TECNICHE DI PILOTAGGIO DELL INVERTER TRIFASE Elettrici II/Complementary... · Nell’ipotesi di...
34
Tecniche di pilotaggio dell'inverter trifase 28/02/01 22.39 TECNICHE DI PILOTAGGIO DELL’INVERTER TRIFASE 1 NOZIONI DI BASE Lo schema di un inverter trifase a tensione impressa è illustrato in Fig. 1.1. Esso è composto da tre rami (insiemi di due interruttori bidirezionali collegati in serie) alimentati in parallelo da una sorgente in continua. A ciascun ramo fa capo un morsetto del carico trifase, alimentato dal centrale tra i due interruttori. m Sa + a Vdc b c Sa − Sb + Sb − Sc + Sc − Da + Da − Db + Db − Dc + Dc − Fig. 1.1 - Schema dell'inverter trifase Dal punto di vista funzionale, esso è un convertitore DC/AC, in grado di trasformare, con opportuno comando degli interruttori di ramo, la continua in ingresso in un sistema trifase di tensioni alternate in uscita. Per evitare il corto circuito della sorgente continua in ingresso, il comando dei due interruttori di ramo deve essere di tipo complementare, come illustrato in Fig. 1.2. d k V dc Fig. 1.2 – Comando di ramo Negli interruttori reali (tempi di apertura e chiusura non nulli) è previsto un tempo morto (“dead time”) per garantire che ciascun interruttore di ramo sia effettivamente aperto quando l’altro chiude. Nelle considerazioni seguenti consideriamo interruttori ideali (tempi di apertura e chiusura nulli) trascurando il tempo morto. In queste condizioni, dal punto di vista logico, il comportamento di ciascun ramo è definito da un solo segnale di comando (d). 2 CALCOLO DELLE TENSIONI DI USCITA Per determinare le tensioni fornite dall’inverter trifase facciamo riferimento allo schema in Fig. 2.3, dove è stato ricavato il punto centrale (0) dell’alimentazione continua (che utilizzeremo
Transcript of TECNICHE DI PILOTAGGIO DELL INVERTER TRIFASE Elettrici II/Complementary... · Nell’ipotesi di...

Tecniche di pilotaggio dell'inverter trifase 28/02/01 22.39
TECNICHE DI PILOTAGGIO DELL’INVERTER TRIFASE
1 NOZIONI DI BASE
Lo schema di un inverter trifase a tensione impressa è illustrato in Fig. 1.1. Esso è composto datre rami (insiemi di due interruttori bidirezionali collegati in serie) alimentati in parallelo dauna sorgente in continua. A ciascun ramo fa capo un morsetto del carico trifase, alimentato dalcentrale tra i due interruttori.
m
Sa +
a
Vdc
b c
Sa −
Sb +
Sb−
Sc +
Sc−
Da+
Da−
Db +
Db −
Dc+
Dc−
Fig. 1.1 - Schema dell'inverter trifase
Dal punto di vista funzionale, esso è un convertitore DC/AC, in grado di trasformare, conopportuno comando degli interruttori di ramo, la continua in ingresso in un sistema trifase ditensioni alternate in uscita.
Per evitare il corto circuito della sorgente continua in ingresso, il comando dei dueinterruttori di ramo deve essere di tipo complementare, come illustrato in Fig. 1.2.
dk
Vdc
Fig. 1.2 – Comando di ramo
Negli interruttori reali (tempi di apertura e chiusura non nulli) è previsto un tempo morto(“dead time”) per garantire che ciascun interruttore di ramo sia effettivamente aperto quandol’altro chiude. Nelle considerazioni seguenti consideriamo interruttori ideali (tempi di aperturae chiusura nulli) trascurando il tempo morto. In queste condizioni, dal punto di vista logico, ilcomportamento di ciascun ramo è definito da un solo segnale di comando (d).
2 CALCOLO DELLE TENSIONI DI USCITA
Per determinare le tensioni fornite dall’inverter trifase facciamo riferimento allo schema inFig. 2.3, dove è stato ricavato il punto centrale (0) dell’alimentazione continua (che utilizzeremo

2 2 Calcolo delle tensioni di uscita
come potenziale di riferimento) e si è considerato il caso generale di un carico collegato a stellacon neutro isolato.
d1
2dcV
0
2dcV
d2 d3
Va0Vam
Vab
m
a b c
Da+
Da−
Db+
Db−
Dc+
Dc−
Vm0
Fig. 2.3 - Tensioni di uscita dell’inverter trifase
Si possono distinguere:• le tensioni di ramo Va0, Vb0, Vc0, che sono direttamente individuate dal comando di ramo:
20
21
20
21
20
21
0303
0202
0101
dcc
dcc
dcb
dcb
dca
dca
VVd
VVd
VVd
VVd
VVd
VVd
→→
→→
→→
====
====
====
;
;
;
(2.1)
• le tensioni concatenate Vab, Vbc, Vca, ottenibili come combinazione delle tensioni di ramo:
00
00
00
acca
cbbc
baab
VVV
VVV
VVV
−=
−=
−=
(2.2)
• le tensioni di fase del carico Vam, Vbm, Vcm;• la tensione del centro stella del carico rispetto al potenziale di riferimento Vm0.
Per quanto concerne l’individuazione delle tensioni di fase, esse possono essere espressecome:
00
00
00
mccm
mbbm
maam
VVV
VVV
VVV
−=
−=
−=
(2.3)
In queste relazioni occorre determinare il potenziale (incognito) del centro stella.
Scomposizione in serie di Fourier 3
Sommando membro a membro si ricava:
( ) 0000 3 mcbacmbmam VVVVVVV −++=++ (2.4)
Nell’ipotesi di carico trifase simmetrico collegato a stella con neutro isolato, è facile dimostrare1
che la somma delle tensioni di fase è nulla:
0=++ cmbmam VVV (2.5)
da cui si ricava:
( )00031
cbamo VVVV ++= (2.6)
Pertanto, note le tensioni di ramo (dal comando), si può calcolare il potenziale del centrostella con la (2.6) e quindi le tensioni di fase dalle (2.3).
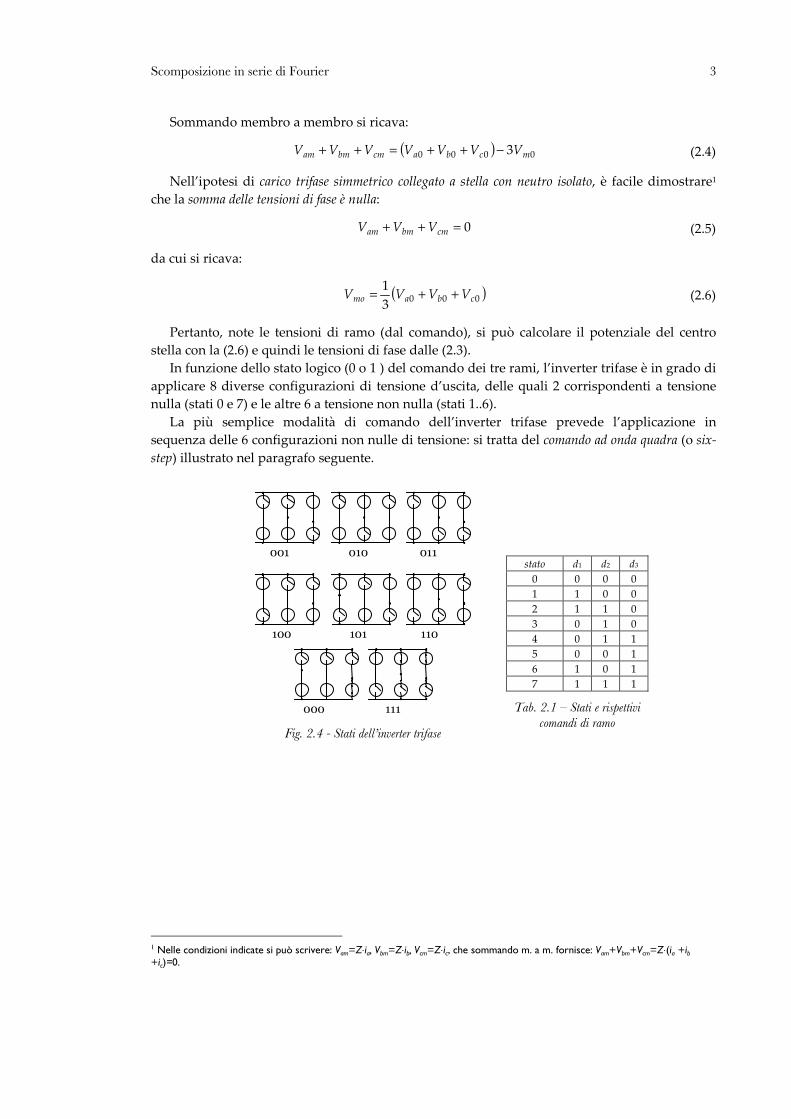
In funzione dello stato logico (0 o 1 ) del comando dei tre rami, l’inverter trifase è in grado diapplicare 8 diverse configurazioni di tensione d’uscita, delle quali 2 corrispondenti a tensionenulla (stati 0 e 7) e le altre 6 a tensione non nulla (stati 1..6).
La più semplice modalità di comando dell’inverter trifase prevede l’applicazione insequenza delle 6 configurazioni non nulle di tensione: si tratta del comando ad onda quadra (o six-step) illustrato nel paragrafo seguente.
stato d1 d2 d3
0 0 0 01 1 0 02 1 1 03 0 1 04 0 1 15 0 0 16 1 0 17 1 1 1
001 011
100 101 110
010
000 111
Fig. 2.4 - Stati dell’inverter trifase
Tab. 2.1 – Stati e rispettivicomandi di ramo
1 Nelle condizioni indicate si può scrivere: Vam=Z⋅ia, Vbm=Z⋅ib, Vcm=Z⋅ic, che sommando m. a m. fornisce: Vam+Vbm+Vcm=Z⋅(ia +ib+ic)=0.
4 3 Comando ad onda quadra (Six Step)
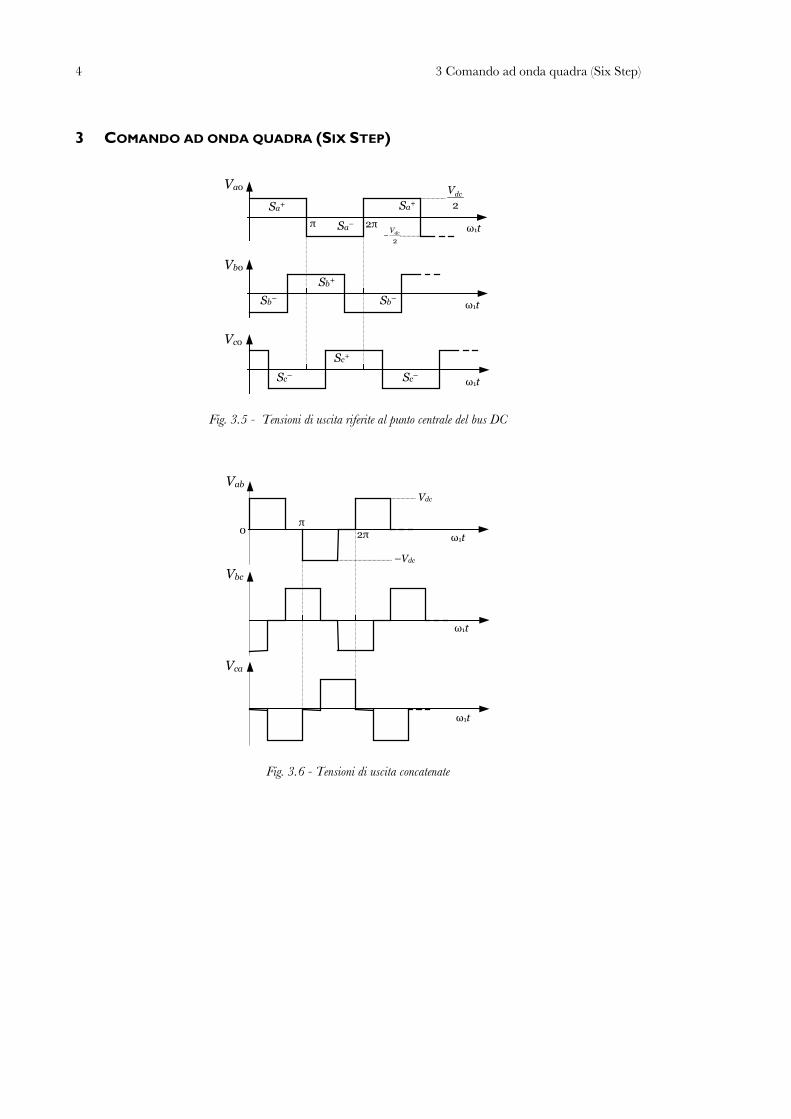
3 COMANDO AD ONDA QUADRA (SIX STEP)
Va0
ω1tπ 2π
Sa+
Sa–
Sa+
Vb0
Vc0
ω1t
ω1t
Sb+
Sb–Sb–
Sc+
Sc–Sc–
2dcV
2dcV−
Fig. 3.5 - Tensioni di uscita riferite al punto centrale del bus DC
ω1t
π2π
Vab
Vdc
ω1t
ω1t
–Vdc
Vbc
Vca
0
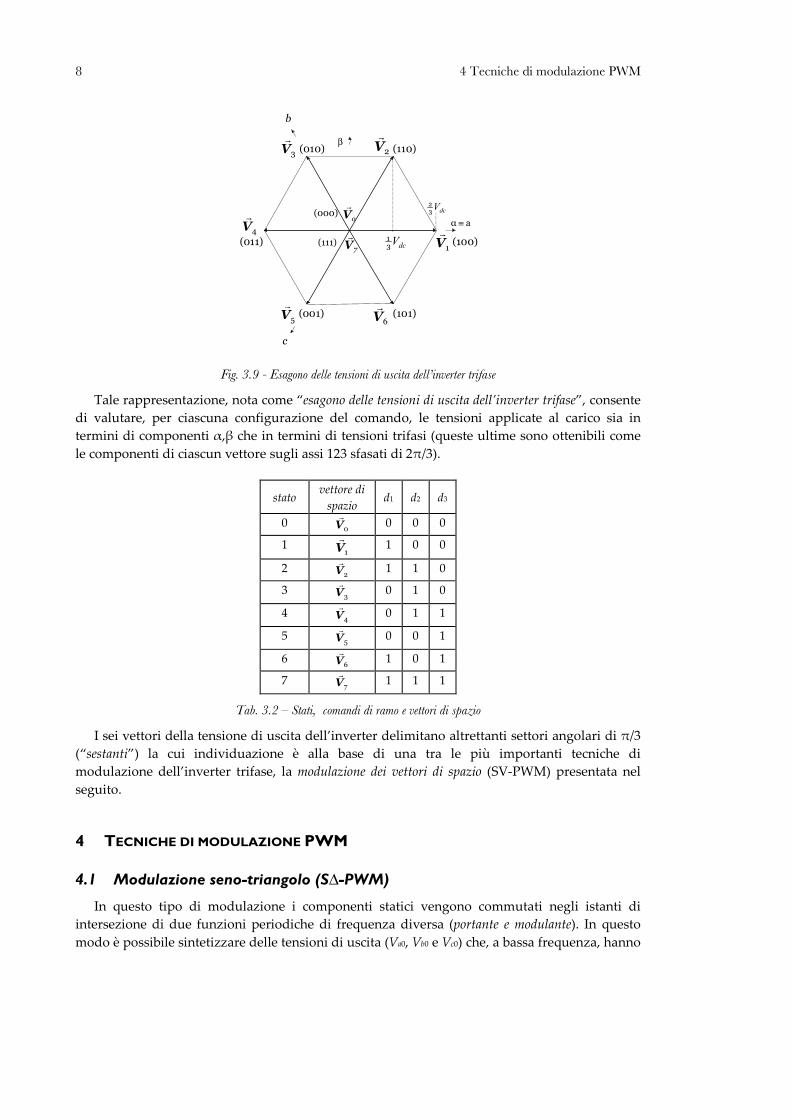
Fig. 3.6 - Tensioni di uscita concatenate

