Fisica del continuo dielettrico ed...
72
Fisica del continuo dielettrico ed elastico Elettromagnetismo Bergamaschini Roberto
Transcript of Fisica del continuo dielettrico ed...
Fisica del continuodielettrico ed elastico
Elettromagnetismo
Bergamaschini Roberto

20 aprile 2005
Dispensa realizzata in riferimento alle lezioni del corso di Fisica del ContinuoDielettrico ed Elastico del Dott. Sanguinetti nell’anno accademico 2004/05(Scienza dei Materiali - Universita degli Studi di Milano Bicocca).Le informazioni contenute sono ricavate dagli appunti delle lezioni e daiseguenti libri:
• Introduction To Classical Electrodynamics - Y K Lim (capitoli 1, 2 e 5)
• A student’s Guide To Fourier Transforms - J. F. James (capitolo 1)
Si declina ogni responsabilita sulla correttezza del contenuto.Per eventuali osservazioni e correzioni [email protected]

Indice
1 Fenomeni elettrici e magnetici 51.1 Campo elettrico ~E . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Campo elettrostatico . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.1 Potenziale elettrostatico . . . . . . . . . . . . . . . . . . . 71.2.2 Conservativita del campo elettrostatico . . . . . . . . . . 8
1.3 Teorema di Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . 91.4 Campi elettrici nei materiali . . . . . . . . . . . . . . . . . . . . . 10
1.4.1 Potenziale del dipolo elettrico . . . . . . . . . . . . . . . . 111.4.2 Vettore spostamento elettrico ~D . . . . . . . . . . . . . . 12
1.5 Corrente elettrica . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.5.1 Equazione di continuita . . . . . . . . . . . . . . . . . . . 15
1.6 Induzione magnetica ~B . . . . . . . . . . . . . . . . . . . . . . . . 161.6.1 Calcolo della divergenza di ~B . . . . . . . . . . . . . . . . 171.6.2 Legge di Ampere e non conservativita di ~B . . . . . . . . 18
1.7 Campi magnetici nei materiali . . . . . . . . . . . . . . . . . . . . 201.7.1 Correnti di polarizzazione nei materiali . . . . . . . . . . 201.7.2 Magnetizzazione ~M . . . . . . . . . . . . . . . . . . . . . 221.7.3 Intensita di magnetizzazione ~H . . . . . . . . . . . . . . . 231.7.4 Teorema di Ampere in forma generale . . . . . . . . . . . 24
1.8 Legge di induzione di Faraday-Lenz . . . . . . . . . . . . . . . . . 24
2 Equazioni di Maxwell 272.1 Equazioni di Maxwell nel vuoto . . . . . . . . . . . . . . . . . . . 272.2 Equazioni di Maxwell nella materia . . . . . . . . . . . . . . . . . 282.3 Equazioni di Maxwell in forma integrale . . . . . . . . . . . . . . 292.4 Condizioni al contorno . . . . . . . . . . . . . . . . . . . . . . . . 302.5 Equazioni di Maxwell in mezzi omogenei, isotropi e lineari . . . . 332.6 Potenziale vettore e scalare . . . . . . . . . . . . . . . . . . . . . 34
2.6.1 Trasformazioni di gauge . . . . . . . . . . . . . . . . . . . 352.6.2 Condizione di Lorentz . . . . . . . . . . . . . . . . . . . . 36
2.7 Teorema di Poynting . . . . . . . . . . . . . . . . . . . . . . . . . 38
3 Onde elettromagnetiche 413.1 Equazioni delle onde elettromagnetiche . . . . . . . . . . . . . . . 41
3.1.1 Onde elettromagnetiche piane . . . . . . . . . . . . . . . . 433.1.2 Polarizzazione . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.2 Teorema di Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . 473.2.1 Sintesi di Fourier . . . . . . . . . . . . . . . . . . . . . . . 47
3
4 INDICE
3.2.2 Analisi di Fourier . . . . . . . . . . . . . . . . . . . . . . . 483.2.3 Rappresentazione in forma complessa . . . . . . . . . . . 503.2.4 Trasformata di Fourier . . . . . . . . . . . . . . . . . . . . 52
3.3 Propagazione delle onde elettromagnatiche . . . . . . . . . . . . . 533.3.1 Sovrapposizione di onde elettromagnetiche . . . . . . . . . 543.3.2 Equazione d’onda in forma vettoriale . . . . . . . . . . . . 55
3.4 Fenomeni di riflessione e rifrazione . . . . . . . . . . . . . . . . . 563.4.1 Leggi di Snell . . . . . . . . . . . . . . . . . . . . . . . . . 573.4.2 Leggi di Fresnel . . . . . . . . . . . . . . . . . . . . . . . . 59
A Operazioni sui campi vettoriali 65A.1 Integrali di linea . . . . . . . . . . . . . . . . . . . . . . . . . . . 65A.2 Integrali di superficie . . . . . . . . . . . . . . . . . . . . . . . . . 66
B Operatori differenziali 67B.1 Vettore Gradiente . . . . . . . . . . . . . . . . . . . . . . . . . . 67B.2 Vettore Rotore . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67B.3 Divergenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68B.4 Laplaciano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68B.5 Proprieta degli operatori differenziali . . . . . . . . . . . . . . . . 68B.6 Combinazioni di operatori differenziali . . . . . . . . . . . . . . . 69
B.6.1 Rotore di un gradiente . . . . . . . . . . . . . . . . . . . . 69B.6.2 Divergenza di un rotore . . . . . . . . . . . . . . . . . . . 69B.6.3 Rotore di un rotore . . . . . . . . . . . . . . . . . . . . . . 70
C Teoremi sui campi vettoriali 71C.1 Teorema fondamentale del calcolo . . . . . . . . . . . . . . . . . . 71C.2 Teorema di Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . 72C.3 Teorema della divergenza . . . . . . . . . . . . . . . . . . . . . . 72
Capitolo 1
Fenomeni elettrici emagnetici
I fenomeni elettrici e magnetici, anche se apparentemente differenti tra loro,presentano una notevole connessione essendo entrambi legati all’esistenza dicarica elettrica: cariche ferme sono responsabili di fenomeni elettrici mentrecariche in moto (correnti) producono fenomeni magnetici.
Per descrivere le interazioni tra le cariche si potrebbe pensare di ricorrereall’idea di forze agenti istantaneamente (teoria dell’azione a distanza) ma ciorisulta in contrasto con considerazioni sia matematiche che fisiche: in partico-lare, se consideriamo cariche in moto relativo tra loro, gli effetti che l’una pro-duce sull’altra non si manifestano istantaneamente ma si propagano con velocitafinita (pari, nel vuoto, alla velocita della luce). Un’interpretazione piu correttadei fenomeni considerati e fornita dalla teoria dei campi la quale afferma chele cariche non interagiscono direttamente tra di loro ma mediante mediazionedei campi generati da esse stesse (dal punto di vista matematico, per camposi intende una corrispondenza biunivoca tra i punti dello spazio e una certagrandezza fisica, scalare o vettoriale). Ogni carica comporta una perturbazionedello spazio che la circonda, il campo, indipendentemente dalla presenza di altrecariche con cui interagire; quando una seconda carica viene collocata entro lospazio perturbato dalla prima, essa interagisce a mezzo del proprio campo conil campo presente dando luogo agli effetti osservabili empiricamente.
L’introduzione del concetto di campo consente una trattazione matematicae fisica completa dei fenomeni elettrici e magnetici a partire da un numero limi-tato di relazioni empiriche.
1.1 Campo elettrico ~E
Quando una particella ferma sperimenta una forza proporzionale alla sua stes-sa carica elettrica e possibile definire l’esistenza di un campo elettrico E. Ingenerale, possiamo determinare l’intensita del campo elettrico come forza perunita di carica, esercitata dal campo stesso su una carica esploratrice positiva.Detta F la forza agente sulla carica esploratrice q il campo elettrico presente
5

6 CAPITOLO 1. FENOMENI ELETTRICI E MAGNETICI
nel punto in cui e collocata la carica e
E = limq→0
F
q
dove il ricorso al limite e reso necessario per assicurare l’assenza di interferenzedella carica esploratrice con il campo esterno. In realta, essendo la carica unagrandezza quantizzata la cui unita minima e la carica elementare e, l’applica-bilita del limite e valida solo per fenomeni macroscopici. L’interpretazione deifenomeni microscopici e comunque possibile estendendo in tale contesto le con-clusioni relative al mondo macroscopico.
1.2 Campo elettrostatico
In condizioni statiche, ovvero in presenza di cariche elettriche ferme, e nel vuoto,e possibile definire un particolare tipo di campo elettrico: il campo elettrostati-co. Sperimentalmente l’interazione tra particelle cariche ferme nello spazio edescritta dalla legge di Coulomb:
F =Qq
4πε0r
r3
dove ε0 e la costante dielettrica del vuoto (8, 85 · 10−12F/m) e r e il vettoreposizione della carica q esploratrice rispetto alla carica Q sorgente del campo(considerata come origine del sistema di riferimento).
Applicando la definizione di campo elettrico otteniamo
E =Q
4πε0r
r3
Il campo elettrostatico puo essere eventualmente generato, anziche da unacarica puntiforme singola, da un numero finito N di cariche qi. In tal casoesso puo essere definito attraverso l’applicazione del principio di sovrapposizionecome somma dei campi generati indipendentemente dalle singole cariche. Intale operazione occorre prestare pero attenzione alla definizione delle distanze:fissato un sistema di riferimento univoco, si individua il punto in cui calcolare ilcampo elettrico mediante il vettore posizione r e le N cariche sorgenti mediantei vettori r′
i; poiche le distanze coinvolte nel calcolo del campo elettrico sonoquelle tra ciascuna carica generatrice e il punto considerato si definisce alloralo spazio delle differenze composto dai vettori posizione r∗
i = r − r′i. Il campo
elettrostatico della distribuzione di carica data e quindi
E =N∑
i=1
Ei =1
4πε0
N∑i=1
qir∗
i
r∗i3
Quanto costruito per cariche discrete puo essere direttamente trasferito alcaso di distribuzioni continue di carica, considerando una somma integrale estesaa tutti i singoli elementi infinitesimi di carica. Se consideriamo una certa super-ficie S sulla quale e presente una distribuzione di carica definita dalla funzioneσ(r) densita di carica superficiale il campo elettrico in un punto P e:
EP =∫
S
dE(r) =1
4πε0
∫S
σ(r)
r∗i
r∗i3 dS

1.2. CAMPO ELETTROSTATICO 7
Se la carica si trova distribuita su un volume V secondo una densita volumicadi carica ρ(r) il campo elettrico in P puo essere espresso come:
EP =∫
V
dE(r) =1
4πε0
∫V
ρ(r)
r∗i
r∗i3 dV
1.2.1 Potenziale elettrostatico
Al campo elettrostatico e possibile associare una funzione potenziale ovvero epossibile definire una grandezza φ di cui il campo e il gradiente:
E = −∇φ
In base alla definizione del campo elettrostatico generato da una singola caricaotteniamo:
E =Q
4πε0r
r3= −∇φ ⇒ φ =
Q
4πε01r
♣ Dimostrazione
−∇φ = −∇(
Q
4πε0r
)= −∇
(Q
4πε01√
x2 + y2 + z2
)=
=Q
4πε0·⟨ xr3,y
r3,z
r3
⟩=
Q
4πε0r
r3= E 2
L’equazione qui determinata per il caso del campo elettrostatico generato dauna carica singola puo essere estesa in maniera immediata al caso di una sorgentedi campo costituita da un insieme finito di cariche, con l’unico accorgimento didefinire correttamente le distanze coinvolte:
E =1
4πε0
N∑i=1
qir∗
i
r∗i3 =
14πε0
N∑i=1
qi∇∗(i)
1r∗i
⇒ φ =1
4πε0
N∑i=1
qir∗i
dove con r∗i si considerano le distanze riferite allo spazio delle differenze (r∗
i =r − r′
i). Nella valutazione del potenziale occorre tenere presente quale spaziodelle distanze viene considerato nel calcolo del gradiente; indicando con x∗i =x− xi una qualsiasi delle componenti di r∗
i valgono le seguenti relazioni:
∂f
∂x=
∂f
∂x∗i· ∂x
∗i
∂x=
∂f
∂x∗i
∂f
∂xi=
∂f
∂x∗i· ∂x
∗i
∂xi= − ∂f
∂x∗i
∇∗(i)f = ∇f = −∇if
In generale la differenza di potenziale tra due punti rappresenta il lavoro che enecessario compiere contro le forze del campo per spostare una carica positivaunitaria da un punto A iniziale a un punto B finale. Se infatti calcoliamo talegrandezza otteniamo:
−Lq
= −∫ B
A
E · dr =∫ B
A
∇φ · dr =∫ B
A
dφ = φB − φA

8 CAPITOLO 1. FENOMENI ELETTRICI E MAGNETICI
dove nella risoluzione dell’integrale si e tenuto presente che:
∇φ · dr =∂φ
∂xdx+
∂φ
∂ydy +
∂φ
∂zdz = dφ
Poiche la dipendenza tra potenziale e campo elettrico in un punto e definitamediante un operazione di gradiente, la funzione φ e in generale indeterminata,nel senso che non e possibile definire in maniera univoca il potenziale elettricoin un punto dello spazio ma solo la differenza di potenziale che sussiste tra duepunti. Se infatti fissiamo arbitrariamente la funzione φ, qualunque funzioneφ′ = φ + costante soddisfa la definizione di potenziale. Possiamo allora sta-bilire un valore di riferimento in corrispondenza del quale il potenziale e fissato:per semplicita si assume che il potenziale di un punto a distanza infinita dallasorgente del campo sia nullo e pertanto si definisce il potenziale in un qualsiasipunto P come il lavoro che e necessario svolgere contro le forze del campo perspostare una carica, inizialmente a distanza infinita, nel punto considerato.
φ = −∫ P
∞E · dr
Alla luce della definizione data possiamo facilmente calcolare il potenzialegenerato da una sorgente qualsiasi di campo elettrostatico. Nel caso di unsistema di N cariche discrete si ottiene:
φP = −∫ P
∞
14πε0
N∑i=1
qir∗
i
r∗i3 · dr =
14πε0
N∑i=1
qi
∫ P
∞∇∗
(i)
1r∗i
· dr∗i =
14πε0
N∑i=1
qir∗i
Considerando un sistema costituito da una distribuzione continua di caricadi densita superficiale σ e densita volumica ρ, applicando la definizione data dipotenziale elettrostatico otteniamo:
φP =1
4πε0
∫S
σ(r)
r∗dS +
14πε0
∫V
ρ(r)
r∗dV
1.2.2 Conservativita del campo elettrostatico
Per definire se il campo elettrostatico e conservativo si procede semplicementealla valutazione della sua circuitazione verificando che l’integrale di linea di Elungo un qualsiasi cammino chiuso C e nullo. Applicando il teorema di Stokesotteniamo ∮
C
E · ds =∫
S
(∇×E) · dA
da cui si ricava che la circuitazione e identicamente nulla se il rotore del campoe nullo. Tale condizione risulta in generale sempre verificata per il campo elet-trostatico in quanto esso e definito come gradiente di un potenziale (il rotore diun gradiente e sempre nullo).
E = −∇φ ⇒ ∇×E = ∇×(−∇φ) = 0 ⇒∮
C
E · ds = 0
Il campo elettrostatico e quindi un campo conservativo: il lavoro compiutospostando una carica lungo un qualsiasi percorso chiuso e quindi sempre uguale

1.3. TEOREMA DI GAUSS 9
a zero. Tale conclusione puo essere ricavata anche effettuando il calcolo direttodel lavoro, nel caso in cui il punto iniziale A coincida con il punto finale B:come evidente l’integrale di linea del lavoro e indipendente dal cammino e, perqualsiasi percorso chiuso, fornisce risultato nullo, come atteso:
−Lq
= −∫ B
A
E · dr = φB − φA = 0 (A ≡ B)
La proprieta di conservativita del campo elettrico e prerogativa esclusiva-mente del campo elettrostatico: considerando un generico campo elettrico E,comprendente una componente non conservativa E′ non elettrostatica la cir-cuitazione totale si riduce alla circuitazione di quest’ultima componente ed equindi diversa da zero: ∮
C
E · ds =∮
C
E′ · ds
Il valore della circuitazione del campo elettrico non conservativo viene defini-ta tensione del circuito elettrico o forza elettromotrice e rappresenta il lavorosvolto dal campo nel muovere una carica unitaria lungo l’intero cammino chiusoC.
1.3 Teorema di Gauss
Il teorema di Gauss permette di quantificare il flusso di un campo elettrico Eattraverso una superficie chiusa S semplicemente valutando l’entita della caricain essa contenuta: ∮
S
E · dA =∑
i qiε0
♣ Dimostrazione
E =1
4πε0
∑i
qir∗
i
r∗i3 ⇒
∮S
E · dA =1
4πε0
∑i
qi
∮S
r∗i
r∗i3 · dA
r∗i
r∗i3 = r∗
i
1r∗i
2 ⇒r∗
i
r∗i3 · dA = r∗
i · n dAr∗i
2 = dΩs
dove l’ultima uguaglianza deriva dalla definizione di angolo solido sotteso dal-l’elemento di superficie dA e individuato dal vettore r∗
i . Se la carica qi e internaalla superficie S, tenendo presente che l’angolo solido per una qualsiasi superficiechiusa vale 4π:∮
S
E · dA =1
4πε0
∑i
qi
∮S
dΩs =1
4πε0
∑i
qi · 4π =∑
i qiε0
2
Il teorema di Gauss puo essere espresso anche in termini di distribuzionicontinue di carica: detta ρ la densita di carica volumica, se V e il volumedelimitato dalla superficie S si ricava che∮
S
E · dA =1ε0
∫V
ρdV

10 CAPITOLO 1. FENOMENI ELETTRICI E MAGNETICI
Applicando il teorema della divergenza possiamo esprimere il teorema diGauss, sin qui riportato in forma integrale, in notazione differenziale:∮
S
E · dA =1ε0
∫V
ρdV =∫
V
∇·EdV
⇒ ∇·E =ρ
ε0
Dal punto di vista fisico l’equazione integrale del teorema di Gauss consistenel conteggio delle linee di campo che attraversano una superficie considerata ein particolare descrive formalmente che, in generale, il numero di linee di campoprovenienti da una carica e proporzionale alla carica stessa. In base all’equazionein forma differenziale possiamo ritenere il valore di ∇·E come una valutazionedel campo elettrico in prossimita del punto considerato.
Anche se la legge di Gauss e stata ricavata nel caso di campi elettrostatici,essa e considerata sempre valida per qualsiasi tipo di campo elettrico, essendostrettamente collegata al principio generale di conservazione della carica.
1.4 Campi elettrici nei materiali
Le equazioni considerate nelle sezioni precedenti presentano validita limitata acampi elettrici nel vuoto. Se si opera in presenza di materia, occorre tenere inconto gli effetti del campo sul materiale considerato.
Se in un campo elettrostatico viene immesso un materiale metallico, carat-terizzato dalla presenza di elettroni liberi (elettroni di conduzione), questi, sottol’azione accelerante del campo, migrano all’interno del corpo generando un cam-po elettrico interno che, una volta raggiunta la condizione statica di equilibrio,rende nullo il campo risultante interno al materiale. In un materiale metallico,quindi, il campo elettrostatico e sempre identicamente nullo.
Se nel campo elettrostatico viene collocato un materiale dielettrico (isolante)non si assiste ad alcun trasferimento di carica, in quanto non sono presenti elet-troni liberi. Il campo, provoca tuttavia spostamento di carica su scala atomicadando luogo a fenomeni di polarizzazione che portano, in generale, alla for-mazione di dipoli elettrici che tendono ad orientrsi in direzione del campo es-terno, modificando il campo elettrico stesso. Il meccanismo di polarizzazionee differente a seconda che il materiale sia polare o meno: se il dielettrico edi per se caratterizzato da molecole con distribuzione asimmetrica di carica,ovvero da dipoli permanenti, il campo elettrico agisce semplicemente sugli stessiprovocando il loro allineamento (polarizzazione per orientamento) contro il dis-ordine prodotto dall’agitazione termica; nel caso in cui il dielettrico sia costituitoda molecole apolari, l’applicazione del campo esterno produce, per interazionecoulombiana, una separazione tra il centro di carica positiva e quello negativoformando quindi dei dipoli elettrici indotti, orientati secondo la direzione delcampo (se le cariche spostate sono elettroni si parla di polarizzazione elettro-nica, mentre nel caso di ioni positivi e negativi il processo prende il nome dipolarizzazione ionica).

