ONDE SONORE E FISICA MATEMATICA DEGLI STRUMENTI … ONDE SONORE E FISICA MATEMATICA DEGLI STRUMENTI...

If you can't read please download the document
Transcript of ONDE SONORE E FISICA MATEMATICA DEGLI STRUMENTI … ONDE SONORE E FISICA MATEMATICA DEGLI STRUMENTI...
Sapienza Università di Roma
FACOLTÀ DI SCIENZE MATEMATICHE, FISICHE E NATURALI
Corso di Laurea Triennale in Fisica
ONDE SONORE E FISICA MATEMATICA
DEGLI STRUMENTI MUSICALI
Tesi di Laurea Triennale in Fisica
Relatore: Candidato:Prof. Paolo Maria Santini Piergiorgio Caramazza
(matricola 1337162)
Anno Accademico 2011/2012
Indice
Introduzione 2
1 Oscillatore accoppiato 31.1 Oscillazioni longitudinali e trasverse di un semplice oscillatore armonico . . 31.2 Oscillatore accoppiato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Oscillazioni anarmoniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Sistemi unidimensionali 82.1 Onde trasverse nella corda . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2 Soluzione generale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3 Soluzione oscillante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4 Meccanismi di eccitazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.5 Smorzamento e trasmissione della vibrazione . . . . . . . . . . . . . . . . . 12
3 Sistemi in più dimensioni 143.1 Membrane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.1 Membrane rettangolari . . . . . . . . . . . . . . . . . . . . . . . . . . 143.1.2 Tamburi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.1.3 Membrane reali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Cavità chiuse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.3 Strumenti a corde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Dinamica dei fluidi ideali comprimibili 224.1 Onde sonore in approssimazione lineare . . . . . . . . . . . . . . . . . . . . 234.2 Onde sonore non lineari: rottura e onde d’urto . . . . . . . . . . . . . . . . 24
5 Strumenti a fiato 275.1 Tubi infiniti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285.2 Tubi reali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.3 Corni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Conclusioni 34
Appendice A 35
1
Introduzione
Lo scopo della seguente trattazione è quello di intraprendere una prima descrizione delfenomeno musicale dal punto di vista fisico, in special modo riguardo ai meccanismi dioscillazione di oggetti musicalmente rilevanti e alla propagazione del suono.Una spiegazione esauriente della fisica di un qualsiasi strumento musicale richiede una trat-tazione specifica che esula dalle possibilità di questa tesi. Al contrario, in questo lavoroverrà messo in evidenza quale tipo di approccio è possibile seguire per cominciare lo stu-dio dei differenti strumenti, a partire dalle parti che lo compongo, fino a tentare, qualorasia possibile, una descrizione generale e completa dello strumento e di come esso riesca apropagare il suono.In genere ogni strumento può essere scomposto in tre parti fisicamente rilevanti: eccitatore,risuonatore, radiatore. La parte che può essere affrontata con minori difficoltà e quella delrisuonatore, ovvero, quella parte dello strumento che genera la perturbazione sonora.In particolare affronteremo risuonatori che appartengono ad un’ampia classe di strumentimusicali quali la corda, la membrana etc... Il suono è generato da oggetti, come quelliappena citati, capaci di vibrare e oscillare. Pertanto ognuno di questi oggetti dovrà esserecaratterizzato da una certa elasticità per la quale, quando sono allontanati dalla loro po-sizione di equilibrio, subiscono una determinata forza, o tensione, che tende a ristabilirnela posizione di equilibrio. L’oggetto sarà anche dotato di una certa massa inerziale che, sedistribuita lungo tutto il sistema, verrà calcolata in termini di massa per unità di volume,superfice o lunghezza, a seconda delle dimensioni del sistema. In sistemi dove la massaè distribuita in una regione finita di spazio la vibrazione è descritta per mezzo di ondestazionarie.Questa breve dissertazione prevede un’iniziale introduzione al concetto di modo normaledi vibrazione attraverso l’esempio dell’oscillatore accoppiato. Successivamente verrannostudiati i principali risuonatori prima citati e le loro differenti problematiche. Inoltre verràaffrontato il problema della propagazione del suono in cavità e in tubi sonori. Per farquesto sarà prima necessario ricavare l’equazione che governa l’evoluzione spazio tempo-rale di una perturbazione ondosa in un fluido, evidenziando anche alcuni aspetti non linearinella propagazione delle onde.Il materiale della seguente dissertazione proviene essenzialmente dal libro The Physics ofMusical Intruments [1], di Fletcher & Rossing, e dalle dispense del corso di Acustica Mu-sicale del professor Paolo Camiz [2]; a queste due principali fonti verrà fatto continuoriferimento nel corso della trattazione.
2
Capitolo 1
Oscillatore accoppiato
In questo capitolo introduttivo vengono studiati semplici sistemi oscillanti, in modo daintrodurre concetti fondamentali per lo studio e la comprensione dell’acustica musicale.
1.1 Oscillazioni longitudinali e trasverse di un semplice os-cillatore armonico
Cominciamo considerando un sistema oscillante composto da una massa m e due molleuguali di costante elastica k, lunghezza a riposo a0 e lunghezza di equilibrio a, dispostecome in fig 1.1. Inoltre definiamo le coordinate: x, parallela alla direzione individuata dallemolle a riposo, e y, che individua una direzione perpendicolare ad essa. Nel piano xy talesistema può oscillare in due direzioni principali; pertanto, parleremo di moto longitudinale,quando il moto si svolge lungo la direzione x, e di moto trasversale, quando il moto avvienelungo y. Naturalmente, in generale, sarà possibile anche un oscillazione composta dai duemoti appena definiti.
Figura 1.1: Oscillazioni longitudinali e trasversali di un sistema che consiste di una massa e duemolle.
Nell’oscillazione longitudinale, la forza totale che agisce sulla massa risulta essere:
Fx = k(a− x− a0)− k(a+ x+ a0) = −2kx. (1.1)Applicando la seconda legge di Newton alla massa in considerazione, si ottiene:
mẍ(t) = −2kx(t), (1.2)ovvero la tipica equazione differenziale del secondo ordine dell’oscillatore armonico. Questaammette soluzione oscillante del tipo:
x(t) = aei(ωt+φ) + c.c., con a, φ ∈ R, (1.3)
dove abbiamo definito la pulsazione:
ω =
√2k
m. (1.4)
3
Invece per l’oscillazione trasversale avremo:
Fy = −2k(√
a2 + y2 − a0) y√
a2 + y2, (1.5)
dove y/√a2 + y2 è la proiezione della forza lungo l’asse y. Per piccole variazioni di y,
sviluppando in serie di Taylor, la (1.5) puo’ essere riscritta come:
Fy = −2ky
(1− a0√
a2 + y2
)≈ −2ky
(1− a0
a
)− Ka0
a3y3. (1.6)
Nel caso in cui la molla è tirata per una lunghezza molto maggiore della lunghezza di riposodella molla, cioè quando a >> a0 , allora il termine dominante è −ky, ovvero la solita forzaelastica lineare in y. Quindi otteniamo un sistema analogo a quello precedente; anche inquesto caso il sistema oscilla con pulsazione (1.4). Qualora a ' a0 allora il termine cubiconon è più trascurabile: il sistema diventa non lineare e pertanto richiede una trattazioneadeguata (si veda il paragrafo 1.3).
1.2 Oscillatore accoppiato
Consideriamo ora un sistema composto da due corpi di massa m1 e m2, connessi tra loroda tre molle di costante elastica k1, k2 e k3, i quali possono scorrere senza attriti lungo ladirezione x, come rappresentato nella figura 1.2.
Figura 1.2: Oscillazioni longitudinali di un sistema che consiste due masse e tre molle; 0 rappresentail punto di equilibrio di ciascuna molla.
Applicando la seconda legge di Newton sulla prima e sulla seconda massa otteniamo ilseguente sistema di equazioni accoppiate:{
m1ẍ1(t) = −(k1 + k2)x1 + k2x2,m2ẍ2(t) = −(k2 + k3)x2 + k2x1.
(1.7)
Questo sistema puo’ anche essere riscritto sotto forma matriciale come:
MẌ(t) = −KX(t), (1.8)
dove
K =
(k1 + k2 −k2−k2 k2 + k3
), X(t) =
(x1(t)x2(t)
), M =
(m1 00 m2
).
Possiamo osservare dalla matrice K, che non è diagonale, l’accoppiamento dei moti. Cer-chiamo delle soluzioni del tipo dell’oscillatore armonico, ovvero come parte reale di:
Ψ(t) =
(ψ1(t)ψ2(t)
)=
(a1e−iψ1
a2e−iψ2
)eiωt = Aeiωt. (1.9)
4
Sostituendo otteniamo la seguente equazione:
−ω2MΨ(t) +KΨ(t) = 0, (1.10)
la quale ha una soluzione non banale solo se:
det(K − ω2M) = 0 (1.11)
Assumendo, per semplicità, che m1 = m2 = m , k1 = k2 = k3 = k e svolgendo i calcoliotteniamo il seguente risultato:
ω1 =
√k
me ω2 =
√3k
m. (1.12)
Tali frequenze corrispondono alle uniche possibili soluzioni in cui il sistema oscilla di mo-to armonico, soluzioni che rappresentano i modi normali di vibrazione. Dalle frequenzeottenute possiamo risalire ai coefficenti che determinano l’equazione del moto delle duemasse; otteniamo i seguenti due moti:
1. nel primo modo le masse hanno lo stesso moto: x1(t) = x2(t); la molla centrale nonviene mai copressa.
Figura 1.3: Modo vibrazionale con frequenza ω1.
2. nel secondo le masse oscillano in controfase: x1(t) = −x2(t), la molla centrale sicomprime il doppio di quelle laterali.
Figura 1.4: Modo vibrazionale con frequenza ω2.
Abbiamo visto come entrambe le soluzioni soddisfino l’equazione del moto; è facile vederecome anche una combinazione lineare delle due soluzioni sia essa stessa soluzione. Questaproprietà fondamentale è dovuta alla linearità dell’equazione differenziale del moto e rap-presenta il cosiddetto principio di sovrapposizione. In generale, quindi, la soluzione saràuna combinazione lineare delle due soluzioni corrispondenti ai due modi normali. Infattii due vettori X(t) ottenuti sono ortogonali e definiscono una base completa per lo spaziodelle soluzioni del sistema (1.7). Inoltre i modi normali sono indipendenti tra loro: infatti,qualora il sistema si trovi inizialmente in un particolare modo vibrazionale, allora l’energiadel sistema rimane confinata in questo moto oscillatorio, trasformandosi da energia cinet-ica in potenziale, e viceversa, proprio come accade per un qualsiasi oscillatore armonico.Da questi semplici ragionamenti deduciamo che l’ energia totale di un sistema oscillante,comunque complesso, è semplicemente esprimibile come la somma delle energie dei singolimodi normali che compongono l’oscillazione. Nel caso generale il sistema non si trova inun singolo modo, pertanto l’energia a disposizione viene scambiata tra i modi normali.
Consideriamo il caso in cui il sistema oscillatore accoppiato sia libero di muoversi in duedirezioni, come rappresentato in figura 1.5.
5
Figura 1.5: Oscillatore accoppiato bidimensionale.
Definiamo ora quattro coordinate x1, x2, y1 e y2, e consideriamo masse e molle eguali. Inentrambe le direzioni, x e y, otteniamo un sistema oscillatore accoppiato analogo a quellounidimensionale studiato precedentemente. Possiamo pertanto affermare che tale sistemapresenta quattro modi di vibrazione: due trasversali, lungo y, e due longitudinali, lungo x.
