SISTEMI ELEMENTARI DEL 1o ORDINE - … · Luigi Biagiotti Controlli Automatici Introduzione -- 14 0...
34
Ing. Luigi Biagiotti Tel. 051 20939903 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/ControlliAutomaticiGestionale.htm SISTEMI ELEMENTARI DEL 1 SISTEMI ELEMENTARI DEL 1 o o E 2 E 2 o o ORDINE ORDINE
Transcript of SISTEMI ELEMENTARI DEL 1o ORDINE - … · Luigi Biagiotti Controlli Automatici Introduzione -- 14 0...

Ing. Luigi BiagiottiTel. 051 20939903
e-mail: [email protected]://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICIIngegneria della Gestione Industriale e della Integrazione di Impresa
http://www.automazione.ingre.unimore.it/pages/corsi/ControlliAutomaticiGestionale.htm
SISTEMI ELEMENTARI DEL 1SISTEMI ELEMENTARI DEL 1o o E 2E 2o o ORDINEORDINE
Luigi Biagiotti Introduzione -- 2Controlli Automatici
SistemiSistemi elementarielementari
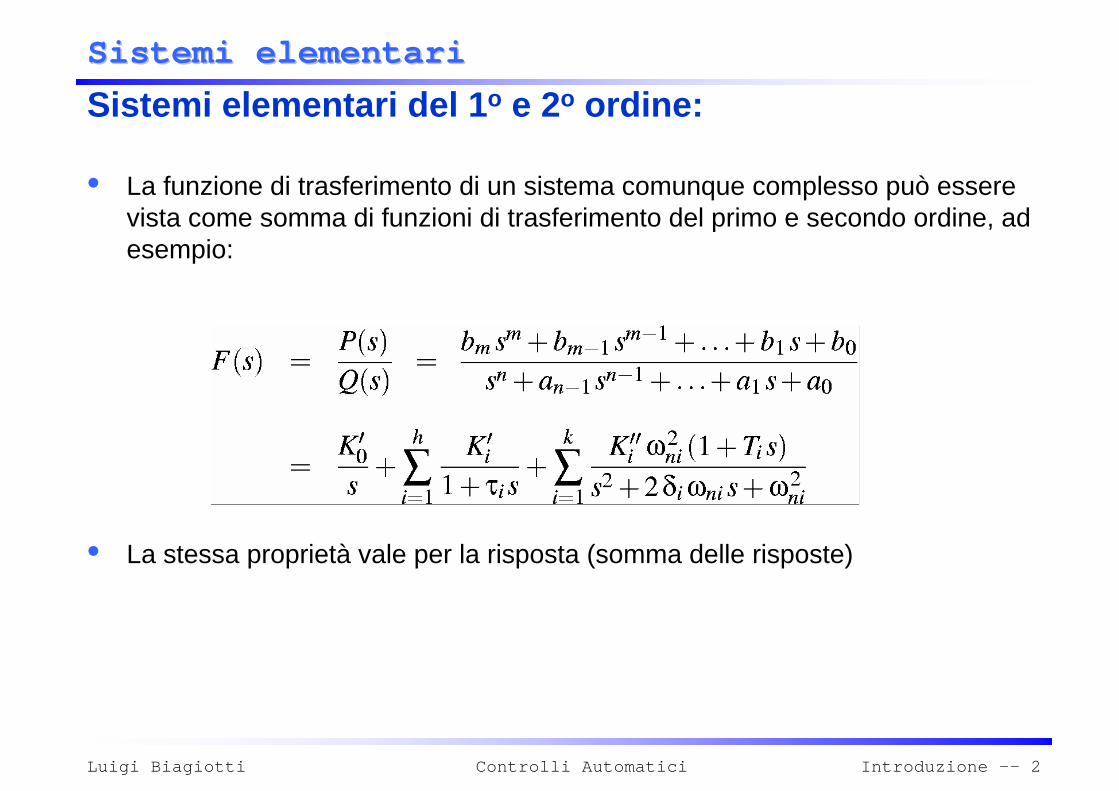
Sistemi elementari del 1o e 2o ordine:
• La funzione di trasferimento di un sistema comunque complesso può esserevista come somma di funzioni di trasferimento del primo e secondo ordine, ad esempio:
• La stessa proprietà vale per la risposta (somma delle risposte)
Luigi Biagiotti Introduzione -- 3Controlli Automatici
SistemiSistemi elementarielementari
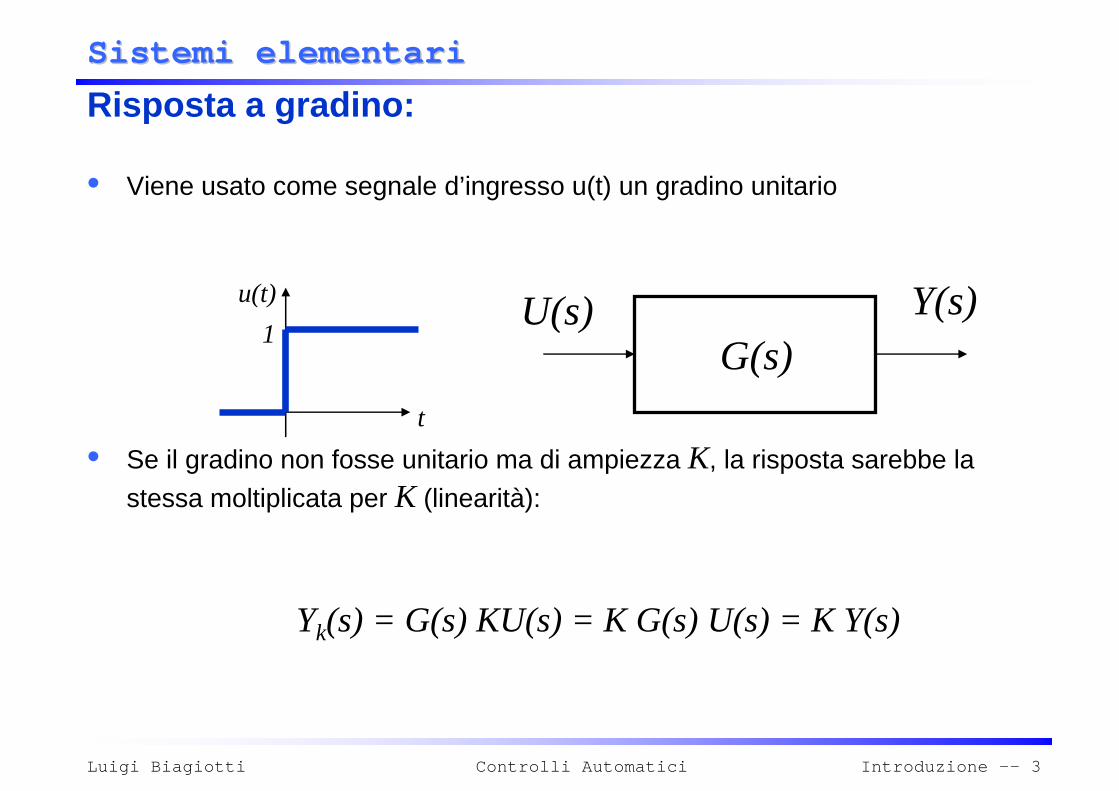
Risposta a gradino:
• Viene usato come segnale d’ingresso u(t) un gradino unitario
• Se il gradino non fosse unitario ma di ampiezza K, la risposta sarebbe la stessa moltiplicata per K (linearità):
t
1u(t)
G(s)U(s) Y(s)
Yk(s) = G(s) KU(s) = K G(s) U(s) = K Y(s)
Luigi Biagiotti Introduzione -- 4Controlli Automatici
SistemiSistemi elementarielementari
Risposta a gradino:
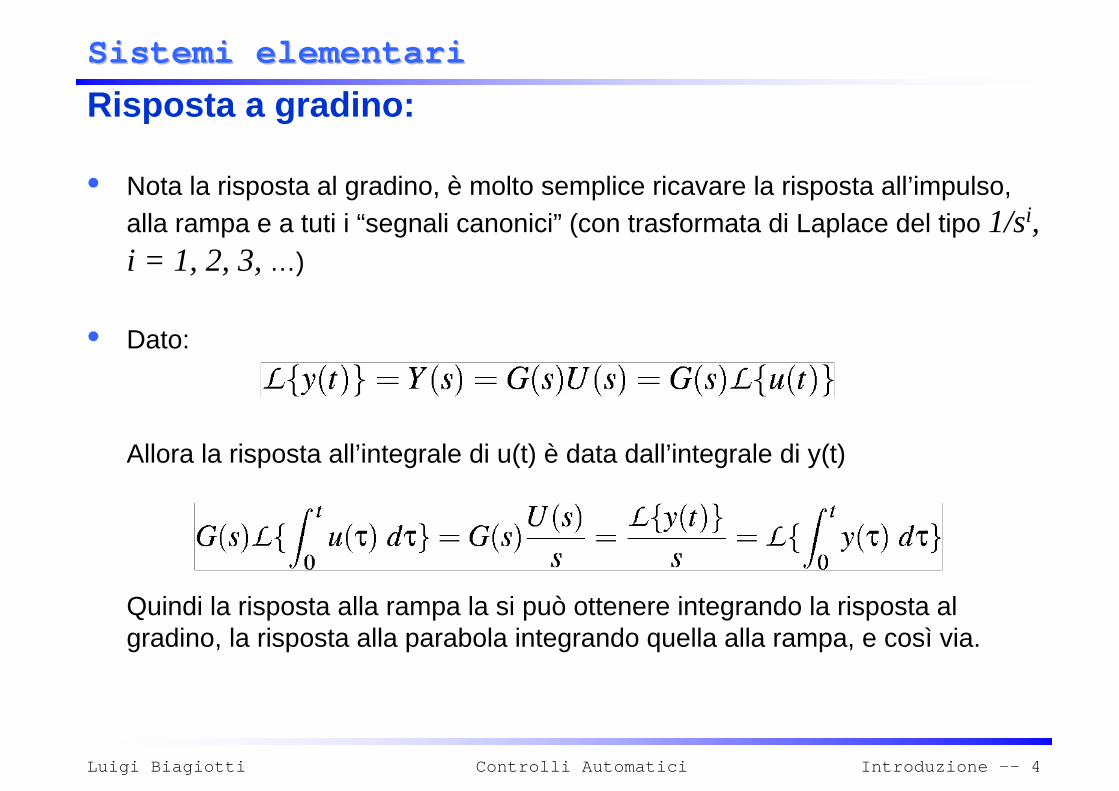
• Nota la risposta al gradino, è molto semplice ricavare la risposta all’impulso, alla rampa e a tuti i “segnali canonici” (con trasformata di Laplace del tipo 1/si, i = 1, 2, 3, …)
• Dato:
Allora la risposta all’integrale di u(t) è data dall’integrale di y(t)
Quindi la risposta alla rampa la si può ottenere integrando la risposta al gradino, la risposta alla parabola integrando quella alla rampa, e così via.
Luigi Biagiotti Introduzione -- 5Controlli Automatici
SistemiSistemi elementarielementari
Risposta a gradino:
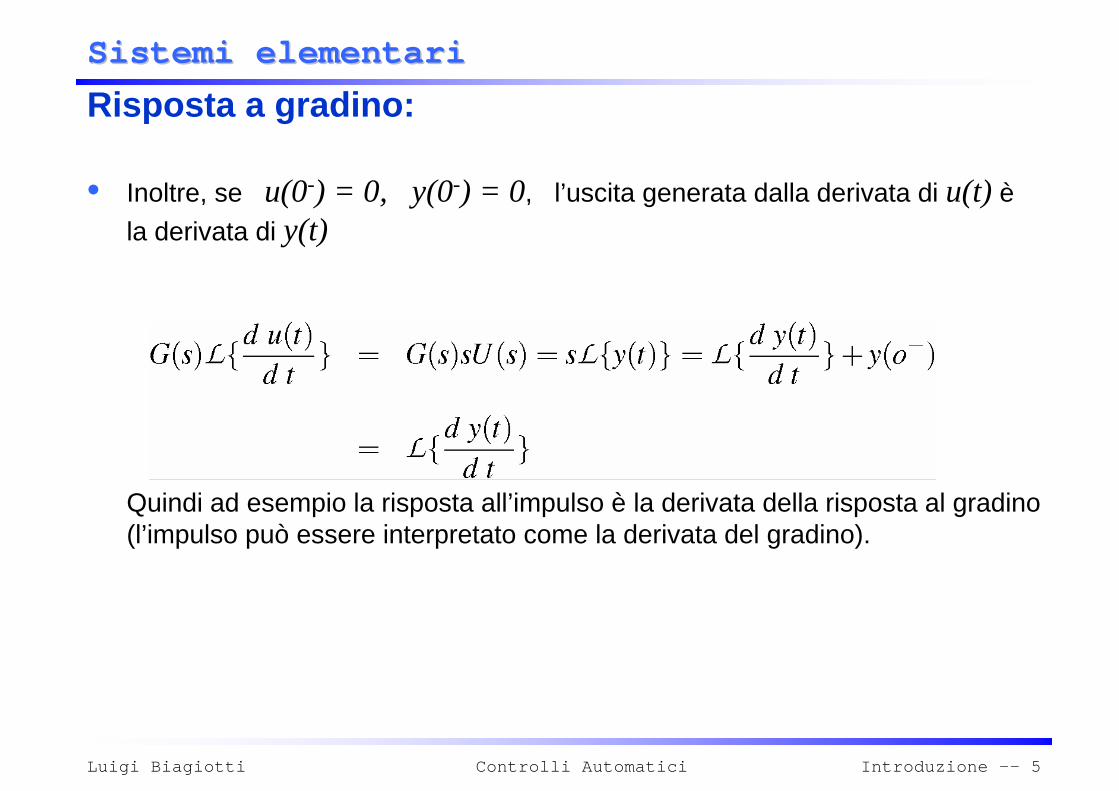
• Inoltre, se u(0-) = 0, y(0-) = 0, l’uscita generata dalla derivata di u(t) èla derivata di y(t)
Quindi ad esempio la risposta all’impulso è la derivata della risposta al gradino(l’impulso può essere interpretato come la derivata del gradino).
