Risultante di carichi concentrati - uniroma2.it · dei carichi pesata con il braccio di ciascuno....
26
Effetto di carichi distribuiti In alcune applicazioni non si può più considerare carichi applicati mediante forze concentrate per la determinazione delle azioni interne. Si pensi al peso proprio (solai, bracci telescopici di gru, …) , ai serbatoi in pressione, ai solai Le forze sono tutte parallele fra loro e quindi è sufficiente sommarne il modulo 1 n i i i R xF x R Risultante di carichi concentrati Tuttavia l’utilizzo della risultante è comodo nella determinazione delle reazioni vincolari Inoltre lo schema che fa uso delle risultanti può essere mantenuto quando si esaminano le azioni interne di parti di struttura ove non sono applicate forze distribuite Per determinare il punto di applicazione (la posizione della retta R) basta imporre l’uguaglianza del suo momento con quello di tutte le forze presenti rispetto ad un polo qualsiasi 1 n i i R F In pratica la posizione della risultante è data dalla media dei carichi pesata con il braccio di ciascuno
Transcript of Risultante di carichi concentrati - uniroma2.it · dei carichi pesata con il braccio di ciascuno....

Effetto di carichi distribuiti
In alcune applicazioni non si può più considerare carichi applicati mediante forze concentrate
per la determinazione delle azioni interne.
Si pensi al peso proprio (solai, bracci telescopici di gru, …) , ai serbatoi in pressione, ai solai
Le forze sono tutte parallele fra loro e quindi
è sufficiente sommarne il modulo
1
n
i i
iR
x F
xR
Risultante di carichi concentrati
Tuttavia l’utilizzo della risultante è comodo nella determinazione delle reazioni vincolari
Inoltre lo schema che fa uso delle risultanti può essere mantenuto quando si esaminano le
azioni interne di parti di struttura ove non sono applicate forze distribuite
Per determinare il punto di applicazione (la
posizione della retta R) basta imporre
l’uguaglianza del suo momento con quello di
tutte le forze presenti rispetto ad un polo
qualsiasi
1
n
