Elementi di Cinematica - Home - people.unica.it -...
22
Elementi di Cinematica La cinematica studia il moto dei corpi indipendentemente dalle cause che lo determinano In generale le grandezze necessarie per la descrizione geometrica del moto di un corpo sono: - posizione (dei punti del corpo in un determinato istante) - posizione (dei punti del corpo in un determinato istante) - tempo (insieme degli istanti a cui riferire la posizione - variazioni nel tempo della posizione (velocità, accelerazione, etc.) Lo studio del moto dei sistemi complessi può risultare piuttosto impegnativo Approccio semplificato con gradi di approssimazione crescenti (punti, corpi approssimazione crescenti (punti, corpi estesi rigidi o deformabili, etc.) PUNTO (MATERIALE) CORPO RIGIDO SISTEMA ARTICOLATO (corpi rigidi) CORPI DEFORMABILI ...
Transcript of Elementi di Cinematica - Home - people.unica.it -...
Elementi di Cinematica
La cinematica studia il moto dei corpi indipendentemente dalle cause che lo determinano
In generale le grandezze necessarie per la descrizione geometrica del moto di un corpo sono:- posizione (dei punti del corpo in un determinato istante)- posizione (dei punti del corpo in un determinato istante)- tempo (insieme degli istanti a cui riferire la posizione- variazioni nel tempo della posizione (velocità, accelerazione, etc.)
Lo studio del moto dei sistemi complessi può risultare piuttosto impegnativo
Approccio semplificato con gradi di approssimazione crescenti (punti, corpi approssimazione crescenti (punti, corpi estesi rigidi o deformabili, etc.)
PUNTO (MATERIALE)
CORPO RIGIDO
SISTEMA ARTICOLATO(corpi rigidi)
CORPI DEFORMABILI
...
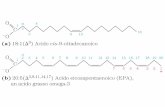
Elementi di Cinematica- cinematica del punto
La posizione del punto è definita rispetto ad un sistema di riferimento.
Si consideri il moto nel piano, e si consideri il punto O come un punto fisso nel
piano piano stesso.
La posizione A del punto ad un certo istante t sarà identificata dal vettore
piano del moto
La posizione A del punto ad un certo istante t sarà identificata dal vettore
posizione r = r(t)
(t)rr A(t) (posizione del punto)
traiettoria del punto durante il motoO
rr

Elementi di Cinematica
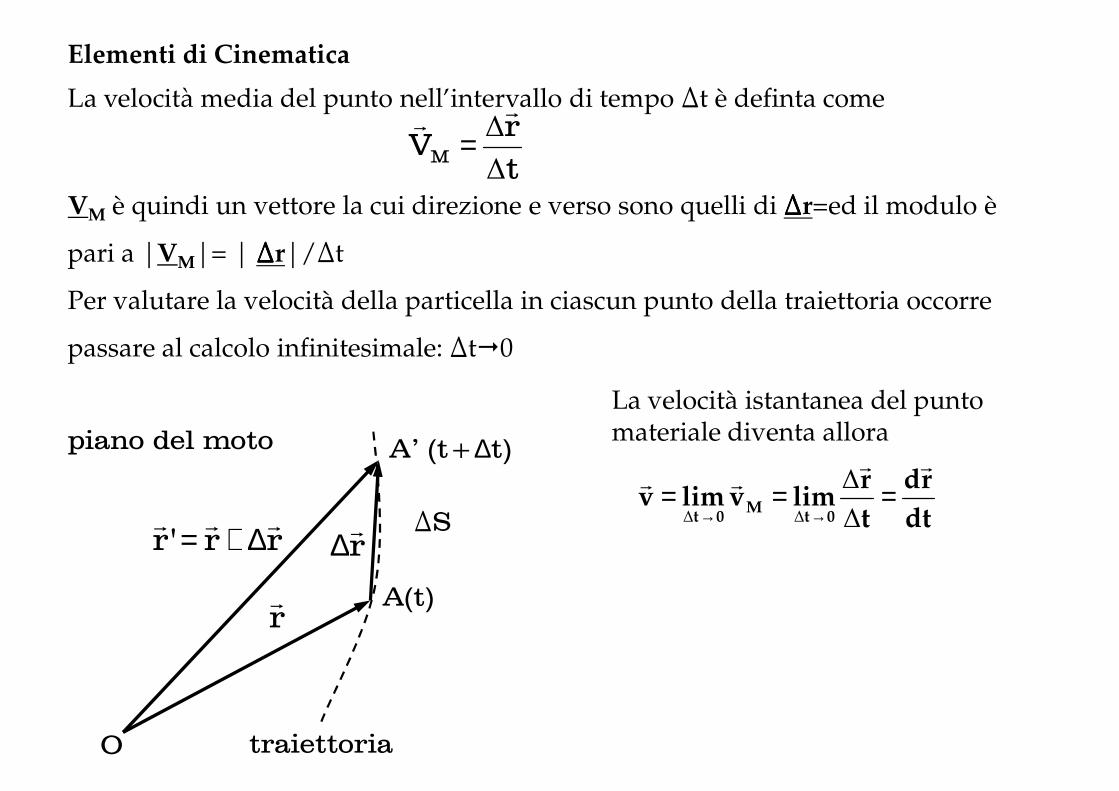
Dopo un certo intervallo di tempo Dt il punto avrà percorso un tratto di traiettoria
lungo DS per portarsi nel punto A’.
