
UNIVERSITÀ DEGLI STUDI DI TRIESTE - unina.stidue.netunina.stidue.net/Universita' di...
69
UNIVERSITÀ DEGLI STUDI DI TRIESTE Facoltà di Ingegneria APPUNTI PER LE LEZIONI DI A Z I O N A M E N T I E L E T T R I C I Del Corso di Laurea triennale in Ingegneria Industriale Laurea triennale in Ingegneria Navale Laurea specialistica in Ingegneria Navale, Ingegneria Meccanica Ingegneria Chimica e di Processo DOCENTE : Gian Franco LADINI Anno Accademico 2008/09
Transcript of UNIVERSITÀ DEGLI STUDI DI TRIESTE - unina.stidue.netunina.stidue.net/Universita' di...
UNIVERSITÀ DEGLI STUDI DI TRIESTE
Facoltà di Ingegneria
APPUNTI PER LE LEZIONI DI
A Z I O N A M E N T I E L E T T R I C I
Del Corso di
Laurea triennale in Ingegneria Industriale Laurea triennale in Ingegneria Navale
Laurea specialistica in Ingegneria Navale, Ingegneria Meccanica Ingegneria Chimica e di Processo
DOCENTE : Gian Franco LADINI
Anno Accademico 2008/09

1
Capitolo I
MACCHINE IN CORRENTE CONTINUA
(Pacinotti: 1862 – 1872)
1.1.0. Generatori di corrente continua – Dinamo
1.1.1. Generalità:
La dinamo è una macchina rotante, che trasforma energia meccanica in energia elettrica sotto forma di corrente continua; si può quindi definirla come Generatore rotante di corrente continua: esso è costituito da due parti fondamentali di forma cilindrica, coassiali. Una parte esterna, sostenuta da un’incastellatura, che funge da sistema induttore ed una parte interna, montata su un albero sostenuto da due supporti, che funziona da sistema indotto; le due parti sono separate da uno strato d’aria, detto traferro.- Le macchine in corrente continua sono anche dotate di un collettore a lamelle, montato sull’albero, con funzione che sarà chiarita in seguito.-
Il sistema induttore è costituito da un anello di materiale ferromagnetico massiccio, che porta
al suo interno un certo numero di coppie di poli magnetici (elettromagneti) distribuiti uniformemente con polarità alterne; i poli sono eccitati da una corrente continua in modo da produrre un flusso che percorra tutto il circuito magnetico della macchina.- L’indotto rotorico è costituito da un cilindro di materiale ferromagnetico laminato (essendo percorso da un flusso variabile) sulla cui periferia sono state ricavate della cave nelle quali ha sede l’avvolgimento indotto che risulta collegato al collettore a lamelle; sul collettore rotante poggiano delle spazzole fisse di elettrografite o carbone che prelevano la tensione e la corrente generata, portandola ai morsetti della macchina.-
1.1.2. Principio di funzionamento:
Si consideri una spira di sezione S portata in rotazione dal rotore ad una velocità angolare ω ed immersa nel campo magnetico d’induzione B generato dai poli d’eccitazione statorici; il flusso concatenato con tale spira risulterà:
tcosSBc ωϕ ⋅⋅=

2
Per le leggi dell’induzione magnetica, nella spira verrà indotta una forza elettromotrice:
tsenEtsenSBdt
de M
c ωωωϕ
=⋅⋅=−=
ove il valore massimo della e della spira è:
60
2 nSBE eccspiraM
πΦω =⋅⋅=
ed il valore massimo della e in un singolo conduttore:
ecceccspiraMMcond knnEE ΦΦπ
===602
1.
Disponendo nelle cave, sulla periferia dell’indotto due spire, a 90° elettrici tra loro, le FEM indotte in ciascuno dei quattro fili saranno rispettivamente:
tsenEv M ω=1
( )°−= 902 tsenEv M ω
( )°−= 1803 tsenEv M ω
( )°−= 2704 tsenEv M ω Collegando ciascun estremo dei quattro
conduttori ad una lamella distinta di un collettore sul quale poggino due spazzole, la
tensione cui si trova ciascuna lamella sarà quella del conduttore cui è collegata, cioè le v1 v2 v3 v4 mentre le due spazzole fisse e quindi i morsetti a e b risulteranno avere la tensione della lamella cui sono in ciascun istante collegati: se le spazzole sono posizionate in modo da toccare in ciascun momento quella lamella che a sua volta è collegata a quel conduttore nel quale nel medesimo momento è indotta la FEM massima, la tensione ai capi delle due spazzole avrà l’andamento ondulato ma unidirezionale di figura.- Aumentando opportunamente il numero di conduttori e di lamelle sul collettore, le FEM nei vari fili avranno tra loro uno sfasamento sempre minore quindi la forma della tensione raccolta alle spazzole risulterà sempre più regolare; si dimostra che con un collettore di 36 lamelle, il fattore d’ondulazione:
M
mM
E
EE.o.d.f
−= 100
si riduce al valore di 0,095%.- In realtà nelle cave della periferia rotorica sono disposte delle bobine di più conduttori per cava, in modo da aumentare il valore della FEM fornita alle spazzole: nKNE ecco Φ=

3
1.1.3. Funzionamento a vuoto:
Una dinamo funziona a vuoto quando, mantenendo l’indotto in rotazione ed il circuito di carico aperto, le bobine d’eccitazione vengono alimentate da una sorgente separata.-
L’espressione della FEM generata dall’indotto è: ecco KnE Φ=
Ad ogni variazione della corrente d’eccitazione, corrisponde una variazione del campo induttore e quindi del eccΦ ; mantenendo costante il numero di giri,
si potrà tracciare la caratteristica a vuoto che fornisce l’andamento della oE in funzione della ecci :
La curva ha l’andamento della caratteristica di magnetizzazione del circuito magnetico della macchina: si noti che, a causa dell’induzione residua, anche con corrente di eccitazione nulla, ai morsetti della dinamo è presente una piccola FEM.- Questo fenomeno viene sfruttato per costruire delle dinamo autoeccitate nelle quali la corrente di eccitazione viene fornita dalla stessa macchina; si possono così costruire tre tipi diversi di dinamo:
In derivazione quando il circuito d’eccitazione è derivato dai morsetti d’indotto: il ramo che così viene costituito deve presentare una resistenza convenientemente elevata al fine di limitare le perdite di potenza per eccitazione (Molte spire di filo sottile attraversate da una debole corrente offrono una grande resistenza e generano un’elevata FMM).-
In serie quando il circuito di eccitazione è in serie con l’indotto per cui la corrente di eccitazione è la stessa corrente di carico: in questo caso le bobine sono costituite da poche spire di filo di notevole sezione (attraversate da una grande corrente producono un’elevata FMM pur avendo piccola resistenza e quindi basse perdite di eccitazione).-
Composta quando l’eccitazione è parte in serie e parte in derivazione: attorno a ciascun polo sono disposte due bobine diverse: una, di poche fili a grande sezione, posta in serie e l’altra, di tanti fili a piccola sezione, posta in derivazione.-

4
Per tracciare la caratteristica a vuoto delle dinamo con eccitazione dipendente, bisogna separare i circuiti d’eccitazione ed alimentarli con una sorgente separata.-
1.1.4. Funzionamento a carico:
Quando la Dinamo alimenta una resistenza di carico, la tensione continua presente ai morsetti fa scorrere nel carico una corrente continua che percorrerà anche i conduttori interni dell’indotto, determinando due distinti effetti:
I° Una caduta di tensione sulla resistenza interna dell’indotto stesso, caduta che dipenderà dal valore della corrente di carico:
IRV iR =∆
II° Una reazione d’indotto dovuta all’interazione tra la corrente che attraversa i conduttori d’indotto ed il flusso del campo d’eccitazione che avrà come conseguenza:
a) Un’alterazione del flusso d’eccitazione tale da originare un flusso risultante FFFFris diverso da quello d’eccitazione a vuoto e quindi una FEM indotta a carico E diversa dalla Eo
risnKE Φ=
La tensione ai morsetti della dinamo sarà quindi:
IREV i−=
b) La nascita di una forza elettromeccanica F agente sui conduttori d’indotto e quindi una coppia di natura frenante Tf che si opporrà alla rotazione; essendo il valore della forza F proporzionale alla corrente I e all’induzione risultante (F = B. l .I ) la coppia frenante sarà:
IKT risf Φ1=
1.1.5. Commutazione:
Per commutazione s’intende l’insieme dei fenomeni che si generano in ciascuna spira (o meglio bobina) d’indotto nell’istante in cui la corrente di carico cambia in essa il verso di circolazione.-
Ad una spazzola arrivano le correnti da due vie interne attraverso il contatto strisciante spazzola-lamella; durante lo spostamento del collettore, il percorso della corrente, nella spira collegata alle due lamelle contigue toccate dalla spazzola, s’inverte; tale inversione e quindi variazione di corrente, fa nascere nella spira commutata una forza elettromotrice d’autoinduzione che si oppone a tale inversione quindi, al momento del distacco della spazzola da una lamella per passare alla successiva, la corrente dovrà essere interrotta venendosi così a generare una arco tra le due lamelle consecutive e la spazzola.-

5
Si realizza così una cattiva commutazione che tende a rovinare tanto il collettore che le spazzole o, in casi estremi, creare un arco continuo su tutto il collettore mettendo in corto circuito la dinamo.-
Una cattiva commutazione con scintillio alle spazzole è dovuta quindi alla FEM d’autoinduzione nella spira in commutazione: bisognerà perciò provvedere un sistema tendente a neutralizzarla, inducendo nella spira stessa un’opportuna FEM. di commutazione di verso contrario. Questa viene prodotta interponendo dei poli ausiliari tra quelli principali. I poli ausiliari sono eccitati dalla stessa corrente d’indotto, in modo da creare, nella zona di commutazione, un campo d’intensità proporzionale alla corrente che invertendosi da origine al fenomeno. La polarità di un polo ausiliario deve essere sempre eguale a quella del polo principale che lo segue nel senso del moto del rotore.-
1.1.6. Caratteristiche a carico:
La caratteristica a carico di una dinamo è quella che fornisce il modo di variare della tensione ai suoi morsetti, al variare della corrente di carico, con il numero di giri e la corrente d’eccitazione mantenuti costanti.-
Il comportamento a carico del generatore varia notevolmente in base al tipo d’eccitazione.-
1.1.6.1. Dinamo con eccitazione indipendente:
La tensione ai morsetti di una dinamo con eccitazione indipendente, quando passa dal funzionamento a vuoto a quello a carico, dove è chiamata ad erogare una certa corrente, si abbassa
dal valore Eo che presentava a vuoto al valore V:
IREV i−=
Tale valore V è uguale alla FEM generata a carico E diminuita della caduta di tensione ohmica dovuta alla resistenza interna dell’avvolgimento d’indotto: il valore della
forza elettromotrice E generata a carico risulta, in conseguenza del fenomeno della reazione d’indotto, inferiore a quella generata a vuoto Eo
Si definisce come caduta di tensione percentuale da vuoto a carico della dinamo la quantità:
o
no
E
VE%v
−=∆
ove Vn è la tensione ai morsetti della dinamo quando eroga la sua corrente nominale, avendo mantenuto invariate sia la corrente d’eccitazione sia il numero di giri; tale caduta ha valori dell’ordine del (5÷10)%.-
Volendo mantenere invece costante la tensione ai morsetti, pur al variare del carico, bisogna variare adeguatamente la corrente d’eccitazione in modo da compensare la caduta di tensione con un opportuna variazione della Eo e quindi della E .-

6
1.1.6.2. Dinamo con eccitazione in derivazione:
La tensione ai morsetti di una dinamo con eccitazione derivata, funzionante con velocità e resistenza del circuito d’eccitazione costanti, diminuisce quando la macchina passa dal
funzionamento a vuoto al funzionamento a carico.- Tale diminuzione è molto più rapida che nelle
dinamo con eccitazione indipendente, poiché, oltre alla caduta di tensione nella resistenza interna della macchina ed alla riduzione della forza elettromotrice dovuta alla reazione d’indotto, si ha, sotto carico, una diminuzione della corrente d’eccitazione dovuta alla riduzione della tensione V ai morsetti della macchina. La caratteristica a carico è rappresentata dal grafico di figura: la tensione ai morsetti della macchina diminuisce col crescere del carico dapprima con legge
quasi proporzionale, indi più rapidamente fino ad un massimo della corrente di carico, alquanto superiore alla corrente nominale In; raggiunto tale massimo della corrente di carico, la macchina si diseccita e diminuiscono bruscamente sia la tensione ai morsetti sia la corrente di carico; la caratteristica esterna taglia l’asse delle ascisse in un punto, che definisce la corrente di corto circuito Icc della dinamo con eccitazione derivata. Questi tipi di dinamo presentano cadute di tensione percentuali da vuoto a pieno carico dell’ordine del (10÷15)%.-
Anche in questa dinamo, volendo mantenere costante la tensione ai morsetti, pur al
variare del carico, bisogna variare adeguatamente la corrente d’eccitazione, e quindi il reostato d’eccitazione, in modo da compensare la caduta di tensione con un’opportuna variazione della Eo e quindi della E.-
1.1.6.3. Dinamo con eccitazione in serie:
La dinamo con eccitazione in serie, quando funziona a vuoto, ha una corrente d’eccitazione nulla quindi la tensione ai morsetti risulta di pochi volt, corrispondenti all’effetto dell’induzione residua. Collegando al generatore una resistenza di carico, tale tensione farà circolare una piccola corrente che rinforza l’eccitazione aumentando il valore della tensione generata che, a sua volta, fa aumentare la corrente erogata e così via; la tensione ai morsetti sarà quindi uguale al valore della Eo diminuita dalle cadute interne e dagli effetti della reazione d’indotto.-
7
Quando la corrente raggiunge valori tali per cui i circuiti magnetici della macchina sono saturi, pur aumentando ulteriormente la corrente, non aumenta la E generata, mentre aumentano le cadute interne quindi la tensione ai morsetti comincia a diminuire, prima lentamente e poi rapidamente fino ad azzerarsi, quando si giunge al corto circuito.-
In pratica, la dinamo con eccitazione in serie è utilizzata nel tratto rapidamente decrescente della caratteristica ove riesce a mantenere una corrente abbastanza costante (In) al variare della resistenza di carico (alimentazione dei circuiti serie).-
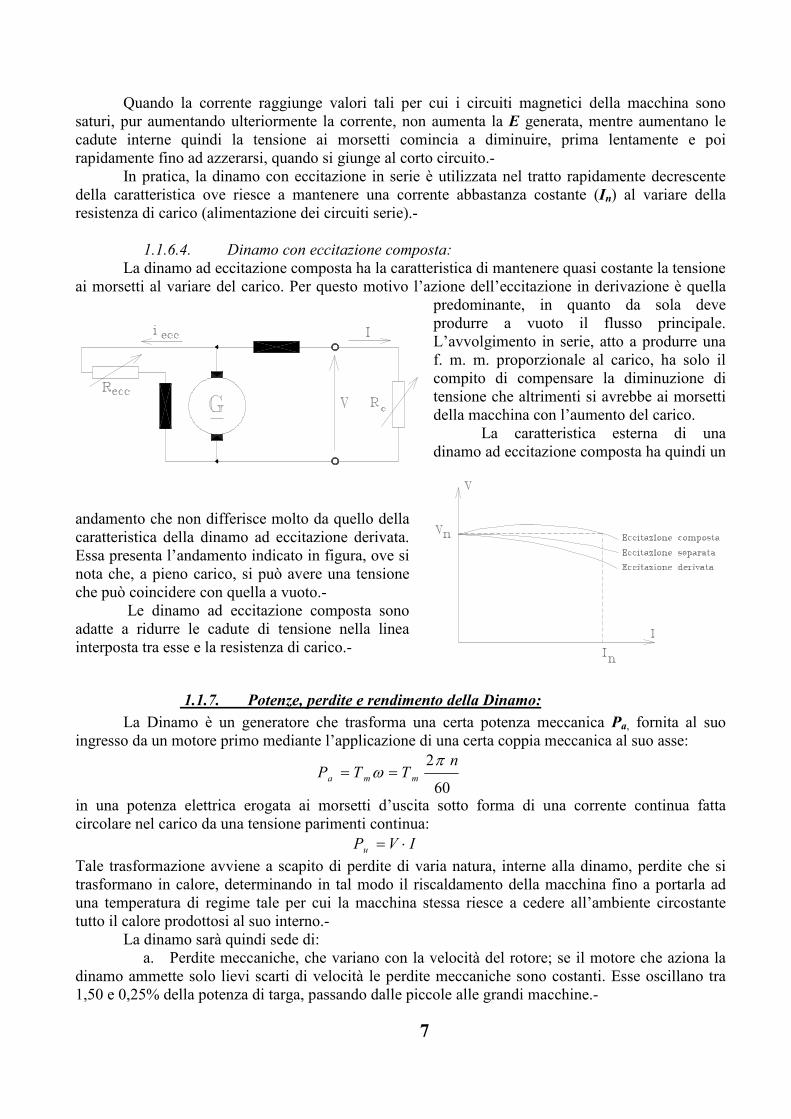
1.1.6.4. Dinamo con eccitazione composta:
La dinamo ad eccitazione composta ha la caratteristica di mantenere quasi costante la tensione ai morsetti al variare del carico. Per questo motivo l’azione dell’eccitazione in derivazione è quella
predominante, in quanto da sola deve produrre a vuoto il flusso principale. L’avvolgimento in serie, atto a produrre una f. m. m. proporzionale al carico, ha solo il compito di compensare la diminuzione di tensione che altrimenti si avrebbe ai morsetti della macchina con l’aumento del carico.
La caratteristica esterna di una dinamo ad eccitazione composta ha quindi un
andamento che non differisce molto da quello della caratteristica della dinamo ad eccitazione derivata. Essa presenta l’andamento indicato in figura, ove si nota che, a pieno carico, si può avere una tensione che può coincidere con quella a vuoto.-
Le dinamo ad eccitazione composta sono adatte a ridurre le cadute di tensione nella linea interposta tra esse e la resistenza di carico.-
1.1.7. Potenze, perdite e rendimento della Dinamo:
La Dinamo è un generatore che trasforma una certa potenza meccanica Pa, fornita al suo ingresso da un motore primo mediante l’applicazione di una certa coppia meccanica al suo asse:
60
2 nTTP mma
πω ==
in una potenza elettrica erogata ai morsetti d’uscita sotto forma di una corrente continua fatta circolare nel carico da una tensione parimenti continua: IVPu ⋅=
Tale trasformazione avviene a scapito di perdite di varia natura, interne alla dinamo, perdite che si trasformano in calore, determinando in tal modo il riscaldamento della macchina fino a portarla ad una temperatura di regime tale per cui la macchina stessa riesce a cedere all’ambiente circostante tutto il calore prodottosi al suo interno.-
La dinamo sarà quindi sede di: a. Perdite meccaniche, che variano con la velocità del rotore; se il motore che aziona la
dinamo ammette solo lievi scarti di velocità le perdite meccaniche sono costanti. Esse oscillano tra 1,50 e 0,25% della potenza di targa, passando dalle piccole alle grandi macchine.-
8
b. Perdite nel ferro, che si localizzano nelle espansioni polari (fenomeno della
pennellazione di flusso) e nel ferro del rotore ove c’è la presenza di un flusso variabile. Esse sono proporzionali al quadrato dell’induzione, e quindi per una dinamo ad eccitazione separata, derivata o composta, in cui il flusso non ha grandi variazioni, si possono ritenere costanti ed eguali a quelle che si riscontrano a vuoto. Esse oscillano tra 4 e 1,5% della potenza di targa, passando dalle piccole alle grandi macchine.-
c. Perdite nel rame e precisamente nella resistenza degli avvolgimenti d’indotto, d’eccitazione, dei poli ausiliari e nei reostati eventualmente inclusi. Queste perdite sono proporzionali alla resistenza dei singoli avvolgimenti ed al quadrato della corrente che li attraversa.-
d. Perdite dovute alla resistenze di contatto tra spazzole e collettore: possono essere ritenute proporzionali alla corrente erogata.-
e. Perdite addizionali, valutate convenzionalmente pari allo 0,5% della potenza resa.- Le perdite nel rame variano con il carico, oscillando a pieno carico tra il 10 e il 4% della potenza di targa, passando dalle piccole alle grandi macchine.
In conclusione, le perdite in una dinamo, funzionante a pieno carico, sono contenute tra il 15 e il 5% della potenza di targa, passando dalle piccole alle grandi macchine.-
La potenza erogata sarà uguale a quella assorbita diminuita di tutte le perdite: pPP au Σ−=
Si definisce come rendimento industriale di una dinamo il rapporto:
perditeP
P
P
P
u
u
a
u
Ση
+==
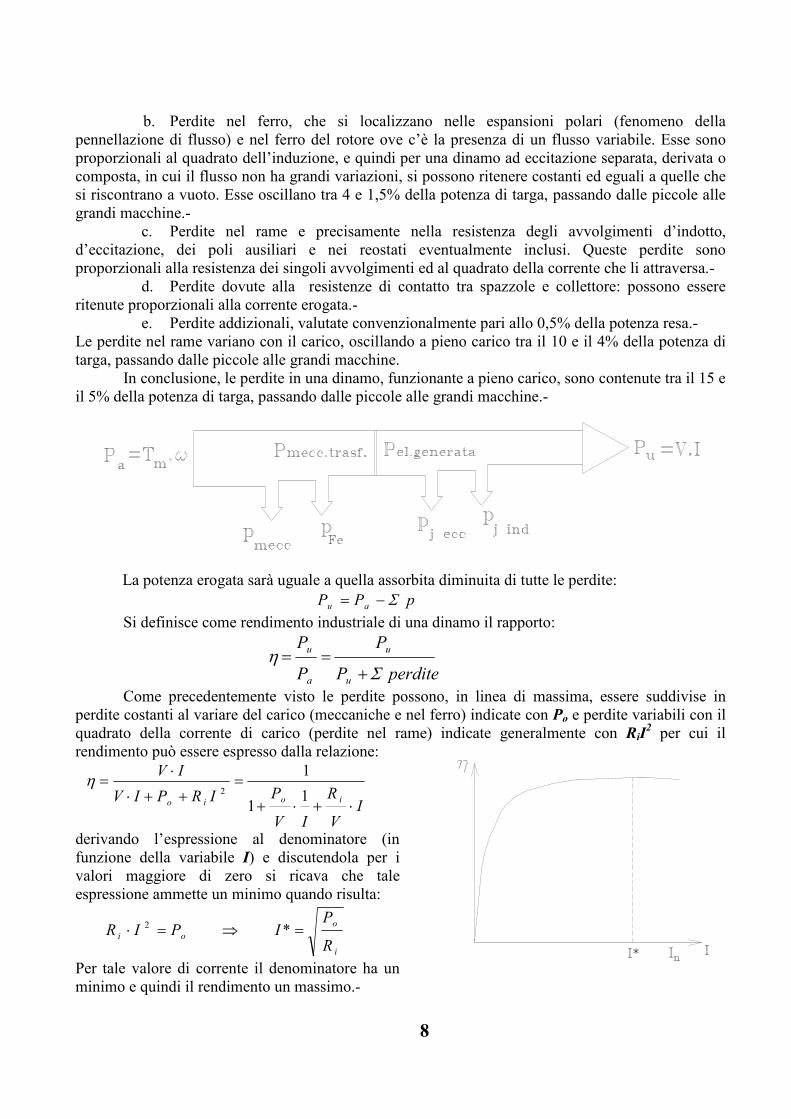
Come precedentemente visto le perdite possono, in linea di massima, essere suddivise in perdite costanti al variare del carico (meccaniche e nel ferro) indicate con Po e perdite variabili con il quadrato della corrente di carico (perdite nel rame) indicate generalmente con RiI
2 per cui il rendimento può essere espresso dalla relazione:
IV
R
IV
PIRPIV
IV
ioio ⋅+⋅+
=++⋅
⋅=
11
12
η
derivando l’espressione al denominatore (in funzione della variabile I) e discutendola per i valori maggiore di zero si ricava che tale espressione ammette un minimo quando risulta:
oi PIR =⋅ 2 ⇒ i
o
R
P*I =
Per tale valore di corrente il denominatore ha un minimo e quindi il rendimento un massimo.-