i
i
R F
In pratica la posizione della risultante è data dalla media
dei carichi pesata con il braccio di ciascuno

Carico uniformemente distribuito
Il carico distribuito p0 risulta essere un carico per unità di
lunghezza (N/m, kN/m , …)
Per il calcolo della risultante basterà considerare che la
sommatoria diviene un integrale e sommare i contributi
elementari
0 00
l
P p dx p l Ugualmente la media pesata
diventa un integrale
2
00
00
22
l
p l
lxp dx lx
lp dx
La risultante è in mezzeria
Carico con distribuzione lineare
2
00 0
0
1
2 2
l x p lP p dx p l
l l
Area sottesa
20
0 0
0 00
2
3
l l
p ll
xxp dx x dx
lx lx xdxp dxl
Baricentro area
sottesa
0
xp x p
l
x
1
2l

Carico con distribuzione parabolica
2
0
xp x p
l
x
2 3
00 02 20
1
3 3
l x p lP p dx p l
l l Area sottesa
2
30 20 0
22
0 020
3
4
l l
p ll
xxp dx x dx
lx lx x dxp dxl
Baricentro area
sottesa
Ugualmente si possono determinare risultante e punto di applicazione del carico per
distribuzioni potenze di x/l od anche polinomiali
0
nx
p x pl
1
00 0
0
1
1 1
n nl
n n
x p lP p dx p l
l l n n
10
0 0
0 00
1
2
nl l
nn
p n ll n
n
xxp dx x dx nlx l
x nx dxp dxl
In generale:
0
l
P p x dx
0
0
l
p l
x p x dxx
p x dx
Se il sistema di riferimento ha
l’origine all’inizio dela trave

Azioni interne in presenza di carichi distribuiti ortogonali
In presenza di carichi distribuiti non si può determinare la
sollecitazione in una qualunque sezione utilizzando le
sole risultanti
Metodo diretto (eq. destra o sinistra)
Si esegue un taglio ideale della struttura e si impone l’equilibrio con le azioni interne N,T,M
Equilibrio verticale sn:
0
l
T F p x dx Eq. Momenti sn (polo sezione di taglio)
0
c
M W Fc p x c x dx
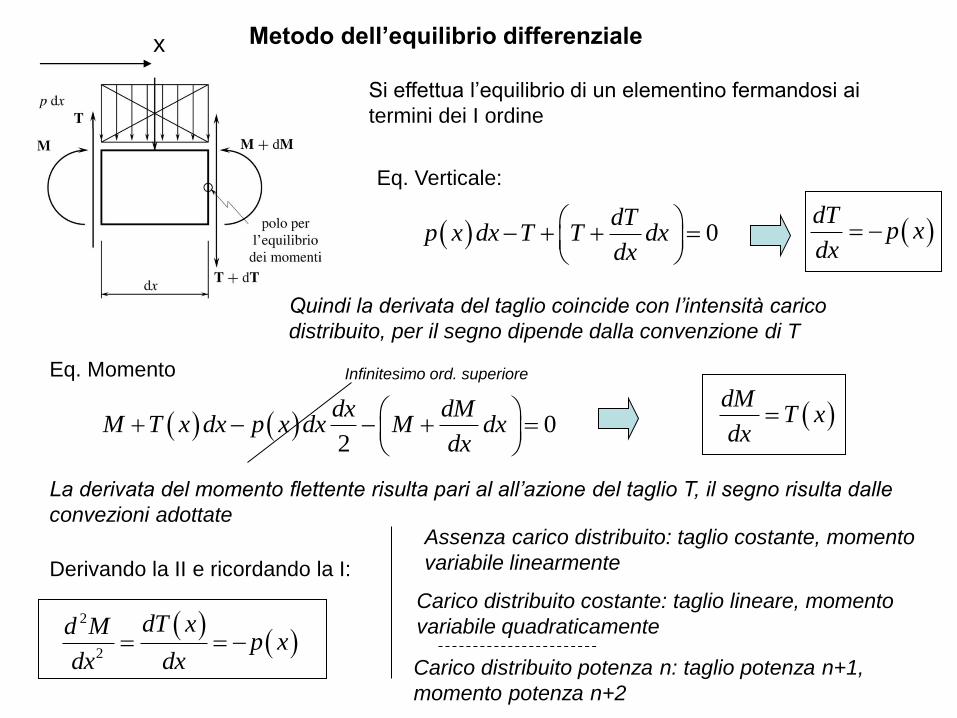
Metodo dell’equilibrio differenziale x
Si effettua l’equilibrio di un elementino fermandosi ai
termini dei I ordine
Eq. Verticale:
0dT
p x dx T T dxdx
dTp x
dx
Quindi la derivata del taglio coincide con l’intensità carico
distribuito, per il segno dipende dalla convenzione di T
Eq. Momento
02
dx dMM T x dx p x dx M dx
dx
dM
