UNIVERSITÀ DEGLI STUDI DI MILANO Facoltà di Scienze ...webuser.unicas.it/pagliarone/ilc/ILC...
226
UNIVERSITÀ DEGLI STUDI DI MILANO Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Fisica SVILUPPO DI UN SISTEMA ATTIVO DI CONTROLLO DELLE VIBRAZIONI INDOTTE IN CAVITÀ SUPERCONDUTTIVE AD ALTO CAMPO PER ACCELERATORI DI PARTICELLE Relatore: Prof. Carlo PAGANI I Correlatore: Dott. Angelo BOSOTTI Tesi di Laurea di: Rocco Paparella Matr. Nr. 581037 Codice PACS:43.40.V Anno Accademico 2002-2003
Transcript of UNIVERSITÀ DEGLI STUDI DI MILANO Facoltà di Scienze ...webuser.unicas.it/pagliarone/ilc/ILC...

UNIVERSITÀ DEGLI STUDI DI MILANO
Facoltà di Scienze Matematiche, Fisiche e Naturali
Corso di Laurea in Fisica
SVILUPPO DI UN SISTEMA ATTIVO DI CONTROLLO DELLE
VIBRAZIONI INDOTTE IN CAVITÀ SUPERCONDUTTIVE AD ALTO
CAMPO PER ACCELERATORI DI PARTICELLE
Relatore: Prof. Carlo PAGANI
I Correlatore: Dott. Angelo BOSOTTI
Tesi di Laurea di:
Rocco Paparella
Matr. Nr. 581037
Codice PACS:43.40.V
Anno Accademico 2002-2003

UNIVERSITÀ DEGLI STUDI DI MILANO
Facoltà di Scienze Matematiche, Fisiche e Naturali
Corso di Laurea in Fisica
DEVELOPMENT OF AN ACTIVE SYSTEM
FOR THE CONTROL OF INDUCED VIBRATIONS IN
SUPERCONDUCTING HIGH GRADIENT CAVITIES
FOR PARTICLES ACCELERATORS
Advisor: Prof. Carlo PAGANI
2nd Advisor: Dott. Angelo BOSOTTI
Tesi di Laurea di:
Rocco Paparella
Matr. Nr. 581037
Codice PACS:43.40.V
INDICE
1
INDICE
INDICE .................................................................................................................................... 1
INTRODUZIONE ................................................................................................................... 3
1 CENNI SU TESLA/TTF ................................................................................................. 8
2 CAVITA’ RISONANTI SUPERCONDUTTIVE ........................................................ 16
2.1. CAVITA’ RISONANTI ......................................................................................... 16 2.1.1. Introduzione ....................................................................................................... 16 2.1.2. Cavità Pill-Box................................................................................................... 17 2.1.3. I modi del campo in cavità.................................................................................. 19 2.1.4. Cavità λ/4........................................................................................................... 22 2.1.5. Cavità a multicelle.............................................................................................. 25 2.1.6. Cavità superconduttive ....................................................................................... 29 2.1.7. Limiti delle cavità superconduttive ..................................................................... 31 2.1.8. Parametri di merito delle cavità superconduttive................................................. 33 2.1.9. Modello RF della cavità ..................................................................................... 34
2.2. LORENTZ FORCE DETUNING E MICROFONICI ............................................. 40 2.2.1. Introduzione ....................................................................................................... 40 2.2.2. Lorentz force detuning........................................................................................ 43 2.2.3. Microfonici......................................................................................................... 49
3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE......................................................................... 51
3.1. CENNI DI TEORIA DEL CONTROLLO .............................................................. 51 3.1.1. Feedback ............................................................................................................ 54
3.1.1.1. Un esempio: Phase Locked Loop ............................................................... 57 3.1.2. Feedforward ....................................................................................................... 60
3.2. TECNICHE ATTUALI .......................................................................................... 63 3.2.1. Stiffening............................................................................................................ 63 3.2.2. Damping passivo ................................................................................................ 64 3.2.3. Controllo del segnale RF .................................................................................... 65 3.2.4. Slow frequency tuner.......................................................................................... 71 3.2.5. Fast frequency tuner ........................................................................................... 73
3.3. COMPENSAZIONE DEL LORENTZ FORCE DETUNING CON IL FAST FREQUENCY TUNER............................................................................................... 83
4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF .......................... 89
4.1. INTRODUZIONE .................................................................................................. 89 4.2. ATTUATORI PIEZOELETTRICI.......................................................................... 91
4.2.1. L’effetto piezoelettrico ....................................................................................... 92 4.2.2. Generalità ed equazioni caratteristiche degli attuatori piezoelettrici .................... 94
4.3. CALIBRAZIONE DI UN SENSORE DI FORZA OPERATIVO IN CONDIZIONI CRIOGENICHE ....................................................................................................... 104
4.3.1. Celle di carico .................................................................................................. 104 4.3.1.1. Specifiche richieste .................................................................................. 104 4.3.1.2. Caratteristiche dei modelli provati............................................................ 106
4.3.2. Apparato di misura ........................................................................................... 108 4.3.2.1. Aspetti generali ........................................................................................ 108 4.3.2.2. Aspetti criogenici e meccanici.................................................................. 111
INDICE
2
4.3.2.3. Elettronica................................................................................................ 115 4.3.3. Risultatati e sviluppi futuri ............................................................................... 116
4.3.3.1. Misure...................................................................................................... 116 4.3.3.2. Commenti e sviluppi futuri....................................................................... 122
4.4. SVILUPPI FUTURI ............................................................................................. 124
5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF...................................................................................................................... 127
5.1. INTRODUZIONE ................................................................................................ 127 5.2. DSP E DIGITAL FILTERING ............................................................................. 128
5.2.1. Digital Signal Processor, FPGA........................................................................ 129 5.2.2. Filtri FIR, formalismo State-Space ................................................................... 132
5.3. PRIME VALUTAZIONI E MISURE PRESSO DESY/TTF................................. 135 5.3.1. Funzioni di trasferimento del sistema ............................................................... 135 5.3.2. Misure sulla cavità 9-celle in chechia ............................................................... 136
5.4. PRIMI TEST DI CONTROLLO FEEDBACK SU CAVITÀ A QUARTO D’ONDA AI LNL ..................................................................................................................... 142
5.4.1. Apparato sperimentale ...................................................................................... 142 5.4.2. Misure .............................................................................................................. 144
5.5. SVILUPPO E REALIZZAZIONE DI UN SISTEMA DI CONTROLLO AD ANELLO RETROAZIONATO PER LA COMPENSAZIONE DEI MICROFONICI.................................................................................................... 148
5.5.1. Progetto della facility di test presso il laboratorio LASA .................................. 148 5.5.2. Sviluppo dell’hardware per il digital filtering ................................................... 150 5.5.3. Componenti meccaniche ed elettroniche di supporto ........................................ 155 5.5.4. Misure e simulazioni ........................................................................................ 159
5.5.4.1. Funzioni di trasferimento ......................................................................... 159 5.5.4.2. Simulazioni .............................................................................................. 163 5.5.4.3. Misure ad anello chiuso ........................................................................... 168
5.6. EVOLUZIONE DELL’ELETTRONICA DI CONTROLLO ED INTEGRAZIONE IN TTF ................................................................................................................. 174
6 CONCLUSIONI .......................................................................................................... 175
APPENDICE A: REALIZZAZIONE DI UN FILTRO DIGITALE TRAMITE DSP ..... 177
A.1. CREAZIONE DI UN MODELLO MATLAB DAI DATI .................................... 178 A.2. SCELTA DEL DESIGN DEL FILTRO................................................................ 179 A.3. CALCOLO DEI COEFFICIENTI STATE-SPACE .............................................. 181 A.4. CREAZIONE DEL FILE SORGENTE ................................................................ 183 A.5. CONFIGURAZIONE DELL’HARDWARE......................................................... 185 A.6. PROGRAMMAZIONE DSP ................................................................................ 186
APPENDICE B: DATA SHEETS....................................................................................... 187
BIBLIOGRAFIA ................................................................................................................. 215
RINGRAZIAMENTI .......................................................................................................... 219

ABSTRACT
i
ABSTRACT
This thesis work has been developed in the framework of the international
collaboration for the TESLA project, a TeV-Collider for +− ee / that employs
superconductive accelerating cavities. INFN Milano is partner of the collaboration,
with the LASA Lab. group. In order to develop the required technology, the TESLA
collaboration operates a test facility at DESY (TTF) which will be utilised as a second
generation test facility for an electron LINAC.
Operating the cavities to 15 MV/m, a Free Electrons Laser (or FEL), integrated in the
TTF linac, has already been tested successfully and today TTF cavities can operate up
to 35 MV/m.
The main goals of the thesis work are the study, the development and the realization
of a control system employing piezoelectric actuators for the compensation of the
detuning of superconductive cavities at high accelerating field.
The main contribution to the detuning of an accelerating cavity is static. Quasi-static
system’s mechanical drifts and the tolerance in the production of the components
involve in fact an intrinsic variability in the cavities resonance frequency. An
appropriate system equipped with a stepping motor, the slow-tuner, is then integrated
in the accelerating module in order to drive back, acting on the longitudinal extension,
the cavity to the nominal frequency (1.3 GHz for TESLA).
When the cavity is set in the operating conditions, also a dynamic detuning, that the
slow-tuner cannot compensate, arises and modulates its resonance frequency. This
detuning has mainly two contributors: the Lorentz force and the exogenous

ABSTRACT
ii
mechanical vibrations, called “microphonics”. The Lorentz force depends from the
square of the amplitude of the accelerating field and is time-varying because of the
TTF/TESLA operating pulsed mode, needed in order to lower the cryogenic load.
These forces couple themselves to the cavity mechanical vibrational modes,
producing the time-varying deformations of its walls, responsible for the detuning.
Microphonic vibrations are instead transferred to the cavity from its own support and
from the cryogenic liquid; they are linked to external elements like pumps or
refuelling lines. The reduced thickness of TESLA cavities walls (2.5 millimetres) and
their extremely high coupled quality factor ( 6105.2 ⋅≅lQ , that corresponds to a 260
Hz bandwidth) makes the whole system extremely sensitive to the detuning from
mechanical solicitations. Amplitude and phase of the accelerating field can be kept
constant in a cavity far from resonance but this happens at the cost of an increase of
RF power that is not acceptable for the TESLA specifications (20000 cavities with 35
MV/m gradient).
Starting from these assumptions, the study of an active detuning compensation system
is then begun. The device is based on a piezoelectric actuator that keeps the cavity
resonance frequency constant, deforming it as needed.
The detuning induced from the Lorentz force is highly repetitive and synchronized to
the RF pulse. For this it has been therefore possible to realize a feed-forward control
system. Such system is today in an advanced development stage and a prototype has
already been tested successfully on TTF/TESLA cavities in the horizontal cryostat
CHECHIA. The integration of this system into a TTF cryomodule is also
forthcoming.
The control of the microphonics detuning introduces greater complications. Its
stochastic nature forces to develop a feedback control system, which demands a high
ABSTRACT
iii
performing feedback loop, so that stability and efficiency are guaranteed. In order to
develop such controller for its future application in TTF/TESLA, whose cavities are
complex objects from both mechanical and electromagnetic point of view, it has been
realized a complete test facility for the control of microphonics on a simpler copper
resonant cavity operating at room temperature. The system reproduces the
longitudinal action and the direct mechanical coupling that characterizes the current
TTF cavities tuning system. The required mechanical components and analogical
electronic equipments has also been designed and realized. The digital filter used in
the feedback loop has then been implemented with a DSP (Digital Signal Processor)
board. This feedback control prototype has been successfully tested realizing the
compensation of low frequency microphonics detuning.
Moreover the choice of the appropriate piezoelectric actuators is essential in sight of
their integration, in the final TTF/TESLA cryomodules, in the tuner for the active
compensation of the detuning. For this purpose the cryogenic operation, long lifetime
and radiation hardness have to be guaranteed. In the frame of this choice, it’s strictly
needed to dispose of a calibrated force sensor, with which the actuator pre-load should
be measured (a key parameter for actuator’s average life time), directly in the working
environment. A part of the thesis work has therefore been devoted to the realization of
the mechanical and electronic components needed in order to calibrate a force sensor
at liquid Helium temperature.
The thesis is organized in 6 chapters. After an introduction on the TESLA project
(chap. 1), in the second chapter the superconductive resonant cavities are introduced,
RF model is examined together with reference equations and elements responsible for
the detuning. In the third chapter the modern detuning control techniques for resonant
cavities are overviewed and analysed, and the two main control techniques are

ABSTRACT
iv
introduced: feedback and feed-forward. A special paragraph is devoted to a deep
discussion about the control of the Lorentz Force Detuning with piezoelectric
actuators.
The development of the system for a force sensor cryogenic calibration, the first tests
carried out on standard load cells and the foreseen developments are argument of the
fourth chapter.
The relevant measures for the development of the microphonics feedback control
system, the DESY test facility and the future developments are described in chapter 5
with the main properties of piezoelectric actuators.
Finally chapter 6 hosts conclusions and perspectives of future development for the
treated subject.

INTRODUZIONE
3
INTRODUZIONE
Questo lavoro di tesi si inserisce nell’attività di ricerca in corso presso il laboratorio
LASA (Laboratorio Acceleratori e Superconduttività Applicata), nel quadro della
collaborazione internazionale per il progetto TESLA, un TeV-Collider per +− ee /
basato su cavità acceleranti superconduttive. TESLA sarà caratterizzato da un’energia
nel centro di massa di 500 GeV ed una luminosità circa 1000 volte maggiore di quella
di LEP a 200 GeV. Sia l’energia che la luminosità sono indispensabili per le nuove
scoperte nel campo della fisica delle alte energie, permettendo precise misure delle
masse, vite medie e delle caratteristiche di interazione delle particelle, in particolare
del bosone di Higgs.
Per lo sviluppo della tecnologia necessaria alla costruzione delle cavità e degli
iniettori, alla qualità del fascio richiesta ed al relativo sistema di controllo, un
impianto di test (Tesla Test Facility o TTF) è stato allestito presso DESY (Amburgo).
TTF è un acceleratore lineare per elettroni che impiega cavità acceleranti
superconduttive che operano alla frequenza di 1.3 GHz. Nel linac TTF è integrato un
SASE FEL (Self Amplified Spontaneus Emission Free Electron Laser) nel profondo
ultravioletto.
La parte principale del lavoro di tesi è dedicata alla progettazione ed alla realizzazione
di un sistema di controllo con attuatori piezoelettrici per la compensazione del
detuning dinamico di cavità superconduttive ad alto campo accelerante.
Il contributo principale al detuning di una cavità accelerante è tuttavia di tipo statico.
Le lente derive meccaniche del sistema e la tolleranza nella produzione dei
componenti portano infatti ad una inevitabile variabilità della frequenza di risonanza
delle cavità, una volta poste in condizioni operative. Come valida soluzione, un

INTRODUZIONE
4
sistema dotato di motore passo-passo, lo slow-tuner, è allora integrato nel modulo
accelerante per riportare la cavità alla frequenza nominale, agendo sull’estensione
longitudinale.
Il lavoro di tesi è allora focalizzato su quei contributi dinamici al detuning, che lo
slow-tuner non può compensare, che si sovrappongono e modulano la frequenza di
risonanza della cavità. A tale detuning contribuiscono principalmente due fattori: la
forza di Lorentz e le vibrazioni meccaniche esogene, dette “microfonici”.
Le forze di Lorentz dipendono quadraticamente dal campo accelerante e sono tempo-
varianti a causa della modalità impulsata, necessaria per minimizzare il carico sul
sistema criogenico, con cui viene operato TTF/TESLA. Esse si accoppiano con i modi
di vibrazione meccanica della cavità producendo delle deformazioni tempo-varianti
delle sue pareti, responsabili del detuning.
Le vibrazioni microfoniche vengono invece trasferite alla cavità dal suo stesso
supporto e dal liquido criogenico e sono riconducibili ad elementi esterni come pompe
o linee di travaso. Lo spessore estremamente sottile delle pareti delle cavità di TESLA
(2.5 mm) e il loro fattore di qualità accoppiato estremamente alto ( 6105.2 ⋅≅lQ cui
corrisponde una larghezza di banda di 260 Hz) rendono il sistema particolarmente
sensibile al detuning da sollecitazioni meccaniche. Si consideri, a titolo d’esempio,
che, se la cavità viene allungata di 1 µm, la sua frequenza di risonanza aumenta
approssimativamente di 315 Hz, uno spostamento superiore alla stessa larghezza di
banda.
Ampiezza e fase del campo accelerante possono essere mantenute costanti in una
cavità fuori dalla risonanza ma ciò avviene al prezzo di un aumento di potenza RF che
non è accettabile per le specifiche di TESLA (20000 cavità a 35 MV/m).

INTRODUZIONE
5
Su tali presupposti è allora iniziato lo studio di un sistema attivo di compensazione del
detuning, basato su un attuatore piezoelettrico che, deformando opportunamente la
cavità, ne mantiene costante la frequenza di risonanza. Non essendo infatti
realizzabile una compensazione punto per punto della deformazione della superficie
della cavità, si è scelto di perturbare la cavità con una singola forza in modo da
generare un detuning opposto a quello indotto dal disturbo (l’alterazione così
introdotta sulla geometria della cavità è comunque trascurabile).
I disturbi indotti dalla forza di Lorentz sono altamente ripetitivi e sincronizzati con
l’impulso RF. Per essi è stato dunque possibile realizzare un sistema di controllo di
tipo feedforward, con il quale un opportuno segnale di comando viene inviato agli
attuatori piezoelettrici, in esatta sincronia con l’impulso RF. Tale sistema si trova oggi
in un’avanzata fase di sviluppo ed un prototipo è già stato testato con successo sulle
cavità di TTF/TESLA nel criostato orizzontale CHECHIA. Inoltre tale prototipo,
essendo integrato nei leveraggi dello slow-tuner già esistente, sarà prossimamente
integrato in un criomodulo TTF con 8 cavità.
Il controllo dei disturbi microfonici presenta invece difficoltà maggiori. La loro natura
stocastica obbliga a ricorrere ad un sistema di controllo di tipo feedback, che richiede
un’accurata regolazione dell’anello di reazione, affinché siano garantite stabilità ed
efficienza ed evitate inversioni della polarità della retroazione (potenzialmente
pericolose per attuatore e cavità). Per sviluppare tale controllore in vista di una sua
applicazione a TTF/TESLA, le cui cavità sono oggetti complessi dal punto di vista
meccanico ed elettromagnetico, è stato realizzato un completo apparato di test per il
controllo dei microfonici su una più semplice cavità in rame a temperatura ambiente.
Il sistema riproduce l’attuazione longitudinale ed in diretto accoppiamento meccanico
che caratterizza l’attuale sistema di tuning delle cavità di TTF. Sono anche state
INTRODUZIONE
6
progettate e realizzate le componenti meccaniche e l’elettronica analogica necessarie.
In particolare, con una scheda basata su un DSP (Digital Signal Processor), è stato
realizzato il filtro digitale utilizzato nell’anello di reazione per garantirne la stabilità
compensando eventuali risonanze. Il prototipo di controllore retroazionato sviluppato
ha consentito la compensazione di disturbi microfonici a bassa frequenza in alcune
misure effettuate presso il LASA.
Una parte del lavoro di tesi è stata poi dedicata, nell’ambito della caratterizzazione
dell’attuatore piezoelettrico per TTF/TESLA, alla realizzazione delle componenti
meccaniche ed elettroniche necessarie alla calibrazione di un sensore di forza alla
temperatura dell’elio liquido. La scelta dell’attuatore piezoelettrico più appropriato è
infatti fondamentale in vista dell’integrazione, nei criomoduli definitivi di
TTF/TESLA, del tuner per la compensazione attiva dei disturbi esposti. Per esso
dovranno essere garantite l’operatività in condizioni criogeniche, lunga durata e
resistenza alle radiazioni. Nell’ottica di tale scelta, è necessario poter disporre di un
sensore di forza calibrato, con cui misurare il precarico dell’attuatore, parametro
determinante per la vita media, direttamente nel punto di lavoro dello stesso.
La tesi è organizzata in 6 capitoli. Dopo un’introduzione sul progetto TESLA (cap. 1),
nel secondo capitolo vengono presentate le cavità risonanti superconduttive, vengono
approfonditi il modello RF, le equazioni di riferimento ed i contributi al detuning
considerati nel lavoro di tesi: il Lorentz force detuning ed i microfonici.
Nel terzo capitolo, dopo aver introdotto i due principali schemi di controllo utilizzati,
feedback e feedforward, vengono esaminate le attuali tecniche di controllo del campo
accelerante per le cavità risonanti ed il progetto di un Fast Frequency Tuner. Un
particolare approfondimento è dedicato allo stato attuale del sistema di
compensazione del Lorentz force detuning.

INTRODUZIONE
7
Lo sviluppo del sistema di calibrazione criogenica per un sensore di forza, le prime
prove effettuate su celle di carico standard, le misure e gli sviluppi previsti sono
argomento del quarto capitolo.
Le misure di rilievo per lo sviluppo del sistema di controllo retroazionato dei
microfonici, gli apparati di test presso DESY, LNL e LASA ed i futuri sviluppi del
controllore realizzato sono descritti nel capitolo 5 insieme alle principali proprietà
degli attuatori piezoelettrici.
Nel capitolo 6 si trovano infine le conclusioni e le prospettive di sviluppo futuro per il
lavoro esposto.
CENNI SU TESLA/TTF Capitolo 1
8
1 CENNI SU TESLA/TTF
Il progetto TESLA (TeV-Energy Superconducting Linear Accelerator) [1], si propone
di realizzare un collider +− ee / con un’energia nel centro di massa di 500 GeV, cinque
volte più alta di quella del primo collisore realizzato a Stanford (SLC) e 2.5 volte più
alta del collisore circolare LEP al CERN [3].
TESLA inoltre si propone di raggiungere una luminosità circa 1000 volte maggiore di
quella di LEP a 200 GeV. Sia l’energia che la luminosità sono indispensabili per
nuove scoperte nel campo della fisica delle alte energie permettendo precise misure
delle masse, vite medie e delle caratteristiche di interazione delle particelle, in
particolare del bosone di Higgs [27]. Queste misure sono necessarie per comprendere
il meccanismo responsabile della generazione delle masse. TESLA inoltre permetterà
l’indagine di teorie che superano il modello standard, come le teorie supersimmetriche
in cui la materia e le forze possono essere unificate.
Per verificare la fattibilità del progetto TESLA, è stato costruito presso il laboratorio
di DESY (Amburgo) il dimostratore TTF (Tesla Test Facility) [2]. TTF è un
acceleratore lineare per elettroni che impiega cavità acceleranti superconduttive che
operano alla frequenza di 1.3 GHz; all’acceleratore è integrato un SASE FEL (Self
Amplified Spontaneus Emission Free Electron Laser) nel profondo ultravioletto
[5][6].
La tecnologia impiegata per la costruzione delle cavità, il tipo di iniettori e la qualità
del fascio di elettroni da loro prodotto nonché il relativo sistema di controllo risultano
essere parametri fondamentali e critici per il corretto funzionamento sia di TTF che di
TESLA (e conseguentemente del SASE FEL).

Capitolo 1 CENNI SU TESLA/TTF
9
Alcuni dettagli del progetto: lungo 30 Km, è costituito principalmente da due sezioni
collineari, lunghe 15 Km. In figura 1.1 e 1.2 viene presentato TESLA ed il suo
schema di principio.
Figura.1.1 - Prospetto di TESLA.

CENNI SU TESLA/TTF Capitolo 1
10
Figura 1.2 - Schema di principio di TESLA. Si notano le due sezioni acceleranti e la zona in cui avviene l’urto elettroni-positroni. Nello schema è anche indicato un FEL a raggi X previsto per
TESLA.
La scelta di un’energia di 500 GeV nel centro di massa e le dimensioni scelte per
l’acceleratore portano alla necessità di costruire un numero di cavità acceleranti
elevato (circa 20000 cavità) e in grado di ottenere un campo accelerante di almeno 25
MV/m.
La necessità di sviluppare le cavità e le tecnologie impiegate per la loro realizzazione
insieme all’iniettore per l’acceleratore ha portato alla costruzione dell’acceleratore
dimostratore TTF. In figura 1.3 è riportata la pianta di TTF.
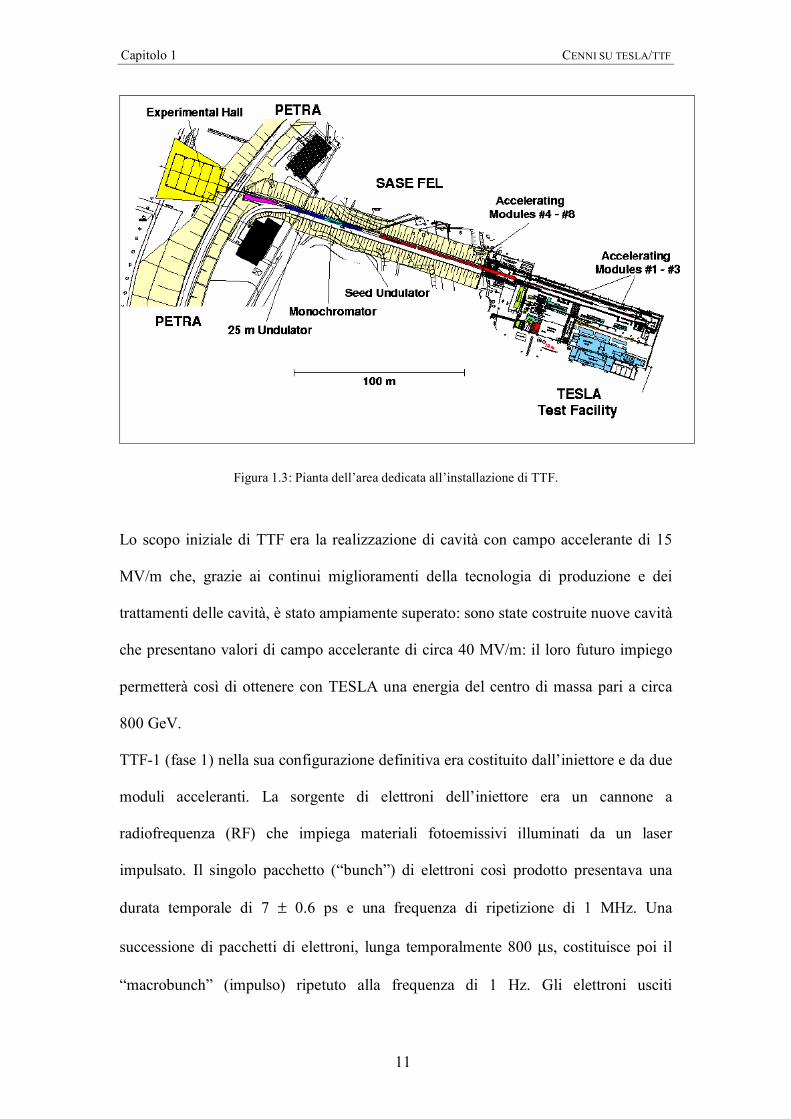
Capitolo 1 CENNI SU TESLA/TTF
11
Figura 1.3: Pianta dell’area dedicata all’installazione di TTF.
Lo scopo iniziale di TTF era la realizzazione di cavità con campo accelerante di 15
MV/m che, grazie ai continui miglioramenti della tecnologia di produzione e dei
trattamenti delle cavità, è stato ampiamente superato: sono state costruite nuove cavità
che presentano valori di campo accelerante di circa 40 MV/m: il loro futuro impiego
permetterà così di ottenere con TESLA una energia del centro di massa pari a circa
800 GeV.
TTF-1 (fase 1) nella sua configurazione definitiva era costituito dall’iniettore e da due
moduli acceleranti. La sorgente di elettroni dell’iniettore era un cannone a
radiofrequenza (RF) che impiega materiali fotoemissivi illuminati da un laser
impulsato. Il singolo pacchetto (“bunch”) di elettroni così prodotto presentava una
durata temporale di 7 ± 0.6 ps e una frequenza di ripetizione di 1 MHz. Una
successione di pacchetti di elettroni, lunga temporalmente 800 µs, costituisce poi il
“macrobunch” (impulso) ripetuto alla frequenza di 1 Hz. Gli elettroni usciti

CENNI SU TESLA/TTF Capitolo 1
12
dall’iniettore con un’energia di 17 MeV, venivano successivamente inviati nei due
moduli acceleranti, ciascuno costituito da otto cavità di nove celle ciascuna. In figura
1.4 è mostrata la geometria delle cavità impiegate.
Figura 1.4: Sezione tipica delle cavità impiegate per il progetto TESLA (TTF). Come indicato nel disegno ogni cavità è costituita da nove celle. I moduli acceleranti sono poi costituiti da otto cavità.
Grazie al campo accelerante prodotto dai due moduli (il primo modulo presentava un
valore medio di gradiente accelerante di 15 MV/m mentre il secondo di 20 MV/m) il
fascio di elettroni in uscita presentava un’energia di circa 230 MeV.
Attualmente TTF-1 è stato smantellato ed è in fase di sviluppo il secondo stadio di
TTF che sarà costituito da sette moduli acceleranti.
In figura 1.5 è mostrato lo schema di TTF e la sua “storia”.

Capitolo 1 CENNI SU TESLA/TTF
13
Figura 1.5: Nella figura è riportata la “storia” di TTF. In alto è presentata la prima configurazione. La figura centrale mostra la configurazione di TTF1. Nell’ultima figura è invece presentato TTF2.
Gli elettroni prodotti da TTF fase 1, con un’energia di 230 MeV, sono stati utilizzati
come iniettori per un SASE FEL nell’ultravioletto [5][6]. Un FEL di tipo SASE basa
il suo principio di funzionamento sull’emissione di radiazione di sincrotrone
spontanea ottenuta senza l’utilizzo di un segnale esterno. Il singolo pacchetto di
elettroni, uscente dal secondo modulo accelerante, viene fatto passare in un opportuno
ondulatore in modo che esso percorra una traiettoria sinusoidale. A causa del percorso
seguito dagli elettroni costituenti il pacchetto, si avrà emissione di radiazione
elettromagnetica (radiazione di sincrotrone): se sono soddisfatte opportune condizioni,
di qualità di fascio e di intensità di corrente, è possibile innescare un’instabilità
CENNI SU TESLA/TTF Capitolo 1
14
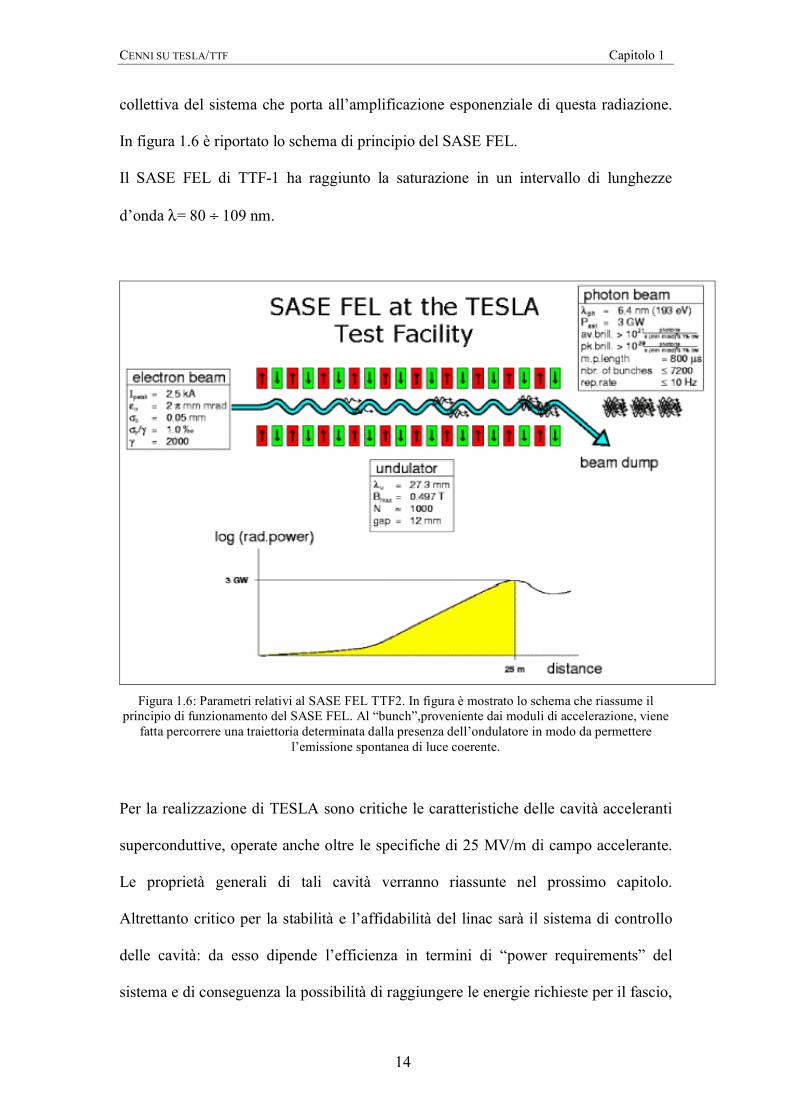
collettiva del sistema che porta all’amplificazione esponenziale di questa radiazione.
In figura 1.6 è riportato lo schema di principio del SASE FEL.
Il SASE FEL di TTF-1 ha raggiunto la saturazione in un intervallo di lunghezze
d’onda λ= 80 ÷ 109 nm.
Figura 1.6: Parametri relativi al SASE FEL TTF2. In figura è mostrato lo schema che riassume il principio di funzionamento del SASE FEL. Al “bunch”,proveniente dai moduli di accelerazione, viene
fatta percorrere una traiettoria determinata dalla presenza dell’ondulatore in modo da permettere l’emissione spontanea di luce coerente.
Per la realizzazione di TESLA sono critiche le caratteristiche delle cavità acceleranti
superconduttive, operate anche oltre le specifiche di 25 MV/m di campo accelerante.
Le proprietà generali di tali cavità verranno riassunte nel prossimo capitolo.
Altrettanto critico per la stabilità e l’affidabilità del linac sarà il sistema di controllo
delle cavità: da esso dipende l’efficienza in termini di “power requirements” del
sistema e di conseguenza la possibilità di raggiungere le energie richieste per il fascio,

Capitolo 1 CENNI SU TESLA/TTF
15
oltre che la sua qualità in termini di spread energetico. Infatti a parità di potenza RF
impiegata, la qualità del sistema di controllo delle cavità determina la stabilità in
ampiezza e fase del campo accelerante e quindi lo spread energetico del fascio.
CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
16
2 CAVITA’ RISONANTI SUPERCONDUTTIVE
2.1. CAVITA’ RISONANTI
2.1.1. Introduzione
Uno degli elementi fondamentali in un acceleratore lineare, ed in particolare la
struttura che permette di trasferire energia alle particelle cariche, è la cavità risonante.
All’interno della cavità, attraverso una sorgente di potenza RF esterna, è possibile
eccitare un particolare modo di oscillazione del campo elettromagnetico che permette
di accelerare le particelle del fascio. Affinché l’accelerazione sia possibile, tutte le
particelle devono trovarsi in fase col campo e rimanere in questa condizione il più a
lungo possibile.
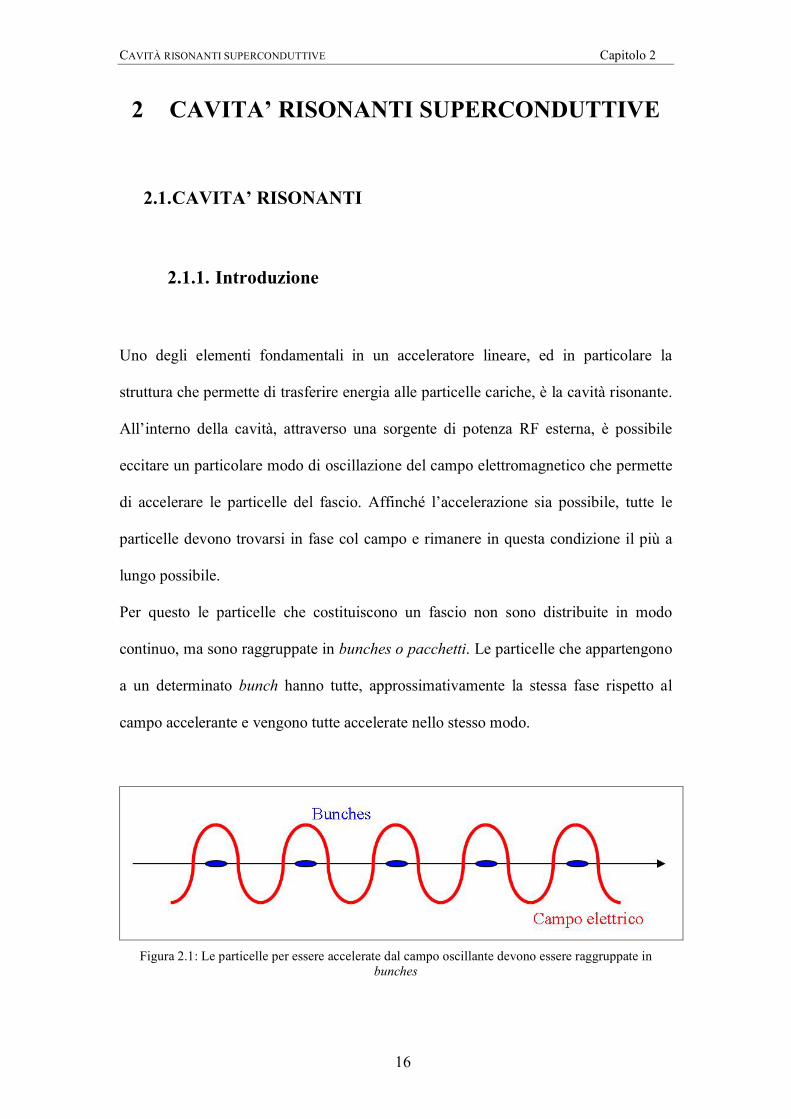
Per questo le particelle che costituiscono un fascio non sono distribuite in modo
continuo, ma sono raggruppate in bunches o pacchetti. Le particelle che appartengono
a un determinato bunch hanno tutte, approssimativamente la stessa fase rispetto al
campo accelerante e vengono tutte accelerate nello stesso modo.
Figura 2.1: Le particelle per essere accelerate dal campo oscillante devono essere raggruppate in
bunches
Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
17
2.1.2. Cavità Pill-Box
Il più semplice esempio di cavità risonante, da cui derivano la maggior parte delle
cavità utilizzate oggi negli acceleratori per protoni e per elettroni, è la cavità cilindrica
o cavità “pill-box”. La cavità pill-box appare come una guida d’onda cilindrica di
lunghezza L, chiusa alle estremità da due piani in materiale conduttore con un foro per
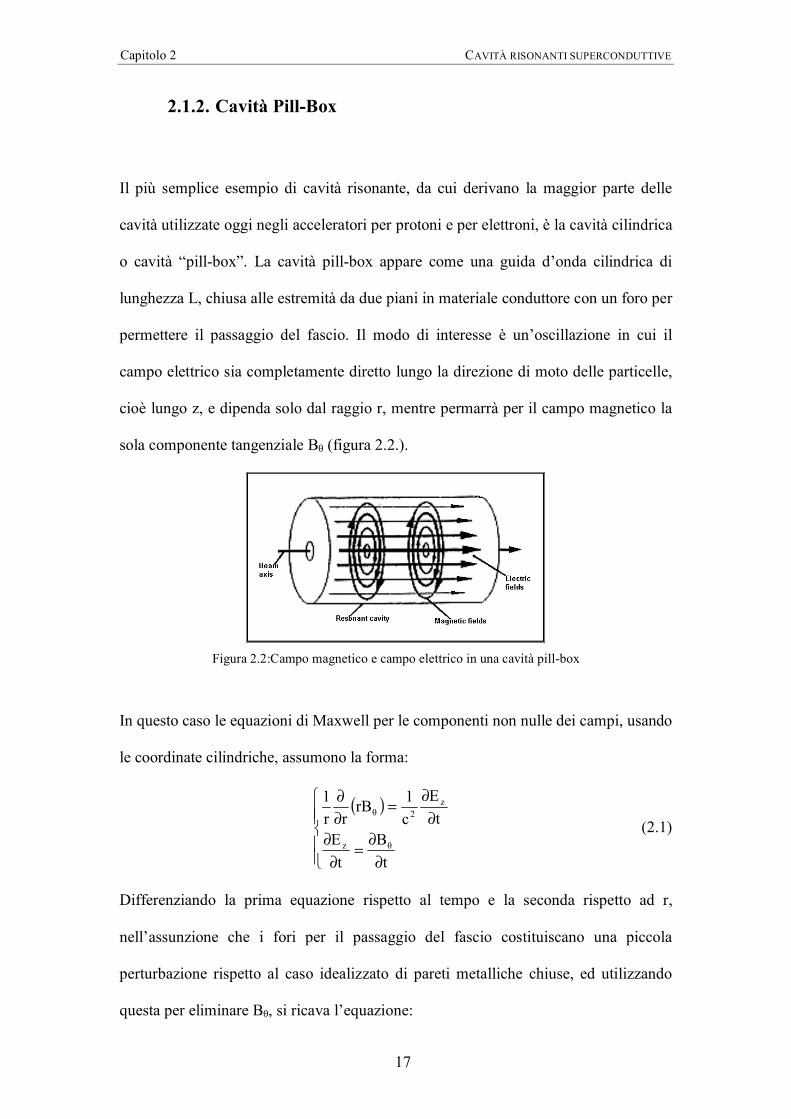
permettere il passaggio del fascio. Il modo di interesse è un’oscillazione in cui il
campo elettrico sia completamente diretto lungo la direzione di moto delle particelle,
cioè lungo z, e dipenda solo dal raggio r, mentre permarrà per il campo magnetico la
sola componente tangenziale Bθ (figura 2.2.).
Figura 2.2:Campo magnetico e campo elettrico in una cavità pill-box
In questo caso le equazioni di Maxwell per le componenti non nulle dei campi, usando
le coordinate cilindriche, assumono la forma:
( )
∂∂
=∂
∂∂
∂=
∂∂
t
B
t
E
t
E
c
1rB
rr
1
θz
z
2θ
(2.1)
Differenziando la prima equazione rispetto al tempo e la seconda rispetto ad r,
nell’assunzione che i fori per il passaggio del fascio costituiscano una piccola
perturbazione rispetto al caso idealizzato di pareti metalliche chiuse, ed utilizzando
questa per eliminare Bθ, si ricava l’equazione:

CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
18
2
z2
2
z
2
z2
t
E
c
1
r
E
r
1
r
E
∂∂
=∂
∂+
∂∂
(2.2)
Se la frequenza angolare del modo considerato è ω e supponendo che la soluzione
dell’equazione abbia la forma ( ) ( ) tωiz erEt,rE = , è possibile sostituire ed ottenere
l’equazione:
( ) ( ) ( ) 0rEc
ωr
rErE
2
=
+
′+′′ (2.3)
Le soluzioni di questa equazione differenziale sono le funzioni di Bessel di ordine 0:
( )
= r
c
ωJErE 00 (2.4)
da cui:
( ) tωcosrc
ωJEt,rE 00z
= (2.5)
dove
rc
ωJ0 è la funzione di Bessel di ordine 0.
E’ ora possibile ricavare il campo magnetico tramite la legge di Ampere e utilizzando
la proprietà delle funzioni di Bessel per cui ( ) ( )xJxJ 01
′−= . Si otteniene:
( ) tωsinrc
ωJ
c
ErB 1
0θ
−= (2.6)
con
rc
ωJ1 funzione di Bessel di ordine 1.
Quindi la componente longitudinale del campo elettrico sull’asse varia nel tempo in
maniera sinusoidale, poiché la funzione di Bessel di ordine 0 vale 1 per r = 0, mentre
il campo magnetico sull’asse è nullo, essendo nulla sull’asse la funzione di Bessel di
primo ordine. Il campo oscilla con frequenza ω tra 0E e 0E− .

Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
19
Nel caso di contorni perfettamente conduttivi, il campo elettrico longitudinale deve
annullarsi alle pareti, quindi rc
ω, per CRr = , il raggio della cavità, deve essere uno
zero della funzione di Bessel, da cui si ricava
405.2Rc
ωC = ,
CR
c405.2ω = (2.7)
Questa relazione permette di dimensionare correttamente la cavità per consentire la
risonanza alla frequenza ω. Questo modo di oscillazione, per convenzione, si chiama
modo traverso magnetico o TM010, essendo nulla la componente lungo z del campo
magnetico.
Esistono anche altri modi sempre caratterizzati dalla funzione di Bessel di ordine 0,
TM01m, con m = 0,1,2,.. che rappresenta il numero intero di lunghezze d’onda della
guida contenute in L, L lunghezza della cavità. La relazione di dispersione in questo
caso assume la forma:
2z
2r2
2
kkc
ω += (2.8)
con C
rR
405.2k = e
L
mπλπ2
kg
z ==
2.1.3. I modi del campo in cavità
Nello spazio libero, senza condizioni al contorno, i vettori dei campi elettromagnetici
sono sempre perpendicolari alla direzione di propagazione, cioè, secondo la
convenzione sopra enunciata, si hanno i modi TEM, transverse electro magnetic.
Nelle cavità risonanti non si possono avere questi modi, poiché almeno una delle

CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
20
componenti del campo deve essere diretta parallelamente alla direzione di
propagazione, in modo da poter soddisfare le condizioni al contorno. In questo caso,
se la componente diretta parallelamente alla direzione di propagazione è quella del
campo elettrico, si parla di modi TM, transverse magnetic, altrimenti, modi TE,
transverse electro. L’esistenza di queste due famiglie di modi distinte è pienamente
giustificata, se si considera che le componenti longitudinali del campo elettrico e del
campo magnetico sono indipendenti e che le condizioni al contorno per i due campi
sono distinte.
La propagazione delle onde in un mezzo chiuso, come una cavità, può essere spiegata
in termini di riflessioni sulle pareti. Le onde che propagano in una guida d’onda
possono avere diversi modi di oscillazione, TMmn, TEmn, dove, in una guida
rettangolare, m e n rappresentano il numero di semiperiodi in x e in y rispettivamente,
mentre in coordinate cilindriche m rappresenta il numero di periodi per la coordinata
angolare, ed n rappresenta il numero di zeri della componente del campo longitudinale
nella direzione radiale esclusi gli assi. In un risonatore gli indici diventano 3, m, n e p.
Il significato dei primi due indici è sempre lo stesso, mentre il terzo indice è il numero
di semiperiodi longitudinali.
Le componenti del campo per i modi TMmnp in una cavità sono:

Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
21
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
′−=
−=
=
−=
′−=
=
tωipmp02
pm
Cθ
tωipmp022
pm
2
Cr
z
tωipmp02
pm
2
Cθ
tωipmp0
pm
Cr
tωipnp0z
eL
zπmcosθpcosrkJE
cx
Rωit,z,rB
eL
zπmcosθpsinrkJE
rcx
pRωit,z,rB
0B
eL
zπmsinθpsinrkJE
rx
pR
L
πmt,z,rE
eL
zπmsinθpcosrkJE
x
R
L
πmt,z,rE
eL
zπmcosθpcosrkJEt,z,rE
(2.9)
e ω, pnk e zk soddisfano la relazione di dispersione:
2
z
2
pn
2
kkc
ω +=
, C
pn
pnR
xk = , ...,2,1,0m,
L
m2k
g
z =π=λ
π= (2.10)
xpn è l’n-esimo zero della funzione di Bessel di ordine p.
Le componenti dei campi nel modo TEmnp sono :
( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
−=
=
=
′′
=
′=
=
tωipmp02
pm
2
Cθ
tωipmp0
pm
Cr
tωipmp0z
tωipmp0
pm
Cθ
tωipmp02
pm
2
Cr
z
eL
zπmcosθsimprkJB
r'x
pR
L
πmt,θ,z,rB
eL
zπmcosθpcosrkJB
'x
R
L
πmt,θ,z,rB
eL
zπmsinθpcosrkJBt,θ,z,rB
eL
zπmsinθpcosrkJB
x
Rωit,θ,z,rE
eL
zπmsinθpsinrkJB
x
pRωit,θ,z,rE
0t,θ,z,rE
(2.11)
con la relazione di dispersione:
2
z
2
pn
2
kkc
+=
ω
, C
pn
pnR
xk
′= , ...,2,1,0m,
L
m2k
g
z =π=λ
π= (2.12)
CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
22
pnx′ è l’n-esimo zero della derivata della funzione di Bessel di ordine p.
E’ facile verificare che solo i modi TM sono utilizzabili per accelerare, perchè nei
modi TE la componente longitudinale del campo elettrico è nulla. Inoltre, tra tutti i
modi TM, solo i modi di ordine più basso, quelli con la funzione di Bessel di ordine 0,
detti anche monopolari, soddisfano la condizione che la componente longitudinale del
campo elettrico sia diversa da 0 sull’asse, e quindi siano utilizzabili per accelerare un
fascio che propaghi lungo l’asse stesso.
2.1.4. Cavità λ/4
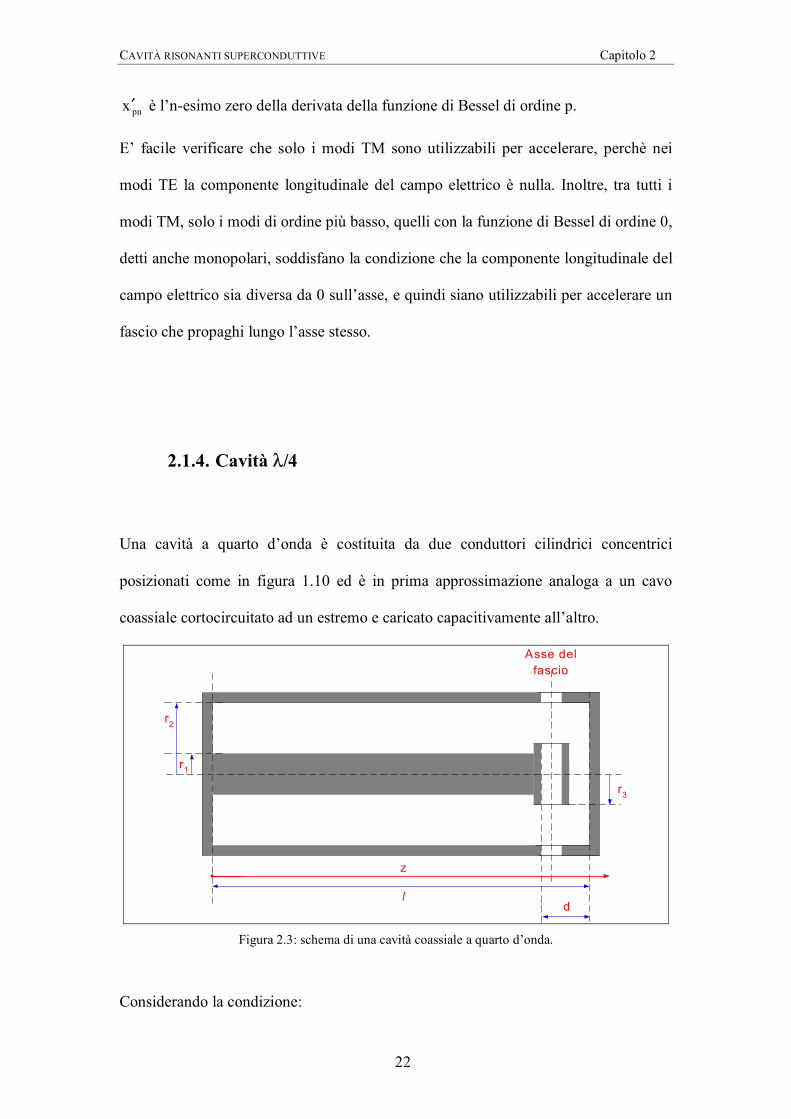
Una cavità a quarto d’onda è costituita da due conduttori cilindrici concentrici
posizionati come in figura 1.10 ed è in prima approssimazione analoga a un cavo
coassiale cortocircuitato ad un estremo e caricato capacitivamente all’altro.
Asse delfascio
z
l
r1
r2
d
r3
Figura 2.3: schema di una cavità coassiale a quarto d’onda.
Considerando la condizione:

Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
23
12 rrdl −>>
assumendo inoltre che all’interno della cavità reale il campo magnetico non abbia
componenti radiali lungo la direzione del fascio (limitandosi cioè al caso di modi TM,
che sono quelli utili per l’accelerazione), e trascurando, infine, le perturbazioni
causate dai gap, si può approssimare il sistema con una linea di trasmissione
uniforme. Si applicano quindi le equazioni per una linea di trasmissione senza perdite:
⋅+⋅⋅=
⋅⋅+⋅=
)cos()sin()(
)sin()cos()(
0
0
zIzZ
VizI
zIZzVzV
LL
LL
ββ
βιβ
(2.13)
dove z è la distanza dalla fine della linea di trasmissione, assunta come origine
dell’asse (in questo caso l’estremo cortocircuitato). VL e IL sono la tensione e la
corrente nell’origine, quindi per effetto del cortocircuito vale VL=0. Z0 e β sono dei
parametri caratteristici della linea chiamati rispettivamente “impedenza caratteristica”
e “costante di fase”.
⋅=
⋅⋅=
)cos()(
)sin()( 0
zIzI
zIzzV
L
L
β
βι (2.14)
Dunque ad una distanza z = z~ dall’estremità cortocircuitata la linea ha un’impedenza
Z:
)~tan()~( 0 zZizZ ⋅⋅= β (2.15)
Lo schema equivalente della cavità è raffigurato in figura 1.11.

CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
24
V(l )
l
IL
0
C
-
+
a
a
Figura 2.4: schema equivalente della cavità coassiale
L’ammettenza Yaa all’ estremità aperta della cavità (con carico C = π⋅r32/d) vale:
⋅
+⋅=lZi
CiYaa
λπ
ω2
tan
1
0
(2.16)
la condizione Yaa= 0 determina le frequenze di risonanza della cavità. Infatti se
l’ammettenza è zero alla sezione a-a allora una tensione sinusoidale potrebbe
riflettersi perfettamente ad entrambe le estremità della cavità e oscillare
indefinitamente al suo interno.
Se il valore della capacità di carico tende a zero, la risonanza a frequenza più bassa
(“fondamentale”) si incontra per 4
λ=l . Per questo motivo le cavità di questo tipo
vengono chiamate “a quarto d’onda”.
Inserendo nell’equazione per la corrente IL (corrente in z =0) la condizione per la
frequenza di risonanza del modo fondamentale si ottiene:
200
0
0
20
0
0
0 )(1)(tan
11
sinCZ
Z
Vi
lZ
Vi
Z
ViI L ω
β+⋅=
⋅+⋅=
⋅⋅−= mm (2.17)

Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
25
quindi inserendo il valore di IL così trovato nelle equazioni per distribuzioni di
tensione e corrente (2.14) lungo la linea di trasmissione si ottiene il valore di V(z) e
I(z) lungo tutta la cavità.
2.1.5. Cavità a multicelle
Utilizzando una singola cavità a simmetria cilindrica e di sezione uniforme il
guadagno di energia è molto basso: il modo di oscillazione del campo
elettromagnetico TM010, in una cavità di questo tipo, ha una velocità di fase maggiore
di quella della luce, come si può verificare dalla relazione di dispersione 2.10. Di
conseguenza la componente longitudinale del campo non può essere sincrona con la
particella.
Figura 2.5: Struttura a multicelle
Una struttura come quelle in figura 2.5, realizzata affiancando più cavità risonanti a
singola cella, permette di avere modi di oscillazione con velocità di fase minore della
velocità della luce e quindi maggiore efficienza nell’accelerazione.

CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
26
In questo caso la cavità a singola cella diventa una sezione per la cavità multicella e
l’accoppiamento tra differenti celle è realizzato dal campo elettrico attraverso i fori
centrali per il passaggio del fascio. Questo tipo di accoppiamento, accoppiamento
capacitivo, è il più semplice. Esiste anche l’accoppiamento induttivo, che coinvolge il
campo magnetico ed è realizzato attraverso dei fori praticati nella zona più periferica
della cella. Questo secondo tipo di accoppiamento è più complesso da realizzare e
viene utilizzato principalmente nelle cavità normalconduttive, dove è più importante
che gli iridi abbiano un diametro piccolo, in modo da avere un’alta impedenza shunt
(parallelo, si veda par. 2.1.6). Nelle cavità superconduttive, dove tale impedenza non è
significativa, si possono avere iridi larghe e quindi viene utilizzato quasi
esclusivamente l’accoppiamento capacitivo.
La geometria della cavità a pill-box è svantaggiosa per la presenza di numerose
traiettorie risonanti per gli elettroni prodotti dall’emissione di campo. Questi elettroni
continuano a urtare la superficie della cavità con energia sempre più elevata, e se il
coefficiente di emissione secondaria del materiale è maggiore di uno, si verifica
un’emissione a valanga di elettroni che sottrae potenza alla cavità, limitando quindi il
campo accelerante raggiungibile.
Questo fenomeno è noto come multipacting [27]. Una forma più arrotondata delle
cavità, come quella mostrata in figura 2.6, permette di ridurre tale effetto.

Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
27
Figura 2.6: Cavità a multicelle
L’utilizzo di una cavità a multicelle introduce una modulazione periodica in z per
l’ampiezza dell’onda, ad esempio, per il modo TM010, si ottiene:
( ) ( ) ( )zktωiL
0ez,rEt,z,rE −= (2.18)
dove ( )z,rE L è una funzione periodica con lo stesso periodo della struttura.
Il teorema di Floquet [35] afferma che se un modo di oscillazione, che varia in
maniera sinusoidale nel tempo, propaga lungo una struttura periodica infinita di
periodo L, allora i campi in due sezioni successive differiscono per una costante, in
generale, complessa, e dipendente dalla frequenza. Per frequenze appartenenti a
determinati intervalli questa costante risulta reale e minore di uno, sono i modi
evanescenti.
Esistono invece degli intervalli di frequenza per cui si ha propagazione, in questo
caso, in assenza di perdite, la costante assume la forma complessa Lik0e , che

CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
28
fisicamente rappresenta uno sfasamento tra una cella e la successiva pari a Lk 0 .
Considerando anche le perdite, il fattore costante diventa zγe− , con 0ikαγ +−= , in
questo modo si ha propagazione con attenuazione. Nell’intervallo di frequenze per cui
si ha propagazione è possibile trovare delle soluzioni per cui il fattore costante vale
1± , in tal caso Lk 0 è 0 o π. Sono appunto indicati come modi di oscillazione 0 e π.
Il campo elettrico lungo z, nel caso in cui si abbia propagazione, deve verificare la
seguente relazione:
( ) ( ) Lik 0ez,rELz,rE ±=+ (2.19)
Il termine EL(r,z) può essere sviluppato in serie di Fourier rispetto alla variabile
indipendente z. Prendendo come origine del sistema di coordinate il centro della
cavità, si può scrivere:
( ) ( ) ( )∑
+=
mmmL z
L
πmsinrbz
L
πmcosraz,rE (2.20)
Considerando esclusivamente le strutture acceleranti operanti in modo π, ed
assumendo che la componente Ez del campo sia simmetrica rispetto al centro della
cavità, si ottiene:
( ) ( )∑ ==m
mz ...5,3,1mtωsinzL
πmcosrat,z,rE (2.21)
Inserendo questa espressione nell’equazione d’onda scritta in coordinate cilindriche:
2
z2
22
z2
z
2
z2
t
E
c
1
r
E
r
E
r
1
z
E
∂∂
=∂
∂+
∂∂
+∂
∂
(2.22)
si ottiene:
0akdr
da
r
1
dr
ad
mm
2m
m
2
m2
=
−+∑ (2.23)
con la seguente legge di dispersione:
22
2m
2
L
mk
−
=
λππ
(2.24)

Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
29
E’ immediato osservare che in questo caso la velocità di fase può essere minore della
velocità della luce. Per ogni m, a seconda del segno di 2mk , si ha l’equazione di Bessel
normale o modificata di ordine 0, quindi:
( ) 0krkJAa 2mm0mm ≤= , con J0 funzione di Bessel normale di ordine zero
( ) 0krkIAa 2mm0mm ≥= , con I0 funzione di Bessel modificata di ordine zero
Le altre componenti del campo elettrico e del campo magnetico non nulle si possono
ricavare dalle equazioni di Maxwell, ottenendo:
( ) ( )
( ) ( )
( ) ( )
=
=
=
∑
∑
∑
tωcosL
zπmcosrkI
ck
ωAt,z,rB
tωsinL
zπmcosrkI
Lk
πmAt,z,rE
tωsinL
zπmcosrkIAt,z,rE
mm12
m
mθ
mm1
m
mr
mm0mz
(2.25)
2.1.6. Cavità superconduttive
Per aumentare il guadagno di energia della cavità e quindi ridurre la lunghezza del
Linac è necessario aumentare il campo accelerante, ma un aumento del campo
accelerante comporta una crescita della potenza dissipata, che in un Linac normal-
conduttivo, con cavità in rame, è già più elevata della potenza trasferita al fascio.
Questo vuol dire che non è possibile raggiungere dei valori di campo accelerante
elevati: l’energia viene infatti dissipata sotto forma di calore ceduto alle pareti della
cavità, e queste si danneggiano oltre un determinata temperatura massima. In questo
caso è quindi fondamentale un utilizzo in modalità impulsata, un duty cicle molto
basso ed un’elevata quantità di calore sottratta alle pareti.
CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
30
Un’alternativa è ridurre la potenza dissipata ricorrendo alla superconduttività.
L’utilizzo di una cavità con pareti in niobio, raffreddata fino ad una temperatura
inferiore alla temperatura critica (9.2 K), permette di ridurre l’energia dissipata, ma
aumenta notevolmente la complessità dell’impianto e le tecnologie necessarie per
operare a tali temperature.
I parametri fondamentali che definiscono una cavità superconduttiva sono il campo
accelerante medio Eacc ed il fattore di qualità Q0.
c
00
P
UQ
ω= (2.26)
Il fattore di qualità è un parametro di merito universale per le cavità risonanti ed è
definito come il rapporto tra l’energia immagazzinata nella cavità e la potenza
dissipata in un periodo RF. Corrisponde dunque al numero di oscillazioni necessarie
per dissipare tutta l’energia immagazzinata. Il fattore di qualità è strettamente legato
alla resistenza superficiale.
La resistenza superficiale alla radiofrequenza, per un superconduttore come il niobio,
è infatti molto inferiore alla resistenza superficiale del rame (tipicamente almeno
cinque ordini di grandezza) e quindi il fattore di qualità di una cavità superconduttiva
è notevolmente maggiore di quello di una cavità normalconduttiva. Questo vuol dire
che nelle cavità superconduttive si possono utilizzare campi acceleranti molto più
elevati con un minore spreco di potenza RF, la potenza dissipata per metro è infatti
direttamente proporzionale al quadrato del campo accelerante ed inversamente
proporzionale al fattore di qualità, con una costante di proporzionalità che dipende
quasi esclusivamente dalla geometria della cavità. Precisamente vale:
0
0
a
2acc
r
E
L
P = (2.27)

Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
31
dove0
a
Q
r è detta impedenza geometrica shunt e dipende principalmente dalla forma
della cavità, soprattutto risente molto della presenza dei fori per il passaggio del fascio
(più sono grandi è più si riduce il suo valore).
In una cavità normal conduttiva (per via del basso Q0) è necessario che l’impedenza
shunt sia più alta possibile, si è dunque obbligati a limitare al massimo le dimensioni
dei fori per il passaggio del fascio, con conseguenti problemi di focalizzazione e di
stabilità. Per una cavità superconduttiva, l’avere una grande impedenza shunt non è
fondamentale poiché il fattore di qualità è già molto elevato e quindi le dimensioni dei
fori per il passaggio del fascio possono essere aumentate, con i conseguenti vantaggi
sulla stabilità. In definitiva la possibilità di avere cavità con aperture più grandi per il
passaggio del fascio e campi acceleranti più elevati con una minore dissipazione sono
gli elementi che spingono ad utilizzare nei moderni acceleratori, in cui circolano fasci
di intensità elevata, cavità superconduttive. Ciò vale soprattutto per quelle macchine
che funzionano in modo continuo, dove la quantità di energia dissipata è molto
elevata.
2.1.7. Limiti delle cavità superconduttive
La potenza dissipata sulla superficie di un conduttore è strettamente legata alla
resistenza superficiale del conduttore stesso.
Questa in generale dipende dalla temperatura e dalla frequenza a cui si opera. Ad
esempio per il niobio [5]:
CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
32
[ ] [ ][ ]
[ ]KT
664.1724
s eKT
GHzf109nR
−×=Ω (2.28)
mentre per il rame si ha :
[ ] [ ]GHzf8.7nR 2
1
s =Ω (2.29)
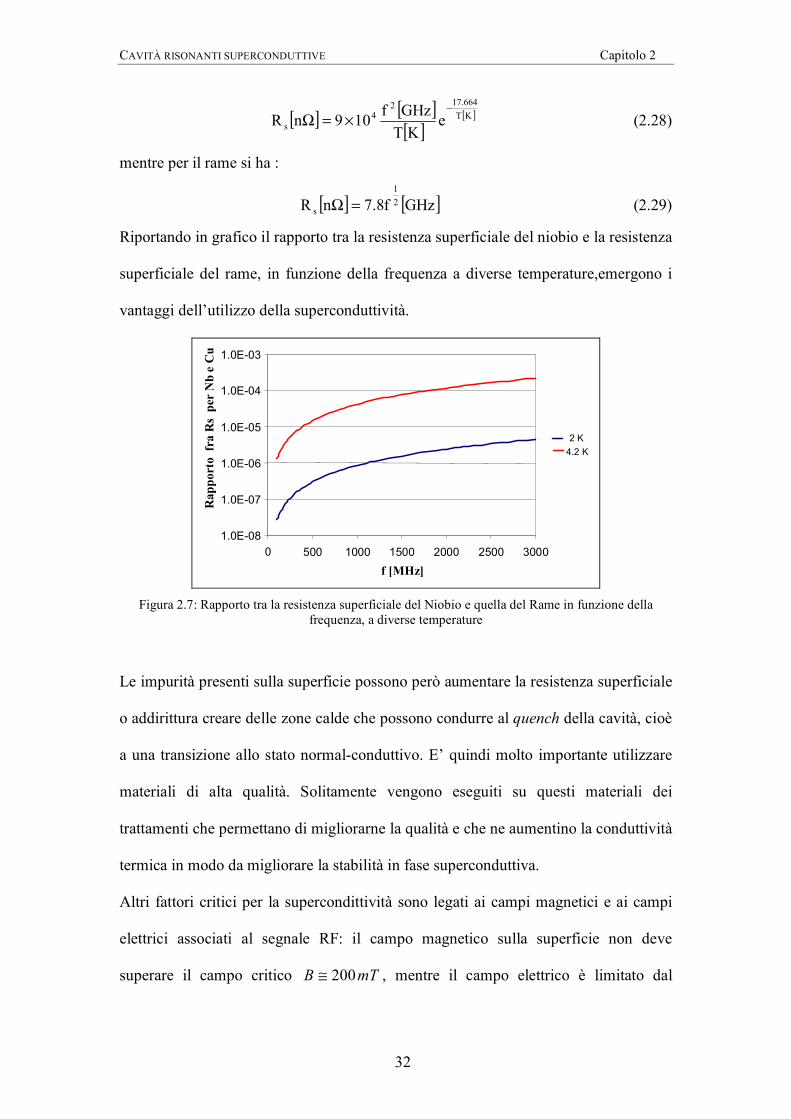
Riportando in grafico il rapporto tra la resistenza superficiale del niobio e la resistenza
superficiale del rame, in funzione della frequenza a diverse temperature,emergono i
vantaggi dell’utilizzo della superconduttività.
1.0E-08
1.0E-07
1.0E-06
1.0E-05
1.0E-04
1.0E-03
0 500 1000 1500 2000 2500 3000
f [MHz]
Rap
por
to f
ra R
s p
er N
b e
Cu
2 K
4.2 K
Figura 2.7: Rapporto tra la resistenza superficiale del Niobio e quella del Rame in funzione della frequenza, a diverse temperature
Le impurità presenti sulla superficie possono però aumentare la resistenza superficiale
o addirittura creare delle zone calde che possono condurre al quench della cavità, cioè
a una transizione allo stato normal-conduttivo. E’ quindi molto importante utilizzare
materiali di alta qualità. Solitamente vengono eseguiti su questi materiali dei
trattamenti che permettano di migliorarne la qualità e che ne aumentino la conduttività
termica in modo da migliorare la stabilità in fase superconduttiva.
Altri fattori critici per la supercondittività sono legati ai campi magnetici e ai campi
elettrici associati al segnale RF: il campo magnetico sulla superficie non deve
superare il campo critico mTB 200≅ , mentre il campo elettrico è limitato dal
Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
33
problema dell’emissione di campo. In entrambi i casi il rischio è quello di una
improvvisa transizione allo stato normal-conduttivo con una conseguente notevole
dissipazione di energia ed gravi problemi di stabilità termica.
2.1.8. Parametri di merito delle cavità superconduttive
Esistono alcuni parametri che permettono di identificare e confrontare cavità di forma
e dimensioni diverse, come il rapporto tra il campo elettrico di picco e il campo
accelerante, e il rapporto tra il campo magnetico di picco e il campo accelerante.
Questi sono determinati principalmente dalla geometria della cavità, e sono importanti
poiché stabiliscono il massimo campo accelerante ottenibile mantenendosi al di sotto
dei limiti per i campi di superficie.
Un altro parametro è il fattore di merito della cavità Q0 (formula 2.26). Dalla
definizione del fattore di qualità, sostituendo le espressioni che legano l’energia
immagazzinata e la potenza dissipata ai campi presenti in cavità, si
ottienes
0R
GQ = dove G è detto fattore geometrico ed Rs è la resistenza delle pareti
della cavità. Poiché il fattore geometrico dipende solo dalla forma della cavità e non
dalle dimensioni, più grande è G, migliore è la cavità.
Un’altra grandezza che caratterizza le perdite della cavità, è l’impedenza shunt del
modo T010-π, c
2
P
VR = ,dove V rappresenta la massima tensione accelerante (ovvero
attivaaccLEV = ) mentre Pc è la potenza dissipata in cavità. Partendo dall’impedenza di
shunt si può definire anche l’impedenza shunt di superficie come il rapporto tra

CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
34
quest’ultima e il fattore di qualità della cavità. Il parametro così definito, risulta
totalmente indipendente dalle dimensioni della cavità e dalla resistenza superficiale
delle pareti, dipende cioè esclusivamente dalla geometria.
L’impedenza shunt superficiale indica il livello di eccitazione del modo considerato.
Obbiettivo è ottenere un’alta impedenza shunt per il modo del campo
elettromagnetico utilizzato per accelerare, mentre limitare quelle per gli eventuali altri
modi che il passaggio delle particelle cariche potrebbe eccitare. In questo modo il loro
livello di eccitazione risulterebbe basso e si eviterebbero possibili danni alla qualità
del fascio.
2.1.9. Modello RF della cavità
Verrà ora introdotto un modello equivalente della cavità dal punto di vista del segnale
RF, di notevole importanza pratica per le analisi che seguiranno nel proseguimento
della tesi. Sarà considerato il solo caso semplificato in cui si tiene conto di un unico
modo di risonanza, il modo accelerante π, che è il modo in cui il campo tra una cella e
la successiva è sfasato di 180°. Sarà considerato nullo il contributo degli altri modi.
Questa approssimazione è ragionevole se si considera l’ampiezza del fattore di qualità
delle cavità superconduttive ed il fatto che esse siano dimensionate per avere modo
accelerante con la stessa frequenza dell’input RF. I modelli matematici usati per le
simulazioni al calcolatore sono più sofisticati e tengono conto di alcuni modi di ordine
superiore [11].
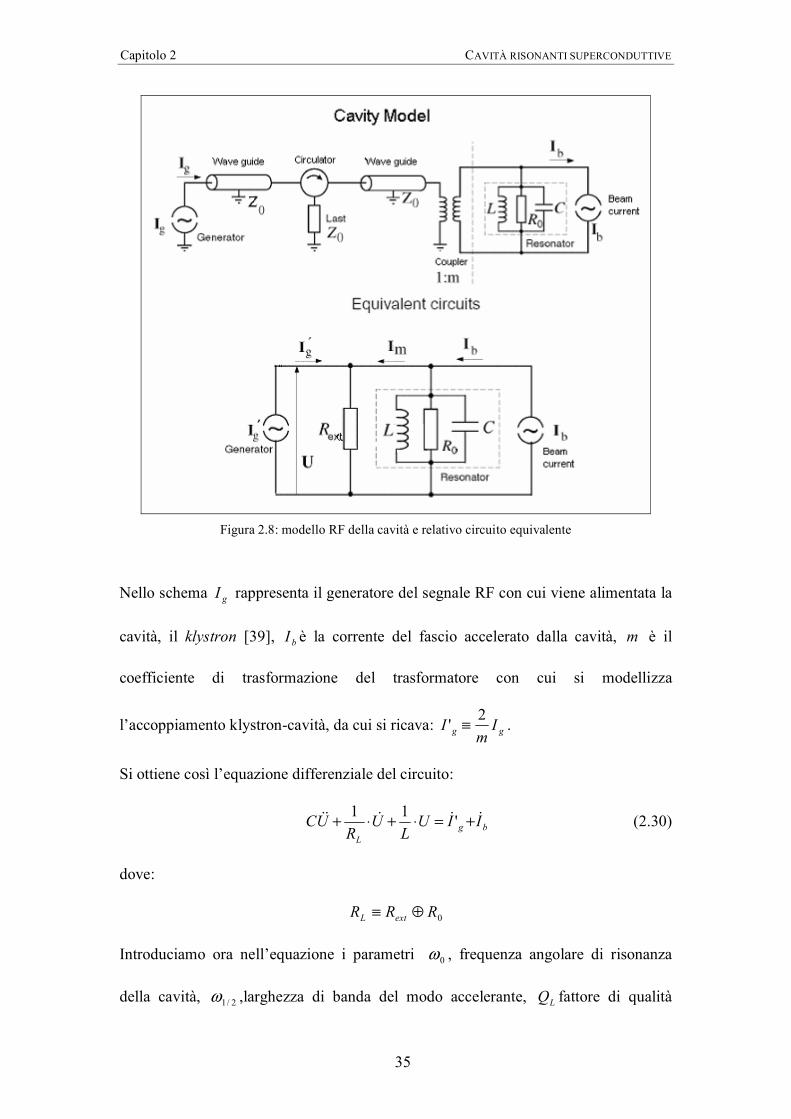
In figura 2.8 è rappresentato il circuito equivalente che modellizza il comportamento
della cavità rispetto al segnale RF.
Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
35
Figura 2.8: modello RF della cavità e relativo circuito equivalente
Nello schema gI rappresenta il generatore del segnale RF con cui viene alimentata la
cavità, il klystron [39], bI è la corrente del fascio accelerato dalla cavità, m è il
coefficiente di trasformazione del trasformatore con cui si modellizza
l’accoppiamento klystron-cavità, da cui si ricava: gg Im
I2
' ≡ .
Si ottiene così l’equazione differenziale del circuito:
bg
L
IIUL
UR
UC &&&&& +=⋅+⋅+ '11
(2.30)
dove:
0RRR extL ⊕≡
Introduciamo ora nell’equazione i parametri 0ω , frequenza angolare di risonanza
della cavità, 2/1ω ,larghezza di banda del modo accelerante, LQ fattore di qualità

CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
36
accoppiato (tiene conto anche degli accoppiatori o coupler, principalmente dell’input
coupler poiché il pick-up con cui si sonda il campo nella cavità è fortemente sotto-
accoppiato proprio per non creare perturbazioni ). Valgono dunque:
LC
10 ≡ω
lL QCR 22
1 02/1
ωω =≡
Sostituendo si ottiene:
)2
(22 2/1
2
02/1 bgL IIm
RUUU &&&&& +⋅=++ ωωω (2.31)
Il segnale in ingresso è del tipo:
)exp())()(()( titiItItI HFgigrg ω⋅+=
dove si sono separate le parti reale e immaginaria dell’inviluppo e HFω è la pulsazione
del segnale RF. Supponiamo di impulsare il segnale in ingresso. L’inviluppo sarà
un’onda quadra. Per linearità:
)exp())()(()( titiUtUtU HFir ω⋅+= (2.32)
)exp())()(()( titiItItI HFbibrb ω⋅+=
Nelle ipotesi di:
lunghezza dell’impulso RF >> periodo HFωπ2
,
HFω >> 1,
2/1ω << HFω ,
valgono le seguenti approssimazioni:
))()(()()(2
tiUtUtUitU irHFir +<<+ ω&&&&
))()(()()(22
2/1 tiUtUtUitU irHFir +<<+ ωω && (2.33)
dttIitIdttIitI ir
t
t
HFir
t
t
))()(())()((2
1
2
1
&&&& +<<+ ∫∫ ω

Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
37
Dunque, sostituendo nell’equazione di partenza ed eliminando nelle derivate i termini
trascurabili si ottengono, per le componenti dell’inviluppo )(tU , le due seguenti
equazioni di primo grado:
)2
()( 2/1 bgHFLirr IIm
RUUtU &&& +⋅=∆++ ωωω (2.34)
)2
()( 2/1 bgHFLrii IIm
RUUtU &&& +⋅=∆−+ ωωω
dove 0ωωω −≡∆ HF .
Esprimiamo ora le due equazioni in forma matriciale:
+
+⋅
+
⋅
∆
∆−−=
2)(
12
)(1
10
01
)(
)(
)(
)(2/1
2/1
2/1
bigi
brgr
L
i
r
i
r
ItI
m
ItI
mRtU
tU
tU
tUω
ωωωω
&
& (2.35)
Per comodità di notazione useremo la rappresentazione state space [20] (si veda par.
5.2.2):
)()()( tutxtxrr&r ⋅+⋅= BA
)()()( tutxtyrr ⋅+⋅= CD
dove il vettore x contiene le variabili di stato, y le uscite e u gli ingressi del
sistema.
Nel nostro caso abbiamo:
∆
∆−−=
2/1
2/1
ωωωω
A ,
=
10
012/1ωLRB (2.36)
=
)(
)()(
tU
tUtx
i
rr ,
+
+=
2)(
12
)(1
)(bi
gi
brgr
ItI
m
ItI
mtur
La soluzione generale è:
')'()'()0()()(0
dttuttxttxt rrr ⋅⋅−+⋅= ∫ BΦΦ (2.37)

CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
38
dove:
∆∆∆−∆
= −
)cos()sin(
)sin()cos()( 2/1
tt
ttet t
ωωωωωΦ
Nel caso particolare di inviluppo rettangolare del segnale di ingresso:
≡
i
r
I
Itu )(
quindi:
⋅
⋅
∆∆∆−∆
−⋅
∆
∆−−⋅
∆+=
−
i
rtL
i
r
I
Ie
tt
ttR
tU
tU2/1
)cos()sin(
)sin()cos(
)(
)(
2/1
2/1
22
2/1
2/1 ω
ωωωω
ωωωω
ωωω
1 (2.38)
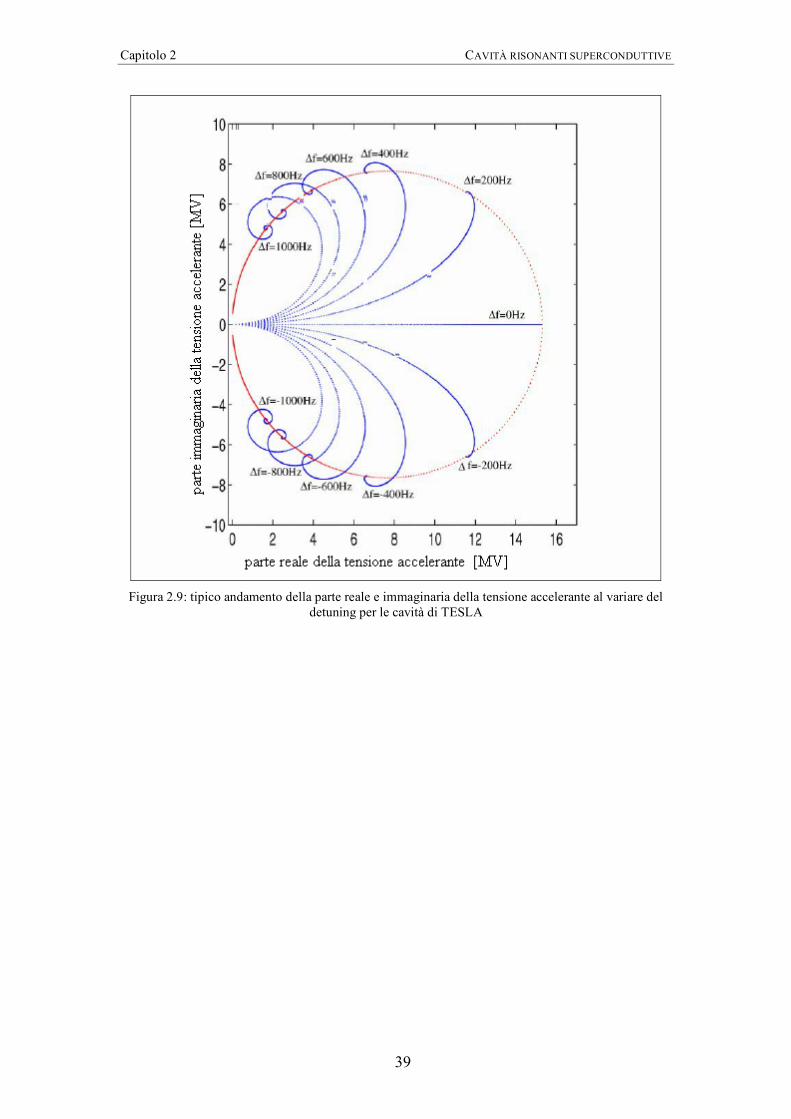
In figura 1.17 è riportato il digramma polare di una simulazione con le caratteristiche
traiettorie dell’inviluppo di )(tU nel piano complesso al variare di gI per vari
detuning ω∆ .
L’errore di fase e la diminuzione dell’ampiezza del campo accelerante, a parità di
potenza di ingresso, diventano drammatiche anche per detuning di poche centinaia di
Hz, a causa dell’alto Q (e della conseguente banda passante molto stretta). Nella
simulazione sono stati usati i parametri tipici delle cavità di TESLA:
90 103.12 ⋅⋅= πω , 6103 ⋅=LQ .
Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
39
Figura 2.9: tipico andamento della parte reale e immaginaria della tensione accelerante al variare del
detuning per le cavità di TESLA
CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
40
2.2. LORENTZ FORCE DETUNING E MICROFONICI
2.2.1. Introduzione
La pressione di radiazione del campo RF e le vibrazioni meccaniche indotte
dall’esterno deformano la geometria della cavità e questa deformazione, anche se solo
di pochi micron, nel caso delle cavità di TESLA comporta un detuning incompatibile
con le specifiche del progetto. L’importanza di questi effetti è legata sia all’elevato
fattore di qualità accoppiato LQ che al ridotto spessore della cavità. Il LQ per TESLA
è circa uguale a 6103 ⋅ , il che comporta una larghezza di banda del modo accelerante
2602/1 ≅f Hz (HWHM).
Allungando anche di un solo micron la cavità lungo l’asse del fascio, la sua frequenza
di risonanza aumenta di circa 315 Hz, già maggiore della larghezza di banda. Lo
spessore delle pareti è di circa 2.5 mm, a causa dell’elevato costo del niobio, infatti, si
cerca di minimizzarne la quantità richiesta. E’ quindi sufficiente una piccola pressione
per deformare la cavità nell’ordine del µm.
In una cavità fuori dalla risonanza, per mantenere costante ampiezza e fase del campo
accelerante è necessaria una potenza RF addizionale che diviene eccessiva per alti
valori del campo.
A titolo d’esempio riportiamo in figura 2.10 la misura, svolta presso il LINAC per
protoni SNS-SC [23][34], della potenza incidente necessaria per garantire un campo
accelerante di 6.7 MV/m, in funzione della variazione della frequenza di risonanza
della cavità.

Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
41
Figura 2.10 misura della potenza necessaria a mantenere costante la fase e l’ampiezza (6.7 MV/m) in
funzione del detuning f∆ della cavità, svolta presso il LINAC per protoni SNS-SC ( 0f =700MHz e
5105 ⋅=LQ ). Come si può vedere dalla posizione del minimo, la cavità era già fuori risonanza
all’inizio della misura.
La dipendenza della potenza richiesta per un corretto funzionamento dal detuning
della cavità si approssima, nel caso stazionario (Continuous Wave o CW) con
l’equazione:
( ( ) )2
2/14
11
f
fIVP baccg
∆+= (2.39)
dove bI è la corrente media di fascio, accV il campo accelerante della cavità e 2/1f la
larghezza di banda (HWHM).
L’accoppiamento tra le deformazioni geometriche della cavità ed il conseguente
cambiamento della frequenza di risonanza elettromagnetica si presenta di elevata
complessità, un effetto altamente non lineare e difficilmente modellizzabile.
Nel caso di una deformazione statica, tuttavia, la soluzione è più semplice. Esistono
infatti software, come Superfish [36], che calcolano la distribuzione di campo del
modo accelerante a partire dalla geometria della cavità.
Applicando il teorema di Slater [8]:
CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
42
dVHEdf )( 20
20 µε −∝ (2.40)
ed integrando tale contributo su tutti gli elementi di volume spostato dV con
l’opportuno coefficiente di proporzionalità (che pure viene fornito da Superfish), si
ottiene la soluzione per piccole deformazioni della geometria:
dVHE
dVHE
f
f
CAVITAV
V
)(
)(
20
20
20
20
'
µε
µε
−
−∝∆
∫
∫∆ (2.41)
Quella di piccola perturbazione è un’ipotesi necessaria per utilizzare la distribuzione
del campo imperturbato nel calcolo.
In presenza di una deformazione dinamica la complessità è però superiore. La cavità è
un oggetto complesso dal punto di vista della dinamica meccanica ed ha molti modi
propri di vibrazione.
Qualitativamente si può prevedere che la risposta del f∆ della cavità, (detuning
elettromagnetico 0ff RES − ) al variare della frequenza di una sollecitazione meccanica,
presenti dei massimi in occorrenza delle frequenze di risonanza meccaniche della
cavità.
E’ però necessario considerare la più complessa interazione con la distribuzione dei
campi.
Un modo di risonanza meccanico può, ad esempio, far vibrare le pareti della cavità in
una zona dove i campi elettrico e magnetico sono bassi, o comunque tali da
contribuire in modo opposto al detuning. In questo caso l’effetto sulla frequenza
elettromagnetica è molto piccolo (si parla allora di modo meccanico “Slater-
compensato”).
Nelle successive valutazioni, sarà assunta valida l’approssimazione che
l’accoppiamento tra deformazione geometrica della cavità e la sua frequenza di
Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
43
risonanza elettromagnetica sia lineare, questo verrà allora modellizzato con una
funzione di trasferimento L(s), che sarà il “plant”, cioè l’oggetto da controllare, del
nostro sistema. Per piccoli segnali questa approssimazione è accettabile, tanto più che
una conoscenza perfetta dell’accoppiamento meccanico-elettromagnetico non è
essenziale ai fini di un controllo efficiente dei disturbi.
2.2.2. Lorentz force detuning
Il campo elettromagnetico nella cavità esercita una forza di Lorentz sulle pareti della
stessa. La pressione di radiazione è data da:
)(4
1 20
2
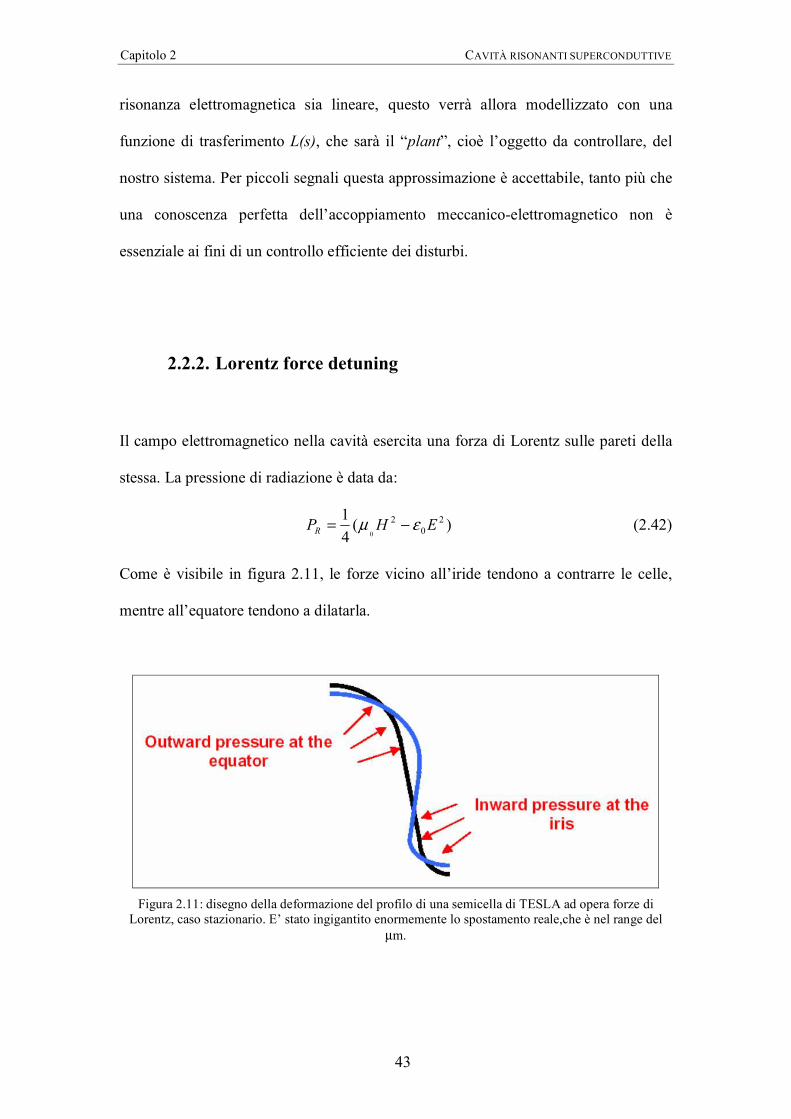
0EHPR εµ −= (2.42)
Come è visibile in figura 2.11, le forze vicino all’iride tendono a contrarre le celle,
mentre all’equatore tendono a dilatarla.
Figura 2.11: disegno della deformazione del profilo di una semicella di TESLA ad opera forze di
Lorentz, caso stazionario. E’ stato ingigantito enormemente lo spostamento reale,che è nel range del µm.

CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
44
L’ordine di grandezza della pressione di radiazione è, anche nel caso di campo
accelerante pari a 35 MV/m, del 2/ cmN . Tuttavia come detto è sufficiente a causare
problemi importanti di detuning. Assumendo che il volume della cavità si deformi
linearmente con la pressione elettromagnetica e che il cambiamento di volume sia
piccolo, il detuning stazionario f∆ a campo accelerante costante è proporzionale al
quadrato del campo:
2
accL EKf ⋅−=∆ (2.43)
La quantità LK è chiamata costante di “Lorentz-force detuning”. LK dipende dalla
rigidità della cavità (per le cavità di TESLA LK =1 Hz/(MV/m).
Se la cavità fosse operata in CW, la pressione delle forze di lorentz sarebbe costante
ed il problema ridotto al caso stazionario. Il detuning relativo potrebbe essere corretto
semplicemente agendo staticamente sulla lunghezza della cavità utilizzando lo slow
tuner descritto nel paragrafo 3.2.4.
Tuttavia TESLA/TTF viene operato in modo impulsato per minimizzare il carico
criogenico, che sarebbe altrimenti eccessivo data la lunghezza dell’acceleratore e gli
alti campi acceleranti. Anche la potenza dissipata dalla cavità ha, infatti, una
dipendenza quadratica dal campo accelerante.
La struttura dell’impulso del campo accelerante del linac TTF è mostrata in figura
2.12. E’ tracciata anche la curva del detuning di Lorentz durante l’impulso.
Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
45
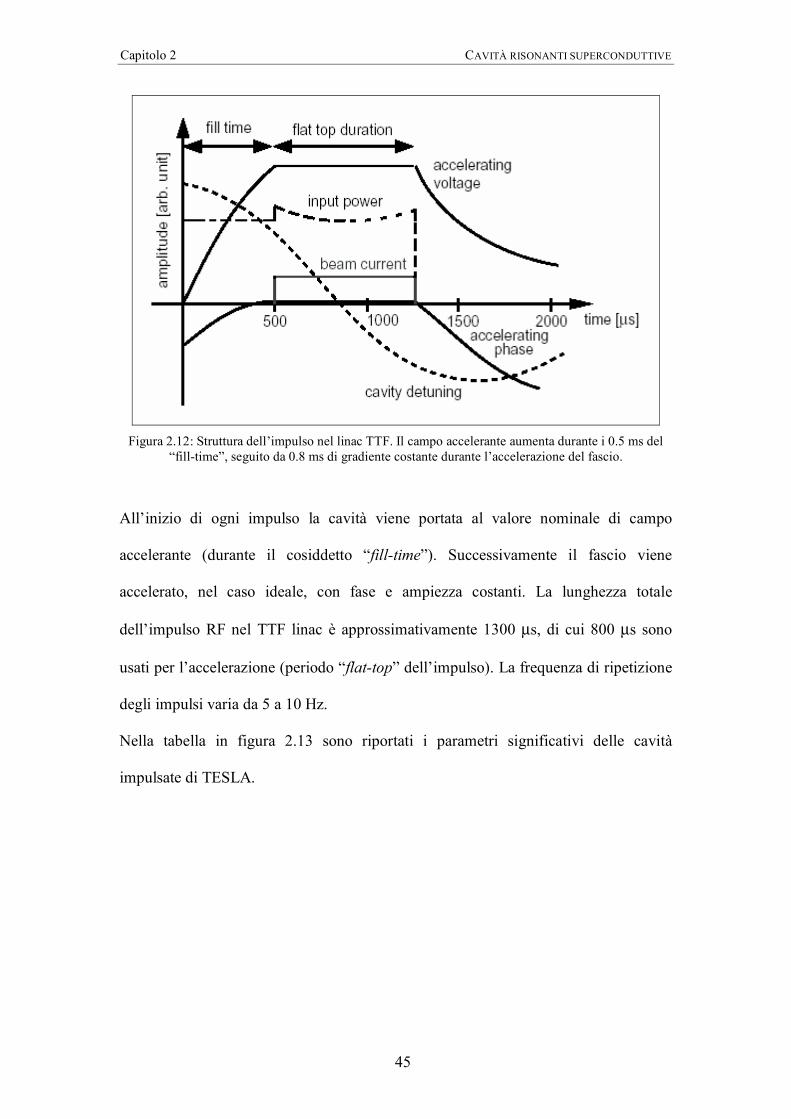
Figura 2.12: Struttura dell’impulso nel linac TTF. Il campo accelerante aumenta durante i 0.5 ms del
“fill-time”, seguito da 0.8 ms di gradiente costante durante l’accelerazione del fascio.
All’inizio di ogni impulso la cavità viene portata al valore nominale di campo
accelerante (durante il cosiddetto “fill-time”). Successivamente il fascio viene
accelerato, nel caso ideale, con fase e ampiezza costanti. La lunghezza totale
dell’impulso RF nel TTF linac è approssimativamente 1300 µs, di cui 800 µs sono
usati per l’accelerazione (periodo “flat-top” dell’impulso). La frequenza di ripetizione
degli impulsi varia da 5 a 10 Hz.
Nella tabella in figura 2.13 sono riportati i parametri significativi delle cavità
impulsate di TESLA.
CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
46
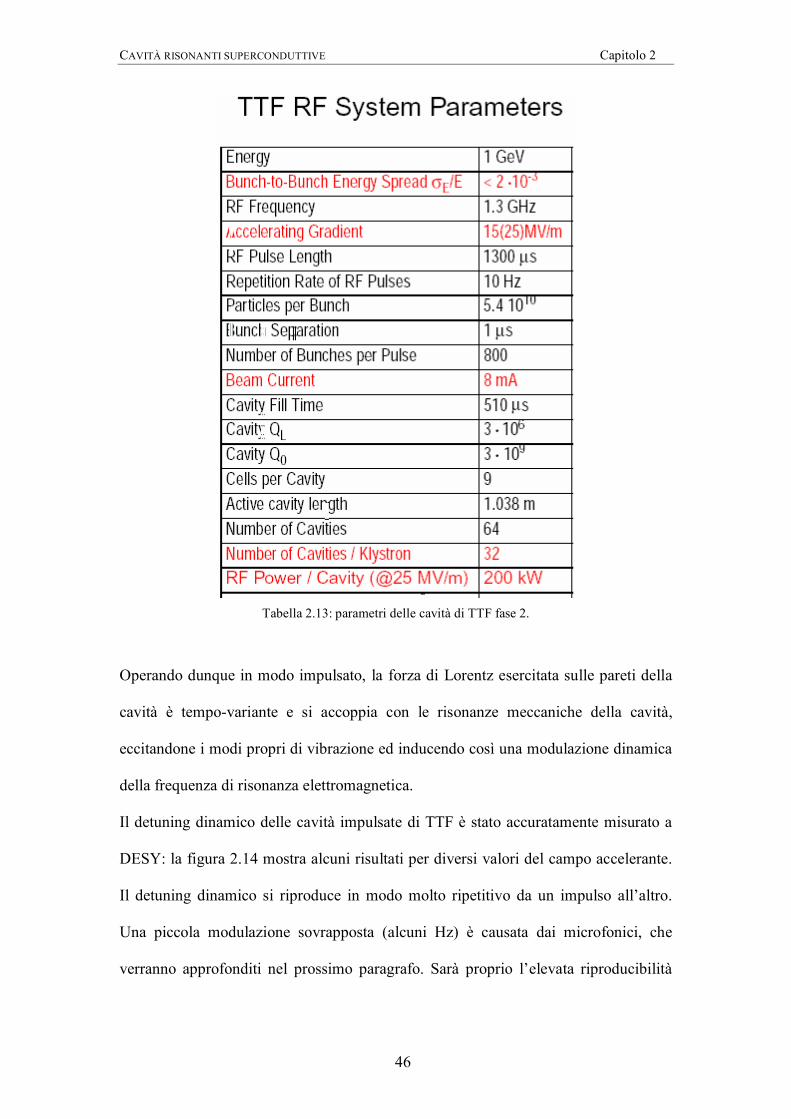
Tabella 2.13: parametri delle cavità di TTF fase 2.
Operando dunque in modo impulsato, la forza di Lorentz esercitata sulle pareti della
cavità è tempo-variante e si accoppia con le risonanze meccaniche della cavità,
eccitandone i modi propri di vibrazione ed inducendo così una modulazione dinamica
della frequenza di risonanza elettromagnetica.
Il detuning dinamico delle cavità impulsate di TTF è stato accuratamente misurato a
DESY: la figura 2.14 mostra alcuni risultati per diversi valori del campo accelerante.
Il detuning dinamico si riproduce in modo molto ripetitivo da un impulso all’altro.
Una piccola modulazione sovrapposta (alcuni Hz) è causata dai microfonici, che
verranno approfonditi nel prossimo paragrafo. Sarà proprio l’elevata riproducibilità
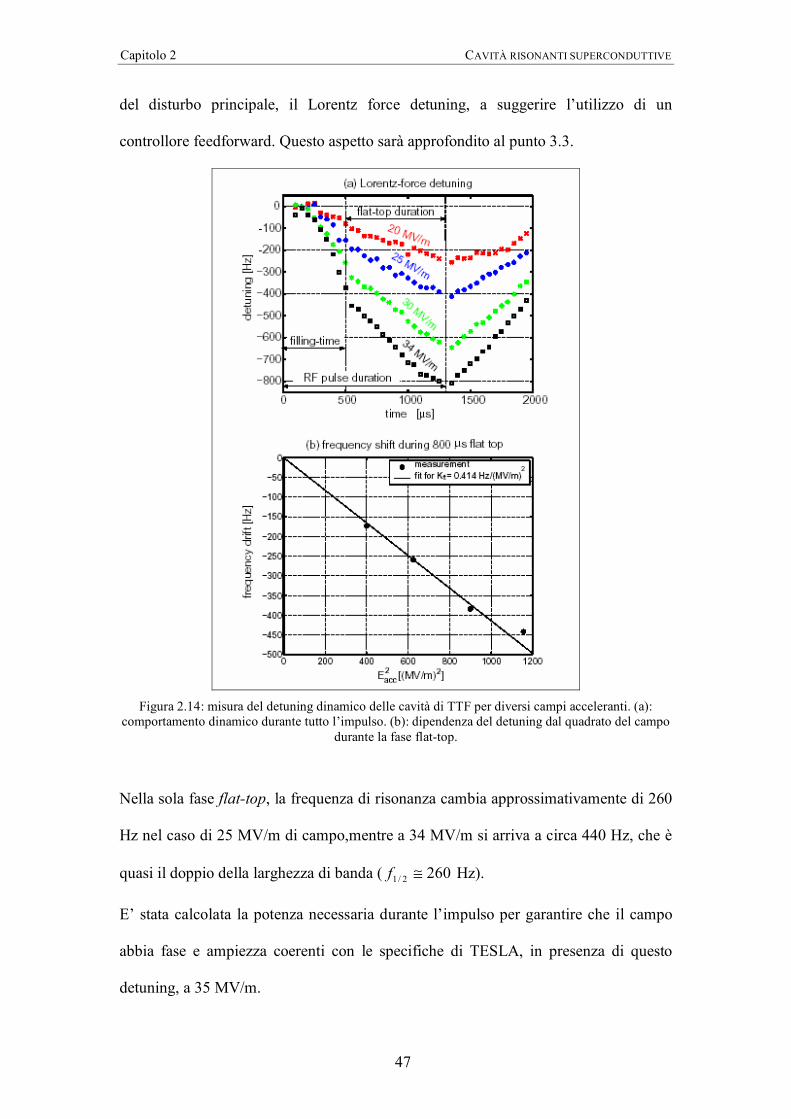
Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
47
del disturbo principale, il Lorentz force detuning, a suggerire l’utilizzo di un
controllore feedforward. Questo aspetto sarà approfondito al punto 3.3.
Figura 2.14: misura del detuning dinamico delle cavità di TTF per diversi campi acceleranti. (a): comportamento dinamico durante tutto l’impulso. (b): dipendenza del detuning dal quadrato del campo
durante la fase flat-top.
Nella sola fase flat-top, la frequenza di risonanza cambia approssimativamente di 260
Hz nel caso di 25 MV/m di campo,mentre a 34 MV/m si arriva a circa 440 Hz, che è
quasi il doppio della larghezza di banda ( 2602/1 ≅f Hz).
E’ stata calcolata la potenza necessaria durante l’impulso per garantire che il campo
abbia fase e ampiezza coerenti con le specifiche di TESLA, in presenza di questo
detuning, a 35 MV/m.
CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
48
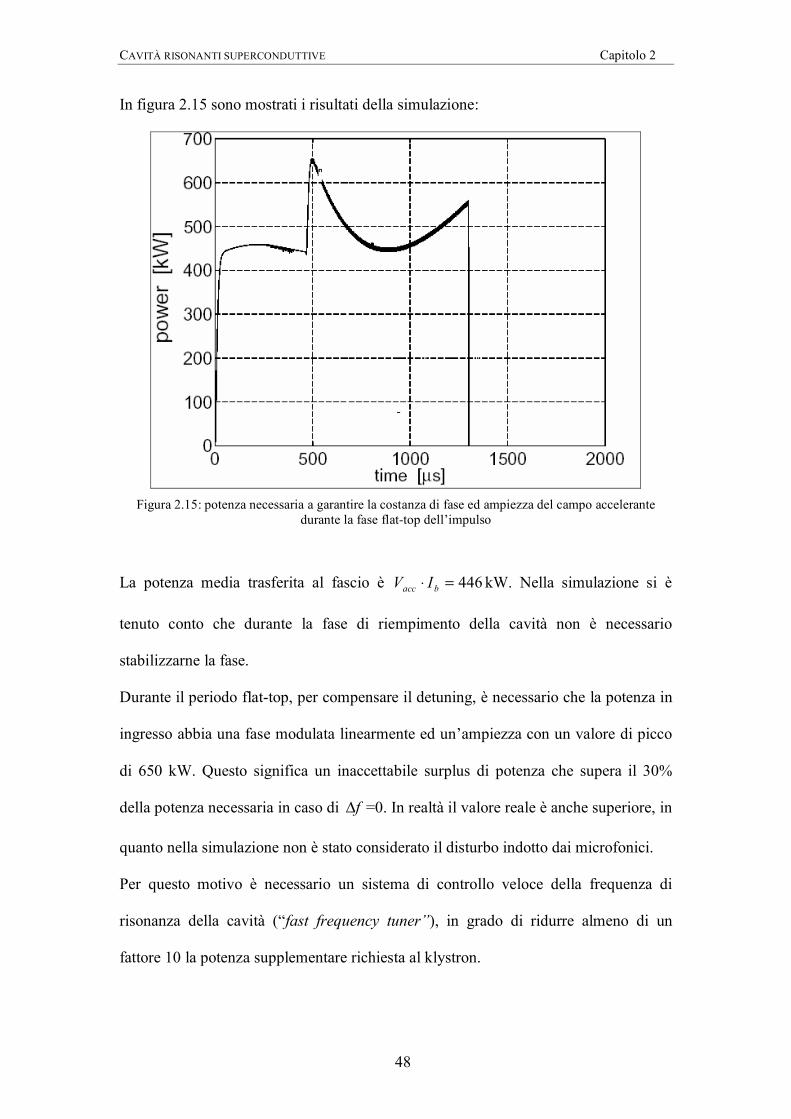
In figura 2.15 sono mostrati i risultati della simulazione:
Figura 2.15: potenza necessaria a garantire la costanza di fase ed ampiezza del campo accelerante durante la fase flat-top dell’impulso
La potenza media trasferita al fascio è 446=⋅ bacc IV kW. Nella simulazione si è
tenuto conto che durante la fase di riempimento della cavità non è necessario
stabilizzarne la fase.
Durante il periodo flat-top, per compensare il detuning, è necessario che la potenza in
ingresso abbia una fase modulata linearmente ed un’ampiezza con un valore di picco
di 650 kW. Questo significa un inaccettabile surplus di potenza che supera il 30%
della potenza necessaria in caso di f∆ =0. In realtà il valore reale è anche superiore, in
quanto nella simulazione non è stato considerato il disturbo indotto dai microfonici.
Per questo motivo è necessario un sistema di controllo veloce della frequenza di
risonanza della cavità (“fast frequency tuner”), in grado di ridurre almeno di un
fattore 10 la potenza supplementare richiesta al klystron.
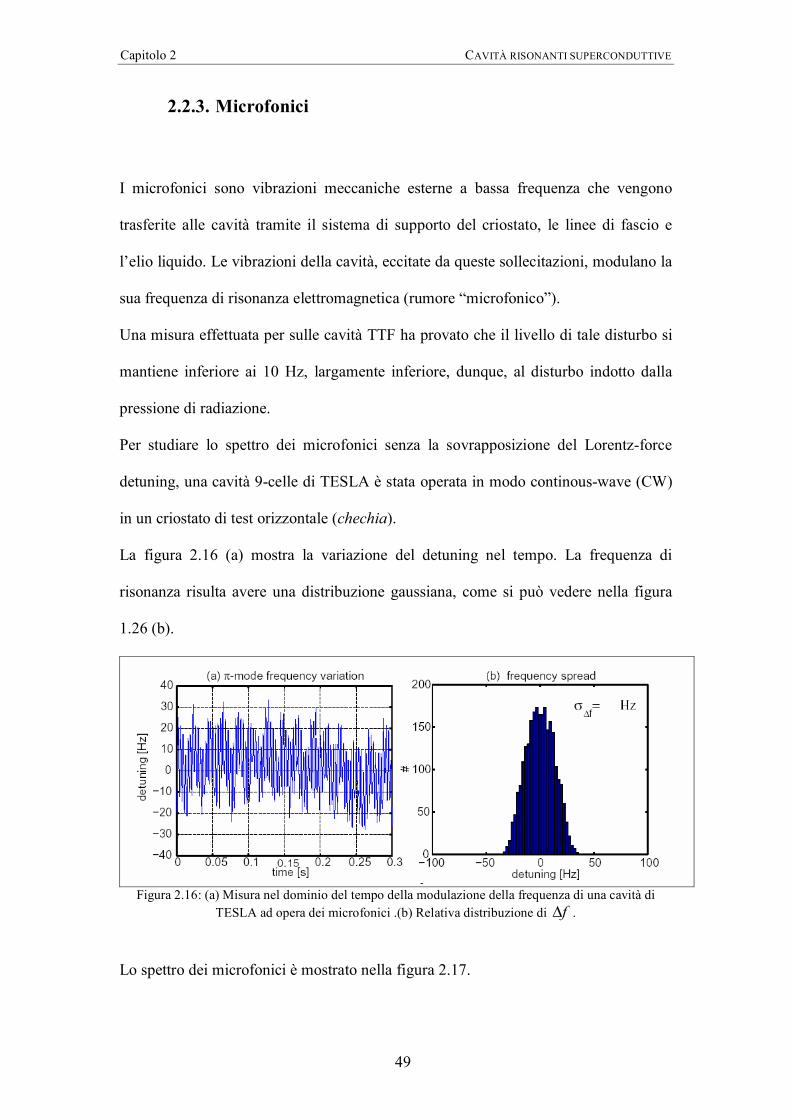
Capitolo 2 CAVITÀ RISONANTI SUPERCONDUTTIVE
49
2.2.3. Microfonici
I microfonici sono vibrazioni meccaniche esterne a bassa frequenza che vengono
trasferite alle cavità tramite il sistema di supporto del criostato, le linee di fascio e
l’elio liquido. Le vibrazioni della cavità, eccitate da queste sollecitazioni, modulano la
sua frequenza di risonanza elettromagnetica (rumore “microfonico”).
Una misura effettuata per sulle cavità TTF ha provato che il livello di tale disturbo si
mantiene inferiore ai 10 Hz, largamente inferiore, dunque, al disturbo indotto dalla
pressione di radiazione.
Per studiare lo spettro dei microfonici senza la sovrapposizione del Lorentz-force
detuning, una cavità 9-celle di TESLA è stata operata in modo continous-wave (CW)
in un criostato di test orizzontale (chechia).
La figura 2.16 (a) mostra la variazione del detuning nel tempo. La frequenza di
risonanza risulta avere una distribuzione gaussiana, come si può vedere nella figura
1.26 (b).
Figura 2.16: (a) Misura nel dominio del tempo della modulazione della frequenza di una cavità di
TESLA ad opera dei microfonici .(b) Relativa distribuzione di f∆ .
Lo spettro dei microfonici è mostrato nella figura 2.17.

CAVITÀ RISONANTI SUPERCONDUTTIVE Capitolo 2
50
Figura 2.17: spettro dei microfonici.
Lo spettro risulta dominato da alcune righe, alcune corrispondono alla frequenza di
vibrazione di elementi esterni (pompe per il vuoto e compressori dell’elio) mentre
altre sono frequenze di risonanza meccanica proprie della cavità.
Complessivamente, il disturbo indotto dai microfonici non è tuttavia sufficientemente
prevedibile e ripetitivo. Contrariamente al Lorentz force detuning, per impostare il
progetto di un sistema attivo di controllo, esso dovrà dunque essere considerato come
un disturbo stocastico.
Sono proprio queste caratteristiche che impongono l’utilizzo, a tal scopo, di un
controllo di tipo feedback. Questo aspetto sarà approfondito nel capitolo 5.
Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
51
3 I SISTEMI DI CONTROLLO DEL CAMPO
ACCELERANTE NEGLI ACCELERATORI DI
PARTICELLE
In questo capitolo saranno esaminate alcune delle principali tecniche attualmente
utilizzate in vari acceleratori superconduttivi per compensare le possibili modulazioni
del campo accelerante, in particolare quelle indotte da disturbi tempo-varianti come le
forze di Lorentz o i microfonici.
Come introduzione a tale trattazione, si espongono alcuni cenni di base di teoria del
controllo, attraverso le modalità d’interesse per il controllo delle cavità acceleranti: il
feedforward ed il feedback.
3.1. CENNI DI TEORIA DEL CONTROLLO
Per affrontare le problematiche relative a questo lavoro di tesi è stato fatto largo uso di
alcuni elementi fondamentali della teoria dei sistemi e del controllo: funzione di
trasferimento, poli e zeri, controlli retroazionati e feedforward.
Sarà in seguito sempre assunto che ogni elemento d’interesse, sia esso elettrico (filtri,
amplificatori etc…) o meccanico (cavità, piezo etc…), possa essere descritto in
termini di un sistema lineare (vale cioè il principio di sovrapposizione degli effetti) ed
orientato, caratterizzato da un numero finito di ingressi ed uscite e della relazione
funzionale tra essi. Le proprietà del sistema complessivo si riflettono allora nella
topologia (serie, parallelo, ad anello) e nei componenti (nodi algebrici, diramazioni) di
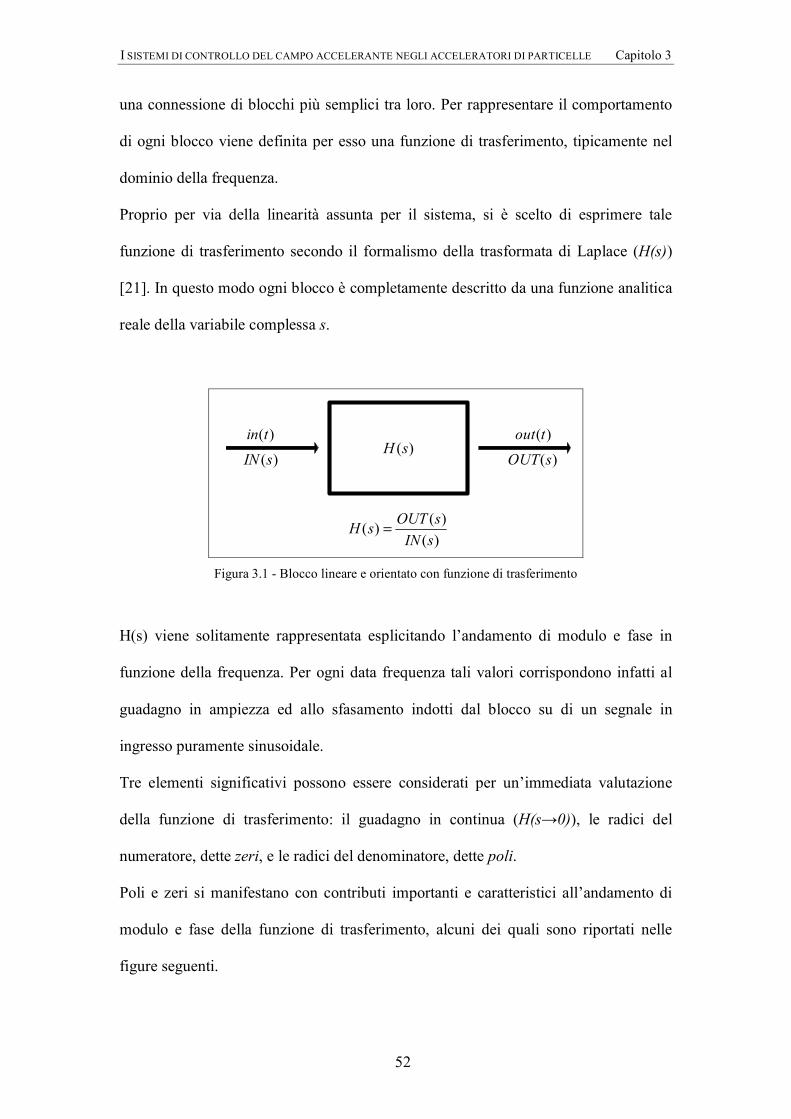
I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
52
una connessione di blocchi più semplici tra loro. Per rappresentare il comportamento
di ogni blocco viene definita per esso una funzione di trasferimento, tipicamente nel
dominio della frequenza.
Proprio per via della linearità assunta per il sistema, si è scelto di esprimere tale
funzione di trasferimento secondo il formalismo della trasformata di Laplace (H(s))
[21]. In questo modo ogni blocco è completamente descritto da una funzione analitica
reale della variabile complessa s.
)(tin )(tout
)(sOUT)(sIN)(sH
)(
)()(
sIN
sOUTsH =
Figura 3.1 - Blocco lineare e orientato con funzione di trasferimento
H(s) viene solitamente rappresentata esplicitando l’andamento di modulo e fase in
funzione della frequenza. Per ogni data frequenza tali valori corrispondono infatti al
guadagno in ampiezza ed allo sfasamento indotti dal blocco su di un segnale in
ingresso puramente sinusoidale.
Tre elementi significativi possono essere considerati per un’immediata valutazione
della funzione di trasferimento: il guadagno in continua (H(s→0)), le radici del
numeratore, dette zeri, e le radici del denominatore, dette poli.
Poli e zeri si manifestano con contributi importanti e caratteristici all’andamento di
modulo e fase della funzione di trasferimento, alcuni dei quali sono riportati nelle
figure seguenti.
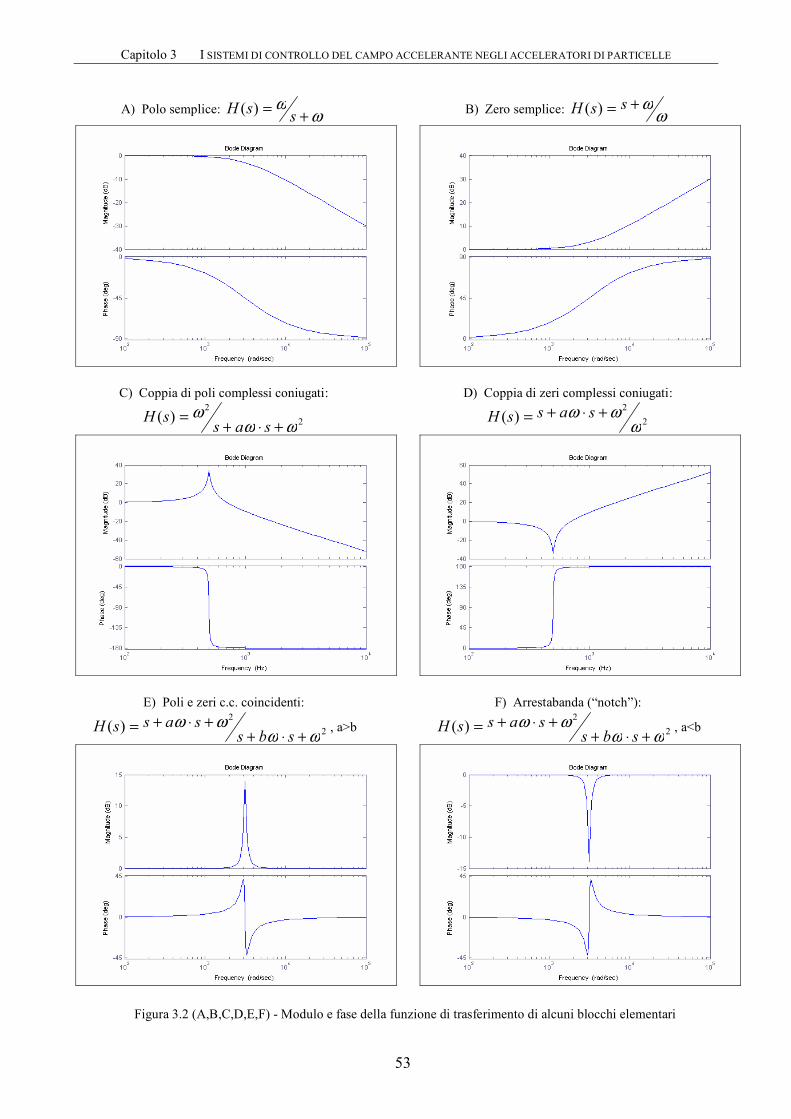
Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
53
A) Polo semplice: ωω
+=s
sH )(
C) Coppia di poli complessi coniugati:
2
2)( ωω
ω+⋅+=
sassH
E) Poli e zeri c.c. coincidenti:
2
2)( ωω
ωω+⋅+
+⋅+=sbs
sassH , a>b
Figura 3.3 (A,B,C,D,E,F) - Modulo e fase della funzione di trasferimento di alcuni blocchi elementari
B) Zero semplice: ωω+= ssH )(
D) Coppia di zeri complessi coniugati:
2
2)( ω
ωω +⋅+= sassH
F) Arrestabanda (“notch”):
2
2)( ωω
ωω+⋅+
+⋅+=sbs
sassH , a<b
Figura 3.2 (A,B,C,D,E,F) - Modulo e fase della funzione di trasferimento di alcuni blocchi elementari
I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
54
Quanto introdotto finora fornisce dunque gli strumenti necessari a generare e gestire
una modellizzazione analitica del sistema in esame. Il passo successivo è allora
introdurre, su tali basi, gli elementi legati al controllo del sistema stesso.
Controllare un sistema implica che una variabile di riferimento dello stesso, variabile
controllata y(t), ubbidisca ad una legge imposta al sistema, come comando esterno, da
una seconda grandezza, la variabile di comando u(t). La misura dell’efficienza del
controllo risiede dunque in una variabile d’errore ε intesa come la differenza tra il
valore istantaneo della variabile controllata ed il valore a cui viene comandata.
Le forme di controllo vengono divise primariamente in due grandi gruppi: i controlli
sequenziali (ad anello aperto, open-loop) ed i controlli retroazionati (ad anello chiuso,
closed-loop). Il passaggio ad un sistema di controllo closed-loop si fonda sull’utilizzo
di un cammino di retroazione o feedback. Le basi teoriche ed gli aspetti d’interesse di
tale tecnica saranno esposti nel prossimo paragrafo.
Verrà anche introdotta una particolare tecnica dei controlli open-loop, il feedforward,
che riveste un ruolo centrale nella compensazione del Lorentz force detuning.
3.1.1. Feedback
In un sistema retroazionato, la risposta del sistema alla grandezza di comando è
costantemente controllata da un nuovo segnale, il segnale errore ε, ottenuto
confrontando, per sottrazione, l’ingresso di comando esterno con un segnale che
rappresenti la stessa variabile controllata. Quest’ultimo, prelevato all’uscita e riportato
all’ingresso, è appunto indicato come segnale di feedback.
Il sistema è illustrato in figura 3.3:

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
55
)(tu )(tε)(sA
+
-
)(sβ
Ingresso(comando)
Segnale difeedback
Uscita(variabile
controllata)Sistema dacontrollare
(Plant)
Blocco direazione
Segnaleerrore
Nodo diconfronto
)(ty
)(tf
Nodo dicampionamento
Figura 3.3 - Schema del controllo retroazionato o feedback
Utilizzando il formalismo introdotto nel precedente paragrafo è possibile valutare le
caratteristiche di un tale schema. Nel dominio della variabile complessa s, valgono le
seguenti relazioni:
)( FUAAY −⋅=Ε⋅= (3.1)
YBF ⋅= (3.2)
Da cui si ricava la funzione di trasferimento dell’intero blocco reazionato:
)()(1
)(
)(
)()(..
sAs
SA
sU
sYsH LC ⋅−
==β
(3.3)
Il fattore )()()( sAssG ⋅= β viene chiamato guadagno d’anello o Gloop.
Il controllo reazionato permette di ridurre la sensibilità dello stadio alle variazioni dei
parametri del sistema, come ad esempio il guadagno di A. Vale infatti:
A
dA
AA
dA
LC
LC
)1(
1
..
..
⋅+=
β (3.4)
Dunque la configurazione ad anello chiuso presenta una stabilità migliorata del fattore
)1( A⋅+ β , detto grado di retroazione.
Detta poi “reiezione del disturbo” di un sistema di controllo la percentuale di rumore
RMS eliminata dal controllore:
ato)incontroll sistema nel disturbo del uscitain RMS (rumore
e)controllor ilcon sistema nel uscitain RMS rumore ( 1epercentual Reiezione −= (3.5)

I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
56
Nel sistema retroazionato vale (nell’ipotesi che il rumore si sommi direttamente ad
u(t) all’ingresso del plant):
ωω
ωω
ω
dAjN
djG
jN
∫
∫⋅⋅
⋅+⋅
=2
2
)(
))((1
1)(
-1 epercentual disturbo del reiezione (3.6)
dove )( ω⋅jN è lo spettro di potenza del rumore in ingresso.
Quindi la reiezione cresce al crescere dell’ampiezza del guadagno d’anello
nell’intervallo di frequenze dello spettro del rumore.
In ambito elettronico lo schema retroazionato introduce fondamentali vantaggi:
riduzione dell’effetto della variazione dei parametri circuitali sul guadagno
dell’amplificatore, possibilità di realizzare amplificatori con caratteristiche quasi
ideali, possibilità di aumentare la banda passante in ragione del fatto che il prodotto
banda passante – guadagno in continua è costante [26][22].
Inoltre, nell’ottica del controllo dei disturbi indotti su cavità risonanti, lo schema
retroazionato permette di ottenere un’azione correttiva indipendente dal tipo di
disturbo. E’ sufficiente infatti che la composizione spettrale del disturbo cada in un
intervallo di frequenze in cui il guadagno d’anello del sistema retroazionato è
sufficientemente elevato. In questo modo si possono compensare anche disturbi
stocastici, proprio come i microfonici.
Importanti svantaggi sono però legati ai problemi di instabilità causati dalla
retroazione che diventa positiva quando il guadagno d’anello è maggiore di uno con
fase fuori dal range di stabilità (180,-180°). Inoltre non si ha azione correttiva senza
deviazione della variabile controllata, dunque non si può ottenere, neppure
teoricamente, un controllo perfetto.

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
57
3.1.1.1.Un esempio: Phase Locked Loop
A titolo d’esempio delle potenzialità di un sistema retroazionato, verrà approfondito
un circuito di vasto utilizzo nell’ambito delle cavità risonanti: Il Phase Locked Loop o
PLL.
Il blocco PLL ha un unico ma fondamentale scopo: sincronizzare la frequenza del
segnale di un oscillatore alla frequenza di un segnale di riferimento, in ingresso,
attraverso la differenza di fase tra i due segnali.
Il PLL è costituito essenzialmente di tre soli elementi, disposti secondo uno schema
retroazionato (figura 3.4):
• Rivelatore di fase
• Filtro passa-basso
• Oscillatore comandato VCO (Voltage controlled oscillator)
Figura 3.4 - schema del circuito PLL
Nel campo dell’alta frequenza il rivelatore di fase è solitamente realizzato con un
mixer (“miscelatore” di frequenze) a cui vengono portati in ingresso due segnali della
stessa frequenza.

