Prof. Paolo Rocco ([email protected])home.deib.polimi.it/rocco/robotica/motori.pdf · magnetico...
22
Robotica industriale Robotica industriale Motori a magneti permanenti Prof. Paolo Rocco ([email protected])
Transcript of Prof. Paolo Rocco ([email protected])home.deib.polimi.it/rocco/robotica/motori.pdf · magnetico...

Robotica industrialeRobotica industriale
Motori a magneti permanenti
Prof. Paolo Rocco ([email protected])

Robotica industriale - Motori a magneti permanenti - P. Rocco [2]
Generazione di coppiaGenerazione di coppiaLa legge di Lorentz ci dice che una carica elettrica q in moto con velocità v in un campo magnetico di intensità B è soggetta ad una forza F:
BvF ×= q
Su un elemento di conduttore di lunghezza dl, percorso da una corrente I:
BlF ×= dIdSe il conduttore è rettilineo e le grandezze sono uniformi, integrando si ha:
BlF ×= I
F
Β
Ι
l
Su una spira si genererà una coppia:
x
y
z
I
I
−F
F
B
B
a b
cd
B
Polo Nord
Polo Sud
lh
Robotica industriale - Motori a magneti permanenti - P. Rocco [3]
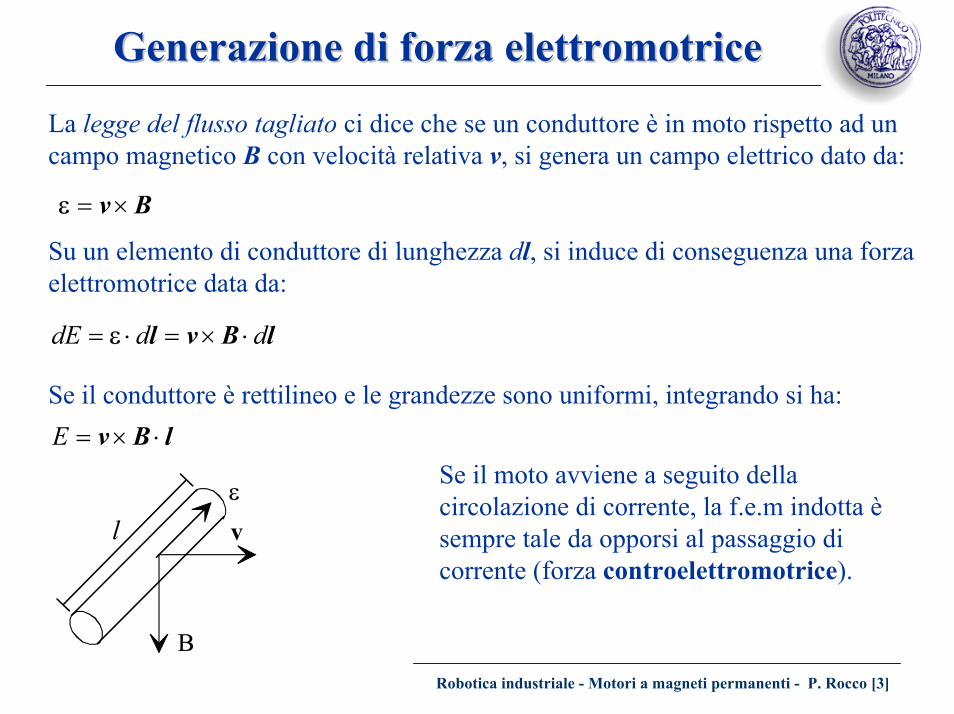
Generazione di forza elettromotriceGenerazione di forza elettromotrice
La legge del flusso tagliato ci dice che se un conduttore è in moto rispetto ad un campo magnetico B con velocità relativa v, si genera un campo elettrico dato da:
Bv×=ε
Su un elemento di conduttore di lunghezza dl, si induce di conseguenza una forza elettromotrice data da:
lBvl dddE ⋅×=⋅= ε
Se il conduttore è rettilineo e le grandezze sono uniformi, integrando si ha:lBv ⋅×=E
Se il moto avviene a seguito della circolazione di corrente, la f.e.m indotta èsempre tale da opporsi al passaggio di corrente (forza controelettromotrice).
v
Β
lε

