Controlli automatici - II - ittfocaccia.gov.it automatici... · I controlli automatici – II a...
23
I controlli automatici – II a parte 1 I controlli automatici – II a parte 1 – Definizione del modello matematico Cerchiamo adesso di applicare quanto detto sui sistemi di controllo ad un caso pratico di processo (elementare): lo svuotamento ed il riempimento di un serbatoio quale, ad esempio, lo sciacquone del bagno di casa. L’operazione può essere descritta attraverso 3 variabili: ▫ volume V di liquido contenuto nel serbatoio; ▫ portata di liquido in ingresso Q in ; ▫ portata di liquido in uscita Q out ; La variabile controllata è rappresentata dal volume V (noi vogliamo che lo sciacquone sia sempre pieno!), il disturbo è dato dalla portata in uscita Q out che improvvisamente può passare dal valore zero ad un massimo che determina lo svuotamento del serbatoio. La variabile manipolata è quindi la portata in ingresso Q in che permette di riempire nuovamente il serbatoio riportando il volume al valore originario V 0 (set-point) che esso aveva prima del disturbo. In assenza di un adatto sistema di controllo il riempimento del serbatoio deve essere fatto manualmente aprendo la valvola posta sulla tubazione di ingresso e chiudendola poi quando il volume di liquido abbia raggiunto il valore desiderato. Le tre variabili su indicate sono legate tra loro da una relazione matematica che esprime il bilancio di materia sul serbatoio: t V V Q Q iniziale finale out in - = - Dove coi simboli Q si sono indicate le portate volumetriche medie nel tempo t. Eseguendo il bilancio relativo ad un intervallo di tempo infinitesimo dt ed indicando col simbolo Q le portate istantanee: dt dV Q Q out in = - (1) In condizioni normali di funzionamento le portate Q in e Q out sono entrambe nulle ed il volume di liquido nel serbatoio è costante e pari a V 0 . L’intervento della variabile di disturbo Q out , che assume un valore diverso da zero, determina improvvisamente lo svuotamento del serbatoio all’istante t = 0. L’utilizzo della equazione (1), a partire da questo momento, ci consente di studiare il comportamento del sistema, ossia come il volume V di liquido contenuto nello sciacquone si modifichi nel tempo. Naturalmente tale comportamento dipenderà dal valore fatto assumere alla variabile Q in dal sistema di controllo adoperato. Una volta che lo scarico è avvenuto (e non ci sono perdite) Q out = 0 per cui l’equazione di bilancio si semplifica in:
Transcript of Controlli automatici - II - ittfocaccia.gov.it automatici... · I controlli automatici – II a...

I controlli automatici ndash IIa parte 1
I controlli automatici ndash IIa
parte 1 ndash Definizione del modello matematico
Cerchiamo adesso di applicare quanto detto sui sistemi di controllo ad un caso pratico di processo (elementare) lo svuotamento ed il riempimento di un serbatoio quale ad esempio lo sciacquone del bagno di casa Lrsquooperazione puograve essere descritta attraverso 3 variabili
volume V di liquido contenuto nel serbatoio portata di liquido in ingresso Qin portata di liquido in uscita Qout
La variabile controllata egrave rappresentata dal volume V (noi vogliamo che lo sciacquone sia sempre pieno) il disturbo egrave dato dalla portata in uscita Qout che improvvisamente puograve passare dal valore zero ad un massimo che determina lo svuotamento del serbatoio La variabile manipolata egrave quindi la portata in ingresso Qin che permette di riempire nuovamente il serbatoio riportando il volume al valore originario V0 (set-point) che esso aveva prima del disturbo In assenza di un adatto sistema di controllo il riempimento del serbatoio deve essere fatto manualmente aprendo la valvola posta sulla tubazione di ingresso e chiudendola poi quando il volume di liquido abbia raggiunto il valore desiderato Le tre variabili su indicate sono legate tra loro da una relazione matematica che esprime il bilancio di materia sul serbatoio
t
VVQQ
inizialefinale
outin
minus
=minus
Dove coi simboli Q si sono indicate le portate volumetriche medie nel tempo t Eseguendo il bilancio relativo ad un intervallo di tempo infinitesimo dt ed indicando col simbolo Q le portate istantanee
dt
dVQQ
outin=minus (1)
In condizioni normali di funzionamento le portate Qin e Qout sono entrambe nulle ed il volume di liquido nel serbatoio egrave costante e pari a V0 Lrsquointervento della variabile di disturbo Qout che assume un valore diverso da zero determina improvvisamente lo svuotamento del serbatoio allrsquoistante t =
0 Lrsquoutilizzo della equazione (1) a partire da questo momento ci consente di studiare il comportamento del sistema ossia come il volume V di liquido contenuto nello sciacquone si modifichi nel tempo Naturalmente tale comportamento dipenderagrave dal valore fatto assumere alla variabile Qin dal sistema di controllo adoperato Una volta che lo scarico egrave avvenuto (e non ci sono perdite) Qout = 0 per cui lrsquoequazione di bilancio si semplifica in
I controlli automatici ndash IIa parte 2
dt
dVQ
in=
ossia esprimendo il volume V di liquido come prodotto tra lrsquoarea A della sezione dello sciacquone e il livello h
dt
dhAQ
insdot= (2)
Nel caso in cui invece la portata in uscita non sia nulla per la presenza di una perdita avremo avQ
outoutsdot=
In cui vout egrave la velocitagrave e a lrsquoarea della sezione di uscita del liquido Velocitagrave di flusso e livello h sono legati tra loro dallrsquoequazione di Bernoulli1
hgkvout
sdotsdotsdot= 2
In cui k egrave un coefficiente che dipende dalla geometria del sistema dalle caratteristiche fisiche del liquido noncheacute entro certi limiti dalla stessa velocitagrave di flusso vout Supponendo che questrsquoultima dipendenza sia poco significativa (ipotesi di moto turbolento pienamente sviluppato) e che quindi k sia costante nel tempo potremo scrivere
( )dt
dhAahgkQ
insdot=sdotsdotsdotsdotminus 2
dt
dhAhKQ
insdot=sdotminus (3)
La (2) o la (3) permettono una volta integrate noto il valore della portata Qin di ricavare lrsquoandamento nel tempo del livello h Saranno quindi possibili diversi casi riportati nel seguito a seconda del tipo di controllo impiegato Prima di effettuare lrsquointegrazione delle suddette equazioni perograve vale la pena di soffermarsi su alcune ipotesi semplificative che egrave opportuno fare per facilitare lrsquoanalisi matematica del problema
1 Qualunque sia la legge secondo la quale il controllore interviene per regolare la portata di ingresso Qin (proporzionale P proporzionale-derivativa PD proporzionale-integrale PI proporzionale-integrale-derivativa PID) si suppone che tale portata abbia sempre un valore inferiore a quello della portata massima che puograve alimentare lo sciacquone Tale portata massima Qinmax egrave funzione del diametro del tubo di alimentazione della pressione esistente nella rete idrica a monte della valvola di regolazione e della perdita di carico che si viene a determinare nella valvola quando questa egrave completamente aperta Se tale ipotesi non fosse soddisfatta dovremmo infatti scrivere
( )
==rArrlt
=rArrge
εfQQQQ se
QQQQ se
econtrollorininmaxinecontrollorin
maxininmaxinecontrollorin
Dove col simbolo ( )εf si egrave indicata la legge generica con la quale il controllore agisce sulla valvola di regolazione Ad esempio nel caso di controllore ad azione proporzionale ( ) εε sdot=
cKf e lrsquoequazione di bilancio di materia opportunamente integrata come vedremo
porta ad ottenere per il livello h dellrsquoacqua in funzione del tempo t lrsquoespressione
minussdot=
sdotminus tA
Kc
ehh 10
Mentre se la portata di ingresso fosse costante e pari a quella massima ammissibile Qinmax il livello varierebbe linearmente nel tempo secondo la legge
tA
Qh maxin
sdot=
1 Supponendo che la perdita sia alla base del serbatoio ovvero in corrispondenza della valvola di scarico dellrsquoacqua e
dovuta ad un difetto di chiusura di questa
I controlli automatici ndash IIa parte 3
Fig 1 - Risposta del sistema per Qincontrollore ge Qinmax
0
10
20
30
40
50
60
70
80
0 1 2 3 4 5 6 7 8 9 10
tempo t
live
llo
h Qin = Qinmax
Qin = Kcε
Qin = min(Qinmax Kcε)
Avremo pertanto che in base al valore fissato per la costante Kc del controllore e di quello assunto dallrsquoerrore ε
minussdot=rArrltniforall
sdot=rArrgeniforall
sdotminus tA
K
maxinecontrollorin
maxin
maxinecontrollorin
c
ehhQQ t
tA
QhQQ t
1
0
che si traduce nel diagramma rappresentato nella figura 1 Lrsquoipotesi suddetta serve proprio ad evitare questa inutile complicazione matematica
2 Nel caso di controllo di tipo integrale poicheacute lrsquoazione del controllore non si esaurisce allrsquoannullarsi dellrsquoerrore ε egrave inevitabile che il comportamento del sistema diventi oscillatorio (presenza di overshoot) Il calcolo cioegrave porta a definire per il livello del liquido un andamento nel tempo del tipo riportato in figura 2 Questo se da un lato egrave sicuramente possibile per un processo continuo (ad es caso di un serbatoio di accumulo alimentato con portate di ingresso e uscita continue nel tempo) egrave fisicamente impossibile per il nostro sciacquone che egrave un sistema discontinuo In altri termini quando il livello a causa dellrsquoazione del controllore integrale sale oltre il valore di set-point fino a raggiungere un massimo non esiste alcun meccanismo in grado di riportalo nuovamente al valore di regime Percheacute ciograve si verifichi sarebbe necessario che la portata di alimentazione Qin comandata dal sistema di controllo diventasse negativa (nel caso di processo continuo il controllore fa semplicemente diminuire Qin al di sotto del valore di regime che in condizioni di normale funzionamento e assenza di disturbi mantiene il livello sul set-point) Il controllore quindi dovrebbe essere capace di gestire anche la valvola di scarico dello sciacquone facendo in modo che
inoutQQ = quando Qin dovesse assumere valori negativi Naturalmente non esiste
nessun sistema di controllo di uno sciacquone cosigrave sofisticato ma noi supporremo di si percheacute questo ci permetteragrave di dedurre considerazioni sicuramente valide per ogni processo continuo gestito da un controllore di questo tipo
I controlli automatici ndash IIa parte 4
Fig 2 - Effetto dellazione di un controllo integrale
0
10
20
30
40
50
60
70
80
0 5 10 15 20 25 30 35
tempo t
liv
ello
h
3 Nel caso in cui si consideri una portata uscente Qout gt 0 ovvero si voglia integrare
lrsquoequazione (3) per ottenere la funzione h(t) egrave evidente che la soluzione della suddetta
equazione diviene complicata per la presenza del termine non lineare h In tal caso una semplificazione puograve consistere nellrsquoutilizzare nel bilancio differenziale al posto della
portata istantanea Qout la portata media outQ (assunta costante) valutabile come
0
0
3
0003
2
2
3
11
0
0
hKh
Kh
hKh
Q
h
h
outsdotsdot=sdotsdot=sdotsdot= int
In tutti i calcoli per i diversi tipi di controllori (tranne che per quello On-Off dove lrsquointegrazione egrave stata eseguita in modo esatto) si egrave adottata questa ipotesi semplificativa
2 ndash Controllore On-Off
In questo schema il controllore agisce mantenendo costante la portata di ingresso (valvola completamente aperta) fino al momento in cui il livello h raggiunge il valore fissato di set-point h0 Dallrsquoequazione di bilancio (2) separando le variabili ed integrando
intint sdot=
t
in
h
dtA
Qdh
00
tA
Qh in
sdot= (4)
Il livello dellrsquoacqua quindi aumenteragrave in misura lineare col tempo tanto piugrave rapidamente quanto maggiore egrave la portata Qin Ponendo nella relazione su scritta come valore per h quello h0 del livello finale egrave possibile ricavare il tempo necessario affincheacute il serbatoio si riempia
in
oriempimentQ
Aht
sdot
=0
I controlli automatici ndash IIa parte 5
Se la portata in uscita Qout non egrave nulla (ma comunque inferiore a quella in ingresso) lrsquointegrazione della (3) fornisce2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Il tempo di riempimento del serbatoio si ottiene ponendo nella (5) 0hh =
+
sdotminussdotsdot
sdotminus=
0
01ln
2h
Q
hK
K
Q
K
At
in
in
oriempiment
La (3) egrave una equazione differenziale non lineare e come giagrave detto per semplificarne la soluzione si puograve considerare costante la portata uscente Qout ponendo il suo valore uguale alla portata media
0
3
2hKQhKQ
outoutsdotsdot=congsdot=
ottenendo cosigrave come risultato finale dellrsquointegrazione
A
QQth outin
minus
sdotcong (6)
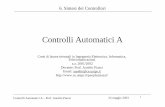
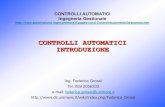
Diagrammando le (4) (5) e (6) otteniamo le figure 3 e 4 Dai due grafici si deduce che come egrave logico nel caso di portata uscente non nulla il tempo di riempimento del serbatoio si allunga e che sempre nel caso in cui Qout sia diverso da zero la linearizzazione della funzione h(t) (equazione (6)) comporta un errore trascurabile rispetto alla soluzione esatta data dalla (5) solo per bassi valori del rapporto Qout Qin
