Dinamica del Corpo Rigido - INFNbissaldi/Fisica1/07_Cap7_Dinamica_Corpo_Rigido.pdf · Elisabetta...
66
Dinamica del Corpo Rigido Dott.ssa Elisabetta Bissaldi
Transcript of Dinamica del Corpo Rigido - INFNbissaldi/Fisica1/07_Cap7_Dinamica_Corpo_Rigido.pdf · Elisabetta...

Dinamica del
Corpo Rigido
Dott.ssa Elisabetta Bissaldi

Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 2
CORPO RIGIDO
Sistema di punti discreto che diventa continuo
o I punti materiali rappresentano gli elementi infinitesimi del corpo
Sistema di punti materiali le cui distanze relative non possono variare
La posizione del CM rispetto ai punti del sistema sarà sempre la stessa
Rappresenta un modello per molti oggetti comuni che sono
approssimativamente non deformabili
o Serve per studiare molte delle proprietà viste per i sistemi di punti
• Distanze tra i punti bloccate Lavoro delle forze interne è nullo (𝑾 𝑰 = 𝟎)
Leggi fondamentali della dinamica dei corpi rigidi:
𝑹 = 𝒎𝒂𝑪𝑴 =𝒅𝑷
𝒅𝒕𝑴 =
𝒅𝑳
𝒅𝒕𝜟𝑬𝒌 = 𝑾
Corpo rigido
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 3
• Per stabilire quale sia il MOTO PIÙ GENERALE di un corpo rigido occorre
esaminare DUE TIPI DI MOTO
1. Moto di traslazione
2. Moto di rotazione
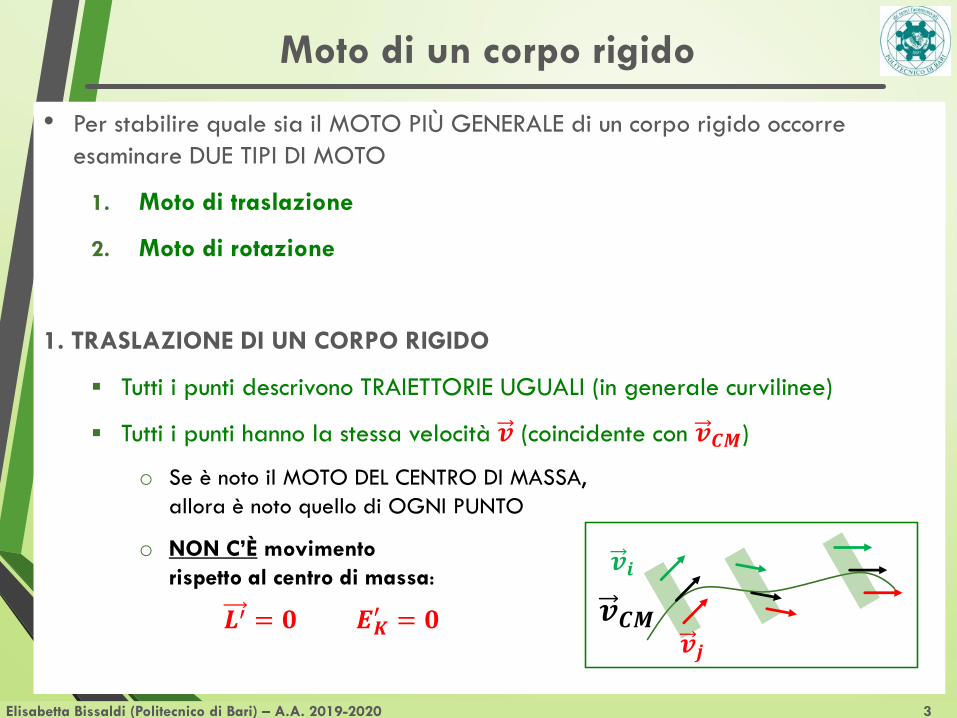
1. TRASLAZIONE DI UN CORPO RIGIDO
Tutti i punti descrivono TRAIETTORIE UGUALI (in generale curvilinee)
Tutti i punti hanno la stessa velocità 𝒗 (coincidente con 𝒗𝑪𝑴)
o Se è noto il MOTO DEL CENTRO DI MASSA,
allora è noto quello di OGNI PUNTO
o NON C’È movimento
rispetto al centro di massa:
𝑳′ = 𝟎 𝑬𝑲′ = 𝟎
Moto di un corpo rigido
𝒗𝑪𝑴
𝒗𝒊
𝒗𝒋
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 4
1. TRASLAZIONE DI UN CORPO RIGIDO
• Grandezze rilevanti per lo studio di questo moto (per un corpo di massa totale
𝒎 e velocità 𝒗)
Quantità di moto: 𝑷 = 𝒎𝒗𝑪𝑴
Energia cinetica: 𝑬𝑲 = 𝑬𝑲,𝑪𝑴 =𝟏
𝟐𝒎𝒗𝑪𝑴
𝟐
• Equazione del moto: 𝑹 = 𝒎𝒂𝑪𝑴
• Momento angolare: 𝑳 = 𝑳𝑪𝑴 = 𝒓𝑪𝑴 ×𝒎𝒗 = 𝒓𝑪𝑴 × 𝑷
𝑳 dipende quindi da 𝑷 e dalla posizione del CM rispetto al polo
o L’equazione 𝑴 = 𝒅𝑳/𝒅𝒕 non aggiunge alcuna informazione
o Si dimostra che 𝑴 = 𝒓𝑪𝑴 × 𝑹
Moto di un corpo rigido
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 5
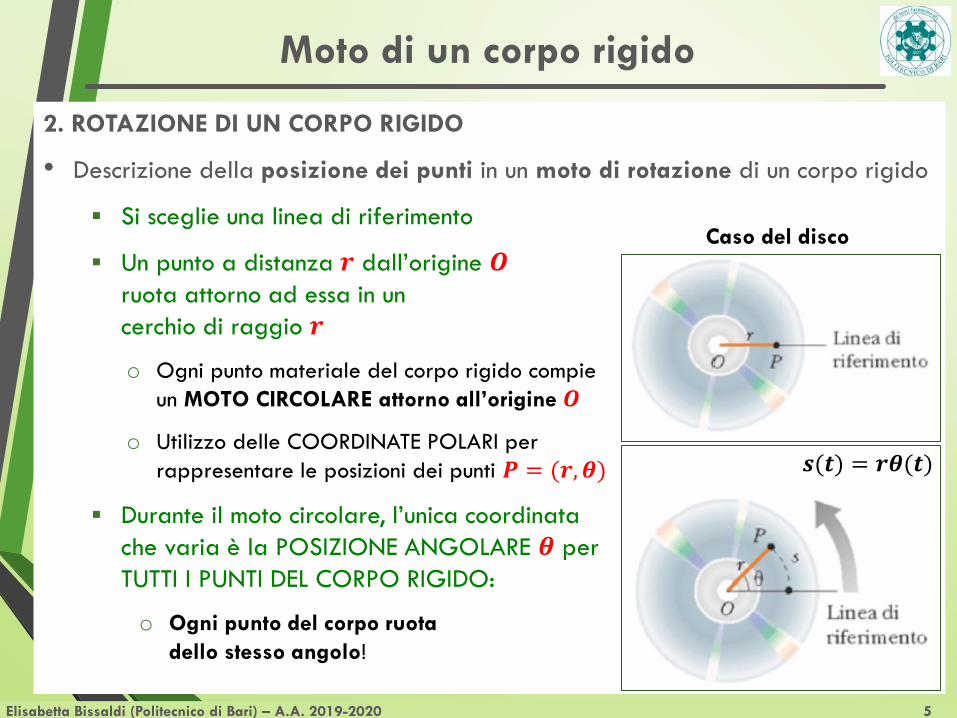
2. ROTAZIONE DI UN CORPO RIGIDO
• Descrizione della posizione dei punti in un moto di rotazione di un corpo rigido
Si sceglie una linea di riferimento
Un punto a distanza 𝒓 dall’origine 𝑶ruota attorno ad essa in un
cerchio di raggio 𝒓
o Ogni punto materiale del corpo rigido compie
un MOTO CIRCOLARE attorno all’origine 𝑶
o Utilizzo delle COORDINATE POLARI per
rappresentare le posizioni dei punti 𝑷 = (𝒓, 𝜽)
Durante il moto circolare, l’unica coordinata
che varia è la POSIZIONE ANGOLARE 𝜽 per
TUTTI I PUNTI DEL CORPO RIGIDO:
o Ogni punto del corpo ruota
dello stesso angolo!
Moto di un corpo rigido
Caso del disco
𝒔(𝒕) = 𝒓𝜽(𝒕)
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 6
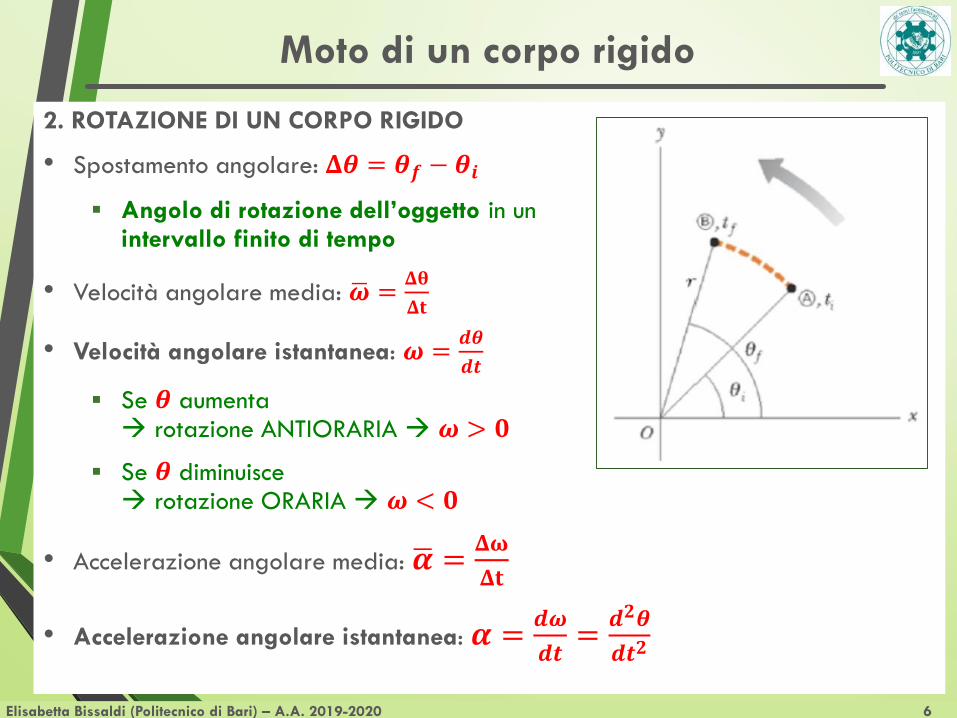
2. ROTAZIONE DI UN CORPO RIGIDO
• Spostamento angolare: 𝚫𝜽 = 𝜽𝒇 − 𝜽𝒊
Angolo di rotazione dell’oggetto in unintervallo finito di tempo
• Velocità angolare media: ഥ𝝎 =𝚫𝛉
𝚫𝐭
• Velocità angolare istantanea: 𝝎 =𝒅𝜽
𝒅𝒕
Se 𝜽 aumenta rotazione ANTIORARIA 𝝎 > 𝟎
Se 𝜽 diminuisce rotazione ORARIA 𝝎 < 𝟎
• Accelerazione angolare media: ഥ𝜶 =𝚫𝛚
𝚫𝐭
• Accelerazione angolare istantanea: 𝜶 =𝒅𝝎
𝒅𝒕=
𝒅𝟐𝜽
𝒅𝒕𝟐
Moto di un corpo rigido
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 7
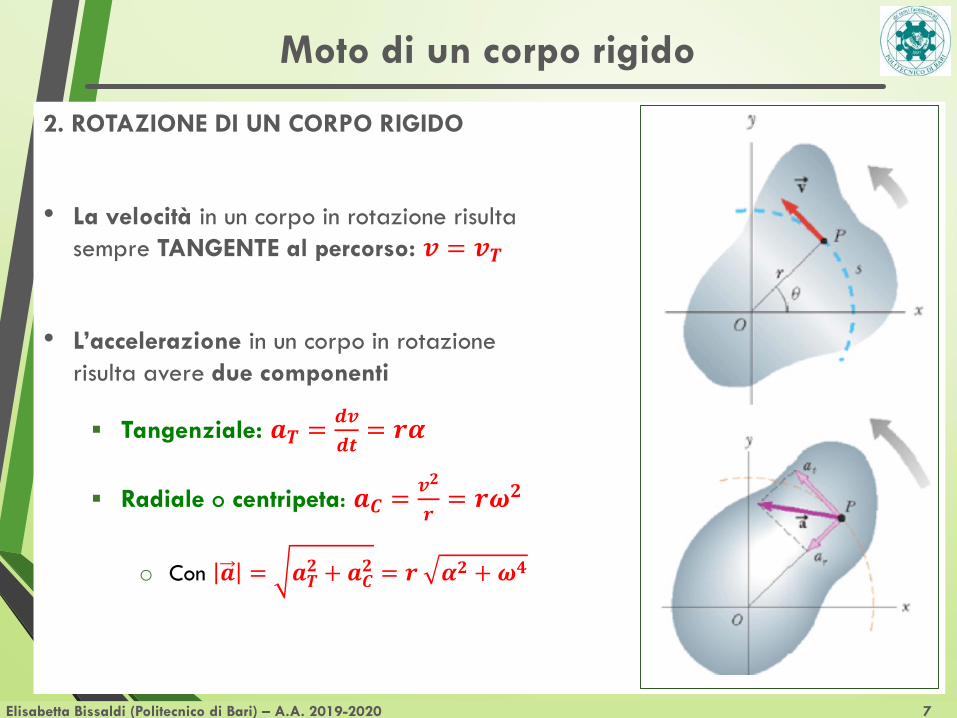
2. ROTAZIONE DI UN CORPO RIGIDO
• La velocità in un corpo in rotazione risulta
sempre TANGENTE al percorso: 𝒗 = 𝒗𝑻
• L’accelerazione in un corpo in rotazione
risulta avere due componenti
Tangenziale: 𝒂𝑻 =𝒅𝒗
𝒅𝒕= 𝒓𝜶
Radiale o centripeta: 𝒂𝑪 =𝒗𝟐
𝒓= 𝒓𝝎𝟐
o Con 𝒂 = 𝒂𝑻𝟐 + 𝒂𝑪
𝟐 = 𝒓 𝜶𝟐 +𝝎𝟒
Moto di un corpo rigido
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 8
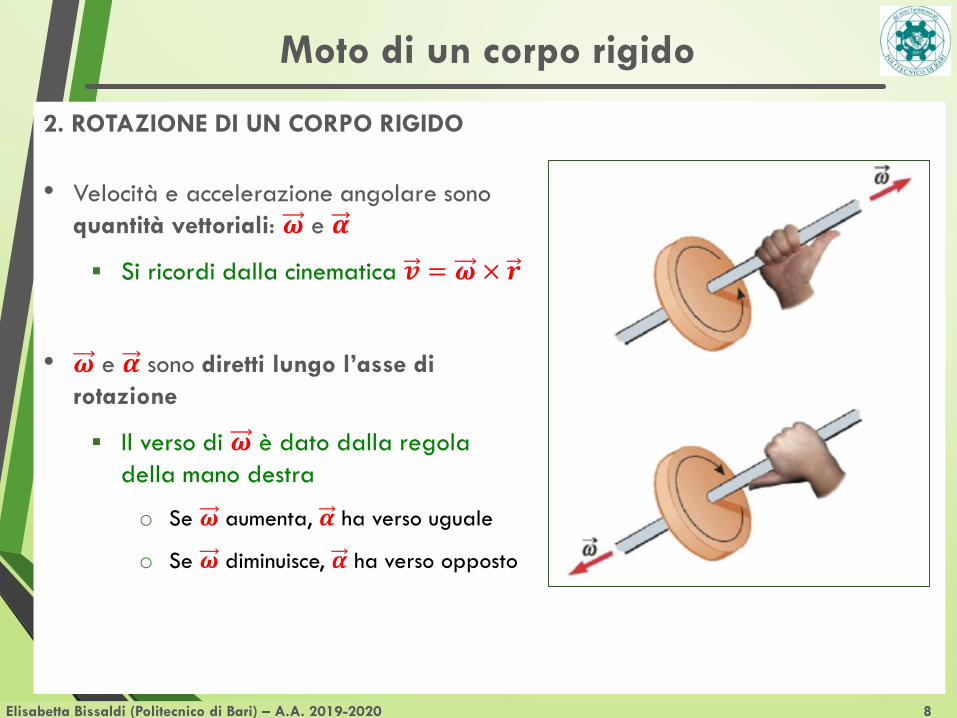
2. ROTAZIONE DI UN CORPO RIGIDO
• Velocità e accelerazione angolare sono
quantità vettoriali: 𝝎 e 𝜶
Si ricordi dalla cinematica 𝒗 = 𝝎 × 𝒓
• 𝝎 e 𝜶 sono diretti lungo l’asse di
rotazione
Il verso di 𝝎 è dato dalla regola
della mano destra
o Se 𝝎 aumenta, 𝜶 ha verso uguale
o Se 𝝎 diminuisce, 𝜶 ha verso opposto
Moto di un corpo rigido
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 9
2. ROTAZIONE DI UN CORPO RIGIDO
• Tutti i punti descrivono un moto circolare
