Lezione 10. Funzione di trasferimento - mOve | MOtor...
30
F. Previdi - Fondamenti di Automatica - Lez.10 1 Lezione 10. Funzione di trasferimento
Transcript of Lezione 10. Funzione di trasferimento - mOve | MOtor...
F. Previdi - Fondamenti di Automatica - Lez.10 1
Lezione 10. Funzione di trasferimento
F. Previdi - Fondamenti di Automatica - Lez.10 2
Schema della lezione
1. Definizione
2. Dimensioni della funzione di trasferimento
3. Interpretazione della funzione di trasferimento
4. Struttura della funzione di trasferimento
5. Rappresentazione interna ed esterna
6. Poli e zeri di una funzione di trasferimento
7. Proprietà di poli e zeri
8. Parametrizzazioni di una funzione di trasferimento
9. Relazione tra guadagno statico e guadagno dellafunzione di trasferimento
F. Previdi - Fondamenti di Automatica - Lez.10 3
tDutCxty
tButAxtx
sBUsAXxssX 0
sBUxsXAsI 0
1. Definizione
sDUsCXsY
Si consideri un sistema LTI
Si esegua la trasformazione di Laplace dell’equazione di stato
Si trasformi infine la trasformazione d’uscita
sBUAsIxAsIsX11
0
F. Previdi - Fondamenti di Automatica - Lez.10 4
quando 00 x
sUDBAsICsY 1
DBAsICsG 1
Funzione di trasferimento
sUDBAsICxAsICsY 11
0
sDUsCXsY
sBUAsIxAsIsX11
0
Sostituendo lo stato nella trasformazione d’uscita si ottiene
F. Previdi - Fondamenti di Automatica - Lez.10 5
sUsGsY
è (una funzionedi s) scalare
2. Dimensioni della funzione di trasferimento
DBAsICsG 1
n1 nn 1n 11
Sistema SISO ingresso ed uscita sono scalari
sU
sYsG
La funzione di trasferimento è il rapporto tra le trasformate di uscita ed ingresso
(con condizione iniziale nulla per lo stato)
F. Previdi - Fondamenti di Automatica - Lez.10 6
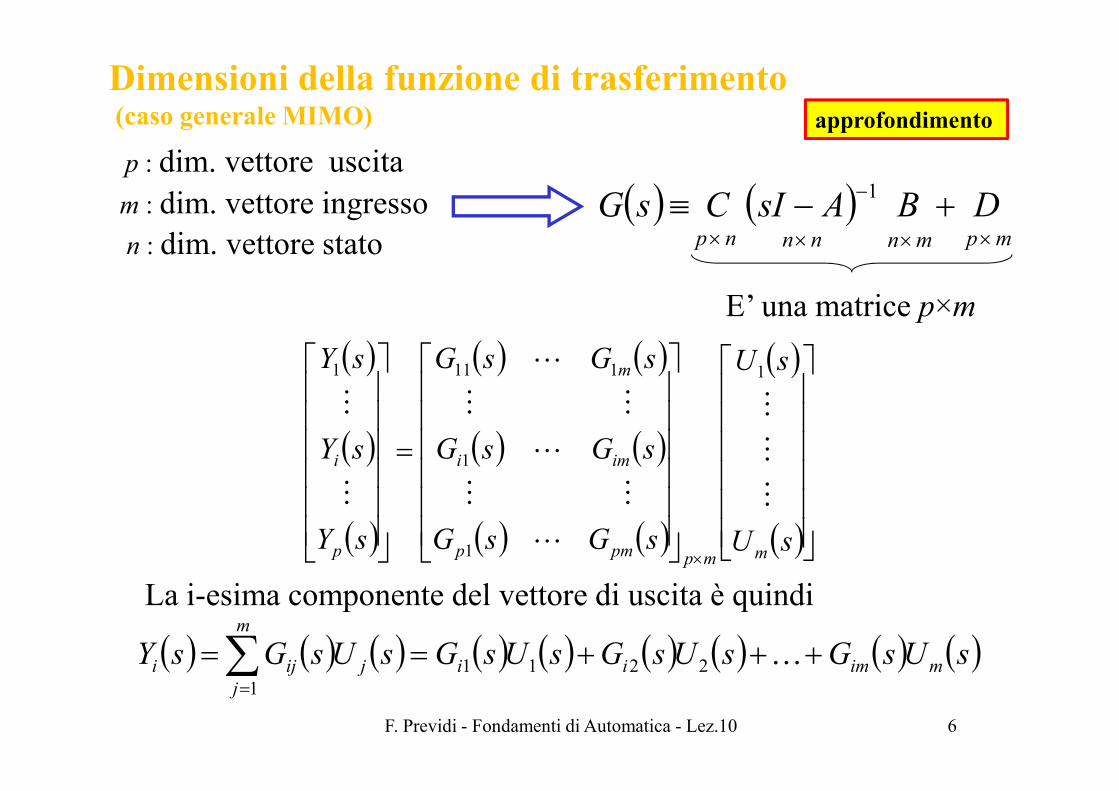
sUsGsUsGsUsGsUsGsY mimii
m
jjiji
22111
sU
sU
sGsG
sGsG
sGsG
sY
sY
sY
mmppmp
imi
m
p
i
1
1
1
1111
DBAsICsG 1
np nn mn mp
Dimensioni della funzione di trasferimento(caso generale MIMO)
p : dim. vettore uscita
m : dim. vettore ingresso
n : dim. vettore stato
E’ una matrice p×m
La i-esima componente del vettore di uscita è quindi
approfondimento
F. Previdi - Fondamenti di Automatica - Lez.10 7
00
1imp)(
x
sUttuL
sGsUsGsY
La funzione di trasferimento è la trasformata diLaplace della risposta all’impulso del sistema
3. Interpretazione della funzione di trasferimento
Allora
Si consideri un sistema SISO con funzione di trasferimento sG
Siano

F. Previdi - Fondamenti di Automatica - Lez.10 8
Esempio
tDutCxty
tButAxtx
02
1210A
1
1B 11C
1
1
2
121011
11
s
sDBAsICsG
0D
1
1
102
1211
2410
1
s
s
ss
2410
2
12
1211
2410
122
ss
s
s
s
ss
Calcolare la funzione di trasferimento del sistema
F. Previdi - Fondamenti di Automatica - Lez.10 9
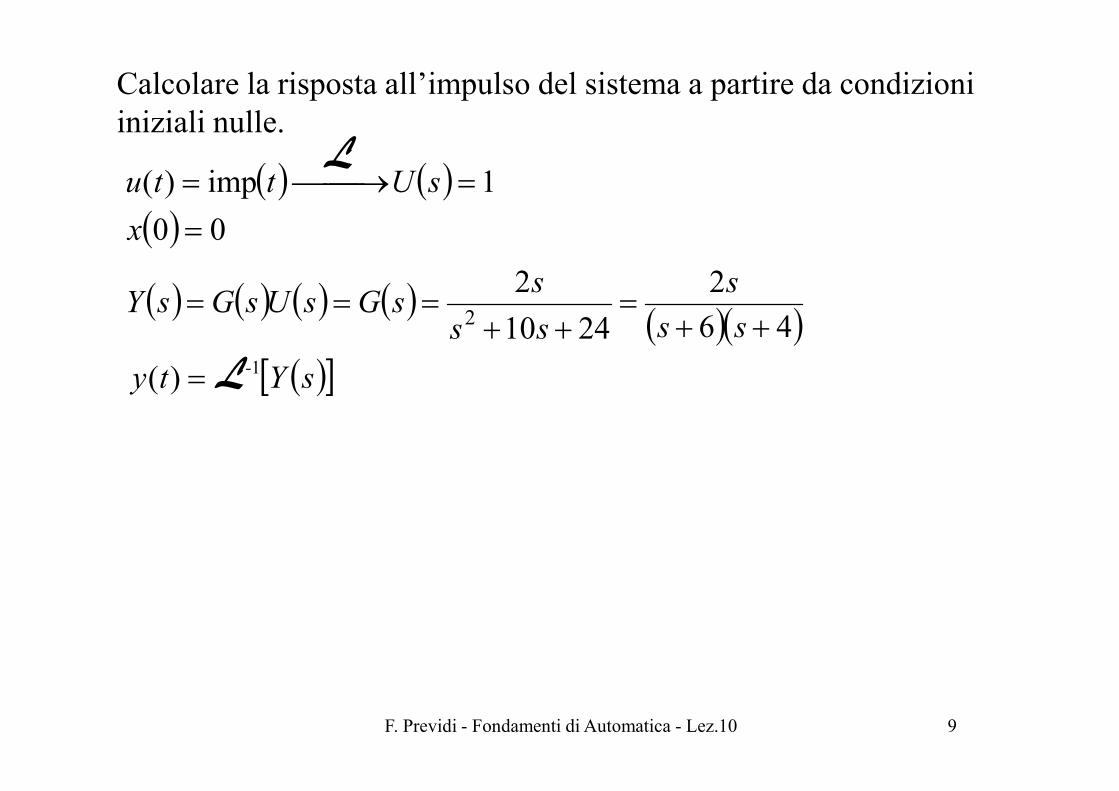
Calcolare la risposta all’impulso del sistema a partire da condizioni iniziali nulle.
46
2
2410
22
ss
s
ss
ssGsUsGsY
00
1imp)(
x
sUttuL
sYty -1)( L
F. Previdi - Fondamenti di Automatica - Lez.10 10
46
46
46
46
6446
2
ss
s
ss
ss
ssss
s
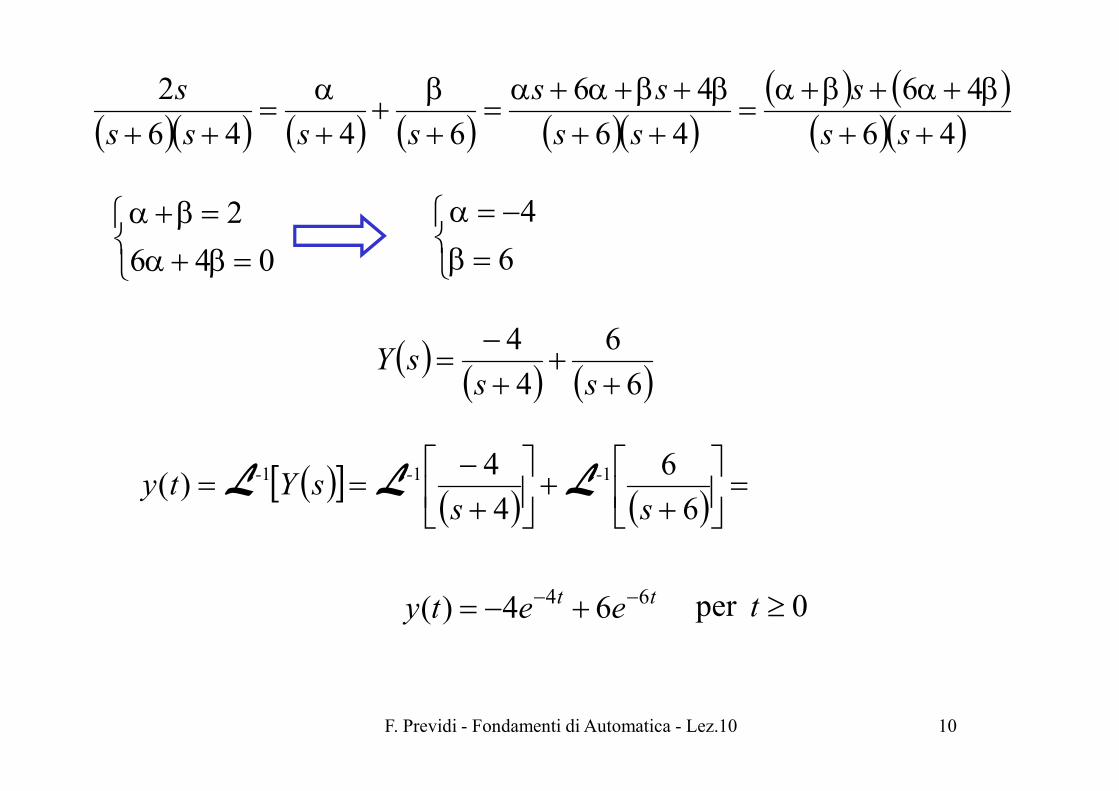
046
2
6
4
6
6
4
4
sssY
6
6
4
4)( 111
sssYty --- LLL
tt eety 64 64)( per 0t
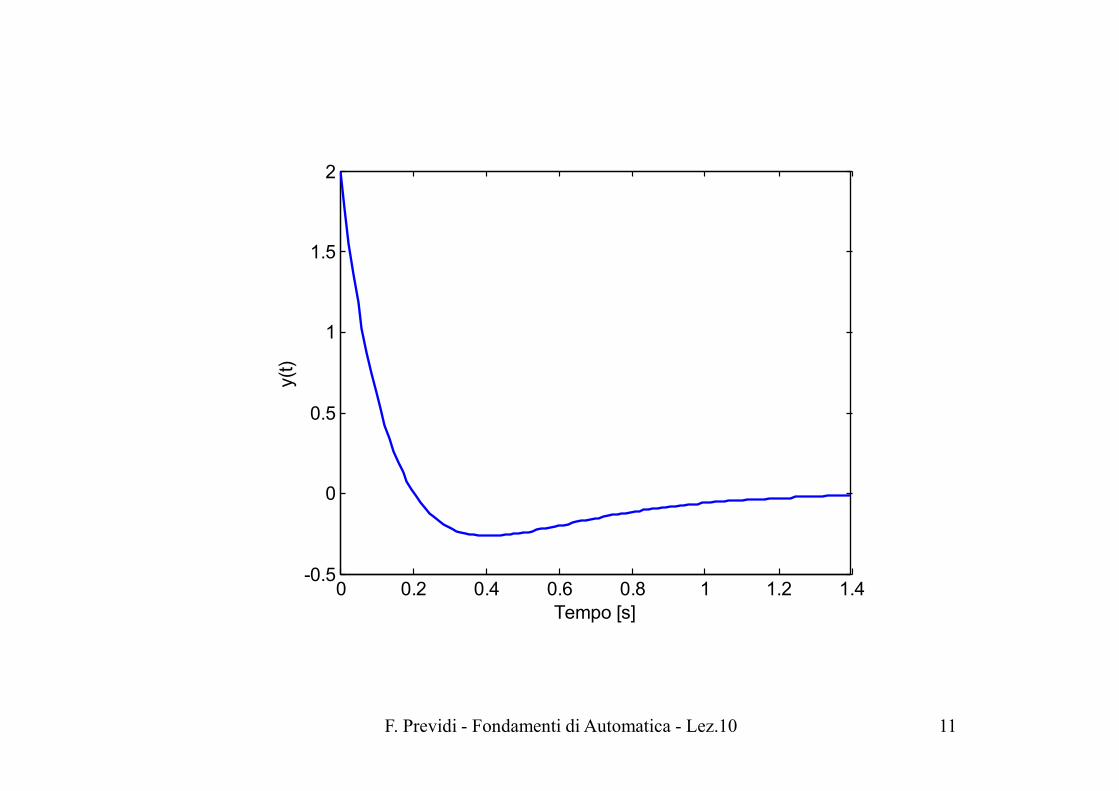
F. Previdi - Fondamenti di Automatica - Lez.10 11
0 0.2 0.4 0.6 0.8 1 1.2 1.4-0.5
0
0.5
1
1.5
2
Tempo [s]
y(t)
F. Previdi - Fondamenti di Automatica - Lez.10 12
DBAsICsG 1
4. Struttura della funzione di trasferimento(per sistemi SISO)
Analisi della struttura fattore per fattore
F. Previdi - Fondamenti di Automatica - Lez.10 13
sKAsI
AsI
det
11 sK nn
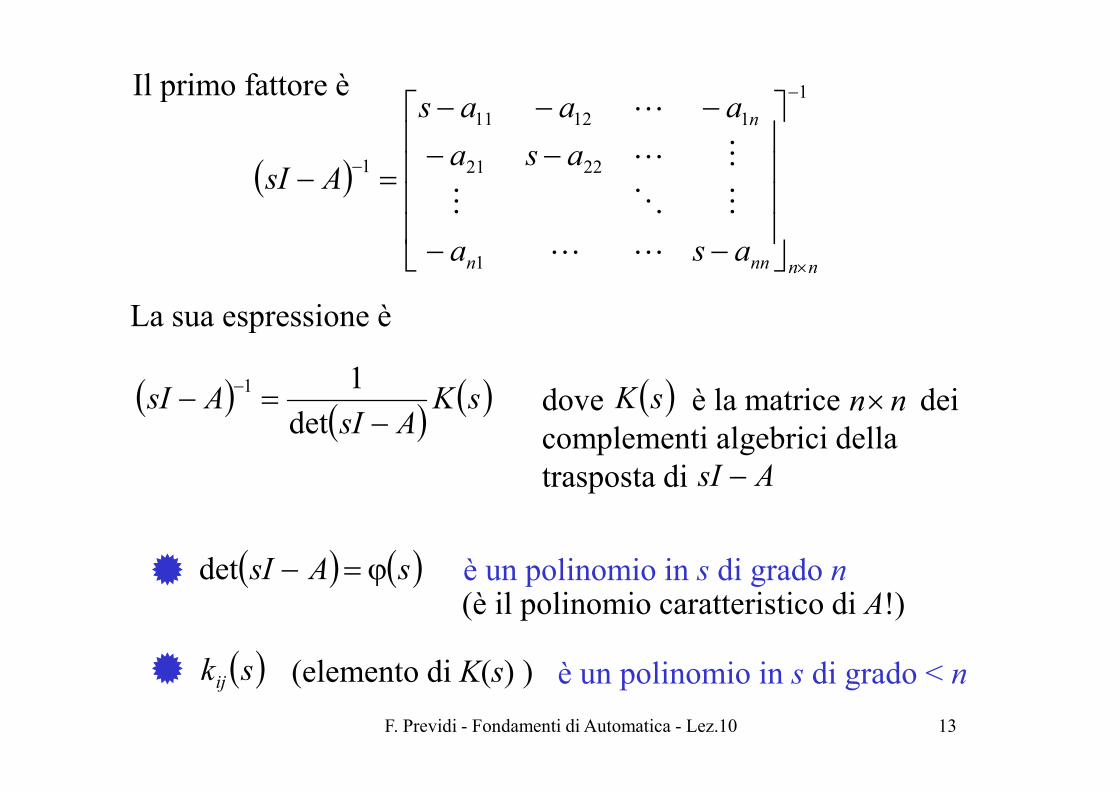
è un polinomio in s di grado n sAsI det
skij (elemento di K(s) ) è un polinomio in s di grado < n
1
1
2221
11211
1
nnnnn
n
asa
asa
aaas
AsI
Il primo fattore è
La sua espressione è
dove è la matrice dei complementi algebrici della trasposta di AsI
(è il polinomio caratteristico di A!)
F. Previdi - Fondamenti di Automatica - Lez.10 14
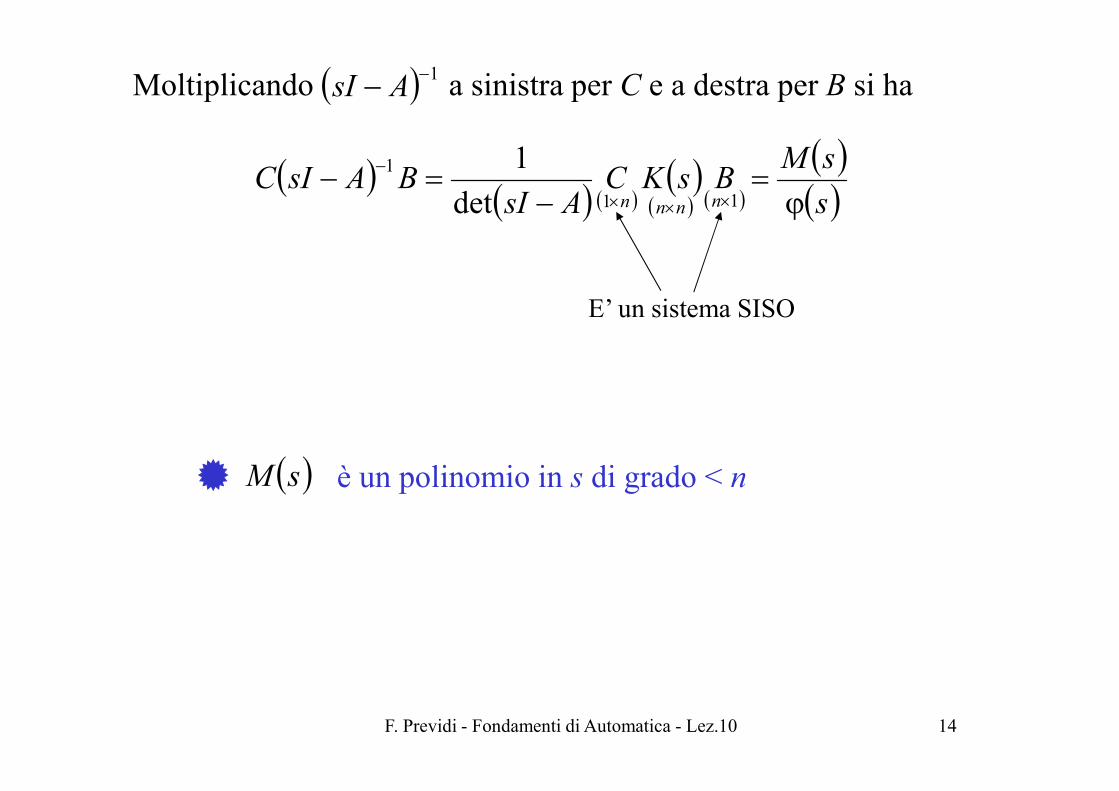
sM è un polinomio in s di grado < n
s
sMBsKC
AsIBAsIC
nnnn
11
1
det
1
Moltiplicando a sinistra per C e a destra per B si ha 1 AsI
E’ un sistema SISO
F. Previdi - Fondamenti di Automatica - Lez.10 15
0Dse
sN è un polinomio in s di grado n
è un polinomio in s di grado < n
Ds
sMDBAsICsG
1
s
sN
s
sDsM
sMsN
Infine, si somma D
(cioè il sistema è strettamente proprio)
F. Previdi - Fondamenti di Automatica - Lez.10 16
Salvo cancellazioni
AsIssD det
sG è razionale
sN è un polinomio in s :
sD
sNsG
di grado n se D è diverso da zero
di grado < n se D è nullo
Riassumendo
è un polinomio in s di grado n(è il polinomio caratteristico di A!)
