Lezione 3. Movimento ed Equilibrio -...
34
F. Previdi - Fondamenti di Automatica - Lez. 3 1 Lezione 3. Movimento ed Equilibrio
Transcript of Lezione 3. Movimento ed Equilibrio -...

F. Previdi - Fondamenti di Automatica - Lez. 3 1
Lezione 3. Movimento ed Equilibrio

F. Previdi - Fondamenti di Automatica - Lez. 3 2
Schema della lezione
1. Movimento dello stato e dell’uscita (generale)
2. (Movimento di) Equilibrio (generale)
3. Sistemi LTI
4. Equilibrio di sistemi LTI
5. Movimento di sistemi LTI
6. Movimento libero e movimento forzato di sistemi LTI
F. Previdi - Fondamenti di Automatica - Lez. 3 3
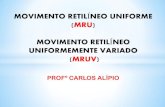
1. Movimento dello stato e dell’uscita
tutgty
tutt
,
,
x
xfx
Sia assegnato l’ingresso
stato iniziale
0 , ttt x
movimento dello stato
0 , ttty
movimento dell’uscita
Integrando l’equazione di stato si ottiene
Sostituendo il risultato nella trasformazione d’uscita si ha
00 xx t
0 , tttu
Problema fondamentale della teoria dei sistemi
F. Previdi - Fondamenti di Automatica - Lez. 3 4
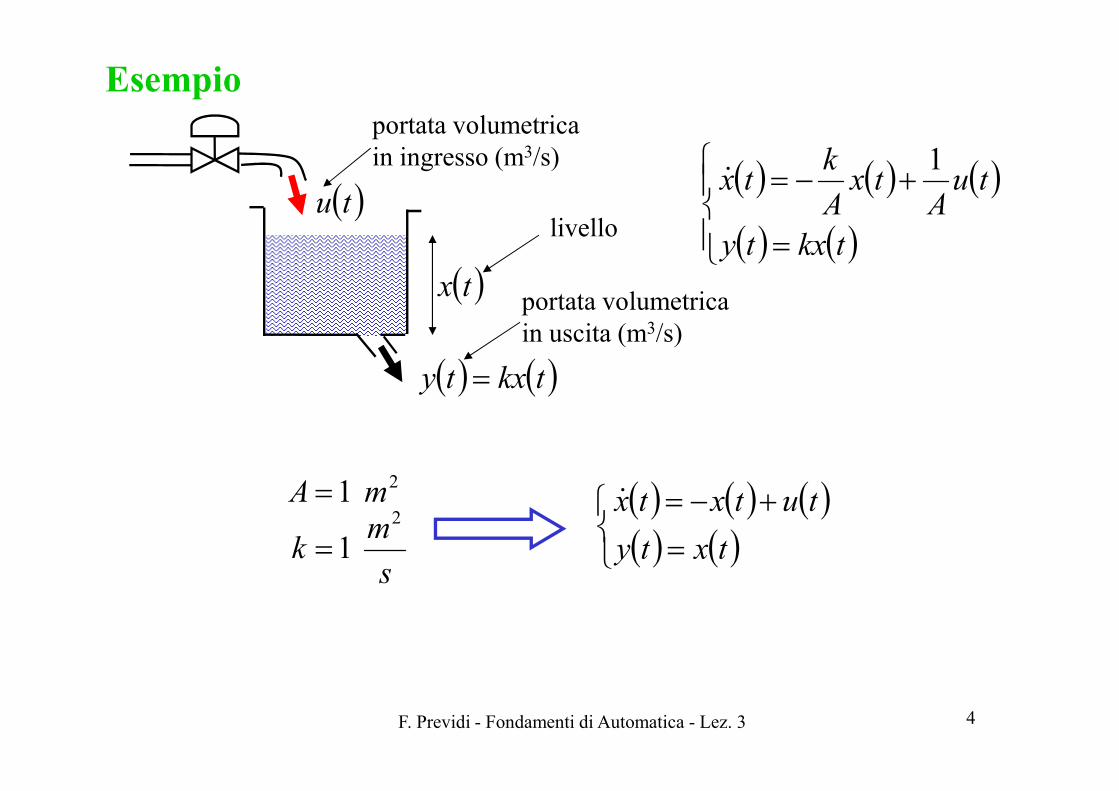
Esempio
tu
tkxty
tx
portata volumetrica in ingresso (m3/s)
portata volumetrica in uscita (m3/s)
livello
tkxty
tuA
txA
ktx
1
2 1 mA
s
mk
2
1
txty
tutxtx
F. Previdi - Fondamenti di Automatica - Lez. 3 5
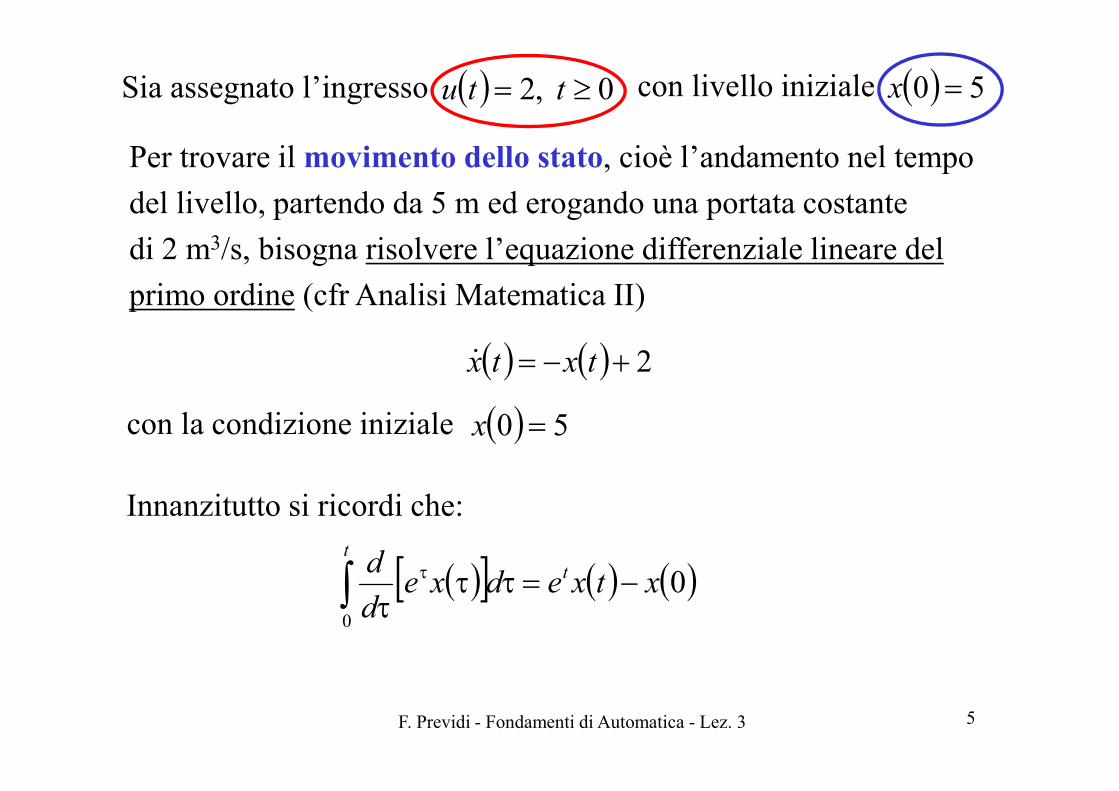
Sia assegnato l’ingresso 0 ,2 ttu
2 txtx
50 x
Per trovare il movimento dello stato, cioè l’andamento nel tempo
del livello, partendo da 5 m ed erogando una portata costante
di 2 m3/s, bisogna risolvere l’equazione differenziale lineare del
primo ordine (cfr Analisi Matematica II)
con la condizione iniziale
50 xcon livello iniziale
Innanzitutto si ricordi che:
00
xtxedxed
d tt

