Correzione geometrica di immagini satellitari ad alta risoluzione mediante modelli indipendenti dal...
10
Click here to load reader
-
Upload
gieolab-geographic-information-e-participation-open-gov -
Category
Documents
-
view
219 -
download
1
description
Aut. M.Palazzo & L. Vasanelli, RIT Rivista Italiana di Telerilevamento, n.29, pagg.9-18, 2004
Transcript of Correzione geometrica di immagini satellitari ad alta risoluzione mediante modelli indipendenti dal...

9
Correzione geometrica di immagini satellitari ad alta risoluzione mediante modelli indipendenti dal sensore
Marco Palazzo1 e Lorenzo Vasanelli1
1 Università degli Studi di Lecce, Dipartimento di Ingegneria dell’Innovazione, Via Monteroni s.n. - 73100 Lecce.E-mail: [email protected]
RiassuntoCon il lancio del satellite Ikonos nel Settembre del 1999, il telerilevamento è entrato nel-l’era dei satelliti commerciali ad alta risoluzione per l’osservazione della Terra. Numerosistudi hanno mostrato che, rimovendo efficacemente le distorsioni geometriche, le imma-gini Ikonos possono essere usate con successo per l’aggiornamento cartografico a grandee media scala a costi contenuti. Il presente lavoro fornisce una panoramica dei modelli dicorrezione della distorsione geometrica che sono indipendenti dal sensore e che possonoessere impiegati con successo per il trattamento delle immagini satellitari ad alta risolu-zione. Nel lavoro è anche fornita una analisi delle prestazioni dei modelli valutate suun’immagine del comune di Surbo, nella Penisola Salentina.
AbstractWith the successful launch of the Ikonos satellite in September 1999, the remote sensingentered the era of commercial high-resolution Earth observation satellites. Scientificinvestigations have shown that, removing distortions, Ikonos imagery can be used for maprevision at large and medium scale. In order to apply rigorous orthorectification process,alternative models that do not need sensor and orbit information have been developed.Aim of this work is to provide an overview of models, displaying a favourable level of sen-sor independence, which can be employed for geometric correction of high resolutionsatellite imagery. A quantitative and qualitative assessment of the models capabilities isthen provided, using municipality of Surbo, in Salento Peninsula, as evaluation site.
IntroduzioneI nuovi satelliti commerciali ad alta risoluzione sono stati messi in orbita con l’obiettivo diallargare il mercato del telerilevamento satellitare rendendo tecnicamente possibili ed eco-nomicamente sostenibili applicazioni a scala locale indispensabili alle Pubbliche Ammini-strazioni che, anche in conseguenza delle nuove disposizioni normative, si trovano a doverdisporre di informazioni territoriali puntuali, integrate ed aggiornate. Tuttavia, la sosteni-bilità dell’uso dei dati satellitari ad alta risoluzione è subordinata al fatto che da essi siapossibile riconoscere le features di interesse (strade, edifici, alberature, ecc.) ai fini di unaggiornamento cartografico di dettaglio ad elevata accuratezza. Per la corretta determina-zione della posizione planimetrica dei punti a partire da immagini acquisite da sensorisatellitari, è necessario disporre del modello del particolare tipo di sensore/piattaforma che
Rivista Italiana di TELERILEVAMENTO - 2004, 29: 9-18

consenta di determinare la relazione funzionale tra lo spazio oggetto e lo spazio immagi-ne (dati orbitali del satellite, dati della camera, ecc.). Tuttavia, le società private che gesti-scono i nuovi satelliti sempre più spesso non distribuiscono agli utenti dettagliate infor-mazioni sulla piattaforma. Ciò ha stimolato la comunità scientifica a sviluppare alcuni effi-caci modelli di correzione della distorsione geometrica che mostrano un buon livello di indi-pendenza dal sensore. In particolare, durante gli ultimi anni, l’ortocorrezione delle immagi-ni ad alta risoluzione è stata effettuata per lo più ricorrendo al Modello delle FunzioniRazionali (RFM, Rational