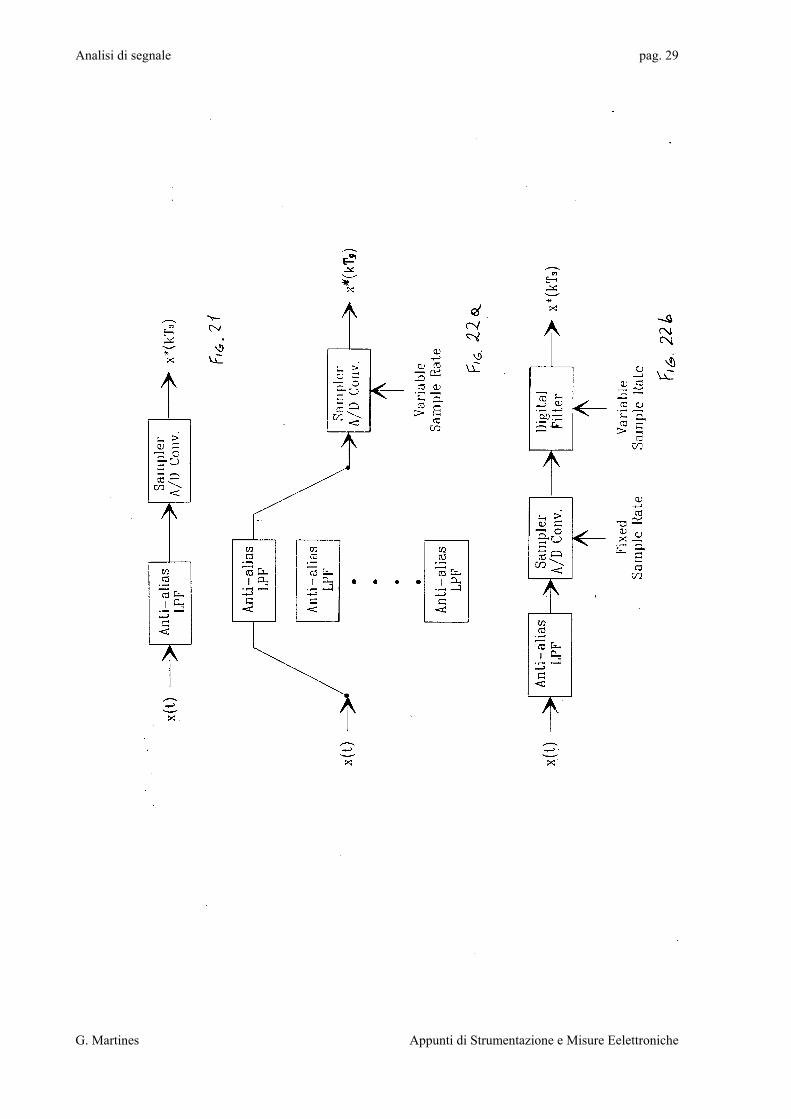
Per evitare la distorsione da aliasing allora, lo schema a blocchi di un qualsiasi sistema di digitalizzazione di un segnale analogico deve essere come quello di Fig. 21.
Queste considerazioni sono valide fino a che la frequenza di campionamento del sistema è costante o aumenta. Purtroppo in tutta la strumentazione elettronica è spesso necessario ridurre la frequenza di campionamento.
Ad esempio, consideriamo un oscilloscopio digitale con una frequenza di campionamento pari a 250 KSa/sec. dotato di un convertitore A/D ad 8 bit e di un filtro anti-alias con FC = 100 KHz (il filtro passa basso ha una banda di transizione di soli 20 KHz) e di una memoria digitale di 1 KB (equivalente al numero di pixel dell’asse dei tempi dello schermo); allora si potrà visualizzare un intervallo di tempo massimo di
1 000250 000
4,,
= msec (400 µsec/div).
Fig. 21
Analisi di segnale pag. 28
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 29
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 30
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Ovviamente sarebbe assurdo che un tale strumento non fosse in grado di visualizzare 20 msec (2 msec/div) del segnale da analizzare; ma questo implica di ridurre a 50 KSa/sec (un quinto) la frequenza di campionamento. Ma così, se non si cambia il filtro all’ingresso del sistema di campionamento e quantizzazione, non è più soddisfatta la condizione di Nyquist e quindi si avrà certamente una fortissima distorsione da aliasing.
NOTA: l’importante in questo caso è il numero di campioni visualizzati nello schermo, perché è qui che viene ricostruito il segnale analogico riportando i valori dei campioni ed eventualmente unendoli con una spezzata.
Per evitare la distorsione di aliasing sono allora possibili due sole soluzioni:
1. utilizzare un diverso filtro anti-alias per ogni valore della frequenza di campionamento che il sistema di campionamento e quantizzazione può realizzare (si veda lo schema in Fig. 22a). Questa, che sembra la soluzione più ragionevole, è in effetti la meno valida sia dal punto di vista dei costi che della affidabilità per la difficoltà di realizzare filtri passa basso con frequenze di taglio diverse (sempre più basse) e prestazioni il più possibili simili in termini di risposta nella banda passante, nella banda di transizione e soprattutto nella banda proibita;
2. utilizzare un unico filtro anti-alias e quindi un sistema di campionamemto e quantizzazione a frequenza fissa (la massima) e ottenere sia la riduzione della frequenza di campionamento che il necessario filtraggio anti-alias ad una elaborazione numerica del segnale digitale. Alla elaborazione numerica viene quindi affidato sia il compito di moltiplicare il segnale digitale completo (ottenuto sempre alla massima frequenza di campionamento) per la opportuna funzione di trasferimento di tipo passa basso che garantisce l’eliminazione della distorsione da aliasing alla frequenza di campionamento desiderata che quello di selezionare fra tutti i campioni disponibili quelli utili per ottenere la frequenza di campionamento ridotta desiderata (si veda lo schema in Fig. 22b).
Disponendo di circuiti digitali sufficientemente veloci (il tempo a disposizione della elaborazione numerica, quando si opera in “tempo reale” con strumentazione numerica, è praticamente quello fra due successivi aggiornamenti del display), questa seconda soluzione risulta non solo molto più economica ma anche molto più affidabile dal punto di vista delle prestazioni (quelle del filtro digitale e del divisore di frequenza) anche perché il sistema di campionamento e quantizzazione funziona a frequenza fissa (la massima) con risoluzione e tempi di apertura costanti.
NOTA: operando in questo semplice modo, però la banda passante dell’oscilloscopio si riduce a
BW = =50
2 520 kSa / sec kHz
. ! Per evitare questo effetto, sicuramente non presente nella strumentazione
analogica, bisognerà agire attraverso particolari tecniche di visualizzazione dei dati numerici.
Richiami sui filtri digitali Un filtro digitale si distingue da un filtro analogico solo per il fatto che la funzione di trasferimento viene realizzata con operazioni matematiche sul segnale digitale (campionato e quantizzato) anziché circuitalmente sul segnale analogico.
Così come per lo studio ed il progetto dei filtri analogici si usa la trasformata di Laplace, nello studio e progetto dei filtri digitali si usa la trasformata Z che permette di rappresentare il comportamento dei sistemi digitali senza approssimazioni.
SI RICORDI che la trasformata Z è definita in modo tale che un segnale discreto f*(t), con periodo di campionamento pari a TS, sia trasformato in una funzione polinomiale F(z) di z-1;
( ) ( ) ( )se allora f t a t nT F z a zn Sn
nn
n
* = − ==
∞−
=
∞
∑ ∑δ0 0
Proprietà comune alla trasformata di Laplace, è che ad una operazione di convoluzione delle funzioni del tempo (dominio del tempo) corrisponde una semplice operazione di moltiplicazione delle funzioni di z o s (dominio di z o di s).
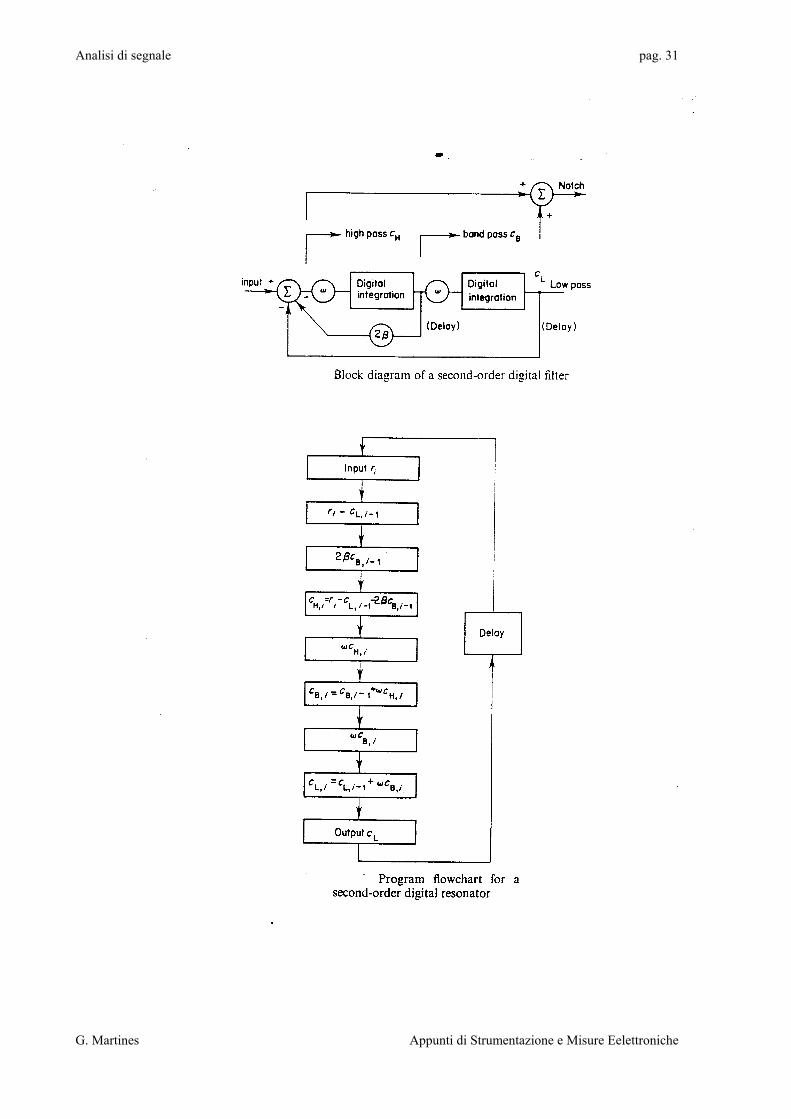
Per implementare le varie funzioni di trasferimento dei filtri in forma digitale, si può per esempio procedere in modo euristico nel modo visto a proposito dei filtri bi-quadratici realizzati con integratori in cascata (BIQUAD). Questa procedura risulta particolarmente semplice perché l’integrazione numerica di una funzione discreta si riduce alla somma dei campioni di cui il periodo di campionamento TS costituisce la costante di integrazione (Esempio nello slide per il generico filtro del secondo ordine).
Analisi di segnale pag. 31
G. Martines Appunti di Strumentazione e Misure Eelettroniche

Analisi di segnale pag. 32
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Affinché il filtro funzioni correttamente sarà necessario rispettare le condizioni:
a) la frequenza di campionamento (1/TS) deve rispettare la condizione di Nyquist in riferimento al segnale analogico;
b) il periodo di campionamento TS deve essere molto più piccolo di qualsiasi costante di tempo del filtraggio perché altrimenti l’operazione di integrazione numerica si discosta dal valore reale dell’integrale;
c) l’errore di quantizzazione deve risultare trascurabile, soprattutto per non dare errori di underflow nella esecuzione dei calcoli;
d) l’ampiezza del segnale non deve mai portare a condizioni di overflow nei calcoli, in questo caso si potrebbero avere discontinuità nell’uscita al valore estremo opposto (rappresentazione dei numeri nei sistemi di elaborazione numerica);
e) i valori dei coefficienti possono essere implementati con precisione nel sistema di calcolo.
Per il resto si rimanda l’approfondimento del tema ai testi che trattano la elaborazione digitale dei segnali (DSP).
Le proprietà della Fast Fourier Trasform (FFT) La FFT è un algoritmo, sviluppato da Cooley e Tukey negli anni ‘60, per eseguire in maniera altamente efficiente i calcoli necessari alla DFT (Discrete Fourier Trasform) basato sulla scomposizione in piccoli gruppi (dimezzamenti successivi) di dati (il cui numero complessivo deve quindi essere una potenza di 2)..
Ad esempio, per calcolare la DFT dalla definizione su N = 16 campioni, sono necessari per ciascuna delle N frequenze, N moltiplicazioni di numeri complessi e N somme di numeri complessi; in totale N2 = 256 moltiplicazioni di numeri complessi; con la FFT (che richiede che N sia una potenza di 2) si possono calcolare gli spettri parziali (che poi possono essere composti a costituire lo spettro complessivo) relativi a N/4 = 4 dati che richiedono un totale di 4*(N/4)2 = 64 moltiplicazioni di numeri complessi !!
Definizione della Discrete-frequency Fourier Trasform La discrete-frequency Fourier Trasform per una sequenza temporale x(kTS) consistente in N campioni uniformemente spaziati di TS secondi (detto time record), è data da:
( )
( )
X nFN
x kT F T n N
x kTN
X nFN
k N
SS
j nk N
k
N
S S
SS j nk N
n
N
= = = −
=
= −
−
=
−
=
−
∑
∑
e , , ...,
e , , ...,
2
0
1
2
0
1
1 0 1 1
1 0 1 1
π
π
con e
con
Si noti che:
1. queste equazioni sono state sviluppate per segnali discreti (non quantizzati) e trasformano un insieme di campioni uniformemente spaziati nel dominio del tempo in un insieme di linee nel dominio della frequenza e viceversa;
2. rassomigliano agli integrali che definiscono la Trasformata di Fourier, ma nel termine esponenziale non compaiono esplicitamente né FS né TS che sono sostituiti da n e k che quindi hanno i connotati n di una frequenza e k di un tempo;
3. la DFT trasforma una intera sequenza di N punti discreti nel tempo x(0), x(TS), x(2TS), ..., x((N-1)TS) in una sequenza di N linee nel dominio della frequenza X(0), X(FS/N), X(2FS/N), ..., X((N-1)FS/N). la trasformazione agisce su blocchi di dati nel senso che tutti i campioni presi nel dominio del tempo sono necessari per calcolare ciascuna e qualsiasi linea dello spettro di frequenza (e viceversa); questo implica che non è possibile calcolare la FFT se prima non si sono acquisiti tutti i campioni nel dominio del tempo (o della frequenza);
NOTA: questo non significa però che uno strumento basato sulla FFT non possa operare in tempo reale, perché nulla vieta, nell’aggiornamento dello spettro, di utilizzare campioni di nuova acquisizione insieme a quelli già acquisiti ed utilizzati nel calcolo, scartando ovviamente i più antichi.
