
Lezioni di Fisica - s99b2fc3326fc85b2.jimcontent.com · funzione di altre grandezze misurate...
68
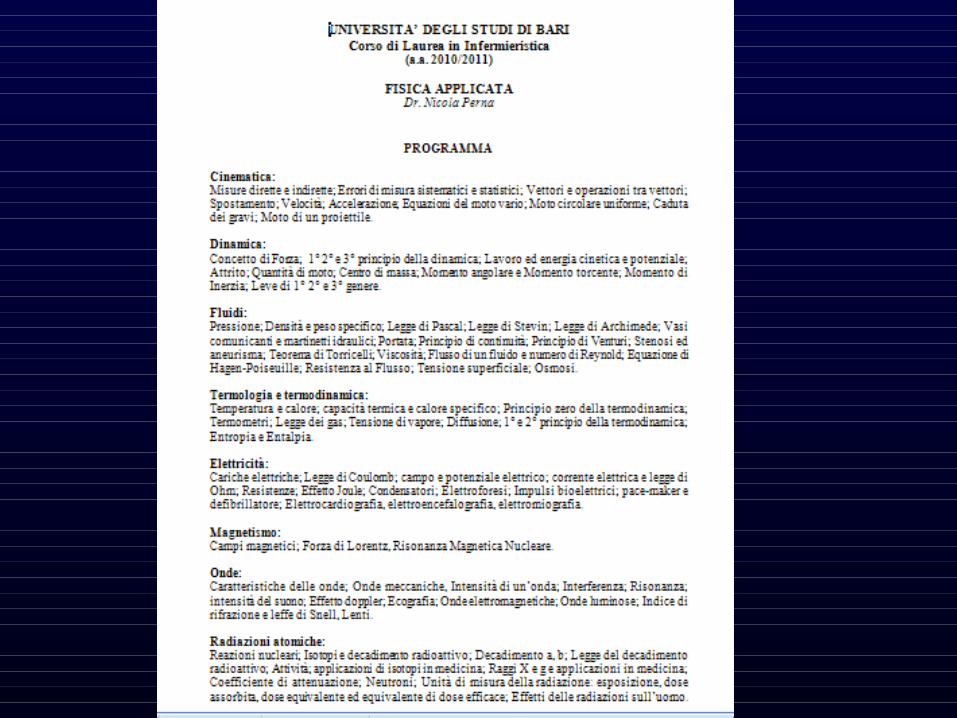
LEZIONI DI FISICA APPLICATA Corso di Laurea Scienze Infermieristiche a.a. 2010/2011 Prof Nicola Perna
-
Upload
nguyentruc -
Category
Documents
-
view
220 -
download
0
Transcript of Lezioni di Fisica - s99b2fc3326fc85b2.jimcontent.com · funzione di altre grandezze misurate...

LEZIONI DI FISICA APPLICATACorso di Laurea
Scienze Infermieristiche
a.a. 2010/2011 Prof Nicola Perna

LEZIONI DI FISICA APPLICATA Nome: Nicola PernaRecapito: Istituto Tumori “Giovanni
Paolo II” Viale Orazio Flacco, 65 U.O.C. di Fisica SanitariaEmail: [email protected]: 0805555462
Ricevimento studenti
Per appuntamento via mail o telefono presso il mio recapito

Calendario lezioni
21/01/2011 ore 16.00-18.0027/01/2011 ore 15.00-18.0028/01/2011 ore 16.00-18.0001/02/2011 ore 15.00-18.0002/02/2011 ore 16.00-18.00
12 ore → 1 CFU
Modalità esameProva scritta
30 – 33 domande a risposta multipla e/o aperta
≥ 70% risposte giuste → esame superato
60% - 69% risposte giuste → recupero con domande orali
< 60% risposte giuste → non idoneo
Modalità esameL’esame deve accertare la preparazione acquisita. Questa modalità serve proprio a distinguere chi ha studiato da chi viene all’esame “tanto per provare”, studiacchiando uno-due argomenti e sperando che io gli chieda proprio quelli. Ritengo questo atteggiamento molto negativo e irrispettoso. Io cercherò sempre di aiutare chi ne ha più bisogno (studenti in difficoltà, lavoratori, stranieri...). Però chiedo rispetto, e un rapporto corretto tra me e voi. In ogni caso, la preparazione richiesta è uguale per tutti. Se ci sono problemi, parliamone. E parliamone prima!
Nicola Perna
... ma io non ho mai fatto Fisica ...
Non importa: il corso di Fisica non presuppone conoscenze preliminari, ma al suo interno tratta tutti gli argomenti necessari a superare l’esame. Semmai il problema può nascere da carenze in Matematica: su questo ti chiedo attenzione, e se necessario “allenamento”
Durante il corso spiego, anche con molti esempi, argomenti molto semplici. All’esame chiedo ancora meno di quel che spiego, Limitandomi ad argomenti fondamentali.Il problema nasce solo per chi non frequenta le lezioni, Nonr iguardale trasparenze, non segue il metodo utilizzatoa lezione...
Insomma, per chi non studia!
Grandezze fisiche e teoria degli errori
a.a. 2010/2011Prof Nicola Perna
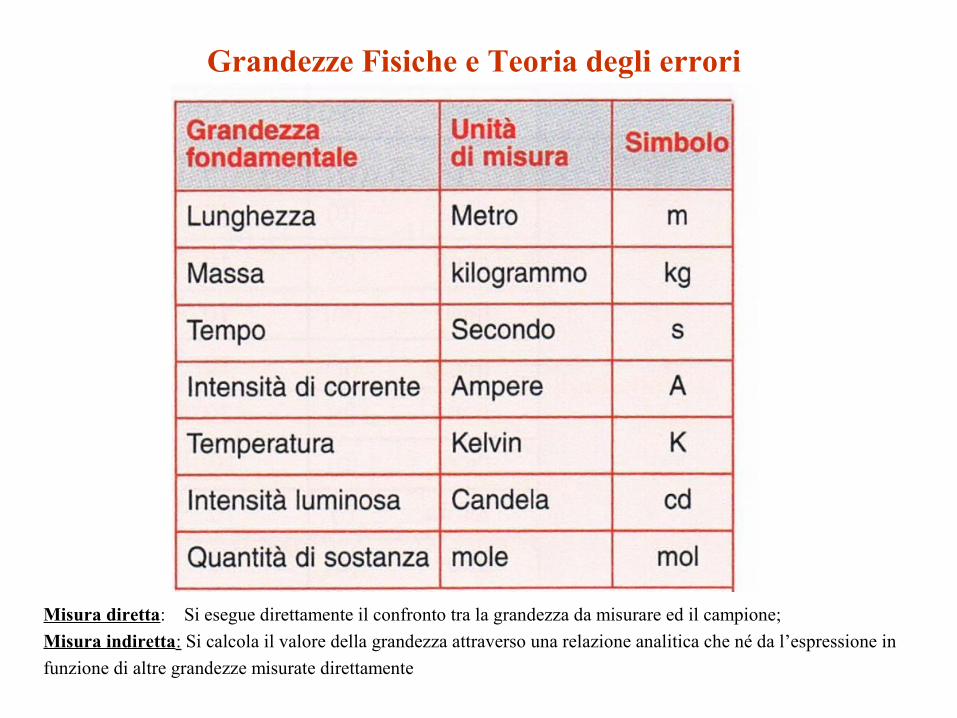
Grandezze Fisiche e Teoria degli errori
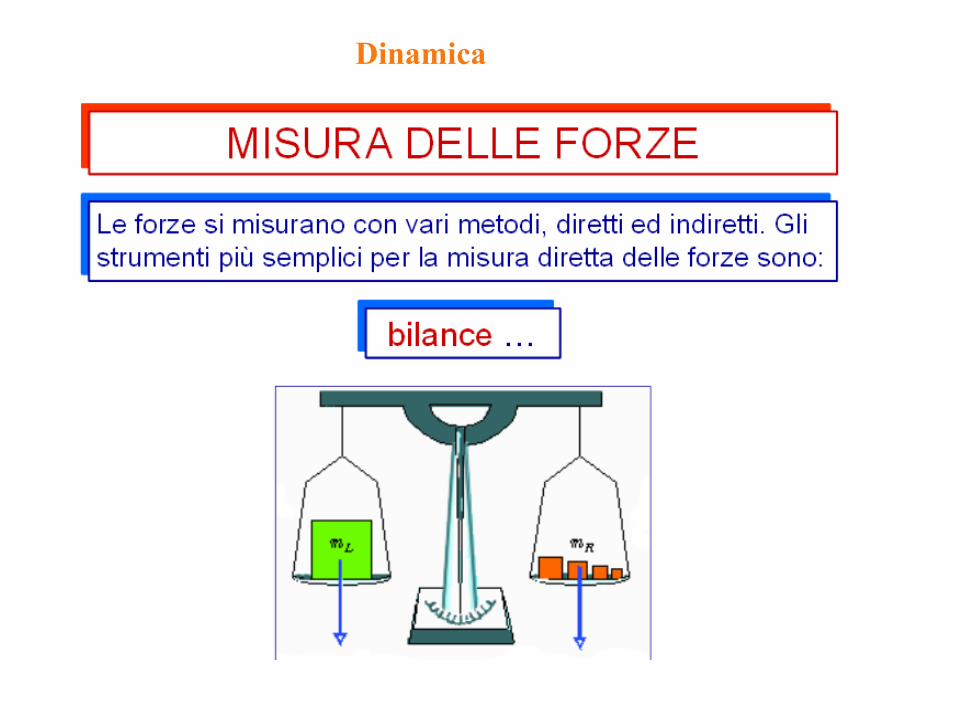
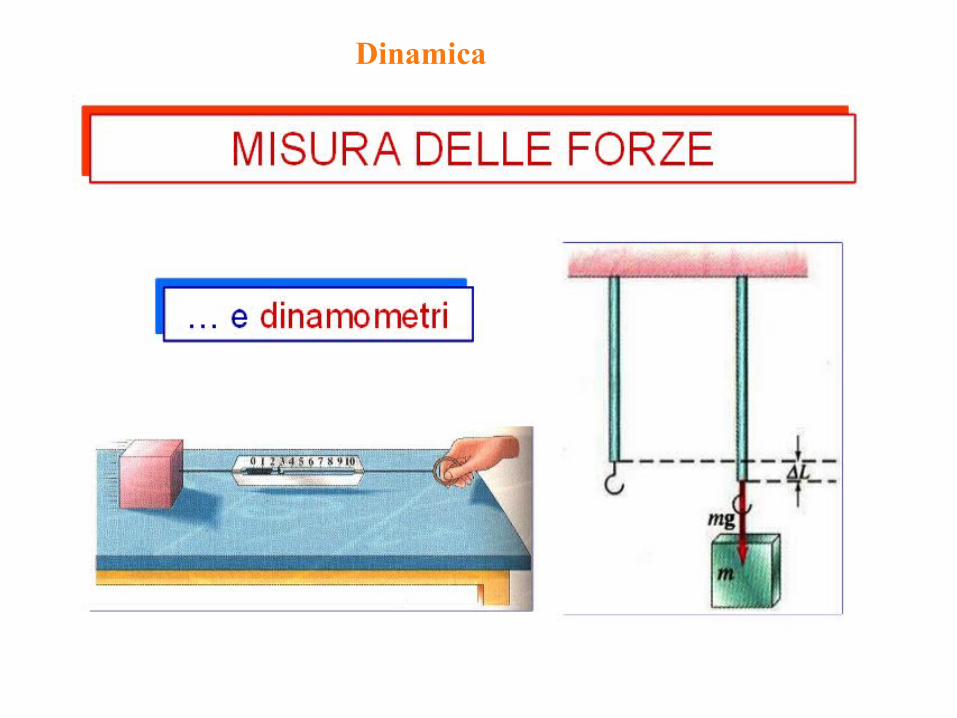
Misura diretta: Si esegue direttamente il confronto tra la grandezza da misurare ed il campione;Misura indiretta: Si calcola il valore della grandezza attraverso una relazione analitica che né da l’espressione in funzione di altre grandezze misurate direttamente
