LE RUOTE DENTATE -...
16
ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5 a serale prof. Ing. Nazzareno Corigliano PAG. 1 LE RUOTE DENTATE GENERALITÀ Abbiamo visto che con le ruote di frizione si hanno dei limiti nella trasmissione di potenze elevate a causa delle proibitive sollecitazioni radiali cui devono essere sottoposte per garantire l’aderenza. A partire da due ruote di frizione ideali, rappresentate dalle circonferenze tratteggiate nella fig. 1, immaginiamo di ricavare sulle loro superfici esterne una serie di denti, alternati a spazi vuoti, che durante il moto si compenetrino facilmente; è evidente come, in tal caso, la trasmissione della potenza non è più affidata all’attrito ma alla spinta che ciascun dente della ruota motrice esercita su quelli della ruota condotta. In tal modo, purché si costruiscano denti sufficientemente robusti, sarà possibile trasmettere potenze anche grandi. Si definisce INGRANAGGIO un meccanismo composto da due ruote dentate una delle quali (motrice) trasmette il moto all’altra (condotta). A seconda dell’andamento dell’asse dei denti, la dentatura può essere diritta (fig. 2a), elicoidale (fig. 2b) o bielicoidale (fig. 2c). Con gli ingranaggi si può trasmettere il moto, oltre che tra due alberi con assi paralleli (con ruote cilindriche a denti diritti e a denti elicoidali), anche tra alberi ad assi concorrenti (fig. 3: utilizzando ruote coniche sia a denti diritti che elicoidali), tra alberi ad assi sghembi (fig. 4a: con Fig. 1 – Principio di funzionamento delle ruote dentate Fig. 2 – Tipi di dentatura Fig. 3 – Ruote coniche
Transcript of LE RUOTE DENTATE -...
ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 1
LE RUOTE DENTATE GENERALITÀ
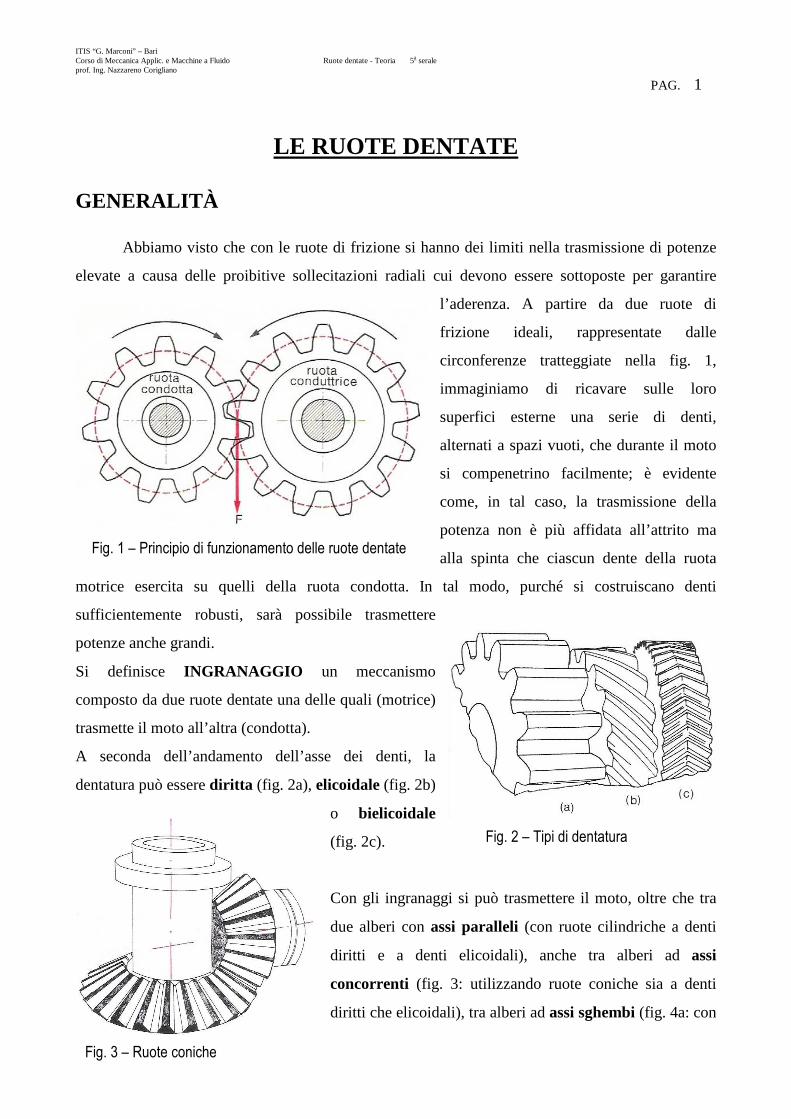
Abbiamo visto che con le ruote di frizione si hanno dei limiti nella trasmissione di potenze
elevate a causa delle proibitive sollecitazioni radiali cui devono essere sottoposte per garantire
l’aderenza. A partire da due ruote di
frizione ideali, rappresentate dalle
circonferenze tratteggiate nella fig. 1,
immaginiamo di ricavare sulle loro
superfici esterne una serie di denti,
alternati a spazi vuoti, che durante il moto
si compenetrino facilmente; è evidente
come, in tal caso, la trasmissione della
potenza non è più affidata all’attrito ma
alla spinta che ciascun dente della ruota
motrice esercita su quelli della ruota condotta. In tal modo, purché si costruiscano denti
sufficientemente robusti, sarà possibile trasmettere
potenze anche grandi.
Si definisce INGRANAGGIO un meccanismo
composto da due ruote dentate una delle quali (motrice)
trasmette il moto all’altra (condotta).
A seconda dell’andamento dell’asse dei denti, la
dentatura può essere diritta (fig. 2a), elicoidale (fig. 2b)
o bielicoidale
(fig. 2c).
