CENTRO DI MASSA - univpm.it · posizionato nel centro di massa e avente massa pari alla massa...
21
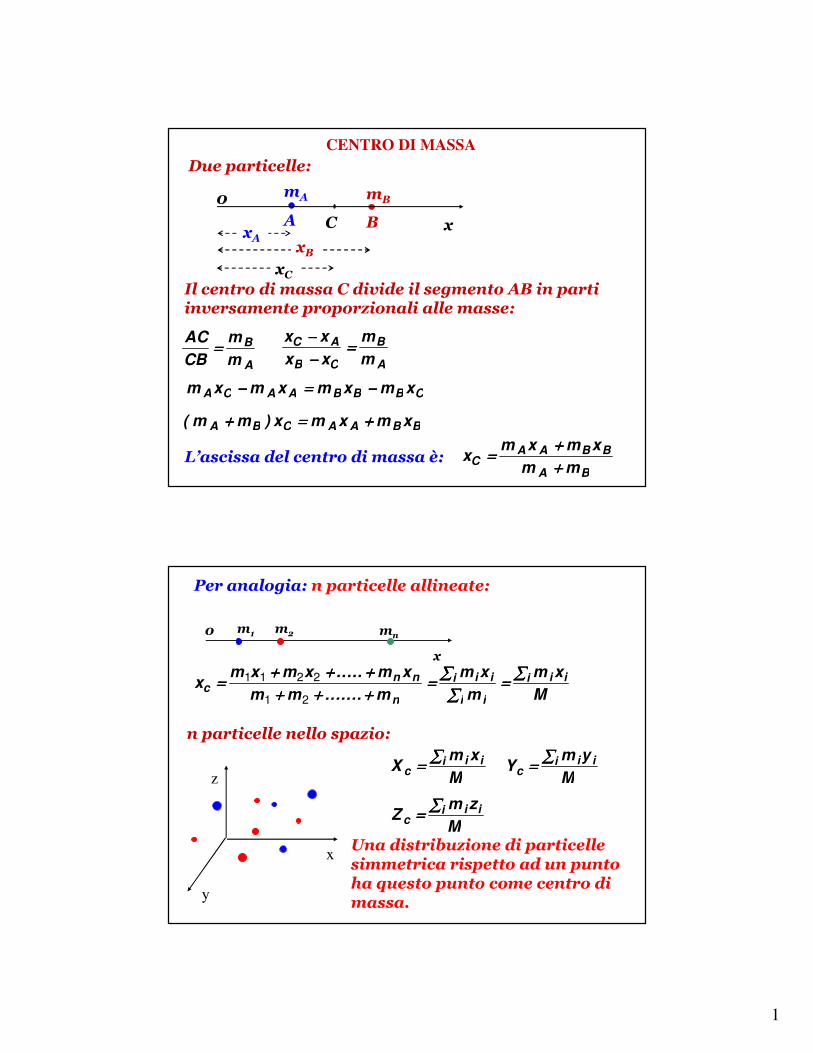
1 CENTRO DI MASSA Due particelle: m A A m B B C 0 x x A x B x C Il centro di massa C divide il segmento AB in parti inversamente proporzionali alle masse: AC CB = = = m B m A x C - - - x A x B - - - x C = = = m B m A m A x C - - - m A x A = = = m B x B - - - m B x C (m A + + + m B )x C = = = m A x A + + + m B x B L’ascissa del centro di massa è: x C = = = m A x A + + + m B x B m A + + + m B Per analogia: n particelle allineate: 0 m 1 m 2 m n x x c = = = m 1 x 1 + + + m 2 x 2 + + + ..... + + + m n x n m 1 + + + m 2 + + + ....... + + + m n = = = m i x i i ∑ ∑ ∑ m i i ∑ ∑ ∑ = = = m i x i i ∑ ∑ ∑ M n particelle nello spazio: x y z X c = = = m i x i i ∑ ∑ ∑ M Y c = = = m i y i i ∑ ∑ ∑ M Z c = = = m i z i i ∑ ∑ ∑ M Una distribuzione di particelle simmetrica rispetto ad un punto ha questo punto come centro di massa.
-
Upload
truongthuy -
Category
Documents
-
view
220 -
download
0
Transcript of CENTRO DI MASSA - univpm.it · posizionato nel centro di massa e avente massa pari alla massa...
1
CENTRO DI MASSA
Due particelle:
mA
A
mB
BC
0
xxAxB
xCIl centro di massa C divide il segmento AB in parti inversamente proporzionali alle masse:
AC
CB====
mB
m A
xC −−−− xA
xB −−−− xC
====mB
m A
m AxC −−−− m A xA ==== mBxB −−−− mB xC
( m A ++++ mB ) xC ==== m A x A ++++ mB xB
L’ascissa del centro di massa è: xC ====
m Ax A ++++ mBxB
m A ++++ mB
Per analogia: n particelle allineate:
0 m1 m2 mn
x
xc ====
m1x1 ++++ m2x2 ++++ ..... ++++ mn xn
m1 ++++ m2 ++++ ....... ++++ mn
====m ix ii∑∑∑∑
m ii∑∑∑∑====
m ixii∑∑∑∑
M
n particelle nello spazio:
x
y
z X c ====
m i x ii∑∑∑∑
M Yc ====
m iy ii∑∑∑∑
M
Z c ====
m izii∑∑∑∑
MUna distribuzione di particelle simmetrica rispetto ad un punto ha questo punto come centro di massa.
2
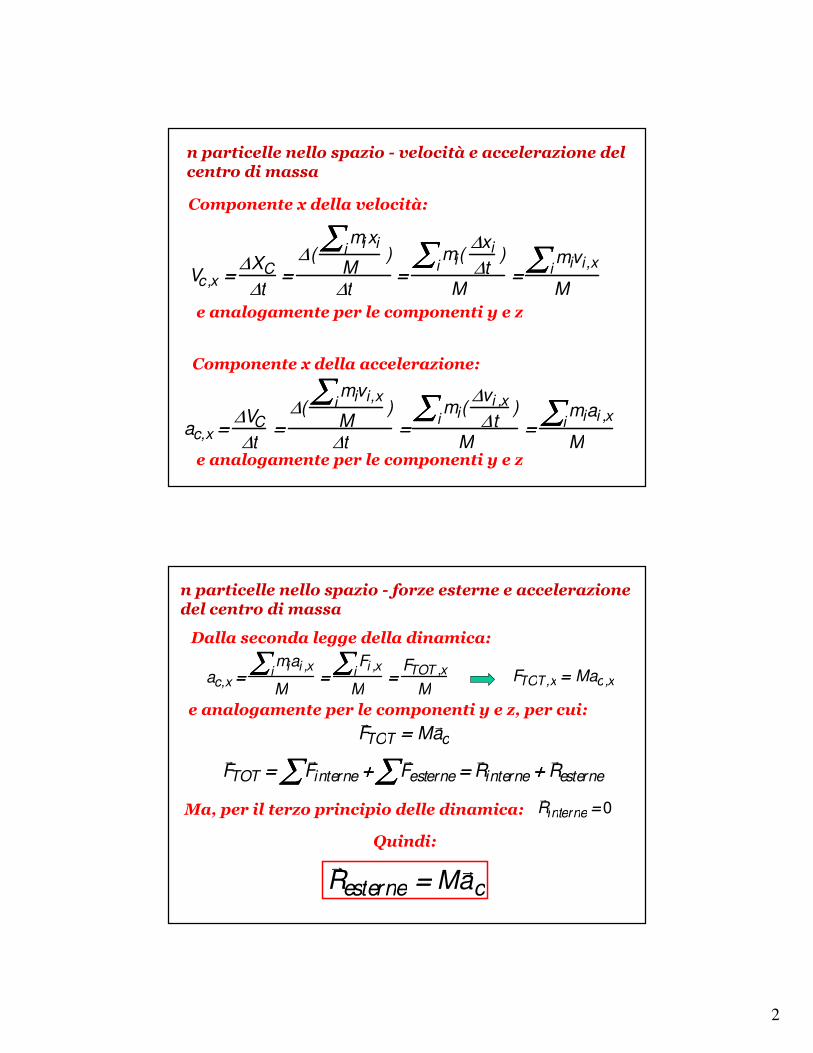
n particelle nello spazio - velocità e accelerazione del centro di massa
Vc,x ====
∆XC
∆t====
∆(mi xii∑∑∑∑
M)
∆t====
mi(∆xi
∆t)
i∑∑∑∑M
====mivi ,xi∑∑∑∑M
e analogamente per le componenti y e z
Componente x della velocità:
Componente x della accelerazione:
ac,x ====
∆VC
∆t====
∆(mivi,xi∑∑∑∑M
)
∆t====
mi(∆vi ,x
∆t)
i∑∑∑∑M
====miai ,xi∑∑∑∑M
e analogamente per le componenti y e z
n particelle nello spazio - forze esterne e accelerazione del centro di massa
Dalla seconda legge della dinamica:
ac,x ====
miai ,xi∑∑∑∑M
====Fi ,xi∑∑∑∑
M====
FTOT ,x
M
e analogamente per le componenti y e z, per cui:
FTOT,x ==== Mac,x
r F TOT ==== M
r a c
r F TOT ====
r F interne∑∑∑∑ ++++
r F esterne∑∑∑∑ ====
r R interne ++++
r R esterne
Ma, per il terzo principio delle dinamica: r R interne ==== 0
Quindi:
r R esterne ==== M
r a c

3
• Il moto di traslazione di un sistema di particelle si può ridurre al moto di un unico corpo puntiforme, posizionato nel centro di massa e avente massa pari alla massa totale del sistema, al quale si può considerare applicata la risultante di tutte le forze esterne al sistema.
