Controlli automatici Proprietà strutturali · Controlli automatici L8 2/82 Proprietà strutturali...
41
L8 Proprietà strutturali Controlli automatici L8 2/82 Proprietà strutturali Modi propri e modi forzati Stabilità Controllo degli stati e controllabilità Osservazione degli stati e osservabilità
Transcript of Controlli automatici Proprietà strutturali · Controlli automatici L8 2/82 Proprietà strutturali...

L8
Proprietà strutturali
Controlli automatici
L8 2/82
Proprietà strutturali
Modi propri e modi forzatiStabilitàControllo degli stati e controllabilitàOsservazione degli stati e osservabilità

L8
Modi propri e modi forzati
Proprietà strutturali
L8 4/82
Modi propri e modi forzati TC
)t(Du)t(Cx)t(y)t(Bu)t(Ax)t(x
L
)s(Du)s(Cx)s(y)s(Bu)s(Ax)0(x)s(sx
liberaevoluzione
1
forzata evoluzione
1
11
)0(x)AsI(C)s(uDB)AsI(C)s(y
)0(x)AsI()s(uB)AsI()s(x
Samuele
Typewriter
G(s) espressa da A, B, C, D
Samuele
Typewriter
si dice libera perchè si ha evoluzione del sistema anche con ingresso nullo

L8 5/82
ubububub
yayayayay
012)m(
m
012)1n(
1n)n(
libera evoluzione
01n
0o
forzata evoluzione
01n
01m
m
001m
m
001n
asas)s(U)s(Y
)s(uasasbsbsb
)s(y
)s(U)s(ub)s(sub)s(usb
)s(Y)s(ya)s(sya)s(ys
Modi propri e modi forzati TC
L8 6/82
Per sistemi lineari invarianti la fdt G(s) èuna funzione razionale:
nm con asasbsbsb
)s(G
D)AsI(detB)AsI(adj C
DB)AsI(C)s(G
)t(yL)s(u)s(y
)s(G
01n
01m
m
1
,fnulle iniziali condizioni
s in polinomi sono )s(D e )s(N dove ,)s(D)s(N
)s(G
Funzione di trasferimento (fdt) in s

L8 7/82
• Il passaggio VS fdt è dato dalla relazione
nm conasasbsbsb
)AsI(det)AsI(detDB)AsI(adj C
D)AsI(detB)AsI(adj C
DB)AsI(C )s(G
01n
01m
m
1
Funzione di trasferimento (fdt) in s
L8 8/82
Analisi della dinamica TC
libera evoluzioneforzata evoluzione
11
)AsI(det)0(x)AsI(adjC
)s(u)AsI(det
D)AsI(detB)AsI(adjC)s(y
)0(x)AsI()s(Bu)AsI()s(x
libera evoluzione
01n
0o
forzata evoluzione
01n
01m
m
asas)s(U)s(Y
)s(uasasbsbsb
)s(y
Ipotesi semplificativa:)s(D)s(N
)s(uu
u
D(s)
N(s) N0(s)
Samuele
Typewriter
non è sempre vero ... ma nei casi più comuni è così
L8 9/82
Ipotesi semplificativa: D(s) e Du(s) hanno radici distinte.
libera evoluzione
n
1i i
i0
forzata evoluzione
n
1i ui
uin
1i i
i
n
1iiuu
n
1ii
0
u
u
sr
sr
sr
)s(y
)s()s(D
)s()s(D
)s(D)s(N
)s(D)s(N
)s(D)s(N
)s(y
u
u
Analisi della dinamica TC
L8 10/82
L’evoluzione forzata è una combinazione lineare di modi propri e di modi forzatiL’evoluzione libera è una combinazione lineare di modi propriNel caso di poli complessi coniugati e/o multipli, i risultati assumono forma simile
liberaevoluzione
n
1i
ti0
forzata evoluzione
n
1i
tui
n
1i
ti
iu
uii ererer)t(y
L-1
forzatimodie
propri modi et
t
ui
i
Modi propri e modi forzati
Samuele
Typewriter
evoluzione forzata evoluzione libera
Samuele
Typewriter
rappresentazione in fratti semplici o frazioni parziali
Samuele
Typewriter
l'evoluzione forzata è caratterizzata sia dai poli del sistema, sia dei poli dell'ingresso mentre, l'evoluzione libera è governata solo dai poli del sistema/modello.
Samuele
Typewriter
quando si ha y(s) in fratti semplici è molto semplice antotrasformare
Samuele
Typewriter
infatti
Samuele
Typewriter
(modi elementari propri o forzati)
Samuele
Typewriter
si dicono propri perchè dipendono solo dal sistema
Samuele
Typewriter
si dicono forzati perchè dipendono solo dal termine forzante
Samuele
Typewriter
è conveniente avere i coefficienti reali

L8 11/82
soluzione:
Calcolare la risposta nel tempo del sistema descritto dalla fdt G(s), per un ingresso a gradino ampio 5 eda condizioni iniziali Y0
11
)0(y)0(y
Y;s5
)s(u 5)t(u
)3s)(2s(12
)s(G
0
t0t3t2
lib. ev.
proprimodi
t3t2
forz. ev.
forz. modo
t0
proprimodi
t3t2
e10e21e32
e1e2e10e20e30)t(y
Esempio TC
L8 12/82
poli: radici del denominatorezeri: radici del numeratoreguadagno stazionario:
)s(D)s(N
)s(G fdt:
A autval.0)s(D i
i0)s(N
iintegrator di numero i con
,)s(GslimK i
0sst
Kaaccelerazione2
Kvvelocità1
Kpposizione0
simb.guadagno dii
Parametri della fdt in s
Samuele
Typewriter
deve esistere Yo stazionario, cioè G(s) con s -> 0
Samuele
Typewriter
in condizioni stazionerie u(t) = u0 y(t) = y0
Samuele
Typewriter
N e D si considerano primi tra loro
Samuele
Typewriter
VEDI PDF DEGLI APPUNTI!

L8 13/82
Definite le grandezze precedenti, è possibile rappresentare la fdt in diversi modi; di volta in volta, in base al problema corrente, si potràscegliere la forma più conveniente.
costanti di tempo:
guadagno a
reali) poli(per 1
ii
)s(GslimK mn
s
con.) compl. poli reale parte( 1
ii
Parametri della fdt in s
L8 14/82
Forme canoniche della fdt in s
polinomiale:
fattorizzata:
frazioni parziali:
costanti di tempo:
casi particolari …
01n
01m
m
asasbsbsb
)s(G
)s()s()s()s(
K)s(Gn1
m1
sempl.) (poli s
rs
r)s(G
n
n
1
1
jj
ii
n1
m1st
1,
1 :con
s1s1s1s1
K)s(G
Samuele
Typewriter
periodo di oscillazione: To=2pi/omega0 (omega0=parte immaginaria nei poli complessi)
Samuele
Typewriter
n è il numero di poli (ordine del sistema) m è il numero di zeri
Samuele
Highlight
Samuele
Highlight
Samuele
Highlight
Samuele
Highlight
Samuele
Typewriter
solo se
Samuele
Typewriter
Kst è il guadagno stazionario

L8 15/82
Modi del primo ordine
Il modo del primo ordine corrisponde a un polo reale:
grafica forma Ke)t(g
sK
)s(g
t
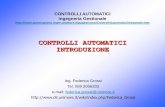
L8 16/82
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Tempo t
Am
piez
ze
Modi propri del primo ordine: exp(lambda*t) con lambda=-2, -1, 0, 1
-2
-1
0
1
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Tempo t
Am
piez
ze
Modi propri del primo ordine: exp(lambda*t) con lambda=-2, -1, 0, 1
-2
-1
0
1lambda
Modi del primo ordine
Samuele
Arrow
Samuele
Arrow
Samuele
Typewriter
Samuele
Typewriter
lambda > 0
Samuele
Typewriter
lambda < 0
Samuele
Textbox
lambda = 0
Samuele
Typewriter
}
Samuele
Typewriter
}
Samuele
Typewriter
Le costanti di tempo sono l'intersezione dell'asse dei tempi della tangente al modo al tempo 0
Samuele
Line
Samuele
Line
Samuele
Line
Samuele
Line
Samuele
Line
Samuele
Line