9
Il rendimento assume quindi l’andamento di figura: normalmente la dinamo viene dimensionata in modo che il massimo del rendimento si presenti in corrispondenza di una corrente dell’ordine del 70 – 80% del suo valore nominale.-
1.2.0. Motori in corrente continua
1.2.1. Principio di funzionamento:
Un motore a corrente continua è costruttivamente identico ad una dinamo; la differenza consiste nel fatto che nel motore avviene una trasformazione energetica inversa a quella del generatore: gli viene fornita una potenza elettrica che lui trasforma in potenza meccanica.-
Applicando una tensione continua V ai morsetti del motore, questo assorbe una corrente I che, attraverso il collettore, entra e percorre tutti i conduttori rotorici che vengono a trovarsi nel campo magnetico generato dal circuito statorico d’eccitazione; di conseguenza ciascun filo sarà sottoposto ad una forza elettrodinamica F proporzionale alla corrente ed al campo d’eccitazione:
IlBF ecc ⋅⋅=
Nascerà così una coppia motrice: IkT eccg Φ1= (1)
Tale coppia farà si che il rotore si ponga in rotazione ad una certa velocità n con la conseguenza di generare, come nella dinamo una forza elettromotrice E che, considerato il senso della rotazione e del flusso, avrà verso contrario alla corrente, sarà cioè una forza contro elettromotrice che risulterà legata al valore del flusso e del numero di giri dalla relazione già vista per le dinamo: nkE ecc ⋅= Φ2 (2)
Indicando con Ri la resistenza interna degli avvolgimenti rotorici d’indotto, l’equazione di funzionamento del motore risulterà:
IREV i+= (3)
Le tre relazioni scritte permettono di ricavare le caratteristiche di funzionamento del motore; poiché in esse compare il flusso di eccitazione, tali caratteristiche risulteranno diverse in base a come tale flusso viene prodotto.- Da questo punto di vista si possono distinguere fondamentalmente due tipi di motori: quelli con eccitazione indipendente e quelli con eccitazione in serie.-
1.2.2. Motori con eccitazione indipendente:
In questo tipo di motori la corrente e quindi il flusso d’eccitazione è indipendente dalle condizioni di carico e quindi ritenuto costante anche al variare del carico meccanico potendo altresì essere cambiato secondo necessità, indipendentemente dal valore del carico stesso.- Negli schemi elettrici tale tipo di motore è rappresentato come in figura.-
10
La caratteristica meccanica del motore può essere ricavata dalle tre relazioni fondamentali viste precedentemente.- Sostituendo nella (3) il valore di E fornito dalla (2) ed il valore di I ricavato dalla (1) si ottiene:
eec
g
iecc
k
TRnkV
ΦΦ
⋅=⋅⋅−
1
2 da cui:
nR
kkV
R
kT
i
ecc
i
ecc
g ⋅Φ⋅
−⋅Φ⋅
=2
211 (4)
Fino a quando l’operatore non varia la corrente d’eccitazione e quindi il relativo flusso, i due termini:
i
ecc
R
VkA
Φ= 1 e
i
ecc
R
kkB
221 Φ
= rimarranno costanti quindi
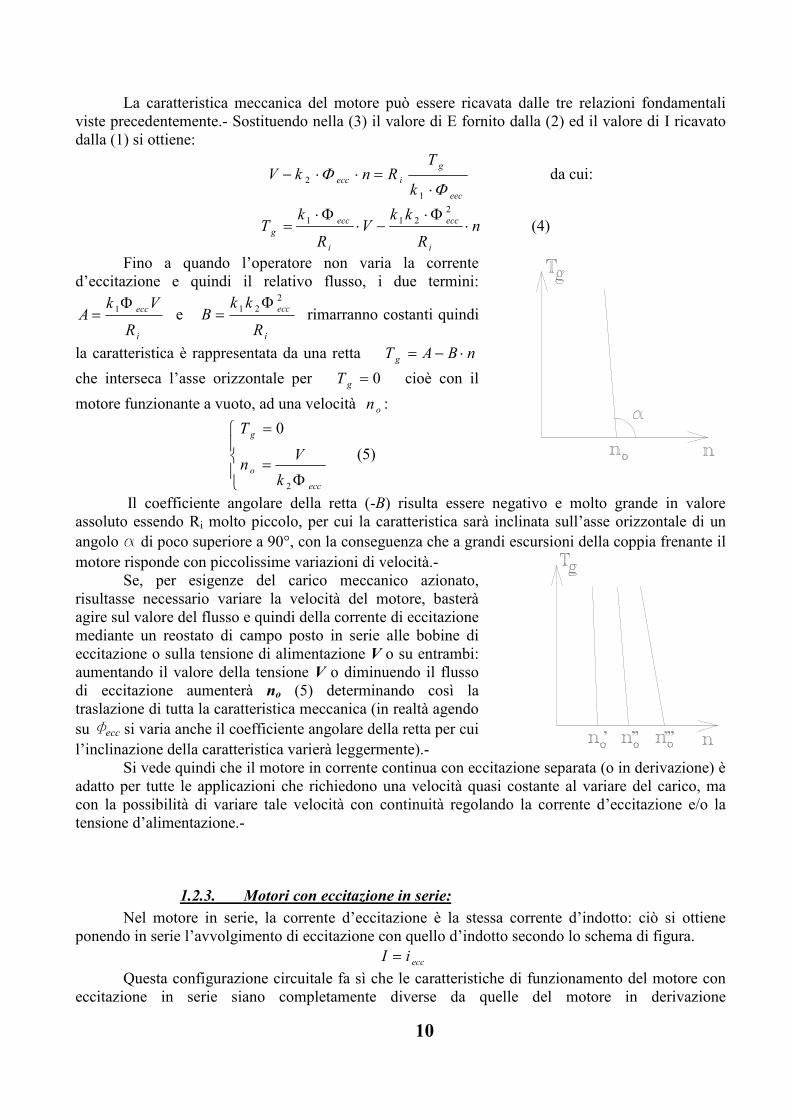
la caratteristica è rappresentata da una retta nBAT g ⋅−=
che interseca l’asse orizzontale per 0=gT cioè con il
motore funzionante a vuoto, ad una velocità on :
(5)
0
2
Φ=
=
ecc
o
g
k
Vn
T
Il coefficiente angolare della retta (-B) risulta essere negativo e molto grande in valore assoluto essendo Ri molto piccolo, per cui la caratteristica sarà inclinata sull’asse orizzontale di un angolo a di poco superiore a 90°, con la conseguenza che a grandi escursioni della coppia frenante il motore risponde con piccolissime variazioni di velocità.-
Se, per esigenze del carico meccanico azionato, risultasse necessario variare la velocità del motore, basterà agire sul valore del flusso e quindi della corrente di eccitazione mediante un reostato di campo posto in serie alle bobine di eccitazione o sulla tensione di alimentazione V o su entrambi: aumentando il valore della tensione V o diminuendo il flusso di eccitazione aumenterà no (5) determinando così la traslazione di tutta la caratteristica meccanica (in realtà agendo su Fecc si varia anche il coefficiente angolare della retta per cui l’inclinazione della caratteristica varierà leggermente).-
Si vede quindi che il motore in corrente continua con eccitazione separata (o in derivazione) è adatto per tutte le applicazioni che richiedono una velocità quasi costante al variare del carico, ma con la possibilità di variare tale velocità con continuità regolando la corrente d’eccitazione e/o la tensione d’alimentazione.-
1.2.3. Motori con eccitazione in serie:
Nel motore in serie, la corrente d’eccitazione è la stessa corrente d’indotto: ciò si ottiene ponendo in serie l’avvolgimento di eccitazione con quello d’indotto secondo lo schema di figura.
ecciI =
Questa configurazione circuitale fa sì che le caratteristiche di funzionamento del motore con eccitazione in serie siano completamente diverse da quelle del motore in derivazione

11
precedentemente visto e ciò perché il flusso di eccitazione, che nel primo caso era costante al variare del carico, nel motore con eccitazione in serie tende ad aumentare con l’aumento del carico e quindi
della corrente assorbita: se si rimane lontani dalla saturazione si può ritenere che il flusso di eccitazione sia proporzionale alla corrente assorbita.-
Ricavando dalla (2) e (3) l’espressione della velocità del motore:
ecc
i
k
IRVn
Φ
−=
2
si può notare che ad ogni aumento del carico e quindi della corrente I e del flusso di eccitazione a lei
proporzionale, il denominatore aumenta ed il numeratore diminuisce per cui si può affermare che nei
motori con eccitazione in serie il numero di giri diminuisce fortemente con l’aumento del carico .- In particolare, nel funzionamento a vuoto, con
copia generata quasi nulla, a parte gli attriti, la corrente assorbita diventa piccolissima e quindi il numero di giri tende all’infinito mentre per velocità nulla corrispondente all’avviamento del motore, si ha la coppia di spunto Ta.- Queste caratteristiche rendono il motore serie particolarmente adatto all’impiego nella trazione elettrica e per il sollevamento (argani, gru, montacarichi).-
Per regolare la velocità, a parità di carico, bisogna agire o sul valore della corrente di eccitazione mediante un reostato di campo ( Rc ) posto in parallelo alle bobine di eccitazione o sul valore della tensione di alimentazione.-
1.2.4. Avviamento dei motori:
All’atto dell’avviamento del motore l’indotto è fermo ( )0=n per cui, anche in presenza del flusso di eccitazione la forza contro elettromotrice E risulta, per la (2), nulla; ne consegue che la corrente assorbita, data dalla (3):
ii
avv
R
V
R
EVI =
−=
essendo Ri molto piccola, assumerà un valore molto elevato, tale da essere pericolosa per il motore stesso.-
Per ovviare a tale inconveniente s’inseri-sce in serie all’avvolgi-mento indotto un reostato d’avviamento Ra di opportuno valore:
n
ai
avv IRR
VI =
+=

12
A mano a mano che il motore aumenta di giri si genera la E che, opponendosi alla tensione applicata, fa ridurre la corrente assorbita, per cui il reostato di avviamento può essere gradualmente escluso.-
In alternativa l’avviamento può essere eseguito a tensione ridotta, se il tipo d’alimentazione lo permette.-
1.2.5. Senso di rotazione dei motori:
Il verso di rotazione di un motore è legato al verso della copia generata: per i motori in corrente continua essa è fornita dalla (1):
IkT eccg ⋅Φ⋅= 1
per cui tale verso può essere cambiato invertendo la corrente d’indotto o la corrente di eccitazione e quindi il relativo flusso; invertendoli entrambi, il verso di rotazione non cambia.- Si può così notare che, sia nei motori in derivazione sia in quelli in serie, l’inversione della tensione d’alimentazione non fa cambiare il senso di rotazione in quanto vengono ad invertirsi sia la corrente di eccitazione sia quella d’indotto.-
Per ottenere l’in-versione del verso di rotazione bisogna eseguire l’inversione dell’una o dell’altra soltanto.-
In genere si preferisce invertire la corrente d’indotto come indicato in figura.-
1.2.6. Rendimento dei motori:
La potenza assorbita dal motore corrisponde alla potenza elettrica assorbita dalla rete d’alimentazione ed è pari al prodotto della tensione d’alimentazione per la corrente totale: tale potenza corrisponde alla potenza meccanica erogata più tutte le perdite meccaniche, elettriche e magnetiche che si hanno all’interno del motore stesso:
magmecelmtota pppPIVP +++=⋅=
Come già visto per le dinamo, le perdite meccaniche sono dovute agli attriti e alla
ventilazione; le perdite elettriche alla dissipazione per effetto Joule nelle resistenze dell’avvolgimento d’indotto e in quello d’eccitazione; in fine quelle magnetiche, dovute ai fenomeni d’isteresi e alle corrente di Foucault, sono presenti nelle parti ferromagnetiche del motore interessate da un flusso variabile (principalmente nel rotore).-
Si definisce come rendimento del motore il rapporto tra la potenza meccanica erogata e quella elettrica assorbita:
a
m
P
P=η

13
tale rendimento varia al variare della potenza meccanica erogata secondo la curva di figura; come si può notare esso raggiunge i suoi valori massimi tra metà carico e pieno carico, mentre scende rapidamente per bassi valori del carico: per tale motivo conviene scegliere i motori di potenza proporzionata a quella che saranno chiamati a sviluppare normalmente.-
1.2.7. Dati di targa delle macchine rotanti:
Ogni macchina, secondo il proprio tipo, deve riportare sulla targa, in base a quanto previsto
dalle norme C.E.I. fascicolo n. 355, i seguenti dati: a. Nome del costruttore; b. Numero di serie e marchio di riconoscimento con anno di costruzione; c. Tipo di macchina (motore o generatore; rotore avvolto o a gabbia per i motori asincroni, ecc.); d. Tipo di servizio (continuo o intermittente, nel qual caso la durata dei cicli e il rapporto di
intermittenza); e. La potenza nominale corrispondente alla potenza che la macchina può erogare in servizio
permanente o intermittente (in base al tipo di macchina); f. La tensione e la corrente nominali d’alimentazione o fornite ai morsetti (a seconda trattasi di
motori o generatori); g. Frequenza nominale e numero delle fasi, per le macchine in corrente alternata; h. La velocità nominale o gamma delle velocità nominali; i. Sovravelocità ammissibile; j. Classe d’isolamento o sovratemperatura ammissibile; k. Tensione e corrente di eccitazione nominali, per le macchine sincrone e per quelle a corrente
continua con eccitazione separata; l. Altre caratteristiche relative alle protezioni contro penetrazione di corpi estranei e
posizionamento del motore.-
Problema Una dinamo, con eccitazione in derivazione, ha i seguenti dati di targa: kWPn 40= -
VV n 200= - Ω040 ,R .ind = - Ω80=.ecc.totR - .min/gn 950= Calcolare, in condizioni di
carico nominale, i valori di: 1. Corrente erogata I - corrente di eccitazione Iecc. – corrente d’indotto Ii ; 2. La Forza Elettromotrice a carico Ec; 3. La potenza assorbita ed il rendimento, essendo nFe.mecc P%PP 4=+ ;

14
4. La coppia motrice applicata all’asse della dinamo e quella di reazione, sempre a pieno carico.-
La corrente erogata a pieno carico dalla
dinamo vale:
AV
PI
n
n 200200
40000===
La corrente assorbita dal circuito di eccitazione vale:
A,R
VI
.ecc.tot
n
ecc 5280
200===
La corrente totale d’indotto sarà invece: A,,III ecci 520252200 =+=+=
La forza elettromotrice a carico risulta: V,,,IRVE iinc 12085202040200 =⋅+=⋅+=
Nel funzionamento a carico nominale, le perdite risultano: W,IRP ecc.ecc.tot.ecc 5005280 22 =⋅==
WP%PP nFe.mecc 160040000100
44 ===+
W,,IRP i.indindottoJ 16405202040 22 =⋅==
La potenza meccanica assorbita dalla dinamo funzionante a pieno carico è: WPPPPPP .indJFemecceccu.ass.mecc 437401640160050040000 =+++=++++=
Il rendimento sarà quindi:
%,P
P
a
u 49143740
40000100100 ===η
La coppia motrice applicata all’asse della dinamo funzionante a pieno carico risulta essere:
rad
J,Pn
PT .ass.mecc
.ass.mecc
n 6439437409502
60
2
60=
⋅⋅===
ππω
La coppia di reazione sviluppata dalla dinamo a pieno carico è:
rad
J,,,IEP
Tic:gen.el
r 6423520212089502
60=⋅
⋅⋅=
⋅==
πωω
Problema Un motore in corrente continua con eccitazione in derivazione ha, tra i suoi dati di targa, i
seguenti valori: VV n 200= - AI n 51= - min
gn o 1000= - Ω120 ,R i = - A,I o 54= -
Ω100=.tot.eccR - Calcolare, nelle condizioni di pieno carico:
1. Il numero di giri 2. La potenza assorbita e quella fornita all’asse. 3. Il rendimento e la coppia utile all’asse.-

15
La corrente d’eccitazione, assorbita in ogni condizione di funzionamento, vale:
AR
Vi
.tot.ecc
ecc 2100
200===
Dalle equazioni fondamentali di funzionamento del motore, scritte nella condizioni a vuoto e di pieno carico, si ricava:
oioio nkIRVE Φ=−= nkIRVE iic Φ=−=
e dividendo membro a membro, tenendo presente che ecci iII −= :
ioi
ii
oo
c
IRV
IRV
n
n
E
E
−
−== ⇒
( )( ) min
g
,,
,
IRV
IRVnn
ioi
ii
o 972254120200
2511202001000 =
−−
−−=
−
−=
La potenza assorbita dal motore a pieno carico risulta:
WIVP nna 1020051200 =⋅=⋅=
Le perdite Joule nel circuito d’eccitazione valgono: WiRp ecc.tot.ecc.ecc 4002100 22 =⋅==
Le perdite nel rame d’indotto sono:
( ) ( ) W,iIRIRp eccniii.Jind 288251120 222 =−⋅=−⋅==
Le perdite meccaniche e nel ferro corrisponderanno alla potenza assorbita a vuoto diminuita dalle perdite nel circuito d’eccitazione: W,iRIVpPPP ecc.tot.ecconeccoFe.mecc 500210054200 22 =⋅−⋅=−=−=+
La potenza resa all’asse del motore risulterà, per differenza: ( ) WperditePP autile 901250028840010200 =++−=−= Σ
Il rendimento del motore è:
%,P
P%
a
u 38810200
9012100100 ===η
La coppia utile all’asse del motore risulta:
rad
J,Pn
PT u
u
u 58890129722
60
2
60=
⋅===
ππω

16
Capitolo II
MACCHINE SINCRONE
(Siemens – Wilde: 1856 – 1866)
2.1.0. Generatori sincroni – Alternatori
2.1.1. Generalità:
Le macchine sincrone sono macchine elettriche rotanti, generalmente trifasi, capaci di trasformare energia meccanica in energia elettrica sotto forma di corrente alternata e viceversa. Nel primo caso prendono il nome di generatori sincroni o alternatori, nel secondo di motori sincroni.-
Le macchine sincrone sono costituite, in generale, da una parte esterna fissa, di forma cilindrica, detta statore, con funzione di indotto, e da una parte interna rotante, anch’essa di forma cilindrica e coassiale con la prima, detta rotore, con funzione di induttore; fra il nucleo magnetico dello statore ed i poli del sistema induttore è compreso uno spazio d’aria, detto traferro, dello spessore di pochi millimetri o di qualche centimetro nelle macchine di grande potenza.-
Il nucleo magnetico dell’indotto statorico è a struttura lamellare, costituito da lamiere magnetiche dello spessore di 0,6 mm, isolate con carta o vernice; i conduttori attivi dell’avvolgimento indotto sono sistemati in cave praticate sulla superficie cilindrica interna dello statore parallelamente all’asse della macchina.-
Il flusso magnetico induttore è ottenuto alimentando il circuito d’eccitazione o di campo del sistema induttore rotorico con una corrente continua inviata ai circuiti attraverso un collettore a due anelli. Il rotore delle macchine sincrone può essere del tipo liscio o del tipo a poli salienti: l’induttore liscio, impiegato nelle macchine veloci, a una o due copie polari, è un cilindro d’acciaio massiccio corredato di cave ricavate sulla superficie esterna entro le quali si sistemano i conduttori dell’avvolgimento d’eccitazione; l’induttore a poli salienti, detto anche ruota polare si riduce ad un semplice mozzo, dal quale sporgono i poli attorno ai quali sono disposte le bobine d’eccitazione.-
Le macchine sincrone, impiegate come generatori sincroni, sono normalmente costruite per grandi potenze, dell’ordine delle decine di MVA o delle centinaia di MVA; nella centrale termoelettrica di La Spezia è installato un turboalternatore con raffreddamento in idrogeno da 320 MVA. Le tensioni delle grosse macchine sincrone sono molto elevate per limitare i valori di corrente nei conduttori dell’avvolgimento indotto: per potenze dell’ordine delle decine di MVA si hanno tensione di 6÷10 kV; per potenze superiori si arriva a tensioni di 15÷24 kV.-