Luigi Biagiotti Introduzione -- 6Controlli Automatici
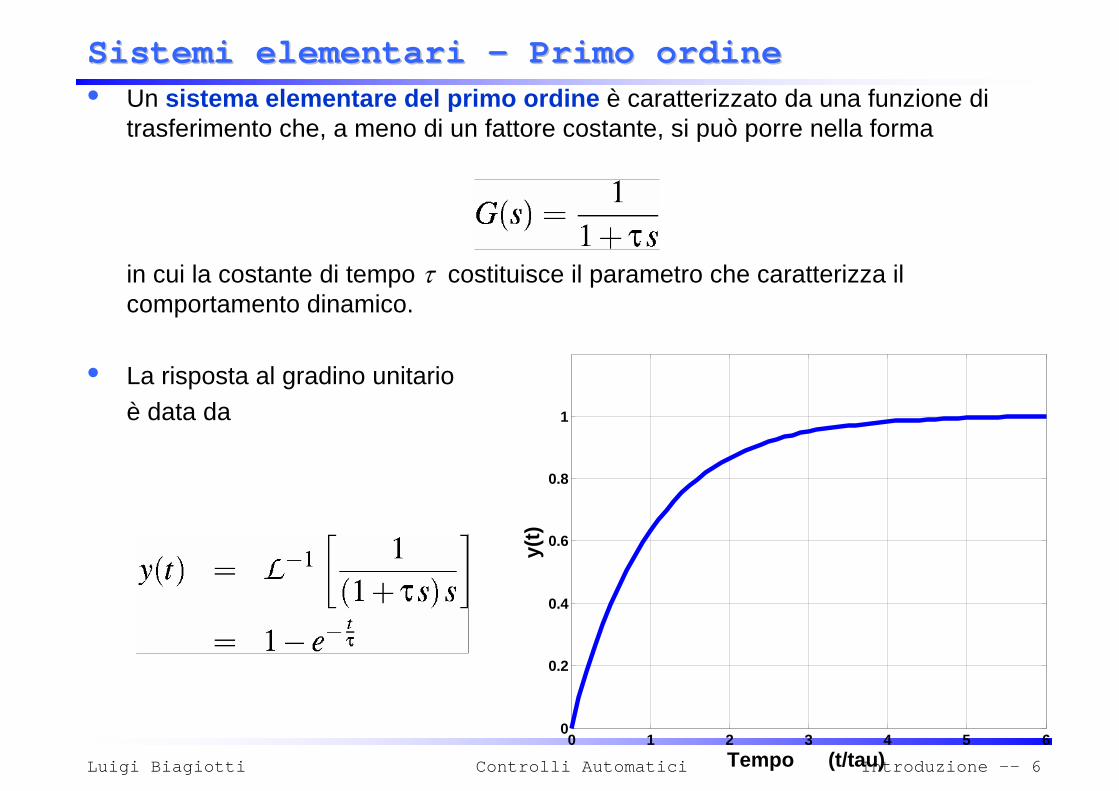
SistemiSistemi elementarielementari –– Primo Primo ordineordine• Un sistema elementare del primo ordine è caratterizzato da una funzione di
trasferimento che, a meno di un fattore costante, si può porre nella forma
in cui la costante di tempo τ costituisce il parametro che caratterizza il comportamento dinamico.
• La risposta al gradino unitario è data da
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Tempo (t/tau)
y(t)
Luigi Biagiotti Introduzione -- 7Controlli Automatici
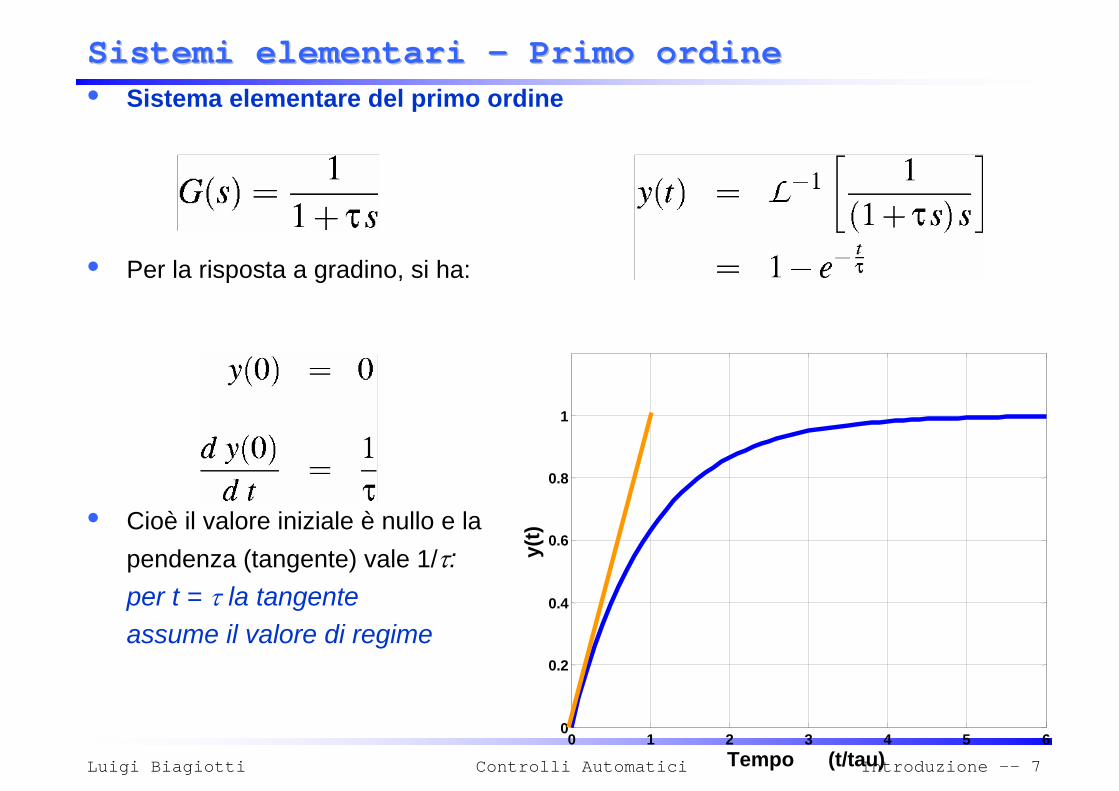
SistemiSistemi elementarielementari –– Primo Primo ordineordine• Sistema elementare del primo ordine
• Per la risposta a gradino, si ha:
• Cioè il valore iniziale è nullo e lapendenza (tangente) vale 1/τ:per t = τ la tangenteassume il valore di regime
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Tempo (t/tau)
y(t)
Luigi Biagiotti Introduzione -- 8Controlli Automatici
SistemiSistemi elementarielementari –– Primo Primo ordineordine
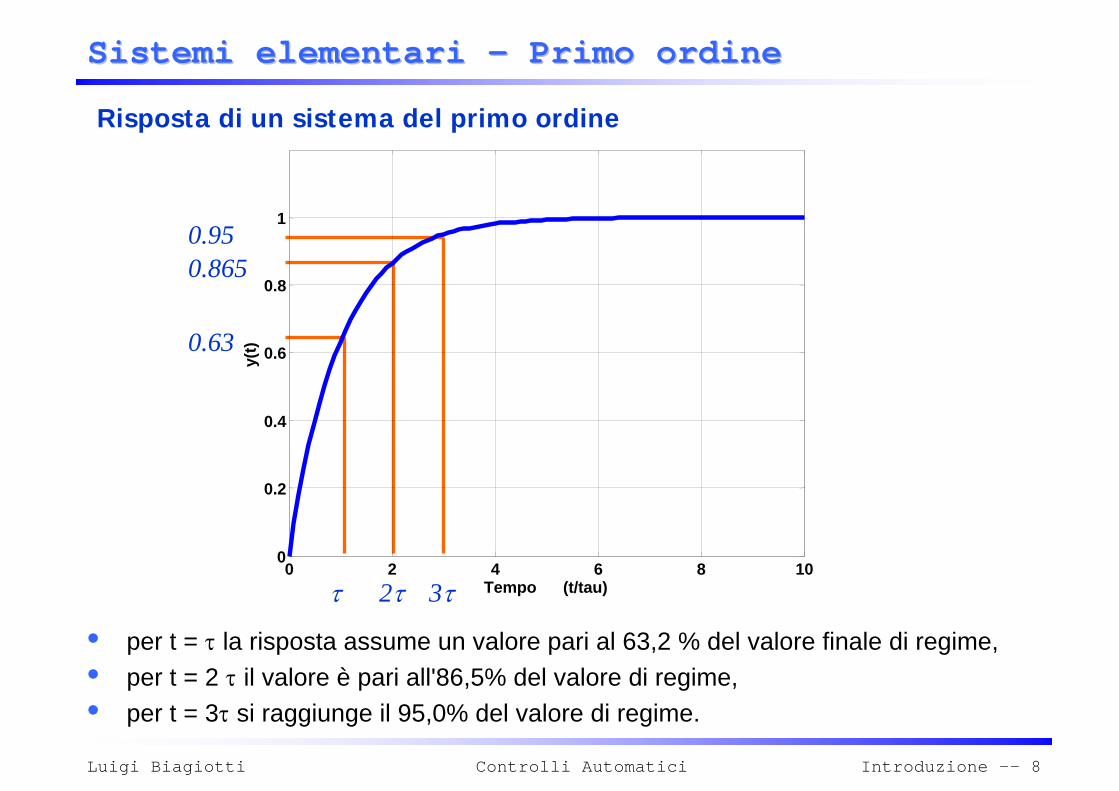
• per t = τ la risposta assume un valore pari al 63,2 % del valore finale di regime,• per t = 2 τ il valore è pari all'86,5% del valore di regime,• per t = 3τ si raggiunge il 95,0% del valore di regime.