L8 17/82
Risposta al gradino unitario 1° ordine
t
e1)t(y,s1
1)s(G
1e
L8 18/82
Modi del secondo ordine
1,
2T
grafica forma )t(sineK
)t(g
s2sK
)js)(js(K
a>b4
bassK
)s(g
oo
ot
o
2nn
2
oo
2
2
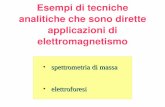
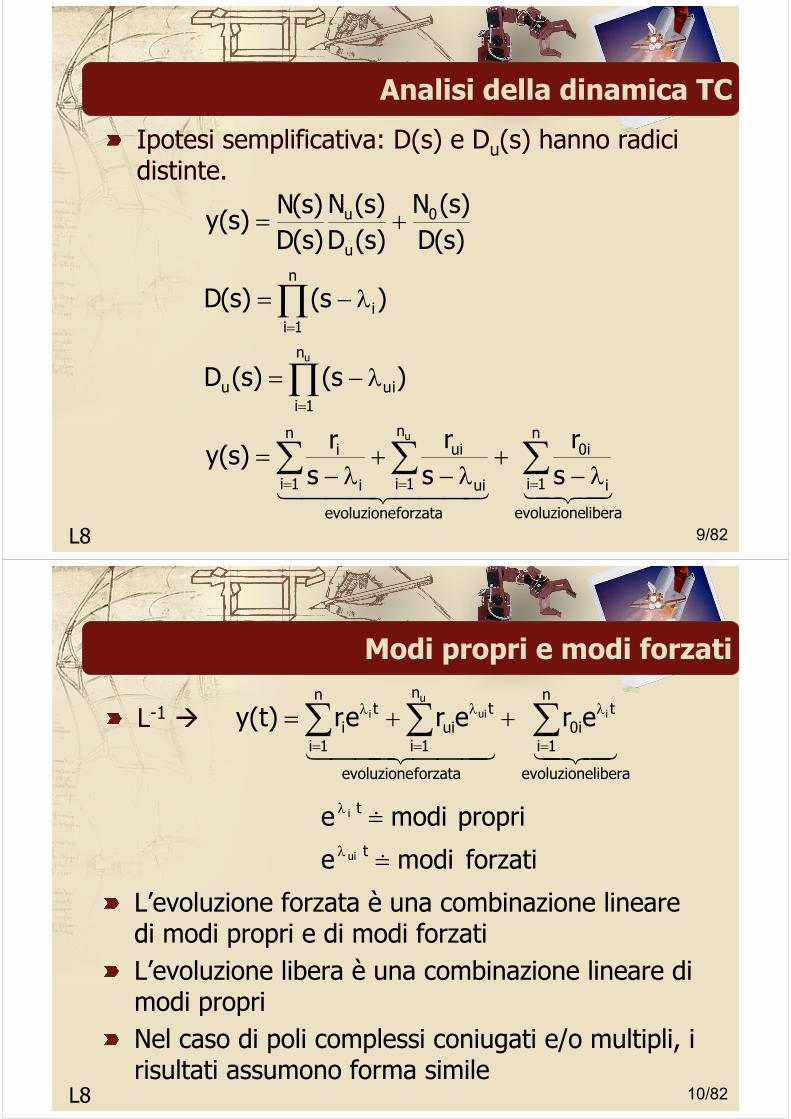
Modi del secondo ordine (coppia poli c.c.)
Samuele
Typewriter
e^(-t/tau) = e^(lambda*t)
Samuele
Typewriter
Kst
Samuele
Typewriter
Kst
L8 19/82
n
jo
o
2o
2n
2no
n
atan
1
-jo
n
)sin(
Modi del secondo ordine (coppia poli c.c.)
L8 20/82
0 5 10 15 20 25-1.5
-1
-0.5
0
0.5
1
1.5
Tempo normalizzato wn*t
Am
pie
zze
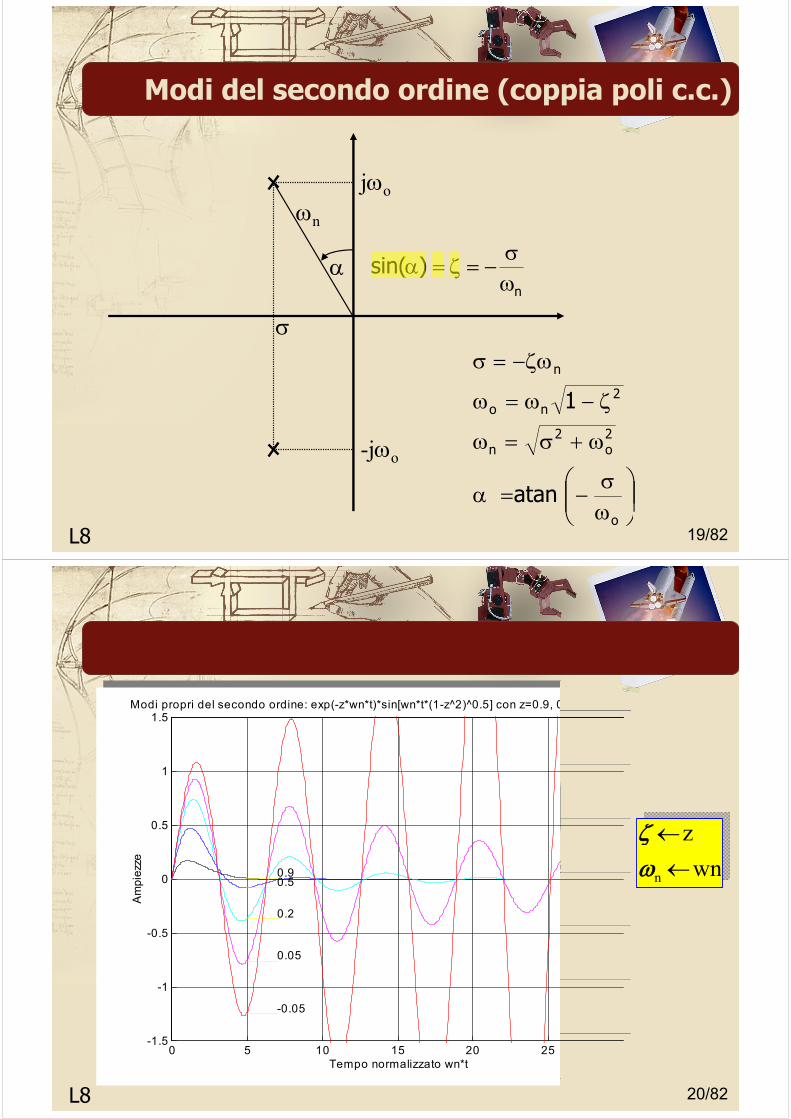
Modi propri del secondo ordine: exp(-z*wn*t)*sin[wn*t*(1-z^2)^0.5] con z=0.9,
0.90.5
0.2
0.05
-0.05
0 5 10 15 20 25-1.5
-1
-0.5
0
0.5
1
1.5
Tempo normalizzato wn*t
Am
pie
zze
Modi propri del secondo ordine: exp(-z*wn*t)*sin[wn*t*(1-z^2)^0.5] con z=0.9, 0
0.90.5
0.2
0.05
-0.05
wn
z
n
Samuele
Typewriter
al posto della fase del numero complesso ci si riferisce ad alpha = arg(lambda)-90°
Samuele
Arrow
Samuele
Arrow
Samuele
Typewriter
alpha>0
Samuele
Typewriter
alpha<0
Samuele
Highlight
Samuele
Typewriter
con z<0 si ha che l'inviluppo cresce e tende quindi ad infinito negli altri casi invece le oscillazioni tendono a 0 "più piccolo è lo smorzamento" tanto più piccolo è lo smorzamento. Si veda per capire la differenza che si ha con z=0.9 e z=0.05
L8 21/82
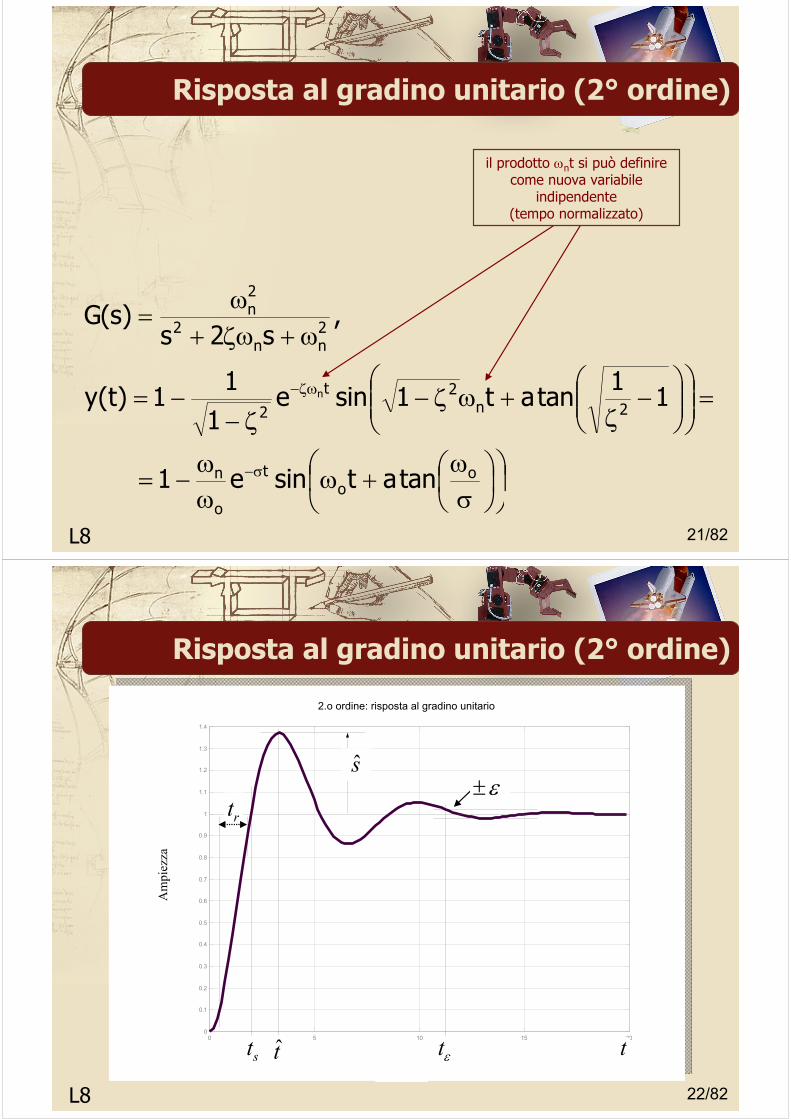
Risposta al gradino unitario (2° ordine)
oo
t
o
n
2n2t
2
2nn
2
2n
tanatsine1
11
tanat1sine1
11)t(y
,s2s
)s(G
n
il prodotto nt si può definire come nuova variabile
indipendente(tempo normalizzato)
L8 22/82
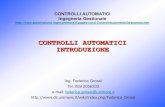
Risposta al gradino unitario (2° ordine)
2.o ordine: risposta al gradino unitario
0 5 10 15 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
Am
piez
za
s
st t
rt
t
t
L8 23/82
: sovraelongazione massima relativa;
: tempo corrispondente alla ;
ts : tempo di salita;
tr : tempo di salita 10%90%
t : tempo di assestamento a .
s
t s
Risposta al gradino unitario (2° ordine)
L8 24/82
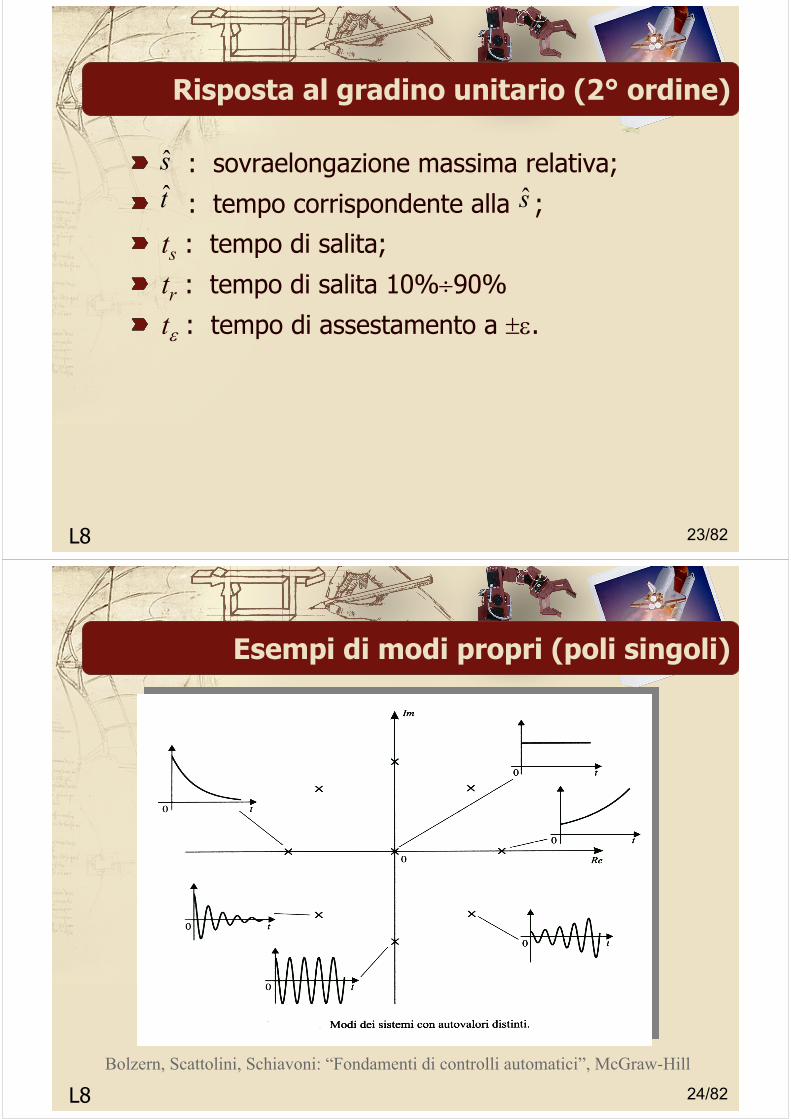
Bolzern, Scattolini, Schiavoni: “Fondamenti di controlli automatici”, McGraw-Hill
Esempi di modi propri (poli singoli)
Samuele
Typewriter
tempo in cui y(t) incontra per la prima volta il valore asintotico
Samuele
Typewriter
del valore di regime moto a volte come t_{r, 10-90}
Samuele
Typewriter
del valore di sovraelongazione massima può anche essere data in modo percentuale e va dato rispetto al valore di regime. Nel grafico si può pensare che s^ = 0.37 -> s^ = 37%
Samuele
Typewriter
al valore stazionario, cioè come rapporto tra valore di sovraelongazione e il valore stazionario
Samuele
Typewriter
sintesi
Samuele
Pencil
Samuele
Pencil
Samuele
Typewriter
smorzamento negativo
Samuele
Typewriter
smorzamento positivo
Samuele
Pencil
Samuele
Typewriter
non si ha smorzamento
Samuele
Typewriter
se i poli sono con Re(lambda)<0 allora tendono a 0, mentre se Re(lambda)>0 allora divergono; infine se Re(lambda)=0 l'uscita resta costante
Samuele
Typewriter
polo con Re(lambda)<0 si dice che è nel semipiano di sinistra polo con Re(lambda)>0 si dice che è nel semipiano di destra