il vettore posizione del punto all’istante t+Dt sarà r’
lo spostamento sarà DDDDr=r’-r (N.B.: in genere |DDDDr|≠ DS)lo spostamento sarà DDDDr=r’-r (N.B.: in genere |DDDDr|≠ DS)
da cui r’= r +DDDDr
A’ (t+∆t)
DSrr'rrrr
∆+= rr
∆
piano del moto
traiettoria
DSrr'rrrr
∆+= rr
∆
O
rr A(t)
Elementi di Cinematica
VM è quindi un vettore la cui direzione e verso sono quelli di DDDDr=ed il modulo è
pari a |VM|= | DDDDr|/Dt
La velocità media del punto nell’intervallo di tempo Dt è definta come
t
rVM
∆
∆r
r=
pari a |VM|= | DDDDr|/Dt
Per valutare la velocità della particella in ciascun punto della traiettoria occorre
passare al calcolo infinitesimale: Dt�0
A’ (t+∆t)
DSrr'rrrr
∆+= rr
∆
piano del moto
La velocità istantanea del punto materiale diventa allora
dt
rd
t
rlimvlimv
0tM
0t
rrrr ===
→→ ∆
∆
∆∆
traiettoria
DSrr'rrrr
∆+= rr
∆
O
rr A(t)
dtt∆
Elementi di Cinematica
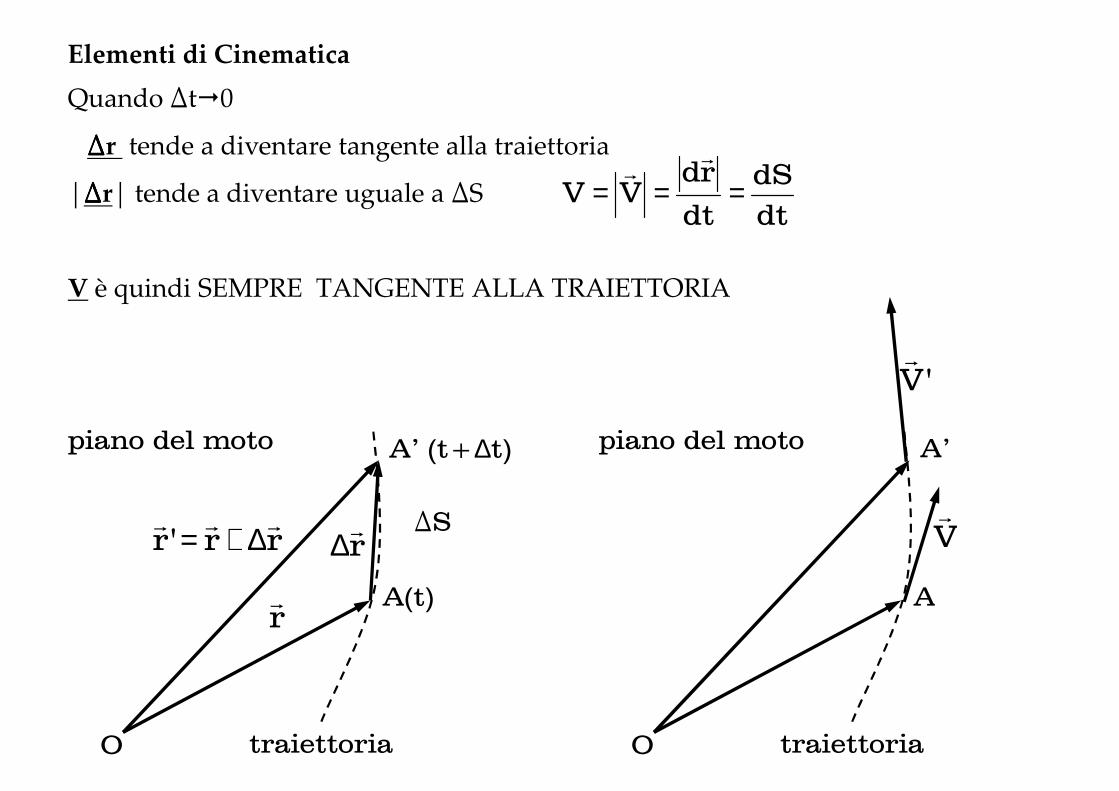
Quando Dt�0
DDDDr tende a diventare tangente alla traiettoria
|DDDDr| tende a diventare uguale a DSdt
dS
dt
rdVV ===
rr
V è quindi SEMPRE TANGENTE ALLA TRAIETTORIA
A’ (t+∆t)
DSrr'rrrr
∆+= rr
∆
piano del moto A’piano del moto
Vr
'Vr
traiettoria
DSrr'rrrr
∆+= rr
∆
O
rr A(t)
traiettoriaO
A
V

Elementi di Cinematica
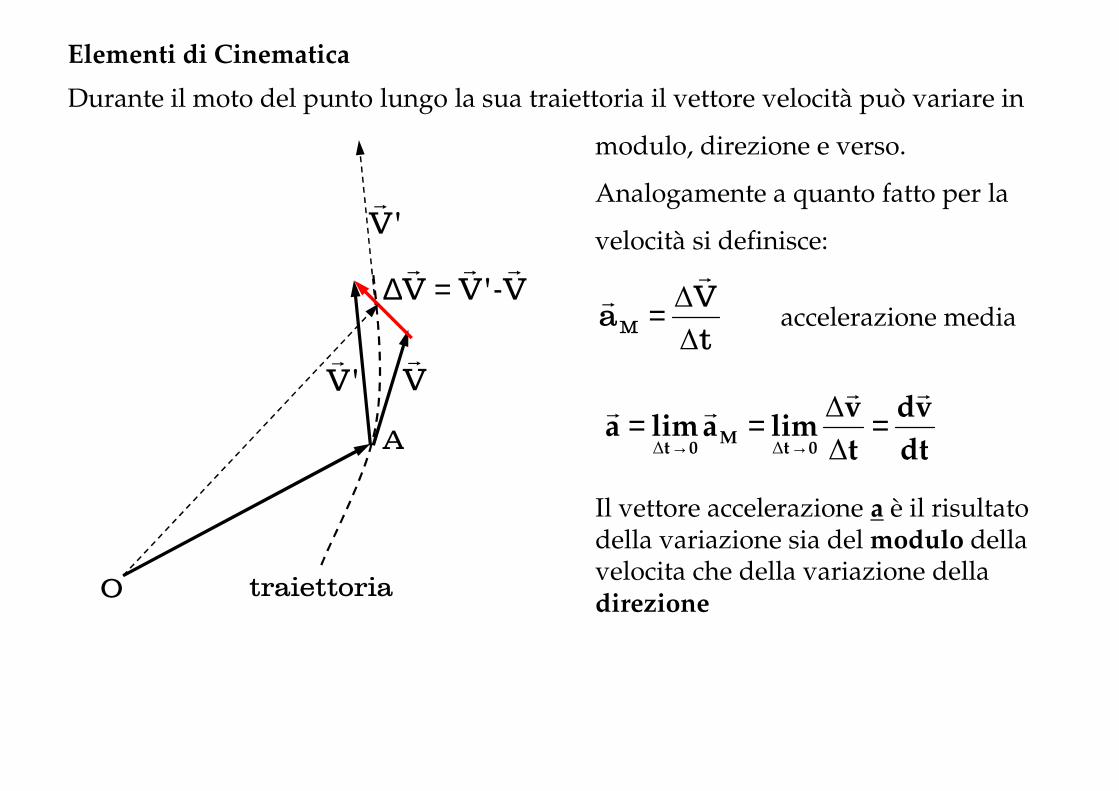
Durante il moto del punto lungo la sua traiettoria il vettore velocità può variare in
modulo, direzione e verso.
Analogamente a quanto fatto per la
velocità si definisce:'Vr
A’
A
Vr
t
VaM
∆
∆r
r= accelerazione media
Il vettore accelerazione a è il risultato della variazione sia del modulo della
dt
vd
t
vlimalima
0tM
0t
rrrr
===→→ ∆
∆
∆∆
traiettoriaO
della variazione sia del modulo della velocita che della variazione della direzione
'Vr
Durante il moto del punto lungo la sua traiettoria il vettore velocità può variare in
modulo, direzione e verso.
Analogamente a quanto fatto per la
velocità si definisce:
Elementi di Cinematica
A
Vr
V'-VVrrr
=∆
'Vr
t
VaM
∆
∆r
r= accelerazione media
Il vettore accelerazione a è il risultato della variazione sia del modulo della
dt
vd
t
vlimalima
0tM
0t
rrrr
===→→ ∆
∆
∆∆
traiettoriaO
della variazione sia del modulo della velocita che della variazione della direzione
Elementi di Cinematica
Le notazioni appena viste sono sempre vere, ma spesso non sono comode per la
determinazione delle grandezze cinematiche in casi pratici.
É possibile esprimere le grandezze cinemetiche in diversi sistemi di riferimento (SDR).
La scelta del SDR più opportuna dipende dalle caratteristiche del problema da La scelta del SDR più opportuna dipende dalle caratteristiche del problema da
affrontare.
