Fondamenti di Tenuta della Nave al Mare - unina.stidue.netunina.stidue.net/Universita' di...
339
Fondamenti di Tenuta della Nave al Mare Radoslav NABERGOJ
Transcript of Fondamenti di Tenuta della Nave al Mare - unina.stidue.netunina.stidue.net/Universita' di...

Fondamenti diTenuta della Nave al Mare
Radoslav NABERGOJ

Copyright c© 2010 Radoslav NABERGOJ. All rights reserved.
Questo documento puo essere riprodotto e distribuito in tutto o in parte, con ogni mezzo fisico o elettronico,purche questo avviso di copyright sia mantenuto su tutte le copie. La ridistribuzione commerciale non epermessa. Ogni traduzione, lavoro derivato o comprendente questo documento deve contenere questo stessoavviso di copyright : per esempio, non si possono produrre lavori derivati da questo documento ed imporrerestrizioni aggiuntive sulla sua distribuzione. Per ulteriori informazioni si prega di contattare l’autoreall’indirizzo [email protected].
This document may be reproduced and distributed in whole or in part, in any medium physical or electronic,as long as this copyright notice is retained on all copies. Commercial redistribution is not allowed. Alltranslations, derivative works, or aggregate works incorporating this document in whole or in part must becovered under this copyright notice. That is, you may not produce a derivative work from this documentand impose additional restrictions on its distribution. For further information please contact the authorat [email protected].
Trieste, 2010
Indice
Prefazione ix
Nomenclatura xi
1 Generalita 11.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Nota storica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
I Onde Marine 9
2 Teoria delle onde 112.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2 Onde regolari piane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3 Teoria potenziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.4 Onde di piccola ampiezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4.1 Acqua profonda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.4.2 Acqua poco profonda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.4.3 Caso intermedio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.5 Onde stazionarie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.6 Smorzamento delle onde progressive . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3 Effetto Doppler 253.1 Angolo di rotta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2 Frequenza d’incontro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.3 Condizioni sfavorevoli per i moti nave . . . . . . . . . . . . . . . . . . . . . . . . . 30
4 Onde oceaniche 334.1 Generazione delle onde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.2 Analisi statistica delle onde irregolari . . . . . . . . . . . . . . . . . . . . . . . . . . 354.3 Analisi di Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.4 Spettro di energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.5 Momenti spettrali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.6 Spettri particolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.7 Spettri teorici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.7.1 Spettro di Pierson-Moskowitz . . . . . . . . . . . . . . . . . . . . . . . . . . 464.7.2 Spettro di Bretschneider . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.7.3 Spettro JONSWAP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.8 Spettro delle pendenze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
iii

4.9 Propagazione delle onde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.10 Raccomandazioni ITTC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5 Statistica delle onde oceaniche 595.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.2 Osservazioni visuali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.2.1 Stato del mare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.2.2 Altezza e periodo osservato . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.3 Atlanti delle onde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 625.3.1 Ossevazioni visuali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 625.3.2 Ricostruzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 635.3.3 Osservazioni strumentali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.4 Raccomandazioni ITTC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
II Moti Nave 69
6 Problema dinamico 716.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 716.2 Assi e definizioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 716.3 Equazioni del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 746.4 Forze agenti su una nave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 766.5 Equazioni lineari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 796.6 Moti in acqua tranquilla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
6.6.1 Forze idrostatiche di richiamo . . . . . . . . . . . . . . . . . . . . . . . . . . 836.6.2 Forze idrodinamiche in un fluido illimitato . . . . . . . . . . . . . . . . . . . 856.6.3 Forze idrodinamiche in un fluido con superficie libera . . . . . . . . . . . . . 86
6.7 Moti in onde regolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 886.8 Nave con simmetria laterale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
7 Moti nave in acqua tranquilla 937.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 937.2 Equazioni dei moti disaccoppiati . . . . . . . . . . . . . . . . . . . . . . . . . . . . 947.3 Oscillazioni libere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
7.3.1 Oscillazioni libere non smorzate . . . . . . . . . . . . . . . . . . . . . . . . . 957.3.2 Oscillazioni libere smorzate . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
7.4 Formule approssimate per i momenti d’inerzia . . . . . . . . . . . . . . . . . . . . . 967.4.1 Momento d’inerzia longitudinale . . . . . . . . . . . . . . . . . . . . . . . . 987.4.2 Momento d’inerzia trasversale . . . . . . . . . . . . . . . . . . . . . . . . . . 997.4.3 Momento d’inerzia centrifugo . . . . . . . . . . . . . . . . . . . . . . . . . . 101
7.5 Formule approssimate per i periodi naturali . . . . . . . . . . . . . . . . . . . . . . 1017.5.1 Sussulto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1027.5.2 Beccheggio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1037.5.3 Metodo di Tasai . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1057.5.4 Rollio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
8 Soluzione del problema idrodinamico 1098.1 Strip theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1098.2 Calcolo bi-dimensionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1108.3 Forme di Lewis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1148.4 Coefficienti idrodinamici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
iv
9 Moti nave in onde regolari 1239.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1239.2 Funzioni di trasferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1239.3 Moti nave in onde regolari di prora . . . . . . . . . . . . . . . . . . . . . . . . . . . 1249.4 Moti nave in onde regolari di poppa . . . . . . . . . . . . . . . . . . . . . . . . . . 1289.5 Moti simmetrici in onde regolari oblique . . . . . . . . . . . . . . . . . . . . . . . . 1309.6 Moti nave in onde regolari al traverso . . . . . . . . . . . . . . . . . . . . . . . . . 1339.7 Moti antisimmetrici in onde regolari oblique . . . . . . . . . . . . . . . . . . . . . . 1369.8 Moti assoluti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1389.9 Moto relativo nave-onda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1409.10 Velocita ed accelerazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1429.11 Lateral Force Estimator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1429.12 Nonlinearita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
10 Moti nave in onde irregolari 14910.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14910.2 Spettro delle onde d’incontro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15010.3 Spettro di energia dei moti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15210.4 Metodi equivalenti per il calcolo dei moti . . . . . . . . . . . . . . . . . . . . . . . 15610.5 Accoppiamento tra spettro dell’eccitazione e funzione di trasferimento . . . . . . . 15710.6 Moti in mare a cresta corta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15710.7 Moti nonlineari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
11 Effetti indesiderati 16311.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16311.2 Probabilita di occorrenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16411.3 Slamming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
11.3.1 Premessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16611.3.2 Prove di impatto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16611.3.3 Prove su modelli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16911.3.4 Pressione di slamming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
11.4 Imbarco d’acqua . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17211.5 Superamento del bordo libero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17311.6 Effetto delle forme di prora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
12 Efficienza operativa 17712.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17712.2 Area e stagione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17712.3 Velocita e rotta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17812.4 Calcolo dell’efficienza operativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
13 Seakeeping nel progetto 18313.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18313.2 Carena madre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18413.3 Effetto delle dimensioni principali . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18413.4 Effetto della forma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
13.4.1 Rapporto immersione/lunghezza . . . . . . . . . . . . . . . . . . . . . . . . 19113.4.2 Rapporto larghezza/lunghezza . . . . . . . . . . . . . . . . . . . . . . . . . 19413.4.3 Coefficiente di pienezza del galleggiamento prodiero . . . . . . . . . . . . . 194
13.5 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
v

14 Resistenza addizionale per cattivo tempo 20114.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20114.2 Resistenza addizionale in onde regolari . . . . . . . . . . . . . . . . . . . . . . . . . 20114.3 Resistenza addizionale in onde irregolari . . . . . . . . . . . . . . . . . . . . . . . . 20414.4 Metodi approssimati di previsione . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
15 Effetti dei moti nave sui passeggeri ed equipaggio 20915.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20915.2 Motion Sickness Incidence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21015.3 Moto soggettivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21215.4 Motion Induced Interruptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
16 Prove al vero 22116.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22116.2 Misura delle onde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22216.3 Misura dei moti nave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22316.4 Misura delle altre risposte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22416.5 Esecuzione delle prove . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
17 Prove su modelli 22717.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22717.2 Prove all’aperto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22717.3 Prove in laboratorio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22817.4 Ondogeni e spiagge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
17.4.1 Ondogeni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23017.4.2 Spiagge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
17.5 Strumentazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23217.5.1 Sussulto e beccheggio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23217.5.2 Onde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23317.5.3 Moto relativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23417.5.4 Imbarco d’acqua e slamming . . . . . . . . . . . . . . . . . . . . . . . . . . 235
17.6 Materiale di costruzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23517.7 Allestimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23717.8 Prove in onde regolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24017.9 Prove in onde irregolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24117.10 Effetti della riflessione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24417.11 Interferenza con le pareti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
III Appendici 251
A Elementi di probabilita e statistica 253A.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253A.2 Analisi di una serie temporale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253A.3 Istogrammi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254A.4 Funzione densita di probabilita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257A.5 Distribuzione di Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259A.6 Distribuzione di Rayleigh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262A.7 Statistica del moto ondoso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263A.8 Probabilita congiunta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
vi
B Trasformazione di coordinate 267B.1 Premessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267B.2 Angoli di Eulero navali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267B.3 Approssimazione lineare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
C Moti oscillatori 273C.1 Premessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273C.2 Moto armonico semplice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273C.3 Moto armonico smorzato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277C.4 Moto armonico forzato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
D Analisi dimensionale e similitudine dinamica 285D.1 Premessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285D.2 Grandezze fisiche e loro misura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286D.3 Grandezze fondamentali e grandezze derivate . . . . . . . . . . . . . . . . . . . . . 287D.4 Cambiamento di unita di misura . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288D.5 Teorema Π . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289D.6 Similitudine dei moti fluidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292D.7 Modellazione del comportamento in mare . . . . . . . . . . . . . . . . . . . . . . . 297
D.7.1 Similitudine del modello . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299D.7.2 Similitudine delle onde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301D.7.3 Similitudine delle velocita . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302D.7.4 Moti in onde regolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302D.7.5 Moti in onde irregolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
Bibliografia 307
Elenco delle Figure 322
Elenco delle Tabelle 323
vii

viii
Prefazione
Il presente volume tratta gli argomenti di maggior interesse per gli studenti del Corso di Laurea inIngegneria Navale che frequentano il corso di Tenuta della Nave al Mare, tenuto dall’autore pressola Facolta di Ingegneria dell’Universita di Trieste. Il libro puo servire come sussidio didatticoper la formazione dei laureati iscritti al Dottorato di Ricerca che intendono specializzarsi neisettori dell’Idrodinamica e della Progettazione Navale. Inoltre, esso deve intendersi come testo diriferimento per tutti gli ingegneri navali che vogliono accrescere il loro bagaglio culturale su unodegli argomenti piu affascinanti ed impegnativi della loro professione, specialmente ai fini dellaprogettazione e dell’analisi specialistica di mezzi navali ad alto contenuto tecnologico.
Purtroppo, non e possibile spiegare la teoria dei moti nave senza far riferimento ai Principi dellaFluidodinamica e della Teoria dei Processi Stocastici. Infatti, nelle applicazioni di ingegneria navalerelative al comportamento della nave in mare ondoso, il problema dei moti e quello dell’operativitadel mezzo appaiono talmente connessi che e necessario affrontarli simultaneamente. Per questo,a differenza dei sussidi didattici su specifici argomenti di Teoria della Nave, nel presente volumevengono introdotti sia gli elementi fondamentali di teoria idrodinamica dei moti nave sia i principaliproblemi connessi con la progettazione ottimale di navi operanti in condizioni meteomarine ostili.La loro trattazione e la contemporanea volonta di mantenere limitata l’estensione del libro, hannocomportato la necessita di condensare al massimo le spiegazioni di molti degli argomenti trattati,essenzialmente con l’esclusione delle particolarita a carattere teorico.
E necessario osservare che la Teoria dei Moti Nave ha avuto, negli ultimi decenni, uno sviluppoparticolarmente intenso a dimostrazione delle aumentate esigenze del mercato industriale e quindinecessariamente della maggiore sensibilita da parte dell’ingegnere progettista. Alcuni problemihanno ricevuto nuove soluzioni per mezzo di metodi piu rigorosi e molto e stato fatto anche in camposperimentale. L’autore si e percio preoccupato di presentare gli argomenti del testo utilizzandosoprattutto materiale consolidato, di significativo interesse applicativo. Tuttavia, questo intentonon sempre e riuscito nel migliore dei modi. Resta comunque al lettore la facolta di esprimere ilgiudizio finale e di formulare, laddove necessario, suggerimenti o consigli.
Cosı, il metodo perturbativo, che occupa ormai una posizione consolidata nella Teoria dei MotiNave per la soluzione dei problemi nonlineari, non ha trovato alcuna ripercussione sulle pagine dellibro. Alla luce dell’impossibilita di presentarlo con i necessari particolari, nel caso specifico ci sie limitati soltanto ad un breve accenno. Nel libro non viene illustrata la teoria degli strumentiimpiegati per la sperimentazione su modelli o al vero in quanto cio richiederebbe l’introduzione dielementi di elettronica e di analisi dei segnali, senza tener conto del fatto che spesso si tratta distrumentazione progettata ad hoc e quindi unica nel suo genere.
Nel capitolo sulla teoria dei moti viene utilizzata la suddivisione classica delle forze idrodina-miche, ma non sono spiegati in dettaglio i metodi matematici per il loro calcolo. Analogamente sie proceduto anche nella presentazione di molti altri problemi. In questi casi l’autore si e limitatoalla enunciazione delle ipotesi fondamentali indicando, laddove possibile, la tendenza degli sviluppifuturi, ma senza entrare nei particolari. Come esempio e possibile ricordare la presentazione delleproblematiche sui moti nonlineari e sulla risonanza parametrica.
ix

Come riferimenti principali per la stesura del libro, visto che sugli argomenti trattati ben poco onulla e stato finora scritto in questo Paese a livello didattico, sono stati largamente utilizzati i princi-pali testi classici sui problemi di Tenuta della Nave al Mare, quali Blagovescenskij (1954), Korvin-Kroukovsky (1961), Bhattacharrya (1978), Borodaj e Necvetaev (1982), Lloyd (1989). Quandopossibile, si e fatto riferimento anche ai risultati conseguiti da alcuni fra i numerosi studiosi chesi sono occupati del problema, le citazioni dei quali si trovano nel libro. Inoltre, e stata messaa frutto l’esperienza acquisita dall’autore nella pluriennale attivita di ricerca nel settore, svoltaa livello internazionale. Si vogliono percio ricordare con piacere le molteplici permanenze pressoi laboratori del KSRI (Krylov Shipbuilding Research Institute) di St. Petersburg che, dopo lacaduta del muro, sono servite a conoscere e scoprire una realta di persone e mezzi rimasti pertroppo tempo sconosciuti. A questi colleghi e amici, che molto hanno contribuito alla formazionedell’autore, viene rivolto il piu sincero ringraziamento.
x
Nomenclatura
a ampiezza dell’onda
aj , bj , cj coefficienti delle forze eccitanti delle onde
an, bn ampiezze delle componenti armoniche
ajk coefficiente sezionale di massa aggiunta
an accelerazione normale
at accelerazione tangenziale
A parametro dello spettro standard
Ajk coefficiente di massa aggiunta
Ax area della sezione trasversale
AW area della figura di galleggiamento
B larghezza, centro di carena, parametro dello spettro standard
bjk coefficiente sezionale di smorzamento
Bjk coefficiente di smorzamento
Bx larghezza della sezione trasversale
B∗44 componente viscosa dello smorzamento di rollio
c velocita di propagazione dell’onda (velocita di fase o celerita)
Cjk coefficiente di richiamo
Cp coefficiente della pressione di slamming
Cs coefficiente di swell-up
CB coefficiente di pienezza totale o di blocco
CP coefficiente di pienezza longitudinale o prismatico
CV P coefficiente di pienezza verticale o prismatico verticale
CWP coefficiente di pienezza della figura di galleggiamento
d profondita del fondale
D altezza di costruzione
Dk immersione della chiglia
xi
Dp immersione dell’estremita superiore della pala dell’elica
E energia dell’onda, energia dissipata per oscillazione
E densita di energia dell’onda
F bordo libero, centro di galleggiamento
Fj risultante delle forze agenti
FBj forze di spinta
FGj forze peso
FHj forze idrodinamiche
FRj forze idrostatiche di richiamo
FWj forze eccitanti delle onde
Fn numero di Froude
g accelerazione di gravita
G centro di massa (baricentro)
Gxyz riferimento solidale centrale
Gξ1η1ζ1 riferimento ausiliario
GML altezza metacentrica longitudinale
GMT altezza metacentrica trasversale
H altezza dell’onda, rapporto larghezza/immersione
Ha altezza apparente
H, Ha altezza media
Hv altezza visuale media
H1/3 altezza significativa
Ijk momento d’inerzia di massa
IT , IL momento statico della figura di galleggiamento
k numero d’onda (frequenza di forma)
kxx, kyy raggio d’inerzia
K energia cinetica
KG altezza del centro di massa (baricentro) sulla linea di chiglia
L lunghezza
LFE Lateral Force Estimator
mi massa
mn momento spettrale
m0 varianza
M massa della nave
xii
Mj momento risultante delle forze agenti
Mjk matrice d’inerzia
N numero di osservazioni
Nds frequenza di immersione del ponte
Nke frequenza di emersione della chiglia
Npe frequenza di emersione dell’elica
Nsl frequenza di slamming
Oxyz riferimento assoluto per la descrizione del moto ondoso
Oξηζ riferimento mobile
O′x′y′z′ riferimento solidale al mezzo
O0ξ0η0ζ0 riferimento assoluto
p pressione, densita di probabilita
p0 pressione atmosferica
P probabilita
Pds probabilita di immersione del ponte
Pke probabilita di emersione della chiglia
Ppe probabilita di emersione dell’elica
Psl probabilita di slamming
r raggio della traiettoria della particella fluida, spostamento relativo
rc velocita critica
rζ ordinata del profilo dell’onda propria
RAW resistenza addizionale
s spostamento assoluto, pendio dell’onda
S densita spettrale di energia
t tempo
T immersione, periodo dell’onda
Te periodo d’incontro
Tj periodo naturale del moto nave
Tm, T0 periodo modale
Tn periodo della componente armonica dell’onda
Tx immersione della sezione trasversale
TR durata del record di registrazione
T−1 periodo medio dell’energia
T∗ immersione media della sezione trasversale
xiii
Tp periodo apparente fra picchi
Tz periodo apparente fra zeri
T , T1 periodo medio
T p periodo medio fra picchi
T v periodo visuale medio
T z, T2 periodo medio fra zeri
u, v, w componenti della velocita del fluido
ug velocita di gruppo
uj spostamento
U energia potenziale, velocita di avanzo
V volume di carena
VW velocita del vento,
xF ascissa del baricentro della superficie di galleggiamento
x′B , y′B , z′B coordinate del centro di carena
x′G, y′G, z′G coordinate del centro di massa (baricentro)
W fattore di peso
α massima pendenza dell’onda, parametro dello spettro standard
αe pendenza effettiva dell’onda
αn pendenza della componente armonica
αw angolo della superficie dell’onda, pendenza dell’onda
β coefficiente di pienezza della sezione,angolo di alzata di madiere,
parametro dello spettro standard
βj sfasamento tra spostamento ed eccitazione
γ parametro di sovraelongazione
γj fase delle forze eccitanti delle onde
Γ funzione gamma
δj fase dello spostamento
δω intervallo di frequenza
δν intervallo angolare
∆p pressione dinamica
ηg scarroccio
χ angolo di rotta
λ lunghezza d’onda
λe lunghezza effettiva dell’onda
xiv
λn lunghezza d’onda della componente armonica
λp lunghezza d’onda apparente fra picchi
λz lunghezza d’onda apparente fra zeri
λp lunghezza d’onda media fra picchi
λz lunghezza d’onda media fra zeri
µ direzione principale delle onde
µe coefficiente di smorzamento equivalente
ν coefficiente di viscosita cinematica, direzione secondaria delle onde
ω frequenza dell’onda, velocita angolare della nave
ωe frequenza d’incontro
ωm frequenza modale
ωn frequenza della componente armonica
ω frequenza media
ψ imbardata
ϕ potenziale di velocita, rollio
φ potenziale di velocita complesso
ρ densita dell’acqua
σ larghezza di banda
σAW coefficiente di resistenza addizionale
σ0 deviazione standard (rms)
θ beccheggio
τe costante di tempo
ε parametro di larghezza di banda
εn fase della componente armonica
ξg abbrivio
ζa ampiezza apparente dell’onda
ζn ampiezza della componente armonica
ζw ordinata del profilo dell’onda
ζg sussulto
ζ livello medio della superficie ondosa
ζa ampiezza media delle onde
ζ1/3 ampiezza significativa delle onde
xv

xvi
Capitolo 1
Generalita
1.1 Introduzione
Il termine moto nave o moti nave viene usato per indicare il movimento oscillatorio descritto dauna nave, considerata come un corpo rigido, che naviga in condizioni di acqua tranquilla o di mareondoso. Lo studio dei moti nave in diverse condizioni meteomarine e oggetto della Teoria dei MotiNave, una delle branche piu recenti della scienza navale che va sotto il nome di Teoria della Nave.
In generale, i moti nave sono prodotti dall’azione delle onde e, senza eccezione, tutte le navivi sono soggette. Tuttavia, il grado di sensibilita differisce dal tipo di imbarcazione e l’esperienzainsegna che anche navi tipologicamente simili si comportano differentemente quando naviganoinsieme in uno stesso mare. Nel caso specifico, il moto e un fenomeno ad impatto negativo inquanto il buon comportamento in mare (seakindiness) non e legato ai movimenti della nave, bensıalla dolcezza ed alla moderatezza degli stessi. Minori sono le ampiezze dei moti e piu lente sono leoscillazioni, migliori sono le qualita di tenuta al mare (seakeeping). Per questo motivo, la tenutaal mare viene considerata come una fra le piu importanti qualita marine della nave, assieme allastabilita, manovrabilita, resistenza al moto, ecc.
Nell’esaminare i moti nave, l’interesse principale e senz’altro quello rappresentato dal moto inmare ondoso, mentre lo studio del moto di una nave in acqua tranquilla viene considerato comeun’introduzione all’analisi piu generale di quello in presenza di onde. Tuttavia, il moto in acquatranquilla assume anche un interesse autonomo in quanto puo verificarsi in tutti quei casi in cui lanave si trova a navigare in acque protette, come ad esempio quelle dei porti, dei laghi e dei fiumi.Esso puo insorgere quando la nave, spostata dalla posizione iniziale di equilibrio, viene lasciatalibera, oppure quando alla nave, inizialmente in posizione di equilibrio, viene impressa una velocitanon nulla (o, in termini equivalenti, le viene trasmesso un certo impulso).
Nello studio dei moti nave, il moto del sistema idrodinamico complessivo nave-fluido, avente unnumero infinito di gradi di liberta, viene ridotto al caso piu semplice del moto di un corpo rigidocon sei gradi di liberta. Conseguentemente, e possibile individuare sei tipi di moto nave, detti motielementari, di cui tre fondamentali e tre complementari.
Vengono chiamati moti fondamentali le oscillazioni della nave durante le quali, nello sposta-mento dalla posizione di equilibrio stabile, si generano forze e momenti tali da farla ritornare nellaposizione iniziale (forze e momenti di richiamo). Distinguiamo per questo:
• moto di sussulto (heave), movimento oscillatorio lineare lungo l’asse verticale;
• moto di rollio (roll), movimento oscillatorio angolare nel piano trasversale;
• moto di beccheggio (pitch), movimento oscillatorio angolare nel piano diametrale.
1
2 CAPITOLO 1. GENERALITA
I moti complementari rappresentano i moti oscillatori della nave attorno alla posizione diequilibrio indifferente e sono dovuti alla variabilita in segno dell’azione esterna. Essi sono:
• moto di abbrivio (surge), movimento traslatorio lungo l’asse longitudinale;
• moto di scarroccio (sway), movimento traslatorio lungo l’asse trasversale;
• moto di imbardata (yaw), movimento rotatorio attorno all’asse verticale.
In acqua tranquilla si possono osservare soltanto i tipi fondamentali di moto. Tuttavia, inpresenza di cause eccitanti esterne, il moto della nave risulta generalmente piu complesso in quan-to dovuto ad una combinazione dei tipi fondamentali e di quelli complementari. Ad esempio, inpresenza di onde, sussistono contemporaneamente almeno due tipi fondamentali di moto: il primopuo essere una combinazione dei moti di sussulto e rollio, chiamato moto trasversale, che si generacon la nave posta trasversalmente all’onda; il secondo puo essere una combinazione dei moti disussulto e beccheggio, chiamato moto longitudinale, il quale si origina con la nave posta longitu-dinalmente rispetto all’onda. Per una nave disposta obliquamente rispetto all’onda, si osservanotutti e sei tipi di moto. In quest’ultimo caso, la previsione dei moti nave si effettua considerandosimultaneamente sia i moti fondamentali sia quelli complementari.
L’aspetto negativo dei moti nave e dovuto al fatto che essi sono accompagnati da una serie difenomeni piu o meno indesiderati, chiamati per questo effetti indesiderati. Alcuni di essi possonocondurre anche alla perdita della nave, altri ne complicano soltanto il normale esercizio.
Gli effetti piu importanti sono certamente quelli che presentano un carattere catastrofico. Essipossono portare alla perdita della nave, assieme alle persone ed al carico imbarcato:
• capovolgimento della nave a causa delle eccessive inclinazioni durante il moto di rollio, oppurea causa di una significativa diminuzione della stabilita;
• rottura dello scafo come conseguenza di un’eccessiva flessione durante il moto di sussulto.
Tra gli effetti importanti, che complicano o compromettono il regolare esercizio della nave, e invecepossibile elencare i seguenti:
• imbarco d’acqua sul ponte;
• danni locali allo scafo sotto l’azione delle forze d’inerzia e degli impatti delle onde;
• disturbo del normale funzionamento delle macchine e delle attrezzature di bordo a causa delleinclinazioni della nave e dell’azione delle forze d’inerzia;
• spostamento dei carichi mobili e di quelli insufficientemente rizzati a causa delle inclinazionidella nave e dell’azione delle forze d’inerzia;
• perdita della velocita di avanzo a causa dell’aumento di resistenza, del peggioramento dellecondizioni di lavoro dei propulsori e dell’impossibilita a mantenere la rotta;
• impossibilita per l’equipaggio di adempiere appieno alle proprie mansioni;
• mal di mare dell’equipaggio e dei passeggeri.
Per l’ingegnere navale, lo scopo degli studi sulla Teoria dei Moti Nave e quello di acquisire i me-todi teorico/pratici necessari sia per ridurre i moti della nave che per eliminare le loro conseguenzeclassificabili come dannose. Per questo, egli deve innanzitutto individuare i principali fattori cheinfluenzano le oscillazioni e quindi sviluppare i metodi analitici per poterle calcolarle. In questomodo egli sara capace di effettuare la previsione degli elementi caratteristici dei moti mentre lanave e ancora in fase progettuale al fine di indicare, in ogni caso concreto, le soluzioni piu razionali
1.1. INTRODUZIONE 3
in grado di influenzarli. La conoscenza delle caratteristiche dei moti riveste enorme importanza siaper la valutazione generale della sicurezza dal punto di vista della stabilita in mare (seaworthiness)di una nave gia concepita, sia per la appropriata progettazione delle macchine, degli ausiliari, dellesingole attrezzature, e della loro piu opportuna sistemazione a bordo.
Si puo influire direttamente sui moti nave in varie maniere:
• in fase di progettazione, scegliendo gli elementi caratteristici della nave in modo tale dagarantire oscillazioni tranquille e di ampiezza limitata;
• regolando entro certi limiti, nel caso di navi passeggeri e da carico, la distribuzione dei pesial fine di ottenere caratteristiche dinamiche piu favorevoli;
• applicando speciali soluzioni tecnologiche per calmare i moti della nave, ad esempio adottandoi cosiddetti tranquillizzatori o stabilizzatori del moto;
• conseguire un abbattimento dei moti con adeguate variazioni della rotta e della velocita diavanzo della nave.
La complessita principale del fenomeno dei moti nave e dovuta al fatto che la nave galleggiantee l’acqua circostante rappresentano un sistema idrodinamico unico, mutuamente interagente. Perquesto, il moto della nave dovrebbe venire esaminato simultaneamente con il moto del mezzo fluido,cioe considerando il sistema globale nave-fluido. Infatti, le onde incontrate inducono i movimentidalla nave e la nave oscillante influenza la struttura delle onde incidenti, alterando il campo dipressione nel fluido. Cosı le variazioni del campo di pressione, che causano l’insorgere dei moti,dipendono a loro volta dagli elementi caratteristici dei moti da esse indotti.
Una trattazione rigorosa del problema piu generale dei moti nave, che tenga accuratamenteconto dell’interazione mutua della nave e del mezzo fluido, porta a grandi difficolta matematiche ede applicabile, con sufficiente affidabilita, solo ai casi isolati dei moti piu semplici. Quando si voglianoesaminare questioni piu complesse, diviene necessario trascurare alcuni elementi dell’interazioneed adottare una serie di ipotesi semplificative. Tuttavia, la necessita di utilizzare sia soluzioniteoriche alternative che dati empirici non sempre degni di fede, puo introdurre nei calcoli unqualche elemento di incertezza. L’ingegnere navale deve percio saper valutare i risultati ottenuti,considerandoli soltanto come una prima approssimazione del fenomeno reale in esame.
Tra le discipline che costituiscono la Teoria della Nave, lo studio dei moti nave si avvicina nellasua impostazione generale alla Teoria della Stabilita. Comunque, nella Teoria della Stabilita, siconsiderano gli spostamenti della nave sotto l’azione di forze, di origine e natura qualsivoglia, chenon appaiono espressamente funzioni del tempo. Lo studio della Teoria dei Moti Nave, d’altraparte, stabilisce le leggi del moto della nave in cui gli spostamenti sono determinati da forze chedipendono esplicitamente dal tempo.
Piu a fondo si vuole esaminare il fenomeno dei moti nave, piu complessa diviene la teoria equindi meno maneggevole il corrispondente modello matematico. Anche qui, come in molti altricampi dell’ingegneria, ci si puo limitare a soluzioni approssimate che evitino i complessi metoditeorici. Conseguentemente, particolari problemi connessi ai moti nave possono venire formulati condiversi gradi di completezza e complessita, tenendo ben presente che sia la trattazione semplificatasia quella piu accurata hanno entrambe una loro legittimita. Molte questioni relative ai moti navepossono percio essere presentate e studiate inizialmente in forma semplice e solo successivamente inuna versione piu approfondita. Tale approccio e giustificato anche dal punto di vista metodologico.
I metodi teorici per lo studio dei moti nave si riducono, in primo luogo, alla formulazione,all’analisi ed alla soluzione delle equazioni differenziali dei moti. Poiche esse contengono un certonumero di grandezze che possono essere determinate correttamente soltanto sulla base di espe-rimenti su modelli o al vero, nella Teoria dei Moti Nave un grande ruolo spetta per questo allaricerca sperimentale.

4 CAPITOLO 1. GENERALITA
1.2 Nota storica
Nel seguito saranno esaminate le tappe principali dello sviluppo storico della Teoria dei Moti Navee verranno ricordati i nomi di quegli studiosi che maggiormente hanno contribuito alla forma-lizzazione ed alla soluzione delle problematiche in oggetto. I loro nomi si possono trovare nellericche bibliografie di alcuni dei classici sulla Tenuta al Mare, quali ad esempio Blagovescenskij(1954), Korvin-Kroukovsky (1961), Price and Bishop (1974), Bhattacharrya (1978), Borodaj andNecvetaev (1982), Lloyd (1989). Saranno volutamente dimenticati, salvo casi particolari, quelli chedell’argomento si sono occupati a partire dagli anni settanta in poi, anche perche poco o nientehanno aggiunto di veramente originale.
I fondamenti teorici per lo studio del moto di una nave sono stati sviluppati nel XVIII secoloda due noti studiosi dell’epoca, lo scienziato svizzero e membro dell’Accademia delle Scienze diPietroburgo Leonard Euler e l’astronomo francese Pierre Bouguer. Essi, a partire da ipotesi moltosimilari, esaminarono il problema del moto di rollio di una nave in acqua tranquilla. I risultaticonseguiti sono stati riportati rispettivamente nel lavoro del primo Scienza Navale, edito in Russianel 1749, e nel lavoro del secondo Trattato della nave, della sua costruzione e dei suoi movimenti,edito in Francia nel 1746.
In questi due lavori importanti (Euler, 1749; Bouguer, 1746), il problema delle piccole oscilla-zioni di un corpo galleggiante e stato ricondotto a quello di un pendolo semplice, avente lo stessoperiodo e la stessa ampiezza delle oscillazioni trasversali della nave. Nella formulazione delle equa-zioni del moto, fra le forze agenti sulla nave, sono state prese in considerazione solo le forze d’inerziae le forze idrostatiche di richiamo, mentre l’influenza delle forze idrodinamiche non e stata tenutain conto.
Il primo ad interessarsi dell’analisi del moto di rollio di una nave in presenza di onde regolarie stato un altro membro dell’Accademia delle Scienze di Pietroburgo, lo scienziato svizzero DanielBernoulli. Nel suo studio Principi idrostatici e meccanici, pubblicato in Francia nel 1759, egli posele basi per la soluzione del problema suddetto, rivolgendo particolare attenzione al chiarimentodelle cause che determinano la brusca intensificazione del moto in caso di accordo fra il periododell’onda ed il periodo delle oscillazioni proprie della nave in acqua tranquilla, cioe nel caso dellarisonanza. Nel corso dei 100 anni successivi, le conclusioni di Bernoulli (1759) sono state considerateclassiche. Tuttavia, l’osservazione pratica secondo cui la nave con maggiore stabilita risulta anchela piu inquieta in mare ondoso, contrastava con la teoria di Bernoulli. Questa discrepanza e stataalla fine chiarita con il fatto che Bernoulli era partito da un’ipotesi errata sulle proprieta del motoondoso dell’acqua, ovvero computando la forza di spinta diretta verticalmente anche in presenzadi onde e questo, come oggi si sa, non corrisponde alla realta fisica del fenomeno.
Dopo il conseguimento di questi primi successi teorici, lo sviluppo delle ricerche nell’ambitodella teoria dei moti nave ha subito un certo rallentamento. Per circa un secolo non sono apparsinuovi lavori dedicati a questo specifico problema, sebbene siano stati pubblicati molti libri di testo emanuali d’uso. In essi vennero spiegati i fondamenti della teoria del moto e si fecero considerazionisui risultati ottenuti ai fini della loro applicazione pratica.
La successiva ricerca teorica di rilievo puo essere considerata la memoria sul Moto trasversaledella nave, del noto ricercatore inglese William Froude, pubblicata nel 1861. La differenza radicalefra la teoria di Froude (1861, 1896) e quella precedente di Bernoulli consiste nel fatto che laforza di spinta dell’acqua ha, in ogni punto, direzione normale alla superficie dell’onda. Questorisultato e conforme alla teoria dell’onda trocoidale elaborata da Gerstner (1804), a quel tempoormai dimenticata e nuovamente scoperta da Rankine (1863).
Nel suo saggio Froude, considerando una nave che avanza trasversalmente rispetto alle onde,suppose le dimensioni trasversali trascurabili rispetto a quelle dell’onda, limitandosi alle piccoleampiezze del moto e dell’altezza dell’onda. I risultati di questa teoria sono stati confermati in
1.2. NOTA STORICA 5
termini qualitativi, nonostante che le previsioni quantitative sovraestimassero di poco l’ampiezzadel moto di rollio.
Negli anni successivi, alla ricerca sul moto di rollio e stata dedicata una grande quantita dilavori. Fra i piu significativi si puo citare quello del ricercatore francese Bertin, nel quale vengonoproposti dei metodi approssimati per il calcolo dell’influenza delle dimensioni finite della nave sulmoto di rollio ed una formula empirica per il calcolo del momento smorzante nel moto di rollio(Bertin, 1873-74). Bertin ha sviluppato anche una formula per determinare il momento addizionaledi resistenza nel caso di una nave con alette antirollio, a quel tempo il piu semplice smorzatore delmoto.
Nell’ambito della teoria sul moto di rollio, i lavori di Froude e di Bertin hanno consentitodi utilizzare i risultati teorici per l’esecuzione di calcoli pratici, con soddisfacente accordo fra leprevisioni numeriche e le misure sperimentali. Tuttavia, gli sviluppi relativi al moto di rollio nonsi poterono trasferire automaticamente al moto di beccheggio: in quest’ultimo caso, la lunghezzadella nave non puo essere considerata come piccola in confronto con la lunghezza dell’onda ed inparticolare, quando insorge un intenso moto di beccheggio, la lunghezza della nave e la lunghezzadell’onda si dimostrano grandezze dello stesso ordine. Inoltre, a quel tempo, non era stato ancorasviluppato il metodo di previsione dei moti di una nave che avanza su di una rotta obliqua rispettoalla direzione di propagazione delle onde, ovvero non era stato risolto il cosiddetto caso generalein cui si manifestano contemporaneamente tutti i tre tipi fondamentali di moto.
La seconda meta del XIX secolo e stata caratterizzata da grandi progressi dell’ingegneria navale.La vela, come propulsore principale, ha definitivamente fatto il suo tempo ed e stata sostituita daruote a pale e da eliche marine, la costruzione navale in legno ha fatto posto inizialmente al ferroe successivamente all’acciaio, le dimensioni delle navi hanno iniziato a crescere rapidamente. Conqueste premesse e maturata anche la richiesta per una soluzione dei problemi sopra citati, al finedi garantire il necessario miglioramento della tenuta al mare ed il contemporaneo aumento dellarobustezza per le nuove navi in fase di progettazione.
Tutti questi problemi sono stati affrontati e risolti alla fine del XIX secolo da Aleksej NikolaevicKrylov, padre dell’ingegneria navale russa. Nella sua molteplice attivita di ricerca egli si distinsesia nel campo delle ricerche teoriche che in quello delle applicazioni pratiche. Nel 1896 egli presentoall’Associazione degli Ingegneri Navali Inglesi la teoria del moto di beccheggio (Krylov, 1896) e nel1898, alla stessa Associazione, la teoria generale dei moti (Krylov, 1898).
Alla base della sua teoria, Krylov ha assunto l’ipotesi secondo cui la presenza della nave noninfluisce sul campo di pressione dell’onda. Da un punto di vista pratico questa semplificazionecomporta una sottostima delle forze idrodinamiche agenti sulla nave durante il moto, anche se nelmodello complessivo tale lacuna veniva parzialmente compensata con un’appropriata valutazionedelle forze di resistenza. La teoria sviluppata da Krylov dava la possibilita di includere nei calcolitutte le proprieta della forma della carena mediante l’utilizzo del piano di costruzione, non avendobisogno di nessuna semplificazione sulle piccole dimensioni della nave. I risultati ottenuti da Froudee da Bertin si dimostrarono casi particolari della teoria di Krylov. Nei suoi lavori Krylov non solosviluppo la teoria dei moti, ma elaboro anche lo schema dei calcoli di previsione. Per questi lavorifondamentali l’Associazione degli Ingegneri Navali Inglesi lo premio con la medaglia d’oro, il primocaso di assegnazione della medaglia ad uno straniero.
Nell’anno 1907 l’aerodinamico russo Zukovskij scrisse il rapporto Azione di un liquido ondosodi piccola profondita su di un corpo galleggiante sulla sua superficie (Zukovskij, 1949). In questolavoro egli esamino il moto di un pontone parallelepipedo rettangolo in presenza di onde lunghe,con particolare attenzione a quelle variazioni delle proprieta fisiche del sistema che si manifestanoa causa del corpo oscillante. Egli riuscı a dimostrare che la reazione di un corpo oscillante sulmoto del liquido circostante conduce alla generazione, fra le forze idrodinamiche, di componentidipendenti dall’accelerazione del corpo, le quali formalmente possono essere computate come uncorrispondente aumento della massa del corpo stesso. Questo significa che nelle equazioni del moto
6 CAPITOLO 1. GENERALITA
della nave, scritte sulla base della teoria di Krylov, e necessario aumentare la sua massa per laquantita detta di massa aggiunta. Nel campo navale, il concetto di massa aggiunta e stato recepitoquasi immediatamente nell’analisi del problema delle vibrazioni scafo (Lewis, 1929). Relativamenteal moto della nave, esso e stato applicato per la prima volta nei lavori di Pavlenko pubblicati neglianni trenta. In questi lavori Pavlenko (1935, 1939) ha proposto anche delle formule approssimateper il calcolo delle masse aggiunte nei moti di beccheggio e sussulto.
La ricerca di Zukovskij costituı l’inizio della teoria idrodinamica dei moti nave. Ad essa feceroriferimento in seguito i lavori di Kocin, uno dei piu grandi idromeccanici sovietici, il quale nel1940 pubblico il saggio Teoria delle onde generate dalle oscillazioni di un corpo sotto la superficielibera di un liquido pesante non viscoso (Kocin, 1949). I risultati conseguiti da questi due studiosihanno consentito a Haskind, alla fine degli anni quaranta, di sviluppare la prima consistente teoriaidrodinamica del moto della nave in presenza di onde (Haskind, 1946, 1953, 1973). La teoria idro-dinamica del moto non conteneva piu l’ipotesi di Krylov sulla invariabilita del campo di pressionedell’onda in presenza della nave. Tuttavia, la soluzione del problema pote essere ottenuta grazie aduna serie di semplificazioni supplementari, tra le quali spiccava l’ipotesi sulla forma stellata dellesezioni della nave, che consentı di considerare in ogni punto la normale alla carena di poco discostadalla perpendicolare al piano diametrale. La nuova teoria idrodinamica ha permesso di ricavare leespressioni generali per le forze inerziali e le forze di resistenza (escluse le forze di origine viscosa)ed ha dato la possibilita di validare teoricamente l’ipotesi sulla suddivisione delle forze agenti.Purtroppo Haskind non riuscı a concludere la sua ricerca sullo sviluppo dettagliato degli schemi dicalcolo per i diversi tipi di moto, o addirittura per il caso piu generale del moto della nave in pre-senza di onde, come fatto precedentemente da Krylov. Negli ultimi tempi, la teoria idrodinamicaha avuto ulteriori sviluppi nei lavori di John (1949, 1950), Basin (1952), Korvin-Kroukovsky andJacobs (1957), Peters and Stoker (1957), Grim (1960), Newman (1961), Lugovskij (1966), Salvesen,Tuck and Faltinsen (1970), nei quali sono riportati anche i corrispondenti metodi di calcolo. Nelleapplicazioni pratiche, questi metodi danno talvolta risultati numerici molto differenti. Un’unicametodologia di previsione teorica (teoria unificata), analoga a quella elaborata da Krylov, non estata finora proposta.
Contemporaneamente alla formalizzazione della teoria idrodinamica del moto, una grande moledi lavoro e stata richiesta dal perfezionamento dei metodi di calcolo. In particolare, molta atten-zione e stata dedicata allo sviluppo dei metodi approssimati di previsione dei moti che tenganoconto dell’influenza delle dimensioni finite della nave. Dopo Bertin, sono state presentate diverseformule approssimate per il calcolo dell’influenza della larghezza e dell’immersione finite della navefra cui si possono ricordare quelle di Van der Fleet (1916), Pavlenko (1935), Hanovic (1948), Bla-govescenskij (1953), Faddeev (1954), Haskind (1954) e Landweber and De Macagno (1957, 1959).Successivamente sono state sviluppate diverse metodologie numeriche, basate soprattutto sui lavoridi Ursell (1949, 1949a), Grim (1953, 1959), Tasai (1959), Frank (1967), Demanche (1968), De Jong(1973). Molto e stato fatto anche per la semplificazione degli schemi di calcolo dei moti nave. Aquesti problemi sono state dedicate le ricerche di Bubnov (1930), Pavlenko (1939), Weinblum andSt. Denis (1950), Papkovic (1956), Havelock (1956) e Vlasov (1959a).
Nella maggior parte delle ricerche sopra citate il moto della nave e stato considerato come unfenomeno oscillatorio di piccola ampiezza, il quale puo essere descritto da equazioni differenzialilineari. Questa e una delle semplificazioni classiche della teoria, che puo anche portare ad errorisignificativi nei risultati finali, principalmente in relazione al moto di rollio, dove le ampiezzeraggiungono in pratica i valori massimi. Per questo e sorto il problema dello studio del cosiddettomoto nonlinerare di rollio. In questo caso gli sforzi dei ricercatori si sono concentrati, da unaparte, sulla determinazione del periodo del moto di rollio in acqua tranquilla e, dall’altra, sullaformulazione e sulla soluzione delle equazioni nonlineari del moto. Il pioniere in questo campofu ancora Krylov (1951). Successivamente, dei problemi del moto nonlineare di rollio si sonointeressati van der Fleet (1916), Vedeler (1925), Pavlenko (1947), Karpov (1951), Grim (1952),
1.2. NOTA STORICA 7
Baumann (1953), Blagovescenskij (1954), Sizov (1954), Wendel (1954), Vlasov (1959), Lugovskij(1963), Horosanskij (1965) e Semenov-Tjan-Sanskij (1965).
Un caso particolare della teoria delle oscillazioni e la cosiddetta risonanza parametrica, chesi presenta quando l’equazione differenziale del moto risulta un’equazione lineare a coefficientiperiodici. Una situazione di questo tipo fu rilevata nel caso del moto di rollio di una nave in presenzadi onde longitudinali. L’esistenza di oscillazioni parametriche risonanti e stata confermata nellasuccessiva analisi del problema, cui sono stati dedicati i lavori di Semenov-Tjan-Sanskij (1951),Basin (1955), Kerwin (1955), Avdeev (1956), Paulling and Rosenberg (1959), Streljaev (1967).
Tutte le ricerche sopra citate riguardano principalmente l’esame del moto di una nave in pre-senza di onde regolari sinusoidali. Tuttavia, l’esperienza insegna che le onde generate dal ventonon sono regolari, cioe due onde successive si differenziano sia in periodo che in ampiezza. Inquesto modo e emersa la necessita di studiare il moto della nave nelle cosiddette onde irregolario mare confuso. Per la prima volta a questo problema ha rivolto l’attenzione Krylov, il quale hadato anche una valutazione qualitativa dell’effetto dell’irregolarita delle onde sul moto della nave(Krylov, 1951a). In seguito, l’argomento e stato affrontato nel lavoro di Krutkov (1934). Negli annicinquanta, per lo studio del moto in onde irregolari e stata applicata la teoria dei processi casualistazionari con l’utilizzo della teoria della probabilita. In questo campo e stato fatto molto da St.Denis and Pierson (1953), che sono gli autori di un lavoro considerato fondamentale. La teoria ed imetodi di calcolo in mare confuso sono stati elaborati anche da Lewis (1955), Korvin-Kroukovsky(1956), Lewis and Numata (1956), Tupysev (1957), Dalzell and Yamanouchi (1958), Voznesenskijand Firsov (1958), Lugovskij (1966) ed altri.
In parallelo con la formulazione della teoria e dei metodi di previsione dei moti, e stato svi-luppato il lavoro sperimentale nel campo della stabilizzazione delle navi. Esso ha trovato spazioinnanzitutto nei lavori di Krylov (1951b, 1951c) e successivamente in quelli di Frahm (1911), Pa-vlenko (1935), Blagovescenskij (1936), Mandel (1953), Abkowitz (1959), Holodilin (1959), Smyrev,Morensil’dt and Il’ina (1961), Conolly (1969) ed altri. Nel frattempo sono stati brevettati diversisistemi di stabilizzatori come quelli proposti da Frahm, Schlik, Sperry, Motora. Gli stabilizzatoridei moti vengono attualmente applicati alle navi dalle seguenti ditte specializzate: Denny-Brown(Inghilterra), Flume (USA), Vosper (Inghilterra), Sperry (USA).

8 CAPITOLO 1. GENERALITA

Parte I
Onde Marine
9

Capitolo 2
Teoria delle onde
2.1 Introduzione
Come noto, i fluidi soggetti all’azione di perturbazioni esterne sono sede di moti ondosi. In relazioneal tipo di forze responsabili della formazione ondosa, e possibile suddividere le onde in gravitazionali,capillari ed elastiche.
Le onde gravitazionali hanno origine in un liquido soggetto al campo della forza peso. Spostatodalla sua posizione di equilibrio a causa di una perturbazione esterna, esso compie delle oscillazioniche, successivamente, si propagano nel mezzo. Alle onde gravitazionali appartengono le ondegenerate dal vento, le onde prodotte dal moto dei corpi, le onde interne, che si generano su superficidi separazione fra zone di fluido con diversa densita oppure in fluidi non omogenei (stratificati), leonde di tsunami, le onde di marea dovute all’attrazione della luna e del sole.
Le onde capillari sono determinate dall’azione delle forze di tensione superficiale ed hannol’aspetto di increspature, frutto dell’azione del vento o del moto dei corpi. Esse possono sussisterecontemporaneamente alle onde gravitazionali.
Le onde elastiche si formano in conseguenza della compressibilita del fluido. Ad esse apparten-gono le onde acustiche e le onde d’urto.
Nell’ambito dell’Architettura Navale hanno significato pratico solo le onde gravitazionali, siasulla superficie libera che sulle superfici di separazione del mezzo. Una descrizione dettagliata dellateoria delle onde di superficie si trova in Wehausen and Laitone (1960).
2.2 Onde regolari piane
Si chiamano onde regolari le onde di superficie aventi caratteristiche che si ripetono periodicamentenel tempo e nello spazio. In particolare, se la forma del moto ondoso e la stessa su piani fra loroparalleli, allora le onde si dicono anche piane. Un esempio di onde regolari piane viene mostratoschematicamente in Figura 2.1. Il profilo della superficie perturbata, ottenuto dall’intersezionedella superficie libera con un piano perpendicolare alle generatrici, e individuato in ogni punto edin ogni istante dall’ordinata ζw dell’onda. Esso viene descritto sinteticamente attraverso grandezzefisiche caratteristiche quali la lunghezza λ, l’altezza H ed il periodo T . Le onde generate dal ventoe quelle create dal moto di una nave, a differenza delle onde piane, hanno carattere tridimensionale.
Con lunghezza d’onda (wave length) viene indicata la distanza fra due creste oppure due cavisuccessivi. Dicesi invece altezza dell’onda (wave height) la differenza di quota tra una cresta edun cavo. La grandezza a = H/2 viene detta ampiezza dell’onda (wave amplitude). L’angolo αw,individuato dalla tangente in un punto generico del profilo ed il piano orizzontale di equilibrio del
11

12 CAPITOLO 2. TEORIA DELLE ONDE
Crest
Trough
dα
z
y
x0
H=2a
ζW
λ
Figura 2.1: Caratteristiche delle onde regolari piane.
fluido (superficie di acqua tranquilla), viene chiamato angolo della superficie dell’onda, mentre lasua tangente trigonometrica prende il nome di pendenza dell’onda (wave slope). Per le onde dipiccola ampiezza, il massimo valore dell’angolo che il profilo ondoso forma con l’orizzontale puoessere determinato con la relazione:
α ≈ tanα =πH
λ=
2πa
λ. (2.1)
La relazione (2.1) esprime la massima pendenza dell’onda. Inoltre, dicesi pendio dell’onda (wavesteepness) il rapporto s = H/λ.
Viene chiamato periodo dell’onda (wave period) l’intervallo di tempo che intercorre fra il pas-saggio di due creste o due cavi successivi per uno stesso punto fisso nello spazio. La grandezzaω = 2π/T esprime la frequenza angolare dell’onda o pulsazione, detta impropriamente frequenzadell’onda (wave frequency).
Le onde gravitazionali possono essere suddivise in progressive e stazionarie. Il profilo delleonde progressive si sposta nello spazio con velocita c, detta velocita di propagazione, velocita difase o celerita dell’onda (wave celerity); per le onde regolari si ha c = λ/T . Alle onde progressiveappartengono le onde generate dal vento e quelle dovute al moto delle navi. Il profilo delle ondestazionarie, invece, non si sposta e, in una prefissata regione di spazio, cambiano solo le sue ordinate;tali onde possono insorgere, per esempio, come risultato della riflessione di onde progressive dallerive di un bacino chiuso o parzialmente aperto.
Le onde prodotte dal vento, quelle dovute ai corpi in moto nel fluido o all’azione degli impulsidi pressione sulla sua superficie, vengono chiamate onde forzate. Accanto a queste possono essereconsiderate anche le onde libere, le cui caratteristiche non cambiano nel tempo e la cui altezzadipende dalle condizioni iniziali di generazione e dalla geometria del fondo; ad esse si approssimanoabbastanza bene le onde di mar morto (swell).
L’influenza della viscosita del fluido nel processo della formazione e dell’estinzione del fenomenoondoso e generalmente di poco conto, vedi Paragrafo 2.6. Per questo, la maggior parte della teoriadelle onde viene sviluppata supponendo il fluido non viscoso ed il suo moto di tipo potenziale.
2.3 Teoria potenziale
Saranno esaminati nel seguito alcuni aspetti fondamentali della teoria delle onde progressive. Inquesto caso, nel sistema di coordinate assoluto Oxyz, avente l’origine sulla superficie libera di

2.4. ONDE DI PICCOLA AMPIEZZA 13
equilibrio e l’asse verticale positivo verso il basso, il potenziale di velocita ϕ(x, y, z, t) soddisfal’equazione di Laplace:
∆ϕ = 0 . (2.2)
SWL
y
z
xz = 0
z = ζw(x,y,t)
z = d
∆ϕ = 0
O
cϕcz = 0
Figura 2.2: Le condizioni al contorno nella teoria potenziale delle onde.
Sulla superficie libera z = ζw(x, y, t) esso verifica le condizioni al contorno cinematiche e di-namiche, mentre sul fondo del bacino deve valere la condizione di non attraversamento. In altritermini, si ha nell’ordine:
∂ϕ
∂z=
∂ϕ
∂x
∂ζw
∂x+
∂ϕ
∂y
∂ζw
∂y+
∂ζw
∂t, per z = ζw(x, y, t)
∂ϕ
∂t+
12
[(∂ϕ
∂x
)2
+(
∂ϕ
∂y
)2
+(
∂ϕ
∂z
)2]− gζw = 0 , per z = ζw(x, y, t)
∂ϕ
∂z= 0 , per z = d (2.3)
essendo g l’accelerazione di gravita e d la profondita del fondale. Le precedenti condizioni alcontorno vengono mostrate schematicamente in Figura 2.2.
Il sistema di equazioni (2.3) viene impiegato nello sviluppo della teoria nonlineare delle on-de (Stoker, 1957). Le equazioni suddette si semplificano alquanto nel caso particolare di ondeprogressive piane, quando il potenziale diviene piu semplicemente ϕ(x, z, t) e la superficie liberarisulta ζw(x, t). Tuttavia, lo sviluppo della teoria nonlineare delle onde e legato a grandi difficoltamatematiche in quanto le derivate parziali delle prime due condizioni (2.3) devono essere calcolateper z = ζw(x, y, t) incognita. Poiche il problema non puo essere risolto in forma chiusa, sono statesviluppate diverse soluzioni approssimate. In Figura 2.3 sono illustrati i limiti di validita di alcuneteorie delle onde fra quelle piu ricorrenti nelle applicazioni d’ingegneria.
2.4 Onde di piccola ampiezza
La piu semplice teoria delle onde, nota con il nome di teoria lineare o teoria di Airy (Lamb, 1932),e basata sull’ipotesi che le onde abbiano ampiezza relativamente piccola e che sia soddisfatta lacondizione:(
λ
d
)3H
λ<< 1 . (2.4)
Il problema si riduce allora alla soluzione dell’equazione ∆ϕ = 0 con le condizioni al contornospostate sulla superficie imperturbata z = 0. In questo caso le (2.3) divengono:
∂ϕ
∂z=
1g
∂2ϕ
∂t2, per z = 0

14 CAPITOLO 2. TEORIA DELLE ONDE
H=H /4
λH/d=262
Cnoidal
Stream
Func
tionBre
aking
H/d=
0.78
Stokes 5nd
H/λ=1/7
DeepIntermediateShallow
10-2
5X10-3
10-3
5X10-4
10-4
5X10-5
5X10-4
10-3
5X10-3
10-2
5X10-2
10-1
HgT2
2d
gT
B
Small Amplitude
Stokes 2nd
Figura 2.3: Limiti di validita delle diverse teorie per le onde regolari.
ζw =1g
∂ϕ
∂t, per z = 0
∂ϕ
∂z= 0 , per z = d . (2.5)
Al pari dell’equazione di Laplace, il sistema di equazioni (2.5) si presenta come un sistema diequazioni differenziali lineari alle derivate parziali, e consente quindi l’applicazione del metodo disovrapposizione delle soluzioni.
Il potenziale di velocita delle onde progressive piane di ampiezza relativamente piccola, che sipropagano lungo la direzione positiva dell’asse delle x, ha la forma complessa:
φ = − i ga
ω
cosh k(d− z)cosh kd
ei(ωt−kx) , (2.6)
oppure la forma reale:
ϕ = <{φ} =ga
ω
cosh k(d− z)cosh kd
sin(ωt− kx) , (2.7)
dove k = 2π/λ e il numero d’onda (wave number) o frequenza di forma, che caratterizza il numerodelle onde presenti in un tratto dell’asse orizzontale avente lunghezza pari a 2π metri. Per laseconda delle (2.5), il corrispondente profilo ondoso ζw(x, t) risulta percio:
ζw =1g
∂ϕ
∂t
∣∣∣∣z=0
= a cos(ωt− kx) . (2.8)
La pendenza delle onde e in prima approssimazione:
αw ≈ ∂ζw
∂x
∣∣∣∣z=0
= ka sin(ωt− kx) , (2.9)
e quindi
αw = α sin(ωt− kx) , (2.10)
2.4. ONDE DI PICCOLA AMPIEZZA 15
con α = ka pari alla massima pendenza dell’onda.La frequenza delle onde e legata alla loro lunghezza dalla relazione di dispersione:
ω =√
gk tanh kd , (2.11)
mentre la velocita di propagazione risulta:
c =√
g
ktanh kd . (2.12)
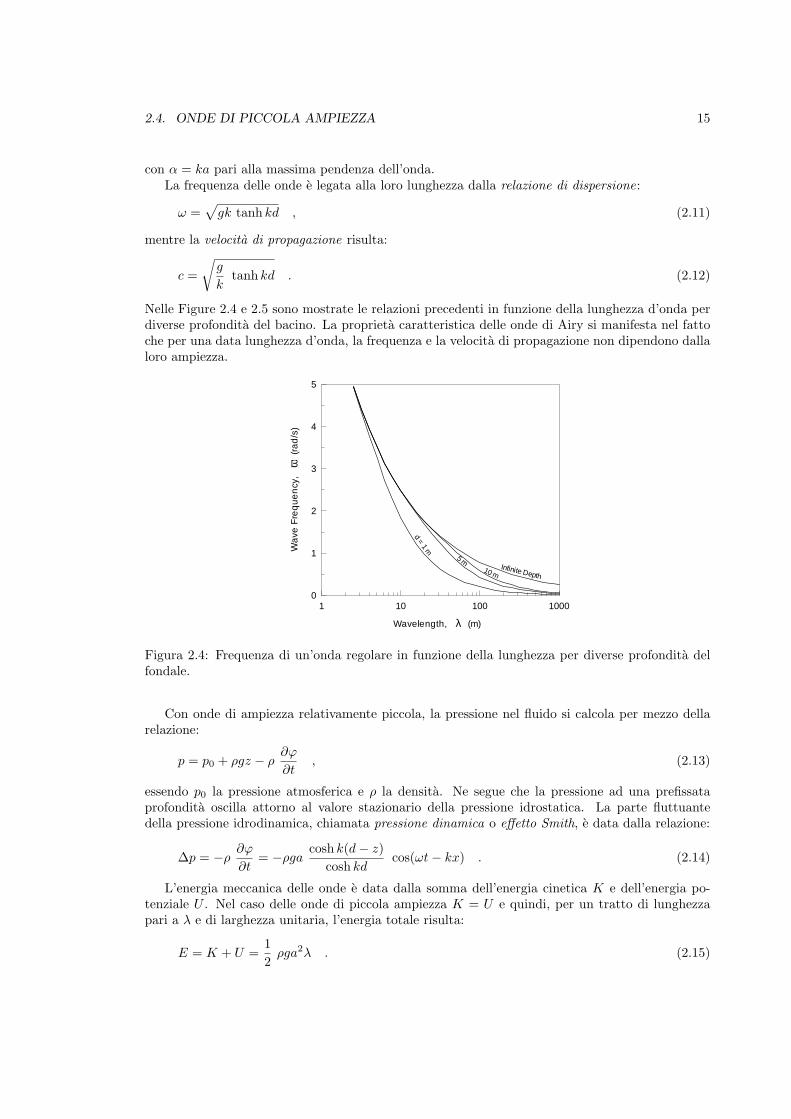
Nelle Figure 2.4 e 2.5 sono mostrate le relazioni precedenti in funzione della lunghezza d’onda perdiverse profondita del bacino. La proprieta caratteristica delle onde di Airy si manifesta nel fattoche per una data lunghezza d’onda, la frequenza e la velocita di propagazione non dipendono dallaloro ampiezza.
1 10 100 1000
Wavelength, λ (m)
0
1
2
3
4
5
Wa
ve F
req
ue
ncy
,
ω
(ra
d/s
)
10 mInfinite Depth
5 m
d = 1 m
Figura 2.4: Frequenza di un’onda regolare in funzione della lunghezza per diverse profondita delfondale.
Con onde di ampiezza relativamente piccola, la pressione nel fluido si calcola per mezzo dellarelazione:
p = p0 + ρgz − ρ∂ϕ
∂t, (2.13)
essendo p0 la pressione atmosferica e ρ la densita. Ne segue che la pressione ad una prefissataprofondita oscilla attorno al valore stazionario della pressione idrostatica. La parte fluttuantedella pressione idrodinamica, chiamata pressione dinamica o effetto Smith, e data dalla relazione:
∆p = −ρ∂ϕ
∂t= −ρga
cosh k(d− z)cosh kd
cos(ωt− kx) . (2.14)
L’energia meccanica delle onde e data dalla somma dell’energia cinetica K e dell’energia po-tenziale U . Nel caso delle onde di piccola ampiezza K = U e quindi, per un tratto di lunghezzapari a λ e di larghezza unitaria, l’energia totale risulta:
E = K + U =12
ρga2λ . (2.15)
16 CAPITOLO 2. TEORIA DELLE ONDE
Infin
ite D
epth
d = 1 m
5 m
10 m
20 m
50 m
100 m
1 10 100 1000
Wavelength, λ (m)
0
10
20
30
40
Ce
lerit
y,
c
(m/s
)
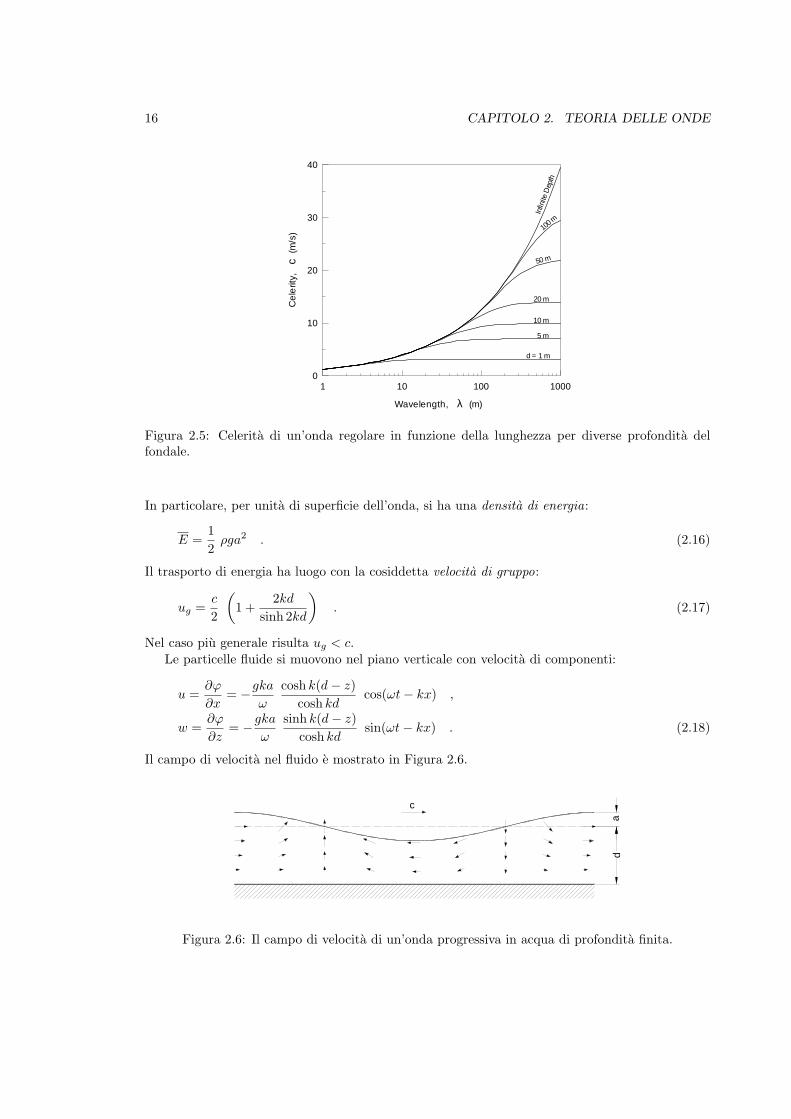
Figura 2.5: Celerita di un’onda regolare in funzione della lunghezza per diverse profondita delfondale.
In particolare, per unita di superficie dell’onda, si ha una densita di energia:
E =12
ρga2 . (2.16)
Il trasporto di energia ha luogo con la cosiddetta velocita di gruppo:
ug =c
2
(1 +
2kd
sinh 2kd
). (2.17)
Nel caso piu generale risulta ug < c.Le particelle fluide si muovono nel piano verticale con velocita di componenti:
u =∂ϕ
∂x= −gka
ω
cosh k(d− z)cosh kd
cos(ωt− kx) ,
w =∂ϕ
∂z= −gka
ω
sinh k(d− z)cosh kd
sin(ωt− kx) . (2.18)
Il campo di velocita nel fluido e mostrato in Figura 2.6.
ad
c
Figura 2.6: Il campo di velocita di un’onda progressiva in acqua di profondita finita.

2.4. ONDE DI PICCOLA AMPIEZZA 17
Dalle relazioni precedenti segue che le particelle fluide descrivono traiettorie chiuse aventi formaellittica, di equazione:
x− x0
acosh k(d− z0)
sinh kd
2
+
z − z0
asinh k(d− z0)
sinh kd
2
= 1 , (2.19)
essendo x0 e z0 le coordinate corrispondenti alla posizione di riposo.
2.4.1 Acqua profonda
Nel caso particolare di un fluido con profondita illimitata, cioe per d →∞, il potenziale di velocita(2.7) assume la forma:
ϕ =ga
ωe−kz sin(ωt− kx) . (2.20)
Allora, per le principali caratteristiche delle onde, si ha nell’ordine:
ω2 = gk =2πg
λ,
T =
√2πλ
g≈ 0.80
√λ ,
λ =gT 2
2π≈ 1.56 T 2 . (2.21)
Per la velocita di fase si ottiene:
c =
√gλ
2π≈ 1.25
√λ , (2.22)
mentre per la velocita di gruppo risulta:
ug =c
2. (2.23)
Si osservi che, nel semplificare le relazioni (2.21) e (2.22), tutte le grandezze sono state espresse inunita del Sistema Internazionale.
In questo caso, la pressione dinamica e data dalla relazione:
∆p = −ρga e−kz cos(ωt− kx) . (2.24)
L’equazione del profilo della superficie libera e la formula per il calcolo dell’energia totaledell’onda coincidono con le espressioni (2.8) e (2.15). Nel caso del fluido profondo le traiettoriedelle particelle hanno la forma di una circonferenza con equazione:
(x− x0)2 + (z − z0)
2 = a2 e−2kz0 . (2.25)
Il raggio r delle traiettorie decresce all’aumentare della profondita e vale:
r = a e−kz0 . (2.26)
La velocita delle particelle fluide, in moto lungo la generica traiettoria circolare, e data da:
v =2πr
T=
2πa
Te−kz0 . (2.27)
In particolare, per z0 = 0, si ha v/c = 2πa/λ e conseguentemente v << c.

18 CAPITOLO 2. TEORIA DELLE ONDE
2.4.2 Acqua poco profonda
Nel secondo caso limite si ha d << λ. In accordo con la teoria generale delle onde, per la velocitadi propagazione segue:
c =√
gd , (2.28)
mentre la velocita di gruppo diviene:
ug = c . (2.29)
2.4.3 Caso intermedio
I risultati precedenti, validi nell’ambito della teoria lineare delle onde, sono riassunti nelle Ta-belle 2.1 e 2.2. Essi sono illustrati schematicamente in Figura 2.7, dove vengono mostrate sia leorbite che le componenti della velocita delle particelle fluide per diverse profondita del bacino. Inparticolare, per d > λ/2, la velocita di fase e la lunghezza d’onda sono sostanzialmente eguali aicorrispondenti valori di profondita illimitata. E questo il limite che definisce il criterio di onde inacqua profonda.
Si noti che, nell’ambito della teoria lineare, l’ampiezza delle onde non puo essere determinataesplicitamente in funzione delle altre grandezze caratteristiche, quali ad esempio la lunghezza. Inpratica, essa viene calcolata con varie formule empiriche. Spesso, per questo scopo, e usata laformula di Zimmermann:
a = 0.085 λ3/4 , (2.30)
essendo a e λ misurate in metri.
2.5 Onde stazionarie
Un sistema di onde stazionarie puo essere generato in un bacino chiuso o parzialmente aperto, comenel caso di porti, laghi, vasche navali, contenitori di liquido, ecc. La teoria delle onde stazionarienon trova percio un’applicazione immediata nei moti nave, ma ne costituisce un elemento necessarioper lo studio di alcuni fenomeni particolari. Ne sono un esempio lo sloshing nelle cisterne dellenavi e la dinamica dell’ondogeno in una vasca navale.
Lo schema della generazione di un’onda stazionaria viene mostrato in Figura 2.8. Come sipuo vedere, essa risulta dalla sovrapposizione di due onde progressive uguali, aventi cioe la stessaampiezza e la stessa frequenza, che si propagano in direzioni opposte.
In termini quantitativi, se:
ζ+w =
12
a cos(ωt− kx) , (2.31)
e
ζ−w =12
a cos(ωt + kx) , (2.32)
indicano rispettivamente un’onda progressiva che si propaga nel verso positivo dell’asse delle ascis-se e quella che si propaga nel verso negativo, il profilo dell’onda stazionaria ottenuta dalla lorosovrapposizione e dato dalla relazione:
ζw = ζ+w + ζ−w = a cos kx cosωt . (2.33)

2.5. ONDE STAZIONARIE 19
(a) Alto fondale dλ > 1
2
(b) Profondita intermedia 120 < d
λ < 12
(c) Basso fondale dλ < 1
20
Figura 2.7: Orbite e componenti della velocita delle particelle fluide secondo la teoria lineare delleonde.
20 CAPITOLO 2. TEORIA DELLE ONDE
1 2 3 4 5
12345
1 2
3
4
5
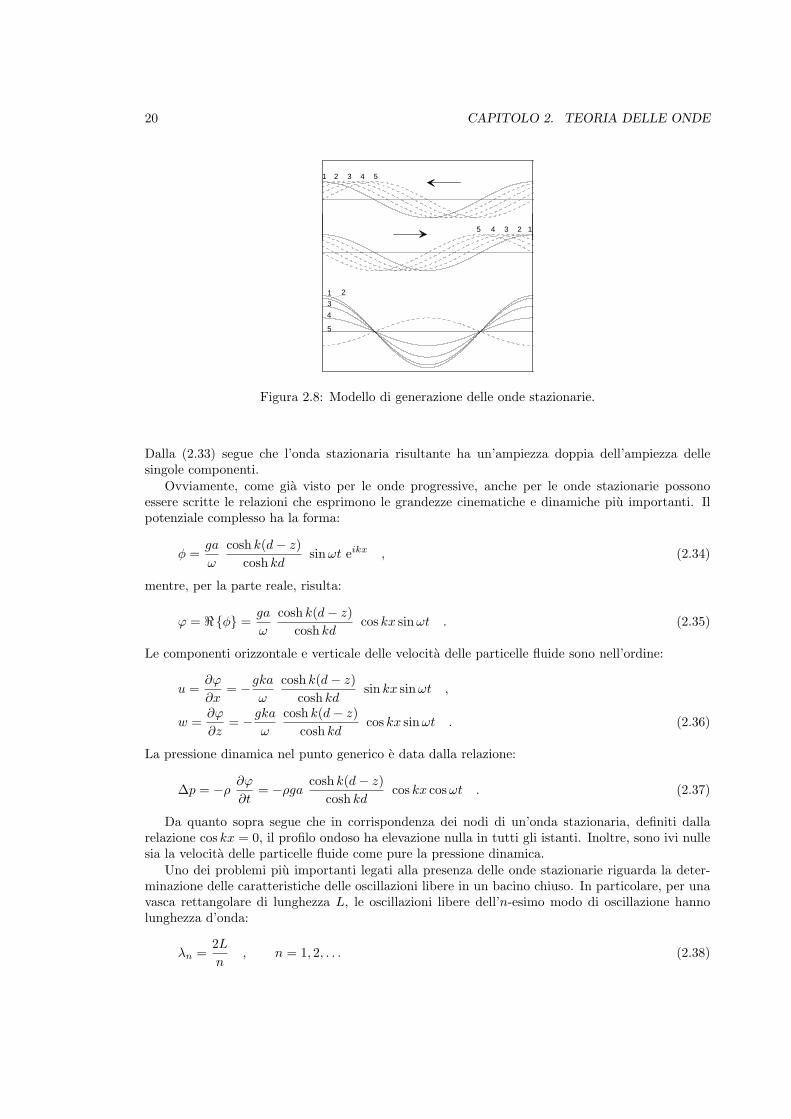
Figura 2.8: Modello di generazione delle onde stazionarie.
Dalla (2.33) segue che l’onda stazionaria risultante ha un’ampiezza doppia dell’ampiezza dellesingole componenti.
Ovviamente, come gia visto per le onde progressive, anche per le onde stazionarie possonoessere scritte le relazioni che esprimono le grandezze cinematiche e dinamiche piu importanti. Ilpotenziale complesso ha la forma:
φ =ga
ω
cosh k(d− z)cosh kd
sin ωt eikx , (2.34)
mentre, per la parte reale, risulta:
ϕ = <{φ} =ga
ω
cosh k(d− z)cosh kd
cos kx sin ωt . (2.35)
Le componenti orizzontale e verticale delle velocita delle particelle fluide sono nell’ordine:
u =∂ϕ
∂x= −gka
ω
cosh k(d− z)cosh kd
sin kx sinωt ,
w =∂ϕ
∂z= −gka
ω
cosh k(d− z)cosh kd
cos kx sin ωt . (2.36)
La pressione dinamica nel punto generico e data dalla relazione:
∆p = −ρ∂ϕ
∂t= −ρga
cosh k(d− z)cosh kd
cos kx cosωt . (2.37)
Da quanto sopra segue che in corrispondenza dei nodi di un’onda stazionaria, definiti dallarelazione cos kx = 0, il profilo ondoso ha elevazione nulla in tutti gli istanti. Inoltre, sono ivi nullesia la velocita delle particelle fluide come pure la pressione dinamica.
Uno dei problemi piu importanti legati alla presenza delle onde stazionarie riguarda la deter-minazione delle caratteristiche delle oscillazioni libere in un bacino chiuso. In particolare, per unavasca rettangolare di lunghezza L, le oscillazioni libere dell’n-esimo modo di oscillazione hannolunghezza d’onda:
λn =2L
n, n = 1, 2, . . . (2.38)

2.6. SMORZAMENTO DELLE ONDE PROGRESSIVE 21
Il corrispondente periodo di oscillazione puo essere calcolato dalla relazione di dispersione, cherimane la stessa delle onde progressive. Ne segue:
Tn =
√2πλn
gcoth
(2πd
λn
). (2.39)
Il problema ovviamente si complica nel caso di contenitori di forma qualsiasi.
2.6 Smorzamento delle onde progressive
Come risultato della dissipazione di energia attraverso l’azione di forze viscose, in un fluido diprofondita infinita l’ampiezza delle onde sinusoidali viene attenuata nel tempo secondo la legge(Lamb, 1932):
a = a0e−2νk2t , (2.40)
dove a0 ed a sono le ampiezze delle onde rispettivamente al tempo iniziale t0 = 0 e al tempo tgenerico, ν il coefficiente di viscosita cinematica e k = 2π/λ il numero d’onda. Poiche la (2.40) sipuo scrivere nella forma alternativa:
a = a0e−µet , (2.41)
con µe coefficiente di smorzamento equivalente, ne segue:
µe = 2νk2 =8π2ν
λ2. (2.42)
Dalla relazione precedente, si ottiene per la costante di tempo:
τe =1µe
=λ2
8π2ν, (2.43)
che rappresenta il tempo necessario affinche l’ampiezza venga ridotta di un fattore pari ad e ∼=2.7183 volte il suo valore iniziale, cioe al 37% circa.
Per esempio, in acqua marina alla temperatura di 15◦C (ν = 1.187 × 10−6 m2/s) la (2.43)implica τe = 1.067 × 104 λ2 s, con λ espressa in metri. Ne segue che le forze viscose estinguonole onde capillari con rapidita molto elevata; per un’onda di lunghezza λ = 1 cm si ha τe = 1.07 se dunque l’ampiezza decresce di un fattore circa tre durante un secondo. D’altronde, per onde dilunghezza considerevole, l’attenuazione ha luogo molto lentamente. Se λ = 10 m, il valore di τe epari a circa 300 ore. Le osservazioni delle onde in mare aperto confermano questi risultati: dopoil cessare del vento che le ha generate, continua a persistere per intervalli di tempo molto lunghiun’onda residua, chiamata swell o onda di mar morto.
Il precedente metodo per la valutazione dell’effetto della viscosita sull’ampiezza delle onde liberee basato sull’assunzione che il valore ωτe, con ω =
√2πg/λ frequenza dell’onda, sia sufficientemente
grande. Nei fluidi di debole viscosita, come per esempio l’acqua, questa condizione vale per tuttele lunghezze d’onda escluse quelle eccezionalmente piccole.

22 CAPITOLO 2. TEORIA DELLE ONDE
Grandezza Funzione Relazione Generale Acqua Profonda(d > 0.5λ)
Acqua Poco Pro-fonda (d < 0.05λ)
ω T 2πT
2πT
2πT
k√
gk tanh kd√
gk k√
gd
λ√
2πgλ
tanh 2πdλ
√2πgλ
2π√
gd
λ
c gc
T ω 2πω
2πω
2πω
k 2π√gk tanh kd
2π√gk
2π
k√
gd
λ√
2πλ
g tanh 2πdλ
√2πλ
gλ√gd
c 2cπg
k ω ω2
gω√gd
T 4π2
gT22π
T√
gd
λ 2πλ
2πλ
2πλ
c gc2
λ ω 2πgω2
2π√
gd
ω
T gT2
2πT√
gd
k 2πk
2πk
2πk
c 2πc2
g
c ω gω
T gT2π
k√
gk
tanh kd√
gk
λ
√gλ2π
tanh 2πdλ
√gλ2π
d√
gd
α ω ω2
ga ω√
gda
T 4π2
gT2 a 2π
T√
gda
k ka ka ka
λ 2πλ
a 2πλ
a 2πλ
a
c gc2
a
Tabella 2.1: Relazioni significative per le onde regolari (continua).
2.6. SMORZAMENTO DELLE ONDE PROGRESSIVE 23
Grandezza Funzione Relazione Generale Acqua Profonda(d > 0.5λ)
Acqua Poco Pro-fonda (d < 0.05λ)
u/a ω ω exp{− ω2z
g
}
T 2πT
exp{− 4π2z
gT2
}
k
√gk cosh k(d−z)√sinh kd cosh kd
√gk exp {−kz}
λ√
2πg cosh2π(d−z)
λ√λ sinh 2πd
λcosh 2πd
λ
√2πgλ
exp{− 2πz
λ
}
c gc
exp{− gz
c2
}gc
d√
gd
w/a ω ω exp{− ω2z
g
}ω(d−z)
d
T 2πT
exp{− 4π2z
gT2
}2π(d−z)
Td
k
√gk sinh k(d−z)√sinh kd cosh kd
√gk exp {−kz} k
√gd(d− z)
λ√
2πg sinh2π(d−z)
λ√λ sinh 2πd
λcosh 2πd
λ
√2πgλ
exp{− 2πz
λ
}2πλ
√gd(d− z)
c gc
exp{− gz
c2
}
(x− x0)/a ω exp{− ω2z
g
}1ω
√gd
T exp{− 4π2z
gT
}T2π
√gd
k cosh k(d−z)sinh kd
exp {−kz} 1kd
λcosh
2π(d−z)λ
sinh 2πdλ
exp{− 2πz
λ
}λ2π
c exp{− gz
c2
}
(z − z0)/a ω exp{− ω2z
g
}
T exp{− 4π2z
gT
}
k sinh k(d−z)sinh kd
exp {−kz}λ
sinh2π(d−z)
λ
sinh 2πdλ
exp{− 2πz
λ
}
c exp{− gz
c2
}
d d−zd
ug ω g2ω
T gT4π
k√
g4k
tanh kd(1 + 2kd
sinh 2kd
) √g4k
λ
√gλ8π
tanh 2πdλ
(1 + 4πd
λ sinh 4πdλ
) √gλ8π
c c2
c
d
√gd4
Tabella 2.2: Continua/1.
24 CAPITOLO 2. TEORIA DELLE ONDE
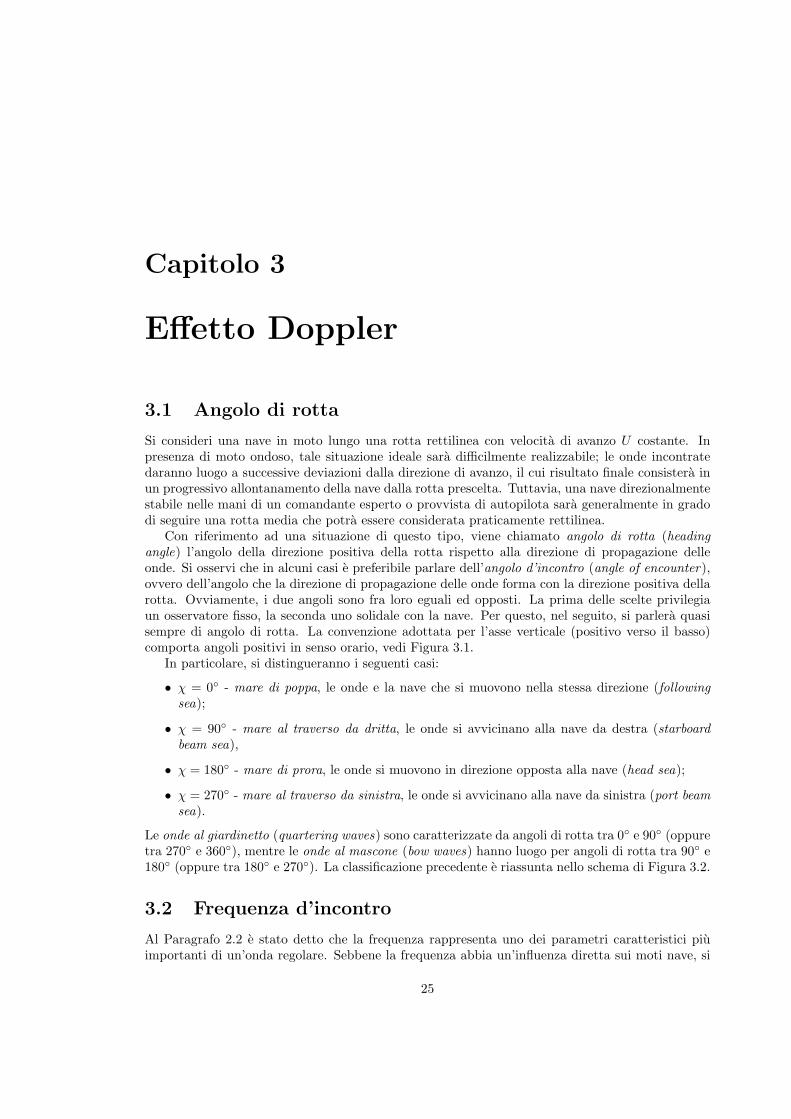
Capitolo 3
Effetto Doppler
3.1 Angolo di rotta
Si consideri una nave in moto lungo una rotta rettilinea con velocita di avanzo U costante. Inpresenza di moto ondoso, tale situazione ideale sara difficilmente realizzabile; le onde incontratedaranno luogo a successive deviazioni dalla direzione di avanzo, il cui risultato finale consistera inun progressivo allontanamento della nave dalla rotta prescelta. Tuttavia, una nave direzionalmentestabile nelle mani di un comandante esperto o provvista di autopilota sara generalmente in gradodi seguire una rotta media che potra essere considerata praticamente rettilinea.
Con riferimento ad una situazione di questo tipo, viene chiamato angolo di rotta (headingangle) l’angolo della direzione positiva della rotta rispetto alla direzione di propagazione delleonde. Si osservi che in alcuni casi e preferibile parlare dell’angolo d’incontro (angle of encounter),ovvero dell’angolo che la direzione di propagazione delle onde forma con la direzione positiva dellarotta. Ovviamente, i due angoli sono fra loro eguali ed opposti. La prima delle scelte privilegiaun osservatore fisso, la seconda uno solidale con la nave. Per questo, nel seguito, si parlera quasisempre di angolo di rotta. La convenzione adottata per l’asse verticale (positivo verso il basso)comporta angoli positivi in senso orario, vedi Figura 3.1.
In particolare, si distingueranno i seguenti casi:
• χ = 0◦ - mare di poppa, le onde e la nave che si muovono nella stessa direzione (followingsea);
• χ = 90◦ - mare al traverso da dritta, le onde si avvicinano alla nave da destra (starboardbeam sea),
• χ = 180◦ - mare di prora, le onde si muovono in direzione opposta alla nave (head sea);
• χ = 270◦ - mare al traverso da sinistra, le onde si avvicinano alla nave da sinistra (port beamsea).
Le onde al giardinetto (quartering waves) sono caratterizzate da angoli di rotta tra 0◦ e 90◦ (oppuretra 270◦ e 360◦), mentre le onde al mascone (bow waves) hanno luogo per angoli di rotta tra 90◦ e180◦ (oppure tra 180◦ e 270◦). La classificazione precedente e riassunta nello schema di Figura 3.2.
3.2 Frequenza d’incontro
Al Paragrafo 2.2 e stato detto che la frequenza rappresenta uno dei parametri caratteristici piuimportanti di un’onda regolare. Sebbene la frequenza abbia un’influenza diretta sui moti nave, si
25

26 CAPITOLO 3. EFFETTO DOPPLER
χU
U cosχ
U
c
λ
Figura 3.1: Definizione dell’angolo di rotta nave-onda.
Port Quarter
Starboard Bow
Starb
oard Q
uarte
r
Port Bow
Starboard Beam
χ = 90°
Port Beamχ = 270°
Headχ = 180°
Followingχ = 0°
Figura 3.2: Classificazione degli angoli di rotta nave-onda.

3.2. FREQUENZA D’INCONTRO 27
vedra nel seguito che essi dipendono esplicitamente solo dalla frequenza apparente (o frequenzaefficace) con la quale la nave in movimento incontra le onde, detta per questo frequenza d’incontro(encounter frequency). In generale, questo fenomeno e noto con il nome di effetto Doppler.
Con riferimento alla Figura 3.1, si puo osservare che la componente della velocita di avanzodella nave nella direzione di propagazione delle onde risulta Uχ = U cos χ; ne segue che le onde simuovono rispetto alla nave con velocita relativa cχ = c − U cos χ. Poiche le creste delle onde sitrovano a distanza λ costante, esse incontrano la nave ad intervalli di tempo Te regolari, essendoil periodo d’incontro (encounter period) dato da:
Te =λ
cχ=
λ
c− U cosχ. (3.1)
Segue per la frequenza d’incontro:
ωe =2π
Te=
2π
λ(c− U cosχ) . (3.2)
In acqua profonda l’espressione precedente si riduce alla relazione fondamentale:
ωe = ω − kU cos χ = ω − ω2U
gcosχ . (3.3)
L’andamento previsto dalla (3.3) viene mostrato in Figura 3.3.
ωe
ω
Hea
d/B
ow S
eas
ω e
> ω
Beam
Sea
s
ω e
= ω
Quartering/Follow
ing Seas
ωe < ω
0
(ωe )max
2(ωe )max
4(ωe )max
Figura 3.3: Frequenza d’incontro per diverse direzioni di avanzo.
In mari di prora o al mascone (90◦ < χ < 270◦), essendo cos χ < 0, la frequenza d’incontroe sempre maggiore della frequenza dell’onda. Per mari al traverso (χ = 90◦ o χ = 270◦) si hacos χ = 0; la frequenza d’incontro risulta eguale alla frequenza delle onde e, come tale, non einfluenzata dalla velocita della nave.
La situazione e invece molto piu complicata quando la nave si trova in mari di poppa o algiardinetto (0◦ < χ < 90◦ o 270◦ < χ < 360◦). Allora, essendo cos χ > 0, la frequenza d’incontro

28 CAPITOLO 3. EFFETTO DOPPLER
puo assumere sia valori positivi (overtaking sea) che negativi (following sea). In particolare, lafrequenza d’incontro raggiunge il valore massimo:
(ωe)max =g
4U cosχ, (3.4)
per la frequenza dell’onda pari a:
ω =g
2U cosχ= 2 (ωe)max . (3.5)
La frequenza d’incontro e zero sia per ω = 0 che per
ω =g
U cosχ= 4 (ωe)max . (3.6)
Questo caso particolare corrisponde alla condizione in cui la componente della velocita di avanzonella direzione di propagazione delle onde e uguale alla celerita, ovvero:
U cosχ = c . (3.7)
La frequenza d’incontro e negativa per valori di ω > 4 (ωe)max e si verifica per onde di frequenza piualta. In genere si tratta di onde corte che avanzano lentamente rispetto alla nave. Una frequenzad’incontro negativa significa che la nave sopravanza le onde.
L’insieme delle situazioni considerate in precedenza viene illustrato in Figura 3.4. Si osserviche per frequenze d’incontro negative le onde sono incontrate sulla faccia sopravvento, mentre perfrequenze d’incontro positive le onde sono incontrate sulla faccia sottovento. Le due facce sono fraloro distinguibili per la presenza degli spruzzi o altri effetti visivi dovuti al vento che, come bennoto, e sempre presente nella zona di tempesta. Per questo, con mari provenienti da prora o almascone la frequenza d’incontro e sempre positiva. Essa puo, tuttavia, essere positiva anche cononde di poppa o al giardinetto ed in tal caso le onde sopravanzano la nave. Si parla allora di maresopravanzante (overtaking sea).
In onde di poppa o al giardinetto, risulta che un prefissato valore assoluto della frequenzad’incontro |ωe| < (ωe)max puo verificarsi in tre differenti sistemi ondosi. Due di essi danno luogo afrequenze d’incontro positive mentre il terzo comporta una frequenza d’incontro negativa. Se pero|ωe| > (ωe)max, un’assegnata frequenza d’incontro si realizza in un solo sistema ondoso ed essa esempre negativa.
In termini quantitativi, la relazione fra la frequenza d’onda e la frequenza d’incontro si ottieneinvertendo l’equazione (3.3). Ne segue:
ω =g
2U cosχ
(1±
√1− 4ωe
gU cos χ
). (3.8)
L’equazione (3.3) puo essere usata anche per trovare il legame tra la frequenza d’incontro, lalunghezza d’onda e la componente della velocita di avanzo nella direzione di propagazione dell’onda.Risulta allora:
Uχ = U cos χ =λ
2π
(√2πg
λ− ωe
). (3.9)
La relazione precedente viene mostrata in Figura 3.5.Dalla figura si nota chiaramente che con onde di poppa e al giardinetto, una stessa frequenza
d’incontro puo essere realizzata su di un ampio intervallo delle lunghezze d’onda. Per esempio,una nave con velocita di 20 kn in onde al giardinetto (χ = 45◦) ha una componente della velocitadi avanzo nella direzione di propagazione delle onde di circa 7.0m/s. In queste condizioni, tutte lelunghezze d’onda nell’intervallo che va da circa 50 m a circa 400 m danno luogo ad una frequenzad’incontro prossima a 0.3 rad/s, ovvero ad un periodo d’incontro di 21 s. Come si vedra al successivoCapitolo 9, questo fenomeno puo avere implicazioni significative sui moti nave ed in particolare sulmoto di rollio in mari provenienti da poppa o al giardinetto.
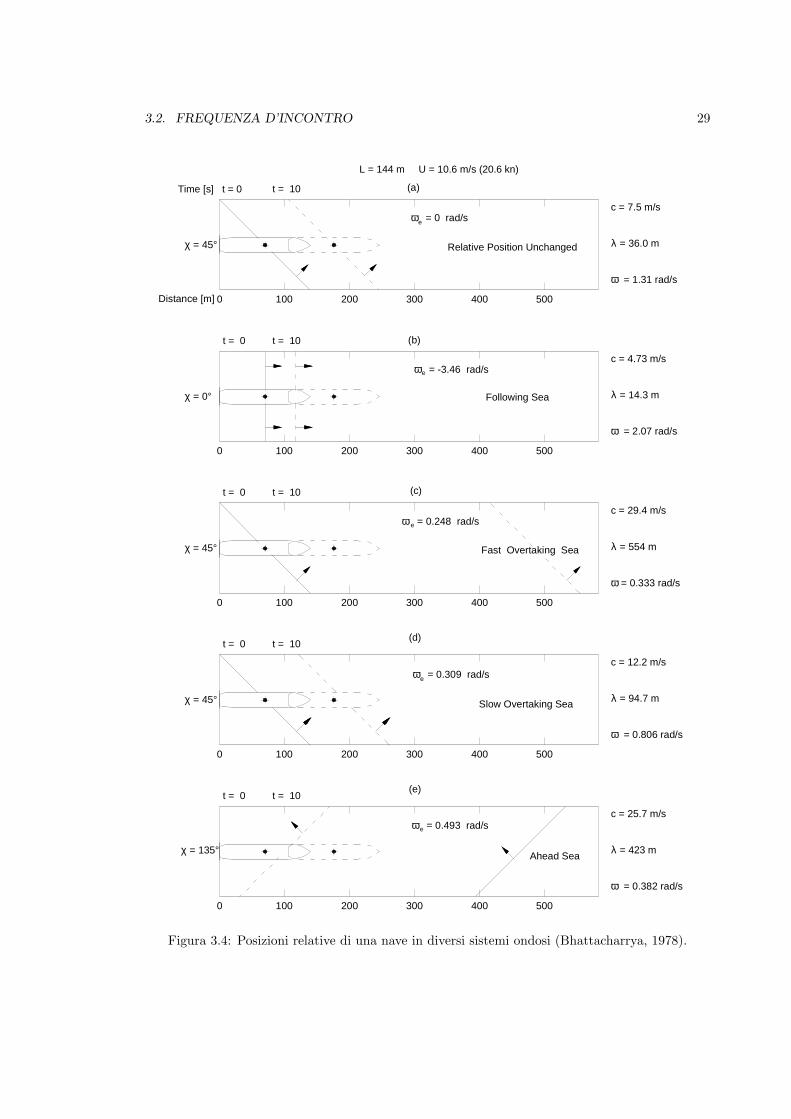
3.2. FREQUENZA D’INCONTRO 29
χ = 135°
3000 100 200 400 500
3000 100 200 400 500
3000 100 200 400 500
3000 100 200 400 500
3000 100 200 400 500
c = 25.7 m/s
λ = 423 m
ω = 0.382 rad/s
(d)
ω = 0.493 rad/s
Ahead Sea
Slow Overtaking Seaχ = 45°
(c)
ω = 0.309 rad/sc = 12.2 m/s
λ = 94.7 m
ω = 0.806 rad/s
Fast Overtaking Seaχ = 45°
(b)
ω = 0.248 rad/sc = 29.4 m/s
λ = 554 m
ω = 0.333 rad/s
Following Seaχ = 0°
(a)
ω = -3.46 rad/sc = 4.73 m/s
λ = 14.3 m
ω = 2.07 rad/s
Relative Position Unchanged
t = 10
Distance [m]
Time [s] t = 0
χ = 45°
L = 144 m U = 10.6 m/s (20.6 kn)
ω = 0 rad/sc = 7.5 m/s
λ = 36.0 m
ω = 1.31 rad/s
e
e
e
e
e
t = 10t = 0
t = 10t = 0
t = 10t = 0
t = 10t = 0(e)
Figura 3.4: Posizioni relative di una nave in diversi sistemi ondosi (Bhattacharrya, 1978).

30 CAPITOLO 3. EFFETTO DOPPLER
20 10 0 -10 -20U cos χ (m/s)
100
200
300
400
500
600
700
800
900
1000
Wav
e Le
ngth
, λ
(m
)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
1.0
0.8
1.5
Encounter Frequency
ωe (rad/s)
Following Seas Head SeasBeam Seas
- 0.1
- 0.2
- 0.5
- 1.0
- 2.0
Figura 3.5: Frequenza d’incontro, lunghezza d’onda e componente della velocita di avanzo dellanave nella direzione di propagazione dell’onda nel caso di onde regolari in acqua profonda.
3.3 Condizioni sfavorevoli per i moti nave
L’eccitazione dei moti nave dipende essenzialmente dal periodo d’incontro delle onde, ovvero dalloro periodo apparente (periodo efficace). Se, per una variazione dell’angolo di rotta e/o dellavelocita di avanzo della nave, il periodo apparente si avvicina al periodo naturale Tj proprio diuno dei moti fondamentali (sussulto, rollio, beccheggio), le corrispondenti ampiezze di oscillazionepossono aumentare sensibilmente per effetto della risonanza ed il moto diviene piu intenso; pervariazioni opposte degli stessi parametri i moti saranno ridotti in ampiezza. Ne segue che lecondizioni necessarie per la riduzione dei moti nave possono essere cambiate con interventi delcomandante che riguardano sia la rotta che la velocita di avanzo.
Per capire meglio questo problema, si consideri la (3.1) scritta nella forma:
U cosχ = c− λ
Te, (3.10)
essendo Uχ = U cosχ la componente della velocita di avanzo nella direzione di propagazionedelle onde. Dalla relazione precedente segue immediatamente che, a partire dall’eguaglianza fra ilperiodo d’incontro ed il periodo di oscillazione della nave in acqua tranquilla (Te = Tj), si possonoricavare le combinazioni piu sfavorevoli di U e di χ che, per una data lunghezza d’onda, dannoluogo alla risonanza di uno dei moti fondamentali. In tali condizioni, l’ampiezza del corrispondentemoto diventa massima e questo puo comportare talvolta un effetto indesiderato.
E possibile determinare i valori sfavorevoli dell’angolo di rotta e della velocita di avanzo per iquali si verifica un’intensificazione dei moti nave con l’ausilio dei cosiddetti diagrammi di Vlasov(Vlasov, 1959), un esempio dei quali viene riportato in Figura 3.6. Il grafico di figura, che siriferisce ad un sistema di onde regolari piane, considera la propagazione delle onde avvenire dadestra verso sinistra, ovvero assume verticale la direzione individuata dalle creste. Il fascio di

3.3. CONDIZIONI SFAVOREVOLI PER I MOTI NAVE 31
rette, con origine al centro, rappresenta alcune delle direzioni possibili per la velocita di avanzo;l’insieme delle circonferenze concentriche corrisponde a diversi valori della velocita di avanzo. Comesi vede, gli angoli di rotta sono riportati ogni 15◦ e le velocita della nave ogni 2 nodi. Poiche idiagrammi sono simmetrici rispetto alla retta orizzontale 0◦ − 180◦, risulta sufficiente tracciarnesolo la meta superiore per poter disporre di tutte le informazioni necessarie. Ogni diagramma vienecostruito espressamente per un’assegnata lunghezza d’onda λ ed un dato periodo Tj del j-esimomoto oscillatorio della nave. Fra i moti fondamentali vengono pero considerati significativi i solimoti di rollio e di beccheggio in quanto responsabili della maggior parte degli effetti indesiderati.Il moto di sussulto viene escluso dall’analisi.
20
16
12
8
4
15°
2
30°
45°
60°75° 90° 105°
120°
135°
150°
165°
180°0°
ϕ θ
22
18
14
10
6
26 kn
A
λ = 40 mT = 8.0 s T = 3.5 s
Direction of Wave Propagation
24
Figura 3.6: Diagramma delle condizioni sfavorevoli per i moti nave.
Si osservi che ad ogni valore della velocita di avanzo U ed angolo di rotta χ corrisponde ununico punto sul diagramma di Vlasov e, inversamente, ad ogni punto del diagramma corrispondeuna ben definita coppia di valori per la velocita di avanzo e l’angolo di rotta. Per esempio, allavelocita di avanzo di 12 nodi e all’angolo di rotta pari a 60◦ (onde al giardinetto) puo essereassociato il punto A di figura. Inoltre, fissando la velocita di avanzo e variando l’angolo di rotta ilcorrispondente punto sul diagramma di Vlasov si sposta lungo un arco circolare, mentre fissandol’angolo di rotta e variando la velocita di avanzo il punto si muove lungo un raggio rettilineo. Se,per un cambiamento simultaneo della velocita di avanzo e dell’angolo di rotta, il prodotto U cos χrimane costante, il punto corrispondente si sposta lungo una linea verticale.
Tenendo presente che le ampiezze di un moto oscillatorio raggiungono valori intensificati inprossimita della risonanza, cioe quando il periodo d’incontro soddisfa la condizione:
0.7 Tj < |Te| < 1.3 Tj , (3.11)
ne segue che, alla zona dei moti piu accentuati, deve corrispondere sul diagramma di Vlasov unaregione ben definita, avente la forma di una striscia verticale. Nella rappresentazione di figurasi tratta delle zone tratteggiate in diagonale per il rollio e di quelle tratteggiate in orizzontaleper il beccheggio. A titolo di esempio, il contorno delle striscie di figura corrisponde a valori diU cosχ calcolati con la (3.11) per un periodo naturale di rollio Tϕ = 8.0 s ed un periodo naturaledi beccheggio Tθ = 3.5 s, mentre le linee verticali tratteggiate che dividono le striscie in due parti,sono relative alla risonanza, cioe alla condizione per le massime ampiezze di oscillazione.
Si noti che in corrispondenza al valore Tϕ = 8.0 s ci sono due zone di rollio accentuato. Infatti,per verificare le condizioni di risonanza e necessaria l’eguaglianza dei valori assoluti del periodo

32 CAPITOLO 3. EFFETTO DOPPLER
d’incontro e del periodo naturale di rollio, i loro segni non essendo influenti ai fini del risultatofinale. Dalla relazione (3.11) segue che il periodo d’incontro puo essere sia positivo che negativo,quest’ultimo caso in conseguenza del fatto che in mari di poppa o al giardinetto le onde possonoanche sopravanzare la nave. Per questo, nel calcolare U cos χ con la (3.10), deve essere usato ilvalore del periodo apparente con due segni distinti, cioe prendere nell’ordine Te = ±Tϕ, Te =± 0.7 Tϕ e Te = ± 1.3 Tϕ. Lo stesso vale anche quando si calcolano le zone sfavorevoli per ilbeccheggio. Ne segue, in definitiva, che su ogni diagramma di Vlasov ci possono essere due zonesfavorevoli sia per il rollio che per il beccheggio.
I diagrammi di Vlasov sono costruiti per una serie prefissata di valori della lunghezza d’ondaa cui vengono associati i periodi di rollio e di beccheggio possibili per le effettive condizioni diesercizio della nave. Poiche, nelle diverse condizioni di carico, il periodo di beccheggio cambiasolo di poco, ne segue che puo essere usato il corrispondente valore medio per costruire tutti idiagrammi significativi. Essendo essi concepiti per l’ipotesi di onde regolari piane (mare lungo),si puo affermare che le previsioni sono tanto meno accurate quanto piu il mare risulta irregolare(mare in tempesta).
Avendo a disposizione i diagrammi di Vlasov, il comandante della nave puo scegliere le combi-nazioni della velocita di avanzo e dell’angolo di rotta che non causano la condizione di risonanzane per il rollio ne per il beccheggio. Per questo, in primo luogo, egli deve determinare visualmentela lunghezza media delle onde sopraggiungenti, ad esempio confrontandole con la lunghezza dellanave. Successivamente, con un album dei diagrammi di Vlasov alla mano, egli puo scegliere quelloche corrisponde alla lunghezza d’onda cosı determinata e che si riferisce ai periodi dei moti perla condizione di carico propria della nave. In questo modo, il comandante e in grado di stabilireimmediatamente i valori piu opportuni dell’angolo di rotta e della velocita di avanzo che gli assi-curano di rimanere al di fuori di tutte le zone tratteggiate, ovvero di evitare tutte le condizioni dinavigazione con moti nave intensificati.
Capitolo 4
Onde oceaniche
4.1 Generazione delle onde
Le onde di maggior interesse pratico sono quelle generate dall’azione del vento, ovvero quelle chesi formano nel mare in tempesta. Si tratta di un sistema ondoso particolarmente complesso, di cuile onde regolari piane studiate al Capitolo 2 ne costituiscono il modello teorico elementare.
Il meccanismo con il quale il vento genera le onde e stato chiarito esaurientemente, anche serestano irrisolti alcuni dettagli a livello microscopico. Comunque, esso non risulta importante neper lo studioso della tenuta al mare ne per quello dei problemi offshore. A tal fine, e sufficienteosservare che un vento costante, soffiando su una distesa di acqua calma, produce inizialmente delleincrespature che si propagano sulla superficie libera in una direzione sostanzialmente concorde conquella della causa eccitante (vedi Figura 4.1). Se il vento continua a perdurare nella sua azioneper un tempo sufficientemente lungo ed inoltre e disponibile una sufficiente lunghezza della zonabattuta (fetch), le increspature hanno modo di crescere sia in lunghezza che in altezza fino atrasformarsi in un sistema ondoso vero e proprio. Essendo il fenomeno continuo, il vento generaripetutamente nuove increspature sulla superficie delle onde in via di formazione. Tali increspaturecrescono a loro volta ed il sistema ondoso che alla fine si instaura appare molto confuso. Unosservatore particolarmente attento puo al massimo affermare che la superficie del mare consistein una sovrapposizione di onde regolari, aventi differenti lunghezze ed altezze, che si propagano fraloro indipendentemente.
(a) Calm Surface
Wind
(b) Ripples (c) Small Waves
(d) Ripples Develop on Growing Waves
Wind Wind
Wind
Figura 4.1: Meccanismo di formazione delle onde generate dal vento.
Le singole componenti ondose si comportano, apparentemente, nello stesso modo in cui esse si
33
34 CAPITOLO 4. ONDE OCEANICHE
comporterebbero nelle condizioni ideali di singole onde regolari, essendo l’interazione trascurabilese non in condizioni meteomarine estreme. Si nota che le onde piu lunghe, dotate di velocita piuelevata, sopravanzano di continuo le onde piu corte che sono le piu lente. Il risultato ultimo e quellodi una superficie che cambia di forma istante dopo istante a causa delle onde che progrediscono,sovrapponendosi e cancellandosi le une con le altre in modo disordinato (vedi Figura 4.2).
Figura 4.2: Ripresa fotografica della superficie del mare con evidenziate le curve di livello.
Poiche la formazione ondosa e associata ad una certa energia meccanica, ne segue che le on-de prodotte dal vento assorbono continuamente energia dalla causa eccitante. Questo scambioenergetico e pero ostacolato da diversi meccanismi di dissipazione, quali ad esempio quelli dovutiall’attrito interno, alla generazione di vortici ed alla rottura delle onde. Il piu importante fra essie certamente quello dovuto al continuo frangersi delle onde aventi maggiore ripidita.
Se il vento continua a soffiare con velocita costante per un tempo sufficientemente lungo ed edisponibile una zona battuta abbastanza estesa, puo essere raggiunto uno stato di equilibrio dina-mico nel quale la rapidita con cui il vento fornisce energia alle onde risulta esattamente bilanciatadalla rapidita con la quale essa viene dissipata dalle stesse. Questa situazione di equilibrio ener-getico corrisponde ad uno stato stazionario di mare pienamente sviluppato (fully developed sea).In pratica tali stati di mare sono molto rari in quanto le condizioni richieste per l’instaurarsi dellastazionarieta del sistema ondoso sono abbastanza restrittive e non sussistono ne per il tempo ri-chiesto ne per l’estensione della zona battuta. Quest’ultima e, in generale, limitata dalla geografialocale.
Quando il vento cessa di soffiare, il sistema ondoso da esso generato non viene piu rifornito dienergia e quindi decade gradualmente. Le onde corte, essendo piu ripide, sono quelle che scom-paiono per prime in quanto piu vicine alle condizioni di frangersi, mentre le onde lunghe vengonoattenuate molto lentamente dalle forze relativamente deboli della viscosita. In oceano aperto, dovei tempi e le estensioni sono appropriati, questo processo puo durare anche per alcuni giorni. Leonde piu lunghe e veloci possono viaggiare per migliaia di chilometri e, alla fine, si trasformanoin onde di mar morto (swell). I sistemi ondosi prodotti localmente possono essere percio alteratidalle onde di mar morto generate altrove che, come tali, non hanno alcuna relazione con il ventolocale. Esse pero contribuiscono al contenuto energetico del mare nella zona considerata.
Si osservi infine che le onde di mar morto, generalmente di periodo lungo e di forma relati-vamente regolare, sono tra le onde reali quelle che piu si avvicinano al modello matematico delleonde regolari piane.

4.2. ANALISI STATISTICA DELLE ONDE IRREGOLARI 35
4.2 Analisi statistica delle onde irregolari
La superficie del mare in tempesta ha una forma continuamente variabile a causa della sovrappo-sizione delle creste e dei cavi di onde che si propagano nelle diverse direzioni. Per molti anni ladescrizione quantitativa di questo stato di confusione apparente costituı un serio ostacolo per glioceanografi e quindi, di riflesso, per lo sviluppo teorico della tenuta al mare di una nave soggettaall’azione di onde irregolari. Il problema della formulazione di un modello del mare confuso furisolto negli anni cinquanta con l’applicazione dei metodi statistici adatti per lo studio dei processicasuali o stocastici, allora gia largamente usati nella scienza delle telecomunicazioni. In questomodo e stato possibile dapprima quantificare le caratteristiche delle onde in qualsiasi condizione dimare e successivamente descrivere i movimenti della nave in un ambiente meteomarino molto piurealistico. Come si vedra in seguito, i metodi statistici stanno alla base della moderna teoria dellatenuta al mare e ne costituiscono percio uno dei punti fondamentali. La trattazione matematicadegli argomenti piu importanti sara comunque semplificata al massimo, senza per altro inficiare irisultati di maggiore interesse applicativo. Il lettore esigente puo far riferimento a testi e/o articolispecifici quali Price and Bishop (1974) e Ochi and Bolton (1973, 1973a, 1973b).
Per capire come sia stato affrontato e risolto il problema, si considerino due differenti tipi diosservazioni della superficie marina, ovvero una ripresa fotogrammetrica eseguita con un aereo eduna registrazione locale per mezzo di una boa oceanografica. La sintesi dei risultati ottenuti inquesto modo viene riportata nelle Figure 4.3 e 4.4 sotto forma di profilo ondoso. Come si puo vedere,entrambe le procedure consentono una descrizione quantitativa dello stato del mare: nel primo casosu di un’area opportunamente estesa ed in un prefissato istante (osservazione istantanea), mentrenel secondo caso su un certo intervallo di tempo ed in un punto prestabilito (osservazione puntuale).
ζ
x
ζ
H
λ
ζ
~
~λ
w
SWL
z
p
aa
a
Figura 4.3: Profilo del mare in un prefissato istante, ottenuto tagliando la superficie ondosa lungouna direzione (osservazione istantanea).
Entrambi i record sono irregolari e, apparentemente, non c’e alcuna coerenza nell’andamentodel profilo ondoso. Per questo, con riferimento alle Figure 4.3 e 4.4, si e soliti definire le seguentigrandezze:
ζa ampiezza apparente dell’onda, distanza verticale di una cresta o di un cavo dal livello mediodell’acqua tranquilla (una cresta o un cavo sotto il livello medio hanno ordinata positiva,mentre le loro ordinate sono negative in caso opposto);
Ha altezza apparente dell’onda, distanza verticale fra una cresta ed il cavo successivo o viceversa(sempre positiva);

36 CAPITOLO 4. ONDE OCEANICHE
ζ
T T
H
~ ~
ζ t
ζ w
SWL
pz
a
a
a
Figura 4.4: Profilo del mare in un punto prestabilito, ottenuto mediante la registrazione delladepressione ondosa nel tempo (osservazione puntuale).
λp lunghezza apparente d’onda fra picchi, distanza tra due picchi (creste o cavi) successivi;
λz lunghezza apparente d’onda fra zeri, distanza tra due successivi passaggi per lo zero entrambiin salita o in discesa;
Tp periodo apparente fra picchi, intervallo di tempo tra due picchi (creste o cavi) successivi;
Tz periodo apparente fra zeri, intervallo di tempo tra due successivi passaggi per lo zero entrambiin salita o in discesa.
Queste grandezze, riferendosi esclusivamente al particolare record in esame, sono di poca utilitaper caratterizzare il corrispondente stato di mare nel suo complesso. Le caratteristiche globali dellasuperficie marina vengono percio definite in termini dei corrispondenti valori medi, ovvero:
ζa ampiezza media delle onde, valore medio delle ampiezze apparenti;
Ha altezza media delle onde, valore medio delle altezze apparenti;
λp lunghezza media d’onda fra picchi, valore medio delle lunghezze d’onda apparenti fra picchi;
λz lunghezza media d’onda fra zeri, valore medio delle lunghezze d’onda apparenti fra zeri;
T p periodo medio fra picchi (peak-to-peak period), valore medio dei periodi apparenti fra picchi;
T z periodo medio fra zeri (zero-crossing period), valore medio dei periodi apparenti fra zeri.
Inoltre, sempre a partire dal record in esame, vengono generalmente definite altre due grandezzegeometriche:
ζ1/3 ampiezza significativa delle onde (significant wave amplitude), valore medio di un terzo dellemisure piu alte delle ampiezze apparenti delle onde;
H1/3 altezza significativa delle onde (significant wave height), valore medio di un terzo delle misurepiu alte delle altezze apparenti delle onde.

