CONTROLLO NEL DOMINIO DELLA FREQUENZAlbiagiotti/MaterialeDidattico0910/CA-04-Controll… ·...
20
Ing. Luigi Biagiotti e-mail: [email protected] http://www.dii.unimore.it/~lbiagiotti SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/SistemiControllo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA CONTROLLO NEL DOMINIO DELLA FREQUENZA
Transcript of CONTROLLO NEL DOMINIO DELLA FREQUENZAlbiagiotti/MaterialeDidattico0910/CA-04-Controll… ·...

Ing. Luigi Biagiottie-mail: [email protected]
http://www.dii.unimore.it/~lbiagiotti
SISTEMI DI CONTROLLOIngegneria Meccanica e Ingegneria del Veicolo
http://www.dii.unimore.it/~lbiagiotti/SistemiControllo.html
CONTROLLO NEL DOMINIO DELLA FREQUENZACONTROLLO NEL DOMINIO DELLA FREQUENZA

Luigi Biagiotti Controllo in frequenza -- 2Sistemi di Controllo
Relazione tra specifiche e proprietRelazione tra specifiche e proprietàà di L(s)di L(s)
• Nell’analisi dei sistemi in retroazione si è visto come le specifiche sia statiche che dinamiche sul sistema in retroazione possano esseretradotte (in maniera approssimata) in specifiche sulla funzione di anello.
• Il problema del controllo che rende soddisfatte le specifiche per il sistema in retroazione può quindi essere trasformato in un problema di progetto di L(s)

Luigi Biagiotti Controllo in frequenza -- 3Sistemi di Controllo
StabilitStabilitàà robustarobusta
• Alti margine di fase e di ampiezza danno garanzia di buona robustezza a fronte di incertezze sulla funzione di risposta armonica d’anello (sia in termini di incertezze sul modulo che sulla fase)
Limite inferiore su Mf e Ma

Luigi Biagiotti Controllo in frequenza -- 4Sistemi di Controllo
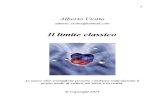
Specifiche staticheSpecifiche statiche• Riferimenti e disturbi sull’uscita (usualmente confinati a basse frequenze)
L’inverso del modulo di |L(jω)| nel campo di frequenze in cui è confinato il riferimento e\o il disturbo rappresenta il fattore di attenuazione a regime sull’errore di inseguimento
R(s)-+ G(s)
++
10-1
100
101
102
103
-60
-40
-20
0
20
40
60Bode Plot
0 dB
Regione proibita per |L(jω)|
Mag
nitu
de(d
B)
Livello di attenuazione desiderato su e
A dB
Range di pulsazioni in cui è confinato il riferimento e/o il disturbo sull’uscita
Limite inferiore su |L(jω)|

Luigi Biagiotti Controllo in frequenza -- 5Sistemi di Controllo
Per soddisfare la specifica statica relativamente a riferimenti e a disturbi sull’uscita costanti e necessario che:• se• se
Specifiche staticheSpecifiche statiche• Riferimenti e disturbi sull’uscita (usualmente confinati a basse frequenze)
10-1
100
101
102
103
-60
-40
-20
0
20
40
60Bode Plot
Mag
nitu
de(d
B)
0 dB
Vincoli sulla pendenza iniziale del diagramma di |L(jω)|
L(s) deve avere almenoun polo nell’origine
R(s)-+ G(s)
++

Luigi Biagiotti Controllo in frequenza -- 6Sistemi di Controllo
Specifiche staticheSpecifiche statiche• Caso di interesse pratico: riferimento/disturbo a gradino
• Sfruttando la sovrapposizione degli effetti
dal teorema del valore finale risulta
dove è assegnato, mentre è possibile agire su tramite Quindi la specifica è soddisfatta se
R(s)-+ G(s)
++

Luigi Biagiotti Controllo in frequenza -- 7Sistemi di Controllo
Specifiche staticheSpecifiche statiche• Caso di interesse pratico: riferimento a gradino e disturbo sinusoidale
• Anche in questo caso si procede sfruttando la sovrapposizione degli effetti
• La specifica sarà soddisfatta imponendo
tramite
R(s)-+ G(s)
++

