MACCHINA IN CORRENTE CONTINUA (AD ECCITAZIONE...
16
1 MACCHINA IN CORRENTE CONTINUA (AD ECCITAZIONE INDIPENDENTE) STRUTTURA. STATORE. E’ costituito da un anello ferromagnetico con espansioni polari interne, sagomate in modo da lasciare un traferro costante rispetto al rotore. Intorno a tali espansioni è posto l’avvolgimento di eccitazione, alimentato in cc, che genera il campo di eccitazione. In piccoli motori, il campo di eccitazione può essere generato da magneti permanenti. ROTORE. E’ un cilindro pieno, dentato per alloggiare i conduttori dell’avvolgimento di indotto. i e i e e AVVOLGIMENTO DI INDOTTO. Si può realizzare in diversi modi. La tipologia più semplice si ottiene collegando ciascun conduttore in cava con quello disposto a (circa) un passo polare (se la macchina ha 2 poli, è quello circa diametralmente opposto). Se U è il N° di conduttori (in fig. U = 8), e i conduttori sono numerati in modo progressivo lungo la periferia, la sequenza dei conduttori so ottiene aggiungendo U/2 - 1 (e sottraendo U quando si supera il valore U). Es: U = 8 => U/2 - 1 = 3 => la sequenza è 1, 4, 7, 2, 5, 8, 3, 6, 1 Completando tutti i collegamenti, l’avvolgimento risulta chiuso (cioè: non esiste un punto di inizio ed uno di fine, ma si ha un unico circuito chiuso). 1 2 3 4 5 6 7 8 COLLETTORE A LAMELLE. E’ un cilindro di rame, formato da tanti spicchi quante sono le matasse dell’avvolgimento; i vari spicchi sono isolati l’uno dall’altro e si chiamano lamelle. Il collettore è coassiale col rotore e solidale con esso (quindi ruota). Ogni lamella è collegata ad una matassa (ad esempio, quella che le è tangente). LAMELLA ISOLAMENTO ISOLAMENTO LAMELLA SPAZZOLE. Sono due parallelepipedi di grafite, premuti contro il collettore da un sistema di molle. In ogni istante, ogni spazzola tocca una lamella, e siccome ogni lamella è collegata in 1 punto all’avvolgimento di indotto, in ogni istante tale avvolgimento presenta alle spazzole 2 vie in parallelo (per verificarlo, provare a seguire il percorso della corrente) SPAZZOLA SPAZZOLA Le spazzole sono fisse (solidali con lo statore) => al ruotare del rotore cambia il percorso della corrente nell’avvolgimento di indotto, ma NON cambia il verso della corrente rispetto allo statore. 1 2 3 4 5 6 7 8 7 8 1 2 3 4 5 6 Ora, se le spazzole sono messe in modo tale da essere a metà dei poli, si vede che i conduttori sotto un polo presentano sempre la stessa corrente => la coppia che il campo ed i conduttori si scambiano ha sempre lo stesso verso (motrice se la macchina funziona da motore, frenante se funziona da generatore). NOTA: si osservi che in questa situazione si ha una quadratura fra gli assi magnetici di eccitazione (orizzontale in figura) e di indotto (verticale in figura), quindi l’angolo fra le f.m.m. di statore e rotore è 90°: si verifica quindi che nella MCC la condizione di coppia massima ( = 90°) è ottenuta intrinsecamente. 1 2 3 4 5 6 7 8
Transcript of MACCHINA IN CORRENTE CONTINUA (AD ECCITAZIONE...

1
MACCHINA IN CORRENTE CONTINUA (AD ECCITAZIONE INDIPENDENTE) STRUTTURA. STATORE. E’ costituito da un anello ferromagnetico con espansioni polari interne, sagomate in modo da lasciare un traferro costante rispetto al rotore. Intorno a tali espansioni è posto l’avvolgimento di eccitazione, alimentato in cc, che genera il campo di eccitazione. In piccoli motori, il campo di eccitazione può essere generato da magneti permanenti. ROTORE. E’ un cilindro pieno, dentato per alloggiare i conduttori dell’avvolgimento di indotto.
ieie
e
AVVOLGIMENTO DI INDOTTO. Si può realizzare in diversi modi. La tipologia più semplice si ottiene collegando ciascun conduttore in cava con quello disposto a (circa) un passo polare (se la macchina ha 2 poli, è quello circa diametralmente opposto). Se U è il N° di conduttori (in fig. U = 8), e i conduttori sono numerati in modo progressivo lungo la periferia, la sequenza dei conduttori so ottiene aggiungendo U/2 - 1 (e sottraendo U quando si supera il valore U). Es: U = 8 => U/2 - 1 = 3 => la sequenza è 1, 4, 7, 2, 5, 8, 3, 6, 1 Completando tutti i collegamenti, l’avvolgimento risulta chiuso (cioè: non esiste un punto di inizio ed uno di fine, ma si ha un unico circuito chiuso).
1
2
345
6
78
COLLETTORE A LAMELLE. E’ un cilindro di rame, formato da tanti spicchi quante sono le matasse dell’avvolgimento; i vari spicchi sono isolati l’uno dall’altro e si chiamano lamelle. Il collettore è coassiale col rotore e solidale con esso (quindi ruota). Ogni lamella è collegata ad una matassa (ad esempio, quella che le è tangente).
LAMELLA
ISOLAMENTO
ISOLAMENTO
LAMELLA
SPAZZOLE. Sono due parallelepipedi di grafite, premuti contro il collettore da un sistema di molle. In ogni istante, ogni spazzola tocca una lamella, e siccome ogni lamella è collegata in 1 punto all’avvolgimento di indotto, in ogni istante tale avvolgimento presenta alle spazzole 2 vie in parallelo (per verificarlo, provare a seguire il percorso della corrente)
SPAZZOLA
SPAZZOLA
Le spazzole sono fisse (solidali con lo statore) => al ruotare del rotore cambia il percorso della corrente nell’avvolgimento di indotto, ma NON cambia il verso della corrente rispetto allo statore.
1
2
345
6
7
8
7
8
123
4
5
6
Ora, se le spazzole sono messe in modo tale da essere a metà dei poli, si vede che i conduttori sotto un polo presentano sempre la stessa corrente => la coppia che il campo ed i conduttori si scambiano ha sempre lo stesso verso (motrice se la macchina funziona da motore, frenante se funziona da generatore). NOTA: si osservi che in questa situazione si ha una quadratura fra gli assi magnetici di eccitazione (orizzontale in figura) e di indotto (verticale in figura), quindi l’angolo fra le f.m.m. di statore e rotore è 90°: si verifica quindi che nella MCC la condizione di coppia massima ( = 90°) è ottenuta intrinsecamente.
