
SISTEMI A TEMPO DISCRETO - Automazione@ingre · Lineari Tempo Invarianti (LTI). Se il sistema che...
34
Cristian Secchi Pag. 1 CONTROLLI DIGITALI Laurea Magistrale in Ingegneria Meccatronica SISTEMI A TEMPO DISCRETO SISTEMI A TEMPO DISCRETO Ing. Cristian Secchi Tel. 0522 522235 e-mail: [email protected] http://www.dismi.unimo.it/Members/csecchi Richiami di Controlli Automatici Richiami di Controlli Automatici Il comportamento ingresso-uscita dei sistemi a tempo continuo può essere descritto da equazioni differenziali, che in generale hanno la forma: Molti sistemi di interesse possono essere descritti da equazioni differenziali lineari a parametri concentrati caratterizzate dalla seguente forma semplificata. CD02 -- 2 Cristian Secchi I sistemi descritti da queste equazioni sono detti sistemi Lineari Tempo Invarianti (LTI). Se il sistema che si sta modellando è caratterizzato da un solo ingresso e una sola uscita, si parlerà di sistemi single input single output (SISO).
-
Upload
nguyenngoc -
Category
Documents
-
view
219 -
download
0
Transcript of SISTEMI A TEMPO DISCRETO - Automazione@ingre · Lineari Tempo Invarianti (LTI). Se il sistema che...

Cristian Secchi Pag. 1
CONTROLLI DIGITALILaurea Magistrale in Ingegneria Meccatronica
SISTEMI A TEMPO DISCRETOSISTEMI A TEMPO DISCRETO
Ing. Cristian SecchiTel. 0522 522235
e-mail: [email protected]://www.dismi.unimo.it/Members/csecchi
Richiami di Controlli AutomaticiRichiami di Controlli Automatici
Il comportamento ingresso-uscita dei sistemi a tempo continuo può essere descritto da equazioni differenziali, che in generale hanno la forma:
Molti sistemi di interesse possono essere descritti da equazioni differenziali lineari a parametri concentrati caratterizzate dalla seguente forma semplificata.
CD02 -- 2Cristian Secchi
I sistemi descritti da queste equazioni sono detti sistemi Lineari Tempo Invarianti (LTI).
Se il sistema che si sta modellando è caratterizzato da un solo ingresso e una sola uscita, si parlerà di sistemi single input single output (SISO).

Cristian Secchi Pag. 2
Richiami di Controlli AutomaticiRichiami di Controlli Automatici
Nel corso di Controlli Automatici sono stati trattati sistemi LTI SISO.
E’ possibile passare da una rappresentazione nel dominio dei tempi a una nel dominio complesso e viceversa tramite le operazioni di Trasformata e Antitrasformata di LaplaceTrasformata e Antitrasformata di Laplace.
CD02 -- 3Cristian Secchi
Il vantaggio principale nel passare al dominio complesso è che un’equazione differenziale viene trasformata in un’equazione algebrica più semplice da gestire.
Richiami di Controlli AutomaticiRichiami di Controlli Automatici
Un sistema LTI-SISO può essere descritto nel dominio complesso tramite una Funzione di Trasferimento.
CD02 -- 4Cristian Secchi
La rappresentazione mediante funzione di trasferimento è molto “comoda” e ha consentito di sviluppare un’analisi approfondita del comportamento del sistema, un’analisi delle specifiche e svariate tecniche per il progetto di controllori.

Cristian Secchi Pag. 3
Richiami di Controlli AutomaticiRichiami di Controlli Automatici
Lo schema di controllo finale è:
-Gc(s) Gp(s)
r(t) e(t) y(t)u(t)
Sia il plant che il controllore sono rappresentati da funzioni di trasferimento e, quindi, sono sistemi a tempo continuo. Ma l’azione di controllo deve essere implementata su un calcolatore che è un sistema a tempo discreto
CD02 -- 5Cristian Secchi
discreto…
Occorre sviluppare un framework per la modellazione dei sistemi discreti in modo da poter costruire un’azione di controllo che sia implementabile su di un sistema a microprocessore.
Descrizione di Sistemi a tempo discretoDescrizione di Sistemi a tempo discreto
Equazioni
SISTEMI SISTEMI TEMPOTEMPO--CONTINUICONTINUI
Equazioni alle
SISTEMI SISTEMI TEMPOTEMPO--DISCRETIDISCRETI
Equazioni differenziali
Trasformata di
Equazioni alle differenze
Trasformata ZDD//AA
AA//DD
CD02 -- 6Cristian Secchi
Laplace Trasformata Z
Cristian Secchi Pag. 4
Equazioni alle differenzeEquazioni alle differenze
El b i
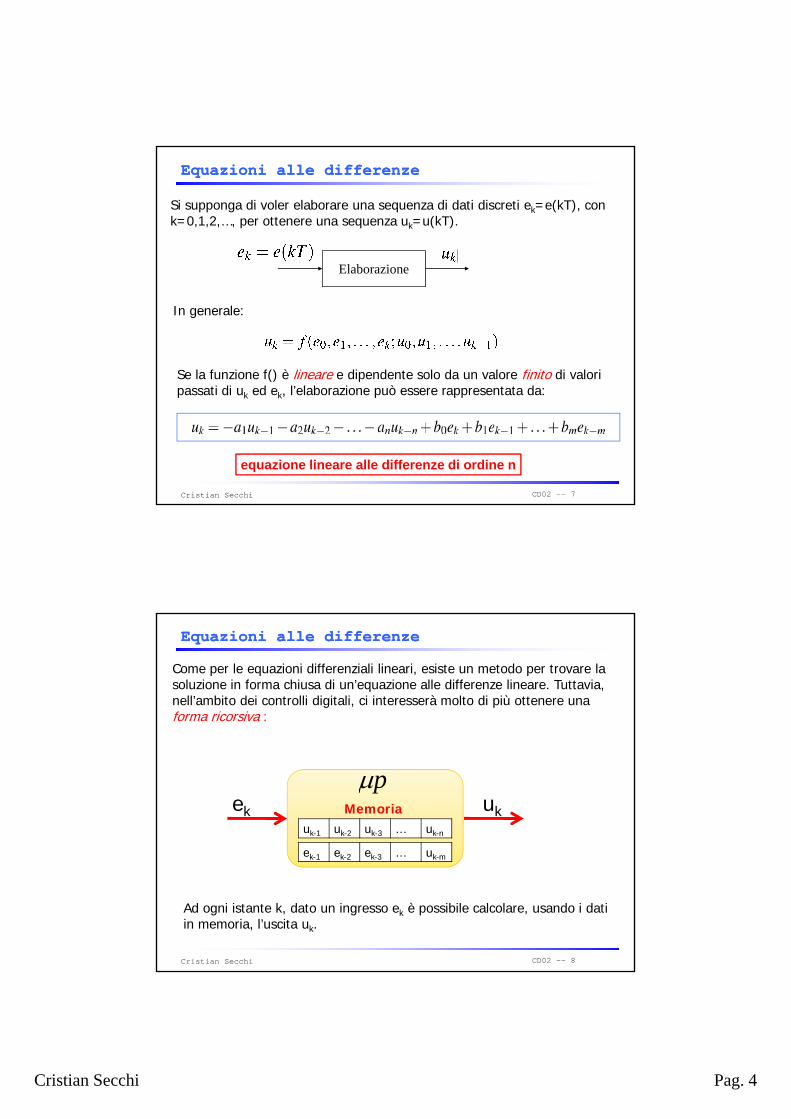
Si supponga di voler elaborare una sequenza di dati discreti ek=e(kT), con k=0,1,2,…, per ottenere una sequenza uk=u(kT).
Elaborazione
In generale:
Se la funzione f() è lineare e dipendente solo da un valore finito di valori i di d l’ l b i ò d
CD02 -- 7Cristian Secchi
equazione lineare alle differenze di ordine n
passati di uk ed ek, l’elaborazione può essere rappresentata da:
Equazioni alle differenzeEquazioni alle differenze
Come per le equazioni differenziali lineari, esiste un metodo per trovare la soluzione in forma chiusa di un’equazione alle differenze lineare. Tuttavia, nell’ambito dei controlli digitali, ci interesserà molto di più ottenere unaforma ricorsiva :
ek uk
pμ
uk-1 uk-2 uk-3 … uk-n
e e e u
Memoria
CD02 -- 8Cristian Secchi
ek-1 ek-2 ek-3 … uk-m
Ad ogni istante k, dato un ingresso ek è possibile calcolare, usando i dati in memoria, l’uscita uk.

