Presentazione di PowerPoint - unibo.itlia.deis.unibo.it/Courses/SistRT/contenuti/4 Seminari/3...
50
1 Universita’ di Bologna - Presentazione IMA 2006
Transcript of Presentazione di PowerPoint - unibo.itlia.deis.unibo.it/Courses/SistRT/contenuti/4 Seminari/3...

1
Universita’ di Bologna - Presentazione IMA 2006
2
Universita’ di Bologna - Presentazione IMA 2006
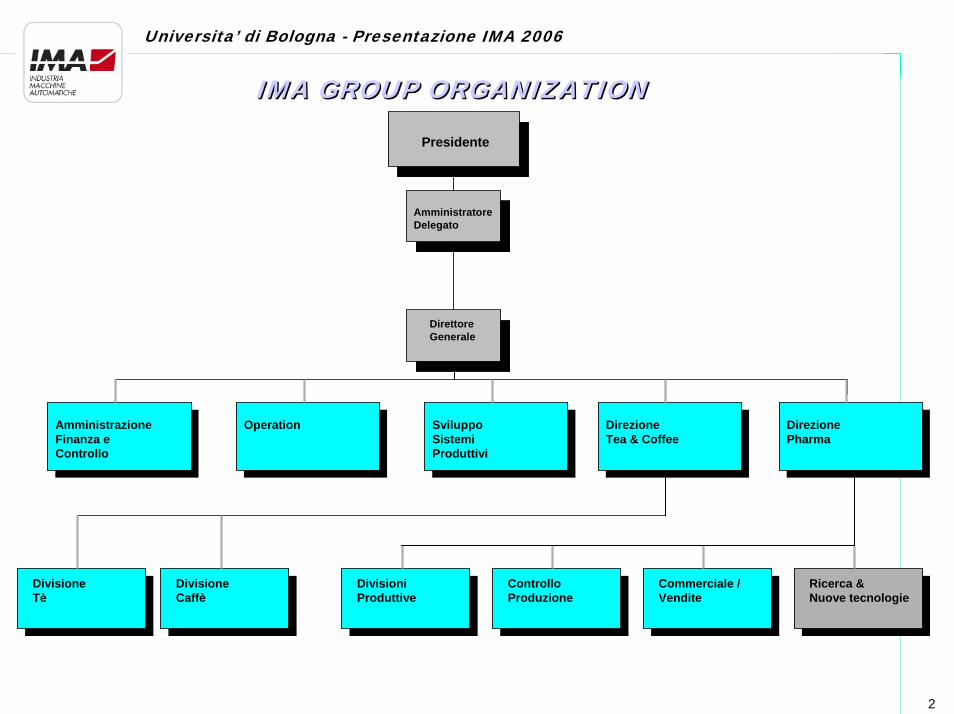
IMA GROUP ORGANIZATIONIMA GROUP ORGANIZATION
Presidente
AmministratoreDelegato
DirettoreGenerale
AmministrazioneFinanza e Controllo
DirezionePharma
SviluppoSistemiProduttivi
Direzione Tea & Coffee
Operation
DivisioneTè
DivisioneCaffè
DivisioniProduttive
ControlloProduzione
Commerciale /Vendite
Ricerca & Nuove tecnologie
3
Universita’ di Bologna - Presentazione IMA 2006
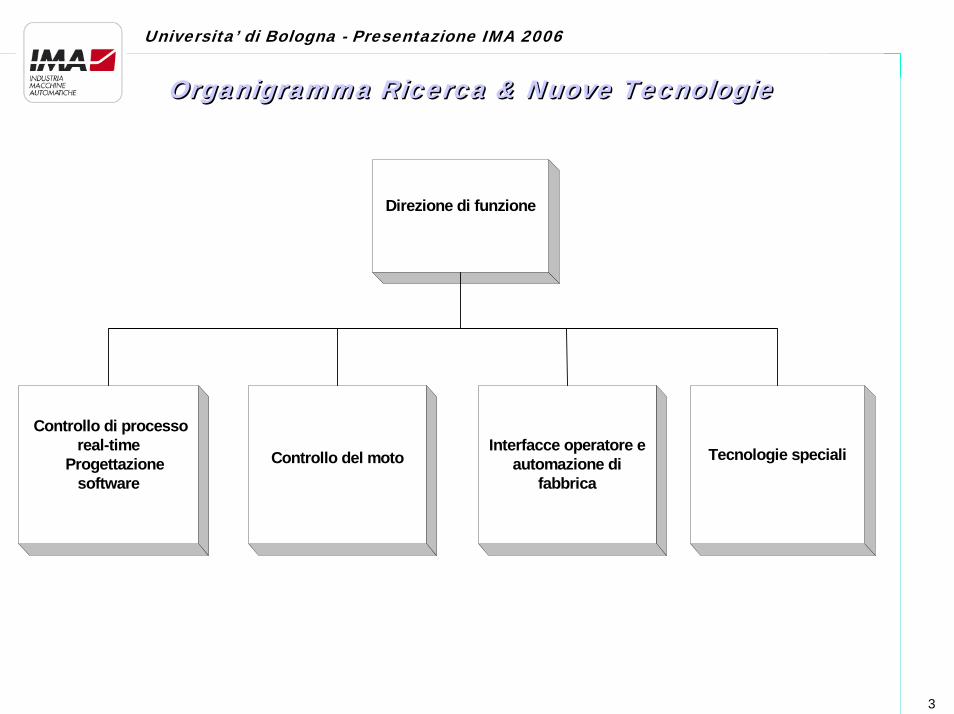
Organigramma Ricerca & Nuove TecnologieOrganigramma Ricerca & Nuove Tecnologie
Direzione di funzione
Controllo di processoreal-time
Progettazionesoftware
Controllo del motoInterfacce operatore e
automazione difabbrica
Tecnologie speciali
4
Universita’ di Bologna - Presentazione IMA 2006
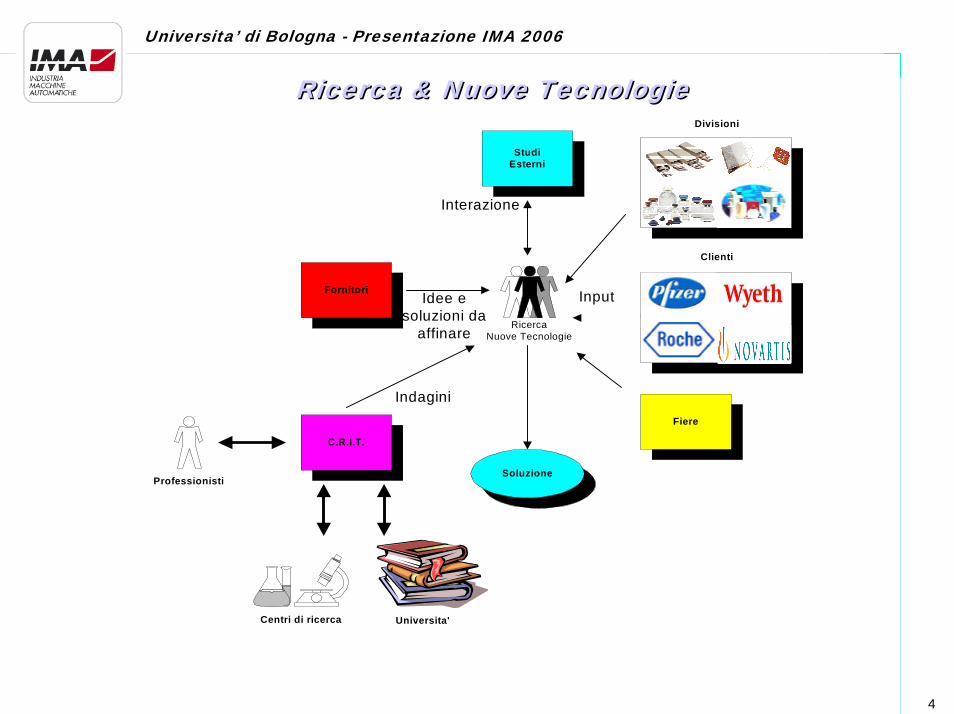
RicercaNuove Tecnologie
StudiEsterni
Fiere
C.R.I.T.