17
2.1.2. Funzionamento a vuoto:
Ciascuna spira dell’avvolgimento indotto, disposta nelle cave statoriche, risulta concatenata con un flusso rotante d’eccitazione prodotto dai poli rotorici, eccitati in corrente continua, ma portati in rotazione dal motore primo:
tcoseccc ωΦϕ =
La spira sarà quindi sede di una forza elettromotrice indotta sinusoidale:
tsenEtsendt
de Mspiraecc
c
spira ωωΦωϕ
==−=
Il valore massimo della FEM indotta in ciascun conduttore della spira risulta:
ecc
eccecc
.cond1M f260
n2
2E Φπ
ΦπΦω=== ove f è la frequenza della FEM indotta;
Il valore efficace della Fem in ciascun conduttore è quindi:
fk2f22
22
fE eccfecc
ecc
cond1 ΦΦπΦπ
=== ove kf è il fattore di forma della
grandezza sinusoidale; Normalmente nelle cave vengono disposti N conduttori per ciascuna fase quindi la FEM raccolta diventa N volte maggiore, anche se in realtà, a causa dei piccoli sfasamenti tra una FEM e l’altra, dovuti alla distanza esistente tra una cava e la successiva, la somma aritmetica dei valori delle FEM deve essere moltiplicata per un certo fattore di avvolgimento ka < 1: eccfa fNKk2E Φ=
In generale, la relazione tra il numero di giri del rotore n ed il valore della frequenza f deve tenere conto del numero di copie polari in quanto, ad ogni giro della ruota polare costituita da p copie di poli, il flusso concatenato con ciascun conduttore d’indotto statorico, compierà p periodi completi:
60
npf ⋅= ⇒
p
f60n =
Poiché l’alternatore deve fornire una tensione avente frequenza costante ed unificata al valore di 50Hz, la velocità di rotazione dovrà rimanere perfettamente costante e pari a:
p
3000
p
5060n =
⋅= corrispondente, in base al numero di
coppie polari del generatore a: p n (g/min) 1 3000 2 1500 3 1000 4 750 5 600 6 500 10 300
Suddividendo il numero di cave statoriche in tre gruppi, distanti tra loro 120° elettrici e
disponendovi tre avvolgimenti distinti aventi il medesimo numero di spire, ognuno di questi fornirà una forza elettromotrice avente valore efficace e frequenza identici alle altre ma sfasate tra loro di 120°: si ottiene in tal modo un sistema trifase simmetrico di tensioni.-
Nel funzionamento a vuoto dell’alternatore, la forza elettromotrice Eo generata ai morsetti, rimanendo per ipotesi la frequenza costante, dipende soltanto dal valore del flusso d’eccitazione e quindi dalla corrente d’eccitazione:
18
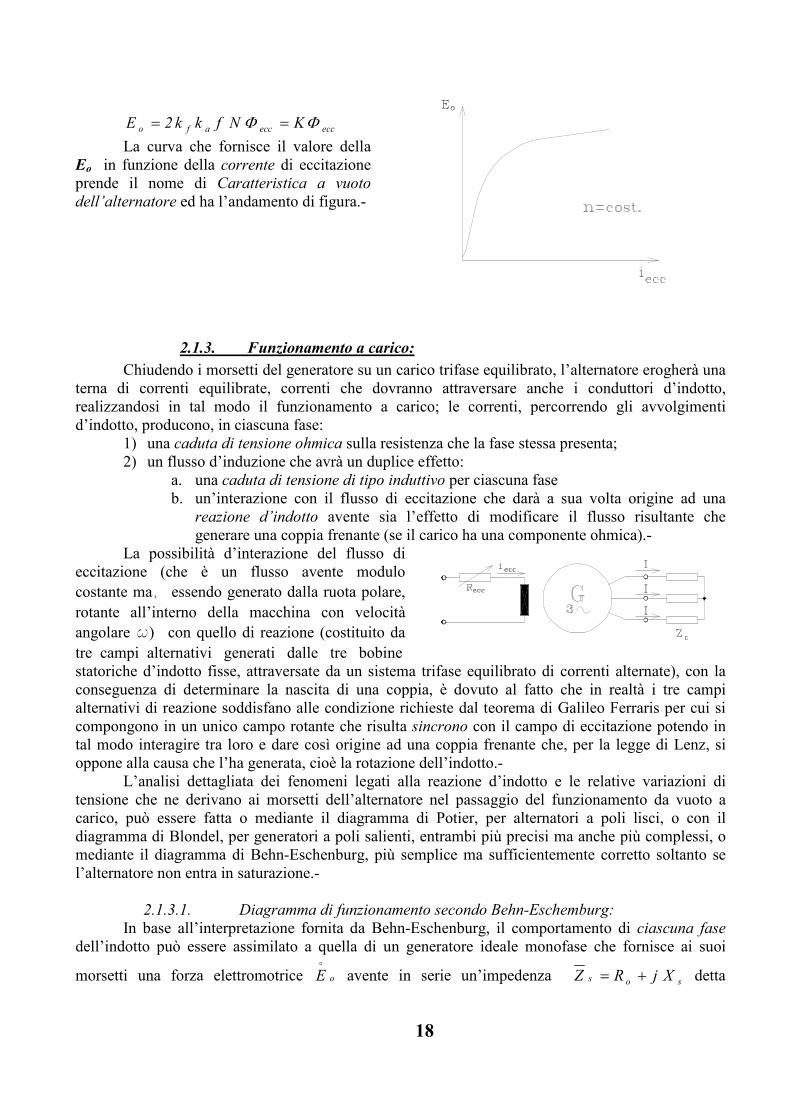
ecceccafo KNfkk2E ΦΦ ==
La curva che fornisce il valore della Eo in funzione della corrente di eccitazione prende il nome di Caratteristica a vuoto
dell’alternatore ed ha l’andamento di figura.-
2.1.3. Funzionamento a carico:
Chiudendo i morsetti del generatore su un carico trifase equilibrato, l’alternatore erogherà una terna di correnti equilibrate, correnti che dovranno attraversare anche i conduttori d’indotto, realizzandosi in tal modo il funzionamento a carico; le correnti, percorrendo gli avvolgimenti d’indotto, producono, in ciascuna fase:
1) una caduta di tensione ohmica sulla resistenza che la fase stessa presenta; 2) un flusso d’induzione che avrà un duplice effetto:
a. una caduta di tensione di tipo induttivo per ciascuna fase b. un’interazione con il flusso di eccitazione che darà a sua volta origine ad una
reazione d’indotto avente sia l’effetto di modificare il flusso risultante che generare una coppia frenante (se il carico ha una componente ohmica).-
La possibilità d’interazione del flusso di eccitazione (che è un flusso avente modulo costante ma, essendo generato dalla ruota polare, rotante all’interno della macchina con velocità angolare w) con quello di reazione (costituito da tre campi alternativi generati dalle tre bobine statoriche d’indotto fisse, attraversate da un sistema trifase equilibrato di correnti alternate), con la conseguenza di determinare la nascita di una coppia, è dovuto al fatto che in realtà i tre campi alternativi di reazione soddisfano alle condizione richieste dal teorema di Galileo Ferraris per cui si compongono in un unico campo rotante che risulta sincrono con il campo di eccitazione potendo in tal modo interagire tra loro e dare così origine ad una coppia frenante che, per la legge di Lenz, si oppone alla causa che l’ha generata, cioè la rotazione dell’indotto.-
L’analisi dettagliata dei fenomeni legati alla reazione d’indotto e le relative variazioni di tensione che ne derivano ai morsetti dell’alternatore nel passaggio del funzionamento da vuoto a carico, può essere fatta o mediante il diagramma di Potier, per alternatori a poli lisci, o con il diagramma di Blondel, per generatori a poli salienti, entrambi più precisi ma anche più complessi, o mediante il diagramma di Behn-Eschenburg, più semplice ma sufficientemente corretto soltanto se l’alternatore non entra in saturazione.-
2.1.3.1. Diagramma di funzionamento secondo Behn-Eschemburg:
In base all’interpretazione fornita da Behn-Eschenburg, il comportamento di ciascuna fase dell’indotto può essere assimilato a quella di un generatore ideale monofase che fornisce ai suoi
morsetti una forza elettromotrice oEo
avente in serie un’impedenza sos XjRZ += detta

19
impedenza sincrona, costituita dalla resistenza ohmica di fase oR dell’avvolgimento e da una
reattanza sincrona sX di valore opportuno.-
L’equazione vettoriale che rappresenta il funzionamento del circuito equivalente di ciascuna fase secondo Behn-Eschenburg risulta:
oooo
IjXIRVE soo ++=
È importante notare che in caso di corto circuito ai morsetti della macchina la corrente è
praticamente limitata dalla sola reattanza sincrona interna Xs, essendo la resistenza Ro pressoché trascurabile; per cui il modulo della corrente di corto circuito sarà:
s
o
s
o
cc
X
E
Z
EI ≅=
L’equazione di Behn-Eschenburg potrà essere scritta in forma semplificata (trascurando il valore di Ro rispetto a quello di Xs ) nel seguente modo:
ooo
IjXVE so +=
e il relativo diagramma polare risulterà quello di figura.- È interessante notare come la potenza attiva e
reattiva erogate dall’alternatore possono essere espresse in funzione del valore di oE e δ ; nei triangoli ABC ed
OBC i segmenti BC e AB valgono rispettivamente: δϕ senEcosIXBC oS == VcosEsenIXAB oS −== δϕ
δϕ sencosS
o
X
EI =
S
o
X
VEI
−=
δϕ
cossen
δϕ sen3
cos3 o
S
EX
VVIP == ( )VE
X
VVIQ o
S
−== δϕ cos3
sen3
2.1.3.2. Caratteristiche esterne:
Per caratteristica esterna di un generatore sincrono s’intende quel grafico che rappresenta la legge di variazione della tensione ai morsetti, in funzione della corrente erogata, quando siano mantenuti costanti velocità, eccitazione e fattore di potenza del carico.-
Le caratteristiche possono essere ricavate o per via sperimentale, mediante una prova di laboratorio, o per via grafica usando il diagramma di Behn-Eschenburg.-
La famiglia di caratteristiche, comunque ricavate, presenta le seguenti proprietà:

20
a) incontrano l’asse delle ordinate nello stesso punto. Ciò è dovuto al fatto che l’intercetta sull’asse delle ordinate rappresenta la f. e. m. vuoto, che è la stessa per tutte, avendo la macchina la medesima eccitazione e la medesima velocità;
b) incontrano l’asse delle ascisse nello stesso punto. Ciò è dovuto al fatto che l’intercetta sull’asse delle ascisse rappresenta la corrente di corto circuito, che è la medesima per tutte le caratteristiche, in quanto tale corrente è il rapporto tra la f. e. m. a vuoto e l’impedenza sincrona;
c) presentano il primo tratto, che è quello utilizzabile, leggermente discendente quando il carico è puramente ohmico. Tale tratto ha una pendenza maggiore per carichi ohmico-induttivi, mentre per carichi ohmico-capacitivi la pendenza è minore, o addirittura la caratteristica risulta ascendente per carichi fortemente capacitivi.-
Volendo mantenere costante la tensione al variare del carico, sarà necessario variare la corrente di eccitazione in modo da adeguare il valore della Eo ai vari carichi.-
2.1.4. Perdite e rendimento dell’alternatore:
Le perdite che si riscontrano nella macchina sono in parte costanti, in parte variabili con le condizioni di carico. Le prime, già presenti nel funzionamento a vuoto, sono:
a) perdite meccaniche per attriti e ventilazione, localizzate nei supporti dell’ asse e nella resistenza del mezzo fluido alla rotazione della ruota polare. Esse dipendono dalla velocità; poiché un generatore sincrono è destinato a girare a velocità costante, si mantengono costanti;
b) perdite nel ferro, localizzate principalmente nel ferro dello statore, essendo questo interessato da un flusso variabile. Una lieve percentuale di perdite si localizza anche nel ferro delle espansioni polari. Infatti, seguendo le linee d’induzione la via di minor riluttanza, queste presentano al traferro una concentrazione in corrispondenza dei denti, formando così tanti pennelli di flusso che, con il movimento della ruota polare, assumono un moto relativo rispetto all’espansione polare, ed il ferro di quest’ultima è quindi sede di perdite, anche se di lieve entità. Le perdite nel ferro, che dipendono dalla frequenza e dall’induzione, si riscontrano già nel funzionamento a vuoto, mantenendosi quasi costanti nel passaggio a carico in quanto l’induzione risultante all’interno della macchina, dal cui quadrato esse dipendono, varia di poco nel passaggio da vuoto a carico, mentre la frequenza rimane rigorosamente costante.-
c) perdite di eccitazione, cioè quelle nel rame degli avvolgimenti di eccitazione. Se si mantiene costante l’intensità della corrente d’eccitazione, le perdite d’eccitazione assumono uno stesso valore a qualsiasi condizione di carico.-
Possiamo quindi concludere che a vuoto la potenza assorbita dalla macchina sincrona deve sopperire alla somma delle perdite ora illustrate, cioè:
eccfemo PPPP ++=
Passando a carico, la macchina è sede, oltre che delle perdite a vuoto, anche di quelle nel
rame degli avvolgimenti d’indotto, definite da: 2
o IR3
avendo indicato con Ro la resistenza di una fase d’armatura, e con I la corrente erogata da ciascuna fase.-

21
Indicando con V la tensione di fase, la potenza erogata vale: ϕcosVI3P = La potenza assorbita è la somma di quella erogata e delle perdite, cioè: 23 IRPPP ooass ++=
Il rapporto tra la potenza erogata e quella assorbita viene definito come rendimento
convenzionale:
233
3
RIPcosVI
cosVI
P
P
oa ++==
ϕ
ϕη
L’espressione del rendimento mostra che esso dipende da due elementi del carico: corrente e fattore di potenza. Al fine di avere una visione generale dell’andamento del rendimento alle varie condizioni di carico, si tracciano, in funzione della corrente erogata, diverse curve, mantenendo per ognuna costante il fattore di potenza.- Essendo le perdite, come già visto per le macchine in corrente continua, in parte costanti con il carico e in parte legate al quadrato della corrente erogata, l’andamento delle caratteristiche sarà quello indicato in figura, ove si riscontra che:
a. il rendimento, a parità di corrente, è maggiore per fattori di potenza superiori: infatti, a parità di potenza erogata, la corrente e quindi le perdite nel rame, saranno tanto minori quanto maggiore è il cos f;
b. il rendimento raggiunge il suo massimo valore per quel valore della corrente ∗I che rende le perdite nel rame d’indotto eguali a quelle a vuoto.-
2.1.5. Parallelo dei generatori sincroni con una rete prevalente:
I generatori sincroni trifasi, installati nelle centrali elettriche, sono chiamati a fornire alla rete prevalente, cui vengono allacciati, una certa aliquota di potenza in modo da contribuire a soddisfare la richiesta globale da parte di tutti gli utilizzatori della rete stessa.- La rete prevalente, sfruttando la potenza che ad essa viene fornita dal complesso di tutte le centrali allacciate, è una rete che mantiene, in ogni situazione, una tensione e una frequenza perfettamente costanti.-
Per poter quindi collegare un generatore sincrono trifase ad una rete prevalente è necessario eseguire delle opportune manovre in modo che, all’istante di chiusura dell’interruttore di parallelo, non si verifichino dei bruschi colpi di corrente che potrebbero danneggiare la macchina e l’impianto.- Si richiede cioè che il generatore, funzionante a vuoto prima della chiusura dell’interruttore, continui a funzionare a vuoto anche dopo la chiusura; le operazioni da eseguire affinché ciò si realizzi, sono:
I. Il gruppo turbina – generatore deve essere avviato; II. La corrente d’eccitazione deve essere regolata in modo che ai suoi morsetti si generi
una terna di forze elettromotrici Eo avente valore efficace uguale a quello della tensione di rete V;

22
III. La velocità del gruppo deve essere tale che le FEM abbiano quasi la medesima frequenza della tensione di rete;
IV. Osservando che con le manovre sopra descritte, le due terne (quella delle FEM generata e quella delle tensioni di rete) ruotano a velocità leggermente diverse, nell’istante in cui le due terne risultano in fase tra loro, si chiude l’interruttore di parallelo. Tale istante può essere fornito dalla lettura di un voltmetro inserito tra due morsetti corrispondenti dell’interruttore di parallelo.-
Eseguito il parallelo, affinché l’alternatore fornisca potenza attiva o/e reattiva alla rete,
bisogna variare la fase o/e il modulo della Eo; la prima manovra si esegue aumentando la coppia motrice applicata al rotore del sincrono, la seconda variando la sua corrente di eccitazione.-
L’equazione che, regolando il funzionamento del generatore, ci permette di valutare il valore della corrente erogata eI è quella di Behn-Eschenburg:
ooo
eso IjXVE +=
Ad ogni aumento della coppia motrice e quindi della potenza meccanica fornita all’alternatore, corrisponderà un aumento dell’angolo d e quindi una circolazione di corrente eI tale da soddisfare
all’equazione scritta: tale corrente risulterà in fase con la tensione, per cui l’alternatore erogherà in rete una potenza attiva (figura a); ad ogni aumento (o diminuzione) della corrente d’eccitazione corrisponderà una variazione del modulo della Eo e quindi una circolazione di corrente

23
eI che risulterà in quadratura ritardo (o anticipo) con la tensione, per cui l’alternatore scambierà con
la rete una potenza reattiva (figura b); nel caso infine che venga fornita sia una coppia motrice sia variata la corrente d’eccitazione, la rete risulterà essere per l’alternatore un carico ohmico-induttivo od ohmico-capacitivo (figura c).-
2.2.0. Motori sincroni
2.2.1. Principio di funzionamento
Il motore sincrono si distingue dagli altri motori per due sue fondamentali proprietà: — mantiene rigorosamente costante la velocità al variare del carico meccanico applicato al
suo asse; — può comportarsi come un carico capacitivo o ohmico-capacitivo, rispetto alla linea
d’alimentazione.- Il motore sincrono, costruttivamente identico all’alternatore, ha disposto nelle cave statoriche
un avvolgimento trifase che funge da indotto e viene collegato alla rete di alimentazione mentre il rotore, che svolge la funzione d’induttore, è costituito da un certo numero di coppie polari eccitate in corrente continua.-
Particolare attenzione deve essere prestata alla fase d’avviamento: non appena viene applicata la tensione di linea, si genera il campo rotante; se la ruota polare è ferma, la grande inerzia che essa presenta le impedisce d’assumere istantaneamente il passo col campo rotante statorico: la ruota polare rimane ferma e il motore non si avvia. Questo significa che il motore sincrono
non è autoavviante.- L’avviamento di un motore
sincrono è normalmente ottenuto mediante un piccolo motore di lancio, necessario a portare preventivamente in rotazione la ruota polare fino alla velocità di sincronismo, come se si trattasse di avviare e fare il parallelo sulla rete della macchina stessa funzionante da alternatore, regolando l’eccitazione e la velocità di rotazione: a parallelo eseguito si stacca il motore di lancio, e la ruota polare rimane in rotazione come motore sincrono a vuoto.-
L’equazione della macchina funzionante come motore è fornita dalla relazione di Behn-Eschemburg, ove alla corrente erogata è stata sostituita la corrente assorbita e quindi si è cambiato il suo segno:
ersO IjXVEoo
+= ⇒ assO IjXVEooo
−= ⇒ assO IjXEVooo
+=
come si vede, la tensione V& agente su ciascuna fase deve vincere la f.c.e.m. E& sviluppata dal motore più la caduta interna dovuta alla reattanza sincrona Xs (nella trattazione viene trascurata la resistenza di fase oR rispetto la reattanza sincrona SX ).-
Nel tracciare il diagramma di Behn-Eschemburg bisogna tenere presente che, mentre nell’alternatore la coppia applicata all’asse è una coppia motrice che porta il rotore e quindi il sistema

24
delle oE in anticipo sulla terna delle V di rete, nel funzionamento come motore viene applicata una
coppia frenante che tende a ritardare, rispetto alla terna delle tensioni di rete, il rotore e quindi la relativa terna delle oE .-
Affinché il motore rimanga stabilmente in equilibrio è necessario che il campo rotante statorico ed il campo rotante generato dai poli di eccitazione rotorici mantengano fissa la loro posizione reciproca, ruotando alla medesima velocità, siano cioè sincroni.-
Questo motore ha dunque la proprietà fondamentale di mantenere rigorosamente la
velocità di sincronismo:
p
fn
⋅=60
ove f è la frequenza della corrente assorbita e p il numero delle coppie di poli.- Il motore sincrono, essendo dotato di un sistema d’eccitazione indipendente, offre la
possibilità di variare la sua forza controelettromotrice oE indipendentemente dagli altri parametri di
funzionamento: ad ogni variazione del flusso d’eccitazione, poiché la tensione ai morsetti e la velocità di rotazione rimangono inalterate, dovrà corrispondere una variazione della corrente assorbita.-
Il diagramma polare del motore, in una certa condizione di carico, risulta essere quello di figura (a): rispetto alla tensione di alimentazione V& , la corrente assorbita è sfasata in ritardo di f1,
mentre la f.c.e.m. risulta in ritardo dell’angolo d1.-
Lo sfasamento della f.c.e.m. rispetto alla tensione è dovuto alla coppia frenante applicata all’asse che tende a ritardare la ruota polare (rispetto all’assetto del funzionamento a vuoto) fino a che, per effetto della differenza aS IjXEV &&& =− ,la corrente assorbita genera una coppia motrice
uguale e contraria alla coppia resistente.- Nel triangolo rettangolo ABC il cateto BC vale:
1aS cosIXBC ϕ=
Ne consegue che la potenza attiva assorbita dal motore può essere espressa in funzione di BC:
BCX
V3cosVI3P
S
1a == ϕ
cioè la potenza attiva assorbita dal motore risulta proporzionale al segmento BC; ugualmente si può vedere che il segmento AC rappresenta la potenza reattiva assorbita.-

25
Trascurando le perdite del motore, il segmento BC rappresenta anche la potenza meccanica Pm sviluppata dal motore e, rimanendo rigorosamente costante la velocità angolare, risulta anche proporzionale alla coppia motrice sviluppata all’asse del motore.-
Se il motore funziona con un carico costante, e quindi tale rimane anche la coppia applicata
all’albero, il suo diagramma polare varierà in modo che il vettore E& conservi costantemente il suo estremo sulla retta t parallela a V& , anche se viene variata l’eccitazione del motore.-
In ogni condizione di funzionamento, la corrente assorbita assumerà un valore tale da compensare con la sua caduta sulla reattanza Xs la differenza tra la tensione applicata e la forza controelettromotrice:
S
a
jX
EVI
&&&
−=
In generale si possono presentare tre casi diversi: La corrente d’eccitazione è regolata in modo che risulti E < V: la corrente assorbita I& risulta sfasata
in ritardo sulla tensione applicata V& , figura (a); in queste condizioni il motore funziona in regime sottoeccitato e per la rete è un carico ohmico-induttivo.
La corrente d’eccitazione è regolata in modo che risulti E > V: la corrente assorbita I& risulta sfasata in anticipo sulla tensione applicata V& , figura (c); in queste condizioni il motore funziona in regime sovraeccitato e per la rete è un carico ohmico-capacitivo.
La corrente d’eccitazione è regolata in modo che il vettore rappresentativo della caduta aS IjX &
risulti normale a V& e la corrente I& sia in fase con V& , figura (b); in queste condizioni il motore è per la rete un carico ohmico. In queste condizioni, la corrente assume il valore minimo, a parità di potenza assorbita, quindi il motore funziona nelle condizioni di massimo rendimento essendo minime le perdite per effetto Joule.-
È importante notare come un motore sincrono funzionante in regime sovraeccitato, è in grado di esercitare un’azione di rifasamento della linea, in modo analogo a quello di un condensatore: quando un motore sincrono viene installato col preciso scopo di utilizzare questa sua azione rifasante, prende il nome di condensatore sincrono o condensatore rotante; in tal caso il motore viene fatto funzionare a vuoto fornendogli il massimo dell’eccitazione così che assorba dalla rete una corrente sfasata praticamente di 90° in anticipo (figura d).-
All’atto pratico i motori sincroni funzionanti a vuoto in qualità di condensatori rotanti trovano importanti applicazioni nelle stazioni elettriche ad alta tensione per il rifasamento delle grandi linee di trasporto dell’energia.-