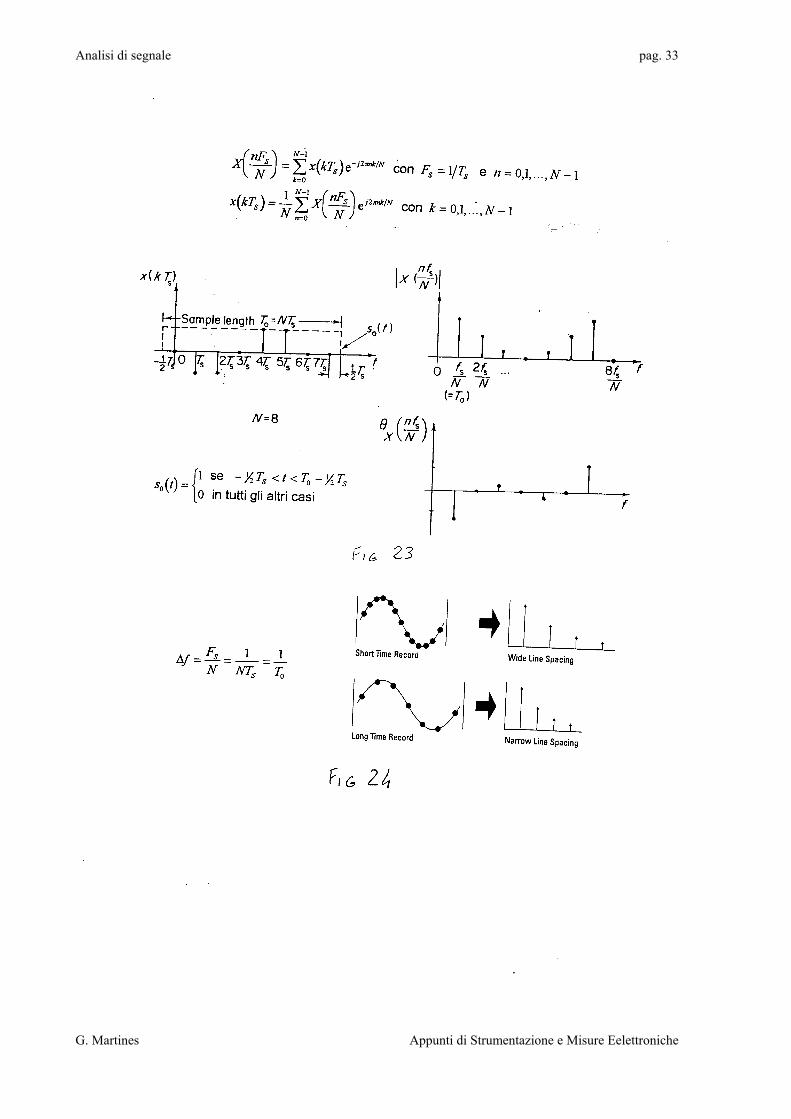
4. una sequenza di valori reali nel dominio del tempo genera una sequenza di valori complessi nel dominio della frequenza, comunemente rappresentati da un diagramma del modulo |X(nFS/N)| e un diagramma della fase θX(nFS/N) (si veda Fig. 23). Si noti allora che per passare dal dominio della frequenza a quello del tempo sarà necessario conoscere i campioni nel dominio della frequenza sia in modulo che in fase;
Analisi di segnale pag. 33
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 34
G. Martines Appunti di Strumentazione e Misure Eelettroniche

Analisi di segnale pag. 35
G. Martines Appunti di Strumentazione e Misure Eelettroniche
5. per calcolare la DFT nella pratica, è necessario che il numero N dei campioni sia ragionevole per cui si prendono in considerazione solo N valori della sequenza x(kTS); in termini matematici questo significa che il segnale digitale viene moltiplicato per una funzione di troncamento s0(t), detta truncation window function, lunga T0 = NTS secondi (si veda la Fig. 23) e definita da:
( )s tT t T TS S
0
12 0
121
0=
− < < −
se in tutti gli altri casi
6. ne consegue che lo spazio fra le linee di frequenza è inversamente proporzionale alla durata della funzione di troncamento T0; infatti
∆f FN NT T
S
S
= = =1 1
0
Quindi più è lunga la sequenza dei campioni nel dominio del tempo, maggiore è la risoluzione nel dominio della frequenza;
7. poiché nella definizione della DFT le sommatorie partono dal valore 0, allora una delle linee di frequenza è certamente quella a 0 Hz (la continua per n = 0) che rappresenta semplicemente il valore medio dei campioni nell’intervallo T0 considerato. Se la linea a 0 Hz fa parte dell’insieme di linee dello spettro della DFT, allora restano determinate la linea a frequenza più bassa che sarà a 1/T0 (l’inverso del time record cioè a ∆f) e quella a frequenza più alta (fmax) che sarà data dal prodotto del numero delle linee per la loro distanza (∆f);
NOTA: questo significa che a parità di numero di campioni N considerato nel calcolo della DFT, la fmax sarà tanto più elevata quanto più breve è la durata T0 del time record (aumenta la distanza fra le linee di frequenza (esempio in Fig. 24)
NOTA: per risolvere correttamente la frequenza di un segnale periodico di periodo T con la FFT sarà necessario scegliere il time record maggiore del periodo: T0 > T.
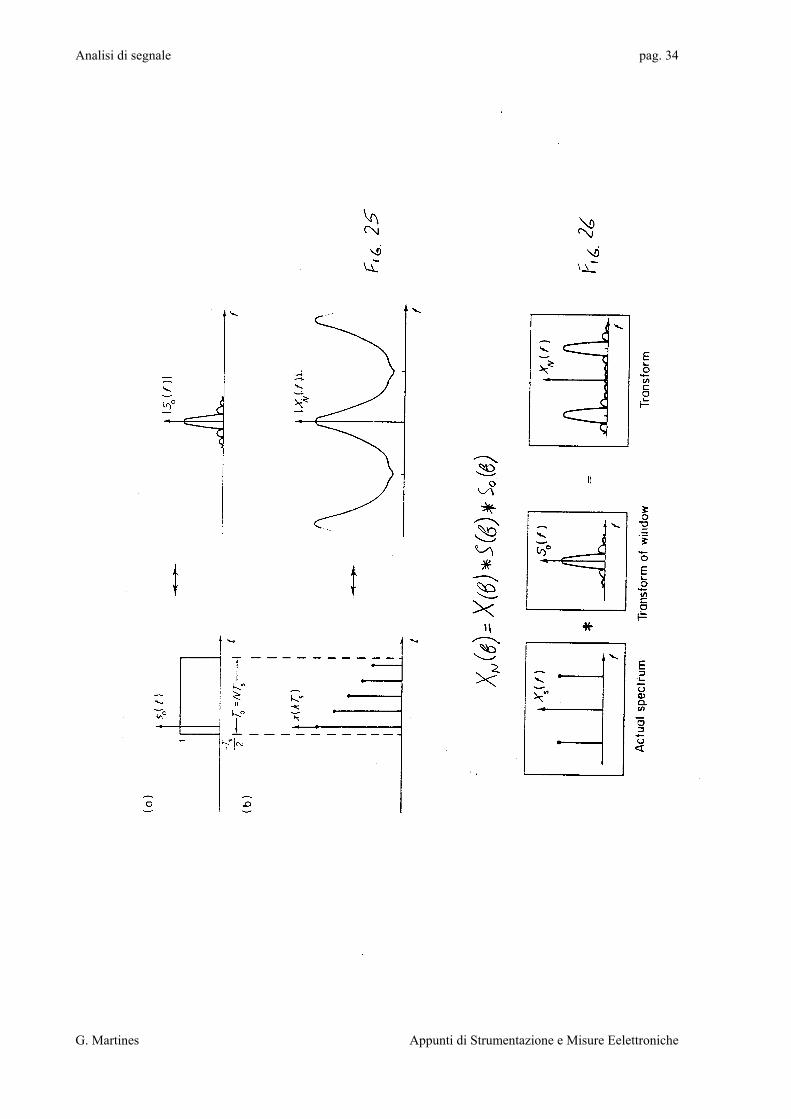
Leakage (dispersione) distortion Come già detto, perché la DFT sia praticamente calcolabile è necessario usare una truncation window function s0(t). Per quella già definita, lo spettro S0(f) è ancora del tipo (sin x)/x (si veda Fig. 25 dove la doppia freccia indica la trasformazione di Fourier). Quindi la trasformata di Fourier che si ottiene per il segnale digitale troncato è ancora dato dalla operazione di convoluzione:
( ) ( ) ( ) ( )X f X f S f S fN = * * 0
Il risultato è ancora mostrato in Fig. 25. Si noti che:
1. l’operazione di troncamento nel dominio del tempo provoca una distorsione dello spettro dovuta alla convoluzione che fa nascere le ripetizioni dello spettro base del segnale, da cui il nome di distorsione da dispersione;
2. ancora più chiaro può risultare l’esempio di Fig. 26 in cui si mostra come il troncamento, per effetto della operazione di convoluzione, trasforma una singola componente sinusoidale dello spettro del segnale analogico in una banda del tipo (sin x)/x disperdendo l’energia associata alla singola linea di frequenza su più linee di frequenza localizzate in un intorno di quella reale e non presenti nel segnale di partenza;
3. l’entità della dispersione introdotta dipende dalla lunghezza T0 della finestra di troncamento rispetto al periodo di campionamento TS; in altre parole bisogna scegliere un compromesso fra il numero di campioni, e quindi il tempo di calcolo della FFT, e precisione della trasformata (entità della distorsione da dispersione);
4. è evidente che l’effetto della distorsione da dispersione dipende dalla funzione che definisce la finestra di troncamento e quindi si può pensare di scegliere una s0(t) diversa dal puro rettangolo.
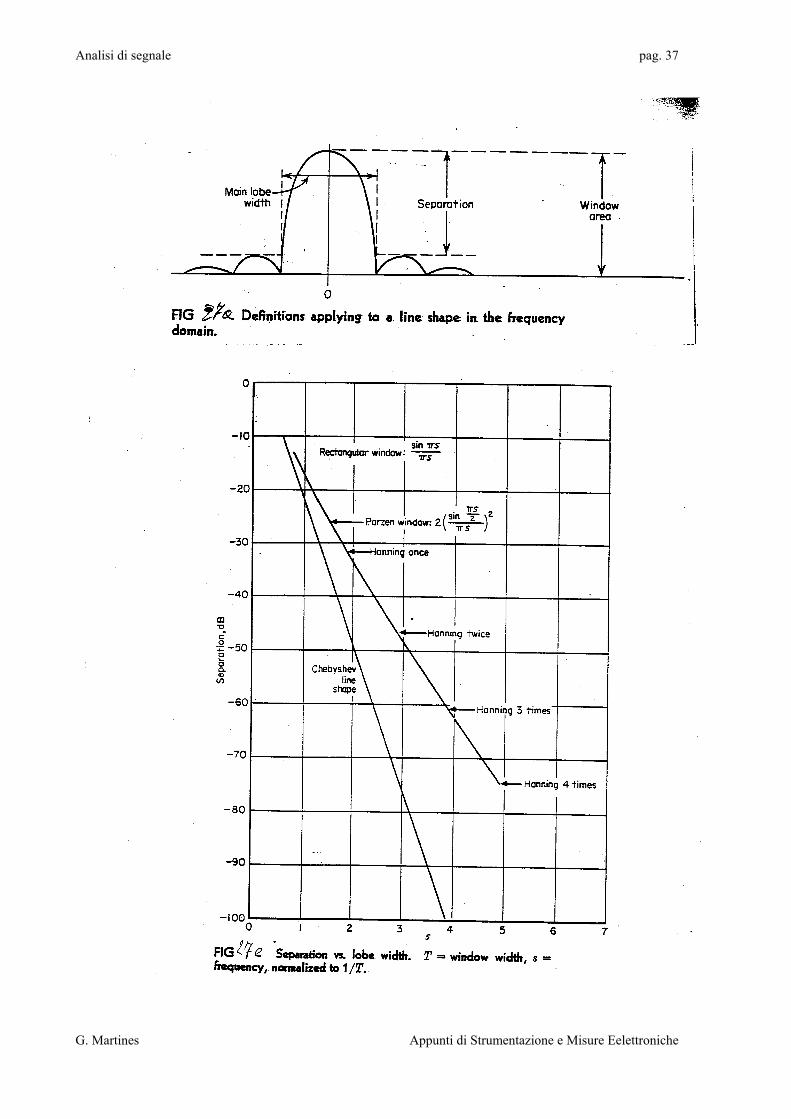
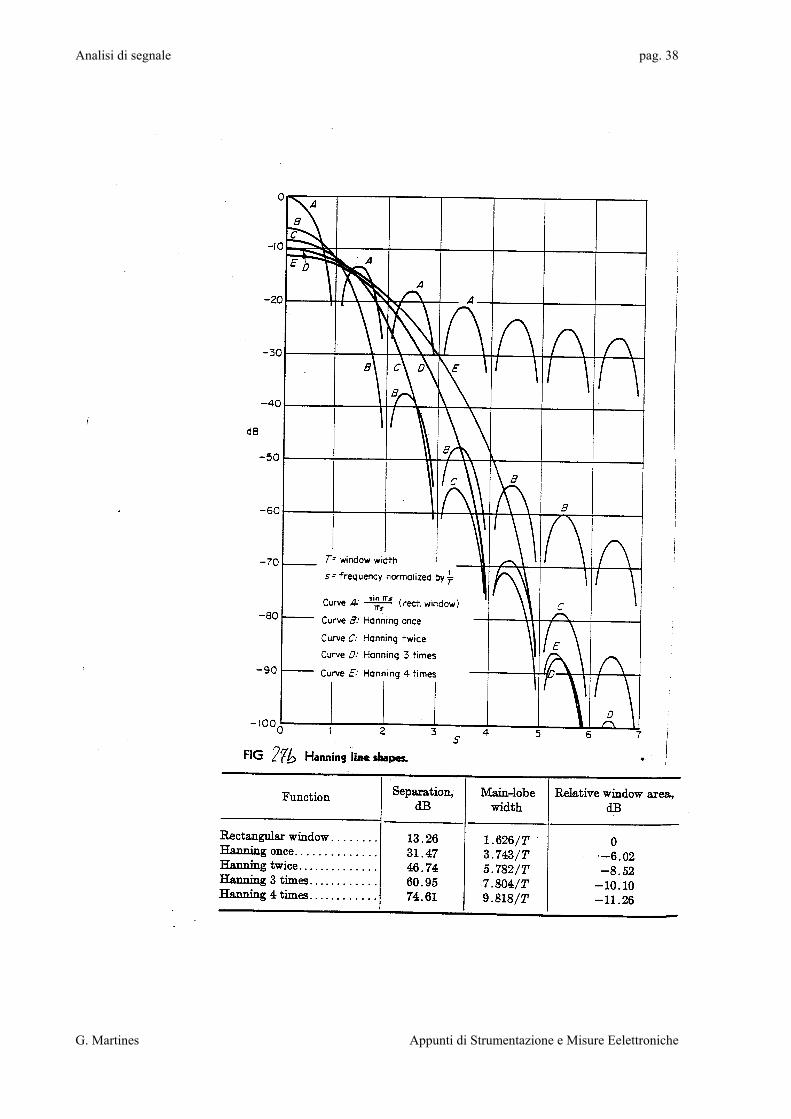
Per confrontare le caratteristiche delle varie funzioni di troncamento in termini di distorsione da dispersione confrontiamo le caratteristiche nel dominio della frequenza (vedasi Fig. 27a), in termini di larghezza del lobo principale, della Separazione e dell’area della finestra in paragone a quelle della finestra rettangolare.
Ad esempio, si può utilizzare una finestra di troncamento definita dalla funzione di Hanning:
g(t) cos tT
= −
12
1 2π per 0 ≤ t ≤ T
Analisi di segnale pag. 36
G. Martines Appunti di Strumentazione e Misure Eelettroniche
la cui trasformata nel dominio della frequenza complessa s è data dalla convoluzione di tre delta di Dirac:
( ) ( ) ( ) ( )G s s s s= − − − +12
14
1 14
1δ δ δ
Ripetendo più di una volta questa operazione si ottengono le finestre di Hanning del secondo, terzo etc ordine. Le caratteristiche in termini di frequenza normalizzata sono mostrate in Fig. 27b sia in forma grafica che in forma numerica.