4.2. ANALISI STATISTICA DELLE ONDE IRREGOLARI 37
Queste ultime sono legate fra loro dalla relazione:
H1/3 = 2 ζ1/3 . (4.1)
Oltre alle statistiche associate ai picchi (creste o cavi) e passaggi per lo zero, esiste un’altrotipo di grandezze caratteristiche particolarmente adatte a quantificare le proprieta globali delleonde irregolari, vedi Appendice A. Per questo, la serie spaziale o temporale del profilo ondosoviene campionata ad intervalli regolari (spaziali o temporali) al fine di ottenere una successione dimisure della perturbazione rispetto ad un arbitrario livello di riferimento. Ad esempio, nel caso diun record temporale l’intervallo di campionamento piu appropriato si aggira attorno ai 0.5÷1.0 s,come mostrato in Figura 4.5.
δt
t
ζ
0
w
Figura 4.5: Campionamento del record di un profilo ondoso: analisi in successivi intervalli ditempo.
Indicando con N il numero totale di osservazioni ζi del profilo ondoso, possono essere definitele seguenti grandezze caratteristiche del record:
• livello medio della superficie ondosa:
ζ =1N
N∑
i=1
ζi , (4.2)
• varianza della perturbazione ondosa rispetto alla media:
m0 =1N
N∑
i=1
(ζi − ζ)2 , (4.3)
• deviazione standard o deviazione quadratica media (root mean square, rms) della perturba-zione ondosa rispetto alla media:
σ0 =√
m0 . (4.4)

38 CAPITOLO 4. ONDE OCEANICHE
Se i valori ottenuti per le diverse grandezze statistiche sono gli stessi, indipendentemente dalfatto che il campionamento sia stato eseguito sul record spaziale o temporale, lo stato di mare sidice stazionario ed ergodico. Tuttavia, un’analisi attendibile fatta usando una qualsiasi delle duetecniche esaminate in precedenza, richiede che il record del profilo ondoso contenga almeno 100paia di creste e di cavi. Un tale record deve avere tipicamente la durata di circa 20–30 minuti.Registrazioni piu corte comportano il rischio di risultati non attendibili in quanto esse possono,casualmente, risultare o troppo severe o troppo moderate.
I record molto lunghi, ad esempio di alcune ore, devono essere evitati in quanto e abbastan-za verosimile che, in questo intervallo di tempo, abbiano avuto luogo variazioni sostanziali nellastatistica delle onde a causa dei cambiamenti della velocita del vento o addirittura per l’arrivodi onde di mar morto provenienti da altre zone lontane. Lo stato di mare non conserva allora lecaratteristiche di stazionarieta.
4.3 Analisi di Fourier
Nel seguito sara considerato uno stato di mare stazionario ed ergodico. Inoltre, verra fatto esplicitoriferimento alle registrazioni temporali in quanto di piu facile acquisizione sperimentale. Analogheconsiderazioni possono essere fatte anche per le serie spaziali, generalizzando opportunamente irisultati. Le statistiche ottenute nei due casi sono comunque fra loro eguali.
La forma tipica di una qualsiasi registrazione del profilo di un sistema di onde irregolarisuggerisce di rappresentare il record della durata TR mediante una serie di Fourier, ovvero:
ζw(t) = ζ +∞∑
n=1
(an cos ωnt + bn sin ωnt) , (4.5)
essendo le frequenze delle componenti armoniche:
ωn =2πn
TR, n = 1, 2, 3, . . . ,∞ (4.6)
ed i coefficienti delle corrispondenti ampiezze:
an =2
TR
∫ TR
0
ζw(t) cos ωnt dt ,
bn =2
TR
∫ TR
0
ζw(t) sin ωnt dt . (4.7)
La (4.5) puo essere scritta anche nella forma alternativa:
ζw(t) = ζ +∞∑
n=1
ζn cos(ωnt + εn) , (4.8)
dove i coefficienti sono:
ζn =√
a2n + b2
n , (4.9)
mentre per le fasi risulta:
tan εn = − bn
an. (4.10)
L’espressione (4.8) ha un significato fisico immediato in quanto permette di rappresentare il profiloondoso di un mare irregolare come una somma o sovrapposizione di infinite onde regolari. Il

4.4. SPETTRO DI ENERGIA 39
periodo della componente di frequenza piu bassa corrisponde alla durata del record, mentre le altrecomponenti hanno periodi sottomultipli di quello fondamentale ovvero risultano delle armonichesuperiori. L’intervallo di frequenza tra due armoniche successive, espresso dalla relazione:
δω = ωn − ωn−1 =2πTR
, (4.11)
diviene molto piccolo quando TR diventa molto grande, cioe al crescere della durata del record.Al limite, per TR → ∞, la serie temporale (4.8) passa da discreta a continua per diventare unintegrale di Fourier. Inoltre, con un’appropriata scelta del livello di riferimento per la misura delprofilo conviene generalmente porre a zero il valore medio del record, ovvero il livello medio dellasuperficie del mare corrisponde all’origine delle ordinate.
Da quanto detto risulta chiaro che ogni singola registrazione ottenuta sperimentalmente puoessere rappresentata in termini delle corrispondenti componenti armoniche attraverso un’appro-priato sviluppo in serie di Fourier. Questo e vero almeno in linea di principio, ovvero qualora fosseeffettivamente possibile determinare tutte le armoniche richieste attraverso il calcolo delle frequen-ze, ampiezze e fasi con le relazioni (4.6), (4.7), (4.9) e (4.10). In questo caso, la serie temporalerisultante coinciderebbe esattamente con quella originale su tutto l’intervallo di registrazione. Tut-tavia, in base al modello teorico prescelto, essa si ripeterebbe periodicamente ad intervalli di temporegolari pari a TR, mentre una qualsiasi registrazione del mare reale non si ripropone mai nellostesso identico modo. La serie di Fourier ottenuta analiticamente non puo percio riprodurre i datisperimentali all’infuori dell’intervallo di registrazione e quindi costituisce un modello matematicodi limitato interesse applicativo. Per risolvere il problema della rappresentazione di un mare con-fuso si deve percio ricorrere a metodi alternativi, piu adatti per il caso specifico di un fenomenostocastico. Uno di questi e basato sull’equivalenza energetica e verra illustrato nel seguito.
4.4 Spettro di energia
L’importanza relativa delle componenti armoniche di un’onda irregolare puo essere conveniente-mente rappresentata in termini dello spettro di densita di energia (wave energy spectrum). Ilprocedimento seguito per la definizione dello spettro di densita di energia, o piu semplicementespettro di energia, puo essere illustrato come segue.
A partire dalla n-esima componente ondosa, si consideri un intervallo di frequenze avente am-piezza δω e centrato sulla frequenza ωn generica. Se la larghezza dell’intervallo e sufficientementepiccola, esso include una sola componente armonica. In realta, per un sistema di onde irregolari, visono anche altre componenti. L’analisi discreta di Fourier, non consentendo di evidenziarle espli-citamente, congloba il loro effetto complessivo nella sola frequenza ωn che percio le rappresentaglobalmente. Un metodo piu circostanziato richiederebbe l’uso dell’integrale di Fourier che, da unpunto di vista pratico, poco aggiunge a quanto gia detto.
Lo spettro di energia di ogni singola componente armonica viene definito in modo che l’areasottesa delimitata da un intervallo elementare di frequenze, a cavallo della componente considerata,risulti proporzionale all’energia per unita di superficie (densita di energia) di tutte le componentiondose comprese in quell’intervallo. Poiche, in base alla (2.16), l’energia per unita di superficiedell’n-esima componente armonica e pari a ρgζ2
n/2, segue per definizione (St. Denis and Pierson,1953):
ρgSζ(ωn) δω =12ρgζ2
n , (4.12)
da cui si ottiene:
Sζ(ωn) =ζ2n
2 δω. (4.13)
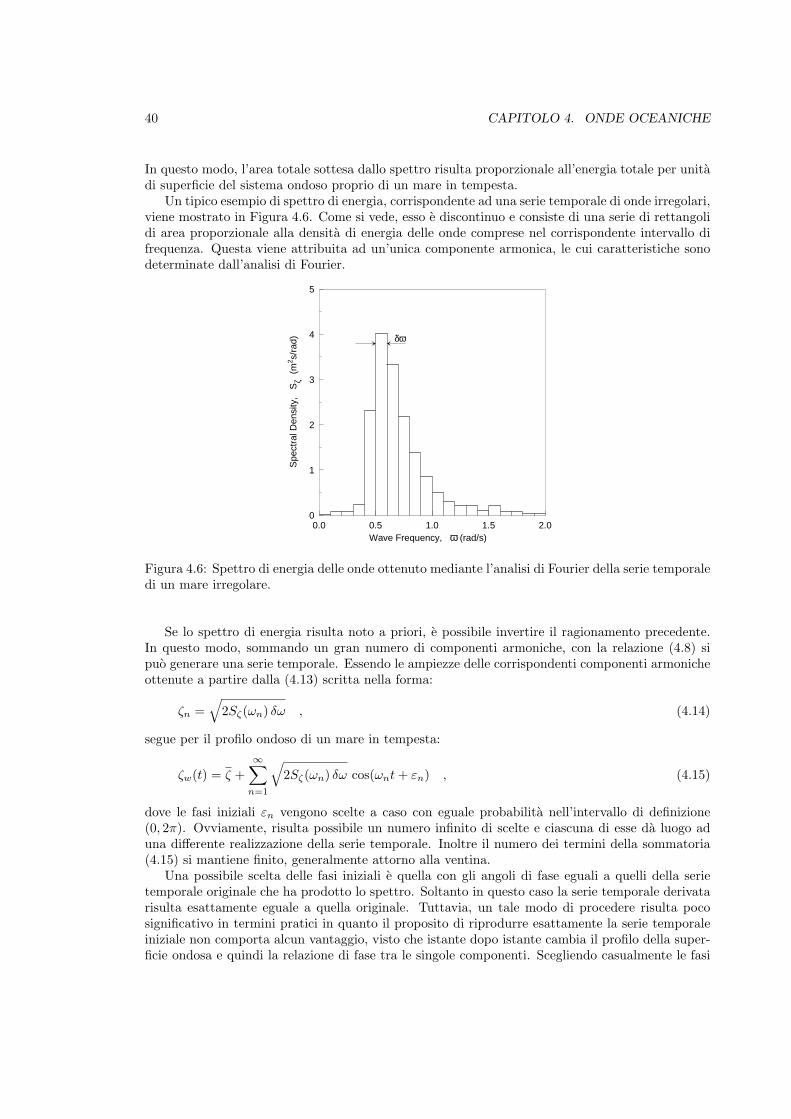
40 CAPITOLO 4. ONDE OCEANICHE
In questo modo, l’area totale sottesa dallo spettro risulta proporzionale all’energia totale per unitadi superficie del sistema ondoso proprio di un mare in tempesta.
Un tipico esempio di spettro di energia, corrispondente ad una serie temporale di onde irregolari,viene mostrato in Figura 4.6. Come si vede, esso e discontinuo e consiste di una serie di rettangolidi area proporzionale alla densita di energia delle onde comprese nel corrispondente intervallo difrequenza. Questa viene attribuita ad un’unica componente armonica, le cui caratteristiche sonodeterminate dall’analisi di Fourier.
0.0 0.5 1.0 1.5 2.0Wave Frequency, ω (rad/s)
0
1
2
3
4
5S
pect
ral D
ensi
ty,
Sζ (
m2 s/
rad) δω
Figura 4.6: Spettro di energia delle onde ottenuto mediante l’analisi di Fourier della serie temporaledi un mare irregolare.
Se lo spettro di energia risulta noto a priori, e possibile invertire il ragionamento precedente.In questo modo, sommando un gran numero di componenti armoniche, con la relazione (4.8) sipuo generare una serie temporale. Essendo le ampiezze delle corrispondenti componenti armonicheottenute a partire dalla (4.13) scritta nella forma:
ζn =√
2Sζ(ωn) δω , (4.14)
segue per il profilo ondoso di un mare in tempesta:
ζw(t) = ζ +∞∑
n=1
√2Sζ(ωn) δω cos(ωnt + εn) , (4.15)
dove le fasi iniziali εn vengono scelte a caso con eguale probabilita nell’intervallo di definizione(0, 2π). Ovviamente, risulta possibile un numero infinito di scelte e ciascuna di esse da luogo aduna differente realizzazione della serie temporale. Inoltre il numero dei termini della sommatoria(4.15) si mantiene finito, generalmente attorno alla ventina.
Una possibile scelta delle fasi iniziali e quella con gli angoli di fase eguali a quelli della serietemporale originale che ha prodotto lo spettro. Soltanto in questo caso la serie temporale derivatarisulta esattamente eguale a quella originale. Tuttavia, un tale modo di procedere risulta pocosignificativo in termini pratici in quanto il proposito di riprodurre esattamente la serie temporaleiniziale non comporta alcun vantaggio, visto che istante dopo istante cambia il profilo della super-ficie ondosa e quindi la relazione di fase tra le singole componenti. Scegliendo casualmente le fasi
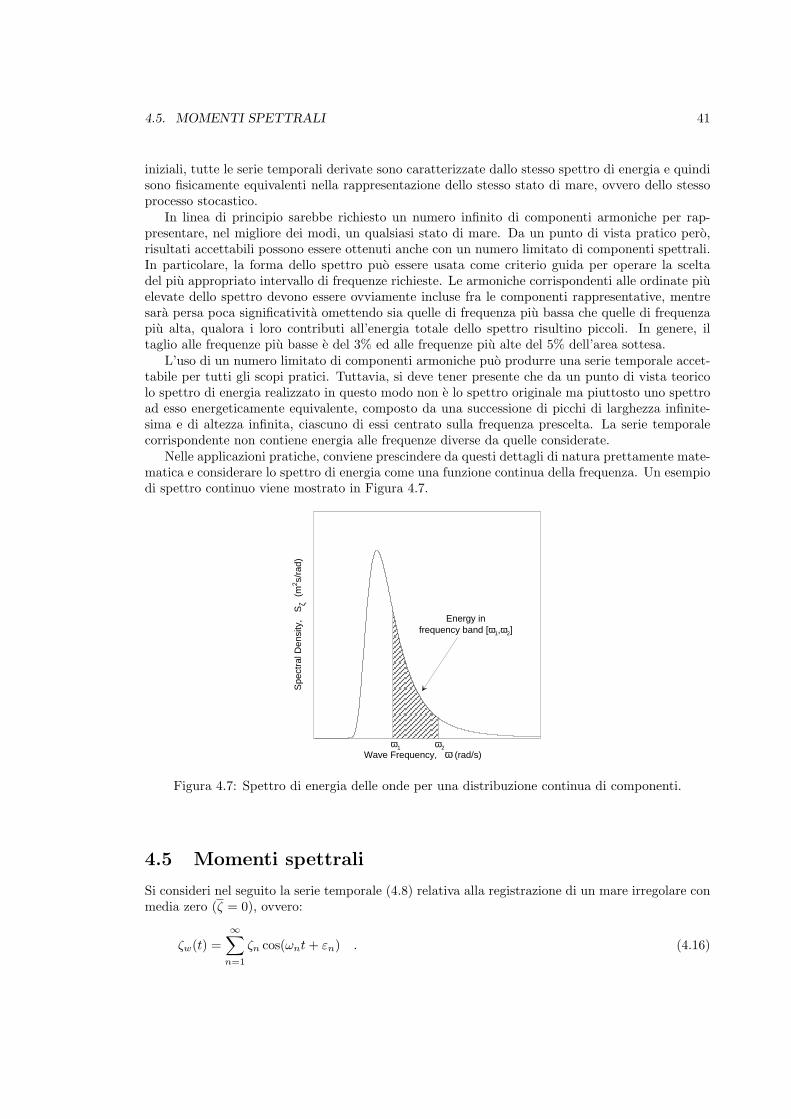
4.5. MOMENTI SPETTRALI 41
iniziali, tutte le serie temporali derivate sono caratterizzate dallo stesso spettro di energia e quindisono fisicamente equivalenti nella rappresentazione dello stesso stato di mare, ovvero dello stessoprocesso stocastico.
In linea di principio sarebbe richiesto un numero infinito di componenti armoniche per rap-presentare, nel migliore dei modi, un qualsiasi stato di mare. Da un punto di vista pratico pero,risultati accettabili possono essere ottenuti anche con un numero limitato di componenti spettrali.In particolare, la forma dello spettro puo essere usata come criterio guida per operare la sceltadel piu appropriato intervallo di frequenze richieste. Le armoniche corrispondenti alle ordinate piuelevate dello spettro devono essere ovviamente incluse fra le componenti rappresentative, mentresara persa poca significativita omettendo sia quelle di frequenza piu bassa che quelle di frequenzapiu alta, qualora i loro contributi all’energia totale dello spettro risultino piccoli. In genere, iltaglio alle frequenze piu basse e del 3% ed alle frequenze piu alte del 5% dell’area sottesa.
L’uso di un numero limitato di componenti armoniche puo produrre una serie temporale accet-tabile per tutti gli scopi pratici. Tuttavia, si deve tener presente che da un punto di vista teoricolo spettro di energia realizzato in questo modo non e lo spettro originale ma piuttosto uno spettroad esso energeticamente equivalente, composto da una successione di picchi di larghezza infinite-sima e di altezza infinita, ciascuno di essi centrato sulla frequenza prescelta. La serie temporalecorrispondente non contiene energia alle frequenze diverse da quelle considerate.
Nelle applicazioni pratiche, conviene prescindere da questi dettagli di natura prettamente mate-matica e considerare lo spettro di energia come una funzione continua della frequenza. Un esempiodi spettro continuo viene mostrato in Figura 4.7.
Wave Frequency, ω (rad/s)
Spe
ctra
l Den
sity
, S
ζ (m
2 s/ra
d)
ω1 ω2
Energy in frequency band [ω1,ω2]
Figura 4.7: Spettro di energia delle onde per una distribuzione continua di componenti.
4.5 Momenti spettrali
Si consideri nel seguito la serie temporale (4.8) relativa alla registrazione di un mare irregolare conmedia zero (ζ = 0), ovvero:
ζw(t) =∞∑
n=1
ζn cos(ωnt + εn) . (4.16)

42 CAPITOLO 4. ONDE OCEANICHE
Se il numero delle osservazioni e sufficientemente grande, la varianza del processo definita dalla(4.3), puo essere scritta nella forma:
m0 =1
TR
∫ TR
0
ζ2w(t) dt =
1TR
∫ TR
0
[ ∞∑n=1
ζn cos(ωnt + εn)
]2
dt . (4.17)
Essendo le frequenze delle componenti armoniche date dalla (4.6), dopo semplici passaggi la (4.17)diviene:
m0 =12
∞∑n=1
ζ2n . (4.18)
Sostituendo nell’espressione precedente la (4.13), che definisce la densita spettrale di energia, segueinfine:
m0 =∞∑
n=1
Sζ(ωn) δω =∫ ∞
0
Sζ(ω) dω . (4.19)
In altri termini, la varianza della serie temporale e uguale all’area sottesa dal corrispondente spettrodi energia.
Attraverso la derivazione rispetto al tempo della serie temporale (4.16), e possibile ottenere siala velocita che l’accelerazione del profilo ondoso. Segue in questo modo:
ζw(t) = −∞∑
n=1
ωnζn sin(ωnt + εn) =∞∑
n=1
ζn cos(ωnt + εn +π
2) ,
ζw(t) = −∞∑
n=1
ω2nζn cos(ωnt + εn) =
∞∑n=1
ζn cos(ωnt + εn + π) . (4.20)
Le (4.20) rappresentano due nuove serie temporali che, riferendosi alla cinematica del profilo on-doso, ne definiscono in ogni istante la velocita e l’accelerazione. In questo caso, le ampiezze dellecorrispondenti componenti armoniche sono rispettivamente ζn = ωnζn e ζn = ω2
nζn.Per ricavare le statistiche della velocita e dell’accelerazione del profilo ondoso, le serie temporali
(4.20) devono essere analizzate in modo del tutto simile a quello descritto in precedenza. Da essee possibile percio ottenere gli spettri di energia delle velocita e delle accelerazioni, ovvero:
Sζ(ωn) =ζ2n
2 δω=
ω2nζ2
n
2 δω= ω2
nSζ(ωn) ,
Sζ(ωn) =ζ2n
2 δω=
ω4nζ2
n
2 δω= ω4
nSζ(ωn) . (4.21)
Ne segue che le densita spettrali della velocita e dell’accelerazione possono essere ottenute sem-plicemente moltiplicando la densita spettrale di energia rispettivamente per la seconda o quartapotenza della frequenza delle singole componenti armoniche. In questo modo possono essere evitatele misure dirette di tali grandezze. Da un punto di vista pratico e quindi sufficiente conoscere unosolo dei tre spettri che descrivono la cinematica del profilo ondoso per poter determinare anchegli altri due. Questo consente una certa flessibilita nella scelta della strumentazione di misura chepuo operare la registrazione indifferentemente di uno qualsiasi dei tre spettri di energia.
L’area sottesa dallo spettro della velocita e dell’accelerazione e uguale rispettivamente allavarianza della velocita ed a quella dell’accelerazione del profilo ondoso. In particolare, per lavarianza della velocita risulta:
m2 =∫ ∞
0
Sζ(ω) dω =∫ ∞
0
ω2Sζ(ω) dω , (4.22)

4.5. MOMENTI SPETTRALI 43
mentre per la varianza dell’accelerazione segue:
m4 =∫ ∞
0
Sζ(ω) dω =∫ ∞
0
ω4Sζ(ω) dω . (4.23)
Le varianze m2 e m4 sono chiamate anche momenti spettrali, in quanto esse possono essere conside-rate a tutti gli effetti come dei momenti geometrici dell’area dello spettro rispetto all’asse verticaleper l’origine. In generale, come definizione di momento spettrale di ordine n, si pone:
mn =∫ ∞
0
ωnSζ(ω) dω , (4.24)
dove n assume valori interi relativi (. . . ,−1, 0, 1, 2, . . .). Nelle applicazioni pratiche i momentispettrali di vario ordine sono usati per calcolare le grandezze statistiche del record.
In particolare, si puo dimostrare (Ochi and Bolton, 1973, 1973a, 1973b) che, il periodo mediofra picchi (peak-to-peak period), e dato dalla relazione:
T p = 2π
√m2
m4, (4.25)
mentre, per il periodo medio fra zeri (zero-crossing period), si ottiene:
T z = 2π
√m0
m2. (4.26)
Analogamente, per la lunghezza media d’onda fra picchi (mean peak-to-peak wave length), risulta:
λp = 2πg
√m4
m8, (4.27)
mentre, per la lunghezza media d’onda fra zeri (mean zero-crossing wave length), segue:
λz = 2πg
√m0
m4. (4.28)
Inoltre, possono essere definite altre grandezze statistiche basate sulle proprieta caratteristichedello spettro di energia. In questo modo, la frequenza media (mean frequency) della serie temporalepuo essere espressa in termini del baricentro dell’area dello spettro:
ω =
∫ ∞
0
ωSζ(ω) dω∫ ∞
0
Sζ(ω) dω
=m1
m0, (4.29)
e quindi, per il corrispondente periodo medio (mean period), risulta:
T =2π
ω= 2π
m0
m1. (4.30)
Infine, si puo definire il cosiddetto periodo medio dell’energia (energy average period), per il qualevale la relazione:
T−1 =
∫ ∞
0
T (ω)Sζ(ω) dω∫ ∞
0
Sζ(ω) dω
= 2π
∫ ∞
0
ω−1Sζ(ω) dω∫ ∞
0
Sζ(ω) dω
= 2πm−1
m0. (4.31)
In senso stretto, le relazioni precedenti sono valide solo se le ordinate del profilo della superficiedel mare sono distribuite con legge normale (vedi Appendice A). In pratica, questa assunzionerestrittiva risulta abbastanza vera per le onde oceaniche.
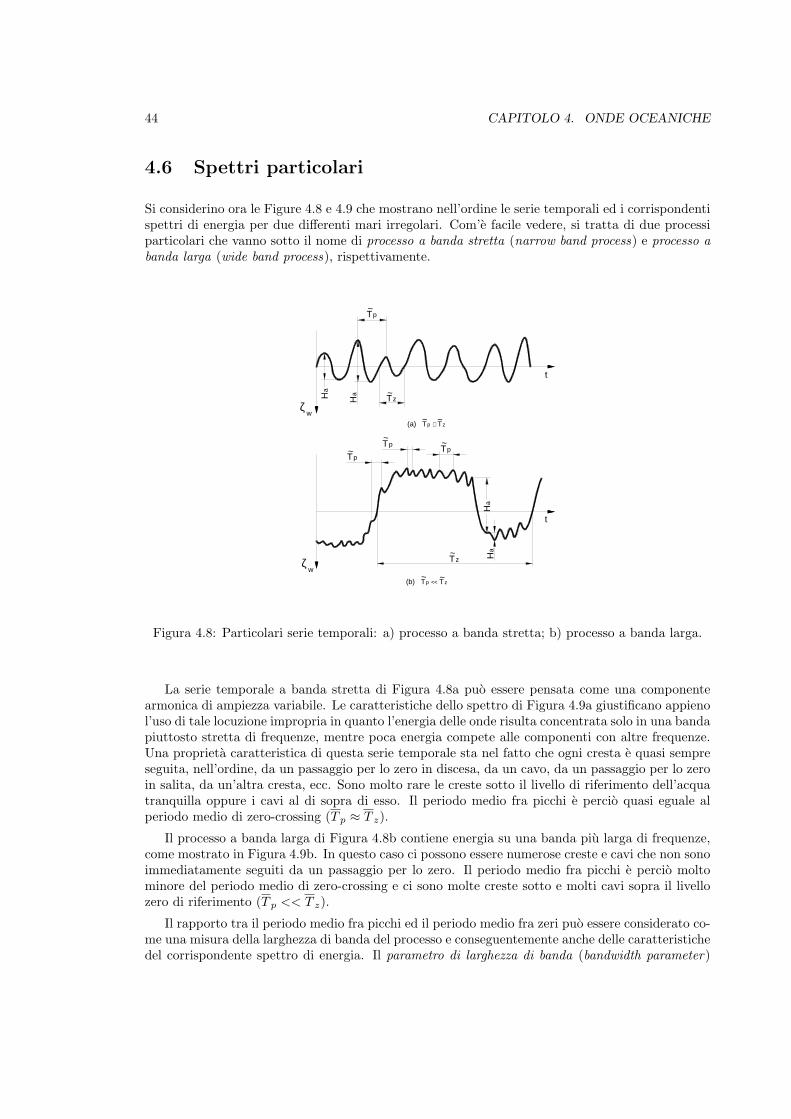
44 CAPITOLO 4. ONDE OCEANICHE
4.6 Spettri particolari
Si considerino ora le Figure 4.8 e 4.9 che mostrano nell’ordine le serie temporali ed i corrispondentispettri di energia per due differenti mari irregolari. Com’e facile vedere, si tratta di due processiparticolari che vanno sotto il nome di processo a banda stretta (narrow band process) e processo abanda larga (wide band process), rispettivamente.
~
~
t
(a) Tp ≅ Tz~ ~
Tz
TpTp
Tp
(b) Tp << Tz~ ~
Ha
Ha
t
~
~ ~
~
Ha
ζ w
wζ
Tp
TzHa
Figura 4.8: Particolari serie temporali: a) processo a banda stretta; b) processo a banda larga.
La serie temporale a banda stretta di Figura 4.8a puo essere pensata come una componentearmonica di ampiezza variabile. Le caratteristiche dello spettro di Figura 4.9a giustificano appienol’uso di tale locuzione impropria in quanto l’energia delle onde risulta concentrata solo in una bandapiuttosto stretta di frequenze, mentre poca energia compete alle componenti con altre frequenze.Una proprieta caratteristica di questa serie temporale sta nel fatto che ogni cresta e quasi sempreseguita, nell’ordine, da un passaggio per lo zero in discesa, da un cavo, da un passaggio per lo zeroin salita, da un’altra cresta, ecc. Sono molto rare le creste sotto il livello di riferimento dell’acquatranquilla oppure i cavi al di sopra di esso. Il periodo medio fra picchi e percio quasi eguale alperiodo medio di zero-crossing (T p ≈ T z).
Il processo a banda larga di Figura 4.8b contiene energia su una banda piu larga di frequenze,come mostrato in Figura 4.9b. In questo caso ci possono essere numerose creste e cavi che non sonoimmediatamente seguiti da un passaggio per lo zero. Il periodo medio fra picchi e percio moltominore del periodo medio di zero-crossing e ci sono molte creste sotto e molti cavi sopra il livellozero di riferimento (T p << T z).
Il rapporto tra il periodo medio fra picchi ed il periodo medio fra zeri puo essere considerato co-me una misura della larghezza di banda del processo e conseguentemente anche delle caratteristichedel corrispondente spettro di energia. Il parametro di larghezza di banda (bandwidth parameter)
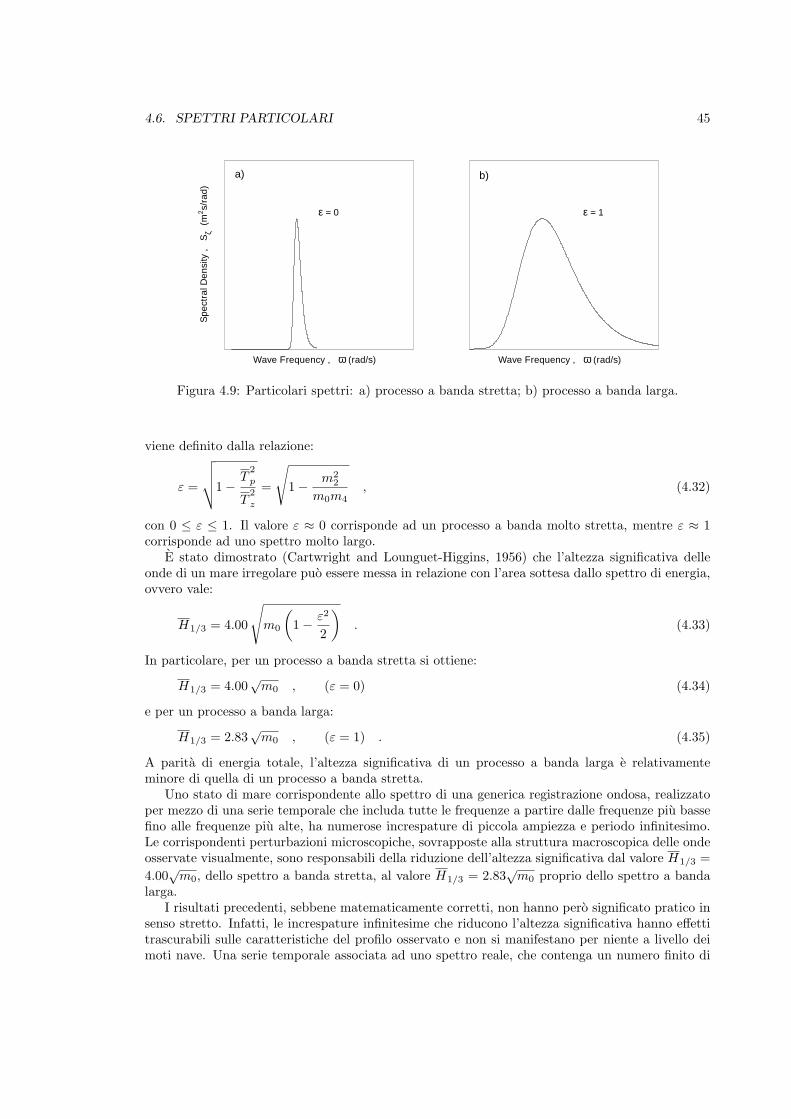
4.6. SPETTRI PARTICOLARI 45
Wave Frequency , ω (rad/s)
Spe
ctra
l Den
sity
, S
ζ (m
2s/
rad)
ε = 0
Wave Frequency , ω (rad/s)
ε = 1
a) b)
Figura 4.9: Particolari spettri: a) processo a banda stretta; b) processo a banda larga.
viene definito dalla relazione:
ε =
√√√√1− T2
p
T2
z
=
√1− m2
2
m0m4, (4.32)
con 0 ≤ ε ≤ 1. Il valore ε ≈ 0 corrisponde ad un processo a banda molto stretta, mentre ε ≈ 1corrisponde ad uno spettro molto largo.
E stato dimostrato (Cartwright and Lounguet-Higgins, 1956) che l’altezza significativa delleonde di un mare irregolare puo essere messa in relazione con l’area sottesa dallo spettro di energia,ovvero vale:
H1/3 = 4.00
√m0
(1− ε2
2
). (4.33)
In particolare, per un processo a banda stretta si ottiene:
H1/3 = 4.00√
m0 , (ε = 0) (4.34)
e per un processo a banda larga:
H1/3 = 2.83√
m0 , (ε = 1) . (4.35)
A parita di energia totale, l’altezza significativa di un processo a banda larga e relativamenteminore di quella di un processo a banda stretta.
Uno stato di mare corrispondente allo spettro di una generica registrazione ondosa, realizzatoper mezzo di una serie temporale che includa tutte le frequenze a partire dalle frequenze piu bassefino alle frequenze piu alte, ha numerose increspature di piccola ampiezza e periodo infinitesimo.Le corrispondenti perturbazioni microscopiche, sovrapposte alla struttura macroscopica delle ondeosservate visualmente, sono responsabili della riduzione dell’altezza significativa dal valore H1/3 =4.00
√m0, dello spettro a banda stretta, al valore H1/3 = 2.83
√m0 proprio dello spettro a banda
larga.I risultati precedenti, sebbene matematicamente corretti, non hanno pero significato pratico in
senso stretto. Infatti, le increspature infinitesime che riducono l’altezza significativa hanno effettitrascurabili sulle caratteristiche del profilo osservato e non si manifestano per niente a livello deimoti nave. Una serie temporale associata ad uno spettro reale, che contenga un numero finito di

46 CAPITOLO 4. ONDE OCEANICHE
frequenze predominanti, si estende percio su di un intervallo adeguato in modo da non includere lefrequenze piu elevate. Nel trovare l’altezza significativa si considerano soltanto le creste ed i cavidi dimensioni osservabili visualmente. La serie temporale ha inevitabilmente le sembianze di unospettro a banda stretta con T p ≈ T z, cosicche l’altezza significativa ottenuta analizzando il recordtemporale filtrato e molto piu vicina al valore dato dalla relazione H1/3 = 4.00
√m0 piuttosto che
quello ottenuto con la relazione H1/3 = 2.83√
m0.Da un punto di vista applicativo, per un sistema di onde oceaniche e spesso conveniente as-
sumere ε = 0 e quindi stimare l’altezza significativa con l’equazione (4.34) dopo aver eseguitol’integrazione dello spettro di energia. In realta ε e generalmente dell’ordine di 0.5 per cui, in ter-mini pratici, la semplificazione adottata rappresenta una sovrastima dell’altezza significativa perle reali condizioni di mare confuso. Questo non costituisce certamente un problema preoccupante,visto che ci si pone da parte della sicurezza.
4.7 Spettri teorici
Lo spettro di energia ottenuto a partire da una registrazione di onde irregolari in un particolarepunto dell’oceano e per un prefissato intervallo di tempo (spettro puntuale), costituisce un risultatosperimentale unico ed irripetibile. Sebbene tale spettro possa essere considerato rappresentativoanche per condizioni di mare analoghe, il suo uso esplicito nella progettazione navale e pero piutto-sto limitato. La pratica quotidiana suggerisce infatti di riferirsi a famiglie di spettri ideali, definiticon formule teoriche, valide sia per condizioni di mare aperto che per mari sotto costa. Nel seguitoverranno esaminati alcuni casi di spettro teorico a maggiore interesse ingegneristico.
4.7.1 Spettro di Pierson-Moskowitz
Lo spettro di Pierson-Moskowitz e uno spettro ad un parametro, concepito dagli oceanografi perrappresentare un mare pienamente sviluppato (Pierson and Moskowitz, 1964). Esso puo essereconsiderato come una forma asintotica di spettro, risultato dell’azione prolungata di un ventocostante in una zona priva di contaminazioni da onde di mar morto.
Il modello e stato basato sulle registrazioni ondose effettuate nel Nord Atlantico da stazionimeteorologiche marine inglesi ed americane. A partire da 460 spettri puntuali disponibili, Mo-skowitz et al. (1962-63) scelsero un campione di 54 spettri che furono raggruppati e distribuitisecondo cinque velocita del vento, ovvero 20, 25, 30, 35 e 40 nodi. Per essere inclusi nel data base,gli spettri dovettero soddisfare appropriati criteri meteorologici: durante l’acquisizione del recordondoso il vento doveva avere durata ragionevole, le sue velocita all’inizio ed alla fine della misuradovevano essere minori della velocita media e la sua direzione istantanea doveva mantenersi sempreall’interno di un intervallo di ± 45 rispetto alla direzione media. Furono esclusi tutti gli spettricontenenti uno o piu sistemi di onde di mar morto provenienti da altre zone di tempesta.
Usando la teoria della similitudine di Kitaigorodskii, per lo spettro teorico di un mare piena-mente sviluppato, Pierson and Moskowitz (1964) proposero la seguente formulazione analitica:
Sζ(ω) =αg2
ω5e−β(g/VW ω)4 , (4.36)
essendo VW la velocita del vento in m/s, misurata ad un’altezza standard di 19.5 m sopra il livellodel mare, α = 0.0081 e β = 0.74. Esempi dello spettro di Pierson-Moskowitz sono riportati inFigura 4.10.
Poiche i primi momenti dello spettro (4.36) sono:
m0 =αV 4
W
4βg2,
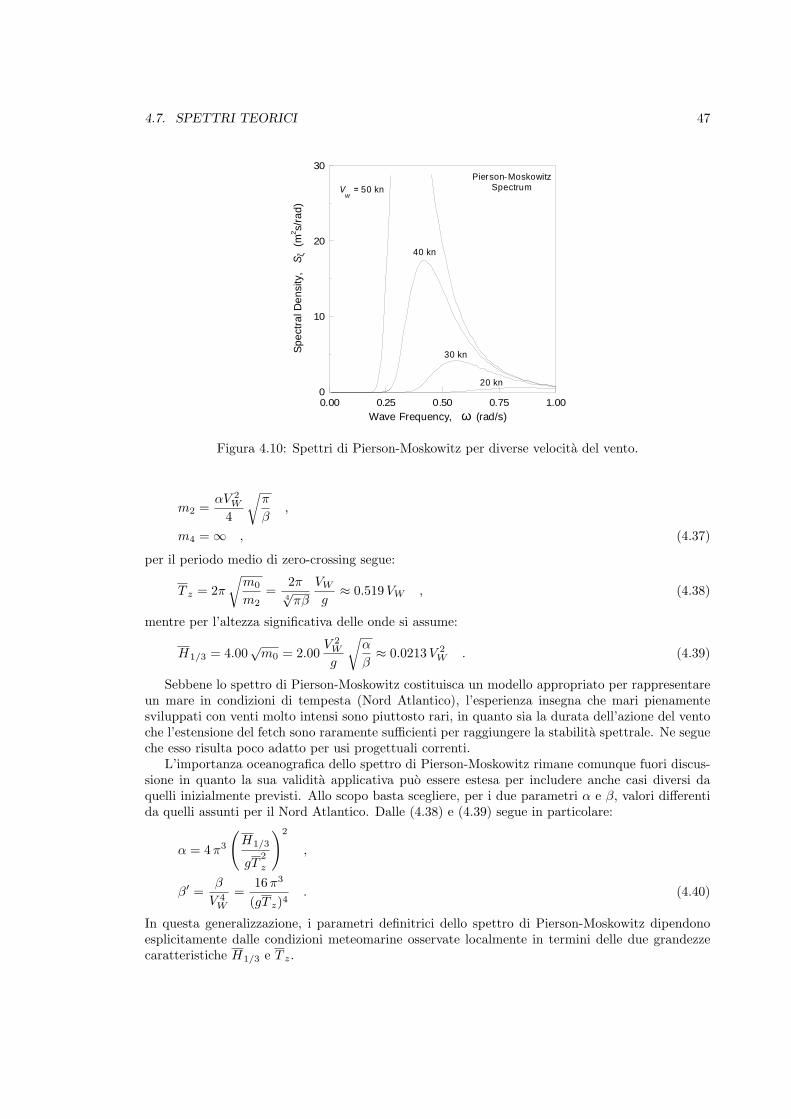
4.7. SPETTRI TEORICI 47
Pierson-MoskowitzSpectrum
30 kn
40 kn
0.00 0.25 0.50 0.75 1.00
Wave Frequency,���ω��(rad/s)
0
10
20
30
Spe
ctra
l Den
sity
,���6
�(m
2 s/ra
d)
20 kn
9Z� �50 kn
Figura 4.10: Spettri di Pierson-Moskowitz per diverse velocita del vento.
m2 =αV 2
W
4
√π
β,
m4 = ∞ , (4.37)
per il periodo medio di zero-crossing segue:
T z = 2π
√m0
m2=
2π4√
πβ
VW
g≈ 0.519 VW , (4.38)
mentre per l’altezza significativa delle onde si assume:
H1/3 = 4.00√
m0 = 2.00V 2
W
g
√α
β≈ 0.0213 V 2
W . (4.39)
Sebbene lo spettro di Pierson-Moskowitz costituisca un modello appropriato per rappresentareun mare in condizioni di tempesta (Nord Atlantico), l’esperienza insegna che mari pienamentesviluppati con venti molto intensi sono piuttosto rari, in quanto sia la durata dell’azione del ventoche l’estensione del fetch sono raramente sufficienti per raggiungere la stabilita spettrale. Ne segueche esso risulta poco adatto per usi progettuali correnti.
L’importanza oceanografica dello spettro di Pierson-Moskowitz rimane comunque fuori discus-sione in quanto la sua validita applicativa puo essere estesa per includere anche casi diversi daquelli inizialmente previsti. Allo scopo basta scegliere, per i due parametri α e β, valori differentida quelli assunti per il Nord Atlantico. Dalle (4.38) e (4.39) segue in particolare:
α = 4 π3
(H1/3
gT2
z
)2
,
β′ =β
V 4W
=16 π3
(gT z)4. (4.40)
In questa generalizzazione, i parametri definitrici dello spettro di Pierson-Moskowitz dipendonoesplicitamente dalle condizioni meteomarine osservate localmente in termini delle due grandezzecaratteristiche H1/3 e T z.

48 CAPITOLO 4. ONDE OCEANICHE
4.7.2 Spettro di Bretschneider
Lo spettro di Bretschneider e uno spettro a due parametri usato per definire, nel caso di mareaperto, sia lo spettro di un mare pienamente sviluppato che quelli di un mare in via di formazioneo di estinzione (Bretschneider, 1952, 1957). Ne segue che si tratta di un modello particolarmenteimportante per scopi ingegneristici.
Lo spettro di Bretschneider e espresso dalla relazione:
SBζ (ω) =
A
ω5e−B/ω4
, (4.41)
con A e B due parametri definitrici, funzioni delle caratteristiche del sistema ondoso.Si osservi che lo spettro (4.36) di Pierson-Moskowitz puo essere ottenuto come caso particolare
dello spettro di Bretschneider (4.41) quando:
A = αg2 ,
B = β
(g
VW
)4
. (4.42)
E facile dimostrare (Borodaj and Necvetaev, 1982) che i momenti dello spettro di Bretschneidersono dati dalla relazione generale:
mn =14
AB−(5−n)/4 Γ(
5− n
4
), (4.43)
dove Γ e la cosiddetta funzione gamma. In particolare, si ottiene:
m−1 =14
AB−5/4 Γ( 54 ) ,
m0 =14
AB−1 Γ(1) =A
4B,
m1 =14
AB−3/4 Γ( 34 ) ,
m2 =14
AB−1/2 Γ( 12 ) =
A
4
√π
B,
m4 =14
AB0 Γ(0) =A
4Γ(0) = ∞ , (4.44)
essendo Γ(1) = 1, Γ( 12 ) =
√π ≈ 1.77245, Γ( 3
4 ) ≈ 1.22541, Γ( 54 ) ≈ 0.90640, Γ(0) = ∞.
Poiche il quarto momento diviene infinito, il parametro di larghezza di banda risulta ε = 1. Nesegue che lo spettro di Bretschneider e uno spettro a banda larga e quindi, per l’altezza significativaed il periodo medio fra picchi, si puo scrivere nell’ordine:
H1/3 = 2.83√
m0 ,
T p = 2π
√m2
m4= 0 . (4.45)
Tuttavia, supponendo che le altezze delle onde seguano una distribuzione di Rayleigh (vedi Ap-pendice A), anche per lo spettro di Bretschneider si assume valida la relazione generale:
H1/3 = 4.00√
m0 , (4.46)
propria di uno spettro a banda stretta. Si opera percio in analogia con quanto detto al Paragra-fo 4.6.

4.7. SPETTRI TEORICI 49
Inoltre, per il periodo medio di zero-crossing, il periodo medio ed il periodo medio dell’energia,dalle (4.44) risulta:
T z = 2π
√m0
m2=
2π4√
πB= 2π3/4B−1/4 ,
T = 2πm0
m1= 2π Γ−1( 3
4 )B−1/4 ,
T−1 = 2πm−1
m0= 2π Γ( 5
4 )B−1/4 . (4.47)
Sempre per il fatto che il quarto momento dello spettro di Bretschneider diverge, per calcolarele lunghezze d’onda medie del processo, non e possibile usare le espressioni generali (4.27) e (4.28).D’altronde, secondo Pierson, Neumann and James (1955), la lunghezza d’onda media fra zeri puoessere calcolata con la relazione:
λz =23
g
2πT
2
z . (4.48)
Essendo lo spettro di Bretschneider uno spettro unimodale, la frequenza ωm del picco puo essereottenuta differenziando l’equazione definitrice (4.41) rispetto alla frequenza e ponendo a zero laderivata prima. In questo modo, la frequenza modale risulta:
ωm = 4
√4B
5, (4.49)
dalla quale segue, per il periodo modale, la relazione:
Tm =2π
ωm= 2π
4
√5
4B. (4.50)
Vale la pena osservare che e facile esprimere lo spettro di Bretschneider in funzione della varianzae della frequenza modale, ovvero di due grandezze caratteristiche del processo. Infatti, sostituendole (4.44) e (4.49) nella (4.41), si trova:
SBζ (ω) =
5 m0
ωm
(ωm
ω
)5
e−54 (ωm/ω)4 . (4.51)
I due parametri definitrici dello spettro di energia, m0 ed ωm, determinano rispettivamente l’a-rea sottesa e la posizione del picco. L’altezza dello spettro si ottiene calcolando l’ordinata incorrispondenza del picco:
SBζ (ωm) =
5 m0
ωme−5/4 = A
(5
4B
)5/4
e−5/4 . (4.52)
La Figura 4.11 mostra alcuni esempi dello spettro di Bretschneider per un’altezza significativaH1/3 = 4m e differenti periodi modali (Tm = 5, 10, 15, 20 s). L’area sottesa dallo spettro e semprela stessa poiche tutti i casi considerati hanno la stessa altezza significativa, mentre la posizione el’altezza dei picchi dipendono dal periodo modale. La Figura 4.12 mostra spettri di Bretschneiderper un periodo modale di Tm = 10 s (ωm = 0.63 rad/s) e varie altezze significative (H1/3 =2, 4, 6, 8m). In questo caso i picchi si trovano tutti nella stessa posizione; l’area sottesa dallospettro e quindi l’altezza dei picchi dipendono dall’altezza significativa delle onde.

50 CAPITOLO 4. ONDE OCEANICHE
Bretschneider SpectrumH
1/3 = 4 m
Tm= 20 s
15 s
5 s
10 s
0.0 0.5 1.0 1.5 2.0
Wave Frequency, ω (rad/s)
0
1
2
3
4
5
6
Spe
ctra
l Den
sity
, S
ζ (m
2s/
rad)
_
Figura 4.11: Spettri di Bretschneider per un’altezza significativa delle onde pari a H1/3 = 4 m ediversi periodi modali Tm.
Bretschneider SpectrumTm= 10 s
H1/3
= 8 m
6 m
2 m
4 m
0.0 0.5 1.0 1.5 2.0
Wave Frequency, ω (rad/s)
0
2
4
6
8
10
Spe
ctra
l Den
sity
, S
ζ (m
2s/
rad)
_
Figura 4.12: Spettri di Bretschneider per un periodo modale delle onde pari a Tm = 10 s e diversealtezze significative H1/3.

4.7. SPETTRI TEORICI 51
4.7.3 Spettro JONSWAP
Lo spettro JONSWAP (Joint North Sea Wave Project) fu proposto nel tentativo di riprodurrei picchi piu alti e gli spostamenti in frequenza che si verificano in una situazione di tempestaa fetch limitato, dei quali lo spettro di Bretschneider, a parita di energia, non riesce a tenerneconto. Questo spettro e ancora unimodale e rappresenta le condizioni ondose di un mare con acqueristrette.
Lo spettro JONSWAP e definito dalla relazione:
SJζ (ω) = 0.658 SB
ζ (ω) γexp[−(ω−ωm)2/2σ2ω2m] , (4.53)
essendo SBζ (ω) la densita spettrale dello spettro di Bretschneider (4.51) e ωm la frequenza del
massimo corrispondente. Il parametro γ, noto come parametro di sovraelongazione (overshootparameter), esprime a meno di un fattore costante il rapporto tra i massimi dello spettro JONSWAPe dello spettro di Bretschneider, mentre σ e la cosiddetta larghezza di banda (bandwidth). Essaassume i seguenti valori:
σ = 0.07 per ω ≤ ωm ,
σ = 0.09 per ω > ωm , (4.54)
validi rispettivamente per la banda sinistra e quella destra di frequenza.Tipicamente si ha 1 < γ < 7, con un valore medio γ = 3.3 per il Mare del Nord. Per le altre
situazioni di mare in tempesta, i valori di γ si possono trovare in funzione dell’altezza significativae del periodo modale usando i grafici di Figura 4.13.
0 5 10 15 20
Significant Wave Height , H1/3 (m)
1
2
3
4
5
6
7
Ove
rsho
ot P
aram
eter
, γ
(-)
Tm= 6 8 10 12 14 16 18
20
Figura 4.13: Parametro di overshoot in funzione dell’altezza significativa e del periodo modale(Chakrabarti and Snider, 1975).
Lo spettro JONSWAP, essendo una generalizzazione dello spettro di Bretschneider, viene an-ch’esso specificato in termini di altezza significativa e periodo modale. La Figura 4.14 mostraun confronto tra i due spettri per altezza significativa H1/3 = 4 m e periodo modale Tm = 10 s.L’effetto dei fattori addizionali nello spettro JONSWAP e quello di aumentare l’altezza del piccodando luogo al cosiddetto overshoot. C’e tuttavia una corrispondente riduzione delle ordinate
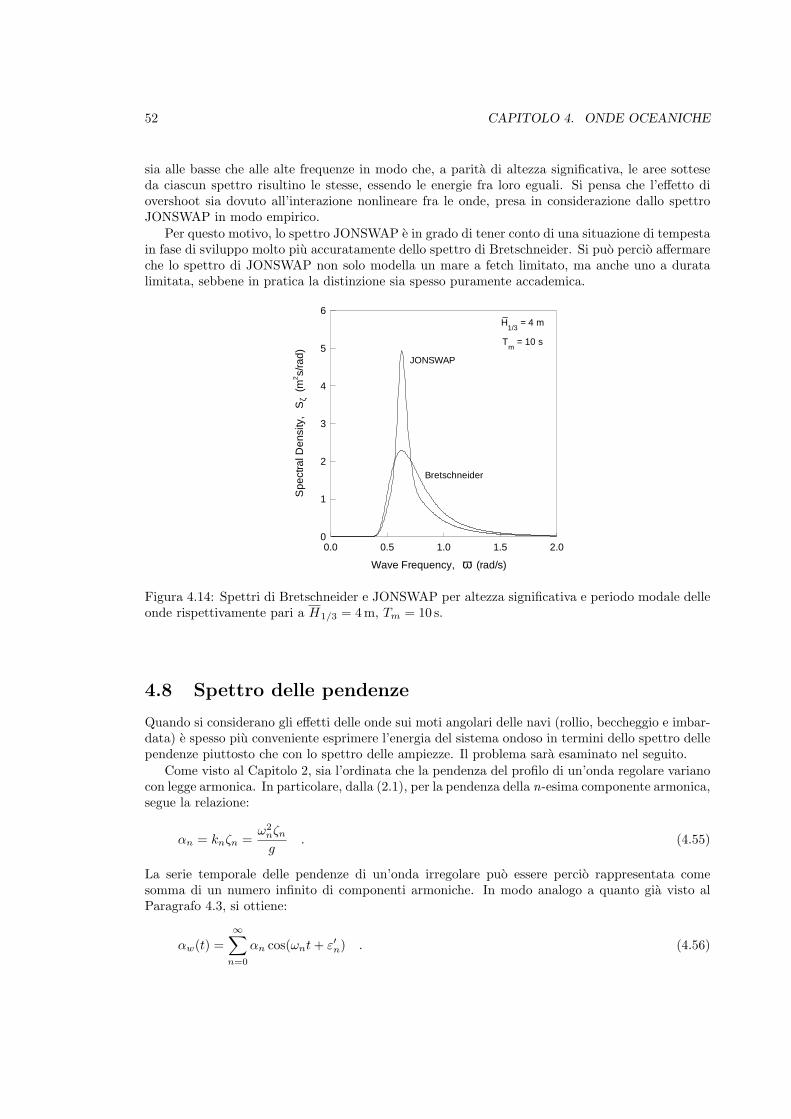
52 CAPITOLO 4. ONDE OCEANICHE
sia alle basse che alle alte frequenze in modo che, a parita di altezza significativa, le aree sotteseda ciascun spettro risultino le stesse, essendo le energie fra loro eguali. Si pensa che l’effetto diovershoot sia dovuto all’interazione nonlineare fra le onde, presa in considerazione dallo spettroJONSWAP in modo empirico.
Per questo motivo, lo spettro JONSWAP e in grado di tener conto di una situazione di tempestain fase di sviluppo molto piu accuratamente dello spettro di Bretschneider. Si puo percio affermareche lo spettro di JONSWAP non solo modella un mare a fetch limitato, ma anche uno a duratalimitata, sebbene in pratica la distinzione sia spesso puramente accademica.
H1/3
= 4 m
Tm
= 10 s
Bretschneider
JONSWAP
0.0 0.5 1.0 1.5 2.0
Wave Frequency, ω (rad/s)
0
1
2
3
4
5
6S
pect
ral D
ensi
ty,
Sζ
(m2s/
rad)
_
Figura 4.14: Spettri di Bretschneider e JONSWAP per altezza significativa e periodo modale delleonde rispettivamente pari a H1/3 = 4 m, Tm = 10 s.
4.8 Spettro delle pendenze
Quando si considerano gli effetti delle onde sui moti angolari delle navi (rollio, beccheggio e imbar-data) e spesso piu conveniente esprimere l’energia del sistema ondoso in termini dello spettro dellependenze piuttosto che con lo spettro delle ampiezze. Il problema sara esaminato nel seguito.
Come visto al Capitolo 2, sia l’ordinata che la pendenza del profilo di un’onda regolare varianocon legge armonica. In particolare, dalla (2.1), per la pendenza della n-esima componente armonica,segue la relazione:
αn = knζn =ω2
nζn
g. (4.55)
La serie temporale delle pendenze di un’onda irregolare puo essere percio rappresentata comesomma di un numero infinito di componenti armoniche. In modo analogo a quanto gia visto alParagrafo 4.3, si ottiene:
αw(t) =∞∑
n=0
αn cos(ωnt + ε′n) . (4.56)

4.9. PROPAGAZIONE DELLE ONDE 53
La serie temporale delle pendenze di un sistema di onde irregolari ha un suo spettro di energia, lecui ordinate sono date dalla relazione:
Sα(ωn) =α2
n
2 δω=
ω4nζ2
n
2g2 δω=
ω4n
g2Sζ(ωn) . (4.57)
Ne segue che lo spettro di energia delle pendenze delle onde puo essere ottenuto a partire dallospettro di energia delle ampiezze moltiplicando lo stesso per il fattore ω4
n/g2.In particolare, nel caso degli spettri di Bretschneider e JONSWAP, gli spettri delle pendenze
sono nell’ordine:
SBα (ω) =
A
ωg2e−B/ω4
,
SJα(ω) = 0.658 SB
α (ω) γexp[−(ω−ωm)2/2σ2ω2m] . (4.58)
La Figura 4.15 mostra alcuni esempi di spettri delle pendenze calcolati in base alle relazioni pre-cedenti. Lo spettro delle pendenze di JONSWAP ha un picco molto acuto che lo distingue dallospettro delle pendenze di Bretschneider, anche se i due spettri hanno una forma molto simile allefrequenze piu alte. Questo fatto e in accordo con le osservazioni sperimentali in base alle quali ri-sulta che le onde piu corte (di frequenza piu alta) sono spesso molto ripide, mentre le loro ampiezzesono molto piccole.
H1/3
= 4 m
Tm
= 10 s
Bretschneider
JONSWAP
0.0 0.5 1.0 1.5 2.0
Wave Frequency, ω (rad/s)
0.000
0.002
0.004
0.006
0.008
0.010
Spe
ctra
l Den
sity
, S
α (
rad2
s/ra
d)
_
Figura 4.15: Spettri delle pendenze di Bretschneider e JONSWAP per altezza significativa e periodomodale delle onde rispettivamente pari a H1/3 = 4m, Tm = 10 s.
Tutte le relazioni quantitative ricavate per gli spettri di ampiezza assumono una forma analogaper gli spettri delle pendenze. Cosı, ad esempio, la varianza delle pendenze d’onda puo essereottenuta integrando lo spettro delle pendenze, ecc.
4.9 Propagazione delle onde
In generale, in una zona di tempesta, ci si puo aspettare che soltanto in condizioni ideali le ondesi propaghino tutte nella stessa direzione. E infatti piu verosimile che le onde reali si muovano in

54 CAPITOLO 4. ONDE OCEANICHE
molte direzioni differenti, sebbene un osservatore esperto possa facilmente evidenziare l’esistenzadi una direzione predominante di propagazione, spesso piu o meno allineata con quella del vento.Tale situazione e provocata dai cambiamenti della direzione del vento e dalla presenza di sistemiondosi generati in altro luogo, cui si devono aggiungere, nel caso di mari poco profondi, anchel’influenza dell’orografia costiera e della topografia del fondo. Per questo, non esiste in natura unmare a cresta lunga (long crested sea), dove le creste infinitamente lunghe rimangono parallele fraloro durante la propagazione delle onde. Solo in condizioni controllate, come ad esempio quelle diun laboratorio di idrodinamica navale, si puo realizzare una situazione di questo tipo.
La presenza di piu sistemi ondosi dovuti a mari a cresta lunga da luogo ad una continuacomposizione o cancellazione delle creste e dei cavi. Questo fenomeno sta alla base del cosiddettomare a cresta corta (short crested sea), caratterizzato dalla coesistenza di piu sistemi ondosi condiverse direzioni di propagazione. In questo caso lo spettro di energia delle onde in un particolarepunto dell’oceano contiene i contributi dovuti ad onde provenienti da molte direzioni, diverseda quella predominante. Il problema relativo alla descrizione di questo stato di mare risultanotevolmente complicato. Per questo motivo, e spesso conveniente ignorare la situazione reale edassumere per semplicita il sistema ondoso del tipo a cresta lunga, visto che per molti scopi praticiquest’approssimazione da risultati accettabili. Tuttavia, il grado di dispersione direzionale delleonde ha un’influenza sostanziale su alcuni movimenti della nave, come ad esempio il moto di rollio,che viene eccitato anche in mari di prora e di poppa. In questo caso gli effetti di un mare a crestacorta non possono essere trascurati (vedi Capitolo 10).
Al pari delle altre grandezze caratteristiche di uno stato di mare generico, anche la dispersionedelle onde dipende sia dalla storia temporale dell’azione del vento che dai fattori geografici delbacino. Esiste ovviamente un numero infinito di possibili tipi di dispersione, ma per tutti gli scopidella progettazione navale si e soliti assumere una serie di semplificazioni teoriche.
µ
ν max
ν m
ax
Limit of Speading
Limit of Spreading
Primary WaveDirection
Secondary WaveDirection
ReferenceDirection
ν
Figura 4.16: Direzione predominante e direzioni secondarie di propagazione delle onde.
Scelto percio un riferimento solidale alla terra come in Figura 4.16, viene indicata con µ ladirezione principale di propagazione e con ν le direzioni secondarie delle onde relativamente all’ondapredominante, queste ultime distribuite sull’intervallo −νmax < ν < νmax. In una situazione del

4.9. PROPAGAZIONE DELLE ONDE 55
νmax
νmax
δν
δω
ω
ω
Primary Wave Direction
Sζ(ω,ν)
Figura 4.17: Tipico spettro direzionale.
genere, lo spettro direzionale delle onde viene definito in modo che la grandezza ρgSζ(ω, ν) δω δνrisulti eguale all’energia delle onde compresa nell’intervallo di frequenze δω e nell’intervallo delledirezioni δν, come mostrato in Figura 4.17. Dunque, in analogia con l’equazione (4.13), la densitaspettrale di energia direzionale e definita da:
Sζ(ωn, νj) =ζ2nj
2 δω δν, (4.59)
essendo ζnj l’ampiezza della componente armonica corrispondente alla n-esima frequenza ed allaj -esima direzione di propagazione. Per scopi progettuali si assume che le ordinate dello spettrodirezionale siano legate alle ordinate dello spettro puntuale dalla relazione:
Sζ(ω, ν) = D cosm
(π
2νmaxν
)Sζ(ω) , (4.60)
con D costante ed m numero intero positivo. Poiche l’energia totale si considera distribuita sututte le direzioni dell’intervallo −νmax < ν < νmax, segue:
Sζ(ω) =∫ νmax
−νmax
Sζ(ω, ν) dν . (4.61)
Per quanto riguarda la costante D, essa viene determinata dalla precedente condizione di norma-lizzazione. Infatti, introducendo la nuova variabile:
ν′ =π
2 νmaxν , (4.62)
e sostituendo nella (4.61), segue:
Sζ(ω) =2νmax
π
∫ π/2
−π/2
Sζ(ω, ν′) dν′ =4νmax
πDSζ(ω)
∫ π/2
0
cosm ν′ dν′ , (4.63)

56 CAPITOLO 4. ONDE OCEANICHE
e quindi:
D =π
4νmax
1∫ π/2
0cosm ν′ dν′
. (4.64)
In particolare si ha:
D =1
2νmax, per m = 0
D =π
4νmax, per m = 1
D =1
νmax, per m = 2 (4.65)
mentre in generale risulta:
D =1 · 3 · 5 · · ·m
2 · 4 · 6 · · · (m− 1)π
4νmax, per m dispari
D =2 · 4 · 6 · · ·m
1 · 3 · 5 · · · (m− 1)1
2νmax, per m pari . (4.66)
La Figura 4.18 mostra la funzione di dispersione (spreading function) D cosm ν′ per differentivalori dell’indice m. In particolare, per m = 0 si ha una dispersione uniforme con eguale contributoall’energia delle onde provenienti da tutte le direzioni. All’aumentare di m, l’energia risulta semprepiu concentrata attorno alla direzione predominante di propagazione, ovvero ν′ = 0. Un mare acresta lunga puo essere percio rappresentato sia scegliendo un valore elevato di m sia un valorepiccolo di νmax.
Per tutti gli scopi pratici connessi alla descrizione di un mare a cresta corta, la tendenza piucomune e quella di usare m = 2 e νmax = 90. L’evidenza sperimentale suggerisce che questadispersione, detta in gergo del tipo coseno quadrato, sia appropriata per la maggior parte dellecondizioni tipiche dell’oceano aperto. Tuttavia, molto frequentemente, possono essere trovati ancheangoli di dispersione inferiori a 60 e superiori a 120. Per una dispersione tipo coseno quadrato conνmax = 90, l’equazione (4.60) diviene:
Sζ(ω, ν) =2π
cos2 ν Sζ(ω) . (4.67)
Si osservi che le relazioni (4.60) e (4.67), possono essere utilizzate per le necessita computazionalirelative alla previsione dei moti nave con mare a cresta corta. Ovviamente, queste previsionirichiedono di rappresentare lo spettro direzionale delle onde con un contributo discreto che derivi daciascuna delle direzioni di propagazione secondaria, in numero finito sull’intervallo della dispersione.Il problema sara considerato in maggiore dettaglio al Capitolo 10.
4.10 Raccomandazioni ITTC
Vengono riportate di seguito le decisioni tecniche adottate dall’ITTC (International Towing TankConference) sull’uso delle diverse formulazioni spettrali per fini progettuali. In particolare, laConferenza raccomanda che, nell’effettuare le previsioni del comportamento in mare ondoso, sifaccia uso esplicito, quando possibile, delle informazioni relative allo stato del mare in cui la naveeffettuera il suo servizio.
Qualora non fossero disponibili le informazioni relative ad uno spettro tipico, la 12th ITTC(ITTC, 1966) raccomanda di usare ad interim, per condizioni di oceano aperto, la formulazionestandard di spettro marino (spettro di Bretschneider):
SBζ (ω) =
A
ω5e−B/ω4
. (4.68)
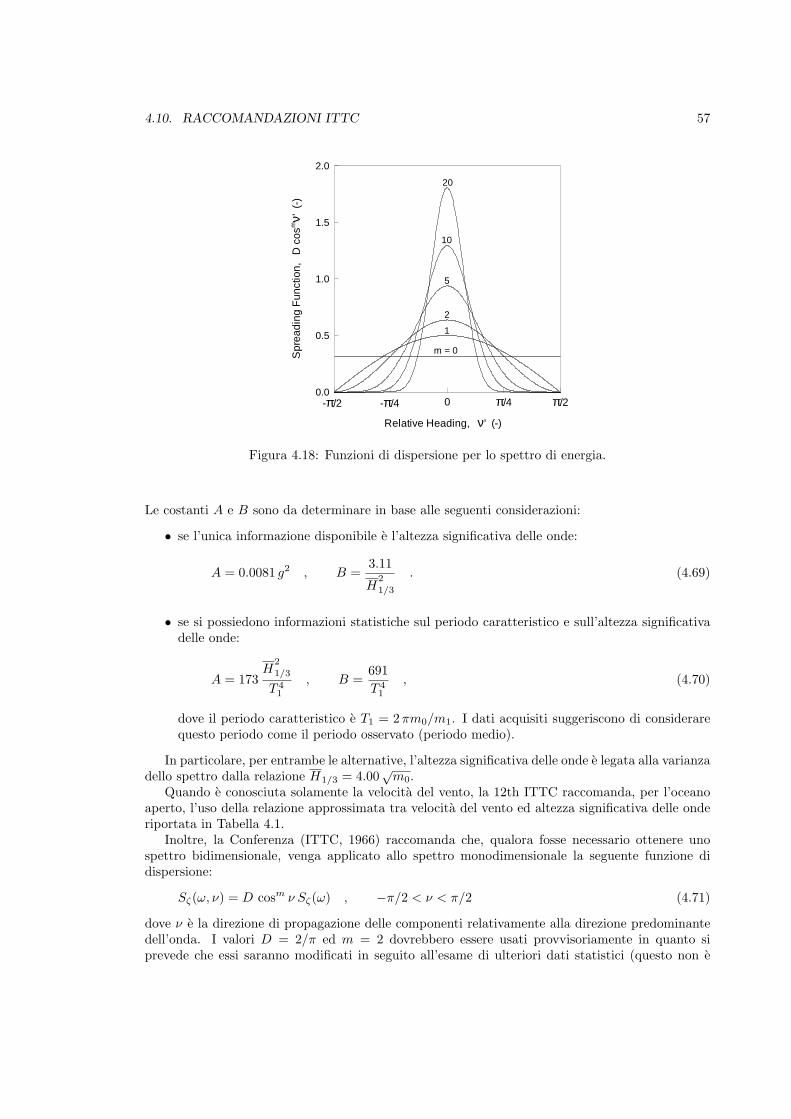
4.10. RACCOMANDAZIONI ITTC 57
2
5
1
m = 0
Relative Heading, ν' (-)
0.0
0.5
1.0
1.5
2.0
Spr
eadi
ng F
unct
ion,
D
cos
mν'
(-)
10
20
-π/2 -π/4 0 π/4 π/2
Figura 4.18: Funzioni di dispersione per lo spettro di energia.
Le costanti A e B sono da determinare in base alle seguenti considerazioni:
• se l’unica informazione disponibile e l’altezza significativa delle onde:
A = 0.0081 g2 , B =3.11
H2
1/3
. (4.69)
• se si possiedono informazioni statistiche sul periodo caratteristico e sull’altezza significativadelle onde:
A = 173H
2
1/3
T 41
, B =691T 4
1
, (4.70)
dove il periodo caratteristico e T1 = 2 πm0/m1. I dati acquisiti suggeriscono di considerarequesto periodo come il periodo osservato (periodo medio).
In particolare, per entrambe le alternative, l’altezza significativa delle onde e legata alla varianzadello spettro dalla relazione H1/3 = 4.00
√m0.
Quando e conosciuta solamente la velocita del vento, la 12th ITTC raccomanda, per l’oceanoaperto, l’uso della relazione approssimata tra velocita del vento ed altezza significativa delle onderiportata in Tabella 4.1.
Inoltre, la Conferenza (ITTC, 1966) raccomanda che, qualora fosse necessario ottenere unospettro bidimensionale, venga applicato allo spettro monodimensionale la seguente funzione didispersione:
Sζ(ω, ν) = D cosm ν Sζ(ω) , −π/2 < ν < π/2 (4.71)
dove ν e la direzione di propagazione delle componenti relativamente alla direzione predominantedell’onda. I valori D = 2/π ed m = 2 dovrebbero essere usati provvisoriamente in quanto siprevede che essi saranno modificati in seguito all’esame di ulteriori dati statistici (questo non e

58 CAPITOLO 4. ONDE OCEANICHE
Wind Speed Significant Height Velocita del Vento Altezza Significativa
(kn) (ft) (m/s) (m)
20 10.0 10.3 3.05
30 17.2 15.4 5.25
40 26.5 20.6 8.08
50 36.6 25.7 11.2
60 48.0 30.9 14.6
Tabella 4.1: Altezza significativa delle onde in funzione della velocita del vento secondo la 12thITTC.
stato finora effettuato). La (4.71) esprime una relazione di dispersione del tipo coseno quadrato epercio coincide con la (4.67).
La formulazione spettrale adottata dalla 12th ITTC per un oceano aperto sono state suc-cessivamente emendate dalla 15th ITTC (ITTC, 1978) e dalla 17th ITTC (ITTC, 1984). Vieneassunta ancora valida la raccomandazione relativa allo spettro standard (4.68), essendo le costan-ti determinate con le (4.70) in funzione del periodo caratteristico e dell’altezza significativa delleonde.
In situazioni di mare con fetch limitato (acque ristrette), la 17th ITTC (ITTC, 1984) racco-manda che lo spettro standard sia modificato secondo la relazione (spettro JONSWAP):
SJζ (ω) = 155
H2
1/3
T 41 ω5
e−944/T 41 ω4
γexp[−(0.191 ωT1−1)2/2σ2] , (4.72)
dove:
σ = 0.07 per ω ≤ 5.24T1
,
σ = 0.09 per ω >5.24T1
. (4.73)
Quest’ultima formulazione puo essere usata anche con gli altri periodi caratteristici delle onde,legati fra loro dalle relazioni:
T1 = 0.924 T−1 = 0.834 T0 = 1.073 T2 , (4.74)
dove, in conformita con la nomenclatura ufficiale adottata dall’ITTC, risulta T−1 = 2πm−1/m0 ilperiodo medio dell’energia, T0 = 2π/ω0 il periodo modale, con ω0 frequenza del picco dello spettro,T1 = 2πm0/m1 il periodo medio e T2 = 2π
√m0/m2 il periodo medio di zero-crossing.
Deve essere osservato che le relazioni (4.74) tra i periodi caratteristici non hanno validitagenerale e quindi possono essere applicate solo al caso particolare dello spettro ITTC.

Capitolo 5
Statistica delle onde oceaniche
5.1 Introduzione
Nel Capitolo 4 e stato definito, in termini di altezza significativa e periodo medio, lo spettro stan-dard di uno stato di mare irregolare. In questo modo viene formalizzata la procedura che consentela costruzione dello spettro teorico rappresentativo di ogni particolare condizione meteomarina,supposto che siano note le grandezze caratteristiche delle onde. Per tutti gli scopi pratici dellaprogettazione navale dovra essere fatta una scelta appropriata delle aree geografiche e delle stagio-ni nelle quali la nave si trovera ad operare. Ne segue che potranno sussistere varie combinazionidi altezza significativa e periodo medio e quindi dovranno essere considerati, nella simulazione delcomportamento in mare, diversi spettri di energia.
In questo capitolo verra fatta una rassegna delle principali fonti d’informazione cui ci si puoriferire per ottenere le caratteristiche degli stati di mare nelle aree geografiche di maggiore interesseapplicativo.
5.2 Osservazioni visuali
5.2.1 Stato del mare
Il meccanismo di generazione delle onde marine da parte del vento fa intuire l’esistenza di unacorrelazione tra l’intensita del vento e l’altezza delle onde prodotte. Tuttavia, e tradizione navaleconsolidata ragionare in senso inverso, cioe riferirsi all’aspetto visivo dello stato del mare perricavare un’indicazione sulla velocita del vento. Questo modo di operare condusse alla formulazionedella famosa scala Beaufort, cioe di una scala numerica associata allo stato del vento in superfice conlo scopo di ottenere una stima approssimata della severita del mare in tempesta (vedi Tabella 5.1).La descrizione della superficie vuole indicare, grosso modo, le condizioni che ci si puo aspettare inmare aperto, lontano dalle coste. Nei mari interni o presso le coste, con venti da terra, le onderisultano meno alte e piu ripide.
Da parte dalle varie autorita nazionali, furono successivamente sviluppate diverse scale per lavalutazione empirica (cifratura) dello stato del mare ed il cui uso rimane tuttora molto frequente,spesso preferito alle misure esatte dell’altezza e del periodo delle onde fatte con strumentazioneapposita. Nel 1970 la World Meteorological Organization (WMO) propose il Codice dello Statodel Mare (Standard Sea Code) riportato in Tabella 5.2, dove ad ogni stato del mare corrispondeun prefissato intervallo di altezze significative. Tuttavia, non essendoci in questa scala alcunaindicazione sul periodo delle onde, ne segue che ogni valutazione dello stato del mare puo essereconsiderata al piu come un’indicazione approssimativa delle reali condizioni ondose esistenti.
59
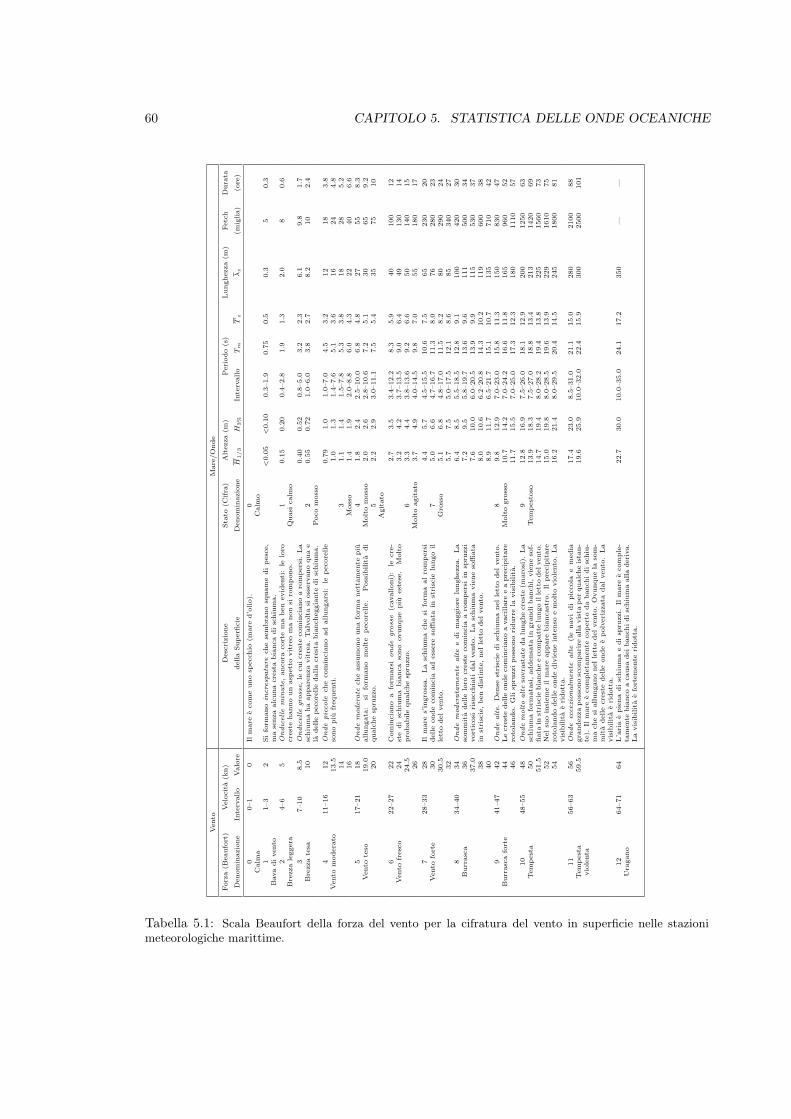
60 CAPITOLO 5. STATISTICA DELLE ONDE OCEANICHE
Vento
Mare
/O
nde
Forz
a(B
eaufo
rt)
Velo
cit
a(k
n)
Desc
rizio
ne
Sta
to(C
ifra
)A
ltezza
(m)
Peri
odo
(s)
Lunghezza
(m)
Fetc
hD
ura
ta
Denom
inazio
ne
Inte
rvallo
Valo
redella
Superfi
cie
Denom
inazio
ne
H1
/3
H3%
Inte
rvallo
Tm
Tz
λz
(mig
lia)
(ore
)
0C
alm
a0–1
0Il
mare
ecom
euno
specch
io(m
are
d’o
lio).
0C
alm
o1
Bava
divento
1–3
2Si
form
ano
incre
spatu
rech
ese
mbra
no
squam
edi
pesc
e,
ma
senza
alc
una
cre
sta
bia
nca
disc
hiu
ma.
<0.0
5<
0.1
00.3
–1.9
0.7
50.5
0.3
50.3
2B
rezza
leggera
4–6
5O
ndic
elle
min
ute
,ancora
cort
em
aben
evid
enti
:le
loro
cre
ste
hanno
un
asp
ett
ovit
reo
ma
non
siro
mpono.
1Q
uasi
calm
o0.1
50.2
00.4
–2.8
1.9
1.3
2.0
80.6
3B
rezza
tesa
7–10
8.5 10
Ondic
elle
gro
sse,le
cuicre
ste
com
incia
no
aro
mpers
i.La
schiu
ma
ha
appare
nza
vit
rea.
Talv
olt
asi
oss
erv
ano
qua
ela
delle
pecore
lle
dalla
cre
sta
bia
nch
eggia
nte
disc
hiu
ma.
2Poco
moss
o
0.4
00.5
50.5
20.7
20.8
–5.0
1.0
–6.0
3.2
3.8
2.3
2.7
6.1
8.2
9.8 10
1.7
2.4
4Vento
modera
to11–16
12
13.5
14
16
Onde
pic
cole
che
com
incia
no
ad
allungars
i:le
pecore
lle
sono
piu
frequenti
.3
Moss
o
0.7
91.0
1.1
1.4
1.0
1.3
1.4
1.9
1.0
–7.0
1.4
–7.6
1.5
–7.8
2.0
–8.8
4.5
5.1
5.3
6.0
3.2
3.6
3.8
4.3
12
16
18
22
18
24
28
40
3.8
4.8
5.2
6.6
5Vento
teso
17–21
18
19.0
20
Onde
modera
tech
eass
um
ono
una
form
anett
am
ente
piu
allungata
:si
form
ano
molt
epecore
lle.
Poss
ibilit
adi
qualc
he
spru
zzo.
4M
olt
om
oss
o5
Agit
ato
1.8
2.0
2.2
2.4
2.6
2.9
2.5
–10.0
2.8
–10.6
3.0
–11.1
6.8
7.2
7.5
4.8
5.1
5.4
27
30
35
55
65
75
8.3
9.2 10
6Vento
fresc
o22–27
22
24
24.5
26
Com
incia
no
afo
rmars
ionde
gro
sse
(cavalloni)
:le
cre
-st
edi
schiu
ma
bia
nca
sono
ovunque
piu
est
ese
.M
olt
opro
babile
qualc
he
spru
zzo.
6M
olt
oagit
ato
2.7
3.2
3.3
3.7
3.5
4.2
4.4
4.9
3.4
–12.2
3.7
–13.5
3.8
–13.6
4.0
–14.5
8.3
9.0
9.2
9.8
5.9
6.4
6.6
7.0
40
49
50
55
100
130
140
180
12
14
15
17
7Vento
fort
e28–33
28
30
30.5
32
Ilm
are
s’in
gro
ssa.
La
schiu
ma
che
sifo
rma
al
rom
pers
idelle
onde
com
incia
ad
ess
ere
soffi
ata
inst
risc
ielu
ngo
ille
tto
delvento
.7
Gro
sso
4.4
5.0
5.1
5.7
5.7
6.6
6.8
7.5
4.5
–15.5
4.7
–16.7
4.8
–17.0
5.0
–17.5
10.6
11.3
11.5
12.1
7.5
8.0
8.2
8.6
65
76
80
85
230
280
290
340
20
23
24
27
8B
urr
asc
a34–40
34
36
37.0
38
40
Onde
modera
tam
ente
alte
edi
maggio
relu
nghezza.
La
som
mit
adelle
loro
cre
ste
com
incia
aro
mpers
iin
spru
zzi
vort
icosi
risu
cch
iati
dalvento
.La
schiu
ma
vie
ne
soffi
ata
inst
risc
ie,ben
dis
tinte
,nelle
tto
delvento
.
6.4
7.2
7.6
8.0
8.9
8.5
9.5
10.0
10.6
11.7
5.5
–18.5
5.8
–19.7
6.0
–20.5
6.2
–20.8
6.5
–21.7
12.8
13.6
13.9
14.3
15.1
9.1
9.6
9.9
10.2
10.7
100
111
115
119
135
420
500
530
600
710
30
34
37
38
42
9B
urr
asc
afo
rte
41–47
42
44
46
Onde
alte.
Dense
stri
scie
disc
hiu
ma
nelle
tto
delvento
.Le
cre
ste
delle
onde
com
incia
no
avacilla
ree
apre
cip
itare
roto
lando.
Gli
spru
zziposs
ono
ridurr
ela
vis
ibilit
a.
8M
olt
ogro
sso
9.8
10.7
11.7
12.9
14.2
15.5
7.0
–23.0
7.0
–24.2
7.0
–25.0
15.8
16.6
17.3
11.3
11.8
12.3
150
165
180
830
960
1110
47
52
57
10
Tem
pest
a48–55
48
50
51.5
52
54
Onde
molto
alte
sovra
state
da
lunghe
cre
ste
(maro
si).
La
schiu
ma
form
ata
si,addensa
tain
gra
ndibanch
i,vie
ne
sof-
fiata
inst
risc
iebia
nch
ee
com
patt
elu
ngo
ille
tto
delvento
.N
elsu
oin
siem
eil
mare
appare
bia
ncast
ro.
Ilpre
cip
itare
roto
lando
delle
onde
div
iene
inte
nso
em
olt
ovio
lento
.La
vis
ibilit
ae
ridott
a.
9Tem
pest
oso
12.8
13.9
14.7
15.0
16.2
16.9
18.3
19.4
19.8
21.4
7.5
–26.0
7.5
–27.0
8.0
–28.2
8.0
–28.5
8.0
–29.5
18.1
18.8
19.4
19.6
20.4
12.9
13.4
13.8
13.9
14.5
200
213
225
229
245
1250
1420
1560
1610
1800
63
69
73
75
81
11
Tem
pest
avio
lenta
56–63
56
59.5
Onde
ecce
zionalm
ente
alte
(le
navi
di
pic
cola
em
edia
gra
ndezza
poss
ono
scom
pari
realla
vis
taperqualc
he
ista
n-
te).
Ilm
are
ecom
ple
tam
ente
copert
oda
banch
idisc
hiu
-m
ach
esi
allungano
nelle
tto
delvento
.O
vunque
laso
m-
mit
adelle
cre
ste
delle
onde
epolv
eri
zzata
dalvento
.La
vis
ibilit
ae
ridott
a.
17.4
19.6
23.0
25.9
8.5
–31.0
10.0
–32.0
21.1
22.4
15.0
15.9
280
300
2100
2500
88
101
12
Ura
gano
64–71
64
L’a
ria
epie
na
disc
hiu
ma
edisp
ruzzi.
Ilm
are
ecom
ple
-ta
mente
bia
nco
acausa
deibanch
idisc
hiu
ma
alla
deri
va.
La
vis
ibilit
ae
fort
em
ente
ridott
a.
22.7
30.0
10.0
–35.0
24.1
17.2
350
——
Tabella 5.1: Scala Beaufort della forza del vento per la cifratura del vento in superficie nelle stazionimeteorologiche marittime.

5.2. OSSERVAZIONI VISUALI 61
Stato del Mare Altezza Significativa (m) Denominazione
(cifra) Intervallo Media
0 0 0 Calmo (piatto, liscio, come unospecchio)
Calm (glassy)
1 0–0.10 0.05 Quasi calmo (con increspature) Calm (rippled)
2 0.10–0.50 0.30 Poco mosso (con ondicelle) Smooth (wavelets)
3 0.50–1.25 0.875 Mosso Slight
4 1.25–2.50 1.875 Molto mosso Moderate
5 2.5–4.0 3.25 Agitato Rough
6 4.0–6.0 5.0 Molto agitato Very Rough
7 6.0–9.0 7.5 Grosso High
8 9.0–14.0 11.5 Molto grosso Very High
9 > 14.0 > 14.0 Tempestoso Phenomenal
Tabella 5.2: Codice dello stato del mare secondo la World Meteorological Organization.
5.2.2 Altezza e periodo osservato
I marinai riportano le condizioni del mare attraverso la stima visuale dei valori medi dell’altezzae del periodo delle onde osservate visualmente. Sempre piu spesso sono pero disponibili anche icorrispondenti valori ottenuti da misure effettuate con boe oceanografiche o altra strumentazioneequivalente. Recentemente si fanno sempre piu strada le osservazioni satellitari.
A partire da questa duplice fonte d’informazioni, al fine di stabilire una correlazione fra lediverse procedure, Hogben and Lumb (1967) confrontarono le osservazioni visuali con i valorimisurati sperimentalmente. Essi trovarono le seguenti relazioni approssimate:
H1/3 = 1.06 Hv ,
T z = 0.73 T v ,
Tm = 1.12 T v , (5.1)
dove Hv e T v sono i valori medi visuali dell’altezza e del periodo delle onde.Successivamente Nordenstrom (1969) ricavo delle espressioni alternative, ovvero:
H1/3 = 1.68 (Hv)0.75 ,
T z = 0.82 (T v)0.96 . (5.2)
Manca in questo caso la relazione fra il periodo modale e quello osservato visualmente. Tuttavia,assumendo valida la relazione (4.50) dello spettro di Bretschneider, segue Tm = 1.408 T z e quindi:
Tm = 1.16 (T v)0.96 . (5.3)
Le relazioni precedenti sono illustrate nelle Figure 5.1 e 5.2, dalle quali si puo concludere che lastima dell’altezza media delle onde irregolari fatta visualmente coincide ragionevolmente bene conla loro altezza significativa. Poiche l’altezza media deve essere minore dell’altezza significativa, nesegue che gli osservatori ignorano, nelle stime visuali, il contributo delle onde piu basse.
Le stime visuali del periodo medio coincidono abbastanza bene con il periodo modale delleonde. Questo semplice risultato deve pero ritenersi valido con riserva. Infatti, Hogben and Lumb(1967) trovarono che le stime fatte da piu osservatori indipendenti, risultando spesso molto diversefra loro, non possono essere considerate come attendibili per confermare la validita generale dellaconclusione precedente.

62 CAPITOLO 5. STATISTICA DELLE ONDE OCEANICHE
Hogben and Lumb(1967)
0 2 4 6 8 10 12 14
Observed Wave Height , H v (m)
0
2
4
6
8
10
12
14
Sig
nific
ant W
ave
Hei
ght ,
H 1
/3 (
m)
Nordenstrom(1967)
..
Figura 5.1: Relazione fra l’altezza media visuale e l’altezza significativa.
5.3 Atlanti delle onde
5.3.1 Ossevazioni visuali
Recentemente e stato pubblicato da Hogben, Dacunha and Oliver (1986) un atlante delle onde, ilGlobal Wave Statistics, basato su piu di 55 milioni di osservazioni visuali fatte da navi in eserciziofra il 1854 ed il 1984. Esso copre praticamente l’intero pianeta e da la probabilita di occorrenza del-le altezze significative e dei periodi di zero-crossing per le aree geografiche mostrate in Figura 5.3.Nei casi sospetti, l’attendibilita delle osservazioni visuali dell’altezza delle onde fu controllata ef-fettuando una correlazione con le osservazioni simultanee della velocita del vento. Questa verificaincrociata consentı di eliminare dal data base le stime non attendibili. Le statistiche dei periodifurono costruite mediante correlazione con le misure delle onde fatte dagli strumenti, mentre furonoescluse le osservazioni visuali del periodo ritenute non realistiche.
La Figura 5.4 mostra un tipico esempio della statistica relativa all’Area 11 (Mare del Nord),valida per la stagione invernale. Come si puo vedere, le osservazioni sono state suddivise secondodifferenti direzioni di propagazione delle onde. I dati sono presentati sotto forma di diagrammi didistribuzione che danno la frequenza congiunta per l’occorrenza (in parti per mille) di particolaricombinazioni dell’altezza significativa e del periodo di zero-crossing. Per esempio, la probabilita dioccorrenza delle onde provenienti da tutte le direzioni con altezze significative nell’intervallo 3–4me con periodi di zero-crossing nell’intervallo 7–8 s risulta essere di 26/1000 = 0.026.
Sopra ciascuna tabella di distribuzione viene riportata, in termini di percentuale delle osserva-zioni eseguite, la frequenza di occorrenza delle onde da ciascuna delle direzioni specificate. Nellacolonna all’estrema destra e mostrata la frequenza di occorrenza di ogni intervallo di altezze signi-ficative per tutti i periodi di zero-crossing, mentre la frequenza di occorrenza di ogni intervallo diperiodi di zero-crossing per tutte le altezze significative e riportata nella riga piu alta. Per esem-pio, nel caso delle onde provenienti da ovest, la probabilita di ogni periodo di zero-crossing aventealtezza significativa nell’intervallo 3–4m e del 95/1000 = 0.095. La probabilita di ogni altezzasignificativa avente periodo di zero-crossing nell’intervallo 7–8 s risulta pari a 74/1000 = 0.074.
La probabilita che l’altezza significativa di uno stato di mare generico superi un dato valore(probabilita di eccedenza) e ottenuta sommando tutte le osservazioni sopra tale livello. Ad esempio,
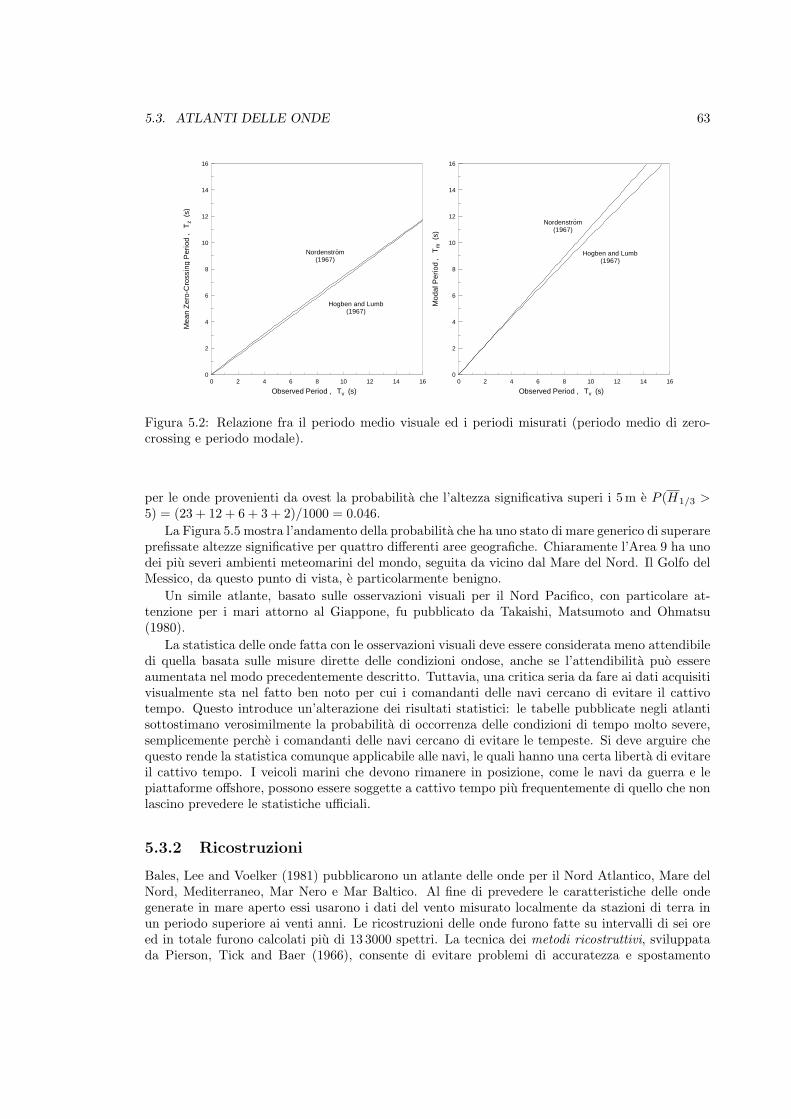
5.3. ATLANTI DELLE ONDE 63
Hogben and Lumb(1967)
Nordenstrom(1967)
0 2 4 6 8 10 12 14 16
Observed Period , Tv (s)
0
2
4
6
8
10
12
14
16
Mea
n Z
ero-
Cro
ssin
g P
erio
d ,
Tz
(s)
..Hogben and Lumb
(1967)
Nordenstrom(1967)
0 2 4 6 8 10 12 14 16
Observed Period , Tv (s)
0
2
4
6
8
10
12
14
16
Mod
al P
erio
d ,
Tm
(s)
..
Figura 5.2: Relazione fra il periodo medio visuale ed i periodi misurati (periodo medio di zero-crossing e periodo modale).
per le onde provenienti da ovest la probabilita che l’altezza significativa superi i 5 m e P (H1/3 >5) = (23 + 12 + 6 + 3 + 2)/1000 = 0.046.
La Figura 5.5 mostra l’andamento della probabilita che ha uno stato di mare generico di superareprefissate altezze significative per quattro differenti aree geografiche. Chiaramente l’Area 9 ha unodei piu severi ambienti meteomarini del mondo, seguita da vicino dal Mare del Nord. Il Golfo delMessico, da questo punto di vista, e particolarmente benigno.
Un simile atlante, basato sulle osservazioni visuali per il Nord Pacifico, con particolare at-tenzione per i mari attorno al Giappone, fu pubblicato da Takaishi, Matsumoto and Ohmatsu(1980).
La statistica delle onde fatta con le osservazioni visuali deve essere considerata meno attendibiledi quella basata sulle misure dirette delle condizioni ondose, anche se l’attendibilita puo essereaumentata nel modo precedentemente descritto. Tuttavia, una critica seria da fare ai dati acquisitivisualmente sta nel fatto ben noto per cui i comandanti delle navi cercano di evitare il cattivotempo. Questo introduce un’alterazione dei risultati statistici: le tabelle pubblicate negli atlantisottostimano verosimilmente la probabilita di occorrenza delle condizioni di tempo molto severe,semplicemente perche i comandanti delle navi cercano di evitare le tempeste. Si deve arguire chequesto rende la statistica comunque applicabile alle navi, le quali hanno una certa liberta di evitareil cattivo tempo. I veicoli marini che devono rimanere in posizione, come le navi da guerra e lepiattaforme offshore, possono essere soggette a cattivo tempo piu frequentemente di quello che nonlascino prevedere le statistiche ufficiali.
5.3.2 Ricostruzioni
Bales, Lee and Voelker (1981) pubblicarono un atlante delle onde per il Nord Atlantico, Mare delNord, Mediterraneo, Mar Nero e Mar Baltico. Al fine di prevedere le caratteristiche delle ondegenerate in mare aperto essi usarono i dati del vento misurato localmente da stazioni di terra inun periodo superiore ai venti anni. Le ricostruzioni delle onde furono fatte su intervalli di sei oreed in totale furono calcolati piu di 13 3000 spettri. La tecnica dei metodi ricostruttivi, sviluppatada Pierson, Tick and Baer (1966), consente di evitare problemi di accuratezza e spostamento

64 CAPITOLO 5. STATISTICA DELLE ONDE OCEANICHE
Figura 5.3: Aree del mare considerate da Hogben, Dacunha and Oliver (1986).
delle misure dovuti al bel tempo e dipende, ovviamente, dall’attendibilita del modello matematicoimpiegato per predire le condizioni delle onde irregolari.
Oltre alle statistiche sulle altezze e sui periodi, l’atlante fornisce dati sulla direzione delle on-de, sulla velocita e direzione del vento in mare. Esso contiene anche informazioni limitate sullavisibilita, copertura nuvolosa, precipitazioni, umidita relativa, temperature dell’aria e dell’acqua,pressione al livello del mare e presenza di ghiaccio. Lee, Bales and Sowby (1985) hanno pubblicatoun atlante simile per il Pacifico.
5.3.3 Osservazioni strumentali
Sia le stime visuali che le ricostruzioni statistiche delle onde irregolari sono soggette ad incertezze.Ne segue che solo le misure dirette degli spettri possono fornire le informazioni piu attendibili inassoluto. Tuttavia, misurare le onde per periodi prolungati (tipicamente per anni) e un’operazioneestremamente costosa e complicata, anche se sono noti alcuni esempi di campagne per la raccoltasistematica di dati. Probabilmente la piu estesa e stata quella organizzata negli Stati Uniti dal USNational Oceanographic and Atmospheric Administration (NOAA), pubblicata da Gilhousen et al.(1983). Tutte le boe oceanografiche utilizzate nel corso del progetto furono attive per almeno treanni ed alcune di esse sono state in operazione continua per una decina di anni. Le informazioniraccolte dalle boe riguardarono la temperatura dell’aria e del mare, la pressione atmosferica, comepure la velocita del vento e le altezze delle onde. Le caratteristiche delle onde furono analizzateogni tre ore e lo spettro corrispondente fu ricavato dalla serie temporale registrata. L’altezzasignificativa ed il periodo di zero-crossing furono calcolati usando le equazioni (4.34) e (4.26) ecome risultato ultimo furono preparati i diagrammi di distribuzione congiunta in forma standard.
In varie localita attorno il mondo furono fatte molte altre osservazioni strumentali delle condi-zioni ondose. In genere si trattava di osservazioni di breve durata, intese a fornire dati sull’ambientein situ per fini di ricerca, di progetti industriali o scopi militari. Ne sono un esempio le applicazioniper le prove sperimentali di tenuta al mare e la progettazione di installazioni offshore o portuali.
Molti dei dati furono acquisiti da organizzazioni commerciali private che li considerano percio
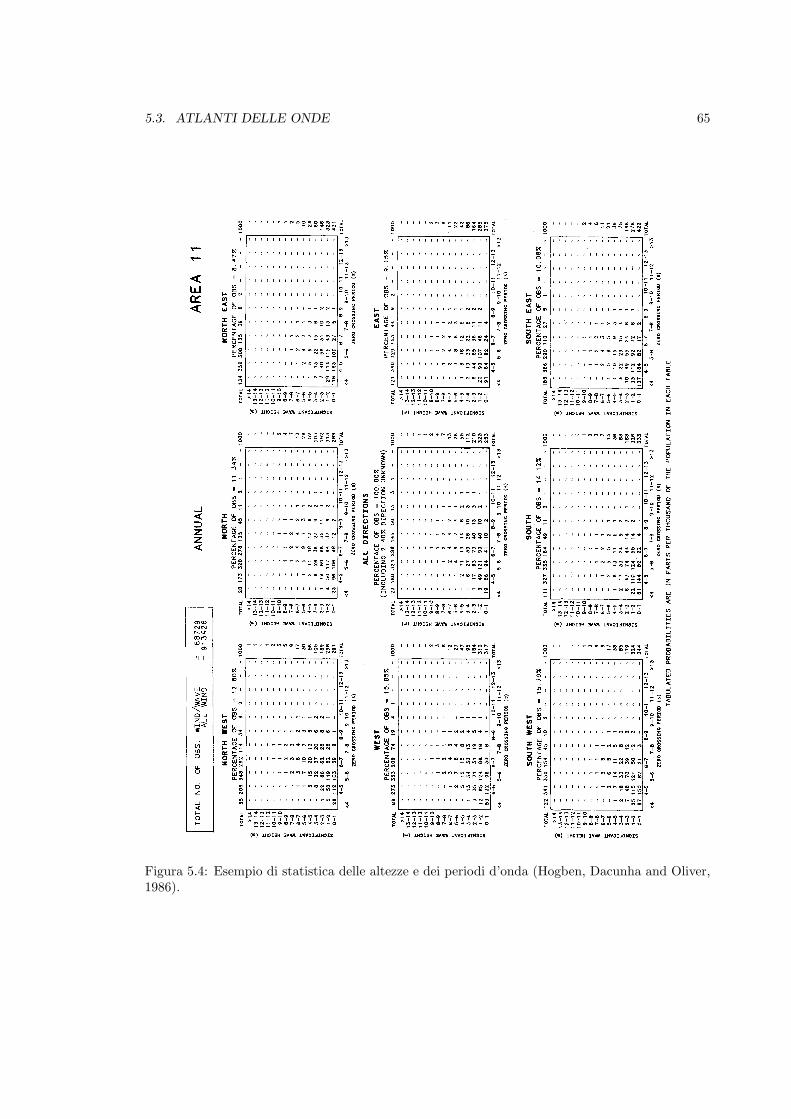
5.3. ATLANTI DELLE ONDE 65
Figura 5.4: Esempio di statistica delle altezze e dei periodi d’onda (Hogben, Dacunha and Oliver,1986).
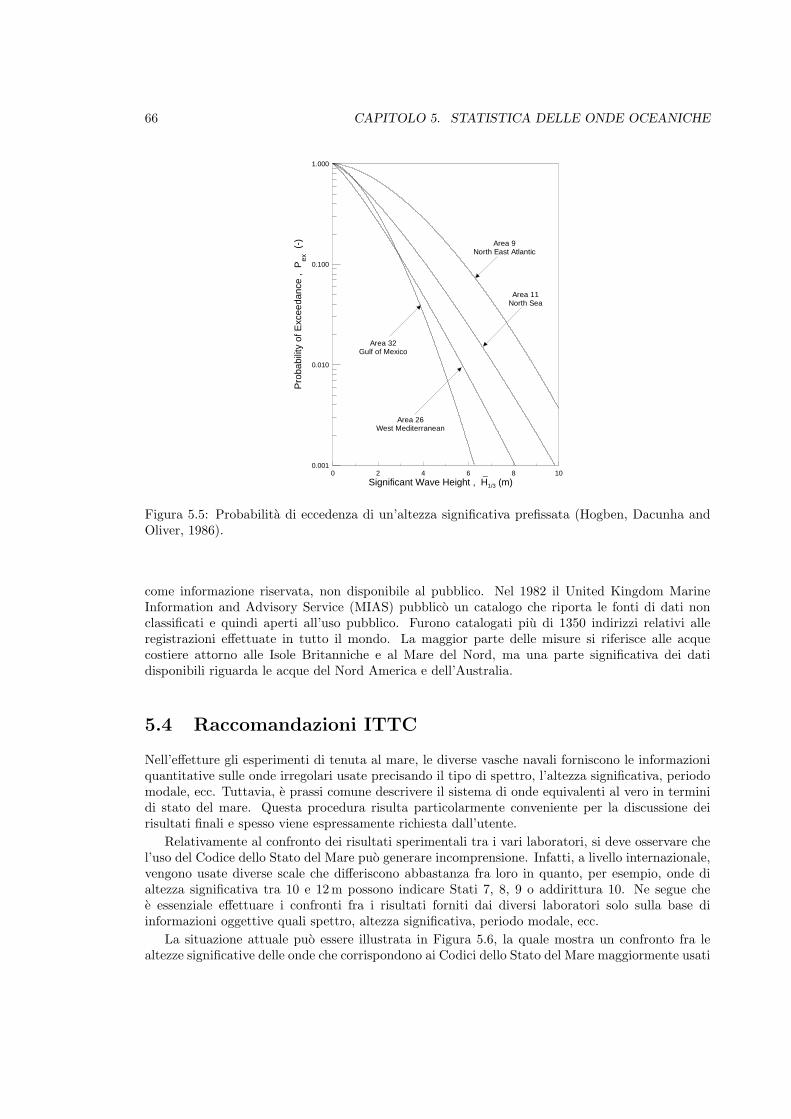
66 CAPITOLO 5. STATISTICA DELLE ONDE OCEANICHE
Area 11North Sea
0 2 4 6 8 10Significant Wave Height , H1/3 (m)
0.001
0.010
0.100
1.000
Pro
babi
lity
of E
xcee
danc
e ,
Pex
(-) Area 9
North East Atlantic
Area 26West Mediterranean
Area 32Gulf of Mexico
_
Figura 5.5: Probabilita di eccedenza di un’altezza significativa prefissata (Hogben, Dacunha andOliver, 1986).
come informazione riservata, non disponibile al pubblico. Nel 1982 il United Kingdom MarineInformation and Advisory Service (MIAS) pubblico un catalogo che riporta le fonti di dati nonclassificati e quindi aperti all’uso pubblico. Furono catalogati piu di 1350 indirizzi relativi alleregistrazioni effettuate in tutto il mondo. La maggior parte delle misure si riferisce alle acquecostiere attorno alle Isole Britanniche e al Mare del Nord, ma una parte significativa dei datidisponibili riguarda le acque del Nord America e dell’Australia.
5.4 Raccomandazioni ITTC
Nell’effetture gli esperimenti di tenuta al mare, le diverse vasche navali forniscono le informazioniquantitative sulle onde irregolari usate precisando il tipo di spettro, l’altezza significativa, periodomodale, ecc. Tuttavia, e prassi comune descrivere il sistema di onde equivalenti al vero in terminidi stato del mare. Questa procedura risulta particolarmente conveniente per la discussione deirisultati finali e spesso viene espressamente richiesta dall’utente.
Relativamente al confronto dei risultati sperimentali tra i vari laboratori, si deve osservare chel’uso del Codice dello Stato del Mare puo generare incomprensione. Infatti, a livello internazionale,vengono usate diverse scale che differiscono abbastanza fra loro in quanto, per esempio, onde dialtezza significativa tra 10 e 12 m possono indicare Stati 7, 8, 9 o addirittura 10. Ne segue chee essenziale effettuare i confronti fra i risultati forniti dai diversi laboratori solo sulla base diinformazioni oggettive quali spettro, altezza significativa, periodo modale, ecc.
La situazione attuale puo essere illustrata in Figura 5.6, la quale mostra un confronto fra lealtezze significative delle onde che corrispondono ai Codici dello Stato del Mare maggiormente usati

5.4. RACCOMANDAZIONI ITTC 67
in sede internazionale (ITTC, 1975). Appare che ci sono due differenti procedure di assegnazionedella Cifra.
La prima e quella di associare lo stato del mare al numero di Beaufort. Nella figura, le primequattro scale sono di questo tipo. Per mari con onde generate dal vento (mare vivo), l’altezzasignificativa che corrisponde a ciascun numero di Beaufort dipende, in generale, dalla relazione frala velocita del vento e l’altezza delle onde prodotte. Ne segue che, per la cifratura dello stato delmare basata sul numero di Beaufort, sono possibili piu scale di quelle mostrate in figura.
La seconda abitudine e quella di adottare una scala dello stato del mare legata all’altezzasignificativa delle onde come suggerito dai vari Uffici Meteorologici o Idrografici. Quattro di questescale sono mostrate in Figura 5.6, di cui due sono state scelte eguali fra loro per motivi pratici.
Sebbene il problema della standardizzazione di una Scala ITTC dello Stato del Mare sia statopiu volte discusso, un’azione in questo senso non e stata mai raccomandata. Da un punto di vistapratico, le varie tecniche di osservazione, ben consolidate fra i marinai, dovrebbero continuare adessere riflesse anche nelle richieste dell’utente.
5040
30
20
108
654
3
2
1
0.8
0.60.5
1
40
30
20
108
654
3
2
0.8
0.60.5
50
100
80
6050
40
30
20
10
8
5
4
2
6
3
SIG
NIF
ICA
NT
WA
VE
HE
IGH
T, m
SIG
NIF
ICA
NT
WA
VE
HE
IGH
T, m
SIG
NIF
ICA
NT
WA
VE
HE
IGH
T, f
t
11
10
9
8
7
6
5
4
11
10
9
8
7
6
5
4
3
11109
8
7
6
5
4
3
2
111098
7
6
5
9
8
7
6
5
4
3
2
9
8
7
6
5
4
3
9
8
7
6
5
4
3
8
7
6
5
4
3
2
A B C D E F G H
Scale - Source
Sea State and Beaufort Numerals Same - Neumann Wind/Wave RelationsASea State and Beaufort Numerals Same - Pierson-Moskovitz Wind/Wave RelationsB
Sea State and Beaufort Numerals Same - 12th ITTC Wind/Wave RelationsC
Sea State and Beaufort Numerals Same - BTTPD
World Meteorological OrganizationE
Japan Meteorological AgencyF
USSR Hydrometeorological Service (Note: Values shown are H = H /1.32)G
USA Hydrographic OfficeH1/3 3%
−
LEGEND
Figura 5.6: Esempi di Scale dello Stato del Mare (ITTC, 1975).

68 CAPITOLO 5. STATISTICA DELLE ONDE OCEANICHE

Parte II
Moti Nave
69

Capitolo 6
Problema dinamico
6.1 Introduzione
Il comportamento in mare di una nave e determinato dall’azione di un mare irregolare mentre,in generale, essa sara soggetta all’azione di onde regolari incidenti solo in casi particolari. Perquesto, lo studio dei moti nave in acqua tranquilla ed in onde regolari potrebbe apparire, a primavista, di limitato interesse pratico e percio giustificabile solo in termini metodologici. Tuttavia,questi due casi particolari rivestono un’importanza fondamentale nello studio della dinamica dellanave in quanto consentono di acquisire le conoscenze necessarie per la comprensione dei fenomenipiu semplici e rappresentano il primo passo per l’analisi dei moti nella situazione piu realistica dinavigazione in un mare confuso.
Nel seguito saranno percio ricavate, in primo luogo, le equazioni del moto di una nave incondizioni di acqua tranquilla ed in presenza di onde regolari. Tali equazioni, necessarie peraffrontare e risolvere le problematiche sopra citate, costituiscono la premessa alla moderna Teoriadei Moti Nave. Solo in fase successiva il problema verra generalizzato al caso piu significativo dimare irregolare.
6.2 Assi e definizioni
In presenza di cattivo tempo, una nave che avanza sulla superficie libera dell’acqua e soggetta aduna combinazione di movimenti i quali, a causa della loro complessita ed imprevedibilita, sembradebbano violare un qualsiasi tipo di descrizione razionale. Tuttavia, anche in una situazione par-ticolarmente sfavorevole come questa, e possibile eseguire tutta una serie di osservazioni su alcunegrandezze caratteristiche del moto al fine ultimo di capire la natura fisica del fenomeno dinamicoin esame.
Per questo, con riferimento alla Figura 6.1, si supponga che la nave segua in acqua tranquillauna traiettoria rettilinea, muovendosi con velocita di avanzo U costante. Si tratta ovviamente diuna situazione ideale in quanto, come noto, le onde tendono ad allontanare la nave dalla rottaprestabilita, ma il timoniere esperto (oppure l’autopilota) puo apportarvi le opportune correzioniper ripristinare, istante dopo istante, la situazione desiderata. Essa seguira in effetti un percorsocomplicato di forma elicoidale, piu o meno allineato con la rotta prefissata, mentre la velocita diavanzo variera continuamente attorno alla velocita nominale per via del moto di abbrivio. Inoltre,come conseguenza del continuo cambiamento del livello dell’acqua originato dal moto ondoso in-cidente sulla carena, la nave subira una successione di movimenti oscillatori di minore o maggioreentita.
71
72 CAPITOLO 6. PROBLEMA DINAMICO
Figura 6.1: Tipica traiettoria di una nave in mare ondoso.
Per l’analisi di una situazione dinamica cosı complessa conviene considerare, in prima approssi-mazione, la nave come un corpo perfettamente rigido. In quest’ipotesi semplificativa, essa possiedesei gradi di liberta, ovvero sono necessarie sei coordinate indipendenti per individuare univocamen-te la sua configurazione nello spazio. Poiche il generico atto di moto di un corpo rigido puo essereconsiderato come il risultato della composizione di una traslazione di un polo ad esso solidale e diuna rotazione attorno all’asse di istantanea rotazione passante per il polo medesimo, ne segue chele sei coordinate indipendenti possono essere scelte attraverso un’opportuna combinazione di trespostamenti lineari e di tre spostamenti angolari. Essi vengono definiti a partire dai riferimenti diFigura 6.2.
θ
G
G
y
x
z
ϕψ
ξ
η
ζ
G
0
U
c
χ
0η
ζ
0
0
00
η
ξ
ζ
g
g
g
Riferimento Solidale
Riferimento Mobile
Riferimento Assoluto
ξ0
Figura 6.2: Sistemi di riferimento usati nello studio dei moti nave.
Per primo viene introdotto un sistema di riferimento assoluto solidale alla terra, indicato conO0ξ0η0ζ0, avente il piano O0ξ0η0 coincidente con la superficie libera dell’acqua tranquilla e l’asseO0ξ0 coincidente con la direzione di propagazione delle onde. L’asse verticale O0ζ0 e orientato

6.2. ASSI E DEFINIZIONI 73
positivamente verso il basso. Successivamente si considera un secondo sistema di riferimento Oξηζ,riferimento mobile, che si muove rispetto al precedente di moto rettilineo uniforme con velocitaU pari alla velocita media di avanzo della nave. Esso e ruotato rispetto al riferimento assoluto,l’origine O si trova sulla superficie libera imperturbata e l’asse Oξ coincide con la direzione mediaseguita dalla nave. Si noti che questo riferimento, nel caso di velocita d’avanzo costante (mototraslatorio uniforme), e di tipo inerziale. L’angolo χ che l’asse Oξ (direzione di avanzo della nave)forma con l’asse O0ξ0 (direzione di propagazione delle onde) e l’angolo di rotta, vedi Capitolo 3.All’istante iniziale, l’origine del riferimento mobile coincide con quella del riferimento assoluto.
In seguito si vedra che, nell’ambito della Teoria dei Moti Nave, i due riferimenti cosı definitihanno funzioni specifiche molto differenti. Considerando percio la Figura 6.2 e possibile scrivere lerelazioni per la trasformazione di coordinate fra i due sistemi. Nel passaggio dal riferimento mobilea quello fisso risulta:
ξ0 = (ξ + Ut) cos χ− η sin χ ,
η0 = (ξ + Ut) sin χ + η cos χ , (6.1)ζ0 = ζ ,
mentre per il passaggio inverso inverso:
ξ = ξ0 cosχ + η0 sin χ− Ut ,
η = −ξ0 sin χ + η0 cosχ , (6.2)ζ = ζ0 .
Si noti che il sistema di riferimento mobile viene spesso scelto con l’origine in G0, posizione diriposo del baricentro, e gli assi coordinati costantemente paralleli e concordi a quelli della ternaOξηζ. Tale sistema, indicato con G0ξ
′η′ζ ′, e detto riferimento mobile ausiliario o anche riferimentodegli assi di equilibrio.
Viene poi considerato un terzo sistema di riferimento O′x′y′z′, detto riferimento solidale, aven-te gli assi solidali alla nave. L’origine O′, che costituisce il polo per la riduzione dei movimenti,e generalmente scelta nel punto di intersezione del piano longitudinale di simmetria (piano dia-metrale), del piano trasversale a meta nave (piano della sezione al mezzo) e del piano orizzontalecoincidente con la superficie libera dell’acqua imperturbata (piano di galleggiamento), mentre gliassi coordinati vengono fatti coincidere con le intersezioni dei tre piani citati. Tali assi sono chia-mati semplicemente assi corpo. I loro versi positivi vengono scelti, nell’ordine, per l’asse O′x′ versoprora, per l’asse O′y′ a murata destra e per l’asse O′z′ in basso. Il riferimento O′x′y′z′ risulta, ingenere, non inerziale. Si osservi che in alcuni casi, effettuando un’oppropriata traslazione degli assi,e conveniente allineare, sulla stessa verticale, l’origine O′ ed il centro di massa G (baricentro) oaddirittura far coincidere O′ con il baricentro G della nave. Per distinguerlo da quello precedente,questo particolare riferimento solidale viene indicato con Gxyz. Tale scelta sara tacitamente assun-ta nel corso di tutta la trattazione, salvo affermazione contraria. Comunque, quando necessario, idue riferimenti solidali potranno essere distinti fra loro chiamandoli nell’ordine riferimento solidaleal mezzo e riferimento solidale centrale. In condizioni di equilibrio il riferimento centrale coincidecon il riferimento mobile ausiliario, da cui la denominazione di riferimento degli assi di equilibrio.
I sistemi di riferimento cosı introdotti hanno una valenza diversa a seconda delle funzioni speci-fiche cui sono destinati. In particolare, il riferimento assoluto e quello piu naturale per descrivere lecaratteristiche delle onde e quindi anche del campo cinetico risultante dall’interazione nave-fluido.Lo stesso puo essere fatto in quello mobile in quanto si tratta di un riferimento inerziale. Essoe il piu adatto per la formulazione delle equazioni del moto, e quindi per la determinazione delleforze agenti sulla nave. Il riferimento solidale centrale serve per definire la posizione della naverispetto al riferimento mobile, mentre il riferimento solidale al mezzo si usa per la descrizione dellecaratteristiche geometriche e di distribuzione delle masse. Il riferimento mobile ausiliario o degli

74 CAPITOLO 6. PROBLEMA DINAMICO
assi di equilibrio, avendo l’origine nella posizione di riposo del baricentro e gli assi paralleli e con-cordi a quelli del riferimento mobile, viene usato per descrivere con semplicita sia le oscillazioni ditraslazione che quelle di rotazione della nave rispetto alla posizione iniziale di equilibrio.
Nel seguito, per la formulazione delle equazioni del moto, saranno usati sia il riferimento mobileche quello solidale centrale. Si tratta di una scelta che va per la maggiore nello studio dei motinave, mentre per i problemi offshore, al riferimento solidale centrale si preferisce quasi sempre ilriferimento solidale al mezzo. In questo contesto anche gli orientamenti degli assi possono esserediversi da quelli qui adottati, in particolare per l’asse verticale (positivo verso l’alto). Infine, leterne di riferimento possono essere sia destre che sinistre.
Infine, vale la pena ricordare che per la soluzione di alcuni problemi idrodinamici associati coni moti nave e spesso piu conveniente lavorare nel riferimento inerziale Oξηζ, ovvero nel riferimentoinerziale ausiliario G0ξ
′η′ζ ′, piuttosto che nel riferimento solidale Gxyz. Per quel che riguarda leequazioni linearizzate del moto, il calcolo delle forze, dei momenti e delle ampiezze dei moti inun sistema o nell’altro non comporta alcuna differenza in quanto la distinzione tra i due vienepersa nella linearizzazione. Tuttavia, nel caso piu generale, e necessario distinguere tra questidue riferimenti in quanto negli sviluppi di una qualsiasi teoria idrodinamica, e quindi anche diquella lineare, solo i termini di ordine di grandezza appropriato possono essere trascurati, vediAppendice B. Questo fatto, che non ha alcuna implicazione sugli argomenti qui trattati, sta allabase della teoria idrodinamica lineare dei moti nave sviluppata da Kocin (1949) e dai suoi successori.
6.3 Equazioni del moto
Le equazioni del moto di un sistema rigido a sei gradi di liberta si ottengono a partire dalle equazionicardinali, scritte in un sistema di riferimento inerziale. Si tratta, come noto, di tre equazioni relativealle traslazioni e di tre equazioni associate alle rotazioni, la cui evoluzione dinamica e determinatarispettivamente dalle forze e dai momenti agenti, tutti osservati nel riferimento inerziale. Da unpunto di vista pratico, e spesso conveniente esprimere tali forze e momenti rispetto al riferimentosolidale al corpo. Per tale osservatore e possibile trasformare opportunamente le equazioni cardinalied ottenere le cosiddette equazioni di Eulero, che ne costituiscono una variante alternativa.
Come visto al paragrafo precedente, per lo studio dei moti nave si assume come osservatoreinerziale quello corrispondente al riferimento mobile Oξηζ, mentre il riferimento solidale al corpoe dato dalla terna Gxyz. Il moto della nave rispetto al sistema mobile, o piu precisamente rispettoal sistema degli assi di equilibrio, e caratterizzato da tre spostamenti lineari e da tre spostamentiangolari, definiti nell’ordine come segue:
ξg — abbrivio (surge), positivo in avanti;
ηg — scarroccio (sway), positivo a destra;
ζg — sussulto (heave), positivo in basso;
ϕ — rollio (roll), positivo con murata destra in basso;
θ — beccheggio (pitch), positivo con prua in alto;
ψ — imbardata (yaw), positivo per accostata destra.
A differenza di quanto non si faccia per casi analoghi, nel formulare le equazioni del moto di unanave si segue generalmente una procedura mista: le equazioni del moto di traslazione si esprimonoattraverso le equazioni cardinali, mentre le equazioni del moto di rotazione vengono scritte nellaforma di Eulero. Un tale modo di procedere, che si dimostra particolarmente conveniente perl’analisi dei moti nave di ampiezza finita, non viene seguito nel caso della manovrabilita.

6.3. EQUAZIONI DEL MOTO 75
Per la traslazione, in base alla legge del moto del centro di massa, si puo percio scrivere:
Mξg = Fξ ,
Mηg = Fη , (6.3)
Mζg = Fζ ,
essendo M la massa della nave, Fξ, Fη e Fζ le componenti del risultante delle forze esterne agentilungo gli assi coordinati del riferimento mobile Oξηζ.
Per la rotazione attorno al centro di massa, in assenza di simmetrie particolari, le equazioni delmoto nella forma di Eulero si riducono al sistema delle seguenti tre equazioni nonlineari accoppiate:
Ixxωx − Ixyωy − Ixzωz
+ (Izz − Iyy)ωyωz + Ixyωxωz − Ixzωxωy + Iyz(ω2z − ω2
y) = Mx ,
Iyyωy − Iyzωz − Ixyωx
+ (Ixx − Izz)ωxωz + Iyzωxωy − Ixyωyωz + Ixz(ω2x − ω2
z) = My , (6.4)Izzωz − Ixzωx − Iyzωy
+ (Iyy − Ixx)ωxωy + Ixzωyωz − Iyzωxωz + Ixy(ω2y − ω2
x) = Mz ,
essendo ωx, ωy e ωz le componenti della velocita angolare della nave, Ixx, Iyy e Izz i momenti centralid’inerzia di massa, Ixy, Ixz e Iyz i momenti d’inerzia centrifughi, Mx, My e Mz le componenti delmomento risultante delle forze agenti, tutti calcolati rispetto agli assi del riferimento solidale Gxyz.
Se mi indica la massa generica di coordinate (xi, yi, zi), risulta in particolare:
M =∑
i
mi , (6.5)
ed inoltre:
Ixx =∑
i
mi(y2i + z2
i ) ,
Iyy =∑
i
mi(x2i + z2
i ) ,
Izz =∑
i
mi(x2i + y2
i ) ,
Ixy =∑
i
mixiyi , (6.6)
Ixz =∑
i
mixizi ,
Iyz =∑
i
miyizi .
D’altra parte, come insegna l’esperienza, e lecito supporre che tutte le componenti del pesodella nave siano distribuite simmetricamente rispetto al piano diametrale. Ne segue che due deimomenti centrifughi sono nulli:
Ixy = Iyz = 0 , (6.7)
e quindi le (6.4) si semplificano ed assumono la forma finale:
Ixxωx − Ixzωz + (Izz − Iyy)ωyωz − Ixzωxωy = Mx ,
Iyyωy + (Ixx − Izz)ωxωz + Ixz(ω2x − ω2
z) = My , (6.8)Izzωz − Ixzωx + (Iyy − Ixx)ωxωy + Ixzωyωz = Mz .

