
Reti Correttrici - Automazione@ingre - Home Page · Controlli Automatici Reti Correttrici -- 3 Rete...
26
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/ControlliAutomaticiGestionale.htm Ing. Federica Grossi Tel. 059 2056333 e-mail: [email protected] http://www.dii.unimore.it/wiki/index.php/Federica_Grossi RETI CORRETTRICI
Transcript of Reti Correttrici - Automazione@ingre - Home Page · Controlli Automatici Reti Correttrici -- 3 Rete...
CONTROLLI AUTOMATICI
Ingegneria Gestionalehttp://www.automazione.ingre.unimore.it/pages/corsi/ControlliAutomaticiGestionale.htm
Ing. Federica Grossi
Tel. 059 2056333
e-mail: [email protected]
http://www.dii.unimore.it/wiki/index.php/Federica_Grossi
RETI CORRETTRICI
Reti Correttrici -- 2Controlli Automatici
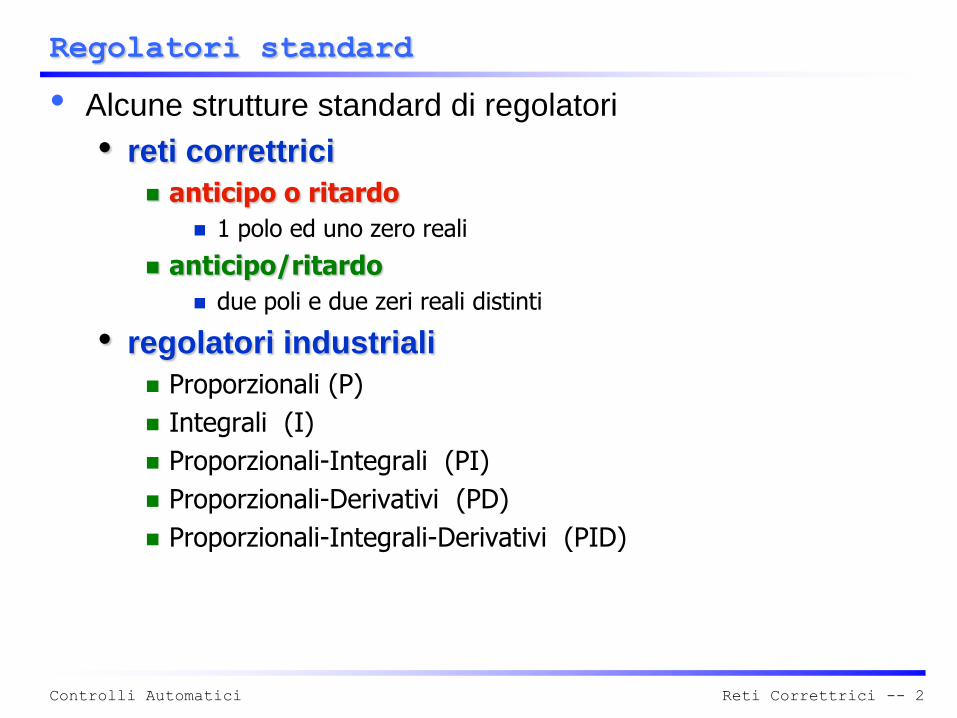
Regolatori standard
• Alcune strutture standard di regolatori
• reti correttrici
anticipo o ritardo
1 polo ed uno zero reali
anticipo/ritardo
due poli e due zeri reali distinti
• regolatori industriali
Proporzionali (P)
Integrali (I)
Proporzionali-Integrali (PI)
Proporzionali-Derivativi (PD)
Proporzionali-Integrali-Derivativi (PID)
Reti Correttrici -- 3Controlli Automatici
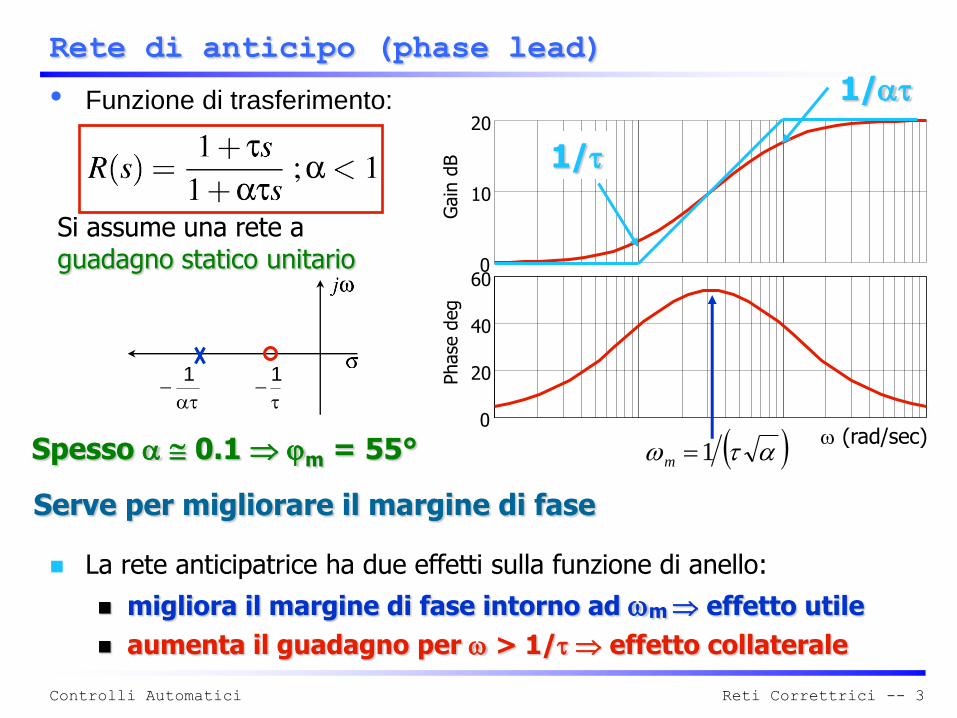
Rete di anticipo (phase lead)
• Funzione di trasferimento:
Spesso 0.1 m = 55°
Serve per migliorare il margine di fase
0
10
20
Gain
dB
(rad/sec)0
20
40
60
Phase
deg
1/
1/
1m
Si assume una rete aguadagno statico unitario