Luigi Biagiotti Controllo in frequenza -- 8Sistemi di Controllo
Specifiche staticheSpecifiche statiche
• Disturbi di misura (usualmente confinati ad alte frequenze)
R(s)-+ G(s)Il modulo di |L(jω)| nel campo di frequenze in cui è confinato il disturbo di misura rappresenta il fattore di attenuazione del disturbo sull’errore
10-1
100
101
102
103
-60
-40
-20
0
20
40
60Bode Plot
Mag
nitu
de(d
B)
Livello di attenuazione desiderato su e
Spettro in cui è confinato il riferimento e/o il disturbo sull’uscita
-A dB
0 dB
Regione proibita per |L(jω)|Limite superiore su |L(jω)|

Luigi Biagiotti Controllo in frequenza -- 9Sistemi di Controllo
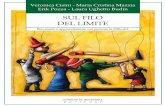
Specifiche dinamicheSpecifiche dinamiche
• Usualmente date in termini di tempo di assestamento e sovraelongazione percentuale massima nella risposta al gradino
• È possibile trasformare (in maniera approssimata) le specifiche dinamiche in specifiche frequenziali su L(jω)
Se la funzione d’anello L(jω) è caratterizzata da una pulsazione di attraversamento ωc e un margine di fase Mf allora è lecito aspettarsi che la coppia dei poli c.c. dominanti del sistema in retroazione sia caratterizzata da

Luigi Biagiotti Controllo in frequenza -- 10Sistemi di Controllo
Specifiche dinamicheSpecifiche dinamiche
10 -1 10 0 10 1 10 2 10 3-60
-40
-20
0
20
40
60Bode Plot
Mag
nitu
de(d
B)
10 10 0 101 10 2 10 3-225
-180
-135
-90
-45
0
45
Frequency - log scale
Phas
e(d
egre
es)
-1
Limite inferiore su Mf
Limite inferiore su ωc

Luigi Biagiotti Controllo in frequenza -- 11Sistemi di Controllo
Moderazione del controllo e realizzabilitModerazione del controllo e realizzabilitàà fisica del fisica del controllorecontrollore
• La moderazione dello sforzo di controllo si ottiene:• Limitando la pulsazione di attraversamento ωc (rispetto alla
pulsazione di attraversamento del sistema controllato)• Realizzando regolatori passa-basso
• Affinchè il regolatore sia fisicamente realizzabile (grado relativo ≥0), occorre che il grado relativo di L(s) sia ≥ di quello di G(s)
10-1
100
101
102
103
-60
-40
-20
0
20
40
60Bode Plot
Mag
nitu
de(d
B)
0 dBPendenza a frequenza elevata di |L(jω)| almeno
pari a quella di |G(jω)|

Luigi Biagiotti Controllo in frequenza -- 12Sistemi di Controllo
10 -1 10 0 10 1 10 2 10 3-60
-40
-20
0
20
40
60Bode Plot
Mag
nitu
de(d
B)
10 100
101
102
103-225
-180
-135
-90
-45
0
45
Frequency - log scale
Phas
e(d
egre
es)
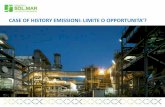
RiepilogoRiepilogo
-1
Limite sup. per ωc dato da:-Robustezza ai ritardi-Moderazione di controllo
Specifica dinamica su S% + robustezza stabilità
Specifica statica per n definito spettralmente
Fisica realizzabilitàcontrollore + moderazione controllo
Specifica dinamica su Ta
Specifica statica per ysp, d definito spettralmente
Specifica statica per ysp, e d costanti

Luigi Biagiotti Controllo in frequenza -- 13Sistemi di Controllo
Approccio al controlloApproccio al controllo
• È conveniente dividere il progetto del controllo in due passi associati al progetto di due sottoparti del regolatore:
Regolatore “dinamico”: parte del regolatore il cui progetto mira ad imporre le specifiche statiche ad alta frequenza (disturbi di misura) e le specifiche dinamiche
Regolatore “statico” : parte del regolatore il cui progetto mira ad imporre le specifiche statiche a bassa frequenza (disturbi sull’uscita e/o riferimenti)