T xdx
La derivata del momento flettente risulta pari al all’azione del taglio T, il segno risulta dalle
convezioni adottate
Infinitesimo ord. superiore
Derivando la II e ricordando la I:
2
2
dT xd Mp x
dx dx
Assenza carico distribuito: taglio costante, momento
variabile linearmente
Carico distribuito costante: taglio lineare, momento
variabile quadraticamente
Carico distribuito potenza n: taglio potenza n+1,
momento potenza n+2
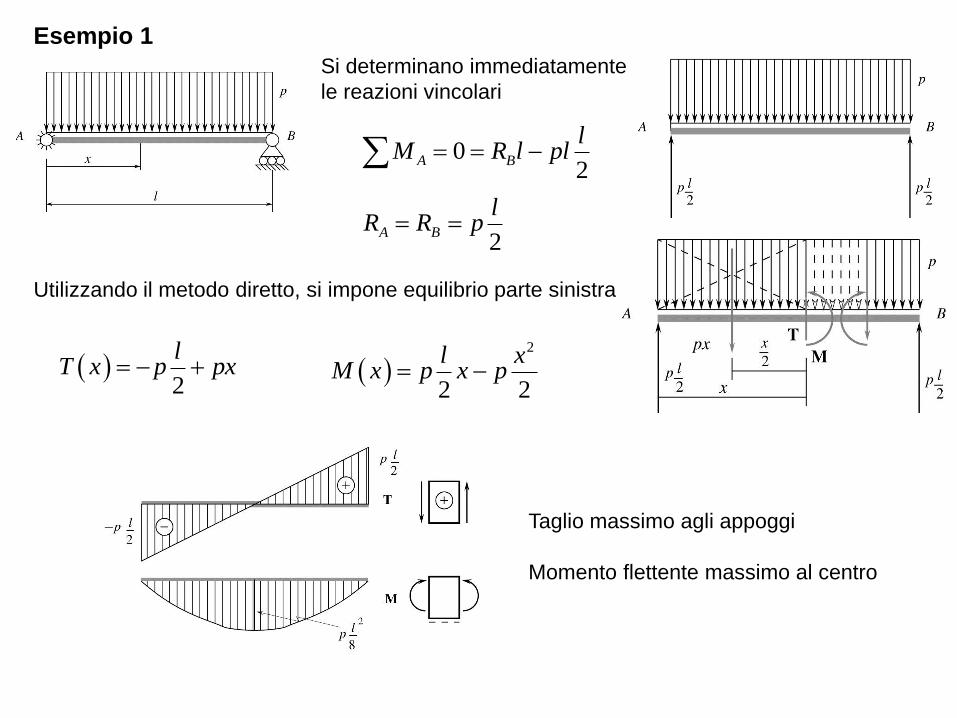
Esempio 1
Si determinano immediatamente
le reazioni vincolari
02
A B
lM R l pl
2A B
lR R p
Utilizzando il metodo diretto, si impone equilibrio parte sinistra
2
lT x p px
2
2 2
l xM x p x p
Taglio massimo agli appoggi
Momento flettente massimo al centro
Per il calcolo conviene prendere x da destra.
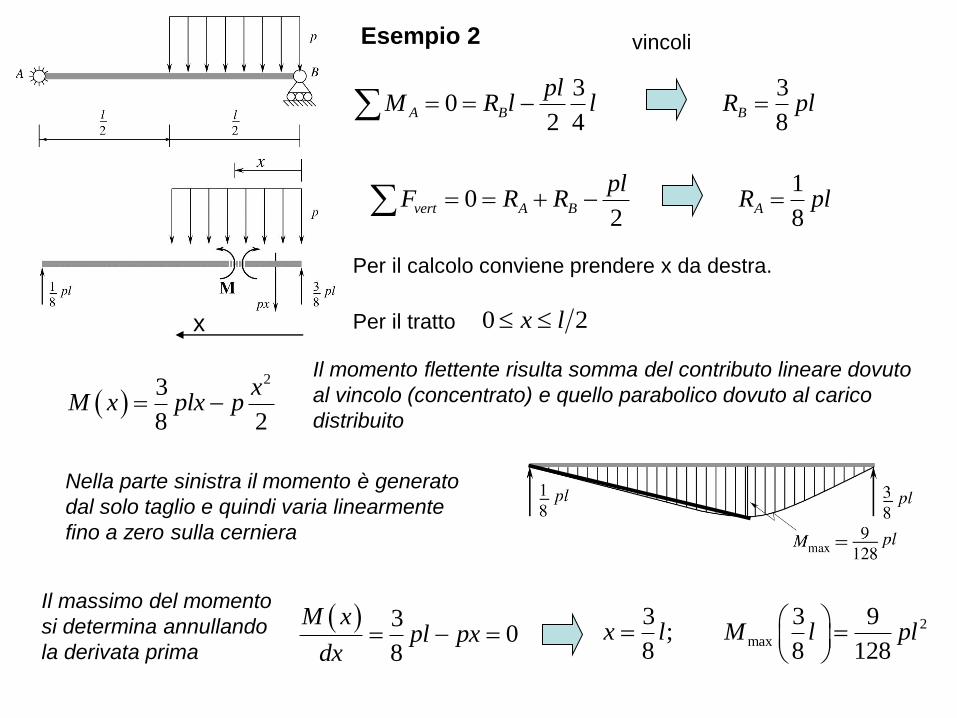
Esempio 2
30
2 4A B
plM R l l
3
8BR pl
02
vert A B
plF R R
1
8AR pl
vincoli
x 0 2x l Per il tratto
23
8 2
xM x plx p
Il momento flettente risulta somma del contributo lineare dovuto
al vincolo (concentrato) e quello parabolico dovuto al carico
distribuito
Nella parte sinistra il momento è generato
dal solo taglio e quindi varia linearmente
fino a zero sulla cerniera
Il massimo del momento
si determina annullando
la derivata prima
30
8
M xpl px
dx
2
max
3 3 9;
8 8 128x l M l pl
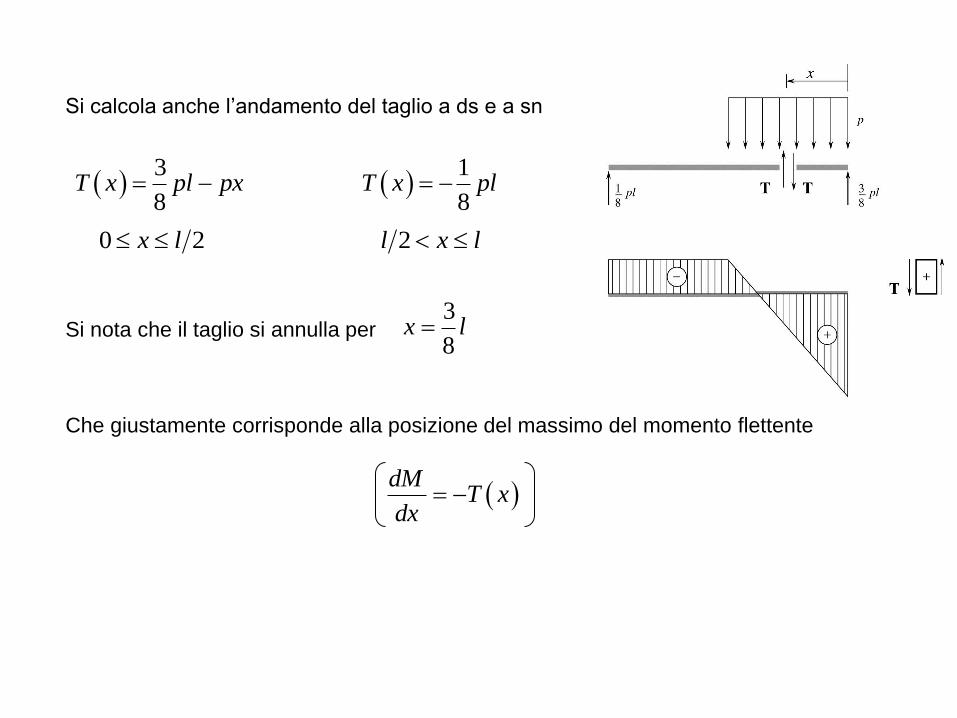
Si calcola anche l’andamento del taglio a ds e a sn
3
8T x pl px
1
8T x pl
0 2x l 2l x l
Si nota che il taglio si annulla per 3
8x l
Che giustamente corrisponde alla posizione del massimo del momento flettente
dM
T xdx
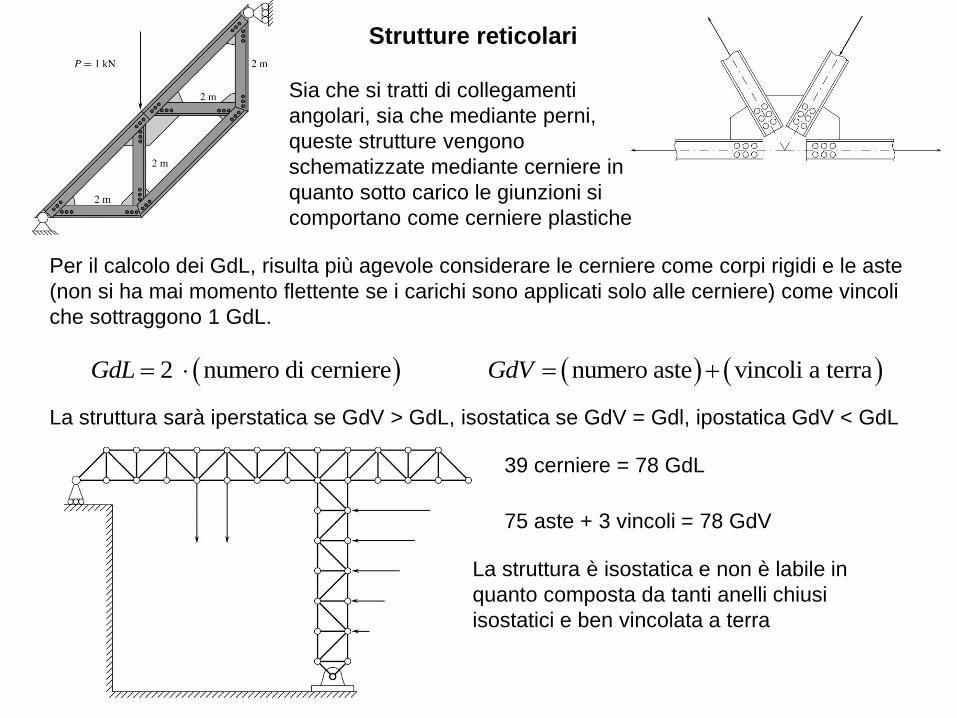
Strutture reticolari
Sia che si tratti di collegamenti
angolari, sia che mediante perni,
queste strutture vengono
schematizzate mediante cerniere in
quanto sotto carico le giunzioni si
comportano come cerniere plastiche
Per il calcolo dei GdL, risulta più agevole considerare le cerniere come corpi rigidi e le aste
(non si ha mai momento flettente se i carichi sono applicati solo alle cerniere) come vincoli
che sottraggono 1 GdL.