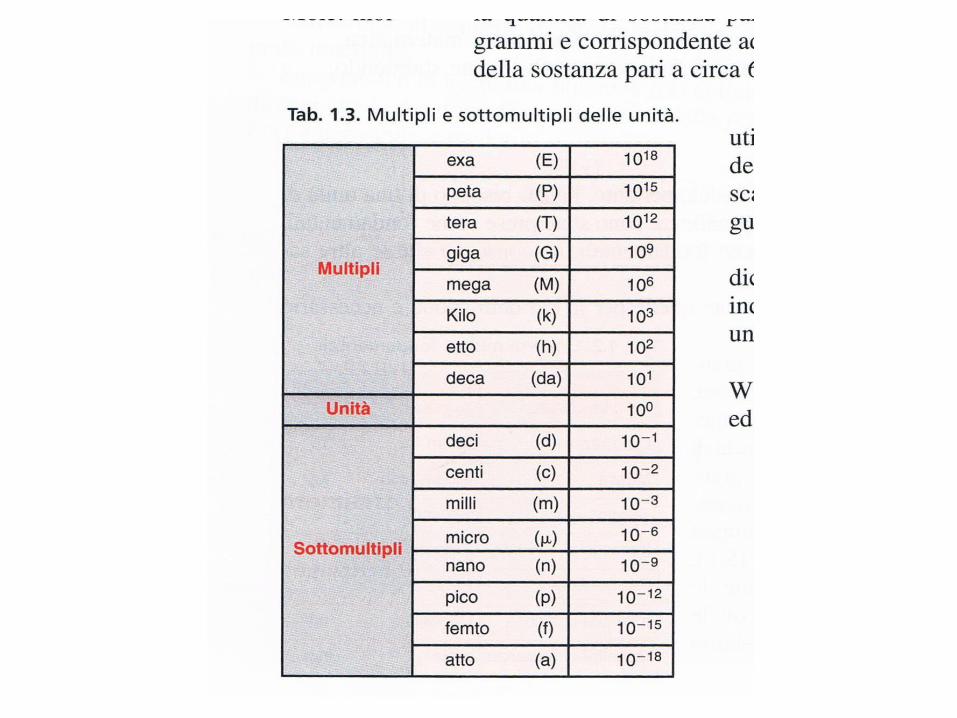
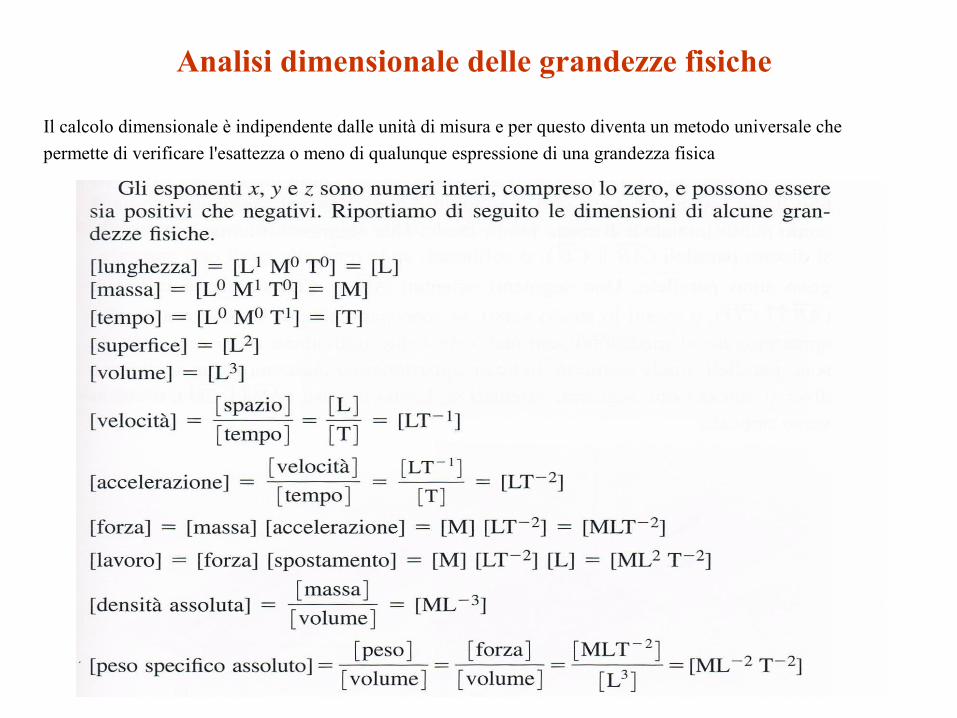
Analisi dimensionale delle grandezze fisiche
Il calcolo dimensionale è indipendente dalle unità di misura e per questo diventa un metodo universale che permette di verificare l'esattezza o meno di qualunque espressione di una grandezza fisica
Grandezze Fisiche e Teoria degli errori
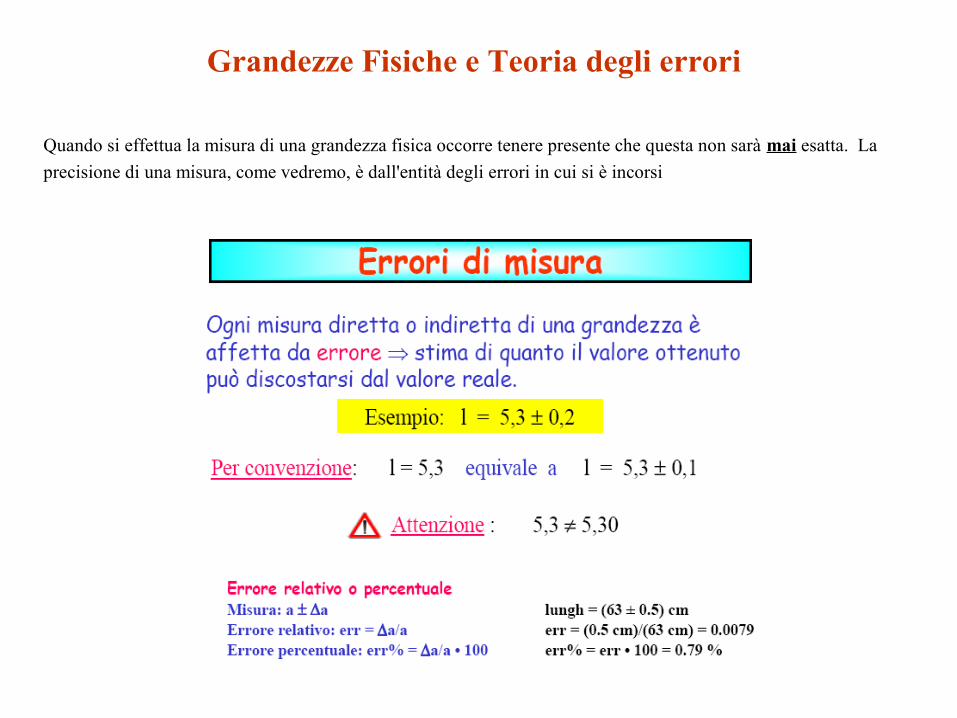
Quando si effettua la misura di una grandezza fisica occorre tenere presente che questa non sarà mai esatta. La precisione di una misura, come vedremo, è dall'entità degli errori in cui si è incorsi
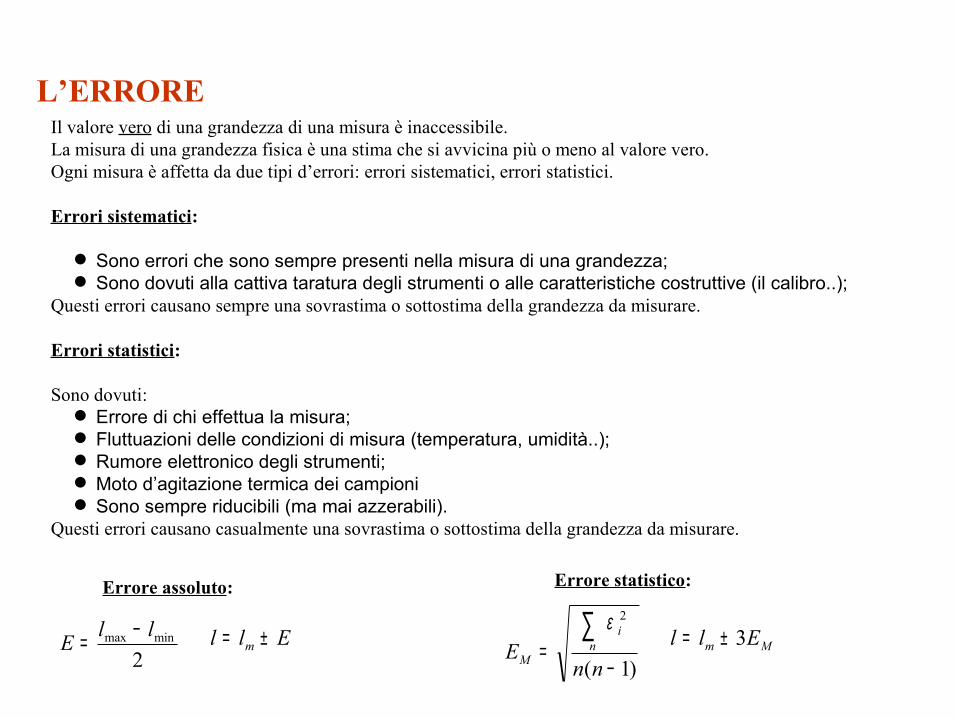
L’ERROREIl valore vero di una grandezza di una misura è inaccessibile.La misura di una grandezza fisica è una stima che si avvicina più o meno al valore vero.Ogni misura è affetta da due tipi d’errori: errori sistematici, errori statistici.
Errori sistematici:
Sono errori che sono sempre presenti nella misura di una grandezza; Sono dovuti alla cattiva taratura degli strumenti o alle caratteristiche costruttive (il calibro..);
Questi errori causano sempre una sovrastima o sottostima della grandezza da misurare.
Errori statistici:
Sono dovuti: Errore di chi effettua la misura; Fluttuazioni delle condizioni di misura (temperatura, umidità..); Rumore elettronico degli strumenti; Moto d’agitazione termica dei campioni Sono sempre riducibili (ma mai azzerabili).
Questi errori causano casualmente una sovrastima o sottostima della grandezza da misurare.
2minmax llE −= Ell m ±=
)1(
2
−=
∑nn
E ni
M
εMm Ell 3±=
Errore assoluto: Errore statistico:

I VETTORI
a.a. 2010/2011Prof Nicola Perna
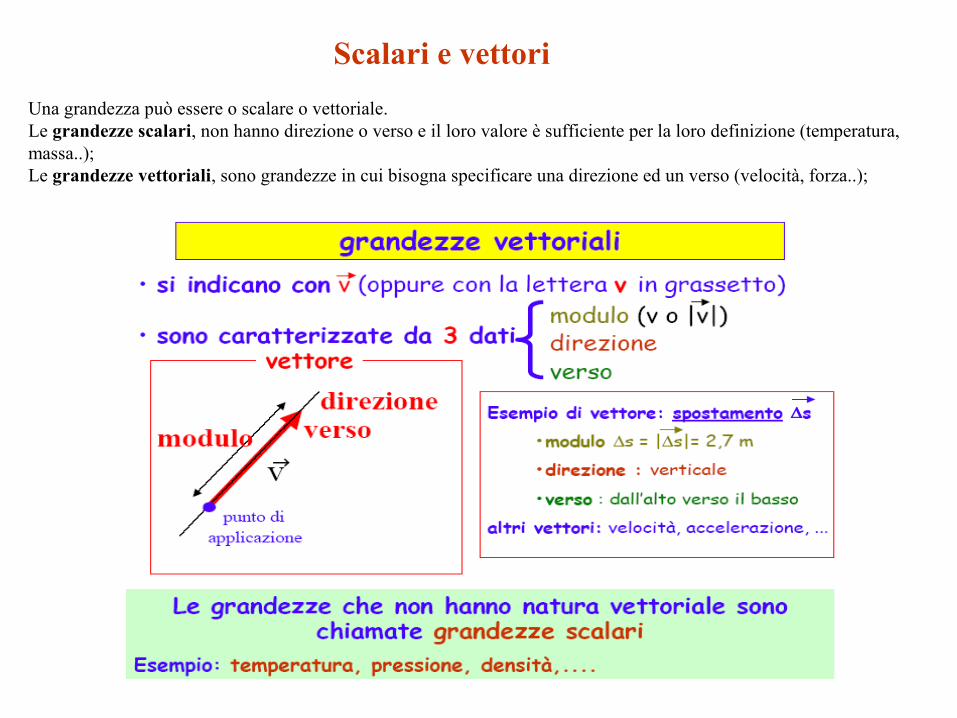
Scalari e vettoriUna grandezza può essere o scalare o vettoriale.Le grandezze scalari, non hanno direzione o verso e il loro valore è sufficiente per la loro definizione (temperatura, massa..);Le grandezze vettoriali, sono grandezze in cui bisogna specificare una direzione ed un verso (velocità, forza..);
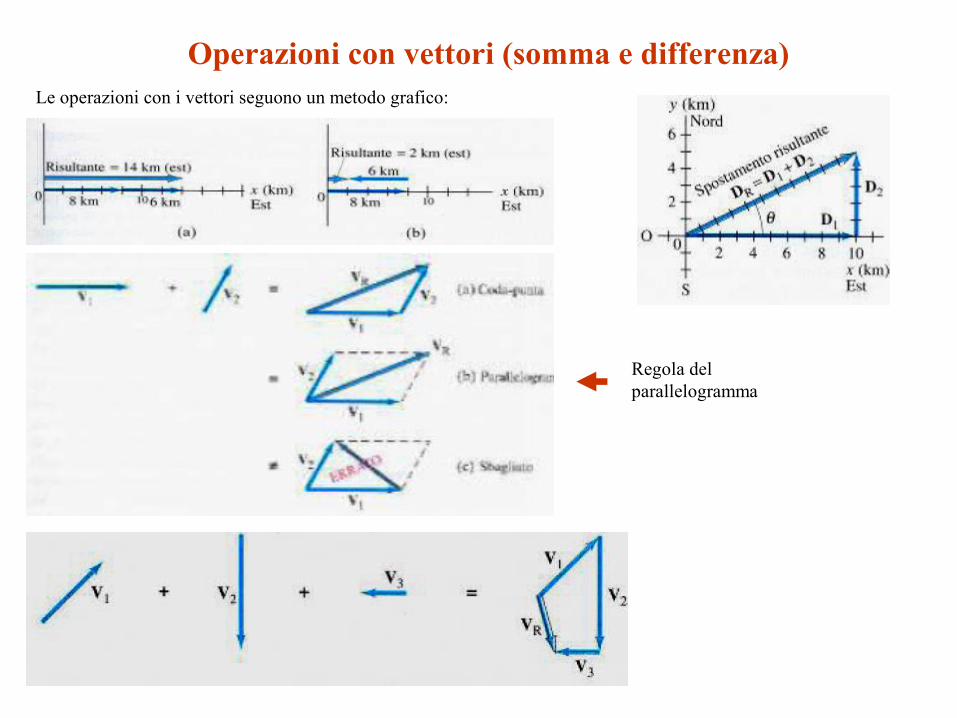
Operazioni con vettori (somma e differenza)Le operazioni con i vettori seguono un metodo grafico:
Regola delparallelogramma
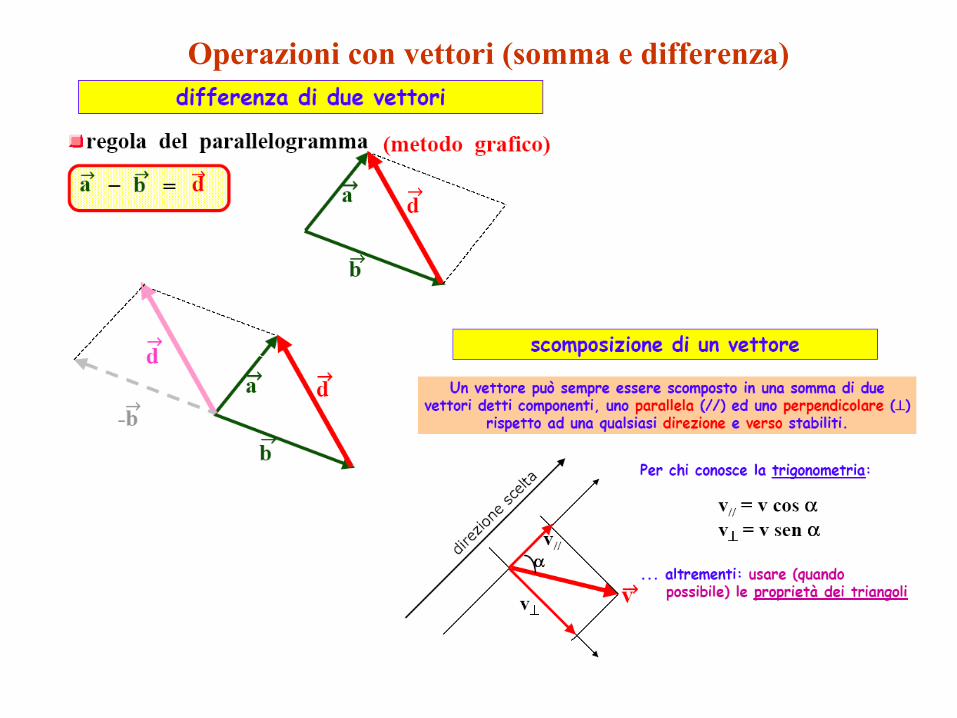
Operazioni con vettori (somma e differenza)
Operazioni con vettori (prodotto)
Il prodotto tra uno scalare ed un vettore è un vettore con la stessa direzione del vettore originale, verso concorde a seconda del segno dello scalare e modulo uguale al prodotto del modulo del vettore per il valore dello scalare (segno dello scalare in valore assoluto).
ba k=
Il prodotto tra due vettori è di 2 tipi a seconda de il risultato è uno scalare o un vettore:bisogna distinguere infatti tra prodotto scalare e prodotto vettoriale.