0.63
0.8650.95
τ 2τ 3τ
Risposta di un sistema del primo ordine
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
Tempo (t/tau)
y(t)
Luigi Biagiotti Introduzione -- 9Controlli Automatici
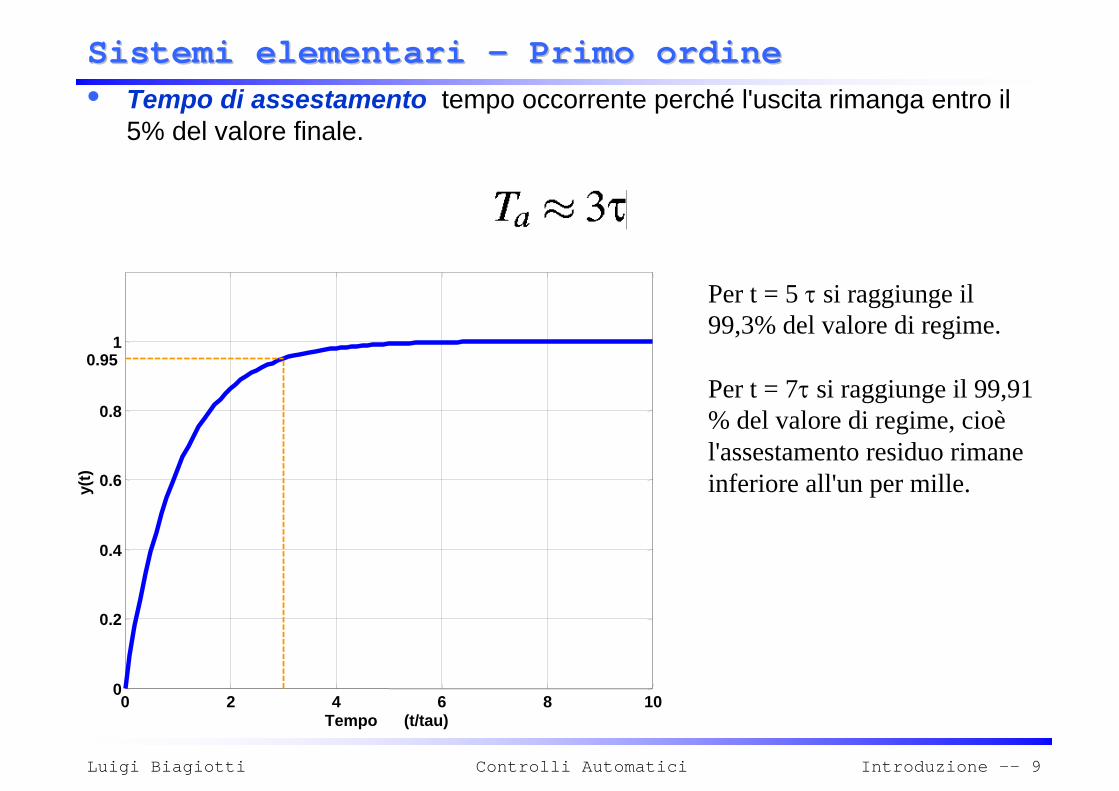
SistemiSistemi elementarielementari –– Primo Primo ordineordine• Tempo di assestamento tempo occorrente perché l'uscita rimanga entro il
5% del valore finale.
Per t = 5 τ si raggiunge il 99,3% del valore di regime.
Per t = 7τ si raggiunge il 99,91 % del valore di regime, cioèl'assestamento residuo rimane inferiore all'un per mille.
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
Tempo (t/tau)
y(t)
0.95
Luigi Biagiotti Introduzione -- 10Controlli Automatici
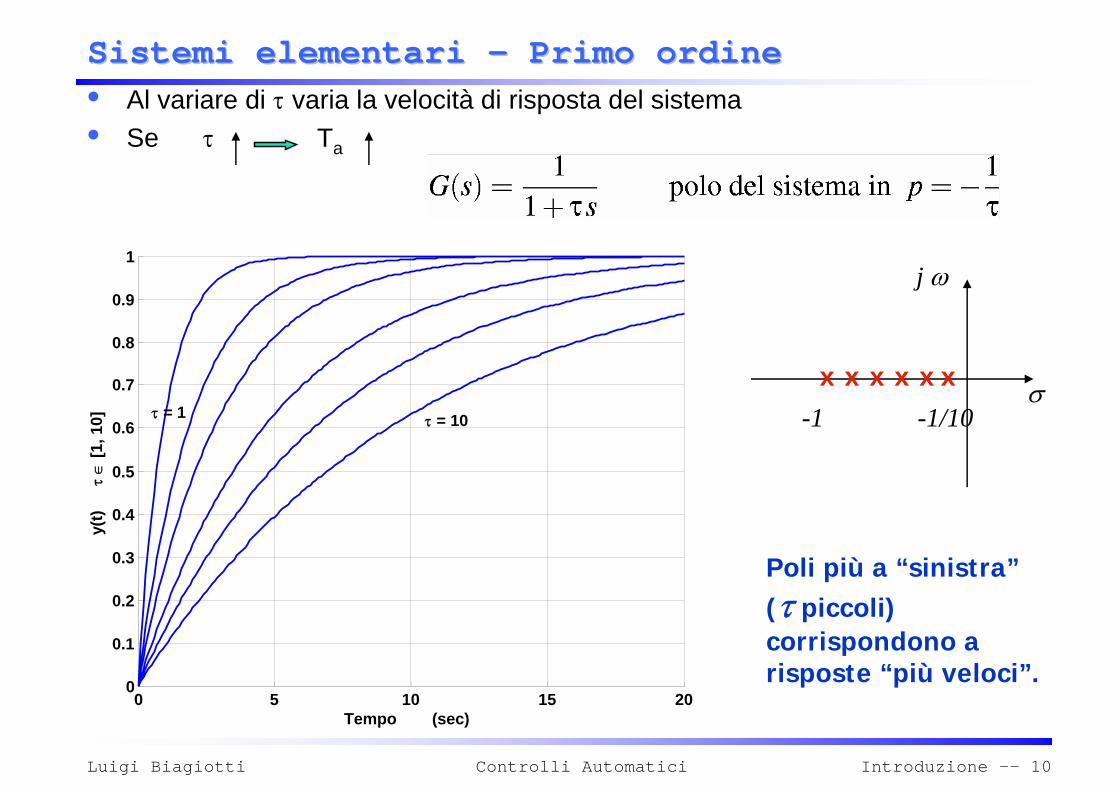
SistemiSistemi elementarielementari –– Primo Primo ordineordine• Al variare di τ varia la velocità di risposta del sistema• Se τ Ta
0 5 10 15 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tempo (sec)
y(t)
τ
∈[1
, 10] τ = 10τ = 1
xxxxxx-1 -1/10
σ
j ω
Poli più a “sinistra”(τ piccoli)corrispondono a risposte “più veloci”.
Luigi Biagiotti Introduzione -- 11Controlli Automatici
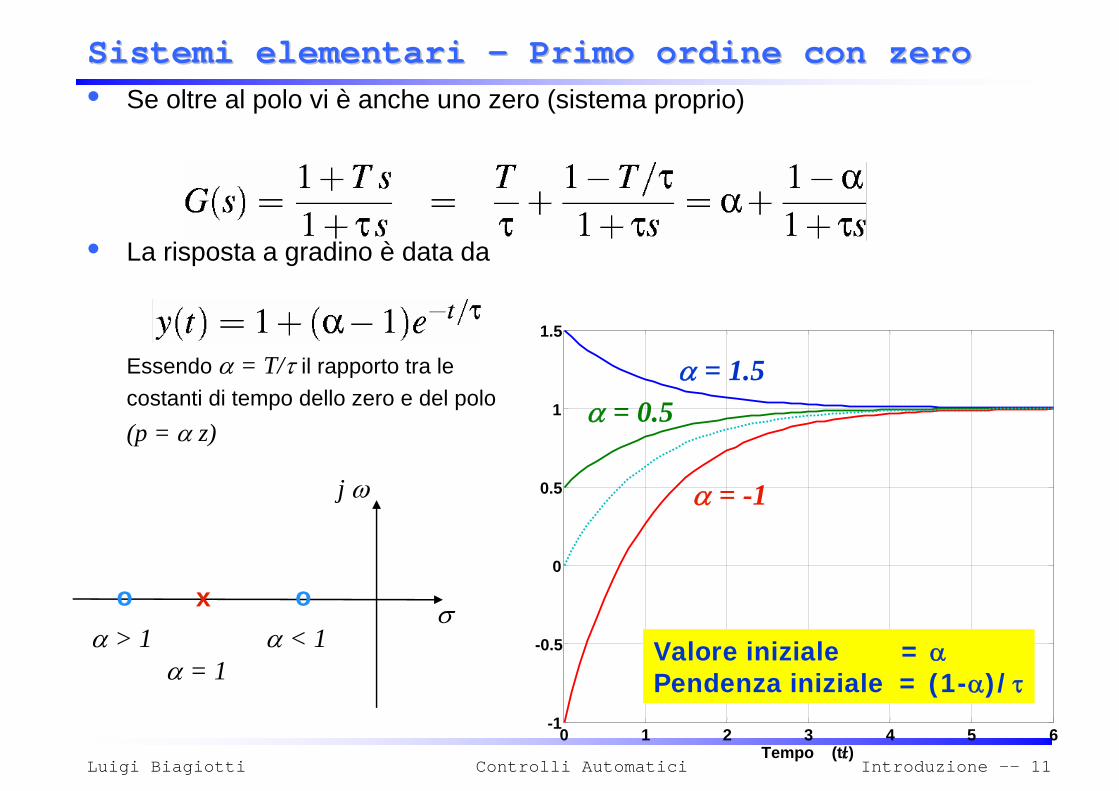
SistemiSistemi elementarielementari –– Primo Primo ordineordine con zerocon zero• Se oltre al polo vi è anche uno zero (sistema proprio)
• La risposta a gradino è data da
Essendo α = T/τ il rapporto tra le costanti di tempo dello zero e del polo(p = α z)
α = -1
α = 1.5α = 0.5
x
α = 1
σ
j ω
α > 1 α < 1oo
0 1 2 3 4 5 6-1
-0.5
0
0.5
1
1.5
Tempo (t/τ)
Valore iniziale = αPendenza iniziale = (1-α)/τ
Luigi Biagiotti Introduzione -- 12Controlli Automatici
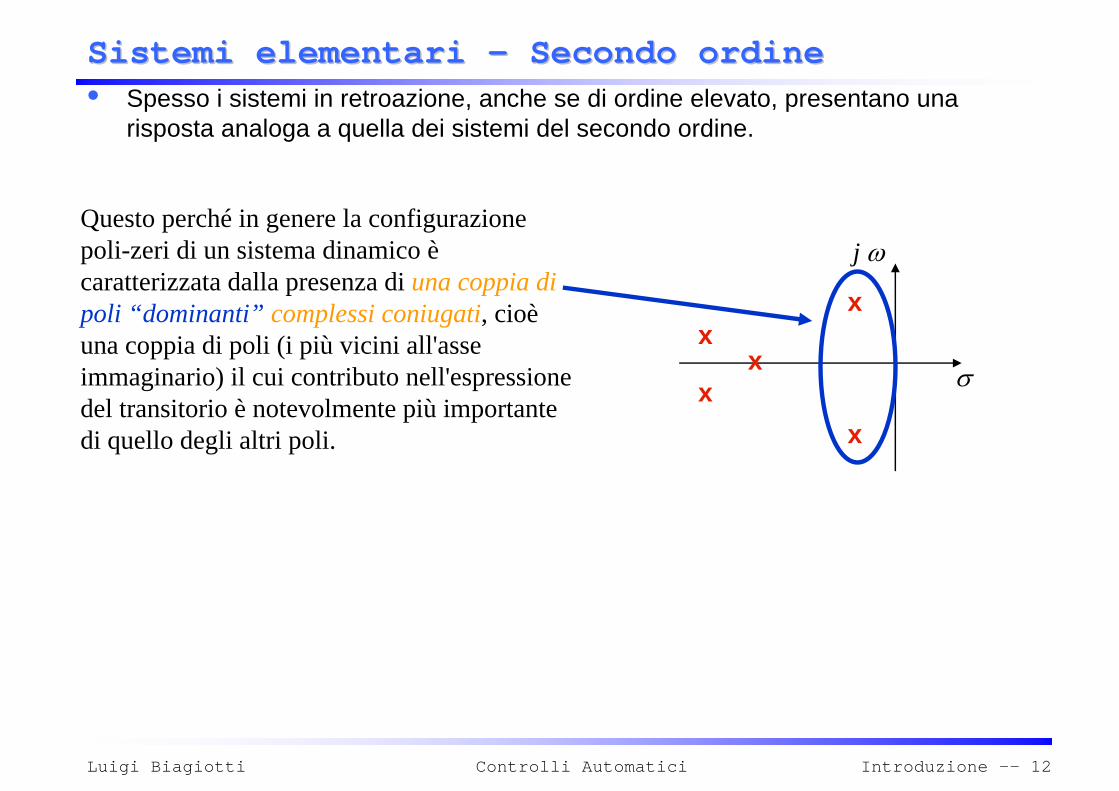
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Spesso i sistemi in retroazione, anche se di ordine elevato, presentano una
risposta analoga a quella dei sistemi del secondo ordine.