Riepilogando, lo studio di questo semplice problema ci aiuta a capire come sia possibileottenere una descrizione completa della dinamica di un qualsiasi sistema vibrante scompo-nendo il moto in semplici componenti che oscillano indipendentemente.
1.3 Oscillazioni anarmoniche
Vediamo ora cosa accade quando consideriamo casi più realistici nell’ambito del sistemamassa-molla. In genere la forza può dunque presentare una dipendenza non lineare dallacoordinata spaziale. Prendiamo in considerazione un sistema che evolve con un’equazionedella forma:
q̈ + q + �q3 = 0, (1.13)
dove � è un parametro piccolo a piacere: |�| << 1. Tale equazione, che va sotto il nome diequazione di Duffing, descrive un oscillatore anarmonico soggetto ad una forza di richiamosimmetrica rispetto al punto di equilibrio, in questo caso in assenza di attriti e forzanti.Nonostante il fatto che possiamo risolvere esattamente l’equazione, attraverso funzioniellittiche [3], a noi interessa utilizzare un approccio perturbativo, motivo per cui abbiamointrodotto il parametro �. Completiamo il problema introducendo le condizioni iniziali:
q(0) = 1, q̇(0) = 0. (1.14)
Il metodo perturbativo prevede lo sviluppo della soluzione q(t) in serie di potenze di �:
q(t) =∞∑n=0
�nqn(t), (1.15)
q0(0) = 1, q̇0(0) = 0; qn(0) = 0, q̇n(0) = 0 con n > 0. (1.16)
Si procede sostituendo la (1.15), in (1.13), e eguagliando i coefficienti delle potenze in �: ot-teniamo un sistema di equazioni differenziali. Solo all’ordine O(1) l’equazione differenzialeè omogenea e prende la forma dell’equazione dell’oscillatore armonico. Date le condizioniiniziali (1.16), la soluzione sarà:
q0(t) = cost. (1.17)
Invece al primo ordine abbiamo:
q̈1 + q1 + �q30 = 0. (1.18)
Questa volta abbiamo a che fare con un oscillatore forzato; sostituendo la (1.17), otteniamocome forzante cos3(t), termine che può anche essere riscritto nella forma 34cost +
14cos3t.
6
Poiché anche la soluzione dell’omogenea della (1.18) oscilla con frequenza unitaria, il sis-tema entra in risonanza. Questo ci dice che la q(t) deve contenere almeno un termine checresce linearmente con t, anche detto secolare, che rende lo sviluppo (1.15)non perturbati-vo, per t = O(�−1), e che esplode per t→∞.Invece, da semplici considerazioni energetiche ci si rende facilmente conto che la q(t) èlimitata: date le condizioni iniziali (1.16), l’energia meccanica del sistema al tempo t = 0(E0), è interamente potenziale; pertanto a partire dall’energia meccanica al generico tempot:
E(t) =1
2q̈2 +
1
2q2 +
1
4�q4 = E0, (1.19)
ricaviamo 12q2 ≤ E0. L’energia meccanica è una quantita conservata, quindi q(t) è limitato
∀t.Onde eliminare la secolarità, utilizziamo il metodo di Stokes-Poincaré dello shift dellafrequenza [4], applicabile nel caso dei sistemi hamiltoniani: ipotizziamo un’ Ansatz dellaforma:
q(t) = Aei(1+α�)t + �(Bei(1+α�)t + Ce3i(1+α�)t) + c.c+O(�2), (1.20)
dove A,B,C sono numeri complessi. Tale ipotesi è più che lecita, infatti tiene conto di unpossibile shift della frequenza, tale da eliminare la secolarità, e della presenza, almeno alprimo ordine, di un termine corrispondente al cubo della soluzione del sistema all’ordinezero, necessario per quanto visto nella (1.18). Sostituendo la (1.20) nel termine cubico siottiene:
A3(e3i(1+α�)t + 3ei(1+α�)t + c.c.
)+O(�). (1.21)
Il primo termine è quello che genera la terza armonica, mentre il secondo è quello cheva eliminato per evitare risonanza. Dunque svolgendo i calcoli e trascurando i termini alsecondo ordine, otteniamo per α la relazione:
α =3
2|A|2. (1.22)
Dalle condizioni iniziali otteniamo |A| = 12 , pertanto la soluzione della (1.13) è:
q(t) = cos
[(1 +
3
8�
)t
]+O(�). (1.23)
Possiamo dunque apprezzare due importanti effetti dovuti alla non linearità del problema,che tipicamente caratterizzano i fenomeni di tipo non lineare. Il primo consiste nello shiftdelle frequenze, proporzionale al modulo quadro dell’ampiezza, che, per quanto visto, sirende necessario per eliminare problemi di risonanza. Il secondo effetto consiste nellagenerazione di armoniche superiori: nel nostro caso, al primo ordine in � viene generata laterza armonica.
7
Capitolo 2
Sistemi unidimensionali
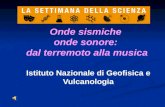
Introduciamo lo studio della corda vibrante con delle prime osservazioni qualitative.Prendiamo in considerazione un’array lineare di N oscillatori: in analogia con il sistemastudiato, considerando le oscillazioni in un piano, avremo 2 x N modi normali di vibrazione.Nella figura 2.1 vengono mostrati i modi trasversi per ordini crescenti in N . Man manoche aumenta N possiamo osservare come il nostro sistema tende a perdere informazioniriguardo alla quantità di oscillatori e comincia ad assomigliare ad una corda vibrante.Dunque, anche se presumibilmente potremmo descrivere il sistema corda con un set di Nequazioni, facendo tendere N all’infinito, conviene, per semplicità, considerare il sistemanel suo complesso.
Figura 2.1: Rappresentazione grafica dei modi normali trasversi di oscillazione per un numerocrescente di oscillatori accoppiati
Lo studio della corda viene intrapreso trascurando il moto longitudinale e quello torsionale.Tale affermazione merita una giustificazione che verrà introdotta successivamente; per oraci basta apprezzare il fatto che nei tre usuali metodi di eccitazione della corda, ovveropizzico, percussione e sfregamento, i modi longitudinali non vengono attivati mentre quellitorsionali interessano solo parzialmente il terzo caso.
2.1 Onde trasverse nella corda
Consideriamo una corda uniforme con densità lineare µ sottoposta ad una tensione ugualeτ in ogni punto. Fissiamo la coordinata x parallela alla corda nella sua configurazione diriposo, dunque chiamiamo y l’asse lungo il quale oscilla la corda. La forza di richiamo dF ,che agisce su un segmento di corda ds, è esprimibile come la differenza di tensione tra i due
8
estremi del segmento, ovvero, indicando con θ l’angolo formato, rispetto all’ascissa, dallatangente al segmento di corda, nel punto x:
dFy = (τ sin θ)x+dx − (τ sin θ)x '∂(τ sin θ)
∂xdx; ‘ (2.1)
dove, nell’ultimo passaggio è stato sviluppato in serie di Taylor il termine (τsinθ)x+dx. Seconsideriamo piccole oscillazioni, allora:
sin θ ∼ tan θ = ∂y/∂x. (2.2)
Quindi, applicando la seconda legge di Newton al segmento ds, otteniamo:
τ∂2y
∂x2dx = (µds)
∂2y
∂t2(2.3)
con µds massa del segmento ds. Avendo ipotizzato dy piccolo, ds ' dx; inoltre, rinomi-nando c2 = τ/µ, si ottiene l’equazione delle onde di D’Alambert in 1 + 1 dimensioni:
∂2y
∂t2= c2
∂2y
∂x2. (2.4)
2.2 Soluzione generale
La soluzione generale della (2.4) è nella forma:
y = f1(ct− x) + f2(ct+ x); (2.5)
come si può osservare tale soluzione è composta da due onde che viaggiano alla stessavelocità c in direzioni opposte. Le funzioni f1 e f2 sono arbitrarie e la loro scelta dipendedalle condizioni iniziali e al contorno imposte dal problema in esame. Questa forma del-la soluzione ci torna particolarmente utile quando vogliamo studiare il comportamentodell’onda ai bordi. Se la corda è fissata ad un estremo posto in x = 0 la soluzione diventerà:
y = 0 = f1(ct) + f2(ct) =⇒ f1(ct) = −f2(ct); (2.6)
pertanto un qualsiasi impulso verrà riflesso simmetricamente rispetto all’asse di propagazione.Questa sarà la condizione che utilizziamo per descrivere la corda, ma è opportuno osservareche negli strumenti come il pianoforte, il violino, la chitarra, etc. . . , la corda è solamenteappoggiata. Nel caso che non consideriamo più sistemi infinitamente estensibili, ma anchecorpi rigidi e soggetti a deformazione, questo tipo di supporti impone ulteriori condizionisulle derivate spaziali della soluzione nell’estremo considerato. Inoltre, in questi casi, sitiene conto della rigidità della corda aggiungendo termini con derivate di ordini superioriall’equazione delle onde: è quello che succede nelle corde in acciaio armonico nei pianofortimoderni [2].
2.3 Soluzione oscillante
Come nel caso dell’oscillatore accoppiato, cerchiamo le soluzioni di tipo armonico esplici-tando le funzioni f1 e f2 in termini di seno e coseno:
y(x, t) = Asinω
c(ct− x) +Bcosω
c(ct− x) + Csinω
c(ct+ x) +Dcos
ω
c(ct+ x)
= Asin(ωt− kx) +Bcos(ωt− kx) + Csin(ωt+ kx) +Dcos(ωt+ kx),(2.7)
9
dove abbiamo definito il numero d’onda:
k =ω
c=
2π
λ, (2.8)
con λ: lunghezza d’onda. Inoltre la frequenza f è legata alla pulsazione ω dalla relazione:
ω = 2πf ; (2.9)
pertanto la velocità può anche essere espressa come:
c = λf. (2.10)
Fissiamo ora le condizioni al contorno per una corda di lunghezza L. Imponiamo quindiy(0, t) = 0 e y(L, t) = 0. La prima condizione, per quanto visto nella (2.6), richiede cheA = −C e B = −D; quindi:
y(x, t) = −A[sin(ωt− kx)− sin(ωt+ kx)] +B[cos(ωt− kx)− cos(ωt+ kx)], (2.11)
può essere riscritta come:
y(x, t) = 2[A cosωt−B sinωt] sin kx. (2.12)
La seconda condizione impone che sinkL = 0 =⇒ k = kn = ωnc ≡nπL con n intero. Quindi
fissando gli estremi, otteniamo la quantizzazione dello spettro delle frequenze, infatti sonoaccessibili solo i valori:
fn =c
2Ln, (2.13)
ai quali corrispondono, dalla (2.10), le lunghezze d’onda:
λn =2L
n. (2.14)
I valori ottenuti corrispondono ai modi normali di vibrazione del sistema, che esplicitiamo:
yn(x, t) = [An sinωnt+Bn cosωnt] sin knx. (2.15)
I punti nei quali la funzione yn si annulla vengono anche detti nodi, mentre con ventri siè soliti indicare i punti in cui la funzione assume periodicamente il suo massimo valore.La relazione tra i modi è armonica, infatti l’ n-esima frequenza è n volte la frequenzafondamentale f1 =
c2L , corrispondente alla lunghezza d’onda λn = 2L (il doppio della
lunghezza della corda). Inoltre è possibile esprimere una qualsiasi soluzione dell’equazionedella corda vibrante, con gli estremi fissati, come somma dei modi normali:
y(x, t) =∑n
[An sinωnt+Bn cosωnt] sinωnx
c; (2.16)
che potremmo anche scrivere nella forma piu’ compatta:
y(x, t) =∑n
Cn cos(ωnt+ φn) sin knx, (2.17)
dove Cn =√A2n +B
2n è l’ampiezza dell’ n − simo modo; abbiamo ottenuto la rappresen-
tazione in serie di Fourier dei seni [5] della y(x, t).