Functions Model). Numerose sono le applicazioni su foto aeree,dati SPOT [Hu e Tao, 2001;Tao e Hu, 2001a; Tao e Hu, 2001b] e immagini Ikonos [Cheng,2000; Toutin e Cheng, 2000; Tao et al., 2002]. L’approccio RFM alla correzione geometrica delle immagini telerilevate ha riscosso un note-vole successo a causa della sua universalità: esso può essere usato con qualsiasi tipo di sen-sore [Dowman e Tao, 2002]. Tuttavia, è stato mostrato che l’uso delle funzioni razionali nonè essenziale per la restituzione di immagini Ikonos, ma che buona accuratezza può essereottenuta con trasformazioni bidimensionali [Hanley e Fraser, 2001] o tridimensionalimediante l’uso del semplice modello Affine, del modello DLT o di sue variazioni [Fraser etal., 2001; Fraser et al., 2002]. L’accuratezza ottenuta nella restituzione delle immagini Ikonosvaria da pochi decimetri a qualche metro. Ad esempio Grodecki e Dial [2001] riportano risul-tati ottenuti da test su immagini Ikonos effettuati con 140 punti di controllo (Ground ControlPoints, GCPs) in cui hanno ottenuto una accuratezza orizzontale di circa 1m. Tuttavia l’accuratezza di posizionamento planimetrico è fortemente dipendente dalla morfo-logia del territorio, dalla qualità del modello numerico del terreno disponibile e dei GCPs uti-lizzati per la correzione dei dati. Obiettivo del presente lavoro è, verificare il comporta-mento, su aree orograficamente poco movimentate, dei modelli di ortocorrezione delleimmagini satellitari ad alta risoluzione che mostrano una buona indipendenza dalle speci-fiche caratteristiche del sensore ed esibiscono la flessibilità indispensabile per fare fronteal crescere del numero dei sensori commerciali e della loro complessità.
Modelli per la generazione della ortoimmagine Di seguito sono illustrate le caratteristiche degli approcci RFM, DLT ed Affine le cui pre-stazioni sono successivamente valutate su un test site localizzato nella Penisola Salentina.
Rational Functions ModelNel Modello delle Funzioni Razionali, le coordinate dello spazio immagine (linea, colon-na) sono espresse attraverso quozienti di polinomi, generalmente di terzo grado, nellecoordinate dello spazio oggetto (E, N e quota oppure latitudine, longitudine e quota).Indicato con (x,y) le coordinate immagine di un punto e con (X,Y,Z) le relative coordina-te oggetto, il modello le mette in corrispondenza attraverso relazioni del tipo seguente:
[1]
E’ importante rilevare che Space Imaging (SI) ha commercializzato 5 classi di prodotto Ikonosdi diversa accuratezza; si tratta dei prodotti Geo, Reference, Pro, Precision e Precision Plus[Space Imaging, 2002]. L’accuratezza di posizionamento planimetrico (RMS) per ciascun pro-dotto è la seguente: Geo, 24m; Reference, 12m; Pro, 5m; Precision, 2m e Precision Plus, 1m.Da alcuni mesi, SI, insieme ai dati, fornisce anche un Image Geometry Model (IGM), cioè l’in-
10
Palazzo et al. Correzione geometrica di immagini satellitari ad alta risoluzione
),,(
),,(
),,(
),,(
2
2
1
1
ZYXq
ZYXpy
ZYXq
ZYXpx
=
=

11
sieme dei coefficienti per la correzione geometrica del dato mediante un RFM. Tuttavia, nelmodello usato da SI i polinomi usati al denominatore delle funzioni razionali sono identici[Baltsavias et al., 2001] e pertanto le equazioni che prenderemo come riferimento nel presen-te lavoro sono le seguenti :
[2]
con ciascun polinomio avente una forma del tipo seguente :
p= c1 + c2Y + c3X + c4Z + c5XY + c6YZ + c7XZ + C8Y2 + c9X2 + c10Z2 + c11ZYX +
c12Y3 + c13X2Y + c14Z2Y + c15Y2X + c16X3 + c17XZ2 + c18Y2Z + c19X2Z + c20Z3
I polinomi p1,p2 e p3 sono lineari rispettivamente nei coefficienti incogniti ci (con il primocoefficiente del polinomio al denominatore posto pari ad 1); tali coefficienti, complessiva-mente in numero di 59, possono essere determinati scrivendo le equazioni [2] per un nume-ro sufficientemente elevato di punti di cui siano note le corrispondenze tra coordinate imma-gine e coordinate oggetto ed utilizzando la tecnica dei minimi quadrati.
