La carta catastale nei nuovi sistemi di riferimento ... · Nuovo sistema di riferimento realizzato...
22
POLITECNICO DI TORINO Dipartimento di Ingegneria del Territorio, dell’Ambiente e delle Geotecnologie 2° WORKSHOP Servizio Catasto Rovereto, 27 novembre 2009 Alberto Cina E-mail: [email protected] Tel / fax 011-5647630 / 99 La carta catastale nei nuovi sistemi di riferimento
Transcript of La carta catastale nei nuovi sistemi di riferimento ... · Nuovo sistema di riferimento realizzato...

POLITECNICO DI TORINO
Dipartimento di Ingegneria del Territorio, dell’Ambiente e delle Geotecnologie
2° WORKSHOP Servizio Catasto
Rovereto, 27 novembre 2009
Alberto Cina
E-mail: [email protected]
Tel / fax 011-5647630 / 99
La carta catastale nei nuovi sistemi di riferimento
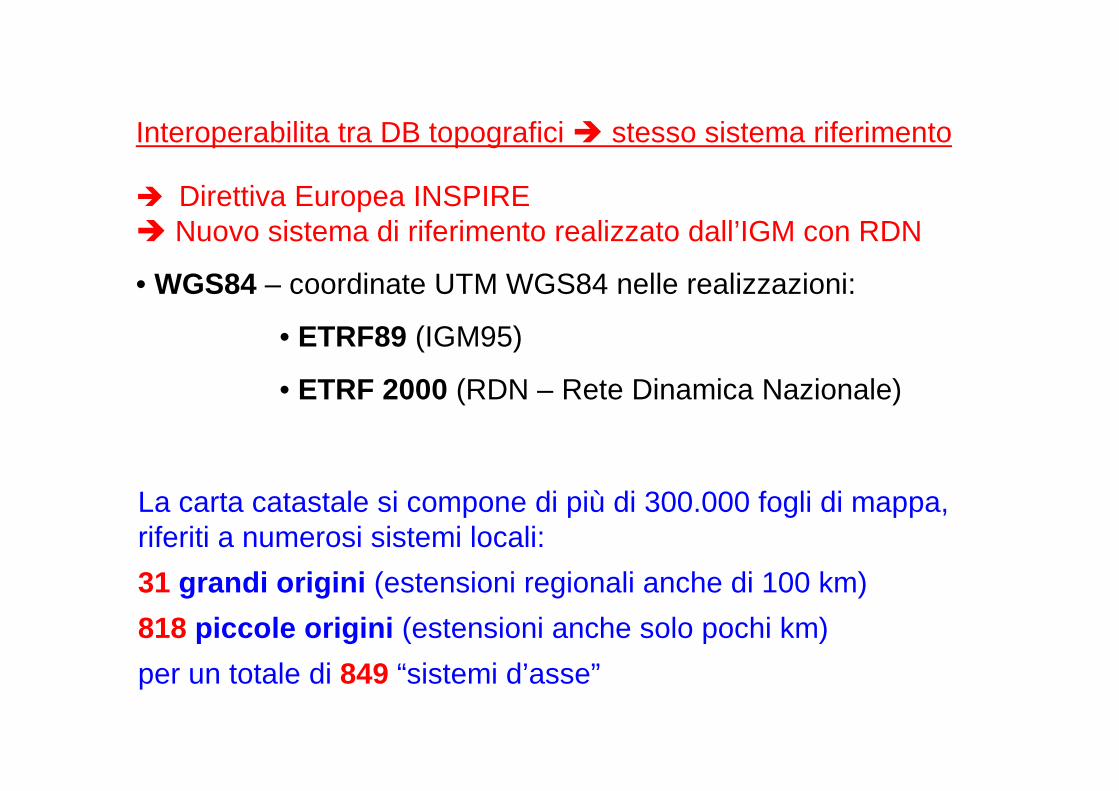
La carta catastale si compone di più di 300.000 fogli di mappa, riferiti a numerosi sistemi locali:
31 grandi origini (estensioni regionali anche di 100 km)
818 piccole origini (estensioni anche solo pochi km)
per un totale di 849 “sistemi d’asse”
Interoperabilita tra DB topografici � stesso sistema riferimento
� Direttiva Europea INSPIRE� Nuovo sistema di riferimento realizzato dall’IGM con RDN
• WGS84 – coordinate UTM WGS84 nelle realizzazioni:
• ETRF89 (IGM95)
• ETRF 2000 (RDN – Rete Dinamica Nazionale)

Le coordinate “Cassini Soldner”
2 1cos sin
3 3x s E y s Eα α = − = −
2
0 0
sin cos
2
sE
N
α αρ
= E = eccesso sferico
Y
X ellissoide piano della carta
Z
Areale (mA)
Lineare (m)
Angolare (δ)
Gauss (conforme)Cassini Soldner (afilattica)Deform.