F. Previdi - Fondamenti di Automatica - Lez. 3 6
ttt
ttt deeedeetx
00
2525
2322512525 0 ttttttttt eeeeeeeee
0 ,23 tetx tIl movimento dello stato è
0 ,23 tetxty tIl movimento dell’uscita è
50 xSfruttando la condizione iniziale:
Quindi, si moltiplichino entrambi i membri dell’equazione per 0te
ttt etxetxe 2 ttt etxetxe 2 tt etxedt
d2
t
t dextxe0
20 t
tt dexetx0
20

F. Previdi - Fondamenti di Automatica - Lez. 3 7
tutgty
tutt
,
,
x
xfx
Movimento dello stato costante nel tempo in corrispondenza di utu
2. (Movimento di) Equilibrio
ingresso costante 0 , ttutu
xx t
Stato di equilibrio
Uscita di equilibrio
Movimento dell’uscita costante nel tempo in corrispondenza di utu
yty
stato iniziale xx 0t

F. Previdi - Fondamenti di Automatica - Lez. 3 8
ugy
uf
,
,0
x
x 0tx
t
x(t)
xx 0 xtx
utu per
Calcolo dell’equilibrio (per sistemi a tempo continuo)
Eq. algebrica
0
Esempio con x scalare

F. Previdi - Fondamenti di Automatica - Lez. 3 9
tutxty
tutxtx
2
32
Esempio
2320 x
Calcolare stato ed uscita di equilibrio in corrispondenza dell’ingresso costante 0 ,2 ttu
Bisogna risolvere l’equazione algebrica
3x Stato di equilibrio(per ) 2 utu
Se si applica l’ingresso costante con condizione iniziale , il movimento dello stato è
2u 30 xx
0 ,3 txtx
L’uscita di equilibrio è
42 uxy

F. Previdi - Fondamenti di Automatica - Lez. 3 10
txty
Ml
tutx
Ml
htx
l
gtx
txtx
1
22212
21
sin
M
Mg
l
C(t)
Ca(t)
(t)
tutC
tyt
txt 1
txt 2
Esempio
Calcolare l’equilibrio utu in corrispondenza di
Sistema NON lineare!!

F. Previdi - Fondamenti di Automatica - Lez. 3 11
1
2221
2
sin0
0
xy
Ml
ux
Ml
hx
l
g
x
1
2
1
0
arcsin
xy
x
Mgl
ux
0,0
0
AA yx
2,
0
2
CC yx
BB y,
0x
0uSe
Mglu Se
pendolo verticale con massa in basso
pendolo verticale con massa in alto
pendolo orizzontale con massa a destra
Stato ed uscita di equilibrio(per costante)u
Per esempio:

F. Previdi - Fondamenti di Automatica - Lez. 3 12
I sistemi LTI hanno una struttura semplice e sono disponibili molti risultati teorici per il loro studio (e per il progetto di controllori)
Inoltre, molti sistemi dinamici sono descrivibili mediante sistemi LTI (almeno in prima approssimazione)
Sistemi dinamici a tempo continuo
Sistemi dinamici Lineari Tempo-Invarianti (LTI)
tuxgy
tuxfx
,,
,,
3. Sistemi dinamici Lineari Tempo-Invarianti (LTI)

F. Previdi - Fondamenti di Automatica - Lez. 3 13
tdutxctxctxcty
tubtxatxatxatx
tubtxatxatxatx
nn
nnnnnnn
nn
2211
2211
112121111
Sistemi LTI: notazione matriciale (caso SISO)
t,utgty
t,utt
x
xfx , , g,fcon lineari
è possibile scrivere esplicitamente le relazioni in forma lineare
tx
tx
t
n
1
xRicordando che
F. Previdi - Fondamenti di Automatica - Lez. 3 14
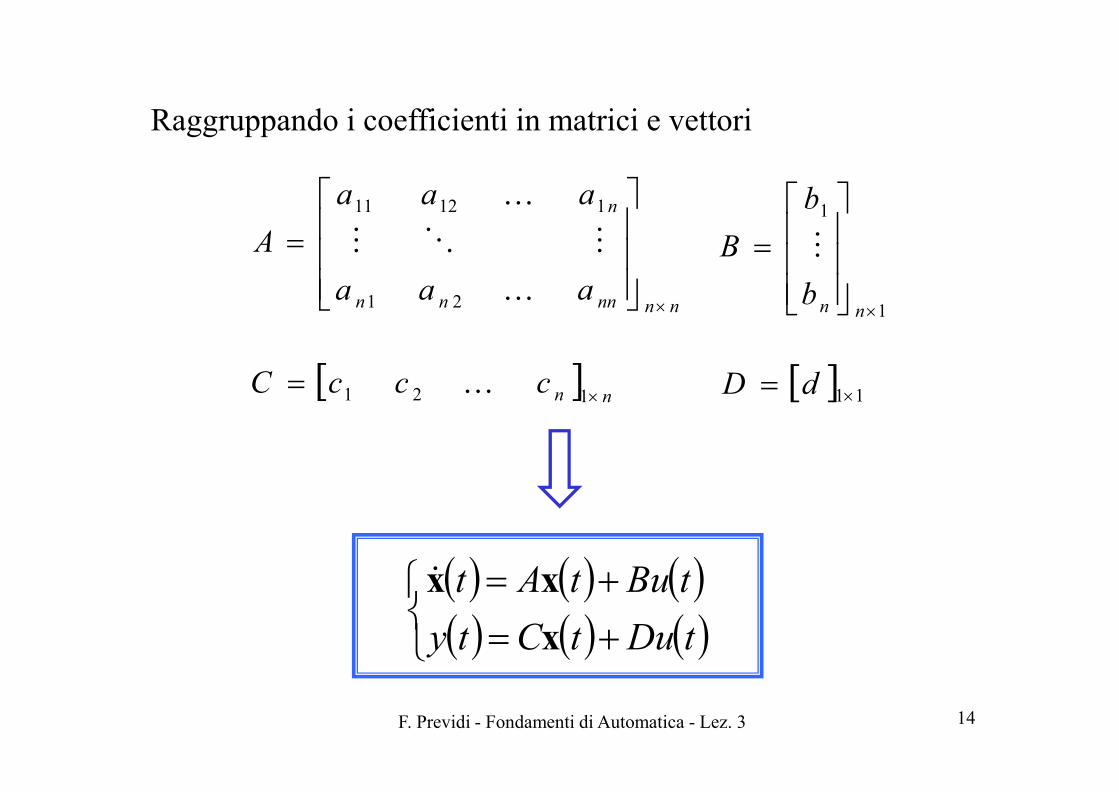
nnnnnn
n
aaa
aaa
A
21
11211
1
1
nnb
b
B
nncccC
121 11 dD
tDutCty
tButAt
x
xx
Raggruppando i coefficienti in matrici e vettori

F. Previdi - Fondamenti di Automatica - Lez. 3 15
tutxtxty
tutxtxtx
tutxtxtx
21
212
211
Esempio
, , g,f sono lineari
tx
txt
2
1x il sistema è di ordine 2
A
B C D
2 3
2 4
2
32 3 2
2 +3
2 +4
2
+3
2 3 +2

