fotogrammetria 1
21
POLITECNICO DI TORINO II FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria civile FOTOGRAMMETRIA CARTOGRAFIA NUMERICA DI UN QUARTIERE DI VILLATA SCALA 1:1000 Prof. Ambrogio Maria Manzino a. a. 2004/2005 Gruppo di Lavoro: Andrea Gilardi Emiliano Grigolo Nicola Mazzia Piciot Simone Pronsati
-
Upload
halid-dogic -
Category
Documents
-
view
66 -
download
0
Transcript of fotogrammetria 1

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 1/21
POLITECNICO DI TORINO
II FACOLTÀ DI INGEGNERIA
Corso di Laurea in Ingegneria civile
FOTOGRAMMETRIA
CARTOGRAFIA NUMERICA DI UN QUARTIERE DI
VILLATA SCALA 1:1000
Prof. Ambrogio Maria Manzino
a. a. 2004/2005
Gruppo di Lavoro:
Andrea Gilardi Emiliano Grigolo
Nicola Mazzia Piciot Simone Pronsati

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 2/21
Corso di fotogrammetria a.a. 2004-2005
INDICE
1. Introduzione ...................................................................................................................................... 2
2. Strumenti utilizzati............................................................................................................................ 3
3. Orientamento interno ........................................................................................................................ 6
4. Orientamento esterno ........................................................................................................................ 8
4.1 Orientamento relativo ............................................................................................................... 8
4.2 Orientamento assoluto .............................................................................................................. 9
5. Restituzione..................................................................................................................................... 17
Pagina 1 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 3/21
Corso di fotogrammetria a.a. 2004-2005
1. Introduzione
La fotogrammetria è la tecnica che consente di determinare metricamente forma e posizione di
oggetti, partendo da almeno due fotogrammi distinti che riprendono lo stesso oggetto. Tale tecnica puòessere aerea e terrestre a seconda degli oggetti che si vanno a rilevare, e si differenzia in base al
rapporto tra distanza focale e distanza dell’oggetto dal punto di presa. La prima viene utilizzata per
produrre carte topografiche mentre con la seconda è possibile rilevare edifici e monumenti con un’alta
precisione.
Le operazioni fondamentali in un lavoro fotogrammetrico sono:
1 presa stereografica della zona interessata;
2 rilievo dei punti di appoggio;
3 orientamenti;
4 restituzione;
5 completamento del rilievo con misure a terra.
Il lavoro da noi svolto è stato quello di generare una cartografia numerica in scala 1:1000, riferita ad
una zona del comune di Villata (VC), eseguendo le operazioni sopra definite ai passi 3 e 4.
Si è partiti da due fotogrammi aerei successivi, 35-36, della strisciata Borgovercelli 1336 e dalle
coordinate di sei punti di appoggio.
In particolare la restituzione consiste nella discretizzazione dell’oggetto e nell’assegnazione ad
ogni punto di una terna di coordinate rispetto ad un sistema di riferimento e di un codice di
identificazione; lo strumento che consente tale operazione è il restitutore, con il quale è possibile
ripristinare l’orientamento esterno dei fotogrammi e poi produrre la carta in modo semiautomatico,
perché l’unico intervento dell’operatore consiste nel collimare i punti omologhi, immagine di punti
reali del terreno, e assegnare loro un codice entità. Ovviamente, un problema di fondamentaleimportanza nella fase di restituzione e, comunque, di tutta la fotogrammetria in generale, è la sicura
individuazione di tutte le coppie di punti corrispondenti dei fotogrammi, la quale deve avvenire con la
maggiore precisione possibile. Tale problema è risolvibile grazie all’introduzione della collimazione
stereoscopica.