I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
58
Un mixer infatti realizza semplicemente il prodotto tra i due segnali in ingresso (LO e
RF). Nel caso specifico di due segnali della forma:
(3.7)
dalla moltiplicazione si ottiene )()()( 213 tststs ⋅= nella forma:
(3.8)
Tramite manipolazioni trigonometriche la (3.8) può essere posta nella forma:
(3.9)
In questo modo è evidente che il segnale prodotto è costituito da due parti, il primo
contributo, in blu, è costante ed è funzione della sola differenza di fase mentre ciò che
rimane (sottolineato) è un segnale a frequenza doppia e fase data dalla somma delle
fasi.
Ecco dunque perché il rivelatore di fase viene fatto seguire da un filtro passa-basso, il
cui scopo è quello di eliminare la componente ad alta frequenza che non contiene
l’informazione voluta sulla differenza di fase.
La risposta complessiva non è dunque lineare rispetto alla fase bensì è della forma:
))(sin(),( tKKtu PBm φφ ∆⋅=∆ (3.10 )
e può essere linearizzata per un piccolo segnale nell’intorno di 0=∆φ .
Un Voltage Controlled Oscillator produce in uscita un segnale periodico la cui
frequenza viene regolata da un segnale di controllo v(t) applicato esternamente.
L’equazione caratteristica è la seguente:
)(0 tvKcout += ωω (3.11)

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
59
Dunque, se è nullo il segnale di comando il VCO produce semplicemente la sua
frequenza propria a riposo (frequenza centrale). Il parametro che caratterizza un VCO,
oltre cω , è allora la costante 0K espressa in Hz/V.
Si consideri ora la corrispondenza integrale tra fase e frequenza per ogni segnale
periodico:
∫=t
ii dttft0
)()(φ (3.12)
La fase è dunque l’integrale della frequenza su un determinato periodo di tempo. Per i
segnali sinusoidali in (3.7) si può dunque scrivere:
(3.13)
e linearizzando per piccolo segnale:
(3.14)
(3.15)
dove Se è l’ampiezza del segnale se(t) al tempo t. Dunque, una variazione di frequenza
del segnale in ingresso viene letta come uno sfasamento linearmente crescente nel
tempo (quindi una crescita lineare di se(t)). Ad esso l’anello di reazione risponde
correggendo in maniera opportuna l’uscita del VCO in modo che, in un tempo finito
tipico del particolare PLL, l’inseguimento del segnale di riferimento abbia termine e
la sincronia tra i due segnali sia realizzata (stato “agganciato”).
La risposta del PLL è tanto più rapida tanto è maggiore il guadagno d’anello del
circuito:
I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
60
0KKKG PBmloop ⋅⋅= (3.16)
ottenuto dal prodotto del guadagno dei tre stadi componenti.
Il PLL è capace di mantenersi agganciato ad un segnale in un range limitato di
frequenza attorno a cω (“hold range”) definito da:
02 KKmH ⋅⋅=∆ω (3.17)
Partendo poi da uno stato non agganciato, il PLL può sincronizzarsi al segnale in
ingresso in un più ristretto intervallo (“capture range”):
PBC B⋅⋅=∆ πω 22 (3.18)
dove PBB è la banda passante del filtro passa-basso.
I PLL vengono diffusamente utilizzati in fase di misura dei parametri elettromagnetici
delle cavità acceleranti. Tali circuiti permettono infatti, una volta agganciato il segnale
RF che oscilla nella cavità, di seguire gli spostamenti, statici e tempo-varianti, della
frequenza di risonanza, come accade ad esempio in presenza di variazioni di
temperatura, forze di stress o disturbi meccanici.
3.1.2. Feedforward
Lo schema feedforward costituisce una diffusa applicazione dei controlli automatici
ad anello aperto. Secondo tale schema, un segnale d’ingresso ausiliario,
opportunamente legato al vero ingresso del sistema, viene utilizzato per ottenere, in
uscita, il voluto comportamento della variabile controllata.
Se il controllo feedback formalmente imponeva al sistema un vincolo tra un’uscita ed
un ingresso, il controllo feedforward realizza dunque un vincolo tra due ingressi del

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
61
sistema. Per esprimere sia il generico sistema da controllare che il vincolo aggiuntivo
si può ricorrere al formalismo state-space [20]. In questo caso, il sistema di equazioni
differenziali di primo ordine con cui può sempre essere descritto un generico sistema
lineare, è espresso in forma matriciale.
)()()(
)()()(.
tuDtxCty
tuBtxAtx
+=
+= (3.19)
Ingressi, uscite e variabili di stato del sistema sono allora genericamente rappresentate
da vettori. Ora dunque tutte le informazioni sul sistema sono contenute nelle matrici
A, B, C, D. Anche la relazione tra gli ingressi che caratterizza il controllore può essere
formalizzata nel modo seguente:
NCFF uGu = , NCNCNCFFNC uGuGuuuu )1( +=+=+→ (3.20)
Dove NCu indicano gli ingressi del sistema non controllato, FFu invece i nuovi
ingressi introdotti per il controllo feedforward.
Per descrivere allora il sistema controllato operiamo la sostituzione (3.20) ed
trasformiamo secondo Laplace la (3.19). Risolviamo poi il sistema per ricavare
l’equivalente state-space della funzione di trasferimento (che sarà la matrice di tutte le
funzioni di trasferimento del sistema). Si ottiene:
Sistema non controllato: )()(])([)( 1 sUHsUDBAsCsY ⋅=⋅+−= − (3.21)
Sistema controllato Feedforward: )()(])()([)( 1 sUHsUDGBAsCsY FF ⋅=⋅++−= − (3.22)
L’effetto del controllo feedforward è allora quello di alterare la risposta del sistema
spostandone gli zeri rispetto al caso non controllato. I poli invece, qui rappresentati
come autovalori della matrice A, non vengono toccati (come invece accade nel caso di
un controllo ad anello chiuso).
I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
62
Un vantaggio intrinseco del controllo feedback è che è in teoria realizzabile un
controllo perfetto. Infatti la compensazione prescinde dalle deviazioni della variabile
controllata dal valore di riferimento. In compenso, per lo stesso motivo, solo una
modulazione altamente ripetitiva e ben nota della variabile controllata può essere
compensata in questo modo.
Si è fatto ricorso infatti al controllo feedforward nel caso del Lorentz force detuning,
un disturbo sempre sincrono all’iniezione in cavità della potenza RF ed altamente
ripetitivo da un impulso RF all’altro.

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
63
3.2. TECNICHE ATTUALI
3.2.1. Stiffening
Come è stato descritto nel paragrafo 2.2.2, la pressione di radiazione della
radiofrequenza causa una deformazione delle pareti della cavità che cambia la
frequenza di risonanza del modo accelerante. Per una cavità a nove celle in niobio
come quelle di TESLA, con pareti di 2.5 mm di spessore, si calcola che lo
spostamento della frequenza (dinamico, ovvero calcolato simulando il funzionamento
della cavità in modo impulsato) sia di 900 Hz per un gradiente accelerante di 25
MV/m. In accordo con la definizione analitica della pressione di radiazione (2.42) e
con il teorema di Slater per la variazione di f0 (2.43), le regioni della cavità dove la
pressione del campo è maggiore sono le stesse che contribuiscono maggiormente allo
spostamento della frequenza. Inoltre la forza di Lorentz e lo spostamento della
frequenza per deformazione della parete hanno segno concorde. Questo implica che
non è possibile eliminare il Lorentz force detuning ottimizzando la forma della cavità,
cioè agendo sulla distribuzione di campo. L’unico rimedio statico e passivo possibile
è aumentare la rigidità meccanica delle pareti. Per questo la cavità è stata rinforzata
con degli anelli di niobio (“stiffening rings”) tra le celle adiacenti, come mostrato in
figura 3.6. Questa soluzione riduce di un fattore 2 il Lorentz force detuning, ma non è
sufficiente per garantire che il detuning sia minore della banda passante della cavità.
Un risultato migliore sarà ottenuto utilizzando il sistema di fast tuning ad attuatori
piezoelettrici (3.5).

I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
64
Figura 3.5 - sezione finale di una cavità di TESLA. E’ evidenziata la presenza di un anello di rinforzo (“stiffening ring”) per ridurre il Lorentz force detuning. Un piatto saldato di forma conica (“conical
head plate” nella figura) connette la cavità al serbatoio dell’elio liquido.
3.2.2. Damping passivo
Nelle cavità a basso β (c
v particella=β è la velocità normalizzata della particella
accelerata), come ad esempio la λ/4 dei Laboratori Nazionali di Legnaro, si utilizza
spesso un sistema di damping meccanico passivo per ridurre l’effetto dei microfonici
sulla frequenza di risonanza della cavità [10]. Lo scopo del damper passivo è dissipare
la potenza delle vibrazioni del conduttore interno diminuendo il Q dei suoi modi
meccanici propri. Un disegno del damper è presentato in figura 3.6.
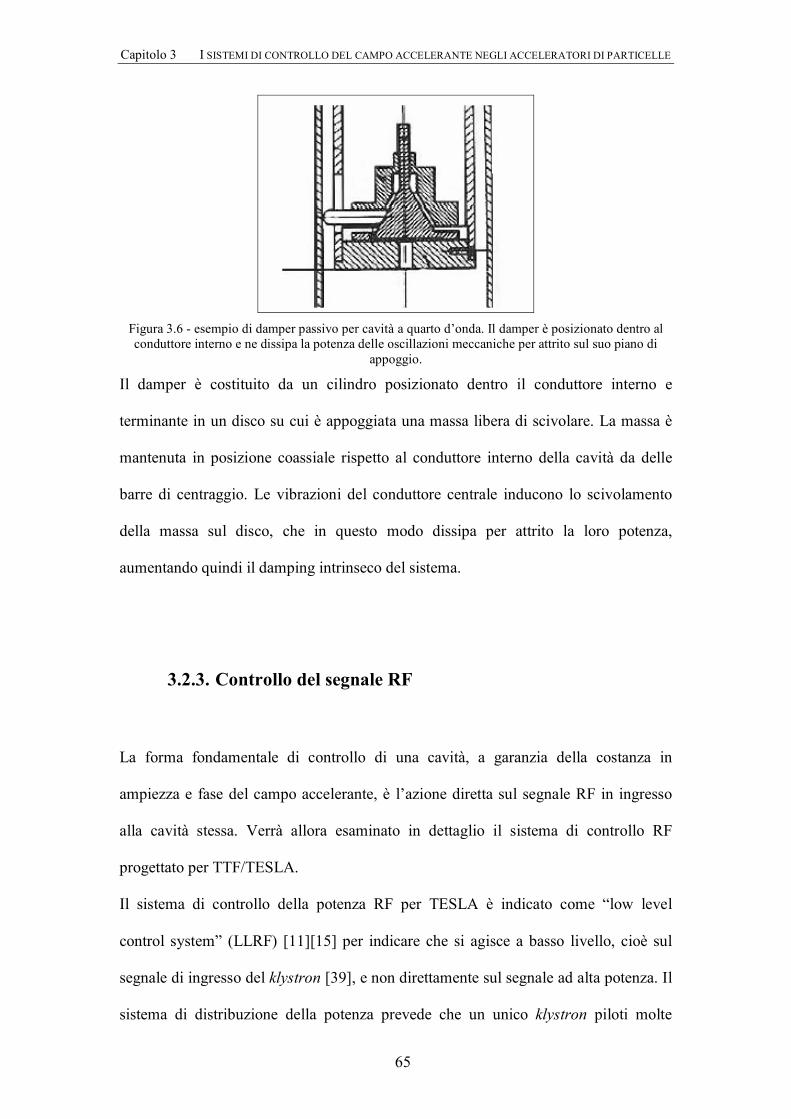
Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
65
Figura 3.6 - esempio di damper passivo per cavità a quarto d’onda. Il damper è posizionato dentro al conduttore interno e ne dissipa la potenza delle oscillazioni meccaniche per attrito sul suo piano di
appoggio.
Il damper è costituito da un cilindro posizionato dentro il conduttore interno e
terminante in un disco su cui è appoggiata una massa libera di scivolare. La massa è
mantenuta in posizione coassiale rispetto al conduttore interno della cavità da delle
barre di centraggio. Le vibrazioni del conduttore centrale inducono lo scivolamento
della massa sul disco, che in questo modo dissipa per attrito la loro potenza,
aumentando quindi il damping intrinseco del sistema.
3.2.3. Controllo del segnale RF
La forma fondamentale di controllo di una cavità, a garanzia della costanza in
ampiezza e fase del campo accelerante, è l’azione diretta sul segnale RF in ingresso
alla cavità stessa. Verrà allora esaminato in dettaglio il sistema di controllo RF
progettato per TTF/TESLA.
Il sistema di controllo della potenza RF per TESLA è indicato come “low level
control system” (LLRF) [11][15] per indicare che si agisce a basso livello, cioè sul
segnale di ingresso del klystron [39], e non direttamente sul segnale ad alta potenza. Il
sistema di distribuzione della potenza prevede che un unico klystron piloti molte

I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
66
cavità (un numero indicativo è 32), quindi il sistema di controllo deve garantire che la
stabilità in fase e in ampiezza della somma vettoriale dei contributi acceleranti di 32
cavità sia coerente con il massimo spread energetico tollerato per il fascio. Nelle
specifiche di TESLA si richiede che lo spread energetico del singolo pacchetto sia di
5⋅ 410− , e che lo spread energetico tra un pacchetto e l’altro sia minore di questo
valore. Ulteriori vincoli per il sistema di controllo sono legati alla potenza richiesta al
klystron, che dovrà essere minimizzata, ed alla necessità che il sistema di controllo sia
efficace, malgrado le variazioni di parametri non costanti come l’effetto di carico e il
guadagno del klystron. E’ necessario che ampiezza e fase del gradiente accelerante (si
consideri la figura 2.12 per la struttura dell’impulso di TESLA e il detuning della
cavità) siano controllati durante la fase flat-top (cioè mentre il fascio viene
accelerato), ma è auspicabile un’azione di controllo del campo anche durante il fill-
time per garantire le condizioni giuste per l’iniezione del fascio e minimizzare la
potenza richiesta per raggiungere il valore di campo della fase flat top. Il detuning
della cavità dovuto alla forza di Lorentz e ai microfonici causa tipicamente al campo
accelerante una diminuzione di ampiezza del 5% e un errore di fase di 20° . Questi
errori devono essere ridotti almeno di un fattore 10. Fortunatamente, come visto in
precedenza, la sorgente di errore dominante (Lorentz force) è ripetitiva e quindi può
essere efficacemente ridotta usando il controllo feedforward.
In figura 3.7 è mostrato uno schema complessivo del sistema di controllo RF per 32
cavità, distribuite in 4 criomoduli.

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
67
Figura 3.7 - schema del sistema di controllo RF per TESLA.
Un modulatore (I/Q modulator”, I per “in-phase” e Q per “quadrature”) è usato per
regolare fase e ampiezza del segnale proveniente dall’oscillatore (master oscillator)
prima che venga amplificato dal klystron. Un campione dei segnali RF incidente e
riflesso in ingresso alla cavità viene prelevato tramite degli coupler direzionali,
mentre un campione del campo presente in cavità viene prelevato con un coupler ad
alto Q posizionato al suo interno. Ognuno di questi segnali viene convertito a una
frequenza di 250 KHz inviandolo ad un mixer insieme al segnale di un oscillatore
locale (“LO”) a frequenza fRF + 250 KHz. I segnali in uscita dai mixer sono
campionati con degli ADC a una frequenza di campionamento di 1 MHz. I segnali
digitali corrispondenti ad ampiezza e fase del campo della cavità così ottenuti
vengono moltiplicati per delle matrici di rotazione 2 x 2 , che in fase di calibrazione
vengono programmate per ciascuna cavità in modo da rendere omogenee le misure di

I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
68
fase e ampiezza, malgrado le inevitabili differenze tra i vari accoppiamenti RF (ad
esempio le inevitabili differenze tra le antenne). In seguito viene eseguita una somma
vettoriale. Al risultato della somma (campo accelerante complessivo),
preliminarmente filtrato da un filtro passa-basso digitale, viene sottratto il valore di
riferimento (registrato nella “set point table” dello schema). Il segnale errore così
ottenuto viene filtrato da uno stadio digitale con il guadagno opportuno (registrato
nella “gain table”).
Le uscite, parte reale e immaginaria, del filtro digitale potrebbero già ora essere
inviate direttamente al DAC e quindi al modulatore, chiudendo così l’anello di
feedback. Tuttavia per compensare più efficientemente la parte ripetitiva del detuning
si somma al dato proveniente dal blocco di retroazione anche un contributo
corrispondente memorizzato nella tabella feedforward. La tabella feedforward potrà
essere aggiornata periodicamente in modo adattativo tramite l’elaborazione della
risposta della somma vettoriale dei campi acceleranti ad un segnale di test (un piccolo
gradino di tensione sovrapposto, dal modulatore, al segnale di ingresso al klystron).
Questo permetterà alla correzione feedforward di seguire le derive lente dei parametri
del sistema, come, ad esempio, il guadagno del klystron.
Per dimostrare la realizzabilità di questo sistema di controllo RF per TESLA, alcune
misure sono state eseguite presso TTF su di un prototipo che controlla un klystron e
16 cavità. In figura 3.8 è riportato lo schema di questo sistema (per comodità si è
omesso di disegnare il secondo criomodulo con le altre 8 cavità).
Vengono utilizzati tre DSP modello TMS320C40 della Texas Instruments. I DSP 1 e
2 realizzano il filtro digitale del blocco di retroazione mentre il DSP 3 realizza il
feedforward. Una work station Sun interfacciata con il DSP 3 provvede ad aggiornare
la tabella feedforward sulla base dell’elaborazione della risposta al segnale di test.

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
69
Figura 3.8 –Sistema di controllo RF per il prototipo con 16 cavità allestito presso TTF.
Il campo accelerante delle cavità è stato fissato a 15 MV/m, corrispondente a un
energia del fascio di 260 MeV. Il sistema è stato testato nelle due configurazioni del
controllore: senza feedforward (solo feedback), e con feedforward. I risultati delle
misure sono esposti nella figura 3.9. Con il solo feedback si è raggiunto per
l’ampiezza del campo un valore di deviazione relativa 3102)( −⋅<
A
Aσ, mentre per la
deviazione della fase si è ottenuto °< 5.0)(φσ . Le fluttuazioni residue erano
dominate da una componente ripetitiva e sono state ridotte di circa un fattore 10 con
l’utilizzo del sistema feedforward.
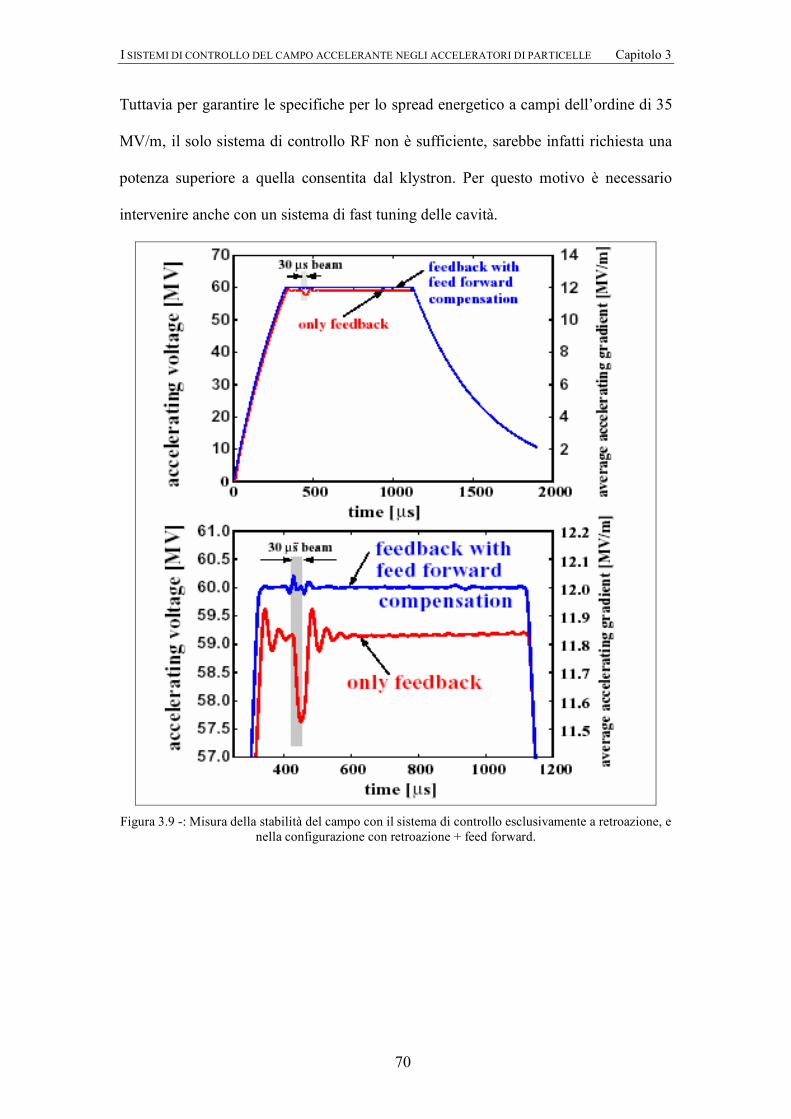
I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
70
Tuttavia per garantire le specifiche per lo spread energetico a campi dell’ordine di 35
MV/m, il solo sistema di controllo RF non è sufficiente, sarebbe infatti richiesta una
potenza superiore a quella consentita dal klystron. Per questo motivo è necessario
intervenire anche con un sistema di fast tuning delle cavità.
Figura 3.9 -: Misura della stabilità del campo con il sistema di controllo esclusivamente a retroazione, e nella configurazione con retroazione + feed forward.

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
71
3.2.4. Slow frequency tuner
Gli “slow tuner” sono dei sistemi meccanici quasi statici di controllo situati nel
criomodulo che deformando la cavità ne garantiscono la giusta frequenza di risonanza
elettromagnetica f0. Essi sono necessari perché la frequenza di risonanza della cavità
non è mai esattamente la frequenza nominale dell’acceleratore, a causa, ad esempio,
delle tolleranze meccaniche, in particolare dopo le operazioni di assemblaggio nel
modulo, il pompaggio dei vuoti ed il raffreddamento (“cooldown”). L’impossibilità di
prevedere i contributi sulla frequenza di risonanza di tutte queste operazioni entro le
tolleranze richieste ( 50-100 Hz per TESLA ) impedisce di dedurre, da misure a
temperatura ambiente, se una cavità avrà una frequenza di risonanza a freddo corretta
per il funzionamento dell’acceleratore.
Lo slow tuner serve inoltre, durante il funzionamento dell’acceleratore, a correggere
le derive lente della frequenza, come ad esempio quelle causate da variazioni di
pressione dei liquidi criogenici o della lunghezza del sistema di supporto dovute al
cambiamento di temperatura nelle sezioni a temperatura ambiente. Esistono molti tipi
diversi di slow tuner, anche se in generale quelli impiegati per cavità superconduttive
a multicelle si basano sulla contrazione/allungamento della cavità lungo la direzione
del fascio. L’omogeneità delle caratteristiche meccaniche delle varie celle che
compongono la cavità fa si che questa operazione non comprometta il profilo di
campo della cavità stessa (se le celle si deformassero in modo diverso l’una dall’altra
il profilo di campo verrebbe alterato). Lo slow tuner deve garantire una risoluzione in
frequenza nell’ordine del centesimo della larghezza di banda della cavità, e questo nel
caso di TESLA richiede un’ accuratezza sub-micrometrica. A questo scopo viene
impiegato un motore passo-passo con un moto-riduttore ad alta sensibilità. Il motore

I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
72
non agisce direttamente sulla cavità ma su un sistema di leve che vanno a comprimere
(o dilatare) il serbatoio dell’elio all’interno del quale è fissata la cavità. Il serbatoio e
il leveraggio vengono realizzati in titanio per limitare le contrazioni termiche
differenziali (in questo modo i materiali posseggono coefficienti di dilatazione simili).
La parte mobile del tuner lavora in vuoto, a 2 K. Il tuning range è di 300 KHz con
una risoluzione di 1 Hz. In figura 3.10 si vede una foto dello slow tuner, dove nel
leveraggio sono integrati anche i due elementi piezoelettrici che saranno utilizzati
come coppia attuatore-sensore per il fast tuning della cavità.
Figura 3.10 - Slow tuner attualmente usato per le cavità di TTF. Sono evidenziati il motore a step, le leve e la posizione dei piezoelettrici per il fast tuning.
Per l’utilizzo delle nuove cavità a superstrutture [12] è necessario un nuovo tipo di
slow tuner, più compatto, perché non sarà più possibile lasciare così tanto spazio tra
una cavità e l’altra. E’ in fase di studio uno slow tuner che soddisfi queste esigenze:

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
73
invece di essere collocato ad un estremo del serbatoio dell’elio, sarà collocato in
posizione coassiale (figura 3.11).
Figura 3.11 - disegno dello slow tuner coassiale progettato per le cavità a superstrutture di TESLA
3.2.5. Fast frequency tuner
Nel caso di cavità acceleranti operate in modalità continua (continuous wave o CW), è
sufficiente (quando è possibile trascurare i disturbi microfonici) un dispositivo come
lo slow tuner appena illustrato per garantire la stabilità del campo accelerante in
condizioni operative.
Nel caso di un uso impulsato della cavità invece, il disturbo indotto dalla forza di
Lorentz (descritto al paragrafo 2.2.2) può diventare critico per il rispetto delle
specifiche dell’acceleratore (come nel caso di TESLA operato a 35 MV/m). In tal
caso, la bassa velocità di operazione che inevitabilmente caratterizza gli slow tuner
I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
74
(dispositivi quasi-statici), li rende inadeguati al controllo di un tale detuning tempo-
variante.
Inoltre, in presenza di cavità dal Q molto elevato oppure di fronte alla richiesta di un
valore di spread energetico del fascio molto ridotto, anche i disturbi microfonici (par.
2.2.3) possono divenire critici per il sistema.
Proprio da ciò emerge allora la necessità di disporre di un dispositivo, il fast
frequency tuner, capace di regolare rapidamente la frequenza di risonanza della cavità.
Proprio come per lo slow tuner, il fast tuner interviene sulla forma della cavità stessa,
in modo da spostarne la frequenza di risonanza in un intervallo però, tipicamente al
più 2 kHz, assai ridotto rispetto allo slow tuner. Le deformazioni indotte dalla forza di
Lorentz e dai microfonici sono distribuite su ampie porzioni della superficie delle
celle e non è in realtà possibile generare un’identica distribuzione di forze contrarie,
tali da annullare la deformazione complessiva in ogni punto della superficie della
cavità. E’ invece accettabile il fatto di applicare una singola forza )(tFtuner che induca
un detuning tempo-variante )(tf tuner∆ tale da compensare esattamente il detuning
causato dai disturbi:
)()( tftf disturbituner ∆−=∆ (3.23)
In questo modo la geometria della cavità, e quindi la distribuzione di campo, sarà
leggermente alterata rispetto al caso non perturbato, variazione comunque del tutto
trascurabile per il campo accelerante effettivo.
Ora al tuner viene però richiesto, rispetto al dispositivo slow, un netto incremento
della banda passante, in funzione della distribuzione in frequenza dei disturbi tempo-
varianti da controllare.
Per realizzare un tale sistema di fast tuning è necessario disporre anzitutto di un
attuatore meccanico capace di generare forza e spostamento sufficienti. La necessità
Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
75
di creare una continuità meccanica tra la cavità e tale attuatore implica altri vincoli
importanti:
• Dimensioni ridotte per essere ospitato all’interno del modulo accelerante
• Operatività a temperature criogeniche
• Resistenza alle radiazioni ionizzanti
• Risoluzione micrometrica
Questi ed altri importanti criteri di scelta saranno debitamente approfonditi nel
paragrafo 4.1, dedicato agli attuatori più diffusamente utilizzati in tale ambito e primi
candidati per il fast tuner di TESLA: gli attuatori piezoelettrici.
In ambito internazionale, il maggiore impulso al lavoro di sviluppo di un fast
frequency tuner per cavità superconduttive viene proprio dall’attività rivolta al
progetto TESLA, in cui sono coinvolti gruppi da DESY, Orsay, CEA (Saclay) e
LASA. Per raggiungere le attuali specifiche di TESLA infatti, come già sottolineato
nei paragrafi 2.2.2 e 3.2.1, un fast tuner è vitale e la compensazione del Lorentz force
detuning è già oggi in un’avanzata fase di sviluppo.
Si riporta allora in figura 3.12 lo schema complessivo del fast frequency tuner
progettato per le cavità acceleranti di TTF/TESLA.
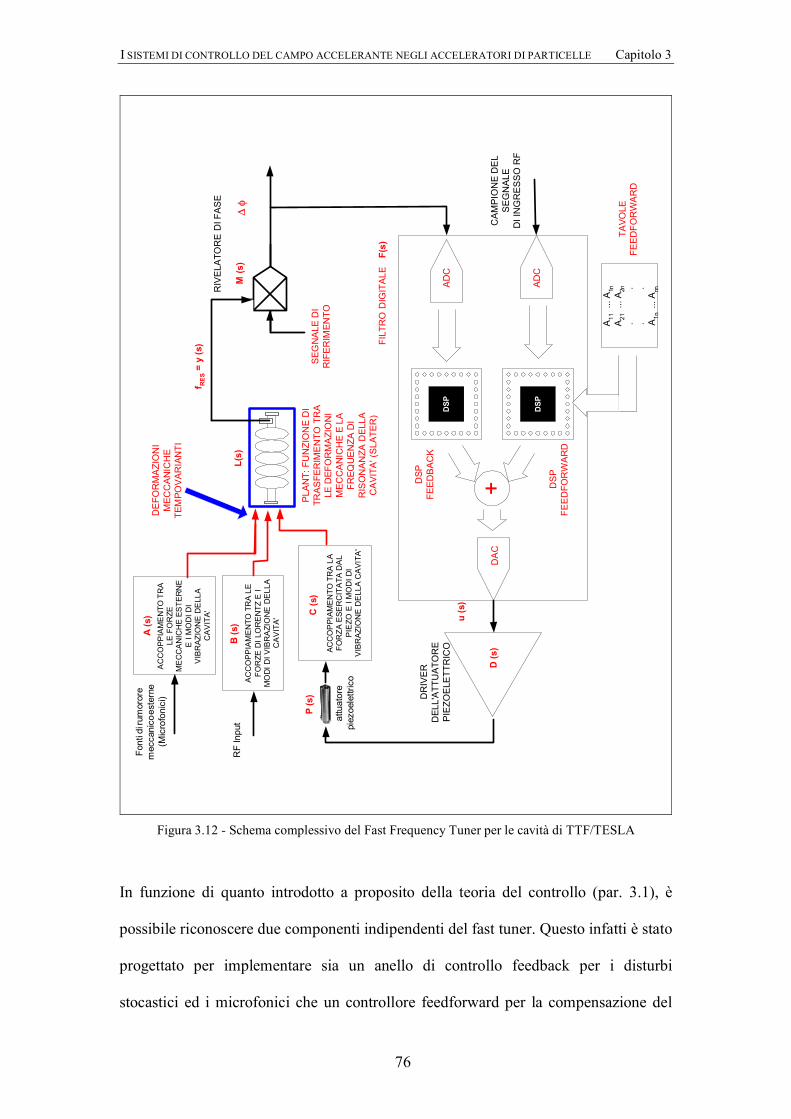
I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
76
attu
ato
repi
ezoel
ettr
ico
∆ φ
Fon
ti di r
umor
ore
mec
canic
o e
ster
ne(M
icro
fonic
i)D
EF
OR
MA
ZIO
NI
ME
CC
AN
ICH
ET
EM
PO
VA
RIA
NT
I
PLA
NT
: F
UN
ZIO
NE
DI
TR
AS
FE
RIM
EN
TO
TR
ALE
DE
FO
RM
AZ
ION
IM
EC
CA
NIC
HE
E L
AF
RE
QU
EN
ZA
DI
RIS
ON
AN
ZA
DE
LLA
CA
VIT
A' (
SL
AT
ER
)
AC
CO
PP
IAM
EN
TO
TR
ALE
FO
RZ
EM
EC
CA
NIC
HE
ES
TE
RN
EE
I M
OD
I D
IV
IBR
AZ
ION
E D
ELL
AC
AV
ITA
'
AC
CO
PP
IAM
EN
TO
TR
A L
AF
OR
ZA
ES
ER
CIT
AT
A D
AL
PIE
ZO
E I
MO
DI
DI
VIB
RA
ZIO
NE
DE
LL
A C
AV
ITA
'
f RE
S =
y (
s)
D (
s)
P (s)
A (
s)
C (
s)
M (
s)
F(s
)
u (
s)
AC
CO
PP
IAM
EN
TO
TR
A L
EF
OR
ZE
DI
LO
RE
NT
Z E
IM
OD
I D
I V
IBR
AZ
ION
E D
EL
LA
CA
VIT
A'
RF
Input
B (
s)
DS
P
FIL
TR
O D
IGIT
ALE
SE
GN
ALE
DI
RIF
ER
IME
NT
O
RIV
ELA
TO
RE
DI F
AS
E
DS
P
A1
1 ... A
1nA
21
... A
2n.
.
.
.
A1
n ... A
nn
DS
PF
EE
DB
AC
K
AD
C
DA
CC
AM
PIO
NE
DE
LS
EG
NA
LE
DI IN
GR
ES
SO
RF
+
AD
C
DS
PF
EE
DF
OR
WA
RD
TA
VO
LE
FE
ED
FO
RW
AR
D
DR
IVE
RD
ELL'A
TT
UA
TO
RE
PIE
ZO
ELE
TT
RIC
O
L(s
)
Figura 3.12 - Schema complessivo del Fast Frequency Tuner per le cavità di TTF/TESLA
In funzione di quanto introdotto a proposito della teoria del controllo (par. 3.1), è
possibile riconoscere due componenti indipendenti del fast tuner. Questo infatti è stato
progettato per implementare sia un anello di controllo feedback per i disturbi
stocastici ed i microfonici che un controllore feedforward per la compensazione del

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
77
Lorentz force detuning. Per quest’ultima parte, un sistema elettronico, basato su un
processore DSP (par. 5.2.1), è stato previsto per generare il corretto impulso di
comando per i piezoelettrici, in sincronia con l’impulso RF. Questa componente del
fast tuner sarà ulteriormente approfondita nel prossimo paragrafo.
Per la componente retroazionata è invece, come visto, fondamentale assicurare la
stabilità dell’anello contro possibili inversioni della polarità della reazione. A tale
scopo all’interno del guadagno d’anello
)()()()()()()( sLsCsPsDsFsMsG = (3.24)
è stato inserito uno stadio )(sF completamente programmabile, anch’esso costituito
da un processore DSP, in modo da poter realizzare un filtro digitale di
compensazione.
Non si ha accesso diretto alla misura di tutte queste funzioni di trasferimento. E’ però
possibile misurare il Lorentz force detuning B(s)⋅L(s), il detuning causato dai
microfonici A(s)⋅L(s) e E(s)⋅L(s), cioè la risposta φ∆ al variare in frequenza del
segnale di ingresso u(ω) del driver dei piezo. Quest’ultima in particolare è di grande
interesse (nei prossimi paragrafi si trovano proprio delle misure di E(s)⋅L(s) effettuate
in diversi laboratori). Infatti, come è illustrato nel paragrafo 3.1.1, anche se del
sistema non si conoscono esattamente il rumore in ingresso e la sua funzione di
trasferimento si può ottenere una alta reiezione del disturbo, purché il guadagno
d’anello G(s) sia elevato nelle regioni di spettro dove è presente il rumore. Tuttavia
per non incorrere in problemi di instabilità, è necessario fare in modo che il guadagno
d’anello G(s)=E(s)⋅L(s)⋅F(s) abbia ampiezza minore di uno quando la sua fase supera
180°.
In generale si vedrà più avanti che la funzione E(s)⋅L(s) misurata ai fini di
caratterizzare il sistema e progettare il corretto filtro correttivo, presenta una alta
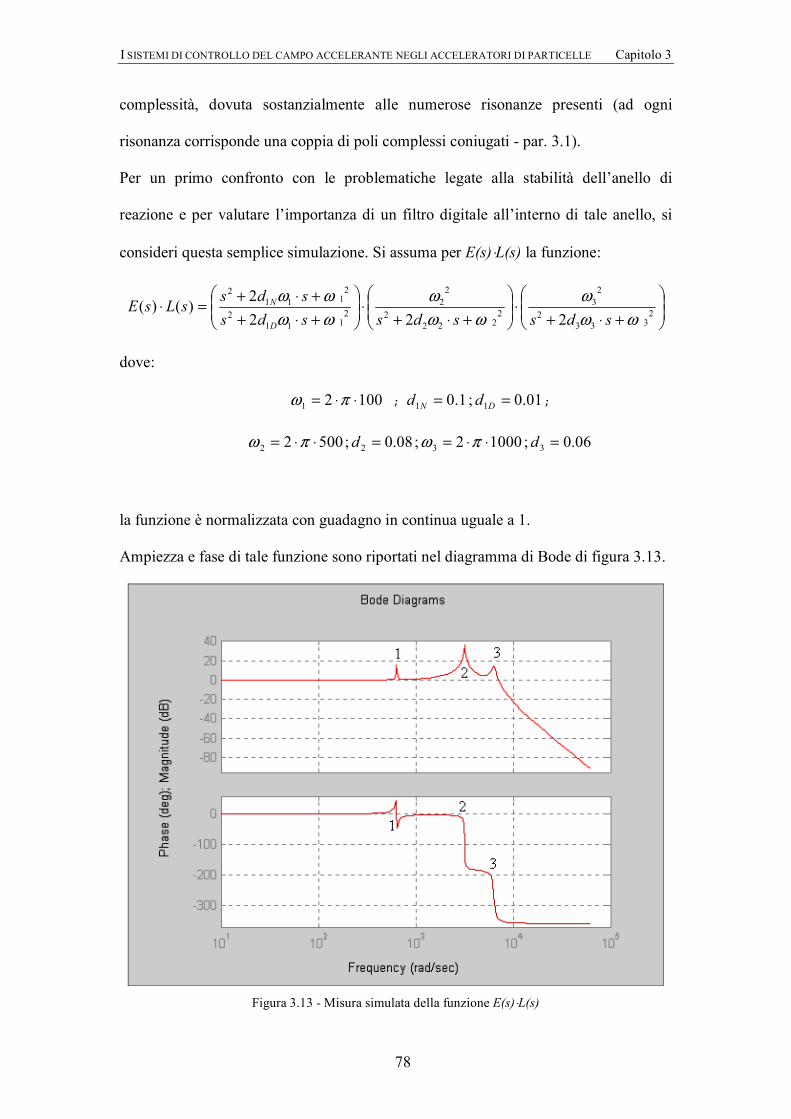
I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
78
complessità, dovuta sostanzialmente alle numerose risonanze presenti (ad ogni
risonanza corrisponde una coppia di poli complessi coniugati - par. 3.1).
Per un primo confronto con le problematiche legate alla stabilità dell’anello di
reazione e per valutare l’importanza di un filtro digitale all’interno di tale anello, si
consideri questa semplice simulazione. Si assuma per E(s)⋅L(s) la funzione:
+⋅+⋅
+⋅+⋅
+⋅++⋅+=⋅
2333
2
2
32
2222
2
22
1112
2111
2
222
2)()(
ωωω
ωωω
ωωωω
sdssdssds
sdssLsE
D
N
dove:
10021 ⋅⋅= πω ; 1.01 =Nd ; 01.01 =Dd ;
50022 ⋅⋅= πω ; 08.02 =d ; 100023 ⋅⋅= πω ; 06.03 =d
la funzione è normalizzata con guadagno in continua uguale a 1.
Ampiezza e fase di tale funzione sono riportati nel diagramma di Bode di figura 3.13.
Figura 3.13 - Misura simulata della funzione E(s)⋅L(s)

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
79
Utilizzando come F(s) un filtro proporzionale,cioè )0()( GsF ≡ , il diagramma di
Bode di G(s) è per la fase identico a quello di E(s)⋅L(s) e per l’ampiezza uguale a
quello di E(s)⋅L(s) traslato in verticale di 20 Log(G(0)). Allora, come si vede dalla
figura 3.13, si dovrebbe scegliere un guadagno d’anello in continua G(0) << 1 per
garantire la stabilità, in modo che il massimo la terza risonanza (dove la fase ha già
superato i 180°) si trovi sotto gli zero decibel. Quindi, come si è visto con la (3.6), la
reiezione del disturbo operata dalla retroazione sarebbe quasi nulla. Invece è
necessario che G(s) sia elevato alle basse frequenze, dove si concentra lo spettro di
potenza del rumore (microfonici e Lorentz force detuning). La soluzione ottimale
sarebbe dunque programmare il DSP in modo da ottenere la funzione inversa:
F(s) = [E(s)⋅L(s)]-1⋅K(s),
con K(s) che introduce i poli necessari a rendere fisicamente realizzabile il filtro ed
eventualmente altri zeri e altri poli di compensazione. E’ infatti necessario che il
numero dei poli sia almeno pari a quello degli zeri, altrimenti il filtro presenta un
comportamento divergente alle alte frequenze.
Nel caso di filtro di compensazione ottimale, vale G(s) ≡ K(s), e quindi la stabilità del
sistema dipende nel caso ideale solo dai poli che sono stati introdotti in alta frequenza
e ci si può permettere un guadagno d’anello molto alto alle basse frequenze senza
problemi di instabilità. Nella figura 3.14 è presentato il diagramma di Bode di F(s)
ottimale cioè:
)(222
2)0()(
1
2333
2
2
3
2222
2
2
2
2112
2
2111
2
sKsdssdssds
sdsGsF
D
N ⋅
+⋅+⋅
+⋅+⋅
+⋅++⋅+
⋅=−
ωωω
ωωω
ωωωω
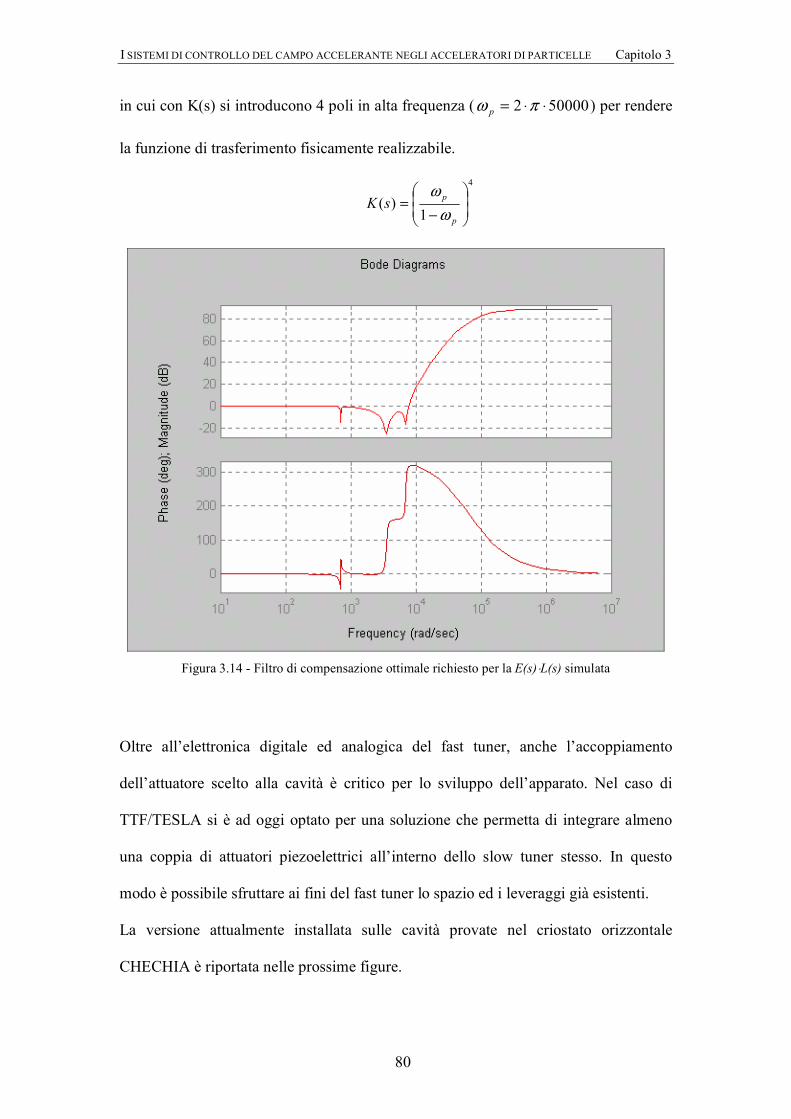
I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
80
in cui con K(s) si introducono 4 poli in alta frequenza ( 500002 ⋅⋅= πω p ) per rendere
la funzione di trasferimento fisicamente realizzabile.
4
1)(
−=
p
psK
ωω
Figura 3.14 - Filtro di compensazione ottimale richiesto per la E(s)⋅L(s) simulata
Oltre all’elettronica digitale ed analogica del fast tuner, anche l’accoppiamento
dell’attuatore scelto alla cavità è critico per lo sviluppo dell’apparato. Nel caso di
TTF/TESLA si è ad oggi optato per una soluzione che permetta di integrare almeno
una coppia di attuatori piezoelettrici all’interno dello slow tuner stesso. In questo
modo è possibile sfruttare ai fini del fast tuner lo spazio ed i leveraggi già esistenti.
La versione attualmente installata sulle cavità provate nel criostato orizzontale
CHECHIA è riportata nelle prossime figure.
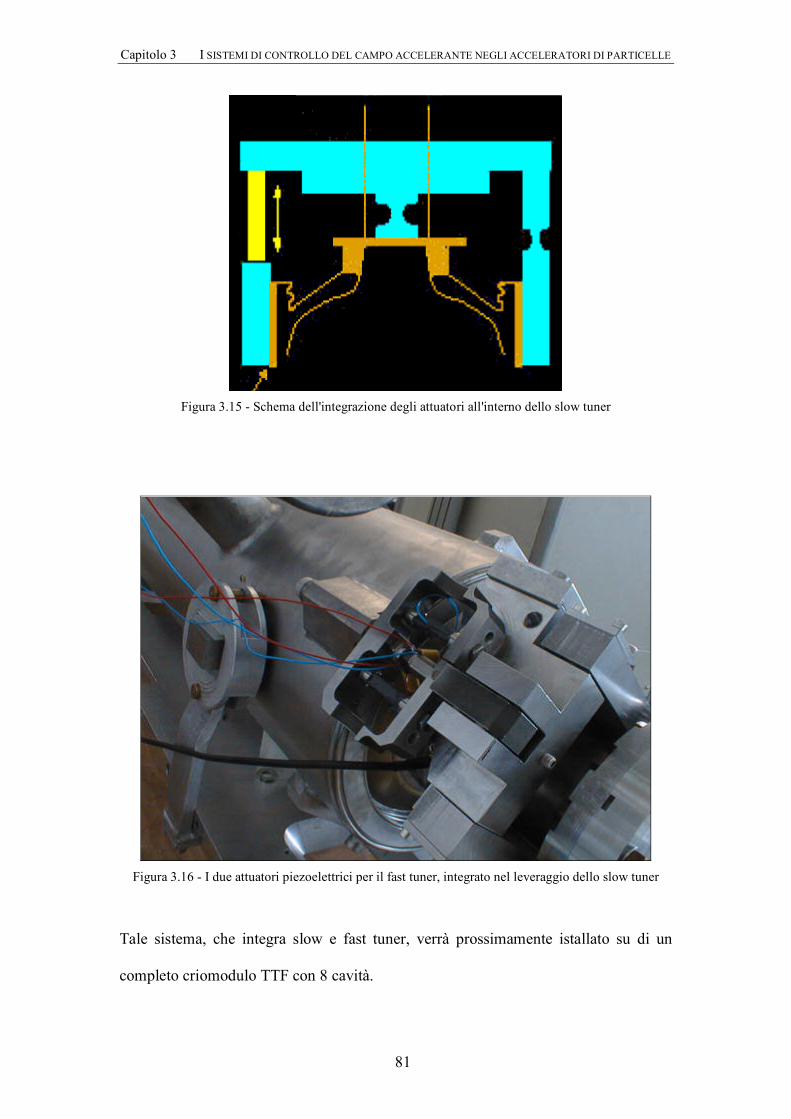
Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
81
Figura 3.15 - Schema dell'integrazione degli attuatori all'interno dello slow tuner
Figura 3.16 - I due attuatori piezoelettrici per il fast tuner, integrato nel leveraggio dello slow tuner
Tale sistema, che integra slow e fast tuner, verrà prossimamente istallato su di un
completo criomodulo TTF con 8 cavità.

I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
82
Un prototipo di fast tuner analogo è in studio anche per le cavità per protoni SNS
(Spallation Neutron Source - JLAB) [34]. In figura 3.17 si riporta una proiezione del
modello del tuner “TESLA” applicato a tali cavità.
Figura 3.17 - Un fast tuner tipo TESLA installato su una cavità SNS

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
83
3.3. COMPENSAZIONE DEL LORENTZ FORCE DETUNING
CON IL FAST FREQUENCY TUNER
Il prototipo di fast frequency tuner sviluppato per le cavità di TTF/TESLA è già stato
utilizzato con successo nella compensazione del Lorentz force detuning in condizioni
operative, nel criostato orizzontale CHECHIA.
L’attuale tuner a leveraggio, descritto nel paragrafo precedente e rappresentato in
figura 3.18, è la base, grazie alla ripetibilità del disturbo in esame, di un sistema di
controllo di tipo feedforward che deforma la cavità in esatta sincronia all’impulso RF
tramite un opportuno segnale inviato agli attuatori piezoelettrici.
Figura 3.18 - Tuner a leveraggio con 2 piezo utilizzato per la compensazione del L.F. detuning
L’attuale versione del controllore feedforward, rappresentata schematicamente in
figura 3.19, è stata integrata nel sistema DOOCS (Distribuited Object Oriented
Control Server) [40], un ambiente software orientato ad oggetti per il controllo
completo di TTF e delle sue applicazioni, realizzato attraverso il controllo dei vari
server di acquisizione dati e delle console di accesso agli stessi.

I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
84
Figura 3.19 - Schema concettuale del controllore feedforward per il L.F. detuning
La forma del segnale di comando degli attuatori piezoelettrici è il parametro chiave
dell’intero sistema di controllo. Diversi profili sono stati valutati per tale segnale. E’
infatti necessario coniugare un efficace compensazione durante il flat-top RF con una
minima perturbazione della cavità, in particolare nei momenti che precedono e
seguono l’impulso.
Ad oggi, la soluzione di riferimento, per la quale sono provate tollerabilità e
affidabilità (più di 700 h di test), è l’impiego di un singolo impulso sinusoidale esteso
a tutta la fase flat-top, come illustrato in figura 3.20.

Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
85
Figura 3.20 - Compensazione del L.F. detuning con un singolo impulso
Dalla deformazione meccanica della cavità, valutata tramite il segnale sul secondo
piezoelettrico (utilizzato come sensore) visibile nel primo grafico di figura 3.20,
emerge la corretta azione dell’attuatore durante la fase flat-top. Un detuning anche
superiore ai 400 Hz è stato correttamente compensato in questo modo, come emerge
dalla figura 3.21 dove lo spostamento della frequenza naturale della cavità è riportato
in funzione del tempo.
La fase flat-top dell’impulso RF è nell’intervallo 500 – 1300 µs.
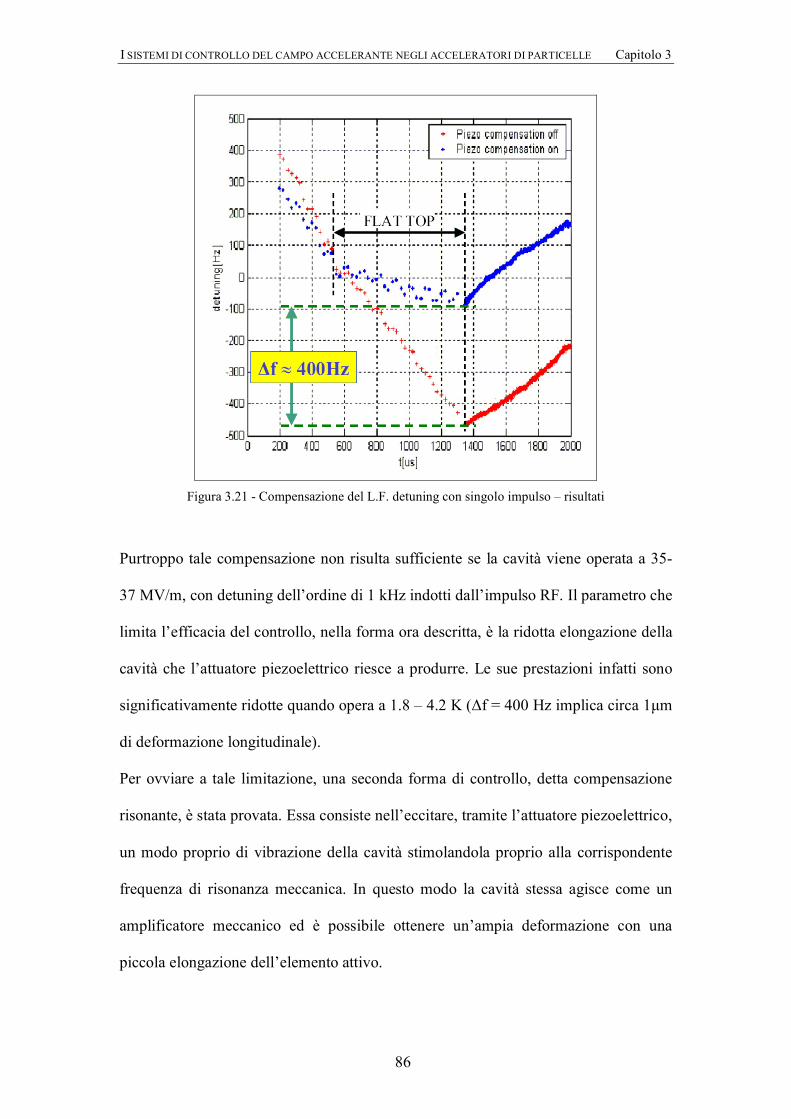
I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
86
Figura 3.21 - Compensazione del L.F. detuning con singolo impulso – risultati
Purtroppo tale compensazione non risulta sufficiente se la cavità viene operata a 35-
37 MV/m, con detuning dell’ordine di 1 kHz indotti dall’impulso RF. Il parametro che
limita l’efficacia del controllo, nella forma ora descritta, è la ridotta elongazione della
cavità che l’attuatore piezoelettrico riesce a produrre. Le sue prestazioni infatti sono
significativamente ridotte quando opera a 1.8 – 4.2 K (∆f = 400 Hz implica circa 1µm
di deformazione longitudinale).
Per ovviare a tale limitazione, una seconda forma di controllo, detta compensazione
risonante, è stata provata. Essa consiste nell’eccitare, tramite l’attuatore piezoelettrico,
un modo proprio di vibrazione della cavità stimolandola proprio alla corrispondente
frequenza di risonanza meccanica. In questo modo la cavità stessa agisce come un
amplificatore meccanico ed è possibile ottenere un’ampia deformazione con una
piccola elongazione dell’elemento attivo.
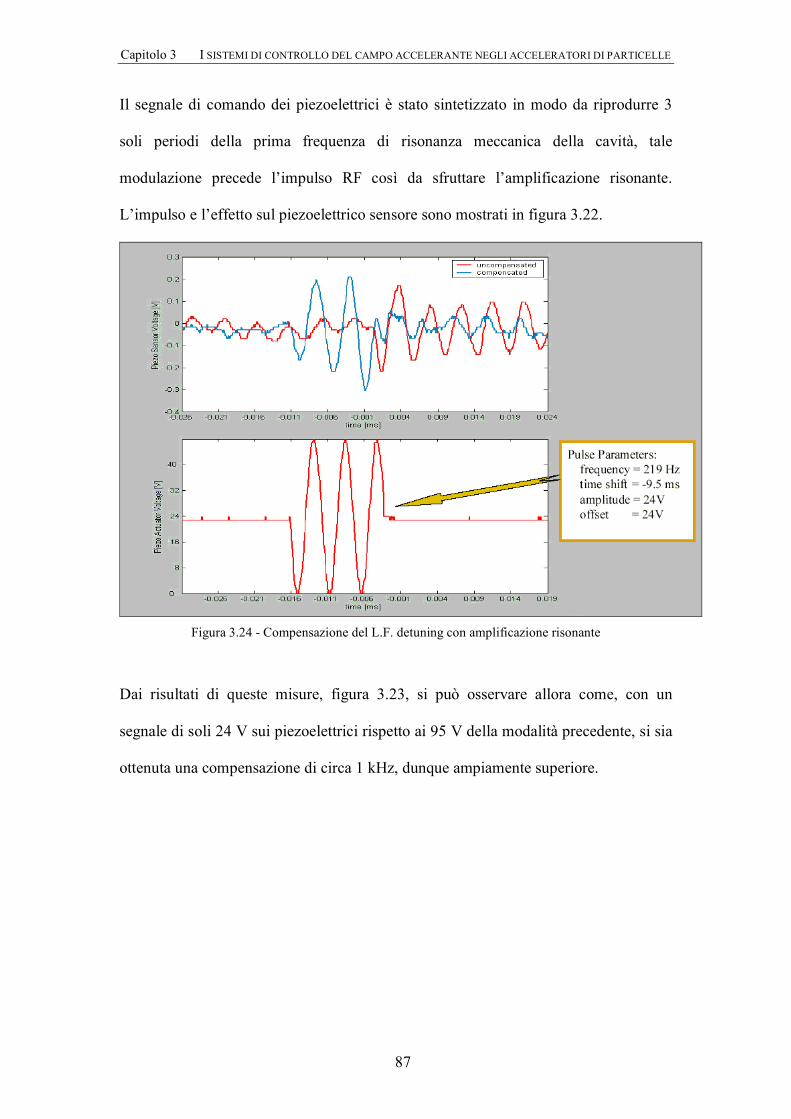
Capitolo 3 I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE
87
Il segnale di comando dei piezoelettrici è stato sintetizzato in modo da riprodurre 3
soli periodi della prima frequenza di risonanza meccanica della cavità, tale
modulazione precede l’impulso RF così da sfruttare l’amplificazione risonante.
L’impulso e l’effetto sul piezoelettrico sensore sono mostrati in figura 3.22.
Figura 3.24 - Compensazione del L.F. detuning con amplificazione risonante
Dai risultati di queste misure, figura 3.23, si può osservare allora come, con un
segnale di soli 24 V sui piezoelettrici rispetto ai 95 V della modalità precedente, si sia
ottenuta una compensazione di circa 1 kHz, dunque ampiamente superiore.
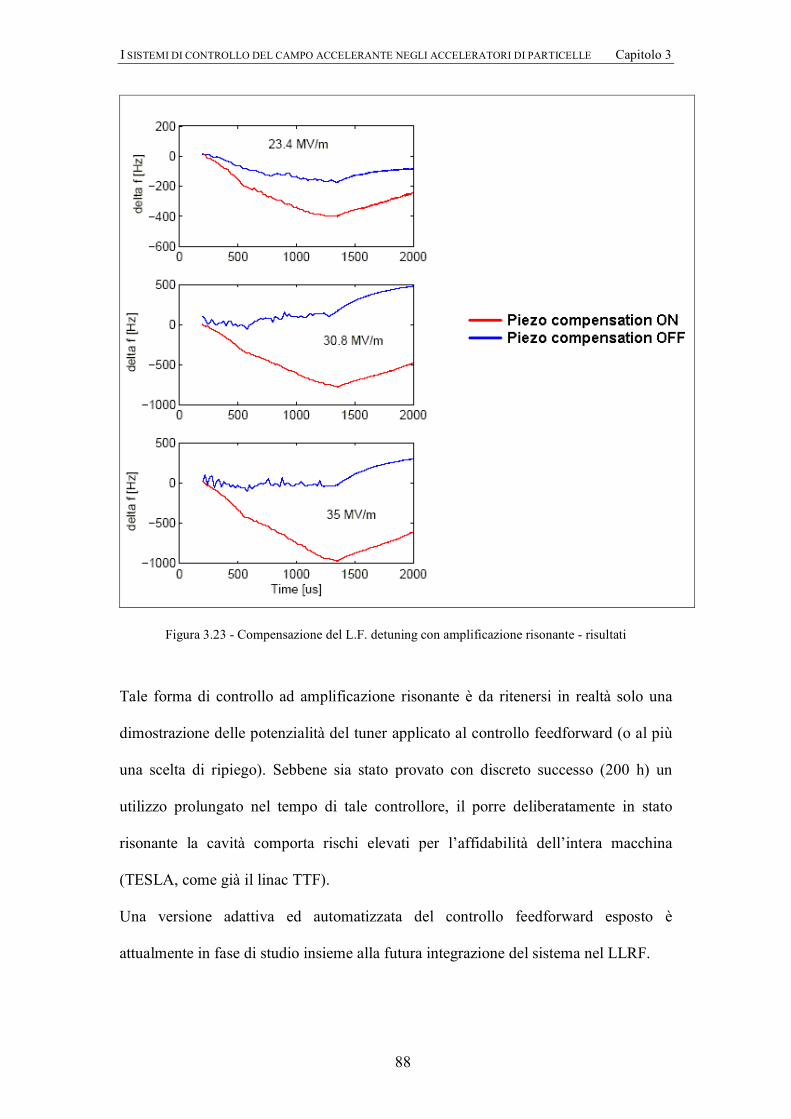
I SISTEMI DI CONTROLLO DEL CAMPO ACCELERANTE NEGLI ACCELERATORI DI PARTICELLE Capitolo 3
88
Figura 3.23 - Compensazione del L.F. detuning con amplificazione risonante - risultati
Tale forma di controllo ad amplificazione risonante è da ritenersi in realtà solo una
dimostrazione delle potenzialità del tuner applicato al controllo feedforward (o al più
una scelta di ripiego). Sebbene sia stato provato con discreto successo (200 h) un
utilizzo prolungato nel tempo di tale controllore, il porre deliberatamente in stato
risonante la cavità comporta rischi elevati per l’affidabilità dell’intera macchina
(TESLA, come già il linac TTF).
Una versione adattiva ed automatizzata del controllo feedforward esposto è
attualmente in fase di studio insieme alla futura integrazione del sistema nel LLRF.
Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
89
4 ATTUATORI PIEZOELETTRICI E LORO
IMPIEGO PER TTF
4.1. INTRODUZIONE
Le cavità di TESLA/TTF lavorano in ambiente criogenico a 2 K, dunque i dispositivi
ausiliari posti attorno alle cavità stesse dovranno lavorare a temperature prossime a
quelle dell’elio liquido superfluido.
In particolare, per quanto riguarda gli attuatori piezoelettrici questo comporta:
• Una forte riduzione della capacità elettrica
• Una riduzione del fattore di perdita
• Una drastica riduzione dell’elongazione massima
• Un forte aumento dell’intensità del campo elettrico coercitivo
In particolare, tale variazione del campo coercitivo è indice della notevole stabilità
contro la perdita dell’allineamento dei dipoli (par. successivo), che l’elemento
piezoelettrico mostra a basse temperature. Ciò consente di applicare, operando in
modo bipolare, una più ampia tensione ai capi dell’attuatore, compensando così,
anche se solo parzialmente, la perdita di elongazione. Alcuni dati indicativi, relativi ad
un attuatore Piezomechanik, sono riportati in tabella:
Piezomechanik PSt 150
T Capacità el. Elongazione Max V range
300 K 100 % 100 % -30/+150
77 K 15 % 20 % -150/+150
4 K 5 % 6 % -300/+300
Tabella 4.1 - Variazione delle proprietà del PM PSt-150 con la temperature

ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
90
Dunque, proprio questa alterazione estrema delle proprietà dell’elemento
piezoelettrico comporta la necessità di ri-calibrare direttamente l’attuatore in esame
nelle condizioni operative, caratterizzando i diversi modelli a disposizione in funzione
delle principali proprietà d’interesse: anzitutto la forza generata e l’elongazione, in
condizioni di temperatura criogenica ed in vuoto di isolamento [30].
Il primo elemento di cui si necessita per tali caratterizzazioni è dunque un sensore di
forza operativo nelle condizioni indicate, che permetta di misurare e confrontare le
prestazioni di diversi attuatori piezoelettrici in termini di forza generata.
In aggiunta va considerato che, come in ogni applicazione criogenica, in un
acceleratore superconduttivo l’affidabilità degli elementi che lavorano a freddo,
usualmente valutata in termini di vita media, è vitale. Ogni controllo o riparazione
infatti comporterebbe, oltre che la sospensione dal funzionamento dell’intera
macchina, il riscaldamento e l’apertura del modulo criogenico coinvolto.
L’importanza di un sensore calibrato si evince allora dal fatto che tra i parametri che
intervengono nel condizionare la vita media di un attuatore piezoelettrico è
fondamentale anche un’opportuna forza di precarico dell’elemento in condizioni
operative (vedi grafico 4.7) (in questo caso ogni carico compressivo permanente che
agisca sull’attuatore è da considerarsi sotto la dicitura di precarico).
Inoltre far operare gli attuatori piezoelettrici con il corretto valore di precarico è
fondamentale perché introduce notevoli vantaggi:
• Maggiore rigidità
• Maggiore elongazione (dipende dal materiale)
• Maggiore prevenzione rispetto a stress tensili e forze non coassiali
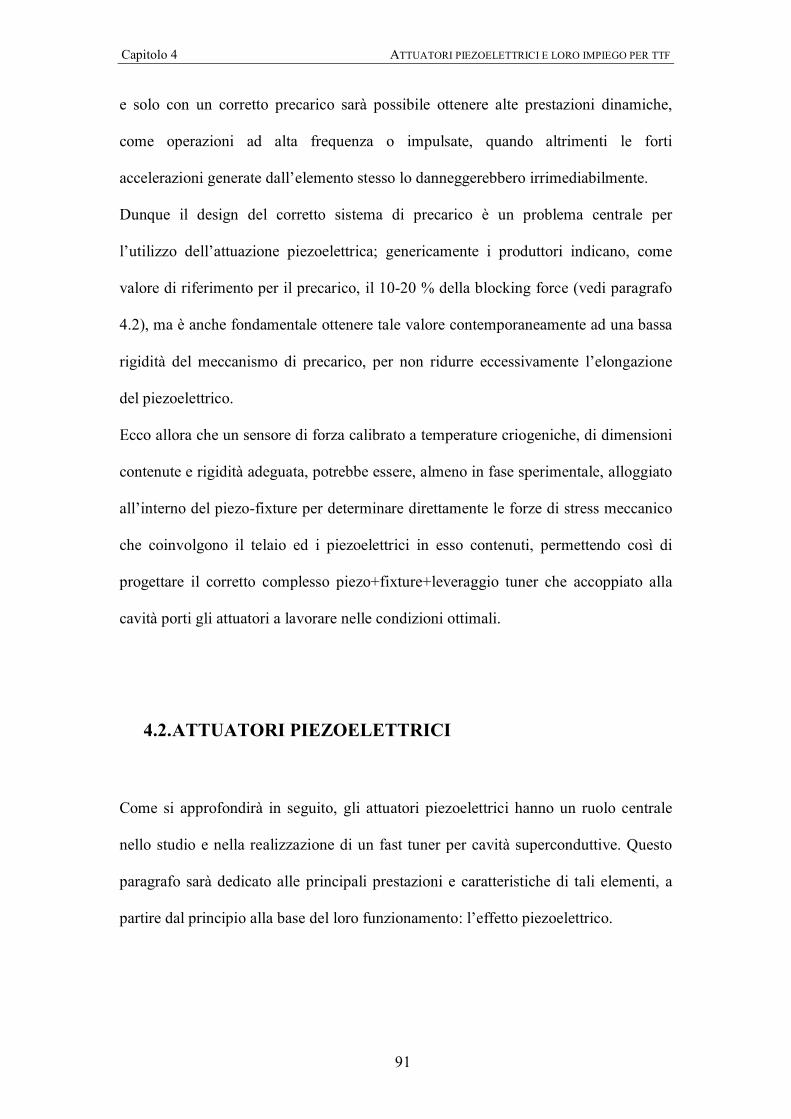
Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
91
e solo con un corretto precarico sarà possibile ottenere alte prestazioni dinamiche,
come operazioni ad alta frequenza o impulsate, quando altrimenti le forti
accelerazioni generate dall’elemento stesso lo danneggerebbero irrimediabilmente.
Dunque il design del corretto sistema di precarico è un problema centrale per
l’utilizzo dell’attuazione piezoelettrica; genericamente i produttori indicano, come
valore di riferimento per il precarico, il 10-20 % della blocking force (vedi paragrafo
4.2), ma è anche fondamentale ottenere tale valore contemporaneamente ad una bassa
rigidità del meccanismo di precarico, per non ridurre eccessivamente l’elongazione
del piezoelettrico.
Ecco allora che un sensore di forza calibrato a temperature criogeniche, di dimensioni
contenute e rigidità adeguata, potrebbe essere, almeno in fase sperimentale, alloggiato
all’interno del piezo-fixture per determinare direttamente le forze di stress meccanico
che coinvolgono il telaio ed i piezoelettrici in esso contenuti, permettendo così di
progettare il corretto complesso piezo+fixture+leveraggio tuner che accoppiato alla
cavità porti gli attuatori a lavorare nelle condizioni ottimali.
4.2. ATTUATORI PIEZOELETTRICI
Come si approfondirà in seguito, gli attuatori piezoelettrici hanno un ruolo centrale
nello studio e nella realizzazione di un fast tuner per cavità superconduttive. Questo
paragrafo sarà dedicato alle principali prestazioni e caratteristiche di tali elementi, a
partire dal principio alla base del loro funzionamento: l’effetto piezoelettrico.
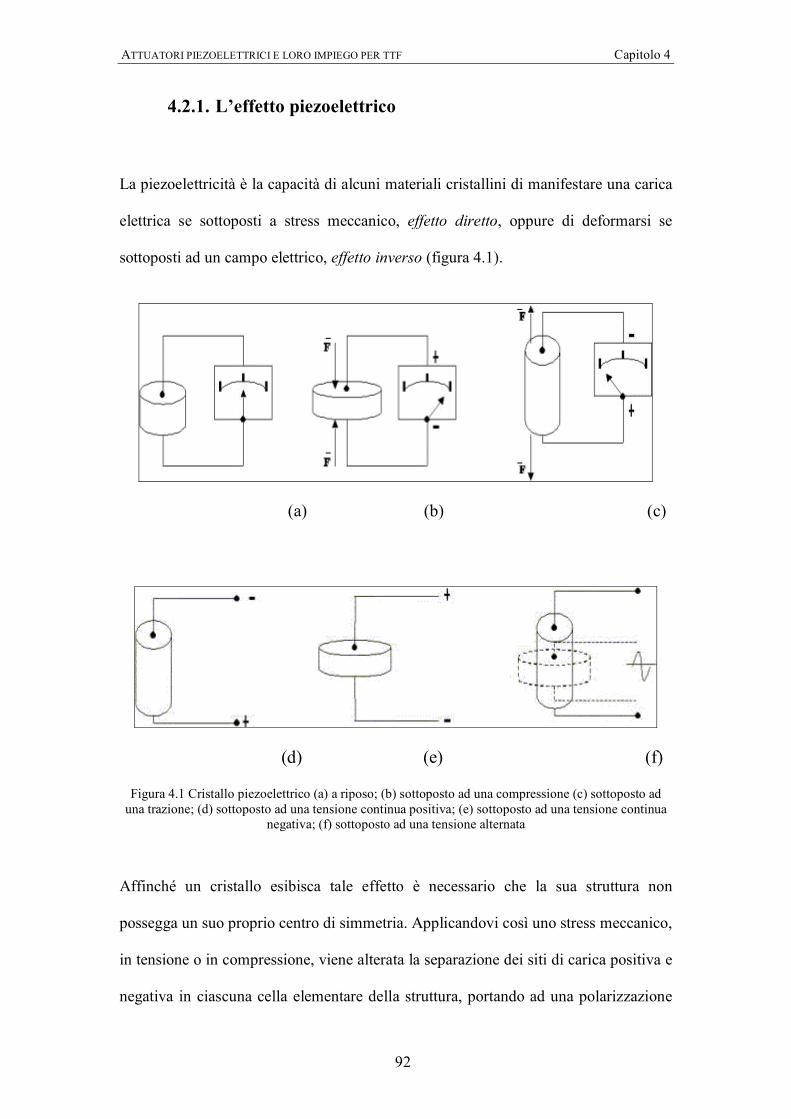
ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
92
4.2.1. L’effetto piezoelettrico
La piezoelettricità è la capacità di alcuni materiali cristallini di manifestare una carica
elettrica se sottoposti a stress meccanico, effetto diretto, oppure di deformarsi se
sottoposti ad un campo elettrico, effetto inverso (figura 4.1).
(a) (b) (c)
(d) (e) (f)
Figura 4.1 Cristallo piezoelettrico (a) a riposo; (b) sottoposto ad una compressione (c) sottoposto ad una trazione; (d) sottoposto ad una tensione continua positiva; (e) sottoposto ad una tensione continua
negativa; (f) sottoposto ad una tensione alternata
Affinché un cristallo esibisca tale effetto è necessario che la sua struttura non
possegga un suo proprio centro di simmetria. Applicandovi così uno stress meccanico,
in tensione o in compressione, viene alterata la separazione dei siti di carica positiva e
negativa in ciascuna cella elementare della struttura, portando ad una polarizzazione
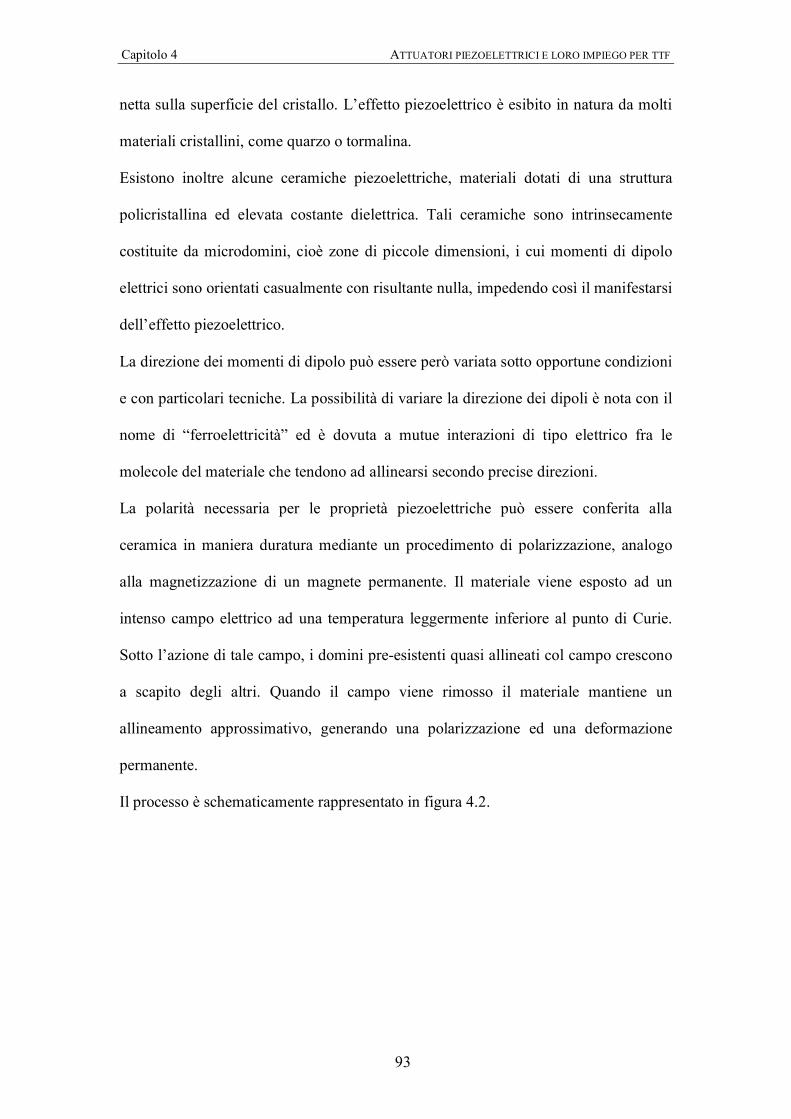
Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
93
netta sulla superficie del cristallo. L’effetto piezoelettrico è esibito in natura da molti
materiali cristallini, come quarzo o tormalina.
Esistono inoltre alcune ceramiche piezoelettriche, materiali dotati di una struttura
policristallina ed elevata costante dielettrica. Tali ceramiche sono intrinsecamente
costituite da microdomini, cioè zone di piccole dimensioni, i cui momenti di dipolo
elettrici sono orientati casualmente con risultante nulla, impedendo così il manifestarsi
dell’effetto piezoelettrico.
La direzione dei momenti di dipolo può essere però variata sotto opportune condizioni
e con particolari tecniche. La possibilità di variare la direzione dei dipoli è nota con il
nome di “ferroelettricità” ed è dovuta a mutue interazioni di tipo elettrico fra le
molecole del materiale che tendono ad allinearsi secondo precise direzioni.
La polarità necessaria per le proprietà piezoelettriche può essere conferita alla
ceramica in maniera duratura mediante un procedimento di polarizzazione, analogo
alla magnetizzazione di un magnete permanente. Il materiale viene esposto ad un
intenso campo elettrico ad una temperatura leggermente inferiore al punto di Curie.
Sotto l’azione di tale campo, i domini pre-esistenti quasi allineati col campo crescono
a scapito degli altri. Quando il campo viene rimosso il materiale mantiene un
allineamento approssimativo, generando una polarizzazione ed una deformazione
permanente.
Il processo è schematicamente rappresentato in figura 4.2.
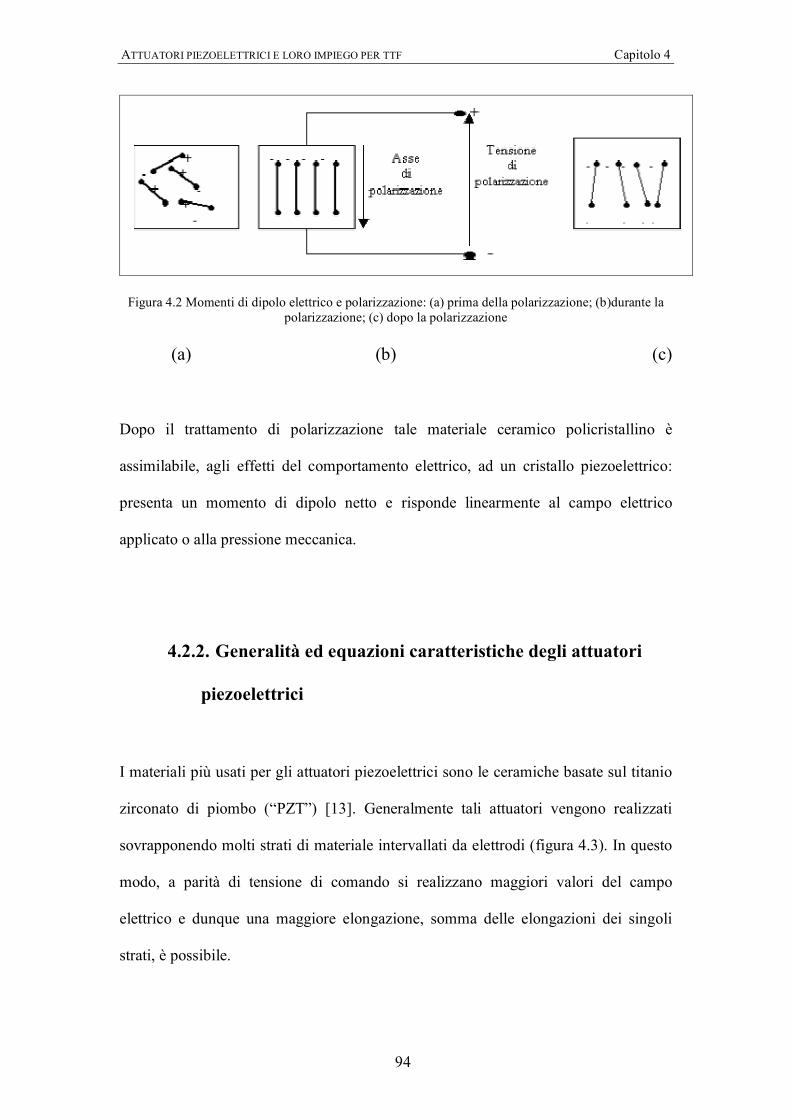
ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
94
Figura 4.2 Momenti di dipolo elettrico e polarizzazione: (a) prima della polarizzazione; (b)durante la polarizzazione; (c) dopo la polarizzazione
(a) (b) (c)
Dopo il trattamento di polarizzazione tale materiale ceramico policristallino è
assimilabile, agli effetti del comportamento elettrico, ad un cristallo piezoelettrico:
presenta un momento di dipolo netto e risponde linearmente al campo elettrico
applicato o alla pressione meccanica.
4.2.2. Generalità ed equazioni caratteristiche degli attuatori
piezoelettrici
I materiali più usati per gli attuatori piezoelettrici sono le ceramiche basate sul titanio
zirconato di piombo (“PZT”) [13]. Generalmente tali attuatori vengono realizzati
sovrapponendo molti strati di materiale intervallati da elettrodi (figura 4.3). In questo
modo, a parità di tensione di comando si realizzano maggiori valori del campo
elettrico e dunque una maggiore elongazione, somma delle elongazioni dei singoli
strati, è possibile.
Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
95
Figura 4.3 struttura e connessioni elettriche di un attuatore piezoelettrico multistrato.
Sono disponibili sul mercato attuatori ad alta e bassa tensione di comando, ad anello
per un’alta dissipazione termica e con guscio metallico di precarico.
La principale differenza tra gli attuatori a bassa ed alta tensione è nello spessore dei
singoli strati e conseguentemente nella loro tecnologia costruttiva. I modelli ad alta
tensione hanno strati con spessore di 0.5÷1 mm, mentre quelli a bassa tensione sono
monolitici e hanno una struttura a strati di 20÷100 µm ottenuta con tecnologia a
diffusione. Gli attuatori ad alta tensione, a causa della tecnologia di fabbricazione più
semplice, possono essere costruiti con sezione maggiore e quindi sopportare carichi
più pesanti (fino a diverse tonnellate).
Il comportamento delle ceramiche, a causa della natura anisotropa, è dipendente dalla
direzione. Nella figura 4.4 viene definita la notazione usata nel seguito per il sistema
di riferimento: gli assi 1, 2 e 3 definiscono la classica terna cartesiana, mentre gli assi
4, 5 e 6 identificano le rotazioni. L’asse 3 è la direzione di polarizzazione.

ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
96
Figura 4.4 : sistema ortogonale che descrive le proprietà di una ceramica piezoelettrica polarizzata.
L’asse 3 è la direzione di polarizzazione
Per una modellizzazione dell’attuatore piezoelettrico verranno considerati alcuni
coefficienti validi in approssimazione di linearità, essi inoltre non sono costanti
indipendenti ma dipendono in generale da vari fattori quali temperatura, geometria
dell’attuatore e condizioni al contorno elettriche e meccaniche. Essi descrivono
adeguatamente le proprietà del piezoelettrico solo nel caso di piccolo segnale, e in
condizioni generali di utilizzo costanti (temperatura in primis). Una trattazione più
approfondita delle proprietà di tali materiali esula dagli scopi di questa tesi. Segue la
definizione di grandezze e coefficienti ( e loro dimensioni):
-L0: Lunghezza a riposo dell’attuatore [m]
-∆L: Variazione della lunghezza dell’attuatore [m]
-∆L0: Massimo allungamento nominale in assenza di forze applicate [m]
-S: Allungamento relativo [L/L] (adimensionale)
-U: Tensione applicata all’attuatore [V]

Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
97
-kS: Rigidità dell’oggetto sul quale agisce il piezoelettrico [N/m]
-kT: Rigidità dell’attuatore piezolelettrico [N/m]
− dij: coefficiente di ”strain ” (allungamento relativo) [m/V]:
− gij: coefficienti di tensione prodotta [Vm/N]:
− kij: coefficienti di accoppiamento [adimensionali].
Il coefficiente dij si definisce come l’allungamento prodotto lungo l’asse j (m/m) per
campo elettrico applicato lungo l’asse i (V/m), in assenza di carico. In seguito verrà
sempre considerata valida la convenzione: i asse lungo il quale è applicata
l’eccitazione e j asse lungo il quale si manifesta l’effetto. Analogamente, per l’effetto
piezoelettrico diretto che consente l’utilizzo come sensore, esso è anche chiamato
“coefficiente di produzione di carica” [C/N] ed è definito come la densità di carica
superficiale prodotta (C/m²) per stress unitario (N/m²).
Il coefficiente gij rappresenta il campo elettrico sviluppato a circuito aperto (V/m) per
stress meccanico applicato (N/m²), oppure (sempre per la dualità effetto diretto-
inverso), l’allungamento prodotto (m/m) per densità di carica applicata (C/m²).
I coefficienti di accoppiamento kij sono rapporti di conversione tra l’energia
meccanica ed elettrica e viceversa: kij 2 è il rapporto tra l’energia meccanica (o
elettrica) immagazzinata nella compressione del piezoelettrico lungo l’asse j e
l’energia elettrica (o meccanica) applicata dall’esterno esercitando una forza (o un
campo elettrico) lungo l’asse i. Per l’attuatore, in caso di piccoli spostamenti, vale l’
equazione:
∆L = S⋅Lo ≈ E⋅dij⋅Lo + F/ kT (4.1)
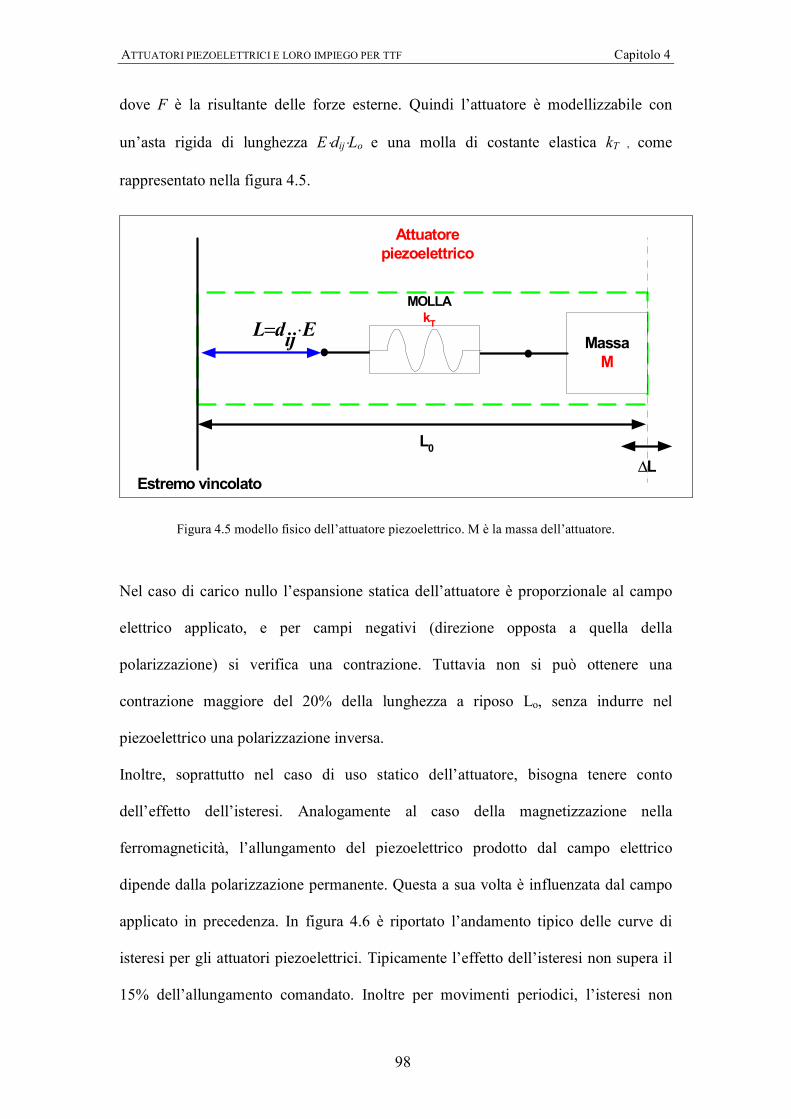
ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
98
dove F è la risultante delle forze esterne. Quindi l’attuatore è modellizzabile con
un’asta rigida di lunghezza E⋅dij⋅Lo e una molla di costante elastica kT , come
rappresentato nella figura 4.5.
MassaM
EijdL ⋅=
Attuatorepiezoelettrico
L0
∆LEstremo vincolato
MOLLAkT
Figura 4.5 modello fisico dell’attuatore piezoelettrico. M è la massa dell’attuatore.
Nel caso di carico nullo l’espansione statica dell’attuatore è proporzionale al campo
elettrico applicato, e per campi negativi (direzione opposta a quella della
polarizzazione) si verifica una contrazione. Tuttavia non si può ottenere una
contrazione maggiore del 20% della lunghezza a riposo Lo, senza indurre nel
piezoelettrico una polarizzazione inversa.
Inoltre, soprattutto nel caso di uso statico dell’attuatore, bisogna tenere conto
dell’effetto dell’isteresi. Analogamente al caso della magnetizzazione nella
ferromagneticità, l’allungamento del piezoelettrico prodotto dal campo elettrico
dipende dalla polarizzazione permanente. Questa a sua volta è influenzata dal campo
applicato in precedenza. In figura 4.6 è riportato l’andamento tipico delle curve di
isteresi per gli attuatori piezoelettrici. Tipicamente l’effetto dell’isteresi non supera il
15% dell’allungamento comandato. Inoltre per movimenti periodici, l’isteresi non

Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
99
compromette la ripetibilità, perciò per le applicazioni dinamiche (come quella in
esame) la sua influenza è di secondaria importanza.
Figura 4.6 tipiche curve di isteresi per attuatori piezoelettrici
La frequenza di risonanza dell’attuatore è M
kf T≈0 , e per un funzionamento efficace
dell’azione di controllo è necessario che la frequenza con cui si opera il piezoelettrico
sia minore di 0f , quindi nel nostro caso occorre che 0f sia più alta delle frequenze
meccaniche della cavità che si vogliono controllare.
Per effetto dell’inerzia, in caso di brusche variazioni di tensione si generano
all’interno dell’attuatore delle forze che possono danneggiarlo. I materiali ceramici in
particolare sono molto sensibili alle trazioni. Per questo motivo è conveniente
utilizzare un sistema di precarico, ovvero delle molle (con costante di rigidità minore
di quella del piezoelettrico) che comprimano l’attuatore spostandone il punto di
lavoro. Il precarico ottimale dovrebbe essere circa il 20% della massima forza che può
supportare l’attuatore (in compressione) FMAX . La vita media dell’attuatore dipende

ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
100
in modo critico dal precarico, come si vede dalla figura 4.7, e, come vedremo in
seguito, la sua misura e la sua taratura costituiscono un problema complesso.
Figura 4.7 esempio di misura della vita media di un attuatore a ceramiche piezoelettriche in funzione
del precarico
Dal punto di vista elettrico, per frequenze inferiori alla sua frequenza di risonanza il
piezoelettrico si modellizza al primo ordine con una capacità C la cui carica
accumulata è proporzionale a ∆L. Le correnti di perdita (“leakage currents”) sono, a
causa dell’alta resistività delle ceramiche, generalmente al più dell’ordine del µA e
possono essere trascurate. La capacità C dipende dal carico F in modo complesso.
In particolare per il modello EPCOS LN 01/8002 utilizzato nelle misure esposte in
seguito si ha C = 2.1 µF e C = 3.4 µF con F = 850 N.
Gli attuatori piezoelettrici sono dunque, ad oggi, la scelta di riferimento per le
problematiche di tuning delle cavità di TESLA ed è imminente l’integrazione di un
tuner dotato di piezoelettrici in un criomodulo del linac TTF. Verranno allora esposte,
Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
101
come conclusione e riassunto di quanto già visto, le caratteristiche di tali attuatori che
li rendono adatti a tali esigenze.
1- Il dispositivo può lavorare a temperature criogeniche. Infatti per la realizzazione
del controllore l’attuatore deve essere posizionato vicino alla cavità, e quindi
all’interno del criostato. L’effetto piezoelettrico dell’attuatore permane anche a
temperature di pochi K, anche se con specifiche ridotte.
Inoltre gli attuatori piezoelettrici hanno una bassa dissipazione di calore, e quindi non
alterano sensibilmente il carico criogenico. La frazione di potenza dissipata è circa
pari a
PPcalore VCfP −⋅⋅⋅≈ δtan (4.2)
dove PPV − è la tensione picco picco applicata al piezoelettrico, f è la frequenza di
lavoro,δ è un parametro relativo al materiale piezoelettrico (e per le ceramiche è
tipicamente dell’ordine di 0.01), C è la capacità dell’attuatore. Nelle nostre
condizioni di utilizzo, ≈IN
calore
P
P2%.
2- La velocità di risposta. Poiché l’attuatore è inserito nel blocco di retroazione del
sistema, la sua velocità è critica per la stabilità. In termini di frequenza, questo si
traduce nella richiesta che l’attuatore abbia una frequenza propria di risonanza molto
superiore a quelle della cavità che si vogliono controllare. Tipicamente gli attuatori
piezoelettrici considerati in seguito hanno una costante di tempo di risposta
dell’ordine dei microsecondi, e una frequenza di risonanza maggiore di 20 KHz.
3- Tra i vari tipi di attuatori, i piezoelettrici sono quelli con la risoluzione maggiore.
La sensibilità del dispositivo è necessaria per effettuare correttamente il fast tuning,
infatti l’attuatore deve necessariamente avere una risoluzione nel range del micron,
dato che una deformazione di 1 µm è sufficiente per spostare la frequenza di
ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
102
risonanza elettromagnetica della cavità di circa una larghezza di banda (per le cavità
di TESLA).
4- Affidabilità e vita media. In caso di malfunzionamento la sostituzione dell’attuatore
potrebbe comportare l’arresto dell’acceleratore e l’apertura del modulo in cui è
inserita la cavità. Questa operazione è critica per il funzionamento dell’acceleratore e
và il più possibile evitata. Gli attuatori piezoelettrici, grazie all’assenza di attrito nella
loro dinamica, sono tra quelli a vita media più lunga nel caso di un corretto utilizzo.
(la vita media è funzione delle condizioni di utilizzo, in particolare della PPV −
applicata, della frequenza di lavoro e del precarico).
5- Resistenza alle radiazioni. L’attuatore piezoelettrico si troverà ad operare in
ambiente radioattivo. Si stima che i piezoelettrici impiegati per il fast tuning delle
cavità di TESLA dovranno sopportare un massimo 2 MGy di radiazione gamma e
1310 neutroni/cm2 durante 10 anni di operazione. Alcuni test sui modelli Epcos LN
01/8002 sono già stati eseguiti e hanno dimostrato l’assenza di un degrado
significativo nelle proprietà di tali attuatori.
6- Compatibilità con applicazioni in vuoto spinto. L’attuatore piezoelettrico, non
producendo attrito ed abrasione, non necessita di lubrificanti e quindi non contamina
l’ambiente in cui è inserito (nella fattispecie, il criostato).
7- Campo magnetico: un’alternativa ai piezoelettrici è stata ipotizzata: i materiali
magnetostrittivi. Tuttavia questi necessitano di elevati campi magnetici, e pongono
quindi il problema di schermare la cavità (per prevenire il quench in caso di
superamento del campo limite).L’attuatore piezoelettrico invece non produce campi
magnetici.
8- La dualità dell’effetto piezoelettrico (effetto diretto-inverso) permette all’attuatore
di funzionare indifferentemente anche come sensore di posizione. Questa

Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
103
caratteristica potrà essere utilizzata nel sistema di controllo in sviluppo per avere delle
informazioni sulle vibrazioni della cavità.

ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
104
4.3. CALIBRAZIONE DI UN SENSORE DI FORZA
OPERATIVO IN CONDIZIONI CRIOGENICHE
4.3.1. Celle di carico
4.3.1.1.Specifiche richieste
All’interno del panorama attuale dei misuratori di forza, o celle di carico, la scelta è
ricaduta sui modelli che garantivano anzitutto dimensioni contenute, considerando sia
la necessità di integrarle in futuro all’interno di un opportuno piezo-fixture che la
richiesta di una frequenza propria di risonanza tendenzialmente elevata in modo da
consentire una calibrazione anche dinamica.
Inoltre a tali sensori è richiesta una rigidità elevata in funzione della struttura del tuner
nel suo complesso.
I sensori che meglio rispondono a tali esigenze sono noti con il nome di load buttons.
La struttura d’acciaio a forma di bottone che ospita la parte sensibile soddisfa tutte le
richieste. In figura 4.8 è riportato un modello tipico.
Figura 4.8 - tipico sensore load button (Burster mod. 8415)
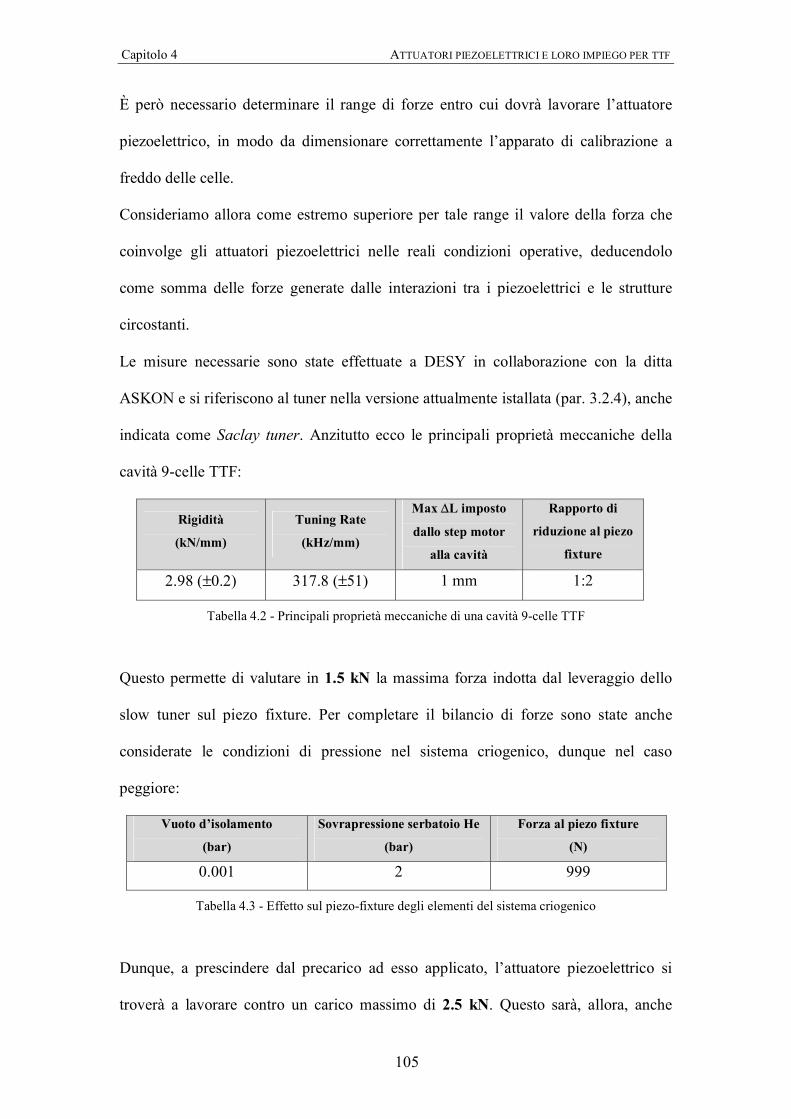
Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
105
È però necessario determinare il range di forze entro cui dovrà lavorare l’attuatore
piezoelettrico, in modo da dimensionare correttamente l’apparato di calibrazione a
freddo delle celle.
Consideriamo allora come estremo superiore per tale range il valore della forza che
coinvolge gli attuatori piezoelettrici nelle reali condizioni operative, deducendolo
come somma delle forze generate dalle interazioni tra i piezoelettrici e le strutture
circostanti.
Le misure necessarie sono state effettuate a DESY in collaborazione con la ditta
ASKON e si riferiscono al tuner nella versione attualmente istallata (par. 3.2.4), anche
indicata come Saclay tuner. Anzitutto ecco le principali proprietà meccaniche della
cavità 9-celle TTF:
Rigidità
(kN/mm)
Tuning Rate
(kHz/mm)
Max ∆L imposto
dallo step motor
alla cavità
Rapporto di
riduzione al piezo
fixture
2.98 (±0.2) 317.8 (±51) 1 mm 1:2
Tabella 4.2 - Principali proprietà meccaniche di una cavità 9-celle TTF
Questo permette di valutare in 1.5 kN la massima forza indotta dal leveraggio dello
slow tuner sul piezo fixture. Per completare il bilancio di forze sono state anche
considerate le condizioni di pressione nel sistema criogenico, dunque nel caso
peggiore:
Vuoto d’isolamento
(bar)
Sovrapressione serbatoio He
(bar)
Forza al piezo fixture
(N)
0.001 2 999
Tabella 4.3 - Effetto sul piezo-fixture degli elementi del sistema criogenico
Dunque, a prescindere dal precarico ad esso applicato, l’attuatore piezoelettrico si
troverà a lavorare contro un carico massimo di 2.5 kN. Questo sarà, allora, anche

ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
106
l’estremo indicativo per l’intervallo di taratura delle celle di carico ed il parametro di
riferimento per il dimensionamento del sistema necessario.
4.3.1.2.Caratteristiche dei modelli provati
In funzione dei criteri esposti nel paragrafo precedente sono stati selezionati alcuni
modelli di celle di carico tra quelli comunemente presenti sul mercato. Segue l’elenco
delle celle usate nelle misure eseguite ad oggi al LASA durante questo lavoro di tesi:
Modello Produttore Dimensioni
(mm)
Capacità
(kN) Serial Number
8415 Burster 20 2 185021/184992
8415 Burster 20 5 206275
LLB400 Futek 32 4.53 125001
Tabella 4.4 - Celle di carico provate durante il lavoro di tesi
Tutti i modelli sono accomunati da una struttura concettualmente identica,
schematicamente indicata in figura 4.9:
Pasta collante
Strain gauge
Case metallico
Forza incognita
Profilo deformato
Segnale in tensione
Figura 4.9 – Load button

Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
107
All’interno di un telaio di acciaio a forma di bottone è contenuta la parte realmente
sensibile trattenuta ad esso tramite un sottile strato di collante, tipicamente di tipo
epossilico.
Si tratta di un sensore di tipo strain gauge
[22]. Esso è costituito da un intreccio di
tracce resistive applicate ad un sottile foglio
plastico protettivo, quando questo è soggetto
a stress la resistenza della griglia metallica
cambia in maniera nota in funzione della
deformazione meccanica. In tutte le celle di carico in esame questi elementi a
resistenza variabile vengono connessi tra loro a
formare una combinazione di quattro elementi
sensibili disposti a ponte di Wheatstone, secondo
lo schema di figura 4.11.
Il ponte viene alimentato con una tensione
continua ad alta stabilità (deriva < 50 ppm) ed il
segnale è letto lungo la diagonale opposta.
Allorché una deformazione è imposta all’intero strato sensibile, la variazione dei
valori di resistenza porta ad uno sbilanciamento del ponte e dunque ad un segnale in
uscita proporzionale alla deformazione stessa.
Dunque la forza da misurare, applicata lungo l’asse del sensore, induce una
deformazione ben determinata della struttura metallica (vedi schema 4.9), questa
viene letta dallo strain gauge ad essa vincolato generando così il segnale in tensione
all’uscita del sensore. Così il telaio posto attorno allo strain gauge rappresenta, nell’
intervallo operativo, l’elemento elastico che, assorbendo il carico da misurare e
Figura 4.10 - Strain gauge
Figura 4.11 - Ponte di Wheatstone

ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
108
trasferendolo ad una zona di estensione omogenea, permette di misurare
indirettamente la forza incognita.
Tipicamente si osserva per tali celle una sensibilità a temperatura ambiente di 1-2
mV/V (mV di output per V di alimentazione) a pieno carico, altri parametri noti sono
riportati in appendice B.
Come indicato in tabella 4.4 , i diversi modelli si distinguono principalmente per il
carico massimo o capacità, inteso come l’estremo superiore del proprio intervallo di
calibrazione. Inoltre alcuni modelli presentano dettagli specifici, come dimensioni
ulteriormente ridotte (modello 8416) o incavi filettati per viti di montaggio (8526 o
LLB400), che permettono applicazioni dinamiche più spinte, grazie, nel primo caso,
ad una frequenza naturale di risonanza più elevata ed ad un ancoraggio ottimale alle
strutture circostanti.
4.3.2. Apparato di misura
4.3.2.1.Aspetti generali
È possibile ora riassumere schematicamente le caratteristiche che dovrà avere
l’apparato per la calibrazione a freddo dei sensori di forza presentati nei punti
precedenti.
Il sistema dovrà infatti:
• Ospitare il sensore in esame in condizioni di vuoto, alla temperatura dell’He
liquido (4.2 K). Progettare il sistema per la termalizzazione della cella alla
temperatura dell’elio superfluido richiede una complessa evoluzione del

Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
109
sistema, che è stata scartata essendo trascurabili le alterazioni indotte sul
sensore (come sullo stesso piezo) nel passaggio da 4.2 K a 2 K.
• Generare e trasferire al sensore in esame una forza fino a 2.5 kN.
• Misurare direttamente la forza trasferita.
• Permettere l’alimentazione dei sensori e la lettura dei segnali per la misura.
Per semplificare le operazioni di calibrazione, i componenti che permettono di
generare e misurare il carico di test opereranno a temperatura ambiente. In particolare
il meccanismo di generazione dovrà essere posto esternamente in maniera da poter
variare con facilità il carico sul sensore a freddo. Scartate sia la soluzione
completamente automatizzata (es: step motor) che l’uso di blocchi dal peso noto,
difficili da maneggiare, una semplice flangia filettata a vite, accoppiata ad
un’opportuna molla, può soddisfare le richieste.
Per misurare in tempo reale il valore effettivo della forza generata sarà sufficiente un
sensore di carico compressivo standard, dato che l’apparato è stato progettato in
maniera da garantire che tale sensore rimanga per tutta la durata del suo utilizzo
all’interno del proprio intervallo di calibrazione.
Gli elementi appena citati, punti chiave dell’apparato di misura, sono operativamente
disposti in serie.
In figura 4.12 viene riportato lo schema a blocchi del sistema:

ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
110
ACCESSIBILEDALL'ESTERNO
A TEMPERATURAAMBIENTE
A FREDDOT = 4.2 K
MECCANISMO AVITE + MOLLA CHE
GENERA ILCARICO
SENSORE DIFORZA CALIBRATO
ASTA RIGIDA PERIL
TRASFERIMENTODEL CARICO
VUOTO DIISOLAMENTO
LOAD BUTTON DACALIBRARE
SEGNALIELETTRICI IN
USCITA
ELETTRONICA DILETTURA E
REGISTRAZIONE
X.xxx
Figura 4.12 - Schema apparato calibrazione
Un’asta rigida sarà quindi responsabile sia del trasferimento della forza generata col
meccanismo a vite che dell’isolamento termico, necessario per mantenere termalizzata
la zona ospitante il sensore da calibrare, e per non portare il sensore calibrato a
temperature eccessivamente basse.
Nei paragrafi successivi seguiranno tutti i dettagli dell’apparato realizzato.
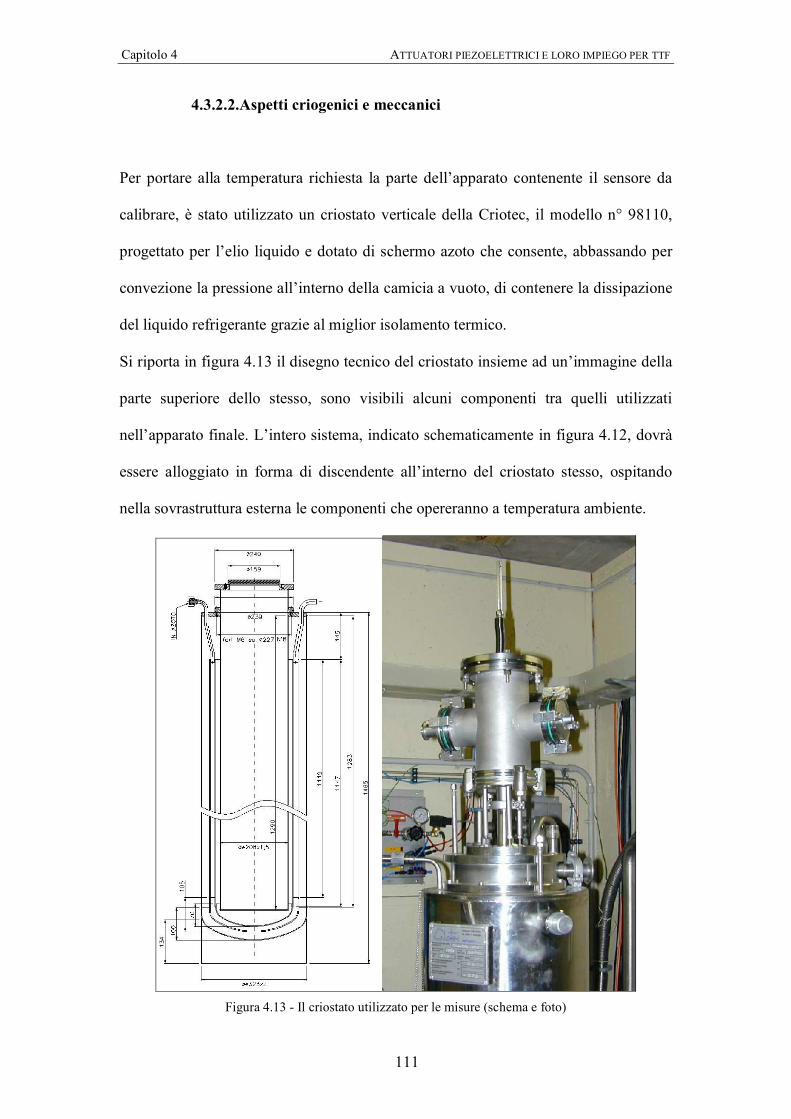
Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
111
4.3.2.2.Aspetti criogenici e meccanici
Per portare alla temperatura richiesta la parte dell’apparato contenente il sensore da
calibrare, è stato utilizzato un criostato verticale della Criotec, il modello n° 98110,
progettato per l’elio liquido e dotato di schermo azoto che consente, abbassando per
convezione la pressione all’interno della camicia a vuoto, di contenere la dissipazione
del liquido refrigerante grazie al miglior isolamento termico.
Si riporta in figura 4.13 il disegno tecnico del criostato insieme ad un’immagine della
parte superiore dello stesso, sono visibili alcuni componenti tra quelli utilizzati
nell’apparato finale. L’intero sistema, indicato schematicamente in figura 4.12, dovrà
essere alloggiato in forma di discendente all’interno del criostato stesso, ospitando
nella sovrastruttura esterna le componenti che opereranno a temperatura ambiente.
Figura 4.13 - Il criostato utilizzato per le misure (schema e foto)
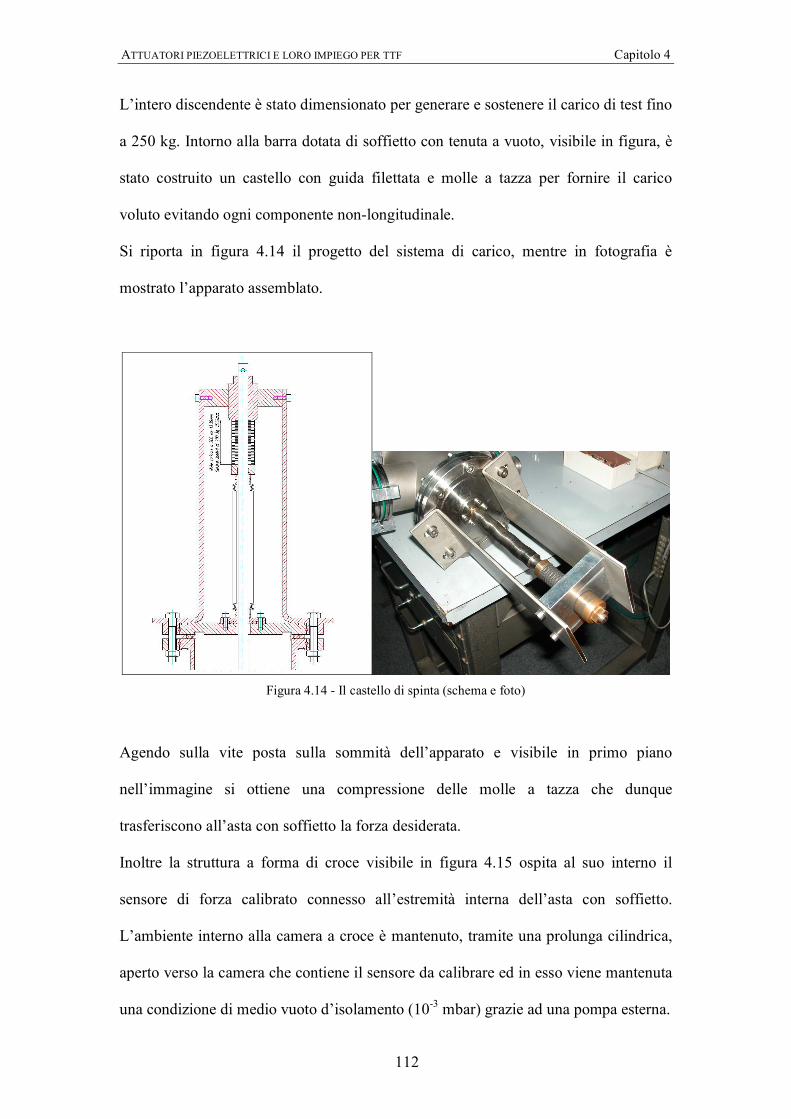
ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
112
L’intero discendente è stato dimensionato per generare e sostenere il carico di test fino
a 250 kg. Intorno alla barra dotata di soffietto con tenuta a vuoto, visibile in figura, è
stato costruito un castello con guida filettata e molle a tazza per fornire il carico
voluto evitando ogni componente non-longitudinale.
Si riporta in figura 4.14 il progetto del sistema di carico, mentre in fotografia è
mostrato l’apparato assemblato.
Figura 4.14 - Il castello di spinta (schema e foto)
Agendo sulla vite posta sulla sommità dell’apparato e visibile in primo piano
nell’immagine si ottiene una compressione delle molle a tazza che dunque
trasferiscono all’asta con soffietto la forza desiderata.
Inoltre la struttura a forma di croce visibile in figura 4.15 ospita al suo interno il
sensore di forza calibrato connesso all’estremità interna dell’asta con soffietto.
L’ambiente interno alla camera a croce è mantenuto, tramite una prolunga cilindrica,
aperto verso la camera che contiene il sensore da calibrare ed in esso viene mantenuta
una condizione di medio vuoto d’isolamento (10-3 mbar) grazie ad una pompa esterna.
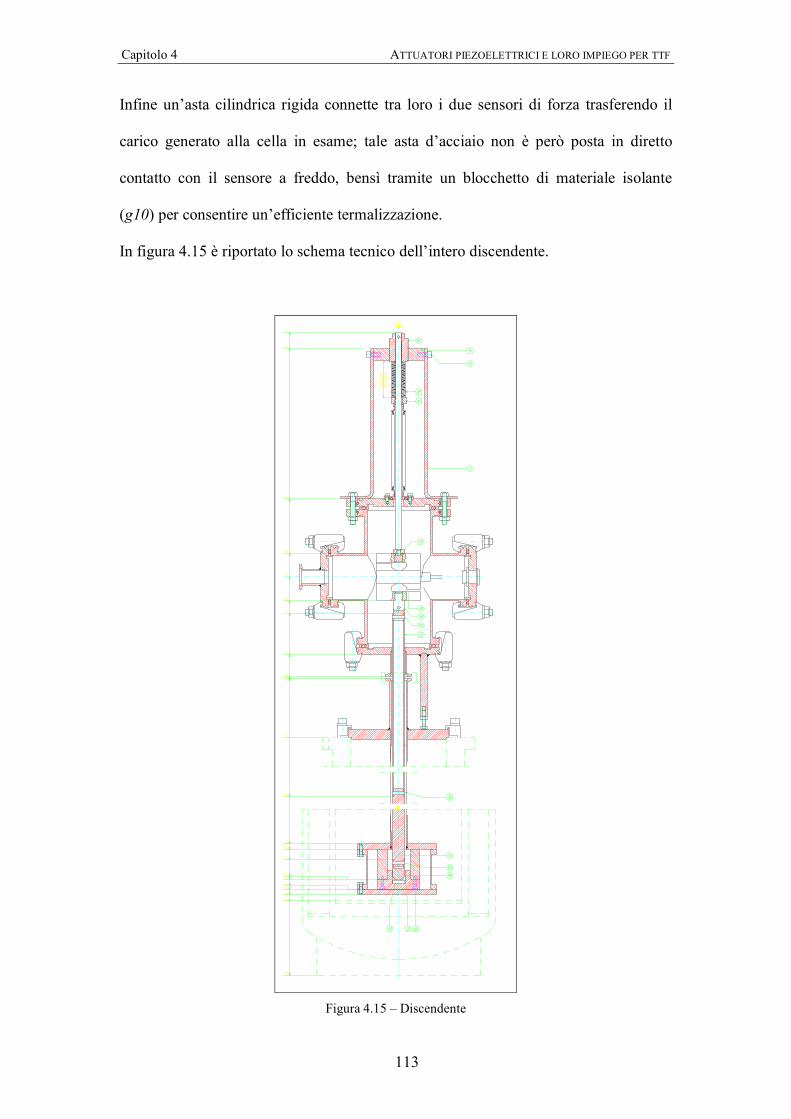
Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
113
Infine un’asta cilindrica rigida connette tra loro i due sensori di forza trasferendo il
carico generato alla cella in esame; tale asta d’acciaio non è però posta in diretto
contatto con il sensore a freddo, bensì tramite un blocchetto di materiale isolante
(g10) per consentire un’efficiente termalizzazione.
In figura 4.15 è riportato lo schema tecnico dell’intero discendente.
Figura 4.15 – Discendente

ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
114
Nei riquadri dettagliati è inoltre possibile osservare i due sensori (53,59) al centro
delle rispettive scatole, in particolare il disegno si riferisce alla cella Burster modello
8415.
Figura 4.16 - Discendente – dettagli
Nel disegno si può notare tra l’altro il tratto di materiale isolante (56) interposto tra la
lunga asta cava e la punta piena (54) che è in diretto contatto con il load button.

Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
115
4.3.2.3.Elettronica
Le attrezzature elettroniche associate all’apparato di calibrazione devono rispondere
alle esigenze di lettura in tempo reale dei segnali in uscita dai due sensori di forza, e
di registrazione storica di tutti i segnali d’interesse. Infatti, per una corretta analisi del
processo di raffreddamento che precede le misure e dello stato di termalizzazione
durante le misure stesse, sono stati installati dei sensori di temperatura resistivi [38] in
punti diversi del discendente.
Una resistenza di tipo PT100 è stata fissata sulla cella di carico nella scatola a croce
per poter controllare che essa rimanga nel suo intervallo di calibrazione (da -10 a +45
°C) per tutta la durata della misura.
Due resistenze di tipo Cryogenic Linear Temperature Sensor o CLTS sono state
fissate una in maniera da essere solidale ed in continuità termica con il load button
(CLTS1), l’altra alloggiata sulla flangia superiore della scatola terminale, dunque a 10
cm circa dal fondo del criostato (CLTS2).
Due resistenze di tipo Cernox calibrate sono invece state posizionate all’esterno del
discendente, sulla flangia superiore della scatola (CNX115) e 20 cm circa sopra di
essa (CNX106).
Infine una sonda di livello resistiva per elio liquido è stata ancorata alla scatola in
maniera da rilevare il livello del liquido refrigerante a partire dal fondo del criostato.
La lettura di tutti i sensori di temperatura avviene a quattro fili [37], compensando
così la resistenza introdotta dai cavi.
Cuore della strumentazione elettronica utilizzata è il multimetro digitale Keithley
dotato di scanner per l’acquisizione simultanea di più canali. Lo strumento
interfacciato via GPIB ad un PC, archivia su disco fisso i valori letti. Infine sono state
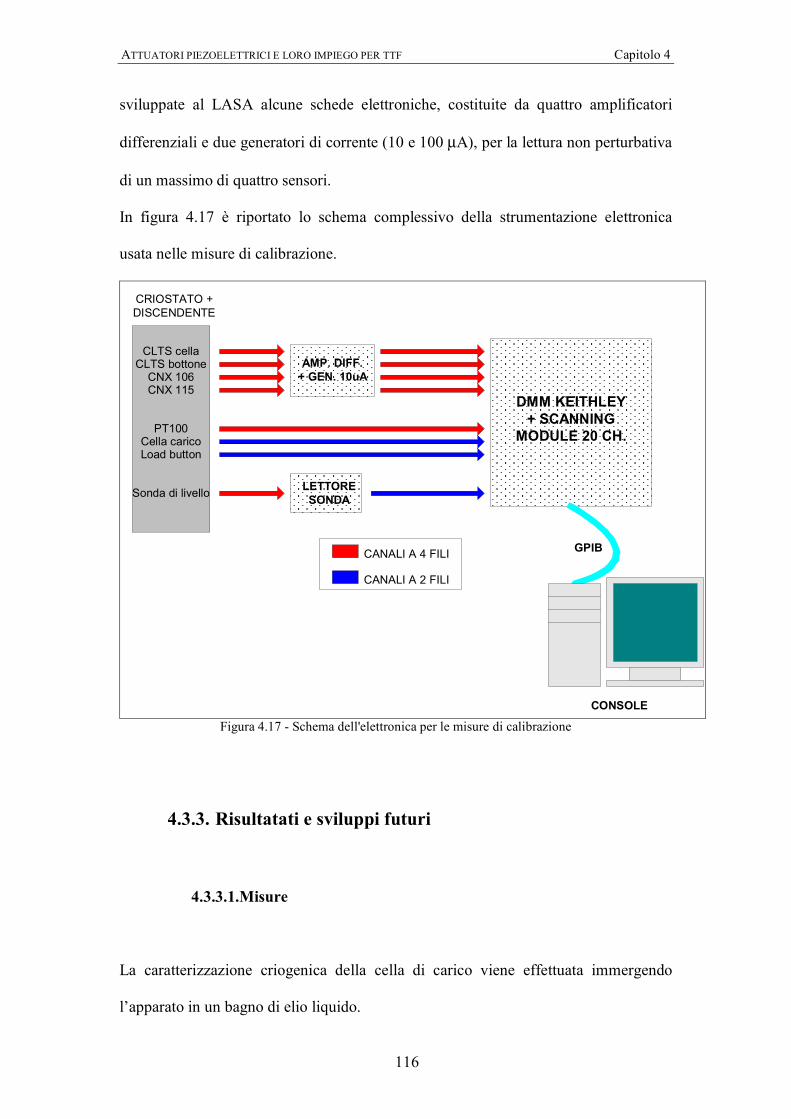
ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
116
sviluppate al LASA alcune schede elettroniche, costituite da quattro amplificatori
differenziali e due generatori di corrente (10 e 100 µA), per la lettura non perturbativa
di un massimo di quattro sensori.
In figura 4.17 è riportato lo schema complessivo della strumentazione elettronica
usata nelle misure di calibrazione.
CRIOSTATO +DISCENDENTE
AMP. DIFF.+ GEN. 10uA
LETTORESONDA
DMM KEITHLEY+ SCANNING
MODULE 20 CH.
GPIB
CONSOLE
CANALI A 4 FILI
CANALI A 2 FILI
Sonda di livello
Load buttonCella carico
CNX 115
PT100
CNX 106CLTS bottone
CLTS cella
Figura 4.17 - Schema dell'elettronica per le misure di calibrazione
4.3.3. Risultatati e sviluppi futuri
4.3.3.1.Misure
La caratterizzazione criogenica della cella di carico viene effettuata immergendo
l’apparato in un bagno di elio liquido.

Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
117
In figura 4.18 è riportato l’apparato necessario alla fase di raffreddamento:
1
2
3
4
5
6
Figura 4.18 – Il criostato durante il cooldown
Sono visibili ed indicati i seguenti elementi:
1. linea schermata per il travaso dell’He liquido
2. linea per il recupero dell’He gassoso
3. connessione alla pompa per il vuoto d’isolamento
4. sensore di pressione
5. connessioni col sistema elettrico di misura
6. tubo di scarico dello schermo azoto
Il riempimento del criostato con il gas elio liquefatto, e la conseguente
termalizzazione del dispositivo alla temperatura di 4 K (fase di cool-down), è
un’operazione molto delicata per via dell’elevata differenza di temperatura imposta.
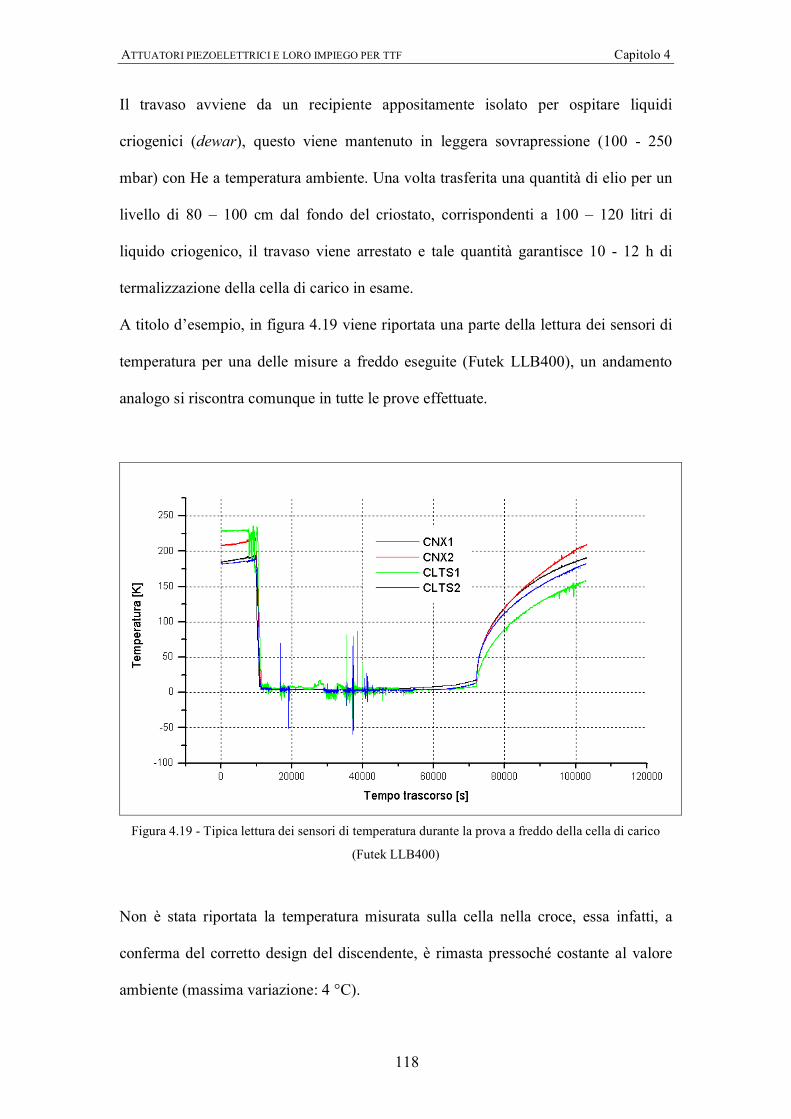
ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
118
Il travaso avviene da un recipiente appositamente isolato per ospitare liquidi
criogenici (dewar), questo viene mantenuto in leggera sovrapressione (100 - 250
mbar) con He a temperatura ambiente. Una volta trasferita una quantità di elio per un
livello di 80 – 100 cm dal fondo del criostato, corrispondenti a 100 – 120 litri di
liquido criogenico, il travaso viene arrestato e tale quantità garantisce 10 - 12 h di
termalizzazione della cella di carico in esame.
A titolo d’esempio, in figura 4.19 viene riportata una parte della lettura dei sensori di
temperatura per una delle misure a freddo eseguite (Futek LLB400), un andamento
analogo si riscontra comunque in tutte le prove effettuate.
Figura 4.19 - Tipica lettura dei sensori di temperatura durante la prova a freddo della cella di carico
(Futek LLB400)
Non è stata riportata la temperatura misurata sulla cella nella croce, essa infatti, a
conferma del corretto design del discendente, è rimasta pressoché costante al valore
ambiente (massima variazione: 4 °C).
Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
119
Per tali prove, il carico criogenico passivo è piccolo in quanto rappresentato
principalmente dalla sola scatola contenente la cella in esame. Più critico è invece il
contributo al carico criogenico degli elementi resistivi presenti. Per evitare i fenomeni
di auto-riscaldamento dovuti ad un’eccessiva potenza da dissipare, i sensori di
temperatura resistivi vengono alimentati con una corrente di 10 µA. Va anche
considerato il comportamento della stessa cella di carico. Lo strain gauge all’interno
di questa è infatti un dissipatore resistivo (circa 100 mW di potenza dissipata) e per
questo motivo si sono rese necessarie successive evoluzioni dell’apparato di misura.
L’uso di calze metalliche e di pasta conduttiva è stato necessario per realizzare un
buon contatto termico tra la cella in esame ed il bagno d’elio, ottimizzando così la
termalizzazione del sensore di forza.
Anche l’elettronica di lettura è stata ottimizzata in maniera da poter alimentare la cella
di carico a freddo con soli 50 mV (invece che 5 V).
Dopo aver sviluppato l’equipaggiamento per la misura, sono state provate alla
temperatura dell’elio liquido tre celle di carico standard (tipico range compensato in
temperatura: 15 – 70 °C). Nessuno dei modelli in esame ha mostrato una ripetibilità
sufficiente a presentare una calibrazione affidabile.
Portando queste celle di carico alla temperatura dell’elio liquido, si inducono, sia sul
telaio metallico che sullo strain gauge, grosse deformazioni, testimoniate da un
significativo aumento dell’offset misurato, senza carico applicato, sul segnale in
uscita.
Tali misure sono riportate in tabella 4.5, dove l’offset a 4.2 K è confrontato con il
segnale corrispondente al massimo carico a temperatura ambiente (indice di
deformazione).
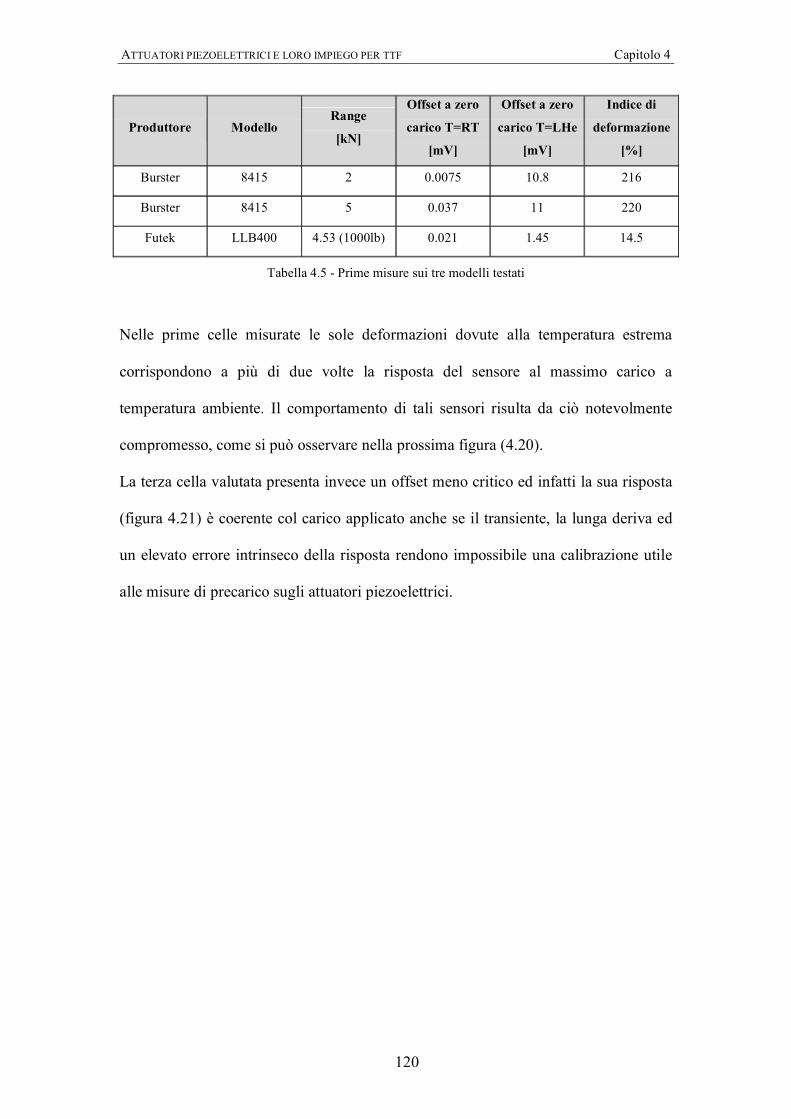
ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
120
Produttore Modello Range
[kN]
Offset a zero
carico T=RT
[mV]
Offset a zero
carico T=LHe
[mV]
Indice di
deformazione
[%]
Burster 8415 2 0.0075 10.8 216
Burster 8415 5 0.037 11 220
Futek LLB400 4.53 (1000lb) 0.021 1.45 14.5
Tabella 4.5 - Prime misure sui tre modelli testati
Nelle prime celle misurate le sole deformazioni dovute alla temperatura estrema
corrispondono a più di due volte la risposta del sensore al massimo carico a
temperatura ambiente. Il comportamento di tali sensori risulta da ciò notevolmente
compromesso, come si può osservare nella prossima figura (4.20).
La terza cella valutata presenta invece un offset meno critico ed infatti la sua risposta
(figura 4.21) è coerente col carico applicato anche se il transiente, la lunga deriva ed
un elevato errore intrinseco della risposta rendono impossibile una calibrazione utile
alle misure di precarico sugli attuatori piezoelettrici.
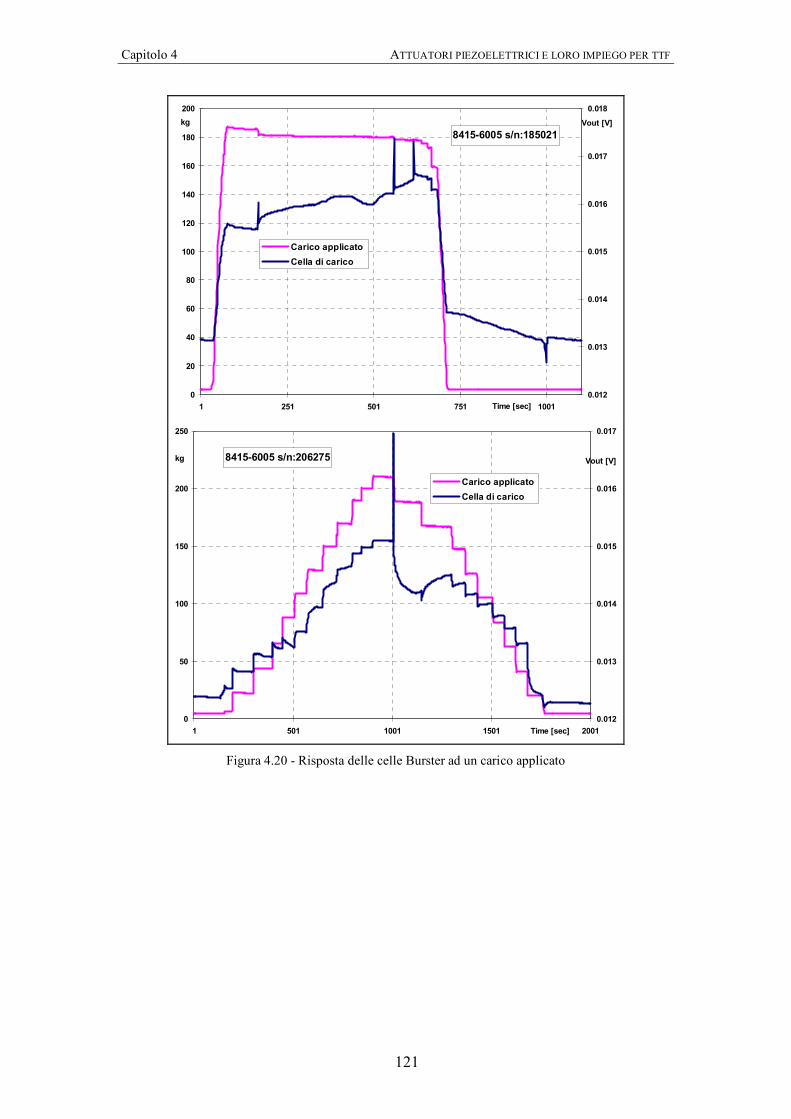
Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
121
8415-6005 s/n:185021
0
20
40
60
80
100
120
140
160
180
200
1 251 501 751 1001Time [sec]
kg
0.012
0.013
0.014
0.015
0.016
0.017
0.018
Vout [V]
Carico applicato
Cella di carico
8415-6005 s/n:206275
0
50
100
150
200
250
1 501 1001 1501 2001Time [sec]
kg
0.012
0.013
0.014
0.015
0.016
0.017
Vout [V]
Carico applicato
Cella di carico
Figura 4.20 - Risposta delle celle Burster ad un carico applicato

ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
122
LLB400-1000lb s/n:125001
0
50
10 0
150
2 0 0
1 10 0 1 2 0 0 1 3 0 0 1T ime [ sec]
kg
0
0 .0 0 1
0 .0 0 2
0 .0 0 3
0 .0 0 4
0 .0 0 5
0 .0 0 6
0 .0 0 7
0 .0 0 8
0 .0 0 9
V o ut [ V ]
Carico applicato
Cella di carico
LLB400-1000lb s/n:125001
0
10
20
30
40
50
60
70
0 8 17 25 33Time [min]
kg
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0.007
Vout [V]
Carico applicato
Cella di carico
Figura 4.21 - Risposta della cella Futek al carico applicato
4.3.3.2.Commenti e sviluppi futuri
Le celle esaminate, dispositivi standard, hanno mostrato un comportamento per nulla
ripetibile ed impossibile da calibrare se portate ad operare così lontano dal loro range
operativo nominale.

Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
123
In alternativa, dunque, due diverse soluzioni sono attualmente in sviluppo. Anzitutto
saranno valutate alcune celle di carico dotate di opzione criogenica, il che comporta
l’utilizzo di soluzioni specifiche per quelli che si sono rivelati i punti critici di tali
sensori: la colla che vincola lo strain gauge ed il materiale che costituisce il case
metallico. In questo modo si ottiene, oltre ad un significativo aumento del prezzo
unitario, un’estensione del range operativo fino a -250 °F (119 K). Tale valore, pur
ancora lontano dalla temperatura di riferimento (4.2 K), rappresenta un netto
incremento rispetto alle celle esaminate finora.
La soluzione più valida sembra però la realizzazione di una cella di carico
appositamente progettata, ottenuta applicando un sensore estensimetrico per criogenia
ad un elemento meccanico opportunamente disegnato. L’uso di estensimetri
funzionanti a temperature criogeniche è già avvenuto nel campo degli acceleratori di
particelle. A tali dispositivi si ricorre ad esempio per lo studio delle deformazioni dei
magneti superconduttivi. Con l’opportuna scelta del disegno e del materiale per
l’elemento meccanico, che realizza la conversione forza-deformazione, sarà possibile
inoltre regolare alcuni importanti parametri come la rigidità dell’oggetto e le sue
dimensioni.
Lo sviluppo di un tale sensore di forza, in collaborazione con DESY, è attualmente in
corso e la calibrazione dello stesso potrà essere effettuata tramite l’apparato
sviluppato presso il LASA ed oggetto di questo capitolo.

ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
124
4.4. SVILUPPI FUTURI
Il poter disporre di un sensore di forza calibrato ed operativo a temperature
criogeniche è una necessità primaria per l’attuale fase di sviluppo del fast tuner per
TTF. Il design del tuner definitivo e la scelta del corretto attuatore dipendono infatti
dalla valutazione in situ delle forze principali.
Ma obbiettivo dell’attività appena esposta è anche la realizzazione di un apparato che
consenta la caratterizzazione meccanica ed elettrica, in condizioni criogeniche, di
diversi attuatori piezoelettrici, scelti tra quelli conformi alle specifiche di
TTF/TESLA.
Oltre ad un sensore di forza calibrato, oggetto del lavoro descritto nei precedenti
paragrafi, anche un secondo elemento è dunque necessario per tale sistema: un
sensore di spostamento calibrato ed operativo in condizioni criogeniche.
Per questo motivo, parallelamente al lavoro sulle celle di carico, ha avuto inizio il
progetto e lo sviluppo della strumentazione necessaria alla caratterizzazione di tale
sensore.
Parti integranti di tale progetto sono, oltre all’apparato criogenico già sviluppato,
alcuni attuatori piezoelettrici standard dotati di un sistema di lettura dello spostamento
come il modello in figura 4.22.

Capitolo 4 ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF
125
Figura 4.22 - Piezomechanik pst150, con case di precarico e sensore di spostamento
Tale attività avviene in collaborazione con altri istituti di ricerca da Orsay e Saclay
(CEA), permettendo così una più completa conoscenza dei dispositivi usati.
Infine, una volta in possesso di tali sensori, il criostato verticale usato nei test sulle
celle di carico potrà ospitare un primo semplice sistema per la caratterizzazione di
diversi attuatori piezoelettrici.
Uno schema indicativo è presentato in figura 4.23.
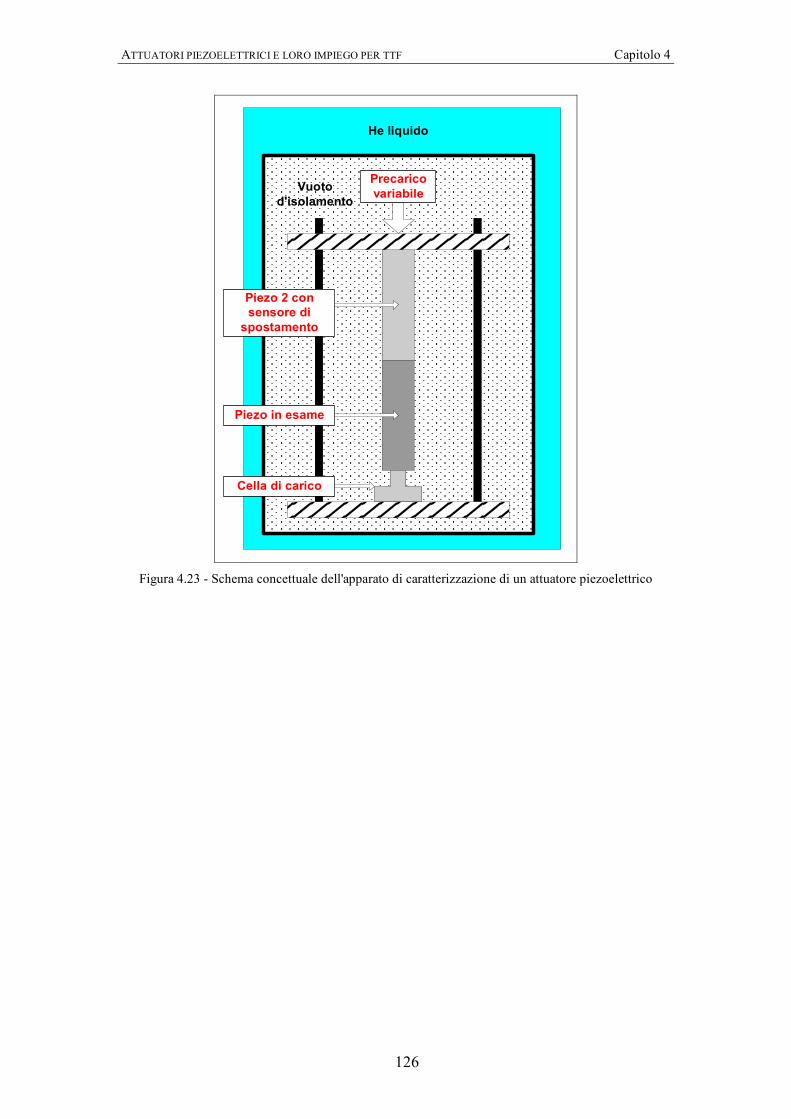
ATTUATORI PIEZOELETTRICI E LORO IMPIEGO PER TTF Capitolo 4
126
He liquido
Vuotod'isolamento
Precaricovariabile
Piezo 2 consensore di
spostamento
Piezo in esame
Cella di carico
Figura 4.23 - Schema concettuale dell'apparato di caratterizzazione di un attuatore piezoelettrico
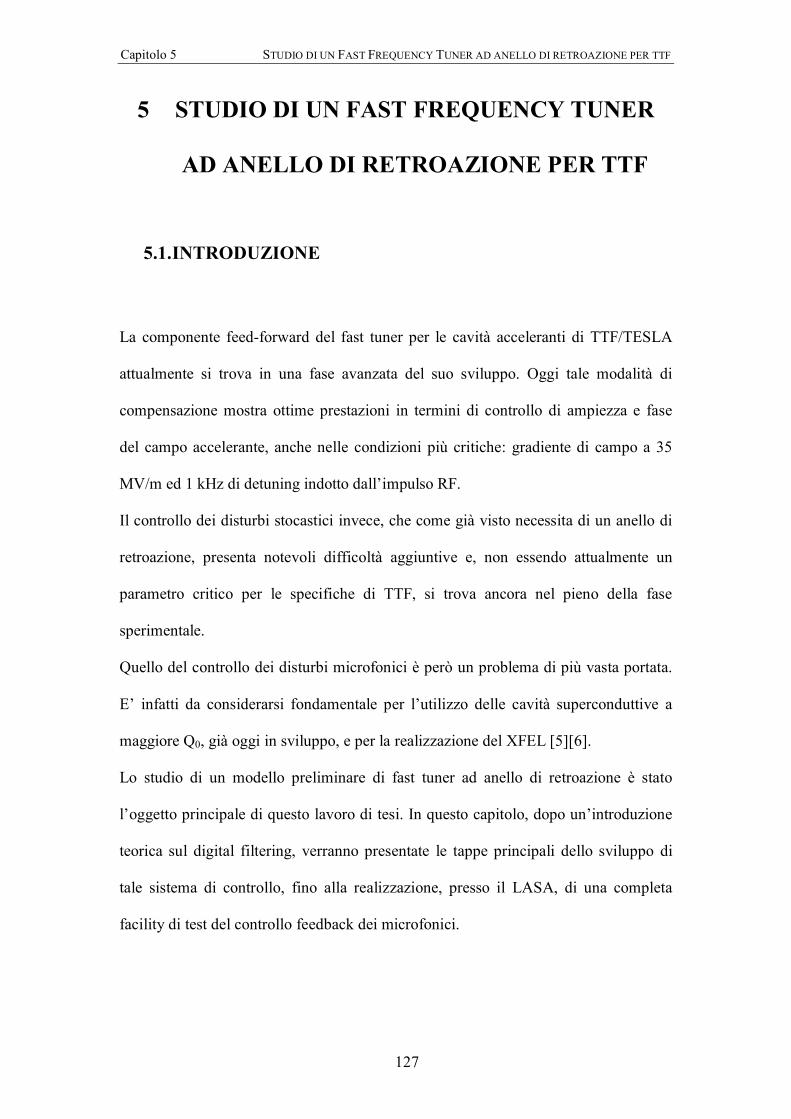
Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
127
5 STUDIO DI UN FAST FREQUENCY TUNER
AD ANELLO DI RETROAZIONE PER TTF
5.1. INTRODUZIONE
La componente feed-forward del fast tuner per le cavità acceleranti di TTF/TESLA
attualmente si trova in una fase avanzata del suo sviluppo. Oggi tale modalità di
compensazione mostra ottime prestazioni in termini di controllo di ampiezza e fase
del campo accelerante, anche nelle condizioni più critiche: gradiente di campo a 35
MV/m ed 1 kHz di detuning indotto dall’impulso RF.
Il controllo dei disturbi stocastici invece, che come già visto necessita di un anello di
retroazione, presenta notevoli difficoltà aggiuntive e, non essendo attualmente un
parametro critico per le specifiche di TTF, si trova ancora nel pieno della fase
sperimentale.
Quello del controllo dei disturbi microfonici è però un problema di più vasta portata.
E’ infatti da considerarsi fondamentale per l’utilizzo delle cavità superconduttive a
maggiore Q0, già oggi in sviluppo, e per la realizzazione del XFEL [5][6].
Lo studio di un modello preliminare di fast tuner ad anello di retroazione è stato
l’oggetto principale di questo lavoro di tesi. In questo capitolo, dopo un’introduzione
teorica sul digital filtering, verranno presentate le tappe principali dello sviluppo di
tale sistema di controllo, fino alla realizzazione, presso il LASA, di una completa
facility di test del controllo feedback dei microfonici.

STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
128
5.2. DSP E DIGITAL FILTERING
La rete che realizza il filtro di compensazione in un sistema retroazionato permette di
intervenire sulla stabilità dell’anello e sulla efficienza dello stesso, in termini di
prodotto guadagno-banda passante.
Il vantaggio dell’implementazione digitale del filtro rispetto ad una di tipo analogico è
fondamentalmente la possibilità di cambiarne rapidamente la funzione di
trasferimento via software. Nell’immediato questa operazione viene svolta a mano
durante gli esperimenti, ma in futuro sarà svolta automaticamente da un sistema di
controllo adattativo per adeguare la catena di retroazione alle derive lente dei
parametri della cavità.
Inoltre la compensazione delle risonanze elettromeccaniche richiesta al filtro,
comporta il dover implementare complesse risposte in frequenza. Stretti filtri notch a
poche centinaia di Hz sono alla portata di un filtro digitale ma praticamente non
realizzabili da una rete analogica.
Per realizzare la conversione e l’elaborazione del segnale, un filtro digitale è costituito
da tre elementi: un ADC (analog to digital converter) che campiona l’ingresso, un
processore che genera l’uscita a partire dai campioni dell’ingresso, secondo la
funzione di trasferimento programmata, e un DAC (digital to analog converter), che
ricostruisce un segnale continuo a partire dai valori discreti dell’uscita del processore.
Una volta definita la frequenza limite limf della banda da compensare, il vincolo
teorico per il filtro (teorema di Nyquist) è che realizzi il processo di conversione,
elaborazione e scrittura in un tempo inferiore a ( )lim21
f⋅ . In realtà questo criterio è
inapplicabile quando il filtro è inserito all’interno di un anello di reazione. La
necessità di controllare perfettamente fase ed ampiezza del segnale di comando

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
129
implica l’impossibilità di inserire un filtro ricostruttivo. Un ulteriore fattore 10
( ( )lim201
f⋅ ) dovrà essere allora considerato nel design del filtro.
5.2.1. Digital Signal Processor, FPGA
Per quanto appena visto la velocità di calcolo è critica ed è il criterio che porta a
scegliere come processore un dispositivo DSP (digital signal processor) [21].
I processori dedicati ad applicazioni general purpose infatti non sono ottimizzati per
gli algoritmi del digital filtering. I DSP invece sono microprocessori specificatamente
progettati per le operazioni matematiche, che riescono a svolgere velocemente grazie
a configurazioni hardware con un forte parallelismo interno.
Il vantaggio dell’utilizzo di un DSP rispetto a un processore general purpose per
l’elaborazione del segnale consiste principalmente in un notevole incremento nella
velocità di calcolo (a parità di costo del dispositivo, naturalmente). Inoltre i DSP a
differenza dei processori utilizzati nei PC, ad esempio, hanno dei tempi di esecuzione
prevedibili, e questo è ovviamente un punto cruciale per le applicazioni real-time.
Anche nel caso del filtraggio di un segnale, le operazioni matematiche richieste si
riducono tipicamente a somme e moltiplicazioni, nelle quali però vengono coinvolti, a
seconda del grado del filtro, un certo numero dei dati d’ingresso più recenti. Questo
implica che bisognerà salvare alcuni dati in una memoria ed interrogarla e aggiornarla
continuamente (e rapidamente). Per ogni coefficiente del filtro, il dispositivo deve
caricare dalla memoria il coefficiente, il campione da moltiplicare, l’operazione
(moltiplicazione), e salvare il risultato nuovamente nella memoria per poi eseguirne la
combinazione lineare con gli altri prodotti.
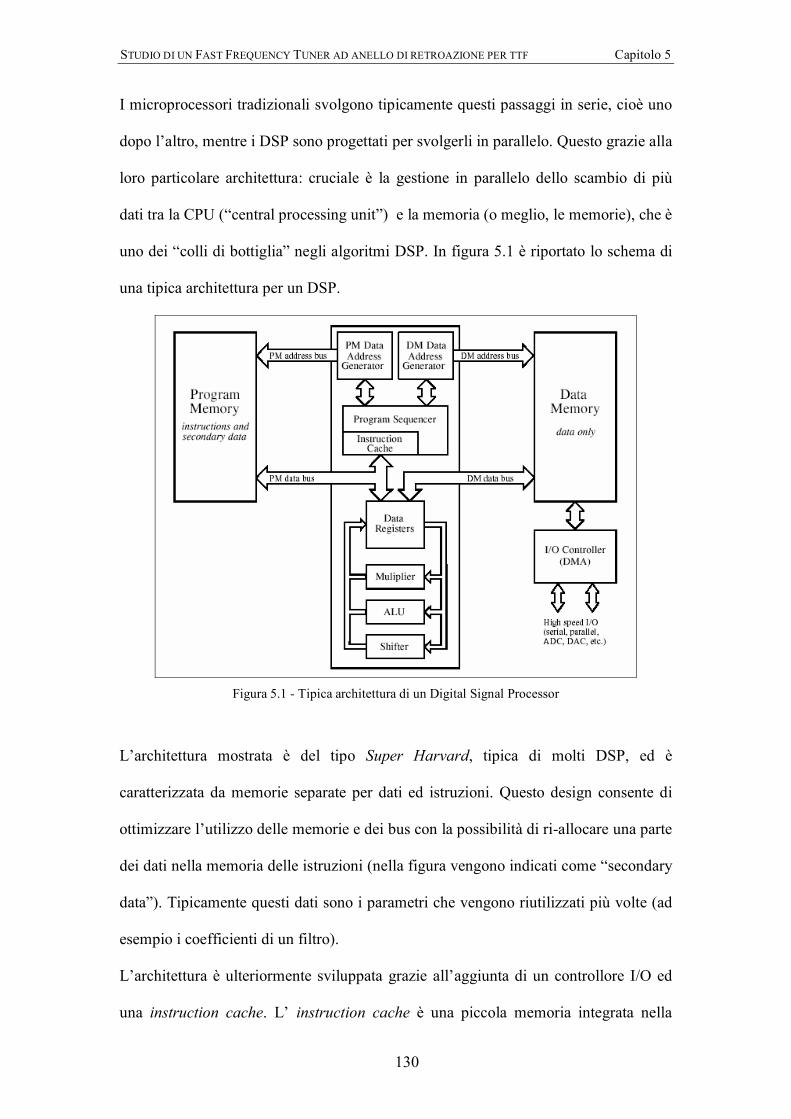
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
130
I microprocessori tradizionali svolgono tipicamente questi passaggi in serie, cioè uno
dopo l’altro, mentre i DSP sono progettati per svolgerli in parallelo. Questo grazie alla
loro particolare architettura: cruciale è la gestione in parallelo dello scambio di più
dati tra la CPU (“central processing unit”) e la memoria (o meglio, le memorie), che è
uno dei “colli di bottiglia” negli algoritmi DSP. In figura 5.1 è riportato lo schema di
una tipica architettura per un DSP.
Figura 5.1 - Tipica architettura di un Digital Signal Processor
L’architettura mostrata è del tipo Super Harvard, tipica di molti DSP, ed è
caratterizzata da memorie separate per dati ed istruzioni. Questo design consente di
ottimizzare l’utilizzo delle memorie e dei bus con la possibilità di ri-allocare una parte
dei dati nella memoria delle istruzioni (nella figura vengono indicati come “secondary
data”). Tipicamente questi dati sono i parametri che vengono riutilizzati più volte (ad
esempio i coefficienti di un filtro).
L’architettura è ulteriormente sviluppata grazie all’aggiunta di un controllore I/O ed
una instruction cache. L’ instruction cache è una piccola memoria integrata nella

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
131
CPU che contiene le più recenti istruzioni del programma. Dal momento che spesso
gli algoritmi del DSP richiedono di ripetere molte volte le stesse istruzioni, questo
consente di risparmiare molto tempo, parallelizzando ulteriormente il processo. Tutte
le volte che l’istruzione necessaria è già stata caricata nella cache, infatti, non è più
necessario prelevarla dalla memoria attraverso il bus.
Il DSP rappresenta dunque la soluzione attuale per ogni esigenza di elaborazione del
segnale e, così come i prototipi sviluppati a DESY, anche per le richieste di questo
lavoro di tesi è stato utilizzato tale processore. Tutte le misure effettuate e riportate nei
prossimi paragrafi, hanno però stabilito inequivocabilmente come una ancor maggiore
potenza di calcolo sia necessaria, ai fini di un ottimale controllo dei disturbi
microfonici.
E’ attualmente in fase di studio l’implementazione del filtro digitale sui chip
programmabili di ultima generazione: i Field Programmable Gate Array (FPGA).
Si tratta di componenti ad elevata integrazione la cui architettura ad alto livello può
essere completamente definita dall’utente.
In una singola FPGA vengono integrate fino a 100000 celle logiche elementari, PLL,
clock multipliers ed un’ampia memoria distribuita. Anche la rete di connessione è
totalmente gestita dall’utente, che può utilizzare net locali, nodi programmabili e bus
veloci per i segnali di sincronia.
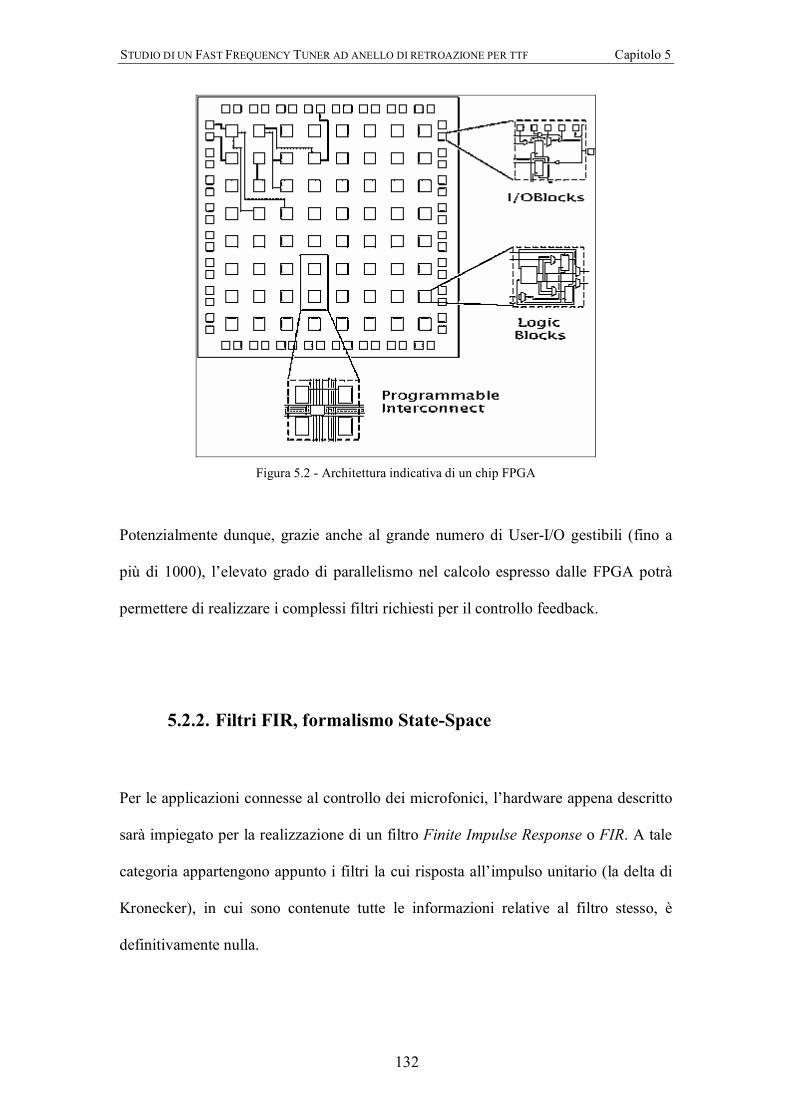
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
132
Figura 5.2 - Architettura indicativa di un chip FPGA
Potenzialmente dunque, grazie anche al grande numero di User-I/O gestibili (fino a
più di 1000), l’elevato grado di parallelismo nel calcolo espresso dalle FPGA potrà
permettere di realizzare i complessi filtri richiesti per il controllo feedback.
5.2.2. Filtri FIR, formalismo State-Space
Per le applicazioni connesse al controllo dei microfonici, l’hardware appena descritto
sarà impiegato per la realizzazione di un filtro Finite Impulse Response o FIR. A tale
categoria appartengono appunto i filtri la cui risposta all’impulso unitario (la delta di
Kronecker), in cui sono contenute tutte le informazioni relative al filtro stesso, è
definitivamente nulla.

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
133
Quando, come per ogni processore digitale, l’esecuzione del filtro avviene in tempo
discreto, tale risposta all’impulso è una serie finita di coefficienti (hj). Tale serie è
coinvolta, per determinare l’uscita del filtro (yj), in una operazione di convoluzione
discreta con un determinato numero di campioni del segnale in ingresso (uj). Proprio
tale quantità (n) rappresenta l’ordine del filtro.
Riassumendo:
∑=
−=n
jjiji uhy
0
Proprio perché la velocità d’elaborazione del segnale è critica per il digital filtering, la
forma con cui questa computazione viene impostata sul processore assume grande
importanza.
Il formalismo State-Space per sistemi discreti permette di esprimere il medesimo
calcolo in una forma matriciale, particolarmente indicata alle caratteristiche del DSP
ed in genere dei programmi di calcolo.
Grazie all’elevato parallelismo hardware ed a librerie di funzioni dedicate, il tempo di
calcolo viene infatti minimizzato.
Il processore viene allora programmato in maniera da eseguire il calcolo:
)()()1( kukxkxrrr ⋅+⋅=+ BA
)()()( kukxkyrrr ⋅+⋅= DC
dove k è la variabile discreta uguale al numero di intervalli di tempo di
campionamento, )(kxr
è il vettore delle variabili di stato (che sono pari al grado n del
filtro), )(kyr
il vettore delle uscite del sistema (nel nostro caso è monodimensionale,
l’unica uscita è la tensione da inviare ai piezoelettrici) e )(kur
è il vettore degli
ingressi, anch’esso monodimensionale, che corrisponde al segnale d’errore che
comanda l’anello di reazione.

STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
134
Le matrici DCBA ,,, decrivono completamente il filtro, secondo questo formalismo,
proprio come la risposta all’impulso discreta hj utilizzata per la convoluzione.
Tali matrici vengono calcolate off-line con un PC (usando il software Matlab, a
partire dalla funzione di trasferimento analitica che si vuole implementare), e
trasferite sul DSP in fase di programmazione. Quest’ultimo quindi ha il compito
specifico di acquisire l’ingresso )(nu , moltiplicare matrici e vettori, aggiornare questi
ultimi e mandare il dato )(ny al DAC.

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
135
5.3. PRIME VALUTAZIONI E MISURE PRESSO DESY/TTF
5.3.1. Funzioni di trasferimento del sistema
Una volta realizzate le singole componenti dell’anello di controllo il sistema è stato
caratterizzato tramite la misura della funzione di trasferimento H(s) tra la tensione
applicata all’attuatore e lo sfasamento misurato dal rivelatore di fase.
Tale funzione rappresenterà infatti, per lo schema del controllore feedback (fig. 3.12),
la risposta del plant, ovvero dell’oggetto da controllare con l’anello di reazione.
Essa è in realtà il risultato complessivo dell’interazione di diversi elementi: l’attuatore
piezoelettrico, i leveraggi del tuner, la cavità vista come sistema elettro-meccanico ed
il rivelatore di fase.
Questo analiticamente comporta che la funzione di trasferimento misurata sia da
considerarsi come il prodotto di più fattori, vedi figura 5.3. Ai fini del controllo
feedback questi non intervengono mai separatamente ed eseguirne una
caratterizzazione indipendente comporterebbe difficoltà notevolmente maggiori,
dunque verrà considerato l’intero sistema come un solo oggetto.
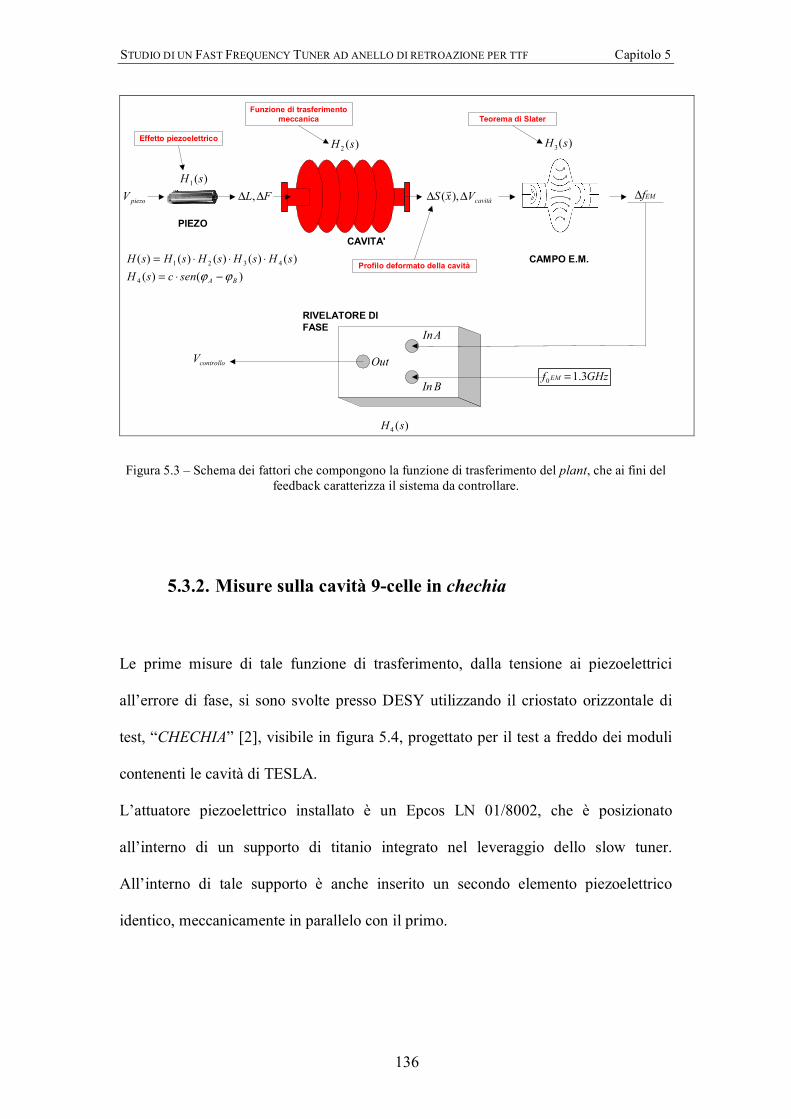
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
136
)(1 sH
piezoV FL ∆∆ ,
)(2 sH
cavitàVxS ∆∆ ),(r
)(3 sH
EMf∆
RIVELATORE DIFASE
AIn
BIn
OutGHzf EM 3.10 =
)(4 sH
controlloV
PIEZO
CAVITA'
CAMPO E.M.)()()()()( 4321 sHsHsHsHsH ⋅⋅⋅=)()(4 BAsencsH ϕϕ −⋅=
Funzione di trasferimentomeccanica Teorema di Slater
Effetto piezoelettrico
Profilo deformato della cavità
Figura 5.3 – Schema dei fattori che compongono la funzione di trasferimento del plant, che ai fini del feedback caratterizza il sistema da controllare.
5.3.2. Misure sulla cavità 9-celle in chechia
Le prime misure di tale funzione di trasferimento, dalla tensione ai piezoelettrici
all’errore di fase, si sono svolte presso DESY utilizzando il criostato orizzontale di
test, “CHECHIA” [2], visibile in figura 5.4, progettato per il test a freddo dei moduli
contenenti le cavità di TESLA.
L’attuatore piezoelettrico installato è un Epcos LN 01/8002, che è posizionato
all’interno di un supporto di titanio integrato nel leveraggio dello slow tuner.
All’interno di tale supporto è anche inserito un secondo elemento piezoelettrico
identico, meccanicamente in parallelo con il primo.
Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
137
Figura 5.4 - inserimento della cavità nel criostato orizzontale di test chechia
La presenza di 2 piezoelettrici consente di usarne uno come sensore e l’altro come
attuatore, e inoltre rende il sistema di controllo ridondante così che in caso di
danneggiamento di un elemento sia possibile utilizzare l’altro come attuatore.
Il supporto o piezo fixture ed il suo alloggiamento nello slow tuner sono mostrati nelle
figure 5.5 e 5.6.
Figura 5.5 - Il piezo-fixture
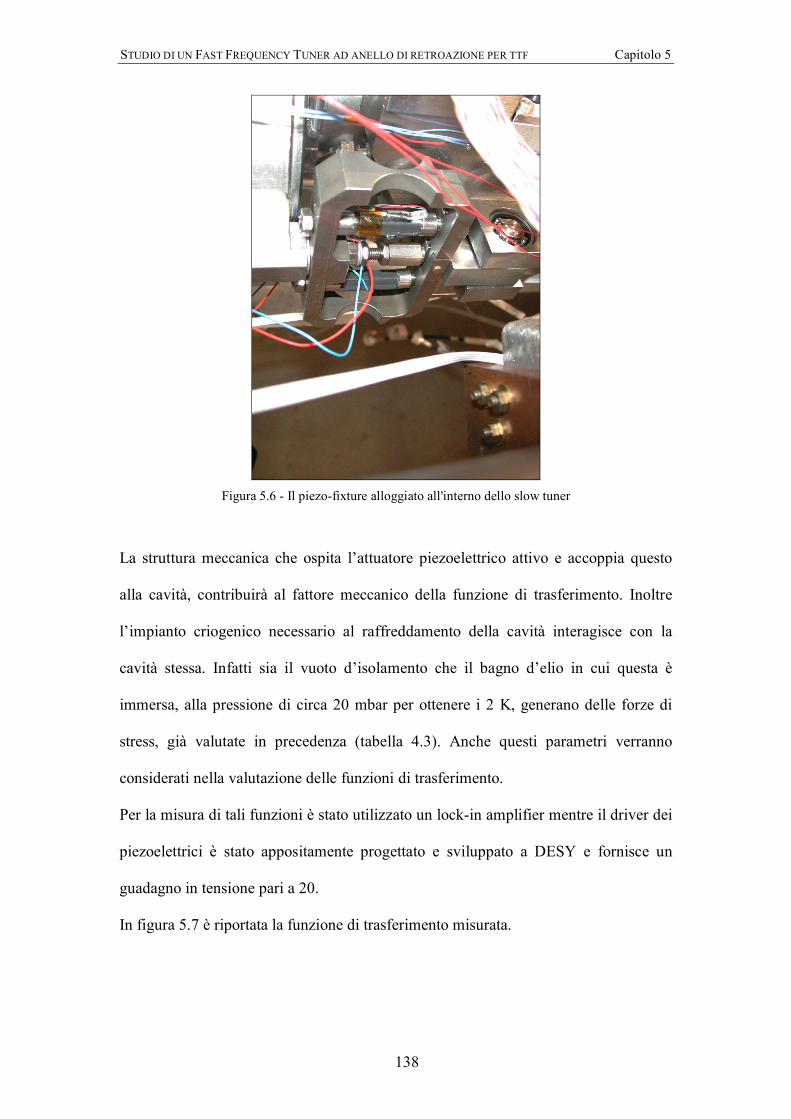
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
138
Figura 5.6 - Il piezo-fixture alloggiato all'interno dello slow tuner
La struttura meccanica che ospita l’attuatore piezoelettrico attivo e accoppia questo
alla cavità, contribuirà al fattore meccanico della funzione di trasferimento. Inoltre
l’impianto criogenico necessario al raffreddamento della cavità interagisce con la
cavità stessa. Infatti sia il vuoto d’isolamento che il bagno d’elio in cui questa è
immersa, alla pressione di circa 20 mbar per ottenere i 2 K, generano delle forze di
stress, già valutate in precedenza (tabella 4.3). Anche questi parametri verranno
considerati nella valutazione delle funzioni di trasferimento.
Per la misura di tali funzioni è stato utilizzato un lock-in amplifier mentre il driver dei
piezoelettrici è stato appositamente progettato e sviluppato a DESY e fornisce un
guadagno in tensione pari a 20.
In figura 5.7 è riportata la funzione di trasferimento misurata.

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
139
Figura 5.7 - Funzione di trasferimento della cavità TTF. L’ampiezza è riportata in unità arbitrarie
In figura 5.7 è visibile la rapida crescita dello sfasamento. La risposta in fase
accumula in soli 3 kHz più di 9000 gradi di ritardo di fase e tale valore è da associare
al gran numero di risonanze visibili nel intervallo di frequenze considerato. Ad

STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
140
ognuna di esse infatti, così come introdotto al paragrafo 3.1, è associato un doppio
polo nel modello analitico della funzione e dunque uno sfasamento di 180 gradi.
Verosimilmente proprio nella complessità della struttura deve essere ricercata la
ragione di una risposta in frequenza così articolata. Potenzialmente infatti ogni
elemento sensibile all’attuazione dei piezoelettrici introduce risonanze e sfasamenti.
Considerata la teoria del controllo feedback esposta al paragrafo 3.11, per realizzare, a
partire da una risposta come quella misurata, un anello stabile ed efficace, al filtro di
compensazione sarebbe richiesta la computazione di un numero eccessivo di poli e
zeri. L’ordine del filtro necessario è fuori dalla portata, per potenza di calcolo
richiesta, delle attuali schede di digital filtering a DSP e proprio per questo è
attualmente in fase di studio l’implementazione di filtri digitali su FPGA.
Anche la risposta del secondo elemento piezoelettrico è stata misurata in funzione
della frequenza. E’ così possibile rilevare direttamente le deformazioni meccaniche
che interessano la cavità nel suo ambiente di lavoro. Queste funzioni di trasferimento,
valutate in diverse condizioni operative, sono riportate in figura 5.8. Si può così
notare l’effetto sul sistema di alcuni elementi esterni come il vuoto d’isolamento, la
pressione dell’elio liquido ed il piezo-driver.
La struttura articolata di queste risposte, contenenti molte risonanze e doppi zeri, è
una diretta testimonianza della complessità meccanica dell’oggetto e sottolinea la
necessità di riferirsi ad una struttura più semplice per lo sviluppo iniziale del
controllore ad anello feedback.
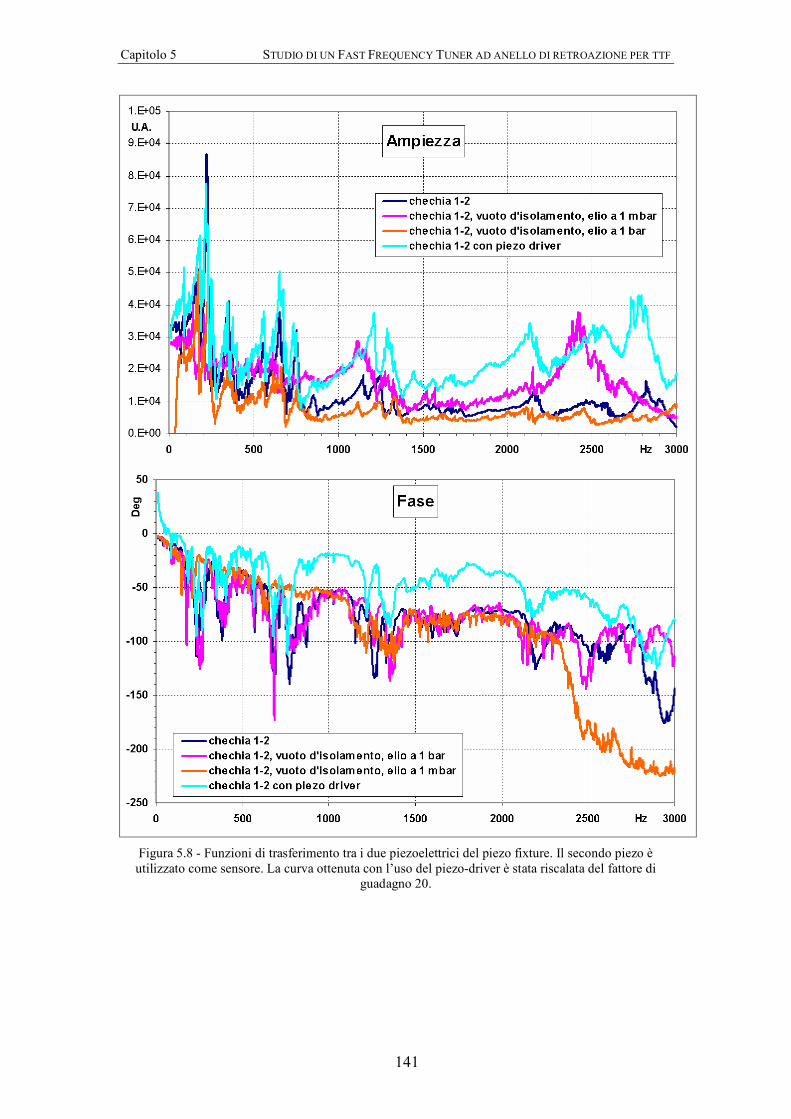
Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
141
Figura 5.8 - Funzioni di trasferimento tra i due piezoelettrici del piezo fixture. Il secondo piezo è utilizzato come sensore. La curva ottenuta con l’uso del piezo-driver è stata riscalata del fattore di
guadagno 20.
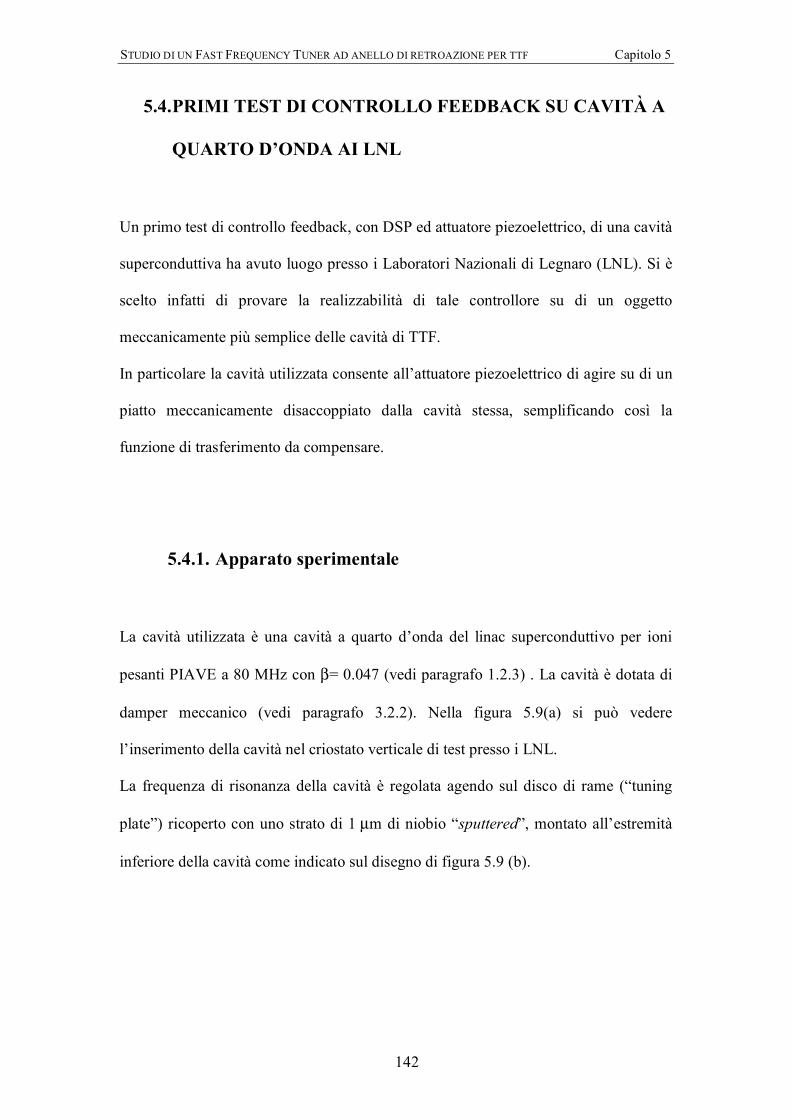
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
142
5.4. PRIMI TEST DI CONTROLLO FEEDBACK SU CAVITÀ A
QUARTO D’ONDA AI LNL
Un primo test di controllo feedback, con DSP ed attuatore piezoelettrico, di una cavità
superconduttiva ha avuto luogo presso i Laboratori Nazionali di Legnaro (LNL). Si è
scelto infatti di provare la realizzabilità di tale controllore su di un oggetto
meccanicamente più semplice delle cavità di TTF.
In particolare la cavità utilizzata consente all’attuatore piezoelettrico di agire su di un
piatto meccanicamente disaccoppiato dalla cavità stessa, semplificando così la
funzione di trasferimento da compensare.
5.4.1. Apparato sperimentale
La cavità utilizzata è una cavità a quarto d’onda del linac superconduttivo per ioni
pesanti PIAVE a 80 MHz con β= 0.047 (vedi paragrafo 1.2.3) . La cavità è dotata di
damper meccanico (vedi paragrafo 3.2.2). Nella figura 5.9(a) si può vedere
l’inserimento della cavità nel criostato verticale di test presso i LNL.
La frequenza di risonanza della cavità è regolata agendo sul disco di rame (“tuning
plate”) ricoperto con uno strato di 1 µm di niobio “sputtered”, montato all’estremità
inferiore della cavità come indicato sul disegno di figura 5.9 (b).
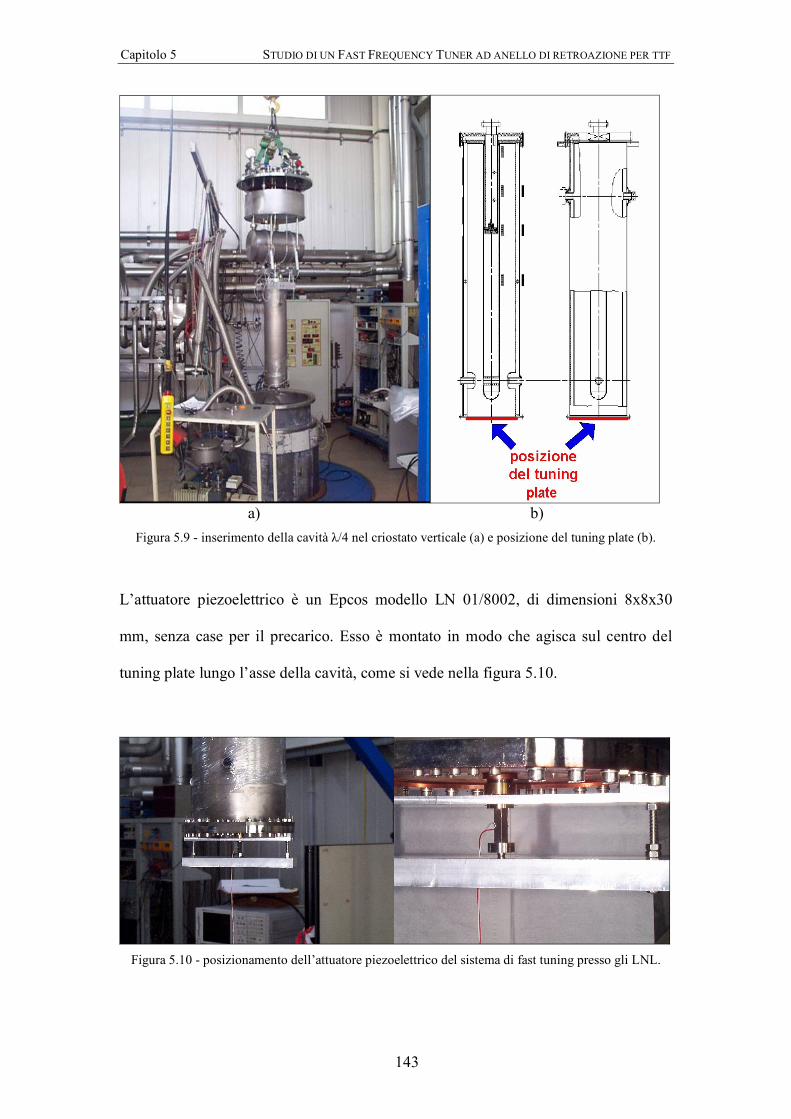
Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
143
a) b)
Figura 5.9 - inserimento della cavità λ/4 nel criostato verticale (a) e posizione del tuning plate (b).
L’attuatore piezoelettrico è un Epcos modello LN 01/8002, di dimensioni 8x8x30
mm, senza case per il precarico. Esso è montato in modo che agisca sul centro del
tuning plate lungo l’asse della cavità, come si vede nella figura 5.10.
Figura 5.10 - posizionamento dell’attuatore piezoelettrico del sistema di fast tuning presso gli LNL.

STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
144
La dinamica del tuning plate è praticamente indipendente rispetto al resto della cavità,
ed è stata simulata separatamente (è in pratica la dinamica di un disco vincolato per la
sua circonferenza). Nella tabella 5.1 sono riportate le prime frequenze proprie del
tuning plate.
Modo 1 636 Hz
Modo 2 1752 Hz
Modo 3 3434 Hz
Modo 4 5601 Hz
Tabella 5.1 - Frequenze dei primi modi propri del tuning plate
5.4.2. Misure
Così come per la cavità 9-celle TTF, è stata misurata, con un lock-in amplifier, la
funzione di trasferimento tra l’ingresso del driver dell’attuatore piezoelettrico e lo
sfasamento della cavità. I risultati di tali misure sono riportati in figura 5.11.
-1
0
1
2
3
4
5
0 500 1000 1500 2000 2500
Frequenze (Hz)
Am
pie
zza
(a
u)
-200
-100
0
100
200
0 500 1000 1500 2000 2500
Frequenze (Hz)
Fase
( g
rad
i )
Figura 5.11 - Funzione di trasferimento tra la Vpiezo e l'uscita del rivelatore di fase
Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
145
Durante le operazioni a freddo non è stato purtroppo possibile acquisire tale funzione
con una maggiore accuratezza, mancando la possibilità di variare automaticamente la
frequenza.
La relativa libertà meccanica di cui gode il tuning plate è verificata dalla mancanza di
risonanze a bassa frequenza associate alla cavità, mentre la prima linea visibile
corrisponde proprio al primo modo del piatto.
Il DSP è stato programmato in modo da realizzare semplicemente un filtro notch
centrato sulla prima risonanza. Tra l’uscita del DAC e l’ingresso del driver dei piezo è
stato inserito un filter-amplifier, impostato con un filtro passa basso a 100 Hz con 20
dB di attenuazione per decade e guadagno variabile. Il filtro è utile per pulire l’uscita
del DAC, caratterizzata da rumore in alta frequenza, mentre il guadagno variabile
serve per cambiare il guadagno d’anello durante le misure senza dover riprogrammare
il DSP. Il sistema retroazionato con guadagno d’anello in continua L(0)=10 si è
rivelato stabile.
Nelle figure 5.12 e 5.13 è visibile, nel dominio del tempo e della frequenza, l’effetto
del controllore feedback sul segnale di errore in fase.

STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
146
Controllo dei microfonici
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0 0,05 0,1 0,15 0,2 0,25 0,3 0,35 0,4
Tempo (sec)
Seg
nale
di e
rro
re d
ella
fase d
ell'
RF
(au
)
error signal regolato
error signal non regolato
Figura 5.12 - Misura dei microfonici con e senza il sistema di controllo
Figura 5.13 - spettri del detuning causato dai microfonici, con e senza sistema di controllo.
Successivamente il sistema di controllo è stato applicato con successo anche alla
compensazione dei disturbi indotti durante il trasferimento dell’azoto liquido. Durante

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
147
il trasferimento infatti, le vibrazioni della canna di travaso fanno aumentare di circa 3
volte il livello del detuning.
E’ stato in seguito escluso completamente il sistema di controllo della fase della
potenza RF, e la cavità è rimasta “agganciata” alla frequenza di riferimento usando
l’attuatore piezoelettrico come unico dispositivo di controllo.
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
148
5.5. SVILUPPO E REALIZZAZIONE DI UN SISTEMA DI
CONTROLLO AD ANELLO RETROAZIONATO PER LA
COMPENSAZIONE DEI MICROFONICI
5.5.1. Progetto della facility di test presso il laboratorio LASA
Le prove di controllo e le misure ad anello chiuso effettuate presso i LNL rivestono un
ruolo di grande importanza. Esse rappresentano infatti la prima applicazione con
successo di un controllo retroazionato dei microfonici tramite attuatori piezoelettrici,
applicato ad una cavità superconduttiva anche se significativamente diversa dalle
cavità TTF.
Il sistema, formato dal tuner a leveraggio e dalla cavità 9-celle, attualmente impiegato
per TTF/TESLA presenta infatti notevoli difficoltà aggiuntive dovute sostanzialmente
alla necessità di agire, per poter variare la distribuzione dei campi EM, direttamente
sulla complessa struttura della cavità, invece che su di una flangia meccanicamente
disaccoppiata da essa, così come accade per la cavità λ/4 dei LNL.
Questo vincola il fast tuner ad interagire con i più complessi modi vibrazionali della
cavità e con l’effetto che questi hanno sulla distribuzione della radiofrequenza
all’interno della stessa.
Per sviluppare allora il sistema di controllo è stato deciso di realizzare un modello
basato su di una monocella del tipo TTF/TESLA in rame, direttamente interfacciata
con l’attuatore senza l’utilizzo del tuner.
Ciò consente di progettare il sistema di controllo per un sistema prossimo a quello
reale anche se semplificato, e di mantenere inalterati i punti chiave del complesso
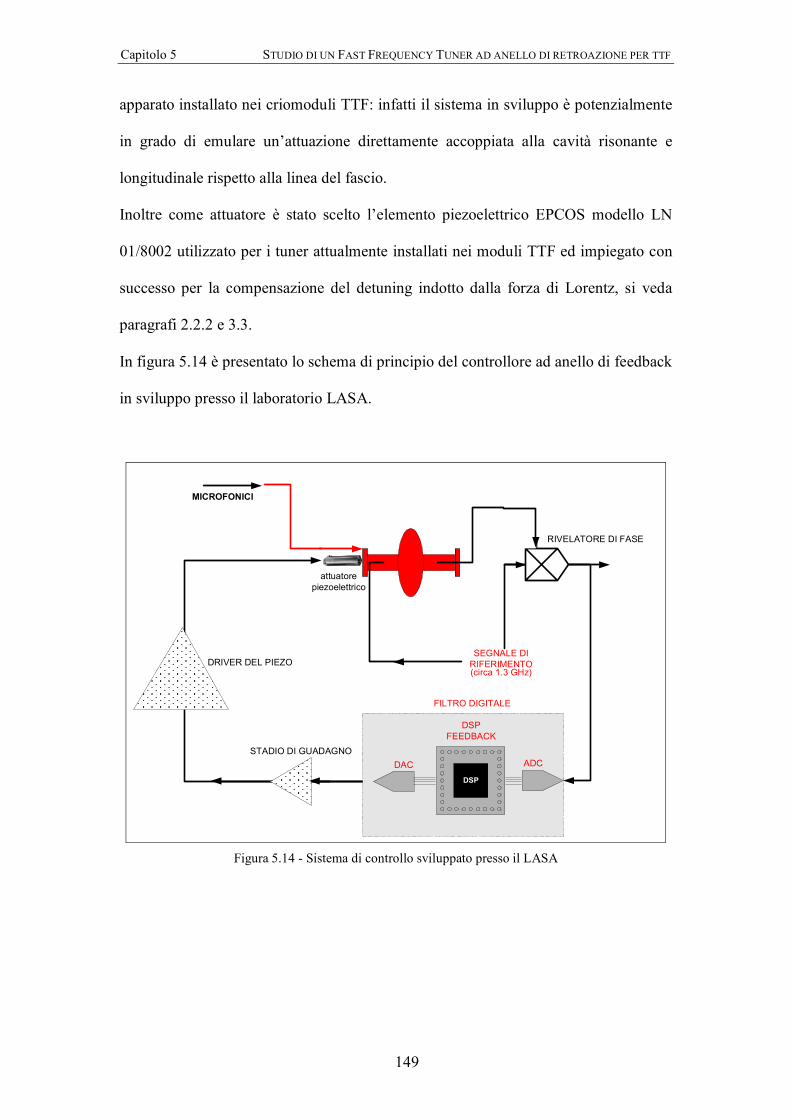
Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
149
apparato installato nei criomoduli TTF: infatti il sistema in sviluppo è potenzialmente
in grado di emulare un’attuazione direttamente accoppiata alla cavità risonante e
longitudinale rispetto alla linea del fascio.
Inoltre come attuatore è stato scelto l’elemento piezoelettrico EPCOS modello LN
01/8002 utilizzato per i tuner attualmente installati nei moduli TTF ed impiegato con
successo per la compensazione del detuning indotto dalla forza di Lorentz, si veda
paragrafi 2.2.2 e 3.3.
In figura 5.14 è presentato lo schema di principio del controllore ad anello di feedback
in sviluppo presso il laboratorio LASA.
attuatorepiezoelettrico
DRIVER DEL PIEZO
MICROFONICI
FILTRO DIGITALE
SEGNALE DIRIFERIMENTO
RIVELATORE DI FASE
(circa 1.3 GHz)
STADIO DI GUADAGNO
F(s)
DSPFEEDBACK
ADCDAC
DSP
Figura 5.14 - Sistema di controllo sviluppato presso il LASA

STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
150
5.5.2. Sviluppo dell’hardware per il digital filtering
Il filtro digitale introdotto nell’anello di feedback viene realizzato con una scheda
standard Texas Instruments, basata su di un Digital Signal Processor (DSP) modello
TMS320C6711 (figura 5.15).
Figura 5.15 - Scheda DSP DSK-TMS320C6711
Tale modello di processore è caratterizzato da un’architettura nativa floating point
(virgola mobile) a 32 bit, da una tecnologia di integrazione di 0.18 µm/5 layer ed
ospita on-chip 72 K di memoria cache oltre che alle periferiche di connettività ed
accesso alla memoria. La struttura ad alto livello del DSP è riassunta in figura 5.16.
In particolare le porte di comunicazione seriale integrate, McBSP0 e 1, sono state
impiegate per il flusso dei dati in ingresso ed in uscita nell’interazione tra il
processore e le periferiche esterne di I/O.
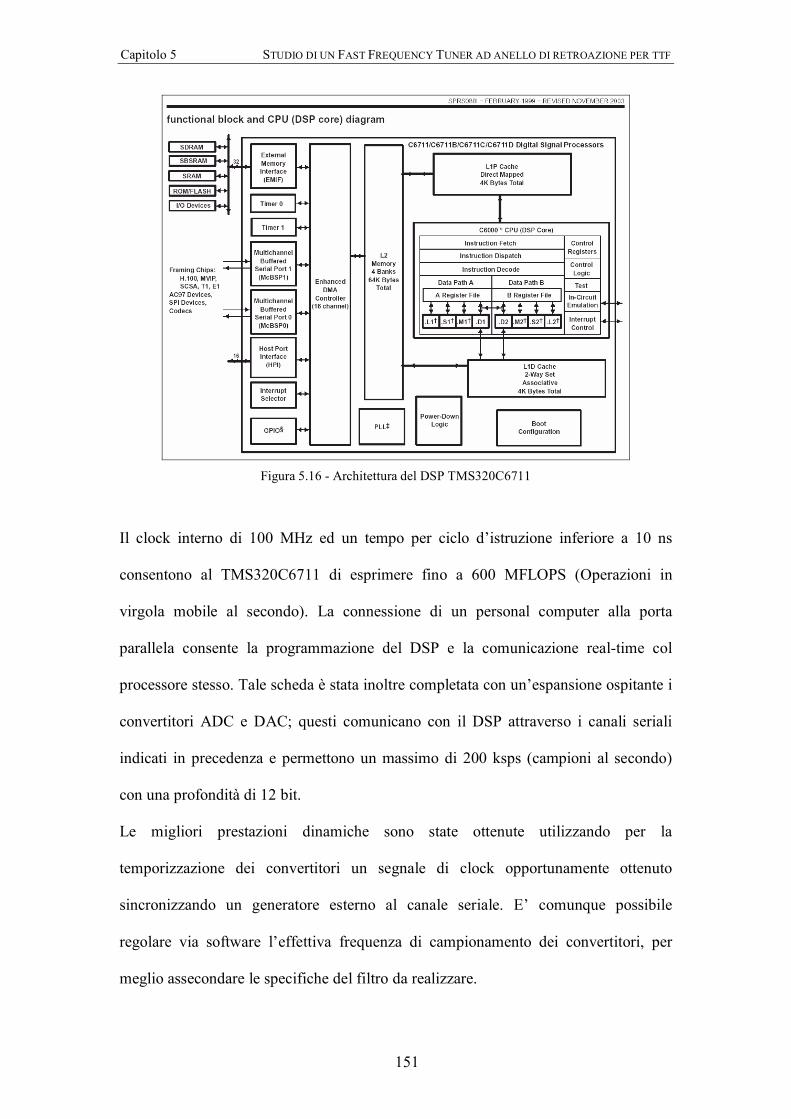
Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
151
Figura 5.16 - Architettura del DSP TMS320C6711
Il clock interno di 100 MHz ed un tempo per ciclo d’istruzione inferiore a 10 ns
consentono al TMS320C6711 di esprimere fino a 600 MFLOPS (Operazioni in
virgola mobile al secondo). La connessione di un personal computer alla porta
parallela consente la programmazione del DSP e la comunicazione real-time col
processore stesso. Tale scheda è stata inoltre completata con un’espansione ospitante i
convertitori ADC e DAC; questi comunicano con il DSP attraverso i canali seriali
indicati in precedenza e permettono un massimo di 200 ksps (campioni al secondo)
con una profondità di 12 bit.
Le migliori prestazioni dinamiche sono state ottenute utilizzando per la
temporizzazione dei convertitori un segnale di clock opportunamente ottenuto
sincronizzando un generatore esterno al canale seriale. E’ comunque possibile
regolare via software l’effettiva frequenza di campionamento dei convertitori, per
meglio assecondare le specifiche del filtro da realizzare.

STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
152
Per generare i codici sorgenti del DSP è stato utilizzato il software Code Composer
Studio (CCS), Release 2.2, indicato per i processori della famiglia C6000 e prodotto
dalla stessa Texas Instruments. Esso segue tutte le fasi del progetto: la generazione in
linguaggio C/C++ dei codici, l’analisi ed il debugging dei sorgenti, l’ottimizzazione
degli stessi in funzione dell’hardware in uso e la programmazione del chip.
Così come genericamente illustrato al punto 1.2, il programma ottenuto realizzerà la
funzione di trasferimento del filtro, sintetizzata utilizzando il formalismo state-space.
Per un ulteriore approfondimento in appendice A sono stati riportati i codici di CCS e
Matlab relativi ad un filtro realmente implementato su DSP.
I codici in C (vedi appendice A) sono volutamente scritti in maniera essenziale e
diretta in modo da velocizzarne l’esecuzione. Le routine di lettura (del nuovo dato
campionato dall’ADC) e scrittura (del nuovo campione filtrato sul DAC) sui canali
seriali consistono nel semplice e diretto aggiornamento degli opportuni registri e
vengono eseguite in continuazione ed alla massima velocità consentita dall’hardware.
Questo porta a minimizzare il tempo necessario al processo di lettura-scrittura ed
implica un ritardo di propagazione comunque presente a prescindere dal tempo di
calcolo. Questo ritardo è stato misurato direttamente ed è di circa 20 µs.
La routine di calcolo del filtro e di aggiornamento del valore da scrivere è invece
chiamata da interrupt indipendenti. Si ottiene così di poter variare via software, in
funzione delle necessità, la frequenza di sampling fino ad un massimo di 185 kHz
effettivi.
Nelle figure seguenti, 5.17, 5.18a e 5.18b, sono rappresentati alcuni passaggi del
processo di design e programmazione del filtro ed infine la funzione di trasferimento
di un filtro di prova implementato tramite il DSP.

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
153
1) Definizione della funzione ditrasferimento del filtro
2) Calcolo dei coefficienti State-Spacecorrispondenti
3) I coefficienti vengono importati in CodeComposer Studio
4) La scheda viene programmata via cavoparallelo
Figura 5.17 - Flusso di progetto e programmazione DSP
Figura 5.18 a e b – Funzione di trasferimento, ampiezza in a e fase in b, del filtro di test su DSP. 3
notch a -6dB (1, 1.5, 2.5 kHz) con F sampling pari a 39.8 kHz, t di propagazione misurato 46 µs. ( in teoria 20 µs + 1/(39.8kHz) = 45 µs )
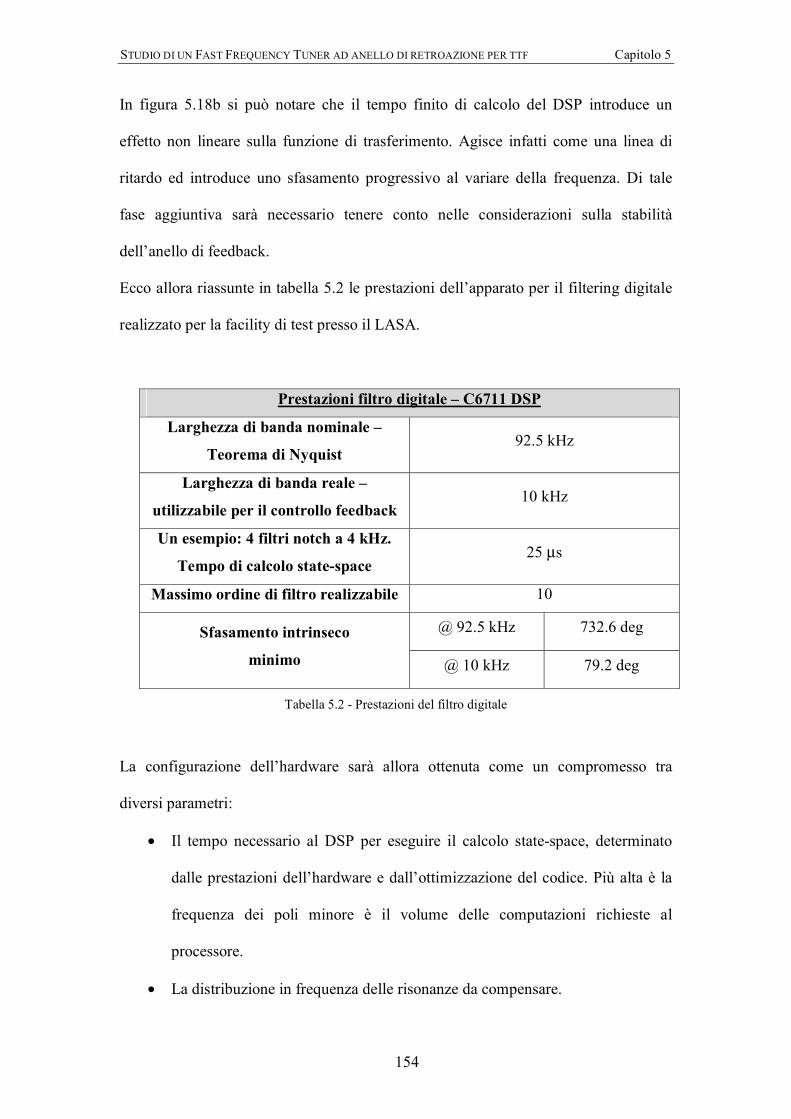
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
154
In figura 5.18b si può notare che il tempo finito di calcolo del DSP introduce un
effetto non lineare sulla funzione di trasferimento. Agisce infatti come una linea di
ritardo ed introduce uno sfasamento progressivo al variare della frequenza. Di tale
fase aggiuntiva sarà necessario tenere conto nelle considerazioni sulla stabilità
dell’anello di feedback.
Ecco allora riassunte in tabella 5.2 le prestazioni dell’apparato per il filtering digitale
realizzato per la facility di test presso il LASA.
Prestazioni filtro digitale – C6711 DSP
Larghezza di banda nominale –
Teorema di Nyquist 92.5 kHz
Larghezza di banda reale –
utilizzabile per il controllo feedback 10 kHz
Un esempio: 4 filtri notch a 4 kHz.
Tempo di calcolo state-space 25 µs
Massimo ordine di filtro realizzabile 10
@ 92.5 kHz 732.6 deg Sfasamento intrinseco
minimo @ 10 kHz 79.2 deg
Tabella 5.2 - Prestazioni del filtro digitale
La configurazione dell’hardware sarà allora ottenuta come un compromesso tra
diversi parametri:
• Il tempo necessario al DSP per eseguire il calcolo state-space, determinato
dalle prestazioni dell’hardware e dall’ottimizzazione del codice. Più alta è la
frequenza dei poli minore è il volume delle computazioni richieste al
processore.
• La distribuzione in frequenza delle risonanze da compensare.

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
155
• La necessità di sovradimensionare rispetto al criterio di Nyquist la banda del
filtro digitale, essendo questo interno ad un anello di reazione (cap. 3.1.1).
In seguito ad un’analisi più dettagliata delle prestazioni dell’apparato di filtering,
tabella 5.3, e valutando i parametri appena esposti è stata evidenziata la
configurazione che meglio soddisfa le richieste. Essa è un compromesso tra un ordine
di filtro insufficiente, quando la frequenza di sampling è pari a 80 kHz, ed una banda
eccessivamente ristretta, a 20 kHz.
Fsampling [kHz] Flimite banda filtro [kHz] Ordine massimo del
filtro
20 1 9
40 2 7
60 3 4
80 4 2
Tabella 5.3 - Configurazioni effettive filtro digitale
Quelle considerate sono solo alcune configurazioni di riferimento, è possibile tuttavia
una procedura di validità generale. Infatti l’hardware per il filtro digitale può essere
configurato anche successivamente alla caratterizzazione del sistema da controllare,
ponendo la frequenza di sampling effettiva pari a 20 volte la frequenza dell’ultima
risonanza da compensare e garantendo così la configurazione ottimale.
5.5.3. Componenti meccaniche ed elettroniche di supporto
La cavità risonante inserita nel nostro sistema semplificato è una monocella tipo
TTF/TESLA realizzata in rame anziché in niobio. La prima versione del sistema,
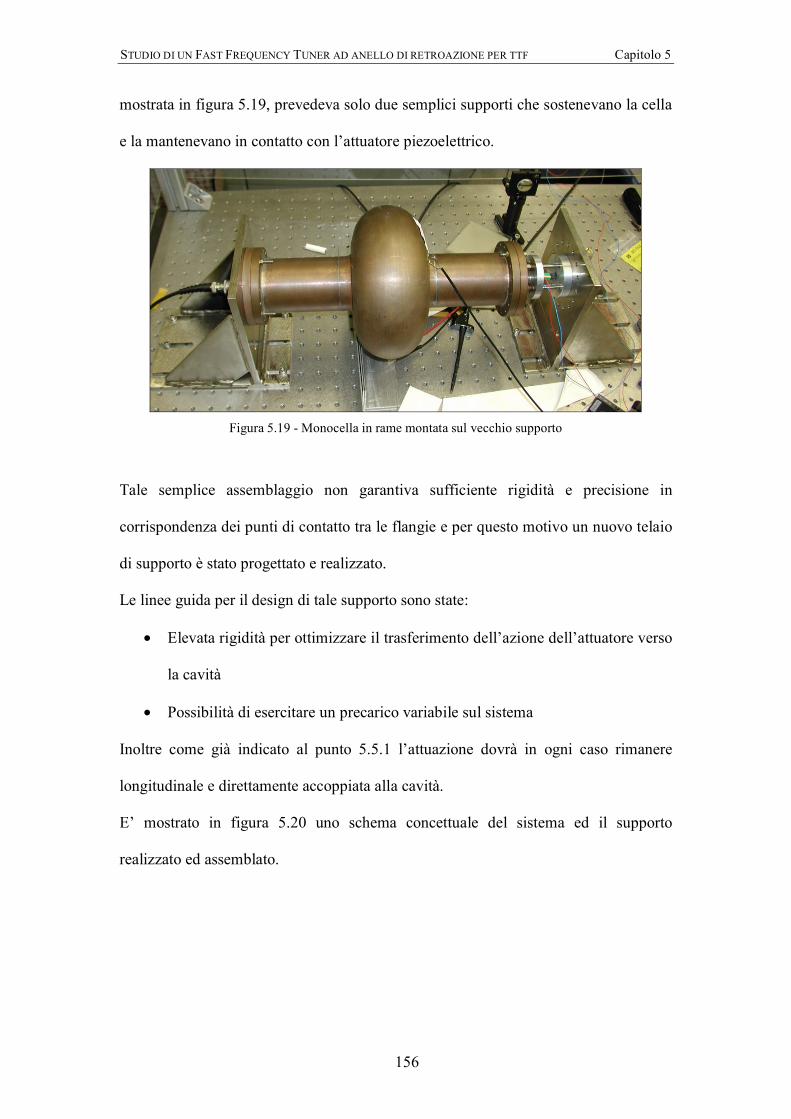
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
156
mostrata in figura 5.19, prevedeva solo due semplici supporti che sostenevano la cella
e la mantenevano in contatto con l’attuatore piezoelettrico.
Figura 5.19 - Monocella in rame montata sul vecchio supporto
Tale semplice assemblaggio non garantiva sufficiente rigidità e precisione in
corrispondenza dei punti di contatto tra le flangie e per questo motivo un nuovo telaio
di supporto è stato progettato e realizzato.
Le linee guida per il design di tale supporto sono state:
• Elevata rigidità per ottimizzare il trasferimento dell’azione dell’attuatore verso
la cavità
• Possibilità di esercitare un precarico variabile sul sistema
Inoltre come già indicato al punto 5.5.1 l’attuazione dovrà in ogni caso rimanere
longitudinale e direttamente accoppiata alla cavità.
E’ mostrato in figura 5.20 uno schema concettuale del sistema ed il supporto
realizzato ed assemblato.

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
157
Figura 5.20 - Nuovo telaio di supporto per monocella
In particolare la sezione che ospita l’attuatore, figura 5.21, consente di installare anche
piezoelettrici di dimensioni differenti permettendo di effettuare una comparazione tra
diversi modelli. Sono inoltre visibili i connettori per segnali a radiofrequenza in
ingresso ed in lettura.
Figura 5.21 - Piezo installato nel nuovo telaio
Come indicato nello schema 5.14, il segnale di comando per l’anello di reazione del
controllore è la risposta di un rivelatore di fase. Questo confronta il segnale prelevato
da un’antenna posizionata nel tubo di cut-off con una copia del segnale in ingresso
alla cavità. Il valore di potenza in ingresso alla cavità è di circa 10 dBm, non è stato

STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
158
necessario utilizzare un amplificatore di potenza. Lo schema dell’elettronica, in figura
5.22, è completato da una linea di ritardo.
Per fornire infine ai piezoelettrici la potenza necessaria ad un utilizzo in frequenza
viene impiegato un opportuno amplificatore driver della Physik Instrumente, modello
E480, in configurazione bipolare –500 : +500 V e capace di erogare una potenza
massima di 2 kW.
SYNTHESIZED SIGNAL GENERATORHP 8662A
RF InputRF Output
RIVELATORE DIFASE
Segnale di comandodell'anello
AIn
BIn
Out
PIEZO
PIEZO DRIVERPI E480
Segnale dicontrollo
Tensione guida delpiezo
Poli analogici dicompensazione
Guadagnod'anellovariabile
AMPLIFICATORE D'ERRORE
Figura 5.22 - Schema dell'elettronica del controllo feedback
Infine per la corretta realizzazione dell’anello di controllo, anche un amplificatore
d’errore è stato inserito nel cammino di reazione. La funzione di trasferimento di tale
blocco potrà essere variata in maniera da ottenere sia un alto guadagno d’anello,
necessario affinché il controllo sia efficace, sia una rete analogica di compensazione.
Quest’ultima si rende necessaria per l’eliminazione del rumore ad alta frequenza, in
particolare quello inevitabilmente introdotto dal filtro digitale.
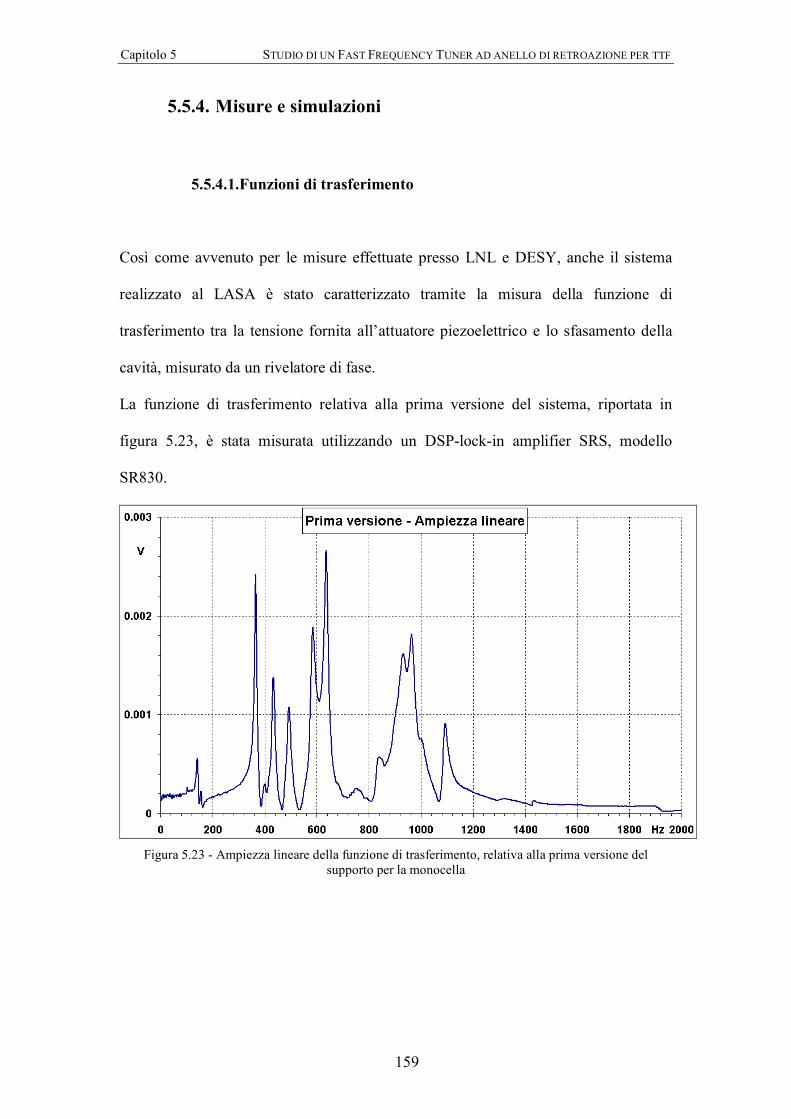
Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
159
5.5.4. Misure e simulazioni
5.5.4.1.Funzioni di trasferimento
Così come avvenuto per le misure effettuate presso LNL e DESY, anche il sistema
realizzato al LASA è stato caratterizzato tramite la misura della funzione di
trasferimento tra la tensione fornita all’attuatore piezoelettrico e lo sfasamento della
cavità, misurato da un rivelatore di fase.
La funzione di trasferimento relativa alla prima versione del sistema, riportata in
figura 5.23, è stata misurata utilizzando un DSP-lock-in amplifier SRS, modello
SR830.
Figura 5.23 - Ampiezza lineare della funzione di trasferimento, relativa alla prima versione del supporto per la monocella

STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
160
Figura 5.24 - Ampiezza e fase della funzione di trasferimento, relativa alla prima versione del supporto
per la monocella
In figura 5.25 è invece riportata la funzione di trasferimento del sistema definitivo,
realizzato durante il lavoro di tesi ed illustrato nei paragrafi precedenti. Tale misura è
stata effettuata tramite un signal analyzer SRS, modello SR785.
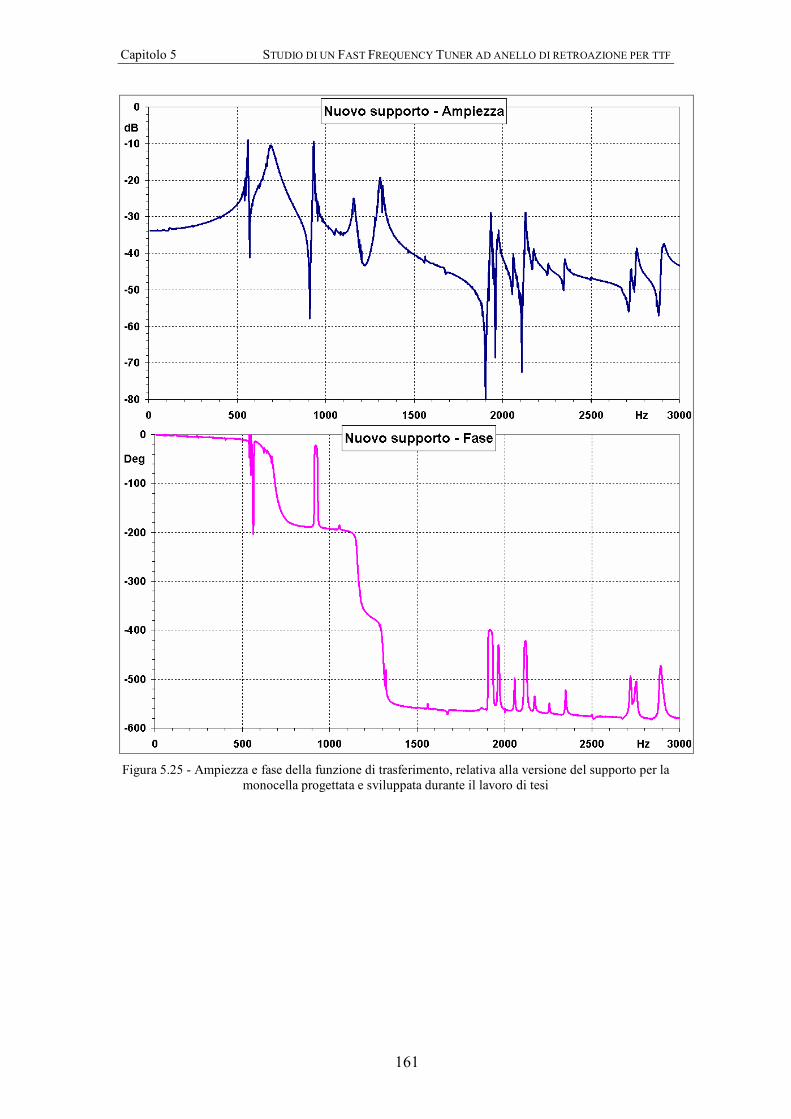
Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
161
Figura 5.25 - Ampiezza e fase della funzione di trasferimento, relativa alla versione del supporto per la
monocella progettata e sviluppata durante il lavoro di tesi

STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
162
Figura 5.26 - Ampiezza lineare della funzione di trasferimento, relativa alla versione del supporto per la monocella progettata e sviluppata durante il lavoro di tesi
La funzione riportata corrisponde, tra le varie configurazioni ottenibili con il nuovo
supporto variando il carico sulla struttura, a quella di massimo guadagno in continua
della risposta. L’importanza di tale parametro emerge al momento di operare ad anello
chiuso: un maggiore guadagno in continua consente infatti, a parità di amplificazione
del segnale (e dunque di range dinamico dello stesso), un guadagno d’anello
superiore. Il netto incremento di tale parametro, di un fattore 100 circa, va quindi
considerato come un fondamentale miglioramento.
Tale risultato va attribuito alla maggiore rigidità e compattezza del nuovo supporto.
Ciò consente infatti di trasferire alla cavità la quasi totalità del lavoro dell’attuatore.
Alcune risonanze a bassa frequenza riscontrate nella prima versione, le più critiche
per il controllo feedback, sono inoltre scomparse. Infatti il migliore allineamento di
attuatore e cavità consente di ridurre l’eccitazione dei modi non longitudinali.
Osservando poi la misura relativa ad una cavità TTF, in figura 5.7, si può notare
come, nel nostro caso, si presenti uno sfasamento notevolmente inferiore (560 gradi
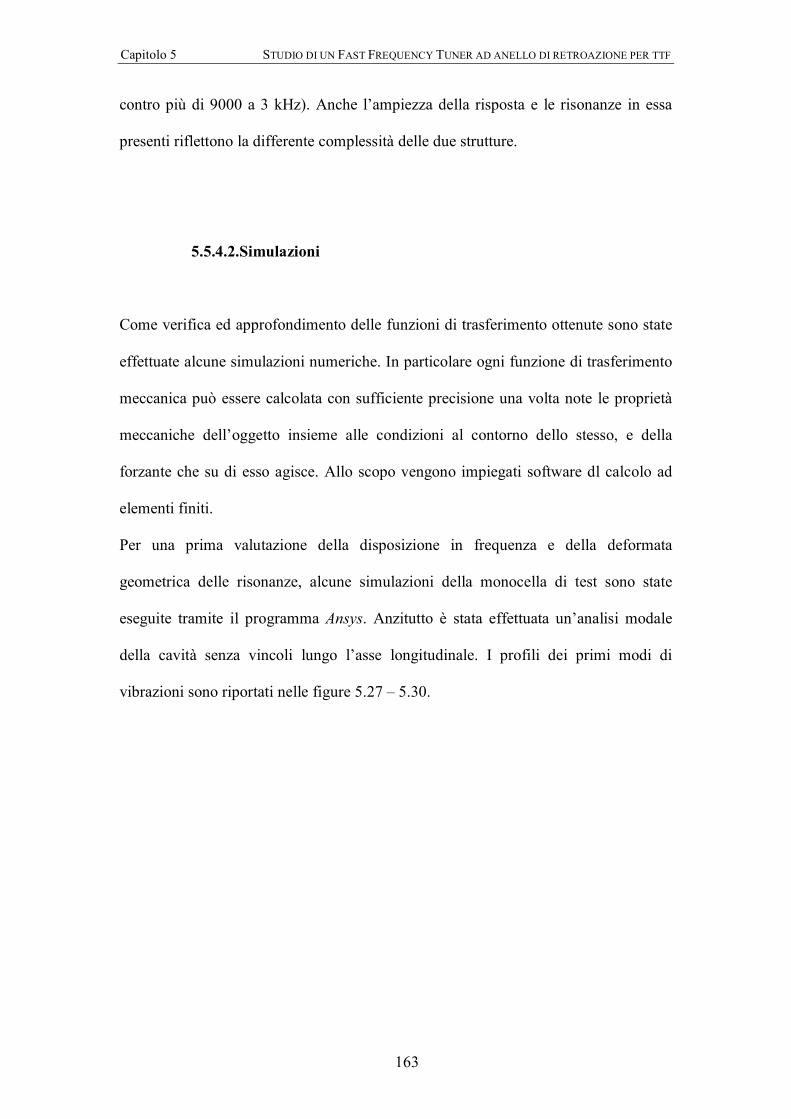
Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
163
contro più di 9000 a 3 kHz). Anche l’ampiezza della risposta e le risonanze in essa
presenti riflettono la differente complessità delle due strutture.
5.5.4.2.Simulazioni
Come verifica ed approfondimento delle funzioni di trasferimento ottenute sono state
effettuate alcune simulazioni numeriche. In particolare ogni funzione di trasferimento
meccanica può essere calcolata con sufficiente precisione una volta note le proprietà
meccaniche dell’oggetto insieme alle condizioni al contorno dello stesso, e della
forzante che su di esso agisce. Allo scopo vengono impiegati software dl calcolo ad
elementi finiti.
Per una prima valutazione della disposizione in frequenza e della deformata
geometrica delle risonanze, alcune simulazioni della monocella di test sono state
eseguite tramite il programma Ansys. Anzitutto è stata effettuata un’analisi modale
della cavità senza vincoli lungo l’asse longitudinale. I profili dei primi modi di
vibrazioni sono riportati nelle figure 5.27 – 5.30.
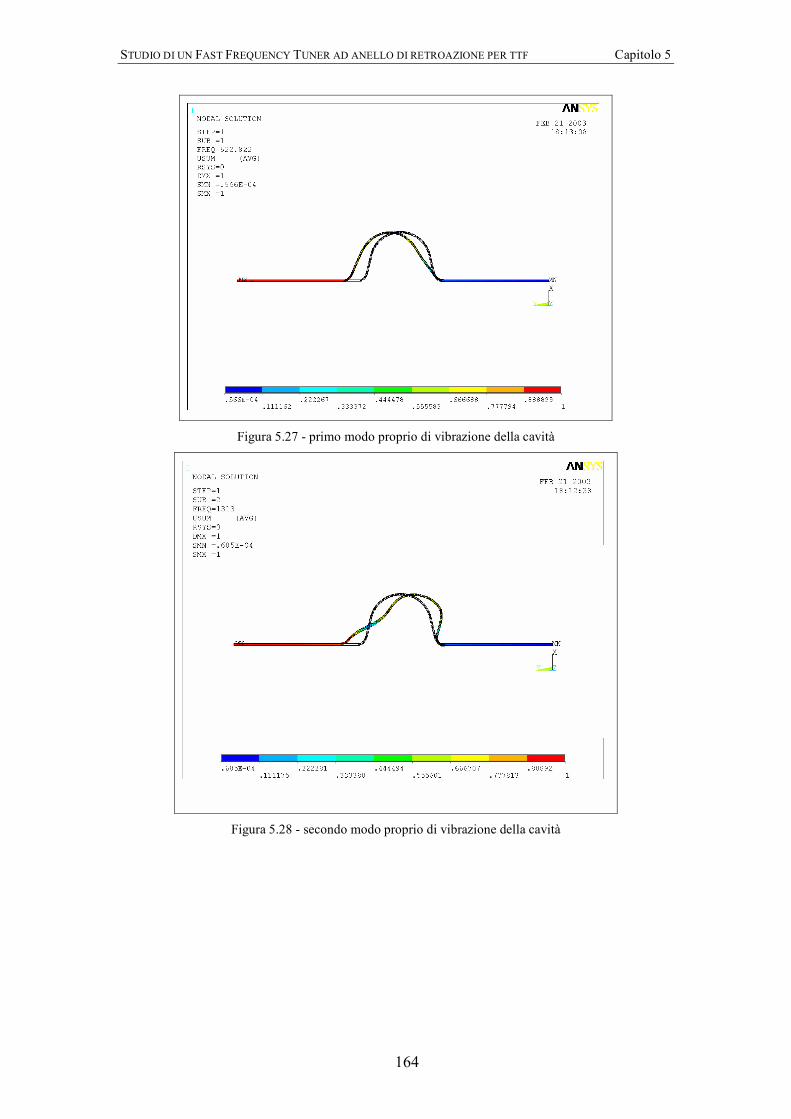
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
164
Figura 5.27 - primo modo proprio di vibrazione della cavità
Figura 5.28 - secondo modo proprio di vibrazione della cavità

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
165
Figura 5.29 - terzo modo proprio di vibrazione della cavità
Figura 5.30 - quarto modo proprio di vibrazione della cavità
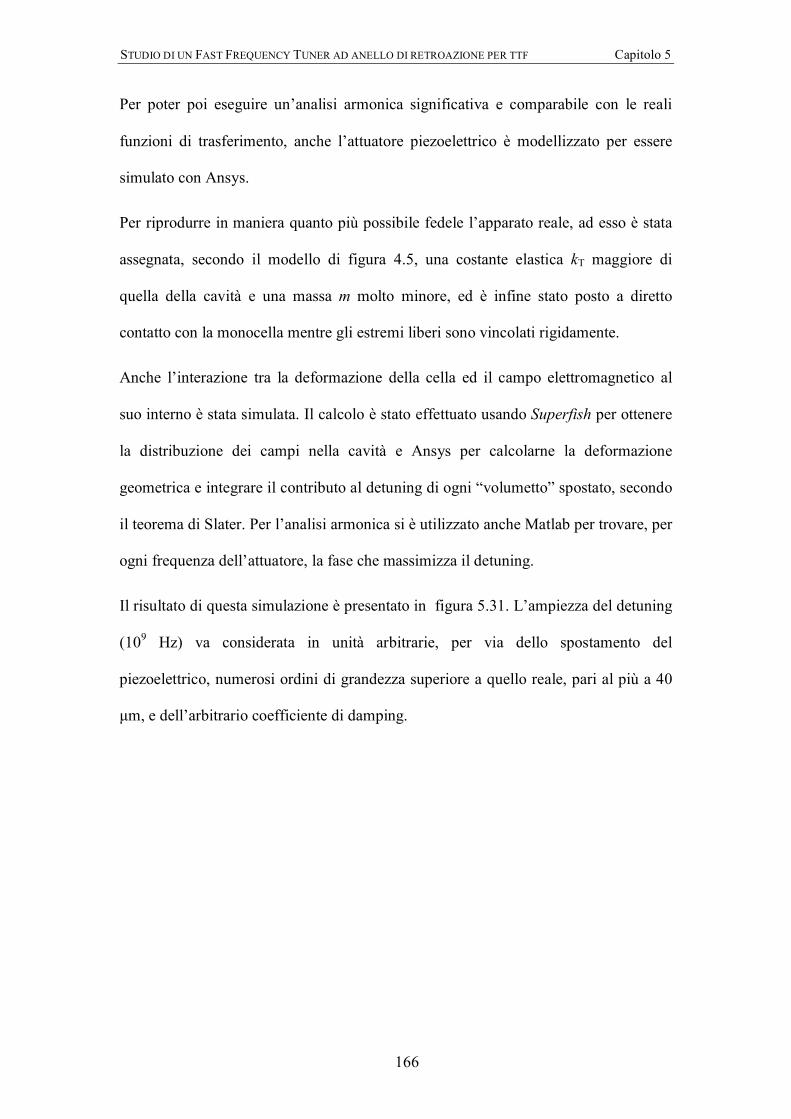
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
166
Per poter poi eseguire un’analisi armonica significativa e comparabile con le reali
funzioni di trasferimento, anche l’attuatore piezoelettrico è modellizzato per essere
simulato con Ansys.
Per riprodurre in maniera quanto più possibile fedele l’apparato reale, ad esso è stata
assegnata, secondo il modello di figura 4.5, una costante elastica kT maggiore di
quella della cavità e una massa m molto minore, ed è infine stato posto a diretto
contatto con la monocella mentre gli estremi liberi sono vincolati rigidamente.
Anche l’interazione tra la deformazione della cella ed il campo elettromagnetico al
suo interno è stata simulata. Il calcolo è stato effettuato usando Superfish per ottenere
la distribuzione dei campi nella cavità e Ansys per calcolarne la deformazione
geometrica e integrare il contributo al detuning di ogni “volumetto” spostato, secondo
il teorema di Slater. Per l’analisi armonica si è utilizzato anche Matlab per trovare, per
ogni frequenza dell’attuatore, la fase che massimizza il detuning.
Il risultato di questa simulazione è presentato in figura 5.31. L’ampiezza del detuning
(109 Hz) va considerata in unità arbitrarie, per via dello spostamento del
piezoelettrico, numerosi ordini di grandezza superiore a quello reale, pari al più a 40
µm, e dell’arbitrario coefficiente di damping.

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
167
Figura 5.31 - simulazione della funzione di trasferimento tra la tensione applicata all’attuatore piezoelettrico e il detuning della cavità.
Questa funzione di trasferimento può dunque essere confrontata con quelle reali di
figura 5.25 e 5.26. Da tale confronto, oltre che una marcata somiglianza qualitativa,
emergono alcuni elementi significativi:
• Compaiono nella funzione simulata proprio quelle risonanze isolate con salto
netto di fase accanto a coppie di poli e zeri doppi, prossime in frequenza,
riscontrate nelle misure.
• Nella funzione simulata è presente un numero inferiore di risonanze.
Nell’apparato reale infatti vengono inevitabilmente introdotte forze non-
longitudinali, non considerate nella simulazione, stimolando così altri modi

STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
168
propri della cavità. Inoltre nella realtà tutti gli elementi del telaio di supporto
interagiscono con l’attuatore introducendo ulteriori risonanze.
• Non tutte le risonanze presenti nella simulazione coincidono con i modi
propri della cavità. Ciò è dovuto alla particolare natura dell’attuazione
piezoelettrica che non corrisponde ad una forzante ideale, a forza costante o
spostamento costante, e che ponendosi spesso in una condizione intermedia
tra queste, non permette di definire le corrette condizioni al contorno per
l’analisi modale. Inoltre per alcuni modi, la deformazione indotta porta i
contributi al detuning, calcolati in ciascun punto della struttura, a compensarsi
l’un l’altro. Tale modo dunque non comporta, al netto, uno sfasamento.
5.5.4.3.Misure ad anello chiuso
Una volta sviluppati gli elementi necessari, alcune misure ad anello chiuso sono state
eseguite per verificare le prestazioni del controllore in termini di reiezione dei
microfonici.
Un filtro analogico, caratterizzato da un singolo polo a 10 kHz, è stato utilizzato come
rete di compensazione del rumore ad alta frequenza. Uno stadio di guadagno
variabile, range 100 – 1000, è stato inserito all’interno della reazione in maniera da
poter regolare il guadagno d’anello durante le misure.
In linea di principio, come indicato al punto 3.2.5, il filtro digitale dovrebbe realizzare
un’inversione della funzione di trasferimento misurata, in modo da compensare
esattamente, in ampiezza e fase, le risonanze in essa presenti. In realtà è stata
riscontrata l’impossibilità di realizzare un modello analitico esatto delle funzioni

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
169
misurate. Non è infatti possibile ricostruire contemporaneamente, in termini di soli
poli e zeri, sia l’ampiezza che la fase della risposta della cavità. Non si tratta infatti di
funzioni di trasferimento puramente elettriche o meccaniche ed inoltre sono generate
tramite un’attuatore non ideale.
Per garantire comunque la stabilità dell’anello, un differente approccio è stato allora
scelto per il design del filtro di compensazione. Alcuni poli dominanti, posti a bassa
frequenza così da anticipare di più di una decade le prime risonanze, smorzano la
risposta della cavità, in questo modo la banda passante è funzione del solo guadagno
d’anello. Le risonanze che eventualmente, all’aumentare del guadagno, divenissero
critiche per la stabilità potranno essere comunque compensate riproponendole
invertite tramite il filtro digitale.
In figura 5.32 è riportata la funzione di trasferimento del filtro digitale, così come è
stata impostata per le prove ad anello chiuso
Figura 5.32 - Funzione di trasferimento del filtro digitale per le misure di compensazione dei
microfonici
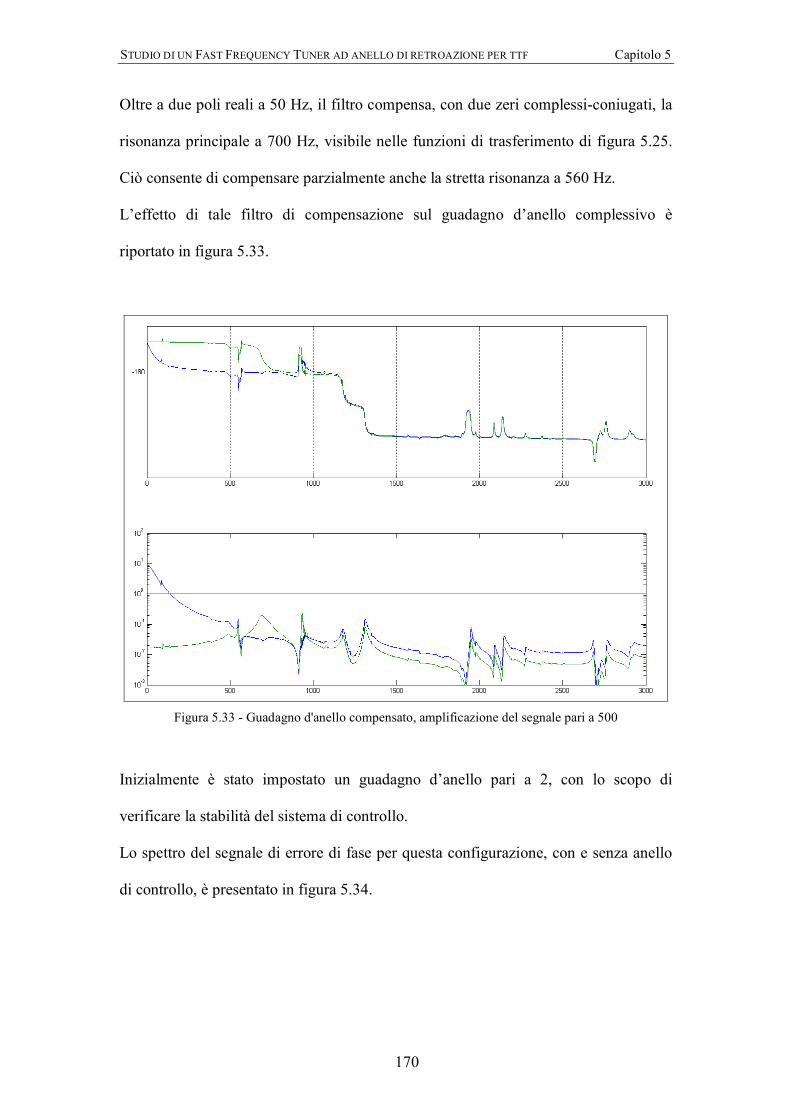
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
170
Oltre a due poli reali a 50 Hz, il filtro compensa, con due zeri complessi-coniugati, la
risonanza principale a 700 Hz, visibile nelle funzioni di trasferimento di figura 5.25.
Ciò consente di compensare parzialmente anche la stretta risonanza a 560 Hz.
L’effetto di tale filtro di compensazione sul guadagno d’anello complessivo è
riportato in figura 5.33.
Figura 5.33 - Guadagno d'anello compensato, amplificazione del segnale pari a 500
Inizialmente è stato impostato un guadagno d’anello pari a 2, con lo scopo di
verificare la stabilità del sistema di controllo.
Lo spettro del segnale di errore di fase per questa configurazione, con e senza anello
di controllo, è presentato in figura 5.34.

Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
171
Guadagno d'anello = 2
0.00
0.05
0.10
0 20 40 60 80 100 120 140 160 180 200Hz
Vrms sistema controllato -anello chiuso
sistema non controllato -anello aperto
Disturbi indotti dall'ambiente attorno alla cavità
Figura 5.34 - Spettro del detuning con e senza il sistema di controllo feedback
Il sistema retroazionato risulta stabile. La banda passante dell’anello, entro la quale
esso riesce a compensare le componenti del detuning, è però ristretta, circa 50 Hz, per
via del basso guadagno d’anello impostato.
Poi, impostando un’amplificazione del segnale pari a 450, il guadagno d’anello in
continua è stato portato a 10. Inoltre utilizzando un secondo attuatore piezoelettrico,
disposto sul banco ottico che ospita il telaio e guidato con un’onda quadra, è stato
indotto sulla cavità un disturbo meccanico. E’ stato così possibile simulare l’azione di
quegli elementi, come pompe per il vuoto o vibrazioni del sistema criogenico, che
contribuiscono a generare disturbi microfonici, con caratteristiche componenti a bassa
frequenza (< 100 Hz).
I risultati di tali prova sono riportati nella figura seguente.
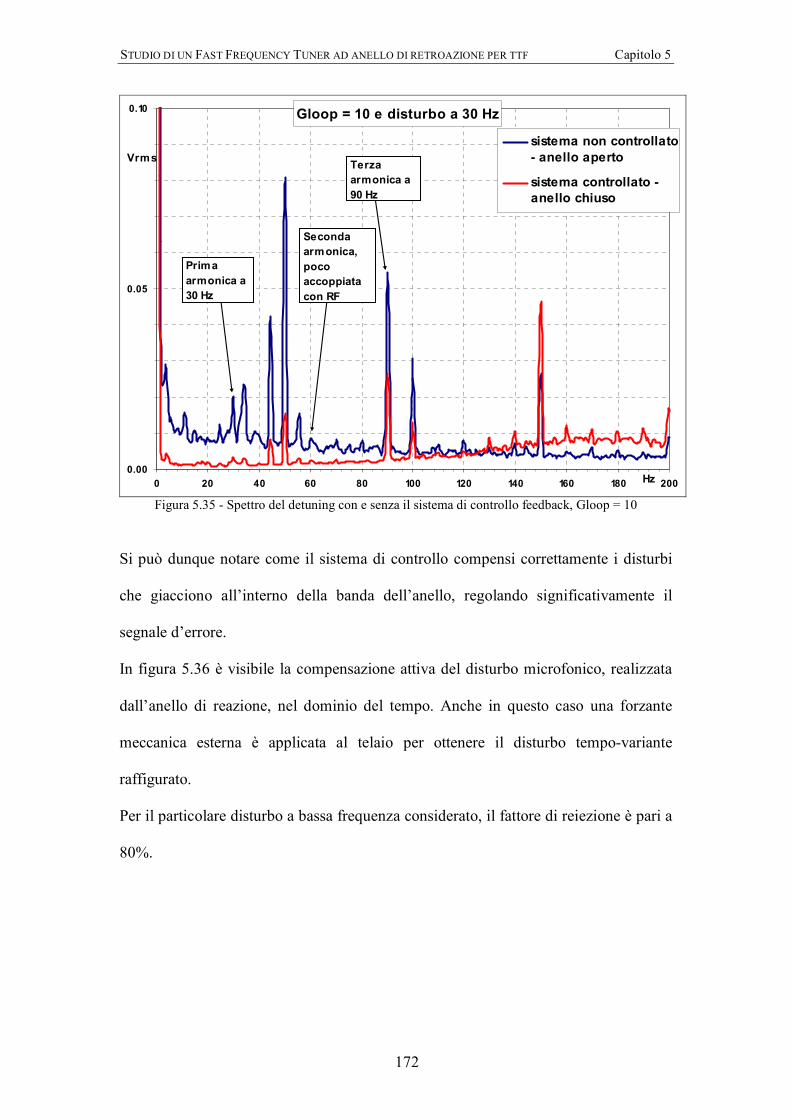
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
172
Gloop = 10 e disturbo a 30 Hz
0.00
0.05
0.10
0 20 40 60 80 100 120 140 160 180 200Hz
Vrms
sistema non controllato- anello aperto
sistema controllato -anello chiuso
Prima
armonica a 30 Hz
Seconda armonica,
poco accoppiata
con RF
Terza armonica a
90 Hz
Figura 5.35 - Spettro del detuning con e senza il sistema di controllo feedback, Gloop = 10
Si può dunque notare come il sistema di controllo compensi correttamente i disturbi
che giacciono all’interno della banda dell’anello, regolando significativamente il
segnale d’errore.
In figura 5.36 è visibile la compensazione attiva del disturbo microfonico, realizzata
dall’anello di reazione, nel dominio del tempo. Anche in questo caso una forzante
meccanica esterna è applicata al telaio per ottenere il disturbo tempo-variante
raffigurato.
Per il particolare disturbo a bassa frequenza considerato, il fattore di reiezione è pari a
80%.
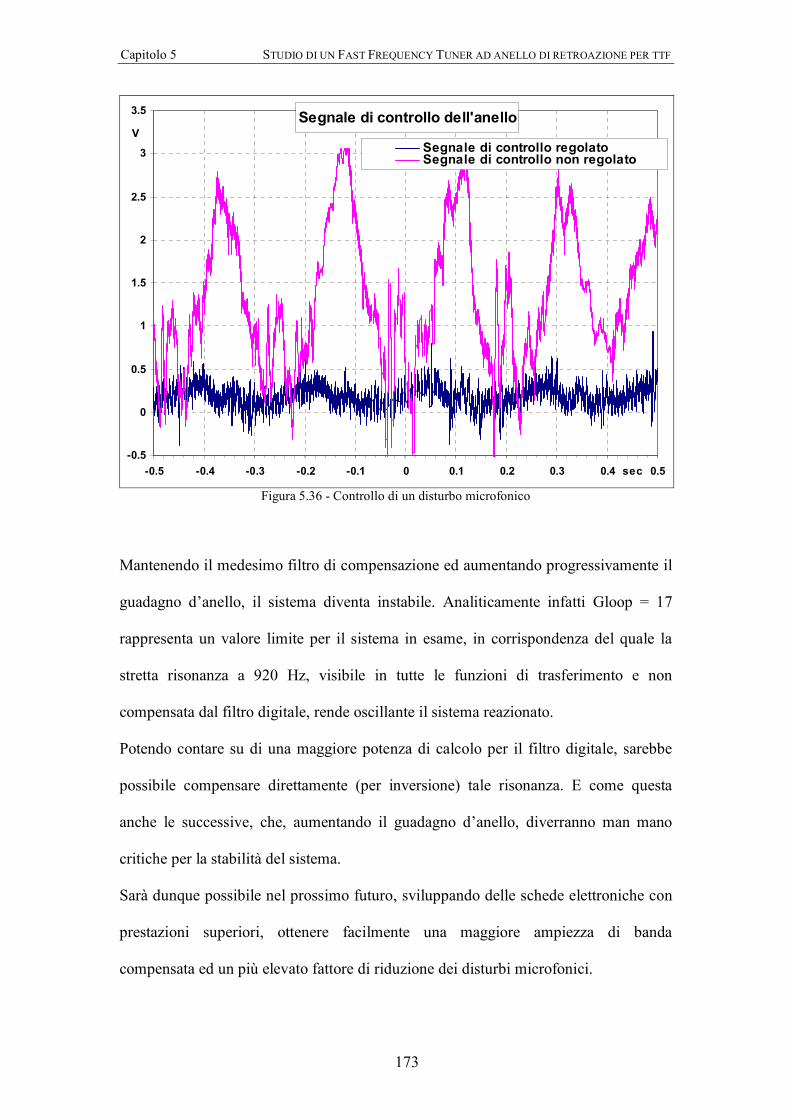
Capitolo 5 STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF
173
Segnale di controllo dell'anello
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5sec
VSegnale di controllo regolatoSegnale di controllo non regolato
Figura 5.36 - Controllo di un disturbo microfonico
Mantenendo il medesimo filtro di compensazione ed aumentando progressivamente il
guadagno d’anello, il sistema diventa instabile. Analiticamente infatti Gloop = 17
rappresenta un valore limite per il sistema in esame, in corrispondenza del quale la
stretta risonanza a 920 Hz, visibile in tutte le funzioni di trasferimento e non
compensata dal filtro digitale, rende oscillante il sistema reazionato.
Potendo contare su di una maggiore potenza di calcolo per il filtro digitale, sarebbe
possibile compensare direttamente (per inversione) tale risonanza. E come questa
anche le successive, che, aumentando il guadagno d’anello, diverranno man mano
critiche per la stabilità del sistema.
Sarà dunque possibile nel prossimo futuro, sviluppando delle schede elettroniche con
prestazioni superiori, ottenere facilmente una maggiore ampiezza di banda
compensata ed un più elevato fattore di riduzione dei disturbi microfonici.
STUDIO DI UN FAST FREQUENCY TUNER AD ANELLO DI RETROAZIONE PER TTF Capitolo 5
174
5.6. EVOLUZIONE DELL’ELETTRONICA DI CONTROLLO
ED INTEGRAZIONE IN TTF
Nel prossimo futuro importanti sviluppi interesseranno la facility di test realizzata al
LASA e l’elettronica sviluppata.
Per ottenere il necessario raffinamento è in costruzione un sistema VME completo,
dotato di scheda DSP, ADC e DAC ed una CPU di tipo Spark-Solaris per
l’interfacciamento e la programmazione.
In considerazione delle notevoli prestazioni richieste all’hardware per il digital
filtering, il nuovo sistema VME rappresenterà un netto incremento in termini di
potenza di calcolo. Oltre che convertitori analogico-digitali capaci di 1 Msps verrà
installato un prototipo dedicato, ospitante il più prestazionale processore C6701, già in
utilizzo a DESY.
Ciò permetterà di realizzare filtri di ordine maggiore, consentendo di compensare un
maggior numero di risonanze ed allargare la banda dell’anello di reazione.
In questo modo il sistema di controllo potrà essere applicato anche ad un sistema
complesso come un’intera cavità TTF a 9 celle in ambiente criogenico.
L’esperienza acquisita nel controllo retroazionato di un oggetto semplice ma
significativo, come la cavità oggetto del lavoro di questa tesi, potrà essere un valido
appoggio nella progettazione dell’opportuno filtro di compensazione e nel design
dell’anello di reazione.
Le misure di compensazione di microfonici potranno essere svolte allora grazie al
criostato orizzontale CHECHIA, presso DESY, già in grado di ospitare la cavità e gli
attuatori piezoelettrici a 2 K e in condizioni di alto campo accelerante, fino ad un
gradiente di 35 MV/m.
Capitolo 6 CONCLUSIONI
175
6 CONCLUSIONI
Nel lavoro esposto finora sono raccolti i principali successi ai fini della realizzazione,
per le cavità di TESLA, di un sistema completo di controllo del detuning basato su
attuatori piezoelettrici.
La fattibilità della compensazione attiva del Lorentz force detuning, necessario per il
rispetto delle specifiche di TESLA, è stata provata e ad oggi, grazie alla tecnica della
compensazione risonante, detuning fino a 1 kHz (impulso RF a 37 MV/m) possono
essere compensati. Il sistema che integra gli attuatori piezoelettrici per il fast tuning,
di cui è prevista la prima installazione di prova in un criomodulo TTF, nell’attuale
leveraggio dello slow tuner sarà oggetto di ulteriori sviluppi. Una volta ottenute le
necessarie informazioni sui valori di stress meccanico in situ (a tal scopo è stata
sviluppata un’apparecchiatura per la calibrazione delle celle di carico) un nuovo tuner
verrà realizzato specificatamente in funzione di una compensazione ottimale dei
disturbi dinamici.
Questo quadro verrà in futuro integrato dal controllore retroazionato necessario alla
compensazione dei disturbi microfonici. La facility di test sviluppata presso il LASA,
basata su una cavità monocella in rame a temperatura ambiente, ha consentito un
primo positivo approccio al problema. Le misure effettuate hanno poi indicato che è
possibile, grazie ad un controllo retroazionato ed attuatori piezoelettrici, compensare
la modulazione microfonica del campo accelerante anche nel caso di un diretto
accoppiamento meccanico tra attuatore e cavità. La facility realizzata è oggi coinvolta
nello sviluppo di nuove componenti elettroniche, digitali (DSP, ADC e DAC) ed
analogiche (Filter Amplifier, Driver). Tali aggiornamenti si sono rivelati necessari per
ottenere la potenza di calcolo (dunque l’ampiezza di banda e la reiezione al disturbo)

CONCLUSIONI Capitolo 6
176
necessaria ad applicare, grazie poi all’esperienza maturata nel design del filtro di
compensazione, il controllo feedback ad una cavità TTF in condizioni operative.
Appendice A REALIZZAZIONE DI UN FILTRO DIGITALE TRAMITE DSP
177
APPENDICE A:
REALIZZAZIONE DI UN FILTRO DIGITALE
TRAMITE DSP
Verranno approfonditi in questa sezione i passaggi principali del processo di
realizzazione di un filtro digitale su scheda DSP. L’hardware utilizzato, debitamente
descritto al paragrafo 5.2.1, è una scheda commerciale Texas Instruments con DSP
modello TMS320C6711, dotata di un’espansione con ADC, DAC e connettori SMA.

