Taratura Statica 7 MAC - miro.ing.unitn.it del... · M. De Cecco - Lucidi del corso di Misure...
12
1 M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I F K C M A B Taratura Statica M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I F K C M A B Vedremo cosa è la taratura statica (RELAZIONI DI INGRESSO-USCITA, SENSIBILITA’ STATICA ASSOLUTA, TIPI DI ERRORI, DIAGRAMMA DI TARATURA) - Come si effettua (mediante campioni primari, per confronto) - Metodi di regressione - Validazione mediante analisi dei residui - Analisi delle incertezze M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I F K C M A B La misura in condizioni statiche si ottiene mediante inversione della caratteristica statica dello strumento: misurando uscita Modello (statico) dello strumento Come si descrive l’operazione di misura? misurando Uscita = y0 y0 Sono conosciuti: - caratteristica statica - uscita Si ricava: - stima del misurando M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I F K C M A B Cosa è la taratura statica? La taratura in condizioni statiche si ottiene mediante interpolazione della caratteristica statica dello strumento: misurando uscita Modello (statico) dello strumento Misurando = m 0 Uscita = y 0 y 0 Sono conosciuti: - ingresso - uscita Si ricava: - caratteristica statica m 0
-
Upload
truongdung -
Category
Documents
-
view
214 -
download
1
Transcript of Taratura Statica 7 MAC - miro.ing.unitn.it del... · M. De Cecco - Lucidi del corso di Misure...

1
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Taratura Statica
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Vedremo cosa è la taratura statica (RELAZIONI DIINGRESSO-USCITA, SENSIBILITA’ STATICAASSOLUTA, TIPI DI ERRORI, DIAGRAMMA DITARATURA)- Come si effettua (mediante campioni primari, perconfronto)- Metodi di regressione- Validazione mediante analisi dei residui- Analisi delle incertezze
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
La misura in condizioni statiche si ottiene mediante inversione dellacaratteristica statica dello strumento:
misurando
uscita
Modello (statico) dellostrumento
Come si descrive l’operazione di misura?
misurandoUscita= y0
y0
Sono conosciuti:- caratteristica statica- uscita
Si ricava:- stima del misurando
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Cosa è la taratura statica?
La taratura in condizioni statiche si ottiene mediante interpolazionedella caratteristica statica dello strumento:
misurando
uscita
Modello (statico) dellostrumento
Misurando= m0
Uscita= y0
y0
Sono conosciuti:- ingresso- uscita
Si ricava:- caratteristica statica
m0
2
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Dunque, nelle condizioni di misura in cui si può supporre chepraticamente ingresso ed uscita non varino nel tempo, l’operazione ditaratura consente di determinare:
• la caratteristica statica ingresso-uscita mediante:1. modellazione
2. raccolta dei dati di taratura
3. regressione del modello
4. validazione del modello mediante analisi dei residui
• l’incertezza associata all’operazione di misura:• dall’incertezza dei vari parametri
• all’incertezza sulla stima del misurando
• all’incertezza della curva di taratura
Le operazioni coinvolte nella taratura statica
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Il modello dello strumento può essere di diversa natura.