2 numero di cerniereGdL numero aste vincoli a terraGdV
La struttura sarà iperstatica se GdV > GdL, isostatica se GdV = Gdl, ipostatica GdV < GdL
39 cerniere = 78 GdL
75 aste + 3 vincoli = 78 GdV
La struttura è isostatica e non è labile in
quanto composta da tanti anelli chiusi
isostatici e ben vincolata a terra
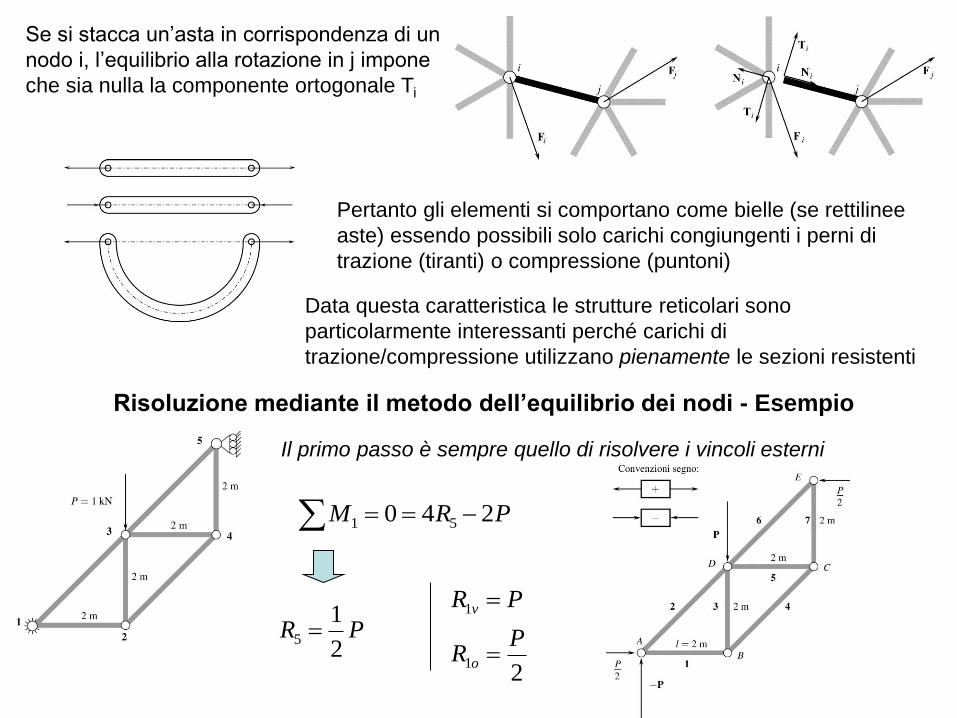
Se si stacca un’asta in corrispondenza di un
nodo i, l’equilibrio alla rotazione in j impone
che sia nulla la componente ortogonale Ti
Pertanto gli elementi si comportano come bielle (se rettilinee
aste) essendo possibili solo carichi congiungenti i perni di
trazione (tiranti) o compressione (puntoni)
Data questa caratteristica le strutture reticolari sono
particolarmente interessanti perché carichi di
trazione/compressione utilizzano pienamente le sezioni resistenti
Risoluzione mediante il metodo dell’equilibrio dei nodi - Esempio
Il primo passo è sempre quello di risolvere i vincoli esterni
1 50 4 2M R P
5
1
2R P
1vR P
12
o
PR

A ogni nodo si compongono vettorialmente le
forze esterne e quelle delle aste e si risolve per
una cerniera alla volta
Cern. E
6 cos 04 2
PN
6 7sin 0
4
N N
6 7
2;
2 2
PN P N
+