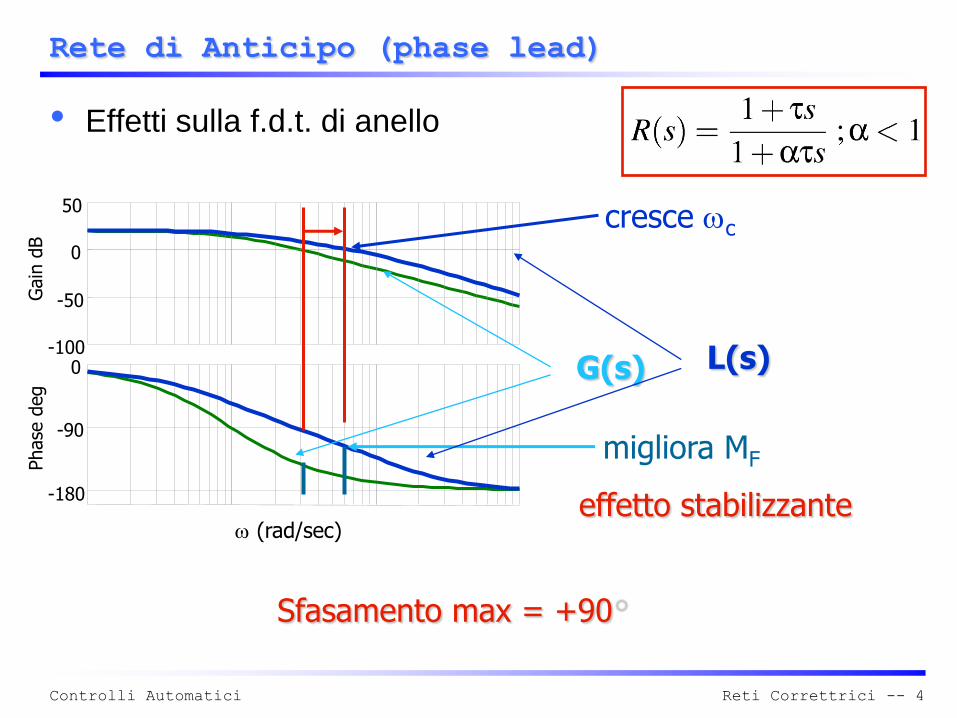
La rete anticipatrice ha due effetti sulla funzione di anello:
migliora il margine di fase intorno ad m effetto utile
aumenta il guadagno per > 1/ effetto collaterale
1 1
Reti Correttrici -- 4Controlli Automatici
Rete di Anticipo (phase lead)
-100
-50
0
50
Gain
dB
(rad/sec)
-90
-180
0
Phase
deg
effetto stabilizzante
migliora MF
cresce c
• Effetti sulla f.d.t. di anello
G(s)
Sfasamento max = +90
L(s)

Reti Correttrici -- 5Controlli Automatici
Ruolo dei parametri
10-2
10-1
100
101
102
0
30
60
Phase (
deg)
0
5
10
15
Magnitu
de (
dB
)
Bode Diagram
Frequency (rad/sec)
fissato
Variando il parametro si sposta il puntodi intervento della rete lasciando fisso illivello di sfasamento positivo
10-2
10-1
100
101
102
0
30
60
Phase (
deg)
0
5
10
15
Magnitu
de (
dB
)
Bode Diagram
Frequency (rad/sec)
fissato
Variando il parametro si varia il livelloe la posizione del picco di sfasamento positivo

Reti Correttrici -- 6Controlli Automatici
Reti anticipatrici formule di inversione
• L’obiettivo è di identificare delle formule per il progetto dei gradi di
libertà (, ) al fine di assegnare una certa pulsazione di
attraversamento e un certo margine di fase desiderati
• NOTA :La rete sfasa in anticipo e amplifica. Quindi la pulsazione di
attraversamento desiderata c* deve essere >= a quella del sistema
esteso e inoltre la fase del sistema esteso per = c* deve essere
minore di -180o + Mf* (Mf* margine di fase desiderato).