Fornitori
Professionisti
Centri di ricerca
Idee esoluzioni da
affinare
Interazione
Indagini
Input
Universita'
Divisioni
Clienti
Soluzione
Ricerca & Nuove TecnologieRicerca & Nuove Tecnologie
5
Universita’ di Bologna - Presentazione IMA 2006
6
Universita’ di Bologna - Presentazione IMA 2006
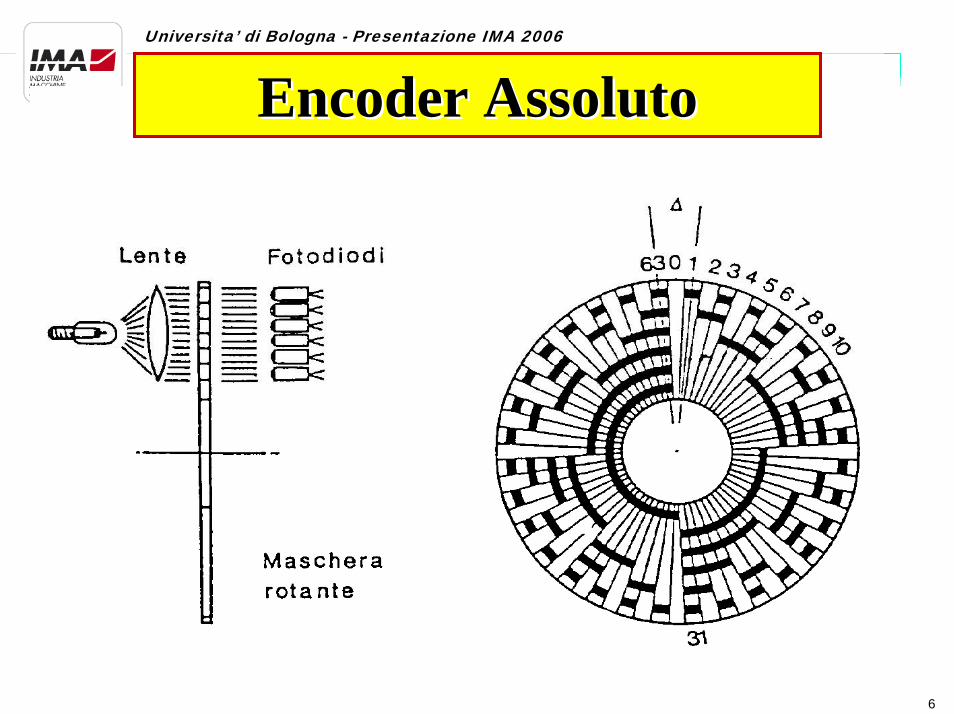
EncoderEncoder AssolutoAssoluto
7
Universita’ di Bologna - Presentazione IMA 2006
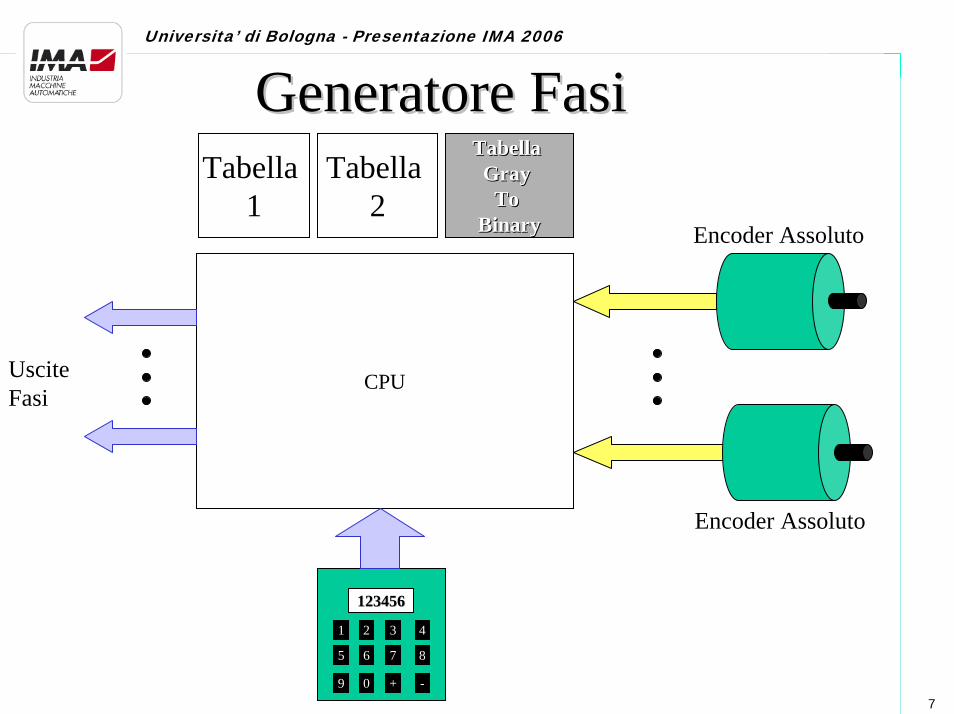
Generatore FasiGeneratore FasiTabella
1Tabella
2
Tabella Tabella GrayGray
ToToBinaryBinary Encoder Assoluto
CPU
123456123456
1 2 3 4
5 6 7 8
9 0 + -
Uscite Fasi
Encoder Assoluto
8
Universita’ di Bologna - Presentazione IMA 2006
9
Universita’ di Bologna - Presentazione IMA 2006
I Ruoli Dell’ingegnere Del SW
Controllo macchina. (Logica)Progettazione e aggiornamento delle Librerie. (RNT)Progettazione, sviluppo e personalizzazione delle applicazioni. (RNT e Divisioni)
Controllo elettronico del moto Progettazione e sviluppo funzionalità di libreria. (RNT)Progettazione, sviluppo e personalizzazione delle applicazioni. (RNT)
Interfaccia uomo macchina.Progettazione e sviluppo dei componenti per gli applicativi specifici di macchina. (RNT)Sviluppo di applicativi. (RNT e Divisioni)Automazione di fabbrica. (RNT e Divisioni)
10
Universita’ di Bologna - Presentazione IMA 2006
Architetture di controllo
11
Universita’ di Bologna - Presentazione IMA 2006
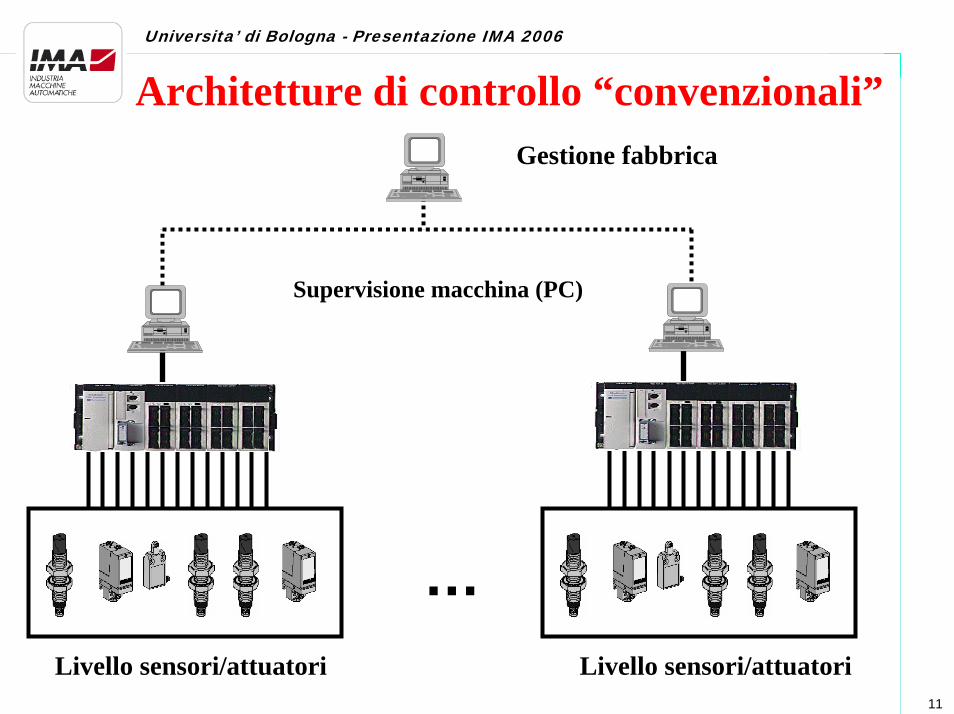
Architetture di controllo “convenzionali”
...
Supervisione macchina (PC)
Gestione fabbrica
Livello sensori/attuatori Livello sensori/attuatori
12
Universita’ di Bologna - Presentazione IMA 2006
...
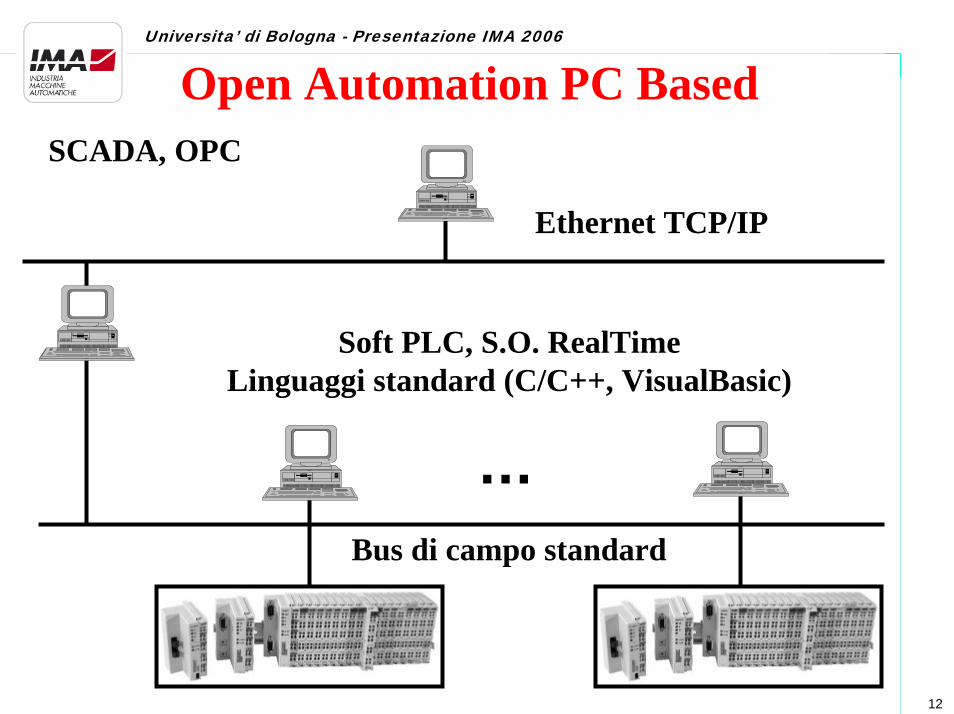
Ethernet TCP/IP
Soft PLC, S.O. RealTimeLinguaggi standard (C/C++, VisualBasic)
Bus di campo standard
SCADA, OPC
Open Automation PC Based
13
Universita’ di Bologna - Presentazione IMA 2006
Architetture di controllo macchina
VxWorks (WindRiver)Sistema operativo RealTime
Multiprog (Klöpper und Wiege GmbH) SoftPLC supports IEC61131 standard