• In particolare, se su un sistema di particelle non agiscono forze esterne oppure la risultante di queste ultime è nulla (sistema isolato), l’accelerazione del centro di massa è nulla, cioè il centro di massa si trova in stato di quiete o si muove di moto rettilineo uniforme:
r R esterne ==== 0 ⇔⇔⇔⇔
r a C ==== 0 ⇔⇔⇔⇔
r V C ==== costante
Baricentro (G): punto di un corpo esteso nel quale è applicata la forza peso
XG ====
migxii∑∑∑∑Mg
YG ====migyii∑∑∑∑
Mg
Se l’accelerazione di gravità g è la stessa in tutti i punti del corpo (come nei casi pratici in prossimità della superficie della Terra), il baricentro G coincide con il centro di massa C
Si può immaginare il corpo (di massa M) come costituito di tanti punti di massa mi, ciascuno con il suo peso mig:
ZG ====
migyii∑∑∑∑Mg
x
y
z
mig G
Mg

4
Quantità di moto di una particella e sua variazione
1 particella: r q ==== m
r v [ ] MLT 1−
kg ⋅⋅⋅⋅ ms−−−−1
Interazione con gli oggetti circostanti: ∆∆∆∆r q ==== ∆∆∆∆( m
r v )
E se si può ritenere costante la massa: ∆∆∆∆r q ==== m∆∆∆∆
r v
∆∆∆∆r q
∆∆∆∆t==== m
∆∆∆∆r v
∆∆∆∆t==== m
r a m ====
r F m ∆∆∆∆
r q ====
r F m ∆∆∆∆t N ⋅⋅⋅⋅ s
In un sistema di riferimento inerziale, la quantità di moto di una particella isolata o soggetta a forze con risultante nulla si conserva (altra formulazione della legge di inerzia).
Conservazione della quantità di moto
Quantità di moto di un sistema di particelle
r Q ==== m i
r v ii∑∑∑∑ Ricordiamo le coordinate del centro
di massa e scriviamo:
M vcy ==== m iviyi∑∑∑∑
Se le particelle sono in moto:
M
∆∆∆∆xc
∆∆∆∆t==== m i
∆∆∆∆x i
∆∆∆∆ti∑∑∑∑
M
∆∆∆∆yc
∆∆∆∆t==== m i
∆∆∆∆y i
∆∆∆∆ti∑∑∑∑
M
∆∆∆∆zc
∆∆∆∆t==== m i
∆∆∆∆zi
∆∆∆∆ti∑∑∑∑
M vcx ==== m i vixi∑∑∑∑ M vcz ==== m i vizi∑∑∑∑
M xc ==== m i x ii∑∑∑∑ M zc ==== m i z ii∑∑∑∑ M yc ==== m i y ii∑∑∑∑
r
Q ==== Mr v cQuindi:
Mr v c ==== m i
r v ii∑∑∑∑Allora: Ma anche:
r Q ==== m i
r v ii∑∑∑∑
dove: Q = quantità di moto totale del sistema
M = massa totale del sistema
vc = velocità del centro di massa
5
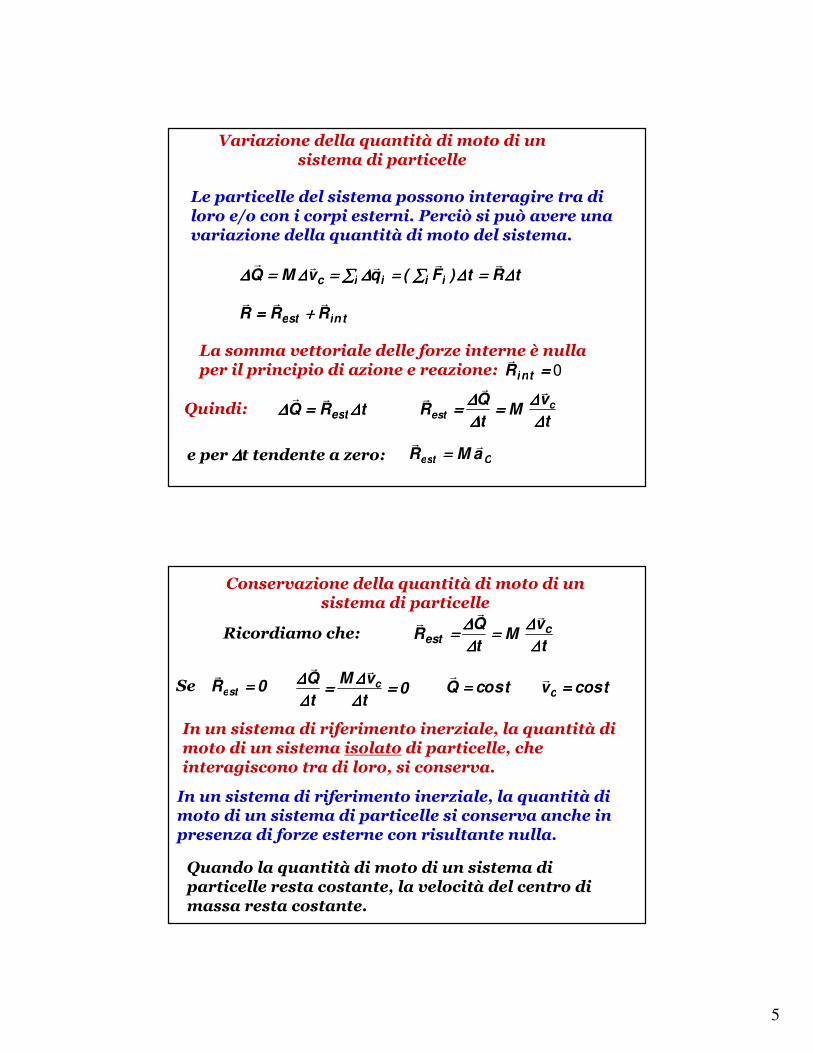
Le particelle del sistema possono interagire tra di loro e/o con i corpi esterni. Perciò si può avere una variazione della quantità di moto del sistema.
∆∆∆∆r
Q ==== M ∆∆∆∆r v c ==== ∆∆∆∆
r q i ==== (
r F ii∑∑∑∑i∑∑∑∑ ) ∆∆∆∆t ====
r R ∆∆∆∆t
r R ====
r R est ++++
r R int
La somma vettoriale delle forze interne è nulla per il principio di azione e reazione:
r R int ==== 0
Quindi: ∆∆∆∆r
Q ====r R est ∆∆∆∆t
r R est ====
∆∆∆∆r
Q
∆∆∆∆t==== M
∆∆∆∆r v c
∆∆∆∆t
e per ∆∆∆∆t tendente a zero: r R est ==== M
r a C
Variazione della quantità di moto di un sistema di particelle
Conservazione della quantità di moto di un sistema di particelle
In un sistema di riferimento inerziale, la quantità di moto di un sistema isolato di particelle, che interagiscono tra di loro, si conserva.
r R est ==== 0Se
r Q ==== cost
In un sistema di riferimento inerziale, la quantità di moto di un sistema di particelle si conserva anche in presenza di forze esterne con risultante nulla.
∆∆∆∆r
Q
∆∆∆∆t====
M ∆∆∆∆r v c
∆∆∆∆t==== 0
Quando la quantità di moto di un sistema di particelle resta costante, la velocità del centro di massa resta costante.
r v c ==== cost
r R est ====
∆∆∆∆r
Q
∆∆∆∆t==== M
∆∆∆∆r v c
∆∆∆∆tRicordiamo che:
6
CONSERVAZIONE DELLA QUANTITA’ DI MOTO
Es: Urto di 2 corpi
Qprima = Qdopo (m1v1 + m2v2)prima = (m1v1 + m2v2)dopo
La quantità di moto totale si conserva:
m1vprima = (m1+ m2 ) v2,dopo
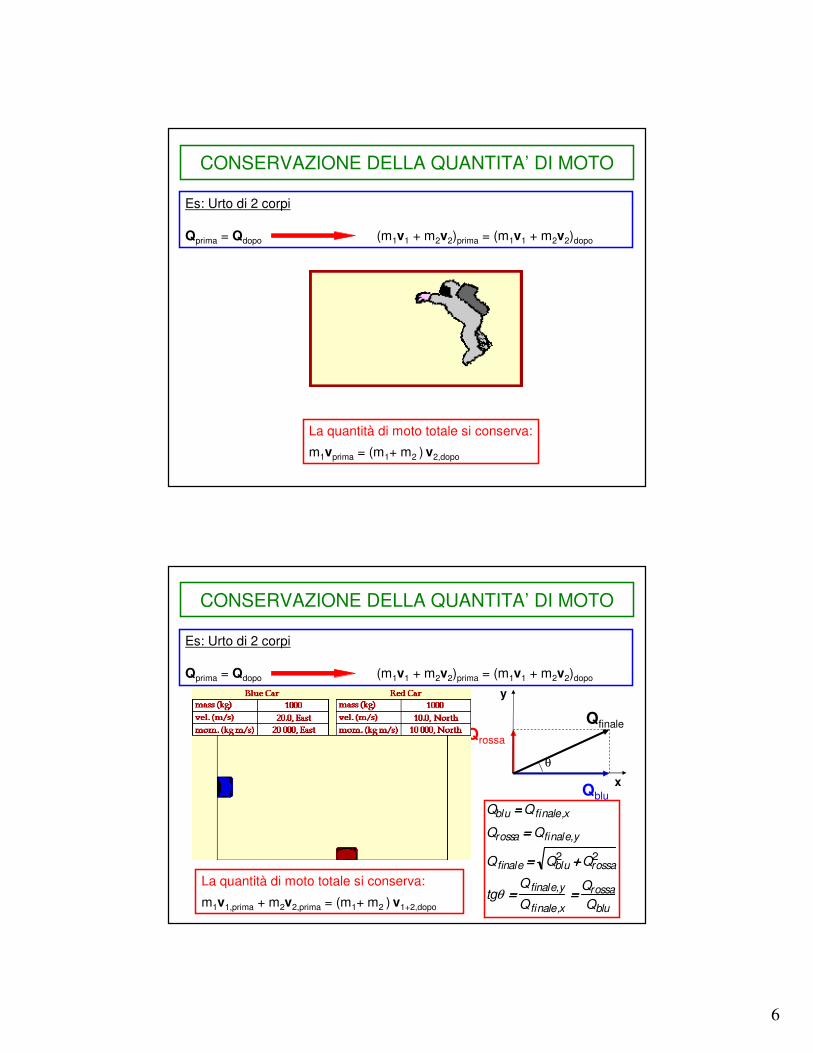
CONSERVAZIONE DELLA QUANTITA’ DI MOTO
Es: Urto di 2 corpi
Qprima = Qdopo (m1v1 + m2v2)prima = (m1v1 + m2v2)dopo
La quantità di moto totale si conserva:
m1v1,prima + m2v2,prima = (m1+ m2 ) v1+2,dopo
Qblu ==== Qfinale,x
Qrossa ==== Qfinale,y
Qfinale ==== Qblu2 ++++ Qrossa
2
tgθ ====Qfinale,y
Qfinale,x
====Qrossa
Qblu
Qrossa
Qblu
Qfinale
x
y
θ

7
• Abbiamo visto che, nei moti di traslazione, applicare una forza F ad un corpo equivale a imprimerle un’accelerazione a (a parità di massa mdel corpo, l’accelerazione impressa ad esso da un certa forza F ha sempre il medesimo valore a = F/m)
• Per i moti di rotazione la situazione è differente: ad esempio, per chiudere una porta (cioè per farla ruotare intorno all’asse passante per i cardini) noi la spingiamo in un punto vicino al bordo della porta piùlontano dai cardini, perché la nostra esperienza quotidiana ci ha insegnato che, a parità di forza applicata, la porta ruota meno facilmente se spingiamo in un punto vicino ai cardini
• Quindi, nelle rotazioni è importante non solo la forza, ma anche il punto in cui essa viene applicata
F1
x1
F2
x2
x1
> x2
F1
< F2
MOMENTO ANGOLARE
Polo O
r
L
q=mv
Pαααα
r L ====
r r ∧∧∧∧ m
r v
L ==== mr v sen αααα
Il vettore momento angolare ha direzione perpendicolare al piano individuato dal vettore posizione e dal vettore quantità di moto, verso stabilito dalla regola della mano destra.
pollice indicem
edio
dimensioni unità di misura kg ⋅⋅⋅⋅ m 2 ⋅⋅⋅⋅s−−−−1
M L
2T
−−−−1[[[[ ]]]]

8
Particella in moto circolare uniforme.
mvr
L
ωωωω
r L ====
r r ∧∧∧∧ m
r v
L ==== r mv sen
ππππ
2==== r mv
v ==== ωωωωr L ==== mr 2ωωωω
I = mr2 è il momento di inerzia della particella, quindi:
r L ==== I
r ω ω ω ω
avendo introdotto il vettore velocità angolare che ha la direzione dell’asse di rotazione e verso tale da vedere la particella ruotare in verso antiorario (direzione e verso del momento angolare).
O
Calcoliamo il momento angolare con polo in O, centro della circonferenza.
L = Iωωωω è il momento angolare della particella in moto circolare uniforme, quando il polo è nel centro della circonferenza.
r L ====
r r ∧∧∧∧ m
r v
∆∆∆∆r L
∆∆∆∆t====
∆∆∆∆(r r ∧∧∧∧
r q )
∆∆∆∆t====r r ∧∧∧∧
∆∆∆∆r q
∆∆∆∆t====r r ∧∧∧∧
r F
Variazione del momento angolare di una particella:
Si può dimostrare che:
MOMENTO DI UNA FORZA
Polo O αααα
r
M ====r r ∧∧∧∧
r F
M = rFsenαααα = rF⊥⊥⊥⊥ = Fb
MF⊥⊥⊥⊥ F
F//
b
r
Il momento della forza F// è nullo
Direzione perpendicola-re al piano individuato dai vettori r e F. Verso stabilito con la regola della mano destra.
b ==== r sen αααα
F⊥⊥⊥⊥= Fsenαααα
è il momento della forza, calcolato rispetto allo stesso polo scelto per il momento angolare.
Il prodotto vettoriale:
Modulo:
9
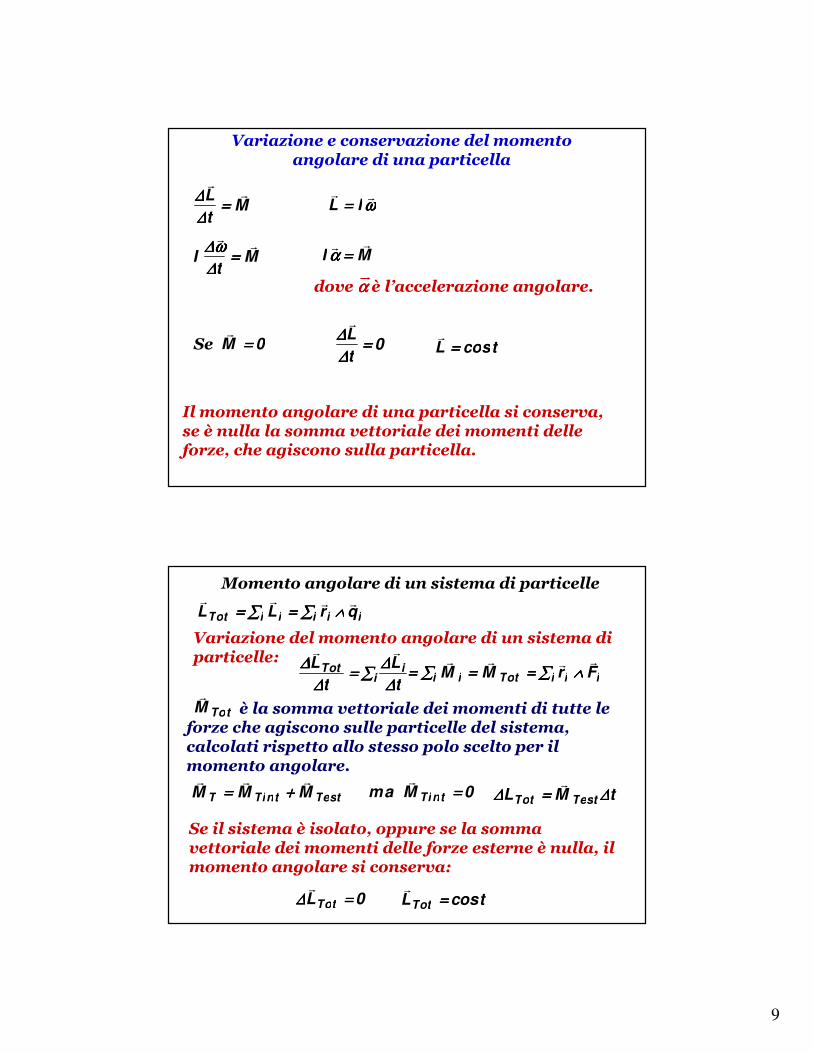
∆∆∆∆r L
∆∆∆∆t====
r M
r L ==== I
r ω ω ω ω
I
∆∆∆∆r ω ω ω ω
∆∆∆∆t====
r M I
r α α α α ====
r M
Se r
M ==== 0
∆∆∆∆r L
∆∆∆∆t==== 0
r L ==== cost
Il momento angolare di una particella si conserva, se è nulla la somma vettoriale dei momenti delle forze, che agiscono sulla particella.
Variazione e conservazione del momento angolare di una particella
dove αααα è l’accelerazione angolare.
Momento angolare di un sistema di particelle
r L Tot ====
r L ii∑∑∑∑ ====
r r ii∑∑∑∑ ∧∧∧∧
r q i
Variazione del momento angolare di un sistema di particelle:
∆∆∆∆r L Tot
∆∆∆∆t====
∆∆∆∆r L i
∆∆∆∆ti∑∑∑∑
r
M Tot è la somma vettoriale dei momenti di tutte le forze che agiscono sulle particelle del sistema, calcolati rispetto allo stesso polo scelto per il momento angolare.
r
M T ====r
M Tint ++++r
M Test ma r
M Tint ==== 0 ∆∆∆∆LTot ====
r M Test ∆∆∆∆t
Se il sistema è isolato, oppure se la somma vettoriale dei momenti delle forze esterne è nulla, il momento angolare si conserva:
∆∆∆∆r L Tot ==== 0
r L Tot ==== cost
====r
M ii∑∑∑∑ ====r
M Tot ====r r i ∧∧∧∧
r F ii∑∑∑∑
10
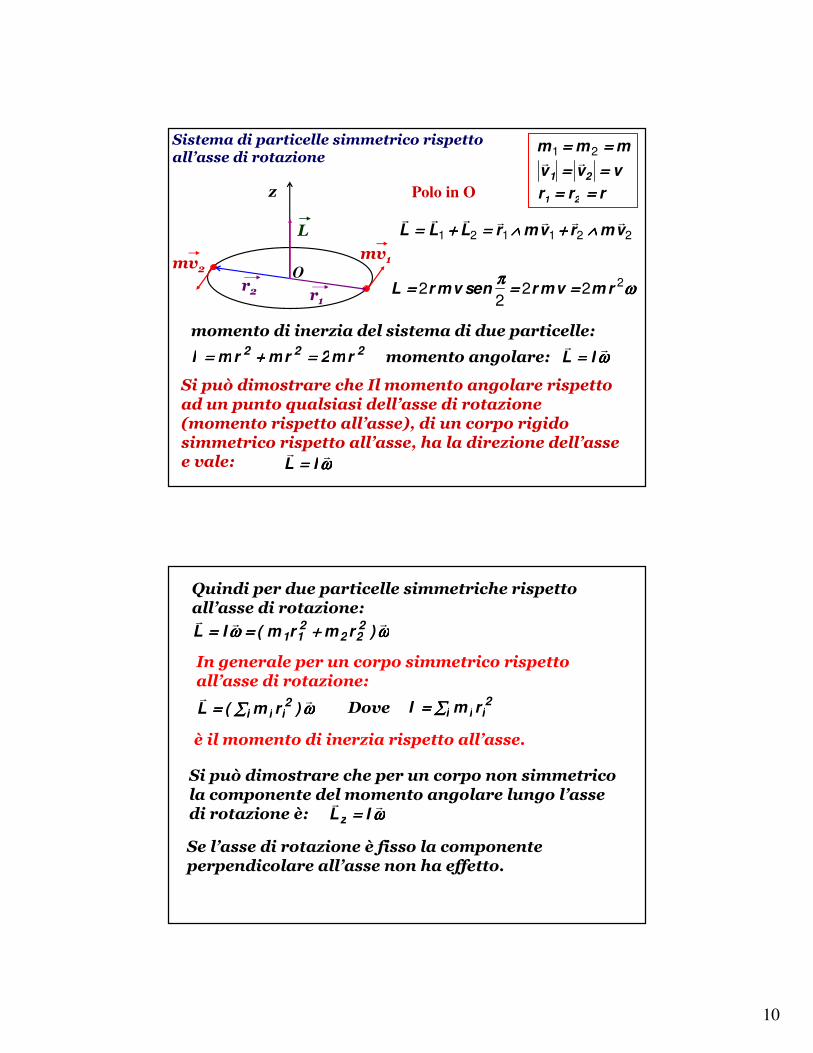
mv2
Sistema di particelle simmetrico rispetto all’asse di rotazione
z
O
mv1
Si può dimostrare che Il momento angolare rispetto ad un punto qualsiasi dell’asse di rotazione (momento rispetto all’asse), di un corpo rigido simmetrico rispetto all’asse, ha la direzione dell’asse e vale:
r L ==== I
r ω ω ω ω
Polo in O
r L ====
r L 1 ++++
r L 2 ====
r r 1 ∧∧∧∧ m
r v 1 ++++
r r 2 ∧∧∧∧ m
r v 2
r1
L
L ==== 2r mv sen
ππππ
2==== 2r mv ==== 2m r 2ωωωω
r L ==== I
r ω ω ω ω
r2
I ==== mr 2 ++++ mr 2 ==== 2mr 2
momento di inerzia del sistema di due particelle:
momento angolare:
m1 ==== m2 ==== m
r v 1 ====
r v 2 ==== v
r1 ==== r2 ==== r
Quindi per due particelle simmetriche rispetto all’asse di rotazione:
r L ==== I
r ω ω ω ω ==== ( m1r1
2 ++++ m2 r22 )
r ω ω ω ω
In generale per un corpo simmetrico rispetto all’asse di rotazione:
r L ==== ( m i ri
2 )r ω ω ω ω i∑∑∑∑ Dove I ==== m i ri
2i∑∑∑∑
è il momento di inerzia rispetto all’asse.
Si può dimostrare che per un corpo non simmetrico la componente del momento angolare lungo l’asse di rotazione è:
r L z ==== I
r ω ω ω ω
Se l’asse di rotazione è fisso la componente perpendicolare all’asse non ha effetto.

11
∆∆∆∆r L ====
r M T
z ∆∆∆∆t
r L z ==== I
v ω ω ω ω I ==== m i ri
2i∑∑∑∑
Se il corpo è isolato o se r
M Tz ==== 0
∆∆∆∆r L ==== 0
r L ==== cost
Se r
M Tz ≠≠≠≠ 0
∆∆∆∆r L
∆∆∆∆t====
∆∆∆∆( Ir ω ω ω ω )
∆∆∆∆t====
r M T
( z )
I
∆∆∆∆r ω ω ω ω
∆∆∆∆t====
r M T
( z )
Ir α α α α ====
r M T
( z )
dove è l’accelerazione angolare.
r α α α α ====
∆∆∆∆r ω ω ω ω
∆∆∆∆t
Per un disco omogeneo: I ====
1
2M R 2
Per un corpo rigido con asse di rotazione fisso quindi:
La variazione del momento angolare è:
si ha:
si ha:
L
ω
N.B.
r M T
( z ) ====r
M Test( z ) ====
r M est
( z ) ====r
M Rest( z ) ====
r M i
zi∑∑∑∑
Moto di una particella
traslatorio rotatorio
m I, momento di inerzia
∆∆∆∆r q
∆∆∆∆t====
r F
∆∆∆∆r L
∆∆∆∆t====
r M
v
a
F
q = mv
F = ma
α, α, α, α, accelerazione angolare
ωωωω, velocità angolare
M = r ∧∧∧∧ F, momento della forza
L = r ∧∧∧∧ mv, momento angolare
M = Iαααα
12
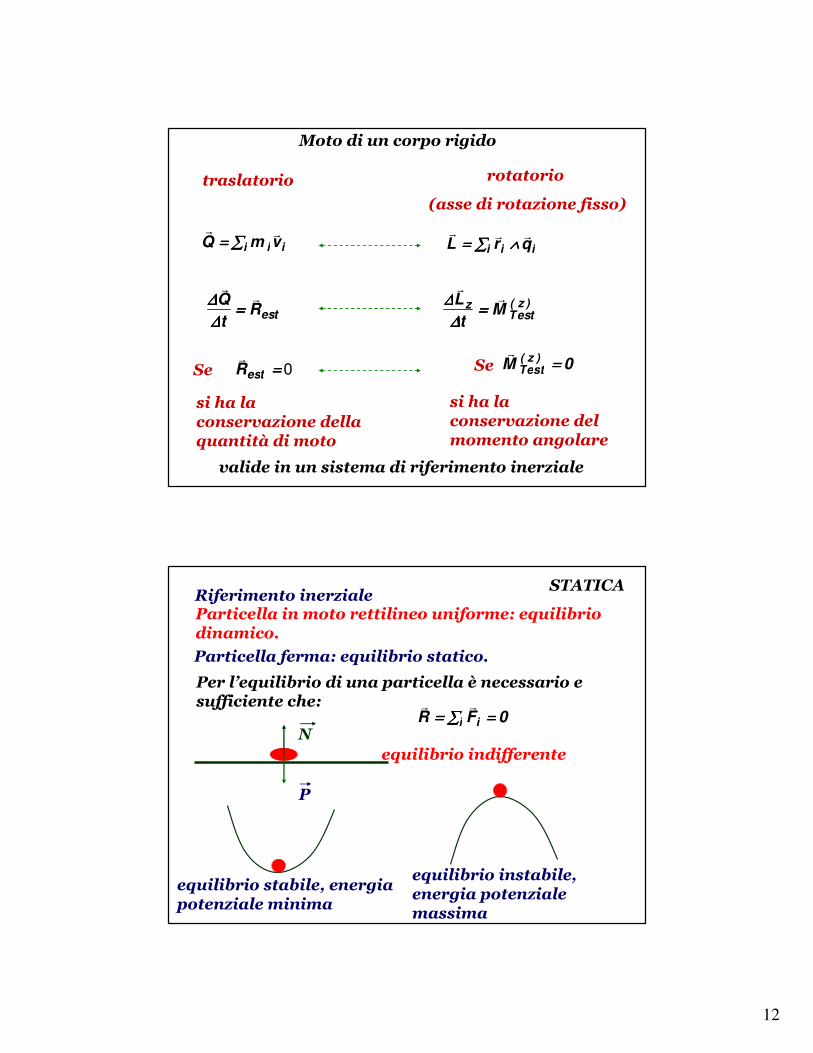
Moto di un corpo rigido
traslatorio rotatorio
(asse di rotazione fisso)
r Q ==== m i
r v ii∑∑∑∑
r L ====
r r i ∧∧∧∧
r q ii∑∑∑∑
∆∆∆∆r
Q
∆∆∆∆t====
r R est
∆∆∆∆r L z∆∆∆∆t
====r
M Test( z )
Se r R est ==== 0
si ha la conservazione della quantità di moto
si ha la conservazione del momento angolare
Se r
M Test( z ) ==== 0
valide in un sistema di riferimento inerziale
STATICARiferimento inerzialeParticella in moto rettilineo uniforme: equilibrio dinamico.
Particella ferma: equilibrio statico.
Per l’equilibrio di una particella è necessario e sufficiente che:
r R ====
r F ii∑∑∑∑ ==== 0
P
N
equilibrio indifferente
equilibrio stabile, energia potenziale minima
equilibrio instabile, energia potenziale massima
13
x
y
z
x
y
z
x
y
z
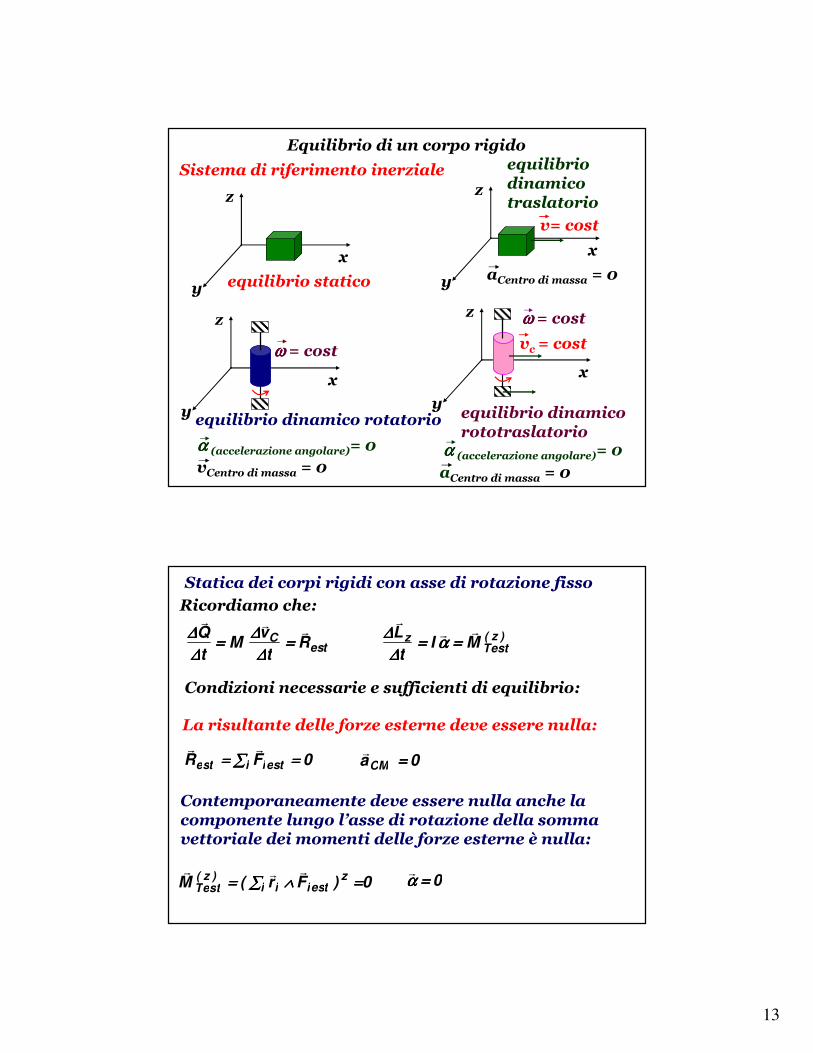
Equilibrio di un corpo rigido
Sistema di riferimento inerziale
x
y
z
equilibrio statico
equilibrio dinamico rotatorio
ωωωω = cost
αααα (accelerazione angolare)= 0
v= cost
equilibrio dinamico traslatorio
vc= cost
ωωωω = cost
equilibrio dinamico rototraslatorio
aCentro di massa = 0
vCentro di massa = 0αααα (accelerazione angolare)= 0
aCentro di massa = 0
Statica dei corpi rigidi con asse di rotazione fisso
Condizioni necessarie e sufficienti di equilibrio:
r M Test
( z ) ==== (r r i ∧∧∧∧
r F iest ) z ====i∑∑∑∑ 0
r R est ====
r F iesti∑∑∑∑ ==== 0
r a CM ==== 0
Contemporaneamente deve essere nulla anche la componente lungo l’asse di rotazione della somma vettoriale dei momenti delle forze esterne è nulla:
r α α α α ==== 0
Ricordiamo che:
∆∆∆∆r
Q
∆∆∆∆t==== M
∆∆∆∆r v C∆∆∆∆t
====r R est
∆∆∆∆r L z∆∆∆∆t
==== Ir α α α α ====
r M Test
( z )
La risultante delle forze esterne deve essere nulla:
14
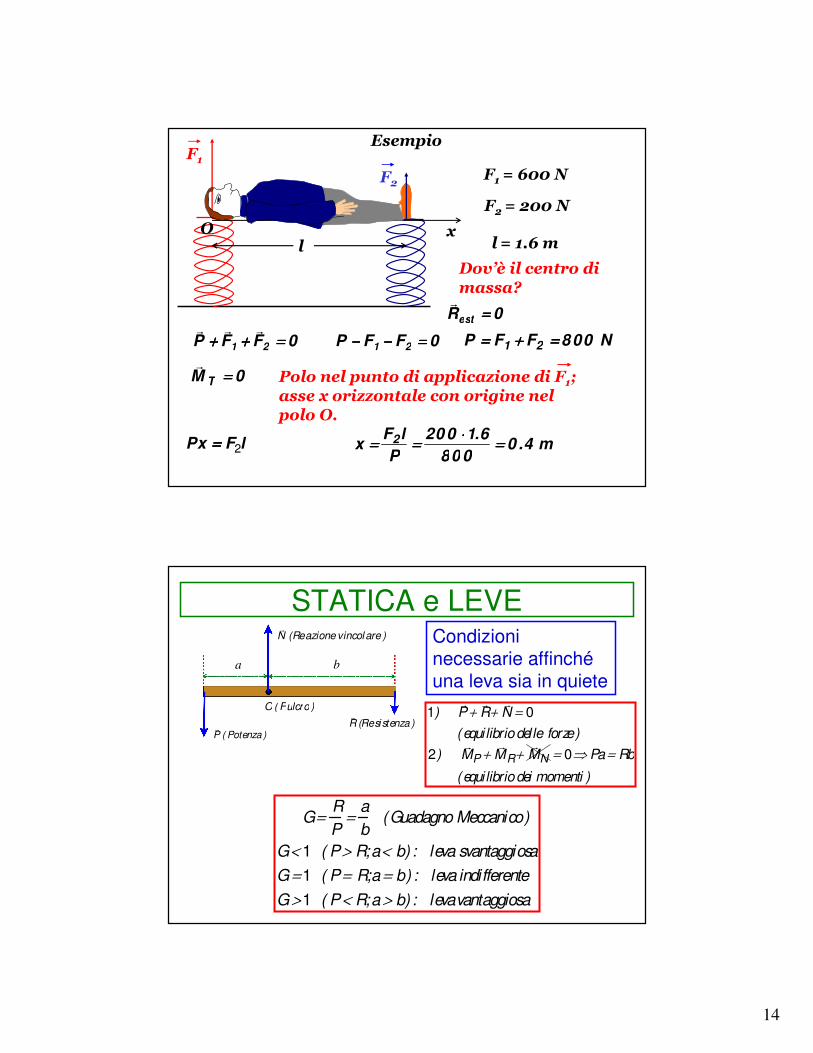
EsempioF1
F2 F1 = 600 N
F2 = 200 N
l= 1.6 ml
Dov’è il centro di massa?
r R est ==== 0
r
M T ==== 0
r P ++++
r F 1 ++++
r F 2 ==== 0 P −−−− F1 −−−− F2 ==== 0 P ==== F1 ++++ F2 ==== 8 00 N
Polo nel punto di applicazione di F1; asse x orizzontale con origine nel polo O.
Px ==== F2l
xO
x ====
F2l
P====
20 0 ⋅⋅⋅⋅ 1.6
80 0==== 0 .4 m
1)r P +
r R +
r N = 0
(equilibriodelle forze)
2)r
M P +r
M R+r
M N = 0⇒ Pa= Rb
(equilibriodei momenti )
STATICA e LEVECondizioni necessarie affinchéuna leva sia in quiete
G=R
P=
a
b(Guadagno Meccanico)
G< 1 ( P> R;a< b) : leva svantaggiosa
G= 1 ( P= R;a= b) : leva indifferente
G> 1 ( P< R;a> b) : levavantaggiosa
r N (Reazione vincolare )
r P ( Potenza )
a b
r R (Resistenza )
O ( Fulcro)
15
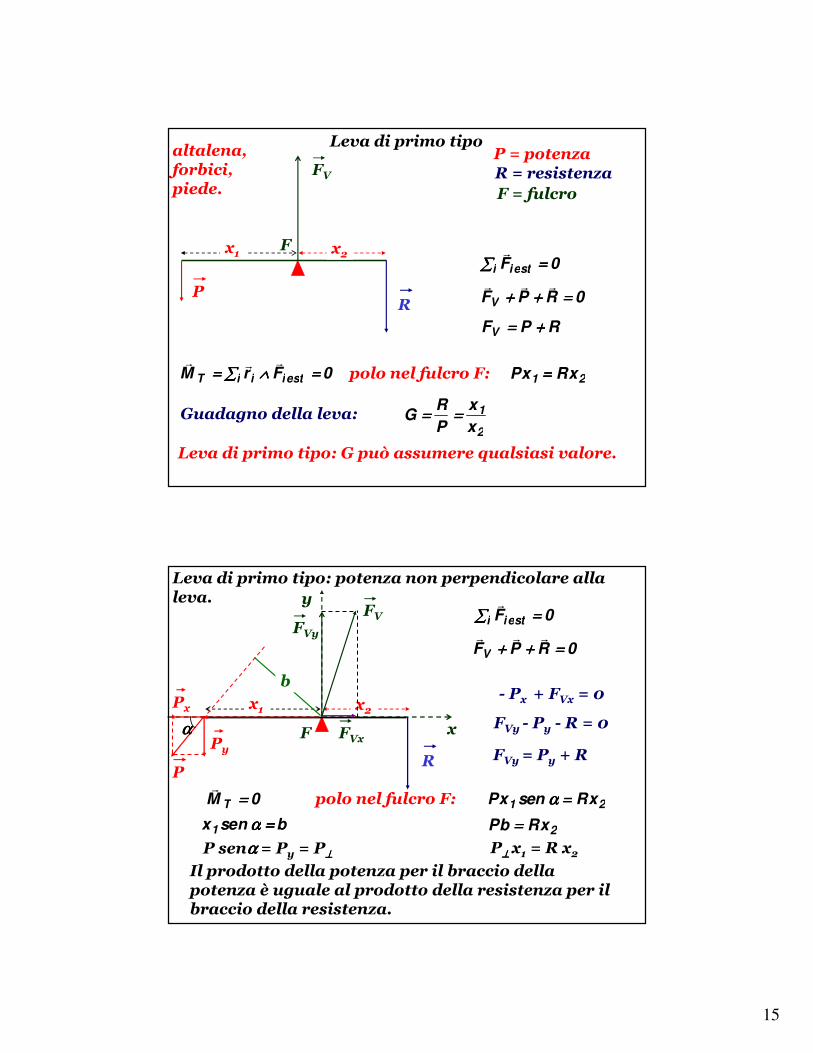
Leva di primo tipo
PR
F
P = potenzaR = resistenza
F = fulcro
x1 x2
FV
r F iesti∑∑∑∑ ==== 0
r
M T ====r r i ∧∧∧∧
r F iesti∑∑∑∑ ==== 0
r F V ++++
r P ++++
r R ==== 0
FV ==== P ++++ R
polo nel fulcro F: Px1 ==== Rx2
Guadagno della leva: G ====
R
P====
x1
x2
Leva di primo tipo: G può assumere qualsiasi valore.
altalena, forbici, piede.
Leva di primo tipo: potenza non perpendicolare alla leva.
Py
R
F
x1 x2
FVy
P
Px
r F iesti∑∑∑∑ ==== 0
r F V ++++
r P ++++
r R ==== 0
r
M T ==== 0 polo nel fulcro F: Px1 sen αααα ==== Rx2
x
y
FVy - Py - R = 0
FVy= Py + R
- Px + FVx = 0
FVxαααα
b
Pb ==== Rx2 x1 sen αααα ==== b
P senαααα = Py = P⊥⊥⊥⊥ P⊥⊥⊥⊥ x1 = R x2
FV
Il prodotto della potenza per il braccio della potenza è uguale al prodotto della resistenza per il braccio della resistenza.
16
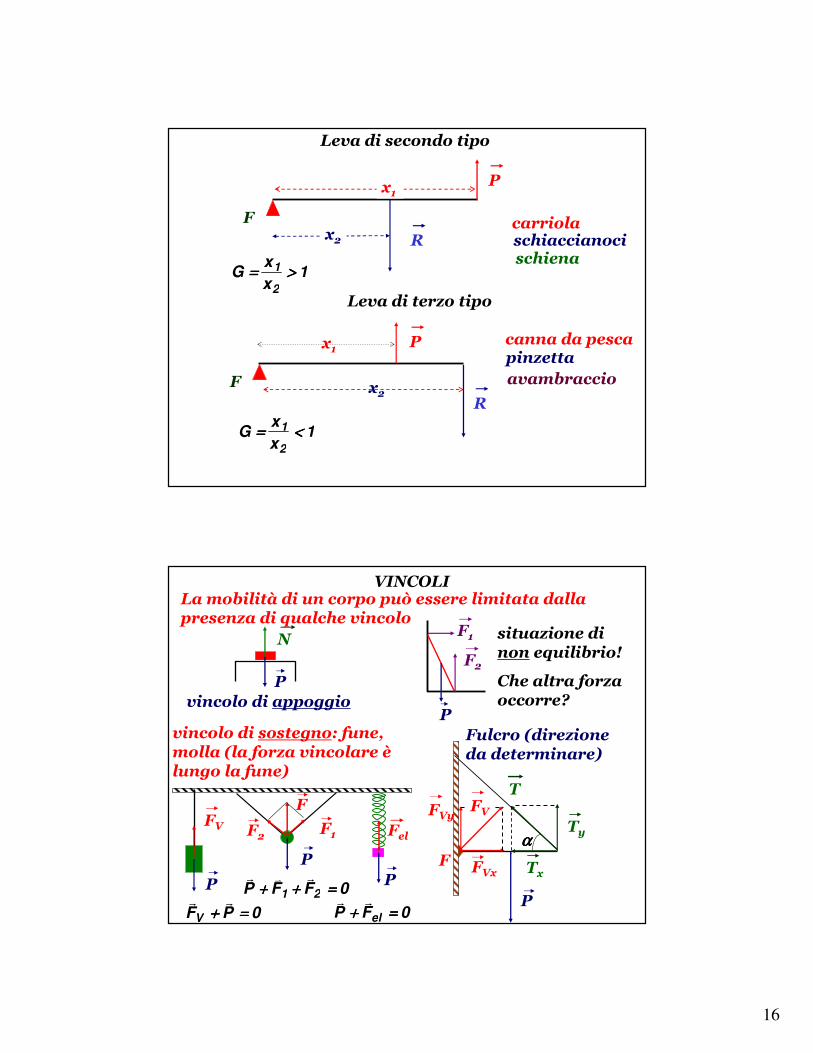
Leva di secondo tipo
R
F
P
x2carriolaschiaccianoci
Leva di terzo tipo
R
F
Px1
x2
canna da pescapinzetta
avambraccio
schiena
G ====
x1
x2
>>>> 1
G ====
x1
x2
<<<< 1
x1
VINCOLILa mobilità di un corpo può essere limitata dalla presenza di qualche vincolo
P
vincolo di appoggioP
NF1
F2
situazione di non equilibrio!
Che altra forza occorre?
vincolo di sostegno: fune, molla (la forza vincolare èlungo la fune)
P
FV
P
P
F1F2 Fel
r F V ++++
r P ==== 0
r P ++++
v F 1 ++++
r F 2 ==== 0
r P ++++
r F el ==== 0
F
Fulcro (direzione da determinare)
αααα
P
T
F FVx
FVy
Tx
Ty
FV
17
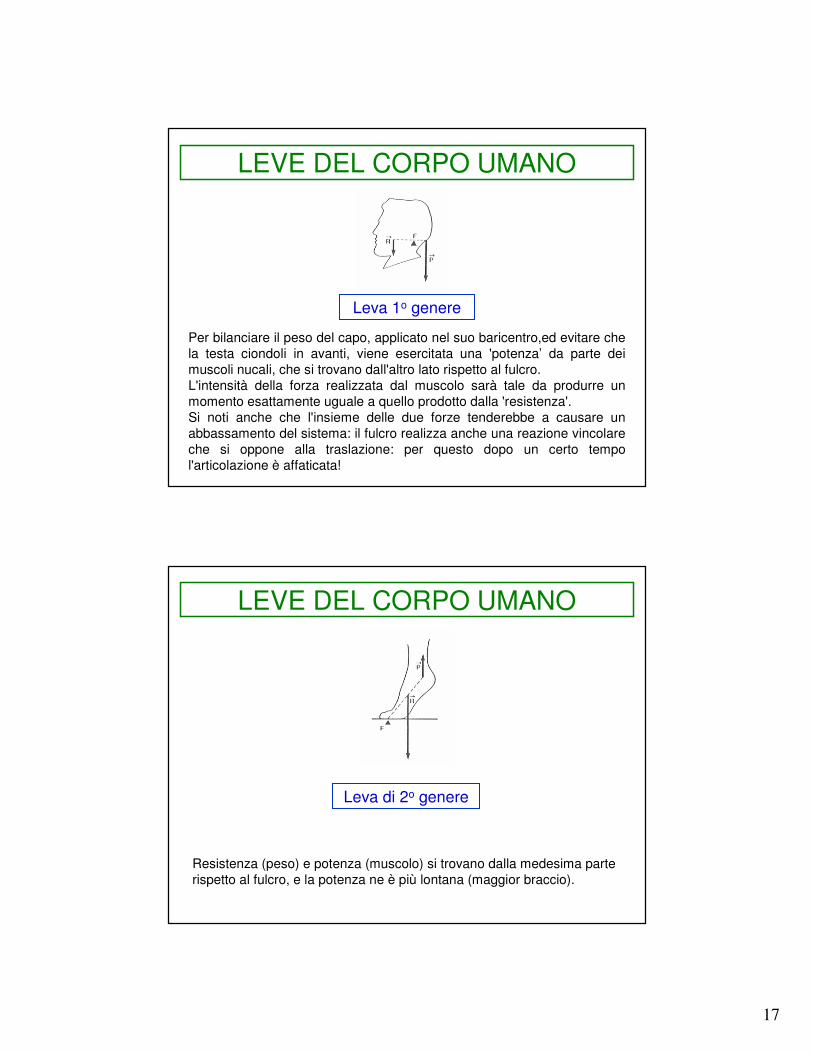
LEVE DEL CORPO UMANO
Per bilanciare il peso del capo, applicato nel suo baricentro,ed evitare che
la testa ciondoli in avanti, viene esercitata una 'potenza’ da parte dei
muscoli nucali, che si trovano dall'altro lato rispetto al fulcro.
L'intensità della forza realizzata dal muscolo sarà tale da produrre un
momento esattamente uguale a quello prodotto dalla 'resistenza'.
Si noti anche che l'insieme delle due forze tenderebbe a causare un
abbassamento del sistema: il fulcro realizza anche una reazione vincolare
che si oppone alla traslazione: per questo dopo un certo tempo
l'articolazione è affaticata!
Leva 1o genere
LEVE DEL CORPO UMANO
Resistenza (peso) e potenza (muscolo) si trovano dalla medesima parte
rispetto al fulcro, e la potenza ne è più lontana (maggior braccio).
Leva di 2o genere
18
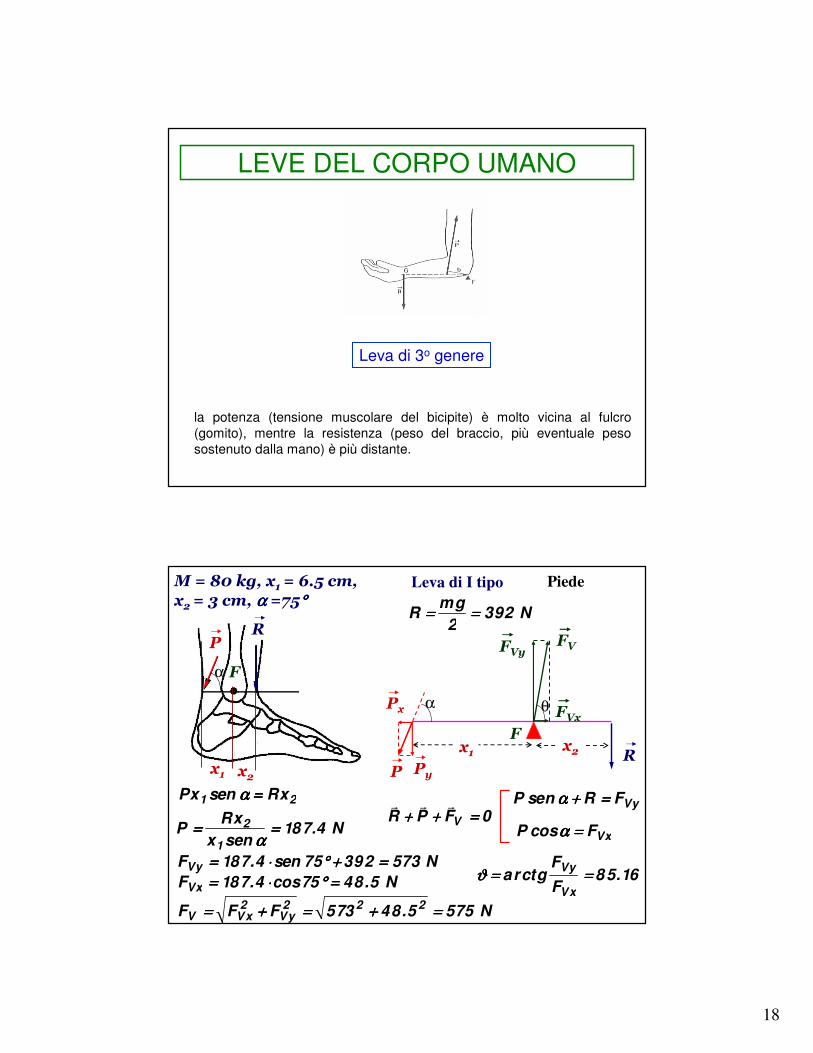
LEVE DEL CORPO UMANO
la potenza (tensione muscolare del bicipite) è molto vicina al fulcro
(gomito), mentre la resistenza (peso del braccio, più eventuale peso
sostenuto dalla mano) è più distante.
Leva di 3o genere
Leva di I tipo
x1 x2
PR
M = 80 kg, x1 = 6.5 cm,
x2 = 3 cm, αααα =75°°°°
α
α
F
PR
x1
Px
Py
FVyFV
FVx
r R ++++
r P ++++
r F V ==== 0
R ====
mg
2==== 392 N
Px1 sen αααα ==== Rx2
P ====
Rx2
x1 sen αααα==== 187.4 N
P sen αααα ++++ R ==== FVy
P cosαααα ==== FVx
FVy ==== 187.4 ⋅⋅⋅⋅ sen 75°°°° ++++ 392 ==== 573 N
FVx ==== 187.4 ⋅⋅⋅⋅cos75°°°° ==== 48.5 N
FV ==== FVx
2 ++++ FVy2 ==== 573 2 ++++ 48.5 2 ==== 575 N
θ
ϑϑϑϑ ==== arctg
FVy
FVx
==== 8 5.16
Piede
F
x2
19
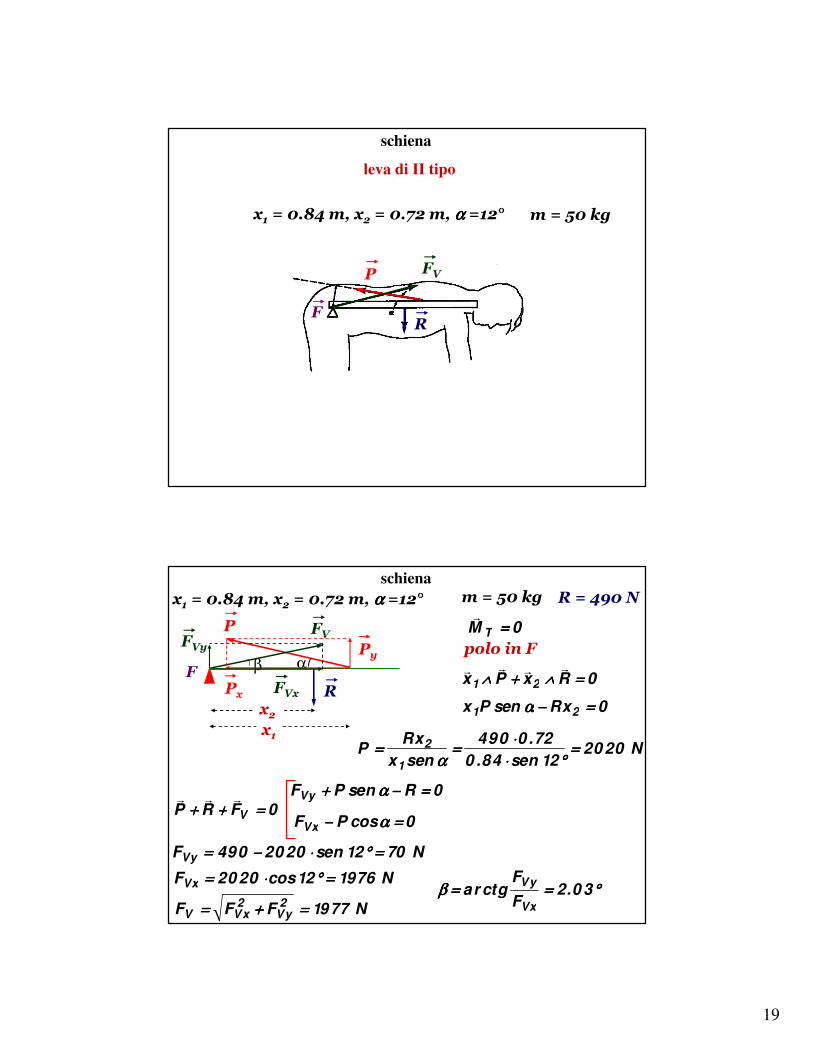
schiena
x1 = 0.84 m, x2 = 0.72 m, αααα =12° m = 50 kg
R
P FV
F
leva di II tipo
R
P FV
schiena
x1 = 0.84 m, x2 = 0.72 m, αααα =12° m = 50 kg R = 490 N
F
r
M T ==== 0
polo in F
x1P sen αααα −−−− Rx2 ==== 0
P ====
Rx2
x1 sen αααα====
490 ⋅⋅⋅⋅0 .72
0 .84 ⋅⋅⋅⋅ sen 12°°°°==== 20 20 N
r P ++++
r R ++++
r F V ==== 0
FVy ++++ P sen αααα −−−− R ==== 0
FVx −−−− P cosαααα ==== 0
FVy ==== 490 −−−− 20 20 ⋅⋅⋅⋅ sen 12°°°° ==== 70 N
FVx ==== 20 20 ⋅⋅⋅⋅cos12°°°° ==== 1976 N
FV ==== FVx
2 ++++ FVy2 ==== 1977 N
ββββ ==== ar ctgFVy
FVx
==== 2.0 3°°°°
αβPy
Px FVx
FVy
x1
x2
r x 1 ∧∧∧∧
r P ++++
r x 2 ∧∧∧∧
r R ==== 0
20
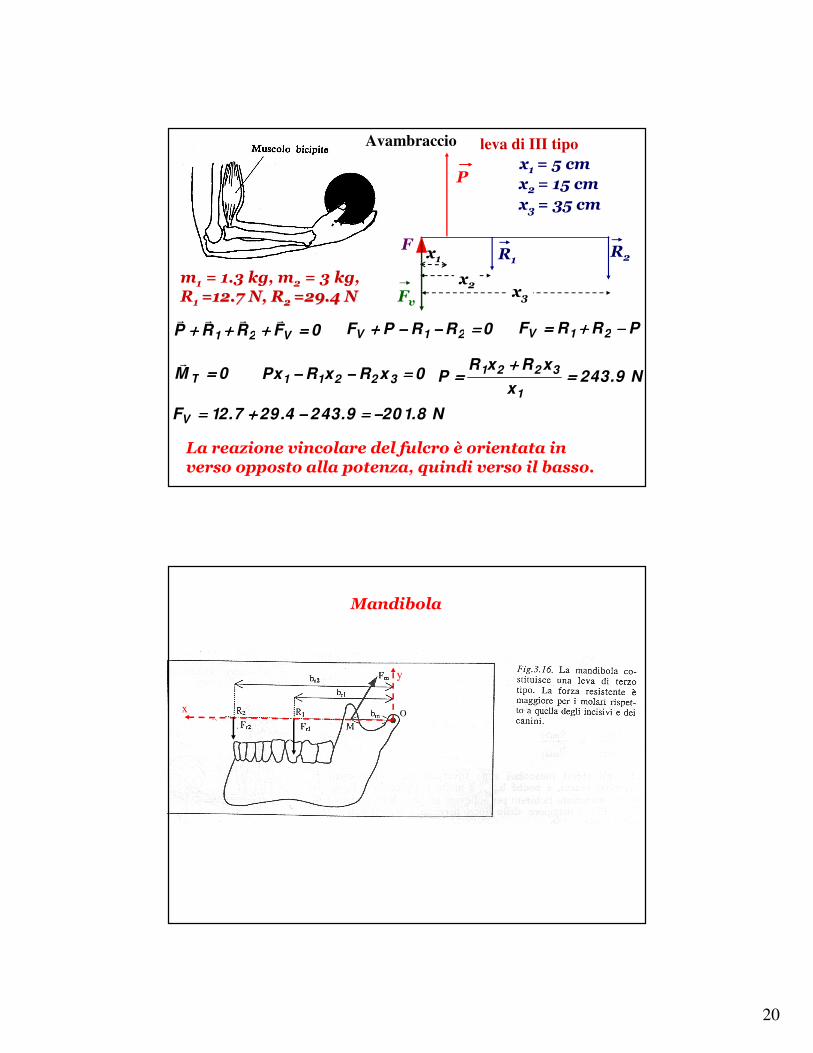
Avambraccio leva di III tipo
F
P
x1
x2
R1R2
x1 = 5 cm
x2 = 15 cm
x3 = 35 cm
x3m1 = 1.3 kg, m2 = 3 kg, R1 =12.7 N, R=12.7 N, R2 2 =29.4 N=29.4 N
r P ++++
r R 1 ++++
r R 2 ++++
r F V ==== 0
r
M T ==== 0 Px1 −−−− R1x2 −−−− R2x3 ==== 0
P ====
R1x2 ++++ R2 x3
x1
==== 243.9 N
FV ++++ P −−−− R1 −−−− R2 ==== 0 FV ==== R1 ++++ R2 −−−− P
FV ==== 12.7 ++++ 29.4 −−−− 243.9 ==== −−−−20 1.8 N
La reazione vincolare del fulcro è orientata in verso opposto alla potenza, quindi verso il basso.
Fv
x
y
O
Mandibola

21
Fm = 500 N br2 = 4 bmEs: usando gli incisivi: θθθθ = 60°
°==β=+=+=
−=⋅−⋅
=θ−=
=⋅
=θ⋅⋅
=⇒θ⋅⋅=⋅⇒=
=+−θ
=⋅=θ=⇒=+θ−
θ=θ==++
4.52F
FarctgN84.40976.324250FFF
N76.3242/35004
2/3500senFFF
N25.1084
2/3500
b
sinbFFsinbFbF0M
0FFsenF
N2502
1500cosFF0FcosF
senFF;cosFF0FFF
Vx
Vy222
Vy
2
VxV
m2rVy
2r
mm2rmm2r2rT
Vy2rm
mVxVxm
mmymmxV2rm
r
rrr
OMR2
Fr2
br2
bm
Fm Fmy
Fmx
θθθθx
y
FVx
FVyFV
β