02. Modelli Matematici: Derivazione - Automazione@ingre · Controlli Automatici Derivazione di...
28
Controlli Automatici 02. Modelli Matematici: Derivazione Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Federica Ferraguti ARSControl - DISMI - Università di Modena e Reggio Emilia E-mail: {nome.cognome}@unimore.it http://www.arscontrol.org/teaching
Transcript of 02. Modelli Matematici: Derivazione - Automazione@ingre · Controlli Automatici Derivazione di...
Co
ntr
olli
Au
tom
atici
02. Modelli Matematici: Derivazione
Prof. Cesare Fantuzzi
Ing. Cristian Secchi
Ing. Federica Ferraguti
ARSControl - DISMI - Università di Modena e Reggio Emilia
E-mail: {nome.cognome}@unimore.it
http://www.arscontrol.org/teaching
Controlli Automatici Derivazione di Modelli Matematici 2
Problema: Determinare il modello matematico che approssimi ilcomportamento di un sistema dinamico
Indagine diretta: il sistema viene suddiviso in sottosistemi elementari il cui modello
matematico è facilmente identificabile e il modello complessivo viene dedotto componendoi modelli dei sottosistemi elementari e applicando leggi base della fisica. Applicabile a casisemplici in cui, sotto certe ipotesi, l’introspezione fisica del sistema permette lamodellazione.
Black box: il sistema si considera come una «scatola nera» di cui occorre identificarne il
comportamento mediante l’analisi dei segnali di ingresso (opportunamente variati) e dellerispettive uscite (analisi armonica). Utile in quei casi dove la fisica del sistema è cosìcomplessa da non permettere una introspezione.
Gray box (approccio misto): il sistema complessivo viene scomposto in diversi sottosistemiinteragenti, di cui alcuni modellati mediante introspezione fisica e altri mediante l’analisiingresso/uscita.
Principi di modellistica
Controlli Automatici Derivazione di Modelli Matematici 3
L’analisi energetica del sistema risulta un utile strumento per la derivazione delmodello matematico.
Dalla definizione di stato (grandezza che sintetizza la storia passata delsistema utile al fine di calcolare l’uscita corrente) sembra ragionevolescegliere, come variabili di stato, grandezze che determinano quantità dienergia accumulate nel sistema (variabili energetiche).
In ogni dominio energetico (tranne in quello termico) ci sono due variabilienergetiche e due meccanismi di accumulo dell’energia che dipendono,ciascuno, da una sola delle due variabili energetiche. Il prodotto delle duevariabili energetiche rappresenta la potenza in quel particolare dominioenergetico.
In ogni dominio energetico esiste un parametro che lega le due variabilienergetiche e che caratterizza il meccanismo di dissipazione dell’energia inquel dominio.
Derivazione del modello mediante indagine diretta
Controlli Automatici Derivazione di Modelli Matematici 4
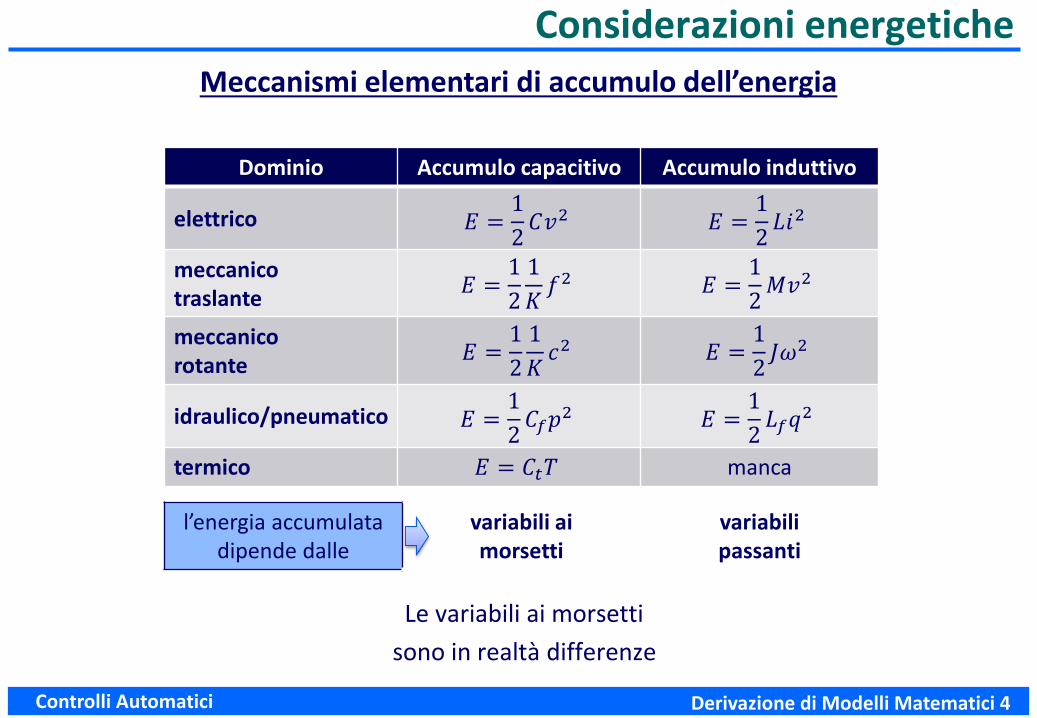
Meccanismi elementari di accumulo dell’energia
Le variabili ai morsetti
sono in realtà differenze
Considerazioni energetiche
Dominio Accumulo capacitivo Accumulo induttivo
elettrico 𝐸 =1
2𝐶𝑣2 𝐸 =
1
2𝐿𝑖2
meccanicotraslante
𝐸 =1
2
1
𝐾𝑓2 𝐸 =
1
2𝑀𝑣2
meccanicorotante
𝐸 =1
2
1
𝐾𝑐2 𝐸 =
1
2𝐽𝜔2
idraulico/pneumatico 𝐸 =1
2𝐶𝑓𝑝
2 𝐸 =1
2𝐿𝑓𝑞
2
termico 𝐸 = 𝐶𝑡𝑇 manca
l’energia accumulata dipende dalle
variabili ai morsetti
variabilipassanti
Controlli Automatici Derivazione di Modelli Matematici 5
Scomposizione del sistema complessivo in sottosistemi elementari il cuimodello matematico sia facilmente derivabile (sotto opportune ipotesi).
Composizione dei modelli elementari mediante principi base della fisica(conservazione dell’energia) per derivare il modello complessivo:
Sistemi elettrici: Leggi di Kirchhoff per le tensioni e per le correnti
Sistemi meccanici: Legge di Newton
Sistemi idraulici: Equazioni di Bernoulli
Derivazione di modelli matematici di sistemi fisici
Controlli Automatici Derivazione di Modelli Matematici 6
Si prenderanno in esame alcuni esempi di modelli matematici dinamici per:• illustrare i procedimenti generali che usualmente si impiegano nella loro deduzione
• chiarire le analogie esistenti fra modelli di sistemi fisici di diversa natura
In particolare, verranno descritti sistemi: elettrici
meccanici
elettro-meccanici
idraulici
termici
Si dedurranno i modelli in forma di equazioni differenziali ordinarie del tipo:
𝑎𝑛𝑑𝑛𝑦
𝑑𝑡𝑛+ 𝑎𝑛−1
𝑑𝑛−1𝑦
𝑑𝑡𝑛−1+⋯+ 𝑎0𝑦 = 𝑏𝑚
𝑑𝑚𝑢
𝑑𝑡𝑚+ 𝑏𝑚−1
𝑑𝑚−1𝑢
𝑑𝑡𝑚−1+⋯+ 𝑏0𝑢
Il problema della soluzione di tali equazioni differenziali, cioè ricavarel’andamento di 𝑦(𝑡) in funzione di 𝑢(𝑡), verrà preso in esame successivamente
Trasformate di Laplace
Modelli matematici di alcuni sistemi dinamici
Controlli Automatici Derivazione di Modelli Matematici 7
Per semplificare la scrittura delle equazioni differenziali si userà il simbolo(operatore) D per indicare l’operazione di derivazione rispetto al tempo:
𝐷𝑥(𝑡) 𝑑𝑥(𝑡)
𝑑𝑡
𝐷2𝑥(𝑡) 𝑑2𝑥(𝑡)
𝑑𝑡2
…
Ad esempio, se 𝑥1(𝑡), 𝑥2(𝑡) sono funzioni derivabili e 𝑎1, 𝑎2 costanti, allora:𝑦 𝑡 = 𝑎1𝑥1(𝑡)+𝑎2𝐷𝑥2(𝑡)
implica
𝐷𝑦 𝑡 = 𝐷 𝑎1𝑥1 𝑡 +𝑎2𝐷𝑥2 𝑡 = 𝑎1𝐷𝑥1(𝑡)+𝑎2𝐷2𝑥2(𝑡)
Si può dare un significato anche al simbolo1
𝐷o 𝐷−1 ponendo
1
𝐷𝑥 𝑡 = 0
𝑡𝑥(𝜏) 𝑑𝜏 + 𝐾 in cui 𝐾 è un’opportuna costante
Operatore “D”
L’operatore D si può trattare come se fosse una costante:gode infatti della proprietà distributiva rispetto allasomma e della proprietà commutativa con le costanti (noncon le funzioni del tempo)
Controlli Automatici Derivazione di Modelli Matematici 8
Questa relazione costituisce una notazione convenzionale, in quanto in realtàl’operatore D non è invertibile, rappresentando una corrispondenza che non èuno a uno, ma molti a uno: tutte le funzioni che differiscono per una costantepresentano infatti la stessa derivata.