Il prodotto scalare:Il risultato è uno scalare;
Si calcola ϑcos⋅⋅=•= bak ba
Il prodotto vettoriale:Il risultato è un vettore;
ϑsin⋅⋅=×= babac
c ha direzione perpendicolare al piano formato dai 2 vettori (applicati alo stesso punto);Verso regola della mano destra;

LA MECCANICA
CINEMATICA
a.a. 2010/2011Prof Nicola Perna
LA MECCANICA
Cinematica: studio del moto di un punto materiale (in 1, 2 o 3 dimensioni); Dinamica del punti materiale: studio delle cause del moto del punto materiale; Cinematica dei sistemi di punti materiali (e dei corpi rigidi); Dinamica dei sistemi di punti materiali (e dei corpi rigidi); Statica dei corpi rigidi
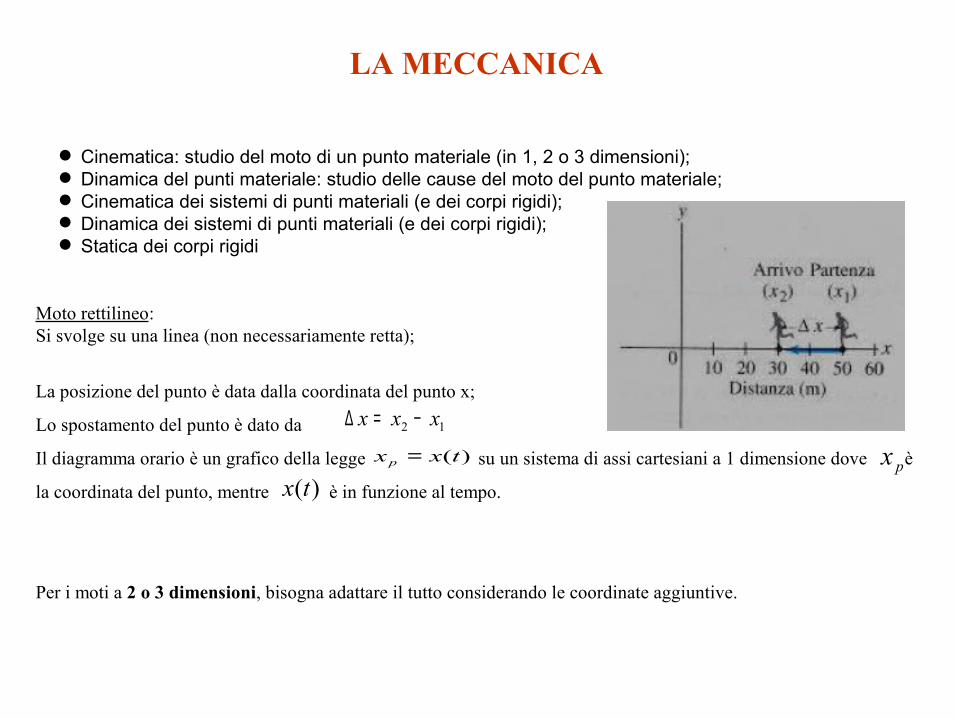
Moto rettilineo:Si svolge su una linea (non necessariamente retta);
La posizione del punto è data dalla coordinata del punto x;
Lo spostamento del punto è dato da
Il diagramma orario è un grafico della legge su un sistema di assi cartesiani a 1 dimensione dove è
la coordinata del punto, mentre è in funzione al tempo.
Per i moti a 2 o 3 dimensioni, bisogna adattare il tutto considerando le coordinate aggiuntive.
12 xxx −=∆
)(txxp = px )(tx
Cinematica
Velocità media: scalare e vettoriale:La posizione di un punto può essere trovata dal vettore che congiunge l’origine degli assi cartesiani e il punto;Lo spostamento invece come la differenza tra il vettore finale e iniziali (il vettore spostamento);
• La velocità media vettoriale, è il rapporto tra il vettore spostamento e il tempo impiegato
per lo spostamento txvm ∆
∆=
;
• La velocità media scalare, è il rapporto tra la distanza complessiva ed il tempo trascorso
ts
tVm ∆
∆=∆
= percorsotot
Attenzione: mm Vv ≠
Velocità istantanea: scalare e vettoriale:E’ data in entrambi i casi dal limite per delle formule di cui sopra.•Il vettore velocità istantanea, è tangente alla traiettoria per ogni punto della traiettoria.•In questo modo, il modulo della velocità vettoriale istantanea, coincide con la velocità istantanea scalare
0→∆ t
Quindi si ha che:
dtsd
txv
t
=
∆∆=
→∆lim
0 v
dtds
tsV
t
==∆∆=
→∆lim
0
dtdsVv ==
Cinematica
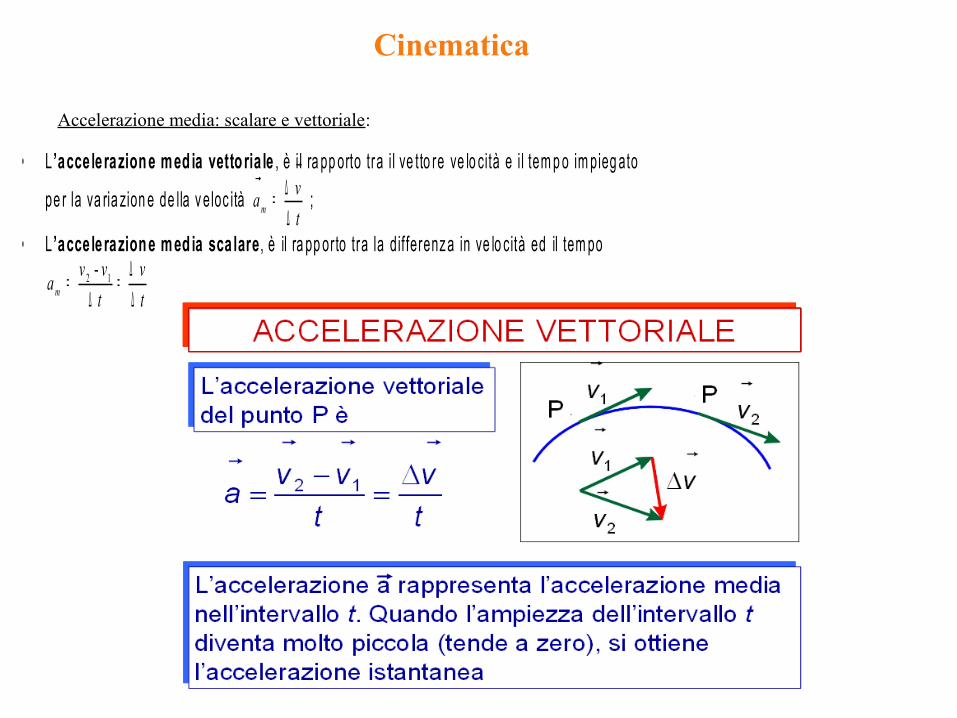
Accelerazione media: scalare e vettoriale:
• L ’acce le ra zion e m ed ia vetto ria le , è il ra pp orto tra il ve tto re ve lo cità e il tem p o im pieg ato
pe r la va ria zion e de lla v e loc ità tva m ∆
∆=
;
• L ’acce le ra zion e m ed ia sca lare , è il ra pp orto tra la dif ferenz a in ve lo cità ed il tem po
tv
tvva m ∆
∆=
∆= 12 -
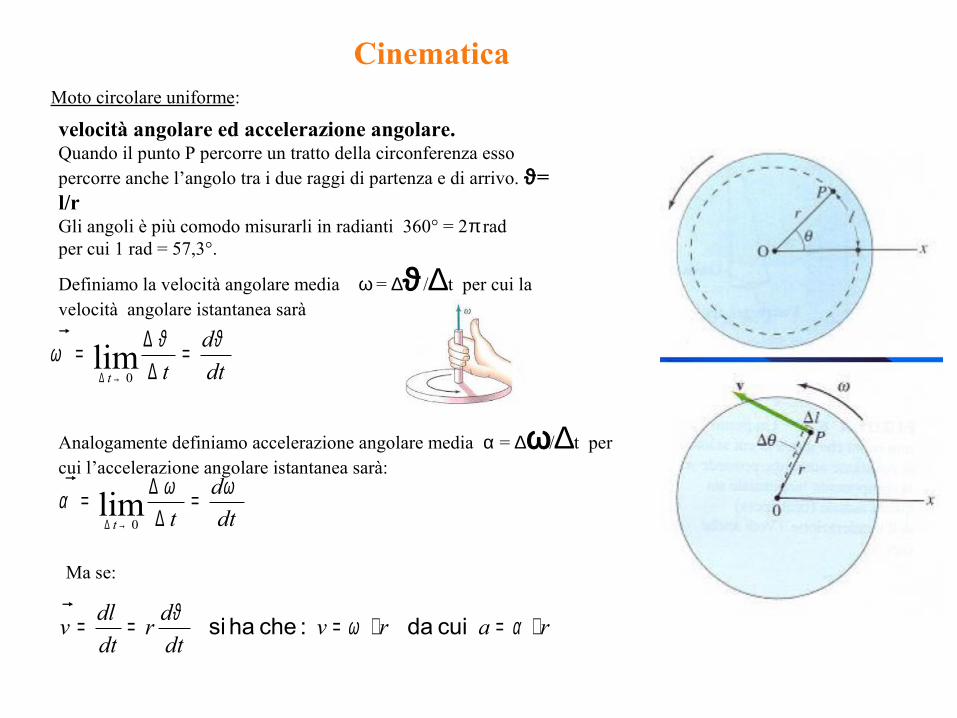
CinematicaMoto circolare uniforme:
velocità angolare ed accelerazione angolare.Quando il punto P percorre un tratto della circonferenza essopercorre anche l’angolo tra i due raggi di partenza e di arrivo. ϑ= l/r Gli angoli è più comodo misurarli in radianti 360° = 2π rad per cui 1 rad = 57,3°.