76 CAPITOLO 6. PROBLEMA DINAMICO
Le (6.3) e (6.8) costituiscono le equazioni generali del moto di una nave. Si tratta di un insiemedi equazioni differenziali nonlineari del secondo ordine, fra loro accoppiate, la cui soluzione puoessere ottenuta note che siano le leggi della forza e dei momenti. Infatti, assegnate la posizione ela velocita all’istante iniziale, le equazioni precedenti permettono, con una prima integrazione, diesprimere le funzioni ξg(t), ηg(t), ζg(t), ϕ(t), θ(t), ψ(t) e, con una successiva integrazione, le leggiorarie ξg(t), ηg(t), ζg(t), ϕ(t), θ(t), ψ(t). Tuttavia, come si vedra nei Capitoli 9 e 10, un tale mododi procedere risulta di limitato interesse per le applicazioni ingegneristiche della teoria dei motinave, se non in casi particolari.
Nel seguito verra fatta un’analisi critica delle forze agenti e sara presentato lo schema classicodi suddivisione delle forze adottato per lo studio dei moti nave. Successivamente, al Paragrafo 6.5,sara considerata la teoria lineare dei moti, la quale corrisponde al caso in cui il moto della naveviene descritto da equazioni differenziali lineari. In questo contesto verranno considerati sia i motiin acqua tranquilla che in mare ondoso. La teoria nonlineare sara sviluppata al Capitolo 00 solorelativamente al moto di rollio ed i risultati presentati corrisponderanno al caso particolare in cui,per la sua descrizione, e possibile utilizzare un’unica equazione differenziale nonlineare. In questomodello risultano nonlineari sia il momento di richiamo che il momento delle forze di resistenza. Lanecessita di descrivere il moto di rollio della nave per mezzo di un’equazione nonlineare si presentaquando gli angoli di sbandamento assumono valori tali da non poterli considerare piccoli.
6.4 Forze agenti su una nave
Una nave in acqua tranquilla e soggetta, in posizione di equilibrio, all’azione di due sole forze eprecisamente il peso e la spinta. Queste sono uguali ed opposte e, come noto dalla Statica dellaNave, i loro punti di applicazione si trovano sulla stessa retta verticale.
La forza peso e la risultante delle forze gravitazionali agenti sulla nave, ha intensita ugualeal peso totale, e diretta verticalmente verso il basso ed il suo punto di applicazione coincide conil baricentro (centro di massa). La forza di spinta, invece, e la risultante delle forze di pressioneesercitate dall’acqua sulla superficie bagnata dello scafo. Essa ha intensita uguale al peso del volumed’acqua spostato dalla carena, e diretta verticalmente verso l’alto ed il suo punto di applicazionesi trova nel centro di spinta, ossia nel centro del volume immerso o centro di carena.
Nel caso in cui la nave descrive un movimento piu o meno complesso, l’insieme delle forzeagenti viene alterato considerevolmente. Cosı, a causa della variazione del volume immerso e deglieffetti indotti dalle onde incidenti, la spinta non si mantiene costante ma cambiano, da istantead istante, sia l’intensita che il punto di applicazione, mentre la retta d’azione si discosta dallaverticale. La pressione dell’acqua su un elemento di superficie della carena non e piu funzione dellasola profondita di immersione, ma dipende tanto dalle caratteristiche del moto ondoso quanto daglispostamenti, dalle velocita e dalle accelerazioni della nave. La pressione esercitata dall’acqua e ditipo idrodinamico, includendo la pressione idrostatica come parte componente. Le forze d’attritosi generano come risultato dell’azione della viscosita attraverso gli sforzi tangenziali sulla superficiebagnata di carena. Soltanto l’intensita, la direzione ed il punto di applicazione del peso rimangonoinalterati mentre, in conseguenza del carattere non uniforme del moto nave, si originano ancheforze inerziali.
In base a quanto detto, considerando la nave come un corpo perfettamente rigido in motooscillatorio nel mezzo fluido, si possono suddividere le forze agenti in quattro gruppi fondamentali(Blagovescenskij, 1953):
• le forze peso della nave,
• le forze d’inerzia della nave,
• le forze di pressione dell’acqua,
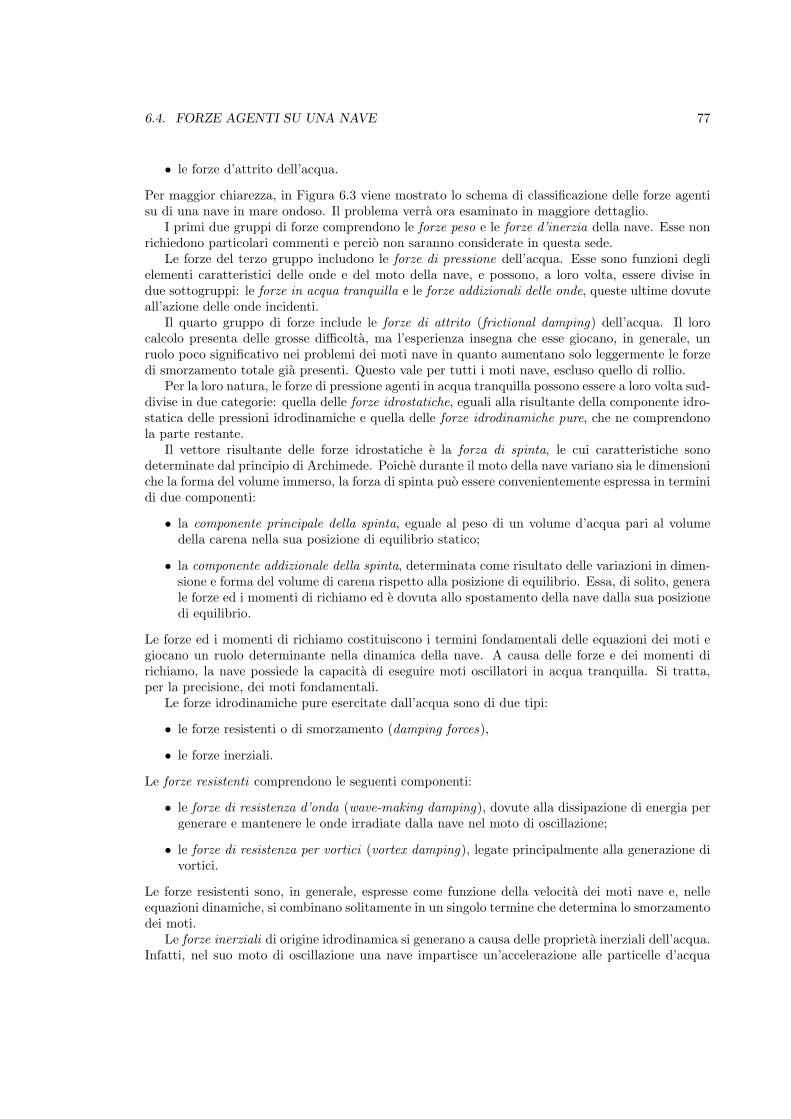
6.4. FORZE AGENTI SU UNA NAVE 77
• le forze d’attrito dell’acqua.
Per maggior chiarezza, in Figura 6.3 viene mostrato lo schema di classificazione delle forze agentisu di una nave in mare ondoso. Il problema verra ora esaminato in maggiore dettaglio.
I primi due gruppi di forze comprendono le forze peso e le forze d’inerzia della nave. Esse nonrichiedono particolari commenti e percio non saranno considerate in questa sede.
Le forze del terzo gruppo includono le forze di pressione dell’acqua. Esse sono funzioni deglielementi caratteristici delle onde e del moto della nave, e possono, a loro volta, essere divise indue sottogruppi: le forze in acqua tranquilla e le forze addizionali delle onde, queste ultime dovuteall’azione delle onde incidenti.
Il quarto gruppo di forze include le forze di attrito (frictional damping) dell’acqua. Il lorocalcolo presenta delle grosse difficolta, ma l’esperienza insegna che esse giocano, in generale, unruolo poco significativo nei problemi dei moti nave in quanto aumentano solo leggermente le forzedi smorzamento totale gia presenti. Questo vale per tutti i moti nave, escluso quello di rollio.
Per la loro natura, le forze di pressione agenti in acqua tranquilla possono essere a loro volta sud-divise in due categorie: quella delle forze idrostatiche, eguali alla risultante della componente idro-statica delle pressioni idrodinamiche e quella delle forze idrodinamiche pure, che ne comprendonola parte restante.
Il vettore risultante delle forze idrostatiche e la forza di spinta, le cui caratteristiche sonodeterminate dal principio di Archimede. Poiche durante il moto della nave variano sia le dimensioniche la forma del volume immerso, la forza di spinta puo essere convenientemente espressa in terminidi due componenti:
• la componente principale della spinta, eguale al peso di un volume d’acqua pari al volumedella carena nella sua posizione di equilibrio statico;
• la componente addizionale della spinta, determinata come risultato delle variazioni in dimen-sione e forma del volume di carena rispetto alla posizione di equilibrio. Essa, di solito, generale forze ed i momenti di richiamo ed e dovuta allo spostamento della nave dalla sua posizionedi equilibrio.
Le forze ed i momenti di richiamo costituiscono i termini fondamentali delle equazioni dei moti egiocano un ruolo determinante nella dinamica della nave. A causa delle forze e dei momenti dirichiamo, la nave possiede la capacita di eseguire moti oscillatori in acqua tranquilla. Si tratta,per la precisione, dei moti fondamentali.
Le forze idrodinamiche pure esercitate dall’acqua sono di due tipi:
• le forze resistenti o di smorzamento (damping forces),
• le forze inerziali.
Le forze resistenti comprendono le seguenti componenti:
• le forze di resistenza d’onda (wave-making damping), dovute alla dissipazione di energia pergenerare e mantenere le onde irradiate dalla nave nel moto di oscillazione;
• le forze di resistenza per vortici (vortex damping), legate principalmente alla generazione divortici.
Le forze resistenti sono, in generale, espresse come funzione della velocita dei moti nave e, nelleequazioni dinamiche, si combinano solitamente in un singolo termine che determina lo smorzamentodei moti.
Le forze inerziali di origine idrodinamica si generano a causa delle proprieta inerziali dell’acqua.Infatti, nel suo moto di oscillazione una nave impartisce un’accelerazione alle particelle d’acqua
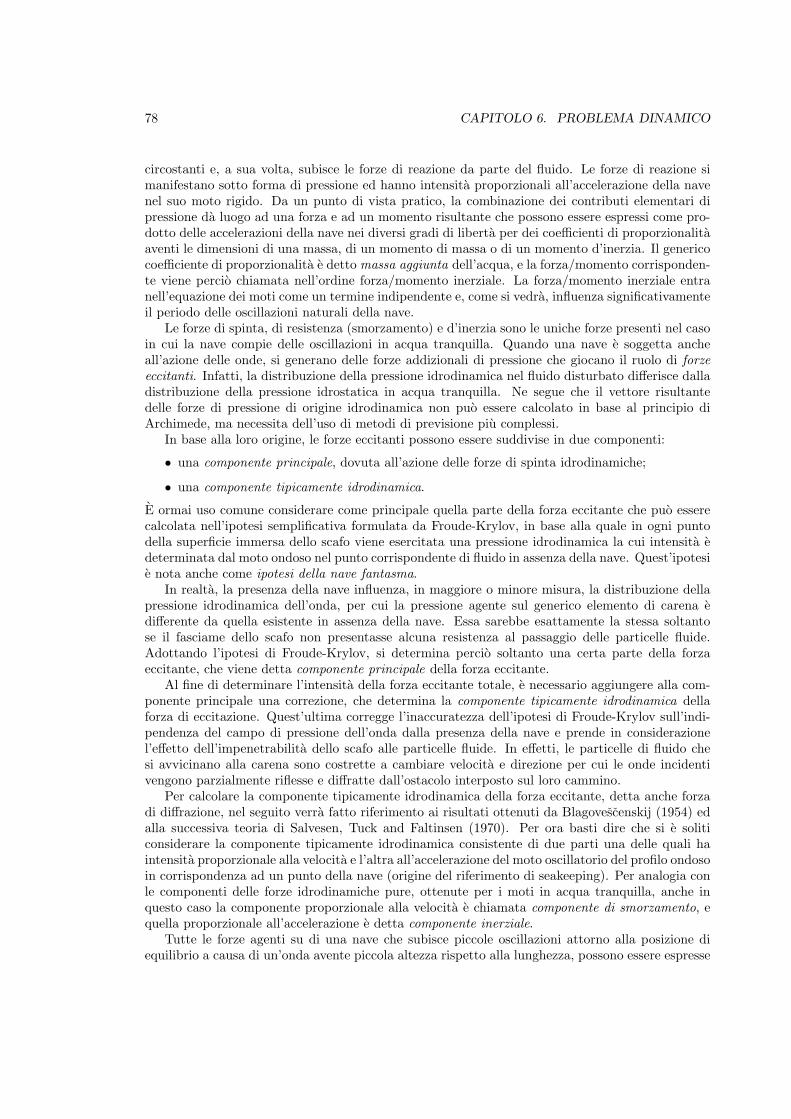
78 CAPITOLO 6. PROBLEMA DINAMICO
circostanti e, a sua volta, subisce le forze di reazione da parte del fluido. Le forze di reazione simanifestano sotto forma di pressione ed hanno intensita proporzionali all’accelerazione della navenel suo moto rigido. Da un punto di vista pratico, la combinazione dei contributi elementari dipressione da luogo ad una forza e ad un momento risultante che possono essere espressi come pro-dotto delle accelerazioni della nave nei diversi gradi di liberta per dei coefficienti di proporzionalitaaventi le dimensioni di una massa, di un momento di massa o di un momento d’inerzia. Il genericocoefficiente di proporzionalita e detto massa aggiunta dell’acqua, e la forza/momento corrisponden-te viene percio chiamata nell’ordine forza/momento inerziale. La forza/momento inerziale entranell’equazione dei moti come un termine indipendente e, come si vedra, influenza significativamenteil periodo delle oscillazioni naturali della nave.
Le forze di spinta, di resistenza (smorzamento) e d’inerzia sono le uniche forze presenti nel casoin cui la nave compie delle oscillazioni in acqua tranquilla. Quando una nave e soggetta ancheall’azione delle onde, si generano delle forze addizionali di pressione che giocano il ruolo di forzeeccitanti. Infatti, la distribuzione della pressione idrodinamica nel fluido disturbato differisce dalladistribuzione della pressione idrostatica in acqua tranquilla. Ne segue che il vettore risultantedelle forze di pressione di origine idrodinamica non puo essere calcolato in base al principio diArchimede, ma necessita dell’uso di metodi di previsione piu complessi.
In base alla loro origine, le forze eccitanti possono essere suddivise in due componenti:
• una componente principale, dovuta all’azione delle forze di spinta idrodinamiche;
• una componente tipicamente idrodinamica.
E ormai uso comune considerare come principale quella parte della forza eccitante che puo esserecalcolata nell’ipotesi semplificativa formulata da Froude-Krylov, in base alla quale in ogni puntodella superficie immersa dello scafo viene esercitata una pressione idrodinamica la cui intensita edeterminata dal moto ondoso nel punto corrispondente di fluido in assenza della nave. Quest’ipotesie nota anche come ipotesi della nave fantasma.
In realta, la presenza della nave influenza, in maggiore o minore misura, la distribuzione dellapressione idrodinamica dell’onda, per cui la pressione agente sul generico elemento di carena edifferente da quella esistente in assenza della nave. Essa sarebbe esattamente la stessa soltantose il fasciame dello scafo non presentasse alcuna resistenza al passaggio delle particelle fluide.Adottando l’ipotesi di Froude-Krylov, si determina percio soltanto una certa parte della forzaeccitante, che viene detta componente principale della forza eccitante.
Al fine di determinare l’intensita della forza eccitante totale, e necessario aggiungere alla com-ponente principale una correzione, che determina la componente tipicamente idrodinamica dellaforza di eccitazione. Quest’ultima corregge l’inaccuratezza dell’ipotesi di Froude-Krylov sull’indi-pendenza del campo di pressione dell’onda dalla presenza della nave e prende in considerazionel’effetto dell’impenetrabilita dello scafo alle particelle fluide. In effetti, le particelle di fluido chesi avvicinano alla carena sono costrette a cambiare velocita e direzione per cui le onde incidentivengono parzialmente riflesse e diffratte dall’ostacolo interposto sul loro cammino.
Per calcolare la componente tipicamente idrodinamica della forza eccitante, detta anche forzadi diffrazione, nel seguito verra fatto riferimento ai risultati ottenuti da Blagovescenskij (1954) edalla successiva teoria di Salvesen, Tuck and Faltinsen (1970). Per ora basti dire che si e soliticonsiderare la componente tipicamente idrodinamica consistente di due parti una delle quali haintensita proporzionale alla velocita e l’altra all’accelerazione del moto oscillatorio del profilo ondosoin corrispondenza ad un punto della nave (origine del riferimento di seakeeping). Per analogia conle componenti delle forze idrodinamiche pure, ottenute per i moti in acqua tranquilla, anche inquesto caso la componente proporzionale alla velocita e chiamata componente di smorzamento, equella proporzionale all’accelerazione e detta componente inerziale.
Tutte le forze agenti su di una nave che subisce piccole oscillazioni attorno alla posizione diequilibrio a causa di un’onda avente piccola altezza rispetto alla lunghezza, possono essere espresse

6.5. EQUAZIONI LINEARI 79
come funzioni lineari degli spostamenti, delle velocita e delle accelerazioni sia dei moti nave chedelle caratteristiche fisiche dell’onda. Le equazioni differenziali dei moti cosı ottenute possonoessere considerate lineari ed a coefficienti costanti. In tal caso, come noto, si puo applicare ilPrincipio di Sovrapposizione degli Effetti, in base al quale l’effetto netto delle forze agenti, perquanto possano differire nella loro natura e nelle modalita d’azione, puo essere calcolato per mezzodi una semplice somma degli effetti delle varie componenti considerate indipendentemente.
Dallo studio della Statica della Nave e noto che le forze/momenti di richiamo della spinta sonolineari per piccoli spostamenti. Questa semplificazione venne introdotta nella teoria dei moti naveda Haskind (1946), il quale formulo la teoria dei moti di piccola ampiezza. Il modello idrodinamicosviluppato in questo contesto introdusse, per la prima volta, l’ipotesi riguardante la linearita equindi l’indipendenza fra le singole componenti idrodinamiche delle forze agenti su di una navegalleggiante sulla superficie libera di un fluido ideale.
Per grandi spostamenti della nave dalla posizione di equilibrio, cioe per grandi ampiezze dioscillazione, l’ipotesi di linearita delle equazioni del moto perde la sua validita ed il Principio diSovrapposizione degli Effetti non e piu applicabile. Tuttavia, nelle analisi dei moti nave che nonrichiedono particolare accuratezza, le assunzioni precedenti sono in parte mantenute anche per leequazioni nonlineari, e l’esperienza mostra che esiste ancora un accordo spesso soddisfacente traprevisioni teoriche e risultati sperimentali.
A conclusione, bisogna osservare che, oltre alle forze agenti in acqua tranquilla ed in mareondoso, la nave puo trovarsi sotto l’influenza di molte altre forze quali, ad esempio, le forze dicorrente, il carico del vento sull’opera morta e sulle sovrastrutture, la pressione dell’acqua sultimone e le forze centrifughe d’inerzia durante una manovra di evoluzione, il tiro di cavi di tensione,ecc. Nonostante queste forze possano influenzare significativamente il comportamento dinamicodella nave, esse non modificano le caratteristiche essenziali dei moti oscillatori che avvengono anchein loro assenza. Un esame dettagliato di queste particolari categorie di forze non rientra, in sensostretto, nella materia oggetto della Teoria dei Moti Nave.
6.5 Equazioni lineari
Poiche le equazioni (6.3) e (6.8) del moto di una nave sono intrinsecamente nonlineari, nella maggiorparte dei problemi specifici si considerano, in prima approssimazione, le corrispondenti equazionilinearizzate. Queste ultime sono valide per i moti di piccola ampiezza e la loro soluzione puo esseretrovata con i metodi tradizionali del calcolo matriciale.
Direttamente dall’ipotesi sulla piccola ampiezza dei moti e delle onde segue che i termini delleequazioni del moto della nave e del moto ondoso del fluido, contenenti quadrati e prodotti dellevelocita lineari ed angolari, si presentano come termini piccoli, cioe di ordine superiore rispetto aitermini contenenti spostamenti, velocita e accelerazioni al primo grado.
Allora, mentre le equazioni della traslazione del centro di massa (6.3) rimangono formalmenteinvariate:
Mξg = Fξ ,
Mηg = Fη , (6.9)
Mζg = Fζ ,
per quelle della rotazione attorno al centro di massa, tenendo presenti le (B.8), dopo le opportunesemplificazioni, dalle (6.8) segue semplicemente:
Ixxϕ− Ixzψ = Mx ,
Iyy θ = My , (6.10)
Izzψ − Ixzϕ = Mz .
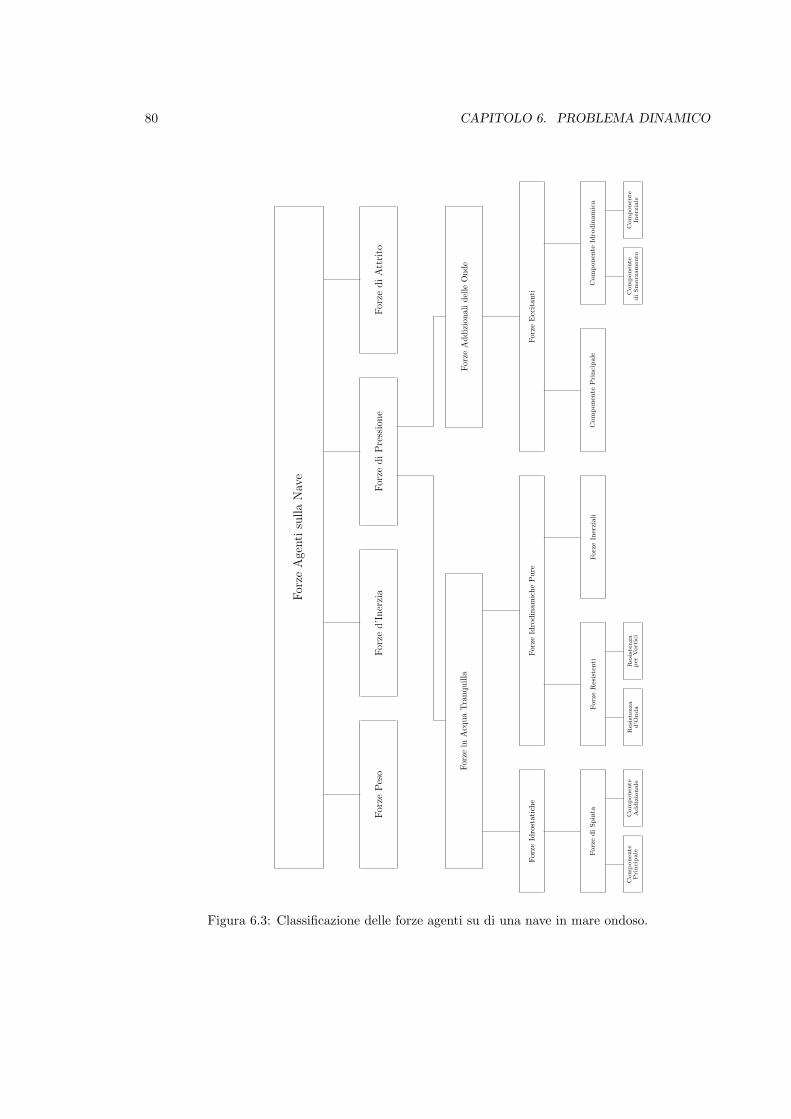
80 CAPITOLO 6. PROBLEMA DINAMICO
Com
ponente
Pri
ncip
ale
Com
ponente
Addiz
ionale
Resi
stenza
d’O
nda
Resi
stenza
per
Vort
ici
Com
ponente
diSm
orz
am
ento
Com
ponente
Inerz
iale
Forz
ediSpin
taForz
eR
esis
tenti
Forz
eIn
erzi
ali
Com
ponen
teP
rinci
pale
Com
ponen
teId
rodin
am
ica
Forz
eId
rost
ati
che
Forz
eId
rodin
am
iche
Pure
Forz
eE
ccit
anti
Forz
ein
Acq
uaTra
nqui
llaFo
rze
Add
izio
nali
delle
Ond
e
For
zePes
oFor
zed’Iner
zia
For
zediP
ress
ione
For
zediA
ttri
to
For
zeA
genti
sulla
Nav
e
Figura 6.3: Classificazione delle forze agenti su di una nave in mare ondoso.

6.5. EQUAZIONI LINEARI 81
Le equazioni (6.9) e (6.10) costituiscono l’insieme delle equazioni lineari dei moti nave. Nell’ordineesse descrivono i moti di abbrivio, scarroccio, sussulto, rollio, beccheggio e imbardata.
Nelle relazioni precedenti, si assume tacitamente che tutte le componenti del peso della navesiano distribuite simmetricamente rispetto al piano diametrale, ovvero che il centro di massa dellanave si trovi nel piano di simmetria longitudinale della nave (yG = 0) e che in posizione di riposoesso sia situato all’ordinata ζG0 relativamente al piano di galleggiamento di equilibrio. Inoltre,nelle applicazioni pratiche, viene spesso introdotta un’ulteriore semplificazione per le (6.10). Essaconsiste nel supporre che l’asse principale d’inerzia in direzione longitudinale sia parallelo all’inter-sezione del piano diametrale e del piano di galleggiamento diritto, corrispondente alla posizione diequilibrio della nave in acqua tranquilla. L’asse principale d’inerzia trasversale e allora perpendi-colare al piano diametrale, ovvero parallelo al piano di galleggiamento di equilibrio, mentre l’asseverticale e perpendicolare agli altri due. In questo caso, la terna solidale Gxyz diviene una ternaprincipale d’inerzia e conseguentemente si annulla il momento centrifugo rollio-imbardata, ovveroIxz = 0.
Su di una nave reale le precedenti ipotesi sulla distribuzione dei pesi non sono soddisfatte insenso stretto. Tuttavia, assumendole per vere non si introducono apprezzabili errori nei risultatifinali di previsione dei moti. Per questo, in alcuni casi particolari, addirittura lo scostamento ζG0
tra il baricentro ed il piano di galleggiamento di equilibrio puo essere trascurato in quanto ritenutopiccolo (baricentro situato nel piano di galleggiamento).
Nelle applicazioni teoriche, con riferimento alle (6.9) e (6.10), conviene scrivere le equazionilineari del moto in termini piu compatti, ovvero:
6∑
k=1
Mjk uk = Fj(t) , j = 1, 2, . . . , 6 (6.11)
dove Mjk rappresenta la componente generica della matrice d’inerzia della nave, la uk e l’accele-razione del moto k-esimo e la Fj la componente della forza o del momento agente nella direzionej-esima. Le (6.11) presentano al primo membro le componenti delle forze/momenti d’inerzia,mentre al secondo compaiono le componenti di tutte le forze/momenti esterne agenti sulla na-ve. Per semplicita, queste ultime vengono spesso chiamate componenti delle forze generalizzate osemplicemente componenti delle forze.
In base al modello di suddivisione delle forze, secondo lo schema generale visto al Paragrafo 6.4,si puo percio scrivere:
Fj = FRj + FH
j + FWj + FF
j , (6.12)
dove:
FRj = FG
j + FBj , j = 1, 2, . . . , 6 . (6.13)
Nelle relazioni precedenti FGj sono le forze peso (weight forces), FB
j le forze idrostatiche di spinta(buoyancy forces), FR
j le forze di richiamo (restoring forces), FHj le forze idrodinamiche pure
(hydrodynamic forces), FWj le forze eccitanti delle onde (wave exciting forces) e FF
j le forze diattrito (frictional damping forces). Le componenti delle forze generalizzate saranno esaminate inmaggiore dettaglio nei paragrafi successivi.
Da un confronto delle equazioni (6.9), (6.10) e (6.11), per la matrice d’inerzia si puo scrivere:
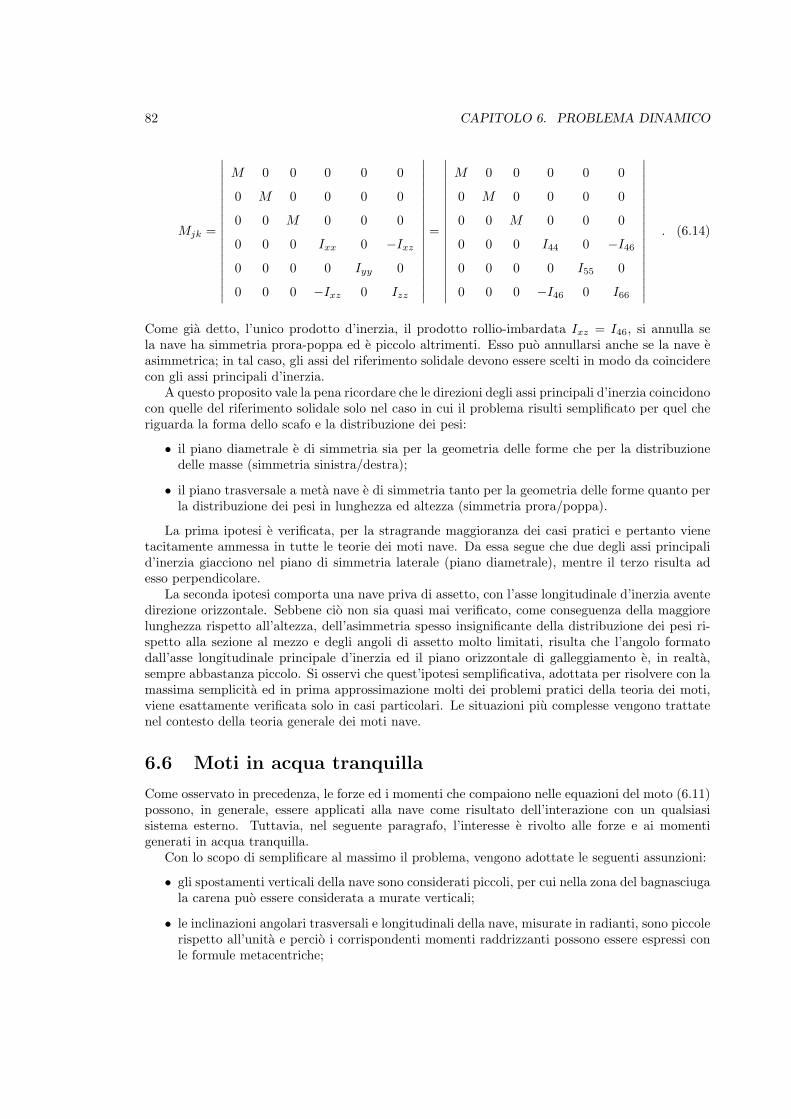
82 CAPITOLO 6. PROBLEMA DINAMICO
Mjk =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
M 0 0 0 0 0
0 M 0 0 0 0
0 0 M 0 0 0
0 0 0 Ixx 0 −Ixz
0 0 0 0 Iyy 0
0 0 0 −Ixz 0 Izz
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
M 0 0 0 0 0
0 M 0 0 0 0
0 0 M 0 0 0
0 0 0 I44 0 −I46
0 0 0 0 I55 0
0 0 0 −I46 0 I66
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
. (6.14)
Come gia detto, l’unico prodotto d’inerzia, il prodotto rollio-imbardata Ixz = I46, si annulla sela nave ha simmetria prora-poppa ed e piccolo altrimenti. Esso puo annullarsi anche se la nave easimmetrica; in tal caso, gli assi del riferimento solidale devono essere scelti in modo da coinciderecon gli assi principali d’inerzia.
A questo proposito vale la pena ricordare che le direzioni degli assi principali d’inerzia coincidonocon quelle del riferimento solidale solo nel caso in cui il problema risulti semplificato per quel cheriguarda la forma dello scafo e la distribuzione dei pesi:
• il piano diametrale e di simmetria sia per la geometria delle forme che per la distribuzionedelle masse (simmetria sinistra/destra);
• il piano trasversale a meta nave e di simmetria tanto per la geometria delle forme quanto perla distribuzione dei pesi in lunghezza ed altezza (simmetria prora/poppa).
La prima ipotesi e verificata, per la stragrande maggioranza dei casi pratici e pertanto vienetacitamente ammessa in tutte le teorie dei moti nave. Da essa segue che due degli assi principalid’inerzia giacciono nel piano di simmetria laterale (piano diametrale), mentre il terzo risulta adesso perpendicolare.
La seconda ipotesi comporta una nave priva di assetto, con l’asse longitudinale d’inerzia aventedirezione orizzontale. Sebbene cio non sia quasi mai verificato, come conseguenza della maggiorelunghezza rispetto all’altezza, dell’asimmetria spesso insignificante della distribuzione dei pesi ri-spetto alla sezione al mezzo e degli angoli di assetto molto limitati, risulta che l’angolo formatodall’asse longitudinale principale d’inerzia ed il piano orizzontale di galleggiamento e, in realta,sempre abbastanza piccolo. Si osservi che quest’ipotesi semplificativa, adottata per risolvere con lamassima semplicita ed in prima approssimazione molti dei problemi pratici della teoria dei moti,viene esattamente verificata solo in casi particolari. Le situazioni piu complesse vengono trattatenel contesto della teoria generale dei moti nave.
6.6 Moti in acqua tranquilla
Come osservato in precedenza, le forze ed i momenti che compaiono nelle equazioni del moto (6.11)possono, in generale, essere applicati alla nave come risultato dell’interazione con un qualsiasisistema esterno. Tuttavia, nel seguente paragrafo, l’interesse e rivolto alle forze e ai momentigenerati in acqua tranquilla.
Con lo scopo di semplificare al massimo il problema, vengono adottate le seguenti assunzioni:
• gli spostamenti verticali della nave sono considerati piccoli, per cui nella zona del bagnasciugala carena puo essere considerata a murate verticali;
• le inclinazioni angolari trasversali e longitudinali della nave, misurate in radianti, sono piccolerispetto all’unita e percio i corrispondenti momenti raddrizzanti possono essere espressi conle formule metacentriche;

6.6. MOTI IN ACQUA TRANQUILLA 83
• gli effetti inerziali dovuti all’azione dell’acqua vengono considerati esplicitamente, includendonelle equazioni dei moti le masse aggiunte;
• gli effetti delle onde irradiate dalla nave nei moti oscillatori sono inclusi nelle equazioni delmoto per il tramite delle forze smorzanti;
• le forze di attrito dell’acqua (resistenza del mezzo) sono assunte come trascurabili.
La classificazione delle forze sara fatta in accordo allo schema del Paragrafo 6.4. In primoluogo, per il calcolo delle forze e dei momenti idrostatici di richiamo verranno riprese alcune rela-zioni di Statica della Nave. Successivamente saranno considerate le forze di natura idrodinamica,considerando dapprima il caso del moto di un corpo immerso in un fluido ideale illimitato per pas-sare poi a trattare quello di un corpo galleggiante che si muove sulla superficie di separazione tradue mezzi. Per questo, nell’esaminare le caratteristiche intrinseche dell’interazione solido-liquidonon si potra prescindere dai risultati ottenuti nell’ambito piu generale della fluidodinamica teoricarelativamente al caso di fluidi ideali a moto potenziale. Entrare nei dettagli del problema esuladagli scopi della presente trattazione, per cui saranno esposti nel seguito in modo sintetico solo iprincipali risultati di esplicito interesse.
6.6.1 Forze idrostatiche di richiamo
Per determinare le forze idrostatiche di richiamo o semplicemente forze di richiamo (restoringforces), si deve tener presente che esse sono dovute all’azione combinata delle forze peso (weightforces) della nave e delle forze di spinta (buoyancy forces) dell’acqua. Le corrispondenti forze emomenti, agenti sulla nave soggetta a spostamenti nei sei gradi di liberta, risultano percio:
FRj = FG
j + FBj = −
6∑
k=1
Cjkuk , j = 1, 2, . . . , 6 (6.15)
essendo FGj le componenti delle forze peso, FB
j le componenti delle forze di spinta e Cjk i coefficientidella matrice di richiamo. Nel modello di suddivisione, le forze di richiamo si identificano con lacomponente addizionale della spinta.
Poiche la pressione idrostatica sulla carena non dipende dagli spostamenti di abbrivio, scarroccioe imbardata, ne segue che le forze ed i momenti di richiamo sono presenti solo nei moti di sussulto,rollio e beccheggio. In un generico riferimento O xy z solidale alla nave, avente l’origine sul pianodiametrale e gli assi paralleli ed equiversi a quello centrale, i ben noti risultati di Geometria eStatica della Nave comportano le relazioni seguenti:
FR1 = FG
1 + FB1 = 0 ,
FR2 = FG
2 + FB2 = 0 ,
FR3 = FG
3 + FB3 = −ρgAW [ζg − (xF − xG)θ] ,
FR4 = FG
4 + FB4 = −ρgV
(IT
V− zB + zG
)ϕ , (6.16)
FR5 = FG
5 + FB5 = ρgAW (xF − xG)ζg − ρgV
(IL
V− zB + zG
)θ ,
FR6 = FG
6 + FB6 = 0 ,
essendo:
AW =∫
L
B(x) dx ,

84 CAPITOLO 6. PROBLEMA DINAMICO
AW xF =∫
L
xB(x) dx ,
IT =∫
S
y2 dy dx , (6.17)
IL =∫
L
(x− xG)2B(x) dx = IFL + AW (xF − xG)2 .
I segni meno nella terza, quarta e quinta delle (6.16) tengono conto del fatto che le forze ed imomenti agenti sono di richiamo, ovvero hanno verso opposto a quello del corrispondente sposta-mento.
Si noti che i tradizionali calcoli di Geometria e Statica della Nave vengono fatti in un riferimentoO x y z solidale alla nave, diverso da quello centrale Gxyz usato per la soluzione del problemadei moti, nel quale xG = yG = zG = 0. Per questo motivo, nelle (6.16) e (6.17) si e volutofar comparire esplicitamente le differenze xF − xG = XGF e zB − zG = −ZBG di immediatosignificato ingegneristico.
Tenendo conto di questo fatto, le espressioni (6.16) per le componenti trasversale e longitudinaledel momento delle forze agenti possono essere ulteriormente semplificate. Essendo:
IT
V− zB + zG = BMT − ZBG = BMT − (KG−KB) = KMT −KG = GMT ,
IFL
V− zB + zG = BML − ZBG = BML − (KG−KB) = KML −KG = GML , (6.18)
segue nell’ordine:
FR4 = −ρgV GMT ϕ ,
FR5 = ρgAW XGFζg − ρgV
[GML +
AW XGF 2
V
]θ . (6.19)
In definitiva, confrontando le relazioni precedenti con la (6.15), si puo scrivere:
C33 = ρgAW ,
C44 = ρgV GMT ,
C55 = ρgV
[GML +
AW XGF 2
V
], (6.20)
C35 = C53 = −ρg AW XGF ,
mentre tutti gli altri coefficienti sono nulli. La matrice di richiamo assumera percio la forma:
Cjk =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
0 0 0 0 0 0
0 0 0 0 0 0
0 0 C33 0 C35 0
0 0 0 C44 0 0
0 0 C53 0 C55 0
0 0 0 0 0 0
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
. (6.21)
Come si puo vedere, l’approssimazione di piccola ampiezza comporta una notevole semplificazionedelle sei equazioni del moto.

6.6. MOTI IN ACQUA TRANQUILLA 85
6.6.2 Forze idrodinamiche in un fluido illimitato
Nello studio del moto di un corpo rigido in un fluido ideale illimitato (corpo immerso), il problemaidrodinamico fondamentale consiste nel determinare le forze di interazione solido-liquido, ovverole forze generalizzate agenti nei sei gradi di liberta. Il problema risulta piu semplice in assenza diviscosita (fluido ideale), quando le forze agenti sono le sole forze di pressione dell’acqua. In questocaso esse si riducono alle forze idrodinamiche pure.
Si puo dimostrare che, in assenza di superficie libera, tali forze sono proporzionali alle accelera-zioni nell’atto di moto generico, ovvero si tratta di forze inerziali. Indicando percio con j e con krispettivamente la componente della forza generalizzata agente e quella dell’accelerazione del corpolungo una terna di assi solidali (assi corpo), segue:
FHj = −
6∑
k=1
Ajkuk , j = 1, 2, . . . , 6 . (6.22)
I coefficienti di proporzionalita Ajk prendono il nome di coefficienti di massa aggiunta. Essi sonodeterminati dalla seguente matrice:
Ajk =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
A11 A12 A13 A14 A15 A16
A21 A22 A23 A24 A25 A26
A31 A32 A33 A34 A35 A36
A41 A42 A43 A44 A45 A46
A51 A52 A53 A54 A55 A56
A61 A62 A63 A64 A65 A66
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
. (6.23)
Si puo dimostrare che gli elementi della matrice (6.23) dipendono solo dalla forma del corpo edalla direzione in cui avviene l’atto di moto. Tuttavia, non tutti i 36 coefficienti sono tra loroindipendenti in quanto deve essere verificata la condizione di simmetria:
Ajk = Akj . (6.24)
Il numero degli Ajk indipendenti e dunque eguale a 21. Se pero il corpo possiede simmetria diforma, il loro numero si riduce ulteriormente.
In particolare, per un corpo avente simmetria rispetto al piano Oxy si ha:
A13 = A14 = A15 = A23 = A24 = A25 = A36 = A46 = A56 = 0 . (6.25)
Se il piano di simmetria coincide con il piano Oxz, allora:
A12 = A14 = A16 = A23 = A25 = A34 = A36 = A45 = A56 = 0 , (6.26)
mentre se corrisponde al piano Oyz, segue:
A12 = A13 = A14 = A25 = A26 = A35 = A36 = A45 = A46 = 0 . (6.27)
In definitiva, per un corpo con un solo piano di simmetria il numero dei coefficienti di massaaggiunta fra loro indipendenti si riduce a 12, con due piani di simmetria diviene 8 e con tre piani disimmetria passa a 6. In quest’ultimo caso sono diversi da zero solo i coefficienti con indici eguali,cioe quelli sulla diagonale principale della matrice (6.23). Da un punto di vista pratico, le situazioniconsiderate corrispondono rispettivamente al sottomarino, al siluro ed alla sfera.

86 CAPITOLO 6. PROBLEMA DINAMICO
6.6.3 Forze idrodinamiche in un fluido con superficie libera
L’interazione solido-liquido diviene piu complessa se si considera un corpo in moto sulla superficielibera del fluido (corpo galleggiante), ad esempio una nave di superficie o un veicolo marino. Inquesto caso, sempre nell’ipotesi di fluido ideale, e quindi della presenza di sole forze idrodinamichepure, oltre alle forze inerziali si generano anche forze di altro tipo, ovvero forze proporzionalialla velocita o forze resistenti. Si tratta di forze associate alla dissipazione di energia tramite leonde generate dal movimento del corpo nei sei gradi di liberta, che vengono dette percio forze diresistenza d’onda. In termini analitici, la forza idrodinamica pura agente sul corpo sara percio:
FHj = −
6∑
k=1
Ajkuk −6∑
k=1
Bjkuk , j = 1, 2, . . . , 6 . (6.28)
Nella relazione precedente viene mantenuto il significato degli indici, essendo j la direzione diproiezione della forza e k la direzione di proiezione sia dell’accelerazione che della velocita sugliassi di un riferimento solidale (assi corpo).
I coefficienti Ajk conservano il significato gia visto al paragrafo precedente, mentre i coefficientidi proporzionalita Bjk prendono il nome di coefficienti di smorzamento. Si dimostra che i coeffi-cienti di smorzamento dipendono solo dalla forma del corpo e dalla direzione in cui avviene l’attodi moto. Essi sono determinati dalla matrice:
Bjk =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
B11 B12 B13 B14 B15 B16
B21 B22 B23 B24 B25 B26
B31 B32 B33 B34 B35 B36
B41 B42 B43 B44 B45 B46
B51 B52 B53 B54 B55 B56
B61 B62 B63 B64 B65 B66
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
. (6.29)
Per la matrice precedente valgono le stesse proprieta viste nel caso dei coefficienti di massa aggiunta.I risultati fin qui esposti possono essere applicati facilmente al caso particolare di una nave
avente simmetria di forma rispetto al piano diametrale. Per la matrice delle masse aggiunte, si haallora:
Ajk =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
A11 0 A13 0 A15 0
0 A22 0 A24 0 A26
A31 0 A33 0 A35 0
0 A42 0 A44 0 A46
A51 0 A53 0 A55 0
0 A62 0 A64 0 A66
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
, (6.30)
mentre per la matrice dei coefficienti di smorzamento risulta:

6.6. MOTI IN ACQUA TRANQUILLA 87
Bjk =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
B11 0 B13 0 B15 0
0 B22 0 B24 0 B26
B31 0 B33 0 B35 0
0 B42 0 B44 0 B46
B51 0 B53 0 B55 0
0 B62 0 B64 0 B66
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
. (6.31)
Per una nave dotata anche di simmetria prora/poppa le matrici (6.30) e (6.31) si semplificanoulteriormente, essendo infatti A13 = A15 = A24 = A46 = 0 e B13 = B15 = B24 = B46 = 0. Ingenerale, per le navi di forma qualsiasi questi coefficienti sono relativamente piccoli per cui, moltospesso, vengono trascurati in una trattazione di prima approssimazione.
Senza entrare nel merito del calcolo esplicito dei coefficienti idrodinamici delle (6.30) e (6.31),bisogna osservare che nell’ambito di una trattazione linearizzata dei moti nave, il fluido puo essereconsiderato come delimitato dalla superficie di acqua tranquilla e dalla superficie bagnata di carenanelle condizioni di equilibrio statico. Ne segue che essi vengono determinati scegliendo il polo perla riduzione dei moti in un punto appartenente al piano di galleggiamento e precisamente quellocoincidente con l’origine del sistema degli assi solidali O′x′y′z′ (riferimento solidale al mezzo).Tuttavia, nello scrivere le equazioni dei moti nave conviene scegliere come riferimento solidale alcorpo un sistema di coordinate Gxyz, avente l’origine nel centro di massa e gli assi paralleli edequiversi a quello precedente (riferimento solidale centrale).
Nel passare da un riferimento all’altro, si pone ovviamente il problema di trasformare i coef-ficienti idrodinamici calcolati in un sistema di coordinate nei corrispondenti coefficienti calcolatinell’altro sistema di riferimento. In particolare, se la nave e dotata di simmetria trasversale dimassa, indicando con (x′G, 0, z′G) le coordinate del centro di massa nel riferimento degli assi corpocon origine a meta nave, valgono le relazioni seguenti (Blagovescenskij, 1954):
A11 = A011 ,
A13 = A013 ,
A15 = A015 − z′GA0
11 + x′GA013 ,
A22 = A022 ,
A24 = A024 + z′GA0
22 ,
A26 = A026 − x′GA0
22 ,
A33 = A033 , (6.32)
A35 = A035 + x′GA0
33 − z′GA013 ,
A44 = A044 + z′2GA0
22 + 2z′GA024 ,
A46 = A046 − x′Gz′GA0
22 − x′GA024 + z′GA0
26 ,
A55 = A055 + z′2GA0
11 + x′2GA033 − 2x′Gz′GA0
13 − 2z′GA015 + 2x′GA0
35 ,
A66 = A066 + x′2GA0
22 − 2x′GA026 .
Forma analoga assumono le formule per la trasformazione dei coefficienti di smorzamento, per iquali risulta:
B11 = B011 ,
B13 = B013 ,
B15 = B015 − z′GB0
11 + x′GB013 ,

88 CAPITOLO 6. PROBLEMA DINAMICO
B22 = B022 ,
B24 = B024 + z′GB0
22 ,
B26 = B026 − x′GB0
22 ,
B33 = B033 , (6.33)
B35 = B035 + x′GB0
33 − z′GB013 ,
B44 = B044 + z′2GB0
22 + 2z′GB024 ,
B46 = B046 − x′Gz′GB0
22 − x′GB024 + z′GB0
26 ,
B55 = B055 + z′2GB0
11 + x′2GB033 − 2x′Gz′GB0
13 − 2z′GB015 + 2x′GB0
35 ,
B66 = B066 + x′2GB0
22 − 2x′GB026 .
Nelle relazioni precedenti l’indice 0 si riferisce alle grandezze calcolate nel sistema di riferimentosolidale al corpo con l’origine nel punto O′ (riferimento solidale al mezzo), mentre i coefficientisenza indice sono determinati nel sistema centrale di coordinate solidali con l’origine nel baricen-tro G (riferimento solidale centrale). Per il caso specifico, le masse aggiunte ed i coefficienti dismorzamento non inclusi nell’elenco sono tutti nulli.
6.7 Moti in onde regolari
Come detto espressamente al Paragrafo 6.4, le forze ed i momenti nelle equazioni del moto (6.11)possono essere applicati alla nave come conseguenza dell’interazione con un qualsiasi altro sistemaesterno. Nella trattazione seguente, l’interesse sara rivolto alle forze ed ai momenti generati da unsistema di onde incidenti, cioe alle forze/momenti eccitanti.
Si consideri percio una nave che si muove in un fluido ideale, rispetto ad un dato sistema di onderegolari, con velocita di avanzo ed angolo di rotta entrambi prefissati. In tal caso le forze generaliz-zate Fj di interazione solido-fluido sono funzioni sia dei moti nave nei sei possibili gradi di liberta(spostamento, velocita, accelerazione) sia dello spostamento, della velocita e dell’accelerazione dellasuperficie libera del mare. Ne segue:
Fj(t) = Fj(ζw, ζw, ζw;uk, uk, uk) , j = 1, 2, . . . , 6 . (6.34)
Se l’ampiezza delle onde incidenti e piccola sia rispetto alla lunghezza propria che rispetto allalunghezza nave, anche i moti risultanti saranno generalmente piccoli. Usando lo sviluppo di Taylorper ottenere un’approssimazione lineare dell’espressione (6.34), si ottiene:
Fj(t) = aj ζw + bj ζw + cjζw −6∑
k=1
(Ajk uk +Bjk uk +Cjkuk) , j = 1, 2, . . . , 6 (6.35)
dove i coefficienti aj , bj , cj , Ajk, Bjk, Cjk sono funzioni della lunghezza (o della frequenza)dell’onda, della velocita di avanzo della nave e della forma di carena, mentre aj , bj e cj sono anchefunzioni dell’angolo di rotta.
Sostituendo le (6.35) nelle (6.11), seguono le sei equazioni generali per i moti nave di piccolaampiezza:
6∑
k=1
[(Mjk + Ajk)uk + Bjkuk + Cjkuk] = FWj (t) , j = 1, 2, . . . , 6 (6.36)
dove le forze ed i momenti di eccitazione dovuti all’azione ondosa (forze addizionali delle onde)sono:
FWj (t) = aj ζw + bj ζw + cjζw , j = 1, 2, . . . , 6 . (6.37)

6.7. MOTI IN ONDE REGOLARI 89
E consueto mettere in relazione i moti della nave con la depressione che l’onda presenta, istantedopo istante, nell’origine del riferimento mobile Oξηζ in assenza della carena, origine che sta sullaverticale per G0, posizione di equilibrio del baricentro. Tale precisazione si rende necessaria inquanto il sistema ondoso e distorto dalla presenza della carena o, al limite, non definibile in quantotale punto si trova spesso all’interno dello scafo.
Per questo, in accordo con i risultati ottenuti al Capitolo 2 e validi per un osservatore assoluto,la depressione ondosa (2.8) in un punto di coordinate (ξ0, η0) puo essere scritta nella forma:
ζ0w = a cos(ωt− kξ0) , (6.38)
dove il tempo viene misurato a partire da un istante arbitrario prefissato. Passando al sistemainerziale in moto con la velocita media U di avanzo della nave (riferimento di seakeeping), ladepressione ondosa nel punto (ξ, η) del riferimento mobile, per mezzo delle (6.1), diviene:
ζw = a cos(ωet− ξk cosχ + ηk sin χ) , (6.39)
avendosi supposto che all’istante iniziale t = 0, l’origine del riferimento mobile coincida con l’originedel riferimento fisso in cui e presente un cavo dell’onda. Nella relazione precedente, χ e l’angolo dirotta, ovvero l’angolo che l’asse Oξ forma con l’asse O0ξ0.
Dall’equazione (6.39), posto ξ = η = 0, segue per la depressione ondosa nell’origine dellecoordinate:
ζw(0, 0; t) = a cosωet . (6.40)
In questo stesso punto, la velocita e l’accelerazione del profilo ondoso sono nell’ordine:
ζw(0, 0; t) = −aωe sin ωet , (6.41)
ζw(0, 0; t) = −aω2e cosωet . (6.42)
Sostituendo le relazioni (6.40), (6.41) e (6.42) nella (6.37), con semplici operazioni algebriche, siottiene:
FWj =
(FW
j
)0cos(ωet + γj) , j = 1, 2, . . . , 6 (6.43)
dove le ampiezze di eccitazione sono date da:(FW
j
)0
= a√
(cj − ω2eaj)2 + (ωebj)2 , j = 1, 2, . . . , 6 (6.44)
mentre per le fasi risulta:
tan γj =ωebj
cj − ω2eaj
, j = 1, 2, . . . , 6 . (6.45)
In altri termini, l’azione di un sistema di onde regolari su di una nave si manifesta attraverso uninsieme di forze e momenti variabili nel tempo con legge armonica.
Sostituendo la (6.43) nelle equazioni del moto (6.36), si puo infine scrivere:
6∑
k=1
[(Mjk + Ajk)uk + Bjkuk + Cjkuk] =(FW
j
)0cos(ωet + γj) , j = 1, 2, . . . , 6 (6.46)
dove nel membro di destra compaiono solo le forze eccitanti delle onde.Come gia detto, le equazioni (6.46) possono essere risolte con i metodi classici del calcolo
matriciale. Le loro soluzioni hanno la forma generale:
uj = (uj)0 cos(ωet + δj) , j = 1, 2, . . . , 6 . (6.47)
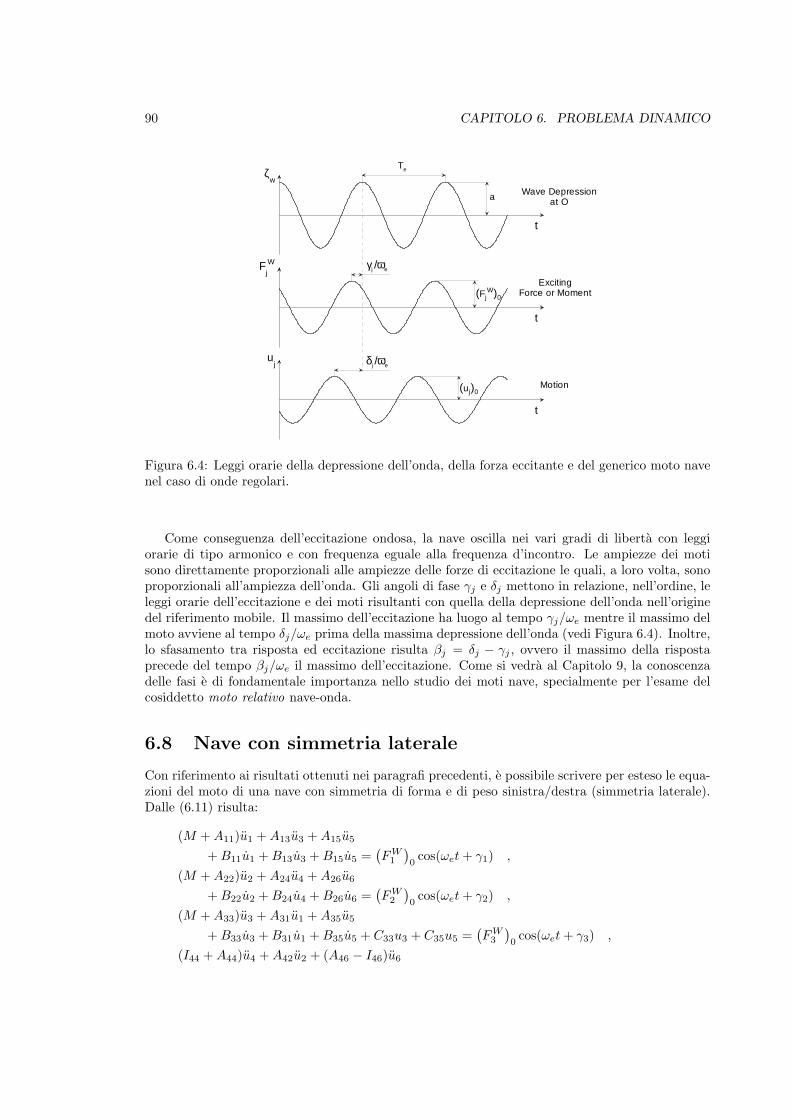
90 CAPITOLO 6. PROBLEMA DINAMICO
t
ζw
t
Fj
W
t
uj
Te
γj /ωe
δj /ωe
a
(FjW)0
(uj)0
Wave Depressionat O
ExcitingForce or Moment
Motion
Figura 6.4: Leggi orarie della depressione dell’onda, della forza eccitante e del generico moto navenel caso di onde regolari.
Come conseguenza dell’eccitazione ondosa, la nave oscilla nei vari gradi di liberta con leggiorarie di tipo armonico e con frequenza eguale alla frequenza d’incontro. Le ampiezze dei motisono direttamente proporzionali alle ampiezze delle forze di eccitazione le quali, a loro volta, sonoproporzionali all’ampiezza dell’onda. Gli angoli di fase γj e δj mettono in relazione, nell’ordine, leleggi orarie dell’eccitazione e dei moti risultanti con quella della depressione dell’onda nell’originedel riferimento mobile. Il massimo dell’eccitazione ha luogo al tempo γj/ωe mentre il massimo delmoto avviene al tempo δj/ωe prima della massima depressione dell’onda (vedi Figura 6.4). Inoltre,lo sfasamento tra risposta ed eccitazione risulta βj = δj − γj , ovvero il massimo della rispostaprecede del tempo βj/ωe il massimo dell’eccitazione. Come si vedra al Capitolo 9, la conoscenzadelle fasi e di fondamentale importanza nello studio dei moti nave, specialmente per l’esame delcosiddetto moto relativo nave-onda.
6.8 Nave con simmetria laterale
Con riferimento ai risultati ottenuti nei paragrafi precedenti, e possibile scrivere per esteso le equa-zioni del moto di una nave con simmetria di forma e di peso sinistra/destra (simmetria laterale).Dalle (6.11) risulta:
(M + A11)u1 + A13u3 + A15u5
+ B11u1 + B13u3 + B15u5 =(FW
1
)0cos(ωet + γ1) ,
(M + A22)u2 + A24u4 + A26u6
+ B22u2 + B24u4 + B26u6 =(FW
2
)0cos(ωet + γ2) ,
(M + A33)u3 + A31u1 + A35u5
+ B33u3 + B31u1 + B35u5 + C33u3 + C35u5 =(FW
3
)0cos(ωet + γ3) ,
(I44 + A44)u4 + A42u2 + (A46 − I46)u6

6.8. NAVE CON SIMMETRIA LATERALE 91
+ B44u4 + B42u2 + B46u6 + C44u4 =(FW
4
)0cos(ωet + γ4) , (6.48)
(I55 + A55)u5 + A51u1 + A53u3
+ B55u5 + B51u1 + B53u3 + C53u3 + C55u5 =(FW
5
)0cos(ωet + γ5) ,
(I66 + A66)u6 + A62u2 + (A64 − I64)u4
+ B66u6 + B62u2 + B64u4 =(FW
6
)0cos(ωet + γ6) .
Il sistema di equazioni differenziali del secondo ordine (6.48) descrive i moti di piccola ampiezzasotto l’azione di onde regolari piane. Poiche nelle equazioni precedenti e stato mantenuto, persemplicita di notazione, il simbolismo finora usato, tutti i coefficienti si devono intendere calcolatinel riferimento solidale centrale. La trasformazione dei coefficienti idrodinamici da un riferimentoall’altro e data dalle (6.32) e (6.33), mentre per i momenti d’inerzia valgono le ben note regoledella Meccanica Razionale.
Le equazioni (6.48) sono state ottenute nell’approssimazione lineare della teoria dei moti navein cui gli spostamenti, le velocita e le accelerazioni vengono considerate come infinitesimi di primoordine, gli infinitesimi di ordine superiore essendo trascurati. Le equazioni di numero dispari, ovverola prima, la terza e la quinta, contengono solo gli spostamenti di abbrivio, sussulto, beccheggioe le loro derivate, cioe le caratteristiche delle oscillazioni piane verticali e di quelle longitudinali.Il sistema di queste equazioni prende il nome di equazioni differenziali dei moti longitudinali osimmetrici (moti piani verticali e moto longitudinale). Le equazioni di numero pari, ovvero laseconda, la quarta e la sesta, contengono invece solo gli spostamenti di scarroccio, rollio, imbardatae le loro derivate, cioe caratterizzano le oscillazioni piane orizzontali e quelle trasversali. Questosistema di equazioni viene spesso chiamato equazioni differenziali dei moti laterali o antisimmetrici(moti piani orizzontali e moto trasversale). Cosı non solo sussulto, beccheggio e abbrivio non sonoinfluenzati dai moti laterali ma nemmeno i moti di scarroccio, rollio e imbardata sono influenzatidai moti longitudinali. Questo consente di considerare separatamente i moti longitudinali e quellilaterali. Il risultato non e necessariamente vero per moti di grande ampiezza.
Per una nave con simmetria rispetto al piano diametrale, i moti longitudinali e trasversalipossono essere considerati separatamente. Per navi o veicoli marini privi di tale simmetria, inseguito alle forme asimmetriche delle sezioni immerse oppure a causa di uno sbandamento iniziale,essi sono invece legati fra loro secondo le (6.10) che hanno validita generale. Inoltre, con riferimentoalle equazioni (6.48) si puo osservare che i coefficienti di accoppiamento fra abbrivio e sussulto e fraabbrivio e beccheggio sono generalmente molto piccoli per cui e possibile ritenere nelle applicazionipratiche A13 = A15 = B13 = B15 = 0. Ci sono comunque numerose indicazioni sperimentali per cuiquesta affermazione puo essere giustificata appieno per navi di lunghezza sufficientemente elevata(nave slanciata).
Se si tralascia dal considerare il moto di abbrivio, il quale non mostra una sostanziale influenzasu sussulto e beccheggio e come tale non dipende da essi, questi due moti possono essere spessoconsiderati separatamente dal moto longitudinale e percio dipendenti solo l’uno dall’altro. Adesempio, in assenza del moto di avanzo, essi non dipendono dall’abbrivio ed inoltre risultanoindipendenti fra loro nel caso di una nave simmetrica rispetto alla sezione al mezzo (simmetria diforma prora/poppa) che si trova ad operare in posizione diritta e con chiglia orizzontale, ovverosenza inclinazione trasversale e assetto longitudinale (simmetria di peso prora/poppa). In questecondizioni particolari di nave ferma anche l’imbardata puo essere considerata indipendente dai motidi scarroccio e rollio ed inversamente gli ultimi due moti sono indipendenti dall’imbardata. Si notipero che, per l’accoppiamento idrodinamico presente, i moti di scarroccio e di rollio possono essereconsiderati indipendenti l’uno dall’altro solo per un corpo profondamente immerso, simmetricorispetto al piano orizzontale, con il centro di massa appartenente ad esso. Per una nave di superficie,i moti di scarroccio e di rollio hanno sempre luogo simultaneamente e pertanto si influenzano fraloro.
Nel seguito, per le trattazioni teoriche si fara sempre riferimento alle equazioni del moto scritte

92 CAPITOLO 6. PROBLEMA DINAMICO
in forma semplificata, mentre solo in casi particolari verranno considerate le equazioni generali(6.48). Una tale scelta e motivata appieno dalle normali esigenze ingegneristiche che richiedono lacomprensione e la soluzione dei problemi pratici, anche se con una certa approssimazione, lasciandoad altre occasioni la possibilita di applicare le teorie piu sofisticate. L’esperienza infatti insegna che,almeno nelle prime fasi progettuali, il guadagno nella precisione previsionale non risulta giustificatodi fronte alle aumentate difficolta computazionali.
Capitolo 7
Moti nave in acqua tranquilla
7.1 Introduzione
Nel seguito verra considerato il caso particolare di una nave che si trova ad operare in uno specchiodi acqua tranquilla. Spostata dalla posizione iniziale di equilibrio stabile e quindi lasciata libera,essa descrive una serie di movimenti oscillatori che vengono chiamati moti nave in acqua tranquilla.In realta, i moti nave avvengono raramente in condizioni di acqua tranquilla. Tuttavia, esiste uninteresse pratico per lo studio di questo fenomeno in quanto le proprieta caratteristiche dei motinave in presenza di mare agitato sono strettamente legate a quelle dei corrispondenti moti in acquatranquilla. Per questo saranno esaminati dapprima i moti fondamentali nel caso piu semplice dinave priva del moto di avanzo e solo successivamente verranno considerate situazioni maggiormentecomplesse.
Con riferimento ai risultati ottenuti nel Capitolo 6, si e visto che le equazioni dei moti nave(6.48) si presentano come un sistema di equazioni differenziali lineari accoppiate. Esse formanodue distinti sotto-sistemi, ciascuno dei quali e costituito da tre equazioni: il primo sistema descrivei moti longitudinali, che comprendono l’abbrivio, il sussulto ed il beccheggio, mentre il secondosistema descrive i moti laterali, i quali includono lo scarroccio, il rollio e l’imbardata. Tuttavia,quando le equazioni non sono fra loro accoppiate, ciascuno dei moti nave puo essere studiato inmodo autonomo, cioe indipendentemente dagli altri. Questi moti, detti moti liberi, non si verificanoin pratica se non in casi particolari.
Per poter considerare singolarmente i diversi tipi di moto si introduce l’ipotesi semplificativa cheil sussulto, rollio e beccheggio non risultino influenzati dai moti complementari (abbrivio, scarroccioe imbardata) e che essi possano esistere indipendentemente l’uno dall’altro (moti disaccoppiati).In questo caso, si parlera semplicemente di moti fondamentali liberi.
Perche questo accada si richiede che la velocita di avanzo sia eguale a zero e che la nave ri-sulti simmetrica rispetto ai piani diametrale e trasversale, sia nelle forme che nella distribuzionedelle masse (nell’ordine yF = yG = 0 e xF = xG = 0). Queste ipotesi restrittive, comportandoA13 = A15 = A26 = A35 = A46 = B13 = B15 = B26 = B35 = B46 = C35 = I46 = 0, sono sufficientiper assicurare che i moti fondamentali siano indipendenti l’uno dall’altro e che le oscillazioni disussulto e beccheggio non dipendano dai moti complementari. Tuttavia, nonostante le semplifica-zioni introdotte, il moto di rollio si accoppia ancora a quello di scarroccio e viceversa in quantoper una nave non possono annullarsi A24 e B24. Per chiarire alcune delle proprieta caratteristichedel moto di rollio conviene comunque trascurare tali coefficienti di accoppiamento ogni qualvoltacio si renda necessario.
93

94 CAPITOLO 7. MOTI NAVE IN ACQUA TRANQUILLA
7.2 Equazioni dei moti disaccoppiati
Al fine di presentare un’analisi completa del problema semplificato di cui al paragrafo preceden-te, saranno esaminate nel seguito le equazioni dei moti fondamentali di una nave in assenza diaccoppiamento. Si tratta di ripetere il ragionamento gia visto al Capitolo 6, con l’avvertenza difinalizzare le equazioni del moto al caso specifico qui considerato.
Nel caso di un moto in acqua tranquilla, le forze ed i momenti agenti comprendono gli effetticongiunti delle forze idrodinamiche inerziali-smorzanti, delle forze idrostatiche di richiamo e del-le forze peso. Se i moti fondamentali hanno luogo indipendentemente l’uno dall’altro e non siaccoppiano con quelli complementari, dalle (6.48) seguono le equazioni:
(M + A33)u3 + B33u3 + C33u3 = 0 ,
(I44 + A44)u4 + B44u4 + C44u4 = 0 , (7.1)(I55 + A55)u5 + B55u5 + C55u5 = 0 ,
essendo per le (6.20):
C33 = ρgAW ,
C44 = ρgV GMT , (7.2)C55 = ρgV GML .
Sostituendo le (7.2) nelle (7.1) ed usando la notazione esplicita, si ottengono le equazioni differen-ziali disaccoppiate per i moti fondamentali della nave in acqua tranquilla:
(M + A33)ζg + B33ζg + ρgAW ζg = 0 ,
(Ixx + A44)ϕ + B44ϕ + ρgV GMT ϕ = 0 , (7.3)(Iyy + A55)θ + B55θ + ρgV GMLθ = 0 .
Si tratta di un insieme di equazioni differenziali lineari omogenee del secondo ordine, a coefficientinon costanti. La prima descrive il moto di sussulto, la seconda quello di rollio e la terza quello dibeccheggio.
Dividendo per i coefficienti delle derivate seconde, dalle (7.3) segue semplicemente:
ζg + 2µζ ζg + ω2ζζg = 0 ,
ϕ + 2µϕϕ + ω2ϕϕ = 0 , (7.4)
θ + 2µθ θ + ω2θθ = 0 ,
dove sono state introdotte delle nuove notazioni. Per i coefficienti di smorzamento si ha:
µζ =B33
2(M + A33),
µϕ =B44
2(Ixx + A44), (7.5)
µθ =B55
2(Iyy + A55),
e per le frequenze naturali:
ω2ζ =
ρgAW
M + A33,
ω2ϕ =
ρgV GMT
Ixx + A44, (7.6)
ω2θ =
ρgV GML
Iyy + A55.

7.3. OSCILLAZIONI LIBERE 95
Per semplicita e conveniente considerare, in prima approssimazione, le (7.4) come un sistemadi equazioni differenziali a coefficienti costanti.
7.3 Oscillazioni libere
Con riferimento alla teoria dei moti oscillatori presentata in Appendice C, e possibile scrivere leequazioni differenziali (7.4) nella forma generale:
uj + 2µj uj + ω20juj = 0 , (7.7)
dove, per j=3, 4, 5, si ottengono rispettivamente i moti di sussulto, rollio e beccheggio. La soluzionedella (7.7) e di tipo differente a seconda che si consideri o meno l’influenza degli effetti smorzantisul moto della nave. I risultati ottenuti dall’integrazione dell’equazione del moto generico, in cuiper semplicita formale conviene tralasciare l’indice j, si possono riassumere come segue.
7.3.1 Oscillazioni libere non smorzate
Si consideri per primo il caso ideale con assenza di smorzamento (µ = 0). L’equazione del motodiviene allora:
u + ω20u = 0 . (7.8)
Si tratta dell’equazione differenziale di un moto armonico, la cui soluzione puo essere scritta nellaforma:
u(t) = C cos(ω0t + γ) , (7.9)
dove C rappresenta l’ampiezza del moto, ω0 la frequenza angolare, ω0t + γ la fase istantanea e γla fase iniziale dell’oscillazione. Le costanti d’integrazione C e γ si determinano con le condizioniiniziali, ovvero assegnando all’istante iniziale t = 0 lo spostamento u(0) = u0 e la velocita u(0) = u0
della nave.Dalla (7.9) segue che, in acqua tranquilla ed in assenza di smorzamento, una nave esegue una
serie di oscillazioni armoniche non smorzate di periodo pari a T0 = 2π/ω0. Questo si verifica siache essa venga spostata dalla posizione di equilibrio e lasciata libera (con o senza velocita iniziale),sia che nella posizione di equilibrio le venga impressa una velocita iniziale non nulla. In base alle(7.6) risulta percio che i periodi naturali dei moti di sussulto, rollio e beccheggio sono nell’ordine:
Tζ = 2π
√M + A33
ρgAW,
Tϕ = 2π
√Ixx + A44
ρgV GMT
, (7.10)
Tθ = 2π
√Iyy + A55
ρgV GML
.
Dalle relazioni precedenti e evidente che all’aumentare della stabilita trasversale della nave (GMT
piu alti) il periodo di rollio in acqua tranquilla decresce, con la conseguenza che le velocita angolariaumentano e quindi il moto diventa piu brusco ed impetuoso (nave dura). Tuttavia, come notodalla pratica di navigazione e come confermato dalla teoria dei moti nave in onde irregolari, nellecondizioni reali il periodo medio delle oscillazioni di rollio, con ampiezza piu o meno rilevante, eapprossimativamente uguale al periodo delle oscillazioni libere in acqua tranquilla. Poiche, per

96 CAPITOLO 7. MOTI NAVE IN ACQUA TRANQUILLA
assicurare una migliore tenuta al mare ed una maggiore abitabilita della nave, il moto di rollionon deve essere impetuoso ma dolce (nave cedevole), ne segue che i valori dell’altezza metacentricatrasversale non devono essere troppo grandi. In fase di progetto si cerca percio di mediare tra ledue esigenze contrastanti di stabilita ed abitabilita.
7.3.2 Oscillazioni libere smorzate
Saranno esaminate ora le oscillazioni in acqua tranquilla con presenza di smorzamento (µ 6= 0). Inquesto caso l’equazione del moto assume la forma:
u + 2µu + ω20u = 0 . (7.11)
Si tratta dell’equazione differenziale di un moto armonico smorzato. Poiche per tutti e tre i motifondamentali della nave il valore di µ non supera il 10–20% di ω0 (coefficiente adimensionale dismorzamento ν = µ/ω0 < 0.10− 0.20), la soluzione della (7.11) sara del tipo:
u(t) = A0e−µt cos(ω′0t + γ) , (7.12)
dove ω′0 e la frequenza delle oscillazioni naturali in presenza dello smorzamento, A0 l’ampiezza e γla fase iniziale dell’oscillazione. Le costanti d’integrazione si determinano con le condizioni iniziali,ovvero u(0) = u0 e u(0) = u0.
La frequenza delle oscillazioni libere smorzate e determinata dalla relazione:
ω′0 =√
ω20 − µ2 = ω0
√1− ν2 . (7.13)
Lo smorzamento comporta un’influenza molto piccola sulla frequenza naturale del moto; ne segueche nel calcolo della frequenza e del periodo di oscillazione e possibile trascurare tale effetto eritenere con buona approssimazione ω′0 ≈ ω0.
La presenza del fattore exp {−µt} nella soluzione (7.12) dell’equazione differenziale (7.11) mo-stra che le oscillazioni libere presentano un carattere smorzato, cioe la loro ampiezza decresce neltempo. E comunque importante osservare che le oscillazioni libere smorzate come pure quelle nonsmorzate hanno la proprieta dell’isocronismo, cioe dell’indipendenza del periodo dall’ampiezza delmoto. Questa proprieta e vera solamente nella misura in cui la reale situazione fisica si descrive conequazioni differenziali lineari. Se, per esempio, si rinuncia all’ipotesi della piccola ampiezza per ilmoto di rollio ed il momento di richiamo non si calcola con la formula metacentrica ma per mezzodel diagramma di stabilita, l’isocronismo non sara soddisfatto in senso stretto. In questo caso, alcontrario, si osserva una sostanziale dipendenza del periodo del moto dall’ampiezza di oscillazione.
In Figura 7.1 sono mostrate le caratteristiche delle oscillazioni della nave in acqua tranquillaper differenti valori del coefficiente di smorzamento µ. La curva µ = 0 rappresenta le oscillazioninon smorzate, mentre per µ < ω0 (ν < 1) si ottengono le oscillazioni smorzate (oscillazioni reali).Per le navi non sussistono mai le condizioni µ = ω0 (ν = 1) e µ > ω0 (ν > 1), cui corrispondonocurve proprie del moto aperiodico.
7.4 Formule approssimate per i momenti d’inerzia
Per poter calcolare i periodi naturali dei moti fondamentali della nave (rollio e beccheggio) enecessario conoscere i momenti d’inerzia di massa rispetto agli assi solidali centrali, ovvero rispettoal riferimento Gxyz usato per la soluzione del problema dinamico. Risulta allora:
Ixx =∫
M
(y2 + z2) dm ,

7.4. FORMULE APPROSSIMATE PER I MOMENTI D’INERZIA 97
Figura 7.1: Caratteristiche dei moti nave per differenti valori del coefficiente di smorzamento.
Iyy =∫
M
(x2 + z2) dm , (7.14)
Izz =∫
M
(x2 + y2) dm .
Tuttavia, da un punto di vista pratico, e piu conveniente effettuare il calcolo dei momentid’inerzia rispetto ad un sistema di assi diverso da quello sopra citato, come ad esempio quello incui viene assegnata nell’ufficio progetti la distribuzione delle masse, per poi ricavare le grandezzecercate mediante semplici formule di trasformazione (Teorema di Steiner–Huygens). Nel seguito,tale riferimento sara identificato con un generico riferimento O xy z solidale alla nave, aventel’origine sul piano diametrale e gli assi paralleli ed equiversi a quello centrale. In tal caso, per icorrispondenti momenti d’inerzia segue:
Ix x =∫
M
(y2 + z2) dm ,
Iy y =∫
M
(x2 + z2) dm , (7.15)
Iz z =∫
M
(x2 + y2) dm .
Tenendo conto della maggiore lunghezza della nave rispetto alle altre due dimensioni lineari,nelle ultime due espressioni (7.15) e possibile trascurare sotto integrale i termini y2 e z2 rispettoad x2. In questo modo, i momenti d’inerzia rispetto all’asse verticale e all’asse longitudinalepossono essere considerati uguali, determinabili come momenti d’inerzia di massa rispetto al pianotrasversale contenente l’origine delle coordinate:
Iy y = Iz z =∫
M
x2dm , (7.16)
Essendo gli assi solidali centrali Gxyz paralleli a quelli del riferimento O xy z, ne segue chei momenti d’inerzia centrali si possono ricavare da quelli precedenti per mezzo del Teorema diSteiner:
Ixx =∫
M
[(y − yG)2 + (z − zG)2
]dm = Ix x −M(y2
G + z2G) ,
Iyy =∫
M
[(x− xG)2 + (z − zG)2
]dm = Iy y −M(x2
G + z2G) , (7.17)

98 CAPITOLO 7. MOTI NAVE IN ACQUA TRANQUILLA
Izz =∫
M
[(x− xG)2 + (y − yG)2
]dm = Iz z −M(x2
G + y2G) ,
dove (xG, yG, zG) sono le coordinate del centro di massa G. Nelle relazioni precedenti le grandezzecon la barra sono calcolate nel sistema di riferimento solidale al corpo con l’origine nel punto O,mentre le grandezze senza barra sono determinate nel sistema centrale di coordinate solidali conorigine in G. Nel caso particolare, quando il riferimento dell’ufficio progetti si identifica con ilriferimento al mezzo, le relazioni precedenti si possono semplificare sostanzialmente e la riduzionedei momenti d’inerzia rispetto al riferimento del centro di massa appare piu immediata.
In particolare, le relazioni (7.17) si semplificano nel caso di una nave a simmetria laterale inquanto yG = 0. Si puo allora scrivere:
Ixx = Ix x −Mz2G ,
Iyy = Iy y −M(x2G + z2
G) , (7.18)Izz = Iz z −Mx2
G .
Tenendo presenti le (7.16), dalle (7.18) segue percio:
Iyy = Iy y −Mx2G ,
Izz = Iz z −Mx2G , (7.19)
e dunque la corrispondente eguaglianza fra i momenti centrali:
Iyy = Izz . (7.20)
Nel seguito verranno esaminati in maggiore dettaglio i problemi relativi al calcolo del momentod’inerzia longitudinale e di quello trasversale della nave. Si tratta dei momenti d’inerzia che entranodirettamente nelle relazioni che esprimono i periodi naturali dei moti di rollio e beccheggio, ovverodi due grandezze della massima importanza per la dinamica della nave.
7.4.1 Momento d’inerzia longitudinale
Il valore del momento d’inerzia longitudinale Iyy e dato dall’espressione generale (7.14), mentre larelazione (7.16) ne consente una valutazione piu immediata ed altrettanto precisa. Del livello diprecisione raggiunto con quest’ultima formula, ci si puo rendere conto immediatamente.
Si consideri per questo l’esempio pratico di un parallelepipedo rettangolo omogeneo di dimen-sioni L, B, D, eguali alle corrispondenti dimensioni principali della nave. Per il momento d’inerzialongitudinale, dalla (7.15) risulta:
Iy y =112
M(L2 + D2) =112
ML2
(1 +
D2
L2
). (7.21)
Si osservi che per le navi d’altura il valore di D/L raramente eccede 0.1. Percio, considerandoesplicitamente il contributo del termine (D/L)2 nella relazione (7.21), si potra ottenere un aumentodel momento d’inerzia definito dalla (7.16) di mezzo o al piu di uno percento. Ne segue che, percalcoli pratici, e sufficiente porre:
Iy y = 1.01∫
M
x2dm . (7.22)
La relazione (7.22), usata da alcuni autori, costituisce solo una rifinitura della (7.16), senza peraltromodificarne sostanzialmente il contenuto.
Il calcolo del momento d’inerzia longitudinale centrale Iyy basato sulla prima delle (7.19) puoessere portato a termine con una certa semplicita quando si ha a disposizione la distribuzione delle

7.4. FORMULE APPROSSIMATE PER I MOMENTI D’INERZIA 99
Figura 7.2: Castello dei pesi.
masse. Un esempio e costituito dall’istogramma di Figura 7.2 che rappresenta il ben noto castellodei pesi usato nei calcoli di robustezza longitudinale della nave. Di solito, la larghezza della strisciagenerica delimitata da due ordinate successive eguaglia quella tra le ossature ∆L = L/2n, con 2nnumero totale delle ossature. I valori riportati nell’istogramma corrispondono al peso pi, ovveroalla massa mi = pi/g, della striscia inclusa tra la i-esima e la (i + 1)-esima sezione trasversale. Ilcentro di massa delle singole striscie si trova a meta del corrispondente intervallo. Per comodita,il numero delle striscie riportate in figura e stato preso eguale a 2n = 20 cioe pari al numero degliintervalli di progetto.
Quando non e conosciuta la distribuzione longitudinale delle masse, per il calcolo del momentod’inerzia di massa Iyy si possono applicare diversi metodi approssimati. Ad esempio:
• e possibile determinarne il valore con una precisione sufficiente per le applicazioni praticheusando la formula di Pavlenko:
Iyy ≈ 0.065 CWP ML2 , (7.23)
essendo CWP il coefficiente di pienezza della figura di galleggiamento.
• esiste una formula semplice, che assume il raggio d’inerzia longitudinale pari ad un quartodella lunghezza nave, ovvero kyy = 0.25L. Ne segue:
Iyy = k2yyM = 0.0625 ML2 . (7.24)
• piu in generale, si assume:
0.24 < kyy/L < 0.26 . (7.25)
7.4.2 Momento d’inerzia trasversale
Esistono diversi metodi per il calcolo approssimato del momento d’inerzia trasversale centrale Ixx,tutti basati sull’impiego del piano di costruzione e della distribuzione delle masse. Comunque,essi risultano oltremodo laboriosi se si tien conto della precisione non troppo elevata cui alla fine

100 CAPITOLO 7. MOTI NAVE IN ACQUA TRANQUILLA
conducono. Infatti, calcolare il momento d’inerzia del fasciame esterno, dell’allestimento o diun qualsivoglia macchinario avente una geometria piu o meno complessa, risulta peraltro moltodifficile. Da un punto di vista pratico, a partire dalle (7.17), si usa la relazione:
Ixx =∑
mi
[yi
2 + (zi − zG)2]+
∑i′xx , (7.26)
essendo mi la massa della striscia i-esima, yi e zi le coordinate del suo centro di massa, i′xx ilcorrispondente momento d’inerzia rispetto al proprio baricentro. Per il calcolo di i′xx si assume disolito che la massa di ogni striscia sia distribuita uniformemente su di un rettangolo di lati y′i ez′i, ovvero:
i′xx =112
mi(y′2i + z′2i ) . (7.27)
La relazione (7.27) assicura una sufficiente precisione del calcolo solo nel caso in cui e data lasuddivisione dei pesi in un gran numero di componenti minori. Tuttavia, disponendo solo dellevoci complessive come ad esempio l’allestimento, il fasciame esterno, ecc., tale modo di procedererisulta poco utile.
Per questo, nelle applicazioni pratiche, per determinare Ixx si ricorre quasi sempre a dellerelazioni approssimate:
• la piu frequentemente usata e la formula di Doyere (1927), valida per un parallelepipedorettangolo di larghezza B ed altezza 2 KG, essendo KG l’altezza del centro di massa sullalinea di chiglia:
Ixx =M
12
(B2 + 4KG
2)
. (7.28)
• altra formula usata e quella di Pavlenko secondo la quale:
Ixx =M
12(B2 + D2
). (7.29)
• puo essere citata pure la formula di Simanskij (1954), valida per un cilindro parabolicogenerico:
Ixx = M
(C2
WP B2
11.4 CB+
D2
12
), (7.30)
dove CB e il coefficiente di pienezza totale, CWP il coefficiente di pienezza della figura digalleggiamento, B la larghezza nave e D l’altezza di costruzione.
• si puo esprimere Ixx per mezzo del raggio d’inerzia della nave, ovvero:
Ixx = k2xxM . (7.31)
Una valutazione grossolana del raggio di girazione rispetto all’asse centrale longitudinale,valida per navi di tipologia diversa, consiglia di assumere:
0.35 < kxx/B < 0.45 . (7.32)

7.5. FORMULE APPROSSIMATE PER I PERIODI NATURALI 101
• come risultato dell’analisi dei dati relativi ad un numero elevato di navi mercantili, Katoha suggerito la seguente formula empirica per migliorare il calcolo del raggio di girazionetrasversale:
(kxx
B
)2
= f
[CBCu + 1.10 Cu(1− CB)
(He
T− 2.20
)+
H2e
B2
]. (7.33)
Nella relazione precedente, f e un coefficiente dipendente dal tipo di nave, T l’immersionemedia, CB il coefficiente di pienezza totale, Cu il coefficiente di pienezza del ponte superiore,He l’altezza effettiva di costruzione:
He = D +A
L, (7.34)
essendo D l’altezza di costruzione, A l’area laterale sopra il ponte principale, comprensivadelle sovrastrutture, casseri e tughe, ed L la lunghezza fra le perpendicolari. In particolare,si ha:
f = 0.125 per le navi passeggeri, da carico e passeggeri-carico;f = 0.133 per i tankers;f = 0.177 per le baleniere;f = 0.200 per i pescherecci.
7.4.3 Momento d’inerzia centrifugo
Per completare l’analisi precedente, e necessario considerare anche il momento d’inerzia centrifugo:
Ixz =∑
mi(xi − xG)(zi − zG) . (7.35)
Per eseguire il calcolo di tale grandezza occorre disporre della distribuzione delle masse sia inlunghezza che in altezza. In generale, come osservato al Paragrafo 7.1, il valore di (7.35) none elevato e nelle applicazioni pratiche si assume quasi sempre Ixz = 0. Questo corrisponde allacondizione per cui l’asse principale d’inerzia longitudinale della nave ha direzione orizzontale.
7.5 Formule approssimate per i periodi naturali
Note che siano le proprieta idrostatiche ed inerziali della nave, e possibile determinare i periodinaturali delle oscillazioni libere. Questo problema, che a prima vista potrebbe sembrare banale,risulta oltremodo complicato in quanto i periodi dei moti dipendono dalle masse aggiunte e questeultime, a loro volta, dipendono dai periodi stessi. L’influenza dello smorzamento sul periodo delleoscillazioni libere e sempre piccola e per questo viene generalmente trascurata. In questo modo,per trovare la soluzione esatta del problema si deve utilizzare il metodo delle approssimazionisuccessive. Tuttavia, per i moti di sussulto e di beccheggio e anche possibile avvalersi del metodografico-analitico proposto da Tasai che verra illustrato nel seguito. L’estensione del metodo diTasai al moto di rollio non comporta alcun problema di principio.
Dal punto di vista pratico, e pero sufficiente disporre in primo luogo di formule meno esattema semplici e comode da maneggiare, che consentano di calcolare con rapidita i periodi delleoscillazioni libere. Per questo, nel seguito verra esaminato in maggiore dettaglio il procedimentoche porta alla maggior parte delle formule approssimate attualmente in uso.

102 CAPITOLO 7. MOTI NAVE IN ACQUA TRANQUILLA
7.5.1 Sussulto
Il periodo del moto libero di sussulto si determina in base all’equazione (7.10), ovvero:
Tζ = 2π
√M + A33
ρgAW. (7.36)
Facendo le ovvie sostituzioni:
M = ρCBLBT , AW = CWP LB , (7.37)
ed esprimendo la massa aggiunta nella forma adimensionale A′33 = A33/M , ne segue:
Tζ =2π√
g
√(1 + A′33)CV P T , (7.38)
dove CV P = CB/CWP e il coefficiente prismatico verticale della nave.Le relazioni approssimate per il calcolo del periodo naturale di sussulto si possono ottenere
dalla (7.38). In primo luogo, tenendo presente che√
g e numericamente circa uguale a π, dopoaver eseguito le necessarie semplificazioni, risulta piu semplicemente:
Tζ ≈ 2√
(1 + A′33)CV P T . (7.39)
Si osservi che per ottenere i periodi espressi in secondi, le lunghezze devono essere misurate in metri.Questo e legato al fatto che per ricavare la formula approssimata (7.39) la grandezza adimensionaleπ e stata semplificata con la grandezza dimensionale
√g, per cui la costante moltiplicativa e
implicitamente dimensionata in unita m−1/2s. Questa precisazione, qui peraltro necessaria, verrasottintesa nel seguito per casi analoghi.
Per effettuare una valutazione grossolana del periodo di sussulto con la (7.39), si procede comesegue:
• ad esempio, si puo semplicemente assumere come valori indicativi A′33 = 1.0 e CV P = 0.80.Segue allora la relazione:
Tζ ≈ 2.5√
T . (7.40)
• una maggiore precisione puo essere ottenuta migliorando la stima di A′33. Ad esempio,avvalendosi della formula empirica:
A′33 = 0.40 CWPB
T, (7.41)
dopo la sostituzione nella (7.39), risulta:
Tζ ≈ 2
√(1 + 0.40 CWP
B
T
)CV P T . (7.42)
Piu in generale, a partire dalla (7.38), il periodo naturale del moto di sussulto puo essereespresso nella forma:
Tζ = kζ
√T , (7.43)

7.5. FORMULE APPROSSIMATE PER I PERIODI NATURALI 103
con
kζ =2π√
g
√(1 + A′33)CV P . (7.44)
I valori del coefficiente kζ dipendono dal metodo usato per calcolare la massa aggiunta. Ad esempio,per una nave con la figura di galleggiamento di forma parabolica, la massa aggiunta puo veniredeterminata con l’espressione:
A33 = a033
ρπB2
4L
C2WP
1 + CWP, (7.45)
essendo a033 la massa aggiunta adimensionale della sezione al mezzo. In questo modo, considerando
con buona approssimazione a033 = 0.80, segue immediatamente:
kζ =√
4.03 CV P + 2.53CWP
1 + CWP
B
T. (7.46)
7.5.2 Beccheggio
Il periodo del moto libero di beccheggio, come visto dalla (7.10), si determina con l’espressione:
Tθ = 2π
√Iyy + A55
MgGML
, (7.47)
dove risulta:
GML =IFL
V− zB + zG = BML − ZBG . (7.48)
Da un punto di vista pratico, essendo BML >> ZBG, conviene approssimare la (7.48) nella forma:
GML ≈ IFL
V= BML , (7.49)
ovvero trascurare la differenza tra il raggio metacentrico longitudinale BML e l’altezza metacen-trica longitudinale GML. Seguono per la (7.47) le due espressioni alternative equivalenti:
Tθ ≈ 2π
√Iyy + A55
ρgIFL
= 2π
√Iyy + A55
MgBML
. (7.50)
Introducendo nelle relazioni (7.50) la grandezza adimensionale A′55 = A55/Iyy, esse possono esserescritte come:
Tθ ≈ 2π√g
√(1 + A′55)Iyy
ρIFL
=2π√
g
√(1 + A′55)k2
yy
BML
, (7.51)
essendo kyy il raggio di girazione longitudinale.Dalle (7.51) si possono ricavare alcune espressioni approssimate per il calcolo del periodo di
beccheggio. Per prima cosa, dopo aver semplificato π con√
g, segue:
Tθ ≈ 2
√(1 + A′55)Iyy
ρIFL
= 2
√(1 + A′55)k2
yy
BML
. (7.52)

104 CAPITOLO 7. MOTI NAVE IN ACQUA TRANQUILLA
Successivamente, disponendo di due espressioni alternative, si puo operare sull’una oppure sull’altraa seconda delle preferenze. Nel primo caso, per il momento d’inerzia di massa e per il momentod’inerzia della figura di galleggiamento, si pone:
Iyy = Mk2yy = ρCBLBTk2
yy ,
IFL = AW l2yy = CWP LBl2yy , (7.53)
e si considera in prima approssimazione kyy = lyy, ovvero uguali i due raggi di girazione meccanicoe geometrico. Nel secondo caso, invece, si esprime tanto il raggio d’inerzia di massa quanto il raggiometacentrico longitudinale mediante le formule empiriche:
k2yy = 0.07 L2 ,
BML =C2
WP
14 CB
L2
T. (7.54)
Sostituendo le due coppie di relazioni (7.53) e (7.54) nella (7.52), dopo aver eseguito le necessariesemplificazioni, si ottiene in entrambi i casi:
Tθ ≈ 2√
(1 + A′55)CV P T , (7.55)
essendo CV P = CB/CWP il coefficiente prismatico verticale.A partire dalla (7.55) si possono ottenere le seguenti formule approssimate:
• ponendo per valutazioni grossolane A′55 = 1.0, CV P = 0.80, segue semplicemente:
Tθ ≈ 2.5√
T . (7.56)
Confrontando quest’ultima espressione con la corrispondente formula (7.40) ottenuta per ilsussulto vediamo che, in prima approssimazione, i periodi naturali dei moti di sussulto e dibeccheggio sono fra loro uguali.
• valori leggermente minori per il periodo naturale di beccheggio si ottengono migliorando lastima di A′55 con l’utilizzo della formula empirica:
A′55 = 0.42 C2P
B
T, (7.57)
dove CP e il coefficiente di pienezza longitudinale della nave. Sostituendo nella (7.55), segue:
Tθ ≈ 2
√(1 + 0.42 C2
P
B
T
)CV P T . (7.58)
Spesso, da un punto di vista pratico, conviene ragionare in termini differenti. Per questo, vieneintrodotta la grandezza k′yy, chiamata raggio effettivo d’inerzia longitudinale:
Iyy + A55 = Mk′yy2
. (7.59)
Si noti che k′yy esprime un raggio d’inerzia in senso lato in quanto il membro di sinistra dell’equa-zione definitrice comprende la somma del momento d’inerzia di massa della nave e del momentod’inerzia di massa aggiunta mentre in quello di destra compare solo la massa della nave.
Sostituendo la (7.59) nella (7.50), per il periodo naturale di beccheggio segue:
Tθ ≈ 2π√g
k′yy√BML
. (7.60)

7.5. FORMULE APPROSSIMATE PER I PERIODI NATURALI 105
In prima approssimazione, poiche A55/M = 1.0 e kyy/L = 0.25, risulta:
k′yy/L = 0.35 . (7.61)
Sostituendo la (7.61) nell’equazione (7.60) e considerando√
g numericamente eguale a π, dopo lenecessarie semplificazioni si ottiene:
Tθ ≈ 0.70 L√BML
. (7.62)
Piu in generale, anche nel caso del moto di beccheggio conviene presentare la (7.51), che esprimeil periodo naturale, nella forma:
Tθ = kθ
√T , (7.63)
dove:
kθ =2π√
g
√(1 + A′55)Iyy
ρIFL T
. (7.64)
I valori di kθ dipendono ovviamente dal metodo di calcolo usato per determinare le grandezzeche compaiono nella relazione precedente. Ad esempio, si possono ottenere risultati abbastanzaprecisi stimando Iyy con la formula empirica (7.23) ed approssimando la figura di galleggiamentocon una parabola generalizzata. In questo caso, il momento longitudinale d’inerzia della figuradi galleggiamento ed il momento d’inerzia di massa aggiunta della nave sono determinati dallerelazioni:
IFL =
∫
L
x′2B(x′) dx′ =L3B
12CWP
3− 2 CWP,
A55 = a033
ρπB2
48L3 C2
WP
(3− CWP )(3− 2 CWP ). (7.65)
Sostituendo nella (7.64) e considerando a033 = 0.80, segue immediatamente:
kθ =√
3.14 CB(3− 2 CWP ) + 2.53CWP
3− CWP
B
T. (7.66)
7.5.3 Metodo di Tasai
Per determinare con maggiore precisione le frequenze naturali dei moti liberi di sussulto e beccheg-gio e necessario disporre dei calcoli delle masse aggiunte per i due moti. In questo caso, tenendoesplicitamente conto della dipendenza delle masse aggiunte dalla frequenza, e possibile risolverenumericamente il problema avvalendosi del metodo delle approssimazioni successive. Tuttavia, daun punto di vista pratico, conviene usare il metodo grafico-analitico proposto da Tasai. In accordocon quest’ultimo, il problema si risolve nel seguente modo.
In primo luogo, con il metodo delle sezioni piane o altro metodo equivalente, si calcolano lamassa aggiunta A33 ed il momento d’inerzia aggiunto A55 per le diverse frequenze. Le curve deicoefficienti adimensionali:
A′33 =A33
M, A′55 =
A55
Iyy, (7.67)
vengono riportate in un grafico come funzioni della frequenza adimensionale ω2T/g, essendo Tl’immersione della nave. In Figura 7.3 tali curve sono tracciate con linea continua.

106 CAPITOLO 7. MOTI NAVE IN ACQUA TRANQUILLA
Figura 7.3: Calcolo dei periodi naturali di sussulto e beccheggio con il metodo grafico-analitico diTasai.
Successivamente, a partire dalle (7.6) e tenendo conto rispettivamente delle (7.37), (7.49) e(7.53), si determinano le corrispondenti espressioni per le frequenze adimensionali:
ω2ζT
g=
ρgAW T
(M + A33)g=
ρCWP LBT
ρCBLBT (1 + A′33)=
1CV P (1 + A′33)
,
ω2θT
g=
ρgIFL T
(Iyy + A55)g=
ρCWP LBl2yyT
ρCBLBTk2yy(1 + A′55)
=l2yy
k2yyCV P (1 + A′55)
, (7.68)
o anche:
ω2θT
g=
MgBMLT
(Iyy + A55)g=
MBMLT
Mk2yy(1 + A′55)
=BMLT
k2yy(1 + A′55)
. (7.69)
Si esprimono quindi i coefficienti A′33 e A′55 come funzioni di ω2T/g:
A′33 =1
CV P
1ω2T/g
− 1 ,
A′55 =l2yy
CV P k2yy
1ω2T/g
− 1 =BMLT
k2yy
1ω2T/g
− 1 , (7.70)
e nello stesso grafico si disegnano le corrispondenti curve. Esse vengono riportate in Figura 7.3 conlinea tratteggiata.
La frequenza adimensionale del moto di sussulto ω2ζT/g coincide con l’ascissa del punto di
intersezione delle due curve A′33 costruite con le modalita illustrate. La frequenza adimensionaledi beccheggio ω2
θT/g viene ricavata in modo analogo a partire dalle due curve di A′55.
7.5.4 Rollio
Nel seguito saranno presentate le relazioni approssimate per il calcolo del periodo naturale del motolibero di rollio. Per questo, verra assunto che l’ampiezza del moto di rollio sia sufficientementepiccola in modo da poter approssimare il periodo con la (7.10), ovvero:
Tϕ = 2π
√Ixx + A44
MgGMT
. (7.71)

7.5. FORMULE APPROSSIMATE PER I PERIODI NATURALI 107
La relazione precedente e valida nell’approssimazione lineare della teoria dei moti nave. Sebbeneessa sia spesso oggetto di discussione, l’esperienza insegna che la curva di stabilita risulta sufficien-temente lineare per angoli di inclinazione trasversale fino ai 20◦ per la maggior parte delle navi. Sirende tuttavia necessario effettuare un esame preliminare della curva dei bracci raddrizzanti al finedi verificare che il moto oscillatorio sia di ampiezza sufficientemente piccola per ritenere l’effettodella nonlinearita poco significativo.
Introducendo nella relazione (7.71) la grandezza adimensionale A′44 = A44/Ixx e ponendo Ixx =Mk2
xx, si puo scrivere:
Tϕ =2π√
g
√(1 + A′44)k2
xx
GMT
, (7.72)
Quando non si dispone di dati precisi sulla distribuzione delle masse, l’inerzia aggiunta puo esserepresa pari al 10–20% del momento d’inerzia di massa della nave. Allora, per una valutazionegrossolana del periodo naturale di rollio, assumendo kxx/B = 0.35 e A′44 = 0.10, per le navi diforme convenzionali si ha:
Tϕ ≈ 0.73B√
GMT
, (7.73)
essendo B la larghezza della nave. Si noti che, nella relazione precedente, la costante moltiplicativa0.73 puo variare fino al 20% per le forme non usuali. Ad esempio per le portaerei, che hanno ilponte di volo molto piu largo di B e quindi Ixx molto maggiore di quello di una nave normale dellastessa larghezza, puo essere senz’altro piu appropriata una costante pari a 0.83 o anche maggiore.D’altra parte, i sommergibili in emersione, che sono a sezioni circolari e non hanno sovrastrutture,possono avere costanti minori di 0.64 quando B viene assunto pari alla larghezza massima.
Tuttavia, da un punto di vista pratico, risulta piu conveniente ragionare in termini differenti.Per questo viene introdotta la grandezza k′xx, detta raggio effettivo d’inerzia trasversale:
Ixx + A44 = Mk′xx2
. (7.74)
Come gia osservato, si tratta di un raggio d’inerzia in senso lato in quanto il membro di sinistradell’equazione definitrice comprende la somma del momento d’inerzia di massa della nave e delmomento d’inerzia di massa aggiunta mentre in quello di destra compare solo la massa della nave.
Sostituendo la (7.74) nell’equazione (7.71) del periodo del moto di rollio e considerando√
gnumericamente eguale a π, dopo le semplificazioni segue:
Tϕ = 2k′xx√GMT
. (7.75)
Esprimendo poi la grandezza k′xx come una frazione della semilarghezza della nave per mezzo dellarelazione:
k′xx = kϕB
2, (7.76)
si ottiene infine la cosiddetta formula del capitano:
Tϕ =kϕB√GMT
. (7.77)
In analogia a quanto gia accennato, la semplificazione della grandezza adimensionale π con lagrandezza dimensionale
√g implica che nella relazione precedente le dimensioni lineari devono
essere assegnate in metri per ottenere il periodo in secondi. In questo modo il coefficiente kϕ, cosı

108 CAPITOLO 7. MOTI NAVE IN ACQUA TRANQUILLA
Navi per navigazione costiera (esclusi tanker)
a) nave vuota o in zavorra 0.88
b) nave a pieno carico con liquidi nelle cisterne in % del peso di pieno carico
a) 20% del pieno carico 0.78
b) 10% del pieno carico 0.75
c) 5% del pieno carico 0.73
Navi mercantili al pieno di provviste
a) mare aperto 0.80
b) pesca costiera gamberi 0.95
c) pesca con stive di pesce vivo 0.60
Tabella 7.1: Tabella IMO dei valori del coefficiente kϕ.
come i coefficienti kζ e kθ caratteristici dei moti di sussulto e beccheggio, viene espresso in unitam−1/2s.
Da un punto di vista pratico, l’International Maritime Organization (IMO) raccomanda diassumere i valori approssimati del coefficiente kϕ per navi di cabotaggio e mercantili riportatiin Tabella 7.1. In generale, nei documenti nazionali relativi alle direttive per la sicurezza dellanavigazione, l’esperienza di alcuni Registri raccomanda di assumere per le navi militari kϕ = 0.71–0.75 m−1/2s, per le navi passeggeri kϕ = 0.80–0.87 m−1/2s, per le navi mercantili a pieno caricokϕ = 0.81 m−1/2s. Valori leggermente piu precisi del coefficiente kϕ possono essere determinatiin dipendenza dei rapporti adimensionali D/B e CB/C2
WP , essendo D l’altezza di costruzione(Remez, 1983). Per comodita di utilizzo, essi vengono riportati in Tabella 7.2.
CB/C2WP D/B
0.30 0.40 0.50 0.60 0.70 0.80
0.90 0.62 0.64 0.66 0.69 0.73 0.76
1.00 0.65 0.67 0.69 0.72 0.76 0.79
1.10 0.68 0.70 0.72 0.75 0.78 0.82
1.20 0.71 0.73 0.75 0.78 0.81 0.84
1.30 0.74 0.76 0.78 0.80 0.83 0.86
1.40 0.76 0.78 0.80 0.82 0.85 0.88
1.50 0.78 0.80 0.82 0.84 0.87 0.90
1.60 0.81 0.82 0.84 0.87 0.89 0.92
1.70 0.83 0.85 0.87 0.89 0.92 0.94
1.80 0.85 0.87 0.89 0.92 0.94 0.96
1.90 0.88 0.90 0.92 0.94 0.96 0.98
2.00 0.90 0.92 0.94 0.96 0.98 1.00
Tabella 7.2: Valori del coefficiente kϕ secondo Remez (1983).
Capitolo 8
Soluzione del problemaidrodinamico
8.1 Strip theory
Come visto al Paragrafo 6.7, per la soluzione del problema di moti nave si richiede la conoscenza siadei coefficienti Mjk, Ajk, Bjk, Cjk che delle ampiezze e delle fasi delle forze di eccitazione dell’ondaFW
j , con FWj = F I
j + FDj . Queste ultime vengono di solito scomposte in due componenti: la
componente principale F Ij (forza di Froude-Krylov), dovuta all’azione delle forze di idrodinamiche
di pressione, e la componente tipicamente idrodinamica FDj (forza di diffrazione), che tiene conto
dell’effetto della diffrazione delle onde incidenti. Una volta note tutte queste grandezze, si possonorisolvere le equazioni del moto e quindi calcolare le ampiezze (uj)0 e le fasi δj dei moti nave.
Gli elementi della matrice di massa Mjk ed i coefficienti delle forze idrostatiche di richiamoCjk possono essere calcolati direttamente con le equazioni (6.14) e (6.20). La forza di eccitazionedi Froude-Krylov F I
j puo essere trovata attraverso l’integrazione diretta della pressione dinamicadell’onda incidente sulla superficie di carena. La maggiore difficolta nel determinare i moti navee pero quella di calcolare i coefficienti di massa aggiunta Ajk, i coefficienti di smorzamento Bjk ele forze eccitanti di diffrazione FD
j , che richiede la soluzione di problemi idrodinamici abbastanzadifficili. In questo paragrafo sara presentata la cosiddetta teoria della striscia (strip theory) usataper calcolare tali grandezze nella maggior parte delle applicazioni pratiche. In una fase successivaverra fatta una breve discussione delle principali tecniche numeriche attualmente utilizzate perdeterminare i coefficienti idrodinamici di massa aggiunta e di smorzamento, come pure delle forzedi diffrazione.
Mentre i fondamenti della formulazione teorica della strip theory sono ancora oggetto di discus-sione, le assunzioni fisiche sono relativamente semplici da descrivere. In primo luogo si fa l’ipotesiche la nave possa essere considerata un corpo slanciato (slender body), cioe con larghezza ed im-mersione molto minori della lunghezza ed avente le sezioni trasversali che variano gradualmentedi forma nella direzione longitudinale. Limitando la discussione alle velocita di avanzo modera-te ed alle frequenze sufficientemente alte, segue che le velocita delle particelle fluide in direzionetrasversale sono molto maggiori di quelle nella direzione longitudinale. Conseguentemente, comemostrato in Figura 8.1, il campo cinetico in corrispondenza di ogni sezione trasversale della navepuo essere approssimato dal flusso bi-dimensionale assunto in quella striscia. Per ottenere il ri-sultato totale sulla nave, gli effetti parziali delle singole striscie sono sommati sulla lunghezza. Icoefficienti sezionali vengono trovati risolvendo un problema idrodinamico bi-dimensionale, comemostrato in Figura 8.2. L’essenza della strip theory e percio quella di ridurre un problema idrodi-
109
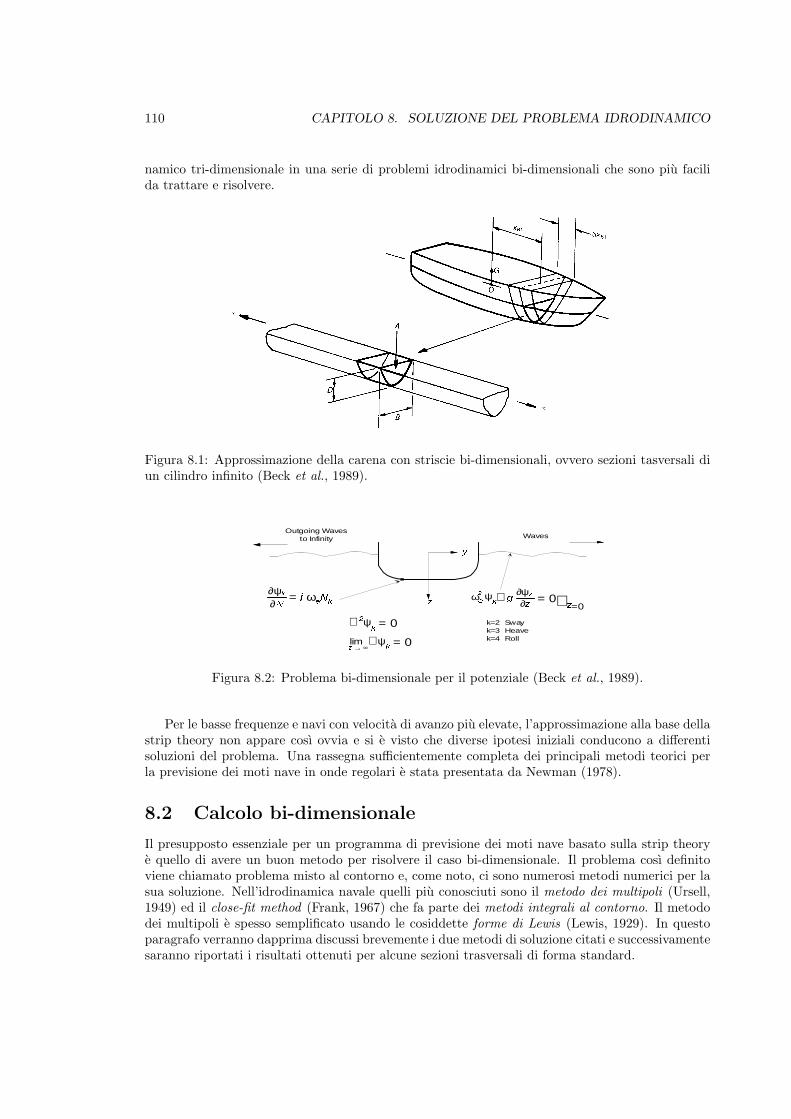
110 CAPITOLO 8. SOLUZIONE DEL PROBLEMA IDRODINAMICO
namico tri-dimensionale in una serie di problemi idrodinamici bi-dimensionali che sono piu facilida trattare e risolvere.
Figura 8.1: Approssimazione della carena con striscie bi-dimensionali, ovvero sezioni tasversali diun cilindro infinito (Beck et al., 1989).
∂ψN
∂1 = L�ωH1N ωH� ψN+ J
∂ψ]
∂] = 0 ]=0
∇ �ψN = 0
lim→] ∞
∇ ψN = 0
]
\
Outgoing Wavesto Infinity Waves
k=2 Swayk=3 Heavek=4 Roll
Figura 8.2: Problema bi-dimensionale per il potenziale (Beck et al., 1989).
Per le basse frequenze e navi con velocita di avanzo piu elevate, l’approssimazione alla base dellastrip theory non appare cosı ovvia e si e visto che diverse ipotesi iniziali conducono a differentisoluzioni del problema. Una rassegna sufficientemente completa dei principali metodi teorici perla previsione dei moti nave in onde regolari e stata presentata da Newman (1978).
8.2 Calcolo bi-dimensionale
Il presupposto essenziale per un programma di previsione dei moti nave basato sulla strip theorye quello di avere un buon metodo per risolvere il caso bi-dimensionale. Il problema cosı definitoviene chiamato problema misto al contorno e, come noto, ci sono numerosi metodi numerici per lasua soluzione. Nell’idrodinamica navale quelli piu conosciuti sono il metodo dei multipoli (Ursell,1949) ed il close-fit method (Frank, 1967) che fa parte dei metodi integrali al contorno. Il metododei multipoli e spesso semplificato usando le cosiddette forme di Lewis (Lewis, 1929). In questoparagrafo verranno dapprima discussi brevemente i due metodi di soluzione citati e successivamentesaranno riportati i risultati ottenuti per alcune sezioni trasversali di forma standard.

8.2. CALCOLO BI-DIMENSIONALE 111
Il metodo dei multipoli fu sviluppato per primo da Ursell (1949) relativamente ai galleggianticon sezioni circolari. Il procedimento consiste nella sovrapposizione di piu funzioni potenziali chesoddisfano singolarmente l’equazione di Laplace, la condizione al contorno sulla superficie libera e lacondizione all’infinito. Tali funzioni potenziali rappresentano una sorgente ed un dipolo orizzontaleposti nell’origine, responsabili della generazione di onde irradiate all’infinito (potenziale di radia-zione), ed una serie di potenziali di multipolo i quali decrescono rapidamente all’aumentare delladistanza dall’origine. L’intensita della sorgente puntiforme, del dipolo orizzontale e dei multipolisono tutte determinate in modo da soddisfare la condizione al contorno sul corpo. Ursell (1949) usola sorgente puntiforme ed i multipoli simmetrici per risolvere il problema del sussulto di un cilindrocircolare. Il dipolo orizzontale ed i multipoli asimmetrici vengono usati per i moti antisimmetricidi scarroccio e rollio. Il numero dei termini dello sviluppo in multipoli (teoricamente infinito) vienedeterminato dal numero di punti sulla superficie bagnata nei quali viene effettivamente soddisfattala condizione al contorno sul corpo (carena).
Per sezioni che non hanno forma circolare viene usato il metodo delle trasformazioni conformi(conformal mapping). Il conformal mapping e una procedura matematica nella quale una formageometrica e trasformata in un’altra mediante un opportuno cambiamento delle variabili che ladescrivono. Le funzioni matematiche che trasformano le coordinate della sezione trasversale dellanave nelle coordinate di una sezione trasversale modificata e chiamata funzione di trasformazione(mapping function). Nel metodo dei multipoli viene cercata e trovata la funzione di mapping chetrasforma una generica sezione trasversale della nave in una sezione circolare per la quale sonovalidi i risultati di Ursell. La difficolta sta nel determinare la funzione di mapping piu appropriataper ogni sezione trasversale. Una descrizione generale del problema puo essere trovata in DeJong (1973). Particolari funzioni di mapping sono state discusse da Lewis (1929), Tasai (1959),Landweber and Macagno (1957, 1959), Demanche (1968).
La trasformazione piu comune nel campo navale usa le cosiddette forme di Lewis (Lewis, 1929;Landweber and Macagno, 1957). Esse sono prodotte da una funzione di mapping a due soliparametri, basata sul rapporto larghezza/immersione e sul coefficiente di pienezza della sezione,rispettivamente H = B/T e β = A/BT . La Figura 8.3 mostra le forme delle sezioni di Lewis pervarie combinazioni del rapporto larghezza/immersione e diversi coefficienti di finezza della sezione.L’esperienza insegna che per navi tradizionali le forme di Lewis approssimano abbastanza bene lamaggior parte delle sezioni. Il fondo non risulta perfettamente piano, ma questo non comportasostanziali errori nella previsione della massa aggiunta e dello smorzamento. Tuttavia, le sezioni abulbo di prora e le sezioni a transom di poppa non sono riprodotte per niente.
Le sezioni di Lewis non possono, tuttavia, approssimare le sezioni navali di forma qualsiasi.Per ogni prefissato rapporto di larghezza/immersione, esiste percio solo un intervallo consentitoper il coefficiente di finezza (Landweber and Macagno, 1957), vedi Paragrafo 8.3. Per sezioni dellanave con parametri al di fuori da tale intervallo, l’applicazione del metodo richiede delle opportunemodifiche della procedura. Alcuni programmi di calcolo dei moti nave variano artificialmente ilcoefficiente di pienezza della sezione e/o il rapporto larghezza/immersione fino a far rientrare lastessa nei limiti dei valori ammessi. Questo approccio semplificativo non risulta troppo penalizzanteai fini delle previsione dei moti solo quando esso riguarda una minima parte delle sezioni. Un altromodo per risolvere il problema idrodinamico e quello di cambiare la funzione di mapping perottenere, con gli stessi parametri, una differente forma della sezione. Cosı Demanche (1968) hausato il rapporto larghezza/immersione ed il coefficiente di finezza della sezione come parametri dimappatura per riprodurre sezioni del tipo bulbo di prora. La combinazione delle forme di Lewis edelle forme a bulbo di Demanche sembra coprire la maggior parte delle sezioni navali di interesseingegneristico.
Il metodo di Frank (1967) viene preferito in molti, se non nella maggior parte, dei programmidi calcolo dei moti nave di concezione piu moderna. Come mostrato in Figura 8.4, il metodo diFrank consiste nel dividere ogni sezione della nave in una serie di segmenti rettilinei. Su ciascun
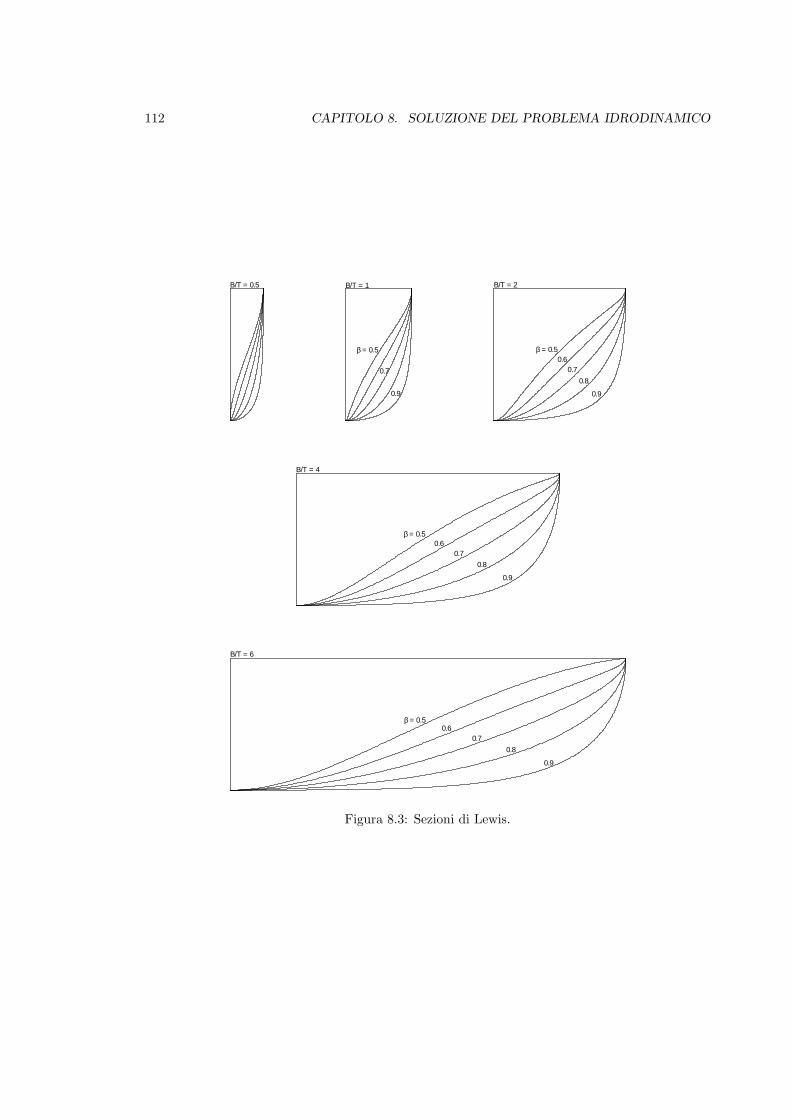
112 CAPITOLO 8. SOLUZIONE DEL PROBLEMA IDRODINAMICO
B/T = 0.5 B/T = 1 B/T = 2
β = 0.50.6
0.7
0.8
0.9
β = 0.5
0.7
0.9
B/T = 4
B/T = 6
β = 0.50.6
β = 0.5
0.7
0.8
0.9
0.60.7
0.8
0.9
Figura 8.3: Sezioni di Lewis.

