Elementi di Topografia - Estratto
25
Indice 1 Geodesia 1 1.1 La superficie di riferimento ................... 5 1.2 Latitudine e longitudine ..................... 8 1.3 Coordinate astronomiche ..................... 9 1.4 Linee geodetiche ......................... 10 1.4.1 Formule di Puiseux-Weingarten ............. 12 1.5 Sistemi di riferimento ...................... 14 1.5.1 Il sistema di riferimento geocentrico ITRF ....... 15 1.5.2 Il sistema di riferimento WGS84 ............ 16 1.5.3 Il sistema di riferimento ETRF ............. 17 1.6 Datum Geodetico ......................... 18 1.6.1 Trasformazioni di Datum ................ 21 2 Rilievo topografico 27 2.1 Definizioni preliminari ...................... 28 2.1.1 Angolo di direzione .................... 28 2.1.2 Relazione che lega gli angoli di direzione ........ 30 2.1.3 Trasporto dell’angolo di direzione lungo una spezzata 30 2.1.4 Distanza fra due punti .................. 31 2.1.5 Relazione che lega le coordinate di un punto ad un altro 31 2.2 Intersezioni ............................ 32 2.2.1 Intersezione semplice in avanti ............. 32 2.2.2 Ellisse d’errore ...................... 35 2.2.3 Intersezione semplice in avanti con misura di distanze 36 2.2.4 Intersezione semplice inversa .............. 39 2.3 Poligonali ............................. 41 2.3.1 Poligonale aperta ..................... 44 i
-
Upload
mediageo-soc-coop -
Category
Documents
-
view
242 -
download
6
description
Selezione di pagine dal testo Elementi di Topografia di R. Carlucci
Transcript of Elementi di Topografia - Estratto

Indice
1 Geodesia 11.1 La superficie di riferimento . . . . . . . . . . . . . . . . . . . 51.2 Latitudine e longitudine . . . . . . . . . . . . . . . . . . . . . 81.3 Coordinate astronomiche . . . . . . . . . . . . . . . . . . . . . 91.4 Linee geodetiche . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4.1 Formule di Puiseux-Weingarten . . . . . . . . . . . . . 121.5 Sistemi di riferimento . . . . . . . . . . . . . . . . . . . . . . 14
1.5.1 Il sistema di riferimento geocentrico ITRF . . . . . . . 151.5.2 Il sistema di riferimento WGS84 . . . . . . . . . . . . 161.5.3 Il sistema di riferimento ETRF . . . . . . . . . . . . . 17
1.6 Datum Geodetico . . . . . . . . . . . . . . . . . . . . . . . . . 181.6.1 Trasformazioni di Datum . . . . . . . . . . . . . . . . 21
2 Rilievo topografico 272.1 Definizioni preliminari . . . . . . . . . . . . . . . . . . . . . . 28
2.1.1 Angolo di direzione . . . . . . . . . . . . . . . . . . . . 282.1.2 Relazione che lega gli angoli di direzione . . . . . . . . 302.1.3 Trasporto dell’angolo di direzione lungo una spezzata 302.1.4 Distanza fra due punti . . . . . . . . . . . . . . . . . . 312.1.5 Relazione che lega le coordinate di un punto ad un altro 31
2.2 Intersezioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.2.1 Intersezione semplice in avanti . . . . . . . . . . . . . 322.2.2 Ellisse d’errore . . . . . . . . . . . . . . . . . . . . . . 352.2.3 Intersezione semplice in avanti con misura di distanze 362.2.4 Intersezione semplice inversa . . . . . . . . . . . . . . 39
2.3 Poligonali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.3.1 Poligonale aperta . . . . . . . . . . . . . . . . . . . . . 44
i

ii INDICE
2.3.2 Poligonale chiusa . . . . . . . . . . . . . . . . . . . . . 462.4 Misura di distanze . . . . . . . . . . . . . . . . . . . . . . . . 472.5 Altimetria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2.5.1 Quota ortometrica e dinamica . . . . . . . . . . . . . . 502.5.2 Livellazioni . . . . . . . . . . . . . . . . . . . . . . . . 522.5.3 Mareografi di riferimento . . . . . . . . . . . . . . . . 572.5.4 Livellazione italiana di riferimento . . . . . . . . . . . 58
3 Strumenti topografici 613.1 Misura degli angoli azimutali e zenitali . . . . . . . . . . . . . 613.2 Determinazione della verticale . . . . . . . . . . . . . . . . . . 633.3 Dispositivi di lettura dei cerchi graduati . . . . . . . . . . . . 66
3.3.1 Cannocchiale, collimazioni e traguardi . . . . . . . . . 703.4 Il Teodolite . . . . . . . . . . . . . . . . . . . . . . . . . . . . 703.5 Il livello . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 763.6 Sistemi di lettura angolare elettronici . . . . . . . . . . . . . . 773.7 Misura delle distanze . . . . . . . . . . . . . . . . . . . . . . 80
3.7.1 Misure dirette . . . . . . . . . . . . . . . . . . . . . . . 813.7.2 Misure indirette . . . . . . . . . . . . . . . . . . . . . 823.7.3 Misure mediante onde . . . . . . . . . . . . . . . . . . 85
4 Cartografia 894.1 Proiezioni di sviluppo . . . . . . . . . . . . . . . . . . . . . . 93
4.1.1 Proiezione di Mercatore . . . . . . . . . . . . . . . . . 964.2 Proiezioni prospettiche . . . . . . . . . . . . . . . . . . . . . . 974.3 Rappresentazioni matematiche . . . . . . . . . . . . . . . . . 994.4 Equazioni della carta e moduli di deformazione . . . . . . . . 1064.5 La carta conforme di Gauss . . . . . . . . . . . . . . . . . . . 1094.6 La cartografia ufficiale italiana . . . . . . . . . . . . . . . . . 114
4.6.1 La cartografia Gauss-Boaga . . . . . . . . . . . . . . . 1144.6.2 Il sistema U.T.M. . . . . . . . . . . . . . . . . . . . . . 119
4.7 Gli organi cartografici . . . . . . . . . . . . . . . . . . . . . . 1254.7.1 L’Istituto Geografico Militare . . . . . . . . . . . . . . 1254.7.2 Lo Stato Maggiore Aeronautica . . . . . . . . . . . . . 1294.7.3 L’Istituto Idrografico della Marina . . . . . . . . . . . 1294.7.4 Il Catasto . . . . . . . . . . . . . . . . . . . . . . . . . 1304.7.5 Il Servizio Geologico . . . . . . . . . . . . . . . . . . . 130
4.8 La Cartografia Tematica . . . . . . . . . . . . . . . . . . . . . 132