Esempio𝑦1 𝑡 = 5𝑥2 𝑡 + 7𝑦2 𝑡 = 5𝑥2 𝑡 + 7
𝑫𝒚𝟏 𝒕 = 𝑫𝒚𝟐 𝒕 = 𝟏𝟎𝒙(𝒕)
Per questo motivo,1
𝐷non si può applicare ai due membri di una relazione
esprimente l’uguaglianza di due funzioni:
se è 𝑦 𝑡 = 𝑥 𝑡
𝐷𝑦 𝑡 = 𝐷𝑥 𝑡
non è detto che sia 𝐷−1𝑦 𝑡 = 𝐷−1𝑥 𝑡 (solo per condizioni iniziali nulle)
Operatore “D”
Controlli Automatici Derivazione di Modelli Matematici 9
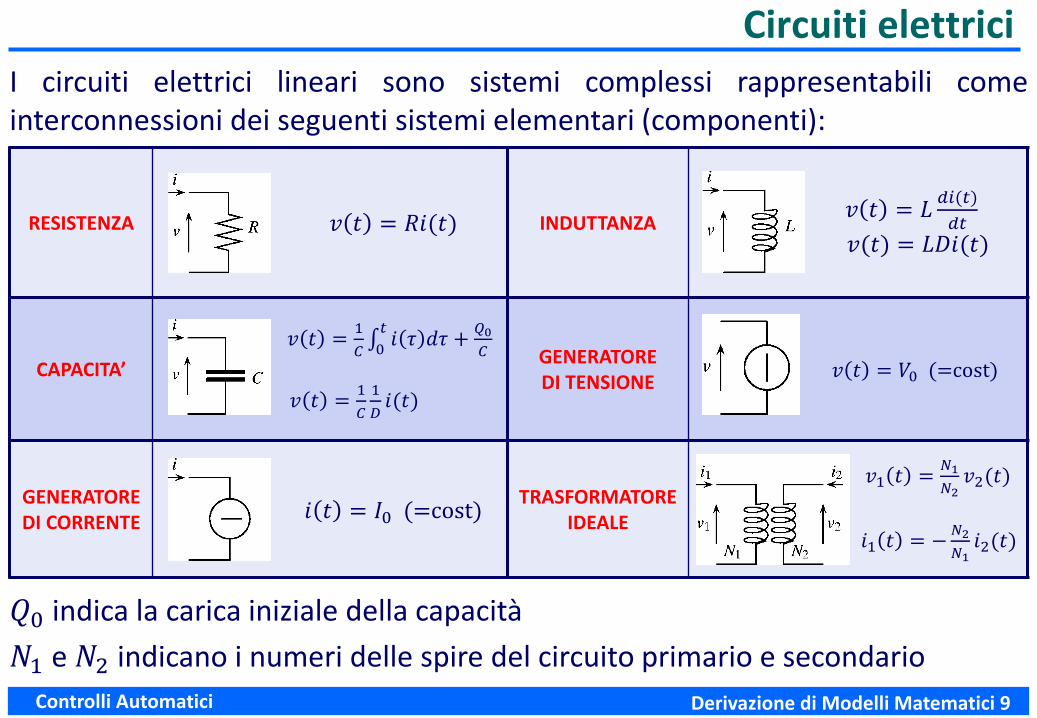
I circuiti elettrici lineari sono sistemi complessi rappresentabili comeinterconnessioni dei seguenti sistemi elementari (componenti):
𝑄0 indica la carica iniziale della capacità
𝑁1 e 𝑁2 indicano i numeri delle spire del circuito primario e secondario
Circuiti elettrici
RESISTENZA 𝑣 𝑡 = 𝑅𝑖(𝑡) INDUTTANZA𝑣 𝑡 = 𝐿
𝑑𝑖(𝑡)
𝑑𝑡
𝑣(𝑡) = 𝐿𝐷𝑖(𝑡)
CAPACITA’
𝑣 𝑡 =1
𝐶 0𝑡𝑖 𝜏 𝑑𝜏 +
𝑄0
𝐶
𝑣 𝑡 =1
𝐶
1
𝐷𝑖(𝑡)
GENERATOREDI TENSIONE
𝑣 𝑡 = 𝑉0 (=cost)
GENERATOREDI CORRENTE
𝑖 𝑡 = 𝐼0 (=cost)TRASFORMATORE
IDEALE
𝑣1 𝑡 =𝑁1
𝑁2𝑣2(𝑡)
𝑖1 𝑡 = −𝑁2
𝑁1𝑖2(𝑡)
Controlli Automatici Derivazione di Modelli Matematici 10
Altri componenti di circuiti elettrici sono:
Amplificatore operazionale
Transistor
Trattando con segnali logici, si possono considerare anche operatori logiciquali: AND, OR, NOT, NOR, … che costituiscono gli elementi di base delle RetiLogiche.
Le unità di misura delle grandezze elettriche nel sistema SI sono:
Circuiti elettrici
Variabili Parametri
𝑣 = 𝑉 Volt 𝑅 = Ω Ohm
𝑖 = 𝐴 Ampere 𝐿 = 𝐻 Henry
𝑄 = 𝐶 Coulomb 𝐶 = 𝐹 Farad
Controlli Automatici Derivazione di Modelli Matematici 11
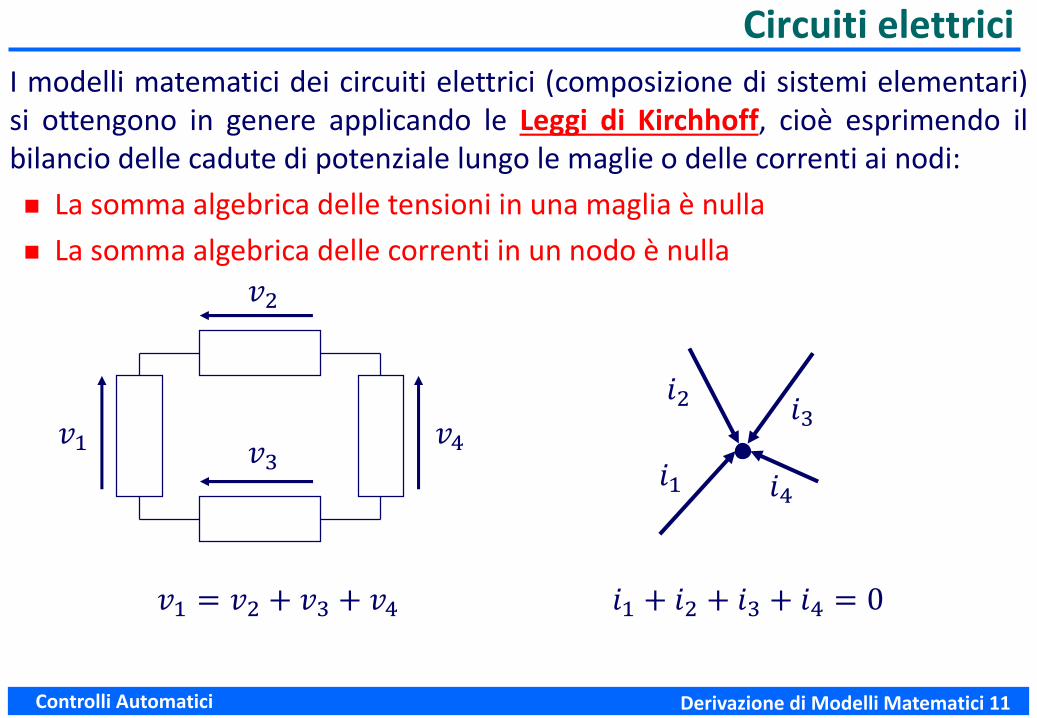
