Robot Beginner KIT V2 ARDUINO UNO REV3 Il Robot per tutti
12
pag. 1 Robot Beginner KIT V2 ARDUINO UNO REV3 Il Robot per tutti Con la tecnologia di oggi, la costruzione di un Robot è realmente alla portata di tutti. Con il nostro kit potete realizzare, in maniera molto semplice, il vostro robot in poco tempo. Anche se le istruzioni affermano che il dispositivo non è un gioco, potete montarlo, programmarlo e collaudarlo assieme a vostro figlio, facendogli assaporare gli aspetti dell’elettronica, della robotica e della programmazione. Il tutto con grande passione e divertimento per tutti.Procediamo per gradi e vediamo come si possa assemblare un gioiello dell’elettronica in poco tempo e, soprattutto, a dargli una vita propria. Parliamo di questo Robot Possedere un robot è stato sempre un sogno di grandi e piccini. Un dispositivo capace di riprodurre fedelmente la volontà dell’uomo, quasi imitandolo è, in effetti, uno dei più affascinanti e interessanti apparecchi che esistano. Il fatto, poi, di poterlo programmare, insegnandogli la strada da percorrere e il comportamento da prendere in determinate condizioni è un piacere impareggiabile. Il Robot Beginner KIT V2 è un kit di montaggio, semplicissimo da assemblare e da montare. Il suo funzionamento è garantito in circa un’ora di lavoro. Seguendo le istruzioni incluse e, soprattutto, la seguente recensione, le operazioni di assemblaggio risulteranno estremamente semplici. Il kit contiene tutto ciò che serve per portare a termine l’intera installazione. E’ stato concepito, soprattutto, per chi desidera iniziare a operare con questa tipologia di dispositivi. La facilità di programmazione di Arduino, infatti, assieme alla duttilità del robot, consentono di dargli subito una vita propria, impartendogli i comandi più disparati e consentendogli di conoscere il mondo circostante, grazie alla sensibilità acustica del suo sensore ad ultrasuoni. Contenuto della confezione Al ricevimento del prodotto, troverete, nella confezione, alcuni componenti. Vediamo assieme di cosa si tratta e la loro funzione generale. Ricordate sempre che la buona realizzazione di un progetto dipende sempre dalla perfetta conoscenza delle parti che lo compongono. Quindi, è sempre consigliabile investire qualche minuto in più del proprio tempo a questo tipo di analisi. Apriamo, dunque, con cura la scatola ed elenchiamo il relativo contenuto, come una sorta d’inventario. ARDUINO UNO REV3 Sicuramente non ha bisogno di presentazione. Si tratta della più famosa scheda elettronica al mondo, contenente il microcontrollore Atmega328. E’ il cuore FIGURA 1: LA CONFEZIONE
Transcript of Robot Beginner KIT V2 ARDUINO UNO REV3 Il Robot per tutti

pag. 1
Robot Beginner KIT V2 ARDUINO UNO REV3Il Robot per tutti
Con la tecnologia di oggi, la costruzione di un Robot è realmente alla portata di tutti. Con ilnostro kit potete realizzare, in maniera molto semplice, il vostro robot in poco tempo.Anche se le istruzioni affermano che il dispositivo non è un gioco, potete montarlo,programmarlo e collaudarlo assieme a vostro figlio, facendogli assaporare gli aspettidell’elettronica, della robotica e della programmazione. Il tutto con grande passione edivertimento per tutti.Procediamo per gradi e vediamo come si possa assemblare ungioiello dell’elettronica in poco tempo e, soprattutto, a dargli una vita propria.
Parliamo di questo Robot
Possedere un robot è stato sempre unsogno di grandi e piccini. Un dispositivocapace di riprodurre fedelmente lavolontà dell’uomo, quasi imitandolo è, ineffetti, uno dei più affascinanti einteressanti apparecchi che esistano. Ilfatto, poi, di poterlo programmare,insegnandogli la strada da percorrere e ilcomportamento da prendere indeterminate condizioni è un piacereimpareggiabile. Il Robot Beginner KIT V2è un kit di montaggio, semplicissimo daassemblare e da montare. Il suofunzionamento è garantito in circa un’oradi lavoro. Seguendo le istruzioni inclusee, soprattutto, la seguente recensione, leoperazioni di assemblaggio risulteranno
estremamente semplici. Il kit contienetutto ciò che serve per portare a terminel’intera installazione. E’ stato concepito,soprattutto, per chi desidera iniziare aoperare con questa tipologia didispositivi. La facilità di programmazionedi Arduino, infatti, assieme alla duttilitàdel robot, consentono di dargli subito unavita propria, impartendogli i comandi piùdisparati e consentendogli di conoscere ilmondo circostante, grazie alla sensibilitàacustica del suo sensore ad ultrasuoni.
Contenuto della confezione
Al ricevimento del prodotto, troverete,nella confezione, alcuni componenti.Vediamo assieme di cosa si tratta e laloro funzione generale. Ricordate sempreche la buona realizzazione di un progettodipende sempre dalla perfettaconoscenza delle parti che locompongono. Quindi, è sempreconsigliabile investire qualche minuto inpiù del proprio tempo a questo tipo dianalisi. Apriamo, dunque, con cura lascatola ed elenchiamo il relativocontenuto, come una sorta d’inventario.
ARDUINO UNO REV3
Sicuramente non ha bisogno dipresentazione. Si tratta della più famosascheda elettronica al mondo, contenenteil microcontrollore Atmega328. E’ il cuoreFIGURA 1: LA CONFEZIONE