1.4. CAMPI ELETTRICI NEI MATERIALI 11
1.4.1 Potenziale del dipolo elettrico
Per poter caratterizzare il comportamento complessivo di un dielettrico polariz-zato occorre definire il contributo al potenziale totale determinato dalla presenzadegli elementi dipolari.
Un dipolo puo essere schematizzato come costituito da due cariche di ugualmodulo q ma di segno opposto, collocate ad una data distanza 2l. Se fissiamo unsistema di riferimento avente origine nel centro del dipolo possiamo individuarela carica (+q) mediante il vettore posizione l; la posizione dell’altra carica (−q)puo essere descritta mediante il vettore posizione l′ = −l.
Consideriamo allora un punto P individuato dal vettore posizione r, tale cher >> l, ovvero collocato a distanza molto maggiore rispetto alla dimensionedel dipolo (condizione sperimentale in generale sempre valida) e calcoliamo ilpotenziale presente in tale posizione:
φP =+q
4πε01
|r − l|+
−q4πε0
1|r − l′|
=
=q
4πε0
(1
|r − l|− 1|r + l|
)=
=q
4πε0
(1√
(r − l) · (r − l)− 1√
(r + l) · (r + l)
)=
=q
4πε0
(1√
r2 + l2 − 2r · l− 1√
r2 + l2 + 2r · l
)=
=q
4πε0r
1√1 +
l2
r2− 2r · l
r2
− 1√1 +
l2
r2+
2r · lr2
Tenendo conto del fatto che l/r << 1 possiamo semplificare i termini tra pa-rentesi definendo una variabile x = l/r → 0 e ricorrendo all’approssimazione di

12 CAPITOLO 1. FENOMENI ELETTRICI E MAGNETICI
Taylor:
f =(
1 +l2
r2± 2r · l
r2
)− 12
=
(1 +
(l
r
)2
± 2r · l · lr
)− 12
=(1 + x2 ± 2r · lx
)− 12
∂f
∂x= −1
2
(1 + x2 ± 2r · lx
)− 32
(2x± 2r · l)
⇒ f ≈ f(x=0) +(∂
∂xf(x=0)
)x = 1∓ r · l · l
r
Sostituendo le approssimazioni calcolate nell’equazione relativa al calcolo delpotenziale dovuto al dipolo otteniamo:
φP ≈q
4πε0r
(1 + r · l · l
r−(
1− r · l · lr
))=
q
4πε02l · r
r3= − 2ql
4πε0· ∇1
r
Il comportamento elettrico del materiale considerato puo essere utilmentecaratterizzato introducendo il vettore momento di dipolo elettrico p. Tale gran-dezza e definita in generale, per molecole dipolari di volume V0, come
p =∫
V0
ρrdV
Se la struttura del dipolo risulta schematizzabile a mezzo di due cariche discreteopposte, di uguale modulo q, e poste a una distanza individuata dal vettore d,di modulo pari a 2l e verso convenzionalmente definito dalla carica negativa aquella positiva, otteniamo semplicemente che p = q ·d = q · 2l. Il potenziale deldipolo da noi considerato puo essere allora definito come:
φ = − 14πε0
p · ∇1r
1.4.2 Vettore spostamento elettrico ~D
Un mezzo dielettrico soggetto ad un campo elettrico esterno puo essere conside-rato come una distribuzione continua di dipoli elementari e quindi la sua carat-terizzazione e possibile introducendo una densita di momento dipolare (dipolonetto per unita di superficie), definita polarizzazione P :
P =∑N
i=1 pi
dV
E’ possibile allora definire il potenziale dovuto alla polarizzazione del dielettricoestendendo estendendo l’equazione del dipolo all’intero materiale, mediante ilvettore di polarizzazione:
φ = − 14πε0
∫V
P · ∇∗(i)
1r∗idV ′
dove si sono definite le distanze relative ai singoli elementi di volume appartenen-ti allo spazio delle differenze mentre l’integrazione e relativa al volume descrittonelle coordinate delle sorgenti del campo. Sfruttando le relazioni, gia definite,

1.4. CAMPI ELETTRICI NEI MATERIALI 13
tra i gradienti relativi ai differenti spazi si puo rendere omogeneo l’integrale,riferendo tutte le distanze allo spazio delle sorgenti:
φ =1
4πε0
∫V
P · ∇i1r∗idV ′
Tenendo conto che, in generale, F∇ψ = ∇·(ψF )−ψ∇·F (vedi proprieta 2 delladivergenza illustrata in Appendice) possiamo esprimere il potenziale come:
φ =1
4πε0
∫V
∇i ·(
P
r∗i
)dV ′ − 1
4πε0
∫V
∇i ·Pr∗i
dV ′
Applicando il teorema della divergenza al primo termine si ricava
φ =1
4πε0
∮S
P
r∗i· dS′ − 1
4πε0
∫V
∇i ·Pr∗i
dV ′
dove S rappresenta la superficie di delimitazione del volume V . Confrontan-do l’equazione con quelle precedentemente ottenute per distribuzioni di caricasuperficiali e volumiche si puo osservare che il potenziale dovuto al dielettricoe definito dalla somma di due termini. Il primo termine e costituito dall’in-tegrale sulla superficie chiusa S e corrisponde al potenziale generato da unadistribuzione superficiale di carica di densita σp = P · n (n e il versore normalealla superficie S). Il secondo elemento che definisce il potenziale consiste nell’in-tegrale di volume corrispondente ad una carica, detta carica di polarizzazione,distribuita entro il volume V con densita ρp = −∇·P .
Alla luce di quanto sin qui considerato possiamo valutare il teorema di Gaussanche nel caso di un sistema di cariche immerso in un dielettrico. Se indichiamocon ρ la densita di carica reale e con ρp la densita di carica di polarizzazione deldielettrico otteniamo:
∇·E =ρ+ ρp
ε0=ρ−∇·P
ε0
Riordinando l’equazione precedente e introducendo un nuovo vettore di campo
D = ε0E + P
detto spostamento elettrico, induzione elettrica o spostamento dielettrico otte-niamo un espressione molto simile a quella originaria per le cariche nel vuoto:
∇·E +∇·Pε0
=ρ
ε0∇·(ε0E + P ) = ρ
∇·D = ρ
Applicando il teorema della divergenza possiamo allora ottenere l’espressionein forma integrale del teorema di Gauss generalizzato anche alla presenza dieventuali dielettrici: ∫
V
∇·DdV =∮
S
D · dS = q
14 CAPITOLO 1. FENOMENI ELETTRICI E MAGNETICI
Le equazioni sin qui riportate esprimono D in funzione delle due variabili, Ped E, supposte tra loro indipendenti. In realta, in molti casi esiste una relazionedi dipendenza tra la polarizzazione del mezzo ed il campo elettrico applicato.Per definire le relazioni suddette occorre caratterizzare il mezzo dal punto divista delle sue proprieta elettriche. Un materiale puo definirsi omogeneo se ecaratterizzato da composizione uniforme; se gli effetti legati al campo elettricosono indipendenti dall’orientazione del corpo il mezzo si dice isotropo e, nelcaso in cui la polarizzazione proporzionale al campo applicato si parla di mezzolineare (mezzi non lineari sono caratterizzati da dipendenza della polarizzazionedal campo definita da un polinomio di grado n). Per un mezzo omogeneo,isotropo e lineare, la polarizzazione P e parallela e proporzionale al campoelettrico E e puo quindi essere espressa mediante la relazione
P = ε0χeE
La costante di proporzionalita χe e definita suscettivita elettrica o polarizzabilitadel mezzo. Sostituendo l’equazione data nella definizione del vettore spostamen-to elettrico D si ottiene allora una relazione di proporzionalita con il campoelettrico E applicato:
D = ε0E + P = ε0 (χe + 1)E = ε0εrE = εE
La costante di proporzionalita ε detta costante dielettrica o permettivit elettri-ca del mezzo ed ´ definita dal prodotto tra ε0 e la costante dielettrica relativaεr = χe + 1. Poiche P ed E sono sempre equiversi tra loro (χe > 0), lospostamento elettrico nel mezzo D sempre maggiore del corrispondente campoelettrico nel vuoto E ovvero ε > ε0. Si noti che ε e una grandezza scalaresolo se il mezzo considerato e isotropo; nel caso di mezzo anisotropo, poiche laproporzionalita tra D ed E e dipendente dalla direzione considerata, ε si rapp-resenta mediante una matrice quadrata 3×3 (diagonale) e costituisce un tensore.
1.5 Corrente elettrica
Si definisce corrente elettrica un flusso ordinato di carica attraverso la superficiedi un conduttore. Se in un tempo dt una sezione normale del conduttore (taleper cui il versore normale n sia parallelo al moto delle cariche) e attraversatada una carica netta dq, l’intensita della corrente elettrica corrispondente e
I =dq
dt
Come descritto nella formula precedente, l’intensita di corrente e una grandez-za scalare ed e indipendente dalla natura dei portatori di carica (essi possonoessere infatti sia cariche positive che negative). L’informazione fornita da I epero insufficiente per poter caratterizzare compiutamente il flusso di carica. Sidefinisce allora una grandezza vettoriale, detta densita di corrente J che descrivela corrente che fluisce attraverso ciascun punto della superficie del conduttore,sia dal punto di vista quantitativo che qualitativo: J e definita nella direzione discorrimento della carica, orientata secondo il moto delle cariche positive (anche

1.5. CORRENTE ELETTRICA 15
se eventualmente la corrente e dovuta a cariche negative) e ha modulo
J =dI
dS
in cui dI e la corrente che fluisce attraverso l’elemento infinitesimo di area dS delconduttore. Sfruttando la definizione precedente e possibile ricavare l’intensitadi corrente attraverso un integrale di flusso di J , esteso a tutta la superficie Sdel conduttore:
I =∫
S
J · dS
Dal punto di vista microscopico J puo essere definita come:
J =∑N
i=1 qi · vi
dV
dove qi e la carica i-esima che attraversa il volume dV con velocita vi. Se tuttele cariche si muovono alla medesima velocita v, detta ρ la densita volumica dicarica, si ottiene:
J =∑N
i=1 qidV
· v = ρv
In generale, il moto delle cariche elettriche e dovuto alla presenza di una femnon nulla agente sul circuito, ovvero ad un campo elettrico E. Nel caso diparticolari mezzi omogenei, isotropi e lineari si puo ritenere J proporzionale alcampo applicato (legge di Ohm microscopica):
J = σE
dove σ e definita conducibilita elettrica ed e caratteristica per il conduttore con-siderato. Tale corrispondenza e valida solo considerando correnti macroscopiche;essa e infatti inapplicabile al caso di fenomeni relativi a correnti atomiche omolecolari in quanto in questo caso intervengono effetti quantistici (come lasuperconduttivita).
1.5.1 Equazione di continuita
L’equazione di continuita della corrente elettrica e una diretta conseguenza delprincipio di conservazione della carica: la quantita di carica in uscita da unacerta superficie chiusa, nell’unita di tempo, deve essere uguale alla velocita didiminuzione della carica in essa contenuta. In termini matematici, quanto sopraenunciato si traduce in:∮
S
J · dS = − d
dt
∫V
ρdV = −∫
V
∂ρ
∂tdV
dove V e un volume arbitrario delimitato dalla superficie S. Applicando ilteorema della divergenza e considerando che V e arbitrariamente definito∮
S
J · dS =∫
V
∇·JdV = −∫
V
∂ρ
∂tdV
⇒ ∇·J +∂ρ
∂t= 0

16 CAPITOLO 1. FENOMENI ELETTRICI E MAGNETICI
Una corrente si dice stazionaria se non si hanno ne accumuluni ne sorgentidi carica in qualsiasi punto del suo percorso. Tale condizione equivale a dire
∂ρ
∂t= 0 ⇒ ∇·J = 0
Nel caso di correnti stazionarie, quindi, la densita di corrente e solenoidale.
1.6 Induzione magnetica ~B
I fenomeni magnetici sono differenti da quelli elettrici per il semplice fatto cheessi sono interpretabili in termini di interazioni tra correnti e non richiedono l’e-sistenza di alcuna specifica carica magnetica. Lo studio del magnetismo e quindipossibile definendo empiricamente le relazioni fondamentali che sussistono traelementi di corrente, intendendo con questo termine il prodotto di una correnteI per una lunghezza elementare dr di conduttore in cui essa fluisce.
Se consideriamo due circuiti C1 e C2 percorsi rispettivamente dalle correntiI1 e I2 possiamo esprimere la forza magnetica che il circuito 1 esercita sul circuito2 mediante la seguente formula sperimentale:
F2 =µ0
4πI1I2
∮C1
∮C2
dr2×(dr1×r21)r321
dove r21 e un vettore che esprime la posizione dell’elemento di lunghezza dr2 delcircuito 2, rispetto alla posizione dell’elemento di lunghezza dr1 del circuito 1(se le posizioni di dr1 e dr2 sono definite rispetto all’origine di un sistema di assicartesiani da due vettori r1 e r2, il vettore r21 e pari alla loro differenza r2−r1).La costante µ0 e detta permeabilita magnetica del vuoto e, per definizione, eesattamente pari a 4π · 10−7H/m.Anche se, nella forma in cui e riportata, l’equazione di interazione tra correntirisulta asimmetrica rispetto agli indici 1 e 2, essa non presenta violazione dellaterza legge di Newton (F2 = −F1).
In analogia con quanto gia effettuato per il campo elettrico, possiamo definireil campo magnetico, o piu propriamente l’induzione magnetica, come il terminedell’espressione della forza dipendente esclusivamente dalla sorgente (circuito 1)e non dal circuito 2 che funge da sonda:
B1 =µ0
4πI1
∮C1
dr1×r21
r321
In base a questa definizione di B e possibile definire la forza cui e soggetto ilcircuito 2 mediante un espressione piu semplice:
F2 = I2
∮C2
dr2×B1
Si puo notare che in questa enunciazione la formula diviene simmetrica rispettoagli indici 1 e 2, a dimostrazione che la forza considerata e newtoniana.L’equazione precedentemente riportata per il campo magnetico generato dalcircuito 1 puo essere interpretata come una somma integrale dei contributi in-finitesimi di campo dB dovuti ai singoli elementi di corrente Idr′, relativa ad

1.6. INDUZIONE MAGNETICA ~B 17
un punto considerato dello spazio, individuato mediante il vettore differenzar∗ = r − r′ (dove r e la posizione del punto rispetto all’origine di un sistemadi assi di riferimento). La legge di Biot-Savart esprime in termini matematiciqueste considerazioni:
dB =µ0
4πIdr′×r∗
r∗3
Osservando le due equazioni relative al campo e alla forza corrispondente, sipuo ricavare che, per testare sperimentalmente la presenza del campo magneticoin un dato punto, e necessario l’utilizzo di un elemento di corrente Idr, tuttavia,l’idea di una corrente isolata non puo essere realizzata fisicamente e pertantooccorre definire relazioni differenti che non richiedano l’utilizzo di elementi dicorrente. A tal fine possiamo introdurre il vettore densita di corrente ottenendo:
Idr = JdA · dr = JdV
Le equazioni per il campo magnetico B e per la forza magnetica F possonoessere allora equivalentemente espresse in termini di densita di corrente come:
B =µ0
4π
∫V ′
J×r∗
r∗3dV ′
F =∫
V
J×BdV
dove con V ′ si considera il volume comprendente tutti i punti sorgente mentrecon V si indica il volume contenente tutti i punti del campo.
In base alla definizione microscopica dalla densita di corrente (J = ρv)possiamo calcolare la forza magnetica agente su una carica puntuale Q (forzadi Lorentz ):
F =∫
V
J×BdV =∫
V
ρv×BdV = qv×B
1.6.1 Calcolo della divergenza di ~B
Considerando una distribuzione continua di corrente, contenuta in un volumeV ′, la divergenza del campo magnetico B e data da:
∇·B = ∇·(µ0
4π
∫V ′
J×r∗
r∗3dV ′
)=µ0
4π
∫V ′
∇·(
J×r∗
r∗3
)dV ′
dove lo spostamento dell’operatore divergenza all’interno del segno di integrale ereso possibile dal fatto che, mentre la divergenza opera rispetto allo spazio dellecoordinate del campo (mantenendo fissi i punti sorgente), l’integrale e riferitoallo spazio delle sorgenti (e mantiene quindi inalterate le posizioni del campo).Considerando che ∇·(F1×F2) = F2 · (∇×F1) − F1 · (∇×F2) (vedi proprieta3 della divergenza riportata in Appendice), la nuova funzione integranda puoessere formulata come
∇·(
J×r∗
r∗3
)= −∇·
(J×∇∗ 1
r∗
)= − (∇×J) · ∇∗ 1
r∗+ J · ∇×∇∗ 1
r∗
dove con ∇∗ si intende che l’operazione e riferita allo spazio delle differenzetra punti di campo e sorgenti. Considerando il primo termine dell’equazione

18 CAPITOLO 1. FENOMENI ELETTRICI E MAGNETICI
riportata possiamo notare che esso e identicamente nullo in quanto J e definitain funzione dei punti sorgente ed e quindi costante rispetto alle coordinate delcampo, a cui si riferisce l’operazione di rotore:
∇×J = 0
Per quanto riguarda il secondo termine dell’equazione, tenendo presente la re-lazione che sussiste tra le operazioni differenziali nel sistema di coordinate delledifferenze, rispetto a quello dei punti di campo, e possibile ricavare che anch’essoe nullo:
J · ∇×∇∗ 1r∗
= J · ∇∗×∇∗ 1r∗
= 0
Dato un generico campo magnetico di induzione B vale quindi la seguenteproprieta:
∇·B = 0
Tale conclusione risulta immediata tenendo presente che non esistono monopolimagnetici ma solo sistemi dipolari e correnti tali da generare campi magneticile cui linee di campo sono sempre chiuse. Il campo magnetico B e quindisolenoidale.
1.6.2 Legge di Ampere e non conservativita di ~B
La valutazione del rotore di un campo magnetico B e particolarmente complessase trattata nella sua forma piu generale. Una trattazione semplificata e possibileconsiderando di operare con correnti stazionarie (∇·J = 0) introducendo la leggedi Ampere come dato sperimentale:∮
C
B · dr = µ0
∫S
J · dS = µ0I
dove I e la corrente concatenata a una qualsiasi superficie delimitata da C.Applicando il teorema di Stokes alla legge di Ampere, possiamo quindi definireil rotore del campo magnetico generato dalle correnti stazionarie considerate:∮
C
B · dr =∫
S
(∇×B) · dS = µ0
∫S
J · dS
⇒ ∇×B = µ0J
Poiche ∇×B 6= 0 e possibile concludere che il campo magnetico non e conserva-tivo, ovvero non puo essere associato ad una funzione potenziale scalare.
La validita della legge di Ampere nella forma indicata e limitata al caso dicorrenti stazionarie. Se nel circuito considerato sono presenti eventualmente deipunti in cui si puo verificare accumulo di carica oppure delle sorgenti, cadono leipotesi di stazionarieta e pertanto l’equazione non puo essere piu applicata. Talefatto puo essere infatti evidenziato considerando un semplice circuito elettrico,percorso da una certa corrente e contenente un condensatore a piatti paralleli:calcolando la circuitazione relativa ad un percorso chiuso C che circonda un trat-to del conduttore, se si valuta l’integrale utilizzando come superficie delimitatada C una qualsiasi superficie S intersecante il conduttore, si ottiene un valorenon nullo (la corrente passante nel circuito e infatti concatenata alla superficie),mentre, per superfici S, ugualmente delimitate da C ma passanti per lo spazio