1
2
34
5
6
7 8
2
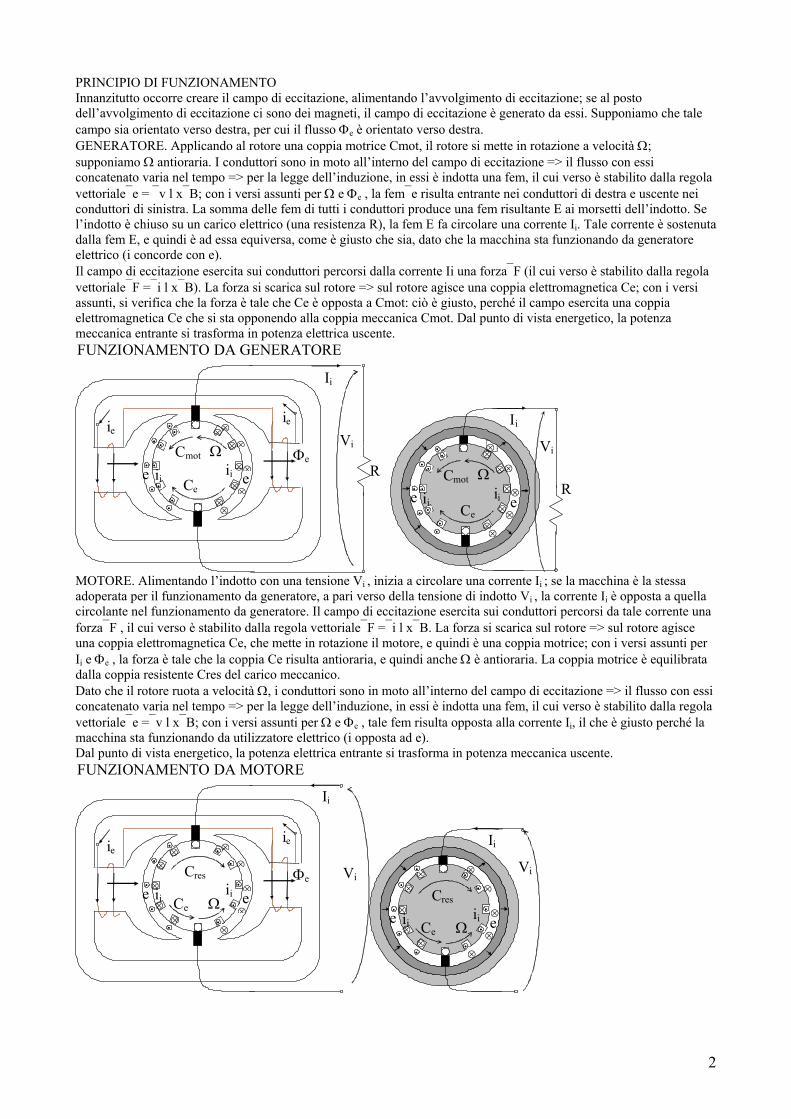
PRINCIPIO DI FUNZIONAMENTO Innanzitutto occorre creare il campo di eccitazione, alimentando l’avvolgimento di eccitazione; se al posto dell’avvolgimento di eccitazione ci sono dei magneti, il campo di eccitazione è generato da essi. Supponiamo che tale campo sia orientato verso destra, per cui il flusso e è orientato verso destra. GENERATORE. Applicando al rotore una coppia motrice Cmot, il rotore si mette in rotazione a velocità ; supponiamo antioraria. I conduttori sono in moto all’interno del campo di eccitazione => il flusso con essi concatenato varia nel tempo => per la legge dell’induzione, in essi è indotta una fem, il cui verso è stabilito dalla regola vettorialee = v l xB; con i versi assunti per e e , la feme risulta entrante nei conduttori di destra e uscente nei conduttori di sinistra. La somma delle fem di tutti i conduttori produce una fem risultante E ai morsetti dell’indotto. Se l’indotto è chiuso su un carico elettrico (una resistenza R), la fem E fa circolare una corrente Ii. Tale corrente è sostenuta dalla fem E, e quindi è ad essa equiversa, come è giusto che sia, dato che la macchina sta funzionando da generatore elettrico (i concorde con e). Il campo di eccitazione esercita sui conduttori percorsi dalla corrente Ii una forzaF (il cui verso è stabilito dalla regola vettorialeF =i l xB). La forza si scarica sul rotore => sul rotore agisce una coppia elettromagnetica Ce; con i versi assunti, si verifica che la forza è tale che Ce è opposta a Cmot: ciò è giusto, perché il campo esercita una coppia elettromagnetica Ce che si sta opponendo alla coppia meccanica Cmot. Dal punto di vista energetico, la potenza meccanica entrante si trasforma in potenza elettrica uscente.
ie ie
e
ii e
e ii
Ce R
Vi
Ii
FUNZIONAMENTO DA GENERATORE
Cmot
R
iie
e ii
Ce
Vi
Ii
Cmot
MOTORE. Alimentando l’indotto con una tensione Vi , inizia a circolare una corrente Ii ; se la macchina è la stessa adoperata per il funzionamento da generatore, a pari verso della tensione di indotto Vi , la corrente Ii è opposta a quella circolante nel funzionamento da generatore. Il campo di eccitazione esercita sui conduttori percorsi da tale corrente una forzaF , il cui verso è stabilito dalla regola vettorialeF =i l xB. La forza si scarica sul rotore => sul rotore agisce una coppia elettromagnetica Ce, che mette in rotazione il motore, e quindi è una coppia motrice; con i versi assunti per Ii e e , la forza è tale che la coppia Ce risulta antioraria, e quindi anche è antioraria. La coppia motrice è equilibrata dalla coppia resistente Cres del carico meccanico. Dato che il rotore ruota a velocità , i conduttori sono in moto all’interno del campo di eccitazione => il flusso con essi concatenato varia nel tempo => per la legge dell’induzione, in essi è indotta una fem, il cui verso è stabilito dalla regola vettorialee =v l xB; con i versi assunti per e e , tale fem risulta opposta alla corrente Ii, il che è giusto perché la macchina sta funzionando da utilizzatore elettrico (i opposta ad e). Dal punto di vista energetico, la potenza elettrica entrante si trasforma in potenza meccanica uscente.
ie ie
e
ii e
e ii
Cres Vi
Ii
FUNZIONAMENTO DA MOTORE
Ce
iie
e ii
Vi
Ii
Cres
Ce

3
CIRCUITO EQUIVALENTE e LEGGE ALLA MAGLIA In entrambi i funzionamenti, il campo di eccitazione induce nell’avvolgimento di indotto una fem E => in entrambi i funzionamenti, l’indotto può essere rappresentato da una fem E con in serie la resistenza dell’avvolgimento Ri. Bisogna poi considerare che ogni avvolgimento dà luogo ad una induttanza, per cui nel circuito si aggiunge l’induttanza del circuito di indotto Li; ovviamente Li fa sentire la sua presenza solo nei transitori, perché in CC a regime un induttore si comporta come un corto circuito, quindi è come se non ci fosse.
ERi Li
Quindi, il circuito equivalente di motore e generatore è lo stesso; ciò che cambia è il verso della corrente (e quindi della potenza). Infatti, come visto prima, nel funzionamento da generatore la corrente è concorde con E, ed uscente, mentre nel funzionamento da motore, la corrente è entrante, ed opposta ad E. Dal circuito equivalente discende immediatamente la legge alla maglia nei due funzionamenti a regime. GENERATORE E = Ri Ii + Vi
E Ri
Vi
Ii
MOTORE Vi = E + Ri Ii
E Ri
Vi
Ii
LEGGI DI FUNZIONAMENTO DELLA MACCHINA C = KI E= K Siano: B = induzione media nel traferro, l = lunghezza del conduttore in senso assiale, = velocità di rotazione in rad/sec, R = raggio del rotore, v = R = velocità tangenziale dei conduttori di rotore, U = numero dei conduttori nell’avvolgimento, a = numero di vie in parallelo, p = numero di poli, = passo polare (= estensione del polo lungo la circonferenza del traferro = 2π R / p), A = l = sezione del polo, = B A = B l = flusso del polo. Tramite la legge dell’induzione elementare, la fem indotta in ciascun conduttore può essere espressa come e = B l v = B l R. La fem ai capi dell’avvolgimento è E = U/a e = U/a B l R = U/a B l R / = K . NOTA: si riconosce che K = (U/a) (R / ) = (U/a) (p / 2 π). Quindi la fem ai morsetti della macchina è proporzionale al flusso e alla velocità di rotazione: E = K . Dalla legge alla maglia (di generatore o motore), moltiplicando per la corrente si ottiene il bilancio di potenze: E Ii = Ri Ii
2 + Vi Ii oppure Vi Ii = Ri Ii2 + E Ii ; Vi Ii è la potenza elettrica (uscente se generatore, entrante se motore);
Ri Ii2 è la potenza persa per effetto Joule; ne segue che E Ii è la potenza elettrica che si trasforma in meccanica; d’altra
parte, la potenza meccanica è esprimibile come C ; allora, dal bilancio energetico EIi = C segue l’espressione della coppia C = K Ii. Trattazione più approfondita
La coppia media su 1 conduttore è
0
2
0
2
01 )(1
)(2
1)(
2
1dcdttc
Tdttc
TC
TT
m
Su ogni conduttore agisce una forza bli con braccio R => c = bliR. Inoltre, se la corrente di indotto è I e ci sono a vie in parallelo, la corrente in ogni conduttore è I/a.
Quindi Ia
pp
a
IlB
p
a
IRlB
a
IdbRl
a
IRd
a
IlbC mmm
2
1
22)(
1)(
1001
.