Cristian Secchi Pag. 5
La trasformata ZLa trasformata Z
La trasformata Z è un metodo utilizzato per studiare i sistemi discreti. Essa rappresenta essenzialmente l'analogo della trasformata di Laplace per i sistemi continui.
DEFINIZIONE: Sia data una sequenza di valori x ∈ R definita per k =DEFINIZIONE: Sia data una sequenza di valori xk ∈ R, definita per k = 0, 1, 2,… e nulla per k < 0. La Z-trasformata (unilatera) della sequenza xk è la funzione di variabile complessa z definita come:
CD02 -- 9Cristian Secchi
La Z-trasformata è definita in una regione del piano complesso zdetta dominio di convergenza, cioè nell'insieme dei punti z per i quali la serie converge.
La trasformata ZetaLa trasformata Zeta
Nel caso in cui la sequenza di valori xk sia ottenuta campionando uniformemente con periodo T un segnale continuo descritto dalla funzione x(t), t ¸ 0, si avrà che xk = x(kT) (o più semplicemente xk = x(k), k = t/T = 0, 1, 2, … ) e corrispondentemente si scriverà
DIPENDE DAL PERIODO (T)DIPENDE DAL PERIODO (T) DIDI
CD02 -- 10Cristian Secchi
DIPENDE DAL PERIODO (T) DIPENDE DAL PERIODO (T) DIDICAMPIONAMENTOCAMPIONAMENTO
Cristian Secchi Pag. 6
La ZLa Z--trasformatatrasformata
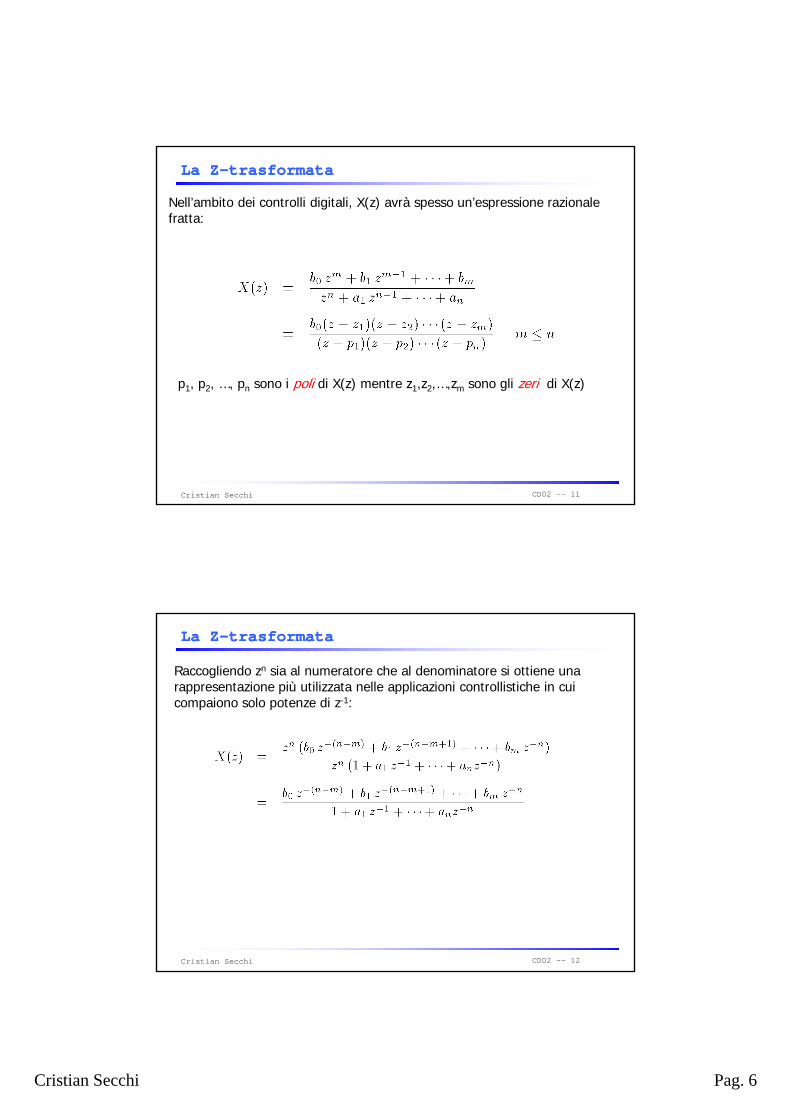
Nell’ambito dei controlli digitali, X(z) avrà spesso un’espressione razionale fratta:
p1 p2 p sono i poli di X(z) mentre z1 z2 z sono gli zeri di X(z)
CD02 -- 11Cristian Secchi
p1, p2, …, pn sono i poli di X(z) mentre z1,z2,…,zm sono gli zeri di X(z)
La ZLa Z--trasformatatrasformata
Raccogliendo zn sia al numeratore che al denominatore si ottiene una rappresentazione più utilizzata nelle applicazioni controllistiche in cui compaiono solo potenze di z-1:
CD02 -- 12Cristian Secchi

Cristian Secchi Pag. 7
La ZLa Z--trasformata trasformata –– Funzioni elementariFunzioni elementari
• Impulso discreto unitario. Sia data la funzione, detta anche funzione delta di Kronecker δ0(t):
• Gradino unitario. Sia data la funzione
CD02 -- 13Cristian Secchi
Serie convergente per |z| > 1
La ZLa Z--trasformata trasformata –– Funzioni elementariFunzioni elementari
• Rampa unitaria. Si consideri la funzione rampa unitaria:
Poichè x(kT) = kT, k = 0, 1, 2, …, la Z-trasformata è
CD02 -- 14Cristian Secchi
Serie convergente per |z| > 1

Cristian Secchi Pag. 8
La ZLa Z--trasformata trasformata –– Funzioni elementariFunzioni elementari
• Funzione potenza ak. Sia data la funzione:
a costante reale o complessa
Dalla definizione si ha
CD02 -- 15Cristian Secchi
Serie convergente per |z| > a
La ZLa Z--trasformatatrasformata
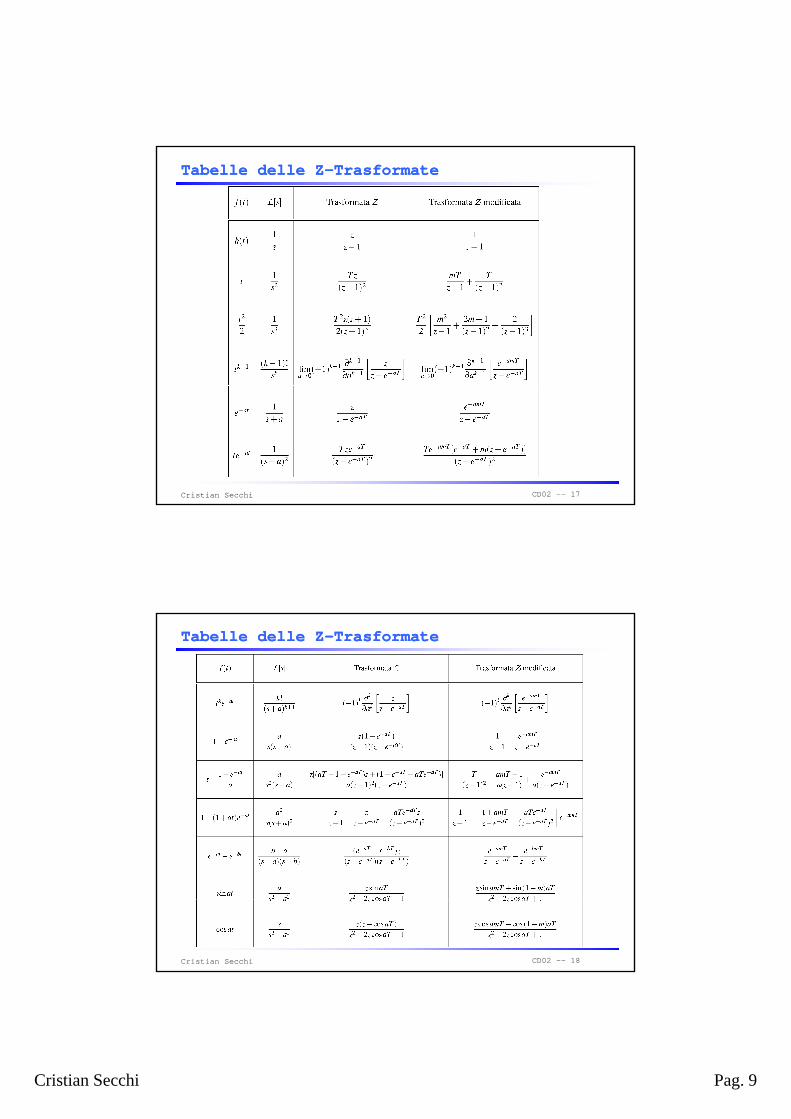
Le trasformate delle funzioni di maggior interesse sono solitamente riportate in tabelle che vengono consultate per la determinazione di Z-trasformate di funzione generiche, in modo analogo a quanto avviene per le tabelle delle trasformate di Laplace.
Tramite le tabelle si possono determinare le Z-trasformate di funzioni di maggior complessità, scomponendo tali funzioni in somme di funzioni più semplici e ricomponendo successivamente le corrispondenti Z-trasformate.
Esempio: Determinare la Z-trasformata di
CD02 -- 16Cristian Secchi
Cristian Secchi Pag. 9
Tabelle delle ZTabelle delle Z--TrasformateTrasformate
CD02 -- 17Cristian Secchi
Tabelle delle ZTabelle delle Z--TrasformateTrasformate
CD02 -- 18Cristian Secchi
Cristian Secchi Pag. 10
La ZLa Z--trasformatatrasformata
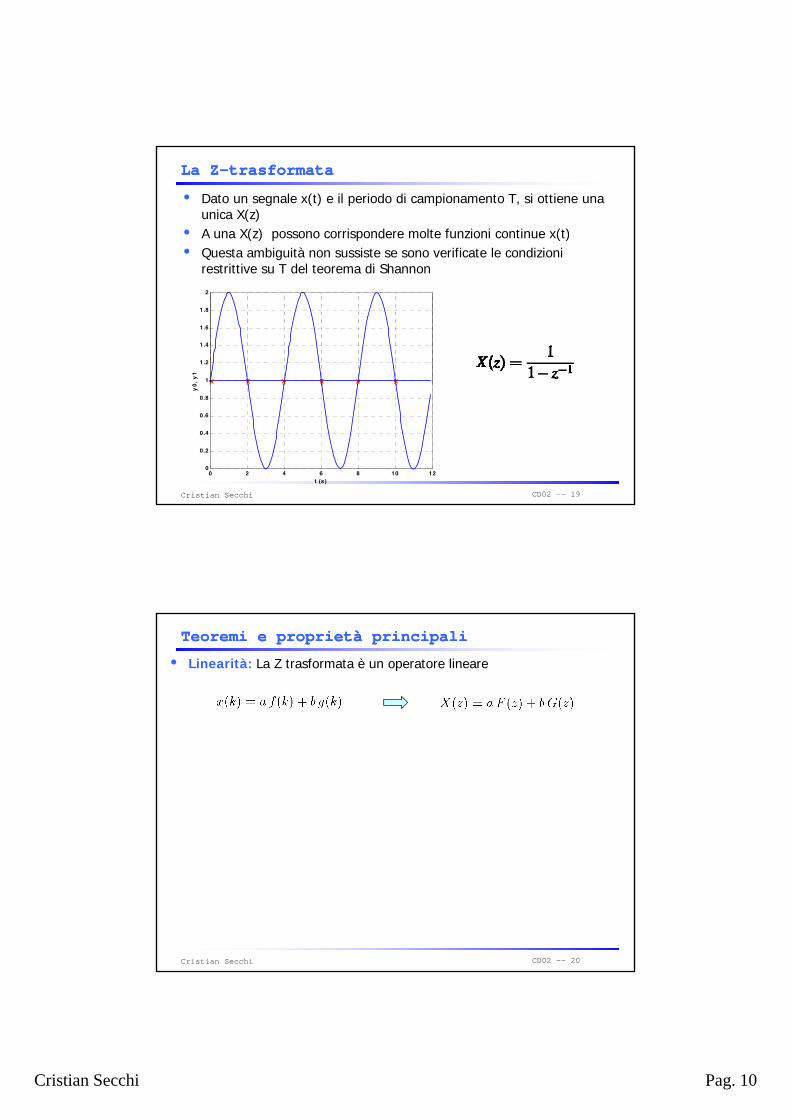
• Dato un segnale x(t) e il periodo di campionamento T, si ottiene una unica X(z)
• A una X(z) possono corrispondere molte funzioni continue x(t)• Questa ambiguità non sussiste se sono verificate le condizioni
est itti e s T del teo ema di Shannonrestrittive su T del teorema di Shannon
1
1.2
1.4
1.6
1.8
2
0,
y1
x x x x x x
CD02 -- 19Cristian Secchi
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
y0
t (s)
TeoremiTeoremi e e proprietproprietàà principaliprincipali
• Linearità: La Z trasformata è un operatore lineare
CD02 -- 20Cristian Secchi

