L’equazione delle onde. Derivazione - mat.unimi.it · elastica; si tratta dell’equazione delle...
19
L’equazione delle onde. Derivazione Corso di Fisica Matematica 2, a.a. 2013-2014 Dipartimento di Matematica, Universit`a di Milano 27/10/2013 In questa dispensa stabiliamo l’equazione che governa il moto di una corda elastica; si tratta dell’equazione delle onde, che in realt`a governa una grande variet` a di fenomeni in cui si hanno piccole deformazioni di un mezzo continuo. Data la sua importanza, scegliamo di discutere la derivazione dell’equazione seguendo vari metodi (che naturalmente portano a stabilire la stessa equazione). L’analisi dell’equazione, ed i metodi per determinare le su esoluzioni, saranno invece discusse nelle dispense successive. 1 Derivazione “continua” dell’equazione Vogliamo determinare l’equazione che governa le vibrazioni trasversali (di pic- cola ampiezza) di una corda omogenea vibrante; supponiamo per semplicit`ache il moto si svolga interamente in un piano ortogonale all’asse della corda imper- turbata 1 . Sceglieremo un sistema di coordinate in cui la corda imperturbata ` e posta lungo l’asse x, ed indicheremo con t la coordinata temporale. Denotiamo con u(x, t) lo spostamento, rispetto alla posizione di riferimento della corda, del segmento che si trova in corrispondenza del punto x al tempo t. Consideriamo ora l’elemento corrispondente all’intervallo tra x − = x − δ/2 e x + = x + δ/2. Facendo riferimento alla figura 1, le forze che agiscono su questo elemento in direzione orizzontale F x e verticale F y sono, in assenza di forze esterne, F x = T + cos(θ + ) − T − cos(θ − ) , (1) F y = T + sin(θ + ) − T − sin(θ − ); (2) abbiamo qui indicato con T ± la tensione applicata nei punti x ± . L’equilibrio delle forze orizzontali fornisce immediatamente T − = T + cos(θ + ) cos(θ − ) ; (3) 1 Sottolineamo che “imperturbata” si riferisce alla configurazione; anche in questa configurazione imperturbata (di riferimento), la corda sar`a soggetta a tensione. 1
Transcript of L’equazione delle onde. Derivazione - mat.unimi.it · elastica; si tratta dell’equazione delle...

L’equazione delle onde. Derivazione
Corso di Fisica Matematica 2, a.a. 2013-2014Dipartimento di Matematica, Universita di Milano
27/10/2013
In questa dispensa stabiliamo l’equazione che governa il moto di una cordaelastica; si tratta dell’equazione delle onde, che in realta governa una grandevarieta di fenomeni in cui si hanno piccole deformazioni di un mezzo continuo.
Data la sua importanza, scegliamo di discutere la derivazione dell’equazioneseguendo vari metodi (che naturalmente portano a stabilire la stessa equazione).L’analisi dell’equazione, ed i metodi per determinare le su esoluzioni, sarannoinvece discusse nelle dispense successive.
1 Derivazione “continua” dell’equazione
Vogliamo determinare l’equazione che governa le vibrazioni trasversali (di pic-cola ampiezza) di una corda omogenea vibrante; supponiamo per semplicita cheil moto si svolga interamente in un piano ortogonale all’asse della corda imper-turbata1. Sceglieremo un sistema di coordinate in cui la corda imperturbata eposta lungo l’asse x, ed indicheremo con t la coordinata temporale.
Denotiamo con u(x, t) lo spostamento, rispetto alla posizione di riferimentodella corda, del segmento che si trova in corrispondenza del punto x al tempo t.
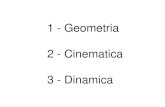
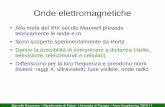
Consideriamo ora l’elemento corrispondente all’intervallo tra x− = x − δ/2e x+ = x + δ/2. Facendo riferimento alla figura 1, le forze che agiscono suquesto elemento in direzione orizzontale Fx e verticale Fy sono, in assenza diforze esterne,
Fx = T+ cos(θ+) − T− cos(θ−) , (1)
Fy = T+ sin(θ+) − T− sin(θ−) ; (2)
abbiamo qui indicato con T± la tensione applicata nei punti x±.L’equilibrio delle forze orizzontali fornisce immediatamente
T− = T+cos(θ+)
cos(θ−); (3)
1Sottolineamo che “imperturbata” si riferisce alla configurazione; anche in questaconfigurazione imperturbata (di riferimento), la corda sara soggetta a tensione.
1

Figura 1: Derivazione “continua” dell’equazione delle onde: forze agenti su unsegmento della corda elastica
inserendo questa nell’equazione relativa alle forze verticali, otteniamo
Fy = T+ sin(θ+) − T+cos(θ+)
cos(θ−)sin(θ−) = T+ cos(θ+) [tan(θ+) − tan(θ−)] .
(4)Notiamo ora che, se consideriamo la configurazione descritta da u(x, t), le
tangenti degli angoli che appaiono nell’equazione precedente sono semplicemente
tan(θ±) = ux(x±, t) ;
inoltre, se consideriamo delle configurazioni che variano lentamente lungo lacorda, gli angoli sono sempre piccoli, e possiamo considerare2
cos(θ) ≃ 1− θ2 ≃ 1 .
Si noti che, per coerenza con questa, la (3) implica allora T+ = T− e dunque Trisulta costante lungo tutta la corda.
Allo stesso modo, se stiamo considerando delle piccole perturbazioni dellaconfigurazione della corda, possiamo assimilare la tensione T+ = T− = T aquella (T0) che si ha nella configurazione di riferimento. In questo modo, escrivendo anche T = T0 per semplicita, otteniamo
Fy = T [ux(x+, t)− ux(x−, t)] . (5)
Sviluppiamo ora ux(x±, t) in serie di Taylor intorno al punto x = (x++x−)/2mediano nel segmento [x−, x+]: otteniamo
ux(x±, t) = ux(x± δ/2, t) = ux(x, t) ± uxx(x, t) δ/2 + O(δ2) . (6)
2Naturalmente nella stessa approssimazione di θ piccolo avremmo anche tan(θ) ≃ sin(θ) ≃θ, ma risulta piu comodo, come vedremo tra un attimo, scrivere le equazioni in termini dellatangente.
2