Self-Calibrating Direct Linear Tranformation (S-DLT)Un modello semplice di restituzione per le immagini satellitari ad alta risoluzione può esse-re facilmente dedotto dalle fondamentali relazioni [3] che correlano un punto p≡[x y –f] dellospazio immagine al suo corrispondente punto P≡[X Y Z] dello spazio-oggetto in un sistemadi proiezione centrale e che sono meglio note come equazioni di collinearità:
[3]
Nelle relazioni [3], X0(t), Y0(t) e Z0(t) rappresentano le coordinate del centro istantaneo diproiezione ed rij(t) le componenti della matrice che esprime la rotazione istantanea relativadel sistema di coordinate della camera rispetto al sistema di coordinate oggetto.Per aree di limitata estensione è possibile assumere che, durante la scansione della scena, ilcentro di proiezione istantaneo non si muova e che i parametri di orientamento esterno dellacamera restino costanti. Sotto queste ipotesi è possibile riscrivere direttamente le equazioni[3] nella seguente forma semplificata :
[4]
Le relazioni [4] rappresentano quindi una approssimazione locale delle più generali rela-zioni [3] e caratterizzano la Direct Linear Transformation (DLT), proposta da Yang [2001].
Rivista Italiana di TELERILEVAMENTO - 2004, 29: 9-18
),,(
),,(
),,(
),,(
3
2
3
1
ZYXp
ZYXpy
ZYXp
ZYXpx
=
=
))()(())()(())()((
))()(())()(())()((
))()(())()(())()((
))()(())()(())()((
033023013
032022012
033023013
031021011
tZZtrtYYtrtXXtr
tZZtrtYYtrtXXtrfy
tZZtrtYYtrtXXtr
tZZtrtYYtrtXXtrfx
−+−+−−+−+−
−=
−+−+−−+−+−
−=
1
1
11109
8765
11109
4321
++++++
=
++++++
=
ZLYLXL
LZLYLXLy
ZLYLXL
LZLYLXLx

E’ evidente che il modello DLT è un caso particolare di modello con funzioni razionali ene consente una diretta interpretazione. Infatti si evince che nell’approccio RFM i terminidel primo ordine rappresentano la distorsione causata dalla geometria di acquisizione tipi-ca di un sistema di proiezione centrale, mentre i termini di ordine superiore rappresentanola distorsione dovuta alla curvatura della Terra, la distorsione causata dalla rifrazioneatmosferica ed altre distorsioni non note. Come già rilevato, le implicite assunzioni delmodello DLT ne limitano evidentemente la sua applicabilità a scene di piccole dimensio-ni. Infatti, aumentando l’estensione della scena non può essere più trascurata la tempo –varianza dei parametri orbitali.L’adozione di un approccio DLT modificato, era stato già proposto da Wang [1999], ilquale anziché assumere come costanti i parametri di orientamento esterno e come fissa laposizione del centro istantaneo di proiezione, li ha supposti variare linearmente nel tempo.Il modello Self-Calibrating DLT, che Wang [1999] ha derivato sempre dalle fondamentaliequazioni di collinearità, è caratterizzato dalle seguenti relazioni
[5]
in cui il parametro L12 di correzione addizionale alle coordinate immagine, si comportacome un elemento di calibrazione del modello per la correzione di eventuali errori siste-matici presenti. I coefficienti Li (i=1..12) sono determinati con il metodo dei minimi qua-drati utilizzando i punti di controllo.
Affine TransformationUn altro semplice approccio alla ortocorrezione, alternativo al modello delle funzioni razio-nali, è quello “Affine”. Il modello si basa sull’osservazione che a causa e dello strettissimoIstantaneous Field Of View (IFOV) che caratterizza i satelliti ad alta risoluzione, si può sup-porre che ogni linea (i) di una immagine sia acquisita con un sistema di proiezione parallela(invece che centrale) nella direzione di scansione. Sotto questa assunzione si può mostrare chele equazioni di collinearità scritte per la i-esima linea dell’immagine, assumono la formaseguente [Ono, 1999] :
[6]
Nell’ipotesi che il sensore si muova linearmente nello spazio e che i parametri di orienta-mento esterno siano tempo-invarianti durante la registrazione della immagine, la posizio-ne del centro di proiezione istantaneo in ogni linea è descritta dalle seguenti relazioni
[7]
con X0,Y0,Z0,∆X, ∆Y, ∆Z costanti. Sostituendo le [7] nelle [6] da queste può essere determi-nato il numero della linea di scansione i, ovvero la coordinata y del punto oggetto P≡[X Y Z]
12
Palazzo et al. Correzione geometrica di immagini satellitari ad alta risoluzione
1
1
11109
8765
1211109
4321
++++++
=
−+++
+++=
ZLYLXL
LZLYLXLy
xyLZLYLXL
LZLYLXLx
)()()(
)()()(0
032022012
031021011
iii
iii
ZZrYYrXXry
ZZrYYrXXr
−+−+−=−+−+−=
iZZZ
iYYY
iXXX
i
i
i
00
00
00
∆+=
∆+=∆+=

13
nello spazio immagine. Pertanto, manipolando le formule precedenti, le equazioni delmodello di ortoproiezione Affine diventano le seguenti:
[8]
I coefficienti Li (i=1…8) sono determinati con il metodo dei minimi quadrati utilizzando ipunti di controllo. Anche il modello Affine, per le osservazioni già fatte, è applicabile a scenedi limitata estensione.