F. Previdi - Fondamenti di Automatica - Lez. 3 16
In corrispondenza di si imponga
uBA x0
uBA 1x
uDBCAuDCy 1x
utu
uBA x
Se 0det A
Se 0det A
guadagno statico
Il sistema può avere infinite o nessuna soluzione.
uBA x
tDutCty
tButAt
x
xx
u
y
4. Equilibrio di sistemi LTI SISO
0tx
F. Previdi - Fondamenti di Automatica - Lez. 3 17
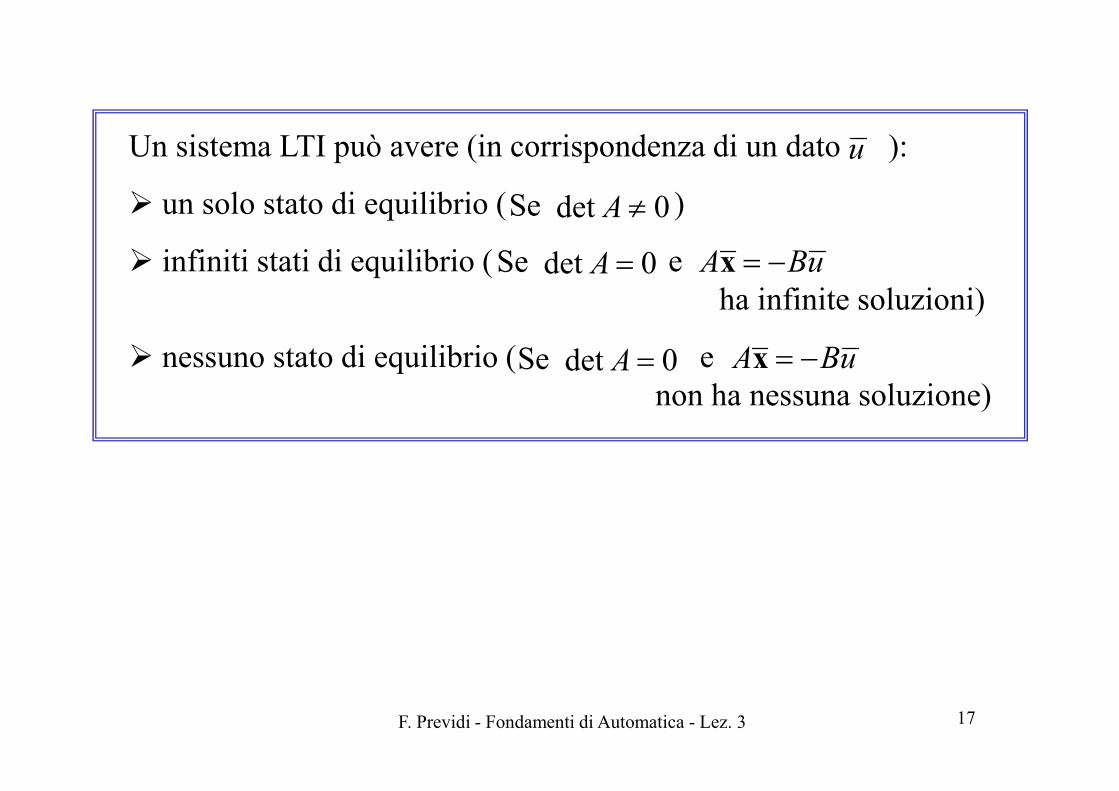
Un sistema LTI può avere (in corrispondenza di un dato ):
un solo stato di equilibrio ( )
infiniti stati di equilibrio ( e ha infinite soluzioni)
nessuno stato di equilibrio ( e non ha nessuna soluzione)
Se 0det A
Se 0det A
Se 0det A
uBA x
uBA x
u