Inserendo questa nella (5) otteniamo
Fy = T δ uxx(x, t) . (7)
La forza applicata al segmento di corda sara uguale, per l’equazione di New-ton, alla sua massa moltiplicata per la sua accelerazione. La massa del segmentoe pari a m = ρ δ, dove ρ > 0 e la sua densita lineare (cioe la massa per unita dilunghezza).
Quanto all’accelerazione, notiamo che la posizione verticale (del punto cen-trale del segmento, che rappresenta la posizione del segmento) e descritta dau(x, t), quindi la velocita e data da ut(x, t) e l’accelerazione da utt(x, t). In con-clusione, inserendo queste nella (7), dividendo per ρ > 0, e prendendo il limiteδ → 0+ per eliminare i termini O(δ2), la dinamica e descritta dall’equazione
utt(x, t) =
(T
ρ
)uxx(x, t) . (8)
Naturalmente, T e ρ sono costanti (positive), e possiamo scrivere α2 = T/ρ;l’equazione diviene quindi
utt − α2 uxx = 0 ; (9)
questa e detta equazione delle onde.L’operatore lineare che appare al membro di sinistra di questa,
L = ∂2t − α2 ∂2
x , (10)
e anche detto operatore di D’Alambert (o Dalambertiano, in analogia al Lapla-ciano).
Notiamo infine che cambiando la scala dello spazio e/o del tempo, possiamosempre ricondurci al caso α = 1. D’altra parte non e possibile cambiare il segnodei due termini in L, ne con cambiamenti di scala ne con cambiamenti di versodelle variabili indipendenti x e t.
L’equazione lineare (9), qui ricavata per le vibrazioni di una corda elastica,descrive una grande varieta di fenomeni fisici; naturalmente, sempre nel regimedi piccole variazioni rispetto ad uno stato di equilibrio o di riferimento.
Per il momento considereremo il caso in cui x ∈ R, cioe la corda infinita, rin-viando la considerazione dei fenomeni indotti da condizioni al contorno quandosi ha una corda finita (come ad esempio negli strumenti musicali a corda) allaseconda parte di questa dispensa.3
2 Derivazione “discreta”
E’ istruttivo considerare anche diverse derivazioni dell’equazione. Vogliamo quiconsiderare una derivazione come limite continuo di un problema discreto.
3L’equazione delle onde descrive anche le oscillazioni di una membrana elastica bidimen-sionale (ad esempio, per restare in ambito musicale, la pelle di un tamburo), di un solidotridimensionale, e via generalizzando. Noi ci limiteremo a considerare il caso di mezzi vibrantidi dimensione uno.
3

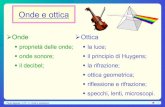
Consideriamo una versione discreta della corda elastica, cioe una catenaomogenea costituita da masse puntuali (massa m) poste, nella configurazionedi riferimento lungo l’asse x, a distanza δ una dall’altra, e connesse tra loro damolle di costante elastica K1 (che collegano masse prime vicine lungo la catena).Le masse possono muoversi solo in direzione ortogonale all’asse della catena (inconfigurazione di riferimento), ad esempio essendo vincolate a muoversi su deibinari4. Indicheremo con ℓk la lunghezza della molla che connette le masse k ek + 1, e supporremo che la lunghezza di riposo della molla sia pari a zero.
Si noti che ora per avere un limite sensato la massa e la costante elasticadevono dipendere da δ; in particolare, la massa sara tale da corrispondere al-la massa del segmento di corda rappresentato in questo modello dalla massapuntuale: pertanto
m = m(δ) = ρ δ .
Indicheremo con yi la posizione (cioe lo spostamento verticale) della massa k-ma, che nella configurazione di riferimento occupa la posizione in x = ξk = kδ.Vedremo in seguito, dopo aver ottenuto le equazioni del moto, come K1 dipendeda δ.
La massa k-ma e soggetta alle forze originate dalle molle che la connettonoalle masse prime vicine; il modulo della forza esercitata dalla massa in ξk+1
(rispettivamente, in ξk−1) e |F+| = K1ℓ+ (rispettivamente, |F−| = K1ℓ−), doveℓ± e la distanza tra la massa in x = ξk e quella in x = ξk±1; d’altra parte, a noiinteressa la componente verticale di questa forza, che e pari a Fy = |F | sin θ±,dove θ± e l’angolo formato dalla retta che congiunge la massa in ξk e quella inξk±1 con l’orizzontale. Ma allora
(F±)y = K1 ℓ± sin(θ±) ; (11)
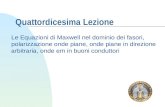
notiamo che (si veda la figura 2)
ℓ± sin θ± = yk±1 − yk .
Finalmente, la forza totale (o meglio la sua componente verticale5) che agiscesulla massa k e
Fk = K1 [(yk+1 − yk) + (yk−1 − yk)] = K1 (yk+1 − 2yk + yk−1) . (12)
Il moto e naturalmente descritto dall’equazione di Newton F = ma, ossia
yk =K1
m(yk+1 − 2yk + yk−1) . (13)
Va sottolineato che nella (13), sia la costante elastica K1 che la massa mdipendono dal parametro δ.
4La ragione per introdurre questo vincolo e che nel limite continuo vogliamo descrivere leconfigurazioni della corda, e non dove si trovano i suoi atomi; quindi stiamo trascurando lemodificazioni “longitudinali” della posizione degli atomi della corda.
5Si ricordi che le masse possono muoversi solo in direzione verticale; quella che abbiamocalcolato e la componente verticale della forza (quella orizzontale sara ad esempio annullatadalle forze di reazione vincolari nel modello “con binari”).
4