26
Se invece il sincrono viene usato soltanto come motore, è opportuno che la sua eccitazione sia regolata in modo tale da fargli assorbire una corrente in fase con la tensione e quindi il rendimento risulti massimo (figura b).-
Problema Un motore sincrono a quattro coppie polari, funzionante alla sua tensione nominale
Hz50/V500V n = , con collegamento delle fasi statoriche a stella, presenta una reattanza sincrona
Ω7,1X S = .- Calcolare la corrente assorbita dalla rete ed il relativo ϕcos quando all’asse risulta
applicata una coppia frenante pari a rad
J320 , la corrente di eccitazione e regolata in modo che la
forza elettromotrici di fase risulti V320E faseO = e il rendimento possa essere ritenuto pari a 82,0 .-
Determinare in oltre che valore deve avere la oE affinché, a parità di carico, il ϕcos diventi
unitario.- La velocità di rotazione del motore risulta:
min
giri750
4
5060
p
f60n =
⋅=
⋅=
La potenza meccanica fornita all’asse è:
W133.2532060
7502T
60
n2TPm =⋅
⋅=⋅=⋅=
ππω
La potenza assorbita dalla rete vale:
W650.3082,0
25133PP
m
.ass ===η
Essendo l’avvolgimento statorico collegato a stella, la tensione di fase risulta:
V7,2883
500
3
VV
linea
fase ===
La componente attiva della corrente assorbita dalla rete è:
A4,357,2883
650.30
V3
PcosI
fase
ass =⋅
=⋅
=ϕ
V18,604,357,1cosIXBC S =⋅== ϕ
188,0320
18,60
OC
BCsen ===δ ⇒ °= 8,10δ
V3,3148,10cos320cosEOB o =°⋅== δ
V6,257,2883,314OAOBAB =−=−=
425,018,60
6,25
BC
ABtg ===ϕ ⇒ 92,0cos =ϕ
A5,3892,0
4,35
cos
cosII ===
ϕ
ϕ
Se, a parità di carico, cioè di potenza assorbita, si vuole che il ϕcos sia unitario, la corrente assorbita dalla rete dovrà risultare:
27
A39,3517,2883
650.30
cosV3
PI
fase
ass =⋅⋅
=⋅
=ϕ
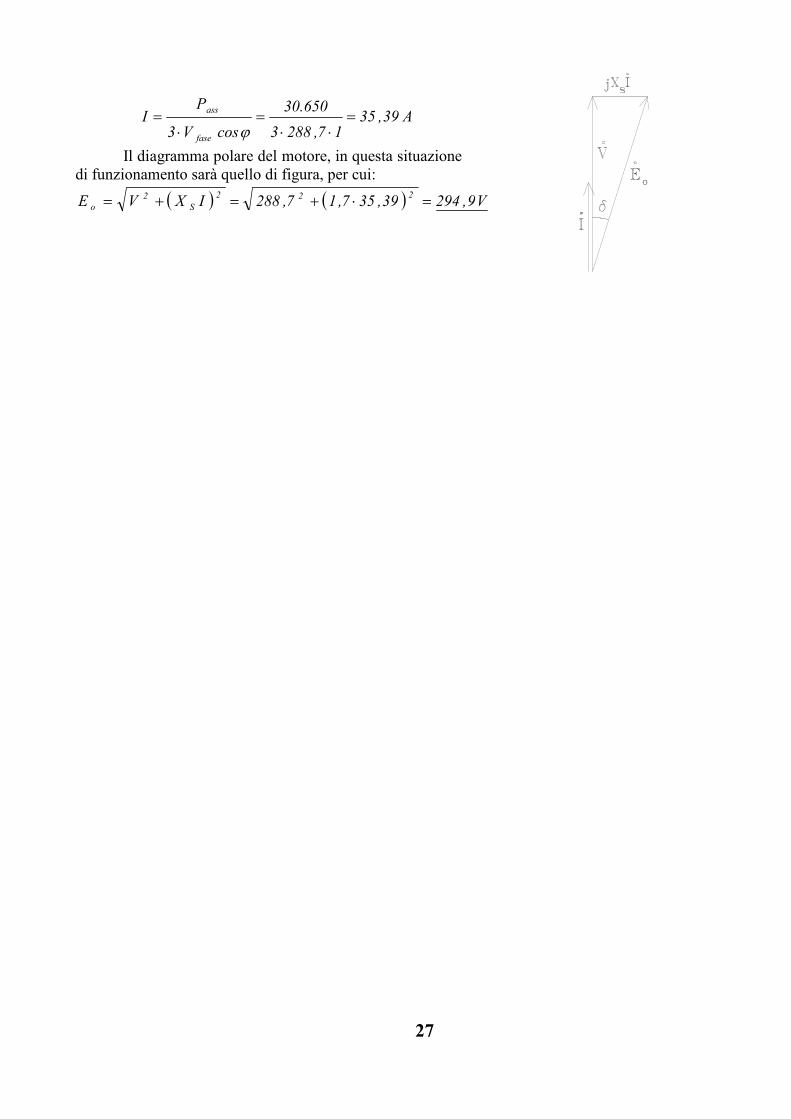
Il diagramma polare del motore, in questa situazione di funzionamento sarà quello di figura, per cui:
( ) ( ) V9,29439,357,17,288IXVE222
S
2
o =⋅+=+=

28
Capitolo III
TRASFORMATORI
(Gaulard – Ferraris – Derì – Kapp: 1885 – 1890)
3.1.0. Trasformatori monofasi
3.1.1. Generalità:
I trasformatori sono macchine elettriche statiche, funzionanti in corrente alternata, basate sul principio dell’induzione elettromagnetica, atte a modificare i valori della tensione e della corrente.-
I trasformatori monofasi sono fondamentalmente formati da due avvolgimenti di cui uno, costituito da N1 spire, funge da induttore
o primario e l’altro, formato da N2 spire è l’indotto o secondario; poiché il flusso prodotto dall’avvolgimento induttore deve potersi concatenare, nella maggior quantità possibile, con il secondario, tali avvolgimenti vengono disposti attorno ad un unico circuito magnetico (nucleo) costituito da lamierini di materiale ferromagnetico (lamierini isolati al ferro-silicio per ridurre le perdite per isteresi magnetica e per correnti di Foucault dovute alla presenza di flussi alternati).-
3.1.2. Trasformatore perfetto:
Il primo approccio al trasformatore, per comprenderne il principio di funzionamento, è quello di immaginare un trasformatore perfetto avente le seguenti caratteristiche:
a. Il circuito magnetico abbia riluttanza nulla ( 0=ℜ ) b. Il nucleo magnetico sia privo di perdite nel ferro c. Le bobine primarie e secondarie siano prive di
resistenza ohmica d. Il concatenamento tra i due avvolgimenti sia totale
(non esistano flussi dispersi) In queste ipotesi, applicando al primario una tensione
alternata o
1V , nel circuito magnetico, privo di riluttanza ℜ , circolerà un flusso Φ senza che per questo sia necessaria la presenza di una forza magnetomotrice
µIN 1 che lo faccia circolare:
Φµ ℜ=IN 1 : se 0=ℜ ⇒ 0=µI
Avendo applicata una tensione sinusoidale, il flusso circolante nel nucleo sarà:
tcosM ωΦϕ = ⇒ o
Φ Tale flusso, concatenandosi con entrambi gli avvolgimenti, indurrà in questi le forze elettromotrici:

29
o
oo
o
ΦωΦΦ
111
1 jNdt
dN
dt
dE
c−=−=−=
o
oo
o
ΦωΦΦ
222
2 jNdt
dN
dt
dE
c−=−=−=
aventi rispettivamente valore efficace:
M1
M
11 Nf44,42
NE ΦΦ
ω == M2
M
22 Nf44,42
NE ΦΦ
ω ==
Il rapporto tra i valori efficaci delle due forze elettromotrici vale:
mN
N
Nf,
Nf,
E
E
M
M ===2
1
2
1
2
1
444
444
Φ
Φ
Poiché la 1
o
E viene indotta nell’avvolgimento primario che genera il flusso induttore, in tale circuito, essa ha la funzione di forza controelettromotrice per cui in ogni istante dovrà risultare:
011 =+oo
EV
La 2
o
E , indotta nel circuito secondario, sarà invece una forza elettromotrice:
121 oo
Em
E = il cui modulo
potrà essere maggiore o minore di 1V a seconda del valore del rapporto di trasformazione m .-
Collegando ai morsetti del secondario un’impedenza CZ , il trasformatore funzionerà a
carico ed erogherà una corrente 2
o
I :
CC Z
V
Z
EI
222
oo
o
==
(la forza elettromotrice secondaria coincide con la tensione in quanto, per ipotesi, il secondario è privo d’impedenza).-
La corrente 2
o
I percorrendo il secondario,
genererà delle amperspire 22
o
IN che, agendo sul circuito magnetico, tenderanno ad alterare l’equilibrio stabilitosi, per cui la rete d’alimentazione primaria invierà nel primario una
corrente o
'I 1 (detta corrente di reazione primaria) tale che le amperspire da essa prodotte compensino esattamente quelle generate dalla
2
o
I :
02211 =+oo
ININ '
22
1
21
1 ooo
Im
IN
NI ' −=−=

30
3.1.3. Trasformatore reale e suo circuito equivalente:
Poiché le quattro ipotesi avanzate per lo studio del trasformatore ideale non si riscontrano
nella realtà, è necessario analizzare le conseguenze pratiche del loro non verificarsi: a. Nella realtà il circuito magnetico ha una sua riluttanza ℜ per cui, per far circolare il
flusso Φ , sarà necessario applicare una forza magnetomotrice °
µIN 1 e quindi una corrente
magnetizzante µ
o
I , fornita dalla rete d’alimentazione, che risulta in fase con il flusso stesso:
o
Φµ ℜ=°
IN 1 ⇒ 1N
I
o
o Φµ
ℜ=
b. Il circuito magnetico, fatto di lamierini al ferro-silicio, essendo interessato da un flusso variabile, sarà sede di perdite per isteresi e correnti di Foucault; la potenza necessaria a compensare tali perdite dovrà essere fornita dalla
rete d’alimentazione per mezzo di una corrente aIo
in fase con la tensione.- In conclusione il trasformatore, già nel funzionamento a vuoto, pur non erogando alcuna corrente al
secondario, dovrà assorbire dalla rete una corrente oIo
:
µ
ooo
III ao += c. I due avvolgimenti, primario e secondario, avranno una loro resistenza ohmica, per cui
le correnti, attraversandoli, determineranno una caduta di tensione e delle perdite di potenza per effetto Joule.-
d. L’accoppiamento magnetico tra avvolgimento primario e secondario non è perfetto, quindi ci saranno dei flussi che, generati dal primario, si concateneranno con il primario che li produce, ma non con il secondario e che, chiudendosi nell’aria, risulteranno proporzionali alla corrente che li genera:
oo
111 IL dd =Φ
Parimenti per il secondario si avranno dei flussi dispersi che, prodotti dalla corrente secondaria, si concateneranno con il secondario ma non con il primario:
222
oo
IL dd =Φ
Tali flussi, essendo variabili, indurranno negli avvolgimenti con i quali sono concatenati, delle forze elettromotrici:
oo
o
o
11111
1 IXjILjdt
dE d
dd −=−=−= ω
Φ
oo
o
o
22222
2 IXjILjdt
dE d
dd −=−=−= ω
Φ
In conclusione, nel circuito primario saranno presenti due F.E.M. indotte ed una caduta di tensione ohmica che si opporranno alla tensione applicata:
oooo
11111 IREEV d =++

31
oooo
111111 IRIXjEV ++−= Osservando l’equazione che regola il funzionamento del circuito primario, si nota come
l’effetto della forza controelettromotrice di dispersione o
1dE può essere rappresentato da una caduta
di tensione su un’opportuna reattanza 1X .-
Nel circuito secondario saranno invece presenti una forza elettromotrice 2
o
E generata dal
flusso primario ed una forza controelettromotrice o
2dE generata dalla corrente secondaria di carico o
2I , oltre alla caduta di tensione ohmica dovuta alla resistenza dell’avvolgimento secondario:
oooo
22222 VIREE d +=+
oooo
222222 IZIXjIRE C++=
anche nel secondario l’effetto della forza controelettromotrice di dispersione o
2dE può essere
rappresentato da una caduta di tensione su un’opportuna reattanza 2X .- La corrente erogata dal secondario, come già visto nel trasformatore perfetto, richiamerà sul
primario una corrente di reazione tale da compensare gli effetti delle amperspire secondarie °
22 IN :
02211 =+oo
ININ ' ⇒ 22
1
21
1 ooo
Im
IN
NI ' −=−=
Questa corrente si sommerà alla corrente a vuoto venendo a formare la corrente totale assorbita dal trasformatore nel suo funzionamento a carico:
ooo'
o III 11 +=
In definitiva, le equazioni che regolano il funzionamento del trasformatore ed il diagramma polare che le rappresenta sono quelle indicate di seguito:
oooooo
111111111 IZEIRIXjEV +−=++−= ooo'
o III 11 +=
µ
ooo
III ao +=
1NI
o
o Φµ
ℜ=
21
1 oo
Im
I ' −=
121 oo
Em
E =
oooooo
222222222 VIZIZIXjIRE C +=++=
111 jXRZ +=
222 jXRZ +=
oo
22 IZV C ⋅=
32
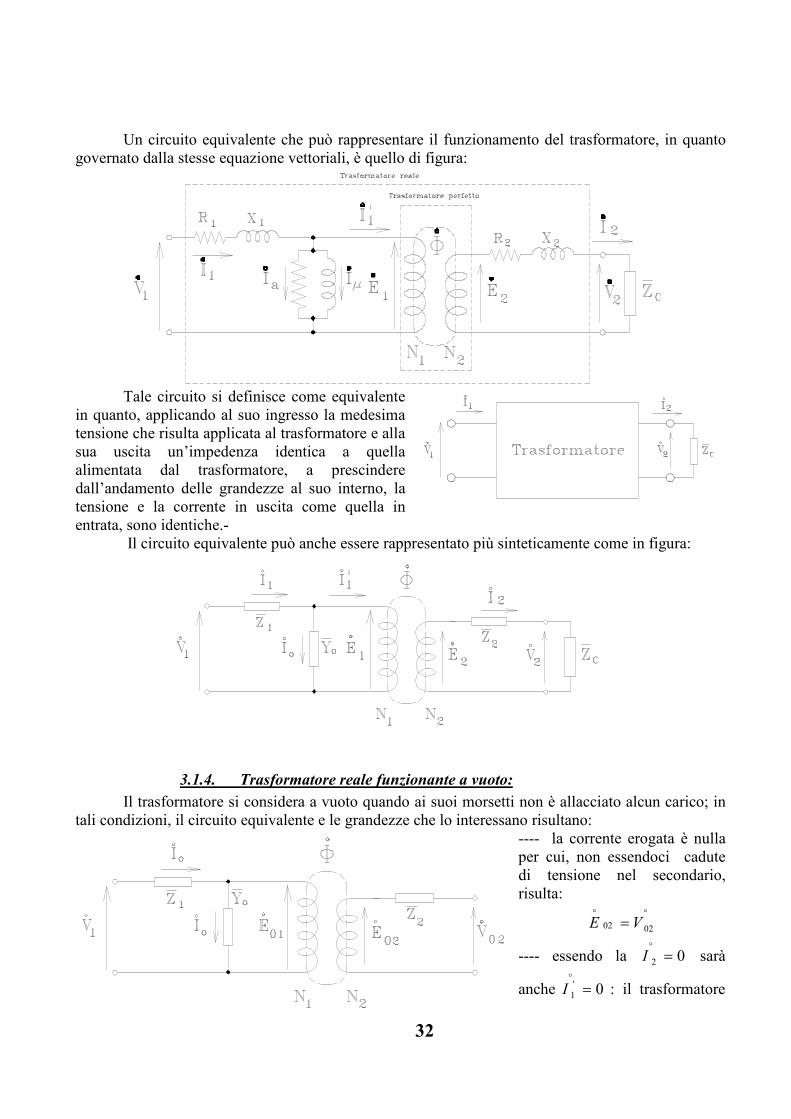
Un circuito equivalente che può rappresentare il funzionamento del trasformatore, in quanto
governato dalla stesse equazione vettoriali, è quello di figura: Tale circuito si definisce come equivalente
in quanto, applicando al suo ingresso la medesima tensione che risulta applicata al trasformatore e alla sua uscita un’impedenza identica a quella alimentata dal trasformatore, a prescindere dall’andamento delle grandezze al suo interno, la tensione e la corrente in uscita come quella in entrata, sono identiche.-
Il circuito equivalente può anche essere rappresentato più sinteticamente come in figura:
3.1.4. Trasformatore reale funzionante a vuoto:
Il trasformatore si considera a vuoto quando ai suoi morsetti non è allacciato alcun carico; in tali condizioni, il circuito equivalente e le grandezze che lo interessano risultano:
---- la corrente erogata è nulla per cui, non essendoci cadute di tensione nel secondario, risulta:
oo
0202 VE =
---- essendo la 02 =o
I sarà
anche 01 =o
'I : il trasformatore
33
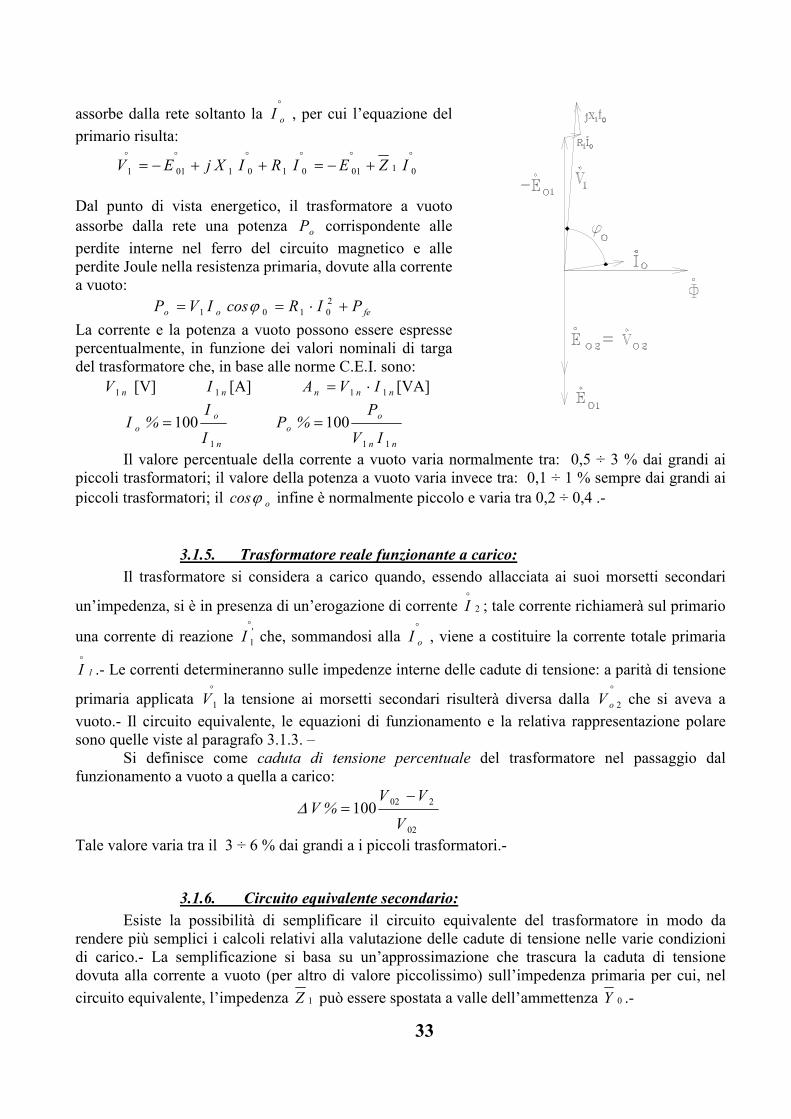
assorbe dalla rete soltanto la o
oI , per cui l’equazione del
primario risulta:
oooooo
01010101011 IZEIRIXjEV +−=++−=
Dal punto di vista energetico, il trasformatore a vuoto assorbe dalla rete una potenza oP corrispondente alle
perdite interne nel ferro del circuito magnetico e alle perdite Joule nella resistenza primaria, dovute alla corrente a vuoto:
feoo PIRcosIVP +⋅== 20101 ϕ
La corrente e la potenza a vuoto possono essere espresse percentualmente, in funzione dei valori nominali di targa del trasformatore che, in base alle norme C.E.I. sono: nV1 [V] nI 1 [A] nnn IVA 11 ⋅= [VA]
n
o
o
I
I%I
1
100= nn
o
o
IV
P%P
11
100=
Il valore percentuale della corrente a vuoto varia normalmente tra: 0,5 ÷ 3 % dai grandi ai piccoli trasformatori; il valore della potenza a vuoto varia invece tra: 0,1 ÷ 1 % sempre dai grandi ai piccoli trasformatori; il ocosϕ infine è normalmente piccolo e varia tra 0,2 ÷ 0,4 .-
3.1.5. Trasformatore reale funzionante a carico:
Il trasformatore si considera a carico quando, essendo allacciata ai suoi morsetti secondari
un’impedenza, si è in presenza di un’erogazione di corrente 2
o
I ; tale corrente richiamerà sul primario
una corrente di reazione o
'I 1 che, sommandosi alla o
oI , viene a costituire la corrente totale primaria
1Io
.- Le correnti determineranno sulle impedenze interne delle cadute di tensione: a parità di tensione
primaria applicata o
1V la tensione ai morsetti secondari risulterà diversa dalla o
2oV che si aveva a
vuoto.- Il circuito equivalente, le equazioni di funzionamento e la relativa rappresentazione polare sono quelle viste al paragrafo 3.1.3. –
Si definisce come caduta di tensione percentuale del trasformatore nel passaggio dal funzionamento a vuoto a quella a carico:
02
202100V
VV%V
−=∆
Tale valore varia tra il 3 ÷ 6 % dai grandi a i piccoli trasformatori.-
3.1.6. Circuito equivalente secondario:
Esiste la possibilità di semplificare il circuito equivalente del trasformatore in modo da rendere più semplici i calcoli relativi alla valutazione delle cadute di tensione nelle varie condizioni di carico.- La semplificazione si basa su un’approssimazione che trascura la caduta di tensione dovuta alla corrente a vuoto (per altro di valore piccolissimo) sull’impedenza primaria per cui, nel
circuito equivalente, l’impedenza 1Z può essere spostata a valle dell’ammettenza 0Y .-

34
Nel funzionamento a vuoto il circuito è quello di figura ed è governato dalle equazioni:
0011 =+oo
EV (a) oo
0201 EmE = (b)
0202
oo
VE = Nel funzionamento a carico il circuito e le equazioni relative sono:
oo
21 EmE = (c) oo'ImI 12 −= (d)
ooo'IZEV 1111 =+ (e)
Il circuito equivalente secondario che si desidera ottenere è quello nel quale l’impedenza
primaria 1Z ed i suoi effetti sulla caduta di tensione interna vengono portati al secondario, come illustrato in figura:
Affinché questo circuito sia equivalente a quello dato, bisognerà che, applicandovi la medesima o
1V ed alimentando lo stesso
carico cZ , la tensione 2
o
V
ai capi di cZ , la corrente erogata e quella assorbita rimangano invariate.-
Osservando i tre circuiti, si nota che ciò avverrà soltanto se la 12Z avrà valore tale che,
attraversata dalla o
2I , determini la caduta oo
202 EE − :
ooo
212202 IZEE =−
Ricavando la 12Z e sostituendo i valori forniti dalle (a), (b), (c), (d), (e):
2
1
1
11
2
11
2
11
2
101
2
20212
m
Z
Imm
IZ
Im
IZ
Im
EV
Im
EE
I
EEZ
'
''
=
−
−=
−=
−−=
−=
−=
o
o
o
o
o
oo
o
oo
o
oo