Cristian Secchi Pag. 11
TeoremiTeoremi e e proprietproprietàà principaliprincipali
• Teorema della traslazione nel tempo: Sia dato un segnale x(t), nullo per t<0, e sia X(z) = Z[x(t)]. Per n = 0, 1, 2, … si ha che:
ritardo
anticipo
In pratica spesso si scrive, con un certo abuso di notazione:
CD02 -- 21Cristian SecchiIngegneria e Tecnologie dei
Sistemi di Controllo
TeoremiTeoremi e e proprietproprietàà principaliprincipali
Teorema del valore iniziale: Se X(z) = Z[x(t)] ed esiste
allora il valore iniziale x(0) di x(t) è dato da:
CD02 -- 22Cristian SecchiIngegneria e Tecnologie dei
Sistemi di Controllo
Infatti si ha che:
Cristian Secchi Pag. 12
TeoremiTeoremi e e proprietproprietàà principaliprincipali
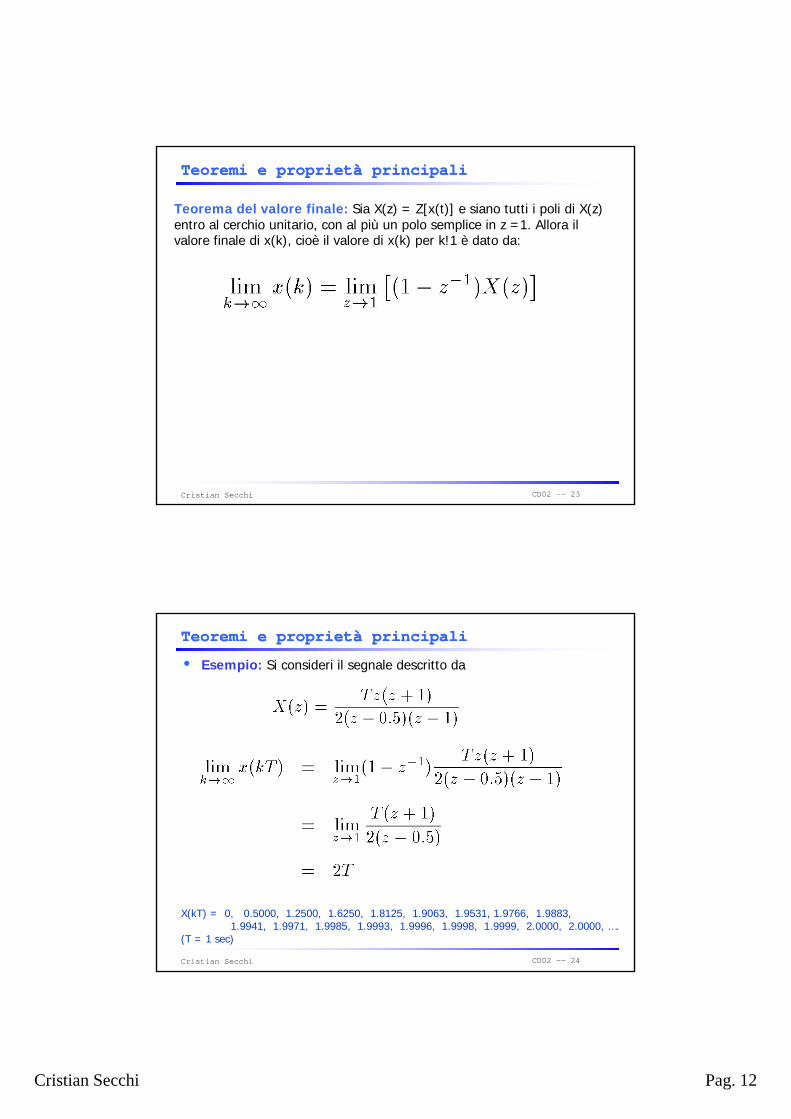
Teorema del valore finale: Sia X(z) = Z[x(t)] e siano tutti i poli di X(z) entro al cerchio unitario, con al più un polo semplice in z =1. Allora il valore finale di x(k), cioè il valore di x(k) per k!1 è dato da:
CD02 -- 23Cristian Secchi
TeoremiTeoremi e e proprietproprietàà principaliprincipali
• Esempio: Si consideri il segnale descritto da
CD02 -- 24Cristian Secchi
X(kT) = 0, 0.5000, 1.2500, 1.6250, 1.8125, 1.9063, 1.9531, 1.9766, 1.9883,1.9941, 1.9971, 1.9985, 1.9993, 1.9996, 1.9998, 1.9999, 2.0000, 2.0000, ….
(T = 1 sec)

Cristian Secchi Pag. 13
TeoremiTeoremi e e proprietproprietàà principaliprincipali
• Differenziazione complessa
Da cui si deduce che:
CD02 -- 25Cristian Secchi
Questa relazione permette di calcolare Z-trasformate di funzioni a partire da Z-trasformate già note.
TeoremiTeoremi e e proprietproprietàà principaliprincipali
Esempio: Gradino unitario. La Z-trasformata del gradino unitario è
Si può usare il teorema della differenziazione complessa per calcolare la Z-trasformata della rampa unitaria x(kT) = kT:
CD02 -- 26Cristian Secchi

Cristian Secchi Pag. 14
TeoremiTeoremi e e proprietproprietàà principaliprincipali
Integrazione complessa: Si consideri la sequenza
dove x(k)/k è finito per k=0 e sia Z[x(k)]=X(z). La Z-trasformata di x(k)/k è data da:
CD02 -- 27Cristian Secchi
TeoremiTeoremi e e proprietproprietàà principaliprincipali
Teorema della convoluzione reale: Siano date due funzioni x1(t) e x2(t), con x1(t) = x2(t) = 0 per t< 0, e siano X1(z) e X2(z) le corrispondenti Z-trasformate. Allora:
CD02 -- 28Cristian Secchi

Cristian Secchi Pag. 15
La antitrasformata ZLa antitrasformata Z
X(z) x(k)
La relazione tra X(z) e x(k) è biunivoca: è possibile ottenere la sequenza di dati x(k) a partire dalla X(z) e viceversa.
L’antitrasformata Z permette di passare da una Z-trasformata X(z) alla corrispondente sequenza x(k).
Esistono diversi metodi per antitrasformare una funzione X(z)
Metodo della lunga divisione
CD02 -- 29Cristian Secchi
• Metodo della lunga divisione• Metodo computazionale• Metodo della scomposizione in fratti semplici• Metodo dell’integrale di inversione
La antitrasformata ZLa antitrasformata Z
x(k) x(t)
La corrispondenza tra la sequenza campionata xk e il segnale originale
1 .4
1 .6
1 .8
2
La corrispondenza tra la sequenza campionata xk e il segnale originale x(t) NON è biunivoca. Se è soddisfatto il Teorema di Shannon sul campionamento, la funzione continua x(t) può essere determinata univocamente a partire dalla sequenza xk.
CD02 -- 30Cristian Secchi
0 2 4 6 8 1 0 1 20
0 .2
0 .4
0 .6
0 .8
1
1 .2
y0
, y
1
t (s )
x x x x x x