COORDINATE CARTESIANE
COOORDINATE LOCALI
COORDINATE POLARI
Lo scopo della cinematica è la descrizione della geometria del movimento di un Lo scopo della cinematica è la descrizione della geometria del movimento di un
sistema meccanico
Elementi di Cinematica
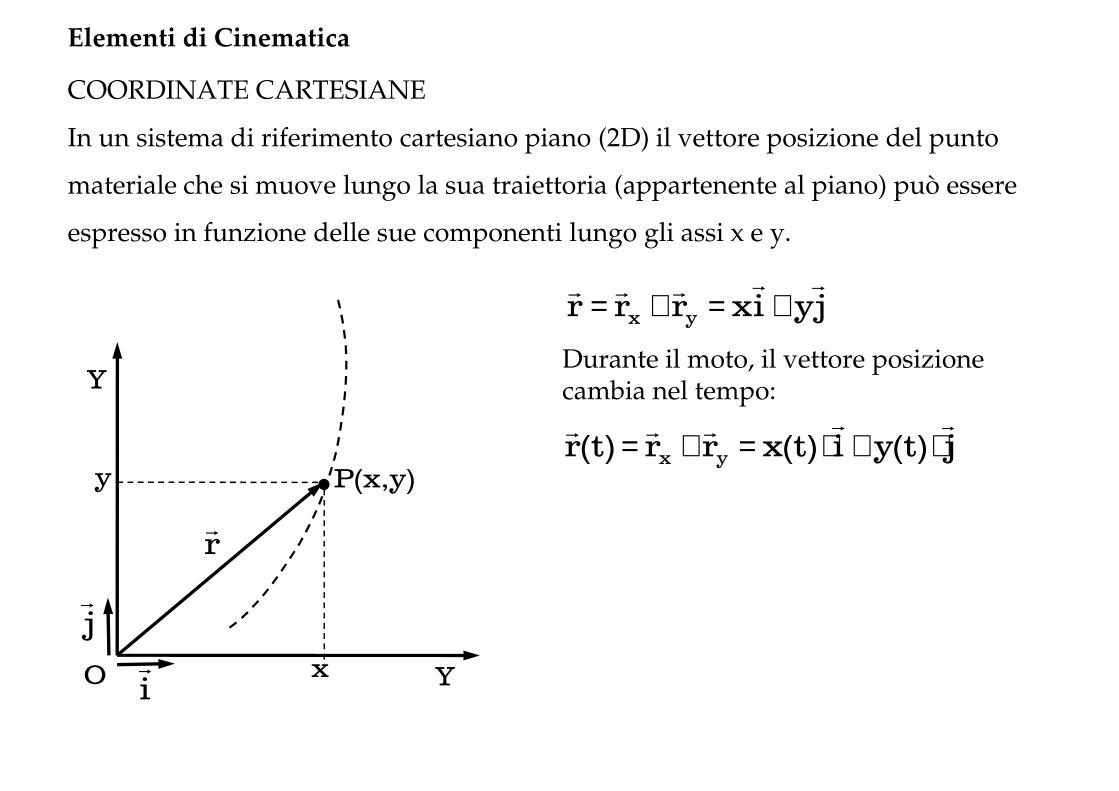
COORDINATE CARTESIANE
In un sistema di riferimento cartesiano piano (2D) il vettore posizione del punto
materiale che si muove lungo la sua traiettoria (appartenente al piano) può essere
espresso in funzione delle sue componenti lungo gli assi x e y.
jyixrrr yx
rrrrr+=+=
jy(t)ix(t)rr(t)r yx
rrrrr⋅+⋅=+=
Durante il moto, il vettore posizione cambia nel tempo:
rr
P(x,y)y
Y
rr
xir
jr
O Y
Elementi di Cinematica
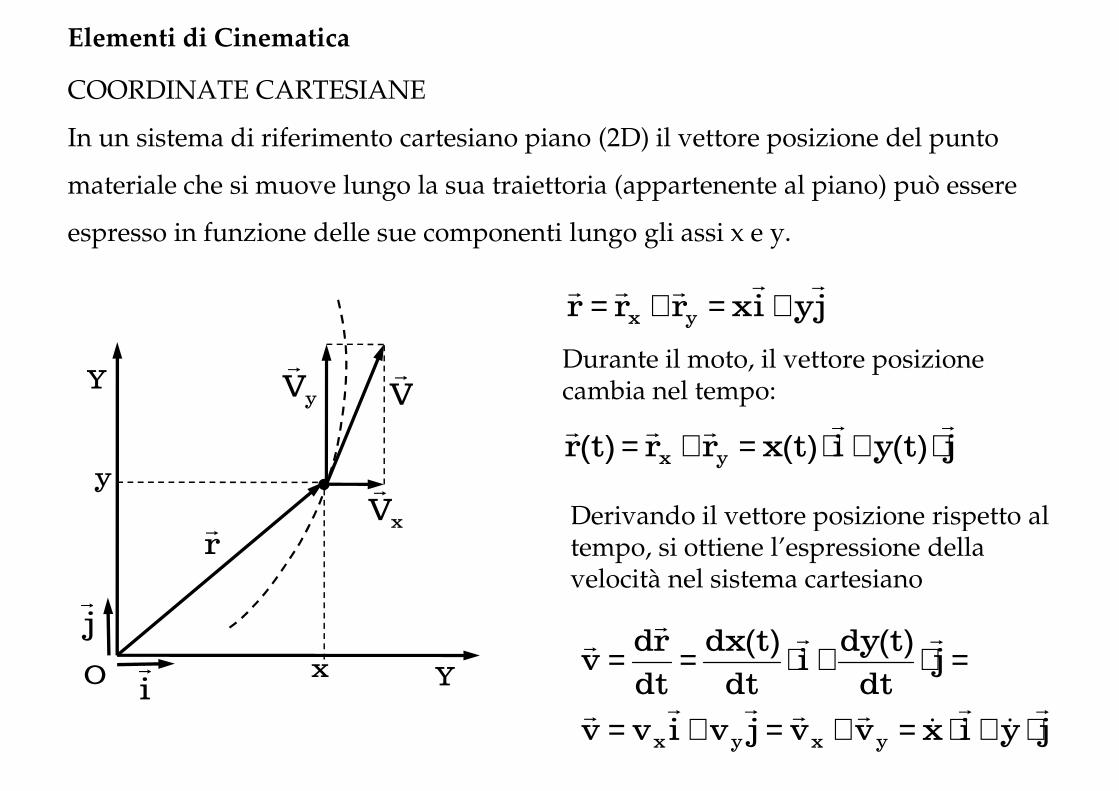
COORDINATE CARTESIANE
In un sistema di riferimento cartesiano piano (2D) il vettore posizione del punto
materiale che si muove lungo la sua traiettoria (appartenente al piano) può essere
espresso in funzione delle sue componenti lungo gli assi x e y.
rr
y
YVr
xVr
yVr
jyixrrr yx
rrrrr+=+=
jy(t)ix(t)rr(t)r yx
rrrrr⋅+⋅=+=
Durante il moto, il vettore posizione cambia nel tempo:
Derivando il vettore posizione rispetto al rr
xir
jr
O Y
xV
jyixvvjvivv
jdt
dy(t)i
dt
dx(t)
dt
rdv
yxyx
r&
r&
rrrrr
rrr
r
⋅+⋅=+=+=
=⋅+⋅==
Derivando il vettore posizione rispetto al tempo, si ottiene l’espressione della velocità nel sistema cartesiano

Elementi di Cinematica
COORDINATE CARTESIANE
In un sistema di riferimento cartesiano piano (2D) il vettore posizione del punto
materiale che si muove lungo la sua traiettoria (appartenente al piano) può essere
espresso in funzione delle sue componenti lungo gli assi x e y.