Con gli ingranaggi si può trasmettere il moto, oltre che tra
due alberi con assi paralleli (con ruote cilindriche a denti
diritti e a denti elicoidali), anche tra alberi ad assi
concorrenti (fig. 3: utilizzando ruote coniche sia a denti
diritti che elicoidali), tra alberi ad assi sghembi (fig. 4a: con
Fig. 1 – Principio di funzionamento delle ruote dentate
Fig. 2 – Tipi di dentatura
Fig. 3 – Ruote coniche
ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 2
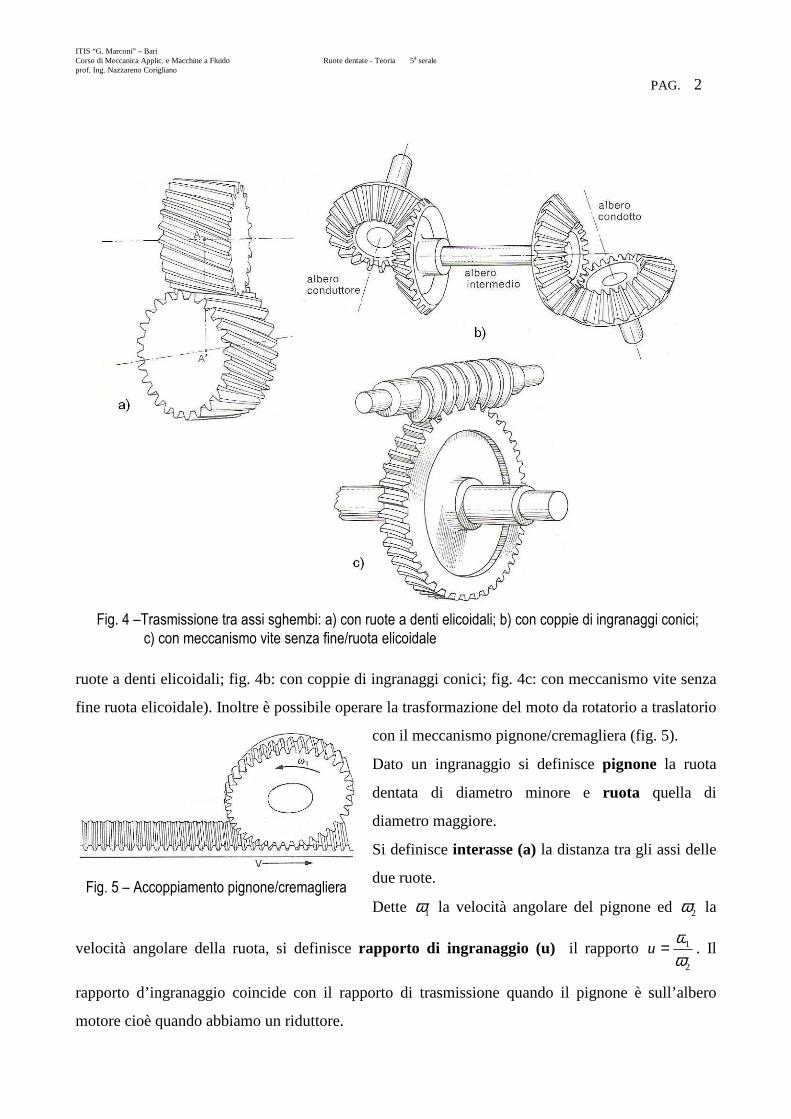
ruote a denti elicoidali; fig. 4b: con coppie di ingranaggi conici; fig. 4c: con meccanismo vite senza
fine ruota elicoidale). Inoltre è possibile operare la trasformazione del moto da rotatorio a traslatorio
con il meccanismo pignone/cremagliera (fig. 5).
Dato un ingranaggio si definisce pignone la ruota
dentata di diametro minore e ruota quella di
diametro maggiore.
Si definisce interasse (a) la distanza tra gli assi delle
due ruote.
Dette 1ω la velocità angolare del pignone ed 2ω la
velocità angolare della ruota, si definisce rapporto di ingranaggio (u) il rapporto 2
1
ωω=u . Il
rapporto d’ingranaggio coincide con il rapporto di trasmissione quando il pignone è sull’albero
motore cioè quando abbiamo un riduttore.
Fig. 4 –Trasmissione tra assi sghembi: a) con ruote a denti elicoidali; b) con coppie di ingranaggi conici;
c) con meccanismo vite senza fine/ruota elicoidale
Fig. 5 – Accoppiamento pignone/cremagliera

ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 3
CARATTERISTICHE DELLA DENTATURA
Con riferimento alla fig. 6, in una ruota dentata, si definisce:
• diametro primitivo (d), il diametro della ruota di frizione fittizia capace di trasmettere il
moto con lo stesso rapporto di trasmissione della ruota dentata;
• testa del dente, la parte di esso
compresa tra la circonferenza
primitiva e la circonferenza esterna
(detta anche di troncatura o di
testa);
• piede del dente, la parte di esso
compresa tra la circonferenza
interna (detta anche di fondo o di
base) e la circonferenza primitiva;
• passo della dentatura (p), la
distanza fra gli assi di due denti
consecutivi, misurata in
corrispondenza della circonferenza primitiva; se indichiamo con “z ” il numero di denti
della ruota, il passo della dentatura sarà dato da z
dp
⋅= π
Perché l’ingranamento sia regolare il passo del pignone deve essere uguale al passo della ruota
2
2
1
121 z
d
z
dpp
⋅=⋅⇒= ππ
ciò implica che 2
1
2
1
z
z
d
d = e quindi, per il rapporto di ingranaggio valgono tutti i seguenti rapporti:
1
2
1
2
2
1
2
1
z
z
d
d
n
nu ====
ωω
Tale relazione vale per qualunque tipo di ingranaggio.
Con riferimento alla seguente fig. 7, detta Ce la circonferenza esterna (di diametro de), Ci la
circonferenza interna (di diametro di), Cp la circonferenza primitiva (di diametro d), avremo ancora:
• altezza del dente (h), 2
ie ddh
−= ;
• addendum (ha), la distanza tra circonferenza primitiva e circonferenza di troncatura esterna;
Fig. 6 – Caratteristiche della dentatura

ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 4
• dedendum (hd), la distanza tra circonferenza primitiva e circonferenza di troncatura interna;
• il gioco di testa, ad hhg −= ;
• lo spessore s ed il vano v, rispettivamente le lunghezze, sulla primitiva, della parte piena del
dente e della parte vuota tra un dente e l’altro (la loro somma è uguale al passo vsp += ;
• la larghezza del dente (b), in senso parallelo all’asse;
• il fianco del dente, corrispondente alla superficie ombreggiata in fig. 7.