REALIZZAZIONE DI UN FILTRO DIGITALE TRAMITE DSP Appendice A
178
A.1. Creazione di un modello Matlab dai dati
Dopo aver misurato, tramite lock-in amplifier o signal analyzer, la funzione di
trasferimento tra tensione ai piezoelettrici ed il detuning, gli array di dati ricavati
(frequenza, ampiezza, fase nel file “fdt.txt”) vengono raccolti come un oggetto frd
(frquency response data) di Matlab. La macro che realizza tale conversione e la
funzione convertita sono riportati in figura A.1 (a) e b) rispettivamente).
Figura A.2 a) e b)
tranfunc=load('FdT.txt'); FREQ=tranfunc(:,1); AMPIEZZA=tranfunc(:,3); FASE=tranfunc(:,2).*pi/180; amp_compl=AMPIEZZA.*cos(FASE)+i*AMPIEZZA.*sin(FASE); NF4=frd(amp_compl,FREQ,'units','Hz'); f=(0:10000)*2*pi; ff=0:10000; x=freqresp(NF4,f); for u=1:length(x), m(u)=abs(x(1,1,u)); p(u)=phase(x(1,1,u)); end pu=unwrap(p); pud=pu*180/pi; subplot(2,1,1) plot(ff,pud) subplot(2,1,2) plot(ff,m)

Appendice A REALIZZAZIONE DI UN FILTRO DIGITALE TRAMITE DSP
179
A.2. Scelta del design del filtro
Il filtro di compensazione necessario viene progettato, grazie al comando tf (transfer
function) di Matlab, per confronto con la forma della funzione misurata.
La composizione delle due funzioni (FdT misurata e filtro impostato) fornisce il
guadagno d’anello del sistema retroazionato, da essa dunque possono essere valutati i
margini di stabilità del sistema ad anello chiuso ed impostato il corretto profilo per il
filtro. In figura A.2 a) e b) sono riportate il confronto delle due funzioni di
trasferimento e la macro di Matlab utilizzata.
Figura A.2 a)
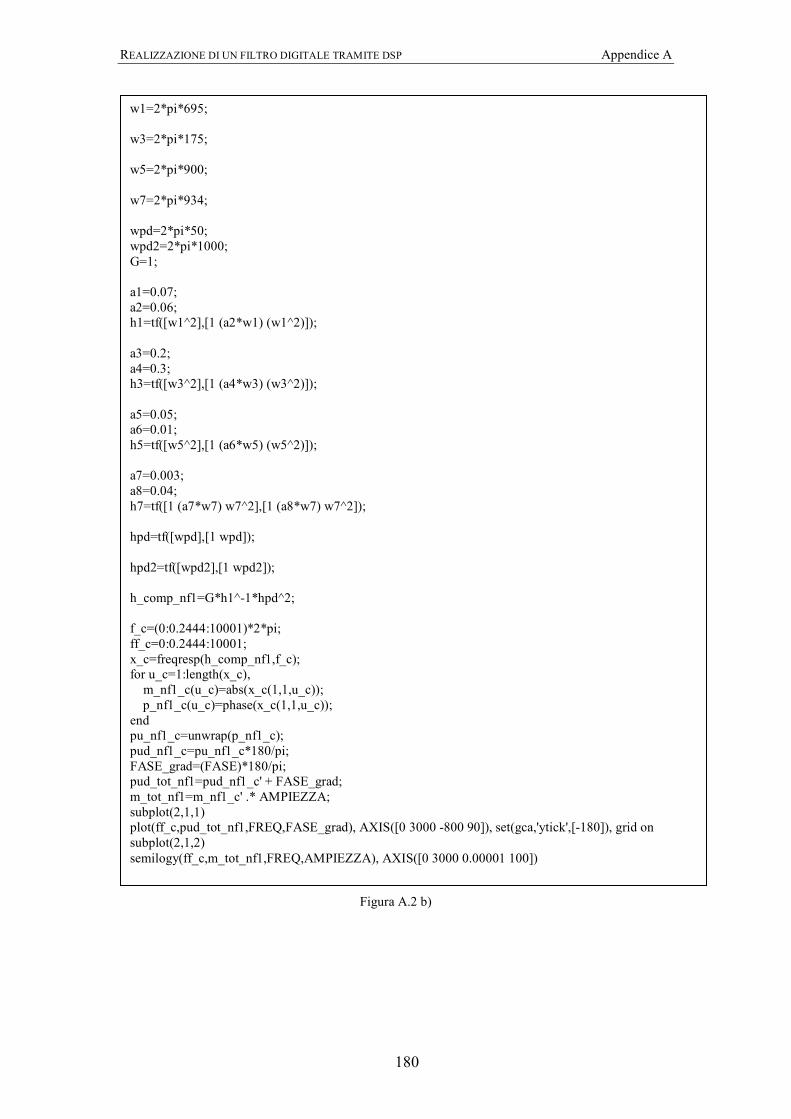
REALIZZAZIONE DI UN FILTRO DIGITALE TRAMITE DSP Appendice A
180
Figura A.2 b)
w1=2*pi*695; w3=2*pi*175; w5=2*pi*900; w7=2*pi*934; wpd=2*pi*50; wpd2=2*pi*1000; G=1; a1=0.07; a2=0.06; h1=tf([w1^2],[1 (a2*w1) (w1^2)]); a3=0.2; a4=0.3; h3=tf([w3^2],[1 (a4*w3) (w3^2)]); a5=0.05; a6=0.01; h5=tf([w5^2],[1 (a6*w5) (w5^2)]); a7=0.003; a8=0.04; h7=tf([1 (a7*w7) w7^2],[1 (a8*w7) w7^2]); hpd=tf([wpd],[1 wpd]); hpd2=tf([wpd2],[1 wpd2]); h_comp_nf1=G*h1^-1*hpd^2; f_c=(0:0.2444:10001)*2*pi; ff_c=0:0.2444:10001; x_c=freqresp(h_comp_nf1,f_c); for u_c=1:length(x_c), m_nf1_c(u_c)=abs(x_c(1,1,u_c)); p_nf1_c(u_c)=phase(x_c(1,1,u_c)); end pu_nf1_c=unwrap(p_nf1_c); pud_nf1_c=pu_nf1_c*180/pi; FASE_grad=(FASE)*180/pi; pud_tot_nf1=pud_nf1_c' + FASE_grad; m_tot_nf1=m_nf1_c' .* AMPIEZZA; subplot(2,1,1) plot(ff_c,pud_tot_nf1,FREQ,FASE_grad), AXIS([0 3000 -800 90]), set(gca,'ytick',[-180]), grid on subplot(2,1,2) semilogy(ff_c,m_tot_nf1,FREQ,AMPIEZZA), AXIS([0 3000 0.00001 100])
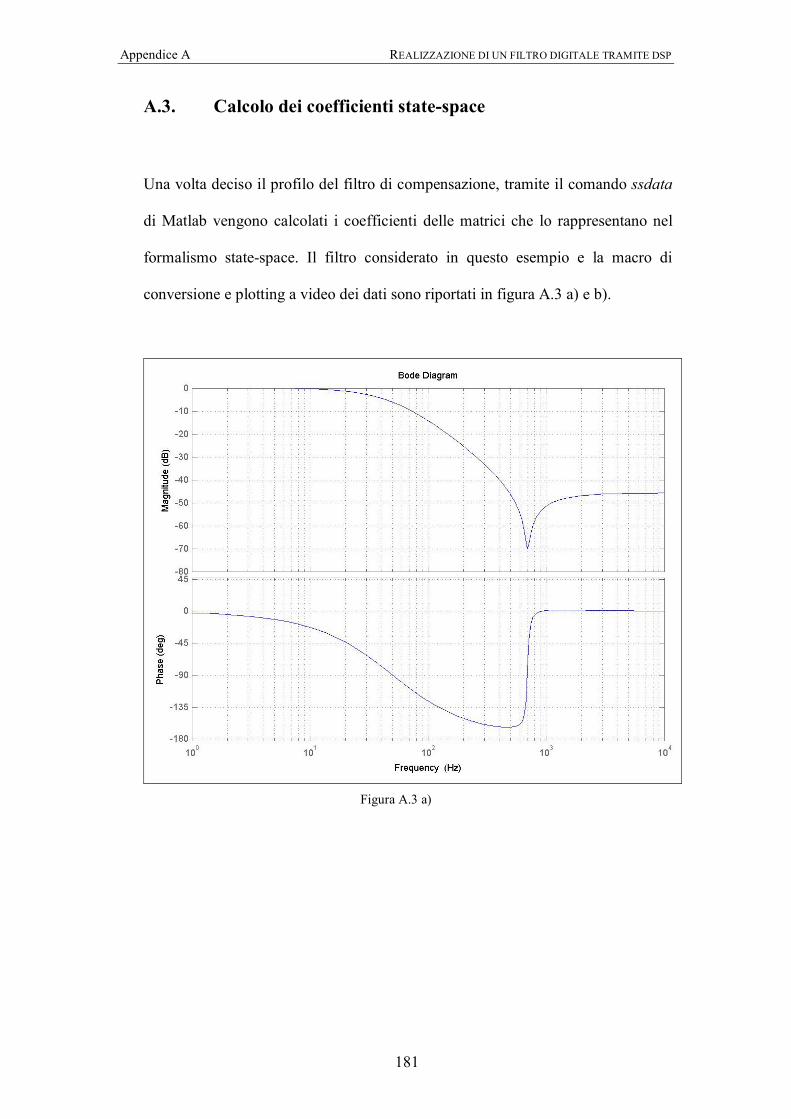
Appendice A REALIZZAZIONE DI UN FILTRO DIGITALE TRAMITE DSP
181
A.3. Calcolo dei coefficienti state-space
Una volta deciso il profilo del filtro di compensazione, tramite il comando ssdata
di Matlab vengono calcolati i coefficienti delle matrici che lo rappresentano nel
formalismo state-space. Il filtro considerato in questo esempio e la macro di
conversione e plotting a video dei dati sono riportati in figura A.3 a) e b).
Figura A.3 a)

REALIZZAZIONE DI UN FILTRO DIGITALE TRAMITE DSP Appendice A
182
Figura A.3 b)
sysd=c2d(sys,1/39978,'matched'); sys_ss=ss(sysd); [A,B,C,D] = ssdata(sys_ss); n=length(B); Astr=''; for r=1:n, for c=1:n, temp_str=sprintf(' %.15f,',A(r,c)); Astr=strcat(Astr,temp_str); end Astr(length(Astr))=''; temp_str=sprintf(' ,\n '); Astr=strcat(Astr,temp_str); end Astr(length(Astr))=''; Astr(length(Astr))=''; Astr(length(Astr))=''; Astr(length(Astr))=''; temp_str=sprintf(' ;\n'); Astr=strcat(Astr,temp_str) Bstr=''; for r=1:n, temp_str=sprintf('%.15f,',B(r)); Bstr=strcat(Bstr,temp_str); end Bstr(length(Bstr))=''; temp_str=sprintf(' ; '); Bstr=strcat(Bstr,temp_str) Cstr=''; for r=1:n, temp_str=sprintf('%.15f, ',C(r)); Cstr=strcat(Cstr,temp_str); end Cstr(length(Cstr))=''; temp_str=sprintf(' ;'); Cstr=strcat(Cstr,temp_str) D figure bode(sysd) figure; bode(sys)
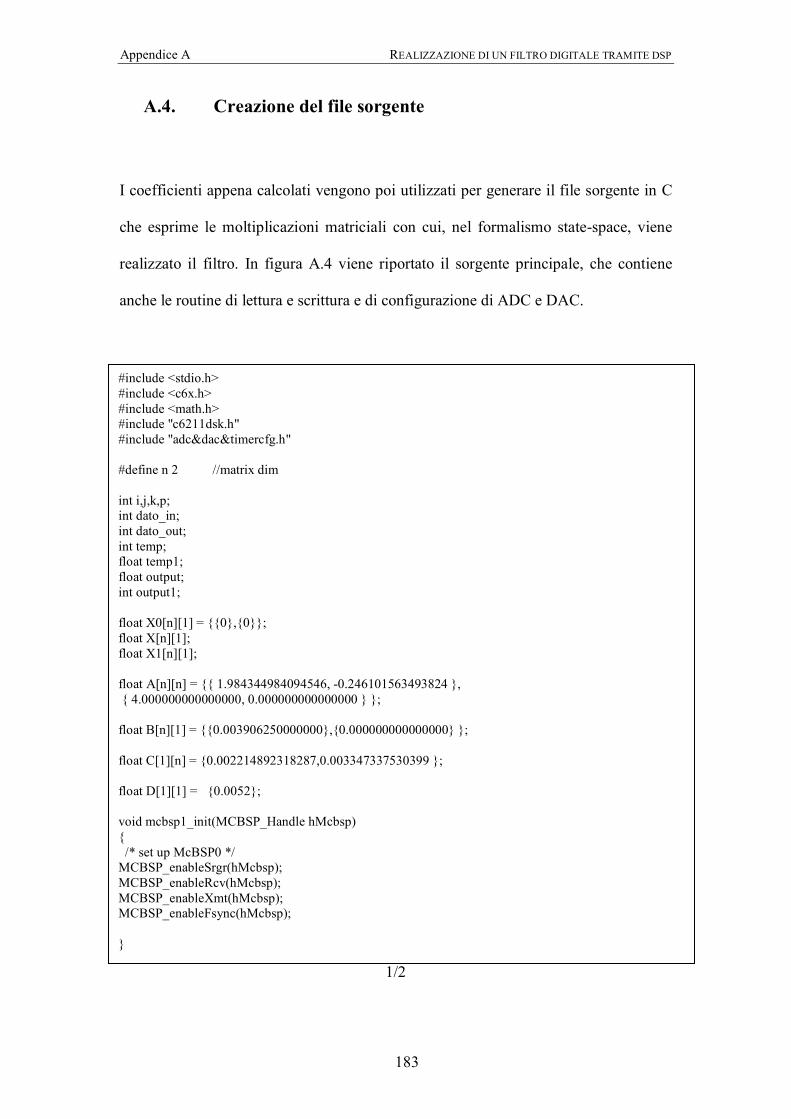
Appendice A REALIZZAZIONE DI UN FILTRO DIGITALE TRAMITE DSP
183
A.4. Creazione del file sorgente
I coefficienti appena calcolati vengono poi utilizzati per generare il file sorgente in C
che esprime le moltiplicazioni matriciali con cui, nel formalismo state-space, viene
realizzato il filtro. In figura A.4 viene riportato il sorgente principale, che contiene
anche le routine di lettura e scrittura e di configurazione di ADC e DAC.
1/2
#include <stdio.h> #include <c6x.h> #include <math.h> #include "c6211dsk.h" #include "adc&dac&timercfg.h" #define n 2 //matrix dim int i,j,k,p; int dato_in; int dato_out; int temp; float temp1; float output; int output1; float X0[n][1] = 0,0; float X[n][1]; float X1[n][1]; float A[n][n] = 1.984344984094546, -0.246101563493824 , 4.000000000000000, 0.000000000000000 ; float B[n][1] = 0.003906250000000,0.000000000000000 ; float C[1][n] = 0.002214892318287,0.003347337530399 ; float D[1][1] = 0.0052; void mcbsp1_init(MCBSP_Handle hMcbsp) /* set up McBSP0 */ MCBSP_enableSrgr(hMcbsp); MCBSP_enableRcv(hMcbsp); MCBSP_enableXmt(hMcbsp); MCBSP_enableFsync(hMcbsp);

REALIZZAZIONE DI UN FILTRO DIGITALE TRAMITE DSP Appendice A
184
Figura A.4
void filter(void); void scrivi(int dato); int leggi(); void main() int DACset = 0xD002; i=0; CSL_cfgInit(); mcbsp1_init(hMcbsp1); MCBSP_write(hMcbsp1, DACset); for (k=0;k<n;k++) X[k][0] = X0[k][0]; //condizioni iniziali... printf("avvio...\n"); BIOS_init(); /* initialize DSP/BIOS */ BIOS_start(); /* start DSP/BIOS */ while(1) dato_in = *(unsigned volatile int *)McBSP1_DRR; // dato_out = (dato_in&0xfff0) >> 4; *(unsigned volatile int *)McBSP1_DXR = dato_out; void filter(void) temp = (dato_in&0xfff0) >> 4; output = 0; temp1 = (float)(temp); for (i=0;i<n;i++) for (j=0;j<n;j++) X1[i][0] += (A[i][j])*(X[j][0]); //conti state space... X1[i][0] += (B[i][0])*(temp1); output += (C[0][i])*(X[i][0]); output += (D[0][0])*(temp1); for (p=0;p<n;p++) X[p][0] = X1[p][0]; X1[p][0] = 0; //aggiorna X... output1 = (int)(output); dato_out = output1&0x0fff;

Appendice A REALIZZAZIONE DI UN FILTRO DIGITALE TRAMITE DSP
185
A.5. Configurazione dell’hardware
La scheda DSP e le periferiche necessarie (canali seriali, ADC, DAC) vengono
configurate attraverso l’apposita interfaccia fornita dal software Code Composer
Studio (CCS). In questa fase vengono impostati anche i tempi per l’interrupt di
chiamata della routine filter (si veda file in C nel precedente paragrafo), in questo
modo si ottiene la frequenza di sampling voluta. In figura A.5 viene riportato il file di
configurazione che elenca tutte le periferiche disponibili. Si possono così notare
quelle effettivamente utilizzate: CLK, PRD e McBSP manager.
Figura A.5

REALIZZAZIONE DI UN FILTRO DIGITALE TRAMITE DSP Appendice A
186
A.6. Programmazione DSP
Il bit-stream ottenuto dalla compilazione dell’intero progetto CCS viene infine
trasferito, in fase di programmazione, al DSP via cavo parallelo. La scheda, in figura
A.6, è ora pronta ad eseguire il filtro impostato.
Figura A.6
Appendice B DATA SHEETS
187
APPENDICE B: DATA SHEETS
Vengono riportati in questa appendice i data-sheets di alcuni elementi significativi per
il lavoro di tesi.
DSP - Texas Instruments TMS320C6711
DAC - Texas Instruments TLV5636
ADC - Texas Instruments TLV2541
Attuatore piezoelettrico - Epcos LN 01/8002
Attuatore piezoelettrico - Piezomechanik PSt 150/10 VS15
Cella di carico - Burster 8415E
Piezo-Driver - Physik Instrumente E-480
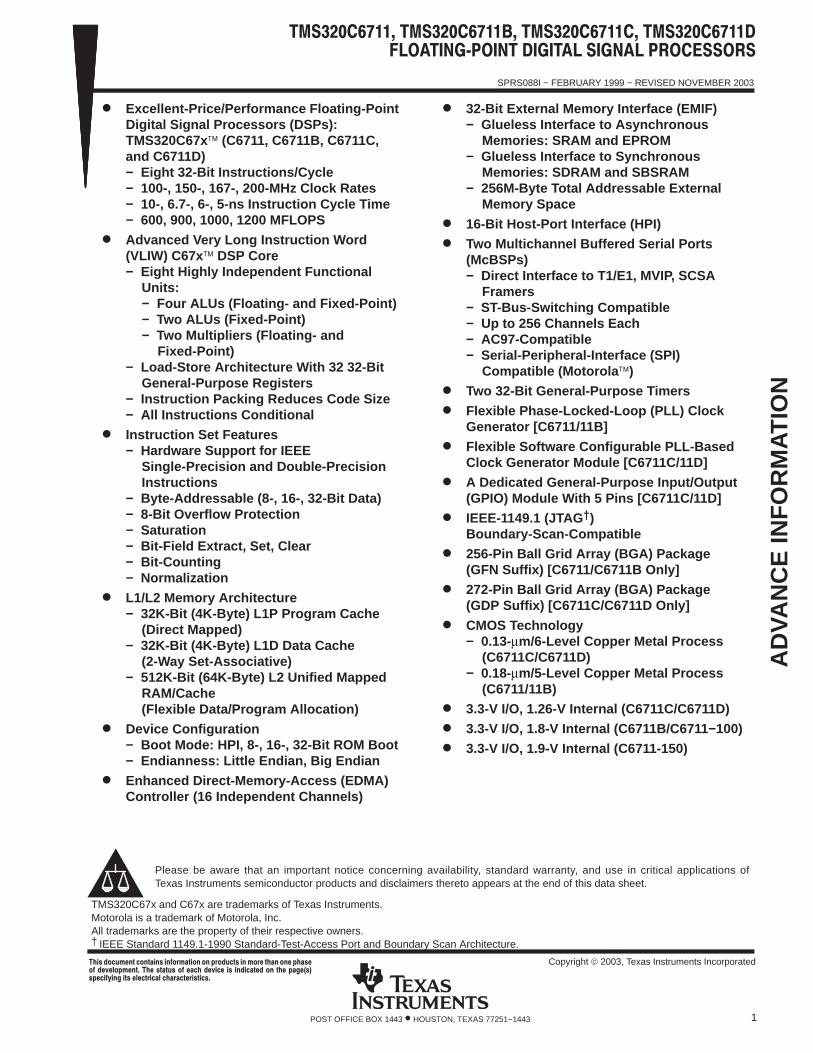
SPRS088I − FEBRUARY 1999 − REVISED NOVEMBER 2003
1POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443
Excellent-Price/Performance Floating-PointDigital Signal Processors (DSPs):TMS320C67x (C6711, C6711B, C6711C,and C6711D) − Eight 32-Bit Instructions/Cycle− 100-, 150-, 167-, 200-MHz Clock Rates− 10-, 6.7-, 6-, 5-ns Instruction Cycle Time− 600, 900, 1000, 1200 MFLOPS
Advanced Very Long Instruction Word(VLIW) C67x DSP Core− Eight Highly Independent Functional
Units:− Four ALUs (Floating- and Fixed-Point)− Two ALUs (Fixed-Point)− Two Multipliers (Floating- and
Fixed-Point)− Load-Store Architecture With 32 32-Bit
General-Purpose Registers− Instruction Packing Reduces Code Size− All Instructions Conditional
Instruction Set Features− Hardware Support for IEEE
Single-Precision and Double-PrecisionInstructions
− Byte-Addressable (8-, 16-, 32-Bit Data)− 8-Bit Overflow Protection− Saturation− Bit-Field Extract, Set, Clear− Bit-Counting− Normalization
L1/L2 Memory Architecture− 32K-Bit (4K-Byte) L1P Program Cache
(Direct Mapped)− 32K-Bit (4K-Byte) L1D Data Cache
(2-Way Set-Associative)− 512K-Bit (64K-Byte) L2 Unified Mapped
RAM/Cache(Flexible Data/Program Allocation)
Device Configuration− Boot Mode: HPI, 8-, 16-, 32-Bit ROM Boot− Endianness: Little Endian, Big Endian
Enhanced Direct-Memory-Access (EDMA)Controller (16 Independent Channels)
32-Bit External Memory Interface (EMIF)− Glueless Interface to Asynchronous
Memories: SRAM and EPROM− Glueless Interface to Synchronous
Memories: SDRAM and SBSRAM− 256M-Byte Total Addressable External
Memory Space
16-Bit Host-Port Interface (HPI)
Two Multichannel Buffered Serial Ports(McBSPs)− Direct Interface to T1/E1, MVIP, SCSA
Framers− ST-Bus-Switching Compatible− Up to 256 Channels Each− AC97-Compatible− Serial-Peripheral-Interface (SPI)
Compatible (Motorola )
Two 32-Bit General-Purpose Timers
Flexible Phase-Locked-Loop (PLL) ClockGenerator [C6711/11B]
Flexible Software Configurable PLL-BasedClock Generator Module [C6711C/11D]
A Dedicated General-Purpose Input/Output(GPIO) Module With 5 Pins [C6711C/11D]
IEEE-1149.1 (JTAG†)Boundary-Scan-Compatible
256-Pin Ball Grid Array (BGA) Package(GFN Suffix) [C6711/C6711B Only]
272-Pin Ball Grid Array (BGA) Package(GDP Suffix) [C6711C/C6711D Only]
CMOS Technology− 0.13-µm/6-Level Copper Metal Process
(C6711C/C6711D)− 0.18-µm/5-Level Copper Metal Process
(C6711/11B)
3.3-V I/O, 1.26-V Internal (C6711C/C6711D)
3.3-V I/O, 1.8-V Internal (C6711B/C6711−100)
3.3-V I/O, 1.9-V Internal (C6711-150)
AD
VA
NC
E IN
FO
RM
ATIO
N
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications ofTexas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
Copyright 2003, Texas Instruments Incorporated !"#$ #$%# #&'!%$# # ('$ # !'" $%# #" (%"& ")"*(!"#$+ " $%$ & "% ")" #%$" # $" (%,"-.("&/#, $ "*"$'%* %'%$"'$+
TMS320C67x and C67x are trademarks of Texas Instruments.Motorola is a trademark of Motorola, Inc.All trademarks are the property of their respective owners.† IEEE Standard 1149.1-1990 Standard-Test-Access Port and Boundary Scan Architecture.
SPRS088I − FEBRUARY 1999 − REVISED NOVEMBER 2003
3POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443
GFN BGA package (bottom view) [C6711/11B only]
1915 1713119
Y
V
TU
PN
R
W
75
L
JK
H
FG
31
D
BC
A
E
M
2 4 6 8 201816141210
GFN 256-PIN BALL GRID ARRAY (BGA) PACKAGE(BOTTOM VIEW)
GDP BGA package (bottom view) [C6711C/11D only]
GDP 272-PIN BALL GRID ARRAY (BGA) PACKAGE(BOTTOM VIEW)
2 4 6 8 201816141210
M
E
A
1
CB
D
GF
H
KJ
L
W
R
NP
UT
V
Y
3 5 7 9 11 171513 19A
DV
AN
CE
INF
OR
MAT
ION
SPRS088I − FEBRUARY 1999 − REVISED NOVEMBER 2003
4 POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443
description
The TMS320C67x DSPs (including the TMS320C6711, TMS320C6711B, TMS320C6711C, TMS320C6711Ddevices†) compose the floating-point DSP family in the TMS320C6000 DSP platform. The C6711, C6711B,C6711C, and C6711D devices are based on the high-performance, advanced very-long-instruction-word(VLIW) architecture developed by Texas Instruments (TI), making these DSPs an excellent choice formultichannel and multifunction applications.
With performance of up to 900 million floating-point operations per second (MFLOPS) at a clock rate of150 MHz, the C6711/C6711B device offers cost-effective solutions to high-performance DSP programmingchallenges. The C6711/C6711B DSP possesses the operational flexibility of high-speed controllers and thenumerical capability of array processors. This processor has 32 general-purpose registers of 32-bit word lengthand eight highly independent functional units. The eight functional units provide four floating-/fixed-point ALUs,two fixed-point ALUs, and two floating-/fixed-point multipliers. The C6711/C6711B can produce two MACs percycle for a total of 300 MMACS.
With performance of up to 1200 million floating-point operations per second (MFLOPS) at a clock rate of200 MHz, the C6711C/C6711D device also offers cost-effective solutions to high-performance DSPprogramming challenges. The C6711C/C6711D DSP also possesses the operational flexibility of high-speedcontrollers and the numerical capability of array processors. This processor has 32 general-purpose registersof 32-bit word length and eight highly independent functional units. The eight functional units provide fourfloating-/fixed-point ALUs, two fixed-point ALUs, and two floating-/fixed-point multipliers. The C6711C/C6711Dcan produce two MACs per cycle for a total of 400 MMACS.
The C6711/C6711B/C6711C/C6711D DSPs also have application-specific hardware logic, on-chip memory,and additional on-chip peripherals.
The C6711/C6711B/C6711C/C6711D uses a two-level cache-based architecture and has a powerful anddiverse set of peripherals. The Level 1 program cache (L1P) is a 32-Kbit direct mapped cache and the Level1 data cache (L1D) is a 32-Kbit 2-way set-associative cache. The Level 2 memory/cache (L2) consists of a512-Kbit memory space that is shared between program and data space. L2 memory can be configured asmapped memory, cache, or combinations of the two. The peripheral set includes two multichannel bufferedserial ports (McBSPs), two general-purpose timers, a host-port interface (HPI), and a glueless external memoryinterface (EMIF) capable of interfacing to SDRAM, SBSRAM and asynchronous peripherals.
The C6711/C6711B/C6711C/C6711D has a complete set of development tools which includes: a new Ccompiler, an assembly optimizer to simplify programming and scheduling, and a Windows debugger interfacefor visibility into source code execution.A
DV
AN
CE
INF
OR
MAT
ION
TMS320C6000 is a trademark of Texas Instruments.Windows is a registered trademark of the Microsoft Corporation.† Throughout the remainder of this document, the TMS320C6711, TMS320C6711B, TMS320C6711C, and TMS320C6711D shall be referred
to as TMS320C67x or C67x where generic, and where specific, their individual full device part numbers will be used or abbreviated as C6711,C6711B, C6711C, C6711D, 11, 11B, 11C, or 11D, etc.
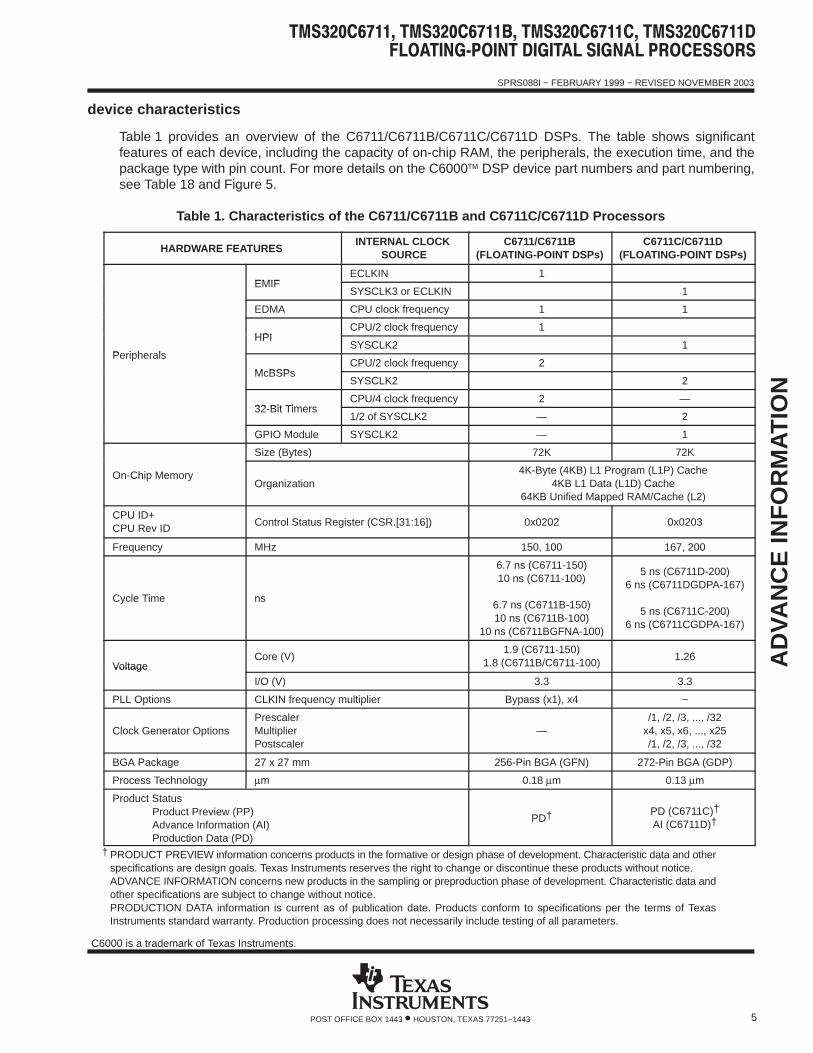
SPRS088I − FEBRUARY 1999 − REVISED NOVEMBER 2003
5POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443
device characteristics
Table 1 provides an overview of the C6711/C6711B/C6711C/C6711D DSPs. The table shows significantfeatures of each device, including the capacity of on-chip RAM, the peripherals, the execution time, and thepackage type with pin count. For more details on the C6000 DSP device part numbers and part numbering,see Table 18 and Figure 5.
Table 1. Characteristics of the C6711/C6711B and C6711C/C6711D Processors
HARDWARE FEATURESINTERNAL CLOCK
SOURCEC6711/C6711B
(FLOATING-POINT DSPs)C6711C/C6711D
(FLOATING-POINT DSPs)
EMIFECLKIN 1
EMIFSYSCLK3 or ECLKIN 1
EDMA CPU clock frequency 1 1
HPICPU/2 clock frequency 1
Peripherals
HPISYSCLK2 1
Peripherals
McBSPsCPU/2 clock frequency 2
McBSPsSYSCLK2 2
32-Bit TimersCPU/4 clock frequency 2 —
32-Bit Timers1/2 of SYSCLK2 — 2
GPIO Module SYSCLK2 — 1
Size (Bytes) 72K 72K
On-Chip MemoryOrganization
4K-Byte (4KB) L1 Program (L1P) Cache4KB L1 Data (L1D) Cache
64KB Unified Mapped RAM/Cache (L2)
CPU ID+CPU Rev ID
Control Status Register (CSR.[31:16]) 0x0202 0x0203
Frequency MHz 150, 100 167, 200
Cycle Time ns
6.7 ns (C6711-150)10 ns (C6711-100)
6.7 ns (C6711B-150)10 ns (C6711B-100)
10 ns (C6711BGFNA-100)
5 ns (C6711D-200)6 ns (C6711DGDPA-167)
5 ns (C6711C-200)6 ns (C6711CGDPA-167)
VoltageCore (V)
1.9 (C6711-150)1.8 (C6711B/C6711-100)
1.26Voltage
I/O (V) 3.3 3.3
PLL Options CLKIN frequency multiplier Bypass (x1), x4 −
Clock Generator OptionsPrescalerMultiplierPostscaler
—/1, /2, /3, ..., /32
x4, x5, x6, ..., x25/1, /2, /3, ..., /32
BGA Package 27 x 27 mm 256-Pin BGA (GFN) 272-Pin BGA (GDP)
Process Technology µm 0.18 µm 0.13 µm
Product StatusProduct Preview (PP)Advance Information (AI)Production Data (PD)
PD† PD (C6711C)†
AI (C6711D)†
† PRODUCT PREVIEW information concerns products in the formative or design phase of development. Characteristic data and otherspecifications are design goals. Texas Instruments reserves the right to change or discontinue these products without notice.ADVANCE INFORMATION concerns new products in the sampling or preproduction phase of development. Characteristic data andother specifications are subject to change without notice.PRODUCTION DATA information is current as of publication date. Products conform to specifications per the terms of TexasInstruments standard warranty. Production processing does not necessarily include testing of all parameters.
AD
VA
NC
E IN
FO
RM
ATIO
N
C6000 is a trademark of Texas Instruments.
SPRS088I − FEBRUARY 1999 − REVISED NOVEMBER 2003
6 POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443
device compatibility
The TMS320C6211/C6211B and C6711/C6711B devices are pin-compatible and have the same peripheral set;thus, making new system designs easier and providing faster time to market. The following list summarizes thedevice characteristic differences among the C6211, C6211B, C6711, C6711B, C6711C, and C6711D devices:
The C6211 and C6211B devices have a fixed-point C62x CPU, while the C6711, C6711B, C6711C, andC6711D devices have a floating-point C67x CPU.
The C6211/C6211B device runs at -167 and -150 MHz clock speeds (with a C6211BGFNA extendedtemperature device that also runs at -150 MHz), while the C6711/C6711B device runs at -150 and -100 MHz(with a C6711BGFNA extended temperature device that also runs at -100 MHz) and the C6711C/C6711Ddevice runs at -200 clock speed (with a C6711CGDPA and C6711DGDPA extended temperature devicesthat also run at -167 MHz).
The C6211/C6211B, C6711-100, and C6711B devices have a core voltage of 1.8 V, the C6711-150 devicecore voltage is 1.9 V, and the C6711C and C6711D devices operate with a core voltage of 1.26 V.
There are several enhancements and features that are only available on the C6711C/C6711D device, suchas: the CLKOUT3 signal, a software programmable PLL and PLL Controller, and a GPIO peripheral module.The C6711D device also has additional enhancements such as: EMIF Big Endian mode correctnessEMIFBE and the L1D requestor priority to L2 bit [“P” bit] in the cache configuration (CCFG) register.
For more detailed discussion on the migration of a C6211, C6211B, C6711, C6711B device to a TMS320C6711Cdevice, see the Migrating from TMS320C6211B/6711B to TMS320C6711C application report (literature numberSPRA837).
For a more detailed discussion on the similarities/differences between the C6211 and C6711 devices, see theHow to Begin Development Today with the TMS320C6211 DSP and How to Begin Development with theTMS320C6711 DSP application reports (literature number SPRA474 and SPRA522, respectively).
AD
VA
NC
E IN
FO
RM
ATIO
N
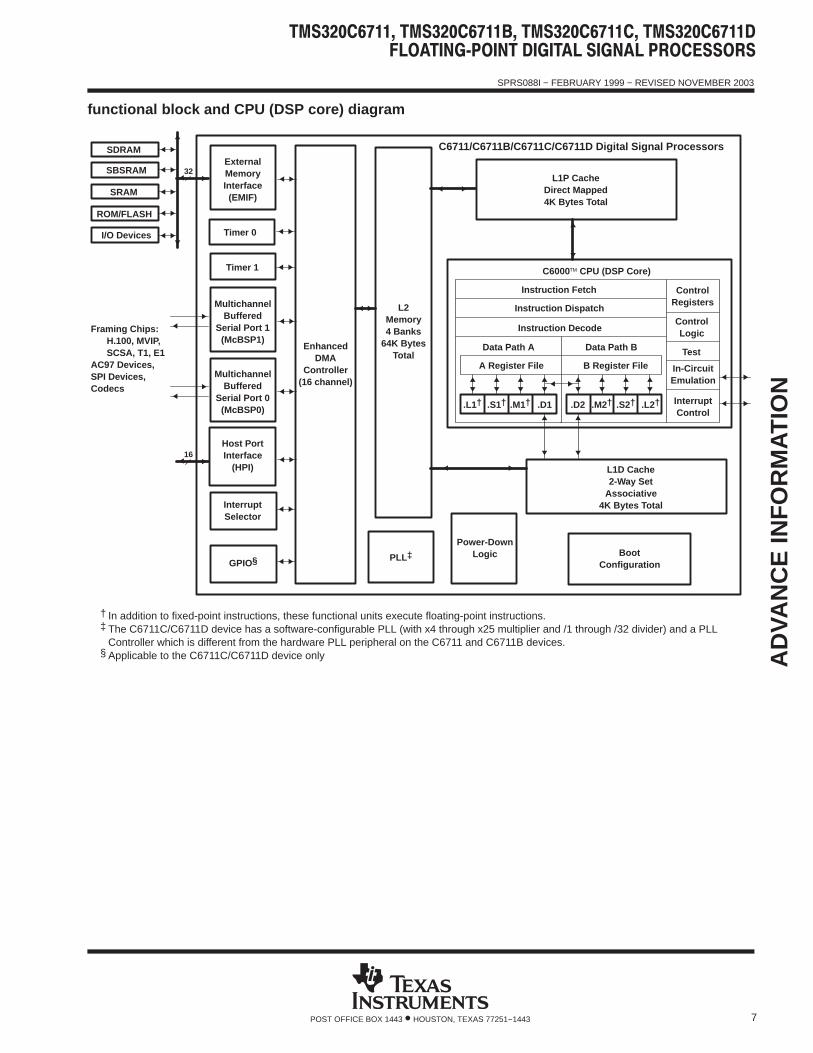
SPRS088I − FEBRUARY 1999 − REVISED NOVEMBER 2003
7POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443
functional block and CPU (DSP core) diagram
ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ
Test
C6000 CPU (DSP Core)
Data Path B
B Register File
Instruction Fetch
Instruction Dispatch
Instruction Decode
Data Path A
A Register File
Power-DownLogic
.L1† .S1† .M1† .D1 .D2 .M2† .S2† .L2†
32
SDRAM
ROM/FLASH
SBSRAM
I/O Devices
L1P CacheDirect Mapped4K Bytes Total
ControlRegisters
ControlLogic
L1D Cache2-Way Set
Associative4K Bytes Total
In-CircuitEmulation
InterruptControl
Framing Chips:H.100, MVIP,SCSA, T1, E1
AC97 Devices,SPI Devices,Codecs
C6711/C6711B/C6711C/C6711D Digital Signal Processors
† In addition to fixed-point instructions, these functional units execute floating-point instructions.‡ The C6711C/C6711D device has a software-configurable PLL (with x4 through x25 multiplier and /1 through /32 divider) and a PLL
Controller which is different from the hardware PLL peripheral on the C6711 and C6711B devices.§ Applicable to the C6711C/C6711D device only
EnhancedDMA
Controller(16 channel)
16
L2Memory4 Banks
64K BytesTotal
PLL‡
Timer 0
ExternalMemoryInterface(EMIF)
MultichannelBuffered
Serial Port 1(McBSP1)
MultichannelBuffered
Serial Port 0(McBSP0)
Host PortInterface
(HPI)
SRAM
Timer 1
BootConfiguration
InterruptSelector
GPIO§
AD
VA
NC
E IN
FO
RM
ATIO
N

SPRS088I − FEBRUARY 1999 − REVISED NOVEMBER 2003
8 POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443
CPU (DSP core) description
The CPU fetches advanced very-long instruction words (VLIW) (256 bits wide) to supply up to eight 32-bitinstructions to the eight functional units during every clock cycle. The VLIW architecture features controls bywhich all eight units do not have to be supplied with instructions if they are not ready to execute. The first bitof every 32-bit instruction determines if the next instruction belongs to the same execute packet as the previousinstruction, or whether it should be executed in the following clock as a part of the next execute packet. Fetchpackets are always 256 bits wide; however, the execute packets can vary in size. The variable-length executepackets are a key memory-saving feature, distinguishing the C67x CPU from other VLIW architectures.
The CPU features two sets of functional units. Each set contains four units and a register file. One set containsfunctional units .L1, .S1, .M1, and .D1; the other set contains units .D2, .M2, .S2, and .L2. The two register fileseach contain 16 32-bit registers for a total of 32 general-purpose registers. The two sets of functional units, alongwith two register files, compose sides A and B of the CPU (see the functional block and CPU diagram andFigure 1). The four functional units on each side of the CPU can freely share the 16 registers belonging to thatside. Additionally, each side features a single data bus connected to all the registers on the other side, by whichthe two sets of functional units can access data from the register files on the opposite side. While register accessby functional units on the same side of the CPU as the register file can service all the units in a single clock cycle,register access using the register file across the CPU supports one read and one write per cycle.
The C67x CPU executes all C62x instructions. In addition to C62x fixed-point instructions, the six out of eightfunctional units (.L1, .S1, .M1, .M2, .S2, and .L2) also execute floating-point instructions. The remaining twofunctional units (.D1 and .D2) also execute the new LDDW instruction which loads 64 bits per CPU side for atotal of 128 bits per cycle.
Another key feature of the C67x CPU is the load/store architecture, where all instructions operate on registers(as opposed to data in memory). Two sets of data-addressing units (.D1 and .D2) are responsible for all datatransfers between the register files and the memory. The data address driven by the .D units allows dataaddresses generated from one register file to be used to load or store data to or from the other register file. TheC67x CPU supports a variety of indirect addressing modes using either linear- or circular-addressing modeswith 5- or 15-bit offsets. All instructions are conditional, and most can access any one of the 32 registers. Someregisters, however, are singled out to support specific addressing or to hold the condition for conditionalinstructions (if the condition is not automatically “true”). The two .M functional units are dedicated for multiplies.The two .S and .L functional units perform a general set of arithmetic, logical, and branch functions with resultsavailable every clock cycle.
The processing flow begins when a 256-bit-wide instruction fetch packet is fetched from a program memory.The 32-bit instructions destined for the individual functional units are “linked” together by “1” bits in the leastsignificant bit (LSB) position of the instructions. The instructions that are “chained” together for simultaneousexecution (up to eight in total) compose an execute packet. A “0” in the LSB of an instruction breaks the chain,effectively placing the instructions that follow it in the next execute packet. If an execute packet crosses thefetch-packet boundary (256 bits wide), the assembler places it in the next fetch packet, while the remainder ofthe current fetch packet is padded with NOP instructions. The number of execute packets within a fetch packetcan vary from one to eight. Execute packets are dispatched to their respective functional units at the rate of oneper clock cycle and the next 256-bit fetch packet is not fetched until all the execute packets from the current fetchpacket have been dispatched. After decoding, the instructions simultaneously drive all active functional unitsfor a maximum execution rate of eight instructions every clock cycle. While most results are stored in 32-bitregisters, they can be subsequently moved to memory as bytes or half-words as well. All load and storeinstructions are byte-, half-word, or word-addressable.
AD
VA
NC
E IN
FO
RM
ATIO
N
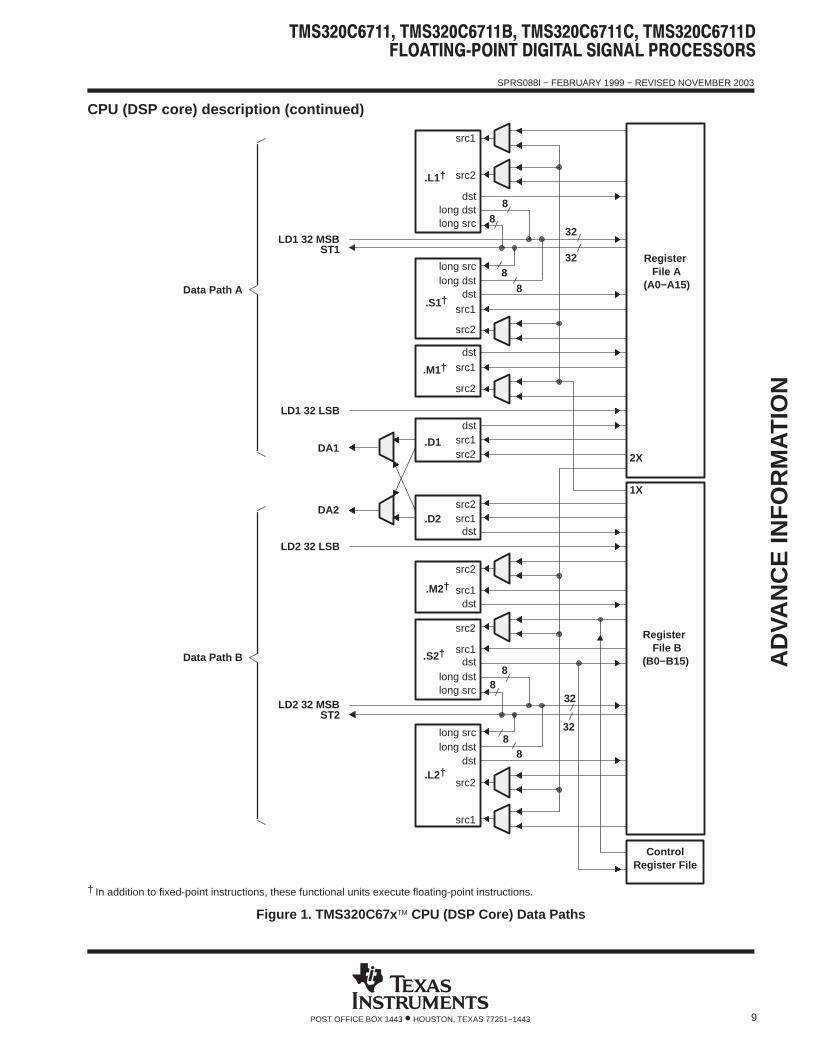
SPRS088I − FEBRUARY 1999 − REVISED NOVEMBER 2003
9POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443
CPU (DSP core) description (continued)
8
ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ
ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ
ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ
ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ
ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ
ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ
ÁÁÁÁÁÁÁÁÁÁÁÁ
8
long src
dst
src2
src1
src1
src1
src1
src1
src1
src1
src1
long dst
long dstdst
dst
dst
dst
dst
dst
dst
src2
src2
src2
src2
src2
src2
src2
long src
long srclong dst
long dstlong src
8
8
8
ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ
ÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁÁ
2X
1X
.L2†
.S2†
.M2†
.D2
ÁÁÁ
Á
Á
Á
ÁÁ
ÁÁÁ
ÁÁ
ÁÁ
ÁÁ
ÁÁÁ
ÁÁ
ÁÁÁÁÁ
ÁÁÁ
ÁÁ
ÁÁ
.D1
.M1†
ÁÁ
ÁÁÁ
ÁÁ Á
ÁÁÁ
Á
.S1†
ÁÁÁ
ÁÁ
.L1†
ÁÁ
ÁÁ
ÁÁÁÁ
ÁÁ
Á
Á
ControlRegister FileÁ
DA1
DA2
ST1
LD1 32 LSB
LD2 32 LSB
LD2 32 MSB
32
32
Data Path A
Data Path B
Register File A
(A0−A15)
Register File B
(B0−B15)
LD1 32 MSB
32
ST2
32
8
8
8
Á
Á
† In addition to fixed-point instructions, these functional units execute floating-point instructions.
Figure 1. TMS320C67x CPU (DSP Core) Data Paths
AD
VA
NC
E IN
FO
RM
ATIO
N
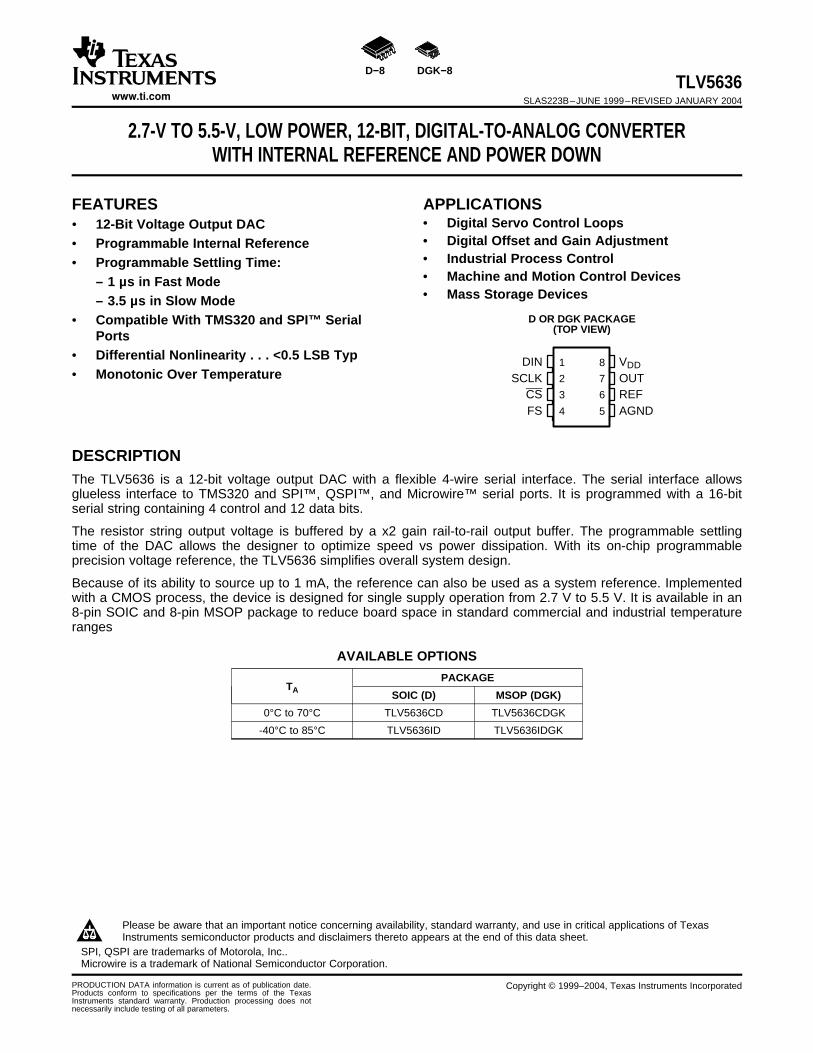
D−8 DGK−8
www.ti.com
FEATURES APPLICATIONS
1
2
3
4
8
7
6
5
DINSCLK
CSFS
VDD
OUTREFAGND
D OR DGK PACKAGE(TOP VIEW)
DESCRIPTION
TLV5636SLAS223B–JUNE 1999–REVISED JANUARY 2004
2.7-V TO 5.5-V, LOW POWER, 12-BIT, DIGITAL-TO-ANALOG CONVERTERWITH INTERNAL REFERENCE AND POWER DOWN
• Digital Servo Control Loops• 12-Bit Voltage Output DAC• Digital Offset and Gain Adjustment• Programmable Internal Reference• Industrial Process Control• Programmable Settling Time:• Machine and Motion Control Devices– 1 µs in Fast Mode• Mass Storage Devices– 3.5 µs in Slow Mode
• Compatible With TMS320 and SPI™ SerialPorts
• Differential Nonlinearity . . . <0.5 LSB Typ• Monotonic Over Temperature
The TLV5636 is a 12-bit voltage output DAC with a flexible 4-wire serial interface. The serial interface allowsglueless interface to TMS320 and SPI™, QSPI™, and Microwire™ serial ports. It is programmed with a 16-bitserial string containing 4 control and 12 data bits.
The resistor string output voltage is buffered by a x2 gain rail-to-rail output buffer. The programmable settlingtime of the DAC allows the designer to optimize speed vs power dissipation. With its on-chip programmableprecision voltage reference, the TLV5636 simplifies overall system design.
Because of its ability to source up to 1 mA, the reference can also be used as a system reference. Implementedwith a CMOS process, the device is designed for single supply operation from 2.7 V to 5.5 V. It is available in an8-pin SOIC and 8-pin MSOP package to reduce board space in standard commercial and industrial temperatureranges
AVAILABLE OPTIONS
PACKAGETA SOIC (D) MSOP (DGK)
0°C to 70°C TLV5636CD TLV5636CDGK
-40°C to 85°C TLV5636ID TLV5636IDGK
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of TexasInstruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
SPI, QSPI are trademarks of Motorola, Inc..Microwire is a trademark of National Semiconductor Corporation.
PRODUCTION DATA information is current as of publication date. Copyright © 1999–2004, Texas Instruments IncorporatedProducts conform to specifications per the terms of the TexasInstruments standard warranty. Production processing does notnecessarily include testing of all parameters.

www.ti.com
SerialInterface
andControl 12-Bit
DACLatch
CS
DIN
OUT
Power-OnReset
x212
2-BitControlLatch
2
Powerand Speed
Control
2
VoltageBandgap
PGA WithOutput Enable
12
REF
FS
SCLK
TLV5636SLAS223B–JUNE 1999–REVISED JANUARY 2004
These devices have limited built-in ESD protection. The leads should be shorted together or the device placed in conductive foamduring storage or handling to prevent electrostatic damage to the MOS gates.
FUNCTIONAL BLOCK DIAGRAM
Terminal Functions
TERMINALI/O/P DESCRIPTION
NAME NO.
AGND 5 P Ground
CS 3 I Chip select. Digital input active low, used to enable/disable inputs
DIN 1 I Digital serial data input
FS 4 I Frame sync input
OUT 7 O DAC A analog voltage output
REF 6 I/O Analog reference voltage input/output
SCLK 2 I Digital serial clock input
VDD 8 P Positive power supply
2
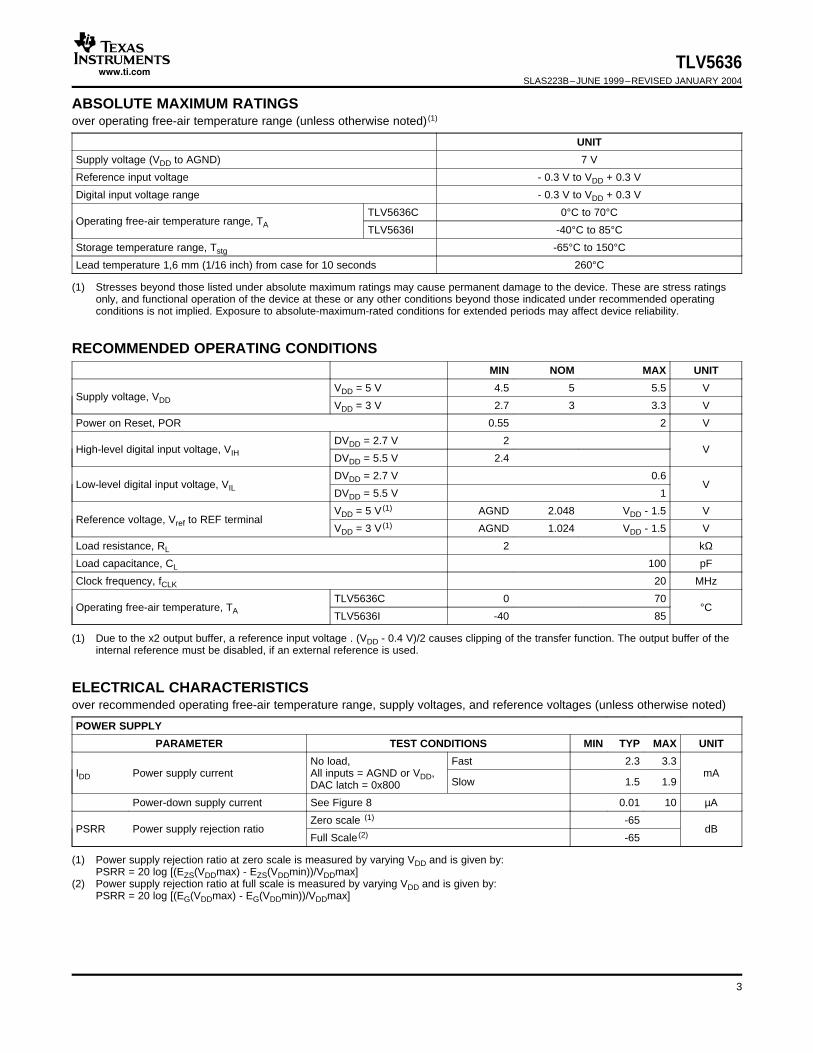
www.ti.com
ABSOLUTE MAXIMUM RATINGS
RECOMMENDED OPERATING CONDITIONS
ELECTRICAL CHARACTERISTICS
TLV5636SLAS223B–JUNE 1999–REVISED JANUARY 2004
over operating free-air temperature range (unless otherwise noted) (1)
UNIT
Supply voltage (VDD to AGND) 7 V
Reference input voltage - 0.3 V to VDD + 0.3 V
Digital input voltage range - 0.3 V to VDD + 0.3 V
TLV5636C 0°C to 70°COperating free-air temperature range, TA TLV5636I -40°C to 85°C
Storage temperature range, Tstg -65°C to 150°C
Lead temperature 1,6 mm (1/16 inch) from case for 10 seconds 260°C
(1) Stresses beyond those listed under absolute maximum ratings may cause permanent damage to the device. These are stress ratingsonly, and functional operation of the device at these or any other conditions beyond those indicated under recommended operatingconditions is not implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
MIN NOM MAX UNIT
VDD = 5 V 4.5 5 5.5 VSupply voltage, VDD VDD = 3 V 2.7 3 3.3 V
Power on Reset, POR 0.55 2 V
DVDD = 2.7 V 2High-level digital input voltage, VIH V
DVDD = 5.5 V 2.4
DVDD = 2.7 V 0.6Low-level digital input voltage, VIL V
DVDD = 5.5 V 1
VDD = 5 V (1) AGND 2.048 VDD - 1.5 VReference voltage, Vref to REF terminal
VDD = 3 V (1) AGND 1.024 VDD - 1.5 V
Load resistance, RL 2 kΩ
Load capacitance, CL 100 pF
Clock frequency, fCLK 20 MHz
TLV5636C 0 70Operating free-air temperature, TA °C
TLV5636I -40 85
(1) Due to the x2 output buffer, a reference input voltage . (VDD - 0.4 V)/2 causes clipping of the transfer function. The output buffer of theinternal reference must be disabled, if an external reference is used.
over recommended operating free-air temperature range, supply voltages, and reference voltages (unless otherwise noted)
POWER SUPPLY
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
No load, Fast 2.3 3.3IDD Power supply current All inputs = AGND or VDD, mA
Slow 1.5 1.9DAC latch = 0x800
Power-down supply current See Figure 8 0.01 10 µA
Zero scale (1) -65PSRR Power supply rejection ratio dB
Full Scale (2) -65
(1) Power supply rejection ratio at zero scale is measured by varying VDD and is given by:PSRR = 20 log [(EZS(VDDmax) - EZS(VDDmin))/VDDmax]
(2) Power supply rejection ratio at full scale is measured by varying VDD and is given by:PSRR = 20 log [(EG(VDDmax) - EG(VDDmin))/VDDmax]
3
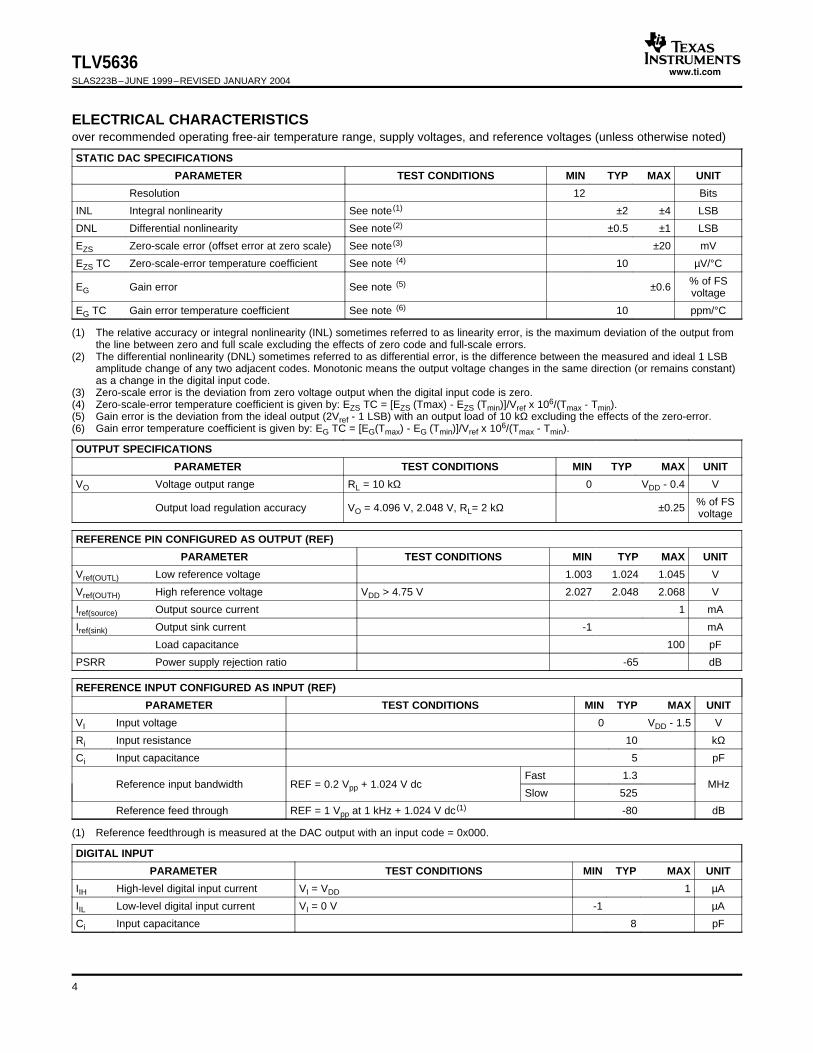
www.ti.com
ELECTRICAL CHARACTERISTICS
TLV5636SLAS223B–JUNE 1999–REVISED JANUARY 2004
over recommended operating free-air temperature range, supply voltages, and reference voltages (unless otherwise noted)
STATIC DAC SPECIFICATIONS
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Resolution 12 Bits
INL Integral nonlinearity See note (1) ±2 ±4 LSB
DNL Differential nonlinearity See note (2) ±0.5 ±1 LSB
EZS Zero-scale error (offset error at zero scale) See note (3) ±20 mV
EZS TC Zero-scale-error temperature coefficient See note (4) 10 µV/°C
% of FSEG Gain error See note (5) ±0.6 voltage
EG TC Gain error temperature coefficient See note (6) 10 ppm/°C
(1) The relative accuracy or integral nonlinearity (INL) sometimes referred to as linearity error, is the maximum deviation of the output fromthe line between zero and full scale excluding the effects of zero code and full-scale errors.
(2) The differential nonlinearity (DNL) sometimes referred to as differential error, is the difference between the measured and ideal 1 LSBamplitude change of any two adjacent codes. Monotonic means the output voltage changes in the same direction (or remains constant)as a change in the digital input code.
(3) Zero-scale error is the deviation from zero voltage output when the digital input code is zero.(4) Zero-scale-error temperature coefficient is given by: EZS TC = [EZS (Tmax) - EZS (Tmin)]/Vref x 106/(Tmax - Tmin).(5) Gain error is the deviation from the ideal output (2Vref - 1 LSB) with an output load of 10 kΩ excluding the effects of the zero-error.(6) Gain error temperature coefficient is given by: EG TC = [EG(Tmax) - EG (Tmin)]/Vref x 106/(Tmax - Tmin).
OUTPUT SPECIFICATIONS
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
VO Voltage output range RL = 10 kΩ 0 VDD - 0.4 V
% of FSOutput load regulation accuracy VO = 4.096 V, 2.048 V, RL= 2 kΩ ±0.25 voltage
REFERENCE PIN CONFIGURED AS OUTPUT (REF)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Vref(OUTL) Low reference voltage 1.003 1.024 1.045 V
Vref(OUTH) High reference voltage VDD > 4.75 V 2.027 2.048 2.068 V
Iref(source) Output source current 1 mA
Iref(sink) Output sink current -1 mA
Load capacitance 100 pF
PSRR Power supply rejection ratio -65 dB
REFERENCE INPUT CONFIGURED AS INPUT (REF)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
VI Input voltage 0 VDD - 1.5 V
Ri Input resistance 10 kΩ
Ci Input capacitance 5 pF
Fast 1.3Reference input bandwidth REF = 0.2 Vpp + 1.024 V dc MHz
Slow 525
Reference feed through REF = 1 Vpp at 1 kHz + 1.024 V dc (1) -80 dB
(1) Reference feedthrough is measured at the DAC output with an input code = 0x000.
DIGITAL INPUT
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
IIH High-level digital input current VI = VDD 1 µA
IIL Low-level digital input current VI = 0 V -1 µA
Ci Input capacitance 8 pF
4
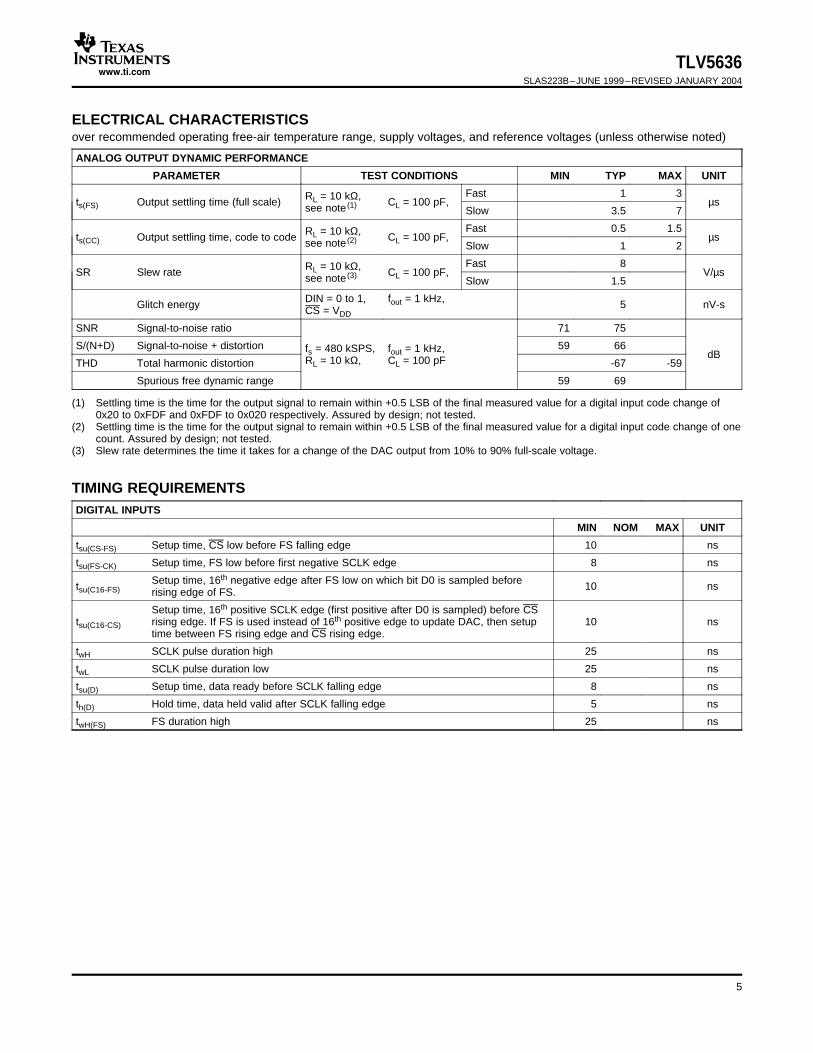
www.ti.com
ELECTRICAL CHARACTERISTICS
TIMING REQUIREMENTS
TLV5636SLAS223B–JUNE 1999–REVISED JANUARY 2004
over recommended operating free-air temperature range, supply voltages, and reference voltages (unless otherwise noted)
ANALOG OUTPUT DYNAMIC PERFORMANCE
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Fast 1 3RL = 10 kΩ,ts(FS) Output settling time (full scale) CL = 100 pF, µssee note (1)Slow 3.5 7
Fast 0.5 1.5RL = 10 kΩ,ts(CC) Output settling time, code to code CL = 100 pF, µssee note (2)Slow 1 2
Fast 8RL = 10 kΩ,SR Slew rate CL = 100 pF, V/µssee note (3)Slow 1.5
DIN = 0 to 1, fout = 1 kHz,Glitch energy 5 nV-sCS = VDD
SNR Signal-to-noise ratio 71 75
S/(N+D) Signal-to-noise + distortion 59 66fs = 480 kSPS, fout = 1 kHz, dBRL = 10 kΩ, CL = 100 pFTHD Total harmonic distortion -67 -59
Spurious free dynamic range 59 69
(1) Settling time is the time for the output signal to remain within +0.5 LSB of the final measured value for a digital input code change of0x20 to 0xFDF and 0xFDF to 0x020 respectively. Assured by design; not tested.
(2) Settling time is the time for the output signal to remain within +0.5 LSB of the final measured value for a digital input code change of onecount. Assured by design; not tested.
(3) Slew rate determines the time it takes for a change of the DAC output from 10% to 90% full-scale voltage.
DIGITAL INPUTS
MIN NOM MAX UNIT
tsu(CS-FS) Setup time, CS low before FS falling edge 10 ns
tsu(FS-CK) Setup time, FS low before first negative SCLK edge 8 ns
Setup time, 16th negative edge after FS low on which bit D0 is sampled beforetsu(C16-FS) 10 nsrising edge of FS.
Setup time, 16th positive SCLK edge (first positive after D0 is sampled) before CStsu(C16-CS) rising edge. If FS is used instead of 16th positive edge to update DAC, then setup 10 ns
time between FS rising edge and CS rising edge.
twH SCLK pulse duration high 25 ns
twL SCLK pulse duration low 25 ns
tsu(D) Setup time, data ready before SCLK falling edge 8 ns
th(D) Hold time, data held valid after SCLK falling edge 5 ns
twH(FS) FS duration high 25 ns
5

www.ti.com
PARAMETER MEASUREMENT INFORMATION
twL
SCLK
CS
DIN
FS
D15 D14 D13 D12 D1 D0 XX
1X 2 3 4 5 15 16 X
twH
tsu(D) th(D)
tsu(CS-FS)
twH(FS) tsu(FS-CK) tsu(C16-FS)
tsu(C16-CS)
TLV5636SLAS223B–JUNE 1999–REVISED JANUARY 2004
Figure 1. Timing Diagram
6
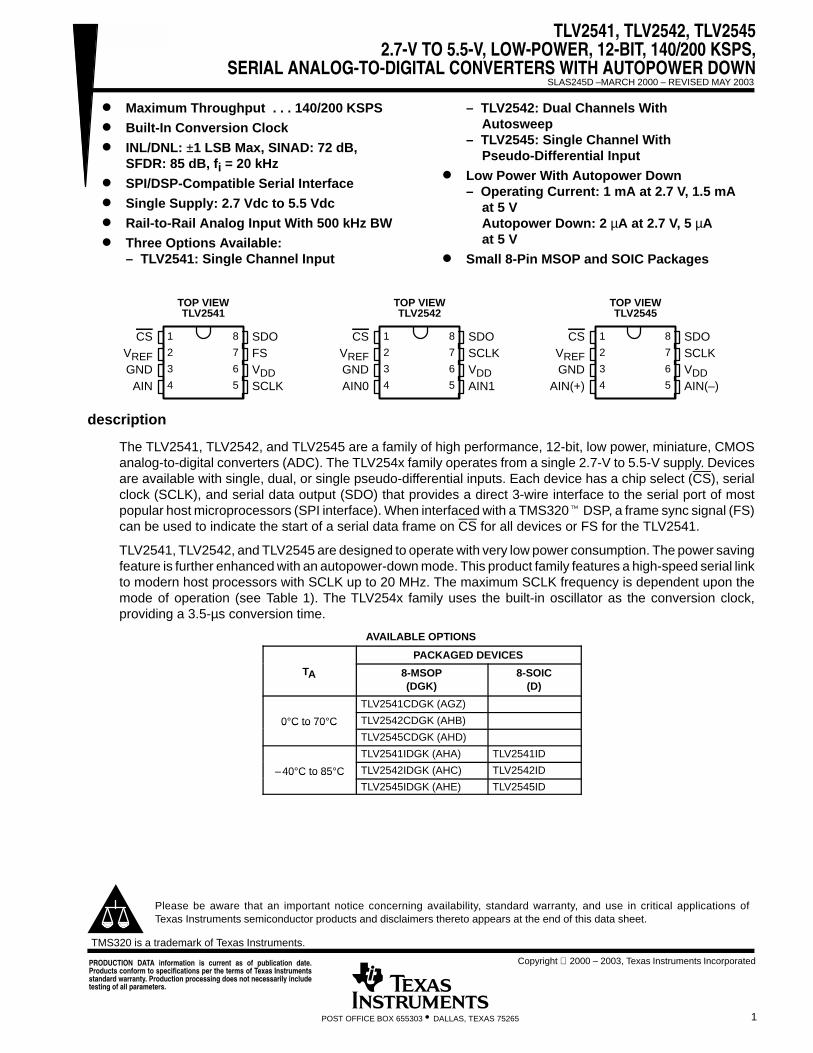
TLV2541, TLV2542, TLV25452.7-V TO 5.5-V, LOW-POWER, 12-BIT, 140/200 KSPS,
SERIAL ANALOG-TO-DIGITAL CONVERTERS WITH AUTOPOWER DOWNSLAS245D –MARCH 2000 – REVISED MAY 2003
1POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Maximum Throughput . . . 140/200 KSPS
Built-In Conversion Clock
INL/DNL: ±1 LSB Max, SINAD: 72 dB,SFDR: 85 dB, fi = 20 kHz
SPI/DSP-Compatible Serial Interface
Single Supply: 2.7 Vdc to 5.5 Vdc
Rail-to-Rail Analog Input With 500 kHz BW
Three Options Available:– TLV2541: Single Channel Input
– TLV2542: Dual Channels WithAutosweep
– TLV2545: Single Channel WithPseudo-Differential Input
Low Power With Autopower Down– Operating Current: 1 mA at 2.7 V, 1.5 mA
at 5 VAutopower Down: 2 µA at 2.7 V, 5 µA at 5 V
Small 8-Pin MSOP and SOIC Packages
TOP VIEWTLV2541
1
2
3
4
8
7
6
5
CSVREFGND
AIN
SDOFSVDDSCLK
1
2
3
4
8
7
6
5
CSVREFGNDAIN0
SDOSCLKVDDAIN1
1
2
3
4
8
7
6
5
CSVREFGND
AIN(+)
SDOSCLKVDDAIN(–)
TOP VIEWTLV2542
TOP VIEWTLV2545
description
The TLV2541, TLV2542, and TLV2545 are a family of high performance, 12-bit, low power, miniature, CMOSanalog-to-digital converters (ADC). The TLV254x family operates from a single 2.7-V to 5.5-V supply. Devicesare available with single, dual, or single pseudo-differential inputs. Each device has a chip select (CS), serialclock (SCLK), and serial data output (SDO) that provides a direct 3-wire interface to the serial port of mostpopular host microprocessors (SPI interface). When interfaced with a TMS320 DSP, a frame sync signal (FS)can be used to indicate the start of a serial data frame on CS for all devices or FS for the TLV2541.
TLV2541, TLV2542, and TLV2545 are designed to operate with very low power consumption. The power savingfeature is further enhanced with an autopower-down mode. This product family features a high-speed serial linkto modern host processors with SCLK up to 20 MHz. The maximum SCLK frequency is dependent upon themode of operation (see Table 1). The TLV254x family uses the built-in oscillator as the conversion clock,providing a 3.5-µs conversion time.
AVAILABLE OPTIONS
PACKAGED DEVICES
TA 8-MSOP(DGK)
8-SOIC(D)
TLV2541CDGK (AGZ)
0°C to 70°C TLV2542CDGK (AHB)0 C to 70 C
TLV2545CDGK (AHD)
TLV2541IDGK (AHA) TLV2541ID
–40°C to 85°C TLV2542IDGK (AHC) TLV2542ID40 C to 85 C
TLV2545IDGK (AHE) TLV2545ID
Copyright 2000 – 2003, Texas Instruments IncorporatedPRODUCTION DATA information is current as of publication date.Products conform to specifications per the terms of Texas Instrumentsstandard warranty. Production processing does not necessarily includetesting of all parameters.
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications ofTexas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
TMS320 is a trademark of Texas Instruments.

TLV2541, TLV2542, TLV25452.7-V TO 5.5-V, LOW-POWER, 12-BIT, 140/200 KSPS,SERIAL ANALOG-TO-DIGITAL CONVERTERS WITH AUTOPOWER DOWNSLAS245D –MARCH 2000 – REVISED MAY 2003
2 POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
functional block diagram
S/H
SDO
VREF
LOW POWERSAR ADC
VDD
OSCConversion
Clock
CONTROLLOGIC
Mux
S/HLOW POWER
12-BITSAR ADC
OSCConversion
Clock
CONTROLLOGIC
AIN
SCLKCSFS
VREF
AIN0
AIN1
SCLKCS
SDO
VDD
GNDGND
TLV2541 TLV2542
S/HLOW POWER
12-BITSAR ADC
OSC ConversionClock
CONTROLLOGIC
VREF
AIN (+)
AIN (–)
SCLKCS
SDO
VDD
GND
TLV2545

TLV2541, TLV2542, TLV25452.7-V TO 5.5-V, LOW-POWER, 12-BIT, 140/200 KSPS,
SERIAL ANALOG-TO-DIGITAL CONVERTERS WITH AUTOPOWER DOWNSLAS245D –MARCH 2000 – REVISED MAY 2003
3POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Terminal Functions
TLV2541
TERMINALI/O DESCRIPTION
NAME NO.I/O DESCRIPTION
AIN 4 I Analog input channel
CS 1 I Chip select. A high-to-low transition on the CS input removes SDO from 3-state within a maximum setup time.CS can be used as the FS pin when a dedicated DSP serial port is used.
FS 7 I DSP frame sync input. Indication of the start of a serial data frame. Tie this terminal to VDD if not used.
GND 3 I Ground return for the internal circuitry. Unless otherwise noted, all voltage measurements are with respect to GND.
SCLK 5 I Output serial clock. This terminal receives the serial SCLK from the host processor.
SDO 8 O The 3-state serial output for the A/D conversion result. SDO is kept in the high-impedance state until CS falling edgeor FS rising edge, whichever occurs first. The output format is MSB first.
When FS is not used (FS = 1 at the falling edge of CS): The MSB is presented to the SDO pin after CS falling edgeand output data is valid on the first falling edge of SCLK.
When CS and FS are both used (FS = 0 at the falling edge of CS): The MSB is presented to the SDO pin after thefalling edge of CS. When CS is tied/held low, the MSB is presented on SDO after the rising FS. Output data is validon the first falling edge of SCLK. (This is typically used with an active FS from a DSP using a dedicated serial port.)
VDD 6 I Positive supply voltage
VREF 2 I External reference input
TLV2542/45
TERMINALI/O DESCRIPTION
NAME NO.I/O DESCRIPTION
AIN0 /AIN(+) 4 I Analog input channel 0 for TLV2542—Positive input for TLV2545.
AIN1/AIN (–) 5 I Analog input channel 1 for TLV2542—Inverted input for TLV2545.
CS 1 I Chip select. A high-to-low transition on CS removes SDO from 3-state within a maximum delay time. This pin canbe connected to the frame sync of a DSP using a dedicated serial port.
GND 3 I Ground return for the internal circuitry. Unless otherwise noted, all voltage measurements are with respect to GND.
SCLK 7 I Output serial clock. This terminal receives the serial SCLK from the host processor.
SDO 8 O The 3-state serial output for the A/D conversion result. SDO is kept in the high-impedance state when CS is highand presents output data after the CS falling edge until the LSB is presented. The output format is MSB first. SDOreturns to the Hi-Z state after the 16th SCLK. Output data is valid on the falling SCLK edge.
VDD 6 I Positive supply voltage
VREF 2 I External reference input
detailed description
The TLV2541, TLV2542, and TLV2545 are successive approximation (SAR) ADCs utilizing a chargeredistribution DAC. Figure 1 shows a simplified version of the ADC.
The sampling capacitor acquires the signal on AIN during the sampling period. When the conversion processstarts, the SAR control logic and charge redistribution DAC are used to add and subtract fixed amounts of chargefrom the sampling capacitor to bring the comparator into a balanced condition. When the comparator isbalanced, the conversion is complete and the ADC output code is generated.
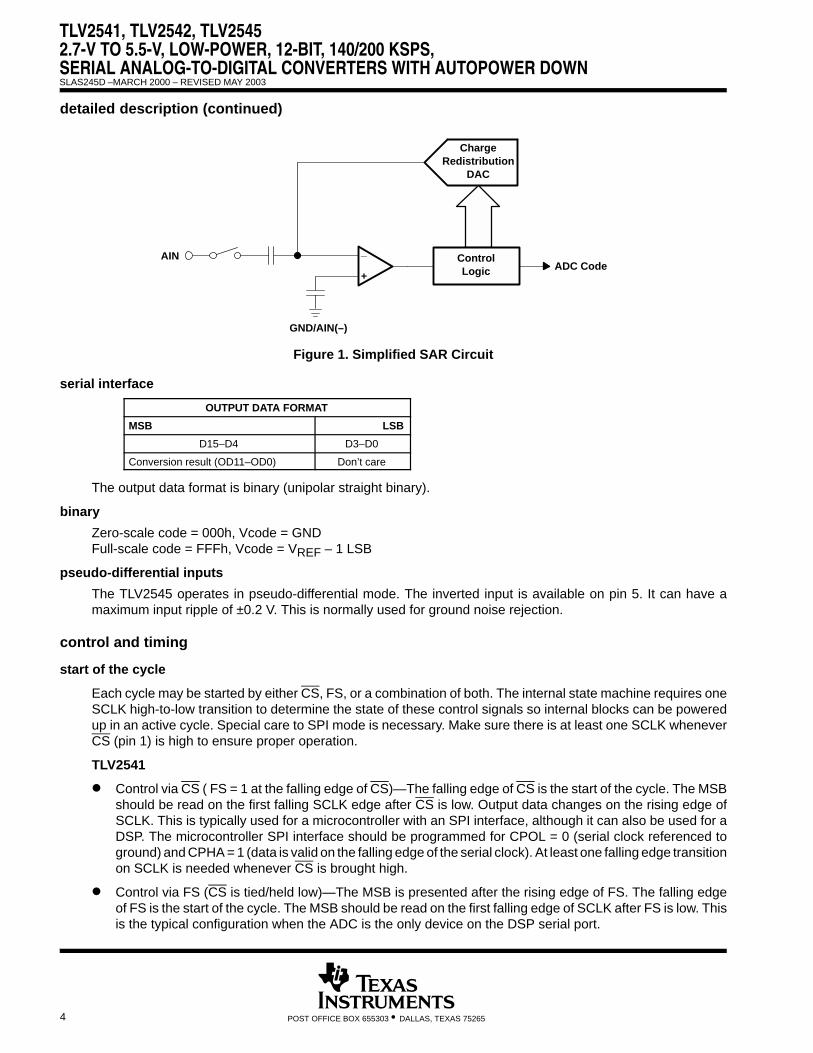
TLV2541, TLV2542, TLV25452.7-V TO 5.5-V, LOW-POWER, 12-BIT, 140/200 KSPS,SERIAL ANALOG-TO-DIGITAL CONVERTERS WITH AUTOPOWER DOWNSLAS245D –MARCH 2000 – REVISED MAY 2003
4 POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
detailed description (continued)
GND/AIN(–)
ADC CodeAIN
ChargeRedistribution
DAC
ControlLogic
_
+
Figure 1. Simplified SAR Circuit
serial interface
OUTPUT DATA FORMAT
MSB LSB
D15–D4 D3–D0
Conversion result (OD11–OD0) Don’t care
The output data format is binary (unipolar straight binary).
binary
Zero-scale code = 000h, Vcode = GNDFull-scale code = FFFh, Vcode = VREF – 1 LSB
pseudo-differential inputs
The TLV2545 operates in pseudo-differential mode. The inverted input is available on pin 5. It can have amaximum input ripple of ±0.2 V. This is normally used for ground noise rejection.
control and timing
start of the cycle
Each cycle may be started by either CS, FS, or a combination of both. The internal state machine requires oneSCLK high-to-low transition to determine the state of these control signals so internal blocks can be poweredup in an active cycle. Special care to SPI mode is necessary. Make sure there is at least one SCLK wheneverCS (pin 1) is high to ensure proper operation.
TLV2541
Control via CS ( FS = 1 at the falling edge of CS)—The falling edge of CS is the start of the cycle. The MSBshould be read on the first falling SCLK edge after CS is low. Output data changes on the rising edge ofSCLK. This is typically used for a microcontroller with an SPI interface, although it can also be used for aDSP. The microcontroller SPI interface should be programmed for CPOL = 0 (serial clock referenced toground) and CPHA = 1 (data is valid on the falling edge of the serial clock). At least one falling edge transitionon SCLK is needed whenever CS is brought high.
Control via FS (CS is tied/held low)—The MSB is presented after the rising edge of FS. The falling edgeof FS is the start of the cycle. The MSB should be read on the first falling edge of SCLK after FS is low. Thisis the typical configuration when the ADC is the only device on the DSP serial port.
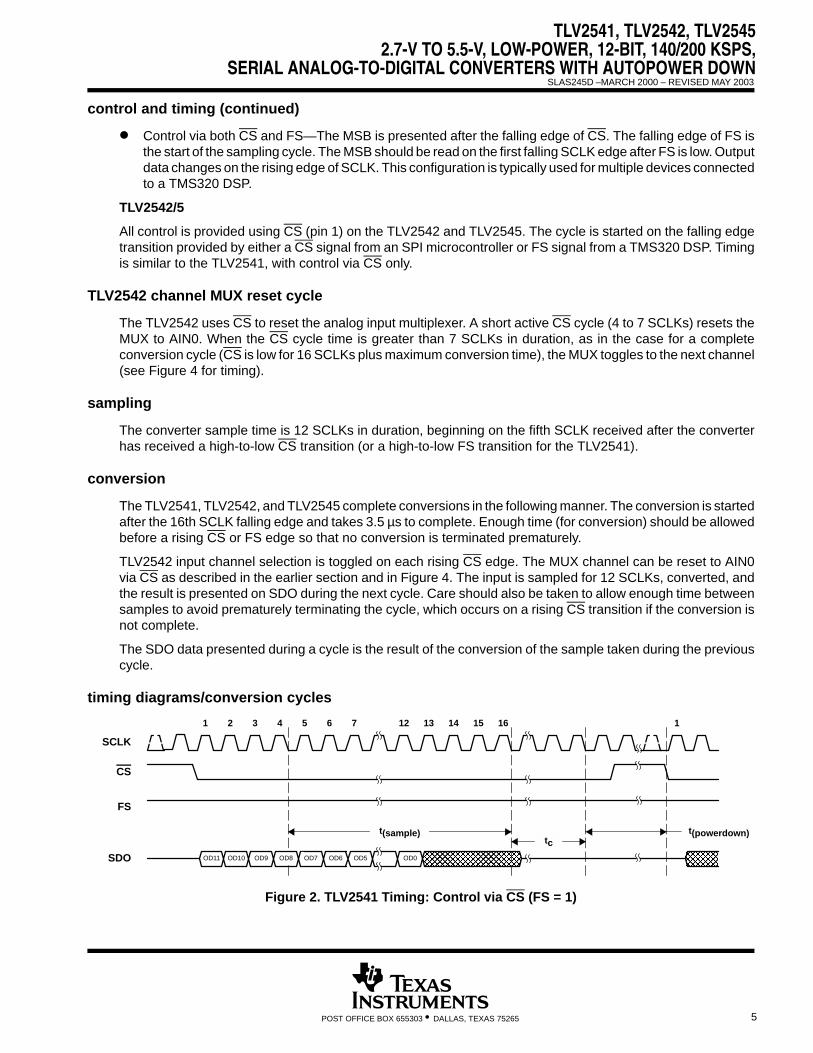
TLV2541, TLV2542, TLV25452.7-V TO 5.5-V, LOW-POWER, 12-BIT, 140/200 KSPS,
SERIAL ANALOG-TO-DIGITAL CONVERTERS WITH AUTOPOWER DOWNSLAS245D –MARCH 2000 – REVISED MAY 2003
5POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
control and timing (continued)
Control via both CS and FS—The MSB is presented after the falling edge of CS. The falling edge of FS isthe start of the sampling cycle. The MSB should be read on the first falling SCLK edge after FS is low. Outputdata changes on the rising edge of SCLK. This configuration is typically used for multiple devices connectedto a TMS320 DSP.
TLV2542/5
All control is provided using CS (pin 1) on the TLV2542 and TLV2545. The cycle is started on the falling edgetransition provided by either a CS signal from an SPI microcontroller or FS signal from a TMS320 DSP. Timingis similar to the TLV2541, with control via CS only.
TLV2542 channel MUX reset cycle
The TLV2542 uses CS to reset the analog input multiplexer. A short active CS cycle (4 to 7 SCLKs) resets theMUX to AIN0. When the CS cycle time is greater than 7 SCLKs in duration, as in the case for a completeconversion cycle (CS is low for 16 SCLKs plus maximum conversion time), the MUX toggles to the next channel(see Figure 4 for timing).
sampling
The converter sample time is 12 SCLKs in duration, beginning on the fifth SCLK received after the converterhas received a high-to-low CS transition (or a high-to-low FS transition for the TLV2541).
conversion
The TLV2541, TLV2542, and TLV2545 complete conversions in the following manner. The conversion is startedafter the 16th SCLK falling edge and takes 3.5 µs to complete. Enough time (for conversion) should be allowedbefore a rising CS or FS edge so that no conversion is terminated prematurely.
TLV2542 input channel selection is toggled on each rising CS edge. The MUX channel can be reset to AIN0via CS as described in the earlier section and in Figure 4. The input is sampled for 12 SCLKs, converted, andthe result is presented on SDO during the next cycle. Care should also be taken to allow enough time betweensamples to avoid prematurely terminating the cycle, which occurs on a rising CS transition if the conversion isnot complete.
The SDO data presented during a cycle is the result of the conversion of the sample taken during the previouscycle.
timing diagrams/conversion cycles
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
SCLK
1 2 3 4 5 6 12 13 14 15 16 1
CS
FS
OD8 OD7 OD6 OD5 OD0SDO
t(sample)tc
t(powerdown)
7
OD10OD11 OD9
Figure 2. TLV2541 Timing: Control via CS (FS = 1)
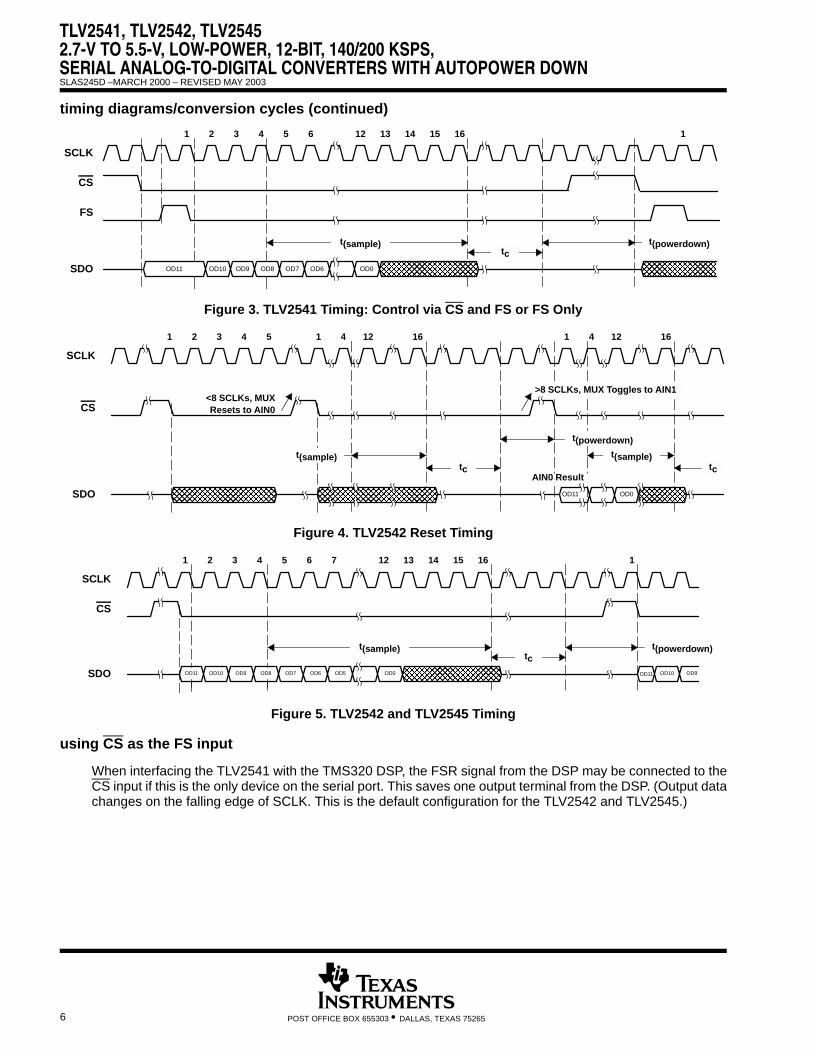
TLV2541, TLV2542, TLV25452.7-V TO 5.5-V, LOW-POWER, 12-BIT, 140/200 KSPS,SERIAL ANALOG-TO-DIGITAL CONVERTERS WITH AUTOPOWER DOWNSLAS245D –MARCH 2000 – REVISED MAY 2003
6 POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
timing diagrams/conversion cycles (continued)
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
SCLK
1 2 3 4 5 6 12 13 14 15 16 1
CS
FS
OD9 OD8OD11 OD10 OD7 OD6 OD0SDO
t(sample)tc
t(powerdown)
Figure 3. TLV2541 Timing: Control via CS and FS or FS Only
SCLK
2 3 4 5 1 12 16
CS
ÎÎÎÎÎÎÎÎÎÎÎÎ
SDO
t(powerdown)
tc
1 4 161241
t(sample)
>8 SCLKs, MUX Toggles to AIN1
AIN0 Resulttc
<8 SCLKs, MUXResets to AIN0
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
t(sample)
ÎÎÎÎÎÎ
OD11 OD0
Figure 4. TLV2542 Reset Timing
OD8
SCLK
1 2 3 4 5 6 12 13 14 15 16
CS
OD7 OD6 OD5 OD0ÎÎÎÎÎÎÎÎÎÎÎÎ
SDO
t(sample)tc
t(powerdown)
7
OD9
1
OD10 OD9OD11 OD10 OD11
Figure 5. TLV2542 and TLV2545 Timing
using CS as the FS input
When interfacing the TLV2541 with the TMS320 DSP, the FSR signal from the DSP may be connected to theCS input if this is the only device on the serial port. This saves one output terminal from the DSP. (Output datachanges on the falling edge of SCLK. This is the default configuration for the TLV2542 and TLV2545.)

TLV2541, TLV2542, TLV25452.7-V TO 5.5-V, LOW-POWER, 12-BIT, 140/200 KSPS,
SERIAL ANALOG-TO-DIGITAL CONVERTERS WITH AUTOPOWER DOWNSLAS245D –MARCH 2000 – REVISED MAY 2003
7POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
using CS as the FS input (continued)
SCLK and conversion speed
The input frequency of SCLK can range from 100 kHz to 20 MHz maximum. The ADC conversion uses aseparate internal oscillator with a minimum frequency of 4 MHz. The conversion cycle takes 14 internal oscillatorclocks to complete. This leads to a 3.5-µs conversion time. For a 20-MHz SCLK, the minimum total cycle timeis given by: 16x(1/20M)+14x(1/4M)+one SCLK = 4.35 µs. An additional SCLK is added to account for therequired CS and/or FS high time. These times specify the minimum cycle time for an active CS or FS signal.If violated, the conversion terminates, invalidating the next data output cycle. Table 1 gives the maximum SCLKfrequency for a given supply voltage and operational mode.
control via pin 1 (CS, SPI interface)
All devices are compatible with this mode operation. A falling CS initiates the cycle (for TLV2541, the FS inputis tied to VDD). CS remains low for the entire cycle time (sample+convert+one SCLK) and can then be released.
NOTE:IMPORTANT: A single SCLK is required whenever CS is high.
control via pin 1 (CS, DSP interface)
All devices are compatible with this mode of operation. The FS signal from a DSP is connected directly to theCS input of the ADC. A falling edge on the CS input initiates the cycle. (For the TLV2541, the FS input can betied to VDD, although better performance can be achieved when using the FS input for control. Refer to the nextsection.) The CS input should remain low for the entire cycle time (sample+convert+one SCLK) and can thenbe released.
NOTE:IMPORTANT: A single SCLK is required whenever CS is high. This should be of little consequence,since SCLK is normally always present when interfacing with a DSP.
control via pin 1 and pin 7 (CS and FS or FS only, DSP interface)
Only the TLV2541 is compatible with this mode of operation. The CS input to the ADC can be controlled via ageneral-purpose I/O pin from the DSP. The FS signal from the DSP is connected directly to the FS input of theADC. A falling edge on CS, if used, releases the MSB on the SDO output. When CS is not used, the rising FSedge releases the MSB. The falling edge on the FS input while SCLK is high initiates the cycle. The CS andFS inputs should remain low for the entire cycle time (sample+convert+one SCLK) and can then be released.
reference voltage
An external reference is applied via VREF. The voltage level applied to this pin establishes the upper limit of theanalog inputs to produce a full-scale reading. The value of VREF and the analog input should not exceed thepositive supply or be less than GND, consistent with the specified absolute maximum ratings. The digital outputis at full scale when the input signal is equal to or higher than VREF and at zero when the input signal is equalto or lower than GND.
power down and power up
Autopower down is built into these devices in order to reduce power consumption. The actual power savingsdepends on the inactive time between cycles and the power supply (loading) decoupling/storage capacitors.Power-down takes effect immediately after the conversion is complete. This is fast enough to provide somepower savings between cycles with longer than 1 SCLK inactive time. The device power goes down to 5 µAwithin 0.5 µs. To achieve the lowest power-down current (deep powerdown) of 1 µA requires 2-ms inactive timebetween cycles. The power-down state is initiated at the end of conversion. These devices wake up immediatelyat the next falling edge of CS or the rising edge of FS.
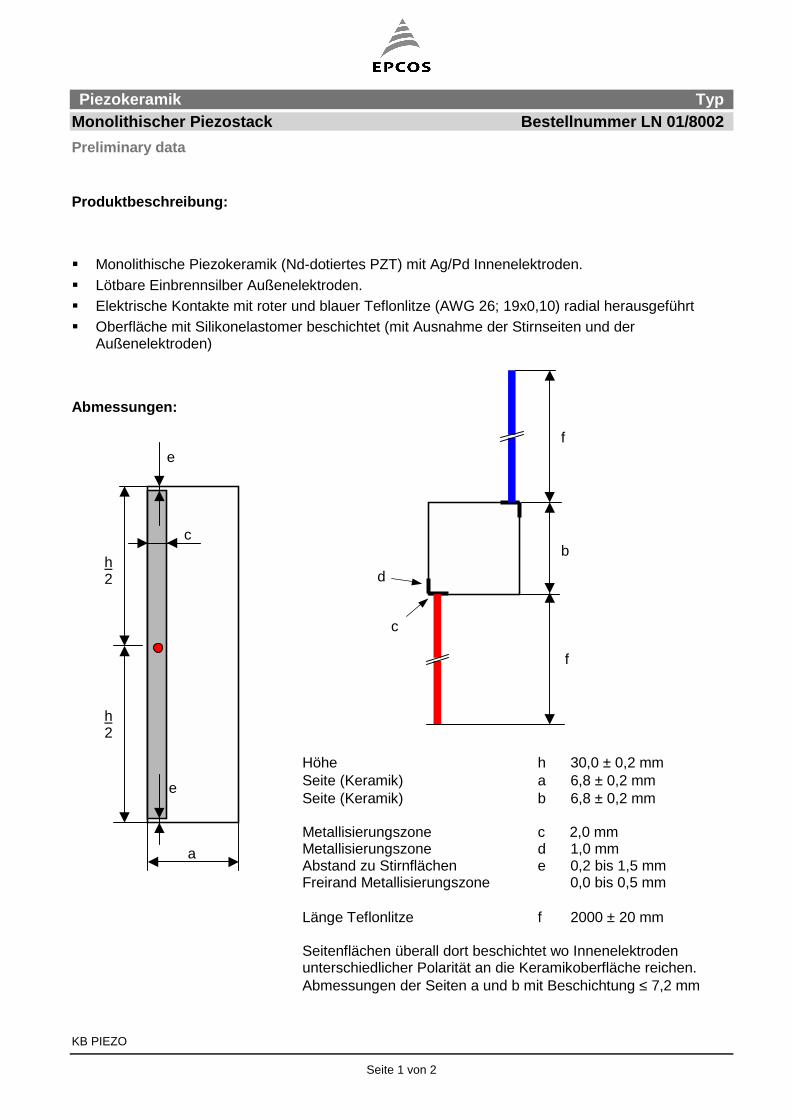
Piezokeramik TypMonolithischer Piezostack Bestellnummer LN 01/8002Preliminary data
KB PIEZO
Seite 1 von 2
Produktbeschreibung:
Monolithische Piezokeramik (Nd-dotiertes PZT) mit Ag/Pd Innenelektroden. Lötbare Einbrennsilber Außenelektroden. Elektrische Kontakte mit roter und blauer Teflonlitze (AWG 26; 19x0,10) radial herausgeführt Oberfläche mit Silikonelastomer beschichtet (mit Ausnahme der Stirnseiten und der
Außenelektroden)
Abmessungen:
a b
Höhe h 30,0 ± 0,2 mmSeite (Keramik) a 6,8 ± 0,2 mmSeite (Keramik) b 6,8 ± 0,2 mm
Metallisierungszone c 2,0 mmMetallisierungszone d 1,0 mmAbstand zu Stirnflächen e 0,2 bis 1,5 mmFreirand Metallisierungszone 0,0 bis 0,5 mm
Länge Teflonlitze f 2000 ± 20 mm
Seitenflächen überall dort beschichtet wo Innenelektrodenunterschiedlicher Polarität an die Keramikoberfläche reichen.Abmessungen der Seiten a und b mit Beschichtung ≤ 7,2 mm
h2
a
c
e
e
c
d
f
h2
f
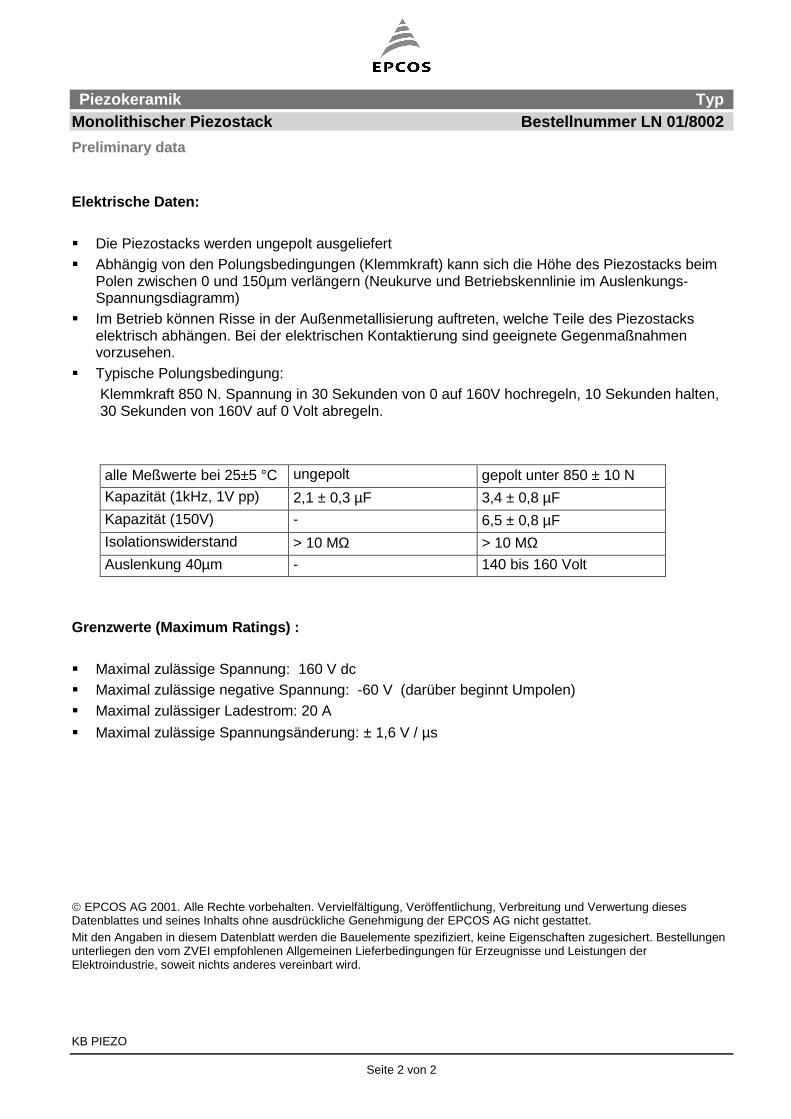
Piezokeramik TypMonolithischer Piezostack Bestellnummer LN 01/8002Preliminary data
KB PIEZO
Seite 2 von 2
Elektrische Daten:
Die Piezostacks werden ungepolt ausgeliefert Abhängig von den Polungsbedingungen (Klemmkraft) kann sich die Höhe des Piezostacks beim
Polen zwischen 0 und 150µm verlängern (Neukurve und Betriebskennlinie im Auslenkungs-Spannungsdiagramm)
Im Betrieb können Risse in der Außenmetallisierung auftreten, welche Teile des Piezostackselektrisch abhängen. Bei der elektrischen Kontaktierung sind geeignete Gegenmaßnahmenvorzusehen.
Typische Polungsbedingung:Klemmkraft 850 N. Spannung in 30 Sekunden von 0 auf 160V hochregeln, 10 Sekunden halten,30 Sekunden von 160V auf 0 Volt abregeln.
alle Meßwerte bei 25±5 °C ungepolt gepolt unter 850 ± 10 NKapazität (1kHz, 1V pp) 2,1 ± 0,3 µF 3,4 ± 0,8 µFKapazität (150V) - 6,5 ± 0,8 µFIsolationswiderstand > 10 MΩ > 10 MΩAuslenkung 40µm - 140 bis 160 Volt
Grenzwerte (Maximum Ratings) :
Maximal zulässige Spannung: 160 V dc Maximal zulässige negative Spannung: -60 V (darüber beginnt Umpolen) Maximal zulässiger Ladestrom: 20 A Maximal zulässige Spannungsänderung: ± 1,6 V / µs
EPCOS AG 2001. Alle Rechte vorbehalten. Vervielfältigung, Veröffentlichung, Verbreitung und Verwertung diesesDatenblattes und seines Inhalts ohne ausdrückliche Genehmigung der EPCOS AG nicht gestattet.Mit den Angaben in diesem Datenblatt werden die Bauelemente spezifiziert, keine Eigenschaften zugesichert. Bestellungenunterliegen den vom ZVEI empfohlenen Allgemeinen Lieferbedingungen für Erzeugnisse und Leistungen derElektroindustrie, soweit nichts anderes vereinbart wird.

12
PSt 150/10/… VS15
General data: see brochure: “Piezomechanics: An Introduction”Prestress force = max. tensile force = approx. 400 NMax. load force: 4000 NMax. force generation: 3500 NOpen loop sensitivity at 1 mV noise for actuator PSt 150/10/7 VS15: 0.05 Nanometer
Type max. stroke length L el. stiffness resonancecapacitance frequency
µm mm µF N/µm kHz
PSt 150/10/200 VS15 27/20 28 3.6 120 30
PSt 150/10/400 VS15 55/40 46 7.2 60 20
PSt 150/10/600 VS15 80/60 64 11 35 14
PSt 150/10/800 VS15 105/80 82 14 25 12
PSt 150/10/100 VS15 130/100 100 18 20 10
PSt 150/10/120 VS15 160/120 118 21 15 8
PSt 150/10/140 VS15 190/140 136 25 14 7
PSt 150/10/160 VS15 210/160 154 28 13 6
PSt 150/10/180 VS15 240/180 172 33 11 5
PSt 150/10/200 VS15 270/200 190 37 10 4
Standard configuration:
Tapped hole in moving endElectrical connection: 1 m coaxial cable RG 178 withBNC connectorOptions:
Coaxial cable RG 178 with LEMOSA connectors00250 or 0S250
Moving end with spherical endpiece VbsMoving end with threaded pin VAgMoving end plane pFThermostable modificationLow temperature modificationUHV compatibilityPosition detection
Accessories see section C
A 2
VbSVAg pF

burster präzisionsmeßtechnik gmbh & co kg . Talstr.1-5 D-76593 Gernsbach (Postfach 1432 D-76587 Gernsbach) Tel. +49-07224-645-0 . Fax 645-88http://www.burster.com . e-mail: [email protected]
ApplicationThe miniature load cells of this type are of a sturdy constructionand made of stainless steel. They have small dimensions andcan therefore be used in various fields of industry and in thelaboratories. The load cells are easy to handle and enable arelatively uncomplicated installation. Because of their smalldimensions they are well-suited for the use in very restrictedstructures for both static and dynamic measurements.As measuring element you can apply these load cells in:
fully automatic production centres measuring and controlling equipment precision mechanics tool manufacturing apparatus engineering etc.
DescriptionThe miniature load cell model 8415 is a flat cylindrical disc, itsbottom is closed with a cover. The load button is integrated inthe load cell.A full bridge circuit is applied on the measuring element. Byapplying force to it, the resistance change of the gages istransformed into an output voltage which is directly proportionalto the measured quantity.The small measured working section of the load cell causes ahigh constancy. The force to be measured has to be introducedin a centric and transversal force-free way. The load cells haveto be mounted on a smooth, plane parallel surface.
Measuring ranges from 0 ... 200 N up to 0 ... 5000 N
Low-priced
Small dimensions
Made of stainless steel
10 mm0 20 mm
Miniature Load CellModel 8415
8415
-E
Code: 8415 EManufacturer: bursterDelivery: ex stock/4 weeksWarranty: 12 monthsIssue: 1.9.2001
CAD data available on
powerPARTS CD-ROM from web2CAD
or online at www.web2cad.com.
See
back side.

Technical Data
E l e c t r i c a l
Bridge resistance: full bridge, foil-type strain gage 350 Ω, nominal
Excitation: max. 5 V DC
Output: 1 mV/V, nominal*
Insulation resistance: > 10 MΩCalibration resistor: 100 kΩ ± 0.1 %
The bridge output voltage, resulting from a shunt of this value, is shown in the calibration certificate.
* Deviations from the stated value are possible.
E n v i r o n m e n t a lTemperature operating: 0 °C ... + 80 °C
Temperature compensated: + 15 °C ... + 70 °C
Temperature effect zero: ≤ ± 1.50 % F.S./50K
Temperature effect span: ≤ + 1.50 % F.S./50K
M e c h a n i c a lNon-linearity:
range ≤ 0 ... 2000 N < 0.5 % F.S.range 0 ... 5000 N < 0.75 % F.S.
Hysteresis:range ≤ 0 ... 2000 N < 0.15 % F.S.range 0 ... 5000 N < 0.25 % F.S.
Non-repeatability: < 0.2 % F.S.
Deflection, full scale: approx. 60 µm
Static overload safe: 150 % over capacity
Dynamic performance:recommended 50 % of capacitymaximum 70 % of capacity
Casing material: High-grade stainless steel 1.4542
Electrical connection:shielded, TPE coated cable with bare ends for soldering
Length approx. 2 m, Bending radius ≥ 10 mm
Protection class: according to DIN 40050 IP 54
Wiring code:White Excitation (positive)Brown Excitation (negative)Yello Signal output (positive)Green Signal output (negative)
Dimensions: see table and scale drawing
Weight: approx. 20 g
Scale Drawing
Order Measuring Dimensions [mm] NaturalCode Range Frequency
ø D1 ø D2 ø D3 H1 H2 [kHz]
8415 - 5200 0 ... 200 N 20 6 16 5.5 7 2.0
8415 - 5500 0 ... 500 N 20 6 16 5.5 7 4.0
8415 - 6001 0 ...1000 N 20 6 16 8 9 6.5
8415 - 6002 0 ...2000 N 20 6 16 8 9 10.5
8415 - 6005 0 ...5000 N 20 6 16 8 9 20.0
8415 E -2 Issue 01.09.2001
OptionStandardization of the sensitivity in the sensorconnection cable to 1.0 mV/V ± 0.5 %. Order code: -V010
Order InformationMiniature load cell,measuring range 0 ... 200 N. Model 8415-5200
(order code see table above)
Miniature load cell,measuring range 0 ... 500 Nstandardization of sensitivityto 1.0 mV/V ± 0.5 %. Model 8415-5500-V010
Technical changes reserved
Special CalibrationCalibration of the load cell separately as well as connected to anindicator is available. Calculation with basic cost and additional cost perpoint. Please state the requested points. Standard is an 11-point-run in20 %-increments up and down.
Order code: 84WKS-8415
AccessoriesMating connector (12 pins) to all bursterinstrumentations in table housing. Order code: 9941
Mounting of mating connectorto conductor cable. Order code: 99004
Amplifiers, sensor supplying instruments and process controllers as e.g.digital measuring indicator, series 9180, modular amplifier,type 9243 or DIGIFORCE® type 9306.
See section 9 of the catalog
DMS SimulatorSupport accessories for creating strain gagesource signals in order to adjust amplifiersand monitors. Model 9405
Load cell drawing can be imported from the CAD-library.The CD-ROM , from web2cad is available free of charge.Data are available also online et www.web2cad.com.

2000 W Peak Power
Output Voltage 0 to
-1000 V & Bipolar
Optional Position Servo-
Control Modules
Optional Display and
Computer Interface
Module
The E-480 high-power ampli-fier/controller is specificallydesigned to drive high-capaci-tance PZT actuators. E-480 isbased on a novel designemploying energy-recoverytechnology and PWM (pulsewidth modulation). Instead ofdissipating the reactive powerin the heat sinks, it is recov-ered so that only the activepower used by the piezo actua-tor has to be supplied. Duringdischarge of the actuator, theenergy not used is returnedand reused to supply theamplifier.
The E-480 can output andsink a peak current of 2000 mAin a voltage range of 0 to-1000 V (depending on connec-tor configuration) and featuresa temperature sensor inputand controller circuit to shutdown the amplifier if the PZTexceeds a maximum tempera-ture threshold.
Because of its high outputcurrent, the E-480 can not beused to operate standard PZTtranslators. It is equipped witha special 8-pin connector. Oneof the pins is connected to theamplifier output (feed voltage,variable between -500 and500 V) the other pins are con-nected to fixed voltages (-500,-250, 0, 250, 500). This designalso allows operation of twoPZT actuators in a bridge.
Standard versions can be oper-ated in two ways:
I. Manual Open-Loop Ope-
ration: The output voltagecan be set by a 10-turn DC-offset potentiometer.
II. External Open-Loop Ope-
ration: The output voltageis controlled by an analogsignal applied to the BNCinput ranging from 0 to 10 Volts. Multiplying by thegain factor of -100, an out-put voltage range of 0 to-1000 Volts results. The DC-offset potentiometer allowscontinuous shifting of theinput range between 0 V to+10 V and -10 V to 0 V (seepage 6.31).
Upgrades
The E-480.00 allows installa-tion of several upgrade optionsfor enhanced versatility (seeOrdering Information).
Two additional modes are pos-sible with versions having theE-509 Sensor & Servo-Con-troller Module upgrade:
I. Manual Closed-Loop Ope-
ration
Displacement of the PZTscan be set by a 10-turn DC-offset potentiometer in therange of zero to nominal dis-placement.
II. External Closed-Loop Ope-
ration
Displacement of the PZT iscontrolled by an analog sig-nal in the range of 0 to+10 V, applied to the BNCinput. The controller is cali-brated in such a way that10 V corresponds to maxi-mum nominal displacementand 0 V corresponds to 0displacement. The DC-off-set potentiometer can beused to add an offset volt-age of 0 to 10 V to the inputsignal.
NotesImportant Calibration Information:Please read details on page 6-41.
High-Power HVPZT Amplifier/
Controller With Energy Recovery
E-480
6-27
E-480.00 with optional E-509.S1 PZT servo-controller (strain gauges) and E-515.03 Display
OrderingInformationE-480.00 High-Power HVPZTAmplifier with Energy Recovery,2000 W, 19” Rackmount
Upgrades
Sensor & Servo-ControllerModules for Closed-Loop PZTOperation (see page 6-36)
E-509.C1A PZT sensor/controller module(capacitive sensor)
E-509.L1PZT sensor/controller module (LVDT sensor)
E-509.S1 PZT sensor/controller module (strain gauge sensor)
Voltage & Position DisplayModule (see page 6-38)
E-515.01Display module for PZT Voltage andDisplacement
Computer Interface and DisplayModule (see page 6-37)
E-516.i320-bit DAC interface/display module,IEEE 488/RS-232
Custom Designs for Volume Buyers
PZT Active Optics / Steering Mirrors
Tutorial: Piezoelectrics...
Capacitive Position Sensors
PZT Control Electronics
MicroPositioners / Hexapod Systems
Photonics Alignment & Packaging Systems
Motor Controllers
Index
PZT Flexure NanoPositioners
http://www.pi.ws
PZT Actuators
http://www.pi.ws
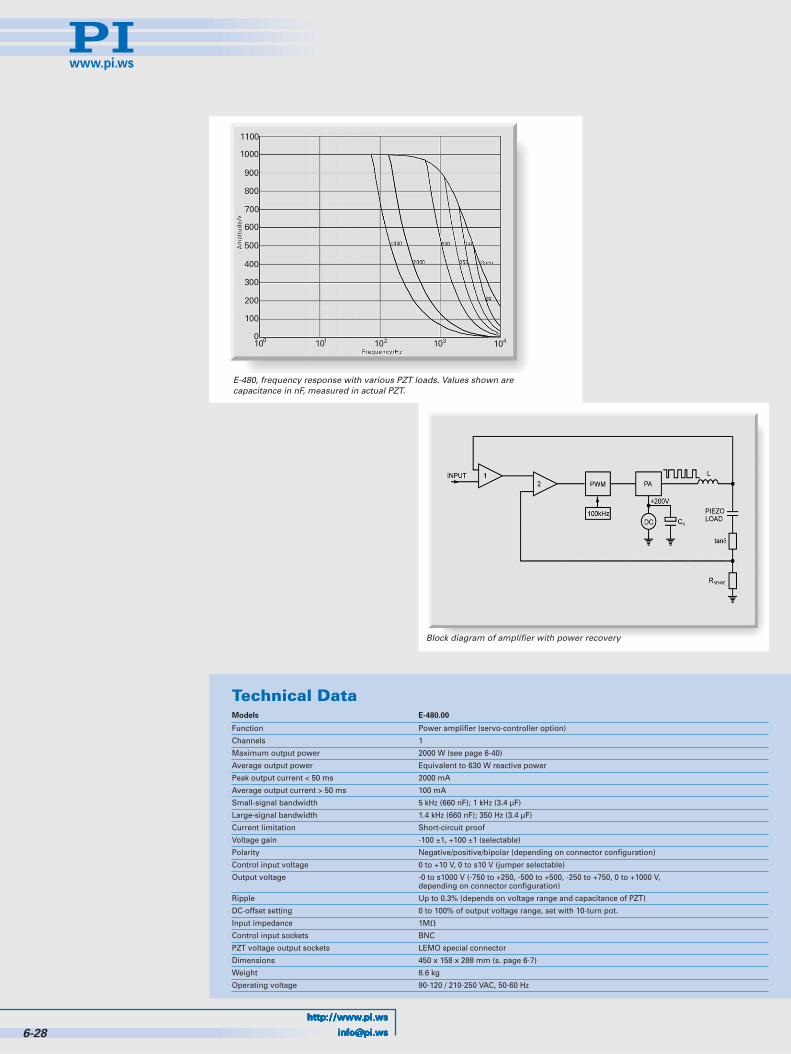
6-28
http://www.pi.ws
http://www.pi.ws
http://www.pi.ws
http://www.pi.ws
http://www.pi.ws
http://www.pi.ws
http://www.pi.ws
http://www.pi.ws
Technical DataModels E-480.00
Function Power amplifier (servo-controller option)
Channels 1
Maximum output power 2000 W (see page 6-40)
Average output power Equivalent to 630 W reactive power
Peak output current < 50 ms 2000 mA
Average output current > 50 ms 100 mA
Small-signal bandwidth 5 kHz (660 nF); 1 kHz (3.4 µF)
Large-signal bandwidth 1.4 kHz (660 nF); 350 Hz (3.4 µF)
Current limitation Short-circuit proof
Voltage gain -100 ±1, +100 ±1 (selectable)
Polarity Negative/positive/bipolar (depending on connector configuration)
Control input voltage 0 to +10 V, 0 to s10 V (jumper selectable)
Output voltage -0 to s1000 V (-750 to +250, -500 to +500, -250 to +750, 0 to +1000 V,depending on connector configuration)
Ripple Up to 0.3% (depends on voltage range and capacitance of PZT)
DC-offset setting 0 to 100% of output voltage range, set with 10-turn pot.
Input impedance 1M
Control input sockets BNC
PZT voltage output sockets LEMO special connector
Dimensions 450 x 158 x 288 mm (s. page 6-7)
Weight 8.6 kg
Operating voltage 90-120 / 210-250 VAC, 50-60 Hz
E-480, frequency response with various PZT loads. Values shown are capacitance in nF, measured in actual PZT.
Block diagram of amplifier with power recovery

BIBLIOGRAFIA
215
BIBLIOGRAFIA
[1] “TESLA Technical Design Report Part II: The Accelerator”, Editors R. Brinkmann,
K. Flöttmann, J. Rossbach, P. Schmüser, N. Walker, H. Weise, DESY 2001-011, ECFA 2001-
209, 2001.
[2] “TESLA Test Facility Design Report”, Editor D. A. Edwards, TESLA-Report, TESLA
95-01, 1995.
[3] AA. VV., “LEP Design Report”, vol. II, Ginevra, Svizzera, 1996.
[4] A. W. Chao, M. Tigner, “Handbook of Accelerator Physics and Engineering”, World
Scientific, Singapore, 1999.
[5] H. Padamsee, J. Knobloch, T. Hays, “RF Superconductivity for Accelerators”, John
Wiley & Sons, New York, Stati Uniti, 1998.
[6] G. Materlik, Th. Tschentscher, “Pert V, The X-ray Free Electron Laser”, TESLA
Technical design report, 2001.
[7] W. Brefeld, B. Faatz et al., “Development of a Femtosecond soft X-ray SASE FEL at
DESY“, TESLA Technical design report, 1995.
[8] J. C. Slater, “Microwave Electronics”, D. Van Nostrand Company, Inc. 1950.
[9] M. Puglisi, CERN Accelerator School 92-03 Vol. I, Oxford, Gran Bretagna, 1992.
[10] A. Facco, “Mechanical mode damping in superconducting low-beta resonators”,
Particle Accelerators, vol. 61, 1998.
[11] S. Simrock, “Overview TTF RF control”, DESY, Aug. 11, 2000.
[12] R. Bandelmann, et al.,”Nb Prototype of the Superstructure for the TESLA Linear
Collider”,in Proc. of the 9th Workshop on RF Superconductivity, Santa Fe,USA, 1999.
[13] L. E. Cross, “Ferroeletric Materials for Eletromechanical Transducer Application”,
Elsevier, New York, 1995.
[14] T. Schilcher, ”Vector-sum Control of Pulsed Accelerating Fields in Lorentz-Force
Detuned Superconducting Cavities”, TESLA-Report, TESLA 98-05, 1998.
[15] S. Michizono, M. Liepe, S. N. Simrock, “Design of Low Level RF Control for the
TESLA Superstructure”, in Proc. of the 2001 Particle Accelerator Conference, Chicago, 2001.

BIBLIOGRAFIA
216
[16] M. U. Liepe, “Superconducting Multicell Cavities for Linear Colliders”,PhD thesis,
Hamburg University, 2001.
[17] S.Simrock at al. ,“Control of microphonics and Lorentz force detuning with a fast
mechanical tuner”, in Proc. of 11th SRF workshop, 2003.
[18] M. Liepe and S. N. Simrock, “Adaptive Feed Forward for the Digital RF Control
System at the TESLA Test Facility”, in Proc. of the 1998 European Particle Accelerator
Conference, Stockholm, Sweden, p. 1735, 1998.
[19] “New Approches to Tuning the TESLA Resonator”,in Proc. of the 9th Workshop on
RF Superconductivity, Santa Fe,USA, 1999.
[20] K. Ogata, “State space analysis of control systems”, prentice-hall, inc., stati uniti,
1985.
[21] S. W. Smith, “The Scientist and Engineer's Guide to Digital Signal Processing”,Sec.
Ed., California Technical Publishing, San Diego, California.
[22] S. Barabaschi, R. Tasselli, “Elementi di servomeccanismi e controlli”, Zanichelli
Bologna 1976.
[23] S.Simrock, “Proton RF control”, DESY , Oct. 27, 2000.
[24] E. Leff, “Introduction to feedback control system”, McGraw Hill 1976.
[25] J. Encinas, “Phase Locked Loops”, Chapman & Hall 1993.
[26] P. Gray, R. Meyer, “Analysis and design of analog integrated circuits”, Wiley 1984.
[27] U. Kelin, D. Proch, in Proceeding of Conference of Future Possibilities for Electron
Accelerators, Charlottesville, pp N1-17, 1979.
[28] RF engineering for particle accelerators” in Proc. of CERN Accelerator School,
Exeter College, Oxford UK, 1991.
[29] “M.Liepe, W.D. Moeller, S.N. Simrock, “Dynamic Lorentz Force compensation with
a Fast Piezoelectric Tuner”, in Proc. of Particle Accelerator Conference, Chicago 2001.
[30] M. Fouaidy, N. Hammoudi, “Characterization of piezoelectric actuators used for SRF
cavities active tuning at low temperature”, IPN Orsay.
[31] L. Trevisan, R. Bordoni, “Misure Gain/Phase in radiofrequenza” Ed.Clued, 1996.
[32] R. Bandelmann, et al., ”Nb Prototype of the Superstructure for the TESLA Linear
Collider”, in Proc. of the 9th Workshop on RF Superconductivity, Santa Fe, USA, 1999.
[33] G. Fradegrada, P. Neroni, P. Capra, “Sistemi di controllo delle vibrazioni”, pitagora
editrice, Bologna, 1986.
BIBLIOGRAFIA
217
[34] M. Doleans, “Etudes dans les cavities supraconductrices elliptique a beta-reduit”,
PhD Thesis, Universite Paris 7, 2003.
[35] W. Magnus. And S. Winkler, “Floquet’s Theorem” §1.2 “Hill equation” New York
Dover, pp3-8, 1979.
[36] “User's Guide for the POISSON/SUPERFISH Group of Codes”, Accelerator Theorie
and Simulatoin Group, AT-6, Los Alamos National Laboratory, LA-UR-87-115, Los Alamos,
1987.
[37] “Low Level Measurements”, Keithley 5th edition, 1998.
[38] A. Nannini, P. Bruschi, “Sensori e rivelatori”, dispense, 2000.
[39] A. Massarotti, M. Pugliesi, “Elementi di radiotecnica”, Zanichelli Bologna, 1964
[40] S. Goloborodko, G. Grygiel et al., “DOOCS: an object oriented control system as
integrating part for the TTF linac”, TESLA Technical documentation
BIBLIOGRAFIA
218
Siti web:
http://www.infn.it/
http://wwwlasa.mi.infn.it/
TESLA:
http://tesla.desy.de/
http://desy.de/
http://tesla.desy.de/doocs/
ATTUATORI PIEZOELETTRICI
http://www.piezomechanik.com/
http://www.physikinstrumente.com/
http://www.epcos.com/
http://www.noliac.com/
LOAD CELL E STRAIN GAUGE
http://www.burster.com/
http://www.futek.com/
http://www.luchsinger.it/
DSP E FPGA
http://dspvillage.ti.com/
http://www.xilinx.com/
http://www.altera.com/
TEORIA PLL
http://www.complextoreal.com/
PROGETTO SNS
http://www.sns.gov/
COLLABORAZIONI
http://www.desy.de/
http://www.in2p3.fr/
http://www.cea.fr/
RINGRAZIAMENTI
219
RINGRAZIAMENTI
Ed eccomi, finalmente, alla conclusione! è stato un lavoro intenso, ma soprattutto
stimolante e per me ricco di nuove e positive esperienze.
Voglio innanzitutto ringraziare la mia famiglia, per la fiducia e l’affetto che mi ha
sempre dimostrato, durante l’intero corso dei miei studi.
Molto di tutto questo lo devo a Chiara, che, con entusiasmo, ha condiviso e condivide
con me gli alti e bassi di questo lavoro, così come della vita di tutti i giorni. Si è presa
cura di me, come amante e come amica, e per questo, con amore, la ringrazio.
Infine ringrazio di cuore tutte le persone con cui ho potuto collaborare per lo sviluppo
di questo lavoro di tesi; ho avuto la fortuna di poter attingere, per tutto questo tempo,
alla loro disponibilità, competenza ed entusiasmo.
Voglio ricordare in particolare Angelo Bosotti, Stefano Andreoli, Danilo Barni, Fabio
Puricelli, Roberto Paulon, Massimo Fusetti, Paolo Michelato, Carlo Pagani, Lutz Lilje
e Przemek Sekalski.
A tutti,
Grazie