rr
y
Y
jyixrrr yx
rrrrr+=+=
jy(t)ix(t)rr(t)r yx
rrrrr⋅+⋅=+=
Durante il moto, il vettore posizione cambia nel tempo:
Derivando due volte il vettore posizione
xar
ar ya
r
rr
xir
jr
O Y
jyixaajaiaa
jdt
y(t)di
dt
x(t)d
dt
rda
yxyx
2
2
2
2
2
2
r&&
r&&
rrrrr
rrr
r
⋅+⋅=+=+=
=⋅+⋅==
Derivando due volte il vettore posizione rispetto al tempo, si ottiene l’espressione dell’accelerazione
Elementi di Cinematica
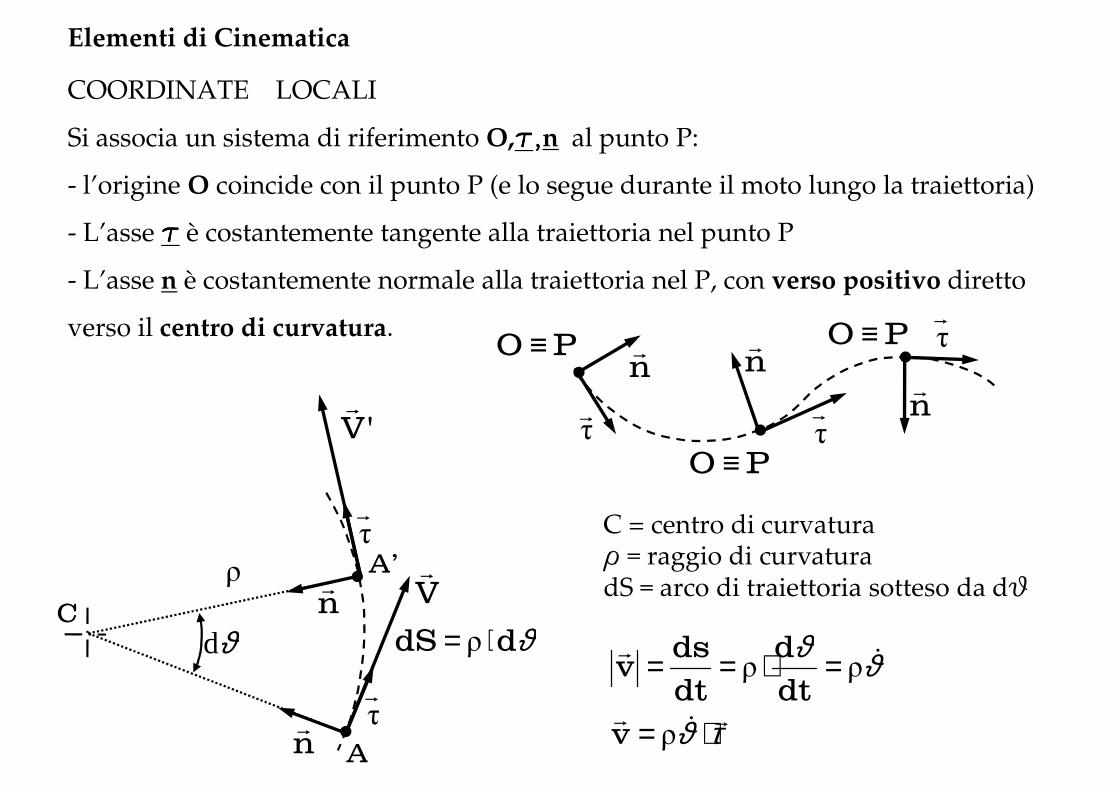
COORDINATE LOCALI
Si associa un sistema di riferimento O,tttt,,,,n al punto P:
- l’origine O coincide con il punto P (e lo segue durante il moto lungo la traiettoria)
- L’asse tttt è costantemente tangente alla traiettoria nel punto P
- L’asse n è costantemente normale alla traiettoria nel P, con verso positivo diretto
verso il centro di curvatura.PO ≡
τr
nr
nr
τr
τr
nr
PO ≡
PO ≡
'Vr
τr C = centro di curvatura
ϑd
A’
A
Vr
ϑddS ⋅= ρ
ρ
τ
τr
C
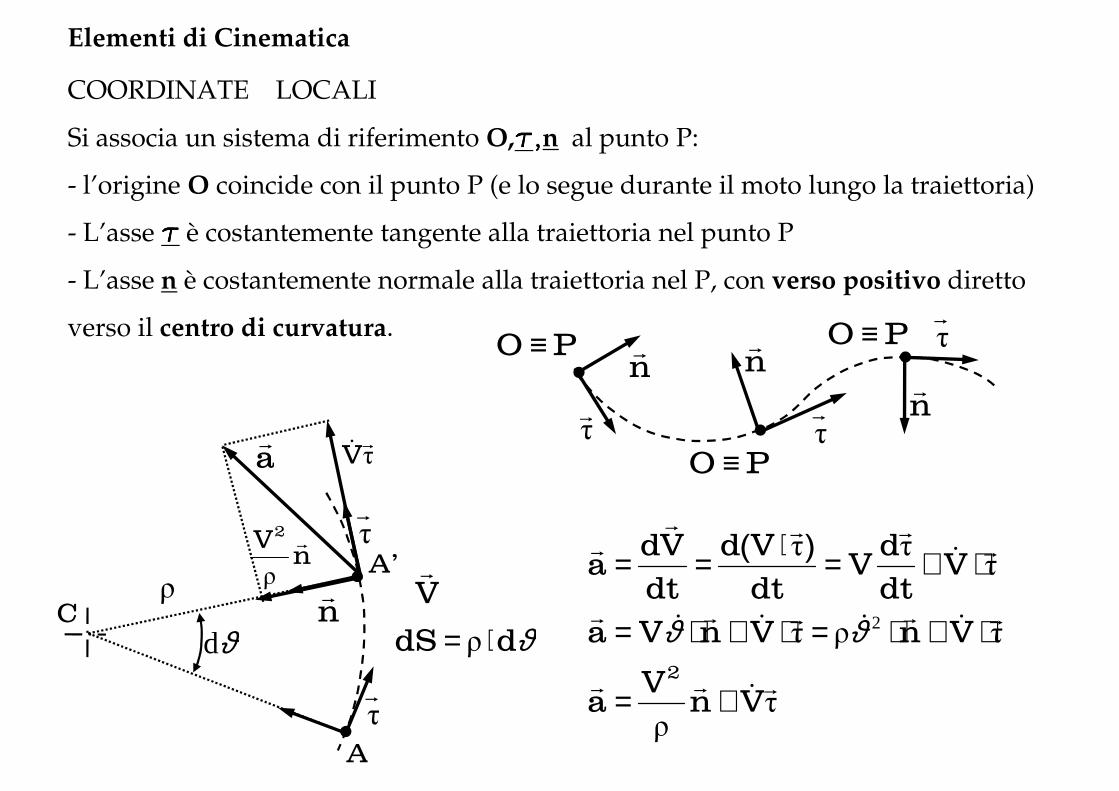
