lezione aste 05 - unife.it · Mentre, nel metodo delle forze, le incognite primarie del problema...
33
L’ analisi matriciale L’ analisi matriciale consente un’analisi accurata e rapida di strutture anche complesse sottoposte sia a carichi dinamici che statici. Si basa sul concetto di sostituire la struttura reale con un modello equivalente fatto di elementi strutturali discreti aventi proprieta’ elastiche ed inerziali note ed esprimibili sotto forma di matrici. Il calcolo in campo elastico delle strutture e’ generalmente riconducibile ad una sequenza di operazioni matriciali. Mentre, nel metodo delle forze, le incognite primarie del problema sono le reazioni iperstatiche di una struttura, nel metodo degli spostamenti, le incognite primarie del problema sono le componenti di movimento (spostamenti e rotazioni) dei nodi della struttura. Quando si opera per via automatica, il metodo degli spostamenti e’ preferibile. Esso non richiede infatti alcuna scelta delle incognite, poiche’ sono fissate univocamente dallo schema strutturale nel quale si opera. Il metodo dell’analisi matriciale si basa pertanto sul metodo degli spostamenti. Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 1
Transcript of lezione aste 05 - unife.it · Mentre, nel metodo delle forze, le incognite primarie del problema...

L’ analisi matriciale
L’ analisi matriciale consente un’analisi accuratae rapida di strutture anche complesse sottoposte siaa carichi dinamici che statici.
Si basa sul concetto di sostituire la strutturareale con un modello equivalente fatto di elementistrutturali discreti aventi proprieta’ elastiche edinerziali note ed esprimibili sotto forma di matrici.
Il calcolo in campo elastico delle strutturee’ generalmente riconducibile ad una sequenza dioperazioni matriciali.
Mentre, nel metodo delle forze, le incogniteprimarie del problema sono le reazioni iperstatichedi una struttura, nel metodo degli spostamenti, leincognite primarie del problema sono le componentidi movimento (spostamenti e rotazioni) dei nodi dellastruttura.
Quando si opera per via automatica, il metododegli spostamenti e’ preferibile. Esso non richiedeinfatti alcuna scelta delle incognite, poiche’ sonofissate univocamente dallo schema strutturale nelquale si opera. Il metodo dell’analisi matriciale sibasa pertanto sul metodo degli spostamenti.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 1

Il modello strutturale
Da JS Przemieniecki, Theory of matrix structuralanalysis, Dover, 1968
Il passo fondamentale nel calcolo matricialedelle strutture riguarda la formulazione di unmodello matematico discreto che idealizzi la strutturaeffettiva. Il modello discreto e’ necessario allo scopodi avere un sistema con un numero finito di gradidi liberta’ che si presti ad essere studiato con ilmetodo dell’analisi matriciale. La formulazione delmodello strutturale si basa su principi di equivalenzaenergetica tra il sistema continuo e quello discreto.Per certi tipi di strutture, quelle costituite da elementistrutturali collegati da nodi discreti, come le strutturereticolari ed i telai, il modello discreto consente lasoluzione esatta del problema.
Quando le connessioni tra elementi strutturali nonsono modellabili sotto forma di vincoli discreti allorail modello strutturale rappresenta un’approssimazionedel modello reale.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 2