Robotica industriale - Motori a magneti permanenti - P. Rocco [4]
Motore a corrente continuaMotore a corrente continua
rotore (armatura)
spazzola
spazzola
commutatore
alloggiamentostatore
(magnete)
E’ costituito da un cilindro mobile di materiale ferromagnetico (rotore) su cui sono disposte le spire a formare un circuito chiuso (armatura) e da una parte fissa (statore) su cui sono alloggiati i magneti permanenti.
isolante
risersegmenti isolante
Commutatore

Robotica industriale - Motori a magneti permanenti - P. Rocco [5]
Meccanismo di commutazioneMeccanismo di commutazione
I
d
c
ba
i
h
g f
e
+−
segmentospire
spazzola
=Ι sΙ2
=Ι sΙ2
V
b)
Le spire sono connesse ad anello l’una all’altra. La corrente d’armatura viene ripartita in due circuiti, in ciascuno dei quali la corrente è I/2.
Qui la spira è cortocircuitata
d d d
+ + +tempo tempo
Come commuta la corrente in una spira?

Robotica industriale - Motori a magneti permanenti - P. Rocco [6]
Costante di coppiaCostante di coppia
NS
+ + + + +++
++
++
++++++
O'Ipotizziamo il campo magnetico costante in modulo, direzione e verso e diretto in senso radiale.r: raggio del cilindrol: lunghezza del cilindroφm: flusso magnetico
O
Su ciascun conduttore agisce la forza, diretta in direzione tangente alla circonferenza esterna del rotore, di modulo:
lBIF s= dove:2
2,,2 rlAA
BII ms
π=
φ==
La coppia complessiva agente sul rotore sarà quindi:
IKINrFNt
mm =
πφ
==τ2
22
Kt: costante di coppia (Nm/A)

Robotica industriale - Motori a magneti permanenti - P. Rocco [7]
Costante di forza Costante di forza controelettromotricecontroelettromotrice
NS
+ + + + +++
++
++
++++++
O'ω: velocità angolare del rotore
O
Su ciascun conduttore agisce il campo elettrico, diretto lungo il conduttore stesso (cioè lungo la generatrice del cilindro), di modulo:
vB=ε dove:2
2,, rlAA
Brv m π=
φ=ω=
La forza controelettromotrice complessiva raccolta ai morsetti del rotore saràquindi:
ω=ωπφ
=ε= em KNlNE
22Ke: costante di forza controelettromotrice (Vs/rad)
te KK =

Robotica industriale - Motori a magneti permanenti - P. Rocco [8]
Modello dinamicoModello dinamicoR L
EV
I
IKKE
EdtdILRIV
tm
e
=τω=
++= V: tensione applicata alle spazzoleR: resistenza del circuito d’armaturaL: induttanza del circuito d’armatura
La velocità angolare ω non è una variabile esogena in quanto dipende dalla coppia τm e dalla dinamica meccanica del motore.

Robotica industriale - Motori a magneti permanenti - P. Rocco [9]
Caratteristica coppiaCaratteristica coppia--velocitàvelocitàA velocità costante anche la corrente è costante. Eliminando I dalle equazioni si ottiene:
( )ω−=τ et
m KVRK
relazione coppia-velocità
ω
V2V1
τm0
ω0
τm
La coppia diminuisce all’aumentare della velocità
τm0: coppia di spuntoω0: velocità a vuoto

Robotica industriale - Motori a magneti permanenti - P. Rocco [10]
Il motore Il motore brushlessbrushlessE’ costituito da un rotore su cui sono alloggiati i magneti permanenti e da uno statore su cui sono disposti tre avvolgimenti (per motore trifase).
La commutazione meccanica del sistema spazzole-collettore è sostituita dalla commutazione elettronica della corrente negli avvolgimenti di statore, affidata ad un inverter.
Per eseguire la commutazione sulla base della posizione del rotore è necessario un sensore.
Controllo Elettronico
Induttore
Avvolgimento trifase
Sensori diposizione
Inverter

Robotica industriale - Motori a magneti permanenti - P. Rocco [11]
Principio di funzionamentoPrincipio di funzionamentoTre sensori ottici sono alternativamente investiti da un fascio di luce.
Il sensore PT1, quando è illuminato, accende il transistor Tr1. Questo permette la circolazione di corrente nel relativo avvolgimento, creando un campo magnetico sul polo P1, che genera il movimento del rotore.
Questo motore si dice ad eccitazione unipolare (la direzione del moto èunica).
Con un inverter più complesso si puòottenere l’inversione del moto (motore ad eccitazione bipolare).
Tr1 Tr2 Tr3
PT1
PT3PT2
Otturatore rotante
Luce
Fototransistor
N
S
PT1
PT2
PT3 P1
P2
P3
Robotica industriale - Motori a magneti permanenti - P. Rocco [12]
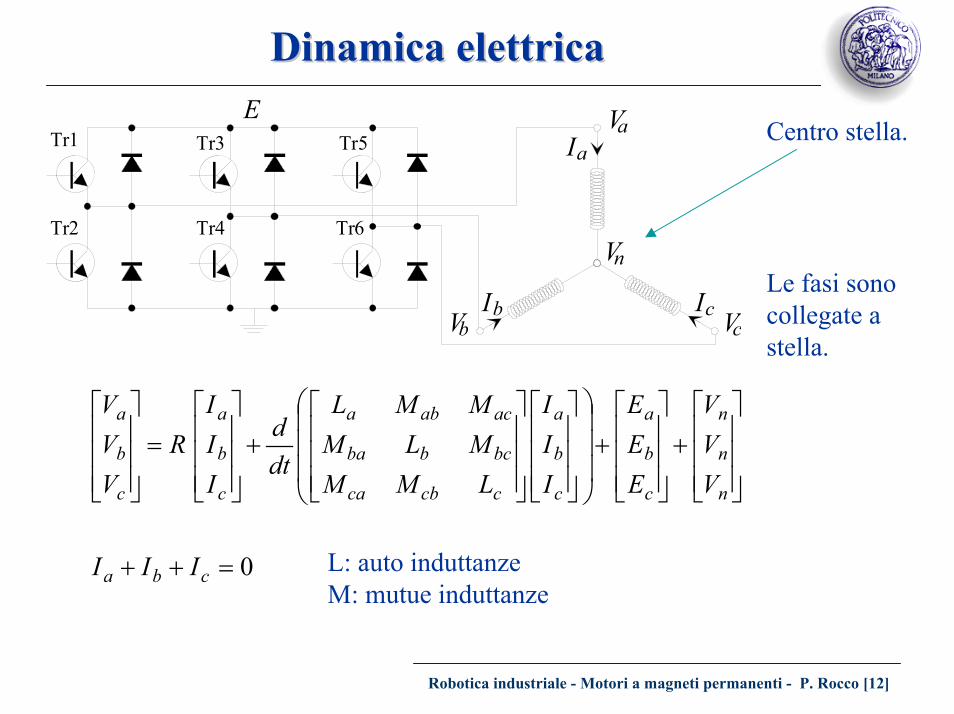
Dinamica elettricaDinamica elettrica
Le fasi sono collegate a stella.
Va
Vb Vc
Ia
Ib Ic
Vn
Tr1
Tr2 Tr4
Tr3 Tr5
Tr6
ECentro stella.
+
+
+
=
n
n
n
c
b
a
c
b
a
ccbca
bcbba
acaba
c
b
a
c
b
a
VVV
EEE
III
LMMMLMMML
dtd
III
RVVV
L: auto induttanzeM: mutue induttanze
0=++ cba III

Robotica industriale - Motori a magneti permanenti - P. Rocco [13]
Dinamica elettrica: macchina isotropaDinamica elettrica: macchina isotropaVa
Vb Vc
Ia
Ib Ic
Vn
Tr1
Tr2 Tr4
Tr3 Tr5
Tr6
Ecost.=iL
cost.=ijM
iji MLL −=
+
+
+
=
n
n
n
c
b
a
c
b
a
c
b
a
c
b
a
VVV
EEE
III
dtdL
III
RVVV
0=++ cba III
Robotica industriale - Motori a magneti permanenti - P. Rocco [14]
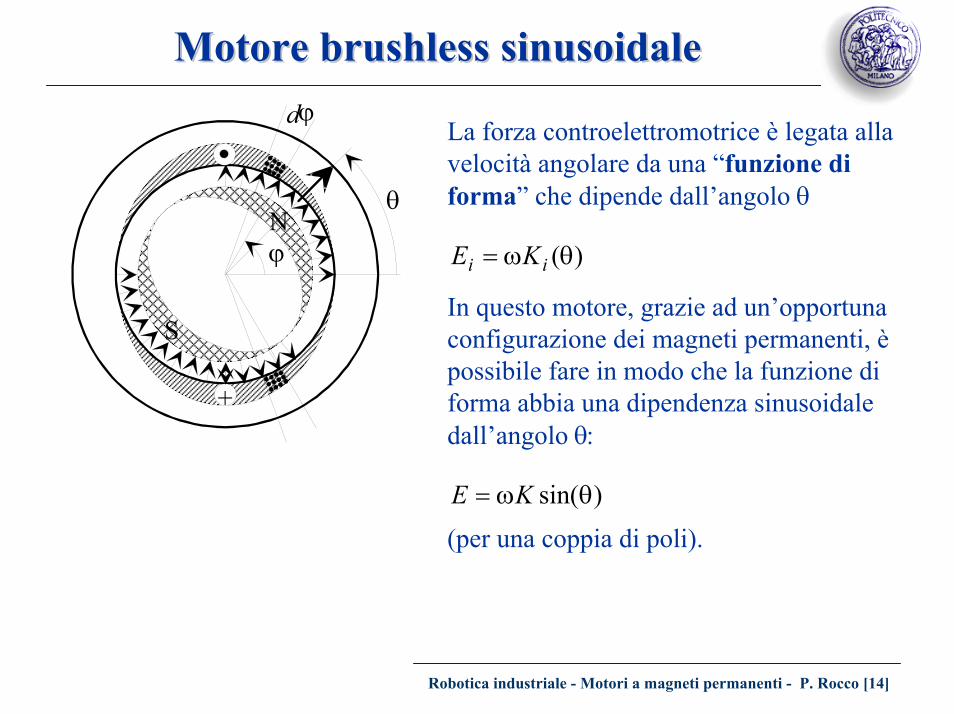
Motore Motore brushless brushless sinusoidalesinusoidale
N
S
+
ϕ
θ
dϕ La forza controelettromotrice è legata alla velocità angolare da una “funzione di forma” che dipende dall’angolo θ
)(θω= ii KE
In questo motore, grazie ad un’opportuna configurazione dei magneti permanenti, èpossibile fare in modo che la funzione di forma abbia una dipendenza sinusoidale dall’angolo θ:
)sin(θω= KE(per una coppia di poli).