F. Previdi - Fondamenti di Automatica - Lez. 3 18
tDutCty
tButAt
x
xx
31
21A
0
1B
01C
0D
Calcolare lo stato e l’uscita di equilibrio ed il guadagno statico in corrispondenza dell’ingresso 2 utu
2
62
0
1
11
23
1
11 uBAx
62
601
uDCy x
01det A
3u
y
Esempio
F. Previdi - Fondamenti di Automatica - Lez. 3 19
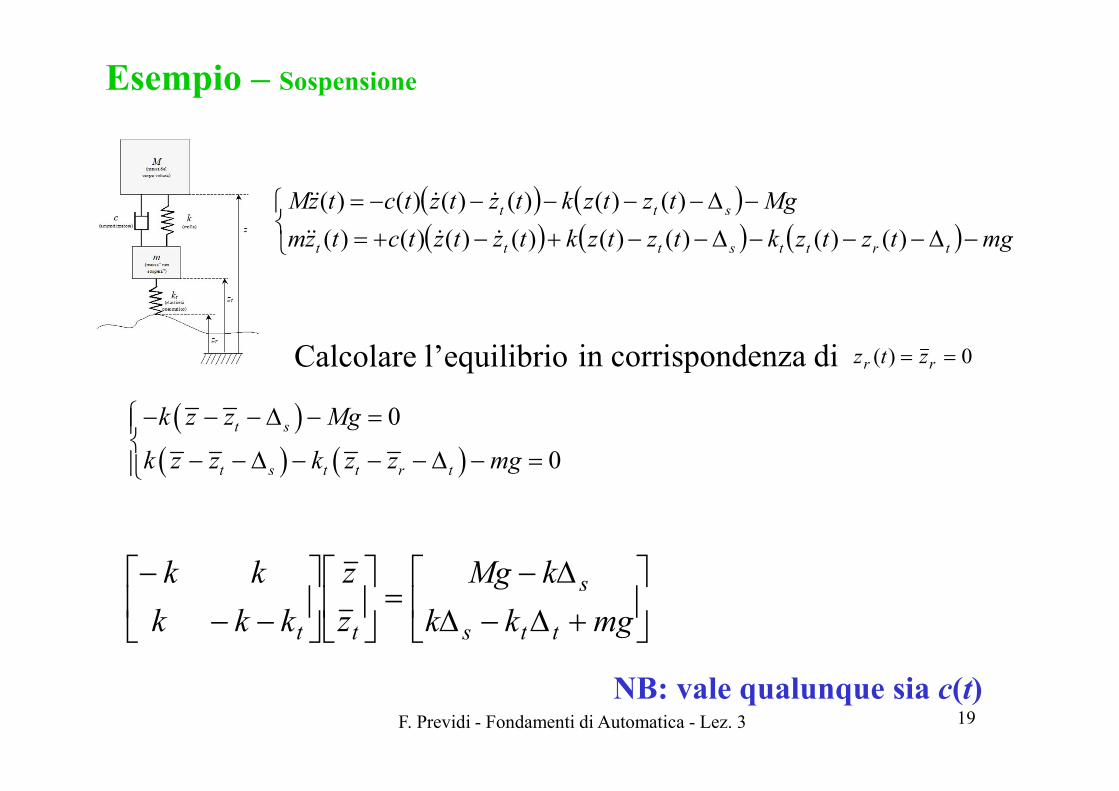
Calcolare l’equilibrio in corrispondenza di
mgtztzktztzktztztctzm
MgtztzktztztctzM
trttsttt
stt
)()()()()()()()(
)()()()()()(
0
0
t s
t s t t r t
k z z Mg
k z z k z z mg
NB: vale qualunque sia c(t)
mgkk
kMg
z
z
kkk
kk
tts
s
tt
0)( rr ztz
Esempio – Sospensione
F. Previdi - Fondamenti di Automatica - Lez. 3 20
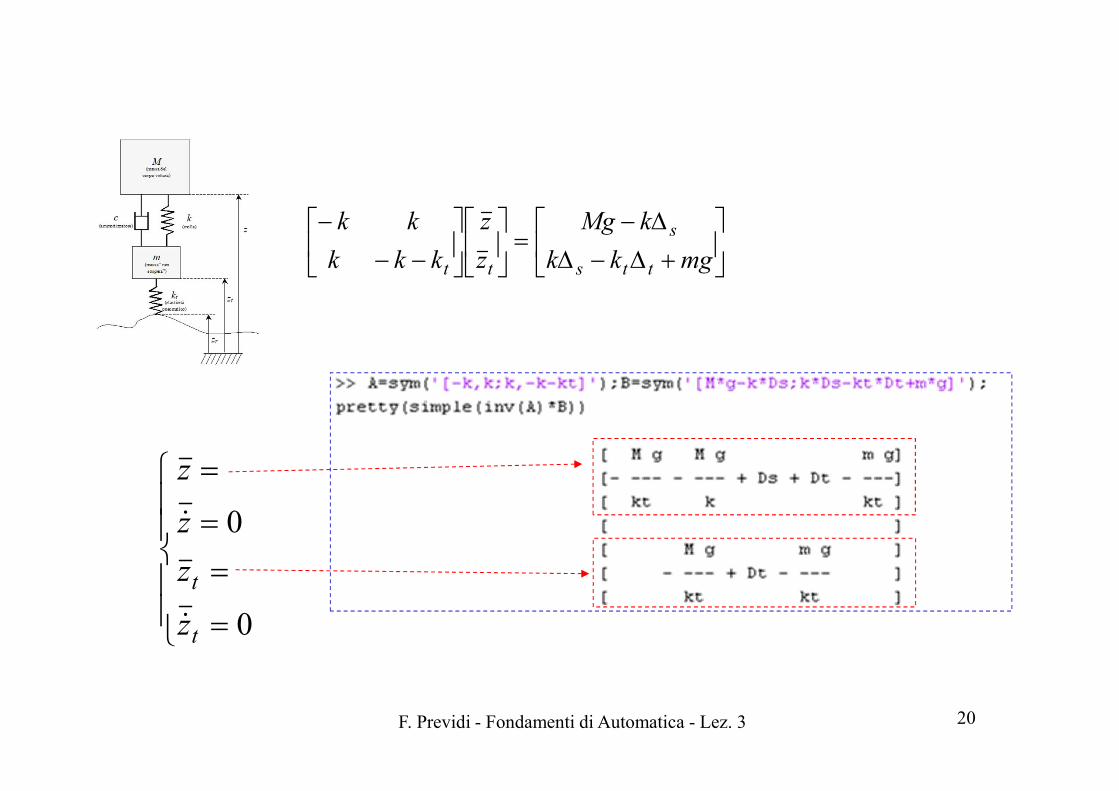
0
0
t
t
z
z
z
z
mgkk
kMg
z
z
kkk
kk
tts
s
tt
F. Previdi - Fondamenti di Automatica - Lez. 3 21
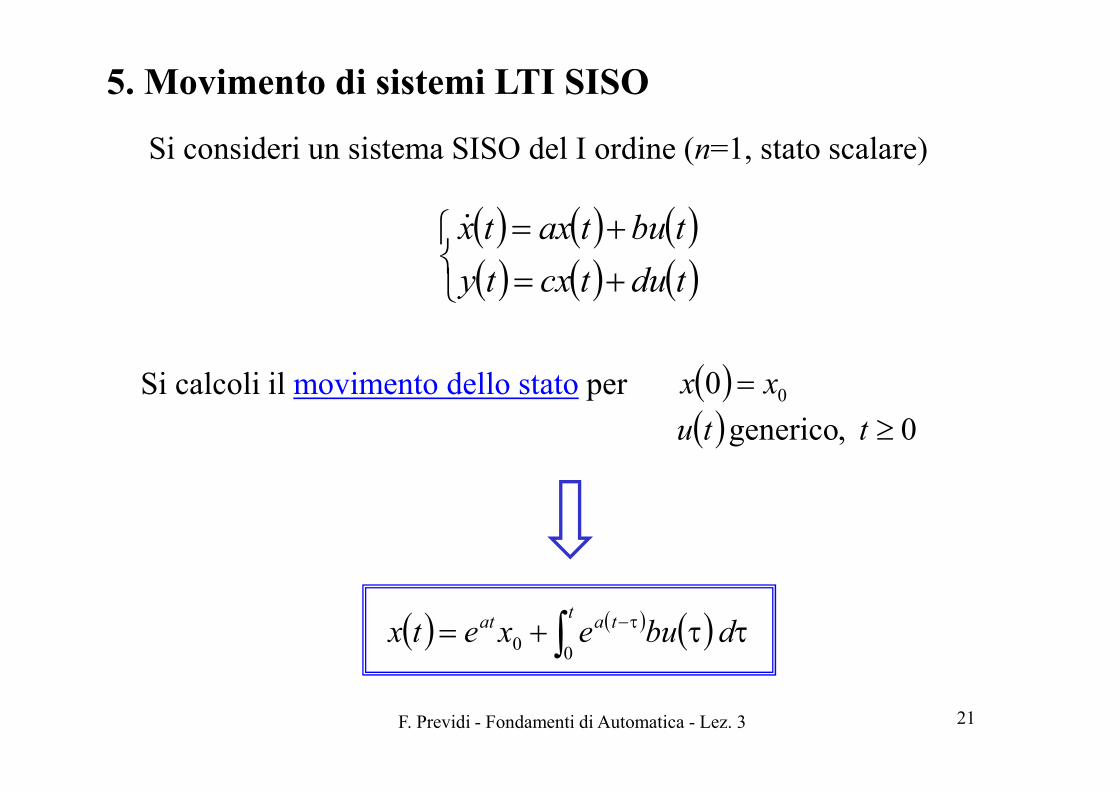
dbuexetx
ttaat
00
0 ,generico ttu
00 xx
Si consideri un sistema SISO del I ordine (n=1, stato scalare)
Si calcoli il movimento dello stato per
tdutcxty
tbutaxtx
5. Movimento di sistemi LTI SISO