22
0 0
1 cos2
ym
Nα
ρ= +
2
20 0
0.9996 12 *0.9996
Xm
Nρ
= +
2 21 1 2 2
10 0 0 0
coscos
2 3 6
s s sin y y y yy sin
N N
α αδ α αρ ρ
+ + = + +
0δ =
2
0 0
12
ym
Nρ= +
22
20 0
0.9996 1*0.9996
Xm
Nρ
= +
sα
y
x
O
P
ϕ0 λ0
Lo stesso oggetto ha diverse deformazioni nelle 2 rappresentazioni
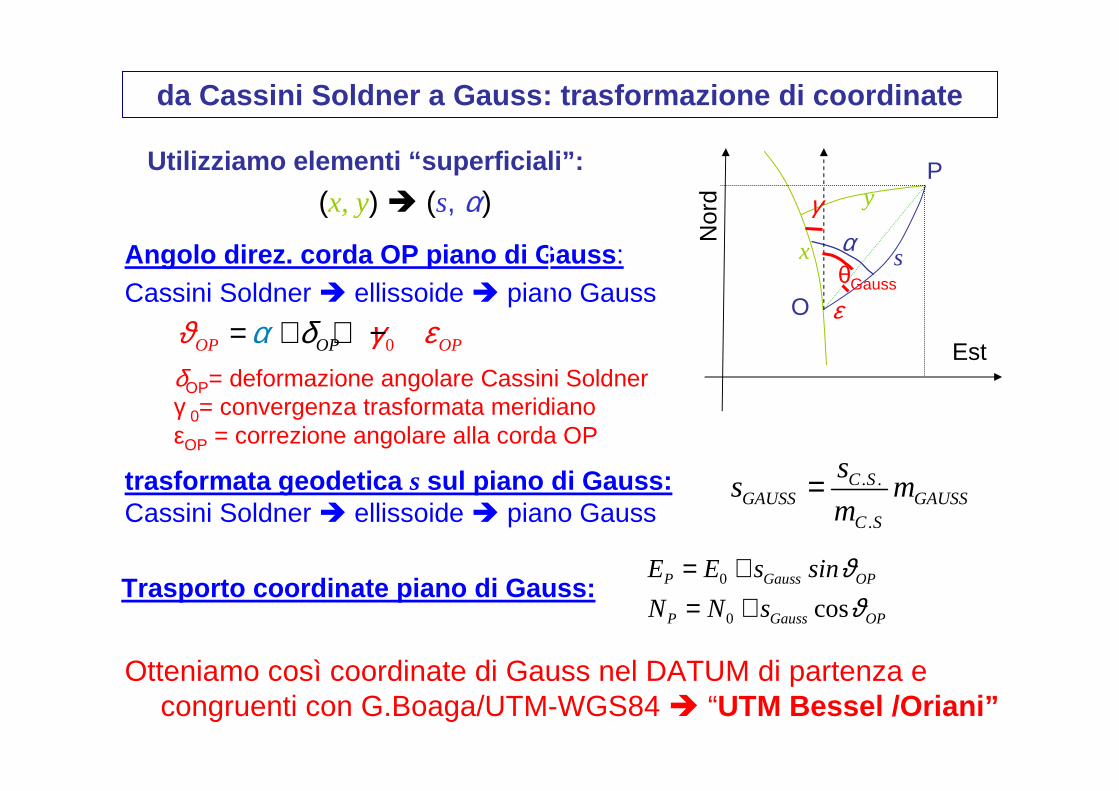
Angolo direz. corda OP piano di Gauss :Cassini Soldner � ellissoide � piano Gauss
da Cassini Soldner a Gauss: trasformazione di coordi nate
δOP= deformazione angolare Cassini Soldnerγ 0= convergenza trasformata meridianoεOP = correzione angolare alla corda OP
Y
X
O
P
Est
Nor
d
x
y
sα
γ
θGauss
ε0OPOP OPϑ δα γ ε= + + −
Utilizziamo elementi “superficiali”:
(x, y) � (s, α)
trasformata geodetica s sul piano di Gauss:Cassini Soldner � ellissoide � piano Gauss
. .
.
C SGAUSS GAUSS
C S
ss m
m=
Trasporto coordinate piano di Gauss: 0
0 cosP Gauss OP
P Gauss OP
E E s sin
N N s
ϑϑ
= += +
Otteniamo così coordinate di Gauss nel DATUM di partenza e congruenti con G.Boaga/UTM-WGS84 � “UTM Bessel /Oriani”
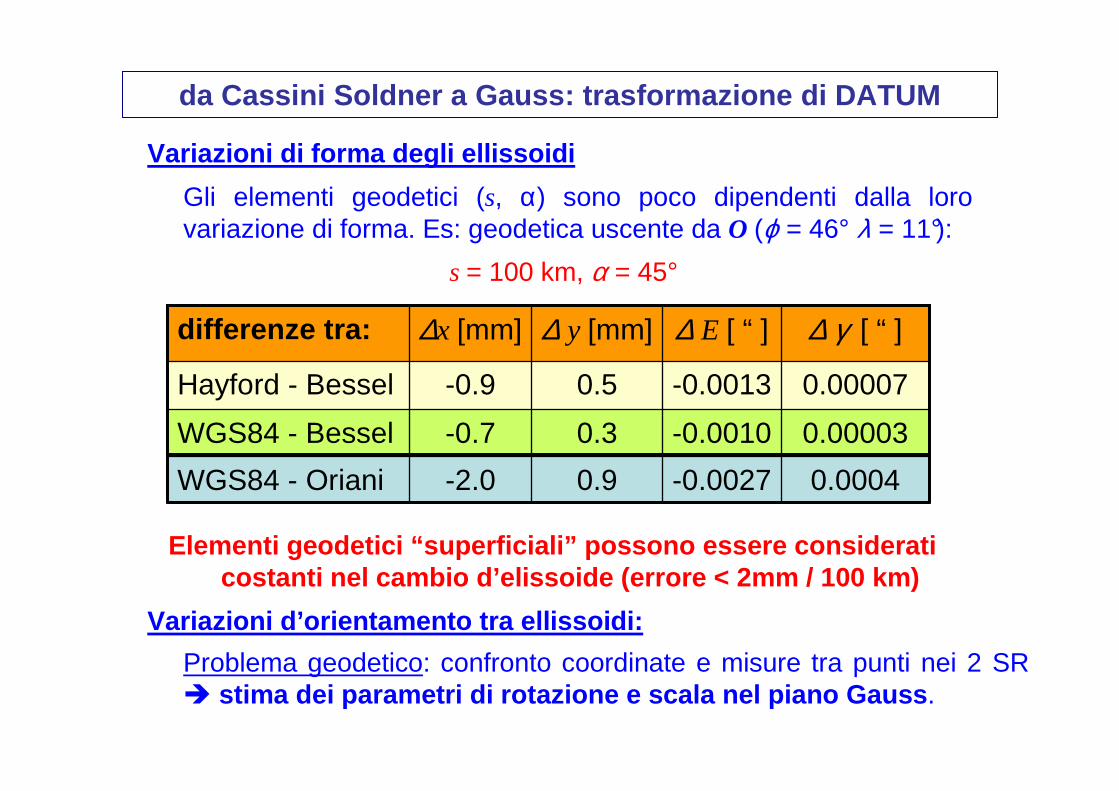
da Cassini Soldner a Gauss: trasformazione di DATUM
YX