Tipicamente una relazione matematica, ma può anche essere descrittoda una procedura, un modello numerico etc
Nella procedura di modellazione occorre esplicitare la relazione staticatra ingresso ed uscita
Sarebbe buona norma esplicitare la relazione statica tra ingressi didisturbo ed uscita
Si definisce incertezza di modello tutto ciò che è presente nella realtàma non viene descritto dal modello in nostro possesso
1. modellazione
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
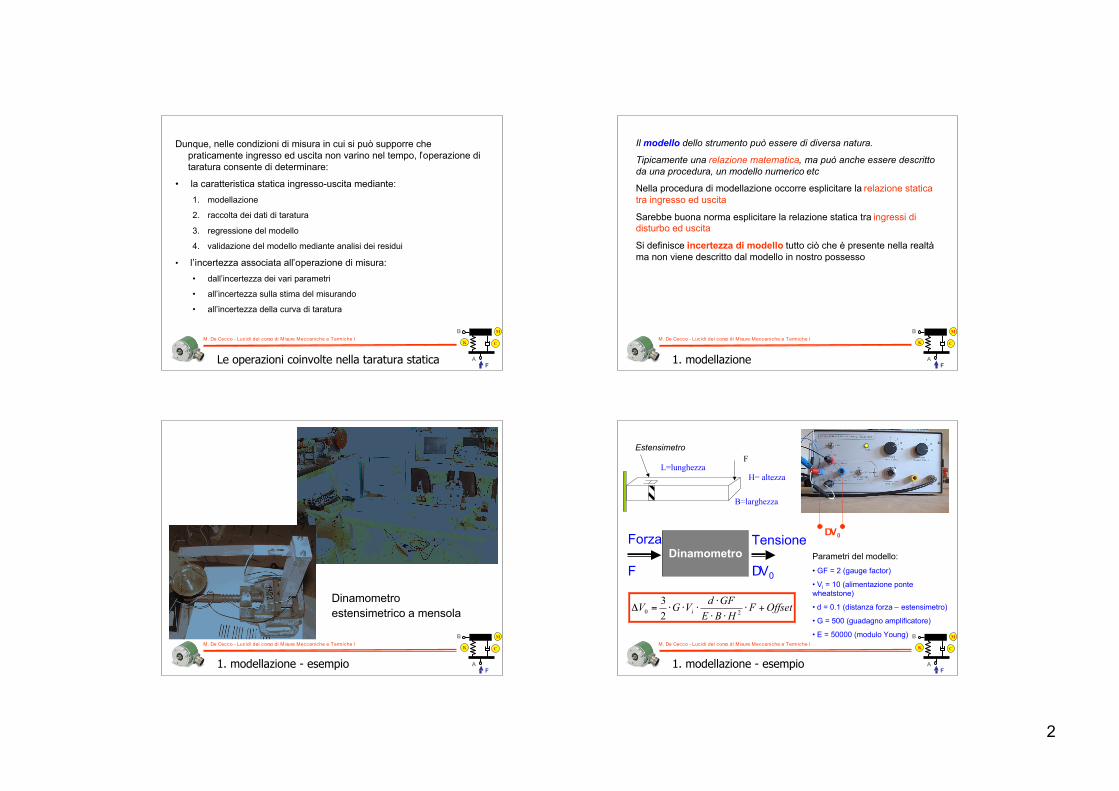
Dinamometroestensimetrico a mensola
1. modellazione - esempio
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
H= altezza
B=larghezza
L=lunghezzaF
Estensimetro
OffsetFHBE
GFdVGV i +!
!!
!!!!="
20
2
3
Parametri del modello:• GF = 2 (gauge factor)
• Vi = 10 (alimentazione pontewheatstone)
• d = 0.1 (distanza forza – estensimetro)
• G = 500 (guadagno amplificatore)
• E = 50000 (modulo Young)
1. modellazione - esempio
DinamometroForza
F
Tensione
DV0
DV0

3
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Nell’esempio appena visto l’incertezza di modello è costituita adesempio da:
- non linearità ed isteresi del materiale
- resistenze di contatto ed effetto di carico elettrico sul ponte diWheatstone
- effetto della temperatura (se non modellato e non misurata, come nelcaso in esame)
- …
1. modellazione
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
misurando
uscita
misurandoUscita= y0
y0
Nella raccolta dei dati per la taratura tutti gli ingressi (interferenti,modificanti, desiderati) sono fissati a valori costanti tranne uno
L’ingresso sotto osservazione viene fatto variare su di un certo insiemediscreto di valori costanti e le corrispondenti uscite registrate
2. raccolta dati di taratura
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Nella realtà risulta spesso il caso in cui esiste un numeromolto elevato di ingressi di disturbo che hanno un deboleeffetto sulla misura e che risultano difficili da controllare
Vengono quindi controllati gli ingressi che hanno un effettoimportante mentre gli altri vengono tenuti incontrollati. Talecondizione viene definita controllo statistico sul processodi misurazione/taratura
Tale condizione mette il sistema in una condizione analogaalla ipotesi di validità del Teorema del Limite Centrale
2. raccolta dati di taratura
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Nella fase di raccolta dati di taratura si possono presentaredue casi:
1. sono disponibili campioni fondamentali della grandezzasotto misura
2. è disponibile uno strumento di riferimento
In entrambi i casi è buona norma avere a disposizione dati ditaratura con un’accuratezza migliore di circa un ordine digrandezza rispetto a quella desiderata
2. raccolta dati di taratura

4
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Uscita
Interpretazionemisure, curva
di taratura
Campionedi laboratorio
Strumentodi misura
2. raccolta dati di taratura
