lezione 2 SISTEMI AUTOMATICI DI MISURA -...
52
1 Corso di Misure per la Automazione e la Qualità (Studenti Ingegneria Elettrica III anno Nuovo Ordinamento ) Sistemi Automatici di Misura Luigi Ferrigno [email protected] Gruppo Misure Elettriche ed Elettroniche Facoltà di Ingegneria, DAEIMI. Università degli Studi di Cassino
Transcript of lezione 2 SISTEMI AUTOMATICI DI MISURA -...

1
Corso di
Misure per la Automazione e la Qualità(Studenti Ingegneria Elettrica III anno Nuovo Ordinamento )
Sistemi Automatici di Misura
Luigi [email protected]
Gruppo Misure Elettriche ed Elettroniche
Facoltà di Ingegneria, DAEIMI.
Università degli Studi di Cassino
2
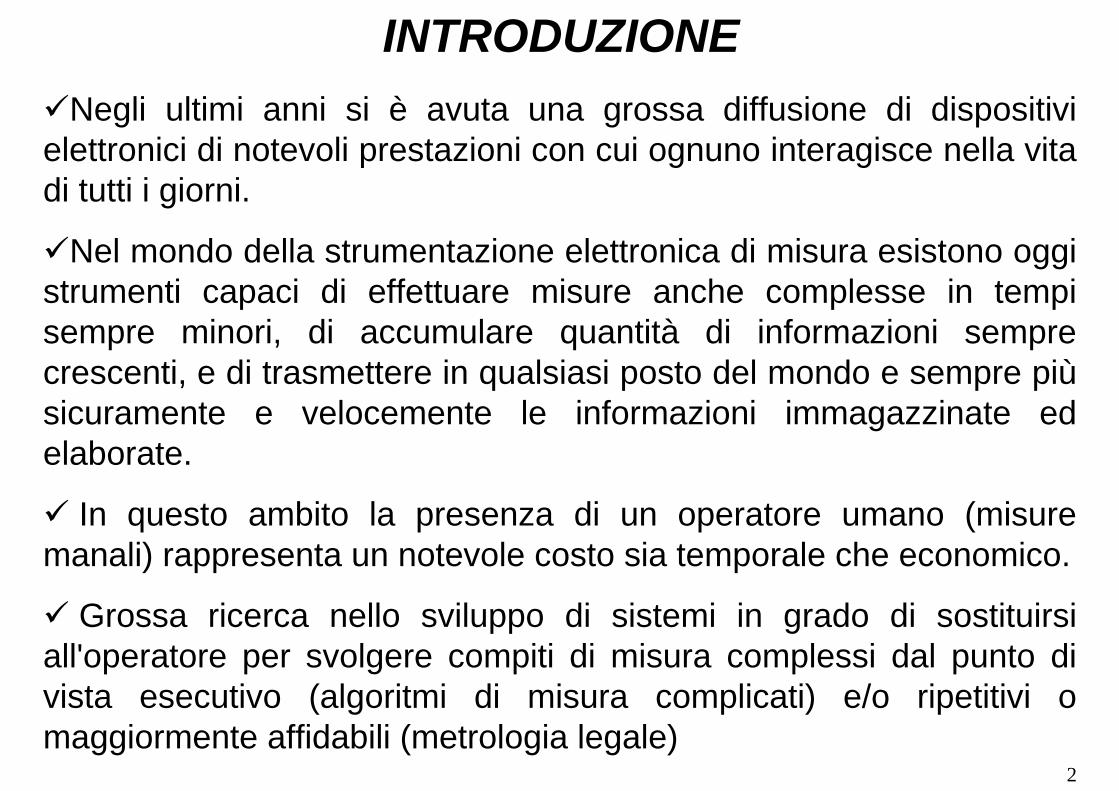
Negli ultimi anni si è avuta una grossa diffusione di dispositivi elettronici di notevoli prestazioni con cui ognuno interagisce nella vita di tutti i giorni.
Nel mondo della strumentazione elettronica di misura esistono oggi strumenti capaci di effettuare misure anche complesse in tempi sempre minori, di accumulare quantità di informazioni sempre crescenti, e di trasmettere in qualsiasi posto del mondo e sempre piùsicuramente e velocemente le informazioni immagazzinate ed elaborate.
In questo ambito la presenza di un operatore umano (misure manali) rappresenta un notevole costo sia temporale che economico.
Grossa ricerca nello sviluppo di sistemi in grado di sostituirsi all'operatore per svolgere compiti di misura complessi dal punto di vista esecutivo (algoritmi di misura complicati) e/o ripetitivi o maggiormente affidabili (metrologia legale)
INTRODUZIONE
3
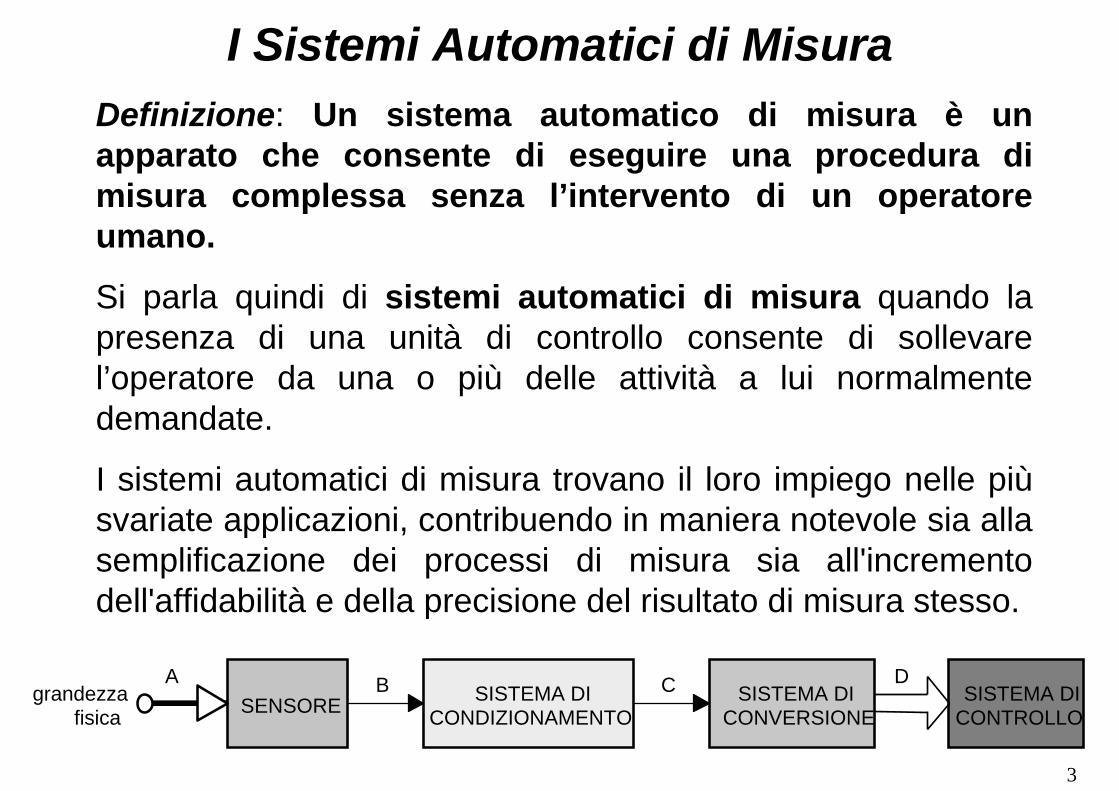
I Sistemi Automatici di MisuraDefinizione: Un sistema automatico di misura è un apparato che consente di eseguire una procedura di misura complessa senza l’intervento di un operatore umano.
Si parla quindi di sistemi automatici di misura quando la presenza di una unità di controllo consente di sollevare l’operatore da una o più delle attività a lui normalmente demandate.
I sistemi automatici di misura trovano il loro impiego nelle piùsvariate applicazioni, contribuendo in maniera notevole sia allasemplificazione dei processi di misura sia all'incremento dell'affidabilità e della precisione del risultato di misura stesso.
SENSORE SISTEMA DICONDIZIONAMENTO
SISTEMA DICONVERSIONE
SISTEMA DICONTROLLO
grandezzafisica
A B C D
4
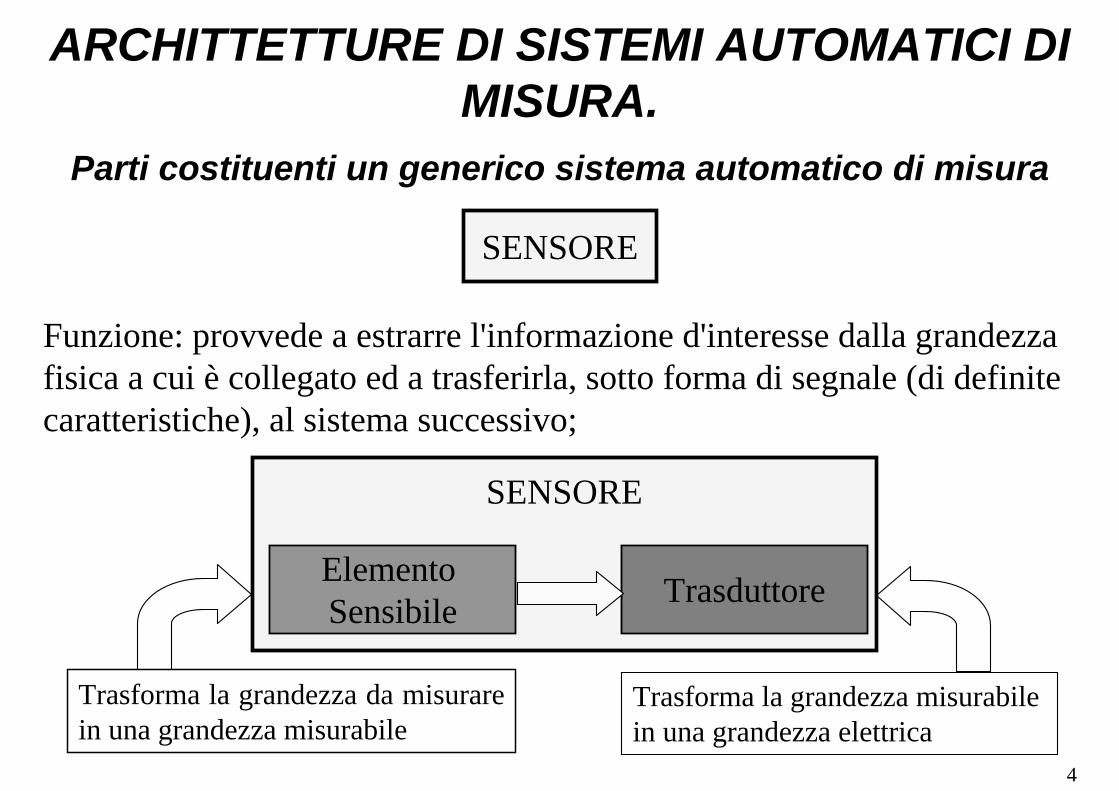
ARCHITTETTURE DI SISTEMI AUTOMATICI DI MISURA.
Parti costituenti un generico sistema automatico di misura
SENSORE
Funzione: provvede a estrarre l'informazione d'interesse dalla grandezza fisica a cui è collegato ed a trasferirla, sotto forma di segnale (di definitecaratteristiche), al sistema successivo;
SENSORE
Elemento Sensibile Trasduttore
Trasforma la grandezza da misurare in una grandezza misurabile
Trasforma la grandezza misurabile in una grandezza elettrica
5
Sensori e Trasduttori
Il sensore è il primo elemento della catena di misura.
Ha il compito di convertire la grandezza fisica da misurare (misurando) in un’altra più facilmente trattabile.
Il trasduttore è un dispositivo che fornisce un segnale elettrico misurabile in risposta ad uno specifico misurando.