Pagina 2 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 4/21
Corso di fotogrammetria a.a. 2004-2005
2. Strumenti utilizzati
Lo strumento utilizzato nell’esercitazione è un restitutore analitico semplificato a due controlli del
tipo Stereobit20 della ditta Galileo Siscam. In particolare esso consiste nei seguenti componenti
hardware e software:
• stereocomparatore: individua i punti omologhi e misura le loro coordinate in un sistema di
riferimento carrello;
• motore di asservimento ed encoder: muovono in maniera controllata i carrelli dello
stereocomparatore e ne misurano le coordinate;
• calcolatore e periferiche di input ed output: ricevono in tempo reale i dati dallo
stereocomparatore e dai dispositivi di controllo dell’operatore e inviano, sempre in tempo reale, i
comandi ai servomotori;
• interfaccia: è costituita da schede elettroniche che consentono lo scambio di informazioni tra i vari
componenti;
• software Winstb: calcola gli orientamenti, fornisce gli output della restituzione e riceve ed invia in
real time i comandi all’interfaccia. Inoltre consente le conversioni di formato degli output in altri
programmi applicativi come ad esempio Autocad.
Tale restitutore è costituito da un apparato per le misure delle coordinate di lastra delle coppie di
punti corrispondenti, detto stereocomparatore, dotato di servomotori che consentono di manovrare in
modo controllato i carrelli e unito ad un calcolatore elettronico che consente di determinare in breve
tempo l’orientamento esterno dei fotogrammi e, poi, di calcolare in tempo reale le coordinate terreno
dei punti collimati.
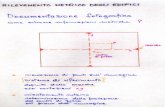
Lo Stereobit 20 è un restitutore analitico semplificato dalle prestazioni eccellenti. E’ uno strumento
a funzionamento ibrido: le coordinate costituiscono l’informazione primaria, ma il calcolatore controlla
due motori pξ1, pη1 collegati ai movimenti differenziali del carrello porta-lastra di sinistra. La figura 1
illustra il flusso di dati: gli spostamenti generali ξ1 = ξ2 e η1 = η2 sono effettuati manualmente
dall’operatore, ma il calcolatore è in grado di muovere ulteriormente uno dei due porta-lastra (quello di
sinistra), in modo che risulti: ξ’1 = ξ1 + pξ1 e η’1 = η1 + pη1.
Pagina 3 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 5/21
Corso di fotogrammetria a.a. 2004-2005
Fig. 1 – schema di funzionamento del restitutore
Ciò consente di calcolare in tempo reale la parallasse d’altezza pη , a orientamento relativo eseguito,
utilizzando ad esempio l’equazione:
2
22
222
211
2211 ω η
φ η ξ
φ η ξ
κ ξ κ ξ η d
ccd
cd
cd d p ⎟⎟
⎠
⎞⎜⎜⎝
⎛ ++−++−=
Si può così esplorare il modello stereoscopico e si possono restituire punti singoli, eliminando solo
la parallasse pη.
Lo schema dello Stereobit è riportato in figura 2. Il carrello principale (1) è mosso dall’operatore,
direttamente quando si effettuano i grandi spostamenti veloci, o per mezzo di un pantografo
demoltiplicatore (2) per le collimazioni fini. La marca è ottenuta osservando stereoscopicamente, per
mezzo dello stereoscopio a specchi (3), due marche incise su lastre di vetro (4) appoggiate ai
fotogrammi.
Un carrello secondario (5) si muove secondo le direzioni pξ , pη, consentendo, così, i movimentidifferenziali dell’immagine di sinistra. Questi movimenti possono essere comandati manualmente con i
tamburi (6), o controllati dal calcolatore. In entrambi i casi sono trasmessi al carrello da due piccoli
motori passo-passo.
Le dimensioni dei portalastra consentono l’osservazione di fotogrammi fino al formato 23 x 23 cm;
infine un doppio sistema di illuminazione permette l’uso sia di diapositive sia di copie su carta.
Pagina 4 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 6/21
Corso di fotogrammetria a.a. 2004-2005
Fig. 2 – schema del restitutore Stereobit 20
Fig. 3 – la strumentazione utilizzata
Pagina 5 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 7/21
Corso di fotogrammetria a.a. 2004-2005
3. Orientamento interno
L’orientamento interno è una operazione che consiste nella ricostruzione degli assi principali del
fotogramma per mezzo della collimazione delle marche fiduciali, dette anche reperes, che vengono
impresse sulla pellicola al momento della presa tramite dei piccolissimi fori presenti nel telaio
dell’apparecchio fotografico. Confrontando le coordinate di tali punti di riferimento, reperibili sul
certificato di calibrazione, con le coordinate ottenute dalle collimazioni effettuate vengono così
eliminati lo stiramento e la deformazione isotropa della pellicola. Si tiene inoltre conto anche della
distorsione radiale media dell’obiettivo della camera e di ogni altra possibile distorsione causata da
piccole deformazioni del sistema di misura.