IL MODULO
Il passo, precedentemente definito, è un elemento caratteristico della dentatura che un tempo
veniva utilizzato come riferimento per il dimensionamento di tutte le altre parti. Tuttavia il passo
presenta l’inconveniente di essere un numero con la virgola in quanto affetto dalla irrazionalità del
π. Allora è stato introdotto il modulo (m) definito come il rapporto tra il diametro primitivo e il
numero dei denti:
z
dm =
Il calcolo delle ruote dentate si basa sul calcolo del modulo individuato il quale si passa al
proporzionamento modulare secondo il seguente schema:
Fig. 7 – Altre caratteristiche della dentatura

ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 5
CARASTTERISTICA FORMULA
passo mp ⋅= π
diametro primitivo zmd ⋅=
diametro esterno )2(2 ±⋅=⋅±= zmmdde
diametro interno mdhdd eei ⋅±=⋅±= 25,22
addendum mha =
dedendum mhd ⋅= 25,1
altezza del dente mhhh da ⋅=+= 25,2
spessore e vano 2m
vs ⋅== π
larghezza mb ⋅= λ
gioco 4m
g =
interasse 2
21 zzma
±⋅=
m
b=λ viene assunto normalmente pari a 10 nelle ruote a denti diritti, mentre può assumere valori
molto maggiori in caso di denti elicoidali o bielicoidali.
I segni negativi nelle formule dove compare ± vanno utilizzati nel caso di ingranaggi interni.
LINEA DI INGRANAMENTO
Nella fig. 8 viene rappresentato, in tre fasi successive, il periodo in cui due denti D1 e D2
delle due ruote di un ingranaggio si fanno contatto durante l’ingranamento. Nella fig. 8 a) si vedono
i due denti nel momento in cui iniziano il contatto nel punto M, che non appartiene a nessuna delle
due primitive, mentre il punto R, prolungamento del raggio O1M fino alla circonferenza primitiva
cp1, è proprio il punto sulla primitiva in cui inizia il contatto. Quando la primitiva cp1 avrà ruotato da
R a C, il punto di contatto si troverà a coincidere con il punto di tangenza tra le due primitive (fig. 8
b)). Si nota che, nel frattempo, (fig. 8 a)) il punto M immaginato appartenente alla prima ruota si

ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 6
troverà in M´ mentre se lo immaginiamo appartenente alla seconda ruota si troverà in M´´. Ciò vuol
dire che il punto di contatto sul profilo del dente D1 avrà percorso lo spazio da M´ a C mentre sul
profilo del dente D2 avrà percorso, nello stesso tempo, lo spazio maggiore da M´´ a C; ossia c’è
stato strisciamento tra le superfici dei due denti con conseguenti problemi di usura. I due denti si
faranno l’ultimo contatto nel punto N (fig. 8 c)) mentre sulla circonferenza primitiva cp2, della
seconda ruota, il corrispondente punto sarà S. Pertanto, durante tutto il periodo dell’ingranameto, i
punti di contatto si saranno spostati da M ad N sulla linea MCN (fig. 8 c)) detta linea di
ingranamento, mentre le circonferenze primitive avranno percorso complessivamente (fig. 8 b))
l’arco RCS detto arco d’azione e, in particolare, l’arco da R a C è detto arco di accesso mentre
l’arco da C a S è detto arco di recesso.
Vale la pena sottolineare che, in una coppia di ruote dentate, l’arco d’azione deve essere maggiore
del passo altrimenti il contatto tra due denti cesserebbe prima dell’inizio del nuovo contatto tra i due
denti successivi.
COSTANZA DEL RAPPORTO DI TRASMISSIONE, PROFILO AD EVOLVENTE E FORZE SCAMBIATE TRA I DENTI
Abbiamo visto come, rispetto alle ruote di frizione, le ruote dentate presentano
l’inconveniente di un leggero strisciamento tra i fianchi dei denti a contatto.
Un altro problema si potrebbe presentare pel il rapporto di trasmissione, infatti, mentre nelle
ruote di frizione il punto di contatto (C) non cambia mai, e quindi il rapporto di trasmissione si
Fig. 8 – Linea d’ingranamento ed arco d’azione
ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 7
mantiene costante durante il moto, nelle ruote dentate il punto di contatto si muove, come abbiamo
visto, lungo la linea d’ingranamento e quindi, variando continuamente la distanza tra esso ed i centri
delle due ruote, potrebbe scaturirne la variabilità, durante il moto, del rapporto di trasmissione.
Per evitare questo inconveniente e far si che anche per le ruote dentate il rapporto di
trasmissione si mantenga costante è necessario operare una scelta opportuna dei profili dei fianchi
dei denti ingrananti.
Si può dimostrare, infatti, che se i profili sono curve capaci di realizzare la condizione che in
ogni istante dell’ingranamento la normale ad essi nel punto di contatto passi per il punto C di
tangenza tra le due primitive, allora certamente il rapporto di trasmissione sarà costante.
Tale condizione di perpendicolarità viene certamente soddisfatta dai profili coniugati che si
possono ottenere assegnando un profilo arbitrario al dente di una ruota ed ottenendo,
costruttivamente, quello sul dente dell’altra come inviluppo generato dal primo nel suo moto
relativo intorno alla seconda ruota.
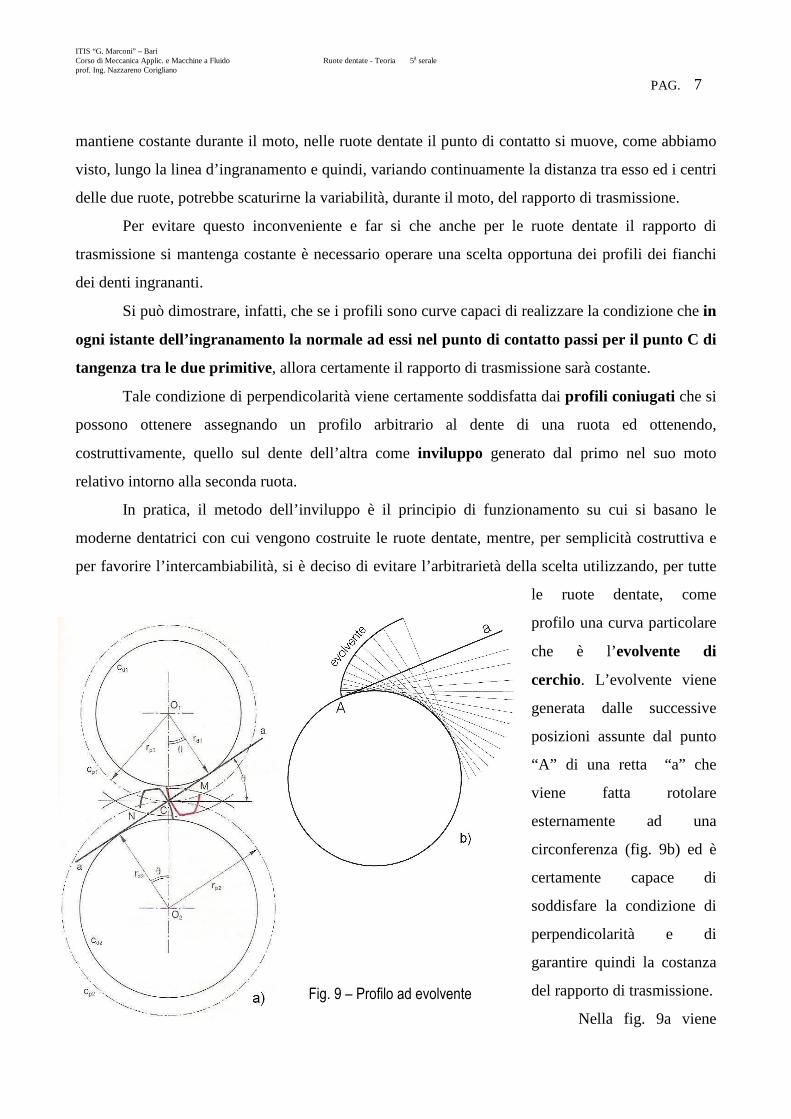
In pratica, il metodo dell’inviluppo è il principio di funzionamento su cui si basano le
moderne dentatrici con cui vengono costruite le ruote dentate, mentre, per semplicità costruttiva e
per favorire l’intercambiabilità, si è deciso di evitare l’arbitrarietà della scelta utilizzando, per tutte
le ruote dentate, come
profilo una curva particolare
che è l’evolvente di
cerchio. L’evolvente viene
generata dalle successive
posizioni assunte dal punto
“A” di una retta “a” che
viene fatta rotolare
esternamente ad una
circonferenza (fig. 9b) ed è
certamente capace di
soddisfare la condizione di
perpendicolarità e di
garantire quindi la costanza
del rapporto di trasmissione.