Fig 3 - Controllore On-Off QoutQin = 070
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
livello
h
Eq (4)
Eq (5)
Eq (6)
Set-Point
Le figure 3 e 4 tuttavia non sono rappresentative di ciograve che effettivamente succede sotto lrsquoazione di un controllore di questo tipo in presenza di una portata uscente Qout ne 0 Infatti una volta che il livello dellrsquoacqua abbia raggiunto il valore di set-point il controllore chiude la valvola di alimentazione In presenza di una predita il serbatoio inizieragrave a svuotarsi con una velocitagrave deducibile dallrsquoequazione di bilancio fornita da 2 Si veda a tale proposito la dimostrazione nellrsquoAppendice ndeg 1
I controlli automatici ndash IIa parte 6
h
dhdt
A
K
dt
dhAhK
dt
dhAQ
out=sdotminusrArrsdot=sdotminusrArrsdot=minus
Relazione che inegrata tra lrsquoistante t1 e lrsquoistante t fornisce
( )2
11
211
minussdot
sdotminus=rArr=sdotminus intint tt
A
Khh
h
dhdt
A
Kh
h
t
t
(7)
Quando il livello saragrave sceso al di sotto del punto di intervento il controllore riapre la valvola di alimentazione ed il livello risale nuovamente con una legge data dallrsquoeq (5b) dellrsquoAppendice 1 Lrsquointera sequenza di svuotamentiriempimenti egrave raffigurata nella fig 5
Fig 4 - Controllore On-Off QoutQin = 030
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
livello
h
Eq (4)
Eq (5)
Eq (6)
Set-Point
Fig 5 - Effetto dellazione di un controllore On-Off per Qout ne 0
0
10
20
30
40
50
60
0 20 40 60 80 100 120
tempo t
liv
ello
h Serie1
Set Point
Punto Intervento
I controlli automatici ndash IIa parte 7
3 - Controllore proporzionale P
Se la portata in ingresso egrave proporzionale allrsquoerrore ε ( )hhKKQ
ccinminussdot=sdot=
0ε
Definito come la differenza tra il livello h0 dellrsquoacqua allrsquoinizio (prima del disturbo) e quello h allrsquoistante t lrsquoequazione (2) diventa
( )( )dt
hhdA
dt
dhAhhK
c
minus
sdotminus=sdot=minussdot0
0
Separando le variabili ed integrando tra il tempo 0 e lrsquoistante t
( )( )
( )
( )
0
0
0
0
00
0
lnln0
0
0
0
h
hhe
h
hhxt
A
K
x
dxdt
A
K
hh
hhddt
A
K
tA
K
hh
h
c
hh
h
t
cc
c minus=
minus==sdotminus
=sdotminusrArrminus
minus=sdotminus
sdotminus
minus
minus
intint
minussdot=
sdotminus tA
Kc
ehh 10
(8)
Se la portata in uscita non fosse nulla (lo sciacquone ha un difetto di chiusura) avremmo invece
( )dt
dhAQhhK
outcsdot=minusminussdot
0
Ovvero
( )( )[ ]
dt
QhhKd
K
AQhhK outc
c
outc
minusminussdot
sdotminus=minusminussdot0
0
Separando le variabili ed integrando ( )[ ]( )
( ) ( )
( )
outc
outct
A
K
outc
outcQhhK
QhK
c
outc
outcc
QhK
QhhKe
QhK
QhhKxt
A
K
QhhK
QhhKddt
A
K
c
outc
outc
minussdot
minusminussdot=
minussdot
minusminussdot==sdotminus
minusminussdot
minusminussdot=sdotminus
sdotminus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
minussdot
minus=
sdotminus tA
K
c
out
c
eK
Qhh 10
(9)
Le seguenti figure 6 7 e 8 rappresentano il diagramma delle eq (8) e (9) su scritte per diversi valori della costante Kc (guadagno o sensibilitagrave) del controllore Il calcolo porta a concludere che in presenza di un disturbo permanente il controllo proporzionale non consente al livello h di tornare al valore di set-point h0 Il livello tenderagrave ad un nuovo valore di regime che saragrave tanto piugrave vicino ad h0 quanto piugrave elevato saragrave il valore di Kc I grafici permettono anche di notare come allrsquoaumentare del guadagno lrsquoazione del controllore proporzionale sia sempre piugrave rapida e piugrave simile a quella di un controllore On-Off
I controlli automatici ndash IIa parte 8
Fig 6 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Kc = 01
Kc = 02
Kc = 1
Set Point
Fig 7 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout = 0 Kc = 01
Qout gt 0 Kc = 01
Set Point
I controlli automatici ndash IIa parte 9
Fig 8 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
live
llo
h
Qout gt 0 Kc = 01
Qout gt 0 Kc = 02
Qout gt 0 Kc = 1
Set Point
4 - Controllore proporzionale-derivativo PD
In presenza di un controllo PD proporzionale derivativo lrsquoequazione di bilancio (relativa a una portata uscente Qout diversa da zero e costante) diventa
( )( )
dt
dhAQ
dt
hhdKhhK
outDccsdot=minus
minussdotsdot+minussdot
0
0τ
Ossia
( )( ) ( )
( ) ( )( )
( )( ) ( )[ ]
dt
QhhKd
K
AKQhhK
dt
hhdAKQhhK
dt
hhdAQ
dt
hhdKhhK
outc
c
Dc
outc
Dcoutc
outDcc
minusminussdotsdot
+sdotminus=minusminussdot
minussdot+sdotminus=minusminussdot
minussdotminus=minus
minussdotsdot+minussdot
0
0
0
0
00
0
τ
τ
τ
Separando le variabili ed integrando
( )( )[ ]( )
( )( ) ( )
( ) ( )
outc
outct
AK
K
outc
outcQhhK
QhKDc
c
outc
outc
Dc
c
QhK
QhhKe
QhK
QhhKxt
AK
K
QhhK
QhhKddt
AK
K
Dc
c
outc
outc
minussdot
minusminussdot
=
minussdot
minusminussdot==sdot
+sdot
minus
minusminussdot
minusminussdot
=sdot
+sdot
minus
sdot
+sdot
minus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
τ
τ
τ
( )
minussdot
minus=
sdot
+sdot
minus tAK
K
c
out Dc
c
eK
Qhh
τ
10
(10)
Egrave evidente che ponendo nella (10) Qout = 0 si ottiene la risposta del sistema allrsquoazione del controllo PD per una portata uscente nulla
I controlli automatici ndash IIa parte 10
Le figure 9 10 ed 11 rappresentano il grafico della eq (10) per diversi valori delle costanti Kc e τD Come si puograve notare la presenza dellrsquoazione derivativa peggiora la risposta (h tenderagrave piugrave lentamente verso il valore di regime) e non serve ad eliminare lrsquooffset Il vantaggio dellrsquoimpiego di questo tipo di controllo sta perograve nel fatto che egrave possibile utilizzare valori elevati di Kc (riducendo lrsquooffset a regime) senza per questo avere risposte troppo brusche (vedi fig 11)
Fig 9 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
τD = 0
τD = 5
τD = 10
Set Point
Fig 10 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout gt 0 τD = 0
Qout gt 0 τD = 10
Set Point
I controlli automatici ndash IIa parte 11
Fig 11 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Qout gt 0 Kc = 01 τD = 10
Qout gt 0 Kc = 02 τD = 10
Qout gt 0 Kc = 1 τD = 10
Set Point
5 - Controllore proporzionale-integrale PI
Nel caso di controllore PI proporzionale integrale il bilancio di materia diventa
( ) ( )( )dt
hhdAQdthh
KhhK
out
t
I
c
c
minus
sdotminus=minussdotminussdot+minussdot int 0
0
00
τ
Nellrsquoespressione su scritta ponendo
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
dt
ydAQy
K
dt
dyK
out
I
c
csdotminus=minussdot+sdot
τ
Ovvero
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
Che egrave unrsquoequazione differenziale lineare del secondo ordine (non omogenea) a coefficienti costanti Lrsquoequazione caratteristica della omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Chiamando z1 e z2 le radici di tale equazione caratteristica la soluzione3 della (11) saragrave
Ideg caso rArrgtsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotgt 4τ
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
3 Vedasi a tale proposito lrsquoAppendice ndeg 2
I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 2
dt
dVQ
in=
ossia esprimendo il volume V di liquido come prodotto tra lrsquoarea A della sezione dello sciacquone e il livello h
dt
dhAQ
insdot= (2)
Nel caso in cui invece la portata in uscita non sia nulla per la presenza di una perdita avremo avQ
outoutsdot=
In cui vout egrave la velocitagrave e a lrsquoarea della sezione di uscita del liquido Velocitagrave di flusso e livello h sono legati tra loro dallrsquoequazione di Bernoulli1
hgkvout
sdotsdotsdot= 2
In cui k egrave un coefficiente che dipende dalla geometria del sistema dalle caratteristiche fisiche del liquido noncheacute entro certi limiti dalla stessa velocitagrave di flusso vout Supponendo che questrsquoultima dipendenza sia poco significativa (ipotesi di moto turbolento pienamente sviluppato) e che quindi k sia costante nel tempo potremo scrivere
( )dt
dhAahgkQ
insdot=sdotsdotsdotsdotminus 2
dt
dhAhKQ
insdot=sdotminus (3)
La (2) o la (3) permettono una volta integrate noto il valore della portata Qin di ricavare lrsquoandamento nel tempo del livello h Saranno quindi possibili diversi casi riportati nel seguito a seconda del tipo di controllo impiegato Prima di effettuare lrsquointegrazione delle suddette equazioni perograve vale la pena di soffermarsi su alcune ipotesi semplificative che egrave opportuno fare per facilitare lrsquoanalisi matematica del problema
1 Qualunque sia la legge secondo la quale il controllore interviene per regolare la portata di ingresso Qin (proporzionale P proporzionale-derivativa PD proporzionale-integrale PI proporzionale-integrale-derivativa PID) si suppone che tale portata abbia sempre un valore inferiore a quello della portata massima che puograve alimentare lo sciacquone Tale portata massima Qinmax egrave funzione del diametro del tubo di alimentazione della pressione esistente nella rete idrica a monte della valvola di regolazione e della perdita di carico che si viene a determinare nella valvola quando questa egrave completamente aperta Se tale ipotesi non fosse soddisfatta dovremmo infatti scrivere
( )
==rArrlt
=rArrge
εfQQQQ se
QQQQ se
econtrollorininmaxinecontrollorin
maxininmaxinecontrollorin
Dove col simbolo ( )εf si egrave indicata la legge generica con la quale il controllore agisce sulla valvola di regolazione Ad esempio nel caso di controllore ad azione proporzionale ( ) εε sdot=
cKf e lrsquoequazione di bilancio di materia opportunamente integrata come vedremo
porta ad ottenere per il livello h dellrsquoacqua in funzione del tempo t lrsquoespressione
minussdot=
sdotminus tA
Kc
ehh 10
Mentre se la portata di ingresso fosse costante e pari a quella massima ammissibile Qinmax il livello varierebbe linearmente nel tempo secondo la legge
tA
Qh maxin
sdot=
1 Supponendo che la perdita sia alla base del serbatoio ovvero in corrispondenza della valvola di scarico dellrsquoacqua e
dovuta ad un difetto di chiusura di questa
I controlli automatici ndash IIa parte 3
Fig 1 - Risposta del sistema per Qincontrollore ge Qinmax
0
10
20
30
40
50
60
70
80
0 1 2 3 4 5 6 7 8 9 10
tempo t
live
llo
h Qin = Qinmax
Qin = Kcε
Qin = min(Qinmax Kcε)
Avremo pertanto che in base al valore fissato per la costante Kc del controllore e di quello assunto dallrsquoerrore ε
minussdot=rArrltniforall
sdot=rArrgeniforall
sdotminus tA
K
maxinecontrollorin
maxin
maxinecontrollorin
c
ehhQQ t
tA
QhQQ t
1
0
che si traduce nel diagramma rappresentato nella figura 1 Lrsquoipotesi suddetta serve proprio ad evitare questa inutile complicazione matematica
2 Nel caso di controllo di tipo integrale poicheacute lrsquoazione del controllore non si esaurisce allrsquoannullarsi dellrsquoerrore ε egrave inevitabile che il comportamento del sistema diventi oscillatorio (presenza di overshoot) Il calcolo cioegrave porta a definire per il livello del liquido un andamento nel tempo del tipo riportato in figura 2 Questo se da un lato egrave sicuramente possibile per un processo continuo (ad es caso di un serbatoio di accumulo alimentato con portate di ingresso e uscita continue nel tempo) egrave fisicamente impossibile per il nostro sciacquone che egrave un sistema discontinuo In altri termini quando il livello a causa dellrsquoazione del controllore integrale sale oltre il valore di set-point fino a raggiungere un massimo non esiste alcun meccanismo in grado di riportalo nuovamente al valore di regime Percheacute ciograve si verifichi sarebbe necessario che la portata di alimentazione Qin comandata dal sistema di controllo diventasse negativa (nel caso di processo continuo il controllore fa semplicemente diminuire Qin al di sotto del valore di regime che in condizioni di normale funzionamento e assenza di disturbi mantiene il livello sul set-point) Il controllore quindi dovrebbe essere capace di gestire anche la valvola di scarico dello sciacquone facendo in modo che
inoutQQ = quando Qin dovesse assumere valori negativi Naturalmente non esiste
nessun sistema di controllo di uno sciacquone cosigrave sofisticato ma noi supporremo di si percheacute questo ci permetteragrave di dedurre considerazioni sicuramente valide per ogni processo continuo gestito da un controllore di questo tipo
I controlli automatici ndash IIa parte 4
Fig 2 - Effetto dellazione di un controllo integrale
0
10
20
30
40
50
60
70
80
0 5 10 15 20 25 30 35
tempo t
liv
ello
h
3 Nel caso in cui si consideri una portata uscente Qout gt 0 ovvero si voglia integrare
lrsquoequazione (3) per ottenere la funzione h(t) egrave evidente che la soluzione della suddetta
equazione diviene complicata per la presenza del termine non lineare h In tal caso una semplificazione puograve consistere nellrsquoutilizzare nel bilancio differenziale al posto della