Un trasduttore è un sensore ma un sensore non ènecessariamente un trasduttore
6
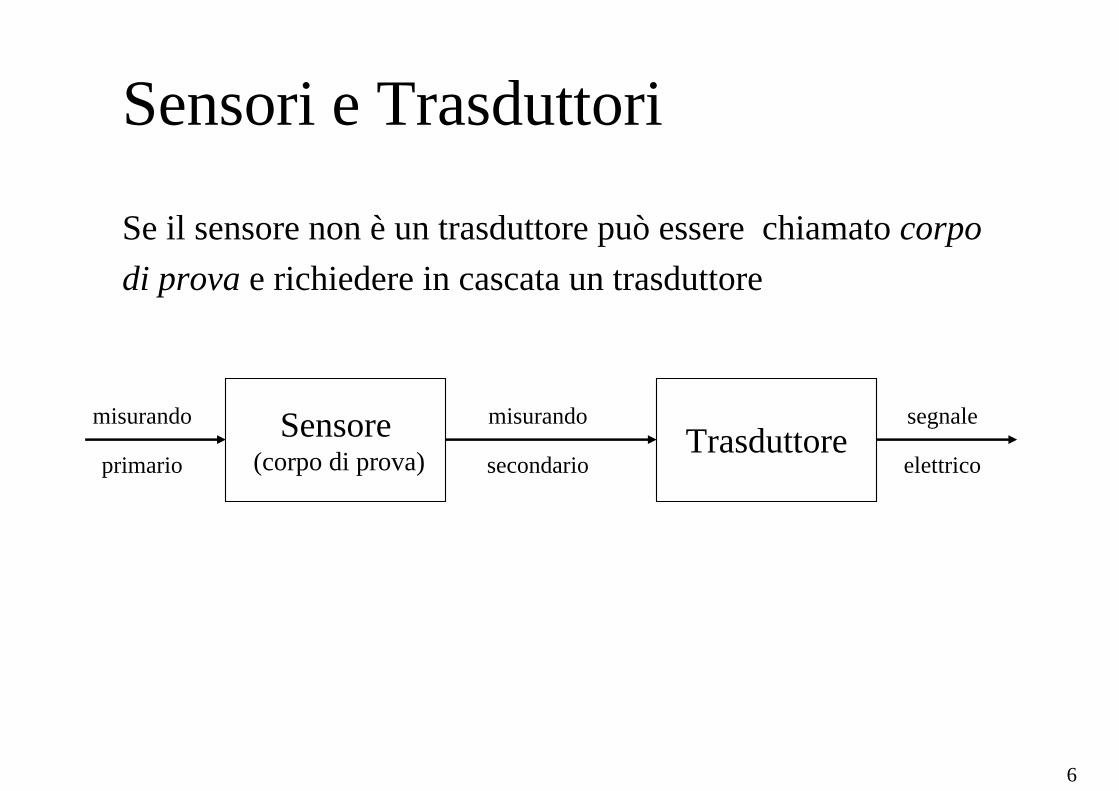
Sensori e Trasduttori
Se il sensore non è un trasduttore può essere chiamato corpo di prova e richiedere in cascata un trasduttore
Sensore(corpo di prova)
Trasduttoremisurando misurando
primario secondario
segnale
elettrico
7
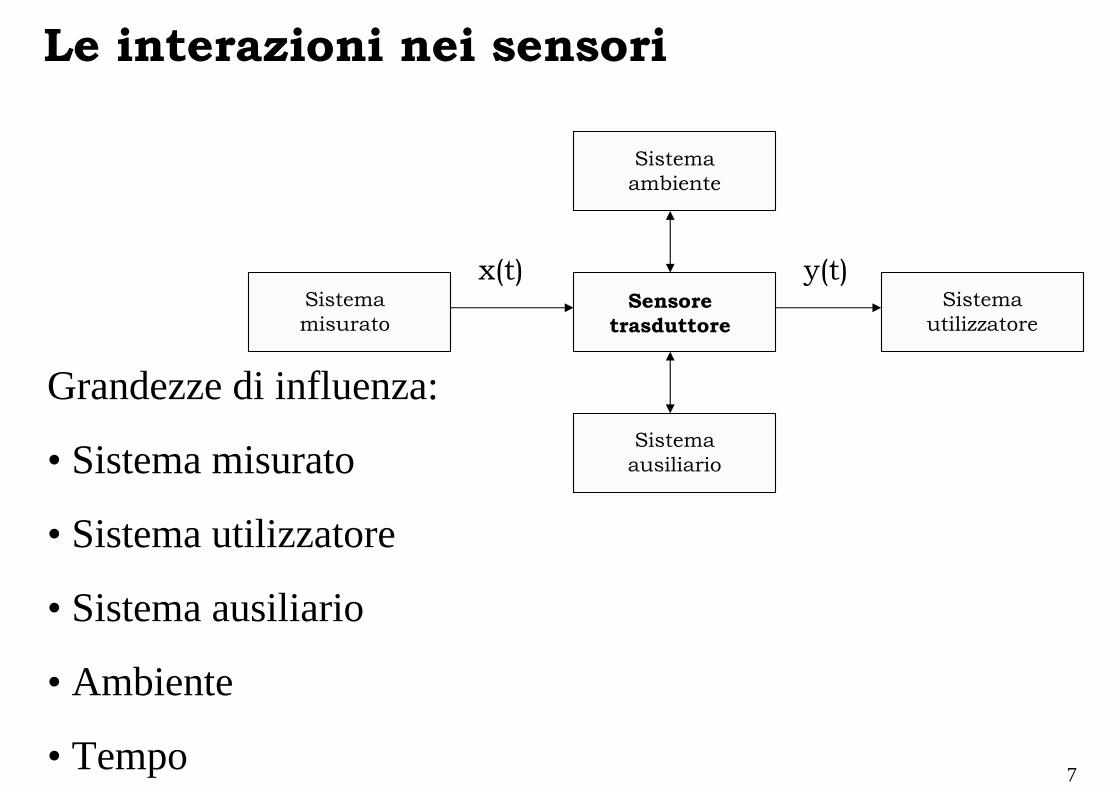
Le interazioni nei sensori
Grandezze di influenza:
• Sistema misurato
• Sistema utilizzatore
• Sistema ausiliario
• Ambiente
• Tempo
Sistema ambiente
Sistema misurato
Sensore trasduttore
Sistema ausiliario
Sistema utilizzatore
x(t) y(t)
8
Sensori attivi e passivi
Un trasduttore può essere attivo o passivo:
• Attivo se l’effetto fisico su cui è basato assicura la trasformazione in
energia elettrica dell’energia propria del misurando (termica,
meccanica, d’irraggiamento, …).
Esempi: Termoelettrico (termocoppia), Piroelettrico (cristalli la cui
polarizzazione dipende dalla temperatura), …
• Passivo se l’effetto del misurando si traduce in una variazione
d’impedenza dell’elemento sensibile.
Esempi: estensimetri, magnetici, …
9
Classificazione dei trasduttori
• Attivi / passivi
• In base alla grandezza misurata: sensori di temperatura,
umidità, illuminamento, velocità, …
• In base alla grandezza che forniscono in uscita: trasduttori
resistivi, induttivi, capacitivi, in tensione, in corrente, …
• Analogici / digitali
10
Circuiti di condizionamento
Un trasduttore è completato dal circuito di condizionamento.
Trasduttore passivo: il circuito di condizionamento èindispensabile per la generazione del segnale elettrico (montaggio).
Trasduttore attivo: il circuito di condizionamento ha il compito di adattare i parametri dell’energia elettrica, generata dal trasduttore, alle caratteristiche d’ingresso del sistema di misura (condizionamento del segnale).
11
Descrizione di un trasduttore
Misurando: grandezza da misurare.
Principio di trasduzione: principio fisico su cui si basa la
generazione del segnale elettrico.
Proprietà significative: tipo di elemento sensibile, tipo di
costruzione, circuiteria interna, …
Range: limite superiore ed inferiore di variazione del
misurando.
12
Caratteristiche di un trasduttore
• Di progetto (specificano come il trasduttore è o dovrebbe essere)
• Prestazioni (caratteristiche metrologiche)
• Affidabilità (caratteristiche ambientali e d’uso che influenzano la vita utile del trasduttore).
13
Caratteristiche relative all’ingresso
• Specie: grandezza fisica in ingresso.
• Campo di misura (input range): intervallo di valori del misurando entro il quale il sensore funziona secondo le specifiche. Il suo limite superiore è la portata.
• Campo di sicurezza del misurando: intervallo di valori del misurando al di fuori del quale il sensore resta danneggiato permanentemente. I suoi valori estremi sono detti di overload o overrange.
14
Caratteristiche relative all’uscita
• Specie: natura della grandezza in uscita.
• Campo di normale funzionamento (output range): intervallo di valori dell’uscita quando l’ingresso varia nell’input range.
• Potenza erogabile: valore limite della potenza che il sensore può fornire al sistema utilizzatore a valle. Se l’uscita è in corrente, si precisa l’impedenza di carico.
• Impedenza di uscita
15
Caratteristiche relative all’uscita (2)
• Incertezza di uscita: larghezza della fascia comprendente tutti i valori che potrebbero essere assunti, con una certa probabilità (livello di confidenza) a rappresentare il valore della uscita corrispondente ad una certa condizione di funzionamento.
• Alimentazione ausiliaria (power supply): viene precisato il valore di tensione o corrente da fornire con una sorgente esterna.
16
Caratteristiche statiche (1)• Funzione di conversione: funzione che permette di
ricavare dall’ingresso il valore della uscita.
• Funzione di taratura: relazione che permette di ricavare da ogni valore della grandezza in uscita il valore dell’ingresso e la corrispondente fascia di incertezza.
– Curva di taratura: valore uscita => valore centrale ingresso;
– Costante di taratura: pendenza della curva di taratura, se è lineare;
– Incertezza di taratura: ampiezza della fascia di valori.
17
Caratteristiche statiche (2)
• Sensibilità (sensitivity): pendenza della curva di conversione in un certo punto:
dxdyS =
Corrisponde all’inverso della pendenza della curva di taratura.
• Stabilità: capacità di conservare inalterate le caratteristiche di funzionamento per un intervallo di tempo relativamente lungo.
18
Caratteristiche statiche (3)
y
x
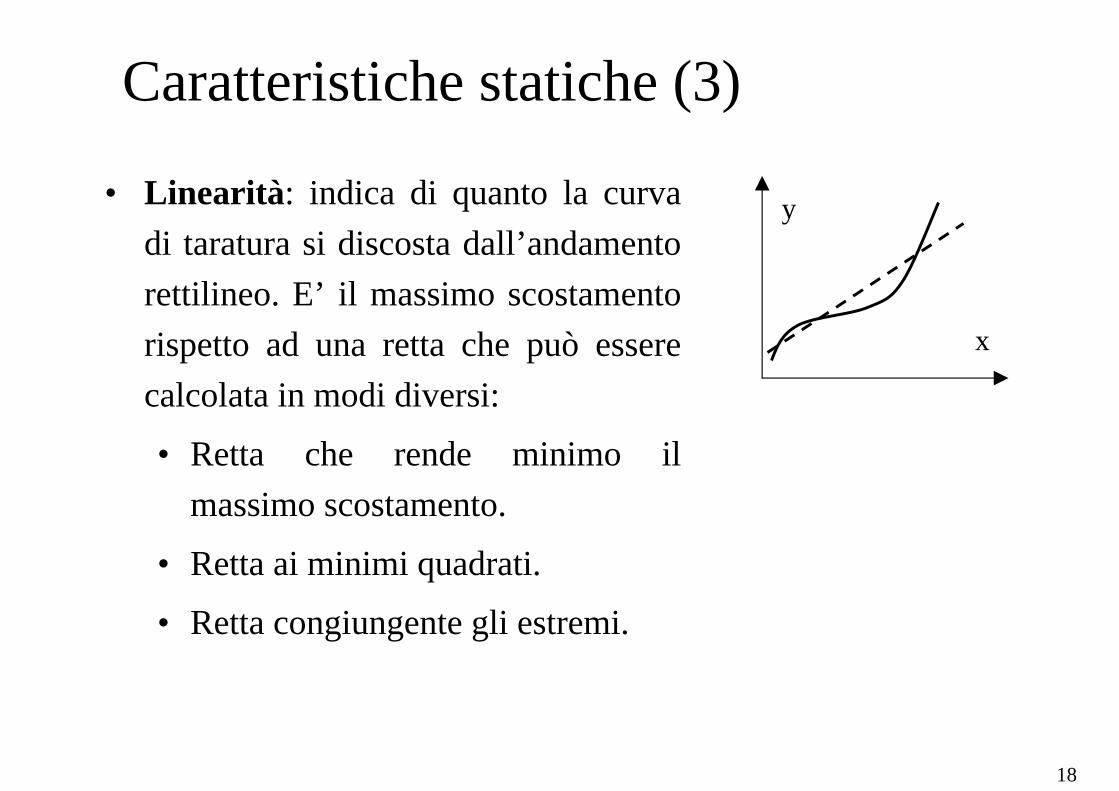
• Linearità: indica di quanto la curva di taratura si discosta dall’andamento rettilineo. E’ il massimo scostamento rispetto ad una retta che può essere calcolata in modi diversi:
• Retta che rende minimo il massimo scostamento.
• Retta ai minimi quadrati.
• Retta congiungente gli estremi.
19
Caratteristiche statiche (4)
• Risoluzione: variazione del valore del misurando che provoca una variazione apprezzabile del valore della grandezza in uscita.
Se il sensore lavora vicino allo zero, si parla di soglia.
• Ripetibilità: attitudine dello strumento a fornire valori della grandezza di uscita poco differenti fra loro, quando èapplicato all’ingresso lo stesso misurando, nelle stesse condizioni operative. Si esprime in modo simile all’incertezza di taratura.