1.6. INDUZIONE MAGNETICA ~B 19
compreso tra le armature del condensatore, la circuitazione dovrebbe inveceavere valore nullo (non vi sono correnti concatenate). La legge di Ampere con-duce quindi ad una contraddizione che e dovuta alla mancanza di stazionarietadella corrente.
Per ripristinare la validita dell’equazione di Ampere occorre quindi sostituirea J una densita di corrente J ′, equivalente ad una corrente stazionaria e taleda contenere le informazioni relative alla reale corrente non stazionaria. Perdefinire la densita di corrente equivalente J ′ possiamo esprimere la velocita divariazione della densita di carica ρ avvalendoci della legge di Gauss:
∇·E =ρ
ε0⇒ ∂ρ
∂t=
∂
∂t(ε0∇·E) = ε0∇· ∂E
∂t
Considerando il principio di continuita otteniamo:
∇·J +∂ρ
∂t= 0
∇·J + ε0∇· ∂E
∂t= 0
∇·(
J + ε0∂E
∂t
)= 0
Il termine ε0E ha le dimensioni di una densita di corrente ma non corrispondead un reale trasferimento di cariche; viene pertanto definito densita di cor-rente di spostamento nel vuoto e consente di interpretare l’instaurarsi di campimagnetici per effetto di campi elettrici variabili, anche in assenza di correnticoncatenate. La somma che figura come argomento dell’operatore divergenzae in definitiva una densita di corrente e corrisponde alla densita di correntestazionaria equivalente J ′:
J ′ = J + ε0∂E
∂t
La legge di Ampere puo essere allora estesa al caso di correnti non stazionarienel modo seguente:∮
C
B · dr = µ0
∫S
J ′ · dS = µ0
∫S
(J + ε0
∂E
∂t
)· dS =
= µ0I + µ0ε0d
dt
∫S
E · dS = µ0I + µ0ε0dΦE
dt
L’equazione sopra riportata riassume in se le modalita con cui e possibile gene-rare un campo magnetico: mediante una corrente elettrica I oppure medianteinduzione attraverso un flusso di campo elettrico variabile nel tempo. Appli-cando il teorema di Stokes possiamo ottenere l’espressione del rotore del campomagnetico B anche nel caso di correnti non stazionarie:∮
C
B · dr =∫
S
(∇×B) · dS =∫
S
(J + ε0
∂E
∂t
)· dS
⇒ ∇×B = µ0J + µ0ε0∂E
∂t

20 CAPITOLO 1. FENOMENI ELETTRICI E MAGNETICI
1.7 Campi magnetici nei materiali
Quanto finora considerato sui campi magnetici ha validita limitata a condizionidi vuoto. Quando si opera in presenza di materiali, essi interagiscono con icampi magnetici alterandone le caratteristiche. Occorre pertanto definire cor-rettamente gli effetti che un materiale produce su un campo magnetico esternoin modo da estendere le equazioni ottenute a qualsiasi condizione sperimentale.
In un mezzo materiale, infatti, la nostra analisi non si limita alle correnti realied eventualmente alle correnti di spostamento ma deve tenere in considerazionealtri termini di corrente associati al mezzo stesso. Limitandoci a considerare unmezzo stazionario, infatti, occore tenere in considerazione due tipi di correntiaddizionali: le correnti di polarizzazione e quelle di magnetizzazione.
1.7.1 Correnti di polarizzazione nei materiali
Se consideriamo un materiale polarizzabile, in generale, un campo magneticopuo agire sui dipoli (permanenti o indotti) generando un spostamento di caricanel dipolo stesso e dando quindi luogo a correnti microscopiche relative a ciascunelemento dipolare del mezzo. Il processo di riarrangiamento della carica all’in-terno di ciascuna molecola o atomo puo essere descritto mediante la derivatatemporale del vettore momento di dipolo elettrico p. Se la carica del dipoloe descritta mediante densita volumica ρ e v e la velocita di spostamento dellacarica stessa, la corrente dipolare puo essere descritta come J = ρv e pertanto,in base al principio di continuita si ottiene:
∇·J +∂ρ
∂t= 0 ⇒ ∂ρ
∂t= −∇·J = −∇·(ρv)
In base alla definizione di momento di dipolo elettrico (vedi sezione 1.4.1),sfruttando la relazione precedente, otteniamo che
dp
dt=
d
dt
∫V0
ρrdV =∫
V0
∂ρ
∂trdV = −
∫V0
r∇·(ρv)dV
dove v0 e il volume della molecola (o atomo) considerata ed r e la posizionedella carica in moto rispetto al centro della molecola. Poiche r e un vettore,l’integrale deve essere calcolato rispetto a ciascuna componente di r stesso.Considerando quindi una qualsiasi delle componenti di r, indicata con x, eapplicando la proprieta 2 dell’operatore divergenza ψ∇·F = ∇·(ψF ) − F∇ψ(vedi Appendice), si ricava
x∇·(ρv) = ∇·(xρv)− ρv · ∇x = ∇·(xρv)− ρvx
dove ∇x e il versore relativo alla componente x considerata. Alla luce del-la relazione evidenziata per ciascuna componente, attraverso l’applicazione delteorema della divergenza al primo termine dell’equazione precedente, si ricavache
dp
dt= −
∮S0
rρv · dS +∫
V0
ρvdV
in cui S0 e la superficie comprendente l’intero volume V0 della molecola. Osser-vando l’integrale di superficie, si nota che esso rappresenta il flusso relativo alla

1.7. CAMPI MAGNETICI NEI MATERIALI 21
carica della molecola sulla sua intera superficie, moltiplicato per ciascuna com-ponente del vettore r; poiche le molecole del dielettrico sono complessivamenteneutre, ovvero la carica risultante all’interno della superficie e nulla, anche ilflusso espresso dall’integrale e nullo e pertanto la variazione della polarizzazionedel mezzo puo essere semplicemente espressa mediante il secondo integrale divolume: ∮
S0
rρv · dS = 0 ⇒ dp
dt=∫
V0
ρvdV
L’entita della corrente di polarizzazione relativa all’intero mezzo e definitadalla somma di tutti i contributi relativi a ciascuna molecola del dielettricoe pertanto puo essere espressa in termini di variazione temporale del vettorepolarizzazione P (vedi sezione 1.4.1), ovvero come velocita di variazione delmomento di dipolo relativo a un volume unitario:
∂P
∂t=
1V0
dp
dt=
1V0
∫V0
ρvdV =< ρv >
Si ricava quindi che la densita di corrente di polarizzazione, espressa dalla varia-zione temporale di P , e pari alla media delle densita di correnti molecolari. Talecorrente produce una variazione del campo magnetico B che puo essere quan-tificata includendo il termine di polarizzazione nella definizione della densita dicorrente totale J tot:
J tot = J +∂P
∂t
Poiche, in generale, Jtot puo non essere stazionaria, occorre inoltre definire,mediante applicazione del principio di continuita, una densita di corrente equi-valente J ′, stazionaria. A tale scopo e necessario tenere in conto che il mezzoe polarizzato e pertanto, oltre alle cariche effettive, di densita volumica ρ, sonopresenti cariche di polarizzazione di densita volumica ρp.
∇·J ′ = ∇·J tot +∂ρtot
∂t= ∇·J ′ = ∇·
(J +
∂P
∂t
)+∂
∂t(ρ+ ρtot) = 0
Dal teorema di Gauss si ricava che ρ+ ρp = ε0∇·E quindi
∇·J ′ = ∇·(
J +∂P
∂t
)+∂
∂t(ε0∇·E) = ∇·
(J +
∂
∂t(ε0E + P )
)= 0
introducendo il vettore spostamento elettrico D = ε0E + P si ricava
∇·J ′ = ∇·(
J +∂D
∂t
)= 0 ⇒ J ′ = J +
∂D
∂t
da cui si puo notare che la polarizzazione del mezzo puo essere tenuto in contoper semplice sostituzione di E con D.
Definita la densita di corrente equivalente J ′ possiamo esprimere il rotoredel campo magnetico B, in presenza di materiali polarizzabili, come
∇×B = µ0J′ = µ0J + µ0
∂D
∂t

22 CAPITOLO 1. FENOMENI ELETTRICI E MAGNETICI
1.7.2 Magnetizzazione ~M
Nella trattazione sin qui portata avanti abbiamo trascurato la possibilita che imateriali presentino un carattere magnetico proprio. In realta, la materia e diper se costituita da cariche in moto: all’interno di ciascun atomo (o molecola),indipendentemente da stimoli esterni, gli elettroni sono in moto continuo al-l’interno dei corrispondenti orbitali e pertanto generano correnti microscopicheassimilabili a quelle generate da spire percorse da corrente. Queste correntiintrinseche al materiale generano deboli campi magnetici caratterizzabili me-diante una grandezza che, in analogia con la polarizzazione dei dielettrici, edefinita momento di dipolo magnetico m. Poiche ciascun atomo (o molecola) ecaratterizzato da un proprio momento dipolare, a livello macroscopico il com-portamento complessivo del materiale si puo caratterizzare mediante il vettoremagnetizzazione M , corrispondente al momento di dipolo magnetico netto perunita di volume:
M =∑N
i=1 mi
dV
Se la magnetizzazione e uniforme (mezzo isotropo), tutte le correnti mi-croscopiche relative a ciascun atomo (o molecola) sono identiche e, pertanto,l’effetto complessivo e un trasferimento di carica solo sulla superficie esterna delmateriale in quanto, all’interno, le correnti relative a dipoli magnetici adiacentisono uguali ed opposte e non danno quindi luogo ad alcun effettivo sposta-mento di carica. Nel caso in cui la magnetizzazione non sia uniforme (mezzoanisotropo), non si verifica annullamento dei termini di corrente interni al ma-teriale poiche la corrente associata a ciascun dipolo magnetico e differente. Inquesto caso all’interno del materiale e presente una corrente risultante non nulla,chiamata corrente di magnetizzazione, la cui densita e definita pari a
Jm = ∇×M
Considerando quindi un materiale stazionario possiamo esprimere la densitadi corrente totale Jtot come la somma della densita di corrente effettiva J ,della densita di corrente di polarizzazione P e della densita di corrente dimagnetizzazione Jm:
Jtot = J +∂P
∂t+ ∇×M
Occorre allora definire una densita di corrente equivalente e stazionaria J ′
che tenga in conto sia della polarizzazione P che della magnetizzazione Mdel mezzo. Applicando il principio di continuita della corrente, tenendo pre-sente che, oltre alla carica effettiva (di densita ρ), e presente una carica dipolarizzazione di densita ρp, otteniamo
∇·J ′ = ∇·J tot +∂ρtot
∂t= ∇·J ′ = ∇·
(J +
∂P
∂t+ ∇×M
)+∂
∂t(ρ+ ρtot) = 0
Applicando il teorema di Gauss e introducendo il vettore spostamento elettricoD (nelle modalita gia descritte nella sezione precedente) otteniamo:
∇·J ′ = ∇·(
J +∂D
∂t+ ∇×M
)= 0 ⇒ J ′ = J +
∂D
∂t+ ∇×M

1.7. CAMPI MAGNETICI NEI MATERIALI 23
L’espressione ottenuta per J ′ consente di trattare le correnti come solenoidali,sia nel caso del vuoto, sia in presenza di materiali (polarizzabili e magnetizza-bili), sia nel caso in cui la corrente reale stessa non presenta stazionarieta. Ifenomeni magnetici, dovuti a correnti elettriche, possono quindi essere sempretrattati considerando opportune correnti stazionarie.
Possiamo allora calcolare il rotore del campo magnetico B presente in unmateriale polarizzato e magnetizzato:
∇×B = µ0J′ = µ0J + µ0
∂D
∂t+ µ0∇×M
1.7.3 Intensita di magnetizzazione ~H
L’equazione precedentemente riportata per il rotore di B puo essere utilmenteriordinata, attraverso l’applicazione della proprieta distributiva dei rotori, inmodo da ottenere un singolo operatore:
∇×(B − µ0M) = µ0
(J +
∂D
∂t
)L’equazione cosı riportata puo essere allora interpretata considerando il campomagnetico prodotto dalla somma di correnti di conduzione e di spostamentocome la quantita
H =B
µ0−M
che viene definita intensita magnetica e la cui utilita si presenta nel momento incui si considerano campi magnetici in mezzi materiali. In base alla definizionedata possiamo allora esprimere la relazione precedente come
∇×H = J +∂D
∂t
Quanto sin qui affermato e valido in generale per un qualsiasi mezzo ma-teriale stazionario. Tuttavia, considerando mezzi isotropi, omogenei e linearipossiamo ricavare l’esistenza di una relazione di proporzionalita tra l’intensitamagnetica H e la magnetizzazione M del materiale tale per cui:
M = χmH
dove la costante di proporzionalita χm e detta suscettivita magnetica.Considerando materiali che soddisfano l’equazione precedente, in base alla
definizione del vettore H, possiamo verificare che tra H stesso e B esiste unarelazione lineare:
B = µ0H + M = µ0(1 + χm)H = µ0µrH = µH
La costante di proporzionalita µ detta costante magnetica o permeabilita ma-gnetica del mezzo ed ´ definita dal prodotto tra µ0 e la permeabilita magneticarelativa del mezzo µr = χm+1. In generale il valore di χm puo essere sia positivoche negativo a seconda del materiale considerato: per i materiali diamagnetici

24 CAPITOLO 1. FENOMENI ELETTRICI E MAGNETICI
χm e negativo e pertanto l’introduzione di un siffatto materiale produce unadiminuzione complessiva del campo magnetico esterno; per materiali parama-gnetici χm presenta invece valori positivi e pertanto l’impiego di tali sostanzecomporta un incremento del campo esterno. Se osserviamo i valori effettividi χm, possiamo osservare che, in generale, |χm| << 1 sia per sostanze dia-magnetiche che paramagnetiche e pertanto si puo concludere che l’effetto delmateriale sul campo magnetico e praticamente trascurabile: µ ≈ µ0. Comegia notato nel caso dei dielettrici, anche µ e una grandezza scalare solo se ilmezzo e isotropo, altrimenti essa assume la forma di un tensore, in modo dacaratterizzare il diverso comportamento del materiale in ogni possibile direzione.
Da queste considerazioni sono esclusi i materiali ferromagnetici in quantoessi presentano fenomeni di isteresi di carattere non lineare e non possono quindiessere caratterizzati da una suscettivita magnetica definita, nemmeno in con-dizioni normali. A differenza degli altri tipi di materiali, i mezzi ferromagneticiproducono notevoli effetti sui campi magnetici.
1.7.4 Teorema di Ampere in forma generale
Avendo introdotto il vettore H, capace di interpretare i fenomeni magnetici neimezzi materiali, e necessario estendere il teorema di Ampere al caso generaledi un mezzo qualsiasi, in cui siano presenti sia fenomeni di polarizzazione chedi magnetizzazione. A tal fine possiamo sfruttare l’equazione precedentementeottenuta per il rotore di H:
∇×H = J +∂D
∂t
Applicando il teorema di Stokes, otteniamo quindi la formulazione generale dellalegge circuitale di Ampere:∫
S
(∇×H) · dS =∮
C
H · dr =∫
S
(J +
∂D
∂t
)· dS = I +
d
dt
∫S
D · dS
dove C rappresenta il contorno della superficie aperta S definita arbitrariamente.Si noti che l’equazione ottenuta e valida sia che si operi nel vuoto (in questo casoH ≡ B e D ≡ E), sia che si consideri un mezzo materiale e inoltre permette diconsiderare sia le correnti reali (I) che le correnti di spostamento dovute a campielettrici variabili (D) ed e quindi applicabile sia nel caso di correnti stazionarieche non.
1.8 Legge di induzione di Faraday-Lenz
Un campo elettrico puo essere generato non solo da cariche elettriche ma an-che attraverso un flusso variabile di un campo magnetico. Tale fenomeno eottenibile in molti modi differenti: ad esempio, modificando il modulo di B,la sua direzione oppure variando la superficie rispetto alla quale si calcola ilflusso. L’interpretazione compiuta dell’induzione magnetica costituisce la leggedi Faraday-Lenz: la forza elettromotrice indotta e pari alla variazione del flussodel campo magnetico rispetto alla superficie considerata.
E =∮
C
E · dr = − d
dt
∫S
B · dS = −dΦB
dt

1.8. LEGGE DI INDUZIONE DI FARADAY-LENZ 25
Il segno meno presente nell’equazione ha come unico significato quello di speci-ficare che il verso della fem indotta, in ossequio alla legge di Lenz, e tale daopporsi, a mezzo del campo magnetico da essa stessa generato, alla variazionedi flusso, responsabile dell’induzione.Ricorrendo al teorema di Stokes, considerando la superficie S fissata, e possibilericavare: ∮
C
E · dr =∫
S
(∇×E) · dS = −∫
S
∂B
∂t· dS
⇒ ∇×E = −∂B
∂t
Nell’ipotesi che la superficie S di integrazione sia costante, il campo elettricoindotto e generato da un campo magnetico B variabile nel tempo (dovuto acorrenti non stazionarie). Il fatto che ∇×E 6= 0 in presenza di campi magneticivariabili, implica che il campo elettrico indotto non e conservativo.

26 CAPITOLO 1. FENOMENI ELETTRICI E MAGNETICI

Capitolo 2
Equazioni di Maxwell
La trattazione dei campi elettrici e magnetici nel capitolo precedente ha eviden-ziato l’esistenza di una notevole interconnessione tra i due fenomeni: in basealle leggi di Faraday e di Ampere (nella forma generalizzata da Maxwell) si puoinfatti osservare che una variazione di un campo magnetico comporta variazio-ne del campo elettrico presente e viceversa. Appare quindi logico e realisticodefinire i fenomeni elettrici e magnetici in un unica teoria: l’elettromagnetismo.Campi elettrici e magnetici possono allora essere descritti come differenti terminidi uno stesso campo elettromagnetico.
Le leggi fondamentali che permettono una descrizione completa dei fenomenielettromagnetici, dette equazioni di Maxwell, sono essenzialmente quattro:
1. Legge di Faraday-Lenz
2. Legge di Ampere generalizzata
3. Legge di Gauss per l’elettricita (corrispondente al principio di conser-vazione della carica elettrica)
4. Legge di Gauss per il magnetismo (relativa all’impossibilita di separare ipoli magnetici)
A tali equazioni si puo inoltre aggiungere il principio di continuita della correnteelettrica (anch’esso legato alla conservazione della carica elettrica).
Nella trattazione che segue, in generale, si considereranno solamente mezzistazionari e quindi nei termini descritti non saranno presenti le variazioni dellecorrenti convettive e della magnetizzazione che si dovrebbero tenere in conto nelcaso di materiale non stazionario.
2.1 Equazioni di Maxwell nel vuoto
Limitandoci a considerare i fenomeni elettromagnetici che si verificano nel vuo-to le equazioni di Maxwell possono essere interamente definite mediante i soli
27

28 CAPITOLO 2. EQUAZIONI DI MAXWELL
vettori campo elettrico E ed induzione magnetica B:
1. ∇×E = −∂B
∂t2. ∇×B = µ0J + µ0ε0
∂E
∂t
3. ∇·E =ρ
ε04. ∇·B = 0
A queste si aggiunge anche l’equazione di continuita della corrente:
∇·J +∂ρ
∂t= 0
Confrontando tra loro le equazioni relative al campo elettrico e quelle rela-tive al campo magnetico, si osserva una sostanziale asimmetria giustificata dalfatto che mentre esistono cariche elettriche elementari, non esistono equivalenti“cariche magnetiche” (ovvero monopoli magnetici). In quest’ottica e possibilegiustificare la differenza che sussiste tra le equazioni 3 e 4, considerando che,mentre per E ha senso parlare di densita di carica ρ, cio non e possibile con-siderando B; analogamente, la presenza del termine relativo alla corrente elet-trica nell’equazione 2, relativa a B, e non nell’equazione 1, riferita a E, trovapiena giustificazione in quanto non esistono equivalenti “correnti magnetiche”.A dimostrazione di quanto sin qui affermato, si puo facilmente notare che, inassenza di cariche elettriche, e quindi di correnti, le equazioni diventano tutteperfettamente simmetriche tra loro.
2.2 Equazioni di Maxwell nella materia
Se consideriamo il caso generale di campi elettromagnetici nei mezzi materiali(stazionari) le equazioni di Maxwell sono rappresentate in forma compatta uti-lizzando, oltre ai vettori E e B, anche lo spostamento elettrico D e l’intensitamagnetica H:
1. ∇×E = −∂B
∂t2. ∇×H = J +
∂D
∂t
3. ∇·D = ρ 4. ∇·B = 0
a cui si aggiunge l’equazione di continuita della corrente:
∇·J +∂ρ
∂t= 0
E’ importante tenere presente che l’introduzione di D e H non e concettual-mente necessaria in quanto le equazioni 2 e 3, nelle quali tali vettori compaiono,possono comunque essere espresse in termini dei soli vettori E e B nella formaseguente:
∇×B = µ0
(ε0∂E
∂t+∂P
∂t+ ∇×M + J
)∇·E =
1ε0
(−∇·P + ρ)