CANopen/ProfibusDP/Profinet/PowerLinkProtocolli Fieldbus Standard
CANCANopenopen
14
Universita’ di Bologna - Presentazione IMA 2006
Controllo Del Moto
15
Universita’ di Bologna - Presentazione IMA 2006
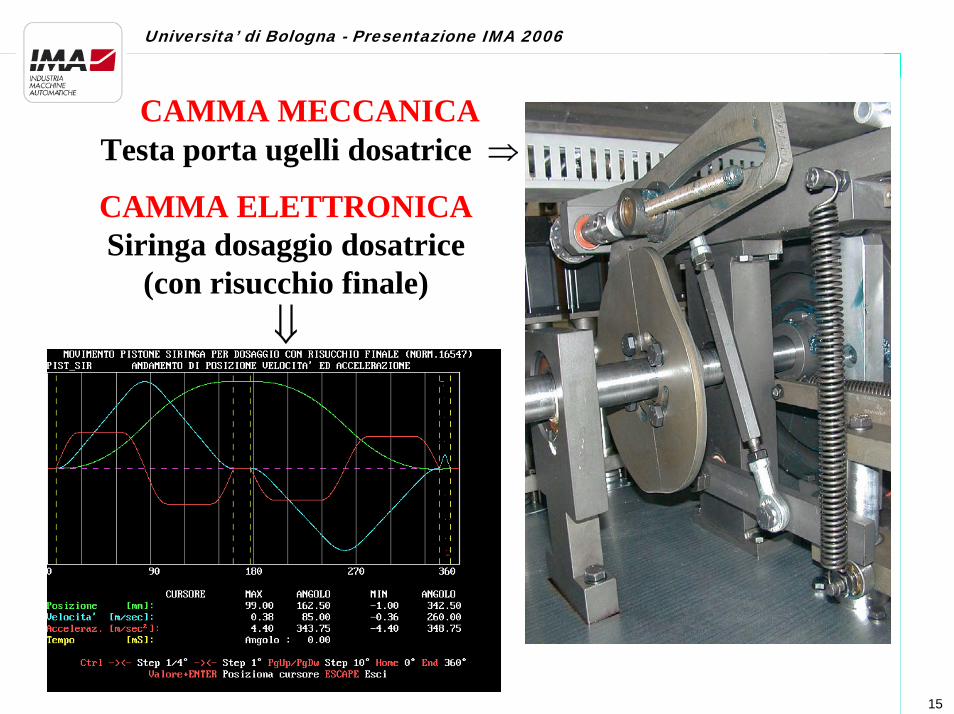
CAMMA MECCANICATesta porta ugelli dosatrice ⇒
CAMMA ELETTRONICASiringa dosaggio dosatrice
(con risucchio finale)⇓
16
Universita’ di Bologna - Presentazione IMA 2006
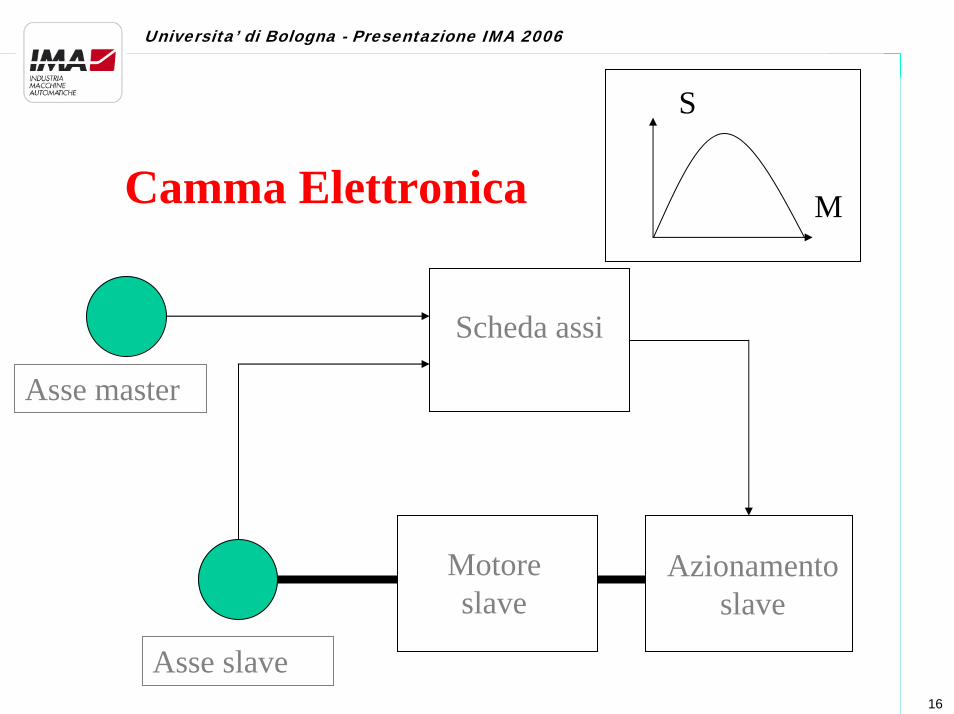
Camma Elettronica
Asse master
Asse slave
Motoreslave
Azionamento slave
Scheda assi
M
S
17
Universita’ di Bologna - Presentazione IMA 2006
CAM ControlledAx ToMaster
Control AxReductor
CamReductor
Master ToSlave AxReductor
Slave contr.Ax PositionIntegrator
Master Enc.To Master
AxReductor
Master AxTo Motor
AxReductor
PID
CamIntegrator
Master AxPosition
Integrator
ControlledTo Motor
Axis SpeedScaler
Motor ToControlledAxis Speed
Scaler
SlowRamp
FastRamp
Speed FeedForward
Filter
TorqueFeed
ForwardFilter
TorqueFeed
ForwardScaler
Speed OutScaler
TorqueFeed
ForwardScaler
PID
SpeedFeedback
Filter
Slave Enc.Ax To Motor
AxReductor
Slave Enc.Ax To Slave
Contr. AxReductor
Slave Contr.Ax PositionIntegrator
34 37
12
3
5
4
8
7
6
32
14
13
10
+
-
SlaveEncoder
MasterEncoder
30
15
16
33
31
+
-
40
38
1
36
17
39
19
18
2
PositionRegulator
Switch
9
RampSwitch
SpeedRegulator
Switch
OutputSwitch
50
49
46
45
47
48
Feed ForwardActuator
Set PointActuator
Position Regulator
Speed Regulator
33
35
MasterAxis Phase
Displacement+
+
ControlledAxis Phase
Displacement
MasterControlledAxis Phase
Displacement
+
+ +
+
Slave AxisSet Point
PhaseDisplacement
+
+
Position
Boolean
Torque
Speed
Delta Position
CamIntegrator
PhaseDisplacement
52
+
+
53
51
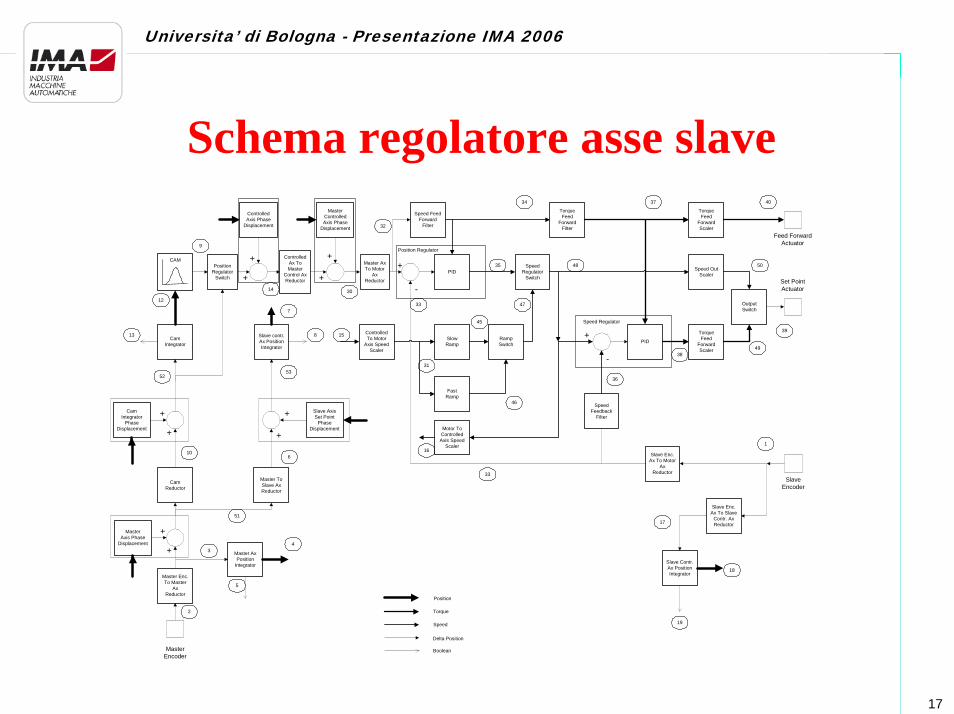
Schema regolatore asse slave
18
Universita’ di Bologna - Presentazione IMA 2006
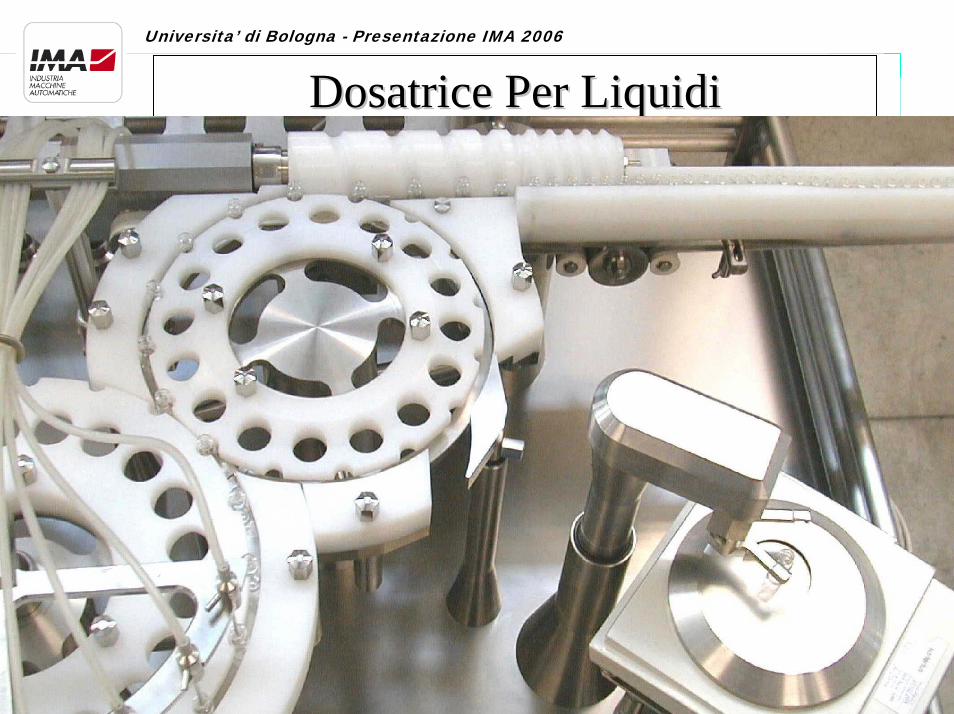
Dosatrice Per LiquidiDosatrice Per Liquidi
19
Universita’ di Bologna - Presentazione IMA 2006
Le funzioni di ingresso prodotto
• Necessità di “accompagnare” i flaconi e sincronizzarli col passo della macchina.