L8 25/82
Bolzern, Scattolini, Schiavoni: “Fondamenti di controlli automatici”, McGraw-Hill
Esempi di modi propri (poli doppi)
L8 26/82
Z)i(Du)i(Cx)i(y
)i(Bu)i(Ax)1i(x
)z(Du)z(Cx)z(y
)z(Bu)z(Ax)0(zx)z(zx
libera evoluzione
1
forzataevoluzione
11
111
)0(x)AzI(zC)z(uzDB)AzI(zC)z(y
)0(x)AIz(z)z(uzB)AzI(z)z(x
Si ricordi: u() è causale
Modi propri e modi forzati TD
Samuele
Typewriter
ogni punto indicato è un polo doppio (come se avessi due x)
Samuele
Typewriter
valgono le "regole" precedenti ad eccezione di Re(lambda)=0 poichè in questo caso l'uscita diverge

L8 27/82
)i(ub)1i(ub)2i(ub)mi(ub
)i(ya)1i(ya)2i(ya)1ni(ya)ni(y
012m
0121n
libera evoluzione
01n
0o
forzata evoluzione
01n
01m
m
001m
m
001n
azaz)z(U)z(Y
)z(uazazbzbzb
)z(y
)z(U)z(ub)z(zub)z(uzb
)z(Y)z(ya)z(zya)z(yz
Modi propri e modi forzati TD
L8 28/82
Per sistemi lineari invarianti la fdt G(z) èuna funzione razionale:
01n
01m
m
1
,fnulle iniziali condizioni
azazbzbzb
)z(G
D)AzI(detB)AzI(adj C
DB)AzI(C)z(G
)i(yL)z(u)z(y
)z(G
z in polinomi sono )z(D e )z(N dove ,)z(D)z(N
)z(G
Funzione di trasferimento (fdt) in z
L8 29/82
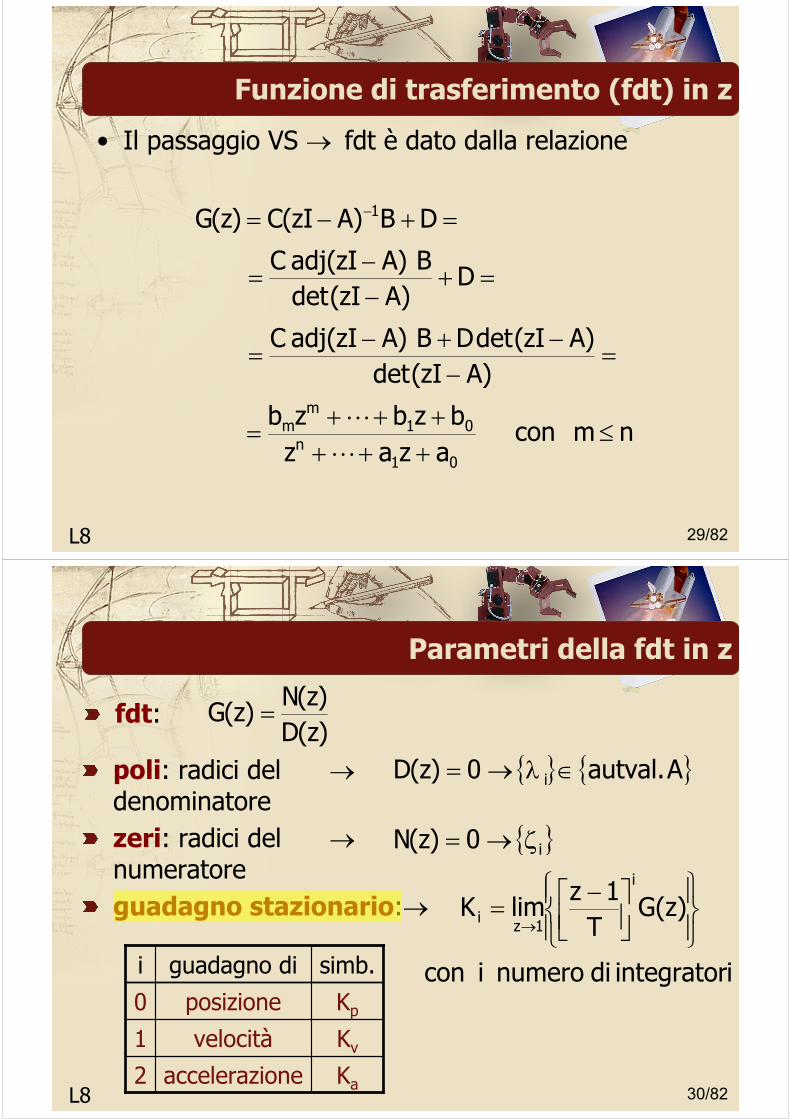
• Il passaggio VS fdt è dato dalla relazione
nm conazazbzbzb
)AzI(det)AzI(detDB)AzI(adj C
D)AzI(detB)AzI(adj C
DB)AzI(C )z(G
01n
01m
m
1
Funzione di trasferimento (fdt) in z
L8 30/82
poli: radici del denominatorezeri: radici del numeratoreguadagno stazionario:
)z(D)z(N
)z(G fdt:
A autval.0)z(D i
i0)z(N
Kaaccelerazione2
Kvvelocità1
Kpposizione0
simb.guadagno dii
Parametri della fdt in z
iintegrator di numero i con
G(z)T
1zlimK
i
1zi
Samuele
Highlight
Samuele
Typewriter
definizione un po' diversa
Samuele
Typewriter
la fdt di un integratore a TD è 1/(z-1) con questa informazione è chiaro che [(z-1)/T]^i è equivalente a s^i presente nella slide 12 l'integratore a TD equivale ad un polo in t=1 (a tempo continuo equivale ad un polo nell'origine)