• Problema: Dati valori desiderati (M*, *,c*) (con M* > 1, 0 < * < 90o)
identificare le formule per trovare (, ) della rete che alla pulsazione
= c* amplifichi di M* e sfasi di *

Reti Correttrici -- 7Controlli Automatici
• I valori di (, ) che garantiscono un’amplificazione pari a M* e uno
sfasamento * (con M* > 1 e 0 < * < 90° ) per = c* sono:
Reti anticipatrici formule di inversione
• Affinché = c* sia la pulsazione di rottura, vogliamo che per = c*
si abbia guadagno unitario (in decibel 0dB):
M* |G(c* )|=1 (in decibel M*dB+|G(c* )|dB=0)
• Affinché si abbia margine di fase desiderato (Mf*) per = c* la fase
dovrebbe essere -180° +Mf*
Lo sfasamento * da introdurre è quindi dato da
* +arg(G(c* ))= -180° +Mf*

Reti Correttrici -- 8Controlli Automatici
10-1
100
101
102
103
104
0
30
60
Phase (
deg)
0
5
10
15
20
Magnitude (
dB
)
Bode Diagram
Frequency (rad/sec)
• Attenzione: non tutti gli sfasamenti 0 < * < 90o e le attenuazioni M*>1
possono essere arbitrariamente ottenuti con > 0 e 0 < <1.
• Infatti mentre è facile verificare che 0 < * < 90o e M* > 1 garantiscono
che > 0 e < 1, si ha che
Reti anticipatrici formule di inversione

Reti Correttrici -- 9Controlli Automatici
• Progetto mediante formule di inversione:
• Dati del problema:
Sistema esteso Ge(s)
Pulsazione di attraversamento c* e margine di fase Mf*
• Algoritmo per il progetto della rete anticipatrice
Reti anticipatrici formule di inversione
Step1: Calcolare e (lettura diagramma di Bode)
Step3: Calcolare (, ) mediante le formule di inversione
Step2: Calcolare
Verificando che
(ovvero che )
(ovvero che )

Reti Correttrici -- 10Controlli Automatici
Esempio
specifiche
-150
-100
-50
0
50
100
Magnitu
de (
dB
)
10-1
100
101
102
103
104
-270
-225
-180
-135
-90
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
-200
-150
-100
-50
0
50
100
Magnitu
de (
dB
)
10-1
100
101
102
103
104
105
-270
-180
-90
0
90
Phase (
deg)
Bode Diagram
Gm = 23.1 dB (at 279 rad/sec) , Pm = 51.2 deg (at 54.9 rad/sec)
Frequency (rad/sec)
Sistema non compensato
Sistema compensato

Reti Correttrici -- 11Controlli Automatici
-80
-60
-40
-20
0
20
40
Magnitu
de (
dB
)
10-2
10-1
100
101
102
103
-180
-135
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
Esempio (code di assestamento)
specifiche
10-2
10-1
100
101
102
103
-180
-90
0
90
Phase (
deg)
-80
-60
-40
-20
0
20
40
Magnitu
de (
dB
)
Bode Diagram
Gm = Inf dB (at Inf rad/sec) , Pm = 73.5 deg (at 29.4 rad/sec)
Frequency (rad/sec)
La dinamica che ci si aspetta in retro e’ quella di una coppia cc con

Reti Correttrici -- 12Controlli Automatici
-60 -50 -40 -30 -20 -10 0-30
-20
-10
0
10
20
300.86 0.76 0.64 0.5 0.34 0.16
60
0.5 0.34 0.16
0.985
0.94
0.94
0.76 0.64
40
0.86
50
0.985
102030
Root Locus
Real Axis
Imagin
ary
Axis
100
101
102
-180
-135
-90
-45
0
Phase (
deg)
-20
-10
0
10
20
30
Magnitu
de (
dB
)
Bode Diagram
Gm = Inf dB (at Inf rad/sec) , Pm = 73.5 deg (at 29.4 rad/sec)
Frequency (rad/sec)