Definiamo la velocità angolare media ϖ = ∆ϑ/∆t per cui la velocità angolare istantanea sarà
dtd
tt
ϑϑϖ
=∆
∆=→∆
lim0
Analogamente definiamo accelerazione angolare media α = ∆ϖ/∆t per cui l’accelerazione angolare istantanea sarà:
dtd
tt
ϖϖα
=∆
∆=→∆
lim0
Ma se:
rarvdtdr
dtldv ⋅=⋅=== αϖϑ cui da :che ha si
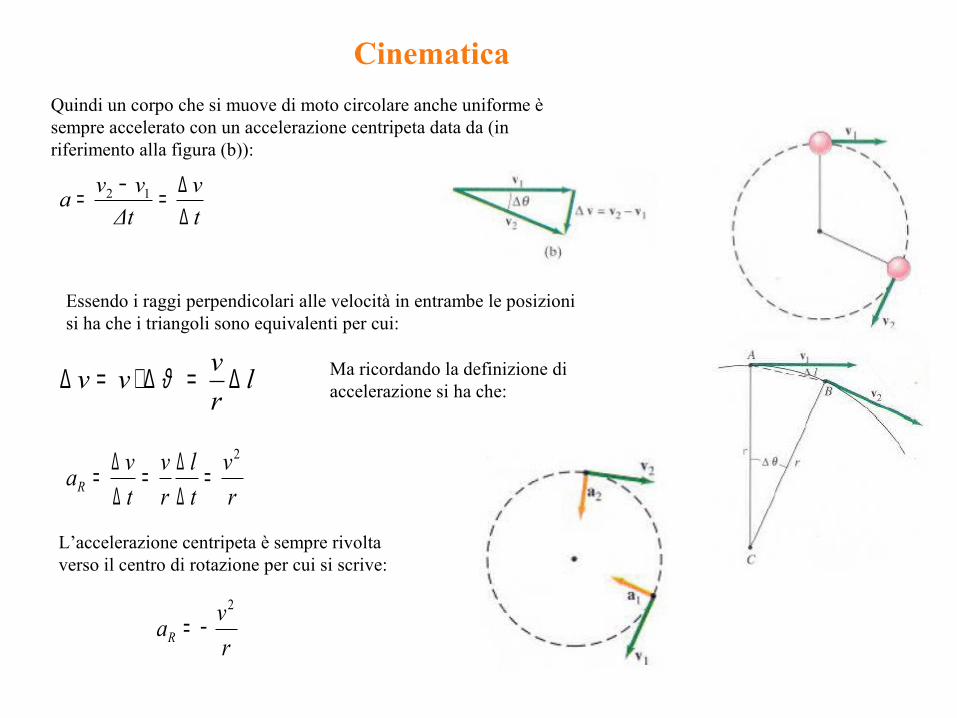
CinematicaQuindi un corpo che si muove di moto circolare anche uniforme è sempre accelerato con un accelerazione centripeta data da (in riferimento alla figura (b)):
tv
Δtvva
∆∆=−= 12
Essendo i raggi perpendicolari alle velocità in entrambe le posizioni si ha che i triangoli sono equivalenti per cui:
Ma ricordando la definizione di accelerazione si ha che: l
rvvv ∆=∆⋅=∆ ϑ
rv
tl
rv
tvaR
2
=∆∆=
∆∆=
L’accelerazione centripeta è sempre rivolta verso il centro di rotazione per cui si scrive:
rvaR
2
−=
Cinematica
ts==
impiegato tempopercorso spaziovelocità
vsttvs =⋅= ;
Moto uniformeMoto uniforme
Cinematica
tvv o−==
impiegato tempovelocità di variazioneoneaccelerazi
tavv o ⋅+=
Moto uniformemente acceleratoMoto uniformemente accelerato
2
21
2attvtvvtvs o
om +=+=⋅=
Cinematica
Cinematica
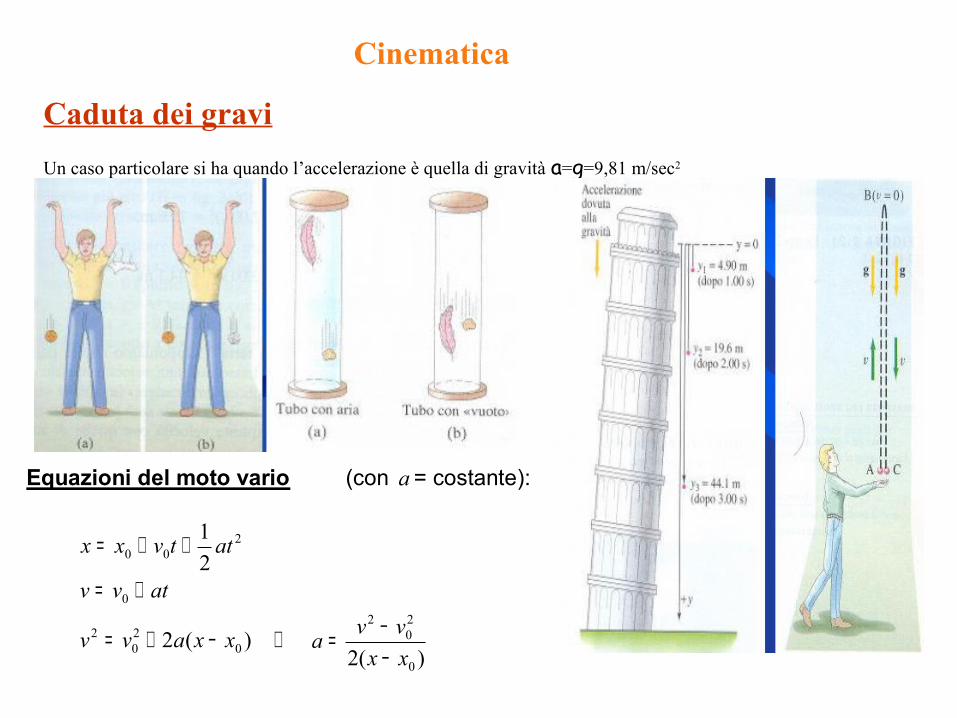
Caduta dei graviUn caso particolare si ha quando l’accelerazione è quella di gravità a=g=9,81 m/sec2
Equazioni del moto vario (con a = costante):
200 2
1 attvxx ++=
atvv += 0
)(2 020
2 xxavv −+= ⇒ )(2 0
20
2
xxvva
−−=
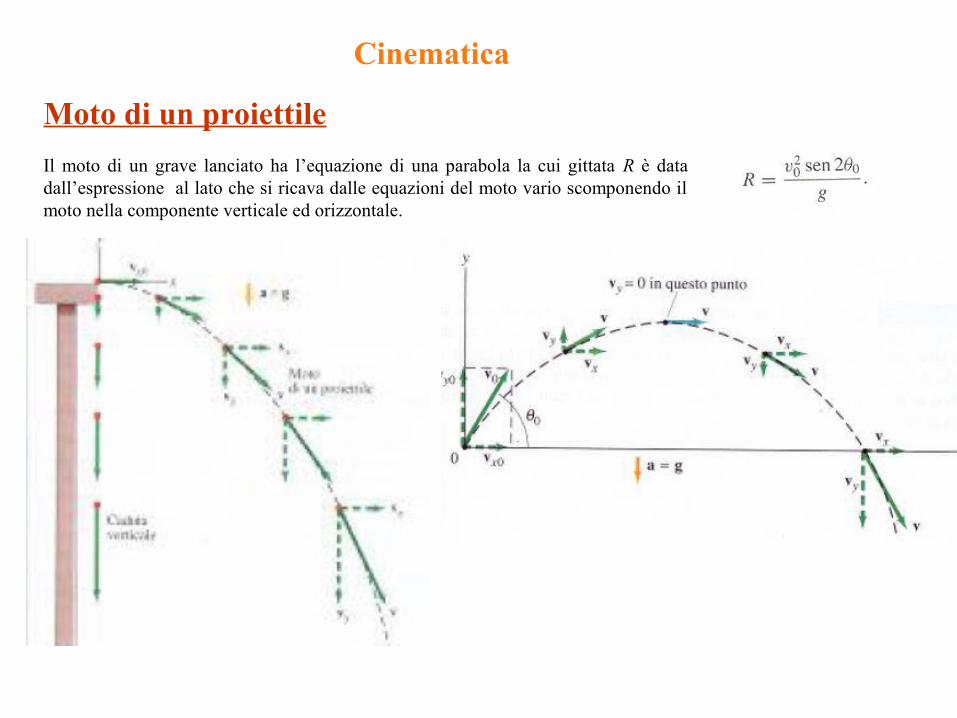
Cinematica
Moto di un proiettileIl moto di un grave lanciato ha l’equazione di una parabola la cui gittata R è data dall’espressione al lato che si ricava dalle equazioni del moto vario scomponendo il moto nella componente verticale ed orizzontale.
LA MECCANICA
DINAMICA
a.a. 2010/2011Prof Nicola Perna
Dinamica
I corpi interagiscono fra di loro mediante azioni, chiamate forze, che costituiscono le cause del moto. Le forze sono grandezze vettoriali.
I corpi interagiscono fra di loro mediante azioni, chiamate forze, che costituiscono le cause del moto. Le forze sono grandezze vettoriali.

Dinamica
Dinamica
Prima legge della dinamica:
“Ogni corpo isolato, cioè non soggetto ad azione esterna, persiste nel suo stato di quiete o di moto rettilineo uniforme”
Questo principio può essere esteso al caso in cui esistano forze esterne ma la risultante è nulla.
Un sistema di riferimento è inerziale se in esso vale la 1a LEGGE DI NEWTON (prima legge dinamica o Principio di inerzia).
Definiamo sistemi inerziali tutti i sistemi che sono in quiete o si muovono con moto rettilineo uniforme;
I sistemi non inerziali, sono quelli che si muovono con moto diverso dal moto rettilineo uniforme.
Forza:La forza è una grandezza vettoriale ed è quindi caratterizzata da una direzione, un verso, un punto d’applicazione, e da un valore.
Se applico una forza ad un corpo produco un cambiamento nello stato del corpo;Il corpo viene accelerato o decelerato
Due forze sono uguali se applicate allo stesso corpo, producono la medesima accelerazione.
Dinamica
amFi
i
⋅=∑
⋅=⋅= 2211
TLM
smKgN
mFa
=
Secondo principio della dinamica:
Si introduce il concetto di massa come quantità di materia a cui è legata l’inerzia di un corpo.La massa inerziale determina il modulo dell’accelerazione del corpo a cui viene applicata una data forza.
La forza si misura in Newton:
Se il corpo è soggetto a una forza costante, si ha che
2a LEGGE DI NEWTON: quando su un corpo di massa m esercitiamo una forza F questo subisce un’accelerazione a che soddisfa la relazione F=m·a
Dinamica
Dinamica
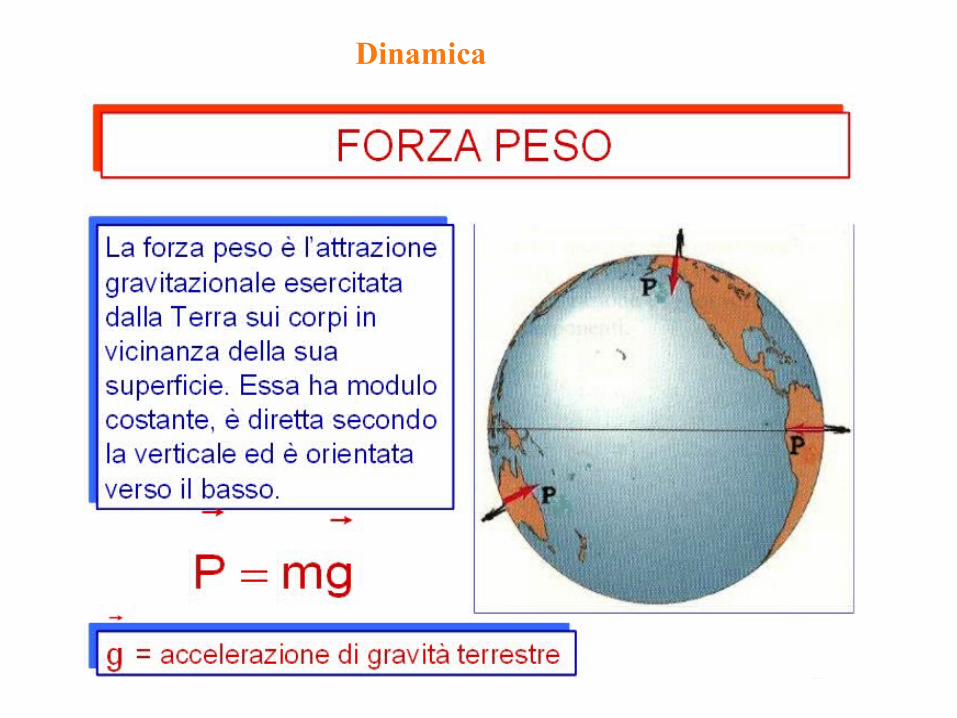
Dinamica
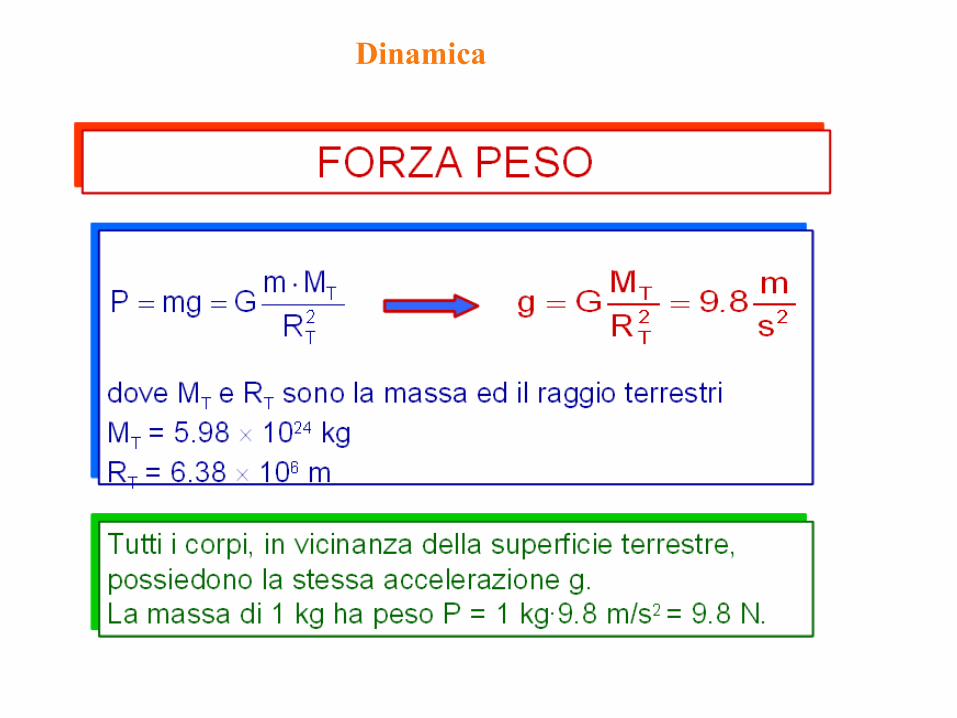
Dinamica
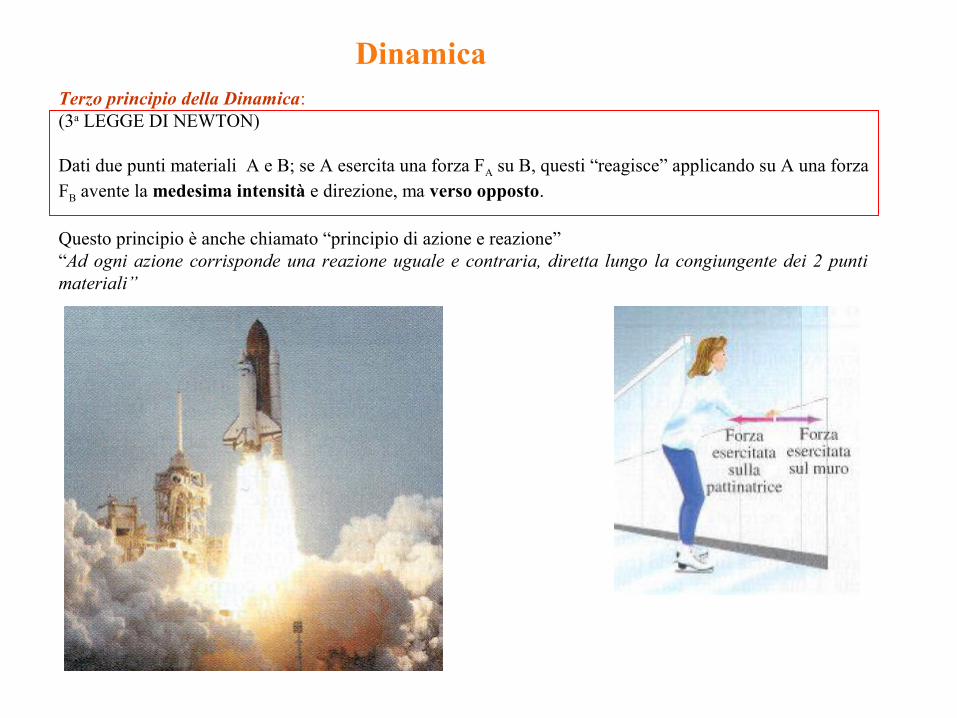
DinamicaTerzo principio della Dinamica:(3a LEGGE DI NEWTON)
Dati due punti materiali A e B; se A esercita una forza FA su B, questi “reagisce” applicando su A una forza FB avente la medesima intensità e direzione, ma verso opposto.
