Promozione del territorio dal basso (web marketing collaborativo)

Realizzazione collaborativa di un Rover Europeo
ITIS ITIS ““A. MONACOA. MONACO””COSENZACOSENZA
www.itimonaco.cs.itwww.itimonaco.cs.itSCUOLA RETE E.N.I.S. CERTIFICATA UNI EN ISO 9001UNI EN ISO 9001
RETE MIUR RETE MIUR –– ROBOT A SCUOLAROBOT A SCUOLA
INFORMATICA
ELETTRONICA E TELECOMUNICAZIONI
MECCANICA E TERMOTECNICA
ELETTROTECNICA E AUTOMAZIONE
CORSO SERALE PROGETTO SIRIO

Realizzazione collaborativa di un Rover Europeo
Realizzazione collaborativa di un Rover EuropeoConception collaborative d’un ROVer Européen
Collaborative design of a EUropean ROVer

Realizzazione collaborativa di un Rover Europeo

Realizzazione collaborativa di un Rover Europeo
BARBERÀ DEL VALLÈS

Realizzazione collaborativa di un Rover Europeo
Temporizzazione attività:• Gennaio 2006: (Francia) formulazione progetto
• Settembre 2006: inizio attività
• Meetings di lavoro: Novembre 2006 (Germania)
Aprile 2007 (Italia)
Settembre 2007 (Polonia)
Febbraio 2008 (Spagna)
Aprile 2008 (Portogallo)
Maggio 2008 (Francia)
• Settembre 2008 : fine attività

Realizzazione collaborativa di un Rover Europeo
Rovers: I rovers sono dei piccoli veicoli autonomi in grado di compiere missioni di ricognizione in ambienti ostili o inaccessibiliall’uomo.
La ‘missione’ del progetto Eurov:Esplorare gli spazi sconosciuti di ogni“pianeta scuola” da un altro “pianeta scuola” nella Galassia Europa
Alla fine del progetto ogni scuola avràil proprio rover e potrà esplorare le altre scuole via Internet.

Realizzazione collaborativa di un Rover Europeo
Laboratorio comandato in remoto via InternetTED 2003 - Atti Didamatica pagina 564 – Best Practice GOLD
Strumenti digitali controllati in
remoto
Labview (Web server)
Assemblaggio SMD
Fieldpoint NI
Robot RV-M2
PLC Siemens
CAD-CAM

Realizzazione collaborativa di un Rover Europeo
Il progetto : realizzare un sistema composto da 6 rovercontrollati in remoto tramite Internet
Rover in un ambiente – scuolasconosciuto
PC connesso adinternet
Immagini ed informazioni
Controllo

Realizzazione collaborativa di un Rover Europeo

Realizzazione collaborativa di un Rover Europeo
Obiettivo pedagogico:
Creare dei gruppi di studenti appartenenti a diverse scuole tecniche europee per lavorareallo stesso progetto utilizzando:• le nuove tecnologie di progettazione e sviluppo,
• TIC
• un ‘workspace collaborativo’ su Internet.

Realizzazione collaborativa di un Rover Europeo
Il workspace collaborativo – http://www.mayeticvillage.com/eurov

Realizzazione collaborativa di un Rover Europeo
Scuole - funzioni:Francia: Disegno e realizzazione meccanica
Italia: Interfaccia web per il controllo remoto e la ricezione dei dati ambientali
Germania: Programmazione del microcontrollore
Spagna: Sistema di alimentazione
Portogallo: Motori e sensori
Polonia: Glossario in otto lingue

Realizzazione collaborativa di un Rover Europeo
Campi di interesse:• Elettronica
• Elettrotecnica
• Meccanica
• Robotica
• Informatica e telematica
• Lavoro collaborativo
• Lingue straniere. Realizzazione di un glossario di termini tecnici in 8 lingue (Inglese, Francese, Italiano, Tedesco, Polacco, Portoghese, Spagnolo e Catalano).

Realizzazione collaborativa di un Rover Europeo
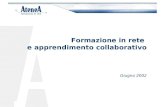
SCHEMA ROVER
Struttura meccanica: 4 ruote motrici direzionali + 2 di sostegnosensori (prossimità – ultrasuoni – temperatura – direzione)
Sistema di alimentazione a batterie Nimhricaricabili da pannello solare
Webcam pan - tilt
motorizzata
Scheda microcontrollore programmabileAccess point wifi

Realizzazione collaborativa di un Rover Europeo

Realizzazione collaborativa di un Rover Europeo
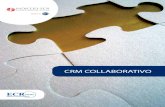
Controllo motori PWMControllo motori PWM
Controllo Servo
Sensore di direzione
Rilevamento ostacolitramite UltraSuoni
Rilevamentobuche nelpercorso con InfraRossi
Controllore Atmel 128

Realizzazione collaborativa di un Rover Europeo
POSSIBILE SCHEMA RETE LOCALE

Realizzazione collaborativa di un Rover Europeo
SCHEMA RETE GLOBALE

Realizzazione collaborativa di un Rover Europeo
PANNELLO
DI
CONTROLLO
SPAZIO PER IMMAGINI

Realizzazione collaborativa di un Rover Europeo
UNA PAGINA DEL GLOSSARIO

Realizzazione collaborativa di un Rover Europeo
Essen, Germania
Novembre 2006

Realizzazione collaborativa di un Rover Europeo
IL TEAM
FRANCESE

Realizzazione collaborativa di un Rover Europeo
COSENZA
APRILE 2007

Realizzazione collaborativa di un Rover Europeo
COSENZA
APRILE 2007

Realizzazione collaborativa di un Rover Europeo
LISBONA
APRILE 2008

Realizzazione collaborativa di un Rover Europeo
AL LAVORO...

Realizzazione collaborativa di un Rover Europeo
GLI STUDENTI RELAZIONANO……..

Realizzazione collaborativa di un Rover Europeo
CNES – PARIGI
PREMIAZIONE

Realizzazione collaborativa di un Rover Europeo
TEST: PORTOGALLO
MANIFESTAZIONE
PARIGI
TEST: SPAGNA CONFERENZA UNIVERSITA’ COSENZA

Realizzazione collaborativa di un Rover Europeo
Punti di forza….:• Progettare e realizzare un ‘oggetto’tangibile che ….’funziona’!!!
• Lavoro di gruppo
• Collaborazione con altri gruppi
• Rispetto delle competenze altrui
• Visione alternativa della tecnologiaInternet
• Creare un sistema permanente di contatto con realtà diverse

Realizzazione collaborativa di un Rover Europeo
http://www.eurov.org