F. Previdi - Fondamenti di Automatica - Lez.10 17
sD è un fattore di di grado r < n
sN
s
Una cancellazione in è un indicatore dell’esistenza di parti “nascoste” (non raggiungibili e/o non osservabili) del sistema (cioè che esistono nella rappresentazione di stato e che “si perdono” passando alla rappresentazione mediante funzione di trasferimento).
sG
In caso di cancellazioni
ha grado v < n (v = r solo se D è diverso da zero)
F. Previdi - Fondamenti di Automatica - Lez.10 18
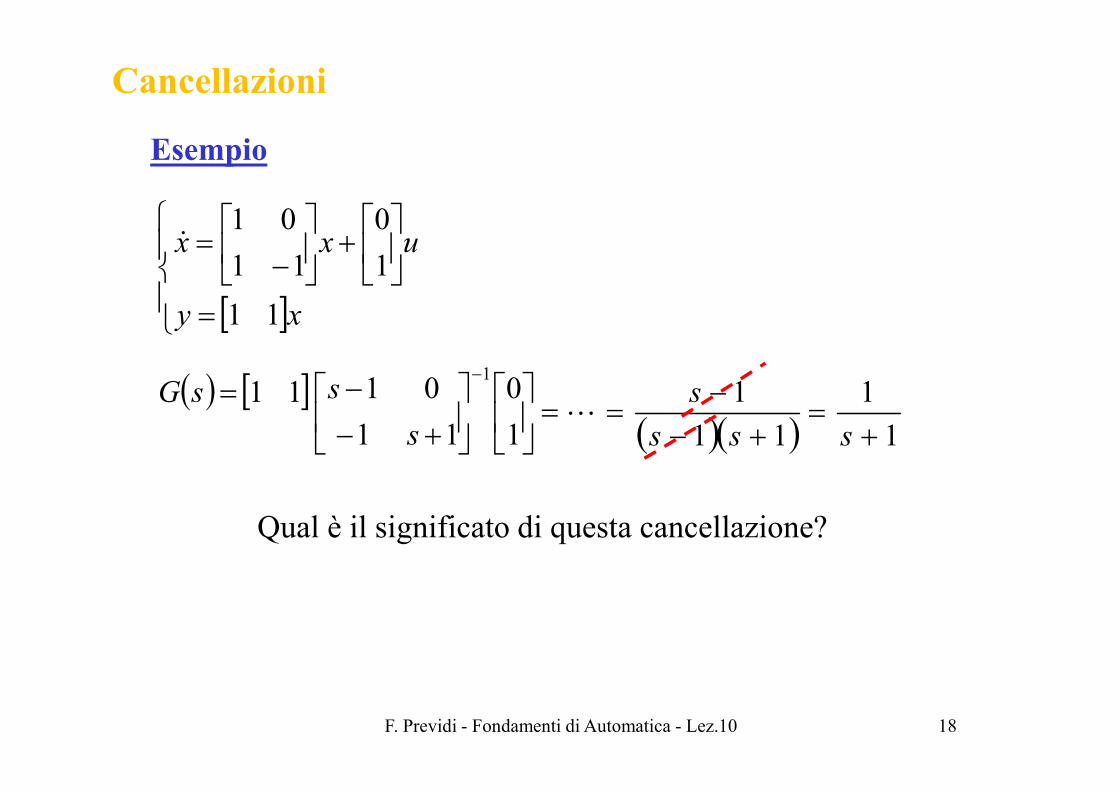
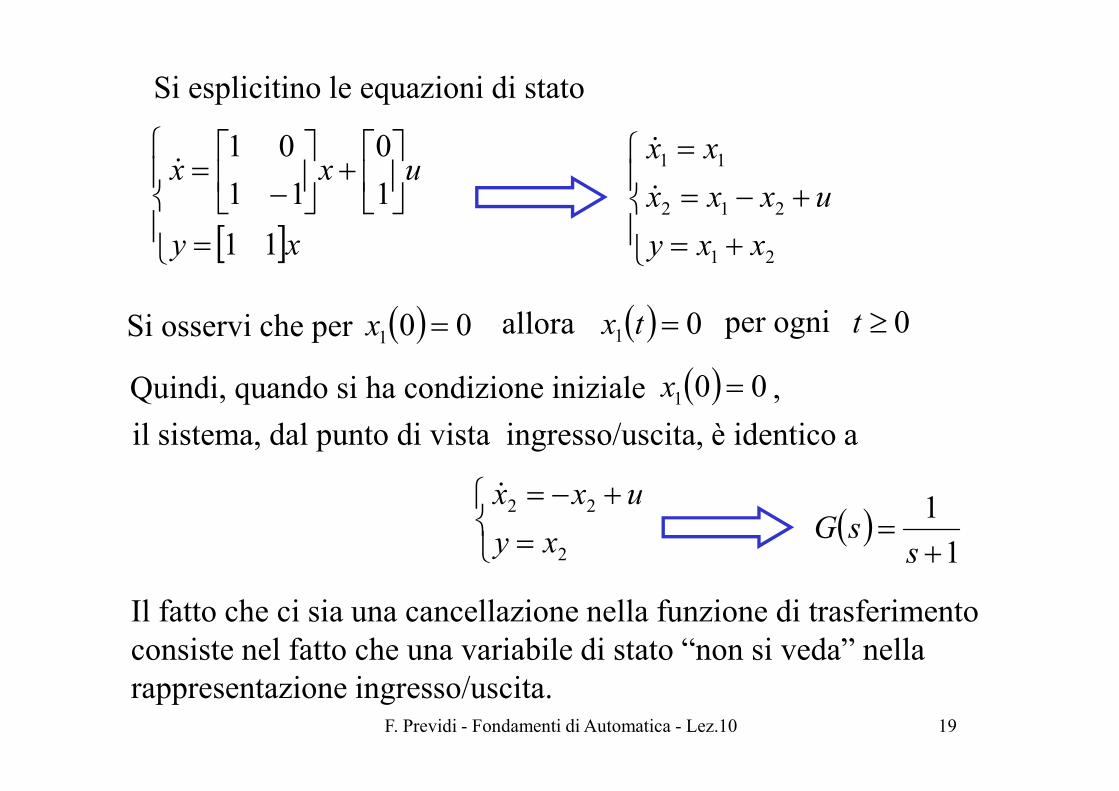
xy
uxx
11
1
0
11
01
11sG
1
0
11
011
s
s
1
1
11
1
sss
s
Cancellazioni
Esempio
Qual è il significato di questa cancellazione?
F. Previdi - Fondamenti di Automatica - Lez.10 19
21
212
11
xxy
uxxx
xx
2
22
xy
uxx
xy
uxx
11
1
0
11
01
Si osservi che per 01 tx 001 x allora 0tper ogni
il sistema, dal punto di vista ingresso/uscita, è identico a
1
1
ssG
Si esplicitino le equazioni di stato
Quindi, quando si ha condizione iniziale , 001 x
Il fatto che ci sia una cancellazione nella funzione di trasferimento consiste nel fatto che una variabile di stato “non si veda” nella rappresentazione ingresso/uscita.
