Morfologia Robot

of 33
-
Upload
marco-pusda -
Category
Documents
-
view
505 -
download
1
description
Morfologia Robot
Transcript of Morfologia Robot
-
5/10/2018 Morfologia Robot
1/33
Capitulo2MORFOLOGiA DEL ROBOT
Cada uno cuenta de Ia feria como Ieva en ella.Refranero popular
Un robot esta formado par los siguientes elementos: estructura mecanica, transmisiones, sistema deaccionarniento, sistema sensorial, sistema de control y elementos terminales,En este capitulo se examinan estos elementos constitutivos de un robot. Se estudia prirnero la es-
tructura rnecanica, hacienda referencia a los distintos tipos de articulaciones posibles entre dos esla-bones consecutivos y a las configuraciones existentes, Seguidamente se analizan los sistemas detransmision y reduccion necesarios para transmitir a cada una de las articulaciones el movimientogenerado par los actuadores, que como elementos can eapaeidad para desplazar la estructura mecani-ca, son examinados en el siguiente apartado.Se repasan despues los denorninados sensores intemos, necesarios para el control de los movi-
mientos del robot. Finalmente, el ultimo apartado se ocupa de los elementos terminales (pinzas, he-rramientas, dispositivos de sujeci6n, etc.), que situados general mente en el extremo del robot, sirvenp a r a que este pueda interaccionar con el mundo exterior realizando las operaciones que le han sidoasignadas.Aunque los elementos empleados en los robots no son exclusivos de estos (rnaquinas herramientas
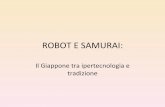
y otras muchas maquinas emplean tecnologfas semejantes), las altas prestaciones que se exigen a losrobots han motivado que en ellos se empleen elementos con caracterfsticas especfficas.La Figura 2.1 muestra la estructura mecanica de un robot, sobre la que se ha indicado alguno de los
elementos que se van a estudiar en este capitulo, examinando las neeesidades particulares de cada unoy comparando las diversas altemativas existentes. Se sefialaran adernas cuales son las tendeneias ac-tuales y los desarrollos que se preven para el futuro.
15
-
5/10/2018 Morfologia Robot
2/33
16 Fundamentos de robotica
Figura 2.1. Ejemplo de estructura rnecanica y elementos ccnst itut ivos de un robot .(Cortes fa de INSER Robotica.)
2.1. ESTRUCTURA MECA.NICA DE UN ROBOT
Mecanicarnente, un robot esta formado por una serie de elementos 0 eslabones unidos mediantearticulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos. Laconstitucion ffsica de la mayor parte de los robots industriales guarda cierta similitud con la anatomia delbrazo humano, por 10 que en oeasiones, para haeer referencia a los distintos elementos que eomponen elrobot, se usan terminos como cuerpo, brazo, coda y mufieca.EI movimiento de cada articulacion puede ser de desplazamiento, de giro, 0 de una combinacion deambos. De este modo son posibles los seis tipos diferentes de artieulaciones que se muestran en la
Figura 2.2, aunque, en la practica, en los robots solo se emplean la de rotacion y la prisrnatica,
-
5/10/2018 Morfologia Robot
3/33
Morfologia del robot 17
Esfcrica 0R6tula(3 GDL)
Planar(2 GDL) Tornillo(I GDL)
Prismatica(1GDL) Rotaci6n(1 GDL) Cilindrica(2GDL)
Figura 2.2. Distintos tipos de articulaciones para robots.
Cadauno de los movimientos independientes que puede realizar cada articulaci6n con respecto a laanterior,se denomina grado de libertad (GDL). En la Figura 2.2 se indica el numero de GDL de cadatipode articulaci6n. El numero de grados de libertad del robot viene dado por la suma de los gradosdelibertadde las articulaciones que 10 componen. Puesto que, como se ha indicado, las articulacionesempleadasson unicamente Lasde rotaci6n y prismatica con un solo GDL cada una, el numero de GDLdelrobot suele coincidir con el mirnero de articulaciones de que se compone.El empleo de diferentes cornbinaciones de articulaciones en un robot, da lugar a diferentes confi-
guraciones, con caracteristicas a tener en cuenta tanto en eLdisefio y construccion del robot como ensu aplicaci6n. Las combinaciones mas frecuentes son las representadas en La Figura 2.3 donde seatiendeunicamente a las tres primeras articulaciones del robot, que son las mas irnportantes a la horadeposicionar su extremo en un punto del espacio.Puestoque para posicionar y orientar un cuerpo de cuaLquier manera en el espacio son necesarios
seisparametros, tres para definir Laposicion y tres para Laorientacion, si se pretende que un robotposicioney oriente su extremo (y con 61la pieza 0 herramienta manipuLada) de cualquier modo en elespacio,se precisaran al menos seis GDL.Enla Figura 2.4 se muestran los seis GDL con que esta dotado el robot ARC Mate 120/S-12 de
Fanuc,as! como sus articuLaciones y eslabones.En la practica, a pesar de ser necesarios los seis GDL comentados para tener total libertad en el
posiciondo y orientacion del extremo del robot, muchos robots industriales cuentan con solo cuatro 0cincoGDL,por ser estos suficientes para Ilevar a cabo las tareas que se les encomiendan.
-
5/10/2018 Morfologia Robot
4/33
18 Fundamentos de robotica
-obot cartesiano Robot cilindrico Robot esferico 0 polarRobot SCARA Robot angular 0 antropomorfico
Figura 2.3. Configuraciones mas frecuentes en robots industriales.
; -,
- _ _)
.1 1 ~1.3D'(.360' )
Figura 2.4. Grados de libertad del robot ARC Mate 120/8-12. (Cortesfa de FANUC.)
-
5/10/2018 Morfologia Robot
5/33
Morfologia del robot 19
Robot plano con 3 GDL paraaumentar su maniobrabilidad Robot plano con 3 GDL paraaumentar su volumen de trabajoFigura 2.5. Robots planares redundantes.
Existen tambien casas opuestos, en los que se precisan mas de seis GDL para que el robot puedatener acceso a todos los puntas de su entorno, Asi, si se trabaja en un entorno can obstaculos, el dotaral robot de grados de Iibertad adicionales Ie perrnitira acceder a posiciones y orientaciones de su ex-trema a las que, como consecuencia de los obstaculos, no hubiera lIegado can seis GDL. Otra situa-cion frecuente es la de dotar al robot de un GDL adicional que Ie permita desplazarse a 10 largo de uncarril, aumentando as! el volumen del espacio al que puede acceder. Cuando el nurnero de grados delibertad del robot es mayor que los necesarios para realizar una determinada tarea se dice que el robotes redundante.La Figura 2.5 representa las dos situaciones comentadas para el caso de robots planares a los que
les bastana can 2 GDL para posicionar su extrema en cualquier punto del plano.
2.2 . TRANSMISIONES Y REDUCTORES
Las t ransmisiones son los elementos encargados de transmitir el movimiento desde los actuadores hastalas a rticulaciones. Se incluiran junto con las transmisiones a los reductores, encargados de adaptar elp a r y la velocidad de la salida del actuador a los valores adecuados para el movimiento de los elementosd e l robot.
-
5/10/2018 Morfologia Robot
6/33
20 Fundamentos de robotica
2.2.1. TransmisionesDado que un robot mueve su extremo con aceleraciones elevadas, es de gran importaneia redueir almaximo su momenta de inereia. Del mismo modo, los pares estaticos que deben veneer los actuadoresdependen direetamente de la distancia de las masas al aetuador. Por estos motivos se procura que losactuadores, par 10 general pesados, esten 10 mas eerca posible de la base del robot. Esta circunstanciaobliga a utilizar sistemas de transmisi6n que trasladen el movimiento hasta las articulaciones,
Tabla 2.1. Sistemas de transmisi6n para robotsEntrada-Salida Dcnorninacion Ventajas lneon venientesCircular-Circular Engranaje
Correa dcntadaCadenaParalelogramoCahle
Pares altosDistancia grandeDistancia grande
HolgurasRuidoGiro limitadoDeformabilidad
Circular-Lineal Tornillo sin finCrcrnallera
Poca holguraHolgura media
RozamientoRozamiento
Lineal-Circular Paral. articuladoCrernallera Holgura media
Control diffcilRozamiento
especialmente a las situadas en el extrema del robot. Asirnismo, las transmisiones pueden ser utilizadaspara convertir movimiento circular en lineal 0 viceversa, 10que en oeasiones puede ser necesario.