Scomposizione in serie di Fourier 5
3.1 Scomposizione in serie di Fourier
3.1.1 Tensioni di uscita riferite al punto centrale del bus DC
( ) ( ) ( ) ( ) ( )
++++= ...tωtωtωtω
Vπ
tv dca 11110 7
715
513
31
24
sinsinsinsin
( ) ( )
+
−+
+++
−= ...πtωπtωtωπtωV
πtv dc
b 327
71
325
513
31
32
24
11110 sinsinsinsin
( ) ( )
+
−+
+++
−= ...πtωπtωtωπtω
Vπ
tv dcc 3
4771
345
513
31
34
24
11110 sinsinsinsin
(3.7)
Sono presenti soltanto le armoniche dispari.
k = 6 j + 1 sequenze direttek = 6 j + 3 sequenze omopolari j = 0, 1, 2, ...k = 6 j + 5 sequenze inverse
3.1.2 Tensioni di uscita concatenate
( )
+
+−
+−
+= K
67
71
65
51
6234
111πtωπtωπtωV
πtv dc
ab sinsinsin
( )
+
−
+−
+
+−
−+= L
32
67
71
32
65
51
32
6234
111ππtωππtωππtωV
πtv dc
bc sinsinsin
( )
+
−
+−
+
+−
−+= K
34
67
71
34
65
51
34
6234
111ππtωππtωππtωV
πtv dc
ca sinsinsin
(3.8)
Non sono presenti le sequenze omopolari nelle tensioni concatenate.
3.1.3 Tensione del centro stella del carico riferita al punto centrale del bus DC
( ) ( ) ( ) ( )( )tvtvtvtv cbam 0000 31 ++= (3.9)

6 3 Comando ad onda quadra (Six Step)
( ) ( ) ( ) ( )
+++= Ltωtωtω
Vπ
tv dcm 1110 15
1519
913
31
24
sinsinsin (3.10)
Sono presenti soltanto le armoniche multiple di tre.
3.1.4 Tensioni di fase del carico
+++= L)sin()sin()sin()( ttt
Vv dc
am 111 ω771ω5
51ω
2π4
t
+
−+
++
−= L
3π2ω7
71
3π2ω5
51
3π2ω
2π4
111 tttVv dcbm sinsinsin)(t (3.11)
+
−+
++
−= L
3π4ω7
71
3π4ω5
51
3π4ω
2π4
111 tttV
v dccm sinsinsin)(t
Non sono presenti le armoniche multiple di tre nelle tensioni di fase.
Riepilogo delle nozioni fondamentali:
- È possibile controllare la frequenza fondamentale π2ω1
1 =f .
- Non è possibile controllare l’ampiezza della fondamentale:
- ampiezza 1a armonica della tensione di fase del carico dcdc
f VV
V 63602π
41 .ˆ ≅=
- ampiezza 1a armonica della tensione di linea del carico dcdc
l VV
V 1132π
41 .ˆ ≅=
- ampiezza 1a armonica della tensione di uscita dell’inverter (riferita al centrale del bus
DC) 2π
40
1 dcf
VV =ˆ .

Rappresentazione vettoriale della tensione di uscita 7
3.2 Rappresentazione vettoriale della tensione di uscita
Va0
1
Vb0
Vc0
1 1
0 0 0
1 1 1
1 1 1
0 0 0
0 0 0
ω1t
2dcV
2ππ
1 2 3 4 5stato 6
ω1t
ω1t
2dcV
−
Fig. 3.7 – Stati dell’inverter e tensioni ai morsetti nel comando “six-step”
Vm0
ω1t
Vam
Vbm
Vcm
100
110101
010011
001
π 2π
ω1t
ω1t
ω1t
6dcV
1 2 3 4 5stato 6
3
2 dcV
Fig. 3.8 – Stati dell’inverter e tensioni sul carico nel comando “six- step”
Se si considerano le 6+2 possibili configurazioni delle tensioni di fase applicate al caricodall’inverter trifase (nelle figure precedenti sono riportate le 6 configurazioni non nulle), e siapplica a ciascuna di esse la trasformazione di fasi2 (abc)→(α,β), si ottengono altrettanti vettori dispazio (ciascuno caratterizzato da una coppia di componenti α,β) la cui rappresentazione nelpiano complesso è indicata in figura:
2 Trasformazione a potenza di fase costante.
8 4 Tecniche di modulazione PWM
(100)
(110) (010)
(011)
(001) (101)
α ≡ a
β
b
c
1Vr
2Vr
3Vr
4Vr
5Vr
6Vr
(111)
(000) dcV32
dcV31
oVr
7Vr
Fig. 3.9 - Esagono delle tensioni di uscita dell’inverter trifase
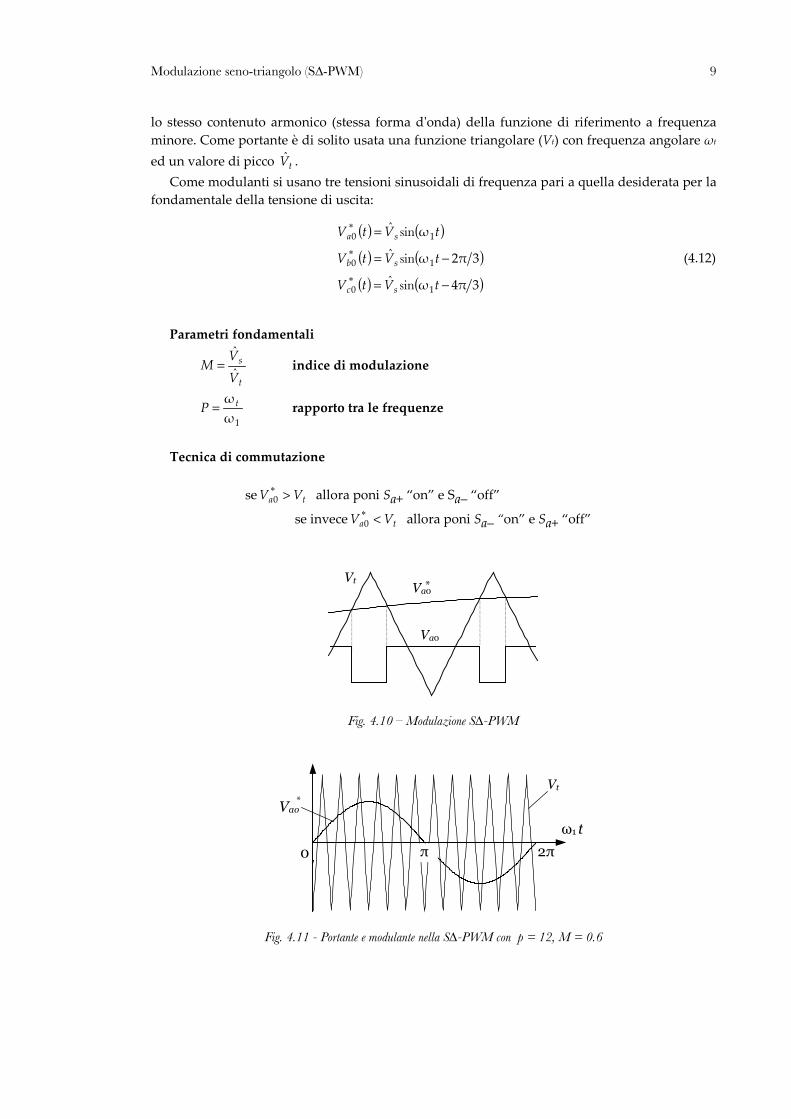
Tale rappresentazione, nota come “esagono delle tensioni di uscita dell’inverter trifase”, consentedi valutare, per ciascuna configurazione del comando, le tensioni applicate al carico sia intermini di componenti α,β che in termini di tensioni trifasi (queste ultime sono ottenibili comele componenti di ciascun vettore sugli assi 123 sfasati di 2π/3).
statovettore di
spaziod1 d2 d3
00Vr 0 0 0
11Vr 1 0 0
22Vr 1 1 0
33Vr 0 1 0
44Vr 0 1 1
55Vr 0 0 1
66Vr 1 0 1
77Vr 1 1 1
Tab. 3.2 – Stati, comandi di ramo e vettori di spazio
I sei vettori della tensione di uscita dell’inverter delimitano altrettanti settori angolari di π/3(“sestanti”) la cui individuazione è alla base di una tra le più importanti tecniche dimodulazione dell’inverter trifase, la modulazione dei vettori di spazio (SV-PWM) presentata nelseguito.
4 TECNICHE DI MODULAZIONE PWM
4.1 Modulazione seno-triangolo (S∆-PWM)
In questo tipo di modulazione i componenti statici vengono commutati negli istanti diintersezione di due funzioni periodiche di frequenza diversa (portante e modulante). In questomodo è possibile sintetizzare delle tensioni di uscita (Va0, Vb0 e Vc0) che, a bassa frequenza, hanno
Modulazione seno-triangolo (S∆-PWM) 9
lo stesso contenuto armonico (stessa forma d'onda) della funzione di riferimento a frequenzaminore. Come portante è di solito usata una funzione triangolare (Vt) con frequenza angolare ωt
ed un valore di picco tV̂ .Come modulanti si usano tre tensioni sinusoidali di frequenza pari a quella desiderata per la
fondamentale della tensione di uscita:
( ) ( )( ) ( )( ) ( )3π4ω
3π2ω
ω
10
10
10
−=
−=
=
tVtV
tVtV
tVtV
sc
sb
sa
sinˆ
sinˆ
sinˆ
*
*
*
(4.12)
Parametri fondamentali
t
s
VV
Mˆ
ˆ= indice di modulazione
1ωω tP = rapporto tra le frequenze
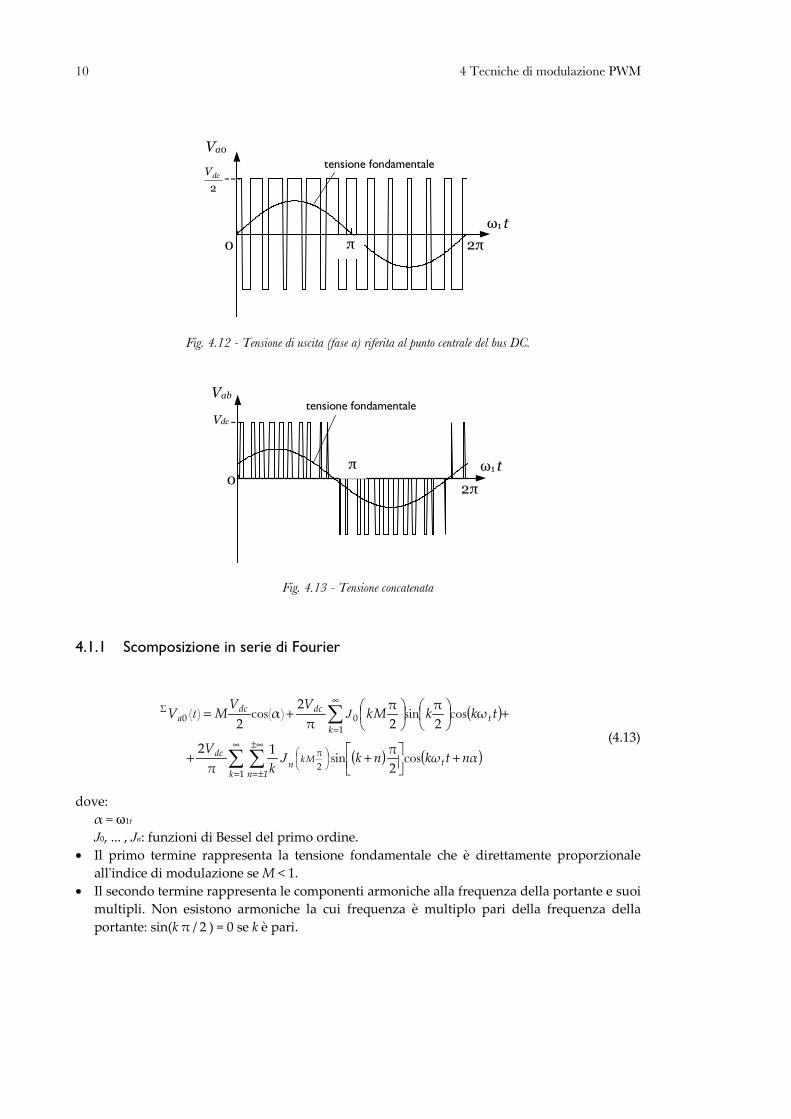
Tecnica di commutazione
se ta VV >*0 allora poni Sa+ “on” e Sa‒ “off”
se invece ta VV <*0 allora poni Sa‒ “on” e Sa+ “off”
Va0Vt *
Va0
Fig. 4.10 – Modulazione S∆-PWM
Vt
Vao*
0 2ππ
ω1 t
Fig. 4.11 - Portante e modulante nella S∆-PWM con p = 12, M = 0.6
10 4 Tecniche di modulazione PWM
Va0
2dcV
tensione fondamentale
0 2ππ
ω1 t
Fig. 4.12 - Tensione di uscita (fase a) riferita al punto centrale del bus DC.
Vab
Vdc
tensione fondamentale
02π
π ω1 t
Fig. 4.13 - Tensione concatenata
4.1.1 Scomposizione in serie di Fourier
( )+
+= ∑
∞
=tkkMk
VVMV t
k
dcdca ω
2π
2π
π2
α2 1
00Σ cossin)cos()( Jt
( ) ( )nαtkωπnkkπ
Vt
k 1n
πMkndc +
++ ∑ ∑
∞
=
±∞
±=
cossin
212
12
J(4.13)
dove:α = ω1t
J0, ... , Jn: funzioni di Bessel del primo ordine.• Il primo termine rappresenta la tensione fondamentale che è direttamente proporzionale
all'indice di modulazione se M < 1.• Il secondo termine rappresenta le componenti armoniche alla frequenza della portante e suoi
multipli. Non esistono armoniche la cui frequenza è multiplo pari della frequenza dellaportante: sin(kπ / 2 ) = 0 se k è pari.