F. Previdi - Fondamenti di Automatica - Lez.10 20
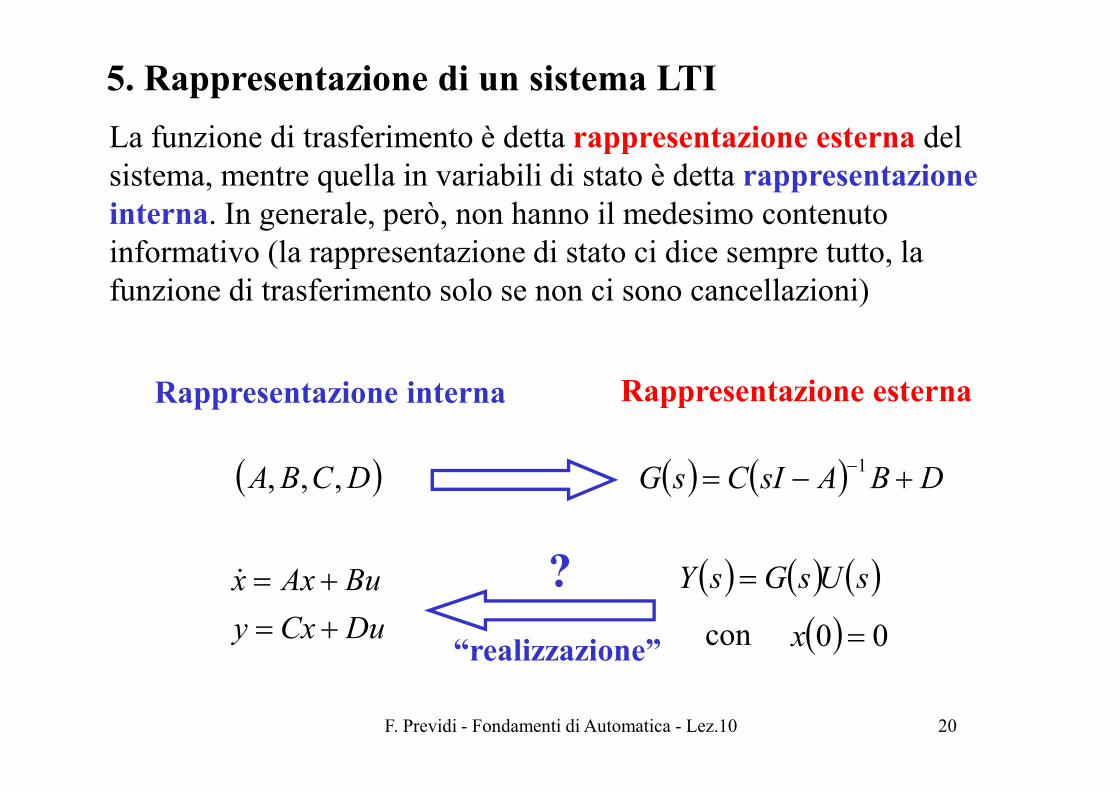
La funzione di trasferimento è detta rappresentazione esterna del sistema, mentre quella in variabili di stato è detta rappresentazione interna. In generale, però, non hanno il medesimo contenuto informativo (la rappresentazione di stato ci dice sempre tutto, la funzione di trasferimento solo se non ci sono cancellazioni)
?
Rappresentazione interna
DCBA ,,,
DuCxy
BuAxx
Rappresentazione esterna
sUsGsY
00 x
DBAsICsG 1
“realizzazione”
5. Rappresentazione di un sistema LTI
con
F. Previdi - Fondamenti di Automatica - Lez.10 21
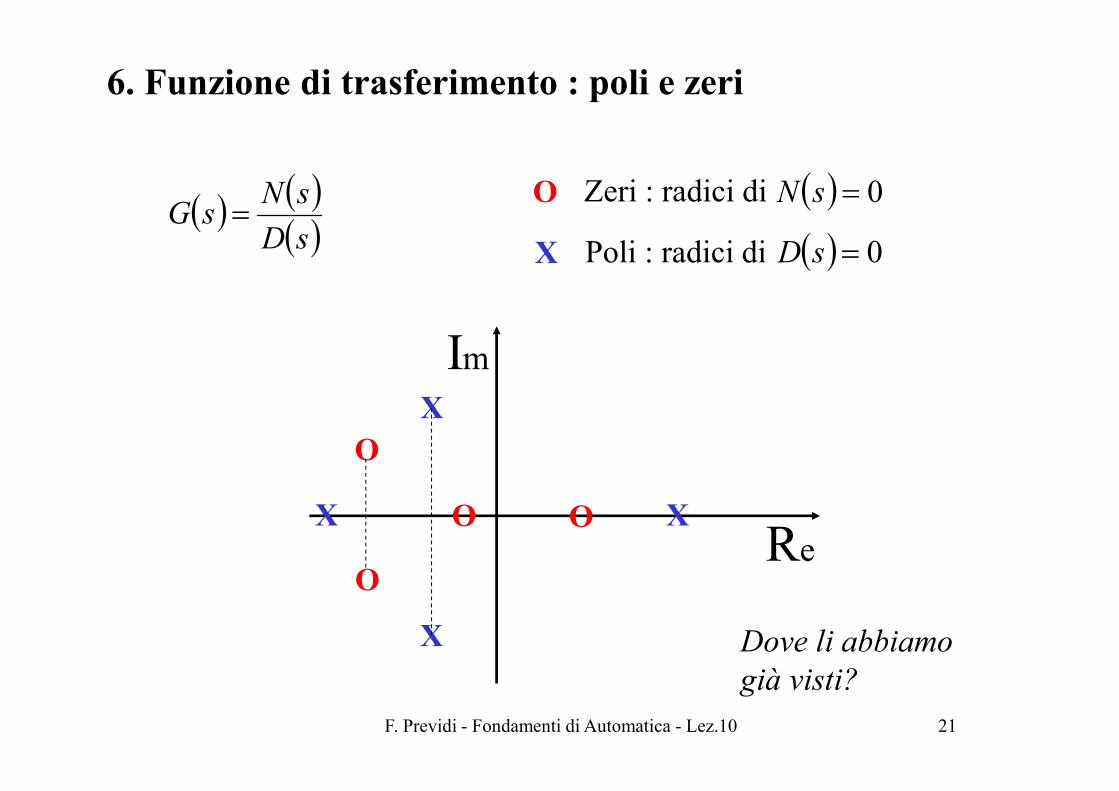
sD
sNsG
eR
mI
Poli : radici di 0sDX
Zeri : radici di 0sNO
X
X
X
X
O
OO
O
6. Funzione di trasferimento : poli e zeri
Dove li abbiamo già visti?