C = centro di curvaturar = raggio di curvaturadS = arco di traiettoria sotteso da dq
τϑ
ϑϑ
r&r
&r
⋅=
=⋅==
ρ
ρρ
v
dt
d
dt
dsv
nr
nr
Elementi di Cinematica
COORDINATE LOCALI
Si associa un sistema di riferimento O,tttt,,,,n al punto P:
- l’origine O coincide con il punto P (e lo segue durante il moto lungo la traiettoria)
- L’asse tttt è costantemente tangente alla traiettoria nel punto P
- L’asse n è costantemente normale alla traiettoria nel P, con verso positivo diretto
verso il centro di curvatura.PO ≡
τr
nr
nr
τr
τr
nr
PO ≡
PO ≡
τr
rrrd)d(VVd ⋅
ar
τr&V
V2r
ϑd
A’
A
Vr
ϑddS ⋅= ρ
ρ
τ
τr
C
τρ
τρτ
τττ
2
r&rr
r&r
&r&r
&r
r&
rrrr
VnV
a
VnVnVa
Vdt
dV
dt
)d(V
dt
Vda
2
+=
⋅+⋅=⋅+⋅=
⋅+=⋅==
ϑϑ
nV2
r
ρ
nr
Elementi di Cinematica
COORDINATE LOCALI
τρ
r&
rr⋅+⋅= vn
va
2
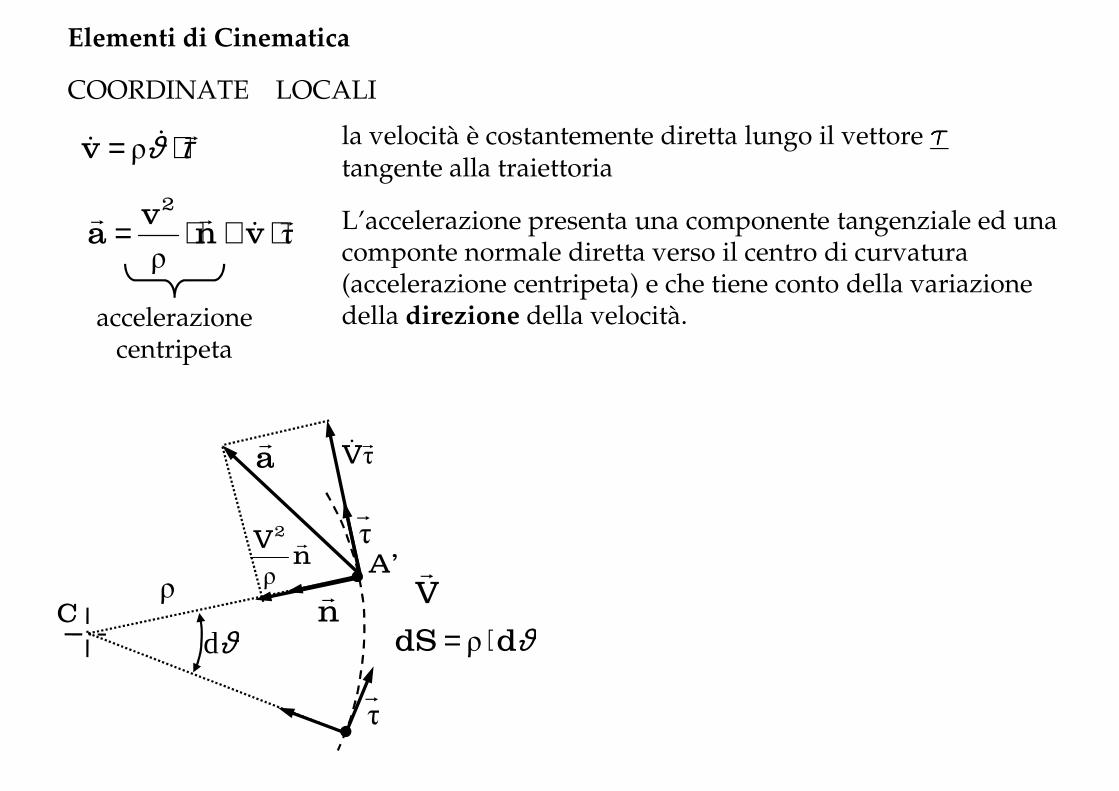
τϑ r&& ⋅= ρv la velocità è costantemente diretta lungo il vettore tttttangente alla traiettoria