Cristian Secchi Pag. 16
La antitrasformata Z La antitrasformata Z –– Il metodo computazionaleIl metodo computazionale
Si consideri ad esempio la seguente Z trasformata:
Essa può essere riscritta come:
D U( ) è l Z t f t d ll’i l it i di t l 1
CD02 -- 31Cristian Secchi
Dove U(z) è la Z-trasformata dell’impulso unitario discreto e vale 1
La antitrasformata Z La antitrasformata Z –– Il metodo computazionaleIl metodo computazionale
Considerando l’operatore z-1 come un ritardo unitario possiamo riscrivere l’espressione precedente sotto forma di equazione alle differenze:
da cui
Le condizioni iniziali, necessarie per risolvere l’equazione alle differenze, sono:
CD02 -- 32Cristian Secchi
Cristian Secchi Pag. 17
La antitrasformata Z La antitrasformata Z –– Il metodo computazionaleIl metodo computazionale
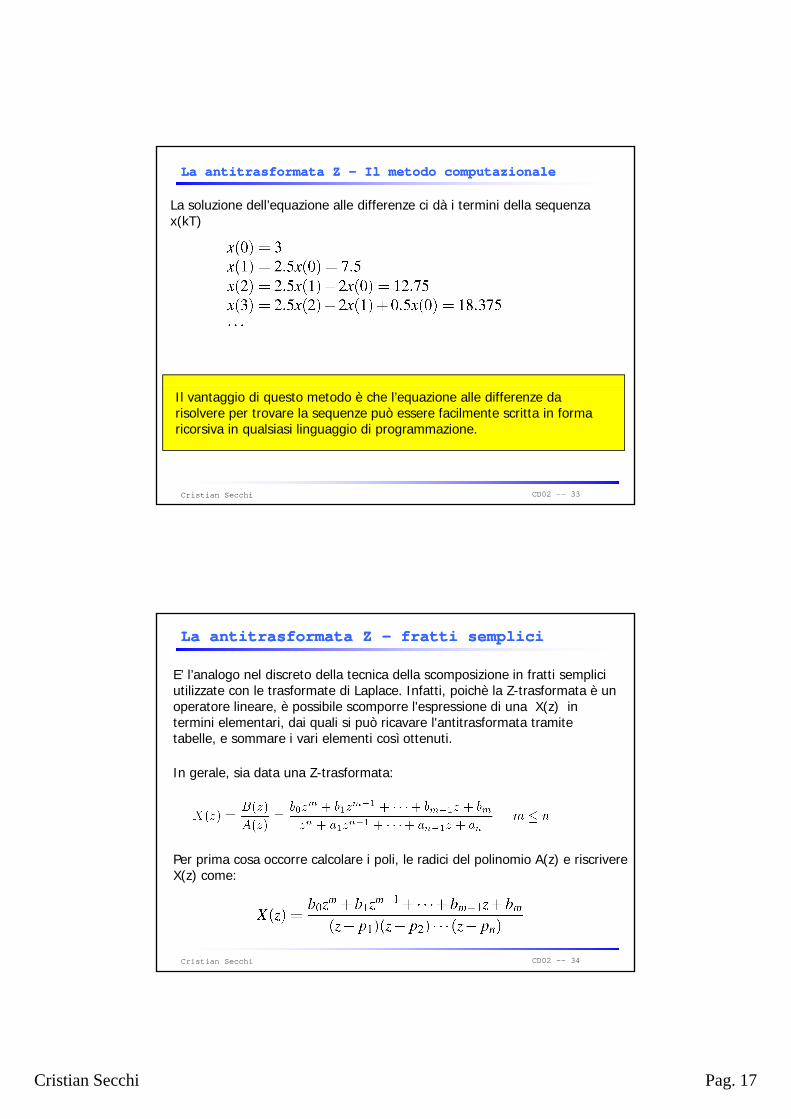
La soluzione dell’equazione alle differenze ci dà i termini della sequenza x(kT)
CD02 -- 33Cristian Secchi
Il vantaggio di questo metodo è che l’equazione alle differenze da risolvere per trovare la sequenze può essere facilmente scritta in forma ricorsiva in qualsiasi linguaggio di programmazione.
La antitrasformata Z La antitrasformata Z –– fratti semplicifratti semplici
E’ l’analogo nel discreto della tecnica della scomposizione in fratti semplici utilizzate con le trasformate di Laplace. Infatti, poichè la Z-trasformata è un operatore lineare, è possibile scomporre l'espressione di una X(z) in termini elementari, dai quali si può ricavare l'antitrasformata tramite
ìtabelle, e sommare i vari elementi così ottenuti.
In gerale, sia data una Z-trasformata:
CD02 -- 34Cristian Secchi
Per prima cosa occorre calcolare i poli, le radici del polinomio A(z) e riscrivere X(z) come:

Cristian Secchi Pag. 18
La antitrasformata Z La antitrasformata Z –– fratti semplicifratti semplici
CASO 1: Tutti i poli di X(z) sono semplici
In questo caso si pone:
dove i coefficienti ci sono detti residui e sono dati da:
CD02 -- 35Cristian Secchi
La antitrasformata Z La antitrasformata Z –– fratti semplicifratti semplici
• Se in X(z) vi è almeno uno zero nell’origine, si usa X(z)/z:
• Quando sono presenti poli complessi coniugati, i coefficienti ci sono anch'essi complessi. In questo caso si ricorre alle formule di Eulero per ottenere funzioni trigonometriche a coefficienti reali.
L’espressione della sequenza x(k) è in forma chiusa ed è data da:
CD02 -- 36Cristian Secchi
Cristian Secchi Pag. 19
La antitrasformata Z La antitrasformata Z –– fratti semplicifratti semplici
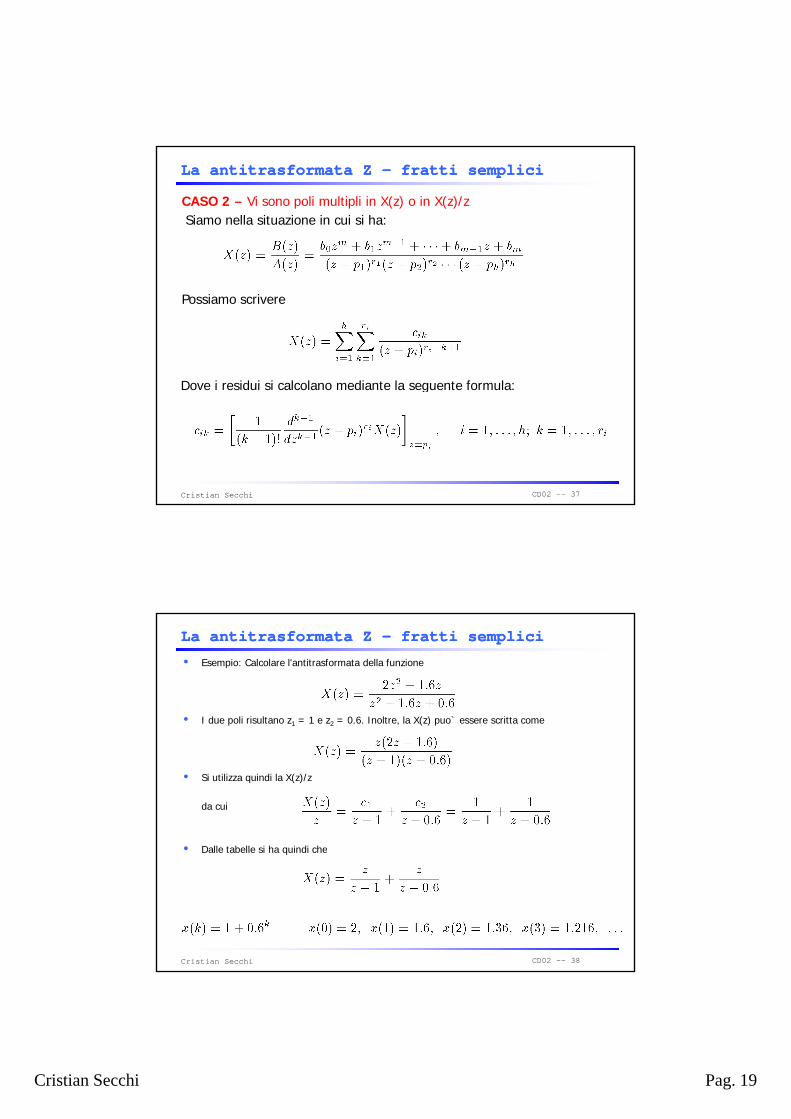
CASO 2 – Vi sono poli multipli in X(z) o in X(z)/zSiamo nella situazione in cui si ha:
Possiamo scrivere
Dove i residui si calcolano mediante la seguente formula:
CD02 -- 37Cristian Secchi
Dove i residui si calcolano mediante la seguente formula:
La antitrasformata Z La antitrasformata Z –– fratti semplicifratti semplici
• Esempio: Calcolare l'antitrasformata della funzione
• I due poli risultano z1 = 1 e z2 = 0.6. Inoltre, la X(z) puo` essere scritta come
• Si utilizza quindi la X(z)/z
da cui
• Dalle tabelle si ha quindi che
CD02 -- 38Cristian Secchi
Dalle tabelle si ha quindi che

Cristian Secchi Pag. 20
La antitrasformata Z La antitrasformata Z –– fratti semplicifratti semplici
• Esempio: Antitrasformare la funzione
• Si ha che
e quindi
CD02 -- 39Cristian Secchi
e
Funzioni di Trasferimento DiscreteFunzioni di Trasferimento Discrete
Considereremo sistemi discreti lineari con un ingresso e un’uscita
uk ykS
mknkknknkk ubububyayaya −−−− +++=+++ LL 121121
SElaborazione
Discreta
Applicando la Z trasformata ad entrambi i membri e sfruttando la linearità dell’operatore, si ottiene:
CD02 -- 40Cristian Secchi
)()()()( 121
121 zUzbzbbzYzazaa m
nn
n−−−− +++=+++ LL