F. Previdi - Fondamenti di Automatica - Lez.10 22
Numero di zeri numero di poli
(salvo cancellazioni)
I poli sono tutti autovalori di A
Un autovalore di A può non essere un polo in caso di cancellazioni
La stabilità dipende dai poli
7. Poli e zeri
As. stabilità Re(poli)<0
F. Previdi - Fondamenti di Automatica - Lez.10 23
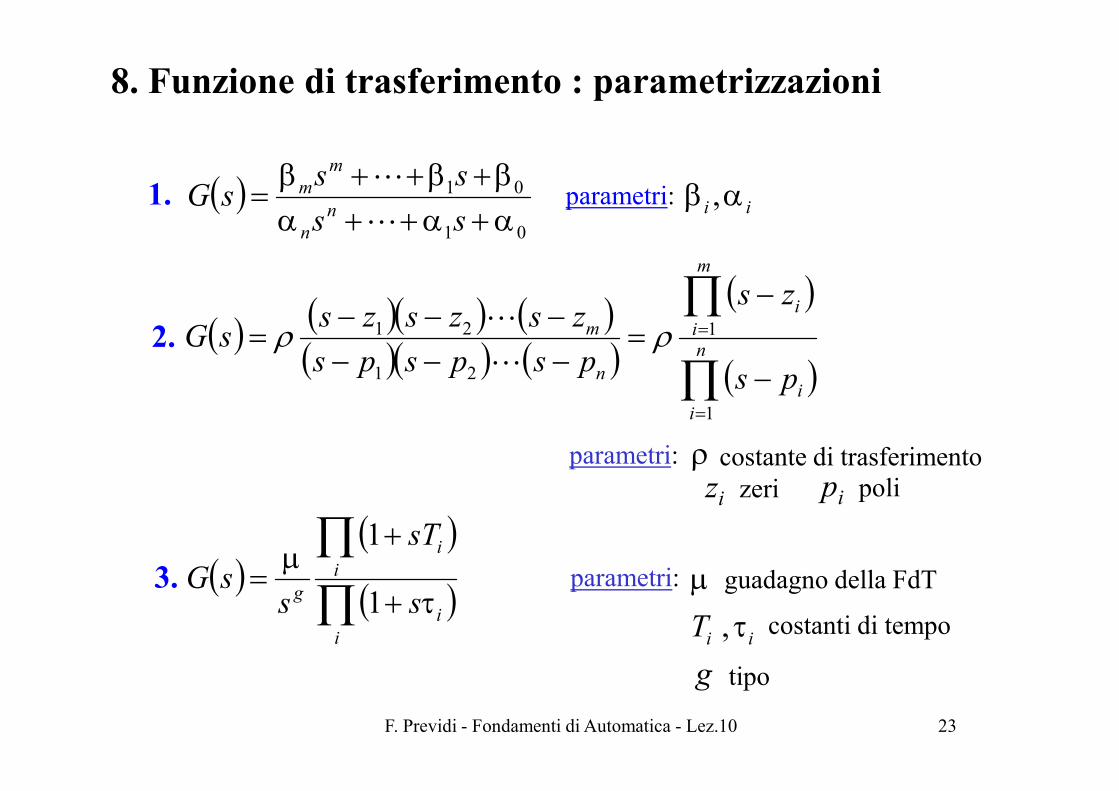
01
01
ss
sssG
nn
mm
n
ii
m
ii
n
m
ps
zs
pspsps
zszszssG
1
1
21
21 rr
ii
ii
g s
sT
ssG
1
1
parametri:
parametri:
parametri:
ii ,
costante di trasferimentozeri poli
iiT
,
g
guadagno della FdT
costanti di tempo
tipo
8. Funzione di trasferimento : parametrizzazioni
1.
2.
zi
rpi
3.
F. Previdi - Fondamenti di Automatica - Lez.10 24
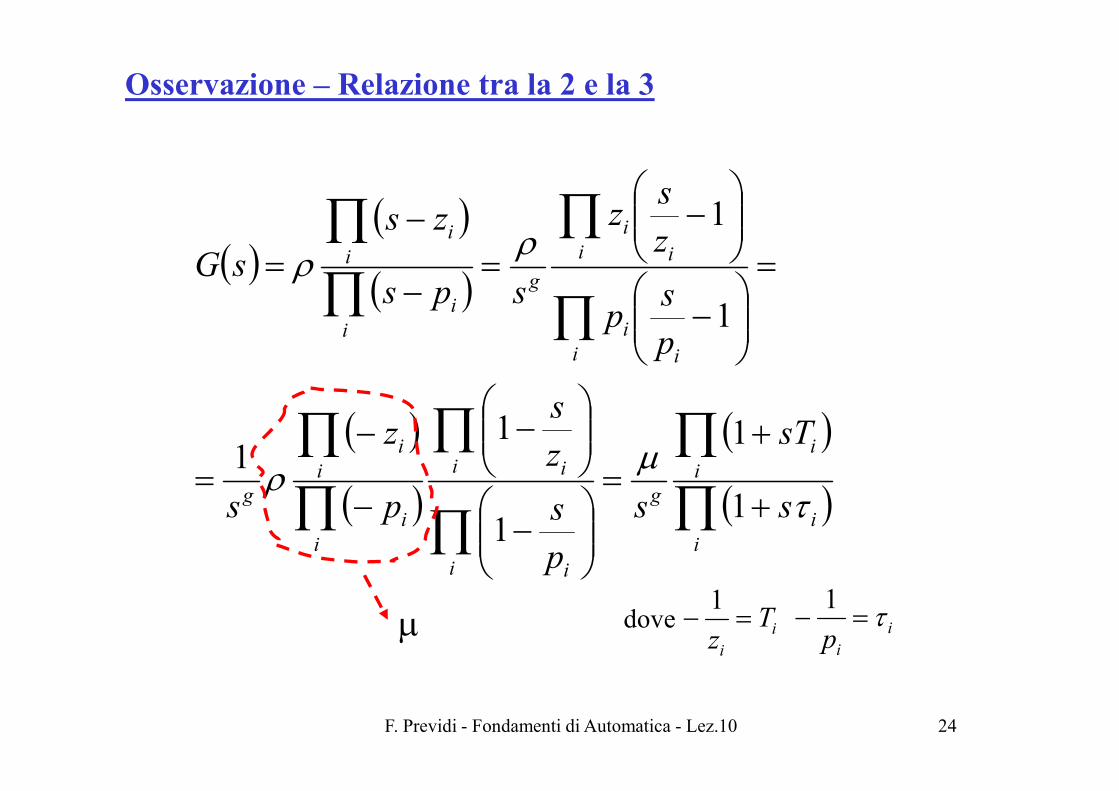
ii
ii
g
i i
i i
ii
ii
g
i i
i
i i
i
g
ii
ii
s
sT
s
p
s
z
s
p
z
s
p
sp
z
sz
sps
zs
sG
r
rr
1
1
1
11
1
1
i
i
Tz
1
dove i
ip
1