Le distorsioni ottiche sono invece eliminate dal calcolatore utilizzando la curva di distorsione radiale
media riportata sul certificato di calibrazione della macchina, la quale identifica la distorsione mediadel fotogramma nelle quattro diagonali. Su un sistema cartesiano sono indicate in ordinata le
deformazioni radiali (Δρ), e in ascissa la distanza radiale dal punto principale (ρ), espressa come segue:
( ) ( )20
20 η η ξ ξ ρ −+−=
oppure anche:
ρ τ ρ Δ+⋅= tgc
da quest’ultima si ottiene:
τ ρ ρ tgc ⋅−=Δ
dove:
c è la distanza principale;
τ è l’angolo d’ingresso.
Quindi la prima operazione da eseguire prima di iniziare la restituzione è quella di trasformare le
coordinate carrello in coordinate immagine (ξ,η) collimando le marche fiduciali. Nel lavoro in
questione sono stati collimati i reperes 2, 3, 4 per il fotogramma di sinistra e 1, 2, 4 per quello di destra,
essendo le zone più esterne di entrambi i fotogrammi non visibili sullo strumento in quanto il
portalastra è di dimensioni contenute(fig. 4).
Una volta eseguita la collimazione dei reperes il calcolatore svolge le operazioni necessarie al
passaggio dal sistema di riferimento strumentale al sistema di riferimento interno dei fotogrammi,
compiendo una rototraslazione piana.
Pagina 6 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 8/21
Corso di fotogrammetria a.a. 2004-2005
Fotogramma sinistro Fotogramma destro
2
1 3
4
2
1 3
4
Fig. 4: sono cerchiati i reperes collimati
Dal punto di vista operativo è bene ricordare che ogni volta che si riprende il lavoro dopo essere
usciti e rientrati dal programma di restituzione è necessario collimare gli start point, ovvero delle
marche presenti su entrambi i carrelli che consentono alla strumentazione di ripristinare l’orientamento
interno precedentemente eseguito. Inoltre, al momento della ripresa della restituzione dopo una lunga
interruzione oppure dopo molte ore di lavoro, a causa di deformazioni o spostamenti accidentali dei
fotogrammi, è indispensabile effettuare nuovamente l’orientamento interno.
.
Pagina 7 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 9/21
Corso di fotogrammetria a.a. 2004-2005
4. Orientamento esterno
L’operazione di orientamento esterno consiste nel determinare 12 parametri, (X0, Y0, Z0, Ω, Φ, Κ)
relativi ai due fotogrammi, in base a misure di punti omologhi sui fotogrammi e a coordinate di altri
punti prese a terra.
Si definiscono due passi:
1) orientamento relativo ovvero la determinazione dei parametri angolari che definiscono la
posizione assunta dalla camera nello spazio al momento della presa di uno dei fotogrammi, rispetto
alla posizione assunta dalla stessa camera al momento della presa dell’altro fotogramma;
2) orientamento assoluto ovvero la determinazione dei parametri di rotazione, traslazione rigide e
fattore di scala necessari a definire la corretta posizione nello spazio dell’oggetto rilevato.
4.1 Orientamento relativo
L’orientamento relativo può essere di tipo simmetrico o asimmetrico a seconda che si muova un solo
fotogramma o entrambi i fotogrammi simmetricamente. Nel nostro caso il software esegue un
orientamento relativo di tipo simmetrico, ricavandone analiticamente le rotazioni di entrambi i
fotogrammi che sono: ϕ1, κ1, ω2, ϕ2, κ2.
Tale procedura si esegue collimando almeno cinque punti su entrambi i fotogrammi cioè il minimo
richiesto per ricavare i cinque gradi libertà, non dipendenti dal sistema terreno, di una camera rispetto
all’altra, a parte una traslazione lungo la base che modifica solo la scala del modello.