Nella fig. 9a viene
Fig. 9 – Profilo ad evolvente

ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 8
rappresentata la retta “a” generatrice dei profili ad evolvente nel suo moto di rotolamento sulle
circonferenze di raggio rd1 ed rd2 denominate circonferenze deferenti, si fa notare che tale retta
risulta inclinata dell’angolo “θ” rispetto alla tangente comune per C alle due circonferenze primitive
di raggi rp1 ed rp2 pertanto risulterà θcos11 ⋅= pd rr e θcos22 ⋅= pd rr . Dalla figura si vede, inoltre,
che tale retta contiene il segmento MCN, definito precedentemente linea di ingranamento, luogo di
tutti i punti di contatto, e quindi sempre perpendicolare ai profili, per cui rappresenta anche la retta a
cui appartiene la forza che si scambiano i denti e, per questo, viene detta retta d’azione, mentre
l’angolo “θ” finisce per essere considerato una
caratteristica della dentatura detto angolo di pressione,
normalmente pari a 20°. Nella fig. 10 vengono
rappresentate le due ruote dentate limitatamente alle
loro circonferenze primitive e si nota come, la forza F
che si scambiano i denti da luogo a due componenti,
una tangenziale, FT, ed una radiale, FR. La forza
tangenziale è quella responsabile del moto rotatorio e,
oltre ad essere la componente della forza totale, è anche
il rapporto tra la coppia motrice ed il raggio della ruota
motrice o tra la coppia resistente ed il raggio della ruota
condotta:
21
cosR
C
R
CFF Rm
T ==⋅= θ
La componente radiale, non è responsabile del moto e costituisce una sollecitazione sull’albero su
cui sono calettate le ruote, è data da:
θθ tansin ⋅=⋅= TR FFF
Nella fig. 11 riportiamo le forze radiale e
tangenziale che insistono sul dente e le
sollecitazioni che esse provocano sia
sull’albero che sui supporti.
Fig. 10 – Forze scambiate tra i denti in presa
Fig. 11 – Sollecitazioni indotte su albero e supporti
ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 9
INTERFERENZA E MINIMO NUMERO DI DENTI
Nella costruzione delle ruote dentate, non si può scendere sotto un certo numero di denti
senza comprometterne il corretto funzionamento.
In primo luogo si evidenzia che per poter avere tutto il profilo del dente ad evolvente occorre
che la circonferenza deferente sia all’interno della circonferenza di fondo o, al massimo, coincidente
con essa.
Realizzando quest’ultima ipotesi dovremmo avere fd RR = dove, ovviamente dR è il
raggio della deferente e fR quello della circonferenza di fondo, se Rè il raggio della primitiva, m il
modulo e θ l’angolo di pressione, poiché θcos⋅= RRd e mRRf ⋅−= 25,1 , avremo
mRR ⋅−=⋅ 25,1cosθ e, sostituendo ad 2Zm
R⋅= , semplificando e risolvendo rispetto a Z si
ottiene θcos1
5,2−
=Z che, per °= 20θ fornisce il valore 42=Z denti, troppo alto per non avere
ruote eccessivamente grandi.
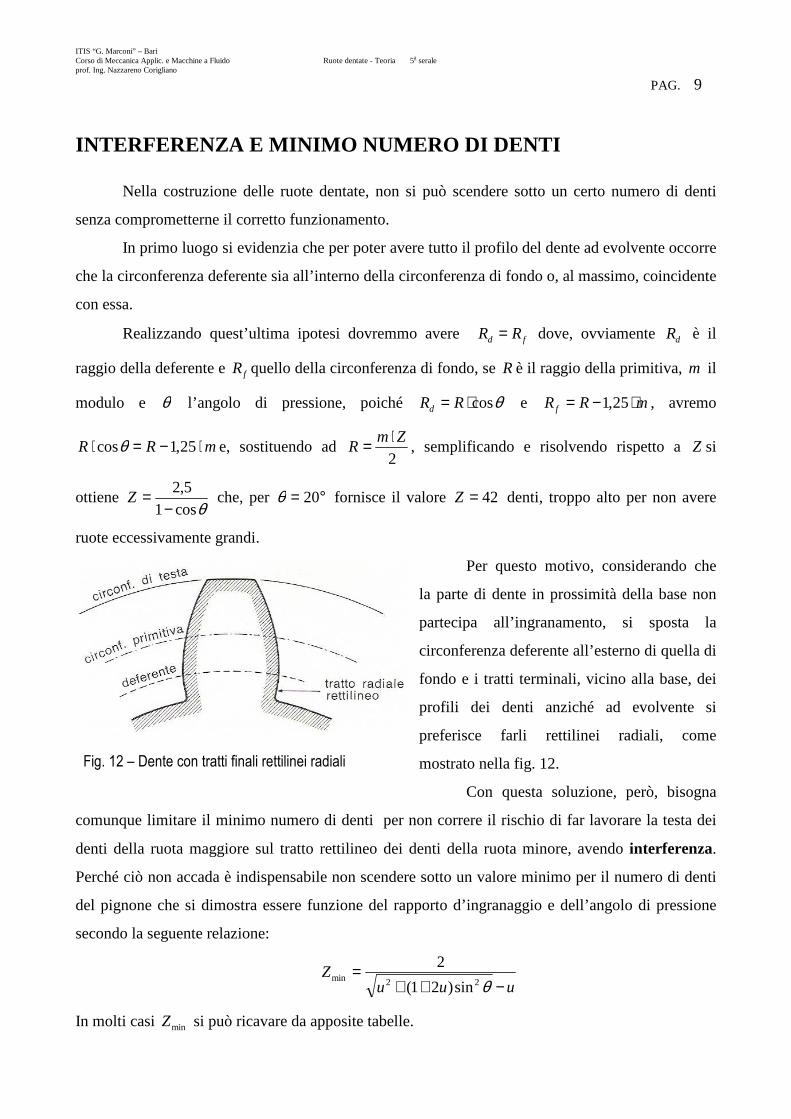
Per questo motivo, considerando che
la parte di dente in prossimità della base non
partecipa all’ingranamento, si sposta la
circonferenza deferente all’esterno di quella di
fondo e i tratti terminali, vicino alla base, dei
profili dei denti anziché ad evolvente si
preferisce farli rettilinei radiali, come
mostrato nella fig. 12.