Existen actualmente en el mere ado robots industriales con aeoplamiento directo entre aeeiona-mien to y articulacion, ventajosos, tal y como se detalla mas adelante, en numerosas ocasiones. Setrata, sin embargo, de casos particulares dentro de la generalidad que en las robots industriales aetua-les supone la existencia de sistemas de transmision junto con reductores para el acoplamiento entreactuadores y articulaciones.
Es de esperar que un buen sistema de transrnision cumpla una serie de caracteristicas basicas: debetener un tamano y peso reducido, se ha de evitar que presente juegos u holguras considerables y sedeben buscar transmisiones con gran rendimiento,
Aunque no existe un sistema de transrnision especifico para robots, S 1 existen algunos usados conmayor frecuencia y que se recogen clasificados en la Tabla 2.1. La clasificacion se ha realizado enbase al tipo de movimiento posible en la entrada y la salida: lineal 0 circular. En la citada tabla tam-bien quedan reflejadas algunas ventajas e inconvenientes propios de algunos sistemas de transmision.Entre elias eabe destacar la holgura 0 juego. Es muy importante que el sistema de transmision a utili-zar no afecte al movimiento que transmite, ya sea por el rozamiento inherente a su funcionamiento 0par las holguras que su desgaste pueda introducir. Tarnbien hay que tener en cuenta que el sistema detransmision sea capaz de soportar un funcionarniento continuo a un par elevado, y a ser posible entregrandes distancias.
-
5/10/2018 Morfologia Robot
7/33
Morfologia del robot 21
Figura 2.6. Telemanipulador TELBOT junto con la caja de transmision por engranajessituada en su base. (Cor tesfa de Walischmiller GmbH. )
Las transmisiones mas habituales son aquellas que cuentan con movimiento circular tanto a la en-trada como a la salida. Incluidas en estas se hallan los engranajes, las correas dentadas y las cadenas.LaFigura 2.6 muestra el brazo articulado de un telemanipulador junto con los engranajes de transmi-si6nque transmiten el par de los motores situados en su base a los eslabones.2 . 2 . 2 . Reduc tore sEn cuanto a los reductores, al contrario que con las transmisiones, si que existen determinados sistemasusadosde manera preferente en los robots industriales. Esto se debe a que a los reduct ores utilizados enrobotica se les exige unas condiciones de funcionamiento muy restrictivas. La exigencia de estascaracteristicas viene motivada por las altas prestaciones que se Ie piden al robot en cuanto a precision yvelocidad de posicionamiento. La Tabla 2.2 muestra val o res tipicos de los reductores para roboticaaetualmente empleados.Se buscan reductores de bajo peso, reducido tamafio, bajo rozamiento y que al mismo tiempo sean
capaces de realizar una reduccion elevada de velocidad en un unico paso. Se tiende tambien a minimi-zar su momento de inercia, de negativa influencia en el funcionamiento del motor, especialmenteentice en el caso de motores de baja inercia [FERRANDO-93].Los reductores, por motivos de disefio, tienen una velocidad maxima de entrada admisible, quecomoregia general aumenta a medida que disminuye el tamafio del motor. Tambien existe una limita-
-
5/10/2018 Morfologia Robot
8/33
22 Fundamentos de robotica
ci6n en cuanto al par de salida nominal permisible (T2) que depende del par de entrada (Td y de larelaci6n de transmision a traves de la relacion:
[2. I]
donde el rendimiento (11) puede llegar a ser cerca del 10 0 % Y la relacion de reduceion de velocidades( C O l = velocidad de entrada; I D . l = velocidad de salida) varia entre 50 y 300.
Tabla 2.2. Caracteristicas de reductores para rob6ticaCaracterfsticas Valores t(picosRelacion de reduccionPeso y tamaiioMomento de inerciaVelocidades de entrada maximaPar de salida nominalPar de salida maximoJuego angularRigidez torsionalRendimiento
50 + 3000.1 + 30 kg10.4 kg m2
6000 ~ 7000 rpm5700Nm7900 Nm0+2 "
100~ 2000 NmJrad85 % ~ 98 %
Puesto que los robots trabajan en ciclos cortos que implican continuos arranques y paradas, es degran importancia que el reductor sea capaz de soportar pares elevados puntuales. Tambien se buscaque el juego angular a backlash sea 1 0 menor posible. Este se define como el angulo que gira el eje desalida cuando se cambia su sentido de giro sin que Ilegue a girar el eje de entrada. Par ultimo, es im-portante que los reductores para rob6tica posean una alta rigidez torsional, definida como el par quehay que aplicar sobre el eje de salida para que, manteniendo bloqueado el de entrada, aquel gire unangulo unitario.Los reductores para robots mas corminmente usados son los de las empresas Harmonic Drive
[HARMONIC-96] y Cyc1o-Getriebebau [CYCLO-96]. Los primeros, denominados HDUC (Figura 2.7), sebasan en una corona exterior rigid a (Figura 2.8) con dentado interior (circular spline) y un vasa flexi-ble (flexspline) can dentado exterior que engrana en el primero. El numero de dientes de ambos difie-re en 1 02. Interiormente al vasa gira un rodamiento elipsoidal (wave generator) que deforma el vaso,poniendo en contacto la corona exterior con la zona del vasa correspondiente al maximo diametro dela elipse. AI girar el wave generator (a1que se fija el eje de entrada), se obliga a que los dientes delflexspline (fijado al eje de salida) engranen uno a uno con los del circular spline, de modo que al ha-ber una diferencia de dientes Z = N, - N f , tras una vuelta completa del wave generator, el flexsplinesolo habra avanzado Z dientes. La relaci6n de reducci6n conseguida sera, por tanto, de ZiNr . En con-creto, se consiguen reducciones de hasta 320, can una holgura cercana a cera y capacidad de transmi-sion de par de 5720 Nm.
-
5/10/2018 Morfologia Robot
9/33
Morfologia del robot 23
Spline Wave Generator(VVG) Circular Spline(CS)
Flexspline(FS)
Figura 2.7. Despiece HDUC.(Cortesia de HarmonicDrive.) Figura 2.S. Esquema HDUC.(Cortesia de HarmonicDrive.)
Par otra parte e1 sistema de reduccion de los reductores CYCLO se basa en el movimiento cicloi-dal de un disco de curvas (Figura 2.9) movido por una excentrica solidaria al arbol de entrada. Porcadarevolucion de la excentrica el disco de curvas avanza un saliente rodando sobre los rodillos exte-riores, Este avance arrastra a su vez a los pemos del arbol de salida que describiran una cicio ide den-tro de los huecos del disco de curvas. La componente de traslacion angular de este movimiento secorrespondecon la rotacion del arbol de salida. La relacion de reduccion viene, por tanto, determina-daporel nurnero de salientes. Para compensar los momentos de flexion y de las masas de cada discoenmovimiento excentrico, generalmente se utilizan dos discos desfasados entre S I 1800
Rodillos exterioresDisco de curvasExcentrica'Arbol de entradaPernos de arrastreArool de salida
Dibujo EsquematicoFigura 2.9. Reductor Cyclo. (Cortesia de Cyclo.)
-
5/10/2018 Morfologia Robot
10/33
24 Fundamentos de robotica
Existe tambien un tercer tipo de reductor denominado REDEX-ACBAR, de funcionamiento simi-lar al CYCLO, pero que presenta la posibilidad de poder reducir el juego angular desde el exterior ateoricamente un valor nulo.