35
Si può quindi affermare che un’impedenza posta al primario, può essere trasportata al secondario, senza che risultino variati i valori delle tensioni e correnti ai morsetti esterni, dividendone il valore per il quadrato del rapporto di trasformazione.-
Le due impedenze secondarie possono essere sostituite dall’impedenza equivalente secondaria:
''
e
''
e
''
e jXRm
XXj
m
RR
m
Xj
m
RjXR
m
ZZZZZ +=
++
+=+++=+=+=
2
122
122
2
2
1222
12122
L’equazione vettoriale che pone in relazione le grandezze al secondario risulta:
22202
oooo
IjXIRVV ''
e
''
e ++=
che, prendendo come vettore di riferimento la corrente erogata, è rappresentata dal diagramma polare di figura.-
Si noti come il circuito equivalente secondario sia assimilabile a quello di una linea monofase ove la
02
o
V corrisponde alla tensione in partenza, la 2
o
V alla tensione all’arrivo, le ''
eR e ''
eX alla resistenza e
reattanza di linea.- Si potrà pertanto, come nelle linee di trasmissione dell’energia elettrica, in prima
approssimazione, scrivere: ( )c
''
ec
''
e senXcosRIVV ϕϕ ++= 2202
La variazione di tensione da vuoto a carico corrisponde alla differenza: ( )C
''
eC
''
e senXcosRIVVV ϕϕ∆ +=−= 2202
La caduta di tensione percentuale da vuoto a carico sarà:
( )
02
C
''
eC
''
e2
02
202
V
senXcosRI100
V
VV100%V
ϕϕ∆
+=
−=
3.1.7. Circuito equivalente primario:
Come si è visto nel paragrafo precedente, gli effetti di un’impedenza primaria possono essere riportati sul secondario, togliendo l’impedenza stessa dal primario e sostituendola con una posta sul secondario avente valore uguale a quella primaria divisa per il quadrato del rapporto di trasformazione:
2
11
m
ZZ ⇒

36
Poiché gli effetti di un’impedenza 2
1
m
Z sul secondario sono identici a quelli dei
un’impedenza 1Z sul primario è chiaro che, per portare un’impedenza secondaria sul primario, basterà moltiplicarla per 2m .-
In conclusione l’impedenza secondaria 2Z potrà essere portata sul primario ove assumerà il
valore: 22
21 ZmZ ⋅= L’impedenza equivalente primaria sarà:
( ) ( )22
122
122
22
1122
1211 XmXjRmRXjmRmjXRZmZZZZ'
e +++=+++=+=+=
'
e2
2
1 RRmR =+
'
e2
2
1 XXmX =+
Le equazioni vettoriali che regolano il funzionamento del circuito e la loro rappresentazione mediante diagramma polare sono:
221
ooo
VmEmE ' ==
211 oo
Im
I'
−=
ooo'
01 oIII +=
oooo'1
''1
''11 IjXIREV ee ++−=

37
3.1.8. Funzionamento in corto circuito:
Il trasformatore risulta in corto circuito quando i suoi morsetti secondari sono direttamente collegati tra loro, cioè in corto circuito; in tali condizioni, per evitare degli elevati assorbimenti di corrente che produrrebbero riscaldamenti pericolosi, il primario deve essere alimentato ad una tensione ridotta.-
La tensione d’alimentazione del trasformatore funzionante in corto circuito, che fa circolare nei due avvolgimenti le correnti nominali di targa, prende nome di tensione di corto circuito V1cc del trasformatore; tale tensione normalmente è compresa tra il 2 ÷ 5 % della tensione nominale passando dai piccoli ai grandi trasformatori.-
La diretta conseguenza dell’applicazione di una tensione di corto molto piccola è che il flusso e quindi l’induzione magnetica saranno proporzionalmente ridotte; essendo il flusso molto piccolo, tale sarà anche la corrente magnetizzante µI necessaria a generarlo (vedi paragrafo 3.1.3. a.).-
Poiché le perdite nel ferro sono legate al quadrato dell’induzione, viste le premesse, tali perdite saranno del tutto trascurabili e così pure lo sarà la corrente aI (vedi paragrafo 9.1.3. b.); in
conclusione la corrente a vuoto oI sarà del tutto trascurabile rispetto alla corrente 'I 1 che coinciderà
con la 1I .- Viste le considerazioni fatte,
nel circuito equivalente che ci servirà per analizzare il funzionamento del trasformatore in corto circuito, verrà tolta la oY che
permetteva la circolazione della oI ;
osservando il circuito equivalente secondario di figura, si ricavano le seguenti relazioni:
n
''
eCC IZE 22
oo
⋅=
CCCCCC EmEV 211
ooo
−=−=
nn Im
I 211 oo
−=
'
e
'
e
'
e
'
e
''
e
''
e
CC
Z
R
Zm
Rm
Z
Rcos ===
2
2
ϕ
che permettono di tracciare il diagramma polare del circuito come risulta in figura.-
Passando ai valori efficaci delle grandezze, dalle relazioni scritte, si ricava:
n
''
eCC IZE 22 ⋅= CCCC mEV 21 = nn ImI 12 ⋅= e quindi:
n
''
eCC IZmV 21 ⋅⋅= ⇒ n
CC
n
CC''
e
Im
V
Im
VZ
12
1
2
1 =⋅
=
Quest’ultima relazione, permette di calcolare l’impedenza equivalente secondaria del trasformatore, non appena si sia misurata la sua tensione di corto circuito.-

38
Si potrà parimenti calcolare l’impedenza equivalente primaria, avendo presente la relazione:
n
CC''
e
'
e
I
VZmZ
1
12 ==
Un’altra conseguenza delle considerazioni iniziali, per cui le perdite nel ferro in corto circuito risultano del tutto trascurabili, è che la potenza assorbita dal trasformatore:
ccnCCCC cosIVP ϕ11=
corrisponderà interamente alle perdite interne nel rame (la potenze erogata al secondario è nulla):
22 n
''
eCC IRP ⋅= ⇒ 22 n
CC''
e
I
PR = ⇒
21
22
22
n
CC
n
CC''
e
'
e
I
P
I
PmRmR ===
La relazione vista permette di calcolare le resistenze equivalenti del trasformatore, nota la sua potenza di corto circuito.-
In base alle norme C.E.I. sulla targa dei trasformatori devono essere indicate sia la tensione di corto circuito percentuale che la potenza di corto circuito percentuale:
n
CC
CC
V
V%V
1
1100= n
CC
CC
A
P%P 100=
Il rapporto tra la potenza e la tensione di corto circuito percentuali vale:
CC
CC
n
nn
CCnCC
CC
n
n
CC
CC
CCcos
V
V
IV
cosIV
V
V
A
P
%V
%Pϕ
ϕ=⋅=
⋅⋅
⋅=
1
1
11
11
1
1
100
100
Normalmente la tensione di corto circuito varia tra 2 ÷ 5 % dai grandi ai piccoli trasformatori, mentre la potenza di corto circuito varia tra 1 ÷ 3 % sempre dai grandi ai piccoli trasformatori.-
3.1.9. Perdite e rendimento dei trasformatori:
Il trasformatore, quando funziona sotto carico, assorbe dalla linea d’alimentazione la potenza
1P , espressa dalla relazione:
1111 ϕcosIVP =
dove f1 è l’angolo di sfasamento tra 1
o
V ed 1
o
I .-
La potenza 2P , erogata dal secondario del trasformatore e assorbita dal carico, è espressa dalla relazione:
2222 ϕcosIVP =
dove cos 2ϕ è il fattore di potenza del carico.- La differenza tra la potenza assorbita e la potenza erogata è uguale a quella persa all’interno
del trasformatore, corrispondente cioè alla somma delle perdite nel ferro e delle perdite nel rame; sussiste quindi la relazione:
uCFe PPPP +=− 21
dove uCP rappresenta le perdite per effetto Joule nel rame del trasformatore col carico stabilito.-
Le perdite nel ferro di un trasformatore, alimentato con tensione e frequenza nominali, possono convenzionalmente ritenersi costanti al variare del carico quindi si possono ricavare dal

39
valore della potenza assorbita a vuoto dal trasformatore ridotta delle perdite nel rame primario, dovute alla corrente a vuoto:
21 OOFe IRPP −=
Le perdite nel rame variano invece in funzione del quadrato della corrente erogata dal
trasformatore sul carico:
22
''2222
12222
22
1222
211 IRIR
m
RIR
m
IRIRIRP euC =
+=+≅+=
Si definisce come rendimento del trasformatore il rapporto fra la potenza 2P erogata e quella
1P assorbita dal trasformatore stesso:
22222
222
1
2
IRPcosIV
cosIV
P
P
''
eFe ++==
ϕ
ϕη
Se le potenze, erogata 2P e assorbita 1P , del trasformatore si misurano direttamente durante il funzionamento a carico, il rendimento del trasformatore si definisce come rendimento effettivo; se invece si considera come potenza assorbita dal trasformatore la somma della potenza erogata e delle varie perdite misurate o valutate convenzionalmente, il rendimento del trasformatore si definisce come rendimento convenzionale.-
L’espressione del rendimento mostra che esso dipende da due elementi del carico: corrente e fattore di potenza. Al fine di avere una visione generale dell’andamento del rendimento alle varie condizioni di carico, si tracciano, in funzione della corrente erogata, diverse curve, mantenendo per ognuna costante il fattore di potenza.- Essendo le perdite, come già visto per le macchine in corrente continua e sincrone, in parte costanti al variare del carico e in parte legate al quadrato della corrente erogata, l’andamento delle caratteristiche sarà quello indicato in figura, ove si riscontra che:
c. il rendimento, a parità di corrente, è maggiore per fattori di potenza superiori: infatti, a parità di potenza erogata, la corrente e quindi le perdite nel rame, saranno tanto minori quanto maggiore è il cos f;
d. il rendimento raggiunge il massimo valore per quella corrente *
2I che rende le perdite nel rame eguali a quelle a vuoto.-
Normalmente, i costruttori dei trasformatori proporzionano le perdite in maniera che la condizione di massimo rendimento si realizzi con un carico uguale a ¾ della potenza nominale.-
I trasformatori, tra tutte le macchine elettriche, sono quelli che lavorano con il rendimento più elevato in quanto non hanno perdite meccaniche: valori normali sono 95 ÷ 99 % dai piccoli ai grandi trasformatori.-

40
Problema Un trasformatore monofase avente i seguenti dati di targa:
kVAA n 50= %,%PCC 52= %%PO 2=
100000010
02
1 .V
V n = 60 ,cos cc =ϕ 20 ,cos O =ϕ
alimenta alla tensione di VV 9502 = un carico che assorbe una potenza kWP 302 = con
( )R,cos C 80=ϕ .- Calcolare la tensione d’alimentazione 1V del trasformatore, la corrente totale
primaria 1I con il relativo 1ϕcos ed il rendimento.-
Stabilito di impiegare per la risoluzione il circuito equivalente secondario, bisogna anzitutto ricavare il valore dell’impedenza equivalente secondaria facendo riferimento ai dati di targa:
AV
AI
n
n 501000
50000
02
2 ===
W,
A%P
P n
CC
CC 125050000100
52
100===
Ω5050
125022
2
,I
PR
n
CC''
e ===
Ωϕ 667033150 ,,,tgRX CC
''
e
''
e =⋅==
La caduta di tensione che si ha sul circuito equivalente secondario, si calcola facendo riferimento alla corrente che il trasformatore deve erogare sul carico:
A,,cosV
PI
C
53980950
30000
2
22 =
⋅==
ϕ
( ) ( ) V,,,.,,senXcosRIV C
''
eC
''
e 631606670805053922 =⋅+⋅=+= ϕϕ∆
V,,VVV 69816319502202 =+=+= ∆ ⇒ V,VmEV 981669811000
1000002011 ==⋅==
Per determinare la corrente totale primaria 1I , decidendo di usare il teorema di Boucherot, è necessario calcolare tutte le potenze attive e reattive a valle dell’ingresso del trasformatore: WP 300002 = VAR,tgPQ C 225007503000022 =⋅== ϕ
W,,IRP ''
euC 78053950 222 =⋅== VAR,,IXQ ''
eX ''e
10405396670 222 =⋅==
WA%P
P n 100050000100
2
100
00 === VAR,tgPQ 489989941000000 =⋅== ϕ
WPPPP uC 31780100078030000021 =++=++=
VARQQQQ ''eX
284394899104022500021 =++=++=
895031780
28439
1
11 ,
P
Qtg ===ϕ ⇒ 74501 ,cos =ϕ
La corrente assorbita ed il rendimento saranno rispettivamente:
A,,cosV
PI 344
74509816
31780
11
11 =
⋅==
ϕ %,
P
P494
31780
30000100100
1
2 ===η

41
3.2.0. Trasformatori trifasi
3.2.1. Generalità e collegamenti:
I trasformatori trifasi sono macchine statiche, capaci di modificare le caratteristiche di tensione e corrente di un sistema trifase, trasformando una terna di tensioni simmetriche, aventi un certo valore efficace, in un’altra terna parimenti simmetrica ma con valore efficace diverso.-
Un trasformatore trifase può essere realizzato nella maniera più semplice impiegando tre trasformatori monofasi, aventi identiche caratteristiche: i tre primari, collegati a stella o a triangolo, vengono alimentati con la terna di tensioni che si desidera trasformare; i tre secondari, collegati tra loro a stella o a triangolo, vanno ad alimentare, alla tensione voluta, l’utenza che costituisce il carico del trasformatore.-
A seconda del collegamento dei primari e dei secondari, si possono ottenere quattro diverse soluzioni che, a parità di rapporto di trasformazione Mk dei singoli trasformatori monofasi,
presentano diversi valori del rapporto di trasformazione della terna trifase Tk : I° Collegamento Stella – Stella Y/y
2
1
2
1
V
V
N
Nk M ==
M
ab
AB
T kV
V
V
V
V
Vk ====
2
1
2
1
3
3
MT kk = II° Collegamento Stella – Triangolo Y/d
2
1
2
1
V
V
N
Nk M ==
M
ab
AB
T kV
V
V
Vk ⋅=== 3
3
2
1
MT kk 3=
III° Collegamento Triangolo – Stella D/y
2
1
2
1
V
V
N
Nk M ==
33 2
1 M
ab
AB
T
k
V
V
V
Vk ===
3
M
T
kk =
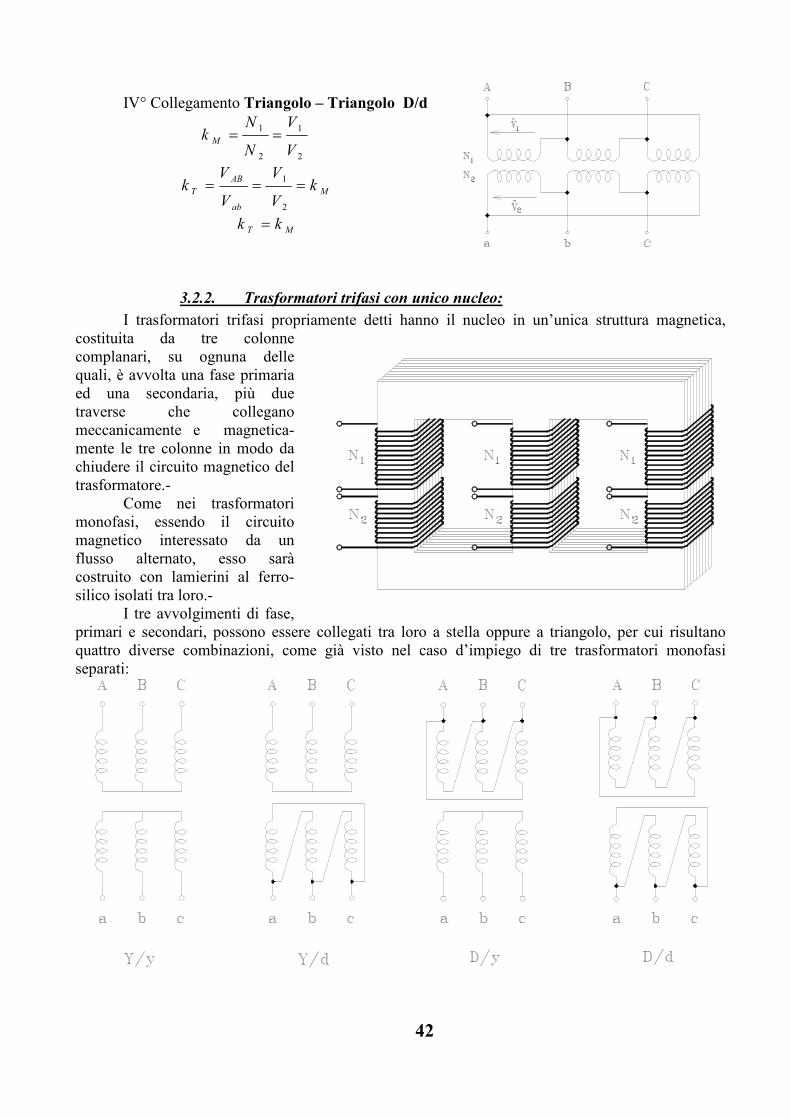
42
IV° Collegamento Triangolo – Triangolo D/d
2
1
2
1
V
V
N
Nk M ==
M
ab
AB
T kV
V
V
Vk ===
2
1
MT kk =
3.2.2. Trasformatori trifasi con unico nucleo:
I trasformatori trifasi propriamente detti hanno il nucleo in un’unica struttura magnetica, costituita da tre colonne complanari, su ognuna delle quali, è avvolta una fase primaria ed una secondaria, più due traverse che collegano meccanicamente e magnetica-mente le tre colonne in modo da chiudere il circuito magnetico del trasformatore.-
Come nei trasformatori monofasi, essendo il circuito magnetico interessato da un flusso alternato, esso sarà costruito con lamierini al ferro-silico isolati tra loro.-
I tre avvolgimenti di fase, primari e secondari, possono essere collegati tra loro a stella oppure a triangolo, per cui risultano quattro diverse combinazioni, come già visto nel caso d’impiego di tre trasformatori monofasi separati:

43
Se il trasformatore viene alimentato con una terna simmetrica di tensioni, essendo gli
avvolgimenti primari delle tre fasi identici, tra le tre forze contro elettromotrici primarie, sussisterà la relazione:
0=++ CBA EEEooo
Essendo i flussi che le generano legati ad esse da una relazione di proporzionalità e ciascuno in
quadratura rispetto alla relativa o
E , risulterà anche:
0=++ CBA
ooo
ΦΦΦ Essendo la somma dei tre flussi uguale a
zero, in ogni istante ci sarà almeno una colonna interessata da un flusso avente valore istantaneo negativo e quindi fungerà da ritorno per le altre due colonne, in modo da chiudere il circuito magnetico.-
3.2.3. Funzionamento a vuoto del trasformatore reale trifase:
Qualsiasi sia il collegamento delle tre fasi primarie, il trasformatore dovrà assorbire dalla rete di alimentazione tre corrente magnetizzanti µI atte a generare i tre flussi CBA ,, ΦΦΦ ; tali flussi
alternativi provocheranno, nel nucleo, delle perdite nel ferro che, sommate alle perdite nel rame primario dovute alla corrente a vuoto, corrisponderanno alla potenza assorbita a vuoto dalla rete 0P :
la relativa corrente a vuoto 0I sarà quindi formata dalla sua componente magnetizzante µI a da una
componente attiva aI .-
Osservando i circuiti magnetici delle tre fasi, si nota che lo sviluppo di quello della fase centrale risulta notevolmente più corto di quella delle due fasi laterali per cui presenterà una riluttanza minore; l’immediata conseguenza di questa considerazione è che, a parità di flussi da generare nei tre circuiti (le tre forze contro elettromotrici da produrre devono costituire un sistema simmetrico) le tre correnti magnetizzanti saranno diverse tra loro, costituiranno cioè un sistema squilibrato. Tale squilibrio non avrà però influenza sul funzionamento a carico in quanto la corrente a vuoto è una piccolissima percentuale della corrente a carico.-
La corrente assorbita a vuoto da un trasformatore trifase, comportandosi il primario nel funzionamento a vuoto come un carico leggermente squilibrato, può essere valutata come la corrente