Taratura mediante campioniTaratura mediante campioniM. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Taratura per confrontoTaratura per confronto
Ingressogenerico
Strumento di misura
Uscita
Interpretazionemisure, curva
di taratura
Strumento di riferimento
2. raccolta dati di taratura
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Non sempre si parte da una situazione del genere:
misurando
uscita
misurandoUscita= y0
y0
3. regressione del modello
Idealmente: modello teorico ≡ punti di taratura raccolti sperimentalmente
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Si può infatti avere la seguente situazione:
misurando
uscita
misurandoUscita= y0
y0
Ovvero il modello teorico ≠ punti di taratura raccolti sperimentalmente
… ed in generale i parametri del modello (tutti od alcuni di essi) possonoessere incogniti, dunque occorre determinarli
3. regressione del modello

5
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
• ANALISI DI REGRESSIONE
• L’analisi di regressione consente dideterminare i parametri di un modelloin modo tale che “al meglio” interpreti idati sperimentali mediante un legamealgebrico ingresso-uscita.
3. regressione del modello
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
• Tipi di modelli
3. regressione del modello
Modelli lineari, ad esempio:
!
y = c1x1+ c
2x2
+ ...cnxn
Modelli non lineari, ad esempio:
!
y = c1c2x1" cos c
3x2( )
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
• Scopo
• Determinare i parametri ci, i=1,...m, inbase alla ripetizione delle misuredelle grandezze xi, i=1,...N, e dellecorrispondenti uscite yi ed alla sceltadel tipo di modello, minimizzando uncerto indice di prestazione.
3. regressione del modello
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
• Nel metodo dei minimi quadrati l’indice diprestazione è costituito dalla somma dei quadratidegli scarti (anche detti residui):
Essendo:
3. regressione del modello
L’insieme dei parametri si determina:!
" c1,...,c
m( ) = #i
2
i=1
N
$
!
"i = yi # f c1,c2,Lcm , x1i , x2i ,Lxni( )
!
c1,...,c
m[ ] :
!
minck
"i
2
i=1
N
#$ % &
' ( )

6
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
parametri (a,b)
x
y
N Dati sperimentali
3. regressione del modello
Caso lineare - Calcolo retta ai minimi quadrati:
Si noti che i residui risultanoessere lineari in funzione deiparametri da determinareDunque anche il fitting con un polinomioqualsiasi risulta risolvibile in manieraanaloga
ei
!
"i = yi # a $ xi +b( )
!
y = ax+b
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
• Posizione delproblema
3. regressione del modello
(La soluzione ha un solo minimo)
!
"# a,b( )"a
= 0
"# a,b( )"b
= 0
$
% &
' &
!
mina,b( )
" a,b( ){ } =mina,b( )
yi # a $ xi +b( )[ ]2
i=1
N
%& ' (
) * +
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
• Soluzione
3. regressione del modello
Dove:
!
a =Cxy
Cxx
b = y " ax
!
y =1
Nyi
i=1
N
" x =1
Nxi
i=1
N
"
!
Cxx
= xi" x ( )
2
i=1
N
# = xi
2
" nx 2( )
i=1
N
#
!
Cxy = xi " x ( ) yi " y ( )i=1
N
# = xiyi " nx y ( )i=1
N
#
!
" y =
yi # axi +b( )[ ]2
i=1
N
$
N # 2!
" a =" y
Cxx
!