Tutte le traiettorie dei punti rappresentano archi di circonferenze diverse che stanno su piani tra loro paralleli e hanno il centro su uno stesso asse:l’ASSE DI ROTAZIONE
La velocità angolare 𝝎 deve essere uguale per tutti i punti
o Risulta parallela all’asse di rotazione
o Le velocità dei punti sono diverse a seconda della posizione: 𝒗𝒊 = 𝝎𝑹𝒊
• Casi particolari:
1. Asse di rotazione fisso nel tempo
o Se 𝝎 varia in modulo e verso moto circolare vario
o Se 𝝎 = 𝒄𝒐𝒔𝒕𝒂𝒏𝒕𝒆 moto circolare uniforme
2. Asse di rotazione variabile nel tempo:
o 𝝎 varia anche in direzione (caso generale)
Moto di un corpo rigido
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 10
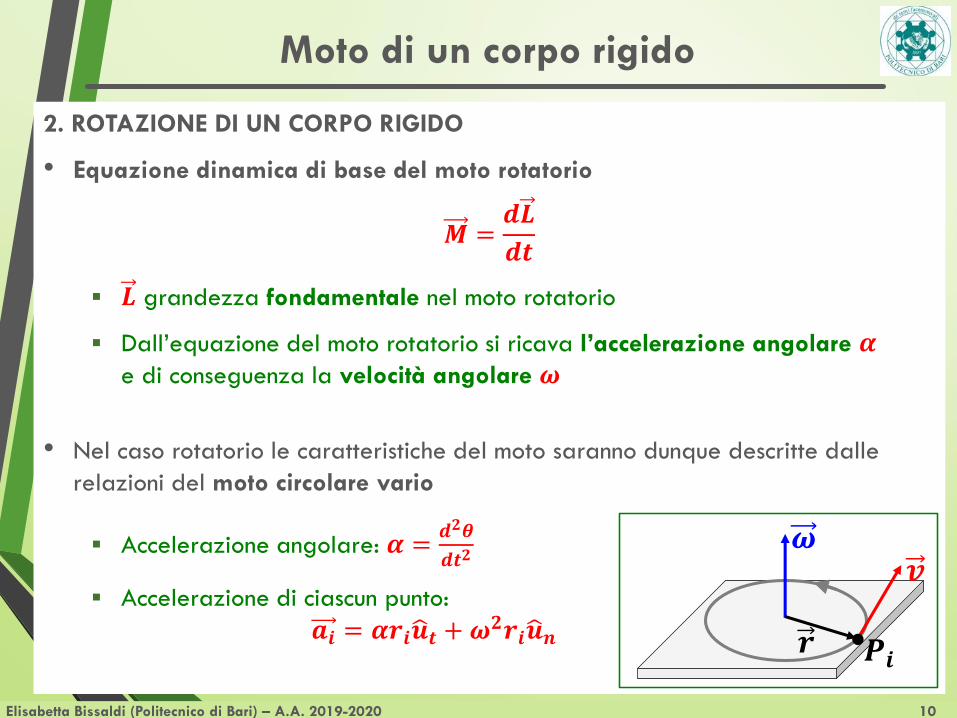
2. ROTAZIONE DI UN CORPO RIGIDO
• Equazione dinamica di base del moto rotatorio
𝑴 =𝒅𝑳
𝒅𝒕
𝑳 grandezza fondamentale nel moto rotatorio
Dall’equazione del moto rotatorio si ricava l’accelerazione angolare 𝜶e di conseguenza la velocità angolare 𝝎
• Nel caso rotatorio le caratteristiche del moto saranno dunque descritte dalle
relazioni del moto circolare vario
Accelerazione angolare: 𝜶 =𝒅𝟐𝜽
𝒅𝒕𝟐
Accelerazione di ciascun punto:
𝒂𝒊 = 𝜶𝒓𝒊ෝ𝒖𝒕 +𝝎𝟐𝒓𝒊ෝ𝒖𝒏
Moto di un corpo rigido
𝝎
𝒓
𝒗
𝑷𝒊
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 11
• Moto rigido più generale MOTO DI ROTOTRASLAZIONE
Ogni spostamento infinitesimo è descrivibile come una sovrapposizione di un moto di traslazione e di un moto di rotazione infinitesimi
o Descritti rispettivamente da 𝒗 e 𝝎.
o Si dimostra inoltre
• 𝝎 è indipendente dall’asse di rotazione scelto
• 𝒗 dipende dall’asse scelto
• Nel caso più generale, il moto è determinato da 6 parametri che possono essere ottenuti conoscendo 𝑹 e 𝑴
3 parametri per la traslazione
o Individuano la posizione del centro di massa
o Si ricavano dal teorema del moto del centro di massa in base alle forze esterne
3 parametri per la rotazione
o Individuano l’orientazione nello spazio del corpo rigido
o Si ricavano dal teorema del momento angolare in base ai momenti delle forze esterne
Moto di un corpo rigido

Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 12
• Per schematizzare un corpo rigido esteso possiamo pensarlo composto da
infiniti punti materiali di volume infinitesimo 𝒅𝑽 e di massa infinitesima 𝒅𝒎.
• DENSITÀ DEL CORPO RIGIDO
𝝆 =𝒅𝒎
𝒅𝑽
In genere può essere variabile nel corpo 𝝆 = 𝝆(𝒙, 𝒚, 𝒛)
• MASSA TOTALE DEL CORPO RIGIDO
𝒎 = න𝑽
𝒅𝒎 = න𝑽
𝝆𝒅𝑽 = න𝑽
𝝆(𝒙, 𝒚, 𝒛)𝒅𝑽
CORPO OMOGENEO (corpo con densità costante)
𝝆 =𝒎
𝑽
CORPO NON OMOGENEO (corpo con densità non costante)
o Si utilizza la densità media ഥ𝝆 =𝒎
𝑽
Sistemi continui
UNITÀ DI MISURA
𝒌𝒈/𝒎𝟑
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 13
• Nel caso di distribuzioni di massa non volumetriche:
Densità superficiale
𝝆𝑺 =𝒅𝒎
𝒅𝑺⇒ 𝒎 = න
𝑺
𝝆𝑺𝒅𝑺
Densità lineare
𝝆𝒍 =𝒅𝒎
𝒅𝒍⇒ 𝒎 = න
𝒍
𝝆𝒍𝒅𝒍
• VOLUME SPECIFICO
𝝂 =𝟏
𝝆=𝒅𝑽
𝒅𝒎
Sistemi continui
UNITÀ DI MISURA
𝒌𝒈/𝒎𝟐
UNITÀ DI MISURA
𝒌𝒈/𝒎
UNITÀ DI MISURA
𝐦𝟑/𝒌𝒈
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 14
• Si determini il numero di atomi contenuti in un blocchetto di rame
di volume 𝑽 = 𝟏 𝒄𝒎𝟑, sapendo che la densità del rame è 𝝆𝑪𝒖 = 𝟖, 𝟗𝟔 𝒈/𝒄𝒎𝟑
e la sua massa atomica è 𝑴𝑪𝒖 = 𝟔𝟑. 𝟓𝟓 𝒈/𝒎𝒐𝒍. Si ricordi che il numero di
Avogadro vale 𝑵𝑨 = 𝟔, 𝟎𝟐 ∙ 𝟏𝟎𝟐𝟑 𝒎𝒐𝒍−𝟏.
Esercizio 7.1
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 15
POSIZIONE DEL CENTRO DI MASSA
𝒓𝑪𝑴 =∫ 𝒓𝒅𝒎
∫ 𝒅𝒎=∫𝑽 𝒓𝝆(𝒓)𝒅𝑽
𝒎
o 𝒓: Vettore posizione dell’elemento di massa 𝒅𝒎
Se il corpo è OMOGENEO (𝝆 costante):
𝒓𝑪𝑴 =𝝆
𝒎න𝑽
𝒓𝒅𝑽 =𝟏
𝑽න𝑽
𝒓𝒅𝑽
o La posizione del centro di massa non dipende dalla massa o dal tipo di
materiale, ma dipende dalla sua FORMA, quindi dal valore medio di 𝒓 nel
volume
Per risolvere gli integrali, si tenga presenta che 𝒓 e 𝝆 sono funzioni delle
coordinate, e che anche 𝒅𝑽 è esprimibile in termini di coordinate:
𝒅𝑽 = 𝒅𝒙 𝒅𝒚 𝒅𝒛 (integrale triplo!)
Calcolo del centro di massa

Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 16
• Calcolare il centro di massa di una bacchetta rettilinea di lunghezza 𝒍 e densità
lineare costante 𝝆𝒍.
Esercizio 7.2
𝑥𝑙0
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 17
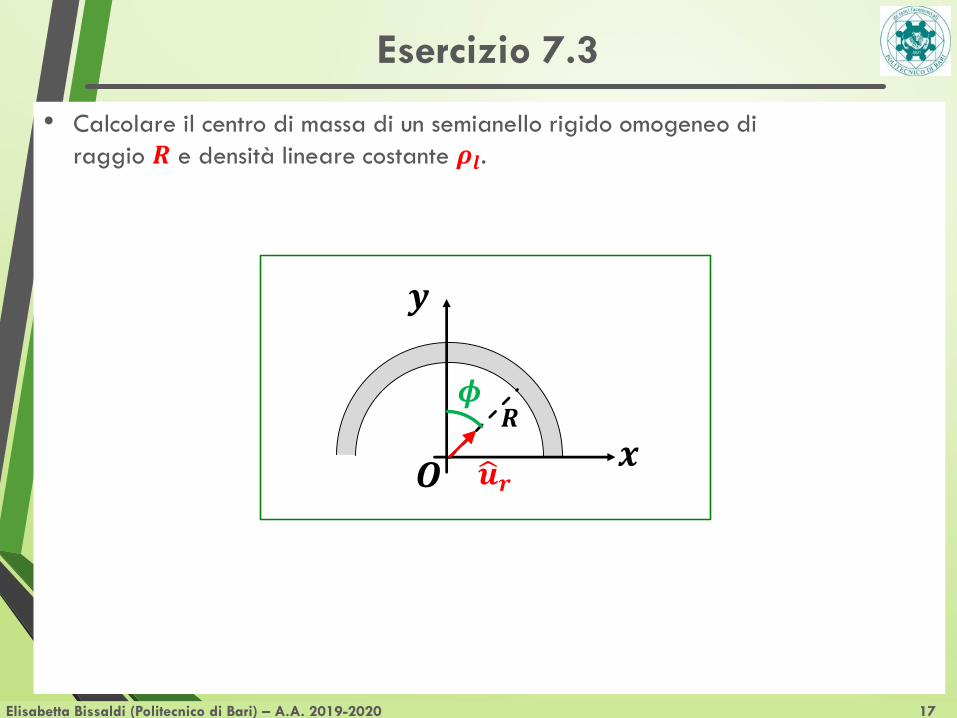
• Calcolare il centro di massa di un semianello rigido omogeneo di
raggio 𝑹 e densità lineare costante 𝝆𝒍.
Esercizio 7.3
𝝓
𝒚
𝒙𝑹
𝑶 ෝ𝒖𝒓
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 18
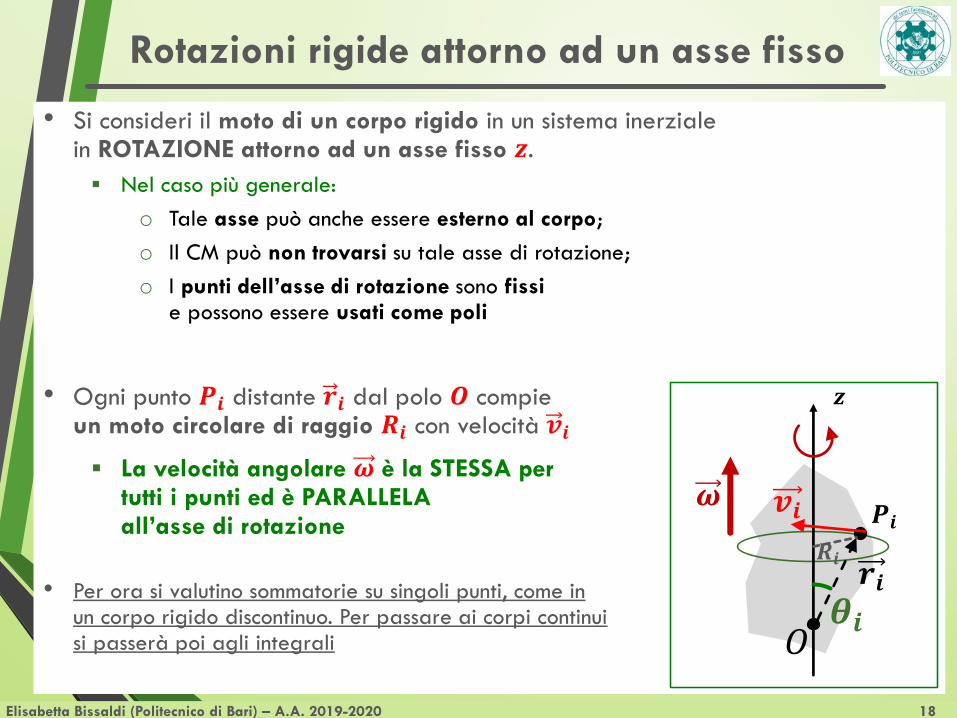
• Si consideri il moto di un corpo rigido in un sistema inerziale in ROTAZIONE attorno ad un asse fisso 𝒛.
