C:/Documents and Settings/Maurizio/Desktop/pubblicazioni...
86
Dal Piano Affine al Piano Euclideo Reale Maria Scafati Tallini e Maurizio Iurlo Dicembre 2007
Transcript of C:/Documents and Settings/Maurizio/Desktop/pubblicazioni...

Dal Piano Affine al Piano
Euclideo Reale
Maria Scafati Tallini e Maurizio Iurlo
Dicembre 2007

Indice
1 Piani affini 1
1.1 Piani affini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Prime proprietà dei piani affini . . . . . . . . . . . . . . . . . 3
1.3 Dilatazioni di un piano affine . . . . . . . . . . . . . . . . . . 4
1.4 Omotetie in un piano affine . . . . . . . . . . . . . . . . . . . 5
1.5 Traslazioni di un piano affine . . . . . . . . . . . . . . . . . . . 8
2 Piani di traslazione 11
2.1 Piani di traslazione . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Quasicorpi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3 Piani numerici su un quasicorpo . . . . . . . . . . . . . . . . . 16
2.4 Piani affini coordinabili su un quasicorpo K . . . . . . . . . . 22
2.5 Coordinabilità di un piano di traslazione su un quasicorpo . . 23
3 Piani affini desarguesiani 39
3.1 Piani affini desarguesiani . . . . . . . . . . . . . . . . . . . . . 39
3.2 Affinità e coordinazioni in un piano desarguesiano . . . . . . . 45
3.3 Teorema di Desargues . . . . . . . . . . . . . . . . . . . . . . 52
3.4 Piani affini pascaliani . . . . . . . . . . . . . . . . . . . . . . . 59
3.5 Piani affini staudtiani . . . . . . . . . . . . . . . . . . . . . . . 61
i

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
4 Piani affini ordinati 65
4.1 Piani affini ordinati sulle rette . . . . . . . . . . . . . . . . . . 65
4.2 Piani affini ordinati . . . . . . . . . . . . . . . . . . . . . . . . 68
4.3 Figure geometriche fondamentali in un piano affine ordinato . 71
4.4 Dilatazioni in un piano affine ordinato . . . . . . . . . . . . . 76
4.5 Coordinazione di un piano affine desarguesiano ordinato su un
corpo ordinato . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.6 Piani affini reali . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Bibliografia 82
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 ii

Capitolo 1
Piani affini
1.1 Piani affini
Sia α (6= ∅) un insieme, i cui elementi saranno chiamati punti, ed ℜ un
insieme di parti di α i cui elementi saranno chiamati rette.
Diremo che il punto X è incidente alla retta y se X appartiene alla retta
y. La coppia (α,ℜ) si chiama piano affine se sono soddisfatte le seguenti
condizioni:
I. - Due punti distinti X1, X2 ∈ α sono incidenti a una e una sola retta
y ∈ ℜ.
II. - Dati comunque un punto X ∈ α e una retta y ∈ ℜ, con X /∈ y, esiste
una e una sola retta y′ ∈ B, tale che x ∈ y′ e non esista nessun punto
incidente simultaneamente a y e a y′.
III. - Esistono tre punti distinti non incidenti a una stessa retta.
L’insieme α dicesi sostegno del piano affine.
1

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Esempio 1.1 Sia (α,ℜ) la coppia definita da
α = {A,B,C,D}, ℜ = {(A,B), (A,C), (A,D), (B,C), (B,D), (C,D)}.
Essa soddisfa alle condizioni I, II e III e, quindi, è un piano affine (il “piú
piccolo” piano affine).
Esempio 1.2 Sia K un campo qualsiasi e sia α = K2 = K × K. ℜ sia
l’insieme delle equazioni lineari y = ax + b e x = c, a coefficienti in K.
Diremo che un punto (x, y) ∈ K2 è incidente a una retta r ∈ ℜ, se la
coppia (x, y) soddisfa all’equazione lineare data da r. Si prova che valgono le
proprietà I, II, III (esse sono immediate conseguenze della teoria dei sistemi
lineari di due equazioni in due incognite su un campo). La coppia (α,ℜ)
risulta dunque essere un piano affine.
Si dirà isomorfismo fra due piani affini (α,ℜ) e (α′,ℜ′) un’applicazione biet-
tiva f : α→ α′ tale che muti rette di ℜ in rette di ℜ′ e tale che f−1 : α′ → α
muti rette di ℜ′ in rette di ℜ. Due piani affini si diranno isomorfi se esiste
un isomorfismo tra essi (un isomorfismo di un piano affine in sé è un auto-
morfismo). Lo studio dei piani affini viene svolto a meno di isomorfismi. Un
isomorfismo tra piani affini sarà piú propriamente detto affinità.
Si noti che l’identità di α è un automorfismo di (α,ℜ) , l’inverso di un
automorfismo e il prodotto di due automorfismi sono ancora automorfismi di
(α,ℜ) , quindi si ha che l’insieme degli automorfismi di (α,ℜ) costituisce un
gruppo, rispetto al prodotto operatorio, il gruppo delle affinità di un piano
affine (α,ℜ) su se stesso, o gruppo strutturale di ℜ, che sarà denotato con
A (α,ℜ). Esso determina una geometria del piano affine (α,ℜ) che consiste
nello studio delle proprietà delle figure (cioè la parti di α) che si conservano
per affinità. Tale geometria prende il nome di geometria affine di (α,ℜ).
Si prova subito la seguente caratterizzazione delle affinità.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 2

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Proposizione 1.3 Siano (α,ℜ) e (α′,ℜ′) piani affini. Una biezione f :
α→ α′ è un’affinità se, e soltanto se, si ha:
∀r ∈ ℜ, f(r) = r′ ∈ ℜ′.
1.2 Prime proprietà dei piani affini
Si dimostrano i seguenti risultati.
Proposizione 1.4 La relazione di parallelismo nell’insieme ℜ delle rette
del piano affine (α,ℜ) risulta di equivalenza.
Dimostrazione. Manifestamente, la relazione di parallelismo è riflessiva e
simmetrica. Proviamo che essa è transitiva. Date a, b, c ∈ ℜ, se a è parallela
a b e b è parallela a c, allora a è parallela a c. Infatti, o a non ha punti
in comune con c (e quindi è parallela a c), oppure essa ha un punto, P , in
comune con c. In questo secondo caso, per il punto P passano due rette, a
e c, parallele alla retta b, ma allora in questo caso a ≡ c, per l’Assioma II, e
quindi, ancora, a è parallela a bc. �
Chiameremo direzione di una retta r la classe di equivalenza rispetto al
parallelismo determinata da r, cioè l’insieme delle rette parallele a r. Dalla
proposizione precedente, si ha che:
Proposizione 1.5 Un’affinità muta rette parallele in rette parallele.
Dimostrazione. Dati due piani affini (α,ℜ) e (α′,ℜ′), poiché un’affinità è
una biezione fra i sostegni dei due piani affini, due rette prive di punti comuni
si mutano in rette prive di punti comuni, onde l’asserto. �
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 3

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Se r è una retta del piano affine α, la direzione di r, cioè l’insieme di tutte le
rette parallele a r, verrà denotato con δr. L’insieme delle direzioni di (α,ℜ)
sarà indicato con ∆. Se P è un punto di α, si chiama fascio di rette con
centro P, FP , l’insieme delle rette di α passanti per P .
Sia α un piano affine. Denotata con q la cardinalità di una fissata retta r di
α, si ha il risultato seguente.
Proposizione 1.6 Ogni retta di α ha cardinalità q e inoltre risulta q ≥ 2.
Se P è un qualsiasi punto e r una qualsiasi retta del piano, si ha:
|FP | = q + 1, |δr| = q, |α| = q2, |ℜ| = q2 + q.
La cardinalità q prende il nome di ordine del piano α.
1.3 Dilatazioni di un piano affine
Sia (α,ℜ) un piano affine. Denoteremo con A(α,ℜ), o semplicemente con A,
il gruppo delle affinità di (α,ℜ).
Si definisce dilatazione una affinità che muta ogni retta in una retta a
essa parallela, cioè un’affinità che muta ogni direzione in sé, ossia che induce
l’identità nell’insieme ∆ delle direzioni di (α,ℜ).
È evidente che le dilatazioni costituiscono un sottogruppo di A(α,ℜ), che
verrà indicato con D = D(α,ℜ).
Si prova che:
Proposizione 1.7 Una dilatazione ψ che abbia unito un punto O di α,
ha unita ogni retta per O (cioè muta in sé ogni retta per O). Viceversa, se
un’affinità ϕ ha unite tutte le rette del fascio FO di centro un punto O, essa
è una dilatazione che ha il punto unito O.
Proposizione 1.8 Una dilatazione con due punti uniti distinti è l’identità.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 4

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
1.4 Omotetie in un piano affine
In base alla Proposizione 1.8, una dilatazione ψ non identica può avere al piú
un punto unito. Si distinguono dunque due casi, a seconda che ψ abbia o no
un punto unito, O. Nel primo caso, la dilatazione prende il nome di omotetia
di centro O; nel secondo caso ψ prende il nome di traslazione.
Piú precisamente, si definisce traslazione l’identità oppure una dilatazione
priva di punti uniti; si definisce omotetia di centro un punto O, l’identità o
una dilatazione che ha il punto O unito, ovvero, in forza della Proposizione
1.7, un’affinità che ha le rette del fascio FO unite.
Proposizione 1.9 Fissato un punto O di un piano affine α e fissata una
coppia di punti P e P ′ distinti tra loro e da O, ma allineati con O, se esiste,
è unica l’omotetia θ con centro O che muta P in P ′.
Dimostrazione. Siano θ e θ1 due qualsiasi omotetie, ambedue di centro O
e che mutino P in P ′. L’affinità θ−1
1 ◦ θ è un’omotetia di centro O, perché
ha unita ciascuna retta per O (in quanto sia θ che θ−1
1 hanno unite le singole
rette per O) e quindi, in forza della Proposizione 1.7, essa è una dilatazione
che ha il punto O unito, cioè è una omotetia di centro O. D’altra parte,
(θ−1
1 ◦ θ)(P ) = P 6= O e, pertanto, in forza della Proposizione 1.8, essa è
l’identità, cioè θ−1
1 ≡ θ, onde l’asserto. �
Proposizione 1.10 Fissato un punto O, l’insieme ΘO delle omotetie di
centro O è un gruppo, sottogruppo di D che prende il nome di gruppo delle
omotetie con centro O.
Dimostrazione. Manifestamente, l’identità è un’omotetia di centro O, l’in-
versa di un’omotetia di centro O è un’omotetia di centro O. Il prodotto di
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 5

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
due omotetie di centro O è una affinità che ha unita ciascuna retta per O e
quindi, per la Proposizione 1.7, essa è una dilatazione che ha O unito, cioè è
un’omotetia di centro O, onde l’asserto. �
Proposizione 1.11 Siano O e O′ due punti distinti di un piano affine α.
Se esiste un’affinità ϕ che muta O in O′, i due gruppi ΘO e ΘO′ sono isomorfi.
Precisamente ΘO risulta il coniugato di ΘO′ nell’automorfismo interno di A
indotto da ϕ.
Dimostrazione. Sia θ′ ∈ ΘO′ . Proviamo che ϕ−1 ◦ θ′ ◦ ϕ è un’omotetia con
centro O, cioè è un elemento di ΘO.
Sia r una qualsiasi retta per O. Posto r′ = ϕ(r) (onde ϕ−1(r′) = r), si ha (in
quanto r′ passa per O′):
ϕ−1 ◦ θ′ ◦ ϕ(r) = ϕ−1 ◦ θ′(r′) = ϕ−1(r′) = r.
Dunque, l’affinità ϕ−1 ◦ θ′ ◦ ϕ ha unita ogni retta passante per O. Per la
Proposizione 1.7, essa è un’omotetia con centro O. Si consideri allora la
seguente biezione tra ΘO e ΘO′ :
F : θ′ ∈ ΘO′ 7−→ ϕ−1 ◦ θ′ ◦ ϕ ∈ ΘO′ .
Essa coincide con la restrizione a ΘO′ dell’automorfismo interno di A, relativo
all’elemento ϕ di A e pertanto è un isomorfismo del gruppo ΘO′ sul gruppo
ΘO. Si ha cosí l’asserto. �
Il gruppo A(α,ℜ) delle affinità si dice transitivo su α, se, scelti comunque
due punti P1 e P2 di α, esiste almeno una affinità che muta P1 in P2.
Dalle proposizioni precedenti segue allora:
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 6

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Proposizione 1.12 Se il gruppo A(α,ℜ) è transitivo su α, i gruppi delle
omotetie aventi i centri nei singoli punti di α sono tutti isomorfi.
Proviamo ora la proposizione seguente.
Proposizione 1.13 Se A(α,ℜ) è transitivo su α e se è dato un punto O
di α, tale che esistano tutte le omotetie con centro in O, allora esistono tutte
le omotetie con centro in un qualsiasi punto di α. Viceversa, se esistono tutte
le possibili omotetie di α, allora A(α,ℜ) è transitivo su α.
Dimostrazione. Supposto A(α,ℜ) transitivo su α e supposto esistente un
punto O, tale che esistano tutte le omotetie che lo ammettono come centro
(cioè un punto O tale che, dati due punti P e P ′, distinti tra loro e da O
e allineati con O, esista l’omotetia di centro O che muta P in P ′), sia O′
un qualsiasi punto di α. Proviamo che esistono tutte le omotetie con centro
O′, cioè che, comunque si prendano due punti Q e Q′, distinti tra loro e
da O′ e allineati con O′, esiste un’omotetia di centro O′ che muta Q in Q′.
Poiché A(α,ℜ) è transitivo su α, esiste un’affinità ϕ che muta O′ in O. Posto
P = ϕ(Q), P ′ = ϕ(Q′), poiché Q, Q′, O′ sono tre punti distinti e allineati
e ϕ è un’affinità, altrettanto accade per i punti O = ϕ(O′), P = ϕ(Q),
P ′ = ϕ(Q′). Sia θ l’omotetia di centro O che muta P in P ′, certamente
esistente per ipotesi. L’affinità ϕ−1 ◦ θ ◦ ϕ è un’omotetia di centro O′ (in
quanto ogni retta r′ per O′ è mutata in sé, perché, posto r = ϕ(r′), da cui
r′ = ϕ−1(r), si ha ϕ−1 ◦ θ ◦ ϕ(r′) = ϕ−1 ◦ θ(r) = ϕ−1(r) = r′); essa muta Q
in Q′, in quanto ϕ−1 ◦ θ ◦ ϕ(Q) = ϕ−1 ◦ θ(P ) = ϕ−1(P ′) = Q′. Si ha cosí la
prima parte dell’asserto. Il viceversa è ovvio. �
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 7

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
1.5 Traslazioni di un piano affine
Una traslazione del piano affine (α,ℜ) è un’affinità che muta ogni retta in
una retta a essa parallela ed è priva di punti uniti, oppure è l’identità di α.
Sia τ una traslazione non identica. Per ogni punto P di α, sia P ′ =
τ(P ). Risulta P ′ 6= P . Sia r la retta PP ′. La retta trasformata τ(r) dovrà
passare per P ′ ed essere parallela a r, dunque deve coincidere con r. Ne
segue che per ogni punto P di α passa una ben determinata retta unita in
τ, precisamente la retta PP ′, congiungente P con il suo corrispondente P ′
mediante τ . Poiché due rette unite distinte in τ non possono incontrarsi in un
punto (il quale, altrimenti, sarebbe unito), le rette unite di τ sono tutte tra
loro parallele e costituiscono una direzione δτ , che prende il nome di direzione
della traslazione τ .
Da quanto precede, si ha che in una traslazione τ due punti corrispondenti
P e P ′ appartengono a una retta avente la direzione δτ della traslazione τ .
Proviamo che:
Proposizione 1.14 Il prodotto di due traslazioni τ, τ ′ aventi la stessa
direzione è ancora una traslazione avente la stessa direzione. Ne segue che
le traslazioni aventi una stessa direzione costituiscono un gruppo.
Dimostrazione. Il prodotto τ ′ ◦ τ delle traslazioni τ, τ ′ è una dilatazione
(perché le dilatazioni formano gruppo) che ha unite tutte le rette della di-
rezione δτ = δτ ′ . Tale dilatazione non può essere un’omotetia (a meno che
non sia l’identità) perché in un’omotetia non identica le rette unite passano
tutte per un punto (mentre τ ′ ◦ τ ha unite delle rette parallele), quindi è una
traslazione. �
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 8