Figura 2: Derivazione “discreta” dell’equazione delle onde: forze agenti su unsegmento della corda elastica, rappresentato da una massa puntuale
In particolare, m = m(δ) = ρδ; dobbiamo ora discutere la dipendenza dellacostante elastica K1 dal parametro δ.
Possiamo ragionare come segue: immaginiamo dapprima una configurazioneper δ = δ0 con la massa in x = ξk nella posizione yk e quelle in ξk±1 = ξk ± δ0in yk±1 = yk ± µ±δ. Passiamo ora a δ = δ0/n, e le masse in ξk + (m/n)δ0 (con1 ≤ m ≤ n) ed in ξk + 2δ0/n, etc., tutte allineate su una retta di pendenza µ±.
L’accelerazione impressa alla massa in x deve essere la stessa nelle due situa-zioni; d’altra parte la posizione della massa prima vicina (a destra) della massain esame sara ben diversa, differendo per un fattore 1/n: infatti, con la nostraipotesi di allineamento, yk±1 = yk ± µ±δ. Abbiamo dunque dalla (13)
yk =K1(δ)
m(δ)(µ+ − µ−) δ =
K1(δ)
ρδ(µ+ − µ−) δ . (14)
Se ora scriviamo µ± = µ0 ± δµ0′, segue subito che, perche l’accelerazione sia
indipendente da δ, deve essere
K1(δ) =K
δ, (15)
dove K e una costante indipendente da δ. Con questa, la (13) si riscrive come
yk =K
ρδ2(yk+1 − 2yk + yk−1) =
α2
δ2(yk+1 − 2yk + yk−1) . (16)
(Abbiamo scritto α2 = K/ρ per sottolineare che si tratta di una costantepositiva.)
5

Vogliamo ora considerare una funzione (il piu possibile liscia) che interpolila configurazione descritta da {yk, k ∈ Z}, cioe una funzione u(x, t) che soddisfi
u(ξk, t) = yk(t) .
Cosı facendo, l’equazione del moto (16) diviene (scriviamo ξk = x e quindiξk±1 = x± δ)
utt(x, t) = (α2/δ2) [u(x+ δ, t) − 2u(x, t) + u(x− δ, t)] . (17)
Per δ piccolo, sviluppiamo in serie di Taylor:
u(x± δ, t) = u(x, t) ± δ ux(x, t) + (δ2/2)uxx(x, t) + O(δ3) ;
inserendo questa nella (17), e poi passando al limite δ → 0, abbiamo infine
utt(x, t) = α2 uxx(x, t) , (18)
cioe nuovamente l’equazione delle onde.
Osservazione. Si noti che nella sezione 1 avevamo definito α2 = T/ρ, mentreora abbiamo definito α2 = K/ρ. Questo determina la costante positiva (altri-menti arbitraria) K che appare nel nostro modello con masse puntuali in terminidella tensione (che descrive le proprieta fisiche) della corda. ⊙
Osservazione. La scrittura µ± = µ0 ± δµ0′ per passare dalla (14) alla (15) ha
forse lasciato perplesso qualche lettore; possiamo procedere anche in un altromodo, del resto piu rigoroso. Direttamente a partire dalla (13), inseriamo unafunzione u(x, t) che interpoli, nel modo piu liscio possibile, la sequenza delle(ξk, yk); la corrispondenza sara data da u(ξk, t) ≃ yk(t). Allora la (13) fornisce(scrivendo x per lo ξk di riferimento)
utt(x, t) =K1(δ)
ρ δ[u(x+ δ, t)− 2u(x, t) + u(x− δ, t)] . (19)
Sviluppiamo ora il termine in parentesi quadre di questa equazione in serie diTaylor; e necessario andare al secondo ordine in δ, in quanto al primo terminesi ha una cancellazione completa. Con
u(x± δ, t) = u(x, t) ± δ ux(x, t) + (δ2/2)uxx(x, t) + o(δ2),
e trascurando i termini di ordine superiore in δ, l’equazione (19) diviene
utt(x, t) =K1(δ)
ρ δδ2 uxx(x, t) . (20)
Ne segue immediatamente che, per avere un limite finito per δ → 0, deve essere(a meno di termini di ordine superiore) K1(δ) = (K/δ), come affermato. ⊙
6

3 Derivazione “variazionale”
Nelle sezioni precedenti abbiamo ottenuto l’equazione che descrive il movimentodella corda (o piu precisamente la dimamica delle sue configurazioni) lavorandodirettamente sulle forse, cioe a livello dell’equazione di Newton. E’ possibileanche lavorare sulle energie, cioe descrivere (sia nell’approccio continuo che inquello discreto) le energie cinetica e potenziale di una versione discretizzata del-la corda, ottenere da questa una Lagrangiana, e passare al limite per ottenerele equazioni del moto come equazioni di Eulero-Lagrange associate alla Lagran-giana. E’ quello che faremo in questa sezione. Lo studente che non fosse a suoagio con la descrizione in termini di Lagrangiane e piu in generale con i principivariazionali puo consultare l’Appendice a questa dispensa (o i testi indicati inBibliografia).
3.1 Approccio “discreto”
La discussione della precedente sezione 2 permette anche di scrivere una Lagran-giana “continua” (come limite di una Lagrangiana “discreta” corrispondente alladescrizione in termini di masse puntuali e molle) per la nostra corda elastica.
L’energia cinetica del sistema e evidentemente fornita dalla somma delleenergie cinetiche delle diverse masse,
T =∑k
1
2m y2k , (21)
mentre l’energia potenziale e data dalla somma delle energie delle singole molle.Quest’ultima e (si veda ancora la figura 2)
U =∑k
1
2K1 ℓ2k =
∑k
1
2K1 [δ2 + (yk+1 − yk)
2] . (22)
Qui ℓk e la lunghezza assunta dalla molla che collega la massa k e la massa k+1;per il teorema di Pitagora, questa soddisfa
ℓk =√
δ2 + (yk+1 − yk)2 . (23)
Notiamo che si puo scrivere anche
U = U0 +∑k
1
2K1 (yk+1 − yk)
2 ,
avendo separato il termine costante
U0 =∑k
1
2K1 δ2 ;
7