Nella macchina ci sono U conduttori, quindi 1 2m m
U pC U C I K I
p a .
La fem media indotta in una spira è )2Ψ(T
Ψ(0)
2T
011m dΨ
T
2dt(t)e
2T
1e
In t = 0, il flusso concatenato è l’intero flusso di polo ; dopo T/2, il flusso concatenato è ancora , ma con segno
negativo; quindi l’integrale del flusso concatenato è 2 => fΦ4Φ2T
2e 1m
Nella macchina, in ogni via in parallelo ci sono U/2a spire, quindi la fem di ogni via è fΦ4a2
Ue
a2
UE 1mm .
Ricordando il legame fra velocità di rotazione e frequenza fpp
222
si ha
Ka
pUp
a
UEm 222
42
.
La trattazione mostra che la costante di proporzionalità K è la stessa per la coppia e la fem, e dipende da come è fatto l’avvolgimento.
4
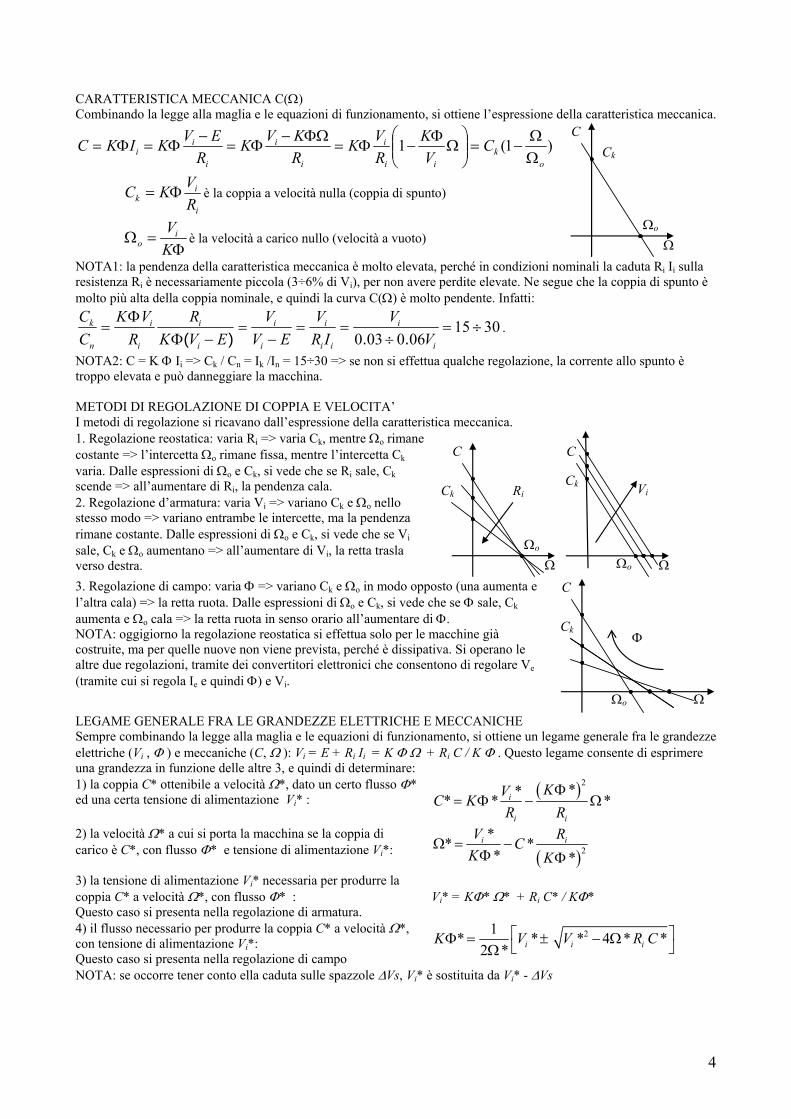
CARATTERISTICA MECCANICA C() Combinando la legge alla maglia e le equazioni di funzionamento, si ottiene l’espressione della caratteristica meccanica.
)1(1o
kii
i
i
i
i
ii C
V
K
R
VK
R
KVK
R
EVKIKC
i
ik R
VKC è la coppia a velocità nulla (coppia di spunto)
K
Vio è la velocità a carico nullo (velocità a vuoto)
Ck
C
o
NOTA1: la pendenza della caratteristica meccanica è molto elevata, perché in condizioni nominali la caduta Ri Ii sulla resistenza Ri è necessariamente piccola (3÷6% di Vi), per non avere perdite elevate. Ne segue che la coppia di spunto è molto più alta della coppia nominale, e quindi la curva C() è molto pendente. Infatti:
15 300 03 0 06( ) . .
k i i i i i
n i i i i i i
C K V R V V V
C R K V E V E R I V
.
NOTA2: C = K Ii => Ck / Cn = Ik /In = 15÷30 => se non si effettua qualche regolazione, la corrente allo spunto è troppo elevata e può danneggiare la macchina. METODI DI REGOLAZIONE DI COPPIA E VELOCITA’ I metodi di regolazione si ricavano dall’espressione della caratteristica meccanica. 1. Regolazione reostatica: varia Ri => varia Ck, mentre o rimane costante => l’intercetta o rimane fissa, mentre l’intercetta Ck varia. Dalle espressioni di o e Ck, si vede che se Ri sale, Ck scende => all’aumentare di Ri, la pendenza cala. 2. Regolazione d’armatura: varia Vi => variano Ck e o nello stesso modo => variano entrambe le intercette, ma la pendenza rimane costante. Dalle espressioni di o e Ck, si vede che se Vi sale, Ck e o aumentano => all’aumentare di Vi, la retta trasla verso destra.
Ck
C
o
Ri
Ck
C
o
Vi
3. Regolazione di campo: varia => variano Ck e o in modo opposto (una aumenta e l’altra cala) => la retta ruota. Dalle espressioni di o e Ck, si vede che se sale, Ck aumenta e o cala => la retta ruota in senso orario all’aumentare di . NOTA: oggigiorno la regolazione reostatica si effettua solo per le macchine già costruite, ma per quelle nuove non viene prevista, perché è dissipativa. Si operano le altre due regolazioni, tramite dei convertitori elettronici che consentono di regolare Ve (tramite cui si regola Ie e quindi ) e Vi.
Ck
C
o
LEGAME GENERALE FRA LE GRANDEZZE ELETTRICHE E MECCANICHE Sempre combinando la legge alla maglia e le equazioni di funzionamento, si ottiene un legame generale fra le grandezze elettriche (Vi , ) e meccaniche (C, ): Vi = E + Ri Ii = K + Ri C / K . Questo legame consente di esprimere una grandezza in funzione delle altre 3, e quindi di determinare: 1) la coppia C* ottenibile a velocità *, dato un certo flusso * ed una certa tensione di alimentazione Vi* :
2**
* * *i
i i
KVC K
R R
2) la velocità * a cui si porta la macchina se la coppia di carico è C*, con flusso * e tensione di alimentazione Vi*: 2
** *
* *i iV R
CK K
3) la tensione di alimentazione Vi* necessaria per produrre la coppia C* a velocità *, con flusso * : Questo caso si presenta nella regolazione di armatura.
Vi* = K* * + Ri C* / K*
4) il flusso necessario per produrre la coppia C* a velocità *, con tensione di alimentazione Vi*: Questo caso si presenta nella regolazione di campo
21* * * 4 * *
2 * i i iK V V R C
NOTA: se occorre tener conto ella caduta sulle spazzole Vs, Vi* è sostituita da Vi* - Vs

5
ESEMPIO DI REGOLAZIONE Utilizzando dapprima la regolazione d’armatura, poi quella di campo, si riesce ad ottenere una caratteristica meccanica con coppia costante fino alla velocità base b, poi con coppia calante come 1/ (potenza costante)
C
b
Per < b si pone = * = cost (ponendo Ve = cost), e si fa in modo che Ii = Ii* = cost, alimentando con una tensione Vi variabile con la velocità , di valore Vi = Ri Ii* + K * (infatti, con tale tensione, la corrente risulta Ii = (Vi – E) / Ri = (Ri Ii* + K * - K * ) / Ri = Ii* = cost); quindi la coppia risulta costante: C = K Ii = K Ii* = C* = cost. Raggiunta la velocità base b (velocità per cui Vi = Vin), si pone Vi = Vin = cost e 1 / (la regolazione di si effettua regolando Ve). Quindi la fem e la corrente sono costanti: E = K = cost = En, Ii = (Vin – En) / Ri = Iin = cost. Ne segue che la coppia è inversamente proporzionale alla velocità, e la potenza P = C è costante. m
Ф C
V P
b
Vmax
Imax
V P
I
Cmax
Ф C
Se la macchina è a MP, il flusso è costante (perché imposto dal magnete), per cui non è possibile regolarlo. In tal caso allora, raggiunta la velocità base b , si procede lungo la caratteristica meccanica naturale della macchina, cioè la caratteristica rettilinea vista precedentemente.
C*
C
o b
NOTA: con questi metodi di regolazione si risolve anche il problema dell’avviamento, perché si vede che la coppia è limitata, e quindi anche la corrente; in particolare, C* sarà non superiore alla coppia nominale Cn (per evitare danni meccanici), e quindi I* risulta inferiore alla corrente nominale In. NOTA su TIPOLOGIE DI ECCITAZIONE e MOTORI UNIVERSALI La trattazione svolta riguarda la macchina cosiddetta “ad eccitazione indipendente”, cioè in cui l’avvolgimento di eccitazione è indipendente da quello di indotto. Esiste un’altra tipologia importante, che è quella cosiddetta “ad eccitazione serie”, in cui cioè l’avvolgimento di eccitazione è in serie a quello di indotto, per cui le correnti di indotto e di eccitazione coincidono. Questo fatto ha due notevoli conseguenze. La prima è che nella caratteristica meccanica la coppia ha già di suo un andamento prossimo a 1/, quindi la macchina già naturalmente lavora quasi a potenza costante, anche senza controllo; per questo motivo, questa tipologia è quella usata per la trazione elettrica (treni, metropolitane, tram). La seconda conseguenza è che se si inverte la tensione di alimentazione, si invertono contemporaneamente sia la corrente di indotto, sia quella di eccitazione, per cui la coppia non cambia verso: grazie a questo fatto, tale macchina può essere alimentata anche in CA, e per questo prende il nome di motore universale; è molto usato per motori di piccola potenza (elettrodomestici, utensili elettrici). CARATTERISTICA MECCANICA DI MOTORE AD ECCITAZIONE SERIE Nel caso di motore ad eccitazione serie, la caratteristica meccanica (C,) si ricava dalle caratteristiche (C, Ii) ed (Ii, ); - la caratteristica (C, Ii) si ricava dalla legge C = K Ii e dalla caratteristica di magnetizzazione (legame (, Iecc),
che qui diventa legame (, Ii), dato che Iecc = Ii): C(Ii) = K (Ii) Ii; - la caratteristica (Ii, ) si ricava dalla legge alla maglia Ii = (V – E) / Ri , dalla legge E = K , e ancora dalla
caratteristica di magnetizzazione (, Ii): Ii = (V – K (Ii) ) / Ri . Per ricavare in modo semplice le varie caratteristiche, assumiamo la semplificazione che la caratteristica di magnetizzazione sia costituita da due tratti rettilinei: nel 1° tratto il flusso è proporzionale alla corrente, cioè = K Ii, nel 2° tratto = cost = *. Si è visto che per basse velocità ( < b) il flusso è mantenuto costante al valore massimo *; si ha quindi Ii = (V – K* ) / Ri e C = K* (V – K* ) / Ri ; l’andamento C() è una retta con pendenza negativa.
*
Iecc
b
Per alte velocità ( > b) il flusso è ridotto: si entra quindi nella zona in cui = K Ii , per cui la corrente risulta Ii = (V – K ) / Ri = (V – K K Ii ) / Ri ; da qui si può ricavare un legame Ii(): Ii Ri = V – K K Ii => Ii Ri + K K Ii = V => Ii() = V / (Ri + K K ). Il legame (C,) risulta quindi: C = K Ii = K K Ii 2 = K K [V / (Ri + K K ) ]2 ; si ha quindi un legame del tipo 1 / 2 . Risulta quindi verificato che la caratteristica meccanica di una macchina ad eccitazione serie ha già di suo un andamento prossimo a 1/ .