L’accelerazione presenta una componente tangenziale ed una componte normale diretta verso il centro di curvatura ρ componte normale diretta verso il centro di curvatura (accelerazione centripeta) e che tiene conto della variazione della direzione della velocità.accelerazione
centripeta
τr
ar
τr&V
V2r
ϑd
A’Vr
ϑddS ⋅= ρ
ρ
τ
τr
C
nV2
r
ρ
nr
Elementi di Cinematica
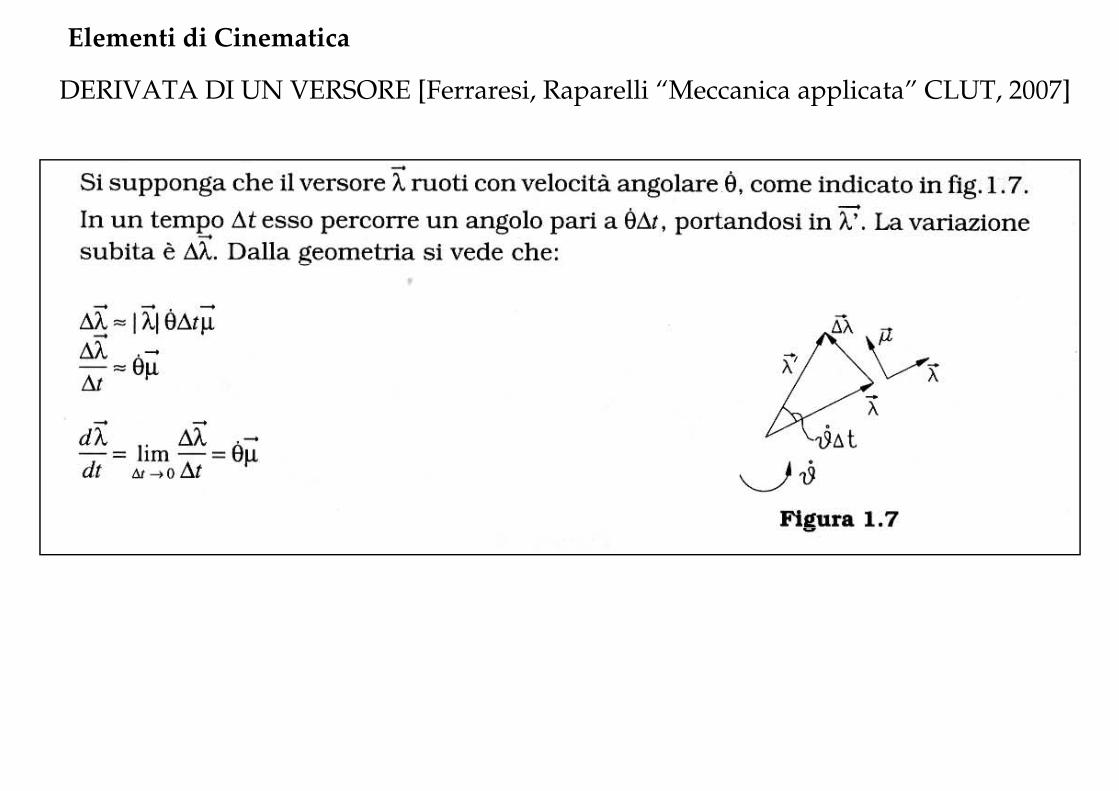
DERIVATA DI UN VERSORE [Ferraresi, Raparelli “Meccanica applicata” CLUT, 2007]
Elementi di Cinematica
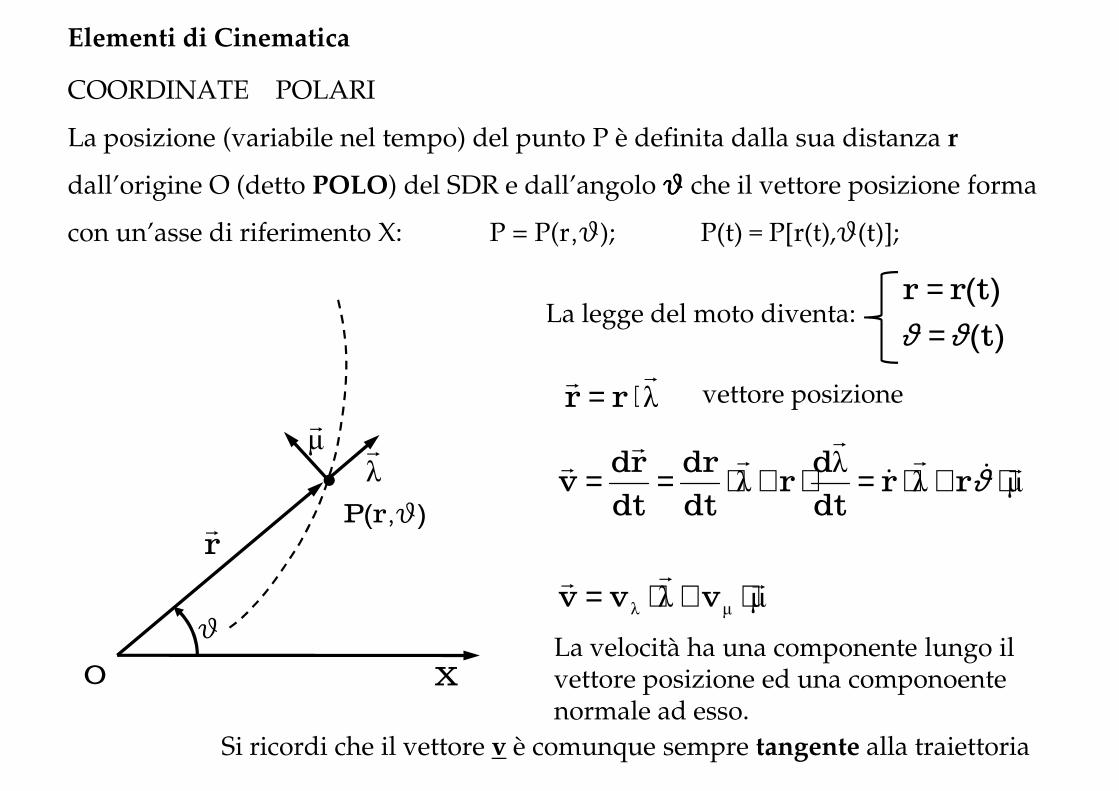
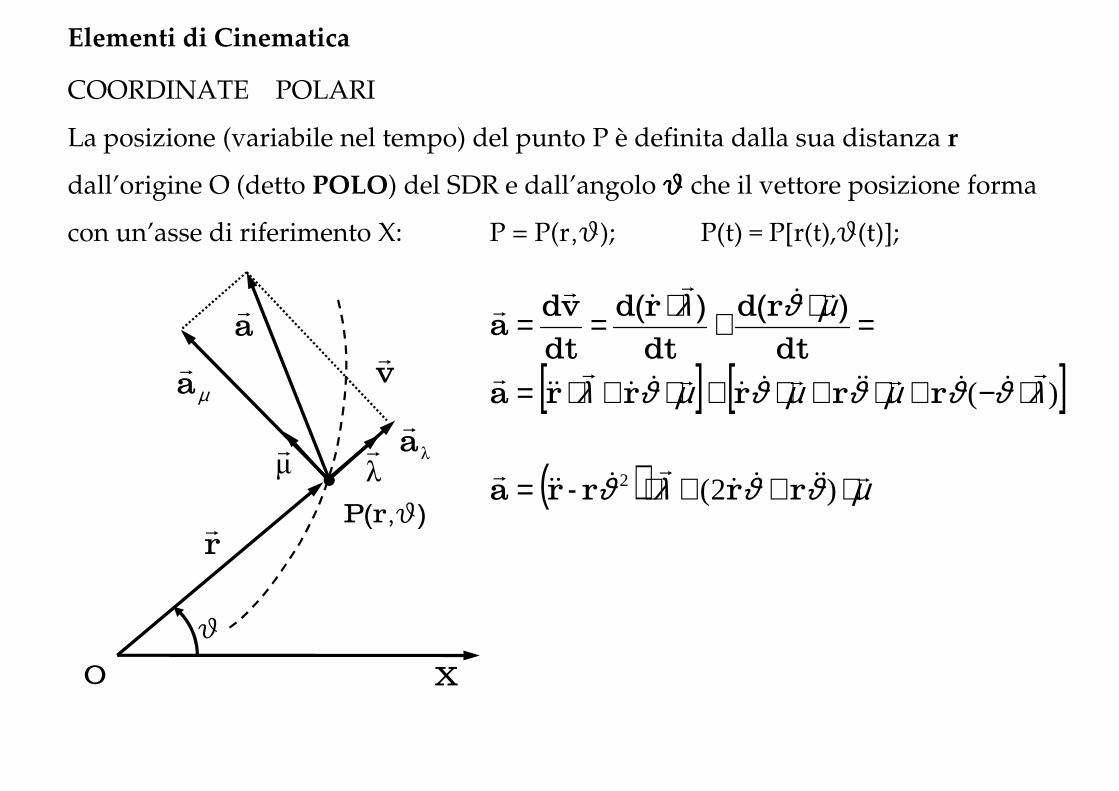
COORDINATE POLARI
La posizione (variabile nel tempo) del punto P è definita dalla sua distanza r
dall’origine O (detto POLO) del SDR e dall’angolo qqqq che il vettore posizione forma
con un’asse di riferimento X: P = P(r,q); P(t) = P[r(t),q(t)];
rr P(r,q)
λrr
⋅= rr vettore posizione
(t)
r(t)r
ϑϑ ==
La legge del moto diventa:
µλλ
λr&
r&
rr
rr
⋅+⋅=⋅+⋅== rrdt
dr
dt
dr
dt
rdv ϑλ
rµr
rr P(r,q)
O X
qLa velocità ha una componente lungo il vettore posizione ed una componoente normale ad esso.
Si ricordi che il vettore v è comunque sempre tangente alla traiettoria
µλ µλ
rrr⋅+⋅= vvv
Elementi di Cinematica
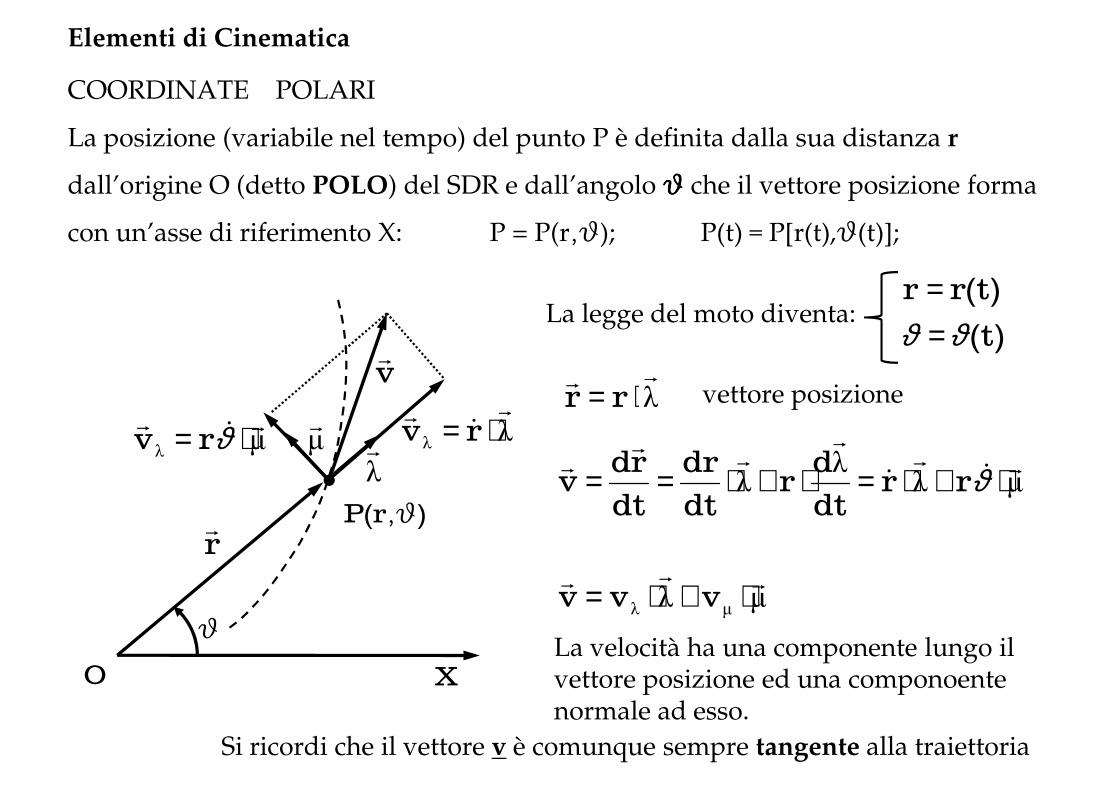
COORDINATE POLARI
La posizione (variabile nel tempo) del punto P è definita dalla sua distanza r
dall’origine O (detto POLO) del SDR e dall’angolo qqqq che il vettore posizione forma
con un’asse di riferimento X: P = P(r,q); P(t) = P[r(t),q(t)];
rr P(r,q)
λrr
⋅= rr vettore posizione
λrµ
r
(t)
r(t)r
ϑϑ ==
La legge del moto diventa:
µλλ
λr&
r&
rr
rr
⋅+⋅=⋅+⋅== rrdt
dr
dt
dr
dt
rdv ϑ
vr
µλ
r&r
⋅= ϑrv λλ
r&
r⋅= rv
rr P(r,q)
O X
qµλ µλ
rrr⋅+⋅= vvv
La velocità ha una componente lungo il vettore posizione ed una componoente normale ad esso.
Si ricordi che il vettore v è comunque sempre tangente alla traiettoria
Elementi di Cinematica
COORDINATE POLARI
La posizione (variabile nel tempo) del punto P è definita dalla sua distanza r
dall’origine O (detto POLO) del SDR e dall’angolo qqqq che il vettore posizione forma
con un’asse di riferimento X: P = P(r,q); P(t) = P[r(t),q(t)];
[ ] [ ]
( ) µϑϑλϑ
λϑϑµϑµϑµϑλ
µϑλ
r&&&&r
&&&r
r&&r&&r&&
r&&r
&&r
r&r
&r
r
⋅++⋅=
⋅−+⋅+⋅+⋅+⋅=
=⋅+⋅==
)2(
)(
2 rrr-ra
rrrrra
dt
)d(r
dt
)rd(
dt
vda
rr P(r,q)
λr
µr
vr
µar
λar
ar
rr P(r,q)
O X
q
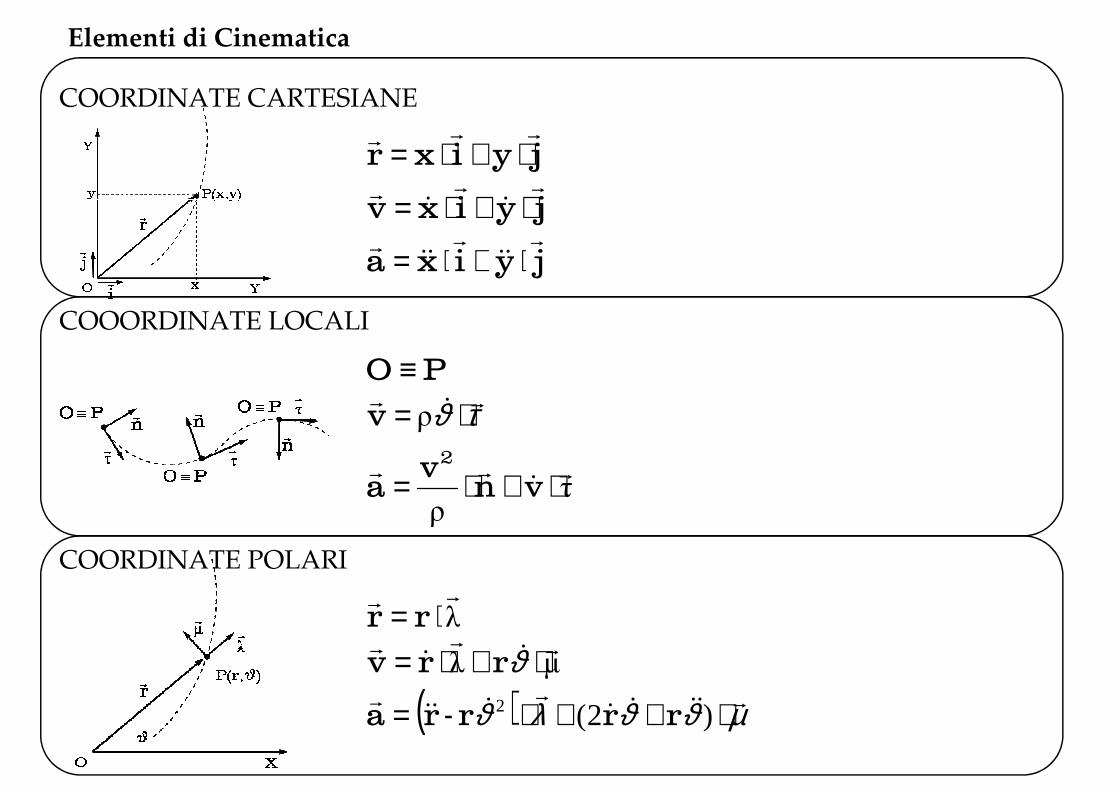
Elementi di Cinematica
COORDINATE CARTESIANE
jyixrrrr
⋅+⋅=
jyixvr
&r
&r
⋅+⋅=
jyixar
&&r
&&r
⋅+⋅=
τϑ r&r
⋅= ρv
τρ
r&
rr⋅+⋅= vn
va
2
PO ≡
jyixa &&&& ⋅+⋅=
COOORDINATE LOCALI
( ) µϑϑλϑ r&&&&r
&&&r
⋅++⋅= )2(2 rrr-ra
µλr&
r&
r⋅+⋅= ϑrrv
λrr
⋅= rr
COORDINATE POLARI
ρ
Elementi di Cinematica
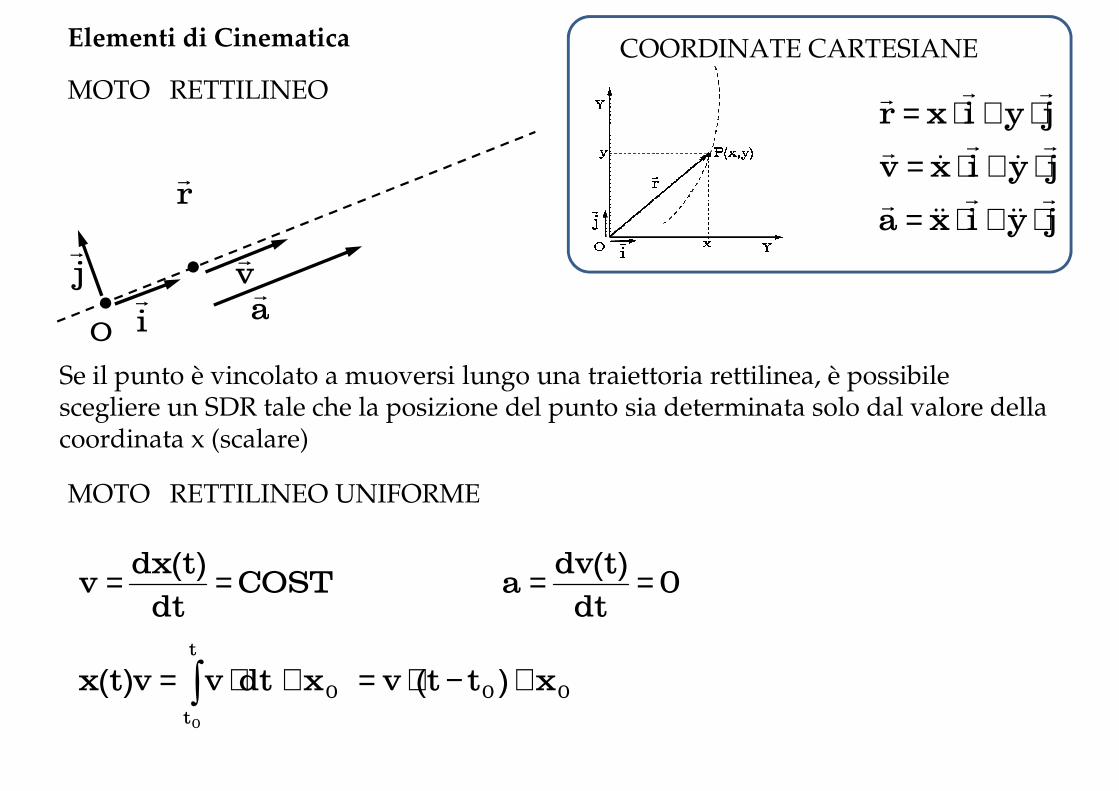