2.3. EQUAZIONI DI MAXWELL IN FORMA INTEGRALE 29
Appare tuttavia evidente il guadagno che deriva dall’impiego di D e H in ter-mini di semplicita di rappresentazione delle equazioni di Maxwell e, per questomotivo, qualunque relazione relativa a fenomeni elettromagnetici nella materiaviene di norma espressa mediante tali vettori.
2.3 Equazioni di Maxwell in forma integrale
Le equazioni di Maxwell, sin qui riportate nella loro definizione puntuale, informa differenziale, possono essere utilmente espresse anche in forma integrale(ammettendo per ipotesi che i campi coinvolti e le loro derivate siano funzionicontinue e definite entro il dominio di integrazione considerato). La conversioneda una forma all’altra e immediata applicando per le equazioni 1 e 2 il teoremadi Stokes e per le equazioni 3 e 4 il teorema della divergenza. Operando comedescritto si ottengono allora le seguenti espressioni:
1.∮
C
E · dr = −∫
S
∂B
∂t· dS 2.
∮C
H · dr =∫
S
(J +
∂D
∂t
)· dS
3.∮
S
D · dS =∫
V
ρdV = q 4.∮
S
B · dS = 0
dove nelle equazioni 1 e 2 S e una superficie qualsiasi, aperta, di cui il circuitochiuso C e il bordo, mentre nelle equazioni 3 e 4 S e una superficie chiusa di cuiV e il volume interno. Anche l’equazione di continuita della corrente puo essereespressa in forma integrale, sfruttando il teorema della divergenza:∮
S
J · dS = −∫
V
∂ρ
∂tdV = −dq
dt
in cui S e una superficie chiusa arbitraria che racchiude il volume V .La rappresentazione in forma integrale delle leggi di Maxwell permette di inter-pretare facilmente il loro significato fisico. Le equazioni 1 e 2 consistono essen-zialmente nelle leggi di Faraday e di Ampere e permettono di definire le modalitadi creazione di campi elettrici e magnetici rispettivamente. Le equazioni 3 e 4,corrispondenti alle leggi di Gauss per i due tipi di campo, possono essere inter-pretate in maniera piu approfondita a partire dalle equazioni sperimentali 1 e2 considerando il caso particolare in cui la superficie S dell’integrale sia chiusa:gli integrali di linea corrispondenti divengono identicamente nulli, perche riferitia un circuito C contratto in un singolo punto. Relativamente all’equazione 1 siottiene:
d
dt
∮S
B · dS = 0
che significa che il flusso del campo magnetico sulla superficie S chiusa e neces-sariamente costante. Del resto e empiricamente noto che non esistono monopolimagnetici ma solamente elementi dipolari tali da generare linee di campo chiusee quindi, considerando la superficie chiusa S, le linee di campo entranti sononecessariamente pari alle linee di campo uscenti e cio implica che il flusso nettoe nullo ovvero ∮
S
B · dS = 0

30 CAPITOLO 2. EQUAZIONI DI MAXWELL
che coincide con l’equazione 4 di Maxwell. In definitiva, quindi, tale leggeafferma semplicemente che il campo magnetico e caratterizzato da linee di cam-po chiuse. Per quanto riguarda l’equazione 3, questa puo essere interpretataconsiderando l’equazione 2, nel caso di superficie S chiusa:
d
dt
∮S
D · dS +∮
S
J · dS = 0
Cio significa che, attraverso la superficie chiusa S, la corrente di conduzione(definita dal flusso di J) e la corrente di spostamento (corrispondente al flusso diD) devono compensarsi tra loro. Grazie al principio di continuita della correnteelettrica si ottiene:
d
dt
∮S
D · dS = −∮
S
J · dS =dq
dt
Confrontando il primo e l’ultimo termine dell’equazione precedente e tenendopresente che in assenza di carica il campo elettrostatico e nullo si ricava∮
S
D · dS = q
soluzione coincidente con il teorema di Gauss, ovvero con l’equazione 3 diMaxwell. Tenendo presente che la continuita della corrente deriva direttamentedal principio di conservazione della carica, e quindi possibile ritenere l’equazione3 come un’enunciazione della conservazione della carica.
2.4 Condizioni al contorno
Le equazioni di Maxwell, espresse in forma integrale, possono essere utilmentesfruttate per caratterizzare il comportamento dei vettori del campo elettroma-gnetico in corrispondenza della superficie di separazione tra due mezzi differenti.L’applicazione delle leggi di Maxwell e tuttavia possibile solo ammettendo chei campi e le loro derivate siano funzioni continue e pertanto e richiesto che an-che le proprieta della materia varino in modo continuo attraverso la superficie diseparazione tra i due mezzi. Tale requisito non puo essere soddisfatto, dal puntodi vista concettuale, poiche l’interfaccia tra due mezzi e caratterizzata da dis-continuita. Per risolvere il problema, possiamo allora immaginare, almeno perfenomeni macroscopici, l’esistenza di un sottile “strato di transizione” tra i duemezzi, di spessore h→ 0, in cui si verifica una variazione continua della permet-tivita elettrica e della permeabilita magnetica dai valori relativi a un mezzo aquelli corrispondenti all’altro. In questo modo, i campi e le loro derivate preser-vano la loro continuita anche al passaggio tra due materiali diversi e quindi leequazioni di Maxwell possono essere correttamente applicate.
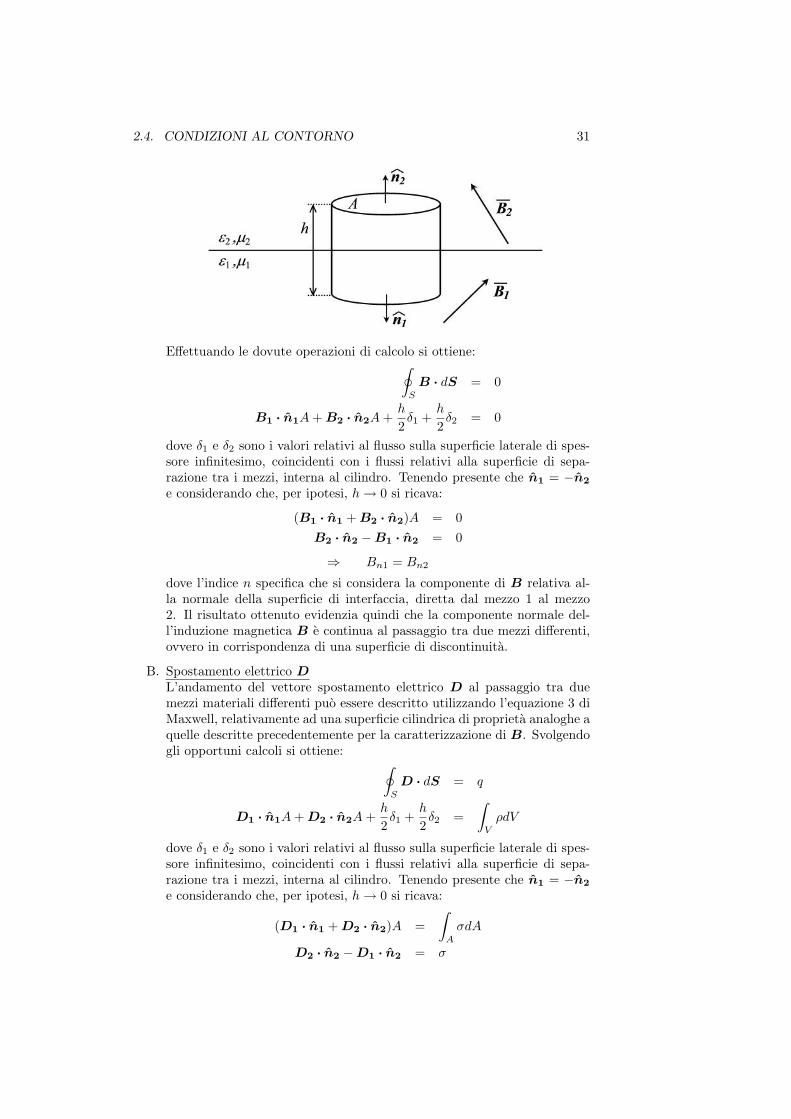
A. Induzione magnetica BLa variazione del campo magnetico B da un mezzo all’altro puo essereevidenziata applicando l’equazione 4 di Maxwell ad una superficie oppor-tuna comprendente l’interfaccia tra i due materiali: un cilindro retto conasse perpendicolare al piano di interfaccia tra i mezzi (a meta tra di essi),altezza h→ 0 (tale da mantenere il cilindro entro lo strato di transizione)e superficie di base A finita ma arbitrariamente piccola.
2.4. CONDIZIONI AL CONTORNO 31
Effettuando le dovute operazioni di calcolo si ottiene:∮S
B · dS = 0
B1 · n1A+ B2 · n2A+h
2δ1 +
h
2δ2 = 0
dove δ1 e δ2 sono i valori relativi al flusso sulla superficie laterale di spes-sore infinitesimo, coincidenti con i flussi relativi alla superficie di sepa-razione tra i mezzi, interna al cilindro. Tenendo presente che n1 = −n2
e considerando che, per ipotesi, h→ 0 si ricava:
(B1 · n1 + B2 · n2)A = 0B2 · n2 −B1 · n2 = 0
⇒ Bn1 = Bn2
dove l’indice n specifica che si considera la componente di B relativa al-la normale della superficie di interfaccia, diretta dal mezzo 1 al mezzo2. Il risultato ottenuto evidenzia quindi che la componente normale del-l’induzione magnetica B e continua al passaggio tra due mezzi differenti,ovvero in corrispondenza di una superficie di discontinuita.
B. Spostamento elettrico DL’andamento del vettore spostamento elettrico D al passaggio tra duemezzi materiali differenti puo essere descritto utilizzando l’equazione 3 diMaxwell, relativamente ad una superficie cilindrica di proprieta analoghe aquelle descritte precedentemente per la caratterizzazione di B. Svolgendogli opportuni calcoli si ottiene: ∮
S
D · dS = q
D1 · n1A+ D2 · n2A+h
2δ1 +
h
2δ2 =
∫V
ρdV
dove δ1 e δ2 sono i valori relativi al flusso sulla superficie laterale di spes-sore infinitesimo, coincidenti con i flussi relativi alla superficie di sepa-razione tra i mezzi, interna al cilindro. Tenendo presente che n1 = −n2
e considerando che, per ipotesi, h→ 0 si ricava:
(D1 · n1 + D2 · n2)A =∫
A
σdA
D2 · n2 −D1 · n2 = σ

32 CAPITOLO 2. EQUAZIONI DI MAXWELL
⇒ Dn2 −Dn1 = σ
dove l’indice n specifica che si considera la componente di B relativa allanormale della superficie di interfaccia, diretta dal mezzo 1 al mezzo 2 e σrappresenta la densita di carica relativa all’interfaccia stessa (il passaggioda ρ a σ e giustificato considerando che, per h→ 0, il volume si appiattiscesu una superficie e, ammettendo, per ipotesi, che ρ sia uniforme, in modoche anche σ sia uniforme). Il risultato ottenuto evidenzia quindi che lacomponente normale dello spostamento elettrico D e continua al passaggiotra due mezzi differenti a meno di una densita di carica superficiale.
C. Intensita elettrica E
Il comportamento del vettore campo elettrico E in corrispondenza del-l’interfaccia tra due differenti mezzi puo essere caratterizzato mediantecalcolo dell’integrale relativo all’equazione 1 di Maxwell. Tale operazionerichiede di definire un circuito C di integrazione opportuno: si consideraallora un rettangolo, collocato perpendicolarmente al piano di separazionetra i due mezzi, posizionato in modo da giacere per meta in un mezzo permeta nell’altro; i due lati piu lunghi (paralleli all’interfaccia tra i dielettri-ci) sono caratterizzati da lunghezza l, gli altri due hanno invece lunghezzah, corrispondente allo spessore dello strato di transizione (i lati sono as-sunti cosı corti che E puo essere ritenuto costante lungo ciascun lato delcircuito). La superficie A puo essere allora considerata come una qualsi-asi superficie di cui C e il contorno (poiche A puo essere presa piccola apiacere, si puo ritenere che su di essa il campo B sia costante). Svolgendol’integrale sul circuito cosı definito si ricava:∮
C
E · dr = −∫
A
∂B
∂t· dA
E1 · t1l + E1 · n1h
2+ E2 · t2l + E2 · n2
h
2= −dB
dtl · h
Passando al limite per h→ 0 e tenendo presente che tra i versori tangen-ziali considerati sussistono le relazioni t1 = −t2, l’espressione precedentepuo essere riscritta come
(E1 · t1 + E2 · t1)l = 0E2 · t2 −E1 · t2l = 0
⇒ Et1 = Et2
Si conclude quindi che il campo elettrico, al passaggio da un mezzo all’al-tro, conserva inalterata la propria componente tangenziale.

2.5. EQUAZIONI DI MAXWELL IN MEZZI OMOGENEI, ISOTROPI E LINEARI33
D. Intensita magnetica HLa caratterizzazione dell’andamento dell’intensita magnetica in corrispon-denza di una superficie di discontinuita tra mezzi materiali differenti,puo essere condotta facilmente applicando l’integrale dell’equazione 4 diMaxwell ad un circuito chiuso C di proprieta pari a quelle descritte prece-dentemente per E (in particolare, le dimensioni di C sono assunte suffi-cientemente piccole da poter ritenere il campo costante H lungo ciascunlato e, inoltre, la corrispondente superficie A e definita in modo da poterritenere costanti le correnti di conduzione J e quelle di spostamento D):∮
C
H · dr =∫
A
(∂D
∂t+ J
)· dA
H1 · t1l + H1 · n1h
2+ H2 · t2l + H2 · n2
h
2= J ′ · h · l
Il passaggio al limite per h→ 0 non comporta problemi per quanto riguar-da il termine di sinistra dell’equazione; la parte destra dell’uguaglianzainvece introduce alcune problematiche legate alla possibile presenza di cor-renti pellicolari. Mentre nel caso di campi a bassa frequenza la correnteequivalente J ′ in corrispondenza della superficie tra i mezzi e limitata equindi, al limite, il termine di destra e nullo, in condizioni di correnti adalta frequenza si riscontra un’elevata concentrazione di corrente sull’inter-faccia e pertanto si ottiene che, per h→ 0, il prodotto J ′ · h→ Il, dove Ile una densita di corrente lineare, corrispondente alla corrente pellicolareche fluisce attraverso l’interfaccia tra i mezzi. Considerando che t1 = −t2si ricava allora:
(H1 · t1 + H2 · t2)l = Il · lH2 · t2 −H1 · t2 = Il
⇒ Ht2 −Ht1 = Il
Si conclude quindi che, a meno della presenza di correnti pellicolari, alpassaggio da un mezzo all’altro, la componente tangenziale dell’intensitamagnetica H si conserva inalterata.
2.5 Equazioni di Maxwell in mezzi omogenei,isotropi e lineari
Prima di introdurre le semplificazioni attese per le equazioni di Maxwell, ricor-diamo le proprieta della categoria di mezzi considerati:
• OMOGENEITA: un mezzo si definisce omogeneo se presenta composizionechimica uniforme.
• ISOTROPIA: un mezzo e isotropo se il suo comportamento fisico e in-dipendente dall’orientamento.
• LINEARITA: un mezzo e detto lineare se il suo comportamento fisico puoessere espresso mediante relazioni lineari.

34 CAPITOLO 2. EQUAZIONI DI MAXWELL
Le proprieta elettriche e magnetiche di un mezzo che sia contemporaneamenteomogeneo, isotropo e lineare possono essere descritte mediante semplici re-lazioni:
D = εE
B = µH
J = σE
dove le costanti ε, µ e σ sono, rispettivamente, la permettivita elettrica, lapermeabilita magnetica e la conducibilita del mezzo considerato. Poiche talicostanti sono dipendenti dalla frequenza dei campi corrispondenti, e possibileevitare queste complicazioni immaginando di considerare il materiale collocatonello spazio libero.
Alla luce delle relazioni tra i vettori di campo precedentemente evidenziate leequazioni di Maxwell possono essere espresse, relativamente ai mezzi omogenei,isotropi e lineari, in forma piu semplice, utilizzando i soli vettori E e B:
1. ∇×E = −∂B
∂t2. ∇×B = µJ + µε
∂E
∂t
3. ∇·E =ρ
ε4. ∇·B = 0
a cui si aggiunge l’equazione di continuita della corrente:
∇·E +1σ
∂ρ
∂t= 0
2.6 Potenziale vettore e scalare
Sebbene il campo magnetico B non sia conservativo, esso puo essere comunquecaratterizzato a mezzo di una funzione potenziale vettore A(r,t). In particolare,sfruttando l’equazione 4 di Maxwell (indipendente dalle sorgenti di campo), sipuo facilmente intuire che, per mantenere sempre verificata la relazione, B deveessere espresso come
B = ∇×A
infatti∇·B = ∇·(∇×A)) = 0
condizione sempre verificata in base alla definizione degli operatori rotore edivergenza.
Anche il campo elettrico puo essere espresso in termini di funzioni poten-ziale, vettore e scalare. Considerando l’equazione 1 di Maxwell (anch’essa in-dipendente dalle sorgenti), sostituendo la definizione data di B in termini delpotenziale vettore A si ottiene:
∇×E = −∂B
∂t= − ∂
∂t(∇×A) = −∇×∂A
∂t
∇×(
E +∂A
∂t
)= 0

2.6. POTENZIALE VETTORE E SCALARE 35
⇒ E = −∂A
∂t−∇φ
dove φ = φ(r,t) e la funzione potenziale scalare.Per ottenere delle equazioni differenziali tali da correlare i potenziali vettoree scalare con le sorgenti del campo elettromagnetico occorre sostituire nellerestanti equazioni di Maxwell (2 e 3) le equazioni ottenute di B ed E in terminidei potenziali. Per poter operare in modo semplice tali sostituzioni limitiamo lanostra trattazione al caso dei mezzi omogenei, isotropi e lineari. Considerandol’equazione 2 si ottiene
∇×(∇×A) = µJ − µε∂
∂t
(∂A
∂t+ ∇φ
)∇(∇·A)−∇2A = µJ − µε
∂2A
∂t2− µε∇∂φ
∂t
⇒ ∇2A− µε∂2A
∂t2+ µJ = ∇
(∇·A + µε
∂φ
∂t
)L’equazione 3 puo invece essere riformulata come:
−∇·(∂A
∂t+ ∇φ
)=
ρ
ε
⇒ ∇·(∂A
∂t
)+∇2φ = −ρ
ε
Le due equazioni ottenute forniscono le espressioni dei potenziali funzionalmentelegati alle densita di carica ρ e di corrente J , ovvero alle sorgenti del campo.
2.6.1 Trasformazioni di gauge
In base alla definizione data di A risulta evidente che tale funzione non e uni-vocamente determinata: fissato un dato campo B essa puo essere indicata ameno del gradiente di una funzione scalare. Se infatti consideriamo un nuovopotenziale vettore dato da
A′ = A + ∇ψ
esso e comunque ugualmente corretto per la caratterizzazione dello stesso campoB in quanto, tenendo presente che, per definizione, il rotore di un gradiente eidenticamente nullo, si ottiene
B = ∇×A′ = ∇×A + ∇×(∇ψ) = ∇×A
L’indeterminazione di A si riflette direttamente anche nella determinazionedei potenziali vettore e scalare relativi al campo elettrico E. Sostituendo il nuovopotenziale vettore A′ nell’equazione 1 di Maxwell e ripetendo le operazioni giaconsiderate in precedenza si ottiene infatti un’espressione equivalente del campo:
∇×E = −∂B
∂t= − ∂
∂t(∇×A′) = −∇×∂A′
∂t
⇒ E = −∂A′
∂t−∇φ′