Questo principio è anche chiamato “principio di azione e reazione”“Ad ogni azione corrisponde una reazione uguale e contraria, diretta lungo la congiungente dei 2 punti materiali”
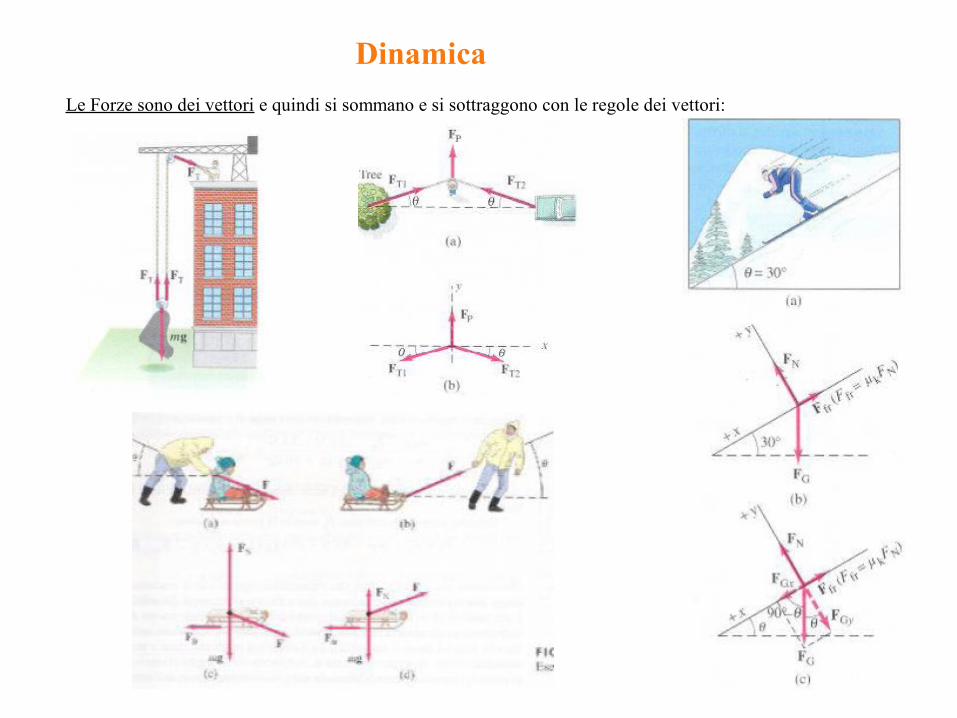
DinamicaLe Forze sono dei vettori e quindi si sommano e si sottraggono con le regole dei vettori:
Dinamica
Dinamica
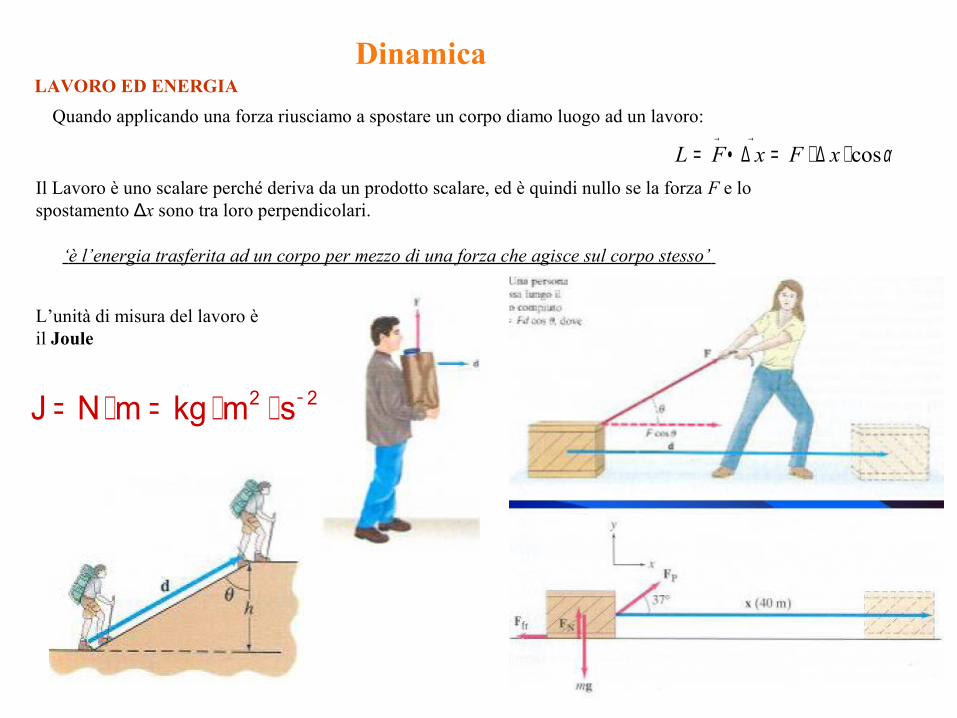
DinamicaLAVORO ED ENERGIA
Quando applicando una forza riusciamo a spostare un corpo diamo luogo ad un lavoro:
αcos⋅∆⋅=∆•=→→
xFxFLIl Lavoro è uno scalare perché deriva da un prodotto scalare, ed è quindi nullo se la forza F e lo spostamento ∆x sono tra loro perpendicolari.
‘è l’energia trasferita ad un corpo per mezzo di una forza che agisce sul corpo stesso’
L’unità di misura del lavoro è il Joule
22 smkgmNJ −⋅⋅=⋅=
Dinamica
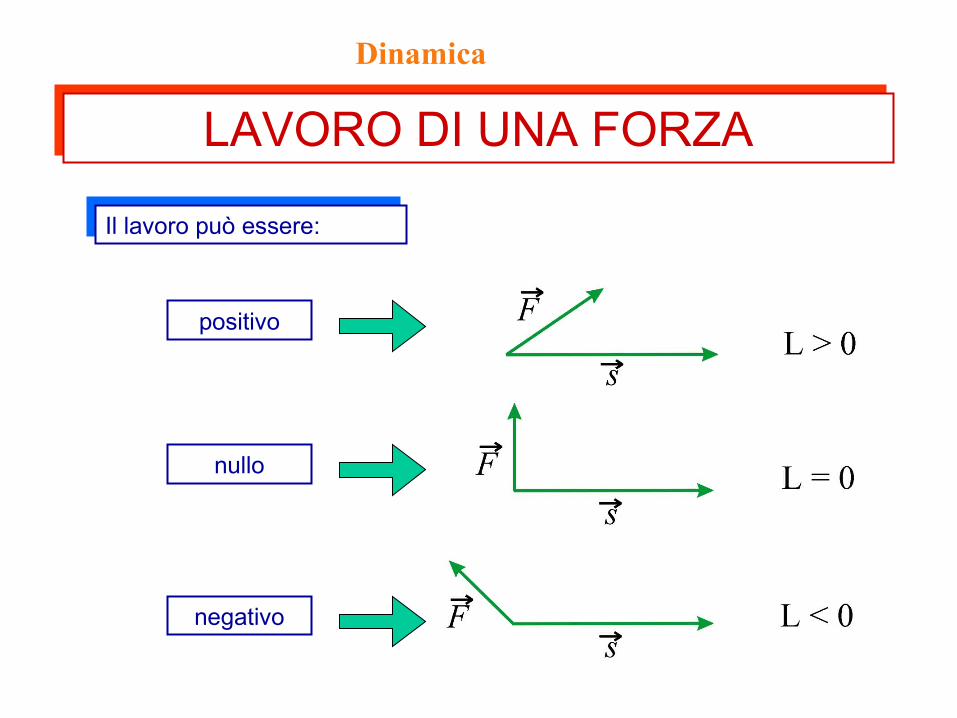
Il lavoro può essere: Il lavoro può essere:
positivo
nullo
negativo
LAVORO DI UNA FORZALAVORO DI UNA FORZA
Dinamica
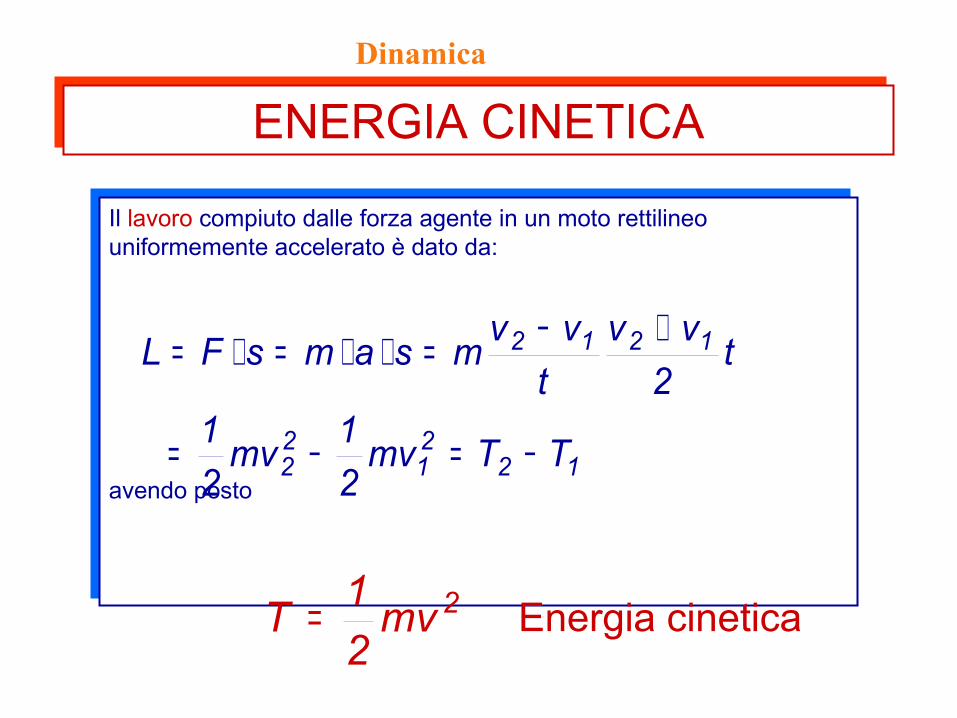
Il lavoro compiuto dalle forza agente in un moto rettilineo uniformemente accelerato è dato da:
avendo posto
Il lavoro compiuto dalle forza agente in un moto rettilineo uniformemente accelerato è dato da:
avendo posto12
21
22
1212
TTmv21mv
21
t2
vvt
vvmsamsFL
−=−=
+−=⋅⋅=⋅=
ENERGIA CINETICAENERGIA CINETICA
2mv21T = Energia cinetica
Dinamica
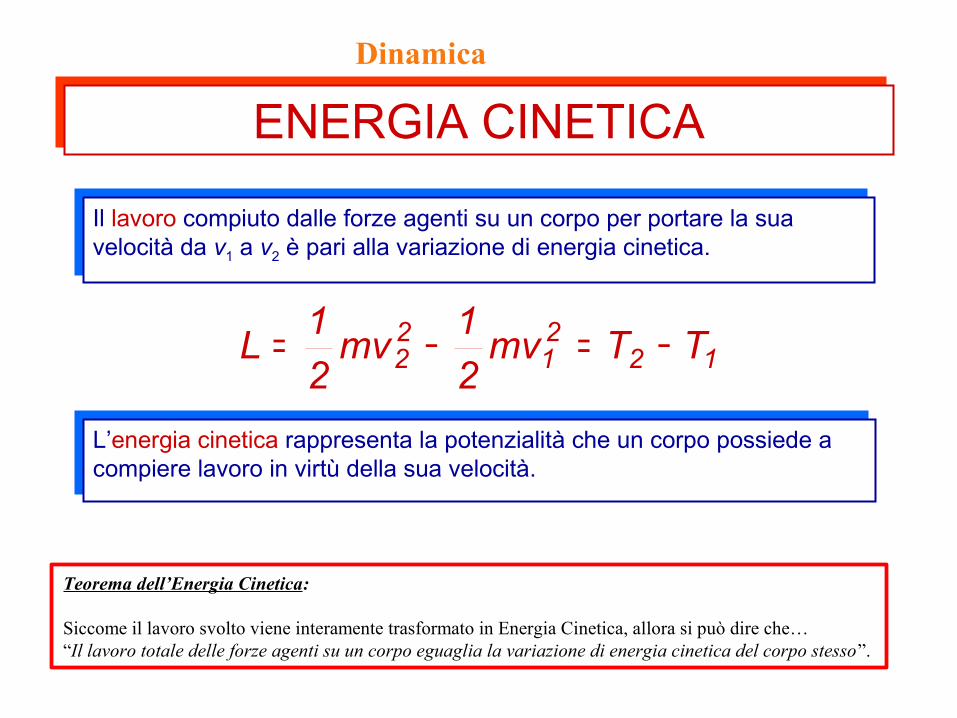
Il lavoro compiuto dalle forze agenti su un corpo per portare la sua velocità da v1 a v2 è pari alla variazione di energia cinetica.Il lavoro compiuto dalle forze agenti su un corpo per portare la sua velocità da v1 a v2 è pari alla variazione di energia cinetica.
1221
22 TTmv
21mv
21L −=−=
L’energia cinetica rappresenta la potenzialità che un corpo possiede a compiere lavoro in virtù della sua velocità.L’energia cinetica rappresenta la potenzialità che un corpo possiede a compiere lavoro in virtù della sua velocità.
ENERGIA CINETICAENERGIA CINETICA
Teorema dell’Energia Cinetica:
Siccome il lavoro svolto viene interamente trasformato in Energia Cinetica, allora si può dire che…“Il lavoro totale delle forze agenti su un corpo eguaglia la variazione di energia cinetica del corpo stesso”.
Dinamica
s P
2z1z
h
21
21
21
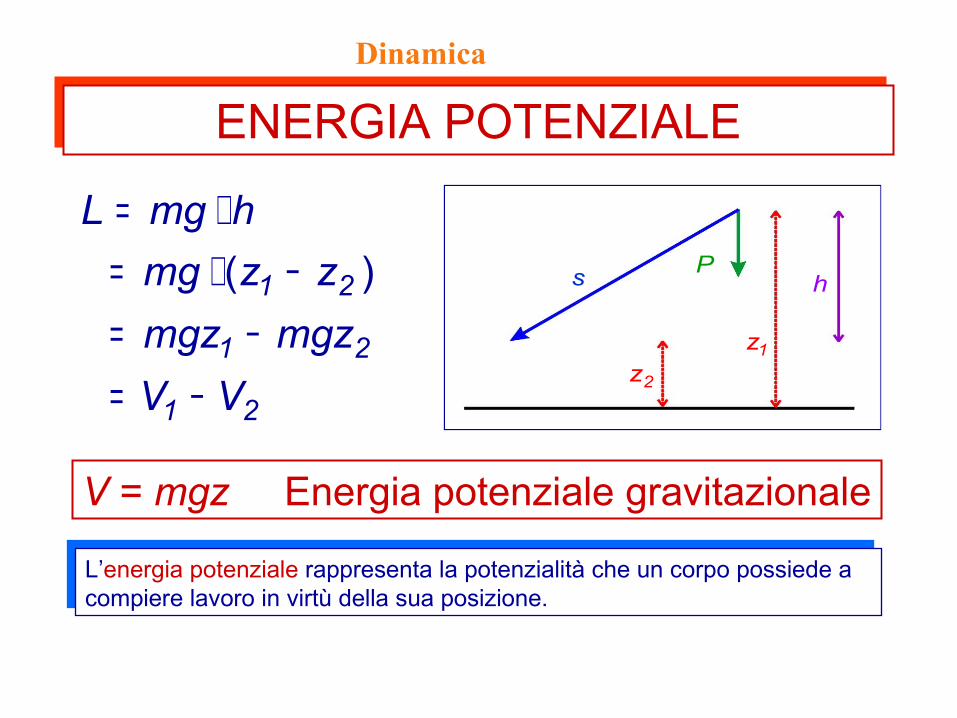
VVmgzmgz
zzmghmgL
−=−=
−⋅=⋅=
)(
L’energia potenziale rappresenta la potenzialità che un corpo possiede a compiere lavoro in virtù della sua posizione.L’energia potenziale rappresenta la potenzialità che un corpo possiede a compiere lavoro in virtù della sua posizione.
ENERGIA POTENZIALEENERGIA POTENZIALE
V = mgz Energia potenziale gravitazionale
DinamicaLAVORO ED ENERGIA
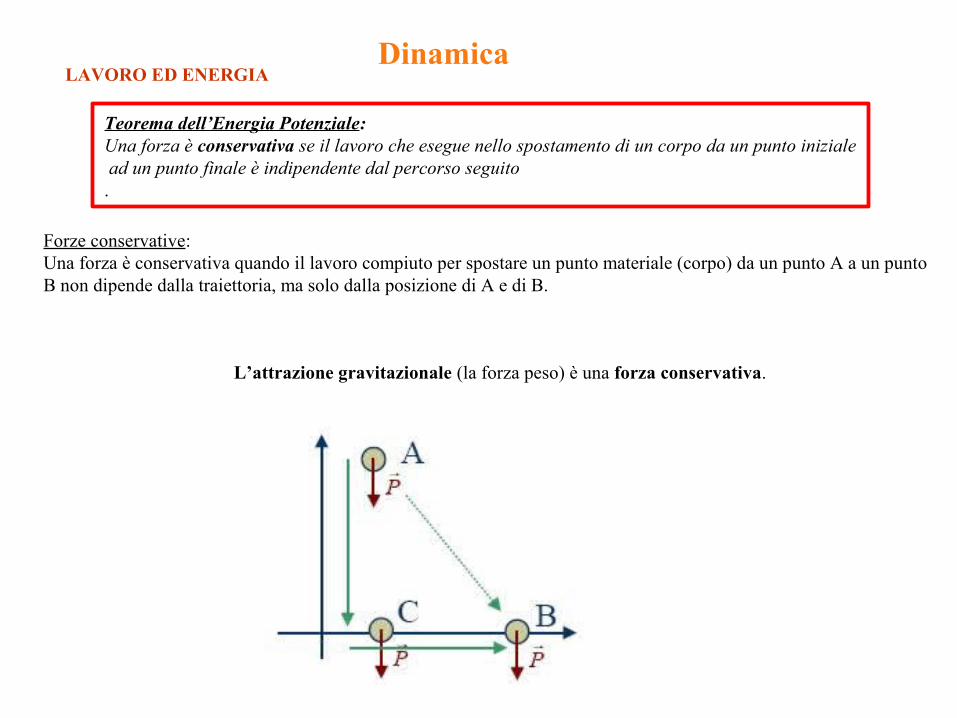
L’attrazione gravitazionale (la forza peso) è una forza conservativa.
Teorema dell’Energia Potenziale:Una forza è conservativa se il lavoro che esegue nello spostamento di un corpo da un punto iniziale ad un punto finale è indipendente dal percorso seguito.
Forze conservative:Una forza è conservativa quando il lavoro compiuto per spostare un punto materiale (corpo) da un punto A a un punto B non dipende dalla traiettoria, ma solo dalla posizione di A e di B.
Dinamica
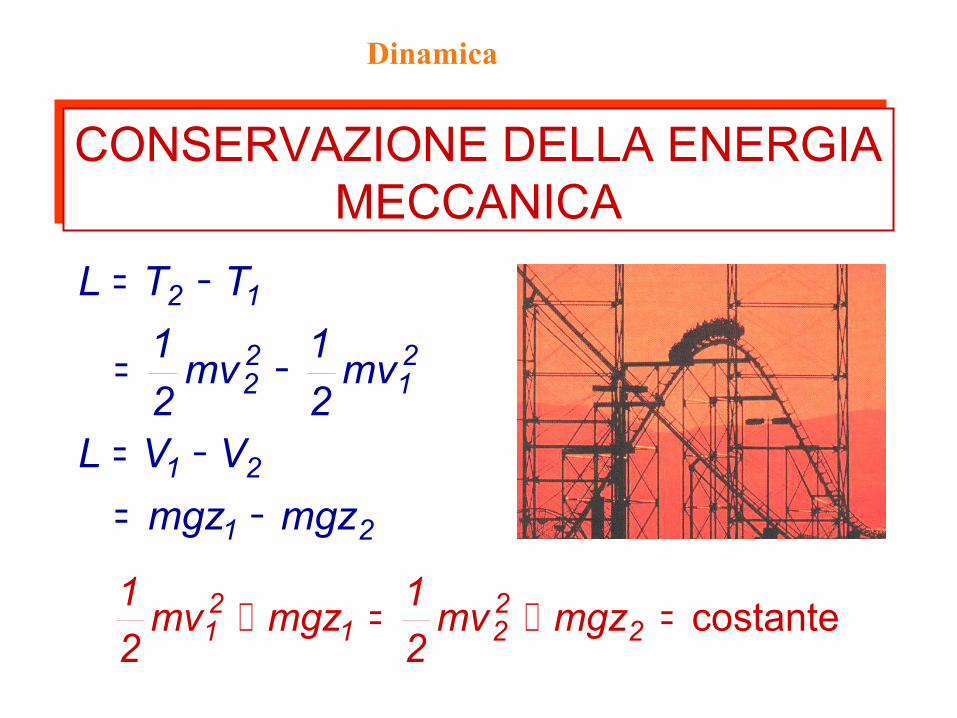
21
21
21
22
12
mgzmgzVVL
mv21mv
21
TTL
−=−=
−=
−=
costante=+=+ 2221
21 mgzmv
21mgzmv
21
CONSERVAZIONE DELLA ENERGIA MECCANICA
CONSERVAZIONE DELLA ENERGIA MECCANICA
Dinamica
CONSERVAZIONE DELLA ENERGIA MECCANICA
CONSERVAZIONE DELLA ENERGIA MECCANICA
Se agiscono solo forze conservative, l’energia meccanica totale di un sistema non aumenta né diminuisce in qualsiasi processo. Essa rimane costante, cioè è conservata.
Se agiscono solo forze conservative, l’energia meccanica totale di un sistema non aumenta né diminuisce in qualsiasi processo. Essa rimane costante, cioè è conservata.
L’energia meccanica totale E è definita come la somma dell’energia cinetica e dell’energia potenziale del sistema ad ogni istante:L’energia meccanica totale E è definita come la somma dell’energia cinetica e dell’energia potenziale del sistema ad ogni istante:
E=T+V
Dinamica
CONSERVAZIONE DELLA ENERGIA MECCANICA
CONSERVAZIONE DELLA ENERGIA MECCANICA
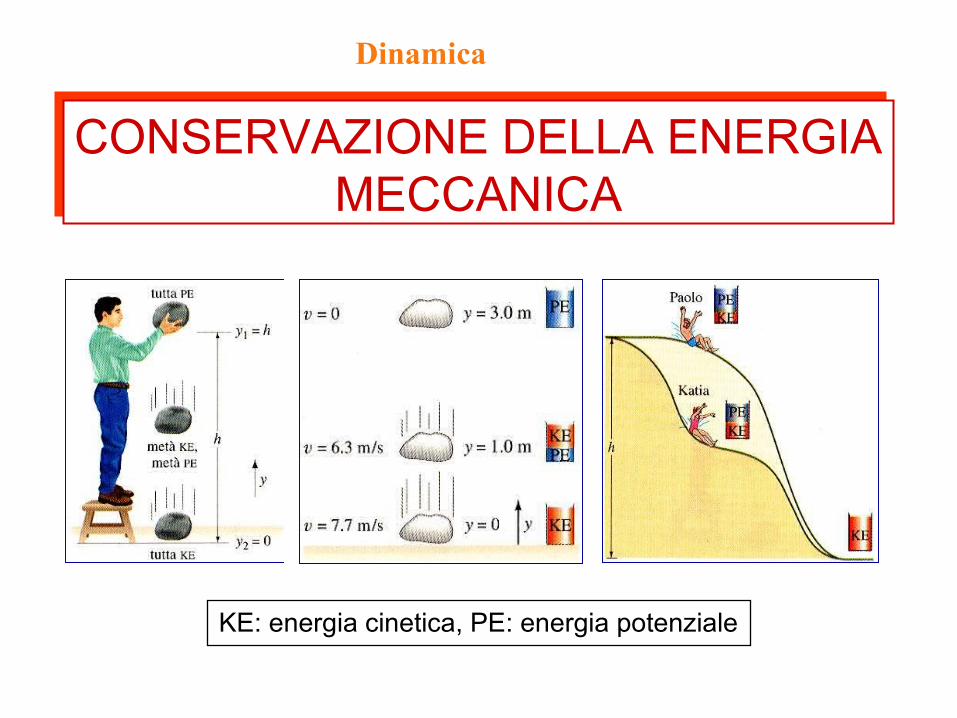
KE: energia cinetica, PE: energia potenzialeKE: energia cinetica, PE: energia potenziale
Dinamica
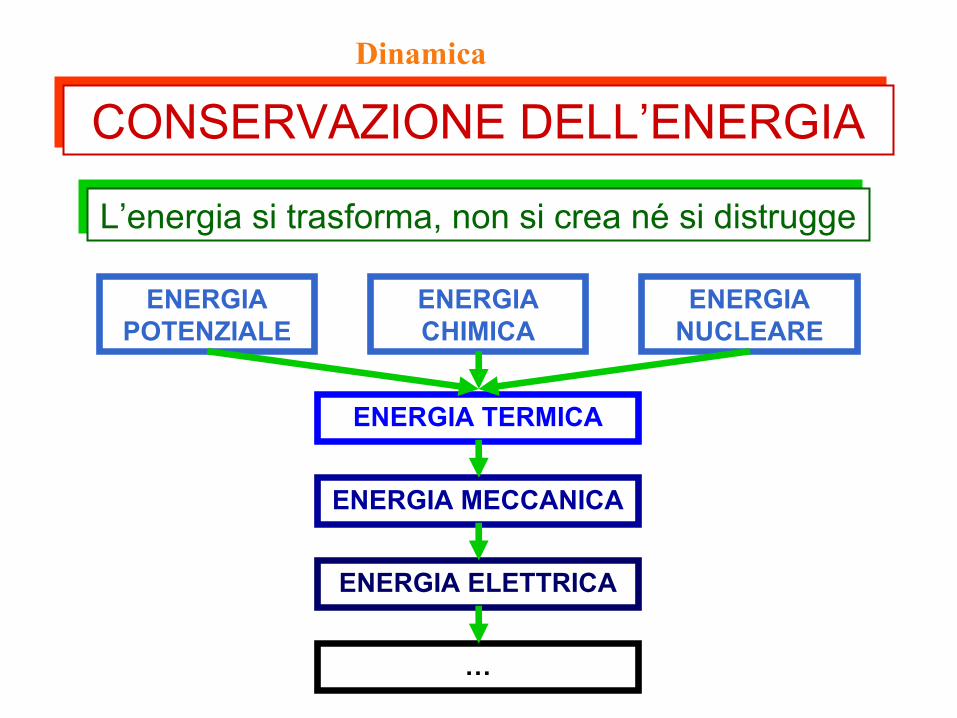
L’energia si trasforma, non si crea né si distruggeL’energia si trasforma, non si crea né si distrugge
CONSERVAZIONE DELL’ENERGIACONSERVAZIONE DELL’ENERGIA
ENERGIA MECCANICA
ENERGIA TERMICA
ENERGIA ELETTRICA
ENERGIAPOTENZIALE
ENERGIACHIMICA
ENERGIANUCLEARE
…
Dinamica
La potenza è il rapporto fra il lavoro compiuto ed il tempo impiegato a compierlo:La potenza è il rapporto fra il lavoro compiuto ed il tempo impiegato a compierlo:
L’unità di misura della potenza nel S.I. si chiama watt (W):L’unità di misura della potenza nel S.I. si chiama watt (W):
POTENZAPOTENZA
DinamicaATTRITO
E’ una forza che si oppone al moto.Attrito radente:È il complesso di forze, contrarie al moto, che si manifestano quando un corpo striscia su un altro
Attrito volvente:È il complesso di forze, contrarie al moto, che si manifestano quando un corpo rotola su un altro
A parità di condizioni, l’attrito che si manifesta quando si cerca di mettere un corpo in moto (attrito statico) è notevolmente superiore a quello che si oppone al moto già in atto (attrito dinamico).
radente attrito tecoefficienpremente forza modulo
radente attrito modulocon
===
=
r
r
rr
kFA
FkA
volvente attrito tecoefficien premente forza modulorotola che corpo del raggio volvente attrito modulo
con
====
=
v
v
vv
kFrA
rFkA
mvp =
Fdtpd
=
La quantità di moto:
• Si definisce come quantità di moto il prodotto tra la massa di un corpo ed il vettore velocità • Un corpo fermo, ha quantità di moto nulla;• La quantità di moto è anche chiamato “impulso”, e si misura in Ns, oppure in Kgm/s.