pag. 2
e il cervello dell’intero sistema, poiché lasua programmazione permette dipersonalizzare al massimo icomportamenti del robot. E’ dotato di ben14 porte digitali, con le quali puòcomunicare con il mondo esterno,attraverso impulsi e segnali. Per maggioriinformazioni si consultino le sezionicontenenti le caratteristiche tecniche diArduino Uno Rev3.
2A Motor Shield per Arduino
Questa scheda costituisce il modulo dipotenza, capace di pilotare direttamente imotori del robot, per un massimo di 2Ampere di carico. Essa utilizza l’integratoL298P, un potente driver Dual Full Bridgeper motori. Può essere direttamentemontata su Arduino.
Staffa per modulo a ultrasuoni
Si tratta di una staffa di plastica
trasparente che ha lo scopo di reggere ilmodulo sensore a ultrasuoni. Esso si puòavvitare alla struttura con delle piccoleviti.
Sensore ad Ultrasuoni
E’ un potente sensore di distanza aultrasuoni. Il suo funzionamento si basa,appunto, sull’invio di una nota acustica,non udibile, che rimbalza sull’ostacolo eritorna indietro. Il tempo impiegatodall’onda sonora a compiere l’interopercorso sancisce la distanza, dopo avereseguito un semplice calcolo aritmetico.Questo tipo di sensori è estremamenteutile per determinare la distanza tra dueoggetti e, nel caso specifico diun’applicazione robotizzata, serve
FIGURA 2: ARDUINO UNO REV3
FIGURA 3: 2A MOTOR SHIELD FOR ARDUINO
FIGURA 4: LA STAFFA PER IL MODULO A
ULTRASUONI
FIGURA 5: IL MODULO AD ULTRASUONI

pag. 3
soprattutto per evitare gli ostacoli. Essoopera entro un buon intervallo lineare.
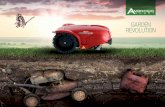
Chassis
Il robot vero è proprio è interamente daassemblare. E’ composto di poche partiche si montano in pochi minuti. Il telaio èin acrilico ed è dotato di numerosi fori perl’alloggiamento di sensori, regolatori,spie, ecc. Grazie alle dettagliate istruzioniil montaggio del telaio è realmente ungioco da ragazzi.
Jumper
Per concludere la descrizione delladotazione della confezione, i jumperrisultano utilissimi per connettere, traloro, le varie parti elettroniche e idispositivi. Essi evitano la preparazionecasalinga di ulteriori cavi dicollegamento. Grazie alle rigideterminazioni, le connessioni elettricherisultano sicure, solide ed affidabili. Sipossono inoltra rimuovere e spostare inpochi istanti. La fornitura comprendealcuni tipi di jumper maschiomaschio emaschio femmina.
FIGURA 8: LE PARTI DELLO CHASSIS
FIGURA 6: LO CHASSISFIGURA 7: I JUMPER