8.2. CALCOLO BI-DIMENSIONALE 113
segmento sono distribuite sorgenti idrodinamiche con intensita costante, inizialmente sconosciute.La forma del potenziale della sorgente unitaria e scelta in modo da soddisfare le condizioni alcontorno sulla superficie libera e all’infinito, mentre le intensita delle sorgenti incognite sono trovateimponendo le condizioni al contorno sul corpo nel solo punto centrale di ogni segmento. Una voltadeterminata l’intensita delle sorgenti, puo essere trovato il corrispondente potenziale cinetico equindi, effettuando un’integrazione delle forze di pressione lungo la sezione, possono essere calcolatii coefficienti sezionali di massa aggiunta e di smorzamento.
INTERIOR FLOW
STRAIGHT LINESEGMENTS
σj = UNKNOWN SOURCESTRENGTH ON j SEGMENTth
CONTROL POINT ON k SEGMENT FOR MEETINGBODY BOUNDARY CONDITION
th
z
Free surfacey
0
Figura 8.4: Approssimazione delle sezioni con il metodo di Frank (Beck et al., 1989).
I vantaggi del metodo di Frank risiedono nel fatto che esso e veloce in termini computazionalie che ogni sezione trasversale della nave puo essere approssimata con tanta accuratezza quantarichiesta dalle effettive esigenze pratiche. In genere sono sufficienti 8–10 segmenti su una mezzasezione per determinare accuratamente i coefficienti di massa aggiunta e di smorzamento per i motinel piano verticale. Un numero leggermente maggiore di segmenti e necessario per i moti laterali,in particolare per il rollio.
Il principale svantaggio del metodo di Frank e dovuto alla presenza delle cosiddette frequenzeirregolari, ovvero di un insieme discreto di frequenze in corrispondenza alle quali la soluzioneottenuta con il metodo integrale al contorno perde unicita oppure diviene illimitata. Il problemanumerico e associato con le frequenze risonati alle quali il campo cinetico nel bacino interno allacarena diviene singolare. Questo inconveniente fu puntualizzato per primo da John (1950) nelcontesto di un’analisi sull’uso delle distribuzioni di sorgenti per risolvere problemi con la superficielibera. Esso puo mettersi in relazione con il fatto che, la maggior parte dei metodi integralirisulta condizionata da frequenze irregolari quando la sezione trasversale e una sezione parzialmenteimmersa, tipica di una nave di superficie.
Frank mostro che per una sezione trasversale di tipo rettangolare, le frequenze irregolari sonodate dalla relazione:
ω2n = n
πg
Bcoth
(n
πT
B
), n = 1, 2, . . . (8.1)
dove ωn e la n-esima frequenza irregolare, B la larghezza e T l’immersione del rettangolo. Inparticolare, il valore piu basso della frequenza irregolare si ha per n = 1.
L’equazione (8.1) mostra che fissata l’immersione, la prima frequenza irregolare decresce al-l’aumentare della larghezza. Per tipi convenzinali di navi le frequenze irregolari sono spesso fuoridall’intervallo di interesse pratico. Tuttavia, per certi tipi di sezione, come poppe a transom osezioni rettangolari delle chiatte offshore, le frequenze irregolari possono causare qualche problemadi calcolo in quanto rientrano nello spettro di energia del mare in tempesta.
Le frequenze irregolari possono essere evitate in vari modi. Ad esempio, Ohmatsu (1975) hasuggerito di estendere la distribuzione delle sorgenti lungo la superficie libera interna della sezione

114 CAPITOLO 8. SOLUZIONE DEL PROBLEMA IDRODINAMICO
trasversale. Altri autori mettono sorgenti concentrate o altre singolarita nell’origine, con intensitae fase scelte in modo che l’energia associata con un possibile modo di risonanza (sloshing) vengaassorbita dalla singolarita concentrata. Numericamente, i metodi proposti sembra non lavorinosempre bene, in particolare nei modi laterali di oscillazione. La ricerca continua con il fine disviluppare un metodo soddisfacente in grado di rimuovere le frequenze irregolari.
Riassumendo, si puo affermare quanto segue. Il metodo di Frank e quello delle forme di Lewissono i due approcci piu comuni per calcolare i valori dei coefficienti bi-dimensionali da usare nellastrip theory. Il metodo di Frank consente una piu accurata descrizione delle sezioni trasversalidella nave, ma e affetto dalle frequenze irregolari. L’approccio delle forme di Lewis non da luogoa frequenze irregolari, ma non puo tener conto accuratamente delle sezioni prodiere a bulbo, dellesezioni poppiere a transom e delle sezioni piatte delle chiatte. Le forme di Lewis sono partico-larmente utili nel progetto preliminare in quanto richiedono che siano note solo le larghezze dellesezioni, le immersioni e le aree sezionali a prescindere dalla loro forma. Come noto, questi sono iparametri progettuali disponibili fin dalle fasi iniziali (diagramma di Bonjean). In fase successiva,risulta probabilmente piu giustificato l’uso di un metodo integrale al contorno (metodo di Frank)oppure di una trasformazione conforme a multiparametro.
8.3 Forme di Lewis
Il calcolo del campo cinetico e dei coefficienti idrodinamici di un cilindro circolare retto in motooscillatorio di sussulto (Ursell, 1949) rappresento senza dubbio un importante passo verso lo svi-luppo dei metodi numerici per la previsione dei moti nave. Tuttavia, le sezioni trasversali delle navinon sono, in genere, di forma circolare per cui si presento la necessita di disporre di una tecnicaefficiente per trattare anche cilindri di sezione arbitraria o quantomeno di tipo navale. Sara vistonel seguito come fu risolto il problema.
Come noto, la tecnica delle trasformazioni conformi fornisce un metodo per trasformare unafigura del piano complesso z = x + iy in un’altra figura del piano complesso ζ = ξ + iη e viceversa.Questo procedimento viene rappresentato schematicamente in Figura 8.5, dove z = F (ζ) e ζ = f(z)indicano le due funzioni di trasformazione, rispettivamente diretta e inversa.
Figura 8.5: Trasformazione di una figura del piano z = x+ iy in un’altra figura del piano ζ = ξ+ iηmediante la tecnica delle trasformazioni conformi.
In particolare, si consideri nel piano z = x + iy un cerchio di raggio r, descritto dall’equazione:
z = x + iy = ire−iθ = r (sin θ + i cos θ) , con − π/2 ≤ θ ≤ π/2 . (8.2)

8.3. FORME DI LEWIS 115
L’origine degli angoli θ, positivi in verso antiorario, e stata fatta coincidere con l’asse verticale delley in modo che al punto di chiglia corrisponda θ = 0 e al punto sulla linea di galleggiamento (assex) il valore θ = π/2. La trasformazione:
ζ = a0
(z +
a1
z+
a3
z3+
a5
z5+ · · ·
), (8.3)
fa corrispondere, ad ogni punto del circolo, uno ed un solo punto di una figura del piano ζ = ξ + iη,a patto che vengano scelti valori appropriati per i coefficienti a0, a1, a3, . . . Come risultato siottiene una figura simmetrica rispetto all’asse verticale.
In pratica si e soliti scegliere un circolo di raggio unitario, cioe r = 1, e considerare latrasformazione (8.3) ridotta ai soli primi tre termini della serie:
ζ = a0
(z +
a1
z+
a3
z3
). (8.4)
Il coefficiente a0 e semplicemente un fattore di scala che regola le dimensioni lineari della forma diLewis. Gli altri due coefficienti a1 e a3 dipendono dalla geometria della sezione.
L’esperienza insegna che, nonostante le semplificazioni introdotte, la (8.4) permette di generareuna grande varieta di sezioni trasversali di tipo navale. Queste forme non saranno, in generale,delle riproduzioni esatte di un’assegnata sezione trasversale, ma l’accordo sara soddisfacente perconsentire delle stime adeguate dei coefficienti idrodinamici alla base del calcolo dei moti nave. Lafamiglia di sezioni ottenuta in questo modo e nota con il nome di forme di Lewis, secondo Lewis(1929) che per primo ne propose l’adozione per la soluzione dei problemi di vibrazioni scafo.
Sostituendo l’espressione (8.2) nell’equazione (8.4) ed eseguendo i calcoli necessari, segue:
ζ = a0 {[(1 + a1) sin θ − a3 sin 3 θ] + i [(1− a1) cos θ + a3 cos 3 θ]} . (8.5)
Separando la parte reale e la parte immaginaria, si ottiene dalla (8.5) una coppia di equazioniparametriche in θ che descrivono il profilo delle forme di Lewis, ovvero:
ξ = a0 [(1 + a1) sin θ − a3 sin 3 θ] ,
η = a0 [(1− a1) cos θ + a3 cos 3 θ] . (8.6)
Il punto θ = 0, relativo alla chiglia del circolo unitario, corrisponde la chiglia della forma di Lewis.A sua volta, per θ = π/2 si ottiene il punto d’intersezione del piano di galleggiamento sia con ilcilindro circolare che con la corrispondente sezione di Lewis. Sostituendo questi valori di θ nella(8.6), segue nell’ordine:
T = a0(1− a1 + a3) ,
B
2= a0(1 + a1 + a3) , (8.7)
essendo T l’immersione e B la larghezza della forma di Lewis.Per una generica forma di Lewis, il rapporto larghezza/immersione, risulta:
H =B
T=
2(1 + a1 + a3)1− a1 + a3
. (8.8)
L’area della forma di Lewis puo essere calcolata sulla base delle (8.6), da cui segue:
A = 2∫ B/2
0
η dξ =πa2
0
2(1− a2
1 − 3a23) . (8.9)
Il coefficiente di finezza della sezione risulta percio:
β =A
BT=
π
41− a2
1 − 3a23
1− a21 + 2a3 + a2
3
=π
41− a2
1 − 3a23
(1 + a3)2 − a21
. (8.10)
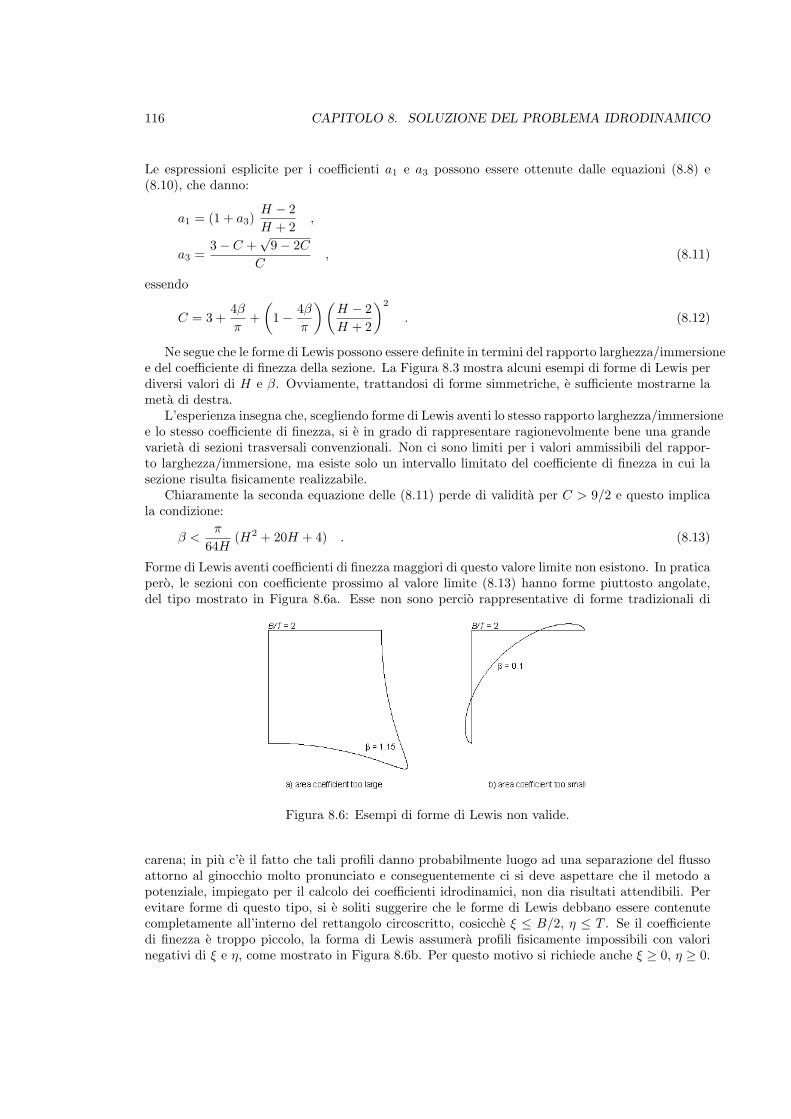
116 CAPITOLO 8. SOLUZIONE DEL PROBLEMA IDRODINAMICO
Le espressioni esplicite per i coefficienti a1 e a3 possono essere ottenute dalle equazioni (8.8) e(8.10), che danno:
a1 = (1 + a3)H − 2H + 2
,
a3 =3− C +
√9− 2C
C, (8.11)
essendo
C = 3 +4β
π+
(1− 4β
π
)(H − 2H + 2
)2
. (8.12)
Ne segue che le forme di Lewis possono essere definite in termini del rapporto larghezza/immersionee del coefficiente di finezza della sezione. La Figura 8.3 mostra alcuni esempi di forme di Lewis perdiversi valori di H e β. Ovviamente, trattandosi di forme simmetriche, e sufficiente mostrarne lameta di destra.
L’esperienza insegna che, scegliendo forme di Lewis aventi lo stesso rapporto larghezza/immersionee lo stesso coefficiente di finezza, si e in grado di rappresentare ragionevolmente bene una grandevarieta di sezioni trasversali convenzionali. Non ci sono limiti per i valori ammissibili del rappor-to larghezza/immersione, ma esiste solo un intervallo limitato del coefficiente di finezza in cui lasezione risulta fisicamente realizzabile.
Chiaramente la seconda equazione delle (8.11) perde di validita per C > 9/2 e questo implicala condizione:
β <π
64H(H2 + 20H + 4) . (8.13)
Forme di Lewis aventi coefficienti di finezza maggiori di questo valore limite non esistono. In praticapero, le sezioni con coefficiente prossimo al valore limite (8.13) hanno forme piuttosto angolate,del tipo mostrato in Figura 8.6a. Esse non sono percio rappresentative di forme tradizionali di
Figura 8.6: Esempi di forme di Lewis non valide.
carena; in piu c’e il fatto che tali profili danno probabilmente luogo ad una separazione del flussoattorno al ginocchio molto pronunciato e conseguentemente ci si deve aspettare che il metodo apotenziale, impiegato per il calcolo dei coefficienti idrodinamici, non dia risultati attendibili. Perevitare forme di questo tipo, si e soliti suggerire che le forme di Lewis debbano essere contenutecompletamente all’interno del rettangolo circoscritto, cosicche ξ ≤ B/2, η ≤ T . Se il coefficientedi finezza e troppo piccolo, la forma di Lewis assumera profili fisicamente impossibili con valorinegativi di ξ e η, come mostrato in Figura 8.6b. Per questo motivo si richiede anche ξ ≥ 0, η ≥ 0.
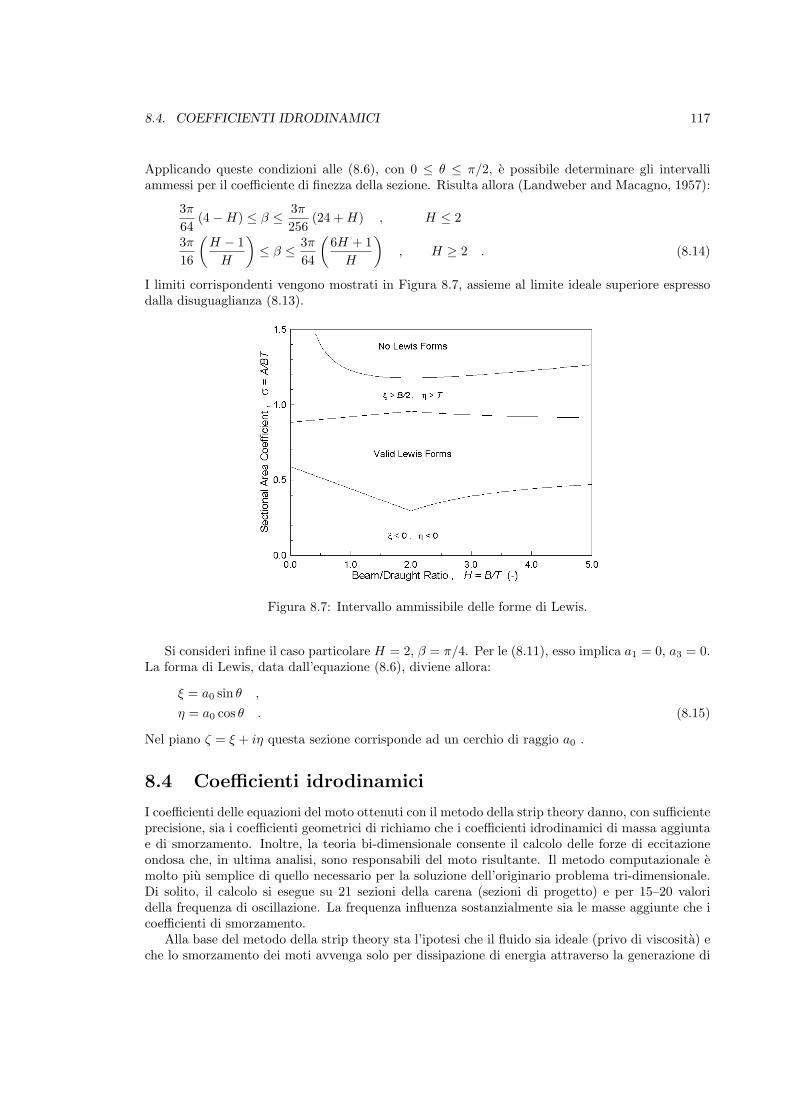
8.4. COEFFICIENTI IDRODINAMICI 117
Applicando queste condizioni alle (8.6), con 0 ≤ θ ≤ π/2, e possibile determinare gli intervalliammessi per il coefficiente di finezza della sezione. Risulta allora (Landweber and Macagno, 1957):
3π
64(4−H) ≤ β ≤ 3π
256(24 + H) , H ≤ 2
3π
16
(H − 1
H
)≤ β ≤ 3π
64
(6H + 1
H
), H ≥ 2 . (8.14)
I limiti corrispondenti vengono mostrati in Figura 8.7, assieme al limite ideale superiore espressodalla disuguaglianza (8.13).
Figura 8.7: Intervallo ammissibile delle forme di Lewis.
Si consideri infine il caso particolare H = 2, β = π/4. Per le (8.11), esso implica a1 = 0, a3 = 0.La forma di Lewis, data dall’equazione (8.6), diviene allora:
ξ = a0 sin θ ,
η = a0 cos θ . (8.15)
Nel piano ζ = ξ + iη questa sezione corrisponde ad un cerchio di raggio a0 .
8.4 Coefficienti idrodinamici
I coefficienti delle equazioni del moto ottenuti con il metodo della strip theory danno, con sufficienteprecisione, sia i coefficienti geometrici di richiamo che i coefficienti idrodinamici di massa aggiuntae di smorzamento. Inoltre, la teoria bi-dimensionale consente il calcolo delle forze di eccitazioneondosa che, in ultima analisi, sono responsabili del moto risultante. Il metodo computazionale emolto piu semplice di quello necessario per la soluzione dell’originario problema tri-dimensionale.Di solito, il calcolo si esegue su 21 sezioni della carena (sezioni di progetto) e per 15–20 valoridella frequenza di oscillazione. La frequenza influenza sostanzialmente sia le masse aggiunte che icoefficienti di smorzamento.
Alla base del metodo della strip theory sta l’ipotesi che il fluido sia ideale (privo di viscosita) eche lo smorzamento dei moti avvenga solo per dissipazione di energia attraverso la generazione di

118 CAPITOLO 8. SOLUZIONE DEL PROBLEMA IDRODINAMICO
onde di radiazione sulla superficie libera del liquido. Quest’ipotesi si applica bene ai moti longitu-dinali dove la componente dello smorzamento viscoso risulta generalmente trascurabile. Tuttavia,per i moti trasversali la situazione e completamente diversa e diviene necessario considerare espli-citamente anche la viscosita, che comporta un sostanziale aumento degli smorzamenti. L’effettoe particolarmente significativo nel caso del moto di rollio ed appare importante anche per la de-terminazione delle oscillazioni di scarroccio ed imbardata. I metodi teorici per la previsione dellosmorzamento di rollio non garantiscono pero la precisione richiesta dai calcoli d’ingegneria. Inoltre,essi non consentono di includere direttamente l’effetto delle alette antirollio o di altri dispositividel genere i quali, come noto, si applicano sulle navi allo scopo di aumentare lo smorzamento. Perquesto motivo, nelle previsioni dei moti antisimmetrici si preferisce privilegiare i dati sperimentaliqualora disponibili. In caso contrario si ricorre a formule semi-empiriche basate su banche dati dilaboratori navali.
I coefficienti delle equazioni del moto ottenuti con la strip theory vengono calcolati integrandosulla lunghezza della nave i contributi delle singole sezioni bi-dimensionali. Esistono svariate teorieche tengono conto dell’influenza della velocita di avanzo sui coefficienti di massa aggiunta e dismorzamento. I risultati ottenuti da alcuni autori, fra i piu noti, saranno riassunti nel seguito. Perquesto verra fatto riferimento alle equazioni dei moti presentate nel Capitolo 6 relativamente adun osservatore con origine nel baricentro della nave. I termini di eccitazione saranno pero scrittiin forma complessa al fine di sfruttare, senza difficolta sostanziali, i risultati provenienti da fontidiverse.
a) moti longitudinaliNell’ambito della strip theory si ha A13 = A15 = B13 = B15 = 0. Ne segue che per i moti diabbrivio, sussulto e beccheggio valgono le seguenti equazioni:
(M + A11)u1 + B11u1 = FW1 eiωet ,
(M + A33)u3 + A35u5 + B33u3 + B35u5 + C33u3 + C35u5 = FW3 eiωet , (8.16)
(I55 + A55)u5 + A53u3 + B55u5 + B53u3 + C53u3 + C55u5 = FW5 eiωet .
I moti di sussulto e beccheggio sono fra loro accoppiati, mentre il moto di abbrivio e indipendentedagli altri due. Come gia detto, i coefficienti idrodinamici e le forze/momenti di eccitazione possonoessere determinati sia per via sperimentale che per via teorica.
La Tabella 8.1 mostra i coefficienti dei moti verticali ottenuti con la strip theory modificata daGerritsma and Beukelman (1967), mentre la Tabella 8.2 riporta quelli ricavati da Salvesen, Tuckand Faltinsen (1970) e da Vugts (1971). In queste tabelle a33 e b33 sono rispettivamente la massaaggiunta ed il coefficiente di smorzamento bi-dimensionali per unita di lunghezza, mentre Bx ela larghezza al galleggiamento della generica sezione. L’ascissa xA, la massa aggiunta aA
33 ed ilcoefficiente di smorzamento bA
33 sono associati con la sezione estrema a poppa della nave. Questitermini sono dovuti alla geometria della carena, nel senso che tengono conto dei possibili effettidelle poppe a transom. Una nave slanciata con estremita ad incrociatore ha aA
33 = bA33 = 0.
Si osservi una certa differenza fra i risultati ottenuti con le due teorie. Nello sviluppo del-la loro teoria, Gerritsma e Beukelman applicarono l’ipotesi della strip theory gia all’inizio dellaformulazione. Salvesen, Tuck and Faltinsen invece, dopo aver costruito il modello matematico ge-nerale, introdussero quest’assunzione soltanto come un mezzo per semplificare l’analisi successiva.Queste ed altre teorie analoghe differiscono per quelli che sono gli effetti della velocita di avanzo,ma risultano in sostanziale accordo per la nave ferma (velocita di avanzo nulla). In questo casoparticolare, entrambe le teorie soddisfano la cosiddetta relazione di Timman and Newman (1962),che si traduce nella condizione A35 = −A53.
La previsione delle forze e dei momenti di eccitazione in onde di prora calcolati con le dueteorie fornisce valori abbastanza simili fra loro nonostante le differenze formali esistenti. I terminiaddizionali trovati da Salvesen, Tuck e Faltinsen (i quali a loro volta differiscono leggermente

8.4. COEFFICIENTI IDRODINAMICI 119
Coefficiente Gerritsma, Beukelman (1967)
A33
∫a33dx
B33
∫b33dx + UaA
33
C33 ρg∫
Bxdx = ρgAW
A35 −∫
xa33dx− Uω−2e
∫b33dx− U2ω−2
e aA33
B35 −∫
xb33dx + U∫
a33dx− UxAaA33
C35 −ρg∫
xBxdx = −ρgMW
A53 −∫
xa33dx
B53 −∫
xb33dx− U∫
a33dx− UxAaA33
C53 −ρg∫
xBxdx = −ρgMW
A55
∫x2a33dx + Uω−2
e
∫xb33dx + U2ω−2
e
∫a33dx + U2ω−2
e xAaA33
B55
∫x2b33dx + Ux2
AaA33
C55 ρg∫
x2Bxdx = ρgIW
F W3 /a
∫[ρgBx − ω (ωea33 − ib33)] eikxe−kT∗x dx + iUωaA
33eikxAe−kT∗A
x
F W5 /a −
∫{x [ρgBx − ω(ωea33 − ib33)] + iUωa33} eikxe−kT∗x dx− iUωxAaA
33eikxAe−kT∗Ax
Tabella 8.1: Coefficienti e forze/momenti di eccitazione dei moti verticali.
da quelli di Vugts) hanno in pratica un effetto molto contenuto sui moti risultanti, a meno chenon si consideri l’intervallo delle alte velocita. Le teorie in oggetto, nel derivare i termini dieccitazione delle onde, assumono una distribuzione della pressione sulla carena coincidente conl’effettiva pressione dell’onda incidente disturbata, ovvero tengono conto dalla effettiva presenzadella nave (ipotesi di Froude-Krylov ed effetto di diffrazione).
La grandezza T ∗x che entra nel calcolo delle ampiezze delle forze e dei momenti eccitanti e lacosiddetta immersione equivalente, definita dalla relazione:
T ∗x =1k
ln
{1− 2k
Bx
∫ Tx
0
ye−kzdz
}, (8.17)
dove Tx e l’immersione della nave alla sezione generica. Una semplificazione all’espressione prece-dente puo essere fatta eguagliando T ∗x all’immersione media di ogni sezione, cioe ponendo T ∗x =Ax/Bx = area/larghezza della sezione.
Quest’approssimazione, che semplifica notevolmente l’aspetto computazionale del problema,vale abbastanza bene per le sezioni di forma regolare. Con prore a bulbo, ad esempio, l’assunzioneprecedente puo comportare errori anche sostanziali nella previsione della forza e del momentoeccitante.
b) moti lateraliLe equazioni che descrivono i moti di scarroccio, rollio e imbardata possono essere espresse nellaforma:
(M + A22)u2 + A24u4 + A26u6 + B22u2 + B24u4 + B26u6 = FW2 eiωet ,
(I44 + A44)u4 + A42u2 + (A46 − I46)u6
+B44u4 + B42u2 + B46u6 + C44u4 = FW4 eiωet , (8.18)
(I66 + A66)u6 + A62u2 + (A64 − I64)u4 + B66u6 + B62u2 + B64u4 = FW6 eiωet .

120 CAPITOLO 8. SOLUZIONE DEL PROBLEMA IDRODINAMICO
Coeffi
cien
teSalv
esen
,Tuck
and
Falt
inse
n(1
970);
Vugts
(1971)
A33
∫ a33dx−
Uω−
2e
bA 33
B33
∫ b 33dx
+U
aA 33
C33
ρg∫ B
xdx
=ρgA
W
A35
−∫ x
a33dx−
Uω−
2e
∫ b 33dx
+U
ω−
2e
xA
bA 33−
U2ω−
2e
aA 33
B35
−∫ x
b 33dx
+U
∫ a33dx−
Ux
Aa
A 33−
U2ω−
2e
bA 33
C35
−ρg∫ x
Bxdx
=−ρ
gM
W
A53
−∫ x
a33dx
+U
ω−
2e
∫ b 33dx
+U
ω−
2e
xA
bA 33
B53
−∫ x
b 33dx−
U∫ a
33dx−
Ux
Aa
A 33
C53
−ρg∫ x
Bxdx
=−ρ
gM
W
A55
∫ x2a33dx
+U
2ω−
2e
∫ a33dx−
Uω−
2e
x2 A
bA 33
+U
2ω−
2e
xA
aA 33
B55
∫ x2b 3
3dx
+U
2ω−
2e
∫ b 33dx
+U
x2 A
aA 33
+U
2ω−
2e
xA
bA 33
C55
ρg∫ x
2B
xdx
=ρgI W
FW 3
/a
∫ [ρgB
x−
ω(ω
ea33−
ib33)]
eik
xe−
kT∗dx
+iU
ω−
1e
ω(ω
ea
A 33−
ibA 33)e
ikx
Ae−
kT
A ∗
FW 5
/a
−∫{
x[ρ
gB
x−
ω(ω
ea33−
ib33)]
+iU
ω−
1e
ω(ω
ea33−
ib33)} ei
kxe−
kT∗dx−
iUω−
1e
ωx
A(ω
ea
A 33−
ibA 33)e
ikx
Ae−
kT
A ∗
Tabella 8.2: Coefficienti e forze/momenti di eccitazione dei moti verticali.

8.4. COEFFICIENTI IDRODINAMICI 121
Per le equazioni precedenti si deve osservare che, in assenza di velocita di avanzo, l’accoppiamento diimbardata con gli altri tipi di moto e generalmente debole, in quanto determinato solo dall’asimme-tria della nave rispetto al piano trasversale a meta nave (coefficienti idrodinamici di accoppiamentomolto piccoli). Aumentando la velocita nave, l’influenza dell’imbardata cresce significativamentein particolare con angoli d’incontro dai quartieri poppieri, ovvero quando la frequenza d’incontrorisulta piccola.
La Tabella 8.3 mostra i coefficienti ottenuti dalle teorie di Salvesen, Tuck and Faltinsen (1970)e di Vugts (1971). Nell’ordine, le grandezze a22 e b22 rappresentano i coefficienti di massa aggiuntae smorzamento di scarroccio, a44 e b44 quelli di rollio, mentre a24 e b24 sono i coefficienti di massaaggiunta e smorzamento bi-dimensionali per unita di lunghezza dovuti all’accoppiamento fra imoti di scarroccio e rollio. Come nel caso dei moti simmetrici xA, aA
22, bA22, ecc. si riferiscono
ai coefficienti associati con la sezione a transom all’estrema poppa. Inoltre, V e il volume dicarena, GMT l’altezza metacentrica trasversale, Ax l’area della sezione trasversale immersa e OBla distanza del centro di spinta dal galleggiamento in acqua tranquilla, B∗
44 la componente viscosadello smorzamento di rollio.
Per una nave slanciata, essendo a22 = b22 = a24 = b24 = 0, i coefficienti di smorzamento contermini dipendenti dalla velocita di avanzo soddisfano le relazioni di Timman and Newman (1962)espresse da B24 = B42, B26 = −B62, B46 = −B64. Inoltre, i coefficienti A26, B26, A46, B46 sononulli per navi simmetriche prora/poppa, mentre per la maggior parte delle navi reali sono piccoli invalore assoluto. Poiche sia le forze inerziali che quelle di smorzamento dipendono dalla frequenzadelle oscillazioni, per una nave dotata di velocita di avanzo, essi risultano funzioni della frequenzad’incontro.
Anche se l’ipotesi della strip theory viene usata per determinare le forze ed i momenti dieccitazione, si puo osservare che gli effetti delle onde sono leggermente diversi nelle due teorieconsiderate. Le espressioni trovate da Vugts per queste ultime dipendono da ω2/ωe, mentre perSalvesen, Tuck and Faltinsen si ottiene piu semplicemente una dipendenza da ω. Per questo, Vugts(1971) suggerı che il termine addizionale ω/ωe risulta importante specialmente alle alte velocitadi avanzo con onde provenienti dai settori prodieri e per direzioni d’incontro fino a 45◦ dalla rottadella nave.
Sebbene i tre moti di scarroccio, rollio e imbardata siano accoppiati fra loro, molti autori hannocercato di studiare il moto di rollio come isolato. Storicamente, fu Froude (1861) a porre le basidella teoria del moto di rollio per navi in mare al traverso. Egli trovo che il centro di massa dellanave si muove come una particella fluida descrivendo una circonferenza di raggio eguale all’ampiezzadell’onda. Nel suo modello teorico, il momento di rollio era originato dalla forza di spinta agentenella direzione normale alla superficie dell’onda (normale idrodinamica) e dalla componente dellaforza peso nella direzione ad essa parallela e passante per il baricentro. Ne risulto che il momentoeccitante e legato alla pendenza delle onde e non gia all’ampiezza delle stesse come erroneamentepensato dagli studiosi dell’epoca. Le forze ed i momenti idrodinamici dati in Tabella 8.3 confermanoa posteriori i semplici risultati trovati da Froude.
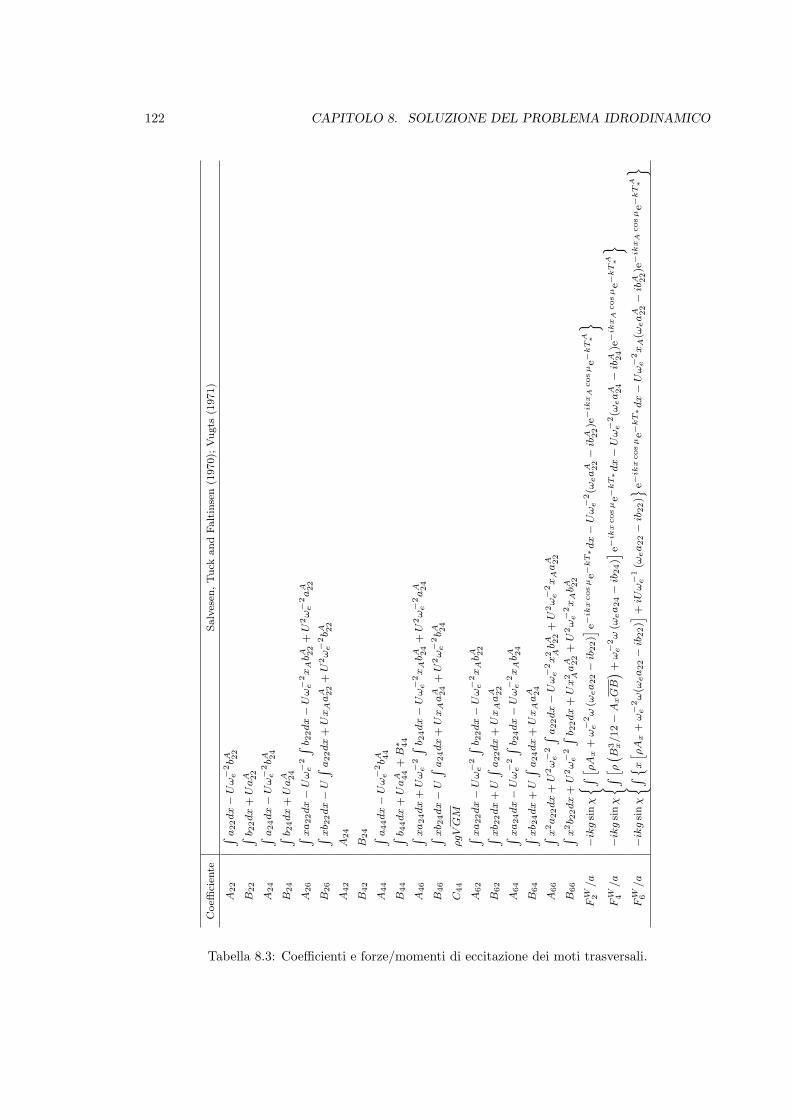
122 CAPITOLO 8. SOLUZIONE DEL PROBLEMA IDRODINAMICO
Coeffi
cien
teSalv
esen
,Tuck
and
Falt
inse
n(1
970);
Vugts
(1971)
A22
∫ a22dx−
Uω−
2e
bA 22
B22
∫ b 22dx
+U
aA 22
A24
∫ a24dx−
Uω−
2e
bA 24
B24
∫ b 24dx
+U
aA 24
A26
∫ xa22dx−
Uω−
2e
∫ b 22dx−
Uω−
2e
xA
bA 22
+U
2ω−
2e
aA 22
B26
∫ xb 2
2dx−
U∫ a
22dx
+U
xA
aA 22
+U
2ω−
2e
bA 22
A42
A24
B42
B24
A44
∫ a44dx−
Uω−
2e
bA 44
B44
∫ b 44dx
+U
aA 44
+B∗ 44
A46
∫ xa24dx
+U
ω−
2e
∫ b 24dx−
Uω−
2e
xA
bA 24
+U
2ω−
2e
aA 24
B46
∫ xb 2
4dx−
U∫ a
24dx
+U
xA
aA 24
+U
2ω−
2e
bA 24
C44
ρgV
GM
A62
∫ xa22dx−
Uω−
2e
∫ b 22dx−
Uω−
2e
xA
bA 22
B62
∫ xb 2
2dx
+U
∫ a22dx
+U
xA
aA 22
A64
∫ xa24dx−
Uω−
2e
∫ b 24dx−
Uω−
2e
xA
bA 24
B64
∫ xb 2
4dx
+U
∫ a24dx
+U
xA
aA 24
A66
∫ x2a22dx
+U
2ω−
2e
∫ a22dx−
Uω−
2e
x2 A
bA 22
+U
2ω−
2e
xA
aA 22
B66
∫ x2b 2
2dx
+U
2ω−
2e
∫ b 22dx
+U
x2 A
aA 22
+U
2ω−
2e
xA
bA 22
FW 2
/a
−ikg
sin
χ
{ ∫[ ρ
Ax
+ω−
2e
ω(ω
ea22−
ib22)] e−
ikx
cos
µe−
kT∗dx−
Uω−
2e
(ωea
A 22−
ibA 22)e−
ikx
Acos
µe−
kT
A ∗}
FW 4
/a
−ikg
sin
χ
{ ∫[ ρ
( B3 x/12−
AxG
B) +
ω−
2e
ω(ω
ea24−
ib24)] e−
ikx
cos
µe−
kT∗dx−
Uω−
2e
(ωea
A 24−
ibA 24)e−
ikx
Acos
µe−
kT
A ∗}
FW 6
/a
−ikg
sin
χ
{ ∫{ x
[ ρA
x+
ω−
2e
ω(ω
ea22−
ib22)] +
iUω−
1e
(ωea22−
ib22)} e−
ikx
cos
µe−
kT∗dx−
Uω−
2e
xA
(ωea
A 22−
ibA 22)e−
ikx
Acos
µe−
kT
A ∗}
Tabella 8.3: Coefficienti e forze/momenti di eccitazione dei moti trasversali.
Capitolo 9
Moti nave in onde regolari
9.1 Introduzione
Il modello teorico sviluppato nei capitoli precedenti puo essere usato per la previsione dei motidi una nave soggetta all’azione di onde regolari di piccola ampiezza. In generale, le previsioninumeriche cosı ottenute hanno un’accuratezza sufficiente, almeno per quel che concerne la soluzionedella maggior parte dei problemi pratici di ingegneria navale relativamente a navi convenzionalicon velocita di avanzo moderate.
Come esempio applicativo, in questo capitolo vengono discussi i risultati ottenuti nel calcolo deimoti nave di una fregata della lunghezza di 125 m. Poiche i moti nave sono funzioni delle dimen-sioni e della forma di carena, le previsioni numeriche relative a questo caso specifico non possonoessere usate per effettuare valutazioni quantitative su navi diverse da quella in esame. Tuttavia, lecaratteristiche qualitative dei risultati conservano la loro validita generale anche per altre navi amonoscafo di forme tradizionali. Nell’esempio applicativo non viene evidenziato a sufficienza il mo-to di abbrivio, per sottolineare il fatto che esso non puo essere calcolato esplicitamente nell’ambitodella strip theory.
9.2 Funzioni di trasferimento
La depresssione dell’onda in corrispondenza dell’origine O del riferimento degli assi mobili (riferi-mento di seakeeping) viene espressa dalla (6.40) come:
ζw = a cosωet , (9.1)
mentre, in base alla (6.47), i moti nave sono dati dalle relazioni:
uj = (uj)0 cos(ωet + δj) , j = 1, 2, . . . , 6 . (9.2)
Le ampiezze (uj)0 e le fasi δj sono funzioni della velocita di avanzo U , dell’angolo di rotta χe della frequenza d’incontro ωe delle onde incidenti. Poiche le ampiezze dei moti sono assunteproporzionali all’ampiezza o alla pendenza dell’onda, si e soliti esprimerle in forma adimensionale:le ampiezze dei moti lineari (u1)0, (u2)0 e (u3)0 vengono adimensionalizzate rispetto all’ampiezzaa dell’onda, mentre le ampiezze dei moti angolari (u4)0, (u5)0 e (u6)0 sono adimensionalizzaterispetto alla pendenza α = ka dell’onda.
Le ampiezze adimensionali ottenute in questo modo prendono il nome di funzioni di trasfe-rimento (transfer functions). Esse forniscono la proporzione con cui il sistema nave trasferisce
123
124 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
l’ampiezza o la pendenza dell’onda nelle corrispondenti ampiezze dei moti lineari o angolari, ri-spettivamente. In generale, le funzioni di trasferimento sono espresse in funzione della frequenzad’incontro, anche se l’uso di rappresentazioni alternative in termini della frequenza vera o dellalunghezza d’onda puo presentare certi vantaggi.
Gli angoli δj esprimono la relazione di fase tra il moto nave ed il profilo dell’onda nell’originedel riferimento mobile: un valore positivo significa che il massimo positivo del moto avviene altempo δj/ωe prima della massima depressione dell’onda (cavo). Valori negativi di δj implicano cheil moto segue la depressione dell’onda. Si parla allora di anticipo o ritardo di fase, rispettivamente.
9.3 Moti nave in onde regolari di prora
Si incominci con il considerare il caso piu semplice dei moti nave in onde regolari di prora (χ =180◦). La simmetria delle forme e dei pesi rispetto al piano diametrale assicura che scarroccio,rollio e imbardata sono assenti e che i moti risultanti sono quelli dovuti ad abbrivio, sussulto ebeccheggio.
Le equazioni di sussulto e beccheggio sono accoppiate fra loro cosicche il moto di sussultoinfluenza il moto di beccheggio e viceversa. L’accoppiamento fra i due e in generale abbastanzadebole e, in prima approssimazione, tali moti possono essere considerati come disaccoppiati.
Nell’ambito della strip theory, l’equazione di abbrivio e tuttavia indipendente dalle due equa-zioni precedenti. Poiche essa e priva del termine di richiamo, ci si deve aspettare che il moto diabbrivio risulti analogo a quello di un sistema smorzato senza rigidezza, ovvero non esiste unafrequenza naturale di abbrivio.
In onde molto lunghe la frequenza d’incontro e molto bassa e gli effetti dinamici associati conla massa aggiunta e con lo smorzamento sono trascurabili. Le azioni e le reazioni subite dallanave sono attribuibili quasi interamente a variazioni di spinta, che si verificano quando le onde simuovono lungo la nave. Assegnando la posizione dell’onda rispetto al riferimento di seakeeping conorigine O, si puo affermare che il massimo momento di beccheggio avviene in corrispondenza deinodi dell’onda, mentre la massima forza di sussulto ha luogo sulla cresta e sui cavi dell’onda. Inqueste condizioni, si hanno le eccitazioni di maggiore intensita e conseguentemente grandi ampiezzedei moti (vedi Figura 9.1).
Per moderate velocita di avanzo la celerita dell’onda e molto maggiore della velocita dellanave e quindi essa puo essere considerata praticamente immobile durante il passaggio dell’onda.Il baricentro della nave si comporta come una particella fluida sulla superficie libera dell’acqua,descrivendo un’orbita circolare di raggio pari all’ampiezza dell’onda. Cosı il massimo sussulto (diampiezza a) ha luogo nelle creste e nei cavi, mentre il massimo abbrivio (pure di ampiezza a) siverifica nei nodi dell’onda. La nave avanza verso la cresta in arrivo e la segue quando questa epassata. Essa risulta sempre allineata con la superficie dell’onda cosicche il massimo beccheggio,pari alla pendenza dell’onda (di ampiezza α = ka), ha luogo nei nodi dell’onda.
Per onde piu corte, ovvero alle frequenze d’incontro piu alte, le forze di spinta si alterna-no in segno lungo la carena, come mostrato in Figura 9.2. Questo fatto, assieme alla crescenteimportanza degli effetti dinamici, comporta una generale riduzione dell’eccitazione. I risultatidell’analisi teorica, confermati dalla sperimentazione (Smith, 1967), indicano che la nave subisceeccitazioni significative solo quando le onde sono piu lunghe di circa tre quarti della lunghezza nave(λ/L > 0.75). Per onde piu corte le eccitazioni sono praticamente trascurabili.
Il calcolo delle funzioni di trasferimento per i moti di sussulto e beccheggio per la fregata da125m in onde regolari di prora da luogo alle previsioni mostrate nelle Figure 9.3 e 9.4. Comeci si poteva aspettare, tutte le risposte si avvicinano all’unita per la frequenza d’incontro zero,corrispondente al caso delle onde piu lunghe, indipendentemente dalla velocita nave.
Le risposte sono generalmente ridotte alle frequenze piu alte (onde piu corte) a causa della

9.3. MOTI NAVE IN ONDE REGOLARI DI PRORA 125
c
t = 0
U
a
λ
(η )g o
θ o
(ζ )g o
(ζ )g o
(η )g o
θ o
t = T4
t = T2
t = 34 T
Figura 9.1: Moti nave in onde molto lunghe di prora (χ = 180◦).
(a) Long waves λ >> L
(b) Medium waves λ = L
(c) Short waves λ << L
Figura 9.2: Forze di spinta agenti su una nave vincolata in onde regolari di ampiezza costante.

126 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
sostanziale riduzione dell’eccitazione. Tuttavia, quando la velocita della nave aumenta, le lunghezzed’onda caratterizzate da valori significativi dell’eccitazione vengono incontrate su di un intervallopiu ampio di frequenze, tale da includere eventualmente anche le frequenze naturali di sussultoe di beccheggio. Le risposte possono percio presentare dei picchi di risonanza, come mostrato inFigura 9.3 per una velocita di avanzo di 30 nodi. I moti di sussulto e beccheggio sono, tuttavia,fortemente smorzati ed i massimi della curva di risposta non possono mai essere molto pronunciati.
Le Figure 9.3 e 9.4 mostrano anche le fasi di sussulto e di beccheggio ottenute dalle previsioninumeriche, le quali rispecchiano la situazione mostrata schematicamente in Figura 9.1. In ondemolto lunghe la fase di sussulto risulta δζ = 0◦, indicando che il moto e sincronizzato con ilmoto delle onde e che il massimo sussulto positivo (in basso) avviene nel cavo dell’onda. Lafase del beccheggio e δθ = −90◦ alla frequenza d’incontro zero. Questo indica che il massimobeccheggio positivo (prua in alto) ha luogo in corrispondenza dei nodi dell’onda, un quarto diperiodo d’incontro dopo che il cavo e passato per il baricentro della nave. In questo stesso istanterisulta massima la pendenza dell’onda, con la quale e sincronizzato il moto di beccheggio. Per ilmoto di abbrivio si ha infine δξ = −90◦. Alle frequenze piu alte queste semplici relazioni di fase sonomodificate dagli effetti dinamici e dagli accoppiamenti con gli altri moti. Tuttavia, esse rimangonogeneralmente valide sulla maggior parte dell’intervallo delle frequenze dove si manifestano motiapprezzabili.
20
30 kn
10
0
20
30 kn
0
10
0.0 0.5 1.0 1.5 2.0 2.5Encounter Frequency , ωe (rad/s)
0.0
0.5
1.0
1.5
Hea
ve T
rans
fer
Fun
ctio
n ,
(ζg
) 0 /a (
m/m
)
0.0 0.5 1.0 1.5 2.0 2.5Encounter Frequency , ωe (rad/s)
-180
-90
0
90
180
Hea
ve P
hase
, δ
ζ g (de
g)
Figura 9.3: Funzioni di trasferimento e fasi del moto di sussulto per una fregata di 125m in ondedi prora (χ = 180◦).
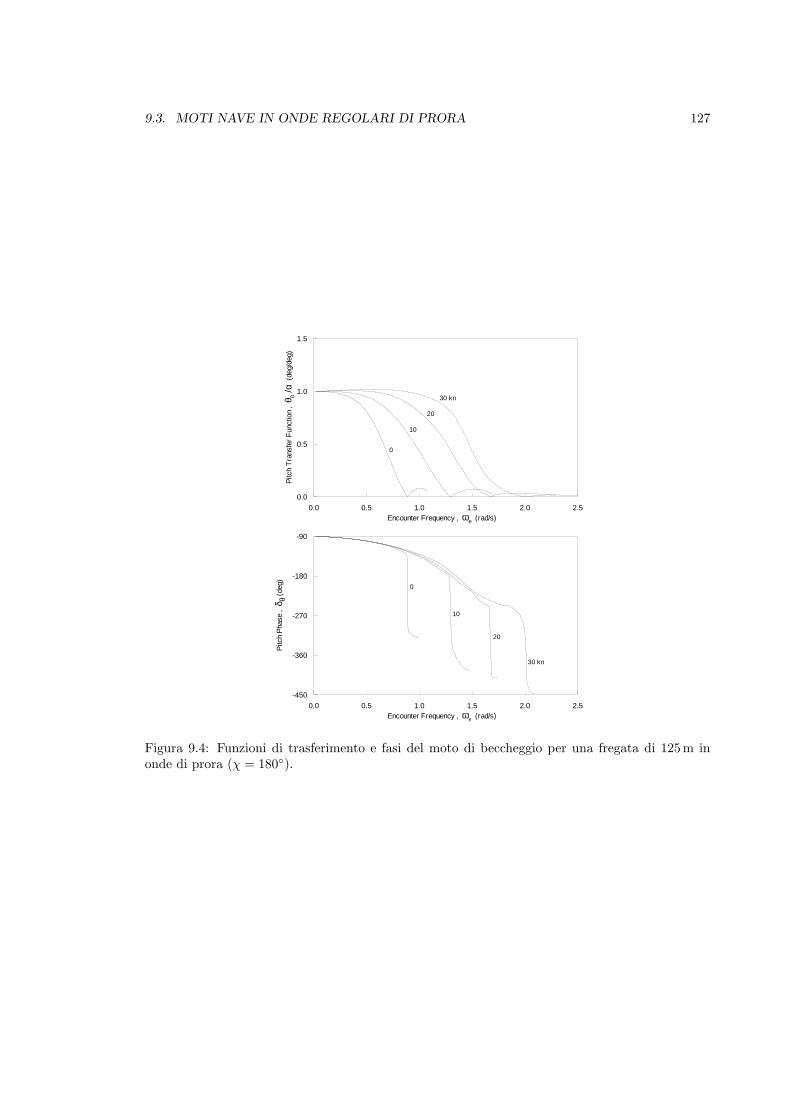
9.3. MOTI NAVE IN ONDE REGOLARI DI PRORA 127
20
30 kn
10
0
20
30 kn
0
10
0.0 0.5 1.0 1.5 2.0 2.5Encounter Frequency , ωe (rad/s)
0.0
0.5
1.0
1.5
Pitc
h T
rans
fer
Fun
ctio
n ,
θ 0 /α
(de
g/de
g)
0.0 0.5 1.0 1.5 2.0 2.5Encounter Frequency , ωe (rad/s)
-450
-360
-270
-180
-90
Pitc
h P
hase
, δ
θ (d
eg)
Figura 9.4: Funzioni di trasferimento e fasi del moto di beccheggio per una fregata di 125 m inonde di prora (χ = 180◦).

128 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
9.4 Moti nave in onde regolari di poppa
In onde di poppa i moti nave rimangono limitati ai soli moti longitudinali di abbrivio, sussulto ebeccheggio. Le Figure 9.5 e 9.6 mostrano le funzioni di trasferimento in onde regolari di poppacalcolate per i moti di sussulto e beccheggio. Esse assumono un valore unitario per onde moltolunghe, cioe quando la frequenza d’incontro e prossima a zero.
Come gia osservato al Capitolo 3, per ogni prefissata velocita di avanzo, la nave puo incontraresoltanto un intervallo limitato di frequenze positive. Le funzioni di trasferimento assumono perciole particolari forme mostrate nelle figure, dove si riscontrano due risposte distinte per ogni valorepositivo della frequenza d’incontro relativa a due differenti lunghezze d’onda. Una terza rispostasi manifesta alla corrispondente frequenza d’incontro negativa, quando cioe la nave sopravanza leonde. Per moderate velocita di avanzo, questo fenomeno ha luogo in onde molto corte, per le qualile eccitazioni e le risposte sono generalmente molto piccole.
2030 kn 10 0
2030 kn 010
-0.5 0.0 0.5 1.0 1.5Encounter Frequency , ωe (rad/s)
0.0
0.5
1.0
1.5
Hea
ve T
rans
fer
Fun
ctio
n ,
(ζg
) 0 /a
(m
/m)
-0.5 0.0 0.5 1.0 1.5Encounter Frequency , ωe (rad/s)
-180
-90
0
90
180
Hea
ve P
hase
, δ
ζ g (
deg)
Figura 9.5: Funzioni di trasferimento e fasi del moto di sussulto per una fregata di 125m in ondedi poppa (χ = 0◦).
Sulla maggior parte dell’intervallo delle frequenze d’incontro dove la risposta risulta significa-tiva, la fase di sussulto e prossima a δζ = 0◦. Questo indica che il moto di sussulto e, anchein questo caso, approssimativamente sincronizzato con il moto ondoso. La fase di beccheggio evicina a δθ = −270◦ (ovvero δθ = 90◦) in quanto il massimo beccheggio (prora in alto) precede lamassima depressione ondosa nel baricentro della nave di circa un quarto di periodo d’incontro, cioesi verifica in corrispondenza della massima pendenza dell’onda. Considerazioni analoghe possonoessere fatte relativamente al moto di abbrivio, per il quale si ha δξ = −270◦ (ovvero δξ = 90◦).
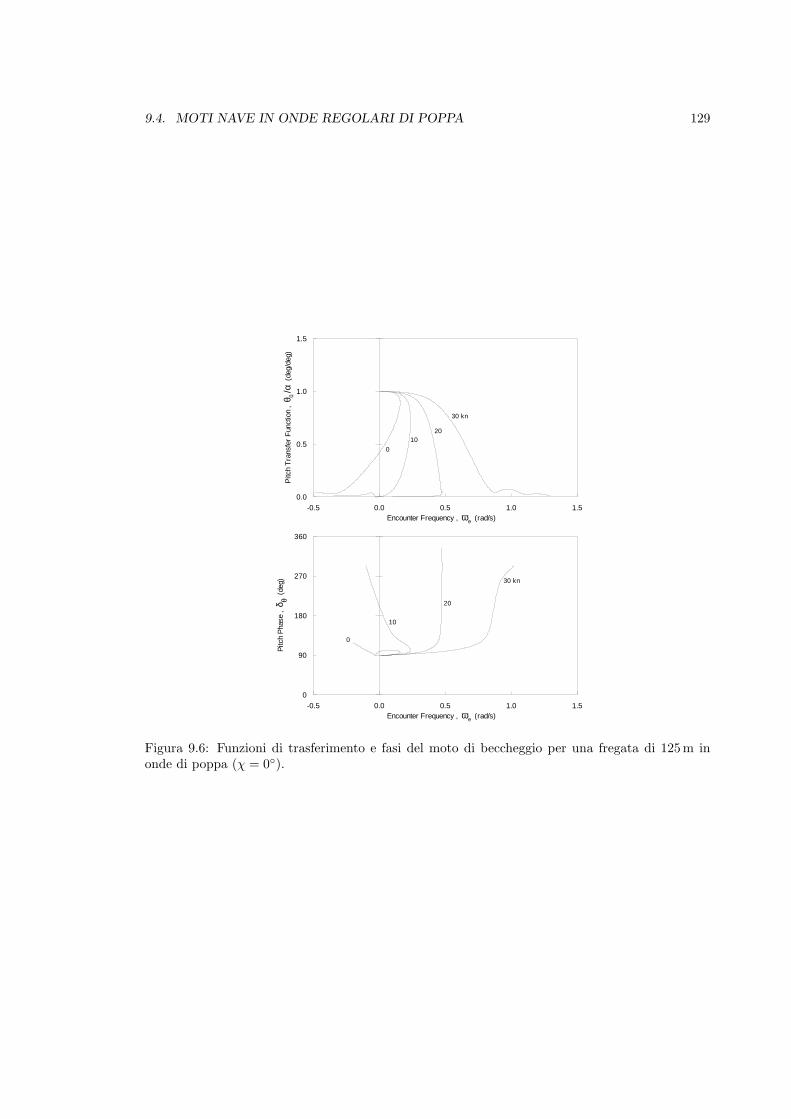
9.4. MOTI NAVE IN ONDE REGOLARI DI POPPA 129
20
30 kn
10
0
20
30 kn
0
10
-0.5 0.0 0.5 1.0 1.5Encounter Frequency , ωe (rad/s)
0.0
0.5
1.0
1.5
Pitc
h T
rans
fer
Fun
ctio
n ,
θ 0 /α
(de
g/de
g)
-0.5 0.0 0.5 1.0 1.5Encounter Frequency , ωe (rad/s)
0
90
180
270
360
Pitc
h P
hase
, δ
θ (de
g)
Figura 9.6: Funzioni di trasferimento e fasi del moto di beccheggio per una fregata di 125 m inonde di poppa (χ = 0◦).
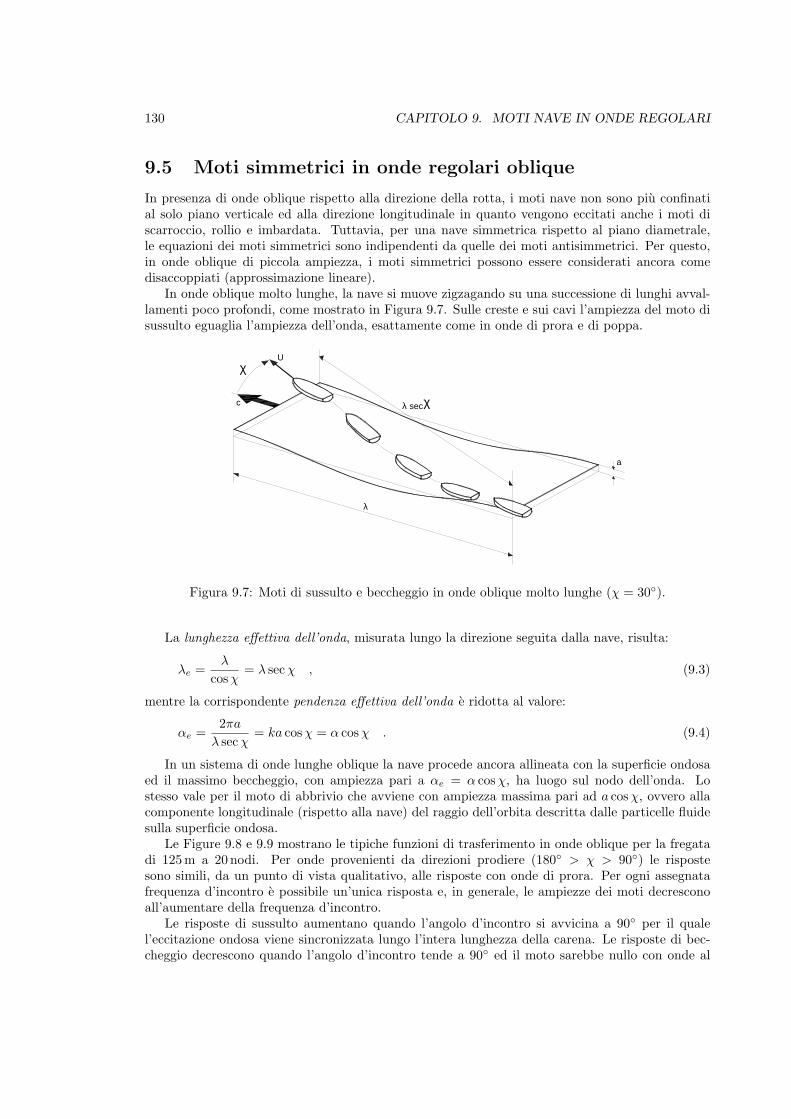
130 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
9.5 Moti simmetrici in onde regolari oblique
In presenza di onde oblique rispetto alla direzione della rotta, i moti nave non sono piu confinatial solo piano verticale ed alla direzione longitudinale in quanto vengono eccitati anche i moti discarroccio, rollio e imbardata. Tuttavia, per una nave simmetrica rispetto al piano diametrale,le equazioni dei moti simmetrici sono indipendenti da quelle dei moti antisimmetrici. Per questo,in onde oblique di piccola ampiezza, i moti simmetrici possono essere considerati ancora comedisaccoppiati (approssimazione lineare).
In onde oblique molto lunghe, la nave si muove zigzagando su una successione di lunghi avval-lamenti poco profondi, come mostrato in Figura 9.7. Sulle creste e sui cavi l’ampiezza del moto disussulto eguaglia l’ampiezza dell’onda, esattamente come in onde di prora e di poppa.
c
λ
a
λ secχ
χU
Figura 9.7: Moti di sussulto e beccheggio in onde oblique molto lunghe (χ = 30◦).
La lunghezza effettiva dell’onda, misurata lungo la direzione seguita dalla nave, risulta:
λe =λ
cos χ= λ sec χ , (9.3)
mentre la corrispondente pendenza effettiva dell’onda e ridotta al valore:
αe =2πa
λ sec χ= ka cos χ = α cosχ . (9.4)
In un sistema di onde lunghe oblique la nave procede ancora allineata con la superficie ondosaed il massimo beccheggio, con ampiezza pari a αe = α cosχ, ha luogo sul nodo dell’onda. Lostesso vale per il moto di abbrivio che avviene con ampiezza massima pari ad a cos χ, ovvero allacomponente longitudinale (rispetto alla nave) del raggio dell’orbita descritta dalle particelle fluidesulla superficie ondosa.
Le Figure 9.8 e 9.9 mostrano le tipiche funzioni di trasferimento in onde oblique per la fregatadi 125m a 20 nodi. Per onde provenienti da direzioni prodiere (180◦ > χ > 90◦) le rispostesono simili, da un punto di vista qualitativo, alle risposte con onde di prora. Per ogni assegnatafrequenza d’incontro e possibile un’unica risposta e, in generale, le ampiezze dei moti decresconoall’aumentare della frequenza d’incontro.
Le risposte di sussulto aumentano quando l’angolo d’incontro si avvicina a 90◦ per il qualel’eccitazione ondosa viene sincronizzata lungo l’intera lunghezza della carena. Le risposte di bec-cheggio decrescono quando l’angolo d’incontro tende a 90◦ ed il moto sarebbe nullo con onde al

9.5. MOTI SIMMETRICI IN ONDE REGOLARI OBLIQUE 131
traverso se la carena avesse simmetria di forma e di peso prora/poppa. Analoghe considerazionivalgono, in linea di massima, anche per il moto di abbrivio.
180o
90o
60o
30o
150o
120o
60o
-0.5 0.0 0.5 1.0 1.5 2.0 2.5
Encounter Frequency , ωe (rad/s)
0.0
0.5
1.0
1.5
Hea
ve T
rans
fer
Fun
ctio
n ,
(ζg
) 0 /a
(m
/m)
-0.5 0.0 0.5 1.0 1.5 2.0 2.5
Encounter Frequency , ωe (rad/s)
-180
-90
0
90
180
Hea
ve P
hase
, δ
ζ g (de
g)150
o
120o
0o
180o
90o
30o0
o
Figura 9.8: Funzioni di trasferimento e fasi del moto di sussulto per una fregata di 125m in ondeoblique alla velocita di 20 nodi.
Per onde dai quartieri poppieri (0◦ < χ < 90◦) le risposte nei moti simmetrici assumono laforma generale gia vista per onde di poppa. L’intervallo delle possibili frequenze d’incontro risultaridotto in funzione della rotta seguita e, per ogni data frequenza d’incontro, e possibile avere piudi una risposta.
In onde molto lunghe, la fase di sussulto e δζ = 0◦, indicando cosı che il sussulto viene sincro-nizzato con la depressione dell’onda per tutti gli angoli d’incontro. Per mari da direzioni prodiere(180◦ > χ > 90◦) la fase di beccheggio e δθ = −90◦ e per mari dai quartieri poppieri (0◦ < χ < 90◦)essa risulta δθ = −270◦ (ovvero δθ = 90◦). Lo stesso vale per il moto di abbrivio.
Si noti che da un punto di vista ingegneristico e spesso piu conveniente rappresentare le fun-zioni di trasferimento dei moti in termini della frequenza vera o della lunghezza nondimensionaledell’onda piuttosto che come funzioni della frequenza d’incontro. La Figura 9.10 mostra le funzionidi trasferimento in onde oblique espresse in questa forma per la fregata di 125 m. Esse hannol’indubbio vantaggio che, per una data frequenza vera o per una data lunghezza d’onda, le rispostesono tutte a valore singolo per cui sono evitate le complicazioni formali legate alle risposte a multi-valore. La stessa procedura viene usata, in generale, nella presentazione dei risultati sperimentaliin vasca navale.
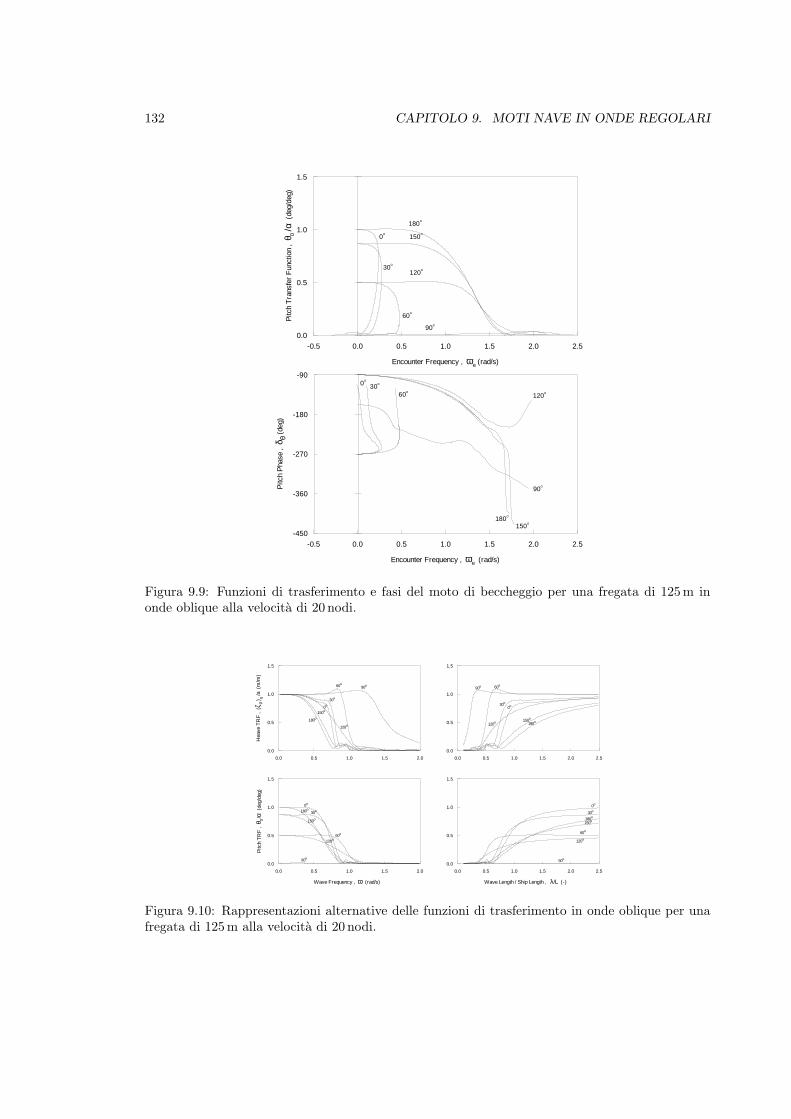
132 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
150o
180o
120o
60o
120o
90o
180o
150o
-0.5 0.0 0.5 1.0 1.5 2.0 2.5
Encounter Frequency , ωe (rad/s)
0.0
0.5
1.0
1.5
Pitc
h T
rans
fer
Fun
ctio
n ,
θ 0 /α
(de
g/de
g)
-0.5 0.0 0.5 1.0 1.5 2.0 2.5
Encounter Frequency , ωe (rad/s)
-450
-360
-270
-180
-90
Pitc
h P
hase
, δ
θ (deg
)
0o
30o
90o
60o30o0o
Figura 9.9: Funzioni di trasferimento e fasi del moto di beccheggio per una fregata di 125 m inonde oblique alla velocita di 20 nodi.
0.0 0.5 1.0 1.5 2.0
0.0
0.5
1.0
1.5
Hea
ve T
RF
, (ζ g
)0 /a
(m
/m)
0.0 0.5 1.0 1.5 2.0 2.5
0.0
0.5
1.0
1.5
0.0 0.5 1.0 1.5 2.0
Wave Frequency , ω (rad/s)
0.0
0.5
1.0
1.5
Pitc
h T
RF
, θ
0 /α
(de
g/de
g)
0.0 0.5 1.0 1.5 2.0 2.5
Wave Length / Ship Length , λ/L (-)
0.0
0.5
1.0
1.5
180o
150o
120o
90o60o
30o
0o
60o
180o120o 150o
30o
90o
0o
60o
150o
90o
30o
0o
120o
180o
60o
120o
30o
150o
180o0o
90o
Figura 9.10: Rappresentazioni alternative delle funzioni di trasferimento in onde oblique per unafregata di 125 m alla velocita di 20 nodi.
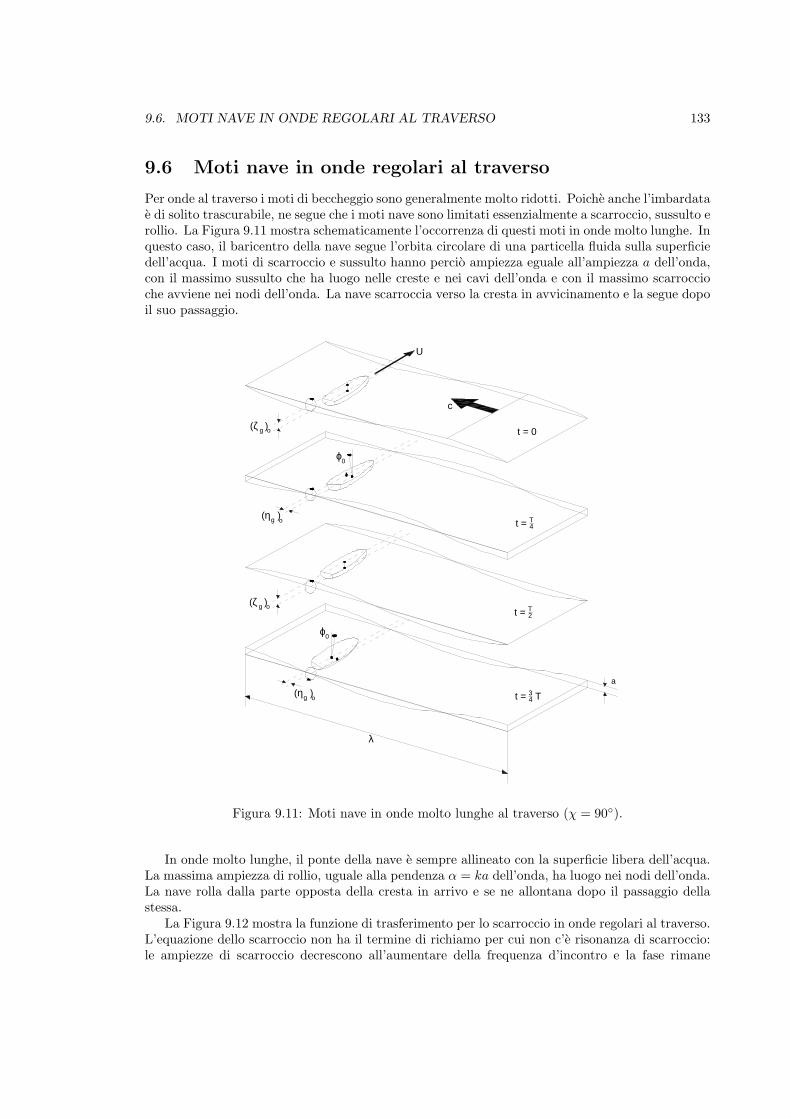
9.6. MOTI NAVE IN ONDE REGOLARI AL TRAVERSO 133
9.6 Moti nave in onde regolari al traverso
Per onde al traverso i moti di beccheggio sono generalmente molto ridotti. Poiche anche l’imbardatae di solito trascurabile, ne segue che i moti nave sono limitati essenzialmente a scarroccio, sussulto erollio. La Figura 9.11 mostra schematicamente l’occorrenza di questi moti in onde molto lunghe. Inquesto caso, il baricentro della nave segue l’orbita circolare di una particella fluida sulla superficiedell’acqua. I moti di scarroccio e sussulto hanno percio ampiezza eguale all’ampiezza a dell’onda,con il massimo sussulto che ha luogo nelle creste e nei cavi dell’onda e con il massimo scarroccioche avviene nei nodi dell’onda. La nave scarroccia verso la cresta in avvicinamento e la segue dopoil suo passaggio.
t = 0
λ
t = T4
t = T2
t = 34 T
(η )g o
(ζ )g o
(ζ )g o
(η )g o
U
ϕ 0
ϕ 0
c
a
Figura 9.11: Moti nave in onde molto lunghe al traverso (χ = 90◦).
In onde molto lunghe, il ponte della nave e sempre allineato con la superficie libera dell’acqua.La massima ampiezza di rollio, uguale alla pendenza α = ka dell’onda, ha luogo nei nodi dell’onda.La nave rolla dalla parte opposta della cresta in arrivo e se ne allontana dopo il passaggio dellastessa.
La Figura 9.12 mostra la funzione di trasferimento per lo scarroccio in onde regolari al traverso.L’equazione dello scarroccio non ha il termine di richiamo per cui non c’e risonanza di scarroccio:le ampiezze di scarroccio decrescono all’aumentare della frequenza d’incontro e la fase rimane
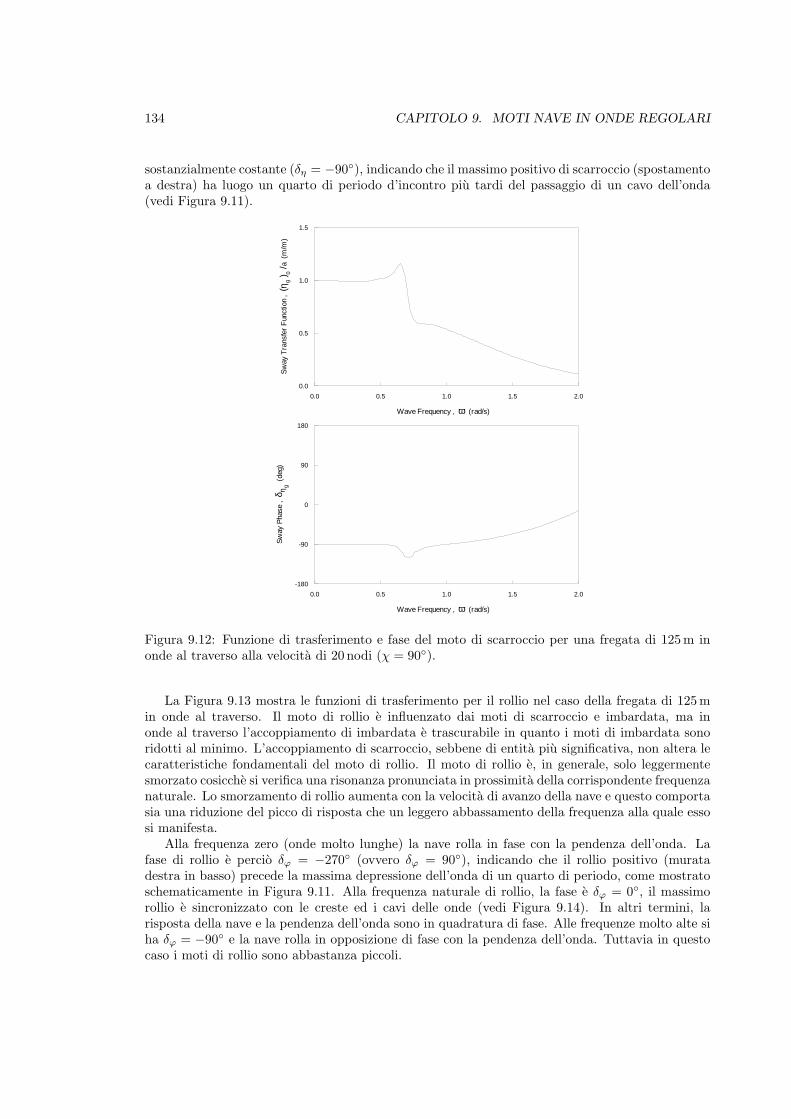
134 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
sostanzialmente costante (δη = −90◦), indicando che il massimo positivo di scarroccio (spostamentoa destra) ha luogo un quarto di periodo d’incontro piu tardi del passaggio di un cavo dell’onda(vedi Figura 9.11).
0.0 0.5 1.0 1.5 2.0
Wave Frequency , ω (rad/s)
0.0
0.5
1.0
1.5
Sw
ay T
rans
fer
Fun
ctio
n ,
(ηg
) 0 /a
(m
/m)
0.0 0.5 1.0 1.5 2.0
Wave Frequency , ω (rad/s)
-180
-90
0
90
180
Sw
ay P
hase
, δ
η g (de
g)
Figura 9.12: Funzione di trasferimento e fase del moto di scarroccio per una fregata di 125 m inonde al traverso alla velocita di 20 nodi (χ = 90◦).
La Figura 9.13 mostra le funzioni di trasferimento per il rollio nel caso della fregata di 125 min onde al traverso. Il moto di rollio e influenzato dai moti di scarroccio e imbardata, ma inonde al traverso l’accoppiamento di imbardata e trascurabile in quanto i moti di imbardata sonoridotti al minimo. L’accoppiamento di scarroccio, sebbene di entita piu significativa, non altera lecaratteristiche fondamentali del moto di rollio. Il moto di rollio e, in generale, solo leggermentesmorzato cosicche si verifica una risonanza pronunciata in prossimita della corrispondente frequenzanaturale. Lo smorzamento di rollio aumenta con la velocita di avanzo della nave e questo comportasia una riduzione del picco di risposta che un leggero abbassamento della frequenza alla quale essosi manifesta.
Alla frequenza zero (onde molto lunghe) la nave rolla in fase con la pendenza dell’onda. Lafase di rollio e percio δϕ = −270◦ (ovvero δϕ = 90◦), indicando che il rollio positivo (muratadestra in basso) precede la massima depressione dell’onda di un quarto di periodo, come mostratoschematicamente in Figura 9.11. Alla frequenza naturale di rollio, la fase e δϕ = 0◦, il massimorollio e sincronizzato con le creste ed i cavi delle onde (vedi Figura 9.14). In altri termini, larisposta della nave e la pendenza dell’onda sono in quadratura di fase. Alle frequenze molto alte siha δϕ = −90◦ e la nave rolla in opposizione di fase con la pendenza dell’onda. Tuttavia in questocaso i moti di rollio sono abbastanza piccoli.
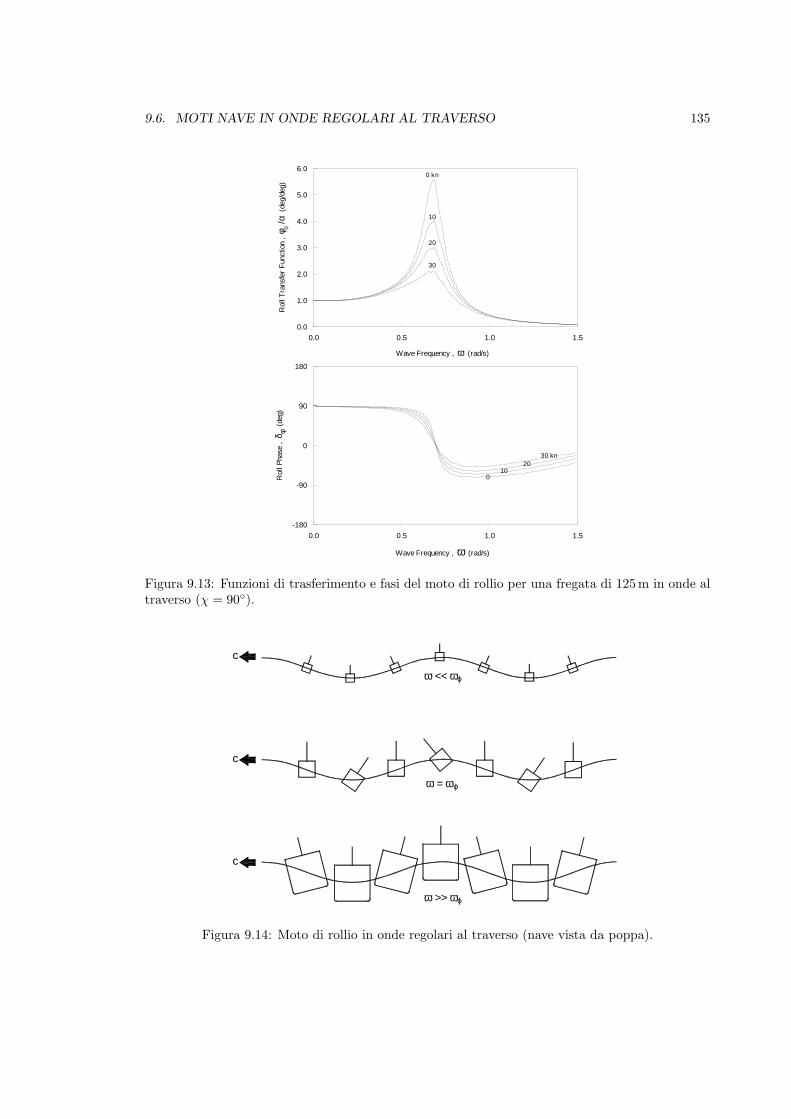
9.6. MOTI NAVE IN ONDE REGOLARI AL TRAVERSO 135
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
0.0
1.0
2.0
3.0
4.0
5.0
6.0
Rol
l Tra
nsfe
r F
unct
ion
, φ 0 /
α (
deg/
deg)
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
-180
-90
0
90
180
Rol
l Pha
se ,
δφ
(de
g)
0 kn
10
20
30
30 kn20
100
Figura 9.13: Funzioni di trasferimento e fasi del moto di rollio per una fregata di 125 m in onde altraverso (χ = 90◦).
c
ω << ωϕ
ω = ωϕ
ω >> ωϕ
c
c
Figura 9.14: Moto di rollio in onde regolari al traverso (nave vista da poppa).
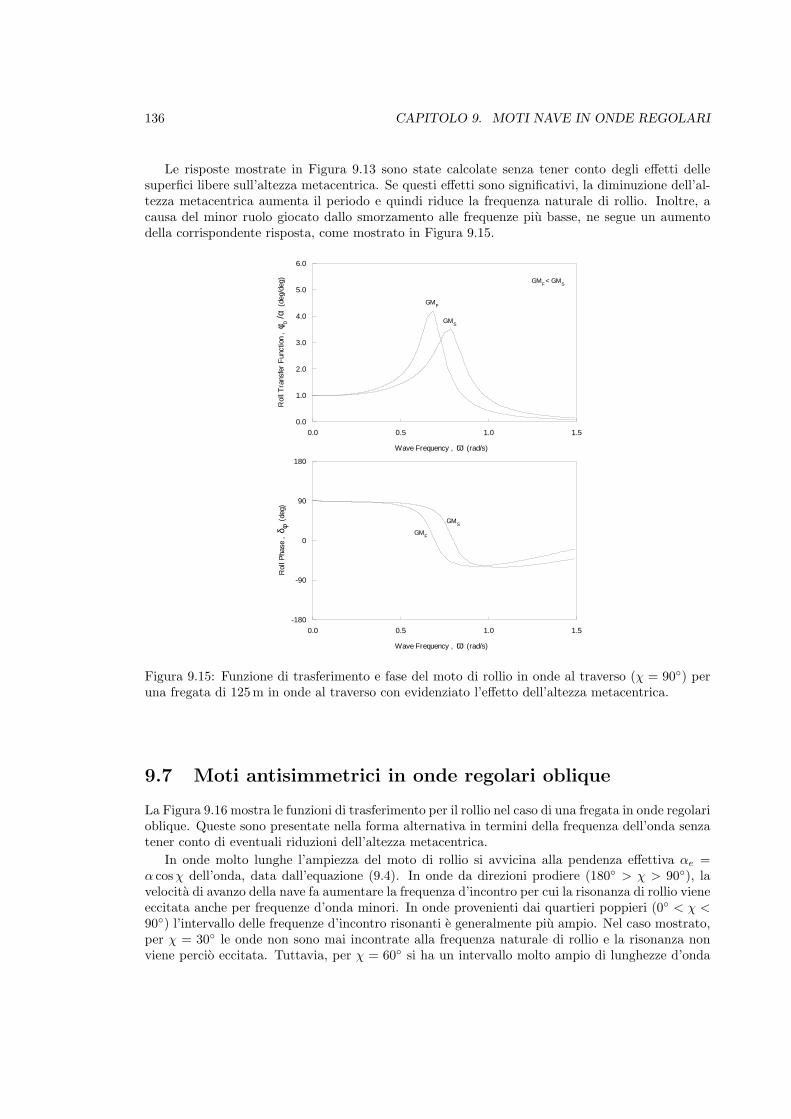
136 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
Le risposte mostrate in Figura 9.13 sono state calcolate senza tener conto degli effetti dellesuperfici libere sull’altezza metacentrica. Se questi effetti sono significativi, la diminuzione dell’al-tezza metacentrica aumenta il periodo e quindi riduce la frequenza naturale di rollio. Inoltre, acausa del minor ruolo giocato dallo smorzamento alle frequenze piu basse, ne segue un aumentodella corrispondente risposta, come mostrato in Figura 9.15.
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
0.0
1.0
2.0
3.0
4.0
5.0
6.0
Rol
l Tra
nsfe
r F
unct
ion
, φ 0 /
α (
deg/
deg)
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
-180
-90
0
90
180
Rol
l Pha
se ,
δφ
(de
g)
GMF
GMS
GMF
GMS
GMF
< GMS
Figura 9.15: Funzione di trasferimento e fase del moto di rollio in onde al traverso (χ = 90◦) peruna fregata di 125m in onde al traverso con evidenziato l’effetto dell’altezza metacentrica.
9.7 Moti antisimmetrici in onde regolari oblique
La Figura 9.16 mostra le funzioni di trasferimento per il rollio nel caso di una fregata in onde regolarioblique. Queste sono presentate nella forma alternativa in termini della frequenza dell’onda senzatener conto di eventuali riduzioni dell’altezza metacentrica.
In onde molto lunghe l’ampiezza del moto di rollio si avvicina alla pendenza effettiva αe =α cosχ dell’onda, data dall’equazione (9.4). In onde da direzioni prodiere (180◦ > χ > 90◦), lavelocita di avanzo della nave fa aumentare la frequenza d’incontro per cui la risonanza di rollio vieneeccitata anche per frequenze d’onda minori. In onde provenienti dai quartieri poppieri (0◦ < χ <90◦) l’intervallo delle frequenze d’incontro risonanti e generalmente piu ampio. Nel caso mostrato,per χ = 30◦ le onde non sono mai incontrate alla frequenza naturale di rollio e la risonanza nonviene percio eccitata. Tuttavia, per χ = 60◦ si ha un intervallo molto ampio di lunghezze d’onda

9.7. MOTI ANTISIMMETRICI IN ONDE REGOLARI OBLIQUE 137
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
0.0
1.0
2.0
3.0
4.0
5.0
6.0
Rol
l Tra
nsfe
r F
unct
ion
, φ 0 /
α (
deg/
deg)
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
0.0
1.0
2.0
3.0
4.0
5.0
6.0
Rol
l Tra
nsfe
r F
unct
ion
, φ 0 /
α (
deg/
deg)
120o
150o
180o
90o
60o
30o
0o
90o
Figura 9.16: Funzioni di trasferimento del moto di rollio per una fregata di 125m in onde oblique allavelocita di 20 nodi.
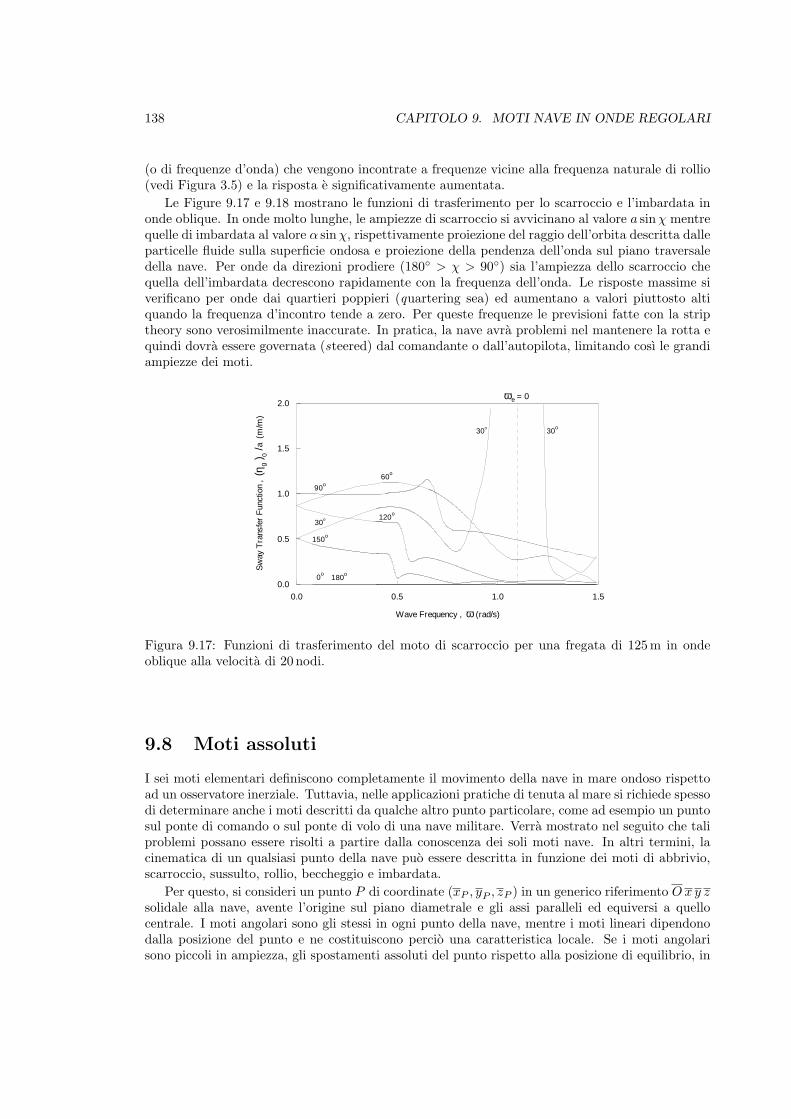
138 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
(o di frequenze d’onda) che vengono incontrate a frequenze vicine alla frequenza naturale di rollio(vedi Figura 3.5) e la risposta e significativamente aumentata.
Le Figure 9.17 e 9.18 mostrano le funzioni di trasferimento per lo scarroccio e l’imbardata inonde oblique. In onde molto lunghe, le ampiezze di scarroccio si avvicinano al valore a sinχ mentrequelle di imbardata al valore α sinχ, rispettivamente proiezione del raggio dell’orbita descritta dalleparticelle fluide sulla superficie ondosa e proiezione della pendenza dell’onda sul piano traversaledella nave. Per onde da direzioni prodiere (180◦ > χ > 90◦) sia l’ampiezza dello scarroccio chequella dell’imbardata decrescono rapidamente con la frequenza dell’onda. Le risposte massime siverificano per onde dai quartieri poppieri (quartering sea) ed aumentano a valori piuttosto altiquando la frequenza d’incontro tende a zero. Per queste frequenze le previsioni fatte con la striptheory sono verosimilmente inaccurate. In pratica, la nave avra problemi nel mantenere la rotta equindi dovra essere governata (steered) dal comandante o dall’autopilota, limitando cosı le grandiampiezze dei moti.
150o
180o
120o
60o
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
0.0
0.5
1.0
1.5
2.0
Sw
ay T
rans
fer
Fun
ctio
n ,
(ηg
) 0 /a
(m
/m)
0o
30o
90o
30o
30o
ωe = 0
Figura 9.17: Funzioni di trasferimento del moto di scarroccio per una fregata di 125 m in ondeoblique alla velocita di 20 nodi.
9.8 Moti assoluti
I sei moti elementari definiscono completamente il movimento della nave in mare ondoso rispettoad un osservatore inerziale. Tuttavia, nelle applicazioni pratiche di tenuta al mare si richiede spessodi determinare anche i moti descritti da qualche altro punto particolare, come ad esempio un puntosul ponte di comando o sul ponte di volo di una nave militare. Verra mostrato nel seguito che taliproblemi possano essere risolti a partire dalla conoscenza dei soli moti nave. In altri termini, lacinematica di un qualsiasi punto della nave puo essere descritta in funzione dei moti di abbrivio,scarroccio, sussulto, rollio, beccheggio e imbardata.
Per questo, si consideri un punto P di coordinate (xP , yP , zP ) in un generico riferimento O xy zsolidale alla nave, avente l’origine sul piano diametrale e gli assi paralleli ed equiversi a quellocentrale. I moti angolari sono gli stessi in ogni punto della nave, mentre i moti lineari dipendonodalla posizione del punto e ne costituiscono percio una caratteristica locale. Se i moti angolarisono piccoli in ampiezza, gli spostamenti assoluti del punto rispetto alla posizione di equilibrio, in
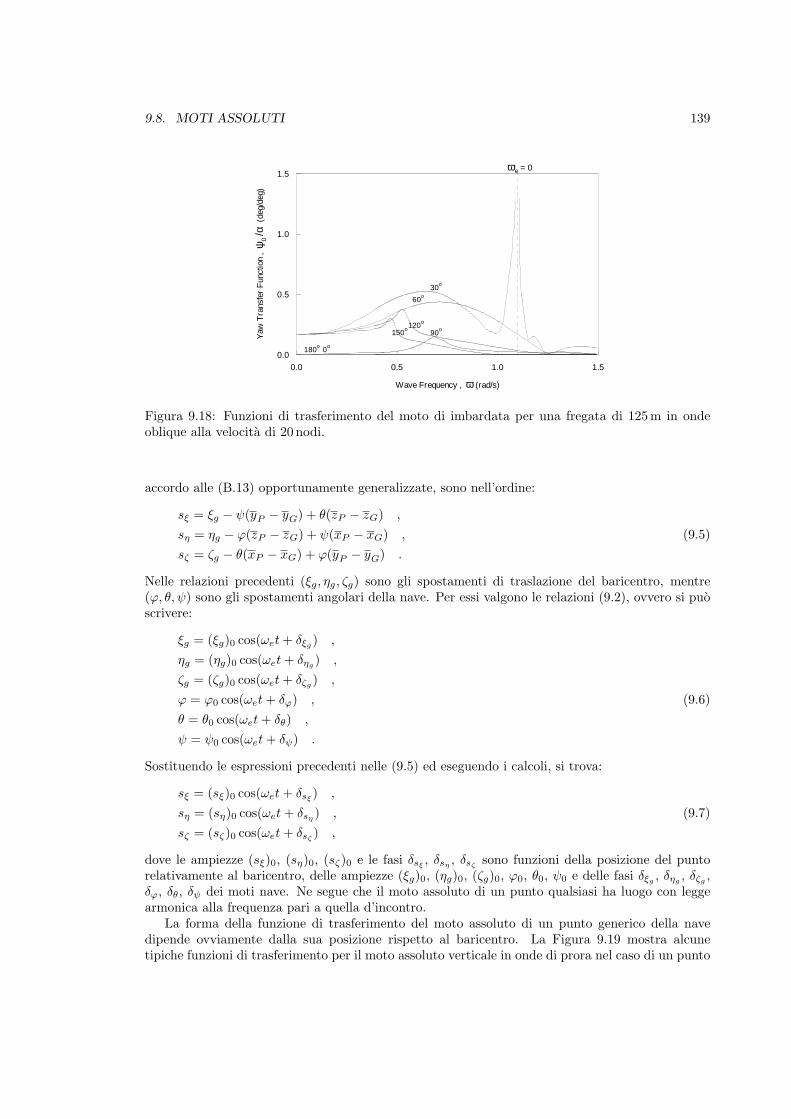
9.8. MOTI ASSOLUTI 139
150o
180o
120o
60o
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
0.0
0.5
1.0
1.5
Yaw
Tra
nsfe
r F
unct
ion
, ψ
0 /α
(de
g/de
g)
0o
30o
90o
ωe = 0
Figura 9.18: Funzioni di trasferimento del moto di imbardata per una fregata di 125 m in ondeoblique alla velocita di 20 nodi.
accordo alle (B.13) opportunamente generalizzate, sono nell’ordine:
sξ = ξg − ψ(yP − yG) + θ(zP − zG) ,
sη = ηg − ϕ(zP − zG) + ψ(xP − xG) , (9.5)sζ = ζg − θ(xP − xG) + ϕ(yP − yG) .
Nelle relazioni precedenti (ξg, ηg, ζg) sono gli spostamenti di traslazione del baricentro, mentre(ϕ, θ, ψ) sono gli spostamenti angolari della nave. Per essi valgono le relazioni (9.2), ovvero si puoscrivere:
ξg = (ξg)0 cos(ωet + δξg ) ,
ηg = (ηg)0 cos(ωet + δηg ) ,
ζg = (ζg)0 cos(ωet + δζg ) ,
ϕ = ϕ0 cos(ωet + δϕ) , (9.6)θ = θ0 cos(ωet + δθ) ,
ψ = ψ0 cos(ωet + δψ) .
Sostituendo le espressioni precedenti nelle (9.5) ed eseguendo i calcoli, si trova:
sξ = (sξ)0 cos(ωet + δsξ) ,
sη = (sη)0 cos(ωet + δsη ) , (9.7)sζ = (sζ)0 cos(ωet + δsζ
) ,
dove le ampiezze (sξ)0, (sη)0, (sζ)0 e le fasi δsξ, δsη , δsζ
sono funzioni della posizione del puntorelativamente al baricentro, delle ampiezze (ξg)0, (ηg)0, (ζg)0, ϕ0, θ0, ψ0 e delle fasi δξg , δηg , δζg ,δϕ, δθ, δψ dei moti nave. Ne segue che il moto assoluto di un punto qualsiasi ha luogo con leggearmonica alla frequenza pari a quella d’incontro.
La forma della funzione di trasferimento del moto assoluto di un punto generico della navedipende ovviamente dalla sua posizione rispetto al baricentro. La Figura 9.19 mostra alcunetipiche funzioni di trasferimento per il moto assoluto verticale in onde di prora nel caso di un punto
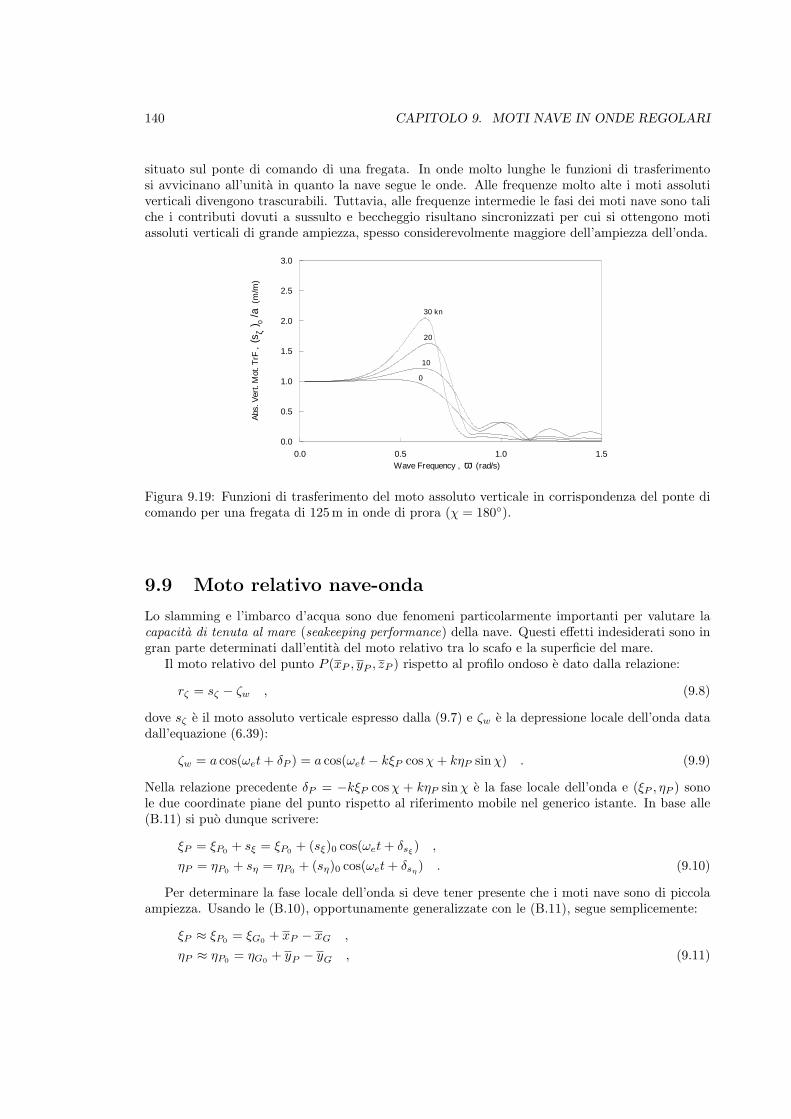
140 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
situato sul ponte di comando di una fregata. In onde molto lunghe le funzioni di trasferimentosi avvicinano all’unita in quanto la nave segue le onde. Alle frequenze molto alte i moti assolutiverticali divengono trascurabili. Tuttavia, alle frequenze intermedie le fasi dei moti nave sono taliche i contributi dovuti a sussulto e beccheggio risultano sincronizzati per cui si ottengono motiassoluti verticali di grande ampiezza, spesso considerevolmente maggiore dell’ampiezza dell’onda.
20
30 kn
10
0
0.0 0.5 1.0 1.5Wave Frequency , ω (rad/s)
0.0
0.5
1.0
1.5
2.0
2.5
3.0A
bs. V
ert.
Mot
. TrF
, (s
ζ )0 /
a (
m/m
)
Figura 9.19: Funzioni di trasferimento del moto assoluto verticale in corrispondenza del ponte dicomando per una fregata di 125 m in onde di prora (χ = 180◦).
9.9 Moto relativo nave-onda
Lo slamming e l’imbarco d’acqua sono due fenomeni particolarmente importanti per valutare lacapacita di tenuta al mare (seakeeping performance) della nave. Questi effetti indesiderati sono ingran parte determinati dall’entita del moto relativo tra lo scafo e la superficie del mare.
Il moto relativo del punto P (xP , yP , zP ) rispetto al profilo ondoso e dato dalla relazione:
rζ = sζ − ζw , (9.8)
dove sζ e il moto assoluto verticale espresso dalla (9.7) e ζw e la depressione locale dell’onda datadall’equazione (6.39):
ζw = a cos(ωet + δP ) = a cos(ωet− kξP cos χ + kηP sinχ) . (9.9)
Nella relazione precedente δP = −kξP cos χ + kηP sin χ e la fase locale dell’onda e (ξP , ηP ) sonole due coordinate piane del punto rispetto al riferimento mobile nel generico istante. In base alle(B.11) si puo dunque scrivere:
ξP = ξP0 + sξ = ξP0 + (sξ)0 cos(ωet + δsξ) ,
ηP = ηP0 + sη = ηP0 + (sη)0 cos(ωet + δsη ) . (9.10)
Per determinare la fase locale dell’onda si deve tener presente che i moti nave sono di piccolaampiezza. Usando le (B.10), opportunamente generalizzate con le (B.11), segue semplicemente:
ξP ≈ ξP0 = ξG0 + xP − xG ,
ηP ≈ ηP0 = ηG0 + yP − yG , (9.11)

9.9. MOTO RELATIVO NAVE-ONDA 141
essendo P0 ≡ (ξP0 , ηP0) e G0 ≡ (ξG0 , ηG0) rispettivamente le coordinate del punto e del baricentroin condizioni di equilibrio. Poiche G0 = (0, 0), in prima approssimazione si ha:
δP ≈ δP0 = −k [(xP − xG) cos χ− (yP − yG) sin χ] , (9.12)
cioe la fase locale risulta costante. Ne segue:
ζw = a cos [ωet− k(xP − xG) cos χ + k(yP − yG) sin χ] . (9.13)
Sostituendo l’espressione (9.13) nella (9.8) ed eseguendo i calcoli algebrici, si trova:
rζ = (rζ)0 cos(ωet + δrζ) . (9.14)
L’ampiezza (rζ)0 e la fase δrζdel moto relativo di un punto rispetto alla superficie ondosa sono
funzioni dell’ampiezza (sζ)0 e della fase δsζdel suo moto assoluto, nonche dell’ampiezza a e della
fase locale δP dell’onda. Il moto relativo e sinusoidale ed avviene con frequenza eguale alla frequenzad’incontro.
In realta, la presenza della carena provoca una considerevole distorsione delle onde in prossimitadella nave e la relazione (9.8) e abbastanza affidabile solo in corrispondenza della perpendicolareavanti. Piu addietro, essa puo sottostimare il moto relativo fino al 50%. Le tecniche sviluppate pervalutare e correggere gli effetti di questa distorsione, detta swell-up, sono ancora oggetto di ricerca enessun metodo universale e stato finora proposto. Tuttavia, nelle applicazioni pratiche, l’equazione(9.8) viene comunque usata per calcolare il moto relativo, talvolta con correzioni empiriche per loswell-up, come descritto al Capitolo 11.
La Figura 9.20 mostra le previsioni ottenute per un punto situato in corrispondenza dellaperpendicolare avanti della fregata di 125 m in onde di prora. Con onde molto lunghe, i motirelativi sono nulli in quanto la nave segue le onde. In onde corte la nave e praticamente immobileed il moto ondoso fornisce l’unico contributo significativo al moto relativo, per cui la funzione ditrasferimento si avvicina all’unita.
20
30 kn
10
0
0.0 0.5 1.0 1.5Wave Frequency , ω (rad/s)
0
1
2
3
4
5
Rel
. Ver
t. M
ot. T
rF ,
(rζ )
0 /a
(m
/m)
Figura 9.20: Funzione di trasferimento del moto relativo in corrispondenza della perpendicolareavanti per una fregata di 125 m in onde di prora (χ = 180◦).
Ad una qualche frequenza intermedia, la fase del moto assoluto verticale e tale che il motoassoluto verso l’alto risulta sincronizzato con la depressione dell’onda nel particolare punto consi-derato. Il moto relativo verticale e allora massimo ed alle alte velocita di avanzo possono verificarsianche risonanze con picchi molto pronunciati.

142 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
9.10 Velocita ed accelerazioni
Poiche gli spostamenti lineari ed angolari del generico atto di moto della nave sia di traslazioneche di rotazione, sia assoluto che relativo, possono essere scritti nella forma:
uj = (uj)0 cos(ωet + δj) , (9.15)
per le corrispondenti velocita ed accelerazioni si ha semplicemente:
uj = −ωe(uj)0 sin(ωet + δj) = (uj)0 cos(ωet + δj +π
2) ,
uj = −ω2e(uj)0 cos(ωet + δj) = (uj)0 cos(ωet + δj + π) , (9.16)
essendo le ampiezze delle velocita e delle accelerazioni definite da:
(uj)0 = ωe(uj)0 ,
(uj)0 = ω2e(uj)0 . (9.17)
Ne segue che le funzioni di trasferimento per le velocita e le accelerazioni possono essere ottenutesemplicemente moltiplicando le funzioni di trasferimento dei moti (assoluti o relativi) rispettiva-mente per la frequenza d’incontro e per il quadrato della frequenza d’incontro. La Figura 9.21mostra alcuni esempi di questa procedura per il moto di sussulto (moto assoluto verticale delbaricentro) in onde di prora e in onde di poppa.
9.11 Lateral Force Estimator
La soluzione di molte problematiche di tenuta al mare richiede la conoscenza dei moti cui sonosoggetti i passeggeri, l’equipaggio e gli oggetti inanimati che si trovano a bordo della nave (riferi-mento solidale). Questi moti, o piu precisamente le corrispondenti accelerazioni, sono importantinel determinare l’occorrenza del mal di mare (seasickness), l’abilita dell’equipaggio a lavorare effi-cientemente e la possibilita dei carichi non rizzati a scivolare lungo il ponte o a ribaltarsi. Alcunidei problemi precedenti verranno discussi con maggiore dettaglio al Capitolo 11. Per il momentosi puo osservare che essi sono legati alle accelerazioni apparenti cui sono sottoposte le persone o glioggetti imbarcati.
Si consideri, per questo, un corpo di massa m posto nel generico punto P (xP , yP , zP ) dellanave, ad esempio in corrispondenza del ponte di coperta, come mostrato in Figura 9.22. Le corri-spondenti equazioni del moto assumono forma diversa a seconda che il problema venga affrontatodall’osservatore assoluto oppure dall’osservatore solidale alla nave.
Infatti, se ~aa e l’accelerazione del corpo nel riferimento inerziale (accelerazione assoluta) ed ~fa
il risultante delle forze agenti nello stesso riferimento (forze reali), per la legge delle accelerazionisi puo scrivere:
m~aa = ~fa , (9.18)
dove:
~fa = m~g + ~R , (9.19)
essendo m~g il peso ed ~R il risultante delle reazioni vincolari, vedi Figura 9.22a.D’altronde, se ~ar e l’accelerazione del corpo nel riferimento non inerziale solidale al corpo
(accelerazione relativa), dalle leggi della cinematica segue che:
~aa = ~ar + ~at + ~ac , (9.20)
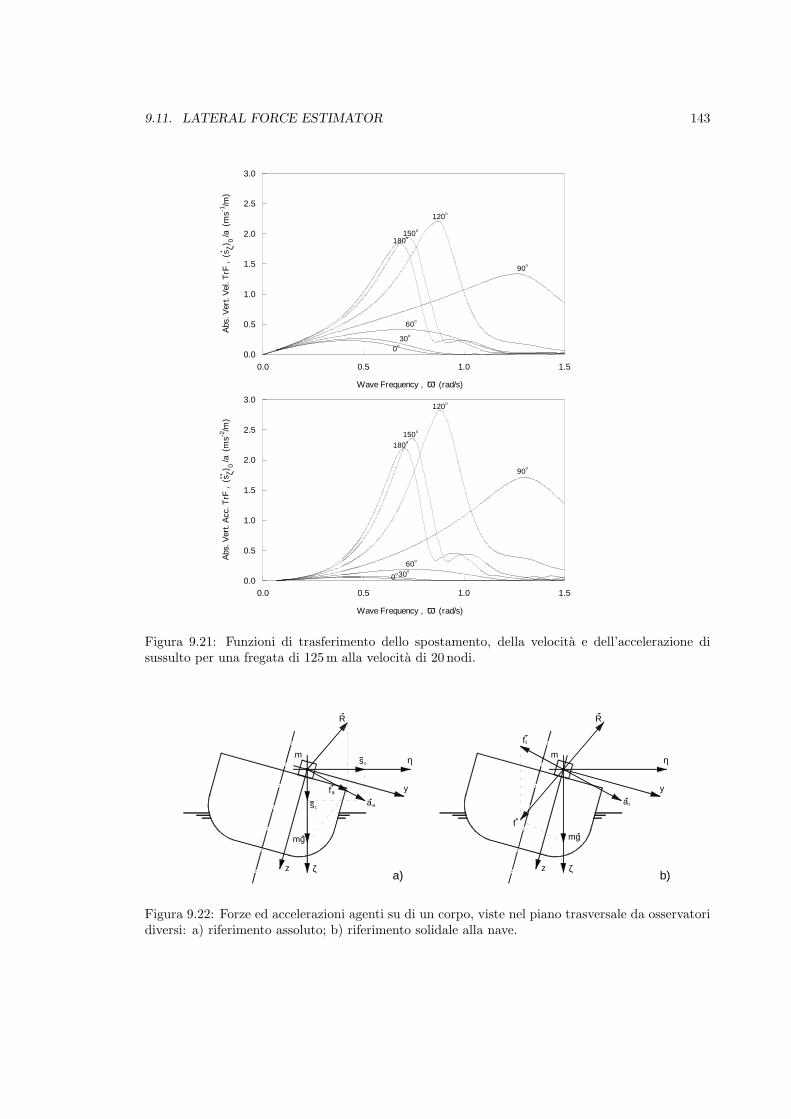
9.11. LATERAL FORCE ESTIMATOR 143
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
Abs
. Ver
t. V
el. T
rF ,
(s ζ) 0 /a
(m
s-1/m
)
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
Abs
. Ver
t. A
cc. T
rF ,
(s ζ) 0 /a
(m
s-2/m
).
..
180o150o
120o
90o
60o
30o
0o
180o
150o
120o
90o
60o
30o
0o
Figura 9.21: Funzioni di trasferimento dello spostamento, della velocita e dell’accelerazione disussulto per una fregata di 125 m alla velocita di 20 nodi.
y
z
mg
ζ
η
aa
m
fa
sζ
sη
R
y
z
mg
ζ
η
R
a t
m
f t
f
a) b)
Figura 9.22: Forze ed accelerazioni agenti su di un corpo, viste nel piano trasversale da osservatoridiversi: a) riferimento assoluto; b) riferimento solidale alla nave.

144 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
ovvero:
~ar = ~aa − ~at − ~ac , (9.21)
dove ~at indica l’accelerazione di trascinamento ed ~ac l’accelerazione complementare o di Coriolis.L’accelerazione di trascinamento e l’accelerazione complementare costituiscono, nel loro insieme,l’accelerazione apparente o fittizia. In particolare, si ha:
~ac = 2~ω × ~vr , (9.22)
dove ~ω e la velocita angolare del riferimento non inerziale (riferimento solidale) rispetto a quel-lo inerziale (riferimento assoluto) e ~vr la velocita del corpo rispetto all’osservatore non inerziale(velocita relativa).
Ne segue che nel riferimento solidale alla nave, oltre alle forze reali, agiscono anche le forzedeterminate dallo stato di moto dell’osservatore e da quello del corpo, dette per questo forzeapparenti o forze fittizie. Da un punto di vista fisico si puo attribuire la loro origine all’inerzia deicorpi, ossia al fatto che essi hanno la tendenza a mantenere lo stato di quiete, oppure a muoversi dimoto rettilineo uniforme. Per questo motivo, le forze fittizie vengono dette talvolta forze d’inerzia.
Per l’osservatore che si trova nel riferimento non inerziale solidale alla nave, indicando con ~fr
la forza relativa, la legge delle accelerazioni assume la forma:
m~ar = ~fr , (9.23)
con:
~fr = ~fa + ~ft + ~fc , (9.24)
dove, in analogia con quanto sopra, ~fa e la forza apparente, ~ft la forza di trascinamento, ~fc la forzacomplementare o di Coriolis. In particolare:
~ft = −m~at ,~fc = −2m~ω × ~vr . (9.25)
Sostituendo la (9.19) e la (9.25) nella (9.24), segue:
~fr = m~g + ~R−m~at − 2m~ω × ~vr . (9.26)
Dunque, l’osservatore non inerziale misura una forza relativa ~fr che e uguale all’azione complessivadelle forze reali e delle forze apparenti. Queste ultime dipendono sia dal moto del sistema diriferimento solidale (attraverso ~at ed ~ω), sia dal moto del corpo relativamente allo stesso (attraverso~vr). Si tenga pero presente che, nonostante il nome, l’effetto delle forze fittizie e reale, nel sensoche per un qualunque corpo vincolato la loro azione si traduce in una deformazione dei vincoli,oppure in una variazione dello stato di moto quando il corpo e libero di muoversi.
Da un punto di vista pratico, e conveniente scomporre le forze agenti in forze attive e forzereattive, queste ultime dovute all’azione dei vincoli. Le forze attive, indicate con ~f , sono responsabilidelle sollecitazioni vincolari e dell’eventuale stato di quiete o di moto relativo del corpo rispettoall’osservatore considerato. Nel riferimento solidale alla nave, essendo ~R la reazione vincolare, inbase alla (9.26), per le forze attive si puo percio scrivere:
~f = m~g −m~at − 2m~ω × ~vr . (9.27)
Poiche la dinamica di un corpo non vincolato risulta generalmente abbastanza complessa, nelseguito verra considerato il solo caso del corpo vincolato, ovvero in quiete relativa rispetto all’os-servatore solidale alla nave (~vr = 0, ~ar = 0), vedi Figura 9.22b. In questo particolare contesto il

9.11. LATERAL FORCE ESTIMATOR 145
problema si semplifica notevolmente, essendo nulla sia la forza complementare (~fc = 0) che la forzarelativa (~fr = 0). Per la forza attiva, segue dalla (9.27):
~f = m~g −m~at = m(~g − ~at) , (9.28)
mentre, per la reazione vincolare incognita, dalla (9.26) si ottiene:
~R = −m~g + m~at = −m(~g − ~at) = −~f . (9.29)
Ne segue che, per un corpo in quiete relativa sulla nave, la reazione vincolare e eguale e contrariaalla forza attiva.
Note che siano le accelerazioni assolute, in base alla (9.28), le componenti della forza attiva ~fnelle direzioni degli assi inerziali Oξηζ, risultano nell’ordine:
fξ = −msξ ,
fη = −msη , (9.30)fζ = mg −msζ = m(g − sζ) .
Tuttavia, da un punto di vista pratico, interessano le tre componenti di ~f lungo gli assi Gxyzdel riferimento solidale, dette rispettivamente componente longitudinale, trasversale (o laterale) enormale (o verticale) della forza attiva. Esse si ottengono facilmente dalle (9.30) per mezzo dellerelazioni:
fx = fξ cos(x, ξ) + fη cos(x, η) + fζ cos(x, ζ) ,
fy = fξ cos(y, ξ) + fη cos(y, η) + fζ cos(y, ζ) , (9.31)fz = fξ cos(z, ξ) + fη cos(z, η) + fζ cos(z, ζ) .
Per i moti di piccola ampiezza, le (9.31) assumono la forma semplificata:
fx = fξ + ψfη − θfζ = −m [sξ + ψsη + θ(g − sζ)] ≈ −m(sξ + gθ) ,
fy = −ψfξ + fη + ϕfζ = m [ψsξ + sη − ϕ(g − sζ)] ≈ −m(sη − gϕ) , (9.32)fz = θfξ − ϕfη + fζ = −m [θsξ − ϕsη − (g − sζ)] ≈ m(g − sζ) .
Nelle relazioni precedenti, al posto delle accelerazioni assolute (sξ, sη, sζ) del corpo, e piu conve-niente far comparire direttamente le accelerazioni dei moti nave nei sei gradi di liberta, ovvero(ξg, ηg, ζg, ϕ, θ, ψ). Pertanto, con riferimento alle (9.5), derivate rispetto al tempo, segue:
sξ = ξg − ψ(yP − yG) + θ(zP − zG) ,
sη = ηg − ϕ(zP − zG) + ψ(xP − xG) , (9.33)
sζ = ζg − θ(xP − xG) + ϕ(yP − yG) ,
da cui, sostituendo nelle (9.32), si ottengono le espressioni alternative:
fx = −m[ξg − ψ(yP − yG) + θ(zP − zG) + gθ
],
fy = −m[ηg − ϕ(zP − zG) + ψ(xP − xG)− gϕ
], (9.34)
fz = m[g − ζg + θ(xP − xG)− ϕ(yP − yG)
].
Le (9.34), noti che siano i moti nave e quindi le corrispondenti accelerazioni, esprimono le compo-nenti della forza attiva agente in ogni punto. Nel caso di un corpo vincolato, esse consentono diricavare, tramite la (9.29) le reazioni vincolari incognite che, come tali, sono alla base del corretto

146 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
dimensionamento dei vincoli. In particolare, la componente longitudinale e quella trasversale sonoresponsabili dell’eventuale scivolamento sul ponte, mentre quella normale e strettamente legata al-l’azione dinamica sulla struttura o al distacco del corpo. Come tale, essa esprime il cosiddetto pesovirtuale, somma del peso reale e di quello apparente. A distacco avvenuto, il problema dinamicosi complica notevolmente in quanto il fenomeno e regolato, nel riferimento relativo, dall’equazionedel moto (9.23), con la forza relativa (9.26) comprensiva di tutti i termini.
Poiche la componente longitudinale della forza attiva ha generalmente intensita minore di quellatrasversale, nelle applicazioni pratiche interessa maggiormente quest’ultima. Ad essa si tendecollegare il problema del comfort a bordo e lo sviluppo degli impianti di stabilizzazione dei motitrasversali della nave. Cio viene fatto introducendo un indice quantitativo, chiamato Lateral ForceEstimator (LFE), definito come la reazione alle forze attive (somma del peso e delle forze apparenti)per unita di massa o, in altri termini, come l’accelerazione corrispondente alle forze attive agentisul corpo in direzione trasversale, cambiate di segno. Dalle (9.32) segue percio:
LFE = − fy
m= sη − gϕ , (9.35)
ovvero, per le (9.34):
LFE = ηg − ϕ(zP − zG) + ψ(xP − xG)− gϕ . (9.36)
Sostituendo nella relazione precedente le espressioni dei moti e delle accelerazioni della nave, consemplici passaggi, segue:
LFE = (LFE)0 cos(ωet + δLFE) . (9.37)
Da quanto gia osservato in precedenza sui moti, risulta che, in presenza di un sistema di onderegolari, il LFE varia nel tempo con legge armonica di frequenza pari alla frequenza d’incontro.L’intensita del LFE non si mantiene costante lungo la nave e la corrispondente funzione di trasfe-rimento dipende dal punto considerato. La Figura 9.23 mostra un esempio relativo alla fregata a20 nodi per una particolare locazione del corpo.
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
0.0
1.0
2.0
3.0
4.0
5.0
LFE
TrF
, (a
t) 0 /a
(m
s-2/m
)
180o
150o
120o
90o
60o
30o
0o
Figura 9.23: Funzioni di trasferimento del LFE per una fregata di 125m alla velocita di 20 nodi;xP − xG = 40 m, yP − yG = 7 m, zP − zG = 10 m.

9.12. NONLINEARITA 147
9.12 Nonlinearita
Le caratteristiche delle funzioni di trasferimento dei moti esaminate nei paragrafi precedenti pre-suppongono che le risposte della nave siano lineari o, in altri termini, che l’ampiezza dei moti perogni velocita di avanzo, angolo d’incontro e frequenza delle onde sia direttamente proporzionaleall’ampiezza delle onde. Questa assunzione e, in effetti, implicita nella definizione della funzionedi trasferimento.
Le equazioni del moto danno luogo a risposte lineari se tutti i coefficienti sono indipendentidall’ampiezza dei moti. In linea di principio questo richiede variazioni trascurabili della superficiebagnata durante il moto della nave in presenza di onde, ovvero e necessario che le ampiezze dei motirelativi siano sufficientemente piccole. Se invece le ampiezze dei moti nave sono grandi, la parteimmersa dello scafo puo variare considerevolmente e l’approssimazione lineare non e piu valida.Un’analisi approfondita del problema si trova al Capitolo 00.
Ne e un esempio il moto relativo di un punto situato a proravia della nave soggetta all’azionedi onde di prora (vedi Figura 9.20). Quando l’ampiezza del moto relativo supera l’immersionelocale della nave, nel moto oscillatorio la chiglia emerge periodicamente dall’acqua durante ognifase di risalita. L’eccitazione locale e le reazioni idrodinamiche si annullano temporaneamentefintanto che la chiglia non rientra, dopo di che esse assumono nuovamente valori finiti. Quando siverificano queste condizioni particolari, ci si dovrebbe aspettare che il fenomeno abbia un effettosignificativo sulle risposte dei moti nave, ma si e trovato in pratica che le nonlinearita associate sonosorprendentemente deboli. Questo e dovuto verosimilmente al fatto che entrambi i membri delleequazioni del moto risultano funzioni della dinamica del fenomeno, mentre gli effetti nonlinearisono associati solo agli estremi delle oscillazioni. Moti di ampiezza molto grande sono, in ognicaso, solo di limitato interesse applicativo in quanto non possono essere tollerati ne dall’equipaggione dalle strutture della nave. Generalmente, essi costituiscono l’eccezione e non la regola.
Quando lo smorzamento di rollio e molto piccolo, si possono sviluppare moti di rollio di grandeampiezza anche in onde modeste e le nonlinearita nella curva dei bracci di stabilita possono divenireimportanti. In altre parole, la rigidezza effettiva di rollio (termine C44) dipende dall’angolo dioscillazione trasverale della nave. Anche lo smorzamento di rollio (termine B44) e legato, in unaqualche misura, all’ampiezza del moto e risulta un’ulteriore fonte di comportamento nonlineare.Questi effetti nonlineari non sono, in generale, particolarmente importanti per navi provviste diadeguati livelli di smorzamento. Il rollio e l’unico moto ad essere significativamente influenzatodalle nonlinearita.

148 CAPITOLO 9. MOTI NAVE IN ONDE REGOLARI
Capitolo 10
Moti nave in onde irregolari
10.1 Introduzione
Dopo una fase iniziale di sviluppo molto promettente (Froude, 1861, 1896; Krylov, 1896, 1898),per molti anni le tecniche di analisi delle qualita di tenuta al mare di una nave non registraronosostanziali cambiamenti. La loro applicazione fu limitata, in linea di massima, al confronto fra leprevisioni teoriche ed i risultati sperimentali in onde regolari e quindi all’esame di una situazioneabbastanza lontana da quella reale di un mare irregolare. I limiti dell’approccio teorico erano bennoti a tutti coloro che si occuparono del problema, ma la mancanza di una metodologia appropria-ta, in grado di risolvere il problema dei moti nave in un mare qualsiasi, si faceva attendere. Unsignificativo passo in avanti si registro con il consolidamento delle tecniche di analisi dei segnali(metodo spettrale) che, verso la fine degli anni quaranta, furono sviluppate nell’ambito dell’elet-tronica e delle telecomunicazioni. Esse furono applicate al campo navale per la prima volta da St.Denis and Pierson (1953), in un lavoro che viene tuttora considerato d’importanza storica. Si puoquindi affermare che l’introduzione del metodo spettrale, assieme alla comparsa quasi simultaneadella strip theory, costituisce uno dei momenti fondamentali della moderna teoria della tenuta almare.
Per capire meglio la metodologia sviluppata, si consideri innanzitutto un elemento circuitalepassivo tipo filtro, ovvero la scatola chiusa (black box ) dei circuiti elettrici, vedi Figura 10.1. Esso,come noto, trasforma il segnale d’ingresso nel corrispondente segnale d’uscita. Quando il segnaled’ingresso contiene piu componenti, le diverse frequenze vengono amplificate o attenuate in accordocon le caratteristiche di risposta del filtro. In uscita si ottiene un segnale che risulta, in genere,differente dal primo. Per esempio, un filtro passa basso attenua le componenti di alta frequenzae consente alle componenti di bassa frequenza di passare piu o meno invariate. Una situazioneopposta si verifica per un filtro passa alto.
L’analogia esistente fra un sistema meccanico qualsiasi ed un circuito elettrico suggerisce diconsiderare la nave come una scatola chiusa tipo filtro e quindi di applicare ad essa le metodologiedi analisi proprie per questo genere di problematiche. Nella corrispondenza formale, la nave vedein ingresso un segnale costituito dalle onde eccitanti e lo trasforma in uscita nei segnali costituitidai moti nave nei diversi gradi di liberta. Poiche per un solo segnale d’ingresso ci sono piu segnalidi uscita, ciascuno corrispondente al moto nave in un grado di liberta, si puo considerare il sistemacomplessivo come equivalente ad un insieme di filtri, dotati di caratteristiche non necessariamenteeguali fra loro. Lo stesso vale anche per una qualsiasi altra risposta della nave all’azione delle onde,come ad esempio i moti assoluti, il moto relativo, i carichi dinamici, ecc.
Per inquadrare meglio il problema, si faccia riferimento al caso specifico del moto di sussultoin onde provenienti da prora. Ad esempio, le funzioni di trasferimento mostrate in Figura 9.3
149

150 CAPITOLO 10. MOTI NAVE IN ONDE IRREGOLARI
definiscono le caratteristiche di risposta del filtro per χ = 180◦ e per diverse velocita nave. Eimmediato constatare che si tratta, essenzialmente, di un filtro passa basso in quanto alle frequenzepiu basse i moti ondosi sono trasferiti nei corrispondenti moti di sussulto senza attenuazione diampiezza e spostamento di fase. All’aumentare della frequenza, i moti di sussulto sono attenuati edalle frequenze piu alte il segnale d’ingresso viene considerevolmente ridotto cosicche non si hannoapprezzabili risposte in uscita.
Il procedimento descritto vale indipendentemente dalla composizione armonica del segnale d’in-gresso e trova la sua giustificazione formale nel ben noto Principio di Sovrapposizione degli Effetti.Per quanto gia detto nei capitoli precedenti, esso vale nel caso in cui i moti nave sono di piccola am-piezza, ovvero quando le ampiezze delle risposte risultano direttamente proporzionali all’ampiezzadell’onda per ogni assegnata velocita di avanzo, angolo e frequenza d’incontro. Come si vedra neiparagrafi successivi, la quantificazione dei moti fatta per mezzo del cosiddetto calcolo spettrale sipresta bene a trattare il caso di un mare confuso. Questa metodologia e attualmente usata per lasoluzione delle problematiche di tenuta al mare nel caso di mare irregolare nella maggior parte deiproblemi ingegneristici.
Input Filter
ShipWaves
Output
Motion
Figura 10.1: Analogia fra un circuito elettrico ed il sistema meccanico nave-fluido.
10.2 Spettro delle onde d’incontro
Come gia detto al Capitolo 4, il primo passo verso la soluzione del problema dei moti nave e quellodi conoscere lo spettro di energia delle onde. In prima approssimazione, e generalmente sufficienteadoperare uno degli spettri ideali anche se, a rigore, si dovrebbe far riferimento ai risultati dieventuali misure al vero. Questo viene effettivamente fatto solo in casi particolari o quando leesigenze del progetto lo richiedono esplicitamente.
Poiche un qualsiasi modello teorico assegna lo spettro di energia dal punto di vista di un osser-vatore fisso (frequenza vera), mentre i moti nave avvengono alla frequenza vista da un osservatoresolidale (frequenza d’incontro), ne segue che si rende necessario unificare le due formulazioni.Fisicamente e piu logico lavorare nel riferimento nave, trasformando lo spettro delle onde dal ri-ferimento assoluto al riferimento mobile. Tuttavia, un tale modo di procedere non sempre risultaconveniente in termini computazionali. In ogni caso, essendo la soluzione del problema non imme-diata, occorre procedere per gradi. Nel seguito si andra a considerare per primo uno stato di mare

10.2. SPETTRO DELLE ONDE D’INCONTRO 151
caratterizzato da onde a cresta lunga e solo successivamente quello corrispondente ad un sistemadi onde a cresta corta.
La relazione tra la frequenza vera delle onde e quella d’incontro e stata determinata al Capito-lo 3. In particolare e stato osservato che in mari di prora le frequenze d’incontro aumentano rispettoa quelle vere, mentre per un mare di poppa esse diminuiscono. Ne segue che per un osservatoresolidale alla nave lo spettro di energia delle onde appare spostato in frequenza tanto da ricoprire unintervallo differente da quello iniziale. L’entita ed il verso dello spostamento dipendono ovviamentedalla velocita relativa fra la nave ed il sistema ondoso. A titolo di esempio, in Figura 10.2 vengonoillustrati i risultati ottenuti nel caso di un mare con onde di prora.
ωH
6ζ�(ωH)
ω
6ζ (ω)
ω
CorrespondingωH
δω
δωH
Wave Spectrum
EncounterWave Spectrum
Areas Equal
Figura 10.2: Trasformazione dello spettro di energia delle onde in spettro d’incontro con onde diprora.
Inoltre, e stato visto che l’area sottesa dallo spettro di energia su di un intervallo elementaredi frequenza risulta proporzionale all’energia delle onde contenuta in tale banda di frequenze.Passando dal riferimento fisso a quello mobile quest’energia non cambia, ovvero l’area nell’intervallodi frequenza δω deve essere esattamente eguale a quella del corrispondente intervallo δωe nellefrequenze d’incontro. La relazione tra i due intervalli e ottenuta differenziando l’equazione (3.3):
ωe = ω − kU cos χ = ω − ω2U
gcosχ , (10.1)
da cui si ottiene:dωe
dω= 1− 2ωU cos χ
g, (10.2)
ovvero:
δωe =(
1− 2ω
gU cosχ
)δω . (10.3)
Passando a considerare le corrispondenti energie, ne segue:
Sζ(ω)δω = Sζ(ωe)δωe , (10.4)
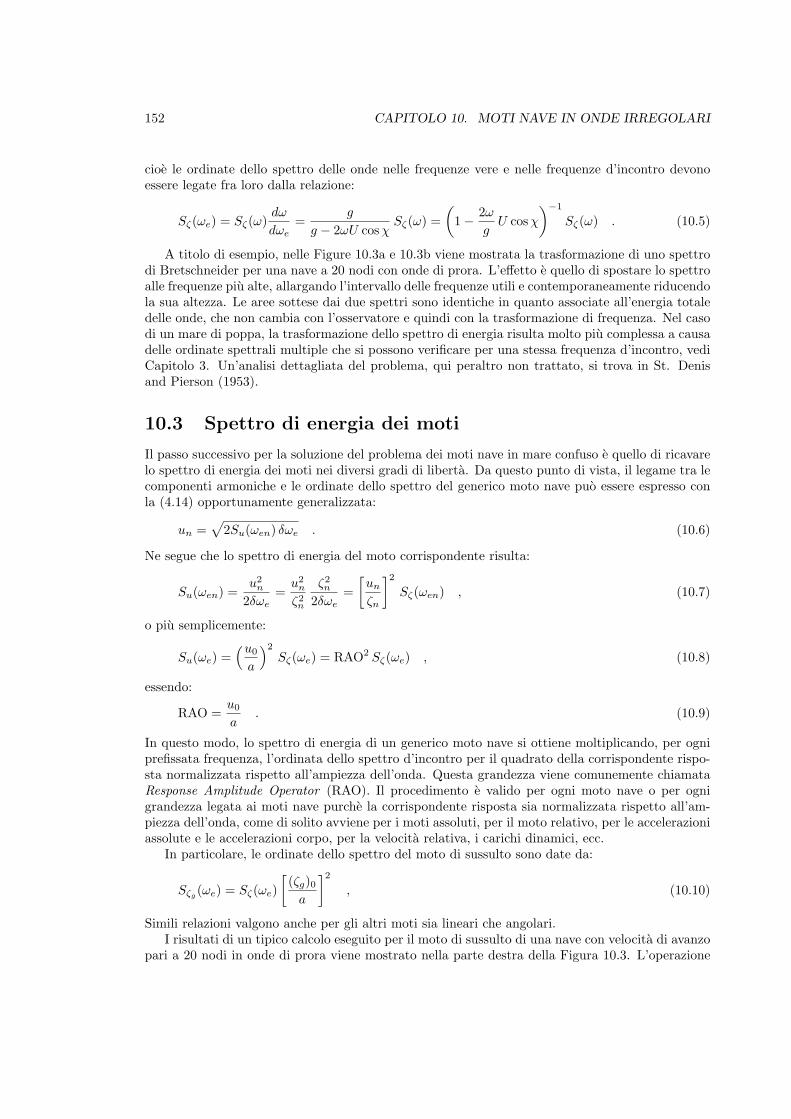
152 CAPITOLO 10. MOTI NAVE IN ONDE IRREGOLARI
cioe le ordinate dello spettro delle onde nelle frequenze vere e nelle frequenze d’incontro devonoessere legate fra loro dalla relazione:
Sζ(ωe) = Sζ(ω)dω
dωe=
g
g − 2ωU cosχSζ(ω) =
(1− 2ω
gU cos χ
)−1
Sζ(ω) . (10.5)
A titolo di esempio, nelle Figure 10.3a e 10.3b viene mostrata la trasformazione di uno spettrodi Bretschneider per una nave a 20 nodi con onde di prora. L’effetto e quello di spostare lo spettroalle frequenze piu alte, allargando l’intervallo delle frequenze utili e contemporaneamente riducendola sua altezza. Le aree sottese dai due spettri sono identiche in quanto associate all’energia totaledelle onde, che non cambia con l’osservatore e quindi con la trasformazione di frequenza. Nel casodi un mare di poppa, la trasformazione dello spettro di energia risulta molto piu complessa a causadelle ordinate spettrali multiple che si possono verificare per una stessa frequenza d’incontro, vediCapitolo 3. Un’analisi dettagliata del problema, qui peraltro non trattato, si trova in St. Denisand Pierson (1953).
10.3 Spettro di energia dei moti
Il passo successivo per la soluzione del problema dei moti nave in mare confuso e quello di ricavarelo spettro di energia dei moti nei diversi gradi di liberta. Da questo punto di vista, il legame tra lecomponenti armoniche e le ordinate dello spettro del generico moto nave puo essere espresso conla (4.14) opportunamente generalizzata:
un =√
2Su(ωen) δωe . (10.6)
Ne segue che lo spettro di energia del moto corrispondente risulta:
Su(ωen) =u2
n
2δωe=
u2n
ζ2n
ζ2n
2δωe=
[un
ζn
]2
Sζ(ωen) , (10.7)
o piu semplicemente:
Su(ωe) =(u0
a
)2
Sζ(ωe) = RAO2 Sζ(ωe) , (10.8)
essendo:
RAO =u0
a. (10.9)
In questo modo, lo spettro di energia di un generico moto nave si ottiene moltiplicando, per ogniprefissata frequenza, l’ordinata dello spettro d’incontro per il quadrato della corrispondente rispo-sta normalizzata rispetto all’ampiezza dell’onda. Questa grandezza viene comunemente chiamataResponse Amplitude Operator (RAO). Il procedimento e valido per ogni moto nave o per ognigrandezza legata ai moti nave purche la corrispondente risposta sia normalizzata rispetto all’am-piezza dell’onda, come di solito avviene per i moti assoluti, per il moto relativo, per le accelerazioniassolute e le accelerazioni corpo, per la velocita relativa, i carichi dinamici, ecc.
In particolare, le ordinate dello spettro del moto di sussulto sono date da:
Sζg (ωe) = Sζ(ωe)[(ζg)0
a
]2
, (10.10)
Simili relazioni valgono anche per gli altri moti sia lineari che angolari.I risultati di un tipico calcolo eseguito per il moto di sussulto di una nave con velocita di avanzo
pari a 20 nodi in onde di prora viene mostrato nella parte destra della Figura 10.3. L’operazione
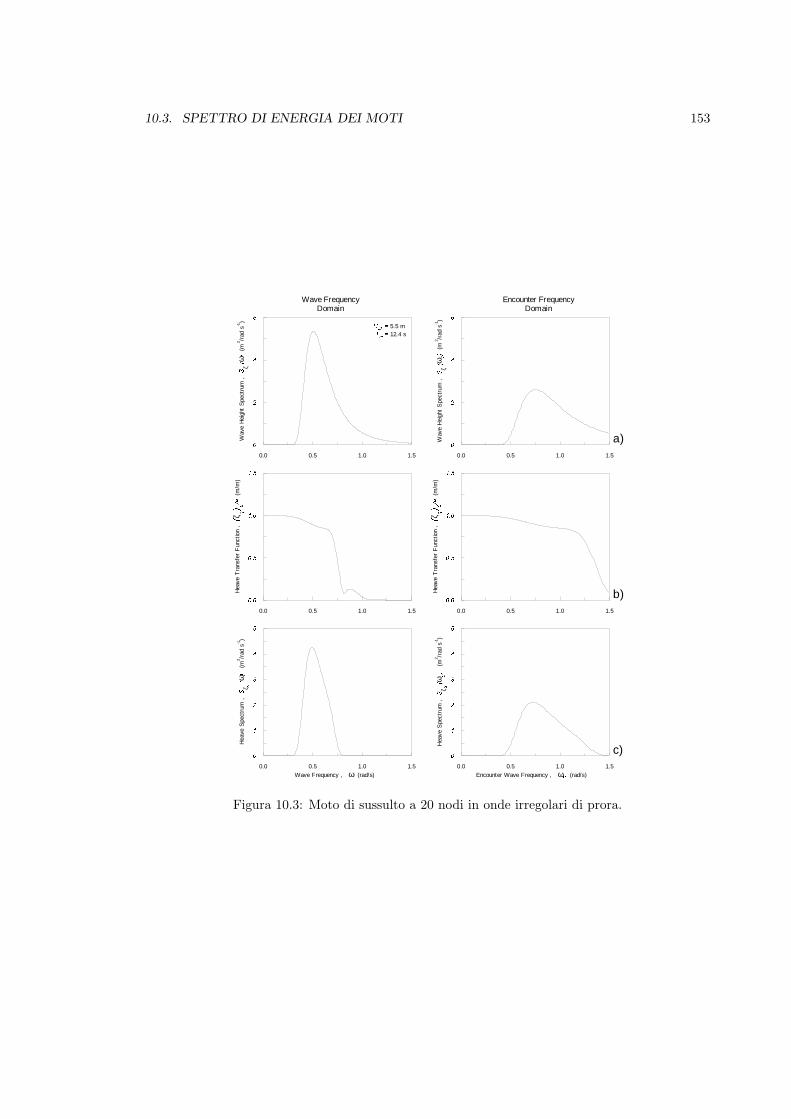
10.3. SPETTRO DI ENERGIA DEI MOTI 153
0.0 0.5 1.0 1.5
���
���
���
���
Hea
ve T
rans
fer
Fun
ctio
n ,
�ζ
J�� ��D
(m
/m)
+���� 5.5 m�7P� 12.4 s
0.0 0.5 1.0 1.5
�
�
�
�
Wav
e H
eigh
t S
pect
rum
,
6ζ��ω
���
(m 2 /r
ad s
-1)
0.0 0.5 1.0 1.5Wave Frequency , ω (rad/s)
�
�
�
�
�
�
Hea
ve S
pect
rum
,
6ζ J��ω
� (
m2 /r
ad s
-1)
0.0 0.5 1.0 1.5
���
���
���
���
Hea
ve T
rans
fer
Fun
ctio
n ,
�ζ
J�� ��D
(m
/m)
0.0 0.5 1.0 1.5
�
�
�
�
Wav
e H
eigh
t S
pect
rum
,
6ζ��ω
H�
(m
2 /rad
s-1)
0.0 0.5 1.0 1.5Encounter Wave Frequency , ωH (rad/s)
�
�
�
�
�
�
Hea
ve S
pect
rum
,
6ζ J��ω
H�
(
m2 /r
ad s
-1)
a)
b)
c)
Wave FrequencyDomain
Encounter FrequencyDomain
Figura 10.3: Moto di sussulto a 20 nodi in onde irregolari di prora.