Questo perché in genere la configurazione poli-zeri di un sistema dinamico ècaratterizzata dalla presenza di una coppia di poli “dominanti” complessi coniugati, cioèuna coppia di poli (i più vicini all'asse immaginario) il cui contributo nell'espressione del transitorio è notevolmente più importante di quello degli altri poli.
x
x
x
xx σ
j ω
Luigi Biagiotti Introduzione -- 13Controlli Automatici
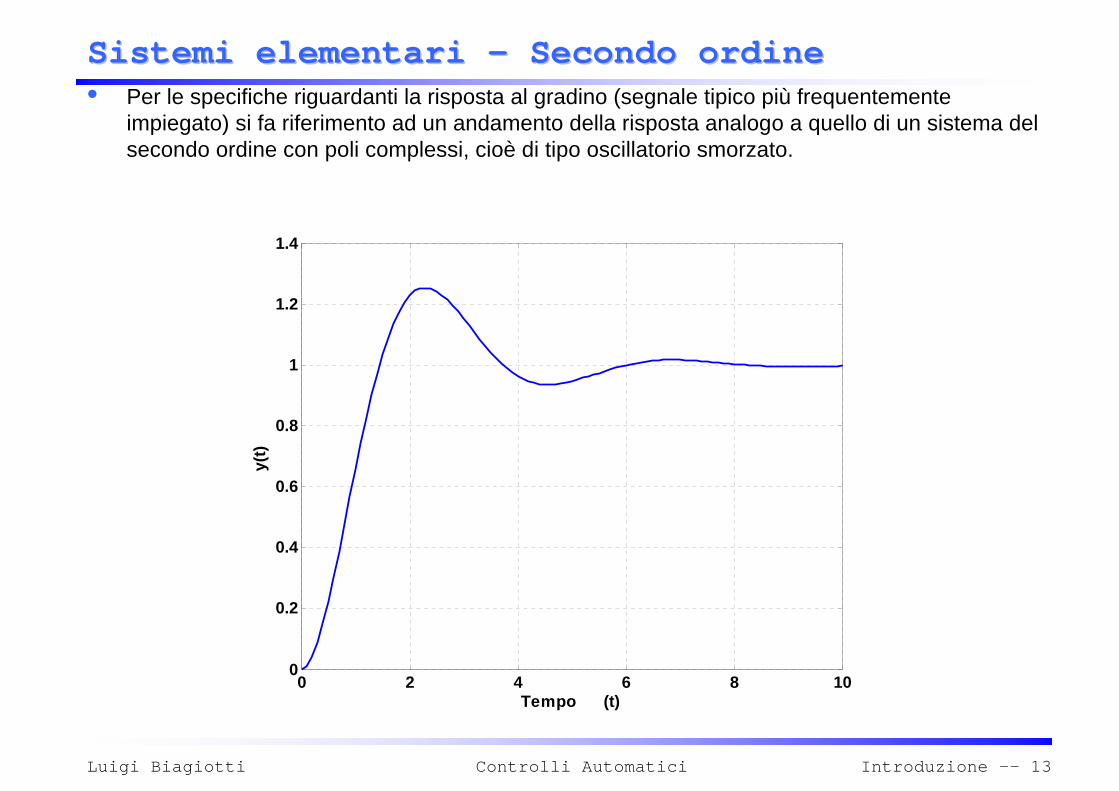
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Per le specifiche riguardanti la risposta al gradino (segnale tipico più frequentemente
impiegato) si fa riferimento ad un andamento della risposta analogo a quello di un sistema del secondo ordine con poli complessi, cioè di tipo oscillatorio smorzato.
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
Tempo (t)
y(t)
Luigi Biagiotti Introduzione -- 14Controlli Automatici
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
Tempo (t)
y(t)
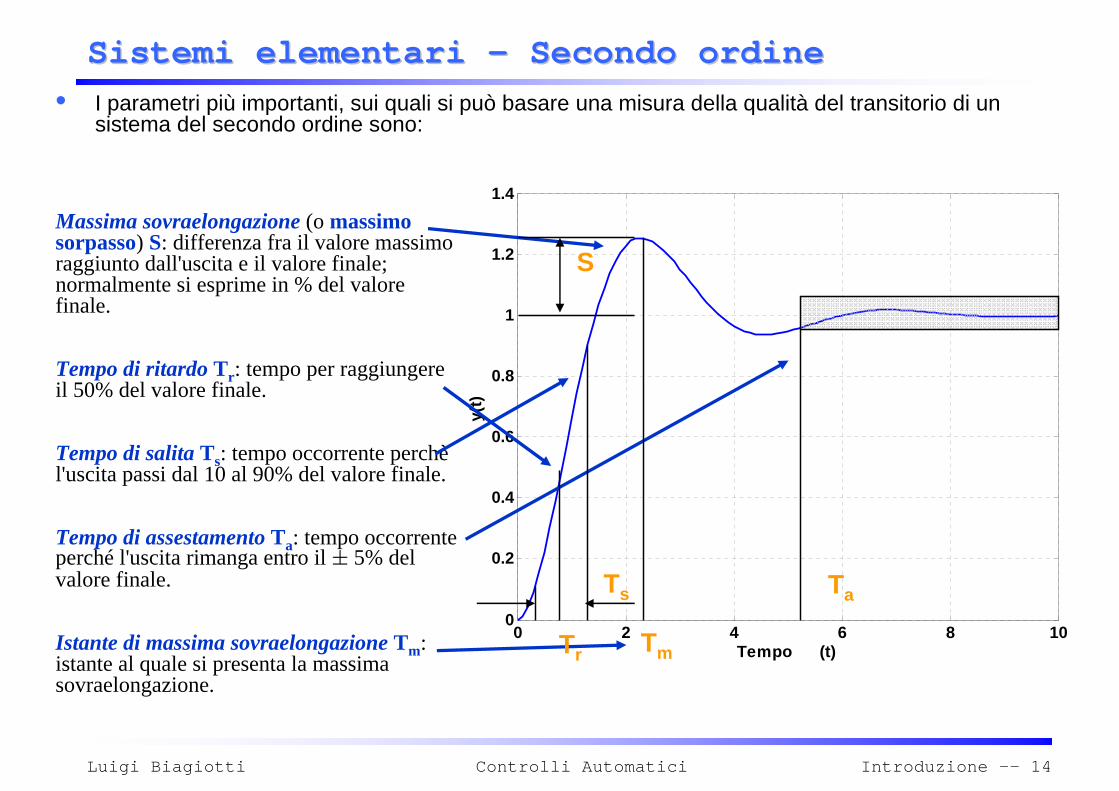
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• I parametri più importanti, sui quali si può basare una misura della qualità del transitorio di un
sistema del secondo ordine sono:
Massima sovraelongazione (o massimo sorpasso) S: differenza fra il valore massimo raggiunto dall'uscita e il valore finale; normalmente si esprime in % del valore finale.
Tempo di ritardo Tr: tempo per raggiungere il 50% del valore finale.
Tempo di salita Ts: tempo occorrente perchèl'uscita passi dal 10 al 90% del valore finale.
Tempo di assestamento Ta: tempo occorrente perché l'uscita rimanga entro il ± 5% del valore finale.
Istante di massima sovraelongazione Tm: istante al quale si presenta la massima sovraelongazione.
S
Tr
Ts Ta
Tm
Luigi Biagiotti Introduzione -- 15Controlli Automatici
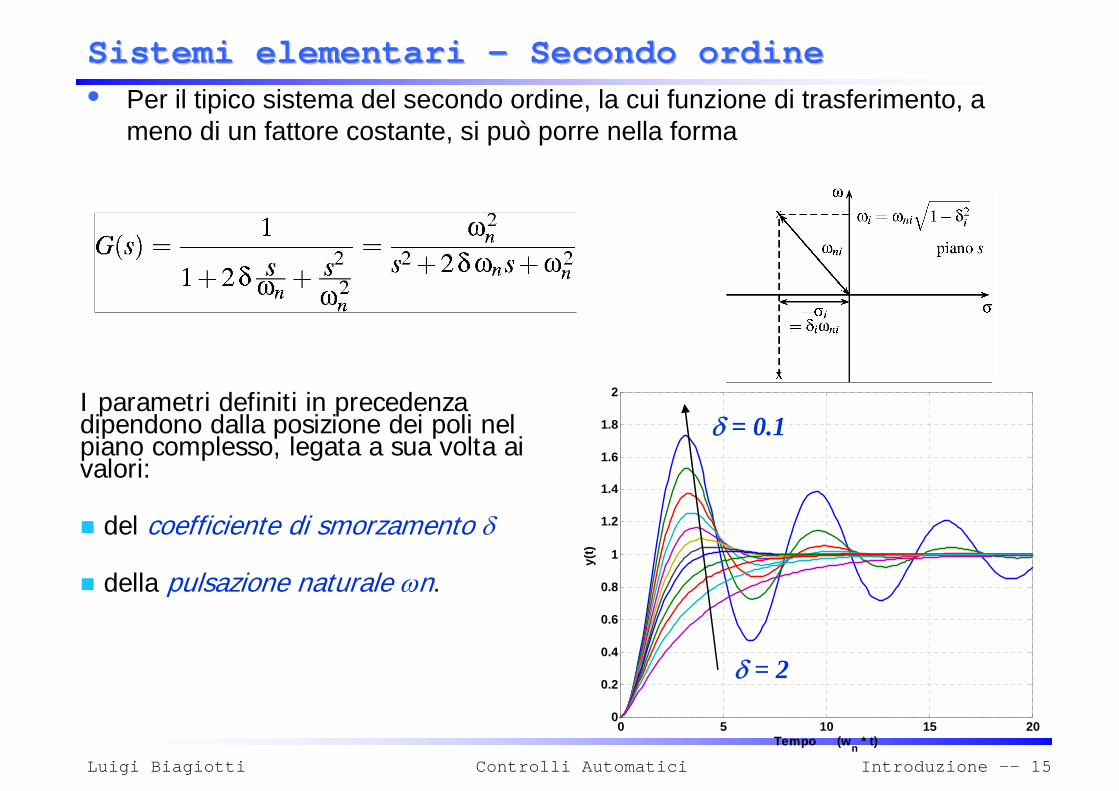
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Per il tipico sistema del secondo ordine, la cui funzione di trasferimento, a
meno di un fattore costante, si può porre nella forma
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Tempo (wn * t)
y(t)
I parametri definiti in precedenza dipendono dalla posizione dei poli nel piano complesso, legata a sua volta ai valori:
del coefficiente di smorzamento δ
della pulsazione naturale ωn.