Variazioni di forma degli ellissoidi
Gli elementi geodetici (s, α) sono poco dipendenti dalla loro variazione di forma. Es: geodetica uscente da O (ϕ = 46° λ = 11°):
s = 100 km, α = 45°
Elementi geodetici “superficiali” possono essere con siderati costanti nel cambio d’elissoide (errore < 2mm / 100 km )
0.00003-0.00100.3-0.7WGS84 - Bessel
0.00007-0.00130.5-0.9Hayford - Bessel
∆ γ [ “ ]∆ E [ “ ]∆ y [mm]∆x [mm]differenze tra:
0.0004-0.00270.9-2.0WGS84 - Oriani
Variazioni d’orientamento tra ellissoidi:
Problema geodetico: confronto coordinate e misure tra punti nei 2 SR � stima dei parametri di rotazione e scala nel piano Gaus s.

… Se non conosciamo l’origine catastale?
Y
(x, y)i, (N, E)i con i ≥ 2
Tx, Ty, α, λ Roto 4P
E0(0)=Tx, N0
(0)=Ty
(x, y)i�(Ei , Ni) Gauss
Tx, Ty, α, λ
CS_2_UTM
Roto 4P
|E0(n)-E0
(n-1)|<ε|N0
(n)-N0(n-1)|<ε
E0(1)=Tx, N0
(1)=Ty
E0(n)=Tx, N0
(n)=Ty, α, λ
(x, y)i, (N, E)i
E0(0), N0
(0), α=0, λ=0
NO
SI
(N, E)i, (N, E)i BESSEL
• Rideterminazione delle coordinate del vertice con misure
• Ristima della posizione da pochi punti “doppi”
- noti da monografia- rilevabili sul terreno (RTK)
� Metodo origine fittizia

Zona test: provincia di Cuneo: superficie: 6903 km 2
250 comuni
101 origini
circa 7500 fogli
procedura “geodetica” di trasformazione da Cassini Soldner a coordinate di Gauss:
• ricerca e verifica delle origini catastali
• stima di parametri di trasformazione tra DATUM
• procedure di trasformazione applicate a cartografia rastere vettoriale
• verifica della mappa catastale trasformata con misu re in campagna

Y
X
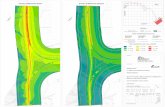
Trasformazione di mappe e confronto con cartografia tecnica
Ottima sovrapponibilità su antiche costruzioni, anche in zona dimontagna

Y
X
Trasformazione di mappe e confronto con cartografia tecnica
Non buona sovrapponibilità su nuove urbanizzazioni (p ur in vicinanza di edifici storici coerenti con la carta tecnica)

Confronti tra mappe di differente origine – Mortara Fg. 24
Y
X
1) Da copione di visura
2) Vettoriale collaudato
Georeferenziate in UTM-WGS84 con procedura geodetica
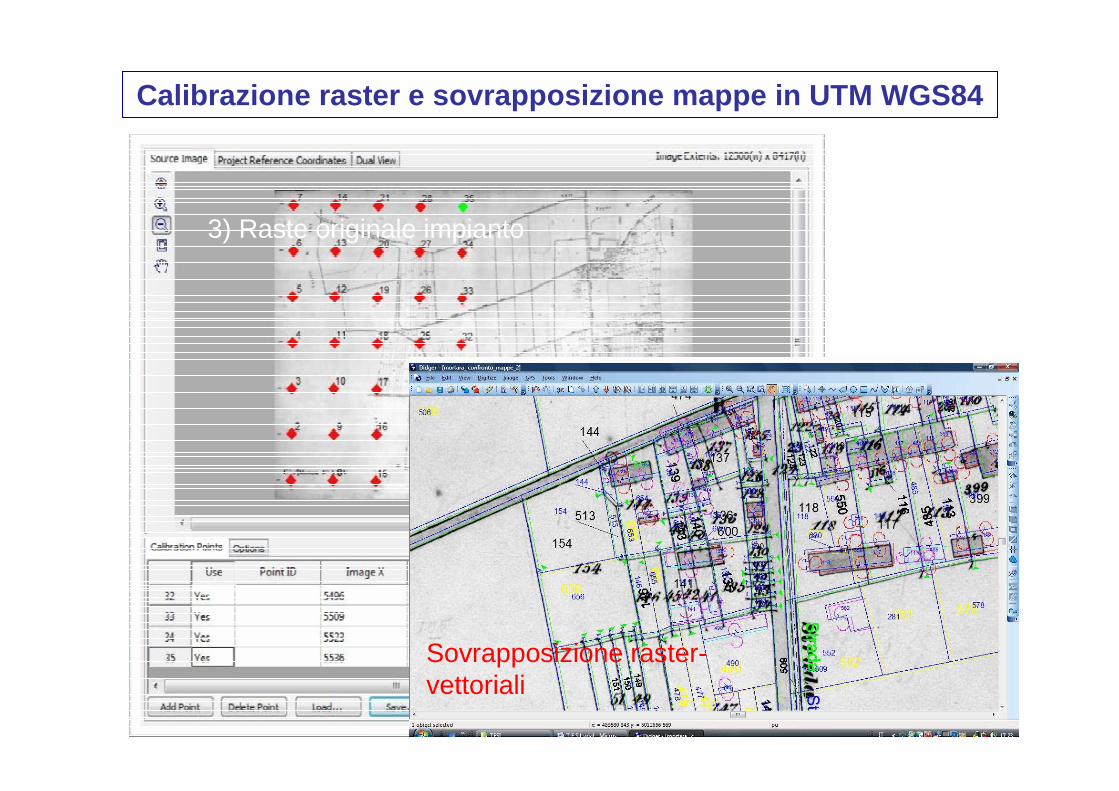
Calibrazione raster e sovrapposizione mappe in UTM W GS84
Y
X
3) Raste originale impianto
Sovrapposizione raster-vettoriali