Una volta collimati i cinque punti, distribuiti omogeneamente sul fotogramma, il calcolatore elabora
i dati determinando i parametri di orientamento e se i punti collimati sono in numero superiore a 5
vengono automaticamente calcolati gli scarti residui. In realtà, per controllare le misure e per conoscere
la precisione di misure, è sempre necessario eseguire la collimazione di ulteriori punti; per questo sono
stati misurati in totale dieci punti. L’operatore ha la facoltà di modificare uno o più punti con residuieccessivi semplicemente riacquisendone le coordinate.
Dopo aver acquisito il numero di punti necessario ed aver confermato l’orientamento relativo
ottenuto, il calcolatore disattiva il comando-rotella che controlla i movimenti in direzione η e abilita
l’altro comando per gli spostamenti in direzione z, rendendo possibile la collimazione dei singoli punti
e la corretta determinazione della quota altimetrica.
Pagina 8 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 10/21
Corso di fotogrammetria a.a. 2004-2005
A questo punto l’intersezione dei raggi omologhi dei punti collimati dà luogo al cosiddetto
modello stereoscopico, ovvero un modello ideale numerico del terreno orientato e posizionato in
maniera generica e in scala pressoché arbitraria.
4.2 Orientamento assoluto
L’orientamento assoluto è il procedimento attraverso il quale si determinano i sette parametri,
dipendenti solo dal sistema terreno, per mezzo dei quali ogni punto del modello, avente assetto e
posizione arbitrarie nello spazio, viene rototraslato e scalato nel sistema di coordinate terreno X,Y,Z.
Le relazioni tra coordinate modello x,y,z e coordinate oggetto X,Y,Z si possono esprimere con le
seguenti equazioni:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ ⋅⋅+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ =
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
z
y
x
Rm
Z
Y
X
Z
Y
X
0
0
0
dove:
• X0,Y0,Z0 sono le coordinate dell’origine del sistema x,y,z nel sistema di coordinate oggetto;
• m è il fattore di scala;
• R è la matrice di rotazione spaziale del sistema x,y,z rispetto al sistema X,Y,Z, funzione delle tre
rotazioni Ω, Φ, Κ.
X0,Y0,Z0, m, Ω, Φ, Κ sono i sette parametri di orientamento assoluto. Quindi per la loro
determinazione sono necessarie almeno sette equazioni: planoaltimetriche di almeno due punti e quella
altimetrica di almeno un punto, oppure quelle planimetriche di due punti e quelle altimetriche di tre
punti.Nel nostro lavoro sono stati utilizzate le coordinate planoaltimetriche di sei punti di appoggio, per
un totale di 18 equazioni.
Pagina 9 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 11/21
Corso di fotogrammetria a.a. 2004-2005
Punto Descrizione X (m) Y (m) Z (m)
1 Spigolo esterno recinzione a terra 5497,96 26472,72 138,06
2 Spigolo esterno recinzione a terra 5848,00 26463,84 138,42
3 Spigolo tetto pensilina 5440,16 25982,44 137,69
4 Spigolo esterno recinzione a terra 5826,82 26133,06 137,00
5 Spigolo esterno recinzione a terra 5367,39 25639,09 134,40
6 Spigolo esterno recinzione a terra 5887,90 25687,12 136,33
I sei punti di appoggio sono riportati nelle seguenti monografie:
Fig. 5 – punto 1
Pagina 10 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 12/21
Corso di fotogrammetria a.a. 2004-2005
Fig. 6 – punto 2
Fig. 7 – punto 3
Pagina 11 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 13/21
Corso di fotogrammetria a.a. 2004-2005
Fig. 8 – punto 4
Fig. 9 – punto 5
Pagina 12 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 14/21
Corso di fotogrammetria a.a. 2004-2005
Fig. 8 – punto 6
Così come per l’orientamento relativo, anche per quello assoluto l’operatore può ricollimare uno o
più punti con residui eccessivi semplicemente riacquisendoli.
Viene qui di seguito riportato il file con i dati di input (tra i quali il tipo di camera adottata), e output
relativo al lavoro di orientamento.