δ = 2
δ = 0.1
Luigi Biagiotti Introduzione -- 16Controlli Automatici
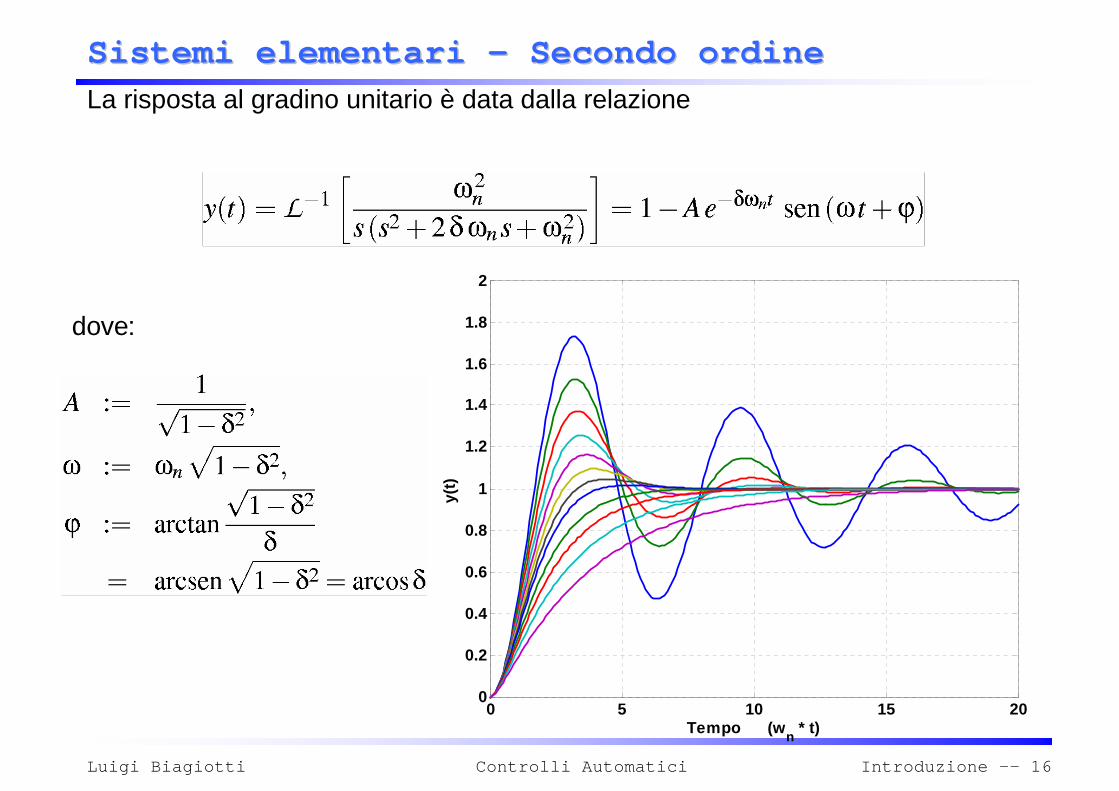
SistemiSistemi elementarielementari –– SecondoSecondo ordineordineLa risposta al gradino unitario è data dalla relazione
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Tempo (wn * t)
y(t)
dove:
Luigi Biagiotti Introduzione -- 17Controlli Automatici
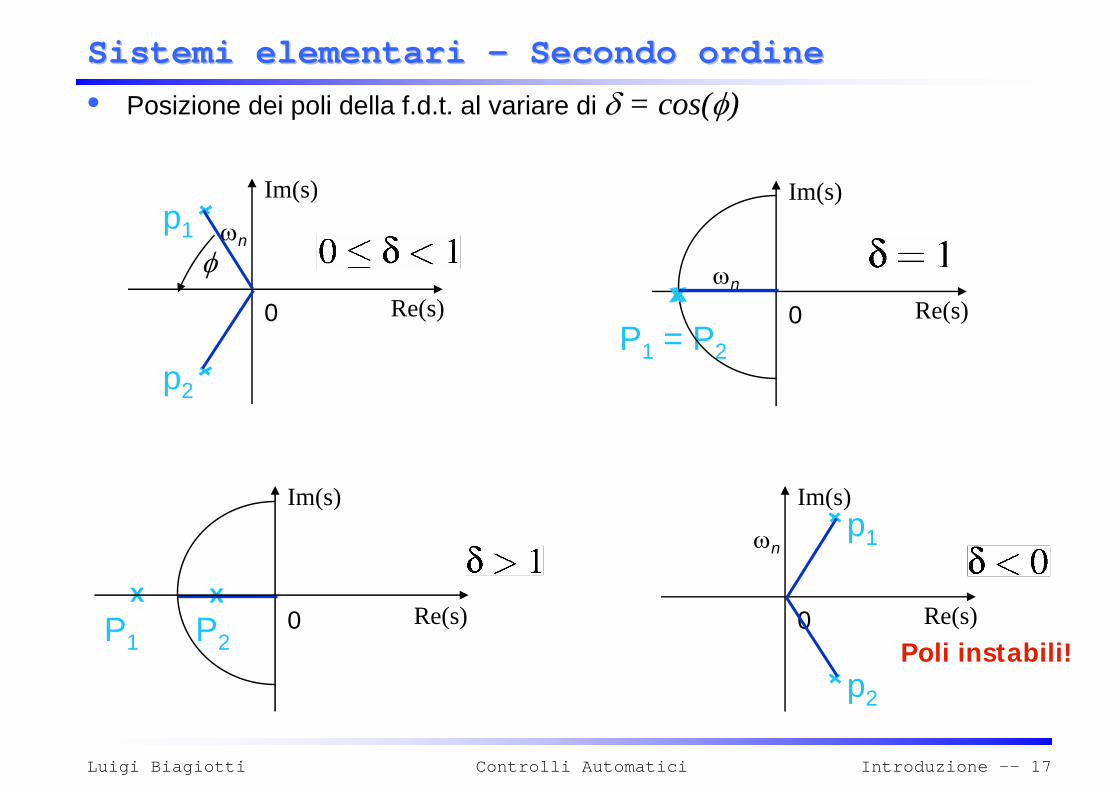
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Posizione dei poli della f.d.t. al variare di δ = cos(φ)
Re(s)
Im(s)
0P1
xxP2
Re(s)
Im(s)
0P1 = P2
ωnxx
Re(s)
Im(s)
0
p1
p2
ωn
Poli instabili!
Re(s)
Im(s)
0
p1
p2
ωnφ
Luigi Biagiotti Introduzione -- 18Controlli Automatici
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine
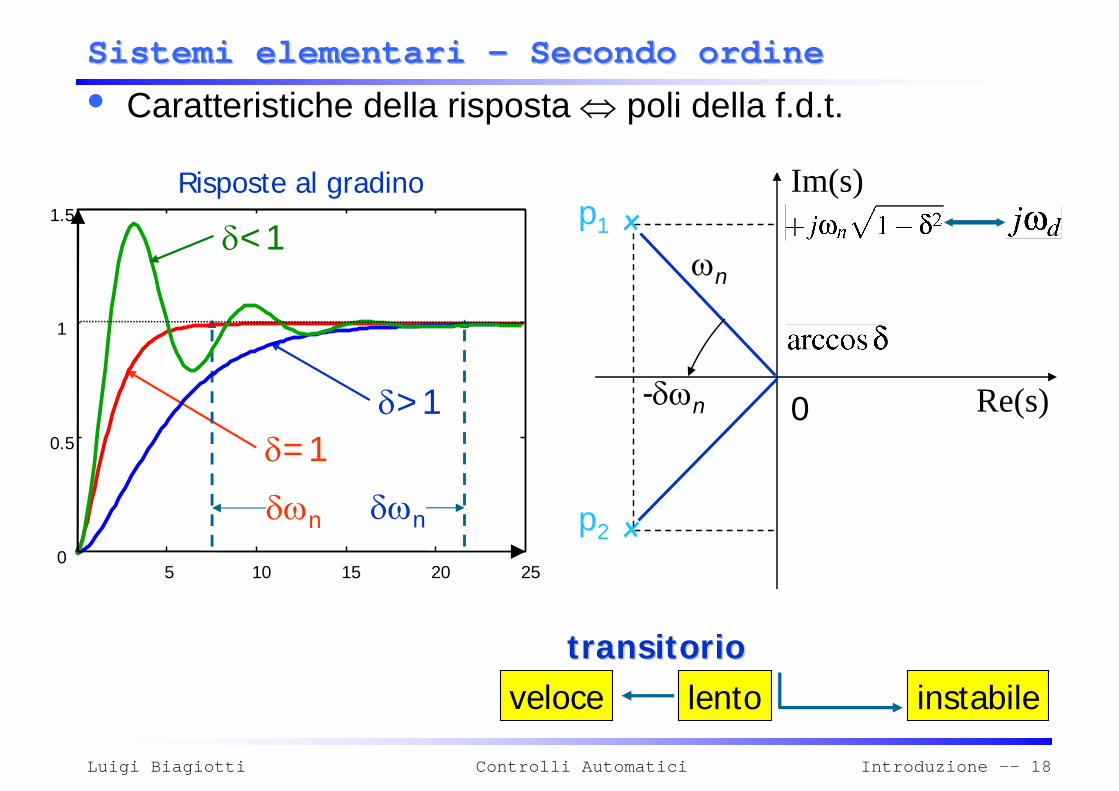
• Caratteristiche della risposta ⇔ poli della f.d.t.
Re(s)
Im(s)
0
p1
p2
ωn
-δωn
instabileveloce lentotransitoriotransitorio
δ=1
δωn
δ>1
δωn
δ<1
5 10 15 20 250
0.5
1
1.5
Risposte al gradino
Luigi Biagiotti Introduzione -- 19Controlli Automatici
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Può interessare la relazione esatta fra il valore del coefficiente di smorzamento e quello della
massima sovraelongazione. Per ricavarla, si deriva rispetto al tempo la
Si ottiene
Ponendo la derivata uguale a zero, si ha
da cui
Luigi Biagiotti Introduzione -- 20Controlli Automatici
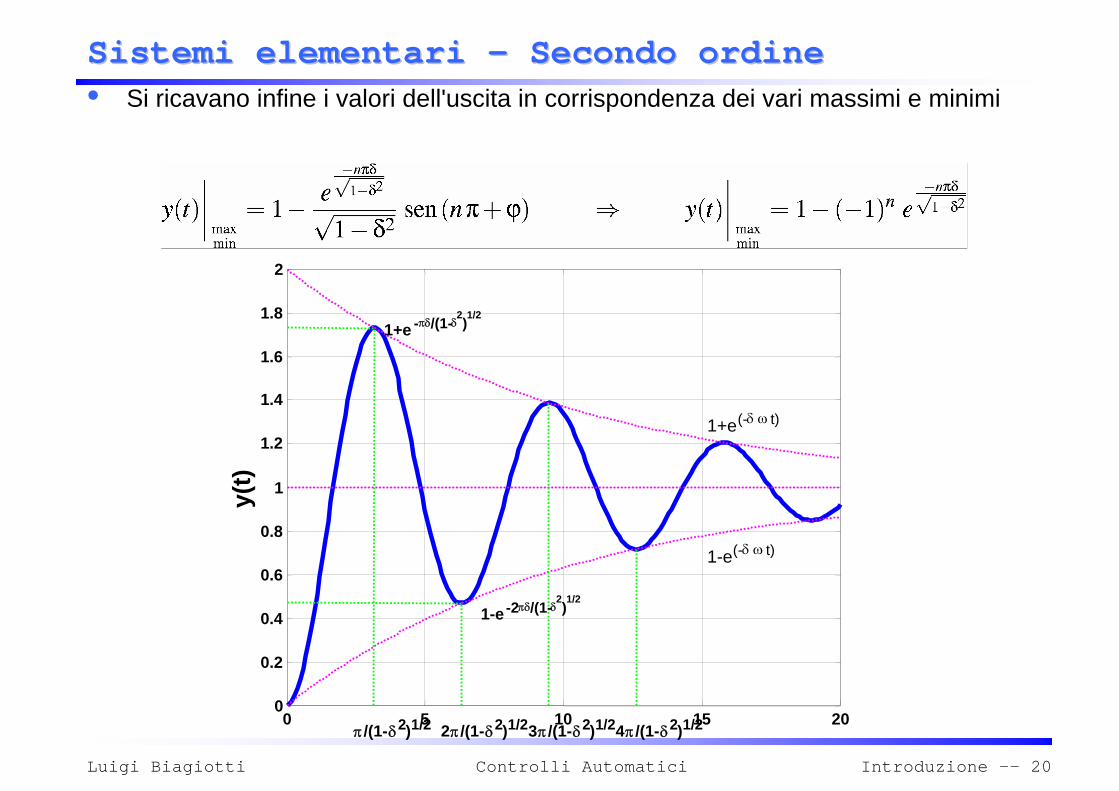
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Si ricavano infine i valori dell'uscita in corrispondenza dei vari massimi e minimi
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2y(
t)
1+e(-δ ω t)
1-e(-δ ω t)
π /(1-δ2)1/2 2π /(1-δ2)1/23π /(1-δ2)1/24π /(1-δ2)1/2
1+e -πδ/(1-δ2)1/2
1-e -2πδ/(1-δ2)1/2
Luigi Biagiotti Introduzione -- 21Controlli Automatici
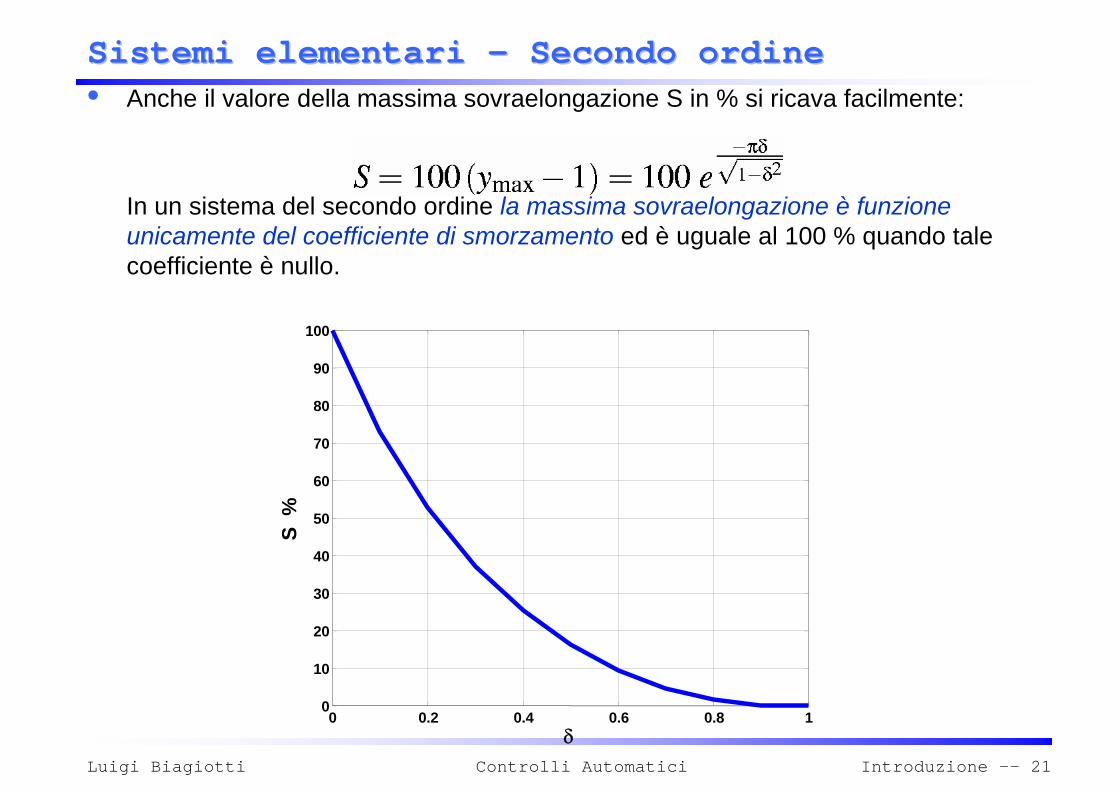
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Anche il valore della massima sovraelongazione S in % si ricava facilmente:
In un sistema del secondo ordine la massima sovraelongazione è funzioneunicamente del coefficiente di smorzamento ed è uguale al 100 % quando tale coefficiente è nullo.