L8 31/82
Definite le grandezze precedenti, è possibile rappresentare la fdt in diversi modi; di volta in volta, in base al problema corrente, si potràscegliere la forma più conveniente.
costanti di tempo:
guadagno a
reali) poli(per 1
1
ii
)z(GzlimK mn
z
con.) compl. poli odulomr( r1
1i
Parametri della fdt in z
L8 32/82
Forme canoniche della fdt in z
polinomiale:
fattorizzata:
frazioni parziali:
costanti di tempo:
casi particolari …
01n
01m
m
azazbzbzb
)z(G
)z()z()z()z(
K)z(Gn1
m1
sempl.) (poli z
rz
r)z(G
n
n
1
1
jj
ii
n1
m1st
11
,1
1 :con
)1z(1)1z(1)1z(1)1z(1
K)z(G
Samuele
Typewriter
sono il numero dei passi
Samuele
Typewriter
se si moltiplica tau_i per T (passo di campionamento) si ha come unità di misura l'unità di tempo

L8 33/82
++u(i) x(i)x(i+1)
C
A
z-1
D
By(i)
L8 34/82
1
0
0
Bc
…..
1nn1n
0n0
'
abb
abb
Cc
……
..
01n
01n
n
aza...z
bzb...zbG(z)
nc bD
1n10
c
a...aa
1
10
A
……
..
y
+++ . . . .
. . . .
. . . .
bn
z-1
xn(i)
-an-1
bn-1
u
-a1
b1 b0
z-1 z-1
-a0
x2(i) x1(i)x3(i)
+
+++
Samuele
Line
Samuele
Line
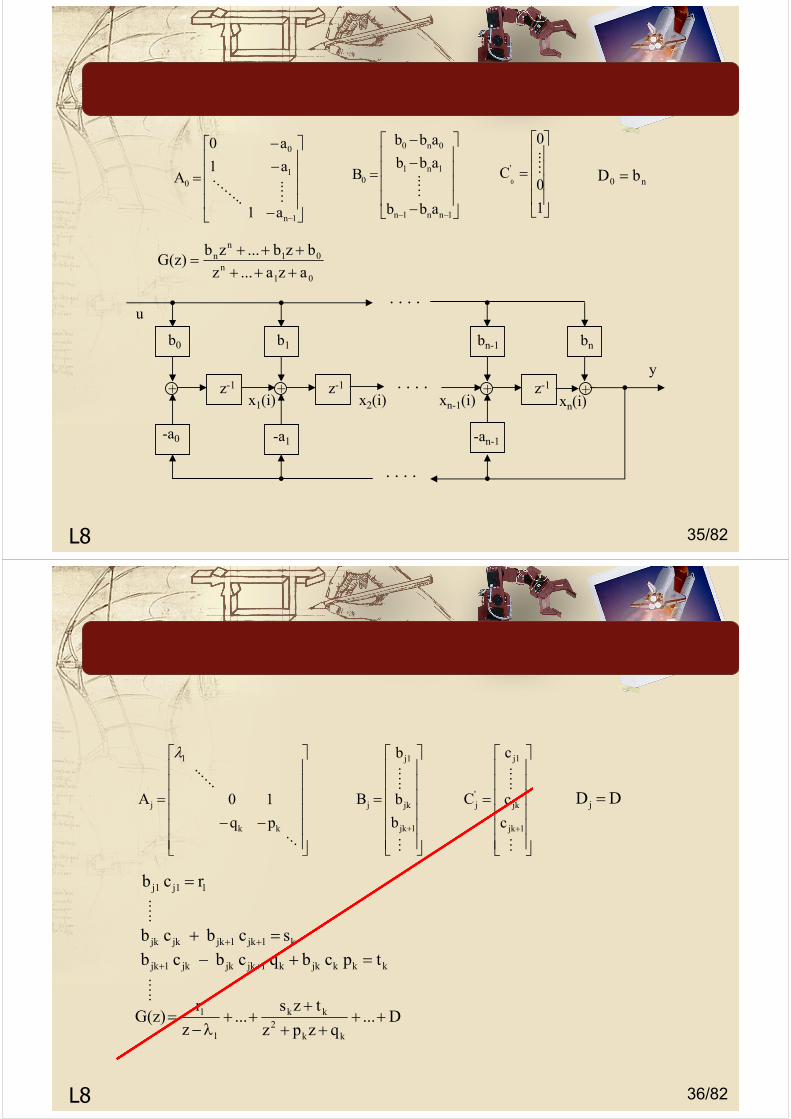
L8 35/82
1
0
0
C'
0
…..
1nn1n
1n1
0n0
0
abb
abb
abb
B
…..
01n
01n
n
aza...z
bzb...zbG(z)
n0 bD
1n
1
0
0
a1
a1
a0
A ……
.. …..
. . . .
. . . .
. . . .
bn
z-1
xn-1(i)
-an-1
bn-1
u
-a1
b1b0
z-1z-1
-a0
x2(i)x1(i)
+++xn(i)
+y
L8 36/82
DDj
1jk
jk
j1
j
b
b
b
B
.….
…
1jk
jk
j1
'j
c
c
c
C
.….
…
kk
1
j
pq
10A
…
.…..
1j1j1 rc b
k1jk1jkjkjk sc b c b
D...qzpz
tzs...
z
rG(z)
kk2
kk
1
1
kkkjkk1jkjkjk1jk tp c b q c b c b
.….
.….
Samuele
Line
Samuele
Line

L8 37/82
y
. . .
.
-pk
-qk
xk(i)
sk
tku
r1
D
z-1
1
x1(i)
++
+
xk+1(i)= xk(i+1)
. . .
.
. . .
. . .
. .
. . .
. . .
. .
z-1
z-1
L8 38/82
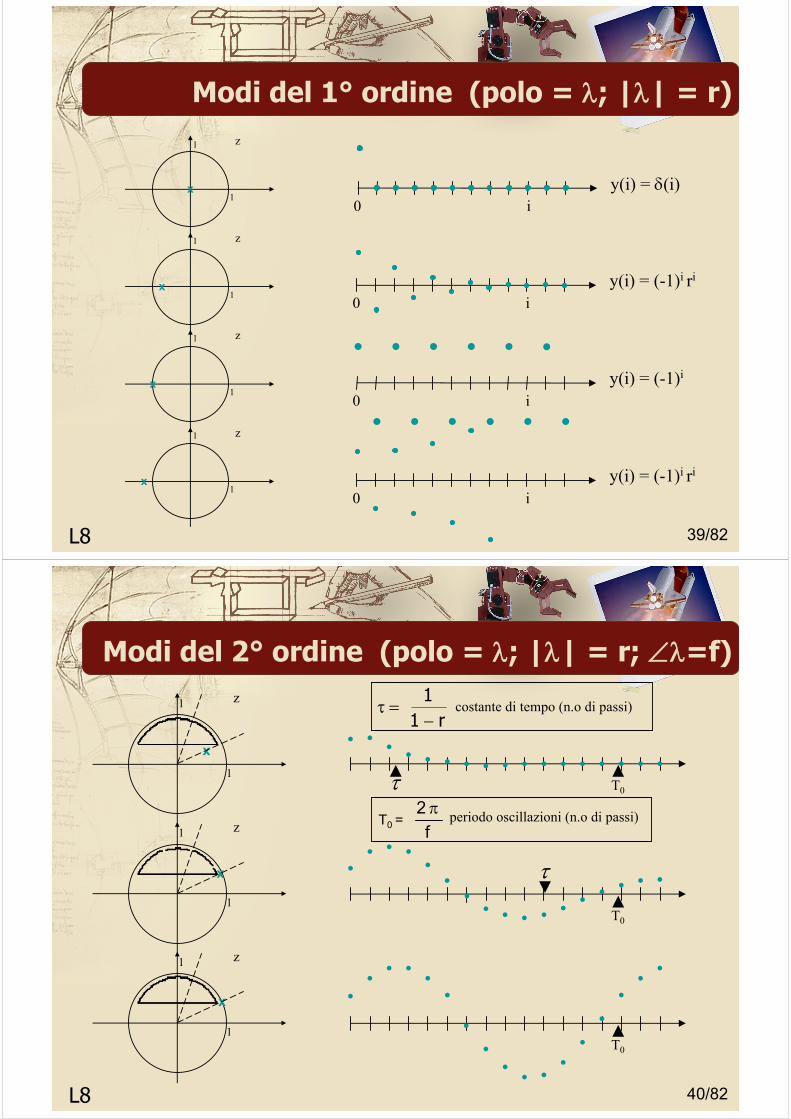
Modi del 1° ordine (polo = ; || = r)
0 i
y(i) = ri
0 i
y(i) = ri
0 i
y(i) = ri
0 i
y(i) = 1
1
z1
x
1
z1
x
1
z1
x
1
z1
x
passi) di (n. tempo di costante 1
1
Samuele
Line
L8 39/82
1
z1
x
1
z1
x
1
z1
x
1
z1
x
0 iy(i) = (i)
0 i
y(i) = (-1)i
0 i
y(i) = (-1)i ri
0 i
y(i) = (-1)i ri
Modi del 1° ordine (polo = ; || = r)
L8 40/82
1
z1
x
1
z1
x
1
z1
x
T0
T0
T0
f
2 T0 = periodo oscillazioni (n.o di passi)
r11
costante di tempo (n.o di passi)
Modi del 2° ordine (polo = ; || = r; =f)
Samuele
Typewriter
x
Samuele
Typewriter
x
Samuele
Typewriter
x