Test site, dati disponibili ed estrazione dei GCPsL’area di studio, avente superficie di circa 60 Km2, include interamente il territorio del comu-ne di Surbo, localizzato nella Penisola Salentina. I test eseguiti sono stati condotti, in ambiente Matlab, avendo a disposizione i seguenti dati:
- un’immagine Ikonos-2 pancromatica, livello Geo, acquisita con angolo di ripresaprossimo a 14° (Nominal Collection Elevation = 76.55 Decimal Degree) il 16 Lugliodel 2001 (non è disponibile un IGM di SI per l’immagine);
- le sezioni N. 496100, 496140 e 512020 della Cartografia Tecnica Provinciale (CTP) rea-lizzata nel 1997 mediante restituzione aerofotogrammetrica (Scala nominale 1:10000);
- un DEM in formato ASCII a 3 colonne (E,N, quota) realizzato con griglia regolare di40m (ricampionato con passo pari alla Ground Sample Distance dell’immagineIkonos corrispondente a 1m).
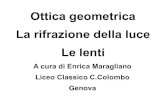
Sebbene l’immagine Ikonos sia stata pre-ortogonalizzata e georiferita dal distributore rispet-to al sistema WGS84 UTM 33N, si è preferito adottare il sistema della CTP (ED50 GB FusoEst) in quanto, non disponendo di ade-guata strumentazione GPS, dalla carto-grafia sono state misurate le coordinatedei Ground Control Points utilizzati perla correzione del dato satellitare.Nel test site sono stati individuati 40GCPs (Fig. 1) tra le intersezioni dei tipi-ci “muretti di campagna a secco”, moltodiffusi nel paesaggio rurale salentino.Tali intersezioni sono chiaramente indi-cate sulla CTP ed appaiono molto bril-lanti nell’immagine Ikonos.
Rivista Italiana di TELERILEVAMENTO - 2004, 29: 9-18
8765
4321
LZLYLXLy
LZLYLXLx
+++=+++=
Figura 1 – La distribuzione dei GCPs nell’areadi studio.

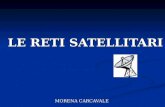
La Figura 2 evidenzia come la procedura di estrazione dei GCPs, caratterizzata da un trat-tamento del dato Ikonos con un filtro passa alto, consenta il riconoscimento delle interse-zioni dei muretti a secco con l’accuratezza del pixel, superando i tipici problemi rilevati daCaprioli et al. [2000] connessi alla perdita di definizione nel caso di eccessivi ingrandi-menti. Le informazioni geometriche dedotte dai punti di controllo sono state sottoposte ad anali-si di regressione ai minimi quadrati al fine di determinare i coefficienti delle equazioni ditrasformazione dei diversi modelli di sensore presi in considerazione.
Risultati e discussioneIn questo lavoro sono state valutate le prestazioni di tre differenti approcci alla ortocorre-zione: i modelli RFM, S-DLT e Affine. In Tabella 1 sono riportate le discrepanze risultan-ti dalle trasformazioni i cui parametri sono stati valutati usando tutti i GCPs disponibili.
14
Palazzo et al. Correzione geometrica di immagini satellitari ad alta risoluzione
Figura 2 – Procedura di estrazione dei GCPs : GCP individuato a) sull’immagine Ikonos; b) sull’imma-gine Ikonos trattata con filtro passa-alto;c) sulla cartografia.