Pagina 13 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 15/21
Corso di fotogrammetria a.a. 2004-2005
----------------------------------------------------------------------------
STEREOBIT 20 00041
Protocollo di orientamento
----------------------------------------------------------------------------
----------------------------------------------------------------------------
Nome file di lavoro : VIL05A.wrk
----------------------------------------------------------------------------
Strisciata numero : 6 Foto sinistra : 1136 Foto destra : 1135
Grandi traslazioni X [km] : 0 Y [km] : 0
Unita' di misura (m,dm,cm,mm) : m Numero di decimali (0-3) : 2
Correzione rifrazione atmosferica : n
Correzione curvatura terrestre : n
1^ operatore : Gilardi Andrea 2^ operatore : Grigolo Emiliano
3^ operatore : Mazzia Piciot Nicola 4^ operatore : Pronsati Simone
Data : marzo 2005 Note :
----------------------------------------------------------------------------
Nome file fotocamera : VIL05A.ftc
----------------------------------------------------------------------------
Marca : Wild Tipo : uag411 N. serie : 1
Distanza principale [mm] : 151.77
Coord. di PPS rispetto a FC [um] X : 0 Y : 0
Coordinate dei reperes (s/n) : n
Distorsione radiale (s/n) : n
Note :
----------------------------------------------------------------------------
ORIENTAMENTO INTERNO
----------------------------------------------------------------------------
Coordinate dei reperes collimati
1) -69160 124490 -7470 121870
2) 46780 239990 108270 237720
3) 162100 123870 224050 121910
4) 46160 8550 108310 6240
Pagina 14 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 16/21
Corso di fotogrammetria a.a. 2004-2005
Coord. centro lastra [μm]
XcS = 46470 XcD = 108290
YcS = 124180 YcD = 121890
KaS [gon] = -0.17 KaD [gon] = 0.01
Residui in [μm]
1) -115631 -0 -0 -115760 0 0
2) -0 115811 -0 -0 115830 -0
3) 115631 0 0 115760 0 0
4) 0 -115630 0 0 -115650 0
----------------------------------------------------------------------------
ORIENTAMENTO RELATIVO
----------------------------------------------------------------------------
Residui in [μm]
1) -1
2) 0
3) -1
4) 0
5) -4
6) 0
7) 1
8) 1
9) -3
10) 6
Parametri angolari [gon]
FI Sx = -0.6805 FI Dx = -0.0491OM Sx = 0.0000 OM Dx = 0.5292
KA Sx = 1.5554 KA Dx = 1.1714
Componente trasversale e verticale della base
in percentuale della componente longitudinale della base
by/bx = 2.444 %
bz/bx = 1.069 %
----------------------------------------------------------------------------
ORIENTAMENTO ASSOLUTO
----------------------------------------------------------------------------
Coordinate dei punti di controllo
cod0 cod1 X Y Z pexy pez
3635 1 5497.96 26472.72 138.06 1. 1.
3635 2 5848.00 26463.84 138.42 1. 1.
3635 3 5440.16 25982.44 137.69 1. 1.
3635 4 5826.82 26133.06 137.00 1. 1.
3635 5 5367.39 25639.09 134.40 1. 1.
3635 6 5887.90 25687.12 136.33 1. 1.
Pagina 15 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 17/21
Corso di fotogrammetria a.a. 2004-2005
Residui in [m]
cod0 cod1 X Y Z
1) 3635 1 0.08 -0.39 -0.00
2) 3635 2 0.02 0.37 -0.10
3) 3635 3 -0.02 0.15 0.13
4) 3635 4 0.25 -0.23 0.08
5) 3635 5 -0.21 -0.21 -0.11
6) 3635 6 -0.13 0.31 0.00
Scarto quadratico medio rxy 0.20 rz 0.07
Punti di presa
X Sx = 5784.93 X Dx = 5399.29
Y Sx = 26056.83 Y Dx = 26053.86
Z Sx = 863.13 Z Dx = 859.90
Base = 385.66
FI [gon] = -0.5318
OM [gon] = 0.4941
Scala media foto = 4700
Angoli di assetto rispetto al sistema di rifer. oggetto
FI Sx [gon] = -1.2250 FI Dx [gon] = -0.6007
OM Sx [gon] = -0.4637 OM Dx [gon] = -1.0113
KA Sx [gon] = -1.0592 KA Dx [gon] = -0.6794
Sequenza di rotazione: Omega, Phi, Kappa
----------------------------------------------------------------------------
Per quanto riguarda l’orientamento relativo si evidenzia un residuo massimo di 6 μm che rientra
ampiamente nei 10 μm di precisione dello strumento.