2.2.3. Accionamiento directoComo se ha indicado anteriormente, desde hace unos afios existen en el mercado robots que poseen 1 0que se ha dado en !lamar accionamiento directo (Direct Drive DD), en el que el eje del actuador seconecta directamente a la carga 0 articulacion, sin la utilizacion de un reductor intermedio lAN-88][YOUCEF-89j [MONTANO-88] . Este termino suele utilizarse exclusivamente para robots con accionamientoelectrico.Este tipo de accionamiento aparece a raiz de la necesidad de utilizar robots en aplicaciones que
exigen combinar gran precision con alta velocidad. Los reductores introducen una serie de efectosnegativos, como son juego angular, rozamiento 0 disminucion de la rigidez del accionador, que pue-den impedir alcanzar los valores de precisi6n y velocidad requeridos.Las principales ventajas que se derivan de la utilizacion de accionamientos directos son las si-
guientes:
fl:f!.
EI principal problema que existe para la aplicacion practica de un accionarniento directo radica en Iel motor a emplear. Debe tratarse de motores que proporcionen un par elevado (unas 50-100 veces I ' : , "mayor que con reductor) a bajas revoluciones (las de movirniento de la articulacion) manteniendo lamaxima rigidez posible.Entre los motores empleados para accionamiento directo y que cumplan estas caracteristicas, se
encuentran los motores sincronos y de continua sin escobillas (brushless), ambos con imanes perma-nentes fabricados con materiales especiales (samario-cobalto). Tambien se utili zan motores de indue-cion de reluctancia variable. La necesaria utilizacion de este tipo de motores encarece notablemente elsistema de accionamiento.Otra cuestion importante a tener en cuenta en el empleo de accionarnientos directos es la propia
cinematica del robot. Colocar motores, general mente pesados y voluminosos, junto a las articulacio-nes, no es factible para todas las configuraciones del robot debido a las inercias que se generan. Elestudio de la cinernatica con la que se diseiia el robot ha de tener en cuenta estos parametres, estandola estructura final elegida altamente condicionada por ellos, Por este motivo, los robots de acciona-rniento directo son general mente de tipo SCARA, cuyo disefio se corresponde bien con las necesida-des que el accionarniento directo implica. Al eliminar el reductor tambien se disrninuye de forma con-siderable la resolucion real del codificador de posicion acoplado al eje, tal y como se detalla en elepigrafe dedicado a sensores internos. Esto lleva ala utilizacion en los DD de codificadores de posi-cion de muy alta resolucion,
Posicionamiento rapido y preciso, pues se evitan los rozamientos y juegos de las transmisionesy reductores.
Aumento de las posibilidades de controlabiIidad del sistema a costa de una mayor complejidad. Simplificacion del sistema mecanico al eliminarse el reductor.
-
5/10/2018 Morfologia Robot
11/33
Morfologia del robot 25
Figura 2.10. Robot AdeptThree de accionamiento directo. (Cortes fa de Adept Technology.)
E I primer robot comercial can accionamiento directo se presento en 1984. Se trataba de un robotSCARA denominado AdeptOne, de la compafiia norteamericana Adept Technology, Inc. A partir deentonceseste tipo de robots se ha hecho popular para aplicaciones que requieran robots con altasprestaciones en velocidad y posicionamiento (montaje microelectronico, corte de metal par laser,etc.).La Figura 2.10 muestra una fotografia del robot AdeptThree, de la misma cornpafifa y tambiendeaccionamiento directo. En la actualidad un robot con accionamiento directo puede llegar a aumen-tar tanto la velocidad como la precision de manera significativa can respecto a aquellos robots deaccionamientotradicional.
2 . 3 . ACTUADORES
Losactuadores tienen por misi6n generar el movimiento de los elementos del robot segun las ordenesdadaspor la unidad de control. Los actuadores utilizados en robotica pueden ernplear energfa neurnatica,hidraulica 0 electrica, Cada uno de estos sistemas presenta caracteristicas diferentes, siendo preciso
-
5/10/2018 Morfologia Robot
12/33
26 Fundamentos de robotica
evaluarlas a la hora de seleccionar el tipo de actuador mas conveniente. Las caracteristicas a considerarson entre otras: Potencia, Controlabilidad. Peso y volumen. Precision. Velocidad, Mantenimiento. Coste.En este epigrafe se exarninan los tres tipos de actuadores citados, comparandolos en cuanto a las
caracteristicas anteriores.
2.3.1. Actuadores neumaticosEn ellos la fuente de energia es aire a presion entre 5 y 10 bar. Existen dos tipos de actuadoresneumaticos: Cilindros neumaticos, Motores neumaticos (de aletas rotativas 0 de pistones axiales).En los primeros se consigue el desplazarniento de un embolo encerrado en un cilindro, como con-
secuencia de la diferencia de presion a ambos lados de aquel (Figura 2.11). Los cilindros neumaticospueden ser de simple 0 doble efecto, En los primeros, el embole se desplaza en un sentido como re-sultado del empuje ejercido por el aire a presion, rnientras que en el otro sentido se desplaza comoconsecuencia del efecto de un muelle (que recupera al embole a su posici6n de reposo), En los cilin-
Figura 2.1L Esquema de cil indro neumatico de doble eleeto. (Cortes fa de FESTO.)
-
5/10/2018 Morfologia Robot
13/33
Morfologia del robot 27
Figura 2.12. Motor de paletas.(Cortesia de FESTO.) Figura 2.13. Motor de pistones axiales.(Cortesia de CEDISA.)
drosde doble efecto el aire a presion es el encargado de empujar al embolo en las dos direcciones, alpoderser introducido de forma arbitraria en cualquiera de las dos camaras, En [DEPPERT94j se explicacanmasdetalle el funcionamiento de estos dispositivos.Normalmente, con los cilindros neumaticos solo se persigue un posicionamiento en los extremos
delmismo y no un posicionarniento continuo. Esto ultimo se puede conseguir con una valvula de dis-tribucion(generalmente de accionamiento electrico) que canaliza el aire a presion hacia una de las doscarasdel embole altemativamente. Existen no obstante sistemas de posicionamiento continuo de ac-cionamientoneumatico, aunque debido a su coste y calidad todavia no resultan competitivos.En los motores neumaticos se consigue el movimiento de rotaci6n de un eje mediante aire a pre-
sion, Los dos tipos mas usados son los motores de aletas rotativas y los motores de pistones axiales.En los primeros (Figura 2.12), sobre el rotor excentrico estan dispuestas las aletas de longitud varia-ble. A I entrar aire a presion en uno de los compartimentos formados por dos aletas y la carcasa, estastiendena girar hacia una situaci6n en la que el compartimento tenga mayor volumen. Los motores depistonesaxiales tienen un eje de giro solidario a un tambor que se ve obligado a girar por las fuerzasqueejercen varios cilindros, que se apoyan sabre un plano inclinado (Figura 2.13).Otro metoda cormin m a s sencillo de obtener movimientos de rotaci6n a partir de actuadores
neurnaticos,se basa en el empleo de cilindros cuyo embole se encuentra acoplado a un sistema depifion-crernallera. El conjunto forma una unidad compacta que puede adquirirse en el mercado comota l (Figura 2.14).En general y debido a la compresibilidad del aire, los actuadores neumaticos no consiguen unabuenaprecisi6n de posicionamiento. Sin embargo, su sencillez y robustez hacen adecuado su usa enaquelloscasos en los que sea suficiente un posicionamiento en dos situaciones diferentes (todo a na-da).Por ejemplo, son utilizados en manipuladores sencillos, en apertura y cierre de pinzas a en deter-minadasarticulaciones de algun robot (como el movimiento vertical del tercer grade de libertad dealgunosrobots tipo SCARA).
-
5/10/2018 Morfologia Robot
14/33
28 Fundamentos de robotica
Figura 2.14. Actuador rolat ivo lipo pi ii6n-cremallera. (Cortesfa de REXROTH MECMAN.)