0 0.2 0.4 0.6 0.8 10
10
20
30
40
50
60
70
80
90
100
δ
S %
Luigi Biagiotti Introduzione -- 22Controlli Automatici
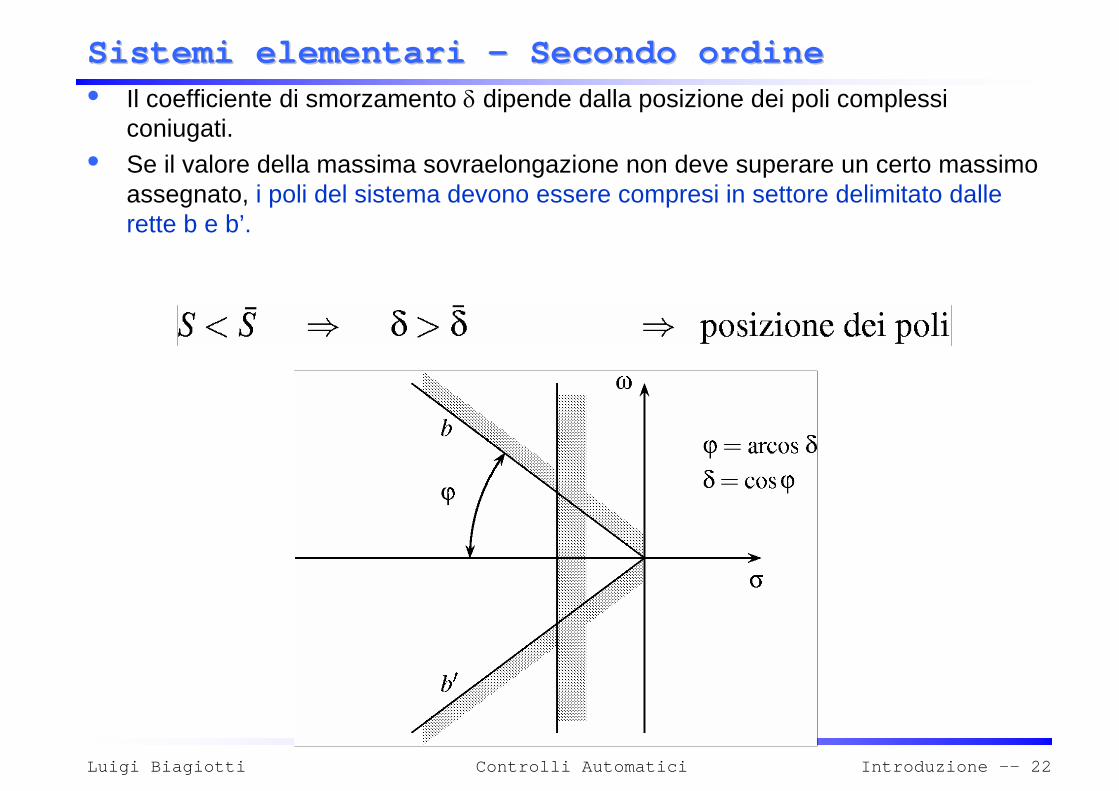
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Il coefficiente di smorzamento δ dipende dalla posizione dei poli complessi
coniugati.• Se il valore della massima sovraelongazione non deve superare un certo massimo
assegnato, i poli del sistema devono essere compresi in settore delimitato dallerette b e b’.
Luigi Biagiotti Introduzione -- 23Controlli Automatici
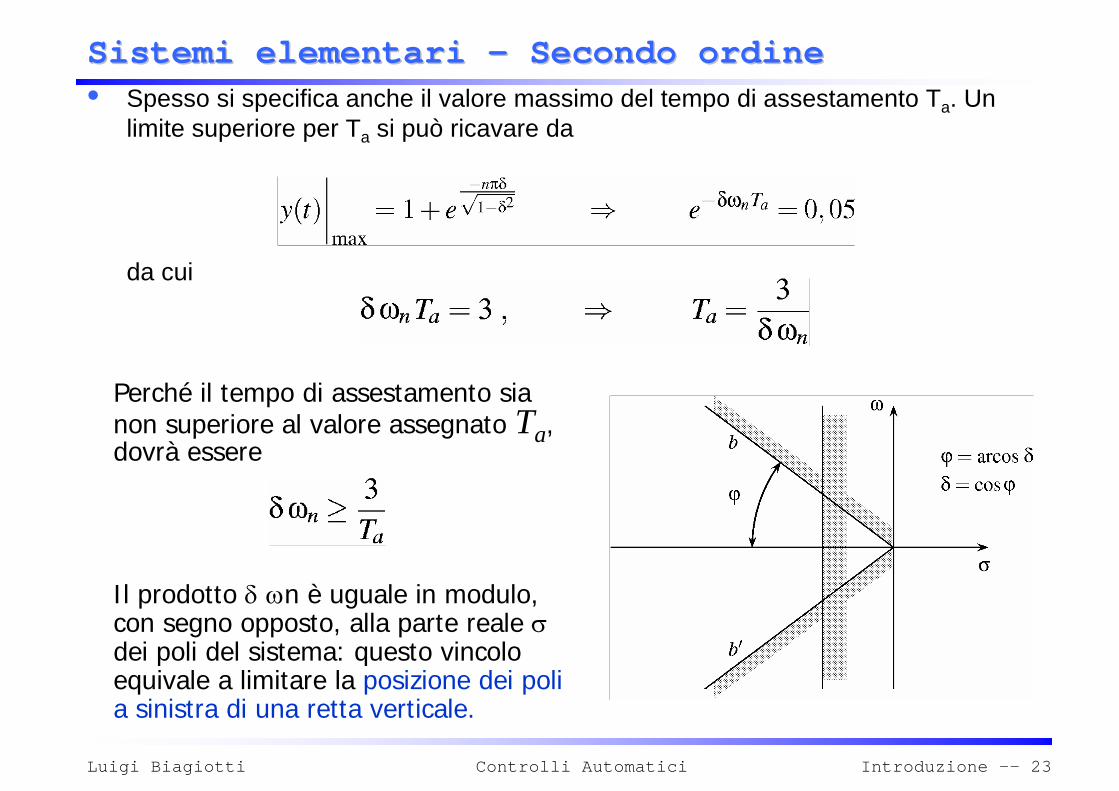
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Spesso si specifica anche il valore massimo del tempo di assestamento Ta. Un
limite superiore per Ta si può ricavare da
da cui
Il prodotto δ ωn è uguale in modulo, con segno opposto, alla parte reale σdei poli del sistema: questo vincolo equivale a limitare la posizione dei poli a sinistra di una retta verticale.
Perché il tempo di assestamento sia non superiore al valore assegnato Ta, dovrà essere
Luigi Biagiotti Introduzione -- 24Controlli Automatici
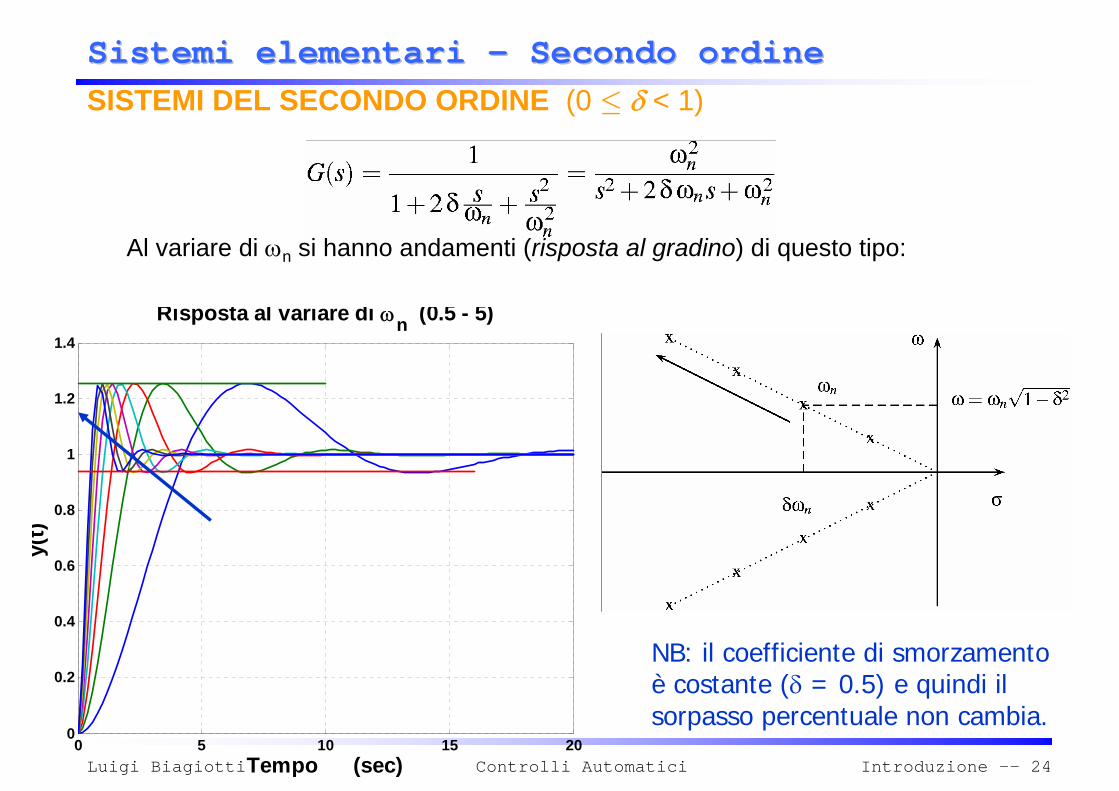
SistemiSistemi elementarielementari –– SecondoSecondo ordineordineSISTEMI DEL SECONDO ORDINE (0 · δ < 1)
Al variare di ωn si hanno andamenti (risposta al gradino) di questo tipo:
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
Tempo (sec)
y(t)
Risposta al variare di ωn (0.5 - 5)
NB: il coefficiente di smorzamentoè costante (δ = 0.5) e quindi ilsorpasso percentuale non cambia.
Luigi Biagiotti Introduzione -- 25Controlli Automatici
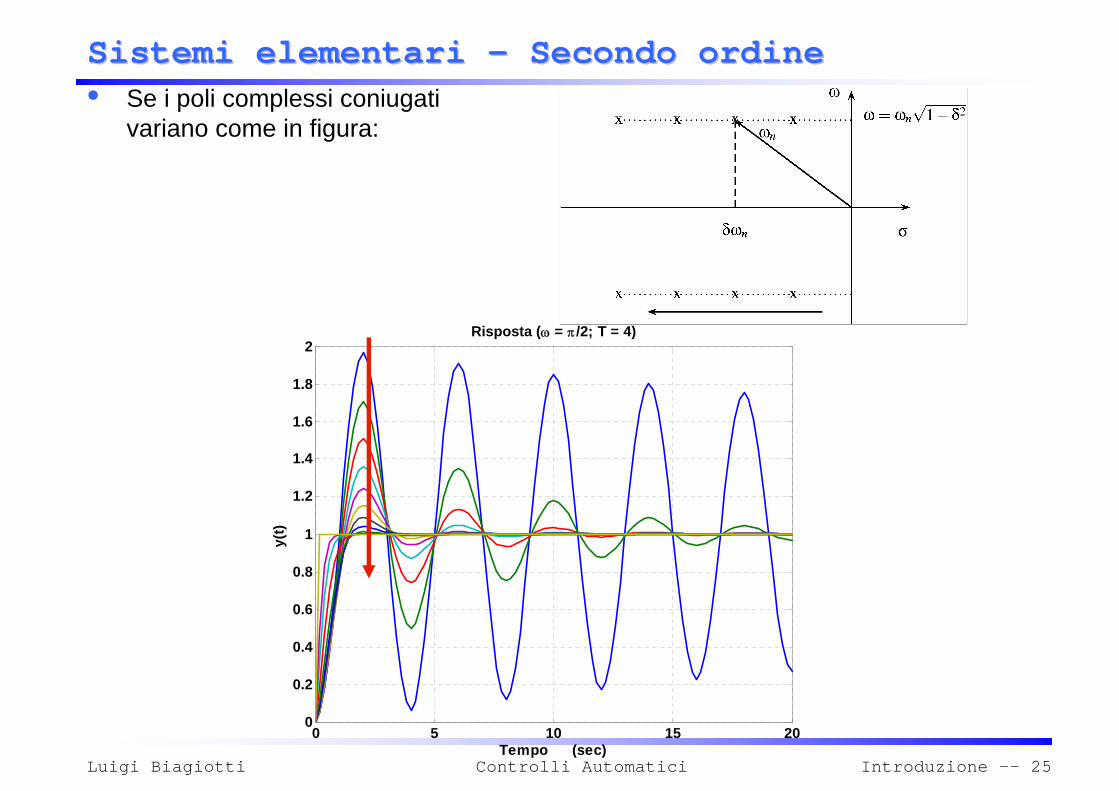
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Se i poli complessi coniugati
variano come in figura:
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Tempo (sec)
y(t)
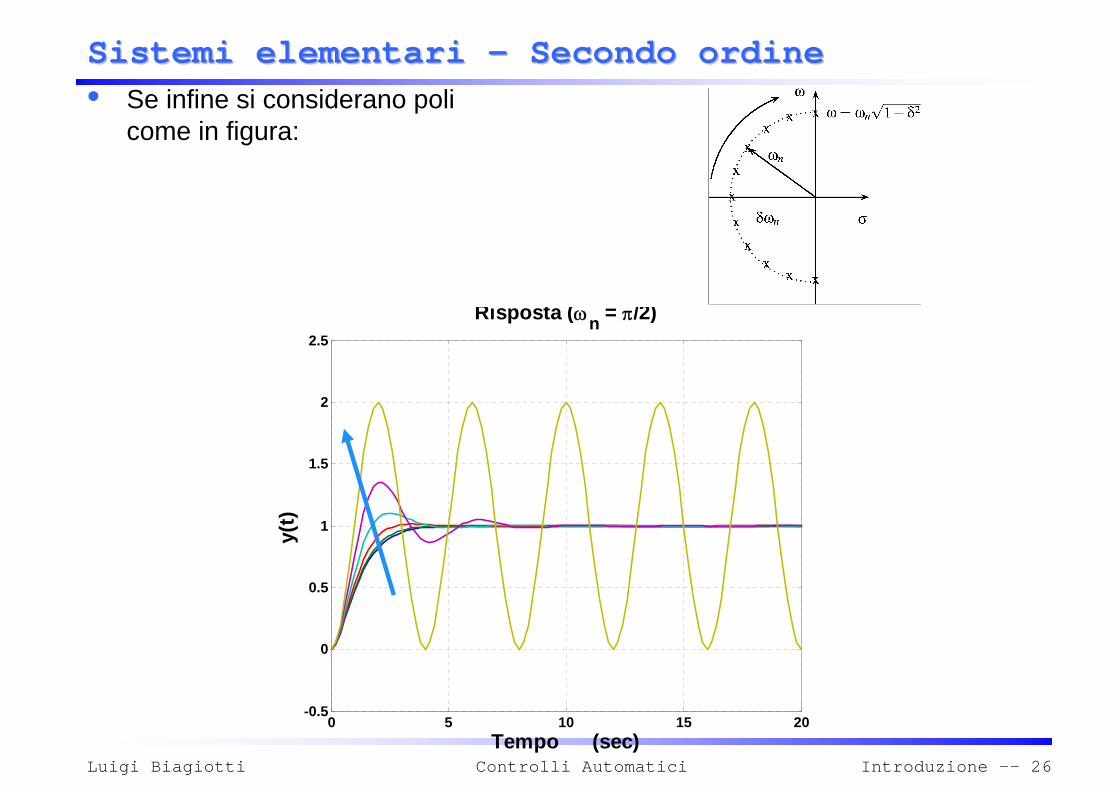
Risposta (ω = π /2; T = 4)
Luigi Biagiotti Introduzione -- 26Controlli Automatici
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Se infine si considerano poli
come in figura:
0 5 10 15 20-0.5
0
0.5
1
1.5
2
2.5
Tempo (sec)
y(t)
Risposta (ωn = π/2)
Luigi Biagiotti Introduzione -- 27Controlli Automatici
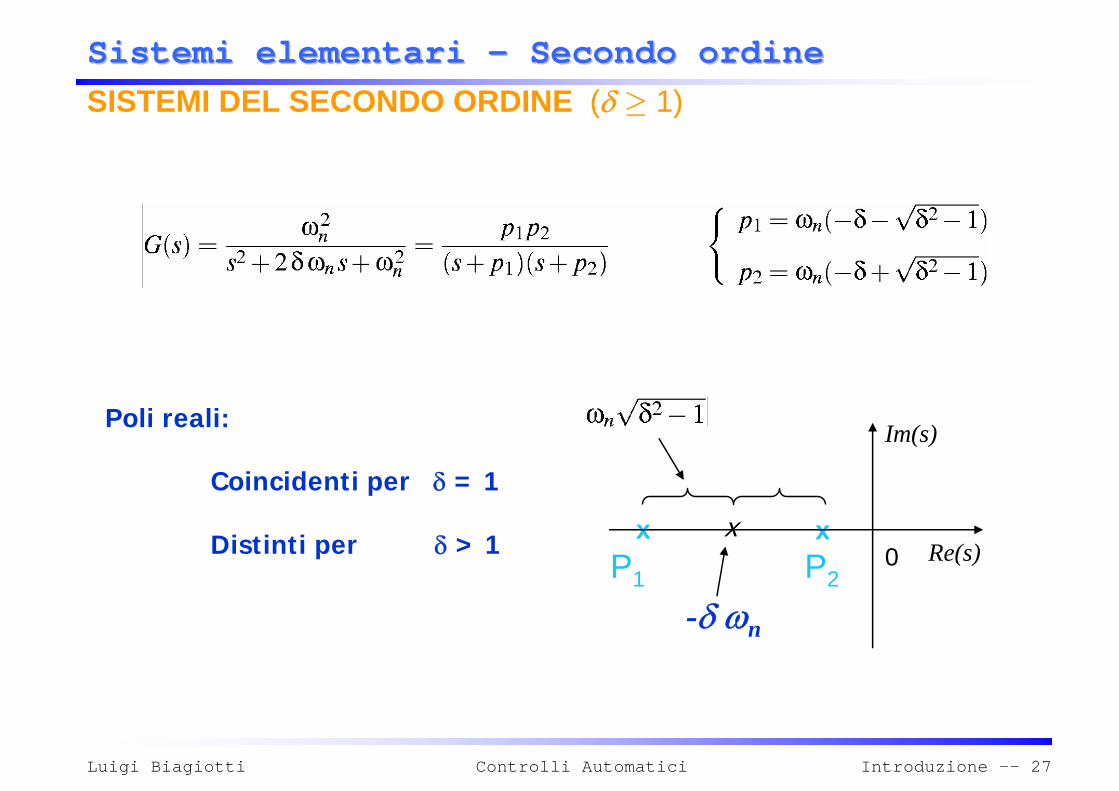
SistemiSistemi elementarielementari –– SecondoSecondo ordineordineSISTEMI DEL SECONDO ORDINE (δ ≥ 1)
Re(s)
Im(s)
0P1
xxP2
x
-δ ωn
Poli reali:
Coincidenti per δ = 1
Distinti per δ > 1
Luigi Biagiotti Introduzione -- 28Controlli Automatici
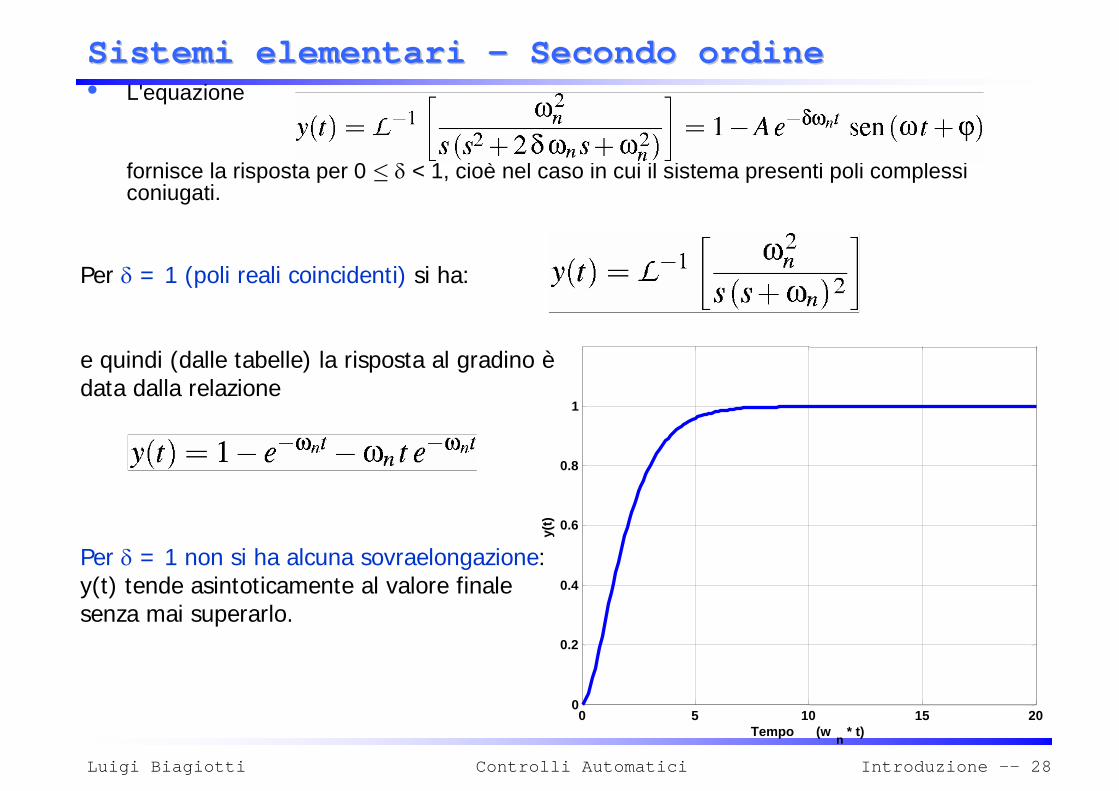
Per δ = 1 (poli reali coincidenti) si ha:
e quindi (dalle tabelle) la risposta al gradino èdata dalla relazione
Per δ = 1 non si ha alcuna sovraelongazione: y(t) tende asintoticamente al valore finale senza mai superarlo.
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• L'equazione
fornisce la risposta per 0 · δ < 1, cioè nel caso in cui il sistema presenti poli complessiconiugati.