portata istantanea Qout la portata media outQ (assunta costante) valutabile come
0
0
3
0003
2
2
3
11
0
0
hKh
Kh
hKh
Q
h
h
outsdotsdot=sdotsdot=sdotsdot= int
In tutti i calcoli per i diversi tipi di controllori (tranne che per quello On-Off dove lrsquointegrazione egrave stata eseguita in modo esatto) si egrave adottata questa ipotesi semplificativa
2 ndash Controllore On-Off
In questo schema il controllore agisce mantenendo costante la portata di ingresso (valvola completamente aperta) fino al momento in cui il livello h raggiunge il valore fissato di set-point h0 Dallrsquoequazione di bilancio (2) separando le variabili ed integrando
intint sdot=
t
in
h
dtA
Qdh
00
tA
Qh in
sdot= (4)
Il livello dellrsquoacqua quindi aumenteragrave in misura lineare col tempo tanto piugrave rapidamente quanto maggiore egrave la portata Qin Ponendo nella relazione su scritta come valore per h quello h0 del livello finale egrave possibile ricavare il tempo necessario affincheacute il serbatoio si riempia
in
oriempimentQ
Aht
sdot
=0
I controlli automatici ndash IIa parte 5
Se la portata in uscita Qout non egrave nulla (ma comunque inferiore a quella in ingresso) lrsquointegrazione della (3) fornisce2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Il tempo di riempimento del serbatoio si ottiene ponendo nella (5) 0hh =
+
sdotminussdotsdot
sdotminus=
0
01ln
2h
Q
hK
K
Q
K
At
in
in
oriempiment
La (3) egrave una equazione differenziale non lineare e come giagrave detto per semplificarne la soluzione si puograve considerare costante la portata uscente Qout ponendo il suo valore uguale alla portata media
0
3
2hKQhKQ
outoutsdotsdot=congsdot=
ottenendo cosigrave come risultato finale dellrsquointegrazione
A
QQth outin
minus
sdotcong (6)
Diagrammando le (4) (5) e (6) otteniamo le figure 3 e 4 Dai due grafici si deduce che come egrave logico nel caso di portata uscente non nulla il tempo di riempimento del serbatoio si allunga e che sempre nel caso in cui Qout sia diverso da zero la linearizzazione della funzione h(t) (equazione (6)) comporta un errore trascurabile rispetto alla soluzione esatta data dalla (5) solo per bassi valori del rapporto Qout Qin
Fig 3 - Controllore On-Off QoutQin = 070
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
livello
h
Eq (4)
Eq (5)
Eq (6)
Set-Point
Le figure 3 e 4 tuttavia non sono rappresentative di ciograve che effettivamente succede sotto lrsquoazione di un controllore di questo tipo in presenza di una portata uscente Qout ne 0 Infatti una volta che il livello dellrsquoacqua abbia raggiunto il valore di set-point il controllore chiude la valvola di alimentazione In presenza di una predita il serbatoio inizieragrave a svuotarsi con una velocitagrave deducibile dallrsquoequazione di bilancio fornita da 2 Si veda a tale proposito la dimostrazione nellrsquoAppendice ndeg 1
I controlli automatici ndash IIa parte 6
h
dhdt
A
K
dt
dhAhK
dt
dhAQ
out=sdotminusrArrsdot=sdotminusrArrsdot=minus
Relazione che inegrata tra lrsquoistante t1 e lrsquoistante t fornisce
( )2
11
211
minussdot
sdotminus=rArr=sdotminus intint tt
A
Khh
h
dhdt
A
Kh
h
t
t
(7)
Quando il livello saragrave sceso al di sotto del punto di intervento il controllore riapre la valvola di alimentazione ed il livello risale nuovamente con una legge data dallrsquoeq (5b) dellrsquoAppendice 1 Lrsquointera sequenza di svuotamentiriempimenti egrave raffigurata nella fig 5
Fig 4 - Controllore On-Off QoutQin = 030
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
livello
h
Eq (4)
Eq (5)
Eq (6)
Set-Point
Fig 5 - Effetto dellazione di un controllore On-Off per Qout ne 0
0
10
20
30
40
50
60
0 20 40 60 80 100 120
tempo t
liv
ello
h Serie1
Set Point
Punto Intervento
I controlli automatici ndash IIa parte 7
3 - Controllore proporzionale P
Se la portata in ingresso egrave proporzionale allrsquoerrore ε ( )hhKKQ
ccinminussdot=sdot=
0ε
Definito come la differenza tra il livello h0 dellrsquoacqua allrsquoinizio (prima del disturbo) e quello h allrsquoistante t lrsquoequazione (2) diventa
( )( )dt
hhdA
dt
dhAhhK
c
minus
sdotminus=sdot=minussdot0
0
Separando le variabili ed integrando tra il tempo 0 e lrsquoistante t
( )( )
( )
( )
0
0
0
0
00
0
lnln0
0
0
0
h
hhe
h
hhxt
A
K
x
dxdt
A
K
hh
hhddt
A
K
tA
K
hh
h
c
hh
h
t
cc
c minus=
minus==sdotminus
=sdotminusrArrminus
minus=sdotminus
sdotminus
minus
minus
intint
minussdot=
sdotminus tA
Kc
ehh 10
(8)
Se la portata in uscita non fosse nulla (lo sciacquone ha un difetto di chiusura) avremmo invece
( )dt
dhAQhhK
outcsdot=minusminussdot
0
Ovvero
( )( )[ ]
dt
QhhKd
K
AQhhK outc
c
outc
minusminussdot
sdotminus=minusminussdot0
0
Separando le variabili ed integrando ( )[ ]( )
( ) ( )
( )
outc
outct
A
K
outc
outcQhhK
QhK
c
outc
outcc
QhK
QhhKe
QhK
QhhKxt
A
K
QhhK
QhhKddt
A
K
c
outc
outc
minussdot
minusminussdot=
minussdot
minusminussdot==sdotminus
minusminussdot
minusminussdot=sdotminus
sdotminus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
minussdot
minus=
sdotminus tA
K
c
out
c
eK
Qhh 10
(9)
Le seguenti figure 6 7 e 8 rappresentano il diagramma delle eq (8) e (9) su scritte per diversi valori della costante Kc (guadagno o sensibilitagrave) del controllore Il calcolo porta a concludere che in presenza di un disturbo permanente il controllo proporzionale non consente al livello h di tornare al valore di set-point h0 Il livello tenderagrave ad un nuovo valore di regime che saragrave tanto piugrave vicino ad h0 quanto piugrave elevato saragrave il valore di Kc I grafici permettono anche di notare come allrsquoaumentare del guadagno lrsquoazione del controllore proporzionale sia sempre piugrave rapida e piugrave simile a quella di un controllore On-Off
I controlli automatici ndash IIa parte 8
Fig 6 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Kc = 01
Kc = 02
Kc = 1
Set Point
Fig 7 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout = 0 Kc = 01
Qout gt 0 Kc = 01
Set Point
I controlli automatici ndash IIa parte 9
Fig 8 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
live
llo
h
Qout gt 0 Kc = 01
Qout gt 0 Kc = 02
Qout gt 0 Kc = 1
Set Point
4 - Controllore proporzionale-derivativo PD
In presenza di un controllo PD proporzionale derivativo lrsquoequazione di bilancio (relativa a una portata uscente Qout diversa da zero e costante) diventa
( )( )
dt
dhAQ
dt
hhdKhhK
outDccsdot=minus
minussdotsdot+minussdot
0
0τ
Ossia
( )( ) ( )
( ) ( )( )
( )( ) ( )[ ]
dt
QhhKd
K
AKQhhK
dt
hhdAKQhhK
dt
hhdAQ
dt
hhdKhhK
outc
c
Dc
outc
Dcoutc
outDcc
minusminussdotsdot
+sdotminus=minusminussdot
minussdot+sdotminus=minusminussdot
minussdotminus=minus
minussdotsdot+minussdot
0
0
0
0
00
0
τ
τ
τ
Separando le variabili ed integrando
( )( )[ ]( )
( )( ) ( )
( ) ( )
outc
outct
AK
K
outc
outcQhhK
QhKDc
c
outc
outc
Dc
c
QhK
QhhKe
QhK
QhhKxt
AK
K
QhhK
QhhKddt
AK
K
Dc
c
outc
outc
minussdot
minusminussdot
=
minussdot
minusminussdot==sdot
+sdot
minus
minusminussdot
minusminussdot
=sdot
+sdot
minus
sdot
+sdot
minus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
τ
τ
τ
( )
minussdot
minus=
sdot
+sdot
minus tAK
K
c
out Dc
c
eK
Qhh
τ
10
(10)
Egrave evidente che ponendo nella (10) Qout = 0 si ottiene la risposta del sistema allrsquoazione del controllo PD per una portata uscente nulla
I controlli automatici ndash IIa parte 10
Le figure 9 10 ed 11 rappresentano il grafico della eq (10) per diversi valori delle costanti Kc e τD Come si puograve notare la presenza dellrsquoazione derivativa peggiora la risposta (h tenderagrave piugrave lentamente verso il valore di regime) e non serve ad eliminare lrsquooffset Il vantaggio dellrsquoimpiego di questo tipo di controllo sta perograve nel fatto che egrave possibile utilizzare valori elevati di Kc (riducendo lrsquooffset a regime) senza per questo avere risposte troppo brusche (vedi fig 11)
Fig 9 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
τD = 0
τD = 5
τD = 10
Set Point
Fig 10 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout gt 0 τD = 0
Qout gt 0 τD = 10
Set Point
I controlli automatici ndash IIa parte 11
Fig 11 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Qout gt 0 Kc = 01 τD = 10
Qout gt 0 Kc = 02 τD = 10
Qout gt 0 Kc = 1 τD = 10
Set Point
5 - Controllore proporzionale-integrale PI
Nel caso di controllore PI proporzionale integrale il bilancio di materia diventa
( ) ( )( )dt
hhdAQdthh
KhhK
out
t
I
c
c
minus
sdotminus=minussdotminussdot+minussdot int 0
0
00
τ
Nellrsquoespressione su scritta ponendo
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
dt
ydAQy
K
dt
dyK
out
I
c
csdotminus=minussdot+sdot
τ
Ovvero
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
Che egrave unrsquoequazione differenziale lineare del secondo ordine (non omogenea) a coefficienti costanti Lrsquoequazione caratteristica della omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Chiamando z1 e z2 le radici di tale equazione caratteristica la soluzione3 della (11) saragrave
Ideg caso rArrgtsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotgt 4τ
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
3 Vedasi a tale proposito lrsquoAppendice ndeg 2
I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 3
Fig 1 - Risposta del sistema per Qincontrollore ge Qinmax
0
10
20
30
40
50
60
70
80
0 1 2 3 4 5 6 7 8 9 10
tempo t
live
llo
h Qin = Qinmax
Qin = Kcε
Qin = min(Qinmax Kcε)
Avremo pertanto che in base al valore fissato per la costante Kc del controllore e di quello assunto dallrsquoerrore ε
minussdot=rArrltniforall
sdot=rArrgeniforall
sdotminus tA
K
maxinecontrollorin
maxin
maxinecontrollorin
c
ehhQQ t
tA
QhQQ t
1
0
che si traduce nel diagramma rappresentato nella figura 1 Lrsquoipotesi suddetta serve proprio ad evitare questa inutile complicazione matematica
2 Nel caso di controllo di tipo integrale poicheacute lrsquoazione del controllore non si esaurisce allrsquoannullarsi dellrsquoerrore ε egrave inevitabile che il comportamento del sistema diventi oscillatorio (presenza di overshoot) Il calcolo cioegrave porta a definire per il livello del liquido un andamento nel tempo del tipo riportato in figura 2 Questo se da un lato egrave sicuramente possibile per un processo continuo (ad es caso di un serbatoio di accumulo alimentato con portate di ingresso e uscita continue nel tempo) egrave fisicamente impossibile per il nostro sciacquone che egrave un sistema discontinuo In altri termini quando il livello a causa dellrsquoazione del controllore integrale sale oltre il valore di set-point fino a raggiungere un massimo non esiste alcun meccanismo in grado di riportalo nuovamente al valore di regime Percheacute ciograve si verifichi sarebbe necessario che la portata di alimentazione Qin comandata dal sistema di controllo diventasse negativa (nel caso di processo continuo il controllore fa semplicemente diminuire Qin al di sotto del valore di regime che in condizioni di normale funzionamento e assenza di disturbi mantiene il livello sul set-point) Il controllore quindi dovrebbe essere capace di gestire anche la valvola di scarico dello sciacquone facendo in modo che
inoutQQ = quando Qin dovesse assumere valori negativi Naturalmente non esiste
nessun sistema di controllo di uno sciacquone cosigrave sofisticato ma noi supporremo di si percheacute questo ci permetteragrave di dedurre considerazioni sicuramente valide per ogni processo continuo gestito da un controllore di questo tipo
I controlli automatici ndash IIa parte 4
Fig 2 - Effetto dellazione di un controllo integrale
0
10
20
30
40
50
60
70
80
0 5 10 15 20 25 30 35
tempo t
liv
ello
h
3 Nel caso in cui si consideri una portata uscente Qout gt 0 ovvero si voglia integrare
lrsquoequazione (3) per ottenere la funzione h(t) egrave evidente che la soluzione della suddetta
equazione diviene complicata per la presenza del termine non lineare h In tal caso una semplificazione puograve consistere nellrsquoutilizzare nel bilancio differenziale al posto della
portata istantanea Qout la portata media outQ (assunta costante) valutabile come
0
0
3
0003
2
2
3
11
0
0
hKh
Kh
hKh
Q
h
h
outsdotsdot=sdotsdot=sdotsdot= int
In tutti i calcoli per i diversi tipi di controllori (tranne che per quello On-Off dove lrsquointegrazione egrave stata eseguita in modo esatto) si egrave adottata questa ipotesi semplificativa
2 ndash Controllore On-Off
In questo schema il controllore agisce mantenendo costante la portata di ingresso (valvola completamente aperta) fino al momento in cui il livello h raggiunge il valore fissato di set-point h0 Dallrsquoequazione di bilancio (2) separando le variabili ed integrando
intint sdot=
t
in
h
dtA
Qdh
00
tA
Qh in
sdot= (4)
Il livello dellrsquoacqua quindi aumenteragrave in misura lineare col tempo tanto piugrave rapidamente quanto maggiore egrave la portata Qin Ponendo nella relazione su scritta come valore per h quello h0 del livello finale egrave possibile ricavare il tempo necessario affincheacute il serbatoio si riempia