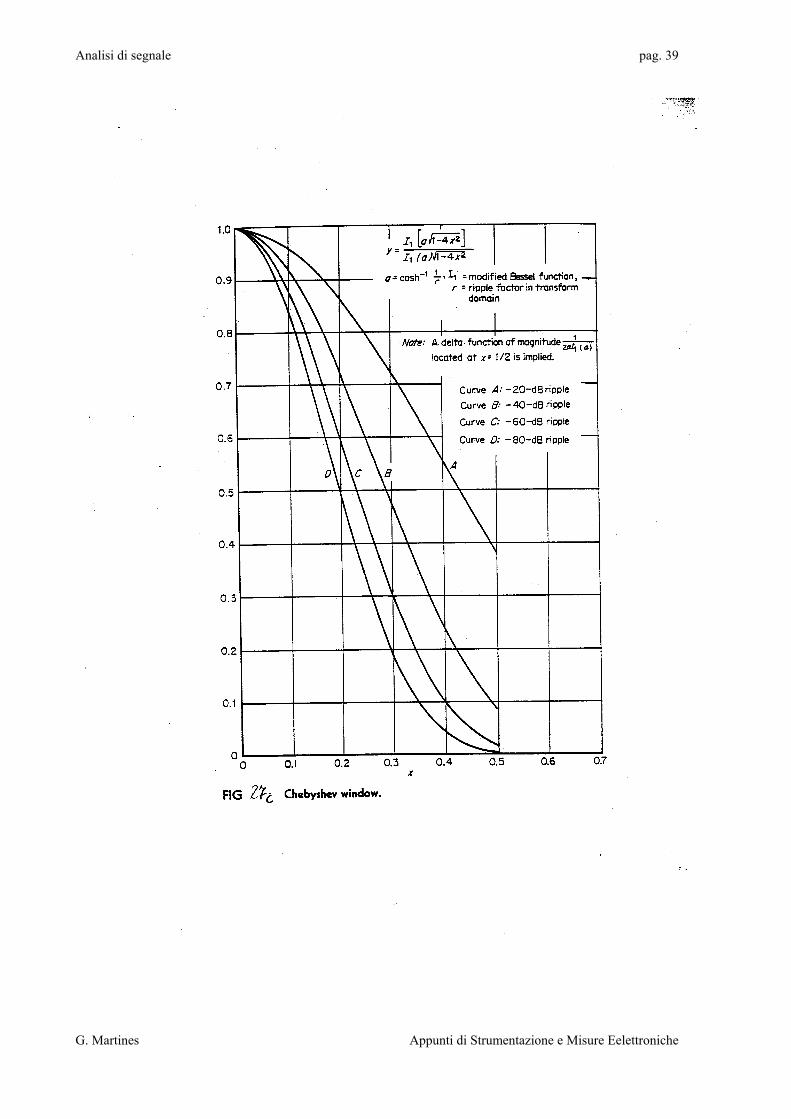
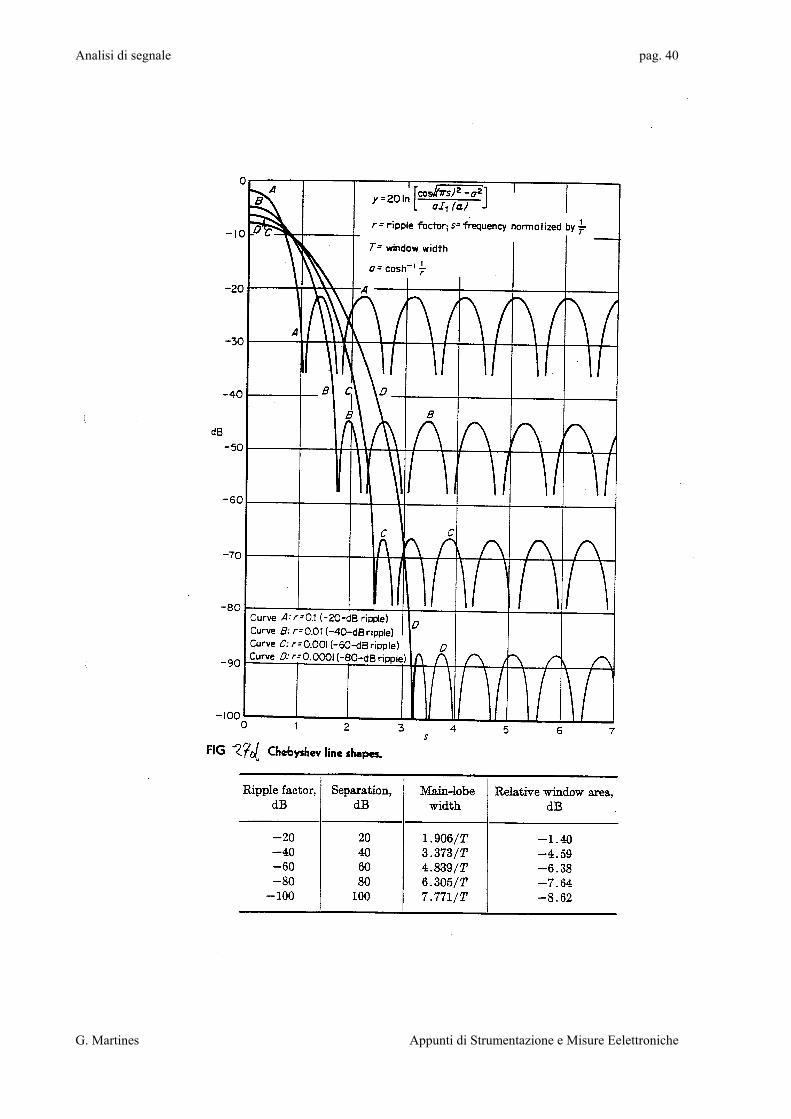
Un’altra finestra di troncamento spesso utilizzata è quella definita dalle ben note funzioni di Chebyshev. Il profilo nel dominio del tempo è mostrato in Fig. 27c, in funzione dell’ampiezza del ripple (10%, 1%, 0.1%, 0.01%) mentre i corrispondenti andamenti nel dominio della frequenza sono mostrati in Fig. 27d.
In Fig. 27e vengono paragonate le tutte le funzioni di troncamento cui si è fatto cenno sulla base della separazione ottenibile. Si noti che in generale ad una migliore separazione corrisponde una maggiore ampiezza del lobo principale e una maggiore riduzione dell’area della finestra con conseguente minore risoluzione e maggiore errore sulla ampiezza delle righe di spettro.
Parleremo dei criteri di scelta di queste funzioni a proposito dei Fourier Spectrum Analyzer.
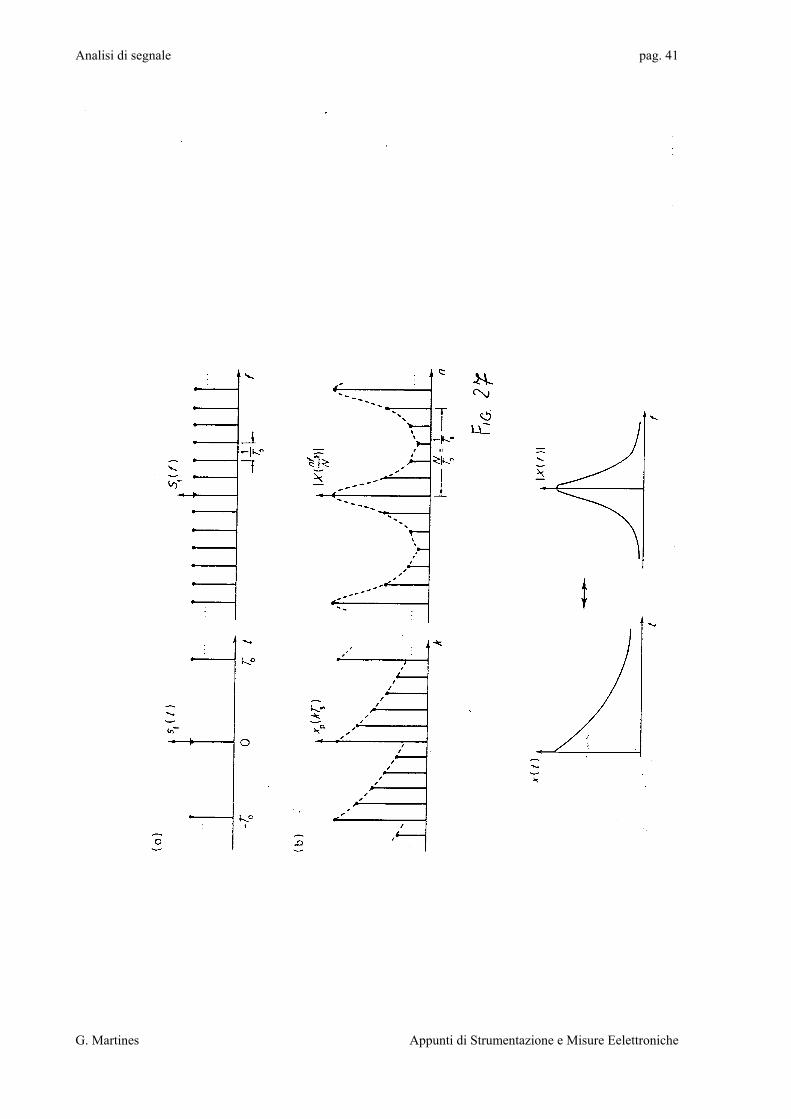
Campionamento nel dominio della frequenza È il processo necessario per passare dal dominio della frequenza a quello del tempo attraverso la FFT e consiste ancora nel rendere discreto lo spettro di un generico segnale, cioè nel passare dalla ( )X fN alla ( )X nF NS . Sulla base di quanto già detto a proposito del campionamento nel dominio del tempo, risulta evidente che per ottenere lo scopo è necessario fare il prodotto:
( ) ( ) ( )X nF N X f S fS N f=
dove ( )S ff è uno spettro costituito da linee di frequenza di ampiezza unitaria (o almeno costante) ed equispaziate, di
1/T0 nell’esempio di Fig. 27. L’equivalente di questa funzione nel dominio del tempo è mostrata nella stessa figura (un treno di impulsi di durata nulla [delta di Dirac] con frequenza di ripetizione T0) unitamente allo spettro prodotto dei due spettri ed alla relativa convoluzione nel dominio del tempo, nell’ipotesi che T0 >> TS .
In conclusione, per effetto della operazione di convoluzione, la FFT tratta il segnale nel dominio del tempo come un segnale discreto con periodo di ripetizione pari a T0 e quindi il segnale originale x(t) al di fuori dell’intervallo della finestra di troncamento, da 0 a NTS = T0 , risulta non specificato. Tuttavia la differenze fra questo segnale fittizio e quello reale costituisce l’errore che si è introdotto campionando lo spettro di frequenza del segnale reale.
Gli effetti della finestra di troncamento sui segnali periodici verrà discusso a proposito dei Fourier Spectrum Analyzer.
Analisi di segnale pag. 37
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 38
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 39
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 40
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 41
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 42
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Rumore e disturbi nelle misure Come è già certamente noto, i segnali elettrici vengono degradati, con riferimento al loro contenuto di informazione, dalla presenza del rumore. È quindi di fondamentale importanza nel dimensionamento di un sistema di acquisizione dati e, più in generale, di un sistema di misura tenere in conto la presenza del rumore sovrapposto al segnale utile sia sotto forma di disturbi a spettro di frequenza ben definito, sia sotto forma di rumore aleatorio e incorrelato.
Una prima conseguenza è che la scelta degli elementi di un sistema di misura deve essere coordinata in modo da ridurre a minimo gli effetti del rumore sulla affidabilità delle misure. In altre parole non ha senso scegliere strumentazione di classe tale da consentire prestazioni (precisione, risoluzione, banda passante, dinamica, etc.) superiori a quelle attendibili per la presenza del rumore sovrapposto al segnale da analizzare.
Una seconda conseguenza consiste nella necessità di operare in modo da ridurre la degradazione del segnale nel sistema di misura. Per ottenere questo risultato da un canto si può agire in modo da elevare il rapporto segnale/rumore proprio del sistema e dall’altro fare in modo di sfruttare al meglio la capacità di reiezione del rumore di cui il sistema è dotato.
Per un buon progetto del sistema di acquisizione dati, l’effetto del rumore dovrebbe essere contenuto al livello della cifra meno significativa che rappresenta numericamente la misura stessa.
Rumore di modo normale Si definisce rumore di modo normale il rumore che si presenta sovrapposto al segnale da analizzare all’ingresso di uno strumento. Un tale rumore è prodotto dalle cause più disparate:
◊ rumore generato all’interno della sorgente stessa del segnale utile,;
◊ disturbi di origine elettromagnetica che originano dalle linee di alimentazione o di trasmissione dell’energia, da dispositivi di telecomunicazioni a radiofrequenza o da apparecchiature a funzionamento impulsivo;
◊ interferenze che derivano da accoppiamento elettromagnetico con linee di segnale vicine.
Per ridurre gli effetti di questo tipo di rumore è buona norma:
⇒ curare che i collegamenti fra le apparecchiature e quelli di prelievo del segnale utile siano i più corti possibili e contemporaneamente non siano fisicamente vicini a possibili sorgenti di disturbi;
⇒ curare che i collegamenti siano realizzati con cavi coassiali o schermati (o almeno con conduttori intrecciati);
⇒ utilizzare tecniche di filtraggio che riducano la banda reale del sistema di misura a quella del segnale utile da analizzare o per lo meno siano in grado di sopprimere i disturbi a frequenze distinte da queste ultime;
NOTA: l’uso di un filtro comporta però una perdita di prestazioni del sistema in termini di velocità di acquisizione dei dati per effetto del tempo di risposta (o del ritardo) del filtro stesso. Tale tempo di risposta, come è noto, dipende dalla banda passante e dall’ordine del filtro e deve essere calcolato sulla base del tempo necessario perché la risposta al gradino approssimi il valore a regime entro un margine di errore pari alla risoluzione del sistema.
⇒ ridurre la sensibilità del sistema (la risoluzione) compatibilmente con le specifiche richieste in modo da aumentare la affidabilità della acquisizione;
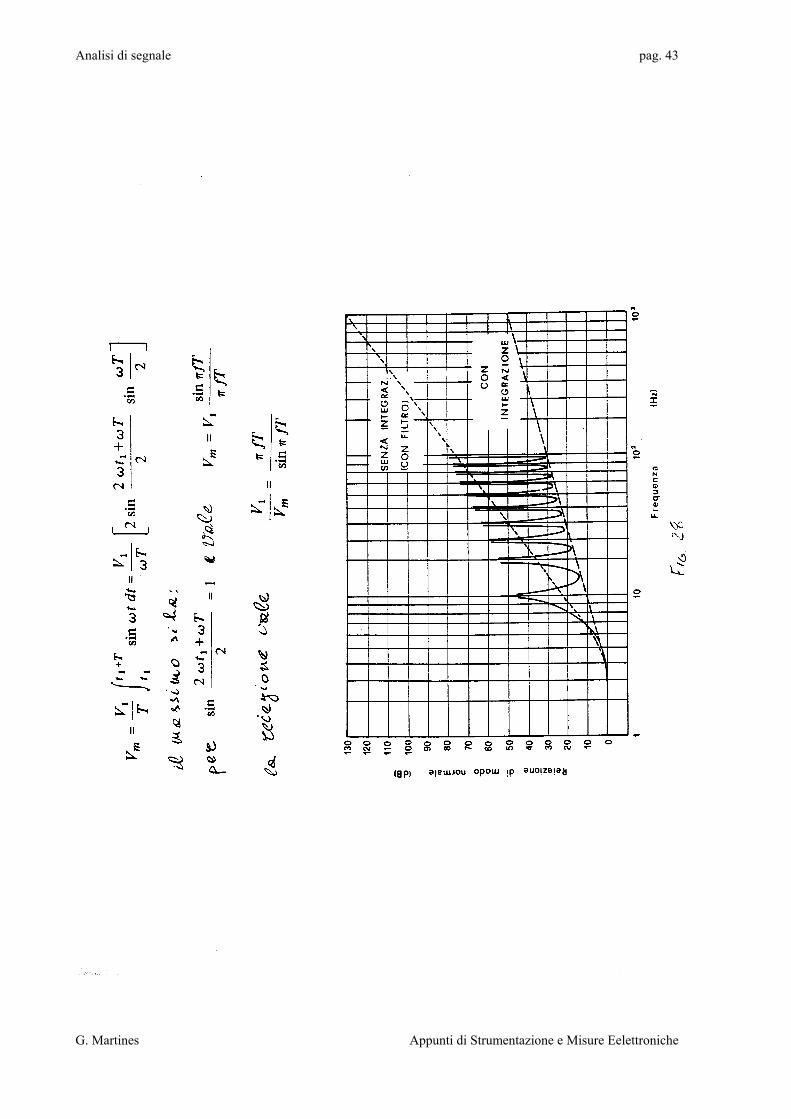
⇒ usare tecniche di integrazione, scegliendo il periodo di integrazione in modo da annullare l’effetto di tutti quei disturbi che, su tale intervallo di tempo, hanno valore medio nullo.