Cristian Secchi Pag. 21
Funzioni di Trasferimento DiscreteFunzioni di Trasferimento Discrete
)()(
)()()( 1
21
121
nn
mn
zazaazbzbb
zUzYzG −−
−−
++++++
==L
L
G(z) è la funzione di trasferimento del sistema a tempo discreto. Analogamente a quanto succede per i sistemi tempo continui:quanto succede per i sistemi tempo continui:
• La sua espressione non dipende dall’ingresso, ma è data dalle proprietà del sistema
• Lega la trasformata Z dell’uscita a quella dell’ingresso tramite Y(z)=G(z)U(z)
• E’ uno strumento molto utile per l’analisi di un sistema discreto e per la sintesi di un controllore
CD02 -- 41Cristian Secchi
• E’ razionale fratta e, quindi, molti degli strumenti introdotti per l’analisi dei sistemi tempo continui possono essere utilizzati, con opportune modifiche, per i sistemi discreti
•Le radici del polinomio al denominatore sono dette poli mentre quelle del polinomio al numeratore sono dette zeri. L’equazione che si ottiene ponendo uguale a zero il polinomio al denominatore è detta equazione caratteristica.
• La funzione di trasferimento può essere interpretata come la Z-trasformata della risposta impulsiva
è
Funzioni di Trasferimento DiscreteFunzioni di Trasferimento Discrete
)(1)()]([)()()()( zGzGkZzGzUzGzY =⋅=== δ• La risposta nel tempo discreto è data dalla sommatoria di
convoluzione tra l’ingresso e la risposta impulsiva del sistema, detta anche sequenza ponderatrice
)]()([)]([)( 11 zUzGZzYZky −− ==
Ricordando il teorema della convoluzione reale si ha che:
CD02 -- 42
• Queste proprietà sono analoghe a quelle della funzione di trasferimento nel dominio di Laplace
Cristian Secchi
∑=
−=k
hhkhugky
0)(
Cristian Secchi Pag. 22
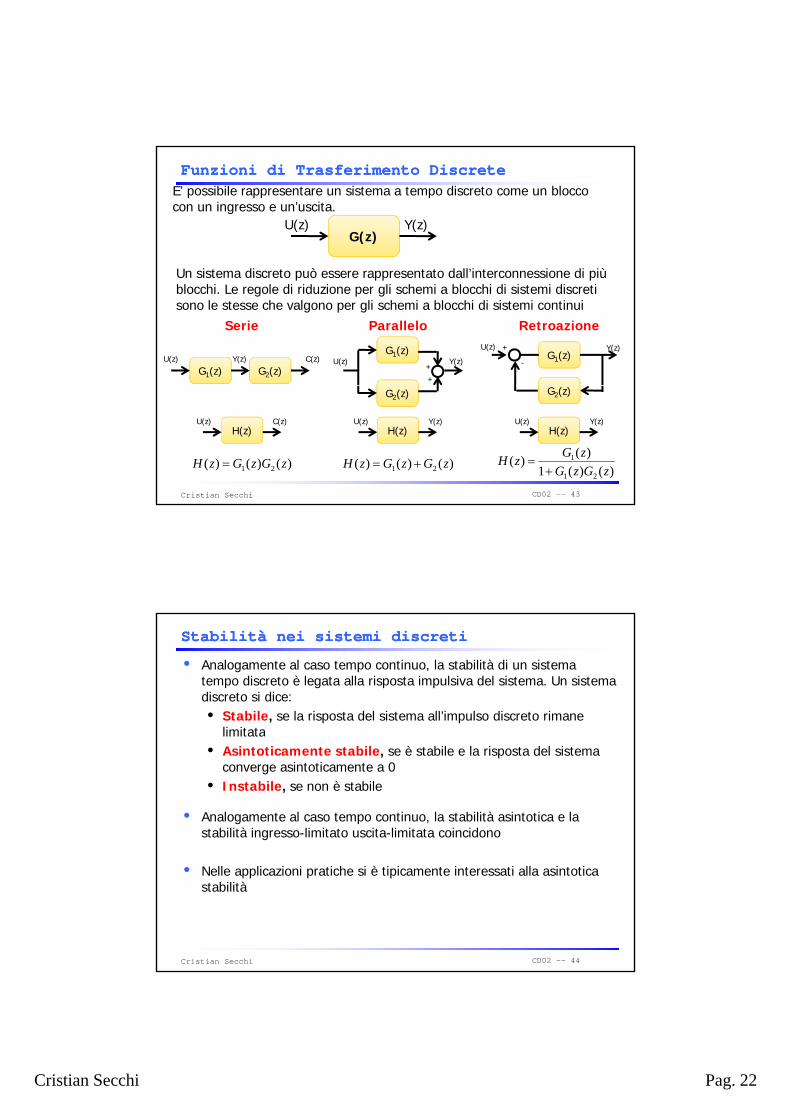
Funzioni di Trasferimento DiscreteFunzioni di Trasferimento DiscreteE’ possibile rappresentare un sistema a tempo discreto come un blocco con un ingresso e un’uscita.
G(z)U(z) Y(z)
Un sistema discreto può essere rappresentato dall’interconnessione di più blocchi. Le regole di riduzione per gli schemi a blocchi di sistemi discreti sono le stesse che valgono per gli schemi a blocchi di sistemi continui
U(z) C(z)
G1(z) G2(z)Y(z)
G1(z)+
+
U(z) Y(z)G1(z)
+
-
U(z) Y(z)
Serie Parallelo Retroazione
CD02 -- 43Cristian Secchi
U(z)H(z)
C(z)
)()()( 21 zGzGzH =
G2(z)
H(z)U(z) Y(z)
)()()( 21 zGzGzH +=
H(z)U(z) Y(z)
)()(1)()(
21
1
zGzGzGzH
+=
G2(z)
• Analogamente al caso tempo continuo, la stabilità di un sistema tempo discreto è legata alla risposta impulsiva del sistema. Un sistema discreto si dice:• Stabile, se la risposta del sistema all’impulso discreto rimane
limitata
Stabilità nei sistemi discretiStabilità nei sistemi discreti
limitata• Asintoticamente stabile, se è stabile e la risposta del sistema
converge asintoticamente a 0• Instabile, se non è stabile
• Analogamente al caso tempo continuo, la stabilità asintotica e la stabilità ingresso-limitato uscita-limitata coincidono
CD02 -- 44
• Nelle applicazioni pratiche si è tipicamente interessati alla asintotica stabilità
Cristian Secchi
Cristian Secchi Pag. 23
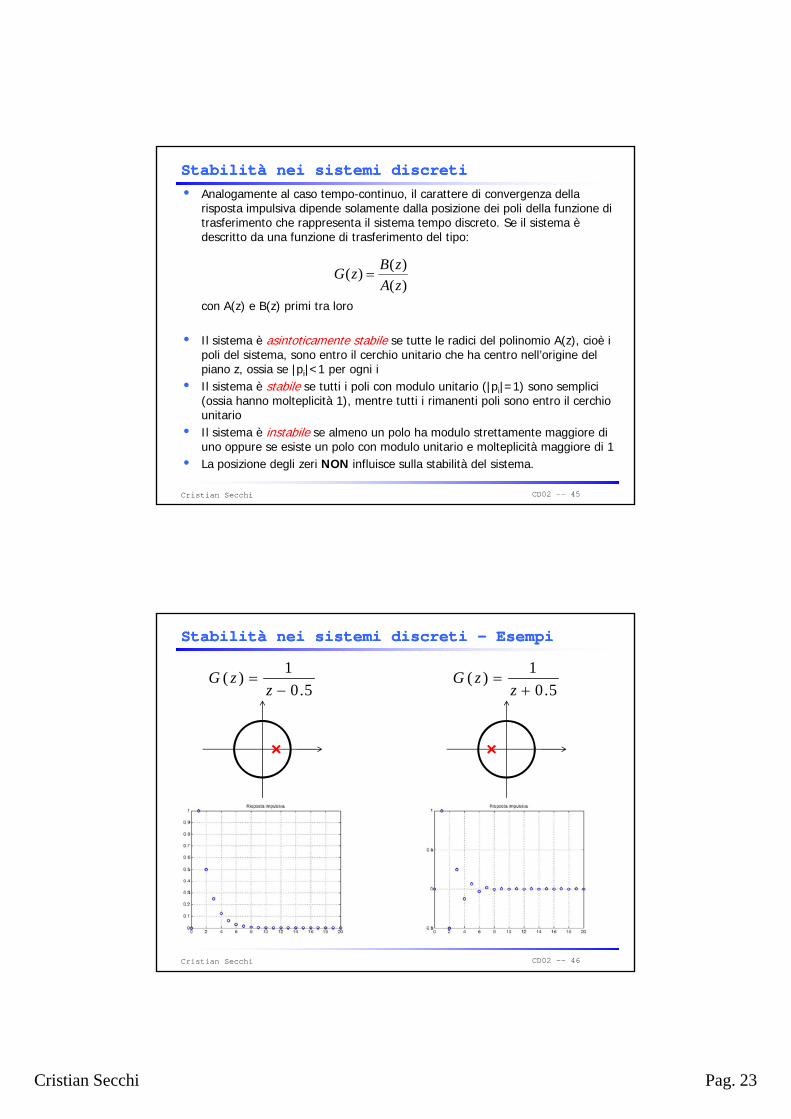
• Analogamente al caso tempo-continuo, il carattere di convergenza della risposta impulsiva dipende solamente dalla posizione dei poli della funzione di trasferimento che rappresenta il sistema tempo discreto. Se il sistema è descritto da una funzione di trasferimento del tipo:
Stabilità nei sistemi discretiStabilità nei sistemi discreti
)(zB
con A(z) e B(z) primi tra loro
• Il sistema è asintoticamente stabile se tutte le radici del polinomio A(z), cioè i poli del sistema, sono entro il cerchio unitario che ha centro nell’origine del piano z, ossia se |pi|<1 per ogni i
• Il sistema è stabile se tutti i poli con modulo unitario (|p |=1) sono semplici
)()()(
zAzBzG =
CD02 -- 45
• Il sistema è stabile se tutti i poli con modulo unitario (|pi|=1) sono semplici (ossia hanno molteplicità 1), mentre tutti i rimanenti poli sono entro il cerchio unitario
• Il sistema è instabile se almeno un polo ha modulo strettamente maggiore di uno oppure se esiste un polo con modulo unitario e molteplicità maggiore di 1
• La posizione degli zeri NON influisce sulla stabilità del sistema.
Cristian Secchi
Stabilità nei sistemi discreti Stabilità nei sistemi discreti -- EsempiEsempi
5.01)(+
=z
zG5.0
1)(−
=z
zG
CD02 -- 46Cristian Secchi
Cristian Secchi Pag. 24
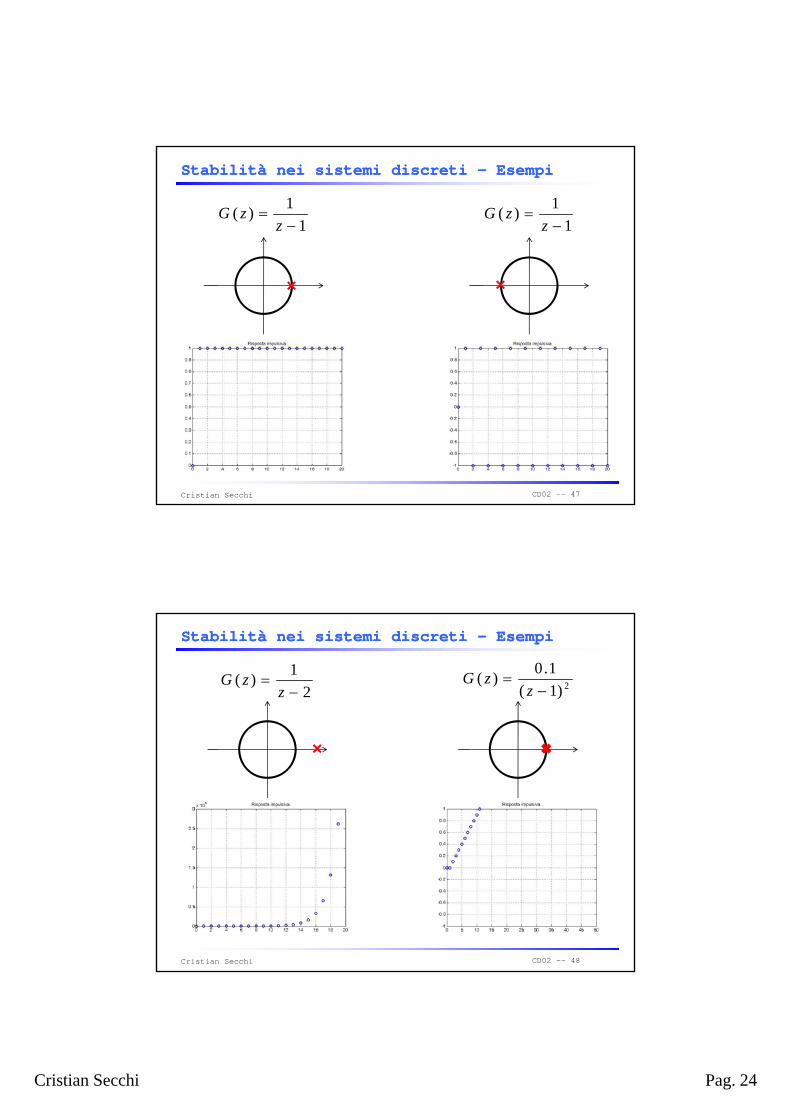
Stabilità nei sistemi discreti Stabilità nei sistemi discreti -- EsempiEsempi
11)(−
=z
zG1
1)(−
=z
zG
CD02 -- 47Cristian Secchi
Stabilità nei sistemi discreti Stabilità nei sistemi discreti -- EsempiEsempi
21)(−
=z
zG 2)1(1.0)(
−=
zzG
CD02 -- 48Cristian Secchi
Cristian Secchi Pag. 25
• L’ uscita del sistema poteva essere ottenuta direttamente antitrasformando la G(z)
• Il fatto che la regione di stabilità sia il cerchio unitario, dipende dal fatto che l’ant it asfo mata di G( ) è composta da te mini in c i
Stabilità nei sistemi discretiStabilità nei sistemi discreti