Zoom sistema compensato
Ci aspettiamo quindi che ilsistema in retro abbia:1. Coppia di poli cc
2. Coppia polo-zero reale “moltovicini” (quasi cancellazione!!)
1
1
2
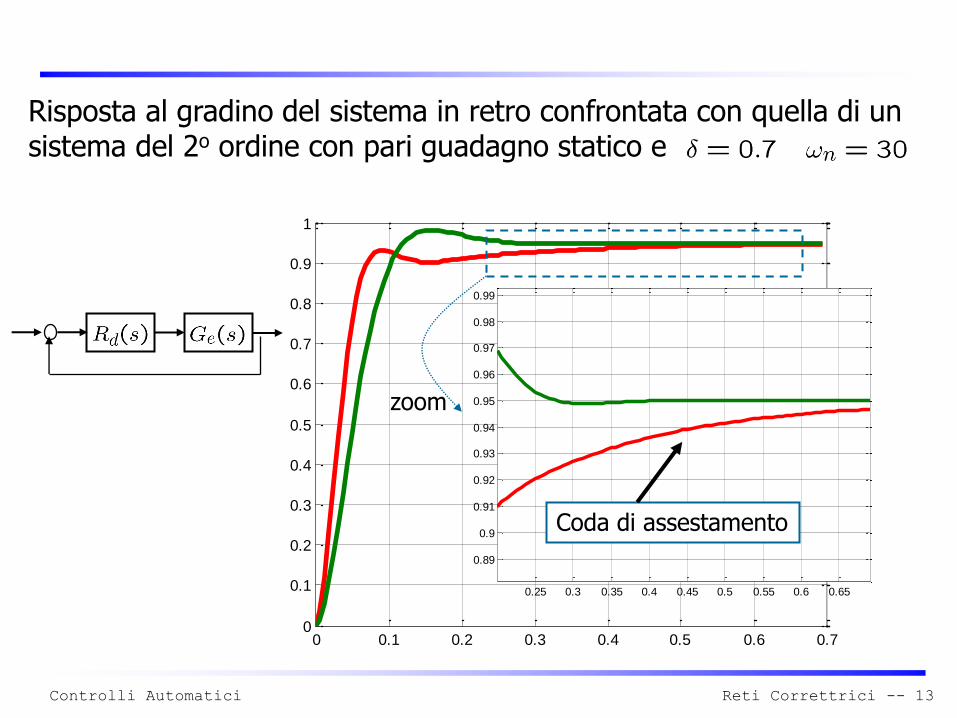
Reti Correttrici -- 13Controlli Automatici
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Risposta al gradino del sistema in retro confrontata con quella di unsistema del 2o ordine con pari guadagno statico e
0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65
0.89
0.9
0.91
0.92
0.93
0.94
0.95
0.96
0.97
0.98
0.99
zoom
Coda di assestamento

Reti Correttrici -- 14Controlli Automatici
Effetti collaterali introdotti dallo zero
polo-zero della retedi anticipo
1) La rete contiene uno zero collocato strutturalmente a frequenza inferiore a quella di attraversamento
2) nella funzione di trasferimento del sistema in retroazione lo zero fungerà da attrattore per un polo dell’impianto, quindi il sistema in retro potrebbe avere una coppia polo-zero con valori comparabili (quasi cancellazione)
3) La dinamica residua complessiva risulterà quindi più lenta di quella imposta con la frequenza di
attraversamento: coda di assestamento
Esempio precedente
La calibrazione della rete piazza lo zero strutturalmente a frequenzainferiore rispetto a quella di attraversamento desiderata. Questo ha due possibili conseguenze:
Reti Correttrici -- 15Controlli Automatici