Osservazione – Relazione tra la 2 e la 3
F. Previdi - Fondamenti di Automatica - Lez.10 25
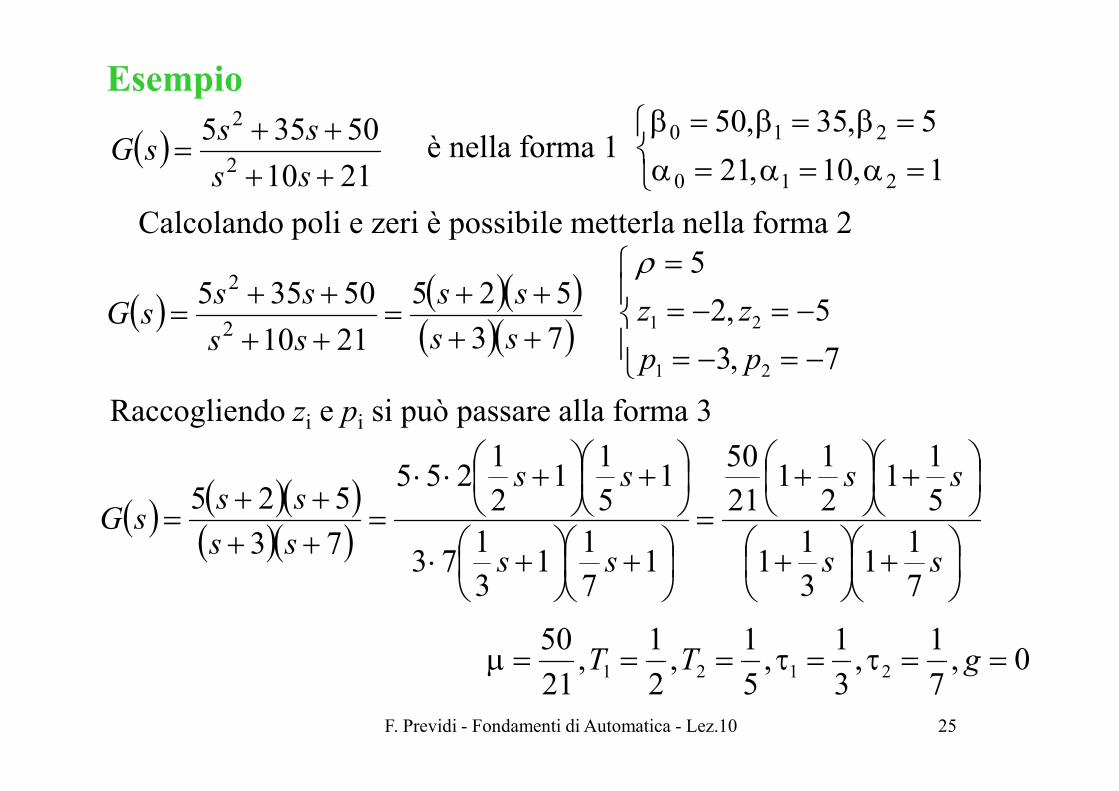
Esempio
è nella forma 1
Calcolando poli e zeri è possibile metterla nella forma 2
73
525
2110
503552
2
ss
ss
ss
sssG
2110
503552
2
ss
sssG
1,10,21
5,35,50
210
210
7,3
5,2
5
21
21
pp
zz
r
Raccogliendo zi e pi si può passare alla forma 3
ss
ss
ss
ss
ss
sssG
7
11
3
11
5
11
2
11
21
50
17
11
3
173
15
11
2
1255
73
525
0,7
1,
3
1,
5
1,
2
1,
21
502121 gTT
F. Previdi - Fondamenti di Automatica - Lez.10 26
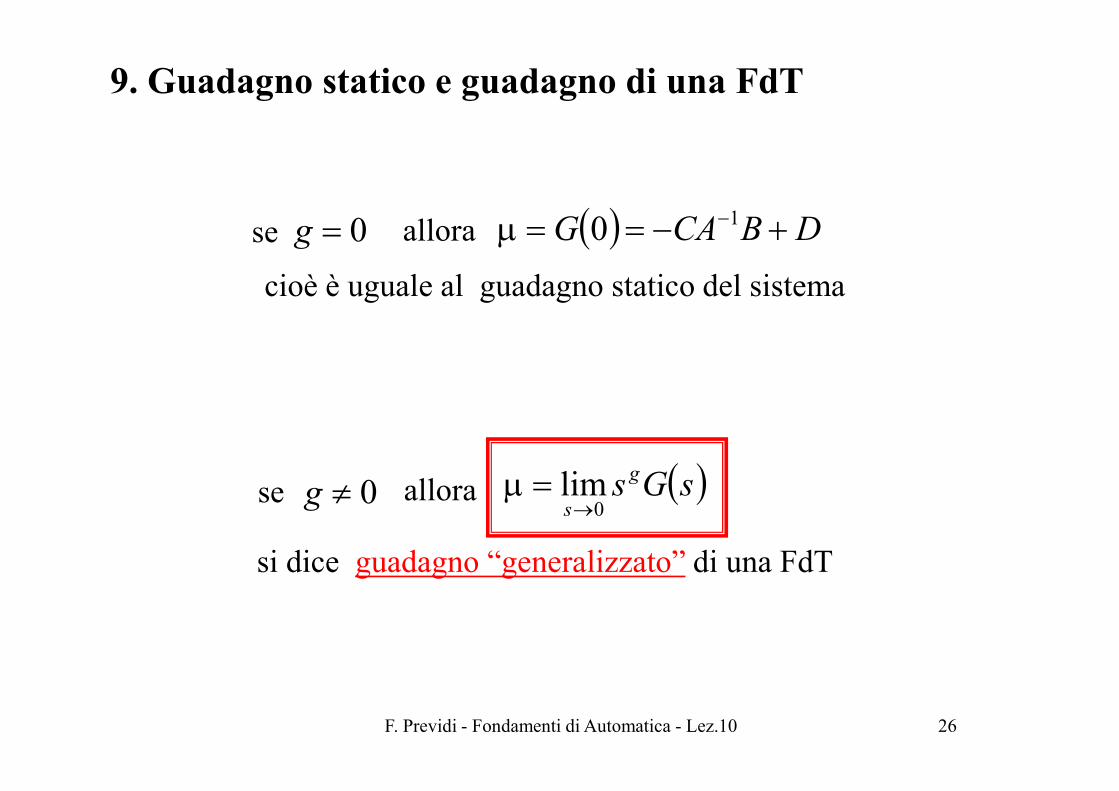
cioè è uguale al guadagno statico del sistema
si dice guadagno “generalizzato” di una FdT
9. Guadagno statico e guadagno di una FdT
0gse DBCAG 10allora
0gse sGsg
s 0lim
allora
F. Previdi - Fondamenti di Automatica - Lez.10 27
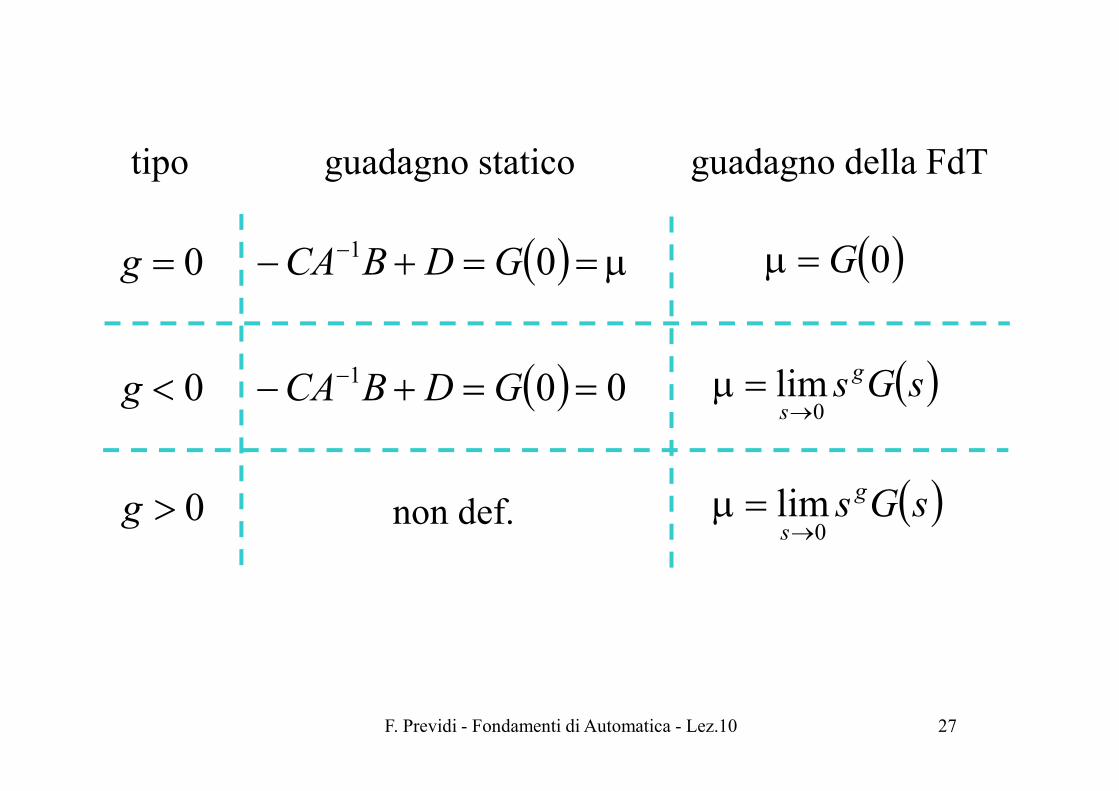
0g
0g
0g
guadagno statico
01 GDBCA
001 GDBCA
non def.