44
del carico trifase equilibrato equivalente ed espressa con la relazione valida per carichi trifasi equilibrati:
01
00
3 ϕcosV
PI =
essendo 1V la tensione concatenata applicata al primario e 0I la relativa corrente di linea.-
La potenza e al corrente a vuoto vengono fornite in funzione della corrente e la potenza nominale del trasformatore in base alle norme C.E.I.:
nnn IVA 113= nI
I%I
1
00 100=
nA
P%P
00 100=
Un altro aspetto del funzionamento a vuoto del trasformatore trifase, che qui viene tralasciato rimandandolo ad altra sede di approfondimento, è quello relativo alla forma della corrente a vuoto e la relativa presenza, nei flussi o nelle correnti magnetizzanti, di componenti di terza armonica: tale presenza, assieme ai valori delle tensioni da trasformare, risulta di fondamentale importanza nella scelta del tipo di collegamento tra le fasi.-
3.2.4. Funzionamento a carico del trasformatore trifase:
Un trasformatore trifase funziona a carico quando si collega ai suoi morsetti secondari un
carico trifase che, in prima ipotesi, si ritiene equilibrato.- Poiché gli avvolgimenti primario e secondario di ciascuna fase, disposti sulla medesima
colonna, si possono considerare come gli avvolgimenti di un trasformatore monofase, valgono per i trasformatori trifasi tutte le considerazioni sviluppate per i trasformatori monofasi. La variazione di tensione, da vuoto a carico, è identica a quella vista per il trasformatore monofase:
220 VVV −=∆
dove 20V e 2V , rappresentano la tensione concatenata fra due morsetti secondari del trasformatore a
vuoto e a carico rispettivamente. La caduta di tensione percentuale del trasformatore trifase sotto carico è espressa dalla relazione:
20
202100V
VV%V
−=∆
Il triangolo caratteristico (Impedenza, Resistenza, Reattanza equivalenti e cosfcc) di una fase del trasformatore trifase si determina, come già visto per il monofase, con la prova di corto circuito: posti in corto circuito netto i tre morsetti secondari, si alimenta il trasformatore, sul lato primario, con una tensione ridotta (tensione di corto circuito) tale da far circolare negli avvolgimenti le correnti nominali. I valori della tensione, della potenza e del cosfcc relativi alla prova di corto circuito, si possono rilevare mediante un’inserzione Aron, come illustrato nel circuito di figura:
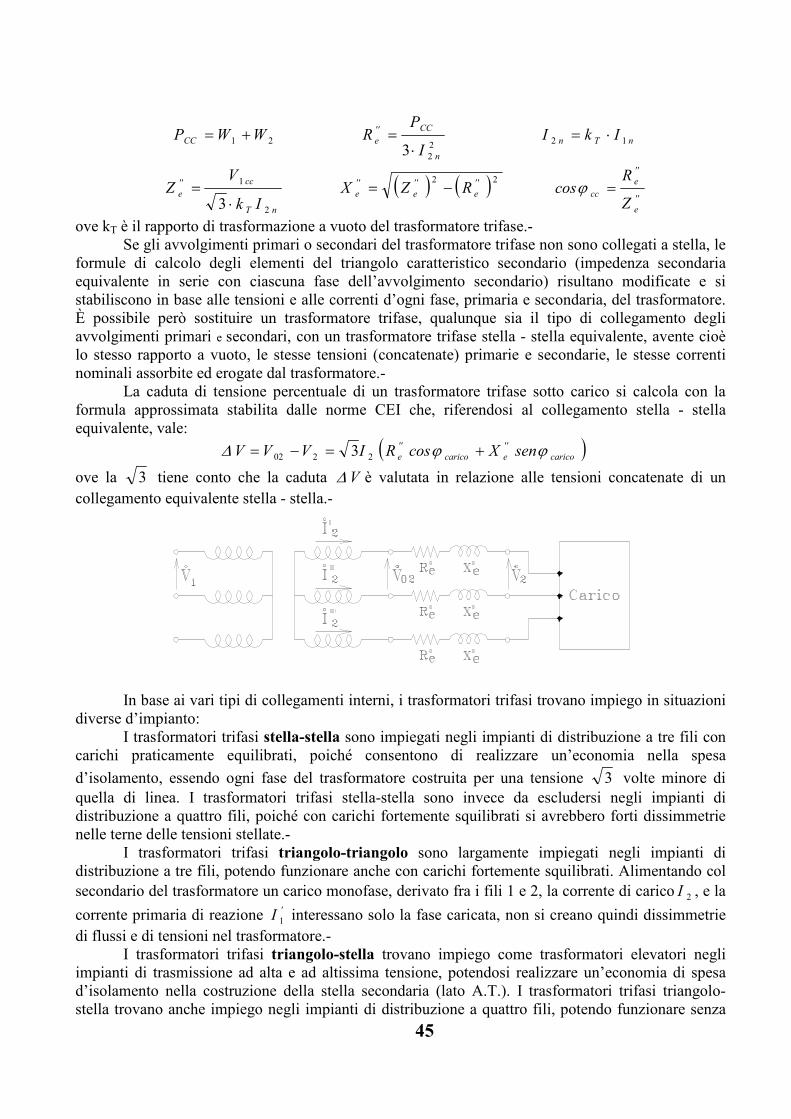
45
21 WWPCC += 223 n
CC''
e
I
PR
⋅= nTn IkI 12 ⋅=
nT
cc''
e
Ik
VZ
2
1
3 ⋅= ( ) ( ) 22 ''
e
''
e
''
e RZX −= ''
e
''
e
cc
Z
Rcos =ϕ
ove kT è il rapporto di trasformazione a vuoto del trasformatore trifase.- Se gli avvolgimenti primari o secondari del trasformatore trifase non sono collegati a stella, le
formule di calcolo degli elementi del triangolo caratteristico secondario (impedenza secondaria equivalente in serie con ciascuna fase dell’avvolgimento secondario) risultano modificate e si stabiliscono in base alle tensioni e alle correnti d’ogni fase, primaria e secondaria, del trasformatore. È possibile però sostituire un trasformatore trifase, qualunque sia il tipo di collegamento degli avvolgimenti primari e secondari, con un trasformatore trifase stella - stella equivalente, avente cioè lo stesso rapporto a vuoto, le stesse tensioni (concatenate) primarie e secondarie, le stesse correnti nominali assorbite ed erogate dal trasformatore.-
La caduta di tensione percentuale di un trasformatore trifase sotto carico si calcola con la formula approssimata stabilita dalle norme CEI che, riferendosi al collegamento stella - stella equivalente, vale:
( )carico
''
ecarico
''
e senXcosRIVVV ϕϕ∆ +=−= 2202 3
ove la 3 tiene conto che la caduta V∆ è valutata in relazione alle tensioni concatenate di un collegamento equivalente stella - stella.-
In base ai vari tipi di collegamenti interni, i trasformatori trifasi trovano impiego in situazioni
diverse d’impianto: I trasformatori trifasi stella-stella sono impiegati negli impianti di distribuzione a tre fili con
carichi praticamente equilibrati, poiché consentono di realizzare un’economia nella spesa
d’isolamento, essendo ogni fase del trasformatore costruita per una tensione 3 volte minore di quella di linea. I trasformatori trifasi stella-stella sono invece da escludersi negli impianti di distribuzione a quattro fili, poiché con carichi fortemente squilibrati si avrebbero forti dissimmetrie nelle terne delle tensioni stellate.-
I trasformatori trifasi triangolo-triangolo sono largamente impiegati negli impianti di distribuzione a tre fili, potendo funzionare anche con carichi fortemente squilibrati. Alimentando col secondario del trasformatore un carico monofase, derivato fra i fili 1 e 2, la corrente di carico 2I , e la
corrente primaria di reazione 'I 1 interessano solo la fase caricata, non si creano quindi dissimmetrie di flussi e di tensioni nel trasformatore.-
I trasformatori trifasi triangolo-stella trovano impiego come trasformatori elevatori negli impianti di trasmissione ad alta e ad altissima tensione, potendosi realizzare un’economia di spesa d’isolamento nella costruzione della stella secondaria (lato A.T.). I trasformatori trifasi triangolo-stella trovano anche impiego negli impianti di distribuzione a quattro fili, potendo funzionare senza

46
inconvenienti anche con carichi squilibrati. Se il trasformatore trifase triangolo-stella con neutro alimenta un carico monofase, derivato fra il filo di fase 1 e il neutro, la corrente di carico 2I e la
corrente primaria di reazione 'I 1 interessano solo la fase caricata e non si creano dissimmetrie di flussi e di tensioni nel trasformatore.-
I trasformatori trifasi stella-triangolo trovano impiego come trasformatori abbassatori negli impianti di trasmissione ad alta e ad altissima tensione, potendosi realizzare un’economia nella co-struzione della stella (lato A.T.). I trasformatori trifasi stella-triangolo trovano impiego anche negli impianti di distribuzione a tre fili, poiché hanno il vantaggio di potere funzionare anche con carichi squilibrati senza creare dissimmetrie di flussi e di tensioni nel trasformatore.-
3.2.5. Perdite e rendimento dei trasformatori trifasi:
Tutte le considerazioni fatte per i trasformatori monofasi, relativamente alle perdite e al rendimento, valgono parimenti anche per il trifase, tenendo presente, nella valutazione dell’entità delle perdite, delle dimensioni e forma diversa del nucleo magnetico e del numero delle fasi.-
La potenza erogata sul carico è espressa dalla relazione:
ccosIVP ϕ222 3=
La potenza assorbita dalla rete d’alimentazione vale:
1111 3 ϕcosIVP = La differenza tra la potenza assorbita e quella erogata corrisponde alle perdite interne nel
rame degli avvolgimenti e nel ferro: FeCu PPPP +=− 21
Le perdite nel rame possono essere valute, facendo riferimento al circuito equivalente secondario, con la relazione:
223 IRP ''
euC ⋅=
Le perdite nel ferro FeP , come nel trasformatore monofase, possono ritenersi
convenzionalmente costanti al variare del carico se rimangono invariate la tensione e la frequenza d’alimentazione.-
Per rendimento del trasformatore s’intende il rapporto tra la potenza erogata e quella assorbita:
Feec
c
PIRIV
IV
P
P
+⋅+==
22
''22
22
1
2
3cos3
cos3
ϕ
ϕη
Come già visto per il rendimento del
trasformatore monofase, anche nel trifase, essendo le perdite costituite da due termini, uno costante e l’altro variabile con il quadrato della corrente erogata, risulterà che il rendimento presenta un massimo per quella corrente di carico *I 2 per la quale le perdite nel rame uguagliano le perdite nel ferro; il rendimento dipenderà anche dal
ccosϕ del carico e sarà massimo in
presenza di carichi ohmici.-

47
I trasformatori sono macchine statiche ad alto rendimento, pur tuttavia sono sede di perdite di energia elettrica (perdite Joule e nel ferro) che si trasformano in calore; tale calore determina un riscaldamento della macchina che aumenterà la sua temperatura fino a raggiungere un valore di regime tale da permetterle di smaltire nell’ambiente esterno tutto il calore prodotto al suo interno.-
Secondo il sistema di raffreddamento impiegato, i trasformatori si dividono in due grandi categorie:
a) trasformatori in aria, b) trasformatori in olio. I trasformatori in aria si costruiscono solo per potenze modeste (fino a 200 KVA) e per
tensioni fino a 5 KV. Il raffreddamento dei trasformatori in aria può essere naturale, se la dispersione del calore avviene per irraggiamento e convezione naturale, o artificiale, se i trasformatori sono disposti in un ambiente nel quale si effettua un forte ricambio dell’aria mediante ventilatori.-
I trasformatori di media e grande potenza per medie e alte tensioni sono tutti del tipo in olio. I trasformatori del tipo in olio sono contenuti in un cassone metallico pieno d’olio minerale, che ha una duplice funzione: isolante e termica. Un buon olio isolante per trasformatori ha una rigidità dielettrica di 100 ÷ 120 kV/cm, alquanto superiore a quella dell’aria secca (21 kV/cm). Nei trasformatori in olio il calore prodotto è trasmesso all’olio circostante, che, circolando nell’interno del cassone con moto naturale, lo cede alle pareti del cassone e quindi all’aria circostante: il calore prodotto dal trasformatore viene così trasmesso all’ambiente, anziché dalla superficie effettiva del trasformatore, dalla superficie esterna, molto più ampia, del cassone. Per aumentare la superficie disperdente del calore si adoperano anche cassoni a superficie ondulata; per potenze maggiori, fino a 10.000 KVA, si adoperano cassoni a radiatori
nei quali si ha la circolazione a termosifone dell’olio.- I trasformatori di grandissima potenza usano un sistema di raffreddamento ancora più efficace
facendo circolare l’olio, mediante una pompa, in un cassone refrigerante esterno; il sistema refrigerante e costituito da un fascio di tubi sottili, lambiti dall’olio, entro i quali passa l’acqua di raffreddamento.-
Nel corso della trattazione dei trasformatori è stata tralasciata l’analisi dei fenomeni relativi alla forma delle correnti magnetizzanti e gli effetti delle conseguenti terze armoniche, l’inserzione in parallelo e gli autotrasformatori; tali argomenti potranno essere oggetto d’approfondimento in altre sedi.-
3.3.0. Dati di targa dei trasformatori
In base alle norme C.E.I. relative ai trasformatori di potenza, fascicolo n. 253, ogni
trasformatore deve portare una targa contente i seguenti dati essenziali: 1 Gruppo - Dati generali:
1) contrassegno CEI, se la macchina è costruita secondo le prescrizioni delle presenti norme; 2) nome del costruttore;
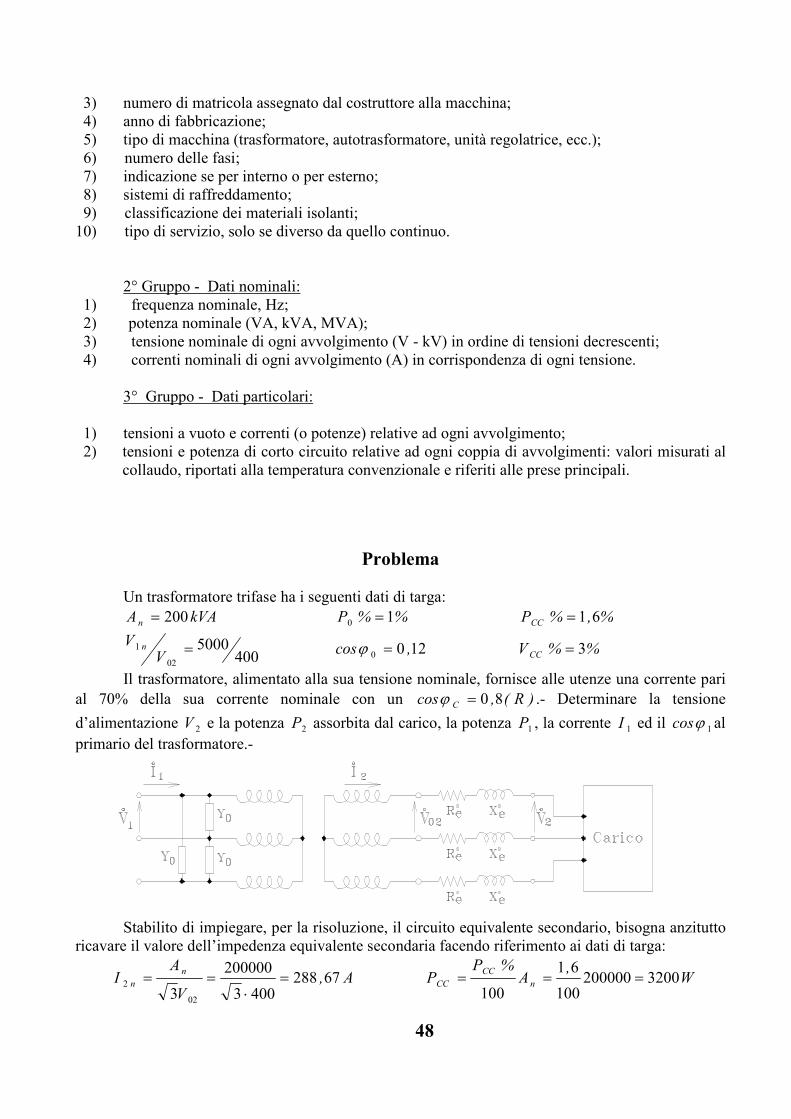
48
3) numero di matricola assegnato dal costruttore alla macchina; 4) anno di fabbricazione; 5) tipo di macchina (trasformatore, autotrasformatore, unità regolatrice, ecc.); 6) numero delle fasi; 7) indicazione se per interno o per esterno; 8) sistemi di raffreddamento; 9) classificazione dei materiali isolanti; 10) tipo di servizio, solo se diverso da quello continuo.
2° Gruppo - Dati nominali:
1) frequenza nominale, Hz; 2) potenza nominale (VA, kVA, MVA); 3) tensione nominale di ogni avvolgimento (V - kV) in ordine di tensioni decrescenti; 4) correnti nominali di ogni avvolgimento (A) in corrispondenza di ogni tensione.
3° Gruppo - Dati particolari:
1) tensioni a vuoto e correnti (o potenze) relative ad ogni avvolgimento; 2) tensioni e potenza di corto circuito relative ad ogni coppia di avvolgimenti: valori misurati al
collaudo, riportati alla temperatura convenzionale e riferiti alle prese principali.
Problema Un trasformatore trifase ha i seguenti dati di targa:
kVAA n 200= %%P 10 = %,%PCC 61=
4005000
02
1 =V
V n 1200 ,cos =ϕ %%V CC 3=
Il trasformatore, alimentato alla sua tensione nominale, fornisce alle utenze una corrente pari al 70% della sua corrente nominale con un )R(,cos C 80=ϕ .- Determinare la tensione
d’alimentazione 2V e la potenza 2P assorbita dal carico, la potenza 1P , la corrente 1I ed il 1ϕcos al primario del trasformatore.-
Stabilito di impiegare, per la risoluzione, il circuito equivalente secondario, bisogna anzitutto
ricavare il valore dell’impedenza equivalente secondaria facendo riferimento ai dati di targa:
A,V
AI
n
n 672884003
200000
3 02
2 =⋅
== W,
A%P
P n
CC
CC 3200200000100
61
100===

49
Ω01280672883
3200
3 222
,,I
PR
n
CC''
e =⋅
=⋅
= 53303
61,
,
%V
%Pcos
CC
CC
CC ===ϕ
Ωϕ 02030586101280 ,.,tgRX CC
''
e
''
e =⋅==
La corrente che il trasformatore eroga sul carico ed il relativo fattore di potenza valgono:
A,,II n 2026728870100
7022 =⋅== 80 ,cos C =ϕ
La caduta di tensione industriale sull’impedenza equivalente secondaria vale:
( ) ( ) V,,,,,senXcosRIVV C
''
eC
''
en 8576002030800128020233 2202 =⋅+⋅⋅=+=− ϕϕ
Essendo il trasformatore alimentato, per ipotesi, alla sua tensione nominale di 5000V, la 02V avrà il
valore di targa pari a 400V, per cui risulterà: V,,VVV 15392857400022 =−=−= ∆
La potenza assorbita dal carico risulta:
W.,,cosIVP C 800109802021539233 222 =⋅⋅⋅== ϕ
Le perdite nel rame del trasformatore saranno: W,IRP ''
euC 15682020128033 222 =⋅⋅==
Le perdite nel ferro si possono dedurre dalla potenza a vuoto (si trascurano le perdite nel rame primario dovute alla corrente a vuoto):
WA%P
P n 2000200000100
1
100
00 ===
La potenza assorbita dal primario sarà, per il teorema di Boucherot: W.PPPP FeCu 3681132000156810980021 =++=++=
La potenza reattiva totale al primario risulterà invece essere: VAR,,,tgPIXtgPQ ''
eC 101384273820002020203037501098003 200
2221 =⋅+⋅⋅+⋅=++= ϕϕ
8940113368
101384
1
11 ,
P
Qtg ===ϕ ⇒ 74501 ,cos =ϕ
La corrente assorbita ed il rendimento del trasformatore valgono:
A,,cosV
PI 5617
745050003
113368
3 11
11 =
⋅⋅==
ϕ %,
P
P% 896
113368
109800100100
1
2 ===η
Problema
Un trasformatore avente i seguenti dati di targa: kVAA n 200= %,%P 510 = %%PCC 2=
45030000
02
1 =V
V n %%I 100 = %%V CC 3=
alimenta una linea trifase che, al suo arrivo, alimenta a sua volta alla tensione VV a 400= due carichi
trifasi equilibrati che assorbono rispettivamente: kWPA 70= kWPB 50=
( )R,cos A 80=ϕ ( )A,cos B 90=ϕ

50
Sapendo che, in tali condizioni di carico, la linea funziona con un rendimento %%L 94=η ed una
caduta di tensione %%V L 10=∆ , determinare il valore della tensione, corrente e cos f al primario del trasformatore ed il suo rendimento.-
Poiché il trasformatore alimenta al secondario una linea, per semplificare i calcoli è opportuno usare il suo circuito equivalente secondario:
A,V
AI
n
n 62564503
200000
3 02
2 =⋅
== V,V%V
VCC
CC 513450100
3
100022 ===
Ω0304062563
513
3 2
2,
,
,
I
VZ
n
CC''
e =⋅
== 66603
2,
%V
%Pcos
CC
CC
CC ===ϕ
=⋅==
=⋅==
Ωϕ
Ωϕ
02260745003040
02020666003040
,,,senZX
,,,cosZR
CC
''
e
''
e
CC
''
e
''
e
Il carico equivalente totale si determina mediante il teorema di Boucherot: WPA 70000= VAR,tgPQ AAA 5250075070000 =⋅== ϕ
WPB 50000= ( ) VAR,tgPQ BBB 24200484050000 −=−⋅== ϕ
WPPP BAT 1200005000070000 =+=+= VARQQQ BAT 283002420052500 =−=+=
2350120000
28300,
P
Qtg
T
T
T ===ϕ ⇒ 9730 ,cos T =ϕ
A,cosV
PII
Ta
T
T 17897304003
120000
32 =
⋅⋅===
ϕ
Determinazione dei parametri di linea:
Ωη
η08060
940
9401
1783
1200001
3 22,
,
,
I
PR
L
L
T
T
L =−
⋅⋅
=−
⋅= VV
%VV aL 40400
100
10
100===
∆∆
( )TLTLTL senXcosRIV ϕϕ∆ +⋅= 3 ⇒ ( )230973008060178340 ,X,, L+⋅⋅=
Ω2230 ,X L =
Per calcolare il valore della 02V conviene immaginare il circuito equivalente secondario del
trasformatore e la linea posti in serie, come un’unica impedenza attraversata dalla corrente totale TI :
100800806002020 ,,,RRR L
''
eT =+=+= Ω24560223002260 ,,,XXX L
''
eT =+=+=
( )( ) V
XRIVV TTTTTa
6,44723,02456,0973,01008,01783400
sencos302
=⋅+⋅⋅+=
+⋅+= ϕϕ

51
V.,mVV 84429450
300006447021 ==⋅=
Per determinare la corrente totale primaria ed il suo cosf è opportuno usare il teorema di Boucherot; la potenza attiva e reattiva assorbite dal trasformatore a vuoto, si ricavano dai suoi dati di targa:
W,
A%P
P n 3000200000100
51
100
00 === 150
10
51
0
00 ,
,
%I
%Pcos ===ϕ ⇒ 5960 ,tgϕ
VAR,tgPQ 197705963000000 =⋅=⋅= ϕ
W.,IRPPP TTT 58113217810080330001200003 2201 =⋅⋅++=++=
VARIXQQQ TTT 414.711782456,0319770283003 2201 =⋅⋅++=++=
540132581
71414
1
11 ,
P
Qtg ===ϕ ⇒ 8801 ,cos =ϕ
A,,cosV
PI
i
9152880298443
132581
3 1
11 =
⋅⋅==
ϕ
%3,96132581
1780806,03120000100
3100100
2
1
2
1
2. =
⋅⋅+=
⋅+==
P
IRP
P
P TLT
Trasfη

52
Capitolo IV
MOTORI ASINCRONI
(Galileo Ferraris: 1885)
4.1.0. Motori asincroni trifasi con rotore avvolto
4.1.1. Generalità e struttura costruttiva:
I motori asincroni trifasi sono delle macchine elettriche funzionanti in corrente alternata che,
alimentate da una rete trifase, assorbono da questa una potenza elettrica e forniscono in uscita al loro asse una potenza meccanica.-
Dal punto di vista costruttivo sono formati da uno statore, costituito da un pacco di lamierini magnetici aventi forma di corona circolare, sulla cui periferia interna sono state tranciate delle cave ove viene disposto un avvolgimento trifase con funzione d’induttore; all’interno dello statore e inserito un rotore, anch’esso a struttura lamellare, sulla cui periferia esterna risultano praticate delle cave ove ha sede l’avvolgimento secondario indotto.-
I pacchi lamellari statorici e rotorici sono realizzati mediante lamierini magnetici al silicio isolati tra loro, in modo da ridurre le perdite per isteresi e correnti parassite, in quanto costituiscono il circuito magnetico della macchina e come tale interessato da un flusso variabile.-
I pacchi statorici sono contenuti entro una carcassa di ghisa o d’acciaio saldato con pura funzione di sostegno.-
I pacchi rotorici risultano fissati, direttamente o attraverso delle ghiere, sull’asse di rotazione che, sostenuto da due scudi, a loro volta fissati sulla carcassa statorica, mantiene centrato il rotore in modo che risulti separato dallo statore da uno strato sottile ed uniforme d’aria chiamato traferro.-
Nelle cave statoriche ha sede un avvolgimento trifase induttore che risulta collegato alla linea di alimentazione ed è avvolto con un opportuno numero di copie polari p, numero dal quale dipenderà la velocità di rotazione del motore stesso.-
Nelle cave rotoriche ha sede un avvolgimento indotto che, in generale, potrà avere un numero di conduttori per fase diverso da quello statorico, ma dovrà obbligatoriamente essere avvolto con il medesimo numero di copie polari di quello statorico; tale avvolgimento fa capo ad un collettore a tre anelli che, mediante spazzole di elettrografite, permette di collegare in serie all’avvolgimento stesso, secondo le necessità, generalmente all’avviamento, un reostato trifase. Il numero di cave rotoriche deve essere diverso dal numero di cave statoriche, per evitare l’imputamento del motore allo spunto; il rapporto fra il numero di cave rotoriche e statoriche non deve essere un numero intero per evitare vibrazioni del motore a causa delle pulsazioni del flusso magnetico.-