F. Previdi - Fondamenti di Automatica - Lez. 3 22
0
22
!2!
tAAtI
k
Ate
k
kAt
Ora, si consideri un sistema SISO di ordine n qualsiasi
dBueett
tAAt
00xx
Esponenziale di matrice
tDutCty
tButAt
x
xx
0 ,generico ttu
00 xx Si calcoli il movimento dello stato per
F. Previdi - Fondamenti di Automatica - Lez. 3 23
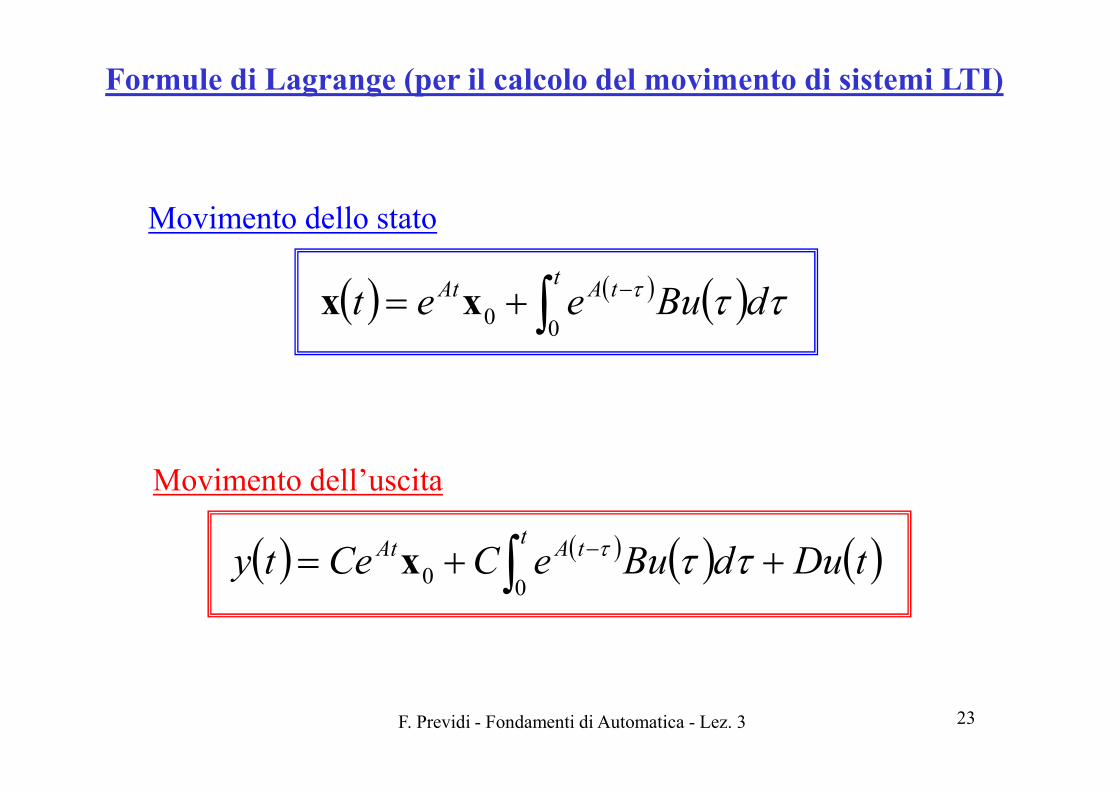
dBueett
tAAt
00xx
tDudBueCCetyt
tAAt
00x
Formule di Lagrange (per il calcolo del movimento di sistemi LTI)
Movimento dello stato
Movimento dell’uscita
F. Previdi - Fondamenti di Automatica - Lez. 3 24
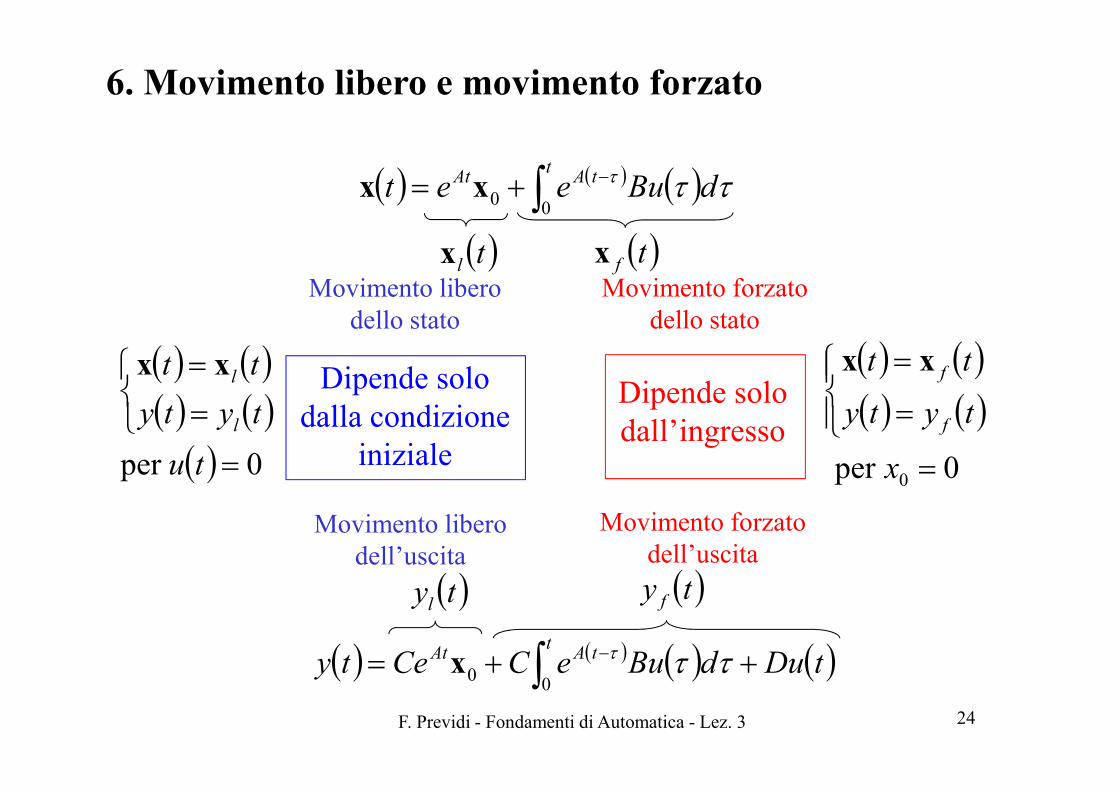
6. Movimento libero e movimento forzato
tlx
dBueett
tAAt
00xx
tfx
tDudBueCCetyt
tAAt
00x
tyl ty f
Movimento libero dello stato
Movimento libero dell’uscita
Movimento forzato dello stato
Movimento forzato dell’uscita
Dipende solo dalla condizione
iniziale
Dipende solo dall’ingresso
0per
tu
tyty
tt
l
lxx
0per 0
x
tyty
tt
f
fxx