INDICE iii
4.9 La Cartografia Urbanistica . . . . . . . . . . . . . . . . . . . 133
5 Reti topografiche 1355.1 Equazione all’angolo di direzione . . . . . . . . . . . . . . . . 1375.2 Equazione alla distanza . . . . . . . . . . . . . . . . . . . . . 1385.3 Equazione all’angolo azimutale . . . . . . . . . . . . . . . . . 1385.4 Normalizzazione e soluzione del sistema . . . . . . . . . . . . 1385.5 Compensazione altimetrica . . . . . . . . . . . . . . . . . . . 141
6 Sistemi Informativi Geografici 1436.1 Cartografia numerica . . . . . . . . . . . . . . . . . . . . . . . 144
6.1.1 Descrizione del processo . . . . . . . . . . . . . . . . . 1456.1.2 Acquisizione dei dati . . . . . . . . . . . . . . . . . . 1476.1.3 Elaborazione dei dati . . . . . . . . . . . . . . . . . . . 1566.1.4 Output dei dati . . . . . . . . . . . . . . . . . . . . . . 159
6.2 Modelli Digitali del Terreno . . . . . . . . . . . . . . . . . . . 1606.2.1 Generazione del DTM . . . . . . . . . . . . . . . . . . 1626.2.2 Costruzione del modello . . . . . . . . . . . . . . . . . 1656.2.3 GRID Griglia rettangolare . . . . . . . . . . . . . . . . 1666.2.4 TIN - Triangulated Irregular Network . . . . . . . . . 1666.2.5 Visualizzazione dei DTM . . . . . . . . . . . . . . . . 168
6.3 Sistemi informativi territoriali . . . . . . . . . . . . . . . . . . 1726.3.1 Le informazioni cartografiche di base . . . . . . . . . . 1736.3.2 Coordinamento della produzione cartografica . . . . . 174
7 Fotogrammetria e Telerilevamento 1777.1 Rilievo diretto e rilievo fotogrammetrico . . . . . . . . . . . . 177
7.1.1 Il passaggio analitico-analogico-digitale . . . . . . . . . 1807.2 Descrizione del processo . . . . . . . . . . . . . . . . . . . . . 1827.3 Le camere da presa . . . . . . . . . . . . . . . . . . . . . . . . 185
7.3.1 Geometria della presa . . . . . . . . . . . . . . . . . . 1907.3.2 Effetti del trascinamento . . . . . . . . . . . . . . . . . 197
7.4 Rotazioni nel piano e nello spazio . . . . . . . . . . . . . . . . 1997.5 Relazione tra coordinate lastra e coordinate reali . . . . . . . 2027.6 Orientamento di una coppia di fotogrammi . . . . . . . . . . 207
7.6.1 Orientamento relativo . . . . . . . . . . . . . . . . . . 2077.6.2 Orientamento assoluto . . . . . . . . . . . . . . . . . . 210
7.7 Fotogrammetria digitale . . . . . . . . . . . . . . . . . . . . . 213