10
2.4 Meccanismi di eccitazione
Una volta osservato un tale meccanismo, è opportuno chiedersi quali dei modi vibrazionalivengono attivati a seconda di come viene eccitata la corda. I meccanismi di eccitazione del-la corda, già citati precedentemente, sono: pizzico, percussione e sfregamento. Nel pizzicola corda viene tirata in un determinato punto fino ad assumere una forma triangolare e suc-cessivamente rilasciata. Quindi, considerando un triangolo di altezza h, in corrispondenzadel punto L/a, le condizioni iniziali sono:
ẏ(x, 0) = 0,
y(x, 0) =ah
Lx, 0 ≤ x ≤ L
a,
y(x, 0) =ah
(a− 1)
(1− x
L
),
L
a≤ x ≤ L.
(2.18)
Utilizziamo l’analisi di Fourier per determinare i coefficenti An e Bn, per i quali si ricavanole seguenti formule:
An =2
ωnL
∫ L0ẏ(x, 0) sin
nπx
Ldx,
Bn =2
L
∫ L0y(x, 0) sin
nπx
Ldx.
(2.19)
La prima condizione delle (2.18) impone An = 0. Utilizzando la seconda otteniamo:
Bn =2
L
∫ La
0
ah
Lx sin
nπx
Ldx+
2
L
∫ LLa
ah
(a− 1)L
(1− x
L
)sin
nπx
Ldx =
=2a2h
(a− 1)n2π2sin
nπ
a.
(2.20)
Dal seguente risultato possiamo estrarre alcune informazioni interessanti; innanzituttoil termine monotono ci dice che l’ampiezza decade, al crescere di n, come una potenzaquadratica e questo spiega perchè le uniche frequenze udibili sono la fondamentale e pochealtre successive. Inoltre il termine in seno si annulla per ogni multiplo di a: n = ma; inquesto modo è dunque possibile eliminare determinati armonici scegliendo opportunamenteil punto della corda dove pizzicare. Se, per esempio, suoniamo la corda al centro (a = 2),vengono eliminati tutti gli armonici pari. Nell’immagine 2.2 viene rappresentato il caso incui viene pizzicata la corda in L/5. Le ampiezze degli armonici multipli di 5 sono tuttenulle.La trattazione della corda percossa viene affrontata con approssimazioni simili a quelledel pizzico. La differenza consiste nel fatto che la corda non viene tirata ma percossa nelpunto b; dunque y(x, 0) = 0 e ẏ(x, 0) = cδ(x− b). Pertanto il coefficente Bn risulterà nullo,mentre per il coefficente An abbiamo[2]:
An ∝1
nsin
(nπb
L
). (2.21)
Rispetto al caso precedente, gli armonici decadono con una potenza minore. Ciò comportache il suono contiene piu’ armonici alti e quindi risulta musicalmente piu’ “duro” rispettoalla corda pizzicata.La corda sfregata è ben più complessa da trattare, pertanto ci limiteremo perlopiù a con-siderazioni di tipo cinematico. Il moto della corda sfregata è composto da una fase di
11
Figura 2.2: Grafico che mostra le intensità di ogni armonica, nel caso di una corda pizzicata nelpunto L/5
attaccamento e una di scivolamento della corda, con il crine dell’archetto. Il meccanismoè il seguente: la corda rimane attaccata, per mezzo dell’attrito statico, finchè la forza dirichiamo non le permette di cominciare il suo moto, che risulterà frenato dall’azione dell’at-trito dinamico. Successivamente, quando la corda inverte il moto, la sua velocità raggiungeun certo valore per il quale viene nuovamente trascinata dall’archetto e ricomincia il ciclo.Uno studio accurato sul moto della corda sfregata è stato fatto da Cramer[6].
2.5 Smorzamento e trasmissione della vibrazione
Finora abbiamo studiato unicamente i modi di vibrazione della corda oscillante nel vuoto;pertanto serve spiegare come il suono prodotto possa irradiarsi per mezzo dell’aria. Divienequindi interessante analizzare anche il bilancio energetico della corda, quali sono i fenomenidi smorzamento e quali di questi consentono la propagazione dell’onda sonora.Lo smorzamento del moto avviene per mezzo dell’aria, per cause interne e per mezzodell’energia trasferita ai supporti (ponte, tavola armonica). La corda vibrante nell’aria nonè di per sé un buon irradiatore di suono e ciò è sia dovuto al fatto che muovendosi produceinsieme una compressione e una rarefazione, agendo di fatto come un dipolo [1], che alfatto che la corda, sottile, smuove in ogni caso poca aria. Quindi il suono che riusciamoa percepire in uno strumento a corde proviene principalmente dall’interazione della cordacon il ponticello, che, a sua volta, trasmette l’energia alla tavola armonica.Possiamo notare come lo smorzamento dovuto all’aria influenzi lo spettro delle frequenze.Infatti, aggiungendo in prima approssimazione un termine di attrito viscoso, proporzionalealla velocità, l’equazione delle onde diventa:
τ∂2y
∂x2− µ∂
2y
∂t2+ b
∂y
∂t= 0. (2.22)
Risolviamo la seguente equazione differenziale con il metodo della separazione delle varia-bili: la soluzione può essere cercata nella forma y = X(x)T (t). Sostituendo otteniamo leequazioni:
Ẍ(x) = −k2X(x), (2.23)
T̈ (t)− bµṪ (t) + k2c2T (t) = 0. (2.24)
12
La (2.23) ha soluzione: X(x) = Acoskx+Bsinkx. Quindi le condizioni al bordo impongononuovamente che An = 0 e k =
nπL . La (2.24) ci restituisce le frequenze di oscillazione del
sistema; sostituendo il valore ottenuto per k, e facendo l’ipotesi di piccolo smorzamento(|b| << 1), otteniamo:
ωn =nπc
L
(1− b
2L2
8µτπ2n2
)+ib
2µ. (2.25)
Come si puo’ osservare, oltre allo smorzamento, descritto dalla parte immaginaria di ωn, lefrequenze vengono effettivamente shiftate: l’effetto diminuisce all’aumentare di n. Questotipo di trattazione è comunque abbastanza approssimativa: in realtà bisogna tener contoanche dei moti turbolenti che vengono generati dall’interazione.Tornando alla questione energetica, un interessante studio di [7] evidenzia in che modopesano i tre tipi di smorzamento, dimostrando che l’aria è il mezzo principale attraverso ilquale la corda scambia energia con l’ambiente. Ci soffermiamo brevemente sull’interzionecon il ponte: nel caso della corda pizzicata si puo’ mostrare [2] come la componentelongitudinale della tensione, alla quale è sottoposto il ponte, sia trascurabile rispetto aquella trasversale. Potremmo interpretare tale risultato come un’ulteriore conferma dellatrascurabilità delle onde longitudinali nella corda.
13
Capitolo 3
Sistemi in più dimensioni
Nel seguente capitolo vengono trattati risuonatori in più dimensioni. Inizialmente vienetrattata la membrana di forma rettangolare e circolare, poi si descrive il caso delle mem-brane reali negli strumenti musicali a percussione. Anche in questo caso bidimensionale latrattazione verrà limitata alle onde trasversali. Successivamente viene trattato il problemadella propagazione delle onde sonore nelle cavità chiuse. Infine possiamo finalmente cercaredi fornire, almeno qualitativamente, una descrizione completa di uno strumento musicalea corde.
3.1 Membrane
3.1.1 Membrane rettangolari
Cominciamo dal caso più semplice che possiamo considerare, ovvero la membrana rettan-golare con estremi fissati e tensione τ costante in ogni punto. Consideriamo un sistemadi coordinate x, y, z con il piano xy parallelo alla membrana a riposo. Un piccolo elemen-to d’area di densità superficiale σ, spostato di una distanza dz, sente una tensione τ chetende a farlo tornare nella sua posizione di equilibrio. La forza lungo z sull’elemento dxdyè F = Fx + Fy, dove Fx (Fy) è la forza che agisce sul lato dy (dx). Ragionando come perla (2.1), otteniamo:
Fx ' τdy[( ∂z∂x)x+dx − (
∂z∂x)x
]' τdxdy ∂2z
∂x2,
Fy ' τdxdy ∂2z∂y2
.(3.1)
Dalla seconda legge di Newton:
τdxdy
(∂2z
∂x2+∂2z
∂y2
)= σdxdy
∂2z
∂t2, (3.2)
ovvero
∂2z
∂t2= c2∇2z, (3.3)
con c =√τ/σ velocità dell’onda trasversa; abbiamo ottenuto nuovamente l’equazione delle
onde di D’Alambert, in 2 + 1 dimensioni.L’equazione (3.3) può essere risolta utilizzando il metodo della separazione delle varia-bili, già introdotto nel paragrafo 2.4. Scriviamo la soluzione nella forma: z(x, y, t) =X(x)Y (y)T (t). Sostituendo si ottiene per le variabili spaziali la relazione:
∂2X
∂x2+∂2Y
∂y2= −ω
2
c2, (3.4)
14
mentre per la variabile temporale:
∂2T
∂t2= −ω2T. (3.5)
La 3.5 ha soluzione della forma: T (t) = A cosωt+B sinωt.Nella 3.4 isoliamo una variabile e poniamo entrambi i membri uguali ad una nuova costantek2:
1
X
d2X
dx2+ω2
c2= − 1
Y
d2Y
dy2= k2 → d
2X
dx2+
(ω2
c2− k2
)X = 0. (3.6)
La soluzione sarà:
X(x) = C cos
√ω2
c2− k2x+D sin
√ω2
c2− k2x (3.7)
Infined2Y
dy2+ k2Y = 0 (3.8)
La cui soluzione sarà del tipo: Y (y) = E cos kt + F sin kt. Imponiamo le condizioni albordo che, per una membrana rettangolare con lati Lx e Ly, equivale ad imporre che lasoluzione gerale si annulli in x = 0, x = Lx, y = 0 e y = Ly. La prima condizione su x cidice che C = 0; dalla seconda otteniamo:
Dsin
√ω2
c2− k2Lx = 0 =⇒
√ω2
c2− k2Lx = mπ, (3.9)
da cui
X(x) = D sinmπx
Lx, con m naturale. (3.10)
Analogamente otteniamo, per Y , E = 0 e:
Y (y) = F sinnπy
Ly, con n naturale. (3.11)
Infine ricaviamo le frequenze modali; dalle condizioni al bordo si ottiene:
ω2mn =
(mπ
Lx
)2c2 +
(nπ
Ly
)2c2 → fmn =
1
2
√τ
σ
√m2
L2x+
n2
L2y. (3.12)
Pertanto la soluzione generale sarà una combinazione lineare delle soluzioni:
zmn(x, y, t) = sinmπx
Lxsin
nπx
Ly(αmn sinωmnt+ βmn cosωmnt) (3.13)
Per ricavare i coefficenti αmn e βmn si procede in maniera analoga a quanto fatto per lacorda.