Modulazione seno-triangolo (S∆-PWM) 11
• Il terzo termine rappresenta le bande di armoniche centrate sulle frequenze multipledella frequenza della portante. In accordo con il termine sin[(k + n )π / 2 ] si ha:- per k dispari, la banda presenta solo armoniche pari;- per k pari, la banda presenta solo armoniche dispari.Poiché l'armonica dominante si ha per ω = ωt, si prende un rapporto di frequenze p multiplo
di tre, in modo tale che l'armonica dominante formi una sequenza omopolare (terne di correntiomopolari non possono circolare).
tensionep.u.
1
0.6
0.2
ω1
ω1 ωt 2ωt 3ωt ω
Fig. 4.14 - Tipico spettro della modulazione S∆-PWM (M = 0.8)
dc
ak
V
V̂ 0 0.5
0.4
0.3
0.2
0.1
0 0.2 0.4 0.6 0.8 1.0
k = 2p± 1
k = 3p± 2
indice di modulazione
k = 1
k = p±2
M
(fondamentale)
Fig. 4.15 - Ampiezza relativa delle armoniche in funzione dell'indice di modulazione (tensione di uscita dell’inverter riferita al centrale del bus DC).
Per M = 1, si ha il massimo valore della tensione fondamentale, che è soltanto il 78.5% dellamassima tensione fondamentale che si può avere dall'inverter (con la modulazione six step):
( ) ( )( )
( )7850
4π
2π4
2 101
01
01
101 .
ˆ
ˆˆ;ˆ ==→==
=
−−=
Ma
STEPSIXadcSTEPSIXa
dcMa
V
VVV
VV 3 (4.14)
3 Queste relazioni valgono anche per la tensione di fase del carico, la cui prima armonica ha la stessa ampiezza della tensione diuscita dell’inverter riferita al centrale del DC bus.

12 4 Tecniche di modulazione PWM
4.1.2 Sovra-modulazione ( M > 1 )
Per sfruttare meglio la tensione continua disponibile si può operare con M > 1. All'aumentaredi M alcuni impulsi vengono eliminati e per un certo valore di M si torna alla modulazione “sixstep” con lo svantaggio di ritrovare le armoniche a bassa frequenza nella tensione di uscita.
VtVa0*
ω1 t0
2ππ
Va0
2dcV
ω1 t0
2ππ
Fig. 4.16 - S∆-PWM con p = 12, M = 1.1
Vt
Va0
0
2ππ
*
ω1 t
Va0
2dcV
02ππ
ω1 t
Fig. 4.17 - S∆-PWM con p = 12, M = 5
M
0.866
1 3.24
1.10
dc
l
V
V̂1
lineare sovramodulazione (six steps)onda quadra
TEORICO
Fig. 4.18 - Ampiezza della 1a armonica della tensione concatenata in funzione dell'indice di modulazione (p = 15)

Modulazione seno-triangolo (S∆-PWM) 13
In pratica, quando un interruttore statico viene commutato, non è possibile commutarloulteriormente prima di un determinato intervallo di tempo che dipende dal suo tempo di“recovery”. Cioè esiste una durata minima d'impulso nella forma d'onda della tensione. Negliinverter è quindi sempre presente un circuito di “lockout”. Ciò determina dei salti di tensioneall'estremità della zona lineare e nella zona di sovra-modulazione.
1.2
1.0
0.8
0.6
0.4
0.2
0.80.60.40.20 1.0 1.2 1.4 1.6 1.8 2.0 M
modulazione lineare sovramodulazione
diminuzionedegli impulsi
(passaggio all'onda quadra)
k=1
k=3
k=5
k=7
diminuzionedegli impulsi
2dc
k
VV
Fig. 4.19 - Andamento reale delle tensioni armoniche in funzione dell'indice di modulazione, in presenza del circuito di lockout
4.1.3 Distorsione della modulante
Per sfruttare meglio la tensione continua disponibile si può inserire una distorsione nelletensioni di riferimento modulanti. In genere viene usata una terza armonica in quanto, essendoomopolare, non influisce sulla corrente del carico4:
( ) ( ) ( )tVtVtV SSa 13110 ω3ω sinˆsinˆ* += (4.15)
Con 63 tS VV ˆˆ = , l’ampiezza della fondamentale della tensione di uscita può raggiungere ilvalore 1.15 Vdc/2.
63t
SV
Vˆ
ˆ =t
S
VV
Mˆ
ˆ1=
4 Nelle tensioni di fase non ci sono terze armoniche poiché, come visto nel 6-step, anche se nella vao c’è la terza e le multiple,queste sono anche nella vmo e facendo vam=vao–vmo si eliminano. Anche nelle concatenate le terze armoniche si elidono (ad es.vab=vao–vbo). Quindi anche con collegamento a triangolo non si hanno tensioni impresse e quindi correnti di terza armonica.
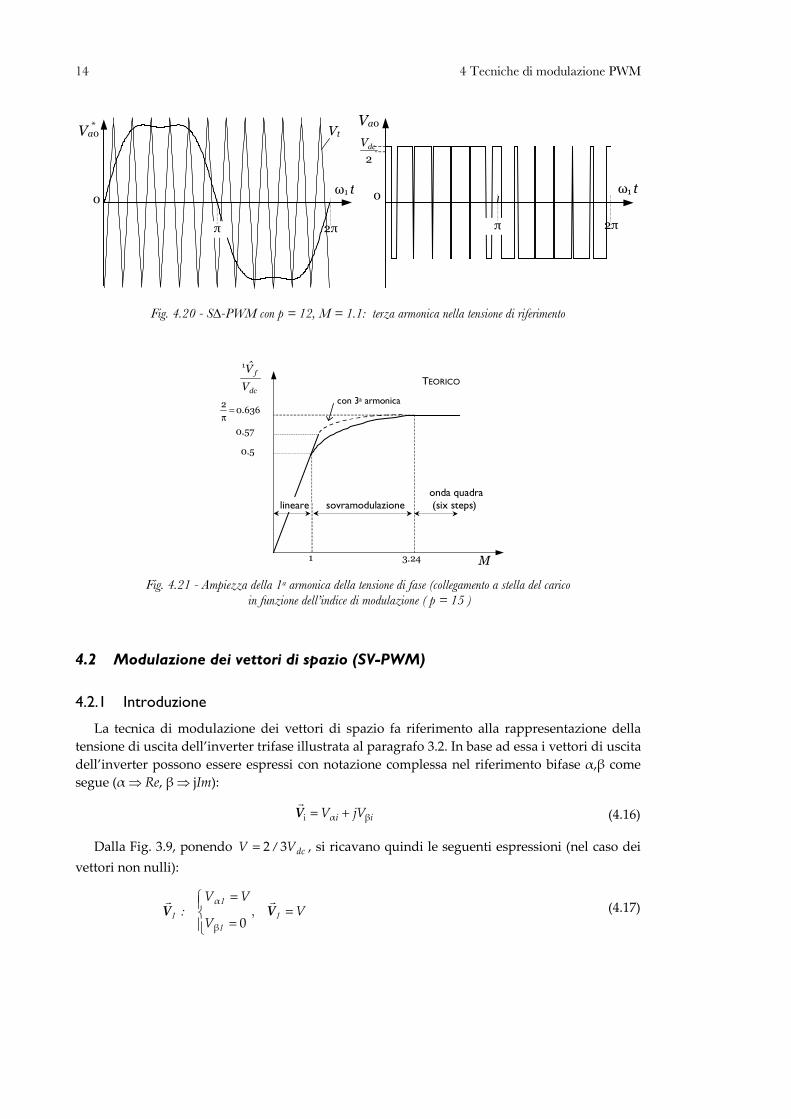
14 4 Tecniche di modulazione PWM
VtVa0*
0
2ππ
ω1 t
Va0
2dcV
0
2ππ
ω1 t
Fig. 4.20 - S∆-PWM con p = 12, M = 1.1: terza armonica nella tensione di riferimento
M
0.5
1 3.24
lineare sovramodulazione (six steps)onda quadra
0.57
con 3a armonica6360
2.=
π
dc
f
V
V̂1
TEORICO
Fig. 4.21 - Ampiezza della 1a armonica della tensione di fase (collegamento a stella del carico in funzione dell’indice di modulazione ( p = 15 )
4.2 Modulazione dei vettori di spazio (SV-PWM)
4.2.1 Introduzione
La tecnica di modulazione dei vettori di spazio fa riferimento alla rappresentazione dellatensione di uscita dell’inverter trifase illustrata al paragrafo 3.2. In base ad essa i vettori di uscitadell’inverter possono essere espressi con notazione complessa nel riferimento bifase α,β comesegue (α ⇒ Re, β ⇒ jIm):
ii jVV βα +=iVr
(4.16)
Dalla Fig. 3.9, ponendo dcVV 32 /= , si ricavano quindi le seguenti espressioni (nel caso deivettori non nulli):
VV
VV=
=
=1
1
1
1 : VVrr
,0β
α (4.17)