36 CAPITOLO 2. EQUAZIONI DI MAXWELL
dove φ′ = φ′(r,t) e la nuova funzione potenziale scalare associata al potenzialevettore A′.
E’ allora evidente che, per ottenere una rappresentazione dello stesso campoelettrico E, se viene modificata la definizione del potenziale vettore A e ne-cessario introdurre una variazione del potenziale scalare φ. La trasformazionedalle definizioni originarie (A, φ) a quelle finali (A′, φ) prende il nome ditrasformazione di gauge e puo essere ricavata dalle espressioni precedentementeottenute per il campo elettrico E:
E = −∂A
∂t−∇φ
E = −∂A′
∂t−∇φ′
Sottraendo membro a membro e sfruttando la definizione di A′ = A + ∇ψ, siottiene:
∂
∂t(A′ −A) + ∇(φ′ − φ) = 0
∇(∂ψ
∂t
)+ ∇(φ′ − φ) = 0
∇(∂ψ
∂t+ φ′ − φ
)= 0
∂ψ
∂t+ φ′ − φ = cost
⇒ φ′ = φ− ∂ψ
∂t+ cost
Fissati i valori iniziali A, φ dei potenziali (in base alla configurazione particolaredelle sorgenti), definita la funzione ψ arbitraria, i valori dei nuovi potenziali A′
e φ′ (detti gauges) sono definiti di conseguenza dalle relazioni precedentementericavate:
A′ = A + ∇ψ
φ′ = φ− ∂ψ
∂t+ cost
Per una qualsiasi trasformazione di gauge la fisica e fissata; in particolare, leequazioni di Maxwell mantengono la loro generale validita indipendentementedal sistema di riferimento considerato.
2.6.2 Condizione di Lorentz
Poiche in generale i potenziali vettore e scalare sono funzioni non definite inmaniera univoca, anche le equazioni precedentemente ottenute che esprimonola loro dipendenza dalle sorgenti non sono determinate ma ammettono infi-nite soluzioni. Per selezionare una soluzione particolare possiamo allora ricor-rere all’imposizione di una condizione iniziale. Considerando le due equazioni

2.6. POTENZIALE VETTORE E SCALARE 37
suddette
∇2A− µε∂2A
∂t2+ µJ = ∇
(∇·A + µε
∂φ
∂t
)∇·(∂A
∂t
)+∇2φ = −ρ
ε
risulta particolarmente utile imporre come condizione l’equazione seguente (det-ta condizione di Lorentz ):
∇·A′ + µε∂φ′
∂t= 0
Tale imposizione comporta una corrispondente trasformazione di gauge daipotenziali iniziali (A, φ) a quelli desiderati (A′, φ′), detti Lorentz gauges, de-scritta a mezzo di una funzione scalare ψ. Ricordando le definizioni generali deipotenziali trasformati A′ e φ′, riportate in precedenza, per sostituzione nellacondizione di Lorentz si ottiene
∇·(A + ∇ψ) + µε∂
∂t
(φ− ∂ψ
∂t
)= 0
−∇2ψ + µε∂2ψ
∂t2= ∇·A + µε
∂φ
∂t
dove A e φ sono i potenziali non trasformati. La condizione di Lorentz e allorasoddisfatta applicando ai potenziali una trasformazione di gauge definita da unadelle funzioni ψ soluzione dell’equazione differenziale sopra riportata.
Il ricorso alla condizione di Lorentz comporta una notevole semplificazionedelle equazioni differenziali relative ai potenziali:
∇2A′ − µε∂2A′
∂t2+ µJ = 0
∇2φ′ − µε∂2φ′
∂t2+ρ
ε= 0
Si noti che entrambe le equazioni cosı ottenute sono espresse nella medesimaforma matematica (si tratta di equazioni d’onda non omogenee) e che le due va-riabili A e φ sono definite indipendentemente tra loro. E’ importante osservare,inoltre, che l’introduzione della condizione di Lorentz non permette di definiredei valori univoci di potenziale: tutte le possibili soluzioni delle equazioni d’ondadisomogenee considerate soddisfano infatti le condizioni imposte. Se pertantoconsideriamo una funzione f che soddisfi l’equazione d’onda omogenea
∇2f − µε∂2f
∂t= 0
e poniamo
A′ = A−∇f φ′ = φ+∂f
∂t
i nuovi valori dei potenziali (A′ e φ′) soddisfano le equazioni ottenute dalleLorentz gauges.
Un altra importante considerazione relativa alle due equazioni dei potenzialie che mentre A dipende solo dalla distribuzione di corrente specificata J , φ

38 CAPITOLO 2. EQUAZIONI DI MAXWELL
e determinato dalla distribuzione di carica ρ. Le due sorgenti possibili peril campo elettromagnetico appartengono quindi a due equazioni indipendentie pertanto, nella condizione di Lorentz, esse non presentano apparentementealcun legame. In realta effettuando alcune manipolazioni sulle equazioni datepossiamo facilmente ricavare che la condizione di Lorentz non e altro che unaenunciazione equivalente del principio di continuita della corrente, ovvero dellarelazione che lega J e ρ. Per evidenziare questo fatto modifichiamo le equazionicome indicato di seguito:
∇·(
∇2A′ − µε∂2A′
∂t2
)= −µ∇·J
µε∂
∂t
(∇2φ′ − µε
∂2φ′
∂t2
)= −µε ∂
∂t
ρ
ε∇2(∇·A′)− µε
∂2
∂t2(∇·A′) = −µ∇·J
∇2
(µε∂φ′
∂t
)− µε
∂2
∂t2
(µε∂φ′
∂t
)= −µ∂ρ
∂t
sommando membro a membro si ottiene
∇2
(∇·A′ + µε
∂φ′
∂t
)− µε
∂2
∂t
(∇·A′ + µε
∂φ′
∂t
)= −µ
(∇·J +
∂ρ
∂t
)Si ricava pertanto che il fatto di imporre la condizione di Lorentz implica ilprincipio di continuita della corrente e viceversa:
∇·A′ + µε∂φ′
∂t= 0 ⇐⇒ ∇·J +
∂ρ
∂t= 0
2.7 Teorema di Poynting
La conservazione dell’energia elettromagnetica in un mezzo puo essere descrittadefinendo un opportuno vettore, detto vettore di Poynting N , le cui caratteri-stiche derivano direttamente da una manipolazione delle equazioni di Maxwell.Per ricavare l’espressione esplicita di N , verificando il suo significato energeticosi puo operare sulle equazioni di Maxwell moltiplicando scalarmente l’equazione1 per H e moltiplicando l’equazione 2 per E:
H · (∇×E) = −H · ∂B
∂t
E · (∇×H) = E · J + E · ∂D
∂t
Sottraendo la prima equazione del sistema alla seconda si ottiene
E · (∇×H)−H · (∇×E) = E · J + E · ∂D
∂t+ H · ∂B
∂t

2.7. TEOREMA DI POYNTING 39
Tenendo presente la proprieta 3 dell’operatore divergenza ∇·(F1×F2) = F2 ·(∇×F1)− F1 · (∇×F2) (vedi Appendice) si ricava
−∇·(E×H) = E · J + E · ∂D
∂t+ H · ∂B
∂t
Considerando il mezzo in cui si opera omogeneo, isotropo e lineare valgono leseguenti relazioni:
D = εE B = µH J = σE
12ε∂E2
∂t=
12ε∂
∂t(E · E) =
12ε
(∂E
∂t· E + E · ∂E
∂t
)= εE · ∂E
∂t= E · ∂D
∂t
12µ∂H2
∂t=
12µ∂
∂t(H · H) =
12µ
(∂H
∂t· H + H · ∂H
∂t
)= µH · ∂H
∂t= H · ∂B
∂t
e pertanto l’equazione precedente puo essere riscritta come
∇·(E×H) + σE2 +∂
∂t
(12εE2 +
12µH2
)= 0
Il vettore di Poynting N puo essere definito come il prodotto vettoriale tra idue campi, elettrico E e magnetico H:
N = E×H
e il suo significato puo essere interpretato in base alla sua divergenza, corrispon-dente al teorema di Poynting:
∇·N + σE2 = − ∂
∂t
(12εE2 +
12µH2
)dove il termine σE2 rappresenta l’espressione microscopica della legge di Ohme corrisponde alla densita di energia dissipata nell’unita di tempo per effettoJoule; la quantita 1
2εE2 corrisponde alla densita di energia associata al campo
elettrico e 12µH
2 e la densita di energia relativa al campo magnetico. Con-siderando quindi il significato fisico dell’operatore divergenza possiamo inter-pretare il teorema di Poynting come un bilancio energetico relativo al campoelettromagnetico, in base al quale si ottiene che l’energia che fuoriesce da unelemento di volume nell’unita di tempo sommata a quella dissipata per effettoJoule e esattamente pari alla velocita di diminuzione dell’energia immagazzinatanel campo elettromagnetico stesso.
Tale interpretazione puo essere resa piu immediata mediante rappresen-tazione del teorema di Poynting in forma integrale:∫
V
NdV =∮
S
N · dS = −∫
V
E · JdV − d
dt
∫V
(12εE2 − 1
2µH2
)dV
dove, nel primo passaggio, si e fatto uso del teorema della divergenza. Analiz-zando i termini che compaiono a destra si evidenzia che essi rappresentano valoridi potenza: l’integrale relativo alle densita di corrente corrisponde alla potenzadissipata per effetto Joule; gli integrali corrispondenti alle densita di energia deicampi elettrico e magnetico forniscono l’energia elettromagnetica contenuta nel

40 CAPITOLO 2. EQUAZIONI DI MAXWELL
volume considerato e, poiche tale quantita e derivata rispetto al tempo, nel-l’equazione di Poynting essa corrisponde alla velocita di variazione dell’energiatotale contenuta nel volume considerato. Allora, il vettore di Poynting N inte-grato sulla superficie S che racchiude il volume considerato rappresenta il flussocomplessivo di energia e pertanto N corrisponde alla densita di flusso elettro-magnetico ovvero alla quantita di energia elettromagnetica che fluisce nell’unitadi tempo, attraverso una superficie unitaria, normale alla direzione del flusso.
Capitolo 3
Onde elettromagnetiche
Uno degli aspetti piu importanti e significativi della teoria dell’elettromag-netismo di Maxwell e il fatto che essa contiene in se la previsione delle onde elet-tromagnetiche ovvero individua la propagazione dei campi elettrici e magneticimediante oscillazioni periodiche nello spazio. Cio significa che attraverso l’appli-cazione delle equazioni di Maxwell e possibile descrivere tutti i fenomeni legatialla propagazione di segnali elettromagnetici ondulatori: riflessione, rifrazione,riflessione totale.
3.1 Equazioni delle onde elettromagnetiche
L’espressione relativa alla propagazione di un campo elettrico puo essere rica-vata calcolando il rotore dei termini che figurano nell’equazione 1 di Maxwell esostituendovi l’equazione 3:
∇×(−µ∂H
∂t
)= ∇×(∇×E)
−µ ∂∂t
(∇×H) = ∇(∇·E)−∇2E
−µ ∂∂t
(ε∂E
∂t+ J
)= ∇(∇·E)−∇2E
−µε∂2E
∂t2+ µJ = ∇(∇·E)−∇2E
Considerando la legge di Ohm microscopica (J = σE) e l’equazione 3 di Maxwell,riferita alla condizione di assenza di cariche, si ricava
∇2E − µε∂2E
∂t2− µε
∂E
∂t= 0
che rappresenta l’equazione d’onda generale del campo elettrico.L’equazione relativa alla propagazione del campo magnetico puo essere rica-
vata in modo analogo al campo elettrico calcolando il rotore di entrambi i mem-bri dell’equazione 2 di Maxwell e sostituendo nel risultato ottenuto l’espressione
41

42 CAPITOLO 3. ONDE ELETTROMAGNETICHE
fornita dall’equazione 1:
∇×(ε∂E
∂t+ J
)= ∇×(∇×H)
ε∂
∂t(∇×E) + ∇×J = ∇(∇·H)−∇2H
ε∂
∂t
(−µ∂H
∂t
)+ ∇×J = ∇(∇·H)−∇2H
−µε∂2H
∂t2+ ∇×J = ∇(∇·H)−∇2H
Considerando l’equazione 4 di Maxwell e la legge di Ohm microscopica (J = σE)si ottiene
−µε∂2H
∂t2+ σ∇×E = −∇2H
∇2H − µε∂2H
∂t2− µε
∂H
∂t= 0
che corrisponde all’equazione d’onda generale del campo magnetico.Osservando le due equazioni ottenute per la propagazione del campo elet-
tromagnetico, occorre tener presente che, in generale, le due soluzioni non sonoindipendenti tra loro ma sono legate tranmite le equazioni di Maxwell: e quindisufficiente ricavare la soluzione relativa all’equazione d’onda di un campo perottenere l’espressione corrispondente per l’altro.
Dal punto di vista della struttura matematica e possibile rilevare che ledue equazioni ottenute sono caratterizzate dalla somma di un termine periodico
(dato da ∇2+∂2
∂t2) e un termine aperidico (corrispondente a µε
∂
∂t) che esprime
un decadimento esponenziale dell’ampiezza dell’onda, dovuto allo smorzamentoindotto dal mezzo. A seconda del tipo di materiale in cui l’onda si propaga sipossono ottenere situazioni in cui uno dei termini presenti risulta praticamentenullo. Nel caso di un dielettrico ideale il termine di smorzamento e trascurabilein quanto σ ≈ 0 e pertanto le equazioni d’onda diventano
∇2E − µε∂2E
∂t2= 0
∇2H − µε∂2H
∂t2= 0
Se consideriamo invece che la propagazione del campo elettromagnetico avven-
ga all’interno di un materiale conduttore il termine µε∂2
∂t2puo essere a ragione
trascurato e pertanto le equazioni che ne derivano sono corrispondenti a quelledi un fenomeno di diffusione, senza propagazione di onde.
Le soluzioni generali dell’equazione d’onda ottenuta per la propagazione deicampi elettromagnetici nei dielettrici sono infinite e differenti le une dalle altrema tutte consistono in funzioni della quantita u = r±vt dove v e la velocita dipropagazione dell’onda stessa, detta velocita di fase. Se per semplicita ci limi-tiamo alla sola componente x dell’onda, una generica soluzione dell’equazionegenerale avra la forma
G(x, t) = A · g1(x+ vt) +B · g2(x− vt)

3.1. EQUAZIONI DELLE ONDE ELETTROMAGNETICHE 43
Se cosideriamo una qualsiasi funzione g = g(u), soluzione dell’equazione d’onda,possiamo ricavare v per sostituzione diretta:
∂2Ex
∂x2− µε
∂2Ex
∂t2= 0
considerando la funzione g = g(u) e u = x− vt per le regole di derivazione dellafunzione composta otteniamo
∂g
∂t=∂g
∂u
∂u
∂t= −v ∂g
∂t∂g
∂t2=
∂
∂t
(∂g
∂t
)=
∂
∂t
(−v ∂g
∂u
)= −v ∂
∂u
(−v ∂g
∂u
)= v2 ∂
2g
∂u2
∂g
∂x=∂g
∂u
∂u
∂x=∂g
∂u∂2g
∂x2=
∂
∂x
(∂g
∂x
)=
∂
∂x
(∂g
∂u
)=
∂
∂u
(∂g
∂u
)=∂2g
∂u2
sostituendo nell’equazione d’onda di partenza otteniamo
∂2g
∂uu− µεv2 ∂
2g
∂u2= 0(
1− µεv2) ∂2g
∂u2= 0
per far sı che l’equazione sia soddisfatta occorre quindi che
v =1√µε
da questa trattazione, definita la velocita di propagazione dell’onda nel mezzoconsiderato si puo osservare l’esistenza di una relazione di dipendenza tra lapermittivita elettrica e la permeabilita magnetica.
3.1.1 Onde elettromagnetiche piane
Le onde elettromagnetiche possono essere caratterizzate da funzioni molto dif-ferenti, tali da soddisfare l’equazione d’onda ricavata dalle equazioni di Maxwell.Tra le possibili soluzioni quelle di maggiore interesse sono senza dubbio le ondepiane, sia per la loro semplicita matematica, sia per l’estensione ad un elevatonumero di casi reali: qualsiasi onda reale, a distanza sufficientemente elevatadalla sorgente ed entro porzioni opportunamente limitate, puo essere rappre-sentata, con buona approssimazione, da onde piane. Inoltre mediante analisi diFourier, qualunque tipo di onda puo essere descritto come sovrapposizione diopportune onde piane.
Un onda piana e definita a mezzo di fronti d’onda piani. Cio significa che,considerando un qualsiasi istante, la perturbazione presente su ciascun pianoperpendicolare alla direzione di propagazione e uniforme e funzione solamentedella distanza del piano da un’origine fissata lungo il percorso di propagazione.Considerando quindi un onda elettromagnatica piana che si propaga lungo la

44 CAPITOLO 3. ONDE ELETTROMAGNETICHE
direzione dell’asse x, essa sara caratterrizzata da un campo elettrico E = E(x, t)e da un campo magnetico H = H(x, t) e pertanto ne consegue che
∂E
∂y= 0 ⇒ ∂Ex
∂y=∂Ey
∂y=∂Ez
∂y= 0
∂E
∂z= 0 ⇒ ∂Ex
∂z=∂Ey
∂z=∂Ez
∂z= 0
considerazioni analoghe valgono per il campo magnetico H. L’onda pianae inoltre caratterizzata dall’assenza di perturbazione in corrispondenza delladirezione di propagazione ovvero essa consiste in un’onda trasversale:
Ex = 0 Hx = 0
Quest’ultima proprieta puo essere ricavata direttamente da quella relativaall’uniformita sui piani perpendicolari alla direzione di propagazione: se consi-deriamo l’equazione 3 di Maxwell, in condizioni di assenza di carica, otteniamoche
∇·E = 0 ⇒ ∂Ex
∂x+∂Ey
∂y+∂Ez
∂z= 0
ma, essendo per ipotesi il campo uniforme rispetto alle direzioni y e z l’equazioneprecedente si riduce a
∂Ex
∂x= 0
da cui consegue che il campo elettrico relativo alla direzione di propagazionee stazionario. Considerando invece l’equazione 2 di Maxwell rispetto alla solacomponente x si ricava:
(∇×H)x = ε∂Ex
∂t∂Hz
∂y− ∂Hy
∂z= ε
∂Ex
∂t
e, sempre per l’uniformita sui piani perpendicolari
∂Ex
∂t= 0
che significa che il campo su x e uniforme. Si conclude quindi che il cam-po elettrico, lungo la direzione di propagazione dell’onda e uniformemente ecostantemente nullo.
In maniera del tutto analoga si dimostra che anche il campo magnetico He costantemente e uniformemente nullo secondo la direzione di propagazione.Dall’equazione 4 di Maxwell si ricava
∇·H = 0 ⇒ ∂Hx
∂x+∂Hy
∂y+∂Hz
∂z= 0 ⇒ ∂Hx
∂x= 0
che indica l’uniformita del campo; dall’equazione 1 di Maxwell relativa allacomponente x si ottiene
(∇×E)x = −µ∂Hx
∂t∂Ez
∂y− ∂Ey
∂z= −µ∂Hx
∂t
∂Hx
∂t= 0

3.1. EQUAZIONI DELLE ONDE ELETTROMAGNETICHE 45
che indica la stazionarieta del campo. Di conseguenza risulta corretto affermareche Hx = 0.
Sfruttando la proprieta di uniformita delle onde piane, l’equazione vettorialedelle onde elettromagnetiche
∇2E − µε∂2E
∂t2= 0
si riduce a due equazioni scalari relative alle componeneti del campo non nulle:mentre sull’asse x il campo e, per ipotesi, uniformemente e costantemente nullo,lungo la direzione dell’asse y esso e dato da
∂2Ey
∂x2+∂2Ey
∂y2+∂2Ey
∂z2− µε
∂2Ey
∂t2= 0
∂2Ey
∂x2− µε
∂2Ey
∂t2= 0
secondo l’asse z, invece, si ottiene
∂2Ez
∂x2+∂2Ez
∂y2+∂2Ez
∂z2− µε
∂2Ey
∂t2= 0
∂2Ez
∂x2− µε
∂2Ez
∂t2= 0
Come si puo notare le due equazioni sono a variabili separate ovvero non esistealcuna dipendenza funzionale tra la componente del campo elettrico sull’asse y(Ey) e quella relativa all’asse z (Ez).
Analogamente si ricavano le equazioni relative alla propagazione del campomagnetico
∂2Hy
∂x2− µε
∂2Hy
∂t2= 0
∂2Hz
∂x2− µε
∂2Hz
∂t2= 0
anche in questo caso le equazioni sono disaccoppiate tra loro e quindi non esistealcuna interdipendenza tra i valori che il campo assume sull’asse y e quellirelativi all’asse z. Si noti che, come previsto dalla definizione di onda piana ilcampo elettromagnetico ha valore non nullo solo nelle direzioni perpendicolaria quella di propagazione (rappresentata dal vettore velocita v).In virtu delle equazioni 1 e 2 di Maxwell, i campi elettrico e magnetico nonsono indipendenti tra loro. Se consideriamo l’equazione 2 e ci limitiamo allasola componente lungo l’asse y otteniamo:
(∇×H)y = ε∂Ey
∂t∂Hx
∂z− ∂Hz
∂x= ε
∂Ey
∂t
−∂Hz
∂x= ε
∂Ey
∂t