Se gli elementi strutturali della struttura realesono connessi da giunti discreti (NODI), l’interazionetra i singoli elementi viene introdotta sotto forma diforze o spostamenti nodali.
Strutture reticolari (pin-jointed truss) e telai connodi rigidi (rigidely-connected beams) sono esempi distrutture connesse attraverso nodi. Le interazioni tragli elementi strutturali in un telaio si rappresentanocome forze nodali (taglio e sforzo normale) e momentiflettenti e torcenti. In tali casi, le teorie elementaridi flessione e torsione consentono direttamente diarrivare alla formulazione matriciale.
Qualora la struttura reale non sia rappresentabileattraverso elementi strutturali collegati da giuntinodali, occorre invece utilizzare il metodo deglielementi finiti.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 3
Analisi matriciale di telai e reticolari
La soluzione si presta ad essere organizzatasecondo una sequenza di fasi logiche:
a Definizione delle azioni interne nelle sezioni diestremita’ di ogni trave per effetto dei carichie degli spostamenti
b Utilizzo delle azioni interne del punto a) perla formulazione di automatica del sistema diequazioni di equilibrio in termini di spostamento
c Determinazione delle componenti di spostamentoincognite come soluzione del sistema di equazionidi equilibrio.
d Calcolo delle sollecitazioni di ogni trave dovuti aicarichi ed agli spostamenti.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 4
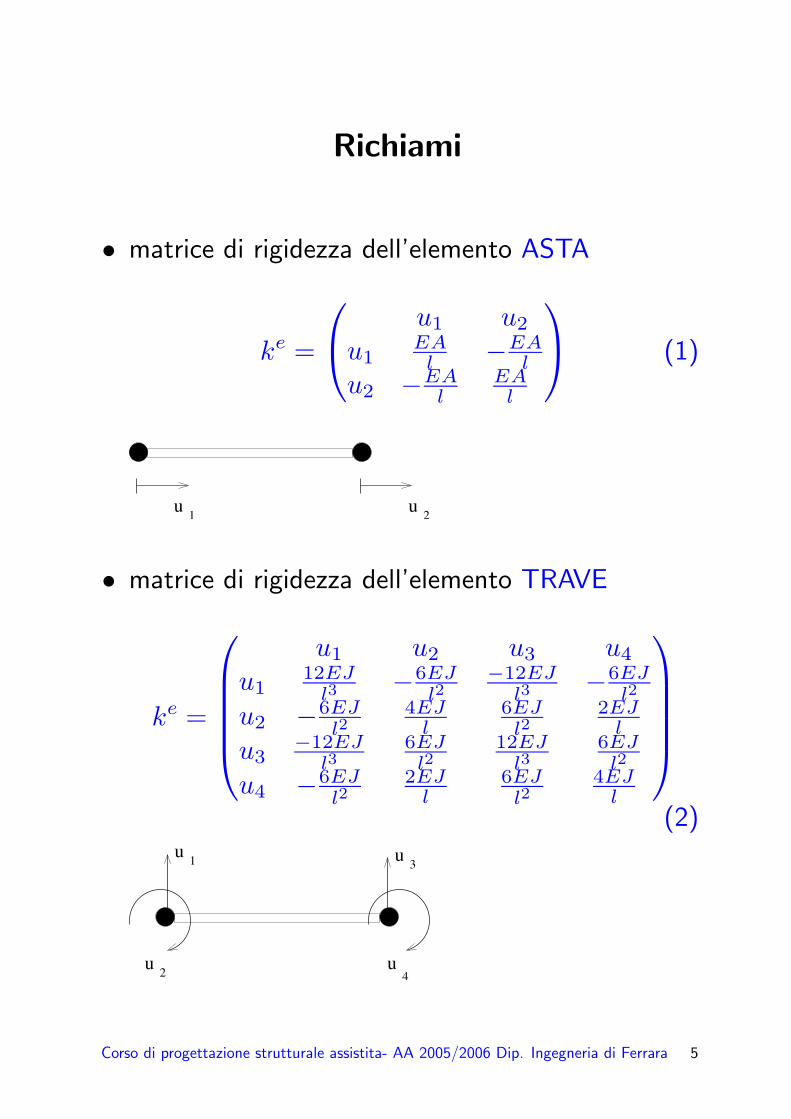
Richiami
• matrice di rigidezza dell’elemento ASTA
ke =
u1 u2
u1EAl
−EAl
u2 −EAl
EAl
(1)
u 21 u
• matrice di rigidezza dell’elemento TRAVE
ke =
u1 u2 u3 u4
u112EJl3
−6EJl2
−12EJl3
−6EJl2
u2 −6EJl2
4EJl
6EJl2
2EJl
u3−12EJl3
6EJl2
12EJl3
6EJl2
u4 −6EJl2
2EJl
6EJl2
4EJl
(2)
u4
3
2
1 uu
u
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 5
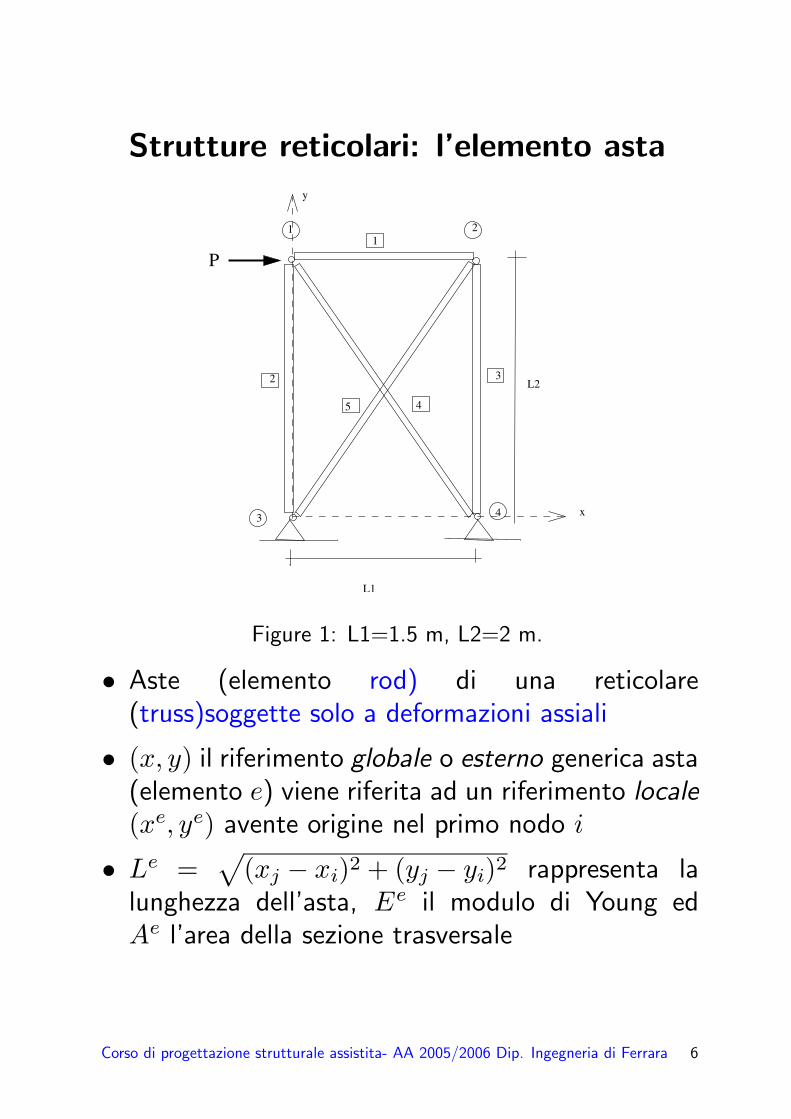
Strutture reticolari: l’elemento asta
L2
P
1 2
43
1
2 3
45
x
y
L1
Figure 1: L1=1.5 m, L2=2 m.
• Aste (elemento rod) di una reticolare(truss)soggette solo a deformazioni assiali
• (x, y) il riferimento globale o esterno generica asta(elemento e) viene riferita ad un riferimento locale(xe, ye) avente origine nel primo nodo i
• Le =√
(xj − xi)2 + (yj − yi)2 rappresenta lalunghezza dell’asta, Ee il modulo di Young edAe l’area della sezione trasversale
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 6
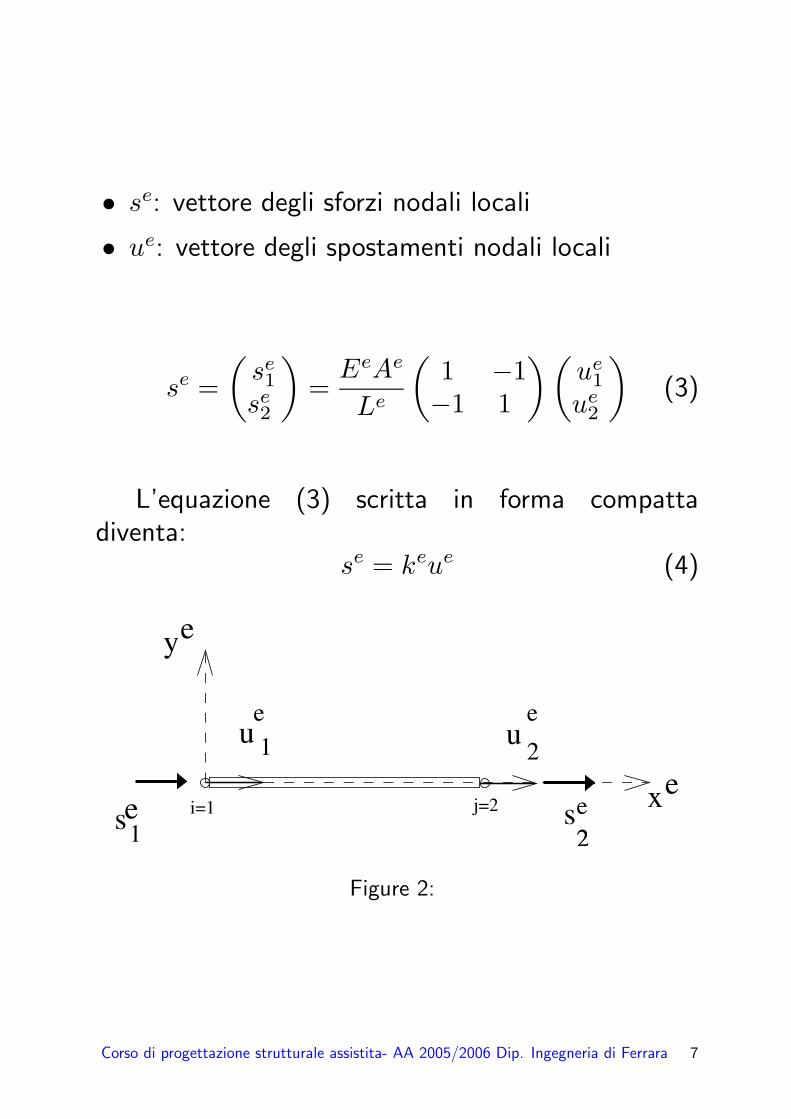
• se: vettore degli sforzi nodali locali
• ue: vettore degli spostamenti nodali locali
se =
(
se1se2
)
=EeAe
Le
(
1 −1−1 1
)(
ue1ue2
)
(3)
L’equazione (3) scritta in forma compattadiventa:
se = keue (4)
i=1e
e
x
y
e e
2
21 uu
2ess1
e j=2
Figure 2:
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 7