" b =" y
xi2
i=1
N
#
NCxx M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
La sensibilità statica Sa è definita come lapendenza della curva di taratura: Sa = dgu / dgi
essendo gi la grandezza in ingresso e gula grandezza in uscita.Se la curva di taratura è una retta, lasensibilità assoluta è costante e si ha: Sa = gu / gi (= a)

7
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – Espressione incertezza
Una volta effettuata la regressione lineare si ottengono iparametri con le loro incertezze, vediamo come si esprimel’incertezza sulla curva di taratura (bande di tolleranza):
misurando
uscita
b
b-2σb
b+2σb
All’interno di tale banda dovrebberoessere compresi circa il 95% dei datisperimentali
!
y+ = a+ 2" a( ) # x+b+ 2" b
!
y = a " x+b
!
y" = a " 2# a( ) $ x+b " 2# b
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – Espressione incertezza
Altre maniera per ottenere le bande di tolleranza:
Oppure mediante propagazione delle densità di probabilitàmediante metodo di Monte Carlo
!
y = a " x+b
# y = # a " x( )2
+ a "# x( )2
+# b
2
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – Espressione incertezza
Calcolata la banda di tolleranza è possibile ricavare per ognivalore del misurando e per ogni valore dell’uscita la relativaincertezza ovvero il relativo intervallo di confidenza (nel casotrattato ai ±2s ovvero al 95%)
misurando
uscita
Incertezzasulmisurando
Incertezzain uscita
!
y+ = a+ 2" a( ) # x+b+ 2" b
!
y = a " x+b
!
y" = a " 2# a( ) $ x+b " 2# b
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
Legame lineare
Cosa accade se la relazione è non lineare:Linearizzazione mediante trasformazione
Ponendo:
3. regressione del modello
!
y = c1" e
c2"x2
# ln y( ) = ln c1( ) + c
2" x
2
!
" y = ln y( )
b = ln c1( )
a = c2
" x = x2
!
" y = a " x + b
8
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
4. validazione del modello mediante analisi dei residui
Il caso in cui esiste un numero molto elevato di ingressi didisturbo che hanno un debole effetto sulla misura e cherisultano difficili od impossibili da controllare coincide conl’ipotesi del teorema del limite centrale che ipotizza unadensità di probabilità di tali effetti combinati di naturagaussiana.