Siempre debe tenerse en cuenta que el empleo de un robot can algun tipo de accionarnientoneumatico debera disponer de una instalacion de aire comprimido, incluyendo: compresor, sistema dedistribucion (tuberias, electrov::ilvulas), filtros, secadores, etc. No obstante, estas instalacionesneumaticas son frecuentes y existen en muchas de las fabricas donde se da cierto grado de automati-zacion.
2.3.2. Actuadores hidraulicosEste tipo de actuadores no se diferencian funcionalmente en mucho de los neumaticos, En ellos, en vezde aire se utilizan aceites minerales a una presion comprendida normalmente entre los 50 y lOObar,llegandose en ocasiones a superar los 300 bar. Existen, como en el casa de los neumaticos, actuadoresdel tipo cilindro y del tipo motores de aletas y pistones [VOCKROTH-94j.Sin embargo, las caracteristicas del fluido utilizado en los actuadores hidraulicos marcan ciertas
diferencias can los neumaticos, En primer lugar, el grado de compresibilidad de los aceites usados esconsiderable mente inferior al del aire, por 10 que la precision obtenida en este caso es mayor. Parmotivos similares, es mas facil en ellos realizar un control continuo, pudiendo posicionar su eje entodo un rango de valores (hacienda usa de servocontrol) con notable precision. Ademas, las elevadaspresiones de trabajo, diez veces superiores a las de los actuadores neumaticos, penni ten desarrollarelevadas fuerzas y pares.Par otra parte, este tipo de actuadores present a estabilidad frente a cargas estaticas. Esto indica que
el actuador es capaz de soportar cargas, como el peso 0 una presion ejercida sobre una superficie, sinaporte de energia (para mover el embole de un cilindro seria preciso vaciar este de aceite). Tambienes destacable su elevada capacidad de carga y relaci6n potencia-peso, asi como sus caracteristicas deautolubricacion y robustez.
~tII!i!tf
-
5/10/2018 Morfologia Robot
15/33
Morfologia del robot 29
Frente a estas ventajas existen tambien ciertos inconvenientes, Par ejernplo, las elevadas presionesalas que se trabaja propician la existencia de fugas de aceite a 1 0 largo de la instalacion. Asimismo,estainstalacion es mas complicada que la necesaria para los actuadores neumaticos y mucho mas queparalos electricos, necesitando de equipos de filtrado de particulas, eliminacion de aire, sistemas derefrigeracion y unidades de control de distribucion.Los accionamientos hidraulicos se usan can frecuencia en aquellos robots que deben manejar
grandescargas. Asi , este tipo de accionamiento ha sido usado par robots como el UNIMATE 2000 y4000 con capacidades de carga de 70 y 20 5 kg, respectivamente.
2.3.3. Actuadores electricosLascaracteristicas de control, sencillez y precision de los accionamientos electricos ha hecho que seanlo s m a s usados en los robots industriales actuales.Dentro de los actuadores electricos pueden distinguirse tres tipos diferentes [CORTES-89J: Motores de corriente continua (DC):
Control ados por inducido.Controlados por excitacion,
Motores de corriente alterna (AC): Sincronos.Asincronos.
Motores paso a paso.
Motores de corriente continua (DC)Sonlos mas usados en la actualidad debido a su facilidad de control. En la Figura 2.15 se muestra unesquemade un motor DC seccionado, en el que se pueden apreciar sus distintos elementos. En este caso,elpropiomotor incluye un codificador de posicion (encoder) para poder realizar su control,Los motares DC estan constituidos por dos devanados internos, inductor e inducido, que se ali-mentan can corriente continua: EI inductor, tambien denorninado devanado de excitacion, esta situado en el estator y crea uncampo magnetico de direccion fija, denominado de excitacion,
E I inducido, situado en el rotor, hace girar al mismo debido a la fuerza de Lorentz que aparececomo combinacion de la corriente circulante par el y del campo magnetico de excitacion. Re-cibe la corriente del exterior a traves del colector de delgas, en el que se apoyan unas escobillasde grafito.
Para que se pueda realizar la conversion de energia electrica en energia mecanica de forma conti-nua es necesario que los campos magneticos del estator y del rotor permanezcan estaticos entre 5 1 .Esta transforrnacion es maxima cuando ambos campos se encuentran en cuadratura. EI colector dedelgas es un conmutador sincronizado con el rotor encargado de que se mantenga el angulo relativoentreel campo del estator y el creado par las corrientes rot6ricas. De esta forma se consigue transfor-
-
5/10/2018 Morfologia Robot
16/33
30 Fundamentos de robotica
Figura 2.15. Esquema de motor DC seccionado con indicaci6n de sus dist intos componentes.(Cortesfa de maxon motor.)
mar automaticamente, en funcion de la velocidad de la maquina, la corriente continua que alimenta a1motor en corriente altern a de frecuencia variable en el inducido. Este tipo de funcionarniento se cono-ce con el nombre de autopilotado.Al aumentar la tension del inducido aumenta la velocidad de la maquina, Si el motor esta alimen-
tado a tension con stante. se puede aumentar la velocidad disrninuyendo el flujo de excitaci6n. Perocuanto mas debil sea el flujo, menor sera el par motor que se puede desarrollar para una intensidad deinducido constante. En el caso de control por inducido, la intensidad del inductor se mantiene cons-tante, mientras que la tension del inducido se utiliza para controlar la velocidad de giro. En los con-trolados por excitacion se actiia al contrario.Del estudio de ambos tipos de motores, y realizandose las simplificaciones correspondientes, se
obtiene que la relaci6n entre tensi6n de control y velocidad de giro (funcion de transferencia), res-ponde a un sistema de primer orden en los controlados por inducido, mientras que en el caso de losmotores controlados por excitacion, esta relacion es la de un segundo orden (Figura 2.16). Ver el epi-grafe 5.6.1 para mas detalles.Ademas, en los motores controlados por inducido se produce un efecto estabilizador de la veloci-
dad de giro originado por la realimentaci6n intrinseca que posee a traves de la fuerza contraelectro-
-
5/10/2018 Morfologia Robot
17/33
Morfologia del robot 31
Controlpor excitacion
Controlpor inducido
!tr Figura 2.16. Motor DC. Esquema y funciones de transferencia.motriz.Par estos mati vas, de los dos tipos de motores DC es el controlado por inducido el que se usaenel accionamiento de robots.
Para mejorar el comportamiento de este tipo de motores, el campo de excitacion se genera me-dianteimanes perrnanentes, can 10 que se evitan fluctuaciones del mismo. Estos imanes son de alea-cionesespeciales como samario-cobalto. Adernas, para disminuir la inercia que poseeria un rotor bo-binado,que es el inducido, se construye este mediante una serie de espiras serigrafiadas en un discoplano(ver Figura 2.17). En contrapartida, este tipo de rotor no posee apenas masa termica 10 que au-mentalos problemas de calentamiento por sobrecarga.
-
5/10/2018 Morfologia Robot
18/33
32 Fundamentos de rob6tica
Figura 2.17. MotorDC de imanes permanentes controlado po r inducido.
Las velocidades de rotacion que se consiguen con estos motores son del orden de 1000 a 3000r.p.rn., con un comportarniento muy lineal y bajas constantes de tiempo. Las potencias que puedenmanejar pueden llegar a los 10 kW.Como se haindicado, los motores DC son controlados mediante referencias de velocidad. Estas
normalmente son seguidas mediante un bucle de realimentacion de velocidad analogico que se cierramediante una electronica especifica (accionador del motor). Sobre este bucle de velocidad se colocaotro de posicion, en el que las referencias son generadas par la unidad de control (rnicroprocesador)en base al error entre la posicion deseada y la real.El motor de corriente continua presenta el inconveniente del obligado mantenimiento de Jas esco-billas. Por otra parte, no es posible mantener el par con el rotor parado mas de unos segundos, debido
a los calentamientos que se producen en el colector.Para evitar estos problemas, se han desarrollado en los iiltimos afios motores sin escobillas
(brushless). En estes, los imanes de excitacion se sinian en el rotor y el devanado de inducido en elestator, con 10 que es posible convertir la corriente mediante interruptores estaticos, que reciben lasefial de conmutacion a traves de un detector de posicion del rotor.Motores paso a pasoLos motores paso a paso general mente no han sido considerados dentro de los accionamientosindustriales, debido principalmente a que los pares para los que estaban disponibles eran muy pequefiosy los pasos entre posiciones consecutivas eran grandes. Esto Iimitaba su aplicacion a controles deposicion simples. En los ultirnos afios se han mejorado notablemente sus caracteristicas tecnicas,especialmente en 1 0 relativo a su control, 1 0 que ha perrnitido fabricar motores paso a paso capaces dedesarrollar pares suficientes en pequefios pasos para su uso como accionarnientos industriales.