Nel caso più generale:
o Tale asse può anche essere esterno al corpo;
o Il CM può non trovarsi su tale asse di rotazione;
o I punti dell’asse di rotazione sono fissi e possono essere usati come poli
• Ogni punto 𝑷𝒊 distante 𝒓𝒊 dal polo 𝑶 compie un moto circolare di raggio 𝑹𝒊 con velocità 𝒗𝒊
La velocità angolare 𝝎 è la STESSA per tutti i punti ed è PARALLELA all’asse di rotazione
• Per ora si valutino sommatorie su singoli punti, come in un corpo rigido discontinuo. Per passare ai corpi continuisi passerà poi agli integrali
Rotazioni rigide attorno ad un asse fisso
𝒛
𝑂
𝑷𝒊
𝜽𝒊
𝒓𝒊
𝒗𝒊
𝑹𝒊
𝝎
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 19
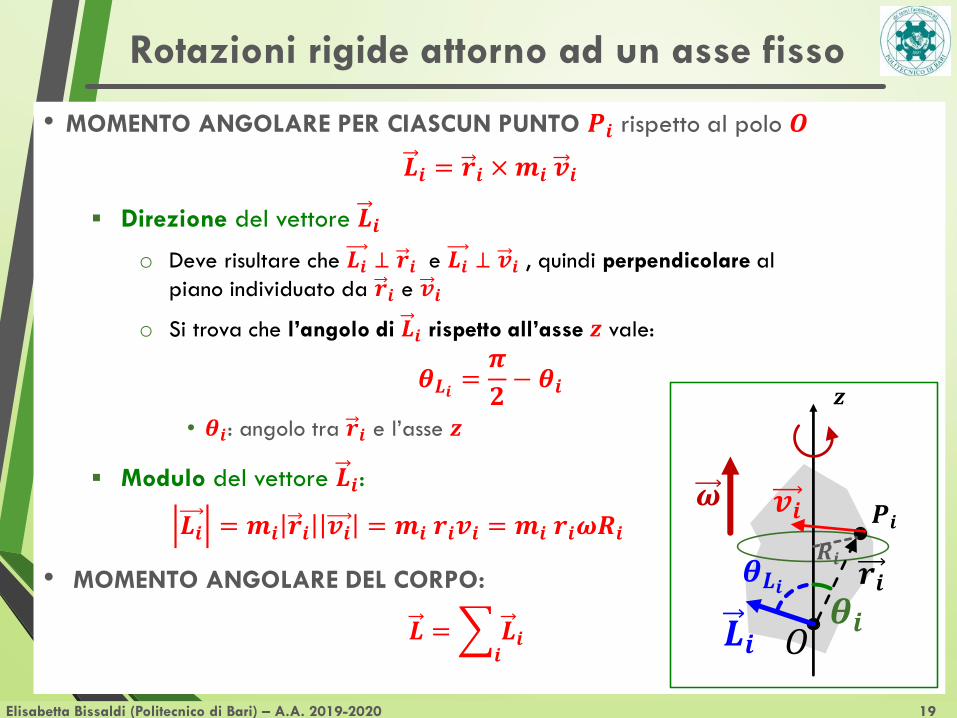
• MOMENTO ANGOLARE PER CIASCUN PUNTO 𝑷𝒊 rispetto al polo 𝑶
𝑳𝒊 = 𝒓𝒊 ×𝒎𝒊 𝒗𝒊
Direzione del vettore 𝑳𝒊
o Deve risultare che 𝑳𝒊 ⊥ 𝒓𝒊 e 𝑳𝒊 ⊥ 𝒗𝒊 , quindi perpendicolare al
piano individuato da 𝒓𝒊 e 𝒗𝒊
o Si trova che l’angolo di 𝑳𝒊 rispetto all’asse 𝒛 vale:
𝜽𝑳𝒊 =𝝅
𝟐− 𝜽𝒊
• 𝜽𝒊: angolo tra 𝒓𝒊 e l’asse 𝒛
Modulo del vettore 𝑳𝒊:
𝑳𝒊 = 𝒎𝒊 𝒓𝒊 𝒗𝒊 = 𝒎𝒊 𝒓𝒊𝒗𝒊 = 𝒎𝒊 𝒓𝒊𝝎𝑹𝒊
• MOMENTO ANGOLARE DEL CORPO:
𝑳 =𝒊𝑳𝒊
Rotazioni rigide attorno ad un asse fisso
𝒛
𝑂
𝑷𝒊
𝜽𝒊
𝒓𝒊
𝒗𝒊𝝎
𝑳𝒊
𝜽𝑳𝒊𝑹𝒊

Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 20
• MOMENTO ANGOLARE ASSIALE per il punto 𝑷𝒊
Componente del momento angolare parallela a 𝒛
𝑳𝒊 ⋅ ෝ𝒖𝒛 = 𝑳𝒊,𝒛 = 𝑳𝒊 𝒄𝒐𝒔 𝜽𝑳𝒊 = 𝒎𝒊 𝒓𝒊𝒔𝒆𝒏 𝜽𝒊 𝝎𝑹𝒊 = 𝒎𝒊 𝝎𝑹𝒊𝟐
• Momento angolare assiale di tutto il corpo:
𝑳𝒛 =
𝒊
𝑵
𝑳𝒊,𝒛 =
𝒊
𝑵
𝒎𝒊 𝑹𝒊𝟐 𝝎 = 𝑰𝒛 𝝎
𝑰𝒛: Momento di inerzia del corpo
rispetto all’asse 𝒛
Rotazioni rigide attorno ad un asse fisso
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 21
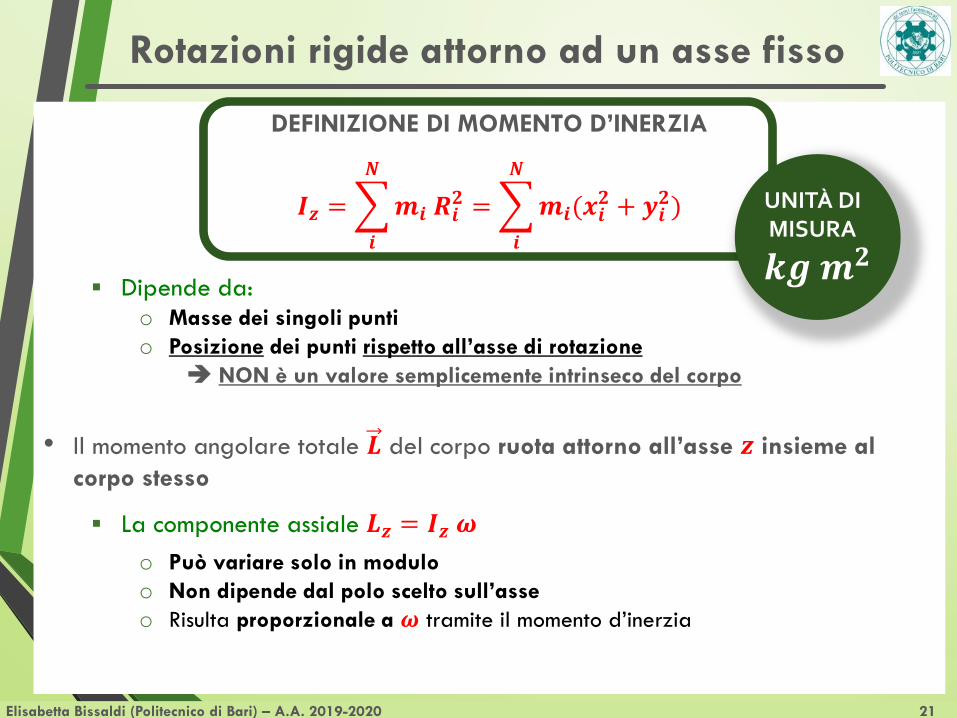
DEFINIZIONE DI MOMENTO D’INERZIA
𝑰𝒛 =
𝒊
𝑵
𝒎𝒊 𝑹𝒊𝟐 =
𝒊
𝑵
𝒎𝒊(𝒙𝒊𝟐 + 𝒚𝒊
𝟐)
Dipende da:
o Masse dei singoli punti
o Posizione dei punti rispetto all’asse di rotazione
NON è un valore semplicemente intrinseco del corpo
• Il momento angolare totale 𝑳 del corpo ruota attorno all’asse 𝒛 insieme al
corpo stesso
La componente assiale 𝑳𝒛 = 𝑰𝒛 𝝎
o Può variare solo in modulo
o Non dipende dal polo scelto sull’asse
o Risulta proporzionale a 𝝎 tramite il momento d’inerzia
Rotazioni rigide attorno ad un asse fisso
UNITÀ DI MISURA
𝒌𝒈𝒎𝟐
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 22
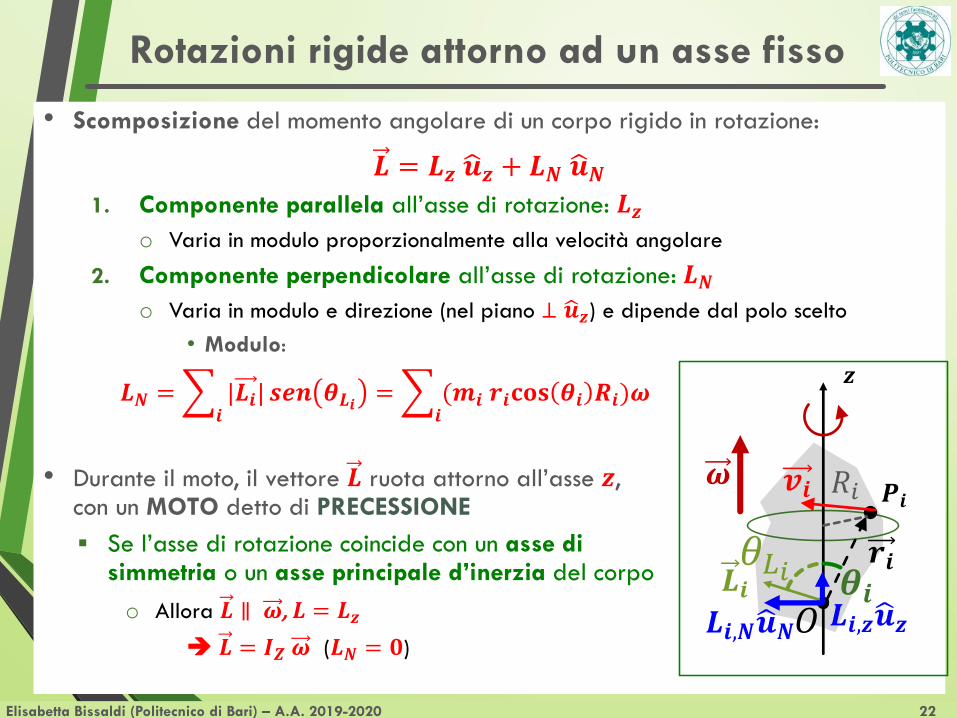
• Scomposizione del momento angolare di un corpo rigido in rotazione:
𝑳 = 𝑳𝒛 ෝ𝒖𝒛 + 𝑳𝑵 ෝ𝒖𝑵1. Componente parallela all’asse di rotazione: 𝑳𝒛
o Varia in modulo proporzionalmente alla velocità angolare
2. Componente perpendicolare all’asse di rotazione: 𝑳𝑵o Varia in modulo e direzione (nel piano ⊥ ෝ𝒖𝒛) e dipende dal polo scelto
• Modulo:
𝑳𝑵 =𝒊|𝑳𝒊| 𝒔𝒆𝒏 𝜽𝑳𝒊 =
𝒊(𝒎𝒊 𝒓𝒊𝐜𝐨𝐬 𝜽𝒊 𝑹𝒊)𝝎
• Durante il moto, il vettore 𝑳 ruota attorno all’asse 𝒛, con un MOTO detto di PRECESSIONE
Se l’asse di rotazione coincide con un asse di simmetria o un asse principale d’inerzia del corpo
o Allora 𝑳 ∥ 𝝎, 𝑳 = 𝑳𝒛
𝑳 = 𝑰𝒁 𝝎 (𝑳𝑵 = 𝟎)
Rotazioni rigide attorno ad un asse fisso
𝒛
𝑂
𝑷𝒊
𝜽𝒊𝒓𝒊
𝒗𝒊 𝑅𝑖𝝎
𝑳𝒊𝜃𝐿𝑖
𝑳𝒊,𝑵ෝ𝒖𝑵 𝑳𝒊,𝒛ෝ𝒖𝒛

Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 23
1. Momento angolare parallelo alla velocità angolare 𝑳 ∥ 𝝎
EQUAZIONE DEL MOTO DI ROTAZIONE
𝑴 =𝒅𝑳
𝒅𝒕=
𝒅
𝒅𝒕𝑰𝒛 𝝎 = 𝑰𝒛
𝒅𝝎
𝒅𝒕= 𝑰𝒛 𝜶
o Sia 𝑴 che 𝜶 sono paralleli all’asse di rotazione, ovvero a 𝝎
o Tutte le quantità sono calcolate per un punto generico sull’asse di rotazione 𝒛
Noto il coefficiente 𝑰𝒛 ed il momento 𝑴 delle forze agenti rispetto l’asse
fisso di rotazione, il moto conseguente è rotatorio
Relazioni cinematiche tra 𝜽, 𝝎 e 𝜶
o Si ottiene la legge oraria (noti 𝝎𝟎 e 𝜽𝟎)
𝜶 𝒕 =𝑴(𝒕)
𝑰𝒁𝝎 𝒕 = 𝝎𝟎 +න
𝟎
𝒕
𝜶 𝒅𝒕 𝜽 𝒕 = 𝜽𝟎 +න𝟎
𝒕
𝝎 𝒅𝒕
Casi particolari
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 24
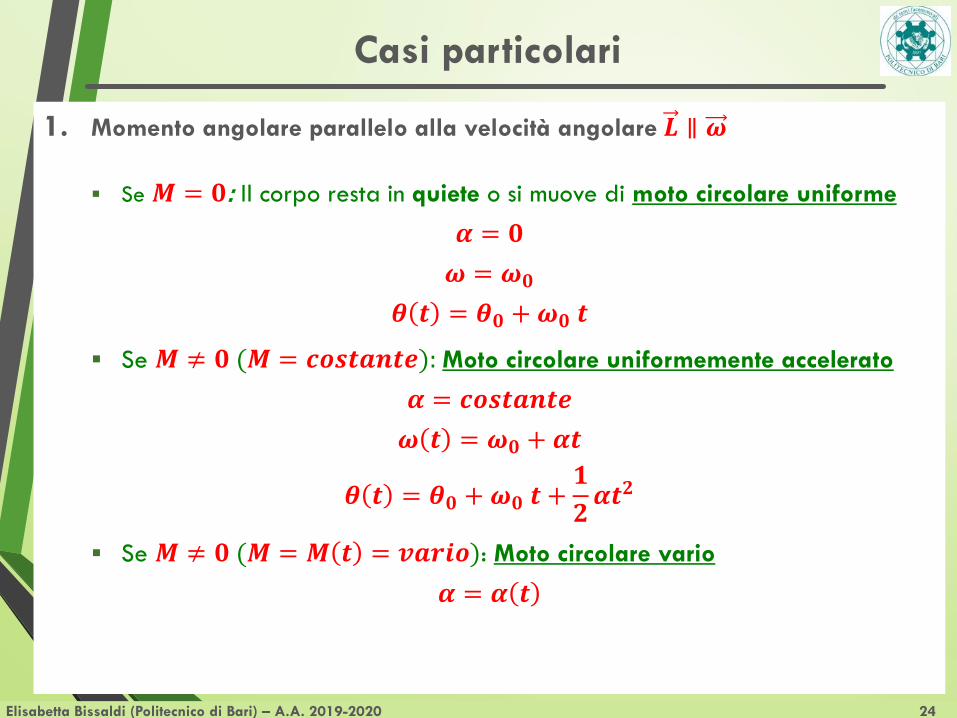
1. Momento angolare parallelo alla velocità angolare 𝑳 ∥ 𝝎
Se 𝑴 = 𝟎: Il corpo resta in quiete o si muove di moto circolare uniforme
𝜶 = 𝟎
𝝎 = 𝝎𝟎
𝜽 𝒕 = 𝜽𝟎 +𝝎𝟎 𝒕
Se 𝑴 ≠ 𝟎 (𝑴 = 𝒄𝒐𝒔𝒕𝒂𝒏𝒕𝒆): Moto circolare uniformemente accelerato
𝜶 = 𝒄𝒐𝒔𝒕𝒂𝒏𝒕𝒆
𝝎 𝒕 = 𝝎𝟎 + 𝜶𝒕
𝜽 𝒕 = 𝜽𝟎 +𝝎𝟎 𝒕 +𝟏
𝟐𝜶𝒕𝟐
Se 𝑴 ≠ 𝟎 (𝑴 = 𝑴 𝒕 = 𝒗𝒂𝒓𝒊𝒐): Moto circolare vario
𝜶 = 𝜶 𝒕
Casi particolari
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 25
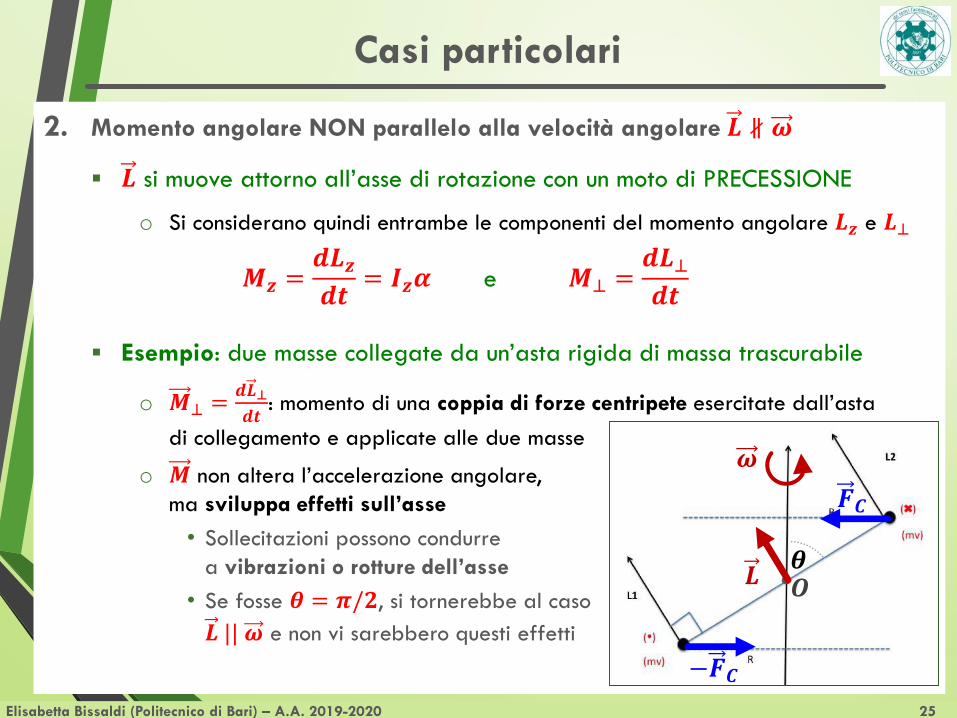
2. Momento angolare NON parallelo alla velocità angolare 𝑳 ∦ 𝝎
𝑳 si muove attorno all’asse di rotazione con un moto di PRECESSIONE
o Si considerano quindi entrambe le componenti del momento angolare 𝑳𝒛 e 𝑳⊥
𝑴𝒛 =𝒅𝑳𝒛𝒅𝒕
= 𝑰𝒛𝜶 e 𝑴⊥ =𝒅𝑳⊥𝒅𝒕
Esempio: due masse collegate da un’asta rigida di massa trascurabile
o 𝑴⊥ =𝒅𝑳⊥
𝒅𝒕: momento di una coppia di forze centripete esercitate dall’asta
di collegamento e applicate alle due masse
o 𝑴 non altera l’accelerazione angolare,
ma sviluppa effetti sull’asse
• Sollecitazioni possono condurre
a vibrazioni o rotture dell’asse
• Se fosse 𝜽 = 𝝅/𝟐, si tornerebbe al caso
𝑳 || 𝝎 e non vi sarebbero questi effetti
Casi particolari
𝝎
𝑭𝑪
−𝑭𝑪
𝑶𝑳𝜽
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 26
• Nella progettazione di un sistema con parti rotanti, è importante che il moto di
rotazione avvenga senza vibrazioni e con minime sollecitazioni sui supporti
dell’asse.
A tal scopo, si cerca di realizzare la condizione per cui il momento
angolare 𝑳 risulta parallelo all’asse di rotazione, dunque a 𝝎.
TEOREMA DI POINSOT
Fissato un punto 𝑶 di un corpo rigido è sempre possibile trovare
3 assi cartesiani tra loro perpendicolari, e centrati in 𝑶, tali che,
scegliendo uno di essi come asse di rotazione, 𝑳 risulterà parallelo a 𝝎
Tali assi si chiamano ASSI PRINCIPALI D’INERZIA relativi al punto 𝑶 Se 𝑶 coincide con il CM, si parla di ASSI CENTRALI D’INERZIA
Il teorema permette inoltre di calcolare il momento d’inerzia del corpo
rispetto a ciascuno dei 3 assi
Teorema di Poinsot - Assi d’inerzia
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 27
• ENERGIA CINETICA DEL CORPO RIGIDO
In rotazione attorno ad un asse fisso
𝑬𝒌 =
𝒊
𝑵𝟏
𝟐𝒎𝒊𝒗𝒊
𝟐 =
𝒊
𝑵𝟏
𝟐𝒎𝒊𝑹𝒊
𝟐𝝎𝟐 =𝟏
𝟐𝑰𝒛 𝝎
𝟐
Se 𝑳 ∥ 𝝎 𝑳 = 𝑰𝒛𝝎:
𝑬𝒌 =𝟏
𝟐𝝎𝑳 =
𝟏
𝟐
𝑳𝟐
𝑰𝒛
• Teorema Lavoro-Energia Cinetica
𝑾 = 𝚫𝑬𝒌 =𝟏
𝟐𝑰𝒛 𝝎𝒇
𝟐 −𝝎𝒊𝟐
Dove 𝝎𝒊 e 𝝎𝒇 rappresentano le velocità angolari iniziali e finali
per un corpo rigido portato in rotazione a seguito dell’applicazione
di un momento esterno
Energia cinetica e lavoro
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 28
• Per variazioni infinitesime risulta:
𝒅𝑾 = 𝒅𝑬𝒌 = 𝒅𝟏
𝟐𝑰𝒛𝝎
𝟐 = 𝑰𝒛𝝎𝒅𝝎 = 𝑰𝒛𝒅𝜽
𝒅𝒕𝒅𝝎 = 𝑰𝒛
𝒅𝝎
𝒅𝒕𝒅𝜽 = 𝑰𝒛𝜶 𝒅𝜽
𝒅𝑾 = 𝑴𝒛 𝒅𝜽
Integrando la relazione precedente si ottiene:
𝑾 = න𝜽𝒊
𝜽𝒇
𝑴𝒛 𝒅𝜽
o Se 𝑳 ∥ 𝝎 𝑳 = 𝑰𝒛𝝎: 𝑴𝒛 = 𝑴
Bisogna conoscere la dipendenza angolare di 𝑴 = 𝑴 𝜽
o Se 𝑴𝒛 = 𝒄𝒐𝒔𝒕𝒂𝒏𝒕𝒆: 𝑾 = 𝑴𝒛 𝜽
• POTENZA ISTANTANEA
𝑷 =𝒅𝑾
𝒅𝒕= 𝑴𝒛
𝒅𝜽
𝒅𝒕= 𝑴𝒛 𝝎
Energia cinetica e lavoro
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 29
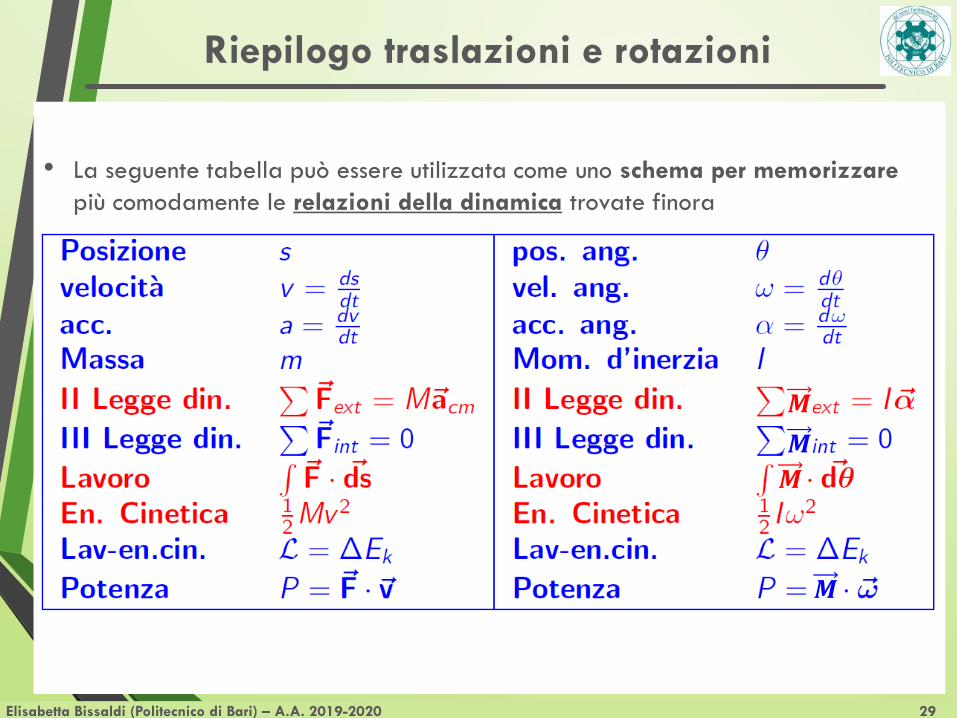
• La seguente tabella può essere utilizzata come uno schema per memorizzare
più comodamente le relazioni della dinamica trovate finora
Riepilogo traslazioni e rotazioni
𝑴
𝑴
𝑴
𝑴
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 30
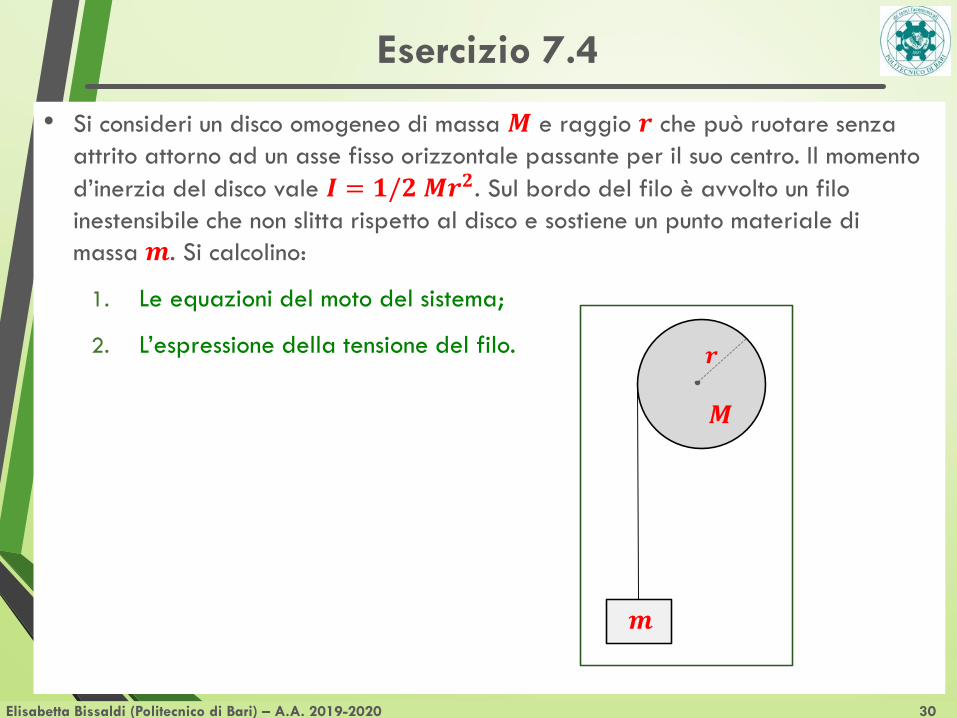
• Si consideri un disco omogeneo di massa 𝑴 e raggio 𝒓 che può ruotare senza
attrito attorno ad un asse fisso orizzontale passante per il suo centro. Il momento
d’inerzia del disco vale 𝑰 = 𝟏/𝟐𝑴𝒓𝟐. Sul bordo del filo è avvolto un filo
inestensibile che non slitta rispetto al disco e sostiene un punto materiale di
massa 𝒎. Si calcolino:
1. Le equazioni del moto del sistema;
2. L’espressione della tensione del filo.
Esercizio 7.4
𝑴
𝒓
𝒎
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 31
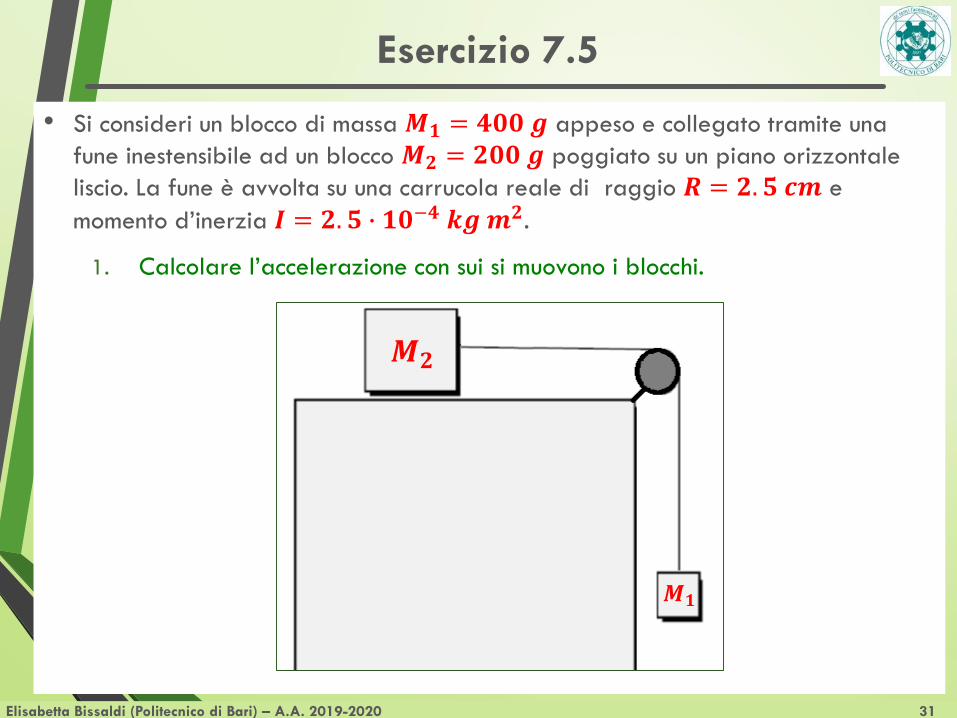
• Si consideri un blocco di massa 𝑴𝟏 = 𝟒𝟎𝟎 𝒈 appeso e collegato tramite una
fune inestensibile ad un blocco 𝑴𝟐 = 𝟐𝟎𝟎 𝒈 poggiato su un piano orizzontale
liscio. La fune è avvolta su una carrucola reale di raggio 𝑹 = 𝟐. 𝟓 𝒄𝒎 e
momento d’inerzia 𝑰 = 𝟐. 𝟓 ∙ 𝟏𝟎−𝟒 𝒌𝒈𝒎𝟐.
1. Calcolare l’accelerazione con sui si muovono i blocchi.
Esercizio 7.5
𝑴𝟏
𝑴𝟐
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 32
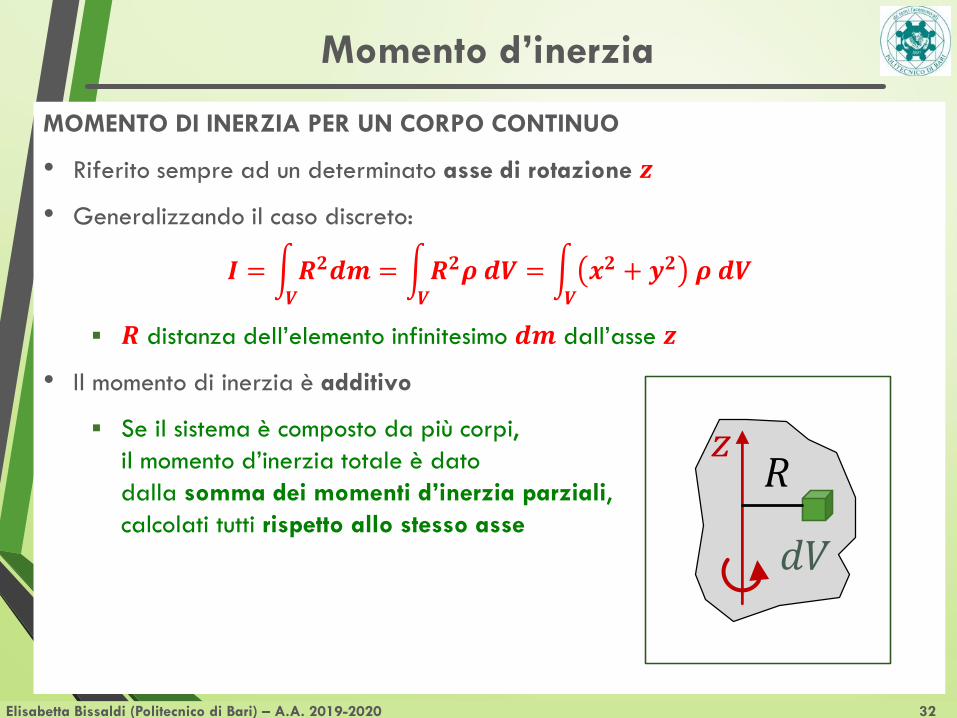
MOMENTO DI INERZIA PER UN CORPO CONTINUO
• Riferito sempre ad un determinato asse di rotazione 𝒛
• Generalizzando il caso discreto:
𝑰 = න𝑽
𝑹𝟐𝒅𝒎 = න𝑽
𝑹𝟐𝝆 𝒅𝑽 = න𝑽
𝒙𝟐 + 𝒚𝟐 𝝆 𝒅𝑽
𝑹 distanza dell’elemento infinitesimo 𝒅𝒎 dall’asse 𝒛
• Il momento di inerzia è additivo
Se il sistema è composto da più corpi,
il momento d’inerzia totale è dato
dalla somma dei momenti d’inerzia parziali,
calcolati tutti rispetto allo stesso asse
Momento d’inerzia
𝑧𝑅
𝑑𝑉
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 33
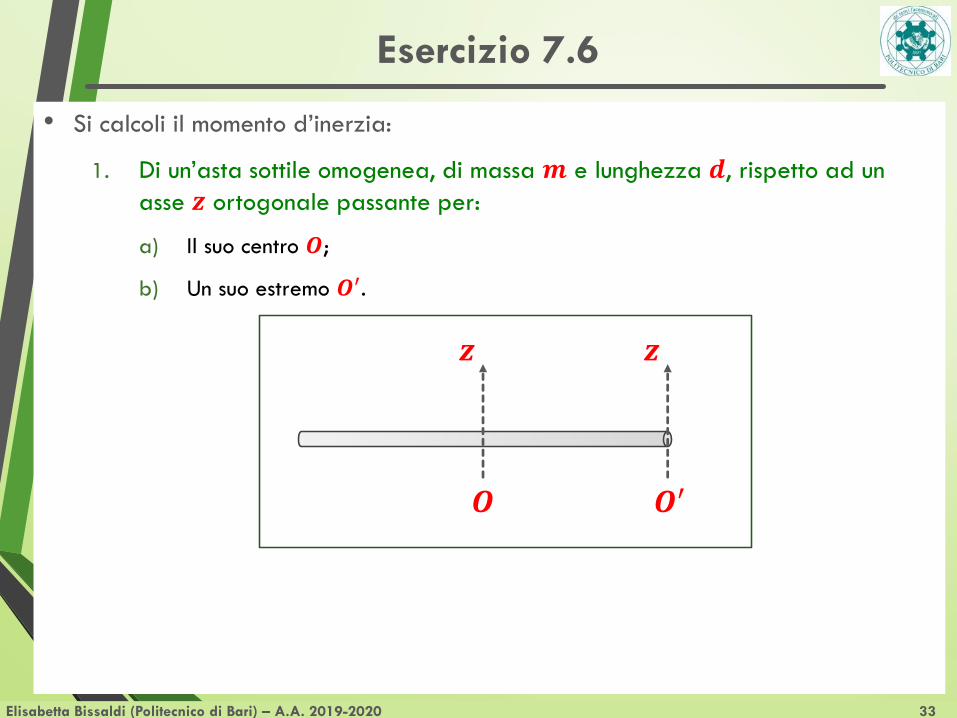
• Si calcoli il momento d’inerzia:
1. Di un’asta sottile omogenea, di massa 𝒎 e lunghezza 𝒅, rispetto ad un
asse 𝒛 ortogonale passante per:
a) Il suo centro 𝑶;
b) Un suo estremo 𝑶′.
Esercizio 7.6
𝒛 𝒛
𝑶 𝑶′
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 34
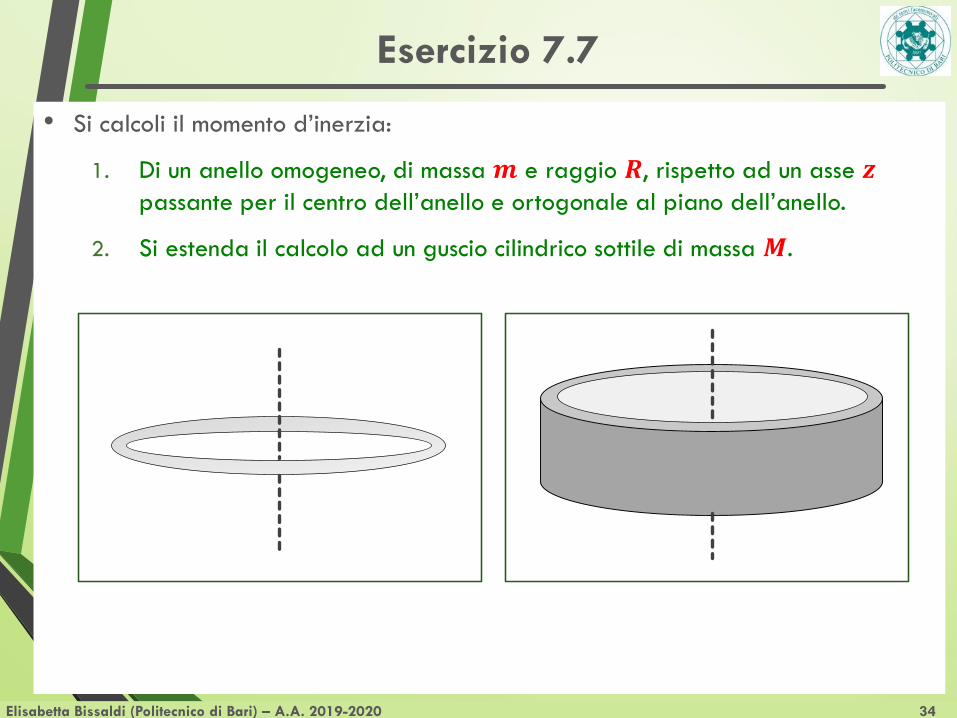
• Si calcoli il momento d’inerzia:
1. Di un anello omogeneo, di massa 𝒎 e raggio 𝑹, rispetto ad un asse 𝒛passante per il centro dell’anello e ortogonale al piano dell’anello.
2. Si estenda il calcolo ad un guscio cilindrico sottile di massa 𝑴.
Esercizio 7.7
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 35
• Si calcoli il momento d’inerzia:
1. Di un disco sottile omogeneo, di massa 𝒎 e raggio 𝑹, rispetto ad un asse 𝒛passante per il centro del disco e ortogonale al piano del disco.
2. Si estenda il calcolo ad un cilindro pieno di massa 𝑴.
Esercizio 7.8
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 36
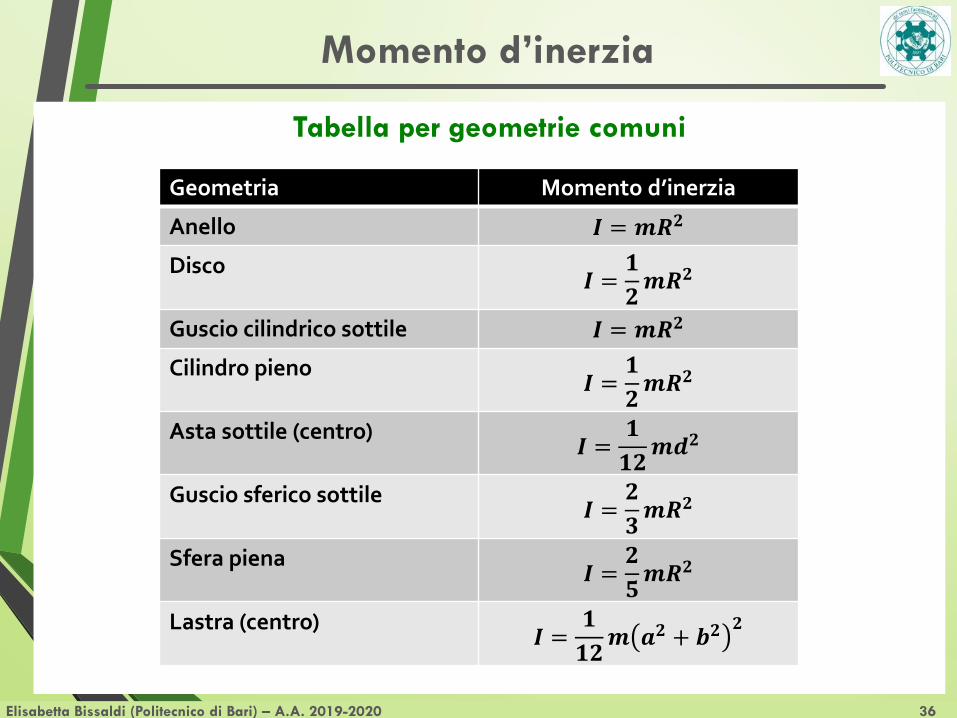
Tabella per geometrie comuni
Momento d’inerzia
Geometria Momento d’inerzia
Anello 𝑰 = 𝒎𝑹𝟐
Disco𝑰 =
𝟏
𝟐𝒎𝑹𝟐
Guscio cilindrico sottile 𝑰 = 𝒎𝑹𝟐
Cilindro pieno𝑰 =
𝟏
𝟐𝒎𝑹𝟐
Asta sottile (centro)𝑰 =
𝟏
𝟏𝟐𝒎𝒅𝟐
Guscio sferico sottile𝑰 =
𝟐
𝟑𝒎𝑹𝟐
Sfera piena𝑰 =
𝟐
𝟓𝒎𝑹𝟐
Lastra (centro)𝑰 =
𝟏
𝟏𝟐𝒎 𝒂𝟐 + 𝒃𝟐
𝟐
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 37
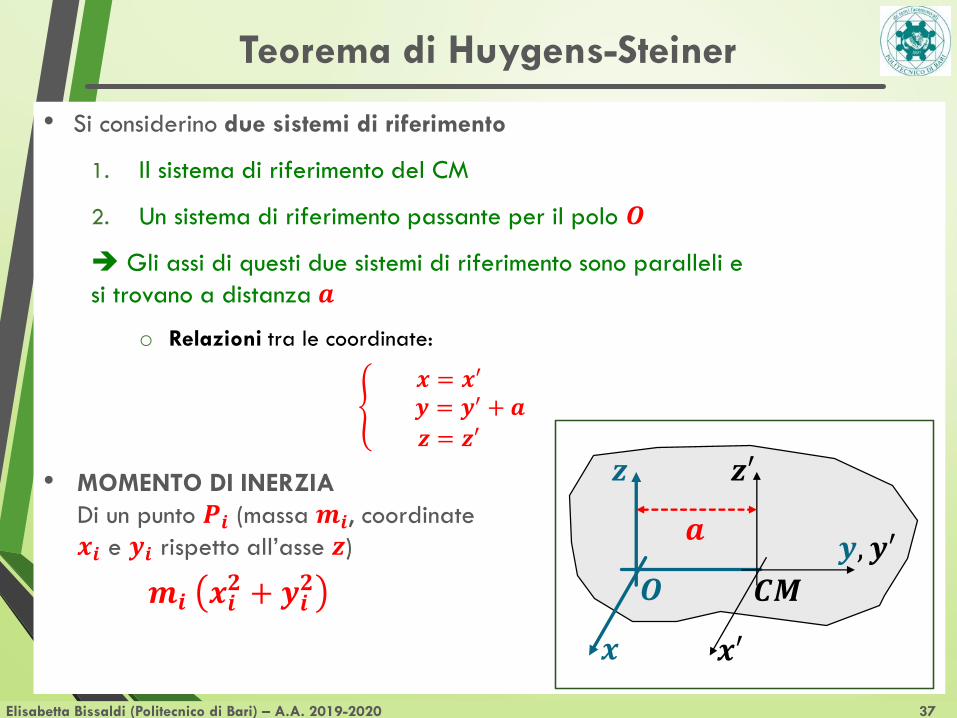
• Si considerino due sistemi di riferimento
1. Il sistema di riferimento del CM
2. Un sistema di riferimento passante per il polo 𝑶
Gli assi di questi due sistemi di riferimento sono paralleli e
si trovano a distanza 𝒂
o Relazioni tra le coordinate:
ቐ𝒙 = 𝒙′𝒚 = 𝒚′ + 𝒂
𝒛 = 𝒛′
• MOMENTO DI INERZIA
Di un punto 𝑷𝒊 (massa 𝒎𝒊, coordinate
𝒙𝒊 e 𝒚𝒊 rispetto all’asse 𝒛)
𝒎𝒊 𝒙𝒊𝟐 + 𝒚𝒊
𝟐
Teorema di Huygens-Steiner
𝒙 𝒙′
𝒚, 𝒚′
𝒛 𝒛′
𝒂
𝑪𝑴𝑶
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 38
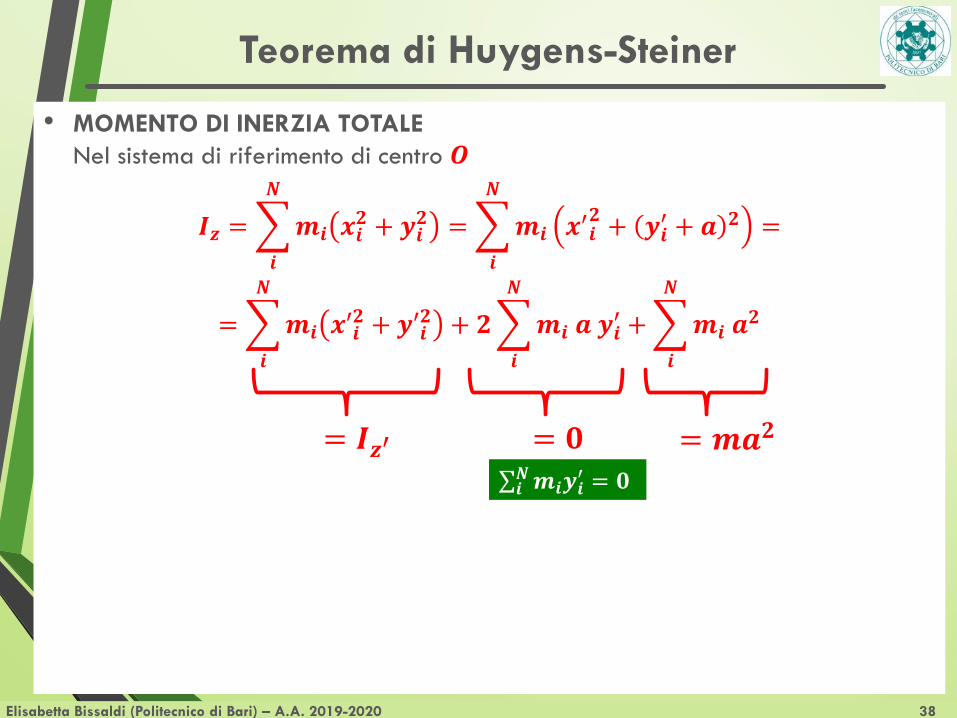
• MOMENTO DI INERZIA TOTALE
Nel sistema di riferimento di centro 𝑶
𝑰𝒛 =
𝒊
𝑵
𝒎𝒊 𝒙𝒊𝟐 + 𝒚𝒊
𝟐 =
𝒊
𝑵
𝒎𝒊 𝒙′𝒊𝟐+ 𝒚𝒊
′ + 𝒂 𝟐 =
=
𝒊
𝑵
𝒎𝒊 𝒙′𝒊𝟐 + 𝒚′𝒊
𝟐 + 𝟐
𝒊
𝑵
𝒎𝒊 𝒂 𝒚𝒊′ +
𝒊
𝑵
𝒎𝒊 𝒂𝟐
Teorema di Huygens-Steiner
= 𝑰𝒛′ = 𝟎 = 𝒎𝒂𝟐
σ𝒊𝑵𝒎𝒊𝒚𝒊
′ = 𝟎
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 39
TEOREMA DI HUYGENS-STEINER
Stabilisce che il momento di inerzia di un corpo di massa 𝒎rispetto ad un asse che si trova ad una distanza 𝒂
da un asse passante per il centro di massa (𝑪𝑴) risulta pari a:
𝑰𝒛 = 𝑰𝒛,𝑪𝑴 +𝒎𝒂𝟐
Poiché risulta 𝒎𝒂𝟐 > 𝟎, il momento di inerzia generico rispetto
a quello per un asse passante per il CM è sempre maggiore
𝑰𝒛 > 𝑰𝒛,𝑪𝑴
• Esempio: Momento d’inerzia di un disco di raggio 𝑹 e massa 𝑴 rispetto ad un
asse passante per il bordo:
𝑰𝒛 = 𝑰𝒛,𝑪𝑴 +𝑴𝑹𝟐 =𝟏
𝟐𝑴𝑹𝟐 +𝑴𝑹𝟐 =
𝟑
𝟐𝑴𝑹𝟐
Teorema di Huygens-Steiner
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 40
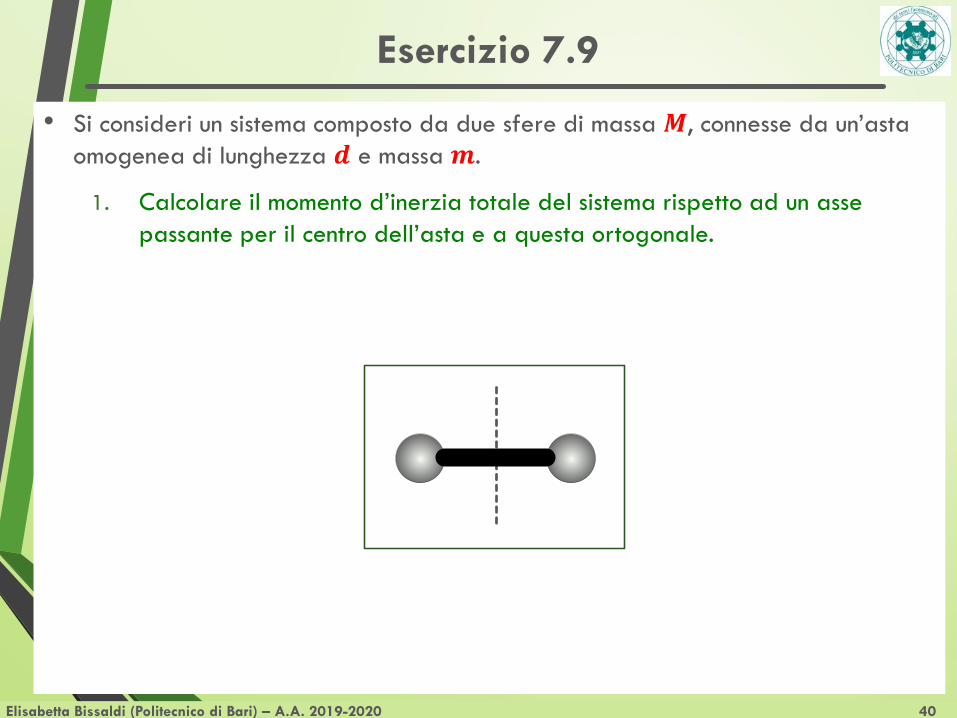
• Si consideri un sistema composto da due sfere di massa 𝑴, connesse da un’asta
omogenea di lunghezza 𝒅 e massa 𝒎.
1. Calcolare il momento d’inerzia totale del sistema rispetto ad un asse
passante per il centro dell’asta e a questa ortogonale.
Esercizio 7.9
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 41
• Si consideri un aspetto che lega il Teorema di Huygens-Steiner con il Teorema di
König per l’energia cinetica.
Energia cinetica per un moto rotatorio: 𝑬𝑲 =𝟏
𝟐𝑰𝒛𝝎
𝟐
• 𝑰𝒛 : momento d’inerzia del corpo rigido rispetto all’asse z di rotazione,
distante 𝒂 dal CM
𝑬𝑲 =𝟏
𝟐𝑰𝒛𝝎
𝟐 =𝟏
𝟐𝑰𝒛,𝑪𝑴 +𝒎𝒂𝟐 𝝎𝟐 =
𝟏
𝟐𝑰𝒛,𝑪𝑴 𝝎𝟐 +
𝟏
𝟐𝒎 𝒗𝑪𝑴
𝟐
• 𝒗𝑪𝑴 = 𝒂𝝎: velocità del CM
ENERGIA CINETICA 𝑬𝑲 = 𝑬𝒌′ + 𝑬𝒌,𝑪𝑴 come somma di due contributi:
1. Termine dovuto alla rotazione rispetto al CM 𝑬𝒌′ =
𝟏
𝟐𝑰𝒛,𝑪𝑴 𝝎𝟐
2. Termine dovuto al moto del CM 𝑬𝒌,𝑪𝑴 =𝟏
𝟐𝒎𝒗𝑪𝑴
𝟐
La velocità di traslazione e quella di rotazione non sono indipendenti
Teorema di H.S. e teorema di König

Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 42
PENDOLO COMPOSTO
Ogni corpo rigido di massa 𝒎 che, per azione del suo peso, può oscillare in un
piano verticale attorno ad un asse fisso orizzontale non passante per il CM.
𝒉: distanza tra 𝑶 e il CM
𝜽: angolo tra la posizione di equilibrio statico (𝜽 = 𝟎, CM sulla retta verticale
passante per 𝑶) ed uno spostamento verso destra o verso sinistrao AZIONE DELLA FORZA PESO: riportare il pendolo verso la posizione di equilibrio
• Momento della forza peso (di richiamo)
𝑴𝒛 = −𝒎𝒈 𝒉 𝒔𝒆𝒏 𝜽
Se non ci sono attriti nel polo 𝑶,
il momento della reazione vincolare è nullo
• Equazione del moto rotatorio
𝑴𝒛 =𝒅𝑳𝒛𝒅𝒕
= 𝑰𝒛𝜶 = 𝑰𝒛𝒅𝟐𝜽
𝒅𝒕𝟐= −𝒎𝒈 𝒉 𝒔𝒆𝒏 𝜽
Da cui: 𝒅𝟐𝜽
𝒅𝒕𝟐+
𝒎𝒈𝒉
𝑰𝒛𝒔𝒆𝒏𝜽 = 𝟎
Pendolo composto
𝑷
𝑪𝑴
𝑶
𝜃
𝒉

Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 43
• Per piccole oscillazioni (𝒔𝒆𝒏𝜽 ≅ 𝜽), si ritrova l’equazione del moto armonico,
che ha come soluzione: 𝜽 = 𝜽𝟎𝒔𝒆𝒏 𝛀𝐭 + 𝝓𝟎
Pulsazione
𝛀 =𝒎𝒈𝒉
𝑰𝒛
Periodo
𝐓 =𝟐𝝅
𝛀= 𝟐𝝅
𝑰𝒛𝒎𝒈𝒉
= 𝟐𝝅𝒍𝑪𝒈
o Lunghezza ridotta del pendolo composto:
𝒍𝑪 =𝑰𝒛𝒎𝒉
• Corrisponde alla lunghezza del filo di un pendolo semplice
che oscilla con lo stesso periodo.
Pendolo composto
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 44
• Si consideri un corpo cilindrico o sferico, posto su un piano, ed in moto rispetto
ad esso. Sono possibili 3 tipi di moto:
1. Puro moto traslatorio:
o Tutti i punti del corpo hanno la stessa velocità 𝒗 parallela al piano
Il corpo STRISCIA sul piano
2. Moto di rototraslazione
o Il corpo rotola sul piano, ma il punto di contatto ha velocità non nulla
rispetto al piano stesso
Il corpo ROTOLA E STRISCIA sul piano
3. Moto di puro rotolamento
o Il corpo rotola sul piano, e il punto di contatto ha velocità nulla rispetto al
piano stesso
Il corpo ROTOLA sul piano
Moto di puro rotolamento
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 45
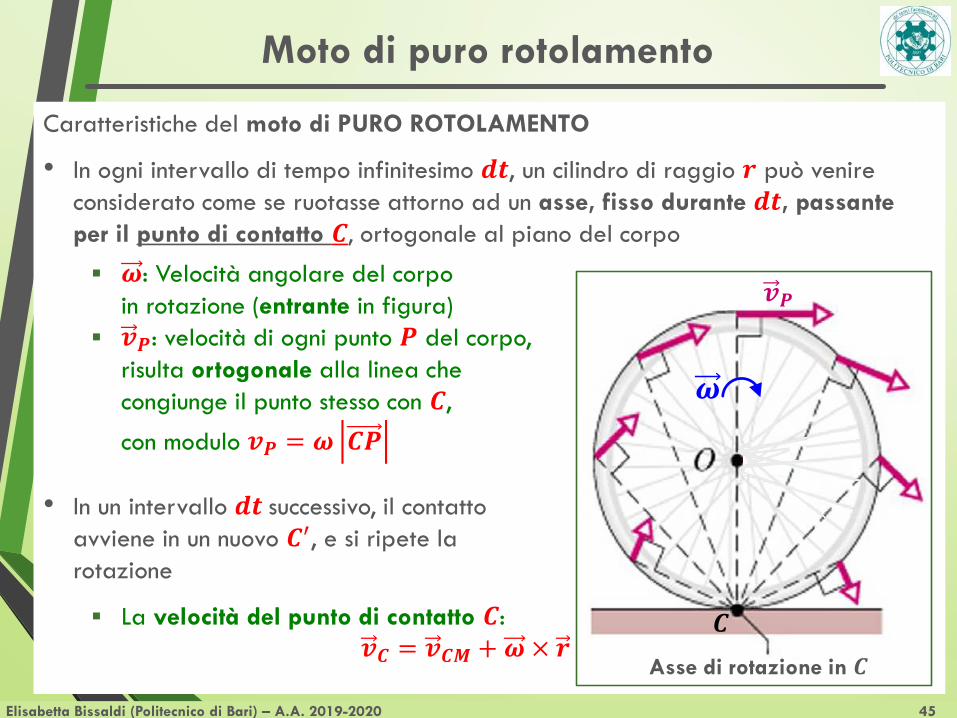
Caratteristiche del moto di PURO ROTOLAMENTO
• In ogni intervallo di tempo infinitesimo 𝒅𝒕, un cilindro di raggio 𝒓 può venire
considerato come se ruotasse attorno ad un asse, fisso durante 𝒅𝒕, passante
per il punto di contatto 𝑪, ortogonale al piano del corpo
𝝎: Velocità angolare del corpo
in rotazione (entrante in figura)
𝒗𝑷: velocità di ogni punto 𝑷 del corpo,
risulta ortogonale alla linea che
congiunge il punto stesso con 𝑪,
con modulo 𝒗𝑷 = 𝝎 𝑪𝑷
• In un intervallo 𝒅𝒕 successivo, il contatto
avviene in un nuovo 𝑪′, e si ripete la
rotazione
La velocità del punto di contatto 𝑪:
𝒗𝑪 = 𝒗𝑪𝑴 +𝝎× 𝒓
Moto di puro rotolamento
𝒗𝑷
Asse di rotazione in 𝑪
𝑪
𝝎
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 46
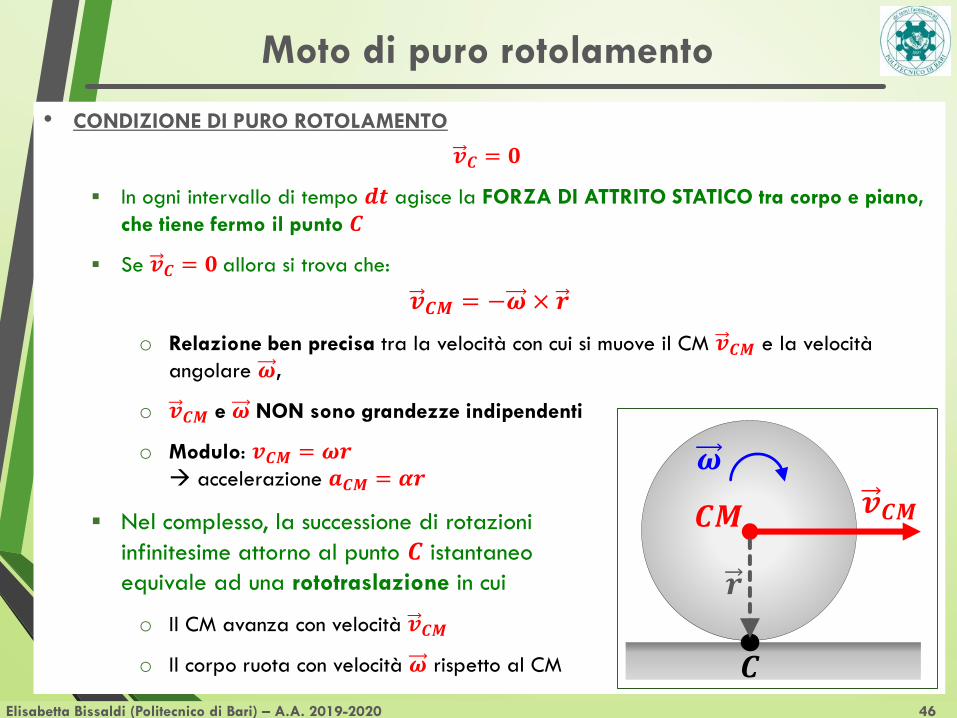
• CONDIZIONE DI PURO ROTOLAMENTO
𝒗𝑪 = 𝟎
In ogni intervallo di tempo 𝒅𝒕 agisce la FORZA DI ATTRITO STATICO tra corpo e piano,
che tiene fermo il punto 𝑪
Se 𝒗𝑪 = 𝟎 allora si trova che:
𝒗𝑪𝑴 = −𝝎 × 𝒓
o Relazione ben precisa tra la velocità con cui si muove il CM 𝒗𝑪𝑴 e la velocità
angolare 𝝎,
o 𝒗𝑪𝑴 e 𝝎 NON sono grandezze indipendenti
o Modulo: 𝒗𝑪𝑴 = 𝝎𝒓 accelerazione 𝒂𝑪𝑴 = 𝜶𝒓
Nel complesso, la successione di rotazioni
infinitesime attorno al punto 𝑪 istantaneo
equivale ad una rototraslazione in cui
o Il CM avanza con velocità 𝒗𝑪𝑴
o Il corpo ruota con velocità 𝝎 rispetto al CM
Moto di puro rotolamento
𝑪𝑴
𝑪
𝒗𝑪𝑴
𝝎
𝒓
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 47
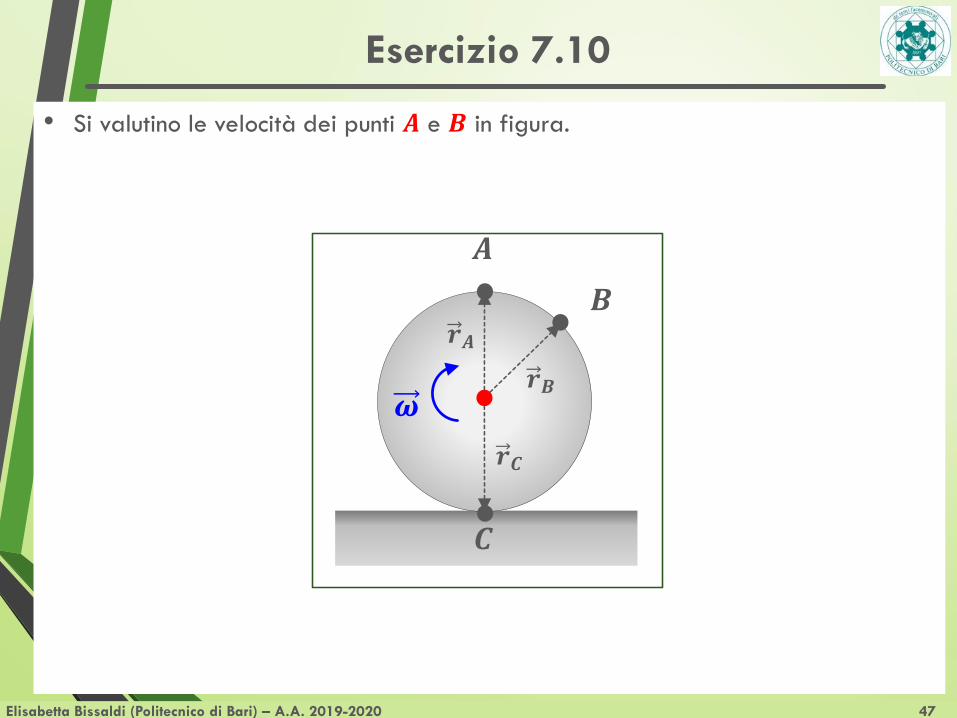
• Si valutino le velocità dei punti 𝑨 e 𝑩 in figura.
Esercizio 7.10
𝑪
𝒓𝑨
𝝎
𝑨
𝑩
𝒓𝑩
𝒓𝑪
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 48
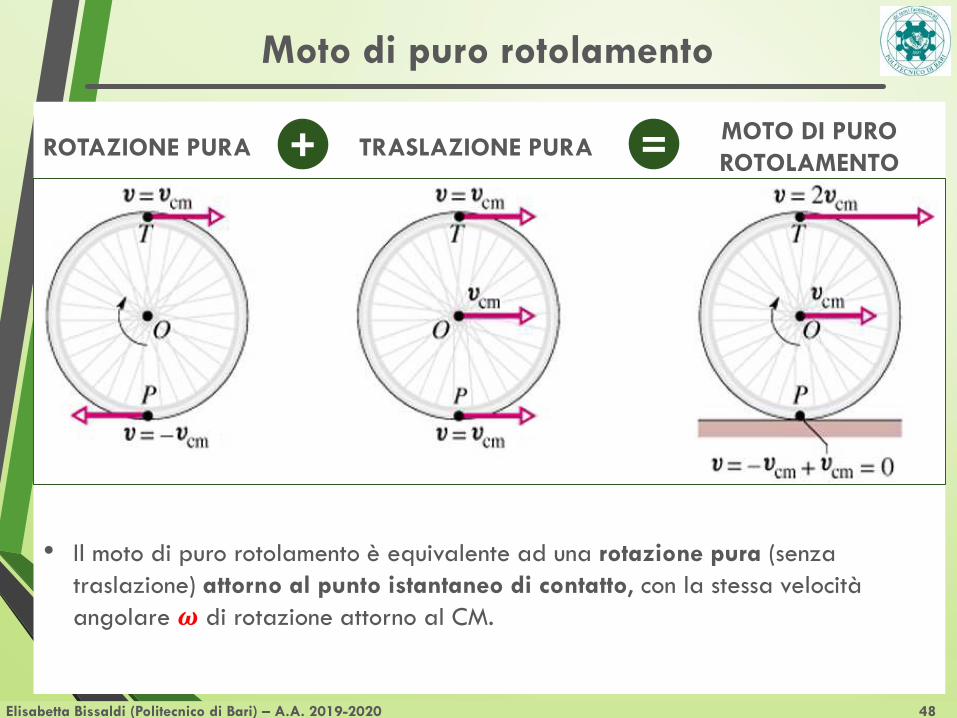
ROTAZIONE PURA TRASLAZIONE PURA
• Il moto di puro rotolamento è equivalente ad una rotazione pura (senza
traslazione) attorno al punto istantaneo di contatto, con la stessa velocità
angolare 𝝎 di rotazione attorno al CM.
Moto di puro rotolamento
+ = MOTO DI PURO
ROTOLAMENTO
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 49
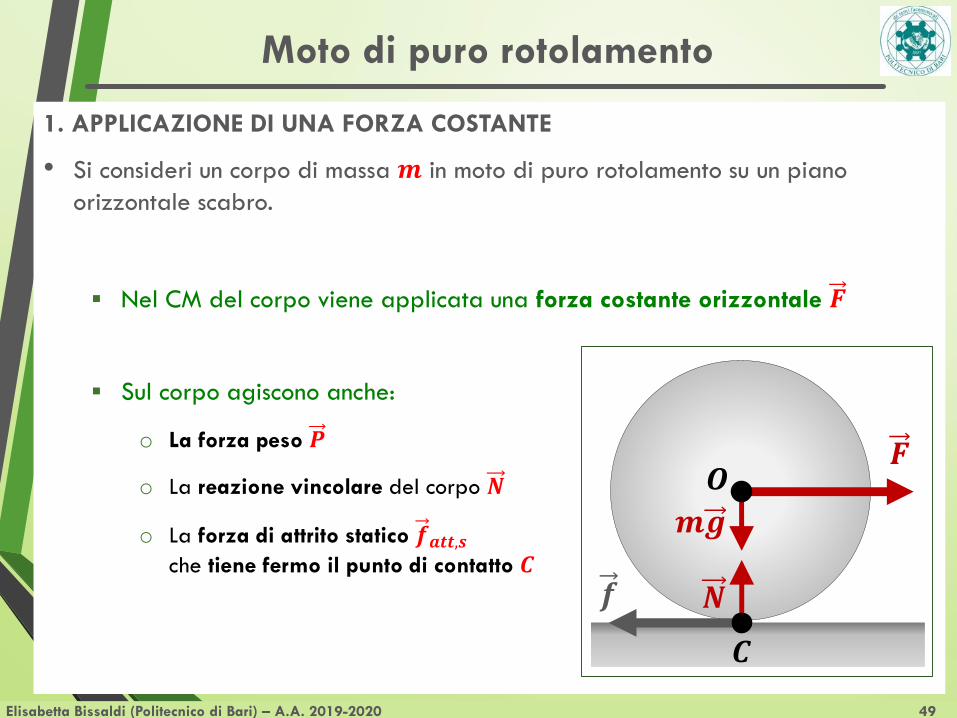
1. APPLICAZIONE DI UNA FORZA COSTANTE
• Si consideri un corpo di massa 𝒎 in moto di puro rotolamento su un piano
orizzontale scabro.
Nel CM del corpo viene applicata una forza costante orizzontale 𝑭
Sul corpo agiscono anche:
o La forza peso 𝑷
o La reazione vincolare del corpo 𝑵
o La forza di attrito statico 𝒇𝒂𝒕𝒕,𝒔che tiene fermo il punto di contatto 𝑪
Moto di puro rotolamento
𝑶
𝑪
𝑭
𝒎𝒈
𝒇 𝑵

Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 50
• Legge del moto del CM
𝑹 = 𝑭 + 𝑵 + 𝒇𝒂𝒕𝒕,𝒔 + 𝑷 = 𝒎𝒂𝑪𝑴
Proiettando sugli assi:
ቊ𝒙: 𝑭 − 𝒇𝒂𝒕𝒕,𝒔 = 𝒎𝒂𝑪𝑴𝒚: 𝑵 −𝒎𝒈 = 𝟎
• Teorema del momento angolare rispetto al CM
𝑴 = 𝒓 × 𝒇𝒂𝒕𝒕,𝒔 = 𝑰𝑪𝑴 𝜶
o Tutte le forze (𝑭,𝑵,𝑷) eccetto 𝒇𝒂𝒕𝒕,𝒔 hanno momento nullo rispetto al CM
Da cui:
𝑴 = 𝒓𝒇𝒂𝒕𝒕,𝒔 = 𝑰𝑪𝑴 𝜶 = 𝑰𝑪𝑴𝒂𝑪𝑴𝒓
Moto di puro rotolamento

Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 51
• Combinando entrambe le equazioni si ottengono le espressioni per:
L’accelerazione del CM
𝒂𝑪𝑴 =𝑭
𝒎 𝟏+𝑰𝑪𝑴𝒎𝒓𝟐
La forza di attrito statico
𝒇𝒂𝒕𝒕,𝒔 =𝑭
𝟏 +𝒎𝒓𝟐
𝑰𝑪𝑴
o Tale forza si oppone al moto
o Non può assumere qualunque, valore, ma il suo modulo deve verificare:
𝒇𝒂𝒕𝒕,𝒔 ≤ 𝝁𝒔𝑵 = 𝝁𝒔𝒎𝒈
Valore limite della forza applicata
𝑭 ≤ 𝝁𝒔𝒎𝒈 𝟏 +𝒎𝒓𝟐
𝑰𝑪𝑴= 𝑭𝒍𝒊𝒎
Condizione sulla forza 𝑭 per il PURO ROTOLAMENTO
Moto di puro rotolamento

Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 52
2. APPLICAZIONE DI UN MOMENTO COSTANTE
• Si consideri un corpo di massa 𝒎 in moto di puro rotolamento su un piano
orizzontale scabro.
All’asse del corpo passante per il CM viene applicato un momento
costante 𝑴, per esempio tramite un motore
L’azione del momento tende a far
slittare verso sinistra il punto di
contatto 𝑪
o La forza di attrito statico 𝒇𝒂𝒕𝒕,𝒔è dunque diretta verso destra,
produce un momento che si
oppone al momento applicato!
Moto di puro rotolamento
𝑶
𝑪
𝑴
𝒎𝒈
𝒇𝑵

Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 53
• Leggi del moto del 𝑪𝑴:
𝑵+ 𝒇𝒂𝒕𝒕,𝒔 + 𝑷 = 𝒎𝒂𝑪𝑴
• Teorema del momento angolare rispetto al 𝑪𝑴:
𝑴+ 𝒓 × 𝒇𝒂𝒕𝒕,𝒔 = 𝑰𝑪𝑴 𝜶
L’accelerazione del 𝑪𝑴 e la forza di attrito statico risultano dunque:
𝒂𝑪𝑴 =𝑴
𝒎𝒓 𝟏 +𝑰𝑪𝑴𝒎𝒓𝟐
𝒇𝒂𝒕𝒕,𝒔 =𝑴
𝒓 𝟏 +𝑰𝑪𝑴𝒎𝒓𝟐
o A causa dell’azione di 𝑴, la forza di attrito FAVORISCE il moto e causa
l’accelerazione del CM: quando un motore fa girare una ruota, è l’attrito al
suolo che la spinge avanti
o Il modulo della forza di attrito deve verificare: 𝒇𝒂𝒕𝒕,𝒔 ≤ 𝝁𝒔𝑵 = 𝝁𝒔𝒎𝒈
𝑴 ≤ 𝝁𝒔 𝒎𝒈 𝒓 𝟏 +𝑰𝑪𝑴𝒎𝒓𝟐
= 𝑴𝒍𝒊𝒎
o Condizione sul momento 𝑴 per il PURO ROTOLAMENTO
Moto di puro rotolamento
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 54
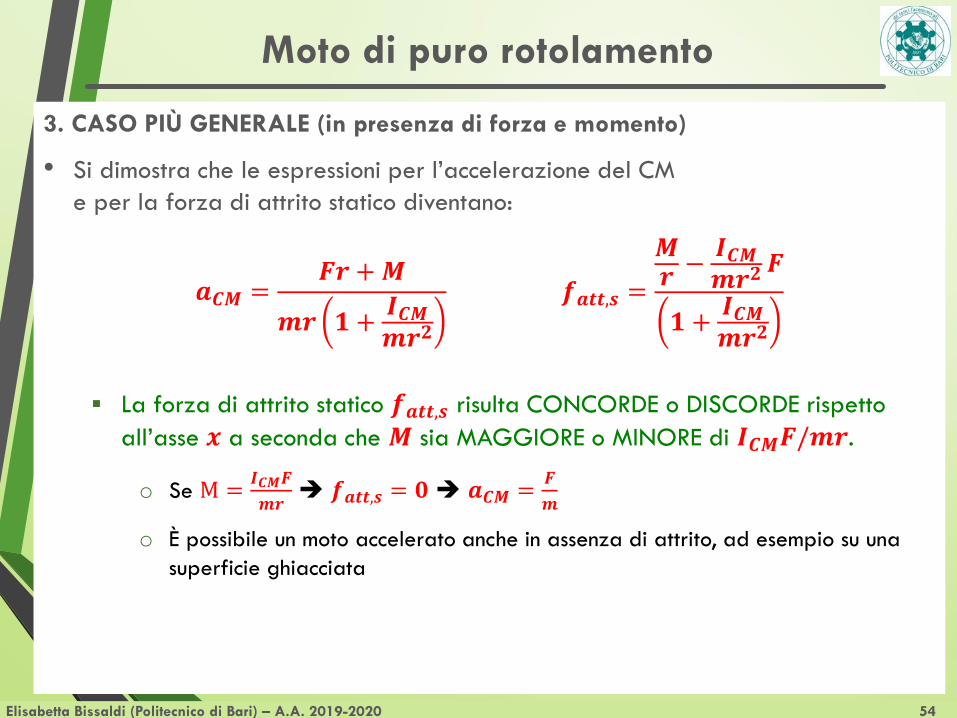
3. CASO PIÙ GENERALE (in presenza di forza e momento)
• Si dimostra che le espressioni per l’accelerazione del CM
e per la forza di attrito statico diventano:
𝒂𝑪𝑴 =𝑭𝒓 +𝑴
𝒎𝒓 𝟏 +𝑰𝑪𝑴𝒎𝒓𝟐
𝒇𝒂𝒕𝒕,𝒔 =
𝑴𝒓−𝑰𝑪𝑴𝒎𝒓𝟐
𝑭
𝟏 +𝑰𝑪𝑴𝒎𝒓𝟐
La forza di attrito statico 𝒇𝒂𝒕𝒕,𝒔 risulta CONCORDE o DISCORDE rispetto
all’asse 𝒙 a seconda che 𝑴 sia MAGGIORE o MINORE di 𝑰𝑪𝑴𝑭/𝒎𝒓.
o Se M =𝑰𝑪𝑴𝑭
𝒎𝒓 𝒇𝒂𝒕𝒕,𝒔 = 𝟎 𝒂𝑪𝑴 =
𝑭
𝒎
o È possibile un moto accelerato anche in assenza di attrito, ad esempio su una
superficie ghiacciata
Moto di puro rotolamento
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 55
• Si consideri un disco rigido di massa 𝒎 = 𝟓 𝒌𝒈 e raggio 𝒓 = 𝟎. 𝟐 𝒎 che rotola
senza strisciare su un piano orizzontale. Il coefficiente di attrito statico vale
𝝁𝒔 = 𝟎. 𝟑. Al CM del disco è applicata una forza 𝑭 = 𝟐𝟏 𝑵, nella direzione del
moto.
Si calcolino:
1. L’accelerazione del CM;
2. La forza di attrito statico
3. Se è rispettata la condizione sulla forza 𝑭 per il puro rotolamento;
4. Il valore del momento costante che bisogna applicare all’asse del disco
per avere la stessa accelerazione del CM;