Con questa soluzione, però, bisogna
comunque limitare il minimo numero di denti per non correre il rischio di far lavorare la testa dei
denti della ruota maggiore sul tratto rettilineo dei denti della ruota minore, avendo interferenza.
Perché ciò non accada è indispensabile non scendere sotto un valore minimo per il numero di denti
del pignone che si dimostra essere funzione del rapporto d’ingranaggio e dell’angolo di pressione
secondo la seguente relazione:
uuuZ
−++=
θ22minsin)21(
2
In molti casi minZ si può ricavare da apposite tabelle.
Fig. 12 – Dente con tratti finali rettilinei radiali
ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 10
RUOTE A DENTI ELICOIDALI
Le ruote a denti diritti, a causa della brusca variazione dei carichi quando si passa da una
coppia di denti in presa alla successiva, sono fonti di vibrazioni, urti e rumorosità sempre più
evidenti all’aumentare della velocità. Si può risolvere l’inconveniente facendo in modo che
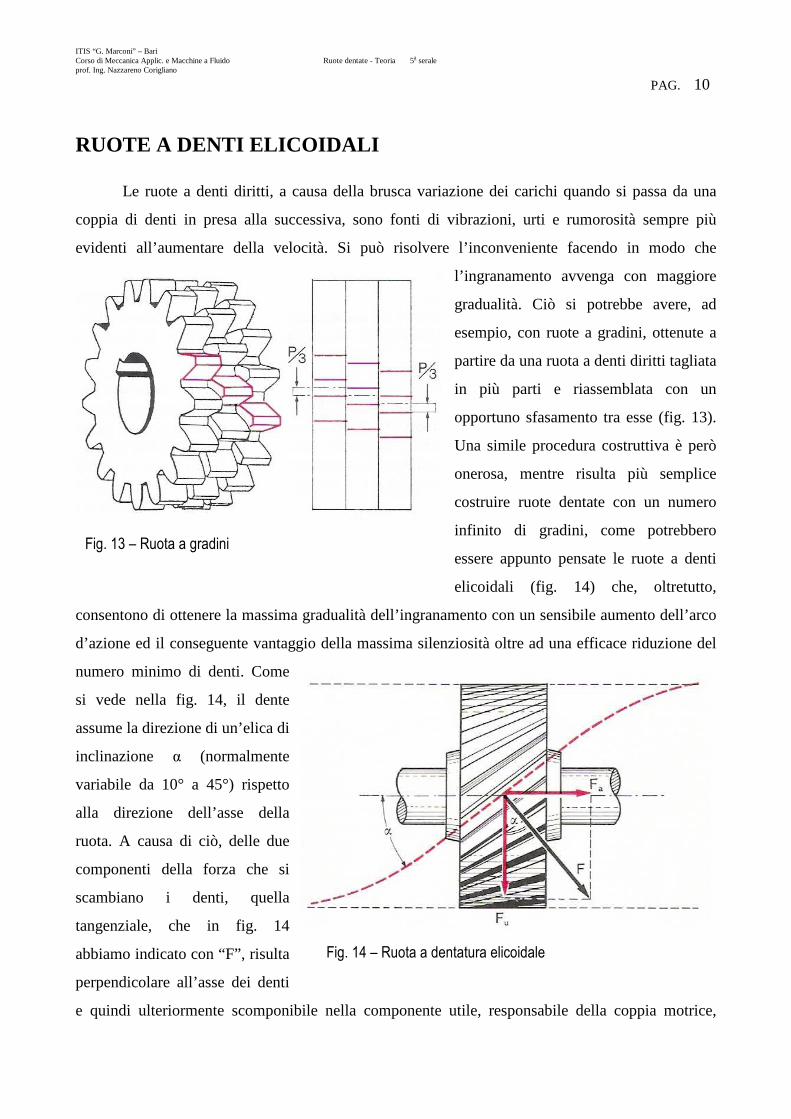
l’ingranamento avvenga con maggiore
gradualità. Ciò si potrebbe avere, ad
esempio, con ruote a gradini, ottenute a
partire da una ruota a denti diritti tagliata
in più parti e riassemblata con un
opportuno sfasamento tra esse (fig. 13).
Una simile procedura costruttiva è però
onerosa, mentre risulta più semplice
costruire ruote dentate con un numero
infinito di gradini, come potrebbero
essere appunto pensate le ruote a denti
elicoidali (fig. 14) che, oltretutto,
consentono di ottenere la massima gradualità dell’ingranamento con un sensibile aumento dell’arco
d’azione ed il conseguente vantaggio della massima silenziosità oltre ad una efficace riduzione del
numero minimo di denti. Come
si vede nella fig. 14, il dente
assume la direzione di un’elica di
inclinazione α (normalmente
variabile da 10° a 45°) rispetto
alla direzione dell’asse della
ruota. A causa di ciò, delle due
componenti della forza che si
scambiano i denti, quella
tangenziale, che in fig. 14
abbiamo indicato con “F”, risulta
perpendicolare all’asse dei denti
e quindi ulteriormente scomponibile nella componente utile, responsabile della coppia motrice,
Fig. 13 – Ruota a gradini
Fig. 14 – Ruota a dentatura elicoidale

ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 11
αcos⋅= FFu , e in una componente assiale, che
finisce per sollecitare sia gli alberi che i
cuscinetti assialmente, αsin⋅= FFa . Nei casi
in cui tale componente assiale è grande la si
equilibra annullandola con l’uso delle ruote
bielicoidali (fig. 15).