come ben noto possiamo sempre aggiungere o sottrarre un termine costante allaLagrangiana ottenendo una Lagrangiana equivalente, quindi questo puo essereeliminato.6
La Lagrangiana sara quindi
L = T − U =∑k
[m
2y2k − K1
2(yk+1 − yk)
2
]. (24)
Naturalmente, le corrispondenti equazioni di Eulero-Lagrange
∂L
∂yk− d
dt
∂L
∂yk= 0 (25)
non sono altro che le (13) ottenute in precedenza.Consideriamo ora come prima una funzione u(x, t) che interpoli la configu-
razione delle masse, cioe tale che u(ξk, t) = yk(t).Abbiamo dunque
u(ξk+1, t) ≃ u(ξk, t) + ux(ξk, t) δ + O(δ2) .
Inoltre, yk = ut(ξk, t). Inserendo questa nella (24) otteniamo
L = T − U =∑k
[m
2u2t (ξk, t) − K1
2[δ ux(ξk, t)]
2
]. (26)
Ricordando ora la dipendenza da δ di m e K1, otteniamo7
L = ρ δ∑k
[1
2u2t (ξk, t) − K
2ρ[ux(ξk, t)]
2
]. (27)
Siamo infine pronti per il passaggio al limite δ → 0; ora la somma (con il fattoreδ) si trasforma in un integrale (in dx),
L → L = ρ
∫ [1
2u2t − α2
2u2x
]dx . (28)
Abbiamo scritto, come in precedenza, α2 = K/ρ.Per passare dalla Lagrangiana alle equazioni che descrivono la dinamica,
non dobbiamo fare altro che scrivere la relativa equazione di Eulero-Lagrange;in questo caso, cioe per una Lagrangiana continua, essa si scrive
∂L∂u
− ∂
∂x
∂L∂ux
− ∂
∂t
∂L∂ut
= 0 . (29)
E’ immediato verificare che, con L fornita dalla (28), otteniamo ancora unavolta l’equazione delle onde
utt − α2 uxx = 0 .
6Allo studente che fosse preoccupato perche la somma e, per δ → 0, su un numero infinitodi termini anche per una corda di lunghezza finita, facciamo osservare quanto segue: sia λ lalunghezza della corda, e si scelga δ = λ/n; allora la somma e su n = λ/δ termini, ed abbiamoU0 = (K1/2)nδ2 = (K1/2)λδ. Ricordando ora che K1 = K/δ, risulta U0 = (K/2)λ.
7Anche moltiplicando la Lagrangiana per un fattore (positivo) ρδ la dinamica non cambia;ma non useremo qui questa proprieta.
8

3.2 Approccio “continuo”
Vogliamo ora ottenere una Lagrangiana seguendo l’approccio della sezione 1,cioe considerando la corda come il limite (per δ → 0) di un sistema di segmenti(di lunghezza δ) interagenti tramite le forze di tensione.
In questo caso (si faccia riferimento alla figura 1) l’energia cinetica di unsegmento e’ evidentemente8
K =1
2m (ut)
2 ,
com m = m(δ) = ρδ la massa del segmento.Quanto all’energia potenziale, essa deriva dalle interazioni con i segmenti
vicini; queste sono di tipo elastico, ed abbiamo calcolato in precedenza, si vedala (7), che la forza risultante e
F = (Tδ) uxx .
Per una forza risultante da un potenziale, abbiamo
F = − d
dxV ,
e quindi risulta
V =1
2(Tδ) (ux)
2 δ2 .
Abbiamo cosı mostrato che (per ogni segmento)
L = K − V =
[1
2
(ρ u2
t − T u2x
)]δ .
Dobbiamo ora sommare su tutti i segmenti; inoltre, passiamo al limite per δ → 0.In questo limite la somma sui segmenti diventa un integrale su x, e δ ≃ dx.Otteniamo quindi, in conclusione,
L =
∫1
2
(ρ u2
t − T u2x
)dx .
L’equazione di Eulero-Lagrange (29) corrispondente a questa Lagrangiana eancora una volta l’equazione delle onde, come e immediato verificare.
8Confidiamo che non si faccia confusione tra energia cinetica e costante elastica, ambedueindicate con il simbolo K.
9

Appendice. Il principio di minima azione e leequazioni di Eulero-Lagrange
Abbiamo visto come l’equazione delle onde si possa ricavare da una considera-zione delle energie in gioco attraverso la Lagrangiana ed il principio variazionale.In questa appendice ricordiamo come si passa da una Lagrangiana alle equazionidi Eulero-Lagrange associate.
A.1. Dimensione finita (Meccanica, ODEs)
Consideriamo il caso in cui la Lagrangiana dipende da un numero finito dicoordinate qi e dalle loro derivate qi.
Data una Lagrangiana L(q, q; t), definiamo la azione S come
S =
∫L(q, q; t) dt .
Possiamo pensare di fissare gli estremi di integrazione; in questo caso la S eun funzionale della funzione (vettoriale) q(t),
S[q(t); t0, t1] =
∫ t1
t0
L[q(t), q(t); t) dt .
Il principio di minima azione afferma che la vera traiettoria q(t) tra i puntiq0 = q(t0) e q1 = q(t1) del sistema e un estremale per S[q(t)]. In altre parole,q e tale che la variazione dell’integrale di azione al variare (vincolato) dellatraiettoria mantenendo fissi i punti q0 e q1 e nulla.
Indichiamo con δq la variazione della traiettoria: in altre parole, se q(t) e latraiettoria imperturbata, quella variata sara q(t) = q(t) + εδq(t). La richiestadi non variare i punti iniziale e finale significa
δq(t0) = δq(t1) = 0 . (A.1)
Quanto alle derivate, avremo dq/dt = q(t) + ε(dδq/dt) := q + δq; sottolineamoche questa definisce implicitamente la notazione
(δq)(t) =d
dtq(t) . (A.2)
Dato che gli estremi dell’intervallo di integrazione (t0, t1) non cambiano, lavariazione di S corrispondera alla variazione dell’integrando; al primo ordine inε abbiamo:
δS =
∫ t1
t0
[∂L
∂qiδqi +
∂L
∂qiδqi
]dt ;
ricordando la (A.2) questa si riscrive come
δS =
∫ t1
t0
[∂L
∂qiδqi +
∂L
∂qi
(d
dtδqi
)]dt .
10