5. Il valore della forza di attrito statico in quest’ultimo caso.
Esercizio 7.11
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 56
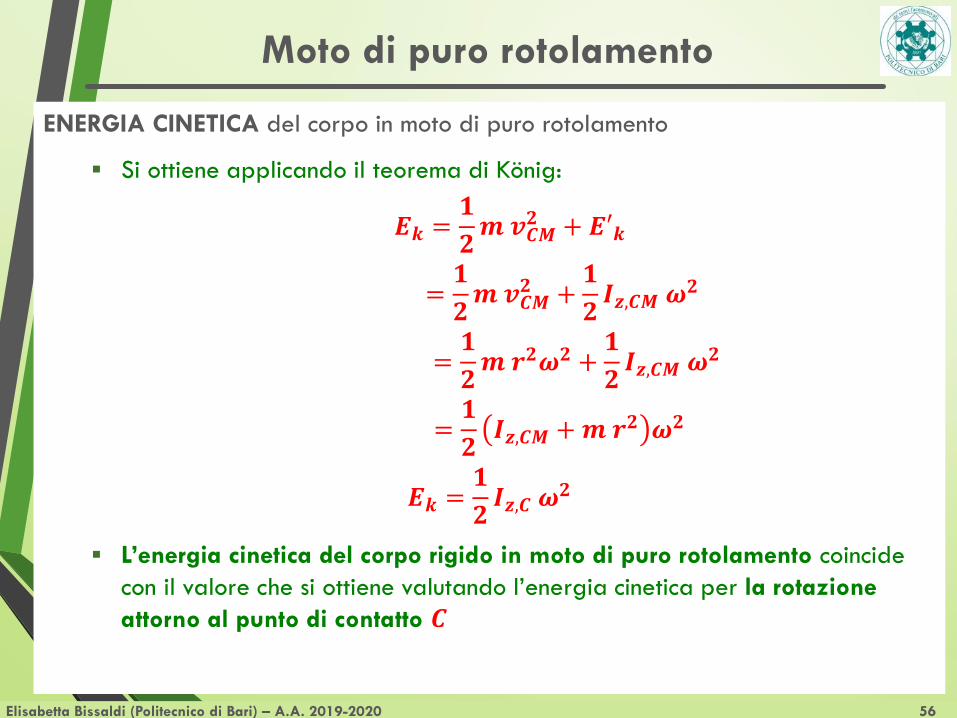
ENERGIA CINETICA del corpo in moto di puro rotolamento
Si ottiene applicando il teorema di König:
𝑬𝒌 =𝟏
𝟐𝒎 𝒗𝑪𝑴
𝟐 + 𝑬′𝒌
=𝟏
𝟐𝒎𝒗𝑪𝑴
𝟐 +𝟏
𝟐𝑰𝒛,𝑪𝑴 𝝎𝟐
=𝟏
𝟐𝒎 𝒓𝟐𝝎𝟐 +
𝟏
𝟐𝑰𝒛,𝑪𝑴 𝝎𝟐
=𝟏
𝟐𝑰𝒛,𝑪𝑴 +𝒎 𝒓𝟐 𝝎𝟐
𝑬𝒌 =𝟏
𝟐𝑰𝒛,𝑪 𝝎
𝟐
L’energia cinetica del corpo rigido in moto di puro rotolamento coincide
con il valore che si ottiene valutando l’energia cinetica per la rotazione
attorno al punto di contatto 𝑪
Moto di puro rotolamento
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 57
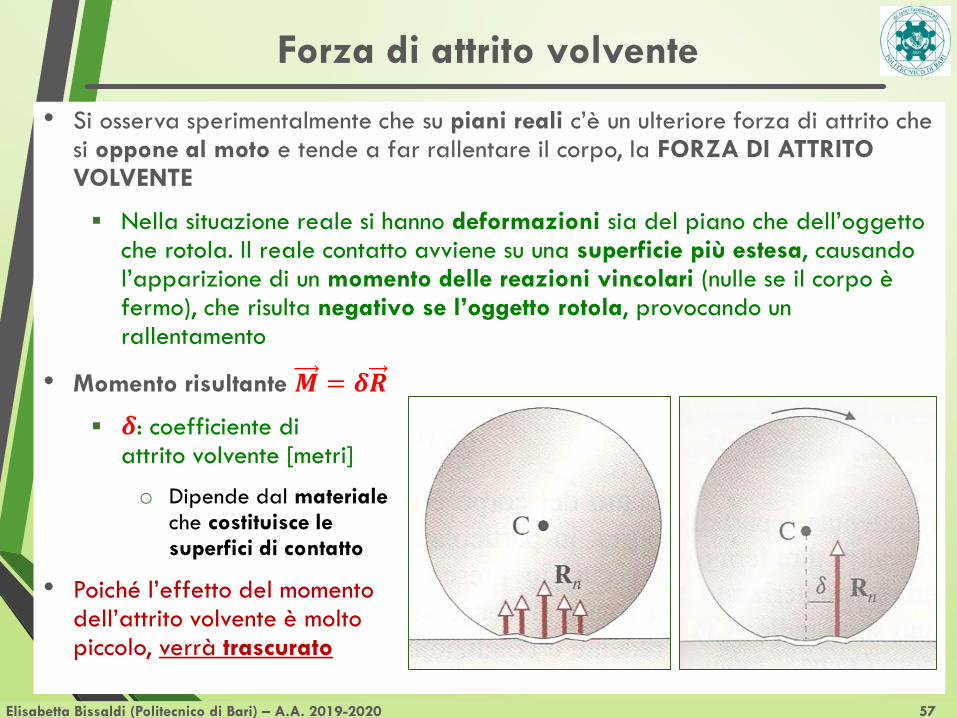
• Si osserva sperimentalmente che su piani reali c’è un ulteriore forza di attrito che si oppone al moto e tende a far rallentare il corpo, la FORZA DI ATTRITO VOLVENTE
Nella situazione reale si hanno deformazioni sia del piano che dell’oggetto che rotola. Il reale contatto avviene su una superficie più estesa, causando l’apparizione di un momento delle reazioni vincolari (nulle se il corpo è fermo), che risulta negativo se l’oggetto rotola, provocando un rallentamento
• Momento risultante 𝑴 = 𝜹𝑹
𝜹: coefficiente di attrito volvente [metri]
o Dipende dal materialeche costituisce le superfici di contatto
• Poiché l’effetto del momentodell’attrito volvente è moltopiccolo, verrà trascurato
Forza di attrito volvente
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 58
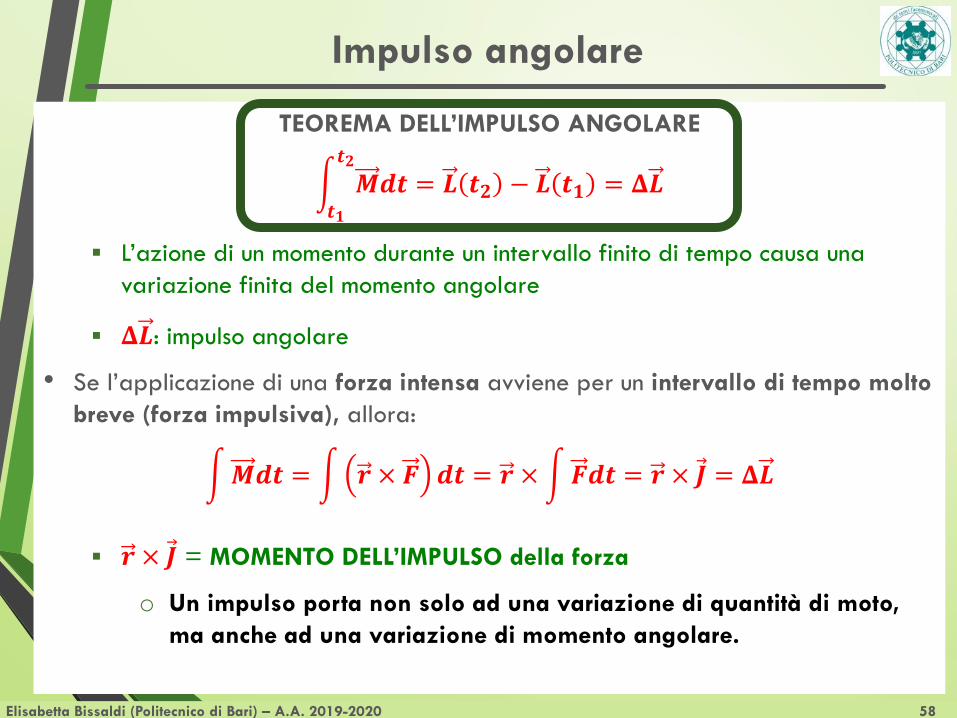
TEOREMA DELL’IMPULSO ANGOLARE
න𝒕𝟏
𝒕𝟐
𝑴𝒅𝒕 = 𝑳 𝒕𝟐 − 𝑳 𝒕𝟏 = 𝚫𝑳
L’azione di un momento durante un intervallo finito di tempo causa una
variazione finita del momento angolare
𝚫𝑳: impulso angolare
• Se l’applicazione di una forza intensa avviene per un intervallo di tempo molto
breve (forza impulsiva), allora:
න𝑴𝒅𝒕 = න 𝒓 × 𝑭 𝒅𝒕 = 𝒓 ×න𝑭𝒅𝒕 = 𝒓 × Ԧ𝑱 = 𝚫𝑳
𝒓 × Ԧ𝑱 = MOMENTO DELL’IMPULSO della forza
o Un impulso porta non solo ad una variazione di quantità di moto,
ma anche ad una variazione di momento angolare.
Impulso angolare
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 59
• Si consideri un’asta rigida di massa 𝒎 = 𝟐. 𝟒 𝒌𝒈 e lunghezza 𝒅 = 𝟎. 𝟒 𝒎,
posata sopra un piano orizzontale liscio e collegata in un estremo ad un asse
verticale. In un intervallo di tempo 𝚫𝐭 = 𝟎. 𝟐 𝐬 viene applicato all’asse un
momento e l’asta entra in rotazione, descrivendo un giro completo in un tempo
𝑻 = 𝟏𝟎 𝒔.
Si calcolino:
1. L’impulso angolare;
2. Il valor medio del momento applicato nel tempo 𝚫𝐭;
3. L’impulso della forza.
Esercizio 7.12
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 60
• Per un corpo rigido inizialmente in quiete, si definisce EQUILIBRIO STATICO la
condizione in cui valgano entrambe queste condizioni
1. 𝑹 = 𝟎
2. 𝑴 = 𝟎
o Da cui:
𝑹 = 𝟎 ⇒ 𝒂𝑪𝑴 = 𝟎 ⇒ 𝒗𝑪𝑴 = 𝟎
𝑴 = 𝟎 ⇒ 𝜶 = 𝟎 ⇒ 𝝎 = 𝟎
Essendo 𝑹 = 𝟎, il valore del momento è indipendente dal polo
rispetto al quale è calcolato
Pertanto 𝑴 = 𝟎 per qualunque polo!
Equilibrio statico del corpo rigido
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 61
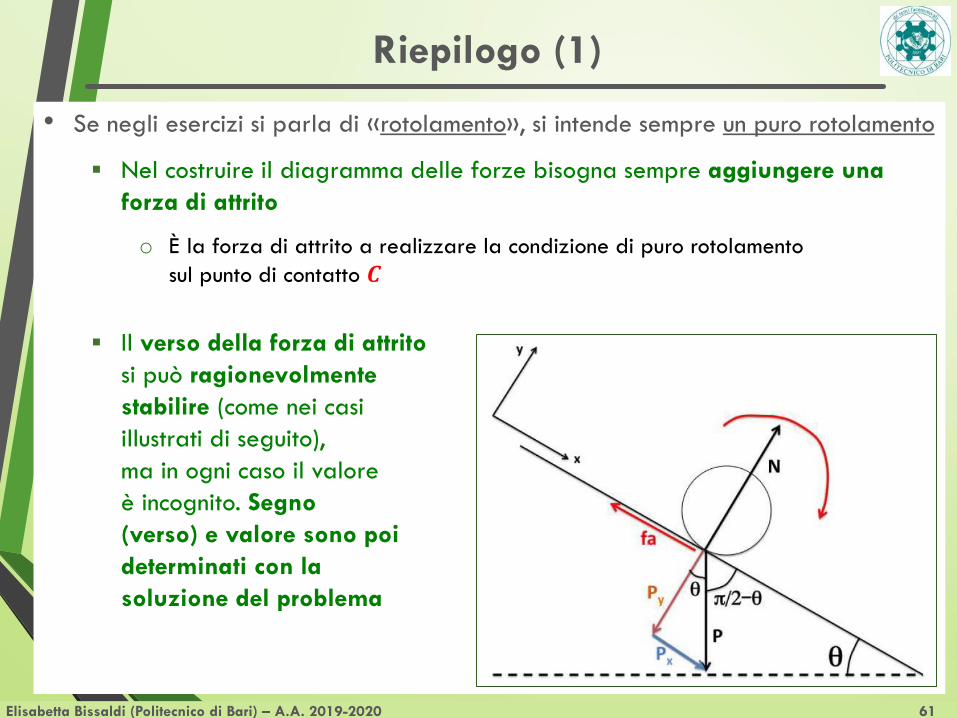
• Se negli esercizi si parla di «rotolamento», si intende sempre un puro rotolamento
Nel costruire il diagramma delle forze bisogna sempre aggiungere una
forza di attrito
o È la forza di attrito a realizzare la condizione di puro rotolamento
sul punto di contatto 𝑪
Il verso della forza di attrito
si può ragionevolmente
stabilire (come nei casi
illustrati di seguito),
ma in ogni caso il valore
è incognito. Segno
(verso) e valore sono poi
determinati con la
soluzione del problema
Riepilogo (1)
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 62
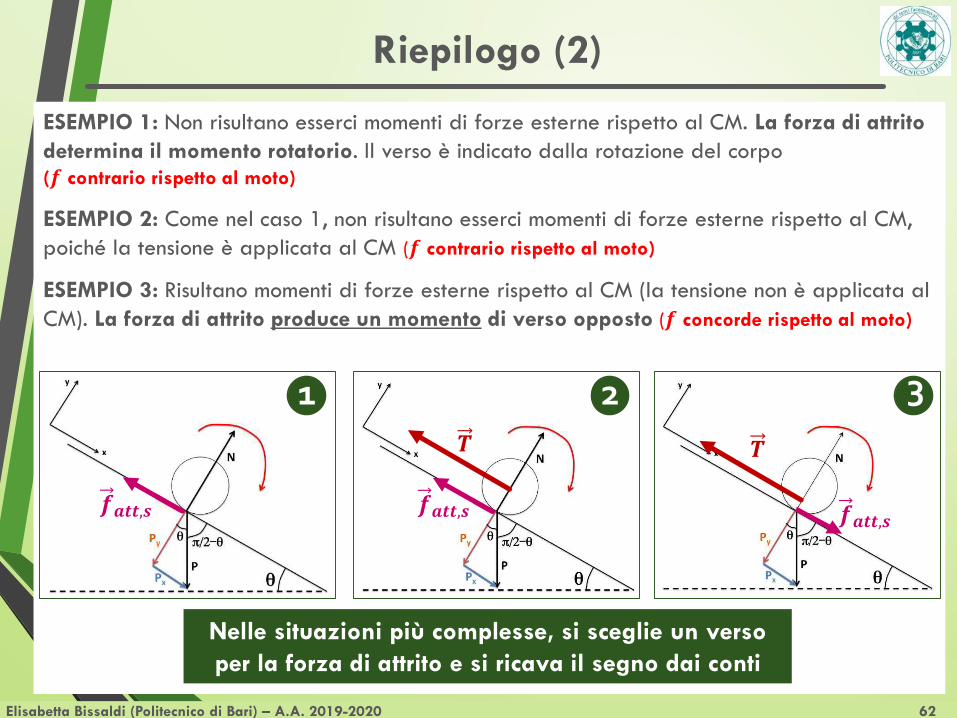
ESEMPIO 1: Non risultano esserci momenti di forze esterne rispetto al CM. La forza di attrito
determina il momento rotatorio. Il verso è indicato dalla rotazione del corpo (𝒇 contrario rispetto al moto)
ESEMPIO 2: Come nel caso 1, non risultano esserci momenti di forze esterne rispetto al CM,
poiché la tensione è applicata al CM (𝒇 contrario rispetto al moto)
ESEMPIO 3: Risultano momenti di forze esterne rispetto al CM (la tensione non è applicata al
CM). La forza di attrito produce un momento di verso opposto (𝒇 concorde rispetto al moto)
Riepilogo (2)
1 2 3
Nelle situazioni più complesse, si sceglie un verso
per la forza di attrito e si ricava il segno dai conti
𝒇𝒂𝒕𝒕,𝒔 𝒇𝒂𝒕𝒕,𝒔 𝒇𝒂𝒕𝒕,𝒔
𝑻𝑻
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 63
Equazioni della dinamica:
1. Forze: 𝑹 = 𝑴 𝒂𝑪𝑴
2. Momenti: 𝑴 =𝒅𝑳
𝒅𝒕= 𝑰 𝜶
Condizione di puro rotolamento: 𝒂𝑪𝑴 = 𝜶𝑹
Regole di risoluzione:
Si sceglie il verso di rotazione intuitivo secondo la direzione del moto e lo si
considera positivo se è positivo il verso del moto (o comunque concordi tra
loro);
I momenti delle forze devono seguire la stessa convenzione;
Se 𝜶 e 𝒂𝑪𝑴 sono stati scelti concordi tra loro allora 𝒂𝑪𝑴 = 𝜶𝑹
Il sistema può essere semplificato scrivendolo come due equazioni in due
incognite
Riepilogo (3)
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 64
LEGGI DI CONSERVAZIONE DEL MOTO
• Nel caso particolare in cui 𝑹 = 𝟎 e 𝑴 = 𝟎, le due leggi implicano:
1. 𝑹 = 𝟎 𝑷 = 𝑴𝒗𝑪𝑴 = 𝒄𝒐𝒔𝒕𝒂𝒏𝒕𝒆Conservazione della quantità di moto del sistema
2. 𝑴 = 𝟎 𝑳 = 𝒄𝒐𝒔𝒕𝒂𝒏𝒕𝒆Conservazione del momento angolare del sistema
o Intesa rispetto al CM
o Solo nel caso in cui l’asse scelto coincida con un’asse principale di inerzia
questa implica 𝑳 = 𝑰𝝎, dunque 𝝎 = 𝒄𝒐𝒔𝒕𝒂𝒏𝒕𝒆
• Il fatto che 𝑳 sia costante negli altri casi non implica automaticamente
che lo sia 𝝎, soprattutto quando trattiamo insiemi di corpi rigidi
Riepilogo (4)
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 65
• Si consideri un anello di massa 𝑴 e raggio 𝑹 che ruota senza strisciare lungo un
piano inclinato con 𝜽 = 𝟑𝟎°.
1. Determinare l’espressione dell’accelerazione del corpo rigido.
Esercizio 7.13
Elisabetta Bissaldi (Politecnico di Bari) – A.A. 2019-2020 66
• Si consideri un anello di massa 𝑴 e raggio 𝑹 che ruota senza strisciare fino alla
base di un piano inclinato, partendo da fermo alla quota 𝒉 = 𝟐𝟎 𝒄𝒎.
1. Determinare la velocità finale dell’anello, adottando un approccio
«energetico».
Esercizio 7.14