Si possono già risolvere le aste 6 e 7, che subiscono azioni contrarie rispetto a N6 e N7, e
pertanto l’asta 6 è in compressione e la 7 in trazione.
Cern. C scelta perché sia minimo il numero di incognite
5 4 cos 04
N N
4 7sin 04
N N
5 4
2;
2 2
PN N P
Considerando i versi impostati per N5 e N4
l’asta 5 è compressa, la 4 tesa
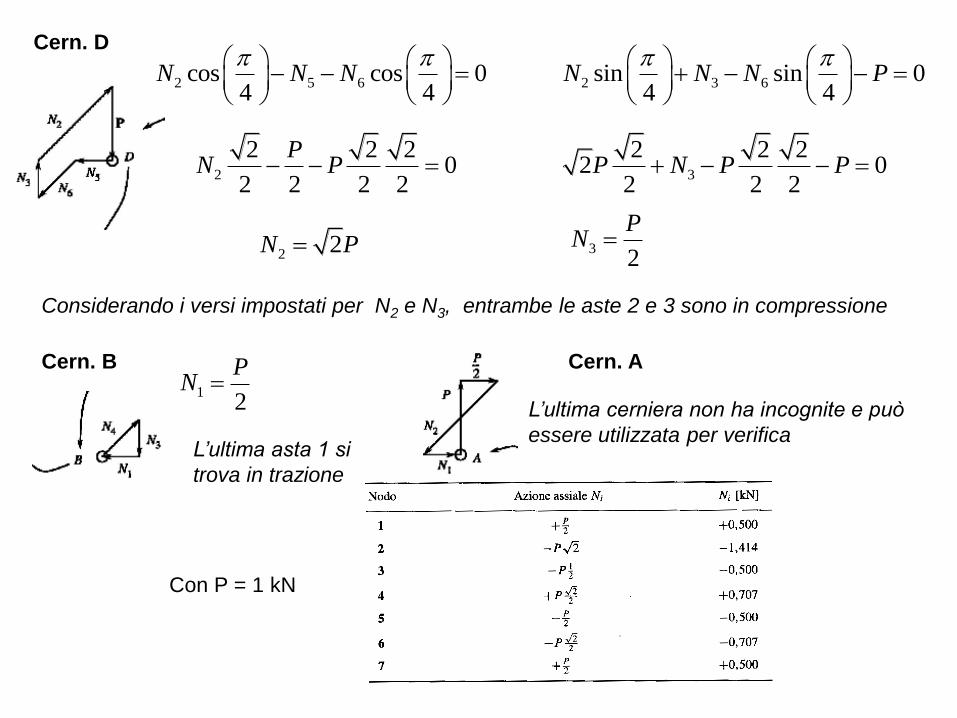
Cern. D
2 5 6cos cos 04 4
N N N
2 2N P
2 3 6sin sin 04 4
N N N P
32
P
N
2
2 2 20
2 2 2 2
PN P 3
2 2 22 0
2 2 2 P N P P
Considerando i versi impostati per N2 e N3, entrambe le aste 2 e 3 sono in compressione
Cern. B
12
P
N
L’ultima asta 1 si
trova in trazione
Cern. A
L’ultima cerniera non ha incognite e può
essere utilizzata per verifica
Con P = 1 kN

Esempio 3
La struttura è isostatica a terra, si calcolano le
reazioni vincolari al terreno
50 3
2 D AM l R pl l
5
6AR pl
0 vert A DF R R pl1
6DvR pl 0DoR
Si elimina il vincolo interno in B sostituendolo
con azione-reazione, e si impone equilibrio
momenti in C dell’elemento CEA
30 2
2 C A BM l R pl l l R
1
6BR pl
Ugualmente si elimina il vincolo in C, dall’equilibrio verticale:
0 vert A B CF R R pl R1
3CvR pl 0CoR