Modulazione dei vettori di spazio (SV-PWM) 15
( )( )
VjVV
VV
+=
=
=
23
21
3π
3π
β
α2
2
2
2 : VVrr
,/sin
/cos
( )( )
VjVV
VV
+−=
=
−=
23
21
3π
3π3
3β
3α3 VV
rr,
/sin
/cos:
VV
VV−=
=
−=4
4β
4α4 0
VVrr
,:
( )( )
VjVV
VV
−−=
−=
−=
23
21
3π
3π5
5β
5α5 VV
rr,
/sin
/cos:
( )( )
VjVV
VV
−=
=
−=
23
21
3π
3π6
6β
6α6 VV
rr,
/sin
/cos:
Nella modulazione dei vettori di spazio, la sintesi del generico vettore di tensione ( *Vr
,“tensione di riferimento”) avviene modulando tra i vettori di uscita dell'inverter che delimitanociascun sestante ed il vettore nullo, come illustrato in Fig. 4.22.
iVr
1+iVr
*Vr
Fig. 4.22 - Sintesi del vettore di tensione nello SV-PWM
4.2.2 Calcolo del settore angolare
Per il calcolo del settore angolare si consideri il sistema di assi xyz tra loro sfasati di 2π/3 edisposti in modo da rappresentare le bisettrici rispettivamente dei settori delimitati da 32 VV
rr−
(asse x), 54 VVrr
− (asse y) e da 16 VVrr
− (asse z), Fig. 4.23.
Le proiezioni su xyz del generico vettore di tensione *Vr
da sintetizzare in un determinatoistante sono date da:
( ) ( )
( ) ( ) αβαβ
αβαβ
β
23
216π3π
23
216π3π
VVVVV
VVVVV
VV
z
y
x
+−=+−=
−−=−−=
=
/cos/cos
/cos/cos (4.18)
È facile comprendere come il valore istantaneo del segno di ciascuna proiezione sia inrelazione diretta ed univoca con l’appartenenza del vettore di tensione ad uno dei sestantidelimitati dai vettori di uscita dell’inverter trifase.

16 4 Tecniche di modulazione PWM
Ad esempio, finché il vettore di tensione appartiene al settore delimitato da 21 VVrr
− , come è ilcaso illustrato in Fig. 4.23, sarà certamente Vx ≥ 0 , Vy < 0 e Vz ≥ 0.
Trascurando il caso singolare di vettore nullo (Vx =Vy =Vz = 0) è facile ricavare la seguente laseguente tabella5:
sestante Vx Vy Vz
21 VVrr
− ≥ 0 < 0 ≥ 0
32 VVrr
− > 0 ≤ 0 ≤ 0
43 VVrr
− ≥ 0 ≥ 0 < 0
54 VVrr
− ≤ 0 > 0 ≤ 0
65 VVrr
− < 0 ≥ 0 ≥ 0
16 VVrr
− ≤ 0 ≤ 0 > 0
> 0 > 0 > 0non applicabile
< 0 < 0 < 0
Tab. 4.3 – Sestanti in funzione delle componenti xyz
(100)
(110) (010)
(011)
(001) (101)
α
β
x
y z
Vy
Vz
Vx
Vx ≥ 0,Vy < 0,Vz ≥ 0
1Vr
2Vr
3Vr
4Vr
5Vr
6Vr
*Vr
Fig. 4.23 - Relazione tra le componenti xyz ed i settori angolari
Trascurando le uguaglianze ed attribuendo il valore numerico “1” se il segno di unacomponente è positivo, “0” se negativo, dalla tabella precedente si può ricavare una codificaunivoca come segue:
LSBit MSBit codificasestanti sgn(Vx) sgn(Vy) sgn(Vz) sgn(Vx)+2·sgn(Vy)+4·sgn(Vz)
21 VVrr
− 1 1 0 3
32 VVrr
− 1 0 0 1
5 Si osservi che le proiezioni xyz del vettore di tensione costituiscono, con la rotazione di questo, una terna trifase nel tempo, eche, pertanto, in ogni istante, non può verificarsi il caso in cui si abbiano tutte le proiezioni contemporaneamente positive onegative.

Modulazione dei vettori di spazio (SV-PWM) 17
43 VVrr
− 1 0 1 5
54 VVrr
− 0 0 1 4
65 VVrr
− 0 1 1 6
16 VVrr
− 0 1 0 2
Tab. 4.4 – Codifica dei sestanti in funzione delle componenti xyz
3
1
5
4
6
2
α
β
x
y z
(100)
(110) (010)
(011)
(001) (101)
1Vr
2Vr
3Vr
4Vr
5Vr
6Vr
Fig. 4.24 - Codifica dei sestanti
4.2.3 Sintesi del vettore di tensione
Con riferimento alla Fig. 4.22, la sintesi del generico vettore di tensione ( *Vr
) avvienemodulando tra i vettori di uscita dell'inverter che delimitano ciascun sestante dell’esagono ( iV
r e
1+iVr
) ed il vettore nullo ( 0Vr
). Essendo 00 =Vr
, ed indicando con T1 e T2 i tempi di applicazione
dei vettori non nulli (rispettivamente T1 di iVr
e T2 di 1+iVr
) si può scrivere:
( ) ( ) ( ) ( )( )∫ ∫∫+
++ +++=+1 21
101β1αβα
0βα
T TT
Tiiii
T
dtjVVdtjVVdtjVV ** (4.19)
Scomponendo nella parte reale ed immaginaria:
( )
( )
+=
+=
∫ ∫∫
∫ ∫∫+
+
+
+
1 21
1
1 21
1
01ββ
0β
01αα
0α
T TT
Tii
T
T TT
Tii
T
dtVdtVdtV
dtVdtVdtV
*
*
(4.20)
e risolvendo gli integrali (i cui argomenti sono costanti nel passo di campionamento) si ottiene:
18 4 Tecniche di modulazione PWM
( )
( )
=+
=+
+
+
TVTVTV
TVTVTV
ii
iaai*
*
β21β1β
α211(4.21)
Questo sistema può essere risolto, in ogni settore, per calcolare i tempi di applicazione deivettori non nulli. Ad esempio, procedendo con il metodo di Kramer si ha:
( )
( ) ( )
( )( ) ( )1αβ1βα
1ββ
1ααββ
αα
21ββ
1αα
1 ∆∆∆ ++
+
++
+
−==== iiiiii
iii
i
i
i
VVVVVV
VVTVV
TVV
TVTV
VTV
T*
*
*
*
(4.22)
mentre il tempo di applicazione del vettore nullo si può calcolare dalla:
( )210 TTTT +−= (4.23)
In ciascun settore la sequenza di applicazione dei vettori non nulli è arbitraria, come pure lascelta del vettore nullo (0 oppure 7) da applicare.
Al riguardo vengono individuati due metodi principali, noti come SV-PWM simmetrico edasimmetrico, in base al fatto che il “pattern” dei segnali di comando di ciascun ramo presenti omeno un andamento simmetrico.
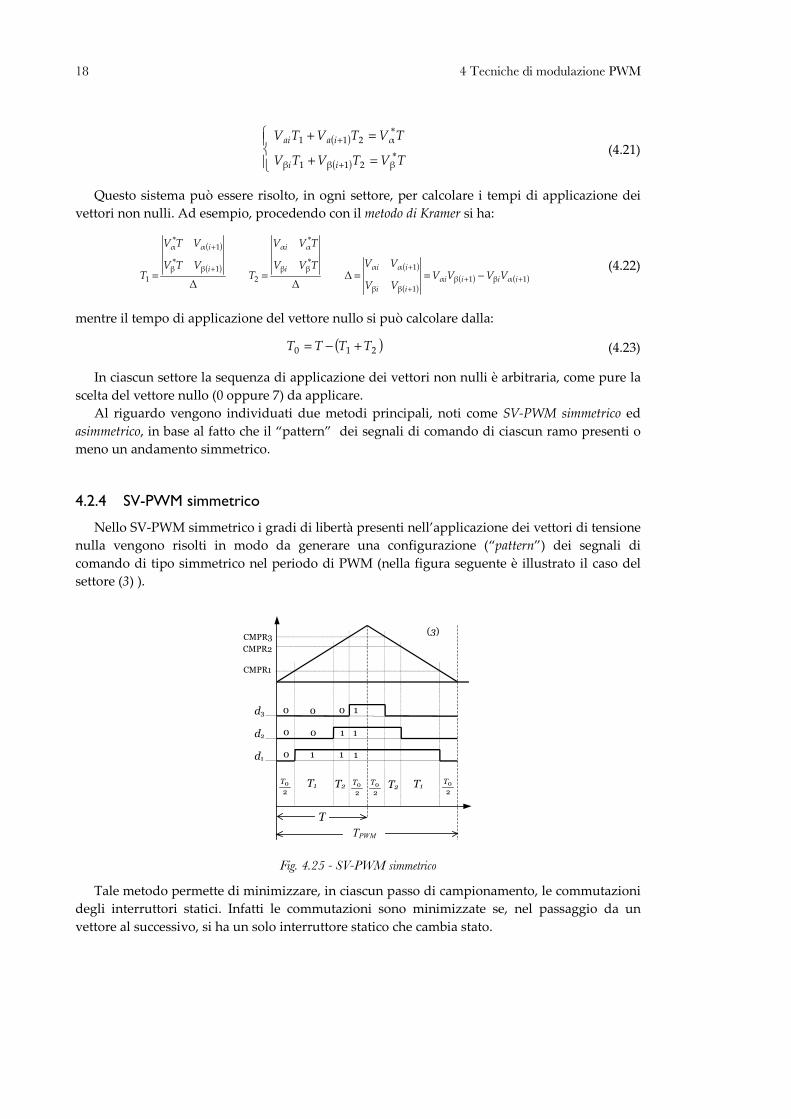
4.2.4 SV-PWM simmetrico
Nello SV-PWM simmetrico i gradi di libertà presenti nell’applicazione dei vettori di tensionenulla vengono risolti in modo da generare una configurazione (“pattern”) dei segnali dicomando di tipo simmetrico nel periodo di PWM (nella figura seguente è illustrato il caso delsettore (3) ).
TPWM
d3
d2
d1
T1
0
1
0 0
0 0 1
10 1
1
1
T
CMPR3CMPR2
CMPR1
T2T1 T220T
20T
20T
20T
(3)
Fig. 4.25 - SV-PWM simmetrico
Tale metodo permette di minimizzare, in ciascun passo di campionamento, le commutazionidegli interruttori statici. Infatti le commutazioni sono minimizzate se, nel passaggio da unvettore al successivo, si ha un solo interruttore statico che cambia stato.