La verifica di gaussianità può quindi essere un validometodo per la validazione sia del modello adottato chedell’operazione di taratura
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
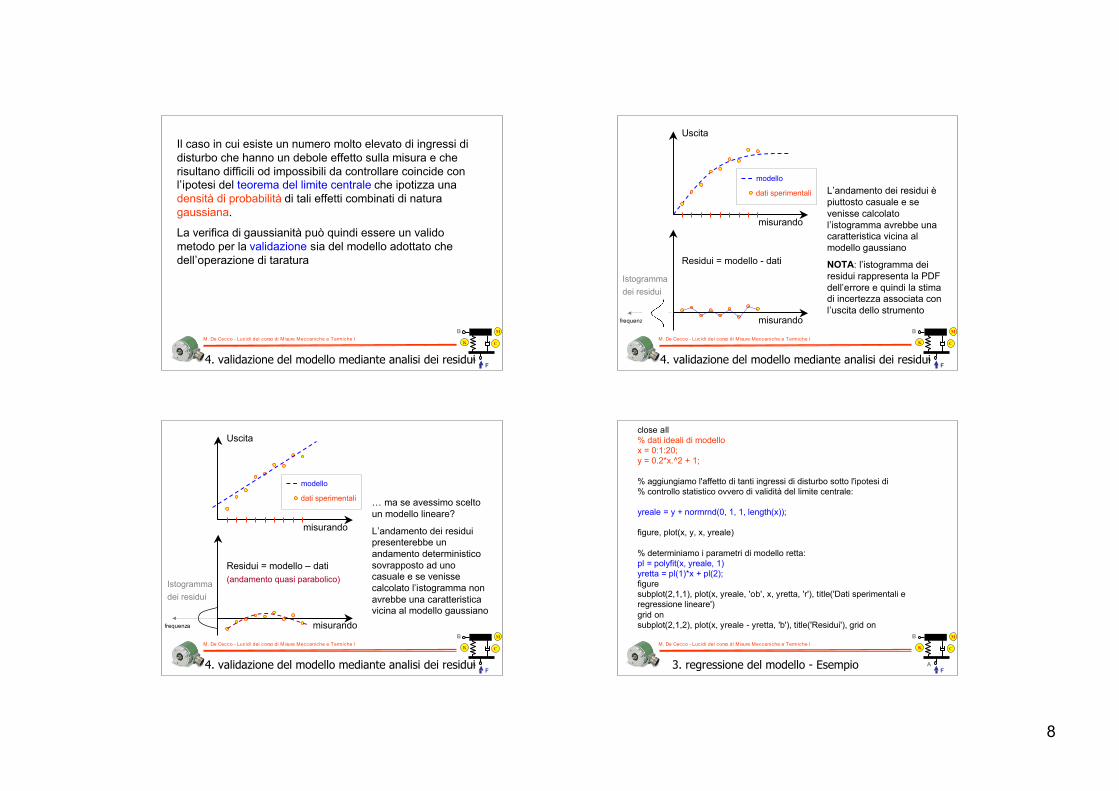
4. validazione del modello mediante analisi dei residui
misurando
Uscita
misurando
Residui = modello - dati
L’andamento dei residui èpiuttosto casuale e sevenisse calcolatol’istogramma avrebbe unacaratteristica vicina almodello gaussiano
NOTA: l’istogramma deiresidui rappresenta la PDFdell’errore e quindi la stimadi incertezza associata conl’uscita dello strumento
modello
dati sperimentali
Istogrammadei residui
frequenza
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
4. validazione del modello mediante analisi dei residui
misurando
Uscita
misurando
Residui = modello – dati(andamento quasi parabolico)
… ma se avessimo sceltoun modello lineare?
L’andamento dei residuipresenterebbe unandamento deterministicosovrapposto ad unocasuale e se venissecalcolato l’istogramma nonavrebbe una caratteristicavicina al modello gaussiano
modello
dati sperimentali
Istogrammadei residui
frequenza
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
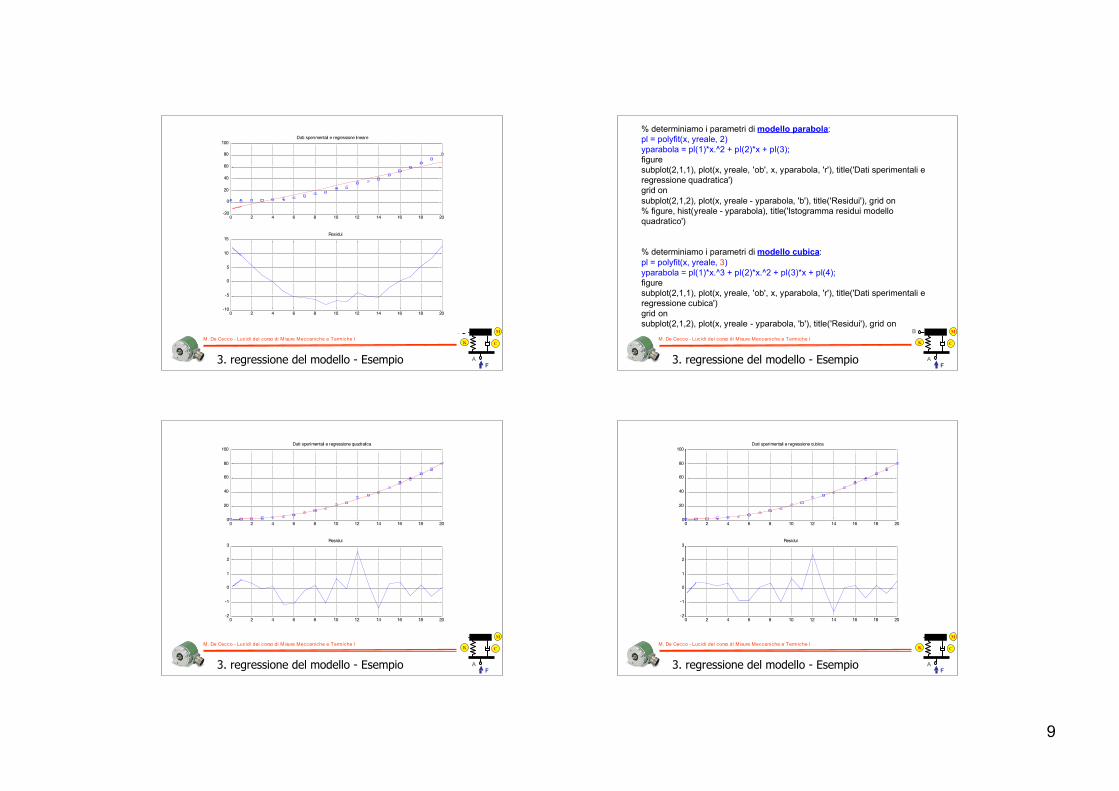
3. regressione del modello - Esempio
close all% dati ideali di modellox = 0:1:20;y = 0.2*x.^2 + 1;
% aggiungiamo l'affetto di tanti ingressi di disturbo sotto l'ipotesi di% controllo statistico ovvero di validità del limite centrale:
yreale = y + normrnd(0, 1, 1, length(x));
figure, plot(x, y, x, yreale)
% determiniamo i parametri di modello retta:pl = polyfit(x, yreale, 1)yretta = pl(1)*x + pl(2);figuresubplot(2,1,1), plot(x, yreale, 'ob', x, yretta, 'r'), title('Dati sperimentali eregressione lineare')grid onsubplot(2,1,2), plot(x, yreale - yretta, 'b'), title('Residui'), grid on
9
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
0 2 4 6 8 10 12 14 16 18 20-20
0
20
40
60
80
100Dati sperimentali e regressione lineare
0 2 4 6 8 10 12 14 16 18 20-10
-5
0
5
10
15Residui
3. regressione del modello - Esempio
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello - Esempio