pag. 4
Montaggio dello Chassis
La prima fase da seguire, ovviamente, èil corretto montaggio dello chassis.Benché esso risulti semplice, si consigliavivamente di seguire le istruzioni riportatenel foglio illustrativo incluso. Ogni partemeccanica ha la sua ben precisafunzione e le minuterie (viti, dadi, bullonirondelle, ecc.) non possono esserescambiate tra loro.Iniziamo, dunque, a preparare una sortadi “inventario” delle minuterie checompongono il kit dello chassis,seguendo il foglio incluso e adagiando,con cura, le parti sul tavolo. Seguendo lafigura 8, la confezione dello chassis ècomposta dal seguente materiale:
•N. 1 Parte superiore chassis (1);•N. 1 Parte inferiore chassis (2);•N. 4 Supporti per motore (3);•N. 2 Supporti velocità (4);•N. 2 Motori (5);•N. 1 Ruota omnidirezionale (6);•N. 2 Ruote (7);•N. 1 Porta batterie (8);•N. 8 Distanziatori L25 (9);•N. 4 Distanziatori L10 (10);•N. 4 Viti M3x30 (11);•N. 2 Viti a testa piatta M3x10 (12);•N. 22 Viti M3x6 (13);•N. 6 Dadi M3 (14).
La suddetta lista deve combaciare allaperfezione con quanto riportato nel foglioillustrativo. Passiamo, adesso, almontaggio vero e proprio, ricordando chela fretta è sempre causa di errore, a volteirreparabili. Seguiamo, dunque, leistruzioni passo per passo. Le fasi daseguire sono otto e l’intera operazionedovrebbe farvi impiegare non più dimezz’ora di tempo, risultando moltopiacevole, rilassante e, soprattutto,semplice.
Passo 1: Inserimento deisupporti del motore
Sulla parte inferiore dello chassis sidevono innestare i quattro supporti delmotore. Seguendo il manuale e le nostreillustrazioni, l’operazione risulta moltosemplice. Al momento, tali supporti nonrisultano solidali alla base, fino adinserimento completo dei motori con leviti. In effetti, più che inserimentodefinitivo, tale operazione si puòconsiderare come un approntamentodelle componenti per il secondosuccessivo passo.
Passo 2: Assemblaggio delmotore
Il secondo passo consiste nel preparare imotori con le ruote dentate, che
FIGURA 9: INSERIMENTO DEI SUPPORTI DEL MOTORE NELLO CHASSIS

pag. 5
andranno a incastrarsi nei correttialberini. Non usare molta forza in questaoperazione.Passo 3: Fissaggio motori
Il terzo passo del montaggio prevede ilfissaggio definitivo dei motori allochassis, attraverso i supporti montatiprecedentemente. Nel posizionare imotori, occorre fare attenzione a che leruote dentate fuoriescano dalle relativefessure sottostanti. Se così non fosse,
occorre spostare (d poco) le stesse,sull’albero motore. Non appena ilposizionamento è avvenuto consuccesso, si può procedere al bloccaggiodefinitivo con le quattro viti M3x30 erelativi dadi. La struttura è stataprogettata con una cura estrema e i fori,assieme agli alloggiamenti,corrispondono alla perfezione. Nonesercitate, in ogni caso, un’eccessivaforza nell’avvitamento. Si tratta sempre disupporti di plastica.
FIGURA 10: ASSEMBLAGGIO MOTORI CON RUOTE DENTATE
FIGURA 11: L’AVVITAMENTO DEI MOTORI SULLO CHASSIS

pag. 6
Passo 4: Assemblaggio delleruote
Per montare le due ruote bastaincastrarle nei rispettivi alberi del motore.Non servono viti e il fissaggio è moltosicuro per via del particolare profilodell’innesto. Le ruote possono essere,comunque, rimosse in maniera semplicee veloce.
Passo 5: Assemblaggio dellaruota omnidirezionale
Il successivo passo prevede il fissaggiodel “ruotino” omnidirezionale sullo
chassis. Allo scopo occorre montare duedistanziatori L25 sul supporto e fissarlicon le rispettive viti M3x6. Sul latoopposto dei distanziatori va installato ilruotino, fissandolo a sua volta con altreviti dello stesso tipo. In effetti, più cheuna ruota, si tratta di una sfera checonsente al robot di prendere qualunquedirezione.
Passo 6: Assemblaggio del vanobatterie
Adesso è il momento di montare ilportapile, che si porta a terminesemplicemente con due viti M3x10 erelativi dadi. E’ possibile alloggiare
FIGURA 12: IL MONTAGGIO DELLE RUOTE
FIGURA 13: IL FISSAGGIO DELLA RUOTA OMNIDIREZIONALE

pag. 7
quattro pile da 1,5V di tipo stilo (AA). Siconsiglia di utilizzare il tipo alcalino.Essendo la realizzazione libera ecompletamente personalizzabile,abbiamo successivamente preferitomontare il vano portapile sulla partesuperiore dello chassis, per una comodasostituzione degli accumulatori.
Passo 7: Montaggio deidistanziatori
Successivamente si passa ad avvitare i
distanziatori, che avranno l’importantefunzione di separare, e tenere ben saldi,la parte superiore e inferiore dellochassis. Occorrono, allo scopo, idistanziatori L25 con relative viti M3x6.Dopo tale operazione, il nostro robotcomincia a prendere forma, con nostragrande soddisfazione.
Passo 8: Montaggio dellochassis superiore
Finalmente, l’ultima fase conclude il
FIGURA 14: INSTALLAZIONE DEL VANO BATTERIE
FIGURA 15: IL MONTAGGIO DEI DISTANZIATORI