. .
-
5/10/2018 Morfologia Robot
19/33
Mar/alogia del robot 33
Existen tres tipos de motores paso a paso [BARRIENTOS-95] : De imanes permanentes. De reluctancia variable. Hibridos.En los primeros, de imanes permanentes (Figura 2.18), el rotor, que posee una polarizacion
magneticaconstante, gira para orientar sus polos de acuerdo al campo magnetico creado por las fasesdel estator. En los motores de reluctancia variable, el rotor esta forrnado par un material ferro-magnetico que tiende a orientarse de modo que facilite el camino de las !ineas de fuerza del campomagnetico generado par la bobinas de estator. Los motores hibridos combinan el modo de funciona-mientode los dos tipos anteriores.En los motores paso a paso la serial de control son trenes de pulsos que van actuando rotativamente
sobreuna serie de electroimanes dispuestos en el estator. Por cada pulso recibido, el rotor del motorgiraun determinado mirnero discreto de grados.Para conseguir el giro del rotor en un determinado mimero de grados, las bobinas del estator deben
serexcitadas secuencialmente a una frecuencia que determina la velocidad de giro. Las inercias pro-piasdel arran que y parada (aumentadas por las fuerzas magnetic as en equilibria que se dan cuandoestaparado) impiden que el rotor alcance la velocidad nominal instantaneamente, par 10 que esta, ypor tanto la frecuencia de los pulsos que la fija, debe ser aumentada progresivamente.
~ +
Figura 2.18. Esquema de un motor paso a paso de imanes permanentes can cuatro fases.
-
5/10/2018 Morfologia Robot
20/33
34 Fundamentos de rob6tica
Para simplificar el control de estos motores existen circuitos especializados que a partir de tres se,fiales (tren de pulsos, sentido de giro e inhibicion) generan, a traves de una etapa Iogica, las secuen-cias de pulsos que un circuito de conmutacion distribuye a cada fase.Su principal ventaja can respecto a los servomotores tradicionales es su capacidad para asegurarun posicionamiento simple y exacto. Pueden girar ademas de forma continua, con velocidad variable,como motores sincronos, ser sincronizados entre sf, obedecer a secuencias complejas de funciona-rniento, etc. Se trata al mismo tiempo de motores muy ligeros, fiables y faciles de controlar, pues alser cada estado de excitacion del estator estable, el control se realiza en bucle abierto, sin la necesidadde sensores de realimentacion,Entre los inconvenientes se puede citar que su funcionamiento a bajas velocidades no es suave, y
que existe el peligro de perdida de una posicion por trabajar en bucle abierto. Tienden a sobrecalen-tarse trabajando a velocidades elevadas y presentan un limite en el tamafio que pueden a1canzar.Su potencia nominal es baja y su precision (minimo angulo girado) Uega tipicamente hasta ),8. Se
emplean para el posicionado de ejes que no precisan grandes potencias (giro de pinza) 0 para robotspequefios (educacionales); tambien son muy utilizados en dispositivos perifericos del robot, comomesas de coordenadas.Motores de corriente alterna (AC)Este tipo de motores no ha tenido aplicacion en el campo de la rob6tica hasta hace unos afios, debidofundamental mente a la dificultad de su control. Sin embargo, las mejoras que se han introducido en lasmaquinas sincronas hacen que se presenten como un claro competidor de los motores de corrientecontinua. Esto se debe principalmente a tres factores:
Figura 2.19. Gama de motores brush/ess con su etapa de control. (Cortesla de Saldor.)
-
5/10/2018 Morfologia Robot
21/33
Morfologia del robot 35
La construccion de rotores sineronos sin escobillas. Uso de convertidores estaticos que permiten variar Lafrecuencia (y asi Lavelocidad de giro) canfacilidad y precision.
Ernpleo de Lamicroelectronica que permite una gran capacidad de control.ELinductor se situa en el rotor y esta constituido por imanes permanentes, rnientras que eLinduci-
do.situado en el estator, esta formado por tres devanados iguales decalados 120 electricos y se ali-mentacon un sistema trifasico de tensiones. Es precise resaltar Lasirnilitud que existe entre este es-quemade funcionamiento y el del motor sin escobillas (Figura 2.19).En Losmotores sincronos la velocidad de giro depende unicamente de fa frecuencia de Latension
quealimenta el inducido. Para poder variar esta con precision, el control de velocidad se realiza me-dianteun convertidor de frecuencia. Para evitar el riesgo de perdida de sincronismo se utiliza un sen-sorde posicion continuo que detecta Laposicion del rotor y perrnite mantener en todo momento elmgulo que forman los campos del estator y del rotor. Este metodo de control se conoce como au-tosincrono0 autopilotado.ELmotor smcrono autopilotado excitado con irnan permanente, tambien llamado motor senoidal,
no presenta problemas de mantenirniento debido a que no posee escobiIlas y tiene una gran capacidaddeevacuacion de calor, ya que los devanados estan en contacto directo con Lacarcasa. ELcontrol deposicionse puede realizar sin Lautilizacion de un sensor extemo adicional, aprovechando el detector
Tabla 2.3. Caracteristicas de distintos tipos de actuadores para robotsNeumatico Hidraulico Electrico
Energfa Aire a presion Aceite mineral Corriente clectrica(5- 10 bar) (50-100 bar )
Opciones Cilindros Cilindros Corriente continuaMotor de paletas Motor de paletas Corriente alternaMotor de pist6n Motor de pistones axiales Motor paso a paso
Ventajas Baratos Rapidos Precisos Rapidos Alta relaei6n potencia-peso Fiables Sencillos Autolubricantes Facil controlRobustos Alta capacidad de carga Sene ilia instalacion
Estabilidad frente a Silenciososcargas cstaticas
Desventajas Dificultad de Diffcil mantcnimiento Potencia limitadacontrol continuo Instalacion especial Instalaci6n especial (filtros, eliminacion aire)(compresor, filtros ) Frecuentes fugasRuidoso Cares
-
5/10/2018 Morfologia Robot
22/33
36 Fundamentos de robotica
de posicion del rotor que posee el propio motor. Ademas perrnite desarrol\ar, a igualdad de peso, unapotencia mayor que el motor de corriente continua. En la actualidad diversos robots industriales em-plean este tipo de accionamientos con notables ventajas frente a los motores de corriente continua.En el caso de los motores asincronos, no se ha conseguido resolver satisfactoriamente los proble-
mas de control que presentan. Esto ha hecho que hasta el momento no tengan aplicacion en robotica,Como resumen de los tipos de actuadores empleados en robotica, en la Tabla 2.3 se presenta un
cuadro comparativo de estes,
2.4. SENSORES INTERNOS
Para conseguir que un robot realice su tarea con la adecuada precision, velocidad e inteligencia, serapreciso que tenga conocimiento tanto de su propio estado como del estado de su entomo. La informacionrelacionada con su estado (fundamentalmente la posicion de sus articulaciones) la consigue con losdenominados sensores intemos, mientras que la que se refiere al estado de su entorno, se adquiere conlos sensores extemos.En este epigrafe se tratara unicamente de los sensores internos. Informacion sobre sensores extemos
puede verse en textos y bibliografia especializada en vision artificial [GONZALEZ-92] , sensores de fuerza[CREUS -79 ] , tacto [RUSSEL-90] , distancia 0 teIemetria. La informacion que la unidad de control del robot
Tabla 2.4. Tipos de sensores internos de robots
Presencia-Inductivo Capacitivo Efecto hall Celula Reed-Optico Ultrasonido Contacto
Analogicos PotenciornetrosResolver Sincro Inductosyn. LVDTosicion
DigitalesEncoders absolutosEncoders incrementalesRegIa optic a
Velocidad Tacogeneratriz
-
5/10/2018 Morfologia Robot
23/33
Morfologia del robot 37
puedeobtener sobre el estado de su estructura mecanica es fundamentaLmente LareLativa a su posicion yvelocidad.En LaTabLa 2.4 se resumen los sensores mas corrainmente empleados para obtener informa-cionde presencia, posicion y velocidad en robots industriales, explicados con mas detalle en [PALLAs-89]y[NACHTIGAL-90]. Se comentan a continuacion los mas significativos.