Tabella 1 – Errore di posizionamento planimetrico ottenuto usando tutti i 40 GCPs sianella stima dei parametri del modello di ortocorrezione che come checkpoints.
Modello di correzione
RFM (m.) S-DLT (m.) DLT (m.) AFFINE (m.)
RMS 0.873 1.255 1.256 1.333 Dev. Std. 0.589 0.686 0.686 0.788
Nelle condizioni di lavoro (scena di limitata estensione, dislivello massimo tra le quote ter-reno pari a circa 70 m, immagine Ikonos Pan di livello Geo acquisita con angolo di ripresaprossimo a 14°), le prestazioni dei modelli valutati appaiono sostanzialmente equivalenti egarantiscono un errore (RMS) non superiore a 1,5 m. Anche quando si considerino sottoin-siemi dei GCPs disponibili per il calcolo dei parametri delle trasformazioni, il valore di RMSnei residui checkpoints, nei modelli più semplici (S-DLT, DLT e Affine), rimane al di sottodi 2 m. e le discrepanze massime riscontrate nella valutazione delle coordinate, che raggiun-gono anche i 4 m, hanno il ruolo di singolarità che non influenzano significativamente laaccuratezza della restituzione (Tab. 2). Ciò ha dato una forte indicazione sulla integrità metri-ca delle immagini Ikonos Geo e sulle potenzialità di questo tipo di dato.

15
Infatti, questa prima analisi, confermando i risultati di Fraser et al. [2001], ha evidenziatoche, in presenza di un numero adeguato di punti di controllo (8-10 per i modelli S-DLT,DLT, AFFINE e 32-34 per il modello RFM), di terreni orograficamente poco movimenta-ti (o di un DEM di buona qualità), dalle immagini Geo è possibile ottenere una accuratez-za di posizionamento planimetrico sensibilmente migliore di quella garantita dalle speci-fiche di prodotto (RMS pari circa a 24 m). La piccola differenza tra i risultati ottenuti con le diverse funzioni di trasformazione (Tab. 1)è principalmente ascrivibile alla morfologia in prevalenza pianeggiante del test site, privo dinotevoli accidentalità orografiche. Inoltre la forte similarità dei risultati conferma, che neisensori caratterizzati da uno stretto Istantaneous Field Of View (0.93° circa per Ikonos), ledeformazioni introdotte, per esempio, dalla curvatura della Terra non danno luogo a signi-ficative distorsioni non lineari nell’immagine [Fraser at al., 2001], come invece accade insensori caratterizzati da IFOV più ampi. Ciò spiega anche la mancata riduzione di RMSche si attendeva con l’aumento della complessità del modello di correzione.
Rivista Italiana di TELERILEVAMENTO - 2004, 29: 9-18
Modello di N.ro RMS Massimo errore N.ro Checkcorrezione GCPs (m.) assoluto (m.) Points
X Y XY X Y
RFM 32 2.089 1.247 2.559 5.828 2.333 834 2.457 1.261 2.825 6.870 2.433 6
S-DLT 8 1.014 1.367 1.862 3.614 4.030 3210 1.150 0.949 1.607 3.595 2.518 30
DLT 8 0.952 1.210 1.679 3.517 3.635 3210 1.102 0.896 1.573 3.629 2.685 30
AFFINE 8 0.974 1.182 1.642 3.432 3.897 3210 1.150 0.949 1.607 3.595 2.518 30
Tabella 2 – Errore di posizionamento planimetrico ottenuto usando un subset dei GCPs disponibili nellastima dei parametri del modello di ortocorrezione ed i restanti come checkpoints.
Tabella 3 – Relazione tra RMS e distribuzione dei GCPs.
Distribuzione di GCPs Modello di correzione Id. Id. GCPs appartenenti alla distribuzione RFM S-DLT DLT AFFINE1 20,15,10,5,30,21,25,32,6,24 1.419 1.416 1.4152 38,10,4,5,14,16,20,40 3.351 1.871 1.9853 21,23,26,27,25,22,32,33 20.382 27.730 2.9954 3,1,19,31,34,23,35,33 27.912 19.159 1.9765 10,18,19,13,8,11,5,4 23.093 10.541 3.3666 1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,28,29,30,
31,34,36,37,38,39,40 7.115 2.047 1.912 1.489 7 1,4,5,8,9,10,11,13,14,17,18,19,21,22,23,24,25,26,27,28,29,30,
31,32,33,34,35,36,37,38, 4.487 1.548 1.535 1.430 8 2,4,5,6,8,9,11,12,13,15,16,17,19,22,23,24,25,26,27,28,29,30,
31,32,34,35,36,38,39,40 4.654 1.334 1.324 1.376 9 1,2,3,4,6,7,8,9,10,11,13,14,17,18,19,20,21,23,24,27,9,30,
31,32,33,34,35,36,37,39 1.307 1.303 1.363 1.749 10 20,15,10,5,30,21,25,32,6,24,12,23,2,22,3,33,
7,27,16,26,14,28,131,18,29,17,19,4,13 1.343 1.281 1.284 1.328

N.ro di GCPs Modello di correzione RFM (m.) S-DLT (m.) DLT (m.) AFFINE (m.)