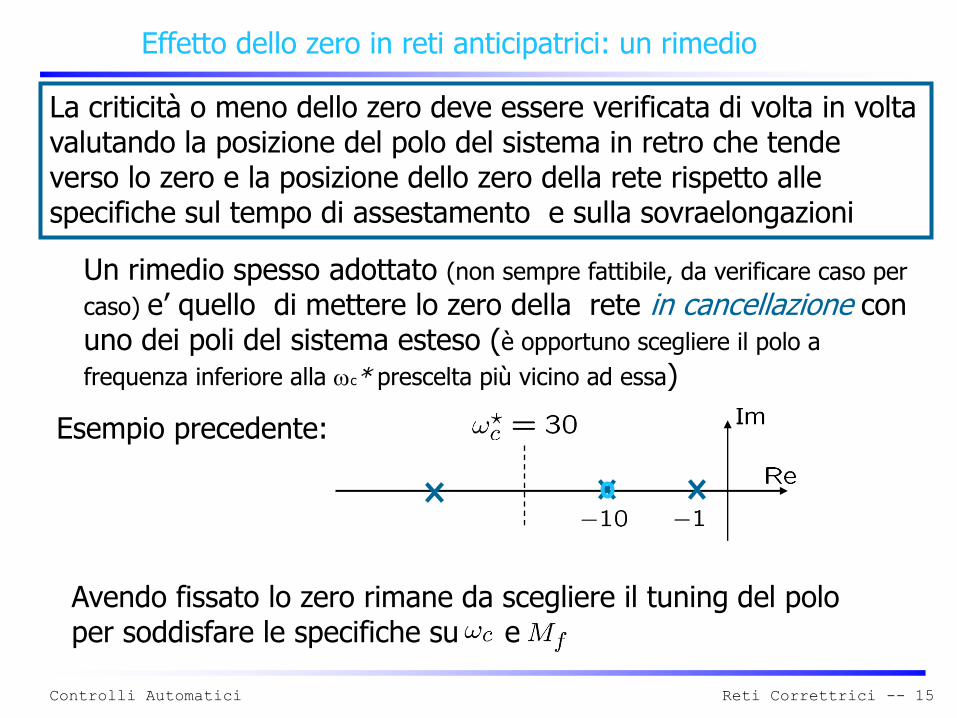
Un rimedio spesso adottato (non sempre fattibile, da verificare caso per
caso) e’ quello di mettere lo zero della rete in cancellazione con uno dei poli del sistema esteso (è opportuno scegliere il polo a
frequenza inferiore alla c* prescelta più vicino ad essa)
Esempio precedente:
Avendo fissato lo zero rimane da scegliere il tuning del poloper soddisfare le specifiche su e
Effetto dello zero in reti anticipatrici: un rimedio
La criticità o meno dello zero deve essere verificata di volta in voltavalutando la posizione del polo del sistema in retro che tende verso lo zero e la posizione dello zero della rete rispetto alle specifiche sul tempo di assestamento e sulla sovraelongazioni
Reti Correttrici -- 16Controlli Automatici
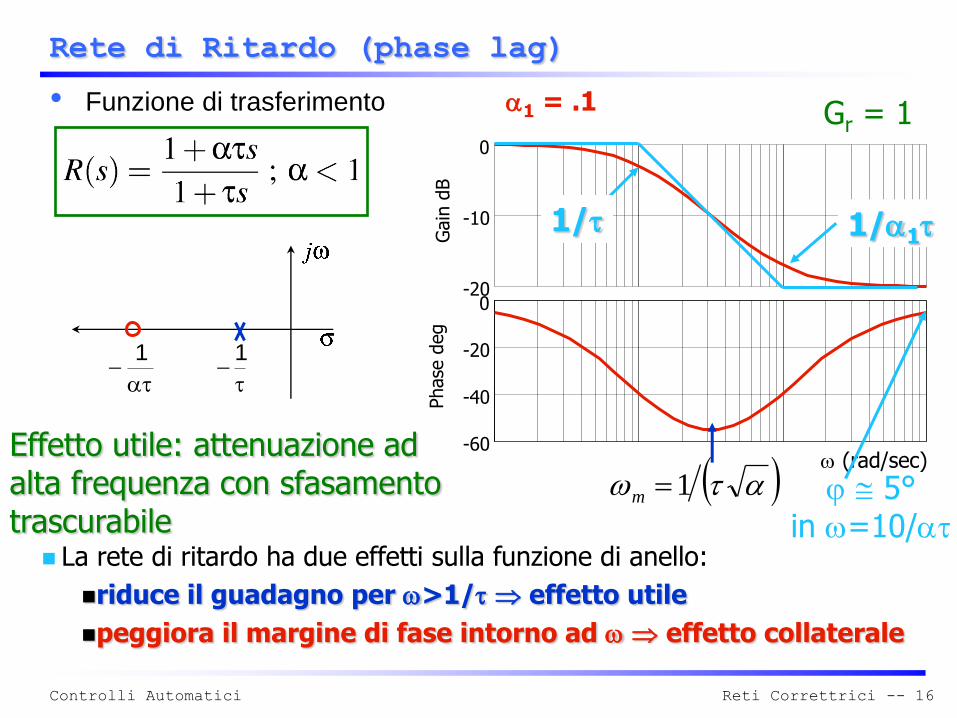
Rete di Ritardo (phase lag)
• Funzione di trasferimento
Effetto utile: attenuazione ad alta frequenza con sfasamento trascurabile
-20
-10
0
Gain
dB
(rad/sec)-60
-40
-20
0
Phase
deg
1/ 1/1
1m
Gr = 1
5°in =10/
1 = .1
La rete di ritardo ha due effetti sulla funzione di anello:
riduce il guadagno per >1/ effetto utile
peggiora il margine di fase intorno ad effetto collaterale
1 1

Reti Correttrici -- 17Controlli Automatici
-20
-15
-10
-5
0
Magnitu
de (
dB
)
10-2
10-1
100
101
102
103
-60
-30
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
fissato
10-2
10-1
100
101
102
103
-60