20
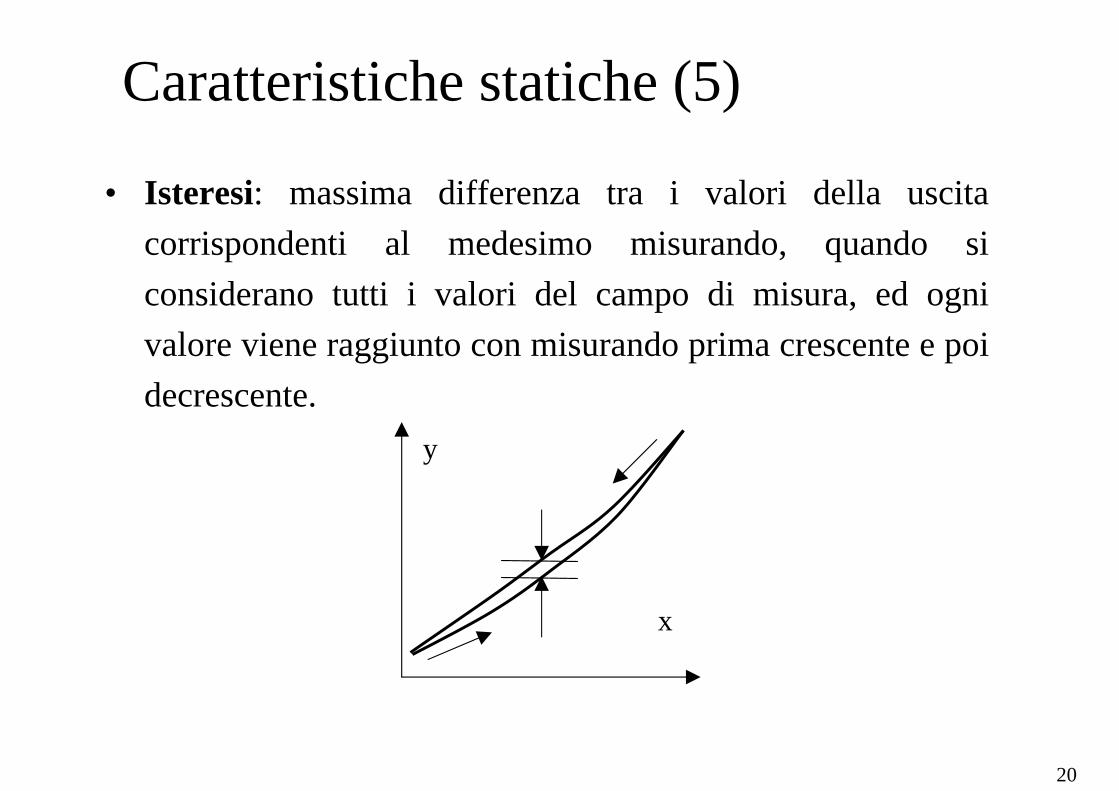
Caratteristiche statiche (5)
• Isteresi: massima differenza tra i valori della uscita corrispondenti al medesimo misurando, quando si considerano tutti i valori del campo di misura, ed ogni valore viene raggiunto con misurando prima crescente e poi decrescente.
y
x
21
Condizioni di riferimento
(Reference operating conditions) Insieme delle fasce dei valori delle grandezze di influenza in corrispondenza delle quali sono valide le specifiche metrologiche indicate dal contruttore.
• Funzioni di influenza (operating influence): informazione su come una grandezza di influenza agisce su una delle caratteristiche metrologiche. Può essere espressa attraverso la sensibilità della grandezza metrologica alla grandezza di influenza.
22
Caratteristiche dinamiche (1)
Nel dominio della frequenza:
• Risposta in frequenza: curve del modulo e della
fase rispetto alla frequenza (Diagrammi di Bode).
• Campo di frequenza: intervallo di frequenze nel
quale la curva di risposta in modulo non esce da una
fascia di tolleranza prefissata.
• Eventuale frequenza di risonanza.
23
Caratteristiche dinamiche (2)Nel dominio del tempo:
• Tempo morto
• Tempo di salita
• Tempo di risposta
• Costante di tempo
• Tempo di assestamento
• Sovraelongazione
• Frequenza delle oscillazioni di assestamento
• Fattore di smorzamento
24
Caratteristiche dinamiche (3)
•Limite di velocità: massima velocità di variazione del
misurando oltre la quale l’uscita non varia
corrispondentemente.
•Tempo di recupero (recovery time): intervallo di tempo
richiesto dopo un evento specificato (ad es. un
sovraccarico) affinché il sensore riprenda a funzionare
secondo le caratteristiche specificate.
25
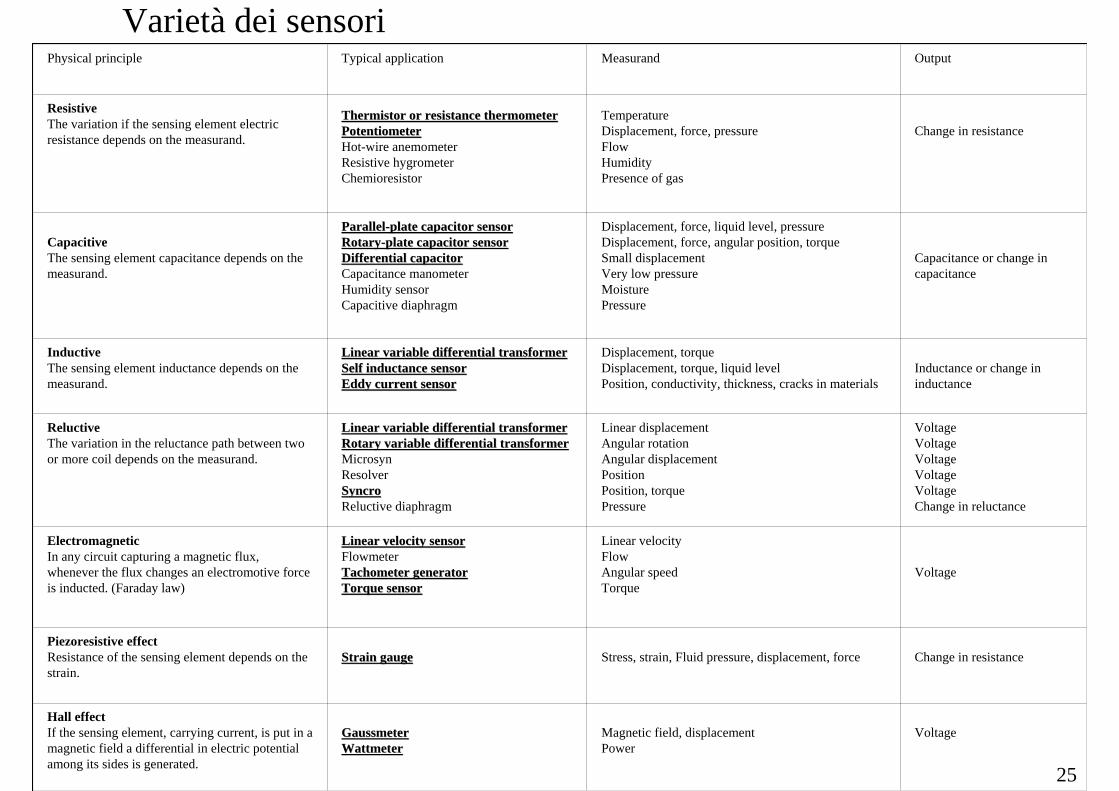
Varietà dei sensoriPhysical principle Typical application Measurand Output
ResistiveThe variation if the sensing element electric resistance depends on the measurand.
ThermistorThermistor or resistance thermometeror resistance thermometerPotentiometerPotentiometerHot-wire anemometerResistive hygrometerChemioresistor
TemperatureDisplacement, force, pressureFlowHumidityPresence of gas
Change in resistance
CapacitiveThe sensing element capacitance depends on the measurand.
ParallelParallel--plate capacitor sensorplate capacitor sensorRotaryRotary--plate capacitor sensorplate capacitor sensorDifferential capacitorDifferential capacitorCapacitance manometerHumidity sensorCapacitive diaphragm
Displacement, force, liquid level, pressureDisplacement, force, angular position, torqueSmall displacementVery low pressureMoisturePressure
Capacitance or change in capacitance
InductiveThe sensing element inductance depends on the measurand.
Linear variable differential transformerLinear variable differential transformerSelf inductance sensorSelf inductance sensorEddy current sensorEddy current sensor
Displacement, torqueDisplacement, torque, liquid levelPosition, conductivity, thickness, cracks in materials
Inductance or change in inductance
ReluctiveThe variation in the reluctance path between two or more coil depends on the measurand.
Linear variable differential transformerLinear variable differential transformerRotary variable differential transformerRotary variable differential transformerMicrosynResolverSyncroSyncroReluctive diaphragm
Linear displacementAngular rotationAngular displacementPositionPosition, torquePressure
VoltageVoltageVoltageVoltageVoltageChange in reluctance
ElectromagneticIn any circuit capturing a magnetic flux, whenever the flux changes an electromotive force is inducted. (Faraday law)
Linear velocity sensorLinear velocity sensorFlowmeterTachometer generatorTachometer generatorTorque sensorTorque sensor
Linear velocityFlowAngular speedTorque
Voltage
Piezoresistive effectResistance of the sensing element depends on the strain.
Strain gaugeStrain gauge Stress, strain, Fluid pressure, displacement, force Change in resistance
Hall effectIf the sensing element, carrying current, is put in a magnetic field a differential in electric potential among its sides is generated.
GaussmeterGaussmeterWattmeterWattmeter
Magnetic field, displacementPower
Voltage

26
Varietà dei sensoriMagnetoresistive effectResistance of the sensing element depends on the strain.
Magnetoresistor Magnetic field, linear and angular displacement, proximity, position
Change in resistance
Piezoelectric effectSubjecting the sensing element to stress there is a generation of electric charge.
Vibration cablesActive and passive force sensorPiezoelectric microphonePiezoelectric temperature sensor
VibrationForceUltrasonic wavesTemperature
Voltage or charge
Pyroelectric effectThe sensing element generates an electric charge in response to a heat flow.
Heat flowmeterPyroelectric sensor
Change in the temperature Voltage
Thermoelectric effectWhen there is a difference in temperature between two junctions of different metals, a difference of electric potential is generated.
ThermocouplesThermocouples, thermopiles, infrared pyrometer
Difference of temperature Voltage
Ionization effectThe sensing element when exposed to the measurand becomes ionized.
Electrolytic sensorVacuum gagesChemical ionizer
Electrical conductivity, pHPressureAtomic radiation
Current
PhotoresistiveThe electric resistance of the sensing element is caused by the incidence of optical radiation.
Photoresistor, photodiode, phototransistor, photofet
Light, position, motion, sound flow, force Change in resistance
Photovoltaic effectWhen the sensing element is subject to a radiation it generates an electric potential
Flame photometerLight detectorPyrometers
Light intensityLight, position, motion, sound flow, forceTemperature
Voltage
Acoustooptic effectThe interaction of an optical wave with an acoustic wave produces a new optical wave
Acoustic optic deflection, Bragg cell Physical vibration Phase modulated voltage signal
Doppler effectThe apparent frequency of a wave train changes in dependence of the relative motion between the source of the train and the observer.
Remote sensor of linear velocity, Doppler radar, laser Doppler velocimeter
Relative velocityFrequency
Thermal radiationAn object emanes thermal radiation, which intensity is related to its temperature
Pyrometer TemperatureVoltage
27
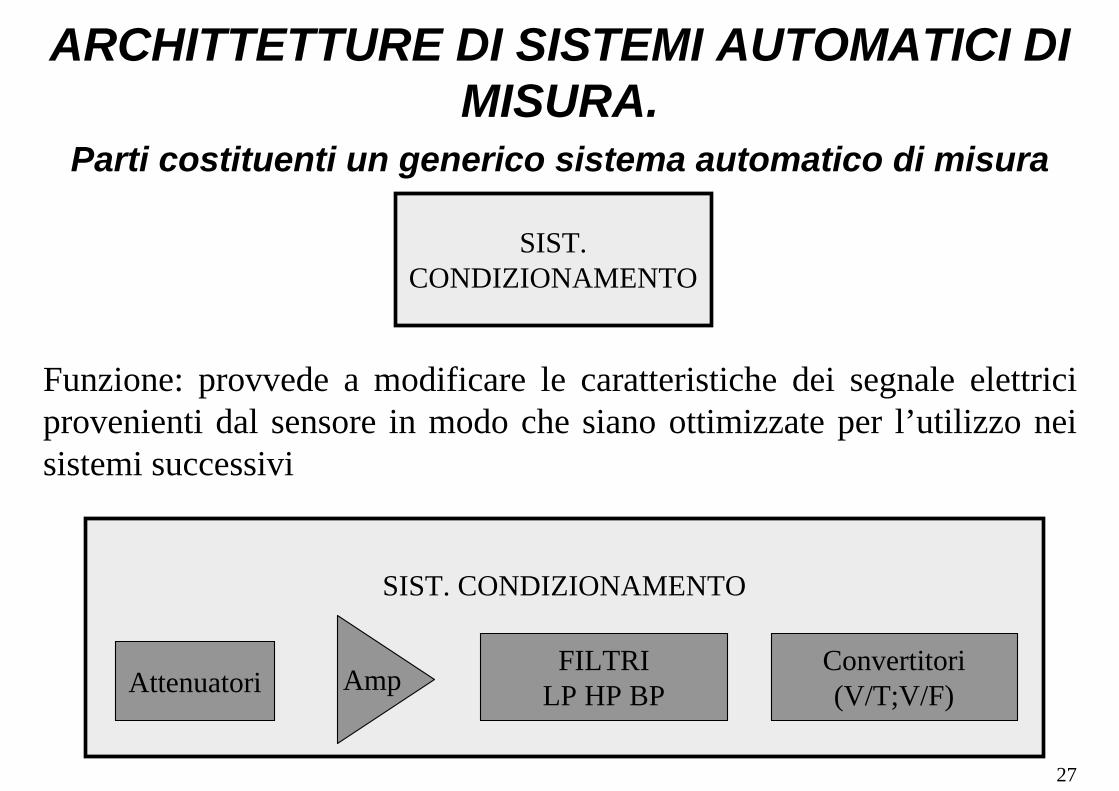
ARCHITTETTURE DI SISTEMI AUTOMATICI DI MISURA.