% determiniamo i parametri di modello parabola:pl = polyfit(x, yreale, 2)yparabola = pl(1)*x.^2 + pl(2)*x + pl(3);figuresubplot(2,1,1), plot(x, yreale, 'ob', x, yparabola, 'r'), title('Dati sperimentali eregressione quadratica')grid onsubplot(2,1,2), plot(x, yreale - yparabola, 'b'), title('Residui'), grid on% figure, hist(yreale - yparabola), title('Istogramma residui modelloquadratico')
% determiniamo i parametri di modello cubica:pl = polyfit(x, yreale, 3)yparabola = pl(1)*x.^3 + pl(2)*x.^2 + pl(3)*x + pl(4);figuresubplot(2,1,1), plot(x, yreale, 'ob', x, yparabola, 'r'), title('Dati sperimentali eregressione cubica')grid onsubplot(2,1,2), plot(x, yreale - yparabola, 'b'), title('Residui'), grid on
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello - Esempio
0 2 4 6 8 10 12 14 16 18 200
20
40
60
80
100Dati sperimentali e regressione quadratica
0 2 4 6 8 10 12 14 16 18 20-2
-1
0
1
2
3Residui
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello - Esempio
0 2 4 6 8 10 12 14 16 18 200
20
40
60
80
100Dati sperimentali e regressione cubica
0 2 4 6 8 10 12 14 16 18 20-2
-1
0
1
2
3Residui

10
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – Esempio: overfitting
% determiniamo i parametri di modello quattordicesino ordine:pl = polyfit(x, yreale, 14)yparabola = pl(1)*x.^14 + pl(2)*x.^13 + pl(3)*x.^12 + pl(4)*x.^11 +.... pl(5)*x.^10 + pl(6)*x.^9 + pl(7)*x.^8 + pl(8)*x.^7 + pl(9)*x.^6 +... pl(10)*x.^5 + pl(11)*x.^4 + pl(12)*x.^3 + pl(13)*x.^2 + pl(14)*x +pl(15);figuresubplot(2,1,1), plot(x, yreale, 'ob', x, yparabola, 'r')title('Dati sperimentali e regressione quattordicesino ordine'), grid onsubplot(2,1,2), plot(x, yreale - yparabola, 'b'), title('Residui'), grid on
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – Esempio: overfitting
0 2 4 6 8 10 12 14 16 18 200
20
40
60
80Dati sperimentali e regressione quattordicesino ordine
0 2 4 6 8 10 12 14 16 18 20-1
-0.5
0
0.5
1
1.5Residui
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
A parte l’andamento oscillante che può non esseregiustificato (dipende dal fenomeno fisico connesso con ilsistema), sembrerebbe che un modello di polinomio diordine superiore sia capace di meglio rappresentarel’andamento ingresso uscita visto che i residui si sonoridotti …
