Resistenza dei materiali - DIMA - Sapienzadma.ing.uniroma1.it/users/veniali/Materiali_3.pdf ·...
19
Dipartimento di Meccanica e Aeronautica Università di Roma La Sapienza Tecnologia dei P iP d tti i Università di Roma La Sapienza Processi Produttivi Resistenza dei materiali Forze di massa gravitazionali inerziali elettromagnetiche di contatto fra solidi di contatto fra solidi fra solidi e liquidi fra solidi e gas attraverso una superficie pressioni tensioni accettabili? sollecitazioni deformazioni accettabili? Materiali 42
Transcript of Resistenza dei materiali - DIMA - Sapienzadma.ing.uniroma1.it/users/veniali/Materiali_3.pdf ·...

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Resistenza dei materiali
Forze di massa gravitazionaliinerzialielettromagnetiche
di contatto fra solididi contatto fra solidifra solidi e liquidifra solidi e gas
attraverso una superficie
pressionitensioni accettabili?sollecitazioni
deformazioni accettabili?
Materiali 42

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
F1
F
Caso generico
F2
F3
Priconducibile a
F
F
che porta a tensioni/deformazioni
Materiali 43

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Studio delle sollecitazioni / deformazioni
Forze FForze F
Reazioni vincolari R1, R2 ,…., Rn = F/ 2 trave appoggiata
Momento flettente Mf = F L / 4
Freccia massima f = F L3 / 48 E I
Tensione σ = Mt y / I
F fF forzaL lunghezzaE modulo elasticoI momento d’inerzia
i
σ < = > σ max?? ??y semi spessore f freccia massimaσ tensionef < = > f max?? ??
Materiali 44

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Tipologia di Carico (Forze o Coppie)Tipologia di Carico (Forze o Coppie)
CONCENTRATO se agisce su un punto isolato della superficie del corpo
RIPARTITO o DISTRIBUITO se agisce su zone esteseg
F q p u M
PERMANENTE se agisce continuamente e invariabilmente (peso proprio)
ACCIDENTALE se agisce non continuamente e con intensità variabile
STATICO se costante o varia con sufficiente lentezza da non produrre vibrazioni nella struttura
DINAMICO se variabile in modo rapido
Materiali 45
Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
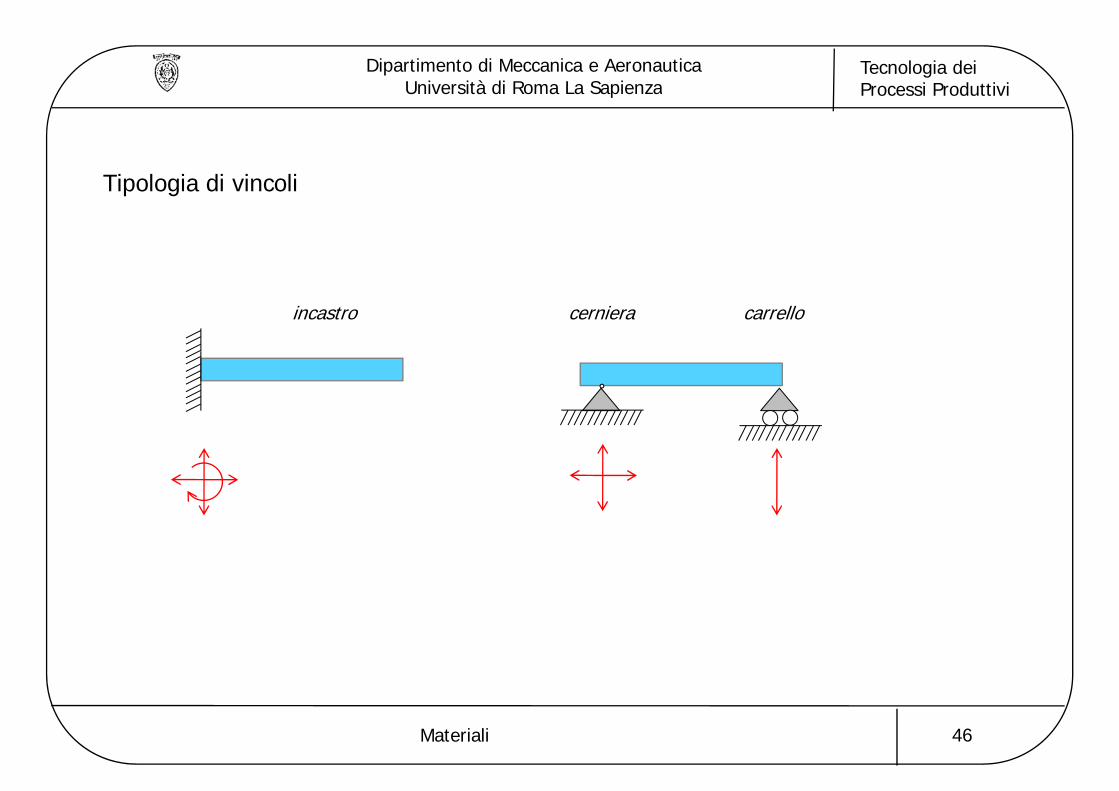
Ti l i di i liTipologia di vincoli
incastro cerniera carrello
Materiali 46