• Necessità di creare uno spazio attorno al flacone da pesare.• Necessità di creare un “buco” nel flusso dei flaconi.• Necessità di fare avanzare un flacone solo.• Necessità di arrestare il flusso dei flaconi e farli ripartire in
fase col resto della macchina
20
Universita’ di Bologna - Presentazione IMA 2006
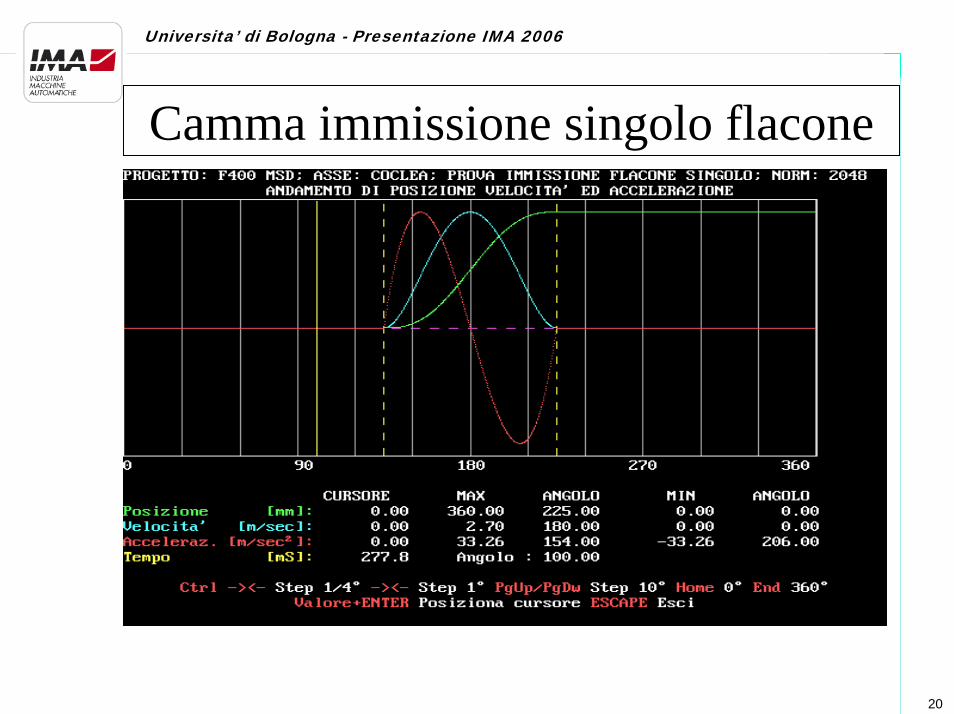
Camma immissione singolo flacone
21
Universita’ di Bologna - Presentazione IMA 2006
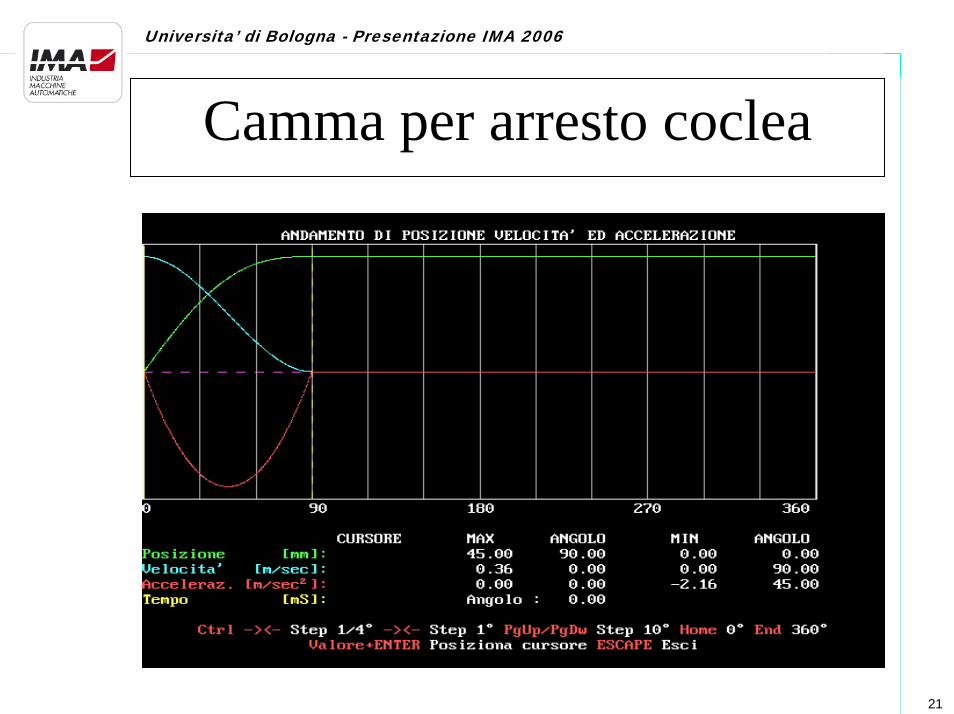
Camma per arresto coclea
22
Universita’ di Bologna - Presentazione IMA 2006
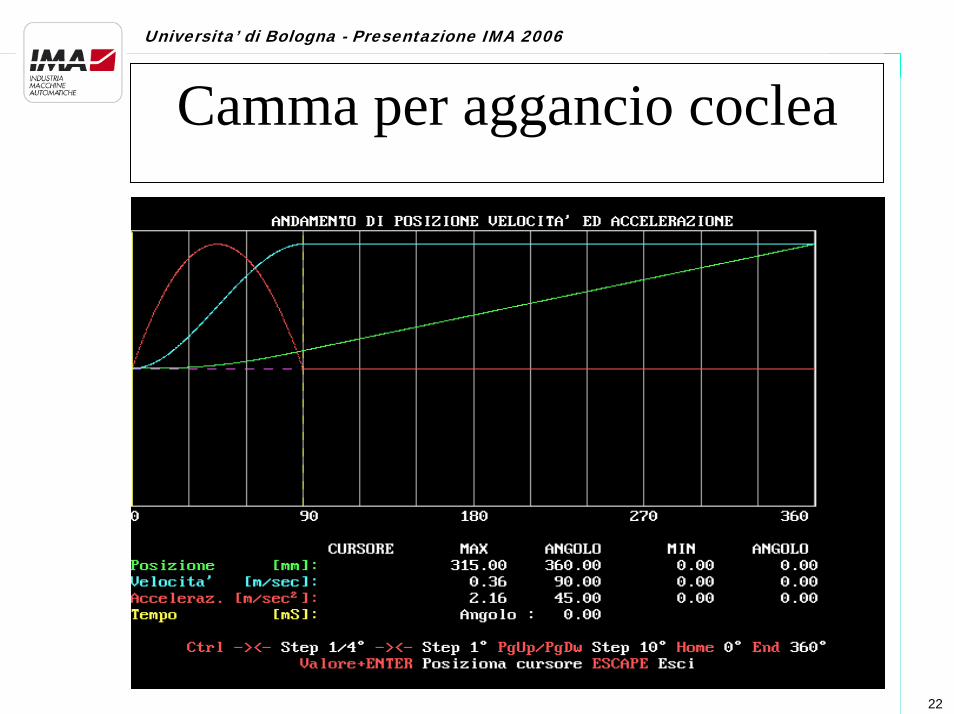
Camma per aggancio coclea
23
Universita’ di Bologna - Presentazione IMA 2006
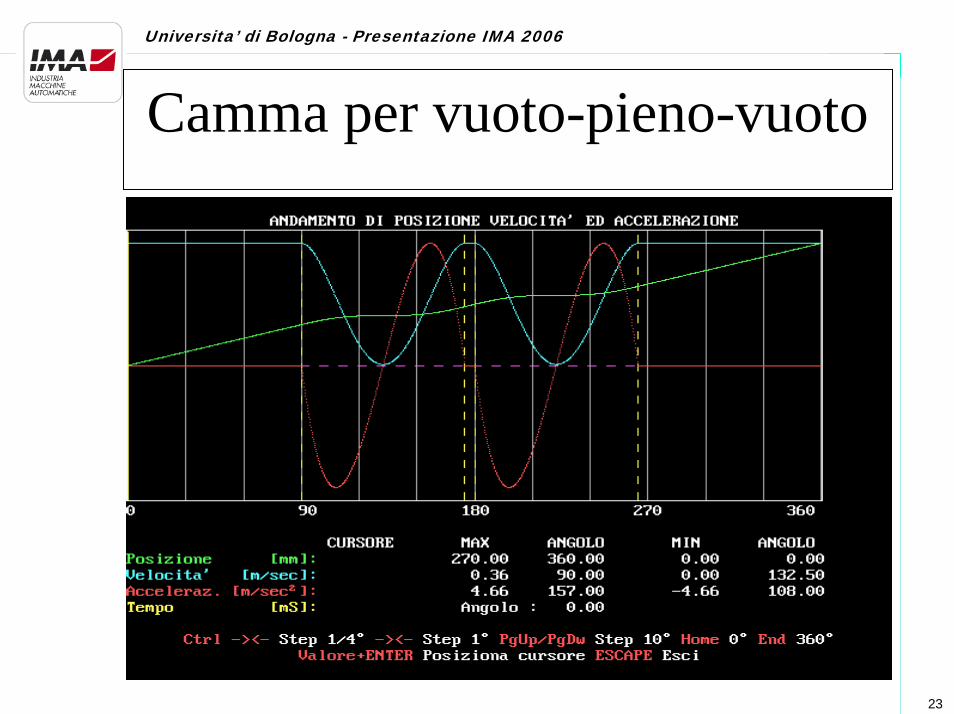
Camma per vuoto-pieno-vuoto
24
Universita’ di Bologna - Presentazione IMA 2006
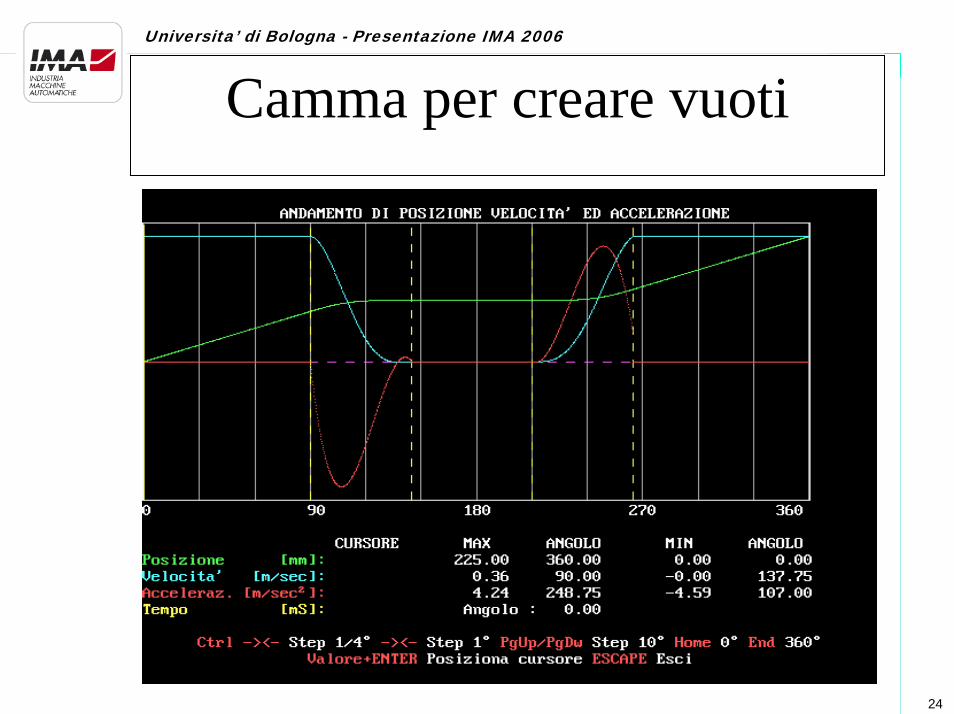
Camma per creare vuoti
25
Universita’ di Bologna - Presentazione IMA 2006
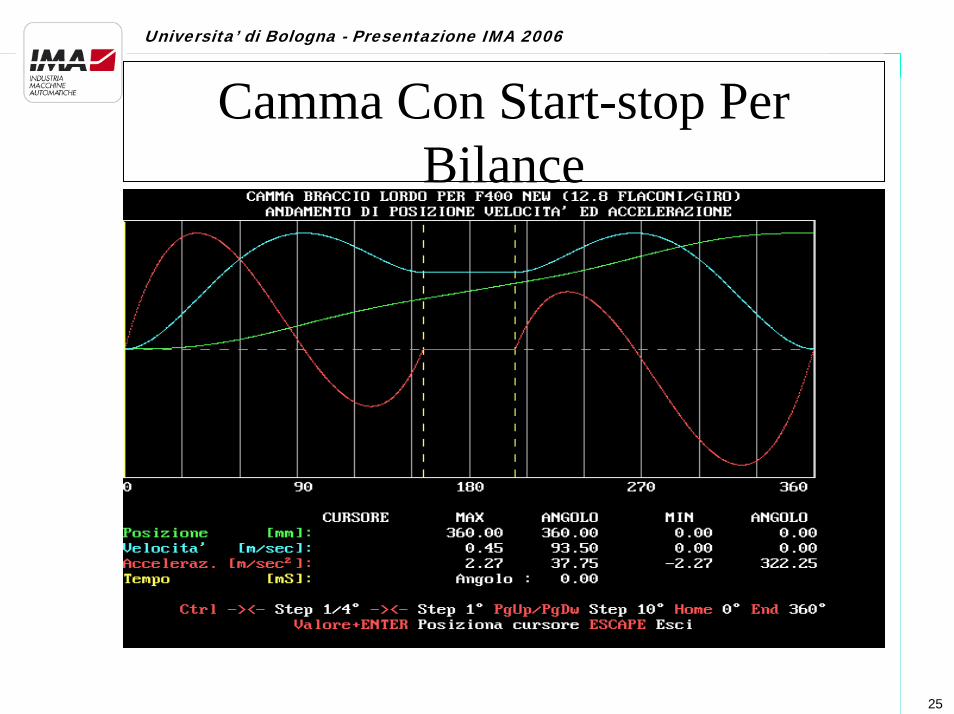
Camma Con Start-stop Per Bilance
26
Universita’ di Bologna - Presentazione IMA 2006
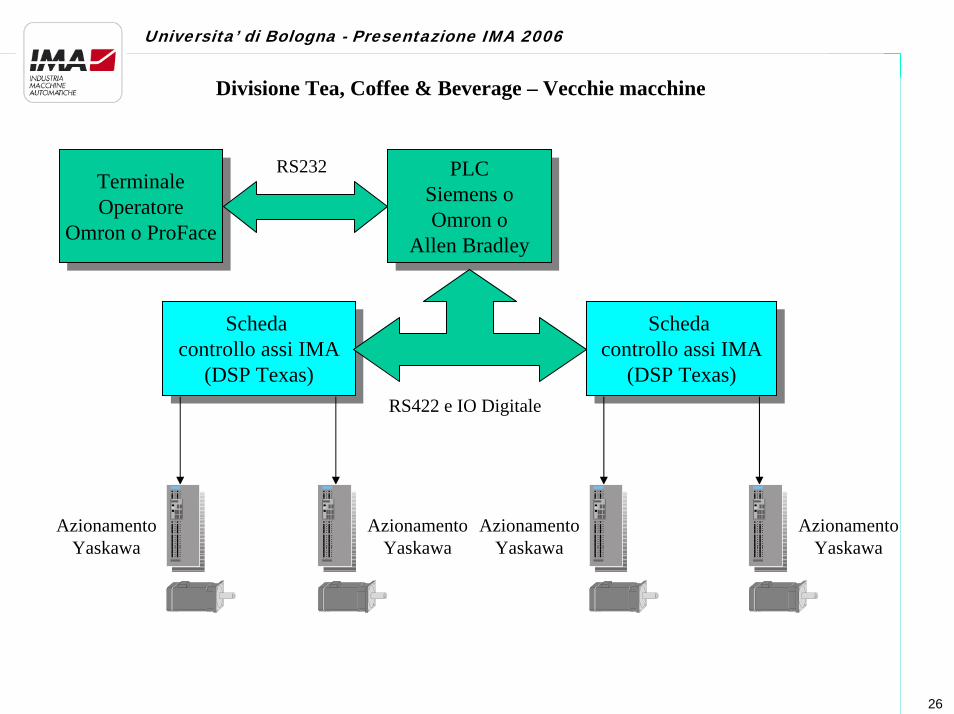