8 1.634 1.487 1.477 20 1.288 1.289 1.367 30 1,328 1.281 1.284 1.343 40 0.873 1.255 1.256 1.333
Inoltre i calcoli eseguiti mediante la DLT standard (con 11 parametri) mostrano essenzial-mente gli stessi risultati ottenuti con il modello S-DLT e ciò conferma che il termine L12, puòessere trascurato per aree non molto superiori a 50 Km2 e per terreni in prevalenza pianeg-gianti, come già rilevato da Fraser et al. [2001]. L’analisi precedente è stata integrata con numerosi test condotti per valutare la variazione del-l’accuratezza di posizionamento 2D relativamente al numero di GCPs utilizzati ed alla lorodistribuzione.Allo scopo di evidenziare l’influenza della distribuzione dei GCPs sull’errore di localizza-zione commesso sono state definite 10 diverse distribuzioni di punti. In Tabella 3 il risultato dei test mostra chiaramente come la distribuzione dei punti influenzisensibilmente l’accuratezza. Ciò si evince dal confronto dei risultati ottenuti per le configu-razioni 2 (RMS S-DLT/AFF=3.35/1.98 m) e 5 (distribuzione critica di punti disposti appros-simativamente su una linea retta, RMS S-DLT/AFF=23.09/3.37 m) che hanno lo stessonumero di GCPs, ma diversa distribuzione. Dal confronto tra i risultati ottenuti per la distri-buzione 9 (RMS RFM =1.31m) e 6 (RMS RFM =7.11m) si evince che le stesse considera-zioni valgono indipendentemente dalla struttura e dalla complessità del modello utilizzato.Infine, in Tabella 4, è riportata la variazione dell’accuratezza in funzione del numero deiGCPs utilizzati per l’ortorettifica. Il risultato della sperimentazione evidenzia come l’utiliz-zo di un numero di punti superiore a quello minimo indispensabile per la risoluzione del
16
Palazzo et al. Correzione geometrica di immagini satellitari ad alta risoluzione
Tabella 4 – Relazione tra RMS e numero di GCPs.
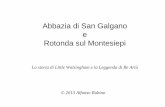
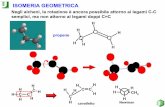
Figura 3 – Sovrapposizione della cartografia all’immagine Ikonos corretta con modello Affine.

17
modello, nell’ipotesi di regolare distribuzione, non incrementi significativamente l’accu-ratezza della restituzione.
Conclusioni I risultati presentati in questo lavoro mostrano che, in territori la cui morfologia è in pre-valenza pianeggiante (ovvero con dislivello massimo tra le quote terreno non superiore a70m), la scelta dell’ordine delle trasformazioni polinomiali utilizzate è sostanzialmenteininfluente sulla accuratezza della restituzione delle immagini satellitari ad alta risoluzio-ne. In particolare, in contesti territoriali simili a quello del test site utilizzato in questolavoro, il modello Affine appare essere il candidato ideale per la correzione geometrica deidati Ikonos Geo (Fig. 3). Infatti il modello Affine, con un piccolo numero di GCPs (4 o 6)ben distribuiti sulla scena e con modesto sforzo computazionale, consente di correggere ilprodotto Geo conferendogli le caratteristiche metriche di un prodotto di classe Precision,che è quello di cui gli utenti hanno maggiormente bisogno per le applicazioni reali(aggiornamento dell’edificato e del grafo stradale, individuazione di siti degradati, censi-mento del verde pubblico, ecc.). I risultati dei test hanno mostrato la possibilità di unarestituzione caratterizzata da una accuratezza non inferiore a 2 m. Ferma restando lasostanziale correttezza dell’approccio alla sperimentazione effettuata, valutazioni piùoggettive sull’accuratezza possono essere fatte utilizzando un DEM di migliore qualità edacquisendo i GCPs, non con l’errore intrinseco della cartografia in scala nominale1:10000, ma con ricevitori GPS in grado di garantire una precisione sub-metrica. Naturaleevoluzione del presente lavoro è la sua trasposizione su altri dati ad alta risoluzione (es.Quick Bird) e lo sviluppo di un software di ortocorrezione open source in ambiente Matlabche abbia come caratteristica genetica quella flessibilità necessaria per consentire agliutenti la implementazione di modelli di correzione personalizzati in funzione dei diversisensori e dei diversi contesti territoriali ed applicativi.
BibliografiaBaltsavias E., Pateraki M., Zhang L. (2001) - Radiometric and geometric evaluation of
Ikonos GEO images and their use for 3D building modelling, Proc. Joint ISPRSWorkshop on Sensors and Mapping from Space 2001, Hannover, 19-21 September.
Caprioli C., Gagliardi S., Tarantino E. (2000) - Verifica delle caratteristiche metriche deidati del satellite Ikonos, Atti della IV Conferenza ASITA, vol.1, pp. 347-352.
Cheng P. (2000) - Orthorectification of Ikonos data using rational functions, ASPRSAnnual Conference, Washington D.C., 22-26 May, (on CD-ROM).
Dowman I., Tao V. (2002) - An Update on the Use of Rational Functions for PhotogrammetricRestitution, ISPRS Highlights, Vol. 7, N° 3, September 2002.
Fraser C.S., Hanley H.B., Yamakawa T. (2001) - Sub-metre positioning with Ikonos Geoimagery, Proc. Joint ISPRS Workshop on Sensors and Mapping from Space 2001,Hannover, 19-21 September.
Fraser C.S., Hanley H.B., Yamakawa T. (2002) – 3D geopositioning accuracy of Ikonosimagery, Photogrammetric Record, 17(99):465-479.
Grodecki J., Dial G. (2001) - Ikonos Geometric accuracy, Proc. Joint ISPRS Workshop onSensors and Mapping from Space 2001, Hannover, 19-21 September (on CD-ROM).
Hanley H.B. e Fraser C.S. (2001) - Geopositioning accuracy of Ikonos imagery: indica-tions from two dimensional transformations, Photogrammetric Record, 17(98):317-329.
Hu Y., Tao C.V. (2001) – Updating solutions of the rational function model using additionalcontrol points and enhanced photogrammetric processing, Proc. Joint ISPRS Workshopon Sensors and Mapping from Space 2001, Hannover, 19-21 September (on CD-ROM).
Rivista Italiana di TELERILEVAMENTO - 2004, 29: 9-18

Ono T. (1999) - Epipolar resampling of high resolution satellite imagery, Proc. Joint ISPRSWorkshop on Sensors and Mapping from Space 1999, Hannover, 27-30 September.
Space Imaging (2002), Company web site. http://www.spaceimaging.com, (accessed 20June 2002).
Tao C.V., Hu Y. (2001a) - A comprensive study on the rational function model for photo-grammetric processing, Photogrammetric Engineering and Remote Sensing, 67(12):1347-1357.
Tao C.V., Hu Y. (2001b) - The Rational Function Model: a tool for processing high reso-lution imagery, Earth Observation Magazine, 10(1): 13-16.
Tao C.V., Hu Y., Schnick (2002) – Photogrammetric exploitation of Ikonos imagery usingthe Rational Function Model, Proc. of ASCM-APSRS Annual convention, WashingtonDC, April 19-26, CD ROM.
Toutin T., Cheng P. (2000) - Demystification of Ikonos, Earth Observation Magazine,9(98): 17-21.
Wang Y. (1999) - Automated triangulation of linear scanner imagery, Proc. Joint ISPRSWorkshop on Sensors and Mapping from Space 1999, Hannover, 27-30 September, 5p.(on CD ROM).
Yang Y. (2001) - Piece-wise linear rational function approximation in digital photogram-metry, Proc. Joint ASPRS Workshop Annual Conference, St.Louis, 23-27 April, 14p.(on CD ROM).
Manoscritto ricevuto il 20/02/2003, accettato il 20/02/2004.
18
Palazzo et al. Correzione geometrica di immagini satellitari ad alta risoluzione