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Gradi di libertà e vincoli
y
Gradi di libertà e vincoli
d l ff dl
xθ
LABILE quando i vincoli sono insufficienti rispetto ai gdl3 gdl: traslazione x
traslazione yrotazione θrotazione θ
2 vincoli traslazione x e y sono impedite, ma l’oggetto può ruotare secondo θ
ISOSTATICA quando il numero dei vincoli è uguale a quello dei gdl
IPERSTATICA quando i vincoli sono sovrabbondanti rispetto ai gdl
Materiali 47

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Stato di Sollecitazione
Noti i carichi: forze e coppie attive (F e M) e le Reazioni vincolari (Rn) agenti su un generico corpo è necessario cercare le interazioni scambiate attraverso una generica sezione piana S del corpo →determinare le Tensioni interne σ
Sollecitazioni sempliciCompressione / Tra ione Prod ce accorciamento / all ngamento delle fibre l ngo asse del solidoCompressione / Trazione Produce accorciamento / allungamento delle fibre lungo asse del solido
Taglio Produce lo scorrimento di una sezione rispetto a quella adiacente sia trasversalmente che longitudinalmente.
Flessione Produce incurvamento longitudinale del solido
Torsione Produce la rotazione delle sezioni trasversali rispetto all’asse
Sollecitazioni compostePressoflessione Produce accorciamento e incurvamento delle fibre lungo l’asse del solido
Flessione e taglio Dovuta a forze inclinate rispetto all’ asse longitudinale per cui provocano deformazioni composte
Carico di punta Produce sbandamento dell’asse essendo i carichi di compressione agenti su solidi troppo snelli
Materiali 48

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Esempi di sollecitazioni elementari cui può essere soggetto un corpo
Barra circolare sottoposta a Trazione
Materiali 49

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Cilindro cavo sottoposto a Torsione
Materiali 50

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Trave sottoposta a Flessione
Materiali 51

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Trave sottoposta a Flessione e Taglio
Materiali 52