Per chiarire quest’ultimo caso si può fare riferimento all’esempio di Fig. 28 dove viene determinata l’espressione del valore medio Vm di una sinusoide V t1 sinω nel periodo di integrazione T che dimostra come il valore medio ha un massimo con un andamento di tipo (sin x)/x (quindi si annulla) e viene mostrato l’andamento della reiezione per un voltmetro ad integratore con T = 20 msec paragonato con quello ottenibile con un voltmetro ad approssimazioni successive con filtro passa basso in ingresso (soppressione dei disturbi legati alla frequenza di rete.
NOTA: anche l’uso delle tecniche di filtraggio comporta una perdita di prestazioni del sistema in termini di velocità di acquisizione per effetto del tempo di integrazione necessario prima di avere il dato valido. Le tecniche di integrazione si prestano bene ad essere implementate nei sistemi digitali (tecniche di averaging di più letture successive).
Analisi di segnale pag. 43
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 44
G. Martines Appunti di Strumentazione e Misure Eelettroniche
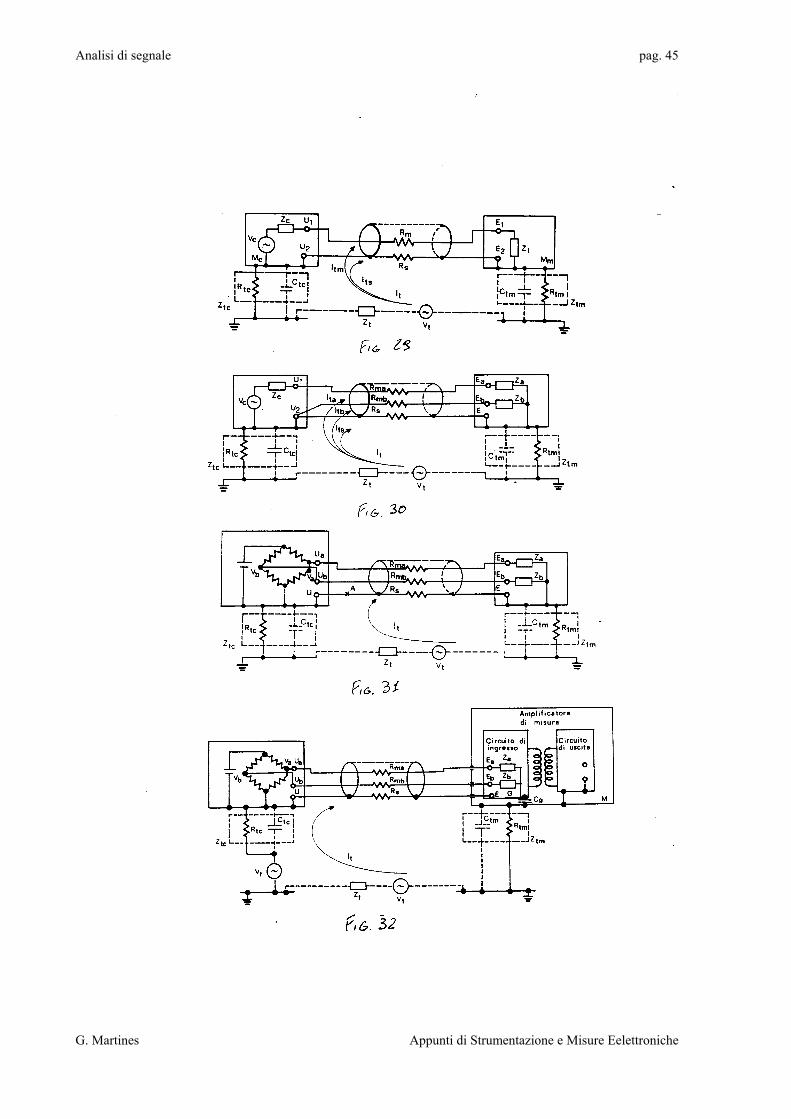
Rumore di modo comune Il rumore di modo comune è costituito da disturbi che si generano tra la messa a terra del generatore del segnale utile e la messa a terra del sistema di misura e quindi nascono dalla interconnessione dei due sistemi, ciascuno dei quali è dotato di una sua propria messa a terra per le norme sulla sicurezza elettrica.
In Fig. 29, viene preso in considerazione il caso più comune in cui entrambi i sistemi hanno un terminale a massa. Il generatore di tensione Vt che schematizza il disturbo, essendo Rs ≠ 0, fa circolare una corrente di terra It nella maglia di terra, che si ripartisce fra Rs ed Rm dando luogo a delle cadute di tensione che si sovrappongono al segnale VC. NOTA: se Zi è molto elevata Itm tende a zero ed il disturbo è pari a Its Rs . Per ridurre l’effetto si può solo aumentare l’impedenza complessiva della maglia di terra, ad esempio eliminando Rtc se Ctc < Ctm (o Rtm nel caso opposto) se le norme di sicurezza lo permettono (doppio isolamento).
In Fig. 30, viene rappresentato lo stesso caso solo che il sistema di misura ha un ingresso differenziale. Il vantaggio è dato solo dalla reiezione del segnale di modo comune dell’amplificatore differenziale all’ingresso del sistema di misura
In Fig. 31, il generatore ha l’uscita appesa (bilanciata) e quindi il sistema di misura ha necessariamente l’ingresso differenziale. In questo caso, per aumentare la impedenza della maglia di terra (e quindi diminuire la corrente di terra) si può interrompere la continuità elettrica dello schermo del collegamento (che in queste condizioni protegge il circuito solo da disturbi di tipo elettrostatico).
In Fig. 32, infine, si ha il caso di massima protezione con il sistema di misura dotato di ingresso differenziale con schermo di guardia (la qualcosa garantisce un collegamento verso massa puramente capacitivo con capacità Cg la più piccola possibile). Si noti che la maglia di terra ha una impedenza molto elevata il che porta a dire che il terminale di terra U del generatore può trovarsi alla tensione Vt del disturbo.
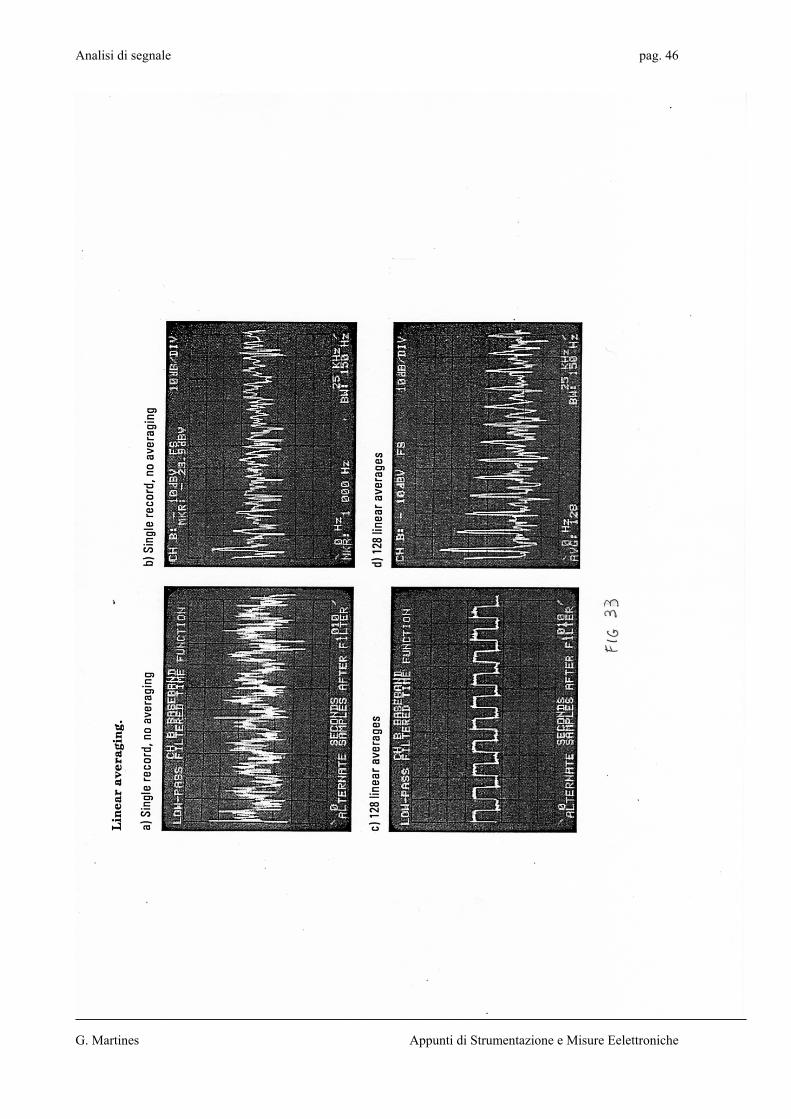
Procedure statistiche per ridurre gli errori Si usano per limitare l’effetto del rumore, in senso lato (rumore e disturbi), presente nella banda del segnale che si vuole analizzare e che quindi non può essere ridotto con tecniche di filtraggio. Le tecniche statistiche consistono semplicemente in operazioni numeriche sul segnale digitale. La tecnica più comune che si usa in statistica per migliorare la stima del valore di una grandezza affetta da variazioni casuali è quella della media. Le principali medie che si adottano sono il valore medio ed il valore quadratico medio (RMS).
Linear averaging Il valore medio si ottiene, come è noto, semplicemente sommando N valori della grandezza (supposta stazionaria) e dividendo per il numero N dei campioni (in senso statistico) considerati.
La caratteristica principale dell’operatore media lineare consiste nella capacità di evidenziare il valore centrale (baricentro) delle variazioni istantanee della grandezza, cioè la sua componente costante nel periodo di osservazione. In altri termini, sul valore medio non hanno effetto tutte le componenti della variazione della grandezza che hanno valore medio nullo nel periodo di osservazione.
Nell’analisi di segnale, questa tecnica viene utilizzata per migliorare il rapporto segnale/disturbo del sistema, in quanto nell’ipotesi di segnale stazionario, permette di ridurre sia il rumore di tipo aleatorio e incorrelato (che è caratterizzato dall’avere un valore medio che tende a zero al crescere del periodo di osservazione) sia quello con spettro definito di tipo periodico e valore medio nullo (molti tipi di disturbi).
Ovviamente questo effetto sarà tanto maggiore quanto più è elevato il numero dei campioni ed il periodo di osservazione. Si tenga presente però che la durata del periodo di osservazione risulta vincolata dall’ipotesi di segnale stazionario e il numero dei campioni dalla velocità di acquisizione del valore istantaneo.
È ovvio inoltre che questa tecnica può essere sempre usata nella acquisizione di grandezze costanti mentre nel caso di un segnale periodico stazionario sarà necessario disporre di un segnale di sincronizzazione che permetta di associare il valore istantaneo misurato ad una precisa posizione nel periodo.
La media lineare può quindi essere facilmente utilizzata nel dominio del tempo, dove il segnale di trigger ha proprio la funzione di sincronizzare la funzione campionatrice con il periodo del segnale. A titolo di esempio, in Fig. 33 viene mostrato l’effetto della media lineare, sia nel dominio del tempo che della frequenza, nella analisi di un’onda quadra con una forte componente di rumore incorrelato sovrapposto. (Notare come, per effetto del miglioramento del rapporto segnale/rumore, diventino facilmente riconoscibili sia la forma d’onda che lo spettro dell’onda quadra)
Analisi di segnale pag. 45
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 46
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 47
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Analisi di segnale pag. 48
G. Martines Appunti di Strumentazione e Misure Eelettroniche
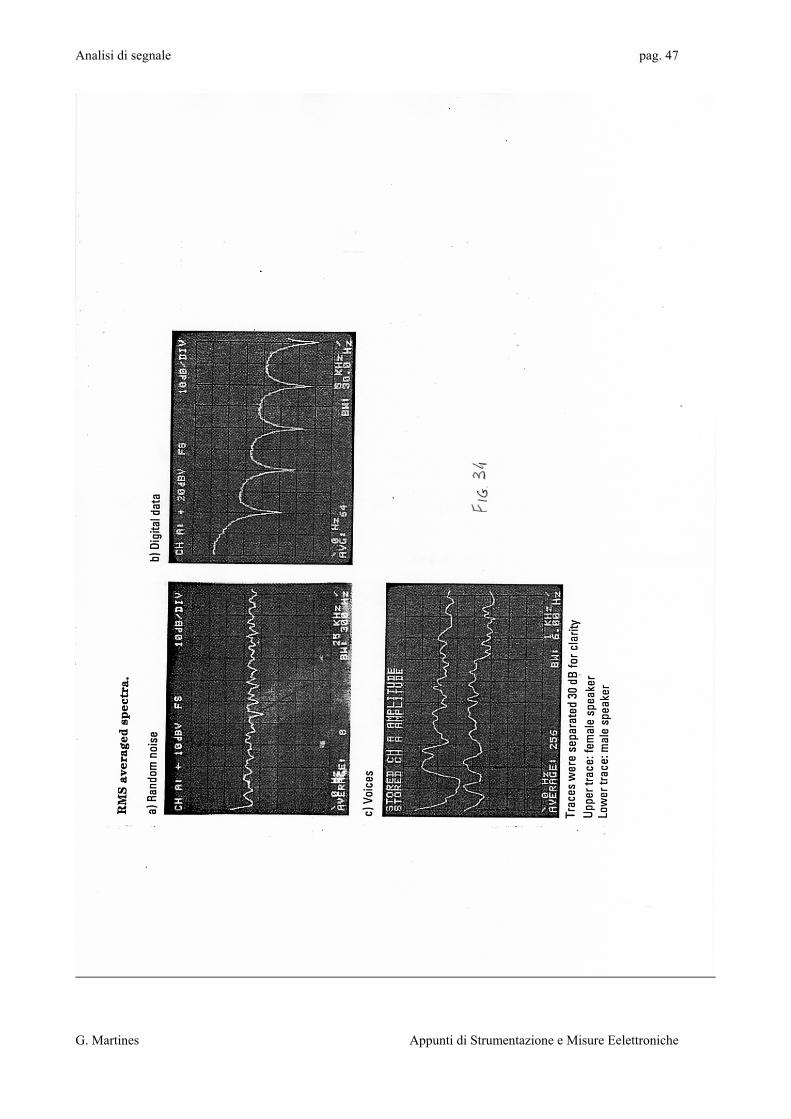
RMS averaging Il valore quadratico medio si ottiene, come è noto, semplicemente elevando al quadrato e quindi sommando gli N valori della grandezza (supposta stazionaria) ed estraendo la radice quadrata di questa somma divisa per il numero N dei campioni (in senso statistico) considerati.
L’operatore media quadratica differisce dalla media lineare solo per il fatto che si opera sul quadrato della grandezza e quindi è una media di potenze che esalta il contributo dei valori più elevati mentre riduce quello dei valori più piccoli della serie e contemporaneamente sopprime l’informazione legata al segno. In altri termini, sul valore quadratico medio hanno effetto tutte le componenti della variazione della grandezza ma le componenti di ampiezza maggiore vengono esaltate rispetto a quelle di ampiezza minore.