I modelli matematici dei circuiti elettrici (composizione di sistemi elementari)si ottengono in genere applicando le Leggi di Kirchhoff, cioè esprimendo ilbilancio delle cadute di potenziale lungo le maglie o delle correnti ai nodi:
La somma algebrica delle tensioni in una maglia è nulla
La somma algebrica delle correnti in un nodo è nulla
Circuiti elettrici
𝑖3
𝑣2
𝑣3𝑣4𝑣1
𝑣1 = 𝑣2 + 𝑣3 + 𝑣4
𝑖2
𝑖1 𝑖4
𝑖1 + 𝑖2 + 𝑖3 + 𝑖4 = 0
Controlli Automatici Derivazione di Modelli Matematici 12
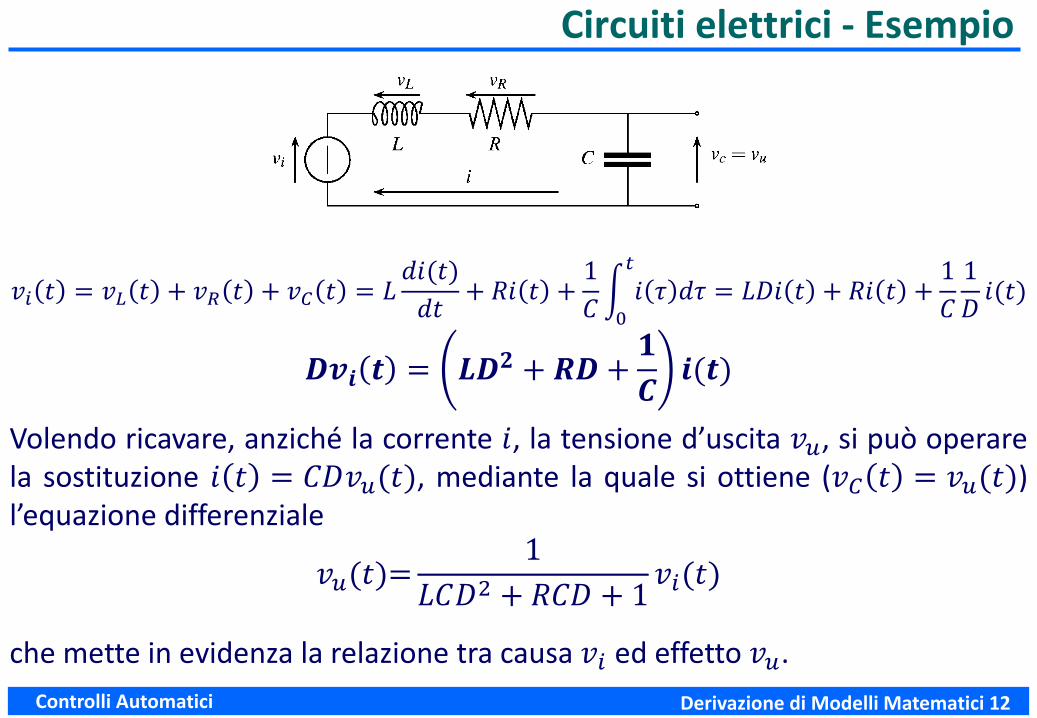
𝑣𝑖 𝑡 = 𝑣𝐿 𝑡 + 𝑣𝑅 𝑡 + 𝑣𝐶 𝑡 = 𝐿𝑑𝑖(𝑡)
𝑑𝑡+ 𝑅𝑖 𝑡 +
1
𝐶 0
𝑡
𝑖 𝜏 𝑑𝜏 = 𝐿𝐷𝑖 𝑡 + 𝑅𝑖 𝑡 +1
𝐶
1
𝐷𝑖(𝑡)
𝑫𝒗𝒊 𝒕 = 𝑳𝑫𝟐 + 𝑹𝑫 +𝟏
𝑪𝒊(𝒕)
Volendo ricavare, anziché la corrente 𝑖, la tensione d’uscita 𝑣𝑢, si può operarela sostituzione 𝑖 𝑡 = 𝐶𝐷𝑣𝑢(𝑡), mediante la quale si ottiene (𝑣𝐶 𝑡 = 𝑣𝑢(𝑡))l’equazione differenziale
𝑣𝑢(𝑡)=1
𝐿𝐶𝐷2 + 𝑅𝐶𝐷 + 1𝑣𝑖(𝑡)
che mette in evidenza la relazione tra causa 𝑣𝑖 ed effetto 𝑣𝑢.
Circuiti elettrici - Esempio
Controlli Automatici Derivazione di Modelli Matematici 13
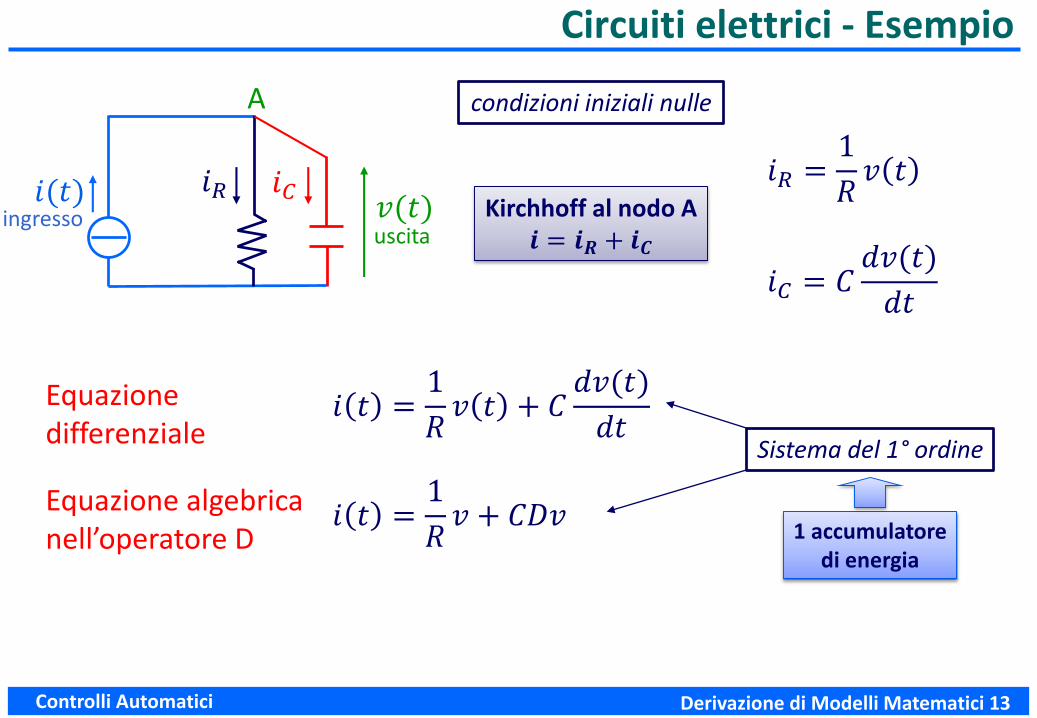
Circuiti elettrici - Esempio
Equazione differenziale
condizioni iniziali nulle
1 accumulatoredi energia
𝑖𝑅 𝑖𝐶𝑖(𝑡)𝑣(𝑡)uscita
ingresso
A
Kirchhoff al nodo A𝒊 = 𝒊𝑹 + 𝒊𝑪
𝑖𝑅 =1
𝑅𝑣 𝑡
𝑖𝐶 = 𝐶𝑑𝑣(𝑡)
𝑑𝑡
Equazione algebrica nell’operatore D
𝑖 𝑡 =1
𝑅𝑣 𝑡 + 𝐶
𝑑𝑣(𝑡)
𝑑𝑡
𝑖 𝑡 =1
𝑅𝑣 + 𝐶𝐷𝑣
Sistema del 1° ordine
Controlli Automatici Derivazione di Modelli Matematici 14
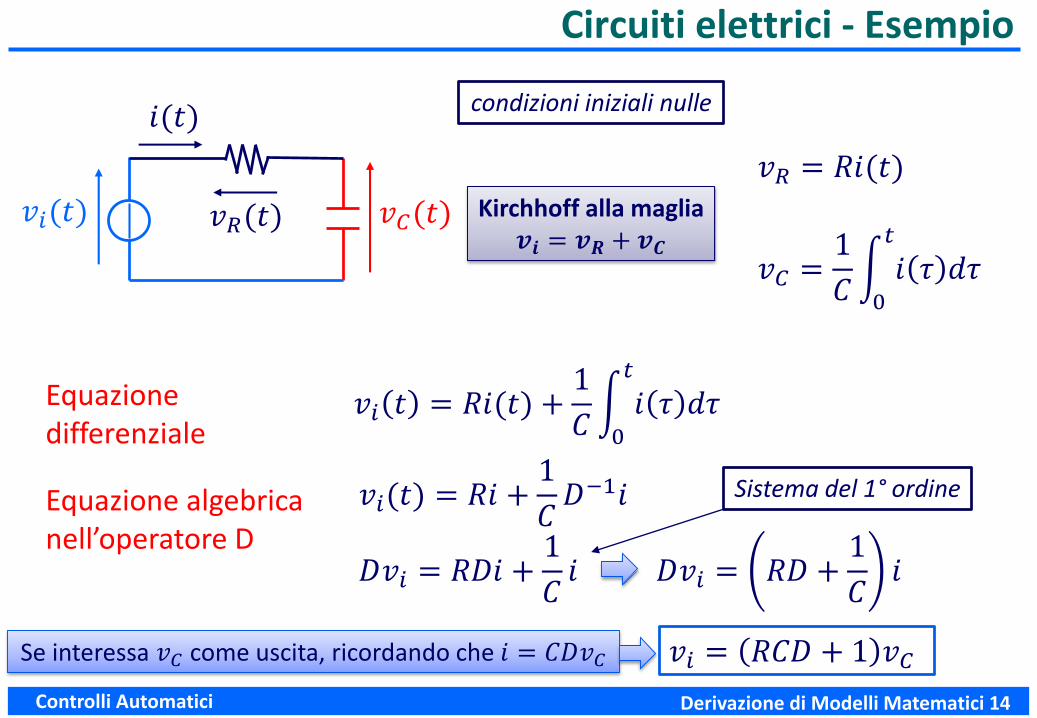
Circuiti elettrici - Esempio
Equazione differenziale
condizioni iniziali nulle
𝑣𝑅(𝑡)
𝑖(𝑡)