in
oriempimentQ
Aht
sdot
=0
I controlli automatici ndash IIa parte 5
Se la portata in uscita Qout non egrave nulla (ma comunque inferiore a quella in ingresso) lrsquointegrazione della (3) fornisce2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Il tempo di riempimento del serbatoio si ottiene ponendo nella (5) 0hh =
+
sdotminussdotsdot
sdotminus=
0
01ln
2h
Q
hK
K
Q
K
At
in
in
oriempiment
La (3) egrave una equazione differenziale non lineare e come giagrave detto per semplificarne la soluzione si puograve considerare costante la portata uscente Qout ponendo il suo valore uguale alla portata media
0
3
2hKQhKQ
outoutsdotsdot=congsdot=
ottenendo cosigrave come risultato finale dellrsquointegrazione
A
QQth outin
minus
sdotcong (6)
Diagrammando le (4) (5) e (6) otteniamo le figure 3 e 4 Dai due grafici si deduce che come egrave logico nel caso di portata uscente non nulla il tempo di riempimento del serbatoio si allunga e che sempre nel caso in cui Qout sia diverso da zero la linearizzazione della funzione h(t) (equazione (6)) comporta un errore trascurabile rispetto alla soluzione esatta data dalla (5) solo per bassi valori del rapporto Qout Qin
Fig 3 - Controllore On-Off QoutQin = 070
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
livello
h
Eq (4)
Eq (5)
Eq (6)
Set-Point
Le figure 3 e 4 tuttavia non sono rappresentative di ciograve che effettivamente succede sotto lrsquoazione di un controllore di questo tipo in presenza di una portata uscente Qout ne 0 Infatti una volta che il livello dellrsquoacqua abbia raggiunto il valore di set-point il controllore chiude la valvola di alimentazione In presenza di una predita il serbatoio inizieragrave a svuotarsi con una velocitagrave deducibile dallrsquoequazione di bilancio fornita da 2 Si veda a tale proposito la dimostrazione nellrsquoAppendice ndeg 1
I controlli automatici ndash IIa parte 6
h
dhdt
A
K
dt
dhAhK
dt
dhAQ
out=sdotminusrArrsdot=sdotminusrArrsdot=minus
Relazione che inegrata tra lrsquoistante t1 e lrsquoistante t fornisce
( )2
11
211
minussdot
sdotminus=rArr=sdotminus intint tt
A
Khh
h
dhdt
A
Kh
h
t
t
(7)
Quando il livello saragrave sceso al di sotto del punto di intervento il controllore riapre la valvola di alimentazione ed il livello risale nuovamente con una legge data dallrsquoeq (5b) dellrsquoAppendice 1 Lrsquointera sequenza di svuotamentiriempimenti egrave raffigurata nella fig 5
Fig 4 - Controllore On-Off QoutQin = 030
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
livello
h
Eq (4)
Eq (5)
Eq (6)
Set-Point
Fig 5 - Effetto dellazione di un controllore On-Off per Qout ne 0
0
10
20
30
40
50
60
0 20 40 60 80 100 120
tempo t
liv
ello
h Serie1
Set Point
Punto Intervento
I controlli automatici ndash IIa parte 7
3 - Controllore proporzionale P
Se la portata in ingresso egrave proporzionale allrsquoerrore ε ( )hhKKQ
ccinminussdot=sdot=
0ε
Definito come la differenza tra il livello h0 dellrsquoacqua allrsquoinizio (prima del disturbo) e quello h allrsquoistante t lrsquoequazione (2) diventa
( )( )dt
hhdA
dt
dhAhhK
c
minus
sdotminus=sdot=minussdot0
0
Separando le variabili ed integrando tra il tempo 0 e lrsquoistante t
( )( )
( )
( )
0
0
0
0
00
0
lnln0
0
0
0
h
hhe
h
hhxt
A
K
x
dxdt
A
K
hh
hhddt
A
K
tA
K
hh
h
c
hh
h
t
cc
c minus=
minus==sdotminus
=sdotminusrArrminus
minus=sdotminus
sdotminus
minus
minus
intint
minussdot=
sdotminus tA
Kc
ehh 10
(8)
Se la portata in uscita non fosse nulla (lo sciacquone ha un difetto di chiusura) avremmo invece
( )dt
dhAQhhK
outcsdot=minusminussdot
0
Ovvero
( )( )[ ]
dt
QhhKd
K
AQhhK outc
c
outc
minusminussdot
sdotminus=minusminussdot0
0
Separando le variabili ed integrando ( )[ ]( )
( ) ( )
( )
outc
outct
A
K
outc
outcQhhK
QhK
c
outc
outcc
QhK
QhhKe
QhK
QhhKxt
A
K
QhhK
QhhKddt
A
K
c
outc
outc
minussdot
minusminussdot=
minussdot
minusminussdot==sdotminus
minusminussdot
minusminussdot=sdotminus
sdotminus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
minussdot
minus=
sdotminus tA
K
c
out
c
eK
Qhh 10
(9)
Le seguenti figure 6 7 e 8 rappresentano il diagramma delle eq (8) e (9) su scritte per diversi valori della costante Kc (guadagno o sensibilitagrave) del controllore Il calcolo porta a concludere che in presenza di un disturbo permanente il controllo proporzionale non consente al livello h di tornare al valore di set-point h0 Il livello tenderagrave ad un nuovo valore di regime che saragrave tanto piugrave vicino ad h0 quanto piugrave elevato saragrave il valore di Kc I grafici permettono anche di notare come allrsquoaumentare del guadagno lrsquoazione del controllore proporzionale sia sempre piugrave rapida e piugrave simile a quella di un controllore On-Off
I controlli automatici ndash IIa parte 8
Fig 6 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Kc = 01
Kc = 02
Kc = 1
Set Point
Fig 7 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout = 0 Kc = 01
Qout gt 0 Kc = 01
Set Point
I controlli automatici ndash IIa parte 9
Fig 8 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
live
llo
h
Qout gt 0 Kc = 01
Qout gt 0 Kc = 02
Qout gt 0 Kc = 1
Set Point
4 - Controllore proporzionale-derivativo PD
In presenza di un controllo PD proporzionale derivativo lrsquoequazione di bilancio (relativa a una portata uscente Qout diversa da zero e costante) diventa
( )( )
dt
dhAQ
dt
hhdKhhK
outDccsdot=minus
minussdotsdot+minussdot
0
0τ
Ossia
( )( ) ( )
( ) ( )( )
( )( ) ( )[ ]
dt
QhhKd
K
AKQhhK
dt
hhdAKQhhK
dt
hhdAQ
dt
hhdKhhK
outc
c
Dc
outc
Dcoutc
outDcc
minusminussdotsdot
+sdotminus=minusminussdot
minussdot+sdotminus=minusminussdot
minussdotminus=minus
minussdotsdot+minussdot
0
0
0
0
00
0
τ
τ
τ
Separando le variabili ed integrando
( )( )[ ]( )
( )( ) ( )
( ) ( )
outc
outct
AK
K
outc
outcQhhK
QhKDc
c
outc
outc
Dc
c
QhK
QhhKe
QhK
QhhKxt
AK
K
QhhK
QhhKddt
AK
K
Dc
c
outc
outc
minussdot
minusminussdot
=
minussdot
minusminussdot==sdot
+sdot
minus
minusminussdot
minusminussdot
=sdot
+sdot
minus
sdot
+sdot
minus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
τ
τ
τ
( )
minussdot
minus=
sdot
+sdot
minus tAK
K
c
out Dc
c
eK
Qhh
τ
10
(10)
Egrave evidente che ponendo nella (10) Qout = 0 si ottiene la risposta del sistema allrsquoazione del controllo PD per una portata uscente nulla
I controlli automatici ndash IIa parte 10
Le figure 9 10 ed 11 rappresentano il grafico della eq (10) per diversi valori delle costanti Kc e τD Come si puograve notare la presenza dellrsquoazione derivativa peggiora la risposta (h tenderagrave piugrave lentamente verso il valore di regime) e non serve ad eliminare lrsquooffset Il vantaggio dellrsquoimpiego di questo tipo di controllo sta perograve nel fatto che egrave possibile utilizzare valori elevati di Kc (riducendo lrsquooffset a regime) senza per questo avere risposte troppo brusche (vedi fig 11)
Fig 9 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
τD = 0
τD = 5
τD = 10
Set Point
Fig 10 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout gt 0 τD = 0
Qout gt 0 τD = 10
Set Point
I controlli automatici ndash IIa parte 11
Fig 11 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Qout gt 0 Kc = 01 τD = 10
Qout gt 0 Kc = 02 τD = 10
Qout gt 0 Kc = 1 τD = 10
Set Point
5 - Controllore proporzionale-integrale PI
Nel caso di controllore PI proporzionale integrale il bilancio di materia diventa
( ) ( )( )dt
hhdAQdthh
KhhK
out
t
I
c
c
minus
sdotminus=minussdotminussdot+minussdot int 0
0
00
τ
Nellrsquoespressione su scritta ponendo
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
dt
ydAQy
K
dt
dyK
out
I
c
csdotminus=minussdot+sdot
τ
Ovvero
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
Che egrave unrsquoequazione differenziale lineare del secondo ordine (non omogenea) a coefficienti costanti Lrsquoequazione caratteristica della omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Chiamando z1 e z2 le radici di tale equazione caratteristica la soluzione3 della (11) saragrave
Ideg caso rArrgtsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotgt 4τ
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
3 Vedasi a tale proposito lrsquoAppendice ndeg 2
I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 4
Fig 2 - Effetto dellazione di un controllo integrale
0
10
20
30
40
50
60
70
80
0 5 10 15 20 25 30 35
tempo t
liv
ello
h
3 Nel caso in cui si consideri una portata uscente Qout gt 0 ovvero si voglia integrare
lrsquoequazione (3) per ottenere la funzione h(t) egrave evidente che la soluzione della suddetta
equazione diviene complicata per la presenza del termine non lineare h In tal caso una semplificazione puograve consistere nellrsquoutilizzare nel bilancio differenziale al posto della
portata istantanea Qout la portata media outQ (assunta costante) valutabile come
0
0
3
0003
2
2
3
11
0
0
hKh
Kh
hKh
Q
h
h
outsdotsdot=sdotsdot=sdotsdot= int
In tutti i calcoli per i diversi tipi di controllori (tranne che per quello On-Off dove lrsquointegrazione egrave stata eseguita in modo esatto) si egrave adottata questa ipotesi semplificativa
2 ndash Controllore On-Off
In questo schema il controllore agisce mantenendo costante la portata di ingresso (valvola completamente aperta) fino al momento in cui il livello h raggiunge il valore fissato di set-point h0 Dallrsquoequazione di bilancio (2) separando le variabili ed integrando
intint sdot=
t
in
h
dtA
Qdh
00
tA
Qh in
sdot= (4)
Il livello dellrsquoacqua quindi aumenteragrave in misura lineare col tempo tanto piugrave rapidamente quanto maggiore egrave la portata Qin Ponendo nella relazione su scritta come valore per h quello h0 del livello finale egrave possibile ricavare il tempo necessario affincheacute il serbatoio si riempia
in
oriempimentQ
Aht
sdot
=0
I controlli automatici ndash IIa parte 5
Se la portata in uscita Qout non egrave nulla (ma comunque inferiore a quella in ingresso) lrsquointegrazione della (3) fornisce2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Il tempo di riempimento del serbatoio si ottiene ponendo nella (5) 0hh =
+
sdotminussdotsdot
sdotminus=
0
01ln
2h
Q
hK
K
Q
K
At
in
in
oriempiment
La (3) egrave una equazione differenziale non lineare e come giagrave detto per semplificarne la soluzione si puograve considerare costante la portata uscente Qout ponendo il suo valore uguale alla portata media
0
3
2hKQhKQ
outoutsdotsdot=congsdot=
ottenendo cosigrave come risultato finale dellrsquointegrazione
A
QQth outin
minus
sdotcong (6)
Diagrammando le (4) (5) e (6) otteniamo le figure 3 e 4 Dai due grafici si deduce che come egrave logico nel caso di portata uscente non nulla il tempo di riempimento del serbatoio si allunga e che sempre nel caso in cui Qout sia diverso da zero la linearizzazione della funzione h(t) (equazione (6)) comporta un errore trascurabile rispetto alla soluzione esatta data dalla (5) solo per bassi valori del rapporto Qout Qin
Fig 3 - Controllore On-Off QoutQin = 070
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
livello
h
Eq (4)
Eq (5)
Eq (6)
Set-Point
Le figure 3 e 4 tuttavia non sono rappresentative di ciograve che effettivamente succede sotto lrsquoazione di un controllore di questo tipo in presenza di una portata uscente Qout ne 0 Infatti una volta che il livello dellrsquoacqua abbia raggiunto il valore di set-point il controllore chiude la valvola di alimentazione In presenza di una predita il serbatoio inizieragrave a svuotarsi con una velocitagrave deducibile dallrsquoequazione di bilancio fornita da 2 Si veda a tale proposito la dimostrazione nellrsquoAppendice ndeg 1
I controlli automatici ndash IIa parte 6
h
dhdt
A
K
dt
dhAhK
dt
dhAQ
out=sdotminusrArrsdot=sdotminusrArrsdot=minus
Relazione che inegrata tra lrsquoistante t1 e lrsquoistante t fornisce
( )2
11
211
minussdot
sdotminus=rArr=sdotminus intint tt
A
Khh
h
dhdt
A
Kh
h
t
t
(7)
Quando il livello saragrave sceso al di sotto del punto di intervento il controllore riapre la valvola di alimentazione ed il livello risale nuovamente con una legge data dallrsquoeq (5b) dellrsquoAppendice 1 Lrsquointera sequenza di svuotamentiriempimenti egrave raffigurata nella fig 5
Fig 4 - Controllore On-Off QoutQin = 030
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
livello
h
Eq (4)
Eq (5)
Eq (6)
Set-Point
Fig 5 - Effetto dellazione di un controllore On-Off per Qout ne 0
0
10
20
30
40
50
60
0 20 40 60 80 100 120
tempo t
liv
ello
h Serie1
Set Point
Punto Intervento
I controlli automatici ndash IIa parte 7
3 - Controllore proporzionale P
Se la portata in ingresso egrave proporzionale allrsquoerrore ε ( )hhKKQ
ccinminussdot=sdot=
0ε
Definito come la differenza tra il livello h0 dellrsquoacqua allrsquoinizio (prima del disturbo) e quello h allrsquoistante t lrsquoequazione (2) diventa
( )( )dt
hhdA
dt
dhAhhK
c
minus
sdotminus=sdot=minussdot0
0
Separando le variabili ed integrando tra il tempo 0 e lrsquoistante t
( )( )
( )
( )
0
0
0
0
00
0
lnln0
0
0
0
h
hhe
h
hhxt
A
K
x
dxdt
A
K
hh
hhddt
A
K
tA
K
hh
h
c
hh
h
t
cc
c minus=
minus==sdotminus
=sdotminusrArrminus
minus=sdotminus
sdotminus
minus
minus
intint
minussdot=
sdotminus tA
Kc
ehh 10
(8)
Se la portata in uscita non fosse nulla (lo sciacquone ha un difetto di chiusura) avremmo invece
( )dt
dhAQhhK
outcsdot=minusminussdot
0
Ovvero
( )( )[ ]
dt
QhhKd
K
AQhhK outc
c
outc
minusminussdot
sdotminus=minusminussdot0
0
Separando le variabili ed integrando ( )[ ]( )
( ) ( )
( )
outc
outct
A
K
outc
outcQhhK
QhK
c
outc
outcc
QhK
QhhKe
QhK
QhhKxt
A
K
QhhK
QhhKddt
A
K
c
outc
outc
minussdot
minusminussdot=
minussdot
minusminussdot==sdotminus
minusminussdot
minusminussdot=sdotminus
sdotminus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
minussdot
minus=
sdotminus tA
K
c
out
c
eK
Qhh 10
(9)
Le seguenti figure 6 7 e 8 rappresentano il diagramma delle eq (8) e (9) su scritte per diversi valori della costante Kc (guadagno o sensibilitagrave) del controllore Il calcolo porta a concludere che in presenza di un disturbo permanente il controllo proporzionale non consente al livello h di tornare al valore di set-point h0 Il livello tenderagrave ad un nuovo valore di regime che saragrave tanto piugrave vicino ad h0 quanto piugrave elevato saragrave il valore di Kc I grafici permettono anche di notare come allrsquoaumentare del guadagno lrsquoazione del controllore proporzionale sia sempre piugrave rapida e piugrave simile a quella di un controllore On-Off
I controlli automatici ndash IIa parte 8
Fig 6 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Kc = 01
Kc = 02
Kc = 1
Set Point
Fig 7 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout = 0 Kc = 01
Qout gt 0 Kc = 01
Set Point
I controlli automatici ndash IIa parte 9
Fig 8 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
live
llo
h
Qout gt 0 Kc = 01
Qout gt 0 Kc = 02
Qout gt 0 Kc = 1
Set Point
4 - Controllore proporzionale-derivativo PD
In presenza di un controllo PD proporzionale derivativo lrsquoequazione di bilancio (relativa a una portata uscente Qout diversa da zero e costante) diventa
( )( )
dt
dhAQ
dt
hhdKhhK
outDccsdot=minus
minussdotsdot+minussdot
0
0τ
Ossia
( )( ) ( )
( ) ( )( )
( )( ) ( )[ ]
dt
QhhKd
K
AKQhhK
dt
hhdAKQhhK
dt
hhdAQ
dt
hhdKhhK
outc
c
Dc
outc
Dcoutc
outDcc
minusminussdotsdot
+sdotminus=minusminussdot
minussdot+sdotminus=minusminussdot
minussdotminus=minus
minussdotsdot+minussdot
0
0
0
0
00
0
τ
τ
τ
Separando le variabili ed integrando
( )( )[ ]( )
( )( ) ( )
( ) ( )
outc
outct
AK
K
outc
outcQhhK
QhKDc
c
outc
outc
Dc
c
QhK
QhhKe
QhK
QhhKxt
AK
K
QhhK
QhhKddt
AK
K
Dc
c
outc
outc
minussdot
minusminussdot
=
minussdot
minusminussdot==sdot
+sdot
minus
minusminussdot
minusminussdot
=sdot
+sdot
minus
sdot
+sdot
minus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
τ
τ
τ
( )
minussdot
minus=
sdot
+sdot
minus tAK
K
c
out Dc
c
eK
Qhh
τ
10
(10)
Egrave evidente che ponendo nella (10) Qout = 0 si ottiene la risposta del sistema allrsquoazione del controllo PD per una portata uscente nulla
I controlli automatici ndash IIa parte 10
Le figure 9 10 ed 11 rappresentano il grafico della eq (10) per diversi valori delle costanti Kc e τD Come si puograve notare la presenza dellrsquoazione derivativa peggiora la risposta (h tenderagrave piugrave lentamente verso il valore di regime) e non serve ad eliminare lrsquooffset Il vantaggio dellrsquoimpiego di questo tipo di controllo sta perograve nel fatto che egrave possibile utilizzare valori elevati di Kc (riducendo lrsquooffset a regime) senza per questo avere risposte troppo brusche (vedi fig 11)
Fig 9 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
τD = 0
τD = 5
τD = 10
Set Point
Fig 10 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout gt 0 τD = 0
Qout gt 0 τD = 10
Set Point
I controlli automatici ndash IIa parte 11
Fig 11 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Qout gt 0 Kc = 01 τD = 10
Qout gt 0 Kc = 02 τD = 10
Qout gt 0 Kc = 1 τD = 10
Set Point
5 - Controllore proporzionale-integrale PI
Nel caso di controllore PI proporzionale integrale il bilancio di materia diventa
( ) ( )( )dt
hhdAQdthh
KhhK
out
t
I
c
c
minus
sdotminus=minussdotminussdot+minussdot int 0
0
00
τ
Nellrsquoespressione su scritta ponendo
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
dt
ydAQy
K
dt
dyK
out
I
c
csdotminus=minussdot+sdot
τ
Ovvero
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
Che egrave unrsquoequazione differenziale lineare del secondo ordine (non omogenea) a coefficienti costanti Lrsquoequazione caratteristica della omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Chiamando z1 e z2 le radici di tale equazione caratteristica la soluzione3 della (11) saragrave
Ideg caso rArrgtsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotgt 4τ
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
3 Vedasi a tale proposito lrsquoAppendice ndeg 2
I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 5
Se la portata in uscita Qout non egrave nulla (ma comunque inferiore a quella in ingresso) lrsquointegrazione della (3) fornisce2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Il tempo di riempimento del serbatoio si ottiene ponendo nella (5) 0hh =
+
sdotminussdotsdot
sdotminus=
0
01ln
2h
Q
hK
K
Q
K
At
in
in
oriempiment
La (3) egrave una equazione differenziale non lineare e come giagrave detto per semplificarne la soluzione si puograve considerare costante la portata uscente Qout ponendo il suo valore uguale alla portata media
0
3
2hKQhKQ
outoutsdotsdot=congsdot=
ottenendo cosigrave come risultato finale dellrsquointegrazione
A
QQth outin
minus
sdotcong (6)
Diagrammando le (4) (5) e (6) otteniamo le figure 3 e 4 Dai due grafici si deduce che come egrave logico nel caso di portata uscente non nulla il tempo di riempimento del serbatoio si allunga e che sempre nel caso in cui Qout sia diverso da zero la linearizzazione della funzione h(t) (equazione (6)) comporta un errore trascurabile rispetto alla soluzione esatta data dalla (5) solo per bassi valori del rapporto Qout Qin
Fig 3 - Controllore On-Off QoutQin = 070
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
livello
h
Eq (4)
Eq (5)
Eq (6)
Set-Point
Le figure 3 e 4 tuttavia non sono rappresentative di ciograve che effettivamente succede sotto lrsquoazione di un controllore di questo tipo in presenza di una portata uscente Qout ne 0 Infatti una volta che il livello dellrsquoacqua abbia raggiunto il valore di set-point il controllore chiude la valvola di alimentazione In presenza di una predita il serbatoio inizieragrave a svuotarsi con una velocitagrave deducibile dallrsquoequazione di bilancio fornita da 2 Si veda a tale proposito la dimostrazione nellrsquoAppendice ndeg 1
I controlli automatici ndash IIa parte 6
h
dhdt
A
K
dt
dhAhK
dt
dhAQ
out=sdotminusrArrsdot=sdotminusrArrsdot=minus
Relazione che inegrata tra lrsquoistante t1 e lrsquoistante t fornisce
( )2
11
211
minussdot
sdotminus=rArr=sdotminus intint tt
A
Khh
h
dhdt
A
Kh
h
t
t
(7)
Quando il livello saragrave sceso al di sotto del punto di intervento il controllore riapre la valvola di alimentazione ed il livello risale nuovamente con una legge data dallrsquoeq (5b) dellrsquoAppendice 1 Lrsquointera sequenza di svuotamentiriempimenti egrave raffigurata nella fig 5
Fig 4 - Controllore On-Off QoutQin = 030
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
livello
h
Eq (4)
Eq (5)
Eq (6)
Set-Point
Fig 5 - Effetto dellazione di un controllore On-Off per Qout ne 0
0
10
20
30
40
50
60
0 20 40 60 80 100 120
tempo t
liv
ello
h Serie1
Set Point
Punto Intervento
I controlli automatici ndash IIa parte 7
3 - Controllore proporzionale P
Se la portata in ingresso egrave proporzionale allrsquoerrore ε ( )hhKKQ
ccinminussdot=sdot=
0ε
Definito come la differenza tra il livello h0 dellrsquoacqua allrsquoinizio (prima del disturbo) e quello h allrsquoistante t lrsquoequazione (2) diventa
( )( )dt
hhdA
dt
dhAhhK
c
minus
sdotminus=sdot=minussdot0
0
Separando le variabili ed integrando tra il tempo 0 e lrsquoistante t
( )( )
( )
( )
0
0
0
0
00
0
lnln0
0
0
0
h
hhe
h
hhxt
A
K
x
dxdt
A
K
hh
hhddt
A
K
tA
K
hh
h
c
hh
h
t
cc
c minus=
minus==sdotminus
=sdotminusrArrminus
minus=sdotminus
sdotminus
minus
minus
intint
minussdot=
sdotminus tA
Kc
ehh 10
(8)
Se la portata in uscita non fosse nulla (lo sciacquone ha un difetto di chiusura) avremmo invece
( )dt
dhAQhhK
outcsdot=minusminussdot
0
Ovvero
( )( )[ ]
dt
QhhKd
K
AQhhK outc
c
outc
minusminussdot
sdotminus=minusminussdot0
0
Separando le variabili ed integrando ( )[ ]( )
( ) ( )
( )
outc
outct
A
K
outc
outcQhhK
QhK
c
outc
outcc
QhK
QhhKe
QhK
QhhKxt
A
K
QhhK
QhhKddt
A
K
c
outc
outc
minussdot
minusminussdot=
minussdot
minusminussdot==sdotminus
minusminussdot
minusminussdot=sdotminus
sdotminus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
minussdot
minus=
sdotminus tA
K
c
out
c
eK
Qhh 10
(9)
Le seguenti figure 6 7 e 8 rappresentano il diagramma delle eq (8) e (9) su scritte per diversi valori della costante Kc (guadagno o sensibilitagrave) del controllore Il calcolo porta a concludere che in presenza di un disturbo permanente il controllo proporzionale non consente al livello h di tornare al valore di set-point h0 Il livello tenderagrave ad un nuovo valore di regime che saragrave tanto piugrave vicino ad h0 quanto piugrave elevato saragrave il valore di Kc I grafici permettono anche di notare come allrsquoaumentare del guadagno lrsquoazione del controllore proporzionale sia sempre piugrave rapida e piugrave simile a quella di un controllore On-Off
I controlli automatici ndash IIa parte 8
Fig 6 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Kc = 01
Kc = 02
Kc = 1
Set Point
Fig 7 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout = 0 Kc = 01
Qout gt 0 Kc = 01
Set Point
I controlli automatici ndash IIa parte 9
Fig 8 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
live
llo
h
Qout gt 0 Kc = 01
Qout gt 0 Kc = 02
Qout gt 0 Kc = 1
Set Point
4 - Controllore proporzionale-derivativo PD
In presenza di un controllo PD proporzionale derivativo lrsquoequazione di bilancio (relativa a una portata uscente Qout diversa da zero e costante) diventa
( )( )
dt
dhAQ
dt
hhdKhhK
outDccsdot=minus
minussdotsdot+minussdot
0
0τ
Ossia
( )( ) ( )
( ) ( )( )
( )( ) ( )[ ]
dt
QhhKd
K
AKQhhK
dt
hhdAKQhhK
dt
hhdAQ
dt
hhdKhhK
outc
c
Dc
outc
Dcoutc
outDcc
minusminussdotsdot
+sdotminus=minusminussdot
minussdot+sdotminus=minusminussdot
minussdotminus=minus
minussdotsdot+minussdot
0
0
0
0
00
0
τ
τ
τ
Separando le variabili ed integrando
( )( )[ ]( )
( )( ) ( )
( ) ( )
outc
outct
AK
K
outc
outcQhhK
QhKDc
c
outc
outc
Dc
c
QhK
QhhKe
QhK
QhhKxt
AK
K
QhhK
QhhKddt
AK
K
Dc
c
outc
outc
minussdot
minusminussdot
=
minussdot
minusminussdot==sdot
+sdot
minus
minusminussdot
minusminussdot
=sdot
+sdot
minus
sdot
+sdot
minus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
τ
τ
τ
( )
minussdot
minus=
sdot
+sdot
minus tAK
K
c
out Dc
c
eK
Qhh
τ
10
(10)
Egrave evidente che ponendo nella (10) Qout = 0 si ottiene la risposta del sistema allrsquoazione del controllo PD per una portata uscente nulla
I controlli automatici ndash IIa parte 10
Le figure 9 10 ed 11 rappresentano il grafico della eq (10) per diversi valori delle costanti Kc e τD Come si puograve notare la presenza dellrsquoazione derivativa peggiora la risposta (h tenderagrave piugrave lentamente verso il valore di regime) e non serve ad eliminare lrsquooffset Il vantaggio dellrsquoimpiego di questo tipo di controllo sta perograve nel fatto che egrave possibile utilizzare valori elevati di Kc (riducendo lrsquooffset a regime) senza per questo avere risposte troppo brusche (vedi fig 11)
Fig 9 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
τD = 0
τD = 5
τD = 10
Set Point
Fig 10 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout gt 0 τD = 0
Qout gt 0 τD = 10
Set Point
I controlli automatici ndash IIa parte 11
Fig 11 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Qout gt 0 Kc = 01 τD = 10
Qout gt 0 Kc = 02 τD = 10
Qout gt 0 Kc = 1 τD = 10
Set Point
5 - Controllore proporzionale-integrale PI
Nel caso di controllore PI proporzionale integrale il bilancio di materia diventa
( ) ( )( )dt
hhdAQdthh
KhhK
out
t
I
c
c
minus
sdotminus=minussdotminussdot+minussdot int 0
0
00
τ
Nellrsquoespressione su scritta ponendo
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
dt
ydAQy
K
dt
dyK
out
I
c
csdotminus=minussdot+sdot
τ
Ovvero
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
Che egrave unrsquoequazione differenziale lineare del secondo ordine (non omogenea) a coefficienti costanti Lrsquoequazione caratteristica della omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Chiamando z1 e z2 le radici di tale equazione caratteristica la soluzione3 della (11) saragrave
Ideg caso rArrgtsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotgt 4τ
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
3 Vedasi a tale proposito lrsquoAppendice ndeg 2
I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 6
h
dhdt
A
K
dt
dhAhK
dt
dhAQ
out=sdotminusrArrsdot=sdotminusrArrsdot=minus
Relazione che inegrata tra lrsquoistante t1 e lrsquoistante t fornisce
( )2
11
211
minussdot
sdotminus=rArr=sdotminus intint tt
A
Khh
h
dhdt
A
Kh
h
t
t
(7)
Quando il livello saragrave sceso al di sotto del punto di intervento il controllore riapre la valvola di alimentazione ed il livello risale nuovamente con una legge data dallrsquoeq (5b) dellrsquoAppendice 1 Lrsquointera sequenza di svuotamentiriempimenti egrave raffigurata nella fig 5
Fig 4 - Controllore On-Off QoutQin = 030
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
livello
h
Eq (4)
Eq (5)
Eq (6)
Set-Point
Fig 5 - Effetto dellazione di un controllore On-Off per Qout ne 0
0
10
20
30
40
50
60
0 20 40 60 80 100 120
tempo t
liv
ello
h Serie1
Set Point
Punto Intervento
I controlli automatici ndash IIa parte 7
3 - Controllore proporzionale P
Se la portata in ingresso egrave proporzionale allrsquoerrore ε ( )hhKKQ
ccinminussdot=sdot=
0ε
Definito come la differenza tra il livello h0 dellrsquoacqua allrsquoinizio (prima del disturbo) e quello h allrsquoistante t lrsquoequazione (2) diventa
( )( )dt
hhdA
dt
dhAhhK
c
minus
sdotminus=sdot=minussdot0
0
Separando le variabili ed integrando tra il tempo 0 e lrsquoistante t
( )( )
( )
( )
0
0
0
0
00
0
lnln0
0
0
0
h
hhe
h
hhxt
A
K
x
dxdt
A
K
hh
hhddt
A
K
tA
K
hh
h
c
hh
h
t
cc
c minus=
minus==sdotminus
=sdotminusrArrminus
minus=sdotminus
sdotminus
minus
minus
intint
minussdot=
sdotminus tA
Kc
ehh 10
(8)
Se la portata in uscita non fosse nulla (lo sciacquone ha un difetto di chiusura) avremmo invece
( )dt
dhAQhhK
outcsdot=minusminussdot
0
Ovvero
( )( )[ ]
dt
QhhKd
K
AQhhK outc
c
outc
minusminussdot
sdotminus=minusminussdot0
0
Separando le variabili ed integrando ( )[ ]( )
( ) ( )
( )
outc
outct
A
K
outc
outcQhhK
QhK
c
outc
outcc
QhK
QhhKe
QhK
QhhKxt
A
K
QhhK
QhhKddt
A
K
c
outc
outc
minussdot
minusminussdot=
minussdot
minusminussdot==sdotminus
minusminussdot
minusminussdot=sdotminus
sdotminus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
minussdot
minus=
sdotminus tA
K
c
out
c
eK
Qhh 10
(9)
Le seguenti figure 6 7 e 8 rappresentano il diagramma delle eq (8) e (9) su scritte per diversi valori della costante Kc (guadagno o sensibilitagrave) del controllore Il calcolo porta a concludere che in presenza di un disturbo permanente il controllo proporzionale non consente al livello h di tornare al valore di set-point h0 Il livello tenderagrave ad un nuovo valore di regime che saragrave tanto piugrave vicino ad h0 quanto piugrave elevato saragrave il valore di Kc I grafici permettono anche di notare come allrsquoaumentare del guadagno lrsquoazione del controllore proporzionale sia sempre piugrave rapida e piugrave simile a quella di un controllore On-Off
I controlli automatici ndash IIa parte 8
Fig 6 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Kc = 01
Kc = 02
Kc = 1
Set Point
Fig 7 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout = 0 Kc = 01
Qout gt 0 Kc = 01
Set Point
I controlli automatici ndash IIa parte 9
Fig 8 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
live
llo
h
Qout gt 0 Kc = 01
Qout gt 0 Kc = 02
Qout gt 0 Kc = 1
Set Point
4 - Controllore proporzionale-derivativo PD
In presenza di un controllo PD proporzionale derivativo lrsquoequazione di bilancio (relativa a una portata uscente Qout diversa da zero e costante) diventa
( )( )
dt
dhAQ
dt
hhdKhhK
outDccsdot=minus
minussdotsdot+minussdot
0
0τ
Ossia
( )( ) ( )
( ) ( )( )
( )( ) ( )[ ]
dt
QhhKd
K
AKQhhK
dt
hhdAKQhhK
dt
hhdAQ
dt
hhdKhhK
outc
c
Dc
outc
Dcoutc
outDcc
minusminussdotsdot
+sdotminus=minusminussdot
minussdot+sdotminus=minusminussdot
minussdotminus=minus
minussdotsdot+minussdot
0
0
0
0
00
0
τ
τ
τ
Separando le variabili ed integrando
( )( )[ ]( )
( )( ) ( )
( ) ( )
outc
outct
AK
K
outc
outcQhhK
QhKDc
c
outc
outc
Dc
c
QhK
QhhKe
QhK
QhhKxt
AK
K
QhhK
QhhKddt
AK
K
Dc
c
outc
outc
minussdot
minusminussdot
=
minussdot
minusminussdot==sdot
+sdot
minus
minusminussdot
minusminussdot
=sdot
+sdot
minus
sdot
+sdot
minus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
τ
τ
τ
( )
minussdot
minus=
sdot
+sdot
minus tAK
K
c
out Dc
c
eK
Qhh
τ
10
(10)
Egrave evidente che ponendo nella (10) Qout = 0 si ottiene la risposta del sistema allrsquoazione del controllo PD per una portata uscente nulla
I controlli automatici ndash IIa parte 10
Le figure 9 10 ed 11 rappresentano il grafico della eq (10) per diversi valori delle costanti Kc e τD Come si puograve notare la presenza dellrsquoazione derivativa peggiora la risposta (h tenderagrave piugrave lentamente verso il valore di regime) e non serve ad eliminare lrsquooffset Il vantaggio dellrsquoimpiego di questo tipo di controllo sta perograve nel fatto che egrave possibile utilizzare valori elevati di Kc (riducendo lrsquooffset a regime) senza per questo avere risposte troppo brusche (vedi fig 11)
Fig 9 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
τD = 0
τD = 5
τD = 10
Set Point
Fig 10 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout gt 0 τD = 0
Qout gt 0 τD = 10
Set Point
I controlli automatici ndash IIa parte 11
Fig 11 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Qout gt 0 Kc = 01 τD = 10
Qout gt 0 Kc = 02 τD = 10
Qout gt 0 Kc = 1 τD = 10
Set Point
5 - Controllore proporzionale-integrale PI
Nel caso di controllore PI proporzionale integrale il bilancio di materia diventa
( ) ( )( )dt
hhdAQdthh
KhhK
out
t
I
c
c
minus
sdotminus=minussdotminussdot+minussdot int 0
0
00
τ
Nellrsquoespressione su scritta ponendo
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
dt
ydAQy
K
dt
dyK
out
I
c
csdotminus=minussdot+sdot
τ
Ovvero
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
Che egrave unrsquoequazione differenziale lineare del secondo ordine (non omogenea) a coefficienti costanti Lrsquoequazione caratteristica della omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Chiamando z1 e z2 le radici di tale equazione caratteristica la soluzione3 della (11) saragrave
Ideg caso rArrgtsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotgt 4τ
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
3 Vedasi a tale proposito lrsquoAppendice ndeg 2
I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 7
3 - Controllore proporzionale P
Se la portata in ingresso egrave proporzionale allrsquoerrore ε ( )hhKKQ
ccinminussdot=sdot=
0ε
Definito come la differenza tra il livello h0 dellrsquoacqua allrsquoinizio (prima del disturbo) e quello h allrsquoistante t lrsquoequazione (2) diventa
( )( )dt
hhdA
dt
dhAhhK
c
minus
sdotminus=sdot=minussdot0
0
Separando le variabili ed integrando tra il tempo 0 e lrsquoistante t
( )( )
( )
( )
0
0
0
0
00
0
lnln0
0
0
0
h
hhe
h
hhxt
A
K
x
dxdt
A
K
hh
hhddt
A
K
tA
K
hh
h
c
hh
h
t
cc
c minus=
minus==sdotminus
=sdotminusrArrminus
minus=sdotminus
sdotminus
minus
minus
intint
minussdot=
sdotminus tA
Kc
ehh 10
(8)
Se la portata in uscita non fosse nulla (lo sciacquone ha un difetto di chiusura) avremmo invece
( )dt
dhAQhhK
outcsdot=minusminussdot
0
Ovvero
( )( )[ ]
dt
QhhKd
K
AQhhK outc
c
outc
minusminussdot
sdotminus=minusminussdot0
0
Separando le variabili ed integrando ( )[ ]( )
( ) ( )
( )
outc
outct
A
K
outc
outcQhhK
QhK
c
outc
outcc
QhK
QhhKe
QhK
QhhKxt
A
K
QhhK
QhhKddt
A
K
c
outc
outc
minussdot
minusminussdot=
minussdot
minusminussdot==sdotminus
minusminussdot
minusminussdot=sdotminus
sdotminus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
minussdot
minus=
sdotminus tA
K
c
out
c
eK
Qhh 10
(9)
Le seguenti figure 6 7 e 8 rappresentano il diagramma delle eq (8) e (9) su scritte per diversi valori della costante Kc (guadagno o sensibilitagrave) del controllore Il calcolo porta a concludere che in presenza di un disturbo permanente il controllo proporzionale non consente al livello h di tornare al valore di set-point h0 Il livello tenderagrave ad un nuovo valore di regime che saragrave tanto piugrave vicino ad h0 quanto piugrave elevato saragrave il valore di Kc I grafici permettono anche di notare come allrsquoaumentare del guadagno lrsquoazione del controllore proporzionale sia sempre piugrave rapida e piugrave simile a quella di un controllore On-Off
I controlli automatici ndash IIa parte 8
Fig 6 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Kc = 01
Kc = 02
Kc = 1
Set Point
Fig 7 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout = 0 Kc = 01
Qout gt 0 Kc = 01
Set Point
I controlli automatici ndash IIa parte 9
Fig 8 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
live
llo
h
Qout gt 0 Kc = 01
Qout gt 0 Kc = 02
Qout gt 0 Kc = 1
Set Point
4 - Controllore proporzionale-derivativo PD
In presenza di un controllo PD proporzionale derivativo lrsquoequazione di bilancio (relativa a una portata uscente Qout diversa da zero e costante) diventa
( )( )
dt
dhAQ
dt
hhdKhhK
outDccsdot=minus
minussdotsdot+minussdot
0
0τ
Ossia
( )( ) ( )
( ) ( )( )
( )( ) ( )[ ]
dt
QhhKd
K
AKQhhK
dt
hhdAKQhhK
dt
hhdAQ
dt
hhdKhhK
outc
c
Dc
outc
Dcoutc
outDcc
minusminussdotsdot
+sdotminus=minusminussdot
minussdot+sdotminus=minusminussdot
minussdotminus=minus
minussdotsdot+minussdot
0
0
0
0
00
0
τ
τ
τ
Separando le variabili ed integrando
( )( )[ ]( )
( )( ) ( )
( ) ( )
outc
outct
AK
K
outc
outcQhhK
QhKDc
c
outc
outc
Dc
c
QhK
QhhKe
QhK
QhhKxt
AK
K
QhhK
QhhKddt
AK
K
Dc
c
outc
outc
minussdot
minusminussdot
=
minussdot
minusminussdot==sdot
+sdot
minus
minusminussdot
minusminussdot
=sdot
+sdot
minus
sdot
+sdot
minus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
τ
τ
τ
( )
minussdot
minus=
sdot
+sdot
minus tAK
K
c
out Dc
c
eK
Qhh
τ
10
(10)
Egrave evidente che ponendo nella (10) Qout = 0 si ottiene la risposta del sistema allrsquoazione del controllo PD per una portata uscente nulla
I controlli automatici ndash IIa parte 10
Le figure 9 10 ed 11 rappresentano il grafico della eq (10) per diversi valori delle costanti Kc e τD Come si puograve notare la presenza dellrsquoazione derivativa peggiora la risposta (h tenderagrave piugrave lentamente verso il valore di regime) e non serve ad eliminare lrsquooffset Il vantaggio dellrsquoimpiego di questo tipo di controllo sta perograve nel fatto che egrave possibile utilizzare valori elevati di Kc (riducendo lrsquooffset a regime) senza per questo avere risposte troppo brusche (vedi fig 11)
Fig 9 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
τD = 0
τD = 5
τD = 10
Set Point
Fig 10 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout gt 0 τD = 0
Qout gt 0 τD = 10
Set Point
I controlli automatici ndash IIa parte 11
Fig 11 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Qout gt 0 Kc = 01 τD = 10
Qout gt 0 Kc = 02 τD = 10
Qout gt 0 Kc = 1 τD = 10
Set Point
5 - Controllore proporzionale-integrale PI
Nel caso di controllore PI proporzionale integrale il bilancio di materia diventa
( ) ( )( )dt
hhdAQdthh
KhhK
out
t
I
c
c
minus
sdotminus=minussdotminussdot+minussdot int 0
0
00
τ
Nellrsquoespressione su scritta ponendo
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
dt
ydAQy
K
dt
dyK
out
I
c
csdotminus=minussdot+sdot
τ
Ovvero
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
Che egrave unrsquoequazione differenziale lineare del secondo ordine (non omogenea) a coefficienti costanti Lrsquoequazione caratteristica della omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Chiamando z1 e z2 le radici di tale equazione caratteristica la soluzione3 della (11) saragrave
Ideg caso rArrgtsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotgt 4τ
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
3 Vedasi a tale proposito lrsquoAppendice ndeg 2
I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 8
Fig 6 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Kc = 01
Kc = 02
Kc = 1
Set Point
Fig 7 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout = 0 Kc = 01
Qout gt 0 Kc = 01
Set Point
I controlli automatici ndash IIa parte 9
Fig 8 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
live
llo
h
Qout gt 0 Kc = 01
Qout gt 0 Kc = 02
Qout gt 0 Kc = 1
Set Point
4 - Controllore proporzionale-derivativo PD
In presenza di un controllo PD proporzionale derivativo lrsquoequazione di bilancio (relativa a una portata uscente Qout diversa da zero e costante) diventa
( )( )
dt
dhAQ
dt
hhdKhhK
outDccsdot=minus
minussdotsdot+minussdot
0
0τ
Ossia
( )( ) ( )
( ) ( )( )
( )( ) ( )[ ]
dt
QhhKd
K
AKQhhK
dt
hhdAKQhhK
dt
hhdAQ
dt
hhdKhhK
outc
c
Dc
outc
Dcoutc
outDcc
minusminussdotsdot
+sdotminus=minusminussdot
minussdot+sdotminus=minusminussdot
minussdotminus=minus
minussdotsdot+minussdot
0
0
0
0
00
0
τ
τ
τ
Separando le variabili ed integrando