154 CAPITOLO 10. MOTI NAVE IN ONDE IRREGOLARI
effettuata, usando un linguaggio ormai consolidato dell’elettronica, si traduce nel filtrare lo spettrodi energia delle onde con la funzione di trasferimento dei moti.
L’effetto del filtro, che si manifesta per mezzo della funzione di trasferimento dei moti, puo essereosservato chiaramente dalla figura. Alle basse frequenze d’incontro la funzione di trasferimento eapprossimativamente unitaria e lo spettro d’incontro viene riprodotto quasi esattamente in terminidi spettro del moto di sussulto. Alle frequenze piu alte il filtro attenua sensibilmente le onde elo spettro di energia del moto risulta praticamente nullo, ovvero presenta un limitato contributoenergetico.
Per i moti angolari della nave, solitamente normalizzati rispetto alla pendenza dell’onda, con-viene adottare una procedura leggermente differente da quella vista in precedenza. Cio per nonperdere gli aspetti fisici del problema, che sono espressi nella funzione di trasferimento. In questocaso e necessario calcolare dapprima lo spettro delle pendenze delle onde e quindi passare al cal-colo dello spettro di energia del corrispondente moto moltiplicando, per ogni prefissata frequenza,l’ordinata dello spettro d’incontro per il quadrato della corrispondente funzione di trasferimento(vedi Figura 10.4). In particolare, lo spettro del moto di beccheggio e dato dalla relazione:
Sθ(ωe) = Sα(ωe)(
θ0
α
)2
. (10.11)
Simili espressioni si possono scrivere anche per gli altri moti angolari della nave.Poiche le formule per il calcolo delle grandezze statistiche associate con gli spettri di energia
delle onde ricavate nel Capitolo 4 sono del tutto generali, esse possono essere applicate ancheagli spettri di energia dei moti nel dominio delle frequenze d’incontro. In particolare, lo scartoquadratico medio (root mean square, rms) del generico spostamento lineare/angolare risulta:
σu =√
Du , (10.12)
dove Du e la varianza del moto, ovvero l’area sottesa dal corrispondente spettro di energia:
Du = D(0)u =
∫ ∞
0
Su(ωe)dωe . (10.13)
In modo analogo le velocita e le accelerazioni quadratiche medie dei moti nave sono espresse dallerelazioni:
σu =√
Du ,
σu =√
Du , (10.14)
essendo, nell’ordine, le varianze della velocita e dell’accelerazione:
Du = D(2)u =
∫ ∞
0
Su(ωe)dωe =∫ ∞
0
ω2eSu(ωe)dωe ,
Du = D(4)u =
∫ ∞
0
Su(ωe)dωe =∫ ∞
0
ω4eSu(ωe)dωe . (10.15)
In generale, il momento n-esimo dell’area dello spettro di energia del moto viene definito dallarelazione:
D(n)u =
∫ ∞
0
ωne Su(ωe)dωe . (10.16)
I periodi associati ai moti nave sono il periodo medio delle oscillazioni, il periodo medio deipicchi ed il periodo medio di zero-crossing. In analogia con i risultati ottenuti al Paragrafo 4.5,
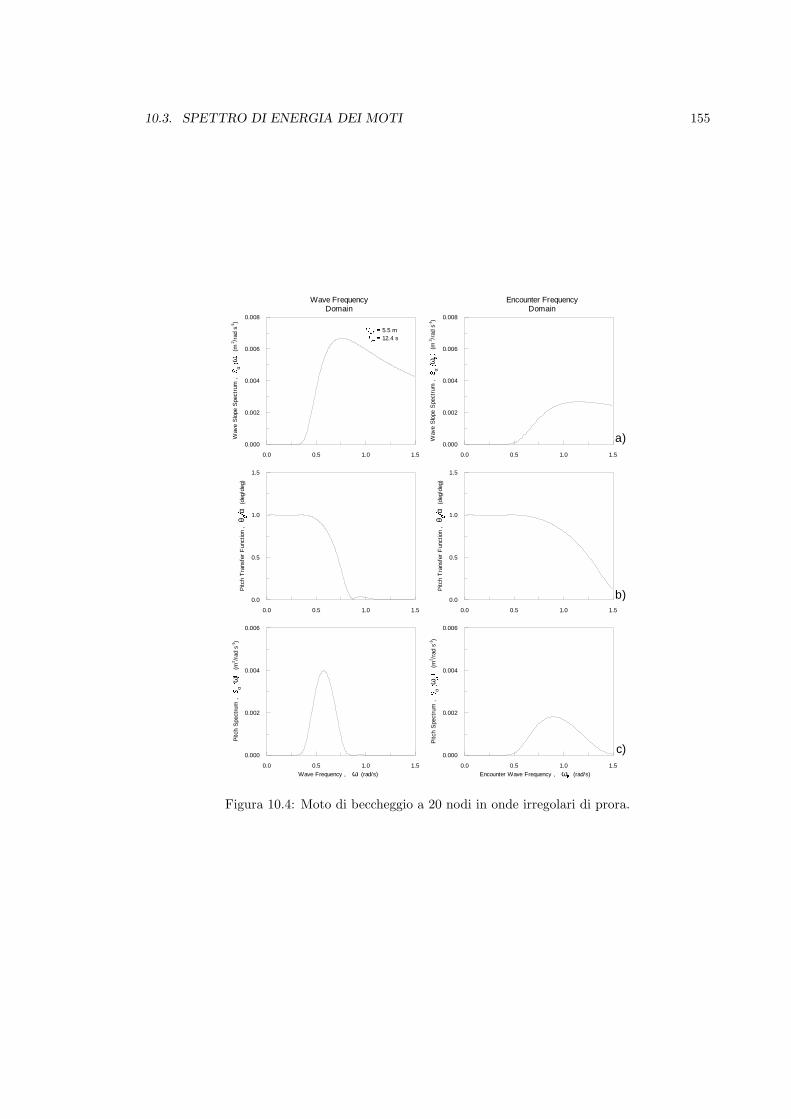
10.3. SPETTRO DI ENERGIA DEI MOTI 155
0.0 0.5 1.0 1.5
0.0
0.5
1.0
1.5
Pitc
h T
rans
fer
Fun
ctio
n ,
θ
��α
(deg
/deg
)
+���� �5.5 m�7P� �12.4 s
0.0 0.5 1.0 1.5
0.000
0.002
0.004
0.006
0.008
Wav
e S
lope
Spe
ctru
m ,
6α��ω
� (m
2 /rad
s-1)
0.0 0.5 1.0 1.5Wave Frequency , ω (rad/s)
0.000
0.002
0.004
0.006
Pitc
h S
pect
rum
,
6α��ω
� (
m2 /r
ad s
-1)
0.0 0.5 1.0 1.5
0.0
0.5
1.0
1.5
Pitc
h T
rans
fer
Fun
ctio
n ,
θ
��α
(deg
/deg
)
0.0 0.5 1.0 1.5
0.000
0.002
0.004
0.006
0.008
Wav
e S
lope
Spe
ctru
m ,
6α��ω
H��
(m 2 /r
ad s
-1)
0.0 0.5 1.0 1.5Encounter Wave Frequency , ωH (rad/s)
0.000
0.002
0.004
0.006
Pitc
h S
pect
rum
,
6α��ω
H��
(m
2 /rad
s-1)
Wave FrequencyDomain
Encounter FrequencyDomain
a)
b)
c)
Figura 10.4: Moto di beccheggio a 20 nodi in onde irregolari di prora.

156 CAPITOLO 10. MOTI NAVE IN ONDE IRREGOLARI
essi sono dati nell’ordine dalle relazioni seguenti:
(T
)u
=2πD
(0)u
D(1)u
=2πDu
D(1)u
,
(T p
)u
= 2π
√D
(2)u
D(4)u
= 2π
√Du
Du, (10.17)
(T z
)u
= 2π
√D
(0)u
D(2)u
= 2π
√Du
Du.
10.4 Metodi equivalenti per il calcolo dei moti
Lo spettro di energia dei moti nel dominio delle frequenze d’incontro puo essere trasformato in unospettro nel dominio delle frequenze vere, come mostrato nelle Figure 10.3e, 10.3f e 10.4e, 10.4f. Leordinate nel dominio delle frequenze vere sono calcolate usando la formula di trasformazione (10.5)che, con appropriata generalizzazione, diviene:
Su(ω) = Su(ωe)(
1− 2ω
gU cos χ
). (10.18)
Per l’equivalenza energetica, l’area sottesa dallo spettro di energia dei moti nel dominio dellefrequenze vere coincide con l’area sottesa dallo spettro nel dominio delle frequenze d’incontro. Nesegue che la varianza dei moti puo essere ottenuta integrando lo spettro di risposta nel dominiodelle frequenze vere, per cui:
Du =∫ ∞
0
Su(ω)dω . (10.19)
Lo spettro di energia dei moti, ottenuto nel dominio delle frequenze vere, presenta il vantaggio dinon comportare le complicazioni analitiche derivanti dalla trasformazione da un domino all’altro,in particolare per un mare di poppa.
Per le funzioni di trasferimento dei moti, normalizzate rispetto all’ampiezza dell’onda, si haallora:
Su(ω) = Sζ(ω)(u0
a
)2
, (10.20)
mentre per le funzioni di trasferimento dei moti, normalizzate rispetto alla pendenza dell’onda,risulta:
Su(ω) = Sα(ω)(u0
α
)2
. (10.21)
In entrambe le relazioni (10.20) e (10.21) e sottinteso che le funzioni di trasferimento dei motinel membro di destra sono funzioni della frequenza vera delle onde. E importante osservare che lospettro dei moti nel dominio delle frequenze vere, non ha alcun significato fisico. Infatti, a differenzadi quello che si potrebbe pensare, non si tratta di uno spettro di energia in senso stretto e questoper il semplice fatto che i moti nave avvengono alla frequenza d’incontro e non alla frequenza veradell’onda.
In analogia con l’equazione (10.4) lo spettro di energia dei moti nelle frequenze vere e la suatrasformazione nelle frequenze d’incontro sono legati dalla relazione:
Su(ω)δω = Su(ωe)δωe . (10.22)
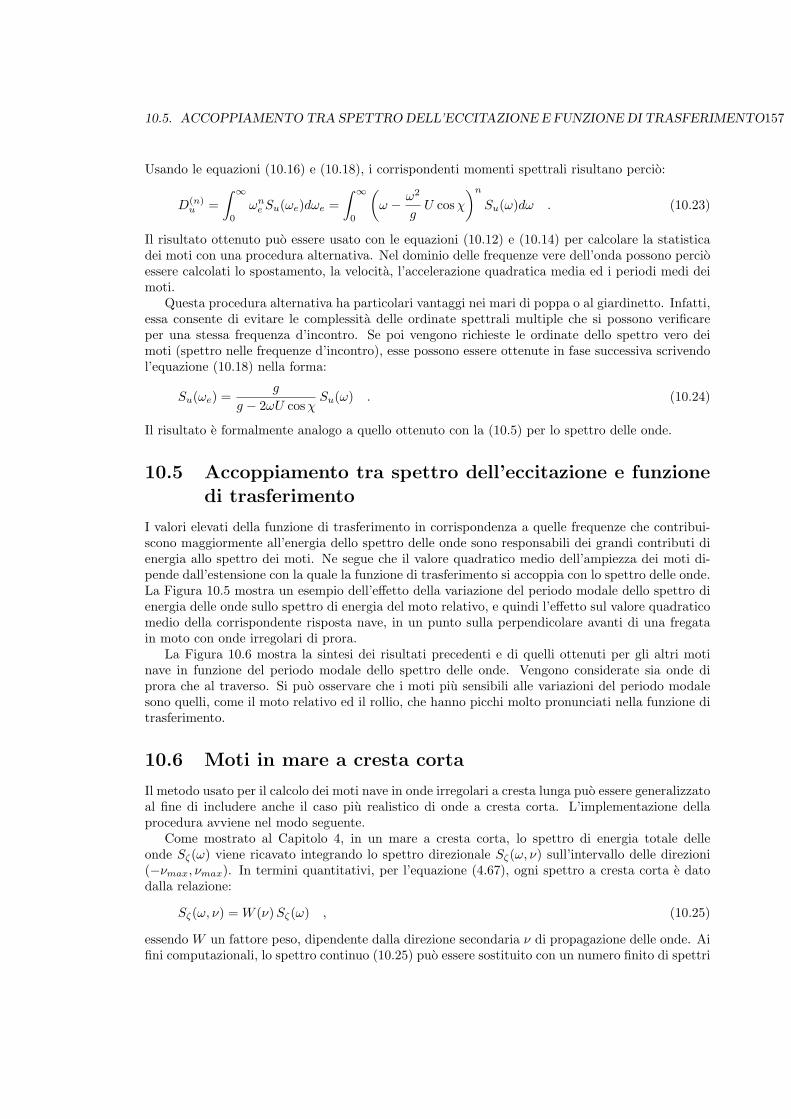
10.5. ACCOPPIAMENTO TRA SPETTRO DELL’ECCITAZIONE E FUNZIONE DI TRASFERIMENTO157
Usando le equazioni (10.16) e (10.18), i corrispondenti momenti spettrali risultano percio:
D(n)u =
∫ ∞
0
ωne Su(ωe)dωe =
∫ ∞
0
(ω − ω2
gU cos χ
)n
Su(ω)dω . (10.23)
Il risultato ottenuto puo essere usato con le equazioni (10.12) e (10.14) per calcolare la statisticadei moti con una procedura alternativa. Nel dominio delle frequenze vere dell’onda possono percioessere calcolati lo spostamento, la velocita, l’accelerazione quadratica media ed i periodi medi deimoti.
Questa procedura alternativa ha particolari vantaggi nei mari di poppa o al giardinetto. Infatti,essa consente di evitare le complessita delle ordinate spettrali multiple che si possono verificareper una stessa frequenza d’incontro. Se poi vengono richieste le ordinate dello spettro vero deimoti (spettro nelle frequenze d’incontro), esse possono essere ottenute in fase successiva scrivendol’equazione (10.18) nella forma:
Su(ωe) =g
g − 2ωU cosχSu(ω) . (10.24)
Il risultato e formalmente analogo a quello ottenuto con la (10.5) per lo spettro delle onde.
10.5 Accoppiamento tra spettro dell’eccitazione e funzionedi trasferimento
I valori elevati della funzione di trasferimento in corrispondenza a quelle frequenze che contribui-scono maggiormente all’energia dello spettro delle onde sono responsabili dei grandi contributi dienergia allo spettro dei moti. Ne segue che il valore quadratico medio dell’ampiezza dei moti di-pende dall’estensione con la quale la funzione di trasferimento si accoppia con lo spettro delle onde.La Figura 10.5 mostra un esempio dell’effetto della variazione del periodo modale dello spettro dienergia delle onde sullo spettro di energia del moto relativo, e quindi l’effetto sul valore quadraticomedio della corrispondente risposta nave, in un punto sulla perpendicolare avanti di una fregatain moto con onde irregolari di prora.
La Figura 10.6 mostra la sintesi dei risultati precedenti e di quelli ottenuti per gli altri motinave in funzione del periodo modale dello spettro delle onde. Vengono considerate sia onde diprora che al traverso. Si puo osservare che i moti piu sensibili alle variazioni del periodo modalesono quelli, come il moto relativo ed il rollio, che hanno picchi molto pronunciati nella funzione ditrasferimento.
10.6 Moti in mare a cresta corta
Il metodo usato per il calcolo dei moti nave in onde irregolari a cresta lunga puo essere generalizzatoal fine di includere anche il caso piu realistico di onde a cresta corta. L’implementazione dellaprocedura avviene nel modo seguente.
Come mostrato al Capitolo 4, in un mare a cresta corta, lo spettro di energia totale delleonde Sζ(ω) viene ricavato integrando lo spettro direzionale Sζ(ω, ν) sull’intervallo delle direzioni(−νmax, νmax). In termini quantitativi, per l’equazione (4.67), ogni spettro a cresta corta e datodalla relazione:
Sζ(ω, ν) = W (ν) Sζ(ω) , (10.25)
essendo W un fattore peso, dipendente dalla direzione secondaria ν di propagazione delle onde. Aifini computazionali, lo spettro continuo (10.25) puo essere sostituito con un numero finito di spettri

158 CAPITOLO 10. MOTI NAVE IN ONDE IRREGOLARI
0.0 0.5 1.0 1.5
0
1
2
3
4
5
Rel
. M
otio
n T
RF
, ��
U ζ ) ���D
(m
/m)
7P� �9.5 s
'Uζ� 3.16 m 'Uζ
� 2.63 m
0.0 0.5 1.0 1.5
0
2
4
6
8
10
Wav
e H
eigh
t S
pect
rum
,
6 ζ(ω)
(m
2 /rad
s-1)
0.0 0.5 1.0 1.5
:DYH�)UHTXHQF\�����ω���UDG�V�
0
20
40
60
Rel
. M
ot.
Spe
ctru
m ,
6U
ζ(ω)
(
m 2 /r
ad s
-1)
0.0 0.5 1.0 1.5
0
1
2
3
4
5
7P� 15.0 s
0.0 0.5 1.0 1.5
0
2
4
6
8
10
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
0
20
40
60
7P� 22.5 s
'Uζ� 1.41 m
0.0 0.5 1.0 1.5
0
1
2
3
4
5
0.0 0.5 1.0 1.5
0
2
4
6
8
10
0.0 0.5 1.0 1.5
Wave Frequency , ω (rad/s)
0
20
40
60
Figura 10.5: Effetto dell’accoppiamento dello spettro di energia delle onde con la funzione ditrasferimento del moto relativo a prora per una fregata a 20 nodi, H1/3=5.5 m.
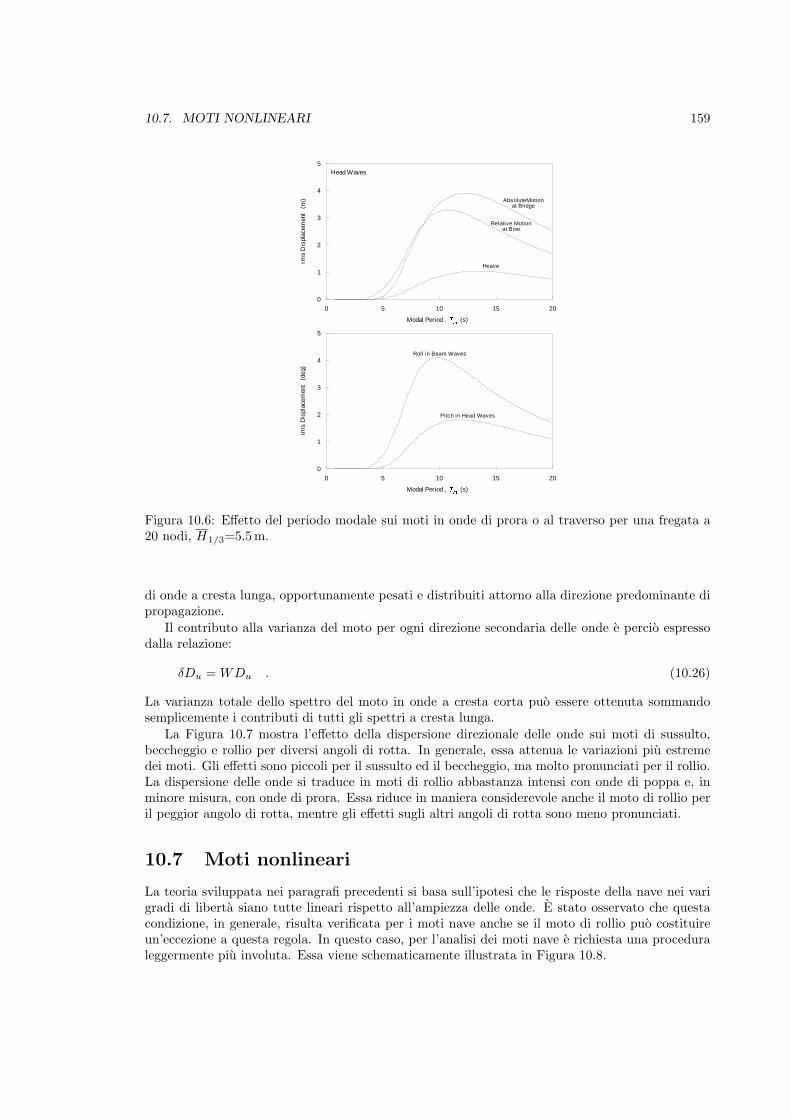
10.7. MOTI NONLINEARI 159
0 5 10 15 20
Modal Period , 7P (s)
0
1
2
3
4
5
rms
Dis
plac
emen
t (
m)
0 5 10 15 20
Modal Period , 7P (s)
0
1
2
3
4
5
rms
Dis
plac
emen
t (
deg)
Pitch in Head Waves
Roll in Beam Waves
Head Waves
Heave
AbsoluteMotionat Bridge
Relative Motionat Bow
Figura 10.6: Effetto del periodo modale sui moti in onde di prora o al traverso per una fregata a20 nodi, H1/3=5.5 m.
di onde a cresta lunga, opportunamente pesati e distribuiti attorno alla direzione predominante dipropagazione.
Il contributo alla varianza del moto per ogni direzione secondaria delle onde e percio espressodalla relazione:
δDu = WDu . (10.26)
La varianza totale dello spettro del moto in onde a cresta corta puo essere ottenuta sommandosemplicemente i contributi di tutti gli spettri a cresta lunga.
La Figura 10.7 mostra l’effetto della dispersione direzionale delle onde sui moti di sussulto,beccheggio e rollio per diversi angoli di rotta. In generale, essa attenua le variazioni piu estremedei moti. Gli effetti sono piccoli per il sussulto ed il beccheggio, ma molto pronunciati per il rollio.La dispersione delle onde si traduce in moti di rollio abbastanza intensi con onde di poppa e, inminore misura, con onde di prora. Essa riduce in maniera considerevole anche il moto di rollio peril peggior angolo di rotta, mentre gli effetti sugli altri angoli di rotta sono meno pronunciati.
10.7 Moti nonlineari
La teoria sviluppata nei paragrafi precedenti si basa sull’ipotesi che le risposte della nave nei varigradi di liberta siano tutte lineari rispetto all’ampiezza delle onde. E stato osservato che questacondizione, in generale, risulta verificata per i moti nave anche se il moto di rollio puo costituireun’eccezione a questa regola. In questo caso, per l’analisi dei moti nave e richiesta una proceduraleggermente piu involuta. Essa viene schematicamente illustrata in Figura 10.8.
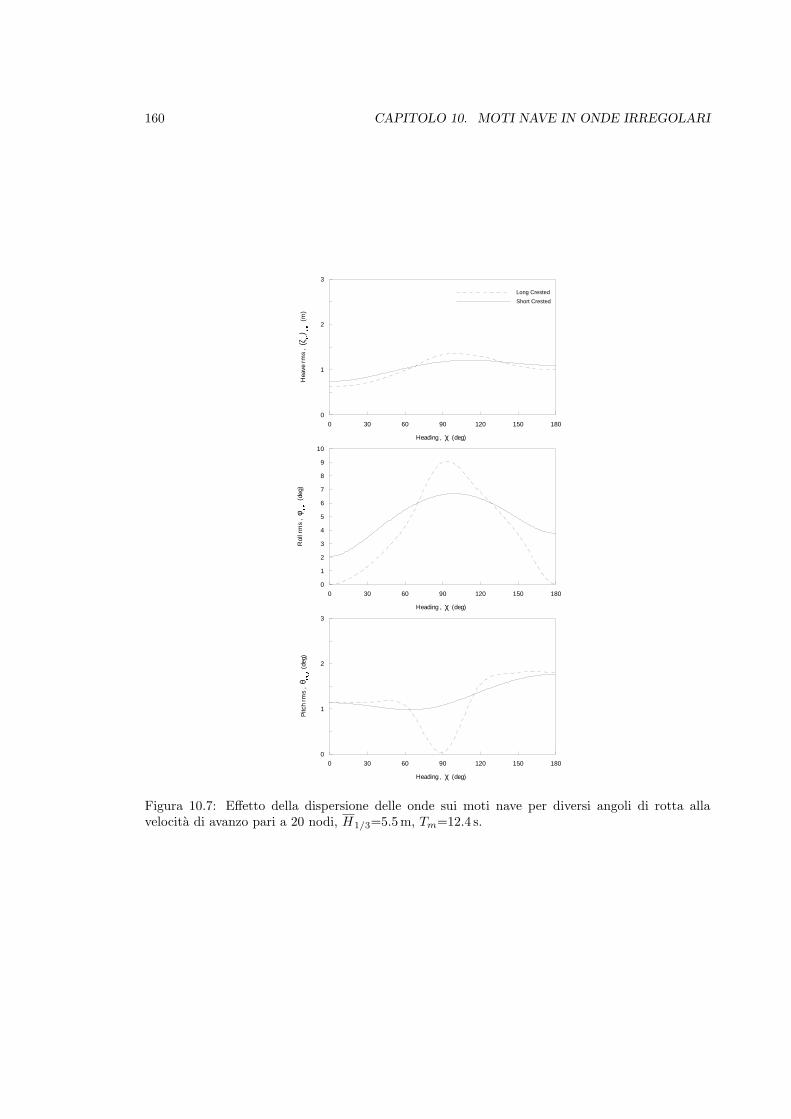
160 CAPITOLO 10. MOTI NAVE IN ONDE IRREGOLARI
0 30 60 90 120 150 180
Heading , χ (deg)
0
1
2
3
4
5
6
7
8
9
10
Rol
l rm
s ,
φ UPV (
deg)
0 30 60 90 120 150 180
Heading , χ (deg)
0
1
2
3
Pitc
h rm
s ,
θ UPV (
deg)
0 30 60 90 120 150 180
Heading , χ (deg)
0
1
2
3
Hea
ve r
ms
, (ζ
J�
� UPV (
m)
Long Crested
Short Crested
Figura 10.7: Effetto della dispersione delle onde sui moti nave per diversi angoli di rotta allavelocita di avanzo pari a 20 nodi, H1/3=5.5m, Tm=12.4 s.
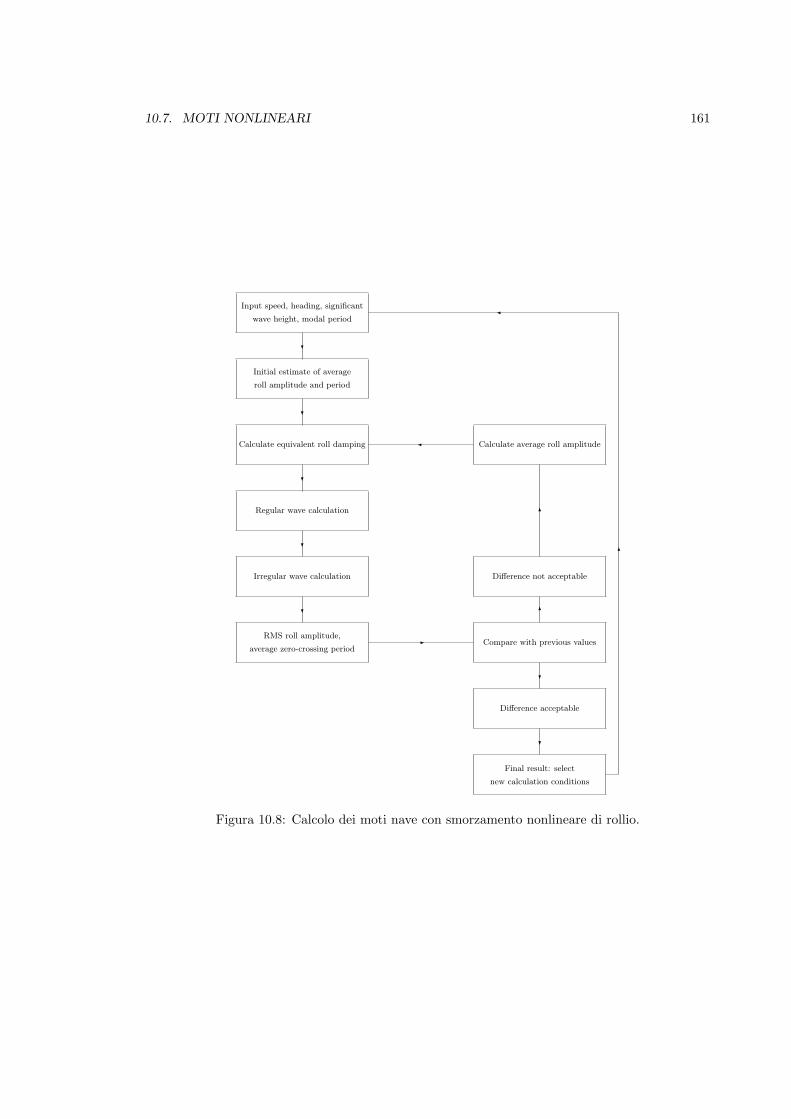
10.7. MOTI NONLINEARI 161
6
¾
Final result: select
new calculation conditions
?
Difference acceptable
?
RMS roll amplitude,
average zero-crossing period- Compare with previous values
6
Irregular wave calculation
?
Difference not acceptable
6Regular wave calculation
?
Calculate equivalent roll damping
?
Calculate average roll amplitude¾
Initial estimate of average
roll amplitude and period
?
Input speed, heading, significant
wave height, modal period
?
Figura 10.8: Calcolo dei moti nave con smorzamento nonlineare di rollio.

162 CAPITOLO 10. MOTI NAVE IN ONDE IRREGOLARI
In primo luogo e necessario innescare il calcolo nonlineare stimando il valore quadratico mediodel moto di rollio per la particolare combinazione di velocita, angolo di rotta, ampiezza significativae periodo modale delle onde per le quali vengono effettuate le previsioni. Ad esempio, cio puo esserefatto usando i risultati di un preventivo calcolo lineare. Per l’ampiezza stimata di rollio deve esserecalcolato il coefficiente linearizzato di smorzamento equivalente, mentre la frequenza piu probabiledelle oscillazioni puo essere assunta coincidente con la frequenza naturale della nave.
I calcoli procedono quindi secondo la successione consueta, determinando dapprima le funzionidi trasferimento dei moti e combinando queste ultime con gli spettri delle onde per ottenere i valoridell’ampiezza quadratica media degli stessi. Puo essere presa in considerazione anche l’eventualedispersione delle onde.
L’ampiezza quadratica media di rollio calcolata alla fine del processo viene confrontata con lastima iniziale. Se la differenza non e grande il calcolo viene interrotto, mentre in caso contrarioesso va ripetuto usando come input il nuovo valore dell’angolo di rollio e quindi una previsione piuaccurata dello smorzamento linearizzato equivalente.
L’iterazione viene continuata fintantoche l’angolo di rollio non raggiunge un valore asintotico. Serichiesto, il calcolo deve essere fatto per ogni prefissata velocita, angolo di rotta, altezza significativae periodo modale delle onde.
Capitolo 11
Effetti indesiderati
11.1 Introduzione
L’esperienza insegna che i moti relativi di una nave rispetto alla superficie dell’acqua risultanogeneralmente maggiori verso le estremita di prora e poppa. In mare mosso, tali moti possonoraggiungere ampiezze sufficientemente elevate tanto da comportare la fuoriuscita della ruota diprora, delle pale dell’elica o l’immersione del ponte di coperta. I fenomeni associati di slamming,fuorigiri dell’elica e imbarco d’acqua sono piu frequenti alle velocita elevate e la loro frequenzaaumenta in mare di prora. Essi possono verificarsi anche per altre combinazioni di velocita nave eangolo di rotta, anche se, in generale, con minore frequenza.
Il fenomeno dello slamming e legato ad una fuoriuscita della ruota di prora ed al successivorientro nell’acqua. Se il rientro risulta sufficientemente violento, esso puo comportare un impatto(slam) dello scafo contro la massa fluida che avviene nell’istante in cui la chiglia colpisce la superficiedel mare (bottom slamming). La severita dei colpi puo essere tale da causare danni al fasciamee, in casi estremi, il carico locale puo avere intensita sufficiente da deformare le lamiere. Unfenomeno simile, sebbene relativamente meno severo, puo verificarsi anche sotto lo slancio di prora(flare slamming) per cui una nave con forme di prora molto stellate puo essere soggetta a taleproblema. Poiche anche uno slam di modesta entita innesca una vibrazione naturale dello scafo,generalmente alla frequenza di alcuni cicli al secondo, ne segue che il conseguente carico di faticariduce la vita della struttura. La vibrazione indotta da uno slam e chiamata whipping e, per ilcomandante, costituisce spesso la prima indicazione dell’occorrenza dello slamming. Per alcunenavi passeggeri a propulsione azimutale si sono verificati anche casi di slamming a poppa checomportano essenzialmente una sostanziale riduzione del comfort a bordo.
L’imbarco d’acqua sul ponte (deck wetness) puo aver luogo in ogni punto della nave, lungotutta la sua lunghezza, e generalmente si verifica laddove il bordo libero e sufficientemente basso.Tuttavia, l’esperienza insegna che l’imbarco d’acqua piu severo avviene all’estremita prodiera e cheesso e favorito dalla velocita della nave e da un mare di prora. In queste condizioni di navigazione,la velocita di avanzo accentua gli effetti dell’acqua imbarcata con la conseguente possibilita didanneggiamento delle sovrastrutture, dell’allestimento e dell’eventuale carico presente sul ponte.Il fenomeno e pericoloso anche per l’equipaggio ed i passeggeri, che possono subire danni fisici oessere addirittura risucchiati fuori bordo. In casi estremi la nave puo addirittura capovolgersi eaffondare a causa del peso dell’acqua imbarcata. Per navi da lavoro, come le posatubi, l’imbarcod’acqua puo verificarsi nella zona del varo a poppa, con conseguente perdita di operativita delmezzo. Lo stesso problema si riscontra nei pescherecci durante la fase di salpamento delle reti.
La fuoriuscita dell’elica (propeller emergence) ha luogo quando le estremita delle pale emergonodall’acqua nella zona superiore del disco elica. L’improvvisa riduzione o aumento del carico, che
163
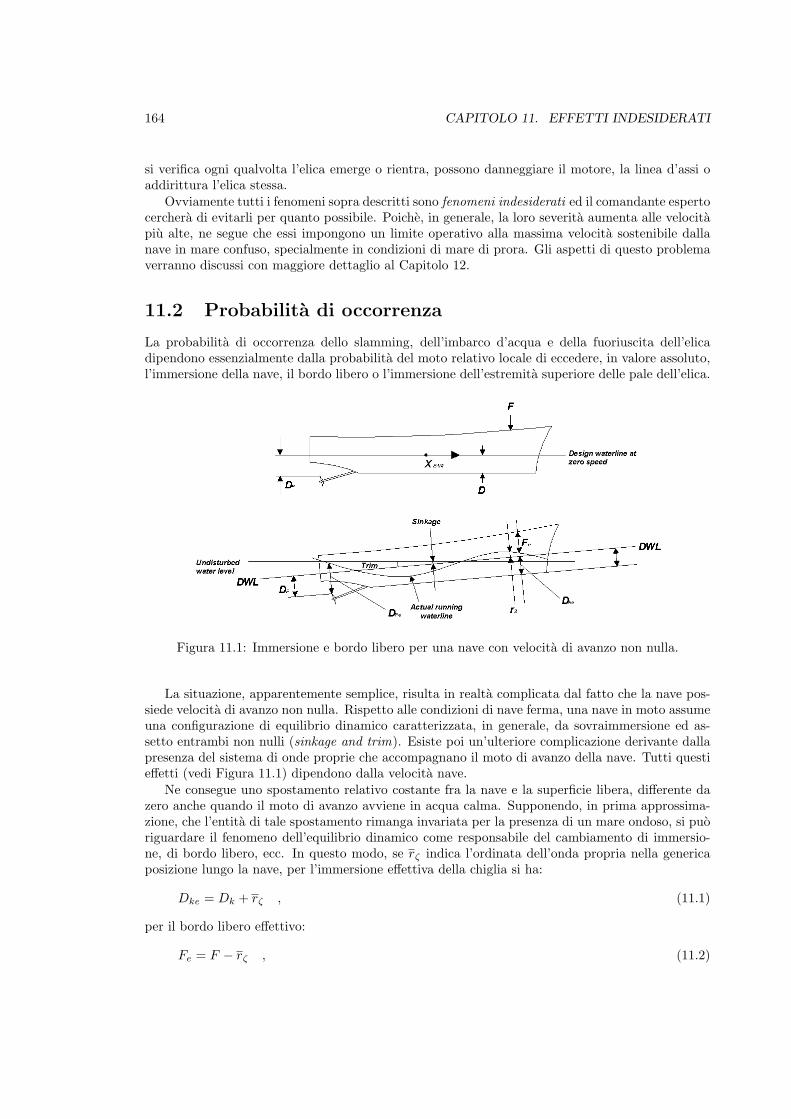
164 CAPITOLO 11. EFFETTI INDESIDERATI
si verifica ogni qualvolta l’elica emerge o rientra, possono danneggiare il motore, la linea d’assi oaddirittura l’elica stessa.
Ovviamente tutti i fenomeni sopra descritti sono fenomeni indesiderati ed il comandante espertocerchera di evitarli per quanto possibile. Poiche, in generale, la loro severita aumenta alle velocitapiu alte, ne segue che essi impongono un limite operativo alla massima velocita sostenibile dallanave in mare confuso, specialmente in condizioni di mare di prora. Gli aspetti di questo problemaverranno discussi con maggiore dettaglio al Capitolo 12.
11.2 Probabilita di occorrenza
La probabilita di occorrenza dello slamming, dell’imbarco d’acqua e della fuoriuscita dell’elicadipendono essenzialmente dalla probabilita del moto relativo locale di eccedere, in valore assoluto,l’immersione della nave, il bordo libero o l’immersione dell’estremita superiore delle pale dell’elica.
Figura 11.1: Immersione e bordo libero per una nave con velocita di avanzo non nulla.
La situazione, apparentemente semplice, risulta in realta complicata dal fatto che la nave pos-siede velocita di avanzo non nulla. Rispetto alle condizioni di nave ferma, una nave in moto assumeuna configurazione di equilibrio dinamico caratterizzata, in generale, da sovraimmersione ed as-setto entrambi non nulli (sinkage and trim). Esiste poi un’ulteriore complicazione derivante dallapresenza del sistema di onde proprie che accompagnano il moto di avanzo della nave. Tutti questieffetti (vedi Figura 11.1) dipendono dalla velocita nave.
Ne consegue uno spostamento relativo costante fra la nave e la superficie libera, differente dazero anche quando il moto di avanzo avviene in acqua calma. Supponendo, in prima approssima-zione, che l’entita di tale spostamento rimanga invariata per la presenza di un mare ondoso, si puoriguardare il fenomeno dell’equilibrio dinamico come responsabile del cambiamento di immersio-ne, di bordo libero, ecc. In questo modo, se rζ indica l’ordinata dell’onda propria nella genericaposizione lungo la nave, per l’immersione effettiva della chiglia si ha:
Dke = Dk + rζ , (11.1)
per il bordo libero effettivo:
Fe = F − rζ , (11.2)

11.2. PROBABILITA DI OCCORRENZA 165
e per l’immersione effettiva dell’estremita superiore delle pale dell’elica:
Dpe = Dp + rζ . (11.3)
Per le navi che operano da ferme, i problemi legati alla velocita non si presentano, per cui i valorieffettivi coincidono con quelli geometrici.
Per definizione, il moto relativo di un punto della nave rispetto all’onda si ottiene sottraendo almoto assoluto verticale l’ordinata istantanea della superficie del mare, vedi (9.8). Tuttavia, quandolo scafo si immerge, l’aumento rapido del volume di fluido spostato crea uno swell-up dell’acquacircostante, ovvero un innalzamento locale di livello. L’effetto scompare quando lo scafo emerge.Ne segue che il moto relativo effettivamente osservato supera in entita quello previsto teoricamente.Di questo si puo tener conto con un coefficiente correttivo:
Cs =ampiezza del moto relativo effettivoampiezza del moto relativo teorico
, (11.4)
detto coefficiente di swell-up. Sperimentalmente si trova che il coefficiente di swell-up e una funzionedella forma di carena, della posizione considerata, della velocita nave e della lunghezza dell’onda.Poiche non e stato sviluppato alcun metodo universalmente accettato per il calcolo di Cs, esso vienemisurato per mezzo di prove su modelli. Probabilmente l’insieme piu vasto di dati sperimentalisull’argomento e quello pubblicato da Blok and Huisman (1985). La Figura 11.2 mostra alcuni deiloro risultati, ottenuti per una fregata in onde di prora con lunghezza eguale alla lunghezza nave.
Fn = 0.5
0.4
0.3
0.3 0.4 0.5x/L (-)
0.0
1.0
2.0
3.0
Sw
ell-
Up
Co
effi
cie
nt,
CS (
-)
Figura 11.2: Coefficiente di swell-up sulla lunghezza nave (Blok and Huisman, 1985).
La probabilita di emersione della chiglia (keel emergence) coincide con la probabilita del motorelativo locale di superare l’immersione effettiva. Ne segue:
Pke = exp(− D2
ke
2C2s Drζ
), (11.5)
essendo Drζla varianza del moto relativo teorico nella posizione considerata lungo la nave. Un’e-
spressione simile puo essere scritta per la probabilita di immersione del ponte (deck submergence):
Pds = exp(− F 2
e
2C2s Drζ
), (11.6)
mentre la probabilita di fuoriuscita dell’elica (propeller emergence) risulta:
Ppe = exp
(− D2
pe
2C2s Drζ
). (11.7)

166 CAPITOLO 11. EFFETTI INDESIDERATI
Il periodo medio dei picchi delle oscillazioni nave connesse con il moto relativo puo essere calcolatoin accordo con quanto visto al Paragrafo 4.5. Ne segue:
(T p
)rζ
= 2π
√Drζ
Drζ
, (11.8)
dove Drζe Drζ
sono le varianze della velocita e dell’accelerazione del moto relativo teorico nellaposizione considerata lungo la nave. Per questo, nell’intervallo di tempo di un’ora, il numero mediodi fuoriuscite della chiglia, di immersioni del ponte e di fuoriuscite dell’elica e dato nell’ordine da:
Nke =3600Pke(
T p
)rζ
,
Nds =3600Pds(
T p
)rζ
, (11.9)
Npe =3600Ppe(
T p
)rζ
.
Le relazioni precedenti esprimono la frequenza di occorrenza dei fenomeni indesiderati visti inprecedenza.
11.3 Slamming
11.3.1 Premessa
La Figura 11.3 mostra una fregata in moto di avanzo con velocita sostenuta ed in presenza di cattivotempo. Come si vede, il moto relativo e sufficientemente elevato da esporre una parte considerevoledella chiglia, per cui e da ritenersi imminente la presenza di uno slam. La nave e avvolta da unospruzzo dovuto ad un precedente imbarco d’acqua e l’acqua imbarcata viene riversata sui fianchiper rientrare in mare al di sotto della chiglia.
Lo slam successivo si verifichera al momento dell’impatto della nave con un insieme di acquae di aria, miscela questa che probabilmente attenua l’entita dell’effetto. I carichi dovuti alla pres-sione d’impatto sono influenzati dalla forma locale della carena, dalla velocita relativa, dall’angoloformato dalla chiglia con la superficie dell’acqua, dall’elasticita locale del fasciame del fondo edall’elasticita generale della struttura dello scafo. Una previsione quantitativa del fenomeno e unproblema molto complesso, che va ben oltre lo scopo di ogni teoria finora sviluppata.
Misure al vero delle pressioni di slamming sono molto rare a causa delle particolari difficoltaconnesse. La Figura 11.4 mostra la storia temporale della pressione di slamming registrata daSellars (1972) sulla chiglia del US Coast Guard vessel Unimark durante uno slam abbastanzasevero. Come si vede, dopo l’impatto iniziale, la pressione aumenta molto rapidamente per poidecrescere altrettanto velocemente.
11.3.2 Prove di impatto
Come noto, la maggior parte delle sezioni prodiere delle navi attualmente in esercizio possono essereapprossimate abbastanza bene con delle semplici forme a cuneo. Il comportamento di queste sezionidurante un fenomeno di slamming puo essere esaminato sperimentalmente facendo impattare dellesezioni bi-dimensionali contro la superficie libera dell’acqua.
L’analisi dimensionale suggerisce che il picco della pressione d’impatto risulti espresso dallarelazione:
p =12
ρCpr2ζ , (11.10)

11.3. SLAMMING 167
Figura 11.3: Slamming di una fregata in presenza di cattivo tempo (Lloyd, 1989).
Time (seconds)
Pre
ssur
e (k
N/m
etre
s²)
0
500
1000
1500
0.1 0.2 0.30.0
Figura 11.4: Andamento temporale della pressione di slamming sulla chiglia del US Coast Guardvessel Unimark (Sellars, 1972).
168 CAPITOLO 11. EFFETTI INDESIDERATI
essendo Cp il coefficiente della pressione di slamming, funzione dell’angolo β di alzata di madiere(deadrise angle), definito in Figura 11.5. La relazione precedente e stata confermata in numerosiesperimenti. La Figura 11.6 mostra come Cp varia in funzione di β.
Figura 11.5: Definizione dell’angolo di alzata di madiere.
0 5 10 15 20 25 30 35 40
Deadrise Angle, β (deg)
1
10
100
Pre
ssu
re C
oe
ffici
en
t, C
P (
-)
Experiment
Hagiwara and Yuhara (1974)
Chuang (1970)
Chuang and Milne (1971)
Figura 11.6: Coefficiente della pressione di slamming in funzione dell’angolo di alzata di madiere.
Per angoli di alzata di madiere superiori a circa 25◦ i risultati sperimentali coincidono abbastan-za bene con le previsioni teoriche ottenute da Wagner (1932) per i carichi d’impatto sulle carenedegli idrovolanti:
Cp = 1 +(
π cot β
2
)2
. (11.11)
Le pressioni di slamming misurate nelle prove sperimentali bi-dimensionali risultano pero molto
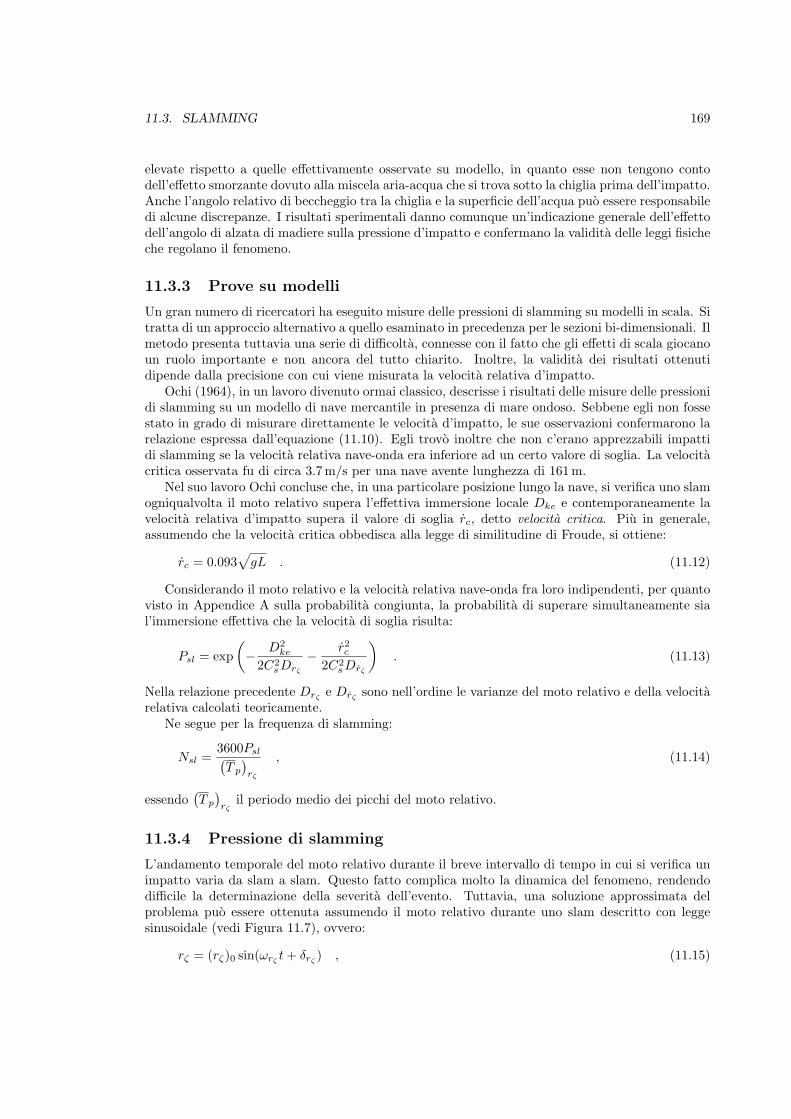
11.3. SLAMMING 169
elevate rispetto a quelle effettivamente osservate su modello, in quanto esse non tengono contodell’effetto smorzante dovuto alla miscela aria-acqua che si trova sotto la chiglia prima dell’impatto.Anche l’angolo relativo di beccheggio tra la chiglia e la superficie dell’acqua puo essere responsabiledi alcune discrepanze. I risultati sperimentali danno comunque un’indicazione generale dell’effettodell’angolo di alzata di madiere sulla pressione d’impatto e confermano la validita delle leggi fisicheche regolano il fenomeno.
11.3.3 Prove su modelli
Un gran numero di ricercatori ha eseguito misure delle pressioni di slamming su modelli in scala. Sitratta di un approccio alternativo a quello esaminato in precedenza per le sezioni bi-dimensionali. Ilmetodo presenta tuttavia una serie di difficolta, connesse con il fatto che gli effetti di scala giocanoun ruolo importante e non ancora del tutto chiarito. Inoltre, la validita dei risultati ottenutidipende dalla precisione con cui viene misurata la velocita relativa d’impatto.
Ochi (1964), in un lavoro divenuto ormai classico, descrisse i risultati delle misure delle pressionidi slamming su un modello di nave mercantile in presenza di mare ondoso. Sebbene egli non fossestato in grado di misurare direttamente le velocita d’impatto, le sue osservazioni confermarono larelazione espressa dall’equazione (11.10). Egli trovo inoltre che non c’erano apprezzabili impattidi slamming se la velocita relativa nave-onda era inferiore ad un certo valore di soglia. La velocitacritica osservata fu di circa 3.7m/s per una nave avente lunghezza di 161m.
Nel suo lavoro Ochi concluse che, in una particolare posizione lungo la nave, si verifica uno slamogniqualvolta il moto relativo supera l’effettiva immersione locale Dke e contemporaneamente lavelocita relativa d’impatto supera il valore di soglia rc, detto velocita critica. Piu in generale,assumendo che la velocita critica obbedisca alla legge di similitudine di Froude, si ottiene:
rc = 0.093√
gL . (11.12)
Considerando il moto relativo e la velocita relativa nave-onda fra loro indipendenti, per quantovisto in Appendice A sulla probabilita congiunta, la probabilita di superare simultaneamente sial’immersione effettiva che la velocita di soglia risulta:
Psl = exp(− D2
ke
2C2s Drζ
− r2c
2C2s Drζ
). (11.13)
Nella relazione precedente Drζe Drζ
sono nell’ordine le varianze del moto relativo e della velocitarelativa calcolati teoricamente.
Ne segue per la frequenza di slamming:
Nsl =3600Psl(T p
)rζ
, (11.14)
essendo(T p
)rζ
il periodo medio dei picchi del moto relativo.
11.3.4 Pressione di slamming
L’andamento temporale del moto relativo durante il breve intervallo di tempo in cui si verifica unimpatto varia da slam a slam. Questo fatto complica molto la dinamica del fenomeno, rendendodifficile la determinazione della severita dell’evento. Tuttavia, una soluzione approssimata delproblema puo essere ottenuta assumendo il moto relativo durante uno slam descritto con leggesinusoidale (vedi Figura 11.7), ovvero:
rζ = (rζ)0 sin(ωrζt + δrζ
) , (11.15)

170 CAPITOLO 11. EFFETTI INDESIDERATI
essendo ωrζe δrζ
rispettivamente la frequenza e la fase iniziale. Al momento dell’impatto (t = 0),si ha:
−Dke = (rζ)0 sin δrζ, (11.16)
e quindi:
δrζ= arcsin
[−Dke
(rζ)0
]. (11.17)
Analogamente, la velocita relativa del moto e data da:
rζ = ωrζ(rζ)0 cos(ωrζ
t + δrζ) . (11.18)
per cui all’impatto risulta:
rsl = ωrζ(rζ)0 cos δrζ
= ωrζ
√(rζ)20 −D2
ke . (11.19)
Il calcolo delle grandezze significative per un fenomeno di slamming richiede di determinare sial’ampiezza del moto relativo (rζ)0 che la frequenza ωrζ
dello stesso.
t
rζ rζ(t) =(rζ )0 sin(ωrζ
t+δrζ)
ImpactKeel emerges
Dke
δrζ
t = 0
(rζ )0
Figura 11.7: Andamento temporale del moto relativo in un punto della chiglia.
Per semplicita, la frequenza ωrζviene assunta coincidente con la frequenza media dei picchi del
moto relativo:
ωrζ≈ 2π(
T p
)rζ
, (11.20)
e quindi, per la (11.8):
ωrζ=
√Drζ
Drζ
. (11.21)
Dall’equazione (11.5) segue poi che la probabilita del moto relativo di eccedere un valore dipicco (rζ)0 e data da:
P = exp(− (rζ)20
2 C2s Drζ
). (11.22)
Il picco avra luogo una volta ogni N oscillazioni, cioe:
P =1N
=2π
TRωrζ
, (11.23)

11.3. SLAMMING 171
essendo TR la lunghezza del record osservato, ovvero un intervallo di tempo arbitrario per ilcampionamento. Ne segue che una volta ogni TR secondi il moto relativo supera l’ampiezza:
(rζ)0 = Csσrζ
[−2 ln
(2π
TRωrζ
)]1/2
, (11.24)
dove σrζ=
√Drζ
e il valore rms del moto relativo teorico.S
lam
min
g p
ress
ure
(kN
/m²)
xB1M/Ls
CS
0.50.40.30.2
(d)400
200
0
Rel
ativ
e m
oti
on
(m
)R
elat
ive
velo
city
(m
/s)
Critical velocity
Relative velocity
Relative motion
DisplacementVelocity
0
5
10(c)
rms
rela
tive
mo
tio
n (
m)
rms
rela
tive
vel
oci
ty (
m/s
)
(b)
(a)
4
2
0
Sla
mm
ing
pre
ssu
re
coef
fici
ent
Dea
dri
se a
ng
le (
deg
)
CS
0
20
40 40
20
0
0.1
Figura 11.8: Calcolo della pressione di slamming per una fregata in onde di prora, TR = 900 s.
Usando le equazioni precedenti e possibile stimare i valori estremi delle pressioni di slammingche vengono superate una sola volta in TR secondi. In Figura 11.8 vengono riassunti i risultati diun esempio di calcolo per una fregata operante con mare di prora, relativamente a TR = 900 s.

172 CAPITOLO 11. EFFETTI INDESIDERATI
La Figura 11.8a mostra l’angolo di alzata di madiere ed il corrispondente coefficiente dellapressione di slamming Cp dato dall’equazione (11.11). Il valore rms del moto relativo e dellavelocita relativa, calcolati con la strip theory per un’assegnata velocita di avanzo e prefissatecondizioni ondose, sono riportati in Figura 11.8b. La Figura 11.8c mostra i valori dell’ampiezzadel moto relativo e della velocita relativa che vengono superati una sola volta in TR secondi, datirispettivamente dalle equazioni (11.24) e (11.19). Questi rappresentano le condizioni peggiori cheverosimilmente accadranno nell’intervallo di tempo considerato della durata di 900 s. La velocitad’impatto e massima all’estremita prodiera della nave e si riduce a zero in una qualche posizionepiu arretrata dove la fuoriuscita della chiglia risulta improbabile. Alcune delle velocita di impattopreviste sono minori della velocita critica calcolata con l’equazione (11.12). Di conseguenza, siassume che lo slamming non abbia avuto luogo.
Infine, la Figura 11.8d mostra la pressione di slamming calcolata in base alla relazione (11.10).La pressione viene posta a zero dove la velocita di impatto e minore della velocita critica.
11.4 Imbarco d’acqua
La Figura 11.9 mostra una fregata soggetta ad imbarco d’acqua in mare mosso. La prora e immersanell’acqua e l’affondamento ha provocato nell’aria circostante una corona di acqua solida (greenwater) e schiuma. La velocita di avanzo della nave assicura che una parte dell’acqua imbarcatavenga a riversarsi sul ponte sebbene una gran parte della stessa sara spinta lateralmente da unaprora ben disegnata. In figura puo essere osservata anche la traccia di un precedente imbarcod’acqua, la cui presenza si manifesta attraverso la schiuma che circonda la nave lungo l’interalunghezza, fino all’estremita del fumaiolo.
Figura 11.9: Imbarco d’acqua nel caso di una fregata (Lloyd, 1989).
Le previsioni analitiche della frequenza di imbarco d’acqua e della severita del fenomeno sonoattualmente impossibili da farsi. Gli esperimenti su modelli possono dare utili informazioni, maanche in questo caso i risultati ottenuti devono essere trattati con estrema prudenza. L’imbarcod’acqua si ritiene possa essere correttamente modellato in un esperimento scalato secondo la leggedi Froude, sebbene sia chiaro dalle osservazioni visuali che la formazione degli spruzzi non puo
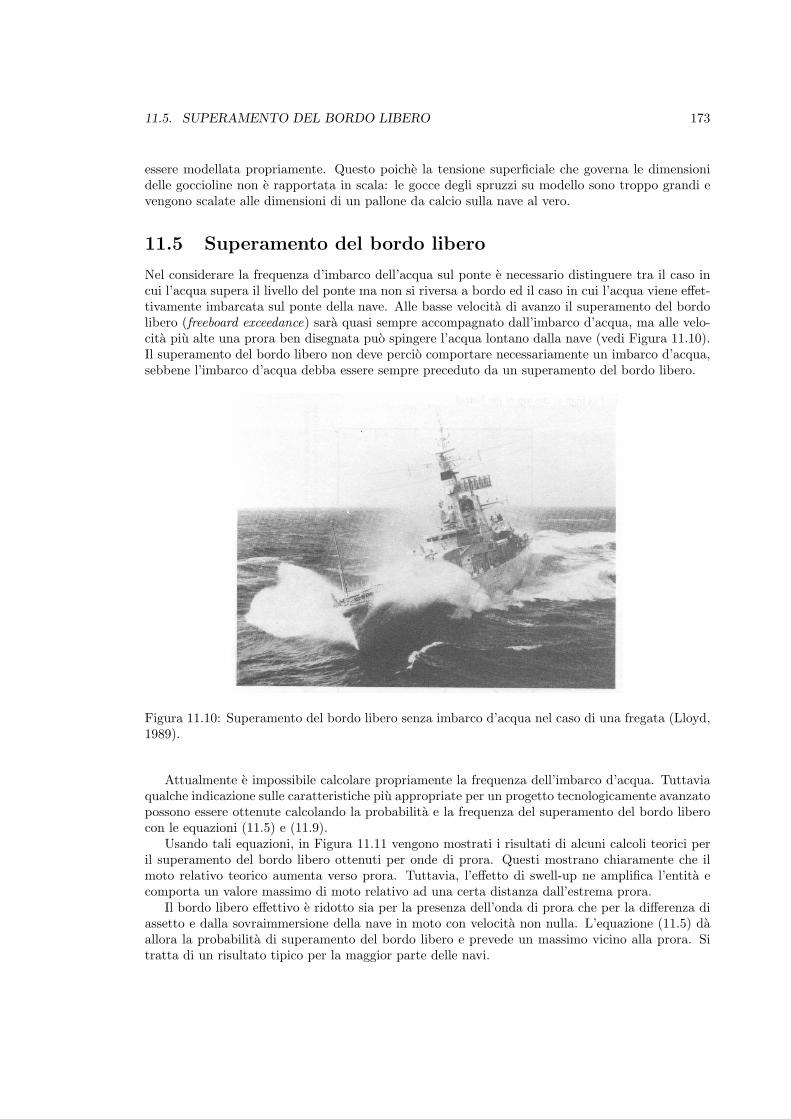
11.5. SUPERAMENTO DEL BORDO LIBERO 173
essere modellata propriamente. Questo poiche la tensione superficiale che governa le dimensionidelle goccioline non e rapportata in scala: le gocce degli spruzzi su modello sono troppo grandi evengono scalate alle dimensioni di un pallone da calcio sulla nave al vero.
11.5 Superamento del bordo libero
Nel considerare la frequenza d’imbarco dell’acqua sul ponte e necessario distinguere tra il caso incui l’acqua supera il livello del ponte ma non si riversa a bordo ed il caso in cui l’acqua viene effet-tivamente imbarcata sul ponte della nave. Alle basse velocita di avanzo il superamento del bordolibero (freeboard exceedance) sara quasi sempre accompagnato dall’imbarco d’acqua, ma alle velo-cita piu alte una prora ben disegnata puo spingere l’acqua lontano dalla nave (vedi Figura 11.10).Il superamento del bordo libero non deve percio comportare necessariamente un imbarco d’acqua,sebbene l’imbarco d’acqua debba essere sempre preceduto da un superamento del bordo libero.
Figura 11.10: Superamento del bordo libero senza imbarco d’acqua nel caso di una fregata (Lloyd,1989).
Attualmente e impossibile calcolare propriamente la frequenza dell’imbarco d’acqua. Tuttaviaqualche indicazione sulle caratteristiche piu appropriate per un progetto tecnologicamente avanzatopossono essere ottenute calcolando la probabilita e la frequenza del superamento del bordo liberocon le equazioni (11.5) e (11.9).
Usando tali equazioni, in Figura 11.11 vengono mostrati i risultati di alcuni calcoli teorici peril superamento del bordo libero ottenuti per onde di prora. Questi mostrano chiaramente che ilmoto relativo teorico aumenta verso prora. Tuttavia, l’effetto di swell-up ne amplifica l’entita ecomporta un valore massimo di moto relativo ad una certa distanza dall’estrema prora.
Il bordo libero effettivo e ridotto sia per la presenza dell’onda di prora che per la differenza diassetto e dalla sovraimmersione della nave in moto con velocita non nulla. L’equazione (11.5) daallora la probabilita di superamento del bordo libero e prevede un massimo vicino alla prora. Sitratta di un risultato tipico per la maggior parte delle navi.

174 CAPITOLO 11. EFFETTI INDESIDERATI
Actual relative motion
Free
boar
d (m
)
10
5
4
3
2
1rms
rela
tive
mot
ion
(m)
0 0.1 0.2 0.3 0.4 0.5
Notional relative motion
Bow wave
Sheer line
0.50.40.30.20.10
DWL
F e
r 3
0.10
0.2
0.4
0.2 0.3 0.4 0.5x B1M /L s
Pro
babi
lity
of
free
boar
d ex
ceed
ence
Figura 11.11: Calcolo della probabilita di superamento del bordo libero nel caso di una fregata a20 nodi; H1/3 = 5.5m, Tm = 12.4 s.

11.6. EFFETTO DELLE FORME DI PRORA 175
Le previsioni teoriche sovrastimano, in generale, la frequenza effettiva di imbarco d’acqua inquanto la maggior parte dei superamenti di bordo libero non sono accompagnati da acqua chebagna il ponte. La Figura 11.11 mostra questo fenomeno. Lloyd, Salsich and Zseleczky (1986),in una serie estesa di esperimenti su modelli, trovarono che la frequenza osservata dell’imbarcod’acqua appare strettamente correlata con i superamenti di bordo libero nella parte prodiera dellanave. In altre parole, un imbarco d’acqua e quasi sempre il risultato di un superamento di bordolibero all’estrema prora, mentre il superamento del bordo libero in un qualsiasi altro punto nonimplica necessariamente imbarco d’acqua a meno che esso non sia accompagnato anche da unsuperamento di bordo libero all’estrema prora. Ne segue che la frequenza del superamento dibordo libero all’estrema prora comporta probabilmente una stima ragionevolmente accurata dellavera frequenza di imbarco d’acqua, almeno in mare di prora e per velocita sostenute della nave.
11.6 Effetto delle forme di prora
Sembra ovvio che la frequenza di imbarco d’acqua e la severita del fenomeno associato debbano es-sere affetti dall’eccesso di acqua che la nave incontra a prora. Risulta tuttavia necessario osservareche non esiste un’indicazione generale sui legami esistenti tra gli effetti e le caratteristiche geome-triche quali il flare, la ruota di prora o gli spigoli. Gli esperimenti finora eseguiti sono abbastanzaconfusi e contraddittori, per cui il problema rimane aperto e costituisce un interessante argomentodi ricerca. Un bordo libero sufficientemente alto e l’unica garanzia universalmente accettata perlimitare l’imbarco d’acqua sul ponte.

176 CAPITOLO 11. EFFETTI INDESIDERATI
Capitolo 12
Efficienza operativa
12.1 Introduzione
Con efficienza operativa si intende la capacita di una nave ad adempiere la missione richiestaper una qualunque condizione meteomarina. In termini quantitativi, tale concetto viene espressoattraverso la percentuale di tempo in cui la nave puo conseguire con successo tutti gli obiettivi pre-fissati per un’assegnata combinazione di aree geografiche e stagioni annuali. Come tale, l’efficienzaoperativa costituisce percio un parametro di confronto della bonta di progetti alternativi.
Nei capitoli precedenti sono state esaminate in dettaglio le procedure di calcolo delle rispostenave in presenza di cattivo tempo, ovvero per una data combinazione di condizioni meteomarine,velocita di avanzo e rotta. Conoscendo i valori limite delle risposte per cui l’operativita vienea mancare, detti per questo valori di soglia o valori massimi ammissibili, e possibile stabilire seun certo obiettivo possa essere conseguito o meno. Estendendo il discorso a tutte le possibilicombinazioni di area del mare, stagione annuale, direzione di propagazione delle onde, altezzasignificativa, periodo modale, velocita e rotta della nave, si e in grado di calcolare la percentuale ditempo nel quale la missione assegnata puo essere portata a termine e quindi realizzata con pienosuccesso.
12.2 Area e stagione
Per effettuare il calcolo dell’efficienza operativa bisogna, in primo luogo, specificare l’ambientemeteomarino nel quale la nave si trova ad operare (teatro delle operazioni). Questo puo esserefatto convenientemente nella forma tabulare di Figura 12.1, che mostra due esempi di distribuzionedi frequenza condizionata per area di mare e stagione annuale. Esse si riferiscono ad una nave dacarico che percorre una rotta transatlantica e ad una nave militare operante nel Nord Atlantico.Le aree del mare sono state numerate secondo la suddivisione vista nel Paragrafo 5.3 (Hogben,Dacunha and Olliver, 1986).
La distribuzione di frequenza condizionata per area di mare e stagione annuale rappresenta lapercentuale di tempo che la nave trascorre in ciascuna area situata sulla rotta prestabilita nellevarie stagioni dell’anno. Per entrambe le navi viene richiesto di svolgere la propria attivita nelcorso di tutto l’anno, senza soste per eventuali riparazioni o carenaggio, cosicche la distribuzionedi frequenza delle stagioni risulta uniforme (4×0.25). Piu precisamente, la nave mercantile navigalungo una rotta di andata e ritorno fra l’Europa ed il Nord America (Figura 12.1a), mentre allanave militare viene richiesta un’attivita di pattugliamento nel Nord Atlantico(Figura 12.1b). Que-
177
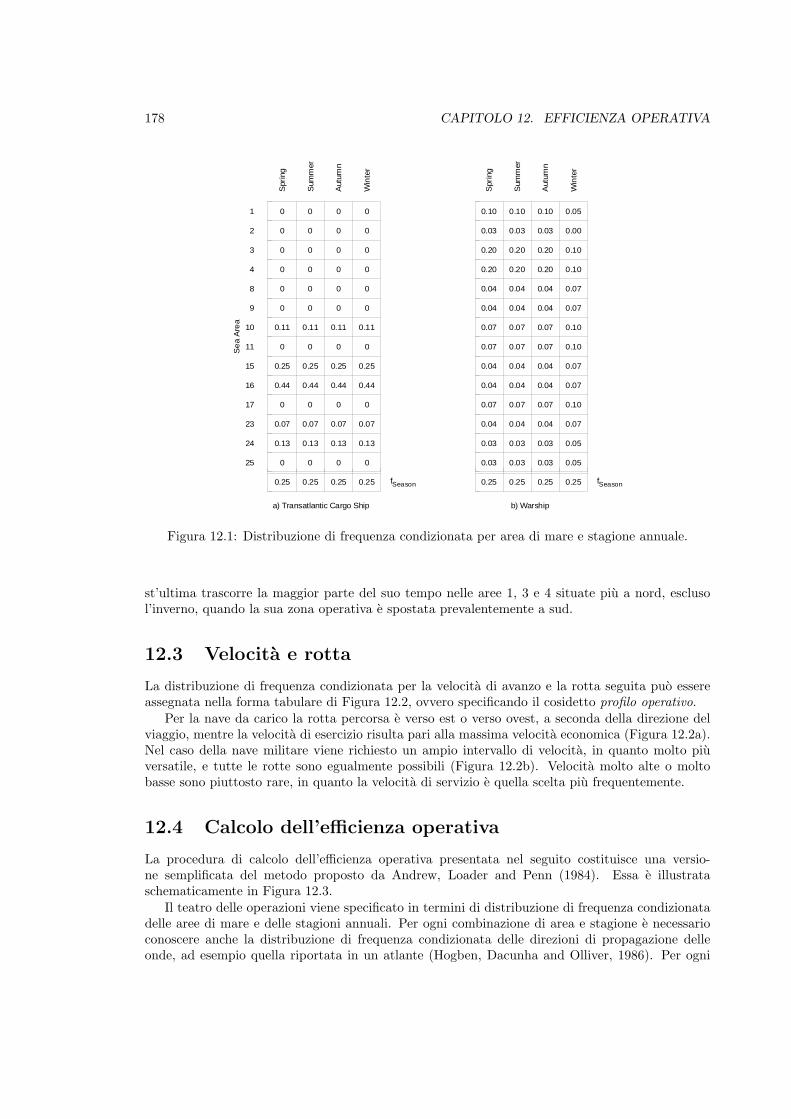
178 CAPITOLO 12. EFFICIENZA OPERATIVA
a) Transatlantic Cargo Ship
Se
a A
rea
0.25
0
0.13
0.07
0
0.44
0.25
0
0.11
0
0
0
0
0
0
25
24
23
17
16
15
11
10
9
8
4
3
2
1
0.25
0
0.13
0.07
0
0.44
0.25
0
0.11
0
0
0
0
0
0
0.25
0
0.13
0.07
0
0.44
0.25
0
0.11
0
0
0
0
0
0
0.25
0
0.13
0.07
0
0.44
0.25
0
0.11
0
0
0
0
0
0
Spr
ing
Sum
mer
Aut
umn
Win
ter
fSeason
b) Warship
0.25
0.03
0.03
0.04
0.07
0.04
0.04
0.07
0.07
0.04
0.04
0.20
0.20
0.03
0.10
0.25
0.03
0.03
0.04
0.07
0.04
0.04
0.07
0.07
0.04
0.04
0.20
0.20
0.03
0.10
0.25
0.03
0.03
0.04
0.07
0.04
0.04
0.07
0.07
0.04
0.04
0.20
0.20
0.03
0.10
0.25
0.05
0.05
0.07
0.10
0.07
0.07
0.10
0.10
0.07
0.07
0.10
0.10
0.00
0.05
Spr
ing
Sum
mer
Aut
umn
Win
ter
fSeason
Figura 12.1: Distribuzione di frequenza condizionata per area di mare e stagione annuale.
st’ultima trascorre la maggior parte del suo tempo nelle aree 1, 3 e 4 situate piu a nord, esclusol’inverno, quando la sua zona operativa e spostata prevalentemente a sud.
12.3 Velocita e rotta
La distribuzione di frequenza condizionata per la velocita di avanzo e la rotta seguita puo essereassegnata nella forma tabulare di Figura 12.2, ovvero specificando il cosidetto profilo operativo.
Per la nave da carico la rotta percorsa e verso est o verso ovest, a seconda della direzione delviaggio, mentre la velocita di esercizio risulta pari alla massima velocita economica (Figura 12.2a).Nel caso della nave militare viene richiesto un ampio intervallo di velocita, in quanto molto piuversatile, e tutte le rotte sono egualmente possibili (Figura 12.2b). Velocita molto alte o moltobasse sono piuttosto rare, in quanto la velocita di servizio e quella scelta piu frequentemente.
12.4 Calcolo dell’efficienza operativa
La procedura di calcolo dell’efficienza operativa presentata nel seguito costituisce una versio-ne semplificata del metodo proposto da Andrew, Loader and Penn (1984). Essa e illustrataschematicamente in Figura 12.3.
Il teatro delle operazioni viene specificato in termini di distribuzione di frequenza condizionatadelle aree di mare e delle stagioni annuali. Per ogni combinazione di area e stagione e necessarioconoscere anche la distribuzione di frequenza condizionata delle direzioni di propagazione delleonde, ad esempio quella riportata in un atlante (Hogben, Dacunha and Olliver, 1986). Per ogni
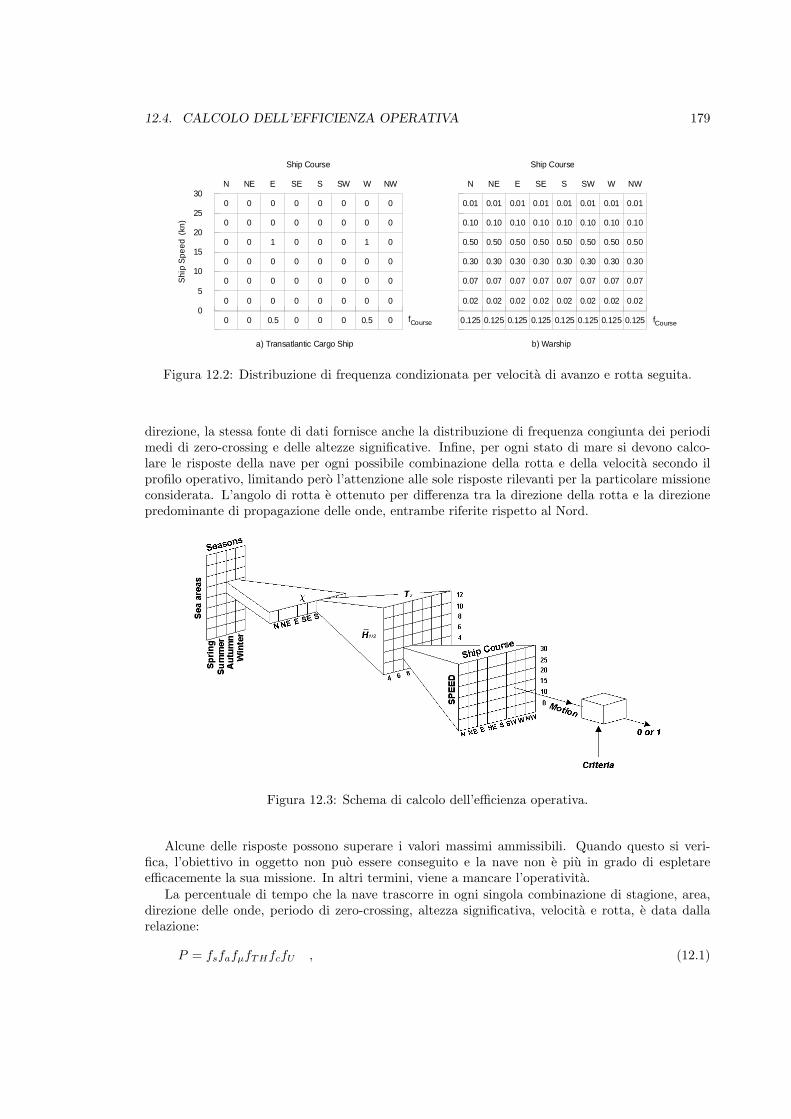
12.4. CALCOLO DELL’EFFICIENZA OPERATIVA 179
a) Transatlantic Cargo Ship
Shi
p S
peed
(kn
)
0
0
0
0
0
0
0
0
5
10
15
20
25
30
0
0
0
0
0
0
0
0.5
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0.5
0
0
0
1
0
0
0
0
0
0
0
0
0
N NE E SE S SW W NW
Ship Course
fCourse
b) Warship
0.02
0.07
0.30
0.50
0.10
0.01
0.02
0.07
0.30
0.50
0.10
0.01
0.02
0.07
0.30
0.50
0.10
0.01
0.02
0.07
0.30
0.50
0.10
0.01
0.02
0.07
0.30
0.50
0.10
0.01
0.02
0.07
0.30
0.50
0.10
0.01
0.02
0.07
0.30
0.50
0.10
0.01
0.02
0.07
0.30
0.50
0.10
0.01
0.125 0.125 0.125 0.125 0.125 0.125 0.125 0.125
N NE E SE S SW W NW
Ship Course
fCourse
Figura 12.2: Distribuzione di frequenza condizionata per velocita di avanzo e rotta seguita.
direzione, la stessa fonte di dati fornisce anche la distribuzione di frequenza congiunta dei periodimedi di zero-crossing e delle altezze significative. Infine, per ogni stato di mare si devono calco-lare le risposte della nave per ogni possibile combinazione della rotta e della velocita secondo ilprofilo operativo, limitando pero l’attenzione alle sole risposte rilevanti per la particolare missioneconsiderata. L’angolo di rotta e ottenuto per differenza tra la direzione della rotta e la direzionepredominante di propagazione delle onde, entrambe riferite rispetto al Nord.
Figura 12.3: Schema di calcolo dell’efficienza operativa.
Alcune delle risposte possono superare i valori massimi ammissibili. Quando questo si veri-fica, l’obiettivo in oggetto non puo essere conseguito e la nave non e piu in grado di espletareefficacemente la sua missione. In altri termini, viene a mancare l’operativita.
La percentuale di tempo che la nave trascorre in ogni singola combinazione di stagione, area,direzione delle onde, periodo di zero-crossing, altezza significativa, velocita e rotta, e data dallarelazione:
P = fsfafµfTHfcfU , (12.1)

180 CAPITOLO 12. EFFICIENZA OPERATIVA
dove:
fs distribuzione di frequenza delle stagioni annuali,
fa distribuzione di frequenza condizionata delle aree di mare per una data stagione,
fµ distribuzione di frequenza condizionata delle direzioni predominanti di propagazione delle onderispetto al Nord per una data stagione ed area,
fTH distribuzione di frequenza congiunta dei periodi medi di zero-crossing e delle altezze signifi-cative per una data stagione, area e direzione di propagazione,
fc distribuzione di frequenza delle rotte della nave rispetto al Nord,
fU distribuzione di frequenza condizionata delle velocita nave per una data rotta.
La nave puo espletare con successo la sua missione solo quando tutte le risposte risultano minoridei livelli di soglia richiesti per la missione considerata. La percentuale di tempo complessivoe ottenuta dalla somma pesata dei valori (12.1) relativi a tutte le possibili combinazioni dellecondizioni di esercizio. Ne segue per l’efficienza operativa:
E = ΣsΣaΣµΣTHΣcΣU (Γ1Γ2Γ3 . . . Γn . . . ΓN )P , (12.2)
dove Σs, Σa, Σµ, ΣTH , Σc e ΣU indicano rispettivamente la sommatoria su tutte le stagioni,aree, direzioni delle onde, periodi medi di zero-crossing e altezze significative, rotte, velocita nave.Inoltre, se N e il numero totale delle risposte considerate, Γn esprime il funzionale di conteggiodefinito dai due valori:
Γn = 1 per rn ≤ rnc ,
Γn = 0 per rn > rnc , (12.3)
essendo rn l’n-esima risposta (ad esempio moto di rollio, accelerazione verticale assoluta, ecc.) edrnc il corrispondente valore critico. In Tabella 12.1 viene riportato un riassunto di tali valori, cosıcome proposti da vari autori sulla base di questionari, esperimenti e conoscenze pratiche.
La Tabella 12.2 mostra i risultati ottenuti nel calcolo dell’efficienza operativa (Andrew, Loaderand Penn, 1984) di una fregata nel Nord Atlantico con e senza stabilizzatori di rollio. La missioneviene considerata possibile solo se il valore rms di beccheggio non supera i 2.0 gradi ed il valorerms di rollio non supera i 3.0 gradi.
Considerando la restrizione sul solo moto di beccheggio, risulta che la nave e capace di espletarela missione per quasi tutto il tempo trascorso nella zona, ovvero per un tempo pari al 97.6% deltotale ed eguale nei due casi. Gli stabilizzatori di rollio non influenzano ovviamente questo risultato.Il loro effetto e quello di limitare le ampiezze di rollio, moto che gioca un ruolo particolarmenteimportante nel ridurre la capacita operativa della nave. Pertanto, con riferimento al solo moto dirollio, si vede che la nave non stabilizzata e efficiente per poco piu della meta del tempo (65.0%),mentre l’operativita aumenta notevolmente con l’ausilio degli stabilizzatori (85.1%). Altro discorsodeve essere invece fatto quando si considerano simultaneamente i limiti richiesti sui due moti nave,per cui l’efficienza operativa passa rispettivamente dal 64.9% al 85.1% nei due casi.
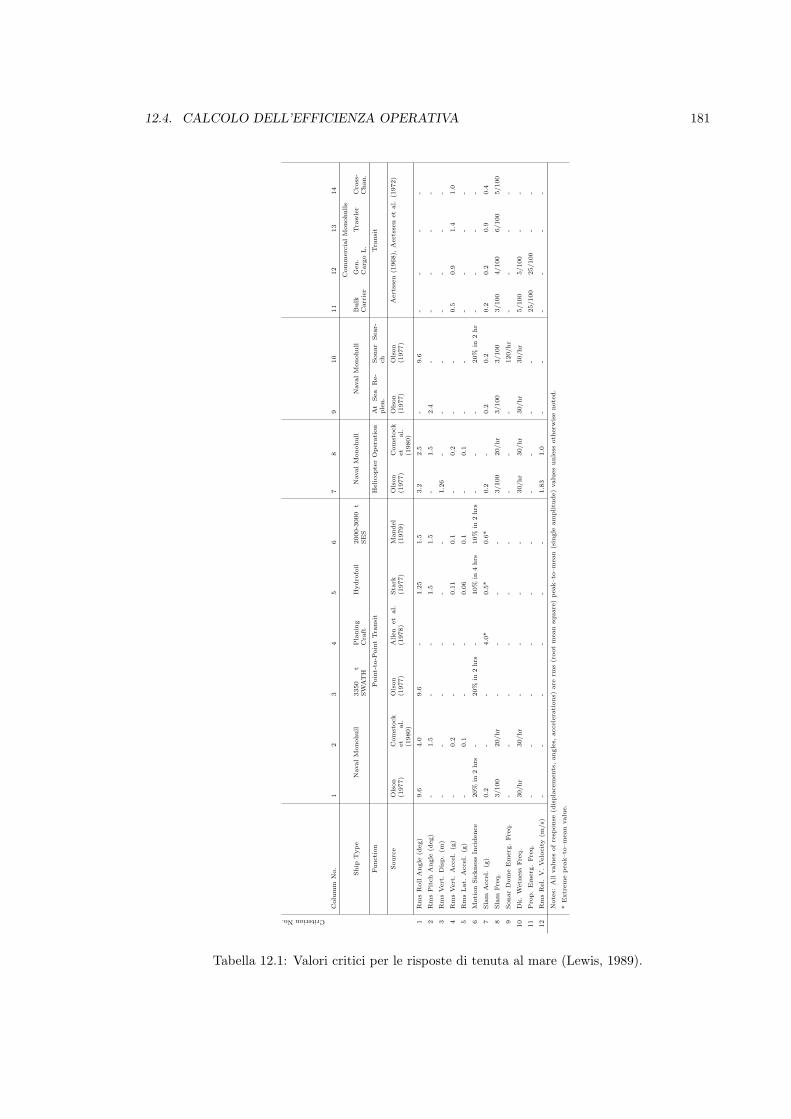
12.4. CALCOLO DELL’EFFICIENZA OPERATIVA 181
CriterionNo.
Colu
mm
No.
12
34
56
78
910
11
12
13
14
Com
merc
ialM
onohulls
Ship
Type
NavalM
onohull
3350
tSW
AT
HPla
nin
gC
raft
Hydro
foil
2000-3
000
tSES
NavalM
onohull
NavalM
onohull
Bulk
Carr
ier
Gen.
Carg
oL.
Tra
wle
rC
ross
-C
han.
Functi
on
Poin
t-to
-Poin
tTra
nsi
tH
elicopte
rO
pera
tion
At
Sea
Re-
ple
n.
Sonar
Sear-
chTra
nsi
t
Sourc
eO
lson
(1977)
Com
stock
et
al.
(1980)
Ols
on
(1977)
Allen
et
al.
(1978)
Sta
rk(1
977)
Mandel
(1979)
Ols
on
(1977)
Com
stock
et
al.
(1980)
Ols
on
(1977)
Ols
on
(1977)
Aert
ssen
(1968),
Aert
ssen
et
al.
(1972)
1R
ms
Roll
Angle
(deg)
9.6
4.0
9.6
-1.2
51.5
3.2
2.5
-9.6
--
--
2R
ms
Pit
chA
ngle
(deg)
-1.5
--
1.5
1.5
-1.5
2.4
--
--
-
3R
ms
Vert
.D
isp.
(m)
--
--
--
1.2
6-
--
--
--
4R
ms
Vert
.A
ccel.
(g)
-0.2
--
0.1
10.1
-0.2
--
0.5
0.9
1.4
1.0
5R
ms
Lat.
Accel.
(g)
-0.1
--
0.0
60.1
-0.1
--
--
--
6M
oti
on
Sic
kness
Incid
ence
20%
in2
hrs
-20%
in2
hrs
-10%
in4
hrs
10%
in2
hrs
--
-20%
in2
hr
--
--
7Sla
mA
ccel.
(g)
0.2
--
4.0
*0.5
*0.6
*0.2
-0.2
0.2
0.2
0.2
0.9
0.4
8Sla
mFre
q.
3/100
20/hr
--
--
3/100
20/hr
3/100
3/100
3/100
4/100
6/100
5/100
9Sonar
Dom
eEm
erg
.Fre
q.
--
--
--
--
-120/hr
--
--
10
Dk.
Wetn
ess
Fre
q.
30/hr
30/hr
--
--
30/hr
30/hr
30/hr
30/hr
5/100
5/100
--
11
Pro
p.
Em
erg
.Fre
q.
--
--
--
--
--
25/100
25/100
--
12
Rm
sR
el.
V.Velo
city
(m/s)
--
--
--
1.8
31.0
--
--
--
Note
s:A
llvalu
es
ofre
sponse
(dis
pla
cem
ents
,angle
s,accele
rati
ons)
are
rms
(root
mean
square
)peak–to
–m
ean
(sin
gle
am
plitu
de)
valu
es
unle
ssoth
erw
ise
note
d.
*Extr
em
epeak–to
–m
ean
valu
e.
Tabella 12.1: Valori critici per le risposte di tenuta al mare (Lewis, 1989).
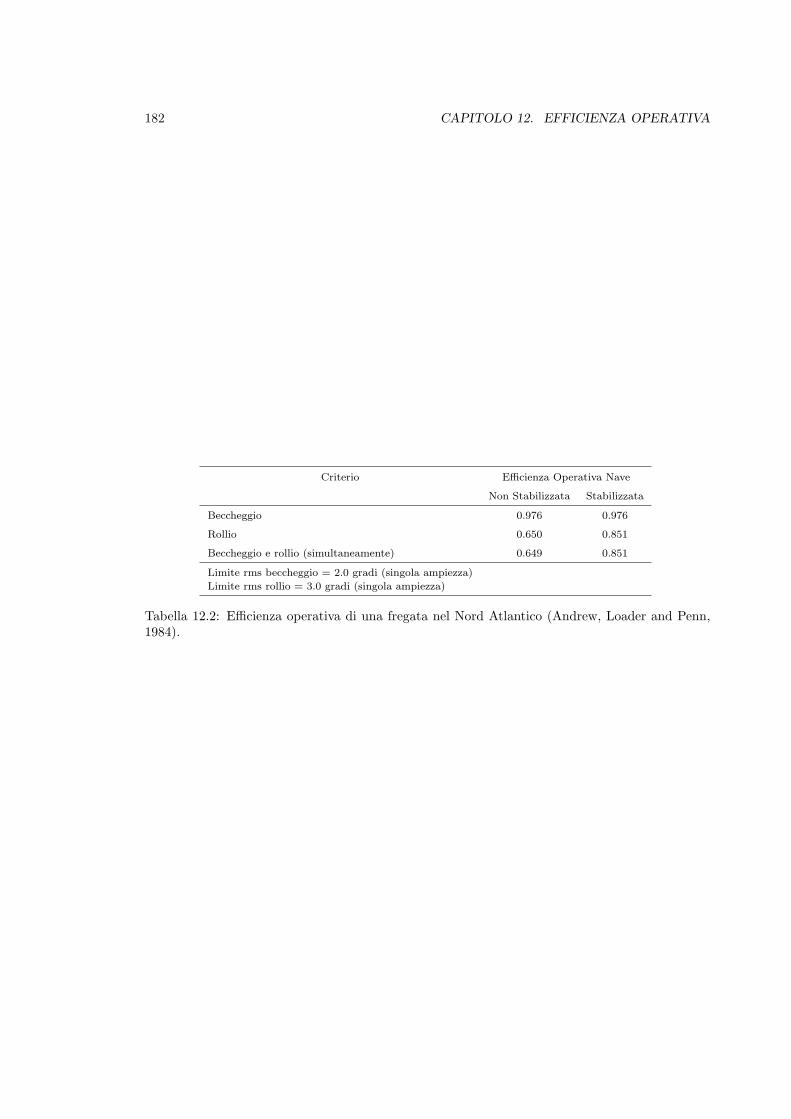
182 CAPITOLO 12. EFFICIENZA OPERATIVA
Criterio Efficienza Operativa Nave
Non Stabilizzata Stabilizzata
Beccheggio 0.976 0.976
Rollio 0.650 0.851
Beccheggio e rollio (simultaneamente) 0.649 0.851
Limite rms beccheggio = 2.0 gradi (singola ampiezza)
Limite rms rollio = 3.0 gradi (singola ampiezza)
Tabella 12.2: Efficienza operativa di una fregata nel Nord Atlantico (Andrew, Loader and Penn,1984).

Capitolo 13
Seakeeping nel progetto
13.1 Introduzione
I metodi di previsione descritti nei capitoli precedenti consentono di quantificare le qualita ditenuta al mare di una nave gia a partire dalle prime fasi progettuali. Nel caso in cui le prestazionirisultino inadeguate, il progettista si trovera nella necessita di intervenire e di apportare una serie dimodifiche migliorative che si traducono, in generale, in un cambiamento delle dimensioni principalie/o della forma di carena.
Per operare delle scelte razionali, il progettista deve percio conoscere le relazioni piu importantiche intercorrono tra i cambiamenti delle dimensioni e/o della forma e le corrispondenti variazionidelle prestazioni di tenuta al mare. Allo scopo di fornire questo tipo di informazioni, sarannoriportati nel seguito i risultati ottenuti nel contesto di uno studio applicativo (Lloyd, 1989). Sitratta ovviamente di indicazioni quantitative valide solo per una particolare tipologia di navi an-che se, come insegna l’esperienza, esse possono essere usate per effettuare stime qualitative sullavariazione delle prestazioni di navi diverse. Le effettive prestazioni di un particolare progetto devo-no comunque essere valutate mediante calcoli basati sulle moderne teorie idrodinamiche dei motinave o facendo riferimento ai risultati sperimentali delle prove su modelli. In questo modo, essepossono essere usate con lo scopo specifico di suggerire le variazioni piu opportune delle dimensioniprincipali e della forma di carena al fine di migliorarne le qualita di tenuta al mare.
Nel seguito, verra considerato l’effetto delle dimensioni principali e della forma di carena sulcomportamento in mare e, per limitare il problema, l’attenzione sara confinata ai soli moti navenel piano verticale con onde provenienti da prora. Questa direzione d’incontro da, in generale, lepeggiori condizioni per i moti verticali. Inoltre, come ampiamente dimostrato nella pratica, unacarena con moti limitati in onde di prora ha quasi sempre prestazioni soddisfacenti anche per glialtri angoli d’incontro. Eventuali problemi di rollio possono essere risolti indipendentemente.
Le grandezze piu importanti da considerare in questo contesto sono le accelerazioni verticaliassolute lungo la nave ed il moto relativo all’estrema prora. Le prime danno un’indicazione sullaseverita dei moti nave subiti dall’equipaggio e dai passeggeri, mentre il secondo e associato al feno-meno indesiderato dello slamming. Per questo, e stato scelto di calcolare l’accelerazione verticaleassoluta alla Stazione 7 (x/L=0.15), una tipica locazione sul ponte di una nave militare o per gliaccomodamenti dei passeggeri su di un ferry. Sara poi determinato il moto relativo alla Stazione 4(x/L=0.3), una stazione dove si verifica spesso uno slam molto severo, con lo scopo di valutare laprobabilita di emersione della chiglia e quindi la frequenza di occorrenza del fenomeno.
I moti laterali e trasversali sono anche essi influenzati dai cambiamenti della forma di carena edelle dimensioni principali. Tuttavia, non e mai stato ritenuto importante ottimizzare la carena perconseguire una limitazione di tali moti. Su di essi si puo intervenire piu efficacemente installando
183
184 CAPITOLO 13. SEAKEEPING NEL PROGETTO
opportuni sistemi di riduzione del rollio come ad esempio le alette antirollio, le pinne attive, lecasse passive e/o attive, ed anche operando con il timone.
13.2 Carena madre
Esiste un numero infinito di modi nei quali si puo effettuare la variazione delle dimensioni principalie/o della forma di una carena. Nell’ambito dello studio dei moti nave e delle finalita proposteconviene comunque fissare dei vincoli sui cambiamenti che saranno esplicitamente considerati. Inprimo luogo, per effettuare un confronto oggettivo fra le previsioni numeriche e necessario scegliereuna carena madre come carena di riferimento. A tal fine, come esempio concreto, si consideri unatipica fregata avente le seguenti caratteristiche:
• rapporto immersione/lunghezza, T/L = 0.034 (L/T = 3.5);
• rapporto larghezza/lunghezza, B/L = 0.12 (L/B = 8.3);
• coefficiente di pienezza della figura di galleggiamento prodiera, CWF = 0.70.
Nel seguito, saranno esaminati gli effetti di un cambiamento delle dimensioni principali e dellaforma di carena procedendo come segue:
• variazione della lunghezza mentre viene tenuta costante la forma;
• variazione della forma mentre viene tenuta costante la lunghezza.
13.3 Effetto delle dimensioni principali
L’effetto delle dimensioni principali sul comportamento della nave in mare mosso puo essere stu-diato calcolando le risposte per una serie di navi geometricamente simili alla carena madre, ovveroaventi tutte la stessa forma ma differenti lunghezze (vedi Figura 13.1). Cambiando la lunghezza,mentre viene mantenuta costante la forma, si ottiene una variazione proporzionale di tutte le altredimensioni lineari (larghezza, immersione, bordo libero, ecc.), con il dislocamento che varia come ilcubo del rapporto delle lunghezze. Le carene cosı ottenute possono essere riguardate come modelliin scala o geosim della carena madre. Inoltre, per soddisfare la similitudine dinamica, le carenegeosim dovranno avere anche la stessa distribuzione dei pesi.
In Figura 13.2 vengono mostrate le funzioni di trasferimento per i moti di sussulto e di bec-cheggio della carena madre in onde di prora, espresse come funzioni della frequenza adimensionaleω√
L/g, della lunghezza d’onda relativa λ/L e del numero di Froude. In una rappresentazione diquesto tipo, le funzioni di trasferimento possono essere usate anche per le carene trasformate inquanto aventi tutte la stessa geometria, la stessa distribuzione dei pesi e la stessa velocita relativa.Come si vede, le risposte di entrambi i moti sono praticamente unitarie in onde molto piu lunghedella nave e diventano quasi trascurabili in piu onde corte, e precisamente al di sotto di una lun-ghezza d’onda critica pari a circa tre quarti della lunghezza nave (λ/L < 0.75). In altre parole, lanave tende a seguire le onde molto lunghe ma non risponde per niente alle onde piu corte, comegia osservato al Capitolo 9.
A partire da questi risultati numerici, possono essere facilmente dedotte le funzioni di trasfe-rimento per una nave di lunghezza qualsiasi e prefissata velocita di avanzo. Esempi di previsionevalidi per i 20 nodi sono mostrati nelle Figure 13.3 e 13.4, dove vengono riportati gli rms dei motinave per uno stato di mare a cresta lunga descritto da uno spettro di Bretschneider. Il metodo dicalcolo usato per ricavare lo spettro delle risposte e quello del dominio delle frequenze vere, anche
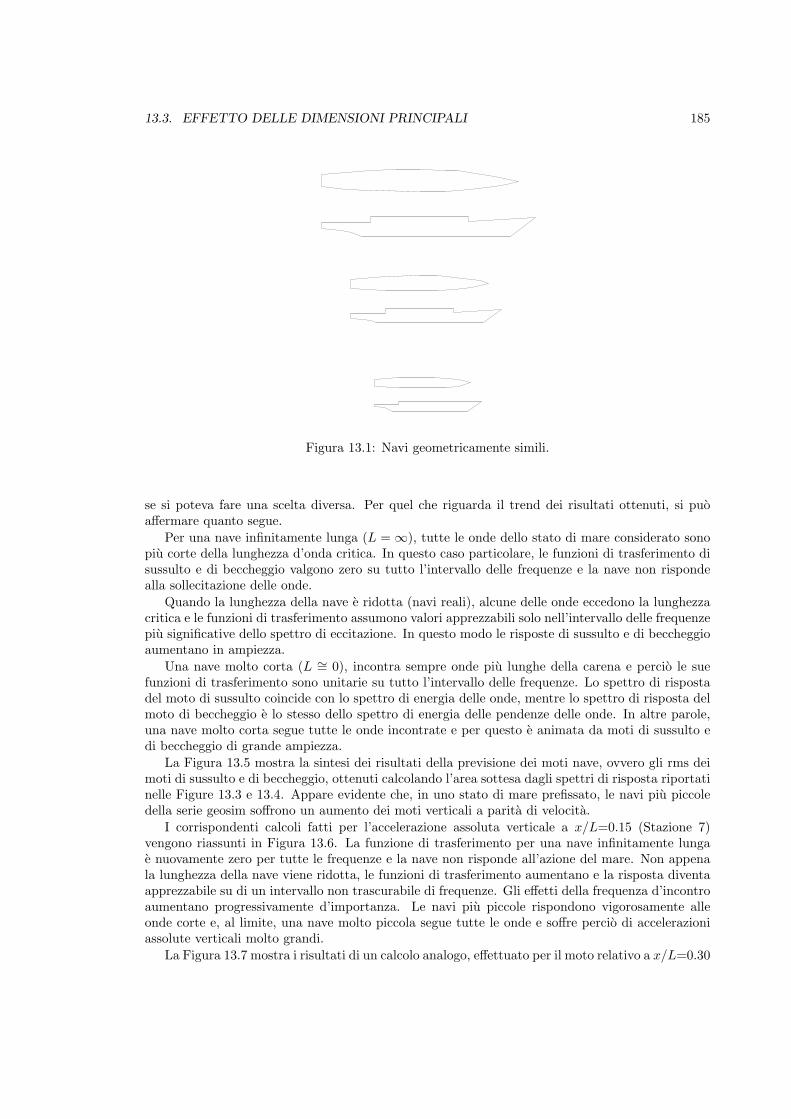
13.3. EFFETTO DELLE DIMENSIONI PRINCIPALI 185
Figura 13.1: Navi geometricamente simili.
se si poteva fare una scelta diversa. Per quel che riguarda il trend dei risultati ottenuti, si puoaffermare quanto segue.
Per una nave infinitamente lunga (L = ∞), tutte le onde dello stato di mare considerato sonopiu corte della lunghezza d’onda critica. In questo caso particolare, le funzioni di trasferimento disussulto e di beccheggio valgono zero su tutto l’intervallo delle frequenze e la nave non rispondealla sollecitazione delle onde.
Quando la lunghezza della nave e ridotta (navi reali), alcune delle onde eccedono la lunghezzacritica e le funzioni di trasferimento assumono valori apprezzabili solo nell’intervallo delle frequenzepiu significative dello spettro di eccitazione. In questo modo le risposte di sussulto e di beccheggioaumentano in ampiezza.
Una nave molto corta (L ∼= 0), incontra sempre onde piu lunghe della carena e percio le suefunzioni di trasferimento sono unitarie su tutto l’intervallo delle frequenze. Lo spettro di rispostadel moto di sussulto coincide con lo spettro di energia delle onde, mentre lo spettro di risposta delmoto di beccheggio e lo stesso dello spettro di energia delle pendenze delle onde. In altre parole,una nave molto corta segue tutte le onde incontrate e per questo e animata da moti di sussulto edi beccheggio di grande ampiezza.
La Figura 13.5 mostra la sintesi dei risultati della previsione dei moti nave, ovvero gli rms deimoti di sussulto e di beccheggio, ottenuti calcolando l’area sottesa dagli spettri di risposta riportatinelle Figure 13.3 e 13.4. Appare evidente che, in uno stato di mare prefissato, le navi piu piccoledella serie geosim soffrono un aumento dei moti verticali a parita di velocita.
I corrispondenti calcoli fatti per l’accelerazione assoluta verticale a x/L=0.15 (Stazione 7)vengono riassunti in Figura 13.6. La funzione di trasferimento per una nave infinitamente lungae nuovamente zero per tutte le frequenze e la nave non risponde all’azione del mare. Non appenala lunghezza della nave viene ridotta, le funzioni di trasferimento aumentano e la risposta diventaapprezzabile su di un intervallo non trascurabile di frequenze. Gli effetti della frequenza d’incontroaumentano progressivamente d’importanza. Le navi piu piccole rispondono vigorosamente alleonde corte e, al limite, una nave molto piccola segue tutte le onde e soffre percio di accelerazioniassolute verticali molto grandi.
La Figura 13.7 mostra i risultati di un calcolo analogo, effettuato per il moto relativo a x/L=0.30

186 CAPITOLO 13. SEAKEEPING NEL PROGETTO
Figura 13.2: Funzioni di trasferimento nondimensionali per i moti di sussulto e beccheggio per lacarena madre in onde di prora.
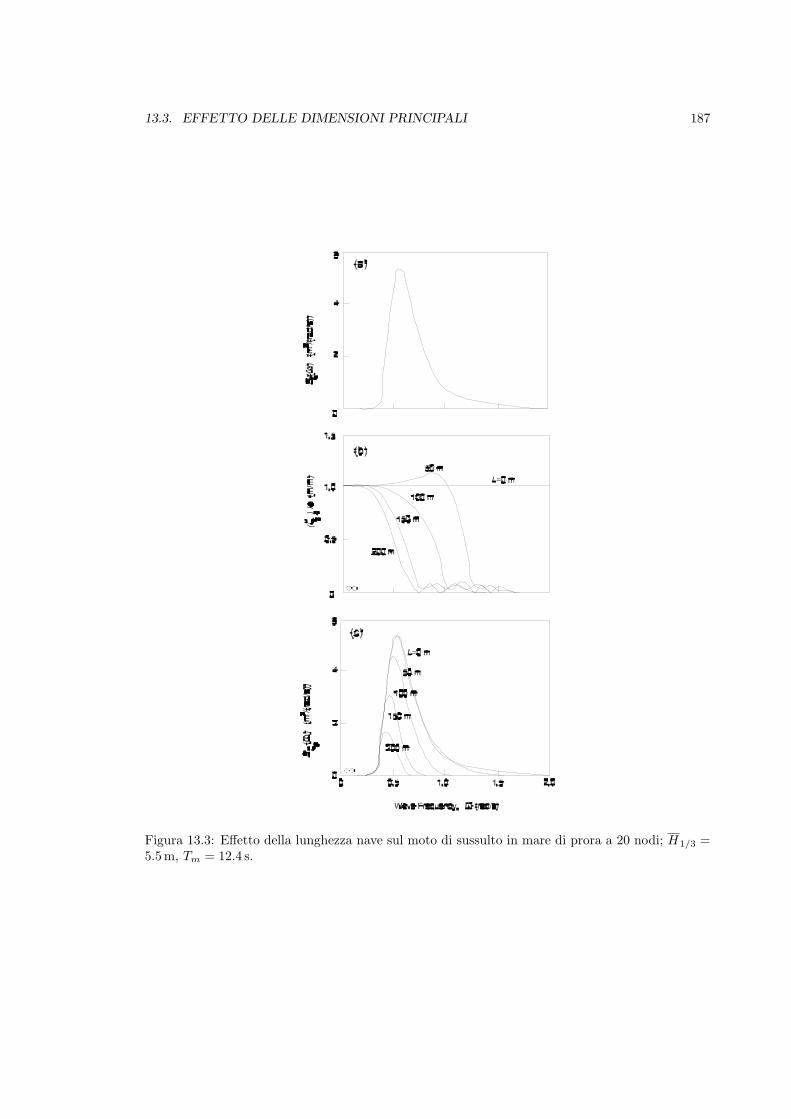
13.3. EFFETTO DELLE DIMENSIONI PRINCIPALI 187
Figura 13.3: Effetto della lunghezza nave sul moto di sussulto in mare di prora a 20 nodi; H1/3 =5.5m, Tm = 12.4 s.
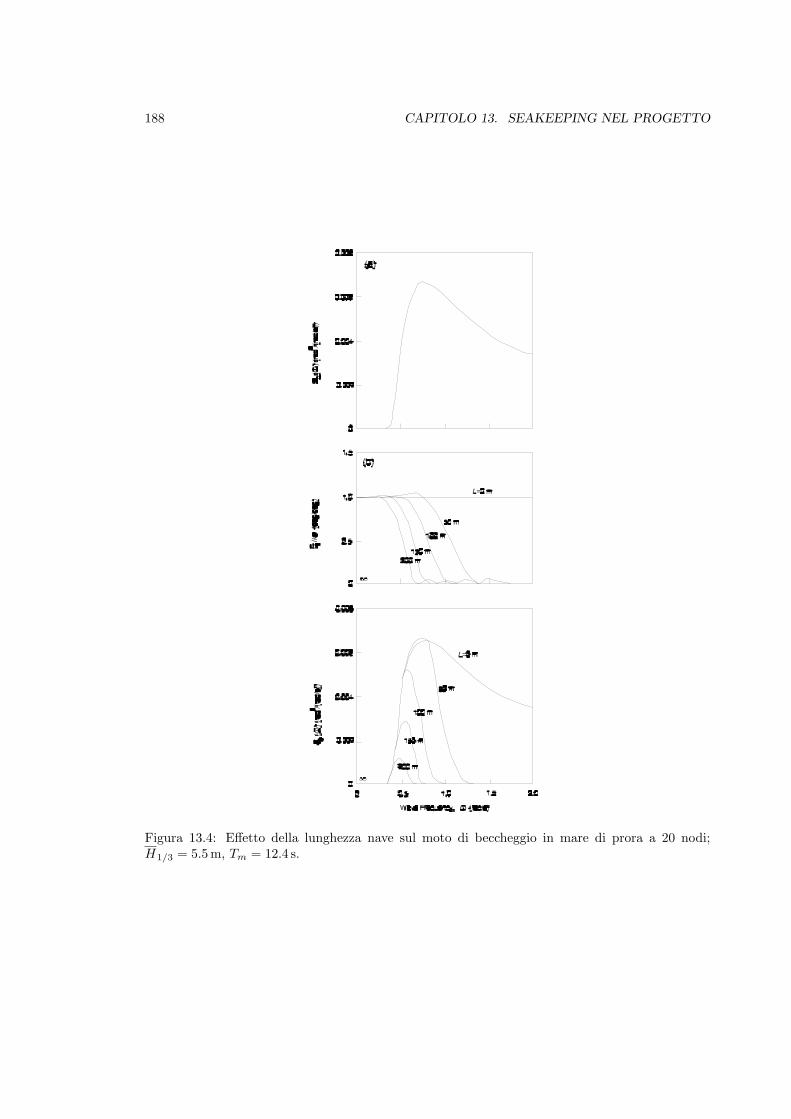
188 CAPITOLO 13. SEAKEEPING NEL PROGETTO
Figura 13.4: Effetto della lunghezza nave sul moto di beccheggio in mare di prora a 20 nodi;H1/3 = 5.5 m, Tm = 12.4 s.
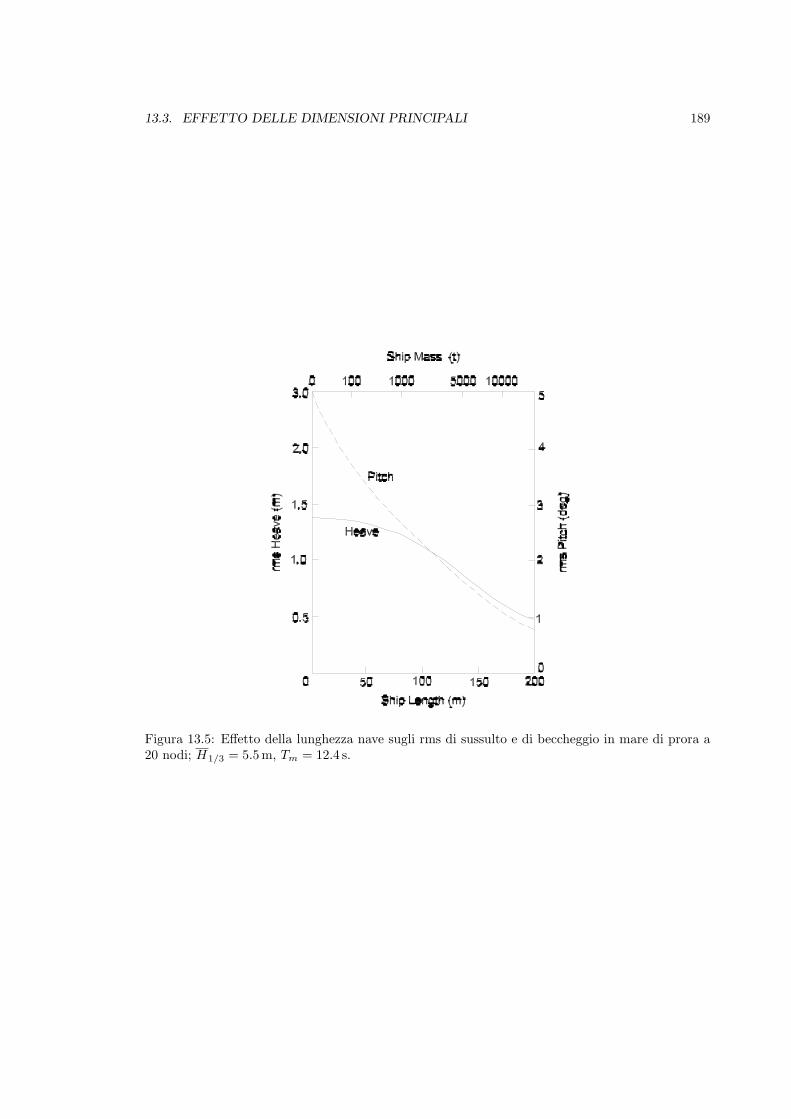
13.3. EFFETTO DELLE DIMENSIONI PRINCIPALI 189
Figura 13.5: Effetto della lunghezza nave sugli rms di sussulto e di beccheggio in mare di prora a20 nodi; H1/3 = 5.5m, Tm = 12.4 s.