Parti costituenti un generico sistema automatico di misura
SIST.CONDIZIONAMENTO
Funzione: provvede a modificare le caratteristiche dei segnale elettrici provenienti dal sensore in modo che siano ottimizzate per l’utilizzo nei sistemi successivi
SIST. CONDIZIONAMENTO
Attenuatori AmpConvertitori(V/T;V/F)
FILTRILP HP BP
28
Circuiti di condizionamento
Un trasduttore è completato dal circuito di condizionamento.
Trasduttore passivo: il circuito di condizionamento èindispensabile per la generazione del segnale elettrico (montaggio).
Trasduttore attivo: il circuito di condizionamento ha il compito di adattare i parametri dell’energia elettrica, generata dal trasduttore, alle caratteristiche d’ingresso del sistema di misura (condizionamento del segnale).
29
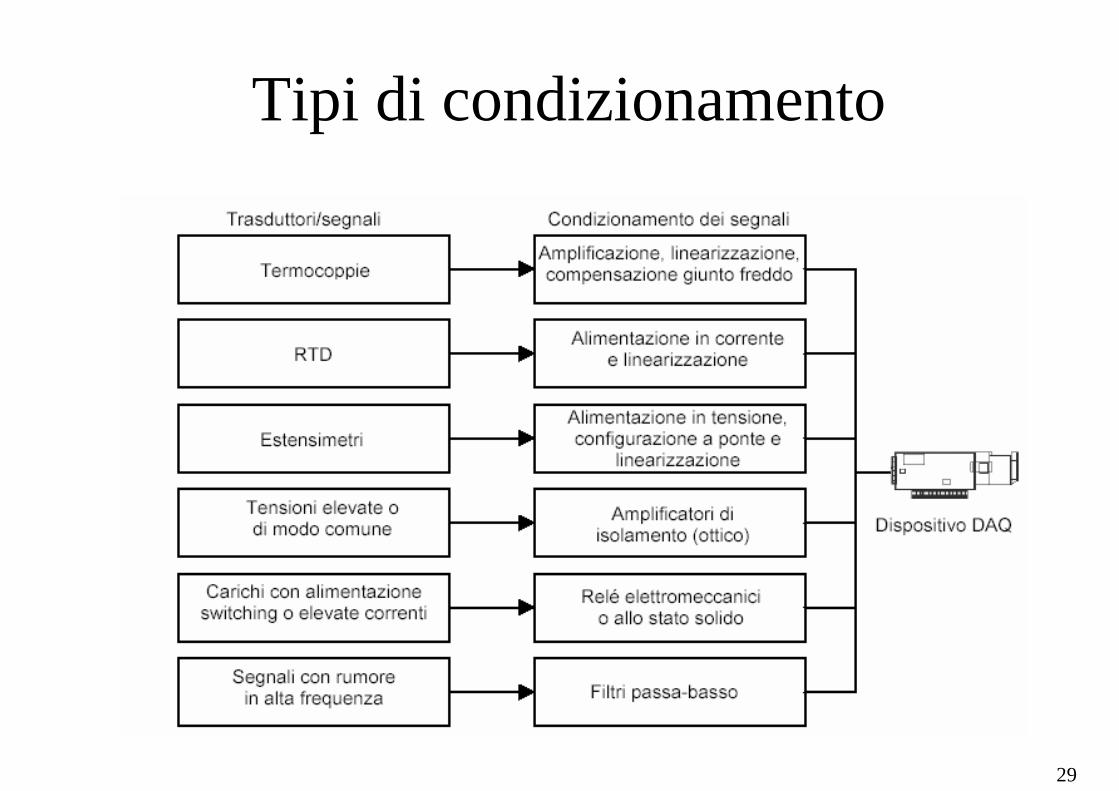
Tipi di condizionamento
30
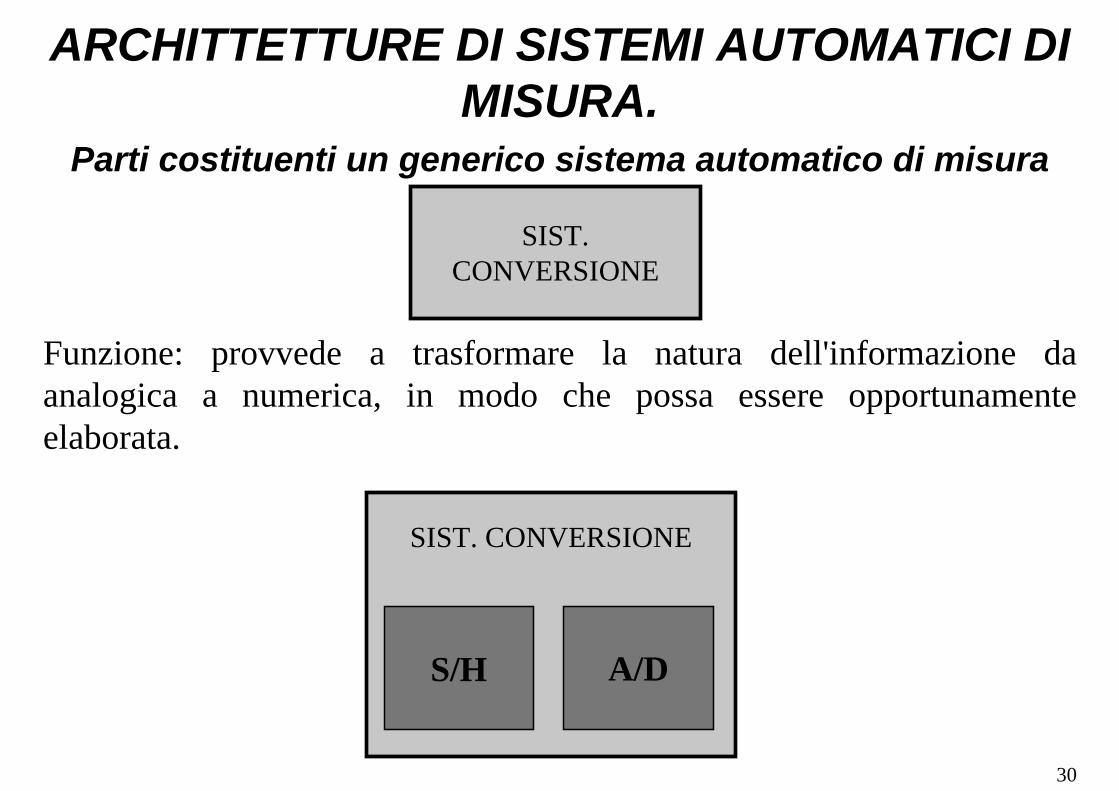
ARCHITTETTURE DI SISTEMI AUTOMATICI DI MISURA.
Parti costituenti un generico sistema automatico di misura
SIST.CONVERSIONE
Funzione: provvede a trasformare la natura dell'informazione da analogica a numerica, in modo che possa essere opportunamente elaborata.
SIST. CONVERSIONE
S/H A/D
31
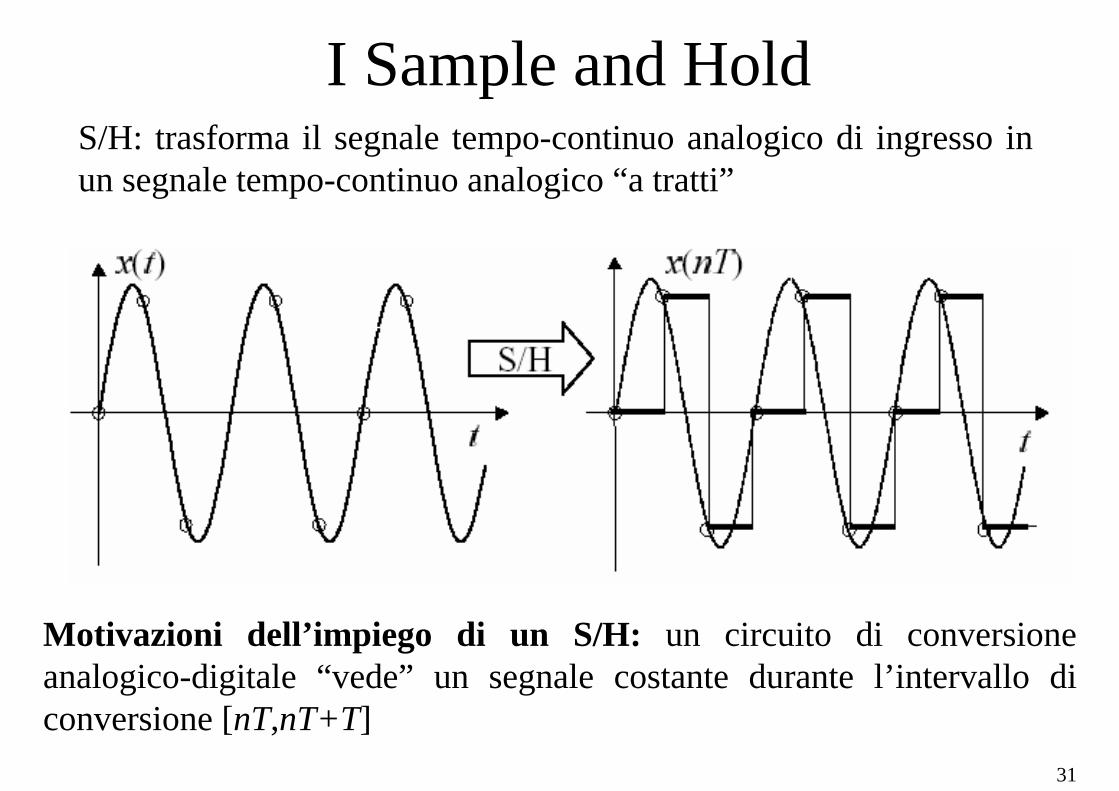
S/H: trasforma il segnale tempo-continuo analogico di ingresso in un segnale tempo-continuo analogico “a tratti”
I Sample and Hold
Motivazioni dell’impiego di un S/H: un circuito di conversione analogico-digitale “vede” un segnale costante durante l’intervallo di conversione [nT,nT+T]
32
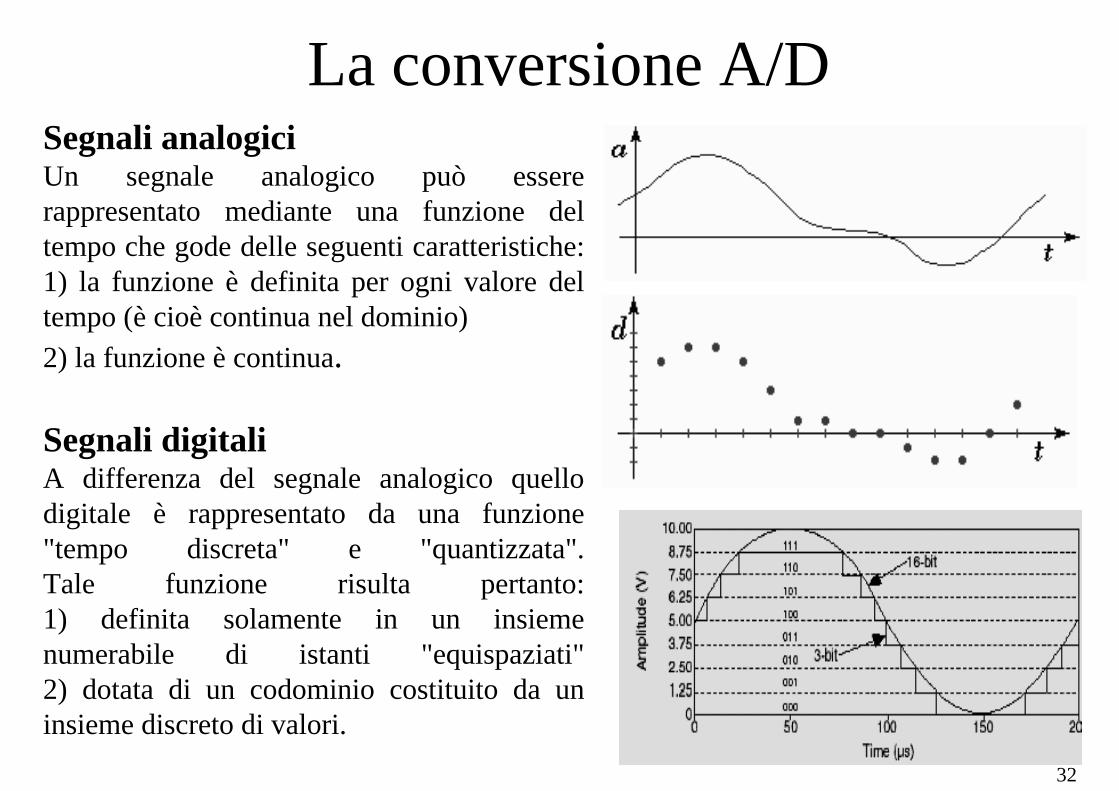
Segnali analogiciUn segnale analogico può essere rappresentato mediante una funzione del tempo che gode delle seguenti caratteristiche:1) la funzione è definita per ogni valore del tempo (è cioè continua nel dominio)2) la funzione è continua.
Segnali digitaliA differenza del segnale analogico quello digitale è rappresentato da una funzione "tempo discreta" e "quantizzata".Tale funzione risulta pertanto:1) definita solamente in un insieme numerabile di istanti "equispaziati"2) dotata di un codominio costituito da un insieme discreto di valori.
