Stabilità di sistemi di controllo con...
33
Stabilità di sistemi di controllo con feedback Fondamenti di Automatica Prof. Silvia Strada 1
Transcript of Stabilità di sistemi di controllo con...

Stabilità di sistemi di controllo con feedback
Fondamenti di AutomaticaProf. Silvia Strada
1
2
Stabilità
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
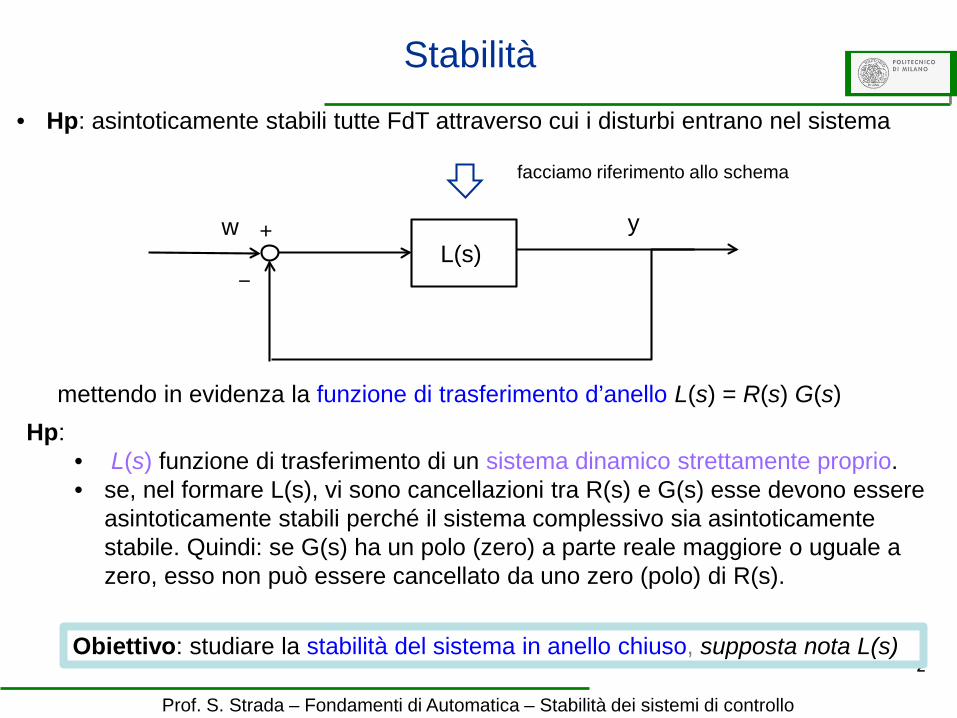
• Hp: asintoticamente stabili tutte FdT attraverso cui i disturbi entrano nel sistema
facciamo riferimento allo schema
w +
-L(s)
y
mettendo in evidenza la funzione di trasferimento d’anello L(s) = R(s) G(s) Hp:
• L(s) funzione di trasferimento di un sistema dinamico strettamente proprio.• se, nel formare L(s), vi sono cancellazioni tra R(s) e G(s) esse devono essere
asintoticamente stabili perché il sistema complessivo sia asintoticamente stabile. Quindi: se G(s) ha un polo (zero) a parte reale maggiore o uguale a zero, esso non può essere cancellato da uno zero (polo) di R(s).
Obiettivo: studiare la stabilità del sistema in anello chiuso, supposta nota L(s)

3
Stabilità
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Utilizzeremo tre criteri per studiare la stabilità dei sistemi di controllo in anello chiuso:
Analisi diretta del polinomio caratteristico
Criterio di Nyquist
Criterio di Bode
polinomio caratteristico in anello chiuso :
4
Analisi del polinomio caratteristico
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
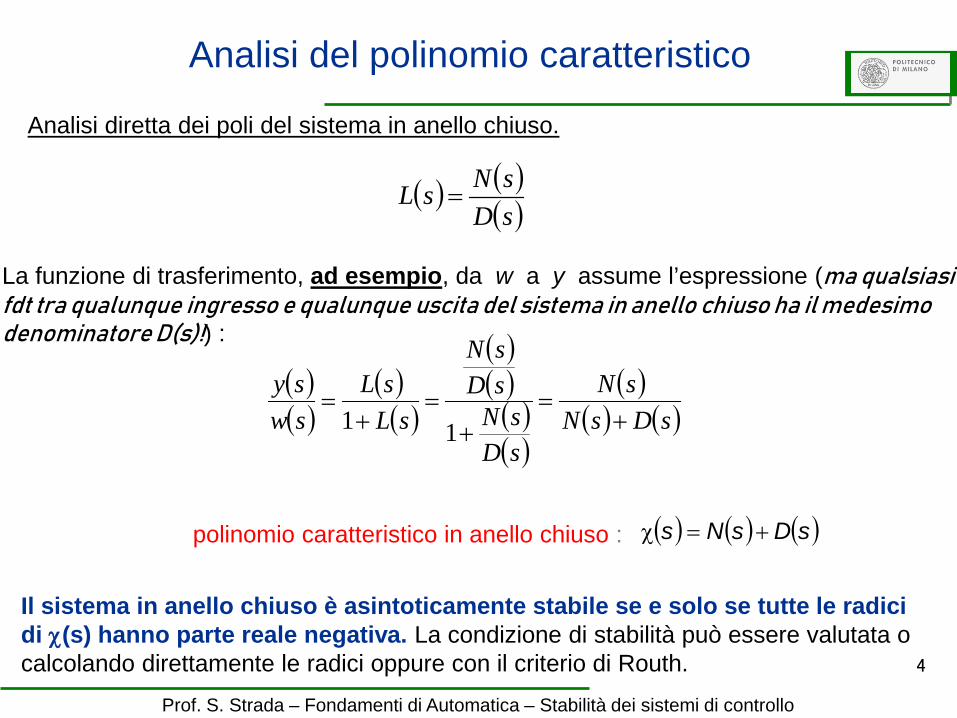
Analisi diretta dei poli del sistema in anello chiuso.
( ) ( )( )sDsNsL =
La funzione di trasferimento, ad esempio, da w a y assume l’espressione (ma qualsiasi fdt tra qualunque ingresso e qualunque uscita del sistema in anello chiuso ha il medesimo denominatore D(s)!) :
( )( )
( )( )
( )( )
( )( )
( )( ) ( )sDsN
sN
sDsN
sDsN
sLsL
swsy
+=
+=
+=
11
( ) ( ) ( )sDsNs +=χ
Il sistema in anello chiuso è asintoticamente stabile se e solo se tutte le radici di χ(s) hanno parte reale negativa. La condizione di stabilità può essere valutata o calcolando direttamente le radici oppure con il criterio di Routh.

5
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
L’analisi diretta del polinomio caratteristico è complessa però da utilizzare quando si debba mettersi in ottica di progetto di R(s), che quindi cambierà presumibilmente via via che si fanno i successivi tentativi per arrivare al regolatore definitivo.
Analisi del polinomio caratteristico

6
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Il criterio di Nyquist è un criterio grafico di stabilità per sistemi con feedback, nota L(s)
Il Criterio di Nyquist si basa sul tracciamento del Diagramma di Nyquist associato a L(s)in base alle seguenti definizioni:
Criterio di Nyquist
Diagramma di Nyquist: diagramma polare della risposta in frequenza di L(s), orientato nel senso delle ω crescenti, cui si aggiunge il simmetrico rispetto all’asse reale del piano complesso
P: numero di poli a parte reale strettamente positiva di L(s) N: numero di giri compiuti dal diagramma di Nyquist intorno al punto
−1 dell’asse reale, contati positivamente se in senso antiorario. Se il diagramma passa per il punto −1, N si dice non definito
Criterio di Nyquist: il sistema in anello chiuso è asintoticamente stabile se e solo seN è ben definito e risulta N = P
Mi limiterò a dare l’enunciato del Criterio (senza dimostrazione):
condizione necessaria e sufficiente! Osservazione: se N<0 il sistema non può essere
asintoticamente stabile in anello chiuso!

7
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Esempio
Analisi del polinomio caratteristico
( )( )31 s
sL+
=µ ( ) µχ ++++= 133 23 ssss
Il sistema in anello chiuso è asintoticamente stabile se e solo se
Criterio di Routh
µ
µµ
+
−+
1
003
8013031
810108
<<−⇒
>+>−
µµµ
8
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Esempio
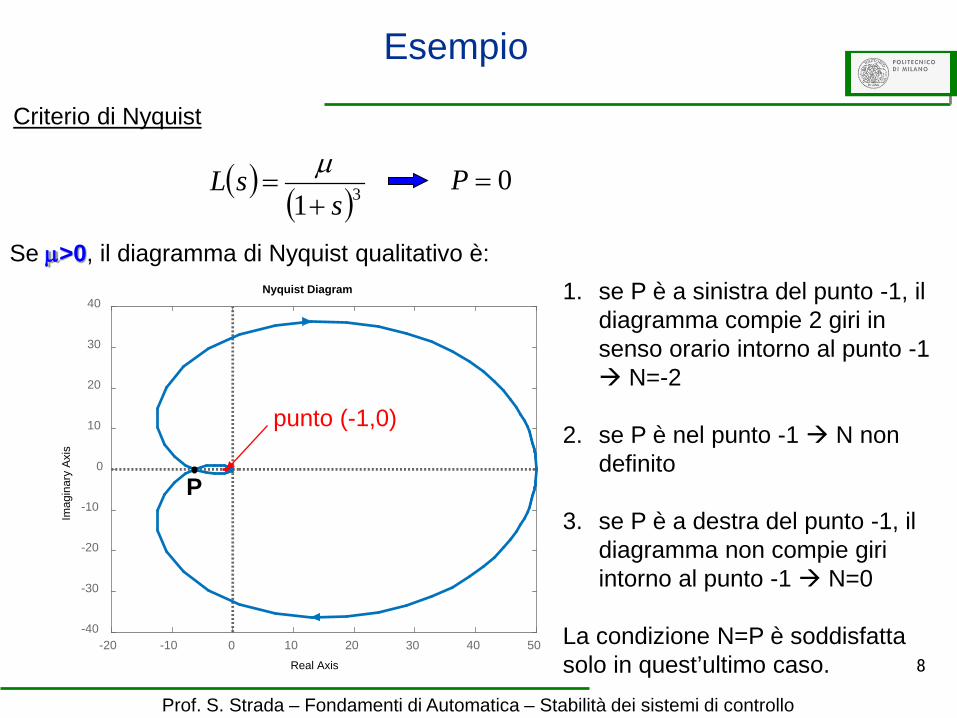
Criterio di Nyquist
( )( )31 s
sL+
=µ 0=P
Se µ>0, il diagramma di Nyquist qualitativo è:
-20 -10 0 10 20 30 40 50-40
-30
-20
-10
0
10
20
30
40Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
P
1. se P è a sinistra del punto -1, il diagramma compie 2 giri in senso orario intorno al punto -1 N=-2
2. se P è nel punto -1 N non definito
3. se P è a destra del punto -1, il diagramma non compie giri intorno al punto -1 N=0
La condizione N=P è soddisfatta solo in quest’ultimo caso.
punto (-1,0)

9
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Esempio
Determinazione del punto P. Vi sono 2 strade, infatti
P è associato alla pulsazione
°−=∠=
180)(0)(Im(
:P
PP jL
jLω
ωω
In questo caso è più comodo seguire la seconda strada:
( )3)(atan3
1)( 3 =→−=−=
+∠=∠ PP
PP j
jL ωπωω
µω
La distanza del punto P dall’origine è il modulo di L in jωP:
( ) 831)3( 3
µµ=
+=
jjL
la condizione è quindi: 818
<→< µµ
10
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Esempio
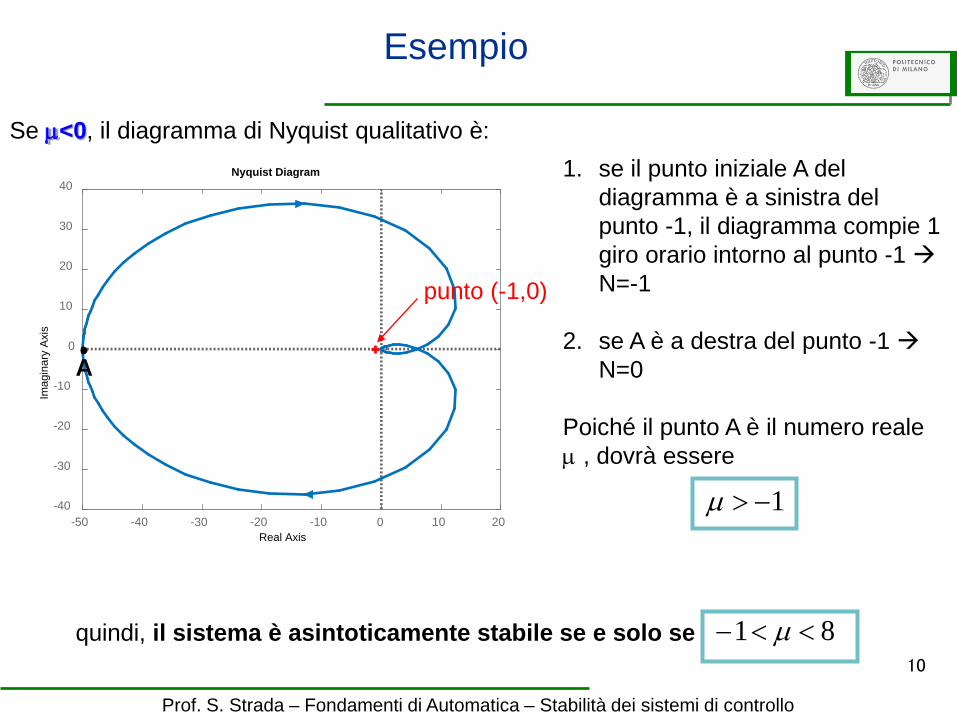
Se µ<0, il diagramma di Nyquist qualitativo è:1. se il punto iniziale A del
diagramma è a sinistra del punto -1, il diagramma compie 1 giro orario intorno al punto -1 N=-1
2. se A è a destra del punto -1 N=0
Poiché il punto A è il numero reale µ , dovrà essere
-50 -40 -30 -20 -10 0 10 20-40
-30
-20
-10
0
10
20
30
40Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
A
1−>µ
quindi, il sistema è asintoticamente stabile se e solo se 81 <<− µ
punto (-1,0)

11
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Esempio
( )1
10−
=s
sL
Si studi la stabilità in anello chiuso del sistema con funzione di trasferimento d’anello:
utilizzando il criterio di Nyquist.
-10 -8 -6 -4 -2 0 2-5
0
5Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Poiché N=1 e P=1il sistema in anello chiuso è asintoticamente stabile
punto (-1,0)
12
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
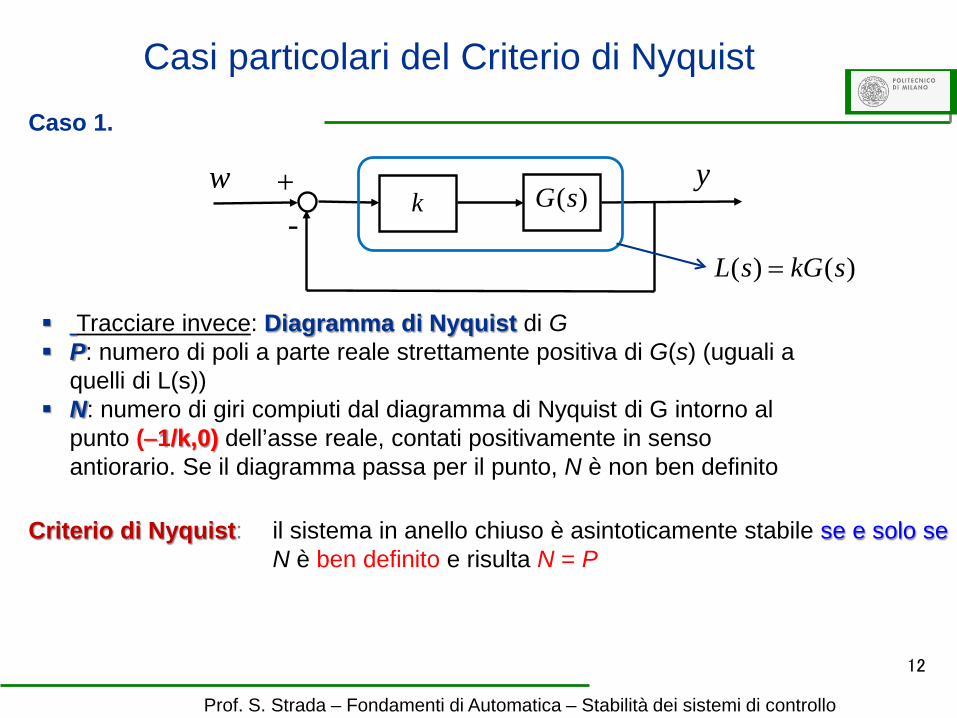
Casi particolari del Criterio di NyquistCaso 1.
y+-
wk
)()( skGsL =
)(sG
Tracciare invece: Diagramma di Nyquist di G P: numero di poli a parte reale strettamente positiva di G(s) (uguali a
quelli di L(s)) N: numero di giri compiuti dal diagramma di Nyquist di G intorno al
punto (−1/k,0) dell’asse reale, contati positivamente in senso antiorario. Se il diagramma passa per il punto, N è non ben definito
Criterio di Nyquist: il sistema in anello chiuso è asintoticamente stabile se e solo seN è ben definito e risulta N = P
13
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
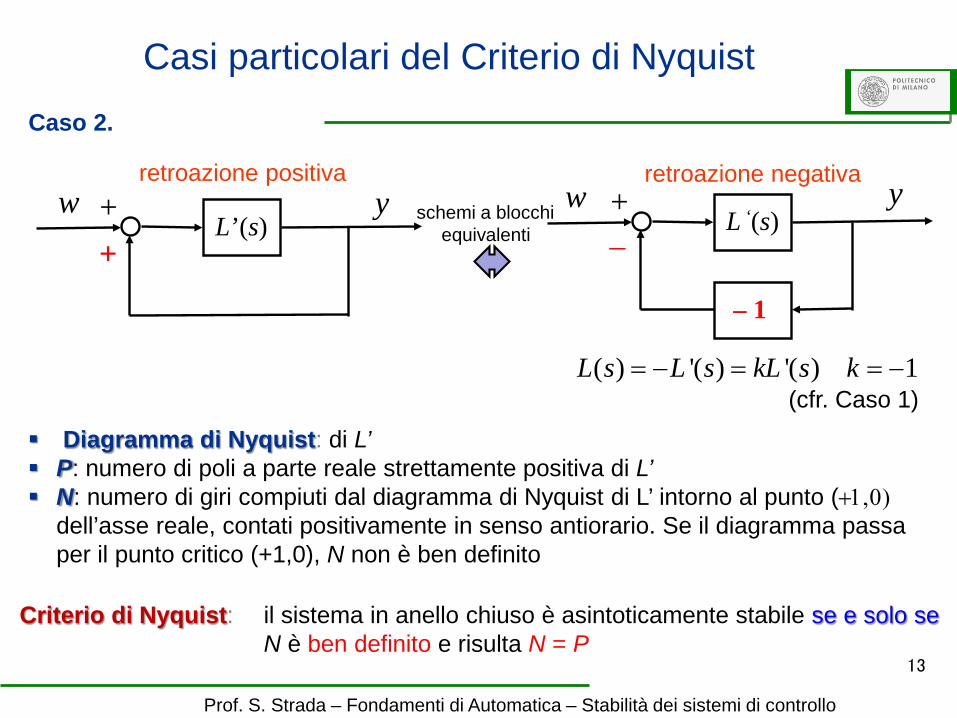
Caso 2.
yL’(s)
++
wretroazione positiva
yL ‘(s)
+−
w
– 1
retroazione negativa
( ) '( ) '( ) 1L s L s kL s k= − = = −(cfr. Caso 1)
Casi particolari del Criterio di Nyquist
Diagramma di Nyquist: di L’ P: numero di poli a parte reale strettamente positiva di L’ N: numero di giri compiuti dal diagramma di Nyquist di L’ intorno al punto (+1,0)
dell’asse reale, contati positivamente in senso antiorario. Se il diagramma passa per il punto critico (+1,0), N non è ben definito
Criterio di Nyquist: il sistema in anello chiuso è asintoticamente stabile se e solo seN è ben definito e risulta N = P
schemi a blocchiequivalenti
14
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
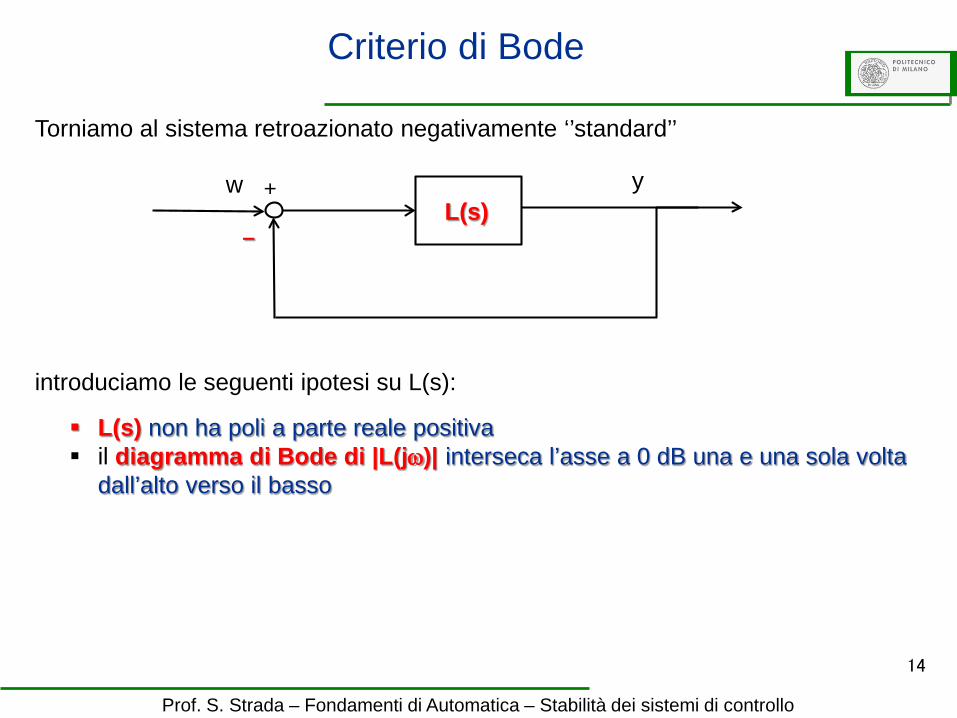
Torniamo al sistema retroazionato negativamente ‘’standard’’
Criterio di Bode
L(s) non ha poli a parte reale positiva il diagramma di Bode di |L(jω)| interseca l’asse a 0 dB una e una sola volta
dall’alto verso il basso
w +
-L(s)
y
introduciamo le seguenti ipotesi su L(s):
15Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Criterio di Bode
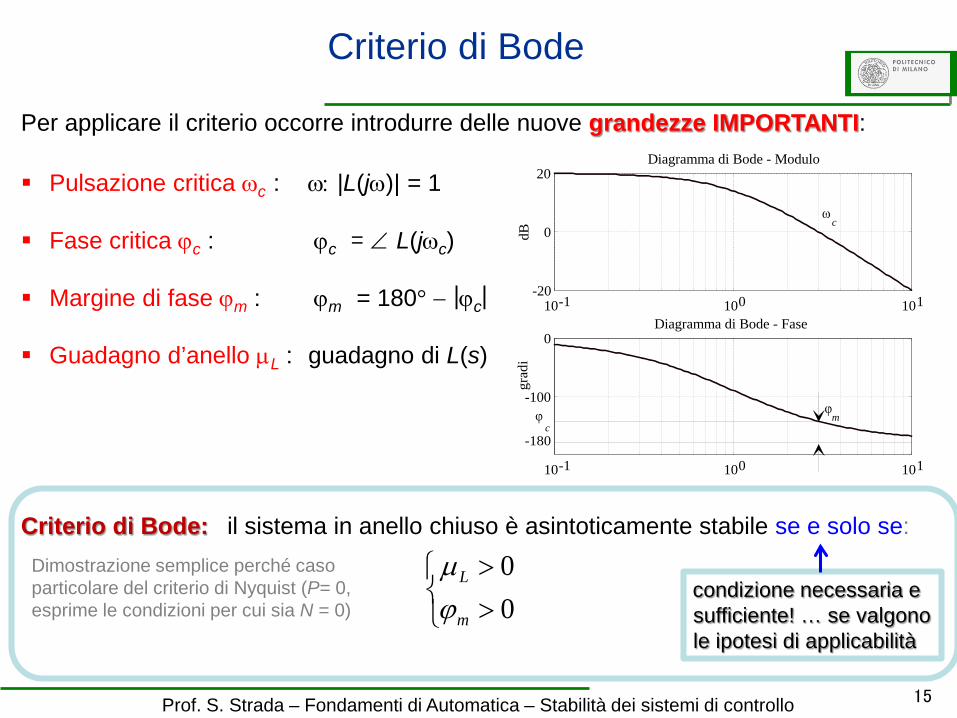
Per applicare il criterio occorre introdurre delle nuove grandezze IMPORTANTI:
Pulsazione critica ωc : ω: |L(jω)| = 1
Fase critica ϕc : ϕc = ∠ L(jωc)
Margine di fase ϕm : ϕm = 180° − |ϕc|
Guadagno d’anello µL : guadagno di L(s)
10-1 100 101-20
0
20Diagramma di Bode - Modulo
dB
10-1 100 101
-100
0Diagramma di Bode - Fase
grad
i
-180
ω
ϕ
c
mc
ϕ
Criterio di Bode: il sistema in anello chiuso è asintoticamente stabile se e solo se:Dimostrazione semplice perché caso particolare del criterio di Nyquist (P= 0, esprime le condizioni per cui sia N = 0)
>>
00
m
L
ϕµ
condizione necessaria e sufficiente! … se valgono le ipotesi di applicabilità
16Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Criterio di Bode
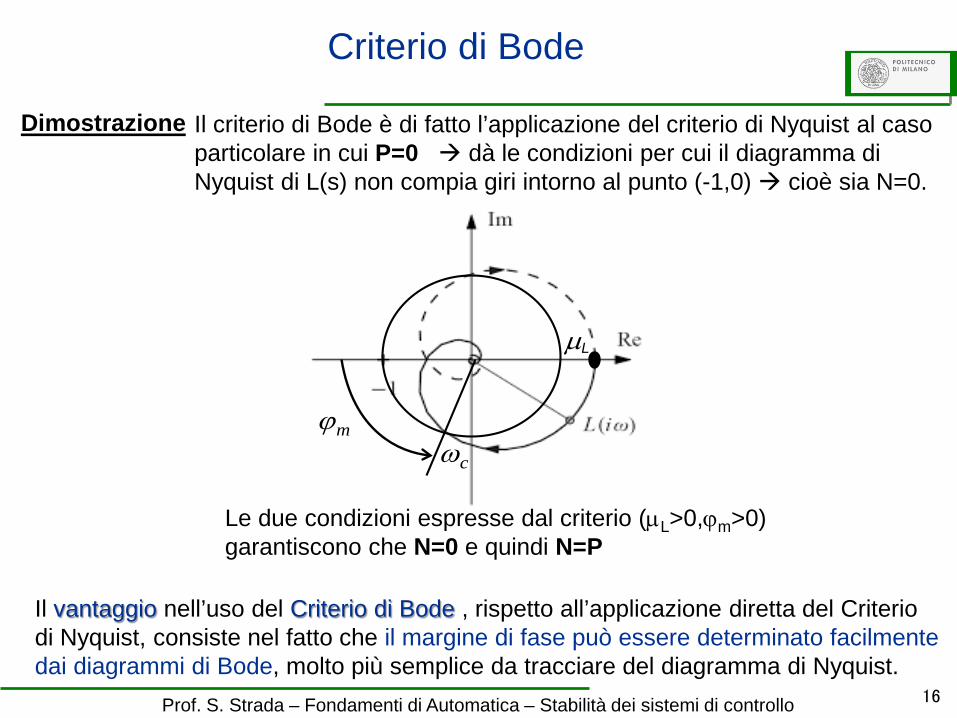
Dimostrazione
µ
mϕcω
Il criterio di Bode è di fatto l’applicazione del criterio di Nyquist al caso particolare in cui P=0 dà le condizioni per cui il diagramma di Nyquist di L(s) non compia giri intorno al punto (-1,0) cioè sia N=0.
Le due condizioni espresse dal criterio (µL>0,ϕm>0) garantiscono che N=0 e quindi N=P
Il vantaggio nell’uso del Criterio di Bode , rispetto all’applicazione diretta del Criterio di Nyquist, consiste nel fatto che il margine di fase può essere determinato facilmente dai diagrammi di Bode, molto più semplice da tracciare del diagramma di Nyquist.
L
17
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Esempio
Criterio di Bode
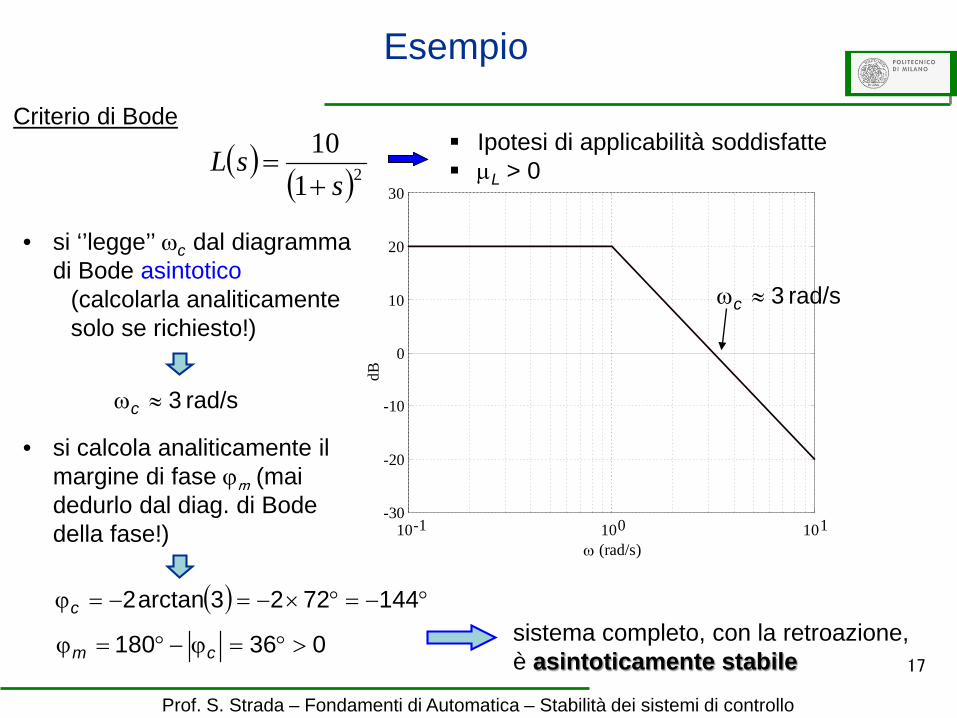
( )( )21
10s
sL+
= Ipotesi di applicabilità soddisfatte µL > 0
10-1 100 101-30
-20
-10
0
10
20
30
dB
ω (rad/s)
• si ‘’legge’’ ωc dal diagramma di Bode asintotico
(calcolarla analiticamente solo se richiesto!)
rad/s 3≈ωc
( ) °−=°×−=−=ϕ 1447223arctan2c
036180 >°=ϕ−°=ϕ cmsistema completo, con la retroazione, è asintoticamente stabile
• si calcola analiticamente il margine di fase ϕm (mai dedurlo dal diag. di Bode della fase!)
rad/s 3≈ωc
-2 0 2 4 6 8 10
-8
-6
-4
-2
0
2
4
6
8
Nyquist Diagram
Real Axis
Imag
inar
y A
xis
18
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
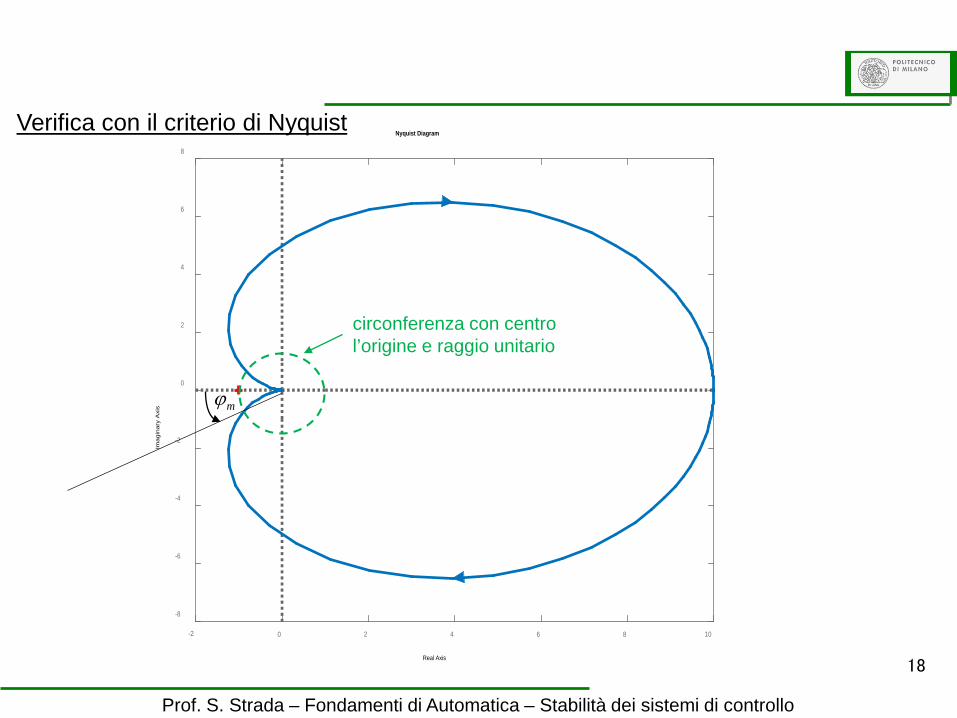
Verifica con il criterio di Nyquist
mϕ
circonferenza con centro l’origine e raggio unitario
19
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
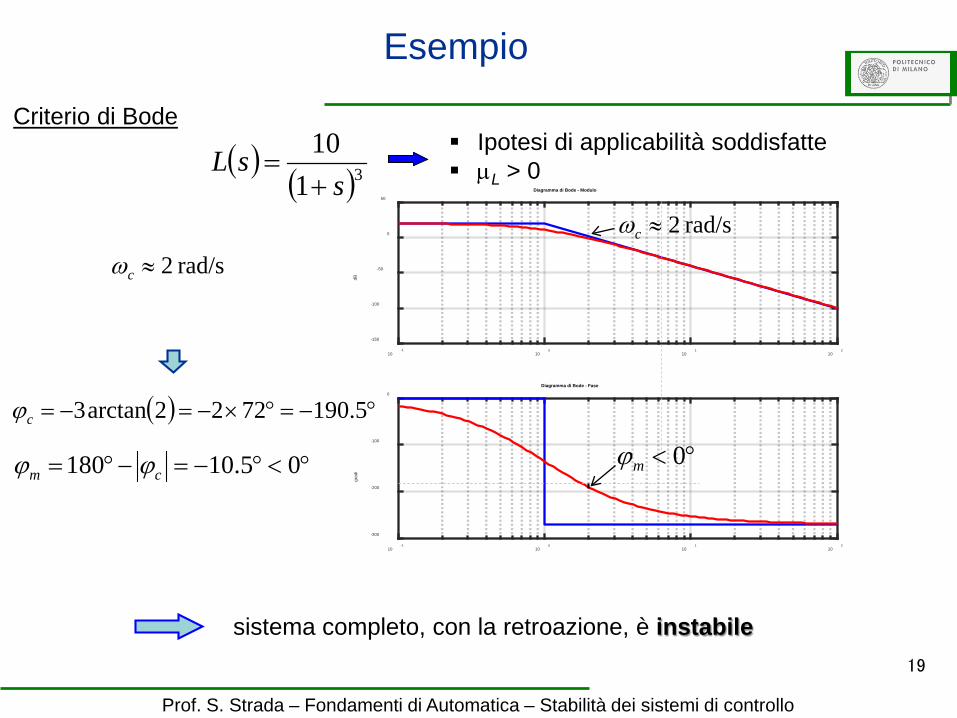
Esempio
Criterio di Bode
( )( )31
10s
sL+
=
( ) °−=°×−=−= 5.1907222arctan3cϕ
180 10.5 0m cϕ ϕ= ° − = − ° < °
10-1
100
101
102
-150
-100
-50
0
50
dB
Diagramma di Bode - Modulo
10-1
100
101
102
-300
-200
-100
0
grad
i
Diagramma di Bode - Fase
rad/s 2≈cω
°< 0mϕ
Ipotesi di applicabilità soddisfatte µL > 0
rad/s 2≈cω
sistema completo, con la retroazione, è instabile
-4 -2 0 2 4 6 8 10
-8
-6
-4
-2
0
2
4
6
8
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
20
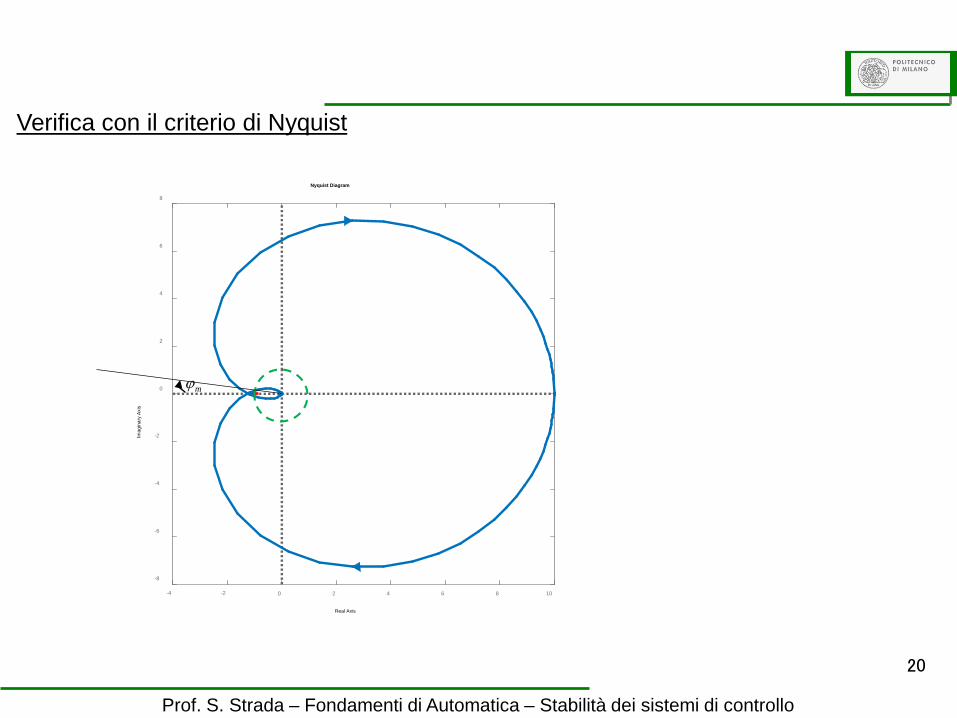
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Verifica con il criterio di Nyquist
mϕ

21
Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Esempio
Criterio di Bode non applicabile
( )( )21
10s
sL−
= Ipotesi di applicabilità NON soddisfatte µL > 0

22Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Osservazione 1 sul Criterio di Bode
• La pulsazione critica ωc può essere ‘’letta’’ dal diagramma di Bode asintotico del modulo di L(s), a meno che non vi siano rilevanti cambi di pendenza nelle vicinanze del taglio dell’asse a 0dB
• Fare attenzione anche al caso di poli/zeri complessi coniugati. Se lo smorzamento è basso il diagramma asintotico può discostarsi molto da quello vero.
10-1
100
101
102
pulsazione
-40
-30
-20
-10
0
10
20
30
40
dB
Diagramma di Bode - Modulo
approxcωveracω
23Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
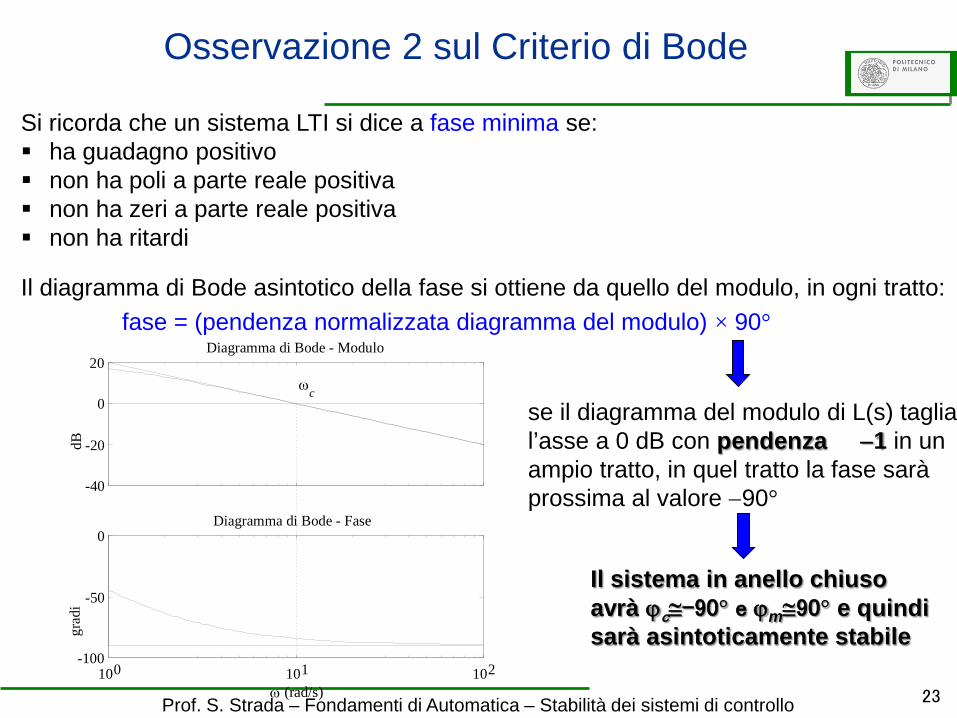
Osservazione 2 sul Criterio di Bode
Si ricorda che un sistema LTI si dice a fase minima se: ha guadagno positivo non ha poli a parte reale positiva non ha zeri a parte reale positiva non ha ritardi
Il diagramma di Bode asintotico della fase si ottiene da quello del modulo, in ogni tratto:fase = (pendenza normalizzata diagramma del modulo) × 90°
-40
-20
0
20Diagramma di Bode - Modulo
dB
100 101 102-100
-50
0Diagramma di Bode - Fase
grad
i
ω (rad/s)
ωc
se il diagramma del modulo di L(s) taglia l’asse a 0 dB con pendenza −1 in un ampio tratto, in quel tratto la fase sarà prossima al valore −90°
Il sistema in anello chiuso avrà ϕc≅-90° e ϕm≅90° e quindi sarà asintoticamente stabile
24Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
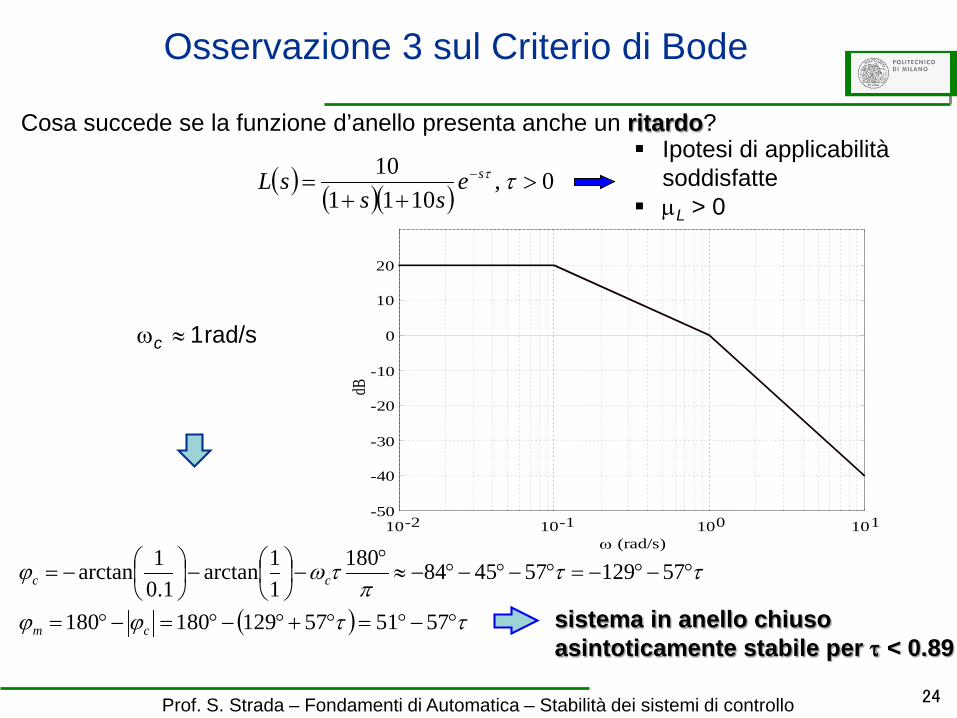
Osservazione 3 sul Criterio di Bode
Cosa succede se la funzione d’anello presenta anche un ritardo?
rad/s 1≈ωc
ττπ
τωϕ °−°−=°−°−°−≈°
−
−
−= 57129574584180
11arctan
1.01arctan cc
( ) ττϕϕ °−°=°+°−°=−°= 575157129180180 cm sistema in anello chiuso asintoticamente stabile per τ < 0.89
( ) ( )( ) 0,1011
10>
++= − ττse
sssL
10-2 10-1 100 101-50
-40
-30
-20
-10
0
10
20
dB
ω (rad/s)
Ipotesi di applicabilità soddisfatte
µL > 0
25Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
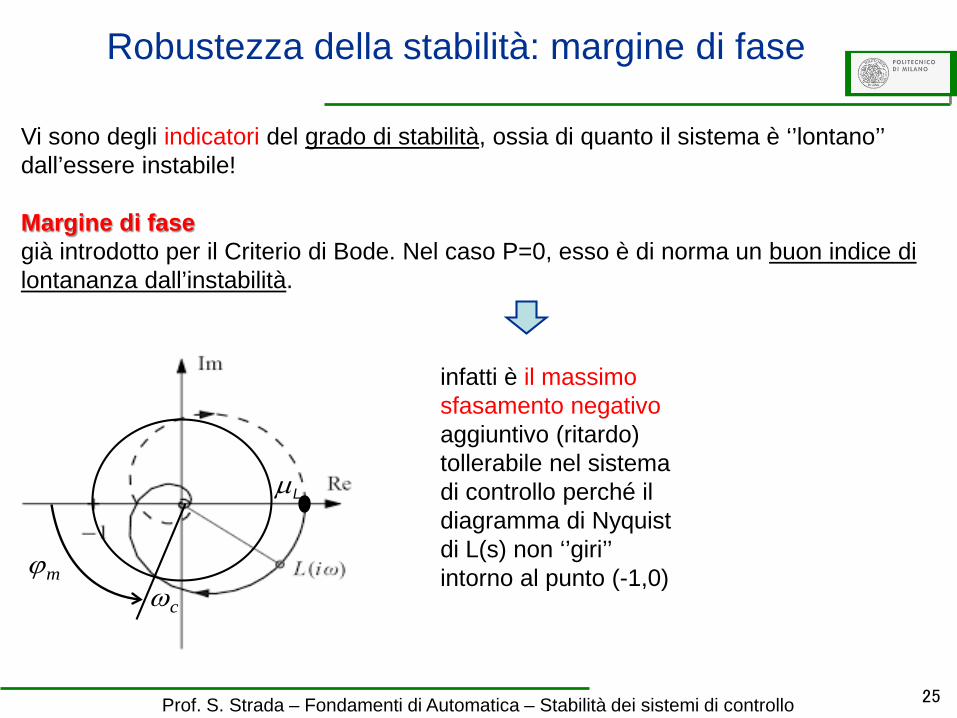
Robustezza della stabilità: margine di fase
Vi sono degli indicatori del grado di stabilità, ossia di quanto il sistema è ‘’lontano’’ dall’essere instabile!