Passiamo ad esprimere le relazioni che
esistono tra il passo dell’elica “pe” la sua
inclinazione “α” e le dimensioni della ruota
anche facendo riferimento alla fig. 16:
ααπ
tantanZpD
p pe
⋅=⋅
=
dove “Dp” è il diametro della circonferenza primitiva e “p” è il passo frontale ossia la distanza tra
due denti consecutivi misurata
sulla circonferenza primitiva
Z
Dp p⋅
=π
, con “Z” numero
dei denti.
Ovviamente, possiamo definire
(fig. 16) il passo normale,
come distanza tra due denti
consecutivi misurata nella
direzione normale ai denti,
αcos⋅= ppn e il passo
assiale, come distanza tra due
denti consecutivi misurata nella direzione dell’asse della ruota, αtan
ppa = . Dividendo questi passi
per “π” avremo altrettanti moduli:
modulo frontale πp
m = ; modulo normale π
nn
pm = ; modulo assiale
πa
a
pm =
Il modulo che si prende a riferimento per il proporzionamento è quello normale mn.
Fig. 15 – Ruota bielicoidale
Fig. 16 – Passi, nella dentatura elicoidale
ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 12
RUOTE CONICHE
Abbiamo già accennato che per trasmettere il moto tra assi concorrenti con ruote dentate e
necessario ricorrere alle ruote dentate coniche che sono l’evoluzione delle ruote di frizione coniche.
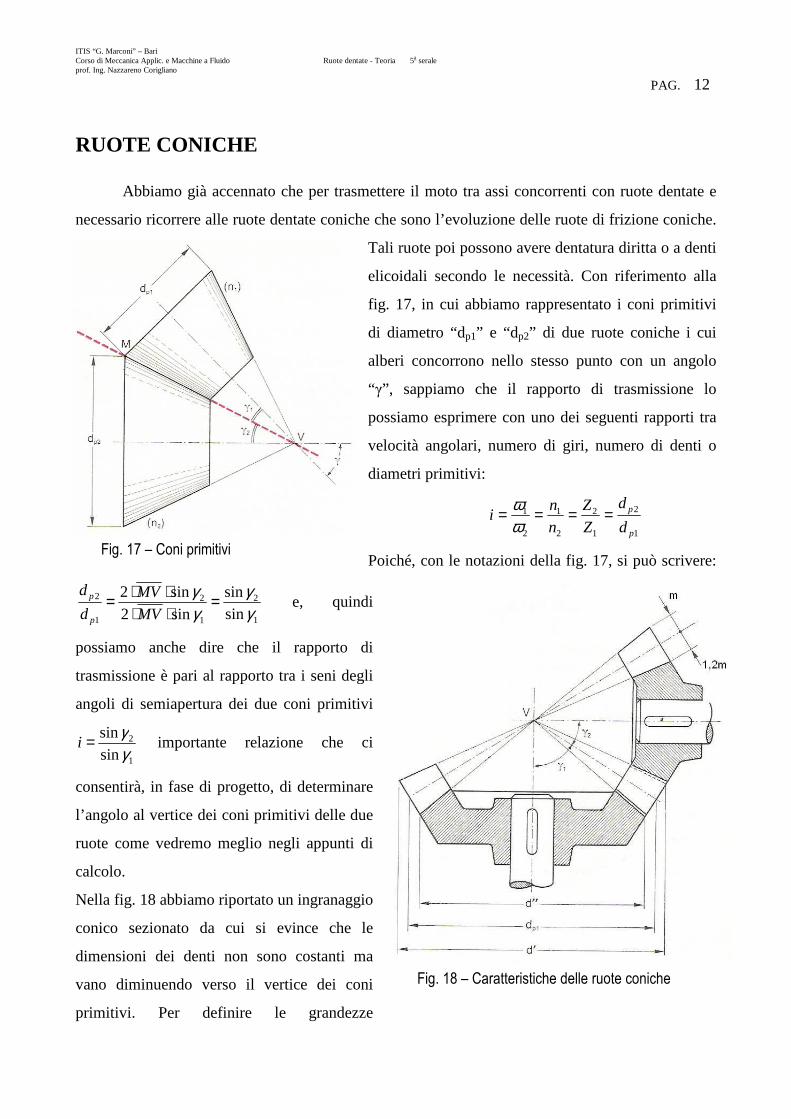
Tali ruote poi possono avere dentatura diritta o a denti
elicoidali secondo le necessità. Con riferimento alla
fig. 17, in cui abbiamo rappresentato i coni primitivi
di diametro “dp1” e “dp2” di due ruote coniche i cui
alberi concorrono nello stesso punto con un angolo
“γ”, sappiamo che il rapporto di trasmissione lo
possiamo esprimere con uno dei seguenti rapporti tra
velocità angolari, numero di giri, numero di denti o
diametri primitivi:
1
2
1
2
2
1
2
1
p
p
d
d
Z
Z
n
ni ====
ωω
Poiché, con le notazioni della fig. 17, si può scrivere:
1
2
1
2
1
2
sinsin
sin2
sin2γγ
γγ =
⋅⋅⋅⋅=
MV
MV
d
d
p
p e, quindi
possiamo anche dire che il rapporto di
trasmissione è pari al rapporto tra i seni degli
angoli di semiapertura dei due coni primitivi
1
2
sinsin
γγ=i importante relazione che ci
consentirà, in fase di progetto, di determinare
l’angolo al vertice dei coni primitivi delle due
ruote come vedremo meglio negli appunti di
calcolo.
Nella fig. 18 abbiamo riportato un ingranaggio
conico sezionato da cui si evince che le
dimensioni dei denti non sono costanti ma
vano diminuendo verso il vertice dei coni
primitivi. Per definire le grandezze
Fig. 17 – Coni primitivi
Fig. 18 – Caratteristiche delle ruote coniche
ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 13
caratteristiche, allora, ci si riferisce alle dimensioni massime. Avremo pertanto il diametro
primitivo 11 Zmdp ⋅= , l’addendum mha = , il dedendum mhd ⋅= 2,1 , l’altezza totale mh ⋅= 2,2 ,
il diametro di testa 11 cos2 γ⋅⋅+=′ mdd p , il diametro di base 11 cos4,2 γ⋅⋅−=′′ mdd p .