Effettuando una integrazione per parti, abbiamo
δS =
∫ t1
t0
[∂L
∂qiδqi −
(d
dt
∂L
∂qi
)δqi
]dt +
∫ t1
t0
(d
dt
∂L
∂qiδqi
)dt
=
∫ t1
t0
[∂L
∂qiδqi −
(d
dt
∂L
∂qi
)δqi
]dt +
[∂L
∂qiδqi
]t1t0
Ricordiamo ora la (A.1): questa significa che il termine di bordo si annulla, erestiamo (raccogliendo il fattore comune δq) con
δS =
∫ t1
t0
[∂L
∂qi−
(d
dt
∂L
∂qi
)](δqi) dt .
Perche δS si annulli per qualsiasi variazione δq, deve evidentemente annullarsiil termine in parentesi quadre. In altre parole, devono valere le equazioni
∂L
∂qi− d
dt
∂L
∂qi= 0 (A.3)
che sono dette equazioni di Eulero-Lagrange (per la Lagrangiana L).
Esercizio 1. Verificare che per una Lagrangiana L = K − U , dove K e l’energiacinetica, U l’energia potenziale, si ottengono le equazioni di Newton.
Esercizio 2. Verificare che per una Lagrangiana della forma L = K − U , doveK = (1/2)Aij q
iqj con A una matrice non-singolare e U = U(q), si ottengono leequazioni
qi = A−1ij (∂U/∂qj) .
Esercizio 3∗. Determinare qual e la piu generale forma della Lagrangiana perche lequazioni di Eulero-Lagrange abbiano la forma di Newton, ossia siano risolte rispettoalle derivate seconde,
qi = f i(q, q) .
Esercizio 4. Come si scrivono le equazioni di Eulero-Lagrange per una Lagrangia-na di secondo ordine, cioe che dipende anche dalle derivate seconde qi? E per unaLagrangiana di ordine n arbitrario (purche finito)?
A.2. Dimensione infinita (teoria dei campi, PDEs)
Consideriamo il caso in cui la Lagrangiana dipende non da funzioni di unasola variabile q(t), ma da funzioni di piu variabili, ad esempio ua(x, t) o piu ingenerale ua(x1, ..., xn).
9
Naturalmente, la Lagrangiana non dipendera solo da ua ma anche dalle suederivate (parziali) rispetto alle diverse variabili indipendenti. Per concretezza,considereremo qui il caso in cui u = u(x, t), e quindi L = L(u, ux, ut;x, t).
9Come visto per l’equazione delle onde, una tale funzione si puo vedere come il limite diuna sequenza infinita di funzioni (ad esempio su un reticolo) qi.
11

La azione S sara ora definita come
S =
∫L(u, ux, ut;x, t) dx dt .
Possiamo pensare di fissare il dominio B ⊂ R2 di integrazione; in questocaso la S e un funzionale delle funzioni ua(x, t),
S[u(x, t);B] =
∫B
L(u, ux, ut;x, t) dx , dt .
Il principio di minima azione afferma che la vera configurazione u(x, t) suldominio B del sistema e un estremale per S[q(t)]. In altre parole, u e tale che lavariazione dell’integrale di azione al variare (vincolato) del campo mantenendofissi i valori nei punti di ∂B e nulla.
Indichiamo con δua la variazione del campo ua: in altre parole, se ua(x, t) ela configurazione imperturbata, quella variata sara ua(x, t) = ua(t)+ εδua(x, t).La richiesta di non variare il valore del campo nei punti della frontiera di Bsignifica
[(δua)(x, t)]∂B = 0 . (A.4)
Quanto alle derivate, avremo ∂ua/∂t = uat + ε(∂δua/∂t) := ua
t + εδuat e allo
stesso modo ∂ua/∂x = uax + ε(∂δua/∂x) := ua
x + εδuax; sottolineamo che questa
definisce implicitamente la notazione
δuat =
∂
∂tδua(x, t) , δua
x =∂
∂xδua(x, t) . (A.5)
Dato che il dominio di integrazione B non cambia, la variazione di S corri-spondera alla variazione dell’integrando:
δS =
∫B
[∂L
∂uaδua +
∂L
∂uax
δuax +
∂L
∂uat
δuat
]dx dt ;
ricordando le (A.4) questa si riscrive come
δS =
∫B
[∂L
∂uaδua +
∂L
∂uax
(∂δua
∂x
)+
∂L
∂uat
(∂δua
∂t
)]dx dt .
Effettuando una integrazione per parti in x ed una in t, abbiamo
δS =
∫B
[∂L
∂uaδua −
(∂
∂t
∂L
∂uat
)δua −
(∂
∂x
∂L
∂uax
)]dx dt
+
∫ (∫∂
∂t
(∂L
∂uat
δua
)dt
)dx +
∫ (∫∂
∂x
(∂L
∂uax
δua
)dx
)dt
=
∫B
[∂L
∂uaδua −
(∂
∂t
∂L
∂uat
)δua −
(∂
∂x
∂L
∂uax
)]dx dt
+
∫∂Bx(t)
(∂L
∂uat
δua
)dx +
∫∂Bt(x)
(∂L
∂uax
δua
)dt .
12