46 CAPITOLO 3. ONDE ELETTROMAGNETICHE
Poiche in generale tutte le soluzioni dell’equazione d’onda sono definite rispettoalla forma g = g(u) con u = x± vt, tenendo presente le relazioni
∂g
∂t= ±v ∂g
∂u
∂g
∂x=∂g
∂u
l’espressione precedentemente ottenuta relativa alla dipendenza tra Ey e Hz puoessere espressa come
±εv ∂Ey
∂u= −∂Hz
∂uIntegrando i membri dell’equazione e trascurando qualsiasi eventuale costantesi ottiene ∫
±εv ∂Ey
∂udu =
∫∂Hz
∂udu
±εvEy = Hz
dove nell’ultima equazione si e introdotto il valore ottenuto per la velocita dipropagazione dell’onda. Come evidente, fissato il campo elettrico nella direzionedell’asse y, il campo magnetico oscilla lungo la direzione perpendicolare definitadall’asse z. Analogamente, ripetendo il ragionamento considerando la compo-nente z del campo elettrico si conclude che il corrispondente campo magneticoe orientato nella direzione dell’asse y cioe comunque perpendicolare al campoelettrico. In definitiva, quindi, fissata la direzione e il modulo del campo elet-trico E, il campo magnetico H ha intensita definita dalla relazione precedenteed e orientato sempre perpendicolarmente al vettore E stesso.
3.1.2 Polarizzazione
Considerazione particolarmente importante e legata al concetto di polarizzazione.In generale un onda elettromagnetica e definita linearmente (o planarmente)polarizzata se il campo elettrico (e di conseguenza il campo magnetico) e carat-terizzato da una direzione di oscillazione fissata e invariante nel tempo. La pos-sibilita di ottenere onde elettromagnetiche polarizzate e mostrata direttamentedal fatto che le due equazioni relative alle componenti del campo elettrico sudue assi ortogonali alla direzione di propagazione sono disaccoppiate e pertan-to fissata l’oscillazione del campo nella direzione di uno degli assi (y), rispettoall’asse ortogonale (z) il campo si mantiene inalterato e costantemente nullo. Ilpiano all’interno del quale avviene l’oscillazione del campo elettrico viene dettopiano di polarizzazione e, di conseguenza, il campo magnetico oscilla perpendi-colarmente ad esso. Un onda elettromagnetica si definisce invece non polarizzatao polarizzata casualmente se la direzione di oscillazione del campo elettrico (equindi del campo magnetico) varia in ogni istante e in ogni punto in manieracompletamente irregolare. In questo caso l’onda ha uguale probabilita di oscil-lare lungo qualsiasi direzione del piano yz e pertanto le componenti Ey ed Ez
presentano, in media, la stessa intensita ma sono in relazione di fase completa-mente casuale; l’onda non polarizzata puo allora essere descritta tramite le duecomponenti ortogonali del campo elettrico Ey ed Ez, definite dalla medesimaampiezza ma da sfasamento del tutto casuale: si tratta quindi di considerarel’onda non polarizzata come composizione di due identiche onde linearmentepolarizzate i cui piani di polarizzazione sono mutuamente perpendicolari.

3.2. TEOREMA DI FOURIER 47
3.2 Teorema di Fourier
Dall’elaborazione delle equazioni di Maxwell abbiamo ricavato che le onde elet-tromagnetiche sono descritte in generale da funzioni qualsiasi definite rispettoalla variabile u = r ± vt. Sappiamo inoltre che il modello delle onde pianesoddisfa l’equazione generale delle onde e pertanto, considerata la semplicita ditrattazione di queste ultime, risulta alquanto utile poter descrivere qualsiasi on-da mediante onde piane. Tale risultato e reso possibile attraverso l’applicazionedel teorema di Fourier, in base al quale un qualsiasi segnale (sia periodico chenon) puo essere definito tramite sovrapposizione di armoniche elementari cor-rispondenti a onde piane sinusoidali e cosinusoidali. Tale possibilita deriva diret-tamente dal fatto che funzioni seno e coseno del tipo sin (2πnν0t) e cos (2πnν0t)definiscono un sistema ortonormale completo e costituiscono, quindi, una basedello spazio relativo a tutte le possibili funzioni d’onda. Essendo le funzioniseno e coseno soluzioni possibili delle onde elettromagnetiche, interpretate comeonde piane, qualsiasi funzione d’onda F (t), comunque complessa, per la pro-prieta di completezza puo essere ottenuta per opportuna combinazione linearedelle funzioni armoniche di base.
Mentre per un segnale periodico le frequenze delle armoniche componenti daconsiderare sono discrete e la loro sovrapposizione e definita mediante sommain serie, per un segnale aperiodico si ha una distribuzione continua di frequenzee petanto la sovrapposizione e definita da un integrale.
Nella trattazione seguente assumiamo in generale di avere a che fare consegnali periodici. Comunque le formule riportate possono essere consideratevalide anche per il caso di segnali non ripetuti semplicemente sostituendo lasommatoria con un integrale.
3.2.1 Sintesi di Fourier
Il processo di sintesi di Fourier consiste nella composizione di un’onda qualsiasia partire dalle singole onde componenti. Le armoniche componenti sono co-stituite da un’armonica fondamentale di frequenza base ν0, che rappresenta lafrequenza dell’onda risultante, e da un numero molto grande (idealmente infini-to) di armoniche secondarie la cui frequenza e un multiplo intero di ν0. Nelladefinizione della funzione d’onda risultante (F (t)) ciascuna componente vienesommata secondo un peso opportuno, definito da un coefficiente numerico chela precede:
F (t) = a0 + a1 cos (2πν0t) + b1 sin (2πν0t) + a2 cos (4πν0t) + b2 sin (4πν0t) ++a3 cos (6πν0t) + b3 sin (6πν0t) + ... =
=∞∑
n=−∞[an cos (2πnν0t) + bn sin (2πnν0t)]
dove l’uso di funzioni seno e coseno per ciascuna armonica e legato all’eventualedifferenza di fase tra l’una e l’altra. La sommatoria puo essere espressa inmaniera piu semplice sfruttando le seguenti relazioni:
cos(−x) = cosx sin(−x) = − sinxAn = an + a−n Bn = bn + b−n

48 CAPITOLO 3. ONDE ELETTROMAGNETICHE
Sostituendo nell’equazione precedentemente ricavata si ottiene infatti
F (t) =A0
2+
∞∑n=1
[An cos (2πnν0t) +Bn sin (2πnν0t)]
dove i termini An e Bn rappresentano i pesi relativi alle singole armoniche.Lo spettro di frequenza dell’onda consiste nel grafico a istogramma che mostrale diverse ampiezze (An e Bn) rispetto alla frequenza fondamentale e ai suoimultipli.
La serie di Fourier cosı ottenuta puo essere utilmente espressa anche in ter-mini di ampiezza di ciascuna componente Rn e di sfasamento tra l’una e l’altramediante angolo di fase φn. Se infatti definiamo
An = Rn cosφn Bn = Rn sinφn
sostituendo nell’espressione relativa alla serie di Fourier precedentemente deter-minata otteniamo
F (t) =A0
2+
∞∑n=1
[Rn cosφn cos (2πnν0t) +Rn sinφn sin (2πnν0t)]
=A0
2+
∞∑n=1
[Rn cos (2πnν0t+ φn)]
In questo modo, anziche definire le ampiezze An e Bn di entrambe le funzioniseno e coseno relative a ciascuna componente, si definisce l’ampiezza Rn di unasola onda sinusoidale ed il suo angolo di fase. Cio comporta inoltre due altrivantaggi: permette di ricavare direttamente l’intensita delle singole componenti(proporzionale a R2
n) e di definire lo sfasamento tra un’armonica e l’altra (se∆φ = φm−φn = 0 le armoniche m-esima e n-esima sono in fase; se ∆φ = 180
le onde sono in opposizione di fase).
3.2.2 Analisi di Fourier
Il procedimento inverso alla sintesi di Fourier e definito analisi di Fourier econsiste nella decomposizione di una data onda qualsiasi F (t) nelle sue ar-moniche costituenti. A tal fine occorre ricavare la frequenza fondamentale ν0 ei coefficienti An e Bn relativi alle ampiezze delle singole componenti.
Il primo problema e di semplice risoluzione in quanto la frequenza fondamen-tale ν0 coincide con la frequenza dell’onda F (t) e si ricava quindi direttamentedall’inverso del periodo della stessa:
ν0 =1T
La determinazione delle ampiezze relative di ciascuna armonica, ovvero deicoefficienti An e Bn, e invece possibile sfruttando la proprieta di ortonormalitadelle funzioni seno e coseno. Tale proprieta afferma che, la sovrapposizione (cioeil prodotto) di due funzioni seno, due funzioni coseno o un seno e un coseno,relativi a multipli di una certa frequenza ν0, integrata su un tempo pari ad un

3.2. TEOREMA DI FOURIER 49
periodo T ha sempre valore nullo a meno di casi particolari. Tradotto in formamatematica
2T
∫ T
0
cos (2πnν0t) · cos (2πmν0t)dt =
0 m 6= n1 m = n
2T
∫ T
0
sin (2πnν0t) · sin (2πmν0t)dt =
0 m 6= n1 m = n
2T
∫ T
0
cos (2πnν0t) · sin (2πmν0t)dt = 0
Considerando la funzione d’onda F (t) espressa come serie di Fourier e cal-colandone l’integrale di sovrapposizione con l’m-esima funzione seno di basesi ricava ∫ T
0
F (t) sin (2πmν0t)dt =
=∫ T
0
A0
2+
∞∑n=1
[An cos (2πnν0t) +Bn sin (2πnν0t)]
sin (2πmν0t)dt =
=∫ T
0
Bm sin2 (2πmν0t) = Bm
∫ T
0
sin2 (2πmν0t) = BmT
2
da cui, invertendo la relazione, si ricava un espressione che permette di calcolarel’m-esimo coeffieciente Bm:
Bm =T
2
∫ T
0
F (t) sin (2πmν0t)dt
Ripetendo quindi il calcolo per tutte le m frequenze considerate si ricavanotutti i coefficienti relativi alle armoniche sinusoidali. L’espressione relativa aicoefficienti delle funzioni coseno puo essere direttamente ricavata dagli integralidi sovrapposizione di F (t) con ciascuna componente armonica cosinusoidale.Ripetendo gli stessi calcoli precedenti si ricava allora∫ T
0
F (t) cos (2πmν0t)dt =
=∫ T
0
A0
2+
∞∑n=1
[An cos (2πnν0t) +Bn sin (2πnν0t)]
cos (2πmν0t)dt =
=∫ T
0
Am cos2 (2πmν0t) = Am
∫ T
0
cos2 (2πmν0t) = AmT
2
⇒ Am =T
2
∫ T
0
F (t) cos (2πmν0t)dt
♠ Esempio: Onda quadraDefiniamo un’onda quadra di periodo T = 1
ν0, data dalla funzione analitica
F (t) =
h − b
2 < t < b2
0 t < − b2 ∧ t >
b2
per ogni periodo

50 CAPITOLO 3. ONDE ELETTROMAGNETICHE
Se per comodita fissiamo l’origine del sistema di riferimento in corrispondenzadella meta di un picco la funzione e pari e pertanto nello sviluppo di Fouriertutti i termini sinusoidali sono nulli, essendo il seno dispari.
Occorre allora procedere al calcolo dei coefficienti Am relativi alle sole armonichecosinusoidali. Applicando la formula precedentemente ricavata si ottiene
Am =2T
∫ T
0
F (t) cos (2πmν0t)dt = 2ν0∫ 1
2ν0
− 12ν0
F (t) cos (2πmν0t)dt
tenendo presente che l’ampiezza della pulsazione e h entro il solo tempo b, mentreper il resto del periodo la funzione d’onda e nulla possiamo sostituire gli estremidi integrazione ottenendo
Am = 2ν0∫ b
2
− b2
h cos (2πmν0t)dt
risolvendo l’integrale e ricordando che sin(−x) = − sinx si ricava
Am =2hν0
2πmν0[sin (πmν0b)− sin (−πmν0b)] =
=2hπm
sin (πmν0b) =
= 2hν0bsin (πmν0b)πmν0b
=
= 2hν0b · sinc(πmν0b)
La funzione analizzata puo essere allora espressa mediante la seguente serie diFourier:
F (t) = hν0b+ 2hν0b∞∑
m=1
[sinc(πν0mb) cos (2πmν0t)]
Ai fini pratici la sommatoria puo essere estesa ad un numero finito di armonichesecondarie. Tale numero deve pero essere sufficientemente grande affinche glispigoli dell’onda quadra non risultino troppo smussati.
3.2.3 Rappresentazione in forma complessa
La serie di Fourier puo essere espressa in maniera piu sintetica facendo ricorsoai numeri complessi. La conversione dalle grandezze reali sin qui utilizzate a

3.2. TEOREMA DI FOURIER 51
quelle complesse e possibile in base alle relazioni seguenti:
z = a+ ib = |z| cosφ+ i|z| sinφ = |z|eiφ
cosφ =eiφ + e−iφ
2sinφ =
eiφ − e−iφ
2i
L’equazione reale della serie di Fourier puo allora essere riscritta, operando ledovute sostituzioni, come equazione a valori complessi:
F (t) =∞∑
n=−∞[an cos (2πnν0t) + bn sin (2πnν0t)] =
=∞∑
n=−∞
[an
2(einθ + e−inθ
)+bn2i(einθ − e−inθ+
)]=
=∞∑
n=−∞
[an − ibn
2einθ
]+
∞∑n=−∞
[an + ibn
2e−inθ
]dove si e assunto θ = 2πν0t. Sostituendo −n con un nuovo indice m si ricava
F (t) =∞∑
n=−∞
[an − ibn
2einθ
]+
∞∑m=−∞
[a−m + ib−m
2eimθ
]Dal momento che an = a−n e bn = b−n, tenendo presente la sostituzione deicoefficienti An = an + a−n e Bn = bn + b−n, otteniamo
F (t) =∞∑
n=−∞
[einθ an − ibn + a−n + ib−n
2
]=
=∞∑
n=−∞
[einθAn − iBn
2
]=
=A0
2+
∞∑n=1
[einθ (An − iBn)
]Ricordando che θ = 2πν0t otteniamo l’equazione complessa attesa:
F (t) =A0
2+
∞∑n=1
[e2πinν0t (An − iBn)
]=
A0
2+
∞∑n=1
[e2πinν0tCn
]in cui Cn = An−iBn e il coefficiente complesso della serie di Fourier cosı definitarappresenta la nuova ampiezza di ciascuna armonica componente.
Tramite il cofficiente Cn possiamo ricavare in modo diretto le informazionirelative all’ampiezza Rn di ciascuna componente e al suo sfasamento φn: laprima corrisponde infatti al modulo di Cn mentre la seconda consiste nel suoargomento
Rn =√A2
n +B2n φn = −Bn
An
52 CAPITOLO 3. ONDE ELETTROMAGNETICHE
Ricordando le espressioni ottenute per la determinazione di An e Bn risultaimmediato ottenere un’analoga espressione per Cn:
Cn =2T
∫ T
0
F (t)e−2πinν0tdt
3.2.4 Trasformata di Fourier
Il passaggio dallo spazio dei tempi a quello delle frequenze (corrispondente allospettro dell’onda) e possibile attraverso un’operazione che prende il nome ditrasformazione di Fourier. Tale metodo e di carattere del tutto generale e puoessere applicato sia al caso di funzioni F (t) periodiche, ottenendo una funzioneΦ(ν) che rappresenta lo spettro a righe gia descritto, che aperiodiche, definendouna funzione Φ(ν) continua. L’espressione generale di Φ(ν) puo essere ricavataa partire della serie di Fourier passando al limite per variazioni di frequenzainfinitesime (ν → 0) e quindi per T → ∞. In questo modo e possibile trattareanche funzioni F (t) aperiodiche come un caso limite di quelle periodiche (perν → 0 infatti le armoniche componenti costituiscono una distribuzione continuadi frequenze). Effettuando l’operazione di limite descritta la serie di Fourierassume la forma di un’integrale:
F (t) = limν→0
∞∑n=−∞
[an cos (2πnν0t) + bn sin (2πnν0t)]
=∫ ∞
−∞[a(ν)dν cos (2πνt)] +
∫ ∞
−∞[b(ν)dν sin (2πνt)]
=∫ ∞
−∞r(ν) cos (2πνt+ φ(ν)) dν
Ricorrendo alla notazione complessa l’espressione precedentemente ottenuta puoessere riformulata in modo piu semplice:
F (t) =∫ ∞
−∞[a(ν)− ib(ν)] e2πiνtdν =
∫ ∞
−∞Φ(ν)e2πiνtdν
La relazione ottenuta e sempre invertibile e pertanto e possibile ricavare un’e-spressione esplicita della funzione Φ(ν), definita trasformata di Fourier dellafunzione F (t). Anche F (t) puo essere equivalentemente definita come trasfor-mata di Fourier della funzione Φ(ν) e pertanto le due funzioni costituiscono unacoppia di Fourier cosı definita:
Φ(ν) =∫ ∞
−∞F (t)e−2πiνtdt
F (t) =∫ ∞
−∞Φ(ν)e2πiνtdν
La relazione qui riportata e del tutto generale nel senso che t e ν possono esseredue variabili qualsiasi. Essa sancisce, in particolare, una relazione di intima cor-rispondenza tra tali variabili al punto che esse si possono correttamente definire

3.3. PROPAGAZIONE DELLE ONDE ELETTROMAGNATICHE 53
come variabili coniugate. In definitiva la trasformazione di Fourier comportauna corrispondenza biunivoca tra lo spazio dei tempi e quello delle frequenzeconsentendo, tramite le trasformate, di passare direttamente dall’uno all’altro:
Φ(ν) ⇐⇒ F (t)
Dal punto di vista pratico si puo notare che, in generale, anche se F (t) e reale,Φ(ν) puo essere sia reale che complessa. Per evitare che Φ(ν) sia definita da unaparte immaginaria e necessario allora che F (t) sia simmetrica (F (−t) = F (t)),ovvero che essa contenga solamente termini coseno:
F (t) =∫ ∞
−∞a(ν) cos (2πνt) dν
In questo caso allora la trasformata Φ(ν) e semplicemente definita in terminireali come
Φ(ν) =∫ ∞
−∞F (t) cos (2πνt) dt
3.3 Propagazione delle onde elettromagnatiche
Grazie all’introduzione del teorema di Fourier risulta possibile considerare unagenerica funzione f(r ± vt), soluzione dell’equazione generale delle onde elet-tromagnetiche, come sovrapposizione di un opportuno numero di onde pianesinusoidali. Tale passaggio permette allora di definire il comportamento com-plessivo dell’onda come sovrapposizione dei comportamenti relativi a ciascunacomponente.
Assumiamo per semplicita di avere a che fare con un’onda elettromagneti-ca polarizzata linearmente lungo l’asse y di un dato sistema di riferimento ediretta secondo l’asse x. Tale ipotesi non limita la validita delle nostre con-siderazioni in quanto un’onda non polarizzata puo essere comunque descrittacome composizione di due onde polarizzate orientate lungo due assi ortogonalie caratterizzata da medesima ampiezza e differenza di fase casuale. Il campoelettrico associato all’onda polarizzata puo allora essere descritto come
E(x, t) = Ey1(x− vt) + Ey2(x+ vt)
Come gia notato quindi la soluzione e definita da una funzione qualsiasi applicataalla coordinata spaziale u = x ± vt. Tuttavia, spesso e particolarmente utiledefinire la dipendenza funzionale dell’onda da una coordinata temporale chepuo essere cosı ottenuta:
t′ =u
v=x
v± t
Se limitiamo la nostra analisi al caso di un onda progressiva, che si propagalungo la sola direzione positiva, possiamo esprimere il campo elettrico come
E(x, t) = Ey(x− vt) = Ey(vt′)