Nell’analisi di segnale, il valore quadratico medio (di una tensione o di una corrente) risulta espressione della potenza associata al segnale e, per l’effetto di espansione della scala verso i valori elevati, può essere utilizzato per meglio stimare il valore del segnale. Si noti che questa tecnica applicata, ad esempio, al caso di un segnale con una forte componente di rumore sovrapposto non migliora il rapporto segnale/disturbo (il rumore aleatorio ha un valore quadratico medio non nullo) ma permette di valutare meglio l’insieme segnale+rumore.
In Fig. 34 vengono mostrati alcuni spettri di segnali aleatori (rumore, digitale e parlato di uomo e donna) in cui si é fatto uso della media quadratica per evidenziare le caratteristiche del segnale in termini di distribuzione dell’energia nel dominio della frequenza.
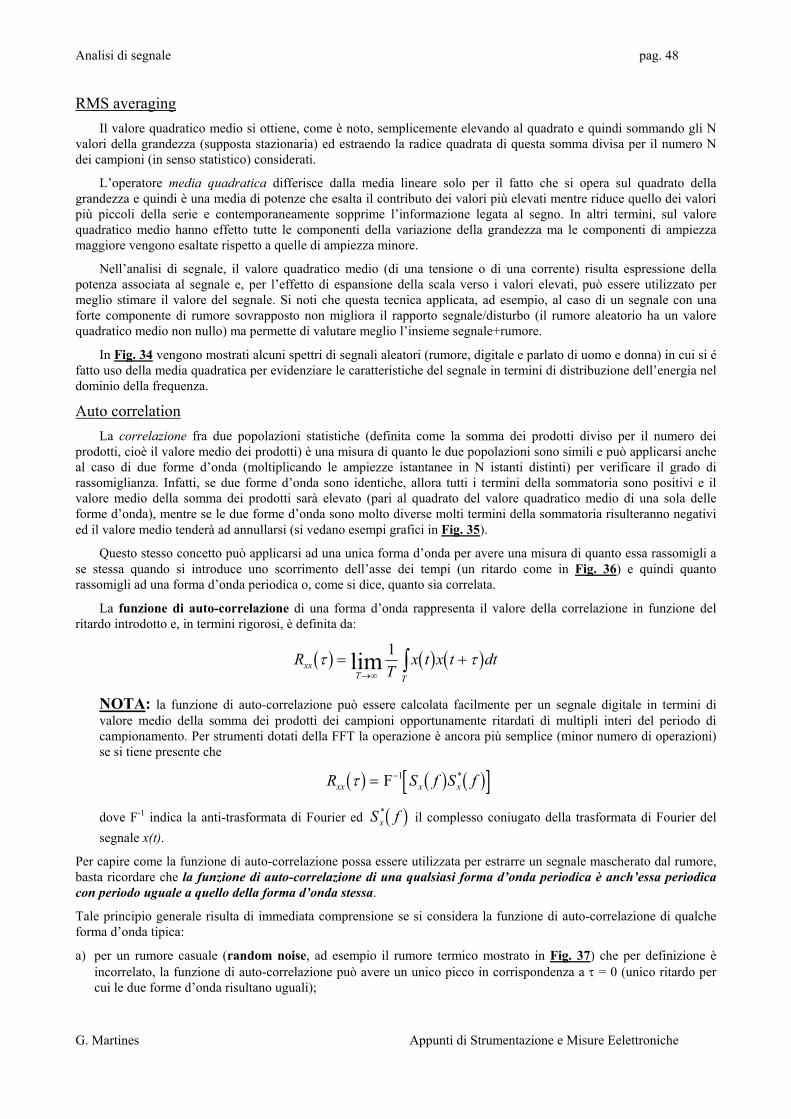
Auto correlation La correlazione fra due popolazioni statistiche (definita come la somma dei prodotti diviso per il numero dei prodotti, cioè il valore medio dei prodotti) è una misura di quanto le due popolazioni sono simili e può applicarsi anche al caso di due forme d’onda (moltiplicando le ampiezze istantanee in N istanti distinti) per verificare il grado di rassomiglianza. Infatti, se due forme d’onda sono identiche, allora tutti i termini della sommatoria sono positivi e il valore medio della somma dei prodotti sarà elevato (pari al quadrato del valore quadratico medio di una sola delle forme d’onda), mentre se le due forme d’onda sono molto diverse molti termini della sommatoria risulteranno negativi ed il valore medio tenderà ad annullarsi (si vedano esempi grafici in Fig. 35).
Questo stesso concetto può applicarsi ad una unica forma d’onda per avere una misura di quanto essa rassomigli a se stessa quando si introduce uno scorrimento dell’asse dei tempi (un ritardo come in Fig. 36) e quindi quanto rassomigli ad una forma d’onda periodica o, come si dice, quanto sia correlata.
La funzione di auto-correlazione di una forma d’onda rappresenta il valore della correlazione in funzione del ritardo introdotto e, in termini rigorosi, è definita da:
( ) ( ) ( )RT
x t x t dtxxT T
τ τ= +→∞
∫lim 1
NOTA: la funzione di auto-correlazione può essere calcolata facilmente per un segnale digitale in termini di valore medio della somma dei prodotti dei campioni opportunamente ritardati di multipli interi del periodo di campionamento. Per strumenti dotati della FFT la operazione è ancora più semplice (minor numero di operazioni) se si tiene presente che
( ) ( ) ( )[ ]R S f S fxx x xτ = −F *1
dove F-1 indica la anti-trasformata di Fourier ed ( )S fx* il complesso coniugato della trasformata di Fourier del
segnale x(t).
Per capire come la funzione di auto-correlazione possa essere utilizzata per estrarre un segnale mascherato dal rumore, basta ricordare che la funzione di auto-correlazione di una qualsiasi forma d’onda periodica è anch’essa periodica con periodo uguale a quello della forma d’onda stessa.
Tale principio generale risulta di immediata comprensione se si considera la funzione di auto-correlazione di qualche forma d’onda tipica:
a) per un rumore casuale (random noise, ad esempio il rumore termico mostrato in Fig. 37) che per definizione è incorrelato, la funzione di auto-correlazione può avere un unico picco in corrispondenza a τ = 0 (unico ritardo per cui le due forme d’onda risultano uguali);
Analisi di segnale pag. 49
G. Martines Appunti di Strumentazione e Misure Eelettroniche
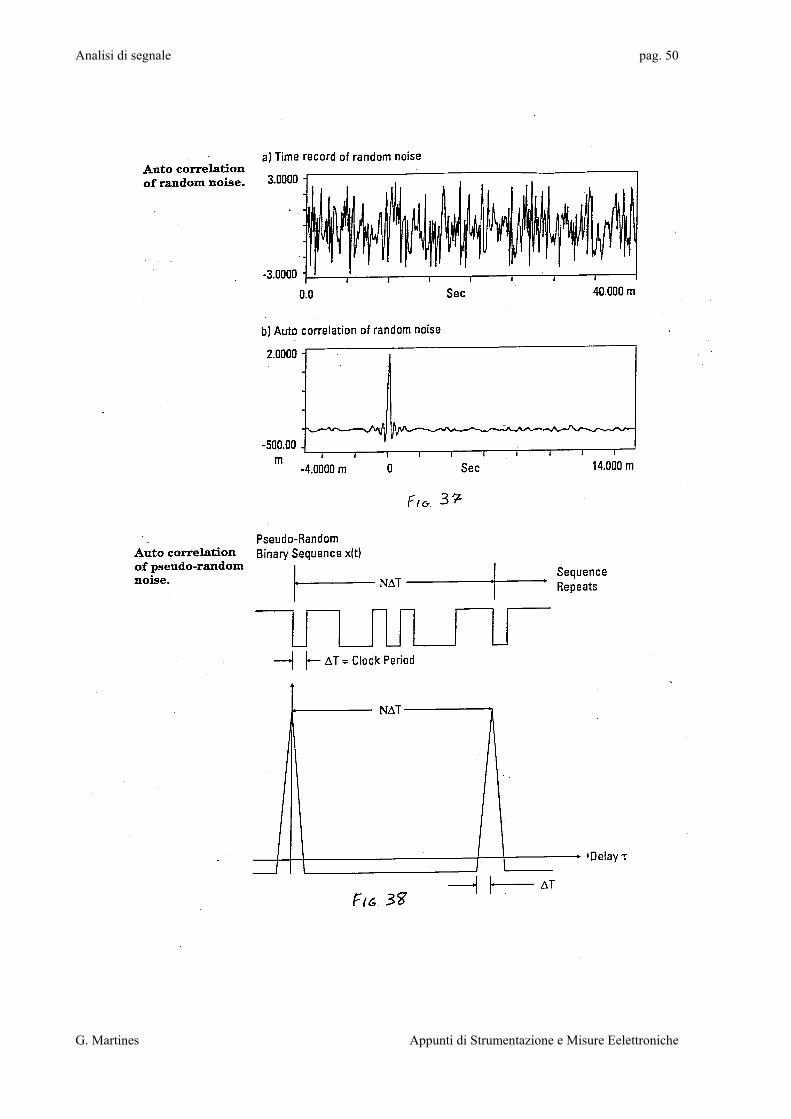
Analisi di segnale pag. 50
G. Martines Appunti di Strumentazione e Misure Eelettroniche
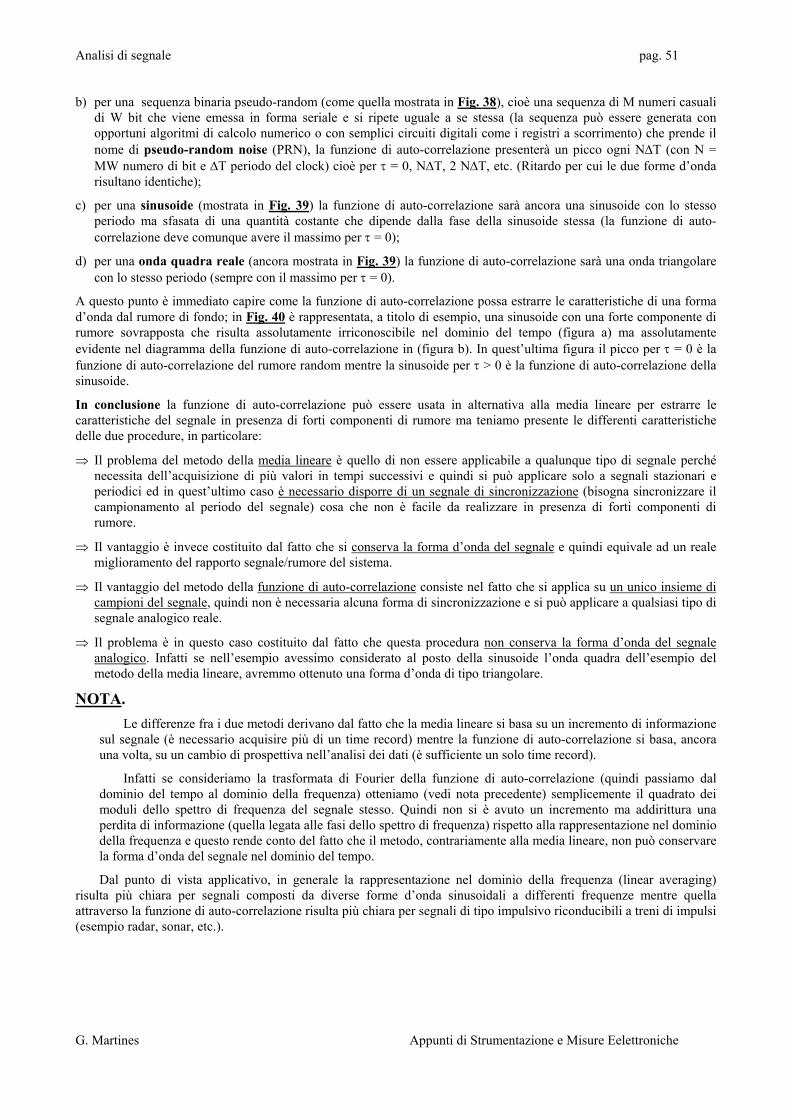
Analisi di segnale pag. 51
G. Martines Appunti di Strumentazione e Misure Eelettroniche
b) per una sequenza binaria pseudo-random (come quella mostrata in Fig. 38), cioè una sequenza di M numeri casuali di W bit che viene emessa in forma seriale e si ripete uguale a se stessa (la sequenza può essere generata con opportuni algoritmi di calcolo numerico o con semplici circuiti digitali come i registri a scorrimento) che prende il nome di pseudo-random noise (PRN), la funzione di auto-correlazione presenterà un picco ogni N∆T (con N = MW numero di bit e ∆T periodo del clock) cioè per τ = 0, N∆T, 2 N∆T, etc. (Ritardo per cui le due forme d’onda risultano identiche);
c) per una sinusoide (mostrata in Fig. 39) la funzione di auto-correlazione sarà ancora una sinusoide con lo stesso periodo ma sfasata di una quantità costante che dipende dalla fase della sinusoide stessa (la funzione di auto-correlazione deve comunque avere il massimo per τ = 0);
d) per una onda quadra reale (ancora mostrata in Fig. 39) la funzione di auto-correlazione sarà una onda triangolare con lo stesso periodo (sempre con il massimo per τ = 0).
A questo punto è immediato capire come la funzione di auto-correlazione possa estrarre le caratteristiche di una forma d’onda dal rumore di fondo; in Fig. 40 è rappresentata, a titolo di esempio, una sinusoide con una forte componente di rumore sovrapposta che risulta assolutamente irriconoscibile nel dominio del tempo (figura a) ma assolutamente evidente nel diagramma della funzione di auto-correlazione in (figura b). In quest’ultima figura il picco per τ = 0 è la funzione di auto-correlazione del rumore random mentre la sinusoide per τ > 0 è la funzione di auto-correlazione della sinusoide.
In conclusione la funzione di auto-correlazione può essere usata in alternativa alla media lineare per estrarre le caratteristiche del segnale in presenza di forti componenti di rumore ma teniamo presente le differenti caratteristiche delle due procedure, in particolare:
⇒ Il problema del metodo della media lineare è quello di non essere applicabile a qualunque tipo di segnale perché necessita dell’acquisizione di più valori in tempi successivi e quindi si può applicare solo a segnali stazionari e periodici ed in quest’ultimo caso è necessario disporre di un segnale di sincronizzazione (bisogna sincronizzare il campionamento al periodo del segnale) cosa che non è facile da realizzare in presenza di forti componenti di rumore.
⇒ Il vantaggio è invece costituito dal fatto che si conserva la forma d’onda del segnale e quindi equivale ad un reale miglioramento del rapporto segnale/rumore del sistema.
⇒ Il vantaggio del metodo della funzione di auto-correlazione consiste nel fatto che si applica su un unico insieme di campioni del segnale, quindi non è necessaria alcuna forma di sincronizzazione e si può applicare a qualsiasi tipo di segnale analogico reale.
⇒ Il problema è in questo caso costituito dal fatto che questa procedura non conserva la forma d’onda del segnale analogico. Infatti se nell’esempio avessimo considerato al posto della sinusoide l’onda quadra dell’esempio del metodo della media lineare, avremmo ottenuto una forma d’onda di tipo triangolare.
NOTA. Le differenze fra i due metodi derivano dal fatto che la media lineare si basa su un incremento di informazione sul segnale (è necessario acquisire più di un time record) mentre la funzione di auto-correlazione si basa, ancora una volta, su un cambio di prospettiva nell’analisi dei dati (è sufficiente un solo time record).