fatto che l’antritrasformata di G(z) è composta da termini in cui compaiono funzioni potenza anziché esponenziali come nel caso tempo continuo.
CD02 -- 49Cristian Secchi
• Per determinare la stabilità è sufficiente verificare la posizione delle radici dell’equazione caratteristica rispetto al cerchio unitario. Se l’equazione è data da:
Determinazione della stabilitàDeterminazione della stabilità
è possibile
• trovare le radici dell’equazione mediante un programma di analisi numerica (es. Matlab roots([1 a1,…,an])
011 =+++ −
nn azaz n L
CD02 -- 50
• usare criteri che consentono di determinare la stabilità del sistema senza dover risolvere l’equazione caratteristica• Criterio di Routh e trasformazione bilineare• Criterio di Jury (vedi Bonivento-Zanasi-Melchiorri Cap. 4)
Cristian Secchi
Cristian Secchi Pag. 26
• Data un’equazione polinomiale di grado n, il criterio di Routh consente di determinare, senza dover risolvere l’equazione, se tutte le radici hanno parte reale negativa.
• Nei sistemi contin i ciò è s fficiente pe dete mina e se n sistema è
Criterio di Criterio di RouthRouth
• Nei sistemi continui, ciò è sufficiente per determinare se un sistema è asintoticamente stabile ma questo non è più vero per i sistemi discreti.
• L’idea è quella di trasformare, mediante una trasformazione bilineare, la funzione data G(z) in un’altra funzione G(w) di variabile complessa w tale da permettere l’applicazione a quest’ultima il criterio di Routh.
CD02 -- 51Cristian Secchi
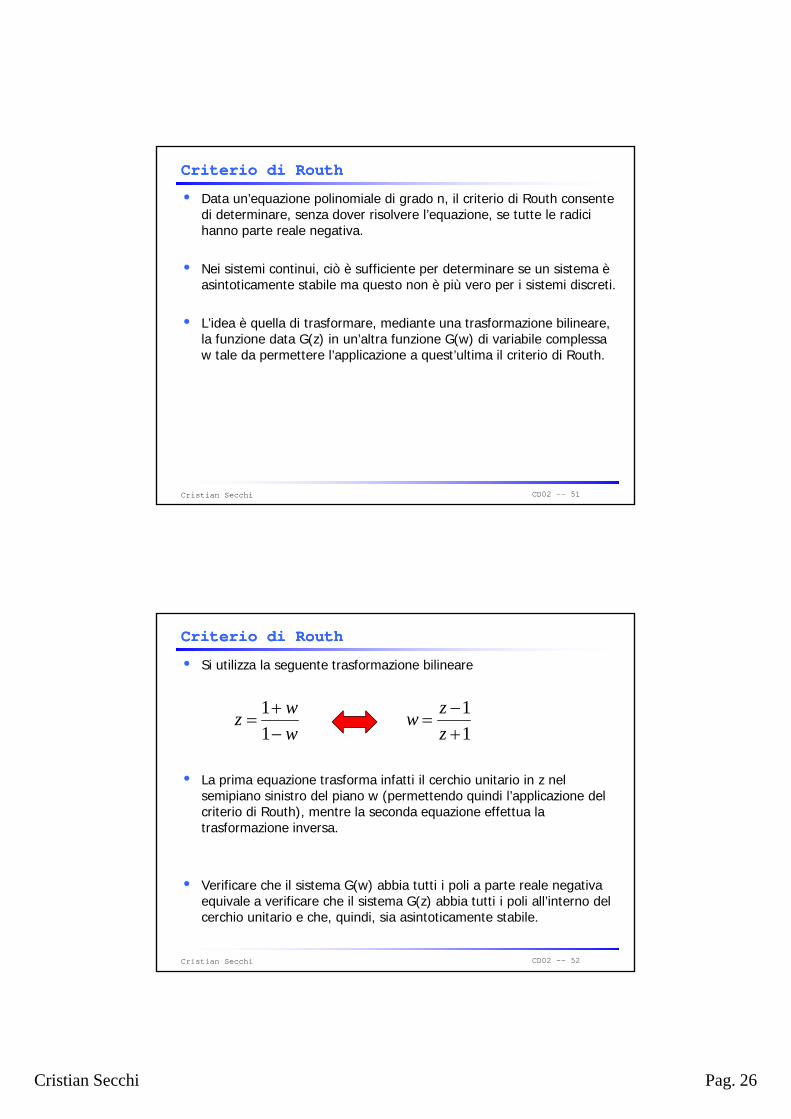
• Si utilizza la seguente trasformazione bilineare
Criterio di Criterio di RouthRouth
wwz +
=11
11
+−
=zzw
• La prima equazione trasforma infatti il cerchio unitario in z nel semipiano sinistro del piano w (permettendo quindi l’applicazione del criterio di Routh), mentre la seconda equazione effettua la trasformazione inversa.
w−1 1+z
CD02 -- 52
• Verificare che il sistema G(w) abbia tutti i poli a parte reale negativa equivale a verificare che il sistema G(z) abbia tutti i poli all’interno del cerchio unitario e che, quindi, sia asintoticamente stabile.
Cristian Secchi
Cristian Secchi Pag. 27
Criterio di Criterio di RouthRouth
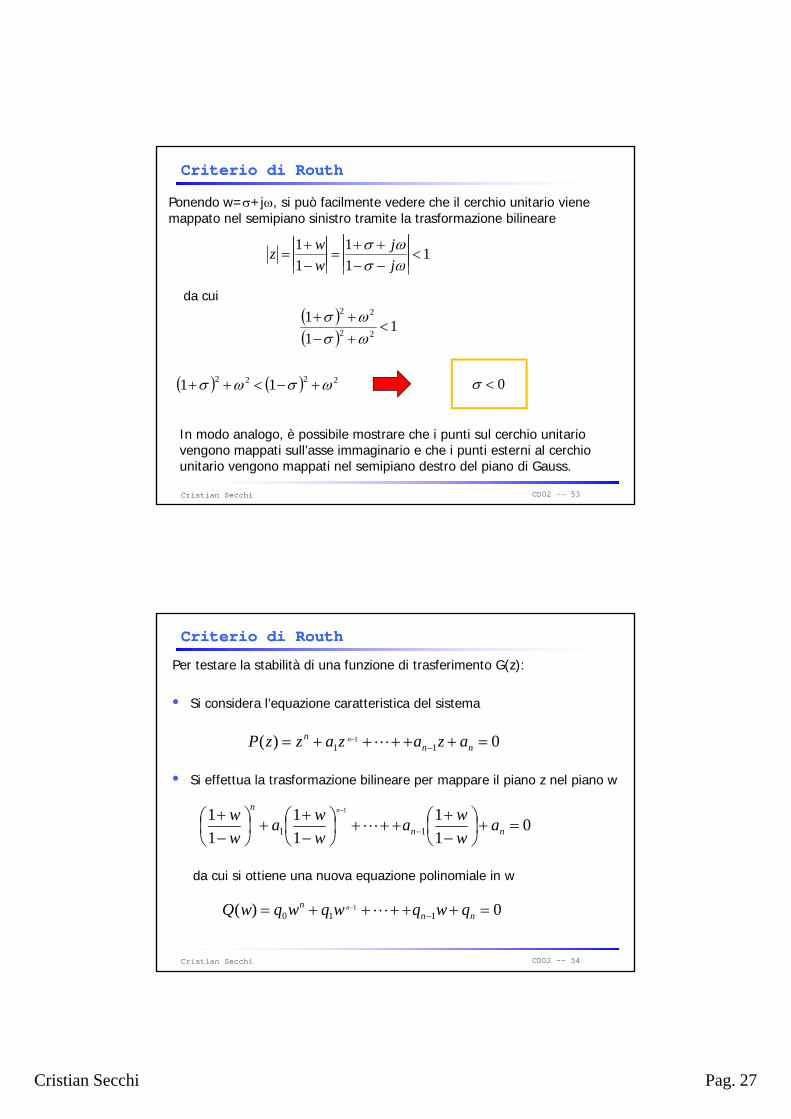
Ponendo w=σ+jω, si può facilmente vedere che il cerchio unitario viene mappato nel semipiano sinistro tramite la trasformazione bilineare
111
11
<++
=+
=ωσωσ
jj
wwz
11 −−− ωσ jw
da cui
( )( )
111
22
22
<+−++ωσωσ
( ) ( ) 2222 11 ωσωσ +−<++ 0<σ
CD02 -- 53Cristian Secchi
( ) ( )11 ωσωσ +−<++ 0<σ
In modo analogo, è possibile mostrare che i punti sul cerchio unitario vengono mappati sull’asse immaginario e che i punti esterni al cerchio unitario vengono mappati nel semipiano destro del piano di Gauss.
Per testare la stabilità di una funzione di trasferimento G(z):
• Si considera l’equazione caratteristica del sistema
Criterio di Criterio di RouthRouth
• Si effettua la trasformazione bilineare per mappare il piano z nel piano w
0)( 111 =+++++= −−
nnn azazazzP n L
011
11
11
11
1
=+⎟⎠⎞
⎜⎝⎛−+
+++⎟⎠⎞
⎜⎝⎛−+
+⎟⎠⎞
⎜⎝⎛−+
−
−
nn
n
awwa
wwa
ww n
L
CD02 -- 54
da cui si ottiene una nuova equazione polinomiale in w
Cristian Secchi
0)( 1101 =+++++= −−
nnn qwqwqwqwQ n L
Cristian Secchi Pag. 28
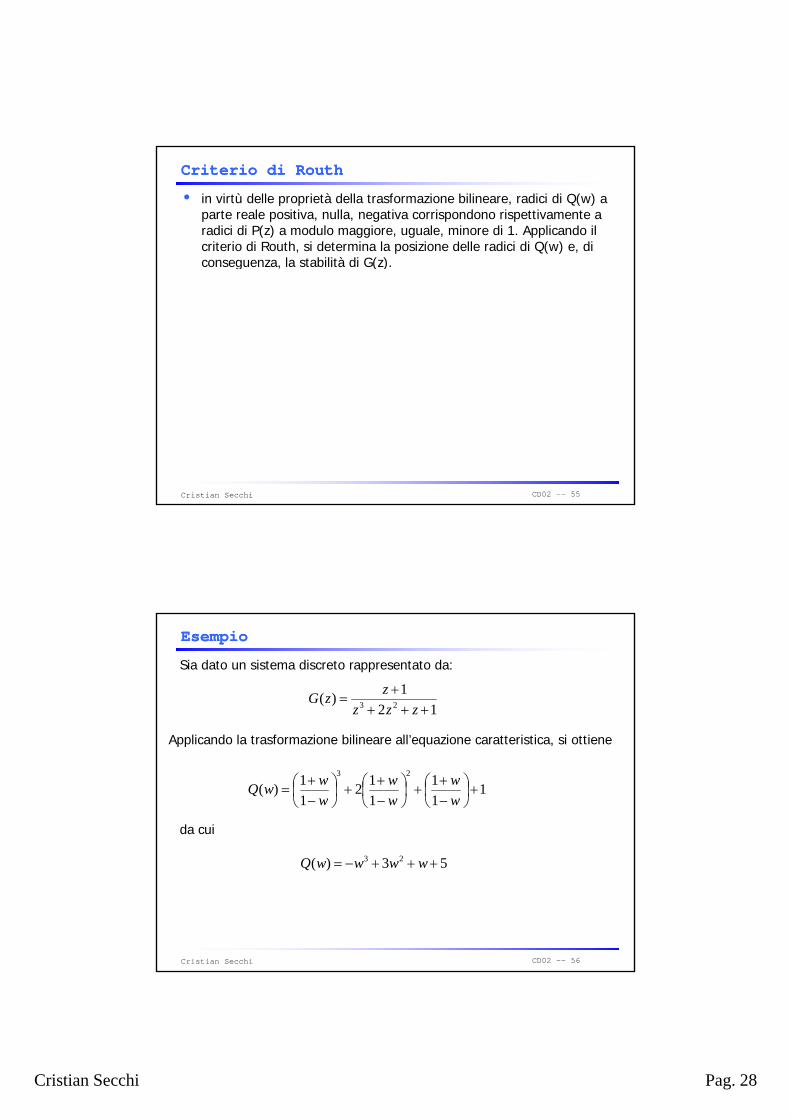
• in virtù delle proprietà della trasformazione bilineare, radici di Q(w) a parte reale positiva, nulla, negativa corrispondono rispettivamente a radici di P(z) a modulo maggiore, uguale, minore di 1. Applicando il criterio di Routh, si determina la posizione delle radici di Q(w) e, di conseguenza, la stabilità di G(z).
Criterio di Criterio di RouthRouth
conseguenza, la stabilità di G(z).
CD02 -- 55Cristian Secchi
EsempioEsempio
121)( 23 +++
+=
zzzzzG
Sia dato un sistema discreto rappresentato da:
Applicando la trasformazione bilineare all’equazione caratteristica, si ottiene
111
112
11)(
23
+⎟⎠⎞
⎜⎝⎛−+
+⎟⎠⎞
⎜⎝⎛−+
+⎟⎠⎞
⎜⎝⎛−+
=ww
ww
wwwQ
da cui
CD02 -- 56Cristian Secchi
53)( 23 +++−= wwwwQ
Cristian Secchi Pag. 29
EsempioEsempio
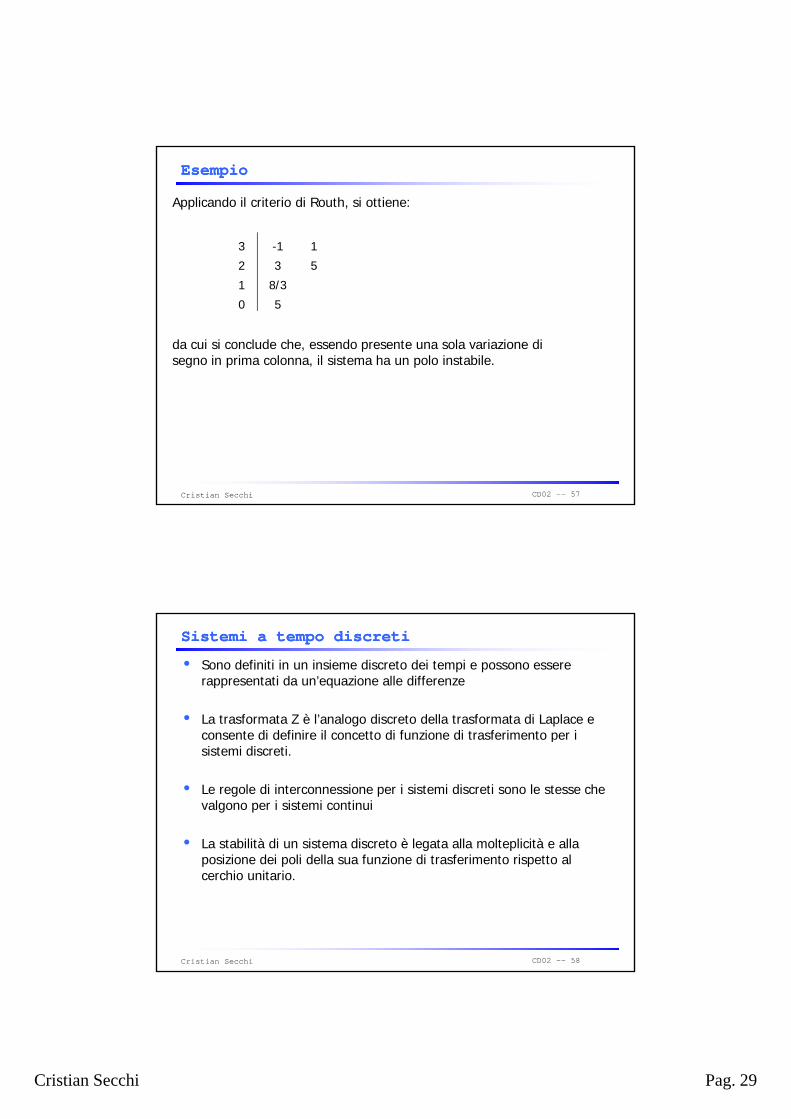
Applicando il criterio di Routh, si ottiene:
3 -1 1
2 3 52 3 5
1 8/3
0 5
da cui si conclude che, essendo presente una sola variazione di segno in prima colonna, il sistema ha un polo instabile.
CD02 -- 57Cristian Secchi
• Sono definiti in un insieme discreto dei tempi e possono essere rappresentati da un’equazione alle differenze
• La trasformata Z è l’analogo discreto della trasformata di Laplace e consente di defini e il concetto di f n ione di t asfe imento pe i
Sistemi a tempo discretiSistemi a tempo discreti
consente di definire il concetto di funzione di trasferimento per i sistemi discreti.
• Le regole di interconnessione per i sistemi discreti sono le stesse che valgono per i sistemi continui
• La stabilità di un sistema discreto è legata alla molteplicità e alla
CD02 -- 58
posizione dei poli della sua funzione di trasferimento rispetto al cerchio unitario.
Cristian Secchi

Cristian Secchi Pag. 30
CONTROLLI DIGITALILaurea Magistrale in Ingegneria Meccatronica
SISTEMI A TEMPO DISCRETOSISTEMI A TEMPO DISCRETO
Ing. Cristian SecchiTel. 0522 522235
e-mail: [email protected]://www.dismi.unimo.it/Members/csecchi
• mettere dopo il teorema del ritardo:
Il termine z-k è interpretabile come un ritardo
• Dire quando si parla del metodo computazionale che è quella la ragione per cui le espressioni razionali fratte vengono espresse in termini di z-1
zz--kk !! ritardo di t = kTritardo di t = kT
CD02 -- 60Cristian Secchi Controlli Digitali
Cristian Secchi Pag. 31
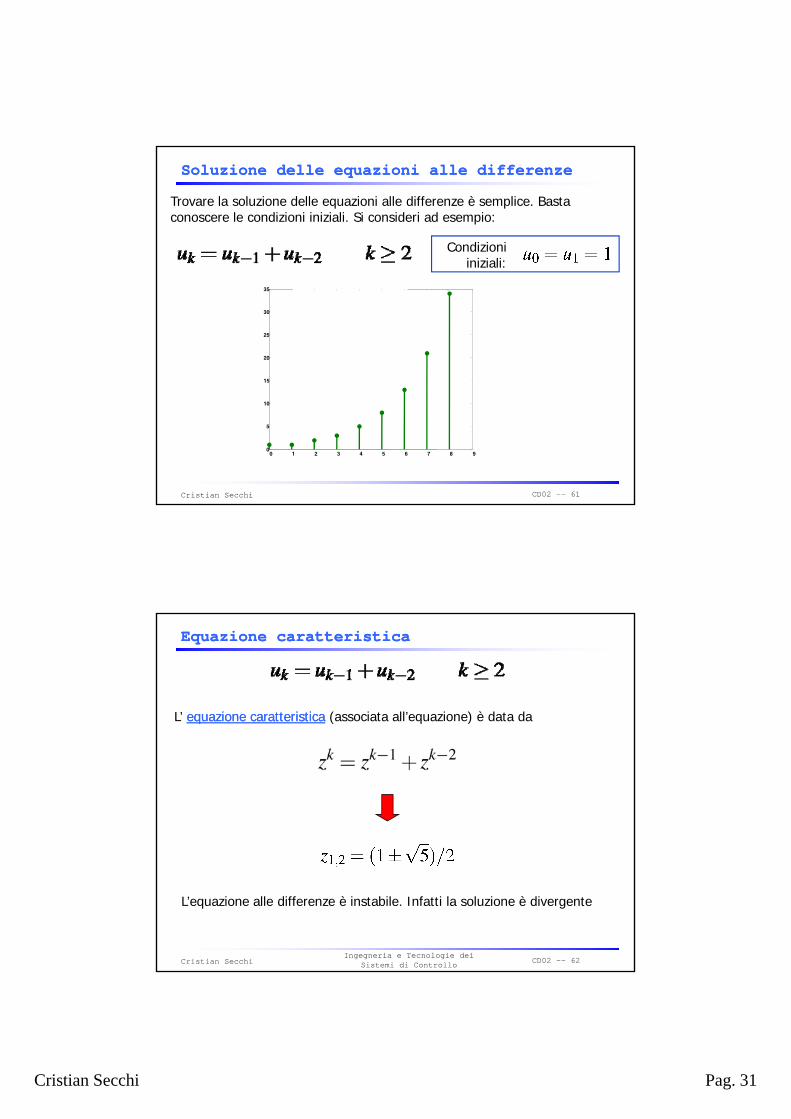
Soluzione delle equazioni alle differenzeSoluzione delle equazioni alle differenze
Condizioni iniziali:
Trovare la soluzione delle equazioni alle differenze è semplice. Basta conoscere le condizioni iniziali. Si consideri ad esempio:
iniziali:
15
20
25
30
35
CD02 -- 61Cristian Secchi
0 1 2 3 4 5 6 7 8 90
5
10
Equazione caratteristicaEquazione caratteristica
L’ equazione caratteristicaequazione caratteristica (associata all’equazione) è data da
CD02 -- 62Cristian SecchiIngegneria e Tecnologie dei
Sistemi di Controllo
L’equazione alle differenze è instabile. Infatti la soluzione è divergente