Kirchhoff alla maglia𝒗𝒊 = 𝒗𝑹 + 𝒗𝑪
𝑣𝑅 = 𝑅𝑖(𝑡)
𝑣𝐶 =1
𝐶 0
𝑡
𝑖 𝜏 𝑑𝜏
Equazione algebrica nell’operatore D
𝑣𝑖 𝑡 = 𝑅𝑖(𝑡) +1
𝐶 0
𝑡
𝑖 𝜏 𝑑𝜏
𝑣𝑖(𝑡) = 𝑅𝑖 +1
𝐶𝐷−1𝑖
𝐷𝑣𝑖 = 𝑅𝐷𝑖 +1
𝐶𝑖 𝐷𝑣𝑖 = 𝑅𝐷 +
1
𝐶𝑖
Sistema del 1° ordine
𝑣𝐶(𝑡)𝑣𝑖(𝑡)
Se interessa 𝑣𝐶 come uscita, ricordando che 𝑖 = 𝐶𝐷𝑣𝐶 𝑣𝑖 = 𝑅𝐶𝐷 + 1 𝑣𝐶
Controlli Automatici Derivazione di Modelli Matematici 15
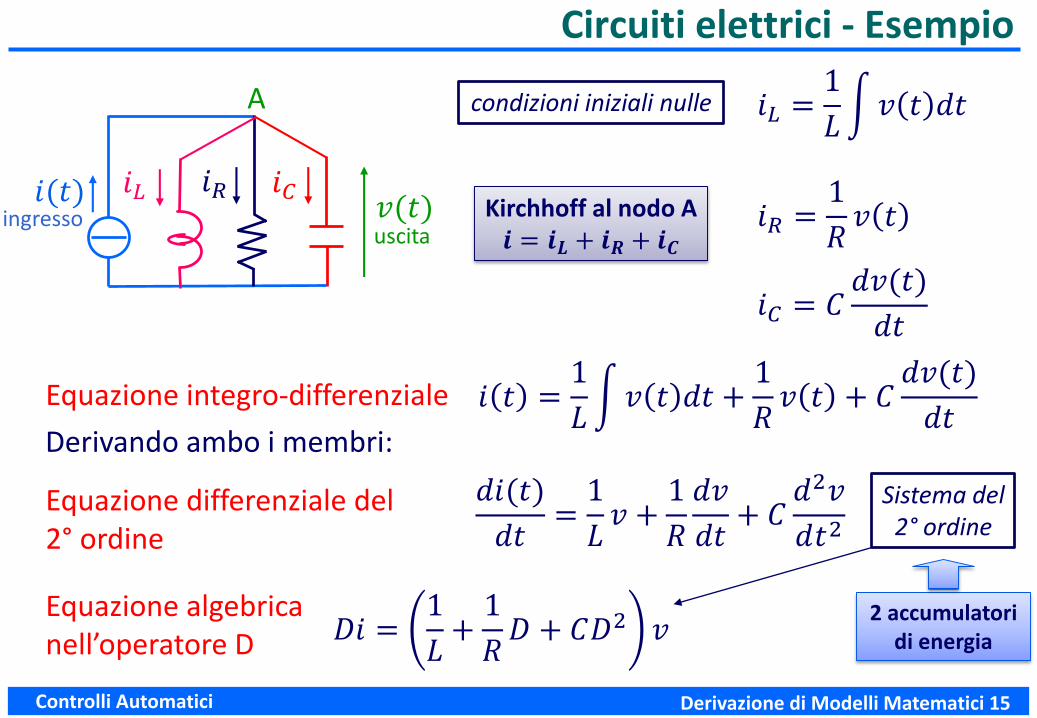
Derivando ambo i membri:
Circuiti elettrici - Esempio
Equazione integro-differenziale
condizioni iniziali nulle
2 accumulatoridi energia
𝑖𝑅 𝑖𝐶𝑖(𝑡)𝑣(𝑡)uscita
ingresso
A
Kirchhoff al nodo A𝒊 = 𝒊𝑳 + 𝒊𝑹 + 𝒊𝑪
Equazione differenziale del 2° ordine
𝑖 𝑡 =1
𝐿 𝑣 𝑡 𝑑𝑡 +
1
𝑅𝑣 𝑡 + 𝐶
𝑑𝑣(𝑡)
𝑑𝑡
𝑑𝑖(𝑡)
𝑑𝑡=1
𝐿𝑣 +
1
𝑅
𝑑𝑣
𝑑𝑡+ 𝐶
𝑑2𝑣
𝑑𝑡2
𝑖𝐿 =1
𝐿 𝑣 𝑡 𝑑𝑡
𝑖𝑅 =1
𝑅𝑣 𝑡
𝑖𝐶 = 𝐶𝑑𝑣(𝑡)
𝑑𝑡
𝑖𝐿
Equazione algebrica nell’operatore D 𝐷𝑖 =
1
𝐿+1
𝑅𝐷 + 𝐶𝐷2 𝑣
Sistema del2° ordine
Controlli Automatici Derivazione di Modelli Matematici 16
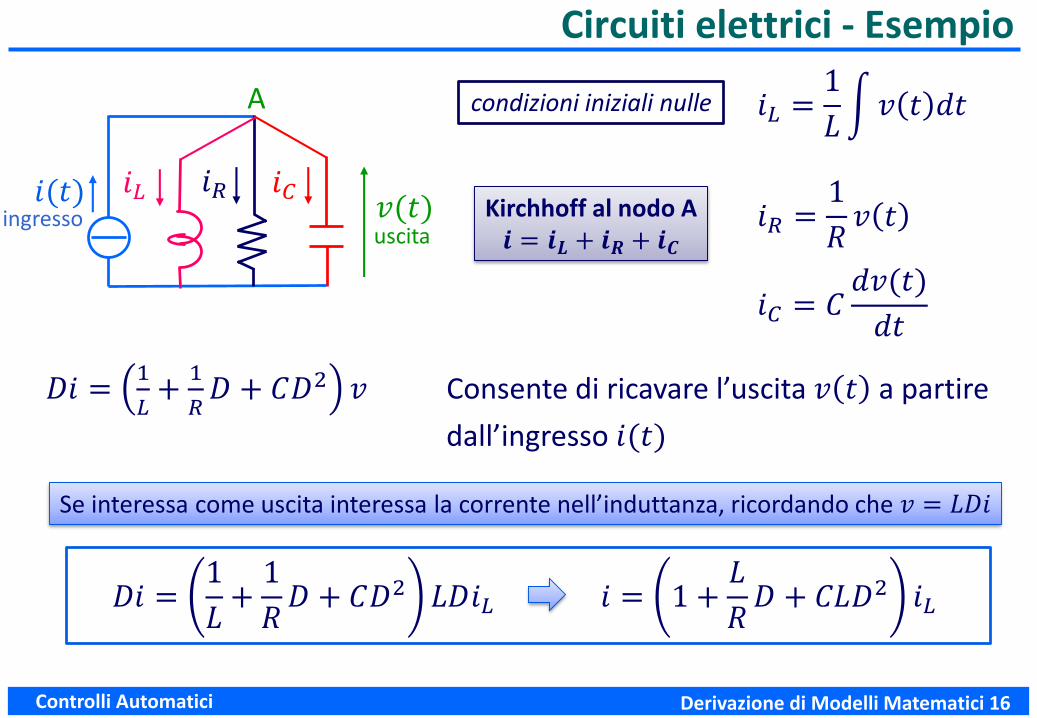
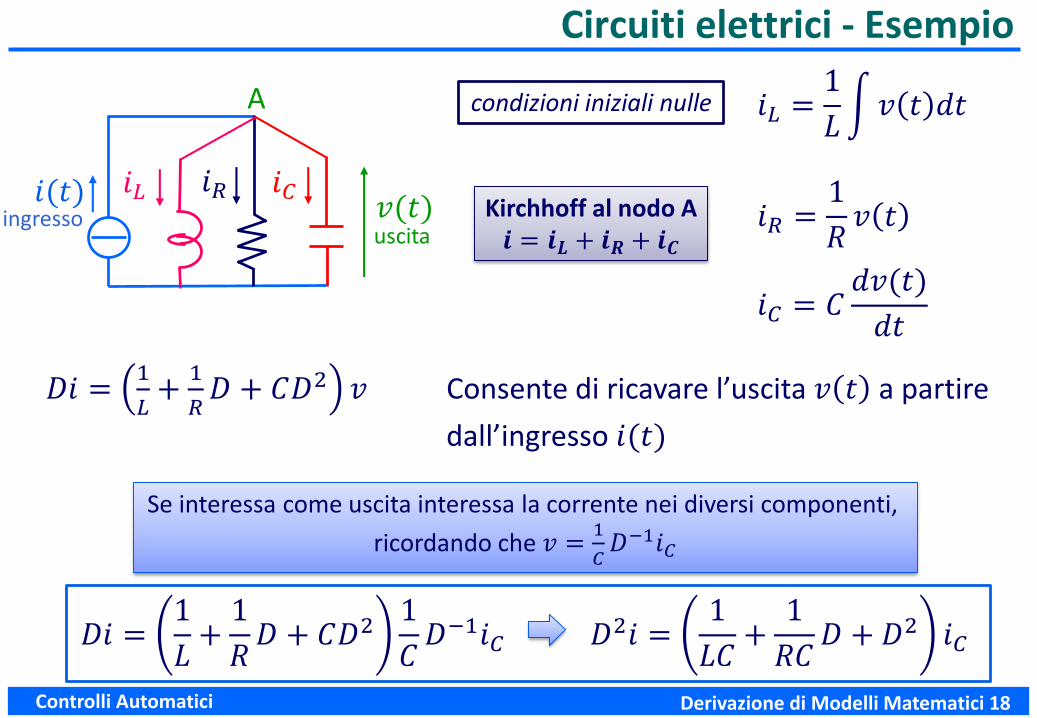
Circuiti elettrici - Esempio
condizioni iniziali nulle
𝑖𝑅 𝑖𝐶𝑖(𝑡)𝑣(𝑡)uscita
ingresso
A
Kirchhoff al nodo A𝒊 = 𝒊𝑳 + 𝒊𝑹 + 𝒊𝑪
𝑖𝐿 =1
𝐿 𝑣 𝑡 𝑑𝑡
𝑖𝑅 =1
𝑅𝑣 𝑡
𝑖𝐶 = 𝐶𝑑𝑣(𝑡)
𝑑𝑡
𝑖𝐿
𝐷𝑖 =1
𝐿+
1
𝑅𝐷 + 𝐶𝐷2 𝑣 Consente di ricavare l’uscita 𝑣 𝑡 a partire
dall’ingresso 𝑖(𝑡)
Se interessa come uscita interessa la corrente nell’induttanza, ricordando che 𝑣 = 𝐿𝐷𝑖
𝐷𝑖 =1
𝐿+1
𝑅𝐷 + 𝐶𝐷2 𝐿𝐷𝑖𝐿 𝑖 = 1 +
𝐿
𝑅𝐷 + 𝐶𝐿𝐷2 𝑖𝐿
Controlli Automatici Derivazione di Modelli Matematici 17
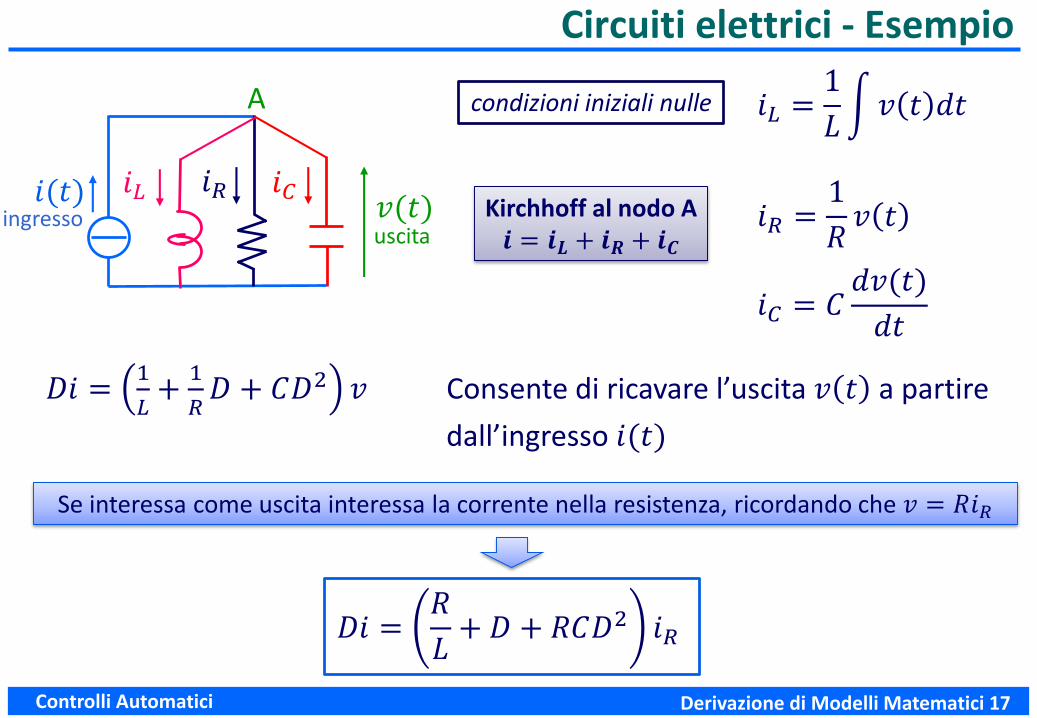
Circuiti elettrici - Esempio
condizioni iniziali nulle
𝑖𝑅 𝑖𝐶𝑖(𝑡)𝑣(𝑡)uscita
ingresso