F. Previdi - Fondamenti di Automatica - Lez. 3 25
Principio di sovrapposizione degli effetti
Consideriamo un sistema SISO (eventualmente tempo-variante) di ordine n qualsiasi
00 xx
tDutCxty
tButAxtx
approfondimento
F. Previdi - Fondamenti di Automatica - Lez. 3 26
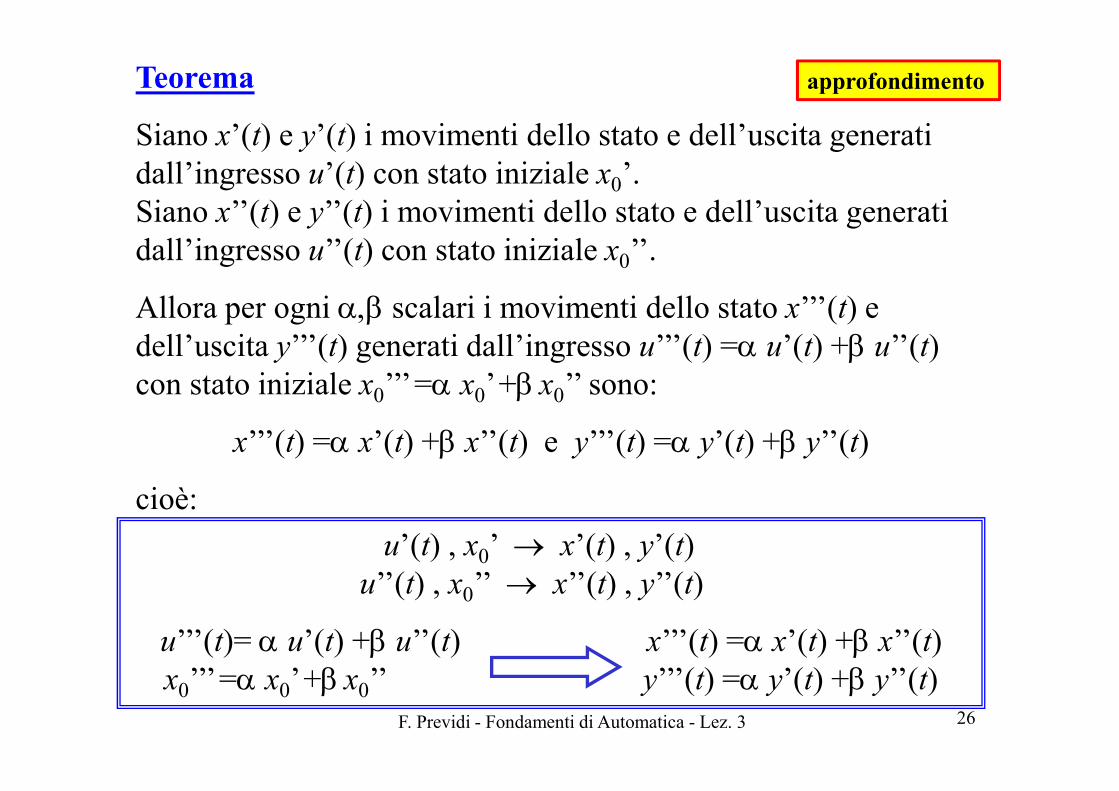
Teorema
Siano x’(t) e y’(t) i movimenti dello stato e dell’uscita generati dall’ingresso u’(t) con stato iniziale x0’.Siano x’’(t) e y’’(t) i movimenti dello stato e dell’uscita generati dall’ingresso u’’(t) con stato iniziale x0’’.
Allora per ogni a,b scalari i movimenti dello stato x’’’(t) e dell’uscita y’’’(t) generati dall’ingresso u’’’(t) =a u’(t) +b u’’(t) con stato iniziale x0’’’=a x0’+b x0’’ sono:
x’’’(t) =a x’(t) +b x’’(t) e y’’’(t) =a y’(t) +b y’’(t)
cioè:
u’(t) , x0’ x’(t) , y’(t)u’’(t) , x0’’ x’’(t) , y’’(t)
u’’’(t)= a u’(t) +b u’’(t) x’’’(t) =a x’(t) +b x’’(t) x0’’’=a x0’+b x0’’ y’’’(t) =a y’(t) +b y’’(t)
approfondimento
F. Previdi - Fondamenti di Automatica - Lez. 3 27
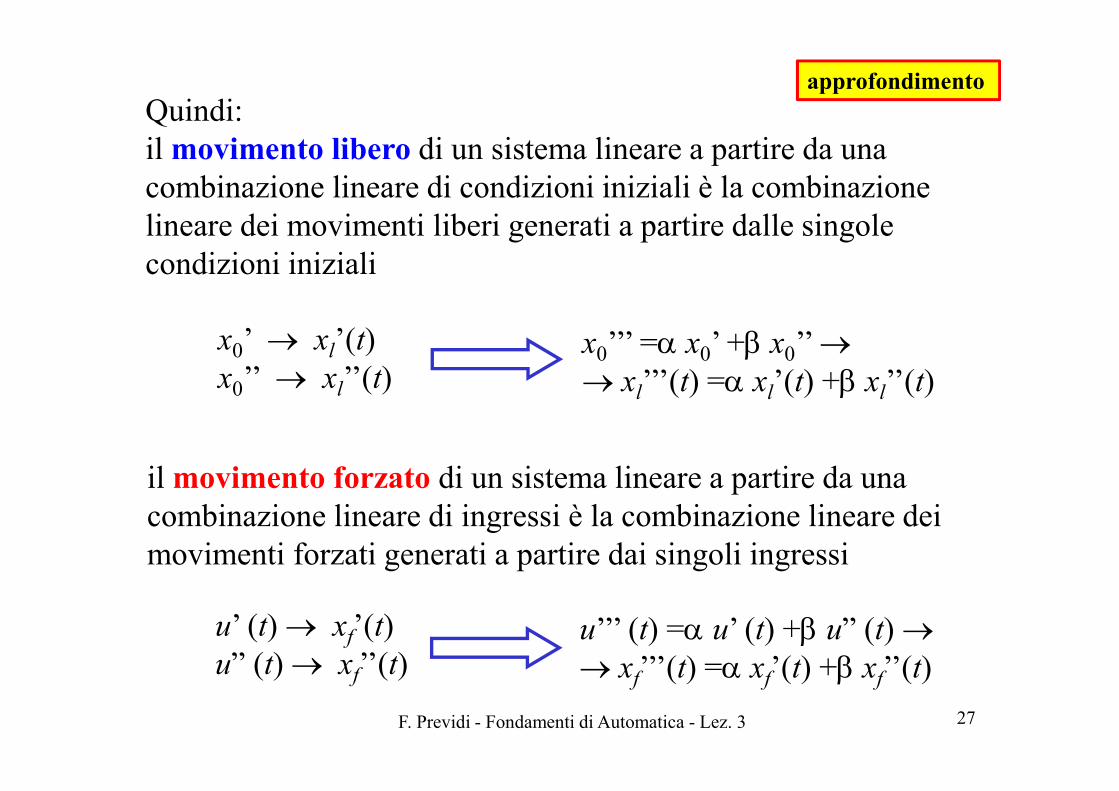
Quindi:il movimento libero di un sistema lineare a partire da una combinazione lineare di condizioni iniziali è la combinazione lineare dei movimenti liberi generati a partire dalle singole condizioni iniziali
x0’ xl’(t) x0’’ xl’’(t)
x0’’’ =a x0’ +b x0’’ xl’’’(t) =a xl’(t) +b xl’’(t)
il movimento forzato di un sistema lineare a partire da una combinazione lineare di ingressi è la combinazione lineare dei movimenti forzati generati a partire dai singoli ingressi
u’ (t) xf’(t) u” (t) xf’’(t)
u’’’ (t) =a u’ (t) +b u” (t) xf’’’(t) =a xf’(t) +b xf’’(t)
approfondimento