Robotica industriale - Motori a magneti permanenti - P. Rocco [15]
Calcolo della coppiaCalcolo della coppia
La potenza meccanica uguaglia la potenza elettrica:
ccbbaae IEIEIEP ++=
ωτ= mmP
ω++
=τ ccbbaam
IEIEIEme PP =
Come imporre che la coppia sia indipendente dall’angolo θ (come in un motore a corrente continua)?
Robotica industriale - Motori a magneti permanenti - P. Rocco [16]
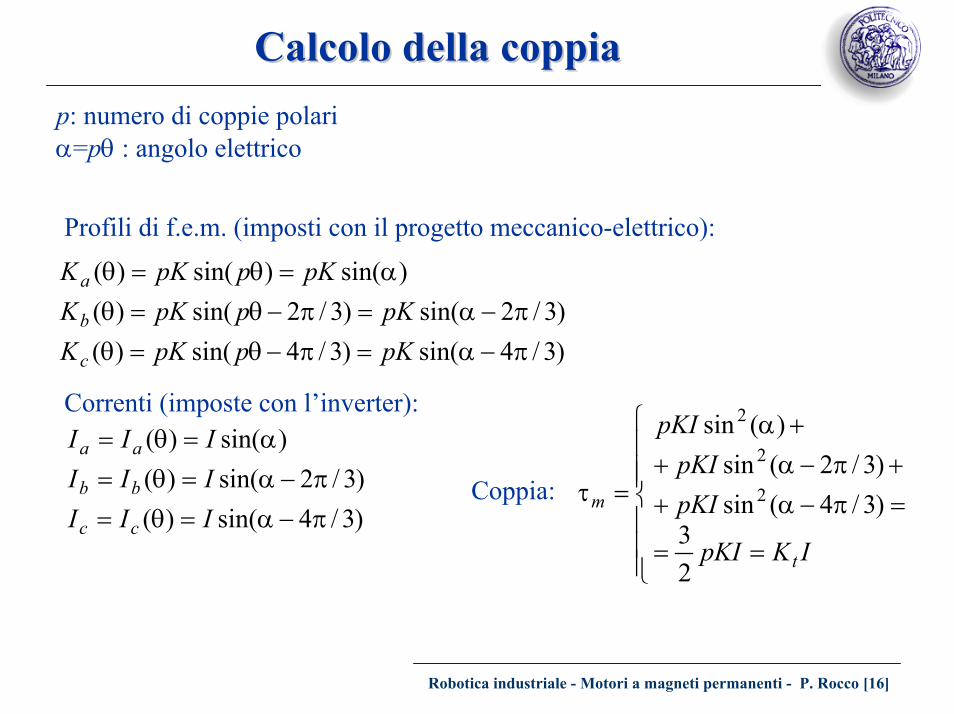
Calcolo della coppiaCalcolo della coppiap: numero di coppie polariα=pθ : angolo elettrico
Profili di f.e.m. (imposti con il progetto meccanico-elettrico):
)3/4sin()3/4sin()()3/2sin()3/2sin()(
)sin()sin()(
π−α=π−θ=θπ−α=π−θ=θ
α=θ=θ
pKppKKpKppKK
pKppKK
c
b
a
Correnti (imposte con l’inverter):
==
=π−α++π−α+
+α
=τ
IKpKI
pKIpKI
pKI
t
m
23
)3/4(sin)3/2(sin
)(sin
2
2
2
)3/4sin()()3/2sin()(
)sin()(
π−α=θ=π−α=θ=
α=θ=
IIIIIIIII
cc
bb
aa
Coppia:

Robotica industriale - Motori a magneti permanenti - P. Rocco [17]
Ripple Ripple di coppiadi coppiaIKtm =τ
Idealmente la coppia non dipende dall’angolo.
In realtà, a causa di imperfezioni nel progetto del motore e dell’inverter, la coppia ha sovrapposta una ondulazione (ripple) dipendente dall’angolo:
-200-100
0100
200
0
100
200
300-0.5
0
0.5
1
1.5
2
Angolo meccanico (Gradi)Corrente (Unità DAC)
Copp
ia (N
m)
Il ripple può eccitare le risonanze del robot.

Robotica industriale - Motori a magneti permanenti - P. Rocco [18]
Motore Motore brushlessbrushless: in sintesi: in sintesi
Vantaggi
• Assenza di scintille• Manutenzione nulla• Maggiori velocità• Minore inerzia, peso, dimensioni• Facilità di raffreddamento• Minore induttanza Svantaggi
• Costo sensore di posizione• Costo magneti• Costo elettronica di controllo• Ripple

Robotica industriale - Motori a magneti permanenti - P. Rocco [19]
Amplificatori di potenza (drive)Amplificatori di potenza (drive)
Regolatore MotoreAmplificatore
dipotenza
Bassa potenza Alta potenzaLa potenza del segnale in uscita da un regolatore di corrente deve essere amplificata:
1R
2R
inV M
outV
Gli amplificatori lineari dissipano troppa potenza.

Robotica industriale - Motori a magneti permanenti - P. Rocco [20]
Amplificatori Amplificatori switchingswitching
VCC
M
VB
1
V
IVCE
1Hanno un funzionamento di tipo on-off.
Modulano il valore medio della tensione applicata.
Frequenze di commutazione: 5000÷50000 Hz
Potenza dissipataP = VCE I
Transistor interdetto ⇒ I = 0Transistor in saturazione ⇒ VCE ≈ 0.2 V
Robotica industriale - Motori a magneti permanenti - P. Rocco [21]
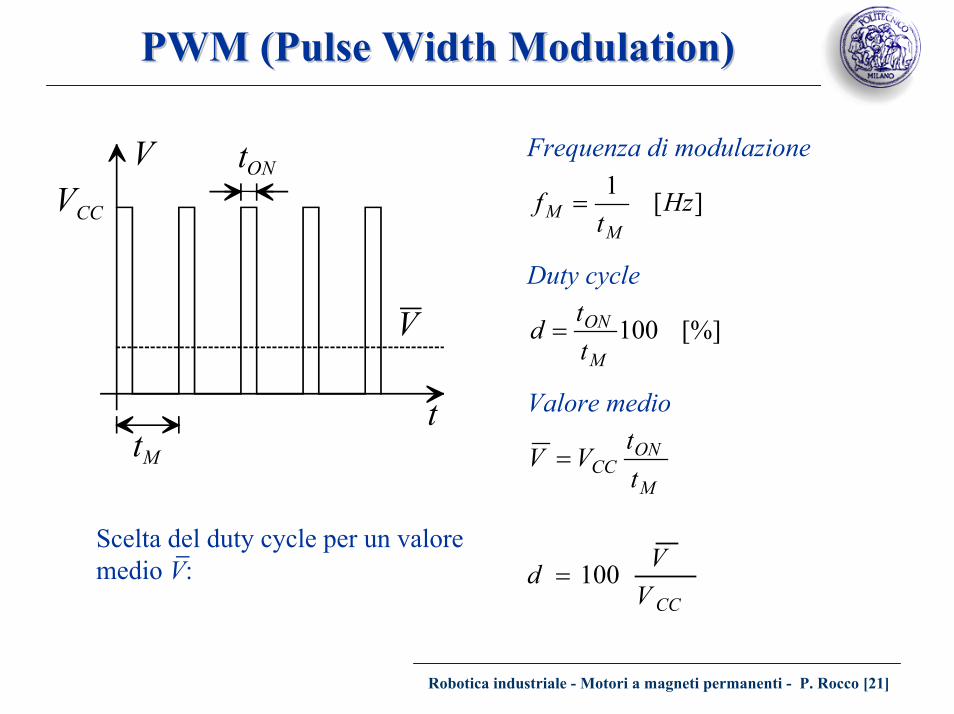
PWM (PWM (Pulse Width ModulationPulse Width Modulation))
Frequenza di modulazioneV
ttM
tON
VCC
V
][1 Hzt
fM
M =
Duty cycle
[%]100M
ON
ttd =
Valore medio
M
ONCC t
tVV =
CCVVd 100=
Scelta del duty cycle per un valore medio V:−

Robotica industriale - Motori a magneti permanenti - P. Rocco [22]
Controllo di correnteControllo di correnteControllo di corrente su due fasi: Su ciascuna fase:
Regolatoredi
corrente_+
Ia
Ia Va
Regolatoredi
corrente
_
+Ib Vb
Ib
_Vc
_
R L
EV
I
InverterA
CB
Tr1
Tr2 Tr4
Tr3 Tr5
Tr6
E
Va, Vb, Vcpilotano i sei transistor
Metodo alternativo: controllo vettoriale.