54 CAPITOLO 3. ONDE ELETTROMAGNETICHE
ovvero otteniamo una relazione che lega il campo al tempo e cio permette didescrivere l’onda rispetto allo spazio delle frequenze, mediante calcolo dellacorrispondente trasformata di Fourier:
E(x, t) = Ey(x− vt) ⇐⇒ f′
y(ν)
Ey(vt′) =∫ ∞
−∞f ′ye
2πiνtdν =∫ ∞
−∞εy(ν, vt′)dν
dove εy(ν, vt′) e l’espressione della singola componente di Fourier. Introducendole grandezze ω = 2πν e k = ω
v si ottiene
εy(ν, vt′) = f ′ye2πiνt = f ′ye
i(kx−ωt)
Si noti in particolare che, anche se l’espressione ottenuta prevede valori com-plessi, cio che ha significato fisico e la sola parte reale. Per ciascuna componentefissato un punto x dello spazio si ricava una funzione sinusoidale di frequenzaν = ω
2π ; definito invece un certo istante t si ricava una sinusoide di lunghezzad’onda λ = 2π
k . Ricercando gli zeri relativi ad una data componente di Fouriersi richiede
sin (kx− ωt) = 0 cos (kx− ωt) = 1
e pertanto la condizione ricercata e
kx− vt = nπ
xn =n
k+ω
kt
dove nk rappresenta la posizione del minimo rispetto alla lunghezza d’onda e
ωk = v, velocita di propagazione dell’onda.
3.3.1 Sovrapposizione di onde elettromagnetiche
Quando un’onda elettromagnetica non e monocromatica essa risulta definitada piu componenti di Fourier, ciascuna caratterizzata da una certa frequen-za. Poiche tutte le componenti cromatiche dell’onda si propagano nella stessadirezione, esse sono sovrapposte le une alle altre determinando l’onda elettro-magnetica risultante. Per osservare in modo semplificato gli effetti di sovrappo-sizione limitiamo la nostra attenzione alla contemporanea propagazione di uncampo elettrico oscillante definito da due componenti
E(x, t) = E1(x, t) + E2(x, t)
dove entrambe le componenti hanno medesima ampiezza
E1(x, t) = E0 sin (k1x− ω1t) E2(x, t) = E0 sin (k2x− ω2t)
Sfruttando la formula di Werner (sinα + sinβ = 2 cos(
α−β2
)sen
(α+β
2
)) pos-
siamo scrivere il campo elettrico risultante dalla sovrapposizione come
E(x, t) = E0 sin (k1x− ω1t) + E0 sin (k2x− ω2t) =
= 2E0 cos[(k1 − k2)x− (ω1 − ω2)t
2
]sin[(k1 + k2)x− (ω1 + ω2)t
2
]

3.3. PROPAGAZIONE DELLE ONDE ELETTROMAGNATICHE 55
Se le due componenti non differiscono di molto tra loro ne per frequenza (ω1 =ω2 + dω) ne per lunghezza d’onda (k1 = k2 + dk) si ottiene
E(x, t) = 2E0 cos(dk · x− dω · t
2
)sin [(k1 + dk)x− (ω1 + dω)t] ≈
≈ 2E0 cos(dk · x− dω · t
2
)sin (k1x− ω1)
Osservando la formula ottenuta si puo facilmente notare che essa consiste nelprodotto della prima componente per un termine modulante legato alla differen-za tra le due componenti:
E(x, t) = 2 cos(x · dk − t · dω
2
)E1(x, t)
Onde modulate secondo le modalita descritte dando luogo al fenomeno dei bat-timenti. Nel caso di sovrapposizione qui descritto occorre allora introdurre unadistinzione sui termini di velocita: la velocita con cui l’onda nel suo insieme sipropaga e detta velocita di fase e, in un dato mezzo di permettivita elettrica εe permeabilita magnetica µ e pari a
vf =ω
k=
1√εµ
la velocita con cui si muove il termine modulante e invece detta velocita digruppo ed e definita come
vg =dω
dk
Anche se in generale vg 6= vf , nel caso di mezzo omogeneo, isotropo e linearele due velocita sono uguali. Un mezzo per il quale invece le due velocita dif-feriscono prende il nome di mezzo dispersivo e comporta un’alterazione dellaforma dell’onda a mano a mano che essa si propaga nello spazio.
L’estensione del fenomeno dei battimenti al caso di un numero molto grandedi onde componenti, caratterizzate da differenze minime di frequenza e lunghez-za d’onda, comporta la suddivisione dell’intera onda in unita ben definite incui la perturbazione e diversa da zero, separate tra loro da tratti in cui lamodulazione determina ampiezza praticamente nulla dell’onda risultante: si ot-tengono allora singoli treni d’onda separati gli uni dagli altri che vengono dettipacchetti d’onda. La distinzione tra zone di oscillazione e non diventa sem-pre piu rilevante a mano a mano che aumenta il numero delle componenti ediminuisce la loro spaziatura di frequenza: nel caso limite di un numero infinitodi armoniche separate tra loro da differenze infinitesime di frequenza, si ottieneuna successione di singole curve gaussiane, ben separate tra loro.
3.3.2 Equazione d’onda in forma vettoriale
Fino ad ora abbiamo sempre descritto la propagazione di onde elettromagnetichepiane attraverso la comoda scelta arbitraria di un sistema di assi cartesiani,orientato in modo tale che l’asse x coincida con la direzione di propagazione.In questo modo risulta possibile definire il campo in funzione della quantitascalare x−vt. Quando tuttavia si vuole descrivere il comportamento di un’onda

56 CAPITOLO 3. ONDE ELETTROMAGNETICHE
in moto in uno spazio definito da una terna cartesiana qualsiasi, in generale,nessun asse e parallelo alla direzione di propagazione dell’onda e pertanto essadeve essere descritta in termini vettoriali. Detto k il versore di propagazione,corrispondente alla direzione su cui si muove l’onda, e fissati due punti qualsiasilungo il percorso dell’onda, individuati rispetto all’origine mediante i vettori r er0 possiamo esprimere lo spostamento lungo la direzione di propagazione come
xk = r − r0
Alla luce di questa relazione l’argomento della funzione dell’onda piana puoessere espresso in termini vettoriali:
x± vt = k · (r − r0)− vt =1k
(k · r − kvt)− k · r0
Il vettore k e detto vettor d’onda, ha modulo k = ωv = 2π
λ e direzione e versocoincidenti con quelli di propagazione dell’onda. Tenendo presente il fatto che ilpunto individuato da r0 e arbitrario, il prodotto k ·r0 e costante cosı come k, ilcampo elettromagnetico sara dipendente dalla quantita k · r− kvt = k · r− ωt.Occorre inoltre prestare attenzione al fatto che nel nuovo sistema di riferimentoconsiderato il campo elettrico E non oscilla piu su un asse specificato ma sara ingenerale sempre perpendicolare alla direzione di propagazione ovvero al vettord’onda k:
E(r, t) ⊥ k ⇒ E(r, t) · k = 0
In base a questa ipotesi otteniamo allora che per una data componente sinu-soidale della generica onda elettromagnetica il campo elettrico ε oscilla secondol’equazione
ε = ε0ei(k·r−ωt)
di cui solo la parte reale ha significato fisico. Risulta infine possibile caratte-rizzare anche il campo magnetico H associato all’onda elettromagnetica data,tenendo presente, mediante introduzione di un prodotto vettoriale, che essodeve essere perpendicolare sia alla direzione di propagazione, definita da k, siaa quella del campo elettrico E:
H =√ε
µk×E
ottenuta dalla relazione ricavata nella sezione Onde elettromagnetiche piane perevidenziare il rapporto tra il campo elettrico lungo un asse e il corrispondentecampo magnetico. Sfruttando la definizione di k il campo magnetico H puoessere anche espresso come
H =√ε
µ
k
k×E =
√ε
µ
v
ωk×E =
√ε
µ
1ω√εµ
k×E =1µω
k×E
3.4 Fenomeni di riflessione e rifrazione
Quando un’onda elettromagnetica qualsiasi proveniente da un mezzo dielettricosi trasmette, attraverso una superficie di interfaccia, ad un’altro mezzo dielet-trico, in corrispondenza della superficie di separazione si verificano sia fenomeni

3.4. FENOMENI DI RIFLESSIONE E RIFRAZIONE 57
di riflessione che di rifrazione. In generale, infatti, solo una parte dell’ener-gia iniziale dell’onda penetra nel secondo mezzo, determinando la rifrazione;la parte restante di energia rimane invece all’interno del mezzo di provenienzadeterminando la riflessione. La caratterizzazione di questi fenomeni e possi-bile direttamente a partire dalle leggi fondamentali di Maxwell, sfruttando inparticolare le condizioni al contorno relative ai campi elettromagnetici.
Come gia sottolineato piu volte la descrizione del comportamento di unaqualsiasi onda elettromagnetica puo essere resa piu semplice attraverso la suadecomposizione nelle armoniche di Fourier corrispondenti. In questo modo,risulta possibile analizzare i fenomeni di riflessione e rifrazione relativi alle sin-gole componenti e poi, eventualmente, ricavare l’equazione generale delle onderiflesse e rifratte, mediante integrale di sovrapposizione delle singole soluzioniottenute.
3.4.1 Leggi di Snell
Le informazioni relative alle direzioni di propagazione dei raggi riflesso e rifrattopossono essere ottenute ricavando le leggi di Snell. Per schematizzare i fenomenisuddetti assumiamo una superficie piana S di separazione tra due mezzi dielet-trici differenti e consideriamo un raggio d’onda incidente di lunghezza d’ondamolto minore dell’estensione dell’interfaccia. Fissiamo un sistema di riferimentoavente origine sulla superficie S e definito in modo che due degli assi cartesianigiacciano sul piano corrispondente S e il terzo sia parallelo alla normale allasuperficie S stessa. Ricorrendo alla rappresentazione vettoriale delle onde elet-tromagnetiche incidente, riflessa e rifratta, nell’ipotesi di singole componentipiane e sinusoidali possiamo esprimere i campi corrispondenti come
E = E0ei(k·r−ωt)
E′ = E′0e
i(k′·r−ω′t)
E′′ = E′′0 e
i(k′′·r−ω′′t)
dove la notazione senza apici si riferisce all’onda incidente, quella con un apice′ corrisponde all’onda rifratta mentre le grandezze con due apici ′′ sono rela-tive all’onda riflessa. Se consideriamo le condizioni al contorno ricavate dalleequazioni di Maxwell per il campo elettrico, ipotizzando l’assenza di corren-ti pellicolari all’interfaccia tra i mezzi, possiamo affermare che la componentetangenziale del campo elettrico relativo alle onde presenti nel primo mezzo (l’on-da incidente e quella rifratta) si conserva al passaggio nel secondo mezzo (cioenell’onda rifratta):
Et + E′′t = E′t
Affinche l’uguaglianza sia soddisfatta i termini esponenziali coinvolti devonoessere necessariamente identici. La validita della relazione per qualunque originedell’asse dei tempi implica quindi che
ω = ω′ = ω′′
il che significa che in seguito ai fenomeni di riflessione e rifrazione l’onda mantieneinalterata la sua frequenza originaria. Per ottenere la validita dell’uguaglianza

58 CAPITOLO 3. ONDE ELETTROMAGNETICHE
considerata relativamente a qualunque sistema di riferimento spaziale si richiedeinoltre che
k · r = k′ · r = k′′ · r
Se ridefinisco il sistema di riferimento cartesiano in modo da collocare l’originelungo la retta di intersezione tra l’interfaccia S dei mezzi ed il piano normaleal raggio incidente e passante per il punto di incidenza, il vettore posizione rche individua il punto di incidenza rispetto all’origine data e perpendicolare alvettore d’onda k, corrispondente alla direzione del raggio incidente e pertanto,considerando l’uguaglianza precedentemente ottenuta si ricava
k ⊥ r ⇒ k · r = k′ · r = k′′ · r = 0
il che permette di concludere che i tre raggi incidente, riflesso e rifratto sonotutti perpendicolari alla direzione del vettore posizione r e giacciono tutti su unostesso piano. Anche la normale n alla superficie di incidenza e perpendicolarea r, essendo quest’ultimo un vettore di S cui n e normale per definizione:
n ⊥ r ⇒ n · r = 0
Anche n giace quindi nel piano in cui sono contenuti i raggi d’onda considerati.Tale piano e pertanto caratteristico dell’incidenza dell’onda elettromagnetica suuna qualsiasi superficie ed e detto piano di incidenza. Possiamo allora enunciarela prima delle leggi di Snell: i raggi incidente, riflesso e rifratto e la normaleall’interfaccia appartengono ad uno stesso piano. Nel caso particolare di inci-denza normale i vettori k, k′, k′′ e n sono collocati sulla stessa retta e pertantoil piano di incidenza non e univocamente definito ma e un qualunque pianonormale a S, contenente la direzione di tali vettori.Per definire le posizioni reciproche dei raggi relativamente al fenomeno di in-cidenza obliqua occorre modificare opportunamente il sistema di riferimentoconsiderato, come mostrato in figura: fissata l’origine in un qualsiasi punto del-la superficie S si orienta l’asse x parallelamente al piano di incidenza e l’asse yparallelo alla normale n. Le direzioni dei raggi incidente, riflesso e rifratto, sulpiano di incidenza possono allora essere definite, rispettivamente, mediante gliangoli θ, θ′ e θ′′, riferiti alla direzione di n.
In base al sistema di coordinate cosı riportato i vettori r, k, k′ e k′′ possonoessere descritti come
r = 〈x, 0, z〉 k = 〈k sin θ + x,−k cos θ, z〉k′ = 〈k′ sin θ′ + x,−k cos θ′, z〉 k′′ = 〈k′′ sin θ′′ + x, k′′ cos θ′′, z〉
k · r = k sin θx+ x2 + z2
k′ · r = k′ sin θ′x+ x2 + z2
k′′ · r = k′′ sin θ′′x+ x2 + z2
Tenendo presente che k = k′′ = ωv = ω
√µ1ε1 in quanto entrambi i vettori sono
riferiti allo stesso mezzo di propagazione, uguagliando tra la loro i due prodottiscalari relativi ai raggi incidente e riflesso, in base a quanto detto sopra, epossibile ricavare la legge di Snell relativa alla riflessione:
k · r = k′′ · r
k sin θx+ x2 + z2 = k′′ sin θ′′x+ x2 + z2
sin θ = sin θ′′

3.4. FENOMENI DI RIFLESSIONE E RIFRAZIONE 59
⇒ θ = θ′′
Si e allora dimostrato che raggio incidente e riflesso formano angoli uguali rispet-to alla normale nel punto di incidenza.Per ottenere la legge di Snell relativa ai fenomeni di rifrazione occorre intro-durre l’indice di rifrazione del mezzo, ovvero il rapporto tra la velocita dellaluce e la velocita effettiva di propagazione dell’onda elettromagnetica nel mezzoconsiderato:
n =c
v=
1√µ0ε0
· √µε
Occorre notare, in particolare, che poiche la costante dielettrica del mezzo ε e ingenerale sensibilmente dipendente dalla frequenza del campo elettromagneticoconsiderato, l’indice di rifrazione sara anch’esso variabile con la frequenza dellaradiazione incidente. Ricordando che, per definizione k = ω
v = ω√µ1ε1 e k′ =
ωv′ = ω
√µ2ε2 possiamo eguagliare tra loro i prodotti scalari relativi all’onda
incidente e a quella rifratta, ottenendo
k · r = k′′ · r
k sin θx+ x2 + z2 = k′ sin θ′x+ x2 + z2
ω√µ1ε1 sin θ = ω
√µ2ε2 sin θ′
√µ1ε1 sin θ =
√µ2ε2 sin θ′
⇒ sin θsin θ′
=√µ2ε2√µ1ε1
=√µ2ε2√µ1ε1
·√µ0ε0√µ0ε0
=n2
n1
L’ultima uguaglianza ottenuta corrisponde alla legge di rifrazione di Snell: rag-gio incidente e raggio rifratto formano angoli, rispetto alla normale, il cui rap-porto e il reciproco degli indici di rifrazione dei rispettivi mezzi di propagazione.
3.4.2 Leggi di Fresnel
Per ottenere informazioni quantitative relativamente alle intensita dei raggi ri-flesso e rifratto, in confronto a quella del raggio incidente, occorre definire la

60 CAPITOLO 3. ONDE ELETTROMAGNETICHE
relazione quantitativa che sussiste tra i corrispondenti campi elettromagnetici.Tale risultato e espresso dalle leggi di Fresnel e puo essere ricavato sfruttandole leggi di Snell, precedentemente ottenute, e le condizioni al contorno relativealle equazioni di Maxwell, riferite ai tre raggi incidente, riflesso e rifratto:
Et + E′′t = E′t Ht +H ′′t = H ′
t
Per ottenere le informazioni ricercate consideriamo per semplicita onde pola-rizzate linearmente. Tale assunzione non limita la validita generale delle leggiricercate in quanto un onda non polarizzata e comunque esprimibile mediantesovrapposizione di due onde polarizzate mutuamente perpendicolari, con re-lazione di fase casuale. Per poter valutare il comportamento generale di unonda elettromagnetica consideriamo allora i due casi limite possibili che cor-rispondono ad un posizionamento del piano di polarizzazione rispettivamenteperpendicolare e parallelo al piano di incidenza. Tutti i casi intermedi sarannoallora ottenuti mediante opportuna combinazione di questi due casi estremi.
Limitandoci inoltre alla propagazione di onde nei dielettrici possiamo in-trodurre un’altra semplificazione assumendo che per i materiali considerati lepermeabilita magnetiche siano pressoche uguali alla permeabilita del vuoto:µ1 ≈ µ2 ≈ µ0. In base a questa approssimazione l’indice di rifrazione di ciascunmezzo e dato da
n =c
v=
1√µ0ε0
· √µε ≈√
ε
ε0
La legge di rifrazione di Snell puo allora essere espressa come
n2
n1=
sin θsin θ′
≈√ε2√ε1
1. Piano di polarizzazione perpendicolare al piano di incidenza
Avendo definito il piano di polarizzazione perpendicolare al piano di inci-denza il campo elettrico corrispondente e per definizione parallelo all’in-terfaccia tra i materiali ed e quindi interamente tangenziale. In base allacondizione al contorno relativa ad E possiamo allora scrivere
Et + E′′t = E′t ⇒ E + E′′ = E′

3.4. FENOMENI DI RIFLESSIONE E RIFRAZIONE 61
Considerando invece il campo magnetico le sue componenti tangenziali allasuperficie di separazione tra i mezzi possono essere ricavate sfruttando gliangoli di incidenza, riflessione e rifrazione:
Ht +H ′′t = H ′
t ⇒ H cos θ −H ′′ cos θ′′ = H ′ cos θ′
Poiche il campo magnetico H e legato al campo elettrico E dalla relazioneH =
√εµ k×E, tenendo presente che nell’onda elettromagnetica E, k
e H sono mutuamente perpendicolari, possiamo riscrivere la relazioneprecedente in funzione del campo elettrico:√
ε1µ1E cos θ −
√ε1µ1E′′ cos θ′′ =
√ε2µ2E′ cos θ′√
ε1µ0
(E − E′′) cos θ =√ε2µ0E cos′ θ′
E − E′′ =√ε2√ε1E′
cos θ′
cos θ
dove per le legge di riflessione di Snell si e posto θ′′ = θ e si e inoltre sfrut-tata l’approssimazione µ1 ≈ µ2 ≈ µ0. Applicando la legge di rifrazionedi Snell (definita rispetto all’approssimazione introdotta) all’equazioneprecedente otteniamo allora
E − E′′ = E′cos θ′
cos θsin θsin θ′
Le ampiezze relative dei campi elettrici riflesso e rifratto possono essereallora ottenute risolvendo il sistema
E − E′′ = E′
E − E′′ = E′cos θ′
cos θsin θsin θ′
da cui si ricava, svolgendo i calcoli opportuni
E′ =2 sin θ′ cos θsin(θ′ + θ)
E E′′ =sin(θ′ − θ)sin(θ′ + θ)
E
2. Piano di polarizzazione parallelo al piano di incidenzaIn base alla definizione del piano di polarizzazione, la condizione al con-torno relativa al campo elettrico puo essere espressa sfruttando gli angolidi incidenza, riflessione e rifrazione, tenendo inoltre presente che θ′′ = θ:
Et + E′′t = E′t ⇒ E cos θ + E′′ cos θ′′ = E′ cos θ′
E + E′′ = E′cos θ′
cos θ
Considerando invece il campo magnetico, esso risulta orientato secondo ladirezione tangenziale all’interfaccia e quindi
Ht +H ′′t = H ′
t ⇒ H −H ′′ = H ′