Luigi Biagiotti Controllo in frequenza -- 14Sistemi di Controllo
Approccio al controllo (1Approccio al controllo (1°° parte parte –– Progetto Progetto RRss(s))(s))
• Gli obbiettivi dietro al progetto di Rs(s) sono:• Rispettare le specifiche sul massimo errore e(t) ammesso a fronte
di:Ingressi di riferimento ysp noti (gradino, rampa, …);Disturbi sull’uscita d(t), costanti o comunque definiti spettralmente (sinusoidi a frequenze comprese in un rangenoto);

Luigi Biagiotti Controllo in frequenza -- 15Sistemi di Controllo
Approccio al controllo (1Approccio al controllo (1°° parte parte –– Progetto Progetto RRss(s))(s))
• Soddisfacimento delle specifiche statiche in caso di segnali costanti
h = numero dei polinell’origine di G(s)

Luigi Biagiotti Controllo in frequenza -- 16Sistemi di Controllo
Approccio al controllo (1Approccio al controllo (1°° parte parte –– Progetto Progetto RRss(s))(s))
• Soddisfacimento delle specifiche statiche in caso di segnali a rampa

Luigi Biagiotti Controllo in frequenza -- 17Sistemi di Controllo
Approccio al controllo (2Approccio al controllo (2°° parte parte –– Progetto Progetto RRdd(s))(s))
• Gli obbiettivi dietro al progetto di Rd(s) sono:• Imporre ωc in un certo intervallo frequenziale• Garantire un certo margine di fase• Garantire una certa attenuazione e pendenza a frequenze elevate
• Non bisogna apportare modifiche alla parte statica del regolatore, giàprogettata (ad es. modificando il guadagno statico)
NOTA BENE: tali obbiettivi vanno raggiunti lavorando sul sistema esteso

Luigi Biagiotti Controllo in frequenza -- 18Sistemi di Controllo
Approccio al controllo (2Approccio al controllo (2°° parte parte –– Progetto Progetto RRdd(s))(s))
• Anche in questo caso si hanno diverse possibilità:• Nel range di valori ammissibili per ωc esiste un intervallo in cui il
valore del margine di fase del sistema esteso è maggiore del limite dato dal margine di fase desiderato
10 -1 10 0 10 1 10 2 10 3-60
-40
-20
0
20
40
60Bode Plot
Mag
nitu
de(d
B)
10 10 0 101 10 2 10 3-225
-180
-135
-90
-45
0
45
Frequency - log scale
Phas
e(d
egre
es)
-1
Intervallo in cui la fase è buona
Occorre tramite il progetto diRd(s) dare attenuazione al fine diavere l’attraversamento di Ge(jω)nell’intervallo in cui la fase èbuona
Variazione guadagno staticoIntroduzione di poli

Luigi Biagiotti Controllo in frequenza -- 19Sistemi di Controllo
Approccio al controllo (2Approccio al controllo (2°° parte parte –– Progetto Progetto RRdd(s))(s))
• Anche in questo caso si hanno diverse possibilità:• Nel range di valori ammissibili per ωc non esistono pulsazioni in cui
il valore del margine di fase del sistema esteso è maggiore del limite dato dal margine di fase desiderato
10 -1 10 0 10 1 10 2 10 3-60
-40
-20
0
20
40
60Bode Plot
Mag
nitu
de(d
B)
10 10 0 101 10 2 10 3-225
-180
-135
-90
-45
0
45
Frequency - log scale
Phas
e(d
egre
es)
-1
Occorre tramite il progetto diRd(s) dare anticipo di fasenell’intervallo di attraversamentodesiderato
Introduzione di zeri

Ing. Luigi Biagiottie-mail: [email protected]
http://www.dii.unimore.it/~lbiagiotti
SISTEMI DI CONTROLLOIngegneria Meccanica e Ingegneria del Veicolo
http://www.dii.unimore.it/~lbiagiotti/SistemiControllo.html
CONTROLLO NEL DOMINIO DELLA FREQUENZACONTROLLO NEL DOMINIO DELLA FREQUENZA-- FINEFINE