190 CAPITOLO 13. SEAKEEPING NEL PROGETTO
Figura 13.6: Effetto della lunghezza nave sull’accelerazione assoluta verticale a 20 nodi in mare diprora; x/L = 0.15 (Stazione 7), H1/3 = 5.5m, Tm = 12.4 s.
13.4. EFFETTO DELLA FORMA 191
(Stazione 4). L’andamento ottenuto e in accordo con quanto precedentemente trovato. Per unanave infinitamente lunga, che non risponde alle onde, il moto relativo coincide con il movimentoondoso, a parte le eventuali distorsioni causate dagli effetti di swell-up. Tale nave ha percio unafunzione di trasferimento per il moto relativo unitaria su tutto l’intervallo delle frequenze, lo spettrodi risposta e lo stesso dello spettro di energia delle onde e il valore rms del moto relativo risultapari al valore rms dello spettro del mare. Quando la lunghezza viene ridotta, la nave comincia aseguire le onde piu lunghe e la funzione di trasferimento del moto relativo abbraccia un intervallopiu limitato di frequenze. La risposta viene amplificata nel caso in cui i picchi della funzione ditrasferimento coincidano con il picco dello spettro di energia delle onde. Per navi molto piccole,che seguono tutte le onde, la funzione di trasferimento e nulla dappertutto e quindi sono nulli icorrispondenti moti relativi.
I risultati ottenuti a partire dalle Figure 13.6 e 13.7, rispettivamente per gli rms dell’acce-lerazione assoluta verticale alla Stazione 7 e del moto relativo alla Stazione 4, sono riassunti inFigura 13.8.
La probabilita di emersione della chiglia, calcolata usando l’equazione (11.5), viene mostratain Figura 13.9. Per lo stato di mare considerato, l’emersione della chiglia e un fenomeno comunenell’intervallo delle lunghezze nave sui 70–200 m e diviene massimo per navi di circa 120 m. Navipiu piccole sono meno suscettibili al fenomeno e questo a causa dei moti relativi piuttosto limitati.Tuttavia, queste navi soffrono di accelerazioni assolute verticali abbastanza elevate che rendonointollerabile la vita a bordo alla velocita di avanzo prescelta.
Per le navi piu grandi, la maggiore immersione assicura una minore probabilita di occorrenza delfenomeno di emersione della chiglia, nonostante che i moti relativi siano apprezzabili. Aumentandole dimensioni della nave si ottiene anche una drastica riduzione delle accelerazioni assolute verticali,per cui si puo affermare che le navi piu grandi sono generalmente piu confortevoli di quelle piccolein condizioni di cattivo tempo. Si tratta ovviamente di risultati ben noti a quanti operano nelsettore.
13.4 Effetto della forma
Variazioni limitate della forma di carena, quali ad esempio l’aumento del raggio di curvatura delginocchio o il cambiamento dell’alzata di madiere, comportano effetti di poco conto sui moti verti-cali della nave. Il progettista che cerca un miglioramento delle prestazioni di tenuta al mare devepercio ripensare in modo radicale tutto il problema, ovvero deve ragionare in termini di variazionisostanziali delle proporzioni complessive piuttosto che di modifiche locali da effettuare con gra-dualita. Da un punto di vista pratico, questo richiede la disponibilita dei calcoli di seakeeping giain uno stadio preliminare del progetto, ovvero prima che le dimensioni principali della nave sianostate fissate definitivamente.
Saranno esaminati nel seguito gli effetti delle variazioni dei rapporti immersione/lunghezza,larghezza/lunghezza e del coefficiente di pienezza della figura di galleggiamento prodiera. Questiparametri sono stati scelti in base all’esperienza acquisita, in quanto essi esercitano un’influenza bendefinita e non trascurabile sulle prestazioni di tenuta al mare. Altri parametri, come il coefficientedi pienezza totale, la larghezza del transom, ecc., hanno effetti relativamente minori e normalmentenon si considera importante cambiarli al fine di migliorare il comportamento complessivo della navein mare ondoso.
13.4.1 Rapporto immersione/lunghezza
La Figura 13.10 illustra il risultato delle variazioni del rapporto immersione/lunghezza sulla carenamadre. Poiche nella trasformazione effettuata si e mantenuto costante il coefficiente di pienezzatotale, un aumento di immersione comporta il cambiamento proporzionale del dislocamento.
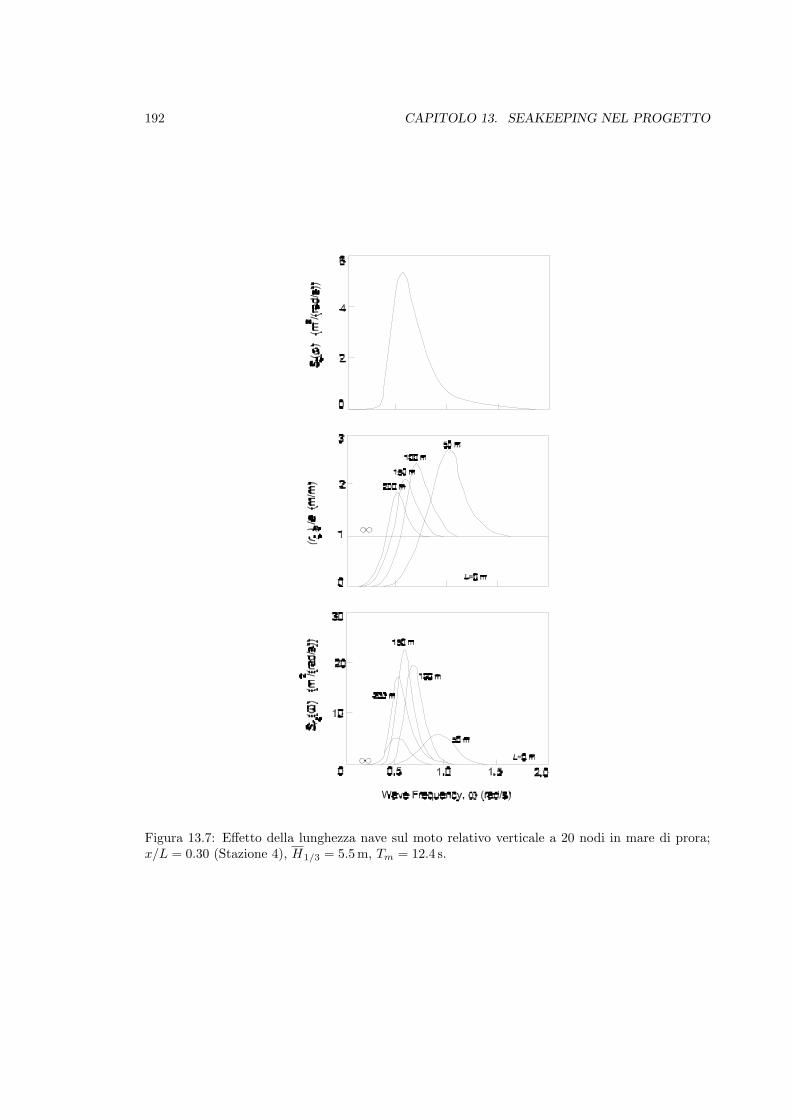
192 CAPITOLO 13. SEAKEEPING NEL PROGETTO
Figura 13.7: Effetto della lunghezza nave sul moto relativo verticale a 20 nodi in mare di prora;x/L = 0.30 (Stazione 4), H1/3 = 5.5 m, Tm = 12.4 s.
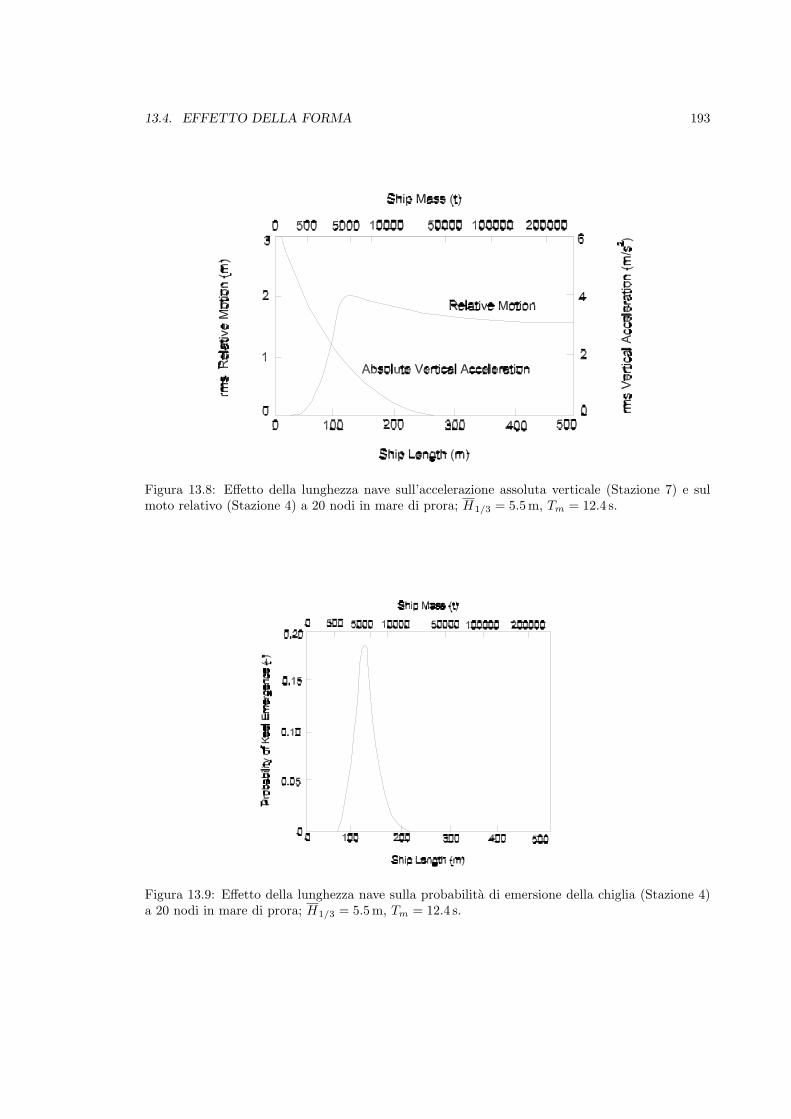
13.4. EFFETTO DELLA FORMA 193
Figura 13.8: Effetto della lunghezza nave sull’accelerazione assoluta verticale (Stazione 7) e sulmoto relativo (Stazione 4) a 20 nodi in mare di prora; H1/3 = 5.5m, Tm = 12.4 s.
Figura 13.9: Effetto della lunghezza nave sulla probabilita di emersione della chiglia (Stazione 4)a 20 nodi in mare di prora; H1/3 = 5.5m, Tm = 12.4 s.
194 CAPITOLO 13. SEAKEEPING NEL PROGETTO
Figura 13.10: Variazioni del rapporto immersione/lunghezza.
Gli effetti di tali variazioni sul moto relativo e sull’accelerazione assoluta verticale sono mostratiin Figura 13.11. Una riduzione dell’immersione ha in generale effetti benefici sul comportamentoin mare in quanto, aumentando le masse aggiunte e gli smorzamenti, vengono ridotti sia i motiassoluti verticali (e quindi le accelerazioni assolute verticali) che quelli relativi.
La Figura 13.12 mostra invece il corrispondente effetto sulla probabilita di emersione della chi-glia. Questa aumenta drasticamente quando l’immersione viene diminuita, nonostante la riduzionedelle ampiezze del moto relativo.
Le due figure precedenti riassumono i risultati in forma adimensionale in modo da poterli ren-dere facilmente applicabili anche a navi con dimensioni differenti, ma appartenenti alla medesimafamiglia. Essi si riferiscono ad un numero di Froude pari a 0.3 e ad un periodo modale adimensio-nale T ′m = Tm
√g/L = 3.5. Tale valore corrisponde approssimativamente ad un periodo modale di
12.4 s per una lunghezza nave di 125 m. Risultati simili sono stati trovati anche per altri periodidello spettro delle onde e diverse lunghezze della nave.
13.4.2 Rapporto larghezza/lunghezza
Le Figure 13.13–13.15 mostrano risultati analoghi a quelli ottenuti nel paragrafo precedente, ma pervariazioni del rapporto larghezza/lunghezza. Anche in questo caso gli aumenti di larghezza sonoassociati con un aumento del dislocamento, maggiore massa aggiunta e maggiori smorzamenti.Per queste navi ci si puo aspettare quindi dei moti ridotti. Tuttavia, l’eccitazione delle ondeaumenta a causa della maggiore area del galleggiamento ed i cambiamenti dei moti non risultanocosı drastici come si potrebbe supporre a priori. Si vede comunque che un maggiore rapporto lar-ghezza/lunghezza riduce le accelerazioni assolute verticali a scapito di un aumento dei moti relativi.La probabilita di emersione della chiglia e maggiore per navi con rapporti larghezza/lunghezzanell’intervallo 0.1–0.2 (L/B=5–10), tipico per molte navi moderne.
13.4.3 Coefficiente di pienezza del galleggiamento prodiero
Gli effetti delle variazioni del coefficiente di pienezza del galleggiamento prodiero vengono mostratinelle Figure 13.16–13.19. Un grande coefficiente di pienezza del galleggiamento prodiero aumentala larghezza locale nella zona di prora e comporta percio cambiamenti favorevoli per i coefficienti
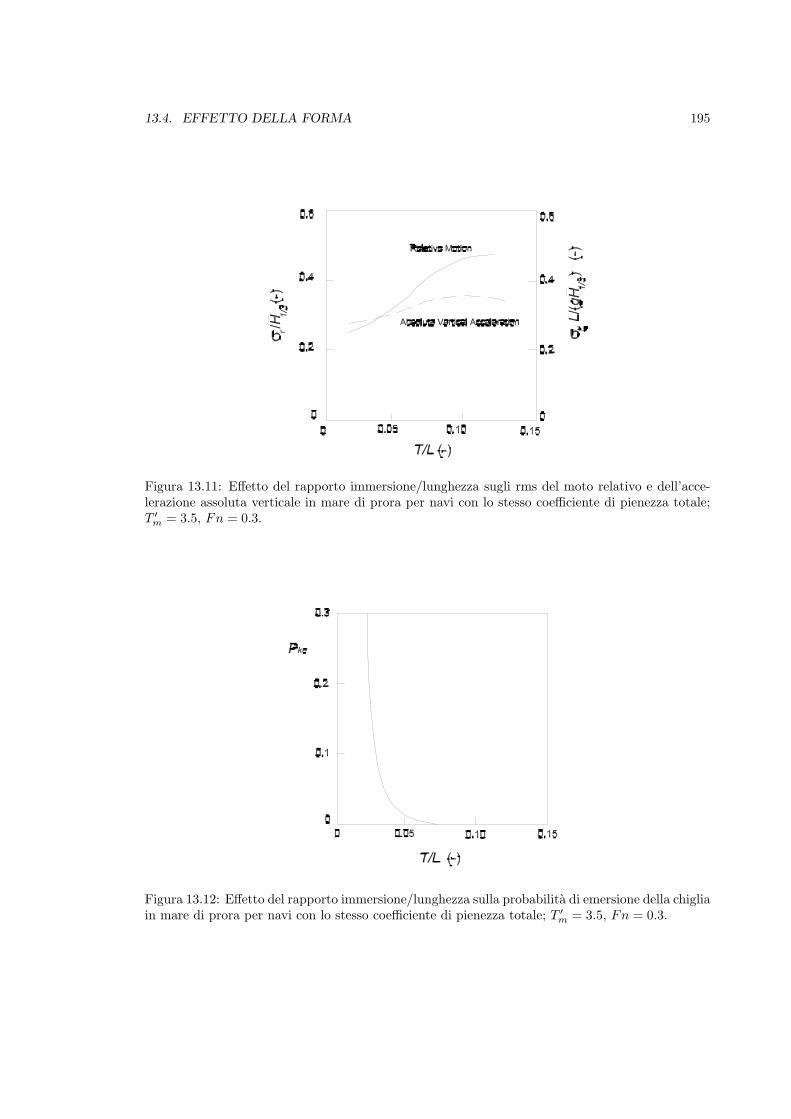
13.4. EFFETTO DELLA FORMA 195
Figura 13.11: Effetto del rapporto immersione/lunghezza sugli rms del moto relativo e dell’acce-lerazione assoluta verticale in mare di prora per navi con lo stesso coefficiente di pienezza totale;T ′m = 3.5, Fn = 0.3.
Figura 13.12: Effetto del rapporto immersione/lunghezza sulla probabilita di emersione della chigliain mare di prora per navi con lo stesso coefficiente di pienezza totale; T ′m = 3.5, Fn = 0.3.

196 CAPITOLO 13. SEAKEEPING NEL PROGETTO
Figura 13.13: Variazioni del rapporto larghezza/lunghezza.
Figura 13.14: Effetto del rapporto larghezza/lunghezza sugli rms del moto relativo edell’accelerazione assoluta verticale in mare di prora; T ′m = 3.5, Fn = 0.3.
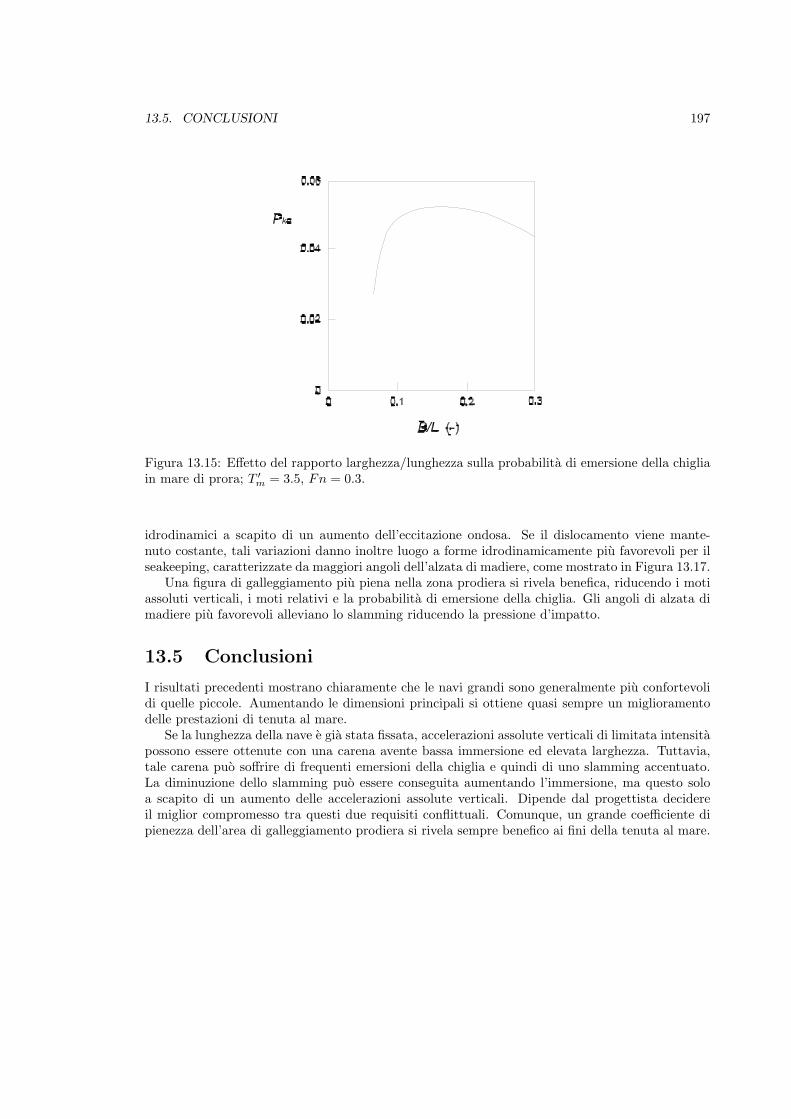
13.5. CONCLUSIONI 197
Figura 13.15: Effetto del rapporto larghezza/lunghezza sulla probabilita di emersione della chigliain mare di prora; T ′m = 3.5, Fn = 0.3.
idrodinamici a scapito di un aumento dell’eccitazione ondosa. Se il dislocamento viene mante-nuto costante, tali variazioni danno inoltre luogo a forme idrodinamicamente piu favorevoli per ilseakeeping, caratterizzate da maggiori angoli dell’alzata di madiere, come mostrato in Figura 13.17.
Una figura di galleggiamento piu piena nella zona prodiera si rivela benefica, riducendo i motiassoluti verticali, i moti relativi e la probabilita di emersione della chiglia. Gli angoli di alzata dimadiere piu favorevoli alleviano lo slamming riducendo la pressione d’impatto.
13.5 Conclusioni
I risultati precedenti mostrano chiaramente che le navi grandi sono generalmente piu confortevolidi quelle piccole. Aumentando le dimensioni principali si ottiene quasi sempre un miglioramentodelle prestazioni di tenuta al mare.
Se la lunghezza della nave e gia stata fissata, accelerazioni assolute verticali di limitata intensitapossono essere ottenute con una carena avente bassa immersione ed elevata larghezza. Tuttavia,tale carena puo soffrire di frequenti emersioni della chiglia e quindi di uno slamming accentuato.La diminuzione dello slamming puo essere conseguita aumentando l’immersione, ma questo soloa scapito di un aumento delle accelerazioni assolute verticali. Dipende dal progettista decidereil miglior compromesso tra questi due requisiti conflittuali. Comunque, un grande coefficiente dipienezza dell’area di galleggiamento prodiera si rivela sempre benefico ai fini della tenuta al mare.

198 CAPITOLO 13. SEAKEEPING NEL PROGETTO
Figura 13.16: Variazioni del coefficiente di pienezza del galleggiamento prodiero.
Figura 13.17: Effetto di un aumento del coefficiente di pienezza del galleggiamento prodiero sullaforma delle sezioni.
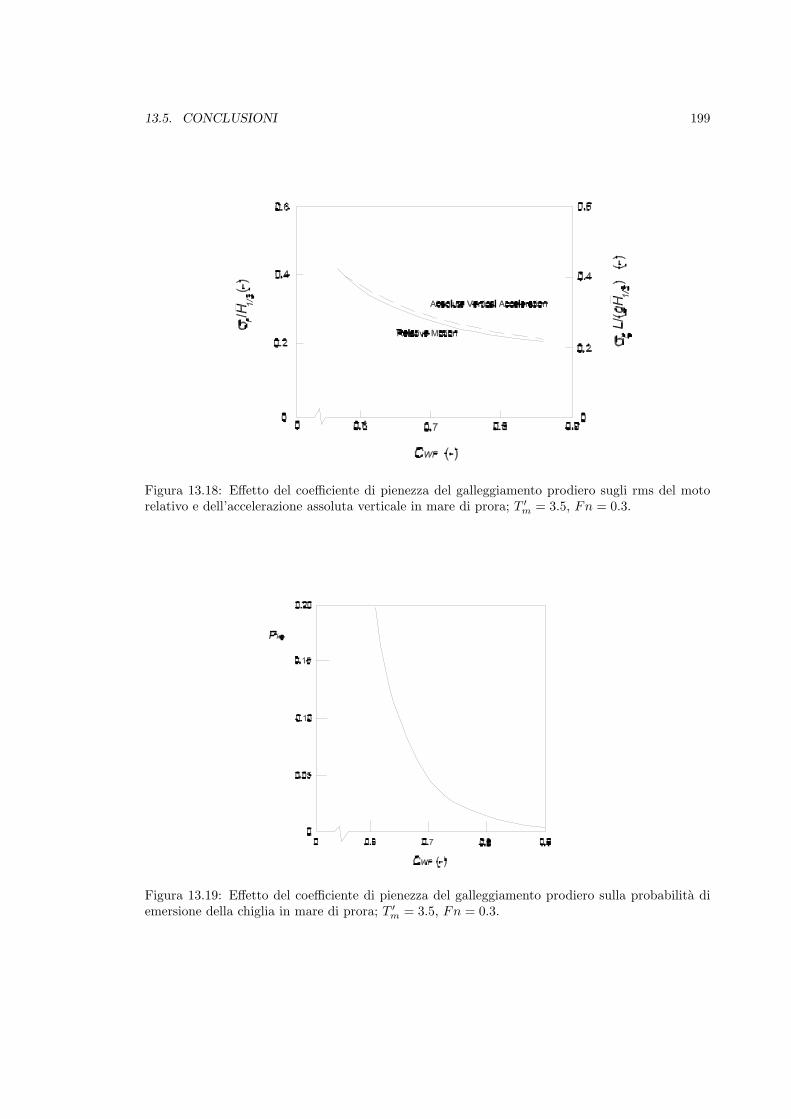
13.5. CONCLUSIONI 199
Figura 13.18: Effetto del coefficiente di pienezza del galleggiamento prodiero sugli rms del motorelativo e dell’accelerazione assoluta verticale in mare di prora; T ′m = 3.5, Fn = 0.3.
Figura 13.19: Effetto del coefficiente di pienezza del galleggiamento prodiero sulla probabilita diemersione della chiglia in mare di prora; T ′m = 3.5, Fn = 0.3.

200 CAPITOLO 13. SEAKEEPING NEL PROGETTO

Capitolo 14
Resistenza addizionale per cattivotempo
14.1 Introduzione
La velocita massima che una nave puo raggiungere in condizioni di acqua tranquilla e governatada un insieme di piu fattori, fra i quali giocano il ruolo principale la resistenza al moto, l’efficienzadell’elica e la potenza dell’apparato motore. In presenza di cattivo tempo, la resistenza al motogeneralmente aumenta a causa dell’azione combinata delle onde e del vento, mentre la conseguentevariazione del carico sull’elica ne riduce l’efficienza propulsiva. Il fenomeno e noto come resistenzaaddizionale per cattivo tempo. Quindi, a parita di potenza dell’apparato motore, la velocita massimasostenibile viene ridotta. Anche se la riduzione involontaria di velocita spesso non ammonta a piudi due/tre nodi, nel caso di navi mercantili essa puo comportare perdite finanziarie significative.
L’aumento della resistenza al moto di una nave in condizioni di mare ondoso puo attribuirsiprincipalmente alle seguenti cause: la resistenza addizionale dell’acqua per via dei moti verticali,l’azione delle onde incidenti e diffratte, la resistenza dell’aria per l’azione del vento, la resistenzadovuta ai moti piani di imbardata e scarroccio, le correnti di superficie. Il moto di rollio e l’a-vanzamento in deriva giocano un ruolo del secondo ordine e, in generale, non vengono consideratiesplicitamente nella previsione delle prestazioni propulsive in presenza di onde. Come mostratoin Figura 14.1, una parte considerevole dell’aumento della resistenza totale della nave in presenzadi cattivo tempo e dovuta anche alla resistenza dell’aria comprensiva dell’azione del vento. Tuttiquesti effetti vengono trattati separatamente.
14.2 Resistenza addizionale in onde regolari
La resistenza idrodinamica di una nave in mare ondoso oscilla continuamente attorno ad un valoremedio non nullo. Per questo, a parita di velocita di avanzo, la resistenza addizionale (addedresistance) si determina come differenza fra il valore medio della resistenza al moto in condizioniondose e la resistenza al rimorchio in acqua tranquilla.
Per il calcolo della resistenza addizionale di una nave in onde regolari, sono stati sviluppatipiu metodi teorici. Uno dei primi e quello rappresentato dalla soluzione di Havelock (1937, 1958),basata sull’ipotesi di Froude-Krylov (assenza di diffrazione). In accordo con questa formulazione,vale la relazione:
RAW = −k
2[(Fζ)0(ζg)0 sin εζF + (Mϑ)0ϑ0 sin εϑM ] , (14.1)
201
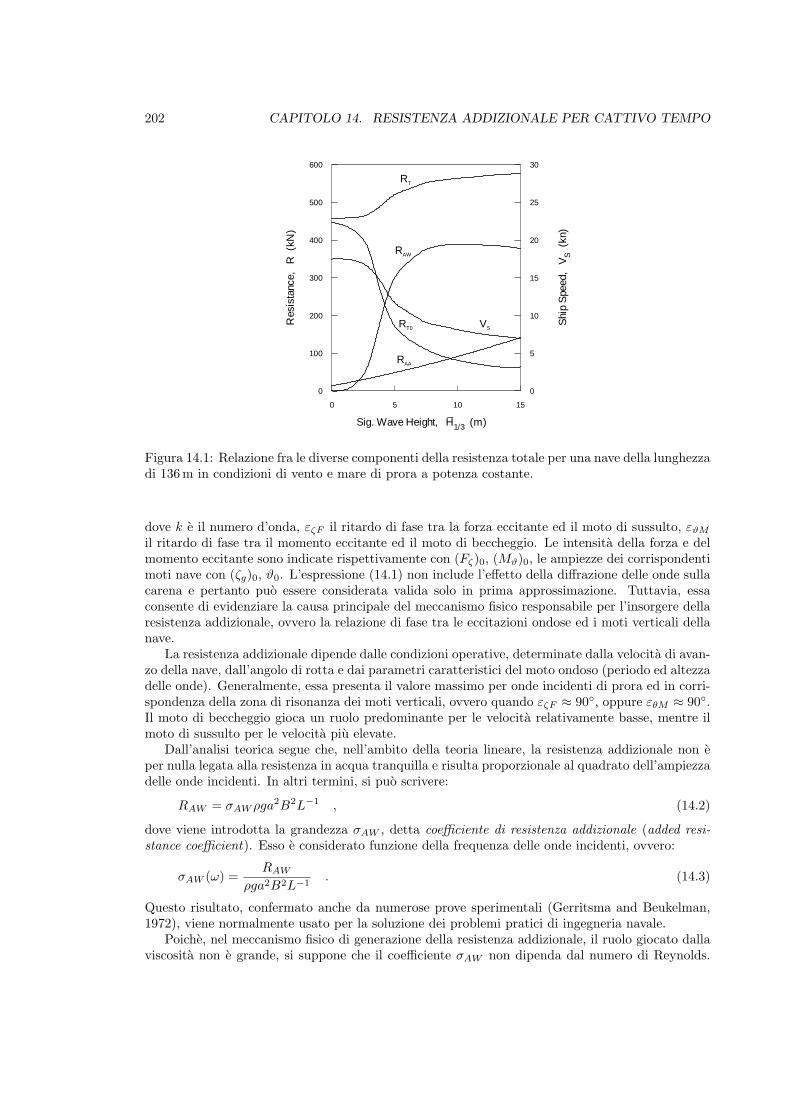
202 CAPITOLO 14. RESISTENZA ADDIZIONALE PER CATTIVO TEMPO
0 5 10 15
Sig. Wave Height, H1/3 (m)
0
100
200
300
400
500
600
Res
ista
nce,
R
(kN
)
0
5
10
15
20
25
30
Shi
p S
peed
, V
S (
kn)
VS
RT
RAW
RT0
RAA
_
Figura 14.1: Relazione fra le diverse componenti della resistenza totale per una nave della lunghezzadi 136 m in condizioni di vento e mare di prora a potenza costante.
dove k e il numero d’onda, εζF il ritardo di fase tra la forza eccitante ed il moto di sussulto, εϑM
il ritardo di fase tra il momento eccitante ed il moto di beccheggio. Le intensita della forza e delmomento eccitante sono indicate rispettivamente con (Fζ)0, (Mϑ)0, le ampiezze dei corrispondentimoti nave con (ζg)0, ϑ0. L’espressione (14.1) non include l’effetto della diffrazione delle onde sullacarena e pertanto puo essere considerata valida solo in prima approssimazione. Tuttavia, essaconsente di evidenziare la causa principale del meccanismo fisico responsabile per l’insorgere dellaresistenza addizionale, ovvero la relazione di fase tra le eccitazioni ondose ed i moti verticali dellanave.
La resistenza addizionale dipende dalle condizioni operative, determinate dalla velocita di avan-zo della nave, dall’angolo di rotta e dai parametri caratteristici del moto ondoso (periodo ed altezzadelle onde). Generalmente, essa presenta il valore massimo per onde incidenti di prora ed in corri-spondenza della zona di risonanza dei moti verticali, ovvero quando εζF ≈ 90◦, oppure εθM ≈ 90◦.Il moto di beccheggio gioca un ruolo predominante per le velocita relativamente basse, mentre ilmoto di sussulto per le velocita piu elevate.
Dall’analisi teorica segue che, nell’ambito della teoria lineare, la resistenza addizionale non eper nulla legata alla resistenza in acqua tranquilla e risulta proporzionale al quadrato dell’ampiezzadelle onde incidenti. In altri termini, si puo scrivere:
RAW = σAW ρga2B2L−1 , (14.2)
dove viene introdotta la grandezza σAW , detta coefficiente di resistenza addizionale (added resi-stance coefficient). Esso e considerato funzione della frequenza delle onde incidenti, ovvero:
σAW (ω) =RAW
ρga2B2L−1. (14.3)
Questo risultato, confermato anche da numerose prove sperimentali (Gerritsma and Beukelman,1972), viene normalmente usato per la soluzione dei problemi pratici di ingegneria navale.
Poiche, nel meccanismo fisico di generazione della resistenza addizionale, il ruolo giocato dallaviscosita non e grande, si suppone che il coefficiente σAW non dipenda dal numero di Reynolds.
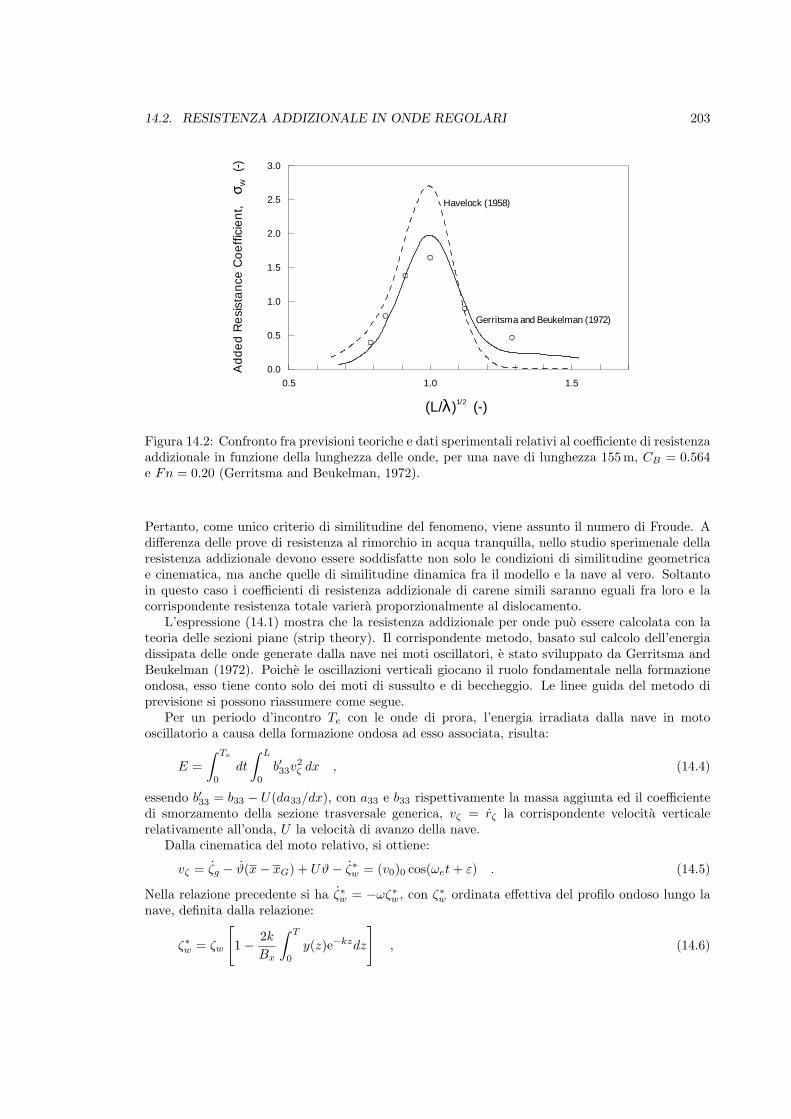
14.2. RESISTENZA ADDIZIONALE IN ONDE REGOLARI 203
0.5 1.0 1.5
(L/λ)1/2 (-)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
Ad
de
d R
esi
sta
nce
Co
eff
icie
nt,
σ
W
(-)
Havelock (1958)
Gerritsma and Beukelman (1972)
Figura 14.2: Confronto fra previsioni teoriche e dati sperimentali relativi al coefficiente di resistenzaaddizionale in funzione della lunghezza delle onde, per una nave di lunghezza 155m, CB = 0.564e Fn = 0.20 (Gerritsma and Beukelman, 1972).
Pertanto, come unico criterio di similitudine del fenomeno, viene assunto il numero di Froude. Adifferenza delle prove di resistenza al rimorchio in acqua tranquilla, nello studio sperimenale dellaresistenza addizionale devono essere soddisfatte non solo le condizioni di similitudine geometricae cinematica, ma anche quelle di similitudine dinamica fra il modello e la nave al vero. Soltantoin questo caso i coefficienti di resistenza addizionale di carene simili saranno eguali fra loro e lacorrispondente resistenza totale variera proporzionalmente al dislocamento.
L’espressione (14.1) mostra che la resistenza addizionale per onde puo essere calcolata con lateoria delle sezioni piane (strip theory). Il corrispondente metodo, basato sul calcolo dell’energiadissipata delle onde generate dalla nave nei moti oscillatori, e stato sviluppato da Gerritsma andBeukelman (1972). Poiche le oscillazioni verticali giocano il ruolo fondamentale nella formazioneondosa, esso tiene conto solo dei moti di sussulto e di beccheggio. Le linee guida del metodo diprevisione si possono riassumere come segue.
Per un periodo d’incontro Te con le onde di prora, l’energia irradiata dalla nave in motooscillatorio a causa della formazione ondosa ad esso associata, risulta:
E =∫ Te
0
dt
∫ L
0
b′33v2ζ dx , (14.4)
essendo b′33 = b33 − U(da33/dx), con a33 e b33 rispettivamente la massa aggiunta ed il coefficientedi smorzamento della sezione trasversale generica, vζ = rζ la corrispondente velocita verticalerelativamente all’onda, U la velocita di avanzo della nave.
Dalla cinematica del moto relativo, si ottiene:
vζ = ζg − ϑ(x− xG) + Uϑ− ζ∗w = (v0)0 cos(ωet + ε) . (14.5)
Nella relazione precedente si ha ζ∗w = −ωζ∗w, con ζ∗w ordinata effettiva del profilo ondoso lungo lanave, definita dalla relazione:
ζ∗w = ζw
[1− 2k
Bx
∫ T
0
y(z)e−kzdz
], (14.6)
204 CAPITOLO 14. RESISTENZA ADDIZIONALE PER CATTIVO TEMPO
essendo Bx la larghezza della sezione sul galleggiamento ed y(z) la corrispondente semi-larghezzaalla generica profondita.
In accordo con la teoria dei moti nave basata su un modello a potenziale, il lavoro delle forzeresistenti per un ciclo oscillatorio risulta eguale all’energia irradiata dalla nave per conto dellaformazione ondosa. Esso si determina per mezzo dell’espressione alternativa:
E = RAW (U + c)Te , (14.7)
dove c e la velocita di propagazione delle onde. Dal confronto delle (14.4) e (14.7), segue per laresistenza addizionale della nave in onde regolari:
RAW =k
2ωe
∫ L
0
b′33(vζ)20 dx . (14.8)
Essendo (vζ)0 proporzionale ad a, in base all’espressione (14.8) e secondo la formula (14.1), risultache la resistenza addizionale della nave in onde regolari e una funzione quadratica dell’ampiezzadell’onda. Numerose ricerche sperimentali hanno dimostrato che le previsioni basate sul metodoprecedentemente illustrato si accordano sufficientemente bene con l’esperimento (Gerritsma andBeukelman, 1972; Strom-Tejsen, Yeh and Morgan, 1973).
La formula (14.8) non tiene conto della diffrazione delle onde sulla carena. Per navi con sezionifini, l’importanza di questo effetto non e grande. Tuttavia, per forme piu piene, la resistenzaaddizionale dovuta alla diffrazione diviene significativa nella regione delle onde corte, ovvero anchequando i moti nave risultano trascurabili.
14.3 Resistenza addizionale in onde irregolari
Per determinare la resistenza addizionale in onde irregolari si applicano generalmente due metodidifferenti:
• prove su modelli in onde irregolari bi-dimensionali con spettro assegnato,
• previsioni numeriche sulla base dei dati di resistenza addizionale per modelli in onde regolari.
Il primo metodo richiede la disponibilita di prove di rimorchio o di autopropulsione su modelliin onde irregolari bi-dimensionali con uno spettro prefissato. Come noto, nelle prove di autopropul-sione, la misura della resistenza di rimorchio viene sostituita da quella della spinta, del momentotorcente e del numero di giri dell’elica. L’esperienza insegna che, in presenza di onde, i risultatiottenuti nelle prove di rimorchio e di autopropulsione sono fra loro molto vicini, ovvero le dueprove risultano praticamente equivalenti ai fini della determinazione sperimentale della resistenzaaggiunta. Inoltre, nel caso di assenza di fuoriuscita e di ventilazione dell’elica, cioe per moti navedi ampiezza moderata ed immersione a poppa sufficientemente grande, le onde incidenti ed i motinave non causano variazioni significative delle principali grandezze propulsive.
Poiche l’effetto scala non comporta grandi variazioni delle caratteristiche di funzionamento del-l’elica, i risultati sperimentali disponibili confermano che le prove su modelli in onde irregolari nonconducono a sostanziali migliorie rispetto alle previsioni basate su misure di resistenza addizionalein onde regolari. In altri termini, il primo ed il secondo metodo sono fra loro equivalenti. Significa-tive discrepanze fra i due (fino al 30–40%) si osservano solo per condizioni di zavorra e questo comeconseguenza della ventilazione o della fuoriuscita dell’elica (Lipis, 1975; Bhattacharyya, 1978).
L’accordo fra le previsioni teoriche di resistenza addizionale ed i risultati sperimentali delleprove di rimorchio e di autopropulsione, consente di affermare che esiste solo una debole influenzaa causa delle oscillazioni della nave nel piano orizzontale. Le prove al vero confermano questaconclusione (Moor and Murdey, 1968, 1970).

14.4. METODI APPROSSIMATI DI PREVISIONE 205
La determinazione quantitativa della resistenza addizionale di una nave in onde irregolari ebasata sull’ipotesi che questa grandezza, per assegnata frequenza dell’onda e velocita della nave,sia proporzionale al quadrato dell’ampiezza dell’onda. Per questo, con riferimento alla (14.4), laresistenza addizionale dovuta ad un’onda regolare di ampiezza ζn e frequenza ωn risulta:
RAW (ωn)ρgB2L−1
= σAW (ωn)ζ2n . (14.9)
Generalizzando il risultato al processo casuale di un mare irregolare (vedi Capitolo 4), per cuiζn =
√2Sζ(ωn)δω, al posto della (14.9) si puo scrivere:
RAW (ωn)ρgB2L−1
= 2σAW (ωn)Sζ(ωn)δω , (14.10)
dove Sζ(ωn) e la densita spettrale di energia delle onde nell’intervallo di frequenza δω.Poiche l’energia totale di un processo casuale non dipende dalla fase delle componenti spettrali,
ma solo dallo loro ampiezza al quadrato, e naturale supporre che anche la resistenza addizionaledella nave in onde irregolari si determini come effetto risultante della successione di onde rego-lari equivalente per composizione spettrale. Quest’ipotesi, con l’ausilio della (14.10) consente dideterminare la resistenza addizionale media in onde irregolari nella seguente forma:
RAW
ρgB2L−1= 2
∞∑n=1
σAW (ωn)Sζ(ωn)δω = 2∫ ∞
0
σAW (ω)Sζ(ω) dω , (14.11)
ovvero:
RAW = 2∫ ∞
0
ΦAW (ω)Sζ(ω) dω , (14.12)
dove ΦAW (ω) = RAW (ω)/a2 = ρgB2L−1σAW (ω) e la caratteristica in frequenza della resistenzaaddizionale della nave. La conferma diretta della validita della relazione (14.11) e basata sunumerose prove sperimentali (Gerritsma, van den Bosch and Beukelman, 1961; Murdey, 1972).
14.4 Metodi approssimati di previsione
L’analisi statistica dei risultati delle prove in vasca su modelli consente di ricavare una serie diformule approssimate per la previsione quantitativa della resistenza addizionale e delle altre ca-ratteristiche propulsive in mare ondoso. I dati sperimentali mostrano che la resistenza addizio-nale dipende relativamente poco da variazioni locali della forma di carena, supposto che venganomantenuti invariati tutti gli altri elementi costruttivi fondamentali.
Sulla base di questa conclusione Jinkine and Ferdinande (1974) hanno analizzato i dati vascadi numerosi autori, relativi a navi mercantili veloci aventi le seguenti caratteristiche:
L/B = 6.7− 7.5 ,
B/T = 2.4− 2.7 ,
CB = 0.56− 0.65 ,
L/V 1/3 = 5.6− 6.2 ,
kyy/L = 0.22− 0.26 ,
Fn = 0.1− 0.3 .
I risultati sperimentali si riferiscono a prove in onde regolari di prora. Questi mostrano che, perassegnato numero di Froude, la resistenza addizionale RAW (ω) varia con la frequenza delle onde

206 CAPITOLO 14. RESISTENZA ADDIZIONALE PER CATTIVO TEMPO
incidenti e presenta un massimo ben marcato nella zona di risonanza dei moti verticali. Per unadata nave, con l’aumentare di Fn, il valore (RAW )max aumenta e la frequenza ωr del massimodiminuisce. Ne segue che la dipendenza del coefficiente adimensionale di resistenza si puo esprimerecon la relazione empirica:
σAW (ω) = aµb exp(cµd
), (14.13)
dove µ = ω√
L/g =√
2πL/λ e la frequenza adimensionale dell’onda, a e c sono dei coefficientiadimensionali dipendenti da Fn e dalla forma della carena, b e d dei parametri costanti per ogninave prescelta. Nel seguito si vedra come eliminare i coefficienti ed assegnare i parametri.
Dall’espressione (14.13) risulta che il valore massimo della funzione σAW (ω) si ottiene per lafrequenza:
ωr = (−b/cd)1/d√
g/L , (14.14)
e vale:
(σAW )max = a(−b/cd)b/d exp (−b/d) . (14.15)
Ne segue che le relazioni precedenti consentono di esprimere la σAW (ω) in forma normalizzata,ovvero:
σAW (ω) = (σAW )max(ω/ωr)b exp{bd−1[1− (ω/ωr)d]
}, (14.16)
la quale non contiene piu i coefficienti a e c.Come mostra la Figura 14.3, le previsioni fatte con la (14.16) bene si accordano con i dati
sperimentali, a conferma dell’indipendenza dal numero di Froude nell’intervallo Fn = 0.1 − 0.3e per frequenze 0.7 < ω/ωr < 1.3. Per la migliore approssimazione della funzione σAW (ω) siassumono i seguenti valori dei parametri: per ω/ωr ≤ 1 si ha b = 11, d = 14, mentre per ω/ωr > 1risulta b = −8.5, d = −14.
Come regola, per ω/ωr > 1.3 la precisione della (14.16) diminuisce. Si osserva allora unanotevole dispersione dei dati sperimentali a testimonianza di una forte influenza della forma dicarena sulla resistenza addizionale nella regione delle onde corte, oppure di una violazione dellalegge di dipendenza quadratica dall’ampiezza dell’onda.
La frequenza ωr, che dipende poco dalla forma di carena, si determina principalmente dalnumero di Froude e dal raggio d’inerzia longitudinale. Essa puo essere calcolata mediante laformula empirica:
ωr = 1.17 Fn−1/7(L/g)−1/2(kyy/L)−1/3 . (14.17)
Il valore (σAW )max e approssimativamente eguale a:
(σAW )max = 4 a1 Fn1.5 exp (−3.5 Fn) , (14.18)
dove il parametro a1 dipende dalla distribuzione delle masse e dalla forma di carena secondo larelazione:
a1 = a0(kyy/L)2 . (14.19)
Per navi di forme fini, come quelle esaminate (CB = 0.56− 0.65), si ottiene in media a0 = 900. Ilpassaggio dalle sezioni a V alle sezioni ad U puo aumentare questo valore fino al 10% circa.
Si osservi che, con l’ausilio del metodo esposto, e possibile risolvere i seguenti problemi pratici:
1. previsione approssimata della resistenza addizionale in onde di prora per navi mercantiliveloci senza ricorrere a prove su modelli, utilizzando semplicemente la relazione empirica(14.13) e successive.
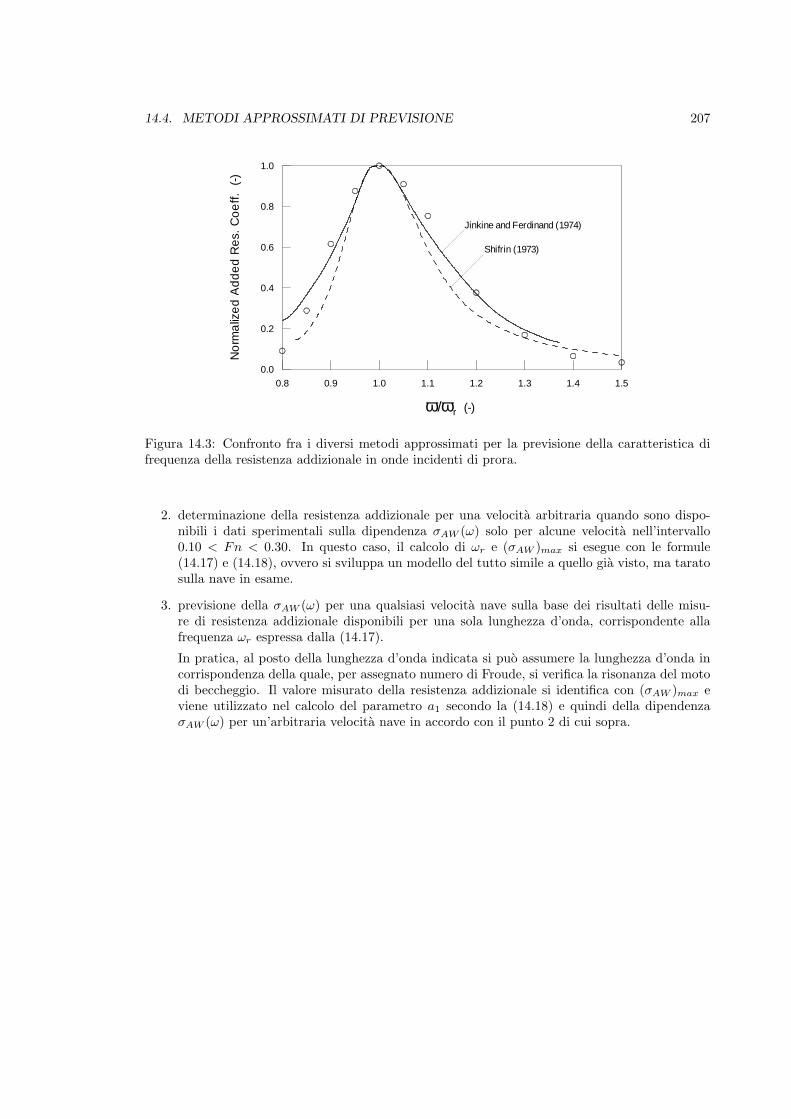
14.4. METODI APPROSSIMATI DI PREVISIONE 207
0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5
ω/ωr (-)
0.0
0.2
0.4
0.6
0.8
1.0
No
rma
lize
d A
dd
ed
Re
s. C
oe
ff.
(-)
Jinkine and Ferdinand (1974)
Shifrin (1973)
Figura 14.3: Confronto fra i diversi metodi approssimati per la previsione della caratteristica difrequenza della resistenza addizionale in onde incidenti di prora.
2. determinazione della resistenza addizionale per una velocita arbitraria quando sono dispo-nibili i dati sperimentali sulla dipendenza σAW (ω) solo per alcune velocita nell’intervallo0.10 < Fn < 0.30. In questo caso, il calcolo di ωr e (σAW )max si esegue con le formule(14.17) e (14.18), ovvero si sviluppa un modello del tutto simile a quello gia visto, ma taratosulla nave in esame.
3. previsione della σAW (ω) per una qualsiasi velocita nave sulla base dei risultati delle misu-re di resistenza addizionale disponibili per una sola lunghezza d’onda, corrispondente allafrequenza ωr espressa dalla (14.17).
In pratica, al posto della lunghezza d’onda indicata si puo assumere la lunghezza d’onda incorrispondenza della quale, per assegnato numero di Froude, si verifica la risonanza del motodi beccheggio. Il valore misurato della resistenza addizionale si identifica con (σAW )max eviene utilizzato nel calcolo del parametro a1 secondo la (14.18) e quindi della dipendenzaσAW (ω) per un’arbitraria velocita nave in accordo con il punto 2 di cui sopra.

208 CAPITOLO 14. RESISTENZA ADDIZIONALE PER CATTIVO TEMPO
Capitolo 15
Effetti dei moti nave sui passeggeried equipaggio
15.1 Introduzione
I moti nave hanno essenzialmente due effetti indesiderati sulle persone imbarcate: essi causanoil mal di mare e rendono piu difficile il controllo dei movimenti. Ne segue che l’esecuzione delleattivita giornaliere puo essere seriamente deteriorata o addirittura pregiudicata in caso di maregrosso.
Gli organi dell’equilibrio, situati nell’orecchio interno, possono rivelare le variazioni sia di in-tensita che di direzione dell’accelerazione di gravita apparente. Inoltre, essi sono sensibili anchealle accelerazioni angolari. Una stimolazione eccessiva di tali organi comporta, nella maggior partedegli individui, l’insorgere di disturbi quali nausea o vomito. Si tratta di disturbi di origine neu-rovegetativa, noti con il nome di chinetosi (o cinetosi), la cui causa e da ricercarsi nel moto nonuniforme (accelerato) dell’individuo, specialmente quando esso si trova su mezzi di trasporto qualiautomobile, nave, treno, aeroplano. La condizione di malessere risulta alleviata, in una certa misu-ra, se le accelerazioni vengono confermate da percezioni visuali. Cosı la condotta di un fuoristradasu un terreno accidentato puo essere piacevole ed eccitante per il guidatore, anche se le accelera-zioni sono molto grandi. Le stesse accelerazioni, provate da un passeggero con gli occhi bendati,quasi certamente comportano una spiacevole chinetosi. Nello stesso modo e possibile stimolare lachinetosi senza che il moto avvenga effettivamente. Questo puo essere fatto, per certi individui,mostrando loro il filmato di una guida sfrenata su di un terreno accidentato.
Ne segue che a bordo delle navi la chinetosi, detta in questo caso mal di mare (sea sickness),avviene piu frequentemente quando i passeggeri o l’equipaggio sono confinati in locali situati sottoil ponte principale o comunque in locali dai quali non e possibile vedere l’orizzonte. Bittner andGuignard (1985) dimostrarono che il mal di mare dipende anche dalla direzione secondo la qualeun individuo si dispone relativamente alla nave, diventando massimo nel caso di una posizione perdiagonale. E quindi preferibile stare seduti o distesi verso avanti, addietro o per traverso. Altrifattori che possono favorire l’insorgere del mal di mare sono l’ansia, la fatica, la fame, gli odori(in particolare quello della cucina e del combustibile), gli alimenti grassi, la lettura, le bevandegassose o alcoliche. Nieuwenhuijsen (1958) osservo che le donne ed i bambini sono in generale piususcettibili degli uomini al mal di mare, mentre le persone anziane sono meno affette di quelle coneta media o molto giovani.
Per fortuna, i sintomi del mal di mare scompaiono, generalmente, dopo alcuni giorni di accli-matizzazione. La Figura 15.1, basata su di uno studio della Royal Navy (Walters, 1964), mostra
209

210 CAPITOLO 15. EFFETTI DEI MOTI NAVE SUI PASSEGGERI ED EQUIPAGGIO
questo risultato in forma grafica. Tuttavia, per molta gente il mal di mare rimane un deterrente
Day of Cruise
0
10
20
30
Mo
tion
Sic
kne
ss In
cid
en
ce,
MS
I (%
)
1 2 3 4 5
Figura 15.1: Motion Sickness Incidence: effetto dell’acclimatizzazione (Walters, 1964).
per i viaggi in nave e costituisce un inconveniente per l’equipaggio. Questo ha comportato unnotevole sforzo di ricerca per lo sviluppo di farmaci in grado di alleviarne i sintomi. Meno risorsesono state dedicate per stabilire la natura precisa della relazione esistente tra i moti nave ed il maldi mare.
I moti deteriorano l’abilita di lavorare efficientemente anche quando non ci sono problemi con ilmal di mare. Muoversi lungo la nave diventa piu difficoltoso: sia i marinai prudenti che i passeggeriinesperti cercano sempre qualche appiglio, al fine di minimizzare le possibilita di infortuni, spe-cialmente in presenza di mare grosso. Anche in condizioni piu moderate, l’esecuzione di compitiche richiedono un buon coordinamento manuale/visuale, come ad esempio il tracciamento degliobiettivi su di uno schermo radar, puo essere seriamente influenzata.
15.2 Motion Sickness Incidence
Si ritiene che la principale causa del mal di mare di un individuo sia dovuta all’accelerazioneverticale apparente cui esso e soggetto. Altre componenti di accelerazione, se sufficientementeelevate, possono causare malessere, ma nelle navi convenzionali esse sono generalmente troppopiccole per offrire uno stimolo addizionale significativo.
Determinare quantitativamente il livello del mal di mare sofferto da un individuo soggetto aimoti casuali della nave e un problema particolarmente difficile da risolvere, se non addiritturaimpossibile. Poiche gli individui differiscono per la loro suscettibilita ai moti, risulta chiaro chel’analisi del fenomeno richiede un approccio di tipo statistico con un gran numero di soggettitestati. La risposta puo anche variare da giorno a giorno in dipendenza dei fattori addizionali,sommariamente elencati al paragrafo precedente. In particolare, una persona che ha un lavoro dafare e verosimilmente molto meno sofferente del mal di mare di un’altra la quale non svolge alcunaattivita fisica o intellettuale.
O’Hanlon and McCauley (1974) misurarono la sensibilita alla chinetosi di un campione di oltre300 volontari maschi, studenti di un’Universita americana. Nessuno degli studenti fu precedente-mente acclimatizzato ai moti. Essi furono testati su di un simulatore dei moti, ovvero una cabina diprova movimentata con legge armonica in direzione verticale ed in grado di oscillare con ampiezzamassima fino a ±3.35 metri (11 piedi) e frequenza prefissata. La cabina era sprovvista di finestrecosicche i soggetti in prova non erano in grado di ricevere alcuna indicazione visuale sull’intensitadel moto. Il loro unico compito era quello di monitorare il proprio stato di malessere attraverso
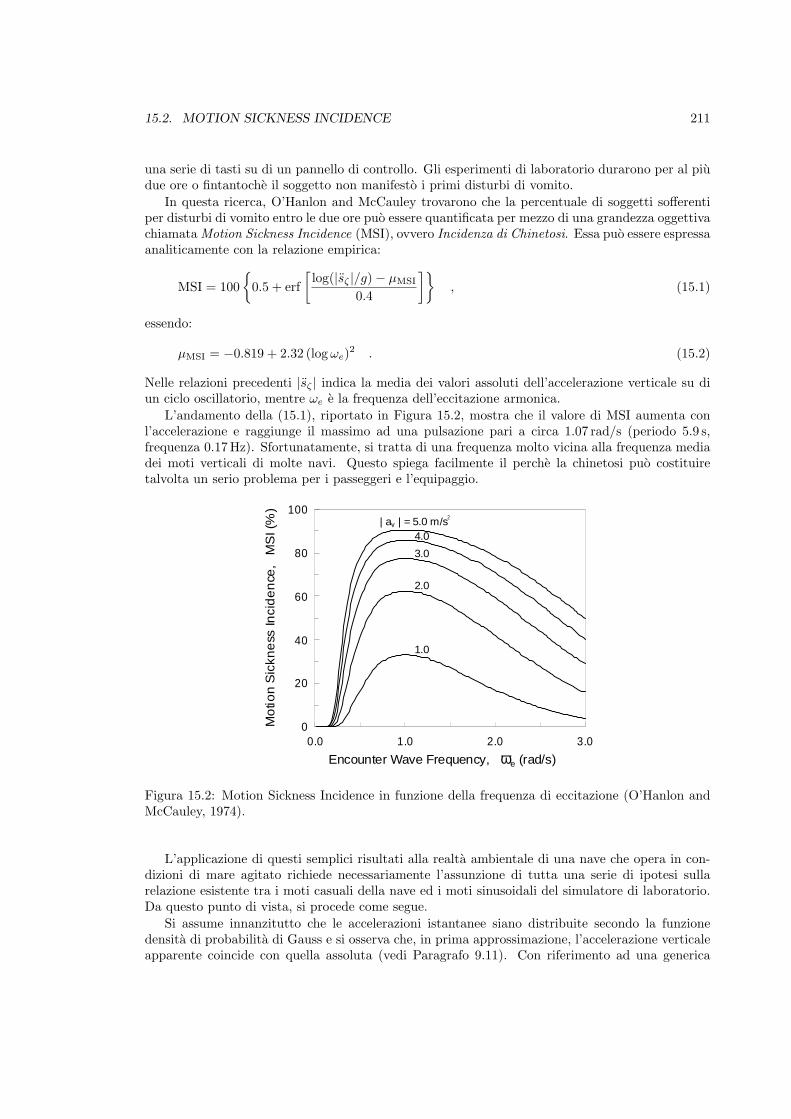
15.2. MOTION SICKNESS INCIDENCE 211
una serie di tasti su di un pannello di controllo. Gli esperimenti di laboratorio durarono per al piudue ore o fintantoche il soggetto non manifesto i primi disturbi di vomito.
In questa ricerca, O’Hanlon and McCauley trovarono che la percentuale di soggetti sofferentiper disturbi di vomito entro le due ore puo essere quantificata per mezzo di una grandezza oggettivachiamata Motion Sickness Incidence (MSI), ovvero Incidenza di Chinetosi. Essa puo essere espressaanaliticamente con la relazione empirica:
MSI = 100{
0.5 + erf[log(|sζ |/g)− µMSI
0.4
]}, (15.1)
essendo:
µMSI = −0.819 + 2.32 (log ωe)2 . (15.2)
Nelle relazioni precedenti |sζ | indica la media dei valori assoluti dell’accelerazione verticale su diun ciclo oscillatorio, mentre ωe e la frequenza dell’eccitazione armonica.
L’andamento della (15.1), riportato in Figura 15.2, mostra che il valore di MSI aumenta conl’accelerazione e raggiunge il massimo ad una pulsazione pari a circa 1.07 rad/s (periodo 5.9 s,frequenza 0.17 Hz). Sfortunatamente, si tratta di una frequenza molto vicina alla frequenza mediadei moti verticali di molte navi. Questo spiega facilmente il perche la chinetosi puo costituiretalvolta un serio problema per i passeggeri e l’equipaggio.
0.0 1.0 2.0 3.0
Encounter Wave Frequency, ωe (rad/s)
0
20
40
60
80
100
Mo
tion
Sic
kne
ss In
cid
en
ce,
MS
I (%
)
| av | = 5.0 m/s2
4.0
3.0
2.0
1.0
Figura 15.2: Motion Sickness Incidence in funzione della frequenza di eccitazione (O’Hanlon andMcCauley, 1974).
L’applicazione di questi semplici risultati alla realta ambientale di una nave che opera in con-dizioni di mare agitato richiede necessariamente l’assunzione di tutta una serie di ipotesi sullarelazione esistente tra i moti casuali della nave ed i moti sinusoidali del simulatore di laboratorio.Da questo punto di vista, si procede come segue.
Si assume innanzitutto che le accelerazioni istantanee siano distribuite secondo la funzionedensita di probabilita di Gauss e si osserva che, in prima approssimazione, l’accelerazione verticaleapparente coincide con quella assoluta (vedi Paragrafo 9.11). Con riferimento ad una generica

212 CAPITOLO 15. EFFETTI DEI MOTI NAVE SUI PASSEGGERI ED EQUIPAGGIO
serie temporale dell’accelerazione verticale misurata a bordo di una nave, per la (A.22), la mediatemporale dei valori assoluti e data da:
|sζ | = 0.798√
Dsζ, (15.3)
dove Dsζe la varianza dell’accelerazione assoluta verticale. Analogamente, la frequenza media
delle accelerazioni verticali puo essere presa come:
ωe =2π
T z
, (15.4)
essendo T z il periodo medio di zero-crossing della serie temporale osservata. A causa delle difficoltacollegate con il calcolo del periodo medio di zero-crossing dell’accelerazione assoluta verticale,dovute al fatto che gli integrali dei momenti presentano problemi di convergenza alle frequenzepiu alte, e piu conveniente assumere che il periodo medio di zero-crossing dell’accelerazione sia lostesso del periodo medio di zero-crossing dello spostamento assoluto verticale e, in base alla (4.26),porre semplicemente:
T z = 2π
√√√√D(0)sζ
D(2)sζ
= 2π
√Dsζ
Dsζ
. (15.5)
Le approssimazioni precedenti consentono di usare la formula (15.1) per effettuare una previ-sione del MSI, ovvero della percentuale di persone che soffriranno il mal di mare dopo due ore diesposizione ad un dato insieme di condizioni meteomarine. Ovviamente, la stima puo non esseremolto accurata sia per le ipotesi semplificative sia a causa delle difficolta oggettive di includerenell’analisi anche i fattori secondari che, talvolta, possono costituire addirittura la principale cau-sa della chinetosi. In ogni caso, la tecnica previsionale sviluppata puo essere utilizzata per dareindicazioni quantitative, almeno in senso comparativo, del livello di comfort a bordo di una navein presenza di cattivo tempo.
A titolo di esempio, la Figura 15.3 mostra il calcolo del MSI per un passenger-ferry a 10 nodi nelcaso di onde di prora. Il valore del MSI e massimo all’estrema prora e diviene minimo leggermentea poppavia della sezione al mezzo. In pratica, l’elevato MSI a prora puo essere poco significativo aifini dell’abitabilita poiche non ci sono generalmente ne passeggeri ne equipaggio in tale locazione.
Una stima migliore del MSI effettivamente sofferto puo essere ottenuta applicando ai valorilocali una funzione peso, al fine di includere correttamente la distribuzione degli spazi occupati daidiversi soggetti all’interno della nave. Il valore medio pesato del MSI e allora dato da:
MSI =
∫MSI W dx∫
W dx
, (15.6)
dove gli integrali sono calcolati sulla lunghezza nave. La Figura 15.3 mostra un esempio moltosemplice di funzione peso, che assegna egual valore a tutti gli spazi occupati dai passeggeri. Perquesto caso particolare, si ottiene un valore medio pesato del MSI pari a MSI = 7%.
15.3 Moto soggettivo
Anche se un equipaggio esperto, ben motivato ed acclimatizzato non soffre generalmente di grossidisturbi a causa del mal di mare, esso puo ancora attribuire ai moti verticali della nave la principaleresponsabilita per la diminuzione della capacita di lavorare efficientemente a causa di disturbi fisici
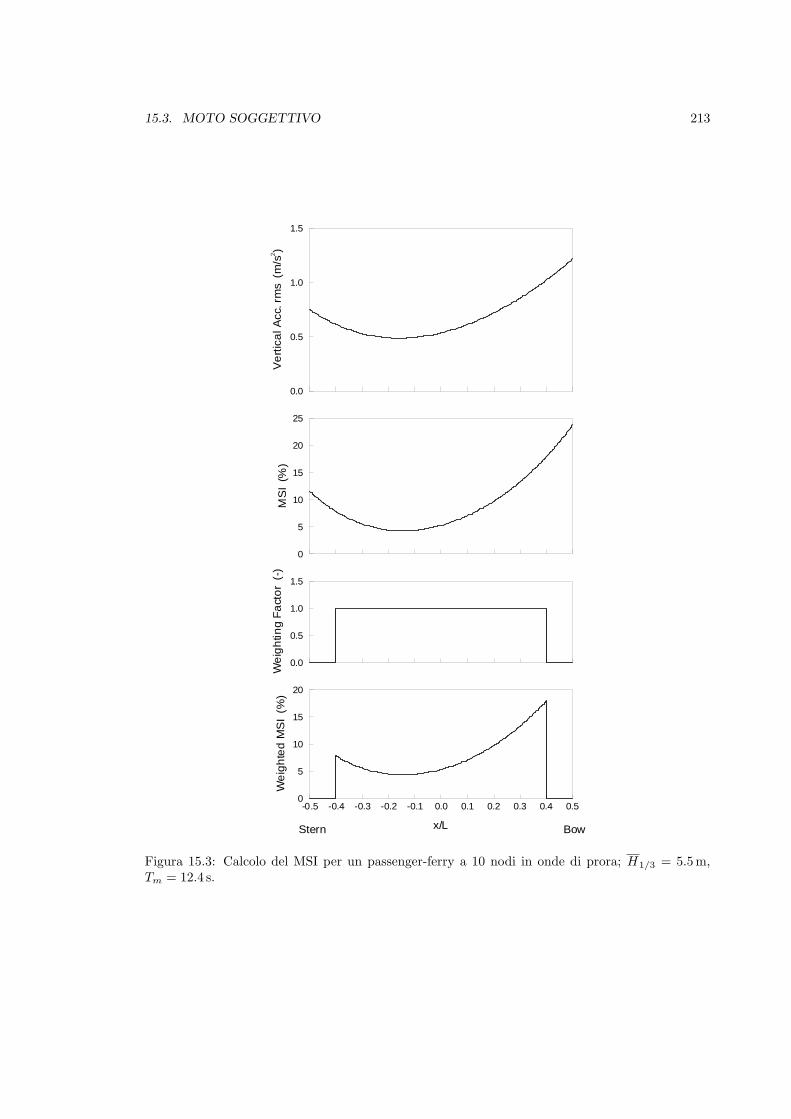
15.3. MOTO SOGGETTIVO 213
Stern Bow
0.0
0.5
1.0
1.5
Ve
rtic
al A
cc. r
ms
(m
/s2 )
0
5
10
15
20
25
MS
I (%
)
0.0
0.5
1.0
1.5
We
igh
ting
Fa
cto
r (
-)
-0.5 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4 0.5
x/L
0
5
10
15
20
We
igh
ted
MS
I (%
)
Figura 15.3: Calcolo del MSI per un passenger-ferry a 10 nodi in onde di prora; H1/3 = 5.5m,Tm = 12.4 s.
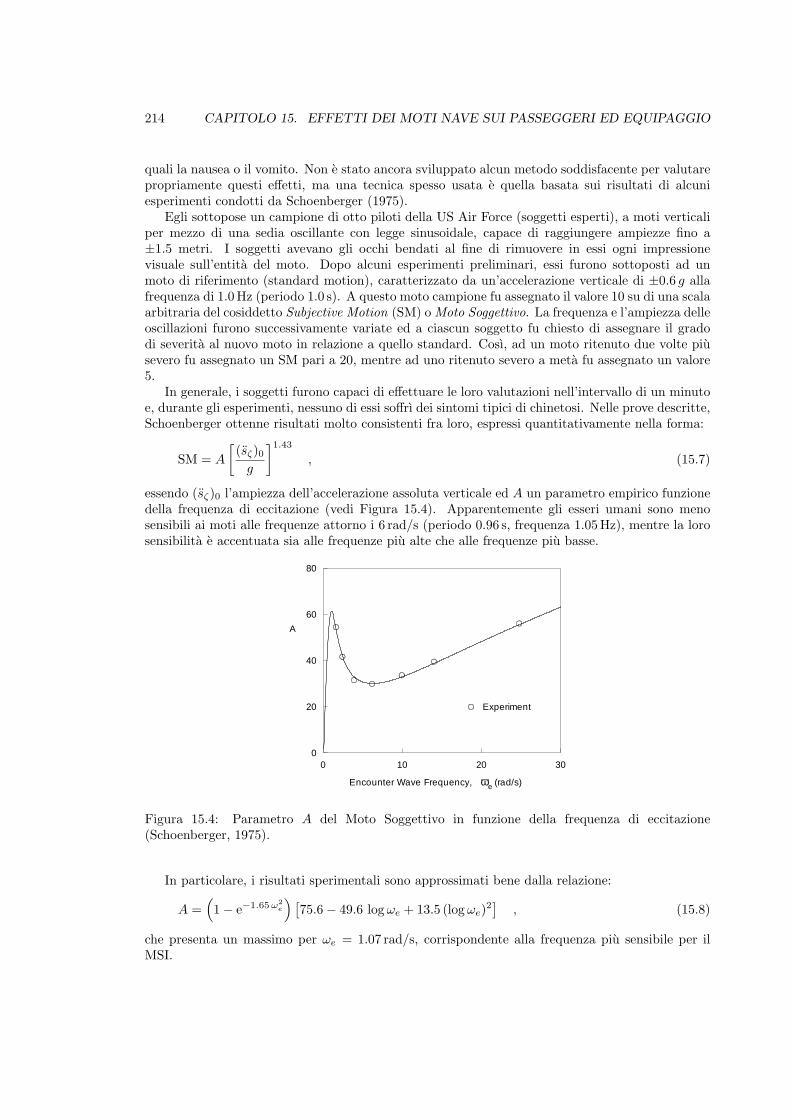
214 CAPITOLO 15. EFFETTI DEI MOTI NAVE SUI PASSEGGERI ED EQUIPAGGIO
quali la nausea o il vomito. Non e stato ancora sviluppato alcun metodo soddisfacente per valutarepropriamente questi effetti, ma una tecnica spesso usata e quella basata sui risultati di alcuniesperimenti condotti da Schoenberger (1975).
Egli sottopose un campione di otto piloti della US Air Force (soggetti esperti), a moti verticaliper mezzo di una sedia oscillante con legge sinusoidale, capace di raggiungere ampiezze fino a±1.5 metri. I soggetti avevano gli occhi bendati al fine di rimuovere in essi ogni impressionevisuale sull’entita del moto. Dopo alcuni esperimenti preliminari, essi furono sottoposti ad unmoto di riferimento (standard motion), caratterizzato da un’accelerazione verticale di ±0.6 g allafrequenza di 1.0 Hz (periodo 1.0 s). A questo moto campione fu assegnato il valore 10 su di una scalaarbitraria del cosiddetto Subjective Motion (SM) o Moto Soggettivo. La frequenza e l’ampiezza delleoscillazioni furono successivamente variate ed a ciascun soggetto fu chiesto di assegnare il gradodi severita al nuovo moto in relazione a quello standard. Cosı, ad un moto ritenuto due volte piusevero fu assegnato un SM pari a 20, mentre ad uno ritenuto severo a meta fu assegnato un valore5.
In generale, i soggetti furono capaci di effettuare le loro valutazioni nell’intervallo di un minutoe, durante gli esperimenti, nessuno di essi soffrı dei sintomi tipici di chinetosi. Nelle prove descritte,Schoenberger ottenne risultati molto consistenti fra loro, espressi quantitativamente nella forma:
SM = A
[(sζ)0
g
]1.43
, (15.7)
essendo (sζ)0 l’ampiezza dell’accelerazione assoluta verticale ed A un parametro empirico funzionedella frequenza di eccitazione (vedi Figura 15.4). Apparentemente gli esseri umani sono menosensibili ai moti alle frequenze attorno i 6 rad/s (periodo 0.96 s, frequenza 1.05Hz), mentre la lorosensibilita e accentuata sia alle frequenze piu alte che alle frequenze piu basse.
Experiment
0 10 20 30
Encounter Wave Frequency, ωe (rad/s)
0
20
40
60
80
A
Figura 15.4: Parametro A del Moto Soggettivo in funzione della frequenza di eccitazione(Schoenberger, 1975).
In particolare, i risultati sperimentali sono approssimati bene dalla relazione:
A =(1− e−1.65 ω2
e
) [75.6− 49.6 log ωe + 13.5 (log ωe)2
], (15.8)
che presenta un massimo per ωe = 1.07 rad/s, corrispondente alla frequenza piu sensibile per ilMSI.

15.3. MOTO SOGGETTIVO 215
Questi esperimenti furono condotti, analogamente a quelli del MSI, usando un oscillatore forzatocon legge armonica. Si pone percio, anche in questo caso, il problema di proporre una qualchemetodologia per il trasferimento dei risultati di laboratorio all’ambiente del moto irregolare a bordodelle navi. Loyd and Andrew (1977), osservando che l’accelerazione verticale apparente coincidecon quella assoluta (in prima approssimazione), suggerirono di assumere:
(sζ)0 = 2√
Dsζ, (15.9)
mentre la frequenza ωe puo essere ancora ottenuta per mezzo dell’equazione (15.4).
0 1 2 3Vertical Acceleration rms (m/s2)
0
10
20
30
Sub
ject
ive
Mo
tion
, S
M (
-)
Intolerable
Hazardous
Severe
Serious
Moderate
(necessary to 'hang on' all the time)
Figura 15.5: Moto Soggettivo ed accelerazione verticale a 1.07 rad/s.
La Figura 15.5 mostra la relazione tra il SM ed il rms dell’accelerazione verticale in accordoall’equazione (15.7) per la frequenza di maggiore sensibilita, ovvero ωe = 1.07 rad/s. Vengonoriportate anche le descrizioni qualitative delle condizioni ambientali conseguenti al moto. Essesono basate sull’esperienza acquisita durante le prove al vero, effettuate in condizioni di cattivotempo a bordo di due fregate della Royal Navy (Andrew and Lloyd, 1981).
La Figura 15.6 mostra un esempio di calcolo del SM per una fregata in onde di prora. Il SMraggiunge il valore 34 (intollerabile) a prora, ma vale soltanto 7 (serio) leggermente a poppaviadella sezione al mezzo. Anche in questo contesto e appropriato applicare una funzione peso pertener conto dell’importanza relativa delle differenti zone della nave. In questo caso, l’importanzadelle parti piu sensibili e stata riconosciuta assegnando un peso di 1.5 al ponte di volo a poppa,al ponte di comando e alla sala delle operazioni a proravia della sezione al mezzo. Il valore mediopesato del SM e dato da:
SM =
∫SMW dx
∫W dx
, (15.10)
dove gli integrali sono calcolati sulla lunghezza della nave. Per l’esempio mostrato il valore mediopesato risulta SM = 14.
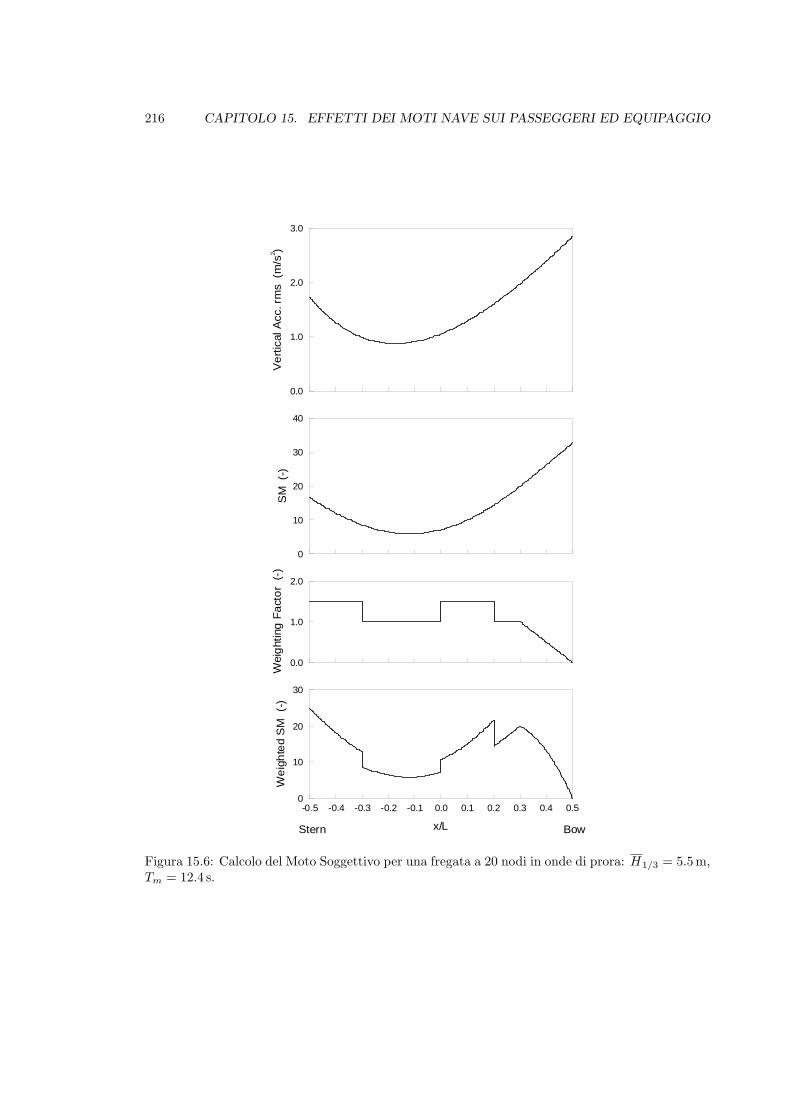
216 CAPITOLO 15. EFFETTI DEI MOTI NAVE SUI PASSEGGERI ED EQUIPAGGIO
Stern Bow
0.0
1.0
2.0
Wei
ght
ing
Fa
cto
r (
-)
-0.5 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4 0.5
x/L
0
10
20
30
We
igh
ted
SM
(-)
0.0
1.0
2.0
3.0
Ve
rtic
al A
cc. r
ms
(m
/s2 )
0
10
20
30
40
SM
(-)
Figura 15.6: Calcolo del Moto Soggettivo per una fregata a 20 nodi in onde di prora: H1/3 = 5.5m,Tm = 12.4 s.
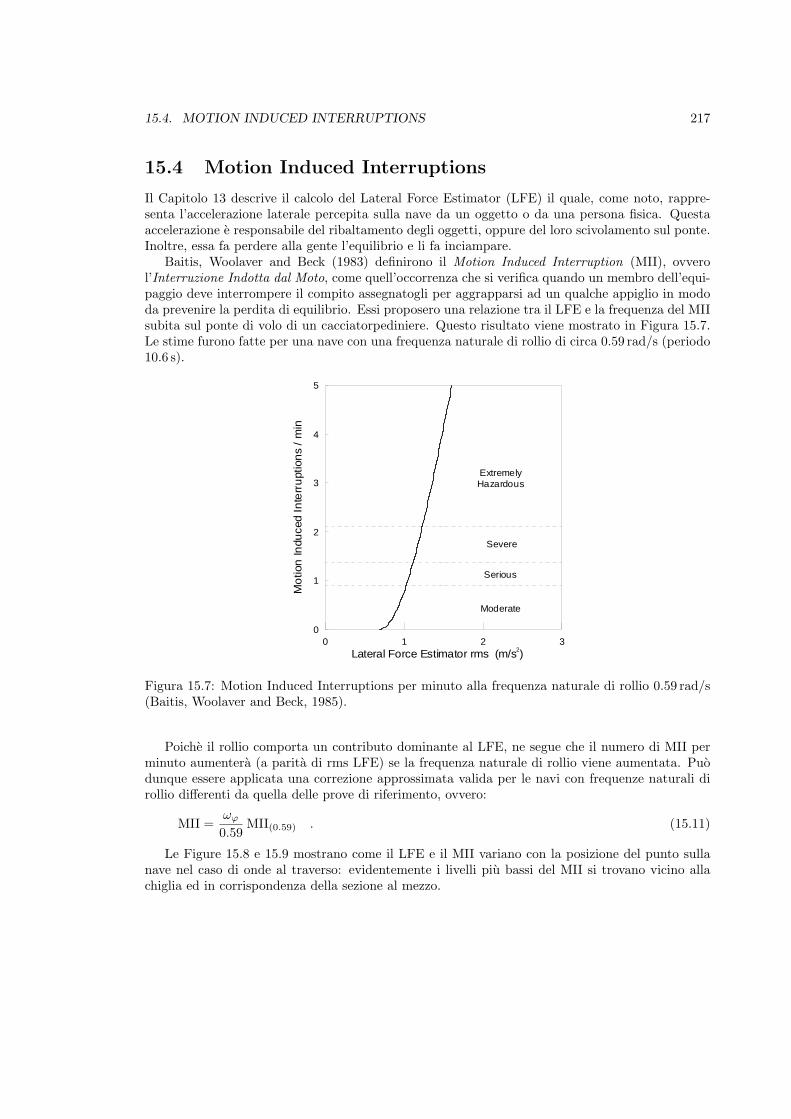
15.4. MOTION INDUCED INTERRUPTIONS 217
15.4 Motion Induced Interruptions
Il Capitolo 13 descrive il calcolo del Lateral Force Estimator (LFE) il quale, come noto, rappre-senta l’accelerazione laterale percepita sulla nave da un oggetto o da una persona fisica. Questaaccelerazione e responsabile del ribaltamento degli oggetti, oppure del loro scivolamento sul ponte.Inoltre, essa fa perdere alla gente l’equilibrio e li fa inciampare.
Baitis, Woolaver and Beck (1983) definirono il Motion Induced Interruption (MII), ovverol’Interruzione Indotta dal Moto, come quell’occorrenza che si verifica quando un membro dell’equi-paggio deve interrompere il compito assegnatogli per aggrapparsi ad un qualche appiglio in mododa prevenire la perdita di equilibrio. Essi proposero una relazione tra il LFE e la frequenza del MIIsubita sul ponte di volo di un cacciatorpediniere. Questo risultato viene mostrato in Figura 15.7.Le stime furono fatte per una nave con una frequenza naturale di rollio di circa 0.59 rad/s (periodo10.6 s).
0 1 2 3Lateral Force Estimator rms (m/s2)
0
1
2
3
4
5
Mo
tion
Indu
ced
Inte
rru
ptio
ns
/ m
in
Moderate
ExtremelyHazardous
Severe
Serious
Figura 15.7: Motion Induced Interruptions per minuto alla frequenza naturale di rollio 0.59 rad/s(Baitis, Woolaver and Beck, 1985).
Poiche il rollio comporta un contributo dominante al LFE, ne segue che il numero di MII perminuto aumentera (a parita di rms LFE) se la frequenza naturale di rollio viene aumentata. Puodunque essere applicata una correzione approssimata valida per le navi con frequenze naturali dirollio differenti da quella delle prove di riferimento, ovvero:
MII =ωϕ
0.59MII(0.59) . (15.11)
Le Figure 15.8 e 15.9 mostrano come il LFE e il MII variano con la posizione del punto sullanave nel caso di onde al traverso: evidentemente i livelli piu bassi del MII si trovano vicino allachiglia ed in corrispondenza della sezione al mezzo.
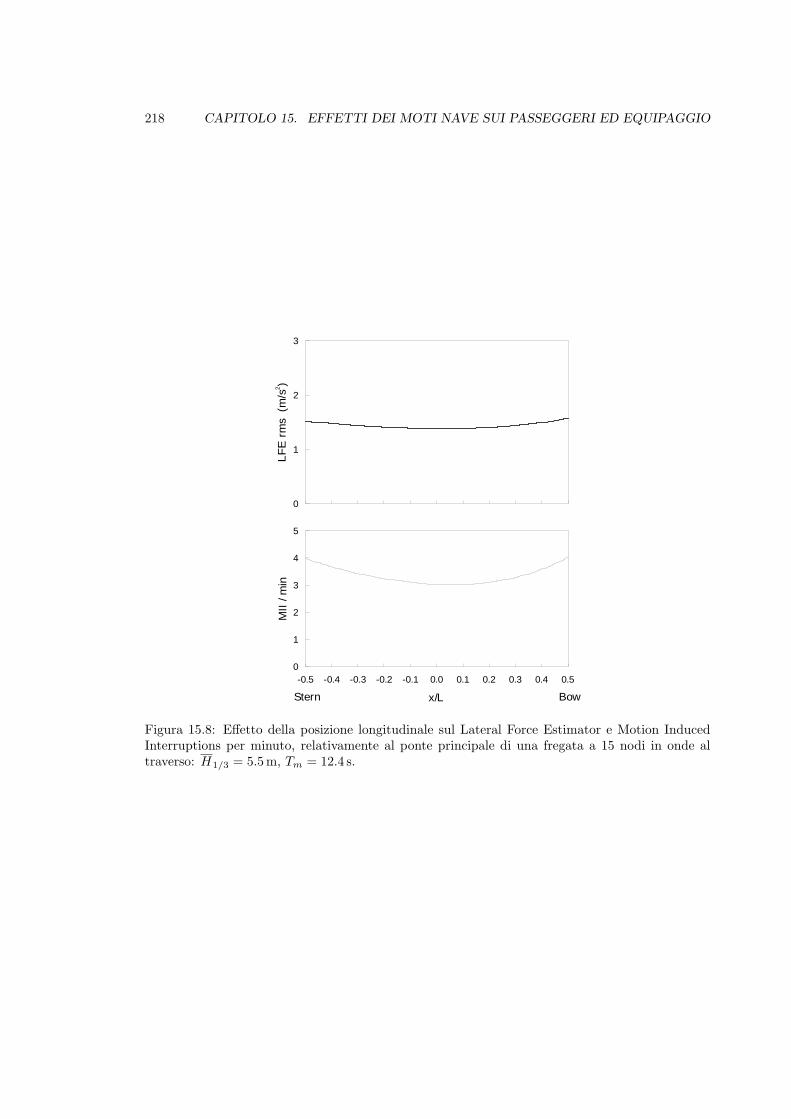
218 CAPITOLO 15. EFFETTI DEI MOTI NAVE SUI PASSEGGERI ED EQUIPAGGIO
Stern Bow
0
1
2
3
LF
E r
ms
(m
/s2 )
-0.5 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4 0.5
x/L
0
1
2
3
4
5
MII
/ m
in
Figura 15.8: Effetto della posizione longitudinale sul Lateral Force Estimator e Motion InducedInterruptions per minuto, relativamente al ponte principale di una fregata a 15 nodi in onde altraverso: H1/3 = 5.5m, Tm = 12.4 s.

15.4. MOTION INDUCED INTERRUPTIONS 219
0
1
2
3
LF
E r
ms
(m
/s2 )
0 5 10 15 20Height Above Keel (m)
0
2
4
6
8
MII
/ m
in
Figura 15.9: Effetto dell’altezza dalla linea di chiglia sul Lateral Force Estimator e Motion InducedInterruptions per minuto, relativamente alla sezione al mezzo di una fregata a 15 nodi in onde altraverso: H1/3 = 5.5m, Tm = 12.4 s.

220 CAPITOLO 15. EFFETTI DEI MOTI NAVE SUI PASSEGGERI ED EQUIPAGGIO
Capitolo 16
Prove al vero
16.1 Introduzione
L’allestimento di una nave per una serie di prove di seakeeping costituisce certamente un’opera-zione particolarmente lunga e oltremodo costosa. Generalmente e necessario fissare la data delleprove con un certo anticipo e non c’e alcuna garanzia che, durante le operazioni, si otterranno lecondizioni meteomarine piu opportune. Molte volte le prove al vero sono state ritardate o addirit-tura cancellate in quanto, nelle giornate previste per la loro esecuzione, non c’erano delle condizionidi mare sufficientemente severe .
Le prove al vero vengono effettuate per misurare, in un ambiente meteomarino costantementesotto osservazione, i moti nave, l’imbarco d’acqua, lo slamming ed altri fenomeni d’interesse inge-gneristico. A priori sembra che si tratti di un metodo particolarmente adatto per determinare, incondizioni di cattivo tempo, le prestazioni di una nave e/o per confrontare le prestazioni di piu navioperanti in uno stesso scenario. Naturalmente, le onde devono essere irregolari e risulta necessarioregistrarle simultaneamente ai moti nave per poi analizzare i risultati ottenuti mediante le tecnicheproprie dell’analisi spettrale, descritte al Capitolo 4. Gli rms dei moti, come pure le altre rispostedi seakeeping, possono essere espressi in funzione dell’altezza significativa delle onde e confrontaticon quelli previsti teoricamente, oppure ottenuti dalle prove su modelli o dalle prove al vero conaltre navi simili.
Il ragionamento precedente risulta, tuttavia, troppo semplicistico in quanto il comportamentodi una nave con cattivo tempo e funzione non soltanto dell’altezza significativa delle onde ma anchedel loro periodo modale, della forma dello spettro di energia e del grado di dispersione delle direzionidi propagazione. Per questo motivo i risultati delle prove al vero, se confrontati con le previsioninumeriche, saranno molto verosimilmente discrepanti e probabilmente anche incongruenti, qualorale condizioni del moto ondoso durante le prove risultano dissimili da quelle teoricamente ipotizzate.
L’unico modo per evitare e superare tutti questi problemi e quello di realizzare prove compa-rative fra due o piu navi, facendole operare simultaneamente, una accanto all’altra, in condizioniondose nominalmente identiche fra loro. I risultati ottenuti costituiscono allora un termine di con-fronto oggettivo fra i moti delle navi considerate per un particolare ambiente meteomarino: ognipeculiarita o variazione delle condizioni ondose durante le prove sono sentite in egual misura daentrambe le navi, cosicche ogni differenza fra i moti puo essere attribuita principalmente alle lorodifferenze progettuali. Tuttavia, se le prove di seakeeping con una nave singola sono poco frequentia causa degli alti costi, esempi di prove comparative che riguardano due o piu navi costituisconouna rarita (Bledsoe, Bussemaker and Cummins, 1960; Andrew and Lloyd, 1981).
Le prove al vero non possono essere certamente considerate come un mezzo di routine perdeterminare le prestazioni di tenuta al mare di un nuovo progetto. Il problema maggiore e da
221
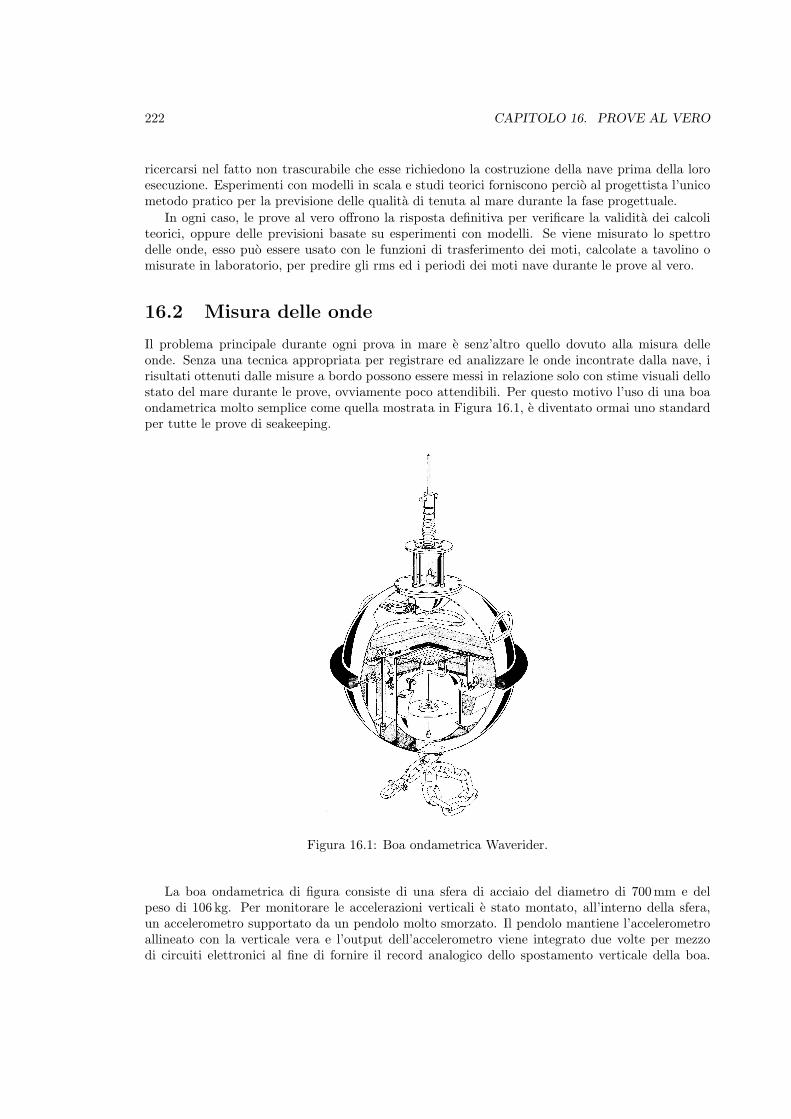
222 CAPITOLO 16. PROVE AL VERO
ricercarsi nel fatto non trascurabile che esse richiedono la costruzione della nave prima della loroesecuzione. Esperimenti con modelli in scala e studi teorici forniscono percio al progettista l’unicometodo pratico per la previsione delle qualita di tenuta al mare durante la fase progettuale.
In ogni caso, le prove al vero offrono la risposta definitiva per verificare la validita dei calcoliteorici, oppure delle previsioni basate su esperimenti con modelli. Se viene misurato lo spettrodelle onde, esso puo essere usato con le funzioni di trasferimento dei moti, calcolate a tavolino omisurate in laboratorio, per predire gli rms ed i periodi dei moti nave durante le prove al vero.
16.2 Misura delle onde
Il problema principale durante ogni prova in mare e senz’altro quello dovuto alla misura delleonde. Senza una tecnica appropriata per registrare ed analizzare le onde incontrate dalla nave, irisultati ottenuti dalle misure a bordo possono essere messi in relazione solo con stime visuali dellostato del mare durante le prove, ovviamente poco attendibili. Per questo motivo l’uso di una boaondametrica molto semplice come quella mostrata in Figura 16.1, e diventato ormai uno standardper tutte le prove di seakeeping.
Figura 16.1: Boa ondametrica Waverider.
La boa ondametrica di figura consiste di una sfera di acciaio del diametro di 700 mm e delpeso di 106 kg. Per monitorare le accelerazioni verticali e stato montato, all’interno della sfera,un accelerometro supportato da un pendolo molto smorzato. Il pendolo mantiene l’accelerometroallineato con la verticale vera e l’output dell’accelerometro viene integrato due volte per mezzodi circuiti elettronici al fine di fornire il record analogico dello spostamento verticale della boa.
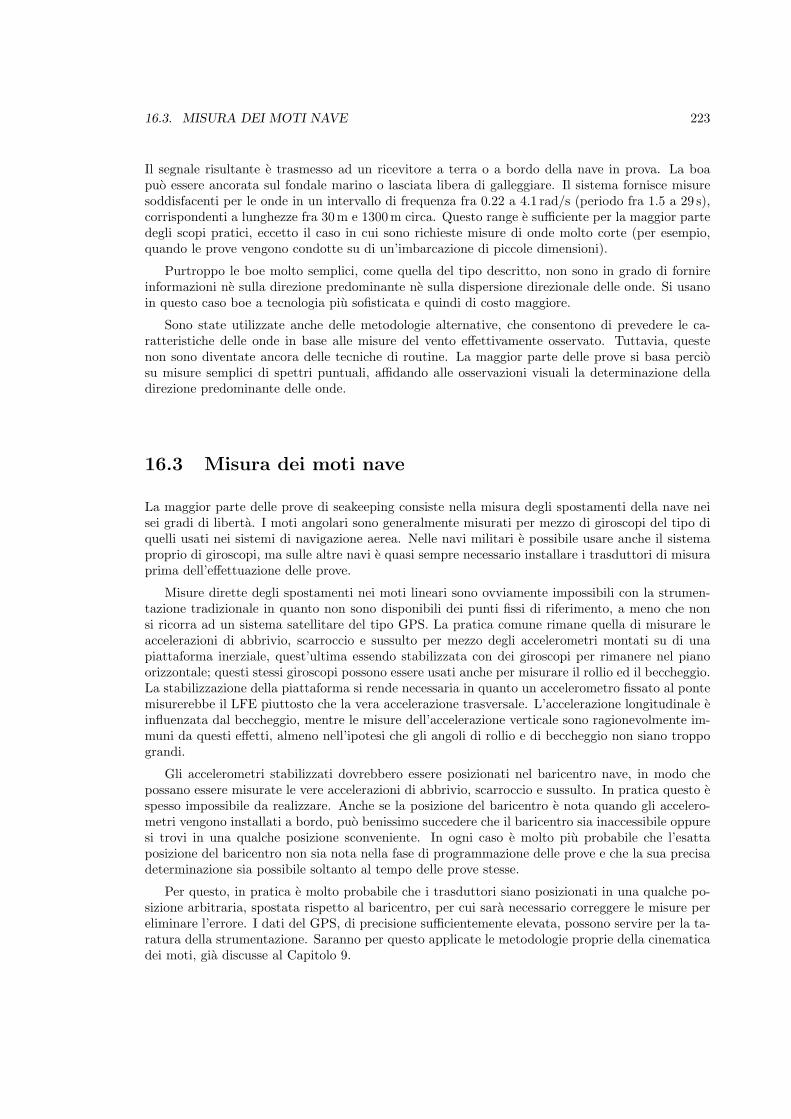
16.3. MISURA DEI MOTI NAVE 223
Il segnale risultante e trasmesso ad un ricevitore a terra o a bordo della nave in prova. La boapuo essere ancorata sul fondale marino o lasciata libera di galleggiare. Il sistema fornisce misuresoddisfacenti per le onde in un intervallo di frequenza fra 0.22 a 4.1 rad/s (periodo fra 1.5 a 29 s),corrispondenti a lunghezze fra 30 m e 1300 m circa. Questo range e sufficiente per la maggior partedegli scopi pratici, eccetto il caso in cui sono richieste misure di onde molto corte (per esempio,quando le prove vengono condotte su di un’imbarcazione di piccole dimensioni).
Purtroppo le boe molto semplici, come quella del tipo descritto, non sono in grado di fornireinformazioni ne sulla direzione predominante ne sulla dispersione direzionale delle onde. Si usanoin questo caso boe a tecnologia piu sofisticata e quindi di costo maggiore.
Sono state utilizzate anche delle metodologie alternative, che consentono di prevedere le ca-ratteristiche delle onde in base alle misure del vento effettivamente osservato. Tuttavia, questenon sono diventate ancora delle tecniche di routine. La maggior parte delle prove si basa perciosu misure semplici di spettri puntuali, affidando alle osservazioni visuali la determinazione delladirezione predominante delle onde.
16.3 Misura dei moti nave
La maggior parte delle prove di seakeeping consiste nella misura degli spostamenti della nave neisei gradi di liberta. I moti angolari sono generalmente misurati per mezzo di giroscopi del tipo diquelli usati nei sistemi di navigazione aerea. Nelle navi militari e possibile usare anche il sistemaproprio di giroscopi, ma sulle altre navi e quasi sempre necessario installare i trasduttori di misuraprima dell’effettuazione delle prove.
Misure dirette degli spostamenti nei moti lineari sono ovviamente impossibili con la strumen-tazione tradizionale in quanto non sono disponibili dei punti fissi di riferimento, a meno che nonsi ricorra ad un sistema satellitare del tipo GPS. La pratica comune rimane quella di misurare leaccelerazioni di abbrivio, scarroccio e sussulto per mezzo degli accelerometri montati su di unapiattaforma inerziale, quest’ultima essendo stabilizzata con dei giroscopi per rimanere nel pianoorizzontale; questi stessi giroscopi possono essere usati anche per misurare il rollio ed il beccheggio.La stabilizzazione della piattaforma si rende necessaria in quanto un accelerometro fissato al pontemisurerebbe il LFE piuttosto che la vera accelerazione trasversale. L’accelerazione longitudinale einfluenzata dal beccheggio, mentre le misure dell’accelerazione verticale sono ragionevolmente im-muni da questi effetti, almeno nell’ipotesi che gli angoli di rollio e di beccheggio non siano troppograndi.
Gli accelerometri stabilizzati dovrebbero essere posizionati nel baricentro nave, in modo chepossano essere misurate le vere accelerazioni di abbrivio, scarroccio e sussulto. In pratica questo espesso impossibile da realizzare. Anche se la posizione del baricentro e nota quando gli accelero-metri vengono installati a bordo, puo benissimo succedere che il baricentro sia inaccessibile oppuresi trovi in una qualche posizione sconveniente. In ogni caso e molto piu probabile che l’esattaposizione del baricentro non sia nota nella fase di programmazione delle prove e che la sua precisadeterminazione sia possibile soltanto al tempo delle prove stesse.
Per questo, in pratica e molto probabile che i trasduttori siano posizionati in una qualche po-sizione arbitraria, spostata rispetto al baricentro, per cui sara necessario correggere le misure pereliminare l’errore. I dati del GPS, di precisione sufficientemente elevata, possono servire per la ta-ratura della strumentazione. Saranno per questo applicate le metodologie proprie della cinematicadei moti, gia discusse al Capitolo 9.

224 CAPITOLO 16. PROVE AL VERO
16.4 Misura delle altre risposte
Le prove di seakeeping comprendono spesso la misura di alcune risposte diverse da quelle dei motinave. Esempi tipici sono l’imbarco d’acqua e lo slamming. Sara generalmente necessaria unastrumentazione molto semplice per misurare la frequenza di occorrenza di questi eventi, che peraltro risultano abbastanza rari. Infatti, e sufficiente un osservatore temprato munito di orologio,penna e quaderno degli appunti per registrare tutto quello che si richiede in pratica.
Osservazioni dell’imbarco d’acqua, che possono essere analizzate successivamente in un labora-torio a terra, sono ottenute mediante una registrazione video della zona di prora. Questa tecnica fuusata con successo nelle prove comparative di seakeeping riportate da Andrew and Lloyd (1981).Misure della severita d’imbarco d’acqua vengono effettuate per mezzo dei trasduttori di pressioneapplicati in opportune posizioni dell’opera morta.
Misure della frequenza di slamming possono essere ottenute usando degli strain-gauge per mo-nitorare il momento flettente nei principali componenti strutturali del fasciame. Gli slams sarannofacilmente rivelati nei record attraverso la presenza di brevi intervalli di oscillazioni ad alta fre-quenza (tipicamente 1.0–2.0 Hz). Le oscillazioni dello scafo, causate dal fenomeno di whipping chesi verifica dopo ogni slam, sono facilmente distintinguibili dalle oscillazioni del momento flettentedovuto alle frequenze d’incontro delle onde in quanto di periodo piu lungo. Alternativamente, levibrazioni di alta frequenza possono essere osservate per mezzo di un accelerometro fissato allastruttura della nave. La severita dello slamming puo essere valutata anche analizzando questiultimi record.
Dei trasduttori di pressione sono talvolta applicati alla superficie dello scafo per misurare lo-calmente le pressioni d’impatto dovute allo slamming. Sara necessario, ovviamente, immettere inbacino la nave quando i trasduttori devono essere applicati sotto la linea di galleggiamento. Questatecnica richiede sia dei trasduttori che un sistema di registrazione, entrambi capaci di rispondere inintervalli temporali molto brevi (dell’ordine dei millisecondi), tipici dei fenomeni d’impatto idrodi-namico. Tale requisito sara spesso incompatibile con le caratteristiche del sistema di registrazionedei moti nave, a frequenza piu bassa, e per questo potrebbe essere necessaria la disponibilita unsistema distinto di registrazione.
16.5 Esecuzione delle prove
E stato visto al Capitolo 4 che, in una serie temporale irregolare, sono necessarie almeno 100 coppiedi massimi e di minimi per assicurare una stima ragionevolmente attendibile del valore degli rms.Ogni prova di seakeeping deve percio essere di durata sufficiente per raggiungere questo requisitominimo. L’effettiva lunghezza della corsa puo essere stimata a partire dai calcoli teorici dei motinave con uno spettro di onde simile a quello previsto durante le prove. Il periodo medio dei picchiper ciascun moto puo allora essere calcolato con l’equazione (4.27), ovvero:
(T p
)u
= 2π
√Du
Du. (16.1)
Ovviamente, i periodi medi dei picchi sono massimi in mare di poppa, dove le frequenze d’incontrosono basse. La Figura 16.2a mostra i risultati ottenuti nel caso di una prova al vero pianificata peruna fregata.
Il tempo di prova necessario per raggiungere 100 cicli di moto e percio dato dalla relazione:
TH = 100(T p
)u
, (16.2)
dove(T p
)u
e il periodo medio dei picchi per il moto prescelto. Il tempo di prova e dato dal valoremassimo di TH per tutti i moti e, per la fregata di cui sopra, viene mostrato in Figura 16.2b.
16.5. ESECUZIONE DELLE PROVE 225
0
5
10
15
20
25
Me
an
Pe
rio
d o
f Mo
tion
Pe
aks
(s)
0 30 60 90 120 150 180
Heading (deg)
0
20
40
60
Ru
n T
ime
(m
in)
Yaw
Sway Roll
Pitch
Heave
a)
b)
Figura 16.2: Minimi tempi di prova per 100 picchi dei moti; fregata a 20 kn, Tm = 12.4 s.
In pratica sono consigliabili prove di durata maggiore del minimo assoluto previsto. Un certomargine di tempo d’abbuono deve essere tenuto in conto all’inizio di ogni prova per consentirealla nave di immettersi sulla rotta prescelta e di acquistare la velocita richiesta. Ancora piuimportante e prendere ogni precauzione al fine di assicurare l’acquisizione dei dati di adeguataqualita. L’opportunita di effettuare delle prove di seakeeping avviene cosı raramente che sarebbeassurdo accorciare la durata delle prove a causa di pressioni economiche o scelte operative. Se iltempo a disposizione e limitato, sarebbe meglio ridurre il numero delle corse piuttosto che la lorolunghezza.
Non sono desiderabili delle corse molto lunghe in quanto possono portare la nave troppo lontanodalla boa ondametrica ed inoltre aumentare il rischio di un cambiamento delle condizioni ondosedurante la prova. Le misure delle onde non saranno allora rappresentative delle effettive condizionimeteomarine durante una parte della prova.
Una buona regola pratica e quella di aggiungere, per ogni corsa, un abbuono di 10 minuti alminimo tempo di prova. La Figura 16.3 mostra una sequenza di corse per una prova pianificata conquesti criteri per il caso di una fregata a 20 nodi. La boa ondametrica viene lanciata all’inizio dellaprova in condizioni di mare di prora, mentre la sequenza delle rotte viene scelta per minimizzarela distanza fra la nave e la boa.

226 CAPITOLO 16. PROVE AL VERO
Wave BuoyB
Beam
10 miles
10 km
Predominant Wave Direction
Hea
d
Fol
low
ing
Bow
Quartering
Figura 16.3: Tipica sequenza di corse per una prova di seakeeping a 20 nodi.
Capitolo 17
Prove su modelli
17.1 Introduzione
Le prove su modelli forniscono un’alternativa concreta rispetto a quelle al vero. I modelli in scalasono ovviamente molto meno costosi della nave e spesso possono essere utilizzati solo per l’esecu-zione degli esperimenti richiesti. Inoltre, e possibile costruire il modello prima della nave prototipoed e facile provare anche un numero elevato di soluzioni progettuali alternative. Infatti, primadell’avvento della teoria di striscia, le prove su modelli fornivano l’unico metodo per determinarele qualita di tenuta al mare di una nave nella fase di progetto.
Quando il modello deve essere provato in una vasca rettilinea o in una vasca di seakeeping,le onde possono essere prodotte e riprodotte a piacere. Misure particolari sono generalmente piusemplici da realizzare in scala che al vero. Tuttavia, i problemi connessi con il trasferimento deirisultati al vero non potranno essere mai completamente superati. Si deve percio ammettere che leprove su modello, eseguite nell’ambiente controllato ed artificiale del laboratorio, mancano sempredi un qualcosa che caratterizza l’incertezza del mondo reale incontrato dalla nave nel teatro delleoperazioni.
17.2 Prove all’aperto
La realizzazione piu semplice della sperimentazione su modelli e certamente quella che si basa sullecosiddette prove in miniatura. Esse riguardano il comportamento in mare di un modello in scalamolto grande avente, in generale, un rapporto dimensionale dell’ordine di 10. Il modello vieneautopropulso per mezzo di un motore marino o elettrico, mentre la strumentazione necessaria peril rilievo dei moti nave e del tutto simile a quella impiegata nelle prove al vero. La scelta dellavelocita di avanzo e della rotta puo essere conseguita per mezzo di un sistema di radiocontrollo adistanza.
Per misurare le onde e necessaria la disponibilita di una boa ondametrica con caratteristichetecniche particolari. Infatti, essa deve essere progettata in modo da rispondere anche all’azionedelle onde piu corte che, in questo caso, sono di specifico interesse per l’esperimento. Una boaondametrica standard, usata per le prove al vero, non e generalmente adeguata a questo proposito.Gli spettri delle onde e dei moti nave, come pure le corrispondenti grandezze statistiche, sonoottenuti con modalita del tutto analoga a quella usata nell’analisi delle prove al vero.
Poiche lo spettro delle onde al vero deve essere riprodotto su scala modello, ne segue che sirichiede un campo di prova ubicato in acque protette con fetch limitato. Questo comporta spessosia la presenza di riflessioni multiple del sistema ondoso da parte della costa sottovento sia un
227
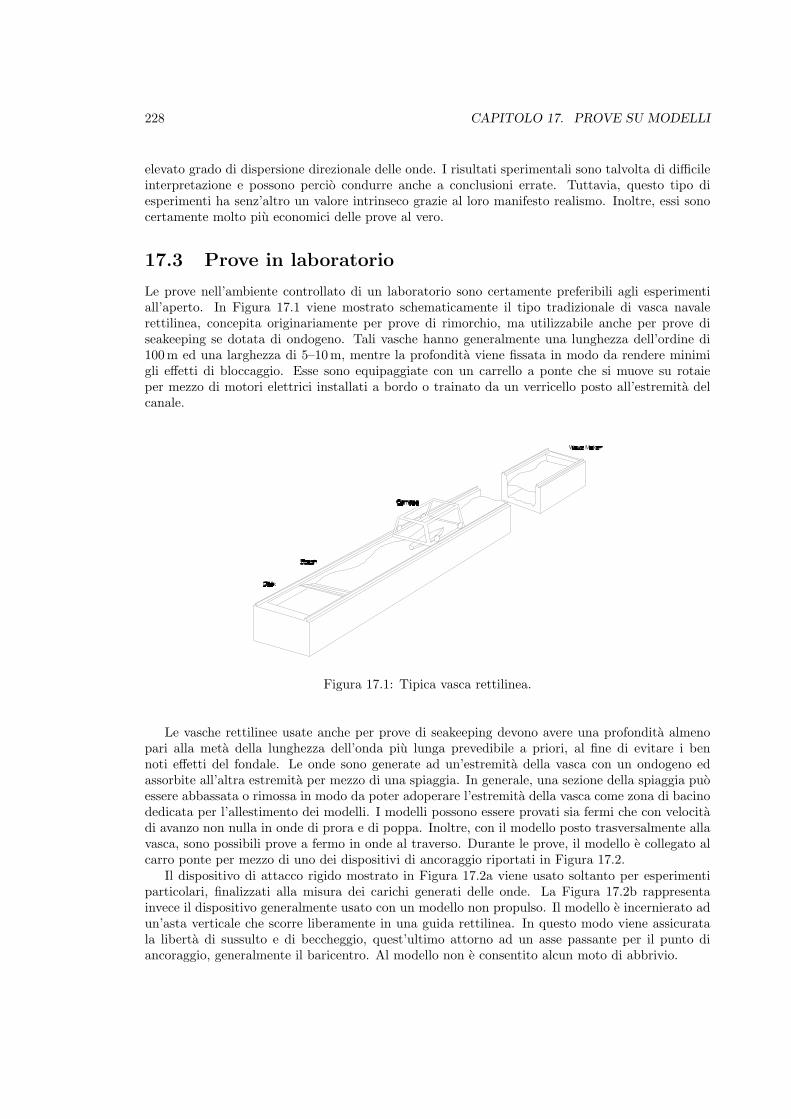
228 CAPITOLO 17. PROVE SU MODELLI
elevato grado di dispersione direzionale delle onde. I risultati sperimentali sono talvolta di difficileinterpretazione e possono percio condurre anche a conclusioni errate. Tuttavia, questo tipo diesperimenti ha senz’altro un valore intrinseco grazie al loro manifesto realismo. Inoltre, essi sonocertamente molto piu economici delle prove al vero.
17.3 Prove in laboratorio
Le prove nell’ambiente controllato di un laboratorio sono certamente preferibili agli esperimentiall’aperto. In Figura 17.1 viene mostrato schematicamente il tipo tradizionale di vasca navalerettilinea, concepita originariamente per prove di rimorchio, ma utilizzabile anche per prove diseakeeping se dotata di ondogeno. Tali vasche hanno generalmente una lunghezza dell’ordine di100m ed una larghezza di 5–10m, mentre la profondita viene fissata in modo da rendere minimigli effetti di bloccaggio. Esse sono equipaggiate con un carrello a ponte che si muove su rotaieper mezzo di motori elettrici installati a bordo o trainato da un verricello posto all’estremita delcanale.
Figura 17.1: Tipica vasca rettilinea.
Le vasche rettilinee usate anche per prove di seakeeping devono avere una profondita almenopari alla meta della lunghezza dell’onda piu lunga prevedibile a priori, al fine di evitare i bennoti effetti del fondale. Le onde sono generate ad un’estremita della vasca con un ondogeno edassorbite all’altra estremita per mezzo di una spiaggia. In generale, una sezione della spiaggia puoessere abbassata o rimossa in modo da poter adoperare l’estremita della vasca come zona di bacinodedicata per l’allestimento dei modelli. I modelli possono essere provati sia fermi che con velocitadi avanzo non nulla in onde di prora e di poppa. Inoltre, con il modello posto trasversalmente allavasca, sono possibili prove a fermo in onde al traverso. Durante le prove, il modello e collegato alcarro ponte per mezzo di uno dei dispositivi di ancoraggio riportati in Figura 17.2.
Il dispositivo di attacco rigido mostrato in Figura 17.2a viene usato soltanto per esperimentiparticolari, finalizzati alla misura dei carichi generati delle onde. La Figura 17.2b rappresentainvece il dispositivo generalmente usato con un modello non propulso. Il modello e incernierato adun’asta verticale che scorre liberamente in una guida rettilinea. In questo modo viene assicuratala liberta di sussulto e di beccheggio, quest’ultimo attorno ad un asse passante per il punto diancoraggio, generalmente il baricentro. Al modello non e consentito alcun moto di abbrivio.

17.3. PROVE IN LABORATORIO 229
(f) Self-contained model (no carriage)
(e) Model restrained only by umbilical cable (powered model)
(d) Free to surge, heave and pitch (powered model)
(c) Free to surge, heave and pitch (unpowered model restrained by springs)
(b) Free to heave and pitch (unpowered model)
(a) Rigidly restrained
Figura 17.2: Sistemi di ancoraggio del modello.
Una limitata liberta di abbrivio puo essere ottenuta usando il dispositivo elastico mostrato inFigura 17.2c. Il vero moto di abbrivio puo essere simulato soltanto con i dispositivi di Figura 17.2de 17.2e, quest’ultimo con il modello autopropulso.
Naturalmente, in tutti questi dispositivi meccanici e necessario usare dei cuscinetti di elevataqualita per ridurre al minimo gli effetti dell’attrito sui moti del modello. Poiche il peso dell’attrez-zatura di attacco nelle varianti di Figura 17.2b–17.2d e sostenuto dal modello, ne segue che se nedeve tener esplicitamente conto nell’approntare l’allestimento in similitudine dinamica. Gli effettidi attrito possono essere eliminati solo introducendo soluzioni particolari, come ad esempio quellamostrata in Figura 17.2e.
Negli ultimi cinquant’anni e stata introdotta nei laboratori navali la cosiddetta vasca di sea-keeping. Questo tipo di vasca, generalmente di forma quadrata e con superficie dell’ordine di50m2, risulta attrezzata sia con ondogeni che con spiagge. L’equipaggiamento ideale e mostratoin Figura 17.3. Un carrello principale, che scorre su rotaie, puo attraversare la vasca in modo deltutto simile a quello delle vasche tradizionali di rimorchio. Inoltre, un carrello secondario e mon-tato sul carrello principale, cosicche il modello puo essere posizionato liberamente in ogni puntodella zona di misura. Durante gli esperimenti con modello autopropulso la posizione del carrellosecondario puo essere mantenuta sopra il modello per mezzo di un sistema automatico di controllo.Alternativamente, per esperimenti con modelli rimorchiati, il carrello secondario puo essere guidatotrasversalmente alla vasca ad un prefissato angolo d’incontro rispetto alle onde.
Nel caso di esperimenti con modelli autopropulsi, il modello e collegato al carrello secondarioper mezzo di un cavo ombelicale, come mostrato in Figura 17.2e. Questo cavo, che fornisce l’energiaelettrica necessaria sia per la propulsione del modello sia per l’alimentazione della strumentazione,serve anche per trasferire i segnali di risposta all’apparecchiatura di registrazione e analisi dei datiposta sul carrello. Il cavo deve essere sufficientemente leggero e flessibile in modo da escludere ogni
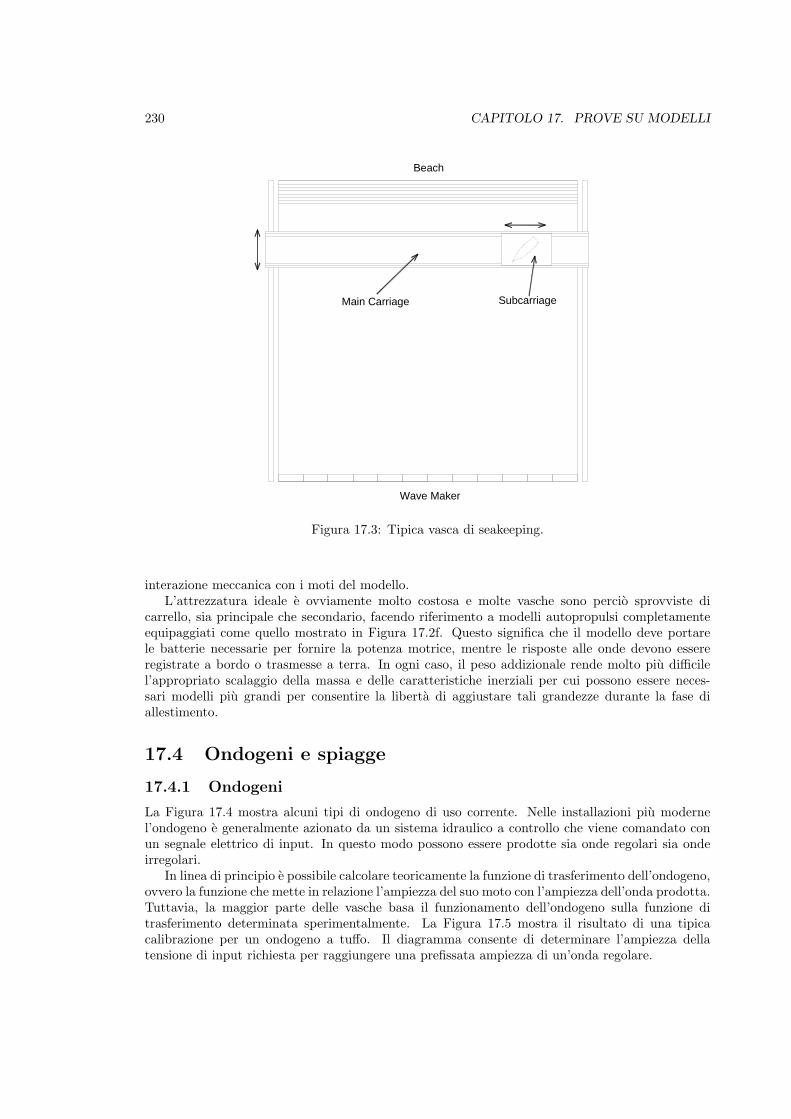
230 CAPITOLO 17. PROVE SU MODELLI
Wave Maker
SubcarriageMain Carriage
Beach
Figura 17.3: Tipica vasca di seakeeping.
interazione meccanica con i moti del modello.L’attrezzatura ideale e ovviamente molto costosa e molte vasche sono percio sprovviste di
carrello, sia principale che secondario, facendo riferimento a modelli autopropulsi completamenteequipaggiati come quello mostrato in Figura 17.2f. Questo significa che il modello deve portarele batterie necessarie per fornire la potenza motrice, mentre le risposte alle onde devono essereregistrate a bordo o trasmesse a terra. In ogni caso, il peso addizionale rende molto piu difficilel’appropriato scalaggio della massa e delle caratteristiche inerziali per cui possono essere neces-sari modelli piu grandi per consentire la liberta di aggiustare tali grandezze durante la fase diallestimento.
17.4 Ondogeni e spiagge
17.4.1 Ondogeni
La Figura 17.4 mostra alcuni tipi di ondogeno di uso corrente. Nelle installazioni piu modernel’ondogeno e generalmente azionato da un sistema idraulico a controllo che viene comandato conun segnale elettrico di input. In questo modo possono essere prodotte sia onde regolari sia ondeirregolari.
In linea di principio e possibile calcolare teoricamente la funzione di trasferimento dell’ondogeno,ovvero la funzione che mette in relazione l’ampiezza del suo moto con l’ampiezza dell’onda prodotta.Tuttavia, la maggior parte delle vasche basa il funzionamento dell’ondogeno sulla funzione ditrasferimento determinata sperimentalmente. La Figura 17.5 mostra il risultato di una tipicacalibrazione per un ondogeno a tuffo. Il diagramma consente di determinare l’ampiezza dellatensione di input richiesta per raggiungere una prefissata ampiezza di un’onda regolare.
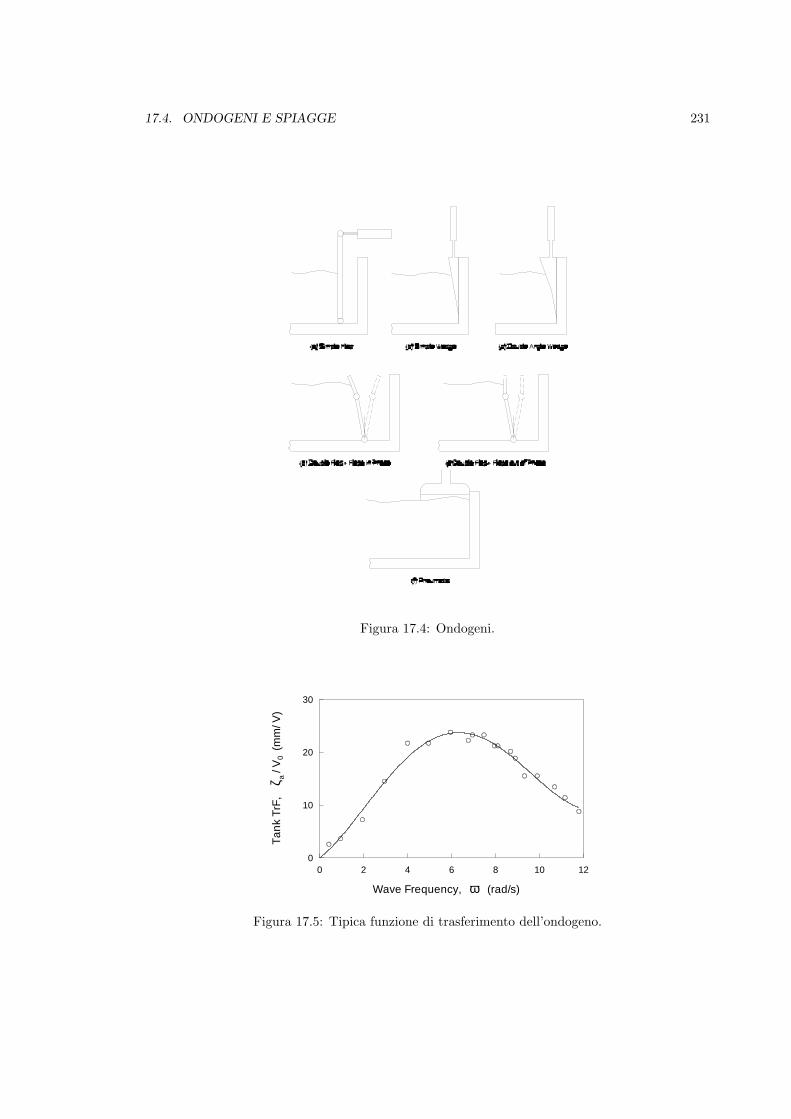
17.4. ONDOGENI E SPIAGGE 231
Figura 17.4: Ondogeni.
0 2 4 6 8 10 12
Wave Frequency, ω (rad/s)
0
10
20
30
Ta
nk
TrF
, ζ
a / V
0 (
mm
/ V)
Figura 17.5: Tipica funzione di trasferimento dell’ondogeno.

232 CAPITOLO 17. PROVE SU MODELLI
17.4.2 Spiagge
La spiaggia adempie all’importante funzione di assorbire le onde incidenti che, dopo aver percor-so l’intera lunghezza della vasca, tendono ad essere riflesse all’estremita opposta. In pratica lespiagge conseguono questo obiettivo solo parzialmente, ovvero una parte dell’energia delle ondeincidenti viene comunque riflessa. L’efficienza dell’assorbimento puo essere quantificata medianteil cosiddetto coefficiente di riflessione:
CR =ampiezza onda riflessa
ampiezza onda incidente. (17.1)
I risultati delle misure dei coefficienti di riflessione su spiagge con diversa pendenza (Hsiung etal., 1983) sono riportati in Figura 17.6, che mostra il CR in funzione della frequenza adimensionaledell’onda ω
√d/g, essendo d la profondita della vasca. La spiaggia presenta la massima efficienza
alle frequenze piu alte (onde corte) con le prestazioni migliori nel caso di spiagge aventi pendenzamolto piccola. D’altronde una spiaggia poco inclinata puo occupare una porzione significativadella lunghezza vasca per cui eventuali considerazioni di carattere pratico possono imporre unlimite massimo alla pendenza effettivamente usata.
0.0 0.5 1.0 1.5 2.0
Nondimensional Wave Frequency, ω(d/g)1/2 (-)
0.0
0.1
0.2
0.3
0.4
0.5
Re
flect
ion
Co
effi
cie
nt,
CR (
-)
15o
12o
6o
Beach Slope
Figura 17.6: Caratteristiche di riflessione delle spiagge (Hsiung et al., 1983).
Nell’intervallo delle lunghezze d’onda che sono importanti per la maggior parte degli esperi-menti in scala, il coefficiente di riflessione e generalmente dell’ordine di 0.05–0.10. Ne segue che lariflessione comporta un’interferenza con le onde incidenti e quindi un’alterazione delle loro carat-teristiche. E percio importante che le misure di seakeeping siano espletate prima che le riflessioniraggiungano il modello. Questo fatto verra discusso in maggiore dettaglio al Paragrafo 17.8
17.5 Strumentazione
17.5.1 Sussulto e beccheggio
Nel caso in cui la vasca dispone di un carrello, questo costituisce un mezzo molto convenienteper la misura dei moti nave. In Figura 17.7 vengono mostrati alcuni esempi delle tecniche piucomunemente usate per la misura dei moti di sussulto e beccheggio. Vari adattamenti dei sistemiprecedenti sono usati anche per la misura degli altri moti nave.
La Figura 17.7a mostra un dispositivo molto semplice equipaggiato con molle e potenziometri.I potenziometri forniscono dei segnali elettrici proporzionali ai moti assoluti dei punti di attacco.