Qui Bx(t) e l’intersezione di ∂B con la retta t = cost, ed allo stesso modo ∂Bx(t)e l’intersezione di ∂B con la retta x = cost. Dato che δua = 0 per qualsiasipunto di ∂B, i termini di bordo si cancellano, ed abbiamo infine
δS =
∫B
[∂L
∂ua−
(∂
∂t
∂L
∂uat
)−
(∂
∂x
∂L
∂uax
)]δua dx dt
Nuovamente, affinche δS si annulli per qualsiasi variazione δq, deve eviden-temente annullarsi il termine in parentesi quadre. In altre parole, devono valerele equazioni
∂L
∂ua− ∂
∂t
∂L
∂uat
− ∂
∂x
∂L
∂uax
= 0 (A.6)
che sono le equazioni di Eulero-Lagrange (per la Lagrangiana L).Sottolineamo che nella (A.6) le derivate (∂/∂t) e (∂/∂x) vanno pensate ap-
plicate anche su u, ux, ut; si tratta cosı di derivate parziali “totali”. A volte sipreferisce introdurre, per maggior chiarezza, i simboli
Dx =∂
∂x+ ua
x
∂
∂ua+ ua
xx
∂
∂uax
+ uaxt
∂
∂uat
,
Dt =∂
∂t+ ua
t
∂
∂ua+ ua
xt
∂
∂uat
+ uatt
∂
∂uat
;
con questi la (A.6) si riscrive come
∂L
∂ua− Dt
(∂L
∂uat
)− Dx
(∂L
∂uax
)= 0 . (A.7)
Esercizio 5. Scrivere l’equazione di Eulero-Lagrange per la Lagrangiana L =∫Ldx
con L = [(u2t/2)− (1− cosu)].
Esercizio 6. Come si scrivono le equazioni di Eulero-Lagrange per una Lagrangianadi secondo ordine, cioe che dipende anche dalle derivate seconde uxx, uxt, utt? E peruna Lagrangiana di ordine n arbitrario (purche finito)?
Esercizio 7. Come si scrivono le equazioni di Eulero-Lagrange nel caso u = u(x1, ..., xm)con m arbitrario (purche finito)? E nel caso di una Lagrangiana di ordine n arbitrario?
Esercizio 8∗. Consideriamo una corda vibrante in cui ogni punto sia soggetto ad unaforza di richiamo F [u(x, t)]; questa si puo pensare come una catena di masse puntualilegate tra loro da molle (come nella sezione 3) ed inoltre soggette ad un potenziale Φ(y).Determinare la Lagrangiana (continua) e le relative equazioni di Eulero-Lagrange inquesto caso. Cercare le soluzioni della forma u(x, t) = φ(x−vt), in particolare nel casoΦ(x) = cos(x). [Suggerimento: l’unica parte che puo presentare difficolta e l’ultima; econveniente utilizzare la conservazione dell’energia.]
A3. Simmetria e leggi di conservazione. Il teorema diNoether (versione elementare) in Meccanica.
La descrizione in termini di un principio variazionale permette di associare im-mediatamente delle leggi di conservazione alle trasformazioni che lascino inva-riato l’integrale d’azione. La corrispondenza tra simmetrie (cioe trasformazioni
13

che lascino invariato l’integrale di azione) e leggi di conservazione e stata stu-diata da E.Noether; il suo teorema e molto profondo, e ne vedremo qui solo leversioni piu elementari.
Descriviamo dapprima questa relazione, come detto nella sua forma piuelementare, nel caso della Meccanica.
Supponiamo che nello spazio delle fasi sia definito un campo di vettori
X = φi(q)∂
∂qi
(si noti che questo non dipende da, ne agisce su, la variabile indipendente t); eche questo lasci invariante la Lagrangiana del sistema.
Sotto l’azione (infinitesima per semplicita) di X, le variabili dipendenti qi
cambieranno secondo la legge
qi → Qi = qi + εφi .
Naturalmente a questa corrisponde una legge per la variazione delle derivatetemporali qi, ossia
qi → Qi = qi + εd
dtφi .
Dunque la variazione di L = L(q, q; t) sotto X sara
δL = ε
[φi ∂L
∂qi+
(dφi
dt
∂L
∂qi
)].
Per ipotesi, abbiamo δL = 0, e quindi risulta
φi ∂L
∂qi+
(dφi
dt
∂L
∂qi
)= 0 . (A.8)
D’altra parte, le equazioni di Eulero-Lagrange (A.3) ci assicurano che sullesoluzioni si ha
∂L
∂qi=
d
dt
∂L
∂qi. (A.9)
Sostituendo questa nella (A.8) otteniamo immediatamente
φi d
dt
∂L
∂qi+
(dφi
dt
∂L
∂qi
)=
d
dt
(φi ∂L
∂qi
)= 0 , (A.10)
il che mostra che la quantita
J := φi ∂L
∂qi
e conservata lungo le soluzioni, ovvero e una costante del moto.
Esercizio 9. Discutere cosa cambia se le φi dipendono anche dalla variabile indipen-dente t.
Esercizio 10. Si consideri la Lagrangiana L = (1/2)(q21 + q22) − V (q21 +q22). Mostrareche questa e invariante sotto il gruppo delle rotazioni nel piano (q1, q2), e quindi sottoil suo generatore X = −q2(∂/∂q1) + q1(∂/∂q2); e determinare la quantita conservatache segue da questa invarianza.
14