Divisione Tea, Coffee & Beverage – Vecchie macchine
TerminaleOperatore
Omron o ProFace
TerminaleOperatore
Omron o ProFace
PLCSiemens oOmron o
Allen Bradley
PLCSiemens oOmron o
Allen Bradley
Scheda controllo assi IMA
(DSP Texas)
Scheda controllo assi IMA
(DSP Texas)
Scheda controllo assi IMA
(DSP Texas)
Scheda controllo assi IMA
(DSP Texas)
RS232
RS422 e IO Digitale
AzionamentoYaskawa
AzionamentoYaskawa
AzionamentoYaskawa
AzionamentoYaskawa
27
Universita’ di Bologna - Presentazione IMA 2006
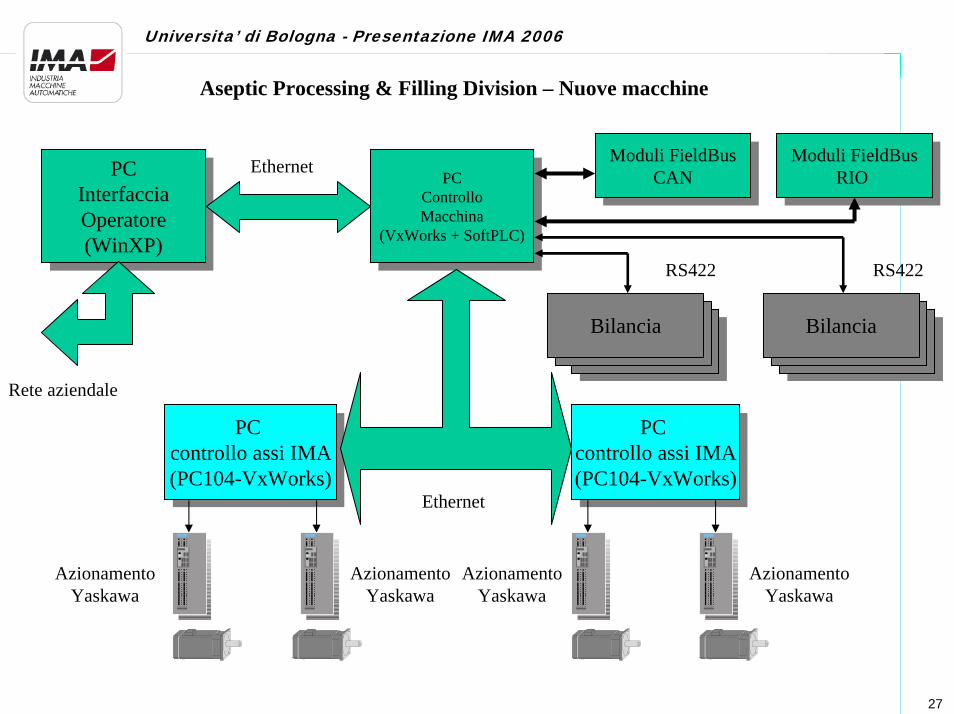
Aseptic Processing & Filling Division – Nuove macchine
PCInterfacciaOperatore(WinXP)
PCInterfacciaOperatore(WinXP)
PCControlloMacchina
(VxWorks + SoftPLC)
PCControlloMacchina
(VxWorks + SoftPLC)
PC controllo assi IMA(PC104-VxWorks)
PC controllo assi IMA(PC104-VxWorks)
PC controllo assi IMA(PC104-VxWorks)
PC controllo assi IMA(PC104-VxWorks)
Moduli FieldBusCAN
Moduli FieldBusCAN
Moduli FieldBusRIO
Moduli FieldBusRIO
Ethernet
Ethernet
BilanciaBilanciaBilanciaBilancia
RS422 RS422
Bilancia BilanciaBilancia Bilancia
Rete aziendale
AzionamentoYaskawa
AzionamentoYaskawa
AzionamentoYaskawa
AzionamentoYaskawa
28
Universita’ di Bologna - Presentazione IMA 2006
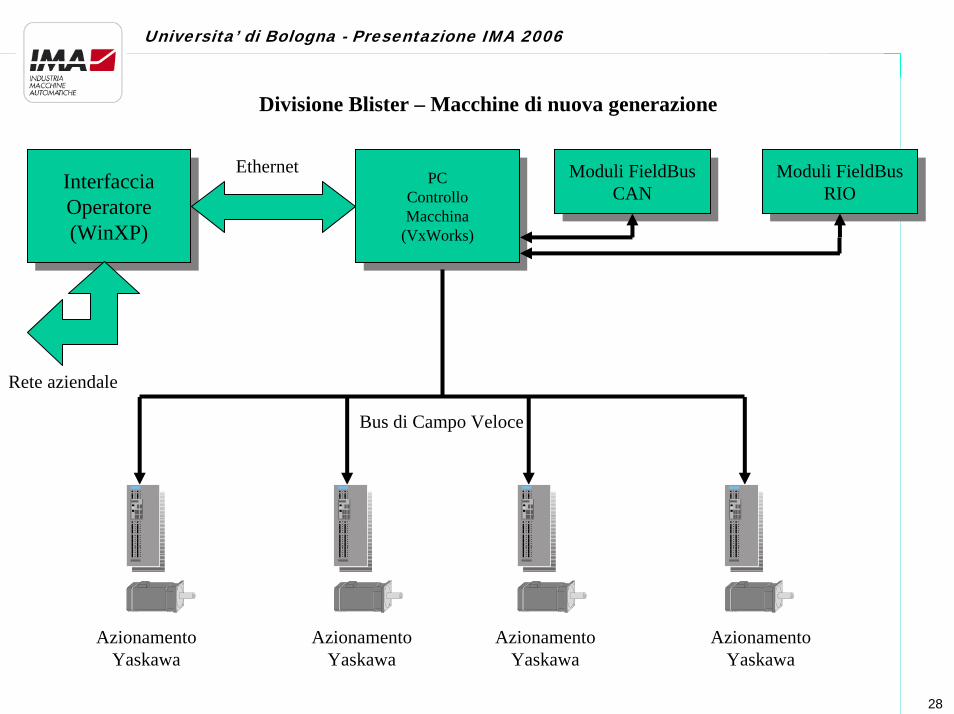
Divisione Blister – Macchine di nuova generazione
InterfacciaOperatore(WinXP)
InterfacciaOperatore(WinXP)
PCControlloMacchina
(VxWorks)
PCControlloMacchina
(VxWorks)
Moduli FieldBusCAN
Moduli FieldBusCAN
Moduli FieldBusRIO
Moduli FieldBusRIO
Bus di Campo Veloce
Ethernet
Rete aziendale
AzionamentoYaskawa
AzionamentoYaskawa
AzionamentoYaskawa
AzionamentoYaskawa
29
Universita’ di Bologna - Presentazione IMA 2006
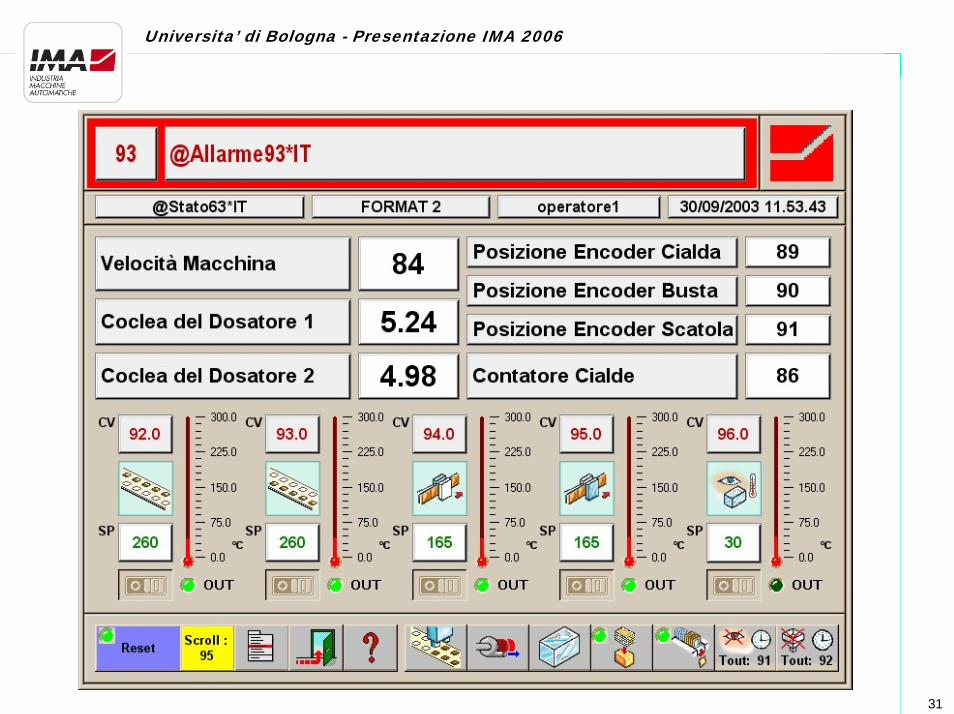
Interfaccia Operatore - Macchina
30
Universita’ di Bologna - Presentazione IMA 2006
31
Universita’ di Bologna - Presentazione IMA 2006

32
Universita’ di Bologna - Presentazione IMA 2006
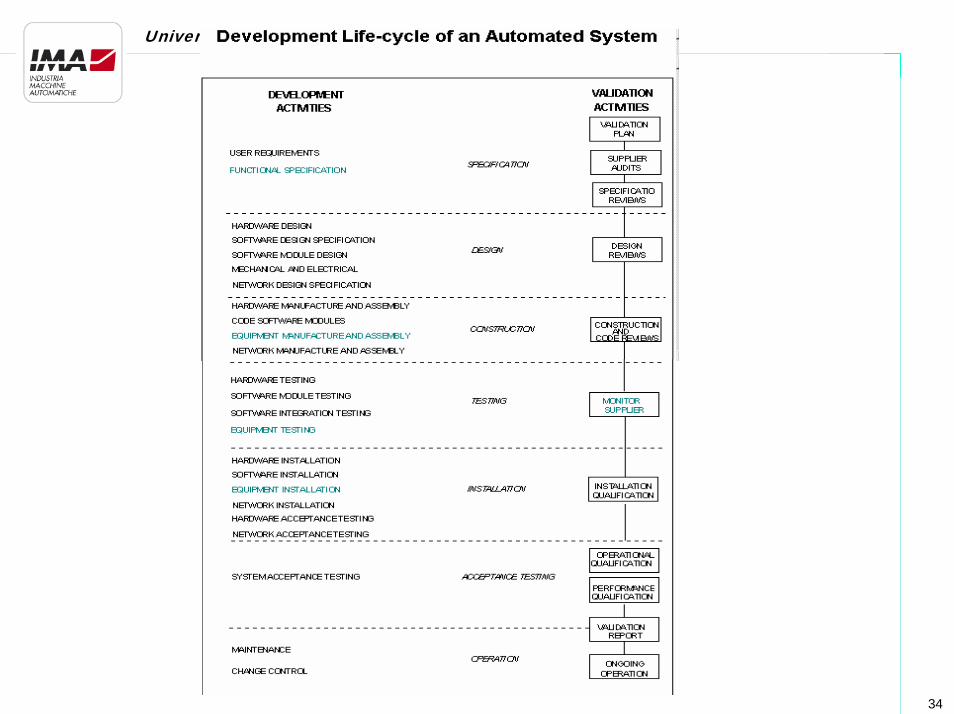
Flusso Di Sviluppo Di Una ApplicazioneFlusso Di Sviluppo Di Una Applicazione
GAMPGAMPPharmaceutical Industry
( Good Automated Manufacturing Practice )
• Definisce i requisiti di qualità per un fornitore di sistemi automatizzati.
• Propone un sistema che aiuti i fornitori a raggiungere tale obiettivo.