Ora si possono tracciare i diagrammi degli sforzi presenti sugli elementi
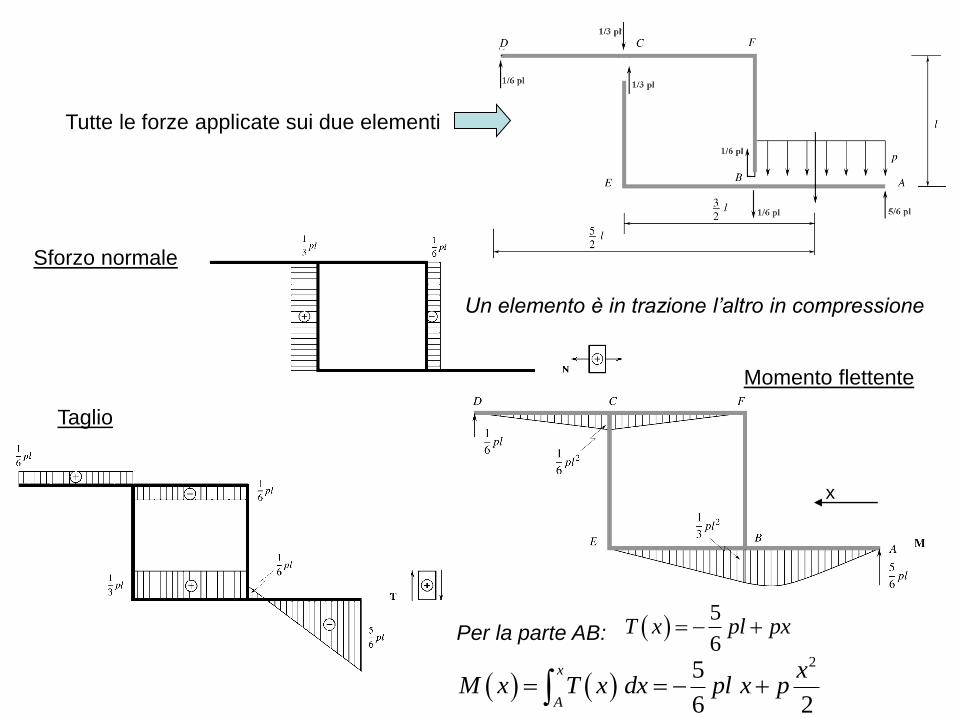
Sforzo normale
Un elemento è in trazione l’altro in compressione
Taglio
Momento flettente
Per la parte AB:
5
6 T x pl px
Tutte le forze applicate sui due elementi
x
25
6 2
x
A
xM x T x dx pl x p
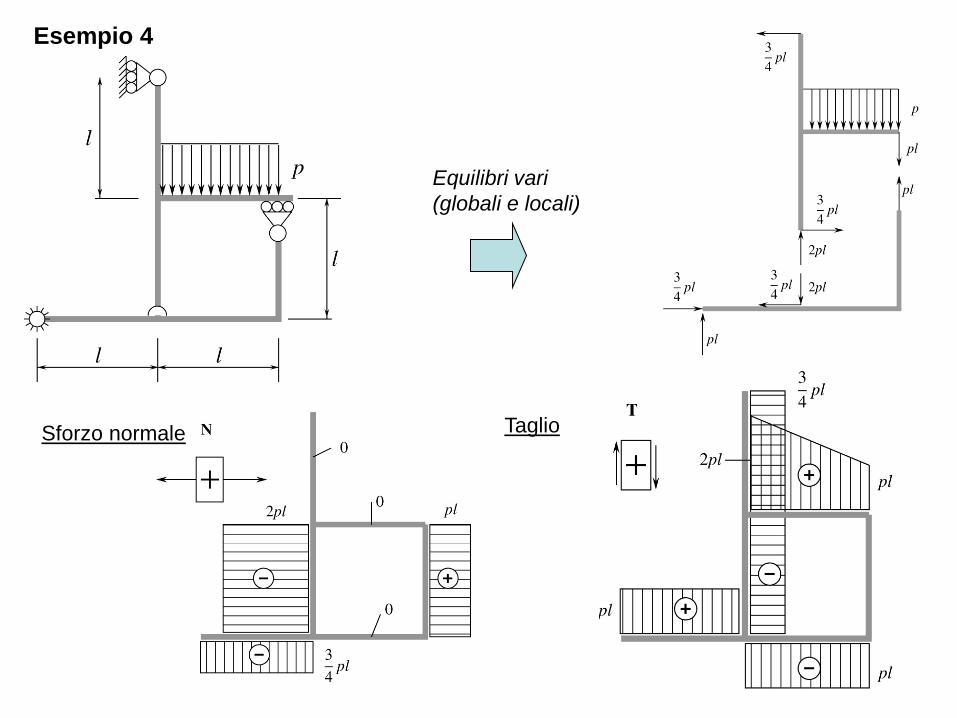
Esempio 4
Equilibri vari
(globali e locali)
Sforzo normale Taglio
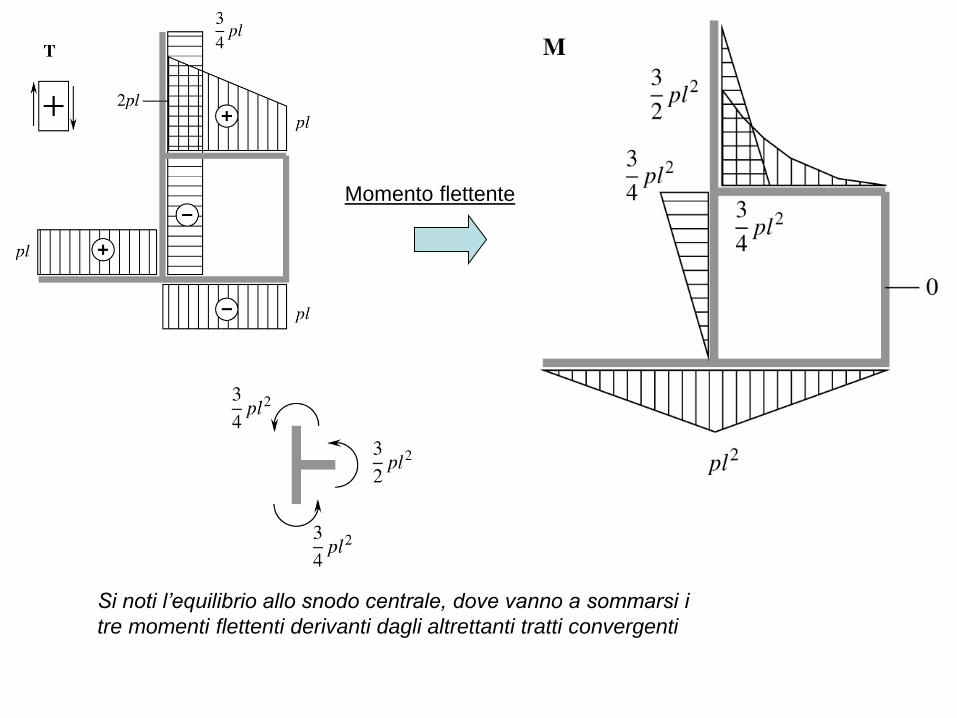
Momento flettente
Si noti l’equilibrio allo snodo centrale, dove vanno a sommarsi i
tre momenti flettenti derivanti dagli altrettanti tratti convergenti
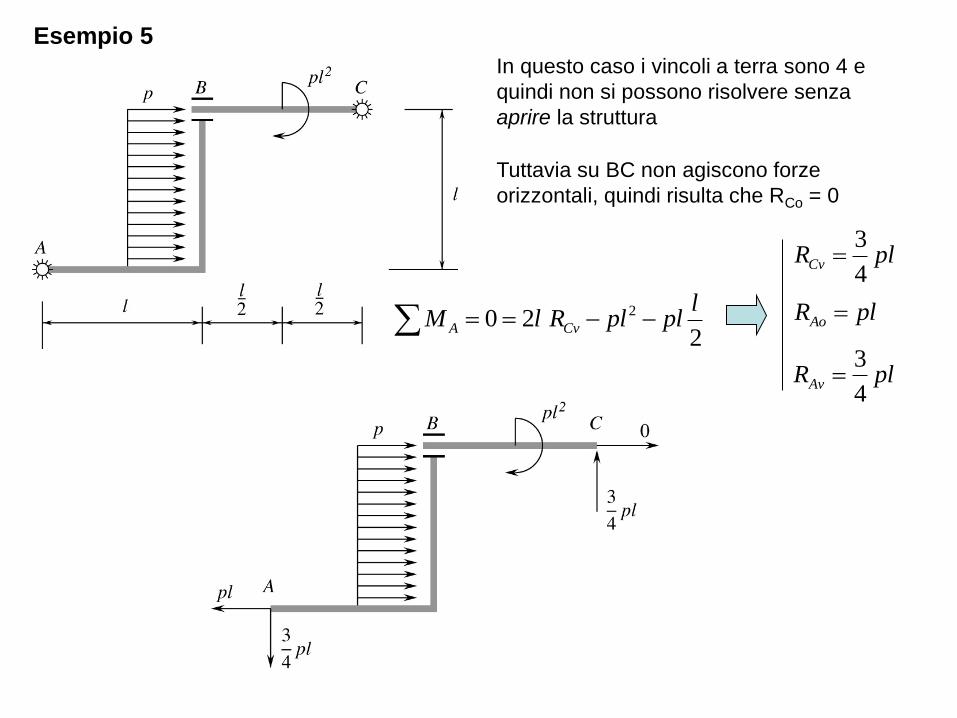
Esempio 5
In questo caso i vincoli a terra sono 4 e
quindi non si possono risolvere senza
aprire la struttura
Tuttavia su BC non agiscono forze
orizzontali, quindi risulta che RCo = 0
20 2 2
A Cv
lM l R pl pl
3
4CvR pl
AoR pl
3
4AvR pl
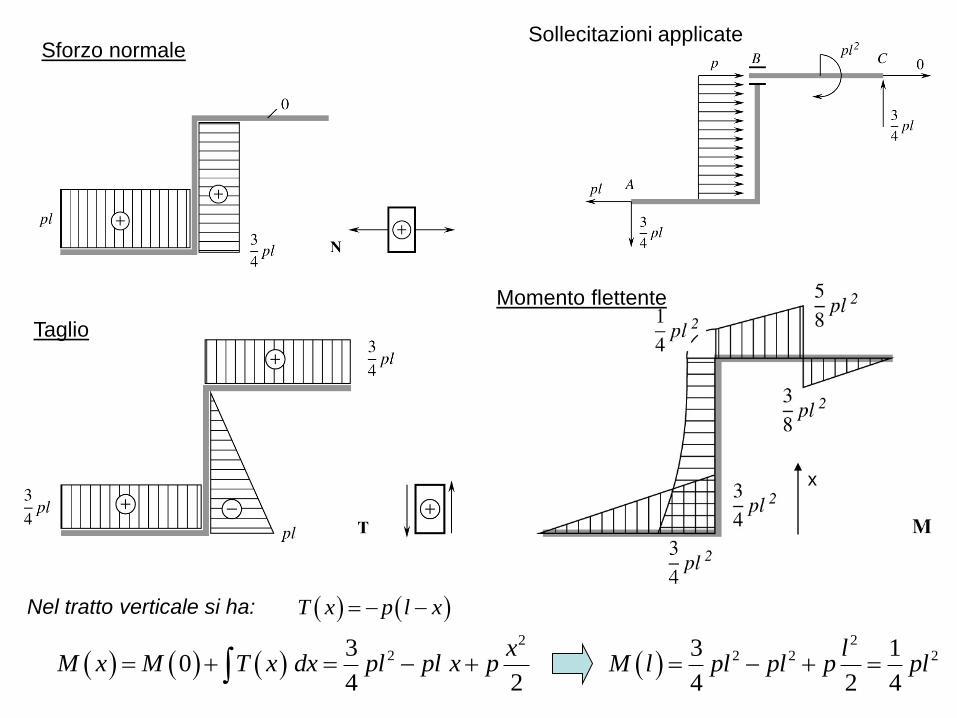
Sforzo normale
Taglio
Sollecitazioni applicate
Momento flettente
x
Nel tratto verticale si ha:
2
230
4 2
xM x M T x dx pl pl x p
22 2 23 1
4 2 4
lM l pl pl p pl
T x p l x

Esempio 6 Vi è un anello chiuso isostatico (tre cerniere) ben vincolato a