La separabilità della soluzione ci mostra come le onde stazionarie nelle direzioni x e ysiano indipendenti; ciò ci fa pensare alla membrana come estensione bidimensionale delmodello della corda. Bisogna comunque notare come la relazione tra le frequenze nonsia piu’ armonica, cioè basata su rapporti interi con la frequenza fondamentale. Questorisultato ha un’importanza musicale non indifferente, infatti il nostro orecchio percepiscela vibrazione prodotta come un rumore, piu’ che come un suono. Inoltre si ripresenta ilproblema, già sollevato nello studio della corda, riguardo alla necessità di affrontare una
15
trattazione adeguata dell’interazione del sistema con l’aria: infatti, essendo la membranauna superficie, viene maggiormente ostacolata rispetto alla corda. Parleremo di questosuccessivamente; per ora ci concentriamo sui casi particolari delle membrane quadrata ecircolare.
Figura 3.1: Nel grafico vengono riportati i primi modi di una membrana rettangolare
In una membrana quadrata i modi normali (m,n) e (n,m) sono degeneri, infatti Lx = Ly →fmn = fnm. Questo vuol dire che, ad una determinata frequenza ωmn, possiamo associaresia il modo (m,n) che quello (n,m), e non solo: anche ogni possibile combinazione linearedei due modi ha la stessa frequenza. Ovvero, per una certa ωmn, possiamo scrivere:
z(x, y, t) = [a sinmπx
Lxsin
nπy
Ly+ b sin
nπx
Lxsin
mπx
Ly](αmn sinωmnt+βmn cosωmnt), (3.14)
dalla quale, al variare dei coefficenti a e b, sono ottenibili infinite diverse forme di vibrazione.Ne riportiamo alcune nel grafico 3.2.
Figura 3.2: Nel grafico vengono riportati alcuni modi degeneri per il caso (1,2) e (1,3)
3.1.2 Tamburi
Per le membrane circolari adottiamo il sistema di coordinate polari (r, φ). In questo modosi ottiene per l’equazione delle onde:
∂2z
∂t2= c2
(∂2z
∂r2+
1
r
∂z
∂r+
1
r2∂2z
∂φ2
)(3.15)
Questa equazione puo’ essere risolta cercando una soluzione del tipo:
z(r, φ, t) = R(r)Φ(φ)eiωt (3.16)
16
Sostituendo otteniamo le equazioni:
∂2Φ
∂φ2= m2Φ (3.17)
∂2R
∂r2+
1
r
∂R
∂r+
(ω2
c2− m
2
r2
)R = 0 (3.18)
La prima equazione ha la seguente soluzione: Φ = Ae±imφ con m = 0, 1, 2....La seconda è un’equazione di Bessel le cui soluzioni, regolari nell’origine, sono le funzionidi Bessel [8] Jm(x), con x =
ωrc , di ordine m. Dalla condizione di annullamento al bordo
otteniamo le frequenze permesse; infatti la m − esima funzione di Bessel si annulla perun insieme discreto di numeri, quindi una volta fissato m e R, l’n − esimo zero di Jm(x)ci dà la frequenza del modo (m,n). Pertanto la soluzione generale sarà una combinazionegenerale delle soluzioni particolari:
zmn = Jm
(ωmnrc
)sin(mφ), (3.19)
dove m = 0, 1, 2... individua il numero di diametri nodali e n = 1, 2... il numero dei cerchinodali.
Figura 3.3: Nel grafico vengono riportati i primi quindici modi vibrazionali con le relative frequenze
3.1.3 Membrane reali
Ora che abbiamo studiato come descrivere il moto della membrana dei tamburi, possiamochiederci cosa accada quando consideriamo una membrana reale. Come già sottolineatoin precedenza, l’effetto dell’aria sul moto della membrana non è trascurabile; in verità,nei tamburi intervengono anche diversi effetti dovuti alla rigidezza della membrana o al-la risonanza con le frequenze proprie della cavità rinchiusa dal tamburo (qualora ci sia).Tutti questi effetti tendono a far variare le frequenze dei modi o ad esaltarne alcune inparticolare. Questo tipo di studio diventa quindi fondamentale per dare una spiegazioneesauriente della qualità e del tipo di suono prodotto nei tamburi piu’ comuni. Diversi studidi Fletcher e Rossing [1] [9] dimostrano come l’effetto predominante sia dovuto principal-mente all’interazione con l’aria, mentre gli altri effetti apportano un contributo tracurabile.A partire da questa osservazione suddividiamo i tamburi in tre categorie:
1. la membrana è a contatto con l’aria dell’ambiente da entrambi i lati;
17
2. la membrana è a contatto con l’aria dell’ambiente da un lato mentre dall’altro conquella della cavità delimitata dallo strumento;
3. lo strumento presenta una cavità delimitata da due membrane.
Analizziamo brevemente quale approccio è possibile intraprendere per studiare queste di-verse configurazioni.
Nel primo caso possiamo schematizzare la membrana come un pistone oscillante che agiscein entrambi i lati su un gas infinitamente esteso. Viene stimata la quantità di gas coinvoltacome un cilindro che ha per base la membrana e per altezza metà della lunghezza d’ondadel suono nell’aria; quest’ultima viene stimata dalla relazione (2.10), dove c è la velocitàdel suono nell’aria, mentre f è la frequenza a cui oscilla la membrana. Il volume ottenutoviene utilizzato per calcolare la massa efficace: Meff = M0 + ρVeff , dove ρ è la densitàdell’aria. Diviene quindi lecito aspettarsi che le frequenze vengano shiftate verso frequenzepiù basse ( si veda la (3.12) ). Ora, questa approssimazione è ragionevole unicamente nelprimo modo, in cui la membrana oscilla tutta con la stessa fase: quando si passa ai suc-cessivi modi le cose si complicano, visto che avremo più regioni che oscillano in controfase,e inoltre è opportuno considerare la differenza tra la velocità della membrana e quella delsuono. Ciò che si può mostrare e misurare [1] è che l’effetto complessivo dello shift dellefrequenze diminuisce all’aumentare della frequenza.
Il secondo caso riguarda strumenti come il timpano, in cui la cavità chiusa permette soloun certo numero di frequenze. Proprio nel caso del timpano si verifica un comportamen-to piuttosto singolare: nonostante questi sia uno strumento a percussione, è comunquecaratterizzato da un suono piu’ musicale. Infatti in questo caso possiamo individuare,nello spettro, delle frequenze in relazione armonica. Per quanto visto finora questa con-dizione di armonicità non viene rispettata nelle membrane, dunque deve essere presenteun effetto che permette un opportuno shift delle frequenze. Effettivamente ciò è dovutoprincipalmente all’interazione con l’aria: le frequenze più basse sono quelle che vengonomaggiormente shiftate e si instaurano delle relazioni armoniche. Vediamo nel concreto cosaaccade riferendoci alla figura 3.3. In questo caso si considera il modo (1, 1) come il modofondamentale, infatti (0, 1) è fortemente smorzato. É possibile osservare che le frequenzedei modi (2, 1), (0, 2) e (3, 1) sono circa 1.5, 1, 68 e 2 volte la frequenza fondamentale. Talivalori corrispondono rispettivamente ad un’intervallo di quinta giusta, di sesta maggiore edi un’ottava. L’effetto è riscontrabile quasi unicamente nei modi con n = 1, ovvero senzacerchi nodali. La risonanza con le frequenze della cavità da una parte, e un’opportunaeccitazione dall’altra, avranno dunque il compito di far risaltar questi modi.
Infine, nel terzo caso, la presenza dell’aria introduce un accoppiamento tra le due mem-brane, che in genere hanno modi di vibrazione differenti. Nel caso del rullante puo’ essereapplicata una semplice approssimazione: quella dell’oscillatore accoppiato con due masse[10]. Le due masse sono le due membrane; queste saranno inoltre caratterizzate da unacerta rigidità, che nel modello costituisce la costante elastica delle molle alle quali sonorispettivamente legate. L’aria viene schematizzata come la molla che genera l’accoppia-mento. Come nel modello iniziale, in 1.2, avremo due soluzioni una con le membrane infase e l’altra con le membrane in controfase. In effetti è proprio cio’ che si verifica per iprimi due modi mentre per i modi successivi è necessaria una trattazione più complessa.
18
3.2 Cavità chiuse
Introduciamo lo studio delle cavità chiuse come naturale estensione di quanto affrontatofinora al caso tridimensionale. Anche in questo caso consideriamo l’equazione delle ondedi D’Alambert
∂2p
∂t2= c2∇2p, (3.20)
dove p è la pressione del gas, come equazione che descrive la propagazione dell’onda sonora;tale affermazione verrà giustificata successivamente nel capitolo 4. Questa forma generaleviene poi adattata alla particolare geometria della cavità, che consideriamo esprimendol’operatore differenziale in un adeguato sistema di coordinate. Nel caso di una cavitàchiusa rettangolare, l’equazione diventa:
∂2p
∂t2= c2(
∂2p
∂x2+∂2p
∂y2+∂2p
∂z2), (3.21)
il che ci permette di cercare soluzioni nella forma: p(x, y, z) = px(x)py(y)pz(z).Nelle cavità chiuse le condizioni al bordo non dipendono solo dalla geometria, ma anchedalla natura fisica dei muri. Poiché il muro è caratterizzato da una certa impedenzacaratteristica, assumiamo che le pareti siano completamente rigide: in questo modo ciò chesi annulla è la componente normale del gradiente della pressione [1]. Come consequenza diciò, si ottiene che le tre soluzioni spaziali saranno descritte dal coseno. In un parallelepipedodi dimensioni a x b x c otteniamo:
p(x, y, z, t) = A coslπx
acos
mπy
bcos
nπz
csinωt (3.22)
con l,m,n interi. Le frequenze permesse saranno:
ω = πc
√l2
a2+m2
b2+n2
c2(3.23)
Studiamo come la forma della cavità influenzi lo spettro delle frequenze modali.
Figura 3.4: Spettro delle frequenze per parallelepipedi con differenti rapporti tra i lati, ma stessovolume. La figura (a) si riferisce ad un cubo, mentre la figura (b) si riferisce ad un parallelepipedo
con rapporto tra i lati 1:2:3.
Come si puo’ osservare nel grafico 3.4, le due cavità hanno uguale volume ma differenti rap-porti per le dimensioni; la forma (b) mostra una migliore risposte in frequenza evidenziatadai picchi di risonanza, mentre nel caso cubico le frequanze sono meno, ma le risonanze
19
presentano picchi piu’ alti. Pertanto risulta conveniente la scelta acustica di una cavitàcon una forma piu’ irregolare.Possiamo studiare anche casi di differenti forme geometriche come figure circolari. In questocaso si fa ricorso a differenti sistemi di coordinate come le armoniche sferiche o le funzionidi Bessel. Se consideriamo casi piu’ complessi quali il corpo di strumenti, come il violino ola chitarra, nessuno dei precedenti sistemi di coordinate è adeguato. Quello che si può fareè ricorrere alla teoria perturbativa [11]. Nel caso del violino, per esempio, si parte dallaforma rettangolare e si cerca la perturbazione più adeguata della forma per la quale i modidi vibrazione si avvicinano a quelli reali del violino.
3.3 Strumenti a corde
Una volta analizzati i principali risuonatori, in una o più dimensioni, possiamo cercaredi descrivere fisicamente il comportamento degli strumenti a corde. In questa famiglia distrumenti, le corde, ovvero i risuonatori, sono appoggiate o fissate su un ponte il quale,come già accennato nel paragrafo 2.5, ha la funzione di trasmettere la vibrazione prodottaad altre componenti dello strumento in modo da amplicarne l’intensità del suono. In questasezione ci concentriamo principalmente su uno strumento: la chitarra.La chitarra è uno strumento a 6 corde. Gli estremi delle corde sono fissati da una partesul manico, mentre dall’altra sono appoggiati sul ponte. Le frequenze delle corde, suonatea vuoto, vanno da 82Hz (Mi2) a 328Hz (Mi4). Il corpo della chitarra, comunemente de-nominato cassa armonica, è composto da due tavole, di cui la superiore, detta anche tavolaarmonica, è a contatto con il ponte, collegate per mezzo delle fasce laterali. All’internodella cassa c’è l’aria che è a contatto con l’ambiente esterno per mezzo del foro centrale.In figura 3.5 è rappresentato un’esploso della chitarra.
Figura 3.5: Esploso di un modello di chitarra classica.
Il primo passo consiste nel descivere i modi vibrazionali delle varie componenti, che costi-tuiscono la cassa armonica, prese separatamente. Riguardo alle tavole potremmo rifarci almodello bidimensionale della membrana. Però, oltre al problema della forma e delle con-dizioni al bordo, si aggiunge il problema dello spessore e quindi delle rigidezza del legno.Di fatto anche in questo caso ci si limita alla descrizione delle onde trasversali; ciò che siottiene dall’aver considerato la rigidezza è un leggero aumento delle frequenze dei modinormali ottenuti per le membrane (effetto che aumenta al crescere delle frequenze)[1]. Lasostanza però rimane invariata: possiamo, almeno teoricamente, ricavare i modi normali divibrazione che saranno nuovamente bidimensionali. Questi sono stati misurati da Rossing[12], e vengono riportati in figura 3.6.Una volta descritto come oscillano le diverse componenti della cassa armonica, dobbiamocercare di accoppiarle opportunamente. Nel caso della chitarra il corpo viene modellizzatocon un oscillatore accoppiato forzato con tre masse. L’analogo meccanico del corpo della
20
Figura 3.6: Analisi dei modi di una chitarra Folk: (a) Modi della tavola superiore; (b) modi dellatavola inferiore.
chitarra è alquanto complesso ma proviamo a darne una descrizione, almeno a grandi linee,per farci un’idea di come potrebbe essere affrontato il problema. Le tre masse si riferisconoalle due tavole, superiore e inferiore, e alla massa d’aria presente nel foro della cassa. Gliaccoppiamenti tra le masse sono generati dall’aria nella cavità e dalle fasce laterali. Laforzante è la forza esercitata dal ponticello che chiaramente agisce solo sulla tavola superio-re. I risultati di questo modello prevedono una distribuzione in frequenza con tre picchi dirisonanza e due di anti-risonanza: effettivamente questo tipo di andamento viene verificato,almeno alle basse frequenze.
Figura 3.7: Spettro sonoro di una chitarra Folk, misurato ad 1 metro di distanza.
Nel caso del pianoforte il suono che ascoltiamo proviene interamente dalla tavola armonica.Nel violino le due tavole di legno sono ulteriormente accoppiate tramite l’inserimento di unlegnetto verticale, anche detto anima. In realtà tutti gli strumenti a corde presentano ul-teriori oggetti atti a rendere migliore l’acustica dello strumento, come è il caso delle catenenegli strumenti ad arco e le chitarre.
21
Capitolo 4
Dinamica dei fluidi idealicomprimibili
Il suono, emesso dal radiatore dello strumento musicale, si propaga nell’aria prima di giun-gere all’orecchio. È necessario quindi studiare tale propagazione. Per far questo, ricaviamole equazioni generali della fluidodinamica valide nel caso di fluidi ideali. Successivamentecerchiamo di risolvere il sistema di equazioni ottenuto sotto l’ipotesi di piccole perturbazionidello stadio di equilibrio in cui densità e pressione del fluido sono costanti, e la velocitàè nulla, utilizzando la teoria delle perturbazioni. Al primo ordine otteniamo l’equazionedelle onde lineare, mostrando quindi l’esistenza delle onde sonore. Al secondo ordine lateoria diventa non lineare; restringendoci al caso di onde quasi unidimensionali, osserviamoil fenomeno di rottura di tali onde, e la genesi di onde d’urto.
Prendiamo in considerazione un fluido ideale. La forza agente su un certo volume di fluidoè pari a: ∮
pd~S, (4.1)
espressione integrata sulla superfice che delimita il volume. Applicando il teorema delladivergenza si ottiene: ∮
pd~S = −∫
(~∇p)dV. (4.2)
Quindi la forza che agisce su un volumetto dV è pari a ~f = ~∇pdV . Dunque possiamoricavare l’equazione del moto di un volumetto dV , di massa m = ρdV , scrivendo la secondalegge di Newton:
ρd~v
dt= −~∇p. (4.3)
Ora, poiché la derivata della velocità è riferita ad un volumetto dV di fluido che si muovenello spazio: ~v = ~v(~r(t), t), dove ~r(t) = (x(t), y(t), z(t)) è la posizione del volumetto difluido al tempo t, cerchiamo di esprimerla in termini di quantità che sono definite rispettoad un punto fisso. Differenziando tale velocità rispetto a t, otteniamo due termini: unoindica la variazione temporale, per x, y e z costanti, mentre l’altro rappresenta la variazionedovuta allo spostamento d~r compiuto dal volumetto durante il tempo dt, ovvero:
d~v =
(∂~v
∂t
)dt+
(dx∂~v
∂x+ dy
∂~v
∂y+ dz
∂~v
∂z
)=∂~v
∂tdt+ (d~r · ~∇)~v. (4.4)
22
Pertanto l’equazione del moto diviene:
∂~v
∂t+ (~v · ~∇)~v = −1
ρ~∇p, (4.5)
nota come equazione di Eulero.Inoltre nel fluido deve essere soddisfatta anche l’equazione di continuità (che segue dallaconservazione della massa):
∂ρ
∂t+ div(ρ~v) = 0. (4.6)
Come vediamo, abbiamo quattro equazioni scalari per cinque incognite (ρ, p e le tre com-ponenti di ~v); ad esse si aggiunge l’equazione di stato p = p(ρ, s), dove s è l’entropia delfluido. Trascurando l’attrito interno e gli scambi di calore, il moto del fluido si dice adia-batico; se inoltre l’entropia in tutto il fluido è costante ad un certo istante iniziale, alloraquesta rimane invariata ovunque nel fluido e per ogni tempo (in questo caso si parla difluido ideale isoentropico).
4.1 Onde sonore in approssimazione lineare
Prendiamo ora in considerazione piccole perturbazioni della soluzione costante delle (4.5)e (4.6). Per far questo riscriviamo le grandezze che caratterizzano il fluido nella forma:
p = p0 + �p1 + �2p2 + ...,
ρ = ρ0 + �ρ1 + �2ρ2 + ...,
~v = �~v1 + �2~v2 + ....
(4.7)
Dove i valori p0 e ρ0 e ~v = ~0 sono i valori costanti; inoltre, poiché p = p(ρ, s0), dove s0 èl’entropia costante, possiamo scrivere:
p1 =∂p
∂ρ(ρ0, s0)ρ1 ≡ c2ρ1, (4.8)
p2 =∂p
∂ρ(ρ0, s0)ρ2 +
1
2
∂2p
∂ρ2(ρ0, s)ρ
21; (4.9)
dove abbiamo definito c2 = ∂p∂ρ(ρ0, s0) (è una quantità positiva, infatti un aumento didensità implica un aumento di pressione).Consideriamo ora la soluzione al primo ordine in �; la (4.5) e la (4.6) diventano:
∂~v1∂t
= − 1ρ0~∇p1, (4.10)
∂ρ1∂t
+ ρ0~∇ · ~v1 = 0. (4.11)
Se prendiamo la divergenza della prima (4.10) e la sommiamo, membro a membro, alladerivata temporale della (4.11), otteniamo:
∂2ρ1∂t2
= ∇2p1. (4.12)
Inoltre, usando la (4.8), abbiamo:
∂2p1∂2t
= c2∇2p1. (4.13)
23
Chiaramente anche per le altre grandezze si ottengono leggi della stessa forma.
Pertanto, al primo ordine nella perturbazione, pressione, densità e velocità soddisfanol’equazione lineare delle onde in 3+1 dimensioni, mostrando l’esistenza delle onde sonore
che si propagano con velocità c =√
∂p∂ρ(ρ0, s0). Come abbiamo già visto tale equazione
ammette come soluzione l’onda monocromatica exp[i(~k · ~r − ωt)], con:
ω2 = c2(k21 + k22 + k
23). (4.14)
4.2 Onde sonore non lineari: rottura e onde d’urto
Studiamo ora il sistema al successivo ordine della perturbazione, restringendo la nostratrattazione alle onde quasi unidimensionali. Per onde quasi unidimensionali intendiamoquelle onde per le quali, nella direzione di propagazione, le variazioni sono molto piùsignificative che nelle direzioni perpendicolari. Indicando con k1 la componente del vettore~k parallela alla direzione di propagazione, e con k̂⊥ il vettore d’onda ortogonale a k1,possiamo allora scrivere:
k̂⊥ = �αk⊥, con α > 0. (4.15)
Sostituendo nella (4.14), si ottiene:
ω = c
√k21 + k̂
2⊥ = ck1
√1 +
�2αk2⊥k21
' ck1(1 + �2αk2⊥2k21
). (4.16)
Quindi inserendo la (4.16), nella soluzione dell’equazione lineare (4.13), otteniamo per lafase la relazione:
~k · ~r − ωt = k1(x− ct) + �αk̂⊥ · ~r⊥ −c�2α
2
k⊥2
k1t. (4.17)
Dalla precedente relazione capiamo che è conveniente introdurre un opportuno cambio dicoordinate:
{ x′ = x− ct,(ȳ, z̄) = �α(y, z)t′ = �2αt.
(4.18)
Le variabili ȳ, z̄, t′ presentano delle variazioni molto più lente rispetto alla coordinata x′.In questo caso affermiamo che le variazioni, nelle diverse coordinate, avvengono con scaletemporali diverse. Questo tipo di approccio è proprio del metodo multiscala, che utilizzia-mo andando a studiare la perturbazione al secondo ordine delle (4.10) e (4.11). Per nonappesantire ulteriormente codesto paragrafo, i calcoli vengono riportati nell’Appendice A.Come risultato otteniamo che α = 12 e la seguente equazione alle derivate parziali:
(u′t + uu′x)x′ + uy′y′ + uz′z′ = 0; (4.19)
dove u è direttamente proporzionale a ρ1, mentre (y′, z′) sono direttamente proporzionali a
(ȳ, z̄). L’equazione ottenuta prende il nome di equazione di Kadomtsev-Petviashvili senzadisperzione in 3 + 1 dimensioni[13][14]. Tale equazione risulta essere rilevante anche inaltri contesti fisici, come in Fisica dei Plasmi e nella teoria delle onde d’acqua superficiali(in quest’ultimo caso il termine uz′z′ = 0) [15]. Nel resto del capitolo, per semplicità, levariabili (x′, y′, z′, t′) diventeranno le (x, y, z, t). Nel caso unidimensionale (onde piane):
24
uyy = uzz = 0, il moto diventa unidimensionale e l’equazione si riduce alla cosidettaequazione di Hopf[16]:
ut + uux = 0; (4.20)
è facile verificare come la soluzione generale di questa equazione sia della forma u(x, t) =F (x–ut), quindi vale F (x) = u(x, 0). Osserviamo come la funzione generica F sia essastessa funzione di u; confrontando con la soluzione di D’Alambert, la u prende il significatodi velocità di propagazione dell’onda.Quindi un determinato punto dell’onda si propaga con velocità pari al valore assunto dallafunzione in quel punto. Come possiamo osservare dal grafico 4.1 relativo ad un’impulsogaussiano, i punti più alti in ordinata viaggiano a velocità maggiore. Il risultato di questoeffetto è che l’onda evolve nel tempo piegandosi.
Figura 4.1: Evoluzione di un impulso gaussiano che si rompe al tempo tb
A seguito della deformazione, arriva un determinato istante, che chiamiamo tempo criticotb, in un certo punto dello spazio, in cui l’onda presenta una pendenza infinita. Da questopunto in poi avviene la cosiddetta rottura dell’onda: infatti ad un singolo valore in ascissa,nella zona della rottura, corrispondono genericamente tre distinti valori di u. In naturatale fenomeno viene comunemente osservato ad esempio nelle onde marine vicino alla riva,se u è l’altezza dell’onda. Se però u è una pressione o una densità, non possiamo accettarela polidromia derivante dalla rottura. In questi casi occorre quindi regolarizzare l’onda.Per far questo vengono usualmente utilizzati due metodi: il primo consiste nel sostituire lasoluzione polidroma con una discontinua, comunemente chiamata onda d’urto; il secondonell’introdurre, ad esempio, dissipazione nel modello. Nel primo metodo, come vediamo infigura 4.2, si procede individuando la posizione s(t) della retta verticale che divide la zonadi polidromia in due lobi di egual area (per la conservazione della massa
∫udx) . Quindi
si costruisce la discontinuità andando a riempire la parte mancante con quella in eccesso:abbiamo quindi sostituito la funzione polidroma con un’onda d’urto. Inoltre è possibilericavare l’evoluzione temporale di s(t) che individua la posizione del fronte d’urto [15].Invece, nel secondo metodo, si inserisce un termine dissipativo nella (4.20) che dipendedalla derivata seconda spaziale. Ciò permette di rallentare la parte superiore dell’ondarispetto a quella inferiore in modo da impedire la rottura dell’onda [15].Ritornando all’equazione di Kadomtsev-Petviashvili senza dispersione è possibile mostrareche anch’essa dà luogo a fenomeni di rottura, con l’ausilio della seguente famiglia disoluzioni particolari [17]:
u(x, t) =1√tF
(x+
1
4ty2 − 2ut
)in 2 + 1 dimensioni, (4.21)
u(x, t) =1
tF
(x+
1
4t(y2 + z2)− ut ln t
)in 3 + 1 dimensioni, (4.22)
25
Figura 4.2: La linea disegnata rappresenta la discontinuità che divide in due lobi di egual area lazona polidroma tb
che descrive soluzioni costanti sul fronte d’onda parabolico, che si rompono simultanea-mente in tutti i punti dello stesso.
Figura 4.3: Il fronte d’onda parabolico delle soluzioni dell’equazione dKP in prossimità del tempodi rottura.
26
Capitolo 5
Strumenti a fiato
Nella famiglia degli strumenti a fiato si presentano le migliori possibilità per uno studioglobale dello strumento. Ogni strumento a fiato presenta delle cavità limitate, di diverseforme, nelle quali si instaurano campi di pressione. La parte dello strumento su cui cisoffermeremo maggiormente sarà dunque il tubo, ovvero il risuonatore, che avrà il compitodi filtrare le frequenze prodotte dall’eccitatore; inoltre, affinchè nello strumento si instauriuna vibrazione che duri il tempo necessario per essere udita, bisogna che il suono ven-ga riflesso piu’ volte all’interno dello strumento stesso. Condizione necessaria affinchè ciòaccada è che, come già visto per la corda, siano presenti degli estremi che delimitino lalunghezza del tubo. I meccanismi di eccitazione richiedono una descrizione accurata di cuiforniamo una spiegazione qualitativa solo alla fine di questo paragrafo. Per ora, riguardoall’eccitazione, ci interessa suddividere gli strumenti a fiato in due categorie: strumenti agetto d’aria, quali i flauti, e strumenti ad ancia, quali il clarinetto, l’oboe, la fisarmonica,gli ottoni etc... . Nel primo caso, parte del getto d’aria diretto nell’imboccatura generaun flusso vorticoso; poiché l’apertura è a diretto contatto con l’aria esterna, la pressioneall’imboccatura si può considerare pari alla pressione atmosferica. Nel secondo caso, la vi-brazione dell’aria è prodotta, nel cosidetto bocchino, dall’ancia, ovvero da una o più lamineche vengono messe in vibrazione dal getto d’aria immesso. Rientrano in questa categoriaanche gli ottoni: in questo caso si parla di ancia labiale. Negli strumenti ad ancia l’estremod’ingresso non è a diretto contatto con l’aria, ma con la bocca del musicista, quindi si puòconsiderare estremo chiuso (pressione massima). L’apertura d’uscita è sempre aperta, equindi alla pressione atmosferica. La trattazione degli strumenti a fiato sembra dunquepoter ricalcare quanto già fatto per la corda: in verità questa rimane comunque una visionesemplicistica dell’oggetto; infatti bisogna tenere conto che, in questo caso, il risuonatore,che in questa famiglia di strumenti è considerato anche radiatore, deve poter comunicarecon l’esterno: non si puo’ più prescindere da un’eventuale accoppiamento del tubo sia conl’ambiente che con l’eccitatore. Beninteso che anche la corda, per quanto già è stato dettoin 2.5, deve poter scambiare energia con l’esterno, e quindi essere considerata un sistemaaccoppiato; ciononostante l’ effetto netto sulla generazione dei modi vibrazionali è trascur-abile.Per ovviare inizialmente a questo tipo di problemi, consideriamo il semplice caso del tubocilindrico di altezza infinita; successivamente prenderemo in considerazione tubi reali, quin-di finiti, di diverse forme. Proseguiamo la nostra trattazione limitandoci alla propagazione,nei tubi, delle onde lineari.
27
5.1 Tubi infiniti
Assumendo che la pressione si propaghi come un’onda piana, la sua espressione sarà, ingenere, una sovrapposizione di due onde che viaggiano in direzioni opposte:
p(x, t) = Ae−i(kx−ωt) +Bei(kx+ωt) + c.c, (5.1)
dove vale la relazione ω = kc. Dalla (4.10) possiamo dunque ricavare la velocità:
v(x, t) =1
ρc
(Ae−i(kx−ωt) −Bei(kx+ωt) + c.c
). (5.2)
Possiamo quindi introdurre un’ ulteriore grandezza fondamentale: l’impedenza acustica Z,definita come il rapporto Z = p(x,t)v(x,t)S , con S superficie di base; nel caso particolare in cui
è assente l’onda regressiva (B = 0), l’impedenza vale Z = ρc/S.Analizziamo ora il caso piu’ semplice possibile, ovvero una canna cilindrica infinita diraggio R, con l’asse pararellelo alla direzione di propagazione dell’onda piana. La formadel sistema ci suggerisce l’utilizzo delle coordinate cilindriche (r, φ, x). L’equazione delleonde diventa:
∂2p
∂t2= c2
(1
r
∂
∂r(r2
∂p
∂r) +
1
r2∂2p
∂φ2+∂2p
∂r2
). (5.3)
Per risolvere tale equazione dobbiamo imporre le condizioni al contorno; se assumiamo chela parete che delimita il tubo sia perfettamente rigida, allora, come nel caso della cavità,si deve annullare la componente del gradiente della pressione normale alla parete, cioè:
∂p
∂n= 0 per r = R. (5.4)
La soluzione dell’equazione viene ottenuta per separazione delle variabili. Imponendo anchela condizione al bordo, otteniamo una soluzione composta da una parte radiale, che èuna funzione di Bessel Jm(
πqmnrR ), e una parte esponenziale della forma exp(i(−kmnx +
ωt + mφ)). Le qmn sono definite dalla condizione al bordo, quindi soddisfano la relazioneJm′(πqmn) = 0; per il vettore d’onda si ottiene la seguente espressione:
k2mn = (ω
c)2 − (πqmn
R)2. (5.5)
Dalla precedente relazione di evince che il generico modo (m,n), per propagarsi, devesuperare, in frequenza, il valore critico:
ωc =πqmnc
R, (5.6)
infatti, per frequenze minori di tale valore, kmn diventa immaginario e quindi la pressioneviene a dipendere da un termine esponenziale che decade in x. Quindi, se immettiamo neltubo infinito una pressione di pulsazione ω, essa si propaga con tutti i numeri d’onda kmn,ottenuti al variare di (m,n) e tali che ω > ωc. Ne consegue che, se il raggio R è molto pic-colo, l’unico modo rilevante è quello con m = n = 0 (q00 = 0), corrispondente a k = ω/c; inquesto caso la pressione p non dipende né da r, né da φ. Inoltre è possibile mostrare[1] chela propagazione dei modi superiori al primo è possibile solo quando il diametro della cannaè maggiore di circa due terzi della lunghezza d’onda acustica. Sono stati affrontati diversistudi riguardo all’incidenza di possibili disturbi nel caso dei fluidi reali. Nel nostro casoè lecito trascurare le vibrazioni meccaniche delle pareti, ma non si puo’ dire altrettantodegli effetti viscosi e termici. Questo tema è stato ben trattato da Benade [18], il quale
28
evidenzia come l’effetto di tale disturbi sia quello di far variare l’impedenza caratteristicaZ0 da un valore reale ad una quantità complessa: ciò rende k una quantità complessa, ilche introduce, a sua volta, una possibile attenuazione lungo la direzione di propagazione.
5.2 Tubi reali
Quando consideriamo una canna reale dobbiamo tener conto dell’effettiva lunghezza del-la canna. La presenza degli estremi del tubo, che siano essi aperti o chiusi, induce lapropagazione di un’onda riflessa. Come già accennato precedentemente, potremmo tentareun approccio simile a quello utilizzato per la corda o la membrana: imponendo condizionial bordo ricaviamo le frequenze permesse. In questo caso, però, non possiamo considerarela canna come un risuonatore passivo: occorre accoppiare opportunamente le soluzioni inentrata e in uscita, ovvero bisogna raccordare le soluzioni, e quindi la pressione e la velocitàacustica (che decrivono completamente il moto del fluido) in queste regioni, tenendo contodel fatto che sono funzioni continue. Queste due grandezze sono legate dall’impedenza, cheabbiamo introdotto precedentemente come Z = p/vS.Consideriamo una canna estesa da x = 0 a x = L, che schematizziamo in figura 5.1:all’estremo L vengono a contatto due regioni con impedenze in genere diverse. Pertan-to, l’onda che nel tubo incide nell’estremo L genera un’onda riflessa internamente e unatrasmessa esternamente. Quindi avremo, dentro al tubo, la sovrapposizione di due onde:una incidente e una riflessa, come nelle (5.1), (5.2). Invece nella zona esterna al tubo saràpresente solo l’onda trasmessa:
p(x, t) = Ce−i(kx−ωt), v(x, t) =1
ρcCe−i(kx−ωt). (5.7)
Figura 5.1: Riflessione dovuta alla differenti impedenze nelle due regioni considerate. I colori siriferiscono alle onde: rosso incidente, verde riflessa, blu trasmessa.
Definiamo ora Z0 =ρcS l’impedenza caratteristica del tubo e ZL =
p(L,t)U(L,t) l’impedenza nel
punto L. Imponendo che pressione e velocità si raccordino in x = L, otteniamo:
B
A= e−2ikL
[(ZL − Z0)(ZL + Z0)
],
C
A=
2ZL(ZL + Z0)
. (5.8)
La prima ci dice che, se ZL = Z0, allora non c’è riflessione; invece la riflessione è totalenel caso in cui ZL vale zero o infinito. Poiché l’impedenza Z è inversamente proporzionalealla sezione S, se l’apertura in x = L (in uscita) è chiusa, allora SL = 0 e ZL = ∞;se invece tale apertura è aperta, allora SL ∼ ∞ e ZL ' 0. Dalla seconda otteniamonuovamente che, per ZL = Z0, l’onda è completamente trasmessa. Se però osserviamo icasi ZL = 0, ZL = ∞, ci accorgiamo che nel primo caso, l’ampiezza tramessa tende a 0,mentre nel secondo l’ampiezza trasmessa è il doppio di quella incidente. Per capire cosa sta
29
succedendo studiamo la potenza trasmessa. La potenza si ottiene da I = pv, in analogiacon i circuiti elettrici. Per la potenza trasmessa abbiamo [1]:
ItI0
=4Z0ZL
(ZL + Z0)2, (5.9)
notiamo ora che effettivamente per ZL → ∞ la potenza trasmessa tende a 0 (come deveessere, essendo in questo caso chiusa l’uscita), ma anche per ZL = 0 vale 0; questo ultimorisultato non può che essere sbagliato visto che un tubo aperto deve poter trasmettereenergia all’esterno. Quindi imporre che l’impedenza nel caso di estremo aperto sia nulla èun errore, che andrà corretto qualora ce ne fosse bisogno.Ricaviamo ora l’impedenza d’ingresso ZIN , in x = 0, allo stesso modo di ZL (ovveroutilizzando le (5.1) e (5.2), all’interno del tubo, e considerando l’onda incidente in entrata);otteniamo:
ZIN = Z0
[(A+B)
(A−B)
]= Z0
[ZL cos kL+ iZ0 sin kL
iZL sin kL+ Z0 cos kL
]. (5.10)
Questa relazione è molto importante perché ci fa vedere come il sistema è accoppiato conl’eccitatore e l’ambiente. Osserviamo cosa succede nei casi limite: se la canna è chiusa inx = L, allora ZL tende a infinito, pertanto:
ZIN (uscita chiusa) = −iZ0 cot kL; (5.11)
mentre per una canna aperta:
ZIN (uscita aperta) = iZ0 tan kL. (5.12)
Da queste due equazioni possiamo risalire alle frequenze di risonanza del tubo. Nel casodei flauti l’estremo d’ingresso viene considerato aperto e quindi ZIN = 0; per una cannachiusa in uscita otteniamo:
ω(uscita chiusa, entrata aperta) =(2n− 1)πc
2L, n = 1, 2, 3..., (5.13)
λn =4
2n− 1L, n = 1, 2, 3...
Invece per una canna aperta in x = L:
ω(uscita aperta, entrata aperta) =nπc
L, n = 1, 2, 3..., (5.14)
λn =4
nL, n = 1, 2, 3...
Nel grafico 5.2 possiamo osservare i diagrammi della pressione all’interno del tubo: nelleestremità aperte dovranno necessariamente essere presenti dei nodi, ovvero quei punti in cuiil diagramma si annulla, mentre nelle estremità chiuse dei massimi. Nei nodi la pressioneassume il valore costante p0 definito nelle (4.7)Negli strumenti ad ancia, l’estremo di ingresso è considerato chiuso (ZIN =∞) si possonoquindi ripetere le stesse considerazioni cercando i punti nei quali le due funzioni trigono-metriche non sono definite. In pratica quello che otteniamo è che si inverte il precedenterisultato: in particolare, nel caso di ingresso chiuso ed uscita aperta, si ottiene la (5.13).Il risultato ottenuto nel caso dell’estremo chiuso costituisce una buona approssimazionedi una canna cilindrica reale, ciononostante non puo’ dirsi altrettanto del caso “aperto”:per quanto già spiegato, risulta inappropriato assumere che l’impedenza sia nulla, anche
30
Figura 5.2: Diagrammi di alcuni modi vibrazionali della pressione, in tubi cilindrici, con estremi:aperto-chiuso e aperto-aperto .
se molto minore di Z0. Uno studio Rayleigh [19] ci mostra come l’impedenza calcolatanell’estremo di una canna aperta, caratterizzata da un raggio R molto minore della sualunghezza, assuma, per la frequenza fondamentale e poche armoniche superiori, la forma:
Z ' iZ0k(
8R
3π
); (5.15)
come si puo’ notare l’espressione equivale all’impedenza ottenuta nel caso dell’estremoaperto (5.12) per una canna di lunghezza: ∆ = (8R3π ).Pertanto si ottiene una buona approssimazione per le frequenze, almeno in questo range,sostituendo alla lunghezza del tubo reale la lunghezza efficacie Leff = L+ ∆.
Riepilogando, nel caso di strumenti quali il flauto o le canne d’organo si considerano en-trambi gli estremi del tubo cilindrico aperti; in questo modo otteniamo uno spettro difrequenze dato dalla (5.14). Invece in strumenti ad ancia quali il clarinetto, consideriamol’estremità in entrata chiusa e quella in uscita aperta; in questo caso lo spettro è indivi-duato dalla (5.13). I due casi sono entrambi riportati nella figura 5.2 prima citata.Chiaramente non tutti gli strumenti a fiato hanno una canna cilindrica, ma presentano ingenere una sezione variabile. Ad esempio nel caso dell’oboe la canna è leggermente conica,mentre negli ottoni in genere è presente una apertura finale a campana.
5.3 Corni
Studiamo ora la propagazione del suono nei corni, in particolare limitiamo la nostra trat-tazione a quei tubi, di lunghezza infinita, che presentano una sezione circolare di dimensionevariabile. Al solito il problema generale consiste nel risolvere l’equazione delle onde, im-ponendo che la componente normale del gradiente della pressione si annulli nei punti chedelimitano il tubo. Tale condizione implica che il fronte d’onda deve essere ortogonale allepareti del tubo, pertanto, al variare della sezione del tubo, il fronte d’onda non sarà piùpiano. Di fatto ciò ci impedisce di considerare la propagazione dell’onda come un prob-lema in un’unica dimensione, introducendo una dipendenza sia radiale che angolare dellapressione. Una soluzione esatta del problema richiede quindi un nuovo adeguato sistemadi coordinate nel quale sia possibile operare la separazione di variabili. Tale operazione è
31
pero’ piuttosto complicata: per ovviare a questo problema si assume che il fronte d’onda siacomunque piano. Questa si rivela essere, in genere, una buona approssimazione, eccezionfatta per quei punti nei quali il corno si allarga molto rapidamente.Per quanto detto, l’equazione delle onde per la pressione va modificata in modo da tenerconto della variazione della sezione [20]:
1
S
∂
∂x(S∂p
∂x) =
1
c
2∂2p
∂t2; (5.16)
questa equazione è anche conosciuta come equazione di Webster. Se poniamo:
p = ψS−12 , (5.17)
e introduciamo una dipendenza temporale del tipo eiωt, otteniamo:
∂2ψ
∂x2+
[ω2
c2− 1
2S
∂2S
∂x2+
1
4S2
(∂S
∂x
)]ψ = 0. (5.18)
L’area della sezione la possiamo scrivere come S = πr2(x); inoltre sostituendo k = ω/c,allora l’equazione diventa:
∂2ψ
∂x2+
[k2 +
1
r(x)
∂2r(x)
∂x2
]ψ = 0, (5.19)
che è analoga all’equazione di Schrödinger in meccanica quantistica. Come ci aspettia-mo per una particella quantistica di energia k2, limitata da una barriera pontenziale, lapropagazione è possibile solo se il termine tra le parentesi è positivo; tale condizione im-pone una frequenza limite sotto la quale non c’è propagazione delle onde.L’equazione puo’ essere risolta semplicemente qualora il termine tra parentesi sia costante:in questi casi otteniamo una semplice equazione differenziale del secondo ordine che ha persoluzione una combinazione di seni e coseni. L’espressione del termine, che coinvolge ilraggio, ci suggerisce che tale condizione è verificata quando r(x) è lineare in x o quando laderivata seconda del raggio è proporzionale al raggio stesso.Nel primo caso rientra evidentemente il tubo cilindrico che è stato già ampiamente tratta-to; oltre a questo, prendiamo in considerazione il tubo conico: in questo caso il raggio èesprimibile come r(x) = b+ cx , pertanto otteniamo per la pressione
p(x) =A sin kx+B cos kx√
π(b+ cx). (5.20)
Per confrontare lo spettro delle frequenze del tubo conico con quello del tubo cilindrico,dobbiamo ricavare l’impedenza ZIN di un generico tubo conico di dimensioni finite. Unatale operazione richiede un complesso lavoro, che ricalca quello affrontato nel caso cilindrico,ma che deve tenere anche conto della curvatura del fronte d’onda [21]. Riportiamo diseguito il risultato: per un corno di lunghezza L, nel caso particolare in cui l’impedenzadell’estremo con area maggiore ZL sia nulla cioè il corno è aperto in uscita; definendo S1l’area nel punto di input x1, S2 l’area nel punto di output x2 (punti presi lungo l’asse xcon origine nel vertice del cono), si ottiene:
ZIN ∝ i(ρc
S1)
sin kL
sin(kL+ arctan(kx1)). (5.21)
Se l’estremo di input ha impedenza nulla, allora sin kL = 0 : otteniamo esattamentele stesse frequenze del caso cilindrico. Invece se ZIN = ∞, che corrisponde al casodell’eccitazione per mezzo di un’ancia, allora sin(kL+ arctan(kx1)) = 0 ovvero:
kL = nπ − arctan(kx1). (5.22)
32
Notiamo che in un tubo cilindrico x1 → ∞ , pertanto kL = (n − 12)π, come già ottenuto.Poiché nel tubo conico, con generica apertura θ, si ha che arctan θ < π/2 per ogni θ,allora le frequenze saranno sempre maggiori rispetto a quelle di un tubo cilindrico dieguale lunghezza. Questo risultato è particolarmente interessante poiché, siccome le cannecilindriche reali presentano delle relazioni tra le frequenze non perfettamente armoniche,allora possiamo far variare opportunamente lo spettro rendendo il tubo leggermente conico.Un’altra famiglia particolarmente interessante è quella dei corni di Bessel. La superficieche consideriamo in questo caso è S(x) = Bx−2�, ovvero un andamento radiale del tipor(x) = bx−�. Notiamo come appartengano a questa famiglia anche i tubi cilindrici, per� = 0, e i tubi conici, � = −1. L’equazione per la ψ diventa:
∂2ψ
∂x2+
(k2 − �(�− 1)
x2
)ψ = 0 (5.23)
Per la pressione avremo delle soluzioni del tipo[22]:
p(x) = x�+12 [AJ�+ 1
2(x) +BN�+ 1
2(x)], (5.24)
che sono delle combinazioni lineari delle funzioni di Bessel e Neumann [23]. Ciò che rendeparticolarmente interessante questa famiglia di strumenti è il fatto che ci permette di stu-diare la propagazione delle onde in tubi di diverse forme: l’andamento esponenziale delraggio consente, per esempio, di individuare una buona approssimazione per la campanadegli strumenti a fiato; inoltre possiamo trattare, sempre in approssimazione di onda pia-na, il comportamento di tubi composti, che hanno una sezione esprimibile secondo Bessel,semplicemente imponendo condizioni di continuità, ovvero eguagliando le impedenze allegiunzioni [22]. Nuovamente possiamo sfruttare questa possibilità per armonicizzare lo spet-tro di uno strumento a fiato con un tubo di forma cilindrica.