• Definisce i requisiti di validazione del sistema automatizzato• Suggerisce agli utilizzatori (nostri clienti) come verificare se il
fornitore ha lavorato “bene” e quale documentazione “pretendere”.
33
Universita’ di Bologna - Presentazione IMA 2006
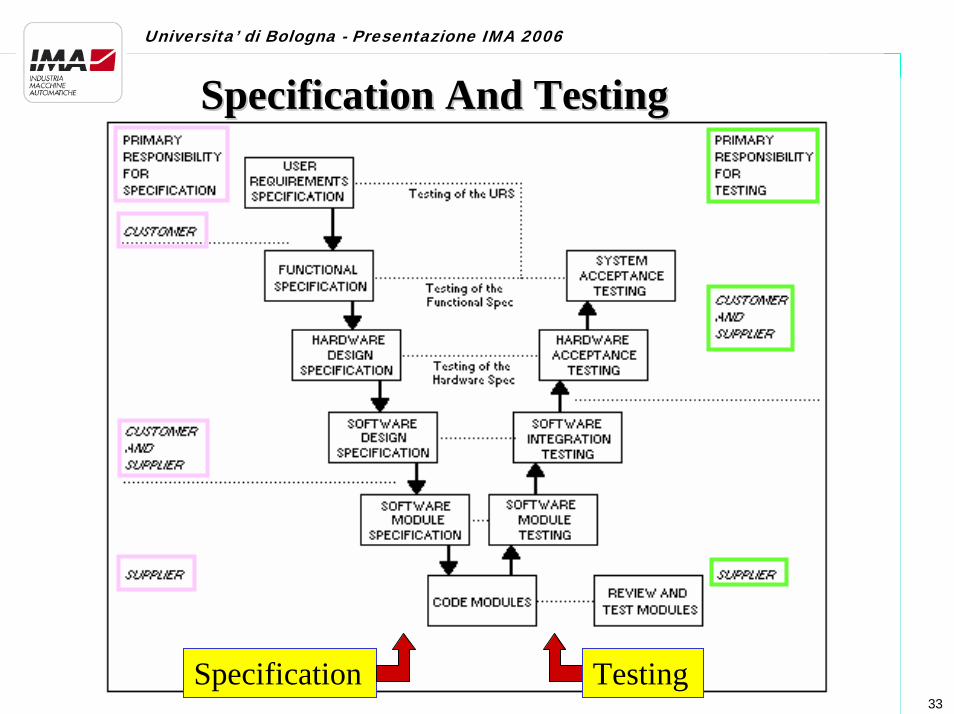
SpecificationSpecification And And TestingTesting
Specification Testing
34
Universita’ di Bologna - Presentazione IMA 2006
35
Universita’ di Bologna - Presentazione IMA 2006
L’Ingenere Del SW Secondo L’azienda
• L’importanza non risiede nella conoscenza dei linguaggi di programmazione (strumenti) ma sapere affrontare un progetto.
• Sapere interpretare le specifiche che spesso provengono da chi non ha sensibilità su che cosa si “può fare” col SW.
• Sapere affrontare un progetto pensando alla sua modularità e al riutilizzo del codice
• Dare maggiore importanza alla leggibilità del codice che alla sua efficienza.
• Assimilare la metodolgia aziendale di lavoro ed integrarsi in essa.• Capacità di lavorare in gruppo.
36
Universita’ di Bologna - Presentazione IMA 2006
Tecnologie speciali

37
Universita’ di Bologna - Presentazione IMA 2006
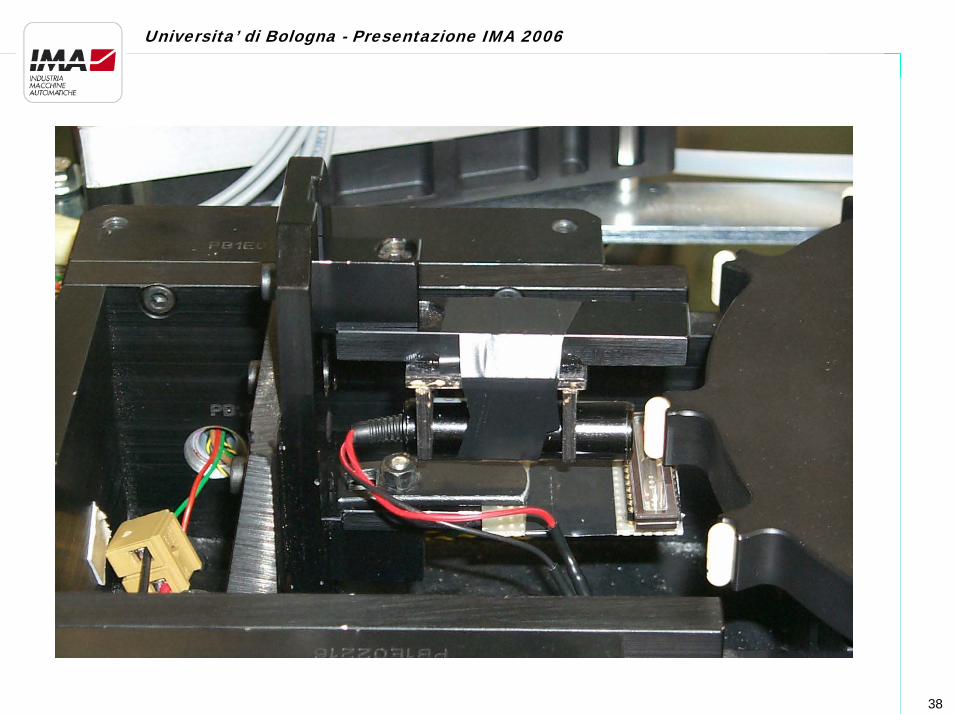
Verifica riempimento opercoli con Laser
38
Universita’ di Bologna - Presentazione IMA 2006
39
Universita’ di Bologna - Presentazione IMA 2006
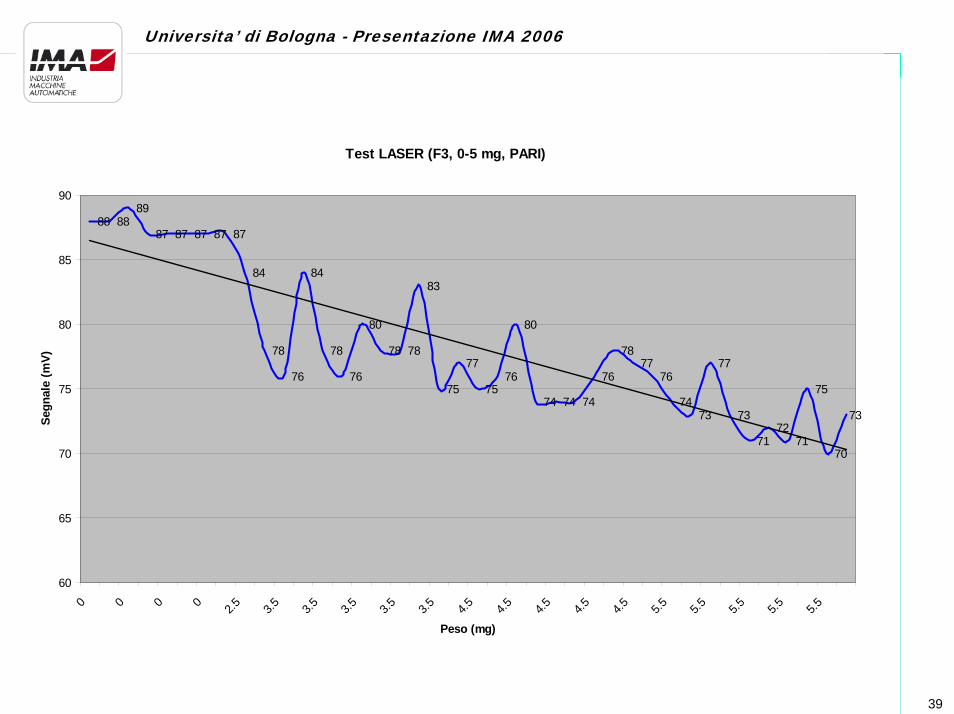
Test LASER (F3, 0-5 mg, PARI)
88 8889
87 87 87 87 87
84
78
76
84
78
76
80
78 78
83
75
77
7576
80
74 74 74
76
7877
76
7473
77
73
7172
71
75
70
73
60
65
70
75
80
85
90
0 0 0 0 2.5 3.5 3.5 3.5 3.5 3.5 4.5 4.5 4.5 4.5 4.5 5.5 5.5 5.5 5.5 5.5
Peso (mg)
Segn
ale
(mV)

40
Universita’ di Bologna - Presentazione IMA 2006
Misura e trasmissione sforzo compressione

41
Universita’ di Bologna - Presentazione IMA 2006

42
Universita’ di Bologna - Presentazione IMA 2006