La conversione A/D
33
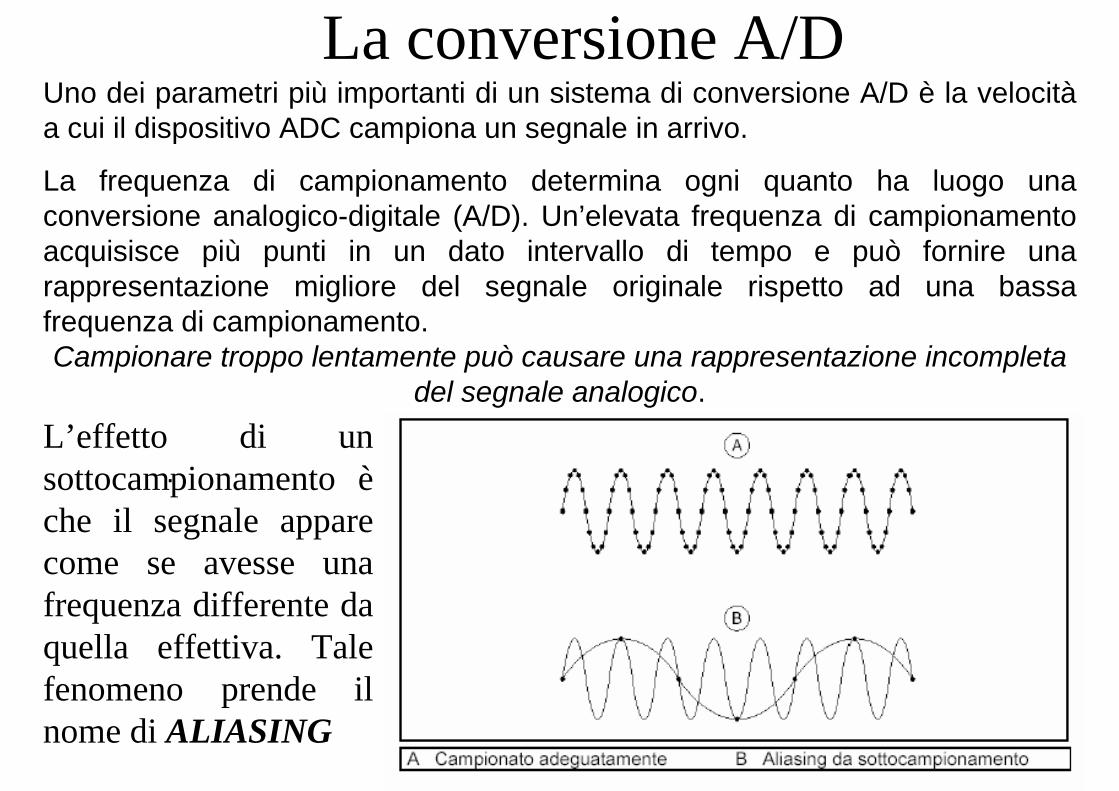
Uno dei parametri più importanti di un sistema di conversione A/D è la velocitàa cui il dispositivo ADC campiona un segnale in arrivo.
La frequenza di campionamento determina ogni quanto ha luogo unaconversione analogico-digitale (A/D). Un’elevata frequenza di campionamento acquisisce più punti in un dato intervallo di tempo e può fornire una rappresentazione migliore del segnale originale rispetto ad una bassa frequenza di campionamento. Campionare troppo lentamente può causare una rappresentazione incompleta
del segnale analogico.
. L’effetto di un sottocampionamento èche il segnale appare come se avesse una frequenza differente da quella effettiva. Tale fenomeno prende il nome di ALIASING
La conversione A/D
34
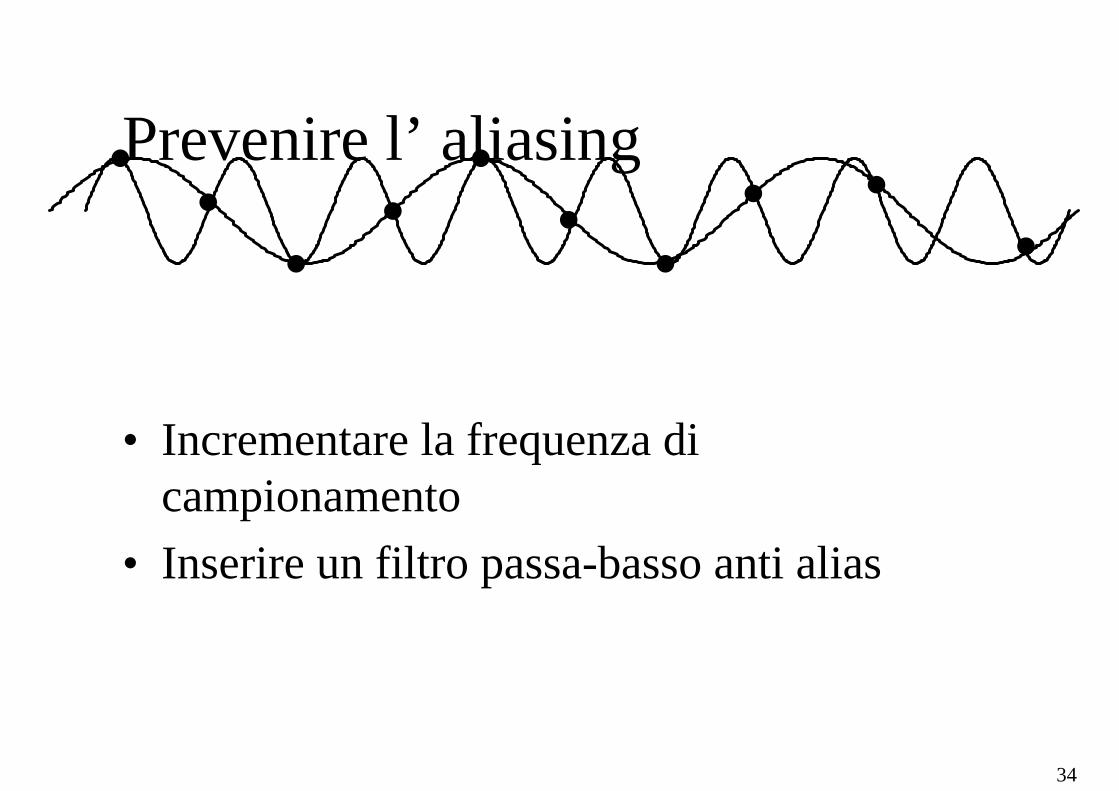
Prevenire l’ aliasing
• Incrementare la frequenza dicampionamento
• Inserire un filtro passa-basso anti alias
35
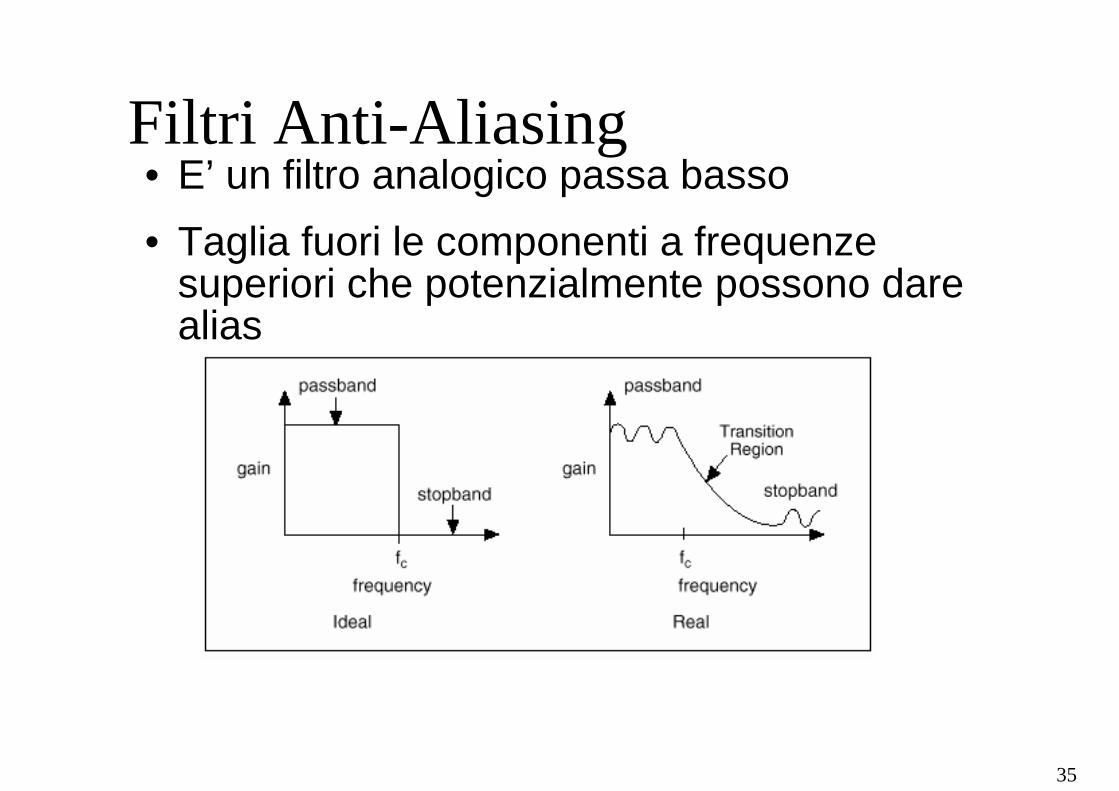
Filtri Anti-Aliasing• E’ un filtro analogico passa basso• Taglia fuori le componenti a frequenze
superiori che potenzialmente possono dare alias
36
Pregi del segnale digitale
I segnali digitali hanno una maggiore reiezione ai disturbi rispetto ai segnali analogici.
I segnali analogici sono costituiti da funzioni continue pertanto possono assumere infiniti valori: il rumore che inevitabilmente si sovrappone al segnale ha pertanto la possibilità di determinare una variazione del valore del segnale composto (segnale utile + rumore) qualunque sia la ampiezza e la potenza del rumore.I segnali digitali, invece, presentano solamente un numero finito di valori separati da una fascia "proibita". Se il rumore non ha ampiezza (e potenza) tale da determinare un superamento della fascia proibita che separa due valori contigui non si riscontra alcuna alterazione del valore.
I segnali digitali possono essere elaborati più facilmente dei segnali analogici
Per elaborare matematicamente i segnali analogici si deve ricorrere agli amplificatori operazionali mediante i quale è possibile realizzare (in modo a volte molto approssimato) semplici operazioni (somma, sottrazione, logaritmo ed esponenziale, integrale e derivata rispetto al tempo, ecc.). La realizzazione di funzioni più "elaborate" può richiedere una complessità circuitale eccessiva e tale da introdurre una incertezza non accettabile per gli scopi prefissati.
La conversione A/D
37
Pregi del segnale digitaleI segnali numerici possono invece essere elaborati mediante
microprocessori
i quali possono permettere la esecuzione di operazioni ed elaborazioni senza richiedere appesantimenti dell'hardware circuitale. Anche in questo caso, però, le operazioni non sono esenti da incertezza: i troncamenti e le approssimazioni introdotte dalla codifica utilizzata dal microprocessore per il trattamento dei dati sono infatti fonte di incertezza, ma si può ricorrere a codifiche (intero, reale a singola o doppia precisione, ecc.) tali da ridurre le incertezze introdotte in modo da renderle compatibili con gli scopi prefissati.
I segnali digitali possono essere registrati in maniera più fedele e stabile dei segnali analogici
Per registrare un segnale analogico si può fare uso di nastri magnetici entro cui il segnale viene registrato: le prestazioni delle tecniche di registrazione meno sofisticate vengono penalizzate dal fenomeno della smagnetizzazione del nastro registrato. Ricorrendo all'uso di memorie RAM oppure di dispositivi di memoria di massa a supporto magnetico (hard e floppy-disk) è possibile invece registrare i segnali digitali con estrema facilità. In questo caso, poi, la codifica usata è quella binaria e la presenza di una ampia fascia di separazione fra il livello considerato 0 e quello considerato 1 permette di garantire una stabilità del dato nel tempo e la sua reiezione pressoché totale ai disturbi.