Se deriviamo la quantità di moto rispetto al tempo, si ottiene la forza!
DinamicaQUANTITA’ DI MOTO
Dalla 2a Legge di Newton si ha che la variazione di p di un corpo è dovuta ad una o più forze applicate
La quantità di moto di un sistema isolato si conserva: ∑ ∑= ffii vmvm
Si può quindi concludere che in un sistema isolato in cui siano presenti solo forze conservative valgono i due principi di conservazione:
Conservazione dell’energia totale; Conservazione della quantità di moto.
DinamicaQUANTITA’ DI MOTO
dmm
mxCdM ⋅+
=21
2
21
2211
mmxmxmxCdM +
+=
∑=
⋅=n
iiiCdM xm
Mx
1
1
Il centro di massa:Un sistema di punti materiali (un corpo quindi) si muove come se tutta la massa del sistema (massa) fosse concentrata in un unico punto. Tale punto viene chiamato Centro di Massa (CdM).La posizione di un punto di massa in un sistema unidimensionale è dato:
dove d è la distanza tra i 2 punti, ed m è la massa per ogni punto.
Da sopra si ottiene che per 2 punti
Mentre la formula generale (per la sola coordinata x) è dove M è la somma delle masse.
Il moto di un corpo può essere scomposto in un moto traslatorio di un punto in cui sia concentrata tutta la sua massa (CdM) e in un moto rotatorio del corpo attorno al suo centro di massa.
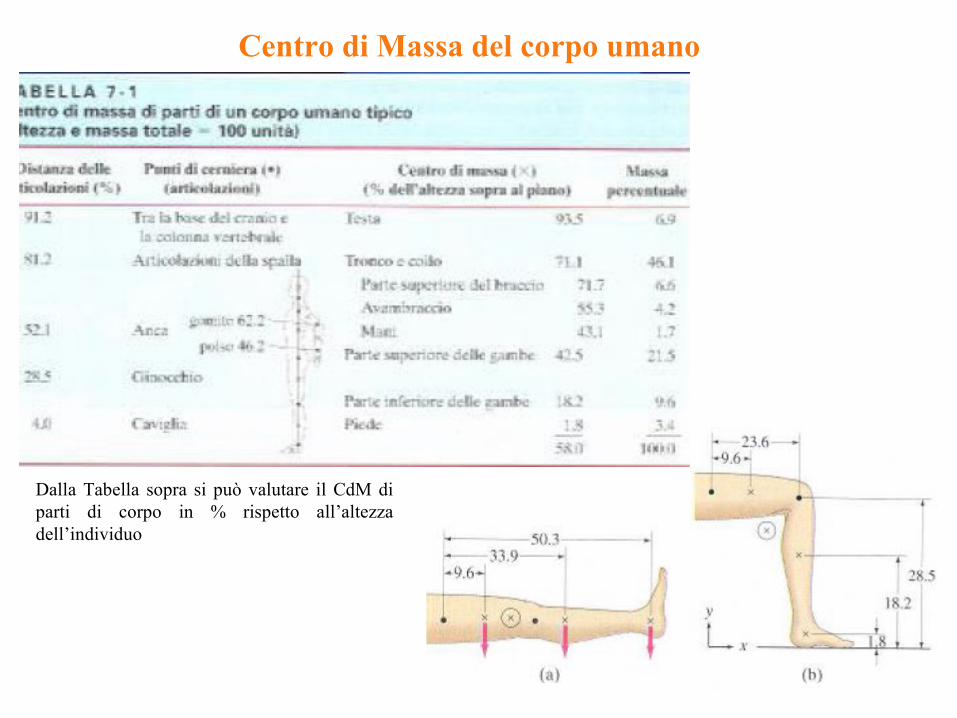
Centro di Massa del corpo umano
Dalla Tabella sopra si può valutare il CdM di parti di corpo in % rispetto all’altezza dell’individuo
Dinamica
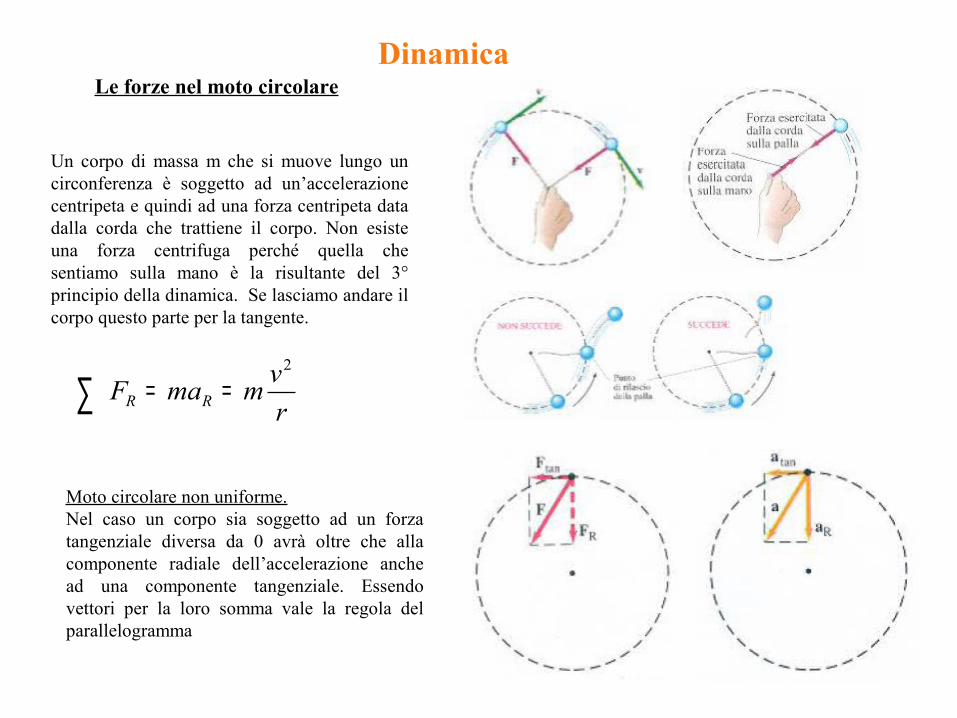
Un corpo di massa m che si muove lungo un circonferenza è soggetto ad un’accelerazione centripeta e quindi ad una forza centripeta data dalla corda che trattiene il corpo. Non esiste una forza centrifuga perché quella che sentiamo sulla mano è la risultante del 3° principio della dinamica. Se lasciamo andare il corpo questo parte per la tangente.
Le forze nel moto circolare
rvmmaF RR
2
==∑
Moto circolare non uniforme.Nel caso un corpo sia soggetto ad un forza tangenziale diversa da 0 avrà oltre che alla componente radiale dell’accelerazione anche ad una componente tangenziale. Essendo vettori per la loro somma vale la regola del parallelogramma
DinamicaMOMENTO ANGOLARE E MOMENTO TORCENTE O DELLA FORZA
ArM
×=
ϑsin⋅⋅= ArM
FrM
×=
vmrprL ×=×=
dtLdM
=
Momento di un vettore:Il momento di un generico vettore A rispetto ad un punto O è definito come:
Siccome il risultato è un vettore, il prodotto è vettoriale e bisogna tener conto dell’angolo:
Se il vettore è la quantità di moto p, allora si parla di momento della quantità di moto o momento angolare
Il momento della forza rispetto ad un punto è uguale alla derivata rispetto al tempo del momento della quantità di moto.
Se O giace sulla retta d’azione di A, il momento è nullo.
Se il vettore è una forza, allora si parla di momento della forza, e d viene anche chiamato braccio della forza
Dinamica
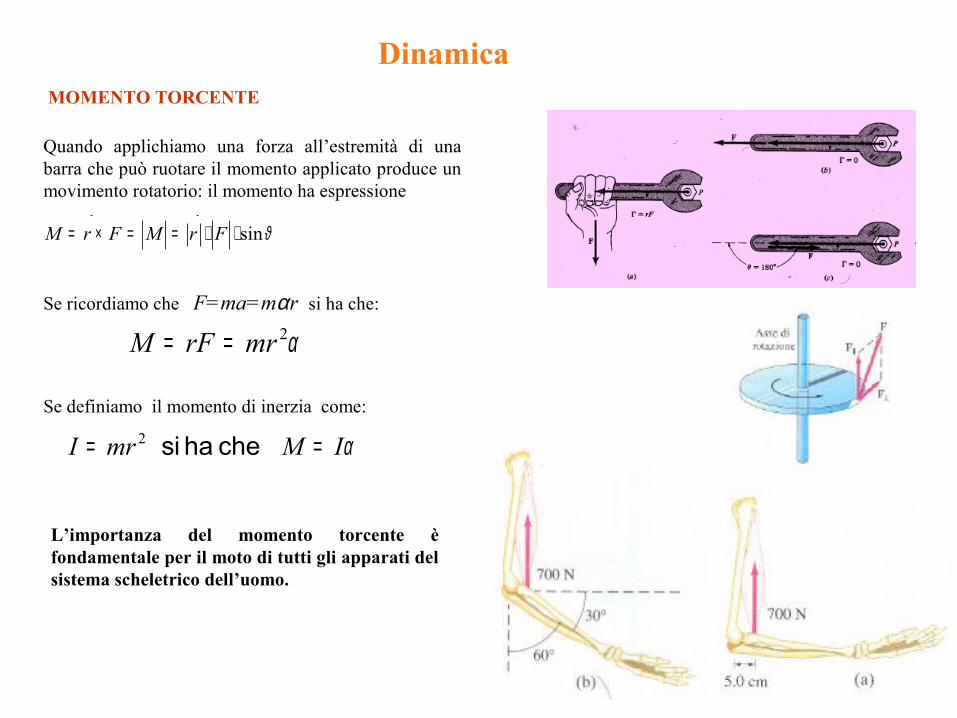
Quando applichiamo una forza all’estremità di una barra che può ruotare il momento applicato produce un movimento rotatorio: il momento ha espressione
MOMENTO TORCENTE
ϑsin⋅⋅==×= FrMFrM
Se ricordiamo che F=ma=mαr si ha che:
α2mrrFM ==
Se definiamo il momento di inerzia come:
αIMmrI == che ha si 2
L’importanza del momento torcente è fondamentale per il moto di tutti gli apparati del sistema scheletrico dell’uomo.
Dinamica
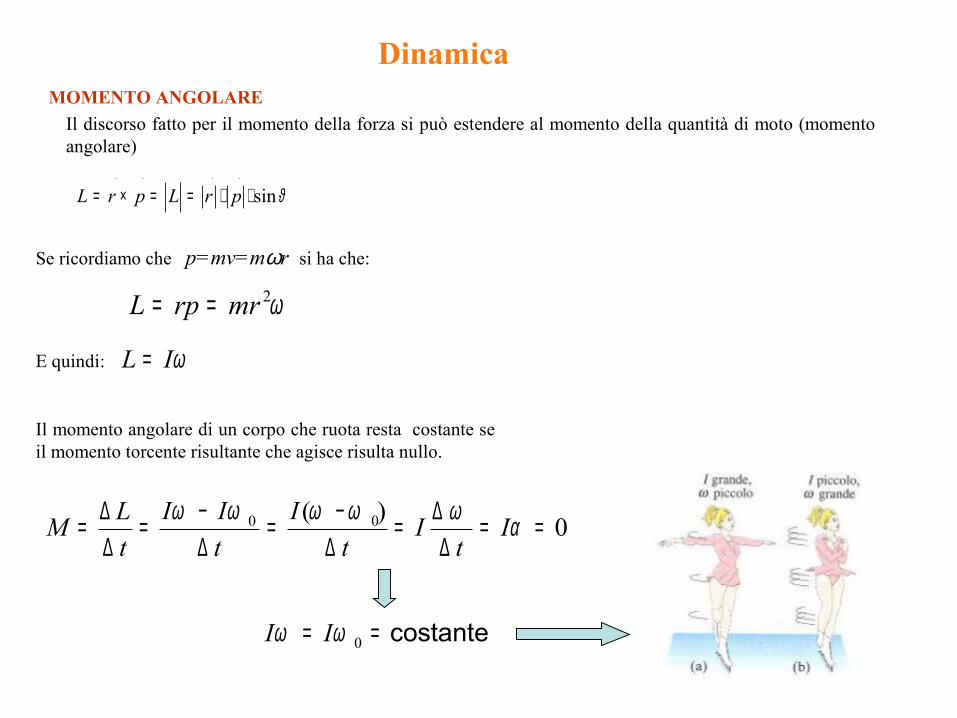
Il discorso fatto per il momento della forza si può estendere al momento della quantità di moto (momento angolare)
MOMENTO ANGOLARE
ϑsin⋅⋅==×= prLprL
Se ricordiamo che p=mv=mϖr si ha che:
ϖ2mrrpL ==
E quindi: ϖIL =
Il momento angolare di un corpo che ruota resta costante se il momento torcente risultante che agisce risulta nullo.