C
b

6

7
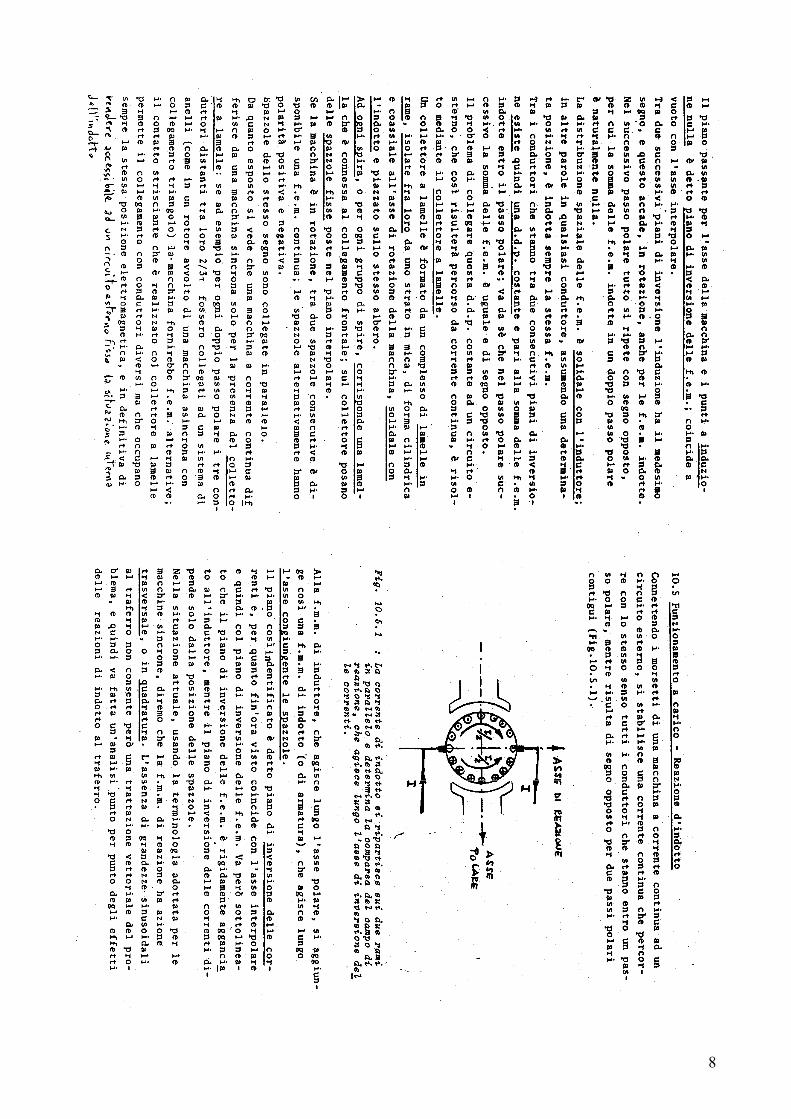
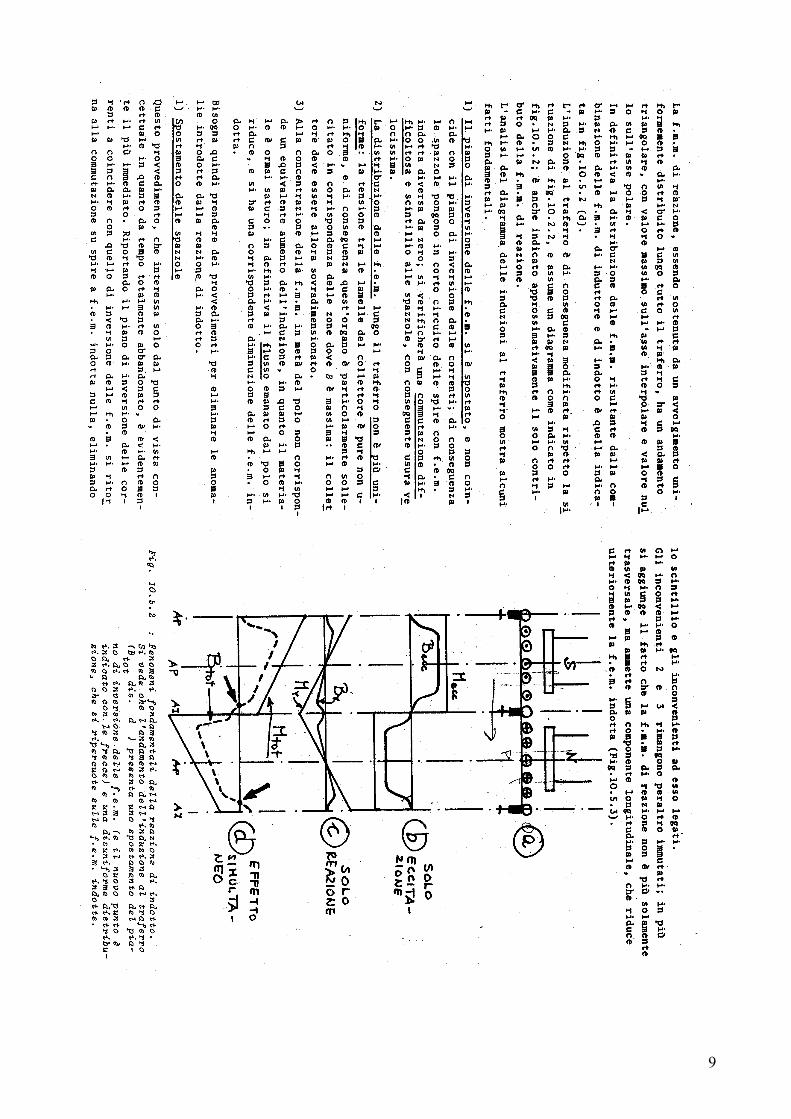
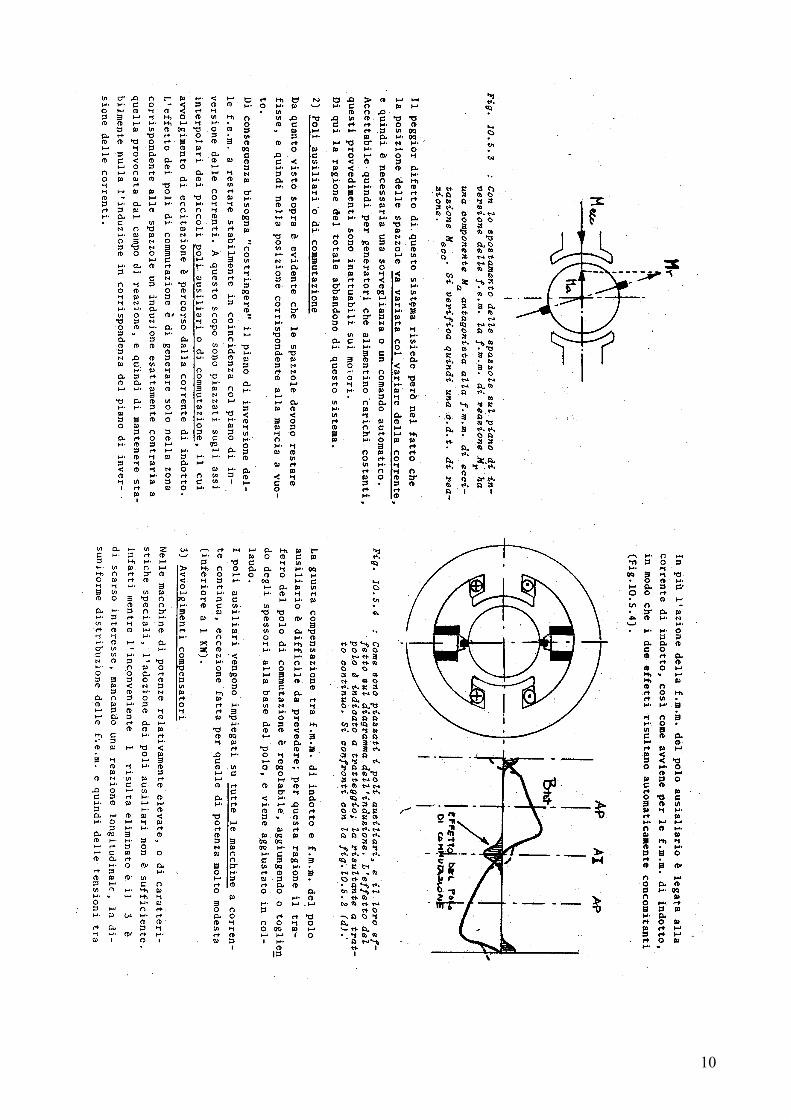
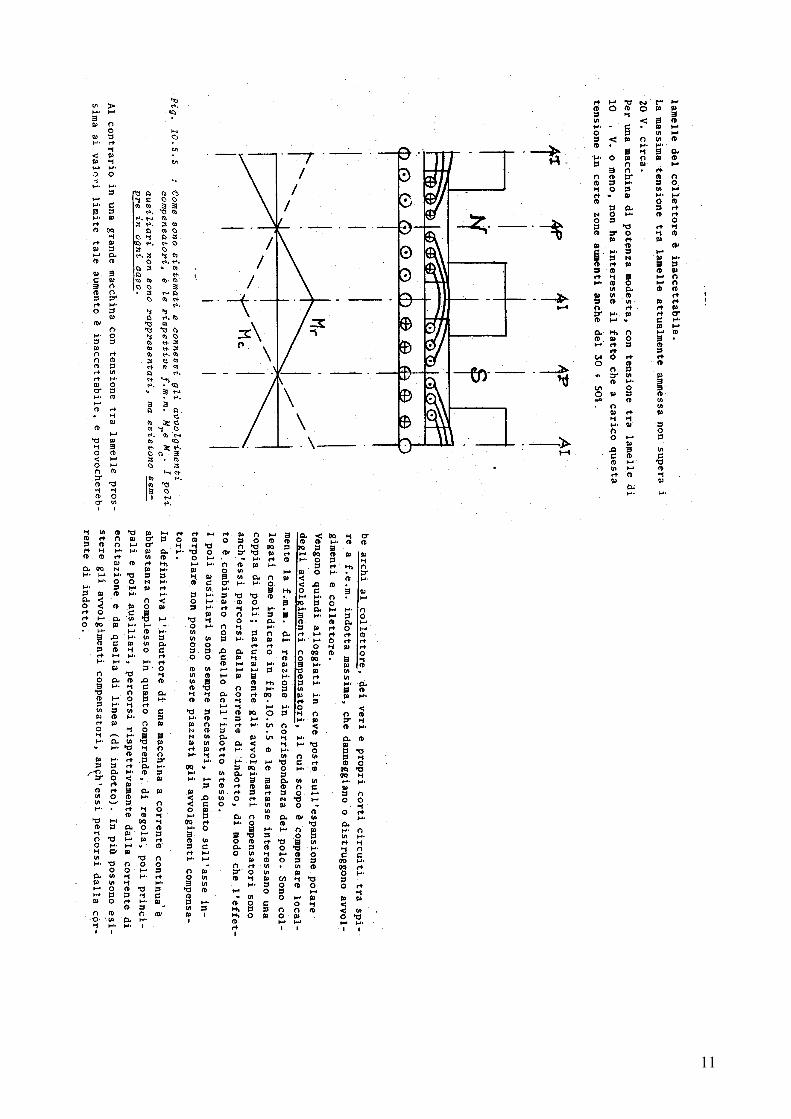
FUNZIONAMENTO A CARICO E REAZIONE D’INDOTTO
8
9
10
11
ESERCIZI SULLA MACCHINA A CORRENTE CONTINUA
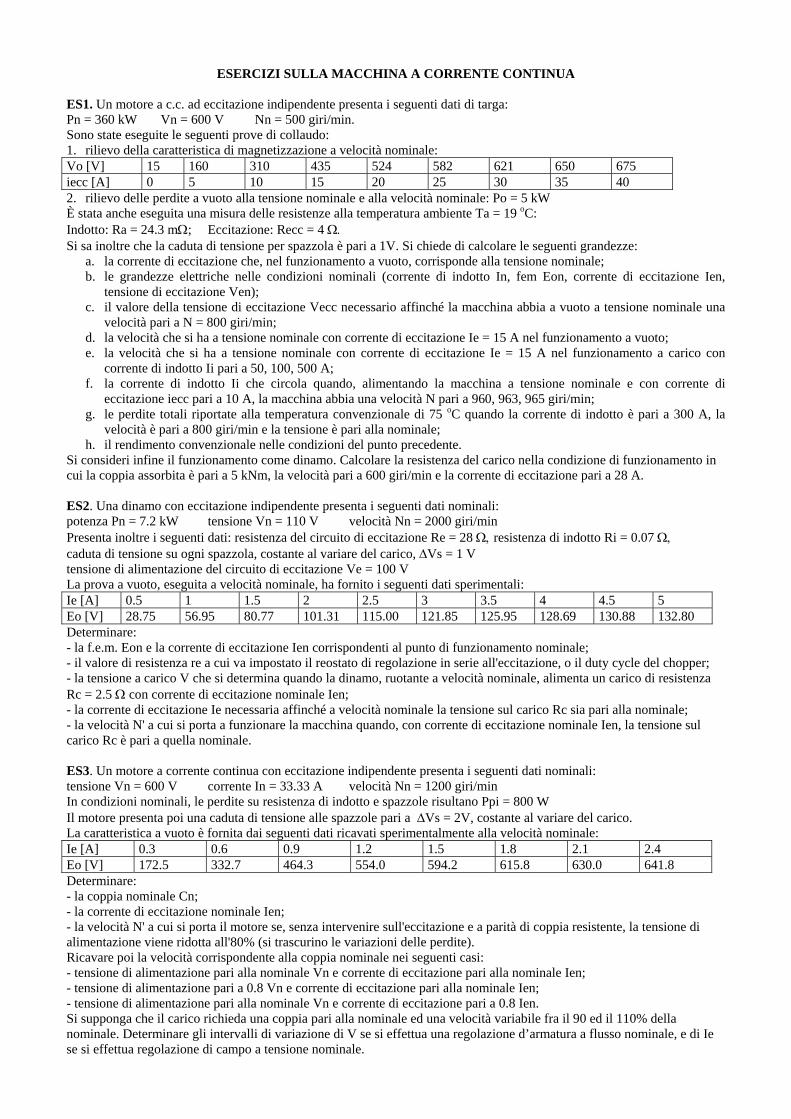
ES1. Un motore a c.c. ad eccitazione indipendente presenta i seguenti dati di targa: Pn = 360 kW Vn = 600 V Nn = 500 giri/min. Sono state eseguite le seguenti prove di collaudo: 1. rilievo della caratteristica di magnetizzazione a velocità nominale: Vo [V] 15 160 310 435 524 582 621 650 675 iecc [A] 0 5 10 15 20 25 30 35 40 2. rilievo delle perdite a vuoto alla tensione nominale e alla velocità nominale: Po = 5 kW È stata anche eseguita una misura delle resistenze alla temperatura ambiente Ta = 19 oC: Indotto: Ra = 24.3 m; Eccitazione: Recc = 4 Si sa inoltre che lacaduta di tensione per spazzola è pari a 1V. Si chiede di calcolare le seguenti grandezze:
a. la corrente di eccitazione che, nel funzionamento a vuoto, corrisponde alla tensione nominale; b. le grandezze elettriche nelle condizioni nominali (corrente di indotto In, fem Eon, corrente di eccitazione Ien,
tensione di eccitazione Ven); c. il valore della tensione di eccitazione Vecc necessario affinché la macchina abbia a vuoto a tensione nominale una
velocità pari a N = 800 giri/min; d. la velocità che si ha a tensione nominale con corrente di eccitazione Ie = 15 A nel funzionamento a vuoto; e. la velocità che si ha a tensione nominale con corrente di eccitazione Ie = 15 A nel funzionamento a carico con
corrente di indotto Ii pari a 50, 100, 500 A; f. la corrente di indotto Ii che circola quando, alimentando la macchina a tensione nominale e con corrente di
eccitazione iecc pari a 10 A, la macchina abbia una velocità N pari a 960, 963, 965 giri/min; g. le perdite totali riportate alla temperatura convenzionale di 75 oC quando la corrente di indotto è pari a 300 A, la
velocità è pari a 800 giri/min e la tensione è pari alla nominale; h. il rendimento convenzionale nelle condizioni del punto precedente.
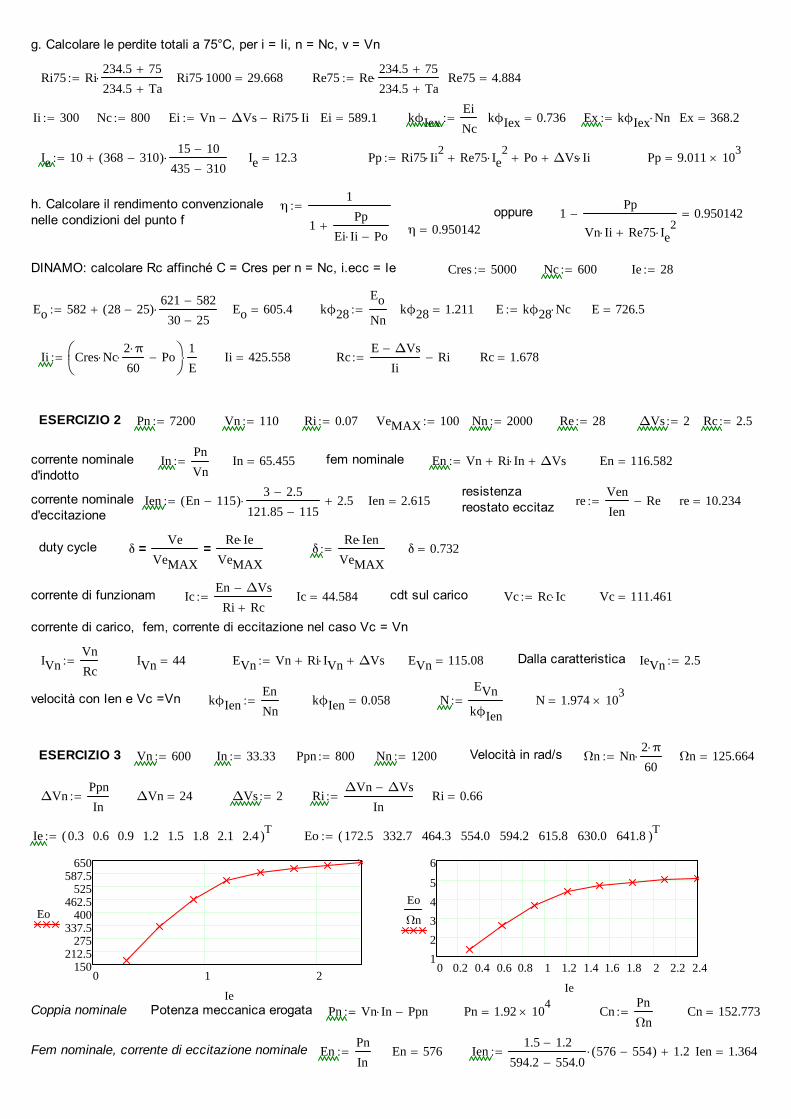
Si consideri infine il funzionamento come dinamo. Calcolare la resistenza del carico nella condizione di funzionamento in cui la coppia assorbita è pari a 5 kNm, la velocità pari a 600 giri/min e la corrente di eccitazione pari a 28 A. ES2. Una dinamo con eccitazione indipendente presenta i seguenti dati nominali: potenza Pn = 7.2 kW tensione Vn = 110 V velocità Nn = 2000 giri/min Presenta inoltre i seguenti dati: resistenza del circuito di eccitazione Re = 28 resistenza di indotto Ri = 0.07 caduta di tensione su ogni spazzola, costante al variare del carico, Vs = 1 V tensione di alimentazione del circuito di eccitazione Ve = 100 V La prova a vuoto, eseguita a velocità nominale, ha fornito i seguenti dati sperimentali: Ie [A] 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Eo [V] 28.75 56.95 80.77 101.31 115.00 121.85 125.95 128.69 130.88 132.80 Determinare: - la f.e.m. Eon e la corrente di eccitazione Ien corrispondenti al punto di funzionamento nominale; - il valore di resistenza re a cui va impostato il reostato di regolazione in serie all'eccitazione, o il duty cycle del chopper; - la tensione a carico V che si determina quando la dinamo, ruotante a velocità nominale, alimenta un carico di resistenza Rc = 2.5 con corrente di eccitazione nominale Ien; - la corrente di eccitazione Ie necessaria affinché a velocità nominale la tensione sul carico Rc sia pari alla nominale; - la velocità N' a cui si porta a funzionare la macchina quando, con corrente di eccitazione nominale Ien, la tensione sul carico Rc è pari a quella nominale. ES3. Un motore a corrente continua con eccitazione indipendente presenta i seguenti dati nominali: tensione Vn = 600 V corrente In = 33.33 A velocità Nn = 1200 giri/min In condizioni nominali, le perdite su resistenza di indotto e spazzole risultano Ppi = 800 W Il motore presenta poi una caduta di tensione alle spazzole pari a Vs = 2V, costante al variare del carico. La caratteristica a vuoto è fornita dai seguenti dati ricavati sperimentalmente alla velocità nominale: Ie [A] 0.3 0.6 0.9 1.2 1.5 1.8 2.1 2.4 Eo [V] 172.5 332.7 464.3 554.0 594.2 615.8 630.0 641.8 Determinare: - la coppia nominale Cn; - la corrente di eccitazione nominale Ien; - la velocità N' a cui si porta il motore se, senza intervenire sull'eccitazione e a parità di coppia resistente, la tensione di alimentazione viene ridotta all'80% (si trascurino le variazioni delle perdite). Ricavare poi la velocità corrispondente alla coppia nominale nei seguenti casi: - tensione di alimentazione pari alla nominale Vn e corrente di eccitazione pari alla nominale Ien; - tensione di alimentazione pari a 0.8 Vn e corrente di eccitazione pari alla nominale Ien; - tensione di alimentazione pari alla nominale Vn e corrente di eccitazione pari a 0.8 Ien. Si supponga che il carico richieda una coppia pari alla nominale ed una velocità variabile fra il 90 ed il 110% della nominale. Determinare gli intervalli di variazione di V se si effettua una regolazione d’armatura a flusso nominale, e di Ie se si effettua regolazione di campo a tensione nominale.

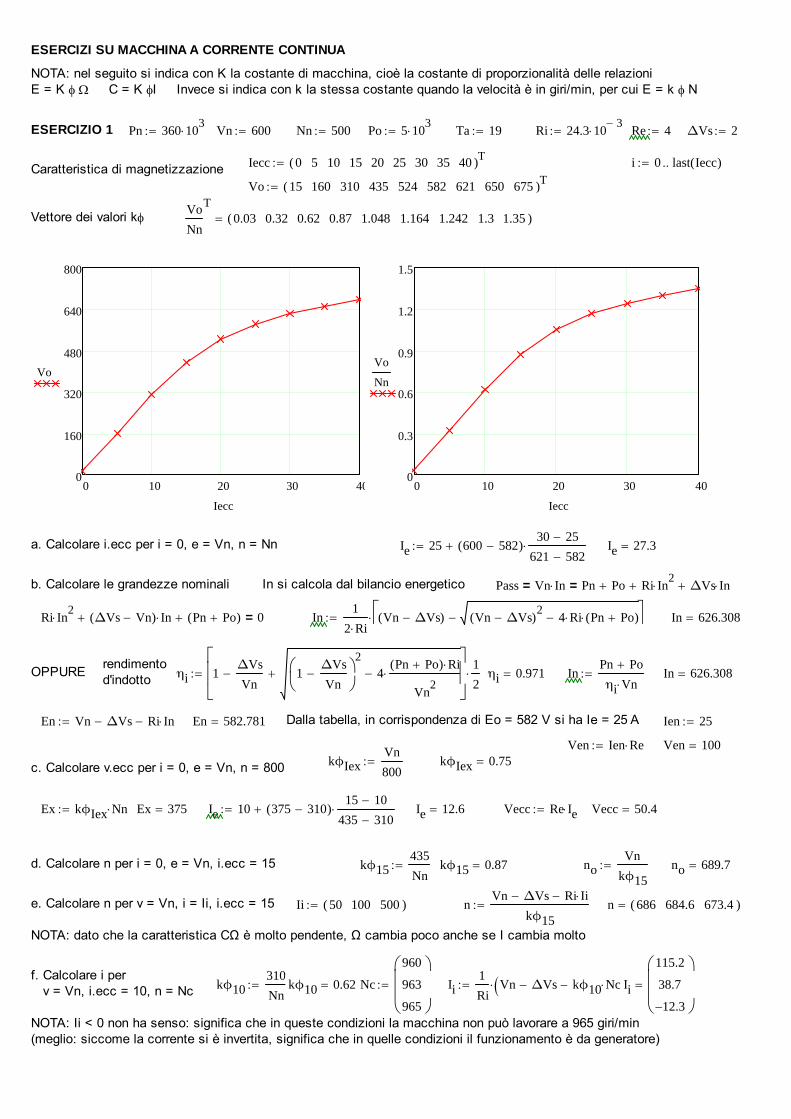
ESERCIZI SU MACCHINA A CORRENTE CONTINUA
NOTA: nel seguito si indica con K la costante di macchina, cioè la costante di proporzionalità delle relazioni E = K C = K I Invece si indica con k la stessa costante quando la velocità è in giri/min, per cui E = k N
ESERCIZIO 1 Pn 360 103
Vn 600 Nn 500 Po 5 103
Ta 19 Ri 24.3 103
Re 4 ΔVs 2
Iecc 0 5 10 15 20 25 30 35 40( )T i 0 last Iecc( )Caratteristica di magnetizzazioneVo 15 160 310 435 524 582 621 650 675( )T
Vettore dei valori kVo
Nn
T0.03 0.32 0.62 0.87 1.048 1.164 1.242 1.3 1.35( )
0 10 20 30 400
160
320
480
640
800
Vo
Iecc
0 10 20 30 400
0.3
0.6
0.9
1.2
1.5
Vo
Nn
Iecc
a. Calcolare i.ecc per i = 0, e = Vn, n = Nn Ie 25 600 582( )30 25
621 582 Ie 27.3
b. Calcolare le grandezze nominali In si calcola dal bilancio energetico Pass Vn In= Pn Po Ri In2
ΔVs In=
Ri In2
ΔVs Vn( ) In Pn Po( ) 0= In1
2 RiVn ΔVs( ) Vn ΔVs( )
24 Ri Pn Po( ) In 626.308
rendimentod'indotto
OPPURE ηi 1ΔVs
Vn 1
ΔVs
Vn
2
4Pn Po( ) Ri
Vn2
1
2 ηi 0.971 In
Pn Po
ηi Vn In 626.308
En Vn ΔVs Ri In En 582.781 Dalla tabella, in corrispondenza di Eo = 582 V si ha Ie = 25 A Ien 25
Ven Ien Re Ven 100kϕIex
Vn
800 kϕIex 0.75c. Calcolare v.ecc per i = 0, e = Vn, n = 800
Ex kϕIex Nn Ex 375 Ie 10 375 310( )15 10
435 310 Ie 12.6 Vecc Re Ie Vecc 50.4
d. Calcolare n per i = 0, e = Vn, i.ecc = 15 kϕ15435
Nn kϕ15 0.87 no
Vn
kϕ15 no 689.7
e. Calcolare n per v = Vn, i = Ii, i.ecc = 15 Ii 50 100 500( ) nVn ΔVs Ri Ii
kϕ15 n 686 684.6 673.4( )
NOTA: dato che la caratteristica CΩ è molto pendente, Ω cambia poco anche se I cambia molto
f. Calcolare i per v = Vn, i.ecc = 10, n = Nc kϕ10
310
Nn kϕ10 0.62 Nc
960
963
965
Ii1
RiVn ΔVs kϕ10 Nc Ii
115.2
38.7
12.3
NOTA: Ii < 0 non ha senso: significa che in queste condizioni la macchina non può lavorare a 965 giri/min (meglio: siccome la corrente si è invertita, significa che in quelle condizioni il funzionamento è da generatore)
g. Calcolare le perdite totali a 75°C, per i = Ii, n = Nc, v = Vn
Ri75 Ri234.5 75
234.5 Ta Ri75 1000 29.668 Re75 Re
234.5 75
234.5 Ta Re75 4.884
Ii 300 Nc 800 Ei Vn ΔVs Ri75 Ii Ei 589.1 kϕIexEi
Nc kϕIex 0.736 Ex kϕIex Nn Ex 368.2
Ie 10 368 310( )15 10
435 310 Ie 12.3 Pp Ri75 Ii
2 Re75 Ie
2 Po ΔVs Ii Pp 9.011 10
3
h. Calcolare il rendimento convenzionalenelle condizioni del punto f
η1
1Pp
Ei Ii Po
oppure 1Pp
Vn Ii Re75 Ie2
0.950142
η 0.950142
DINAMO: calcolare Rc affinché C = Cres per n = Nc, i.ecc = Ie Cres 5000 Nc 600 Ie 28
Eo 582 28 25( )621 582
30 25 Eo 605.4 kϕ28
Eo
Nn kϕ28 1.211 E kϕ28 Nc E 726.5
Ii Cres Nc2 π
60 Po
1
E Ii 425.558 Rc
E ΔVs
IiRi Rc 1.678
ESERCIZIO 2 Pn 7200 Vn 110 Ri 0.07 VeMAX 100 Nn 2000 Re 28 ΔVs 2 Rc 2.5
corrente nominaled'indotto
InPn
Vn In 65.455 fem nominale En Vn Ri In ΔVs En 116.582
resistenzareostato eccitaz
corrente nominaled'eccitazione
Ien En 115( )3 2.5
121.85 115 2.5 Ien 2.615 re
Ven
IenRe re 10.234
duty cycle δVe
VeMAX=
Re Ie
VeMAX= δ
Re Ien
VeMAX δ 0.732
corrente di funzionam IcEn ΔVs
Ri Rc Ic 44.584 cdt sul carico Vc Rc Ic Vc 111.461
corrente di carico, fem, corrente di eccitazione nel caso Vc = Vn
IVnVn
Rc IVn 44 EVn Vn Ri IVn ΔVs EVn 115.08 Dalla caratteristica IeVn 2.5
velocità con Ien e Vc =Vn kϕIenEn
Nn kϕIen 0.058 N
EVn
kϕIen N 1.974 10
3
ESERCIZIO 3 Vn 600 In 33.33 Ppn 800 Nn 1200 Velocità in rad/s Ωn Nn2 π
60 Ωn 125.664
ΔVnPpn
In ΔVn 24 ΔVs 2 Ri
ΔVn ΔVs
In Ri 0.66
Ie 0.3 0.6 0.9 1.2 1.5 1.8 2.1 2.4( )T Eo 172.5 332.7 464.3 554.0 594.2 615.8 630.0 641.8( )T
0 1 2150
212.5275
337.5400
462.5525
587.5650
Eo
Ie
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.41
2
3
4
5
6
Eo
Ωn
Ie
Coppia nominale Potenza meccanica erogata Pn Vn In Ppn Pn 1.92 104
CnPn
Ωn Cn 152.773
Fem nominale, corrente di eccitazione nominale EnPn
In En 576 Ien
1.5 1.2
594.2 554.0576 554( ) 1.2 Ien 1.364

Velocità per V = 0.8 Vn Se non cambia l'eccitazione, non cambia il flusso, e quindi non cambia K. Se poi non cambia la coppia resistente, noncambia neanche la coppia elettromagnetica C = KI => non cambia neanche la corrente, che rimane pari a In. Allora
0.8 Vn V= E Ri Ii= Kϕ Ω Ri In=Cn
InΩ ΔVn= Ω 0.8 Vn ΔVn( )
In
Cn Ω
60
2 π 950
Determinazione della velocità di rotazione
MODO1. Si usa la legge alla maglia Vi ΔVs Ri Ii E= ΔVs RiC
Kϕ Kϕ Ω= da cui Ω Vi ΔVs
C Ri
Kϕ
1
Kϕ=
Kϕ si ricava dal legame E/Ω = cost, cioè KϕE
Ω=
Erif
Ωrif= (a pari flusso ϕ)
MODO2. Si usa legame E/Ω = cost, cioè E
Ω
Erif
Ωrif= Kϕ= da cui Ω E
Ωrif
Erif=
E
Kϕ=
E si ricava dalla legge alla maglia E Vi ΔVs Ri Ii= Vi ΔVs RiC
Kϕ=
Sostituendo, si ha Ω Vi ΔVsC Ri
Kϕ
1
Kϕ= , che è la stessa espressione del MODO1 => i due modi sono identici
Quindi, nel seguito per valutare Ω si userà l'espressione finale Ω Vi ΔVsC Ri
Kϕ
1
Kϕ= , ricavando di volta in volta Kϕ dal
legame E/Ω = cost, cioè KϕErif
Ωrif= (a pari flusso ϕ)
Ω Vi Kϕ C( ) Vi ΔVsC Ri
Kϕ
1
Kϕ KϕIen
En
Ωn KϕIen 4.584
0.8 Ien 1.091 E0.8Ien554 464.3
1.2 0.90.8 Ien 0.9( ) 464.3 E0.8Ien 522 Kϕ0.8Ien
E0.8Ien
Ωn Kϕ0.8Ien 4.15
1. Kϕ KϕIen= V Vn= Ω Vn KϕIen Cn 125.664 Ω Vn KϕIen Cn 60
2 π 1.2 10
3
2. Kϕ KϕIen= V 0.8 Vn= Ω 0.8 Vn KϕIen Cn 99.5 Ω 0.8 Vn KϕIen Cn 60
2 π 950
3. Kϕ Kϕ0.8Ien= V Vn= Ω Vn Kϕ0.8Ien Cn 138.239 Ω Vn Kϕ0.8Ien Cn 60
2 π 1.32 10
3
Regolazione d'armatura: = cost, V varia V Ω( ) ΔVs KϕIen ΩRi Cn
KϕIen V 0.9 Ωn( ) 542.4 V 01.1 Ωn( ) 657.6
NOTA: dato che il legame (V, ) è lineare, si è ottenuto giustamente 600 + 57.6 o 600 - 57.6. Però, non si può superare latensione nominale => il valore 600 + 57.6 non è accettabile => la regolazione di armatura per V > 600V non è lecita
Regolazione di campo: V = cost, varia E Kϕ Ω= Vn ΔVsRi Cn
Kϕ= Kϕ Ω( )
Vn ΔVs
2 Ω1 1
4 Ω Ri Cn
Vn ΔVs( )2
NOTA: nella formula ci sarebbe un doppio segno, ma scarto il segno - perché dà valori di k prossimi a 0, mentre i valori accettabili sono quelli prossimi a k(Ien) =4.584
Kϕ 0.9 Ωn( ) 5.113 Kϕ 1.1 Ωn( ) 4.15 Ora vado a vedere a velocità nominale quale fem gli corrisponde
Kϕ 0.9 Ωn( ) Ωn 642.5292.4 2.1
641.8 630Kϕ 0.9 Ωn( ) Ωn 630( ) 2.1 2.419 Valore non accettabile (molto superiore a Ien)
del resto, anche la fem Kϕ 0.9 Ωn( ) Ωn 642.529 non era accettabile, perché comporta V > Vn
Kϕ 1.1 Ωn( ) Ωn 521.5461.2 0.9
554 464.3Kϕ 1.1 Ωn( ) Ωn 464.3( ) 0.9 1.091 Valore accettabile
(il valore 1.091 era già stato trovato prima,ed è corretto, perché siamo con lo stesso valore di k = 4.15)
Verifica Ω Vn Kϕ 0.9 Ωn( ) Cn( )
Ωn0.9
Ω Vn Kϕ 1.1 Ωn( ) Cn( )
Ωn1.1
Quindi: N < Nn => regolazione di armatura; N > Nn => regolazione di campo