Modulazione dei vettori di spazio (SV-PWM) 19
In termini di vettore nullo, tale condizione porta all'impiego, in ogni passo dicampionamento, di entrambe le configurazioni (0 e 7) suddividendo a metà il tempo T0 edapplicando tensione nulla all'inizio ed alla fine del passo.
In questo modo si arriva a determinare un pattern dei segnali di comando dell'invertertrifase di tipo simmetrico, con una fase di “andata” ed una di “ritorno” corrispondenti, nellapratica implementazione, ai fronti di salita e discesa di una portante triangolare di periodo parial periodo di PWM.
Con tali osservazioni, la sequenza di applicazione dei vettori di uscita dell'inverter nei seisestanti sarà la seguente:
andata → ← ritorno
sestante T0/2 T1 (Vi) T2 (Vi+1) T0/2
1Vr
2Vr
(3) 0Vr
1Vr
2Vr 7V
r
3Vr
2Vr
(1) 0Vr
3Vr
2Vr 7V
r
3Vr
4Vr
(5) 0Vr
3Vr
4Vr 7V
r
5Vr
4Vr
(4) 0Vr
5Vr
4Vr 7V
r
5Vr
6Vr
(6) 0Vr
5Vr
6Vr 7V
r
1Vr
6Vr
(2) 0Vr
1Vr
6Vr 7V
r
Tab. 4.5 – Tempi di applicazione dei vettori di spazio nei diversi sestanti
L'applicazione delle relazioni per il calcolo dei tempi di applicazione dei vettori non nulli,tenuto conto della sequenza indicata nelle precedenti tabelle, fornisce i seguenti risultati:
sestante ∆ 1T 2T
(3) 2
23 V ZVKVK −=− **
β1α2 XVK =*β12
(1) 2
23 V− ZVKVK =+− **
β1α2 YVKVK =+ **β1α2
(5) 2
23 V XVK =*
β12 YVKVK −=−− **β1α2
(4) 2
23 V XVK −=− *
β12 ZVKVK =+− **β1α2
(6) 2
23 V− YVKVK −=−− **
β1α2 ZVKVK −=− **β1α2
Tab. 4.6 – Tempi di applicazione dei vettori attivi in funzione delle variabili X, Y e Z
dove si è posto:
dcdc VTK
VTK
23
23
21 == , (4.24)
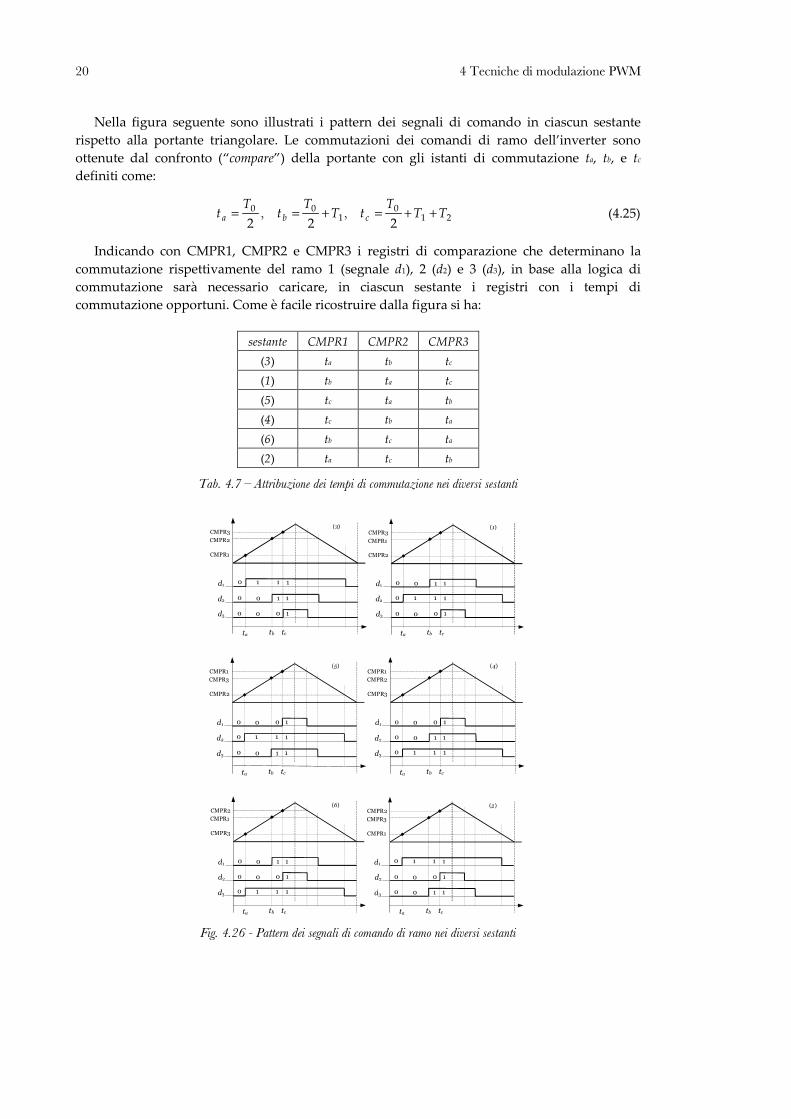
20 4 Tecniche di modulazione PWM
Nella figura seguente sono illustrati i pattern dei segnali di comando in ciascun sestanterispetto alla portante triangolare. Le commutazioni dei comandi di ramo dell’inverter sonoottenute dal confronto (“compare”) della portante con gli istanti di commutazione ta, tb, e tc
definiti come:
210
100
222TT
TtT
Tt
Tt cba ++=+== ,, (4.25)
Indicando con CMPR1, CMPR2 e CMPR3 i registri di comparazione che determinano lacommutazione rispettivamente del ramo 1 (segnale d1), 2 (d2) e 3 (d3), in base alla logica dicommutazione sarà necessario caricare, in ciascun sestante i registri con i tempi dicommutazione opportuni. Come è facile ricostruire dalla figura si ha:
sestante CMPR1 CMPR2 CMPR3(3) ta tb tc
(1) tb ta tc
(5) tc ta tb
(4) tc tb ta
(6) tb tc ta
(2) ta tc tb
Tab. 4.7 – Attribuzione dei tempi di commutazione nei diversi sestanti
ta tb tc
(3)
d2 0 0 1 1
CMPR3CMPR2
CMPR1
d1 1 10 1
d3 0 0 0 1
ta tb tc
(1)CMPR3
CMPR1
CMPR2
d3 0 0 0 1
d2 1 10 1
d1 0 0 1 1
ta tb tc
(5)CMPR1CMPR3
CMPR2
d2 1 10 1
d3 0 0 1 1
d1 0 0 0 1
ta tb tc
(4)CMPR1CMPR2
CMPR3
d1 0 0 0 1
d3 1 10 1
d2 0 0 1 1
ta tb tc
(6)CMPR2CMPR1
CMPR3
d3 1 10 1
d2 0 0 0 1
d1 0 0 1 1
ta tb tc
(2)CMPR2
CMPR3
CMPR1
d2 0 0 0 1
d1 1 10 1
d3 0 0 1 1
Fig. 4.26 - Pattern dei segnali di comando di ramo nei diversi sestanti
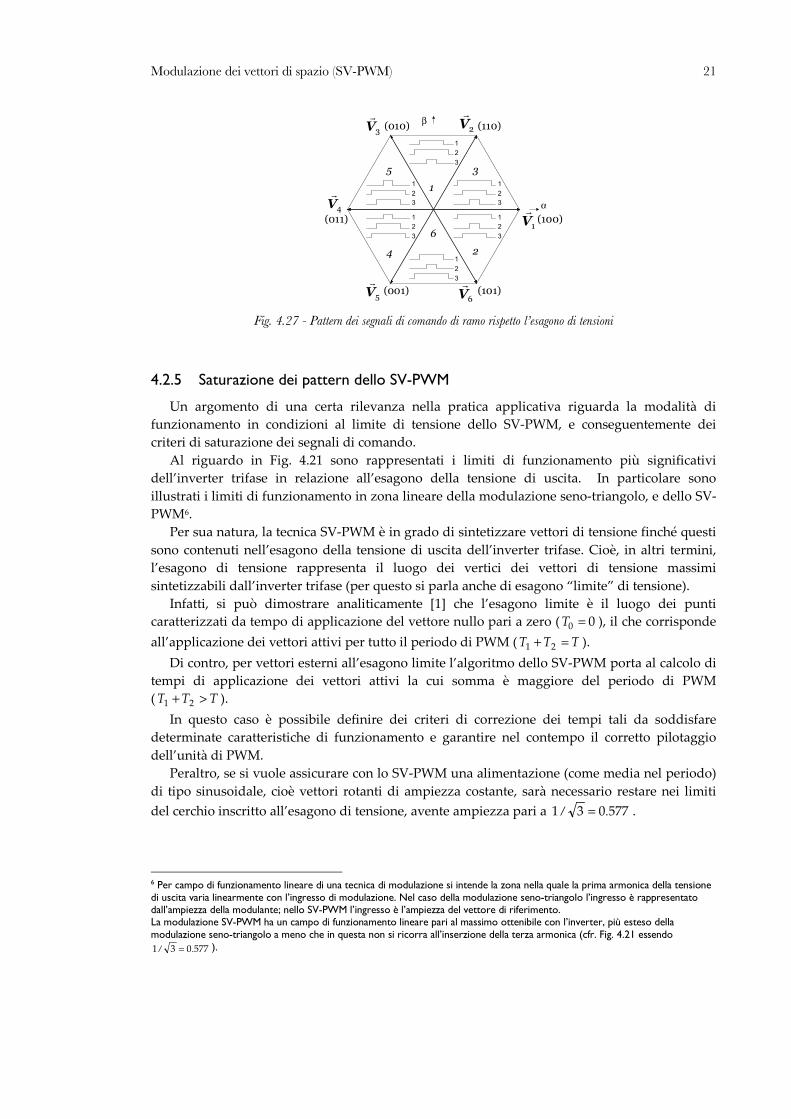
Modulazione dei vettori di spazio (SV-PWM) 21
3
1
5
4
6
2
α
β
123
123
123
123
123
123
(100)
(110) (010)
(011)
(001) (101)
1Vr
2Vr
3Vr
4Vr
5Vr
6Vr
Fig. 4.27 - Pattern dei segnali di comando di ramo rispetto l’esagono di tensioni
4.2.5 Saturazione dei pattern dello SV-PWM
Un argomento di una certa rilevanza nella pratica applicativa riguarda la modalità difunzionamento in condizioni al limite di tensione dello SV-PWM, e conseguentemente deicriteri di saturazione dei segnali di comando.
Al riguardo in Fig. 4.21 sono rappresentati i limiti di funzionamento più significatividell’inverter trifase in relazione all’esagono della tensione di uscita. In particolare sonoillustrati i limiti di funzionamento in zona lineare della modulazione seno-triangolo, e dello SV-PWM6.
Per sua natura, la tecnica SV-PWM è in grado di sintetizzare vettori di tensione finché questisono contenuti nell’esagono della tensione di uscita dell’inverter trifase. Cioè, in altri termini,l’esagono di tensione rappresenta il luogo dei vertici dei vettori di tensione massimisintetizzabili dall’inverter trifase (per questo si parla anche di esagono “limite” di tensione).
Infatti, si può dimostrare analiticamente [1] che l’esagono limite è il luogo dei punticaratterizzati da tempo di applicazione del vettore nullo pari a zero ( 00 =T ), il che corrispondeall’applicazione dei vettori attivi per tutto il periodo di PWM ( TTT =+ 21 ).
Di contro, per vettori esterni all’esagono limite l’algoritmo dello SV-PWM porta al calcolo ditempi di applicazione dei vettori attivi la cui somma è maggiore del periodo di PWM( TTT >+ 21 ).
In questo caso è possibile definire dei criteri di correzione dei tempi tali da soddisfaredeterminate caratteristiche di funzionamento e garantire nel contempo il corretto pilotaggiodell’unità di PWM.
Peraltro, se si vuole assicurare con lo SV-PWM una alimentazione (come media nel periodo)di tipo sinusoidale, cioè vettori rotanti di ampiezza costante, sarà necessario restare nei limitidel cerchio inscritto all’esagono di tensione, avente ampiezza pari a 577031 ./ = .
6 Per campo di funzionamento lineare di una tecnica di modulazione si intende la zona nella quale la prima armonica della tensionedi uscita varia linearmente con l’ingresso di modulazione. Nel caso della modulazione seno-triangolo l’ingresso è rappresentatodall’ampiezza della modulante; nello SV-PWM l’ingresso è l’ampiezza del vettore di riferimento.La modulazione SV-PWM ha un campo di funzionamento lineare pari al massimo ottenibile con l’inverter, più esteso dellamodulazione seno-triangolo a meno che in questa non si ricorra all’inserzione della terza armonica (cfr. Fig. 4.21 essendo
577031 ./ = ).