62 CAPITOLO 3. ONDE ELETTROMAGNETICHE
Considerando la relazione che lega il campo magnetico H al campo elet-trico E (H =
√εµ k ×E) e tenendo presente che nell’onda elettromagne-
tica E, h e H sono mutuamente perpendicolari, possiamo riscrivere larelazione precedente in funzione del campo elettrico:√
ε1µ1E −
√ε1µ1E′′ =
√ε2µ2E′√
ε1µ0
(E − E′′) =√ε2µ0E′
E − E′′ =√ε2√ε1E′
dove si e sfruttata l’approssimazione µ1 ≈ µ2 ≈ µ0. Sostituendo la leggedi rifrazione di Snell (definita rispetto all’approssimazione introdotta)nell’equazione precedente si ricava
E − E′ = E′sin θsin θ′
Le ampiezze relative dei campi elettrici riflesso e rifratto sono ottenutequindi dalla risoluzione del sistema
E + E′′ = E′cos θ′
cos θ
E − E′′ = E′sin θsin θ′
da cui si ricava, svolgendo i calcoli opportuni
E′ =2 sin θ′ cos θ
sin(θ′ + θ) cos θ′ − θE E′′ =
tan(θ′ − θ)tan(θ′ + θ)
E
Definiamo intensita di un’onda elettromagnetica il flusso medio di energiarelativo ad una superficie unitaria per unita di tempo. Tale grandezza e definita

3.4. FENOMENI DI RIFLESSIONE E RIFRAZIONE 63
come un’energia media, e non istantanea, in quanto la frequenza di un ondaelettromagnetica e in genere alquanto elevata (dell’ordine di 1015 Hz) e quindile sue fluttuazioni non sono percepibili; cio che viene in effetti rilevato e allora ilvalore medio delle oscillazioni. Ricordando la definizione del vettore di PoyntingN come flusso istantaneo di energia, possiamo allora definire l’intensita di unonda elettromagnetica come il valore medio di tale grandezza:
I =<N>=<E×H>=12EHk
dove si e assunto che per un onda elettromagnetica piana E ed H sono perdefinizione perpendicolari tra loro e alla direzione di propagazione k e sonoentrambi funzioni sinusoidali del tempo (da cui deriva che il prodotto tra di essicomporta un termine sin2 la cui media su un tempo sufficientemente grande darendere trascurabili eventuali frazioni di periodo e pari a 1/2).
Definiamo allora un coefficiente di trasmissione T come il rapporto tral’intensita dell’onda rifratta e quella dell’onda incidente:
T =I ′
I=
12E
′H ′k12EHk
=E′
√ε2√µ2E′ cos θ′
E√
ε1√µ1E cos θ
≈E′2 cos θ′
√ε2
E2 cos θ√ε1
=E′2 cos θ′ sin θE2 cos θ sin θ′
dove ci si e avvalsi dell’approssimazione µ1 ≈ µ2 ≈ µ0 e della legge di rifrazionedi Snell.
Analogamente possiamo definire un coefficiente di riflessione R pari al rap-porto tra l’intensita dell’onda riflessa e quella dell’onda incidente:
R =I ′′
I=
12E
′′H ′′k12EHk
=E′′
√ε1√µ1E′′ cos θ′′
E√
ε1√µ1E cos θ
=E′′2 cos θE2 cos θ
=E′′2
E2
dove si e fatto uso della legge di riflessione di Snell.Le espressione di T e R ottenute sono del tutto generali e non dipendono
dalla direzione dei campi. Poiche una qualsiasi onda elettromagnetica puo essereespressa come sovrapposizione di due componenti polarizzate su direzioni orto-gonali, noti i coefficienti T ed R per tali direzioni estreme, tutti i casi intermedipossono essere descritti mediante loro opportune sovrapposizioni. Riferendociallora ai due casi particolari precedentemente illustrati otteniamo
1. Piano di polarizzazione perpendicolare al piano di incidenza
T⊥ =sin(2θ′) sin(2θ)
sin2(θ′ + θ)R⊥ =
sin2(θ′ − θ)sin2(θ′ + θ)
2. Piano di polarizzazione parallelo al piano di incidenza
T// =sin(2θ′) sin(2θ)
sin2(θ′ + θ) cos(θ′ − θ)R// =
tan2(θ′ − θ)tan2(θ′ + θ)
Analizzando le equazioni ottenute possiamo innanzitutto notare che i coefficientidi trasmissione e riflessione sono differenti a seconda della polarizzazione e,pertanto, se l’onda incidente sulla superficie di interfaccia tra due mezzi non ecaratterizzata da alcuna polarizzazione, le corrispondenti onde riflessa e rifratta

64 CAPITOLO 3. ONDE ELETTROMAGNETICHE
presenteranno comunque un certo grado di polarizzazione dovuto al fatto che ledue componenti polarizzate con cui puo essere schematizzata l’onda incidentenon si ripartiscono in ugual misura tra i raggi riflesso e rifratto.
In particolare, si puo osservare che nel caso di incidenza tale per cui θ+θ′ =90 la componente dell’onda il cui piano di polarizzazione e parallelo al pianodi incidenza non subisce alcuna riflessione ma viene totalmente rifratta. L’ondaelettromagnetica riflessa complessivamente e quindi privata delle componenti incui il campo elettrico oscilla sul piano di incidenza ed e caratterizzata pertantodalle sole componenti il cui piano di polarizzazione e perpendicolare: l’ondariflessa e quindi linearmente polarizzata in direzione perpendicolare al pianodi incidenza. Parimenti, l’onda rifratta sara caratterizzata maggiormente dallecomponenti il cui campo e sul piano di incidenza, in quanto queste sono intera-mente trasmesse: essa e quindi parzialmente polarizzata in direzione parallelaal piano di incidenza stesso. Per determinare l’angolo di incidenza θB , dettoangolo di Brewster che determina questo fenomeno di polarizzazione per rifles-sione si sfrutta la legge di rifrazione di Snell, imponendo la condizione che legal’angolo di incidenza e l’angolo rifratto:
n2
n1=
sin θB
sin θ′=
sin θB
sin(90)− θB=
sin θB
cos θB= tan θB
⇒ θB = arctann2
n1
Tanto piu la radiazione incidente si avvicina a θB tanto maggiore e il grado dipolarizzazione dell’onda riflessa e tanto minore e il contenuto della componenteparallela al piano di incidenza nell’onda rifratta. Ai fini pratici, di norma, nellapolarizzazione per riflessione non viene sfruttato il raggio riflesso polarizzatoma si procede alla polarizzazione del raggio rifratto mediante l’utilizzo di piusuperfici in successione.

Appendice A
Operazioni sui campivettoriali
A.1 Integrali di linea
Data una funzione scalare f(x(t), y(t), z(t)) = f(r(t)), continua in una regionecontenente un cammino C, descritto dalla funzione vettoriale r(t) con a ≤ t ≤ b,si puo definire l’integrale di linea di f lungo C come:∫
C
f(x, y, z)ds =∫ b
a
f(r(t)) |r′(t)| dt
Il valore dell’integrale di linea e indipendente dal verso di percorrimento dellacurva C: ∫
C
f(x, y, z)ds =∫−C
f(x, y, z)ds
Data una funzione vettoriale F = Fxi +Fy j +Fzk, continua in una regionedello spazio contenente il cammino di integrazione C, individuato dalla funzionevettoriale r(t)(a ≤ t ≤ b), l’integrale di linea di F lungo C e:∫
C
F · dr =∫ b
a
F (r(t)) · r′(t)dt =∫
C
F · T ds
A differenza degli integrali di linea di funzioni scalari, per funzioni vettoriali ilsegno dell’integrale e dipendente dal verso di percorrenza della curva C:∫
C
F · dr = −∫−C
F · dr
Convenzionalmente, per cammini C aperti si definisce come orientazione pos-itiva quella descritta da valori crescenti del parametro t. Nel caso di percorsichiusi, invece, si assume come orientazione positiva quella antioraria e l’integraledi linea viene anche definito circuitazione. In generale il calcolo degli integrali dilinea e possibile su qualunque curva regolare; nel caso in cui la curva sia regolarea tratti, esso e definito dalla somma di tutti i contributi relativi a ciascun tratto.
65

66 APPENDICE A. OPERAZIONI SUI CAMPI VETTORIALI
A.2 Integrali di superficie
Data una funzione scalare f(x(u, v), y(u, v), z(u, v)) = f(r(u, v)), continua inuna regione contenente una superficie S, descritta dalla funzione vettorialer(u, v) con u, v ∈ D, si puo definire l’integrale di superficie di f lungo S come:∫∫
S
f(x, y, z)dS =∫∫
D
f(r(u, v)) |ru×rv| dA
L’espressione vettoriale di un integrale di superficie richiede l’introduzionedi un vettore superficiale S di modulo pari alla superficie considerata, direzionenormale ad essa e orientamento opportunamente definito: se si considera unasuperficie S regolare, aperta, assegnata dall’equazione parametrica r(u, v) il ver-so positivo del vettore superficiale in un dato punto coincide con l’orientazionedel versore normale
n =ru×rv
|ru×rv|Se S e una superficie chiusa, ossia e la frontiera di una regione solida V , siscieglie convenzionalmente come orientazione positiva quella secondo la quale ilversore normale e uscente dal volume V .
Se F = Fxi + Fy j + Fzk e un campo vettoriale continuo definito su unasuperficie orientata di equazione parametrica r(u, v), con versore normale n, sidefinisce integrale di superficie (o flusso) di F su S la quantita∫∫
S
F · dS =∫∫
S
F · ndS =∫∫
D
F · (ru×rv) dA
dove D e il dominio dei parametri. Come evidente, se si considera una superficieorientata secondo la direzione negativa −n, l’integrale di flusso corrispondenterisultera di segno opposto. In generale il calcolo degli integrali di superficie epossibile su qualunque superficie regolare; nel caso in cui la superficie sia regolarea tratti, esso e definito dalla somma di tutti i contributi relativi a ciascun tratto.

Appendice B
Operatori differenziali
B.1 Vettore Gradiente
Data una funzione scalare f(x, y, z) il suo gradiente e un campo vettoriale su<3 dato da:
∇f =∂f
∂xi +
∂f
∂yj +
∂f
∂zk
B.2 Vettore Rotore
Dato un campo vettoriale F = Fxi + Fy j + Fzk su <3, se esistono le derivateparziali prime di Fx, Fy e Fz e possibile definire il rotore di F come un vettorela cui componente nella direzione del versore n, normale alla superficie S di cuiil cammino chiuso C e il contorno, soddisfi l’equazione:
rotF · n = limS→0
1S
∮C
F · ds
⇒ rotF =(∂Fz
∂y− ∂Fy
∂z
)i +
(∂Fx
∂z− ∂Fz
∂x
)j +
(∂Fy
∂x− ∂Fx
∂y
)k
Dal punto di vista formale il rotore pu essere definito come il prodotto vettorialedell’operatore ∇ con il campo vettoriale F :
rotF = ∇×F =
∣∣∣∣∣∣∣∣∣i j k
∂
∂x
∂
∂y
∂
∂z
Fx Fy Fz
∣∣∣∣∣∣∣∣∣Un campo F tale che rotF = 0 si definisce conservativo o irrotazionale.
67

68 APPENDICE B. OPERATORI DIFFERENZIALI
B.3 Divergenza
Dato un campo vettoriale F = Fxi + Fy j + Fzk su <3, se esistono le derivateparziali prime di Fx, Fy e Fz e possibile definire la divergenza di F come lafunzione scalare in tre variabili data da:
divF = limV→0
1V
∮S
F · dA =∂Fx
∂x+∂Fy
∂y+∂Fz
∂z
dove V rappresenta il volume racchiuso dalla superficie S. Dal punto di vistaformale la divergenza pu essere definita come il prodotto scalare dell’operatore∇ con il campo vettoriale F :
divF = ∇·F
Un campo F tale che divF = 0 si definisce solenoidale o incomprimibile.
B.4 Laplaciano
Data una funzione scalare f(x, y, z) il suo Laplaciano e una funzione scalaredefinita come:
∇2f =∂2f
∂x2+∂2f
∂y2+∂2f
∂z2
L’operatore Laplaciano pu essere esteso anche a campi vettoriali F = Fxi +Fy j + Fzk su <3 e, in tal caso, esso opera su ciascuna componente:
∇2F = ∇2Fxi +∇2Fy j +∇2Fzk
Dal punto di vista formale il Laplaciano pu essere definito come divergenza diun gradiente:
∇2f = div(∇f) = ∇·∇f
B.5 Proprieta degli operatori differenziali
Dette ψ, ψ1 e ψ2 funzioni scalari qualsiasi e F , F1 e F2 funzioni vettorialivalgono le seguenti proprieta degli operatori differenziali:
• Gradiente
1. ∇(ψ1 + ψ2) = ∇ψ1 + ∇ψ2
2. ∇(ψ1ψ2) = ψ2∇ψ1 + ψ1∇ψ2
3. ∇(F1 · F2) = (F1 · ∇)F2 + (F2 · ∇)F1 + F1×∇×F2 + F2×∇×F1
• Divergenza
1. ∇·(F1 + F2) = ∇·F1 + ∇·F2

B.6. COMBINAZIONI DI OPERATORI DIFFERENZIALI 69
2. ∇·(ψF ) = F∇ψ + ψ∇·F3. ∇·(F1×F2) = F2 · (∇×F1)− F1 · (∇×F2)
• Rotore
1. ∇×(F1 + F2) = ∇×F1 + ∇×F2
2. ∇×(ψF ) = ψ∇×F + ∇ψ×F
3. ∇×(F1×F2) = F1 · ∇·F2 − F2∇·F1 + (F2 · ∇)F1 − (F1 · ∇)F2
B.6 Combinazioni di operatori differenziali
B.6.1 Rotore di un gradiente
Data una funzione scalare f(x, y, z) con derivate parziali seconde continue valela relazione:
rot(∇f) = ∇×∇f = 0
♣ Dimostrazione
∇×∇f =
∣∣∣∣∣∣∣∣∣∣∣
i j k
∂
∂x
∂
∂y
∂
∂z
∂f
∂x
∂f
∂y
∂f
∂z
∣∣∣∣∣∣∣∣∣∣∣=
=(∂2f
∂y∂z− ∂2f
∂z∂y
)i +
(∂2f
∂z∂x− ∂2f
∂x∂z
)j +
(∂2f
∂x∂y− ∂2f
∂y∂x
)k =
= 0i + 0j + 0k = 0 (per il teorema di Clairaut) 2
Il teorema sopra enunciato permette quindi di concludere che, se il campo vet-toriale F = ∇f , allora F e conservativo.
B.6.2 Divergenza di un rotore
Dato un campo vettoriale F = Fxi + Fy j + Fzk su <3, tale che Fx, Fy e Fz
ammettano derivate parziali seconde continue vale la relazione:
div(rotF ) = ∇·(∇×F ) = 0
♣ Dimostrazione
∇·(∇×F ) =∂
∂x
(∂Fz
∂y− ∂Fy
∂z
)+
∂
∂y
(∂Fx
∂z− ∂Fz
∂x
)+
∂
∂z
(∂Fy
∂x− ∂Fx
∂y
)=
=∂2Fz
∂x∂y− ∂2Fy
∂x∂z+∂2Fx
∂y∂z− ∂2Fz
∂y∂x+∂2Fy
∂z∂x− ∂2Fx
∂z∂y= 0

70 APPENDICE B. OPERATORI DIFFERENZIALI
(per il teorema di Clairaut) 2
Il teorema sopra enunciato permette quindi di concludere che, se il campo vet-toriale F = ∇×C, allora F e solenoidale.
B.6.3 Rotore di un rotore
Dato un campo vettoriale F = Fxi + Fy j + Fzk su <3, tale che Fx, Fy e Fz
ammettano derivate parziali seconde continue vale la relazione:
rot (rotF ) = ∇×(∇×F ) = ∇(∇·F )−∇2F
La dimostrazione e immediata svolgendo le opportune operazioni di calcolo,sulla base delle definizioni date degli operatori.
Appendice C
Teoremi sui campi vettoriali
C.1 Teorema fondamentale del calcolo
Data C una curva regolare assegnata tramite la funzione a valori vettoriali r(t)(a ≤ t ≤ b) e f(x, y, z) una funzione scalare differenziabile il cui gradiente ∇f econtinuo su C, allora ∫
c
∇f · dr = f(r(b))− f(r(a))
Il teorema enunciato permette di concludere che se un campo vettoriale F edefinito come gradiente di una funzione scalare data F = ∇f , l’integrale di linearelativo ad una curva C qualsiasi puo essere valutato semplicemente conoscendoi valori assunti da f agli estremi della curva stessa. L’integrale di linea di∇f corrisponde quindi alla variazione totale della funzione f stessa. Alla lucedel teorema considerato possiamo ricavare due importanti proprieta dei campidefiniti da un gradiente (F = ∇f):
• Fissati due punti A e B l’integrale di linea di F relativo ad una qual-siasi curva C congiungente i due punti fornisce sempre lo stesso valoreindipendentemente dal cammino considerato (indipendenza dal cammino):∫
C1
F · dr =∫
C1
F · dr = f(B)− f(A)
per ogni coppia di curve C1 e C2 congiungenti i punti A e B.
• Considerando un qualsiasi percorso chiuso (tale che i punti estremi coin-cidono A ≡ B) l’integrale di linea di F e identicamente nullo qualunquesia la curva C considerata: ∮ B≡A
A
F · dr = 0
Le due proprieta sono strettamente collegate tra loro: un’integrale di linea eindipendente dal cammino se e solo se l’integrale di circuitazione e nullo suqualsiasi cammino chiuso C.
71

72 APPENDICE C. TEOREMI SUI CAMPI VETTORIALI
Se F e un campo vettoriale continuo in una regione D aperta (tale da noncontenere punti di frontiera) e connessa (tale per cui due punti qualsiasi di Dpossano essere congiunti da un cammino interamente contenuto in D stesso)e se l’integrale di linea di F e indipendente dal cammino in D, allora F e uncampo vettoriale conservativo in D, cioe esiste una funzione f tale che F = ∇f .
C.2 Teorema di Stokes
Detta S una superficie regolare a tratti la cui frontiera e una curva C = ∂Ssemplice, chiusa, regolare a tratti con orientamento positivo, se F e un campovettoriale le cui componenti abbiano derivate parziali continue in una regioneaperta di <3, contenente S, allora∮
C
F · dr =∫∫
S
(∇×F ) · dS
La relazione rappresentata dal teorema di Stokes afferma essenzialmente la pos-sibilita di calcolare un integrale di linea di un campo F lungo una curva chiusaC mediante l’integrale di flusso di ∇×F relativamente ad una qualsiasi superficieS di cui C sia il contorno.
C.3 Teorema della divergenza
Sia V uan regione semplice solida e S la sua superficie, assunta con orientazionepositiva (uscente). Dato un campo vettoriale F , le cui funzioni componentihanno derivate parziali continue su una regione aperta contenente V , allora∮∫
S
F · dS =∫∫∫
V
(∇·F ) · dV
Il teorema enunciato afferma essenzialmente che l’integrale di flusso di un campovettoriale F attraverso la superficie chiusa S corrisponde all’integrale di volumedi ∇·F relativo alla regione delimitata da S.