iv INDICE
7.7.1 L’immagine digitale . . . . . . . . . . . . . . . . . . . 2137.7.2 La risoluzione radiometrica . . . . . . . . . . . . . . . 2157.7.3 La risoluzione geometrica . . . . . . . . . . . . . . . . 2167.7.4 Gli scanner fotogrammetrici . . . . . . . . . . . . . . 2177.7.5 I sistemi per la visione stereoscopica . . . . . . . . . . 2187.7.6 Gli algoritmi della fotogrammetria digitale . . . . . . 2197.7.7 Procedure di orientamento automatiche . . . . . . . . 224
7.8 Fotocarte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2287.8.1 Fotopiani . . . . . . . . . . . . . . . . . . . . . . . . . 2297.8.2 Ortoproiezione . . . . . . . . . . . . . . . . . . . . . . 229
7.9 Telerilevamento . . . . . . . . . . . . . . . . . . . . . . . . . . 2317.9.1 Sensori attivi e passivi . . . . . . . . . . . . . . . . . . 2327.9.2 Lo spettro elettromagnetico . . . . . . . . . . . . . . . 2347.9.3 Sensori ad alta risoluzione . . . . . . . . . . . . . . . . 2367.9.4 Sistemi interferometrici radar (SAR) . . . . . . . . . . 2427.9.5 Fotogrammetria e Radargrammetria . . . . . . . . . . 2467.9.6 Sistemi Laser . . . . . . . . . . . . . . . . . . . . . . . 247
8 Posizionamento satellitare 2518.1 I sistemi GNSS . . . . . . . . . . . . . . . . . . . . . . . . . . 2518.2 Principi base . . . . . . . . . . . . . . . . . . . . . . . . . . . 2528.3 Le componenti del sistema . . . . . . . . . . . . . . . . . . . . 2538.4 Il segnale inviato dai satelliti . . . . . . . . . . . . . . . . . . 257
8.4.1 Le equazioni delle osservazioni . . . . . . . . . . . . . 2598.4.2 Osservazioni di fase sulla portante . . . . . . . . . . . 2638.4.3 Posizionamento per la navigazione . . . . . . . . . . . 2648.4.4 Le principali cause di errore . . . . . . . . . . . . . . . 2658.4.5 Determinazioni altimetriche . . . . . . . . . . . . . . . 2698.4.6 Tecniche di misurazione . . . . . . . . . . . . . . . . . 2728.4.7 Correzione differenziale delle posizioni (DGPS) . . . . 273
8.5 La rete IGM95 . . . . . . . . . . . . . . . . . . . . . . . . . . 2758.6 Reti permanenti . . . . . . . . . . . . . . . . . . . . . . . . . 279
8.6.1 Configurazione di una stazione permanente . . . . . . 279
Appendice 2838.7 Cenni di teoria degli errori . . . . . . . . . . . . . . . . . . . . 283
8.7.1 Definizione di errore e scarto quadratico medio . . . . 2838.7.2 Distribuzione di Gauss . . . . . . . . . . . . . . . . . . 285

INDICE
8.7.3 Misure dirette . . . . . . . . . . . . . . . . . . . . . . . 2888.7.4 Misure indirette . . . . . . . . . . . . . . . . . . . . . 2898.7.5 Il peso e la media ponderata . . . . . . . . . . . . . . 291
8.8 Angoli e teoremi dei triangoli . . . . . . . . . . . . . . . . . . 2948.8.1 Angolo . . . . . . . . . . . . . . . . . . . . . . . . . . . 294

INDICE

Capitolo 1
Geodesia
“Geodesy is the science concerned with the study of the shape and size ofthe earth in the geometric sense as well as with the form of the equipotentialsurfaces of the gravity potential” Friedrich R. Helmert (1880)
Dalla rappresentazione della Terra come un disco circondato dagli oceani(Omero, Iliade 800 a.C.) si arrivo alla nozione di forma sferica con le scuoledi Pitagora (500 a.C.) e di Aristotele (300 a.C.). La prima misura del raggioterrestre risale al III◦ secolo a.C., ad opera di Eratostene, eseguita misuran-do l’inclinazione del Sole sulla verticale di Alessandria. Egli seppe infattiche a Siene (attualmente Assuan al Tropico del Cancro) i pozzi, al Solstiziod’Estate, erano illuminati fino in fondo, significando che a mezzogiorno ilSole passava esattamente sulla loro verticale. Misuro quindi l’inclinazionedei raggi solari a mezzogiorno a Alessandria. Con cio aveva misurato, essen-do il Sole a distanza (praticamente) infinita, e quindi i suoi raggi paralleli,l’angolo al centro della terra dell’arco di meridiano da Siene ad Alessandria.
1

2 1. Geodesia
Conoscendo quindi la distanza D tra le due citta (misurata a passi dicammello) ottenne il raggio:
R = D/Angolo
Figura 1.1: La misura del raggio terrestre di Eratostene
L’errore fu soltanto del 10 %, nel dedurre una lunghezza del cerchio massimoterrestre di 252.000 stadii (da 39.000 Km a 47.000 Km, a seconda del valoreattribuito allo stadio). Tali misure vennero ripetute in seguito dai cinesinell’ VIII secolo d.C. e dagli arabi nel secolo successivo con valori gia moltovicini a quello che Fernel ottenne nel 1525, pari a 40.063 Km, misurandola differenza di latitudine tra Amiens e Parigi e la loro distanza tramite uncontatore applicato alla ruota di una carrozza.Si arriva cosı al primo vero metodo geodetico usato da Snellius (ideatoredella triangolazione) nel 1615; le sue misure, affette da un errore grossola-no, forniranno un valore ragionevole solo in seguito ad un rigoroso controllo,un secolo dopo.Con l’enunciazione della Teoria gravitazionale di Newton, si comincio a pen-sare ad una forma della Terra diversa da quella sferica: l’ellissoide schiaccia-to ai poli. Sebbene oggetto inizialmente di molte perplessita, questa teoriavenne in parte verificata con sondaggi diretti, le cosiddette spedizioni per lamisura del grado di meridiano, in Peru e Lapponia. Altre misure di archi dimeridiano vennero effettuate nel secolo scorso da diversi geodeti, con l’intro-