guadagno della FdT
sGsg
s 0lim
0G
sGsg
s 0lim
tipo
F. Previdi - Fondamenti di Automatica - Lez.10 28
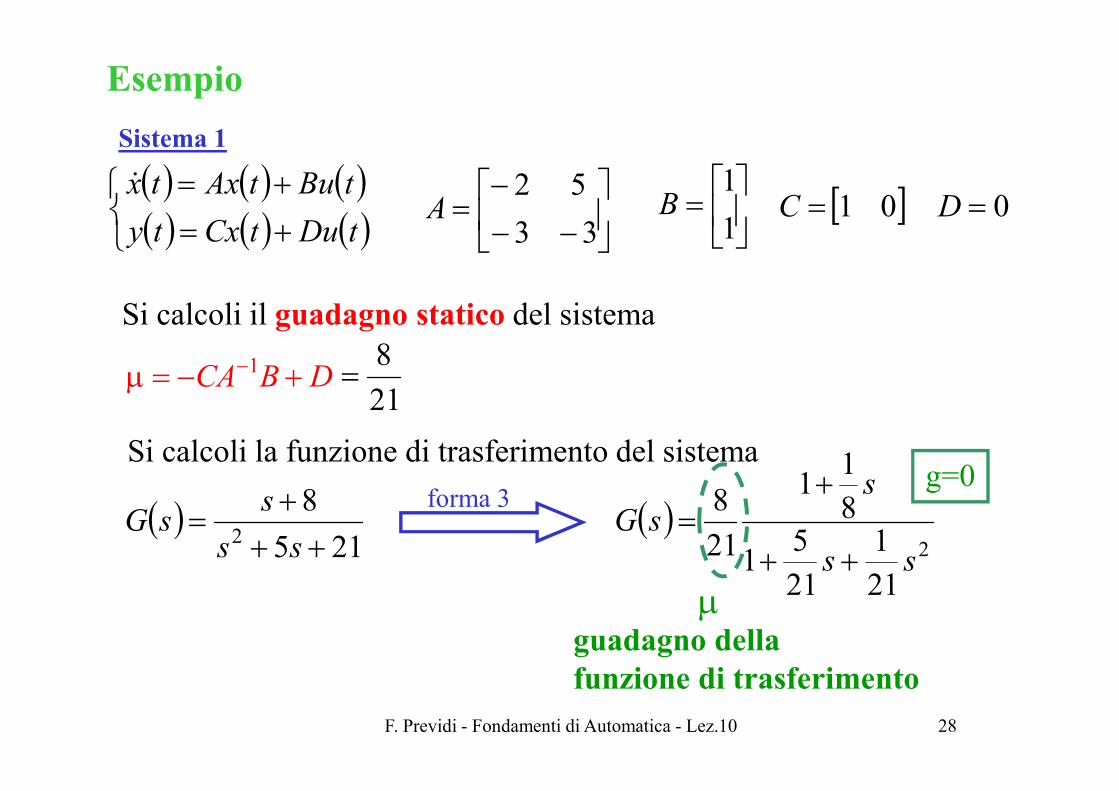
Esempio
tDutCxty
tButAxtx
33
52A
1
1B 01C 0D
Sistema 1
DBCA 1
Si calcoli il guadagno statico del sistema
Si calcoli la funzione di trasferimento del sistema
215
82
ss
ssG
forma 3
2
21
1
21
51
8
11
21
8
ss
ssG
21
8
guadagno della funzione di trasferimento
g=0
F. Previdi - Fondamenti di Automatica - Lez.10 29
ss
ss
10
11
4
11
8
11
5
4
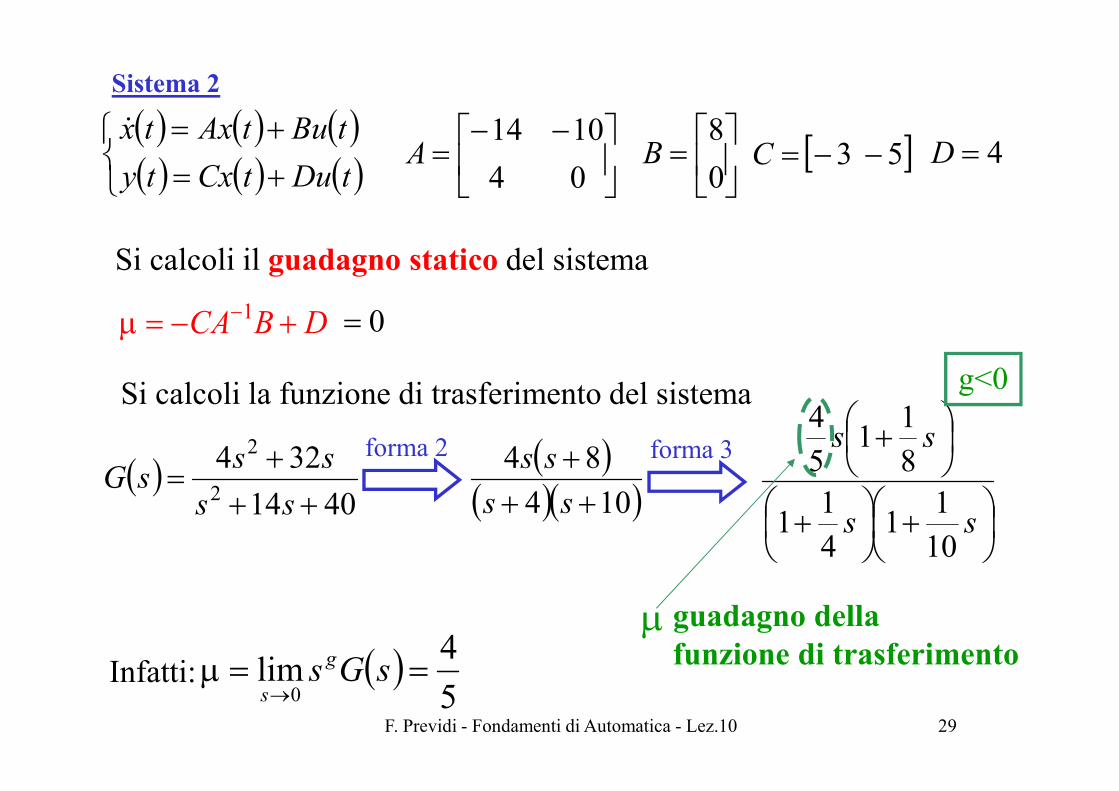
tDutCxty
tButAxtx
04
1014A
0
8B 5 3 C 4D
Sistema 2
DBCA 1
Si calcoli il guadagno statico del sistema
Si calcoli la funzione di trasferimento del sistema
4014
3242
2
ss
sssG
forma 2
0
guadagno della funzione di trasferimento
104
84
ss
ss forma 3
g<0
5
4lim
0
sGsg
sInfatti:

F. Previdi - Fondamenti di Automatica - Lez.10 30
tDutCxty
tButAxtx
02
04A
0
4B 4 1C 0D
Sistema 3
Non si può calcolare il guadagno statico del sistema perchè A non è invertibile.
Si calcoli la funzione di trasferimento del sistema
ss
ssG
4
3242
forma 2
guadagno della funzione di trasferimento
4
84
ss
s
ss
s
4
11
8
118forma 3
g>0
1 0det AA
8lim0
sGsg
sInfatti: