Spacecraft Attitude Dynamics Bacconi

of 148
-
Upload
mykingboody2156 -
Category
Documents
-
view
230 -
download
0
Transcript of Spacecraft Attitude Dynamics Bacconi
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
1/148
UNIVERSIT A DEGLI STUDI DI FIRENZE
Dipartimento di Sistemi e Informatica
Dottorato di Ricerca in
Ingegneria Informatica e dellAutomazione
ING-INF/04
XVIII Ciclo
Spacecraft Attitude Dynamics
and Control
Fabio Bacconi
Ph.D. Coordinator
Prof. Edoardo Mosca
Advisors
Prof. Edoardo Mosca
Prof. Alessandro Casavola
Anno Accademico 20052006
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
2/148
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
3/148
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
4/148
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
5/148
8.3 Simulations of a LEO spacecraft performing Large Angle Maneuvers 123
8.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .127
Conclusion 128
Geo-stationary Spacecraft and the 3D Pendulum . . . . . . . . . . . . . 129
Constrained MEO and LEO Spacecraft . . . . . . . . . . . . . . . . . . . 131
Research Contribution and Future Developments . . . . . . . . . . . . . 132
Bibliography 134
CONTENTS iii
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
6/148
List of Figures
1.1 Inertial references frame {I }and body reference frame {B} . . . . 101.2 Sequence of Eulers angles to be applied to frame{I }for obtaining
frame {B}orienta t ion . . . . . . . . . . . . . . . . . . . . . . . . . 131.3 A schematic of a 3D Rigid Pendulum . . . . . . . . . . . . . . . . . 14
1.4 Triaxial Air Bearing Testbed. . . . . . . . . . . . . . . . . . . . . . 20
2.1 A schematic of a 3D Rigid Pendulum with one axis of symmetry . . 23
2.2 Classical representation of the 2D spherical pendulum . . . . . . . . 25
2.3 A schematic of a heavy spinning top not constrained by the table . 27
3.1 Fan thrusters scheme of the Triaxial Attitude Control Testbed. . . . 37
3.2 Experimental results for the evolution of the angular velocity of the
3D pendulum in the body frame. . . . . . . . . . . . . . . . . . . . 45
3.3 Experimental results for the evolution of the components of the di-
rection of gravity in the body frame. . . . . . . . . . . . . . . . . 45
3.4 Experimental result for the evolution of the angle between the re-
duced attitude vector (t) and the desired reduced attitude vector
0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.1 Evolution of the closed loop system (3.2), (4.1) and (4.2) towards
the unstable equilibrium. . . . . . . . . . . . . . . . . . . . . . . . 52
4.2 Evolution of the angular velocity of the 3D pendulum in the body
frame. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
7/148
4.3 Evolution of the components of the direction of gravity in the
body frame. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.4 Evolution of the angle between the reduced attitude vector (t) and
the desired reduced attitude vector 0 . . . . . . . . . . . . . . . . . 58
4.5 Vertical angular momentum (solid line) and total energy (dash line)
of the 3D pendulum. . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.6 Motion of the vector between the pivot and the center of mass of
the 3D pendulum in the inertial frame. . . . . . . . . . . . . . . . . 60
4.7 Evolution of the angle between the reduced attitude vector (t) and
the desired reduced attitude vector 0 for (0) = 0 . . . . . . . . . . 60
5.1 Evolution of the angular velocity of the symmetric heavy top in the
body frame. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.2 Evolution of the components of the direction of gravity in the
body frame. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.3 Vertical angular momentum (solid line) and total energy (dash line)
of the symmetric top. . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.4 Closed-loop trajectory of the symmetric top in the inertial frame. . . 82
5.5 Evolution of the angular velocity of the 2D pendulum in the body
frame. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.6 Evolution of the components of the direction of gravity in the
body frame. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.7 Evolution of the angle between the reduced attitude vector (t) and
the desired reduced attitude vector 0 for (0) = 0 . . . . . . . . . . 84
5.8 Closed-loop trajectory of the 2D pendulum in the inertial frame. . . 84
6.1 Reference frame {B}motion with respect to an Earth centered ref-erence frame {EC I } . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.2 Reference frame {B}with respect to an orbiting reference frame{O}, both moving in {ECI } . . . . . . . . . . . . . . . . . . . . . 92
7.1 Command Governor scheme. . . . . . . . . . . . . . . . . . . . . .101
7.2 Relative position components x(k), y(k), z(k) of the LEO satellite,
under the proposed LQ+CG control law (7.14). . . . . . . . . . . . 108
LIST OF FIGURES v
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
8/148
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
9/148
8.3 Reconguration for a LEO spacecraft, requiring a large angle maneuver.124
8.4 Relative position y(t) (desired reference in dash lines), control forcef 2(t) and error e2(t) in coordination accuracy for y(t) (constraint
boundaries in dash lines) under HCG. The vertical dash lines indicate
instants of switching. . . . . . . . . . . . . . . . . . . . . . . . . .124
8.5 Eulers angle (t) (desired reference in dash lines), control torque
3(t) and error e3(t) in coordination accuracy for (t) (constraint
boundaries in dash lines) under HCG. The vertical dash lines indicate
instants of switching. . . . . . . . . . . . . . . . . . . . . . . . . .125
8.6 Values of ( t) and (t) for the HCG selection logic (7.14), (8.7). . 1258.7 Relative position y(t), control force f 2(t) and error e2(t) in coor-
dination accuracy for y(t) under LQ (constraint boundaries in dash
lines). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .126
LIST OF FIGURES vii
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
10/148
Introduction
Attitude control has been one of the most interesting and challenging problems
in aerospace systems, from the rst half of the twentieth century, to present
time. A modern spacecraft is a multibody system, composed of rigid bodies
connected together by exible rods. From a mechanical point of view and with
the aim of controlling its orientation, however, it can be modeled as a single rigid
body. As a consequence, a spacecraft can be thought as a mechanical system
with three translational and three rotational degrees of freedom. Moreover, if
the satellite orbits at an altitude of approximately 35 .786 km above Earths
surface, it appears stationary. Thus, only rotational motion is observed from
Earth.
Behavior of space vehicles on Medium (MEO) and Low Earth orbits (LEO)
is quite different from the one at GEO altitudes. On a GEO orbit, dynamics
is described by attitude models. Moreover, gravity does not affect rotational
motion. At lower altitudes, on the contrary, also translational motion, and its
effects on rotational motion, have to be taken into account. Indeed, differentpositions may correspond to different angular velocities, producing changes on
attitude.
The main goal of this dissertation is modeling and controlling the attitude of
spacecraft, orbiting around Earth at GEO, MEO and LEO altitudes. Although
on GEO orbits, gravity does not affect motion, we generalize the former case,
introducing a new mechanical system with three rotational degrees of freedom
in uniform gravity. Such a system, consists of a rigid body constrained to
INTRODUCTION 1
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
11/148
rotate about a pivot. We refer to it as 3D Pendulum. Furthermore, we study
attitude dynamics and control of rigid bodies traveling on MEO and LEO orbits.To do that, we introduce a mathematical model describing both rotations and
translations.
Prior Literature on Spacecraft Attitude Control
The idea of using satellites for communication purposes, goes back to 1945,
when the science ction author Arthur C. Clarke, proposed a geo-stationary or-
bit where placing a mechanical system, suitably oriented with respect to Earth.
From that time, a huge literature has been produced on the several aspect
related to the motion of space vehicles, as orbital motion and maneuvers, per-
turbations, and attitude acquisition. Related theory has been summarized in
numerous text books on spacecraft motion and control. Two classical texts
are mainly referred in this dissertation. The rst one, has been published by
Kaplan [Kap76] in the seventies. It analyzes spacecraft dynamics. The second
one, written by Huges [Hug86] during the subsequent decade, is more focused
on attitude. From a more technological perspective, especially related to space
vehicles moving on MEO and LEO orbits and to their instrumentations, promi-
nent is the text recently published by Sidi [Sid00]. Astrodynamics, on the other
hand, are extensively described in [BMW71]. In particular, it illustrates in de-
tail the classical two body and three body problems. Dynamics on MEO and
LEO orbits are strictly connected to this theory.
In this thesis, we study attitude control problems. Beyond the peculiar prop-
erties of space systems, listed above, we focus our attention on the mechanical
properties of rigid bodies. From this point of view, related theory is especiallyconnected to classical mechanics and geometry. Therefore, attitude models de-
scribed by Goldstein et al. in [GPS80] and geometric properties presented by
Marseden et al. in [MR99] and [MRS00] are fundamental. The literature on
rotating mechanical systems is wide. One and two degrees of freedom rotating
rigid bodies have been analyzed in several works, giving rise to pendulum mod-
els. They constitute fundamental background for studying more sophisticated
structures, as three degrees of freedom rotating rigid bodies. A comprehensive
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
12/148
survey on pendulum literature has been presented by Furuta in [Fur03]. Related
references cover the evolution of corresponding theory. Prominent is the workmade by Shirieav et al. in the nineties. [SEL99], [SPLE00] and [SEL04] propose
control techniques for 2D pendulum, using conserved quantities of the motion
and passivity-based results. We use a similar approach in this dissertation. In
particular, we refer to a 3D rotating rigid body and we use reduction theory
for modeling the system. Then, we use input-output passivity, for controlling
attitude. Reduction theory is described in [MRS00]. Its main aspects have
been developed by Bloch et al. , for controlling mechanical systems [BLM00],
[BLM01]. Connections to the 2D pendulum and to the spinning heavy top,have been illustrated by Simo et al. in [SLRM92], by Wan et al. , [WCB95],
[WCB95], and by related references. Passivity theory has been extensively de-
scribed by Ortega et al. in [OSR98].
Passivity control, lies in the more general context of energy-based control. In
this thesis we make extensive use of energy-based control and Lyapunov func-
tions. They are particularly suitable in the presence of mechanical systems.
Ideas on suitable Lyapunov functions for rotating 3D rigid bodies have been
provided by Burkov. In [Bur95], the author proposes a Lyapunov function for
controlling the attitude of a spacecraft, with three control torques. On the other
hand, control techniques based on the use of only two input torques, have been
summarized by Doumtchenko and Tsiotras in [DT00]. Tsiotras et al. have pro-
vided prominent work on modeling and controlling underactuated spacecraft.
See [CLT00], [WTCB94] and related references.
Recent theory in spacecraft attitude dynamics and control, has been focusing
its attention on small satellites placed on MEO and LEO orbits. For Earth ob-
serving missions and interferometric systems, these structures are more suitable
than GEO spacecraft. If large instrumentation is required, the use of distrib-
uted systems, shared between vehicles ying in formation, has been suggested.
A survey on this new theory has been illustrated by Esper et al. in [ENS+ 03].
Suitable models and control techniques have been analyzed for such systems.
Due to their small dimension, constraints play a key role on their dynamics.
On this subject, Veres et al. present a Model Based Predictive Control (MPC)
technique for a eet of two LEO nano-satellites, in [VGRM01]. In this disser-
INTRODUCTION 3
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
13/148
tation we propose an attitude control technique also based on MPC. It consists
on a suitably modied version of the Command Governor (CG) approach, de-veloped by Bemporad et al. [BCM97] and subsequently adopted in [CMA00]
and [ABC + 03].
Dissertation Outline
We treat attitude models and control for rigid spacecraft. Since, dynamics of
rigid bodies on GEO orbits are different from dynamics on LEO orbits, this
dissertation can be broadly divided into two parts. In the rst part, we face the
problem of modeling and controlling attitude of geo-stationary satellites. Apart
of the presence of gravity, we notice immediately that their motion can be re-
produced on Earth, pivoting a rigid body on a xed point. Thus, in Chapter 1
we introduce the new concept of 3D Pendulum. It consists exactly of a three
rotational degrees of freedom rigid body, whose translations are obstructed by
the pivot. Its equilibria and their stability properties are described as well.
Actually, the 3D pendulum model generalizes GEO spacecraft attitude models.
Moreover, it generalizes 2D pendulum, 1D pendulum and spinning top mod-
els. These aspects are developed in Chapter 2. Assumptions to be placed on
the 3D pendulum model, for obtaining the mathematical description of these
classical systems, are analyzed. Furthermore, advantages on using the 3D pen-
dulum model, for controlling the equilibria of 2D pendulum and spinning top,
in comparison to prior techniques, are motivated. A new mechanical system,
following directly from the 3D pendulum model, is illustrated in Section 2.3.
It represents a heavy top, spinning below its pivot. This system has not been
studied in previous literature.Subsequently, we face the problem of stabilizing the natural equilibria of a 3D
pendulum. They consist of the two congurations where direction of gravity is
vertical, with respect to the rigid body. In Chapter 3, we propose passivity-
based control laws for stabilizing these congurations in the general case, i.e.
when the 3D pendulum is asymmetric. Techniques for stabilizing arbitrary ori-
entations of the 3D pendulum are illustrated in Chapter 4. They represent
attitude controllers that can be directly used to stabilize any attitude of geo-
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
14/148
stationary spacecraft.
The case when the 3D pendulum is axi-symmetric, is illustrated in Chapter 5.In this case, the control laws we propose, actually stabilize the 2D pendulum
and the spinning top. In particular, in Section 5.3 we show that our approach
guarantees the use of a continuous state-feedback for swinging up the spherical
pendulum. It is a prominent result, if compared to previous literature, where
this problem is solved by a swing-up controller, singular at the desired equilib-
rium, a local stabilizing controller, and a technique for switching between the
two.
Attitude control of MEO and LEO spacecraft is faced in the second part of thisdissertation. In Chapter 6 we describe the main properties of space vehicles
orbiting around Earth at constant velocity, under a leader-following approach.
The subsequent model, describing both rotational and translational motion, is
presented. Model Based Predictive Control techniques, under the assumption of
small angular displacements between the satellite and a suitably dened orbital
leader reference frame, are illustrated in Chapter 7. They adopt a Command
Governor approach, for taking the presence of saturation constraints into ac-
count. Indeed, satellites moving on low orbits are usually small. Thus, their
thrusters cannot provide large torques. Moreover, we introduce suitable state-
accuracy constraints, usually present in real missions. The importance of con-
sidering constraints is the main difference between space systems on high orbits,
as geo-stationary spacecraft, and space systems on low orbits. In this disser-
tation this difference is the watershed between the rst and the second part.
Finally, in Chapter 8, we remove the small angular displacements assumption.
In order to restore results illustrated in the previous chapter, we address our
control technique in a hybrid framework, proposing a Hybrid Command Gover-
nor controller. It consists of a bank of controller as those presented in Chapter
7, each one designed with respect to a reference attitude, and of a technique for
switching between them.
INTRODUCTION 5
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
15/148
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
16/148
Part I
Geo-Stationary Spacecraft
Attitude Control
7
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
17/148
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
18/148
Chapter
1Dynamics of the 3D Pendulum
Three degrees of freedom (3D) rigid bodies have been extensively studied in me-
chanics and their dynamics equations are well known in literature. They provide
the fundamental background for modeling and controlling modern space and un-
derwater vehicles. Simply, a rigid body is a system of particles whose relative
distances are xed with time.
In this chapter we introduce a particular kind of 3D rigid body: the 3D pendu-
lum . Its dynamics is strictly related to the one of spacecraft in geo-stationary
(GEO) orbits. Pendulum models have provided a rich source of examples in
nonlinear dynamics and, in recent years, in nonlinear control. Several different
models have been developed to analyze the properties of the uncontrolled planar
1D pendulum and spherical 2D pendulum. However, their extension to a threedegrees of freedom pendulum, supported by a xed frictionless pivot, has never
surprisingly been performed. Indeed, very few publications view the pendulum
as a rigid body.
We rst remind the main concepts describing 3D rigid body attitude models.
This provides appropriate background for the subsequent introduction of the
3D pendulum. Further, we present both the complete mathematical model of
this system and a simplied version of it, particularly suitable for control pur-
9
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
19/148
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
20/148
with J denoting the constant inertia matrix in the body-xed reference frame,
and
dP dt I
=ddt
(r mv) = m(drdt v) + m(r
dvdt
) = r d(mv)
dt= ( r F ) =
with m representing the total mass of the rigid body, r the position of its center
of mass in {I }and a possibly applied torque. Thus,
J = J + (1.2)
Equation (1.2) is referred to as the Eulers equation and represents the dynamics
of the rigid body in the general case. It is usually a simplifying assumption to
select {B}aligned with the principals axes of the body, or equivalently, the mo-mentum P parallel to the angular velocity . In this case, all the extra-diagonal
terms of J are null and the system reduces to three scalar equations. Details
can be found in [GPS80], [Kap76] and [Sid00].
Kinematics equations complete the mathematical model of the 3D rigid body.
They describe the geometry of the motion apart from its causes. Many different
kinematics models have been proposed in mechanics literature and aerospace
control. An extensive overview of these models with focus on their main differ-
ences can be found in [Hug86]. This text has also strongly inspired the connec-
tions between space vehicles control and the 3D pendulum control described in
the following chapters. In this dissertation we make use of two of these models.
The rst one, namely the Poissons model , aims at describing the orientation of
the inertial frame {I }in {B}, simply expressing its versors in terms of the {B}coordinates X , Y and Z . It is useful to control the attitude of satellites in
GEO orbits. For this reason, it will be used hereafter to describe the 3D pen-
dulum. The second model uses the Eulers angles equations and it is suitable to
control the attitude of space vehicles in medium (MEO) and low (LEO) orbits.
It will be widely described in the second part of this dissertation.
The kinematics model arises from the representation of {I }in {B}by a suitablerotation matrix R
{I }= R{B} (1.3)
11
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
21/148
It follows from the fact that the conguration manifold of a rotating body lies
in1 SO (3) R 3 , in the general case [MR99], being SO (3) the group of theorthogonal matrices with determinant equal to 1:
SO (3) = {R (3) : RR T = I, det (R) = 1}As described in detail in [Hug86] and in [Hal02], equation (1.3) is not a proper
matrix product, but a notation commonly referred to as the vectrix represen-
tation . The elements of R represent the cosines directors. Indeed, the ori-
entation of any axes of {I }can be expressed as a linear combination of the
{B}versors: X = R11 X + R12 Y + R13 Z , Y = R21 X + R22 Y + R23 Z and Z = R31 X + R32 Y + R33 Z where X = [1 , 0, 0]T , Y = [0 , 1, 0]T andZ = [0 , 0, 1]T in {B}. Now, applying equation (1.1) to the rst axis of {I },gives
X = X = X (1.4)and analogous for Y and Z . Here is the skew-symmetric matric denoting the
cross products between two vectors, such that a b = ab. It corresponds to
a =
0 a3 a2a3 0 a1a2 a1 0
(1.5)
Hence, rewriting (1.4) in terms of (1.3), we have directly
R = R (1.6)
that is the kinematics equation of the rigid body.
The Poissons representation is originated by writing the above expression for
any component. However, this representation is redundant because of the six
orthogonality constraints. In fact SO (3) is a sub-variety of dimension 3 of R 9
[MR99]. The, three variables, corresponding to the three degrees of freedom
of the rigid body are enough for describing its orientation in space. Several
mathematical models have been developed in order to characterize R using a
lower number of variables. The most common is the Eulers angles kinematic
model. It describes R in terms of the angles corresponding to three subsequent1 The properties of SO(3) affecting control actions on rigid bodies will be discussed in the
following chapters. More details on the topology of SO(3) can be found in [MR99] and [Hat01].
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
22/148
rotations to apply to the inertial frame, to become coincident with the body
frame. In this work we consider three successive elementary rotations denedby the yaw angle , the pitch angle and the roll angle . First, impressing o
Figure 1.2. Sequence of Eulers angles to be applied to frame {I } for obtaining
frame {B } orientation
rotation of angle to the Z axis of {I }, we have a new reference frame {I }:
{I }= R {I }=cos() sin( ) 0
sin() cos() 00 0 1
{I }
Subsequently, we can impress to this new reference frame a second rotation of
pitch angle giving another frame {I }and then a third rotation of roll angle to {I }, obtaining {B}= R R R {I }. Thus, R in (1.3) corresponds to
R = RT RT R
T =
cc sc + css ss cscsc cc sss cs + sscs cs cc
(1.7)
where cx stands for cos( x) and sx stands for sin( x). Equation (1.6) can then
be written in terms of Eulers angles taking the rst derivative of (1.7) and
extracting , and . It produces three rst order differential equations
= y sin sec + z cos sec (1.8)
= y cos z sin (1.9) = x + y sin tan + z cos tan (1.10)
known as the Eulers angles representation . Note that these equations are valid
as long as the pitch angle avoid the singularities at / 2.Model (1.2), (1.6) and some variations will be used in the rst part of this thesis
in order to illustrate the properties of the 3D pendulum and its connections to
13
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
23/148
previous literature. It is particularly suitable for controlling the attitude of
GEO spacecraft. On the contrary, model (1.2), (1.8)-(1.10) is more convenientfor attitude control of MEO and LEO satellites. It will be mostly used in the
second part of this thesis.
1.2 The 3D Pendulum
A pendulum is a rigid body supported by a xes, frictionless pivot, acted on by
gravitational forces and disturbance and control forces or moments. In the most
general case, we consider a pendulum without axes of symmetry. A schematic
of a rigid pendulum is shown in Figure 1.3. The supporting pivot allows three
Figure 1.3. A schematic of a 3D Rigid Pendulum
degrees of rotational freedom to the pendulum. Uniform constant gravity is
assumed. It represents the element in equation (1.2). Thus, the pendulum is
described by at least three spacial coordinates and three rotational coordinates,
suggesting the terminology 3D pendulum .
Two coordinate frames, are of interest. The inertial reference frame {I }hasits origin at the pivot, the rst two coordinate axes lie in the horizontal planeand the third coordinate axis is vertical in the direction of gravity. The origin
of the body frame {B}is also located at the pivot. In this frame the inertiamatrix J is constant and can be simply computed from the moment of inertia
of a translated coordinate frame whose origin is located at the center of mass of
the pendulum, using the parallel axis theorem [HRW04]. The body-xed vector
from the pivot to the center of mass of the pendulum is denoted by . The
symbol g denotes the constant acceleration due to gravity. This is the data on
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
24/148
which the equations of motion are based. The dynamics are given by the Eulers
equation (1.2) that includes the moment due to gravity:
J = J + mg RT e3 (1.11)
where m is the total mass of the rigid body and e3 is the third unit vector in
the inertial coordinate frame, namely e3 = (0 , 0, 1)T . Equation (1.11) and the
rotational kinematics equation (1.6) dene the full dynamics of a rigid pendulum
in SO (3) R 3 .It is important to point out that in GEO aerospace applications the dynamics
are not affected by gravity terms [Kap76]. Hence, these systems are specialcases of the above model. In particular, this is the case when the center of mass
of the rigid body is located at the pivot, that is = 0. In the context of the
rigid pendulum, we refer to this situation as the balanced case. It allows at
viewing the geo-stationary spacecraft attitude control problem as a simplied
version of the 3D pendulum attitude control problem. Therefore, the focus on
what follows, will be on the more general unbalanced case, viz. = 0.
There are two conserved quantities for the rigid pendulum. The rst one is
the total energy, which is the sum of the rotational kinetic energy and thegravitational potential energy. In addition, there is a rotational symmetry of the
equations of motion corresponding to the group of rotations about the vertical
line through the pivot. These two results are summarized as follows.
Proposition 1.1 The total energy
E = 0 .5T J mg T RT e3and the component of the angular momentum vector about the vertical axis
through the pivot h = T JR T e3
are constant along motions of the rigid pendulum.
The proof follows by showing that the time derivative of the total energy and the
time derivative of the angular momentum component are identically zero. This
can be shown using the dynamics equations (1.11) and the kinematics equation
(1.6).
15
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
25/148
Thanks to the presence of a conserved quantity along the motion, it is possible
to obtain a lower dimensional reduced model for the pendulum. In practice,the function h can be seen as a constraint imposing the system to lie in a lower
dimensional manifold. It allows at expressing one of the variables of the motion
with respect to the others. A comprehensive explanation of the constants of the
motion for a dynamic system and their effects on the conguration manifold can
be found in [MR99]. Here, we introduce a model reduction by exploiting the
fact that the dynamics and kinematics can be written in terms of the reduced
attitude vector = RT e3 , which is the unit vector that expresses the gravity
direction in the body-xed frame {B}.Proposition 1.2 The dynamics of the 3D pendulum given by (1.11) and (1.6)
induce a ow on S 2 R 3 given by the reduced dynamics
J = J + mg (1.12)
and the reduced kinematics
= (1.13)
The proof follows from the denition of the reduced attitude vector anddemonstration that = 1.
Equations (1.12) and (1.13) are in non-canonical form, but they are very useful
for studying the reduced dynamics of the rigid pendulum. Thus, they are used
in this dissertation, in place of the full dynamical model. It is worth to point
out that the reduced model describes the orientation of the 3D rigid pendulum
modulo a rotation along its third axis Z . However, this is not a limitation in
spacecraft control problems, where usually, the task is of controlling the direc-
tion of an axis, e.g. represented by an antenna, instead of the complete attitude.Finally, equations (1.12) and (1.13) can also be expressed in terms of the Eulers
angles noticing that
(, ) =sin
sin cos
cos cos
(1.14)
In fact, equations (1.9)-(1.10) and (1.13) using (1.14) are exactly an expression
of the reduced dynamics of motion of the rigid pendulum on S 2 R 3 expressed
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
26/148
in terms of the Eulers angles. Further, the kinematics can be shown to be
independent from the yaw angle [MR99].
1.3 Equilibria of the 3D Pendulum
To further understand the dynamics of the 3D pendulum, we study its equilibria.
To simplify the analysis it is convenient to choose the body-xed frame so that
its third axis Z is aligned with the vector from the pivot to the center of mass.
Thus, in {B}, = (0 , 0, l)T , where l > 0. Consequently, the gravity terms thatappear in equation (1.11) can be considerably simplied.
The equilibrium solutions for the 3D pendulum satisfy = 0, so that the
attitude of the pendulum is constant. Substituting = 0 in equation (1.11), we
obtain
RT e3 = 0The above equation implies that the 3D pendulum is in equilibrium only if
the center of mass vector is collinear with the gravity vector RT e3 in the
body-xed coordinate frame. This implies that
RT e e3 = e 3
where = 1. For = 1, the center of mass vector points in the directionof the gravity vector. Similarly, for = 1, the center of mass vector pointsin the direction opposite to the gravity vector. Now, let Re denote an attitude
rotation that solves equation (1.11) and dene e = RT e e3 . Then, any attitude
in the conguration manifold given by
{R SO (3) : R = R e Q(), arbitrary
}denes an equilibrium attitude corresponding to = 0 where
Q() =
cos sin 0
sin cos 00 0 1
Hence, if R e denes an equilibrium attitude for the 3D pendulum, then a rota-
tion of the pendulum about the gravity vector by an arbitrary angle is also an
17
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
27/148
equilibrium. Consequently, in SO (3) there are two disjoint equilibrium mani-
folds of the 3D pendulum. We dene the manifold corresponding to = 1 in theabove description as the hanging equilibrium manifold , since the center of mass
is below the pivot for each attitude in the manifold. The manifold correspond-
ing to = 1 in the above description is dened as the inverted equilibrium manifold , since the center of mass is above the pivot for each attitude in the
manifold.
Next, we study the equilibria of the reduced equations (1.12) and (1.13). As
before, the equilibria of the system satises = 0. Substituting in (1.12), we
get = 0 .
Thus, we obtain two isolated equilibrium solutions of the reduced equations in
S 2 R 3 given by = e3 , = 0, and by = e3 , = 0. Alternatively, thetwo equilibrium solutions can be expressed using Eulers angles as = 0, = 0,
= 0 and = 0, = , = 0. For each of these representations of the
equilibrium solutions, the rst corresponds to the hanging equilibrium where
the center of mass is below the pivot and the second corresponds to the inverted
equilibrium where the center of mass is above the pivot.The stability of the two isolated equilibrium solutions of the reduced equations
of motion is readily assessed. The stability of the two families of equilibrium
manifolds of the full equations of motions follows. The stability analysis can
then be based on the reduced model.
Proposition 1.3 The hanging equilibrium of the reduced dynamics of the 3D
pendulum described by equations (1.12) and (1.13) is locally stable in the sense
of Lyapunov.
Proof. The hanging equilibrium corresponds to the conguration 0 = 0 and0 = (0 , 0, 1)T . Consider the Lyapunov function
V (, ) =12
T J + mg(l T )V (0 , 0) = 0 and V (, ) > 0 elsewhere. The derivative of V along the
trajectories is
V = T J mg T = T (J + mg ) mg T ( )= T mg mg T = mg(T T ) 0
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
28/148
where the last equality follows from the mixed vector product property [HRW04].
Hence, V is a continuously differentiable function, positive denite and suchthat V (0 , 0) = 0 and 2 V (, ) 0 (, ). Thus, the hanging equilibriumis locally Lyapunov stable [Kha01].
Proposition 1.4 The inverted equilibrium of the reduced dynamics of the 3D
pendulum described by equations (1.12) and (1.13) is locally unstable.
Proof. The hanging equilibrium corresponds to the conguration 0 = 0 and
0 = (0 , 0, 1)T . Consider the Lyapunov function
V (, ) =12
T J + mg(l + T )
V (0 , 0) = 0 and V (, ) > 0 elsewhere. The derivative of V along the
trajectories is
V = T J + mg T = T (J + mg ) + mg T ( )= T mg + mg T = 2 mg T ( )
where the last equality follows from the mixed vector product property [HRW04].
V is not denite. Hence, V is a continuously differentiable function such thatV (0 , 0) = 0 and V (, ) > 0, V (, ) > 0 for some points ( , ) arbitrarily
close to (0 , 0). Thus, by Chetaevs theorem [Kha01], the inverted equilibrium
is unstable.
As a consequence of the two propositions above, one can conclude that the
hanging equilibrium manifold of the full dynamics of the 3D pendulum is stable
in the sense of Lyapunov and that the inverted equilibrium manifold of the full
dynamics of the 3D pendulum is unstable in the sense of Lyapunov.
1.4 Triaxial Attitude Control Testbed
The test-bed used for experiments in the rst part of this dissertation is based
on the spherical air bearing manufactured by Space Electronics, Inc., Berlin,2 Notice that the result V 0 could be expected, since V denes the total energy of the
system, that is a constant of the motion, as described in section 1.2.
19
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
29/148
CT, depicted in Figure 1.4. It is available at the Attitude Dynamics and Con-
trol Laboratory, Department of Aerospace Engineering, University of Michigan.We refer to this systems as the Triaxial Attitude Control Testbed (TACT).
Figure 1.4. Triaxial Air Bearing Testbed.
An aluminum sphere of diameter 11 inch oats on a thin lm of air that exits
holes located in the surface of the cup. Air at high constant pressure is supplied
to the cup by means of a hose that passes through the center of the vertical
support. Once the main components are mounted, additional masses can be
added to modify the nal mass distribution. Hence, the center of mass can
be balanced at the rotational center (no effects from the gravity), in order to
simulate a geo-stationary spacecraft, or in any other position, representing a 3D
unbalanced rigid pendulum. The spherical air bearing guarantees low friction
and three-dimensional motion with unrestricted roll and yaw and a maximum
45 degrees pitch angle.A comprehensive description of the hardware related to the TACT has been pro-
vided by [BMB01]. Mathematical models for the TACT have been introduced in[CSMB01] and [CSM03]. There, a description equivalent to (1.11) and (1.6), is
obtained by means of the Lagrangian equations. This geometrical approach to
mechanical systems, well known in the literature, is widely described in [MR99]
and [MRS00].
As illustrated in Figure 1.4, a one-piece shaft passes through the center of the
sphere and extends between a pair of circular mounting plates. Extension shafts
connect the circular mounting plates to larger square mounting plates. Circular
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
30/148
plates are used for supporting hardware instrumentation, while square plates
are used for supporting fan thrusters, batteries and additional weights. In-deed, weights can be attached to the TACT, thanks to access holes cut into the
plates. This allows at modifying the inertia matrix J of the TACT, before per-
forming experiments. Once the entire system is set up, the procedure described
in [CBA+ 06] can be adopted, to identify the inertia matrix of the system.
1.5 Conclusions
In this chapter we have introduced the new concept of 3D rigid pendulum.
It represents a three rotational degrees of freedom rigid body, supported by a
frictionless pivot. We have presented the 3D pendulum model in the general
unbalanced case. The special balanced case, corresponding the absence of grav-
ity terms in the system, encompasses the geo-stationary spacecraft dynamics
model. Therefore, we have addressed the problem of controlling the attitude
of GEO satellites, as a simplied version of the 3D pendulum attitude control
problem.
21
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
31/148
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
32/148
duce assumptions to be placed on model (1.12), (1.13) for obtaining a spherical
pendulum model and then a planar pendulum model. Further, we show that,with simple assumptions, the 3D pendulum model can describe the heavy top
dynamics. The corresponding dynamics seem not to have been previously stud-
ied. Finally, we study the stability properties of this new spinning top model,
illustrating connections with the classical heavy top problem, widely discussed
in [GPS80].
2.1 Axisymmetric 3D Rigid PendulumWe select the body-xed reference frame {B}such that its versors X , Y andZ are aligned with the principal axes of the 3D rigid body. This renders the
extra-diagonal terms of the inertia matrix J null. In this case, the diagonal
terms of J are referred to as the principal moments of inertia . Hence, model
(1.12) using (1.14), reduces to three scalar equations, as described in Chapter
1.
Moreover, we consider the axisymmetric case, where two of the principal mo-
ments of inertia of the pendulum are identical and the pivot is located on the
axis of symmetry of the pendulum. This is an usual assumption while facing
Figure 2.1. A schematic of a 3D Rigid Pendulum with one axis of symmetry
attitude control problems for underactuated geo-stationary spacecraft [DT00].
In particular, we assume that the body-xed axes are selected so that J =
diag( J t , J t , J a ) and = le3 where l is a positive scalar constant. Consequently,
23
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
33/148
equation (1.12) using (1.14), can be written in scalar form, as
J t x = ( J t J a )y z mgl cos sin J t y = ( J a J t )z x mgl sin J a z = 0
(2.1)
From the last equation in (2.1) we see that the component of the angular velocity
vector about its axis of symmetry is constant. This means that a constant z
denes an invariant manifold for the pendulum dynamics. The resulting reduced
equations of motion, for constant z , can be represented by equations (2.1) and
(1.9)-(1.10)J t x = ( J t J a )y z mgl cos sin J t y = ( J a J t )z x mgl sin
= y cos z sin = x + y sin tan + z cos tan
(2.2)
Remember that the yaw motion of the pendulum is described by the kinematic
equation (1.8). Hence, the evolution of can be deduced from the evolution of
the other variables of motion.
Now, the special case z 0 leads to an axisymmetric rigid body whom atti-tude dynamics are described by two angles and two angular velocities, namely,a 2D spherical pendulum .
Proposition 2.1 Assume the rigid pendulum has a single axis of symmetry and
the pivot is located on the axis of symmetry of the pendulum. The equations of
motion of the rigid pendulum dene an induced ow on the manifold S 2 R 2corresponding to z = 0 , given by the equations
J t x = mgl cos sin J t y = mgl sin
= y cos
= x + y sin tan
(2.3)
These equations are said to represent a 2D spherical pendulum. They exhibit
singularities for = n/ 2.It is worth to point out that the above representation is not the one commonly
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
34/148
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
35/148
is that now the singularities are in q 1 = n , i.e. in the upward position.This leads to several disadvantages while designing control laws for swingingup the spherical pendulum, that is a basic problem in the literature related to
attitude control. For instance, in [SEL99] and [SEL04] the authors use model
(2.5) and they switch to a different model in the close proximity of the upward
position. It produces a discontinuous representation of the system with many
related difficulties. As it will be seen in the following chapters, it could simply
be avoided, by selecting the more suitable description of the mechanical system
(2.3), arising from the interpretation of the 2D spherical pendulum as a rotating
rigid body.Now, beyond the assumption above of z = 0, consider the case where x = 0
and = 0. It is straightforward to show that this leads to an invariant dynamics
of the axisymmetric rigid pendulum, described as follows:
Proposition 2.2 Assume the rigid pendulum has a single axis of symmetry and
the pivot is located on the axis of symmetry of the pendulum. The equations of
motion of the rigid pendulum dene an induced ow on the manifold S 1 R 1corresponding to x = 0 , z = 0 , and = 0 , given by the equations
J t y = mgl sin = y
(2.6)
These equations are said to represent a 1D planar pendulum .
Thus, for an axially symmetric pendulum with the pivot located on the axis
of symmetry, the well known 2D spherical pendulum and 1D planar pendulum,
can be viewed as special cases of the 3D rotating rigid pendulum. On the other
hand, if the pendulum is asymmetric, then its dynamics are general, in the
sense that neither the spherical pendulum dynamics, nor the planar pendulum
dynamics, arise as special cases.
2.2 Spinning Axisymmetric 3D Rigid Pendulum
The 2D spherical pendulum has been shown to originate from the 3D axisym-
metric rigid pendulum, under the assumption of z 0. The induced dynamicscorresponding to a nonzero value of z is fundamentally different from this case.
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
36/148
These dynamics seem not to have been previously studied.
Thus, consider again an axisymmetric pendulum with the pivot located onits axis of symmetry. Its dynamics are described by model (2.2). Assume
z = k = 0. Since the third equation in (2.1) holds true, we have the following
result:
Proposition 2.3 Assume the rigid pendulum has a single axis of symmetry and
the pivot is located on the axis of symmetry of the pendulum. For any constant
k = 0 , the equations of motion of the rigid pendulum dene an induced ow on
the manifold S 2
R 2 corresponding to z = k, given by the equations
J t x = ( J t J a )k y mgl cos sin J t y = ( J a J t )k x mgl sin
= y cos k sin = x + y sin tan + k cos tan
(2.7)
These equations represent the dynamics of a symmetric rigid body spinning
steadily around its axis of symmetry under the effects of gravity, namely, an
heavy spinning top [GPS80]. In particular, differently from previous literature,
they extend the concept of heavy spinning top to the space under the table.
It is depicted in Figure 2.3.
Figure 2.3. A schematic of a heavy spinning top not constrained by the table
Thus, the motion of the symmetric top can be seen as a special case of the 3D
rigid pendulum dynamics.
Problems related to the symmetric spinning top have been extensively studied in
27
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
37/148
mechanics. A wide discussion on the properties of the motion, on the conditions
for precession and on the stability of the upward conguration, can be found in[GPS80]. Several papers have analyzed the properties of its dynamics as well,
with particular focus on stabilizing the sleeping motion. On this subject, see
[WTCB94], [WCB95] and related references. The sleeping motion consists of
the situation where the top stands in the vertical conguration, steady rotating.
Furthermore, the dynamics of the heavy top represent basic background in the
literature of astrodynamics, for instance, to explain the Earth wobble and the
precession of equinox [BMW71].
Surprisingly, none of the published works have extended the motion of the heavytop to the case where there is no table, i.e. when the top is also allowed to move
under the horizontal plane. From this point of view, current theory can be
considered incomplete. Further, proposed control laws for the vertical upward
equilibrium, dened global as in [WCB95], are actually not global. This is
due to the presence of another equilibrium for the system, represented by the
downward vertical conguration. In the language introduced for the 3D rigid
pendulum, this conguration consists of the hanging equilibrium of the reduced
dynamics (1.12) and (1.13). On the other hand, the upward equilibrium cong-
uration, consists of the inverted equilibrium.
In order to complete the description of the dynamics of the spinning top in
the new context of the 3D rigid pendulum, we study the stability of its hang-
ing equilibrium. An almost global attitude control law for the system, will be
proposed in the following chapters.
2.3 Hanging Equilibrium of the Symmetric Spinning
Top
For any constant velocity z = k, system (2.7) has two equilibria on S 2 R 2 .They are given by the two states where x = y = 0 and angles and cor-
responding to the upward and the downward conguration. The rst one is
described by = 0, = or = , = 0 and it is referred to as the inverted
equilibrium. The second one is described by = 0, = 0 or = , =
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
38/148
and it is referred to as the hanging equilibrium. As introduced above, only
the inverted equilibrium has been studied in classical mechanics, restricting theanalysis to the space above the horizontal plane: (/ 2, 3/ 2). However,
model (2.7) describes the motion on the entire space S 2 R 2 , provided thatangle does not cross the horizontal: = / 2 and = 3 / 2. Thus, we study
the properties of the second equilibrium, located below the horizontal plane. It
aims at completing theory related to the heavy symmetric top.
In order to analyze the stability of the hanging equilibrium, we make use of a
different model with respect to (2.7), representing a 3-2-1 formulation of the
Eulers angles. The reason of this selections is motivated by the fact that inmodel (1.8)-(1.10), the sleeping motion does not correspond to an isolated equi-
librium. Indeed, when the rst rotation is around axis Z , the second and the
third Eulers angles are not distinguishable. It could be expected noticing that
each equilibrium is described by two different congurations.
In this context, the problem can be overcame by using a 2-1-3 Eulers angles
formulation, as the one previously presented in [WCB95]. There, the inertial
frame {I }attitude is described by three angles corresponding to three subse-quent rotations, where the rst one is around Y , the second one is around the
rst axis of the new frame and the last one is around the third axis of the ob-
tained frame. In [WCB95] an angle is introduced, corresponding to the rst
rotation about Y . Then, the new frame is rotated of angle about the rst
axis. Resulting reference frame is referred to as F . Finally, a positive rotation
of the F -frame of angle about its third axis, results in the body-xed frame.
Thus, F precesses, but does not spin with the top. The angular velocity of the
3D rigid body can then be expressed in F , giving
= [ , cos , sin ]T (2.8)
It allows at writing the kinetic and potential energy in F coordinates and then
at following the Lagrangian approach (2.4). The resulting model is
J t + J t 2 cos sin + p cos mgl sin cos = 0J t cos2 2J t cos sin p cos mgl cos sin = 0
(2.9)
29
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
39/148
where p is the constant generalized momentum corresponding to :
p = L
= J t ( sin )
The rational under description (2.9), depending only on two of the three Eulers
angles, is that does not appear in the Lagrangian [WCB95], so it is an ignorable
variable. As a consequence, the Lagrangian can be replaced by the Routhian R ,
dened by R = L p . Reduction theory, useful in the presence of symmetriesin mechanical systems, is extensively described in [MRS00].
Now, letting
x1 = x2 = x3 = x4 =
b =pJ t
c =2mgl
J t(2.10)
we obtain a state space representation for model (2.9):
x1 = x2
x2 = x242
sin(2x1) bx4 cos x1 +c2
sin x1 cos x3
x3 = x4
x4 = (2 x2x4 sin x1 + bx2 +c2 sin x3)
1cos x1
(2.11)
Notice again the presence of singularities, here for = n/ 2, n Z . As ex-
pected, the equilibria of the system correspond now to isolated points repre-
sented by x = [i, 0,j, 0]T . This results in the inverted equilibrium, i.e. the
upward vertical sleeping motion, when i j is even. Otherwise, it correspondsto the hanging equilibrium.
In [WCB95] a linearized analysis around the inverted equilibrium x i = [0 , 0, 0, 0]T
is performed, to show that it is unstable for b2 < c . It means that the rotation
of the top needs to be fast enough, to guarantee a vertical conguration. Anenergy based equivalent proof is provided in [GPS80]. Here, we use a similar ap-
proach, dening a suitable Lyapunov function. Indeed, it is easy to show that
the linearized model around xh does not provide information on its stability,
being the eigenvalues complex conjugates.
Thus, we introduce a Lyapunov function based on the conserved quantities of the
motion embedded in (2.11): total energy and vertical momentum. This way to
proceed, previously suggested by [SLRM92], is referred to as the Energy-Casimir
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
40/148
method. It consists of selecting a Lyapunov function composed by Casimir func-
tionals, i.e. differences between conserved quantities and their minimum values.Now, the total energy of (2.9) is given by
E =12
J t (2 + 2 cos2 ) +12
J a ( sin )2 + mgl cos cos
Disregarding the kinetic energy related to the rotation around the spinning axis
and dividing by J t we obtain a constant of the motion:
hc1(x) =12
(x22 + x24 cos
2 x1) +c2
cos x1 cos x3 (2.12)
expressed in the state space variables dened above. Further, the vertical mo-
mentum is given by h = T J with dened by (2.8) and as introduced in
Chapter 1, but expressed in F coordinates:
=
1 0 0
0 cos sin
0 sin cos
cos 0 sin 0 1 0
sin 0 cos
0
0
1
=sin sin cos
cos cos
Hence,
h = J t sin + J t cos cos sin + J 3( sin )cos cos == J t sin + J t cos cos sin + J t bcos cos
Dividing by J t and using the state space representation, we have a second con-
stant of the motion:
hc2(x) = x2 sin x3 + x4 sin x1 cos x1 cos x3 + bcos x1 cos x3 (2.13)
Therefore, a suitable Energy-Casimir based Lyapunov function for the system
isV (x) = [hc1(x) hc1(xh )] +
b2
[hc2(x) hc2(xh )]Consequently, stability of the hanging equilibrium can be studied.
Proposition 2.4 For any constant spinning velocity z = k = 0 , the hanging
equilibrium of the axisymmetric rigid pendulum (2.7), is locally stable in the
sense of Lyapunov.
31
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
41/148
Proof. Consider description (2.11) of the system and the following Energy-
Casimir based Lyapunov function
V (x) = [ hc1(x) hc1(xh )] +b2
[hc2(x) hc2(xh )]=
12
(x22 + x24 cos
2 x1) +c2
cos x1 cos x3 +c2
+b2
(x2 sin x3+ x4 sin x1 cos x1 cos x3 + bcos x1 cos x3 + b)
(2.14)
where b and c are dened by (2.10).
V (xh ) = 0 and V (x) 0 x. Indeed, (2.14) is composed by two constants of the motion. Moreover, consider the Hessian matrix of V (x) evaluated in xh :
V (xh ) =
c+ b22 0 0 b20 1 b2 0
0 b2c+ b2
2 0
b2 0 0 1(2.15)
Its eigenvalues are
1,2 = b4 + 2 b2c + c2 4c + 4
4+
b2 + c + 24
3,4 = + b4 + 2 b2c + c2 4c + 4
4+
b2 + c + 24
Simple manipulations show that 1,2 can be negative only if b2 + 2 c < 0, but
this is clearly impossible, since c = 2 mgl/J t > 0. Moreover, 3 ,4 are always
positive. Thus, all the eigenvalues of the Hessian matrix evaluated in xh are
positive, i.e. V (xh ) is positive denite. Therefore, the hanging equilibrium is
Lyapunov stable [Kha01].
As a consequence of the above proposition, the inverted equilibrium cannot be
globally stabilized in S 2 R 2 .Finally, in [GPS80] it is shown that the heavy top is in steady precession when
p2 4J t mgl cos cos Thus, since any attitude of the top below the horizontal plane is such that
cos cos < 0, there the precession is always steady, no matter is the angular
velocity. These dynamics are fundamentally different from those of the spherical
pendulum. They open new interesting theoretical problems that seem not to be
previously studied, as the research of possibly existing periodic trajectories.
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
42/148
2.4 Conclusions
In Chapter 1 we have introduced a 3D rigid pendulum mathematical model
encompassing geo-stationary spacecraft descriptions. In this chapter we have
shown that this model actually embodies many other classical problems. Indeed,
the 2D spherical pendulum, the 1D planar pendulum and the symmetric heavy
top have been shown to represent special cases of model (1.12)-(1.13). Thus,
the study of the 3D pendulum includes the study of these classical problems.
Moreover, we have extended the classical description of the heavy top to the
space below the horizontal plane, giving rise to novel dynamics. Finally, we
have analyzed the equilibria of this new inverted top illustrating connections
with current literature.
33
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
43/148
Chapter
3Stabilization of an Asymmetric
3D Rigid Pendulum
In the previous chapters we have introduced several different classications of
an uncontrolled 3D rigid pendulum supported by a frictionless pivot, both in
the asymmetric and axisymmetric case. Related theory is basic in spacecraft
dynamics and control problems, since an asymmetric balanced 3D rigid pen-
dulum, actually represents a generic geo-stationary satellite [Hug86], [Kap76].
Moreover, assumptions on the symmetry of the rigid body, have been taken in
the literature, while facing attitude control problems for underactuated space-
craft. Indeed, a rigid body with only two control inputs satises the fundamental
Broketts condition [BMS83] for continuous feedback stabilization, only if it issymmetric. Consequent model coincide with the axisymmetric balanced 3D
rigid pendulum developed in Chapter 2.
In this chapter we focus the attention on an asymmetric 3D rigid pendulum
and we study the stabilization of its reduced model. For stabilizing the reduced
model of the 3D pendulum we mean stabilizing its hanging equilibrium, i.e.
pointing the vector downwards.
First, we make control actuation assumptions for the system, reminding briey
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
44/148
some alternatives to our selection. Then, we present a simple controller consist-
ing of angular velocity feedback. The related control law is based on dampinginjection and it is shown to have a dense domain of attraction. Damping in-
jection, as well as passivity based control [OSR98], is particularly suitable for
mechanical systems, as the TACT presented in Chapter 1. Afterwards, we show
experimental results on the TACT, conrming the effectiveness of the proposed
controller.
3.1 3D Rigid Body Control TorquesSo far, we have considered the mathematical model of an uncontrolled 3D rigid
body supported by a frictionless pivot, making assumptions on its geometrical
structure and analyzing its dynamics. In order to consider control inputs to the
system, the dynamics equation have to be modied for including moments. In
particular, (1.11) can be modied as
J = J + mg RT e3 + M (3.1)
where M represents the vector control moment on the 3D rigid pendulum, ex-pressed in the body-xed coordinate frame. The specic form of the control
moment depends on the actuation assumptions, i.e. on the hardware selected
for providing torques to the system. Several different actuation structures have
been studied in the literature. One important example of control actuation as-
sumption, generalizing the development in [AF00], is the pivot acceleration in
the control input. In this case the control moment is
M = m
RT u
where u denotes the pivot acceleration, expressed in the inertial coordinate
frame. Such a control actuation assumption typically breaks the symmetry of
the uncontrolled rigid pendulum dynamics. Consequently, the angular momen-
tum component about the vertical axis through the pivot is not conserved and
it is not possible to express the controlled dynamics in terms of the reduced
attitude .
Another control actuation assumption, generalizing the development in [CSMB01]
35
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
45/148
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
46/148
Y
Z
X
F1
r
F2
F3
F4
C Mq
q
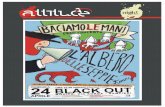
Figure 3.1. Fan thrusters scheme of the Triaxial Attitude Control Testbed.
In the case of the TACT, forces F i are generated applying suitable voltages to
the fan thrusters. The relations between torques and voltages are described
in [CBA+ 06]. They allows at expressing control inputs to the TACT in terms
of voltages to be applied to the fans. Results obtained in this reference are
promising for continuing fruitful research on the control test-bed.
Beyond the relations between F i and the torques in the roll, pitch and yawdirections, we assume here that inputs to the 3D rigid body are directly the
angular momentum corresponding to roll , pitch and yaw . Hence, the dynamics
model extending (1.11) is simply
J = J + mg RT e3 + uMoreover, RT e3 can be replaced by , since the angular momentum component
about the vertical axis through the pivot is conserved along the trajectories
of rigid body. Therefore, the control model for the fully actuated 3D rigid
pendulum on which we focus our attention is
J = J + mg + u =
(3.2)
where R 3 is the angular velocity of the body, S 2 is the reduced at-
titude vector representing the direction of gravity in {B}and u R 3 is theangular momentum input vector, and where all the variables are expressed in
{B}coordinates.
37
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
47/148
3.2 Asymptotic Stabilization of the Hanging Equilib-
rium
In this section, we develop a simple controller that makes the hanging equi-
librium of the asymmetric 3D pendulum asymptotically stable. The controller
is based on the observation that the control model given by equation (3.2) is
input-output passive if the angular velocity is taken as the output. Passivity
based control is a natural way to proceed in the presence of mechanical systems,
as well as in the presence of electrical systems [OSR98]. Briey, a system with
state x, input u and output y is dissipative with respect to a supply function
s(u(t), y(t)) if there exists a function H such that
H (x(T )) H (x(0)) + T
0s(u(t), y(t))dt (3.3)
Such a function is referred to as the storage function . When the supply rate
is s(u, y ) = uT y, the system is said input-output passive . In this case, it is
immediate to notice thatdH
dt uT y
Thus, selecting u = y, gives a closed-loop system where dH/dt 0. There-fore, if H is the total energy, u drives the system to the minimum of its energy,
corresponding to a stable equilibrium.
In the case of the 3D rigid pendulum, the total energy 12 T J mg T can be
selected as a storage function. Since it has a minimum at the hanging equilib-
rium (0 , h ), a control law based on angular velocity feedback is suggested.
Let : R 3 R 3 be a smooth function such that
1 x 2 xT (x) 2 x 2 , x R 3 (3.4)where 2 1 > 0. Thus, we propose a class of controllers, referred to asdamping injection controllers, given by
u = () (3.5)
where satises (3.4). We next show that the above family of controllers,
which requires only angular velocity feedback, renders the hanging equilibrium
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
48/148
of a 3D asymmetric pendulum asymptotically stable, with a guaranteed domain
of attraction.
Lemma 3.1 Consider the fully actuated 3D asymmetric pendulum given by
(3.2). Let : R 3 R 3 be a smooth function satisfying (3.4) and choose a controller in the form of (3.5). Then, the hanging equilibrium (0, h ) is asymp-
totically stable.
Furthermore, for every (0, 2mgl ), all solutions of the closed-loop system
given by (3.2) and (3.5), such that ((0) , (0)) H, where
H= (, ) R3
S 2
:12
T
J +12mgl
l
T
l 2mgl
satisfy limt
(t) = 0 and limt
(t) = h .
Proof. Consider the closed loop system given by (3.2) and (3.5). We propose
the following candidate Lyapunov function
V (, ) =12
T J + mgl l
T
l
(3.6)
Note that the above Lyapunov function is positive denite on R3
S 2
andV (0, h ) = 0. Furthermore, the derivative along a solution of the closed-loop
system given by (3.2) and (3.5) is
V (, ) = T (J ) + mg(l )T = T (J + mg ()) + mg(l )T ( )= T () + mg T ( ) mg T ( )= T () 1 2 ,
where the last inequality follows from (3.4). Thus, V (, ) is positive deniteand V (, ) is negative semidenite on R 3 S 2 .Next, consider the sub-level set given by H= {(, ) R 3 S 2 : V (, ) 2mgl }. Note that the compact set Hcontains the hanging equilibrium(0, h ). Since, V (, ) 0, all solutions such that ( (0) , (0)) H satisfy((t), ( t)) Hfor all t 0. Thus, His an invariant set for solutions of (3.2)and (3.5). Furthermore, from LaSalles invariant set theorem, we obtain that
solutions satisfying ( (0) , (0)) H converge to the largest invariant set in
39
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
49/148
{(, ) H : = 0}, that is = 0.Therefore, either ( t) /l = h or ( t) /l = i as t . Since(0, i ) H, it follows that ( t) h as t . Thus, (0 , h ) is an asymptoti-cally stable equilibrium of the closed-loop system given by (3.2) and (3.5), with
a domain of attraction H.
This result could be expected noticing that 2 mgl is the total energy of the pen-
dulum at the inverted equilibrium. Thus, when ( (0) , (0)) is in H, injectionof dumping can only decelerate the rigid body, towards the other equilibrium,
represented by the hanging equilibrium. Different is the case when ( (0) , (0))is such that the total energy is exactly 2 mgl . In this case ( t) can be shown
to approach h as t , only if the initial kinetic energy is not zero. Thenontrivial proof of this result is provided by the following Lemma.
Lemma 3.2 Consider the fully actuated 3D asymmetric pendulum given by
(3.2). Let : R 3 R 3 be a smooth function satisfying (3.4) and choose a controller as given by (3.5). Then, all solutions of the closed-loop system given
by (3.2) and (3.5), such that (0) = 0 and ((0) , (0)) A, where
A= (, ) R 3 S 2 :12
T J +12
mgl l
T
l
= 2 mgl
satisfy limt
(t) = 0 and limt
(t) = h .
Proof. Consider the closed loop system given by (3.2) and (3.5), and the Lya-
punov function given in (3.6). As already shown, V (, ) = T (). Thus,
V (, ) = T () T () = T () + T
since is smooth. Furthermore, for all ( , ) A, is bounded and
= J 1 (J + mg ())is also bounded. Dene
N = sup(, ) A
T () +
T
< .
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
50/148
Next, since ( (0) , (0)) A, V ((0) , (0)) = 2 mgl and V ((0) , (0)) N .Expanding V ((t), (t)) in a Taylor series, gives
V ((t), ( t)) = 2 mgl (0) T ((0)) t + R(t) 2mgl 1 (0) 2 t + N t 2 ,
since the remainder necessarily satises R(t) Nt 2 .Dene
= min 2mgl, 3 21(0) 4
16N .
It can be easily shown that for all t [T 1 , T 2],
t2 1 (0)2
N t + N 0where
T 1 = 1(0) 2
2N 1 1 4 N 21 (0) 4 > 0
and T 2 T 1 1 (0) 2
2N . Choose an (0, ). Then, for all t [T 1 , T 2],
V ((t), (t)) 2mgl < 2mgl and hence, ( (t), ( t)) H, where Histhe invariant set given in Lemma 1. Thus, from Lemma 1, we obtain the result
that (t)
0 and ( t)
h , as t
.
By the two Lemmas above, the hanging equilibrium is stable, with a guaranteed
domain of attraction. Indeed, when the initial conditions ( (0) , (0)) H, thetrajectories converge to the hanging equilibrium. Furthermore, when the initial
total energy is 2 mgl and the initial kinetic energy is not zero, the trajectories
enter Hin nite time. This result is obtained applying the simple dampinginjection based control law (3.5). This result is summarized by next theorem.
Theorem 3.1 Consider the fully actuated 3D pendulum given by (3.2). Let
: R 3 R 3 be a smooth function satisfying (3.4) and choose controller as in (3.5). Then, all solutions of the closed-loop system given by (3.2) and (3.5),
such that ((0) , (0)) N\{(0, i )}, where
N = (, ) R 3 S 2 :12
T J +12
mgl l
T
l 2mgl (3.7)
satisfy limt
(t) = 0 and limt
(t) = h .
41
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
51/148
Proof. From Lemmas 3.1 and 3.2, we obtain the result that for every
(0, 2mgl ) and ( (0) , (0)) H A, where Hand Aare as dened in Lemmas3.1 and 3.2, (t) 0 and ( t) h as t . Since, N can be written as
N =(0 ,2mgl )
(H A)
the result follows.
It is important to point out that N\{(0, i )}is an invariant set, but it is notthe maximal domain of attraction of the hanging equilibrium. Any solution of
(3.2) and (3.5), starting from an initial condition not in N\{(0, i )}, that doesnot pass through (0 , i ), must eventually enter N\{(0, i )}. Hence, the maxi-mal domain of attraction of the hanging equilibrium is a proper superset of the
invariant set N\{(0, i )}.In the subsequent theorem, we claim that for the control given in (3.5), the
equilibrium (0 , h ) of (3.2) and (3.5) is almost globally asymptotically stable,
and the domain of attraction of the hanging equilibrium is dense.
Theorem 3.2 Consider the fully actuated 3D asymmetric pendulum described
by (3.2). Let : R 3 R 3 be a smooth function satisfying (3.4) and (0)be positive denite and symmetric. Choose controller as given in (3.5). Let Mdenote the stable manifold of the equilibrium (0, i ). Then (R 3S 2)\Mis dense in (R 3 S 2), and all solutions of the closed-loop system given by (3.2) and (3.5),such that ((0) , (0)) (R 3 S 2)\M, satisfy limt (t) = 0 and limt (t) = h .Proof. Consider the closed loop system given by (3.2) and (3.5), and the
Lyapunov function given in (3.6). Since S 2 is a compact set and the Lyapunovfunction V (, ) is quadratic in , each sublevel set of V (, ) is a compact
set. Furthermore, since V (, ) = T () 0, by LaSalles invariant settheorem, all solutions converge to the largest invariant set in {(, ) R 3 S 2 :V (, ) = 0 }.The largest such invariant set is given by {(0, h )} {(0, i )}. Hence, it is suf-cient to show that the stable manifold of the inverted equilibrium (0 , i ), has
dimension less than the dimension of ( R 3 S 2), i.e. ve, since all other solutions
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
52/148
converge to the hanging equilibrium (0 , h ) by invariant set theorem [Kha01].
Using linearization, it can be shown that the equilibrium (0 , i ) of the closedloop given by (3.2) and (3.5) is unstable and hyperbolic with nontrivial stable
and unstable manifolds. Hence, from theorem 3.2.1 in [GH83], it follows that
the dimension of the stable manifold of (0 , i ) is less than ve, so that the do-
main of attraction in theorem 3.1 is dense in ( R 3 S 2).
Comparing the conclusions in the two previous theorems we notice that, theo-
rem 3.1 provides an explicit description of a domain of attraction of the hanging
equilibrium; however that domain of attraction is not maximal. In contrast, the-orem 3.2 shows that the maximal domain of attraction consists of all points in
(R 3 S 2) that are not in the stable manifold Mof the inverted equilibrium.However, the stable manifold of the inverted equilibrium is not explicitly de-
scribed. We note that Lebesgue measure of Mis zero.
3.3 Experiments on Stabilization of the Hanging Equi-
librium
In this section we present experimental results on the stabilization of the hanging
equilibrium of the asymmetric 3D rigid pendulum. They validate the controller
proposed in the previous section, showing that (3.5) asymptotically stabilizes the
hanging equilibrium with angular velocity feedback. The test-bed on which the
experiments are performed, is the Triaxial Attitude Control Testbed (TACT)
described above.
We are able to measure the angular velocity of the TACT thanks to threeorthogonal gyroscopes mounted on one of the two external plates, suitably cali-
brated. First, bias is eliminated keeping the TACT in a resting position. Then,
a rotation about each axis is performed, assuring output only from the corre-
sponding gyro, and no data from the others.
In order to measure the attitude of the TACT, a triaxial accelerometer is
mounted on one of the two external plates, aligned with the body-xed axes.
Before each test, the accelerometer triad is calibrated to read g on each indi-
43
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
53/148
vidual axis when aligned with the downward vertical. To do this, the TACT
is rotated about each axis independently, while taking continuous reading fromthe accelerometer. The accelerometer axis is dened to be aligned with the
downward vertical when a maximum occurs in the data. Bias and scaling fac-
tors are then adjusted such that each accelerometer outputs g at the maximum
point.
Actually, the reduced attitude cannot be measured directly. Indeed, accelerom-
eter are not mounted at the center of gravity of the system. Thus, must be
estimated. We are able to estimate the reduced attitude using accelerometers
and gyroscopes together. First we read the accelerometer measure. It gives notonly the acceleration due to gravity, but also angular and centripetal accelera-
tion terms. Centripetal acceleration can be determined indirectly by using the
knowledge of the angular velocity. It correspond to ( r ). The angularacceleration term is ignored in the computation of the reduced attitude, but
preliminary calculations suggest that its contribution is quite small.
Hence, direction of gravity is calculated as
Gravity = Measure ( r )
representing the vector, since already expressed in body-xed coordinates.
Finally, inertia matrix J is identied as described in [CBA + 06].
Results of the application of (3.5) to stabilize the hanging equilibrium, are
depicted in Figures 3.2 to 3.4. The controller used for this purpose is chosen
such that
() = P where P = 10 I 3 . This choice of equal gains in the three feedback chan-
nels does not represent a particularly effective choice in terms of closed-loopperformance. However, our objective in the experiment is to demonstrate
closed-loop stabilization; we do not seek to tune the gains to achieve closed-
loop performance. The desired reduced attitude vector is the hanging equi-
librium 0 = (0 , 0, 1)T . The pendulum is released from the reduced attitude
(0) = ( 0.2936, 0.8579, 0.4217)T , with (0) = 0. These initial conditions arechosen to excite all degrees of freedom of the system.
As seen from experimental closed loop responses shown in Figures 3.2 and 3.3,
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
54/148
0 5 10 15 20 25 30 35 405
0
5
x
( D e g
/ s e c )
Angular Velocities
0 5 10 15 20 25 30 35 405
0
5
y
( D e g
/ s e c
)
0 5 10 15 20 25 30 35 4050
0
50
100
z
( D e g
/ s e c
)
Time [sec]
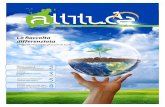
Figure 3.2. Experimental results for the evolution of the angular velocity of the 3Dpendulum in the body frame.
0 5 10 15 20 25 30 35 40
0.5
0
0.5
Reduced Attitude Vector in Body Frame
x
0 5 10 15 20 25 30 35 401
0.5
0
0.5
1
y
0 5 10 15 20 25 30 35 400
0.5
1
z
Time [sec]
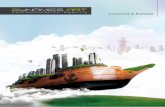
Figure 3.3. Experimental results for the evolution of the components of the directionof gravity in the body frame.
the angular velocity converges to zero and ( t) converges to 0 = (0 , 0, 1)T as
t . This is clear from Figure 3.4 which shows that the response of the
45
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
55/148
0 5 10 15 20 25 30 35 400
10
20
30
40
50
60
70
80
Time [sec]
[
D e g
]
Angle between (t) and 0 in Body Frame
Figure 3.4. Experimental result for the evolution of the angle between the reducedattitude vector ( t ) and the desired reduced attitude vector 0 .
angle between ( t) and 0 converges to zero as t . Notice that a residualdamped oscillation remains in the pitch axis angular velocity. It can be reduced
adjusting the feedback control gains. Notice also that measurements during the
initial transient period are especially noisy. This can be attributed to both gyros
noise and an attitude estimation algorithm that ignores angular acceleration,
which can add to noisy measurements during the initial transient period.
The fan thrusters mounted on the TACT provide approximately 5 Nm of con-
trol authority in each axis. Thrusters saturation can be an issue in these control
experiments and the feedback gains need to be tuned to minimize any nonlin-
earities arising from saturation. This is not critical in stabilizing the hangingequilibrium of the 3D pendulum. Indeed, saturation might only produce a slower
convergence. On the other hand, it has to be taken into account while stabi-
lizing a generic attitude. Techniques to be used in the presence of saturation
constraints, for stabilizing spacecraft, will be presented in the second part of
this dissertation.
Finally, notice that in this experiment, initial conditions are inside the guaran-
teed domain of attraction N . Several experiments have been performed on the
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
56/148
TACT showing that under (3.5), dynamics converge to the hanging equilibrium
also starting outside N . They are presented in [SCB + 05].
3.4 Conclusions
In this chapter we have introduced a passivity based control law for stabilizing
the hanging equilibrium of an asymmetric 3D rigid pendulum. The described
control technique is based on the observation that angular velocity feedback
renders the closed-loop input-output passive, with the total energy as storage
function. We have shown that this control law cannot be global, due to the
presence of the inverted equilibrium, but it is near-global. Finally, we have
presented results of the application of the technique to the TACT.
Even if the task of stabilizing the hanging equilibrium of the 3D rigid pendulum
can appear quite simple, since h is a minimum for the potential energy, this is
fundamental for introducing the control of a generic attitude described in the
following chapter.
47
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
57/148
Chapter
4Attitude Control of an
Asymmetric 3D Rigid
Pendulum
In the previous chapter we have presented a technique for stabilizing the hanging
equilibrium of an asymmetric 3D pendulum, based on damping injection. The
proposed control law has been inspired by the fact that the hanging equilibrium
is a minimum of the potential energy of the system. In this chapter we gen-
eralize this concept, proposing a control law for an arbitrary reduced attitude
vector.
For controlling the reduced attitude of a 3D pendulum we mean pointing its vector towards a pre-established direction. This is an usual task in satellite sys-
tems, corresponding to stabilize the orientation of spacecraft instrumentations
or antennas. Thus, this problem is strictly related to geo-stationary satellites
attitude control. Several local control laws for geo-stationary spacecraft, have
been proposed in the literature, based on Eulers angle error, quaternion error,
Euler axis of rotation and many other techniques 1 . In particular, here we focus1 See [Kap76] and [Sid00] for a comprehensive overview.
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
58/148
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
59/148
following control law for stabilizing an arbitrary orientation 0
u = P + k(0 ) (4.2)
with P a positive denite matrix and k a real positive constant.
Theorem 4.1 The closed-loop system (3.2) and (4.2) with u as given in (4.1),
possesses an asymptotically stable equilibrium in (, ) = (0 , 0) and an unstable
equilibrium in (, ) = (0 , 0).
Proof. Let 0 be an arbitrary reduced attitude. Note that the closed loopsystem given by (3.2), (4.1) and (4.2) has two equilibria for ( , ) = (0 , 0) and
(, ) = (0 , 0). Consider the following candidate Lyapunov function
V (, ) =12
T J + k( 0)T ( 0) (4.3)
The above Lyapunov function is positive denite on R 3 S 2 and V (0, 0) = 0.Furthermore, the derivative along a solution of the closed-loop system given by
(3.2), (4.1) and (4.2) is
V (, ) = T J + k( 0)T = T (P + k( 0)) + k(0)T ( )= T P + kT ( 0) kT 0 ( )= T P 0
Thus, V (, ) is positive denite and V (, ) is negative semidenite on R 3S 2 .Hence, from LaSalles invariant set theorem, we obtain that ( , ) converges to
the largest invariant set in R 3 S 2 such that = 0, i.e. ( 0) = 0. Moreover,if ((0) , (0)) is such that V ((0) , (0)) < 2k, V ((0) , (0)) is an invariant set
for the trajectories of the closed loop system, starting from ( (0) , (0)). Since
V (0, 0) = 2 k, it follows that ( t) 0 as t . Thus, (0 , 0) is anasymptotically stable equilibrium of the closed-loop system given by (3.2), (4.1)
and (4.2).
On the other hand, consider the following Lyapunov function
V (, ) =12
T J + k( + 0)T ( + 0) (4.4)
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
60/148
The above function is positive denite on R 3 S 2 and V (0, 0) = 0. Fur-thermore, it is straightforward to show that V (, ) is not dened along thetrajectories of the closed-loop system given by (3.2), (4.1) and (4.2). Thus,
(0, 0) is an unstable equilibrium of the closed-loop system given by (3.2),(4.1) and (4.2).
Notice that the term P in (4.2) can be replaced by any function ( ) asdened by (3.5). Indeed, it plays the role of injecting damping into the system.
Hence, the above controller is strictly connected to the one presented in chapter
3, for stabilizing the hanging equilibrium h = /l . This can also be deduced
comparing equation (3.6) and equation (4.3). The fundamental difference is that
an arbitrary 0 is not a minimum of the potential energy, unless the potential
in suitably modied. In some way, this is what equations (4.1) and (4.2) do.
They modify the system, for having a closed-loop whose potential energy has a
minimum at = 0 . This way to proceed, is referred to as potential shaping ,
in the sense that the control law actually re-shape the potential energy of the
whole system. A comprehensive description of this technique, that is particu-
larly suitable in the presence of mechanical systems, can be found in [BLM00],
[BLM01] and related references.
theorem 4.1 states the capability of control law (4.1) and (4.2) of stabiliz-
ing a desired attitude 0 , when initial condition satises V ((0) , (0)) < 2k,
with V (, ) dened by (4.3). Unfortunately, it does not guarantee that in
general, the evolution of the closed loop system converge to the desired atti-
tude. Indeed, initial condition cannot be assured to belong to the invariant set
V ((0) , (0)) < 2k. Selecting a large k for enlarging the guaranteed domain
of attraction of (0 , 0) is not in accordance with constraints usually presentin practical problem. In fact, in real applications, thrusters cannot supply ar-
bitrary large torques. This is especially true in aerospace applications, where
minimizing consumption is also an issue.
When ( (0) , (0)) is not in V ((0) , (0)) < 2k, an initial condition belonging
to the stable manifold of (0 , 0) cannot be avoided a priori. This situation isdepicted in Figure 4.1 where lines represent function V (, ) level sets.
Therefore, the technique proposed in [Bur95] and its simplied version described
51
-
7/27/2019 Spacecraft Attitude Dynamics Bacconi
61/148
G
-G
0
0
V( = 2k w,G)
G
w
(w(0),G(0))
0
Figure 4.1. Evolution of the closed loop system (3.2), (4.1) and (4.2) towards theunstable equilibrium.
above, represent a local attitude control law. In order to arbitrarily enlarge the
domain of attraction of the desired nal attitude, one should design a controller
that enforces the closed-loop trajectories to move away from ( , ) = (0 , 0)as soon as the closed-loop evolution approaches the unstable equilibrium. This
argument leads to th