NB:il generico coefficiente di rigidezza kijrappresenta lo sforzo nodale sej corrispondente adun movimento ui unitario nel riferimento locale.
Xs2ei=1 j=2
u1 u2
xe
ye
uje
Figure 3:
XLe
EeAe= 1,
si = keij = −X = −EeAe
Le
sj = kejj = X =EeAe
Le.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 8
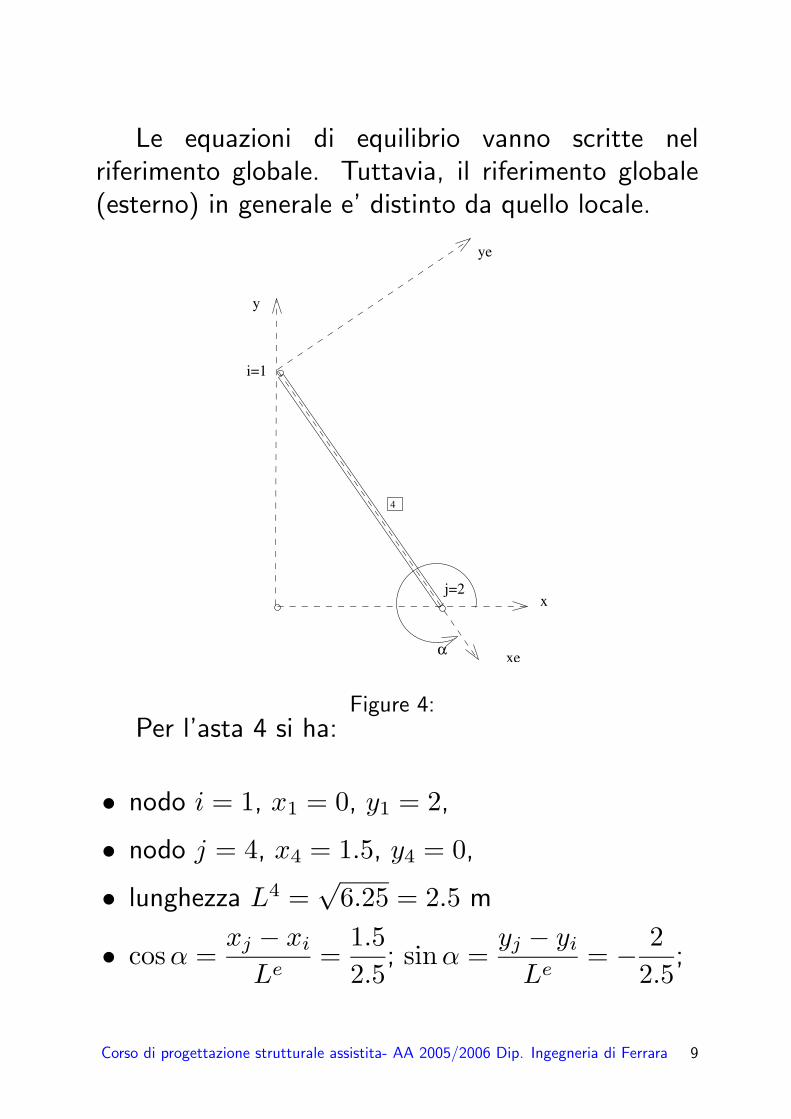
Le equazioni di equilibrio vanno scritte nelriferimento globale. Tuttavia, il riferimento globale(esterno) in generale e’ distinto da quello locale.
4
α
j=2
i=1
ye
xe
y
x
Figure 4:Per l’asta 4 si ha:
• nodo i = 1, x1 = 0, y1 = 2,
• nodo j = 4, x4 = 1.5, y4 = 0,
• lunghezza L4 =√6.25 = 2.5 m
• cosα =xj − xi
Le=
1.5
2.5; sinα =
yj − yi
Le= − 2
2.5;
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 9

Dal riferimento locale a quello globale
X
αXsin
Ysin
Xcos α
α
P
α
y
x
Y
Figure 5:
(
x
y
)
=
(
cosα sinα− sinα cosα
)(
X
Y
)
à x = RX
(5)
(
X
Y
)
=
(
cosα − sinαsinα cosα
)(
x
y
)
à X = Rtx
(6)
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 10

Dal riferimento locale a quello globale
Matrice di rotazione Re dell’elemento e
Re =
cosα sinα 0 0− sinα cosα 0 0
0 0 cosα sinα0 0 − sinα cosα
(7)
dove:se = ReSe, ue = ReUe (8)
• Ue ed Se: vettore degli spostamenti e degli sforzinel riferimento globale
• Re e ortonormale (rotazione propria) tale cheReReT = I, ReT = Re−1, det Re = 1 e quindi
Se = ReTse, Ue = Re
Tue (9)
Sostituendo se = keue si ottiene
Se = ReTse = Re
Tkeue = Re
TkeReUe (10)
⇒ Se = KeUe dove Ke = ReTkeRe e la matricedi rigidezza nel riferimento globale.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 11
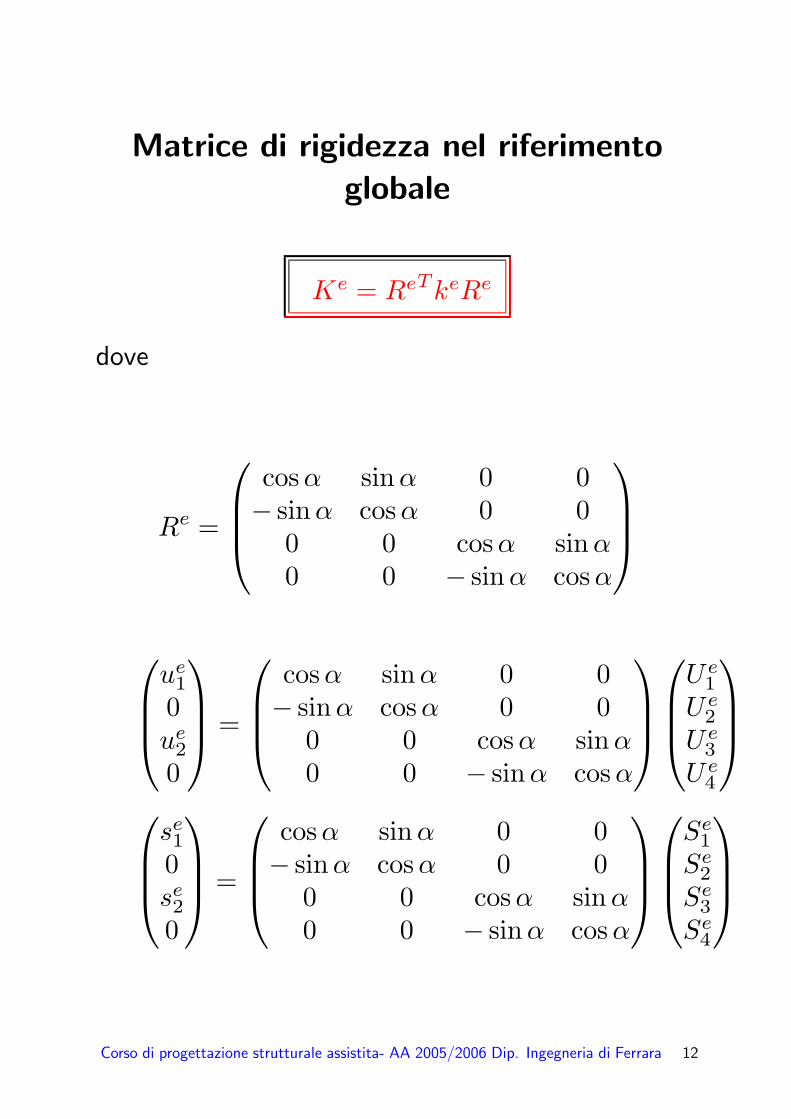
Matrice di rigidezza nel riferimento
globale
Ke = ReTkeRe
dove
Re =
cosα sinα 0 0− sinα cosα 0 0
0 0 cosα sinα0 0 − sinα cosα
ue10ue20
=
cosα sinα 0 0− sinα cosα 0 0
0 0 cosα sinα0 0 − sinα cosα
Ue1
Ue2
Ue3
Ue4
se10se20
=
cosα sinα 0 0− sinα cosα 0 0
0 0 cosα sinα0 0 − sinα cosα
Se1Se2Se3Se4
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 12