2.4.1. Sensores de posicionP a r a el control de posicion anguLar se emplean fundamental mente los denominados encoders yresolvers. Los potenciometros dan bajas prestaciones por 10 que no se emplean salvo en contadasocasiones(robots educacionales, ejes de poca importancia).Codificadores angulares de posicion (encoders)L o s codificadores opticos 0 encoders incrementales constan, en su forma mas simple, de un discotransparente con una serie de marcas opacas colocadas radialmente y equidistantes entre sf; de unsistemade iluminacion en el que LaLuzes colimada de forma correcta, y de un elemento fotorreceptor(Figura 2.20). EI eje cuya posicion se quiere medir va acoplado aL disco trasparente. Con estadisposicion,a medida que el eje gire se iran generando pulsos en el receptor cada vez que la luz atraviesecadamarca, y lIevando una cuenta de estos pulsos es posibLeconocer Laposicion del eje.Existe,s in embargo, eLproblema de no saber si en un momento dado se esta realizando un giro en un
sentido0 en otro, con el peligro que supone no estar contando adecuadamente. Una solucion a este pro-blemaconsiste en disponer de otra franja de marcas, desplazada de la anterior de manera que el tren depulsosque con ella se genere este despLazado 90 electricos can respecto al generado por la primera
Marcade cera
Figura 2.20. Disposic i6n de un codificador optico (encoder) incremental .
-
5/10/2018 Morfologia Robot
24/33
38 Fundamentos de rob6tica
Figura 2.21. Disco codificado con c6digo de Gray para utilizar en encoders absolutes.(Cortesia de HEIDENHAIN.)
franja. De esta manera, con un circuito reLativamente sencillo es posible obtener una serial adicional queindique CUi:iLs eLsentido de giro, y que acnie sobre eLcontador correspondiente indicando que incre-mente 0 decremente la cuenta que se este reaLizando.Es necesario ademas disponer de una marca de referencia sobre el disco que indique que se ha dado
una vuelta completa y que, por tanto, se ha de empezar Lacuenta de nuevo. Esta marca sirve tambien parapoder comenzar a contar tras recuperarse de una cafda de tension.La resolucion de este tipo de sensores depende directarnente del mimero de marcas que se pueden
poner ffsicamente en el disco. Un metoda relativamente sencillo para aumentar esta resolucion es, nosolamente contabilizar los flancos de subida de Lostrenes de pulsos, sino contabilizar tarnbien Losdebajada, incrementando asf por cuatro Laresolucion de captador, pudiendose lIegar, con ayuda de circuitosadicionales, hasta 100.000 puLsospor vuelta.El funcionamiento basico de los codificadores 0 encoders absolutos es similar aLde los incrementales.
Se tiene una fuente de luz con Laslentes de adaptaci6n correspondientes, un disco graduado y unos foto-rreceptores. En este caso, eLdisco trans parente se divide en un ntimero detenninado de sectores (potenciade 2), codificandose cada uno de elias segiin un codigo binario cfclico (normal mente codigo Gray) quequeda representado por zonas transparentes y opacas dispuestas radialmente (Figura 2.21).No es necesario ahora ningiin contador 0 electronica adicional para detectar el sentido de giro, pues
cada posicion (sector) es codificado de forma absoluta. Su resolucion es fija, y vendra dada por el mime-ro de anillos que posea el disco graduado. Resoluciones habituales van desde 28 aibits (desde 256 a524.288 posiciones distintas).Normalmente los sensores de posicion se acoplan al eje del motor. Considerando que en la mayor
parte de los casas entre el eje del motor y el de Laarticulacion se situa un reductor de relacion N, cadamovimiento de la articulacion se vera multiplicado por N al ser medido por el sensor. Este aumentara asisu resolucion multiplicandola por N.Este probLema se soluciona en los encoders absolutos con la utilizacion de otro encoder absoluto mas
pequefio conectado por un engranaje reductor al principal, de manera que cuando este gire un vuelta
-
5/10/2018 Morfologia Robot
25/33
Morfologia del robot 39
cornpleta,el codificado adicional avanzara una posicion. Son los denominados encoders absolutos mul-tivuelta.Esta rnisma circunstancia origin ani que en el caso de los codificadores incrementales la sefial de refe-
rencia0marca de cero, sea insuficiente para detectar el punto origen para la cuenta de pulsos, pues habraN posibles puntos de referencia para un giro completo de la articulaci6n. Para distinguir cual de ellos eselcorrecto se suele utilizar un detector de presencia denominado de sincronismo, acoplado directamentea t eslab6n del robot que se considere. Cuando se conecta el robot desde una situaci6n de apagado, esprecisoejecutar un procedimiento de busqueda de referencias para los sensares (sincronizado). Durantesuejecuci6n se leen los detectores de sincronismo que detectan la presencia a ausencia del eslab6n delrobot.Cuando se detecta la conmutacion de presencia a ausencia de pieza, 0 viceversa, se atiende al en-coderincremental, tomandose como posicion de origen la correspondiente al primer pulso de marca decero que aguel genere.Los encoders pueden presentar problemas mecanicos debido a la gran precision que se debe tener en
su fabricacion, La contaminacion ambiental puede ser una fuente de interferencias en la transmisionoptics. Son dispositivos particularmente sensibles a golpes y vibraciones, estando su margen de tempe-raturade trabajo Iimitado por la presencia de componentes electr6nicos.
Eje .d e giro
Figura 2.22. Esquema de funcionamiento de un resolver.
Captadores angulares de posicion (siacro-resolvers)L a otraaltemativa en sensores de posicion para robots la representan los resolvers y los sincroresolvers,tambienllamados sincros. Se trata de captadores anal6gicos con resolucion teoricamente infinita. Elfuncionarnientode los resolvers se basa en la utilizaci6n de una bobina solidaria al eje excitada par unaportadora,generalmente con 400Hz, y por dos bobinas fijas situadas a su alrededor (Figura 2.22).
-
5/10/2018 Morfologia Robot
26/33
40 Fundamentos de robotica
El giro de la bobina movil hace que el acoplamiento con las bobinas fijas vane, consiguiendo que lasefial resultante en estas dependa del seno del angulo de giro. La bob ina movil excitada con tensi6nVsenuot) y girada un angulo e induce en las bobinas fijas situadas en cuadratura las siguientes tensiones:
V I =V s en (r ot } s en eV2 =V sentrotlcosa [2.2]
que la Hamada representacion del angulo e en formato resolver.El funcionamiento de los sincros e s a na lo g o al de los resolvers, excepto que las bobinas fijas forman
un sistema trifasico en estrella. Para un giro e de la bob ina rnovil excitada con tension Vsen(rot), admi-tiendo que los acoplamientos y los desfases son los mismos para todos los devanados, se obtienen lassiguientes tensiones entre las fases del estator:
V13 = J3 V c os(ro t) se n eVn = J3 V coslrot) sen{ e + 120)V 21 = J3 V coslcot) sen(e + 240)
[2.3]
que es la llamada representaci6n del angulo Elen formato sincro.El cambio de formato sincro a formato resolver 0 viceversa es inmediato, ya que se puede pasar de
uno a otro a traves de la lIamada red de Scott 0 transformador de Scott, de funcionamiento bidireccional.Para poder tratar en eI sistema de control la informaci6n generada por los resolvers y los sincros es
necesario convertir las sefiales analogicas en digitales. Para ello se utilizan los lIamados convertidoresresolver/digital (RID), que tradicionalmente se basan en dos tipos de estructuras distintas: seguimiento(tracking) y muestreo (sampling).