0 5 10 15 200
0.2
0.4
0.6
0.8
1
Tempo (w n * t)
y(t)
Luigi Biagiotti Introduzione -- 29Controlli Automatici
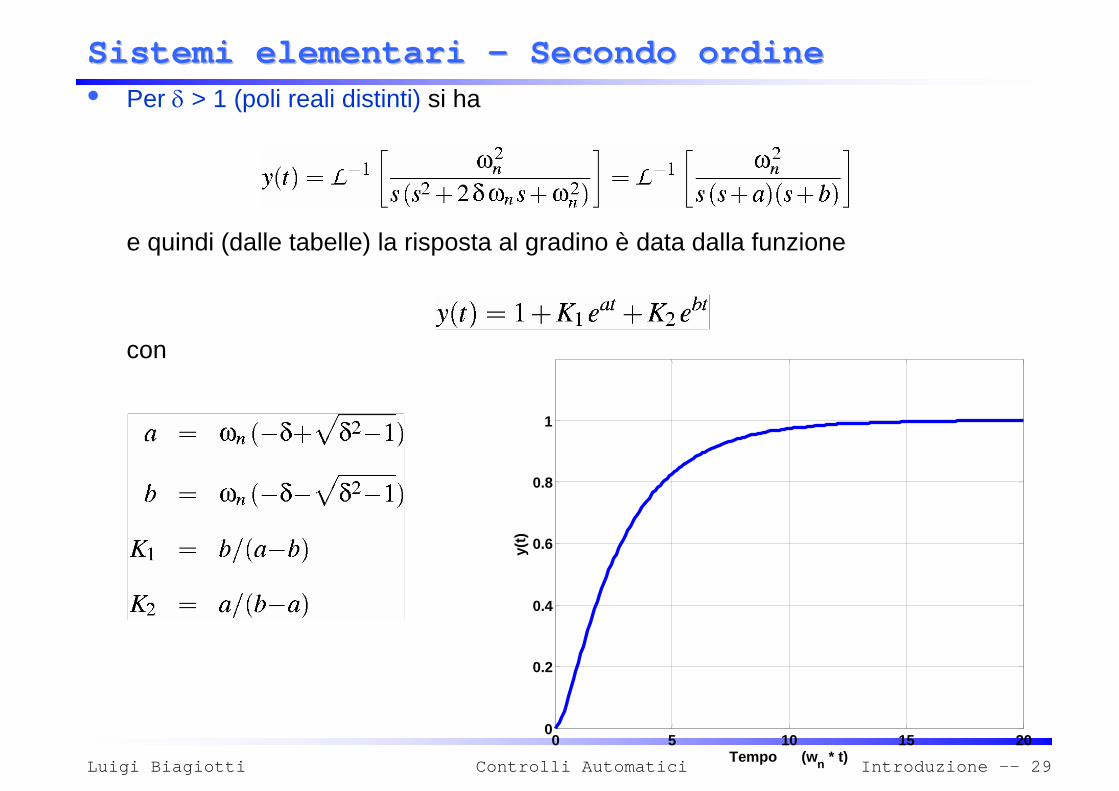
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine• Per δ > 1 (poli reali distinti) si ha
e quindi (dalle tabelle) la risposta al gradino è data dalla funzione
con
0 5 10 15 200
0.2
0.4
0.6
0.8
1
Tempo (wn * t)
y(t)
Luigi Biagiotti Introduzione -- 30Controlli Automatici
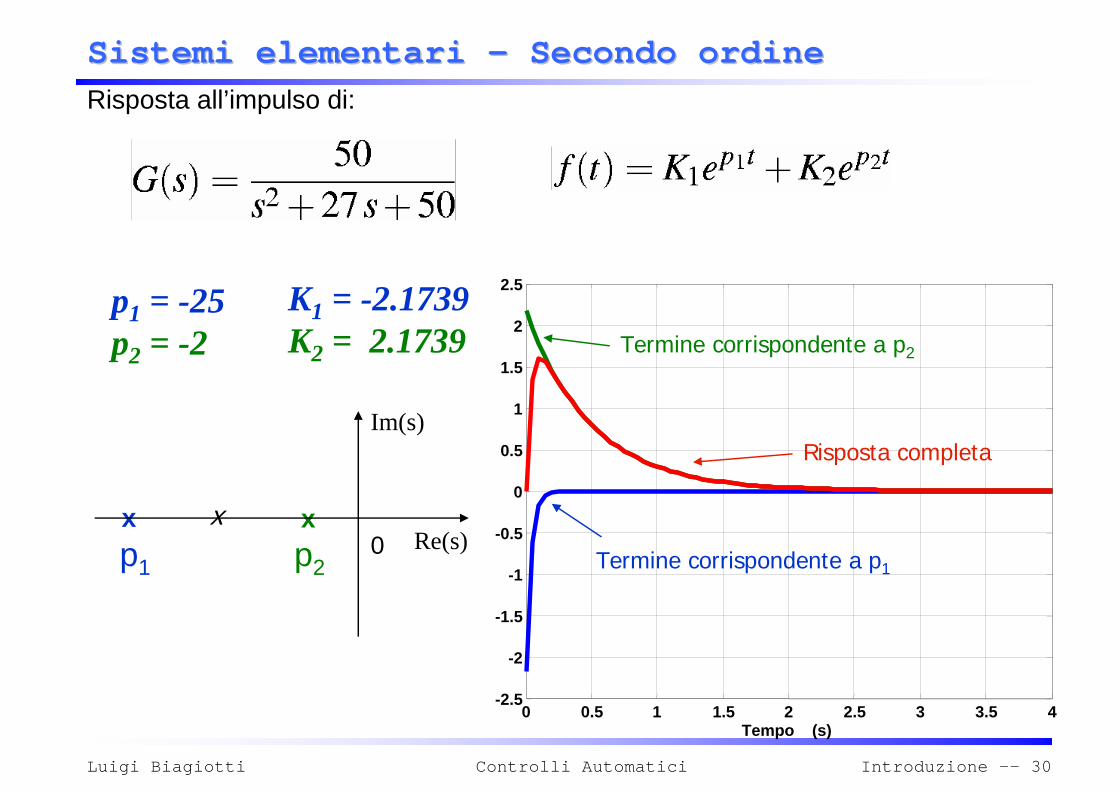
SistemiSistemi elementarielementari –– SecondoSecondo ordineordineRisposta all’impulso di:
Re(s)
Im(s)
0p1
xxp2
x
p1 = -25p2 = -2
Termine corrispondente a p1
Termine corrispondente a p2
Risposta completa
K1 = -2.1739K2 = 2.1739
0 0.5 1 1.5 2 2.5 3 3.5 4-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Tempo (s)
Luigi Biagiotti Introduzione -- 31Controlli Automatici
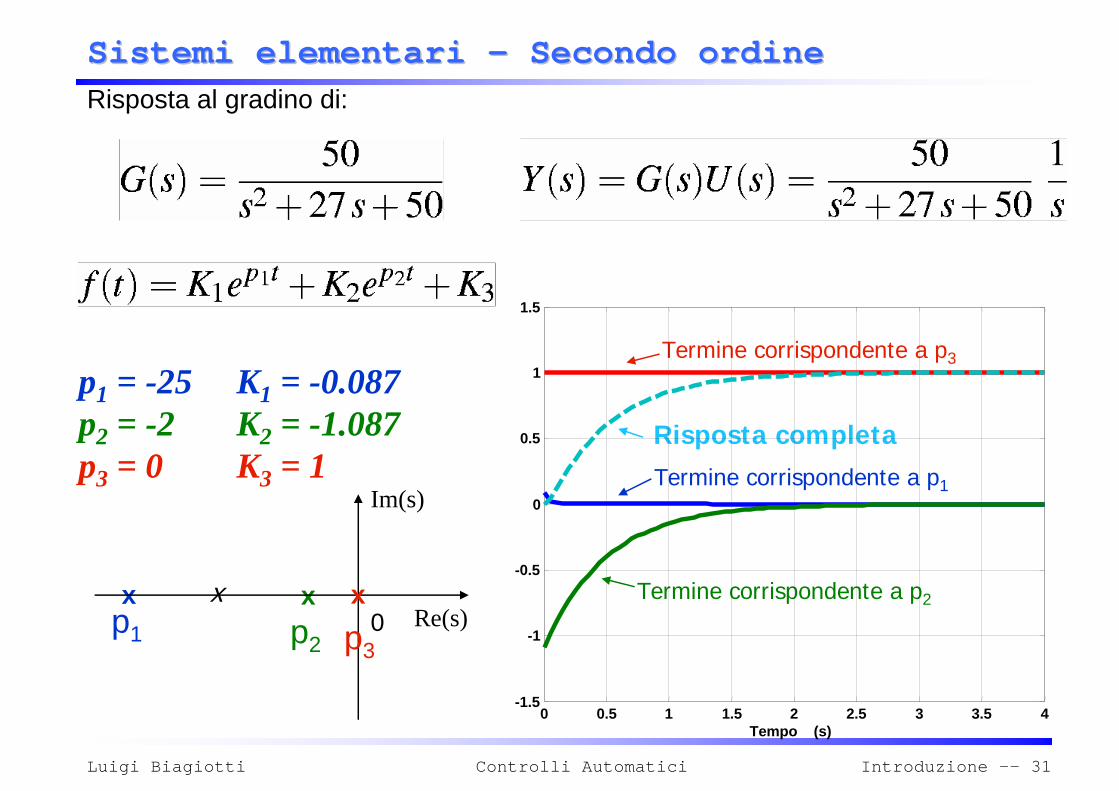
SistemiSistemi elementarielementari –– SecondoSecondo ordineordineRisposta al gradino di:
Re(s)
Im(s)
0p1
xxp2
x
p1 = -25p2 = -2p3 = 0
x
p3
Termine corrispondente a p1
Termine corrispondente a p2
Termine corrispondente a p3
Risposta completa
K1 = -0.087K2 = -1.087K3 = 1
0 0.5 1 1.5 2 2.5 3 3.5 4-1.5
-1
-0.5
0
0.5
1
1.5
Tempo (s)
Luigi Biagiotti Introduzione -- 32Controlli Automatici
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine con zerocon zeroSia data la funzione
Si può scrivere:
Da cui
Luigi Biagiotti Introduzione -- 33Controlli Automatici
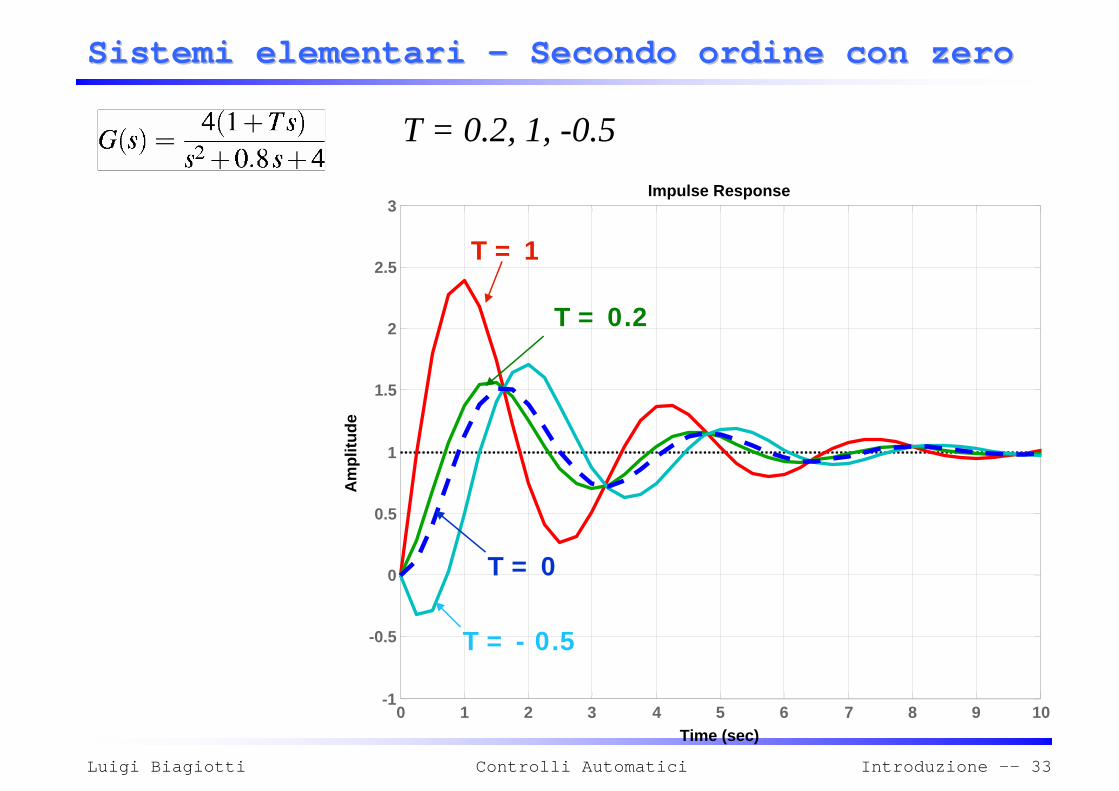
SistemiSistemi elementarielementari –– SecondoSecondo ordineordine con zerocon zero
0 1 2 3 4 5 6 7 8 9 10-1
-0.5
0
0.5
1
1.5
2
2.5
3Impulse Response
Time (sec)
Am
plitu
de
T = 0.2
T = 0
T = - 0.5
T = 1
T = 0.2, 1, -0.5

Ing. Luigi BiagiottiTel. 051 20939903
e-mail: [email protected]://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICIIngegneria della Gestione Industriale e della Integrazione di Impresa
http://www.automazione.ingre.unimore.it/pages/corsi/ControlliAutomaticiGestionale.htm
Sistemi elementari del 1Sistemi elementari del 1o o e 2e 2o o ordineordineFINEFINE