F. Previdi - Fondamenti di Automatica - Lez. 3 28
pmn ty,tu,tx
Sistemi LTI MIMO (cenni)
A matrice n × n
B matrice n × m
C matrice p × n
D matrice p × m
tx
tx
tx
n
1
tu
tu
tu
m
1
ty
ty
ty
p
1
tDutCxty
tButAxtx
approfondimento
F. Previdi - Fondamenti di Automatica - Lez. 3 29
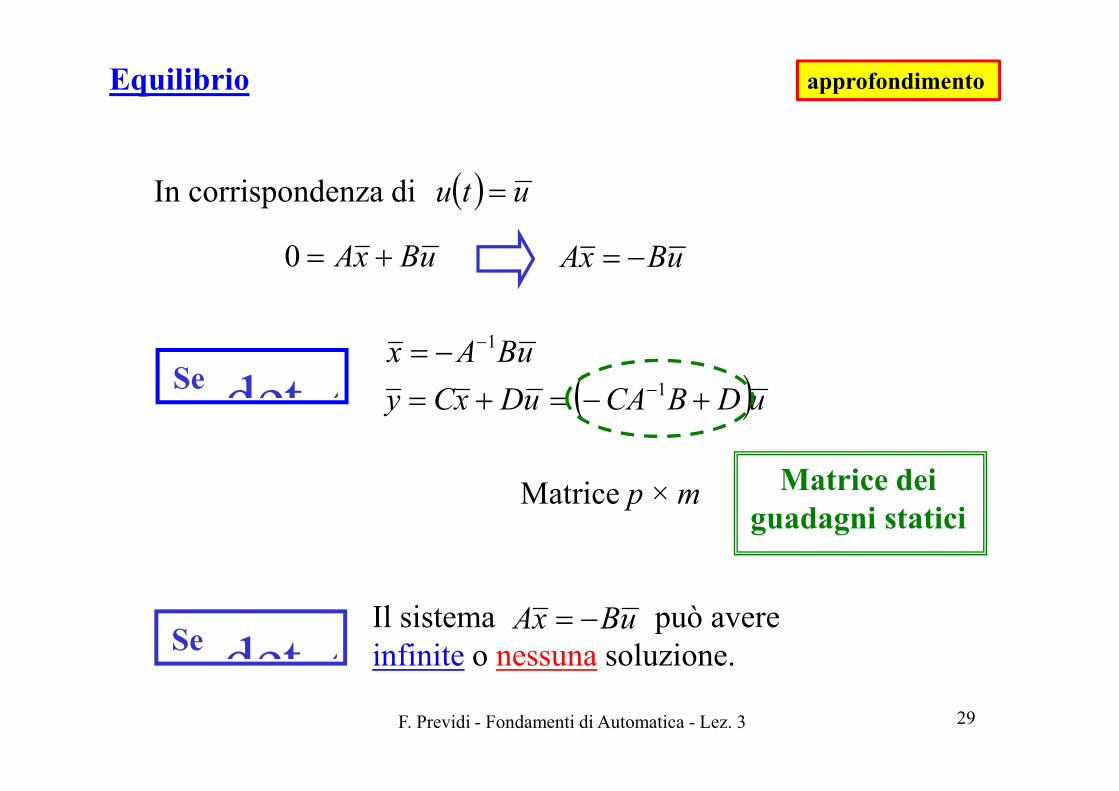
uBxA 0
uBAx 1
uDBCAuDxCy 1
utu In corrispondenza di
uBxA
Matrice dei guadagni statici
Il sistema può avere infinite o nessuna soluzione.
uBxA
Equilibrio
Matrice p × m
Se det A
Se det A
approfondimento
F. Previdi - Fondamenti di Automatica - Lez. 3 30
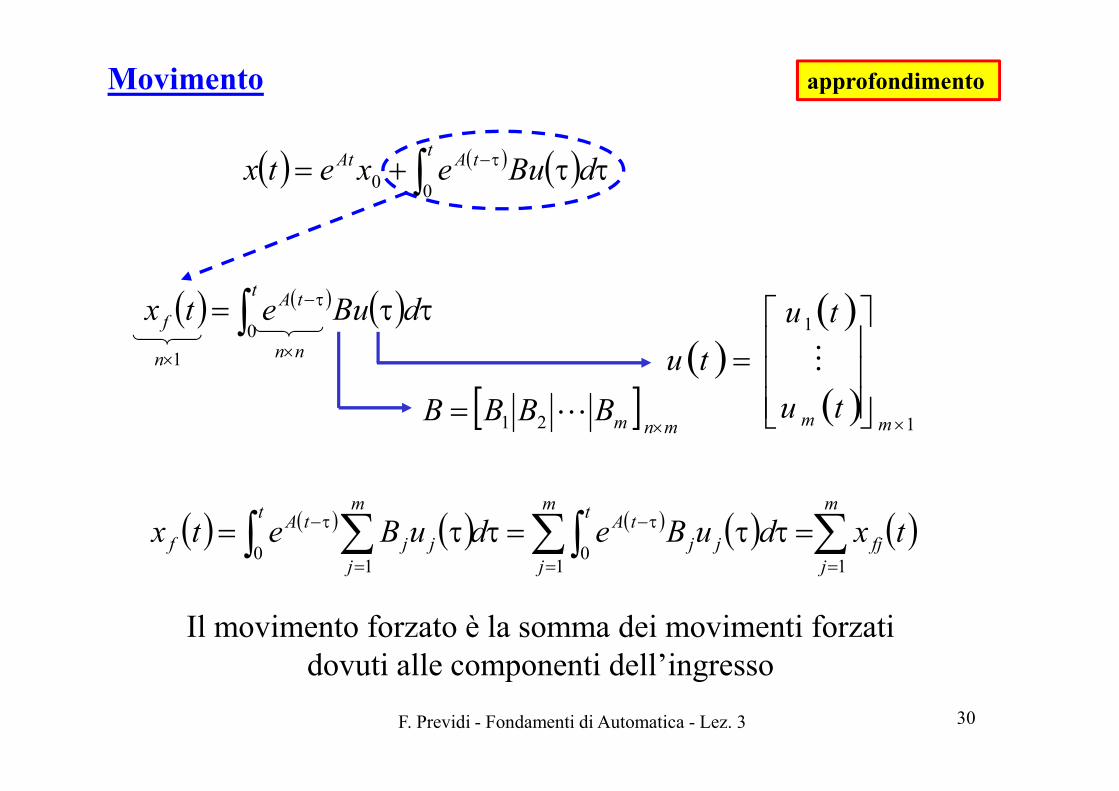
Movimento
dBuexetx
ttAAt
00
mnmBBBB
21
dBuetx
ttA
f0
1
1
mm tu
tu
tu nn 1 n
m
jfj
m
jjj
ttA
m
jjj
ttA
f txduBeduBetx11
01
0
Il movimento forzato è la somma dei movimenti forzati dovuti alle componenti dell’ingresso
approfondimento
F. Previdi - Fondamenti di Automatica - Lez. 3 31
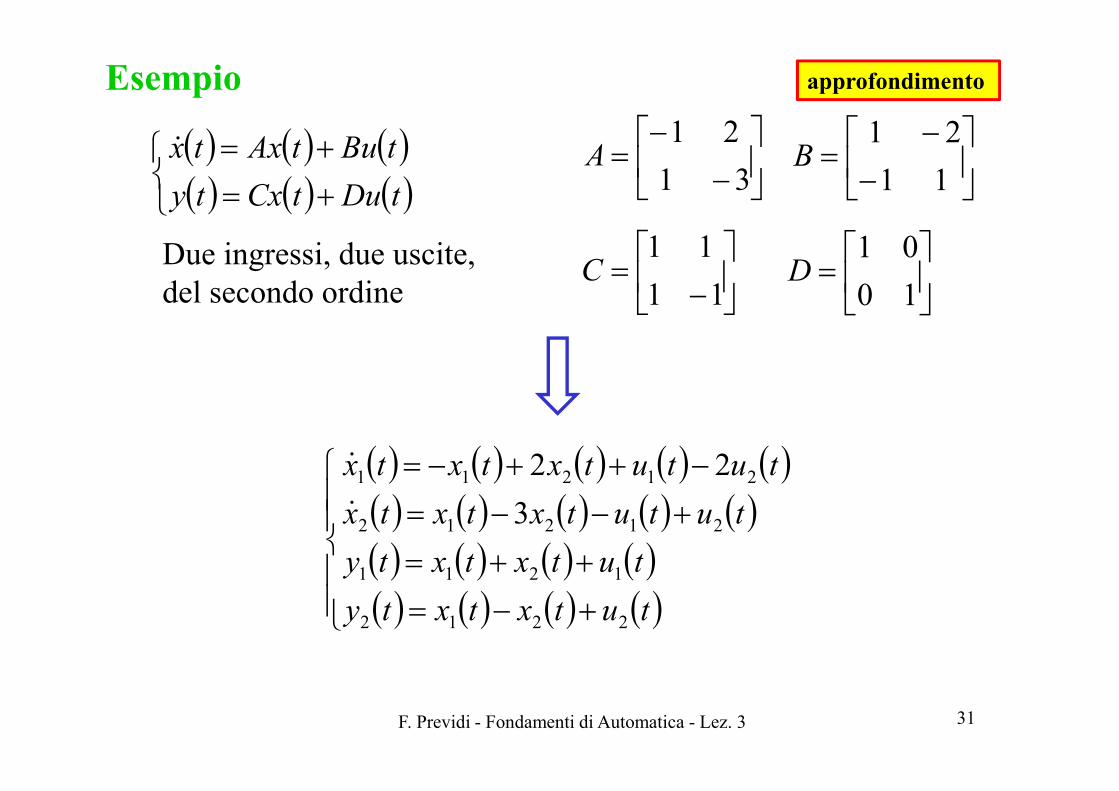
tDutCxty
tButAxtx
31
21A
11
21B
10
01D
Esempio
11
11C
tutxtxty
tutxtxty
tututxtxtx
tututxtxtx
2212
1211
21212
21211
3
22
Due ingressi, due uscite, del secondo ordine
approfondimento