0)( 00 ==∆
∆=∆
−=∆−=
∆∆= αϖϖϖϖϖ I
tI
tI
tII
tLM
costante== 0ϖϖ II
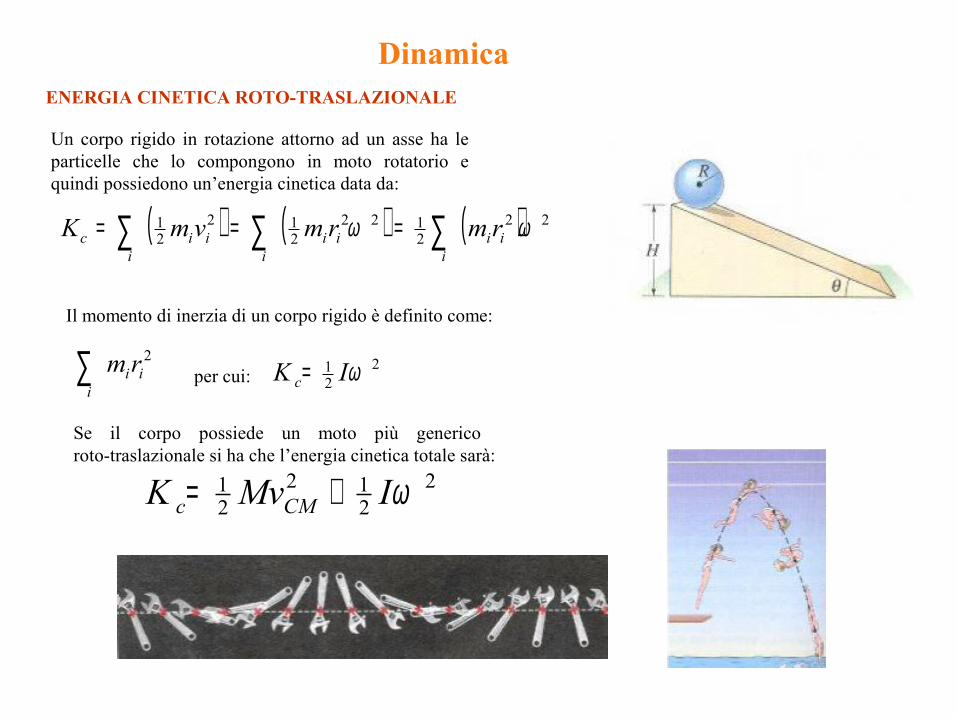
DinamicaENERGIA CINETICA ROTO-TRASLAZIONALE
Un corpo rigido in rotazione attorno ad un asse ha le particelle che lo compongono in moto rotatorio e quindi possiedono un’energia cinetica data da:
( ) ( ) ( ) 222122
212
21 ϖϖ∑ ∑∑ ===
i iiiii
iiic rmrmvmK
Il momento di inerzia di un corpo rigido è definito come:
∑i
iirm 2per cui:
221 ϖIK c=
Se il corpo possiede un moto più generico roto-traslazionale si ha che l’energia cinetica totale sarà:
2212
21 ϖIMvK CMc +=
65
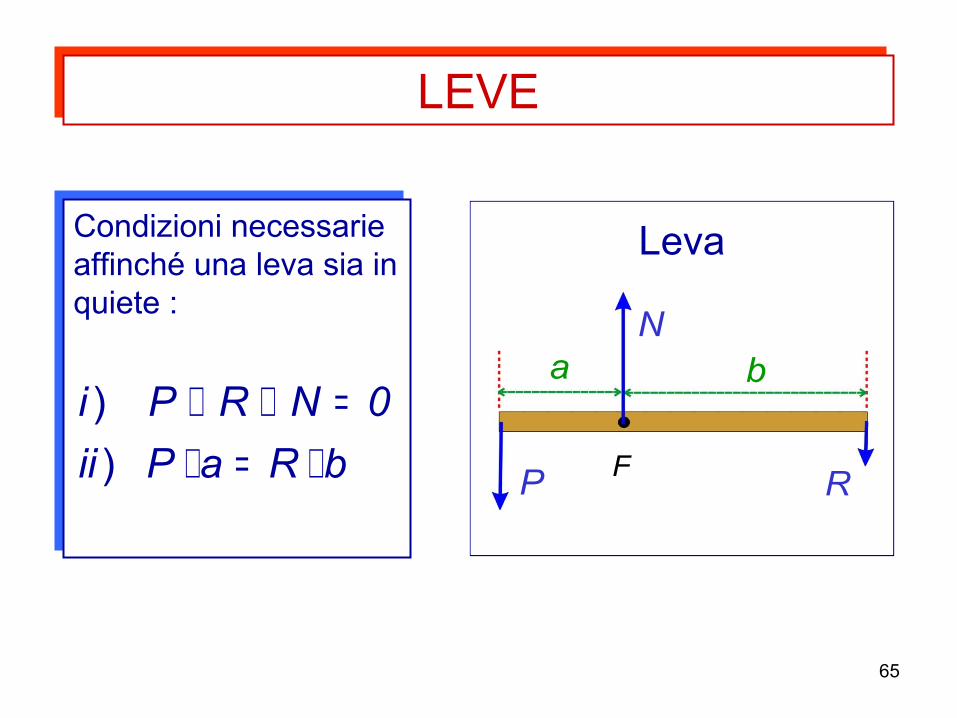
Condizioni necessarie affinché una leva sia in quiete :
Condizioni necessarie affinché una leva sia in quiete :
bRaPii0NRPi
⋅=⋅=++
))
P
R
N
a b
F
LEVELEVE
Leva
66
a b
RP F
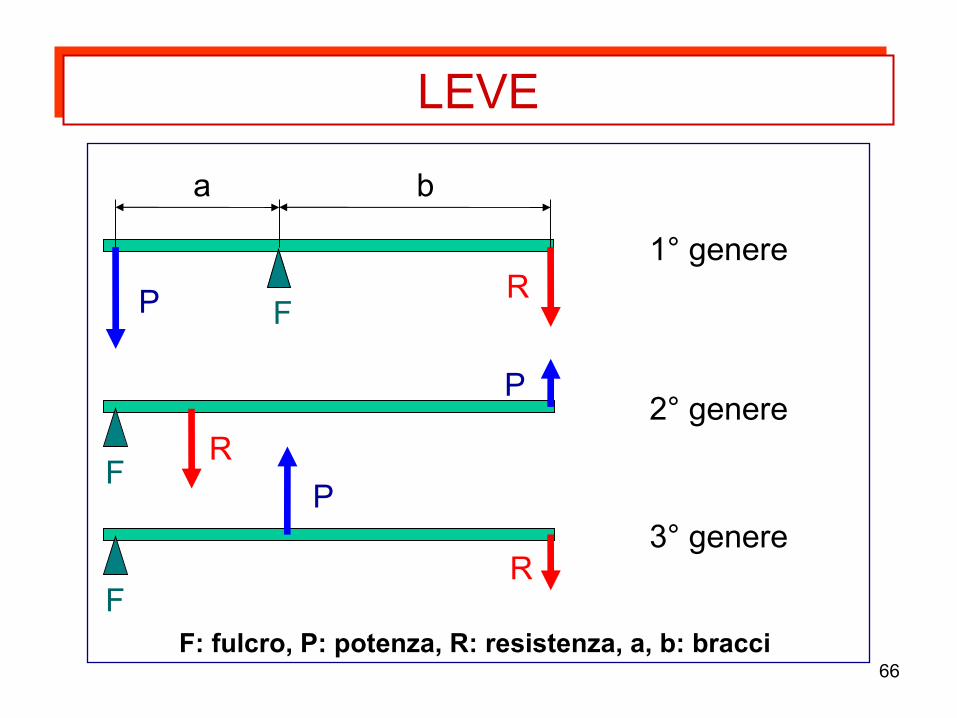
F: fulcro, P: potenza, R: resistenza, a, b: bracci
LEVELEVE
P
RF
P
RF
1° genere
2° genere
3° genere
67
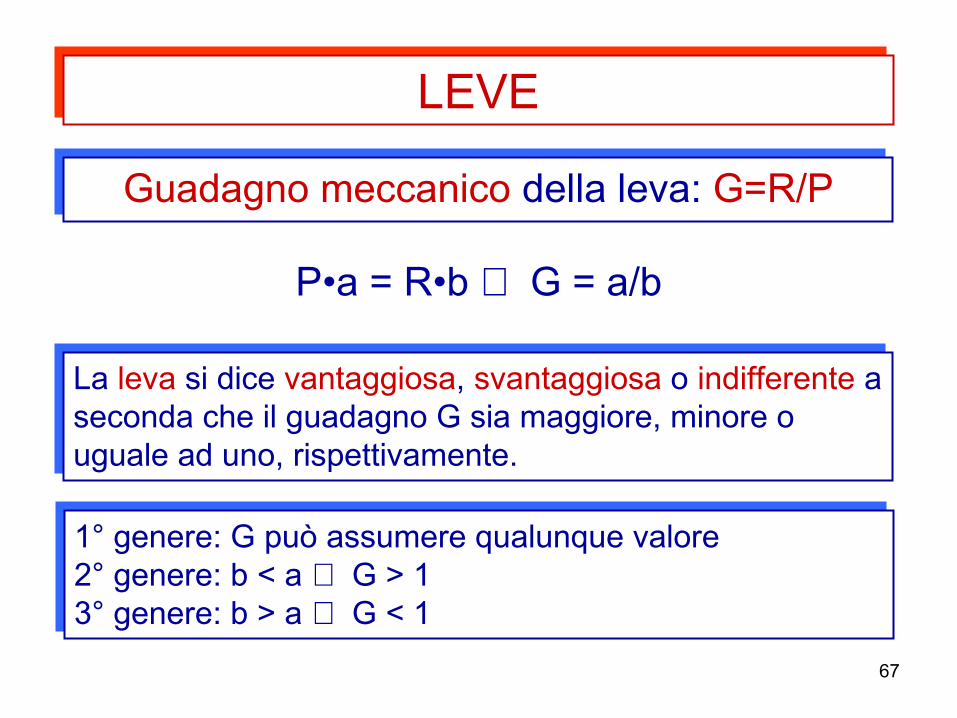
P•a = R•b ⇒ G = a/bP•a = R•b ⇒ G = a/b
LEVELEVE
Guadagno meccanico della leva: G=R/PGuadagno meccanico della leva: G=R/P
La leva si dice vantaggiosa, svantaggiosa o indifferente a seconda che il guadagno G sia maggiore, minore o uguale ad uno, rispettivamente.
La leva si dice vantaggiosa, svantaggiosa o indifferente a seconda che il guadagno G sia maggiore, minore o uguale ad uno, rispettivamente.
1° genere: G può assumere qualunque valore2° genere: b < a ⇒ G > 1 3° genere: b > a ⇒ G < 1
1° genere: G può assumere qualunque valore2° genere: b < a ⇒ G > 1 3° genere: b > a ⇒ G < 1
68
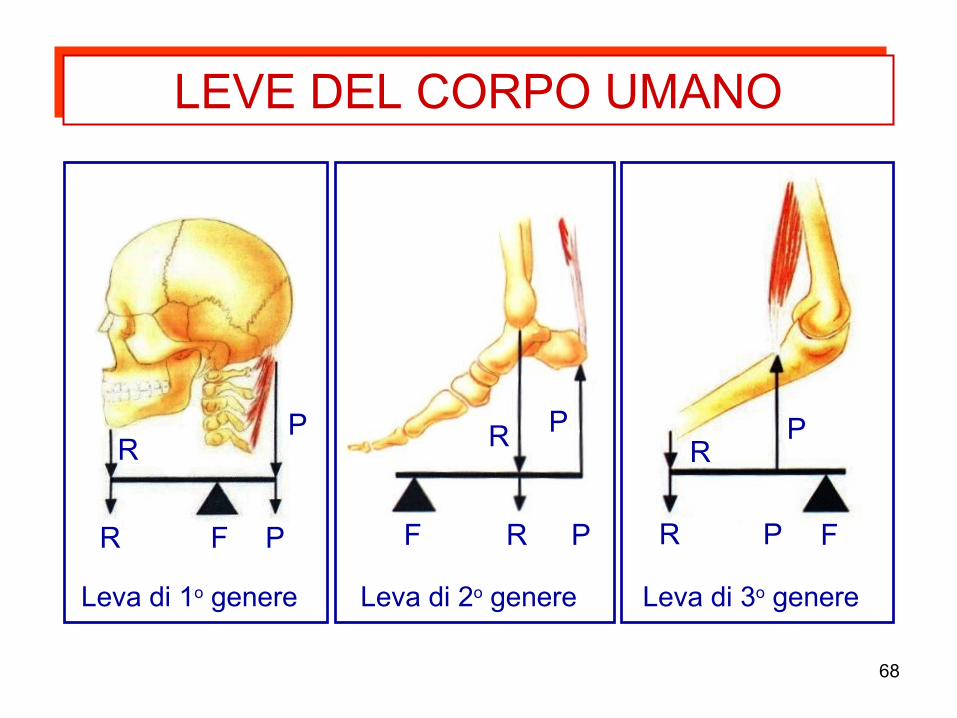
LEVE DEL CORPO UMANOLEVE DEL CORPO UMANO
Leva di 1o genereLeva di 1o genere
R
PFR
P
Leva di 2o genereLeva di 2o genere
R
PF R
P
Leva di 3o genereLeva di 3o genere
FP
PR
R

![immunologia [modalità compatibilità]s99b2fc3326fc85b2.jimcontent.com/download/version/1300049868/... · RISPOSTA IMMUNITARIA “ Reazione coordinata delle cellule e delle molecole](https://static.fdocumenti.com/doc/165x107/5c6655d809d3f252168c33e3/immunologia-modalita-compatibilita-risposta-immunitaria-reazione-coordinata.jpg)


![Illuminotecnica - Grandezze Fotometricheacustica.ing.unibo.it/AAI2/01 Grandezze Fotometriche.pdfTitle Microsoft PowerPoint - 01 Grandezze Fotometriche.ppt [modalità compatibilità]](https://static.fdocumenti.com/doc/165x107/5f7df6314748e352b1085323/illuminotecnica-grandezze-grandezze-fotometrichepdf-title-microsoft-powerpoint.jpg)




![proporzionalità diretta e inversa [modalità compatibilità] · Grandezze costanti Grandezze che mantengono sempre lo stesso valore Sono grandezze costanti: ... Consideriamo due](https://static.fdocumenti.com/doc/165x107/5c6835d409d3f2ff5a8d29ba/proporzionalita-diretta-e-inversa-modalita-compatibilita-grandezze-costanti.jpg)