17.5. STRUMENTAZIONE 233
Figura 17.7: Strumentazione per la misura del sussulto e del beccheggio.
Questi ultimi possono essere opportunamente combinati per ottenere la misura del sussulto e delbeccheggio.
Un’altra tecnica di uso molto frequente viene illustrata in Figura 17.7b. In questo caso ilsussulto e misurato direttamente attraverso il moto verticale dell’asta, mentre il beccheggio eottenuto accoppiando un potenziometro all’asse di rotazione del modello.
Nel caso in cui non viene realizzato un collegamento fisico tra il modello ed il carrello (a parteil cavo ombelicale), sistemi simili a quello mostrato in Figura 17.7c hanno riscontrato un certofavore degli sperimentatori. In questo caso il beccheggio e misurato da un giroscopio, mentre ilsussulto si osserva per mezzo di un trasduttore acustico. Il trasduttore emette impulsi ultrasonoridi breve durata che vengono riflessi da una tavola orizzontale montata sotto il carrello. Si misurail tempo necessario al suono per propagarsi dal trasduttore alla tavola e ritorno, che ovviamenterisulta proporzionale alla distanza del trasduttore dalla tavola.
In assenza di carrello, il sussulto e gli altri moti nave non possono essere misurati direttamentepoiche non e disponibile nessun livello di riferimento. Per l’esecuzione delle misure e allora neces-sario ricorrere agli accelerometri e ai giroscopi, come nelle prove al vero. Questa soluzione vieneillustrata in Figura 17.7d.
17.5.2 Onde
In Figura 17.8 sono mostrati due tipi di trasduttori usati per il rilievo delle onde, entrambi con-sistenti di un paio di elementi metallici parzialmente immersi. Si distingue fra sensori resistivi ecapacitivi. Nel primo caso viene misurata la resistenza dell’acqua tra i due elementi, funzione dellaprofondita di immersione. Nel secondo gli elementi costituiscono le piastre di un condensatore cheusa l’acqua come mezzo dielettrico, la cui capacita dipende dalla profondita di immersione.
Queste sonde presentano tuttavia alcuni svantaggi. Infatti, gli effetti della tensione superficialepossono far sı che il livello dell’acqua sulla superficie dell’elemento sia leggermente diverso da quelloeffettivo nelle immediate vicinanze della sonda. Tuttavia, gli errori dovuti alla tensione superficialenon sono importanti a meno che le sonde non siano usate per la misura di onde con ampiezza moltopiccola. Effetti certamente piu significativi si osservano quando le sonde sono fissate ad un carrelloche si muove con il modello, ovvero per la misura delle onde d’incontro. In questo caso la sondacausa inevitabilmente un disturbo della superficie ondosa e questo puo comportare degli errori
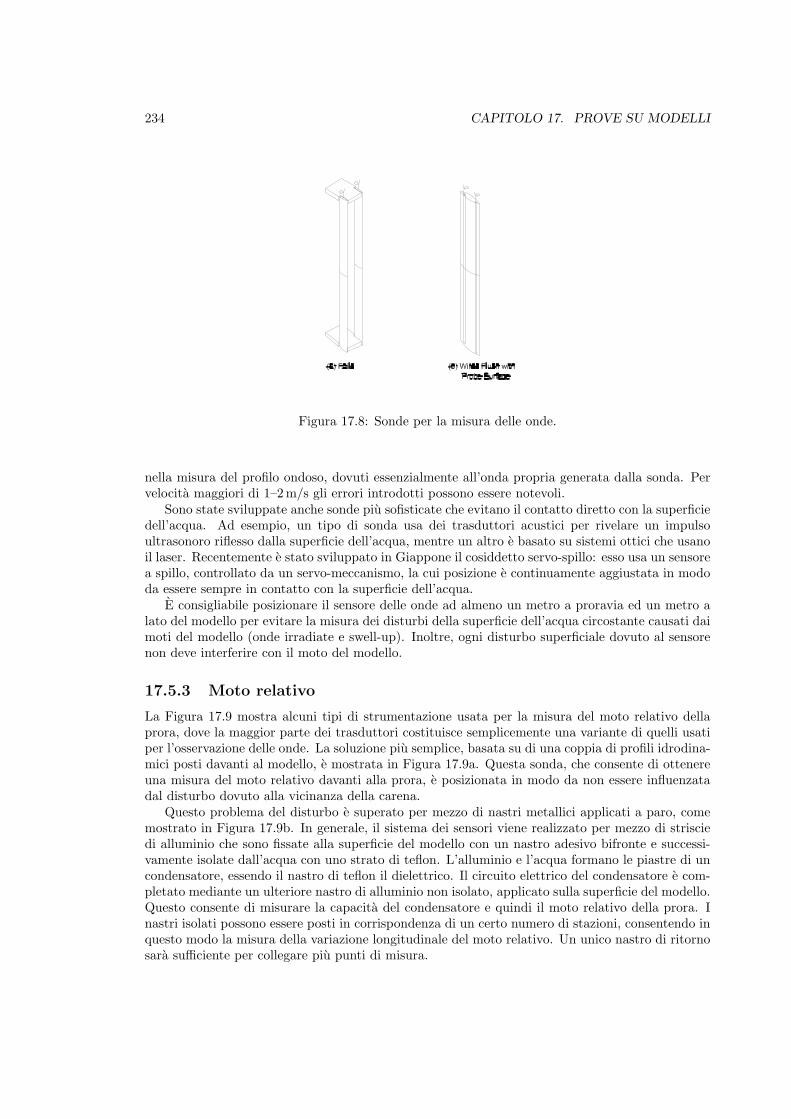
234 CAPITOLO 17. PROVE SU MODELLI
Figura 17.8: Sonde per la misura delle onde.
nella misura del profilo ondoso, dovuti essenzialmente all’onda propria generata dalla sonda. Pervelocita maggiori di 1–2m/s gli errori introdotti possono essere notevoli.
Sono state sviluppate anche sonde piu sofisticate che evitano il contatto diretto con la superficiedell’acqua. Ad esempio, un tipo di sonda usa dei trasduttori acustici per rivelare un impulsoultrasonoro riflesso dalla superficie dell’acqua, mentre un altro e basato su sistemi ottici che usanoil laser. Recentemente e stato sviluppato in Giappone il cosiddetto servo-spillo: esso usa un sensorea spillo, controllato da un servo-meccanismo, la cui posizione e continuamente aggiustata in mododa essere sempre in contatto con la superficie dell’acqua.
E consigliabile posizionare il sensore delle onde ad almeno un metro a proravia ed un metro alato del modello per evitare la misura dei disturbi della superficie dell’acqua circostante causati daimoti del modello (onde irradiate e swell-up). Inoltre, ogni disturbo superficiale dovuto al sensorenon deve interferire con il moto del modello.
17.5.3 Moto relativo
La Figura 17.9 mostra alcuni tipi di strumentazione usata per la misura del moto relativo dellaprora, dove la maggior parte dei trasduttori costituisce semplicemente una variante di quelli usatiper l’osservazione delle onde. La soluzione piu semplice, basata su di una coppia di profili idrodina-mici posti davanti al modello, e mostrata in Figura 17.9a. Questa sonda, che consente di ottenereuna misura del moto relativo davanti alla prora, e posizionata in modo da non essere influenzatadal disturbo dovuto alla vicinanza della carena.
Questo problema del disturbo e superato per mezzo di nastri metallici applicati a paro, comemostrato in Figura 17.9b. In generale, il sistema dei sensori viene realizzato per mezzo di strisciedi alluminio che sono fissate alla superficie del modello con un nastro adesivo bifronte e successi-vamente isolate dall’acqua con uno strato di teflon. L’alluminio e l’acqua formano le piastre di uncondensatore, essendo il nastro di teflon il dielettrico. Il circuito elettrico del condensatore e com-pletato mediante un ulteriore nastro di alluminio non isolato, applicato sulla superficie del modello.Questo consente di misurare la capacita del condensatore e quindi il moto relativo della prora. Inastri isolati possono essere posti in corrispondenza di un certo numero di stazioni, consentendo inquesto modo la misura della variazione longitudinale del moto relativo. Un unico nastro di ritornosara sufficiente per collegare piu punti di misura.

17.6. MATERIALE DI COSTRUZIONE 235
Figura 17.9: Strumentazione per il moto relativo.
Misure con questo dispositivo includono certamente gli effetti dei disturbi dovuti alla carena mapossono essere influenzate anche dagli effetti della tensione superficiale sulle sonde. L’equipaggia-mento mostrato in Figura 17.9c e stato proposto come un’alternativa alla soluzione precedente. Inquesto caso vengono usati dei fili resistivi, sottesi dalla chiglia al ponte. I fili non devono toccare lasuperficie del modello in modo da non essere soggetti alla tensione superficiale. Allo stesso tempoessi devono trovarsi sufficientemente vicini alla carena per fornire misure che includono anche glieffetti del disturbo ondoso locale dovuto alla carena.
17.5.4 Imbarco d’acqua e slamming
Gli esperimenti condotti per l’analisi dell’imbarco d’acqua e dello slamming sono di una certaimportanza nella sperimentazione sul comportamento in mare. Dei trasduttori opportuni permonitorare l’imbarco d’acqua sono mostrati in Figura 17.10. Un tipo di soluzione (Figura 17.10a)prevede il montaggio, sul castello di prora, di una piastra verticale che incorpora una serie di cellesensibili alla pressione, usate per misurare sia le pressioni d’impatto che la frequenza d’imbarcod’acqua. Le celle sono coperte da un sottile diaframma elastico e sono collegate ai trasduttori dipressione montati sul carrello per mezzo di tubicini flessibili. Una tecnica alternativa usa invecesonde a filo resistivo (Figura 17.10b). In questo caso i sensori misurano il livello dell’acqua sulponte, ma possono essere usati anche per monitorare la frequenza d’imbarco dell’acqua. Negliesperimenti di slamming, i trasduttori di pressione sono generalmente montati sia a paro con lachiglia sia sotto lo stellato di prora (bow flare) per misurare direttamente le pressioni d’impatto.
17.6 Materiale di costruzione
La tecnica di costruzione dei modelli in cera di paraffina, sviluppata per prima, continua ad essereusata tutt’oggi in molte vasche navali. Si tratta di un materiale particolare che presenta moltissimivantaggi: e di facile lavorazione ed i modelli possono essere modificati in ogni momento, anche permezzo delle sole mani. Trascorsa la vita utile del modello, esso puo essere fuso e la cera utilizzatanuovamente. Tuttavia, i modelli in cera non sono molto robusti e, se non immagazzinati corretta-mente, si deformano gradualmente nel tempo. Questo inconveniente puo essere evitato lasciandoli

236 CAPITOLO 17. PROVE SU MODELLI
Figura 17.10: Strumentazione per l’imbarco d’acqua.
sommersi, specialmente nel caso in cui essi siano richiesti a tempi brevi per esperimenti addiziona-li. Si tratta tuttavia di un’operazione poco conveniente in quanto tutto l’equipaggiamento internodeve essere rimosso. I modelli in cera vanno senz’altro bene per prove di resistenza e autopropul-sione, ma per esperimenti di seakeeping viene generalmente scelto un materiale di costruzione piurobusto.
Il materiale preferito e il legno, essendo facilmente lavorabile e piu duraturo. La tecnica usualee quella di preparare una serie di tavole, tagliate nella forma delle linea d’acqua dello scafo, e diassemblare le stesse nella cosiddetta costruzione del castello. L’eccesso di materiale viene rimossosia meccanicamente che a mano, usando delle sagome di guida per le fasi finali di lavorazione. L’in-terno del modello viene asportato per ricavare gli spazi necessari per alloggiare l’equipaggiamentoe per ridurre il peso.
E sempre necessario mantenere un considerevole spessore delle pareti per assicurare una robu-stezza adeguata al modello in legno per cui lo spazio interno disponibile risulta spesso limitato. Imodelli in legno sono generalmente abbastanza pesanti ed e necessaria soltanto una piccola quan-tita di zavorra per portarli alla massa richiesta. Per questo c’e poca liberta di posizionamentodella massa addizionale sia per ottenere le inerzie proprie che riprodurre il baricentro. Il legnoha anche lo svantaggio di assorbire l’umidita dell’acqua, indipendentemente dalla bonta del mezzoimpregnante. Per questo, la stabilita delle dimensioni e difficile da mantenere nel tempo in quantoil legno umido si gonfia e successivamente si restringe quando viene essicato.
Per questa ragione vengono spesso usati nella costruzione del modello di seakeeping dei materialialternativi piu moderni, in particolare per i modelli autopropulsi che devono imbarcare anche lebatterie per l’erogazione della potenza motrice. Un materiale preferito e senz’altro la fibra divetro rinforzata. Il fasciame del modello deve avere lo spessore di alcuni millimetri, essendo nelcontempo molto leggero e robusto. Dapprima e necessario costruire uno stampo positivo (maschio)di forma esattamente eguale a quella dello scafo e questo puo essere fatto utilizzando la cera diparaffina. Lo stampo viene poi ricoperto con un agente chimico di rilascio. Successivamente, sullostampo maschio, viene costruito uno stampo negativo (femmina) utilizzando allo scopo degli stratisottili di tessuto in fibra di vetro impregnata con resina. Quando la resina e indurita i due stampivengono separati fra loro ed il maschio eliminato. L’interno della femmina viene ricoperto con unagente chimico di rilascio, dove successivamente si alloggia una serie di strati di tessuto in fibradi vetro impregnata per formare lo scafo finito in vetroresina. Dopo l’indurimento della resina,
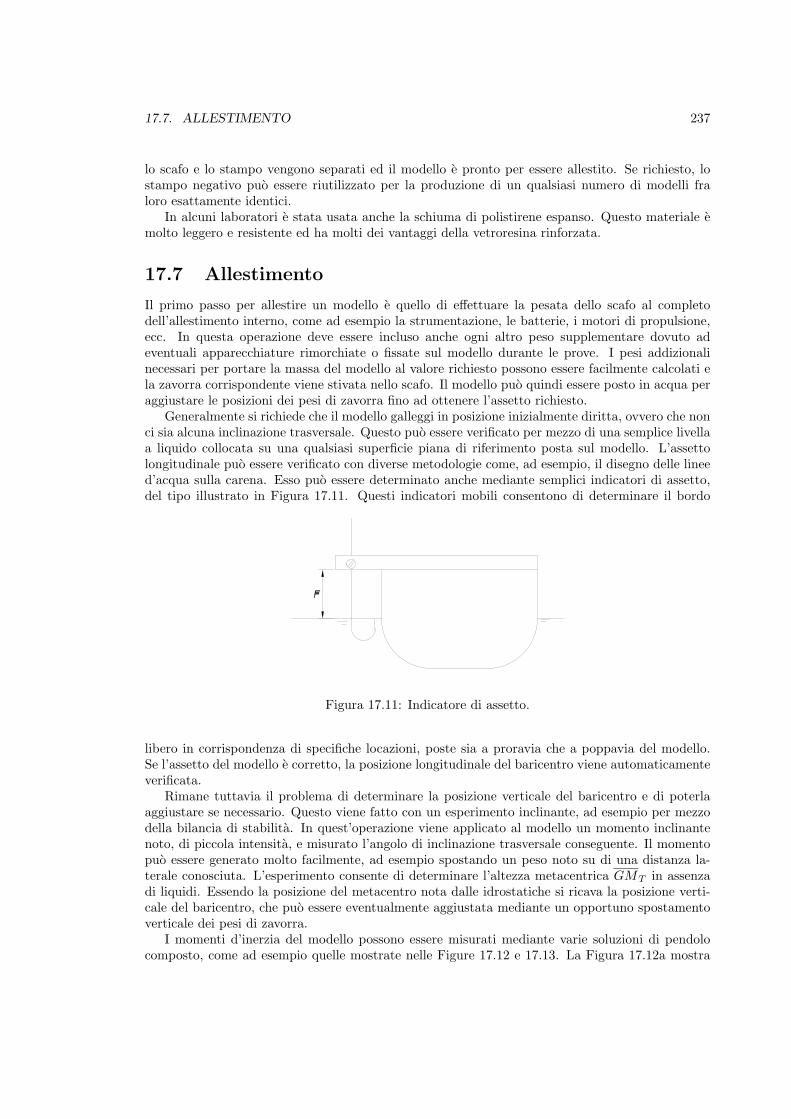
17.7. ALLESTIMENTO 237
lo scafo e lo stampo vengono separati ed il modello e pronto per essere allestito. Se richiesto, lostampo negativo puo essere riutilizzato per la produzione di un qualsiasi numero di modelli fraloro esattamente identici.
In alcuni laboratori e stata usata anche la schiuma di polistirene espanso. Questo materiale emolto leggero e resistente ed ha molti dei vantaggi della vetroresina rinforzata.
17.7 Allestimento
Il primo passo per allestire un modello e quello di effettuare la pesata dello scafo al completodell’allestimento interno, come ad esempio la strumentazione, le batterie, i motori di propulsione,ecc. In questa operazione deve essere incluso anche ogni altro peso supplementare dovuto adeventuali apparecchiature rimorchiate o fissate sul modello durante le prove. I pesi addizionalinecessari per portare la massa del modello al valore richiesto possono essere facilmente calcolati ela zavorra corrispondente viene stivata nello scafo. Il modello puo quindi essere posto in acqua peraggiustare le posizioni dei pesi di zavorra fino ad ottenere l’assetto richiesto.
Generalmente si richiede che il modello galleggi in posizione inizialmente diritta, ovvero che nonci sia alcuna inclinazione trasversale. Questo puo essere verificato per mezzo di una semplice livellaa liquido collocata su una qualsiasi superficie piana di riferimento posta sul modello. L’assettolongitudinale puo essere verificato con diverse metodologie come, ad esempio, il disegno delle lineed’acqua sulla carena. Esso puo essere determinato anche mediante semplici indicatori di assetto,del tipo illustrato in Figura 17.11. Questi indicatori mobili consentono di determinare il bordo
Figura 17.11: Indicatore di assetto.
libero in corrispondenza di specifiche locazioni, poste sia a proravia che a poppavia del modello.Se l’assetto del modello e corretto, la posizione longitudinale del baricentro viene automaticamenteverificata.
Rimane tuttavia il problema di determinare la posizione verticale del baricentro e di poterlaaggiustare se necessario. Questo viene fatto con un esperimento inclinante, ad esempio per mezzodella bilancia di stabilita. In quest’operazione viene applicato al modello un momento inclinantenoto, di piccola intensita, e misurato l’angolo di inclinazione trasversale conseguente. Il momentopuo essere generato molto facilmente, ad esempio spostando un peso noto su di una distanza la-terale conosciuta. L’esperimento consente di determinare l’altezza metacentrica GMT in assenzadi liquidi. Essendo la posizione del metacentro nota dalle idrostatiche si ricava la posizione verti-cale del baricentro, che puo essere eventualmente aggiustata mediante un opportuno spostamentoverticale dei pesi di zavorra.
I momenti d’inerzia del modello possono essere misurati mediante varie soluzioni di pendolocomposto, come ad esempio quelle mostrate nelle Figure 17.12 e 17.13. La Figura 17.12a mostra
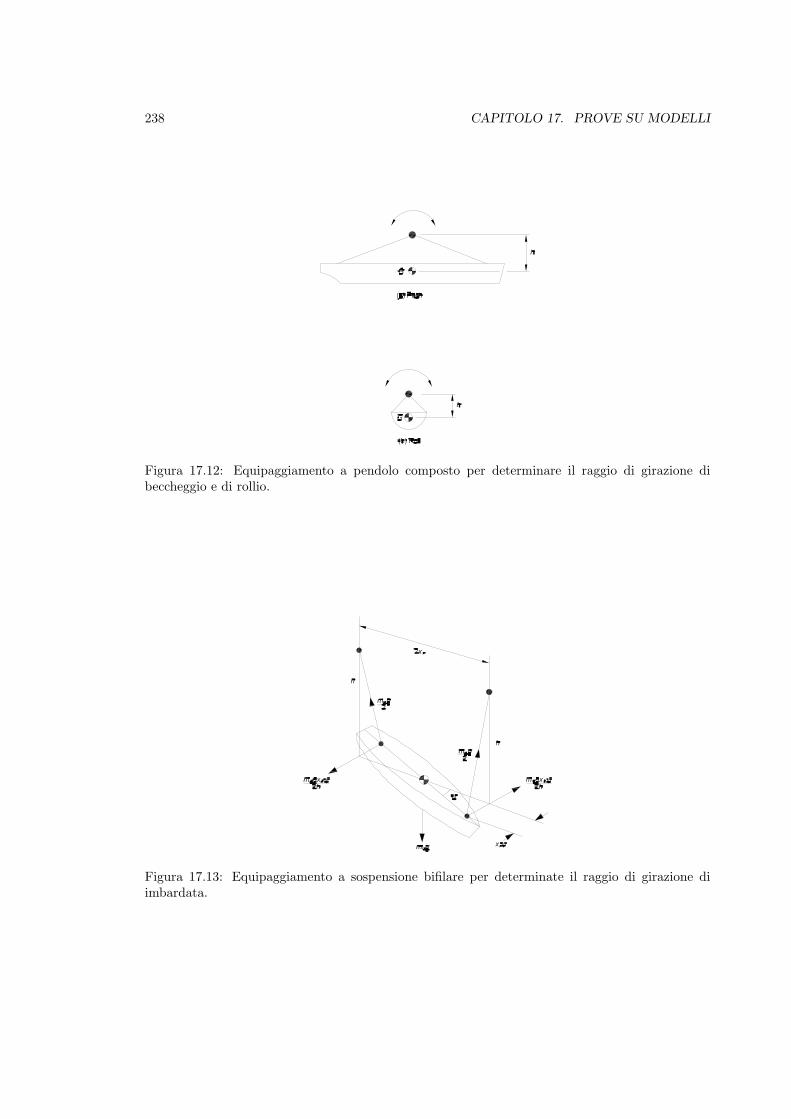
238 CAPITOLO 17. PROVE SU MODELLI
Figura 17.12: Equipaggiamento a pendolo composto per determinare il raggio di girazione dibeccheggio e di rollio.
Figura 17.13: Equipaggiamento a sospensione bifilare per determinate il raggio di girazione diimbardata.

17.7. ALLESTIMENTO 239
una tecnica molto semplice, adatta per misurare il momento d’inerzia di beccheggio Iyy. Il modelloviene sospeso per mezzo di un telaio molto leggero in modo che il baricentro si trovi alla distanza hsotto il punto di sospensione. L’equipaggiamento completo viene fatto oscillare liberamente al finedi determinare il periodo di oscillazione mediante la misura del tempo richiesto per completare unprefissato numero di oscillazioni, ad esempio dieci. Il momento d’inerzia dell’equipaggiamento alcompleto puo essere determinato applicando il teorema degli assi paralleli, ovvero:
I = mM (k2yy + h2) + IF , (17.2)
mentre la rigidita del sistema risulta:
c = (mMh + mF hF )g , (17.3)
essendo mF e la massa del telaio di supporto, IF il momento d’inerzia di massa del telaio disupporto, hF la distanza fra il baricentro del telaio di supporto ed il punto di sospensione.
Indicando con Tn il periodo naturale, per la (C.9), la frequenza di oscillazione risulta:
ωn =2π
Tn=
√c
I. (17.4)
Dalla (17.4) segue per il raggio di girazione del modello la relazione:
kyy =
√(mMh + mF hF )gT 2
n
4π2mM− h2 − IF
mM. (17.5)
Un procedimento del tutto simile viene usato per determinare il raggio di girazione di rolliocon il dispositivo mostrato in Figura 17.12b. In entrambi i casi e auspicabile mantenere la massaed il momento d’inerzia del telaio di supporto quanto piu piccoli possibile al fine di minimizzaregli errori nella fase di calcolo delle caratteristiche meccaniche del modello. L’inerzia del supportopuo essere trovata misurando il periodo naturale di oscillazione del telaio senza lo scafo.
Un procedimento leggermente piu semplice per determinare il raggio di girazione di imbardatapuo essere fatto senza l’uso del telaio di supporto e viene mostrato in Figura 17.13. Il modello esospeso a due fili attaccati ad una trave di sospensione. Tipicamente i fili hanno una lunghezza di5–6m. Il modello viene fatto oscillare in imbardata, avendo particolare cura nell’evitare i moti dirollio e di scarroccio. In questo caso, per la rigidita del sistema si ha:
c =mMgx2
r
h, (17.6)
essendo xr la distanza fra i due punti di atttacco.Il momento d’inerzia di sostegno del modello e trascurabile, per cui la frequenza naturale del
sistema risulta:
ωn =2π
Tn=
√c
mMk2zz
=√
g
h
xr
kzz, (17.7)
mentre il raggio di girazione di imbardata vale:
kzz =Tnxr
2π
√g
h. (17.8)
Il metodo della sospensione bifilare viene usato diffusamente per determinare il raggio di girazio-ne di imbardata grazie alla sua semplicita e convenienza, visto che non richiede altra strumentazioneoltre ad un cronometro di precisione ed una coppia di fili appesi a dei ganci applicati su di unatrave di sospensione. In linea di principio lo stesso metodo puo essere usato anche per la misura
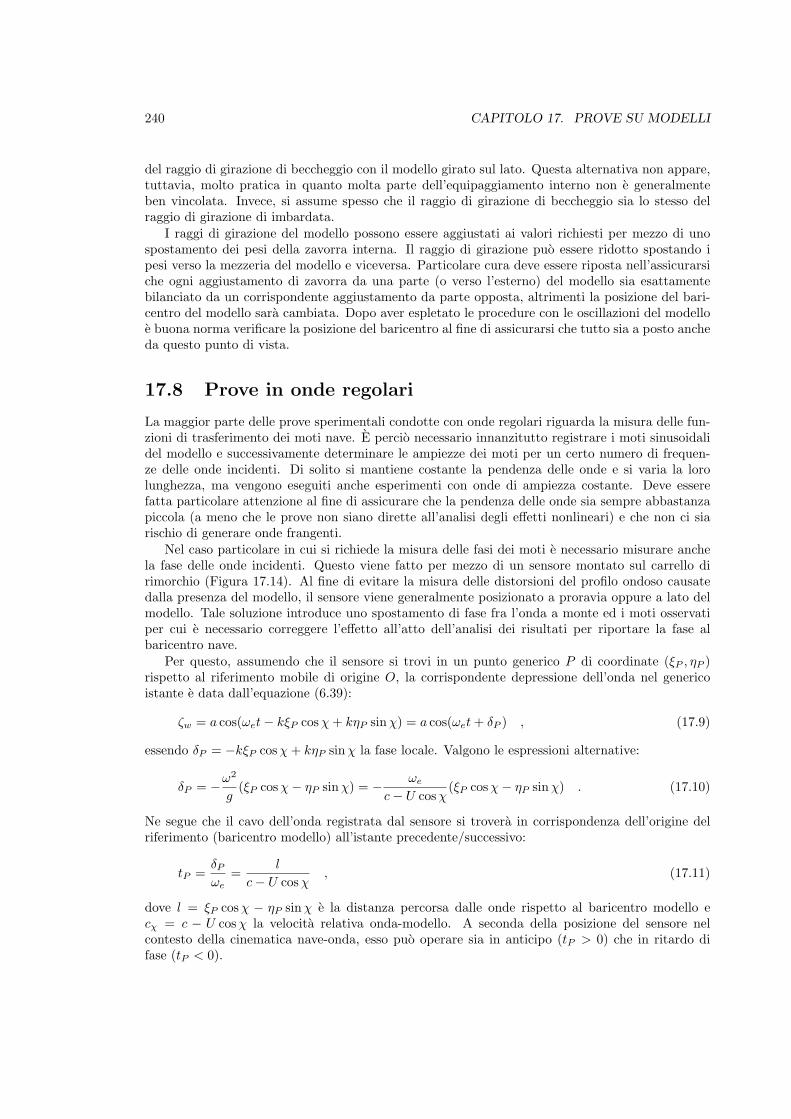
240 CAPITOLO 17. PROVE SU MODELLI
del raggio di girazione di beccheggio con il modello girato sul lato. Questa alternativa non appare,tuttavia, molto pratica in quanto molta parte dell’equipaggiamento interno non e generalmenteben vincolata. Invece, si assume spesso che il raggio di girazione di beccheggio sia lo stesso delraggio di girazione di imbardata.
I raggi di girazione del modello possono essere aggiustati ai valori richiesti per mezzo di unospostamento dei pesi della zavorra interna. Il raggio di girazione puo essere ridotto spostando ipesi verso la mezzeria del modello e viceversa. Particolare cura deve essere riposta nell’assicurarsiche ogni aggiustamento di zavorra da una parte (o verso l’esterno) del modello sia esattamentebilanciato da un corrispondente aggiustamento da parte opposta, altrimenti la posizione del bari-centro del modello sara cambiata. Dopo aver espletato le procedure con le oscillazioni del modelloe buona norma verificare la posizione del baricentro al fine di assicurarsi che tutto sia a posto ancheda questo punto di vista.
17.8 Prove in onde regolari
La maggior parte delle prove sperimentali condotte con onde regolari riguarda la misura delle fun-zioni di trasferimento dei moti nave. E percio necessario innanzitutto registrare i moti sinusoidalidel modello e successivamente determinare le ampiezze dei moti per un certo numero di frequen-ze delle onde incidenti. Di solito si mantiene costante la pendenza delle onde e si varia la lorolunghezza, ma vengono eseguiti anche esperimenti con onde di ampiezza costante. Deve esserefatta particolare attenzione al fine di assicurare che la pendenza delle onde sia sempre abbastanzapiccola (a meno che le prove non siano dirette all’analisi degli effetti nonlineari) e che non ci siarischio di generare onde frangenti.
Nel caso particolare in cui si richiede la misura delle fasi dei moti e necessario misurare anchela fase delle onde incidenti. Questo viene fatto per mezzo di un sensore montato sul carrello dirimorchio (Figura 17.14). Al fine di evitare la misura delle distorsioni del profilo ondoso causatedalla presenza del modello, il sensore viene generalmente posizionato a proravia oppure a lato delmodello. Tale soluzione introduce uno spostamento di fase fra l’onda a monte ed i moti osservatiper cui e necessario correggere l’effetto all’atto dell’analisi dei risultati per riportare la fase albaricentro nave.
Per questo, assumendo che il sensore si trovi in un punto generico P di coordinate (ξP , ηP )rispetto al riferimento mobile di origine O, la corrispondente depressione dell’onda nel genericoistante e data dall’equazione (6.39):
ζw = a cos(ωet− kξP cos χ + kηP sinχ) = a cos(ωet + δP ) , (17.9)
essendo δP = −kξP cosχ + kηP sin χ la fase locale. Valgono le espressioni alternative:
δP = −ω2
g(ξP cos χ− ηP sin χ) = − ωe
c− U cos χ(ξP cosχ− ηP sin χ) . (17.10)
Ne segue che il cavo dell’onda registrata dal sensore si trovera in corrispondenza dell’origine delriferimento (baricentro modello) all’istante precedente/successivo:
tP =δP
ωe=
l
c− U cosχ, (17.11)
dove l = ξP cosχ − ηP sin χ e la distanza percorsa dalle onde rispetto al baricentro modello ecχ = c − U cosχ la velocita relativa onda-modello. A seconda della posizione del sensore nelcontesto della cinematica nave-onda, esso puo operare sia in anticipo (tP > 0) che in ritardo difase (tP < 0).
17.9. PROVE IN ONDE IRREGOLARI 241
Figura 17.14: Spostamento di fase dovuto al posizionamento del sensore delle onde.
17.9 Prove in onde irregolari
Le prove in onde irregolari richiedono una procedura leggermente piu complicata di quella adottatanel caso di onde regolari. In primo luogo e necessario scalare le ordinate dello spettro di energiadelle onde secondo le leggi di similitudine riportate in Appendice D. In secondo luogo, si richiede dipilotare l’ondogeno con un segnale elettrico irregolare appropriato con lo scopo finale di riprodurreun treno di onde irregolari aventi uno spettro di energia prefissato, vedi Figura 17.15. Lo spettro delsegnale di input puo essere dedotto dalla conoscenza della funzione di trasferimento dell’ondogeno,per mezzo di una procedura di calcolo spettrale del tutto simile a quella descritta al Capitolo 10.
In particolare, per lo spettro di energia delle onde si puo scrivere:
Sζ(ω) = Sv(ω)(
ζ0
v0
)2
, (17.12)
e quindi, per lo spettro del segnale pilota segue la relazione:
Sv(ω) = Sζ(ω)(
ζ0
v0
)−2
. (17.13)
Utilizzando la tecnica della sovrapposizione lineare descritta al Capitolo 4, deve essere costruitaun’opportuna serie temporale avente lo spettro definito dall’equazione (17.13). Solo operando inquesto modo ci si puo aspettare di produrre con l’ondogeno la serie temporale di onde avente lospettro di energia richiesto.
In pratica questa tecnica molto semplice non riesce a dare risultati di accuratezza adeguata,in quanto la risposta dell’ondogeno soffre di un’interazione tra le molte frequenze presenti nello
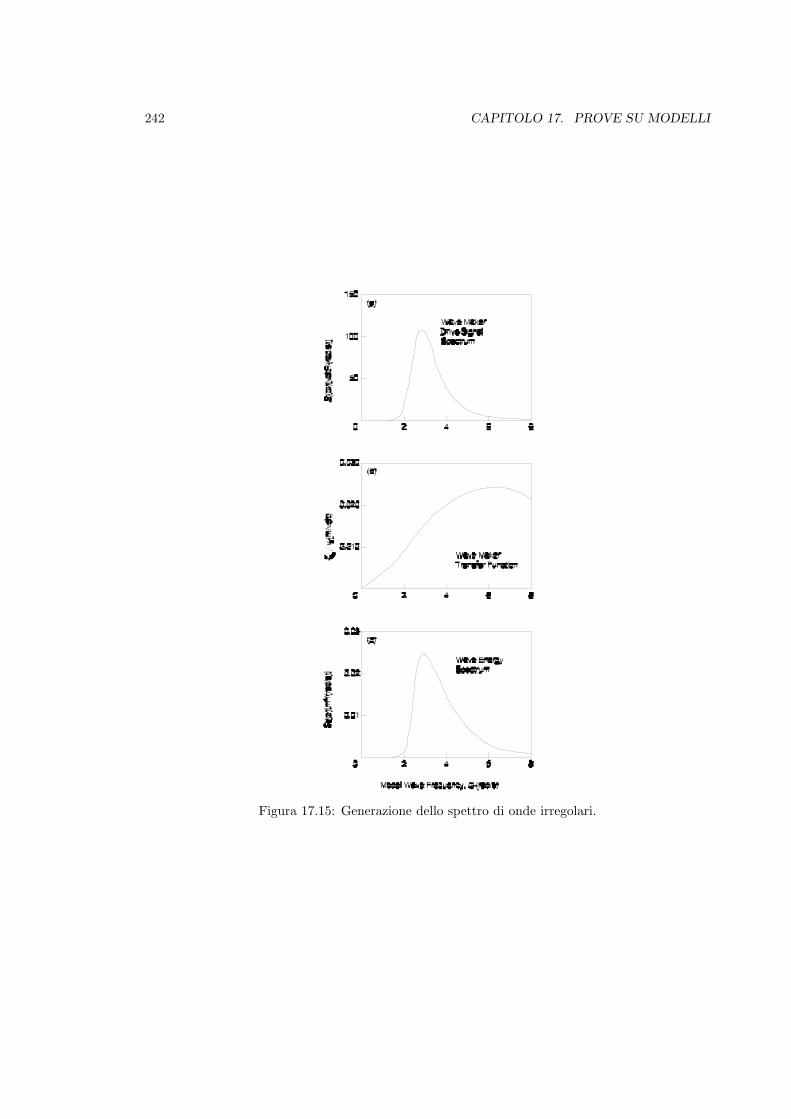
242 CAPITOLO 17. PROVE SU MODELLI
Figura 17.15: Generazione dello spettro di onde irregolari.
17.9. PROVE IN ONDE IRREGOLARI 243
spettro delle onde irregolari generate. A causa di queste interazioni, ovviamente assenti quandol’ondogeno viene usato per produrre un’unica onda regolare di frequenza assegnata, la funzionedi trasferimento delle onde regolari puo essere considerata solo come una prima approssimazionedi quella necessaria per quantificare l’effettiva risposta dell’ondogeno alle onde irregolari. Inol-tre, la funzione di trasferimento richiesta dipende sia dalle caratteristiche dello spettro che dallaparticolare serie temporale generata. Ne segue che, a parita di spettro di energia delle onde, larealizzazione di ogni nuova serie temporale richiede una funzione di trasferimento diversa.
Tutte queste difficolta possono essere superate empiricamente mediante successivi aggiustamentidello spettro del segnale pilota dell’ondogeno. Se in una misura di taratura o di verifica alcunedelle ordinate dello spettro delle onde sono troppo basse, le corrispondenti ordinate spettrali delsegnale pilota devono essere aumentate e viceversa. Di solito e possibile raggiungere una buonariproduzione dello spettro richiesto con due o tre aggiustamenti di questo genere.
Ogni componente del sistema di onde irregolari si propaga lungo la vasca con la velocita digruppo, preceduta pero da un insieme di onde di ampiezza ridotta e stessa frequenza che si muovecon la velocita di fase (celerita). In questo modo, la componente di frequenza piu bassa, la qualepossiede le massime velocita di gruppo e di fase, sopravvanzera il resto delle onde ed arriveraall’estremita della vasca prima delle altre componenti di frequenza piu alta. Lo spettro completodelle onde non verra sentito in una assegnata posizione della vasca finche la componente di massimafrequenza non arrivera in quel punto. In questo intervallo di tempo le onde di frequenza piubassa possono essere state riflesse dalla spiaggia e possono aver contaminato le onde che si stannopropagano lungo la vasca nella direzione opposta.
Tutto questo puo essere evitato introducendo nel segnale pilota dell’ondogeno le componentidi frequenza, e quindi le onde generate in vasca, secondo il naturale ordine discendente. In questomodo, viene per prima introdotta la frequenza piu alta e solo successivamente vengono incluse lealtre componenti. L’operazione deve essere effettuata in istanti specifici per assicurare che tutte lecomponenti di frequenza arrivino simultaneamente in un punto specifico della vasca.
Per chiarire meglio il problema, si supponga che lo spettro delle onde richiesto contenga Ncomponenti di frequenza ω1, . . . , ωn, . . . , ωN . La componente ondosa di massima frequenza, ωN , sipropaghera lungo la vasca con una velocita di gruppo pari a:
ugN =g
2ωN, (17.14)
e arrivera nel punto di prova, posto a distanza xT dall’ondogeno, al tempo:
t =xT
ugN. (17.15)
Per arrivare nello stesso punto, la n-esima componente ondosa ωn impieghera invece il tempoxT /ugn. Sara percio necessario ritardare la sua introduzione nella serie temporale fino all’istante:
tn = xT
(1
ugN− 1
ugn
)=
2xT
g(ωN − ωn) . (17.16)
Ovviamente il punto nel quale si richiede la coalescenza delle onde, deve essere preso in modo damassimizzare la lunghezza vasca disponibile per l’esperimento. Con riferimento alla Figura 17.18 sipuo tuttavia affermare che, per una data velocita di avanzo e per un assegnato angolo d’incontro,le condizioni piu critiche avvengono quando la celerita dell’onda e massima. In altre parole, lalunghezza vasca disponibile per le prove e piccola quando la frequenza dell’onda risulta bassa. Cosıla minima frequenza dello spettro delle onde imporra la scelta del punto di coalescenza e questodetermina anche il tempo consentito per l’effettuazione della corsa. In generale, questo tempo saramolto breve, per cui si porranno alcuni problemi di analisi dei risultati acquisiti.
Infatti, un tempo di corsa troppo breve risulta insufficiente per assicurare una statistica sta-bile per i moti nave. In presenza di onde irregolari, un tempo di corsa sufficientemente lungo

244 CAPITOLO 17. PROVE SU MODELLI
per incontrare almeno un centinaio di creste delle onde viene considerato generalmente come iltempo necessario per ottenere delle stime affidabili degli rms dei moti nave o di altre grandezzecinematiche. Prove con corse di durata ancora maggiore sono ovviamente richieste per ottenererisultati consistenti anche per gli eventi rari come ad esempio l’occorrenza dell’imbarco d’acqua edello slamming. Un tempo di corsa molto lungo non puo percio essere ottenuto se non per mezzo diuna successione di rilievi corrispondenti a piu corse brevi. In tal caso, il valore medio degli rms deimoti nave puo essere calcolato facendo la media delle varianze dei moti ottenute per ogni singolacorsa di breve durata.
17.10 Effetti della riflessione
Tutte le spiagge, riflettendo una frazione di energia delle onde incidenti (Paragrafo 17.4), possonoalla fine alterare le caratteristiche delle onde prodotte dall’ondogeno. Ne segue che, in un sistemadi onde contaminate a causa della riflessione, le prove sperimentali su modello possono fornire deirisultati errati. Il problema e serio, ma puo essere evitato facendo attenzione all’istante d’iniziodelle misure in relazione al tempo nel quale viene messo in funzione l’ondogeno.
Per chiarire meglio tutto questo, si consideri un modello situato nella vasca sperimentale diFigura 17.16. All’atto della generazione di un sistema di onde con l’ondogeno, un fronte d’ondaprimario di ampiezza finita si propaga nella vasca alla velocita di gruppo (Capitolo 2). Tale sistemae tuttavia preceduto da un fronte d’onda secondario di ampiezza ridotta che viaggia alla velocitapropria dell’onda (celerita). La durata della registrazione deve percio essere confinata alla parte divasca che contiene solo le onde incidenti di ampiezza appropriata. In altre parole, le risposte delmodello dovranno essere misurate solo quando esso si trova a valle del fronte d’onda primario WWin fase di avanzamento lungo la . Nello stesso tempo e necessario evitare di registrare le rispostedopo che il modello ha incontrato i primi disturbi provenienti dalla riflessione del fronte d’ondasecondario RR contro la spiaggia.
Figura 17.16: Fronti d’onda e locazione del modello.
Il problema puo essere analizzato in maggiore dettaglio per mezzo del diagramma cinematico
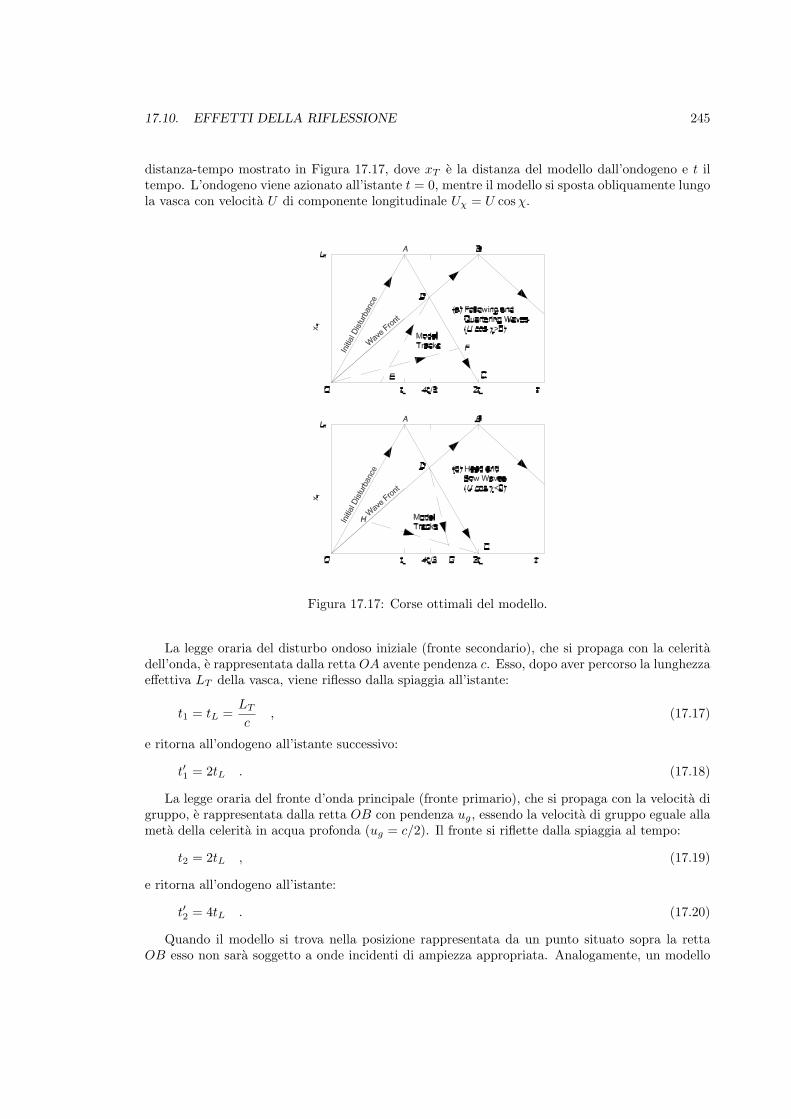
17.10. EFFETTI DELLA RIFLESSIONE 245
distanza-tempo mostrato in Figura 17.17, dove xT e la distanza del modello dall’ondogeno e t iltempo. L’ondogeno viene azionato all’istante t = 0, mentre il modello si sposta obliquamente lungola vasca con velocita U di componente longitudinale Uχ = U cos χ.
Figura 17.17: Corse ottimali del modello.
La legge oraria del disturbo ondoso iniziale (fronte secondario), che si propaga con la celeritadell’onda, e rappresentata dalla retta OA avente pendenza c. Esso, dopo aver percorso la lunghezzaeffettiva LT della vasca, viene riflesso dalla spiaggia all’istante:
t1 = tL =LT
c, (17.17)
e ritorna all’ondogeno all’istante successivo:
t′1 = 2tL . (17.18)
La legge oraria del fronte d’onda principale (fronte primario), che si propaga con la velocita digruppo, e rappresentata dalla retta OB con pendenza ug, essendo la velocita di gruppo eguale allameta della celerita in acqua profonda (ug = c/2). Il fronte si riflette dalla spiaggia al tempo:
t2 = 2tL , (17.19)
e ritorna all’ondogeno all’istante:
t′2 = 4tL . (17.20)
Quando il modello si trova nella posizione rappresentata da un punto situato sopra la rettaOB esso non sara soggetto a onde incidenti di ampiezza appropriata. Analogamente, un modello

246 CAPITOLO 17. PROVE SU MODELLI
situato in una posizione rappresentata da un punto sopra la retta AC sara soggetto ai disturbi delleonde riflesse. Ne segue che, nelle prove in onde regolari, le condizioni necessarie per ottenere delleosservazioni corrette in onde non contaminate si verificano solo quando la posizione del modello edefinita da punti all’interno del triangolo ODC.
a) Onde di poppa e al giardinetto
Si supponga dapprima che il modello debba essere provato in onde di poppa o al giardinetto, co-sicche risulta U cos χ > 0, vedi Figura 17.17a. Trascurando le distanze necessarie per accelerare ilmodello fino alla velocita di prova e per riportarlo a fermo dopo l’effetuazione della corsa, general-mente entrambe molto brevi, la legge oraria del moto del modello lungo la vasca viene rappresentatacon una retta avente pendenza positiva pari a U cosχ. Tale retta puo essere situata ovunque neldiagramma cinematico, ovviamente in funzione del tempo scelto per l’inizio della corsa. Tuttavia,il posizionamento ottimale, che consente di realizzare la corsa con maggiore lunghezza, dipendedal fatto che U cos χ sia maggiore o minore della velocita di gruppo. In particolare, per questi casiseguono le leggi orarie definite dalle due rette tratteggiate di figura:
• Se U cosχ > uG la traiettoria ottimale e mostrata dalla retta ED e la lunghezza della corsae data da:
xT
LT=
23
. (17.21)
Questa combinazione di lunghezza viene raggiunta iniziando l’esperimento al tempo:
t =2LT
3
(2c− 1
U cosχ
), (17.22)
per cui la durata della corsa risulta:
TH =xT
U cosχ=
2LT
3U cosχ. (17.23)
• Se U cos χ < ug la traiettoria ottimale e rappresentata dalla retta OF , mentre la lunghezzadella corsa e data da:
xT
LT=
2U cosχ
U cos χ + c. (17.24)
Questa combinazione viene raggiunta facendo partire il modello immediatamente dopo averazionato l’ondogeno, ovvero al tempo t = 0. La durata della corsa e invece espressa dallarelazione:
TH =2LT
U cosχ + c. (17.25)
b) Onde di prora e al mascone
Il caso di prove con onde di prora o al mascone viene mostrato in Figura 17.17b. Poiche U cosχ < 0,la legge oraria del modello viene rappresentata con una retta a pendenza negativa. Distingueremodue casi, a seconda che |U cosχ| sia maggiore o minore della celerita dell’onda. Le corrispondenticorse ottimali sono rappresentate nel diagramma cinematico di figura dalle rette tratteggiate.

17.11. INTERFERENZA CON LE PARETI 247
• Quando la velocita di avanzo e l’angolo d’incontro sono tali che U cosχ < −c, la traiettoriaottimale corrisponde alla retta DG, per cui la lunghezza della corsa risulta:
xT
LT=
23
. (17.26)
Questo viene conseguito facendo partire il modello da un punto situato a distanza xT = L/3dalla spiaggia, al tempo:
t =4tL3
. (17.27)
Si ottiene cosı un tempo di corsa:
TH = − 2LT
3U cos χ. (17.28)
• Per il caso 0 > U cosχ > −c la legge oraria del moto sulla traiettoria ottimale e quellamostrata con la retta HC. La lunghezza della corsa risulta data da:
xT
LT=
2U cosχ
2U cos χ− c. (17.29)
Questo viene raggiunto facendo partire il modello da un punto posto a distanza xT = cLT /(c−2U cosχ) dalla spiaggia, all’istante:
t =4LT U cosχ
3(2U cos χ− c), (17.30)
La durata della corsa risulta percio:
TH =2LT
c− 2U cosχ. (17.31)
I risultati precedenti mostrano che, anche nelle condizioni piu favorevoli, sono disponibili solodue terzi della lunghezza vasca per effettuare la sperimentazione su modello in onde regolari, vediFigura 17.18. In pratica pero, quando la spiaggia e molto efficiente, possono essere utilizzate anchelunghezze vasca leggermente maggiori.
17.11 Interferenza con le pareti
Il modello oscillante costituisce una sorgente di onde che sono irradiate in tutte le direzioni. Questomeccanismo di generazione delle onde, come visto al Capitolo 6, e responsabile della dissipazione dienergia e costituisce il contributo principale per lo smorzamento dei moti. Ovviamente il modellooscilla alla frequenza d’incontro per cui le onde irradiate viaggiano con la celerita propria di questafrequenza. Alla fine le onde raggiungono le pareti della vasca e vengono riflesse verso il modello,come mostrato schematicamente in Figura 17.19.
Se la velocita del modello risulta troppo bassa, le onde riflesse ritornano al centro della vascaprima che il modello sia sufficientemente avanzato, dando luogo ad una interferenza con le ondeincidenti nel punto di prova, vedi Figura 17.19a. In questo caso i moti del modello sono influenzatianche dalle onde riflesse e si ottengono per questo dei risultati errati. Tuttavia, se la velocita
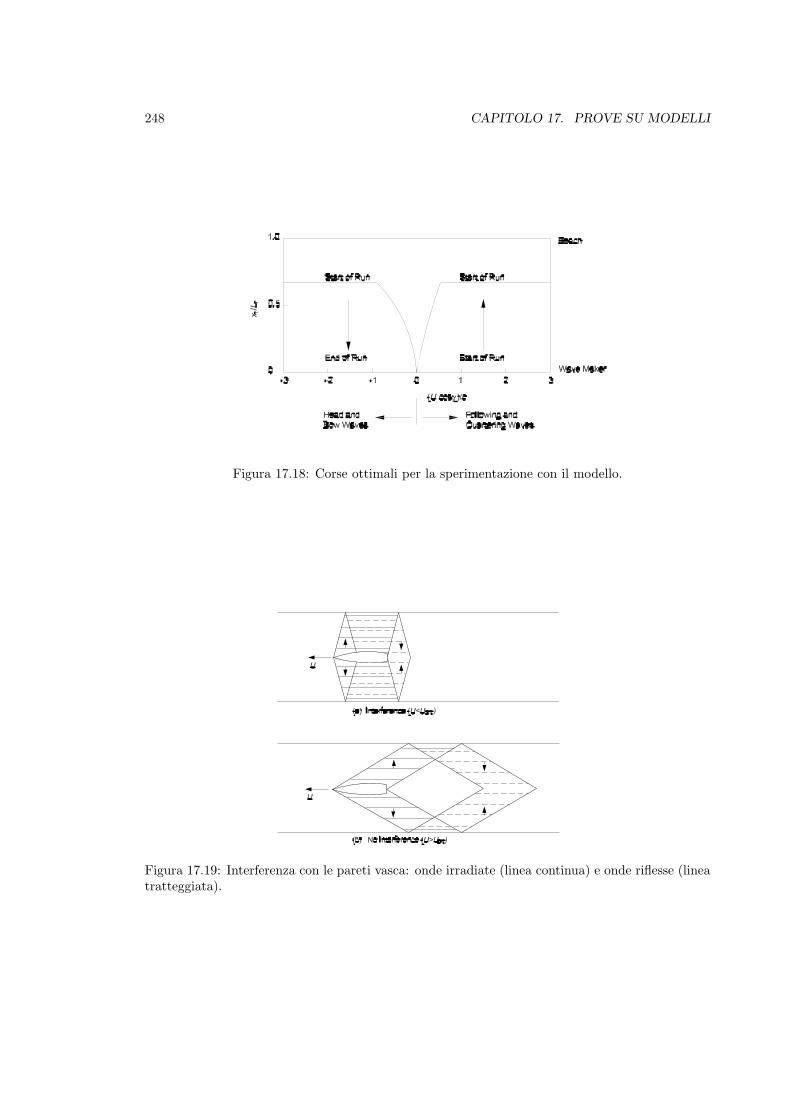
248 CAPITOLO 17. PROVE SU MODELLI
Figura 17.18: Corse ottimali per la sperimentazione con il modello.
Figura 17.19: Interferenza con le pareti vasca: onde irradiate (linea continua) e onde riflesse (lineatratteggiata).

17.11. INTERFERENZA CON LE PARETI 249
del modello e sufficientemente elevata, le riflessioni raggiungono il centro della vasca solo dopo ilpassaggio del modello e percio non ha luogo alcuna interferenza con le onde riflesse dalle pareti. Lavelocita critica alla quale avviene il fenomeno puo essere calcolata facilmente nel modo che segue.
Si suppone che il modello avanzi al centro di una vasca rettilinea in presenza di onde provenientida prora o da poppa. La frequenza d’incontro e allora espressa dalla relazione:
ωe = ω − ω2U cos χ
g, (17.32)
dove cos χ = ∓1 a seconda dell’angolo d’incontro. La celerita delle onde irradiate risulta percio:
c =g
ωe. (17.33)
Se BT indica la larghezza della vasca, per spostarsi dal modello alla parete e per ritornare al centrodella vasca, ogni singola cresta impiega un tempo pari a:
t =BT
c=
BT ωe
g. (17.34)
L’interferenza con le pareti avviene se in questo intervallo di tempo il modello si sposta meno dellapropria lunghezza. La velocita critica del modello per la quale inizia l’interferenza risulta percio:
Ucr =LM
t. (17.35)
Combinando fra loro le (17.32)–(17.35), segue per la velocita critica:
Ucr =g
2ω cos χ
(1±
√1± 4 cos χ
LM
BT
). (17.36)
In forma adimensionale, si puo parlare di numero di Froude critico Fncr. Nel caso di onde di prorasi ha :
Fncr = − 12ω
√g
LM
(1−
√1 +
4LM
BT
), (17.37)
mentre per le onde di poppa risulta:
Fncr =12ω
√g
LM
(1 +
√1− 4LM
BT
), (17.38)
Per le onde di pora la relazione (17.37) viene illustrata in Figura 17.20a. In questo caso, perevitare l’interferenza con le pareti, il numero di Foude deve essere maggione del valore critico.Il numero di Froude critico aumenta con la lunghezza del modello e risulta molto elevato per lefrequenze piu basse (onde lunghe).
Per le onde di poppa la Figura 17.20b mostra il numero di Froude critico ottenuto con l’equa-zione (17.38). In questo caso, per evitare l’interferenza, il numero di Froude deve essere compresoin un intervallo finito di valori, con l’ampiezza dell’intervallo decrescente all’aumentare della lun-ghezza modello. Quando la lunghezza del modello e pari ad un quarto della larghezza vasca(LM/BT = 0.25), per ogni frequenza d’onda esiste un unico numero di Froude che consente diottenere risultati esenti da effetti di interferenza. Modelli di lunghezza maggiore saranno sempresoggetti all’interferenza con le pareti qualsiasi sia il numero di Froude o la frequenza d’onda. Nesegue che la lunghezza massima ammissibile di un modello per prove in onde di poppa e pari adun quarto della larghezza vasca.
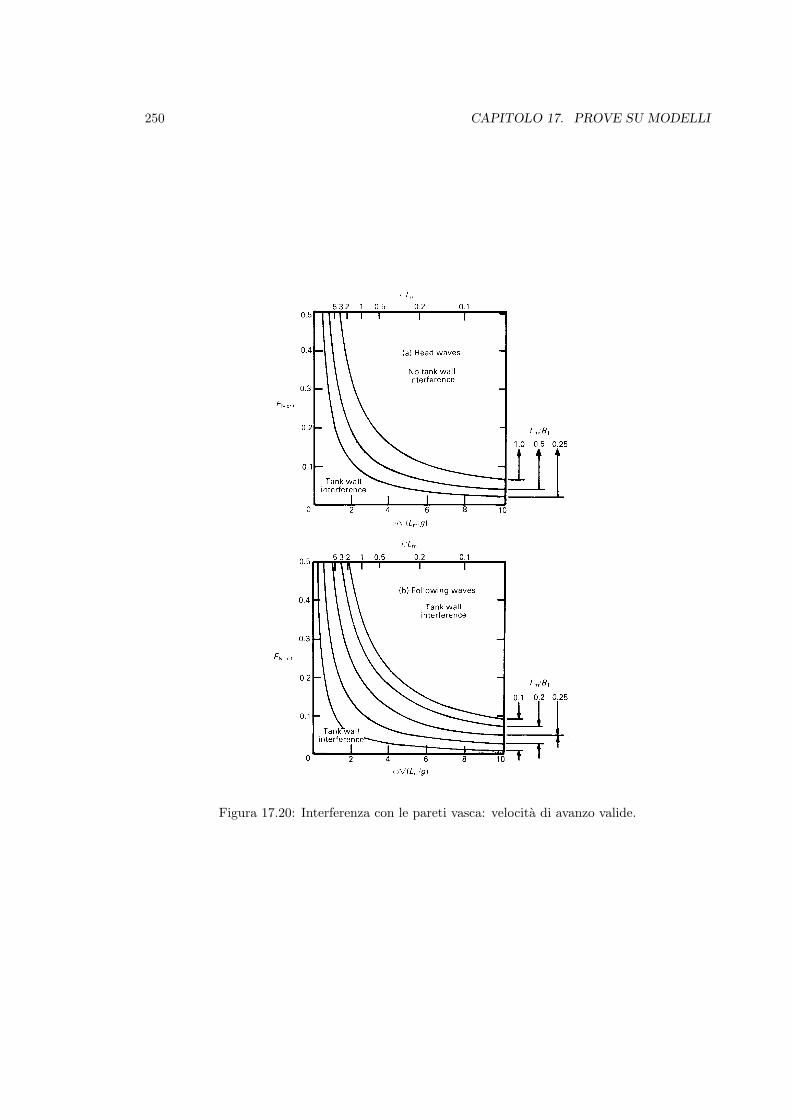
250 CAPITOLO 17. PROVE SU MODELLI
Figura 17.20: Interferenza con le pareti vasca: velocita di avanzo valide.
Parte III
Appendici
251

Appendice A
Elementi di probabilita e statistica
A.1 Introduzione
Una serie temporale associata alla realizzazione di un processo stocastico, come ad esempio unaregistrazione del profilo ondoso o dei moti nave, e caratterizzata da una distribuzione di frequenza,uno spettro di energia e da varie grandezze statistiche quali il valore medio, il periodo di zerocrossing, lo scarto quadratico medio, ecc. La disponibilita di queste informazioni risulta sufficienteper la soluzione della maggior parte dei problemi di tenuta al mare.
Tuttavia, per poter rispondere ad alcuni quesiti particolari, e necessaria una conoscenza piudettagliata sia delle caratteristiche delle onde che dei moti nave. In questo caso, le corrispondentiserie temporali devono essere analizzate in modo opportuno al fine di fornire tutte le informazionisupplementari richieste.
La discussione che segue, sebbene riferita esplicitamente al caso particolare delle onde, deveintendersi egualmente valida sia per i moti nave che per un qualsiasi altro processo stocastico. Perl’approfondimento del problema, il lettore e invitato a consultare testi specifici.
A.2 Analisi di una serie temporale
L’osservazione di un processo stocastico fornisce come risultato la registrazione di una serie tem-porale, quella corrispondente alla particolare realizzazione in esame. Vengono comunemente usatidue differenti metodi per l’analisi delle serie temporali.
Nel primo caso, allo scopo di misurare i valori assunti dalla grandezza fisica osservata, il re-cord e campionato ad intervalli regolari di tempo (ad esempio ogni 0.5–1.0 s, come mostrato inFigura 4.5). Sono cosı rilevate le ordinate del profilo ondoso in funzione del tempo. Tale metodoviene generalmente usato per trovare la frazione di tempo ovvero la probabilita con cui il profilodell’onda eccede un prefissato valore di riferimento.
Il secondo metodo, alternativo a quello precedente, riguarda invece la misura di alcuni elementicaratteristici della serie temporale quali ad esempio le creste, i cavi, i passaggi per lo zero. Esso eusato per ottenere informazioni sulla probabilita che le creste ed i cavi eccedano un valore di sogliaassegnato.
A rigori, nell’analisi di una serie omogenea di misure, sarebbe piu corretto parlare di frequenzadelle misure, visto il numero discreto di osservazioni, per passare poi al concetto di probabilita solonel caso limite del continuo. Tuttavia, per motivi di semplicita, nel seguito si e preferito ovviare aquesta inutile complicazione formale.
253

254 APPENDICE A. ELEMENTI DI PROBABILITA E STATISTICA
A.3 Istogrammi
Indipendentemente dal tipo di metodo usato, i risultati ottenuti dall’analisi di una serie temporaleconsistono in una successione di misure che apparentemente sembrano del tutto casuali. Tuttavia,esse possono essere ordinate in base ai valori assunti e suddivise su un certo numero di intervallidiscreti, generalmente della stessa ampiezza.
A titolo di esempio, le Tabelle A.1 e A.2 mostrano i risultati relativi all’analisi di una serietemporale del moto ondoso della durata di 30 minuti, usando per la suddivisione delle misure unintervallo di larghezza costante pari a 0.5 m ed applicando, nell’ordine, i due metodi di analisi citatial paragrafo precedente. La Tabella A.1 riporta i valori delle ordinate del profilo ondoso che siottengono con il campionamento del record ogni 1.0 s. La Tabella A.2 mostra, invece, i risultatidella misura delle ampiezze apparenti delle onde rispetto al livello medio della superficie marina;in questo caso non viene fatta alcuna distinzione tra creste e cavi, che vengono percio trattaticongiuntamente come picchi.
Nella Tabella A.1 si vede che 37 misure delle ordinate del profilo ondoso rispetto ad un livelloarbitrario di riferimento, non necessariamente coincidente con la superficie media del mare, risul-tano comprese nell’intervallo 4.5–5.0 m. In Tabella A.2 ci sono 23 misure di ampiezza apparente(picchi) nell’intervallo 3.5–4.0m. Come risultato di quest’analisi, seguono gli istogrammi riportatiin Figura A.1 e A.2, rispettivamente per i due casi. Essi sono stati ottenuti riportando su ogniintervallo di suddivisione un’ordinata pari al corrispondente numero di osservazioni.
-4 -2 0 2 4 6 8
Surface Depression,���ζ�Z (m)
0
1000
2000
3000
4000
Num
ber o
f Mea
sure
men
ts p
er B
in ,��1
L Mean Surface Depression
Figura A.1: Istogramma ottenuto dall’analisi delle ordinate del profilo ondoso campionato adintervalli regolari di tempo (Tabella A.1).
Il numero complessivo delle misure effettuate, siano esse ottenute mediante campionatura delrecord ad intervalli regolari di tempo oppure con la misura delle ampiezze apparenti della serietemporale, puo essere trovato sommando fra loro tutte le osservazioni:
N =∑
Ni . (A.1)
La probabilita che una generica misura ζ sia compresa nell’intervallo (ζ1, ζ2) risulta percio:
P (ζ1 < ζ < ζ2) =1N
ζ2∑
ζ1
Ni , (A.2)

A.3. ISTOGRAMMI 255
Intervallo Numero Probabilita Densitaossevazioni occorrenza probabilita
(m) Ni Pi pi (m−1)
[-3.5,-3.0] 0 0.000 0.000
(-3.0,-2.5] 1 0.001 0.001
(-2.5,-2.0] 3 0.002 0.003
(-2.0,-1.5] 11 0.006 0.012
(-1.5,-1.0] 23 0.013 0.026
(-1.0,-0.5] 36 0.020 0.040
(-0.5,0.0] 71 0.039 0.079
(0.0,0.5] 122 0.068 0.136
(0.5,1.0] 180 0.100 0.200
(1.0,1.5] 210 0.117 0.233
(1.5,2.0] 240 0.133 0.267
(2.0,2.5] 250 0.139 0.278
(2.5,3.0] 210 0.117 0.233
(3.0,3.5] 172 0.096 0.191
(3.5,4.0] 120 0.067 0.133
(4.0,4.5] 75 0.042 0.083
(4.5,5.0] 37 0.021 0.041
(5.0,5.5] 20 0.011 0.022
(5.5,6.0] 9 0.005 0.010
(6.0,6.5] 5 0.003 0.006
(6.5,7.0] 4 0.002 0.004
(7.0,7.5] 1 0.001 0.001
(7.5,8.0] 0 0.000 0.000
Totale 1800 1.000
Livello medio ζ = 2.01 m
Tabella A.1: Analisi delle ordinate del profilo ondoso campionato ad intervalli regolari di tempo(lunghezza record = 1800 s, intervallo campionamento = 1.0 s).
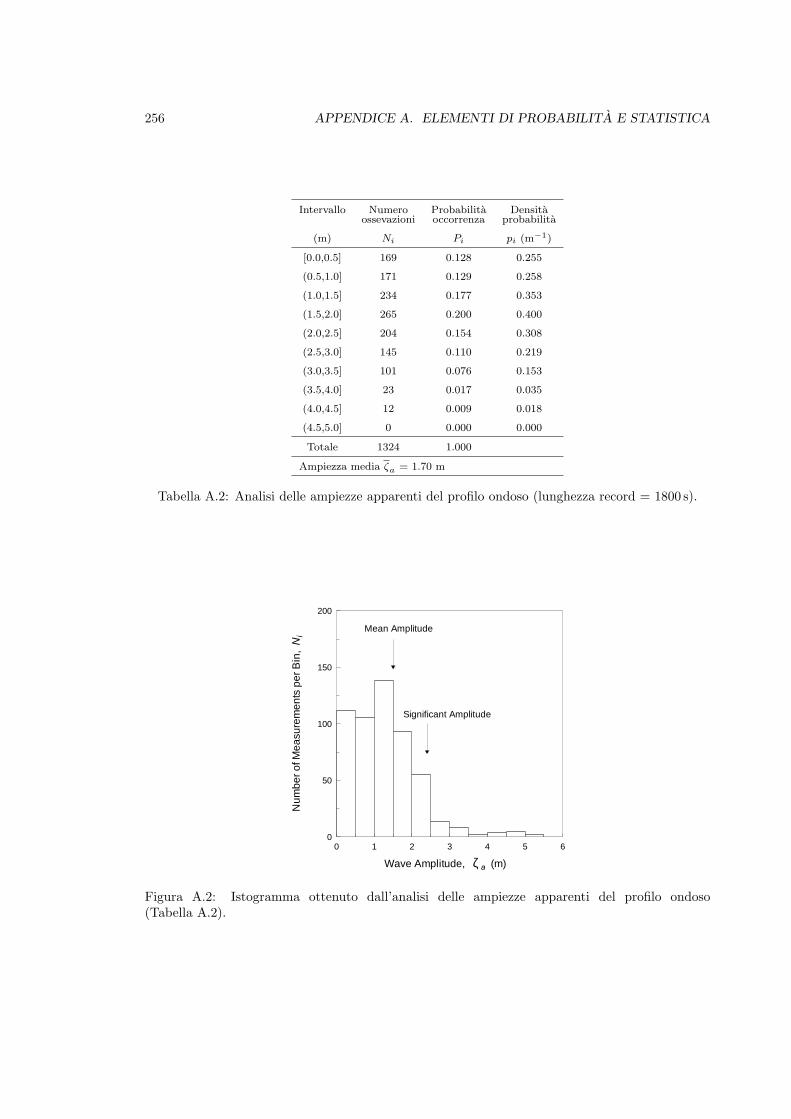
256 APPENDICE A. ELEMENTI DI PROBABILITA E STATISTICA
Intervallo Numero Probabilita Densitaossevazioni occorrenza probabilita
(m) Ni Pi pi (m−1)
[0.0,0.5] 169 0.128 0.255
(0.5,1.0] 171 0.129 0.258
(1.0,1.5] 234 0.177 0.353
(1.5,2.0] 265 0.200 0.400
(2.0,2.5] 204 0.154 0.308
(2.5,3.0] 145 0.110 0.219
(3.0,3.5] 101 0.076 0.153
(3.5,4.0] 23 0.017 0.035
(4.0,4.5] 12 0.009 0.018
(4.5,5.0] 0 0.000 0.000
Totale 1324 1.000
Ampiezza media ζa = 1.70 m
Tabella A.2: Analisi delle ampiezze apparenti del profilo ondoso (lunghezza record = 1800 s).
0 1 2 3 4 5 6
Wave Amplitude,���ζ�D (m)
0
50
100
150
200
Num
ber o
f Mea
sure
men
ts p
er B
in,��1
L Mean Amplitude
Significant Amplitude
Figura A.2: Istogramma ottenuto dall’analisi delle ampiezze apparenti del profilo ondoso(Tabella A.2).

A.4. FUNZIONE DENSITA DI PROBABILITA 257
e quindi la probabilita che essa ecceda un prefissato valore di soglia ζ0 sara:
P (ζ > ζ0) =1N
∞∑
ζ1
Ni . (A.3)
Il valore medio delle osservazioni e dato dalla relazione:
ζ =∑
ζ
N=
1N
∞∑−∞
ζiNi , (A.4)
essendo ζi il valore corrispondente al centro del generico intervallo di suddivisione. Applicando la(A.4) ai dati riportati nelle Tabelle A.1 e A.2 si ottiene nell’ordine il valore medio delle ordinatedel profilo ondoso (livello medio della superficie del mare) e l’ampiezza media delle onde. Percomodita, tali valori sono evidenziati anche nelle Figure A.1 e A.2.
L’esperienza insegna che, nelle problematiche di seakeeping, gli istogrammi presentano general-mente un massimo vicino al valore medio calcolato teoricamente. In altre parole, le osservazionivicine alla media sono molto piu frequenti di quelle lontane. L’istogramma di Figura A.1, relativoal campionamento temporale delle ordinate del profilo ondoso, mostra la caratteristica forma acampana, simmetrica rispetto al valore medio: prevalgono le piccole deviazioni, mentre i grandiscostamenti dalla media sono rari. L’istogramma delle ampiezze apparenti delle onde di Figura A.2non e simmetrico rispetto alla media in accordo con il fatto che le onde di piccola ampiezza sonopiu frequenti di quelle grandi.
A.4 Funzione densita di probabilita
La presentazione dei risultati di un’analisi statistica per mezzo di un istogramma del tipo di quelli diFigura A.1 e A.2 e caratterizzata da una serie di inconvenienti che ne limitano l’uso piu immediato.Essi sono dovuti al fatto che le ordinate del grafico (numero di osservazioni in ciascun intervallo)dipendono dalla durata del record e dalla larghezza dell’intervallo di suddivisione delle misure. Inparticolare, sussiste l’impossibilita di effettuare il confronto tra i risultati ottenuti a partire dadifferenti analisi della stessa serie temporale.
La dipendenza dalla lunghezza del record e dalla larghezza degli intervalli di suddivisione puoessere eliminata con l’introduzione della funzione densita di probabilita (Probability Density Func-tion - PDF), definita in modo che l’area sottesa dalla curva su ogni intervallo risulti equivalentealla probabilita che una generica misura cada entro tale intervallo.
Pertanto, se Pi indica la probabilita che una generica misura cada nell’i -esimo intervallo dilarghezza ∆i, si puo scrivere:
Pi = pi∆i =Ni
N, (A.5)
da cui segue che la PDF e definita dalla relazione:
pi =Pi
∆i=
Ni
N∆i. (A.6)
Le probabilita considerate nelle relazioni (A.2) e (A.3) possono percio essere scritte nella formaalternativa:
P (ζ1 < ζ < ζ2) =ζ2∑
ζ1
pi∆i , (A.7)

258 APPENDICE A. ELEMENTI DI PROBABILITA E STATISTICA
e
P (ζ > ζ0) =∞∑
ζ0
pi∆i . (A.8)
L’area totale sottesa dalla PDF e pari alla probabilita che un generico valore venga osservatodurante una qualsiasi delle misure, ovvero:
P (−∞ < ζ < ∞) =∞∑−∞
pi∆i = 1 . (A.9)
Inoltre, il valore medio delle ordinate del profilo ondoso, definito dalla (A.4), e dato dalla relazionealternativa:
ζ =∞∑−∞
ζiPi =∞∑−∞
ζipi∆i . (A.10)
La probabilita e la densita di probabilita corrispondenti agli esempi precedentemente consideratisono state riportate nelle ultime due colonne delle Tabelle A.1 e A.2. I risultati corrispondenti sonoillustrati nelle Figure A.3 e A.4, dalle quali risulta evidente che i grafici hanno esattamente la stessaforma degli istogrammi precedenti ma presentano le ordinate ridotte del fattore 1/(N∆i). Si trattacioe di istogrammi normalizzati.
-4 -2 0 2 4 6 8
Surface Depression,���ζ�Z��(m)
0.0
0.1
0.2
0.3
0.4
0.5
Pro
babi
lity
Den
sity
Fun
ctio
n,���S
��(m-1
) ζZ� �1.75 m
σ�� �1.20 m Gaussian PDF
_
Figura A.3: Funzione densita di probabilita ottenuta dall’analisi delle ordinate del profilo ondosocampionato ad intervalli regolari di tempo (Tabella A.1).
La funzione densita di probabilita definita dalla (A.6) e discontinua, essendo finito sia il numerodelle misure che quello degli intervalli. Tuttavia, se il record ha durata sufficiente e l’ampiezzadegli intervalli di suddivisione viene opportunamente ridotta, la PDF tende gradualmente versouna curva regolare e continua. In questo modo, le (A.7) e (A.8) diventano nell’ordine:
P (ζ1 < ζ < ζ2) =∫ ζ2
ζ1
p dζ , (A.11)
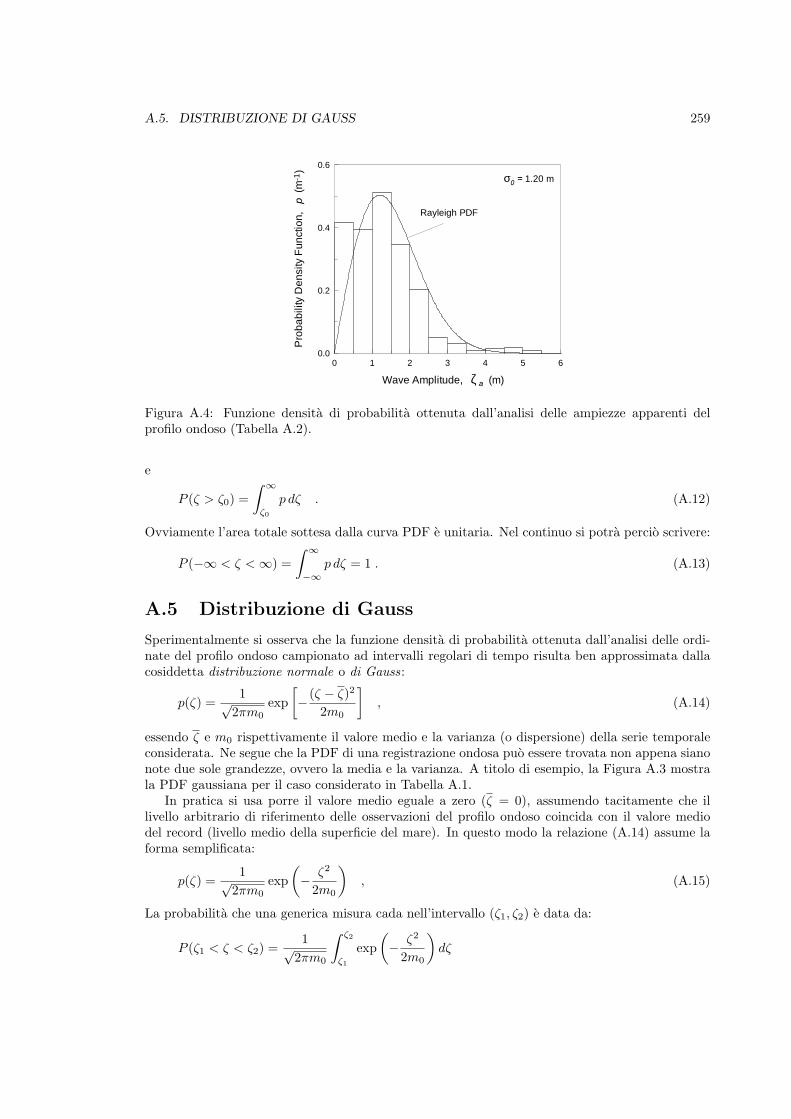
A.5. DISTRIBUZIONE DI GAUSS 259
σ�� �1.20 m
0 1 2 3 4 5 6
Wave Amplitude,���ζ�D��(m)
0.0
0.2
0.4
0.6
Pro
babi
lity
Den
sity
Fun
ctio
n,���S
��(m-1
)
Rayleigh PDF
Figura A.4: Funzione densita di probabilita ottenuta dall’analisi delle ampiezze apparenti delprofilo ondoso (Tabella A.2).
e
P (ζ > ζ0) =∫ ∞
ζ0
p dζ . (A.12)
Ovviamente l’area totale sottesa dalla curva PDF e unitaria. Nel continuo si potra percio scrivere:
P (−∞ < ζ < ∞) =∫ ∞
−∞p dζ = 1 . (A.13)
A.5 Distribuzione di Gauss
Sperimentalmente si osserva che la funzione densita di probabilita ottenuta dall’analisi delle ordi-nate del profilo ondoso campionato ad intervalli regolari di tempo risulta ben approssimata dallacosiddetta distribuzione normale o di Gauss:
p(ζ) =1√
2πm0exp
[− (ζ − ζ)2
2m0
], (A.14)
essendo ζ e m0 rispettivamente il valore medio e la varianza (o dispersione) della serie temporaleconsiderata. Ne segue che la PDF di una registrazione ondosa puo essere trovata non appena sianonote due sole grandezze, ovvero la media e la varianza. A titolo di esempio, la Figura A.3 mostrala PDF gaussiana per il caso considerato in Tabella A.1.
In pratica si usa porre il valore medio eguale a zero (ζ = 0), assumendo tacitamente che illivello arbitrario di riferimento delle osservazioni del profilo ondoso coincida con il valore mediodel record (livello medio della superficie del mare). In questo modo la relazione (A.14) assume laforma semplificata:
p(ζ) =1√
2πm0exp
(− ζ2
2m0
), (A.15)
La probabilita che una generica misura cada nell’intervallo (ζ1, ζ2) e data da:
P (ζ1 < ζ < ζ2) =1√
2πm0
∫ ζ2
ζ1
exp(− ζ2
2m0
)dζ

260 APPENDICE A. ELEMENTI DI PROBABILITA E STATISTICA
=1√2π
∫ ζ2/σ0
ζ1/σ0
exp
[−1
2
(ζ
σ0
)2]
d
(ζ
σ0
)
= erf(
ζ2
σ0
)− erf
(ζ1
σ0
). (A.16)
Nella relazione precedente σ0 =√
m0 e la deviazione standard o scarto quadratico medio (rms) ederf(x) la cosiddetta funzione errore (error function):
erf(x) =1√2π
∫ x
0
exp(−z2
2
)dz . (A.17)
La funzione errore, che per comodita viene tabulata nella Tabella A.3, gode delle seguenti proprieta:
erf(−x) = erf(x) ,
erf(−∞) = erf(∞) = 0.5 . (A.18)
In questo modo, la probabilita che una generica misura ecceda un prefissato valore positivo ζ0
risulta:
P (ζ > ζ0) = erf(∞)− erf(
ζ0
σ0
)= 0.5− erf
(ζ0
σ0
). (A.19)
Si noti che l’equazione (A.19) si riferisce a misure con valori positivi e pertanto considerasoltanto la meta destra della distribuzione di Gauss. Per questo, la probabilita che una genericamisura cada fuori dall’intervallo (−ζ0, ζ0) e data da:
P (|ζ| > ζ0) = 1− 2 erf(
ζ0
σ0
), (A.20)
mentre la probabilita che una generica misura venga osservata e ovviamente:
P (−∞ < ζ < ∞) = erf(∞) + erf(−∞) = 1 . (A.21)
0
Surface Depression,���ζ�Z�σ� (-)
Pro
babi
lity
Den
sity
Fun
ctio
n,���S
��(-)
ζ��σ� ζ��σ�
erf(ζ��σ�)
Probability of ζlying between
ζ� and ζ�
Probability of ζexceeding ζ�
Probability of ζ< 0equals 0.5
Figura A.5: Proprieta della funzione densita di probabilita di Gauss.
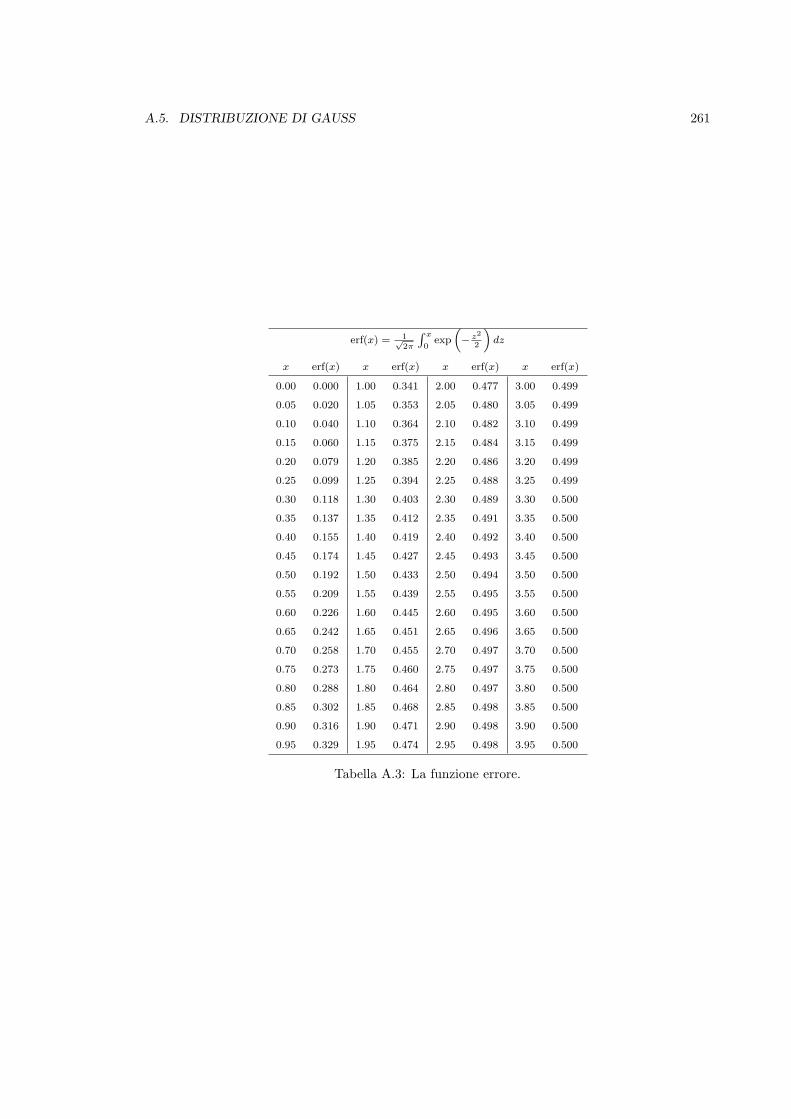
A.5. DISTRIBUZIONE DI GAUSS 261
erf(x) = 1√2π
∫ x
0exp
(− z2
2
)dz
x erf(x) x erf(x) x erf(x) x erf(x)
0.00 0.000 1.00 0.341 2.00 0.477 3.00 0.499
0.05 0.020 1.05 0.353 2.05 0.480 3.05 0.499
0.10 0.040 1.10 0.364 2.10 0.482 3.10 0.499
0.15 0.060 1.15 0.375 2.15 0.484 3.15 0.499
0.20 0.079 1.20 0.385 2.20 0.486 3.20 0.499
0.25 0.099 1.25 0.394 2.25 0.488 3.25 0.499
0.30 0.118 1.30 0.403 2.30 0.489 3.30 0.500
0.35 0.137 1.35 0.412 2.35 0.491 3.35 0.500
0.40 0.155 1.40 0.419 2.40 0.492 3.40 0.500
0.45 0.174 1.45 0.427 2.45 0.493 3.45 0.500
0.50 0.192 1.50 0.433 2.50 0.494 3.50 0.500
0.55 0.209 1.55 0.439 2.55 0.495 3.55 0.500
0.60 0.226 1.60 0.445 2.60 0.495 3.60 0.500
0.65 0.242 1.65 0.451 2.65 0.496 3.65 0.500
0.70 0.258 1.70 0.455 2.70 0.497 3.70 0.500
0.75 0.273 1.75 0.460 2.75 0.497 3.75 0.500
0.80 0.288 1.80 0.464 2.80 0.497 3.80 0.500
0.85 0.302 1.85 0.468 2.85 0.498 3.85 0.500
0.90 0.316 1.90 0.471 2.90 0.498 3.90 0.500
0.95 0.329 1.95 0.474 2.95 0.498 3.95 0.500
Tabella A.3: La funzione errore.

262 APPENDICE A. ELEMENTI DI PROBABILITA E STATISTICA
I risultati precedenti sono illustrati nella Figura A.5. La Tabella A.4 riporta invece alcunedelle proprieta salienti della PDF di Gauss, basate sulle equazioni (A.19) e (A.20). Si puo vedereche il 99.8% di tutte le misure delle ordinate del profilo ondoso, relative ad una serie temporalecampionata ad intervalli regolari di tempo, giacciono all’interno di un intervallo avente ampiezzapari al triplo del valore rms.
ζ/σ0 Probabilita Probabilitadi eccedere ζ di eccedere |ζ|
0.0 0.500 1.000
0.5 0.308 0.616
1.0 0.159 0.318
1.5 0.067 0.134
2.0 0.023 0.046
2.5 0.006 0.012
3.0 0.001 0.002
Tabella A.4: Probabilita di eccedere valori prefissati secondo la distribuzione di Gauss.
Infine, si tenga presente che il valore medio di tutte le osservazioni positive e negative presentinel record (media dei valori assoluti delle misure) puo essere ottenuto come segue:
|ζ| =
∫ ∞
−∞|ζ|p dζ
∫ ∞
−∞p dζ
= 2∫ ∞
0
ζp dζ = 0.798√
m0 . (A.22)
A.6 Distribuzione di Rayleigh
In generale si osserva che la funzione densita di probabilita delle ampiezze apparenti delle ondepuo essere approssimata abbastanza bene con la distribuzione di Rayleigh:
p(ζa) =ζa
m0exp
(− ζ2
a
2m0
), (A.23)
essendo m0 la varianza della serie temporale corrispondente. Questo risultato consente di trovarela PDF quando e conosciuta la varianza delle ordinate del profilo ondoso. La PDF di Rayleigh,per l’esempio considerato in Tabella A.2, viene mostrata in Figura A.4.
La probabilita che una generica misura di ampiezza ζa cada nell’intervallo (ζa1, ζa2) e data dallarelazione:
P (ζa1 < ζa < ζa2) =1
m0
∫ ζa2
ζa1
ζa exp(− ζ2
a
2m0
)dζa
= exp(− ζ2
a1
2m0
)− exp
(− ζ2
a2
2m0
). (A.24)
mentre la probabilita che l’ampiezza ecceda un prefissato valore ζa0 risulta:
P (ζa > ζa0) =1
m0
∫ ∞
ζa0
ζa exp(− ζ2
a
2m0
)dζa
= exp(− ζ2
a0
2m0
)= exp
[−1
2
(ζa0
σ0
)2]
. (A.25)

A.7. STATISTICA DEL MOTO ONDOSO 263
La funzione precedente viene mostrata in Figura A.6. La probabilita che una generica ampiezzagiaccia all’interno di tutto l’intervallo delle possibili ampiezze e unitaria, ovvero:
P (−∞ < ζa < ∞) =1
m0
∫ ∞
−∞ζa exp
(− ζ2
a
2m0
)dζa = 1 , (A.26)
0 1 2 3 4
Nondimensional Amplitude,���ζ�D��σ���(-)
0.001
0.010
0.100
1.000
Pro
babi
lity
of E
xcee
danc
e,���3 H
[��(-
)
Figura A.6: Probabilita di eccedere un prefissato valore di ampiezza secondo la distribuzione diRayleigh.
L’equazione (A.25) puo essere risolta per esprimere il valore dell’ampiezza apparente caratte-rizzata da una prefissata probabilita di superamento:
ζa =√−2m0 ln [P (ζa > ζa0)] , (A.27)
ovvero:ζa
σ0=
√−2 ln [P (ζa > ζa0)] . (A.28)
La Tabella A.5 riporta alcuni risultati ottenuti applicando rispettivamente la (A.25) e la (A.28).Ad esempio, la probabilita che una generica ampiezza ecceda un valore pari a circa tre volte ilvalore rms e molto piccola: soltanto un picco (cresta o cavo) su cento supera questo livello.
A.7 Statistica del moto ondoso
E stato mostrato al Capitolo 4 che l’altezza significativa delle onde, definita come la media dellealtezze di un terzo delle onde piu alte, risulta strettamente correlata all’altezza media stimatavisualmente da un osservatore sufficientemente esperto. Ci si deve percio aspettare che anche lestime delle ampiezze medie dei moti nave, fornite da un comandante, debbano essere correlate nellostesso modo alle corrispondenti ampiezze significative. Poiche l’interesse pratico e spesso rivolto aqueste grandezze, verranno illustrati nel seguito alcuni aspetti della statistica degli estremi di unprocesso stocastico.
In termini piu generali si vuole trovare un’espressione che fornisca il valore medio di 1/n-esimo delle ampiezze piu alte osservate durante una registrazione (essendo n = 3 per l’ampiezza
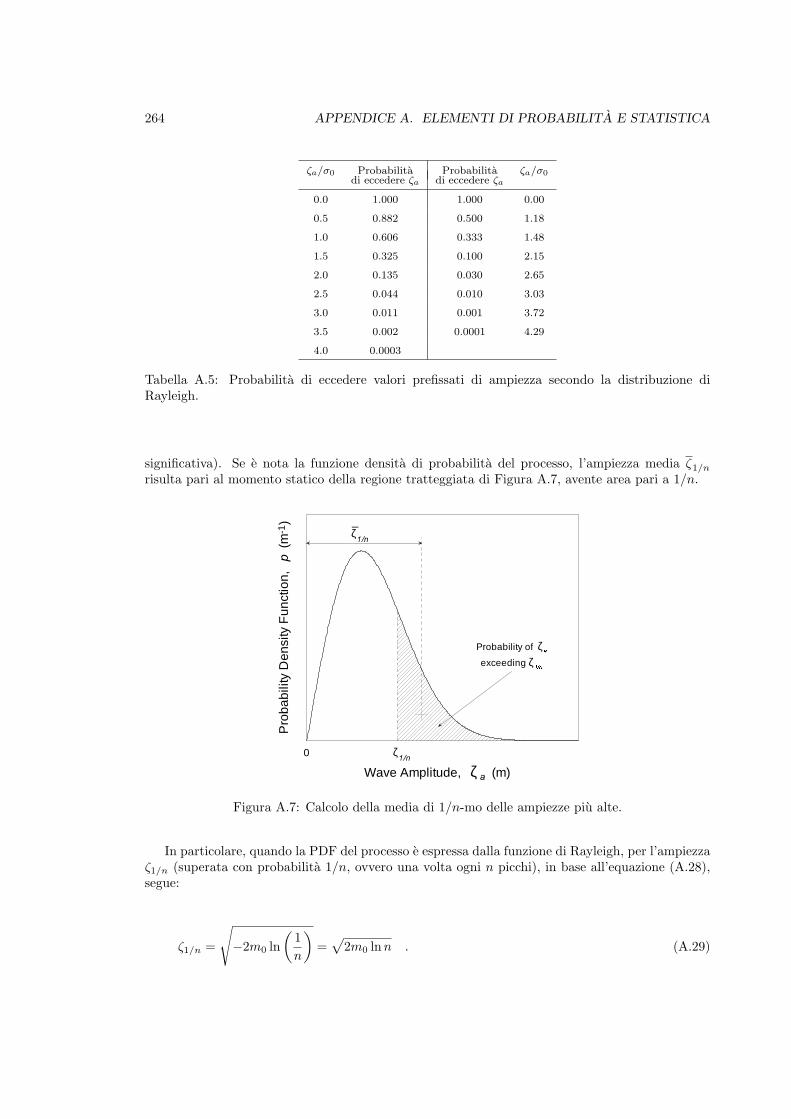
264 APPENDICE A. ELEMENTI DI PROBABILITA E STATISTICA
ζa/σ0 Probabilita Probabilita ζa/σ0di eccedere ζa di eccedere ζa
0.0 1.000 1.000 0.00
0.5 0.882 0.500 1.18
1.0 0.606 0.333 1.48
1.5 0.325 0.100 2.15
2.0 0.135 0.030 2.65
2.5 0.044 0.010 3.03
3.0 0.011 0.001 3.72
3.5 0.002 0.0001 4.29
4.0 0.0003
Tabella A.5: Probabilita di eccedere valori prefissati di ampiezza secondo la distribuzione diRayleigh.
significativa). Se e nota la funzione densita di probabilita del processo, l’ampiezza media ζ1/n
risulta pari al momento statico della regione tratteggiata di Figura A.7, avente area pari a 1/n.
Wave Amplitude,���ζ�D��(m)
Pro
babi
lity
Den
sity
Fun
ctio
n,���S
��(m-1
)
Probability of ζD
exceeding �Q
�Q0
�Q_
Figura A.7: Calcolo della media di 1/n-mo delle ampiezze piu alte.
In particolare, quando la PDF del processo e espressa dalla funzione di Rayleigh, per l’ampiezzaζ1/n (superata con probabilita 1/n, ovvero una volta ogni n picchi), in base all’equazione (A.28),segue:
ζ1/n =
√−2m0 ln
(1n
)=
√2m0 ln n . (A.29)

A.7. STATISTICA DEL MOTO ONDOSO 265
Il valore medio di 1/n-mo delle ampiezze piu alte risulta percio:
ζ1/n =
∫ ∞
ζ1/n
ζap dζa
∫ ∞
ζ1/n
p dζa
=
∫ ∞
ζ1/n
ζap dζa
P (ζa > ζ1/n)= n
∫ ∞
ζ1/n
ζap dζa , (A.30)
da cui, sostituendo la (A.23), si ottiene:
ζ1/n = n
∫ ∞
ζ1/n
ζ2a
m0exp
(− ζ2
a
2m0
)dζa , (A.31)
ovvero:
ζ1/n
σ0= n
√2
[√ln n
n+√
π
(12− erf
√2 lnn
)]. (A.32)
Alcuni risultati ottenuti applicando la (A.32) sono riportati in Tabella A.6. Di particolare interessesono ovviamente i casi n = 1 e n = 3. Ponendo n = 1 si ricava il valore medio di tutte le ampiezze,detto ampiezza media:
ζa = 1.25 σ0 . (A.33)
Ponendo n = 3 si ottiene l’ampiezza significativa:
ζ1/3 = 2.00 σ0 . (A.34)
per cui l’altezza significativa risulta:
H1/3 = 2ζ1/3 = 4.00 σ0 . (A.35)
Generalmente si assume che i risultati precedenti siano applicabili sia alle registrazioni ondose cheai moti nave. Si deve tuttavia tener presente che essi sono strettamente validi solo se i picchi delprocesso stocastico considerato seguono effettivamente la distribuzione di Rayleigh.
n ζ1/n/σ0
1 1.25
2 1.77
3 2.00
10 2.54
100 3.34
1000 3.72
10000 4.29
Tabella A.6: Media di 1/n-mo delle ampiezze piu alte secondo la distribuzione di Rayleigh.
266 APPENDICE A. ELEMENTI DI PROBABILITA E STATISTICA
A.8 Probabilita congiunta
La soluzione di alcuni problemi di tenuta al mare, quali ad esempio quello dello slamming, richie-de la conoscenza della probabilita che due eventi avvengano simultaneamente, ovvero della loroprobabilita congiunta. Se i due eventi sono statisticamente indipendenti (non correlati), la loroprobabilita congiunta e data semplicemente dal prodotto delle probabilita di ogni singolo eventopreso come indipendente.
Ad esempio, con riferimento ai moti nave che seguono la distribuzione di Rayleigh, la probabilitache il moto xi ecceda il valore xi0 e che, allo stesso tempo, il moto xj ecceda il valore xj0 risulta:
P (xi > xi0, xj > xj0) = exp(− x2
i0
2m0i
)exp
(− x2
j0
2m0j
)
= exp
(− x2
i0
2m0i− x2
j0
2m0j
), (A.36)
essendo m0i ed m0j le varianze dei moti corrispondenti. La relazione precedente puo, ovviamente,essere generalizzata al caso con piu dimensioni.
Appendice B
Trasformazione di coordinate
B.1 Premessa
Considerando il movimento della nave composto da una traslazione e da una rotazione attorno adun generico polo (centro di massa G), si puo affermare quanto segue: lo spostamento di traslazionee determinato, se in ogni istante sono note le coordinate del centro di massa; al fine di assegnarela rotazione della nave e invece necessario conoscere in ogni istante l’orientamento degli assi delsistema solidale Gxyz rispetto agli assi del sistema di equilibrio G0ξ
′η′ζ ′ o quello mobile Oξηζ.Questo puo essere fatto assegnando nove coseni direttori, vale a dire i coseni degli angoli formatidagli assi Gx, Gy e Gz con ciascuno degli assi Oξ, Oη e Oζ. Tuttavia, i nove coseni direttoricosı definiti non sono fra loro indipendenti, in quanto legati da sei equazioni che esprimono lecondizioni di perpendicolarita degli assi di ciascuna terna di riferimento. In questo modo rimangonoindipendenti solo tre dei nove angoli, la cui scelta puo essere effettuata in modo arbitrario.
B.2 Angoli di Eulero navali
Una scelta particolare dei tre angoli indipendenti necessari per determinare la rotazione della naverispetto al suo centro di massa e stata proposta da Eulero e, per questo, tali angoli si chiamanoangoli di Eulero. Sebbene si tratti di un sistema di angoli molto conveniente per le applicazioni dimeccanica celeste, essi non sono particolarmente adatti per lo studio dei moti nave in quanto, perpiccoli scostamenti della nave dalla posizione diritta di equilibrio, alcuni degli angoli del sistemaastronomico possono assumere valori finiti non nulli. Per evitare questo inconveniente, Krylov haproposto di sostituire il sistema degli angoli astronomici con un altro sistema, che egli ha chiamatosistema navale. In questo modo, piccoli scostamenti della nave dalla posizione iniziale danno luogoa piccole ampiezze per gli angoli di Eulero. Nello studio dei moti di piccola ampiezza, con questosistema di angoli e possibile utilizzare il metodo delle approssimazioni successive con lo sviluppo inserie secondo un parametro perturbativo, facilitando significativamente la soluzione del problemadinamico. In particolare, nel sistema navale proposto da Krylov, il primo angolo e eguale all’angolodi imbardata e gli altri due, per piccole inclinazioni della nave, differiscono di poco dall’angolo disbandamento e di assetto.
Il sistema navale degli angoli di Eulero attualmente piu diffuso in ambito navale e pero quelloproposto da Blagovescenskij (1954) che, differendo leggermente da quello di Krylov, ne migliora lecaratteristiche e lo rende di piu immediata interpretazione geometrica. La scelta di un tale sistemadi angoli navali viene fatta in accordo con la Figura B.1, dove, per semplicita di esposizione, si evoluto far coincidere l’origine G del riferimento centrale con l’origine O del riferimento mobile.
267

268 APPENDICE B. TRASFORMAZIONE DI COORDINATE
G=O
y K z
x
P
N
ξ
ζ
ηϕθ
ψ
ψ
ϕ
θ
θ
ϕ
ψ
Figura B.1: Angoli di Eulero navali.
Innanzitutto viene definita la retta GN , individuata dall’intersezione dei piani coordinati ξGη(piano parallelo alla superficie di acqua tranquilla e passante per il baricentro) e yGz (pianotrasversale per il baricentro), che costituisce la linea dei nodi. Il verso positivo su questa rettaviene scelto in modo tale che un osservatore, disposto in G nello stesso verso dell’asse, vede ruotarein senso antiorario l’asse ζ positivo allorche questo va a sovrapporsi all’asse x attraverso l’angoloζGx piu piccolo. In questo modo, come si vede dalla figura, il piano ζGx e perpendicolare allalinea dei nodi.
L’angolo ψ = ηGN giace nel piano ξGη tra l’asse Gη e la linea dei nodi GN . Tale angolo vienemisurato dall’asse Gη all’asse GN , positivo con verso antiorario rispetto ad un osservatore postoin G ed orientato nello stesso verso dell’asse Gζ. L’angolo ψ corrisponde all’imbardata della nave,con valori positivi per un’accostata a destra. Il vettore velocita angolare ψ coincide con l’asse Gζ.
L’angolo θ + 90◦ = ζGx giace nel piano ζGx ed e ottenuto attraverso una rotazione della ternadegli assi solidali attorno alla linea dei nodi GN . Gli angoli θ + 90◦ vengono misurati dall’asse Gζall’asse Gx, positivi in senso antiorario se visti da un osservatore posto in G e orientato nello stessoverso della linea dei nodi GN . L’angolo θ e approssimativamente eguale all’angolo di assetto e unvalore positivo corrisponde ad un appoppamento della nave. In assenza di sbandamento, l’angolo θe esattamente eguale all’angolo di assetto, ma di segno contrario. Il corrispondente vettore velocitaangolare θ coincide con la linea dei nodi GN .
L’angolo ϕ giace nel piano yGz (piano trasversale per il baricentro) tra l’asse Gy e la linea deinodi GN . Esso viene misurato dalla linea dei nodi GN all’asse Gy, positivo in senso antiorario sevisto da un osservatore posto in G e orientato nello stesso verso dell’asse Gx. L’angolo ϕ coincidecon l’angolo di sbandamento e, per un valore positivo dell’angolo, lo sbandamento della nave esulla murata destra. Il vettore velocita angolare ϕ coincide con l’asse Gx.
Per passare dalla configurazione iniziale a quella finale, la variazione degli angoli di Eulero estata portata a termine in una successione prefissata, ovvero imbardata, beccheggio e rollio. Comesi puo vedere dalla Figura B.1, la linea GP rappresenta la posizione dell’asse Gx dopo la rotazionedell’angolo ψ. La linea GK rappresenta la posizione dell’asse Gz dopo la rotazione dell’angolo θ.
In Statica della Nave, l’angolo di sbandamento ϕS rappresenta l’angolo che l’asse y forma conla traccia del piano di galleggiamento sul piano trasversale a meta nave, mentre l’angolo di assettoθS individua l’angolo tra l’asse x e la traccia del piano di galleggiamento sul piano diametrale. In
B.2. ANGOLI DI EULERO NAVALI 269
questo modo gli angoli ϕS e ϕ, sia in statica che nei moti nave, hanno significato identico. Peril moto nave, l’angolo θ e l’angolo tra l’asse x e la superficie dell’acqua e quindi ha un significatodiverso dell’angolo θS della statica. Senza entrare in merito ai dettagli della dimostrazione, illegame tra questi due angoli puo essere espresso da:
tan ϕS = tan ϕ ,
tan θS = − tan θ
cos ϕ. (B.1)
Nella seconda relazione il segno meno e dovuto al fatto che per verso positivo dell’angolo θ vieneassunto quello che comporta un’inclinazione a poppa, mentre l’angolo di assetto θS si considerapositivo per un’inclinazione a prora.
Gli angoli di Eulero, scelti nel modo precedentemente mostrato, sono caratterizzati dalle se-guenti proprieta:
• per mezzo di una variazione opportuna di questi angoli e possibile far assumere alla nave unorientamento arbitrario nello spazio;
• la variazione di un angolo non influisce sul valore degli altri due;
• una nuova direzione della nave nello spazio dipende dall’ordine di variazione degli angoli.
Per chiarire meglio il significato degli angoli di Eulero navali, si consideri il sistema meccanicomostrato in Figura B.2. Esso rappresenta un giroscopio provvisto di sospensione cardanica checonsente piena liberta di movimento intorno al centro di massa G tenuto fisso in O. Il giroscopiopropriamente detto, e costituito dal volano, girevole attorno al proprio asse di rotazione Ox (1).Questo e portato dall’anello interno (2), girevole attorno all’asse orizzontale ON , e sostenutoa sua volta dal semi-anello esterno (3), girevole intorno all’asse verticale (4). L’asse verticalee imperniato sul supporto fisso (5). La rotazione attorno all’asse verticale (4) corrisponde allavariazione dell’angolo di Eulero ψ, la rotazione attorno all’asse orizzontale ON alla variazionedell’angolo θ e la rotazione del volano attorno al proprio asse alla variazione dell’angolo ϕ. Nelsistema giroscopico di figura, il piano di rotazione del volano corrisponde al piano trasversale peril baricentro della nave. Con opportune variazioni degli angoli ψ, θ e ϕ, e possibile far assumere alvolano (sezione al mezzo) un arbitrario orientamento nello spazio. In questo, la variazione di ogniangolo deve essere eseguita in successione prefissata, ovvero imbardata, beccheggio e rollio. Ad unpiccolo scostamento del giroscopio dalla posizione iniziale corrispondono piccoli angoli di Eulero.In questo caso limite le tre rotazioni sono commutative.
Ne segue che la posizione della nave ad ogni istante e data dalle coordinate ξG, ηG e ζG delsuo centro di massa e dai tre angoli di Eulero ϕ, θ e ψ. In posizione iniziale di equilibrio si ha(ξG0 , ηG0 , ζG0 , 0, 0, 0), ovvero tre di queste grandezze sono eguali a zero. Nel caso piu generale esseassumono valori arbitrari del loro campo di definizione, ma fisicamente accettabili. Senza entrarenel merito della dimostrazione (Blagovescenskij, 1954), si riportano nel seguito le relazioni chelegano fra loro le coordinate dei sistemi di riferimento mobile e solidale.
La rotazione relativa fra i due sistemi di coordinate Gxyz e Oξηζ puo essere determinataattraverso la conoscenza di nove coseni direttori. I coseni degli angoli formati dalle due terne diassi possono essere espressi attraverso gli angoli di Eulero come segue:
a1 = cos(xGξ) = cos θ cos ψ ,
a2 = cos(xGη) = cos θ sin ψ ,
a3 = cos(xGζ) = − sin θ ,
b1 = cos(yGξ) = sin ϕ sin θ cosψ − cosϕ sin ψ ,
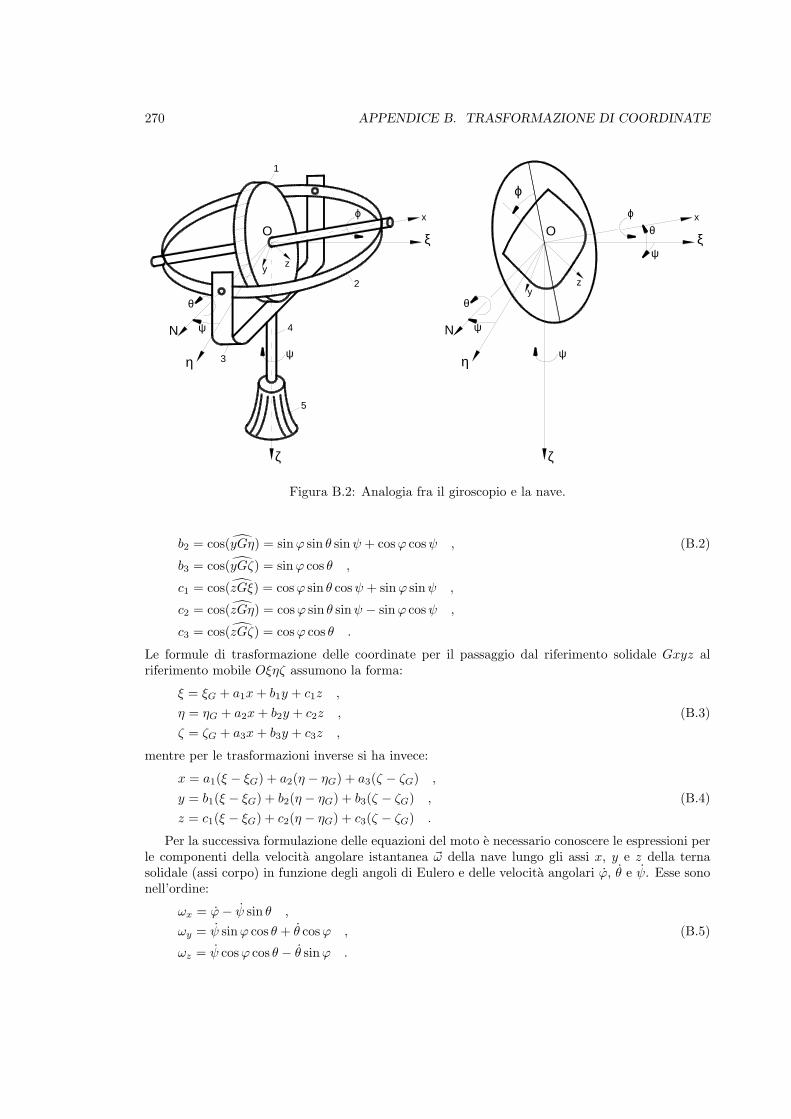
270 APPENDICE B. TRASFORMAZIONE DI COORDINATE
ξ
xϕ
zy
O
θ
N ψ
ηψ
ζ
θ
ψ
ϕ
x
ξ
ζ
η
N
θ
ψ
ψ
O
yz
2
1
4
5
3
ϕ
Figura B.2: Analogia fra il giroscopio e la nave.
b2 = cos(yGη) = sin ϕ sin θ sin ψ + cosϕ cosψ , (B.2)
b3 = cos(yGζ) = sin ϕ cos θ ,
c1 = cos(zGξ) = cos ϕ sin θ cosψ + sin ϕ sin ψ ,
c2 = cos(zGη) = cos ϕ sin θ sin ψ − sin ϕ cos ψ ,
c3 = cos(zGζ) = cos ϕ cos θ .
Le formule di trasformazione delle coordinate per il passaggio dal riferimento solidale Gxyz alriferimento mobile Oξηζ assumono la forma:
ξ = ξG + a1x + b1y + c1z ,
η = ηG + a2x + b2y + c2z , (B.3)ζ = ζG + a3x + b3y + c3z ,
mentre per le trasformazioni inverse si ha invece:
x = a1(ξ − ξG) + a2(η − ηG) + a3(ζ − ζG) ,
y = b1(ξ − ξG) + b2(η − ηG) + b3(ζ − ζG) , (B.4)z = c1(ξ − ξG) + c2(η − ηG) + c3(ζ − ζG) .
Per la successiva formulazione delle equazioni del moto e necessario conoscere le espressioni perle componenti della velocita angolare istantanea ~ω della nave lungo gli assi x, y e z della ternasolidale (assi corpo) in funzione degli angoli di Eulero e delle velocita angolari ϕ, θ e ψ. Esse sononell’ordine:
ωx = ϕ− ψ sin θ ,
ωy = ψ sin ϕ cos θ + θ cosϕ , (B.5)
ωz = ψ cos ϕ cos θ − θ sin ϕ .
B.3. APPROSSIMAZIONE LINEARE 271
B.3 Approssimazione lineare
Le precedenti relazioni (B.2), (B.3), (B.4) e (B.5) si semplificano notevolmente nell’ambito dellateoria lineare, quando cioe gli angoli ϕ, θ e ψ vengono considerati di piccola ampiezza. In questocaso e possibile porre nell’ordine sin ϕ ≈ ϕ, sin θ ≈ θ, sin ψ ≈ ψ, cos ϕ ≈ 1, cos θ ≈ 1, cos ψ ≈ 1.
Allora, le formule di trasformazione (B.3) assumono la forma approssimata:
ξ = ξG + x− ψy + θz ,
η = ηG + ψx + y − ϕz , (B.6)ζ = ζG − θx + ϕy + z ,
mentre per le trasformazioni inverse (B.4) si ha:
x = (ξ − ξG) + ψ(η − ηG)− θ(ζ − ζG) ,
y = −ψ(ξ − ξG) + (η − ηG) + ϕ(ζ − ζG) , (B.7)z = θ(ξ − ξG)− ϕ(η − ηG) + (ζ − ζG) .
Inoltre, dalle (B.5) seguono le espressioni semplificate per le componenti della velocita angolareistantanea lungo gli assi del riferimento solidale:
ωx = ϕ ,
ωy = θ , (B.8)
ωz = ψ .
Si noti che, nei limiti dell’approssimazione lineare, le (B.8) esprimono anche le componenti dellavelocita angolare lungo gli assi del riferimento mobile.
Infine, tra le relazioni che vengono utilizzate per lo studio della cinematica dei moti, interessanoin particolare quelle che danno lo spostamento di un qualsiasi punto solidale alla nave rispettoalla sua posizione iniziale di riposo. Per questo, se all’istante generico il punto P ha coordinate(xP , yP , zP ) nel riferimento solidale centrale, per le (B.3), la sua posizione nel riferimento mobilesara:
ξP = ξG + a1xP + b1yP + c1zP ,
ηP = ηG + a2xP + b2yP + c2zP , (B.9)ζP = ζG + a3xP + b3yP + c3zP .
All’equilibrio, essendo la configurazione della nave data da (ξG0 , ηG0 , ζG0 , 0, 0, 0), segue in partico-lare:
ξP0 = ξG0 + xP ,
ηP0 = ηG0 + yP , (B.10)ζP0 = ζG0 + zP .
Lo spostamento assoluto del punto rispetto alla posizione iniziale risulta percio:
sξ = ξP − ξP0 = ξg + (a1 − 1)xP + b1yP + c1zP ,
sη = ηP − ηP0 = ηg + a2xP + (b2 − 1)yP + c2zP , (B.11)sζ = ζP − ζP0 = ζg + a3xP + b3yP + (c3 − 1)zP ,
essendo lo spostamento assoluto del baricentro dato dalle relazioni:
ξg = ξG − ξG0 ,
ηg = ηG − ηG0 , (B.12)ζg = ζG − ζG0 .

272 APPENDICE B. TRASFORMAZIONE DI COORDINATE
In approssimazione lineare le (B.11) si semplificano come segue:
sξ = ξg − ψyP + θzP ,
sη = ηg + ψxP − ϕzP , (B.13)sζ = ζg − θxP + ϕyP .
Si osservi che gli spostamenti assoluti non sono altro che spostamenti misurati rispetto al riferi-mento degli assi di equilibrio.
Appendice C
Moti oscillatori
C.1 Premessa
I fenomeni oscillatori ricorrono frequentemente in natura. Infatti, in generale, ogni sistema inizial-mente in una posizione di equilibrio stabile, spostato leggermente da essa e quindi lasciato libero, simuove di moto oscillatorio attorno alla posizione iniziale. Si pensi ed esempio al pendolo semplice,ad un corpo sottoposto all’azione di una molla elastica, ad un circuito elettrico con induttanza ecapacita, agli atomi di un solido, ecc.
I fenomeni oscillatori dei sistemi fisici, di natura anche molto diversa, hanno in comune il fattonotevole di essere descritti dalle stesse equazioni. Tra essi il piu semplice, ma il piu importante, e ilmoto armonico, la cui trattazione costituisce un modello per una descrizione esatta od approssimatadella maggior parte dei fenomeni oscillatori che si presentano in pratica quando ci si limiti aconsiderare il caso di piccole oscillazioni attorno alle posizioni di equilibrio stabile.
Nel seguito saranno studiati i fenomeni di questo tipo. Allo scopo, verranno considerate, oltrealla forza di richiamo (moto armonico semplice), anche le forze responsabili dello smorzamento delleoscillazioni (moto armonico smorzato), non escludendo l’azione di ulteriori sollecitazioni periodiche(moto armonico forzato). In ogni caso, lo studio sara effettuato con riferimento ad un corpo dimassa m soggetto all’azione di una molla elastica di cui un estremo e connesso ad un punto fisso.Rimane implicito che le conclusioni, con le necessarie corrispondenze, si possono estendere a queisistemi, fisicamente diversi, descritti dalle stesse equazioni.
Lo studio dei fenomeni in oggetto richiede l’uso di equazioni differenziali lineari del secondoordine. Per quanto ci riguarda, e sufficiente fornire solo le soluzioni delle suddette equazioniomettendo i calcoli intermedi, per la cui esecuzione il lettore viene rimandato ai corsi di analisi.
C.2 Moto armonico semplice
Si consideri un corpo di massa m sottoposto all’azione di una molla ideale di costante elastica k elunghezza di riposo l0, come quello mostrato in Figura C.1.
Supponendo che la molla sia vincolata all’altro estremo e che il corpo sia libero di muoversi sudi un piano orizzontale privo di attrito, la configurazione di equilibrio stabile del sistema coincidecon il punto O. In accordo con le osservazioni sperimentali, il corpo spostato dalla posizione diequilibrio e quindi lasciato libero, inizia ad oscillare attorno ad essa. Per la descrizione del motoconviene allora introdurre un sistema di ascisse x con origine in O ed orientamento scelto come infigura.
273

274 APPENDICE C. MOTI OSCILLATORI
a)
b)
x
m
m
0
Figura C.1: Sistema oscillante semplice.
Nella generica posizione, la componente della forza che agisce sul corpo lungo la direzione delmoto risulta:
fx = −kx , (C.1)
dove x = l − l0 e l’allungamento della molla. Si tratta di una forza di richiamo che si opponead ogni spostamento del sistema dalla posizione di equilibrio e quindi il segno della componente esempre opposto a quello dello spostamento.
L’equazione del moto segue dalla seconda legge della dinamica proiettata nella direzione delleascisse:
mx = fx . (C.2)
Sostituendo la (C.1) nella (C.2) si ottiene percio:
mx = −kx . (C.3)
Portando il termine di destra al primo membro e dividendo per m, segue:
x +k
mx = 0 , (C.4)
ovvero:
x + ω20 x = 0 , (C.5)
dove si pone ω20 = k/m. L’equazione del moto (C.5) e un’equazione differenziale omogenea del
secondo ordine, i cui integrali (soluzioni) sono tutte le funzioni la cui derivata seconda rispetto altempo e proporzionale alla funzione stessa. Ad esempio sono di questo tipo le funzioni armonichecos ω0t e sinω0t.
La soluzione generale dell’equazione (C.5) si ottiene facendo la combinazione lineare dellefunzioni precedenti, vale a dire ha la forma:
x(t) = A cosω0t + B sin ω0t , (C.6)
con A e B costanti da determinare in base alle condizioni iniziali. Piu spesso conviene porre lasoluzione della (C.5) nella forma equivalente:
x(t) = C cos(ω0t + γ) , (C.7)

C.2. MOTO ARMONICO SEMPLICE 275
con C e γ costanti che, come si puo verificare immediatamente, sono legate ad A e B dalle relazioni:
C =√
A2 + B2 , tan γ =B
A. (C.8)
La soluzione (C.7), ovvero la (C.7), rappresenta la legge oraria di un moto armonico di ampiezzaC, pulsazione ω0 (spesso indicata con il nome di frequenza angolare od anche, impropriamente,con quello di frequenza) e costante di fase γ (fase iniziale).
Figura C.2: Legge oraria del moto armonico.
Il grafico delle corrispondenti oscillazioni libere, ossia la legge oraria del moto, e riportato inFigura C.2. Si noti che la frequenza ed il periodo delle oscillazioni libere, definiti dalle relazioni:
ω0 =
√k
m, T0 =
2π
ω0= 2π
√m
k, (C.9)
vengono spesso chiamati anche frequenza naturale e periodo naturale in quanto riferiti ad un sistemaideale privo di smorzamento. Essi sono espressi per mezzo delle caratteristiche fisiche del sistema(inerziali ed elastiche) e sono indipendenti dalle condizioni iniziali del moto. Nei sistemi reali laproprieta precedente e vera soltanto nell’ipotesi delle piccole oscillazioni.
A conclusione e utile riportare le relazioni che sussistono tra le diverse forme di soluzione della(C.5) piu comunemente incontrate in letteratura e le condizioni iniziali del moto, ovvero:
x(t) = A cosω0t + B sin ω0t ,
x(t) = C cos(ω0t + γ) ,
x(t) = <{(A1 + iB1)eiω0t
},
x(t) = A2eiω0t + B2e−iω0t , (C.10)
dove < e il simbolo della parte reale di un numero complesso. Sostituendo un’arbitraria di questesoluzioni nella (C.5) e possibile convincersi che essa soddisfa l’equazione differenziale del motoarmonico. Inoltre, e facile dimostrare la loro equivalenza determinando esplicitamente le costantidi integrazione per mezzo delle condizioni iniziali. Di solito, queste ultime vengono assegnateassumendo che per t = 0 si abbia x(0) = x0, x(0) = x0, cioe supponendo che nell’istante sceltocome iniziale la massa sia spostata dalla posizione di equilibrio della quantita x0 e possieda velocitax0.
A tal fine, conviene scrivere le espressioni per lo spostamento e la velocita in forma trigonome-trica, avvalendosi qualora necessario della formula di Eulero per gli esponenziali. In questo modorisulta per la prima espressione:

276 APPENDICE C. MOTI OSCILLATORI
x(t) = A cosω0t + B sin ω0t ,
x(t) = −ω0A sin ω0t + ω0B cosω0t , (C.11)
per la seconda:
x(t) = C(cosω0t cos γ + sin ω0t sin γ) ,
x(t) = ω0C(− sin ω0t cos γ + cos ω0t sin γ) , (C.12)
per la terza:
x(t) = <{(A1 + iB1)(cos ω0t + i sin ω0t)} = A1 cos ω0t−B1 sinω0t ,
x(t) = −ω0A1 sin ω0t− ω0B1 cos ω0t , (C.13)
ed infine per la quarta:
x(t) = (A2 + B2) cos ω0t + i(A2 −B2) sin ω0t ,
x(t) = −ω0(A2 + B2) sin ω0t + iω0(A2 −B2) cos ω0t . (C.14)
Sostituendo le condizioni iniziali nelle (C.11), (C.12), (C.13), e (C.14), si ottengono le costanti diintegrazione cercate. Segue per la prima espressione:
A = x0 , B =x0
ω0, (C.15)
per la seconda:
C =√
x20 + (x0/ω0)2 , tan γ = − x0/ω0
x0, (C.16)
per la terza:
A1 = x0 , B1 = − x0
ω0, (C.17)
ed infine per la quarta:
A2 =12
(x0 − i
x0
ω0
), B2 =
12
(x0 + i
x0
ω0
). (C.18)
Si noti che i risultati precedenti possono essere riassunti piu semplicemente in un’unica espres-sione, ottenuta scrivendo la soluzione dell’equazione differenziale (C.5) nella forma:
x(t) = x0 cosω0t +x0
ω0sinω0t . (C.19)
Si tratta della legge oraria del moto armonico in cui compaiono esplicitamente le condizioni iniziali.