La conversione A/D
38
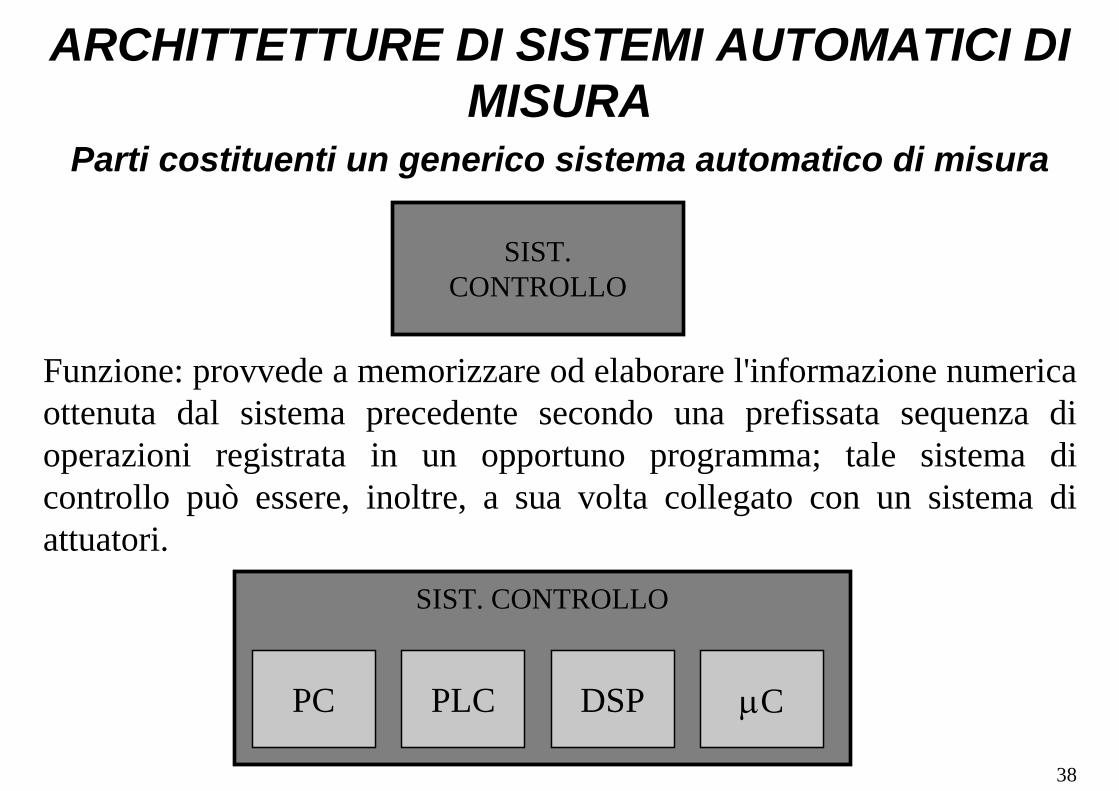
ARCHITTETTURE DI SISTEMI AUTOMATICI DI MISURA
Parti costituenti un generico sistema automatico di misura
SIST.CONTROLLO
Funzione: provvede a memorizzare od elaborare l'informazione numerica ottenuta dal sistema precedente secondo una prefissata sequenza di operazioni registrata in un opportuno programma; tale sistema dicontrollo può essere, inoltre, a sua volta collegato con un sistema di attuatori.
SIST. CONTROLLO
PC PLC DSP µC

39
I SISTEMI DI CONTROLLO
40
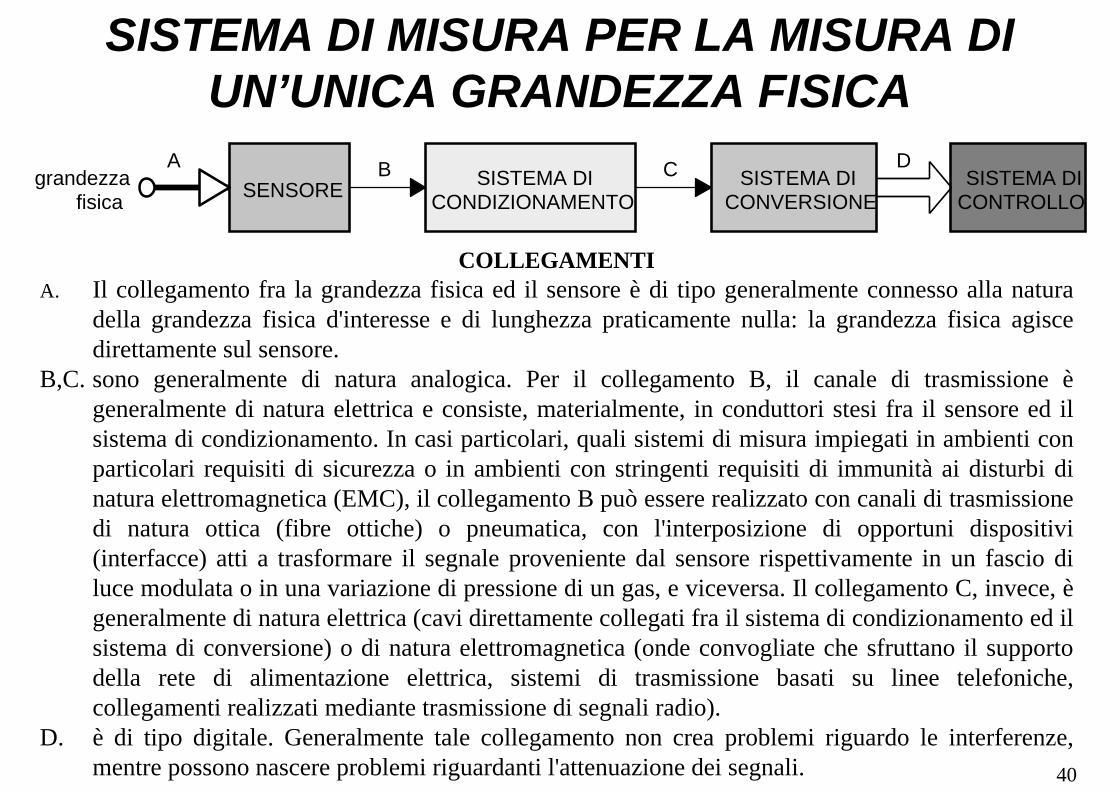
SISTEMA DI MISURA PER LA MISURA DI UN’UNICA GRANDEZZA FISICA
SENSORE SISTEMA DICONDIZIONAMENTO
SISTEMA DICONVERSIONE
SISTEMA DICONTROLLO
grandezzafisica
A B C D
COLLEGAMENTIA. Il collegamento fra la grandezza fisica ed il sensore è di tipo generalmente connesso alla natura
della grandezza fisica d'interesse e di lunghezza praticamente nulla: la grandezza fisica agisce direttamente sul sensore.
B,C. sono generalmente di natura analogica. Per il collegamento B, il canale di trasmissione ègeneralmente di natura elettrica e consiste, materialmente, in conduttori stesi fra il sensore ed il sistema di condizionamento. In casi particolari, quali sistemi di misura impiegati in ambienti con particolari requisiti di sicurezza o in ambienti con stringenti requisiti di immunità ai disturbi di natura elettromagnetica (EMC), il collegamento B può essere realizzato con canali di trasmissione di natura ottica (fibre ottiche) o pneumatica, con l'interposizione di opportuni dispositivi (interfacce) atti a trasformare il segnale proveniente dal sensore rispettivamente in un fascio di luce modulata o in una variazione di pressione di un gas, e viceversa. Il collegamento C, invece, ègeneralmente di natura elettrica (cavi direttamente collegati fra il sistema di condizionamento ed il sistema di conversione) o di natura elettromagnetica (onde convogliate che sfruttano il supporto della rete di alimentazione elettrica, sistemi di trasmissione basati su linee telefoniche, collegamenti realizzati mediante trasmissione di segnali radio).
D. è di tipo digitale. Generalmente tale collegamento non crea problemi riguardo le interferenze, mentre possono nascere problemi riguardanti l'attenuazione dei segnali.
41
L’ACQUISIZIONE DEI DATI
I SISTEMI DI ACQUISIZIONE DATI
42
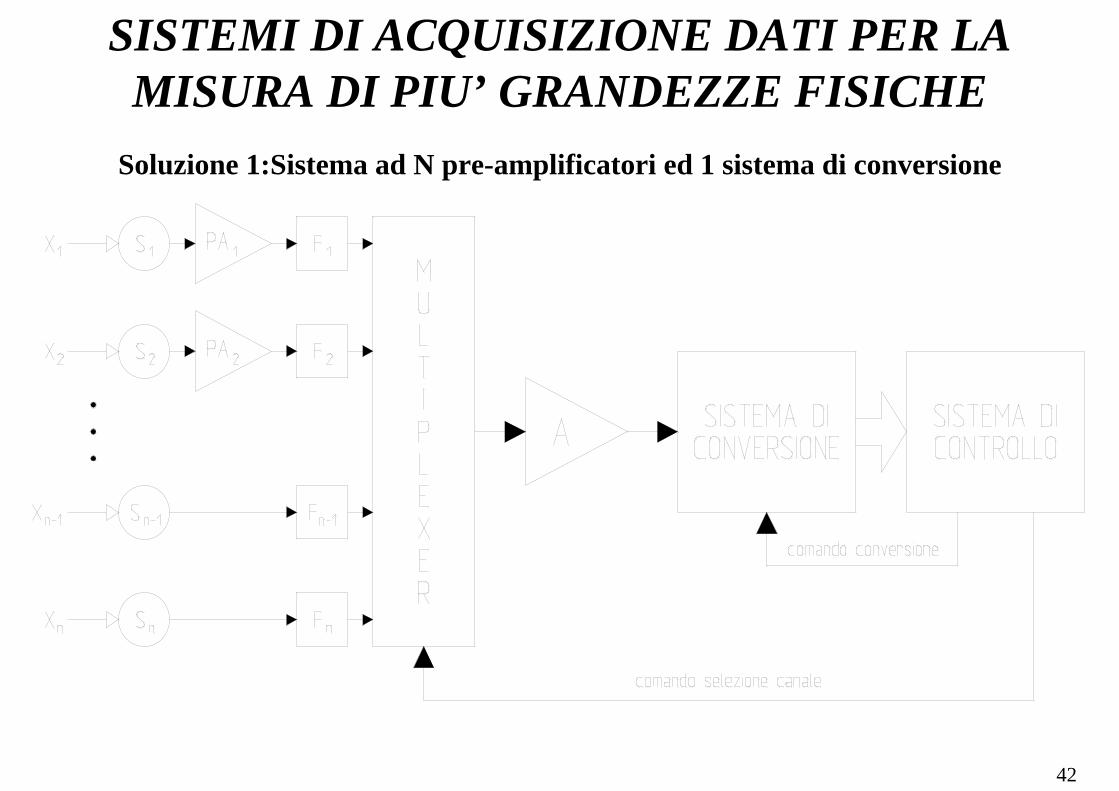
SISTEMI DI ACQUISIZIONE DATI PER LA MISURA DI PIU’ GRANDEZZE FISICHE
Soluzione 1:Sistema ad N pre-amplificatori ed 1 sistema di conversione
43
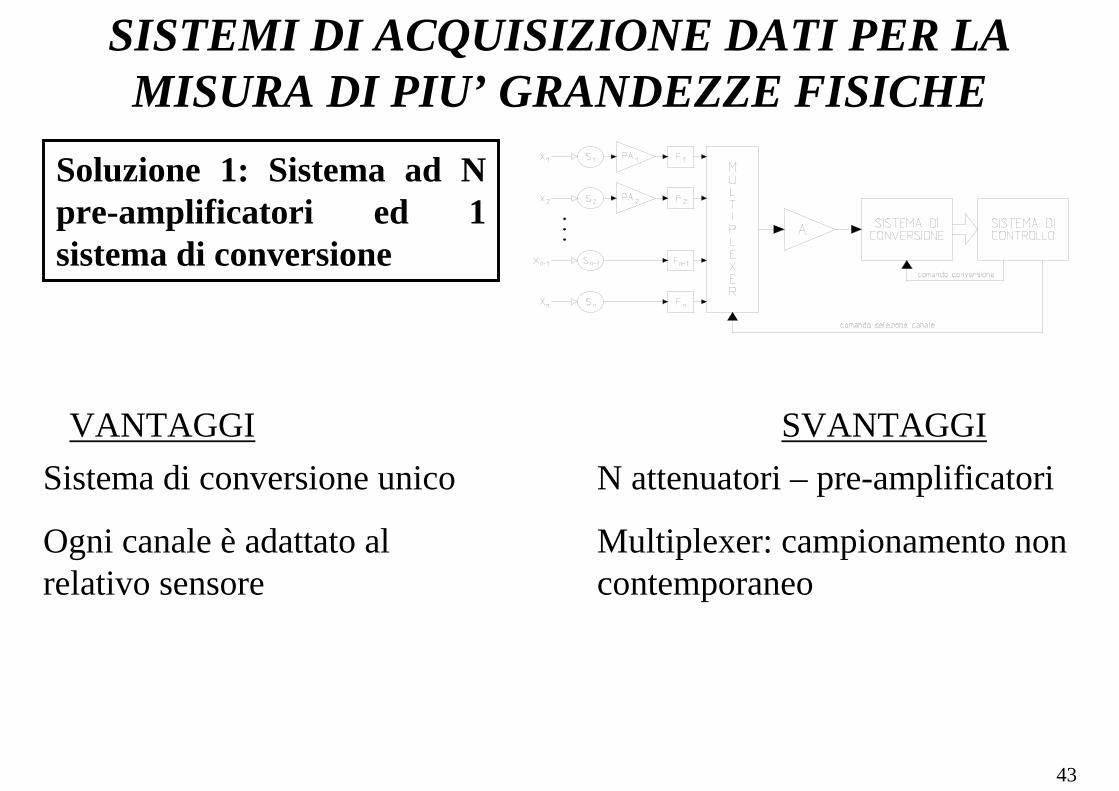
Soluzione 1: Sistema ad N pre-amplificatori ed 1 sistema di conversione
VANTAGGI SVANTAGGISistema di conversione unico
Ogni canale è adattato al relativo sensore
N attenuatori – pre-amplificatori
Multiplexer: campionamento non contemporaneo
SISTEMI DI ACQUISIZIONE DATI PER LA MISURA DI PIU’ GRANDEZZE FISICHE
44
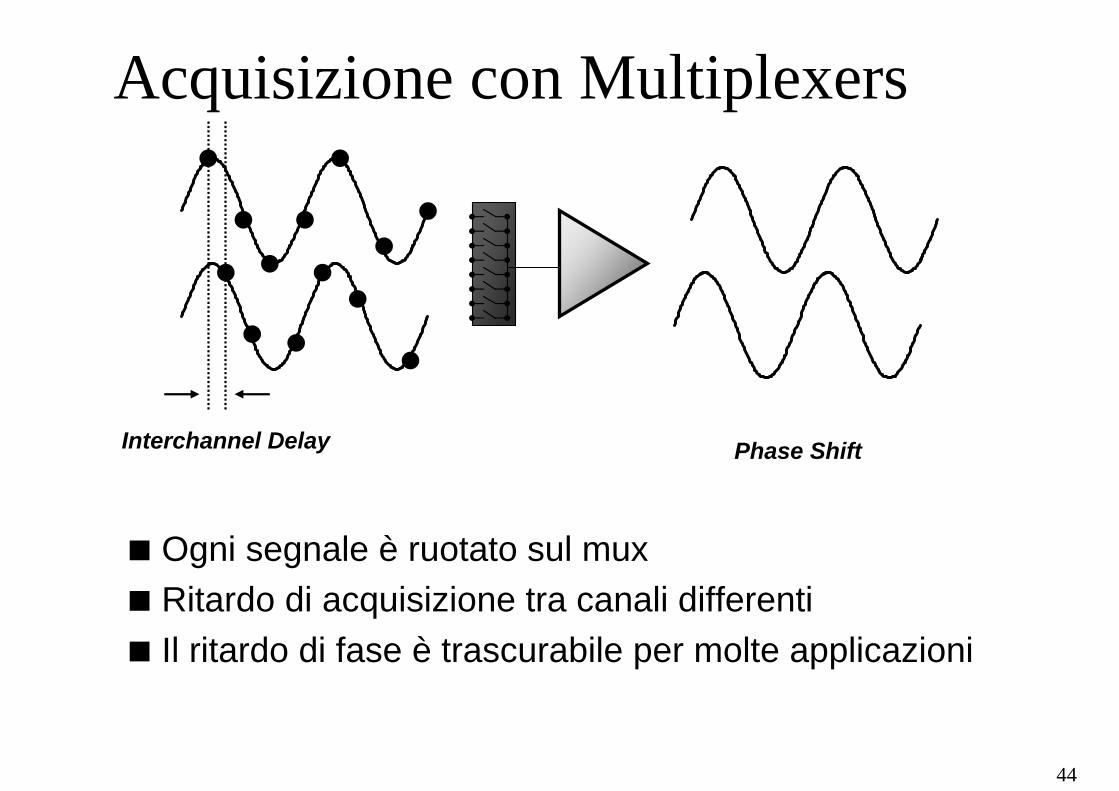
Acquisizione con Multiplexers
Interchannel Delay Phase Shift
Ogni segnale è ruotato sul muxRitardo di acquisizione tra canali differentiIl ritardo di fase è trascurabile per molte applicazioni
45
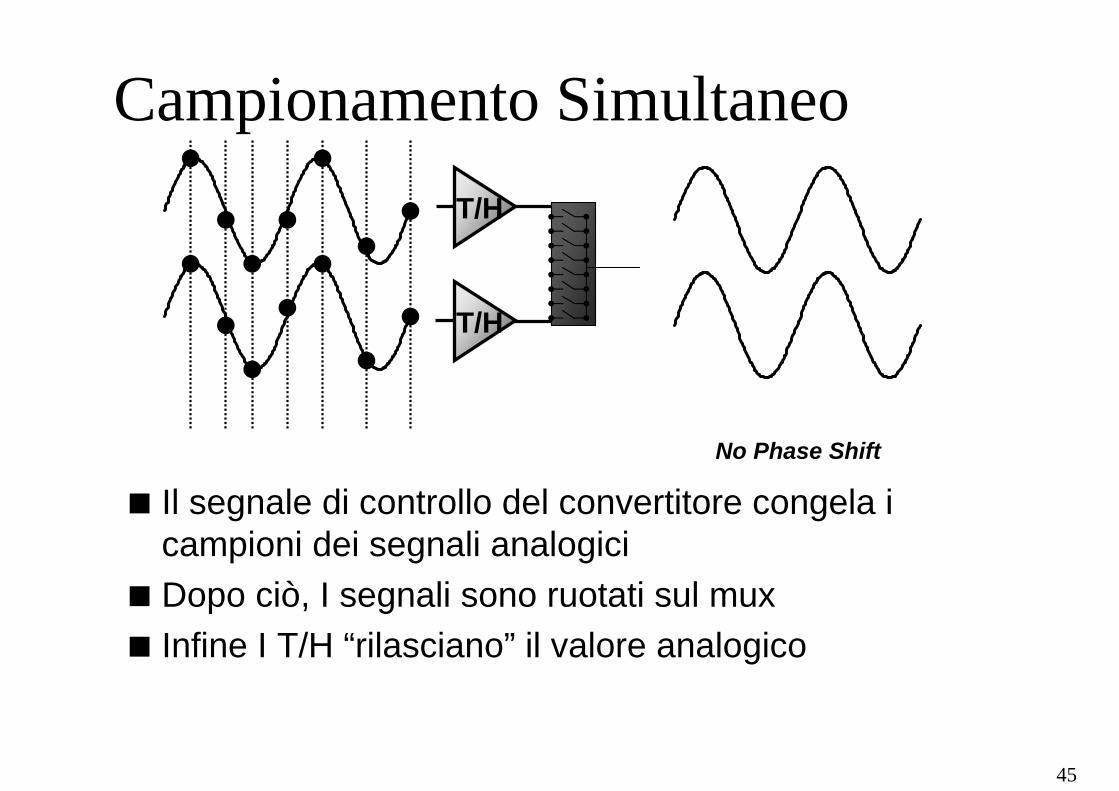
Campionamento Simultaneo
No Phase Shift
T/H
T/H
Il segnale di controllo del convertitore congela i campioni dei segnali analogiciDopo ciò, I segnali sono ruotati sul muxInfine I T/H “rilasciano” il valore analogico
46
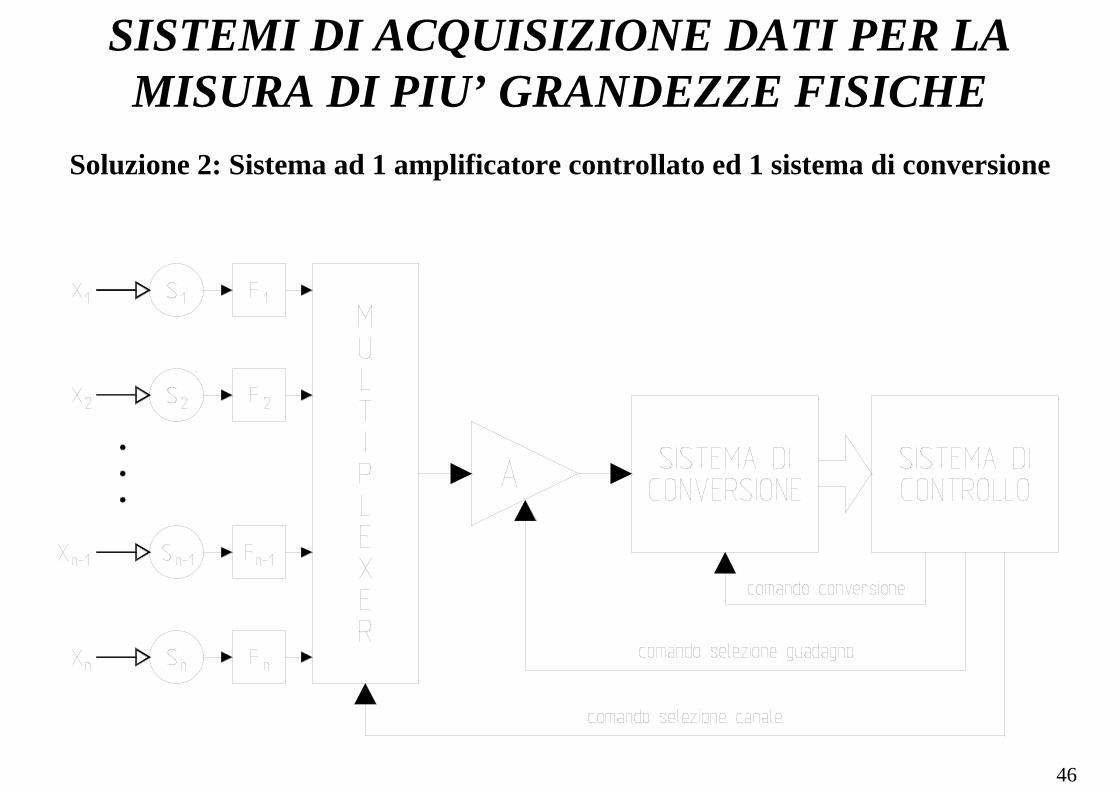
Soluzione 2: Sistema ad 1 amplificatore controllato ed 1 sistema di conversione
SISTEMI DI ACQUISIZIONE DATI PER LA MISURA DI PIU’ GRANDEZZE FISICHE
47
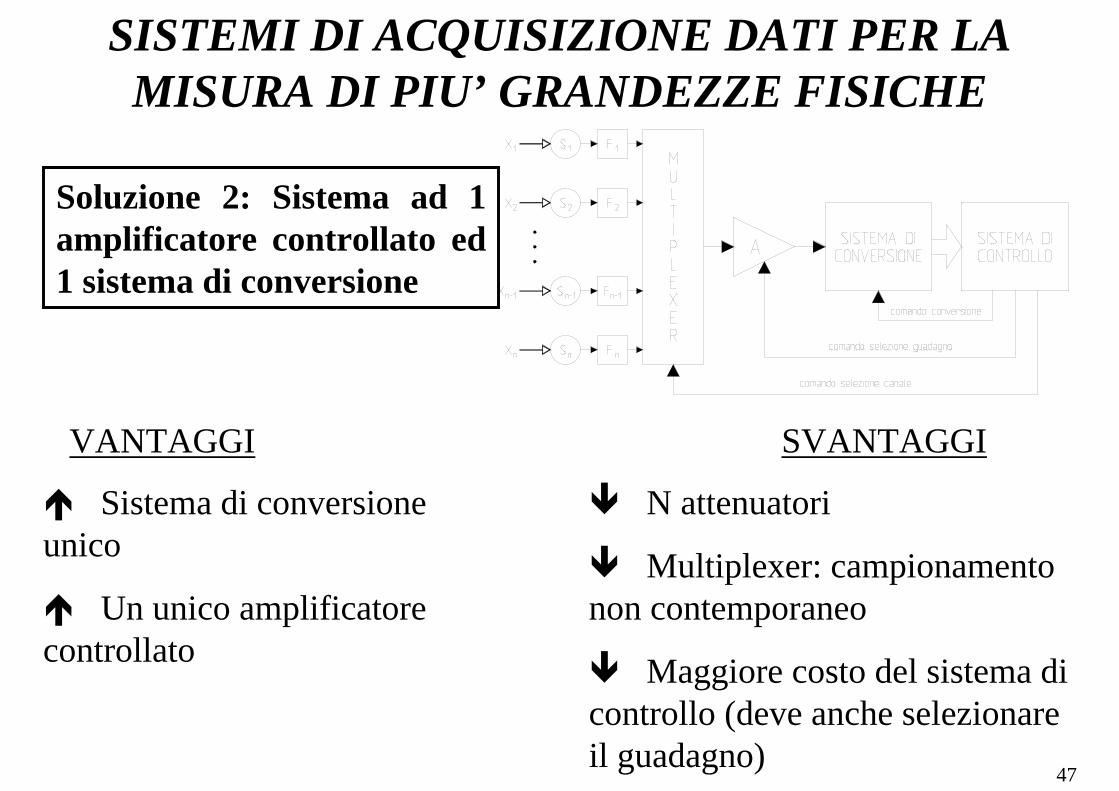
Soluzione 2: Sistema ad 1 amplificatore controllato ed 1 sistema di conversione
VANTAGGI SVANTAGGI
Sistema di conversione unico
Un unico amplificatore controllato
N attenuatori
Multiplexer: campionamento non contemporaneo
Maggiore costo del sistema di controllo (deve anche selezionare il guadagno)
SISTEMI DI ACQUISIZIONE DATI PER LA MISURA DI PIU’ GRANDEZZE FISICHE
48
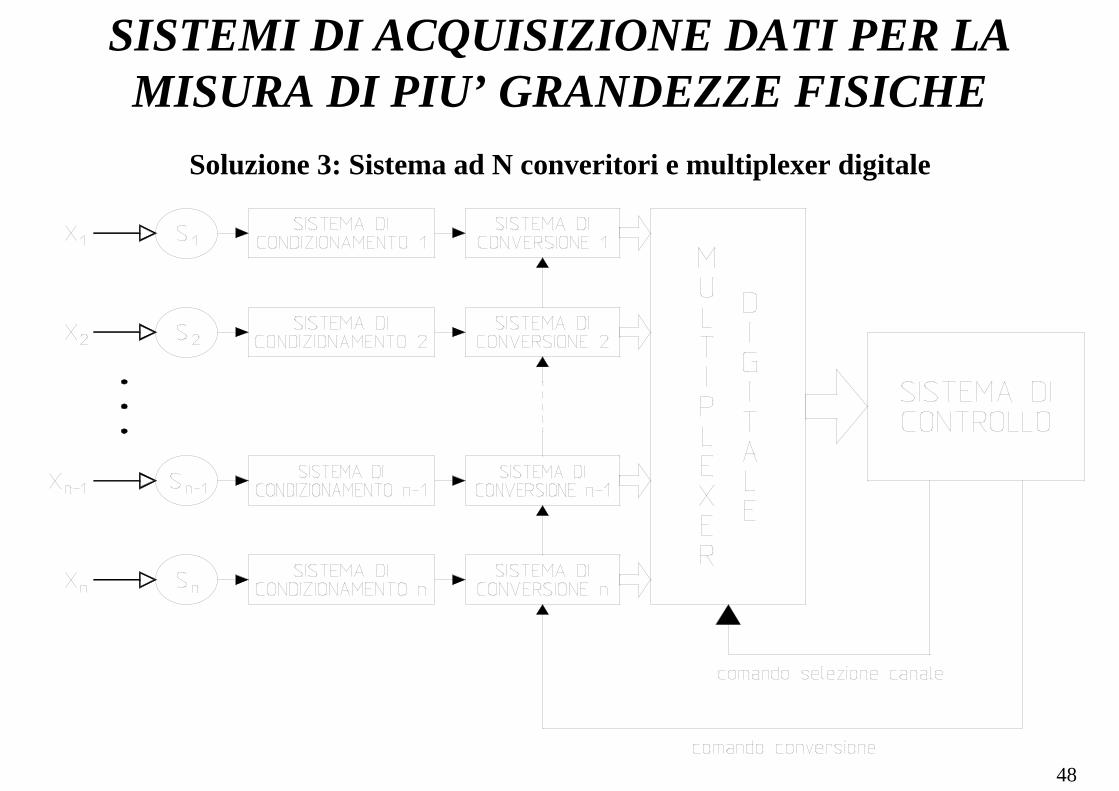
Soluzione 3: Sistema ad N converitori e multiplexer digitale
SISTEMI DI ACQUISIZIONE DATI PER LA MISURA DI PIU’ GRANDEZZE FISICHE
49
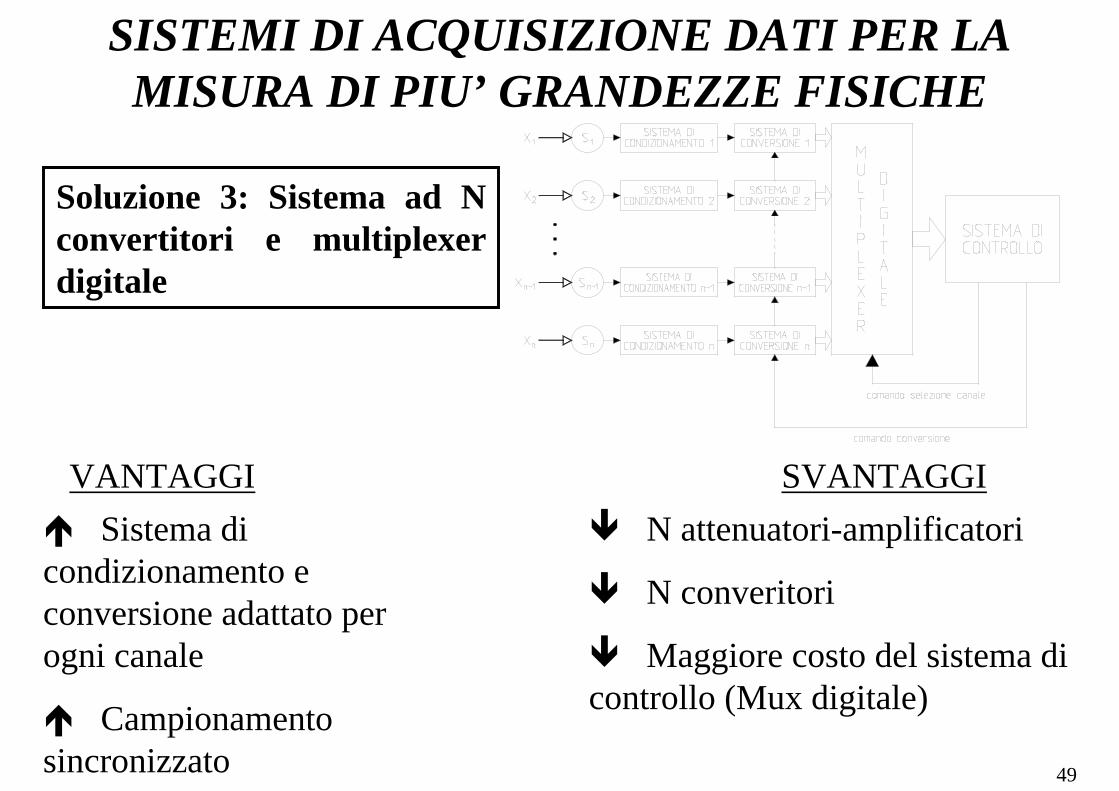
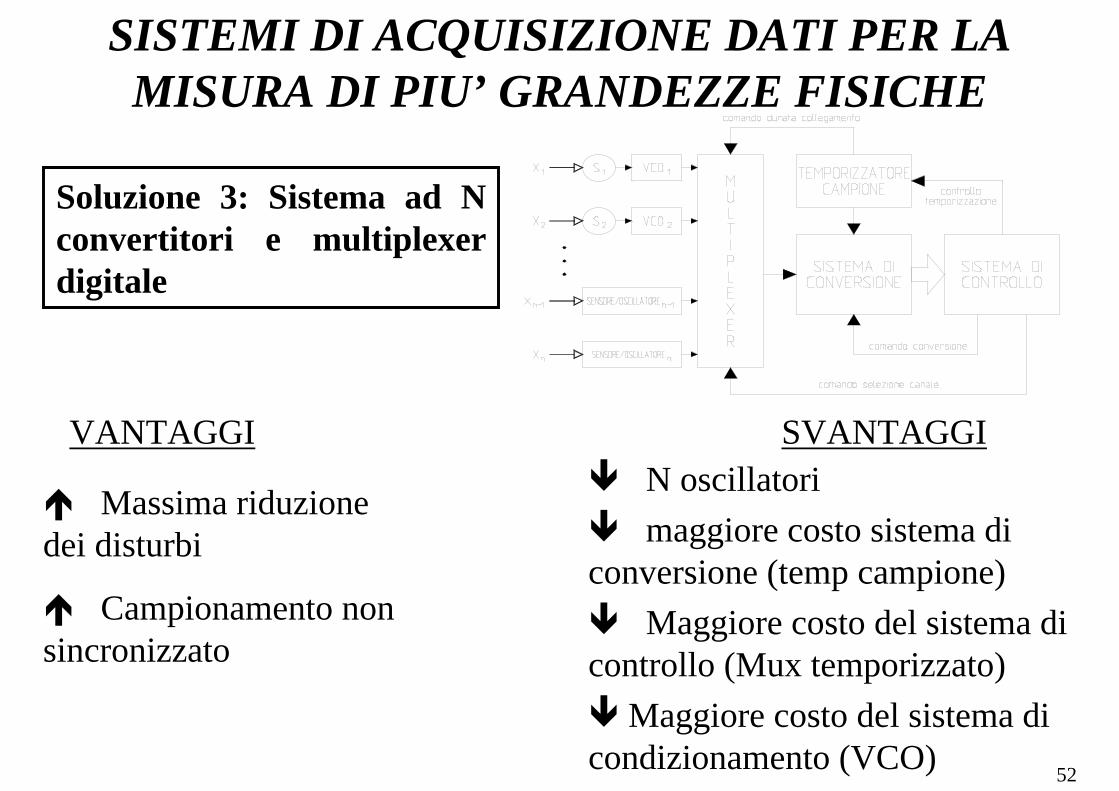
Soluzione 3: Sistema ad N convertitori e multiplexerdigitale
VANTAGGI SVANTAGGISistema di