Nella nostra trattazione ci siamo concentrati in modo particolare sulle frequenze permesseall’interno del tubo evidenziando la necessità di studiare il tubo come un sistema accoppia-to. Alla luce di ciò proviamo a capire, almeno qualitativamente, come funzionano i diversimeccanismi di eccitazione e quali modi vibrazionali attivano. Come già detto, negli stru-menti a fiato distinguiamo tra gli strumenti a getto d’aria e quelli ad ancia. Nella primacategoria inseriamo tutti quegli strumenti in cui la perturbazione sonora viene generatafacendo urtare il getto d’aria immesso contro un ostacolo (nel flauto è il bordo del foroin cui si soffia): il flusso vorticoso cos̀ı generato contiene in principio tutte le frequenze;le frequenze che possiamo udire sono dunque le frequenze proprie del tubo, ma in praticasono solo le prime armoniche e la fondamentale. Invece negli strumenti ad ancia il fun-zionamento dello strumento è ben più complesso; la vibrazione dell’ancia è descrivibile permezzo di un’equazione differenziale non lineare, ne risulta che anche l’accoppiamento deltubo con l’ancia è di tipo non lineare [24]. A differenza del caso precedente è l’ancia avibrare con una frequenza fondamentale e i suoi armonici, mentre un opportuno accoppi-amento permette di ottenere il timbro desiderato. Anche la famiglia delle trombe (ottoni)vengono considerate degli strumenti ad ancia; in questo caso si parla di ancia labiale, infattiil suono è prodotto dalla vibrazione delle labbra nell’apposito bocchino. Un tale mecca-nismo permette l’emissione di un suono maggiormente ricco di armonici; ciò giustifica laprecisione utilizzata nel costruire i tubi che ha storicamente richiesto la scoperta e l’utilizzodi materiali adeguati.
33
Conclusioni
In questo breve trattazione abbiamo cominciato ad apprezzare quale strada occorre in-traprendere, e quali finora sono state intraprese, qualora si voglia descrivere fisicamentei fenomeni naturali che coinvolgono il suono e gli strumenti musicali. Il suono è prodot-to da oggetti vibranti, pertanto si è ritenuto opportuno cominciare dal concetto di modonormale di vibrazione. Durante la dissertazione sono stati studiati diversi tipi di oggettimusicali atti a produrre la vibrazione, i risuonatori, determinando i relativi spettri dellefrequenze. Si è poi reso necessario osservare come la vibrazione effettivamente prodotta inun qualsiasi strumento musicale non possa essere semplicemente descritta dal suo risuona-tore, ma richieda un’attenta analisi delle diverse parti che compongono lo strumento e dicome i risuonatori vengano eccitati. In generale il suono prodotto da uno strumento è ilrisultato dell’accoppiamento delle diverse parti che lo compongono. Ad esempio nel casodella strumenti a corda, la vibrazione deve essere trasmessa alla tavola armonica; abbiamoapprofondito il caso della chitarra.Una trattazione adeguata della propagazione delle onde nei fluidi, ha richiesto lo studiodella fluidodinamica e l’applicazione della teoria perturbativa. Ciò ci ha condotto ad ana-lizzare le onde sonore lineari e quelle non lineari, rispettivamente come approssimazioni delprimo e secondo ordine.Nello studio dei tubi, si è apprezzata la necessità di una grandezza quale l’impedenza, in-dispensabile qualora si vogliano raccordare le grandezze che descrivono il fluido (velocità epressione) nel passaggio tra mezzi diversi. In questo modo è stato possibile ricavare i modinormali delle onde di pressione in tubi con diverse configurazioni agli estremi, che possonoessere aperti o chiusi.
34
Appendice A
Per quanto introdotto in 4.2, il metodo multiscala prevede, nel nostro caso, l’utilizzo dellaseguente trasformazione di coordinate:
{ x′ = x− ct,(ȳ, z̄) = �α(y, z) α > 0,t′ = �2αt.
(5.25)
Gli operatori di derivazione vengono trasformati, nel seguente sistema di coordinate, in:
∂x = ∂x′ ,∂y,z = �
α∂ȳ,z̄,∂t = −c∂x + �2α∂t′ .
(5.26)
Possiamo dunque procedere alla soluzione del sistema, dato dalle equazioni (4.10) e (4.11) ,in questo sistema di coordinate, utilizzando gli sviluppi in serie (4.7). Inoltre è convenienteintrodurre il potenziale ~v1 = ~∇φ.Pertanto per l’equazione di continuità (4.11), ricaviamo:
ρt = �(−cρ1x′) + �2(−cρ2x′) + �1+2α(ρ1t′) + ..., (5.27)
~v = �~∇φ+ �2~v2 + ... = �
φx�αφȳ�αφȳ
,+�2 v21�αv22
�αv23
(5.28)dove abbiamo indicato con 1, 2, 3 il numero delle componenti del vettore. Quindi calcolando~∇(ρ~v) e imponendo α = 12 , la (4.11) diventa:
�(−cρ1x′ + ρ0φx′x′) + �2[−cρ2x′ + ρ1t′ + ρ0(φȳȳ + φz̄z̄)++ρ0v
12x′ + (ρ1φx′)x′ ] + ... = 0
(5.29)
Invece per l’equazione di Eulero (4.10):
~vt = �∇~xφt + �2~v2t =
= �c
φ′x
�12φȳ
�12φz̄
+ �2 φt′x′� 12φt′ȳ
�12φt′z̄
− c v
12x′
�12 v22x′
�12 v32x′
+ ... (5.30)
1
ρ~∇p = 1
ρ0
�p1x′ + �2(p2x′ − ρ1ρ0 p1x′)O(�
32 )
O(�32 )
(5.31)
35
(~v · ~∇)~v = �2 φx′φx′x′0
0
+O(� 32 ). (5.32)Sostituendo:
�(−cφx′x′ +p1x′
ρ0) + �2(cv12x −
1
ρ0p2x′ − φt′x − φx′φx′x′ +
ρ1ρ02
p1x′). (5.33)
Dalle (5.29) e (5.33), al primo ordine in � otteniamo:
φx′ = v11 =
c
ρ0p1, p1 = cρ0v
11 = c
2ρ1. (5.34)
Tali equazioni ci permettono di mettere in relazione le tre grandezze al primo ordine in �.Sfruttando le (5.34) e combinando opportunamente le equazioni (5.29), (5.33), al secondoordine, si ottiene:
2
[ρ1t′ +
(c2
ρ0+d
c
)ρ1ρ1x′
]x′
+ c(ρ1ȳȳ + ρ1z̄z̄) = 0, (5.35)
dove si è definito d = 12∂2p∂2ρ
(ρ0, s0), all’interno dello sviluppo perturbativo (4.9). Infine,introducendo le variabili:
u =
(c2
ρ0+d
c
)ρ1, (y
′, z′) =
√2
c(ȳ, z̄), (5.36)
otteniamo finalmente l’equazione:
(u′t + uu′x)x′ + (uy′y′ + uz′z′) = 0. (5.37)
36
Bibliografia
[1] Fletcher & Rossing, Physics of musical instruments, second edition, Springer,1997.
[2] Camiz, Paolo, Dispense del corso di acustica musicale, Università Sapienza di Roma, 2003.
[3] Apostol, Tom M.Modular Functions and Dirichlet Series in Number Theory,Springer, 1976.
[4] Poincaré, H.Les Methodes Nouvelles de la Mecanique Celeste, Gauthier-Villars,Paris, 1892.
[5] Piskunov, N., Calcolo differenziale e integrale, Edizioni Mir, Vol. 2, Mosca, 1975.
[6] Cramer, L., Physik der Geige. Hirtzel Verlag, Stuttgart, 1981.
[7] Fletcher, Neville H.,Analysis of the design and performance of harpsichords,Acustica, vol.37, pag. 139-147, 1977.
[8] Watson, George Neville, A treatise on the theory of Bessel functions, CambridgeUniversity Press, 1922.
[9] Rossing, Thomas D., The physics of kettledrums, Scientific American, vol. 297, pag.172-178, 1981.
[10] Rossing et al., Acoustic of snare drums, Journal of the Acoustical Society ofAmerica, Vol 92, pag 84-94, 1992.
[11] Jansson, E.V., Acoustical properties of complex cavities, prediction and measure-ment of the resonance properties of violin-shaped and guitar-shaped cavities ,Acustica,Vol.37, pag. 211-221, 1977.
[12] Rossing et al., Acoustical responce of guitar,Proc. SMAC 83. Royal SwedishAcademy of Music, pag. 311-332, 1985.
[13] E. A. Zabolotskaya and R. V. Khokhlov, Quasi-plane waves in the nonlinearacoustics of confined beams., Sov. Phys. Acoust. 15, 35–40,1969
[14] Kadomtsev B.B. and Petviashvili V.I., On the stability of solitary waves inweakly dispersive media., Sov. Phys. Vol. 15, 1970.
[15] Santucci, Federica, Onde debolmente non lineari e quasi unidimensionali in Natu-ra. La rottura di tali onde e il problema della loro regolarizzazione dissipativa,dissertazione di laurea specialistica in Fisica, Università Sapienza di Roma , 2012.
[16] Whitham, G.B., Linear and non linear waves, John Wiley & Sons, 1974.
37
[17] S.V Manakov & P.M Santini, On the dispersionless Kadomtsev–Petviashvili equa-tion in n+1 dimensions: exact solutions, the Cauchy problem for small initial dataand wave breaking, J. Phys. A: Math. Theor., Vol. 44, 2011.
[18] Benade, A.H., On the propagation of sound waves in cylindrical conduit, Journal ofthe Acoustical Society of America, vol. 31, pag. 137-146, 1968.
[19] Rayleigh, Lord, The theory of sound, Macmillan, London, 1894.
[20] Landau, L.D.,Fluid Mechanics Volume 6 of course of theoretycal physics, Secondediction, Pergamon Press, 1987.
[21] Fletcher & Thwaites,Response of obliquely truncates simple horns: Idealiadmodels for vertebrate pinnae, Acustica, Vol. 65,pag. 194-204 1988.
[22] Pyle, R.W., Effective lenght of horns, Journal of the Acoustical Society of America,vol. 57, pag. 1309-1317, 1975.
[23] Byerly, William Ellwood, An elementary treatise on Fourier’s series and spherical,cylindrical, and ellipsoidal harmonics with applications to problems in mathematicalphysics, Ginn & Co., Boston, 1893.
[24] Fletcher, N.H., Nonlinear theory of musical wind instruments, pplied Acoustics,vol. 30, pag. 85-115, 1990.
38
IntroduzioneOscillatore accoppiatoOscillazioni longitudinali e trasverse di un semplice oscillatore armonicoOscillatore accoppiatoOscillazioni anarmoniche
Sistemi unidimensionaliOnde trasverse nella cordaSoluzione generaleSoluzione oscillanteMeccanismi di eccitazioneSmorzamento e trasmissione della vibrazione
Sistemi in più dimensioniMembraneMembrane rettangolariTamburiMembrane reali
Cavità chiuseStrumenti a corde
Dinamica dei fluidi ideali comprimibiliOnde sonore in approssimazione lineareOnde sonore non lineari: rottura e onde d'urto
Strumenti a fiatoTubi infinitiTubi realiCorni
ConclusioniAppendice A