A4. Simmetria e leggi di conservazione. Il teorema diNoether (versione elementare) in teoria dei campi.
Descriviamo ora la relazione tra simmetrie e leggi di conservazione, nuovamentenella sua forma piu elementare, nell’ambito della teoria dei campi. Procederemoesattamente nello stesso modo che nel caso della Meccanica.
Ora la trasformazione che agisce sulle variabili dipendenti ua sara descrittada un campo di vettori
X = φa(u)∂
∂ua
(si noti che questo non dipende da, ne agisce su, le variabili indipendenti xi); eche questo lasci invariante la Lagrangiana del sistema.
Sotto l’azione (infinitesinma per semplicita) di X, le variabili dipendenti ua
cambieranno secondo la legge
ua → Ua = ua + εφa .
Naturalmente a questa corrisponde una legge per la variazione delle derivateparziali ua
i , ossia
uai → Ua
i = uai + ε
d
dxiφa .
Dunque la variazione di L = L(u, ux;x) sotto X sara
δL = ε
[φa ∂L
∂ua+
(∂φa
∂xi
∂L
∂uai
)].
Per ipotesi, abbiamo δL = 0, e quindi risulta
φa ∂L
∂ua+
(∂φa
∂xi
∂L
∂uai
)= 0 . (A.11)
D’altra parte, le equazioni di Eulero-Lagrange per la teoria dei campi (A.6) ciassicurano che sulle soluzioni si ha
∂L
∂ua=
∂
∂xi
∂L
∂uai
; (A.12)
ovvero, nella notazione usata per (A.7) e scrivendo Di = Dxi ,
∂L
∂ua= Di
∂L
∂uai
. (A.13)
Sostituendo questa nella (A.11) otteniamo immediatamente
φa Di∂L
∂uai
+
(∂φa
∂xi
∂L
∂uai
)= Di
(φa ∂L
∂uai
)= 0 . (A.14)
Ora non abbiamo una quantita conservata, ma piuttosto una legge di conserva-zione, della forma
DiJi = 0 ,
15

dove il vettore J i e definito da
J i =∑a
φa (∂L/∂uai ) .
Esercizio 11. Discutere cosa cambia se le φa dipendono anche dalle x1, ..., xn.
Esercizio 12. Si consideri la Lagrangiana L = (1/2)∑
iKi(ui + vi)
2 − V (u2 + v2).Mostrare che questa e invariante sotto il gruppo delle rotazioni nel piano (u, v), equindi sotto il suo generatore X = −v(∂/∂u) + u(∂/∂v); e determinare la legge diconservazione che segue da questa invarianza.
A5. Simmetria e leggi di conservazione. Trasformazionidello spazio-tempo e teorema di Noether.
Abiamo fin qui considerato trasformazioni delle sole variabili dipendenti; d’altraparte, avviene spesso che la Lagrangiana sia invariante sotto trasformazioniche agiscono anche o solo sulle variabili indipendenti, cioe – per equazioni dicarattere fisico – sulle variabili spaziali o temporali.10
Avviene che le leggi di conservazione associate a queste trasformazioni sianoparticolarmente importanti, ed e dunque il caso di discutere, sia pur brevemen-te, questo caso. Resteremo sempre nell’ambito della versione elementare delteorema di Noether.
Una discussione dettagliata richiederebbe di considerare l’effetto delle tra-sformazioni sulle forme differenziali che vengono integrate11, e dunque la de-rivata di Lie di una forma differenziale sotto l’azione di un campo di vettori(in questo caso, il generatore delle trasformazioni che lasceranno invariante laforma); possiamo pero procedere in modo leggermente diverso, senza dover farricorso a questi concetti, che non tutti gli studenti hanno incontrato a questopunto del loro percorso di studio.
Per far questo, dobbiamo vedere come una trasformazione delle variabili indi-pendenti agisce sulel funzioni di queste. Risulta che considerare trasformazioniche agiscano allo stesso tempo sulel variabili indipendenti e su quelle dipen-denti non e piu complicato che considerare ytrasformazioni delle sole variabiliindipendenti, e dunque tratteremo direttamente il caso generale.
Per comprendere qual e la strategia da usare, consideriamo pero dapprimail caso di una sola variabile dipendente q(t) della variabile indipendente t, ela trasformazione t → t + ε corrispondente ad una traslazione (infinitesima seeps → 0) della t. Il punto dello spazio delle fasi allargato (t, q) viene trasformatonel punto
(t, q) = (t+ ε, q) . (A.15)
10Ad esempio, molte delle Lagrangiane incontrate in Fisica (e tutte quelle incontrate inquesto corso) sono autonome, cioe non dipendono ne dalla variabile temporale t ne dallevariabili spaziali x.
11Anche nel caso della Meccanica, l’argomento dell’integrale non e la Lagrangiana L, ma laforma differenziale Ldt.
16

Se consideriamo pero il grafico della funzione q = f(t), questo viene trasformato
nel grafico di una nuova funzione, q = f(t). Infatti, sostituendo q = f(t) nella(A.15), abbiamo
q = q = f(t) ;
ma siccome dobiamo esprimere q in funzione di t (e non di t), e necessarioinvertire la relazione tra le vecchie e le nuove variabile, il che ovviamente fornisce
t = t − ε .
Dunque la relazione precedente diviene
q = f(t− ε) .
Notiamo ora che se ε → 0, questa si scrive al primo ordine in ε come
q = f(t) − f ′(t) ε ;
in altre parole, ora la relazione tra la variabile indipendente t e la variabiledipendente q e descritta da
q = f(t) := f(t) − ε f ′(t) .
Notiamo ora che si arriverebbe allo stesso risultato considerando una trasfor-mazione che agisca solo sulla q, ma con una legge di trasformazione che facciaintervenire anche la sua derivata, vale a dire
q → q − ε q .
Possiamo procedere allo stesso modo nel caso di un qualsiasi numero divariabili indipendenti xi e variabili dipendenti ua. Le trasformazioni saranno
xi → xi = xi + ε ξi(x, u) ,
ua → ua = ua + εφa(x, u) .
Consideriamo il grafico della funzione (vettoriale)
ua = fa(x) ,
cioe il luogo dei punti {(x, u) : u = f(x)}; sotto questa trasformazione, essoviene mappato nell’insieme
{(x, u)} = {(x+ εξ[x, f(x)], f(x) + εφ[x, f(x)]} ,
che vorremmo descrivere come il luogo dei punti (x, u) : u = f(x) per una
opportuna funzione f .Per far cio dobbiamo esprimere u in termini non delle x ma delle x. Inver-
tendo la relazione tra le vecchie e le nuove variabili abbiamo, al primo ordine inε,
xi = xi − ε ξi(x, u) + o(ε) = xi − ε ξi(x, u) + o(ε) .
17