Ambos captadores son de tipo absoluto en cada vuelta del eje acoplado a ellos. Entre sus ventajasdestacan su buena robustez mecanica durante el funcionamiento y su inmunidad a contaminaci6n, hume-dad, altas temperaturas y vibraciones. Debido a su reducido momenta de inercia, imponen poca cargamecanica al funcionamiento del eje.
La Tabla 2.5 presenta una comparacion entre distintos tipos de sensores de posicion angular aten-diendo a diversos parametres de funcionamiento. Se comenta brevemente a continuaci6n alguno de ellos.
Tabla 2.5. Comparaci6n entre dist intos sensores de posici6n angularRobustez Rango Resolucionmecanica dinamico
Estabilidadtermica
Encoder mediaala buena buenaResolver buena buena buenauenaPotenciometro mala malaalaegular
-
5/10/2018 Morfologia Robot
27/33
Morfologia del robot 41
Dado el caracter continuo de la sefial, la resolucion de los resolvers es teoricamente infinita. Bien esverdad que depende en la mayoria de las ocasiones de una electronica asociada, 10 que limita la precisionde f orma practica, En el caso de los codificadores optic os la resolucion viene limitada por el mimero desecciones opaco/transparentes que se utilicen.La exactitud estatica, definida como la diferencia entre las posicion fisica del eje y la serial electrica
de salida, es relativamente alta tanto en resolvers como en codificadores opticos, EI rango dinamico seencuentra mas limitado en el caso de los codificadores opticos 0 digitales, no asi en los resolvers don decan conversiones RID adecuadas se puede trabajar con velocidades superiores a las 6000 rpm.Sensores lineales de posicion (LVDT e Inductosyn)Entre los sen s ores de posicion lineales destaca el transformador diferencial de variacion lineal (LVDT)debido a su casi infinita resolucion, poco rozamiento yalta repetibilidad. Su funcionarniento se basa enla utilizacion de un micleo de material ferromagnetico unido al eje cuyo movimiento se quiere medir.Este micleo se mueve linealmente entre un devanado primario y dos secundarios, haciendo con sumovirniento que varie la inductancia entre ellos. La Figura 2.23 presenta un breve esquema de sufuncionamiento.Los dos devanados secundarios conectados en oposicion serie yen como la induccion de la tension
altema del primario, al variar la posicion del micleo, hace crecer la tension en un devanado y disminuirlaen el otro, Del estudio de la tension E o se deduce que esta es proporcional a la diferencia de inductanciasmutuas entre el devanado primario con cada uno de los secundarios, y que por tanto depende lineal mentedel desplazarniento del vastago solidario al nucleo.Ademas de las ventajas sefialadas, el LVDT presenta una alta linealidad, gran sensibilidad y una res-
puesta dinamica elevada. Su uso esta ampliamente extendido, a pesar del inconveniente de poder seraplicado iinicamente en la rnedicion de pequeiios desplazamientos,
Vsen(rot) ""
Figura 2.23. Esquema de funcionamiento de un LVDT.
-
5/10/2018 Morfologia Robot
28/33
42 Fundamentos de robotica
Otros sensores lineales que tambien se emplean con relativa freeueneia son las denominadas reglasopticas (equivalentes a los codificadores opticos angulares) y las reglas magnetic as 0 Induetosyn (marcaregistrada de Farrand Industries Inc.). EI funeionamiento dellnductosyn es similar al del resolver con Ladifereneia de que el rotor desliza Iinealmente sobre el estator, siendo Laforma de los devanados la repre-sentada en la Figura 2.24. EI estator se eneuentra excitado por una tensi6n conocida que induce en elrotor dependiendo de su posici6n relativa una tension V,:
V , = k V C O { 2 1 1 : ; ) [2.4]
vp ~.
Figura 2.24. Esquema de funcionamiento de un Inductosyn.
2.4.2. Sensores de velocidadLa eaptaci6n de la velocidad se haee necesaria para mejorar el comportamiento dinamico de losactuadores del robot. La informacion de la velocidad de movimiento de cada actuador (que tras elreductor es la de giro de la articulaci6n) se realimenta normal mente a un bucle de control analogicoimpLementado en el propio aecionador del elemento motor. No obstante, en ocasiones en las que elsistema de control del robot 10 exija, la velocidad de giro de cada actuador es llevada hasta la unidad decontrol del robot.Normalmente, y puesto que el bucle de control de velocidad es anal6gico, el captador usado es unatacogeneratriz que proporciona una tensi6n proporcional a la velocidad de giro de su eje (valores npicospueden ser 10 milivoLtios par rpm).
-
5/10/2018 Morfologia Robot
29/33
Morfologia del robot 43
Otra posibilidad, usada para el caso de que la unidad de control del robot precise valorar la velocidaddegirode las articulaciones, consiste en derivar la informacion de posicion que esta posee.
2.4.3. Sensores de presenciaEste tipo de sensor es capaz de detectar la presencia de un objeto dentro de un radio de acciondeterminado. Esta deteccion puede hacerse con 0 sin contacto can el objeto. En el segundo caso seutilizandiferentes principios ffsicos para detectar la presencia, dando lugar a los diferentes tipos decaptadores(ver Tabla 2.4). En el caso de deteccion con contacto, se trata siempre de un interruptor,nonnalmente abierto a normal mente cerrado segun interese, actuado mecanicamente a traves de unvastagou otro dispositivo. Los detectores de presencia se utilizan en robotic a principalmente comoauxiliaresde los detectores de posicion, para indicar los limites de movimiento de las articulaciones ypermitirlocalizar la posicion de referencia de cero de estes en el caso de que sean incrementales.Ademas de esta aplicacion, los sensores de presencia se usan como sensores externos, siendo muy
sencillosde incorporar al robot por su caracter binario y su costa reducido. Los detectores inductivospennitendetectar la presencia 0 contar el numero de objetos rnetalicos sin necesidad de contacto. Pre-sentanel inconveniente de distinto comportamiento segun del tipo de metal del que se trate. El mismotipode apJicaci6n tiene los detectores capacitivos, mas voluminosos, aunque en este caso los objetos adetectarno precisan ser metalicos, En cambio presentan problemas de trabajo en condiciones humedas yconpuestas a tierra defectuosas.Los sensores basados en el efecto Hall detectan la presencia de objetos ferromagnetic os par la defor-m a c io n que estos provocan sobre un campo magnetico. Los captadores opticos, sin embargo, puedendetectarla reflexi6n del rayo de luz procedente del ernisor sobre el objeto.
Tabla 2.6. S istemas de sujecion para robotsTiposde sujecion Accionamiento UsoPinzade presion. desp. angular. desp. lineal
Neurnatico 0 electrico Transporte y manipulaci6n de piezas sobre lasque no importe presionar.
Electroirnan Electrico
Piezas de grandes dimensiones 0 sobre las queno se puede ejercer presion.Cuerpos con superficie lisa poco porosa (cristal,plastico, etc.).Piezas ferromagneticas.