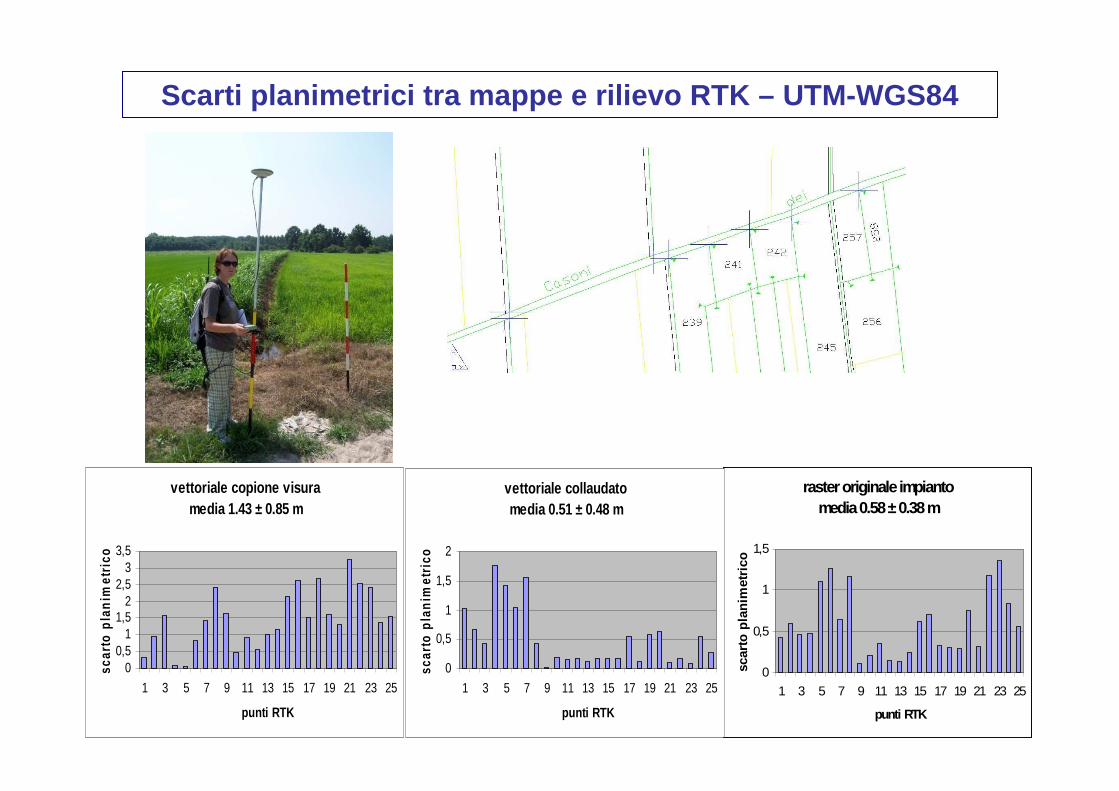
Scarti planimetrici tra mappe e rilievo RTK – UTM-WG S84
Y
X
raster originale impiantomedia 0.58 ± 0.38 m
0
0,5
1
1,5
1 3 5 7 9 11 13 15 17 19 21 23 25
punti RTK
scar
to p
lani
met
rico
vettoriale copione visuramedia 1.43 ± 0.85 m
00,5
11,5
22,5
33,5
1 3 5 7 9 11 13 15 17 19 21 23 25
punti RTK
scar
to p
lani
met
rico
vettoriale collaudatomedia 0.51 ± 0.48 m
0
0,5
1
1,5
2
1 3 5 7 9 11 13 15 17 19 21 23 25
punti RTK
scar
to p
lani
met
rico
Il miglioramento della mappa catastale – gli errori
Y
X
1) Errori accidentali (misura, graficismo, collimazione a particolari cartografici … ) � stima con minimi quadrati
3) Errori grossolani di rilievo o di riporto in mappa
� da individuare e risolvere per singolo caso
2) Errori sistematici : nell’ipotesi di deformazioni cartografiche correttamente considerate:
-) deformazioni della mappa (supporto cartaceo, scanner …) e modello usato per la calibrazione
-) deformazioni del sistema di riferimento della rete storica rispetto a quello “di arrivo”
� individuare la legge di variazione (calibrazione della mappa)
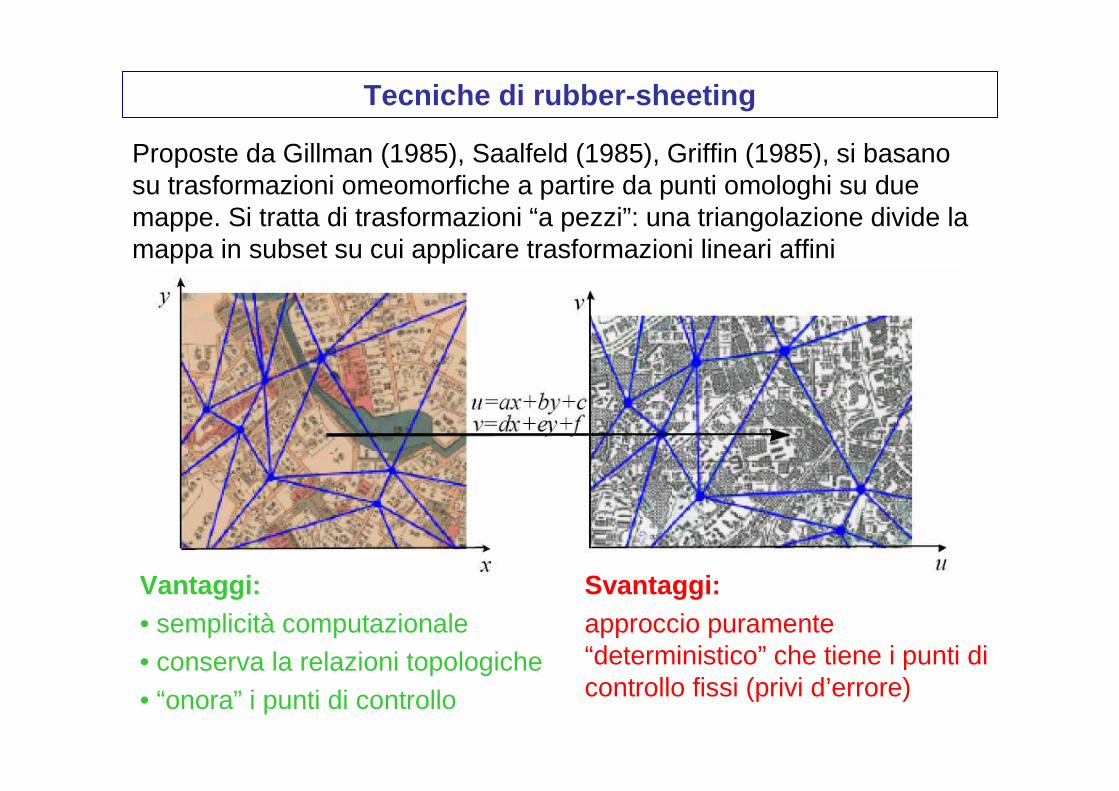