3
duzione di moderne triangolazioni. Al metodo ideato da Snellius si aggiunsela compensazione degli errori di osservazione, applicata per la prima voltada Gauss.Nel secolo scorso sono state eseguite varie determinazioni dei parametridell’ellissoide (semiassi a, b e schiacciamento), fra le quali spicca quella diBessel del 1841. Bessel la ricavo tramite misure di 10 archi di meridiano,con 38 determinazioni di latitudine effettuate in America, Europa e Asia.L’Ellissoide di Bessel e stato adottato come supporto dei lavori geodeticiin diversi paesi, tra i quali l’Italia, ed e rimasto alla base della cartografiaininterrottamente fino alla fine della seconda guerra mondiale.I suoi parametri sono:
a = 6.377.397, 2 m (semiasse maggiore)
s =a− b
a=
1299, 15
(schiacciamento)
b = 6.356.079, 0 m (semiasse minore)
Nel 1924 furono adottati universalmente quali parametri dell’ellissoide diriferimento, quelli proposti da Hayford al Congresso dell’Unione Geodeti-ca e Geofisica Internazionale (UGGI) di Madrid. Per tale ellissoide (an-che detto Internazionale) al semiasse maggiore e allo schiacciamento furonoufficialmente attribuiti i seguenti valori:
a = 6.378.388(±35)m (semiasse maggiore)
s =a− b
a=
1297
(schiacciamento)
b = 6.356.911, 946 m (semiasse minore)
L’ ultimo ellissoide adottato, in ordine di tempo, e il WGS84 (World Geode-tic System) del 1984, che venne realizzato modificando il Navy NavigationSatellite System (NNSS), o TRANSIT, Doppler Reference Frame (NSWC9Z-2) sia nell’origine che nella scala, ruotandolo per portare il suo meridianodi riferimento a coincidere con quello definito dal Bureau International del’Heure (BIH).Le origini e gli assi del sistema WGS84 sono definiti come segue:Origine = Centro di massa della TerraAsse Z = Direzione del Polo Convenzionale Terrestre (CPT) cosı come de-finito dal BIH

4 1. Geodesia
Asse X = Intersezione del piano meridiano di riferimento del WGS84 conl’equatore (sempre riferito al CTP)Asse Y = Quello che completa un sistema di riferimento Cartesiano ortogo-nale destrorso (90◦ Est dall’asse X)
ZWGS84
XWGS84 YWGS84
CENTRO DIMASSADELLATERRA
MERIDIANO ZERO
Figura 1.2: Il sistema Earth Centered, Earth Fixed WGS84
Il sistema si definisce ECEF (Earth Centered, Earth fixed) ed ha i seguentiparametri:
a = 6.378.137m (semiasse maggiore)
f =1
298.257223563(schiacciamento)
ω = 7.292115 ∗ 10− 5rads−1 (velocita angolare)
La particolarita di questo riferimento e il vincolo stretto tra i parametrimetrici dell’ellissoide e quelli fisico-dinamici del campo gravitazionale.
Le ragioni per cui si e sentito il bisogno di variare questi valori sono dovutealle numerose misure di gravita compiute, alla perturbazione delle orbitedei primi satelliti artificiali rispetto alle teorie kepleriane e alle nuove teorie

1.1 La superficie di riferimento 5
che consentivano di rappresentare il campo gravitazionale e di conseguenzala superficie dinamica della Terra. Il problema in origine e stato sollevatoessenzialmente dagli astronomi, i quali, studiando le orbite dei satelliti,hanno dedotto i nuovi dati dell’ellissoide internazionale di riferimento.
1.1 La superficie di riferimento
La forma della Terra viene attualmente dedotta dalla legge di gravitazioneuniversale. Tutte le particelle terrestri sono sollecitate dalla forza di gravitae dalla forza centrifuga generata dal moto di rotazione. La forza di gravitagenera un potenziale
W (x, y, z)
funzione delle coordinate del punto, riferite ad una terna con origine nelcentro della Terra. L’insieme dei punti in cui questo potenziale e costante
W (x, y, z) = cost
appartiene manifestamente ad una superficie; tale superficie viene detta su-perficie equipotenziale o superficie di livello.Nel caso della Terra, poiche le densita variano da punto a punto (mari,montagne, ecc.), ci si limita a definire la sua forma come la superficie diequilibrio idrostatico, assunta dalla superficie degli oceani purche suppostiliberi da tutte le perturbazioni dovute a maree, correnti, temperatura, mo-vimenti sismici, ecc., e prolungati idealmente sotto i continenti. Questa,cosı definita, e la superficie del livello medio del mare detta GEOIDE.
Per essa non e possibile trovare un’adeguata rappresentazione matemati-ca: quella che piu le si approssima, sembra essere l’ellissoide di rotazione(a tre assi, secondo gli studi piu recenti). Gli scostamenti massimi delGeoide dall’Ellissoide sono valutati nell’ordine di qualche centinaio di me-tri. Consistono in lievi ondulazioni dovute alle rugosita montane o a zonegeneralmente assunte come anomale. La verticale in un punto al Geoide (fi-sicamente individuabile col filo a piombo) non coincide normalmente con laverticale all’Ellissoide; l’angolo tra le due verticali viene definito deviazione