pag. 8
piacevole montaggio della parte fisica delrobot. Si deve semplicemente fissare,con delle viti M3x6, la parte superioredello chassis. Questa, di fatto, costituisceun coperchio, coprendo i motori e il vanoporta batterie. La loro sostituzione,pertanto, ne implica lo smontaggio.
Installazione del sensore aultrasuoni e supporto
La struttura, ormai ultimata, è pronta aospitare le parti elettroniche. E’ il
momento di montare il supporto per ilsensore a ultrasuoni, fissandolo con ledue viti e relativi dadi. Il modulopermette, in effetti, tante soluzioni ariguardo e si può installarlo sulla parteanteriore dello chassis.
Installazione di Arduino
Per mezzo dei distanziatori in dotazione,anche tale operazione è molto semplice.I numerosi fori presenti sullo chassisconsentono una libera scelta delmontaggio, anche se la posizione
FIGURA 16: ASSEMBLAGGIO FINALE DELLO CHASSIS
FIGURA 17: IL ROBOT MONTATO
FIGURA 18: INSTALLAZIONE DEL SENSORE AD
ULTRASUONI

pag. 9
migliore e consigliata resta sempre quellacentrale. Per queste operazioni non ènecessario utilizzare alcun saldatore astagno. Tutte le connessioni avvengonoper avvitamento o incastro.
Impilazione del Motor Shield suArduino
Una volta che Arduino è stato fissatosaldamente sullo chassis, si può
innestare su esso il Motor Shield,impilandolo sul sistema. La connessionepintopin è estremamente semplice, inquanto tutti i terminali sono numeratiprogressivamente. Al di là di questo,occorre orientare i morsetti di coloreverde del c.s. vero le prese dialimentazione e USB di Arduino. Inoltre, idue pettini d’innesto sono di lunghezzavariabile e la possibilità di errore si riduce
FIGURA 19: INSTALLAZIONE DI ARDUINO SULLO
CHASSIS FIGURA 20: INNESTO DEL MOTOR SHIELD SU
ARDUINO
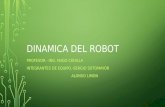
FIGURA 21: SCHEMA DI CABLAGGIO DEL SENSORE AD ULTRASUONI CON ARDUINO

pag. 10
drasticamente.
Cablaggio elettrico del sensoread ultrasuoni con l’elettronica
E’ giunto finalmente il momento delcablaggio delle parti elettroniche.Iniziamo dal sensore a ultrasuoni, per ilcui collegamento possiamo seguire lafigura 21. I morsetti sui c.s. sonopassanti, per cui anche se ilcollegamento fisico è effettuato sul MotorShield, di fatto esso è realizzato suArduino. Si devono utilizzare, allo scopo,i jumper colorati per connettere tra loro leparti.
Programmazione di Arduino
E’ il momento, finalmente, diprogrammare Arduino con il softwarepredisposto a muovere il robot.Trattandosi, appunto, di un firmware, sipuò realizzare qualsiasi applicazionepratica, ludica o professionale. Occorre,naturalmente, conoscere il linguaggio diprogrammazione di Arduino. Dopo aver
scaricato da Internet e installato l’ArduinoSoftware (IDE), si può aprire lo sketchdel robot, anch’esso scaricato dal sito. Sipresuppone che l’utente abbia ancheinstallato il driver per il riconoscimento diArduino, come dispositivo seriale COM,anche se connesso alla porta USB. Losketch può essere caricato su Arduinopremendo l’apposito tasto dell’IDE (untondino con la freccia rivolta a destra)oppure attraverso il menù “Sketch” e lavoce “Carica”. Se l’operazione va a buonfine, il robot deve funzionareimmediatamente.
Arduino Motor Shield
Come detto prima, si tratta di un circuitodi potenza che permette di pilotare duemotori in corrente continua. Il controllodella velocità è effettuata controllando ledue porte digitali 5 e 6 (in output) edenominate nello sketch, rispettivamente,E1 e E2. L’abilitazione o meno dei motoriè effettuata, invece, attraverso le portedigitali 4 e 7, nominate M1 e M2.Benché i motori possano esserealimentati direttamente da Arduino,consigliamo di dare loro tensioneattraverso un’alimentazione esterna.Questo per non stressare e scaricaresubito le batterie della logica di controllo.
FIGURA 22: IL CABLAGGIO DEL SENSORE AD
ULTRASUONI CON ARDUINO
FIGURA 23: LO SKETCH DEL ROBOT PRONTO
PER ESSERE CARICATO