Ke
=
cosα
−sinα
00
sinα
cosα
00
00
cosα
−sinα
00
sinα
cosα
k0
−k
0
00
00
−k
0k
0
00
00
cosα
sinα
00
−sinα
cosα
00
00
cosα
sinα
00
−sinα
cosα
ovvero:
' &
$ %
Ke=
EA l
cos2α
cosαsinα
−cos2α
−cosαsinα
cosαsinα
sin
2α
−cosαsinα
−sin
2α
−cos2α
−cosαsinα
cos2α
cosαsinα
−cosαsinα
−sin
2α
cosαsinα
sin
2α
dovek=
EA le
Cor
sodipr
oget
tazi
one
stru
ttura
leas
sist
ita-
AA
2005
/200
6D
ip.
Inge
gner
iadiFer
rara
13
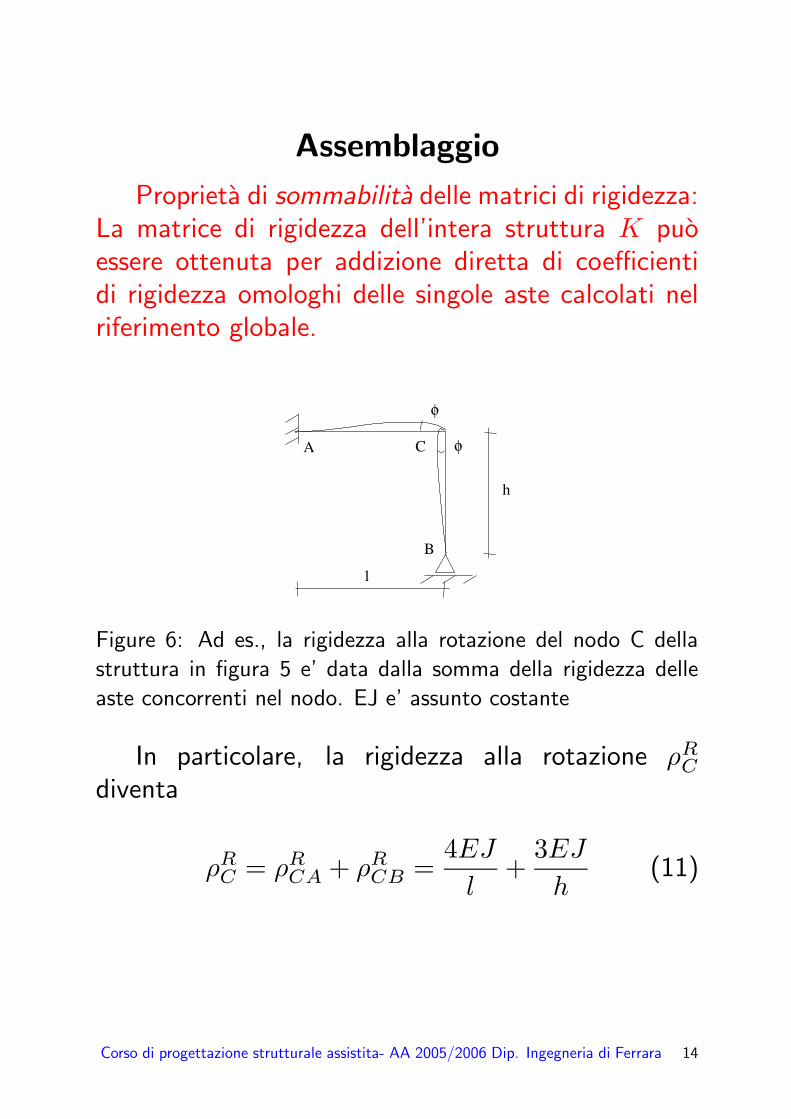
Assemblaggio
Proprieta di sommabilita delle matrici di rigidezza:La matrice di rigidezza dell’intera struttura K puoessere ottenuta per addizione diretta di coefficientidi rigidezza omologhi delle singole aste calcolati nelriferimento globale.
φ
B
A C
l
h
φ
Figure 6: Ad es., la rigidezza alla rotazione del nodo C della
struttura in figura 5 e’ data dalla somma della rigidezza delle
aste concorrenti nel nodo. EJ e’ assunto costante
In particolare, la rigidezza alla rotazione ρRCdiventa
ρRC = ρRCA + ρRCB =4EJ
l+
3EJ
h(11)
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 14
U6
L2
L1
y
x
5 4
32
1
34
21
P
U2
U1
U4
U3
U7
U8
U5
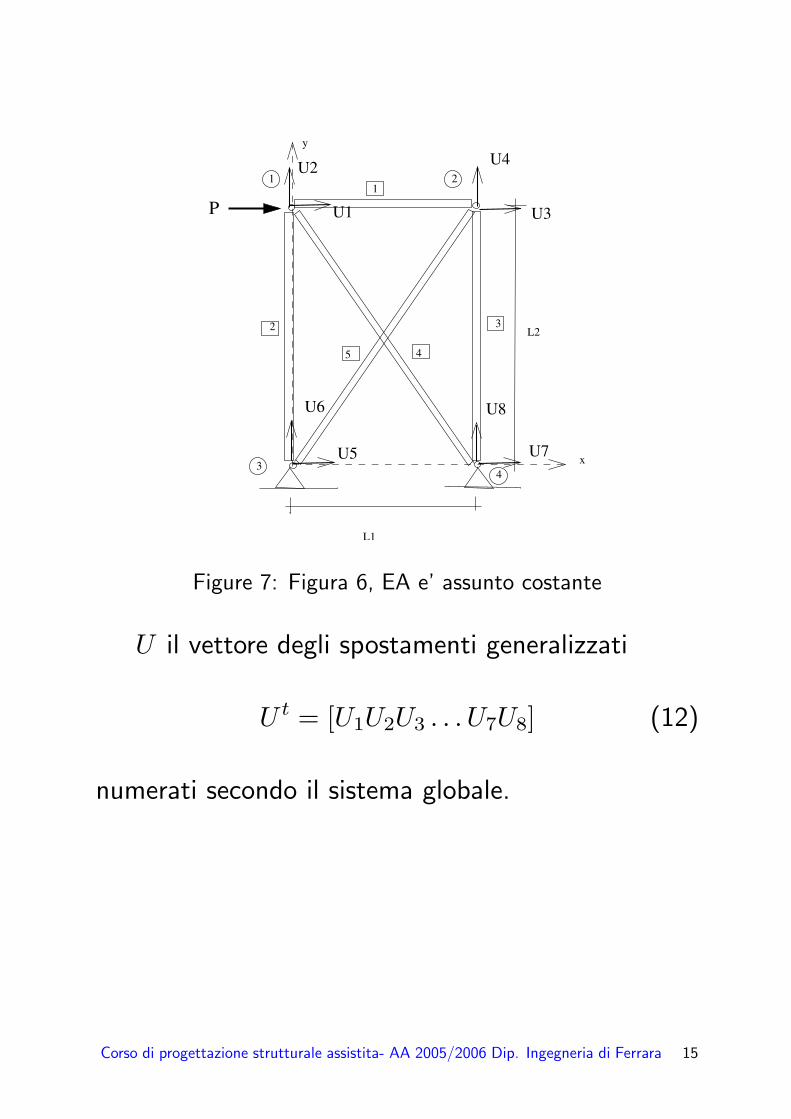
Figure 7: Figura 6, EA e’ assunto costante
U il vettore degli spostamenti generalizzati
U t = [U1U2U3 . . . U7U8] (12)
numerati secondo il sistema globale.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 15
Un esempio di matrice topologica:
CALFEM
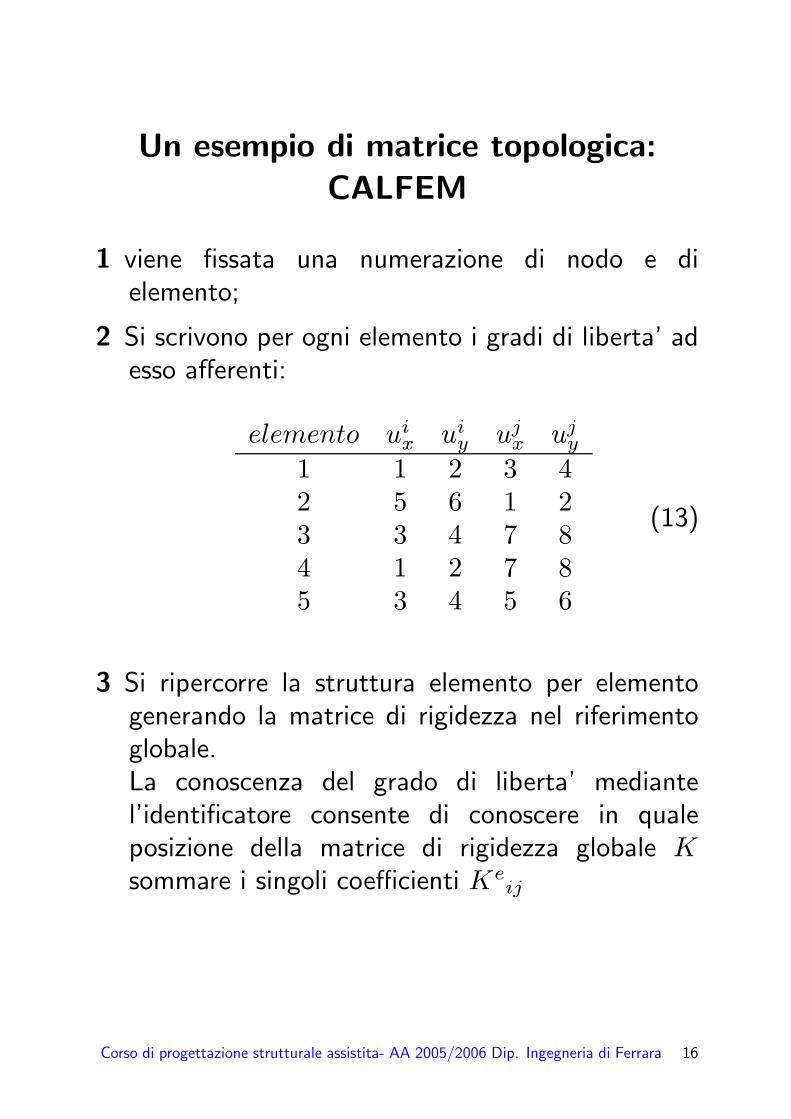
1 viene fissata una numerazione di nodo e dielemento;
2 Si scrivono per ogni elemento i gradi di liberta’ adesso afferenti:
elemento uix uiy ujx ujy1 1 2 3 42 5 6 1 23 3 4 7 84 1 2 7 85 3 4 5 6
(13)
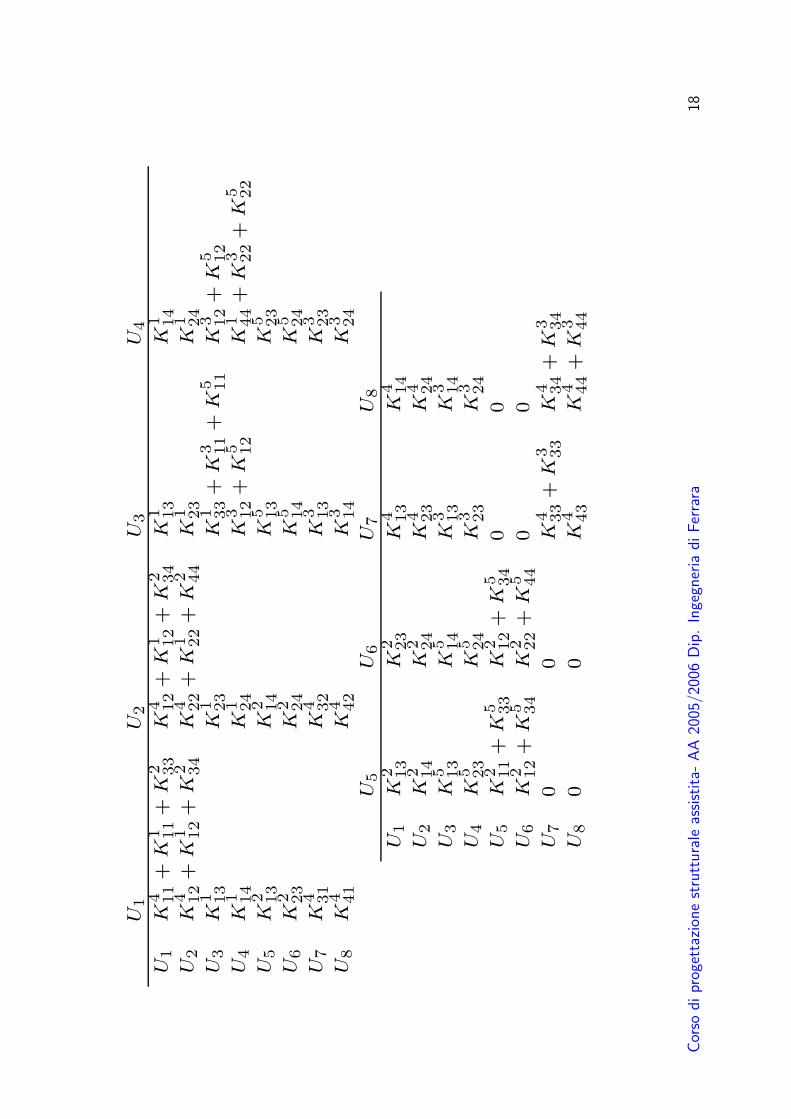
3 Si ripercorre la struttura elemento per elementogenerando la matrice di rigidezza nel riferimentoglobale.La conoscenza del grado di liberta’ mediantel’identificatore consente di conoscere in qualeposizione della matrice di rigidezza globale K
sommare i singoli coefficienti Keij
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 16