L8 41/82
T0
T0
T0
1
z1
x
1
z1
x
1
z1
x
f sin1
inviluppo iniziale valore
Modi del 2° ordine (polo = ; || = r; =f)
L8 42/82
Analisi di stabilità TC
Stabilità interna modi propri degli stati autovalori di AStabilità esterna modi propri dell’uscita poli della fdt Stabilità 1: se tutti i modi propri rimangono limitati per ogni t.Stabilità 2: se tutti gli stati rimangono limitati per ogni u(t) limitato e per ogni t.Stabilità 3: se l’uscita rimane limitata per ogni u(t) limitato e per ogni t.Stabilità 4: .....
Samuele
Typewriter
si dicono asintoticamente stabili i sistemi che hanno tutti i poli nel remipiano sinistro (parte reale negativa)
L8 43/82
Criteri di stabilità TC
Dalle espressioni sopra riportate si deduce quanto segue:
modi propri semplici:
)t(sine e/o e ott
modi propri multipli:
)t(sinet e/o et otiti
modi propri e forz. semplici:
)t(sine e/o e ott
modi propri e forz. multipli:
)t(sinet e/o et otiti
L8 44/82
Stabilità TC
Un sistema è asintoticamente stabile se tutti i suoi poli (autovalori) sono reali negativi o complessi coniugati a parte reale negativa (stabilitàasintotica).Se il sistema possiede anche dei poli (autovalori) nulli o a parte reale nulla e semplici allora èsemplicemente stabile (stabilità semplice).Un sistema è instabile se possiede almeno un polo (autovalore) reale positivo ovvero almeno una coppia di poli (autovalori) complessi coniugati a parte reale positiva ovvero ancora poli multipli a parte reale nulla (instabilità).
Samuele
Highlight
Samuele
Highlight
Samuele
Underline
Samuele
Underline
Samuele
Highlight
Samuele
Underline
Samuele
Typewriter
perchè si hanno modi propri divergenti

L8 45/82
Stabilità BIBO TC
DefinizioneVale quanto già riportato, con l’eccezione che non sono stabili i poli a parte reale nulla. Infatti, un sistema con un polo nullo (o con coppia di poli complessi coniugati a parte reale nulla) eccitato con un ingresso caratterizzato da una trasformata con poli identici, presenterebbe un’uscita non limitata.Esempio 1: integratore eccitato da un gradino.Esempio 2: oscillatore ideale eccitato da una sinusoide di frequenza identica a quella propria del dispositivo.
L8 46/82
piano C
S t
a b
i l i
t
S t
a b
i l i
t
S t
a b
i l i
t àà à
I n
s t
a b
i l i
t
I n
s t
a b
i l i
t
I n
s t
a b
i l i
t àà à
Casi particolariCasi particolariCasi particolari
Im
Re
Stabilità TC
Samuele
Line
Samuele
Typewriter
tutti i poli devono essere in questa regione del piano (al max una coppia sull'asse immaginario) (tutti i modi propri tendono a 0)
Samuele
Typewriter
anche se con un solo polo
L8 47/82
Analisi di stabilità TC
Poli (autovalori) polinomio caratteristico calcolo delle radici problema: evitare il calcolo delle radici ovvero analisi della stabilità dai coefficienti del pol. caratteristico
Soluzione: criterio di Routh
L8 48/82
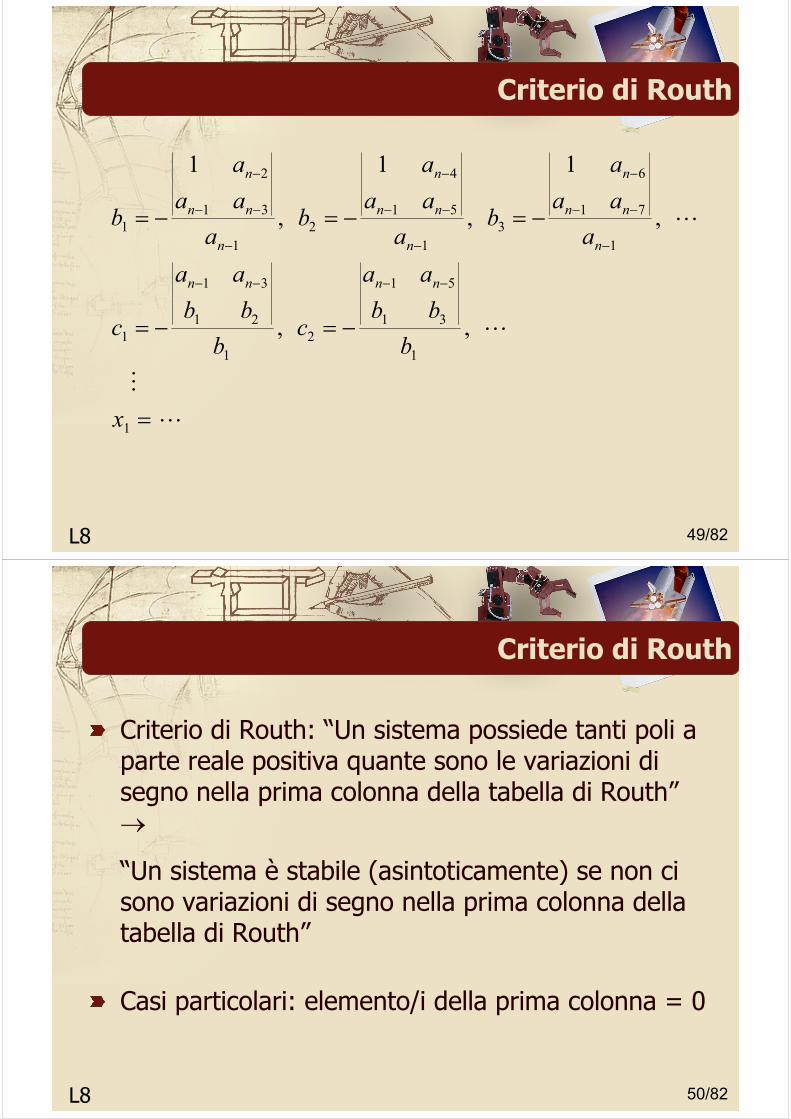
Criterio di Routh
dove i coefficienti b, c, ... , x sono cosìdeterminati:
D s s a s a s ann
n( )
11
1 0
1 0
0
0
0
0
0
2 4
1 3 5
1 2 3
1 2
1
a a
a a a
b b b
c c
x
n n
n n n
tabella di Routh
(monico)
Samuele
Typewriter
(denominatore della fdt o polinomio caratteristico della matrice A)
Samuele
Typewriter
(pole(FDT), roots(denFDT), eig(A))
Samuele
Highlight
Samuele
Typewriter
perchè in generale è un problema mal condizionato
Samuele
Typewriter
se le radici del polinomio caratteristico sono nel semipiano di sinistra allora i coefficienti sono tutti maggiori di 0 (non vale il viceversa) se i coefficienti sono tutti positivi allora si ha stabilità assoluta solo per sistemi del 1°e 2° ordine (si trattano comunque polinomi "monici", cioè polinomi con coefficiente di grado massimo pari a 1)
Samuele
Underline
Samuele
Typewriter
(Raut)
L8 49/82
b
a
a a
ab
a
a a
ab
a
a a
a
c
a a
b b
bc
a a
b b
b
x
n
n n
n
n
n n
n
n
n n
n
n n n n
1
2
1 3
12
4
1 5
13
6
1 7
1
1
1 3
1 2
12
1 5
1 3
1
1
1 1 1
, , ,
, ,
Criterio di Routh
L8 50/82
Criterio di Routh: “Un sistema possiede tanti poli a parte reale positiva quante sono le variazioni di segno nella prima colonna della tabella di Routh”
“Un sistema è stabile (asintoticamente) se non ci sono variazioni di segno nella prima colonna della tabella di Routh”
Casi particolari: elemento/i della prima colonna = 0
Criterio di Routh