Infatti se consideriamo la trasformata di Fourier della funzione di auto-correlazione (quindi passiamo dal dominio del tempo al dominio della frequenza) otteniamo (vedi nota precedente) semplicemente il quadrato dei moduli dello spettro di frequenza del segnale stesso. Quindi non si è avuto un incremento ma addirittura una perdita di informazione (quella legata alle fasi dello spettro di frequenza) rispetto alla rappresentazione nel dominio della frequenza e questo rende conto del fatto che il metodo, contrariamente alla media lineare, non può conservare la forma d’onda del segnale nel dominio del tempo.
Dal punto di vista applicativo, in generale la rappresentazione nel dominio della frequenza (linear averaging) risulta più chiara per segnali composti da diverse forme d’onda sinusoidali a differenti frequenze mentre quella attraverso la funzione di auto-correlazione risulta più chiara per segnali di tipo impulsivo riconducibili a treni di impulsi (esempio radar, sonar, etc.).
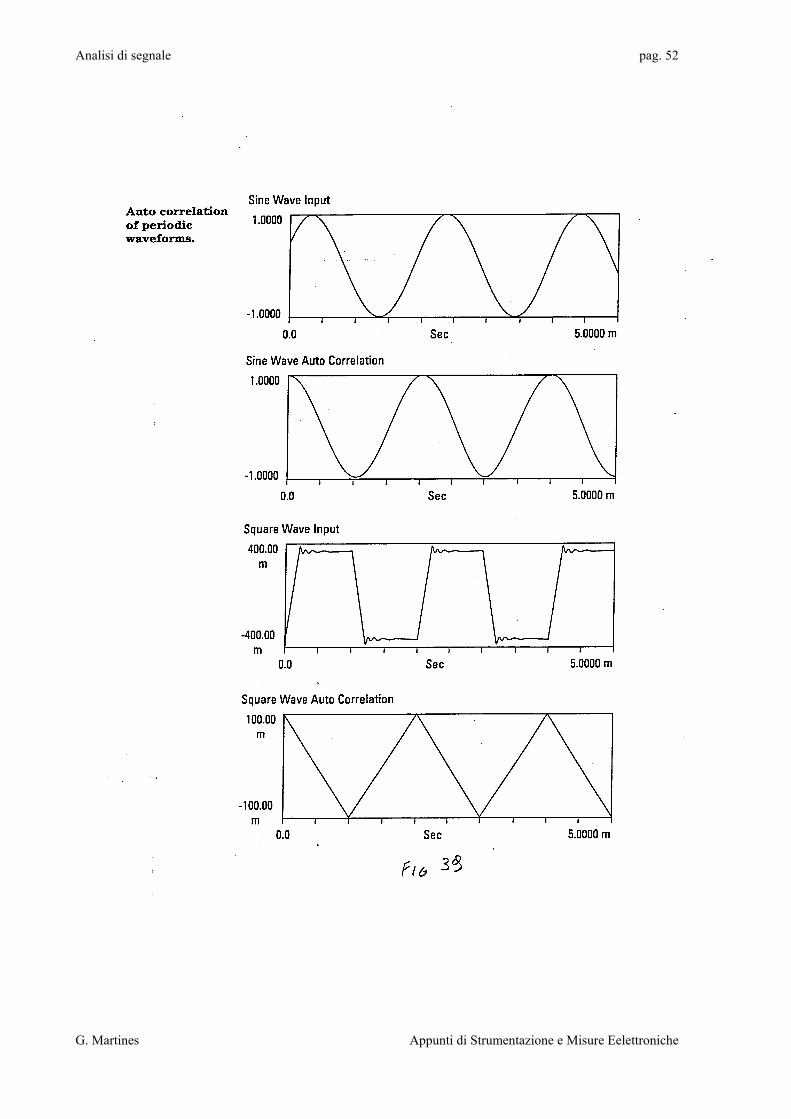
Analisi di segnale pag. 52
G. Martines Appunti di Strumentazione e Misure Eelettroniche
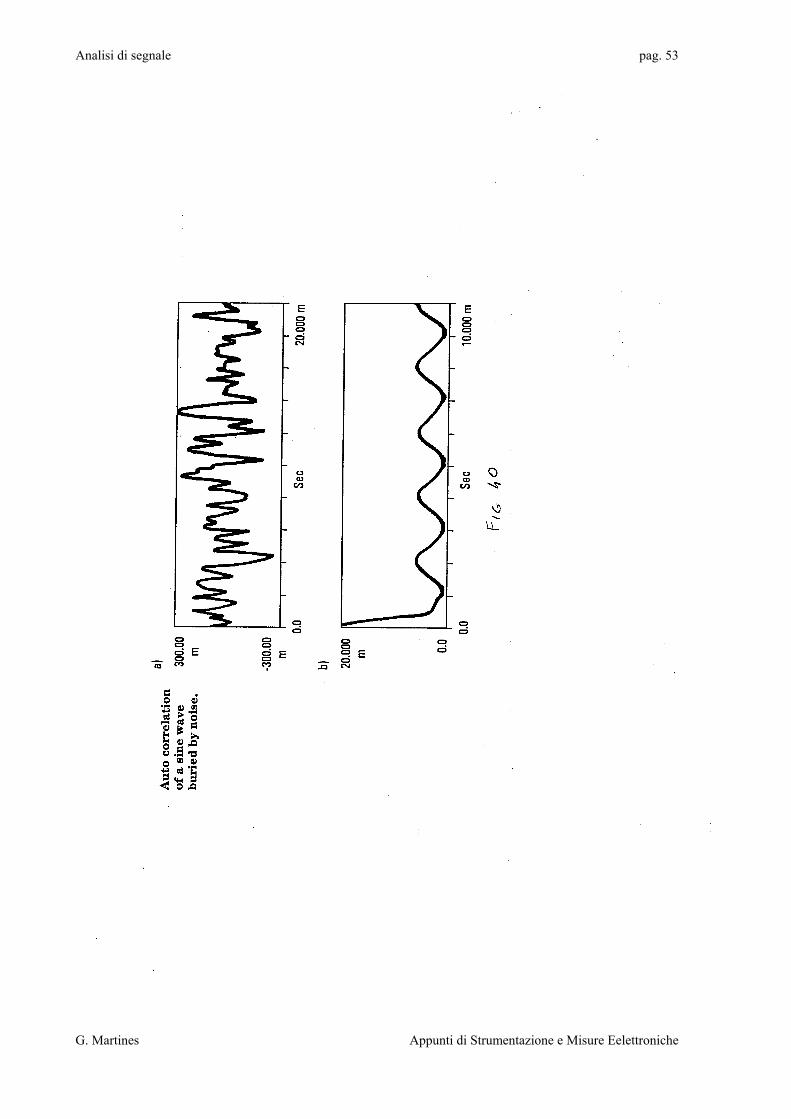
Analisi di segnale pag. 53
G. Martines Appunti di Strumentazione e Misure Eelettroniche
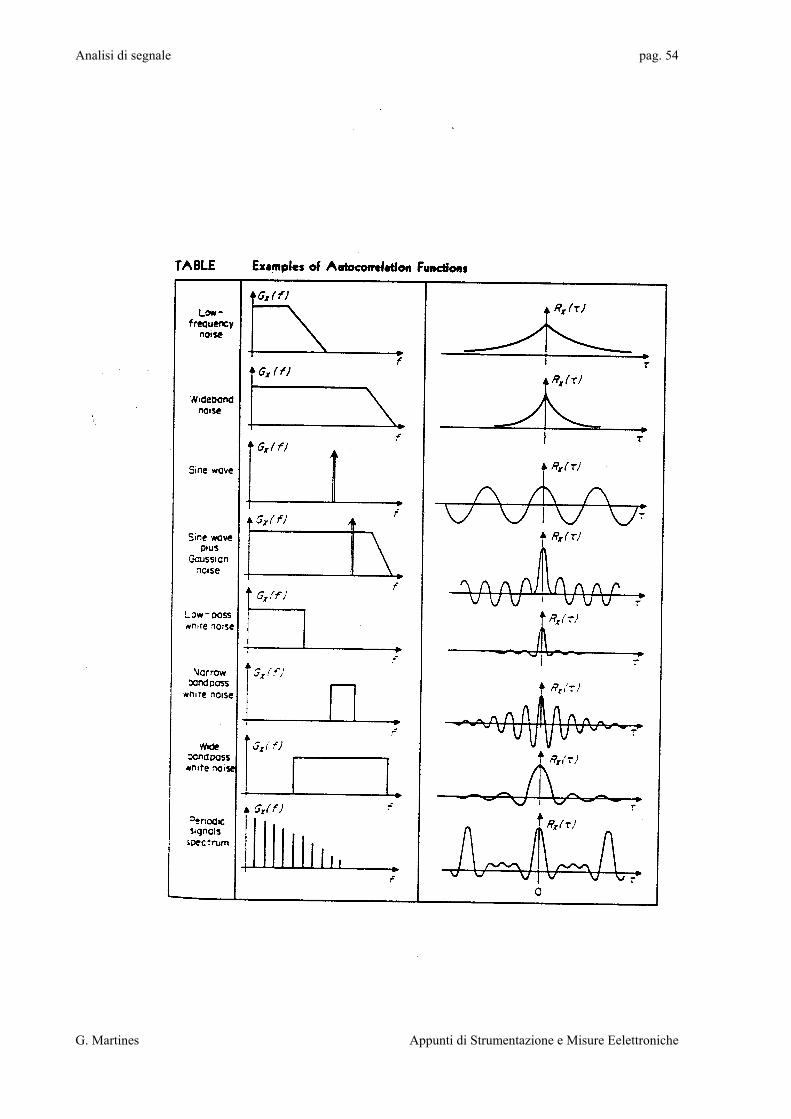
Analisi di segnale pag. 54
G. Martines Appunti di Strumentazione e Misure Eelettroniche
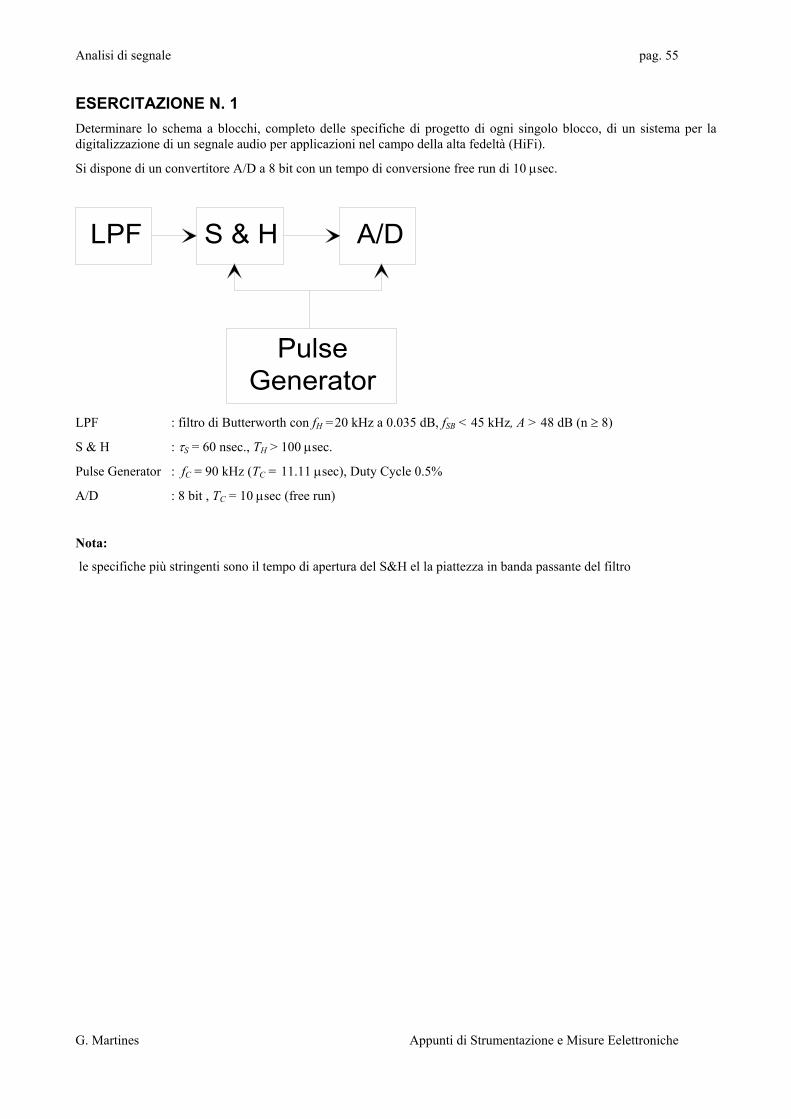
Analisi di segnale pag. 55
G. Martines Appunti di Strumentazione e Misure Eelettroniche
ESERCITAZIONE N. 1 Determinare lo schema a blocchi, completo delle specifiche di progetto di ogni singolo blocco, di un sistema per la digitalizzazione di un segnale audio per applicazioni nel campo della alta fedeltà (HiFi).
Si dispone di un convertitore A/D a 8 bit con un tempo di conversione free run di 10 µsec.
LPF S & H A/D
PulseGenerator
LPF : filtro di Butterworth con fH =20 kHz a 0.035 dB, fSB < 45 kHz, A > 48 dB (n ≥ 8)
S & H : τS = 60 nsec., TH > 100 µsec.
Pulse Generator : fC = 90 kHz (TC = 11.11 µsec), Duty Cycle 0.5%
A/D : 8 bit , TC = 10 µsec (free run)
Nota:
le specifiche più stringenti sono il tempo di apertura del S&H el la piattezza in banda passante del filtro

Analisi di segnale pag. 56
G. Martines Appunti di Strumentazione e Misure Eelettroniche
ANALISI DI RETE
Sollecitazione e risposta di un bi-porta L’analisi di rete (o stimulus/response testing) è il più classico dei problemi della ingegneria e consiste nel determinare come un sistema risponde ad una sollecitazione. Per l’ingegnere elettronico il problema si riduce a determinare come una rete risponderà ad un ingresso e quindi è basata sull’analisi di segnale che serve sia a conoscere le caratteristiche della sollecitazione che quelle della risposta per poterle poi correlare e paragonare. Il problema risulta allo stesso tempo più semplice e più complesso della normale analisi di segnale, per diversi motivi:
• nell’analisi di rete si è in generale interessati alle caratteristiche di trasmissione e reiezione del segnale e alla misura della integrità del segnale stesso e quindi al paragone di due segnali (la eccitazione e la risposta);
• la sollecitazione può e deve essere scelta con caratteristiche tali da garantire le migliori condizioni non solo dal punto di vista dell’analisi delle caratteristiche del sistema in prova ma anche da quello dell’analisi dei segnali e della generazione della sollecitazione;
• nella analisi della risposta si è in generale interessati solo alle caratteristiche che sono strettamente correlate alla eccitazione e quindi è necessario isolare, con adeguati metodi e procedure di test, tutte le componenti che non dipendono dalla sollecitazione. Perché questo risulti possibile è spesso necessario paragonare i due o più (nel caso di reti multi-porta) segnali o almeno alcune delle loro caratteristiche significative nella determinazione delle prestazioni del sistema in prova e quindi servono strumenti con due o più canali di misura le cui caratteristiche devono essere le più simili possibili;
il problema riduce la sua complessità nel caso che la rete in prova possa considerarsi lineare, perché in tal caso vale il principio di sovrapposizione degli effetti. Purtroppo nessuno sistema reale è completamente lineare perché la risposta del sistema deve risultare limitata e quindi bisogna operare in modo che il sistema reale possa essere approssimato con un sistema lineare anche per ridurre il problema della instabilità da non linearità nella risposta (legata a fenomeni di isteresi nel comportamento del sistema).
Analisi di reti lineari Poiché vale il principio di sovrapposizione degli effetti, la risposta di un tale sistema è data dalla somma delle risposte alle singole componenti della sollecitazione e quindi si può predire la risposta ad una qualunque sollecitazione se si conosce la risposta del sistema a ciascuna delle onde sinusoidali in cui si può scomporre il segnale in ingresso. Questo è il concetto di risposta in frequenza che è una proprietà dei sistemi lineari. Questa proprietà permette di analizzare il comportamento del sistema sulla base di sollecitazioni puramente sinusoidali di frequenza variabile.
Si ricordi che la risposta in frequenza di un sistema lineare è caratterizzata dal fatto che l’ampiezza della risposta è proporzionale alla ampiezza della sollecitazione mentre la variazione di fase, introdotta dal sistema, dipende solo dalla frequenza.
La risposta a regime di un sistema lineare può essere facilmente ottenuta nel dominio della frequenza perché è semplicemente il prodotto dello spettro della sollecitazione per la risposta in frequenza del sistema (la funzione di trasferimento); nel dominio del tempo l’operazione è molto più complessa perché è la convoluzione della forma d’onda della sollecitazione con la risposta all’impulso della rete. Quindi, per la risposta a regime, conviene operare nel dominio della frequenza e quindi passare il risultato nel dominio del tempo attraverso la anti-trasformata di Fourier.
Lo strumento principale per questo tipo di misura è l’analizzatore di reti vettoriale che opera nel dominio della frequenza.
ResponseAnalyzer
NetworkUnder Test
StimulusSource
Schema a blocchi di un sistema per l’analisi di rete
Fig. 41
Analisi di segnale pag. 57
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Come è noto, la risposta in frequenza non ha validità solo per la risposta a regime in quanto contiene tutte le informazioni necessarie anche per determinare il transitorio di risposta del sistema ad una qualsiasi sollecitazione. A tal proposito si ricordi che per le caratteristiche della trasformazione di Fourier, un segnale che risulta largo in un dominio risulta stretto nell’altro. Ad esempio se si considera un filtro passa banda, se il Q è elevato la banda risulta stretta ma il transitorio (risposta all’impulso nel dominio del tempo equivalente alla funzione di trasferimento nel dominio della frequenza) è lungo; viceversa se il Q è basso la banda è larga ma il transitorio è breve.
Dal punto di vista della strumentazione questo significa che strumenti selettivi in frequenza hanno un tempo di risposta lungo.
Queste considerazioni sono importanti nella esecuzione delle misure e soprattutto nel progetto di sistemi automatici di misura, perché per acquisire un dato valido è necessario attendere che sia il sistema in prova che quello di misura abbiano raggiunto il valore a regime. Nel caso in cui questo comportasse tempi di acquisizione inaccettabilmente lunghi (sistemi a Q elevato), bisognerebbe essere in grado di valutare, e possibilmente limitare, l’errore che si commette nel considerare il dato acquisito durante il transitorio come valido.
Analisi di reti non lineari Per un sistema non lineare la risposta in frequenza non è più una proprietà del sistema perché dipende anche dalle caratteristiche della sollecitazione.
In termini di guadagno ad una data frequenza ed in presenza di una eccitazione puramente sinusoidale il concetto risulta evidente: il guadagno in generale dipende dall’ampiezza della sinusoide applicata.
Meno evidente è il fatto che il guadagno ad una data frequenza dipende dallo spettro di frequenza della sollecitazione. Per rendersene conto basta pensare al caso di una sollecitazione costituita da due segnali puramente sinusoidali a frequenza diverse: per effetto della non linearità del sistema, nella risposta saranno presenti non solo le due frequenze presenti nella sollecitazione ma anche tutti i prodotti di intermodulazione. A questo punto è evidente che, in presenza di una sollecitazione con uno spettro di frequenza a più linee, una linea dello spettro di frequenza della risposta avrà una ampiezza che dipende sia dalla ampiezza della linea corrispondente nello spettro della sollecitazione ma anche da quelle dei prodotti di intermodulazione con quella stessa frequenza.
A questo punto ci si dovrebbe chiedere che senso ha considerare la risposta in frequenza nel caso di sistemi non lineari. Dal punto di vista matematico, infatti, non ha senso perché non è una proprietà del sistema (come nel caso dei sistemi lineari) ma dal punto di vista pratico, tenuto conto delle enormi difficoltà dell’analisi non lineare in termini matematici, ha senso se la sollecitazione ha uno spettro molto simile al tipo di segnale che normalmente il sistema in prova è chiamato ad elaborare.
In base a queste considerazioni, tenendo conto che buona parte dei segnali ricchi di informazione ha uno spettro simile a quello del rumore in una banda limitata, una sollecitazione adeguata per il test dei sistemi non lineari è proprio il rumore.
Un’ultima considerazione è necessaria sulla sollecitazione nella analisi di rete; poiché normalmente si è interessati alla risposta del sistema in una banda limitata, allora è bene che anche la sollecitazione abbia uno spettro limitato alla banda di interesse. Infatti l’energia associata a frequenze esterne a questa banda non dà nessun contributo alla misura stessa mentre potrebbe eccitare le non linearità alterando la misura (ancora a causa dei prodotti di intermodulazione).
Tecniche statistiche per l’analisi di rete Si usano quando non è possibile isolare la sollecitazione nella risposta del sistema per effetto di un basso rapporto segnale/rumore o della presenza di disturbi. Casi classici sono ad esempio le misure su sistemi comprendenti un canale di trasmissione in spazio libero (tipicamente un ponte radio, un sistema radar o sonar, etc.).
Cross correlation La tecnica è ancora quella della correlazione statistica che questa volta viene applicata calcolando la funzione di correlazione incrociata (cross correlation function) procedendo in modo analogo a quanto visto per la funzione di auto-correlazione. In pratica si calcola la correlazione di due forme d’onda distinte in funzione del ritardo τ che viene introdotto su una sola di esse secondo le definizioni:
( ) ( ) ( )RT
x t y t dtxyT T
τ τ= +→∞
∫lim 1 ovvero ( ) ( ) ( )[ ]fSfSR yxxy
*1F−=τ
L’effetto è quello di evidenziare le componenti presenti in entrambe le forme d’onda e di attenuare quelle presenti in una soltanto di esse. Dal punto di vista dei calcoli su un segnale digitale si hanno le stesse condizioni che per la
Analisi di segnale pag. 58
G. Martines Appunti di Strumentazione e Misure Eelettroniche
funzione di auto-correlazione solo che questa volta sono necessari due time records (uno per ciascuna delle forme d’onda) e nel dominio della frequenza semplicemente rappresenta il modulo quadro del prodotto degli spettri di frequenza dei due segnali (cross power spectrum o spettro della potenza incrociata) e quindi anche in questo caso è conveniente calcolare la funzione attraverso la FFT (minor numero di operazioni) quando è disponibile.
In Fig. 42 è riportata fig. c), a titolo di esempio, la funzione di correlazione incrociata fra il segnale radar emesso (un impulso di una sinusoide modulata in frequenza da una rampa che viene detto “chirp” mostrato in fig. a) e quello ricevuto (simulato dallo stesso segnale di ampiezza ridotta con sovrapposto una forte componente di rumore incorrelato e mostrato in fig. b). Si noti come la funzione di correlazione incrociata presenta un picco che può essere utilizzato per determinare il ritardo introdotto dalla trasmissione, che nel caso del radar rappresenterebbe il ritardo dell’eco. (In effetti i picchi sono tre e ci si riferisce a quello negativo che ha l’ampiezza massima; il τ corrispondente indica il ritardo introdotto dalla trasmissione).
Misure su circuiti analogici Questi circuiti sono nella gran parte sistemi lineari e quindi le misure principali consistono nella determinazione della risposta in frequenza nel dominio del tempo (risposta all’impulso) o nel dominio della frequenza (funzione di trasferimento in modulo e fase) e nella verifica della linearità di funzionamento (distorsione introdotta) e delle prestazioni di rumore.
Le misure sono quindi sostanzialmente misure di:
a) impedenza al variare della frequenza;
b) guadagno di tensione, corrente o potenza sia diretto che inverso (isolamento) sia in modulo che in fase;
c) banda passante e banda proibita;
d) distorsione nel campo di funzionamento lineare;
e) verifica del campo di funzionamento lineare sia per determinare l’ampiezza massima del segnale (effetti di compressione) che per la linearità di fase con la frequenza;
f) rumore per verificare la sensibilità del circuito (ampiezza minima del segnale);
g) sensibilità alle variazioni parametriche generalmente con riferimento alla alimentazione e alla temperatura.
Misure su sistemi lineari
Scelta della sollecitazione Visto che spesso i circuiti analogici sono anche sistemi lineari, vale il principio di sovrapposizione degli effetti e quindi la forma d’onda principalmente utilizzata, sia per misure nel dominio del tempo che nel dominio della frequenza, è costituita da una sinusoide di frequenza opportuna (misure CW = continue wave) o da un segnale sinusoidale di frequenza variabile nel tempo (generalmente a rampa o gradinata). In questo caso il generatore di segnale dovrà avere caratteristiche adeguate alle prestazioni dello strumento di misura in termini di distorsione armonica, modulazione residua e precisione di ampiezza e frequenza.
Inoltre, poiché un sistema lineare può essere caratterizzato in termini di risposta all’impulso nel dominio del tempo, forme d’onda molto utilizzate per misure in questo dominio sono sia l’onda quadra che i treni di impulsi. In questo caso il generatore deve essere scelto con prestazioni (ad esempio in termini di tempo di salita e di discesa) adeguate alla banda passante sia del sistema in prova che della strumentazione di misura.
NOTA: Utilizzando un’unica onda quadra (o meglio un treno di impulsi) si possono avere tutte le informazioni nel dominio del tempo che si avrebbero da misure con eccitazione di tipo sinusoidale a frequenza variabile (lo si giustifica o, come già detto in termini di risposta all’impulso, o in termini di spettro della onda quadra).
Nel dominio della frequenza, un segnale che dà gli stessi vantaggi che l’onda quadra dà nel dominio del tempo è il rumore. Infatti la sollecitazione costituita dalla singola linea di un’onda sinusoidale che viene ripetuta in tempi diversi a frequenza diversa può essere vantaggiosamente sostituita dallo spettro del rumore sia random che PRN in cui si possono considerare presenti tutte le righe necessarie. Ovviamente il vantaggio si ha solo nel caso in cui si vogliano fare misure di ampiezza (non di fase) e se l’analizzatore di spettro opera in parallelo.
NOTA: Per misure nel dominio della frequenza su sistemi lineari (e solo su di essi) una sollecitazione di tipo PRN ha il vantaggio, rispetto ad un rumore random, di permettere di utilizzare proficuamente le tecniche di averaging (la sollecitazione è periodica, cioè il segnale di “rumore” a largo spettro si ripete sempre uguale a se stesso).
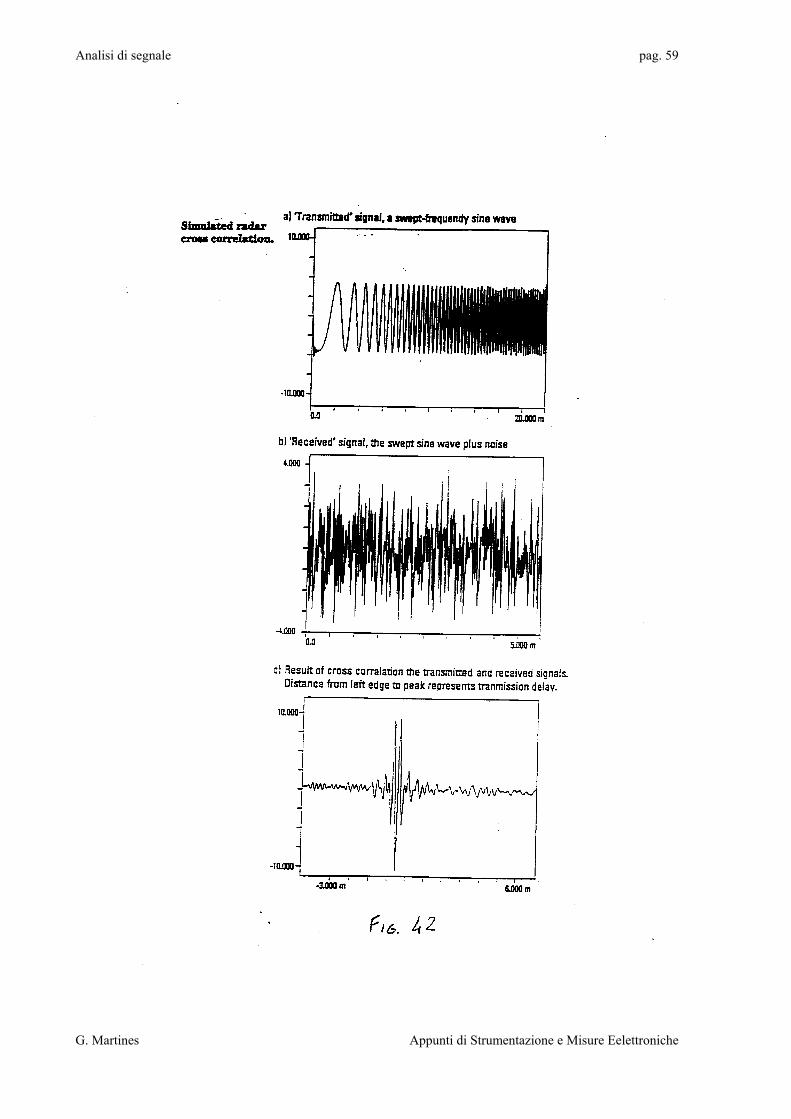
Analisi di segnale pag. 59
G. Martines Appunti di Strumentazione e Misure Eelettroniche
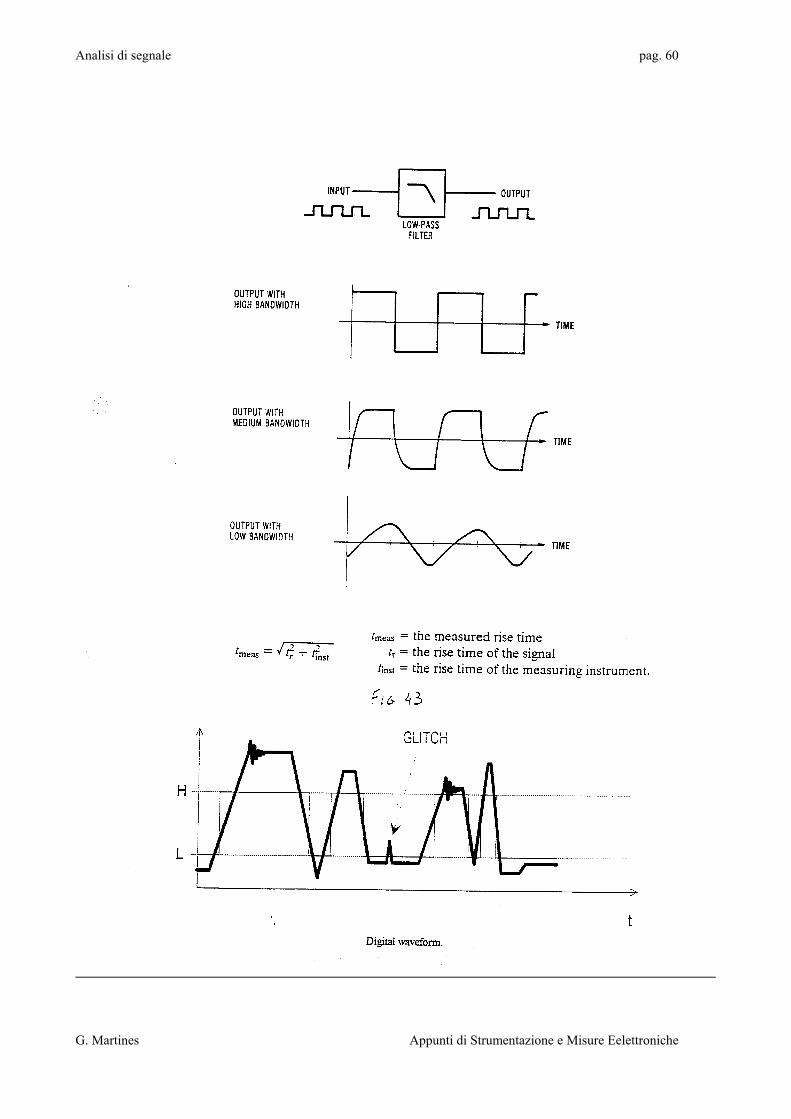
Analisi di segnale pag. 60
G. Martines Appunti di Strumentazione e Misure Eelettroniche

Analisi di segnale pag. 61
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Scelta della strumentazione Per prima cosa si deve scegliere se eseguire le misure nel dominio del tempo o della frequenza (quando possibile).