-30
0
Phase (
deg)
-15
-10
-5
0
Magnitu
de (
dB
)
Bode Diagram
Frequency (rad/sec)
fissato
Ruolo dei parametri
Variando il parametro si sposta il puntodi intervento della rete lasciando fisso illivello di attenuazione massimo
Variando il parametro si varia il livellodi attenuazione massima lasciando fissoil punto di intervento
Reti Correttrici -- 18Controlli Automatici
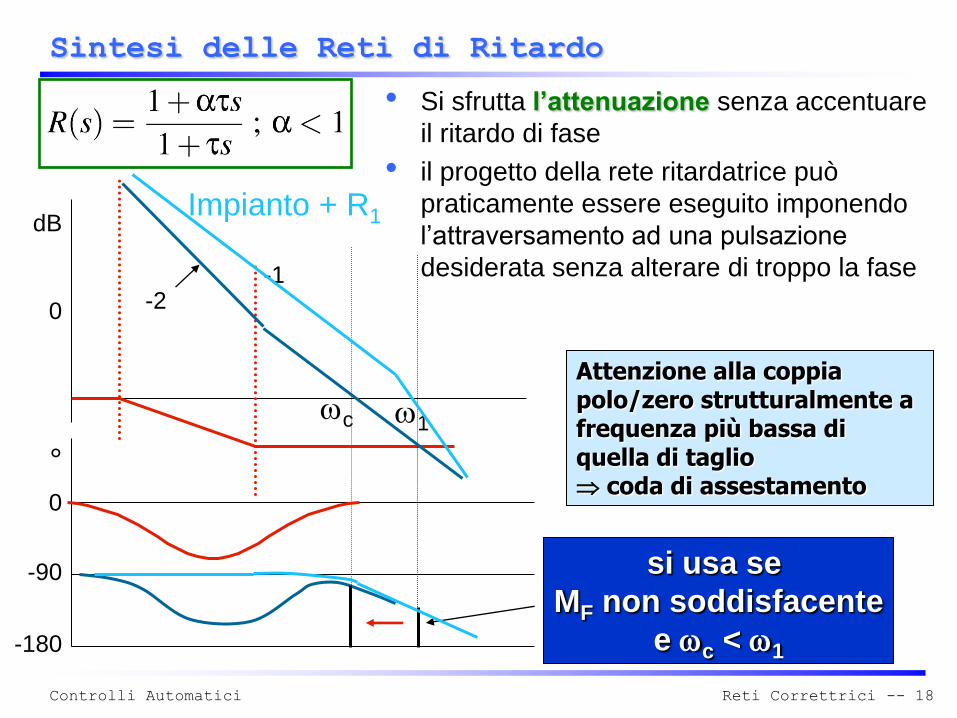
Sintesi delle Reti di Ritardo
• Si sfrutta l’attenuazione senza accentuare
il ritardo di fase
• il progetto della rete ritardatrice può
praticamente essere eseguito imponendo
l’attraversamento ad una pulsazione
desiderata senza alterare di troppo la fase
0
dB
°
0
-90
-180
Impianto + R1
c
si usa se
MF non soddisfacente
e c < 1
1
-2-1
Attenzione alla coppia polo/zero strutturalmente a frequenza più bassa di quella di taglio coda di assestamento
Reti Correttrici -- 19Controlli Automatici
Reti ritardatrici formule di inversione
• L’obbiettivo è di identificare delle formule per il progetto dei gradi di
libertà (, ) al fine di assegnare una certa pulsazione di
attraversamento e un certo margine di fase desiderati
• NOTA :La rete attenua e sfasa in ritardo. Quindi la pulsazione di
attraversamento desiderata c* deve essere <= a quella del sistema
esteso e inoltre la fase del sistema esteso per = c* deve essere
maggiore di -180o + Mf* (Mf* margine di fase desiderato).
• Problema: Dati valori desiderati (M*, *,c*) (con 0 < M* < 1,
-90 < * < 0o) identificare le formule per trovare (, ) della rete che
alla pulsazione = c* attenui di M* e sfasi di *
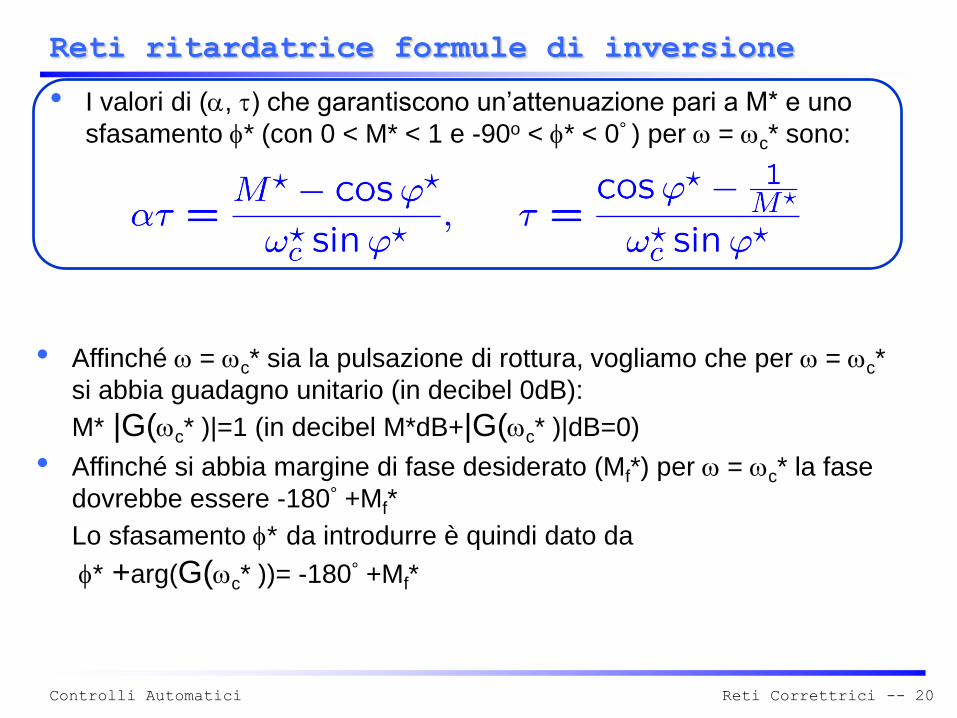
Reti Correttrici -- 20Controlli Automatici
• I valori di (, ) che garantiscono un’attenuazione pari a M* e uno
sfasamento * (con 0 < M* < 1 e -90o < * < 0° ) per = c* sono:
Reti ritardatrice formule di inversione
• Affinché = c* sia la pulsazione di rottura, vogliamo che per = c*
si abbia guadagno unitario (in decibel 0dB):
M* |G(c* )|=1 (in decibel M*dB+|G(c* )|dB=0)
• Affinché si abbia margine di fase desiderato (Mf*) per = c* la fase
dovrebbe essere -180° +Mf*
Lo sfasamento * da introdurre è quindi dato da
* +arg(G(c* ))= -180° +Mf*

Reti Correttrici -- 21Controlli Automatici
-20
-15
-10
-5
0
Magnitude (
dB
)
10-1
100
101
102
103
104
-60
-30
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
• Attenzione: non tutti gli sfasamenti -90o < * < 0o e le attenuazioni
0< M* <1 possono essere arbitrariamente ottenuti con > 0 e
0 < <1.
• Infatti mentre è facile verificare che -90o < * < 0o e 0 < M* <1
garantiscono che > 0 e < 1, si ha che
Reti ritardatrici formule di inversione

Reti Correttrici -- 22Controlli Automatici
• Progetto mediante formule di inversione:
• Dati del problema:
Sistema esteso Ge(s)
Pulsazione di attraversamento c* e margine di fase Mf*
• Algoritmo per il progetto della rete ritardatrice
Reti ritardatrici formule di inversione
Step1: Calcolare e (lettura diagramma di Bode)
Step3: Calcolare (, ) mediante le formule di inversione
Step2: Calcolare
Verificando che
(ovvero che )
(ovvero che )

Reti Correttrici -- 23Controlli Automatici
Esempio
specifiche
-100
-50
0
50
Magnitu
de (
dB
)
100
101
102
103
104
105
-270
-180