6 1. Geodesia
Figura 1.3: Geoide ed Ellissoide
della verticale: e una grandezza che assume valori dell’ordine del secondo earriva al massimo al primo.
Nella pratica operativa mentre le misure sono eseguite direttamente sulGeoide, i calcoli sono effettuati sulla superficie geometrica dell’Ellissoide(riferimento su cui e matematicamente possibile operare). L’equazione del-l’ellissoide di semiassi a e b, riferita ad una terna cartesiana con origine nelcentro dell’ellissoide e asse Z coincidente con l’asse polare orientato versoNord, e:
x2 + y2
a2+
z2
b2= 1
ove, posto x2 + y2 = r2 si ha
r2
a2+
z2
b2= 1
che nel piano zr e l’equazione di una ellisse meridiana.

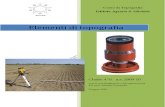
7.9 Telerilevamento 231
Figura 7.33: Ortofoto mosaicata
Figura 7.34: Ingrandimento giunzione ortofoto mosaicata
7.9 Telerilevamento
Il Telerilevamento puo essere definito come l’acquisizione di dati fisici diun oggetto con un sensore che non ha contatto diretto con l’oggetto stesso.Fotografie della superficie della Terra si datano gia ai primi anni dell’800,quando nel 1839 Louis Daguerre riporto pubblicamente risultati di imma-gini da esperimenti fotografici. Nel 1858 fu prodotta la prima vista aereada un pallone e nel 1910 Wilber Smith piloto l’aereo che realizzo le primefamose fotografie aeree d’Italia. Immagini fotografiche aeree furono raccolteper routine durante entrambe le Guerre Mondiali; durante la seconda guerra

232 7. Fotogrammetria e Telerilevamento
mondiale per la prima volta vennero usate parti non visibili dello spettroelettromagnetico (EM) utilizzando la tecnologia del radar. Negli anni ses-santa fu lanciato il primo satellite meteorologico anche se l’acquisizione diimmagini dallo spazio risale anche a tempi precedenti da parte di satellitispia.
Nel 1972, col lancio del satellite per l’osservazione terrestre Landsat 1 (cam-bio il nome da ERTS-1), si inizio a fare osservazioni ripetitive e sistemati-che. Molte missioni dedicate all’osservazione della terra seguirono il Land-sat 1 e nel 1980 la Nasa avvio lo sviluppo di strumenti di acquisizioneiperspettrali coprendo il visibile ad onda corta con porzioni infrarosse dellospettro elettromagnetico. Simultaneamente nel campo dei sensori remotia microonda attiva la ricerca condusse allo sviluppo di sistemi di radar amulti-polarizzazione e sistemi interferometrici.
7.9.1 Sensori attivi e passivi
Un sensore e uno strumento in grado di acquisire informazioni attraverso lamisura e la registrazione di energia elettromagnetica. Viene posto su unapiattaforma stabile lontana dalla superficie che deve essere osservata e puoessere situato sul terreno, su un aereo o su una navicella o su un satellite.A terra vengono usati spesso per confrontare le informazioni raccolte daisensori montati su aereo o su satellite. Le piattaforme aeree sono usate perottenere immagini di dettaglio. Nello spazio il rilevamento a distanza e, avolte, effettuato da uno shuttle o, piu comunemente, da satellite.
I sensori possono essere attivi o passivi. Attivi se generano un segnale cheillumina l’oggetto e ne registrano l’eco di ritorno. Passivi quando misuranola radiazione naturalmente disponibile emessa o riflessa dagli oggetti. L’e-nergia che viene naturalmente emessa (come quella dell’infrarosso termico)puo essere registrata sia di giorno che di notte, purche la quantita di ener-gia sia tale da essere registrata. I sensori attivi forniscono una sorgente dienergia per l’illuminazione emettendo una radiazione diretta verso l’oggettoda osservare. La radiazione riflessa dall’oggetto e registrata e misurata dalsensore. I sistemi attivi richiedono la generazione di una enorme quantita

7.9 Telerilevamento 233
di energia per illuminare adeguatamente l’oggetto. Un esempio di sensoreattivo e il Radar ad Apertura Sintetica (SAR).
Ogni sensore e caratterizzato da quattro proprieta:
• la risoluzione spaziale;
• la risoluzione radiometrica;
• la risoluzione spettrale;
• la risoluzione temporale.
La risoluzione spaziale e l’area minima sul terreno vista dallo strumentoda una data altezza ad un dato istante e viene rappresentata dalla dimen-sione dell’elemento di superficie riconoscibile in una immagine registrata o,ancora, dalla distanza minima entro la quale due oggetti appaiono distintinell’immagine. I satelliti commerciali forniscono immagini con risoluzioniche variano dal submetrico a diversi chilometri.
La risoluzione radiometrica rappresenta la minima differenza di intensitache un sensore puo rilevare tra due valori di energia raggiante. Le caratte-ristiche radiometriche descrivono il contenuto informativo in un’immagine.Ogni volta che una immagine e acquisita su un film o da un sensore, la suasensibilita alla grandezza dell’energia elettromagnetica determina la risolu-zione radiometrica. Migliore e la risoluzione radiometrica di un sensore, piusensibile e nel registrare piccole differenze nell’energia riflessa o emessa. E’anche definito come il numero di livelli discreti in cui puo venire suddivisoun segnale 5. I dati in una immagine sono generalmente visualizzati in unintervallo di toni di grigio con il nero che rappresenta il numero digitale 0 e
5I dati in una immagine sono rappresentati da numeri digitali positivi che varianoda 0 a (uno meno di) una potenza di 2. Questo range corrisponde al numero di bitsusati per codificare i numeri nel formato binario. Ciascun bit registra un esponente dellapotenza di due (per esempio 1 bit = 21 = 2). Il massimo numero di livelli di luminositadisponibili dipende dal numero di bits usati per rappresentare l’energia registrata. Quindise un sensore usa 8 bits per registrare i dati, i valori digitali disponibili sono 28 = 256,variando da 0 a 255. Se sono usati solo 4 bits i valori disponibili saranno 24 = 16 variandoda 0 a 15 con una risoluzione radiometrica minore

234 7. Fotogrammetria e Telerilevamento
il bianco che rappresenta il valore massimo (per esempio 255 in dati a 8 bit).Confrontando una immagine a 2 bit con una a 8 bit possiamo vedere che c’euna grande differenza nel livello di dettaglio individuabile in funzione dellarisoluzione radiometrica. Piu alto e il numero di livelli di grigio (o di colorergb), migliore e la risoluzione radiometrica.
La risoluzione spettrale e l’ampiezza delle bande spettrali risolte dal sensorecioe il minimo intervallo tra le lunghezze d’onda medie di due bande spettraliche un sensore puo separare. Migliore e la risoluzione spettrale, piu sottile el’intervallo di lunghezze d’onda per una particolare banda. Molti sistemi ditelerilevamento registrano l’energia di intervalli separati di lunghezza d’on-da a diverse risoluzioni spettrali. Questi sono detti sensori multispettrali.Sensori multispettrali avanzati, chiamati iperspettrali, registrano centina-ia di ristrette bande spettrali nella porzione dello spettro elettromagneticodel visibile, dell’infrarosso vicino e del medio infrarosso. La loro risoluzionespettrale molto alta rende possibile la discriminazione tra differenti oggettisulla base della loro risposta spettrale in ciascuna delle bande.
La risoluzione temporale e il tempo che intercorre tra acquisizioni successivedella stessa area. Il periodo di rivisitazione di un sensore satellitare e nor-malmente di diversi giorni. Alcuni satelliti hanno la capacita di orientarei loro sensori per riprendere la stessa area in passaggi differenti con inter-valli temporali piu ristretti. Quindi la risoluzione temporale di un sensoredipende da una varieta di fattori fra cui le caratteristiche del satellite e delsensore, la sovrapposizione dell’ampiezza di ripresa e la latitudine.
7.9.2 Lo spettro elettromagnetico
La distribuzione delle energie di radiazione puo essere rappresentata siain funzione della lunghezza d’onda che della frequenza in un grafico notocome spettro elettromagnetico (EM). Lo spettro EM e stato arbitrariamentesuddiviso in regioni o intervalli cui sono stati attribuiti nomi descrittivi.All’estremo piu energetico (alte frequenze, piccole lunghezze d’onda) ci sonoi raggi gamma e i raggi x (le cui lunghezze d’onda sono usualmente misuratein angstroms [A]).

7.9 Telerilevamento 235
Figura 7.35: Spettro elettromagnetico EM
La radiazione ultravioletta si estende da circa 300 A a circa 4000 A. Per leregioni centrali dello spettro e opportuno utilizzare una fra le due seguentiunita di misura: micron (µm), ovvero multipli di 10-6 m o nanometri (nm),di base 10-9 m. La regione visibile occupa l’intervallo fra 0.4 e 0.7 µm, oquello equivalente da 4000 a 7000 A o ancora da 400 a 700 nm.
La regione infrarossa, compresa fra 0.7 e 100 µm, ha quattro sottointervallidi particolare interesse: l’IR riflesso (0.7 - 3.0 µm) e l’IR fotografico (0.7 -0.9 µm), ovvero il range di sensibilita delle pellicole; e le bande termiche a(3 - 5 µm) e (8 - 14 µm).
Per gli intervalli di lunghezze d’onda maggiori si passa dai mm ai cm aimetri. La regione delle microonde va da 0.1 a 100 cm; include i rangedi frequenze di tutti i sistemi radar costruiti dall’uomo che producono laradiazione a microonde che illumina gli oggetti e viene da questi riflessa.
La regione di lunghezze d’onda maggiori (frequenze piu basse) oltre i 100