F. Previdi - Fondamenti di Automatica - Lez. 3 32
Si calcoli l’equilibrio in corrispondenza di
1
1u
01det A
1
3
1
1
11
21
31
211
1 uBAx
1
3
1
1
10
01
1
3
11
11uDxCy
21
521 DBCA
approfondimento
F. Previdi - Fondamenti di Automatica - Lez. 3 33
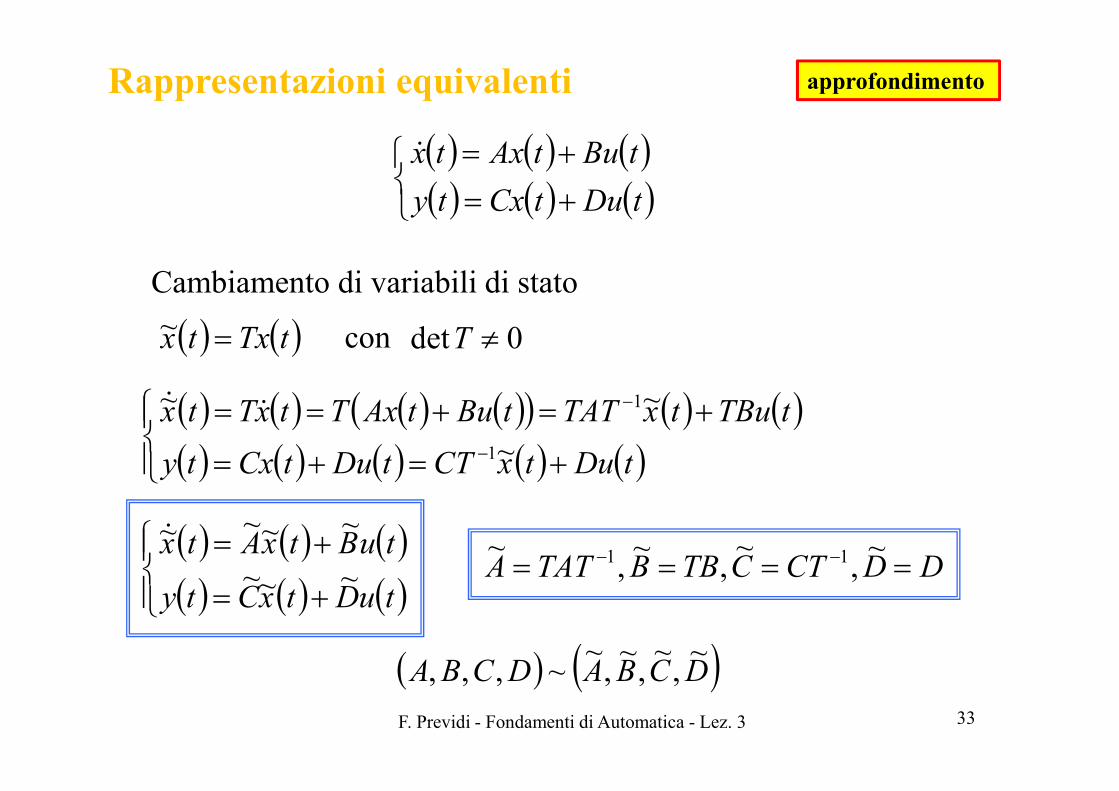
tDutCxty
tButAxtx
tTxtx ~
tDutxCTtDutCxty
tTButxTATtButAxTtxTtx~
~~
1
1
Rappresentazioni equivalenti
0det T
Cambiamento di variabili di stato
con
DCBADCBA~
,~
,~
,~
~,,,
DDCTCTBBTATA
tuDtxCty
tuBtxAtx
~,
~,
~,
~ ~~~
~~~~11
approfondimento
F. Previdi - Fondamenti di Automatica - Lez. 3 34
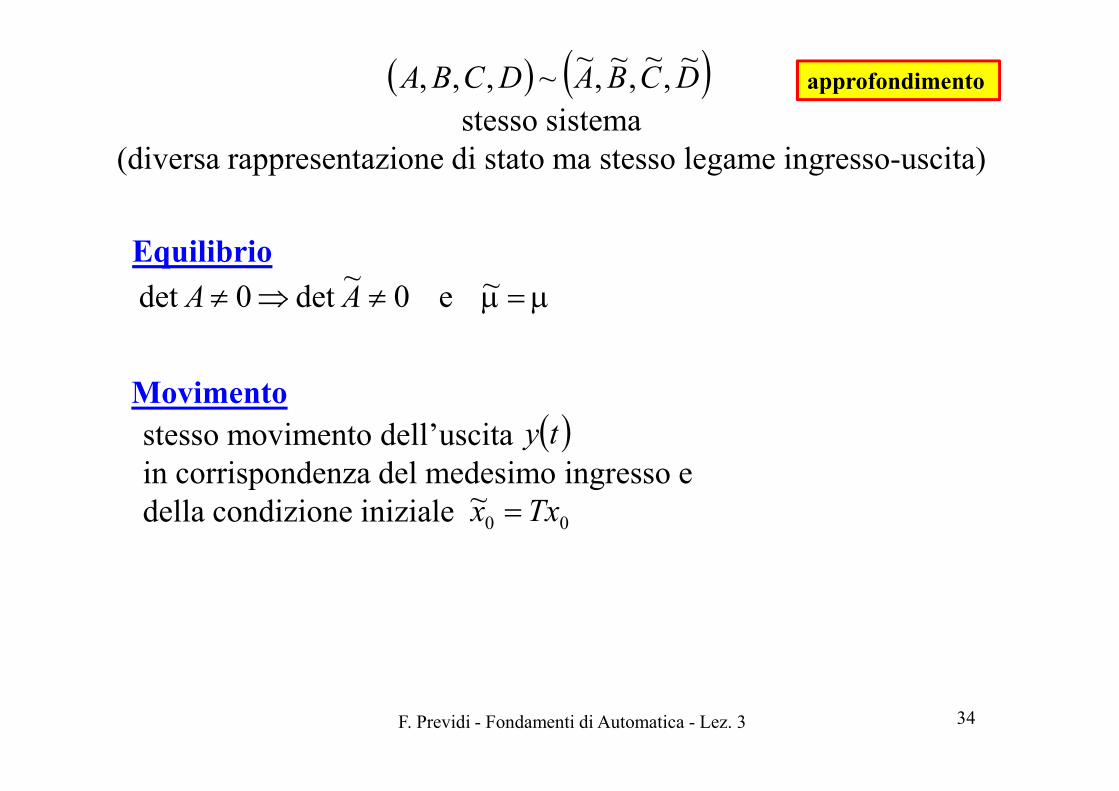
stesso sistema(diversa rappresentazione di stato ma stesso legame ingresso-uscita)
Equilibrio
Movimento
~e0~
det0det AA
DCBADCBA~
,~
,~
,~
~,,,
stesso movimento dell’uscitain corrispondenza del medesimo ingresso e della condizione iniziale
ty
00~ Txx
approfondimento