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Diagrammi delle sollecitazioni Sforzo normale
TaglioTaglio
Materiali 53
Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
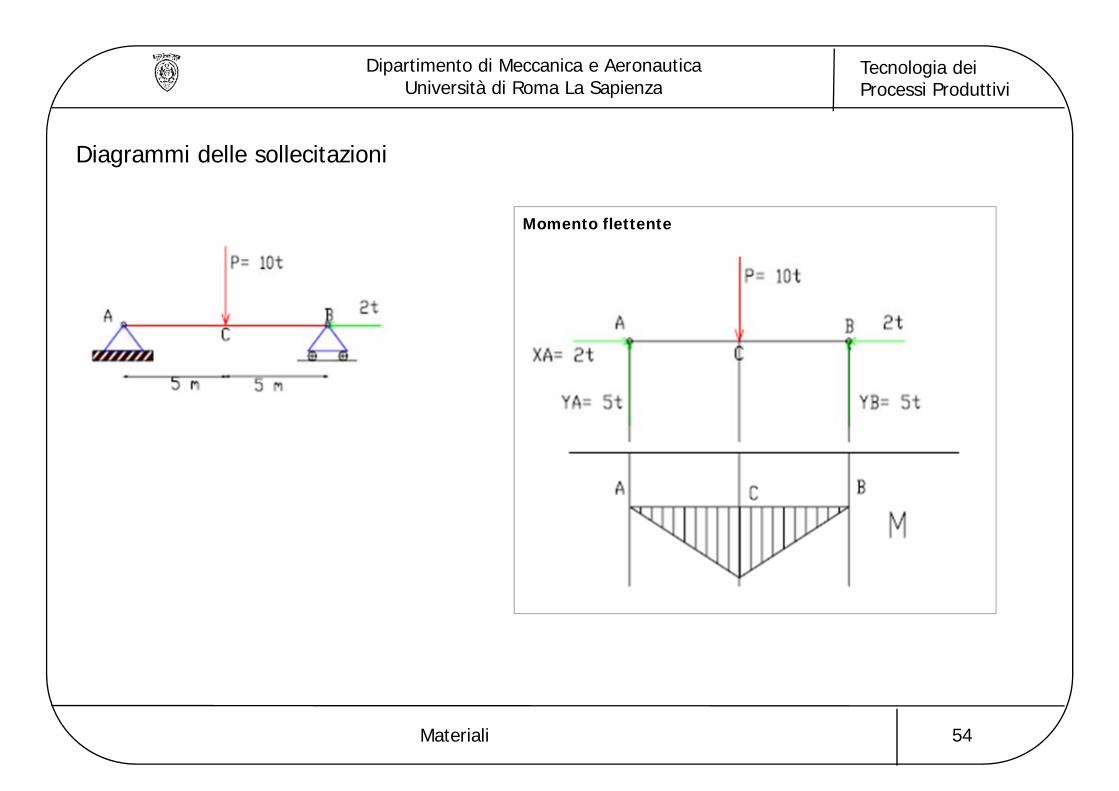
Diagrammi delle sollecitazioni
Momento flettente
Materiali 54

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Dal diagramma delle sollecitazioni è possibile determinare la sollecitazione massima
e quindi
verificare, ad esempio, se si raggiunge la sollecitazione di rottura σr
Mmax ymaxσmax = -------------- <=> σr
E I
Mmax= P L / 4
Materiali 55

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Dalle sollecitazioni è possibile determinare le deformazioni
Linea elastica
ff
fmax
Materiali 56

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Dalla conoscenza della linea elastica è possibile determinare la deformazione massimaDalla conoscenza della linea elastica è possibile determinare la deformazione massima
e quindi
verificare, ad esempio, se le deformazioni sono compatibili con la funzionalità del pezzo
fmax = P L3 / 48 E I
Nota: in queste formule compare: il materiale attraverso il suo modulo elastico E
la geometria del pezzo attraverso il momento d’inerzia I
il carico applicato P
le condizioni di vincolo attraverso la distanza degli appoggi L
Materiali 57

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Albero sottoposto ad un sistema di forze
(a) Forza di taglio; (b) Sforzo normale; (c) diagramma del momento flettente.
Materiali 58

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Masse e Momenti di Inerzia
la Massa è una misura della resistenza alle variazioni in unla Massa è una misura della resistenza alle variazioni in un moto di traslazione
il Momento di Inerzia è una misura della resistenza del corpo a mutare la sua velocità di rotazione. Dipende dalla massa del corpo e dalla distribuzione di questa rispetto all'asse di rotazione.
Materiali 59

Dipartimento di Meccanica e AeronauticaUniversità di Roma La Sapienza
Tecnologia dei P i P d tti iUniversità di Roma La Sapienza Processi Produttivi
Nelle lavorazioni meccaniche difficilmente abbiamo stati di sforzo uniassiali …. per fare qualche esempio:Nelle lavorazioni meccaniche difficilmente abbiamo stati di sforzo uniassiali …. per fare qualche esempio:
f ti ttili i i i t tsfera a pareti sottili in pressione internamente
trafilatura attraverso stampo conicotrafilatura attraverso stampo conico
processo di imbutituraprocesso di imbutitura
Materiali 60