Usando questa relazione, e notando inoltre che
φa(x, u) = phia(x, u) + O(ε) ,
possiamo scrivere (lavorando sempre al primo ordine in ε)
ua = fa[x− εξ(x, u)] + εφa(x, u)
= fa(x) + ε
[φa(x, u) −
(∂fa
∂xi
)ξi(x, u)
]= fa(x) + ε
[φa(x, f [x]) −
(∂fa
∂xi
)ξi[x, f(x)]
]:= fa(x) = fa(x) + ε (δf)(x) .
In altre parole, la funzione u = fa(x) viene trasformata nella funzione u =
f(x) con
fa(x) = fa(x) + ε
[φa(x, u) −
(∂ua
∂xi
)ξi(x, u)
]= fa(x) + ε [φa(x, u) − ua
i ξi(x, u)] .
Qui abbiamo scritto nuovamente u per f(x), per semplicita di notazione12, edinoltre ua
i ≡ (∂ua/∂xi).Ora non resta che notare che si arriverebbe alla stessa situazione conside-
rando una trasformazione che agisca solo sulle variabili dipendenti ua, ma chedipenda anche dalle loro derivate; si tratta della trasformazione
ua → ua + εΦa(x, u, ux) ;
Φa(x, u, ux) = φa(x, u) − uai ξ
i(x, u) .
In questo modo13 possiamo trattare anche delle trasformazioni che agisconosulle variabili indipendenti (fisicamente, sullo spazio-tempo) nel quadro gia trat-tato in precedenza. In particolare, possiamo associare a delle trasformazioni chelascino invariante la Lagrangiana delle quantita conservate (per la Meccanica)o delle leggi di conservazione (per la Teoria dei Campi), applicando le stesseformule viste in precedenza.
Esercizio 13. Mostrare che per ogni Lagrangiana L(q, q) indipendente dal tempo, edunque invariante sotto le trasformazioni di traslazione temporale, generate dal campodi vettori (∂/∂t), si ha la conservazione dell’energia.
Esercizio 14. Mostrare che per ogni Lagrangiana corrispondente ad un sistema dipunti materiali che interagiscono tra loro con forze arbitrarie ma non soggetti a forze
12E perche e vero, dato che stiamo considerando la trasformazione della funzione u = f(x).13Che puo sollevare delle perplessita, ma che e reso rigoroso dall’introduzione dello spazio
dei getti (jet space); si tratta qui di vedere le equazioni differenziali come oggetti geometriciin uno spazio dotato di una cosiddetta struttura di contatto, secondo un approccio dovuto aCartan ed Ehresman; si vedano ad esempio il testo di Arnold sui “Metodi geometrici” per unaintroduzione all’essenza del metodo, e quello di Olver citato in Bibliografia per un trattamentopiu approfondito.
18

esterne, e dunque invariante sotto le trasformazioni di traslazione spaziale, si ha laconservazione della quantita di moto.
Esercizio 15. Mostrare che per ogni Lagrangiana corrispondente ad un sistema dipunti materiali che interagiscono tra loro con forze arbitrarie e soggetti ad una forzaesterna che dipenda solo dalla distanza da un punto fisso (“centro”), e dunque inva-riante sotto le trasformazioni di rotazione intorno al centro, si ha la conservazione delmomento della quantita di moto.
Bibliografia
La derivazione dell’equazione delle onde e discussa in quasi tutti i testi chetrattano le equazioni a derivate parziali. Come gia detto, qui abbiamo seguitoin parte (con alcune integrazioni) il classico testo di Smirnov nella sezione 1;per una discussione piu approfondita della derivazione attraverso il modello conmasse puntuali e molle, si veda ad esempio il testo di Gallavotti, o quello diArnold sulle PDE.
Anche per quanto riguarda l’appendice qui di seguito, e piu in generalela discussione del principio variazionale (anche nella sua formulazione infinito-dimensionale, cioe per la teoria dei campi), sarebbe possibile indicare una mi-riade di testi. Mi limitero a segnalarne tre, e cioe quello di Arnold e quello diLandau e Lifshitz dedicati alla Meccanica Classica (ambedue disponibili anchein Italiano nell’edizione, recentemente ristampata, degli Editori Riuniti), ed iltesto di Lanczos. Questi testi contengono anche una discussione della versioneelementare del teorema di Noether; una discussione abbastanza semplice dellesue applicazioni in Fisica si trova nel testo di Neuenschwander. Una discussionedella versione generale del teorema e data da Olver.
• V.I. Arnold, Mathematical methods of classical mechanics, Springer, 1978
• V.I. Arnold, Lectures on partial differential equations, Springer, 2004
• G. Gallavotti, Meccanica elementare, Boringhieri, 1980
• C. Lanczos, The variational principles of mechanics, Dover, 1986 (edizioneoriginale University of Toronto, 1970)
• L.D. Landau and E.M. Lifshitz, Mechanics, Pergamon 1960
• D.E. Neuenschwander, Emmy Noether’s wonderful theorem, John HopkinsUniversity Press, 2011
• P.J. Olver, Applications of Lie groups to differential equations, Springer,2000
• V.I. Smirnov, Corso di matematica superiore – vol.II, Editori Riuniti, 1974
G. Gaeta, 27/10/2013
19