αU8
U7
U2
U1
4
x
y
ÃK
=
12
34
56
78
K4 11
K4 12
K4 13
K4 14
K4 21
K4 22
K4 23
K4 24
K4 31
K4 32
K4 33
K4 34
K4 41
K4 42
K4 43
K4 44
K4=
R4Tk
4R
4T.
(14)
Cor
sodipr
oget
tazi
one
stru
ttura
leas
sist
ita-
AA
2005
/200
6D
ip.
Inge
gner
iadiFer
rara
17
U1
U2
U3
U4
U1
K4 11
+K
1 11
+K
2 33
K4 12
+K
1 12
+K
2 34
K1 13
K1 14
U2
K4 12
+K
1 12
+K
2 34
K4 22
+K
1 22
+K
2 44
K1 23
K1 24
U3
K1 13
K1 23
K1 33
+K
3 11
+K
5 11
K3 12
+K
5 12
U4
K1 14
K1 24
K3 12
+K
5 12
K1 44
+K
3 22
+K
5 22
U5
K2 13
K2 14
K5 13
K5 23
U6
K2 23
K2 24
K5 14
K5 24
U7
K4 31
K4 32
K3 13
K3 23
U8
K4 41
K4 42
K3 14
K3 24
U5
U6
U7
U8
U1
K2 13
K2 23
K4 13
K4 14
U2
K2 14
K2 24
K4 23
K4 24
U3
K5 13
K5 14
K3 13
K3 14
U4
K5 23
K5 24
K3 23
K3 24
U5
K2 11
+K
5 33
K2 12
+K
5 34
00
U6
K2 12
+K
5 34
K2 22
+K
5 44
00
U7
00
K4 33
+K
3 33
K4 34
+K
3 34
U8
00
K4 43
K4 44
+K
3 44
Cor
sodipr
oget
tazi
one
stru
ttura
leas
sist
ita-
AA
2005
/200
6D
ip.
Inge
gner
iadiFer
rara
18
Carichi applicati sui nodi
In fase di input, vengono assegnate per ogni nodole forze esterne direttamente secondo il riferimentoglobale. Mediante la matrice di identificazione ID,i carichi vengono poi associati al grado di liberta’.Poiche’ i carichi concentrati possono generalmentesia essere applicati sui nodi che in punti diversi dainodi, occorre trasformarli in carichi nodali equivalenti.Analogamente, i carichi distribuiti devono esseretrasformati in carichi nodali equivalenti.
• i carichi vengono trasformati in carichi nodaliequivalenti Seq
• NB: Seq possono anche essere visti come reazionidi vincolo perfetto cambiate di segnoIn tal caso, per il principio di sovrapposizione deglieffetti, per il singolo elemento e lo sforzo globale
agente e’ dato da
Se = KeUe − Seeq . (15)
• In alternativa, si osservi che il vettore −Seeqrappresenta proprio le reazioni di incastro perfetto
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 19