C.3. MOTO ARMONICO SMORZATO 277
x
m
Figura C.3: Sistema oscillante smorzato.
C.3 Moto armonico smorzato
L’esperienza insegna che ogni sistema oscillante non mantiene l’ampiezza di oscillazione costantecome previsto dall’equazione (C.7). Infatti, a causa delle inevitabili resistenze passive, l’ampiezzadiminuisce progressivamente fino ad annullarsi: ogni moto oscillatorio reale e dunque smorzato.
Finora e stato supposto che il moto dei corpi avvenisse nel vuoto in modo da poter trascurarela resistenza del mezzo. Per descrivere una situazione piu vicina all’andamento reale, si consideriil sistema rappresentato in Figura C.3.
Esso e stato ottenuto generalizzando il sistema piu semplice rappresentato in Figura C.1, me-diante l’aggiunta di uno smorzatore, cioe di un disco di massa trascurabile, ma di dimensioni finite,immerso in un fluido. Durante il moto il fluido esercita sul sistema una resistenza che, almeno pervelocita sufficientemente piccole, si puo considerare direttamente proporzionale alla prima potenzadella velocita:
fr = −bx . (C.20)
Per determinare l’equazione del moto conviene scegliere un riferimento con l’origine delle ascissenella posizione di equilibrio. Le forze agenti sono la forza elastica della molla e la resistenza delmezzo ed il loro risultante, nella direzione del moto, ha componente eguale a:
fx = −kx− bx . (C.21)
Dalla seconda legge della dinamica, con semplici passaggi, segue:
x +b
mx +
k
mx = 0 . (C.22)
L’equazione (C.22) rappresenta l’equazione del moto armonico smorzato. Facendo, per semplicita,le sostituzioni:
ω20 =
k
m, 2µ =
b
m, (C.23)
dove ω0 e la frequenza naturale delle oscillazioni in assenza di smorzamento e µ il coefficiente dismorzamento, l’equazione (C.22) diviene:
x + 2µx + ω20x = 0 . (C.24)
Si tratta di un’equazione differenziale lineare omogenea del secondo ordine, la cui soluzione di-pende dal valore relativo dei coefficienti ω0 e µ (cioe, in ultima analisi, dei parametri k e b). Piuprecisamente, la (C.24) puo essere risolta assumendo una soluzione della forma:
x(t) = est , (C.25)
dove s e una costante da determinarsi. Sostituendo la (C.25) nell’equazione (C.24), si ottiene larelazione:
(s2 + 2µs + ω2
0
)est = 0 , (C.26)

278 APPENDICE C. MOTI OSCILLATORI
che e soddisfatta per tutti i valori di t quando:
s2 + 2µs + ω20 = 0 . (C.27)
L’equazione (C.27), e conosciuta come equazione caratteristica. Poiche essa ha due radici:
s1,2 = −µ∓√
µ2 − ω20 , (C.28)
la soluzione generale per le oscillazioni libere smorzate risulta:
x(t) = Aes1t + Bes2t , (C.29)
dove A e B sono costanti arbitrarie dipendenti dalle condizioni iniziali.Dall’equazione (C.28) segue che il comportamento dinamico del sistema smorzato dipende dal
valore numerico del radicando ∆ = µ2−ω20 . Il valore dello smorzamento che riduce tale radicando
a zero e chiamato smorzamento critico:
µc = ω0 . (C.30)
Esso viene spesso preso come grandezza di riferimento per la misura degli smorzamenti. Per questo,esprimendo lo smorzamento reale del sistema con il rapporto adimensionale:
ν =µ
µc=
µ
ω0, (C.31)
noto come coefficiente adimensionale di smorzamento, si ottiene per l’equazione del moto (C.22)la forma equivalente:
x + 2νω0x + ω20x = 0 . (C.32)
La (C.32) si presta bene per lo studio del moto armonico smorzato. Infatti, poiche le radicidell’equazione caratteristica (C.28) diventano:
s1,2 =(−ν ∓
√ν2 − 1
)ω0 , (C.33)
risulta ovvio che si verificano diverse situazioni fisiche quando ν e piu grande, uguale o piu piccolodell’unita. Analizzando separatamente i vari casi si ottiene quanto segue.
a) Smorzamento minore di quello critico (ν < 1)
E questo il caso µ < ω0 (∆ < 0). Posto allora ω′0 =√
ω20 − µ2, la soluzione dell’equazione (C.24)
assume la forma:
x(t) = A0e−µt cos(ω′0t + γ) , (C.34)
essendo A0 l’ampiezza, γ la fase iniziale ed ω′0 la frequenza naturale del sistema in presenza dellosmorzamento. L’equazione (C.34) e la legge oraria di un moto oscillatorio di frequenza ω′0 edampiezza A decrescente nel tempo secondo la legge esponenziale:
A(t) = A0e−µt . (C.35)
Un esempio di soluzione e mostrato in Figura C.4.Il moto descritto dall’equazione (C.34) non e periodico in senso stretto e viene percio deno-
minato moto periodico smorzato o pseudoperiodico. La costante µ e un parametro caratteristicodel sistema il cui reciproco τ = 1/µ rappresenta il tempo necessario perche l’ampiezza decresca

C.3. MOTO ARMONICO SMORZATO 279
t
x
A0
e -µt
0
A0
Figura C.4: Moto armonico smorzato.
del fattore 1/e=0.367879 . . . , essendo e=2.718281 . . . . Esso viene chiamato costante di tempo. Selo smorzamento e molto piccolo, ovvero µ << ω0, si ha ω′0 ∼= ω0, nel qual caso lo smorzamentomostra un’influenza piccola sulla frequenza di oscillazione e quindi e possibile trascurarne l’effetto.In particolare questo succede per i moti nave, dove il valore di µ non supera il 10-20% di ω0.
Le costanti d’integrazione A0 e γ della soluzione (C.34) si determinano con le condizioni iniziali.Differenziando tale espressione rispetto al tempo, si ottiene:
x(t) = −µA0e−µt cos(ω′0t + γ)− ω′0A0e−µt sin(ω′0t + γ) . (C.36)
Sostituendo nelle (C.34) e (C.36) lo spostamento e la velocita al tempo t = 0, si puo scrivere:
x0 = A0 cos γ ,
x0 = −µA0 cos γ − ω′0A0 sin γ . (C.37)
Da qui, con semplici passaggi, segue:
A0 =
√x2
0 +(
x0 + µx0
ω′0
)2
,
tan γ = − x0 + µx0
ω′0x0. (C.38)
E interessante osservare che le oscillazioni libere smorzate come pure quelle non smorzate hannola proprieta dell’isocronismo, cioe il periodo di oscillazione e indipendente dall’ampiezza. Questaproprieta e vera solamente nella misura in cui la reale situazione fisica del moto si descrive conequazioni differenziali lineari.
b) Smorzamento maggiore di quello critico (ν > 1)
In questo caso µ > ω0 (∆ > 0). La soluzione dell’equazione (C.24), assume la forma:
x(t) = C1e−(µ+√
µ2−ω20)t + C2e−(µ−
√µ2−ω2
0)t , (C.39)
con C1 e C2 costanti dipendenti dalle condizioni iniziali. Si tratta di un moto aperiodico, ovvero inconseguenza del forte smorzamento il corpo si avvicina progressivamente alla posizione di equilibriox = 0, senza compiere oscillazioni. Esempi di moto aperiodico vengono mostrati in Figura C.5,relativamente a due differenti valori della velocita iniziale x0.

280 APPENDICE C. MOTI OSCILLATORI
t
x
µ0> 0
µ0= 0
A0
Figura C.5: Esempi di moto aperiodico.
x
m
f cos t0 ω
Figura C.6: Sistema oscillante forzato
c) Smorzamento uguale a quello critico (ν = 1)
Il coefficiente di smorzamento ha il valore critico µc = ω0 (∆ = 0). Il moto e un moto aperiodicocritico e la corrispondente legge oraria risulta:
x(t) = e−µt(C1t + C2) , (C.40)
con C1 e C2 costanti da determinare in base ai valori iniziali di spostamento e velocita. Larappresentazione grafica della legge oraria (C.40) assomiglia a quella gia vista in Figura C.5.
L’importanza pratica di questo tipo di moto sta nel fatto che in condizioni critiche il sistemaimpiega, rispetto agli altri casi, un tempo minore perche l’ampiezza di oscillazione scenda al disotto di una frazione assegnata dell’ampiezza iniziale. In genere si cerca di realizzare questacondizione negli strumenti di misura ad equipaggio mobile in quanto lo stato di smorzamentocritico corrisponde per l’apparecchiatura alla condizione di massima prontezza.
C.4 Moto armonico forzato
Si consideri ora il sistema di Figura C.6 che descrive un moto oscillatorio forzato. Esso e soggettoad una forza eccitante esterna periodica del tipo:
f(t) = f0 cosωt , (C.41)
In questo caso, l’equazione del moto acquista allora la forma:
x +b
mx +
k
mx =
f0
mcosωt , (C.42)
ovvero:
x + 2µx + ω20x =
f0
mcos ωt , (C.43)
essendo µ = b/2m il coefficiente di smorzamento ed ω0 =√
k/m la frequenza naturale del sistemain assenza di smorzamento.

C.4. MOTO ARMONICO FORZATO 281
La (C.43) e un’equazione lineare del secondo ordine non omogenea e la sua soluzione consta didue termini distinti, ovvero e del tipo:
x(t) = x1(t) + x2(t) . (C.44)
Il primo termine x1(t) e la soluzione generale dell’equazione omogenea associata all’equazione(C.43) e descrive percio il moto del sistema in assenza di eccitazione esterna periodica (motonaturale). Poiche l’equazione omogenea associata si riduce alla (C.24) gia studiata nel paragrafoprecedente, ne segue che tale soluzione puo essere di tipo periodico smorzato, aperiodico, oppureaperiodico critico. In ogni caso, essa rappresenta un moto smorzato, la cui ampiezza divienetrascurabile dopo un opportuno intervallo di tempo che caratterizza la durata della fase transitoria,ovvero limt→∞ x1(t) = 0. Le condizioni iniziali, che entrano nella soluzione attraverso le costantid’integrazione, vengono alla fine dimenticate dal sistema.
Il secondo termine e una soluzione particolare dell’equazione (C.43) completa del suo secondomembro e la sua espressione e del tipo:
x2(t) = Q cos(ωt + δ) . (C.45)
Si tratta di un moto armonico con ampiezza Q e fase iniziale δ indipendenti dalle condizioniiniziali e determinate sostituendo tale soluzione nell’equazione del moto. Risulta in particolare:
Q =f0/m√
(ω2 − ω20)2 + 4µ2ω2
,
tan δ =2µω
ω20 − ω2
. (C.46)
Dopo un tempo sufficientemente lungo, la (C.45) assume percio la forma:
x(t) = Q cos(ωt + δ) , (C.47)
che rappresenta la risposta stazionaria del sistema in regime forzato. Il sistema oscilla con lafrequenza ω dell’azione forzante, mentre l’ampiezza Q delle oscillazioni in regime stazionario (C.45)varia in funzione del rapporto delle frequenze ω/ω0 e dello smorzamento µ. Per ω = 0 si haQ(0) = Q0 = f0/k, vale a dire l’elongazione del sistema in condizioni statiche (freccia a frequenzanulla). Per questo si usa definire il coefficiente di amplificazione κ(ω) = Q(ω)/Q0 che rappresentail fattore per cui la freccia a frequenza nulla deve essere moltiplicata al fine di ottenere l’ampiezzadi oscillazione alla frequenza generica. Risulta percio:
κ =ω2
0√(ω2 − ω2
0)2 + 4µ2ω2. (C.48)
Introducendo ora il rapporto di sincronismo (tuning ratio) Λ = ω/ω0 ed il coefficiente adimensionaledi smorzamento ν, dalle relazioni (C.46) e (C.48) segue:
κ =1√
(1− Λ2)2 + 4ν2Λ2,
tan δ = − 2νΛ1− Λ2
. (C.49)
La Figura C.7a mostra l’andamento del fattore di amplificazione in funzione del rapporto disincronismo Λ per differenti valori del coefficiente ν, ovvero la cosiddetta curva di risposta infrequenza. Come si vede dal grafico, e possibile raggiungere una notevole amplificazione dell’oscil-lazione a condizione che si abbia Λ ≈ 1, cioe per frequenze di eccitazione prossime alla frequenza

282 APPENDICE C. MOTI OSCILLATORI
0.0 0.5 1.0 1.5 2.0
Tuning Ratio, Λ = ω/ω0 (-)
0
2
4
6
8
10
12
Am
plifi
catio
n F
acto
r,
κ =
Q/Q
0 (
-)
ν = 0
0.05
0.10
0.25
0.50
0.0 0.5 1.0 1.5 2.0
Tuning Ratio, Λ = ω/ω0 (-)
-180
-135
-90
-45
0
Initi
al P
hase
, δ
(d
eg)
ν = 00.050.100.25
0.50
a)
b)
Figura C.7: Curva di risposta in frequenza e corrispondente andamento della fase iniziale.
C.4. MOTO ARMONICO FORZATO 283
naturale del sistema non smorzato. In particolare, se lo smorzamento non e troppo grande, puorisultare anche κ >> 1 ed il massimo della risposta si ottiene quando il radicando della (C.46)presenta un minimo. La condizione perche questo avvenga segue immediatamente dopo aver diffe-renziato tale integrando rispetto a Λ ed eguagliato la derivata a zero. Si ottiene in questo modo ilrapporto di sincronismo:
Λres =√
1− 2ν2 , (C.50)
cui corrisponde il massimo della risposta:
κmax =1
2ν√
1− ν2. (C.51)
Questo fenomeno e noto come risonanza e la frequenza in corrispondenza alla quale l’ampiezzaassume il valore massimo si chiama frequenza di risonanza. In particolare, nel caso ideale dismorzamento nullo, per Λ → Λres, il fattore di amplificazione tende ad infinito. In pratica, questasituazione non e pero realizzabile, sia per la inevitabile presenza dello smorzamento, sia perche ilsistema ha una resistenza meccanica finita.
Per quanto riguarda la fase dell’oscillazione stazionaria, si puo osservare che, in base all’e-quazione (C.45), essa non e determinata dalle condizioni iniziali, ma dalla frequenza della forzaeccitante. In particolare, in condizioni di risonanza, si ha δ = π/2, cioe lo spostamento e in ritardodi π/2 rispetto alla forza. L’andamento della fase in funzione della frequenza di eccitazione vienemostrato in Figura C.7b per differenti valori dello smorzamento.
Da quanto precede si puo comprendere l’importanza che ha nella pratica lo studio e la cono-scenza delle frequenze naturali di un sistema fisico. Ad esempio, nel caso di una macchina o diun edificio, la conoscenza di queste frequenze permette, in fase di progettazione, di evitare unapossibile risonanza con le sollecitazioni esterne.
Questo problema non e, pero, di facile soluzione non appena il sistema abbia una strutturaun po’ complessa. Inoltre, quando le oscillazioni non sono di piccola ampiezza, a causa dellanonlinearita della forza di richiamo, vengono alla luce aspetti completamente nuovi. Ad esempio,un sistema puo presentare il fenomeno della risonanza anche alle frequenze multiple e sottomultipledella frequenza naturale, per una stessa frequenza si puo avere piu di uno stato oscillatorio, ecc.
I fenomeni appena accennati non sono previsti in base alla trattazione fin qui svolta. Essi infattiinsorgono quando si considerino gli effetti nonlineari dei fenomeni oscillatori, quando cioe si studinole oscillazioni nonlineari di cui la presente trattazione costituisce solo una prima approssimazione.

284 APPENDICE C. MOTI OSCILLATORI
Appendice D
Analisi dimensionale e similitudinedinamica
D.1 Premessa
Anche sotto ipotesi molto semplificative, le equazioni che governano i diversi regimi di flusso diun fluido reale sono cosı complesse da non ammettere soluzioni analitiche, se non per alcunegeometrie molto semplici. Tuttavia, l’ingegnere progettista che spesso deve cimentarsi con unanuova costruzione, una struttura offshore, una turbina, un propulsore aereo o una trasmissioneidraulica, ha la necessita di conoscere i moti fluidi anche per geometrie molto complesse. Inalcune di queste situazioni, l’uso dei calcolatori elettronici gli consente la previsione degli effettipiu significativi, ma la fiducia nella validita di questi ultimi diminuisce con l’aumentare del grado dicomplessita del fenomeno. Ne segue che, per ottenere una buona capacita previsionale, il progettistae costretto a ricorrere alla sperimentazione su modelli in scala da effettuarsi prima della costruzionedel prototipo. Nella pratica ingegneristica moderna ogni nuova realizzazione tecnica, soggettaall’interazione con un mezzo fluido, viene raramente portata a termine senza che siano state fattedelle prove sperimentali di laboratorio.
I modelli in scala sono dei sistemi proporzionati in base al sistema originale in modo tale cheil comportamento quantitativo del prototipo possa essere dedotto dal comportamento quantita-tivo del modello, sebbene il modello possa avere una minore (maggiore) dimensione e maggiori(minori) velocita. Questo fatto sfrutta la similitudine fisica tra il comportamento del prototipo edel suo modello. Generalmente, i modelli sono realizzati in scala ridotta e percio possono esserecostruiti e provati a costo comparativamente molto minore del prototipo. Tuttavia, nei casi in cuile dimensioni microscopiche del prototipo rendono difficile la sperimentazione, i modelli si possonorealizzare anche nelle versioni in scala maggiorata; ad esempio, per mezzo di modelli in scala mag-giorata e stato possibile studiare il moto di micro-organismi in fluidi biologici. I modelli possonoessere usati vantaggiosamente anche per simulare flussi troppo rapidi o troppo lenti per consentireun’appropriata sperimentazione; la deriva dei ghiacci e stata modellata mediante flussi a velocitamaggiore di quella reale sfruttando per questo miscele di acqua e caolino.
Nel seguito, vengono discussi i principi che governano la progettazione dei modelli in scala ela successiva interpretazione dei risultati sperimentali. Per questo, sara importante sottolinearel’impiego delle unita di misura che, per il modo stesso in cui vengono definite, formano un sistemacapace di assicurare la piena validita delle relazioni quantitative che stanno alla base delle diverseleggi fisiche. Del problema, fondamentale per tutto il vastissimo campo delle misure tecniche, cisi occupera solo marginalmente. Maggiore risalto sara dato invece all’analisi dimensionale ed alle
285

286 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
sue implicazioni piu significative. Tra queste vale la pena sottolineare l’introduzione dei cosiddetticriteri di similitudine fisica che portano alla definizione di alcuni parametri adimensionali parti-colarmente adatti per descrivere le caratteristiche fisiche dei diversi regimi di flusso. Il numeromassimo di tali parametri, nell’ambito di una certa tipologia di fenomeni, e regolato dal ben notoTeorema Π (Teorema Pi). I risultati dell’analisi dimensionale verranno infine applicati al caso spe-cifico della realizzazione dei modelli in scala di navi di superficie ed alla modellazione delle provedi tenuta al mare.
D.2 Grandezze fisiche e loro misura
Scopo della fisica e lo studio dei fenomeni naturali al fine di darne una descrizione quantitativa,ovvero di determinare eventuali relazioni tra le grandezze che in essi intervengono (leggi fisiche).Per questo si fa uso del metodo sperimentale che consiste nell’esame dei fenomeni in condizionicontrollate e riproducibili, avvalendosi di prove ed esperimenti.
Si chiamano grandezze fisiche quegli enti, quelle proprieta o piu in generale quei caratteri diun fenomeno che e possibile tradurre in numeri. In termini equivalenti, si puo dire che l’oggettodella fisica e dei suoi esperimenti sono le grandezze fisiche, cioe quegli aspetti dei fenomeni su cuie possibile operare in modo tale da darne un’espressione quantitativa. Con il termine misura siindica appunto il procedimento con il quale gli enti caratteristici di un fenomeno sono trasformatiin numeri, vale ad dire l’insieme di quelle operazioni di laboratorio (con le quali si osservanoo si registrano informazioni sugli aspetti caratteristici del fenomeno) e dei successivi processi dielaborazione, che hanno come risultato l’espressione quantitativa del fenomeno stesso. In altritermini, l’operazione di misura consiste in un confronto tra l’ente in esame ed un altro della stessaspecie assunto come unita, il cui risultato finale e un valore numerico seguito dall’indicazionedell’unita scelta. Il fatto che l’unita (o campione) debba essere dello stesso tipo, vale a dire debbapossedere le stesse caratteristiche della grandezza da misurare, implica una suddivisione degli entisu cui si opera in classi o specie, ciascuna costituita da elementi tra i quali e possibile l’operazionedel confronto (enti o grandezze omogenee).
Se nell’ambito di una determinata classe di grandezze si sceglie un campione o unita di misura,in generale indicato con UG, ad ogni elemento G della classe si puo far corrispondere, con unopportuno procedimento, un numero g che esprime quante volte l’unita UG e contenuta in G. Ilnumero g e la misura di G rispetto all’unita UG. In simboli cio si puo scrivere come:
G = gUG , (D.1)
ovvero:
g =G
UG. (D.2)
Sebbene in linea di principio la misura di una grandezza fisica sia data da un numero reale,evidenti limitazioni operative consentono di ottenerne soltanto un valore approssimato espresso daun numero decimale limitato, salvo casi particolari.
La definizione di grandezza fisica ha percio carattere essenzialmente operativo e si puo sinte-tizzare nei punti che seguono:
• scelta di un’unita di misura omogenea con la grandezza in esame;
• definizione delle operazioni di laboratorio e dei successivi processi di elaborazione che, almenoin linea di principio, si devono eseguire per fare il confronto con l’unita ed in particolare perstabilire quando due grandezze sono uguali oppure una e multipla dell’altra;

D.3. GRANDEZZE FONDAMENTALI E GRANDEZZE DERIVATE 287
• espressione numerica del valore della grandezza, seguita dall’indicazione dell’unita usata ecorredata dal grado di attendibilita (errore).
Un modo equivalente per esprimere che piu grandezze sono della stessa specie (o della stessaclasse), e quello di dire che esse hanno le stesse dimensioni. Per indicare le dimensioni dellagrandezza G, e dunque della classe di grandezze a cui G appartiene, si scrivera semplicemente [G].
L’analisi dimensionale di una grandezza fisica permette un esame qualitativo della stessa inrelazione a grandezze di altro tipo. In questo modo, non solo e possibile eseguire una primaverifica della correttezza e compatibilita delle relazioni che esprimono i risultati di un’indaginesperimentale o la risoluzione di un problema, ma e anche possibile, una volta schematizzato ilfenomeno in oggetto, fare previsioni sulla struttura delle leggi che ne regolano l’andamento, con isoli mezzi dimensionali. L’analisi dimensionale, come noto, e alla base della Teoria dei Modelli edella Similitudine Fisica, i cui metodi sono largamente impiegati nelle scienze applicate.
In linea di principio, le grandezze fisiche si possono distinguere in:
• grandezze direttamente misurabili, per le quali e possibile effettuare il confronto diretto conil campione. Lo sono, ad esempio, le lunghezze entro determinati limiti.
• grandezze indirettamente misurabili, la cui misura e ricondotta alla misura delle grandezzeda cui dipendono e per le quali si puo seguire un procedimento di misura diretto. Ne sonoun esempio la densita, la velocita, l’energia, ecc.
• grandezze ordinabili, per le quali si puo solamente constatare l’uguaglianza ed eventualmentedistinguere tra maggiore e minore, come ad esempio la temperatura, la durezza, ecc.
Per questa distinzione e per la problematica connessa, si rimanda il lettore a testi specializzatidi Metodi di Osservazione e Misura.
D.3 Grandezze fondamentali e grandezze derivate
La fenomenologia fisica risulta tale per cui, nell’ambito di un certo tipo di fenomeni (ad esempioquelli della cinematica, oppure quelli della dinamica, od ancora dell’elettrologia, ecc.), e possibilefissare un certo numero di grandezze (grandezze fondamentali o primitive) e da esse ricavare, o piupropriamente derivare, tutte le altre (grandezze derivate). Anche se in linea di principio la scelta,ed entro certi limiti anche il numero, delle grandezze fondamentali puo essere fatta/fissato inmodo arbitrario, in pratica essa e condizionata da particolari ragioni di convenienza e semplicita.Al proposito si osservi che la distinzione delle grandezze in fondamentali e derivate, non devefar ritenere che in fisica esistano grandezze piu importanti o piu essenziali di altre. Essa staa significare soltanto che, considerate tutte le grandezze che intervengono nella descrizione di uncerto tipo di fenomeni per cosı dire affini, mediante alcune di esse e possibile esprimere tutte le altre.Cosı, nell’ambito della cinematica, tutte le grandezze si possono derivare dalle due fondamentalilunghezza e tempo; nell’ambito della dinamica ricorrendo a lunghezza, tempo e massa; nell’ambitodell’elettrologia ricorrendo a lunghezza, tempo, massa ed intensita di corrente, ecc.
Volendo tradurre questi concetti in forma piu rigorosa, si puo dire che se A, B, C, . . . sono isimboli delle grandezze scelte come fondamentali per la descrizione di un certo tipo di fenomeni,ogni altra grandezza che in essi compare e espressa tramite le grandezze fondamentali medianteuna relazione del tipo:
G = kAαBβCγ . . . , (D.3)
con k reale diverso da zero ed α, β, γ, . . . razionali. La (D.3) e l’Equazione Definitrice dellagrandezza G in termini delle grandezze fondamentali A, B, C, . . .. Essa puo essere una relazione

288 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
di definizione oppure una legge naturale. Analogamente, tra le misure delle grandezze, ciascunaespressa nelle rispettive unita, intercorre la relazione:
g = kaαbβcγ . . . , (D.4)
ove a, b, c, . . . sono le misure delle grandezze A, B, C, . . .. Tra le unita di misura si ha invece:
UG = UαAUβ
BUγC . . . , (D.5)
con ovvio significato dei termini. Con riferimento poi alla natura delle grandezze in questione,piuttosto che alla loro espressione quantitativa, si puo scrivere:
[G] = [AαBβCγ . . .] = [A]α[B]β [C]γ . . . , (D.6)
formalmente identica a quella tra le unita di misura. La (D.6) si chiama Equazione Dimensionaledella grandezza G mentre gli esponenti α, β, γ, . . . si dicono le dimensioni di G rispetto allegrandezze fondamentali A, B, C, . . .. Se, in particolare, α = β = γ = . . . = 0, la grandezza G euna grandezza adimensionale e si scrive semplicemente [G] = 1. In questo caso l’unita di misura eanonima.
In generale, fissate le grandezze fondamentali, nella definizione delle grandezze derivate sipossono presentare tre casi:
• grandezze di specie diversa aventi dimensioni diverse;
• grandezze di specie diversa aventi le stesse dimensioni (ad esempio il momento di una forzaed il lavoro);
• grandezze di specie diversa, ma adimensionali (ad esempio il rendimento, la densita relativa,ecc.).
E chiaro che il numero delle grandezze di specie diversa aventi le stesse dimensioni diminuisceaumentando opportunamente il numero delle grandezze fondamentali. Ad esempio, introducendoanche l’angolo piano come grandezza fondamentale, le dimensioni del lavoro e del momento di unaforza si diversificano, in maniera alquanto artificiosa, a spese di una maggiore complessita formaledel sistema di unita.
Poiche le operazioni di somma e sottrazione hanno senso solo tra grandezze della stessa specie,ne segue che la prima condizione necessaria per la consistenza di un’uguaglianza tra grandezzefisiche e che le dimensioni dei singoli addendi, e quindi anche dei due membri, siano uguali. Questacondizione costituisce il Principio di Omogeneita Dimensionale. In generale esso non e sufficienteper affermare la validita di un’equazione. Infatti, come visto, puo accadere che grandezze di speciediversa (e dunque non omogenee) abbiano le stesse dimensioni: non basta che due grandezze sianoentrambe adimensionali per poterle sommare. In questo consiste la differenza spesso dimenticatatra grandezze adimensionali e numeri puri che invece si possono sempre sommare.
D.4 Cambiamento di unita di misura
La conoscenza dell’equazione dimensionale di una grandezza G ne rende agevole il cambiamentodell’unita di misura in conseguenza di un cambiamento delle unita delle grandezze fondamentali.In particolare, per la (D.1), se G ha il valore g in unita UG e valore g′ in unita uG, sussiste larelazione:
hG =g′
g=
UG
uG, (D.7)

D.5. TEOREMA Π 289
cioe il rapporto tra i valori numerici che esprimono le misure della grandezza in esame rispettoad unita diverse e uguale al rapporto inverso tra i valori delle corrispondenti unita. Il numero hG
rappresenta il fattore di ragguaglio (detto anche coefficiente di riduzione), ovvero il fattore per cuioccorre moltiplicare il valore della grandezza nella vecchia unita UG per ottenere il valore dellastessa nella nuova unita uG:
g′ = hGg . (D.8)
Per calcolare il fattore di ragguaglio, si supponga di usare per le grandezze fondamentali A,B, C, . . . le unita uA, uB , uC , . . . in luogo di UA, UB , UC , . . ., con UA = hAuA, UB = hBuB ,UC = hCuC , . . .. Con questa scelta, la vecchia unita UG e la nuova unita uG sono legate dallarelazione:
UG = UαAUβ
BUγC . . . =
(hα
AhβBhγ
C . . .)(
uαAuβ
BuγC . . .
)=
(hα
AhβBhγ
C . . .)
uG , (D.9)
essendo uG = uαAuβ
BuγC . . .. Dal confronto tra l’equazione (D.7) e la (D.9) segue immediatamente:
hG = hαAhβ
BhγC . . . . (D.10)
Nel seguito verra tacitamente assunto che le grandezze fisiche fondamentali vengano scelte coe-rentemente al Sistema Internazionale di unita di misura. In questo sistema, limitatamente aifenomeni della meccanica, le grandezze fondamentali sono massa, lunghezza e tempo, mentre isimboli adottati per le loro dimensioni sono M , L e T . Non verra dato alcun particolare risaltoal ben noto Sistema Tecnico che assume come grandezze fondamentali forza, lunghezza e tem-po, rispettivamente con dimensioni F , L e T . Altri sistemi di unita di misura, propri dell’areaanglosassone, saranno del tutto ignorati.
D.5 Teorema Π
Quando il numero delle grandezze caratteristiche che intervengono in un fenomeno fisico e maggioreo uguale del numero delle grandezze fondamentali disponibili (base), il Teorema Π fornisce unostrumento valido per organizzare queste grandezze in un numero minimo di gruppi adimensionalisignificativi (Buckingham, 1915). In particolare, il Teorema Π afferma che in un problema fisico,descritto da un insieme n di grandezze con m dimensioni fondamentali, e possibile raggruppare taligrandezze in n−m prodotti adimensionali fra loro indipendenti, nel senso che ogni altro prodottoadimensionale e una funzione di questi. I raggruppamenti adimensionali cosı ottenuti si chiamanotermini o parametri Π.
In molti casi il raggruppamento delle grandezze fisiche e tale che la combinazione adimensionalerisulti evidente oppure sia suggerita dal senso comune. Il caso piu semplice appare senz’altro quelloin cui due grandezze hanno le stesse dimensioni, ad esempio quelle di una lunghezza, per cui il lororapporto e un termine Π.
I passaggi necessari per determinare i parametri Π possono essere riassunti come segue:
• Elencare le n grandezze fisiche che entrano nel particolare problema in esame, notandonele dimensioni ed il numero m di dimensioni fondamentali. Questo richiede una qualcheconoscenza del fenomeno, ovvero le variabili significative devono essere note a priori. Adesempio, siano A1, A2, A3, . . ., An le grandezze pertinenti del problema (velocita, pressione,viscosita, ecc.) ed M , L, T le tre dimensioni fondamentali.
• Scrivere le relazioni funzionali fra le stesse, come ad esempio:
f(A1, A2, A3, . . . , An) = 0 , (D.11)

290 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
Grandezza Sistema Internazionale Sistema Tecnico
Eq. Dim. Unita Eq. Dim. Unita
Lunghezza L m L m
Tempo T s T s
Massa M kg FL−1T 2 kgf s2/m
Superficie L2 m2 L2 m2
Volume L3 m3 L3 m3
Velocita lineare LT−1 m/s LT−1 m/s
Accelerazione lineare LT−2 m/s2 LT−2 m/s2
Velocita angolare T−1 rad/s T−1 rad/s
Accelerazione angolare T−2 rad/s2 T−2 rad/s2
Periodo T s T s
Frequenza T−1 Hz T−1 Hz
Frequenza angolare (Pulsazione) T−1 s−1 T−1 s−1
Forza MLT−2 newton (N) F kgf
Impulso di forza MLT−1 N s FT kgf s
Quantita di moto MLT−1 kg m/s FT kgf s
Momento di una forza ML2T−2 N m FL kgf m
Momento di quantita di moto ML2T−1 kg m2/s FLT kgf m s
Momento d’inerzia ML2 kg m2 FLT 2 kgf m s2
Lavoro, Energia ML2T−2 joule (J) FL kgf m
Potenza ML2T−3 watt (W) FLT−1 kgf m/s
Densita ML−3 kg/m3 FL−4T 2 kgf s2/m4
Peso specifico ML−2T−2 N/m3 FL−3 kgf/m3
Rendimento 1 — 1 —
Pressione ML−1T−2 pascal (Pa) FL−2 kgf/m2
Modulo di elasticita ML−1T−2 N/m2 FL−2 kgf/m2
Tensione superficiale MT−2 N/m FL−1 kgf/m
Sforzo di taglio ML−1T−2 N/m2 FL−2 kgf/m2
Viscosita dinamica ML−1T−1 N s/m2 FL−2T kgf s/m2
Viscosita cinematica L2T−1 m2/s L2T−1 m2/s
Tabella D.1: Equazioni dimensionali e unita di misura.

D.5. TEOREMA Π 291
• Scegliere tra le grandezze fisiche iniziali un numero m di grandezze privilegiate, dette variabiliricorrenti, in modo da includere in esse tutte le dimensioni fondamentali del problema. Peresempio, siano A1, A2, A3 le grandezze che contengono M , L, T come dimensioni fondamen-tali, non necessariamente in ciascuna di esse ma nel loro insieme. Spesso una grandezza vienescelta in quanto essa specifica la scala geometrica, un’altra le condizioni cinematiche, ecc.Nei casi di maggiore interesse conviene fare riferimento alla massa del sistema o alle forze ingioco.
• Scrivere i termini Π sotto forma di espressioni monomie. Il primo termine Π puo essereespresso come prodotto delle grandezze scelte come variabili ricorrenti, ciascuna con espo-nente incognito, per un’altra grandezza fra quelle iniziali ma con potenza nota (generalmentepresa uguale ad uno):
Π1 = Ax11 Ay1
2 Az13 A4 . (D.12)
• Conservare le grandezze scelte come variabili ricorrenti e usare una delle restanti per co-struire il prossimo termine Π, ripetendo il ragionamento anche nella formazione dei terminisuccessivi. Segue per il secondo termine:
Π2 = Ax21 Ay2
2 Az23 A5 , (D.13)
e cosı via, fino all’ultimo:
Πn−m = Axn−m
1 Ayn−m
2 Azn−m
3 An . (D.14)
• Per ciascuna delle espressioni definitrici dei termini Π scrivere le equazioni degli esponenti,in modo che la somma degli esponenti di ogni dimensione risulti uguale a zero. In questomodo ogni termine Π risulta adimensionale.
• Risolvere simultaneamente le equazioni degli esponenti.
• Sostituire nelle espressioni dei termini Π gli esponenti cosı determinati per ottenere tutti glin−m parametri adimensionali.
• Stabilire la nuova relazione funzionale:
F1(Π1, Π2, Π3, . . . , Πn−m) = 0 , (D.15)
oppure risolvere esplicitamente rispetto ad uno dei termini Π:
Π1 = F2(Π2, Π3, . . . , Πn−m) . (D.16)
• Se richiesto, ricombinare i termini Π ottenuti in precedenza per alterare la loro forma,mantenendo pero lo stesso numero dei parametri indipendenti.
Un metodo molto semplice per determinare insiemi di termini Π alternativi a quello inizialeconsiste in una combinazione arbitraria dei parametri appartenenti al primo insieme. In questomodo, se ad esempio sono noti quattro termini Π, ovvero Π1, Π2, Π3, Π4, allora:
Πa = Πa11 Πa2
2 Πa33 Πa4
4 , (D.17)
e un nuovo termine Π, dove gli esponenti sono presi a piacere. Ne segue che Π1, Π2, Π3, Π4,costituiscono un nuovo insieme di termini Π. Questa procedura puo, in linea di massima, esserecontinuata all’infinito per trovare tutti gli insiemi possibili.
292 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
I parametri adimensionali approfondiscono significativamente la conoscenza dei fenomeni ca-ratteristici dei fluidi. Essi permettono di applicare un numero limitato di risultati sperimentali asituazioni complesse che coinvolgono diverse grandezze fisiche. Il concetto dell’analisi dimensionale,supportato da una comprensione delle peculiarita del fenomeno in esame, rende possibile una certageneralizzazione dei dati sperimentali. Ne segue che e spesso possibile condurre un numero minoredi prove, sebbene molto selettive, al fine di scoprire le maggiori problematiche del fenomeno e diconseguire importanti risparmi di tempo e denaro.
I risultati di un’analisi dimensionale possono essere trasmessi ad altri ricercatori in modo com-patto e significativo con la conseguente facilitazione nell’uso. Una tale presentazione delle informa-zioni, particolarmente semplice ed incisiva, consente spesso sia di scoprire nuove caratteristiche delfenomeno sia di mettere in evidenza i limiti di conoscenza del problema stesso. Uno dei principalivantaggi della scrittura adimensionale delle relazioni fisiche e quello dell’unicita di rappresentazio-ne. Infatti, se una grandezza e adimensionale in un sistema di unita di misura lo sara anche in unqualunque altro sistema equivalente. Pertanto un diagramma in variabili adimensionali e unico,vale a dire che esso non cambia, non solo se variano le unita di misura, ma anche se viene utilizzatoun diverso sistema di unita. Due sperimentatori che adoperino l’uno il Sistema Internazionale el’altro il Sistema Tecnico inglese pervengono, in variabili adimensionali, allo stesso grafico.
D.6 Similitudine dei moti fluidi
Nell’analisi delle forze e dei momenti di natura fluidodinamica, generati da flussi di corrente attornoalla carena, ai propulsori, ai timoni, sono frequentemente utilizzati i risultati delle prove su modelliin scala. Come noto, tali prove vengono effettuate nelle vasche navali, gallerie a vento e altreattrezzature sperimentali. Al fine di poter giudicare, sulla base dei risultati ottenuti, le forze ed imomenti generati al vero, i flussi attorno al corpo (prototipo) ed il suo modello devono trovarsi insimilitudine fisica (Sedov, 1959). In particolare, si puo osservare quanto segue:
• tra modello e prototipo esiste la similitudine geometrica se sono uguali i rapporti tra tuttele corrispondenti dimensioni del modello e del prototipo;
• tra sistemi geometricamente simili esiste la similitudine cinematica se le traiettorie delleparticelle omologhe (aventi la stessa posizione relativa) sono geometricamente simili e se irapporti tra le loro velocita sono uguali nel modello e nel prototipo;
• tra modello e prototipo geometricamente e cinematicamente simili esiste la similitudinedinamica se i rapporti tra forze omologhe nel modello e nel prototipo sono gli stessi.
Nel caso in cui il prototipo si trova in un flusso limitato, oltre alla necessita di assicurarela similitudine geometrica del prototipo e del modello, per realizzare la similitudine dinamica, enecessario soddisfare anche la similitudine geometrica dei contorni del campo. Questo significa,ad esempio, che nell’analisi del moto di una nave all’interno di un canale il modello deve essererimorchiato in un canale con sezione geometricamente simile alla sezione al vero.
La similitudine dinamica tra il prototipo ed il suo modello geometricamente simile puo essereottenuta usando in modo opportuno le grandezze fisiche indipendenti che caratterizzano il feno-meno. Queste grandezze influenzano il campo di flusso e quindi determinando le forze in gioco,come ad esempio le forze peso, le forze viscose, le forze di pressione, le forze di tensione superfi-ciale, ecc. (vedi Tabella D.2). La forza risultante (forza d’inerzia) agente sulla generica particellafluida e data dalla somma vettoriale delle forze componenti. Appare percio ragionevole richiedereche i rapporti delle varie forze componenti rispetto alla forza risultante siano gli stessi sia per ilprototipo che per il modello, ovvero che i due flussi siano caratterizzati dall’uguaglianza di al-cuni rapporti adimensionali (termini Π). Ne segue che per corpi geometricamente simili, i flussi

D.6. SIMILITUDINE DEI MOTI FLUIDI 293
idrodinamici possiedono similitudine dinamica solo se, nei punti corrispondenti, sono simili le lorolinee di corrente e sono eguali le forze idrodinamiche adimensionali agenti. Questo requisito costi-tuisce, probabilmente, il metodo piu convincente per stabilire i cosiddetti criteri di similitudine.Tali criteri, che costituiscono la condizione necessaria per la similitudine dinamica dei flussi dicorrente, non assicurano certamente la sufficienza della stessa. Le procedure seguite per ottenereanche la sufficienza non sono ovviamente cosı evidenti e richiedono, in linea di massima, un’analisidettagliata del fenomeno.
Forza componente Legge fisica Ordine di grandezza
Forza viscosa Fµ = µ(area)(gradiente velocita) µLU
Forza peso Fg = g(massa) ρgL3
Forza di pressione Fp =(pressione)(area) pL2
Forza di tensione superficiale Fs = σ(lunghezza) σL
Forza elastica Fe = E(area) EL2
Forza centrifuga Fc =(massa)(ω2r) ρω2L4
Forza d’inerzia Fi =(massa)(accelerazione) ρL2U2
Tabella D.2: Forze agenti in un fluido.
I criteri di similitudine dinamica comportano alcune limitazioni alla velocita del flusso, inrelazione alla scala del modello e delle proprieta fisiche dei fluidi considerati. Piu precisamente, icriteri di similitudine dei flussi di un fluido incompressibile e viscoso si realizzano per mezzo deiseguenti numeri adimensionali:
• numero di Eulero
Eu =2p
ρU2, (D.18)
• numero di Froude
Fn =U√gL
, (D.19)
• numero di Reynolds
Rn =UL
ν, (D.20)
• numero di Strouhal
Sh =L
UT, (D.21)
essendo U , L, T , rispettivamente la velocita, la dimensione lineare e l’intervallo di tempo carat-teristici del processo. In pratica puo essere presa come caratteristica, ad esempio, la velocita delmoto di avanzo del corpo, la velocita del flusso incidente ad una distanza significativa dal corpo(flusso imperturbato), ecc. Nella scelta della dimensione lineare caratteristica si deve tener contodelle proprieta specifiche del fenomeno considerato: per la resistenza al moto, nella maggior partedei casi, si sceglie L pari alla lunghezza del corpo nella direzione del flusso, ma in altri casi, comenello studio della planata, si preferisce usare la larghezza B oppure la grandezza V 2/3, essendo Vil volume di dislocamento. In acqua poco profonda il flusso viene caratterizzato dalla profondita ddell’acqua, per mezzo della quale si esprime frequentemente anche il numero di Froude.

294 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
Il numero di Eulero rappresenta il rapporto delle forze di pressione e le forze inerziali. Questonumero gioca un ruolo importante nella modellazione del fenomeno della cavitazione, quando perassicurare la similitudine dinamica dei flussi deve essere realizzata l’eguaglianza dei numeri dicavitazione del modello e del vero. Sono percio varianti del numero di Eulero sia il numero dicavitazione:
σ =2(p∞ − pc)
ρU2, (D.22)
con pc la pressione nella cavita, che il coefficiente di pressione:
p =2(p− p∞)
ρU2∞, (D.23)
essendo p∞ e U∞ la pressione e la velocita nel flusso indisturbato. Entrambi questi numeri, usatiper quantificare il rapporto tra la pressione statica e la pressione dinamica, esprimono il numeroEu per mezzo di una differenza di pressioni.
Se il moto del corpo non si accompagna con l’insorgere del fenomeno della cavitazione, lacondizione di eguaglianza degli altri criteri di similitudine, cioe dei numeri Fn, Rn e Sh, assicural’eguaglianza di p e di Eu nei punti corrispondenti dei flussi al vero e al modello. Ne segue che inquesti casi il criterio di Eulero non gioca alcun ruolo indipendente. Nel caso di flusso stazionariodi un fluido ideale con assenza di formazione ondosa, si consegue l’eguaglianza dei coefficienti dipressione p per una velocita di moto arbitraria senza dover soddisfare alcun requisito addizionale.
Il numero di Froude caratterizza il rapporto tra le forze inerziali e le forze peso. L’eguaglianzadei numeri Fn del modello e al vero assicura la proporzionalita di queste forze in ogni punto delflusso. Essa deve essere realizzata in tutti i casi in cui giocano un ruolo sostanziale i fenomenigenerati dal peso del fluido. Conseguentemente, nell’adempimento dell’eguaglianza:
UM√gLM
=US√gLS
, (D.24)
le caratteristiche della formazione ondosa attorno al modello e al vero saranno geometricamentesimili, le forze generate dalla formazione ondosa proporzionali al rapporto fra i cubi, mentre imomenti idrodinamici alla quarta potenza del rapporto fra le loro dimensioni lineari.
La velocita di avanzo del modello segue dall’eguaglianza dei numeri Fn del modello e al vero equindi puo essere calcolata secondo la formula:
UM = US
√κ , (D.25)
dove κ = LM/LS e il fattore geometrico di scala del modello. In questo modo si trova la velocitadi avanzo dei modelli di navi durante le prove nelle vasche sperimentali: questa velocita e minoredi quella della nave. Per corpi immersi, il cui moto sotto la superficie libera dell’acqua non com-porta alcuna formazione ondosa, l’adempimento dell’eguaglianza dei numeri Fn non si presentanecessaria.
Il numero di Reynolds caratterizza il rapporto delle forze inerziali con le forze viscose. Perla conservazione della proporzionalita di tali forze nel modello e al vero deve essere assicuratal’eguaglianza dei loro numeri Rn, ovvero:
UMLM
νM=
USLS
νS. (D.26)
Tuttavia, le caratteristiche della formazione vorticosa e dello strato limite nel modello e al vero sa-ranno geometricamente simili solo se contemporaneamente al criterio precedente si consegue anchela stessa estensione relativa dello strato limite laminare. Quest’ultimo, oltre che dal numero Rn,

D.6. SIMILITUDINE DEI MOTI FLUIDI 295
dipende anche dalle caratteristiche di rugosita della superficie del corpo e dal grado di turbolenzadel flusso incidente.
Dalla condizione di eguaglianza dei numeri Rn, la velocita del moto del modello si determinacon la formula:
UM = USLS
LM
νM
νS. (D.27)
La velocita di avanzo del modello in una prova effettuata con lo stesso fluido nel quale si muovel’oggetto al vero, risulta κ volte maggiore della velocita al vero, mentre le forze di natura viscosa,agenti sul modello e al vero, saranno tra loro eguali. In pratica, non conviene soddisfare l’egua-glianza dei numeri Rn nelle prove dei modelli di navi, dei propulsori e dei timoni ne nelle vaschenavali ne nei tunnel di cavitazione o nelle gallerie a vento. Conseguentemente, non e realizzabileil simultaneo adempimento dell’eguaglianza dei numeri Fn e Rn, come richiesto per le prove sumodelli di navi galleggianti, in quanto la viscosita del fluido per le prove su modello dovrebbe esseredeterminata con la relazione νM = νS/κ3/2.
Disporre di un fluido, la viscosita νM del quale consente di soddisfare la condizione stabilita inprecedenza, e praticamente impossibile. Per questo, nelle prove su modelli di corpi che si muovonosulla superficie libera del fluido o vicino ad essa, viene effettuata una modellazione parziale, deter-minando la velocita di avanzo del modello soltanto dall’eguaglianza dei numeri Fn. Per diminuirel’influenza della mancata corrispondenza dei numeri Rn nel corso di tali prove si utilizzano modellidi dimensioni abbastanza grandi, consentendo cosı di ridurre questa influenza e di tenerne contoper mezzo di un qualche metodo approssimato di calcolo.
Il numero di Strouhal rappresenta il rapporto tra le forze centrifughe e le forze inerziali. Essoesprime la condizione di similitudine dei moti dipendenti dal tempo, cioe dei moti non stazionari delfluido. Nel caso di un moto periodico, come intervallo di tempo caratteristico viene scelto il periodoT del fenomeno. Per un moto stazionario si puo prescindere da questo criterio di similitudine.
L’adempimento simultaneo dell’eguaglianza dei numeri Fn e Sh implica la relazione di scala:
TM = TS
√κ . (D.28)
Dopo aver stabilito la similitudine tra il modello ed il prototipo con le regole della modellazione,tutte le grandezze fisiche dipendenti saranno automaticamente riprodotte attraverso i loro specificifattori di scala. Ad esempio, per il calcolo delle forze idrodinamiche R e dei momenti idrodinamiciM valgono le formule generali:
R = CρU2
2S , M = Cm
ρU2
2SL , (D.29)
essendo S la superficie ed L la dimensione lineare caratteristica. Il fattore C si chiama coefficientedella forza idrodinamica, mentre Cm viene detto coefficiente del momento idrodinamico. I coeffi-cienti C e Cm possono essere determinati sperimentalmente oppure mediante previsioni teoriche.Entrambi dipendono dalla forma del corpo, dal suo orientamento rispetto alla direzione del motofluido e sono funzioni dei criteri di similitudine dinamica, ovvero:
C = f1(Fn, Rn, Sh) , Cm = f2(Fn, Rn, Sh) . (D.30)
Se i flussi incidenti sono dinamicamente simili, allora nel modello e al vero sono eguali sia icoefficienti delle forze idrodinamiche che dei momenti idrodinamici.
Si possono evidenziare i seguenti casi particolari di un corpo in moto con velocita costante(flusso stazionario):
• fluido viscoso
C = f1(Fn, Rn) , Cm = f2(Fn, Rn) . (D.31)

296 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
• fluido viscoso con assenza di formazione ondosa
C = f1(Rn) , Cm = f2(Rn) . (D.32)
• fluido non viscoso con presenza di formazione ondosa
C = f1(Fn) , Cm = f2(Fn) . (D.33)
Per corpi di alcune geometrie particolari (lastre piane disposte trasversalmente al flusso, sfere,cilindri circolari, ecc.) in moto lontano dalla superficie libera, i coefficienti delle forze e dei mo-menti idrodinamici risultano praticamente costanti su di un significativo intervallo di variazionedei numeri Rn. Questo significa che le caratteristiche del flusso attorno a tali corpi non dipendonodalla velocita.
I flussi di corrente nei quali i coefficienti delle forze idrodinamiche non dipendono dai criteri disimilitudine, si chiamano flussi automodellati. In particolare puo essere realizzata l’automodella-zione parziale rispetto a qualche particolare criterio. Se l’oggetto al vero si muove con numeri diRn corrispondenti alla zona di automodellazione, allora il flusso viene modellato per Rn arbitrari,anche se compresi nei limiti richiesti. Per corpi galleggianti in moto con velocita molto grandi omolto piccole e possibile ottenere l’automodellazione dei flussi anche rispetto al numero Fn.
Se le caratteristiche dei flussi di corrente dipendono anche dalle proprieta fisiche del fluidonon incluse nell’idrodinamica dei fluidi incompressibili, allora per la modellazione di tali flussie delle forze che in essi si originano e necessario prendere in considerazione i cosiddetti criterisupplementari di similitudine. Al proposito si puo ricordare quanto segue.
Nei flussi con fluido compressibile i criteri supplementari di similitudine sono il numero di Mach:
M =U
cs, (D.34)
essendo cs la velocita di propagazione del suono, ed il numero di Prandtl :
Pr =µcp
λT, (D.35)
dove cp e il calore specifico a pressione costante e λT la conducibilita termica. Il numero di Machesprime il rapporto tra la velocita delle particelle fluide e la velocita locale del suono. In un liquidola velocita di propagazione del suono si mantiene sensibilmente costante con la temperatura e lapressione. Nel caso dei gas, invece, essa varia con la temperatura assoluta T secondo la leggecs =
√γRT , essendo γ il rapporto tra i calori specifici ed R la costante universale.
Nei flussi dove un ruolo significativo appartiene alle forze della tensione superficiale, comecriterio di similitudine serve il numero di Weber :
We =ρU2L
σ, (D.36)
essendo σ la tensione superficiale del fluido. Il numero di Weber esprime il rapporto tra le forzed’inerzia e le forze di tensione superficiale.
Nei caso di flussi caratterizzati da scambi termici viene introdotto il numero di Nusselt :
Nu =hL
λT, (D.37)
dove h e il coefficiente di trasmissione del calore.In flussi turbolenti, le caratteristiche fisiche e le forze idrodinamiche dipendono dal grado di
turbolenza, definito dalla relazione:
εT =
√(v − v)2
v, (D.38)

D.7. MODELLAZIONE DEL COMPORTAMENTO IN MARE 297
essendo v la velocita del flusso pulsante e v la sua media temporale. Come tale, il grado diturbolenza caratterizza il rapporto tra l’energia cinetica del flusso pulsante e quella del flussomedio.
Nei flussi di fluidi non newtoniani, come criterio di similitudine serve il numero di Reynoldsgeneralizzato:
Rn0 =U2−nLnρ
µn, (D.39)
essendo n e µn due grandezze caratteristiche definite dal tensore degli sforzi.Il criterio di similitudine per flussi stratificati verticalmente si basa sul numero di Richardson:
Ri =g
ρ
∂ρ
∂z
(∂U
∂z
)−2
. (D.40)
Per l’oceano risulta ∂ρ/∂z = 1·10−6 g/cm4, mentre nell’atmosfera, con un gradiente di temperaturadi 1 deg/m, si ha ∂ρ/∂z = 4 · 10−8 g/cm4.
Nello studio dei fenomeni di interazione del flusso di corrente con corpi elastici (idroelasticita,moto nei ghiacci), si utilizza come criterio di similitudine il numero di Cauchy :
Ch =ρU2
E, (D.41)
con E modulo di elasticita del materiale. Come tale esso esprime il rapporto tra le forze d’inerziae le forze elastiche. Per i gas ed i liquidi, essendo la velocita del suono cs =
√E/ρ, il numero di
Cauchy corrisponde al quadrato del numero di Mach.Nei fluidi viscoelastici, come criterio di similitudine serve il numero di Debor :
De =Uθ
L, (D.42)
dove L e la dimensione lineare caratteristica nella direzione del flusso e θ il tempo di rilassamento.A causa dell’influenza specifica delle singole proprieta fisiche del fluido sulla struttura del flusso,
ne segue che in molti casi anche i coefficienti delle forze idrodinamiche e dei momenti sarannofunzioni dei criteri supplementari di similitudine. Si osservi che, oltre ai criteri sopra elencati,spesso vengono utilizzati altri numeri adimensionali consistenti in una combinazione razionale diquelli precedenti. L’applicazione circostanziata di criteri combinati, dai quali d’altronde dipendonoi coefficienti delle forze e dei momenti idrodinamici, puo rendere possibile il trasferimento al verodei risultati di ogni analisi sperimentale o teorica.
D.7 Modellazione del comportamento in mare
Come in ogni sperimentazione con modelli in scala, anche nell’analisi dimensionale del problema deimoti nave si presenta la necessita di simulare le condizioni di prova in modo da assicurare che i motidel modello siano l’esatta riproduzione dei moti della nave al vero. Per rispondere correttamentea questo quesito si fa ricorso alle ormai consolidate metodologie dell’analisi dimensionale che,anche in questo caso, consentono l’identificazione appropriata delle condizioni di prova del modelloper mezzo di gruppi di grandezze adimensionali, significative per l’esperimento. In particolare,nell’esaminare le leggi di similitudine del comportamento in mare, verra considerato esplicitamente,a titolo di esempio, il generico moto della nave (moto lineare) in presenza di onde regolari. Ildiscorso sara successivamente esteso a tutte le altre risposte e generalizzato al caso di un mareconfuso.

298 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
Si assume a priori di conoscere sufficientemente bene le caratteristiche del fenomeno dei motinave in modo da poter scrivere senza difficolta la relazione funzionale esistente tra le varie gran-dezze fisiche coinvolte. Per questo e ragionevole supporre che l’ampiezza del moto sia funzionedell’ampiezza e della frequenza dell’onda eccitante, della velocita di avanzo, dell’angolo di rotta,delle dimensioni lineari, della massa e del momento d’inerzia della nave. Inoltre, ci si deve aspet-tare che essa dipenda anche dall’accelerazione di gravita e dalle proprieta fisiche dell’acqua qualila densita e la viscosita. Ne segue una relazione funzionale del tutto generale fra queste grandezze,ovvero:
u
a= f(a, ω, U, χ, L, M, I, g, ρ, µ) . (D.43)
Come visto al Paragrafo D.4, un’espressione di questo tipo puo essere scritta in termini di unnumero minore di parametri rispetto a quello iniziale, tutti adimensionali (termini Π). Sebbenesiano possibili diverse formulazioni alternative, e conveniente considerare la forma:
u
a= f
(a
L, ω
√L
g,
U√gL
, χ,M
ρL3,
I
ρL5,ρUL
µ
), (D.44)
dove l’ampiezza del moto lineare viene espressa in forma adimensionale per mezzo del rapportocon l’ampiezza dell’onda incidente. Nella relazione precedente l’ampiezza adimensionale del moto(funzione di trasferimento) e data in termini di un gruppo di sette parametri adimensionali formaticon le dieci grandezze considerate importanti per la fisica del fenomeno, essendo tre le grandezzefondamentali.
L’equazione (D.44) afferma che l’ampiezza adimensionale del moto e la stessa per il modello eper la nave al vero nell’ipotesi che tutti i parametri adimensionali presenti nella relazione funzionaleassumano lo stesso valore numerico sia in scala che al vero. Tra questi parametri si riconosce ilnumero di Froude Fn = U/
√gL, il numero di Reynolds Rn = ρUL/µ e la frequenza adimensionale
ω√
L/g. Quest’ultima costituisce una variante del numero di Strouhal.Per un modello scalato correttamente, ovvero in similitudine geometrica e dinamica, l’equazione
(D.44) si riduce alla forma:
u
a= f
(a
L, ω
√L
g, Fn, χ, Rn
). (D.45)
Per fortuna le forze viscose non giocano un ruolo molto importante nella dinamica dei motinave, eccetto che nella determinazione dello smorzamento di rollio. Se questo non e il caso, larichiesta di scalare le forze viscose in proporzione alle forze d’inerzia puo essere abbandonata e nonrisulta necessario far coincidere i numeri di Reynolds del modello e della nave al vero.
Tuttavia, in alcune situazioni specifiche, trascurare il numero di Reynolds puo comportarerisultati errati. Se il numero di Reynolds e troppo piccolo (come solitamente avviene nella spe-rimentazione sui modelli navali) il punto di transizione si trova spostato a poppavia rispetto alvero, per cui risulta laminare una gran parte dello strato limite. Questo puo avere qualche effettosul comportamento dinamico del modello in quanto la resistenza d’attrito sara troppo elevata. Nesegue la giustificazione della pratica usuale di stimolare la turbolenza rendendo ruvida la super-ficie del modello nel punto di transizione previsto, al fine di compensare gli effetti della mancataeguaglianza dei numeri di Reynolds. Tale procedura puo pero essere vista solo come una soluzio-ne empirica in quanto e sempre consigliabile usare, quando possibile, un modello piu grande perridurre al minimo i problemi connessi con lo scalaggio delle forze viscose.
Prescindendo dal criterio di similitudine di Reynolds, la (D.45) diventa piu semplicemente:
u
a= f
(a
L, ω
√L
g, Fn, χ
). (D.46)

D.7. MODELLAZIONE DEL COMPORTAMENTO IN MARE 299
In generale, l’ampiezza adimensionale del generico moto risulta sostanzialmente indipendentedall’ampiezza adimensionale dell’onda a/L, almeno per onde di ampiezza ridotta. Ne segue chel’ampiezza del moto dipende linearmente dall’ampiezza dell’onda, come assunto nella teoria deimoti di piccola ampiezza (teoria lineare). In questi casi si puo scrivere l’equazione (D.46) nellaforma:
u
a= f
(ω
√L
g, Fn, χ
). (D.47)
Fra l’altro si deve notare che la frequenza adimensionale ω√
L/g puo essere espressa in termi-ni alternativi come funzione della lunghezza adimensionale dell’onda o λ/L della frequenza adi-mensionale d’incontro ωe
√L/g. In questo caso, la relazione funzionale precedente viene scritta
alternativamente come:
u
a= f
(λ
L, Fn, χ
), (D.48)
oppure:
u
a= f
(ωe
√L
g, Fn, χ
). (D.49)
D.7.1 Similitudine del modello
Il modello e la nave al vero devono trovarsi in similitudine geometrica e dinamica. Per questo siassume che il rapporto dimensionale del modello (fattore scala) sia definito da:
κ =LS
LM, (D.50)
dove LM e LS sono rispettivamente la lunghezza del modello e la lunghezza della nave.Affinche le coordinate adimensionali x/L, che caratterizzano la forma di carena, i centri geo-
metrici, ecc., siano identiche per il modello e la nave e necessario richiedere che ogni dimensionecorrispondente sia legata dalla relazione:
xM
LM=
xS
LS, (D.51)
in modo che risulti:
xM =xS
κ. (D.52)
In altre parole, il modello deve essere geometricamente simile alla nave in senso lato. La formadello scafo deve essere riprodotta esattamente dalla chiglia al ponte di coperta incluso. Di solitonon e necessario applicare la sovrastruttura in quanto questa ha effetti limitati sui moti nave,eccetto che in condizioni molto severe o nel caso in cui si voglia studiare espressamente il problemadell’imbarco d’acqua.
La necessita di riprodurre accuratamente le forme dello scafo richiede che la linea di galleggia-mento del modello sia posizionata correttamente. Questo implica che la massa del modello e anchel’assetto siano opportunamente scalati.
L’assetto del modello e determinato dalla posizione longitudinale del baricentro. Questa puo es-sere considerata come una dimensione lineare e percio deve essere scalata in accordo con l’equazione(D.52).

300 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
La massa del modello risulta:
mM = ρM
∫dVM , (D.53)
dove l’integrazione viene eseguita sul volume dello scafo. Poiche tutte le dimensioni del modellodevono essere scalate in accordo con l’equazione (D.52), la massa del modello puo essere scrittacome:
mM =ρM
κ3
∫dVS =
ρMmS
ρSκ3. (D.54)
Quando le densita dell’acqua sono identiche, ρM = ρS , si ha in particolare:
mM =mS
κ3. (D.55)
Ne segue che la massa del modello viene ridotta in proporzione al cubo del rapporto dimensionale.In pratica si e soliti provare modelli di navi d’altura in acqua dolce, per cui le densita non sonoidentiche e di questo si deve tener conto per mezzo dell’equazione (D.54).
I momenti d’inerzia sono scalati con la relazione:
IM
ρML5M
=IS
ρSL5S
. (D.56)
Risulta percio che i momenti d’inerzia del modello sono dati da:
IM =ρMIS
ρSκ5, (D.57)
da cui, per ρM = ρS , segue:
IM =IS
κ5. (D.58)
In questo modo, se le densita dell’acqua sono le stesse in scala modello e al vero, i momenti d’inerziadevono essere riprodotti in proporzione alla quinta potenza del rapporto dimensionale. Anche inquesto caso e necessario tener conto, con l’equazione (D.57), delle eventuali differenze fra le densitadell’acqua durante le prove sperimentali.
Infine, esprimendo il momento d’inerzia in termini di raggio di girazione, si puo scrivere per ilmodello:
IM = mMk2M , (D.59)
e per la nave:
IS = mSk2S . (D.60)
Sostituendo le (D.54) e (D.57) si trova la relazione:
kM =kS
κ. (D.61)
In altri termini, i raggi di girazione sono, come tutte le altre dimensioni lineari del modello, ridottiin proporzione al rapporto dimensionale.

D.7. MODELLAZIONE DEL COMPORTAMENTO IN MARE 301
D.7.2 Similitudine delle onde
Al fine di riprodurre esattamente l’ampiezza nondimensionale dell’onda a/L, si richiede che valgala relazione:
aM =aS
κ, (D.62)
in modo che l’ampiezza, come le altre lunghezze modello, deve essere ridotta in proporzione alrapporto dimensionale.
La frequenza dell’onda per il modello e la nave deve soddisfare il criterio di similitudine:
ωM
√LM
gM= ωS
√LS
gS, (D.63)
da cui, essendo g lo stesso nei due casi, segue:
ωM = ωS
√κ . (D.64)
Le frequenze delle onde modello devono essere aumentate in proporzione alla radice quadrata delrapporto dimensionale e sono percio maggiori delle corrispondenti frequenze della nave al vero.
Il periodo dell’onda e dato dalla relazione:
T =2π
ω. (D.65)
Segue dalla (D.64) che i periodi dell’onda modello sono ridotti in proporzione alla radice quadratadel rapporto dimensionale:
TM =TS√
κ. (D.66)
Poiche la lunghezza dell’onda e data da:
λ =2πg
ω2, (D.67)
ne segue:
λM =λS
κ, (D.68)
e quindi le lunghezze d’onda modello vengono ridotte in proporzione al rapporto dimensionale.Per il numero d’onda si ha:
k =2π
λ. (D.69)
Ne segue che i numeri d’onda del modello e della nave al vero sono legati dalla relazione:
kM = kSκ . (D.70)
Ovviamente, l’angolo di rotta deve essere lo stesso sia per il modello che per la nave:
χM = χS . (D.71)

302 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
D.7.3 Similitudine delle velocita
I numeri di Froude del modello e al vero devono essere eguali. Si richiede per questo la validitadella relazione:
UM√gMLM
=US√gSLS
, (D.72)
ovvero:
UM =US√
κ. (D.73)
La velocita modello deve essere ridotta in proporzione alla radice quadrata del rapporto dimensio-nale.
Per ottenere numeri di Reynolds eguali si richiede:
ρMUMLM
µM=
ρSUSLS
µS, (D.74)
da cui segue che la velocita del modello deve essere:
UM =ρSµMUSκ
ρMµS. (D.75)
Se ρM = ρS e µM = µS , risulta semplicemente:
UM = USκ . (D.76)
Per le stesse proprieta fisiche dell’acqua, la velocita del modello deve essere aumentata in pro-porzione al rapporto dimensionale. Eventuali differenze in densita e viscosita non cambianosostanzialmente questo risultato.
Come noto, le equazioni (D.73) e (D.76) non possono essere verificate simultaneamente, a menoche non si eseguano prove al vero, nel qual caso ovviamente κ = 1. In altre parole, come avvienenelle prove di rimorchio, anche nelle prove di seakeeping e impossibile soddisfare l’eguaglianza deinumeri di Froude e di Reynolds nello stesso tempo. Sono percio impossibili le prove su modellonelle quali viene mantenuta l’appropriata relazione tra forze inerziali, forze peso e forze viscose.
D.7.4 Moti in onde regolari
L’approccio descritto in precedenza puo essere applicato a tutti i moti nave (spostamenti linearied angolari, velocita ed accelerazioni) con il risultato di ottenere delle relazioni funzionali aventila stessa forma generale (D.46)–(D.49). Nell’ambito della similitudine, anche queste risposte de-vono essere adimensionalizzate per mezzo di appropriate combinazioni delle variabili piu rilevantidel processo. Poiche le ampiezze delle risposte sono generalmente proporzionali all’ampiezza del-l’onda, e conveniente riferire le stesse rispetto all’ampiezza dell’onda che viene fatta comparire aldenominatore delle relazioni di adimensionalizzazione.
Per spostamenti lineari come abbrivio, scarroccio, sussulto, moti assoluti e moto relativo esufficiente assegnare la grandezza adimensionale:
(ξg)0a
,(ηg)0
a,
(ζg)0a
;(sξ)0
a,
(sη)0a
,(sζ)0
a;
(rζ)0a
. (D.77)
Per le altre risposte di seakeeping sara, in generale, necessario includere al denominatore dellegrandezze addizionali per ottenere le stesse dimensioni del numeratore. Cosı le ampiezze degli spo-stamenti angolari sono generalmente adimensionalizzate per mezzo della divisione con la pendenzadell’onda:
ϕ0
ka,
θ0
ka,
ψ0
ka. (D.78)
D.7. MODELLAZIONE DEL COMPORTAMENTO IN MARE 303
Le ampiezze delle accelerazioni lineari possono essere adimensionalizzate nella forma:(ξg
)0L
ga,
(ηg)0 L
ga,
(ζg
)0L
ga;
(sξ)0 L
ga,
(sη)0 L
ga,
(sζ)0 L
ga;
(rζ)0 L
ga. (D.79)
Le leggi di similitudine per le altre risposte di seakeeping possono essere ricavate facilmentedalle relazioni precedenti. Per esempio, se la velocita adimensionale di sussulto e espressa come(ζg
)0/ωa, si puo concludere che in un esperimento propriamente scalato:
(ζg
)0M
ωMaM=
(ζg
)0S
ωSaS. (D.80)
Usando le (D.62) e (D.64) si trova:
(ζg
)0M
=
(ζg
)0S√
κ, (D.81)
mostrando che la velocita di sussulto, come la velocita di avanzo, viene ridotta in proporzione allaradice quadrata del rapporto dimensionale. Analogamente si puo mostrare che le accelerazioni delmodello e della nave sono identiche:
(ζg
)0M
=(ζg
)0S
. (D.82)
Inoltre, le frequenze d’incontro del modello sono, come le frequenze delle onde, aumentate inproporzione per la radice quadrata del rapporto dimensionale. Una conseguenza importante diquesto risultato e che le risposte del modello alle onde incidenti appaiono, ad un osservatore nonabituato, troppo veloci. Una visione piu realistica del fenomeno puo essere ottenuta registrandoi moti modello con una cinepresa o telecamera e proiettando successivamente gli stessi ad unavelocita ridotta. La velocita di proiezione deve essere ridotta in proporzione alla radice quadratadel rapporto dimensionale.
La Tabella D.3 riporta una lista esauriente dei fattori di scala per condizioni di prova modelloe delle risposte misurate.
D.7.5 Moti in onde irregolari
Anche se l’analisi precedente si applica agli esperimenti di seakeeping in onde regolari, per leonde irregolari puo essere sviluppato un approccio molto simile. In questo caso, pero, si de-ve tener presente che vengono misurate delle grandezze statistiche piuttosto che delle grandezzedeterministiche.
Per questo si consideri di nuovo un generico moto lineare del modello e della nave al vero.Tracciando un parallelismo con l’equazione (D.43) valida per le onde regolari, e legittimo supporreche, per uno spettro assegnato di onde, il rms del moto ha una relazione funzionale con un numerorilevante di grandezze del tipo che segue:
σu = f(H1/3, T0, U, χ, L,M, I, g, ρ, µ) . (D.83)
Applicando lo spesso approccio generale si trova che, per un modello scalato propriamente, il valorenondimensionale di rms del moto puo essere convenientemente espresso come:
σu
H1/3
= f
(H1/3
L, T0
√g
L,
U√gL
, χ,M
ρL3,
I
ρL5,ρUL
µ
). (D.84)

304 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
Grandezza Esempio Fattore scala delle grandezze modello
Massa Massa nave. 1/κ3
Lunghezza Lunghezza nave; tutte le dimensioni lineari;spostamento di abbrivio, scarroccio, sussulto;spostamenti assoluti e spostamento relativo;ampiezze e lunghezze delle onde.
1/κ
Tempo Periodi delle onde e dei moti; tempo di prova;intervalli tra gli eventi rari.
1/√
κ
Velocita Velocita nave; velocita di abbrivio, scarroc-cio, sussulto; velocita dei moti assoluti e delmoto relativo; celerita delle onde e velocita digruppo.
1/√
κ
Accelerazione Accelerazione di abbrivio, scarroccio, sussul-to; accelerazione dei moti assoluti e del motorelativo; accelerazione di gravita.
1
Angolo Angolo di rollio, beccheggio, imbardata; an-golo di rotta, di posizionamento degli sta-bilizzatori e del timone; fasi delle rispostenave.
1
Velocita angolare Velocita di rollio, beccheggio, imbarda-ta; velocita di variazione della rotta, delposizionamento degli stabilizzatori e deltimone.
√κ
Accelerazione angolare Accelerazione di rollio, beccheggio, imbarda-ta; accelerazione di variazione della rotta,del posizionamento degli stabilizzatori e deltimone.
κ
Pressione e sforzo Pressione d’impatto dello slamming e del-l’acqua sul ponte; pressione idrostatica;pressione dinamica; sforzo.
1/κ
Frequenza Frequenza delle onde e frequenza d’incontro;frequenza degli eventi rari; numero di giridell’elica.
√κ
Forza Forza di eccitazione; forza di taglio; tensione;peso nave; spinta dell’elica.
1/κ3
Momenti Momento di eccitazione; momento flettente;momento torcente dell’elica.
1/κ4
Tabella D.3: Leggi di similitudine per il modello.

D.7. MODELLAZIONE DEL COMPORTAMENTO IN MARE 305
Ne segue, dopo aver realizzato la similitudine geometrica e dinamica del modello e trascuratol’influenza del numero di Reynolds, la relazione:
σu
H1/3
= f
(H1/3
L, T0
√g
L, Fn, χ
). (D.85)
In altri termini, il rms adimensionale del generico moto e funzione dell’altezza significativa nondi-mensionale delle onde e del loro periodo modale nondimensionale, del numero di Froude e dell’an-golo di rotta. Si vede facilmente che l’altezza significativa delle onde modello deve essere scalata inproporzione al rapporto dimensionale, mentre il periodo modale deve essere ridotto in proporzionedella radice quadrata del rapporto dimensionale. Per condizioni di severita moderata, la dipenden-za delle risposte dall’altezza significativa nondimensionale e spesso debole e quindi il rms del moto,per un dato periodo modale, numero di Froude e angolo di rotta, e direttamente proporzionaleall’altezza significativa delle onde.
I risultati precedenti possono essere facilmente estesi agli rms delle altre risposte di seakeeping.Si tratta soltanto di ripetere il ragionamento gia sviluppato per il mare regolare. Vista la semplicitadel problema, esso non viene esplicitamente considerato.

306 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
Bibliografia
Abkowitz, M.A., 1959, The effect of antipitching fins on ship motions, Transactions of theSociety of Naval Architects and Marine Engineers, 67, p. 210-252.
Aertssen, G., 1968, Laboring of ships in rough seas with special emphasis on the fast ship, SNAMEDiamond Jubilee International Meeting.
Aertssen, G., van Sluijs, M.F., 1972, Service performance and seakeeping trials on a large contai-nership, Transactions of the Royal Institution of Naval Architects, 114, p. 429-447.
Allen, R.G., Jones, R.R., 1978, Structural design-limit pressures on high performance marinevehicles, AIAA and SNAME Advanced Marine Vehicles Conference.
Andrew, R.N., Lloyd, A.R.J.M., 1981, Full-scale comparative measurements of the behaviour oftwo frigates in severe head seas, Transactions of the Royal Institution of Naval Architects,123, p. 00.
Andrew, R.N., Loader, P.R., Penn, V.E., 1984, The assessment of ship seakeeping performance inlikely to be encountered wind and wave conditions, RINA International Symposium on Wave andWind Climate Worldwide, London.
Avdeev, G.K., 1956, Eksperimental’no-teoreticeskoe issledovanie nekotoryh voprosov bokovoj kackisudov vnutrennego plavanija, Avtoreferat dissertacii, Leningradskij Korablestroitel’nyj Institut,Leningrad.
Baitis, A.E., Woolaver, D.A., Beck, T.A., 1983, Rudder roll stabilization for Coast Guard cuttersand frigates, Naval Engineers Journal, 95, p. 00.
Bales, S.L., Lee, W.T., Voelker, J.M., 1981, Standardized wave and wind environments for NATOoperational areas, David Taylor Naval Ship Research and Development Center, Report SPD-0919-01, Washington, DC.
Basin, A.M., 1952, Priblizennoe issledovanie dejstvija volnenija na plavajuscee sudno, Trudy Cen-tral’nogo Naucno-Issledovatel’skogo Instituta Recnogo Flota, vyp. XVII.
Basin, A.M., 1955, Bortovaja kacka i ostojcivost’ korablja na volnenii, Trudy Central’nogo Naucno-Issledovatel’skogo Instituta Recnogo Flota, vyp. XXX.
Baumann, H., 1953, Rollzustande grosser Amplitude in seitlicher Dunung, Schiffstechnik, 2, S.189-199.
Beck, R.F., Cummins, W.E., Dalzell, J.F., Mandel, P., Webster, W.C., 1989, Motions in waves,in Principles of Naval Architecture, Vol. 3, E.V. Lewis Ed., The Society of Naval Architectsand Marine Engineers, Jersey City.
Bernoulli, D., 1759, Principes hydrostatiques et mechaniques, Paris.
307

308 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
Bertin, L.E., 1873-1874, Les vagues et les roulis, Memoires de la Societe Nationale des SciencesNaturelles de Cherbourg.
Bhattacharrya, R., 1978, Dynamics of marine vehicles, John Wiley & Sons, New York.
Bittner, A.C., Guignard, J.C., 1985, Human factors engineering principles for minimizing adverseship motion effects: theory and practice, Naval Engineers Journal, 97, p. 00.
Blagovescenskij, S.N., 1936, Uspokoitel’nye cisterny i ih primenenie na ledokole, Otdelenie NaucnoTehniceskogo Instituta, Leningrad.
Blagovescenskij, S.N., 1953, O popravocnyh koefficientah dlja uceta vlijanija poperecnyh razmerovsudna na ego kacku v polozenii lagom k volne, Trudy Leningradskogo Korablestroitel’nogo Instituta,vyp. XII, Leningrad.
Blagovescenskij, S.N., 1954, Kacka korablja, Sudpromgiz, Leningrad.
Bledsoe, M.D., Bussemaker, O., Cummins, W.E., 1960, Ship sway, roll and yaw motions in obliqueseas, Transactions of the Society of Naval Architects and Marine Engineers, 68, p. 00.
Blok, J.J., Huisman, J., 1984, Relative motions and swell up for a frigate bow, Transactions ofthe Royal Institution of Naval Architects, 126, p. 227-244.
Borodaj, I.K., Necvetaev, Ju.A., 1982, Morehodnost’ sudov, Sudostroenie, Leningrad.
Bouguer, P., 1746, Traite du navire, de sa construction et de ses mouvements, Jombert,Paris.
Bretschneider, C.L., 1952, The generation and decay of wind waves in deep water, Transactionsof the American Geophysical Union, 37, p. 00.
Bretschneider, C.L., 1957, Review of practical methods for observing and forecasting ocean wavesby means of wave spectra and statistics, Transactions of the American Geophysical Union,42, p. 00.
Bubnov, I.G., 1930, Dopolnitel’nye stat’i k stroitel’noj mehanike korablja, Izdatel’stvo Leningrad-skogo Korablestroitel’nogo Instituta, Leningrad.
Buckingham, E., 1915, Model experiments and the form of empirical equations, Transactions ofthe American Society of Mechanical Engineers, 37, p. 263-296.
Cartwright, D.E., Longuet-Higgins, M.S., 1956, The statistical distribution of the maxima of arandom function, Proceedings of the Royal Society, A 237, p. 212-232.
Chakrabarti, S.K., Snider, R.H., 1975, Modelling of wind waves with JONSWAP spectra, Procee-dings of Modelling, p. 120-139.
Chuang, S.L., 1970, Investigation of impact of rigid and elastic bodies with water, Naval ShipResearch and Development Center, Report 3248, Washington, DC.
Chuang, S.L., Milne, D.T., 1971, Drop tests of cones to investigate the three dimensional effects ofslamming, Naval Ship Research and Development Center, Report 3253, Washington, DC.
Comstock, E.M., Bales, S.L., Keane, R.G., 1980, Seakeeping in ship operations, SNAME ShipTechnology and Research Symposium, San Diego, California.
Conolly, J.E., 1969, Rolling and its stabilization by active fins, Transactions of the RoyalInstitution of Naval Architects, 111, p. 21-48.
D.7. MODELLAZIONE DEL COMPORTAMENTO IN MARE 309
Dalzell, J., Yamanouchi, Y., 1958, Analysis of model test results in irregular head seas to determinemotion amplitudes and phase relationships to waves, Second Summer Seminar, Ship Behavior atSea, Report 708, p. 97-112, Stevens Institute of Technology, Hoboken, New Yersey.
De Jong, B., 1973, Computation of the hydrodynamic coefficients of oscillating cylinders, Nether-lands Ship Research Centre TNO, Report 145S, Delft.
Demanche, J.F., 1968, Added mass and damping coefficients for cylinders with bulb-like cross-section oscillating in a free surface, M.S. Thesis, Massachusetts Institute of Technology, Cambridge,Massachusetts.
Doyere, C., 1927, Theorie du Navire, Paris.
Euler, L., 1749, Scientia Navalis, St. Petersbourg.
Faddeev, Ju.I., 1954, Opredelenie glavnoj casti vozmuscajuscej sily pri bortovoj kacke na volnenii vuslovijah melkovod’ja, Trudy Leningradskogo Korablestroitel’nogo Instituta, vyp. XIII, Leningrad.
Firsov, G.A., 1958, K voprosu o rascete bortovoj kacki sudov na nereguljarnom volnenii pri neline-jnom soprotivlenii, Doklady k X naucno-tehniceskoj konferencii NTO sudproma po teorii korablja,s. 5-8, Leningrad.
Frahm, H., 1911, Neuartige Schlingertanks zur Abdampfung von Schiffsrollbewegungen und ihreerfolgreiche Anwendung in der Praxis, Jahrbuch der Schiffbautechnischen Gesellschaft, 5,S. 00.
Frank, W., 1967, Oscillation of cylinders in or below the free surface of deep fluids, Report 2375,Naval Ship Research and Development Center, Washington, DC.
Froude, W., 1861, On the rolling of ships, Transactions of the Institution of Naval Archi-tects, 2, p. 180-229.
Froude, W., 1896, The non uniform rolling of ships, Transactions of the Institution of NavalArchitects, 37, p. 293-325.
Gerritsma, J., Beukelman, W., 1967, Analysis of the modified strip theory for the calculation of shipmotions and wave bending moments, International Shipbuilding Progress, 14, p. 319-337.
Gerritsma, J., Beukelman, W., 1972, Analysis of the resistance increase in waves of a fast cargoship, International Shipbuilding Progress, 19, p. 285-293.
Gerritsma, J., van den Bosch, J.J., Beukelman, W., 1961, Propulsion in regular and irregularwaves, International Shipbuilding Progress, 8, p. 235-247.
Gerstner, F., 1804, Theorie der Wellen, Prag.
Gilhousen, D.B., Quayle, R.G., Baldwin, R.G., Karl, T.R., Brines, R.O., 1983, Climatic summariesfor NOAA data buoys, US Department of Commerce National Weather Service.
Grim, O., 1952, Rollschwingungen, Stabilitat und Sicherheit im Seegang, Schiffstechnik, 1, S.10-21.
Grim, O., 1953, Berechnung der durch Schwingungen eines Schiffskorpers erzeugten hydrodynami-schen Krafte, Jahrbuch der Schiffbautechnischen Gesellschaft, 47, S. 277-299.
Grim, O., 1959, Die Schwingungen von schwimmenden, zweidimensionalen Korpern, Bericht 1171,Hamburgische Schiffbau-Versuchsanstalt, Hamburg.
Grim, O., 1960, A Method for a more precise computation of heaving and pitching motions, both insmooth water and in waves, Proceedings Third Symposium of Naval Hydrodynamics, Scheveningen.
310 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
Hagiwara, K., Yuhara, T., 1974, Study of wave impact load on ship bow, Japan Shipbuildingand Marine Engineering, 8, p. 00.
Hanovic, I.T., 1948, Opredelenie effektivnogo znacenija volnovogo sklona pri rascetah bokovoj kacki,Sudostroenie, 5, s. 00.
Haskind, M.D., 1946, Gidrodinamiceskaja teorija kacki korablja na volnenii, Prikladnaja Mate-matika i Mehanika, t. 10, vyp. 1, s. 33-66.
Haskind, M.D., 1953, Kolebanija plavajuscego kontura na poverhnosti tjazeloj zidkosti, Priklad-naja Matematika i Mehanika, t. 17, vyp. 3, s. 00.
Haskind, M. D., 1954, Priblizennye metody opredelenija gidrodinamiceskih harakteristik kacki,Izvestija Akademii Nauk SSSR, Otdelenie Tehniceskih Nauk, 11, s. 66-86.
Haskind, M.D., 1973, Gidrodinamiceskaja teorija kacki korablja, Nauka, Moskva.
Havelock, T.H., 1937, The resistance of a ship among waves, Proceedings of the Royal Society,A 161, p. 299-000.
Havelock, T.H., 1956, The damping of heave and pitch: a comparison of two-dimensional andthree-dimensional calculations, Transactions of the Institution of Naval Architects, 98, p.464-468.
Havelock, T.H., 1958, The effect of speed of advance upon the damping of heave and pitch, Tran-sactions of the Institution of Naval Architects, 100, p. 131-135.
Hogben, N., Dacunha, N.M.C., Olliver, G.F., 1986, Global wave statistics, British MaritimeTechnology Limited, Feltham, Middlesex.
Hogben, N., Lumb, F.E., 1967, Ocean wave statistics, Her Mayesty’s Stationery Office, London.
Holodilin, A.N., 1959, Stabilizacija sudna vertikal’nym rulem, Trudy Leningradskogo Korablestroi-tel’nogo Instituta, vyp. XXIX, Leningrad.
Horosanskij, G.M., 1965, Uspokoiteli kacki, vozdejstvujuscie na nacal’nuju ostojcivost’ sudna,Sudostroenie, 6, s. 00.
Hsiung, C.C., Friis,D., Milne, W., Peters, G.R., Weber, H.W., 1983, New towing facilities atMemorial University of Newfoundland, Proceedings 20th American Towing Tank Conference.
ITTC, 1966, Proceedings 12th International Towing Tank Conference, Rome.
ITTC, 1975, Proceedings 14th International Towing Tank Conference, Ottawa.
ITTC, 1978, Proceedings 15th International Towing Tank Conference, The Hague.
ITTC, 1984, Proceedings 17th International Towing Tank Conference, Goteborg.
Jinkine, V., Ferdinande, V., 1974, A method for predicting the added resistance of fast cargo shipsin head seas, International Shipbuilding Progress, 21, p. 149-167.
John, F., 1949, On the motion of floating bodies - Part I, Communications on Pure andApplied Mathematics, 2, p. 13-57.
John, F., 1950, On the motion of floating bodies - Part II, Communications on Pure andApplied Mathematics, 3, p. 45-101.
Karpov, A.B., 1951, K rascetu bokovoj kacki pri konecnyh amplitudah, Sudostroenie, 6, s. 00.
Kerwin, J.E., 1955, Notes on rolling in longitudinal waves, International Shipbuilding Pro-gress, 2, p. 597-614.
D.7. MODELLAZIONE DEL COMPORTAMENTO IN MARE 311
Kocin, N.E., 1949, Teorija voln, vynuzdaemyh kolebanijami tela pod svobodnoj poverhnost’ju tjazelojneszimaemoj zidkosti, Sobranie socinenij, t. II, s. 277-304, Izdatel’stvo Akademii Nauk SSSR,Moskva-Leningrad.
Korvin-Kroukovsky, B.V., 1956, Irregular seas . . . a new towing tank problem, ETT TM, 112,Stevens Institute of Technology, Hoboken, New Yersey.
Korvin-Kroukovsky, B.V., 1961, Theory of seakeeping, The Society of Naval Architects andMarine Engineers, New York.
Korvin-Kroukovsky, B.V., Jacobs, W.R., 1957, Pitching and heaving motions of a ship in regularwaves, Transactions of the Society of Naval Architects and Marine Engineers, 65, p.590-632.
Krutkov, Ju.A., 1934, Zamecanie o bokovoj kacke korablja na volnenii, Doklady Akademii NaukSSSR, nov. ser. t. II, 3.
Krylov, A.N., 1896, A new theory of the pitching motion of ships on waves and of the stressesproduced by this motion, Transactions of the Institution of Naval Architects, 37, p. 326-368.
Krylov, A.N., 1898, A general theory of the oscillations of a ship on waves, Transactions of theInstitution of Naval Architects, 40, p. 135-196.
Krylov, A.N., 1951, O bokovoj kacke korablja, imejuscego zadannuju diagrammu ostojcivosti, So-branie trudov, t. XI, s. 93-110, Izdatel’stvo Akademii Nauk SSSR, Moskva-Leningrad.
Krylov, A.N., 1951a, Frudovskaja teoria bokovoj kacki korablja na volenii, Sobranie trudov, t.XI, s. 114-135, Izdatel’stvo Akademii Nauk SSSR, Moskva-Leningrad.
Krylov, A.N., 1951b, Uspokoitel’nye cisterny Frama i ih issledovanie na parohode Meteor, Sobra-nie trudov, t. XI, s. 265-285, Izdatel’stvo Akademii Nauk SSSR, Moskva-Leningrad.
Krylov, A.N.,1951c, Teorija passivnyh uspokoitel’nyh cistern Frama, Sobranie trudov, t. XI, s.339-364, Izdatel’stvo Akademii Nauk SSSR, Moskva-Leningrad.
Lamb, H., 1932, Hydrodynamics, Cambridge University Press, Cambridge.
Landweber, L., De Macagno, M.C., 1957, Added mass of two-dimensional forms oscillating in afree surface, Journal of Ship Research, 1, p. 20-30 (128-138).
Landweber, L., Macagno, M., 1959, Added mass of a three-parameter family of two-dimensionalforms oscillating in a free surface, Journal of Ship Research, 2, p. 36-48.
Lee, W.T., Bales, S.L., Sowby, S.E., 1985, Standardized wind and wave environments for Nor-th Pacific Ocean areas, Naval Ship Research and Development Center, Report SPD-0919-02,Washington, DC.
Lewis, E.V., 1989, Principles of naval architecture, The Society of Naval Architects and MarineEngineers, Jersey City, NJ.
Lewis, E.V., 1955, Ship speeds in irregular seas, Transactions of the Society of Naval Archi-tects and Marine Engineers, 63, p. 134-202.
Lewis, E.V., Numata, E., 1956, Ship model tests in regular and irregular seas, ETT, Report 567,Stevens Institute of Technology, Hoboken, New Yersey.
Lewis, F.M., 1929, The inertia of the water surrounding a vibrating ship, Transactions of theSociety of Naval Architects and Marine Engineers, 37, p. 1-20.
Lipis, V.B., 1975, Gidrodinamika grebnogo vinta pri kacke sudna, Sudostroenie, Leningrad.

312 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
Lloyd, A.R.J.M., 1989, Seakeeping: ship behaviour in rough weather, Ellis Horwood Limi-ted, Chichester, West Sussex.
Lloyd, A.R.J.M., Andrew, R.N., 1977, Criteria for ship speed in rough weather, Proceedings 18thAmerican Towing Tank Conference, New York.
Lloyd, A.R.J.M., Salsich, J.O., Zseleczky, J.J., 1986, The effect of bow shape on deck wetness inhead seas, Transactions of the Royal Institution of Naval Architects, 128, p. 9-25.
Lugovskij, V.V., 1963, Novaja metodika opredelenija uslovnoj rascetnoj amplitudy kacki trans-portnyh sudov pri normirovanii ostojcivosti, Sbornik Teoreticeskie i prakticeskie voprosyostojcivosti morskih sudov, Morskoj Transport, Leningrad.
Lugovskij, V.V., 1966, Nelinejnye zadaci morehodnosti korablja, Sudostoenie, Leningrad.
Mandel, P., 1953, Some hydrodynamic aspects of appendage design, Transactions of the Societyof Naval Architects and Marine Engineers, 61, p. 464-515.
Mandel, P., 1979, Seagoing box scores and seakeeping criteria for monohull, SWATH, planing,hydrofoil, surface effect ships and air cushion vehicles, David Taylor Naval Ship Research andDevelopment Center, Report SPD-79/1, Washington, DC.
Moskowitz, L., Pierson, W.J., Mehr, E., 1962-63, Wave spectra estimated from wave records obtai-ned by the OWS Weather Explorer and OWS Weather Reporter, New York University, College ofEngineering, New York.
Moor, D.I., Murdey, D.C., 1968, Motions and propulsion of single screw models in head seas,Transactions of the Royal Institution of Naval Architects, 110, p. 403-446.
Moor, D.I., Murdey, D.C., 1970, Motions and propulsion of single screw models in head seas, PartII, Transactions of the Royal Institution of Naval Architects, 112, p. 121-164.
Murdey, D.C., 1972, An analysis of longitudinal bending moments measured on models in headwaves, Transactions of the Royal Institution of Naval Architects, 114, p. 221-240.
Newman, J.N., 1961, A linearized theory for the motion of a thin ship in regular waves, Journalof Ship Research, 5, p. 44-55.
Newman, J.N., 1978, Theory of ship motions, Advances in Applied Mechanics, 18, p. 00.
Nieuwenhuijsen, J.H., 1958, Experimental investigation on sea sickness, Drukkerij Schotanusand Jens, Utrecht.
Nordenstrom, N., 1969, Methods for predicting long term distributions of wave loads and probabilityof failure for ships, AP11, Det Norske Veritas, Report 69-22-S.
O’Hanlon, J.F., McCauley, M.E., 1974, Motion sickness incidence as a function of the frequencyand acceleration of vertical sinusoidal motion, Aerospace Medicine, 00, p. 00.
Ochi, M.K., 1964, Extreme behaviour of ships in rough seas — slamming and shipping of greenwater, Transactions of the Society of Naval Architects and Marine Engineers, 72, p.143-202.
Ochi, M.K., Bolton, W.E., 1973, Statistics for prediction of ship performance in a seaway, Part I,International Shipbuilding Progress, 20, p. 27-54.
Ochi, M.K., Bolton, W.E., 1973a, Statistics for prediction of ship performance in a seaway, PartII, International Shipbuilding Progress, 20, p. 89-121.
D.7. MODELLAZIONE DEL COMPORTAMENTO IN MARE 313
Ochi, M.K., Bolton, W.E., 1973b, Statistics for prediction of ship performance in a seaway, PartIII, International Shipbuilding Progress, 20, p. 346-373.
Ohmatsu, S., 1975, On the irregular frequencies in the theory of oscillating bodies in a free surface,Ship Research Institute, Paper 48, Tokyo.
Olson, S.R., 1977, A seakeeping evaluation of four naval monohulls and a 3,250 ton SWATH,Center for Naval Analysis Memorandum 77-0640.
Papkovic, P.F., 1956, Analiz dopolnitel’nyh izgibajuscih momentov, voznikajuscih v korpuse prja-mostennogo korablja na pravil’noj sinusoidal’noj zybi, Trudy po procnosti korablja, Sudpromgiz,Leningrad.
Paulling, J.R., Rosenberg, R.M., 1959, On unstable ship motions resulting from nonlinear coupling,Journal of Ship Research, 3, p. 36-46.
Pavlenko, G.E., 1935, Kacka sudov, Gostransizdat, Leningrad.
Pavlenko, G.E., 1939, Teorija rascetov prodol’noj kacki korablja, Izdatel’stvo LeningradskogoKorablestroitel’nogo Instituta, Leningrad.
Pavlenko, G.E., 1947, K teorii bortovoj kacki v svjazi s opredeleniem bezopasnosti korablja navolnenii, Izvestija Akademii Nauk SSSR, Otdelenie Tehniceskih Nauk, 12, s. 00.
Peters, A.S., Stoker, J.J., 1957, The motion of a ship as a floating rigid body in a seaway,Communications on Pure and Applied Mathematics, 10, p. 399-490.
Pierson, W.J., Neumann, G., James, R.W., 1955, Practical methods for observing and forecastingocean waves by means of wave spectra and statistics, United States Navy Hydrographic Office,Publication 603, Washington, DC.
Pierson, W.J., Moskowitz, L., 1964, A proposed spectral form for fully developed wind seas basedon the similarity theory of S.A. Kitaigorodskii, Journal of Geophysical Research, 69, p. 5181.
Pierson, W.J., Tick, L.J., Baer, I., 1966, Computer based procedures for preparing global forecastsand wind field analyses capable of using wave data obtained by spacecraft, 6th Office of NavalResearch Hydrodynamics Symposium, Washington, D.C.
Price, W.G., Bishop, R.E.D., 1974, Probabilistic theory of ship dynamics, Chapman andHall, London.
Rankine, W.J., 1863, On the exact form of waves near the surface of deep water, London Philo-sophical Transactions, 0, p. 00.
Remez, Ju.V., 1983, Kacka Korablja, Sudostroenie, Leningrad.
Salvesen, N., Tuck, E.O., Faltinsen, O., 1970, Ship motions and sea loads, Transactions of theSociety of Naval Architects and Marine Engineers, 78, p. 250-287.
Schoenberger, R.W., 1975, Subjective rsponse to very low frequency vibration, Aviation, Spaceand Environmental Medicine, 00, p. 00.
Sedov, L.I., 1959, Similarity and dimensional methods in mechanics, Academic, New York.
Sellars, F.H., 1972, Comparison of model and full-scale slamming impact pressure data, MPRAssociates Inc., Report 351, Washington, DC.
Semenov-Tjan-Sanskij, V.V., 1951, Vlijanie vertikal’noj kacki na poperecnuju nacal’nuju ostojcivost’,Trudy Leningradskogo Korablestroitel’nogo Instituta, vyp. IX, Leningrad.
314 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
Semenov-Tjan-Sanskij, V.V., 1965, Resenie uravnenija nelinejnoj bortovoj kacki metodom energe-ticeskogo balansa, Doklady k XV naucno-tehniceskoj konferencii po teorii korablja i gidromehanikesudna, Sbornik NTO sudproma, vyp. 64.
Sizov, V.G., 1954, O rascete bortovoj kacki korablja po zadannoj diagramme ostojcivosti, TrudyOdesskogo instituta inzenirov morskogo flota, vyp. XI, Odessa.
Smith, W.E., 1967, Equation of motion coefficients for a pitching and heaving destroyer model,Naval Ship Research and Development Center, Report 98S, Washington, DC.
St. Denis, M., Pierson Jr., W.J., 1953, On the motion of ships in confused seas, Transactions ofthe Society of Naval Architects and Marine Engineers, 61, p. 280-357.
Stark, D.A., 1977, Hydrofoil control and dynamics criteria (Tecnical substantation), Vol. 3A,Boeing Marine Systems, Report D321-51313-2.
Streljaev, L.N., 1967, K rascetu castotnoj harakteristiki nelinejnoj bortovoj kacki sudov na tohojvode, Sbornik Teoreticeskie i prakticeskie voprosy morehodnyh kacestv sudov, Transport,Moskva.
Strom-Tejsen, J., Yeh, H.Y.H., Morgan, D.D., 1973, Added resistance in waves, Transactions ofthe Society of Naval Architects and Marine Engineers, 81, p. 109-143.
Sifrin, L.S., 1973, Priblizennyj rascet dopolnitel’nogo soprotivlenija sudna na reguljarnom volnenii,Sudostroenie, 12, s. 5-7.
Simanskij, Ju.A., 1954, O nadlezascem vybore metacentriceskoj vysoty pri proektirovanii sudna,Sbornik statej po sudostroeniju, s. 121-127, Sudpromgiz, Leningrad.
Smyrev, A.N., Morensil’dt, V.A., Il’ina, S.G., 1961, Uspokoiteli kacki sudov, Sudpromgiz,Leningrad.
Takaishi, Y., Matsumoto, T., Ohmatsu, S., 1980, Wind and waves of the Nord Pacific Ocean1964-1973, Ship Research Institute, Tokyo.
Tasai, F., 1959, On the damping force and added mass of ships heaving and pitching, Journal ofthe Society of Naval Architects of Japan, 105, p. 47-56.
Timman, R., Newman, J.N., 1962, The coupled damping coefficients of a symmetric ship, Journalof Ship Research, 5, p. 1-7 (169-175).
Tupysev, A.N., 1957, Prilozenie teorii stacionarnyh slucajnyh pocessov k issledovaniju kacki kora-blja na nereguljarnom volnenii, Trudy NTO sudproma, t. VII, vyp. 2.
Ursell, F., 1949, On the heaving motion of a circular cylinder on the surface of a fluid, QuarterlyJurnal of Mechanics and Applied Mathematics, 2, p. 218-231.
Ursell, F., 1949a, On the rolling motion of cylinders in the surface of a fluid, Quarterly Jurnalof Mechanics and Applied Mathematics, 2, p. 335-353.
Van der Fleet, A.P., 1916, Teorija korablja, Lekcii, citannye studentam korablestroitel’nogootdelenija Petrogradskogo politehniceskogo instituta v 1915/1916 ucnom godu, Petrograd.
Vedeler, G., 1925, Notes on the rolling of ships, Transactions of the Institution of NavalArchitects, 67, p. 166-178.
Vlasov, V.G., 1959, O periode svobodnyh kolebanij korablja, Sobranie trudov, t. II, Sudpromgiz,Leningrad.
D.7. MODELLAZIONE DEL COMPORTAMENTO IN MARE 315
Vlasov, V.G., 1959a, Integral’noe interpolirovanie po nacal’nym i konecnym proizvodnym, Sobra-nie trudov, t. V, Sudpromgiz, Leningrad.
Vugts, J.H., 1971, The hydrodynamic forces and ship motions in oblique waves, Netherlands ShipResearch Centre TNO, Report 150S, Delft.
Wagner, H., 1932, Landing of seaplanes, National Advisory Committee for Aeronautics, TN 622,Washington, DC.
Walters, J.D., 1964, Motion sickness, medicine and travel, Documenta Geigy, J.R. Geigy SA,Basel.
Wehausen, J.V., Laitone, E.V., 1960, Surface Waves, in Handbuch der Physic, Ed. S. Flugge,Springer-Verlag, Berlin, Vol. IX, pp. 446–778.
Weinblum, G., St. Denis, M., 1950, On the motions of ships at sea, Transactions of the Societyof Naval Architects and Marine Engineers, 58, p. 184-248.
Wendel, K., 1954, Stabilitatseinbussen im Seegang und durch Koksdecklast, Hansa, 91, S. 2009-2022.
Zukovskij, N.E., 1949, Dejstvie volnujuscejsja zidkosti maloj glubiny na plavajuscie na ee poverh-nosti tela, Sobranie socinenij, t. II, s. 726-776, Gostehteoretizdat, Moskva.

316 APPENDICE D. ANALISI DIMENSIONALE E SIMILITUDINE DINAMICA
Elenco delle figure
2.1 Caratteristiche delle onde regolari piane. . . . . . . . . . . . . . . . . . . . . . . . . 122.2 Le condizioni al contorno nella teoria potenziale delle onde. . . . . . . . . . . . . . 132.3 Limiti di validita delle diverse teorie per le onde regolari. . . . . . . . . . . . . . . 142.4 Frequenza di un’onda regolare in funzione della lunghezza per diverse profondita del
fondale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.5 Celerita di un’onda regolare in funzione della lunghezza per diverse profondita del
fondale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.6 Il campo di velocita di un’onda progressiva in acqua di profondita finita. . . . . . . 162.7 Orbite e componenti della velocita delle particelle fluide secondo la teoria lineare
delle onde. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.8 Modello di generazione delle onde stazionarie. . . . . . . . . . . . . . . . . . . . . . 20
3.1 Definizione dell’angolo di rotta nave-onda. . . . . . . . . . . . . . . . . . . . . . . . 263.2 Classificazione degli angoli di rotta nave-onda. . . . . . . . . . . . . . . . . . . . . 263.3 Frequenza d’incontro per diverse direzioni di avanzo. . . . . . . . . . . . . . . . . . 273.4 Posizioni relative di una nave in diversi sistemi ondosi (Bhattacharrya, 1978). . . . 293.5 Frequenza d’incontro, lunghezza d’onda e componente della velocita di avanzo della
nave nella direzione di propagazione dell’onda nel caso di onde regolari in acquaprofonda. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.6 Diagramma delle condizioni sfavorevoli per i moti nave. . . . . . . . . . . . . . . . 31
4.1 Meccanismo di formazione delle onde generate dal vento. . . . . . . . . . . . . . . . 334.2 Ripresa fotografica della superficie del mare con evidenziate le curve di livello. . . . 344.3 Profilo del mare in un prefissato istante, ottenuto tagliando la superficie ondosa
lungo una direzione (osservazione istantanea). . . . . . . . . . . . . . . . . . . . . . 354.4 Profilo del mare in un punto prestabilito, ottenuto mediante la registrazione della
depressione ondosa nel tempo (osservazione puntuale). . . . . . . . . . . . . . . . . 364.5 Campionamento del record di un profilo ondoso: analisi in successivi intervalli di
tempo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.6 Spettro di energia delle onde ottenuto mediante l’analisi di Fourier della serie tem-
porale di un mare irregolare. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.7 Spettro di energia delle onde per una distribuzione continua di componenti. . . . . 414.8 Particolari serie temporali: a) processo a banda stretta; b) processo a banda larga. 444.9 Particolari spettri: a) processo a banda stretta; b) processo a banda larga. . . . . . 454.10 Spettri di Pierson-Moskowitz per diverse velocita del vento. . . . . . . . . . . . . . 474.11 Spettri di Bretschneider per un’altezza significativa delle onde pari a H1/3 = 4 m e
diversi periodi modali Tm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
317
318 ELENCO DELLE FIGURE
4.12 Spettri di Bretschneider per un periodo modale delle onde pari a Tm = 10 s e diversealtezze significative H1/3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.13 Parametro di overshoot in funzione dell’altezza significativa e del periodo modale(Chakrabarti and Snider, 1975). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.14 Spettri di Bretschneider e JONSWAP per altezza significativa e periodo modale delleonde rispettivamente pari a H1/3 = 4 m, Tm = 10 s. . . . . . . . . . . . . . . . . . . 52
4.15 Spettri delle pendenze di Bretschneider e JONSWAP per altezza significativa eperiodo modale delle onde rispettivamente pari a H1/3 = 4m, Tm = 10 s. . . . . . . 53
4.16 Direzione predominante e direzioni secondarie di propagazione delle onde. . . . . . 544.17 Tipico spettro direzionale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.18 Funzioni di dispersione per lo spettro di energia. . . . . . . . . . . . . . . . . . . . 57
5.1 Relazione fra l’altezza media visuale e l’altezza significativa. . . . . . . . . . . . . . 625.2 Relazione fra il periodo medio visuale ed i periodi misurati (periodo medio di zero-
crossing e periodo modale). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 635.3 Aree del mare considerate da Hogben, Dacunha and Oliver (1986). . . . . . . . . . 645.4 Esempio di statistica delle altezze e dei periodi d’onda (Hogben, Dacunha and Oliver,
1986). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655.5 Probabilita di eccedenza di un’altezza significativa prefissata (Hogben, Dacunha and
Oliver, 1986). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 665.6 Esempi di Scale dello Stato del Mare (ITTC, 1975). . . . . . . . . . . . . . . . . . 67
6.1 Tipica traiettoria di una nave in mare ondoso. . . . . . . . . . . . . . . . . . . . . . 726.2 Sistemi di riferimento usati nello studio dei moti nave. . . . . . . . . . . . . . . . . 726.3 Classificazione delle forze agenti su di una nave in mare ondoso. . . . . . . . . . . . 806.4 Leggi orarie della depressione dell’onda, della forza eccitante e del generico moto
nave nel caso di onde regolari. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
7.1 Caratteristiche dei moti nave per differenti valori del coefficiente di smorzamento. . 977.2 Castello dei pesi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 997.3 Calcolo dei periodi naturali di sussulto e beccheggio con il metodo grafico-analitico
di Tasai. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
8.1 Approssimazione della carena con striscie bi-dimensionali, ovvero sezioni tasversalidi un cilindro infinito (Beck et al., 1989). . . . . . . . . . . . . . . . . . . . . . . . 110
8.2 Problema bi-dimensionale per il potenziale (Beck et al., 1989). . . . . . . . . . . . 1108.3 Sezioni di Lewis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1128.4 Approssimazione delle sezioni con il metodo di Frank (Beck et al., 1989). . . . . . . 1138.5 Trasformazione di una figura del piano z = x + iy in un’altra figura del piano
ζ = ξ + iη mediante la tecnica delle trasformazioni conformi. . . . . . . . . . . . . 1148.6 Esempi di forme di Lewis non valide. . . . . . . . . . . . . . . . . . . . . . . . . . . 1168.7 Intervallo ammissibile delle forme di Lewis. . . . . . . . . . . . . . . . . . . . . . . 117
9.1 Moti nave in onde molto lunghe di prora (χ = 180◦). . . . . . . . . . . . . . . . . . 1259.2 Forze di spinta agenti su una nave vincolata in onde regolari di ampiezza costante. 1259.3 Funzioni di trasferimento e fasi del moto di sussulto per una fregata di 125 m in
onde di prora (χ = 180◦). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1269.4 Funzioni di trasferimento e fasi del moto di beccheggio per una fregata di 125m in
onde di prora (χ = 180◦). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1279.5 Funzioni di trasferimento e fasi del moto di sussulto per una fregata di 125 m in
onde di poppa (χ = 0◦). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
ELENCO DELLE FIGURE 319
9.6 Funzioni di trasferimento e fasi del moto di beccheggio per una fregata di 125m inonde di poppa (χ = 0◦). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
9.7 Moti di sussulto e beccheggio in onde oblique molto lunghe (χ = 30◦). . . . . . . . 1309.8 Funzioni di trasferimento e fasi del moto di sussulto per una fregata di 125 m in
onde oblique alla velocita di 20 nodi. . . . . . . . . . . . . . . . . . . . . . . . . . . 1319.9 Funzioni di trasferimento e fasi del moto di beccheggio per una fregata di 125m in
onde oblique alla velocita di 20 nodi. . . . . . . . . . . . . . . . . . . . . . . . . . . 1329.10 Rappresentazioni alternative delle funzioni di trasferimento in onde oblique per una
fregata di 125 m alla velocita di 20 nodi. . . . . . . . . . . . . . . . . . . . . . . . . 1329.11 Moti nave in onde molto lunghe al traverso (χ = 90◦). . . . . . . . . . . . . . . . . 1339.12 Funzione di trasferimento e fase del moto di scarroccio per una fregata di 125 m in
onde al traverso alla velocita di 20 nodi (χ = 90◦). . . . . . . . . . . . . . . . . . . 1349.13 Funzioni di trasferimento e fasi del moto di rollio per una fregata di 125 m in onde
al traverso (χ = 90◦). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1359.14 Moto di rollio in onde regolari al traverso (nave vista da poppa). . . . . . . . . . . 1359.15 Funzione di trasferimento e fase del moto di rollio in onde al traverso (χ = 90◦)
per una fregata di 125 m in onde al traverso con evidenziato l’effetto dell’altezzametacentrica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
9.16 Funzioni di trasferimento del moto di rollio per una fregata di 125m in onde oblique alla
velocita di 20 nodi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1379.17 Funzioni di trasferimento del moto di scarroccio per una fregata di 125m in onde
oblique alla velocita di 20 nodi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1389.18 Funzioni di trasferimento del moto di imbardata per una fregata di 125 m in onde
oblique alla velocita di 20 nodi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1399.19 Funzioni di trasferimento del moto assoluto verticale in corrispondenza del ponte di
comando per una fregata di 125m in onde di prora (χ = 180◦). . . . . . . . . . . . 1409.20 Funzione di trasferimento del moto relativo in corrispondenza della perpendicolare
avanti per una fregata di 125 m in onde di prora (χ = 180◦). . . . . . . . . . . . . 1419.21 Funzioni di trasferimento dello spostamento, della velocita e dell’accelerazione di
sussulto per una fregata di 125m alla velocita di 20 nodi. . . . . . . . . . . . . . . . 1439.22 Forze ed accelerazioni agenti su di un corpo, viste nel piano trasversale da osservatori
diversi: a) riferimento assoluto; b) riferimento solidale alla nave. . . . . . . . . . . 1439.23 Funzioni di trasferimento del LFE per una fregata di 125 m alla velocita di 20 nodi;
xP − xG = 40 m, yP − yG = 7 m, zP − zG = 10 m. . . . . . . . . . . . . . . . . . . 146
10.1 Analogia fra un circuito elettrico ed il sistema meccanico nave-fluido. . . . . . . . . 15010.2 Trasformazione dello spettro di energia delle onde in spettro d’incontro con onde di
prora. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15110.3 Moto di sussulto a 20 nodi in onde irregolari di prora. . . . . . . . . . . . . . . . . 15310.4 Moto di beccheggio a 20 nodi in onde irregolari di prora. . . . . . . . . . . . . . . . 15510.5 Effetto dell’accoppiamento dello spettro di energia delle onde con la funzione di
trasferimento del moto relativo a prora per una fregata a 20 nodi, H1/3=5.5 m. . . 15810.6 Effetto del periodo modale sui moti in onde di prora o al traverso per una fregata a
20 nodi, H1/3=5.5m. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15910.7 Effetto della dispersione delle onde sui moti nave per diversi angoli di rotta alla
velocita di avanzo pari a 20 nodi, H1/3=5.5 m, Tm=12.4 s. . . . . . . . . . . . . . . 16010.8 Calcolo dei moti nave con smorzamento nonlineare di rollio. . . . . . . . . . . . . . 161
11.1 Immersione e bordo libero per una nave con velocita di avanzo non nulla. . . . . . 16411.2 Coefficiente di swell-up sulla lunghezza nave (Blok and Huisman, 1985). . . . . . . 165

320 ELENCO DELLE FIGURE
11.3 Slamming di una fregata in presenza di cattivo tempo (Lloyd, 1989). . . . . . . . . 16711.4 Andamento temporale della pressione di slamming sulla chiglia del US Coast Guard
vessel Unimark (Sellars, 1972). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16711.5 Definizione dell’angolo di alzata di madiere. . . . . . . . . . . . . . . . . . . . . . . 16811.6 Coefficiente della pressione di slamming in funzione dell’angolo di alzata di madiere. 16811.7 Andamento temporale del moto relativo in un punto della chiglia. . . . . . . . . . . 17011.8 Calcolo della pressione di slamming per una fregata in onde di prora, TR = 900 s. . 17111.9 Imbarco d’acqua nel caso di una fregata (Lloyd, 1989). . . . . . . . . . . . . . . . . 17211.10Superamento del bordo libero senza imbarco d’acqua nel caso di una fregata (Lloyd,
1989). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17311.11Calcolo della probabilita di superamento del bordo libero nel caso di una fregata a
20 nodi; H1/3 = 5.5m, Tm = 12.4 s. . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
12.1 Distribuzione di frequenza condizionata per area di mare e stagione annuale. . . . 17812.2 Distribuzione di frequenza condizionata per velocita di avanzo e rotta seguita. . . . 17912.3 Schema di calcolo dell’efficienza operativa. . . . . . . . . . . . . . . . . . . . . . . . 179
13.1 Navi geometricamente simili. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18513.2 Funzioni di trasferimento nondimensionali per i moti di sussulto e beccheggio per la
carena madre in onde di prora. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18613.3 Effetto della lunghezza nave sul moto di sussulto in mare di prora a 20 nodi; H1/3 =
5.5 m, Tm = 12.4 s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18713.4 Effetto della lunghezza nave sul moto di beccheggio in mare di prora a 20 nodi;
H1/3 = 5.5m, Tm = 12.4 s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18813.5 Effetto della lunghezza nave sugli rms di sussulto e di beccheggio in mare di prora
a 20 nodi; H1/3 = 5.5m, Tm = 12.4 s. . . . . . . . . . . . . . . . . . . . . . . . . . . 18913.6 Effetto della lunghezza nave sull’accelerazione assoluta verticale a 20 nodi in mare
di prora; x/L = 0.15 (Stazione 7), H1/3 = 5.5m, Tm = 12.4 s. . . . . . . . . . . . . 19013.7 Effetto della lunghezza nave sul moto relativo verticale a 20 nodi in mare di prora;
x/L = 0.30 (Stazione 4), H1/3 = 5.5m, Tm = 12.4 s. . . . . . . . . . . . . . . . . . 19213.8 Effetto della lunghezza nave sull’accelerazione assoluta verticale (Stazione 7) e sul
moto relativo (Stazione 4) a 20 nodi in mare di prora; H1/3 = 5.5m, Tm = 12.4 s. . 19313.9 Effetto della lunghezza nave sulla probabilita di emersione della chiglia (Stazione 4)
a 20 nodi in mare di prora; H1/3 = 5.5m, Tm = 12.4 s. . . . . . . . . . . . . . . . . 19313.10Variazioni del rapporto immersione/lunghezza. . . . . . . . . . . . . . . . . . . . . 19413.11Effetto del rapporto immersione/lunghezza sugli rms del moto relativo e dell’acce-
lerazione assoluta verticale in mare di prora per navi con lo stesso coefficiente dipienezza totale; T ′m = 3.5, Fn = 0.3. . . . . . . . . . . . . . . . . . . . . . . . . . . 195
13.12Effetto del rapporto immersione/lunghezza sulla probabilita di emersione della chi-glia in mare di prora per navi con lo stesso coefficiente di pienezza totale; T ′m = 3.5,Fn = 0.3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
13.13Variazioni del rapporto larghezza/lunghezza. . . . . . . . . . . . . . . . . . . . . . 19613.14Effetto del rapporto larghezza/lunghezza sugli rms del moto relativo e dell’accele-
razione assoluta verticale in mare di prora; T ′m = 3.5, Fn = 0.3. . . . . . . . . . . . 19613.15Effetto del rapporto larghezza/lunghezza sulla probabilita di emersione della chiglia
in mare di prora; T ′m = 3.5, Fn = 0.3. . . . . . . . . . . . . . . . . . . . . . . . . . 19713.16Variazioni del coefficiente di pienezza del galleggiamento prodiero. . . . . . . . . . 19813.17Effetto di un aumento del coefficiente di pienezza del galleggiamento prodiero sulla
forma delle sezioni. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198

ELENCO DELLE FIGURE 321
13.18Effetto del coefficiente di pienezza del galleggiamento prodiero sugli rms del motorelativo e dell’accelerazione assoluta verticale in mare di prora; T ′m = 3.5, Fn = 0.3. 199
13.19Effetto del coefficiente di pienezza del galleggiamento prodiero sulla probabilita diemersione della chiglia in mare di prora; T ′m = 3.5, Fn = 0.3. . . . . . . . . . . . . 199
14.1 Relazione fra le diverse componenti della resistenza totale per una nave della lun-ghezza di 136 m in condizioni di vento e mare di prora a potenza costante. . . . . . 202
14.2 Confronto fra previsioni teoriche e dati sperimentali relativi al coefficiente di resi-stenza addizionale in funzione della lunghezza delle onde, per una nave di lunghezza155m, CB = 0.564 e Fn = 0.20 (Gerritsma and Beukelman, 1972). . . . . . . . . . 203
14.3 Confronto fra i diversi metodi approssimati per la previsione della caratteristica difrequenza della resistenza addizionale in onde incidenti di prora. . . . . . . . . . . 207
15.1 Motion Sickness Incidence: effetto dell’acclimatizzazione (Walters, 1964). . . . . . 21015.2 Motion Sickness Incidence in funzione della frequenza di eccitazione (O’Hanlon and
McCauley, 1974). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21115.3 Calcolo del MSI per un passenger-ferry a 10 nodi in onde di prora; H1/3 = 5.5m,
Tm = 12.4 s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21315.4 Parametro A del Moto Soggettivo in funzione della frequenza di eccitazione (Schoen-
berger, 1975). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21415.5 Moto Soggettivo ed accelerazione verticale a 1.07 rad/s. . . . . . . . . . . . . . . . 21515.6 Calcolo del Moto Soggettivo per una fregata a 20 nodi in onde di prora: H1/3 =
5.5 m, Tm = 12.4 s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21615.7 Motion Induced Interruptions per minuto alla frequenza naturale di rollio 0.59 rad/s
(Baitis, Woolaver and Beck, 1985). . . . . . . . . . . . . . . . . . . . . . . . . . . . 21715.8 Effetto della posizione longitudinale sul Lateral Force Estimator e Motion Induced
Interruptions per minuto, relativamente al ponte principale di una fregata a 15 nodiin onde al traverso: H1/3 = 5.5m, Tm = 12.4 s. . . . . . . . . . . . . . . . . . . . . 218
15.9 Effetto dell’altezza dalla linea di chiglia sul Lateral Force Estimator e Motion Indu-ced Interruptions per minuto, relativamente alla sezione al mezzo di una fregata a15 nodi in onde al traverso: H1/3 = 5.5m, Tm = 12.4 s. . . . . . . . . . . . . . . . . 219
16.1 Boa ondametrica Waverider. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22216.2 Minimi tempi di prova per 100 picchi dei moti; fregata a 20 kn, Tm = 12.4 s. . . . . 22516.3 Tipica sequenza di corse per una prova di seakeeping a 20 nodi. . . . . . . . . . . . 226
17.1 Tipica vasca rettilinea. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22817.2 Sistemi di ancoraggio del modello. . . . . . . . . . . . . . . . . . . . . . . . . . . . 22917.3 Tipica vasca di seakeeping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23017.4 Ondogeni. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23117.5 Tipica funzione di trasferimento dell’ondogeno. . . . . . . . . . . . . . . . . . . . . 23117.6 Caratteristiche di riflessione delle spiagge (Hsiung et al., 1983). . . . . . . . . . . . 23217.7 Strumentazione per la misura del sussulto e del beccheggio. . . . . . . . . . . . . . 23317.8 Sonde per la misura delle onde. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23417.9 Strumentazione per il moto relativo. . . . . . . . . . . . . . . . . . . . . . . . . . . 23517.10Strumentazione per l’imbarco d’acqua. . . . . . . . . . . . . . . . . . . . . . . . . . 23617.11Indicatore di assetto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23717.12Equipaggiamento a pendolo composto per determinare il raggio di girazione di
beccheggio e di rollio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23817.13Equipaggiamento a sospensione bifilare per determinate il raggio di girazione di
imbardata. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238

322 ELENCO DELLE FIGURE
17.14Spostamento di fase dovuto al posizionamento del sensore delle onde. . . . . . . . . 24117.15Generazione dello spettro di onde irregolari. . . . . . . . . . . . . . . . . . . . . . . 24217.16Fronti d’onda e locazione del modello. . . . . . . . . . . . . . . . . . . . . . . . . . 24417.17Corse ottimali del modello. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24517.18Corse ottimali per la sperimentazione con il modello. . . . . . . . . . . . . . . . . . 24817.19Interferenza con le pareti vasca: onde irradiate (linea continua) e onde riflesse (linea
tratteggiata). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24817.20Interferenza con le pareti vasca: velocita di avanzo valide. . . . . . . . . . . . . . . 250
A.1 Istogramma ottenuto dall’analisi delle ordinate del profilo ondoso campionato adintervalli regolari di tempo (Tabella A.1). . . . . . . . . . . . . . . . . . . . . . . . 254
A.2 Istogramma ottenuto dall’analisi delle ampiezze apparenti del profilo ondoso (Ta-bella A.2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
A.3 Funzione densita di probabilita ottenuta dall’analisi delle ordinate del profilo ondosocampionato ad intervalli regolari di tempo (Tabella A.1). . . . . . . . . . . . . . . . 258
A.4 Funzione densita di probabilita ottenuta dall’analisi delle ampiezze apparenti delprofilo ondoso (Tabella A.2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
A.5 Proprieta della funzione densita di probabilita di Gauss. . . . . . . . . . . . . . . . 260A.6 Probabilita di eccedere un prefissato valore di ampiezza secondo la distribuzione di
Rayleigh. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263A.7 Calcolo della media di 1/n-mo delle ampiezze piu alte. . . . . . . . . . . . . . . . . 264
B.1 Angoli di Eulero navali. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 268B.2 Analogia fra il giroscopio e la nave. . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
C.1 Sistema oscillante semplice. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274C.2 Legge oraria del moto armonico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275C.3 Sistema oscillante smorzato. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277C.4 Moto armonico smorzato. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279C.5 Esempi di moto aperiodico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280C.6 Sistema oscillante forzato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280C.7 Curva di risposta in frequenza e corrispondente andamento della fase iniziale. . . . 282
Elenco delle tabelle
2.1 Relazioni significative per le onde regolari (continua). . . . . . . . . . . . . . . . . . 222.2 Continua/1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1 Altezza significativa delle onde in funzione della velocita del vento secondo la 12thITTC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.1 Scala Beaufort della forza del vento per la cifratura del vento in superficie nelle stazioni
meteorologiche marittime. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605.2 Codice dello stato del mare secondo la World Meteorological Organization. . . . . 61
7.1 Tabella IMO dei valori del coefficiente kϕ. . . . . . . . . . . . . . . . . . . . . . . . 1087.2 Valori del coefficiente kϕ secondo Remez (1983). . . . . . . . . . . . . . . . . . . . 108
8.1 Coefficienti e forze/momenti di eccitazione dei moti verticali. . . . . . . . . . . . . 1198.2 Coefficienti e forze/momenti di eccitazione dei moti verticali. . . . . . . . . . . . . 1208.3 Coefficienti e forze/momenti di eccitazione dei moti trasversali. . . . . . . . . . . . 122
12.1 Valori critici per le risposte di tenuta al mare (Lewis, 1989). . . . . . . . . . . . . . 18112.2 Efficienza operativa di una fregata nel Nord Atlantico (Andrew, Loader and Penn,
1984). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
A.1 Analisi delle ordinate del profilo ondoso campionato ad intervalli regolari di tempo(lunghezza record = 1800 s, intervallo campionamento = 1.0 s). . . . . . . . . . . . 255
A.2 Analisi delle ampiezze apparenti del profilo ondoso (lunghezza record = 1800 s). . . 256A.3 La funzione errore. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261A.4 Probabilita di eccedere valori prefissati secondo la distribuzione di Gauss. . . . . . 262A.5 Probabilita di eccedere valori prefissati di ampiezza secondo la distribuzione di
Rayleigh. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264A.6 Media di 1/n-mo delle ampiezze piu alte secondo la distribuzione di Rayleigh. . . . 265
D.1 Equazioni dimensionali e unita di misura. . . . . . . . . . . . . . . . . . . . . . . . 290D.2 Forze agenti in un fluido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293D.3 Leggi di similitudine per il modello. . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
323