L8 51/82
Analisi di stabilità: criteri polinomiali TC
Condizione necessaria e sufficiente (CNS) perchètutti i poli siano strettamente nel semipiano di sinistra è che sia soddisfatto il criterio di Routh. Condizione solo necessaria (CN) perchè tutti i poli siano strettamente nel semipiano di sinistra è che i coefficienti del polinomio caratteristico (monico!) siano tutti positivi. N.B:
qualche coefficiente negativo implica certamente qualche polo nel semipiano di destra;tutti i coefficienti positivi non è detto che implichino tutti i poli nel semipiano di sinistra;se tutti i poli sono nel semipiano di sinistra allora tutti i coefficienti del polinomio caratteristico sono positivi.
L8 52/82
CNS per la stabilità TC: casi particolari
dca
ac
>b
0>d0>c0>a
dcsbsass)s(D
ac
>b
0>c0>a
cbsass)s(D
0>b0>a
bass)s(D
0>aas)s(D
234
23
2
a0
b
a
b
c/a1
a > 0c > 0
b
d
a/ca > 0c > 0
c/a
Samuele
Highlight
Samuele
Highlight
Samuele
Highlight
Samuele
Highlight
Samuele
Highlight
Samuele
Line
Samuele
Underline
Samuele
Typewriter
in tutti i casi particolari si fa in modo che tutti i coeff siano positivi (si rispetta la CN)
Samuele
Typewriter
condizione più restrittiva
Samuele
Typewriter
condizione più restrittiva

L8 53/82
La stabilità di un sistema (modello) TD dipende dalla posizione dei poli sul piano complesso z.
= zona di stabilità1
z1
stabilità
instabilità
casi partico
lari
Stabilità TD
L8 54/82
Un sistema discreto e’ stabile (asintoticamente) se tutti i suoi poli hanno modulo minore di uno.Un sistema discreto e’ stabile (asintoticamente) se tutti i suoi poli si trovano dentro la circonferenza di raggio unitario.Un sistema discreto e’ instabile se presenta almeno un polo fuori dalla circonferenza di raggio unitario.Poli sulla circonferenza di raggio unitario si considerano stabili se hanno molteplicita’ 1.
Stabilità TD
Samuele
Typewriter
il sistema a TD è stabile se ha tutti i poli interni alla circonferenza di raggio 1!
Samuele
Highlight
Samuele
Underline
Samuele
Underline
Samuele
Underline
Samuele
Highlight
Samuele
Underline
Samuele
Underline
Samuele
Highlight
Samuele
Underline
Samuele
Underline
Samuele
Typewriter
Il sistema a TD si dice stabile se ha tutti i poli con modulo minore di uno ad eccezione, al massimo, di poli complessi coniugati sulla circonferenza unitaria o di poli reali sulla circonferenza (con molteplicità = 1)

L8 55/82
Criterio di Jury (C.N.S.)
1
11
L8 56/82
01)F(1)( n
1
1n+1 costraintsn+1 costraints
Criterio di Jury (C.N.S.)
Samuele
Line
Samuele
Line

L8 57/82
Per i sistemi del 1o ordine è banale (C.N.&S.):
Per i sistemi del 2o ordine:
Criterio di Jury (as. stabilità)
1
,1
,1 2
ab
abbazz
b
1 aaz
1
1
-1
-1 2
b
a
1C.S.
1&2C.N.
ba
ba
a
-1 1
L8 58/82
Criterio di Jury (as. stabilità)
Per i sistemi del 3o ordine:
)1()1(
1
1
1
2
attivonon
2
23
cacbcac
cab
cab
ccbzazz
Samuele
Typewriter
CN => tutti i coefficienti con modulo minore di 1!
Samuele
Typewriter
si ha asintotica stabilità
Samuele
Typewriter
si ha asintotica stabilità
Samuele
Typewriter
non è detto che se i parametri rispettano le relazioni si ha il sistema asintoticamente stabile
Samuele
Typewriter
se questa relazione è verificata allora si ha certamente stabilità asintotica ma è una condizione molto più restrittiva rispetto all'area
Samuele
Line
Samuele
Line
Samuele
Line

L8 59/82
Criterio di Jury (as. stabilità)
Per i sistemi del 3o ordine:
)1()1(
1
1
1
2
attivonon
2
23
cacbcac
cab
cab
ccbzazz
L8 60/82
a
b
asint. stabilitàall’interno del triangolo con
–1 < c < 1
cc 21,2
1, c
cc 21,2 cab 1
21 ccab
cab 1
Criterio di Jury (as. stabilità 3° ordine)
Samuele
Line
Samuele
Line
Samuele
Typewriter
90°

L8 61/82
Retroazione dagli stati
x
u y
d
S_
+
K
r
L8 62/82
rDDx
C
)DKC(yr
B
Bx
A
)BKA(x
KxruDuCxyBuAxx
cc
cc
)i(rDD)i(x
C
)DKC()i(y)i(r
B
B)i(x
A
)BKA()1i(x
)i(Kx)i(r)i(u)i(Du)i(Cx)i(y
)i(Bu)i(Ax)1i(x
cc
cc
Retroazione dagli stati
Samuele
Typewriter
riferimento o uscita dediderata
Samuele
Typewriter
x è lo stato e rappresenta in modo univoco il sistema!
Samuele
Typewriter
segnale di comando
Samuele
Typewriter
un segnale di controllo è un segnale di comando a potenza nulla!
Samuele
Typewriter
controllo a catena chiusa
Samuele
Rectangle
Samuele
Typewriter
C
Samuele
Arrow
Samuele
Arrow
Samuele
Typewriter
r
Samuele
Typewriter
x
Samuele
Arrow
Samuele
Arrow
Samuele
Typewriter
specifiche
Samuele
Typewriter
Samuele
Typewriter
u = f(r, x)
Samuele
Typewriter
un caso semplificativo può essere u = ar + bx, con 'a' matrice 1x1, 'b' matrice 1xn (se lo stato x è una matrice nx1) Per ragioni tradizionali si usa u = ar - kx (cambiano solo i nomi e nient'altro)
Samuele
Typewriter
in rosso è riportato il sistema vero mentre in blu è riportato il sistema di controllo o controllore!
Samuele
Typewriter
dal punto di vista progettuale è necessario che il sistema, S, sia dato in variabili di stato
Samuele
Line
Samuele
Typewriter
legge del sistema
Samuele
Typewriter
TC
Samuele
Typewriter
TD
Samuele
Typewriter
legge del sistema controllato si osserva che gli stati non cambiano
Samuele
Line
Samuele
Typewriter
tutto lo schema a blocchi rappresenta il sistema controllato
Samuele
Typewriter
le dim di Ac e A, Bc e B, Cc e C, Dc e D non variano!
Samuele
Typewriter
affinchè il sistema funzioni è necessario che il sistema controllato sia asintoticamente stabile (cioè Ac abbia autovalori nel semipiano di sinistra, anche eventualmente se A porta ad un sistema instabile)
Samuele
Typewriter
(in generale si preferisce avere modulo dei poli grandi, tau piccola ma è comunque legata al tipo di sistema, e con smorzamento grande, compreso tra 0.5 e 0.8)