Per quanto riguarda l’orientamento assoluto si osserva che gli scarti quadratici medi sono
confrontabili con il valore derivante dall’errore di graficismo per una carta in scala 1:1000, che è pari a
0,20 m. E’ da osservare che i singoli scarti di alcuni punti presentano dei valori eccedenti al limite di
0,20 m, tuttavia si possono ancora ritenere accettabili, in quanto rientrano nello stesso ordine di
grandezza.
Pagina 16 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 18/21
Corso di fotogrammetria a.a. 2004-2005
5. Restituzione
Una volta completate e accettate tutte le procedure di orientamento il software consente di iniziare
la restituzione vera e propria.
Il lavoro ha previsto la restituzione del seguente isolato (evidenziato in giallo):
Fig. 9 – Isolato interessato dalla restituzione(Comune di Villata VC)
Prima di iniziare la procedura vera e propria di restituzione è necessario creare in ambiente DOS un
file di nome CODESCR, con estensione a piacere, (in questo caso CODESCR.GRA), nel quale si
definiscono i codici entità e le penne colorate per ognuno di essi.
La definizione di particolari in fase di restituzione è funzione della scala della cartografia che si
andrà a realizzare; per una scala 1:1000 si ritiene sufficiente la rappresentazione della sagoma esterna
degli edifici (ove è visibile stereoscopicamente), il perimetro delle copertura, le recinzioni, i cortili, le
strade principali, le rogge, ecc...
Pagina 17 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 19/21
Corso di fotogrammetria a.a. 2004-2005
Viene di seguito riportato il file codescr.gra adottato per l’esercitazione:
Codice Penna Descrizione
1.01 9 Fabbricati-Piede
1.02 1 Fabbricati-Tetti1.03 6 Baracche – Tettoie
1.04 2 Aie
1.10 7 Ponti
2.01 3 Recinzioni in muratura
2.02 8 Recinzioni metalliche
2.03 5 Siepi di recinzione
3.01 13 Strade comunali
3.02 12 Strade poderali
4.01 10 Fossi – rogge5.01 15 Vegetazione ad alto fusto
5.02 4 Vegetazione a basso fusto
5.03 11 Orti e giardini
5.02 14 Campi coltivati
6.01 10 Punti quotati
Una volta definiti i sopracitati parametri si può avviare il programma di restituzione che
inizialmente richiede l’estensione del file CODESCR da cui dovrà attingere i codici e le penne.Successivamente verrà domandato il nome del file che si andrà a creare con la restituzione.
Considerando che la prima lettera di tale nome è impostata obbligatoriamente dal software come “D”, il
file è stato chiamato DVIL05A per indicare la restituzione del Comune di Villata relativa al gruppo di
lavoro A.
Prima di iniziare la restituzione vera e propria è ancora necessario definire delle tolleranze che il
programma utilizzerà per eseguire riattacchi del cursore a entità già esistenti.
Nel caso in esame le tolleranze stabilite sono le seguenti:
- tolleranza di fine entità = 0,20 m;
- tolleranza di chiusura entità = 0,20 m;
- tolleranza di riattacco planimetrico = 0,20 m;
- tolleranza di riattacco altimetrico = 0,30 m;
Per iniziare la restituzione occorre portare la marca del restitutore sulla zona di interesse e digitare
Pagina 18 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 20/21
Corso di fotogrammetria a.a. 2004-2005
il comando F2 sulla tastiera del calcolatore; in questo modo il programma centrerà la finestra su tale
zona e mostrerà a video un cursore che rappresenta la marca.
Per ottimizzare l’operazione si è scelto di restituire di volta in volta tutte le entità dello stesso
gruppo, ossia prima tutti i tetti dei fabbricati, e così via. In tale modo non è necessario restituire per una
abitazione, il tetto, le murature visibili, il giardino ecc...
Digitando il comando F4 è possibile assegnare all’entità da restituire uno dei codici identificativi
definiti precedentemente, che sono inoltre correlati ad una determinata penna. Nel caso in cui, dopo
aver collimato un’entità, ci si renda conto di aver utilizzando un codice errato, è possibile apportare la
correzione, senza ricollimare lo stesso oggetto, selezionando il menù EDIT 1 sulla parte destra dello
schermo.