22 4 Tecniche di modulazione PWM
α=a
b
cS∆-PWM
SV-PWM
O L
M
N
OL=2/3Vdc
ON=1/2Vdc
dcV/ 31OM =
β
Fig. 4.28 - Limiti in tensione dell’inverter trifase
Nel seguito sono presentate le tre modalità di funzionamento al limite di tensione piùcomuni: la saturazione nel cerchio inscritto, la saturazione sull’esagono limite e la transizionenel funzionamento a six-step.
4.2.6 Saturazione nel cerchio inscritto all’esagono di tensione
Questa modalità di saturazione viene messa in atto quando si vuole evitare che l’ampiezzadel vettore sintetizzato fuoriesca dal cerchio inscritto, cioè si vuole garantire un funzionamentosempre “sinusoidale” dell’inverter. In tal caso si rinuncia a sfruttare completamente la capacitàdell’inverter ma si impedisce che la modulazione introduca una distorsione della tensione che,di solito, è causa di instabilità negli azionamenti controllati in corrente.
La logica di saturazione è la seguente:
• si calcola l’ampiezza del vettore di riferimento || *Vr
• si calcola il rapporto tra questo ed il limite di tensione 3
δdcV
|| *Vr
=
• se ξ>1 allora poni: ( )lim,lim,lim,lim,lim, 2101
21
1 δδTTTT
TT
TT +−=== ;;
Questa saturazione conserva la direzione del vettore di tensione (data dal rapporto tra itempi di applicazione dei vettori attivi 21 TT / ) e garantisce un tempo un tempo di applicazionedel vettore nullo 00 ≥T (l’uguaglianza a zero si verifica solo in corrispondenza delle bisettricidei sestanti).
4.2.7 Saturazione sull’esagono limite di tensione
Questa modalità di saturazione è attivata quando si voglia sfruttare tutta la capacità disintesi vettoriale dell’inverter trifase e si sia in grado di accettare le distorsioni di tensione cheseguono all’applicazione di vettori esterni al cerchio inscritto. Un caso tipico è quello di

Modulazione dei vettori di spazio (SV-PWM) 23
azionamenti con controllo scalare azionati da inverter a pilotaggio mediante condensatori di“bootstrap”7.
Una semplice logica di saturazione che mantiene la direzione del vettore di tensione è laseguente:
• si calcola il rapporto tra i tempi T
TT 21δ +=
• se ξ>1 allora poni: 0δδ 01
21
1 === lim,lim,lim, TT
TT
T ;;
Una semplice variante di questa logica è quella che prevede in ogni caso un tempo minimodi applicazione del vettore nullo ( 00 >= costantemin,T ). Questo deve essere assicurato ad esempionel caso in cui sia prevista la misura della corrente mediante shunt resistivi posti in serie tra gliswitch inferiori dell’inverter e la linea negativa del bus in continua [2].
La condizione costante=min,0T inserita nella logica precedente porta alla saturazione su unesagono interno all’esagono limite di tensione.
4.2.8 Transizione nel funzionamento a six-step
Questa modalità di saturazione consente di attingere il funzionamento a sei gradinidell’inverter trifase, consentendo quindi di sfruttare tutta la capacità di tensione in termini divalore efficace della tensione di uscita. Si ammette la distorsione della tensione (e quindi dellacorrente) di uscita.
La logica di saturazione è la seguente:
• si calcola la somma dei tempi di applicazione dei vettori non nulli 21δ TT +=• se ξ>T allora esegui i controlli seguenti:
- se 21 TT > allora poni 00 021 === lim,lim,lim, TTTT ;;
- invece se 12 TT > allora poni 00 012 === lim,lim,lim, TTTT ;;
- invece se 12 TT = allora poni 022 021 === lim,lim,lim, // TTTTT ;;
Tale logica sfocia nel comando a sei gradini nel caso l’ampiezza del vettore di riferimento(supposta costante) sia maggiore del cerchio circoscritto all’esagono. Poiché nel comando a seigradini sono utilizzati solo i vettori attivi dell’inverter, ciascuno per un sesto del periodo dellafondamentale, il tempo minimo tra due commutazioni di ramo è proprio pari a tale valore.Pertanto, tale modalità di funzionamento è applicabile agli azionamenti con controllo scalarema azionati da inverter in cui non è utilizzato il pilotaggio mediante condensatori di bootstrap.
4.2.9 Diagrammi delle grandezze nella modulazione SV-PWM
Nel seguito sono illustrati gli andamenti delle principali grandezze alle quali si è fattoriferimento nella descrizione della modulazione SV-PWM. Tali andamenti sono stati ottenuti 7 In tali inverter il comando di ciascuno degli switch connessi alla linea positiva del bus in continua è fornito dalla caricaimmagazzinata in condensatori, detti di “bootstrap”, i quali si caricano quando lo switch inferiore si chiude. Pertanto tali inverter,per funzionare correttamente, hanno bisogno che ciascun ramo commuti sicuramente entro un certo tempo, progettato in mododa essere superiore (ma non di molto) del periodo di PWM di funzionamento.
24 4 Tecniche di modulazione PWM
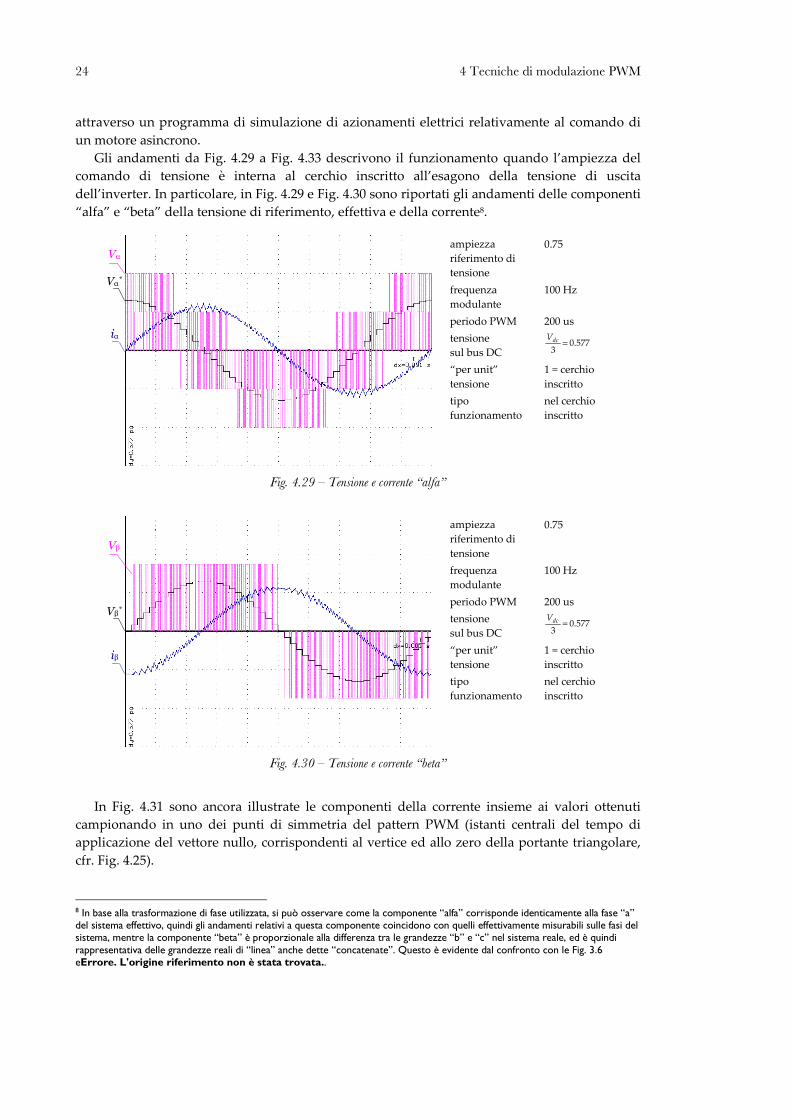
attraverso un programma di simulazione di azionamenti elettrici relativamente al comando diun motore asincrono.
Gli andamenti da Fig. 4.29 a Fig. 4.33 descrivono il funzionamento quando l’ampiezza delcomando di tensione è interna al cerchio inscritto all’esagono della tensione di uscitadell’inverter. In particolare, in Fig. 4.29 e Fig. 4.30 sono riportati gli andamenti delle componenti“alfa” e “beta” della tensione di riferimento, effettiva e della corrente8.
ampiezzariferimento ditensione
0.75
frequenzamodulante
100 Hz
periodo PWM 200 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
Vα
Vα*
iα
tipofunzionamento
nel cerchioinscritto
Fig. 4.29 – Tensione e corrente “alfa”
ampiezzariferimento ditensione
0.75
frequenzamodulante
100 Hz
periodo PWM 200 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
Vβ
Vβ*
iβ
tipofunzionamento
nel cerchioinscritto
Fig. 4.30 – Tensione e corrente “beta”
In Fig. 4.31 sono ancora illustrate le componenti della corrente insieme ai valori ottenuticampionando in uno dei punti di simmetria del pattern PWM (istanti centrali del tempo diapplicazione del vettore nullo, corrispondenti al vertice ed allo zero della portante triangolare,cfr. Fig. 4.25).
8 In base alla trasformazione di fase utilizzata, si può osservare come la componente “alfa” corrisponde identicamente alla fase “a”del sistema effettivo, quindi gli andamenti relativi a questa componente coincidono con quelli effettivamente misurabili sulle fasi delsistema, mentre la componente “beta” è proporzionale alla differenza tra le grandezze “b” e “c” nel sistema reale, ed è quindirappresentativa delle grandezze reali di “linea” anche dette “concatenate”. Questo è evidente dal confronto con le Fig. 3.6eErrore. L'origine riferimento non è stata trovata..
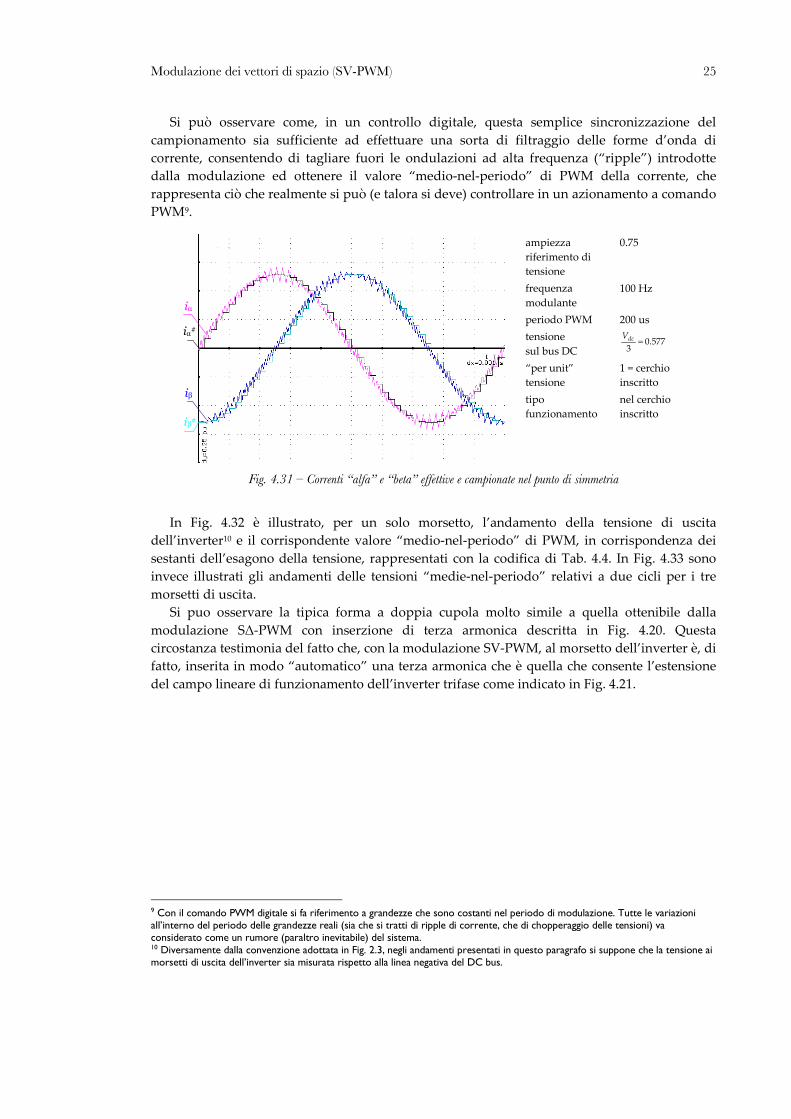
Modulazione dei vettori di spazio (SV-PWM) 25
Si può osservare come, in un controllo digitale, questa semplice sincronizzazione delcampionamento sia sufficiente ad effettuare una sorta di filtraggio delle forme d’onda dicorrente, consentendo di tagliare fuori le ondulazioni ad alta frequenza (“ripple”) introdottedalla modulazione ed ottenere il valore “medio-nel-periodo” di PWM della corrente, cherappresenta ciò che realmente si può (e talora si deve) controllare in un azionamento a comandoPWM9.
ampiezzariferimento ditensione
0.75
frequenzamodulante
100 Hz
periodo PWM 200 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
iβ#
iα
iα#
iβ tipofunzionamento
nel cerchioinscritto
Fig. 4.31 – Correnti “alfa” e “beta” effettive e campionate nel punto di simmetria
In Fig. 4.32 è illustrato, per un solo morsetto, l’andamento della tensione di uscitadell’inverter10 e il corrispondente valore “medio-nel-periodo” di PWM, in corrispondenza deisestanti dell’esagono della tensione, rappresentati con la codifica di Tab. 4.4. In Fig. 4.33 sonoinvece illustrati gli andamenti delle tensioni “medie-nel-periodo” relativi a due cicli per i tremorsetti di uscita.
Si puo osservare la tipica forma a doppia cupola molto simile a quella ottenibile dallamodulazione S∆-PWM con inserzione di terza armonica descritta in Fig. 4.20. Questacircostanza testimonia del fatto che, con la modulazione SV-PWM, al morsetto dell’inverter è, difatto, inserita in modo “automatico” una terza armonica che è quella che consente l’estensionedel campo lineare di funzionamento dell’inverter trifase come indicato in Fig. 4.21.
9 Con il comando PWM digitale si fa riferimento a grandezze che sono costanti nel periodo di modulazione. Tutte le variazioniall’interno del periodo delle grandezze reali (sia che si tratti di ripple di corrente, che di chopperaggio delle tensioni) vaconsiderato come un rumore (paraltro inevitabile) del sistema.10 Diversamente dalla convenzione adottata in Fig. 2.3, negli andamenti presentati in questo paragrafo si suppone che la tensione aimorsetti di uscita dell’inverter sia misurata rispetto alla linea negativa del DC bus.