condizionamento e conversione adattato per ogni canale
Campionamento sincronizzato
N attenuatori-amplificatori
N converitori
Maggiore costo del sistema di controllo (Mux digitale)
SISTEMI DI ACQUISIZIONE DATI PER LA MISURA DI PIU’ GRANDEZZE FISICHE
50
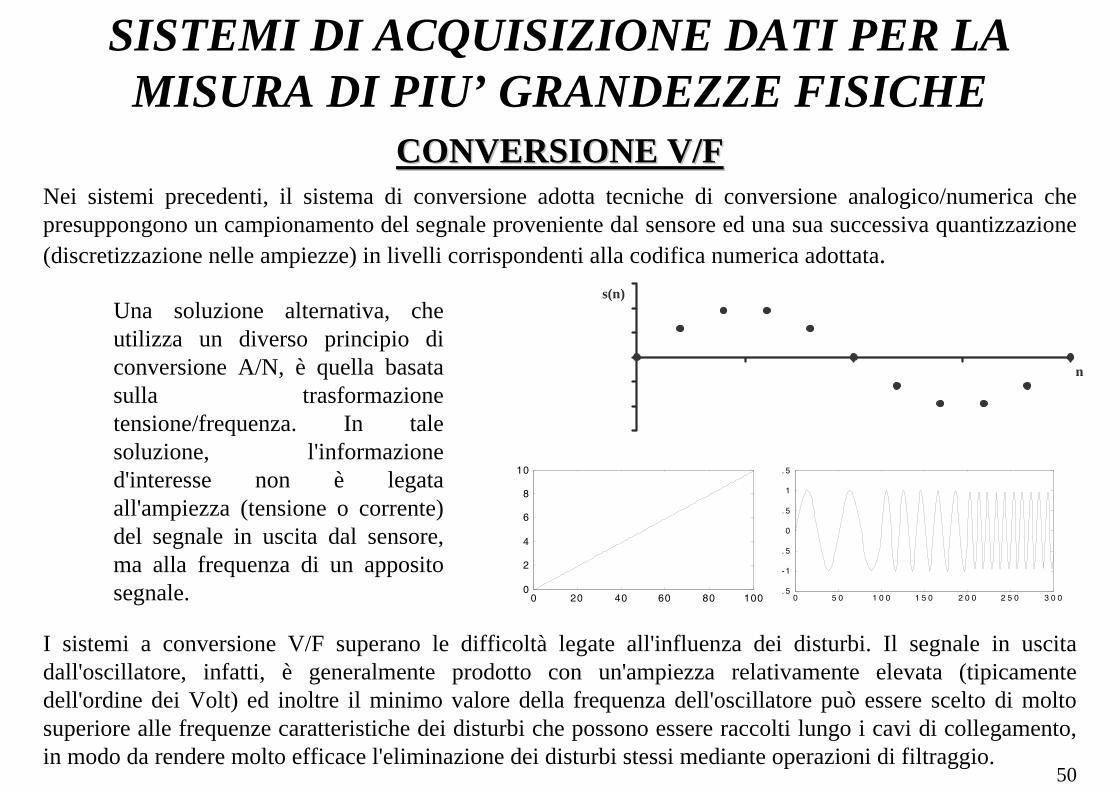
I sistemi a conversione V/F superano le difficoltà legate all'influenza dei disturbi. Il segnale in uscita dall'oscillatore, infatti, è generalmente prodotto con un'ampiezza relativamente elevata (tipicamente dell'ordine dei Volt) ed inoltre il minimo valore della frequenza dell'oscillatore può essere scelto di molto superiore alle frequenze caratteristiche dei disturbi che possono essere raccolti lungo i cavi di collegamento, in modo da rendere molto efficace l'eliminazione dei disturbi stessi mediante operazioni di filtraggio.
Nei sistemi precedenti, il sistema di conversione adotta tecniche di conversione analogico/numerica che presuppongono un campionamento del segnale proveniente dal sensore ed una sua successiva quantizzazione (discretizzazione nelle ampiezze) in livelli corrispondenti alla codifica numerica adottata.
n
s(n)Una soluzione alternativa, che utilizza un diverso principio di conversione A/N, è quella basata sulla trasformazione tensione/frequenza. In tale soluzione, l'informazione d'interesse non è legata all'ampiezza (tensione o corrente) del segnale in uscita dal sensore, ma alla frequenza di un apposito segnale. 0 5 0 1 0 0 1 5 0 2 0 0 2 5 0 3 0 0
-1 . 5
-1
-0 . 5
0
0 . 5
1
1 . 5
0 20 40 60 80 1000
2
4
6
8
10
CONVERSIONE V/FCONVERSIONE V/F
SISTEMI DI ACQUISIZIONE DATI PER LA MISURA DI PIU’ GRANDEZZE FISICHE

51
Soluzione 4: Sistema con convertitori V/F
SISTEMI DI ACQUISIZIONE DATI PER LA MISURA DI PIU’ GRANDEZZE FISICHE
52
Soluzione 3: Sistema ad N convertitori e multiplexerdigitale
VANTAGGI SVANTAGGI
Massima riduzione dei disturbi
Campionamento non sincronizzato
N oscillatorimaggiore costo sistema di
conversione (temp campione)Maggiore costo del sistema di
controllo (Mux temporizzato)Maggiore costo del sistema di
condizionamento (VCO)
SISTEMI DI ACQUISIZIONE DATI PER LA MISURA DI PIU’ GRANDEZZE FISICHE