terra. All’interno dell’anello è inserito un elemento (ben vincolato)
0 2 vert AvF R pl 2AvR pl
2 20 2 2 A DM pl pl R l1
2DR pl
Si può ora esplorare l’elemento interno,
che non ha applicate forze verticali o
orizzontali
L’unica azione presente su di esso è un
momento flettente nel tratto FE
1
2 A DR R pl
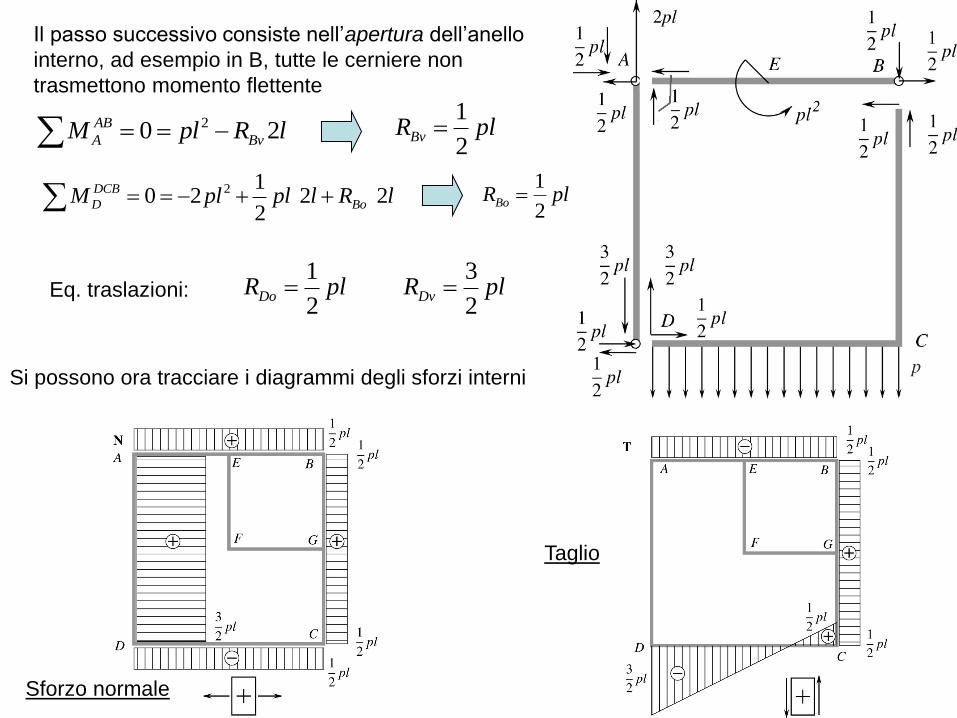
Il passo successivo consiste nell’apertura dell’anello
interno, ad esempio in B, tutte le cerniere non
trasmettono momento flettente
20 2 AB
A BvM pl R l1
2BvR pl
2 10 2 2 2
2 DCB
D BoM pl pl l R l1
2BoR pl
1
2DoR pl
3
2DvR plEq. traslazioni:
Si possono ora tracciare i diagrammi degli sforzi interni
Sforzo normale
Taglio
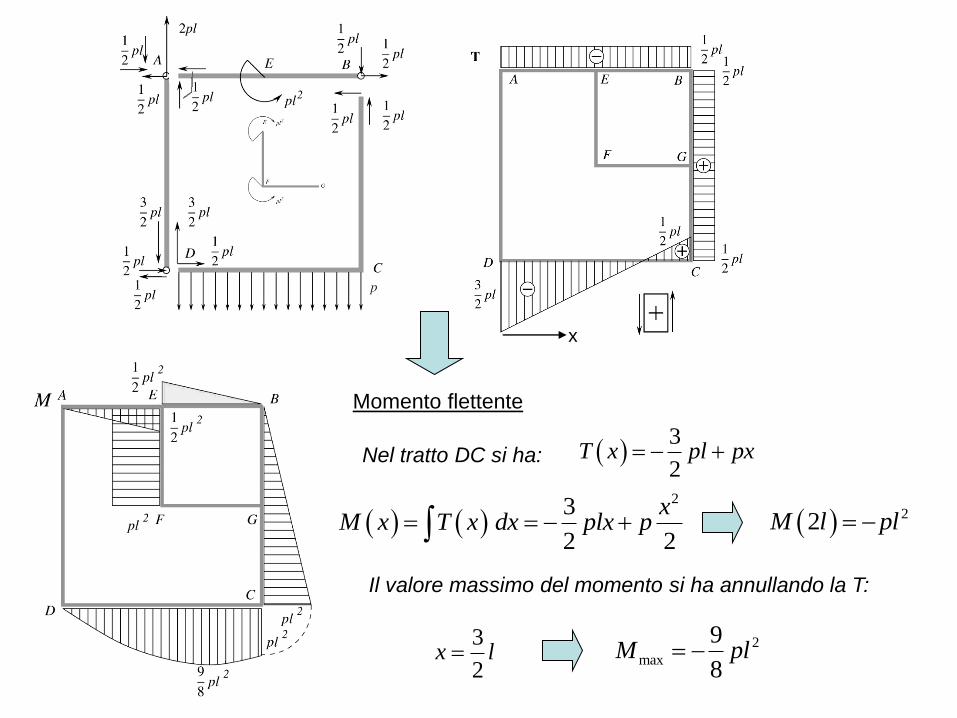
Momento flettente
Nel tratto DC si ha: 3
2 T x pl px
23
2 2
x
M x T x dx plx p 22 M l pl
x
Il valore massimo del momento si ha annullando la T:
3
2x l
2
max
9
8 M pl
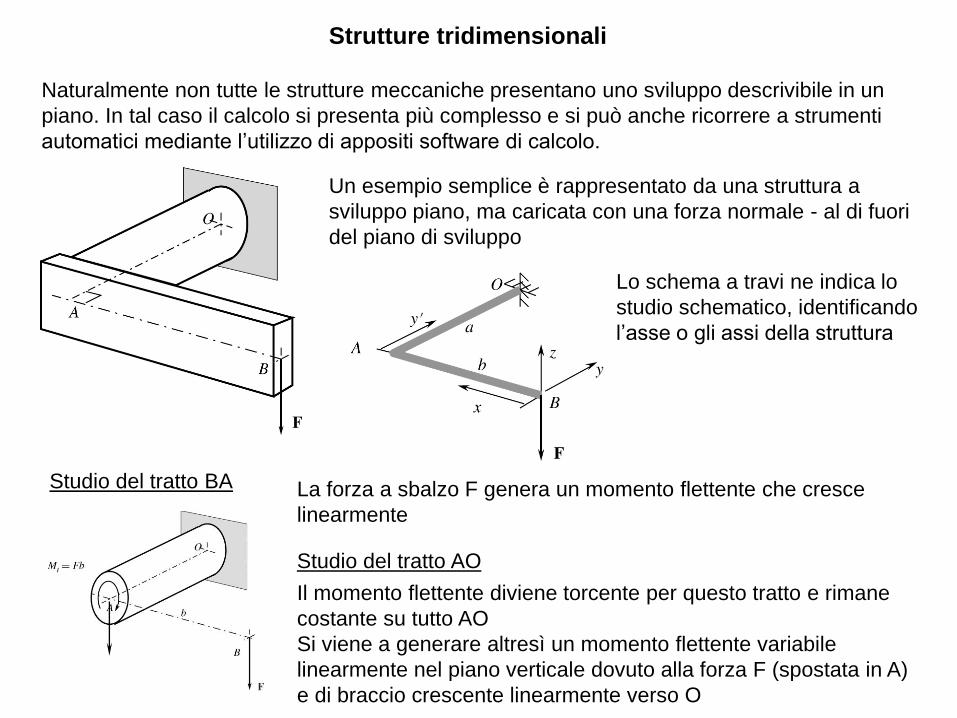
Strutture tridimensionali
Naturalmente non tutte le strutture meccaniche presentano uno sviluppo descrivibile in un
piano. In tal caso il calcolo si presenta più complesso e si può anche ricorrere a strumenti
automatici mediante l’utilizzo di appositi software di calcolo.
Un esempio semplice è rappresentato da una struttura a
sviluppo piano, ma caricata con una forza normale - al di fuori
del piano di sviluppo
Lo schema a travi ne indica lo
studio schematico, identificando
l’asse o gli assi della struttura
Studio del tratto BA La forza a sbalzo F genera un momento flettente che cresce
linearmente
Studio del tratto AO
Il momento flettente diviene torcente per questo tratto e rimane
costante su tutto AO
Si viene a generare altresì un momento flettente variabile
linearmente nel piano verticale dovuto alla forza F (spostata in A)
e di braccio crescente linearmente verso O
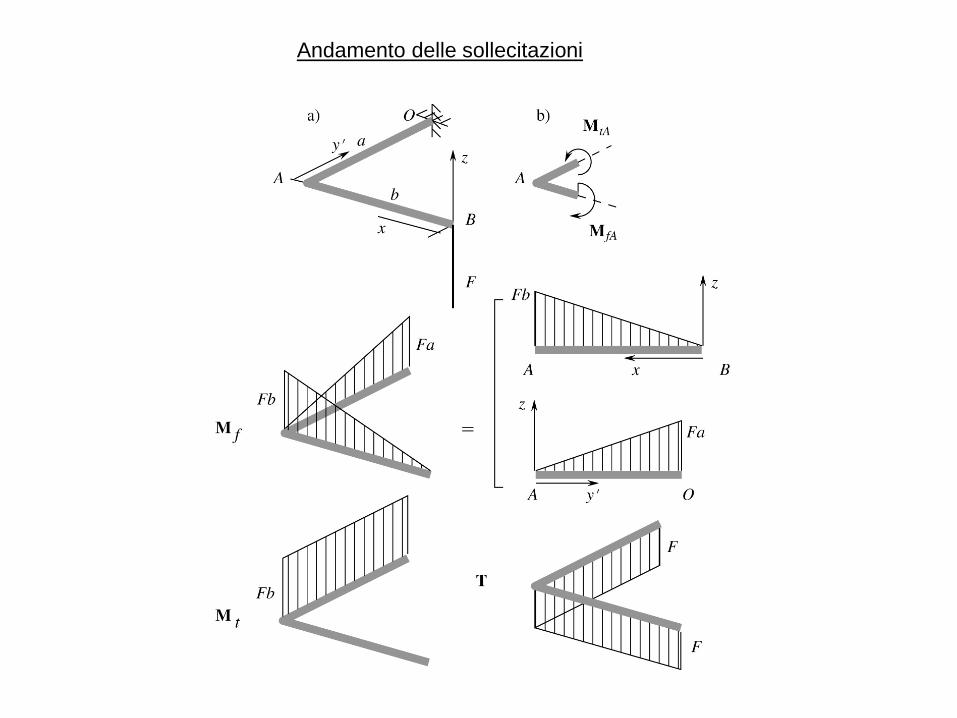
Andamento delle sollecitazioni

Esempio 1 Si considera un albero che trasmette una coppia con
ingresso attraverso una ruota dentata a denti elicoidali
La ruota dentata elicoidale fornisce una spinta radiale, assiale e tangenziale
Il cuscinetto in A provvede a scaricare spinte radiali e assiali, mentre quello in B
solo radiali, il sistema d’appoggio è dunque isostatico
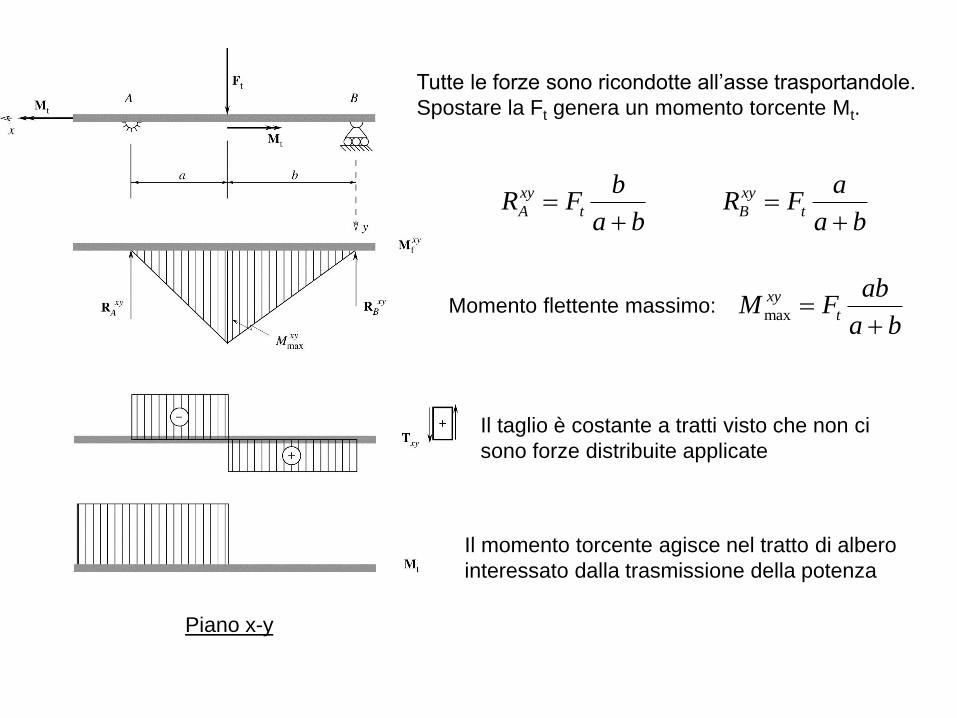
Tutte le forze sono ricondotte all’asse trasportandole.
Spostare la Ft genera un momento torcente Mt.
Piano x-y
xy
A t
bR F
a b
xy
B t
aR F
a b
max
xy
t
abM F
a b
Momento flettente massimo:
Il momento torcente agisce nel tratto di albero
interessato dalla trasmissione della potenza
Il taglio è costante a tratti visto che non ci
sono forze distribuite applicate

Lo spostamento della Fa genera un momento flettente
concentrato nel punto di ancoraggio della ruota dentata.
2
xz aA r
b F DR F
a b a b
Vi è una sollecitazione di trazione nel tratto tra
la ruota dentata e il cuscinetto assiale
Il taglio è costante a tratti visto che non ci
sono forze distribuite applicate
Per il calcolo del momento occorre considerare anche M
Piano x-z
2
xz aB r
a F DR F
a b a b
Le sollecitazioni di momento (e di taglio), nei due piani
ortogonali, si possono comporre col teorema di Pitagora
2 2
xy xz
tot f fM M M direzione risultante