236 7. Fotogrammetria e Telerilevamento
cm corrisponde alle bande radio.
Figura 7.36: Bande EM
7.9.3 Sensori ad alta risoluzione
I sensori ad alta risoluzione si spingono a risoluzione inferiore al metro, va-lore che era una volta appannaggio esclusivo dei satelliti spia. Per poterraggiungere tali risoluzioni i satelliti civili hanno dovuto attendere fino agliultimi giorni del 20◦ secolo in quanto l’avanzamento tecnologico e stato re-golamento da politiche di sicurezza. Lo US Land Remote Sensing Act del1992 concluse che una industria robusta satellitare commerciale era impor-tante al welfare degli Stati Uniti e creo un processo per autorizzare societaprivate per sviluppare, possedere, operare, e vendere dati ad alta risoluzionedall’osservazione terrestre dei satelliti. Due anni piu tardi quattro licenzeper sistemi al metro furono accordati, ed attualmente i primi due satellitiautorizzati, IKONOS e Quick Bird sono nello spazio.
In contrasto ai satelliti a risoluzione media, i sistemi ad alta risoluzione han-

7.9 Telerilevamento 237
no limitata copertura multispettrale, o addirittura solo capacita pancroma-tiche. Hanno capacita di puntamento estreme per aumentare la copertura.La capacita di puntamento puo essere usata anche per la riprogrammazioneall’ultimo minuto del satellite in caso di copertura di nubi.
I satelliti ad alta risoluzione hanno una risoluzione spaziale inferiore ai 5metri, lavorano su 1 o 4 bande spettrali, hanno un’abbracciamento di scenadell’ordine di 100 km ed un tempo di ritorno migliore di 3 giorni. Si riportadi seguito una lista di sensori:
Piattaforma Sensore Risoluz. Multi Ampiezza Capacita Tempospaziale spettr. di banda puntamento rivisitaz.
IRS-1C -1D pan 5.8 m 4 bande 70 km 26◦ 5 giorniCosmo KVR-1000 2 m No 160 km No N/AOrbView-3 pan 1 m 4 bande 8 km 45◦ 3 giorniIkonos 1 OSA 1 m 4 bande 11 km 30◦ 1-3 giorniQuickBird QBP 1 m 4 bande 27 km 30◦ 1-3 giorniEROS A+ CCD 1.8 m No 12.5 km
IRS-1C e IRS-1D
Lanciati dall’India (la settima nazione a lanciare con successo un satelliteorbitante per telerilevamento a luglio del 1980, l’India sta spingendo con unprogramma nazionale impressionante finalizzato allo sviluppo di lanciatoricosı come di produzione di satelliti per comunicazioni e meteorologia) IRS-1C e 1D sono dotati di tre sensori separati, i WiFS, i LISS, ed il sensorepancromatico ad alta risoluzione. Il Wide Field Sensor (WiFS) offre imma-gini regionali acquisite in fascie di 800 km di ampiezza ad una risoluzione di188 m in due bande spettrali, visibile (620-680 nm) e vicino infrarosso (770-860 nm) ed e usato per rilevamento di indici vegetazionali. Il WiFS offre unrapido tempo di rivisitazione di 3 giorni. Il Linear Imaging Self-ScanningSensor 3 (LISS-3) e adibito a acquisizione di immagini multispettrali. LISS-3 acquisisce quattro bande (520-590, 620-680, 770-860, e 1550-1750 nm) con23.7 m di risoluzione spaziale configurandosi come ideale complemento aidati del vecchio sensore Landsat 5 Thematic Mapper (TM). Il sensore pan-cromatico ha una risoluzione di 5.8m. IRS-1C fu lanciato il 28 dicembre1995, IRS-1D il 28 settembre 1997. E’ stato recentemente lanciato IRS-P5

Capitolo 8
Posizionamento satellitare
“...appare chiaramente l’importanza che i satelliti hanno assunto in Geode-sia. Il recente sviluppo delle loro applicazioni, integrando quelle fornite daimezzi classici, fa intravedere la possibilita di ottenere un sistema geodeti-co mondiale unificato -Universal World Datum-, riferito al centro di massadella Terra e dotato di uniforme ed elevata precisione; i suoi vantaggi sareb-bero immensi, sia dal punto di vista scientifico che da quello applicativo.”Giuseppe Birardi (1988)
8.1 I sistemi GNSS
I sistemi di posizionamento satellitari sono denominati GNSS (Global Navi-gation Satellite Systems) e attualmente ne esistono due operazionali e dispo-nibili all’uso civile: il NAVSTAR (NAVigation Satellite Time And Ranging)- GPS (Global Positioning System)1 degli Stati Uniti e il GLONASS (GLO-
1http://gps.losangeles.af.mil/
251

252 8. Posizionamento satellitare
bal’naya NAvigatisionnaya Sputnikovaya Sistema)2 della Russia. E in corsodi realizzazione il sistema Galileo3da parte della Comunita Europea per soliscopi civili4.
8.2 Principi base
I sistemi di posizionamento satellitare si basano sull’emissione, da parte disatelliti artificiali, di segnali radio che contengono informazioni sufficientiper poter ricavare la distanza satellite-ricevitore. Supposta nota istante peristante la posizione di ciascun satellite, e possibile determinare le coordinatedel ricevitore con un’equazione del tipo:
ρij =
√(Xi −Xj)2 + (Y i − Yj)2 + (Zi − Zj)2 (8.1)
dove:
ρj = distanza misurata tra il satellite i-esimo ed il ricevitore j-esimo;
Xj , Yj , Zj= coordinate incognite del ricevitore j-esimo;
Xi, Y i, Zi = coordinate note del satellite i-esimo;
Con tre equazioni indipendenti del tipo (8.1) e teoricamente possibile, im-piegando contemporaneamente le misure di distanza tra un ricevitore e tresatelliti, determinare la posizione del ricevitore in similitudine al processogeometrico classico di intersezione inversa con misure di distanza.
In realta le equazioni che legano la distanza misurata alla posizione delricevitore contengono altre incognite dovute ad errori di misura, comunque
2http://www.glonass-ianc.rsa.ru3http://ec.europa.eu/dgs/energy-transport/galileo/4Riassumendo in forma matematica potremmo dire che:
GNSS = f(GPS, GLONASS, GALILEO)