A
Kirchhoff al nodo A𝒊 = 𝒊𝑳 + 𝒊𝑹 + 𝒊𝑪
𝑖𝐿 =1
𝐿 𝑣 𝑡 𝑑𝑡
𝑖𝑅 =1
𝑅𝑣 𝑡
𝑖𝐶 = 𝐶𝑑𝑣(𝑡)
𝑑𝑡
𝑖𝐿
𝐷𝑖 =1
𝐿+
1
𝑅𝐷 + 𝐶𝐷2 𝑣 Consente di ricavare l’uscita 𝑣 𝑡 a partire
dall’ingresso 𝑖(𝑡)
Se interessa come uscita interessa la corrente nella resistenza, ricordando che 𝑣 = 𝑅𝑖𝑅
𝐷𝑖 =𝑅
𝐿+ 𝐷 + 𝑅𝐶𝐷2 𝑖𝑅
Controlli Automatici Derivazione di Modelli Matematici 18
Circuiti elettrici - Esempio
condizioni iniziali nulle
𝑖𝑅 𝑖𝐶𝑖(𝑡)𝑣(𝑡)uscita
ingresso
A
Kirchhoff al nodo A𝒊 = 𝒊𝑳 + 𝒊𝑹 + 𝒊𝑪
𝑖𝐿 =1
𝐿 𝑣 𝑡 𝑑𝑡
𝑖𝑅 =1
𝑅𝑣 𝑡
𝑖𝐶 = 𝐶𝑑𝑣(𝑡)
𝑑𝑡
𝑖𝐿
𝐷𝑖 =1
𝐿+
1
𝑅𝐷 + 𝐶𝐷2 𝑣 Consente di ricavare l’uscita 𝑣 𝑡 a partire
dall’ingresso 𝑖(𝑡)
Se interessa come uscita interessa la corrente nei diversi componenti,
ricordando che 𝑣 =1
𝐶𝐷−1𝑖𝐶
𝐷𝑖 =1
𝐿+1
𝑅𝐷 + 𝐶𝐷2
1
𝐶𝐷−1𝑖𝐶 𝐷2𝑖 =
1
𝐿𝐶+
1
𝑅𝐶𝐷 + 𝐷2 𝑖𝐶

Controlli Automatici Derivazione di Modelli Matematici 19
Le equazioni differenziali che descrivono il moto dei sistemi meccanici siricavano di regola esprimendo l’equilibrio delle forze e delle coppie applicate aciascuna delle parti in movimento.
In generale, si cerca di adottare modelli a costanti concentrate, perché di piùfacile impiego, anche se spesso alquanto approssimativi e meno aderenti allarealtà di quanto non lo siano nel caso dei circuiti elettrici: ad esempio, in unmodello a costanti concentrate la massa di una molla (distribuita), è suppostatrascurabile o concentrata agli estremi della molla.
Inoltre, si cerca di adottare modelli lineari, anche se ciò implica la limitazionedello studio a variazioni relativamente piccole delle grandezze in gioco.
Sistemi meccanici
Controlli Automatici Derivazione di Modelli Matematici 20
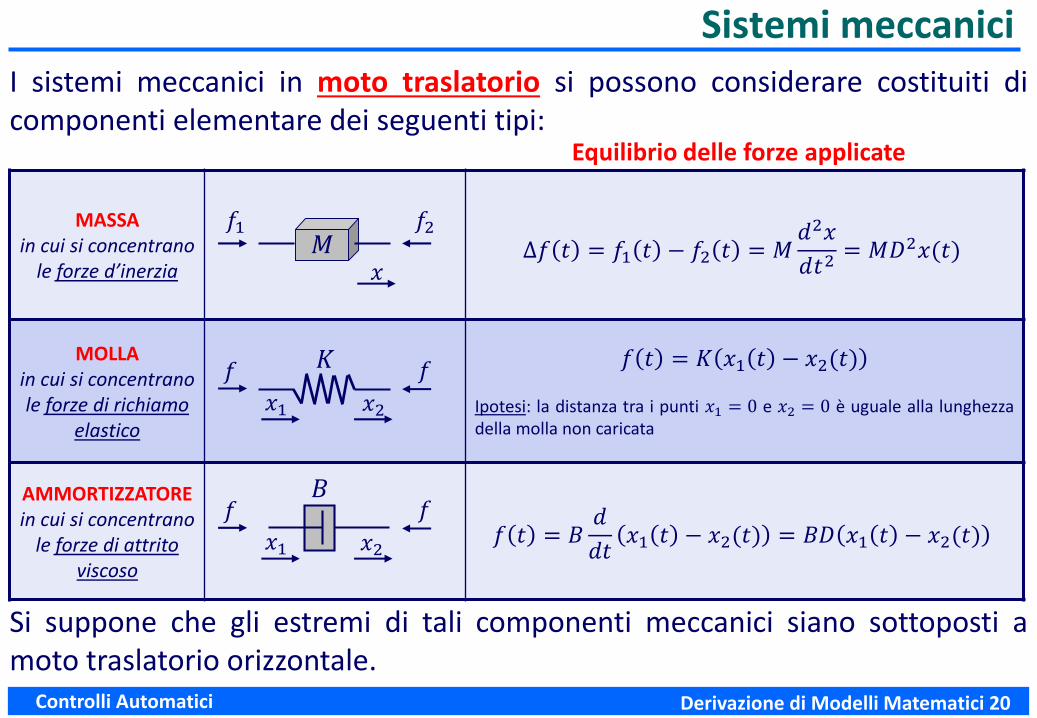
I sistemi meccanici in moto traslatorio si possono considerare costituiti dicomponenti elementare dei seguenti tipi:
Si suppone che gli estremi di tali componenti meccanici siano sottoposti amoto traslatorio orizzontale.
Sistemi meccanici
MASSAin cui si concentrano
le forze d’inerzia∆𝑓 𝑡 = 𝑓1 𝑡 − 𝑓2 𝑡 = 𝑀
𝑑2𝑥
𝑑𝑡2= 𝑀𝐷2𝑥(𝑡)
MOLLAin cui si concentrano le forze di richiamo
elastico
𝑓 𝑡 = 𝐾 𝑥1 𝑡 − 𝑥2(𝑡)
Ipotesi: la distanza tra i punti 𝑥1 = 0 e 𝑥2 = 0 è uguale alla lunghezzadella molla non caricata
AMMORTIZZATOREin cui si concentrano
le forze di attrito viscoso
𝑓 𝑡 = 𝐵𝑑
𝑑𝑡𝑥1 𝑡 − 𝑥2(𝑡) = 𝐵𝐷 𝑥1 𝑡 − 𝑥2(𝑡)
𝑀𝑓1 𝑓2
𝑥
Equilibrio delle forze applicate
𝑓 𝑓
𝑥1 𝑥2
𝐾
𝑓 𝑓
𝑥1 𝑥2
𝐵
Controlli Automatici Derivazione di Modelli Matematici 21
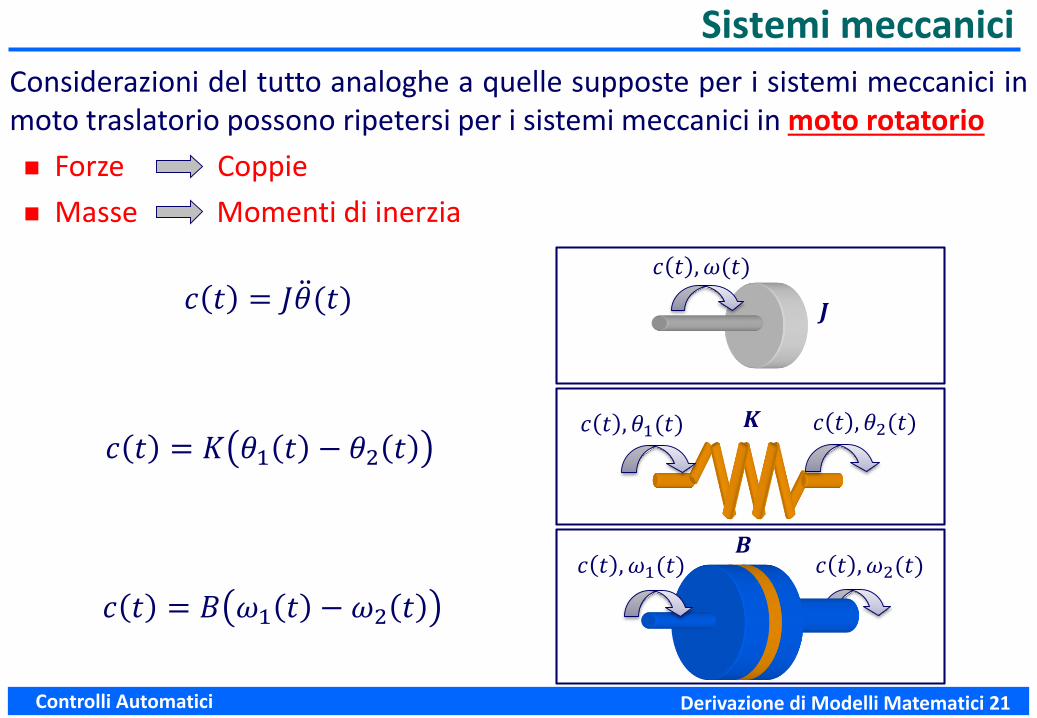
Considerazioni del tutto analoghe a quelle supposte per i sistemi meccanici inmoto traslatorio possono ripetersi per i sistemi meccanici in moto rotatorio
Forze Coppie
Masse Momenti di inerzia
𝑐 𝑡 = 𝐽 𝜃(𝑡)
𝑐 𝑡 = 𝐾 𝜃1 𝑡 − 𝜃2 𝑡
𝑐 𝑡 = 𝐵 𝜔1 𝑡 − 𝜔2 𝑡
Sistemi meccanici
𝑐 𝑡 , 𝜃1(𝑡) 𝑐 𝑡 , 𝜃2(𝑡)𝑲
𝑐 𝑡 , 𝜔(𝑡)
𝑱
𝑐 𝑡 , 𝜔1(𝑡) 𝑐 𝑡 , 𝜔2(𝑡)𝑩
Controlli Automatici Derivazione di Modelli Matematici 22
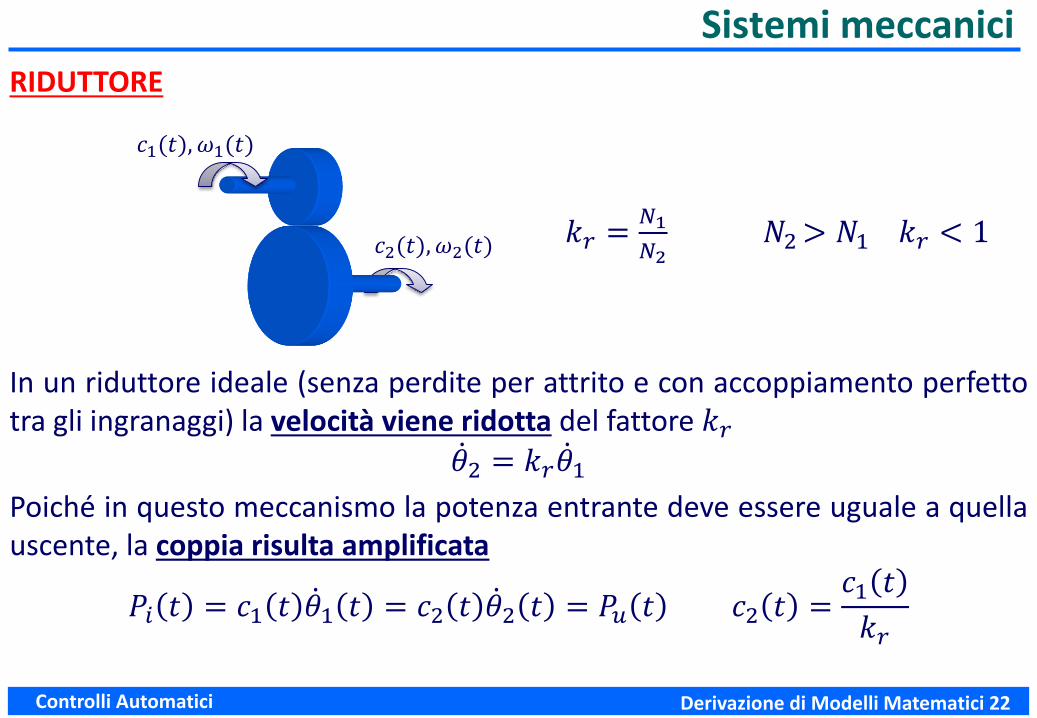
RIDUTTORE
𝑘𝑟 =𝑁1
𝑁2𝑁2> 𝑁1 𝑘𝑟 < 1
In un riduttore ideale (senza perdite per attrito e con accoppiamento perfettotra gli ingranaggi) la velocità viene ridotta del fattore 𝑘𝑟
𝜃2 = 𝑘𝑟 𝜃1Poiché in questo meccanismo la potenza entrante deve essere uguale a quellauscente, la coppia risulta amplificata
𝑃𝑖 𝑡 = 𝑐1 𝑡 𝜃1 𝑡 = 𝑐2 𝑡 𝜃2 𝑡 = 𝑃𝑢 𝑡 𝑐2 𝑡 =𝑐1 𝑡
𝑘𝑟
Sistemi meccanici
𝑐1(𝑡), 𝜔1(𝑡)
𝑐2(𝑡), 𝜔2(𝑡)
Controlli Automatici Derivazione di Modelli Matematici 23
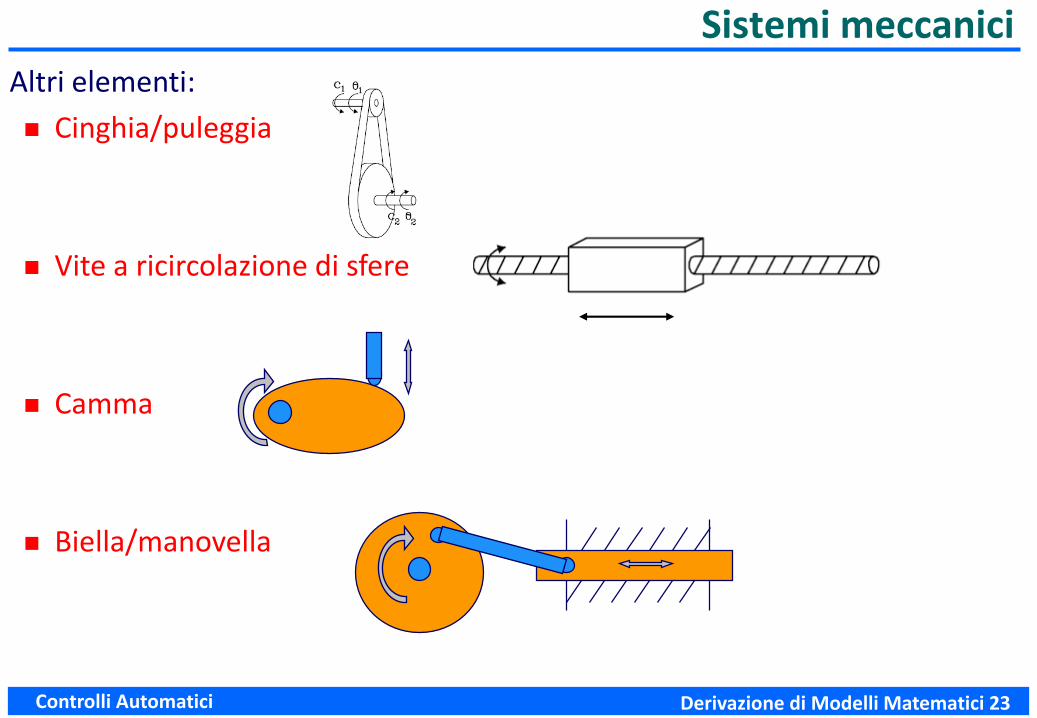
Altri elementi:
Cinghia/puleggia
Vite a ricircolazione di sfere
Camma
Biella/manovella
Sistemi meccanici
Controlli Automatici Derivazione di Modelli Matematici 24
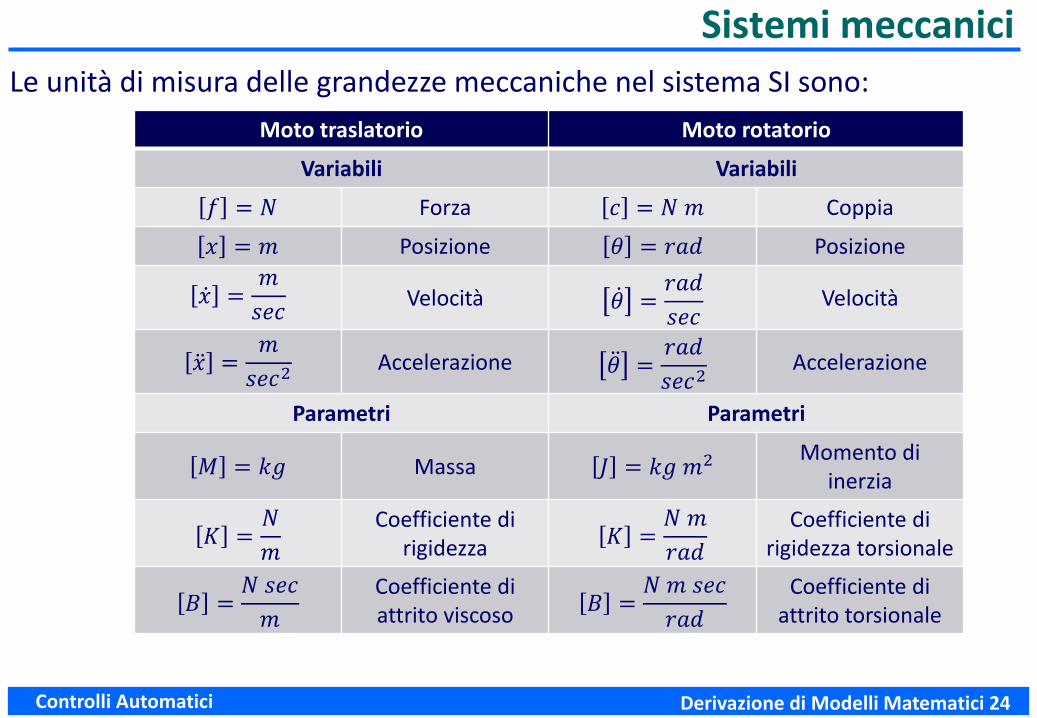
Le unità di misura delle grandezze meccaniche nel sistema SI sono:
Sistemi meccanici
Moto traslatorio Moto rotatorio
Variabili Variabili
𝑓 = 𝑁 Forza 𝑐 = 𝑁 𝑚 Coppia
𝑥 = 𝑚 Posizione 𝜃 = 𝑟𝑎𝑑 Posizione
𝑥 =𝑚
𝑠𝑒𝑐Velocità 𝜃 =
𝑟𝑎𝑑
𝑠𝑒𝑐Velocità
𝑥 =𝑚
𝑠𝑒𝑐2Accelerazione 𝜃 =
𝑟𝑎𝑑
𝑠𝑒𝑐2Accelerazione
Parametri Parametri
𝑀 = 𝑘𝑔 Massa 𝐽 = 𝑘𝑔 𝑚2 Momento di inerzia
𝐾 =𝑁
𝑚
Coefficiente di rigidezza 𝐾 =
𝑁 𝑚
𝑟𝑎𝑑
Coefficiente di rigidezza torsionale
𝐵 =𝑁 𝑠𝑒𝑐
𝑚
Coefficiente di attrito viscoso 𝐵 =
𝑁 𝑚 𝑠𝑒𝑐
𝑟𝑎𝑑
Coefficiente di attrito torsionale
Controlli Automatici Derivazione di Modelli Matematici 25
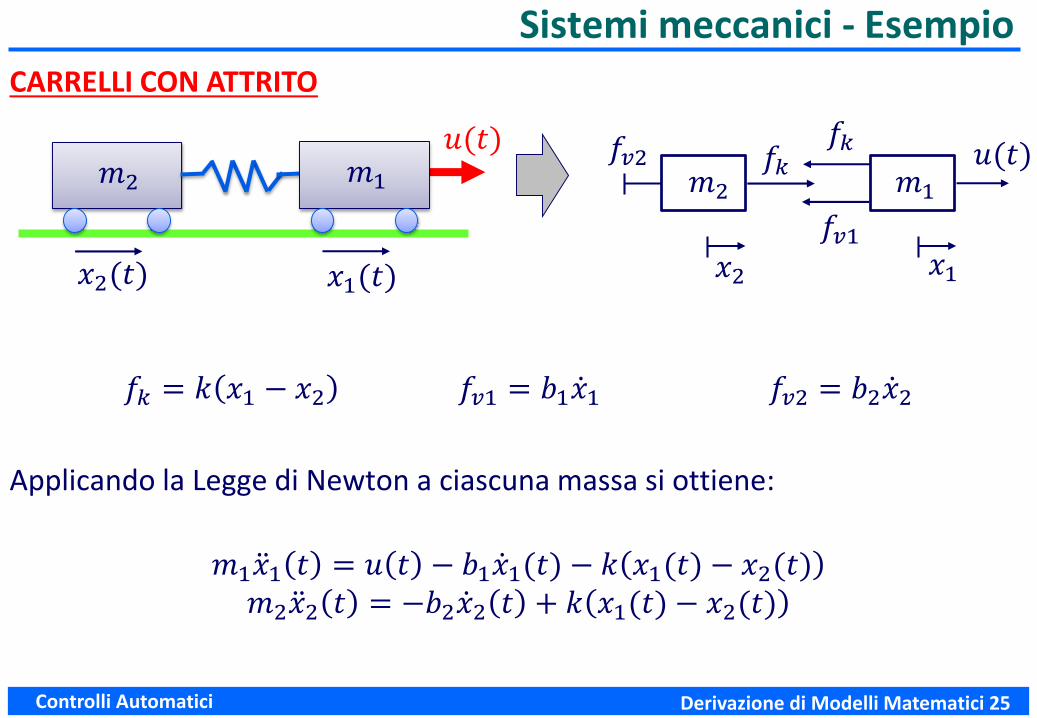
CARRELLI CON ATTRITO
𝑓𝑘 = 𝑘 𝑥1 − 𝑥2 𝑓𝑣1 = 𝑏1 𝑥1 𝑓𝑣2 = 𝑏2 𝑥2
Applicando la Legge di Newton a ciascuna massa si ottiene:
𝑚1 𝑥1 𝑡 = 𝑢 𝑡 − 𝑏1 𝑥1(𝑡) − 𝑘 𝑥1(𝑡) − 𝑥2(𝑡)𝑚2 𝑥2 𝑡 = −𝑏2 𝑥2 𝑡 + 𝑘 𝑥1(𝑡) − 𝑥2(𝑡)
Sistemi meccanici - Esempio
𝑚2 𝑚1
𝑢(𝑡)
𝑥2(𝑡) 𝑥1(𝑡)
𝑚2 𝑚1
𝑓𝑣2 𝑓𝑘𝑓𝑘
𝑓𝑣1𝑥2 𝑥1
𝑢(𝑡)
Controlli Automatici Derivazione di Modelli Matematici 26
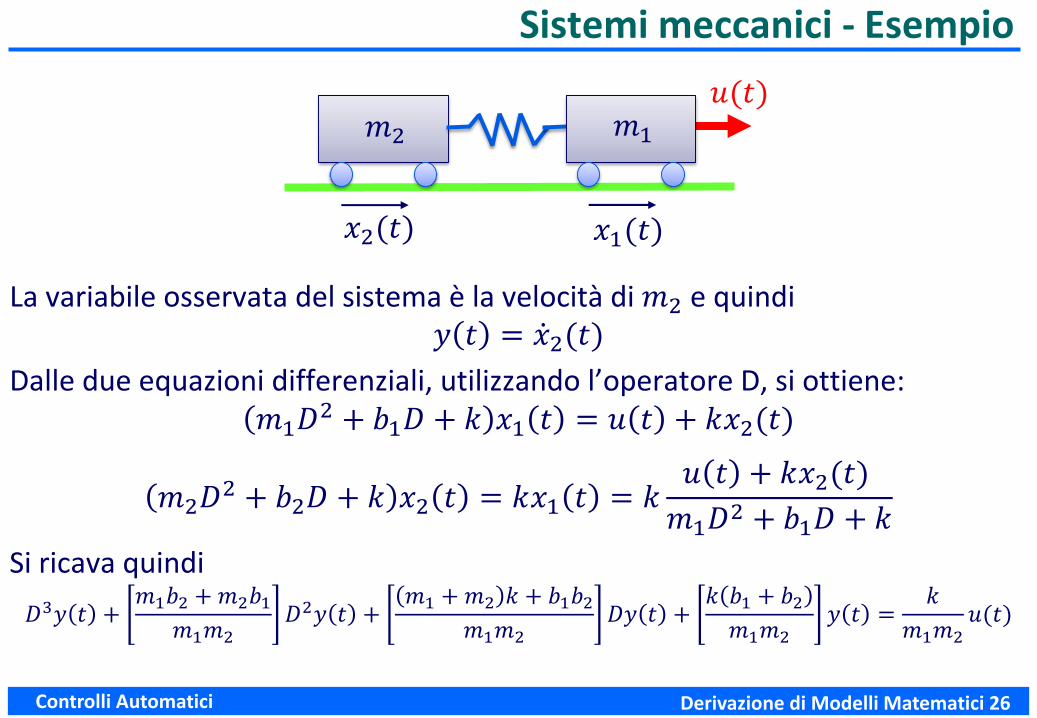
La variabile osservata del sistema è la velocità di 𝑚2 e quindi𝑦 𝑡 = 𝑥2(𝑡)
Dalle due equazioni differenziali, utilizzando l’operatore D, si ottiene:𝑚1𝐷
2 + 𝑏1𝐷 + 𝑘 𝑥1 𝑡 = 𝑢 𝑡 + 𝑘𝑥2(𝑡)
𝑚2𝐷2 + 𝑏2𝐷 + 𝑘 𝑥2 𝑡 = 𝑘𝑥1 𝑡 = 𝑘
𝑢 𝑡 + 𝑘𝑥2(𝑡)
𝑚1𝐷2 + 𝑏1𝐷 + 𝑘
Si ricava quindi
𝐷3𝑦 𝑡 +𝑚1𝑏2 +𝑚2𝑏1
𝑚1𝑚2𝐷2𝑦 𝑡 +
𝑚1 +𝑚2 𝑘 + 𝑏1𝑏2𝑚1𝑚2
𝐷𝑦 𝑡 +𝑘 𝑏1 + 𝑏2𝑚1𝑚2
𝑦 𝑡 =𝑘
𝑚1𝑚2𝑢(𝑡)
Sistemi meccanici - Esempio
𝑚2 𝑚1
𝑢(𝑡)
𝑥2(𝑡) 𝑥1(𝑡)
Controlli Automatici Derivazione di Modelli Matematici 27
Esempio con valori numerici𝑚1 = 100 𝑘𝑔
𝑚2 = 10 𝑘𝑔
𝑏1 = 20𝑁 𝑠𝑒𝑐
𝑚
𝑏2 = 2𝑁 𝑠𝑒𝑐
𝑚
𝑘 = 10𝑁
𝑚
Si ottiene quindi l’equazione differenziale𝑑3𝑦(𝑡)
𝑑𝑡3+ 0.40
𝑑2𝑦(𝑡)
𝑑𝑡2+ 1.14
𝑑𝑦(𝑡)
𝑑𝑡+ 0.22𝑦 𝑡 = 0.01𝑢(𝑡)
La cui soluzione 𝑦(𝑡) descrive l’andamento dell’uscita in funzione dell’ingresso𝑢(𝑡) e delle condizioni iniziali 𝑦 𝑡0 = 𝑥2(𝑡0).
Sistemi meccanici - Esempio
Controlli Automatici Derivazione di Modelli Matematici 28
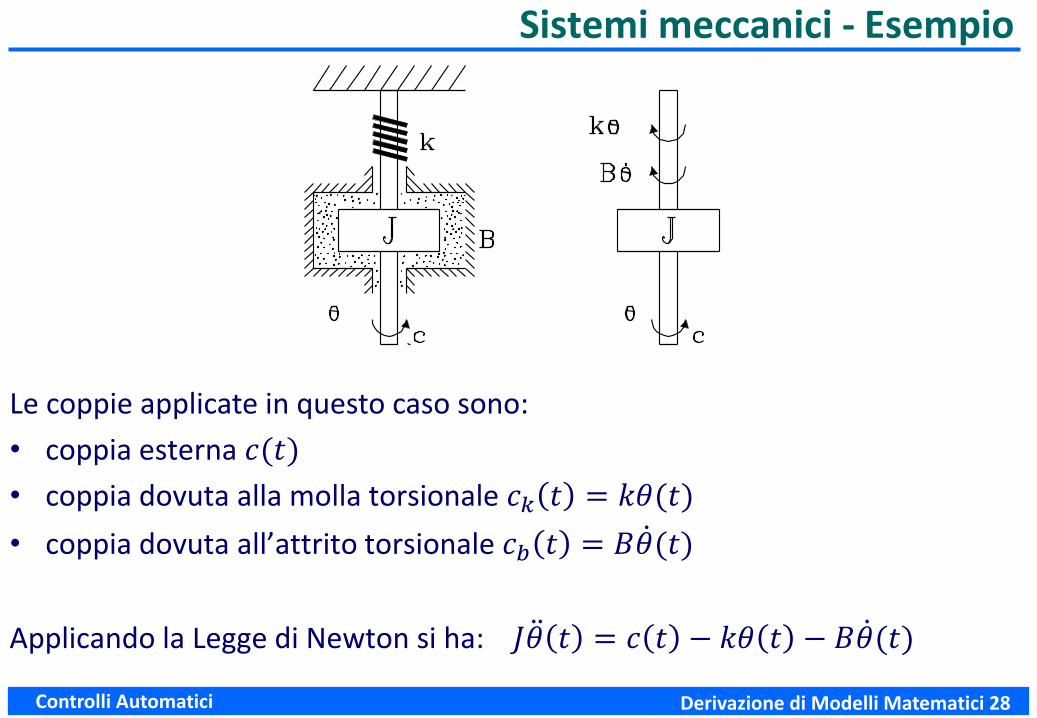
Le coppie applicate in questo caso sono:
• coppia esterna 𝑐(𝑡)
• coppia dovuta alla molla torsionale 𝑐𝑘 𝑡 = 𝑘𝜃(𝑡)
• coppia dovuta all’attrito torsionale 𝑐𝑏 𝑡 = 𝐵 𝜃(𝑡)
Applicando la Legge di Newton si ha: 𝐽 𝜃 𝑡 = 𝑐 𝑡 − 𝑘𝜃 𝑡 − 𝐵 𝜃(𝑡)
Sistemi meccanici - Esempio