Tecniche di rubber-sheeting
Proposte da Gillman (1985), Saalfeld (1985), Griffin (1985), si basano su trasformazioni omeomorfiche a partire da punti omologhi su due mappe. Si tratta di trasformazioni “a pezzi”: una triangolazione divide la mappa in subset su cui applicare trasformazioni lineari affini
Vantaggi:• semplicità computazionale• conserva la relazioni topologiche• “onora” i punti di controllo
Svantaggi:approccio puramente “deterministico” che tiene i punti di controllo fissi (privi d’errore)
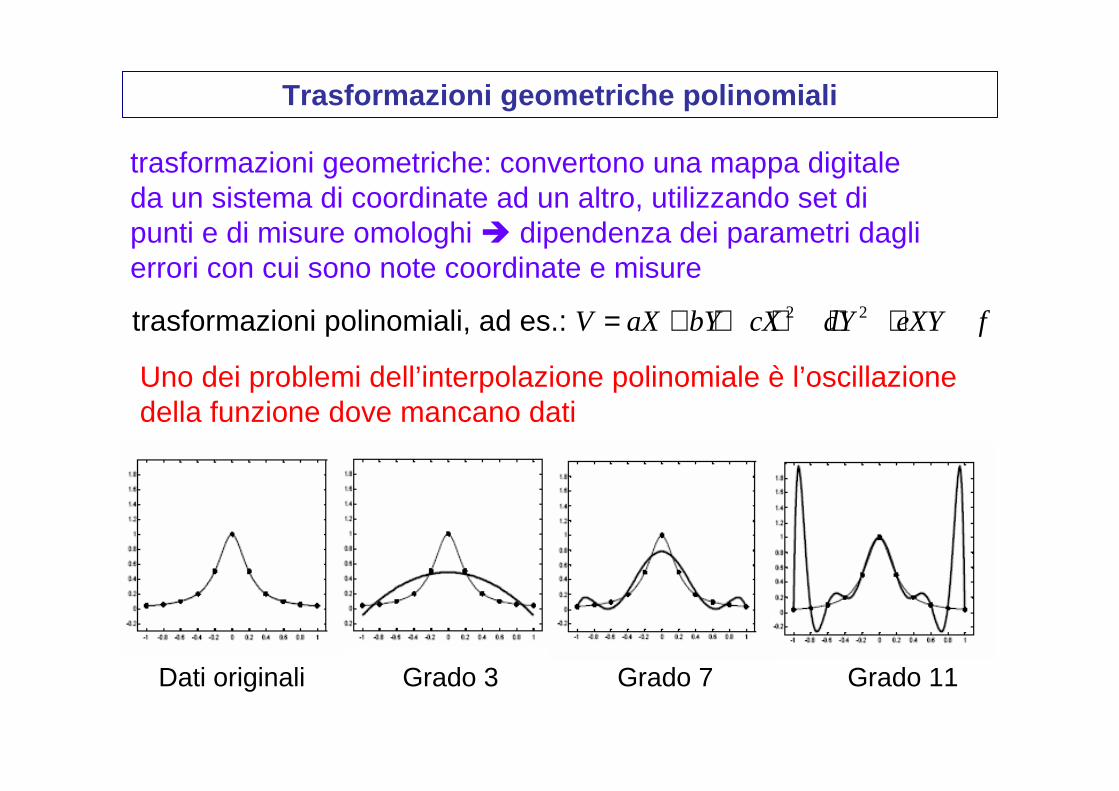
Trasformazioni geometriche polinomiali
trasformazioni geometriche: convertono una mappa digitale da un sistema di coordinate ad un altro, utilizzando set di punti e di misure omologhi � dipendenza dei parametri dagli errori con cui sono note coordinate e misure
2 2V aX bY cX dY eXY f= + + + + +trasformazioni polinomiali, ad es.:
Uno dei problemi dell’interpolazione polinomiale è l’oscillazione della funzione dove mancano dati
Dati originali Grado 3 Grado 7 Grado 11
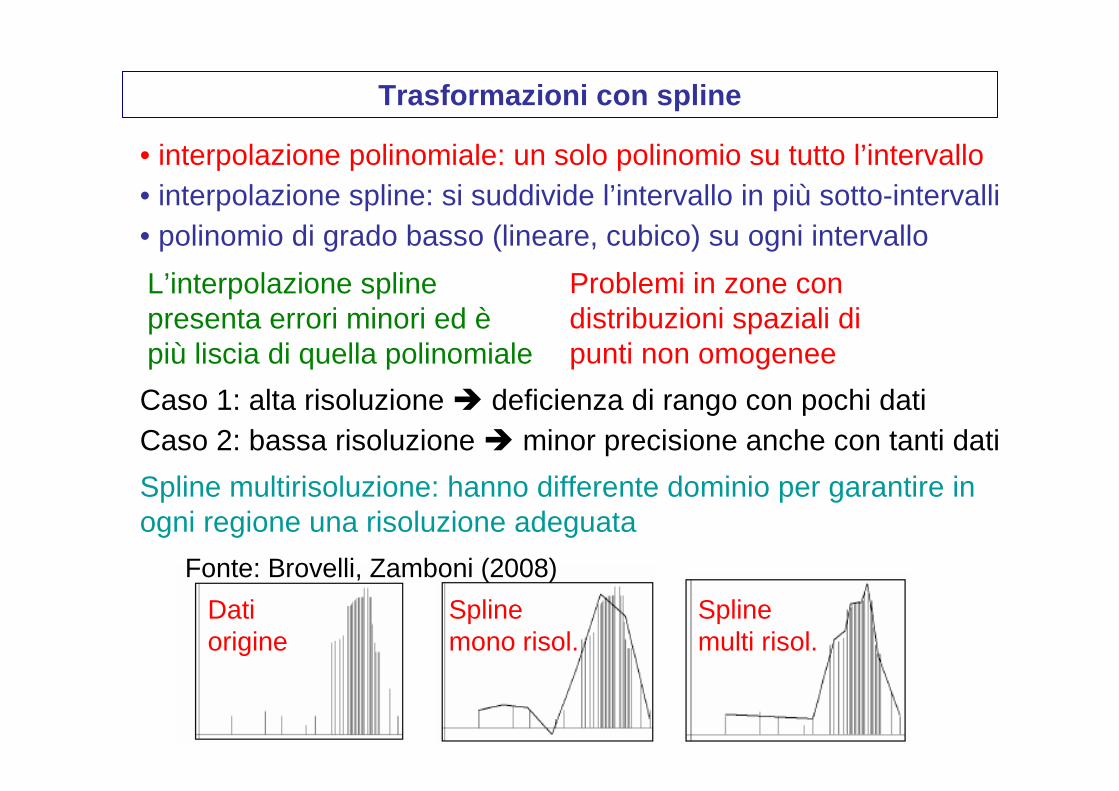
Trasformazioni con spline
Dati origine
Splinemono risol.
Splinemulti risol.