Pinzade enganche Neumatico 0 electricoVentosas de vacfo Neumatico
-
5/10/2018 Morfologia Robot
30/33
44 Fundamentos de robotica
2.5. ELEMENTOS TERMINALES
Los elementos terminales, tambien llamados efectores finales (end effector) son los encargados deinteraccionar directamente con el entomo del robot. Pueden ser tanto elementos de aprehensi6n comoherramientas,Si bien un mismo robot industrial es, dentro de unos limites l6gicos, versatil y readaptable a una
gran variedad de aplicaciones, no ocurre asi con los elementos terminates, que son en muchos casosespecificamente disefiados para cada tipo de trabajo.Se puede establecer una cIasificaci6n de los elementos terminales atendiendo a si se trata de un
elemento de sujeci6n 0 de una herramienta. Los primeros se pueden clasificar segun el sistema desujecion empleado. En la Tabla 2.6. se representan estas opciones, asi como los usos mas frecuentes.Los elementos de sujeci6n se utilizan para agarrar y sostener los objetos y se sueIen denominar
pinzas. Se distingue entre las que utilizan dispositivos de agarre mecanico (Figura 2.25), y las queutilizan algun otro tipo de dispositivo (ventosas, pinzas magneticas, adhesivas, ganchos, etc.).En la elecci6n 0 disefio de una pinza se han de tener en cuenta diversos factores. Entre los que
afectan al tipo de objeto y de manipulacion a realizar destacan el peso, la forma, el tamafio del objetoy la fuerza que es necesario ejercer y mantener para sujetarlo. Entre los parametres de la pinza cabedestacar su peso (que afecta a las inercias del robot), el equipo de accionamiento y la capacidad decontrol.EI accionamiento neumatico es el mas utilizado por ofrecer mayores ventajas en simplicidad, pre-
cio y fiabilidad, aunque presenta dificultades de control de posiciones intermedias. En ocasiones seutilizan accionamientos de tipo electrico.
Figura 2.25. Pinza neurnatica de dedos paralelos. (Cortesia de FESTO.)
-
5/10/2018 Morfologia Robot
31/33
Morfologia del robot 45
Figura 2.26. Pistolas neumaticas de pulverizacion de pintura. (Cortesia de Kremlin.)
Figura 2.27. Pinzas de soldadura con transformador incorporado.De accianamienta par t ijera y rectil ineo. (Cortesfa de ARO.)
En la pinza se sueIen situar sensores para detectar el estado de la misrna (abierto 0 cerrado). Sepuedenincorporar a la pinza otro tipo de sensores para controlar el estado de la pieza, sistemas devisionque proporcionen datos geometricos de los objetos, detectores de proximidad, sensores fuerza-par,etc.
-
5/10/2018 Morfologia Robot
32/33
46 Fundamentos de rob6tica
Tabla 2.7. Herramienlas lerminales para robotsTipo de herramienta ComentariosPinza soldadura por puntosSoplete soldadura al arcoCucharon para coladaAtomilladorFresa-lijaPistola de pinturaCanon laserCanon de agua a presion
Dos electrodos que se cierran sobre la pieza a soldar.Aportan el flujo de electrodo que se funde.Para trabajos de fundicion.Suelen incluir la alimentacion de tomillos.Para perfilar, eliminar rebabas, pulir, etc.Por pulverizacion de la pintura.Para corte de materiales, soldadura 0 inspeccion.Para corte de materiales.
Como se ha indicado, el elemento terminal de aprehensi6n debe ser disefiado con frecuencia a me-dida para la aplicacion. Existen ciertos elementos comerciales que sirven de base para la pinza, siendoposible a partir de ellos disefiar efectores validos para cada aplicacion concreta. Sin embargo, en otrasocasiones el efector deber ser desarrollado Integramente, constituyendo su coste un porcentaje irn-portante dentro del total de la aplicacion.En muchas aplicaciones el robot ha de realizar operaciones que no consisten en manipular objetos,
sino que irnplican el uso de una herramienta. E I tipo de herramientas con que puede dotarse a un robotes muy amplio. La Figura 2.26 y la Figura 2.27 muestran, respectivamente, dos pistol as de pulveriza-cion de pintura y dos pinzas de soldadura por puntos. Normalmente, la herramienta esta fijada ngida-mente al extremo del robot aunque en ocasiones se dota a este de un dispositive de cambio au-tomatico, que permita al robot usar diferentes herramientas durante su tarea. La Tabla 2.7 enumeraalgunas de las herramientas mas frecuentes. En [GROOVER-89jy [FERRATE-86jpuede encontrarse unestudio detail ado sobre distintas herramientas y pinzas para robots.Aparte de estos elementos de sujecion y herramientas mas 0 menos convencionales, existen intere-santes desarrollos e investigaciones, muchos de ellos orientados a la manipulacion de objetos compJi-cados y delicados. Par ejemplo, existen diversas realizaciones de pinzas dotadas de tacto 0 de dedoscon falanges.
2.6. BIBLIOGRAFIA
[AN-88] An, C.H., Atkenson, C.G. y Hollerbach, 1.M., "Direct Drive Arms", en: Model-based Controlof a Robot ManipuLator, The MIT Press, 1988.[BARRIENTOS-95]Barrientos, A., Pefiin, L.F., Carrera, 1., Automatizacion de Lafabricaci6n. Trans-ductores, actuadores y aut6matas programables, Seccion de Publicaciones ETSI Industriales deMadrid, Universidad Politecnica de Madrid, 1995.
-
5/10/2018 Morfologia Robot
33/33
Morfologia del robot 47
[CORTES-89] Cortes Cherta, M., Curso moderno de maquinas electricas rotativas. Cuatro tomos.EditoresTecnicos Asociados, Barcelona, 1989 .[CODINA-92] Codina, E., "Servoactuadores neurnaticos", Automdtica e lnstrumentacion, 224, pp 1 18 -
1 29 , 1 99 2.[CODlNA-90] Codina, E., "Servoactuadores oleohidraulicos", Automdtica e Instrumentaci6n, 203 , pp
171 - 182 ,1990 .[CREus-79] Creus, A., lnstrumentacion industrial, Marcombo Boixareu Editores, Barcelona, 1979 .[CYCLo-96 ] Cyclo Getriebebau, Catdlogo de productos, 1992.[DEPPERT-94 ] Deppert, W., Dispositivos neumaticos, Marcombo Boixareu Editores, Barcelona, 1994 .[FERRANDO-93] Ferrando, F., J. Mercader, "Criterios para la seleccion de un reductor de velocidad",Automdtica e Instrumentacion, 237, pp 1 00 -1 0 6, 1 993 .
[FERRATE-86 ] Ferrate, G., Rob6tica industrial, Marcombo Boixareu Editores, Barcelona, 1986 .[GoNZALEZ-92] R.C Gonzalez y R.E. Woods, Digital Image Processing, Addison Wesley, 1992.[GROOVER-89] Groover, M.P, "Robot y efectores finales", en: Robotica Industrial. Tecnologia, Pro-g ram ac io n y A plic ac io ne s, McGraw-Hill, Madrid, 1989 .[HARMONIC-96 j HarmonicDrive, Catdlogo de Productos, 1990.[MONTANO-88] Montano, L., Tardos, J.D., y Sagiies, C., "Accionamientos directos para robots", Au-
to md ti ca e Instrumentacion, 179 , pp 251 -261 , 1 988.[NACHTIGAL-90] NatchtigaJ, C.L., Instrumentation and control. Fundamentals and applications, Wi-ley-Interscience, 1990 .
[PALLAS-89] Pallas, R., "Transductores de reactancia variable y electromagneticos", en: Transducto-res y acondicionadores de seiial, Marcornbo, Barcelona, 1989 .
i [PRENYANOSA-94 ] Prenyanosa, G., "Sensores de posici6n y velocidad", Automdtica e lnstrumenta-cion, 244, pp 66-82,1994 .
[RUSSEL-90] Russel, R.A., Robot Tactile Sensing, Prentice-Hall, 1990 .[SUDRIA-95 ] Sudria, A., "Servomotores electricos", Automdtica e Instrumentacion, 259, pp. 86-97,
1995[SUDRIA-88j Sudria, A., "Control de velocidad de motores electricos", Automdtica e lnstrumentacion,182 , pp. 1 05-1 36 , 1 988.
[VOCKROTH-94 j Vockroth, R.W., Industrial Hydraulics, Delmar Publishers, Nueva York, 1994 .[YOUCEF-89] Youcef-Toumi, K., "Design and Control of Direct-Drive Robots ~ a Survey", en: TheRoboticsReview 1 ( O. Khatib, l.1. Craig y Lozano-Perez, Ed.), pp 283-302 . The MIT Press, Cam-bridge, 1989 .