… andiamo a curiosare su cosa esprime il modello al difuori dei valori campionati, ovvero andiamo a campionareil dominio x con passo più fine
3. regressione del modello – Esempio: overfitting
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – Esempio: overfitting
figure, plot(x, yreale, 'ob'), hold onx = 0:0.02:20;yparabola = pl(1)*x.^14 + pl(2)*x.^13 + pl(3)*x.^12 + pl(4)*x.^11 +.... pl(5)*x.^10 + pl(6)*x.^9 + pl(7)*x.^8 + pl(8)*x.^7 + pl(9)*x.^6 +... pl(10)*x.^5 + pl(11)*x.^4 + pl(12)*x.^3 + pl(13)*x.^2 + pl(14)*x +pl(15);
plot(x, yparabola, 'r'), grid ontitle('Dati sperimentali e regressione quattordicesino ordine')

11
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – Esempio: overfitting
0 2 4 6 8 10 12 14 16 18 20-10
0
10
20
30
40
50
60
70
80
90
Dati sperimentali e regressione quattordicesino ordine
In alcuni tratti ilmodello del 14°ordine estrapolal’andamento inmanieraassolutamente nongiustificata!!!
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – Esempio: overfitting
Ripetendo le acquisizionied il fitting il risultato èanche poco ripetibile!
0 2 4 6 8 10 12 14 16 18 20-10
0
10
20
30
40
50
60
70
80
90Dati sperimentali e regressione quattordicesino ordine
0 2 4 6 8 10 12 14 16 18 200
10
20
30
40
50
60
70
80
90Dati sperimentali e regressione quattordicesino ordine
0 2 4 6 8 10 12 14 16 18 200
10
20
30
40
50
60
70
80
90Dati sperimentali e regressione quattordicesino ordine
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – Esempio: overfitting
Per poter verificare la bontà sia del processo di acquisizioneche del modello usato è possibile effettuare una collezione deidati due volte. Una per la regressione ed una per la verifica
0 2 4 6 8 10 12 14 16 18 20-10
0
10
20
30
40
50
60
70
80
90Dati sperimentali e regressione quattordicesino ordine
0 2 4 6 8 10 12 14 16 18 200
10
20
30
40
50
60
70
80
90Dati sperimentali e regressione quattordicesino ordine
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – caso non lineare
Si potrebbe procedere analiticamenteimponendo le solite due equazioni edandando a cercarne i minimi
Analizziamo il seguente caso di regressione non lineare:
!
mina,b( )
" a,b( ){ } =mina,b( )
yi #a
1+b $ xi
%
& '
(
) *
+
, -
.
/ 0
2
i=1
N
12 3 4
5 4
6 7 4
8 4 !
y =a
1+b " x
!