L8 63/82
Retroazione dagli stati: schema equivalente
Se il modello A,B,C,D è esatto, questo schema è algebricamente equivalente al precedente
BAsIK)s(D)s(N
,DBAsIC)s(D)s(N dove
1
P
K1
P
P
Sistemau y
x
+
–
r
P
K
NN
L8 64/82
Controllabilità: possibilità di trasferire lo stato in uno stato desiderato e prefissato (detto stato zero).Raggiungibilità: possibilità di raggiungere qualsiasi stato a partire da uno stato desiderato e prefissato (detto stato zero).Per sistemi lineari invarianti:
controllabilità raggiungibilità
Un sistema (lin. e inv.) è completamente controllabile se la matrice di controllabilità C è a rango pieno.
BABAABB Sia 1n2 CC
Controllabilità
Samuele
Typewriter
Per motivi fisici, e talvolta anche econimici, può risultare difficile/oneroso procedere con la retroazione degli stati, pertanto si cerca una soluzione per ricavare gli stati essendo noto u e y (ricostruzione dello stato).
L8 65/82
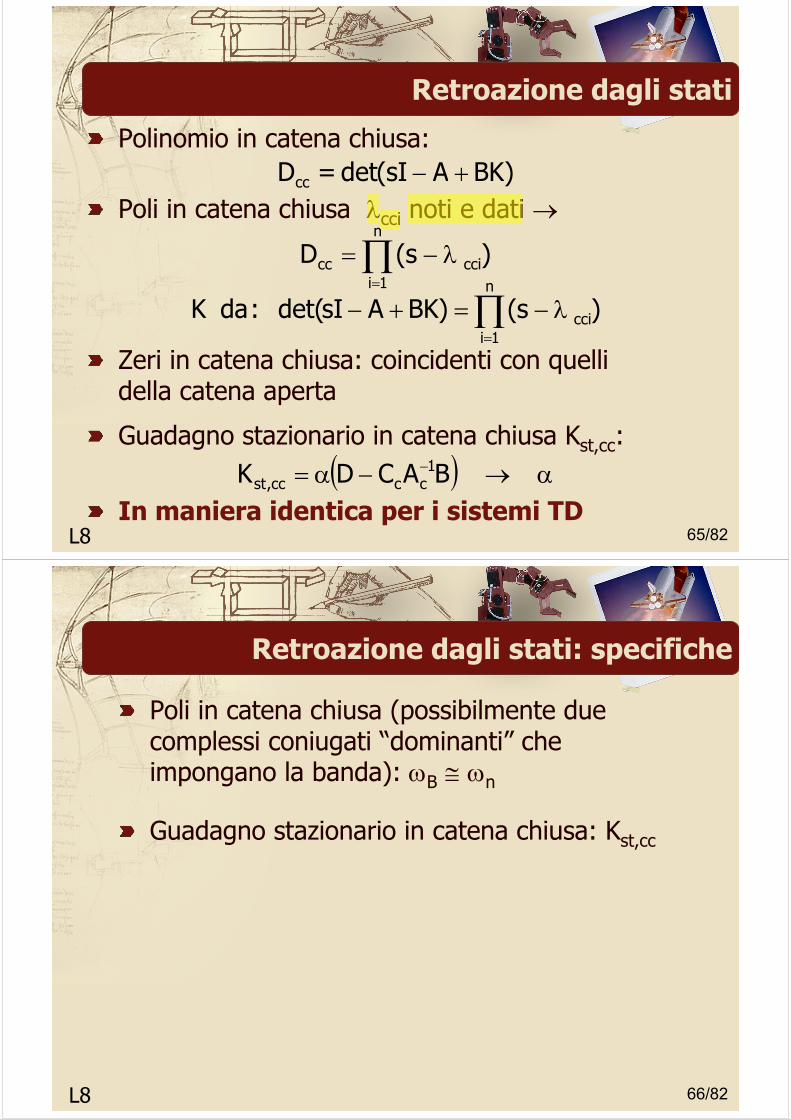
Guadagno stazionario in catena chiusa Kst,cc:
Polinomio in catena chiusa:)BKAsI(det=Dcc
Poli in catena chiusa cci noti e dati
n
1iccicc )s(D
Zeri in catena chiusa: coincidenti con quelli della catena aperta
n
1icci)s()BKAsIdet( :da K
In maniera identica per i sistemi TD BACDK 1
cccc,st
Retroazione dagli stati
L8 66/82
Retroazione dagli stati: specifiche
Poli in catena chiusa (possibilmente due complessi coniugati “dominanti” che impongano la banda): B n
Guadagno stazionario in catena chiusa: Kst,cc
Samuele
Typewriter
= det(sI - Ac)
Samuele
Typewriter
polinomio caratteristico di Ac in funzuione di K
Samuele
Highlight
Samuele
Typewriter
pertanto si ricava K!

L8 67/82
Es. 1: controllo di posizione di un motore cc
0D 010C
10
B 2.00
10A
Specifiche:• poli in catena chiusa:• guadagno stazionario:
8.0j1cc 1K cc,st
Verifiche: simulazioni (e verifica sperimentale)
L8 68/82
ilecontrollab compl. non
0D 10C
11
B 3120
A
Specifiche:• poli in catena chiusa: 2cc1cccc ,
Sistema di eq. risultante:
2cc1cc21
2cc1cc21
2kk
3kk
Sistema non invertibile in generale; invertibile se cc1= -1, per qualunque cc2)
Esempio 2
Samuele
Highlight
Samuele
Typewriter
(si vuole che il sistema contollato abbia le seguenti caratteristiche)

L8 69/82
Retroazione dagli stati ricostruiti
Problema: utilizzare i vantaggi della retroazione dagli stati evitando di misurare gli stessi.
Soluzione: ricostruire gli stati sulla base delle misure di ingresso e uscita.
Tecnica 1: ricostruzione istantanea.Tecnica 2: ricostruzione asintotica.
L8 70/82
)1n(T)1n(T
2n1n
2
uuuuU ;yyyyY
DCBCABBCA
DCBCABDCB
D
H ;
CA
CACAC
dove )HUY(x
O
O
O
O-1
Ricostruzione istantanea dello stato T.C.
da cui, derivando e sostituendo:Modello:
DuCxyBuAxx
Attenzione! O deve essere invertibileAttenzione! O deve essere invertibileO

L8 71/82
T1210 ,,,,con ns ssss
Sistemau y
– +
sH1O s1O
x
Ricostruzione istantanea dello stato T.C.
L8 72/82
e)LCA(e
xxe
e stima di errorel' definisce Si
LyuLDBx)LCA(x
)DuxCy(LBuxA)yy(LBuxAx
DuxCyx:oreRicostrutt
DuCxy BuAxx :Sistema
Ricostruzione asintotica dello stato T.C.
Samuele
Line
Samuele
Line
Samuele
Typewriter
dati u(t) e y(t) si può ricavare x(t), ma l'implementazione tecnologica è molto complessa
Samuele
Typewriter
Dati u(t) e y(t) ci si ricava x(tau) -> x(t) per tau -> +oo
Samuele
Typewriter
partendo dal sistema reale, si può realizzare un altro dispositivo caratterizzato dalle stesse matrici A, B, C, D
Samuele
Line
Samuele
Line
Samuele
Typewriter
le equazioni sottolineate sono le eq del ricostruttore (con stato x^ noto)
Samuele
Typewriter
a parità di ingresso si può verificare se le uscite sono uguali (nel caso non siano uguali si aggiunge un elemento correttivo L(y - y^), y-y^=ey è l'errore di ricostruzione, L è un vettore colonna di n elementi)
Samuele
Typewriter
(B-LD)u+Ly = [B-LD | L] * [u y]
Samuele
Typewriter
Samuele
Typewriter
Aric
Samuele
Typewriter
Bric
Samuele
Line
Samuele
Typewriter
x^ -> x se A-LC ha autovalori tutti asintoticamente stabili
Samuele
Typewriter
si può dimostrare
Samuele
Typewriter
equazione di stato senza ingresso, quindi in evoluzione libera, a partire! da e^(t=0)

L8 73/82
L viene calcolato imponendo i poli del ricostruttore (autovalori di ALC).Attenzione! Anche in questo caso la matrice di osservabilità O deve essere invertibile
Ricostruzione asintotica dello stato T.C.
e)LCA(e
yu
LLDBx)LCA(x
LyuLDBx)LCA(x
L8 74/82
Ricostruzione asintotica dello stato T.C.
Sistemau y
D
L
CB 1AsI yx
eL
Samuele
Typewriter
Se si impone A-LC abbia autovalori a parte reale negativa, con modulo molto grande si hanno tau_ric molto piccole, pertanto e^ -> 0 molto velocemente e quindi x^ -> x molto velocemente Per ottenere questo è quindi necessario ricavare L (simile a come è stato fatto per l'esercizio 1).
Samuele
Pencil
Samuele
Typewriter
ricostruttore
Samuele
Typewriter
Il termine correttivo è necessario poichè ci possono essere "rumori" e comunque il modello non rappresenta mai perfettamente il sistema vero.
Samuele
Typewriter
Si può dimostrare che L = [l1, l2, ..., ln] sono determinabili dati A, C e {lambda_ric} se e solo se la matrice O è di rango pieno.
Samuele
Typewriter
[C CA CA^2 ...... CA^(n-1)]
Samuele
Arrow
Samuele
Typewriter
E quindi bene verificare (prima di iniziare) che il sistema sia completamente ricostruibile o osservabile.