53
4.1.2. Principio di funzionamento:
L’avvolgimento trifase statorico, avente p coppie polari, è collegato alla rete d’alimentazione
funzionante a tensione V1 e frequenza f1, ed assorbe da questa una terna equilibrata di correnti che genera a sua volta tre campi magnetici alternativi, aventi tutte le caratteristiche richieste dal teorema di Galileo Ferraris; tali campi avranno come risultante un unico campo rotante (CRS) d’ampiezza costante (FFFF1) e rotante nel circuito magnetico della macchina con velocità costante pari a:
p
fn
11
60= nel senso dei ritardi delle
fasi d’alimentazione.- Gli effetti di tale campo rotante, ad ampiezza e velocità costanti, sono simili a quelli prodotti dal flusso generato da una ruota polare eccitata in corrente continua (vedi generatore sincrono) e cioè:
a. Nell’avvolgimento trifase statorico indurrà una terna di forze contro elettromotrici: 111111111 22 fNkfNkkE fa ΦΦ ==
tali che risulti: 011 =+oo
EV se si trascurano le cadute nell’avvolgimento storico dovute alla corrente assorbita.-
b. Nell’avvolgimento trifase rotorico, che inizialmente s’immagina aperto, indurrà una terna di forze elettromotrici:
212221222 22 fNkfNkkE fa ΦΦ ==
essendo f2 la frequenza delle FEM indotte, legata al valore della velocità relativa tra campo induttore e avvolgimento indotto rotorico dalla relazione:
60
2
pnf
relativa= Inizialmente, a rotore
fermo, nrelativa coincide con n1 per cui risulta f2 = f1.- Se l’avvolgimento rotorico rimane aperto, in esso non circola alcuna corrente per cui, in
assenza d’interazioni tra flussi induttori e correnti indotte, non si svilupperà alcuna coppia ed il rotore rimane fermo: n2 = 0 .-
Se invece, come normalmente avviene, gli avvolgimenti rotorici sono chiusi in corto circuito, la terna delle E2 farà circolare una terna equilibrata di correnti che genereranno a loro volta un campo magnetico rotante rotorico (CRR) che reagirà con il campo statorico dando origine ad una coppia motrice tendente a portare il rotore in rotazione ad una velocità n2.-
Analizzando il verso di rotazione del campo induttore e delle correnti indotte (applicando prima la regola della mano destra e poi quella della mano sinistra) si può notare che la coppia motrice che si genera tenderà a portare il rotore in rotazione nello stesso senso in cui ruota il campo induttore ad una velocità n2 leggermente inferiore a quella (n1) del campo induttore.- In tal modo il campo induttore FFFF1
ruoterà, rispetto ai conduttori rotorici d’indotto, ad una velocità relativa pari a:
21 nnn relativa −=
per cui le FEM indotte nel rotore avranno frequenza:
( )
60
212
pnnf
−=

54
Si definisce con il termine di scorrimento la velocità relativa, riferita al numero di giri del campo induttore:
1
21
n
nns
−= ed in percentuale:
1
21100n
nn%s
−=
In base alle relazioni viste, risulterà:
( )
11121
2606060
fspn
spnspnn
f ⋅=⋅=⋅
=−
=
Lo scorrimento, nei motori asincroni, può variare teoricamente tra 1 (quando il rotore è ancora fermo all’avviamento per cui n2 è uguale a zero) è 0 quando il rotore riuscisse a ruotare a velocità di sincronismo cioè n2 = n1 ; nelle condizioni normali di funzionamento esso varia tra i valori di 0,005 a vuoto fino a 0,05 a pieno carico.-
Dalla relazione che definisce lo scorrimento, si ricava:
( ) ( )sp
fsnn −=−= 1
601 1
12
Un motore asincrono con avvolgimento a tre copie polari (p=3) ed alimentato con una tensione a frequenza 50Hz, ruoterà ad una velocità di 995 giri/min. a vuoto ed una velocità di 950 giri/min. a pieno carico, mentre la frequenza delle FEM e delle correnti rotoriche varierà tra 0,25 e 2,5 Hz da vuoto a pieno carico.-
Il valore della FEM secondaria può essere espresso in funzione dello scorrimento: ( ) 121212222 22 ΦΦ NfskNfksE == Indicando con E2(1) il valore della FEM secondaria con rotore bloccato, cioè all’avviamento
ove s = 1:
( ) 12122 21 ΦNfkE = si ricava la fondamentale relazione:
( ) ( )122 EssE ⋅=
4.1.3. Circuito equivalente del motore asincrono:
Ciascuna fase del motore asincrono può essere rappresentata mediante un circuito equivalente
simile a quello visto per i trasformatori: infatti ogni singola fase, sia statorica che rotorica, avrà anzitutto una sua resistenza ohmica R1 ed R2 oltre ad un flusso disperso che, generato da ciascun avvolgimento, si concatena con l’avvolgimento che lo produce ma non con l’altro. L’effetto di tale flusso disperso (che in realtà e quello di indurre nell’avvolgimento con cui si concatenano una forza controelettromotrice) può essere rappresentato, come già visto nel trasformatore, come una caduta di tensione su una reattanza equivalente X1 ed X2 rispettivamente:
11111 2 LfLX πω == 2122222 22 LfsLfLX ππω === Come si può notare, mentre il valore della X1 rimane costante, il valore della X2 è legato allo scorrimento: ( ) 212 2 LfssX π⋅= e, indicando con X2(1) il valore della reattanza secondaria a scorrimento uno: ( ) 212 21 LfX π= ⇒ ( ) ( )122 XssX ⋅=
Ciascuna fase del primario statorico presenterà così un’impedenza:
111 jXRZ +=

55
Ciascuna fase rotorica o secondaria offrirà invece un’impedenza variabile con lo scorrimento:
( ) ( ) ( )122222 XsjRsXjRsZ ⋅+=+=
L’avvolgimento primario statorico, alimentato alla tensione di linea °
1V , assorbirà, già nel
funzionamento a vuoto, con scorrimento idealmente uguale a zero, una corrente magnetizzante °
µI in
quadratura ritardo rispetto alla tensione d’alimentazione e necessaria per creare il campo magnetico
rotante statorico ed una corrente di perdita °
aI in fase con la tensione d’alimentazione legata alle
perdite nel ferro statorico e alle perdite meccaniche.- Entrambe queste correnti sono indipendenti dalle condizioni di carico del motore e la loro risultante:
ooo
µIII ao +=
è la corrente assorbita a vuoto dal motore.- L’equazione vettoriale che rappresenta il funzionamento di ciascuna fase primaria del motore,
funzionante a vuoto ( s = 0) risulta essere:
oooo
oo IXjIREV 1111 +=+
Il relativo circuito equivalente governato, nel suo funzionamento, dall’equazione sopra scritta è quello di figura:
Applicando all’asse una coppia frenante, passando cioè
da vuoto a carico, il numero di giri del rotore diminuirà: 12 nn <
lo scorrimento risulterà maggiore di zero e quindi si genererà, nel circuito rotorico chiuso in corto su se stesso, una FEM secondaria e la relativa corrente:
( ) ( )122
oo
EssE ⋅= ⇒ ( ) ( )( )
( )( )1
1
22
2
2
2
2XsjR
Es
sZ
sEsI
⋅+
⋅==
oo
o
In realtà sia la FEM che la corrente secondaria varieranno in funzione dello scorrimento, cioè del carico meccanico applicato all’asse, oltre ad avere una frequenza 12 fsf ⋅= variabile con lo scorrimento stesso.-
Al fine di costruire un circuito equivalente secondario, si consideri un trasformatore avente rapporto di trasformazione:
( ) 22
11
122
111
2
1
2
2
1 Nk
Nk
fNk
fNk
E
Em
CRS
CRS ===Φ
Φ
ai morsetti del secondario, il campo rotante statorico indurrà una FEM pari ad ( )12E .- Considerando l’espressione della corrente secondaria ricavata in precedenza e dividendo
numeratore e denominatore per s si ottiene:
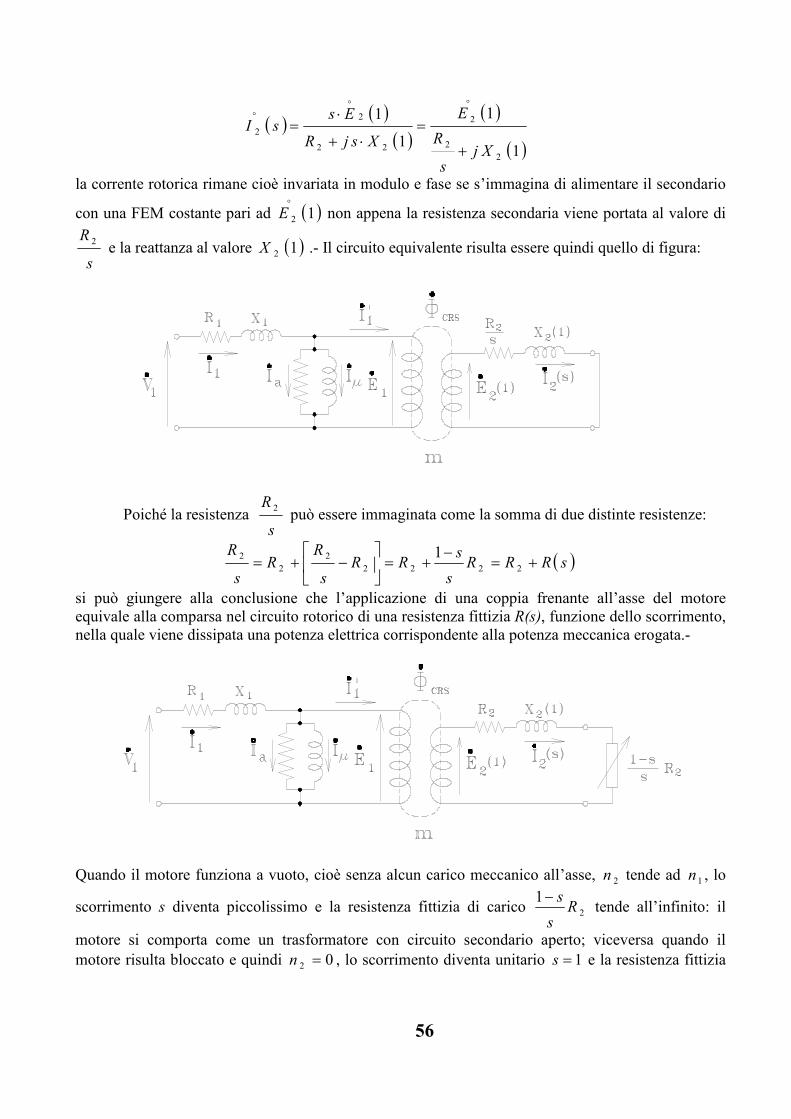
56
( ) ( )( )
( )
( )1
1
1
1
22
2
22
2
2
Xjs
R
E
XsjR
EssI
+
=⋅+
⋅=
oo
o
la corrente rotorica rimane cioè invariata in modulo e fase se s’immagina di alimentare il secondario
con una FEM costante pari ad ( )12
o
E non appena la resistenza secondaria viene portata al valore di
s
R 2 e la reattanza al valore ( )12X .- Il circuito equivalente risulta essere quindi quello di figura:
Poiché la resistenza s
R 2 può essere immaginata come la somma di due distinte resistenze:
( )sRRRs
sRR
s
RR
s
R+=
−+=
−+= 2222
22
2 1
si può giungere alla conclusione che l’applicazione di una coppia frenante all’asse del motore equivale alla comparsa nel circuito rotorico di una resistenza fittizia R(s), funzione dello scorrimento, nella quale viene dissipata una potenza elettrica corrispondente alla potenza meccanica erogata.- Quando il motore funziona a vuoto, cioè senza alcun carico meccanico all’asse, 2n tende ad 1n , lo
scorrimento s diventa piccolissimo e la resistenza fittizia di carico 2
1R
s
s− tende all’infinito: il
motore si comporta come un trasformatore con circuito secondario aperto; viceversa quando il motore risulta bloccato e quindi 02 =n , lo scorrimento diventa unitario 1=s e la resistenza fittizia

57
di carico si annulla 01
2 =−
Rs
s : il motore a rotore bloccato funziona come un trasformatore in
cortocircuito.-
La corrente secondaria ( )sIo
2 , circolando negli avvolgimenti rotorici, genera il campo di reazione rotorica CRR che, tendendo ad alterare l’equilibrio magnetico del motore, richiamerà, dalla linea d’alimentazione, sul primario statorico
una corrente di reazione ( )sIo
'1 tale da
compensare, con le sue amperspire, gli effetti della corrente secondaria:
( ) ( ) 0222'111 =+ sINksINk
oo
( ) ( )sINk
NksI
oo
2
11
22'1 −=
La corrente di reazione primaria si sommerà alla corrente a vuoto a costituire la corrente totale primaria:
( ) ( )sIIsI o
ooo'11 +=
4.1.4. Diagramma circolare del motore asincrono:
Il diagramma circolare di un motore asincrono (chiamato anche diagramma di Heyland)
permette di analizzare come varia la corrente primaria assorbita dal motore, alimentato a tensione e frequenza costanti, al variare dello scorrimento, cioè della coppia frenate applicata all’asse.-
Il diagramma è ricavato nelle seguenti ipotesi semplificative: a. Si trascurano le cadute di tensione al primario, perciò a
tensione d’alimentazione costante, corrisponde una 1E costante
e quindi parimenti costante rimarrà il flusso CRSΦ :
011 =+oo
EV b. Le perdite meccaniche sono conglobate alle perdite nel ferro
statorico perciò nel funzionamento a vuoto non c’è bisogno d’alcuna coppia motrice con la conseguenza che, sempre a vuoto, lo scorrimento sarà esattamente uguale a zero; la
corrente assorbita a vuoto oIo
corrisponderà alla somma delle sue due componenti, attiva per compensare le perdite a vuoto e magnetizzante per generare il flusso del campo magnetico rotante statorico:
µ
ooo
III ao += In base alle ipotesi fatte, il diagramma polare del motore funzionante a vuoto risulta essere
quello indicato in figura.-

58
Quando all’asse viene applicata una coppia frenante, il numero di giri del rotore diminuisce e lo scorrimento assume un valore positivo, ancorchè piccolo, con la conseguenza di fare nascere una F.E.M. ed una corrente secondaria rotorica che assume il valore visto nel paragrafo 10.1.3.:
( ) ( )( )
( )
( )1
1
1
1
22
2
22
2
2
Xjs
R
E
XsjR
EssI
+
=⋅+
⋅=
oo
o
Tale corrente è sfasata in ritardo rispetto alla 2
o
E , che la fa circolare, dell’angolo 2ϕ definito da:
( )( )
2
22
1
R
Xsstg
⋅=ϕ
La corrente rotorica raggiungerà il suo valore massimo teorico quando lo scorrimento tenderà all’infinito (cioè quando il rotore dovesse ruotare, in via del tutto ipotetica, in senso contrario a
velocità infinita +∞=−
−∞→1
21
2
limn
nn
n ):
( )( )
( )[ ] 22
2
2
22
1
1
Xs
R
EsI
+
= ⇒ ( )( )( )11
2
22
X
EI =∞
Tale corrente secondaria massima ( )∞2I risulterà sfasata rispetto alla ( )12E dell’angolo:
( )2
2
πϕ =∞
La corrente secondaria può essere anche espressa dalla relazione:
( )( )( )
( )
( )[ ]( ) ( ) ( ) ( )
−⋅∞=⋅∞=
+
⋅= sIsI
Xs
R
X
X
EsI 2222
22
2
2
2
2
22
2cossen
1
1
1
1ϕ
πϕ
La relazione sopra scritta dimostra che il triangolo OAB è rettangolo con ( )sI 2 cateto e
( )∞2I ipotenusa; ne consegue che, al variare dello scorrimento, l’estremo della corrente secondaria
(punto A) si muove lungo una semicirconferenza, avente come diametro il vettore ( )∞2I .-

59
Se il motore asincrono funziona col flusso magnetico costante, quando nel rotore circola la corrente ( )sI 2 , il motore assorbe dalla linea, oltre alla corrente a vuoto oI , la corrente di reazione
'1I legata alla corrente ( )sI 2 da un rapporto costante; la corrente rotorica e la corrente primaria di
reazione sono legate dalla relazione:
( ) ( ) ( )sIm
sINk
NksI
ooo
22
11
22'1
1−=−=
dove m è il rapporto di trasformazione degli avvolgimenti statorici e rotorici del motore. Di
conseguenza l’estremo della ( )sIo
'1 si muoverà, al variare dello scorrimento, lungo una
semicirconferenza di diametro ( )m
I ∞2 , simmetrica rispetto a quella vista per la ( )sI 2 e che ha
origine sull’estremo della oI .-
La determinazione del diagramma circolare di un motore asincrono trifase si fa in pratica con
due prove di laboratorio: la prova a vuoto e la prova di corto circuito. Le due prove consentono di
determinare due punti del diagramma circolare: l’estremo del vettore oIo
(corrente a vuoto) e l’e-
stremo del vettore o
CCI 1 (corrente di corto circuito).-
La prova a vuoto di un motore asincrono trifase si effettua impiegando l’inserzione Aron, secondo lo schema di figura: si alimenta il motore, funzionante a vuoto, con tensione e frequenza nominale e si misura la corrente oI
e la potenza oP assorbite,
determinando quindi il relativo fattore di potenza oϕcos :
nV1 oI BAo WWP += on
o
o
IV
P
⋅⋅=
13cosϕ
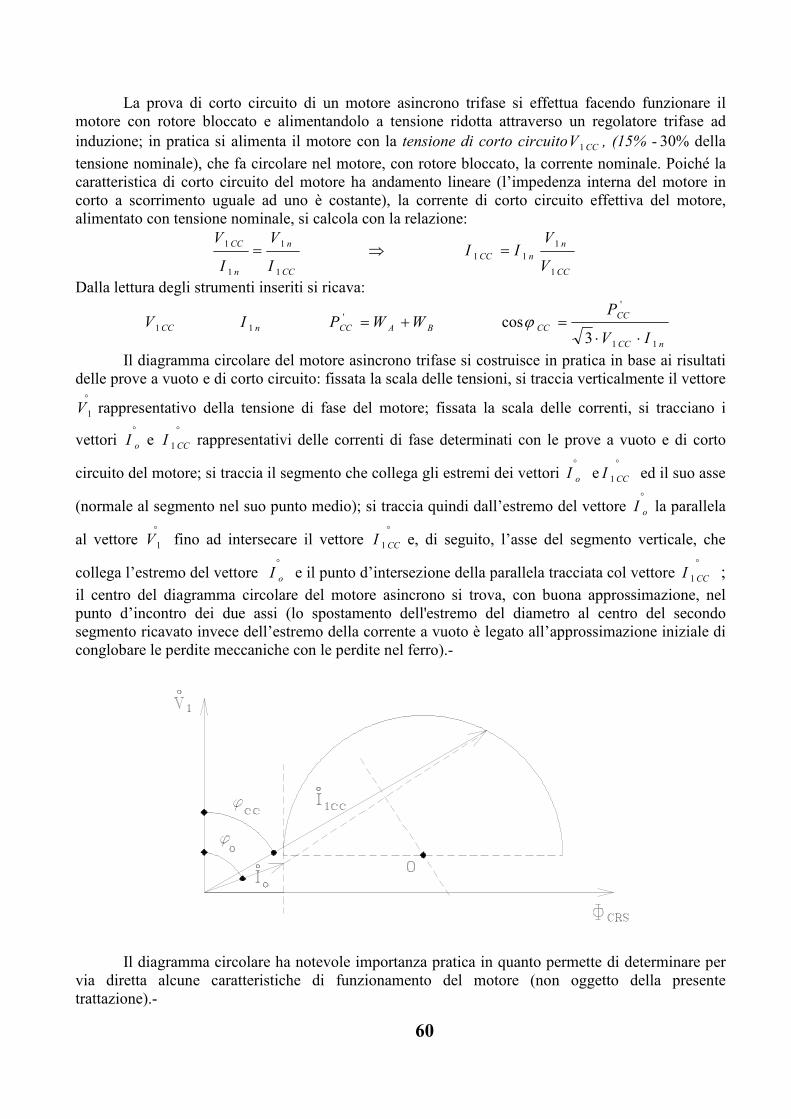
60
La prova di corto circuito di un motore asincrono trifase si effettua facendo funzionare il motore con rotore bloccato e alimentandolo a tensione ridotta attraverso un regolatore trifase ad induzione; in pratica si alimenta il motore con la tensione di corto circuito CCV1 , (15% - 30% della
tensione nominale), che fa circolare nel motore, con rotore bloccato, la corrente nominale. Poiché la caratteristica di corto circuito del motore ha andamento lineare (l’impedenza interna del motore in corto a scorrimento uguale ad uno è costante), la corrente di corto circuito effettiva del motore, alimentato con tensione nominale, si calcola con la relazione:
CC
n
n
CC
I
V
I
V
1
1
1
1 = ⇒ CC
n
nCC
V
VII
1
111 =
Dalla lettura degli strumenti inseriti si ricava:
CCV1 nI 1 BACC WWP +=' nCC
CC
CC
IV
P
11
'
3cos
⋅⋅=ϕ
Il diagramma circolare del motore asincrono trifase si costruisce in pratica in base ai risultati delle prove a vuoto e di corto circuito: fissata la scala delle tensioni, si traccia verticalmente il vettore o
1V rappresentativo della tensione di fase del motore; fissata la scala delle correnti, si tracciano i
vettori o
oI e o
CCI 1 rappresentativi delle correnti di fase determinati con le prove a vuoto e di corto
circuito del motore; si traccia il segmento che collega gli estremi dei vettori o
oI eo
CCI 1 ed il suo asse
(normale al segmento nel suo punto medio); si traccia quindi dall’estremo del vettore o
oI la parallela
al vettore o
1V fino ad intersecare il vettore o
CCI 1 e, di seguito, l’asse del segmento verticale, che
collega l’estremo del vettore o
oI e il punto d’intersezione della parallela tracciata col vettore o
CCI 1 ; il centro del diagramma circolare del motore asincrono si trova, con buona approssimazione, nel punto d’incontro dei due assi (lo spostamento dell'estremo del diametro al centro del secondo segmento ricavato invece dell’estremo della corrente a vuoto è legato all’approssimazione iniziale di conglobare le perdite meccaniche con le perdite nel ferro).-
Il diagramma circolare ha notevole importanza pratica in quanto permette di determinare per
via diretta alcune caratteristiche di funzionamento del motore (non oggetto della presente trattazione).-

