STRUTTURA DI UN ROBOT Un robot è composto da organi meccanici ed elettrici governati da una o più...
12
STRUTTURA DI UN ROBOT STRUTTURA DI UN ROBOT Un robot è composto da organi meccanici ed elettrici governati da una o più unita centrali assimilabili alla CPU di un normale computer che, unitamente a componenti di memoria riscrivibili, permettono la memorizzazione e l’esecuzione dei comandi. Nella struttura un robot può essere considerato come una macchina costituita da un certo numero di End effector
-
Upload
crocifisso-esposito -
Category
Documents
-
view
221 -
download
1
Transcript of STRUTTURA DI UN ROBOT Un robot è composto da organi meccanici ed elettrici governati da una o più...

STRUTTURA DI UN ROBOTSTRUTTURA DI UN ROBOT
Un robot è composto da organi meccanici ed elettrici governati da una o più unita centrali assimilabili alla CPU di un normale computer che, unitamente a componenti di memoria riscrivibili, permettono la memorizzazione e l’esecuzione dei comandi. Nella struttura un robot può essere considerato come una macchina costituita da un certo numero di elementi uniti tra di loro (LINK) tramite giunti cinematici (JOINT) che consentono loro un movimento relativo.
End effector

END EFFECTOREND EFFECTOR
La struttura dell’end effector dipende dall’operazione che deve compiere il robot; in alcuni casi può essere simile ad una mano dotata di dita oppure un utensile senza la possibilità di presa, ma adatto allo svolgimento di uno specifico compito. I più diffusi attrezzi per l’end effector sono le pinze di atterraggio, meccaniche o magnetiche, le pinze da saldatura e le pistole da verniciatura.

GIUNTI E LINKGIUNTI E LINK
Un robot è caratterizzato da un insieme di elementi, detti link, connessi per mezzo di giunti chiamati joint.I giunti sono divisibili in due categorie:
Prismatici (P): consento un moto lineare tra due link Rotoidali (R): permettono un moto rotatorio tra due link attorno ad una asse che può essere parallelo o perpendicolare agli assi dei link

GRADI DI LIBERTA’GRADI DI LIBERTA’
Fondamentale per la caratterizzazione di un robot è il numero di assi, o i gradi di libertà, di cui è dotato.
Un grado di libertà è ottenibile con un giunto, prismatico o rotoidale, che unisce due link successivi.
Maggiore è il numero di gradi di libertà del robot, e maggiore è la sua capacità di assumere posizioni e orientamenti diversi, ma anche maggiore è la sua complessità.

TIPOLOGIE DI ROBOTTIPOLOGIE DI ROBOT
I robot industriali non sono solo differenziabili a seconda dell’impiego, ma anche in base alla geometria che li caratterizza. la successione di coppie cinematiche e il numero di gradi di libertà possibili determina la struttura generale del robot, come riportato in tabella
Tipo di robot Successione di coppie cinematiche Gradi di libertà
Cartesiano P P P 3
A Portale P P P 2 - 3
Polare R R P 3
Cilindrico R P P 3
Sferico R R P 3
SCARA R R P 2 - 4
Antropomorfo R R R 3 - 8
Pick-and-Place R/P R/P R/P 3

ROBOT CARTESIANIROBOT CARTESIANI
I movimenti principali sono tre e sono realizzati per mezzo di tre giunti prismatici, di conseguenza il volume utile di lavoro risulta un parallelepipedo Ad ogni grado di libertà dei giunti corrisponde un grado di libertà cartesiano;questo comporta una sempliceprogrammazione dei movimenti, in quanto ogni punto raggiungibile è identificato da una terna cartesiana, e anche una notevole rigidezza meccanica.I robot cartesiani sono particolarmente utilizzati per operazioni di assemblaggio in ambienti strutturati e spesso sono fissati ad una rotaia che permette lo spostamento lungo uno dei tre assi. Generalmente sono utilizzati in applicazioni con grandi volumi di lavoro oppure quando è necessario effettuare più operazioni su una stessa linea. In ambito industriale i robot cartesiani costituiscono il 20% dei robot installati.
http://www.directindustry.it/prod/schneider-electric-motion-deutschland/robot-cartesiano-4819-30854.html