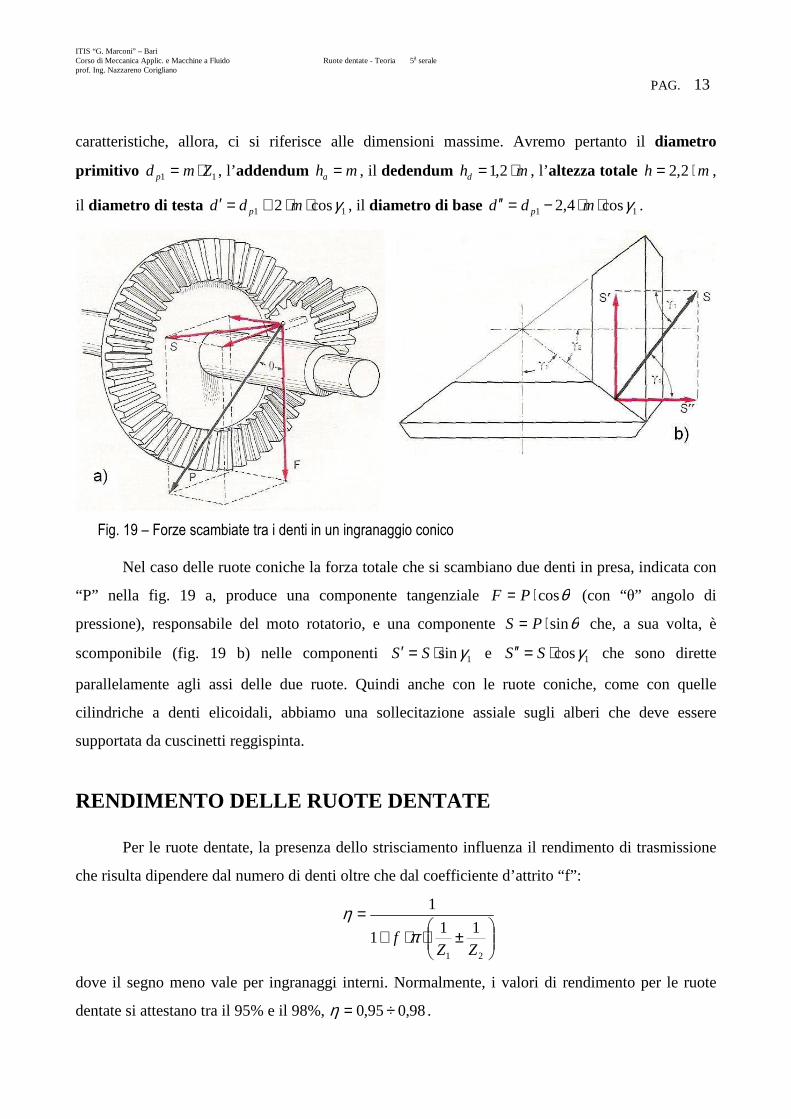
Nel caso delle ruote coniche la forza totale che si scambiano due denti in presa, indicata con
“P” nella fig. 19 a, produce una componente tangenziale θcos⋅= PF (con “θ” angolo di
pressione), responsabile del moto rotatorio, e una componente θsin⋅= PS che, a sua volta, è
scomponibile (fig. 19 b) nelle componenti 1sinγ⋅=′ SS e 1cosγ⋅=′′ SS che sono dirette
parallelamente agli assi delle due ruote. Quindi anche con le ruote coniche, come con quelle
cilindriche a denti elicoidali, abbiamo una sollecitazione assiale sugli alberi che deve essere
supportata da cuscinetti reggispinta.
RENDIMENTO DELLE RUOTE DENTATE
Per le ruote dentate, la presenza dello strisciamento influenza il rendimento di trasmissione
che risulta dipendere dal numero di denti oltre che dal coefficiente d’attrito “f”:
±⋅⋅+
=
21
111
1
ZZf π
η
dove il segno meno vale per ingranaggi interni. Normalmente, i valori di rendimento per le ruote
dentate si attestano tra il 95% e il 98%, 98,095,0 ÷=η .
Fig. 19 – Forze scambiate tra i denti in un ingranaggio conico

ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 14
ROTISMI
Con un ingranaggio, ossia una coppia di ruote dentate, non è possibile trasmettere il moto
con rapporti di trasmissione elevatissimi. Quindi si ricorre a “treni di ingranaggi” ossia ad insiemi di
ruote dentate ingranati tra loro calettate su più alberi a costituire complessi meccanismi detti
rotismi . Esistono due tipi di rotismi: rotismi ordinari , in cui tutti gli alberi sono fissi nella loro
posizione pur potendo ruotare sul proprio asse, e rotismi epicicloidali, in cui almeno uno degli
alberi è mobile nel senso che oltre a poter ruotare intorno al proprio asse varia la sua posizione nel
tempo e nello spazio. La fig. 20 mostra un rotismo ordinario costituito dall’albero motore che
ruota ad n1 giri al minuto, due alberi
ausiliari intermedi che ruotano ad n2 ed
n3 giri al minuto e un albero condotto che
ruota ad n4 giri al minuto; su di essi sono
calettate le ruote dentate di Z1, Z2, Z3, Z4,
Z5, e Z6 denti. Per ciascun ingranaggio
del rotismo si può determinare il rapporto
di trasmissione:
1
2
2
11 Z
Z
n
ni ==
3
4
3
22 Z
Z
n
ni ==
5
6
4
33 Z
Z
n
ni ==
mentre il rapporto di trasmissione totale è
3214
3
3
2
2
1
4
1 iiin
n
n
n
n
n
n
ni ⋅⋅=⋅⋅== dato dal
prodotto dei rapporti parziali. In
definitiva 531
642
ZZZ
ZZZi
⋅⋅⋅⋅= formula
utilissima per determinare i numeri dei
denti delle ruote di un rotismo ordinario.
Ad esempio, supponiamo di dover realizzare, con un rotismo ordinario come quello della fig. 20, un
rapporto di trasmissione totale i=60; si può fissare, 51 =i , 42 =i e 33 =i visto che
60345 =⋅⋅ pertanto potremmo adottare le ruote:
Fig. 20 – Rotismo ordinario
ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 15
20100
51
2 ==Z
Z
2288
43
4 ==Z
Z
2472
35
6 ==Z
Z
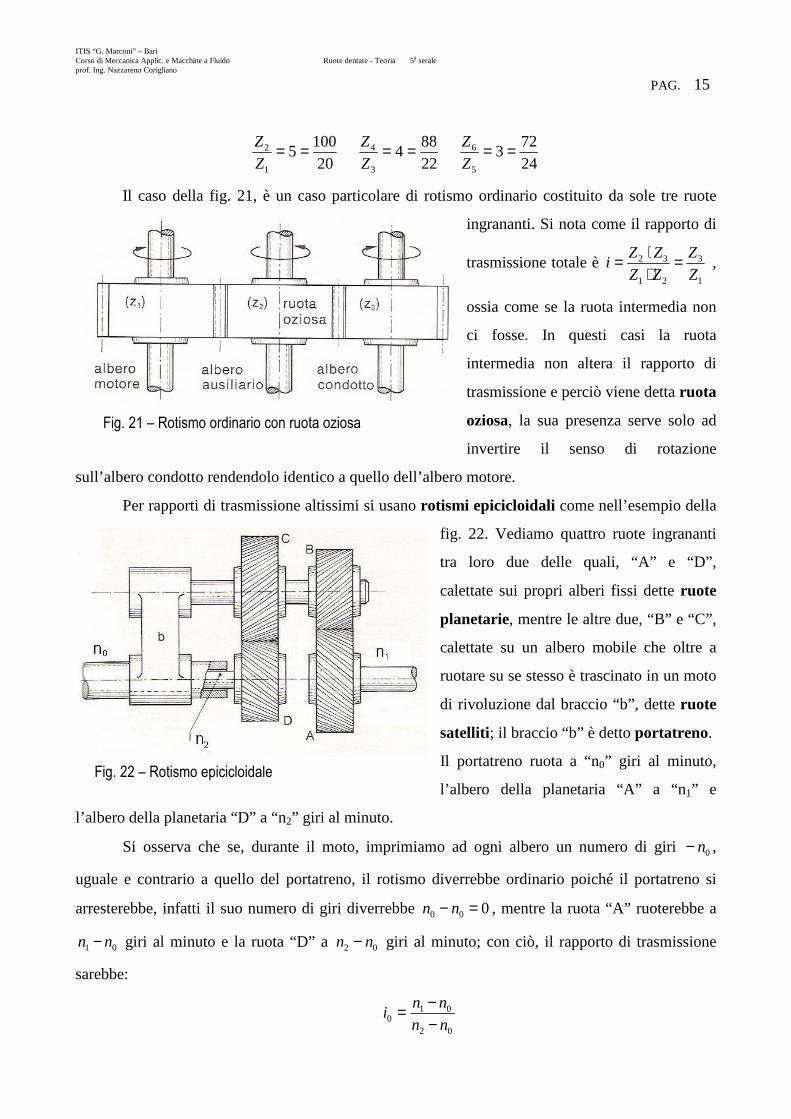
Il caso della fig. 21, è un caso particolare di rotismo ordinario costituito da sole tre ruote
ingrananti. Si nota come il rapporto di
trasmissione totale è 1
3
21
32
Z
Z
ZZ
ZZi =
⋅⋅= ,
ossia come se la ruota intermedia non
ci fosse. In questi casi la ruota
intermedia non altera il rapporto di
trasmissione e perciò viene detta ruota
oziosa, la sua presenza serve solo ad
invertire il senso di rotazione
sull’albero condotto rendendolo identico a quello dell’albero motore.
Per rapporti di trasmissione altissimi si usano rotismi epicicloidali come nell’esempio della
fig. 22. Vediamo quattro ruote ingrananti
tra loro due delle quali, “A” e “D”,
calettate sui propri alberi fissi dette ruote
planetarie, mentre le altre due, “B” e “C”,
calettate su un albero mobile che oltre a
ruotare su se stesso è trascinato in un moto
di rivoluzione dal braccio “b”, dette ruote
satelliti; il braccio “b” è detto portatreno.
Il portatreno ruota a “n0” giri al minuto,
l’albero della planetaria “A” a “n1” e
l’albero della planetaria “D” a “n2” giri al minuto.
Si osserva che se, durante il moto, imprimiamo ad ogni albero un numero di giri 0n− ,
uguale e contrario a quello del portatreno, il rotismo diverrebbe ordinario poiché il portatreno si
arresterebbe, infatti il suo numero di giri diverrebbe 000 =− nn , mentre la ruota “A” ruoterebbe a
01 nn − giri al minuto e la ruota “D” a 02 nn − giri al minuto; con ciò, il rapporto di trasmissione
sarebbe:
02
010 nn
nni
−−=
Fig. 21 – Rotismo ordinario con ruota oziosa
Fig. 22 – Rotismo epicicloidale

ITIS “G. Marconi” – Bari Corso di Meccanica Applic. e Macchine a Fluido Ruote dentate - Teoria 5a serale prof. Ing. Nazzareno Corigliano
PAG. 16
Tale relazione, tra le velocità dei tre alberi, detta formula di Willis è molto utile per risolvere i
problemi relativi ai rotismi epicicloidali e, come abbiamo visto, rappresenta il rapporto di
trasmissione del rotismo reso ordinario.
Con i tre alberi di un rotismo epicicloidale si possono realizzare situazioni diverse:
• due alberi motori e uno condotto;
• un albero motore e due condotti;
• un albero motore, uno condotto e uno fisso.
Proprio nella terza condizione, applicata al
rotismo della fig. 22, così come evidenziato nella
fig. 23, in cui abbiamo resa fissa la ruota “D”
( 02 =n ) , motore l’albero del portatreno e
condotta la ruota “A”, dimostreremo come si
possa ottenere un altissimo rapporto di riduzione.
In tal caso, il rapporto di trasmissione del rotismo
è dato da:
1
0
n
ni =
mentre la formula di Willis diviene: 0
010 n
nni
−−= da cui, dopo semplici passaggi, si ottiene:
01
0
11in
n
−= cioè, in definitiva, avremo
011i
i−
= .
Ora, per il rotismo reso ordinario si ha CA
DB
ZZ
ZZi
⋅⋅=0 e quindi, scelte opportunamente le ruote, ad
esempio con i seguenti numeri di denti: 30=AZ , 29=BZ , 30=CZ e 31=DZ si avrebbe
900899
30303129
0 =⋅⋅=i e quindi 900
900899
1
1 =−
=i
valore veramente alto, ottenuto con solo quattro ruote relativamente di piccole dimensioni,
impossibile da ottenere con qualsiasi rotismo ordinario.
Fig. 23 – Riduttore epicicloidale