61
4.1.5. Potenze, perdite e rendimento dei motori asincroni:
Le potenze e le perdite presenti in un motore asincrono possono essere analizzate facendo
riferimento al diagramma di flusso indicato in figura: Quando all’asse del motore è applicata una coppia frenante, lo statore assorbe dalla rete una
potenza reale pari a: 111 cos3 ϕfasefasea IVP =
La corrente statorica, dovendo percorrere gli avvolgimenti primari, determinerà in questi una perdita per effetto Joule: 2
113 faseICu IRP ⋅=°
Il campo rotante statorico, generato dalla corrente magnetizzante assorbita, concatenandosi in modo variabile con il circuito magnetico statorico, determinerà in questo delle perdite nel ferro per isteresi e corrente parassite °IFeP ; tali perdite, essendo legate alla frequenza e al quadrato dell’induzione (il
motore funziona a flusso costante), rimarranno costanti da vuoto a carico.- La differenza tra potenza assorbita e le perdite viste corrisponderà alla potenza elettrica trasformata
TP , quindi a quella potenza che diventa potenza meccanica attraverso l’interazione dei campi rotanti statorico e rotorico: °° −−= IFeICuaT PPPP
Affinché tale interazione avvenga, e necessario essere in presenza di uno scorrimento s maggiore di zero, tale da far circolare negli avvolgimenti di rotore un’opportuna corrente che dia origine al campo rotante rotorico CRR; la corrente rotorica determinerà a sua volta delle perdite per effetto Joule nel rame secondario: 2
223 IRP IICu ⋅=°
La potenza meccanica generata MGP risulterà essere la differenza tra potenza elettrica trasformata e le
perdite nel rame secondario: °−= IICutMG PPP
È interessante osservare, ai fini di successive applicazioni, che la potenza trasmessa e la potenza meccanica generata possono essere espresse anche in funzione della coppia generata e delle velocità angolari: La potenza trasmessa a livello di CRS (rotante a velocità 1Ω ) corrisponderà ad una coppia
generata gT :
1Ω⋅= gT TP
La potenza meccanica generata nel rotore (rotante a velocità 2Ω ), corrispondente alla medesima coppia generata, risulterà: 2Ω⋅= gMG TP
Di conseguenza le perdite nel rame secondario potranno essere espresse anche mediante la relazione:

62
( ) ( )21212160
2nnTTTTPPP ggggMGTIICu −=−=−=−=°
πΩΩΩΩ
TggIICu PsTsnsTP ⋅=⋅=⋅=° 1160
2Ω
π ⇒
T
IICu
P
Ps
°=
Alla potenza meccanica generata andranno sottratte le perdite meccaniche per attriti e ventilazione
meccP che, dipendendo dalla velocità di rotazione, quasi invariata da vuoto a carico, potranno ritenersi
praticamente costanti nel passaggio da vuoto a carico.- Le perdite nel ferro di rotore sono del tutto trascurabili in conseguenza della ridotta frequenza con cui il rotore viene tagliato dalle linee di flusso del campo rotante statorico ( f2 = s f1 ).-
In definitiva, la potenza meccanica fornita dal motore resaP sarà uguale a quella assorbita
aP diminuita dalla somma di tutte le perdite interne:
( )meccIICuIFeICuaresa PPPPPP +++−= °°°
Si definisce come rendimento del motore il rapporto tra la potenza meccanica resa all’asse e quella elettrica assorbita dalla linea di alimentazione:
a
resa
P
P=η
Il rendimento varia al variare del carico e raggiunge normalmente il suo massimo intorno al 75% del carico nominale con valori che variano tra il 70 ÷ 95 % dai piccoli ai grandi motori.-
4.1.6. Caratteristica meccanica del motore asincrono:
La caratteristica meccanica di un motore asincrono è quella che fornisce l’andamento della
coppia all’asse in funzione del numero di giri o, equivalentemente, dello scorrimento; la curva cercata si può ricavare analiticamente dall’espressione:
TIICu PsP ⋅=°
vista nel paragrafo 4.1.5., tenendo presente che la coppia utile all’asse differisce da quella generata di una quantità minima e costante, nel campo di normale funzionamento della macchina, dovuta alle perdite meccaniche per attriti e ventilazione.-
( ) ( )
( )113
602
603
2
60122
222
22
22
1
222
111 XsR
Es
s
R
f
p
s
sIR
ns
PPT
IICuT
g
+⋅====
°
ππΩΩ
( ) ( )12
3
12
322
222
2
1
21
222
222
2
2
1
1 XsR
Rs
f
V
m
p
XsR
sR
m
E
f
pT g
+≅
+
=
ππ
La relazione ricavata permette di tracciare la curva della gT in funzione dello scorrimento:
È di fondamentale importanza rilevare che la curva ammette un massimo (basta discutere la derivata prima della coppia in funzione dello scorrimento); tale massimo si ottiene per un valore di scorrimento pari a:
( )12
2*
X
Rs =
Il valore della coppia massima risulta essere:
( )12
1
2
3
21
21
2 Xf
V
m
pT MAX
π=

63
All’avviamento, con scorrimento uguale ad uno, la coppia di spunto vale:
( )12
322
22
2
1
21
2 XR
R
f
V
m
pT Avv
+=
π
Poiché nei motori con rotore avvolto normalmente risulta ( )11,0 22 XR ⋅≅ si otterrà:
1,0* ≅s ; ( )( ) ( ) MaxAvv T
Xf
V
m
p
X
X
f
V
m
pT
5
1
5
1
12
1
2
3
101,1
11,0
2
3
21
21
222
2
1
21
2≅⋅≅
⋅
⋅≅
ππ
La curva della coppia generata in funzione dello scorrimento risulta quindi essere quella rappresentata in figura. L’analisi dei valori ricavati e dell’andamento della curva permettono di concludere che:
a. La coppia generata è proporzionale al quadrato della tensione d’alimentazione, quindi anche lievi variazioni di tensione producono notevoli variazioni di coppia;
b. La coppia d’avviamento del motore è appena un quinto della sua coppia massima, quindi, nel caso che l’avviamento non sia eseguito a vuoto, si prospettano dei problemi che dovranno
essere risolti con opportuni accorgimenti, come si vedrà nel paragrafo relativo all’avviamento dei motori;
c. Il motore funziona stabilmente soltanto nel tratto di caratteristica compresa tra lo scorrimento 0 ÷ s* in quanto soltanto in questo tratto ad ogni aumento di coppia frenante e quindi di scorrimento corrisponde un aumento di coppia generata;
d. Per evitare che il motore, durante il suo funzionamento normale, scivoli nel tratto di caratteristica instabile che si trova di là dalla coppia massima, la coppia nominale verrà fissata ad un valore di circa il 50% della coppia massima.-
La curva della coppia generata può essere anche tracciata in funzione del numero di giri del rotore, tenendo presente la relazione: ( ) 12 1 nsn −= ricavata dall’espressione che definisce lo scorrimento, per cui si hanno le corrispondenze:
=
=
12
0
nn
s
=
=
0
1
2n
s
( )
≅−=
≅
11*2 9,0*1
1,0*
nnsn
s
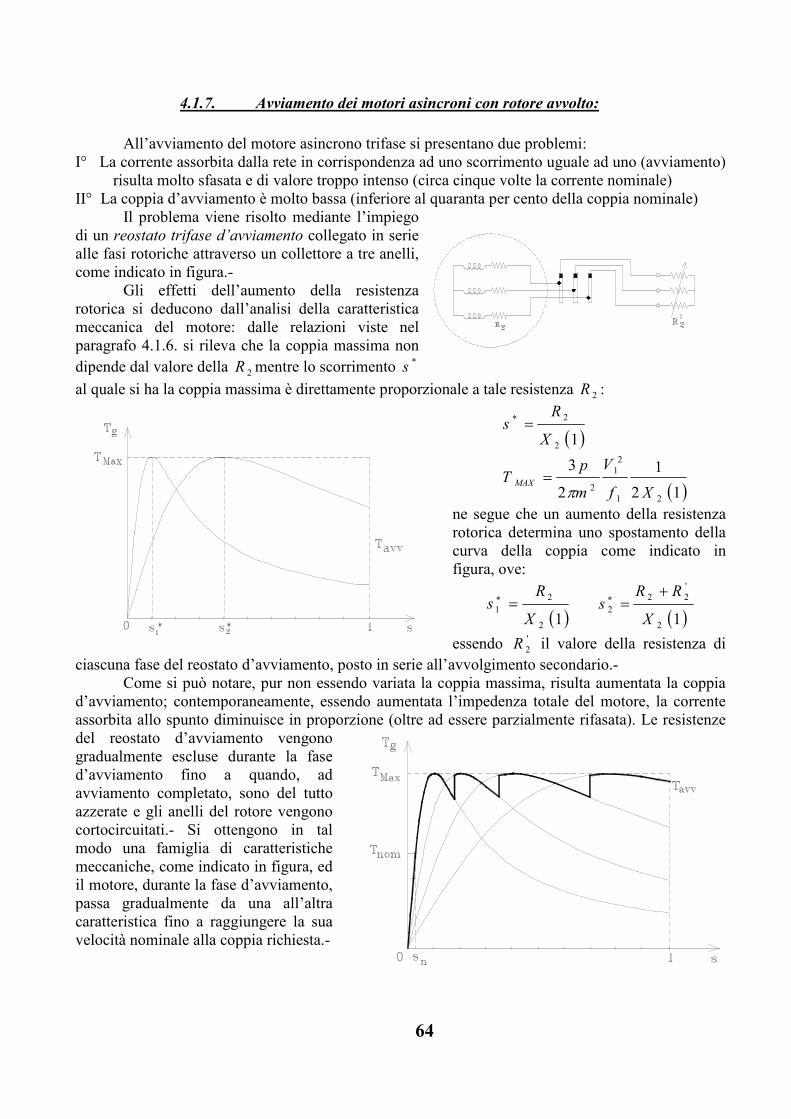
64
4.1.7. Avviamento dei motori asincroni con rotore avvolto:
All’avviamento del motore asincrono trifase si presentano due problemi:
I° La corrente assorbita dalla rete in corrispondenza ad uno scorrimento uguale ad uno (avviamento) risulta molto sfasata e di valore troppo intenso (circa cinque volte la corrente nominale)
II° La coppia d’avviamento è molto bassa (inferiore al quaranta per cento della coppia nominale) Il problema viene risolto mediante l’impiego
di un reostato trifase d’avviamento collegato in serie alle fasi rotoriche attraverso un collettore a tre anelli, come indicato in figura.-
Gli effetti dell’aumento della resistenza rotorica si deducono dall’analisi della caratteristica meccanica del motore: dalle relazioni viste nel paragrafo 4.1.6. si rileva che la coppia massima non dipende dal valore della 2R mentre lo scorrimento *s
al quale si ha la coppia massima è direttamente proporzionale a tale resistenza 2R :
( )12
2*
X
Rs =
( )12
1
2
3
21
21
2 Xf
V
m
pT MAX
π=
ne segue che un aumento della resistenza rotorica determina uno spostamento della curva della coppia come indicato in figura, ove:
( )12
21
X
Rs =∗
( )12
'22
2X
RRs
+=∗
essendo '2R il valore della resistenza di
ciascuna fase del reostato d’avviamento, posto in serie all’avvolgimento secondario.- Come si può notare, pur non essendo variata la coppia massima, risulta aumentata la coppia
d’avviamento; contemporaneamente, essendo aumentata l’impedenza totale del motore, la corrente assorbita allo spunto diminuisce in proporzione (oltre ad essere parzialmente rifasata). Le resistenze del reostato d’avviamento vengono gradualmente escluse durante la fase d’avviamento fino a quando, ad avviamento completato, sono del tutto azzerate e gli anelli del rotore vengono cortocircuitati.- Si ottengono in tal modo una famiglia di caratteristiche meccaniche, come indicato in figura, ed il motore, durante la fase d’avviamento, passa gradualmente da una all’altra caratteristica fino a raggiungere la sua velocità nominale alla coppia richiesta.-

65
4.2.0. Motori asincroni trifasi con rotore a gabbia
4.2.1. Motori asincroni a gabbia semplice:
I motori asincroni con rotore a gabbia semplice hanno l’avvolgimento secondario ridotto ad un solo conduttore per cava quindi il circuito rotorico risulta costituito da tante sbarre conduttrici di rame, o alluminio, infilate nelle cave rotoriche; le testate delle sbarre, che sporgono alle due estremità del pacco lamellare rotorico, sono collegate tra loro da due grossi anelli di rame.-
Le sbarre, collegate sulle fronti dai due anelli formano tanti circuiti chiusi di piccolissima resistenza ohmica, nei quali possono circolare liberamente le correnti che vi sono indotte dal campo rotante statorico.-
Questo particolarissimo tipo d’avvolgimento non ha un numero di poli proprio in quanto le correnti indotte, circolando liberamente nelle sbarre, si chiudono attraverso i due anelli delle teste in modo da generare altrettanti poli quanti sono quelli del campo rotante induttore statorico.-
I motori asincroni con rotore a gabbia presentano, rispetto a quelli con rotore avvolto, il duplice vantaggio di una maggior semplicità costruttiva (e quindi un minor costo) e di potersi avviare senza l’impiego del reostato d’avviamento con le relative manovre; hanno però l’inconveniente d’assorbire all’avviamento una corrente piuttosto intensa, che non sempre è tollerata dall’impianto ed avere una coppia di spunto piuttosto bassa.-
I motori a gabbia semplice, alimentati direttamente alla loro tensione nominale, sviluppano all’avviamento una coppia minore della coppia nominale, assorbendo una corrente di spunto pari a 5 ÷ 6 volte quella nominale del motore; l’impiego di tali motori con alimentazione diretta è consentito dalle Società distributrici solo per piccole potenze (2 ÷ 3 KW). I motori a gabbia semplice si possono impiegare per potenze superiori (fino a 20 KW), se si avviano con tensione ridotta (avviamento a stella-triangolo): si riduce in tal modo sia la corrente sia la coppia d’avviamento quindi l’avviamento di tali motori deve essere fatto a vuoto o a carico ridotto.-
4.2.2. Motori asincroni a doppia gabbia:
Il rotore del motore asincrono a doppia gabbia è provvisto di due gabbie disposte una dentro
l’altra; la più esterna, costituita da sbarre aventi sezione ridotta, è posta in cave superficiali mentre l’interna ha i conduttori di sezione maggiore che risultano molto immersi nel pacco rotorico; i lamierini rotorici assumono quindi la forma indicata in figura.-
Viste le sezioni delle sbarre e il loro posizionamento, i lati attivi della gabbia esterna presenteranno, rispetto agli altri: 1. Una resistenza maggiore, essendo di sezione minore;

66
2. Un’induttanza di dispersione minore; infatti i conduttori sono meno profondamente immersi nel ferro di quanto lo siano quelli della gabbia interna, e i corrispondenti flussi dispersi in cava risultano minori (sono più vicini all’avvolgimento statorico).-
I lati attivi sono collegati tra loro da anelli frontali, per cui l’avvolgimento rotorico della macchina assume la forma caratteristica di due gabbie di scoiattolo, una interna all’altra.-
La coppia motrice, generata all’albero, è la somma di quelle dovute a ciascuna delle due gabbie. Sarà utile analizzare quale sia il contributo d’ognuna di esse in base al loro andamento in funzione dello scorrimento, andamento legato al valore della loro resistenza e reattanza.-
La gabbia interna ha un’elevata reattanza di dispersione ed una bassa resistenza e viene dimensionata in modo che lo scorrimento *
is al
quale fornisce la sua coppia massima risulti:
( )
1,012
2* ≅=i
i
i
X
Rs
per cui tale gabbia fornirà una coppia di spunto abbastanza ridotta.-
La gabbia esterna, di contro, ha una elevata resistenza ed una bassa reattanza di dispersione e viene dimensionata in modo che lo scorrimento *
es al quale fornisce la sua
coppia massima risulti:
( )
112
2* ≅=e
e
e
X
Rs
per cui tale gabbia fornirà una coppia di spunto corrispondente circa alla sua coppia massima.- La coppia risultante all’asse, pari alla somma delle due coppie, è quella indicata in figura: il
motore presenterà una coppia d’avviamento che può risultare doppia della sua coppia nominale.-
Poiché dalle osservazioni fatte risulta che la gabbia esterna è quella che interviene fonda-mentalmente all’avviamento, mentre l’interna è quella che fa sentire la sua influenza nel funzionamento a regime con scorrimenti molto bassi, si deduce che in fase d’avviamento la gabbia esterna ad alta resistenza riesce a limitare l’assorbimento di corrente dalla linea d’alimentazione a valori di due o tre volte la corrente di pieno carico; per limitare ulteriormente tale corrente, nei grossi motori, si ricorre ad un avviamento a tensione ridotta.-
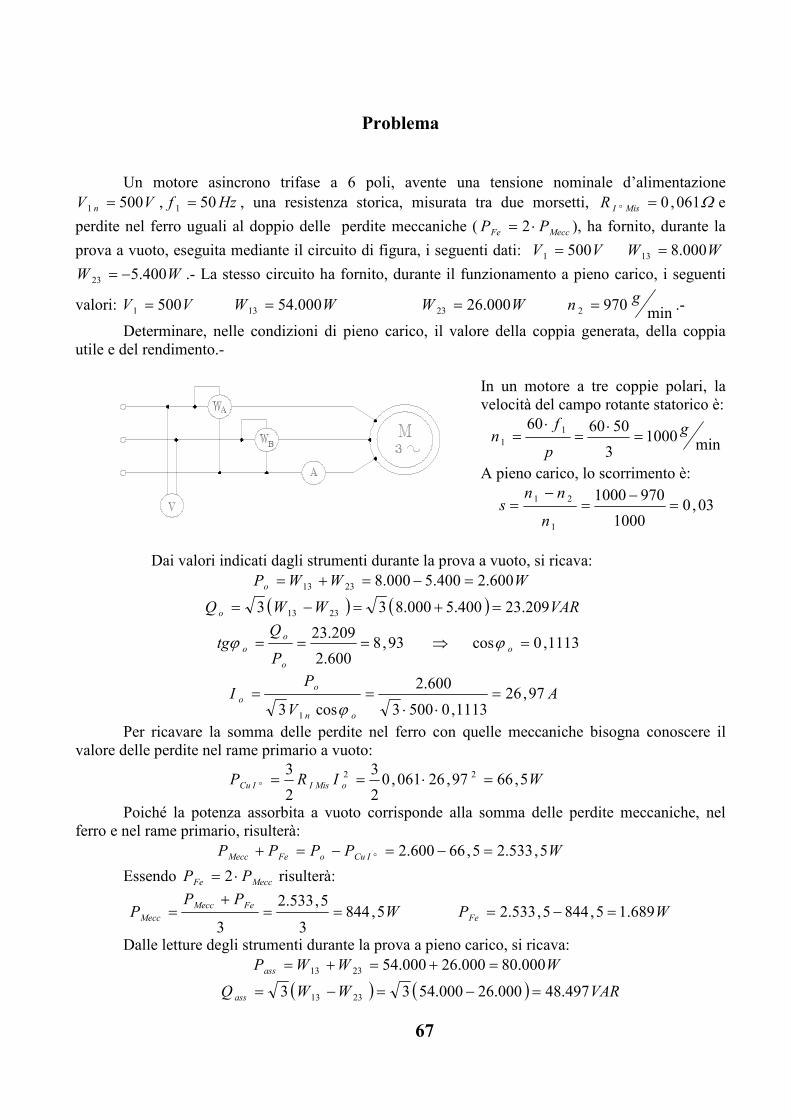
67
Problema
Un motore asincrono trifase a 6 poli, avente una tensione nominale d’alimentazione
VV n 5001 = , Hzf 501 = , una resistenza storica, misurata tra due morsetti, Ω061,0=° MisIR e
perdite nel ferro uguali al doppio delle perdite meccaniche ( MeccFe PP ⋅= 2 ), ha fornito, durante la
prova a vuoto, eseguita mediante il circuito di figura, i seguenti dati: VV 5001 = WW 000.813 =
WW 400.523 −= .- La stesso circuito ha fornito, durante il funzionamento a pieno carico, i seguenti
valori: VV 5001 = WW 000.5413 = WW 000.2623 = min9702g
n = .-
Determinare, nelle condizioni di pieno carico, il valore della coppia generata, della coppia utile e del rendimento.-
In un motore a tre coppie polari, la velocità del campo rotante statorico è:
min10003
506060 11
g
p
fn =
⋅=
⋅=
A pieno carico, lo scorrimento è:
03,01000
9701000
1
21 =−
=−
=n
nns
Dai valori indicati dagli strumenti durante la prova a vuoto, si ricava: WWWPo 600.2400.5000.82313 =−=+=
( ) ( ) VARWWQ o 209.23400.5000.833 2313 =+=−=
93,8600.2
209.23===
o
o
o
P
Qtgϕ ⇒ 1113,0cos =oϕ
AV
PI
on
o
o 97,261113,05003
600.2
cos3 1
=⋅⋅
==ϕ
Per ricavare la somma delle perdite nel ferro con quelle meccaniche bisogna conoscere il valore delle perdite nel rame primario a vuoto:
WIRP oMisIICu 5,6697,26061,02
3
2
3 22 =⋅==°
Poiché la potenza assorbita a vuoto corrisponde alla somma delle perdite meccaniche, nel ferro e nel rame primario, risulterà:
WPPPP ICuoFeMecc 5,533.25,66600.2 =−=−=+ °
Essendo MeccFe PP ⋅= 2 risulterà:
WPP
PFeMecc
Mecc 5,8443
5,533.2
3==
+= WPFe 689.15,8445,533.2 =−=
Dalle letture degli strumenti durante la prova a pieno carico, si ricava: WWWPass 000.80000.26000.542313 =+=+=
( ) ( ) VARWWQ ass 497.48000.26000.5433 2313 =−=−=

68
6062,0000.80
497.481 ===
ass
ass
P
Qtgϕ ⇒ 8551,0cos 1 =ϕ
AV
PI
ass 1088551,05003
000.80
cos3 11
1 =⋅⋅
==ϕ
Le perdite nel rame primario, con la corrente di pieno carico, sono:
AIRP MisICuI 068.1108061,02
3
2
3 221 =⋅⋅==
Analizzando il flusso della potenza all’interno del motore, si deduce che la potenza trasmessa vale:
WPPPP ICuFeassT 243.77068.1689.1000.80 =−−=−−=
Le perdite nel rame del rotore secondario risultano: WPsP TIIJ 317.2243.7703,0 =⋅=⋅=°
La potenza meccanica generata è: WPPP IIJTgenMecc 926.74317.2243.77.. =−=−= °
In definitiva, la potenza utile all’asse è: WPPP meccgenMeccutile 081.745,844926.74.. =−=−=
Il rendimento del motore funzionante a pieno carico è:
%6,92000.80
081.74100100% ===
ass
utile
P
Pη
La coppia meccanica generata risulta:
mNn
P
n
PT
genMeccT
g ⋅=⋅
⋅=
⋅=
⋅= 6,737
10002
60243.77
2
60
2
60
2
..
1 πππ
La coppia utile all’asse a pieno carico, risulta:
mNn
PT
utile
u ⋅=⋅
⋅=
⋅= 3,729
9702
60081.74
2
60
2 ππ
La differenza tra la coppia generata e quella utile corrisponde alla coppia che il motore impiega per vincere gli attriti meccanici: mNTTT ugo ⋅=−=−= 3,83,7296,737




![1° Suppl. Ordinario al n. 6 - 8 febbraio 2010Bollettino Ufficiale della Regione Lombardia Y –3– 1º Suppl. Ordinario al n.6-8febbraio 2010 [BUR2008021] [1.1.0] Legge regionale](https://static.fdocumenti.com/doc/165x107/5f2bf86d7781d279b8005014/1-suppl-ordinario-al-n-6-8-febbraio-bollettino-uficiale-della-regione-lombardia.jpg)