L8 75/82
)i(u)1i(u)2ni(u)1ni(uU
)i(y)1i(y)2ni(y)1ni(yY
:dove )HUY()n1i(x
T
T
OO-1
Ricostruzione istantanea dello stato T.D.
da cui:Modello:
)i(Du)i(Cx)i(y)i(Bu)i(Ax)1i(x
Attenzione! O deve essere invertibileAttenzione! O deve essere invertibileO
O e H sono definiti come per i sistemi TC
L8 76/82 T013n2n1n
s z,z,,z,z,z con
Sistemau(i) y(i)
– +
s1HO s
1O
x
Ricostruzione istantanea dello stato T.D.
L8 77/82
)i(e)LCA()1i(e
xxe
e stima di errorel' definisce Si
LyuLDBx)LCA()1i(x)DuxCy(LBuxA)yy(LBuxA)1i(x
DuxCyx:oreRicostrutt
)i(Du)i(Cx)i(y )i(Bu)i(Ax)1i(x :Sistema
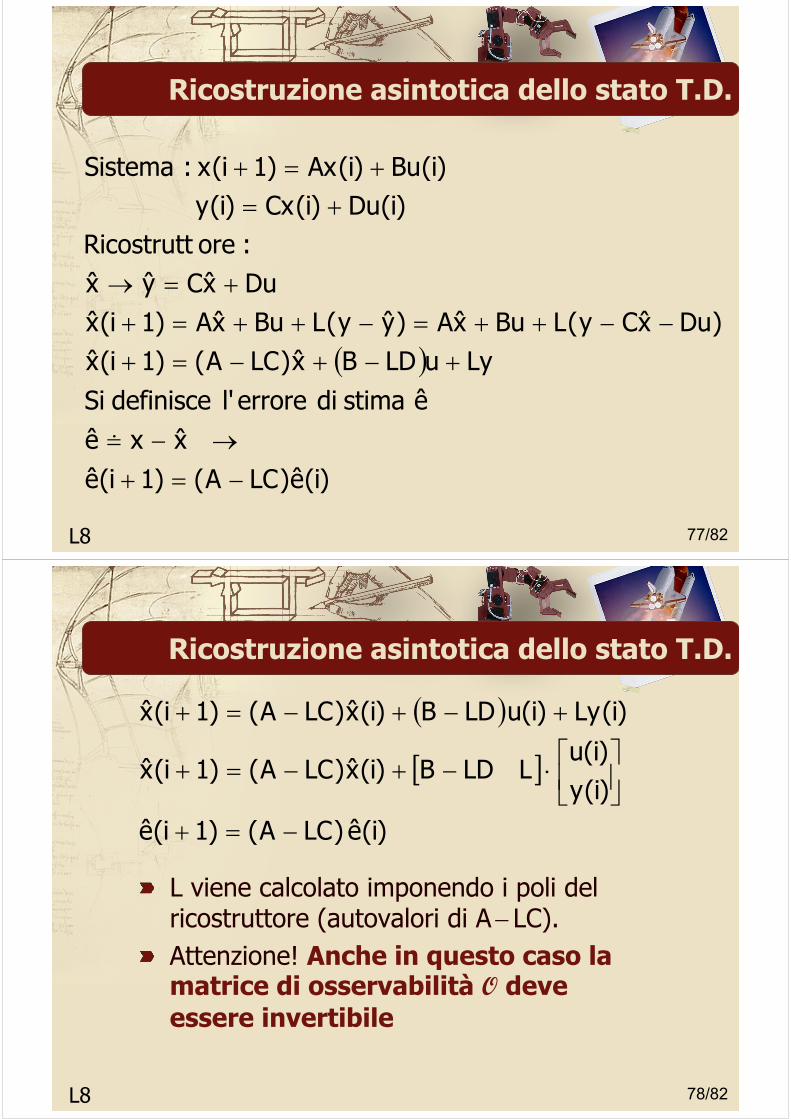
Ricostruzione asintotica dello stato T.D.
L8 78/82
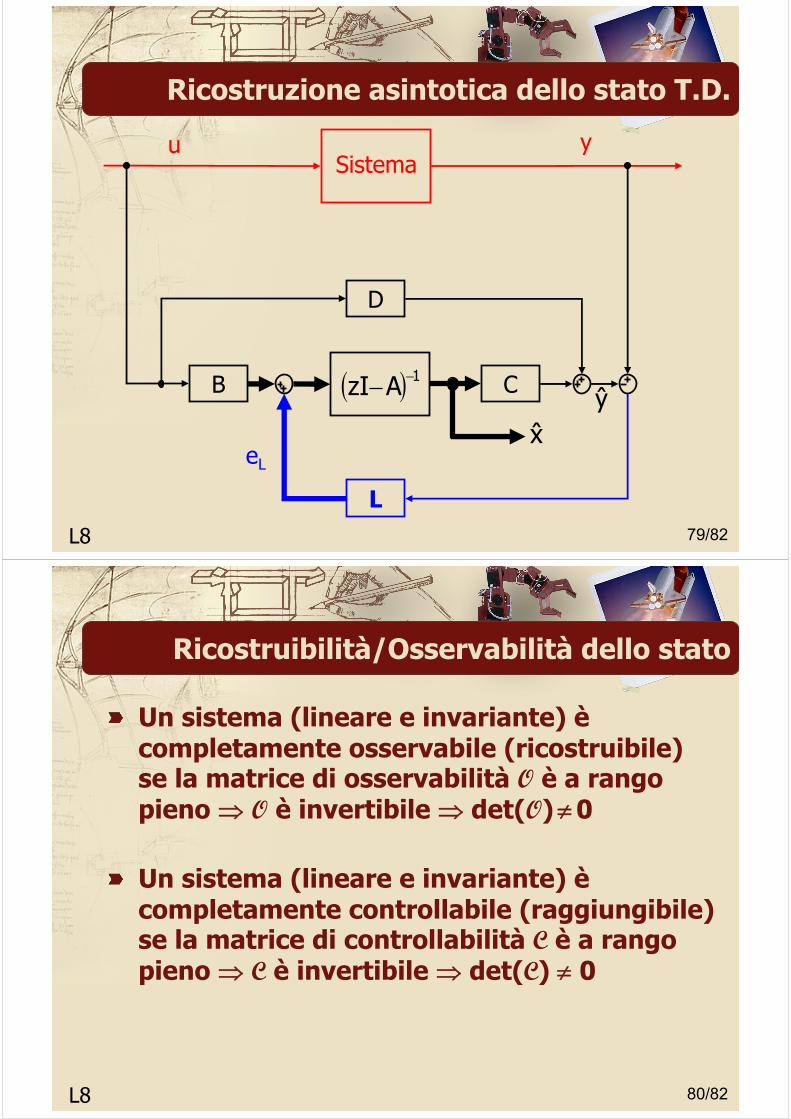
L viene calcolato imponendo i poli del ricostruttore (autovalori di ALC).Attenzione! Anche in questo caso la matrice di osservabilità O deve essere invertibile
Ricostruzione asintotica dello stato T.D.
)i(e)LCA()1i(e
)i(y)i(u
LLDB)i(x)LCA()1i(x
)i(Ly)i(uLDB)i(x)LCA()1i(x
L8 79/82
Ricostruzione asintotica dello stato T.D.
Sistemau y
D
L
CB 1AzI yx
eL
L8 80/82
Un sistema (lineare e invariante) ècompletamente osservabile (ricostruibile) se la matrice di osservabilità O è a rango pieno O è invertibile det(O)0
Un sistema (lineare e invariante) ècompletamente controllabile (raggiungibile) se la matrice di controllabilità C è a rango pieno C è invertibile det(C) 0
Ricostruibilità/Osservabilità dello stato
L8 81/82
Se un sistema non è completamente controllabile e/o non completamente osservabile allora alcuni autovalori saranno “cancellati” da altrettanti zeri, ovvero: i polinomi
avranno una o più radici in comuneSi ricordi che det(sIA) e Cadj(sIA)B+Ddet(sIA)sono rispettivamente numeratore e denominatore della funzione di trasferimentoNB: questa eventualità è stata già citata in L5
NOTA IMPORTANTE
)AsIdet(DB)AsI(adjC e )AsIdet(
L8 82/82
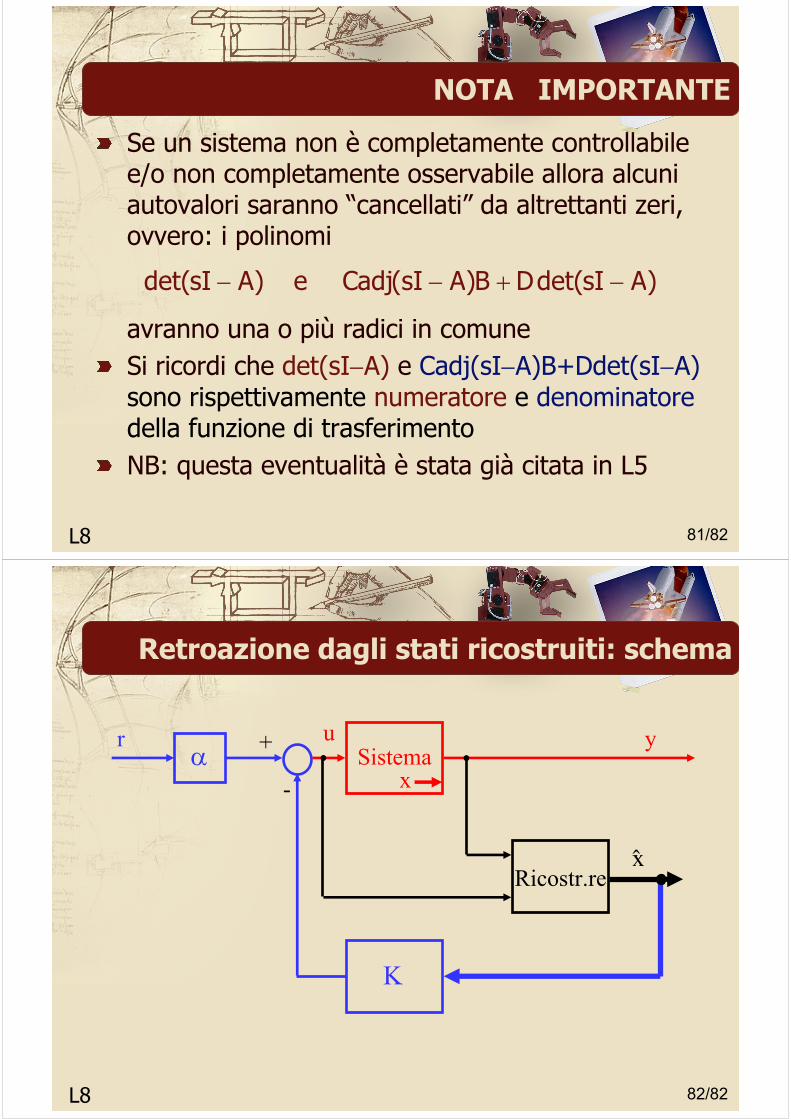
Retroazione dagli stati ricostruiti: schema
Ricostr.re
K
r
Sistemau y
x
+
-
x
Samuele
Typewriter
degli stati