pag. 11
Tale scelta è effettuata attraverso deijumper, presenti sulla scheda di potenza.In caso di batteria esterna, la massa diArduino e quella della fonte esternadevono essere collegate tra loro. Siconsiglia di non utilizzare delle batterieesterne non troppo pesanti. I due motoriin DC si connettono ad altrettanti morsettidi alimentazione, presenti sempre sullaMotor Shield. La connessione vaeffettuata seguendo la polarità riportatasulla serigrafia della scheda. Unaeventuale inversione di polarità cambia ladirezione dei motori.
Un semplice sketch di prova
Per chi volesse testare immediatamentela velocità del robot, con un programmafacile facile, proponiamo di seguito unosketch di prova. Esso non utilizza ilsensore a ultrasuoni ma si limita a fargirare le ruote in avanti per tre secondi epoi indietro per altri tre secondi, in unloop infinito, in modo da far “danzare” ilrobot. Ovviamente occorre evitare gliostacoli perché, come detto, il listato noncontrolla la presenza di oggetti sulpercorso del robot. Il valore del PWM èimpostato 255 cosicché i motori girano almassimo della loro velocità, essendo ilduty cycle stabilito al 100%. Il listatoevidenzia che, per far avanzare il motoreoccorre agire sulle variabili M1 e M2,mentre per fermare i motori o regolarnela velocità si devono usare le variabili E1e E2.L’utente può, anzi, iniziare ad analizzarequesta base di codice, per poi espandereil progetto con movimenti ecomportamenti ben più complessi.Il motore si pilota agendo su alcuni valorilogici delle porte, nonché sul duty cycleper controllarne la velocità. In particolare,le seguenti tabelle della verità prevedonotutte le funzionalità del caso.
Per la corretta comprensione delletabelle, si assuma che il simbolo “H”significa un livello logico alto, il simbolo“L” un livello logico basso e il simbolo “X”qualsiasi livello logico applicabile.
Conclusioni
L’esperienza con il Robot Beginner KITV2 è stata davvero entusiasmante. Giàdall’apertura della confezione edall’inventariazione dei componenti si ècompreso subito che si trattava di unprodotto di qualità, ben sviluppato,progettato e concepito. Gli elementi damontare sono pochi e si assemblano consemplicità e velocità estreme, senzal’ausilio di saldatore o collanti vari.Lo chassis è stato progettato veramentebene e offre infinite soluzioni diadattamenti e personalizzazioni, grazie ainumerosi fori di diversa misura, presentisul suo corpo. La programmazione è,anch’essa, molto facile e, dopo i primiistanti di adeguamento al sistema, èpossibile cominciare, fin da subito, laprogrammazione dei primi prototipi.Si consiglia di utilizzare pile leggère ealcaline, e non batterie economiche chenon fornirebbero la giusta corrente per ilfunzionamento. Come tutti i dispositivielettronici occorre sempre prestare lamassima cautela nel montaggio enell’utilizzo. Evitare l’uso in luoghi umidi obagnati e, alla presenza di bambini, deveessere assicurata quella di un adulto.Un prodotto, dunque, che ha suscitatogrande interesse di chi scrive, e che hadato tanti nuovi spunti e idee per il suointeressante utilizzo.Un prodotto sicuramente da acquistare eda tenere tra i propri dispositivi più cari.Un apparecchio che, soprattutto, puòdare nuove opportunità e idee per larealizzazione di qualcosa più importantee grandioso.

pag. 12
Listato 1
int E1 = 5;int M1 = 4;int E2 = 6;int M2 = 7;void setup()
pinMode(M1, OUTPUT);pinMode(M2, OUTPUT);
void loop()
digitalWrite(M1,HIGH);digitalWrite(M2,HIGH);analogWrite(E1, 255); //PWM Speed ControlanalogWrite(E2, 255); //PWM Speed Controldelay(3000);
digitalWrite(M1,LOW);digitalWrite(M2,LOW);analogWrite(E1, 255); //PWM Speed ControlanalogWrite(E2, 255); //PWM Speed Controldelay(3000);
FIGURA 24: L’ALIMENTAZIONE ESTERNA DEI
MOTORI FIGURA 25: I MORSETTI PER I MOTORI IN CC
Tabella 1: Controlli per i motori