"# a,b( )"a
= 0
"# a,b( )"b
= 0
$
% &
' &
12
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
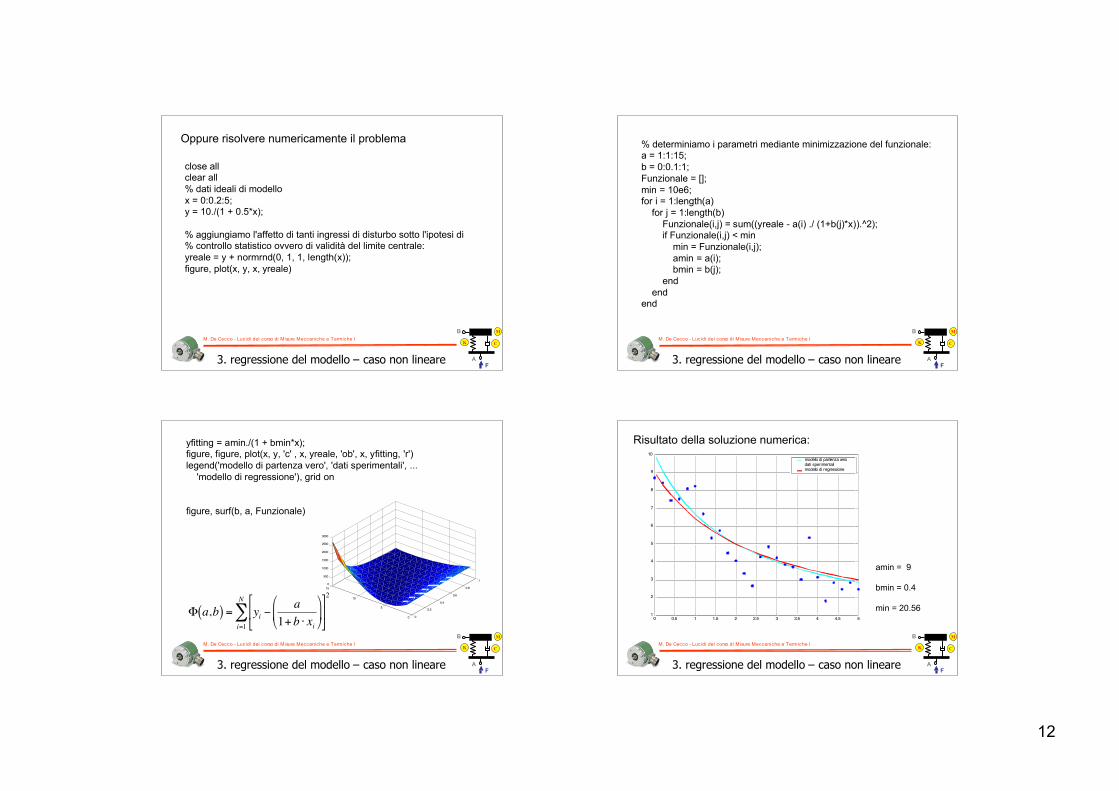
Oppure risolvere numericamente il problema
3. regressione del modello – caso non lineare
close allclear all% dati ideali di modellox = 0:0.2:5;y = 10./(1 + 0.5*x);
% aggiungiamo l'affetto di tanti ingressi di disturbo sotto l'ipotesi di% controllo statistico ovvero di validità del limite centrale:yreale = y + normrnd(0, 1, 1, length(x));figure, plot(x, y, x, yreale)
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – caso non lineare
% determiniamo i parametri mediante minimizzazione del funzionale:a = 1:1:15;b = 0:0.1:1;Funzionale = [];min = 10e6;for i = 1:length(a) for j = 1:length(b) Funzionale(i,j) = sum((yreale - a(i) ./ (1+b(j)*x)).^2); if Funzionale(i,j) < min min = Funzionale(i,j); amin = a(i); bmin = b(j); end endend
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – caso non lineare
yfitting = amin./(1 + bmin*x);figure, figure, plot(x, y, 'c' , x, yreale, 'ob', x, yfitting, 'r')legend('modello di partenza vero', 'dati sperimentali', ... 'modello di regressione'), grid on
figure, surf(b, a, Funzionale)
0
0.2
0.4
0.6
0.8
1
0
5
10
15
0
500
1000
1500
2000
2500
3000
!
" a,b( ) = yi #a
1+b $ xi
%
& '
(
) *
+
, -
.
/ 0
2
i=1
N
1
M. De Cecco - Lucidi del corso di Misure Meccaniche e Termiche I
F
K C
M
A
B
3. regressione del modello – caso non lineare
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 51
2
3
4
5
6
7
8
9
10
modello di partenza verodati sperimentalimodello di regressione
amin = 9
bmin = 0.4
min = 20.56
Risultato della soluzione numerica: