Stabilità dei sistemi di controllo in...
53
Controlli automatici Casi di studio © 2007 Politecnico di Torino 1 Stabilità dei sistemi di controllo in retroazione 2 Casi di studio Un esempio di analisi della stabilità Il caso di un sistema a non minima rotazione di fase Pendolo inverso su carrello Levitatore magnetico
Transcript of Stabilità dei sistemi di controllo in...

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 1
Stabilità dei sistemi di controllo in retroazione
2
Casi di studio
Un esempio di analisi della stabilitàIl caso di un sistema a non minima rotazione di fasePendolo inverso su carrelloLevitatore magnetico

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 2
3
Casi di studio
Un esempio di analisi della stabilitàIl caso di un sistema a non minima rotazione di fasePendolo inverso su carrelloLevitatore magnetico
Utilizzo di Matlab
4
Casi di studio
Un esempio di analisi della stabilitàIl caso di un sistema a non minima rotazione di fasePendolo inverso su carrelloLevitatore magnetico
Utilizzo di Matlab
File Matlab:
“Caso1_U2L6.m”

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 3
5
Casi di studio
Un esempio di analisi della stabilitàIl caso di un sistema a non minima rotazione di fasePendolo inverso su carrelloLevitatore magnetico Stabilità in catena
chiusa per valori negativi del guadagno
6
Casi di studio
Un esempio di analisi della stabilitàIl caso di un sistema a non minima rotazione di fasePendolo inverso su carrelloLevitatore magnetico Stabilità in catena
chiusa per valori negativi del guadagno
File Matlab:
“Caso2_U2L6.m”

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 4
7
Casi di studio
Un esempio di analisi della stabilitàIl caso di un sistema a non minima rotazione di fasePendolo inverso su carrelloLevitatore magnetico
Esempi di casi reali
Casi di studio

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 5
9
Definizione del problema (1/2)
Si consideri il consueto schema di controllo
con:
–
e u yd
++
F(s)ydes
+
rKr
C(s)
c r2
200(s 0.1)F(s) , C(s) K , K 1
s(s 0.2s 1)(s 10)+
= = =+ + +
10
Si consideri il consueto schema di controllo
con: c r2
200(s 0.1)F(s) , C(s) K , K 1
s(s 0.2s 1)(s 10)+
= = =+ + +
Definizione del problema (1/2)
–
e u yd
++
F(s)ydes
+
rKr
C(s)
Fdt già usata in precedenti lezioni per la costruzione di DdB, DdN e DdNic
Controllore statico da progettare

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 6
11
Definizione del problema (2/2)
Si consideri il consueto schema di controllo
con:
Trovare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa. Determinare i margini di stabilità e Mr per un particolare valoredi Kc scelto all’interno di tale intervallo
–
e u yd
++
F(s)ydes
+
rKr
C(s)
c r2
200(s 0.1)F(s) , C(s) K , K 1
s(s 0.2s 1)(s 10)+
= = =+ + +
12
Applicazione del criterio di Nyquist (1/5)
Per determinare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa, èsufficiente tracciare il DdN di F(jω) ed applicare ilcriterio di Nyquist a Ga(jω) = Kc F(jω), considerando il punto critico variabile (-1/Kc, 0)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 7
13
Applicazione del criterio di Nyquist (1/5)
Per determinare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa, èsufficiente tracciare il DdN di F(jω) ed applicare ilcriterio di Nyquist a Ga(jω) = Kc F(jω), considerando il punto critico variabile (-1/Kc, 0)
-300 -200 -100 0 100 200 300-300
-200
-100
0
100
200
300Nyquist Diagram
Real Axis
Imag
inar
yA
xis
A
ni,a = 0(-13.24,0)Ottenuto con il
comando nyquist(F)con l’aggiunta manuale del semicerchio di raggio infinito e dello zoom
14
Applicazione del criterio di Nyquist (2/5)
Per determinare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa, èsufficiente tracciare il DdN di F(jω) ed applicare ilcriterio di Nyquist a Ga(jω) = Kc F(jω), considerando il punto critico variabile (-1/Kc, 0)
-300 -200 -100 0 100 200 300-300
-200
-100
0
100
200
300Nyquist Diagram
Real Axis
Imag
inar
yA
xis
A
(-13.24,0)(-1/Kc, 0)
per 0<Kc<0.076
ni,a = 0

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 8
15
Applicazione del criterio di Nyquist (2/5)
Per determinare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa, èsufficiente tracciare il DdN di F(jω) ed applicare ilcriterio di Nyquist a Ga(jω) = Kc F(jω), considerando il punto critico variabile (-1/Kc, 0)
-300 -200 -100 0 100 200 300-300
-200
-100
0
100
200
300Nyquist Diagram
Real Axis
Imag
inar
yA
xis
A
(-13.24,0)(-1/Kc, 0)
per 0<Kc<0.076
ni,a = 0
N = 0
16
Applicazione del criterio di Nyquist (2/5)
Per determinare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa, èsufficiente tracciare il DdN di F(jω) ed applicare ilcriterio di Nyquist a Ga(jω) = Kc F(jω), considerando il punto critico variabile (-1/Kc, 0)
-300 -200 -100 0 100 200 300-300
-200
-100
0
100
200
300Nyquist Diagram
Real Axis
Imag
inar
yA
xis
A
(-13.24,0)(-1/Kc, 0)
per 0<Kc<0.076
ni,a = 0
N = 0 i,cn 0=

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 9
17
Applicazione del criterio di Nyquist (3/5)
Per determinare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa, èsufficiente tracciare il DdN di F(jω) ed applicare ilcriterio di Nyquist a Ga(jω) = Kc F(jω), considerando il punto critico variabile (-1/Kc, 0)
-300 -200 -100 0 100 200 300-300
-200
-100
0
100
200
300Nyquist Diagram
Real Axis
Imag
inar
yA
xis
A
ni,a = 0(-13.24,0)(-1/Kc, 0)
per Kc>0.076
18
Applicazione del criterio di Nyquist (3/5)
Per determinare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa, èsufficiente tracciare il DdN di F(jω) ed applicare ilcriterio di Nyquist a Ga(jω) = Kc F(jω), considerando il punto critico variabile (-1/Kc, 0)
-300 -200 -100 0 100 200 300-300
-200
-100
0
100
200
300Nyquist Diagram
Real Axis
Imag
inar
yA
xis
A
ni,a = 0(-13.24,0)(-1/Kc, 0)
per Kc>0.076
N = 2

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 10
19
Applicazione del criterio di Nyquist (3/5)
Per determinare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa, èsufficiente tracciare il DdN di F(jω) ed applicare ilcriterio di Nyquist a Ga(jω) = Kc F(jω), considerando il punto critico variabile (-1/Kc, 0)
-300 -200 -100 0 100 200 300-300
-200
-100
0
100
200
300Nyquist Diagram
Real Axis
Imag
inar
yA
xis
A
ni,a = 0(-13.24,0)(-1/Kc, 0)
per Kc>0.076
i,cn 2=N = 2
20
Applicazione del criterio di Nyquist (4/5)
Per determinare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa, èsufficiente tracciare il DdN di F(jω) ed applicare ilcriterio di Nyquist a Ga(jω) = Kc F(jω), considerando il punto critico variabile (-1/Kc, 0)
-300 -200 -100 0 100 200 300-300
-200
-100
0
100
200
300Nyquist Diagram
Real Axis
Imag
inar
yA
xis
A
ni,a = 0(-13.24,0)(-1/Kc, 0)
per Kc< 0

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 11
21
Applicazione del criterio di Nyquist (4/5)
Per determinare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa, èsufficiente tracciare il DdN di F(jω) ed applicare ilcriterio di Nyquist a Ga(jω) = Kc F(jω), considerando il punto critico variabile (-1/Kc, 0)
-300 -200 -100 0 100 200 300-300
-200
-100
0
100
200
300Nyquist Diagram
Real Axis
Imag
inar
yA
xis
A
ni,a = 0(-13.24,0)(-1/Kc, 0)
per Kc< 0
N = 1
22
Applicazione del criterio di Nyquist (4/5)
Per determinare l’intervallo di valori di Kc per cui si ha asintotica stabilità in catena chiusa, èsufficiente tracciare il DdN di F(jω) ed applicare ilcriterio di Nyquist a Ga(jω) = Kc F(jω), considerando il punto critico variabile (-1/Kc, 0)
-300 -200 -100 0 100 200 300-300
-200
-100
0
100
200
300Nyquist Diagram
Real Axis
Imag
inar
yA
xis
A
ni,a = 0(-13.24,0)(-1/Kc, 0)
per Kc< 0
i,cn 1=N = 1

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 12
23
Applicazione del criterio di Nyquist (5/5)
Il sistema in catena chiusa risulta pertantoasintoticamente stabile per 0<Kc<0.076Si osserva in particolare che per Kc= 1 (cioèchiudendo semplicemente F(jω) in retroazionenegativa unitaria) si ottiene un sistema instabilein catena chiusa
24
Scelta di Kc e verifica della stabilità
Il valore prescelto di Kc è 0.015Si può verificare l’asintotica stabilità del sistemain catena chiusa calcolandone i poli con Matlab:
2.32e-0021.00e+000-2.32e-002
1.14e+0006.47e-002-7.35e-002 + 1.13e+000i
1.14e+0006.47e-002-7.35e-002 - 1.13e+000i
1.00e+0011.00e+000-1.00e+001
Freq. (rad/s)DampingEigenvalue

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 13
25
Valutazione dei margini di stabilità sul DdN
Sul DdN della fdt d’anello Ga(jω) = Kc F(jω), per Kc = 0.015, si individuano i margini di stabilità
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Real Axis
Imag
inar
yA
xis
1/mG
(-0.199,0)
mϕ
C
A
G
o
m 5
m 36
≅
≅ϕ
26
Lettura dei margini di stabilità sul DdB
Sui DdB della fdt d’anello Ga(jω) = Kc F(jω) sipossono leggere più accuratamente i margini
-200
-150
-100
-50
0
50
Mag
nitu
de(d
B)
10 -3 10 -2 10 -1 10 0 101 10 2 10 3-270
-225
-180
-135
-90
-45
0
Phas
e(d
eg)
Frequency (rad/sec)
mG,dB = 13.7 dB
mϕ = 35.7o
A
C
Ottenuti con il comando bode(Ga)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 14
27
Lettura dei margini di stabilità sul DdB
Sul DdB della fdt d’anello Ga(jω) = Kc F(jω) sipossono leggere più accuratamente i margini
-200
-150
-100
-50
0
50
Mag
nitu
de(d
B)
10 -3 10 -2 10 -1 10 0 101 10 2 10 3-270
-225
-180
-135
-90
-45
0
Phas
e(d
eg)
Frequency (rad/sec)
mG,dB = 13.7 dB
mϕ = 35.7o
Verificare la correttezza della risposta ottenuta dal comandomargin(Ga)
A
C
28
Lettura dei margini di stabilità sul DdNic
Sul DdNic della fdt d’anello Ga(jω) = Kc F(jω) si possono ritrovare i margini letti sui DdB
-270 -225 -180 -135 -90 -45 0
-20
-10
0
10
20
30
-20 dB
1 dB -1 dB
0.5 dB
0.25 dB
0 dB
-12 dB
-3 dB
-6 dB
Open-Loop Phase (deg)
Ope
n-Lo
opG
ain
(dB)
mϕ
mG,dB
6 dB
3 dB

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 15
29
Stima di Mr dalla carta di Nichols
Sovrapponendo la carta di Nichols al DdNic dellafdt d’anello Ga(jω) si può stimare il picco di risonanza Mr in catena chiusa
-270 -225 -180 -135 -90 -45 0
-20
-10
0
10
20
30
-20 dB
1 dB
6 dB
3 dB
-1 dB
0.5 dB
0.25 dB
0 dB
-12 dB
-3 dB
-6 dB
Open-Loop Phase (deg)
Ope
n-Lo
opG
ain
(dB)
Il picco di risonanza Mrè stimato fra 3 e 6 dB
La carta di Nichols èsemplicemente generata dal comando grid
30
Stima di Mr dai luoghi a M costante
Mr può essere valutato anche sul piano complesso, sovrapponendo i luoghi a modulo M costante al DdN della fdt d’anello Ga(jω)
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
20 dB
-20 dB
-6 dB
-4 dB
-2 dB
20 dB
10 dB
2 dB
Real Axis
Imag
inar
y A
xis
4 dB
6 dB
-10 dB
Il picco di risonanza Mrè stimato fra 4 e 6 dB
Anche i cerchi M sono generati semplicemente dal comandogrid

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 16
31
Lettura di Mr sul DdB di Wy(jω)
Sui DdB della fdt in catena chiusa Wy(jω) sipuò leggere accuratamente il valore di Mr
10-3
10-2
10-1
100
101
102
103
-270
-225
-180
-135
-90
-45
0
Phas
e(d
eg)
-160
-140
-120
-100
-80
-60
-40
-20
0
20
Mag
nitu
de(d
B)
Frequency (rad/sec)
Ottenuti con il comando bode(W), avendo calcolato W con il comando feedback
32
Lettura di Mr sul DdB di Wy(jω)
Sul DdB della fdt in catena chiusa Wy(jω) sipuò leggere accuratamente il valore di Mr
10-3
10-2
10-1
100
101
102
103
-270
-225
-180
-135
-90
-45
0
Phas
e(d
eg)
-160
-140
-120
-100
-80
-60
-40
-20
20
Mag
nitu
de(d
B)
System: WyPeak gain (dB): 5.06 At frequency (rad/sec): 1.13
Frequency (rad/sec)
Letto da Matlab come Peak Responsefra le caratteristiche del sistema
0

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 17
Casi di studio
34
Definizione del problema (1/2)
Si consideri il consueto schema di controllo
con:
–
e u yd
++
F(s)ydes
+
rKr
C(s)
c r2
s 1F(s) , C(s) K , K 1
s(s 2.5s 4)(s 0.2)−
= = =+ + +

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 18
35
Definizione del problema (2/2)
Si consideri il consueto schema di controllo
con:
Tracciare i DdB ed il DdN di F(jω)Studiare la stabilità del sistema in catena chiusaal variare di Kc. Determinare mG e mϕ per un particolare valore di Kc per cui si ha stabilità
–
e u yd
++
F(s)ydes
+
rKr
C(s)
c r2
s 1F(s) , C(s) K , K 1
s(s 2.5s 4)(s 0.2)−
= = =+ + +
36
Analisi delle caratteristiche di F(jω)
Prima di determinare esattamente i diagrammi di Bode di F(jω) con l’ausilio di Matlab, è possibile prevederne l’andamento osservando le principali caratteristiche della funzione:

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 19
37
Analisi delle caratteristiche di F(jω)
Prima di determinare esattamente i diagrammi di Bode di F(jω) con l’ausilio di Matlab, è possibile prevederne l’andamento osservando le principali caratteristiche della funzione:
Zero in +1Poli in 0, -0.2, n1.25 1.56j ( 2, 0.625)− ± ω = ζ =
38
Analisi delle caratteristiche di F(jω)
Prima di determinare esattamente i diagrammi di Bode di F(jω) con l’ausilio di Matlab, è possibile prevederne l’andamento osservando le principali caratteristiche della funzione:
Zero in +1Poli in 0, -0.2, n1.25 1.56j ( 2, 0.625)− ± ω = ζ =
Sistema a non minima rotazione di fase

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 20
39
Analisi delle caratteristiche di F(jω)
Prima di determinare esattamente i diagrammi di Bode di F(jω) con l’ausilio di Matlab, è possibile prevederne l’andamento osservando le principali caratteristiche della funzione:
Zero in +1Poli in 0, -0.2,
Per 0.125
0 : F(j )j
ω → ω → −ω
n1.25 1.56j ( 2, 0.625)− ± ω = ζ =
40
Analisi delle caratteristiche di F(jω)
Prima di determinare esattamente i diagrammi di Bode di F(jω) con l’ausilio di Matlab, è possibile prevederne l’andamento osservando le principali caratteristiche della funzione:
Zero in +1Poli in 0, -0.2,
Per 0.125
0 : F(j )j
ω → ω → −ω
n1.25 1.56j ( 2, 0.625)− ± ω = ζ =
Pendenza iniziale del modulo: -20dB/decFase iniziale: -270°
(= +90o sul piano complesso)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 21
41
Analisi delle caratteristiche di F(jω)
Prima di determinare esattamente i diagrammi di Bode di F(jω) con l’ausilio di Matlab, è possibile prevederne l’andamento osservando le principali caratteristiche della funzione:
Zero in +1Poli in 0, -0.2,
Per
Per 3
1: F(j )
jω → ∞ ω →
ω
n1.25 1.56j ( 2, 0.625)− ± ω = ζ =
0.1250 : F(j )
jω → ω → −
ω
42
Analisi delle caratteristiche di F(jω)
Prima di determinare esattamente i diagrammi di Bode di F(jω) con l’ausilio di Matlab, è possibile prevederne l’andamento osservando le principali caratteristiche della funzione:
Zero in +1Poli in 0, -0.2,
Per
PerPendenza finale del modulo: -60dB/decFase finale: -270°
(avendo perso 360°)
n1.25 1.56j ( 2, 0.625)− ± ω = ζ =
3
1: F(j )
jω → ∞ ω →
ω
0.1250 : F(j )
jω → ω → −
ω

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 22
43
Tracciamento dei DdB di F(jω)
Diagrammi di Bode di F(jω):
-150
-100
-50
0
50
Mag
nitu
de(d
B)
10 -2 10-1 10 0 101 102-270
-180
-90
0
90
Phas
e(d
eg)
Frequency (rad/sec)
Ottenuti con il comando bode(F)
Bode Diagram
44
Tracciamento dei DdB di F(jω)
Diagrammi di Bode di F(jω):
-150
-100
-50
0
50
Mag
nitu
de(d
B)
10 -2 10-1 10 0 101 102-270
-180
-90
0
90
Phas
e(d
eg)
Frequency (rad/sec)
Bode Diagram
B
A Attraversamenti dell’asse reale del DdN
Ottenuti con il comando bode(F)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 23
45
Tracciamento del DdN di F(jω)
Diagramma di Nyquist di F(jω):
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Ottenuto con il comando nyquist(F)con l’aggiunta manuale del semicerchio di raggio infinito e dello zoom
Imag
inar
y A
xis
A
B
46
Applicazione del criterio di Nyquist per Kc = 1
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
A
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (1/6)
(-0.0545,0)
ni,a = 0
(2.02,0)
B
Punto critico di Nyquist (-1,0)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 24
47
Applicazione del criterio di Nyquist per Kc = 1
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (1/6)
Punto critico di Nyquist (-1,0)
(-0.0545,0)
ni,a = 0
N = 1
A
B
(2.02,0)
48
Applicazione del criterio di Nyquist per Kc = 1
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (1/6)
(-0.0545,0)
ni,a = 0
i,cn 1=
A
B
(2.02,0)Punto critico di Nyquist (-1,0)
N = 1

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 25
49
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (2/6)
(-0.0545,0)
ni,a = 0
A
B
(2.02,0)
(-1/Kc, 0)
per 0<Kc<18.39
50
(-1/Kc, 0)
per 0<Kc<18.39
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (2/6)
(-0.0545,0)
ni,a = 0
N = 1
A
B
(2.02,0)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 26
51
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (2/6)
(-0.0545,0)
ni,a = 0
i,cn 1=
A
B
(2.02,0)
(-1/Kc, 0)
per 0<Kc<18.39
N = 1
52
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (3/6)
(-0.0545,0)
ni,a = 0
A
B
(2.02,0)
(-1/Kc, 0)
per Kc>18.39

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 27
53
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (3/6)
(-0.0545,0)
ni,a = 0
(-1/Kc, 0)
per Kc>18.39
N = 3
A
B
(2.02,0)
54
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (3/6)
(-0.0545,0)
ni,a = 0
i,cn 3=
A
B
(2.02,0)
(-1/Kc, 0)
per Kc>18.39
N = 3

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 28
55
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (4/6)
(-0.0545,0)
ni,a = 0
A
B
(2.02,0)
(-1/Kc, 0)
per Kc<-0.495
56
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (4/6)
(-0.0545,0)
ni,a = 0
(-1/Kc, 0)
per Kc<-0.495
N = 2
A
B
(2.02,0)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 29
57
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (4/6)
(-0.0545,0)
ni,a = 0
i,cn 2=
A
B
(2.02,0)
(-1/Kc, 0)
per Kc<-0.495
N = 2
58
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (5/6)
(-0.0545,0)
ni,a = 0
A
B
(2.02,0)
(-1/Kc, 0)
per -0.495<Kc<0

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 30
59
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (5/6)
(-0.0545,0)
ni,a = 0
(-1/Kc, 0)
per -0.495<Kc<0
N = 0
A
B
(2.02,0)
60
Applicazione del criterio di Nyquist con Kcvariabile
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
Studio della stabilità in catena chiusa (5/6)
(-0.0545,0)
ni,a = 0
i,cn 0=
A
B
(2.02,0)
(-1/Kc, 0)
per -0.495<Kc<0
N = 0

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 31
61
Dall’applicazione del criterio di Nyquist, il sistema in catena chiusa risulta asintoticamente stabile per valori negativi del guadagno Kc(in particolare per -0.495 < Kc < 0) La condizione di asintotica stabilità è altresìraggiunta considerando una retroazionepositiva con Kc di valore compreso fra 0 e 0.495
Studio della stabilità in catena chiusa (6/6)
62
Scelta di Kc e verifica della stabilità
Il valore prescelto di Kc è -0.2Si può verificare l’asintotica stabilità del sistemain catena chiusa calcolandone i poli con Matlab:
2.19e-0012.61-001-5.72e-002 + 2.12e-001i
2.19e-0012.61-001-5.72e-002 - 2.12e-001i
2.04e+0006.34e-001-1.29e+000 + 1.58e+000i
2.04e+0006.34e-001-1.29e+000 - 1.58e+000i
Freq. (rad/s)DampingEigenvalue

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 32
63
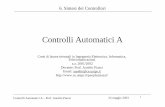
Valutazione dei margini di stabilità sul DdN
Sul DdN della fdt d’anello Ga(jω) = Kc F(jω), per Kc = -0.2, si individuano i margini di stabilità
G
o
m 2.47
m 30
≅
≅ϕ
-1.5 -1 -0.5 0 0.5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1 Nyquist Diagram
Real Axis
Imag
inar
yA
xis
mϕ
1/mG
(-0.404,0)
64
Valutazione dei margini di stabilità sul DdN
Sul DdN della fdt d’anello Ga(jω) = Kc F(jω), per Kc = -0.2, si individuano i margini di stabilità
G
o
m 2.47
m 30
≅
≅ϕ
-1.5 -1 -0.5 0 0.5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1 Nyquist Diagram
Real Axis
Imag
inar
yA
xis
mϕ
1/mG
(-0.404,0)Il significato dei margini di stabilità è quello “standard” di max aumento del guadagno e maxperdita di fase ammissibili

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 33
65
Lettura automatica dei margini di stabilità
È possibile valutare automaticamente il valore di mG e mϕ per mezzo del comando margin(Ga)
-150
-100
-50
0
50
Mag
nitu
de(d
B)
10-2 10-1 100 101 102-90
0
90
180
270
Pha
se(d
eg)
Bode DiagramGm = 7.87 dB (at 0.336 rad/sec) , Pm = 29.8 deg (at 0.186 rad/sec)
Frequency (rad/sec)
66
Lettura automatica dei margini di stabilità
È possibile valutare automaticamente il valore di mG e mϕ per mezzo del comando margin(Ga)
-150
-100
-50
0
50
Mag
nitu
de(d
B)
10-2 10-1 100 101 102-90
0
90
180
270
Pha
se(d
eg)
Bode DiagramGm = 7.87 dB (at 0.336 rad/sec) , Pm = 29.8 deg (at 0.186 rad/sec)
Frequency (rad/sec)
Lettura corretta dei margini di stabilità
mϕ
mG,dB
Gm = 7.87 dB (at 0.336 rad/sec) Pm = 29.8 deg (at 0.186 rad/sec)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 34
Casi di studio
68
Il sistema fisico
α
x Motore carrello
Asta
Cerniera passiva
Tensione contr.
Carrello
Cinghia dentata

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 35
69
Rappresentazione del sistema fisico
u = tensione di controllo motore (in V)ys= posizione angolare α (in rad)y = misura dell’angolo α (in V)d = disturbi vari riportati sull’uscita (in V)F(s) = y(s)/u(s) modello lineare del sistema
u yd
++
F(s)
70
Il modello
Un modello lineare che approssima sufficientemente bene il sistema in esame nell’intorno del punto di equilibrio (instabile) ècostituito dalla seguente fdt
Si noti che il sistemaÈ instabile Ha due zeri nell’origine (derivatore doppio)Ha le restanti singolarità con modulo nell’intervallo 5÷110 rad/s
)12100s120)(s5)(s5)(s14(s)100(ss1100)s(F 2
2
++−+++−
=

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 36
71
Il controllore
Si consideri il controllore caratterizzato dalla seguente funzione di trasferimento
progettato per il soddisfacimento di adeguate specifiche (secondo quanto discusso successivamente nel corso)
Si noti che il controllore è instabile
)3.0s()3(s
)90(s)15(s
)4(s216)s(C
++
⋅++
⋅−
−=
72
L’anello di controllo
La struttura del sistema di controllo fa riferimento a quella presentata nelle lezioni precedenti (con Kr=1 e quindi ydes= r)
La funzione d’anello è definita come:
–
e u yd
++
F(s)+
rC(s)
aG (s) C(s)F(s)=

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 37
73
DdN di Ga(s) ed analisi della stabilità
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5-1.5
-1
-0.5
0
0.5
1
1.5
Asse reale
Ass
e im
mag
inar
io
ni,a= 2
N = -2
i,cn 0=
74
Valutazione dei margini sul DdN di Ga (1/6)
Asse reale
Ass
e im
mag
inar
io
R = 1
Due intersezioni del DdN con la circonferenza di raggio unitario
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5-1.5
-1
-0.5
0
0.5
1
1.5

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 38
75Asse reale
Ass
e im
mag
inar
io
R = 1
1mϕ
Valutazione dei margini sul DdN di Ga (2/6)
Massimo aumentodi fase (circa 33°)
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5-1.5
-1
-0.5
0
0.5
1
1.5
76Asse reale
Ass
e im
mag
inar
io
R = 12mϕ
Valutazione dei margini sul DdN di Ga (3/6)
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5-1.5
-1
-0.5
0
0.5
1
1.5
Massima perditadi fase (circa 57°)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 39
77
Valutazione dei margini sul DdN di Ga (4/6)
Asse reale
Ass
e im
mag
inar
io
Due intersezioni del DdN con l’asse reale
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5-1.5
-1
-0.5
0
0.5
1
1.5
78Asse reale
Ass
e im
mag
inar
io
G11 /m
Valutazione dei margini sul DdN di Ga (5/6)
(-1.83,0)
G1m 0.54≅Massima attenuazionedel guadagno
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5-1.5
-1
-0.5
0
0.5
1
1.5

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 40
79Asse reale
Ass
e im
mag
inar
io
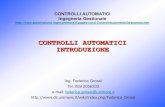
Valutazione dei margini sul DdN di Ga (6/6)
G21 / m
(-0.195,0)
Massima amplificazionedel guadagno
G2m 5.13≅
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5-1.5
-1
-0.5
0
0.5
1
1.5
80
Lettura di Mr dai luoghi a M costante
Asse reale
Ass
e im
mag
inar
io
Mr=8 dBωr=2.35 rad/s
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5-1.5
-1
-0.5
0
0.5
1
1.5

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 41
81
Riepilogo dei punti di lettura dei parametri
Asse reale
Ass
e im
mag
inar
io
1mϕ
1Gm
2mϕ
2Gm
Mr
R = 1
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5-1.5
-1
-0.5
0
0.5
1
1.5
82
Lettura dei margini sui DdB di Ga
10-1 100 101 102 10390
135
180
225
270
Fase
(deg
)
-80
-60
-40
-20
0
20
Mod
ulo
(dB
)
1mϕ
1Gm
2mϕ
2Gm
1ϕω 1Gω 2ϕω 2Gω
1
1
G1
G1
2
2
G2
G2
m 33
1.5 rad/s
m 5.3 dB
3.3 rad/s
m 57
21 rad/s
m 14 dB
102 rad/s
ϕ
ϕ
ϕ
ϕ
= −
ω =
= −
ω =
=
ω =
=
ω =

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 42
83
Lettura dei margini sul DdNic di Ga (1/4)
0 45 90 135 180 225 270 315 360-50
-40
-30
-20
-10
0
10
Fase catena aperta (deg)
Gua
dagn
o ca
tena
ape
rta
(dB
)
1mϕ
84
0 45 90 135 180 225 270 315 360-50
-40
-30
-20
-10
0
10
Fase catena aperta (deg)
Gua
dagn
o ca
tena
ape
rta
(dB
)
2mϕ
Lettura dei margini sul DdNic di Ga (2/4)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 43
85
Lettura dei margini sul DdNic di Ga (3/4)
0 45 90 135 180 225 270 315 360-50
-40
-30
-20
-10
0
10
Fase catena aperta (deg)
Gua
dagn
o ca
tena
ape
rta
(dB
)
1Gm
86
Lettura dei margini sul DdNic di Ga (4/4)
0 45 90 135 180 225 270 315 360-50
-40
-30
-20
-10
0
10
Fase catena aperta (deg)
Gua
dagn
o ca
tena
ape
rta
(dB
)
2Gm

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 44
87
Lettura di Mr dalla carta di Nichols
0 45 90 135 180 225 270 315 360-50
-40
-30
-20
-10
0
10
Fase catena aperta (deg)
Gua
dagn
o ca
tena
ape
rta
(dB
)
Mr = 8 dB
88
Riepilogo dei punti di lettura dei parametri
0 45 90 135 180 225 270 315 360-50
-40
-30
-20
-10
0
10
Fase catena aperta (deg)
Mod
ulo
cate
na a
pert
a (d
B)
1mϕ 2mϕ
2Gm
Mr1Gm

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 45
89
Osservazioni finali
Il sistema in catena chiusa è asintoticamente stabileGa(s) è caratterizzata da:
Due margini di fase, uno positivo e l’altro negativo ⇒ risultano nocivi, rispettivamente, sia una diminuzione sia un incremento di fase Due margini di guadagno, uno positivo e l’altro negativo in dB ⇒ risultano nocivi, rispettivamente, sia un aumento sia una diminuzione di guadagno
La fdt in catena chiusa presenta un solo picco di risonanza
Casi di studio

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 46
91
Il sistema fisico (1/2)
Elettromagnete
Sferetta ferrosa, posizione z
Tensione di controllo
Trasduttore senza contatto
Misura della posizione z (tens.)
92
Il sistema fisico (2/2)
Trasduttore senza contatto
Sferetta ferrosa
Fotodiodi all’infrarosso(trasmittenti)
Fototransistor all’infrarosso(riceventi)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 47
93
Rappresentazione del sistema fisico
u = tensione di controllo (impone la corrente nell’elettromagnete) (in V)ys= posizione verticale z della sferetta (in m)y = tensione proporzionale alla posizione z (in V)d = disturbi vari riportati sull’uscita (in V)F(s) = y(s)/u(s) modello lineare del sistema
u yd
++
F(s)
94
Il modello
Un modello lineare che approssima sufficientemente bene il sistema in esame nell’intorno di un punto di equilibrio (instabile) ècostituito dalla seguente fdt
Si noti che il sistemaÈ instabile Ha due poli di modulo 30 rad/s
)30)(s30(s7000)s(F
−+−
=

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 48
95
Il controllore
Si consideri il controllore caratterizzato dalla seguente funzione di trasferimento
progettato per il soddisfacimento di adeguate specifiche (secondo quanto discusso successivamente nel corso)Si noti che il controllore cambia segno al guadagno d’anello (il che equivale a realizzare una retroazione positiva con guadagno positivo)
)600(s)40(s
s)10s(13)s(C
++
⋅+−
=
96
L’anello di controllo
La struttura del sistema di controllo fa riferimento a quella presentata nelle lezioni precedenti (con Kr=1 e quindi ydes= r)
La funzione d’anello è definita come:
–
e u yd
++
F(s)+
rC(s)
aG (s) C(s)F(s)=

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 49
97
-8 -7 -6 -5 -4 -3 -2 -1 0 1
-3
-2
-1
0
1
2
3
Asse reale
Ass
e im
mag
inar
io
ni,a= 1
N = -1
i,cn 0=
DdN di Ga(s) ed analisi della stabilità
98
-8 -7 -6 -5 -4 -3 -2 -1 0 1
-3
-2
-1
0
1
2
3
Asse reale
Ass
e im
mag
inar
io
Valutazione dei margini sul DdN di Ga (1/2)
R = 1ϕm
Massima perditadi fase (circa 57°)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 50
99
-8 -7 -6 -5 -4 -3 -2 -1 0 1
-3
-2
-1
0
1
2
3
Asse reale
Ass
e im
mag
inar
ioValutazione dei margini sul DdN di Ga (2/2)
G1 /m
Gm 0.177≅
Massima attenuazionedel guadagno
-15 dB
100
-8 -7 -6 -5 -4 -3 -2 -1 0 1
-3
-2
-1
0
1
2
3
Asse reale
Ass
e im
mag
inar
io
Lettura di Mr dai luoghi a M costante
Mr = 2.6 dBωr = 63 rad/s

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 51
101
-8 -7 -6 -5 -4 -3 -2 -1 0 1
-3
-2
-1
0
1
2
3
Asse reale
Ass
e im
mag
inar
io
ϕmGm
Mr
R = 1
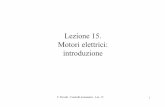
Riepilogo dei punti di lettura dei parametri
102Gω100 101 102 103 104-270
-225
-180
-135
-90
Fase
(deg
)
-40
-20
0
20
40
Mod
ulo
(dB
)
ϕω
ϕm
Gm
Lettura dei margini sui DdB di Ga
rad/s 146
57m
rad/s 21
dB 15m
G
G
=ω
=
=ω
−=
ϕ
ϕ

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 52
103
-360 -315 -270 -225 -180 -135 -90 -45 0-40
-30
-20
-10
0
10
20
30
40
Fase catena aperta (deg)
Mod
ulo
cate
na a
pert
a (d
B)
ϕm
Lettura dei margini sul DdNic di Ga (1/2)
104
-360 -315 -270 -225 -180 -135 -90 -45 0-40
-30
-20
-10
0
10
20
30
40
Fase catena aperta (deg)
Mod
ulo
cate
na a
pert
a (d
B)
Gm
Lettura dei margini sul DdNic di Ga (2/2)

Controlli automatici Casi di studio
© 2007 Politecnico di Torino 53
105
-360 -315 -270 -225 -180 -135 -90 -45 0-40
-30
-20
-10
0
10
20
30
40
Fase catena aperta (deg)
Mod
ulo
cate
na a
pert
a (d
B) Mr = 2.6 dB
Lettura di Mr dalla carta di Nichols
106
Osservazioni finali
Il sistema in catena chiusa è asintoticamente stabileGa(s) è caratterizzata da:
Margine di fase positivo ⇒ risulta nociva una diminuzione di fase Margine di guadagno negativo in dB ⇒ risulta nociva una diminuzione di guadagno
La fdt in catena chiusa presenta un solo picco di risonanza