8.3 Le componenti del sistema 253
determinabili, dovuti principalmente all’attraversamento dell’atmosfera daparte di onde radio.
La posizione del Satellite all’istante di tempo considerato e derivata dallaconoscenza dell’orbita. Il moto dei satelliti lungo la propria orbita e ilrisultato dell’equilibrio di un’insieme di forze gravitazionali essenzialmentedovute all’influenza della terra, del sole e della luna. Per lo studio del motodel satellite si utilizzano modelli kepleriani newtoniani semplificati nei qualivengono introdotti modelli di variazione dell’orbita dovuti al fatto essenzialeche in realta le orbite non sono ellissi contenute in un piano. Il movimentorisente infatti di tutte le variazioni gravitazionali dovute principalmente allairregolarita di distribuzione delle masse terrestri, solari e lunari.
8.3 Le componenti del sistema
Il sistema di posizionamento satellitare5 si compone di tre elementi denomi-nati segmenti: segmento spaziale, segmento di controllo, segmento utente.
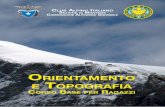
Il segmento spaziale del GPS e costituito da 28 satelliti artificiali a circa20000 Km di altezza, in orbita su sei piani orbitali egualmente spaziati inlongitudine (ascensione retta) di 60 gradi e inclinati di 55 gradi rispetto alpiano equatoriale.
Il periodo di rivoluzione di un satellite e di 12 ore siderali e a causa delladifferenza tra giorno sidereo e giorno solare medio, ciascun satellite sorge,ogni giorno, circa 4 minuti prima del giorno precedente.
Con questa configurazione geometrica e garantita la visibilita di ciascunsatellite, da parte di un osservatore posto sulla terra, per 5 delle 12 oretotali di rivoluzione. In pratica con orizzonte libero e sempre possibile vederealmeno 4-5 satelliti in qualsiasi posizione e a qualsiasi ora.
5Verranno illustrate nel seguito le caratteristiche del sistema GPS

254 8. Posizionamento satellitare
Figura 8.1: La costellazione dei satelliti GPS
Ogni satellite e dotato di oscillatori ad altissima precisione (orologi) al Cesioe al Rubidio, pesa circa 845 kg ed ha una vita media di progetto di 7,5anni. Trasmettono varie informazioni all’utenza mediante l’invio di segnalicomplessi, ma nello stesso tempo ricevono informazioni dalle stazioni delsegmento di controllo.
Il segmento di controllo e costituito da cinque stazioni a terra approssima-tivamente disposte equidistanti lungo l’equatore e di posizione determinatacon grande precisione.
A seconda della funzione che esse svolgono vengono classificate in: MonitorStations (MSs), Master Control Station (MCS), Ground Control Station(GCS).
Ogni stazione e dotata di apparecchiature per ricevere in continuo il segnaleproveniente dai satelliti e per misurare i parametri atmosferici e orbitali.
Alla stazione principale di controllo (MCS, situata a Colorado Springs),confluiscono tutti i dati registrati dalle MSs che consentono, mediante op-

8.3 Le componenti del sistema 255
Figura 8.2: Le stazioni di controllo
portuni trattamenti, la determinazione dei modelli per la correzione deglierrori dovuti all’asincronismo tra gli oscillatori dei satelliti e quelli dei rice-vitori e la determinazione delle effemeridi dei satelliti (effemeridi predetteo Broadcast Ephemerides) che vengono ricalcolate ogni 15 minuti interpo-lando, con compensazione ai minimi quadrati, i dati di posizione trasmessidai satelliti. I dati di navigazione, cosı aggiornati da parte delle stazionidi controllo, vengono inviati ai satelliti che a loro volta trasmettono questeinformazioni agli utenti.
La stazione MCS controlla inoltre la posizione orbitale dei satelliti coman-dando piccole correzioni della stessa
Le stazioni GCS costituiscono il collegamento tra la stazione MCS ed ilsegmento spaziale trasmettendo ai satelliti i dati provenienti dalla stazionedi controllo.
Il segmento utente e costituito dagli utenti dotati dell’equipaggiamento dibase per potere ricevere i segnali radio inviati dai satelliti, costituito daun’antenna ed un ricevitore. Quest’ultimo raccoglie i dati che vengono suc-cessivamente trattati da appositi software forniti dalle case costruttrici deiricevitori stessi.

256 8. Posizionamento satellitare
Figura 8.3: Antenna GPS per scopi geodetici