La restituzione inizia collimando un punto di una entità e fissandolo tramite una singola pressione
sul pedale del restitutore che “abbassa” la penna; da tale punto il restitutore traccia una linea fino alpunto successivo che viene fissato con un’altra pressione singola sul pedale. Si procede in questo modo
finchè si chiude l’entità sul punto iniziale premendo due volte sul pedale oppure, da tastiera, due volte
il comando F8 in modo da “alzare” la penna. A questo punto si può muovere la marca su un’altra entità
e ricominciare l’operazione precedente.
Un altro comando da tastiera molto utile è SHIFT+F8 che permette di riattaccarsi ad un punto già
restituito, se esso viene ricollimato con uno scarto tale da rientrare nelle tolleranze definite ad inizio
restituzione.Durante la restituzione sono stati sfruttati solo in parte i comandi del programma disponibili e tra
essi si ricordano il comando ZOOM e il menù EDIT 1 che compaiono sulla parte destra dello schermo.
Con quest’ultimo è possibile cancellare, spezzare, stirare, spostare ecc.. le entità già restituite.
Osservando i fotogrammi appaiono evidenti delle zone in cui, o per via delle ombre oppure per la
presenza di alberi, non sono collimabili stereoscopicamente alcuni punti; tali entità verranno restituite
solo per la parte visibile su entrambi i fotogrammi, mentre le parti non visibili saranno rilevate a mezzo
di misurazioni a terra. La stessa procedura deve essere eseguita per il rilievo del perimetro esterno delle
murature degli edifici che, nascoste dai tetti, sono collimabili solo in parte. Tale operazione è definita
“sgrondatura”.
L’ultima parte della restituzione ha previsto l’inserimento di un certo numero di punti quotati posti
in zone significative.
Sono di seguito riporati i principali comandi da tastiera disponibili durante la restituzione.
- F1 help
Pagina 19 di 20

5/17/2018 fotogrammetria 1 - slidepdf.com
http://slidepdf.com/reader/full/fotogrammetria-1 21/21
Corso di fotogrammetria a.a. 2004-2005
- F2 centra la finestra sulla marca
- F3 cambia la provenienza
- F4 cambia codice
- F5 cambia ultimo punto
- F6 cancella entità
- F7 posizionamento della marca sulla grafica
- F8 riattacco a penna giù
- F9 prossimo profilo sezione o curva di livello
- SHIFT+F1 passa in pag testo
- SHIFT+F2 porta la marca al centro della finestra grafica
- SHIFT+F4 chiude entità cambia codice e apre una nuova entità
- SHIFT+F8 riattacco a penna sù- Freccia SU riattacco di quota su vertice terminale
- Freccia GIU riattacco su vertice terminale
- Page UP cambia quota a tutti i vertici dell’entità catturata
- Page DOWN cambia quota ad alcuni vertici dell’entità catturata
A restituzione terminata il software consente di trasformare il file di lavoro in un file con estensione
DXF che è quindi possibile aprire con AUTOCAD per essere impaginato e stampato. Dal MENÙPRINCIPALE del software si seleziona il comando RESTITUZIONE e quindi il comando
CONVERSIONE.
Selezionando il comando CONVERSIONE da DCT a DXF il software richiede in ordine:
- la directory nella quale è allocato il file da convertire;
- il nome di tale file;
- l’estensione del file CODESCR;
- la directory nella quale verrà allocato il file convertito;
- il record inizio conversione entità (digitare “2”);
- il record finale conversione entità (digitare “ULTIMO”);
- la conferma per la conversione delle campiture e dei simboli puntuali;
- la definizione dell’entità (digitare “2” che equivale alla scelta 3DPOLY).
A questo punto viene generato il file con estensione DXF che può essere gestito con Autocad.
Pagina 20 di 20



![Principi di Fotogrammetria - unige.it · = 45 micron * H/f [1 micron = 10-6 m] Fissata la scala cartografica (fsc) alla quale voglio restituire il mio rilievo, l’errore di restituzione](https://static.fdocumenti.com/doc/165x107/5ed0246b137588523c699e56/principi-di-fotogrammetria-unigeit-45-micron-hf-1-micron-10-6-m-fissata.jpg)