MOTO RETTILINEO
COORDINATE CARTESIANE
jyixrrrr
⋅+⋅=
jyixvr
&r
&r
⋅+⋅=
jyixar
&&r
&&r
⋅+⋅=rr
jr
vr
Se il punto è vincolato a muoversi lungo una traiettoria rettilinea, è possibile scegliere un SDR tale che la posizione del punto sia determinata solo dal valore della coordinata x (scalare)
MOTO RETTILINEO UNIFORME
ir
j
O
vr
ar
COSTdt
dx(t)v ==
00
t
t
0 x)t(tv x dtvx(t)v
0
+−⋅=+⋅= ∫
0dt
dv(t)a ==
Elementi di Cinematica
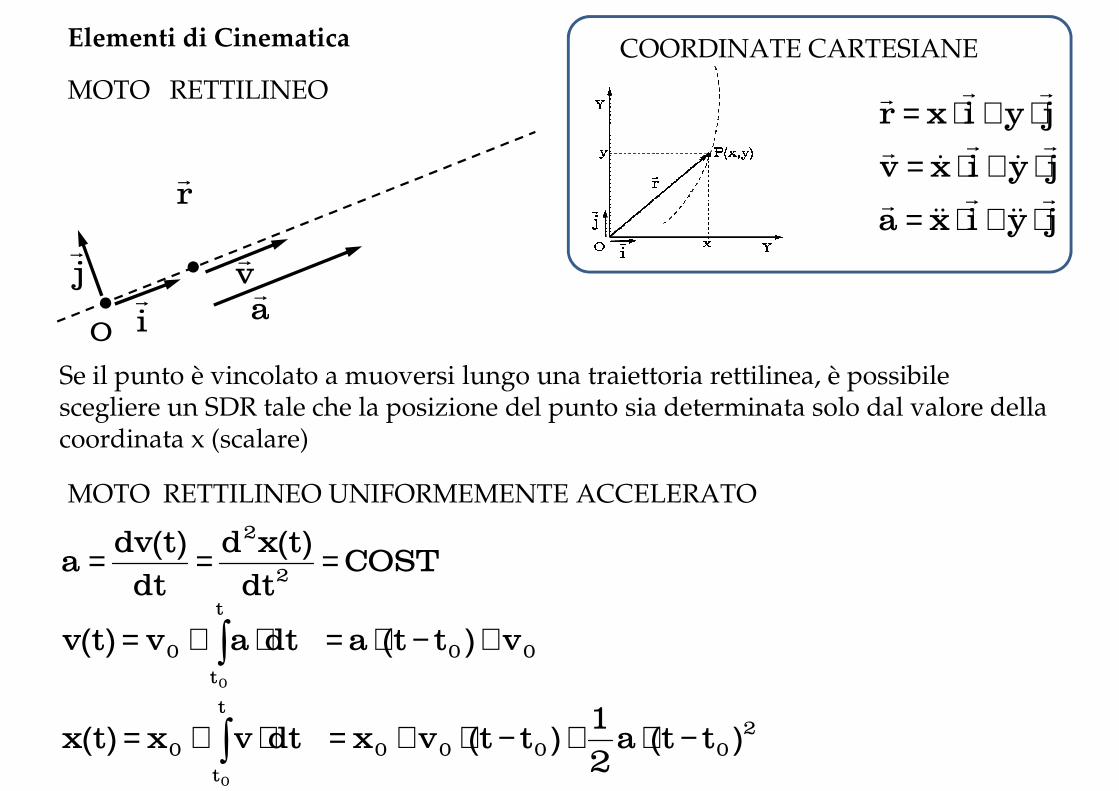
MOTO RETTILINEO
COORDINATE CARTESIANE
jyixrrrr
⋅+⋅=
jyixvr
&r
&r
⋅+⋅=
jyixar
&&r
&&r
⋅+⋅=rr
jr
vr
ir
j
O
Se il punto è vincolato a muoversi lungo una traiettoria rettilinea, è possibile scegliere un SDR tale che la posizione del punto sia determinata solo dal valore della coordinata x (scalare)
MOTO RETTILINEO UNIFORMEMENTE ACCELERATO
x(t)ddv(t) 2
vr
ar
20000
t
t
0 )t(ta2
1)t(tvx dtvxx(t)
0
−⋅+−⋅+=⋅+= ∫
COSTdt
x(t)d
dt
dv(t)a
2
2
===
00
t
t
0 v)t(ta dtavv(t)
0
+−⋅=⋅+= ∫

Elementi di Cinematica
MOTO CIRCOLARE: Il punto P è vincolato a muoversi lungo
una traiettoria circonferenziale di raggio r
costante. Conviene esperimere le leggi del
moto in coordinate polari:
( ) µϑϑλϑ r&&&&r
&&&r
⋅++⋅= )2(2 rrr-ra
µλr&
r&
r⋅+⋅= ϑrrv
λrr
⋅= rr
0rr COSTr ==→= &&&
Per identificare la posizione di P è sufficiente conoscere la coordinata angolare qqqqPer identificare la posizione di P è sufficiente conoscere la coordinata angolare qqqq
µr&
r⋅= ϑrv ha solo componente tangenziale
nt2 aarra
rrr&r&&
r+=⋅−⋅= λµ ϑϑ ha componente tangenziale e normale
In genere si indica con la velocita angolare ϑ&ω
µrr
⋅= ωrv nt2 aarra
rrrr&
r+=⋅−⋅= λµ ωω