ROBOT A PORTALEROBOT A PORTALE
Sono cinematicamente simili ai robot cartesiani; infatti anch’essi sono costituiti da tre giunti prismatici che consentono di ottenere un volume utile di lavoro a parallelepipedoLa struttura a portale permette di sostenere il robot e di utilizzarlo per applicazioni di grosse dimensioni; inoltre, in questo modo si ha la possibilità di posizionare l’unità terminale sopra al pezzo da lavorare in modo da non ostruire la zona con il robot stesso.I robot a portale sono prevalentemente utilizzati per operazioni di movimentazione di materiale e palletizzazione; strutture dello stesso tipo, ma di ridotte dimensioni sono impiegate nel montaggio di componenti meccanici o elettronici.
http://www.directindustry.it/prod/newtec/pallettizzatore-robotizzato-portale-8162-78629.html

ROBOT CILINDRICOROBOT CILINDRICO
Sono realizzati con due giunti prismatici e un giunto rotoidale che conferiscono al robot tre gradi di libertàIl volume utile di lavoro ha forma cilindrica.
http://www.youtube.com/watch?v=xmdsY8oW2WY
La disposizione degli assi permette di utilizzare strutture di questo tipo per operazioni di manipolazione di oggetti, asservimento di macchine e montaggioRispetto ad altre configurazioni i robot cilindrici presentano minor libertà di movimento, ma hanno come vantaggio l’utilizzo di un giunto di rotazione, poco costoso e di semplice realizzazione

ROBOT SFERICOROBOT SFERICO
la struttura è costituita da un giunto prismatico e due giunti rotoidali che permettono di ottenere un volume utile di lavoro di forma semisferica.sono utilizzati in applicazioni dove non è richiesto un grande spazio di manovra.
http://www.youtube.com/watch?v=xmdsY8oW2WY

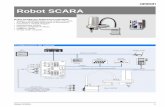
ROBOT SCARAROBOT SCARA
SCARA è l’acronimo di Selective Compliance Assembly Robot Arm (braccio robotico di assemblaggio a cedevolezza selettiva) ed è stato realizzato espressamente per operazioni di montaggio.E’ costituito da tre giunti, di cui due rotoidali e uno prismatico
http://www.youtube.com/watch?v=v5eR0eHknZk
Sono particolarmente adatti a operazioni in cui è richiesta elevata precisione e piccoli spostamenti per completare il lavoro. La struttura è anche contraddistinta da una notevole rapidità di posizionamento e un’elevata precisione e ripetibilità. Nelle applicazioni industriali questi robot costituiscono l’11% del totale.

ROBOT ANTROPOMORFOROBOT ANTROPOMORFO
Sono i più versatili e i più utilizzati nell’industria meccanica. La struttura di base comprende tre giunti rotoidali, ma si possono avere anche fino a otto gradi di libertà. Nel caso in cui il numero di assi sia maggiore di quattro, si parla di robot antropomorfo in quanto la struttura e i movimenti assomigliano a quelli di un braccio umano.I robot di questo tipo non presentano grandi volumi di lavoro, ma possono raggiungere un punto nello spazio da varie direzioni e orientamenti della mano; per tale motivo le applicazioni in cui i robot antropomorfi sono maggiormente utilizzati comprendono assemblaggio di pezzi, saldature, sbavatura e verniciatura.
http://www.directindustry.it/prod/fanuc-robotics-europe/robot-antropomorfo-32007-162230.html

ROBOT PICK AND PLACEROBOT PICK AND PLACE
Le strutture pick-and-place non sono propriamente considerate dei robot, ma dei manipolatori impiegati per operazioni di presa e posizionamento di oggetti.Sono utilizzati principalmente in processi produttivi in cui è richiesto lo stesso lavoro ciclicamente e generalmente sono caratterizzati da tre gradi di libertà e da un azionamento pneumatico.Le strutture di tipo pick-and-place permettono di ottenere elevate velocità e grande accuratezza nel movimento di oggetti, inoltre la possibilità di riprogrammare il robot aumenta notevolmente la flessibilità e la produzione della linea.
http://www.youtube.com/watch?v=wzvYsklwKqk