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Proposizione 1.15 Dati comunque due punti distinti P e P ′ di a, se
esiste, è unica la traslazione τ che muta P in P ′.
Dimostrazione. Ogni traslazione che muta P in P ′ ha la direzione della
retta r = PP ′. Siano τ e τ1 due traslazioni che mutano P in P ′. L’affinità
τ−1 ◦ τ è una traslazione, per la proposizione precedente, ma il punto P è in
essa unito, dunque essa è l’identità, cioè τ1 = τ . �
Enunciamo, senza dimostrare, la proposizione seguente.
Proposizione 1.16 L’insieme T di tutte le traslazioni di α costituisce un
gruppo, sottogruppo di D. Inoltre, se τ1 e τ2 sono due traslazioni con direzioni
distinte, risulta τ1 ◦ τ2 = τ2 ◦ τ1.
Si dimostra che:
Proposizione 1.17 Il gruppo T delle traslazioni è invariante nel gruppo
A delle affinità di A e quindi anche nel gruppo D delle dilatazioni.
Nel piano affine (α,ℜ) rimangono cosí determinati il gruppo A delle
affinità, il gruppo ∆ delle dilatazioni, sottogruppo invariante di A, il gruppo
T delle traslazioni, sottogruppo invariante di D e di A. Possiamo allora con-
siderare i gruppi quozienti A�T e D�T, il secondo essendo un sottogruppo
invariante del primo.
Si fissi il punto O del piano α e sia AO il gruppo delle affinità che hanno
O unito e ΘO il sottogruppo di AO delle omotetie di centro O. Sia:
FO : ϕO ∈ AO 7−→ [ϕO] = ϕO ◦ T ∈ A�T (1.1)
la restrizione ad AO dell’omomorfismo canonico
F : ϕ ∈ A 7−→ [ϕ] = ϕ ◦ T ∈ A�T.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 9

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Si prova che FO è un monomorfismo, cioè che è iniettivo, cosí come la sua
restrizione a ΘO:
fO : θ ∈ ΘO 7−→ [θ] = θ ◦ T ∈ ∆�T.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 10

Capitolo 2
Piani di traslazione
2.1 Piani di traslazione
Un piano affine (α,ℜ) si dice di traslazione, se il gruppo T delle sue traslazioni
è transitivo su α, cioè se, per ogni coppia di punti P0, P1 di α, esiste una (e
quindi una sola, cfr Proposizione 1.15) traslazione che muta P0 in P1.
Per esempio, se K è un campo, il piano affine K2 (cfr Esempio 1.2) risulta
manifestamente un piano di traslazione che muta il punto P0(x0, y0) nel punto
P1(x1, y1),la trasformazione essendo data da x′ = x−x0 +x1, y′ = y−y0 +y1.
In un piano di traslazione il gruppo A è manifestamente transitivo (in
quanto lo è il suo sottogruppo T) e, quindi, in forza della Proposizione 1.12,
per ogni coppia di punti O e O′ di α il gruppo ΘO è isomorfo al gruppo ΘO′ .
Dimostriamo che:
Proposizione 2.1 Il monomorfismo FO, dato dalla (1.1) risulta un iso-
morfismo e quindi ΘO è isomorfo a ∆�T, per ogni punto O di α.
Dimostrazione. Si tratta di provare che, per ogni [ϕ1] ∈ A�T, esiste
ϕ ∈ AO, tale che ϕ appartiene alla classe [ϕ1] , cioè che esiste una traslazione
11

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
τ ∈ T, tale che posto ϕ = ϕ1 ◦τ, risulta ϕ(O) = O. Posto O′ = ϕ−1
1 (O), onde
O = ϕ1(O′), sia τ la traslazione che muta O in O′ (certo esistente perché il
piano è di traslazione) e sia ϕ = ϕ1 ◦ τ . Risulta
ϕ(O) = ϕ1 ◦ τ(O) = ϕ1(O′) = O.
Si ha cosí l’asserto. �
Come corollario della proposizione precedente si ha che:
Proposizione 2.2 Fissato comunque un punto O del piano di traslazione
α, ogni affinità ϕ ∈ A si può decomporre in uno e un sol modo nel prodotto
di un’affinità ϕO ∈ AO e di una traslazione τ :
ϕ = ϕO ◦ τ.
Inoltre, l’applicazione
f : ϕ ∈ A 7−→ (ϕO, τ) ∈ AO ⊗ T
è un isomorfismo tra il gruppo A e il gruppo prodotto diretto di AO per T.
Dimostrazione. Per ogni ϕO ∈ A, nella classe [ϕ] = ϕ ◦ T ∈ A�T esiste
uno e un solo elemento ϕO ∈ AO, dato da ϕO = F−1
O ([ϕ]) , ma allora si ha
ϕO ∈ [ϕ] , cioè ϕ = ϕO ◦ τ . Dalla unicità di ϕO segue poi anche l’unicità di
τ . Ne segue l’asserto. �
Diamo ora la seguente caratterizzazione di un piano di traslazione.
Proposizione 2.3 Condizione necessaria e sufficiente affinché un piano
affine α sia un piano di traslazione è che vi siano due direzioni distinte x
e y tali che esistano tutte le traslazioni con direzioni x e y, cioè che dati
comunque due punti distinti P e P ′ tali che la retta PP ′ abbia la direzione
x oppure y, esista la traslazione che muta P in P ′.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 12

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Dimostrazione. Se un piano α è di traslazione, manifestamente è verificata
la proprietà enunciata.
Proviamo il viceversa, cioè che, se esistono tutte le traslazioni con direzione
x oppure y, il piano α è di traslazione. Siano P e P ′ due qualunque punti
distinti di α. Si tratta di provare che esiste una traslazione che muta P in
P ′. Se la retta PP ′ ha la direzione x, o la direzione y, esiste senz’altro la
traslazione cercata, per ipotesi. Supponiamo dunque che la retta PP ′ abbia
direzione distinta da x e da y. La retta per P avente direzione x e la retta
per P ′ avente direzione y non sono parallele (in quanto x e y sono direzioni
distinte). Sia allora P1 il punto di incontro di tali due rette. Esiste per
ipotesi una traslazione τ1 che muta P in P1 e una traslazione τ2 che muta P1
in P ′. Il prodotto τ2 ◦ τ1 è una traslazione (cfr Proposizione 1.16), la quale
manifestamente muta P in P ′, onde l’asserto. �
Si hanno i risultati seguenti.
Proposizione 2.4 Sia α un piano di traslazione. Fissata comunque una
traslazione τ e due direzioni x e y distinte, esiste una e una sola coppia di
traslazioni τx e τy, aventi rispettivamente le direzioni x e y, tali che:
τ = τy ◦ τx.
Proposizione 2.5 Il gruppo T delle traslazioni del piano di traslazione
α è commutativo. Inoltre, fissate comunque due direzioni distinte x e y e
denotati con Tx e Ty i gruppi delle traslazioni con direzioni x e y, si ha che
il gruppo T è isomorfo al prodotto diretto Tx ⊗ Ty.
Dimostrazione. Siano τ1 e τ2 due qualunque traslazioni. Se esse hanno
direzioni distinte, si è già provato (cfr Proposizione 1.16) che τ2 ◦ τ1 = τ1 ◦ τ2.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 13

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Supponiamo dunque che τ1 e τ2 abbiano la stessa direzione. Siano x e y
due direzioni distinte tra loro e dalla direzione comune a τ1 e τ2 (certamente
esistenti, perché in α esistono almeno tre direzioni distinte). Per la propo-
sizione precedente, esistono due traslazioni τ1x, τ1y, tali che τ1 = τ1y ◦ τ1x.
Si ha allora, in forza del fatto che τ1x e τ1y hanno direzioni distinte dalla
direzione di τ2 e della Proposizione 1.16):
τ2 ◦ τ1 = τ2 ◦ τ1y ◦ τ1x = τ1y ◦ τ2 ◦ τ1x = τ1y ◦ τ1x ◦ τ2 = τ1 ◦ τ2.
Ciò prova che T è commutativo. Fissate due direzioni distinte x e y, in forza
della proposizione precedente, ogni τ ∈ T si può scrivere in uno e un sol
modo nella forma τy ◦ τx, con τx ∈ Tx, τy ∈ Ty. L’applicazione:
f : τ ∈ T 7−→ (τx, τy) ∈ Tx ⊗ Ty
è manifestamente un isomorfismo tra il gruppo T e il gruppo prodotto diretto
Tx ⊗ Ty. Ne segue l’asserto. �
2.2 Quasicorpi
Sia K un insieme non vuoto in cui sono definite un’operazione (+) di somma
e un’operazione (·) di prodotto. Si dice che la terna (K,+, ·) è un quasicorpo
destro, se sono verificati i seguenti assiomi:
I - (K,+) è un gruppo abeliano additivo;
II - K ′ = K − {0} 6= ∅ è chiuso rispetto al prodotto, è dotato di unità u;
III - a (b+ c) = ab+ ac, ∀a, b, c ∈ K;
IV - ∃! x ∈ K | xa = b, ∀a, b ∈ K, a 6= 0;
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 14

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
V - ∃! y ∈ K | ay − by = c, ∀a, b, c ∈ K.
In modo analogo si definiscono i quasicorpi sinistri, qualora siano verificati
gli assiomi I, II e i seguenti:
III′ - (b+ c) a = ba+ ca, ∀a, b, c ∈ K;
IV′ - ∃! x ∈ K | ax = b, ∀a, b ∈ K, a 6= 0;
V′ - ∃! y ∈ K | ya− yb = c, ∀a, b, c ∈ K.
Nel seguito, per fissare le idee, noi ci occuperemo dei quasicorpi destri,
quanto diremo valendo con le opportune modifiche anche per i quasicorpi
sinistri. Un quasicorpo destro si chiamerà sovente quasicorpo, sottintendendo
l’aggettivo destro.
Un quasicorpo destro dicesi associativo, quando l’operazione di prodotto
gode della proprietà associativa. Un quasicorpo destro si dice distributivo
quando vale la proprietà distributiva anche a sinistra. Infine, esso si dice
commutativo quando il prodotto è commutativo.
Sia (K,+, ·) un quasicorpo. Si possono provare le seguenti proprietà.
Proposizione 2.6 Un quasicorpo destro che sia associativo e distributivo
è un corpo.
Proposizione 2.7 Un quasicorpo è privo di divisori dello zero.
Proposizione 2.8 ∀a, b, c ∈ K si ha a(b− c) = ab− ac.
Proposizione 2.9 ∀a, c ∈ K si ha a(−c) = −ac.
Proposizione 2.10 Un quasicorpo associativo è tale (K, ·) è un gruppo.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 15

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Proposizione 2.11 In un quasicorpo valgono le seguenti leggi di sempli-
ficazione:
ax = ay, a 6= 0 =⇒ x = y,
xb = yb, b 6= 0 =⇒ x = y.
2.3 Piani numerici su un quasicorpo
Sia K un quasicorpo destro. Consideriamo il prodotto cartesiano K ×K =
K2, costituito dalle coppie (x, y) , con x ∈ K, y ∈ K. Un elemento (x, y) di
K2 sarà detto punto di coordinate x e y (x ascissa, y ordinata). Denotiamo
con ℜ la famiglia (non vuota) di parti di K2, ciascuna delle quali - che
chiameremo rette - consta dei punti di K2 le cui coordinate soddisfano a
un’equazione del tipo:
y = ax+ b, a, b ∈ K, (2.1)
oppure del tipo:
x = c, c ∈ K. (2.2)
Ci proponiamo di mostrare che ℜ costituisce una struttura di piano affine in
K2. All’uopo proviamo che:
Proposizione 2.12 Dati due elementi (x1, y1) , (x2, y2) distinti di K2, es-
iste una e una sola equazione del tipo (2.1), ovvero (2.2) che è soddisfatta da
entrambi i punti.
Dimostrazione. Dobbiamo dimostrare che esiste una sola coppia (a, b) ∈K2, ovvero un sol c ∈ K, tali che l’equazione y = ax+ b, ovvero l’equazione
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 16

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
x = c sia soddisfatta da entrambi i punti.
Supponiamo dapprima x1 = x2. Posto allora c = x1 = x2, entrambi i punti
(x1, y1) = (c, y1) e (x2, y2) = (c, y2) soddisfano all’equazione x = c. Tale
equazione è unica; infatti se due punti soddisfacessero anche a un’equazione
del tipo x = c′, necessariamente sarebbe c = c′; se invece essi soddisfacessero
a un’equazione del tipo (2.2), si avrebbe:
y1 = ac+ b, y2 = ac+ b
e quindi y1 = y2, onde i due punti coinciderebbero, contro l’ipotesi.
Supponiamo ora che sia x1 6= x2. In tal caso, non esiste manifestamente
nessuna equazione del tipo (2.2) soddisfatta da entrambi i punti. Poiché
x1−x2 6= 0, esiste (Assioma IV di quasicorpo, con a = x1−x2 e b = y1− y2)
uno e un solo elemento a ∈ K, tale che sia
a (x1 − x2) = y1 − y2. (2.3)
Posto poi
b = −(ax1) + y1, (2.4)
verifichiamo che l’equazione
y = ax+ b (2.5)
è soddisfatta da entrambi i punti. La (2.4) esprime il fatto che (x1, y1) sod-
disfa alla (2.5). Verifichiamo ora che anche (x2, y2) soddisfa alla (2.5). Si ha
in forza della Proposizione 2.9 e della (2.4):
ax2 + b = ax2 − (ax1) + y1 = ax2 + a (−x1) + y1
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 17

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
e quindi, per l’Assioma III di quasicorpo e per la Proposizione 2.9 e tenendo
conto della (2.3),
ax2 + b = a (x2 − x1) + y1 = a (− (x1 − x2)) + y1 =
= − (a (x1 − x2)) + y1 = − (y1 − y2) + y1 = y2,
cioè (x2, y2) soddisfa alla (2.5).
Se y = ax + b è un’equazione soddisfatta da entrambi i punti, essa deve
necessariamente coincidere con la (2.5). Infatti, da
y1 = ax1 + b, y2 = ax2 + b, (2.6)
sottraendo membro a membro, si ha:
(y1 − y2) = a (x1 − x2) ,
onde necessariamente a = a (cfr Assioma IV e (2.3)), quindi, per le (2.4) e
(2.6), si ha b = b. Rimane cosí completamente provato l’asserto. �
Proposizione 2.13 Ogni retta di K2 ha cardinalità |K| ≥ 2. Ne consegue
che ogi retta r ∈ ℜ ha almeno due punti.
Dimostrazione. Una retta di equazione (2.2) consta di tutti i punti (c, y),
∀y ∈ K. Pertanto ogni retta (2.2) ha cardinalità |K|. Inoltre, data una retta
r di equazione (2.1), l’applicazione
x ∈ K 7−→ (x, ax+ b) ∈ r
è manifestamente biettiva (in quanto valori distinti di x dànno origine a punti
distinti di r), onde la cardinalità di r è |K|. Si ha cosí l’asserto. �
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 18

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Proposizione 2.14 La famiglia ℜ è propria, nel senso che equazioni dis-
tinte (2.1) o (2.2) dànno luogo a rette distinte.
Dimostrazione. Se due equazioni distinte (2.1) ovvero (2.2) dessero luogo
alla stessa retta r, poiché una retta (la r in questo caso) contiene almeno due
punti distinti (cfr Proposizione 2.13), tali due equazioni sarebbero soddisfatte
entrambe da due punti distinti, in contraddizione con la Proposizione 2.12,
onde l’asserto. �
Proposizione 2.15 Tutte e sole le rette di ℜ parallele alla retta x = c
hanno equazione x = c′, al variare di c′ in K. Tutte e sole le rette di ℜparallele alla retta y = ax + b hanno equazione y = ax + b′, al variare di b′
in K.
Dimostrazione. Due rette di equazioni x = c, x = c′, o non hanno alcun
punto in comune, se c 6= c′, ovvero coincidono se c = c′.
Una retta x = c e una retta y = ax + b hanno in comune l’unico punto
(c, ac+ b) e quindi non sono parallele.
Due rette di equazioni y = ax+ b, y = a′x+ b′ hanno sempre un unico punto
in comune, se a 6= a′. Infatti, per l’Assioma V di quasicorpo, esiste ed è unico
l’elemento x1 di K soluzione dell’equazione
ax− a′x = b− b′,
cioè dell’equazione
ax+ b = a′x+ b′.
Quindi, posto y1 = a′x1 + b = a′x1 + b′, esiste ed è unico il punto (x1, y1)
soluzione di entrambe le equazioni date. Ne segue che, se una retta è parallela
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 19

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
alla retta y = ax + b, essa deve avere equazione y = ax + b′. Proviamo
che, per ogni b′ ∈ K, la retta y = ax + b′ è di fatto parallela alla retta
y = ax + b, mostrando che, se tali due rette avessero un punto in comune,
esse coinciderebbero. Infatti, se (x1, y1) soddisfa a entrambe le equazioni,
deve aversi
y1 = ax1 + b = ax1 + b′,
onde b = b′. Si è cosí completamente provato l’asserto. �
Proposizione 2.16 Dato un punto P0 (x0, y0) di K2 e una retta r di equazione
(2.1), ovvero (2.2), esiste una e una sola retta per P0 parallela a r. Precisa-
mente, essa ha equazione y − y0 = a (x− x0) , nel primo caso, e x = x0 nel
secondo caso.
Dimostrazione. Una retta parallela alla (2.1) deve avere equazione (cfr
Proposizione 2.15) y = ax + b′. Dovendo essa contenere il punto (x0, y0) ,
sarà y0 = ax0 + b′, onde b′ = y0 − (ax0) e quindi siffatta retta ha equazione
y = ax+ y0 − (ax0)⇐⇒ y − y0 = a (x− x0) .
Una retta parallela alla (2.2) deve avere equazione x = c′ (cfr Proposizione
2.15); dovendo essa contenere il punto (x0, y0) , deve essere c′ = x0, onde
l’asserto. �
Proposizione 2.17 In K2 esistono tre punti distinti e non appartenenti
a una stessa retta.
Dimostrazione. Osservato che K possiede almeno due elementi, 0 e 1,
i tre punti (0, 0) , (1, 0) , (0, 1) di K2 sono manifestamente distinti e non
appartengono a una stessa retta. �
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 20

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Per la Proposizione 2.14, si ha che ℜ è una famiglia (non vuota) propria
di parti di K2. Dalle Proposizioni 2.12 e 2.16 si hanno gli Assiomi I e II di
piano affine; la Proposizione 2.17 equivale all’Assioma III di quasicorpo.
Si ha pertanto che (K2,ℜ) è un piano affine. Esso ha ordine q = |K| , in forza
della Proposizione 2.13, e si chiama piano affine numerico sul quasicorpo K.
Proviamo infine che:
Proposizione 2.18 Il piano affine (K2,ℜ) è un piano di traslazione.
Dimostrazione. Dati comunque due punti, P1 (x1, y1) e P2 (x2, y2) , si trat-
ta di provare che esiste una traslazione che muta P1 in P2. Si consideri
l’applicazione
τ : (x, y) ∈ K2 7−→ (x′, y′) ∈ K2,
di equazioni:
x′ = x+ x2 − x1
y′ = y + y2 − y1
. (2.7)
Essa muta P1 in P2 ed è biettiva, la sua inversa essendo:
x = x′ + x1 − x2
y = y′ + y1 − y2
.
L’applicazione τ muta ogni retta di equazione x = c nella retta x′ = c+x2−x1,
che è parallela a essa (cfr Proposizione 2.15). τ muta inoltre ogni retta di
equazione y = ax+ b nella retta di equazione
y′ = ax′ + [a (x1 − x2) + y2 − y1] + b
che è parallela a essa. τ è quindi un’affinità che muta ogni retta in una a
essa parallela, cioè è una dilatazione. Mostriamo ora che essa è o l’identità
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 21

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
(se P1 = P2) oppure è priva di punti uniti, cioè τ è una traslazione. Dalla
(2.7) si ha (posto x′ = x, y′ = y):
x2 = x1, y2 = y1,
onde l’asserto. �
2.4 Piani affini coordinabili su un quasicorpo
K
Un piano affine si dice coordinabile (o coordinatizzabile) su un quasicorpo
K, se esso risulta isomorfo al piano numerico K2 sul quasicorpo K (defini-
to nel numero precedente), cioè se esiste una affinità c : α → K2. Tale
affinità prende il nome di coordinazione del piano affine α sul quasicorpo K.
Proviamo che:
Proposizione 2.19 Un piano affine α, coordinabile sul quasicorpo K, è
un piano di traslazione.
Dimostrazione. Sia c : α → K2 una coordinazione di α su K. Scelti
comunque due punti P e P ′ di α, si consideri l’affinità ϕ di α, data da
ϕ = c−1 ◦ τ ◦ c, (2.8)
ove τ è la traslazione di K2 che muta c(P ) in c(P ′), traslazione certamente
esistente, perché K2 è un piano di traslazione. La ϕ muta manifestamente
P in P ′. Mostriamo che ϕ è una traslazione di α, cioè che ϕ o è l’identità
ovvero non ha punti uniti e che muta ogni retta r di α in una retta a essa
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 22

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
parallela.
Se Q è un punto unito di ϕ, si ha:
Q = (c−1 ◦ τ ◦ c)(Q) =⇒ c(Q) = (τ ◦ c)(Q) = τ(c(Q)),
onde c(Q) è un punto unito di K2 in τ . Poiché τ è una traslazione di K2,
essa deve essere uguale all’identità di K2 e quindi, per la (2.8), anche ϕ è
l’identità di α. Sia r una qualsiasi retta di α e r′ = ϕ(r). Proviamo infine
che, se r e r′ hanno un punto, T, in comune, esse coincidono. Si ha:
T = r ∩ (c−1 ◦ τ ◦ c)(r) =⇒ c(T ) = c(r) ∩ (τ ◦ c)(r) = c(r) ∩ τ(c(r)).
Poiché τ è una traslazione di K2, le due rette c(r) e τ(c(r)), avendo il punto
c(T ) in comune, coincidono e quindi r = (c−1 ◦ τ ◦ c)(r) = r′. Si ha cosí
l’asserto. �
La proposizione precedente equivale ad affermare che
• se un piano affine α non è di traslazione, esso non è coordinabile su
un quasicorpo.
In relazione a ciò, osserviamo che esistono di fatto piani affini che non sono
di traslazione. Inoltre, si dimostra che ogni piano di traslazione è coordinabile
su un quasicorpo. Ne seguirà che lo studio dei piani di traslazione è ricondotto
a quello dei quasicorpi.
2.5 Coordinabilità di un piano di traslazione su
un quasicorpo
Ci proponiamo ora di invertire la Proposizione 2.19, cioè di provare che ogni
piano di traslazione risulta coordinabile su un quasicorpo.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 23

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Sia α un piano di traslazione. Siano X e Y due rette distinte di α,
incidenti in un punto O e u un punto di X distinto da O, u un punto di Y
distinto da O (u e u esistono in ogni caso, perché in α ogni retta ha almeno
due punti). Denotato con V il punto di intersezione della retta per u parallela
a Y e della retta per u parallela a X (vedi Figura 2.1), sia U la retta per O
e V (si noti che è O 6= V ). Si consideri la biezione ∼ di X su Y :
aya
UY
u V
xa
O u a X
Figura 2.1:
∼: a ∈ X 7−→ a ∈ Y,
che associa a a ∈ X il punto a ∈ Y, ottenuto nel modo seguente: si conduca
per a la parallela xa a Y e per il punto xa ∩ U la parallela ya a Y . La ya
incontra Y nel punto a. Sia P un qualsiasi punto del piano α. Per P si
conduca la retta parallela a Y (cfr Figura 2.2) e sia x il punto d’incontro di
tale retta con X. Si conduca per P la parallela a X e sia y il punto d’incontro
di tale parallela con Y e y il punto di X che nella biezione ∼ si muta in y.
Si ottiene in tal modo una biezione c di α su X2 = X ×X:
c : P ∈ α 7−→ (x, y) ∈ X2. (2.9)
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 24

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
y
Y
P (x, y)U
u V
O u x y X
Figura 2.2:
x e y prendono il nome di coordinate del punto P nel riferimento coordinato
(O,X, Y, u, u).
Definiamo la seguente operazione di somma (cfr Figura 2.3). Per ogni
Y
L
U
M
O a b a+ b X
Figura 2.3:
a, b ∈ X, si conduca la retta per b parallela a Y e sia L il punto d’incontro
di essa con la retta U . Per il punto L si conduca la parallela a X e sia M
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 25

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
il punto d’incontro di essa con la parallela per a alla U . Definiamo a + b il
punto d’incontro della parallela per M all’asse Y con l’asse X.
Rispetto all’operazione di somma X è dunque un gruppoide.
Denotiamo con TX il gruppo delle traslazioni di α aventi come direzione
quelle della retta X. Si consideri l’applicazione:
ϕ : τ ∈ T 7−→ τ(O) ∈ X.
L’applicazione ϕ, qualunque sia il piano α (anche non di traslazione), risulta
iniettiva, in quanto, se esiste, è unica la traslazione di TX che muta O in
un punto di X (cfr Proposizione 1.15). La ϕ risulta poi surgettiva (e quindi
biettiva), se esistono tutte le traslazioni aventi la direzione X. Attualmente,
poiché α è un piano di traslazione, ϕ è una biezione.
Mostriamo ora che, qualunque sia α, ϕ è un monomorfismo e, quindi, se α è
un piano di traslazione, ϕ è un isomorfismo del gruppo abeliano T (cfr Propo-
sizione 2.5) sul gruppoide X. Ne segue che, se α è un piano di traslazione,
(X,+) risulta un gruppo abeliano additivo.
Si tratta di provare che:
ϕ (τ ◦ τ ′) = ϕ (τ) + ϕ (τ ′) , ∀τ, τ ′ ∈ TX ,
cioè che:
(τ ◦ τ ′) (O) = τ(O) + τ ′(O),
ossia che, posto a = τ(O) e b = τ ′(O), si ha:
τ(b) = a+ b. (2.10)
La traslazione τ muta la retta U nella retta per a parallela a essa (in quanto
τ(O) = a) e quindi trasforma il punto L nel punto M (vedi Figura 2.3),
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 26

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
perché τ ha la direzione della retta X, cioè della retta LM . Dunque τ muta
la retta per L parallela a Y (cioè la retta che congiunge L con b) nella retta
per M parallela a Y (cioè nella retta che congiunge M con a+ b). Ne segue
che τ muta b in a+ b, onde la (2.10).
Osserviamo infine che lo zero di (X,+), che indicheremo con 0X o semplice-
mente con 0, risulta il punto O, in quanto ϕ, essendo un isomorfismo, muta
l’identità di TX nello zero di (X,+) e d’altra parte ϕ (1TX) = 0X .
Si è cosí provato che:
Lemma 2.20 L’insieme X, rispetto all’operazione di somma testé introdot-
ta, risulta un gruppo abeliano, in cui lo zero è dato dal punto O.
Le rette parallele a X hanno equazione y = c, con c ∈ X (nel senso che
se r ∈ ℜ è una retta di α parallela all’asse X, i suoi punti hanno coordinate,
nel riferimento (O,X, Y, u, u) , soddisfacenti all’equazione y = c e, viceversa,
ogni punto soddisfacente a tale equazione appartiene alla retta r). ??
Ciò segue immediatamente dalla definizione delle coordinate di un punto nel
riferimento (O,X, Y, u, u). Viceversa, dato comunque un elemento c ∈ X,
l’insieme dei punti di α le cui coordinate soddisfano all’equazione y = c,
risulta una retta parallela all’asse X. In particolare, l’asse X ha equazione
y = 0. Analogamente, le rette parallele all’asse Y hanno equazione x = k, con
k ∈ X, e viceversa ogni equazione di tal tipo è quella di una retta parallela
all’asse Y . Evidentemente, sussiste una corrispondenza biunivoca fra tali
rette e le loro equazioni.
La retta unitaria U ha manifestamente equazione x = y, per come sono state
definite le coordinate di un punto di α (vedi Figura 2.4).
Proviamo ora che
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 27

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
YU
yV
O x = y X
Figura 2.4:
Lemma 2.21 Per ogni a ∈ X, la traslazione τa ∈ TX , che muta O in a, ha
equazioni:
x′ = x+ a
y′ = y. (2.11)
Dimostrazione. Sia L il punto d’incontro della retta U con la retta per P
parallela all’asse Y e M l’intersezione della retta per L parallela all’asse X
con la retta per a parallela a U (cfr Figura 2.5) La traslazione che muta O in
a, muta L in M e muta x (ascissa di P ) in a + x (per come è stata definita
l’operazione di somma). Allora P ′ = τa(P ) sarà l’intersezione della retta per
P parallela all’asse X con la retta per M parallela all’asse Y e quindi avrà
la stessa ordinata di P (ossia y′ = y) e ascissa x′ = a + x, da cui l’asserto,
tenuto conto che è a+ x = x+ a, per il Lemma 2.20. �
Proviamo ora che
Lemma 2.22 Per ogni b ∈ X, la traslazione τb∈ TY che muta O in b ∈ Y,
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 28

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Y
XO
U
P (x, y) P (x′, y′)
LM
x a a+ x
Figura 2.5:
ha equazioni:
x′ = x
y′ = y + b. (2.12)
Dimostrazione. Per ogni punto P (x, y) del piano α: si conduca la parallela
a U per b, per y si conduca la parallela a X, ottenendosi come intersezione il
punto M (vedi Figura 2.6). Per M si conduca la parallela a Y : essa interseca
X nel punto b + y (per definizione di somma). Sia N l’intersezione di tale
retta con U . La traslazione τb
che muta O in b, muta b in B (vedi Figura
2.5) e quindi la retta bM nella retta U, onde τb
muta M in N . Allora τb
muta y in b+ y. Il punto P (x, y) si muterà dunque mediante τb
nel punto
P ′(x′, y′) che ha la stessa ascissa di P (onde x′ = x) e che ha come ordinata
y′ = b+ y = y + b, onde l’asserto. �
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 29

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Y
XO
U
b+ yN
P ′(x, b+ y)
yM
P (x, y)
b B
L
b y b+ y
Figura 2.6:
Lemma 2.23 Una traslazione τ del piano α che muta O nel punto di coor-
dinate (a, b) ha equazioni:
x′ = x+ a
y′ = y + b.
Dimostrazione. La traslazione τ è il prodotto della traslazione τa ∈ TX
che muta O in a e della traslazione τb∈ TY che muta O in b (vedi Figura
2.7). Dunque, per ogni punto P (x, y) si ha (per la (2.11)):
τa(P ) = (x+ a, y),
onde
τ(P ) = τb◦ τa(P ) = (x+ a, y + b)
(per la (2.12)), onde l’asserto. �
Ci proponiamo ora di definire in X un’operazione di prodotto. Per ogni
a, b ∈ X, si consideri il punto A di coordinate (u, a) e la retta r congiungente
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 30

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Y
XO
b (a, b)
τb τ
τa
a
Figura 2.7:
O con A(u, a) (si tenga presente che A(u, a) è sempre distinto da O e dunque
la retta r è sempre determinata). Si intersechi la retta r con la retta di
equazione x = b e sia P il punto di incontro. Si osservi che la retta r non è
mai parallela a Y, in quanto u 6= O e quindi r incontra la retta x = b in un
ben determinato punto.
Definiremo prodotto di a per b l’ordinata del punto P . Esso si denoterà con
ab (vedi Figura 2.8). Si prova subito che
Ox = xO = O, ∀x ∈ X. (2.13)
In X sono cosí definite un’operazione di somma (+) e un’operazione di
prodotto (·).Ci proponiamo di provare che (X,+, ·) è un quasicorpo destro. È stato
già provato che (X,+) è un gruppo abeliano additivo (o modulo).
Proviamo che:
Lemma 2.24 L’insieme X ′ = X − {O}, il quale è non vuoto, è chiuso
rispetto al prodotto e dotato di unità, data da u.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 31

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Y
XO
rU
abP (b, ab)
Q
a
u
A(u, a)
V
u b a ab
Figura 2.8:
Dimostrazione. Provare che X ′ è chiuso rispetto al prodotto equivale a
dimostrare che in X si ha
(ab = 0, b 6= 0) =⇒ a = 0. (2.14)
Infatti dalla (2.14) si ha anche
(ab = 0, a 6= 0) =⇒ b = 0,
poiché, se fosse ab = 0, a 6= 0, b 6= 0, si avrebbe, per la (2.14) a = 0, contro
l’ipotesi a 6= 0.
Proviamo dunque la (2.14). Se ab = 0, il punto P (b, ab) coincide con il punto
P (b, 0) ed è un punto dell’asse X distinto da O, perché è b 6= 0. La retta
OP coincide allora con l’asse X e quindi A(u, a) è un punto dell’asse X, cioè
a = 0. Proviamo ora che:
ub = b, au = a, ∀a, b ∈ X. (2.15)
Se a = u, il punto A è il punto (u, u) e quindi la retta r coincide con la retta
U, onde il punto P (b, ab) = P (b, ub) ∈ r è tale che b = ub. Se b = u, il punto
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 32

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
P (b, ab) = P (u, au) coincide con il punto A(u, a), onde a = au. Si ha cosí la
(2.15) e quindi l’asserto. �
Lemma 2.25 Per ogni a, b ∈ X, con a 6= 0, esiste uno e un sol punto x ∈ Xtale che sia xa = b.
Dimostrazione. Siano Q il punto della retta U di ascissa b, ossia il punto
di coordinate (b, b) (vedi Figura 2.9); P il punto di coordinate (a, b), ossia il
punto d’incontro della retta per Q parallela a X con la retta per a parallela
a Y ; r la retta OP (si noti che la retta è ben determinata, in quanto P è
distinto da O, essendo a 6= 0); A il punto d’incontro di r con la retta per
u parallela a Y (si osservi che, essendo r non parallela a Y, in quanto è
a 6= 0, la retta r è incidente alla retta per u parallela a Y ). L’ordinata x
Y
XO
bP (a, b)
Q(b, b)
U
xA(u, x)
r
u x a b = xa
Figura 2.9:
di A è soluzione dell’equazione xa = b, per la definizione data di prodotto
ed è l’unica soluzione, in quanto la costruzione eseguita per determinare x, a
partire da a e b è unica. �
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 33

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Si è cosí provato che (X,+, ·) soddisfa alle condizioni I,II e IV di un
quasicorpo destro. Onde provare che (X,+, ·) soddisfa alle condizioni III e
V di quasicorpo, si può dimostrare il lemma seguente.
Lemma 2.26 Una qualsiasi retta r per O, distinta da Y , ha equazione
y = ax, (2.16)
ove a ∈ X è tale che A(u, a) risulta il punto d’incontro di r con x = u. Ne
segue che vi è una corrispondenza biunivoca tra le rette per O, distinte da Y,
e le equazioni (2.16).
Dimostrazione. Sia P (x, y) un punto di r. Poiché r interseca la retta x = u
nel punto A(u, a), il prodotto ax è l’ordinata del punto P (x, y), onde y = ax.
Viceversa, se P (x, y) è un punto di α tale che si y = ax ed è P 6= O, la
retta OP è distinta dall’asse Y , perché l’unico punto dell’asse Y tale che sia
y = ax è O, in forza della (2.13) e pertanto essa interseca la retta x = u in
un punto (u, b); per definizione di prodotto, risulta allora y = bx. D’altra
parte, è y = ax, onde a = b (in quanto l’equazione nell’incognita z, data da
y = zx, ammette un’unica soluzione z = a, per il Lemma 2.25). Ne segue
che la retta OP coincide con la retta OA, ossia con la retta r, onde P ∈ r.Si è cosí provato che tutti e soli i punti della retta r soddisfano con le loro
coordinate all’equazione (2.16). �
Lemma 2.27 Sia s una qualsiasi retta di α non parallela a Y . Se la retta
r parallela a s per O ha equazione y = ax ed è b = s ∩ Y, la retta s ha
equazione:
y = ax+ b. (2.17)
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 34

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Viceversa, il luogo dei punti P (x, y) del piano α, soddisfacenti con le loro
coordinate a un’equazione del tipo (2.17), è la retta per b parallela alla retta
y = ax. Ne segue che due rette sono parallele se, e soltanto se, nelle loro
equazioni i coefficienti della x (coefficienti angolari) coincidono.
Dimostrazione. La traslazione τb
che muta O in b ha equazioni (2.12), che
si invertono nelle
x = x′
y = y′ − b. (2.18)
La τb
muta la retta r, che ha equazione y = ax, nella retta s (in quanto τb
muta O in b e quindi r nella parallela a essa per b, cioè in s). Ne segue, in
forza della (2.18), che la retta s ha equazione y′ − b = ax′, cioè equazione
(2.17), qualora si sostituiscano a x′ e a y′ rispettivamente x e y. Rimane cosí
provata la prima parte dell’asserto.
Viceversa, data l’equazione (2.17), si consideri la retta r per O di equazione
y = ax (cfr Lemma 2.26) e quindi la retta s per b parallela a r. La retta s
ha equazione y − ax = b, per quanto già provato, onde l’asserto. �
Lemma 2.28 Per ogni a, b, c ∈ X si ha che
a(b+ c) = ab+ ac.
Dimostrazione. Si considerino la retta r di equazione y = ax e il punto
−c ∈ X (vedi Figura 2.10) La retta s per −c parallela alla r, ha equazione
y = a(x+ c). Infatti, la traslazione che muta O in −c ha equazioni:
x′ = x− cy′ = y
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 35
M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Y
XO
ac
r : y = axs
P
x = b
−c
Figura 2.10:
ed essa muta r in s, onde la retta s ha l’equazione suddetta. Ne segue che s
interseca Y nel punto ac. Per il Lemma 2.27, la retta s ha anche equazione
y = ax + ac, Per ogni x = b ∈ X, il punto P di ascissa b, appartenente a s,
ha ordinata data da y = a(b+ c), che deve risultare uguale a y = ab+ac. Ne
segue l’asserto. �
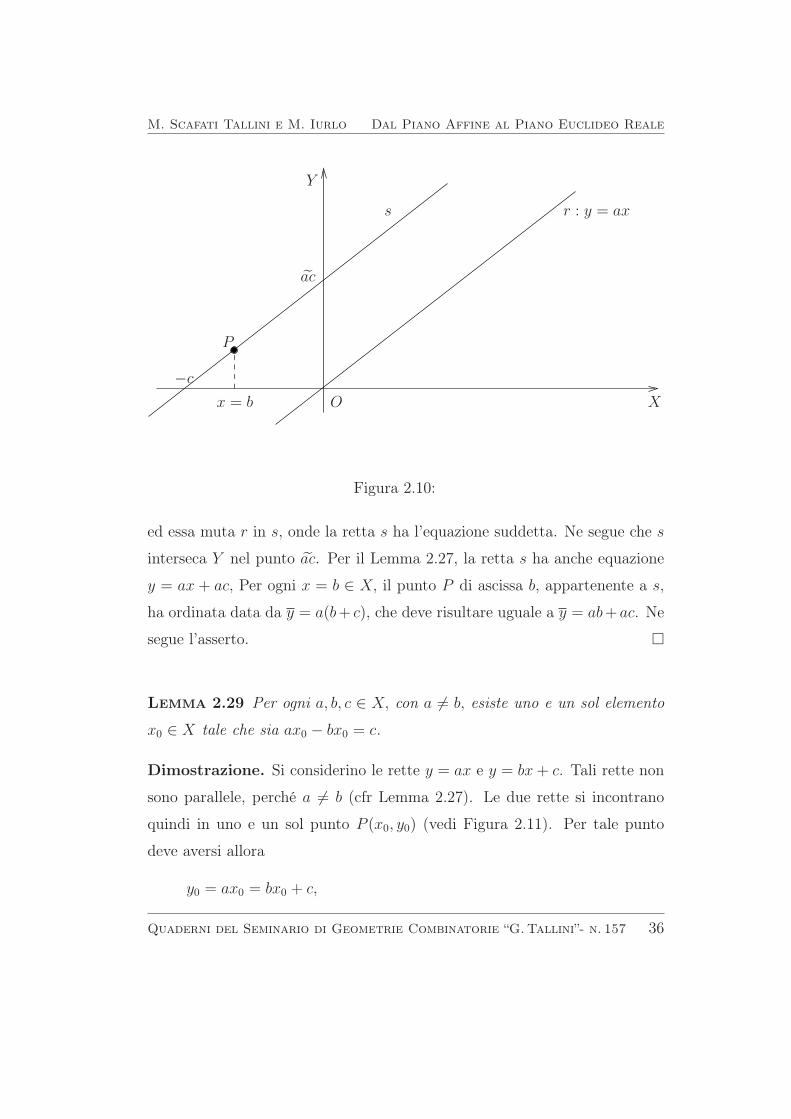
Lemma 2.29 Per ogni a, b, c ∈ X, con a 6= b, esiste uno e un sol elemento
x0 ∈ X tale che sia ax0 − bx0 = c.
Dimostrazione. Si considerino le rette y = ax e y = bx+ c. Tali rette non
sono parallele, perché a 6= b (cfr Lemma 2.27). Le due rette si incontrano
quindi in uno e un sol punto P (x0, y0) (vedi Figura 2.11). Per tale punto
deve aversi allora
y0 = ax0 = bx0 + c,
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 36

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Y
XO
y = bx+ c
y = ax
P (x0, y0)
x0
Figura 2.11:
onde l’asserto. �
Possiamo ora enunciare e dimostrare il risultato preannunciato all’inizio
di questo paragrafo.
Proposizione 2.30 Ogni piano α di traslazione risulta coordinabile
su un quasicorpo.
Dimostrazione. In base ai Lemmi 2.20, 2.24, 2.25, 2.28 e 2.29 si ha che
(X,+, ·) è un quasicorpo destro. Inoltre, in forza del Lemma 2.27 e per il
fatto che ogni retta parallela a Y ha equazione x = c, si ha che la biezione c
definita in (2.9) è un isomorfismo tra il piano α e il piano numerico X2 sul
quasicorpo X, onde la proposizione è completamente dimostrata. �
In forza delle Proposizioni 2.3, 2.19 e 2.30, si ha che:
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 37

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Proposizione 2.31 Un piano affine è coordinabile su un quasicorpo se, e
soltanto se, esso ammette tutte le traslazioni con due fissate direzioni distinte.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 38

Capitolo 3
Piani affini desarguesiani
3.1 Piani affini desarguesiani
Un piano affine (α,ℜ) si dice desarguesiano, se esso ammette tutte le omotetie
e tutte le traslazioni, ossia se, comunque scelti un punto O e una coppia di
punti P, P ′ distinti tra loro e da O, allineati con O, esiste l’omotetia di centro
O che muta P in P ′ e inoltre se, dati comunque due punti distinti P e P ′
esiste la traslazione che muta P in P ′. Dunque, un piano desarguesiano è un
piano di traslazione che ammette tutte le omotetie.
In effetti,
• è sufficiente che un piano ammetta tutte le omotetie, perché esso am-
metta tutte le traslazioni, ossia risulti desarguesiano.
Infatti, se P e P ′ sono due punti distinti di α, scelto un punto Q non
sulla retta PP ′ e una retta r parallela a PP ′ e da essa distinta, con Q /∈ r,denotati con O1 e O2 i punti di incontro di r con QP e QP ′, rispettivamente,
si considerino l’omotetia θ1 di centro O1 che muta P in Q e l’omotetia θ2 di
39

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
centro O2 che muta Q in P ′. Il prodotto θ2 per θ1 è una dilatazione che muta
P in P ′ e ha unite la retta PP ′ e la retta O1O2 (perché r = O1O2 è unita sia
in θ1 che in θ2). La dilatazione θ2 ◦ θ1 è allora una traslazione, avendo due
rette unite parallele, che muta P in P ′.
Dalle Proposizioni 1.13 e 2.3, osservato che in un piano di traslazione il
gruppo delle affinità è transitivo, si ha che:
Proposizione 3.1 Un piano affine (α,ℜ) è desarguesiano se, e soltanto
se, esistono tutte le traslazioni con due fissate direzioni distinte e tutte le
omotetie con centro in un fissato punto.
Proviamo ora la proposizione seguente.
Proposizione 3.2 Sia K un corpo e (K2, ℜ) il piano affine sopra
il corpo K. Il piano affine (K2, ℜ) risulta desarguesiano.
Dimostrazione. PoichéK, essendo un corpo, è un quasicorpo, per la Propo-
sizione 2.18, si ha che (K2,ℜ) è di traslazione. In forza della Proposizione 3.1,
basta mostrare che (K2,ℜ) ammette tutte le omotetie con centro in O(0, 0).
Siano P1(x1, y1) e P2(x2, y2) punti distinti tra loro e da O, allineati con O.
Supponiamo dapprima che P1 (e quindi P2) non appartenga né all’asse X,
né all’asse Y , cioè che sia x1 6= 0, y1 6= 0 ( e quindi x2 6= 0, y2 6= 0). I
punti P1 e P2 apparterranno allora alla retta y = ax, con a ∈ K − {0}. Sarà
dunque a = y1x−1
1 = y2x−1
2 , onde risulta x−1
1 x2 = y−1
1 y2. Si consideri allora
l’applicazione
ω : P (x, y) ∈ K2 7−→ P ′(x′, y′) ∈ K2,
definita dalle equazioni
ω :
x′ = xc
y′ = yc, c = x−1
1 x2 = y−1
1 y2 6= 0.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 40

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Proviamo che ω è un’omotetia di centro O. Essa è una biezione, l’inversa
essendo data da
ω−1 :
x = x′c−1
y = y′c−1.
Inoltre ω muta la retta r di equazione y = ax + b nella retta di equazione
y′ = ax′ + b′, che è una retta parallela a r. Si ha poi che ω muta la retta
x = h (h ∈ K) nella retta x′ = hc, che è parallela a x = h. Infine ω ha unite
le rette per O, cioè le rette di equazione y = mx, e anche la retta x = 0. Si
è cosí provato che ω è un’omotetia di centro O. È immediato verificare che
ω muta P1 in P2.
Supponiamo ora che P1 (e quindi P2) appartengano all’asse X (in modo
analogo si ragiona se essi appartengono all’asse Y ). Sarà dunque y1 = y2 = 0,
ma x1 6= 0 e x2 6= 0. Si ponga c = x−1
1 x2 ∈ K e si consideri l’applicazione
ω :
x′ = xc
y′ = yc, c = x−1
1 x2 6= 0.
Si prova, analogamente al caso precedente che ω è un’omotetia di centro O.
Inoltre è immediato verificare che ω muta P1 in P2. Si ha cosí l’asserto. �
Dalla proposizione precedente si ha subito che:
Proposizione 3.3 Ogni piano (α, ℜ) coordinabile sopra un corpo
risulta desarguesiano.
La proposizione sopra enunciata può essere invertita.
Proposizione 3.4 Ogni piano affine desarguesiano risulta coordinabile so-
pra un corpo, il cui gruppo additivo è isomorfo al gruppo abeliano Tx delle
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 41

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
traslazioni aventi come direzione una fissata retta x e il cui gruppo molti-
plicativo è isomorfo al gruppo ΘO delle omotetie di centro un fissato punto
O.
Dimostrazione. Sia (α,ℜ) un piano affine desarguesiano. Esso è un piano di
traslazione e, in base alla Proposizione 2.30, è coordinabile su un quasicorpo.
Precisamente, fissato un riferimento (O,X, Y, u, u) e introdotte le operazioni
di somma e prodotto in X, come nel paragrafo precedente, (X,+, ·) risulta
un quasicorpo. Inoltre, la coordinazione
c : P ∈ α 7−→ (x, y) ∈ X2,
ove (x, y) sono le coordinate di P nel fissato riferimento, muta ogni retta r di
α in una retta del piano numerico sul quasicorpo X, di equazione y = ax+ b,
oppure x = c e viceversa. Infine, (X,+) è isomorfo a TX . Per provare
l’asserto, basta mostrare che il quasicorpo (X,+, ·) risulta un corpo e che
(X ′, ·), X ′ = X − {0}, è isomorfo a ΘO, gruppo delle omotetie di centro O.
Si consideri l’applicazione:
ψ : θ ∈ ΘO 7−→ θ(u) ∈ X ′.
L’applicazione ψ è biettiva, in quanto, fissato comunque un elemento a di
X ′, esiste ed è unica l’omotetia θ ∈ ΘO che muta u in a. Proviamo che ψ è
un omomorfismo del gruppo ΘO nel gruppoide (X ′, ·). Ne seguirà che ψ è un
isomorfismo tra il gruppo ΘO e il gruppoide (X ′, ·) e quindi che (X ′, ·) è un
gruppo. Si tratta di provare che, per ogni θ1, θ2 ∈ ΘO, risulta:
ψ (θ1θ2) = ψ(θ1) · ψ(θ2),
cioè
θ2 ◦ θ1(u) = θ1θ2(u) = θ1(u)θ2(u),
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 42

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
ossia posto a = θ1(u), b = θ2(u), che si abbia
θ2(a) = ab. (3.1)
Con riferimento alla Figura 3.1, l’omotetia θ2 che muta u in b, trasforma
Y
XO
ab
a
B M U
A L
u b a ab
Figura 3.1:
A(u, a) in B(b, ab) e quindi muta L(a, a) in M(ab, ab), onde muta a in ab.
Si ha cosí la (3.1). Rimane quindi dimostrato che (X ′, ·) è un gruppo. Per
provare completamente l’asserto, si deve dimostrare che (X,+, ·) gode della
proprietà distributiva a sinistra:
∀a, b, c ∈ X, (a+ b)c = ac+ bc. (3.2)
Osserviamo che la (3.2) è evidente se uno dei tre elementi a, b, c coincide con
0. Nel seguito perciò supporremo a, b, c ∈ X ′. Consideriamo l’omotetia θc
che muta u in c. Essa trasforma x ∈ X in xc (basta porre b = c e a = x nella
(3.1)). Se P (x, y) è un qualsiasi punto del piano, il trasformato P ′(x′, y′) di
P sarà tale, per quanto precede, che x′ = xc. D’altra parte, P, P ′ e O sono
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 43

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
allineati, cioè P e P ′ appartengono a una retta di equazione Y = aX, onde
a = yx−1 e quindi
y′ = ax′ = axc = yx−1xc = yc.
Ne segue che le equazioni dell’omotetia θc sono date da
x′ = xc
y′ = yc. (3.3)
Per ogni a, b, c ∈ X ′, si consideri ora il punto Q di coordinate (a, a+ b) (vedi
Figura 3.2). Esso si trasforma nel punto Q′ di coordinate (ac, (a + b)c), in
forza delle (3.3). D’altra parte, il punto Q appartiene alla retta y = x + b,
Y
XO
bc
Q′(ac, (a+ b)c)
y = x+ b
y = x+ bc
Q(a, a+ b)
u ca
Figura 3.2:
la quale viene mutata da θc nella retta a essa parallela passante per bc, che
è il corrispondente di b mediante θc, sempre in forza delle (3.3), cioè viene
mutata nella retta di equazione y = x+bc. Il punto (ac, (a+b)c) deve dunque
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 44

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
soddisfare all’equazione y = x + bc, cioè deve aversi (a + b)c = ac + bc. Ne
segue l’asserto. �
3.2 Affinità e coordinazioni in un piano desar-
guesiano
Fissato un riferimento (O,X, Y, u, u) in un piano affine desarguesiano (α,ℜ) ,
si ha che in tale riferimento ogni retta ha una equazione del tipo y = mx+n
oppure x = h (con m, n, h elementi del corpo X), cioè un’equazione del tipo
ax+ by + c = 0 a, b, c ∈ X; a, b non ambedue nulli. (3.4)
Proviamo che, viceversa, attualmente la (3.4) è l’equazione di una retta,
cioè che la (3.4) si può scrivere anche nella forma y = mx + n, oppure
x = h. Infatti, se nella (3.4) è b 6= 0, moltiplicando la (3.4) ad ambo i
membri a sinistra per b−1 (tenendo poi presente che attualmente valgono la
proprietà associativa del prodotto e la proprietà distributiva a sinistra), si ha
y = mx+ n, ove si è posto m = b−1a, n = b−1c. Se invece è b = 0, la (3.4) si
può scrivere nella forma x = h, ove si è posto h = a−1c.
Proviamo che:
Proposizione 3.5 Siano (α,ℜ) un piano affine desarguesiano e (O,X, Y, u, u)
un fissato riferimento in (α,ℜ) . Se ax+by+c = 0 e a1x+b1y+c1 = 0 sono le
equazioni di due rette r ed r1, non parallele, di (α,ℜ) nel fissato riferimento,
l’applicazione
F : P (x, y) ∈ α 7−→ P ′ (x′, y′) ∈ α,
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 45

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
di equazioni
x′ = ax+ by + c
y′ = a1x+ b1y + c1(3.5)
è un’affinità di (α,ℜ) che muta la retta r nell’asse Y e la retta r1 nell’asse
X.
Dimostrazione. L’applicazione F è biettiva. Infatti, fissato comunque un
punto P ′(x′, y′) di α e sostituite le coordinate di P ′ nei primi membri della
(3.5), le due equazioni che cosí si ottengono rappresentano due rette r′, r′1,
rispettivamente parallele a r e a r1. Ne segue, essendo r non parallela a r1,
che r′ non è parallela a r′1. Dunque r′ e r′1 si incontrano in uno e un sol punto
P (x, y), cioè esiste una e una sola coppia (x, y) di elementi di X, che verifica
le (3.5). Si ha cosí l’asserita biettività di F.
Proviamo che, data comunque una retta r′ di equazioni Ax′ + By′ + C =
0, esiste una ben determinata retta r tale che F(r) = r′. Consideriamo
l’equazione
A(ax+ by + c) +B(a1x+ b1y + c1) + C = 0. (3.6)
Essa è soddisfatta da tutti e soli i punti (x, y) di α che si mutano nei punti di
r′ mediante F, ossia essa definisce F−1(r′). Poiché F è biettiva, F−1(r′) 6= α,
F−1(r′) 6= ∅. Pertanto i coefficienti di x e y nella (3.6) non sono ambedue
nulli e, quindi, la (3.6) rappresenta una retta r di ℜ. Ne segue F−1(r′) = r,
cioè l’asserto. In base alla Proposizione 1.3, ove si ponga f = F−1, si ha
che F−1 è un isomorfismo di α e quindi lo è anche F. La proposizione è cosí
provata. �
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 46

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Proposizione 3.6 Siano A, B, C e A′, B′, C ′ due terne, ciascuna costi-
tuita da punti distinti e non allineati di un piano desarguesiano (α,ℜ). Esiste
almeno una affinità di α che muta A in A′, B in B′ e C in C ′.
Dimostrazione. Si fissi un riferimento (O,X, Y, u, u) in cui sia O = A,
u = B, u = C. In esso siano (x0, y0), (x1, y1) e (x2, y2) le coordinate rispetti-
vamente di A′, B′ e C ′. Osservato che non può aversi contemporaneamente
né x1 − x0 = x2 − x0 = 0, né y1 − y0 = y2 − y0 = 0 (altrimenti A′, B′ e C ′
sarebbero allineati), si considerino le rette di equazione:
(x1 − x0)x+ (x2 − x0) y + x0 = 0
(y1 − y0)x+ (y2 − y0) y + y0 = 0.
Esse non sono parallele. Infatti, se lo fossero, le parallele a esse passanti per
O dovrebbero coincidere, cioè le equazioni
(x1 − x0)x+ (x2 − x0) y = 0
(y1 − y0)x+ (y2 − y0) y = 0(3.7)
dovrebbero coincidere. Ne segue che dovrebbe essere (non potendo aversi
x2 − x0 = 0, altrimenti dalla coincidenza delle equazioni (3.7) si avrebbe
anche y2 − y0 = 0 e quindi A′ = C ′; analogamente non potendo aversi
y2 − y0 = 0)
(x2 − x0)−1 (x1 − x0) = (y2 − y0)
−1 (y1 − y0) . (3.8)
I tre punti A′, B′ e C ′ sarebbero allora, in forza della (3.8), allineati sulla
retta A′C ′, di equazione
(x2 − x0)−1 (x− x0) = (y2 − y0)
−1 (y − y0) .
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 47

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Dalla Proposizione 3.5 si ha quindi che le equazioni
x′ = (x1 − x0)x+ (x2 − x0) y
y′ = (y1 − y0) x+ (y2 − y0) y(3.9)
rappresentano un’affinità ϕ : α → α. L’affinità ϕ muta manifestamente
A(0, 0) in A′(x0, y0), B(1, 0) in B′(x1, y1) e C(0, 1) in C ′(x2, y2). Si ha cosí
l’asserto. �
Proposizione 3.7 Sia (α,ℜ) un piano affine desarguesiano e siano dati
in esso due qualsiasi riferimenti (O,X, Y, u, u) e (O′, X ′, Y ′, u′, u′). I corpi
(X,+, ·) e (X ′,+′, ·′) relativi ai due riferimenti sono isomorfi.
Dimostrazione. Sia F un’affinità di (α,ℜ) che muti i punti O, u, u rispetti-
vamente nei punti O′, u′, u′ (affinità certamente esistente, per la proposizione
precedente). La F induce una biezione tra X e X ′ la quale risulta un isomor-
fismo tra i corpi (X,+, ·) e (X ′,+′, ·′) , in quanto F muta le configurazioni
grafiche che definiscono la somma e il prodotto in (X,+, ·) nelle analoghe
configurazioni grafiche relative a (X ′,+′, ·′) . Si ha cosí l’asserto. �
Proposizione 3.8 Sia (α,ℜ) un piano affine desarguesiano e siano c e c′
due qualsiasi coordinazioni di (α,ℜ) rispettivamente nei corpi K e K ′. Allora
K e K ′ sono isomorfi. Un piano affine desarguesiano è dunque coordinabile
sopra un corpo, il quale è determinato a meno di isomorfismi.
Dimostrazione. Siano O, u e u i punti di α che nella coordinazione c sul
corpo K:
c : P ∈ α 7−→ (x, y) ∈ K2,
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 48

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
hanno coordinate (0, 0) , (1, 0) e (0, 1) . Si consideri il riferimento (O,X, Y, u, u),
ove X è la retta Ou e Y è la retta Ou. Rimane allora determinata da quel
riferimento la coordinazione c sul corpo (X,+, ·):
c : P ∈ α 7−→ (x, y) ∈ X2.
Poiché c e c sono isomorfismi, F = c ◦ c−1 : X2 → K2 è un isomorfismo
del piano affine numerico su X nel piano affine numerico su K. L’affinità F
induce una biezione tra X e K, la quale risulta un isomorfismo tra i due
corpi X e K, in quanto F muta le configurazioni grafiche che definiscono la
somma e il prodotto in X nelle analoghe configurazioni grafiche che dànno
manifestamente in K la somma e il prodotto. Dunque X e K sono isomorfi.
Analogamente, se c′ è un’altra coordinazione di α sul corpo K ′, questo risulta
isomorfo al corpo X ′, relativo al riferimento (O′, X ′, Y ′, u′, u′) determinato
come sopra dalla coordinazione c′. Poiché, per la proposizione precedente, i
corpi (X,+, ·) e (X ′,+′, ·′) sono isomorfi, ne segue che K è isomorfo a K ′,
onde l’asserto. �
Proposizione 3.9 Sia (α,ℜ) un piano affine desarguesiano e (O,X, Y, u, u)
un fissato riferimento in esso. Una qualsiasi affinità F di (α,ℜ) che ha uniti
i punti O, u, u, ha equazioni, nel riferimento dato:
x′ = f(x)
y′ = f(y), (3.10)
ove f, restrizione di F all’asse X, risulta un automorfismo del corpo (X,+, ·) .Viceversa, se f : X → X è un qualsiasi automorfismo del corpo X, le
equazioni (3.10) rappresentano un’affinità che ha uniti i punti O, u, u, la cui
restrizione f a X è un isomorfismo del gruppo delle affinità di (α,ℜ) che
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 49

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
hanno uniti O, u, u, sul gruppo degli automorfismi del corpo (X,+, ·). Ne
segue che le cardinalità dei due suddetti gruppi coincidono e quindi, se il
corpo ammette il solo automorfismo identico, esiste una sola affinità che ha
uniti O, u, u, la quale è l’identità.
Dimostrazione. Sia P (x, y) un qualsiasi punto di α e P ′(x′, y′) il suo cor-
rispondente punto in F (vedi Figura 3.3). Poiché sia l’asse X che l’asse Y
sono uniti in F, le rette per u parallele a Y e per u parallele a X sono unite
(essendo u e u unite e ricordando che in un’affinità due rette parallele si
mutano in due rette ancora parallele). Dunque, il punto V (u, u) è unito. Ne
segue che la retta OV è unita in F. Le rette per P parallele agli assi si muter-
anno in F nelle rette per P ′ parallele agli assi, onde x′ = f(x), f essendo
la restrizione di F all’asse X. Poiché la retta OV è unita, il punto A(y, y) si
muta nel punto A′(y′, y′). La retta per A parallela all’asse Y si muta in F
nella retta per A′ parallela all’asse Y, onde y si muta in y′ e quindi y′ = f(y).
Rimangono cosí stabilite le (3.10).
Y
XO
V
y
P (x, y)
P ′(x′, y′)
U
y
u
f(y) = y′A′
A
u xf(y) f(x) = x′
Figura 3.3:
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 50

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Proviamo che f è un automorfismo di (X,+, ·). La configurazione grafica che
porta dalla coppia x, y di X all’elemento x+y di X, si muta manifestamente
nella configurazione grafica che porta dalla coppia (f(x), f(y)) di X all’ele-
mento f(x) + f(y) di X. Quindi x + y si muta in f(x + y) = f(x) + f(y).
Una analoga conclusione si ha per quanto riguarda il prodotto definito in X,
onde f è un automorfismo.
Viceversa, se f : X −→ X è un automorfismo del corpo (X,+, ·), si verifi-
ca facilmente che la biezione di α, di equazioni (3.10), muta rette in rette,
cioè è un’affinità. Le altre affermazioni contenute nella proposizione essendo
evidenti, ne segue l’asserto. �
Proposizione 3.10 In un piano desarguesiano (α,ℜ) , siano A,B,C e
A′, B′, C ′ due terne, ciascuna costituita da punti distinti e non allineati.
Scelto il riferimento (O,X, Y, u, u) in modo che sia O = A, u = B, u = C e
denotate con (x0, y0) , (x1, y1) , (x2, y2) , le coordinate rispettivamente di A′,
B′, C ′, le equazioni di una qualsiasi affinità che muta A in A′, B in B′, C
in C ′, nel riferimento fissato sono date da
x′ = (x1 − x0) θ(x) + (x2 − x0) θ(y) + x0
y′ = (y1 − y0) θ(x) + (y2 − y0) θ(y) + y0
, (3.11)
dove θ è un qualsiasi automorfismo del campo (X,+, ·) .
Dimostrazione. Sia F una qualsiasi affinità che muti A in A′, B in B′, C
in C ′. Si consideri l’affinità ϕ di equazioni (3.9). Essa muta A in A′, B in
B′, C in C ′. L’affinità θ = ϕ−1 ◦ F ha uniti i punti A = O, B = u e C = u.
Pertanto, in forza della proposizione precedente, essa ha equazioni:
x′ = θ(x)
y′ = θ(y),
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 51

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
ove θ è un automorfismo di (X,+, ·) . Ne segue che F = ϕ ◦ θ ha equazioni
(3.11), onde l’asserto. �
Osserviamo che un corpo K, che non sia un campo, ammette senz’altro
degli automorfismi non identici, dati per esempio, dagli automorfismi interni.
Se K è un campo, esso può o meno ammettere degli automorfismi non identici.
Per esempio, il campo reale il campo razionale e i campi Zp (p primo) non
ammettono automorfismi diversi dall’identità, mentre il campo complesso e
tutti i campi finiti di ordine q = ph (p primo, h ≥ 2) ammettono automorfismi
non identici.
Ciò ricordato, come corollario della precedente proposizione, si ha che
Proposizione 3.11 Sia (α,ℜ) un piano desarguesiano, coordinabile sopra
un corpo K (definito a meno di isomorfismi). Fissate due terne A, B, C, e
A′, B′, C ′, di punti distinti e non allineati, è unica l’affinità che muta A in
A′, B in B′, C in C ′, se, e soltanto se, il campo K è privo di automorfismi
non identici.
3.3 Teorema di Desargues
In un piano affine desarguesiano sussiste il seguente Teorema di Desargues o
dei triangoli omologici.
Proposizione 3.12 Sia (α,ℜ) un piano desarguesiano e siano A, B, C e
A′, B′, C ′ due triangoli di (α,ℜ) , con A 6= A′, B 6= B′, C 6= C ′, e tali che
le rette AB, BC, CA siano rispettivamente distinte dalle rette A′B′, B′C ′,
C ′A′. Se le rette AA′, BB′, CC ′ passano per uno stesso punto, oppure hanno
la stessa direzione, allora, se AB è parallela a A′B′ e BC è parallela a B′C ′,
anche AC è parallela a A′C ′.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 52

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Dimostrazione. Osserviamo anzitutto che le tre rette AA′, BB′ e CC ′ sono,
in ogni caso distinte tra loro. Se infatti, a esempio, AA′ e BB′ coincidessero,
le rette AB e A′B′ dovrebbero coincidere, contro il supposto. Supponiamo
A′
A BC
C ′
B′
δ
Figura 3.4:
dapprima che AA′, BB′ e CC ′ abbiano la stessa direzione δ (vedi Figura
3.4). Sia allora τ la traslazione che muta A in A′ (certamente esistente
perché il piano è desarguesiano). La τ muta B in B′ (in quanto τ trasforma
la retta AB nella parallela a essa da A′, cioè nella retta A′B′ e la retta
BB′ è unita, avendo la direzione di τ, onde B = AB ∩ BB′ si trasforma in
τ(B) = A′B′ ∩ BB′ = B′). Analogamente, poiché B′ = τ(B), la τ muta C
in C ′. Ne segue che la retta AC è mutata da τ nella retta A′C ′, onde AC e
A′C ′ sono parallele.
Supponiamo ora che le rette AA′, BB′ e CC ′ concorrano in un punto O (vedi
Figura 3.5). Il punto O è certamente distinto dai vertici dei due triangoli.
Infatti, se per esempio O coincidesse con A, i tre punti A, B, B′ sarebbero
allineati, ma allora la retta AB non sarebbe piú parallela alla retta A′B′,
contro l’ipotesi. In modo analogo si esclude che O coincida con uno degli altri
vertici. Si consideri l’omotetia θ di centro O e che muta A in A′ (certamente
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 53

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
A
B
C
A′
B′
C ′
O
Figura 3.5:
esistente perché il piano è desarguesiano). L’omotetia θ muta B in B′ (in
quanto θ trasforma la retta AB nella retta per A′ parallela a AB, cioè nella
retta A′B′ ed ha unita la retta BB′, onde B = AB ∩BB′ si muta in θ(B) =
A′B′∩BB′ = B′). Analogamente, poiché B′ = θ(B), l’omotetia θ muta C in
C ′. Dunque θ muta la retta AC nella retta A′C ′. Ne segue che tali due rette
sono parallele, onde l’asserto. �
In un piano affine (α,ℜ) diremo che vale universalmente la configurazione
affine di Desargues se dati comunque due triangoli ABC e A′B′C ′, con A 6=A′, B 6= B′, C 6= C ′ e con AB 6= A′B′, BC 6= B′C ′, AC 6= A′C ′, tali che le
rette AA′, BB′ e CC ′ abbiano la stessa direzione, oppure abbiano lo stesso
punto O in comune e inoltre la retta AB sia parallela alla retta A′B′ e la
retta BC sia parallela alla retta B′C ′, allora si abbia che la retta AC sia
parallela alla retta A′C ′.
In un piano affine (α,ℜ) diremo che vale la configurazione affine di De-
sargues, relativamente a un punto fissato O, ovvero a una fissata direzione
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 54

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
δ, se quanto detto precedentemente per i triangoli ABC e A′B′C ′, vale rela-
tivamente ai triangoli tali che le rette AA′, BB′, CC ′ passino per O, ovvero
abbiano la direzione δ.
La proposizione precedente si può allora enunciare affermando che
Proposizione 3.13 In un piano affine desarguesiano vale universalmente
la configurazione affine di Desargues.
Allo scopo di invertire la Proposizione 3.13, proviamo le seguenti propo-
sizioni, aventi anche interesse a sé.
Proposizione 3.14 Se in un piano affine (α,ℜ) vale la configurazione di
Desargues, relativamente a un punto fissato O, esistono tutte le omotetie di
centro O.
Dimostrazione. Siano A e A′ due punti distinti tra loro e da O e allineati
con O. Si tratta di provare che esiste l’omotetia di centro O che muta A in
A′. Denotata con a la retta AA′ (vedi Figura 3.6) e posto αa = α − a, si
consideri l’applicazione di αa in sé:
ωAA′ : P ∈ αa 7−→ P ′ ∈ αa,
definita nel modo seguente: si consideri la parallela per A′ alla retta AP.
Essa incontra la retta OP in un punto P ′, da definirsi corrispondente di P in
ωAA′ . La ωAA′ è, evidentemente, una biezione di αa. Osserviamo poi che, se
esiste l’omotetia di centro O che muta A in A′, essa coincide con ωAA′ fuori
di a. La ωAA′ ha unite, per costruzione, le rette per O e quindi le coppie di
punti corrispondenti sono allineate con O. Inoltre, se r 6= a è una qualsiasi
retta per A, e r′ è la retta per A′ parallela a r, risulta
ωAA′ (r − {A}) = r′ − {A′}. (3.12)
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 55

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
ar′
O
A
QP
rA′
Q′ P ′
Figura 3.6:
A questo punto non possiamo però affermare che analogamente accada per
una qualsiasi altra retta del piano.
Siano B, B′ due qualunque fissati punti, corrispondentesi in ωAA′ . Denotata
con b la retta BB′ (vedi Figura 3.7) e posto αb = α−b, possiamo considerare
l’applicazione biettiva ωBB′ : αb → αb, ottenuta in modo analogo alla ωAA′ ,
a partire dalla coppia B, B′, invece che dalla coppia A, A′. Ci proponiamo
di dimostrare che, in α− (a ∪ b) si ha:
ωAA′ = ωBB′ ,
cioè che
ωAA′(C) = ωBB′(C), ∀C ∈ α− (a ∪ b). (3.13)
Sia C ′ = ωBB′(C), cioè l’intersezione della retta OC con la parallela per B′
alla retta BC. I triangoli ABC e A′B′C ′ sono tali che A 6= A′, B 6= B′,
C 6= C ′; inoltre AB 6= A′B′, BC 6= B′C ′, AC 6= A′C ′ e, infine, le rette AA′,
BB′, CC ′ passano per O. Poiché, per ipotesi, vale la configurazione affine di
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 56

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
a
c
O
A
B
C
b
A′
B′
C ′
Figura 3.7:
Desargues relativamente al punto O e le rette AB e BC sono rispettivamente
parallele alle rette A′B′ e B′C ′, deve aversi che le rette AC e A′C ′ sono
parallele. Ciò prova che ωAA′(C) = C ′, ossia la (3.13).
Se C, C ′ è una qualsiasi coppia di punti corrispondentesi in ωAA′ , proviamo
che ωCC′ coincide con ωBB′ su a − {O}. Due casi sono possibili, a seconda
che le rette BB′, CC ′ siano distinte, oppure coincidano. Nel primo caso,
l’affermazione segue ragionando sulle due coppie di punti B,B′ e C,C ′, come
si è fatto precedentemente con le coppie A,A′ e B,B′ (una volta tenuto conto
che valgono le (3.13)). Nel secondo caso, sia t una retta per O, distinta da a
e da b, certamente esistente, perché per ogni punto del piano passano almeno
tre rette. Scelto un punto C1 su t e posto C′
1 = ωAA′(C1), si ha, per quanto
ora provato (primo caso), che ωBB′ coincide con ωCC′ su a − {O} e inoltre
ωCC′ coincide con ωC1C′
1su a−{O}. Ne segue che ωCC′ e ωBB′ coincidono su
a− {O}.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 57

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Consideriamo la biezione ω di α su se stesso, definita nel modo seguente:
ω(P ) = ωAA′(P ), ∀P ∈ αa,
ω(P ) = ωBB′(P ), ∀P ∈ a− {O},ω(O) = O.
Si noti che la ω non dipende dalla scelta della coppia B,B′, per quan-
to precedentemente provato. Inoltre, se P e P ′ sono due qualsiasi punti
corrispondenti in ω, si ha che, posto p = PP ′ e αp = α− p:
ωPP ′ = ω, in αp. (3.14)
Proviamo che ω muta ogni retta r in una retta r′ a essa parallela, cioè che
ω è un’omotetia (essendo O unito in ω). Possiamo supporre che r non passi
per O (essendo l’asserto già vero in tal caso). Sia P un punto di r e P ′ il suo
corrispondente in ω. Sia r′ la retta per P ′ parallela a r. Per la (3.12), relativa
alla coppia P, P ′, si ha che ωPP ′ (r − {P}) = r′−{P ′} e, quindi, per la (3.14)
ed essendo P ′ = ω(P ), si ha ω(r) = r′, cioè l’asserto. �
In modo del tutto analogo alla proposizione precedente, con le opportune
varianti del caso, si prova che:
Proposizione 3.15 Se in un piano affine (α,ℜ) vale la configurazione
di Desarues relativa a una fissata direzione, esistono tutte le traslazioni di
direzione δ.
Dalle Proposizioni 3.1, 3.13, 3.14 e 3.15, si ha che:
Proposizione 3.16 Se vale la configurazione di Desargues in un piano
affine (α,ℜ) vale relativamente a un fissato punto O e a due fissate direzioni
distinte, allora (α,ℜ) ammette tutte le traslazioni e tutte le omotetie, cioè
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 58

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
il piano è desarguesiano e quindi vale universalmente la configurazione di
Desargues.
Come conclusione di quanto detto nei Paragrafi 3.1 e 3.3, si ha che:
Proposizione 3.17 Sia (α, ℜ) un piano affine. Le seguenti affer-
mazioni sono equivalenti.
a) (α, ℜ) è coordinabile su un corpo.
b) (α, ℜ) è desarguesiano.
c) In (α, ℜ) vale universalmente la configurazione di Desargues.
d) In (α, ℜ) vale la configurazione di Desargues relativamente a
un fissato punto O e a due fissate direzioni distinte.
Dimostrazione. Per la Proposizione 3.13, si ha che b) implica c). Ovvi-
amente la c) implica d). Per la Proposizione 3.16, si ha che d) implica b).
Dunque:
b) =⇒ c) =⇒ d) =⇒ b).
Infine, la a) equivale alla b) per le Proposizioni ?? e 3.4. Ne segue l’asserto.�
3.4 Piani affini pascaliani
In un piano affine (α,ℜ) diremo che vale la configurazione affine di Pascal,
relativamente a una coppia di rette, r ed r′, distinte e incidenti in O, se scelti
comunque tre punti A, B, C, su r, distinti tra loro e da O, e tre punti A′, B′,
C ′, su r′, distinti tra loro e da O, tali che le rette AB′ e A′B siano parallele
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 59

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
O A B Cr
r′
A′
B′
C ′
Figura 3.8:
e le rette BC ′ e B′C siano pure parallele, si abbia AC ′ parallela ad A′C.
Diremo che la configurazione affine di Pascal vale universalmente, se essa
vale per ogni coppia di rette r ed r′ incidenti.
Si prova che:
Proposizione 3.18 In un piano affine (α,ℜ) , se la configurazione affine
di Pascal vale per ogni coppia di rette distinte passanti per un fissato punto
O, allora il gruppo ΘO delle omotetie di centro O è abeliano.
Proviamo invece ora il risultato seguente.
Proposizione 3.19 Un piano affine desarguesiano (α,ℜ) , per cui valga
la configurazione di Pascal per ogni coppia di rette distinte e passanti per un
fissato punto O, è coordinabile su un campo.
Dimostrazione. In forza della Proposizione 3.4, il piano desarguesiano
(α,ℜ) è coordinabile sopra un corpoK, il cui gruppo moltiplicativo è isomorfo
al gruppo ΘO delle omotetie di centro O, il quale gruppo è abeliano (cfr
Proposizione 3.18), onde il corpo K è un campo. Si ha cosí l’asserto. �
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 60

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Se un piano (α,ℜ) è coordinabile sopra un campo, si può facilmente
provare che in esso vale universalmente la configurazione di Pascal (basta
prendere le due rette r ed r′ della configurazione di Pascal come assi X e Y
e verificare la validità analiticamente).
Da quanto osservato e dalla Proposizione 3.19, si ha che:
Proposizione 3.20 Un piano desarguesiano (α,ℜ) è coordinabile sopra
un campo se, e soltanto se, in esso vale universalmente la configurazione di
Desargues.
Un piano desarguesiano coordinabile su un campo prende anche il nome di
piano pascaliano, il nome essendo giustificato dalla proposizione precedente.
3.5 Piani affini staudtiani
Un piano affine desarguesiano (α,ℜ) si dice staudtiano (dal nome del mate-
matico Staudt che per primo si interessò di tali piani) se soddisfa alla seguente
condizione:
• Ogni affinità di (α,ℜ) avente tre direzioni unite è una dilatazione.
Dimostriamo la seguente proposizione, che dà una caratterizzazione dei
piani staudtiani.
Proposizione 3.21 Un piano staudtiano (α,ℜ) risulta pascaliano. Inoltre
ogni campo K su cui esso è coordinabile è privo di automorfismi non identici.
Viceversa, se un piano affine (α,ℜ) è coordiabile sopra un campo K privo di
automorfismi non identici, esso è staudtiano.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 61

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Dimostrazione. Il piano (α,ℜ) è desarguesiano (perché è staudtiano) e
quindi è coordinabile su un corpo K (cfr Proposizione 3.4). Se proviamo che
date due terne di punti distinti e non allineati, A, B, C e A′, B′, C ′, è unica
l’affinità che muta A in A′, B in B′, C in C ′, dalla Proposizione 3.11 seguirà
che K è un campo privo di automorfismi non identici e cioè la prima parte
dell’enunciato. All’uopo, siano F1 e F2 due affinità di α che mutano A in A′,
B in B′ e C in C ′. L’affinita F = F−1
1 ◦ F2 ha uniti ciscuno dei punti A, B e
C e quindi ha unite le rette AB, BC e CA, per cui le tre distinte direzioni di
tali rette sono unite in F. Poiché (α,ℜ) è staudtiano, la F è una dilatazione,
la quale deve coincidere con l’identità di α, avendo i tre punti distinti A, B
e C uniti. Dunque risulta F1 = F2 cioè quanto volevasi dimostrare.
Dimostriamo ora la seconda parte della proposizione. Sia F una qualsiasi
affinità di (α,ℜ), avente tre direzioni distinte, δ1, δ2, δ3, unite. Si scelga in
(α,ℜ) un riferimento (O,X, Y, u, u) tale che le rette X, Y e U = OV (ove V è
il punto d’incontro della retta per u parallela a Y e della retta per u parallela
a X) abbiano rispettivamente le direzioni δ1, δ2, δ3. Dall’ipotesi segue che
il corpo (X,+, ·) risulta un campo privo di automorfismi non identici (cfr
Proposizione 3.8). In tale riferimento, siano (x0, y0), (x1, y1) e (x2, y2) le
coordinate rispettivamente dei punti A′ = F(O), B′ = F(u), C ′ = F(u).
Poiché F(X) è una retta parallela a X, cioè di equazione y = k, in quanto δ1
è una direzione unita di F, dovrà essere y0 = y1; cosí dovrà aversi x0 = x2,
essendo F(Y ) una retta parallela a Y. Per la Proposizione 3.10, poiché la F
muta i punti A = O, B = u, C = u nei punti A′, B′, C ′, le equazioni di F
sono date dalla (3.11), ove si ponga y0 = y1, x0 = x2 e inoltre θ = identita
(per quanto precede e perché il corpo (X,+, ·) è privo di automorfismi non
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 62

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
identici), cioè:
x′ = (x1 − x0)x+ x0
y′ = (y2 − y0) y + y0
. (3.15)
Infine, poiché la F trasforma la retta U (di equazione y = x) in una retta a
essa paralella (e quindi di equazione y′ = x′ + h), in quanto δ3 è unita in F,
nelle (3.15) dovrà aversi x1 − x0 = y2 − y0. Le equazioni di F, sono dunque:
x′ = ax+ x0
y′ = ay + y0
, (3.16)
ove si è posto a = x1 − x0 = y2 − y0. Dalle (3.16) si ha subito che F muta
ogni retta in una retta a essa parallela, cioè la F è una dilatazione. Si ha cosí
l’asserto. �
Proposizione 3.22 Se (α,ℜ) è un piano staudtiano e K, K ′ sono due
campi su cui (α,ℜ) può coordinarsi, esiste un solo isomorfismo i tra K e K ′.
onde tali campi possono identificarsi mediante i.
Dimostrazione. Per la Proposizione 3.21, K eK ′ sono privi di automorfismi
non identici. Per la Proposizione 3.8, i campi K e K ′ sono isomorfi. Siano
F1 e F2 due isomorfismi fra K e K ′. Si ha che F−1
1 ◦F2 è un automorfismo di
K e quindi F−1
1 ◦ F2 = identita di K, onde F1 = F2. Si ha cosí l’asserto. �
Dalle Proposizioni 3.10, 3.11 e 3.21, si ha subito che:
Proposizione 3.23 Sia (α,ℜ) un piano affine desarguesiano. Le seguenti
affermazioni sono equivalenti:
a) (α,ℜ) è staudtiano.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 63

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
b) (α,ℜ) è coordinabile su un campo privo di automorfismi non identici.
c) Date due terne A,B,C e A′, B′, C ′ di punti distinti e non allineati in
α, esiste ed è unica l’affinità che muta A in A′, B in B′ e C in C ′.
d) Fissato un riferimento (O,X, Y, u, u) , una qualsiasi affinità F di (α,ℜ)
ha equazioni:
F :
x′ = ax+ by + c
y′ = a1x+ b1y + c, ab1 − a1b 6= 0,
ove a, b, c, a1, b1, c1 ∈ X.
Come è noto, i campi Q e R dei razionali e dei reali sono privi di auto-
morfismi non identici. Ne segue che i piani affini coordinabili su tali campi
dànno esempi di piani staudtiani. Cosí non è per i piani coordinabili sul pi-
ano complesso C (perché C ammette automorfismi non identici, per esempio
il coniugio).
Ricordiamo che un campo di Galois Kq di ordine q = ph, (p caratteristica
di Kq, h ∈ N) è privo di automorfismi non identici se, e soltanto se, risulta
h = 1, cioè se, e soltanto se, esso coincide con Zp. Da ciò e dalla Proposizione
3.19 segue:
Proposizione 3.24 Un piano finito staudtiano è coordinabile sul campo
Zp delle classi dei resti modulo p (p primo) e viceversa.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 64

Capitolo 4
Piani affini ordinati
4.1 Piani affini ordinati sulle rette
Ricordiamo che si definisce ordinamento in un insieme S una relazione defini-
ta in S, che denoteremo con ≤ (oppure con →) che goda delle seguenti tre
proprietà.
I - Proprietà riflessiva: a ≤ a, ∀a ∈ S.
II - Proprietà antisimmetrica: a ≤ b, b ≤ a =⇒ a = b, a, b ∈ S.
III - Proprietà transitiva: a ≤ b, b ≤ c =⇒ a ≤ c, a, b, c ∈ S.
Un ordinamento si dice totale, se è soddisfatta la seguente condizione:
IV - ∀a, b ∈ S, a ≤ b oppure b ≤ a.
Se è a ≤ b, a 6= b, scriveremo a < b.
La coppia (S,≤), costituita da un insieme S e da un ordinamento sull’in-
sieme stesso, prende il nome di insieme ordinato. Nel caso in cui l’ordina-
mento sia totale, essa prende il nome di insieme totalmente ordinato.
65

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Ogni ordinamento, ≤, determina l’ordinamento opposto, ≥, definito nel
modo seguente:
a ≥ b =⇒ b ≤ a, ∀a, b ∈ S. (4.1)
Si verifica subito, infatti, che la relazione ≥, definita dalla (4.1) è un or-
dinamento. È immediato che l’opposto di un ordinamento totale è anch’esso
totale.
Dato un ordinamento totale (S,≤) e fissati comunque due elementi a e b
di S, con a ≤ b, rimane determinato il sottoinsieme di S:
[a, b]≤ = {c ∈ S : a ≤ c ≤ b}.
Esso prende il nome di intervallo chiuso di estremi a e b.
Evidentemente a ∈ [a, b]≤, b ∈ [a, b]≤. Osserviamo che [a, b]≤ si può anche
definire mediante l’ordinamento opposto:
[b, a]≥ = {c ∈ S : b ≥ c ≥ a} = {c ∈ S : a ≤ c ≤ b} = [a, b]≤.
Pertanto, non sussistendo possibilità di equivoci, porremo [a, b] = [a, b]≤ =
[b, a]≥.
Un ordinamento totale ≤ in un insieme S si dice completo, se, scelto
comunque un sottoinsieme A di S, limitato superiormente (cioè tale che esista
in S un elemento c per cui si abbia a ≤ c, per ogni a ∈ A), esso ammette un
estremo superiore in S, cioè esiste in S un elemento e, tale che
∀a ∈ A, a ≤ e,
∀x ∈ S, t.c. x ≤ e, x 6= e, ∃a ∈ A, t.c. x ≤ a, x 6= a.
Diremo che un piano affine (α,ℜ) è ordinato sulle rette, se su ogni retta
r ∈ ℜ sono date due relazioni d’ordine totale, una opposta dell’altra.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 66

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Chiamiamo retta orientata la coppia costituita da una retta r e da uno
fissato dei due ordinamenti dati su di essa. L’ordinamento cosí fissato prende
il nome di orientamento della retta oientata. Se notiamo con → tale ordi-
namento, la retta r orientata si denoterà con −→r . Con ← indicheremo allora
l’orientamento opposto di →; la retta orientata ←−r si dirà orientata in verso
opposto a quello di −→r .Dati due punti distinti A e B di α, consideriamo la retta AB. Denotan-
do con → l’ordinamento della retta AB, in cui A → B, la retta orientata
(AB,→) si denoterà con−→AB.
Sia data una retta orientata −→r e sia A un suo punto. Chiameremo
semiretta positiva chiusa di origine A di −→r , l’insieme dei punti P di r tali
che sia A→ P .
Denoteremo con −→rA tale semiretta, cioè porremo
−→rA = {P ∈ r : A→ P}.
L’insieme −→rA − {A} si chiamerà semiretta positiva aperta. Si osservi che
A ∈ −→rA, ma può accadere che la semiretta consti del solo punto A.
Dati due punti distinti A, B, di α, si consideri la retta orientata−→AB.
Chiameremo segmento (chiuso) di estremi A e B, il sottoinsieme AB di r,
definito nel segeunte modo:
AB = {P ∈ r : A→ P → B}.
Dunque AB è l’intervallo chiuso di estremi A e B, relativamente all’insieme
ordinato−→AB. Evidentemente, il segmento AB coincide con il segmento BA.
I punti di AB, distinti da A e da B, diconsi interni al segmento AB.
Dati tre punti distinti A, B, C, di una retta −→r , tali che sia A→ B → C,
risulta manifestamente:
AC = AB ∪BC, AB ∩BC = {B}. (4.2)
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 67

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Converrà nel seguito considerare anche come segmento un singolo punto
di una retta −→r di α: esso si dirà segmento con estremi coincidenti e si
indicherà con AA.
Dati tre punti distinti e non allineati A, B, C di α, chiameremo trilatero
l’insieme costituito dai tre punti A, B, C e dai tre segmenti AB, BC, CA.
Questi ultimi prendono il nome di lati del trilatero, il quale sarà denotato
con (A,B,C) (o con ABC).
Dati quattro punti distinti A, B, C, D, tali che la retta AB sia distinta
dalla retta CD, e a essa parallela, e la retta AC sia distinta dalla retta BD, e
a essa parallela, chiameremo parallelolatero (A,B,C,D) l’insieme costituito
dai quattro punti A, B, C, D, che si diranno vertici, e dai quattro segmenti
AB, BC, CD, DA, che si diranno lati (consecutivi, se hanno un vertice in
comune, altrimenti opposti).
I segmenti AC e BD prendono il nome di diagonali del parallelolatero.
Sia γ un sottoinsieme non vuoto di α. Diremo che γ è convesso, se, per
ogni A,B ∈ γ si ha AB ⊆ γ.
4.2 Piani affini ordinati
Un piano affine (α,ℜ) si dice ordinato, se esso è ordinato sulle rette, in modo
tale che sia verificata la seguente condizione.
Assioma di Pasch. Dato comunque un trilatero (A,B,C) una qualsiasi
retta di α, non passante per i vertici del trilatero, o non incontra nessun
lato del trilatero, o ne incontra esattamente due.
Un piano affine di ordine q = 2 è un piano affine ordinato, qualora su
ogni retta, che consta di due punti, si fissi uno dei due possibili ordinamenti.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 68

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Nel seguito, per evitare tale caso banale, supporremo sempre q ≥ 3.
Si prova che in un piano affine ordinato valgono le seguenti proposizioni.
Proposizione 4.1 Sia (A,B,C) un trilatero di (α,ℜ) . Se P è interno a
AB, denotata con r la retta per P parallela alla retta AC, il punto P ′ = r∩BCè interno al segmento BC.
Proposizione 4.2 Siano A e B due punti distinti ordinati di α, a e b
due rette parallele distinte, rispettivamente per A e B, e A′ e B′ i punti
di incontro di a e b con una qualsiasi retta s (non parallela a a). Se P è
interno al segmento AB, denotata con r la retta per P, parallela a a, il punto
P ′ = r ∩ s è interno al segmento A′B′.
Proposizione 4.3 Siano T un punto di α, a e b due rette distinte per T ,
A e A′ due punti di α, distinti tra loro e da T , e B e B′ due punti distinti
tra loro e da T . Se accade che
T /∈ AA′, T /∈ BB′, (4.3)
oppure
T ∈ AA′, T ∈ BB′, (4.4)
si ha che per ogni punto P interno a AB, il punto P ′ = TP ∩A′B′ è interno
al segmento A′B′.
Le Proposizioni 4.2 e 4.3 si possono enunciare anche nel modo seguente.
Proposizione 4.4 Dati un segmento AB, una direzione δ non parallela
alla retta AB e una retta s non parallela a δ, denotati con A′ e B′ i punti di
incontro di s con le rette, a e b, per A e B e parallele a δ, la proiezione del
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 69

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
segmento AB sulla retta s dalla direzione δ, coincide con A′B′.
Dati due segmenti AB e A′B′, A 6= A′, B 6= B′, tali che le rette AA′ e BB′
si incontrino in un punto T (distinto da A, A′, B, B′), se sono verificate le
(4.3), ovvero le (4.4), la proiezione del segmento AB da T sulla retta A′B′
coincide con il segmento A′B′.
Proposizione 4.5 Siano r e r′ due rette distinte, incidenti in un punto O,
A un punto di r, con A 6= O, A′ un punto di r′, con A′ 6= O. Si considerino
le rette orientate −→r =−→OA e
−→r′ =
−−→O′A′. La biezione
ϕ : P ∈ r 7−→ P ′ ∈ r′
che si ottiene proiettando il punto P ∈ r sulla retta r′ nella direzione della
retta AA′, muta l’ordinamento di r nell’ordinamento di r′, nel senso che:
se P,Q ∈ r, P → Q, allora P ′ = ϕ(P )→ Q = ϕ(Q). (4.5)
Proposizione 4.6 Siano r e r′ due rette parallele e distinte, O e A due
punti distinti di r, O′ e A′ due punti distinti di r, tali che le rette OO′ e AA′
siano parallele. Si considerino le rette orientate −→r =−→OA e
−→r′ =
−−→O′A′. La
biezione
ϕ : P ∈ r 7−→ P ′ ∈ r′
che si ottiene proiettando il punto P ∈ r sulla retta r′ nella direzione del-
la retta AA′ muta l’orientamento di −→r nell’orientamento di−→r′ (nel senso
espresso dalla (4.5)).
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 70

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
4.3 Figure geometriche fondamentali in un pi-
ano affine ordinato
Sia (α,ℜ) un piano affine ordinato, di ordine q > 2. Si provano le seguenti
proposizioni.
Proposizione 4.7 Fissato un punto A su una retta orientata −→r di (α,ℜ),
esistono un punto B e un punto C su r tali che B → A→ C, B 6= A, C 6= A.
Proposizione 4.8 Ogni semiretta −→rA contiene infiniti punti distinti.
Proposizione 4.9 Ogni segmento AB, con A 6= B, contiene almeno un
punto interno.
Proposizione 4.10 Ogni segmento AB, con A 6= B, contiene infiniti
punti distinti.
Dalla Proposizione 4.8 (o anche dalla Proposizione 4.10) si ha che ogni
piano affine ordinato (con q > 2) ha ordine infinito.
Diamo ora la nozione di semipiano di origine una retta r in un piano
affine ordinato.
Data una retta r nel piano α, si consideri la seguente relazione ρ (deter-
minata da r) in α− r:
AρB ⇐⇒ AB ∩ r = ∅, A,B ∈ α− r.
Proviamo che ρ è una relazione di equivalenza. Essa è manifestamente riflessi-
va (perché AA = {A} e A /∈ r) e simmetrica. Mostriamo che ρ è transitiva,
cioè che
AB ∩ r = ∅, BC ∩ r = ∅ =⇒ AC ∩ r = ∅, A,B,C ∈ α− r. (4.6)
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 71

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Se A, B e C sono allineati, la (4.6) segue immediatamente dalla (4.2). Se
A, B e C non sono allineati, il trilatero (A,B,C) è tale che la retta r (che
non passa per i vertici) non incontra né il lato AB, né il lato BC, onde, per
l’Assioma di Pasch, è AC ∩ r = ∅.La relazione di equivalenza ρ determina in α− r una partizione in classi.
Tali classi sono in numero di due, come ora proveremo. Sia −→s una ret-
ta orientata, non parallela a r, A il suo punto di intersezione con r. Per la
Proposizione 4.7, la retta −→s contiene un punto B e un punto C distinti tra
loro e da A, tali che B → A→ C. Pertanto, il segmento BC interseca r nel
punto A, ossia Bρ�C. Ciò prova che esistono almeno due classi di equivalenza
distinte.
Dimostriamo che non possono esistere tre classi di equivalenza distinte. Sup-
poniamo, per assurdo, che esistano le tre classi e indichiamo con A, B e C
i rappresentanti di ciascuna classe. Non può accadere che A, B e C siano
allineati su una retta s, altrimenti, fissato un orientamento su s, nel quale
(pur di cambiare denominazione ai punti) si può sempre supporre che sia
A → B → C, si avrebbe AB ∩ r 6= ∅, BC ∩ r 6= ∅ e quindi necessaria-
mente (cfr (4.2)) s ∩ r 6= B, mentre è B /∈ r. Consideriamo allora il trilatero
(A,B,C). Poiché Aρ�B, Bρ�C e Cρ�A, la retta r dovrebbe incontrare i tre
lati del trilatero, il che è escluso dall’Assioma di Pasch.
Le due classi di equivalenza relative a ρ, prendono il nome di semipiani
di origine r. Ciascun semipiano risulta evidentemente un insieme convesso.
Se P è un punto di α− r, il semipiano di origine r contenente P si indicherà
con αPr . L’insieme αP
r ∪ r si dirà semipiano chiuso di origine r e si indicherà
con αPr . Il semipiano αP
r si dirà anche semipiano aperto.
Si può dimostrare che:
Proposizione 4.11 Fissata una retta r di α, una qualsiasi retta parallela
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 72

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
a r, e da essa distinta, appartiene tutta a uno dei due semipiani di origine
r. Sia s una retta non parallela a r. L’intersezione di s con ciascuno dei due
semipiani chiusi di origine r è ciascuna delle due semirette di s, aventi come
origine il punto A = s ∩ r. Precisamente, detto P un punto di s, P 6= A, e
indicata con sA la semiretta di origine A, orientata da A verso P, risulta:
−→SA = αP
r ∩ s.
Date due rette distinte, r e s, incidenti in un punto V, siano A ∈ r, A 6= V
e B ∈ s, B 6= V. Fissiamo su r l’orientamento per cui V → A e su s quello
per cui V → B. Siano −→rV e −→sV le semirette di origine V, relative alle rette −→re −→s , cosí orientate. Si considerino i semipiani (aperti) αB
r e αAs di origini r e
s, individuati dai punti B e A rispettivamente (ovvero da due qualsiasi punti
B′ ∈ −→sV − {V } e A′ ∈ −→rV − {V }). Il sottoinsieme αBr ∩ αA
s si dirà angolo
aperto di lati −→rV , −→sV e vertice V. Ovviamente tale insieme dipende soltanto
dalle semirette −→rV e −→sV .
Il sottoinsieme suddetto è non vuoto (esso contiene tutti i punti interni al
segmento AB, in quanto, se P è interno a AB, il segmento BP non interseca
la retta r e quindi P ∈ αBr ; analogamente il segmento PA non interseca s e
quindi P ∈ αBs , onde P ∈ α ∩ αA
r ) e convesso, in quanto intersezione dei due
insiemi convessi αBr e αA
s .
Si definisce angolo chiuso, o semplicemente angolo, di lati le semirette −→rV
e −→sV e vertice V, l’insieme αBr ∩ αA
s . Evidentemente, si ha:
αBr ∩ αA
s =(αB
r ∩ αAs
)∪ (−→rV ∪ −→sV ) .
Si prova facilmente che l’insieme αBr ∩ αA
s è convesso e inoltre che esso è
l’unione di tutte le semirette di origine V, congiungenti V con un qualsiasi
punto P ∈ AB.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 73

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
L’insieme complementare di αBr ∩αA
s in α, ∁(αB
r ∩ αAs
), si chiamerà angolo
concavo chiuso di lati −→rV e −→sV e vertice V. Il complementare ∁(αB
r ∩ αAs
)di
αBr ∩αA
s in α si dirà angolo concavo aperto di lati −→rV e −→sV e vertice V. Risulta:
∁(αB
r ∩ αAs
)= ∁
(αB
r ∩ αAs
)∪ (−→rV ∪ −→sV ) .
L’insieme ∁(αB
r ∩ αAs
)è un insieme non convesso (onde il nome di angolo
concavo). Infatti, sia A1 un punto, distinto da A, della retta AB, tale che nel-
l’orientamento A→ B si abbia A1 → A (tale punto esiste, per la Proposizione
4.7) e siaB1 un punto, distinto daB, della rettaAB, tale che siaB → B1 (nel-
l’orientamento suddetto). Il punto A1 non appartiene a αBr (in quanto il seg-
mento A1B interseca r in A ed è A 6= A1), cioè A1 ∈ ∁(αB
r
)⊆ ∁
(αB
r ∩ αAs
).
Analogamente, B1 non appartiene a αAs , cioè B1 ∈ ∁
(αA
s
)⊆ ∁
(αB
r ∩ αAs
).
Quindi A1 e B1 sono elementi di(αB
r ∩ αAs
). D’altra parte, il segmento A1B1,
poiché contiene il segmento AB, non è tutto contenuto in ∁(αB
r ∩ αAs
), onde
l’asserto.
Per completezza, diciamo che chiamiamo angolo piatto di lati −→rV e −→sV e
vertice V, uno qualsiasi dei due semipiani determinati da r.
Dato un trilatero (A,B,C) diremo triangolo di vertici A, B, C, l’insieme
costituito dai tre punti A, B, C; dai tre segmenti AB, BC, CA e dalla
intersezione ∆ dei tre semipiani chiusi αCAB, α
ABC , αB
CA. I punti di ∆ non
appartenenti ai lati si diranno interni al triangolo. Evidentemente ∆ è un
insieme convesso.
Sia data una n−pla di punti A0, A1, . . . , An, tale che A0 6= A1, Ai 6= Ai+1 e
inoltre tale che la retta Ai−1Ai sia distinta dalla retta AiAi+1, i = 1, . . . , n−1.
Si chiama poligonale (A0,A1, . . . , An) di verici A0, A1, . . . , An, l’insieme dei
segmenti A0A1, A1A2, . . . , An−1An.
I suddetti segmenti prendono il nome di lati della poligonale. Due lati
Ai−1Ai e AiAi+1 si dicono consecutivi.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 74

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Una poligonale si dice intrecciata, se esistono due lati non consecutivi a
intersezione non vuota. In caso contrario si avrà una poligonale semplice.
Una poligonale si dice chiusa, se il primo vertice, A0, coincide con l’ultimo,
An.
Sia data una poligonale semplice e chiusa (A0,A1, . . . , An) , tale che per
ogni suo lato, la poligonale appartenga interamente a uno dei due semipiani
aventi per origine la retta individuata dal lato stesso. Sia ∆ l’intersezione di
tutti i suddetti semipiani chiusi, al variare del lato nella poligonale. Chia-
meremo poligono convesso di vertici A0, A1, . . . , An l’insieme costituito dai
vertici, dai lati della poligonale e da ∆. I punti di ∆ non appartenenti ai
lati, si diranno interni al poligono. Evidentemente ∆ è convesso, essendo
l’intersezione di insiemi convessi e cosí anche l’insieme dei punti interni al
poligono.
Un segmento che unisce due vertici non consecutivi del poligono prende
il nome di diagonale. Essa è evidentemente contenuta in ∆.
Chiamasi quadrangolo un poligono con quattro lati. Due lati non consecu-
tivi del quadrangolo diconsi opposti. Se un quadrangolo ha esattamente una
coppia di lati opposti su rette parallele dicesi trapezio. Se un quadrangolo ha
le due coppie di lati opposti su rette parallele, si chiama parallelogramma.
Dato un parallelogramma di vertici A, B, C, D, la poligonale (A,B,C,D)
è un parallelolatero. Viceversa, dato un parallelolatero (A,B,C,D), esso è
una poligonale che individua un paralellogramma.
Si dimostra la proposizione seguente.
Proposizione 4.12 In un parallelogramma di vertici A, B, C, D le due
diagonali AC e BD si incontrano in un punto interno.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 75

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
4.4 Dilatazioni in un piano affine ordinato
Siano dati due piani affini ordinati (α,ℜ) e (α′,ℜ′) . Una affinità ϕ : α→ α′
dicesi ordinata, se muta ogni retta orientata −→r di α in una retta orientata−→r′
di α′, cioè se A e B sono due punti distinti di α e A′ = ϕ(A), B′ = ϕ(B), per
ogni coppia di punti P e Q della retta AB, tali che P → Q nell’orientamento
di−→AB, si ha che ϕ(P )→ ϕ(Q) nell’orientamento di
−−→A′B′.
Evidentemente un’affinità orientata ϕ muta segmenti in segmenti e quindi
semipiani in semipiani, angoli in angoli, triangoli in triangoli, poligoni in
poligoni.
Si dimostrano le proposizioni seguenti.
Proposizione 4.13 Ogni affinità ϕ : α → α′ che muta segmenti in seg-
menti è ordinata.
Proposizione 4.14 In un piano di traslazione (α,ℜ) ordinato, ogni traslazione
τ muta segmenti in segmenti, cioè è un’affinità ordinata.
Proposizione 4.15 Sia (α,ℜ) un piano di traslazione ordinato e τ una
sua qualsivoglia traslazione. Se A e A′ sono due punti corrispondenti in τ,
fissato sulla retta r = AA′ l’orientamento A → A′, si ha che, se P,Q ∈ r
sono tali che P → Q, risulta τ(P )→ τ(Q). Ne segue che, su ogni retta unita,
la traslazione τ muta ciascuno dei due ordinamenti in sé.
Proposizione 4.16 In un piano desarguesiano (α,ℜ) ordinato, ogni omote-
tia θ muta segmenti in segmenti e, quindi, è un’affinità ordinata.
Proposizione 4.17 In un piano desarguesiano (α,ℜ) ordinato, ogni di-
latazione muta segmenti in segmenti, cioè è un’affinità ordinata.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 76

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
4.5 Coordinazione di un piano affine desargue-
siano ordinato su un corpo ordinato
Ricordiamo che si definisce corpo ordinato una coppia (K,K+) costituita da
un corpo K e da un sottoinsieme K+ di K, i cui elementi si diranno positivi,
tale che:
I - 0 ∈ K;
II - ∀a, b ∈ K+, a+ b ∈ K+, ab ∈ K+;
III - ∀a ∈ K − (K+ ∪ {0}), −a ∈ K+.
Denoteremo con K− l’insieme K − (K+ ∪ {0}) . Dalle I e II, si ha:
a ∈ K+ ⇐⇒ −a ∈ K−.
Poniamo
a < b⇐⇒ b− a ∈ K+ (4.7)
e quindi
0 < a⇐⇒ a ∈ K+.
In K rimane definita la relazione ≤ seguente
a ≤ b⇐⇒ a < b ovvero a = b. (4.8)
La relazione ≤ data dalla (4.8) risulta evidentemente una relazione d’ordine
totale.
Proviamo che:
∀a, b, c ∈ K, a < b⇒ a+ c < b+ c.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 77

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Infatti:
a < b⇒ b− a ∈ K ⇒ (b+ c)− (a+ c) ∈ K+ ⇒ a+ c < b+ c.
Si ha inoltre:
∀a, b, c ∈ K : a < b, c > 0, si ha ac < bc, ca < cb.
Infatti:
(0 < c, a < b)⇒(b− a ∈ K+, c ∈ K+
)⇒ c (b− a) ∈ K+,
(b− a) c ∈ K+ ⇒(cb− ca ∈ K+, bc− ac ∈ K+
)⇒ (ac < bc, ca < cb) .
Evidentemente l’unità u di K è tale che u ∈ K+ e inoltre è nu > 0, quindi
un corpo ordinato ha caratteristica zero.
Sia K un corpo, dotato di una relazione d’ordine totale ≤, tale che siano
soddisfatte le condizioni seguenti:
∀a, b, c ∈ K, a < b⇒ a+ c < b+ c, (4.9)
∀a, b, c ∈ K : a < b, c > 0, si ha ac < bc. (4.10)
Si prova che:
Proposizione 4.18 Denotato con K+ il sottoinsieme di K degli elementi
a, tali che sia 0 < a, la coppia (K,K+) risulta un corpo ordinato, tale che
l’ordinamento indotto in K in base alla (4.7) coincide con l’ordinamento ≤già assegnato in K.
La proposizione ora enunciata ci permette di asserire che un corpo ordi-
nato si può anche definire come una coppia (K,≤) , ove K è un corpo, ≤ è
una relazione d’ordine totale in K, soddisfacente alle (4.9) e (4.10).
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 78

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Sia (K,≤) un corpo ordinato. Si consideri il piano affine numerico (K2,ℜK)
suK. L’ordinamento≤ diK induce su ciascuna retta del piano affine (K2,ℜK)
in modo naturale un ordinamento. Precisamente, per una retta parallela al-
l’asse X, cioè di equazione x = b (b ∈ K), diremo che P1 (x1, b) → P2 (x2, b)
quando x1 ≤ x2; per una retta parallela all’asse Y, cioè di equazione y = b
(b ∈ K) diremo che P1 (b, y1)→ P2 (b, y2) quando y1 ≤ y2; infine per una retta
di equazione y = ax+ b (a, b ∈ K, a 6= 0) diremo che P1 (x1, y1)→ P2 (x2, y2)
quando x1 ≤ x2 (il che equivale a dire, se a > 0, che y1 ≤ y2; se invece a < 0,
y2 ≤ y1). Dunque (K2,ℜK) è un piano affine ordinato sulle rette.
Si prova poi, analiticamente, con semplici calcoli, che per tale piano, vale
l’Assioma di Pasch. Quindi (K2,ℜ) è un piano affine ordinato.
Un piano affine ordinato (α,ℜ) dicesi coordinabile sopra un corpo ordi-
nato (K,≤) , se esiste un’affinità ordinata di (α,ℜ) sul paino affine ordinato
(K2,ℜK) . Evidentemente un tale piano è desarguesiano.
Viceversa, si può provare che:
Proposizione 4.19 Ogni piano affine (α, ℜ) desarguesiano ordi-
nato è coordinabile su un corpo ordinato (K, ≤).
Dimostrazione. Fissiamo nel piano α un riferimento (O, u, u,X, Y ) e in-
troduciamo sull’asse X, nel modo noto, l’operazione di somma e di prodotto,
ottenendo cosí il corpo (X,+, ·). Sappiamo che l’applicazione
c : P ∈ α 7−→ (x, y) ∈ X2 (4.11)
(che al punto P associa le sue coordinate nel riferimento dato) è un’affinità
di (α,ℜ) sul piano numerico (X2,ℜX) , cioè ogni retta del piano (α,ℜ) ha
come immagine in c una retta del piano (X2,ℜX) di equazione y = ax + b,
ovvero x = costante.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 79

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
Denotato con ≤ l’ordinamento dell’asse X per cui è O ≤ u, proviamo che
(X,≤) soddisfa alle (4.9) e (4.10), cioè che (X,≤) è un campo ordinato.
Per ogni a, b, c di K, con a < b, si consideri la traslazione τc che muta O in
c. Essa, in forza della Proposizione 4.15, muta l’orientamento ≤ dell’asse X
(che è una retta unita in τc) in sé, quindi τc(a) < τc(b), ossia a + c < b + c,
essendo τc(a) = a+ c, τc(b) = b+ c. Si è cosí provata la (4.9).
Per ogni a, b, c di K, con a < b e c > 0, si consideri l’omotetia θc di centro O,
tale che θc(u) = c. Essa è un’affinità ordinata (cfr Proposizione 4.16) e l’asse
X è una retta unita in essa. Quindi, l’omotetia θc muta l’orientamento ≤dell’asse X o in sé, oppure nel suo opposto. Poiché è O ≤ u e θc(O) ≤ θc(u)
(in quanto θc(O) = O, θc(u) = c ed è O ≤ c), se ne deduce che θc muta
l’orientamento ≤ dell’asse X in sé e quindi, essendo a < b, risulta θc(b) <
θc(b), cioè ac < bc, in quanto θc(a) = ac e θc(b) = bc. Resta cosí provata la
(4.10).
Dunque, (X,≤) è un corpo ordinato. L’orientamento ≤ di X induce nel
piano affine (X2,ℜX) un ordinamento sulle rette (secondo quanto detto a
pagina 78) tale che (X2,ℜX) risulta un piano affine ordinato. In forza delle
Proposizioni 4.5 e 4.6, si ha che la coordinazione c, descritta in (4.11), è
un’affinità ordinata tra i piani affini ordinati (α,ℜ) e (X2,ℜX) . Ne segue
l’asserto. �
Ci proponiamo infine di dare un esempio di piano desarguesiano ordinato
che ammette delle affinità non ordinate. Sia Q(√
2)
il campo ampliamento
algebrico del campo razionale Q, mediante l’equazione x2 − 2 = 0. I suoi
elementi sono della forma a+b√
2, con a, b ∈ Q. L’applicazione θ : a+b√
2 ∈Q → a − b
√2 ∈ Q
(√2)
è manifestamente un automorfismo del campo
suddetto. Il campo Q(√
2)
è un sottocampo del campo reale ed è quindi un
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 80

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
campo ordinato dall’usuale relazione ≤ di R. Possiamo allora considerare il
piano affine numerico (α,ℜ) relativo al campo(Q
(√2),≤
). L’applicazione
Θ di α in sé di equazioni:
x′ = θ(x)
y′ = θ(x), θ : a+ b
√2 ∈ Q
(√2)→ a− b
√2 ∈ Q
(√2),
risulta manifestamente un’affinità del piano affine (α,ℜ), in quanto θ è un
automorfismo di Q(√
2). Ma tale affinità non è ordinata: infatti, il segmento
di estremi A(1, 0) e B(2, 0) non è mutato ancora in un segmento. Essendo
infatti A e B uniti in Θ, dovrebbe aversi Θ(AB) = AB, mentre il punto
P(√
2, 0)∈ AB si muta nel punto Θ(P ) =
(−√
2, 0)
che non appartiene a
AB.
4.6 Piani affini reali
Un corpo ordinato (K,≤) si dice completo, se l’ordinamento ≤ è completo,
cioè se ogni sottoinsieme di K limitato superiormente ammette un estremo
superiore. Il campo reale R rispetto alla usuale relazione di disuguaglianza
≤ risulta un campo ordinato completo. Ebbene, si dimostra che:
Proposizione 4.20 Dato un corpo ordinato completo (K,≤), esiste un
isomorfismo ordinato di (K,≤) in (R,≤) . Tale isomorfismo è unico.
Un piano affine ordinato si dirà completo, se l’ordinamento di ogni sua ret-
ta risulta completo, per il che occorre e basta, in forza delle Proposizioni 4.5
e 4.6, che vi sia almeno una retta di α, relativamente alla quale l’ordinamento
sia completo.
Sia (α,ℜ) un piano desarguesiano ordinato e completo. Esso, per la
Proposizione 4.19, risulta coordinabile su un corpo ordinato (X,≤) , il quale
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 81

M. Scafati Tallini e M. Iurlo Dal Piano Affine al Piano Euclideo Reale
risulta completo (in quanto l’ordinamento ≤ sull’asse X del riferimento rela-
tivo alla coordinazione è completo). Dunque, per la proposizione precedente,
(X,≤) si può identificare con il campo reale (R,≤) , mediante l’isomorfismo
ivi citato. Ne segue che:
Proposizione 4.21 Ogni piano affine desarguesiano, ordinato e
completo risulta isomorfo, mediante un’affinità ordinata, al pi-
ano affine numerico reale (R, ≤) , cioè è coordinabile - come piano
affine ordinato - sul campo reale ordinato (R, ≤) .
Definiremo piano affine reale, ogni piano affine desarguesiano,
ordinato e completo, cioè ogni piano affine ordinato coordinabile
sul campo reale.
Quaderni del Seminario di Geometrie Combinatorie “G.Tallini”- n. 157 82

Bibliografia
[1] E. Artin, Algebra geometrica, Feltrinelli, Milano, 1957.
[2] L. M. Blumenthal, A modern view of geometry, W. H. Freeman and
Company, San Francisco, 1961.
[3] L. Lombardo Radice, Istituzioni di algebra astratta, Feltrinelli, Milano,
1965.
[4] L. Lombardo Radice, Assiomi algebrici e postulati geometrici,
Archimede (3) (1951), 177-188.
[5] M. Scafati Tallini, Strutture d’incidenza e piani affini, Liguori, Napoli,
1976.
[6] B. Segre, Lectures on modern geometry. With an appendix by Lucio
Lombardo-Radice, Edizioni Cremonese, Roma, 1961.
83