Cristian Secchi Pag. 32
Soluzione delle equazioni alle differenzeSoluzione delle equazioni alle differenze
Nel caso generale, si ipotizza che la sequenza soluzione sia nella forma:
Sostituendo la soluzione candidata nell’equazione si ottiene:q
Dividendo per czk si ottiene
CD02 -- 63Cristian SecchiIngegneria e Tecnologie dei
Sistemi di Controllo
Poiché l’equazione è lineare, si ha che la combinazione lineare di due soluzioni è ancora una soluzione. Quindi
è ancora una soluzione
Soluzione delle equazioni alle differenzeSoluzione delle equazioni alle differenze
Le costanti c1 e c2 si determinano imponendo specifiche condizioni iniziali.
da cui
CD02 -- 64Cristian SecchiIngegneria e Tecnologie dei
Sistemi di Controllo
da cui

Cristian Secchi Pag. 33
Soluzione delle equazioni alle differenzeSoluzione delle equazioni alle differenzeL’equazione che si ottiene dopo la sostituzione uk=zk è detta equazione equazione caratteristicacaratteristica dell’equazione alle differenze.
Se una delle radici dell’equazione caratteristica ha modulo maggiore di 1, allora la corrispondente equazione alle differenze è instabile (cioè la sua soluzione divergerà al crescere del tempo per qualsiasi condizione iniziale finita).
Se tutte le radici dell’equazione caratteristica hanno modulo minore di 1, allora la corrispondente equazione alle differenze è stabile (cioè la sua soluzione convergerà a 0 al crescere del tempo per qualsiasi condizione iniziale finita).
instabileinstabile
CD02 -- 65Cristian SecchiIngegneria e Tecnologie dei
Sistemi di Controllo
1
stabilestabile
instabileinstabile
La ZLa Z--trasformata trasformata –– Funzioni elementariFunzioni elementari
• Funzione esponenziale. Sia data la funzione:
a costante reale o complessa
Poichè x(kT) = e-akT, k = 0, 1, 2, …, si ha
CD02 -- 66Cristian SecchiIngegneria e Tecnologie dei
Sistemi di Controllo
Convergente per |z| > e-Re(a)T

Cristian Secchi Pag. 34
La ZLa Z--trasformata trasformata –– Funzioni elementariFunzioni elementari
• Funzione sinusoidale. Sia data la funzione:
Dalle formule di Eulero:
CD02 -- 67Cristian SecchiIngegneria e Tecnologie dei
Sistemi di Controllo
Convergente per |z| > 1
La ZLa Z--trasformata trasformata –– Funzioni elementariFunzioni elementari
• Funzione cosinusoidale. Sia data la funzione:
Analogamente a prima, con le formule di Eulero
CD02 -- 68Cristian SecchiIngegneria e Tecnologie dei
Sistemi di Controllo
Convergente per |z| > 1


