Nel caso del dominio del tempo, infatti, generalmente si misurano tensioni e la strumentazione deve essere a larga banda per avere tempi di risposta brevi e potere quindi seguire le variazioni del segnale.
La strumentazione allora va scelta con banda sufficientemente ampia da garantire che l’errore di misura dovuto alla
banda limitata sia paragonabile alla precisione nella misura delle ampiezze e dei tempi ma non troppo ampia per non ridurre eccessivamente la dinamica a causa della maggior quantità di rumore e di disturbi che verranno sovrapposti al segnale da misurare (si veda Fig. 43 per un esempio della distorsione della forma d’onda del segnale causata dalla limitazione di banda).
Inoltre la strumentazione dovrà avere una impedenza tale da garantire il massimo trasferimento di tensione. Questo significa che, in riferimento alle impedenze del circuito, i generatori dovranno avere impedenza bassa mentre gli strumenti di misura dovranno avere impedenza elevata (anche per non perturbare eccessivamente il funzionamento del circuito stesso). Ed ancora questo significa che è conveniente misurare le tensioni scegliendo punti a bassa impedenza (rispetto a massa, visto che gli strumenti hanno generalmente un punto a massa nella porta di ingresso) nel circuito.
Proprio la necessità di una impedenza di ingresso elevata della strumentazione, oltre che l’ampiezza di banda necessaria, condiziona la scelta del dominio del tempo per eseguire misure che possono essere fatte sia nel dominio del tempo che della frequenza. Al crescere della frequenza infatti la lunghezza dei collegamenti non può più essere trascurata e quindi, poiché questi ultimi si comportano come linee di trasmissione, è necessario adattare l’impedenza di ingresso e di uscita degli strumenti alla impedenza caratteristica Z0 della linea di trasmissione che costituisce il collegamento (normalmente 50 Ω).
Se si vuole mantenere allora la condizione per il massimo trasferimento di tensione e quindi avere una elevata
impedenza di ingresso solo nel punto di testing sarà necessario ricorrere ad opportuni trasformatori di impedenza, da impedenza elevata a Z0, da localizzare all’estremità del cavo di collegamento. Questi circuiti, detti sonde di misura, possono essere sia passivi, ad esempio realizzate con partitori compensati che però introducono una attenuazione nota del segnale (normalmente 10:1) e generalmente anche limitazioni nella banda, che attivi, ad esempio realizzati con amplificatori in configurazione di inseguitore di tensione, che non introducono attenuazione né limitano la banda passante ma hanno dinamica ridotta e sono sensibili alla elettrostatica (possono risultare costose quanto lo strumento stesso).
Si ricordi che il tempo di salita della risposta di un circuito di tipo passa basso (supposta valida la approssimazione del polo dominante) è legato alla banda passante dalla relazione:
tB
Br ≅0 35. con banda passante a 3 dB
e che se indichiamo con tr il tempo di salita del segnale e con tinst quello del sistema di misura, allora il tempo di salita misurato tm è approssimativamente dato da:
t t tm r inst≈ +2 2
NOTA:
La lunghezza d’onda è definita da λε
= = ×c
fc con cm / sec2 9979248 1010. la velocità
della luce, f la frequenza in Hz ed ε la costante dielettrica del mezzo in cui l’onda si propaga.
Già a 200 MHz vale 150 cm. nel vuoto ed ancora meno in un cavo coassiale e quindi la lunghezza dei collegamenti non può essere più trascurata
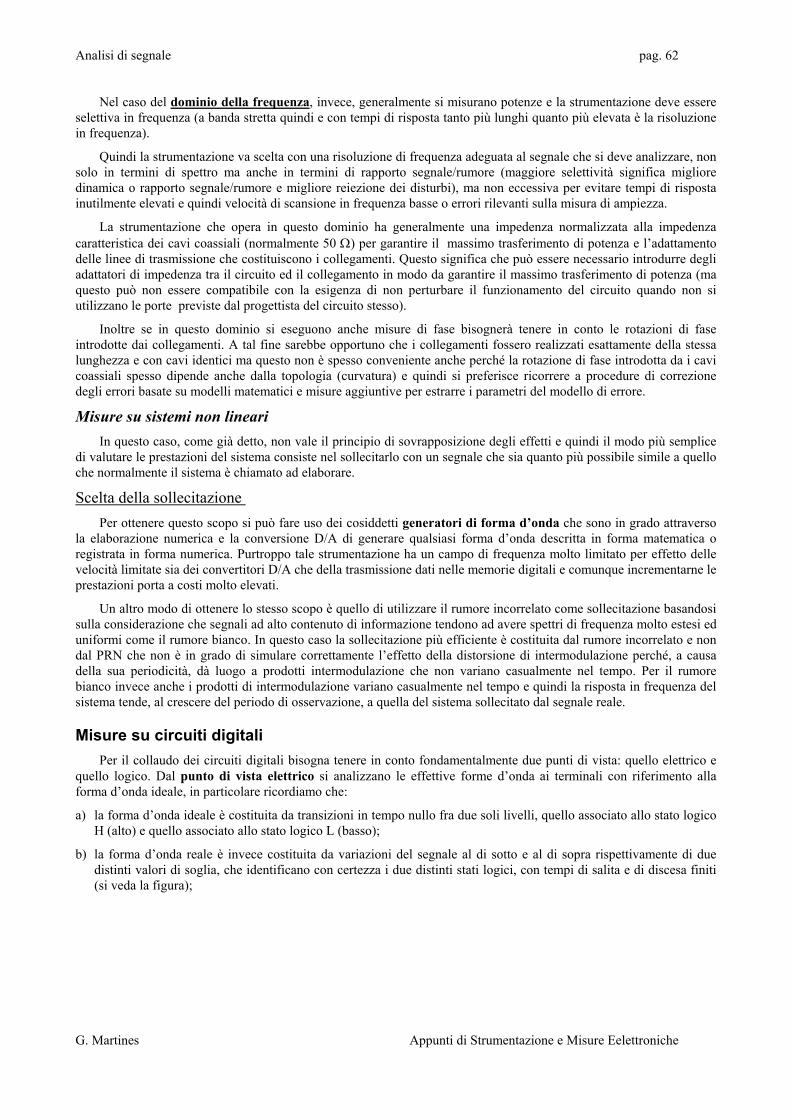
Analisi di segnale pag. 62
G. Martines Appunti di Strumentazione e Misure Eelettroniche
Nel caso del dominio della frequenza, invece, generalmente si misurano potenze e la strumentazione deve essere selettiva in frequenza (a banda stretta quindi e con tempi di risposta tanto più lunghi quanto più elevata è la risoluzione in frequenza).
Quindi la strumentazione va scelta con una risoluzione di frequenza adeguata al segnale che si deve analizzare, non solo in termini di spettro ma anche in termini di rapporto segnale/rumore (maggiore selettività significa migliore dinamica o rapporto segnale/rumore e migliore reiezione dei disturbi), ma non eccessiva per evitare tempi di risposta inutilmente elevati e quindi velocità di scansione in frequenza basse o errori rilevanti sulla misura di ampiezza.
La strumentazione che opera in questo dominio ha generalmente una impedenza normalizzata alla impedenza caratteristica dei cavi coassiali (normalmente 50 Ω) per garantire il massimo trasferimento di potenza e l’adattamento delle linee di trasmissione che costituiscono i collegamenti. Questo significa che può essere necessario introdurre degli adattatori di impedenza tra il circuito ed il collegamento in modo da garantire il massimo trasferimento di potenza (ma questo può non essere compatibile con la esigenza di non perturbare il funzionamento del circuito quando non si utilizzano le porte previste dal progettista del circuito stesso).
Inoltre se in questo dominio si eseguono anche misure di fase bisognerà tenere in conto le rotazioni di fase introdotte dai collegamenti. A tal fine sarebbe opportuno che i collegamenti fossero realizzati esattamente della stessa lunghezza e con cavi identici ma questo non è spesso conveniente anche perché la rotazione di fase introdotta da i cavi coassiali spesso dipende anche dalla topologia (curvatura) e quindi si preferisce ricorrere a procedure di correzione degli errori basate su modelli matematici e misure aggiuntive per estrarre i parametri del modello di errore.
Misure su sistemi non lineari In questo caso, come già detto, non vale il principio di sovrapposizione degli effetti e quindi il modo più semplice di valutare le prestazioni del sistema consiste nel sollecitarlo con un segnale che sia quanto più possibile simile a quello che normalmente il sistema è chiamato ad elaborare.
Scelta della sollecitazione Per ottenere questo scopo si può fare uso dei cosiddetti generatori di forma d’onda che sono in grado attraverso la elaborazione numerica e la conversione D/A di generare qualsiasi forma d’onda descritta in forma matematica o registrata in forma numerica. Purtroppo tale strumentazione ha un campo di frequenza molto limitato per effetto delle velocità limitate sia dei convertitori D/A che della trasmissione dati nelle memorie digitali e comunque incrementarne le prestazioni porta a costi molto elevati.
Un altro modo di ottenere lo stesso scopo è quello di utilizzare il rumore incorrelato come sollecitazione basandosi sulla considerazione che segnali ad alto contenuto di informazione tendono ad avere spettri di frequenza molto estesi ed uniformi come il rumore bianco. In questo caso la sollecitazione più efficiente è costituita dal rumore incorrelato e non dal PRN che non è in grado di simulare correttamente l’effetto della distorsione di intermodulazione perché, a causa della sua periodicità, dà luogo a prodotti intermodulazione che non variano casualmente nel tempo. Per il rumore bianco invece anche i prodotti di intermodulazione variano casualmente nel tempo e quindi la risposta in frequenza del sistema tende, al crescere del periodo di osservazione, a quella del sistema sollecitato dal segnale reale.
Misure su circuiti digitali Per il collaudo dei circuiti digitali bisogna tenere in conto fondamentalmente due punti di vista: quello elettrico e quello logico. Dal punto di vista elettrico si analizzano le effettive forme d’onda ai terminali con riferimento alla forma d’onda ideale, in particolare ricordiamo che:
a) la forma d’onda ideale è costituita da transizioni in tempo nullo fra due soli livelli, quello associato allo stato logico H (alto) e quello associato allo stato logico L (basso);
b) la forma d’onda reale è invece costituita da variazioni del segnale al di sotto e al di sopra rispettivamente di due distinti valori di soglia, che identificano con certezza i due distinti stati logici, con tempi di salita e di discesa finiti (si veda la figura);
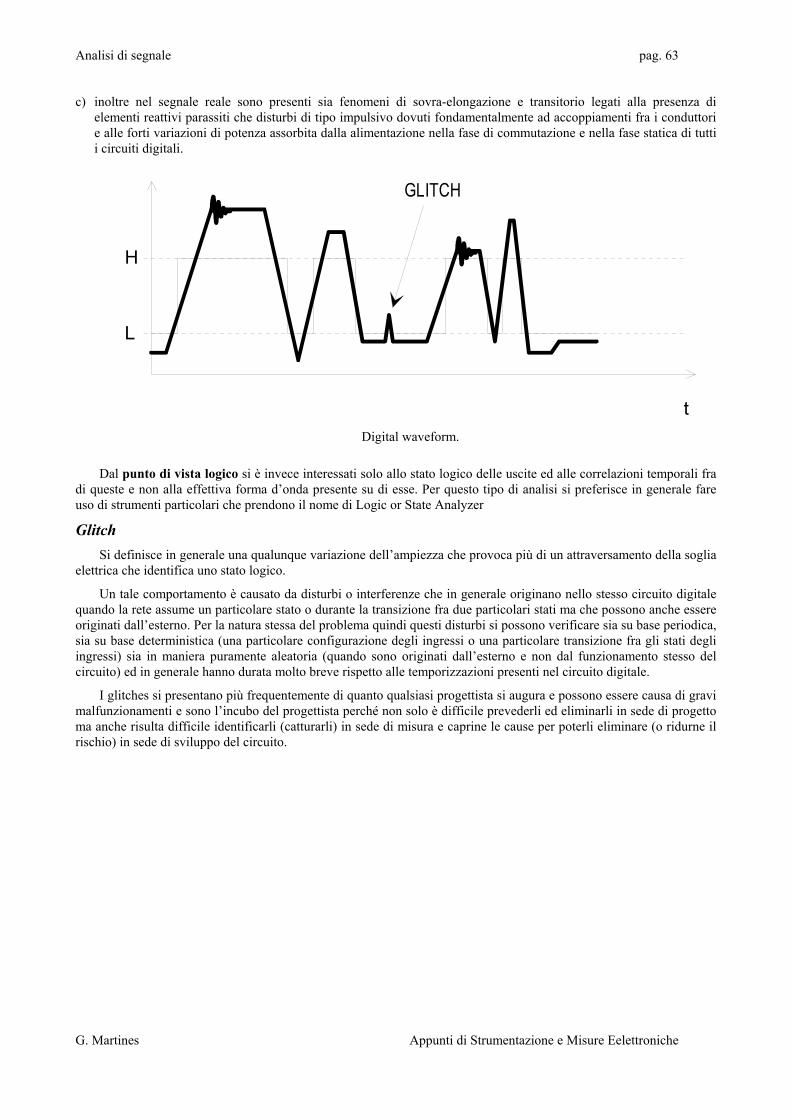
Analisi di segnale pag. 63
G. Martines Appunti di Strumentazione e Misure Eelettroniche
c) inoltre nel segnale reale sono presenti sia fenomeni di sovra-elongazione e transitorio legati alla presenza di elementi reattivi parassiti che disturbi di tipo impulsivo dovuti fondamentalmente ad accoppiamenti fra i conduttori e alle forti variazioni di potenza assorbita dalla alimentazione nella fase di commutazione e nella fase statica di tutti i circuiti digitali.
Dal punto di vista logico si è invece interessati solo allo stato logico delle uscite ed alle correlazioni temporali fra di queste e non alla effettiva forma d’onda presente su di esse. Per questo tipo di analisi si preferisce in generale fare uso di strumenti particolari che prendono il nome di Logic or State Analyzer
Glitch Si definisce in generale una qualunque variazione dell’ampiezza che provoca più di un attraversamento della soglia elettrica che identifica uno stato logico.
Un tale comportamento è causato da disturbi o interferenze che in generale originano nello stesso circuito digitale quando la rete assume un particolare stato o durante la transizione fra due particolari stati ma che possono anche essere originati dall’esterno. Per la natura stessa del problema quindi questi disturbi si possono verificare sia su base periodica, sia su base deterministica (una particolare configurazione degli ingressi o una particolare transizione fra gli stati degli ingressi) sia in maniera puramente aleatoria (quando sono originati dall’esterno e non dal funzionamento stesso del circuito) ed in generale hanno durata molto breve rispetto alle temporizzazioni presenti nel circuito digitale.
I glitches si presentano più frequentemente di quanto qualsiasi progettista si augura e possono essere causa di gravi malfunzionamenti e sono l’incubo del progettista perché non solo è difficile prevederli ed eliminarli in sede di progetto ma anche risulta difficile identificarli (catturarli) in sede di misura e caprine le cause per poterli eliminare (o ridurne il rischio) in sede di sviluppo del circuito.
H
L
t
GLITCH
Digital waveform.