Carichiapplicatisuinodi
2/3
l
L2
y
x
54
32
1
34
21
P l/3
2/3
l
2/3P
P/3
P l/3
2/3
PP/
3
l
L2
y
x
54
32
1
34
21
Figure
8:Esempio
1
Cor
sodipr
oget
tazi
one
stru
ttura
leas
sist
ita-
AA
2005
/200
6D
ip.
Inge
gner
iadiFer
rara
20
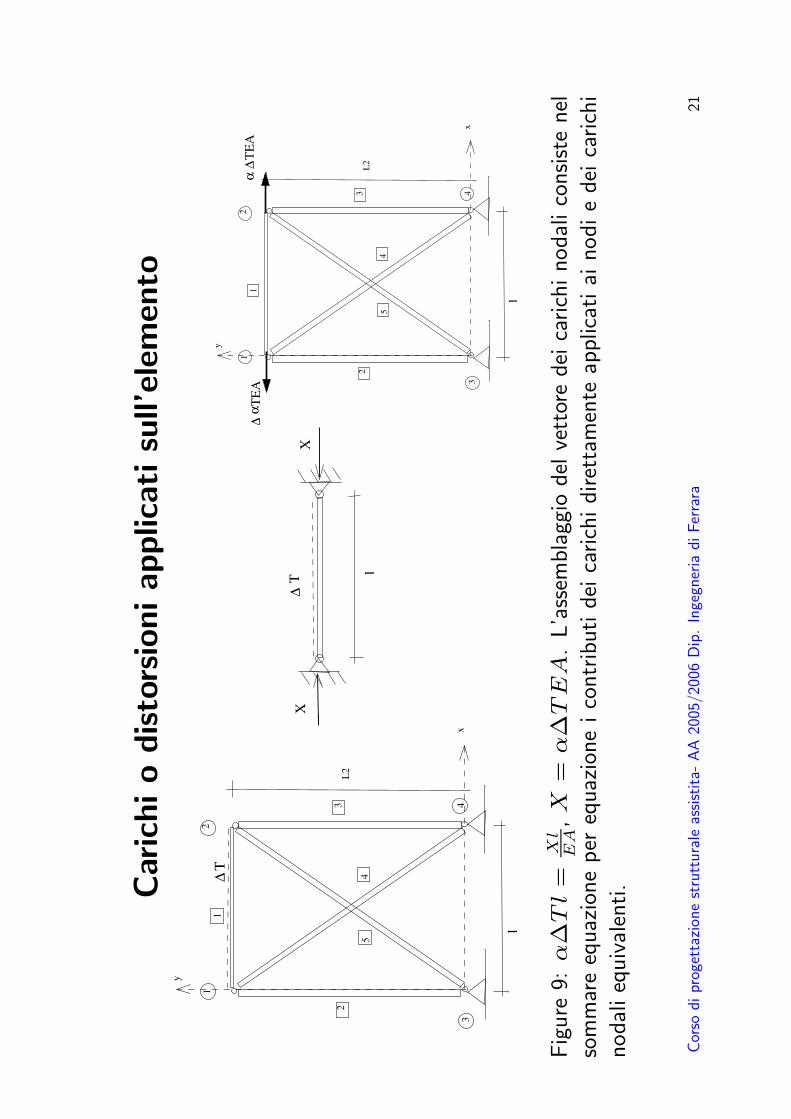
Carichiodistorsioniapplicatisull’elemento
1
l
∆T
L2
y
x
54
32
1
34
2
lT∆
XX
TE
A1
2
43
1
23
45
x
y
L2
l
TE
Aα
∆α
∆
Figure
9:α∆Tl=
Xl
EA,X=α∆TEA.L’assem
blaggio
delvettoredeicarichinodaliconsistenel
sommareequazioneper
equazioneicontributideicarichidirettamente
applicatiai
nodiedeicarichi
nodaliequivalenti.
Cor
sodipr
oget
tazi
one
stru
ttura
leas
sist
ita-
AA
2005
/200
6D
ip.
Inge
gner
iadiFer
rara
21

Imposizione delle condizioni di vincolo
• vincoli vengono supposti perfetti, ovvero lisci ebilateri.
• gradi di liberta’ U (spostamenti generalizzati)dell’intera struttura
UT = [UTl UT
0 ] (16)
UL: vettore dei gradi di liberta’ liberi (incogniti)Uo indica il vettore dei gradi di liberta’ assegnati.
• vettore dei carichi F
FT = [FT RT ] (17)
F : vettore dei carichi assegnati;R: vettore delle reazioni vincolari.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 22
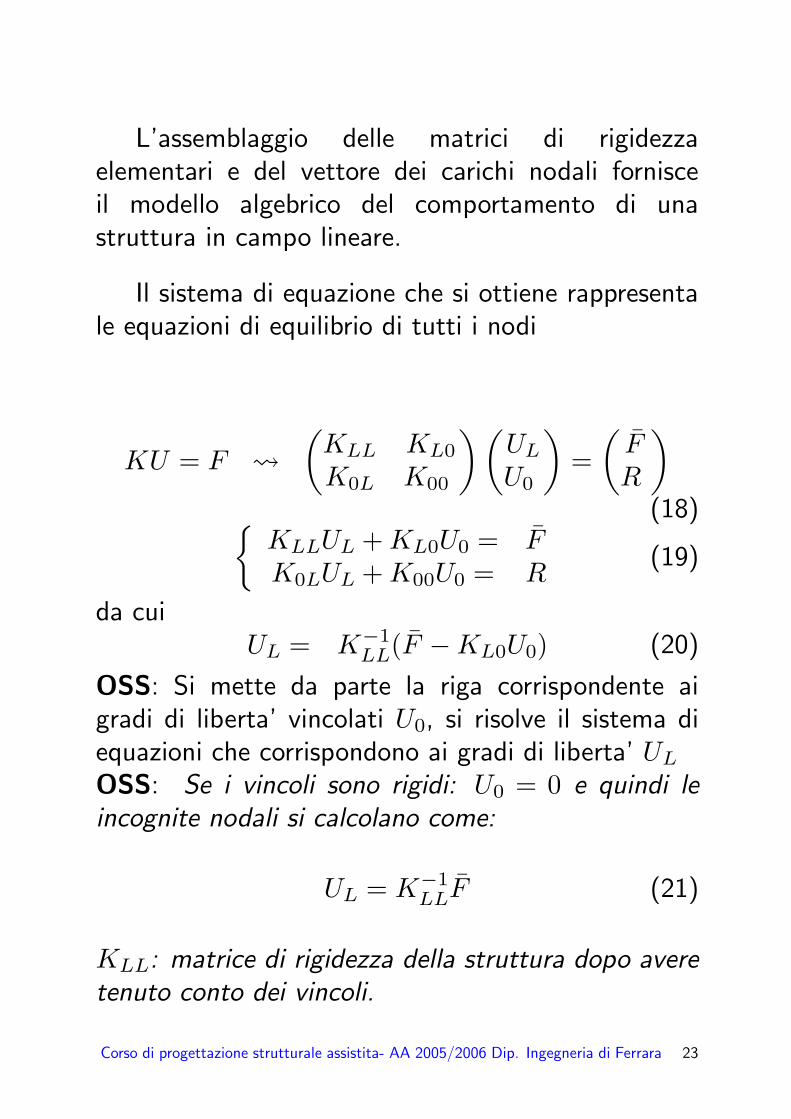
L’assemblaggio delle matrici di rigidezzaelementari e del vettore dei carichi nodali fornisceil modello algebrico del comportamento di unastruttura in campo lineare.
Il sistema di equazione che si ottiene rappresentale equazioni di equilibrio di tutti i nodi
KU = F Ã
(
KLL KL0
K0L K00
)(
ULU0
)
=
(
F
R
)
(18){
KLLUL +KL0U0 = F
K0LUL +K00U0 = R(19)
da cuiUL = K−1
LL(F −KL0U0) (20)
OSS: Si mette da parte la riga corrispondente aigradi di liberta’ vincolati U0, si risolve il sistema diequazioni che corrispondono ai gradi di liberta’ ULOSS: Se i vincoli sono rigidi: U0 = 0 e quindi leincognite nodali si calcolano come:
UL = K−1LLF (21)
KLL: matrice di rigidezza della struttura dopo averetenuto conto dei vincoli.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 23

Proprieta di KLL
1 Posto che la struttura non sia labile, la soluzionedel sistema (19) esiste ed e’ unica (teorema diKirchhoff). Pertanto la matrice KLL deve esserenon singolare (detKLL 6= 0)
2 La matrice di rigidezza KLL e’ simmetrica(Teorema di Betti-Maxwell); si memorizza e/ocostruisce solo meta’ di essa.
3 La simmetria di K o di KLL comporta cheδUT (KU − F ) = δΠ(U) sia un differenzialeesatto e δΠ(U) = 0 rappresenti la condizione distazionarieta dell’Energia Potenziale Totale dellastruttura:
Π(U) =1
2UTKU − UTF (22)
Tra tutti i campi di spostamento cinematicamenteammissibili (congruenti e che verificano lecondizioni di vincolo), rappresentati dai parametriLagrangiani U , quello che verifica le equazionidi equilibrio rende minima l’Energia PotenzialeTotale (22). Si noti che in assenza di vincolil’EPT risulta solo debolmente convessa e KLL
semi-definita positiva.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 24

4 matrice KLL, matrice Hessiana della EPT dellastruttura vincolata, risulta pertanto definitapositiva. Quindi, condizione necessaria esufficiente affinche’ KLL sia definita positiva e’che:
• tutti gli autovalori di KLL siano positivi (si ricordiche detKLL =
∏n
i λi > 0)• tutti i minori principali e quindi anche tutti i terminisulla diagonale principale sono positivi
• inoltre, risulta che UTKLLU ≥ 0, per ogni UL eUTKLLU = 0 sse UL = 0.
Se sono possibili moti rigidi la matrice KLL risultasemidefinita positiva ed ha determinate nullo;inoltre ad ogni atto di moto rigido corrispondeun autovalore nullo.
5 La matrice KLL e’ sparsa; in particolare, i terminidiversi da zero sono addensati in prossimita’della diagonale principale (matrice a banda), e ladimensione della banda dipende dalla numerazionedei nodi. Cio’ riduce di molto l’onere di calcolodel sistema e lo spazio di memoria necessario.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 25

Esercizi
La soluzione di un esercizio si articola nelleseguenti fasi:
• Assemblaggio matrice di rigidezza
• Imposizione delle condizioni al contorno
• Soluzione sistema KU = F
• Calcolo delle reazioni vincolari
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 26
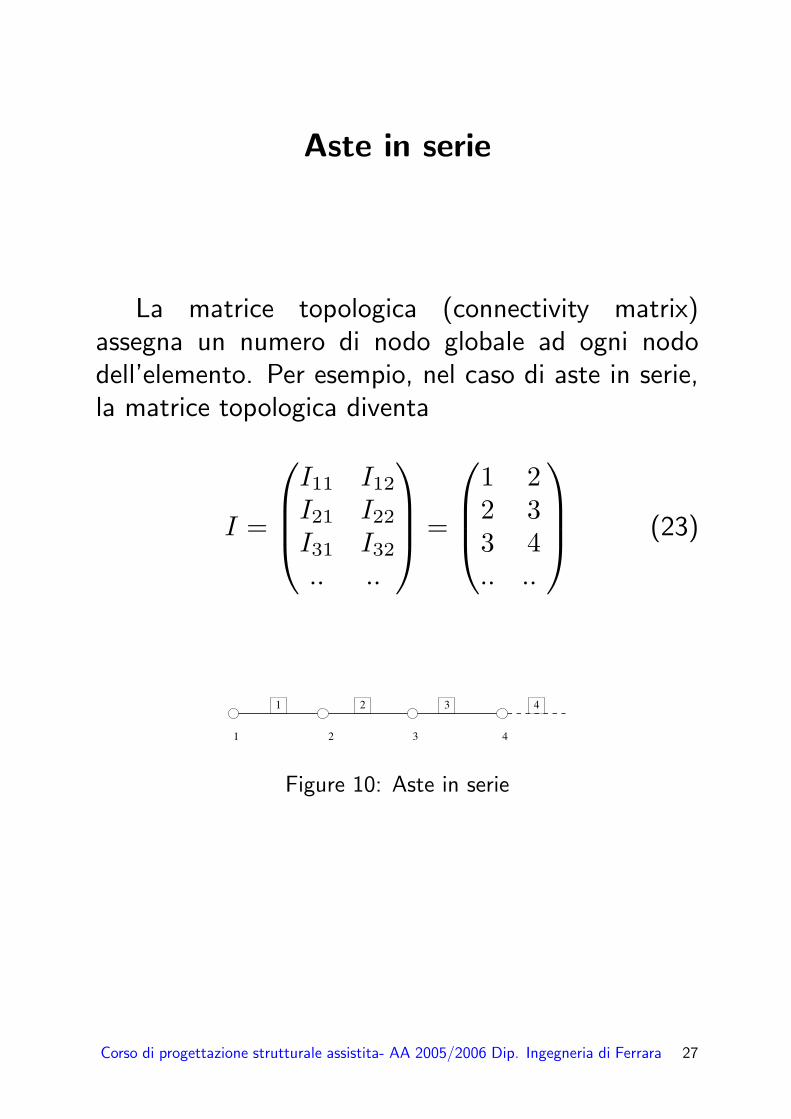
Aste in serie
La matrice topologica (connectivity matrix)assegna un numero di nodo globale ad ogni nododell’elemento. Per esempio, nel caso di aste in serie,la matrice topologica diventa
I =
I11 I12I21 I22I31 I32.. ..
=
1 22 33 4.. ..
(23)
4
4321
1 2 3
Figure 10: Aste in serie
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 27

Aste in parallelo ed in serie
P
4u3u1u
2u
4
3
2
13
2
1
P
Figure 11:
DATI: Ei, area della sezione trasversale Ai,lunghezza li, con i = 1, 2, 3
matrice topologica:ID =
1 32 33 4
matrice di rigidezza
K =
E1A1
l10 −E1A1
l10
0E2A2
l2−E2A2
l20
−E1A1
l1−E2A2
l2
3∑
i
EiAi
li−E3A3
l3
0 0 −E3A3
l3
E3A3
l3
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 28
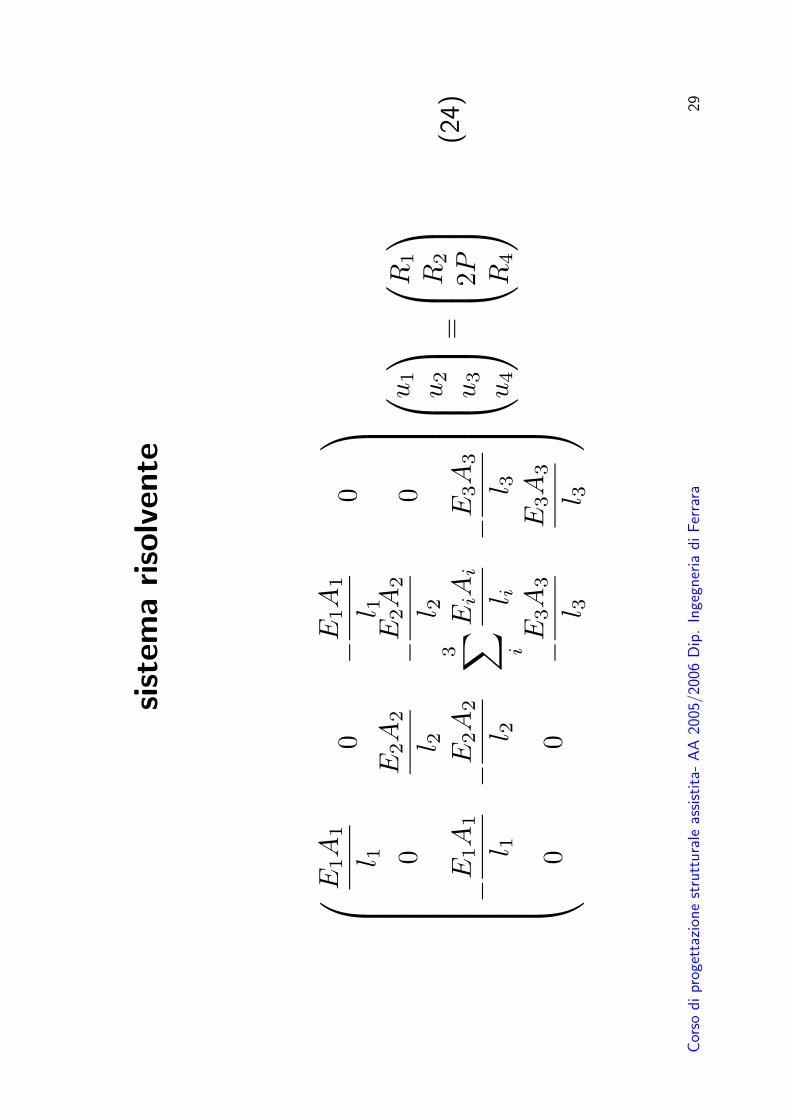
sistemarisolvente
E1A
1
l 10
−E
1A
1
l 10
0E
2A
2
l 2−E
2A
2
l 20
−E
1A
1
l 1−E
2A
2
l 2
3∑
i
EiA
i
l i−E
3A
3
l 3
00
−E
3A
3
l 3
E3A
3
l 3
u1
u2
u3
u4
=
R1
R2
2P R4
(24)
Cor
sodipr
oget
tazi
one
stru
ttura
leas
sist
ita-
AA
2005
/200
6D
ip.
Inge
gner
iadiFer
rara
29

• Si impongono le condizioni al contorno:u1 = 0 , u2 = 0 , u4 = 0Nella soluzione manuale, si tralasciano le equazionidi equilibrio relative ad u1, u2, u4: verranno usatealla fine per il calcolo delle reazioni vincolari.
• dalla equazione che governa l’equilibrio lungo u3
si ha
u3 =2P
E1A1
l1+
E2A2
l2+
E3A3
l3
(25)
• Le reazioni vincolari si calcolano attraverso leequazioni di equlibrio relative ai gradi di liberta’vincolati (post-processing):
R1
R2
R4
=
E1A1
l10 −E1A1
l10
0E2A2
l2−E2A2
l20
0 0 −E3A3
l3
E3A3
l3
u1
u2
u3
u4
dove u1 = 0, u2 = 0, u4 = 0 e u3 6= 0
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 30

Un esempio di struttura reticolareu4
α
P
2P
1
2 3
1
23 3 2
1
32
1
u5
u6
u1
u2
u3
Figure 12: Reticolare
Vogliamo determinare gli spostamenti orizzontalie verticali del nodo 3 delle struttura reticolare difigura 12.
nr. el. nodi Geom Mat. α
1 2 3 A,l1=l E 0 o
2 1 3 A,l2 =l√2 E 45 o
3 1 2 A,l3=l E 90 o
matrice topologica
ID =
elemento uix uiy ujx ujy1 3 4 5 62 1 2 5 63 1 2 3 4
(26)
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 31

matricedirigidezzaglobale
K=
K2 11+K
3 11
K2 12+K
3 12
K3 13
K3 14
K2 13
K3 14
K2 22+K
3 22
K3 23
K3 24
K2 23
K2 24
K1 11+K
3 33
K3 34+K
1 12
K1 13
K1 14
K3 44+K
1 22
K1 23
K1 24
K1 33+K
2 33
K1 34+K
2 34
K1 44+K
2 44
(27)
vettoredelle
forzenodali:
F=
F3 1+F
2 1
F3 2+F
2 2
F3 3+F
1 1
F3 4+F
1 2
−2P P
(28)
Cor
sodipr
oget
tazi
one
stru
ttura
leas
sist
ita-
AA
2005
/200
6D
ip.
Inge
gner
iadiFer
rara
32

• Si impongono le condizioni al contorno:u1 = u2 = u3 = u4 = 0Nella soluzione manuale, si “tralasciano” leequazioni di equilibrio relative ad u1, u2, u3, u4;verranno recuperate alla fine per il calcolo dellereazioni vincolari
• Dalle equazioni relative ad u5 ed u6, si ha:
EAl
(
1.3536 0.35360.3536 0.3536
)(
u5
u6
)
=
(
−2PP
)
⇒ u5 = −3PlEA
, u6 = (3 + 2√2) PlEA
= 5.828 PlEA
• Dalle equazioni relative ad u1, u2, u3, u4, sicalcolano le reazioni vincolari:
F =
F 31 + F 2
1
F 32 + F 2
2
F 33 + F 1
1
F 34 + F 1
2
= EAl
−0.3536 −0.3536−0.3536 −0.3536−1 00 0
(
u5
u6
)
dove si e’ gia’ sostituito u1 = u2 = u3 = u4 = 0.
Corso di progettazione strutturale assistita- AA 2005/2006 Dip. Ingegneria di Ferrara 33