( )( )[ ]( )
( )( ) ( )
( ) ( )
outc
outct
AK
K
outc
outcQhhK
QhKDc
c
outc
outc
Dc
c
QhK
QhhKe
QhK
QhhKxt
AK
K
QhhK
QhhKddt
AK
K
Dc
c
outc
outc
minussdot
minusminussdot
=
minussdot
minusminussdot==sdot
+sdot
minus
minusminussdot
minusminussdot
=sdot
+sdot
minus
sdot
+sdot
minus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
τ
τ
τ
( )
minussdot
minus=
sdot
+sdot
minus tAK
K
c
out Dc
c
eK
Qhh
τ
10
(10)
Egrave evidente che ponendo nella (10) Qout = 0 si ottiene la risposta del sistema allrsquoazione del controllo PD per una portata uscente nulla
I controlli automatici ndash IIa parte 10
Le figure 9 10 ed 11 rappresentano il grafico della eq (10) per diversi valori delle costanti Kc e τD Come si puograve notare la presenza dellrsquoazione derivativa peggiora la risposta (h tenderagrave piugrave lentamente verso il valore di regime) e non serve ad eliminare lrsquooffset Il vantaggio dellrsquoimpiego di questo tipo di controllo sta perograve nel fatto che egrave possibile utilizzare valori elevati di Kc (riducendo lrsquooffset a regime) senza per questo avere risposte troppo brusche (vedi fig 11)
Fig 9 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
τD = 0
τD = 5
τD = 10
Set Point
Fig 10 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout gt 0 τD = 0
Qout gt 0 τD = 10
Set Point
I controlli automatici ndash IIa parte 11
Fig 11 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Qout gt 0 Kc = 01 τD = 10
Qout gt 0 Kc = 02 τD = 10
Qout gt 0 Kc = 1 τD = 10
Set Point
5 - Controllore proporzionale-integrale PI
Nel caso di controllore PI proporzionale integrale il bilancio di materia diventa
( ) ( )( )dt
hhdAQdthh
KhhK
out
t
I
c
c
minus
sdotminus=minussdotminussdot+minussdot int 0
0
00
τ
Nellrsquoespressione su scritta ponendo
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
dt
ydAQy
K
dt
dyK
out
I
c
csdotminus=minussdot+sdot
τ
Ovvero
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
Che egrave unrsquoequazione differenziale lineare del secondo ordine (non omogenea) a coefficienti costanti Lrsquoequazione caratteristica della omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Chiamando z1 e z2 le radici di tale equazione caratteristica la soluzione3 della (11) saragrave
Ideg caso rArrgtsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotgt 4τ
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
3 Vedasi a tale proposito lrsquoAppendice ndeg 2
I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 9
Fig 8 - Controllore Proporzionale P
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
live
llo
h
Qout gt 0 Kc = 01
Qout gt 0 Kc = 02
Qout gt 0 Kc = 1
Set Point
4 - Controllore proporzionale-derivativo PD
In presenza di un controllo PD proporzionale derivativo lrsquoequazione di bilancio (relativa a una portata uscente Qout diversa da zero e costante) diventa
( )( )
dt
dhAQ
dt
hhdKhhK
outDccsdot=minus
minussdotsdot+minussdot
0
0τ
Ossia
( )( ) ( )
( ) ( )( )
( )( ) ( )[ ]
dt
QhhKd
K
AKQhhK
dt
hhdAKQhhK
dt
hhdAQ
dt
hhdKhhK
outc
c
Dc
outc
Dcoutc
outDcc
minusminussdotsdot
+sdotminus=minusminussdot
minussdot+sdotminus=minusminussdot
minussdotminus=minus
minussdotsdot+minussdot
0
0
0
0
00
0
τ
τ
τ
Separando le variabili ed integrando
( )( )[ ]( )
( )( ) ( )
( ) ( )
outc
outct
AK
K
outc
outcQhhK
QhKDc
c
outc
outc
Dc
c
QhK
QhhKe
QhK
QhhKxt
AK
K
QhhK
QhhKddt
AK
K
Dc
c
outc
outc
minussdot
minusminussdot
=
minussdot
minusminussdot==sdot
+sdot
minus
minusminussdot
minusminussdot
=sdot
+sdot
minus
sdot
+sdot
minus
minusminussdot
minussdot
0
0
0
0
0
0
lnln0
0
τ
τ
τ
( )
minussdot
minus=
sdot
+sdot
minus tAK
K
c
out Dc
c
eK
Qhh
τ
10
(10)
Egrave evidente che ponendo nella (10) Qout = 0 si ottiene la risposta del sistema allrsquoazione del controllo PD per una portata uscente nulla
I controlli automatici ndash IIa parte 10
Le figure 9 10 ed 11 rappresentano il grafico della eq (10) per diversi valori delle costanti Kc e τD Come si puograve notare la presenza dellrsquoazione derivativa peggiora la risposta (h tenderagrave piugrave lentamente verso il valore di regime) e non serve ad eliminare lrsquooffset Il vantaggio dellrsquoimpiego di questo tipo di controllo sta perograve nel fatto che egrave possibile utilizzare valori elevati di Kc (riducendo lrsquooffset a regime) senza per questo avere risposte troppo brusche (vedi fig 11)
Fig 9 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
τD = 0
τD = 5
τD = 10
Set Point
Fig 10 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout gt 0 τD = 0
Qout gt 0 τD = 10
Set Point
I controlli automatici ndash IIa parte 11
Fig 11 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Qout gt 0 Kc = 01 τD = 10
Qout gt 0 Kc = 02 τD = 10
Qout gt 0 Kc = 1 τD = 10
Set Point
5 - Controllore proporzionale-integrale PI
Nel caso di controllore PI proporzionale integrale il bilancio di materia diventa
( ) ( )( )dt
hhdAQdthh
KhhK
out
t
I
c
c
minus
sdotminus=minussdotminussdot+minussdot int 0
0
00
τ
Nellrsquoespressione su scritta ponendo
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
dt
ydAQy
K
dt
dyK
out
I
c
csdotminus=minussdot+sdot
τ
Ovvero
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
Che egrave unrsquoequazione differenziale lineare del secondo ordine (non omogenea) a coefficienti costanti Lrsquoequazione caratteristica della omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Chiamando z1 e z2 le radici di tale equazione caratteristica la soluzione3 della (11) saragrave
Ideg caso rArrgtsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotgt 4τ
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
3 Vedasi a tale proposito lrsquoAppendice ndeg 2
I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 10
Le figure 9 10 ed 11 rappresentano il grafico della eq (10) per diversi valori delle costanti Kc e τD Come si puograve notare la presenza dellrsquoazione derivativa peggiora la risposta (h tenderagrave piugrave lentamente verso il valore di regime) e non serve ad eliminare lrsquooffset Il vantaggio dellrsquoimpiego di questo tipo di controllo sta perograve nel fatto che egrave possibile utilizzare valori elevati di Kc (riducendo lrsquooffset a regime) senza per questo avere risposte troppo brusche (vedi fig 11)
Fig 9 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
τD = 0
τD = 5
τD = 10
Set Point
Fig 10 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h Qout gt 0 τD = 0
Qout gt 0 τD = 10
Set Point
I controlli automatici ndash IIa parte 11
Fig 11 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Qout gt 0 Kc = 01 τD = 10
Qout gt 0 Kc = 02 τD = 10
Qout gt 0 Kc = 1 τD = 10
Set Point
5 - Controllore proporzionale-integrale PI
Nel caso di controllore PI proporzionale integrale il bilancio di materia diventa
( ) ( )( )dt
hhdAQdthh
KhhK
out
t
I
c
c
minus
sdotminus=minussdotminussdot+minussdot int 0
0
00
τ
Nellrsquoespressione su scritta ponendo
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
dt
ydAQy
K
dt
dyK
out
I
c
csdotminus=minussdot+sdot
τ
Ovvero
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
Che egrave unrsquoequazione differenziale lineare del secondo ordine (non omogenea) a coefficienti costanti Lrsquoequazione caratteristica della omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Chiamando z1 e z2 le radici di tale equazione caratteristica la soluzione3 della (11) saragrave
Ideg caso rArrgtsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotgt 4τ
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
3 Vedasi a tale proposito lrsquoAppendice ndeg 2
I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 11
Fig 11 - Controllore PD
0
10
20
30
40
50
60
0 10 20 30 40 50 60
tempo t
liv
ello
h
Qout gt 0 Kc = 01 τD = 10
Qout gt 0 Kc = 02 τD = 10
Qout gt 0 Kc = 1 τD = 10
Set Point
5 - Controllore proporzionale-integrale PI
Nel caso di controllore PI proporzionale integrale il bilancio di materia diventa
( ) ( )( )dt
hhdAQdthh
KhhK
out
t
I
c
c
minus
sdotminus=minussdotminussdot+minussdot int 0
0
00
τ
Nellrsquoespressione su scritta ponendo
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
dt
ydAQy
K
dt
dyK
out
I
c
csdotminus=minussdot+sdot
τ
Ovvero
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
Che egrave unrsquoequazione differenziale lineare del secondo ordine (non omogenea) a coefficienti costanti Lrsquoequazione caratteristica della omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Chiamando z1 e z2 le radici di tale equazione caratteristica la soluzione3 della (11) saragrave
Ideg caso rArrgtsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotgt 4τ
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
3 Vedasi a tale proposito lrsquoAppendice ndeg 2
I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 12
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
12
0
12
1
2
12
0
12
1
11
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
ττ
IIdeg caso rArr=sdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdot= 4τ
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
A
Kzz
c
sdot
minus==
221
c
Iout
c
Iout
K
Qzhc
K
Qc
ττ sdotsdot+=
sdotminus=
1021
IIIdeg caso rArrltsdot
sdotminus
=∆ 04
2
I
cc
A
K
A
K
τc
I
K
Asdotlt 4τ
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
sdotsdotminus
minussdot=
sdotminus=sdotplusmn=
I
ccc
A
K
A
K
A
K iz
τβαβα 4
2
1
2
2
21
β
τα
τc
Iout
c
IoutK
Qh
c K
Qc
sdotsdot+
=sdot
minus=
0
21
Dal grafico della risposta di un controllore di questo tipo si deduce che 1 lrsquoazione integrale elimina lrsquooffset in altri termini pur in presenza di un disturbo
permanente il livello ritorna sempre al valore di set-point 2 la risposta del sistema tende perograve a diventare di tipo oscillatorio anche se tale tendenza egrave
meno pronunciata quando Qout ne 0 con un pendolarismo strettamente legato al valore delle costanti Kc e τI In ogni caso al diminuire dellrsquoampiezza dellrsquooscillazione aumenta il tempo affincheacute la variabile controllata si stabilizzi sul valore di regime
3 in questo tipo di controllo esiste un problema di scelta del valore ottimale da assegnare alle costanti suddette per rendere la risposta del sistema la migliore possibile
I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 13
Fig 12 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτIA gt 4
Qout = 0 KcτIA = 4
Qout = 0 KcτIA lt 4
Set Point
Fig 13 - Controllore PI
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout gt 0 KcτIA gt 4
Qout gt 0 KcτIA = 4
Qout gt 0 KcτIA lt 4
Set Point
6 - Controllore proporzionale-integrale-derivativo PID
Per un controllore proporzionale integrale derivativo PID il bilancio sul serbatoio si scrive
( ) ( )( ) ( )
dt
hhdAQ
dt
hhdKdthh
KhhK
outDc
t
I
c
c
minus
sdotminus=minus
minus
sdotsdot+sdotminussdot+minussdot int 00
0
00τ
τ
E con la solita posizione
I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 14
( ) ( )int sdotminus=
t
dthhty0
0
Avremo
2
2
2
2
dt
ydAQ
dt
ydKy
K
dt
dyK
outDc
I
c
csdotminus=minussdotsdot+sdot+sdot τ
τ
Ovvero
( ) AK
Qy
AK
K
dt
dy
AK
K
dt
yd
Dc
out
DcI
c
Dc
c
+sdot
=sdot
+sdotsdot
+sdot
+sdot
+
ττττ2
2
(15)
Sono possibili tre casi (la dimostrazione viene tralasciata percheacute del tutto identica al caso del controllore PI con le uniche differenze legate alle espressioni del discriminante della equazione caratteristica e del termine noto dellrsquoequazione completa)
Ideg caso ( )
rArrgt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotgt
c
DI
K
Aττ 4
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110 (12)
Dove
( )
2
4
2
21
AK
K
AK
K
AK
K
zDcI
c
Dc
c
Dc
c
+sdotsdotsdotminus
+sdotplusmn
+sdotminus
=ττττ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
IIdeg caso ( )
rArr=+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdot=
c
DI
K
Aττ 4
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot (13)
Dove
( )AK
Kzz
Dc
c
+sdotsdot
minus==
τ221
sdotsdot+=
sdotminus=
c
Iout
c
Iout
K
Qzhc
K
Qc
τ
τ
102
1
IIIdeg caso ( )
rArrlt+sdotsdot
sdotminus
+sdot=∆ 04
2
AK
K
AK
K
DcI
c
Dc
c
τττ
+sdotlt
c
DI
K
Aττ 4
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210
(14)
Dove
( ) ( )
+sdotsdotsdotminus
+sdotminussdot=
+sdotsdotminus=
sdotplusmn=
AK
K
AK
K
AK
K
iz
DcI
c
Dc
c
Dc
c
τττβ
τα
βα
42
1
2
2
21
I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 15
sdotsdot+
=
sdotminus=
β
τα
τ
c
Iout
c
Iout
K
Qh
c
K
Qc
0
2
1
La risposta del sistema sottoposto ad unrsquoazione di controllo di questo tipo egrave diagrammata in fig 14 per Qout = 0
Fig 14 - Controllore PID
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h
Qout = 0 KcτI(KcτD+A) gt 4
Qout = 0 KcτI(KcτD+A) = 4
Qout = 0 KcτI(KcτD+A) lt 4
Set Point
Se ora disegniamo la risposta del controllore PID e la confrontiamo con quella di un controllore PI per un disturbo permanente otterremo un grafico del tipo illustrato nella fig 15
Fig 15 - Controllore PID vs PI
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PID - KcτI(KcτD+A) lt 4
PI - KcτIA lt 4
Set Point
I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 16
Come si puograve notare la presenza dellrsquoazione derivativa comporta un peggioramento della risposta del sistema che diventa piugrave oscillatoria ossia con periodo e ampiezza dellrsquooscillazione maggiori Anche in questo caso inoltre come in quello giagrave discusso del controllore PI esiste un problema legato alla scelta ottimale dei valori dei parametri Kc τI e τD 7 ndash Conclusioni
Riassumendo dallrsquoanalisi delle risposte fornite dal sistema sotto lrsquoazione dei diversi controllori egrave possibile trarre le seguenti considerazioni
1 il controllore On-Off sarebbe in teoria il migliore tipo di controllo del nostro sciacquone per il suo basso costo e la sua maggiore efficienza in termini di tempo di riempimento Il suo limite principale egrave legato al fatto che la risposta al disturbo puograve essere molto brusca (a meno di non prendere opportune precauzioni) poicheacute la valvola di alimentazione si apre subito al massimo e rimane in questo stato fino al cessare dellrsquoazione del controllore Inoltre nel caso di perdite dovute a una non perfetta chiusura della valvola di scarico il livello dellrsquoacqua nel serbatoio oscilleragrave continuamente tra il valore impostato di set-point e il valore minimo al di sotto del quale il controllore si attiva
2 il controllore proporzionale (P) puograve essere reso simile al controllore On-Off aumentando il valore del guadagno Kc ma egrave anche possibile modulando opportunamente il valore di questa grandezza rendere piugrave ldquodolcerdquo la risposta del sistema ossia meno intensa la portata di adduzione dellrsquoacqua Tale portata andragrave comunque decrescendo nel tempo allungando i tempi di risposta rispetto al caso del sistema On-Off In effetti il controllore proporzionale egrave quello universalmente piugrave adoperato per questo tipo di processo anche se il suo limite principale risiede nellrsquoimpossibilitagrave di riportare il livello sul valore di set-point nel caso di disturbi protratti nel tempo (presenza di offset)
3 lrsquoaggiunta dellrsquoazione derivativa a quella proporzionale (PD) egrave inutile o addirittura dannosa in un processo discontinuo quale egrave il riempimento del nostro sciacquone In questo processo infatti il disturbo o ha una durata molto limitata (periodo nel quale il sistema di controllo in ogni caso non puograve agire date le caratteristiche costruttive dello sciacquone) o egrave costante nel tempo per cui lrsquoerrore ε egrave comunque una funzione monotona decrescente nel tempo Per tale motivo lrsquoaggiunta di questo tipo di controllo si traduce in un rallentamento della velocitagrave di riempimento e si puograve giustificare soltanto se contestualmente si incrementa il valore del guadagno proporzionale Kc in modo da avere una risposta rapida ma non troppo brusca e con basso offset
4 lrsquoazione integrale unita a quella proporzionale (PI) ha il grande vantaggio di eliminare lrsquooffset in presenza di disturbi costanti a spese perograve del comportamento oscillatorio assunto dal sistema Lrsquoopportuno settaggio dei parametri di controllo (Kc e τI) puograve comunque consentire di ottenere una risposta adeguata alle necessitagrave
5 non esiste alcun motivo realmente valido per utilizzare un controllo di tipo PID per il processo discontinuo in questione Oltre al maggior costo di questo tipo di apparecchiatura crsquoegrave da dire che lrsquoazione derivativa unita a quella integrale peggiora in modo molto marcato la risposta del sistema rallentandola e facendo aumentare lrsquoovershoot (mentre in un sistema continuo si otterrebbe lrsquoeffetto esattamente opposto) Lrsquounico vantaggio dellrsquoutilizzo contemporaneo dei tre meccanismi di controllo (proporzionale integrale e derivativo) si ha nella possibilitagrave di regolare tre parametri (Kc τI τD) al posto di uno solo (Kc) o due (Kc e τI oppure Kc e τD) per ottimizzare la risposta In effetti incrementando la costante Kc insieme al tempo derivativo τD egrave possibile rendere la risposta del sistema veloce (ma non troppo rapida come si avrebbe in un controllo di tipo puramente PI) e nello stesso tempo ridurne considerevolmente il comportamento oscillatorio (vedi fig 16 seguente)
I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 17
Fig 16 - PI vs PID (KcPIDKcPI = 10)
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16 18 20
tempo t
liv
ello
h PI
PID
Set Point
I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 18
Appendice 1 Integrazione dellrsquoequazione di bilancio per un controllore On ndash Off
Data lrsquoequazione
dt
dhAhKQ
insdot=sdotminus (3)
Eseguendo la sostituzione
dhdyyhyhy =sdotsdotrArr=rArr= 22
avremo
A
K
yA
Q
dt
dy
dt
dyyAyKQ
in
in
sdot
minus
sdotsdot
=
sdotsdotsdot=sdotminus
22
2
Ovvero ponendo
A
K
A
Qin
sdot
=
sdot
=
22βα
βαminus=
ydt
dy
E introducendo la nuova variabile
zdt
dz
z
dt
dz
zdt
dzy
dt
dy
dt
dy
ydt
dz
zy
yz
=sdot
+sdotminus
sdot
+sdotminus=sdotminus=rArrsdotminus=
+=rArrminus=
2
22
2
1
1
β
α
α
β
α
αα
α
β
αβ
α
Abbiamo trasformato lrsquoequazione originaria in una a variabili separabili
( ) αβ
dtdz
zzminus=sdot
+sdot2
1
La frazione a primo membro puograve essere scomposta col metodo dei coefficienti indeterminati ottenendo
( ) ( ) ( )( ) ( )
=
minus=+sdotminus
=
minus=
rArr
=
sdotminussdotsdotminus=
minus=
rArr
=sdot
=+sdot+sdotsdot
=+
=sdot+sdotsdot+sdot+sdot+sdotsdotsdot+sdot
=sdot++sdotsdot++sdotrArr+
++
+=+sdot
2
22
2
2
2
222
2
22
1
12
1
1
2
1
02
0
12
11
β
ββ
β
β
β
β
β
ββ
β
ββ
βββ
βββββ
A
C
B
A
BAC
AB
A
CBA
BA
zCzBzBAzAzA
zCzzBzAz
C
z
B
z
A
zz
Per cui lrsquointegrale fornisce
( ) ( ) ( ) intint int intint sdotminus=sdot
+
+sdot
+
+sdot=sdot
+sdot
dtdzz
Cdz
z
Bdz
z
Adz
zz αβββ
11
22
I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 19
( )( )
αβαα
β
β
ααα
β
αα
αβ
α
αα
αβ
α
αββ
tyy
Cy
t
CtyCy
A
CtyC
yyA
Ct
y
C
yB
yA
Ct
z
CzBzA
minus=sdot
+
sdotminussdot
=rArr
=
=
+minus=sdot
minus
sdotminussdot
+minus=sdot
minus
minus
minussdot
+minus=
minus
sdot+
minussdot
+minus=+
minus+sdot+sdot
1ln1
00
0
1ln
lnln
lnln
lnln
2
α
β
α
β
α
β2
1ln sdotminus=sdot
+
sdotminus t
yy
Ovvero
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotminus=
sdot+
sdotminus
21ln
2
(5)
Mentre se le condizioni iniziali fossero diverse avremmo
αβαα
β
β
111
2
1
11ln
1
tyyC
yy
tt+
sdot+
sdotminussdot=rArr
=
=
Ossia
+
sdot+
sdotminussdot+minus=
sdot+
sdotminussdot
αβαα
β
βαβαα
β
β
111
221ln
11ln
1 tyytyy
α
β
α
β
α
β
α
β
α
β
α
β 22
1
111ln1ln sdotminus=
sdot+
sdot+
sdotminusminus
sdot+
sdotminus tt
yyyy
ininininininQA
Kt
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdotsdotminus=
sdotsdotsdot+
sdot+
sdotminusminus
sdot+
sdotminus
221ln1ln
22
1
11 (5b)
Poicheacute la (5) non fornisce esplicitamente lrsquoaltezza h in funzione del tempo t egrave possibile approssimare il logaritmo del primo membro mediante espansione in serie Avremo allora
( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
( ) suminfin
=
minus=minus
+sdot
minus
minusminussdot
minus
minussdot
minus
minusminus=minus
+sdot++sdot+sdot+=
1
2
2
2
1ln
01
1
201
1
01
101ln1ln
02
000
n
n
n
n
n
n
n
xx
n
xxxx
n
xf
xfxffxf
I termini nella sommatoria sono decrescenti (si ricordi che il fattore in
Q
hKx
sdot
= egrave minore di 1 in
quanto rappresenta il rapporto tra la portata uscente e quella in ingresso al serbatoio) Limitando lrsquoespansione in serie ai primi tre termini non nulli e sostituendo in (5)
I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 20
ininin
ininininin
QA
Kt
Q
hhK
Q
hK
QA
Kt
Q
hK
Q
hK
Q
hK
Q
hK
sdotsdot
sdotcong
sdot
sdotsdot+
sdot
sdot
sdotsdot
sdotminuscongsdot
+
sdot
sdotminus
sdot
sdotminus
sdotminus
232
232
2
3
3
2
2
2
3
33
2
2
inininQA
Kt
Q
hK
Q
hK
sdotsdotsdotcong
sdotsdot+sdot
sdot
sdot
23
21
2
2
2
2
in
out
in
Q
QA
Qth
+
sdotsdotcong
1
1 (5c)
Dove col simbolo outQ si egrave indicata la portata media uscente ovvero
0
3
2hKQ
outsdotsdot=
La (5c) puograve essere ulteriormente semplificata espandendo in serie anche il fattore
in
out
Q
Q+1
1
( ) ( )
01
1
01
1
01
1
1
1
1
1 2
32+sdot
+
+sdot
+
minus
+
=
+
=
+
xxx
Q
Q
in
out
E trascurando i termini con esponente maggiore di 1 (in
out
Q
Q egrave minore di 1)
in
out
in
outQ
Q
Q
Qminuscong
+
1
1
1
Per cui la (5c) diventa
A
QQt
Q
Q
A
Qth outin
in
outinminus
sdot=
minussdotsdotcong 1 (6)
I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 21
Appendice 2 Integrazione dellrsquoequazione di bilancio per un controllore PI
Come visto il bilancio di materia sul serbatoio in presenza di controllo proporzionale integrale porta a
A
Qy
A
K
dt
dy
A
K
dt
ydout
I
cc=sdot
sdot
+sdot+
τ2
2
(11)
La soluzione generale y(t) della suddetta equazione si ottiene sommando ad una sua soluzione particolare y0(t) la soluzione generale della equazione omogenea associata
02
2
=sdot
sdot
+sdot+ yA
K
dt
dy
A
K
dt
yd
I
cc
τ
Poicheacute A
Qout (il termine a secondo membro della (1)) egrave una costante e puograve essere considerato un
polinomio di grado zero rispetto alla variabile tempo t e I
c
A
K
τsdot
(il coefficiente della funzione
incognita y) egrave diverso da zero la teoria risolutiva di questo tipo di equazioni impone che anche la soluzione particolare y0(t) sia un polinomio di grado zero del tipo y0(t) = a e che deve rispettare la condizione
( )c
Iout
c
Ioutout
I
ccout
I
cc
K
Qty
K
Qa
A
Qa
A
K
A
K
A
Qy
A
K
dt
dy
A
K
dt
yd
τ
τ
ττ
sdot=
sdot=rArr=sdot
sdot
+sdot+rArr=sdot
sdot
+sdot+
0
0
0
2
0
2
00
Lrsquoequazione caratteristica della equazione differenziale omogenea associata alla suddetta equazione egrave
02
=
sdot
+sdot+
I
cc
A
Kz
A
Kz
τ
Avremo allora in base al segno del discriminante di tale equazione Ideg caso 0gt∆
c
I
I
c
I
cc
I
cc
K
A
A
K
A
K
A
K
A
K
A
KsdotgtrArrgtrArr
sdotsdotgt
rArrgt
sdotsdotminus
4
4404
22
τ
τττ
2
4
2
21
I
ccc
A
K
A
K
A
K
zτsdot
sdotminus
plusmnminus
=
E lrsquointegrale generale dellrsquoomogenea associata egrave tztz
ececysdotsdot
sdot+sdot=21
21
IIdeg caso 0=∆
A
Kzz
K
A
A
K
A
K
A
K
A
K
A
K
c
c
I
I
c
I
cc
I
cc
sdotminus==
sdot=rArr=rArrsdot
sdot=
rArr=
sdotsdotminus
2
44
404
21
22
τ
τττ
Lrsquointegrale generale dellrsquoomogenea associata egrave ( )tcceytz
sdot+sdotsdot=sdot
21
1 IIIdeg caso 0lt∆
βα
ττττ
sdotplusmn=
sdotltrArrltrArrsdot
sdotlt
rArrlt
sdotsdotminus
iz
K
A
A
K
A
K
A
K
A
K
A
K
c
I
I
c
I
cc
I
cc
21
22
44
404
I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 22
sdotsdotminus
minussdot=
sdotminus=
I
ccc
A
K
A
K
A
K
τβα 4
2
1
2
2
Lrsquointegrale generale dellrsquoomogenea associata diventa ( ) ( )[ ]tctceyt
sdotsdot+sdotsdotsdot=sdot ββα
sincos21
Lrsquointegrale generale dellrsquoequazione completa (11) saragrave allora Ideg caso ( )tyececy
tztz
021
21+sdot+sdot=
sdotsdot
IIdeg caso ( ) ( )tytcceytz
021
1+sdot+sdotsdot=
sdot
IIIdeg caso ( ) ( )[ ] ( )tytctceyt
021sincos +sdotsdot+sdotsdotsdot=
sdot
ββα
Lrsquointegrale particolare ottenuto ponendo le condizioni al contorno ( ) ( )0
000 hyy == saragrave
Ideg caso
( )
( )
=sdot+sdot
sdotminus=+
rArr
=sdotsdot+sdotsdot=
=sdot
+sdot+sdot=
sdotsdot
sdotsdot
02211
21
0
0
22
0
11
0
2
0
1
21
21
0
00
hzczc
K
Qcc
hezcezcy
K
Qececy
c
Iout
zz
c
Ioutzz ττ
minus
sdotsdot
+
=
sdotminus
minus
sdotsdot
+
minus=
rArr
=sdot+sdot
sdot+minus
sdotminusminus=
12
10
2
12
10
1
02212
21
zz
zK
Qh
c
K
Q
zz
zK
Qh
c
hzczK
Qc
K
Qcc
c
Iout
c
Ioutc
Iout
c
Iout
c
Iout
τ
τ
τ
τ
τ
minus+
minussdot
sdot=
minus+
+
minussdot
sdotminus=
12
0
12
1
2
12
0
12
1
11
zz
h
zz
z
K
Qc
zz
h
zz
z
K
Qc
c
Iout
c
Iout
τ
τ
Per cui ( ) tztz
ezcezchhtysdotsdot
sdotsdot+sdotsdot=minus=21
22110
tztz
ezcezchhsdotsdot
sdotsdotminussdotsdotminus=21
22110
IIdeg caso
( ) ( )
( ) ( )
sdotsdot+=
sdotminus=
rArr
=+sdot
sdotminus=
rArr
=sdot+sdot+sdotsdotsdot=
=sdot
+sdot+sdotsdot=
sdotsdot
sdot
c
Iout
c
Iout
c
Iout
zz
c
Ioutz
K
Qzhc
K
Qc
hccz
K
Qc
hceccezy
K
Qccey
τ
τ
ττ
102
1
0211
1
02
0
21
0
1
21
0
11
1
00
000
Per cui ( ) ( )
22110
11 cetccezhhtytztz
sdot+sdot+sdotsdotsdot=minus=sdotsdot
( )22110
11 cetccezhhtztz
sdotminussdot+sdotsdotsdotminus=sdotsdot
IIIdeg caso
( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )[ ]
=sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=
=sdot
+sdotsdot+sdotsdotsdot=
sdotsdot
sdot
021
0
21
0
21
0
0cos0sin0sin0cos0
00sin0cos0
hcceccey
K
Qccey
c
Iout
ββββββα
τββ
αα
α
I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210

I controlli automatici ndash IIa parte 23
sdotsdot+
=
sdotminus=
rArr
=sdot+sdot
sdotminus=
β
τα
τ
βα
τ
c
Iout
c
Iout
c
Iout
K
Qh
c
K
Qc
hcc
K
Qc
0
2
1
021
1
Per cui ( ) ( ) ( )[ ] ( ) ( )[ ]tctcetctcehhty tt
sdotsdotsdot+sdotsdotsdotminussdot+sdotsdot+sdotsdotsdotsdot=minus=sdotsdot
ββββββααα
cossinsincos21210
( ) ( )[ ] ( ) ( )[ ]tctcetctcehhtt
sdotsdot+sdotsdotminussdotsdotminussdotsdot+sdotsdotsdotsdotminus=sdotsdot
βββββααα
cossinsincos21210