-90
0
Phase (
deg)
Bode Diagram
Gm = -4.36 dB (at 1.1e+003 rad/sec) , Pm = -13.9 deg (at 1.38e+003 rad/sec)
Frequency (rad/sec)
-150
-100
-50
0
50
Magnitu
de (
dB
)
10-1
100
101
102
103
104
105
-270
-180
-90
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
Sistema non compensato
Sistema compensato
Reti Correttrici -- 24Controlli Automatici
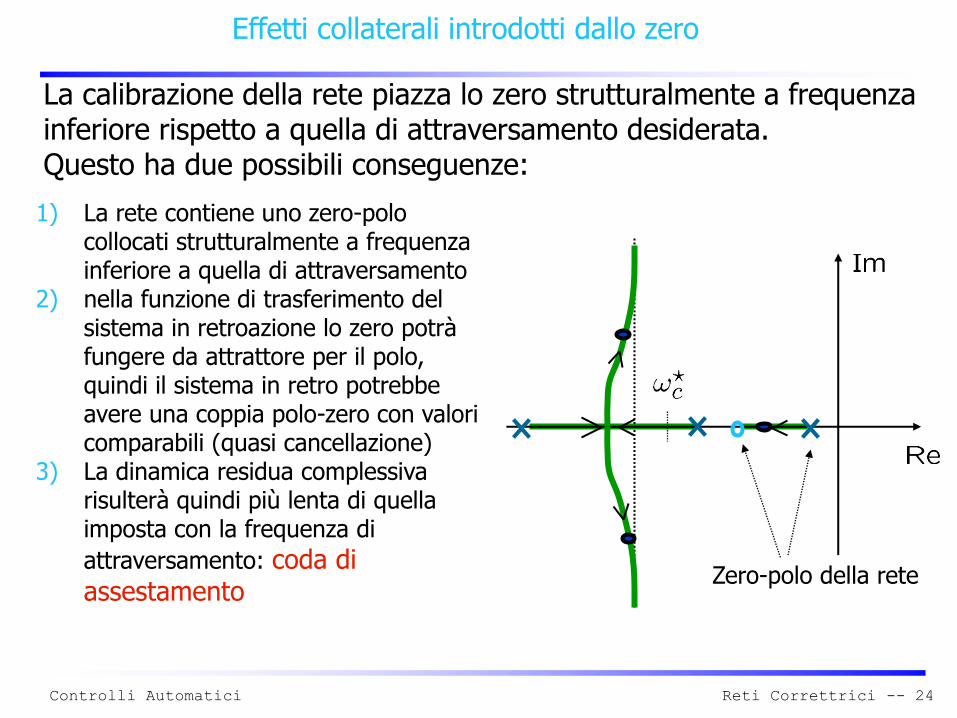
Effetti collaterali introdotti dallo zero
1) La rete contiene uno zero-polo collocati strutturalmente a frequenza inferiore a quella di attraversamento
2) nella funzione di trasferimento del sistema in retroazione lo zero potrà fungere da attrattore per il polo, quindi il sistema in retro potrebbe avere una coppia polo-zero con valori comparabili (quasi cancellazione)
3) La dinamica residua complessiva risulterà quindi più lenta di quella imposta con la frequenza di
attraversamento: coda di assestamento
La calibrazione della rete piazza lo zero strutturalmente a frequenzainferiore rispetto a quella di attraversamento desiderata. Questo ha due possibili conseguenze:
Zero-polo della rete
Reti Correttrici -- 25Controlli Automatici
1 1 1
1 1 2 2
Re
Im
a
Log|G(j)|
Arg[G(j)]
log(w)
log(w)0
1 2 1 1
1 1 1
Diagramma di Bode asintotico
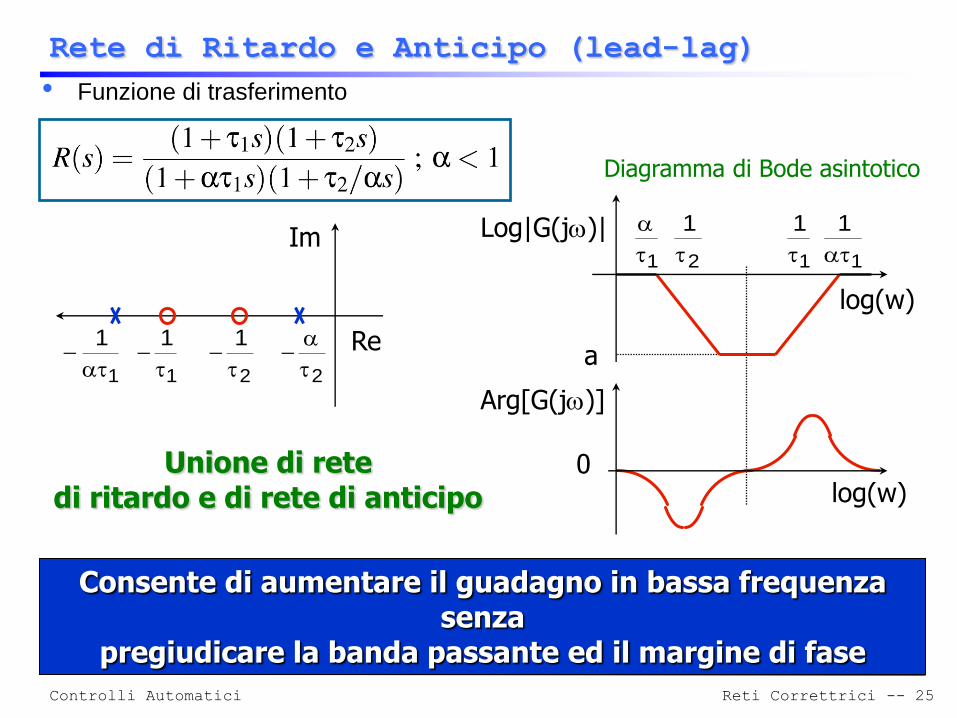
Rete di Ritardo e Anticipo (lead-lag)
• Funzione di trasferimento
Unione di rete di ritardo e di rete di anticipo
Consente di aumentare il guadagno in bassa frequenza senza
pregiudicare la banda passante ed il margine di fase

CONTROLLI AUTOMATICI
Ingegneria Gestionalehttp://www.automazione.ingre.unimore.it/pages/corsi/ControlliAutomaticiGestionale.htm
Ing. Federica Grossi
Tel. 059 2056333
e-mail: [email protected]
http://www.dii.unimore.it/wiki/index.php/Federica_Grossi
RETI CORRETTRICI
FINE


