Margine di fasegià introdotto per il Criterio di Bode. Nel caso P=0, esso è di norma un buon indice di lontananza dall’instabilità.
µ
mϕcω
infatti è il massimo sfasamento negativoaggiuntivo (ritardo) tollerabile nel sistema di controllo perché il diagramma di Nyquistdi L(s) non ‘’giri’’ intorno al punto (-1,0)
L

26Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Robustezza della stabilità: margine di fase
Inoltre, se
( ) )(difasedimarginee)( sLesLsL nomms
nom ϕτ−=
• lo sfasamento negativo dovuto al ritardo è)(radc τω ⋅
• il valore massimo del ritardo per non perdere la stabilità asintotica è
°⋅=→=
°⋅⋅
180180
maxmaxπ
ωϕτϕ
πτω
c
mmc
S i g n i f i c a t o p r a t i c o d e l m a r g i n e d i f a s e : è un indicatore di robustezza rispetto a incertezze sul ritardo nell’anello
27Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
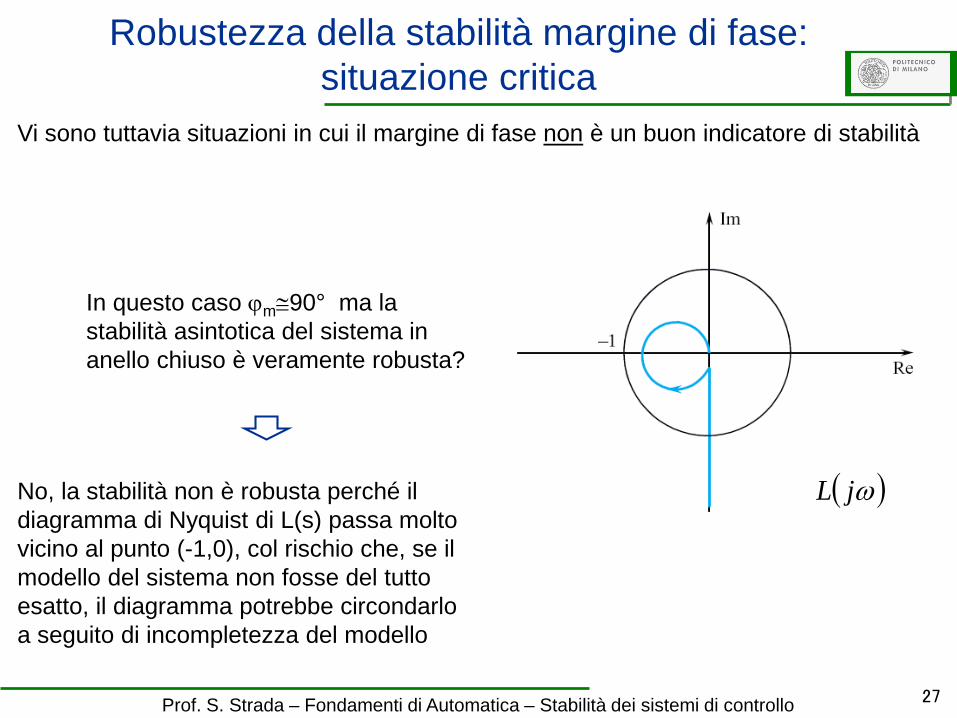
Robustezza della stabilità margine di fase: situazione critica
Vi sono tuttavia situazioni in cui il margine di fase non è un buon indicatore di stabilità
( )ωjL
In questo caso ϕm≅90° ma la stabilità asintotica del sistema in anello chiuso è veramente robusta?
No, la stabilità non è robusta perché il diagramma di Nyquist di L(s) passa molto vicino al punto (-1,0), col rischio che, se il modello del sistema non fosse del tutto esatto, il diagramma potrebbe circondarlo a seguito di incompletezza del modello

28Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Robustezza della stabilità: margine di fasesituazioni anomale
Intersezioni multiple
Mancanza di intersezione
+∞=mϕ
mϕ
Poiché un ritardo, anche elevato, non può mai destabilizzare il sistema si dice che
Teorema del piccolo guadagno
29Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
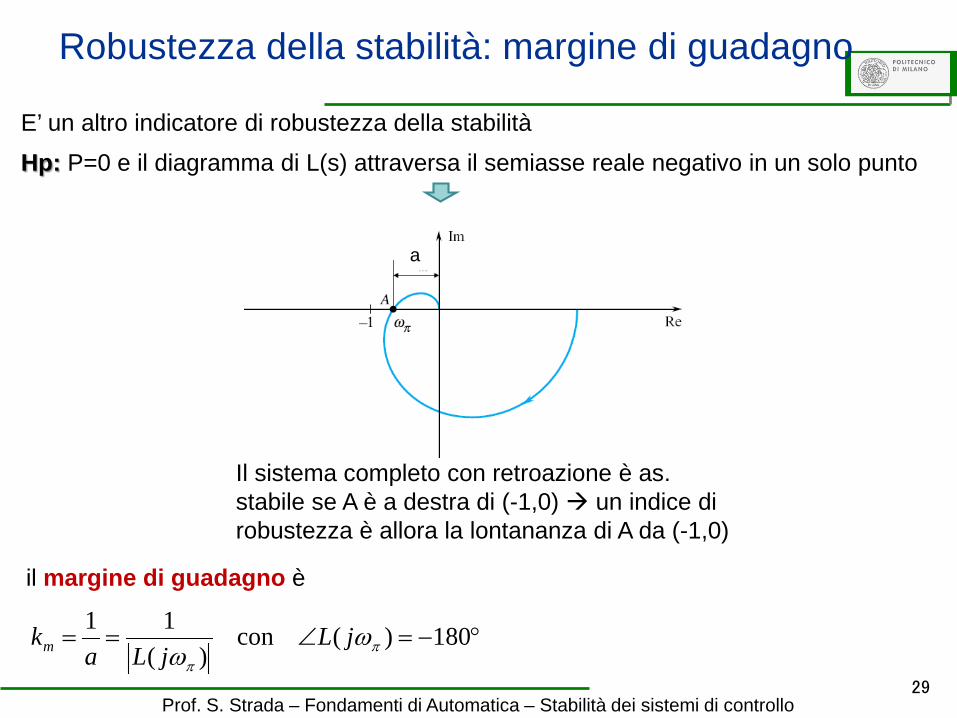
Robustezza della stabilità: margine di guadagno
E’ un altro indicatore di robustezza della stabilitàHp: P=0 e il diagramma di L(s) attraversa il semiasse reale negativo in un solo punto
Il sistema completo con retroazione è as. stabile se A è a destra di (-1,0) un indice di robustezza è allora la lontananza di A da (-1,0)
a
il margine di guadagno è
°−=∠== 180)(con)(
11π
π
ωω
jLjLa
km
30Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Il sistema in anello chiuso è asintoticamente stabile se km>1 e lo è in maniera tanto più robusta quanto maggiore è km
Inoltre, se
( ) )(diguadagnodimarginee)( sLkskLsL nommnom=
s i g n i f i c a t o p r a t i c o d e l m a r g i n e d i g u a d a g n o : è il massimo fattore per cui è consentito moltiplicare il guadagno d’anello senza perdere la stabilità. Quindi, è un indicatore di robustezza rispetto a incertezze sul guadagno d’anello
Robustezza della stabilità: margine di guadagno
10-1
100
101
-60
-40
-20
0
20
dB
Diagramma di Bode - Modulo
10-1
100
101
-300
-200
-100
0
grad
iDiagramma di Bode - Fase
31Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
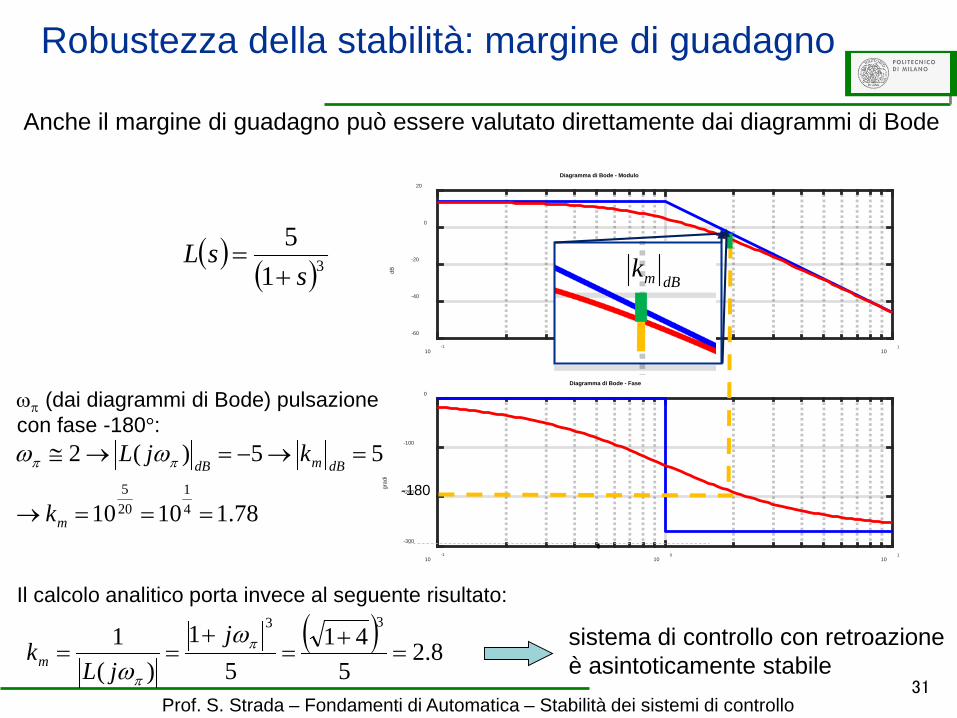
Anche il margine di guadagno può essere valutato direttamente dai diagrammi di Bode
( )( )31
5s
sL+
=
78.11010
55)(2
41
205
===→
=→−=→≅
m
dBmdB
k
kjL ππ ωω
sistema di controllo con retroazione è asintoticamente stabile
ωπ (dai diagrammi di Bode) pulsazione con fase -180°:
-180
Il calcolo analitico porta invece al seguente risultato:
( ) 8.25
415
1)(
133
=+
=+
== π
π
ωω
jjL
km
Robustezza della stabilità: margine di guadagno
dBmk
32Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
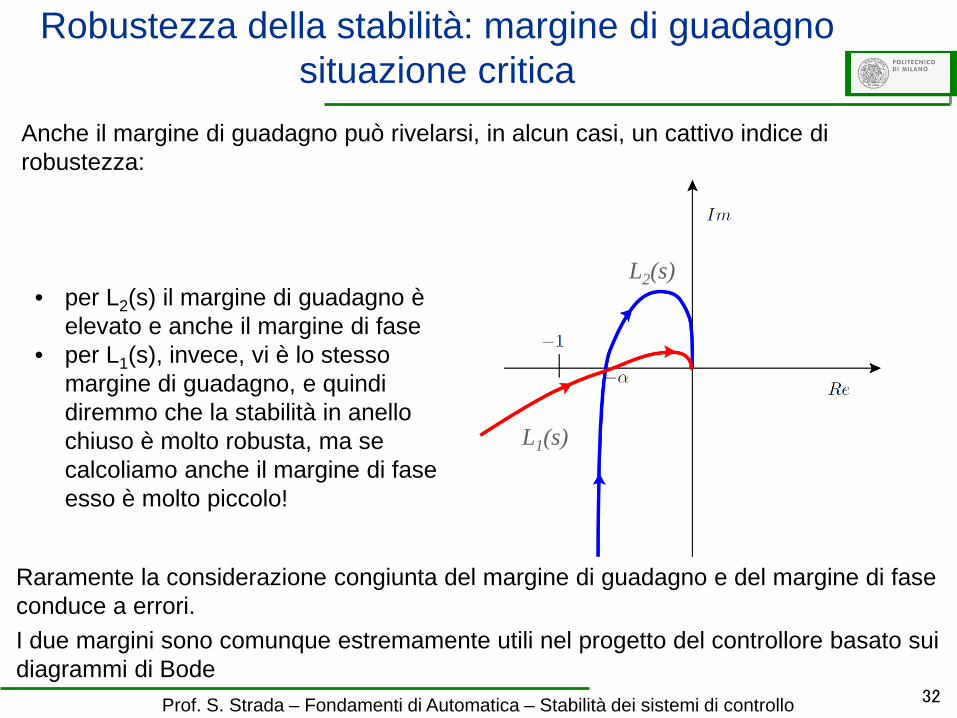
Anche il margine di guadagno può rivelarsi, in alcun casi, un cattivo indice di robustezza:
L1(s)
L2(s)• per L2(s) il margine di guadagno è
elevato e anche il margine di fase• per L1(s), invece, vi è lo stesso
margine di guadagno, e quindi diremmo che la stabilità in anello chiuso è molto robusta, ma se calcoliamo anche il margine di fase esso è molto piccolo!
Raramente la considerazione congiunta del margine di guadagno e del margine di fase conduce a errori.I due margini sono comunque estremamente utili nel progetto del controllore basato sui diagrammi di Bode
Robustezza della stabilità: margine di guadagnosituazione critica
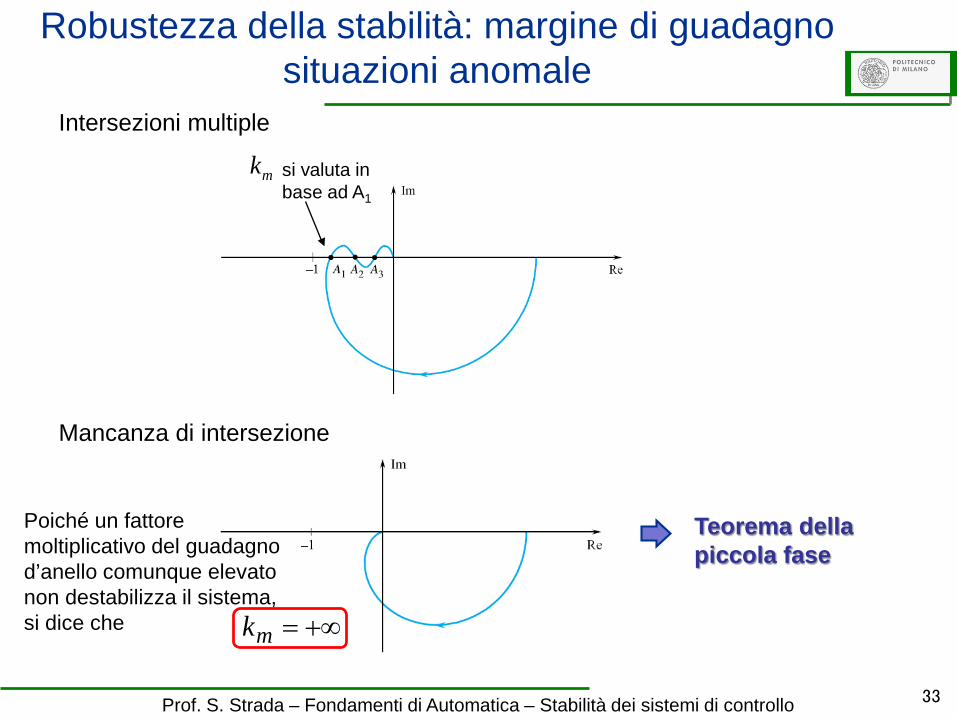
Intersezioni multiple
Mancanza di intersezione
33Prof. S. Strada – Fondamenti di Automatica – Stabilità dei sistemi di controllo
Robustezza della stabilità: margine di guadagnosituazioni anomale
+∞=mk
mk si valuta in base ad A1
Poiché un fattore moltiplicativo del guadagno d’anello comunque elevato non destabilizza il sistema, si dice che
Teorema della piccola fase