• interpolazione polinomiale: un solo polinomio su tutto l’intervallo• interpolazione spline: si suddivide l’intervallo in più sotto-intervalli• polinomio di grado basso (lineare, cubico) su ogni intervallo
L’interpolazione splinepresenta errori minori ed èpiù liscia di quella polinomiale
Problemi in zone con distribuzioni spaziali di punti non omogenee
Caso 1: alta risoluzione � deficienza di rango con pochi datiCaso 2: bassa risoluzione � minor precisione anche con tanti dati
Spline multirisoluzione: hanno differente dominio per garantire in ogni regione una risoluzione adeguata
Fonte: Brovelli, Zamboni (2008)

Trasformazioni piane
Y
X
' '
' '
X aX bY e
Y cX dY f
= + += + +
trasformazione affine 6 parametri:
' '
' '
X aX dY e
Y dX aY f
= + += − + +
trasformazione conforme 4 parametri:
Se il polinomio è di grado 1 avremo le trasformazioni:
Parametri stimabili m.q. da coordinate nei 2 SR
' '
' 'x
y
aX bY e X v
cX dY f Y v
+ + − =+ + − =
� stima (a,b,c,d,e,f,g)
Es. trasf. affine: stima 6 parametri da n > 3 punti “doppi”
Possiamo stimare i parametri da misure di angoli e distanze?
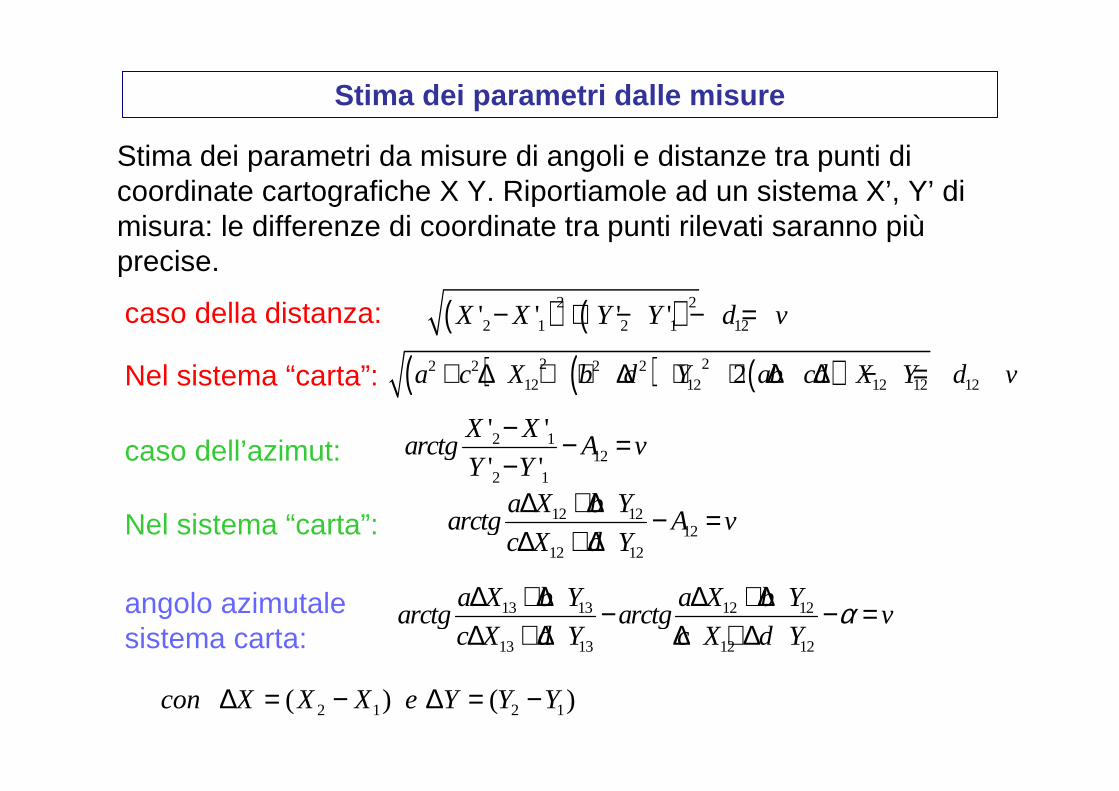
Stima dei parametri dalle misure
X
( ) ( )2 2
2 1 2 1 12' ' ' 'X X Y Y d v− + − − =
Stima dei parametri da misure di angoli e distanze tra punti di coordinate cartografiche X Y. Riportiamole ad un sistema X’, Y’ di misura: le differenze di coordinate tra punti rilevati saranno più precise.