26 4 Tecniche di modulazione PWM
ampiezzariferimento ditensione
0.75
frequenzamodulante
100 Hz
periodo PWM 200 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
V1m
V1mα
sextant
tipofunzionamento
nel cerchioinscritto
Fig. 4.32 – Tensione effettiva e “media-nel-periodo” al morsetto dell’inverter e sestante
ampiezzariferimento ditensione
0.75
frequenzamodulante
100 Hz
periodo pwm 100 ustensionesul bus dc
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
sextant
V1mav
V3mav
V2mav tipofunzionamento
nel cerchioinscritto
Fig. 4.33 – Tensione “media-nel-periodo”ai morsetti dell’inverter e sestante
In Fig. 4.34 è illustrata la modalità di variazione dei tempi di applicazione dei vettori attivi enulli lungo i sestanti dell’esagono di tensione.
Si può osservare come il tempo di applicazione del vettore nullo abbia un minimo incorrispondenza della bisettrice di ciascun sestante, punto in cui è minima la distanzadall’esagono limite, mentre i vettori attivi assumano valore massimo e rispettivamente zero nelpassaggio da un sestante all’altro.

Modulazione dei vettori di spazio (SV-PWM) 27
ampiezzariferimento ditensione
0.75
frequenzamodulante
100 Hz
periodo PWM 200 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
“per unit” tempi 1 = ½ TPWM
sextant
T0
T1
T2
tipofunzionamento
nel cerchioinscritto
Fig. 4.34 – Tempi di applicazione dei vettori attivi e nulli lungo i sestanti
In Fig. 4.35 sono illustrati gli stessi tempi nel caso di imposizione di un riferimento ditensione di ampiezza pari al raggio del cerchio inscritto all’esagono limite di tensione. Rispettoalla figura precedente si può notare come il tempo di applicazione del vettore nullo diventi paria zero in corrispondenza delle bisettrici dei sestanti, punto nel quale la somma dei tempi diapplicazione dei vettori attivi diventa uguale al semiperiodo di PWM (1 pu).
ampiezzariferimento ditensione
1
frequenzamodulante
100 Hz
periodo pwm 100 ustensionesul bus dc
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
“per unit” tempi 1 = ½ TPWM
sextant
T0
T1
T2 tipofunzionamento
sul cerchioinscritto
Fig. 4.35 – Tempi di applicazione dei vettori attivi e nulli lungo i sestanti
Negli andamenti da Fig. 4.36 fino a Fig. 4.38 è illustrato il caso in cui venga applicato unriferimento di tensione di ampiezza pari al raggio del cerchio circoscritto all’esagono ditensione, e venga applicata la modalità di saturazione del comando sull’esagono stesso descrittaal par. 0.
In Fig. 4.34 sono presentati gli andamenti del riferimento di tensione e della corrispondentetensione “media nel periodo” in forma polare. Essi sono ottenuti componendo, rispettivamentein ascissa ed ordinata, le componenti “alfa” e “beta” nel tempo. Nella successiva Fig. 4.37 lecomponenti della tensione “media-nel-periodo” sono presentate nel tempo e rispetto al sestante.

28 4 Tecniche di modulazione PWM
ampiezzariferimento ditensione
1.156
frequenzamodulante
100 Hz
periodo PWM 100 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
Vβ*
Vβav
Vα*
Vαav
tipofunzionamento
sul cerchiocircoscritto
Fig. 4.36 – Tensioni “alfa-beta” di comando e “medie-nel-periodo” in forma polare
ampiezzariferimento ditensione
1.156
frequenzamodulante
100 Hz
periodo pwm 100 ustensionesul bus dc
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
Vαav
Vβav
sextant
tipofunzionamento
sul cerchiocircoscritto
Fig. 4.37 – Tensioni “alfa-beta” “medie-nel-periodo” lungo i sestanti
In Fig. 4.38 è riportato l’andamento delle tensioni “alfa-beta” effettive e delle omologhecorrenti, queste ultime presentate in forma polare in Fig. 4.3911.
Questi andamenti consentono di valutare la distorsione di corrente causata dalla saturazionedelle tensioni, peraltro trascurabile in forma polare. Consente anche di comprendere lecaratteristiche del ripple di corrente dovuto alla modulazione. Si possono notare, infatti, seizone in cui il ripple è più elevato. Considerando lo sfasamento di circa π/2 esistente, nel casoconsiderato, tra tensione e corrente, ne risulta che l’ondulazione di corrente è massima quandoil riferimento di tensione è allineato con le bisettrici dei sestanti, laddove sono entrambimassimi i tempi di applicazione dei vettori attivi, mentre è minimo il tempo di applicazione delvettore nullo12.
11 È possibile osservare la costanza della tensione beta in corrispondenza dei settori 1 e 6, il che non vuol dire assenza dicommutazioni, ma solo che si sta commutando tra vettori di spazio aventi la stessa compoonente.12 Si ricordi che vettore nullo vuol dire fase di ricircolo nei diodi dell’inverter, la corrente tende a zero spinta dalla tensioneindotta nelle fasi del motore; vettore attivo vuol dire invece fase di alimentazione attraverso i transistors, la corrente è forzata avariare dalla differenza tra la tensione applicata e quella indotta nelle fasi.

Modulazione dei vettori di spazio (SV-PWM) 29
ampiezzariferimento ditensione
1.156
frequenzamodulante
100 Hz
periodo pwm 100 ustensionesul bus dc
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
iβ
Vα
Vβ
iα
tipofunzionamento
sul cerchiocircoscritto
Fig. 4.38 – Tensioni e correnti “alfa-beta”
ampiezzariferimento ditensione
1.156
frequenzamodulante
100 Hz
periodo PWM 100 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
iβ*
iα*
tipofunzionamento
Sul cerchiocircoscritto
Fig. 4.39 – Correnti “alfa-beta” in forma polare
ampiezzariferimento ditensione
1.156
frequenzamodulante
100 Hz
periodo PWM 100 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
sextant
V1mav
V2mav
V3mav
tipofunzionamento
sul cerchiocircoscritto
Fig. 4.40 – Tensioni “medie-nel-periodo” ai morsetti dell’inverter lungo i sestanti

30 4 Tecniche di modulazione PWM
In Fig. 4.41 sono illustrati i tempi di applicazione dei vettori dello SV-PWM. Si può verificareil tempo di applicazione del vettore nullo costantemente a zero, mentre i tempi di applicazionedei vettori attivi variano in modo lineare lungo il settore riempiendo l’inetro semiperiodo doPWM.
ampiezzariferimento ditensione
1.156
frequenzamodulante
100 Hz
periodo PWM 100 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
“per unit” tempi 1 = ½ TPWM
sextant
T0
T1
T2
tipofunzionamento
sul cerchiocircoscritto
Fig. 4.41 – Tempi di applicazione dei vettori attivi e nulli lungo i sestanti
Le curve in Fig. 4.42 fino alla Fig. 4.46 mostrano infine il caso in cui il riferimento di tensioneassume una ampiezza intermedia tra il raggio del cerchio inscritto e circoscritto, sempre nelcaso in cui si ponga in atto la saturazione sull’esagono limite di tensione.
ampiezzariferimento ditensione
1.078
frequenzamodulante
100 Hz
periodo PWM 100 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
Vβ*
Vβav
Vα*
Vαav
tipofunzionamento
tra il cerchioinscritto ed ilcircoscritto
Fig. 4.42 – Tensioni “alfa-beta” di comando e “medie-nel-periodo” in forma polare
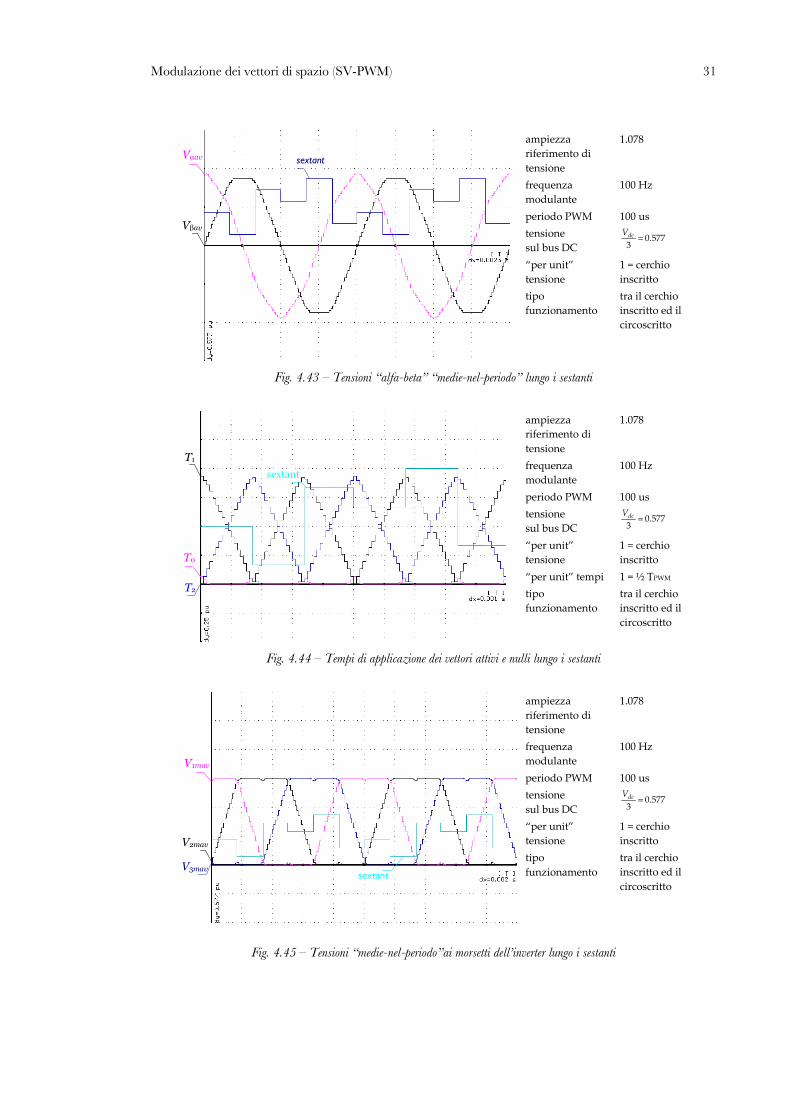
Modulazione dei vettori di spazio (SV-PWM) 31
ampiezzariferimento ditensione
1.078
frequenzamodulante
100 Hz
periodo PWM 100 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
Vαav
Vβav
sextant
tipofunzionamento
tra il cerchioinscritto ed ilcircoscritto
Fig. 4.43 – Tensioni “alfa-beta” “medie-nel-periodo” lungo i sestanti
ampiezzariferimento ditensione
1.078
frequenzamodulante
100 Hz
periodo PWM 100 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
“per unit” tempi 1 = ½ TPWM
sextant
T0
T1
T2 tipofunzionamento
tra il cerchioinscritto ed ilcircoscritto
Fig. 4.44 – Tempi di applicazione dei vettori attivi e nulli lungo i sestanti
ampiezzariferimento ditensione
1.078
frequenzamodulante
100 Hz
periodo PWM 100 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
sextant
V1mav
V2mav
V3mavtipofunzionamento
tra il cerchioinscritto ed ilcircoscritto
Fig. 4.45 – Tensioni “medie-nel-periodo”ai morsetti dell’inverter lungo i sestanti
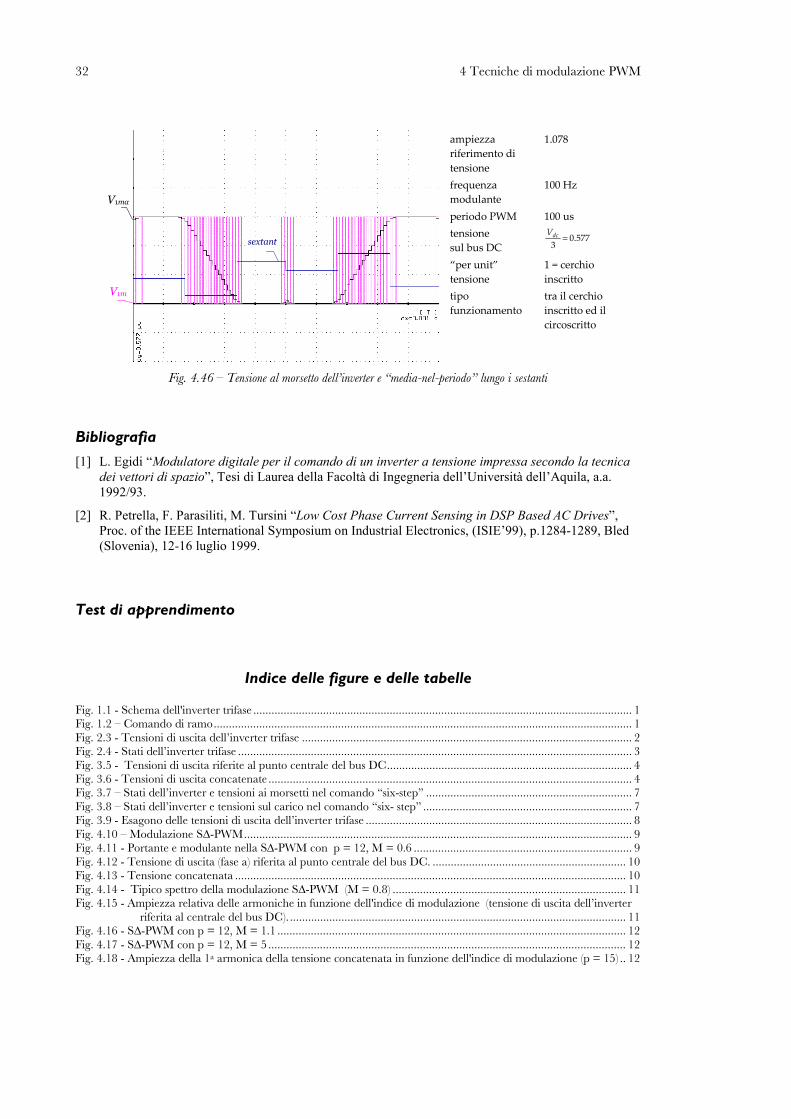
32 4 Tecniche di modulazione PWM
ampiezzariferimento ditensione
1.078
frequenzamodulante
100 Hz
periodo PWM 100 ustensionesul bus DC
0.5773
=dcV
“per unit”tensione
1 = cerchioinscritto
V1m
V1mα
sextant
tipofunzionamento
tra il cerchioinscritto ed ilcircoscritto
Fig. 4.46 – Tensione al morsetto dell’inverter e “media-nel-periodo” lungo i sestanti
Bibliografia
[1] L. Egidi “Modulatore digitale per il comando di un inverter a tensione impressa secondo la tecnicadei vettori di spazio”, Tesi di Laurea della Facoltà di Ingegneria dell’Università dell’Aquila, a.a.1992/93.
[2] R. Petrella, F. Parasiliti, M. Tursini “Low Cost Phase Current Sensing in DSP Based AC Drives”,Proc. of the IEEE International Symposium on Industrial Electronics, (ISIE’99), p.1284-1289, Bled(Slovenia), 12-16 luglio 1999.
Test di apprendimento
Indice delle figure e delle tabelle
Fig. 1.1 - Schema dell'inverter trifase ............................................................................................................................. 1Fig. 1.2 – Comando di ramo.......................................................................................................................................... 1Fig. 2.3 - Tensioni di uscita dell’inverter trifase ............................................................................................................. 2Fig. 2.4 - Stati dell’inverter trifase .................................................................................................................................. 3Fig. 3.5 - Tensioni di uscita riferite al punto centrale del bus DC................................................................................. 4Fig. 3.6 - Tensioni di uscita concatenate ........................................................................................................................ 4Fig. 3.7 – Stati dell’inverter e tensioni ai morsetti nel comando “six-step” .................................................................... 7Fig. 3.8 – Stati dell’inverter e tensioni sul carico nel comando “six- step” ..................................................................... 7Fig. 3.9 - Esagono delle tensioni di uscita dell’inverter trifase ........................................................................................ 8Fig. 4.10 – Modulazione S∆-PWM................................................................................................................................ 9Fig. 4.11 - Portante e modulante nella S∆-PWM con p = 12, M = 0.6 ........................................................................ 9Fig. 4.12 - Tensione di uscita (fase a) riferita al punto centrale del bus DC. ................................................................ 10Fig. 4.13 - Tensione concatenata ................................................................................................................................. 10Fig. 4.14 - Tipico spettro della modulazione S∆-PWM (M = 0.8) ............................................................................. 11Fig. 4.15 - Ampiezza relativa delle armoniche in funzione dell'indice di modulazione (tensione di uscita dell’inverter
riferita al centrale del bus DC)................................................................................................................ 11Fig. 4.16 - S∆-PWM con p = 12, M = 1.1 ................................................................................................................... 12Fig. 4.17 - S∆-PWM con p = 12, M = 5 ...................................................................................................................... 12Fig. 4.18 - Ampiezza della 1a armonica della tensione concatenata in funzione dell'indice di modulazione (p = 15) .. 12
INDICE 33
Fig. 4.19 - Andamento reale delle tensioni armoniche in funzione dell'indice di modulazione, in presenza del circuitodi lockout ................................................................................................................................................ 13
Fig. 4.20 - S∆-PWM con p = 12, M = 1.1: terza armonica nella tensione di riferimento........................................... 14Fig. 4.21 - Ampiezza della 1a armonica della tensione di fase (collegamento a stella del carico in funzione dell’indice
di modulazione ( p = 15 ) ........................................................................................................................ 14Fig. 4.22 - Sintesi del vettore di tensione nello SV-PWM ............................................................................................ 15Fig. 4.23 - Relazione tra le componenti xyz ed i settori angolari ................................................................................. 16Fig. 4.24 - Codifica dei sestanti ................................................................................................................................... 17Fig. 4.25 - SV-PWM simmetrico.................................................................................................................................. 18Fig. 4.26 - Pattern dei segnali di comando di ramo nei diversi sestanti ........................................................................ 20Fig. 4.27 - Pattern dei segnali di comando di ramo rispetto l’esagono di tensioni........................................................ 21Fig. 4.28 - Limiti in tensione dell’inverter trifase.......................................................................................................... 22Fig. 4.29 – Tensione e corrente “alfa” ......................................................................................................................... 24Fig. 4.30 – Tensione e corrente “beta” ........................................................................................................................ 24Fig. 4.31 – Correnti “alfa” e “beta” effettive e campionate nel punto di simmetria..................................................... 25Fig. 4.32 – Tensione effettiva e “media-nel-periodo” al morsetto dell’inverter e sestante............................................ 26Fig. 4.33 – Tensione “media-nel-periodo”ai morsetti dell’inverter e sestante .............................................................. 26Fig. 4.34 – Tempi di applicazione dei vettori attivi e nulli lungo i sestanti................................................................... 27Fig. 4.35 – Tempi di applicazione dei vettori attivi e nulli lungo i sestanti................................................................... 27Fig. 4.36 – Tensioni “alfa-beta” di comando e “medie-nel-periodo” in forma polare ................................................. 28Fig. 4.37 – Tensioni “alfa-beta” “medie-nel-periodo” lungo i sestanti......................................................................... 28Fig. 4.38 – Tensioni e correnti “alfa-beta”................................................................................................................... 29Fig. 4.39 – Correnti “alfa-beta” in forma polare.......................................................................................................... 29Fig. 4.40 – Tensioni “medie-nel-periodo” ai morsetti dell’inverter lungo i sestanti ..................................................... 29Fig. 4.41 – Tempi di applicazione dei vettori attivi e nulli lungo i sestanti................................................................... 30Fig. 4.42 – Tensioni “alfa-beta” di comando e “medie-nel-periodo” in forma polare ................................................. 30Fig. 4.43 – Tensioni “alfa-beta” “medie-nel-periodo” lungo i sestanti......................................................................... 31Fig. 4.44 – Tempi di applicazione dei vettori attivi e nulli lungo i sestanti................................................................... 31Fig. 4.45 – Tensioni “medie-nel-periodo”ai morsetti dell’inverter lungo i sestanti ...................................................... 31Fig. 4.46 – Tensione al morsetto dell’inverter e “media-nel-periodo” lungo i sestanti ................................................. 32
Tab. 2.1 – Stati e rispettivi comandi di ramo................................................................................................................. 3Tab. 3.2 – Stati, comandi di ramo e vettori di spazio ................................................................................................... 8Tab. 4.3 – Sestanti in funzione delle componenti xyz.................................................................................................. 16Tab. 4.4 – Codifica dei sestanti in funzione delle componenti xyz .............................................................................. 17Tab. 4.5 – Tempi di applicazione dei vettori di spazio nei diversi sestanti .................................................................. 19Tab. 4.6 – Tempi di applicazione dei vettori attivi in funzione delle variabili X, Y e Z ........................................... 19Tab. 4.7 – Attribuzione dei tempi di commutazione nei diversi sestanti...................................................................... 20
INDICE
TECNICHE DI PILOTAGGIO DELL’INVERTER TRIFASE........................................1
1 Nozioni di base ..........................................................................................................1
2 Calcolo delle tensioni di uscita ................................................................................1
3 Comando ad onda quadra (Six Step)......................................................................4
3.1 Scomposizione in serie di Fourier................................................................................ 53.1.1 Tensioni di uscita riferite al punto centrale del bus DC ........................................................5
3.1.2 Tensioni di uscita concatenate ..............................................................................................5
3.1.3 Tensione del centro stella del carico riferita al punto centrale del bus DC............................5
3.1.4 Tensioni di fase del carico .....................................................................................................6
3.2 Rappresentazione vettoriale della tensione di uscita ................................................. 7
4 Tecniche di modulazione PWM ..............................................................................8
4.1 Modulazione seno-triangolo (S∆-PWM) ...................................................................... 8
34 4 Tecniche di modulazione PWM
4.1.1 Scomposizione in serie di Fourier ....................................................................................... 10
4.1.2 Sovra-modulazione ( M > 1 ) .............................................................................................. 12
4.1.3 Distorsione della modulante ............................................................................................... 13
4.2 Modulazione dei vettori di spazio (SV-PWM) ...........................................................144.2.1 Introduzione ....................................................................................................................... 14
4.2.2 Calcolo del settore angolare................................................................................................ 15
4.2.3 Sintesi del vettore di tensione.............................................................................................. 17
4.2.4 SV-PWM simmetrico ......................................................................................................... 18
4.2.5 Saturazione dei pattern dello SV-PWM ............................................................................. 21
4.2.6 Saturazione nel cerchio inscritto all’esagono di tensione .................................................... 22
4.2.7 Saturazione sull’esagono limite di tensione......................................................................... 22
4.2.8 Transizione nel funzionamento a six-step........................................................................... 23
4.2.9 Diagrammi delle grandezze nella modulazione SV-PWM ................................................. 23
Bibliografia ..................................................................................................................................32
Test di apprendimento ..............................................................................................................32
Indice delle figure e delle tabelle...............................................................................................32
INDICE........................................................................................................................................33