caso della distanza:
caso dell’azimut:
angolo azimutale sistema carta:
Nel sistema “carta”: ( ) ( ) ( )2 22 2 2 212 12 12 12 122a c X b d Y ab cd X Y d v+ ∆ + + ∆ + + ∆ ∆ − =
2 1 2 1( ) ( )con X X X e Y Y Y∆ = − ∆ = −
2 112
2 1
' '
' '
X Xarctg A v
Y Y
− − =−
13 13 12 12
13 13 12 12
a X b Y a X b Yarctg arctg v
c X d Y c X d Yα∆ + ∆ ∆ + ∆− − =
∆ + ∆ ∆ + ∆
Nel sistema “carta”: 12 1212
12 12
a X b Yarctg A v
c X d Y
∆ + ∆ − =∆ + ∆
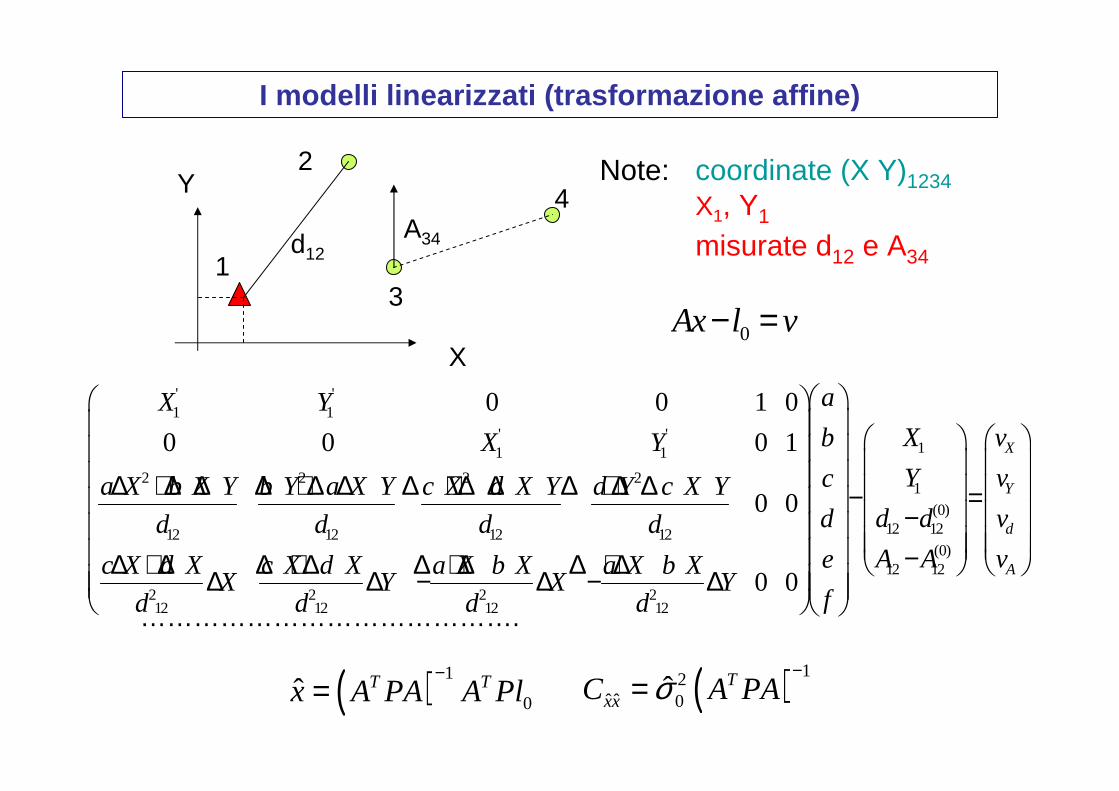
I modelli linearizzati (trasformazione affine)
X
' '1 1
' '11 1
2 2 2 21
(0)12 1212 12 12 12
(012 12
2 2 2 212 12 12 12
0 0 1 0
0 0 0 1
0 0
0 0
aX YXbX YYca X b X Y b Y a X Y c X d X Y d Y c X Y
d ddd d d dA Aec X d X c X d X a X b X a X b X
X Y X Yfd d d d
∆ + ∆ ∆ ∆ + ∆ ∆ ∆ + ∆ ∆ ∆ + ∆ ∆ − − −∆ + ∆ ∆ + ∆ ∆ + ∆ ∆ + ∆ ∆ ∆ − ∆ − ∆
)
X
Y
d
A
v
v
v
v
=
1
2
3
4
d12A34
X
Y
…………………………………….
( ) 1
0ˆ T Tx A PA A Pl−
=
0Ax l v− =
Note: coordinate (X Y)1234X1, Y1
misurate d12 e A34
( ) 12ˆˆ 0ˆ TxxC A PAσ
−=

TRASFORMAZIONE DI MAPPE RASTER AD ALTRI S.R.
Y
X
Est = A*X + B*Y + ENord = C*X + D*Y + F
X pixel
Y pixelEst
Nord
Sistema di coordinate cartograficheSistema di coordinate immagine
(X, Y)” (pixel) � (X, Y)’(Cassini Soldner) � (E, N)UTM
E = AX’ + BY’ + EN = CX’ + DY’ + F
X’ = aX’’ + bY’’ + eY’ = cX’’ + dY’’ + f
La trasformazione complessivamente sarà:
E = A (aX’’ + bY’’ + e) + B * (cX’’ + dY’’ + f) + EN = C (aX’’ + bY’’ + e) + D * (cX’’ + dY’’ + f) + F
Il file TFW della trasformazione affine da (X,Y)’’ a (X, Y) sarà composto dalle 6 righe con valori ottenibili eseguendo i prodotti:
1) a A + c B2) b A + d B3) a C + c D4) b C + d D5) E + e A + f B6) F + e C + f D

Una trasformazione affine di una affine è sempre af fine
Y
X
-142511.187G
-19039.264E
-0.3211885712D
0.0000000000C
0.0000000000B
0.3211885712A
TFW da px a CSParam.affine
5094864.421
1666400.825
-0.321037417
0.009659300
0.009662988
0.321039619
TFW da px a GB
5237881.120
1681143.797
0.999529390
0.030073610
-0.030085092
0.999536246
TFW da CS a GB proc. Geodetica
Conclusioni
X
Procedure di ricalibrazione della mappa applicabile a intero foglio o parte di esso (rubber sheeting)
� Rimuovere errori grossolani dalle misure e dai punti doppi, pernon deviare la stima dei parametri
Trasformazioni polinomiali da usare con cautela e difficilmente reversibili
Trasformazioni con spline multirisoluzione idonee per distribuzione di dati non regolare
Valutare la significatività dei parametri prima di applicarli (Cxx)
Procedura di ricalibrazione automatizzabile sia su raster che su vettoriali, una volta stimati i parametri della trasformazione