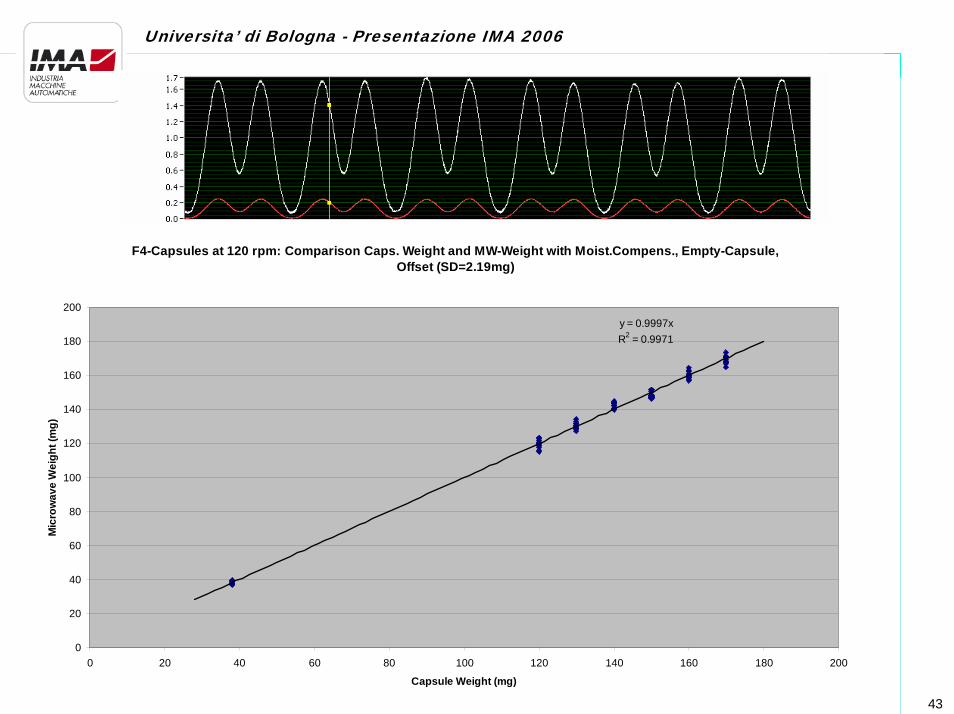
Verifica riempimento opercoli con MicroOnde
43
Universita’ di Bologna - Presentazione IMA 2006
F4-Capsules at 120 rpm: Comparison Caps. Weight and MW-Weight with Moist.Compens., Empty-Capsule, Offset (SD=2.19mg)
y = 0.9997xR2 = 0.9971
0
20
40
60
80
100
120
140
160
180
200
0 20 40 60 80 100 120 140 160 180 200
Capsule Weight (mg)
Mic
row
ave
Wei
ght (
mg)
44
Universita’ di Bologna - Presentazione IMA 2006
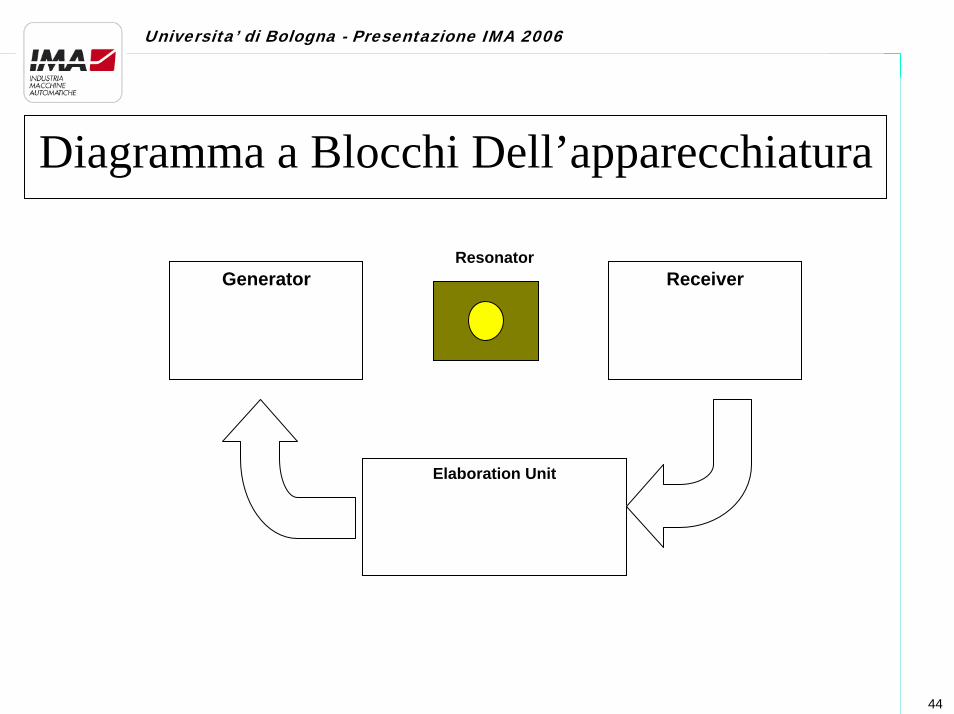
Diagramma a Blocchi Dell’apparecchiatura
Generator ReceiverResonator
Elaboration Unit
45
Universita’ di Bologna - Presentazione IMA 2006
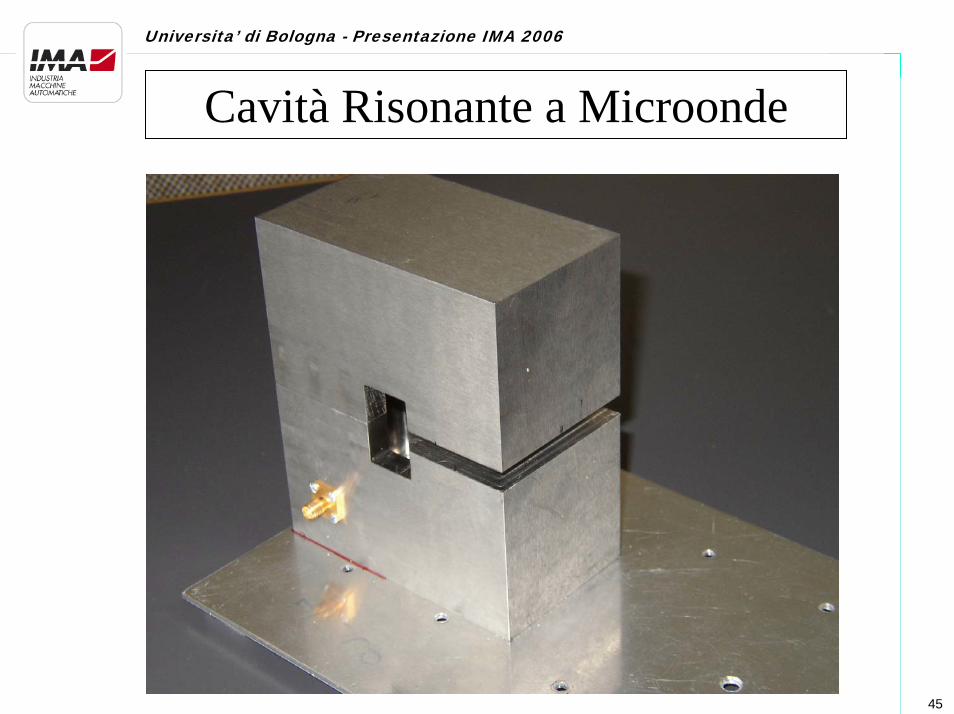
Cavità Risonante a Microonde
46
Universita’ di Bologna - Presentazione IMA 2006
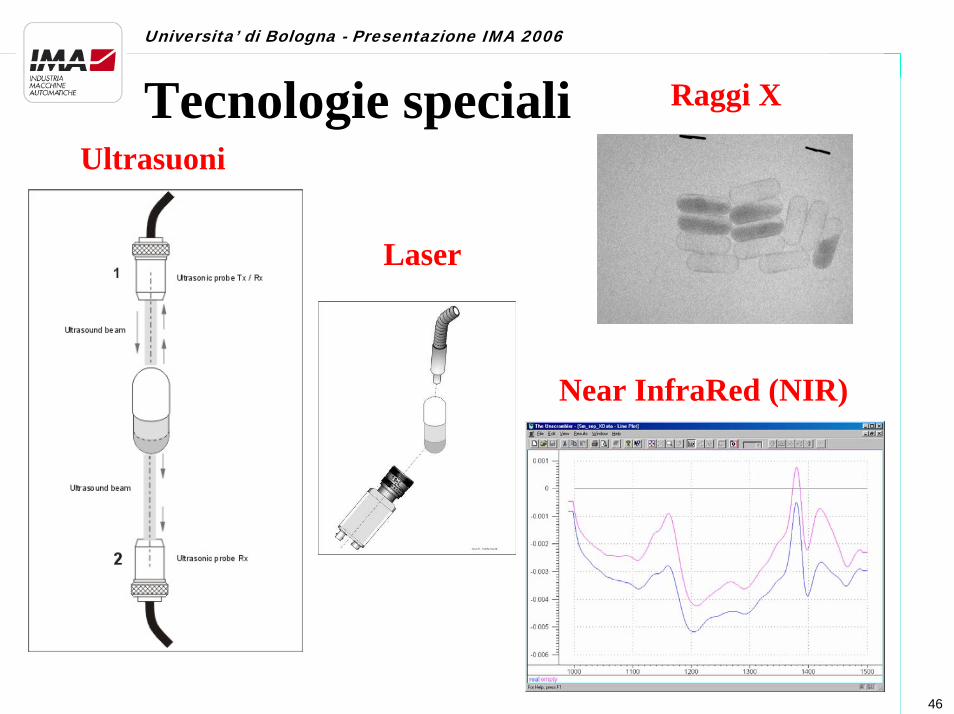
Tecnologie speciali Raggi X
Ultrasuoni
Laser
Near InfraRed (NIR)
47
Universita’ di Bologna - Presentazione IMA 2006
IL PROGRAMMA DI BENEVENUTOIL PROGRAMMA DI BENEVENUTOIl programma si compone di una Il programma si compone di una struttura a moduli.struttura a moduli.Alcuni moduli sono comuni a tutti i Alcuni moduli sono comuni a tutti i neoassunti e altri sono specifici per neoassunti e altri sono specifici per tipologia di contratto di inserimento tipologia di contratto di inserimento e/o per mansioni e posizione e/o per mansioni e posizione organizzativa. organizzativa. Il percorso si sviluppa nellIl percorso si sviluppa nell’’arco di sei arco di sei mesi dallmesi dall’’inserimento in azienda.inserimento in azienda.Il Il ““corpo docenticorpo docenti”” èè composto da composto da manager e specialisti del Gruppo.manager e specialisti del Gruppo.

48
Universita’ di Bologna - Presentazione IMA 2006
I MODULI COMUNI I MODULI COMUNI

49
Universita’ di Bologna - Presentazione IMA 2006
I MODULI SPECIFICII MODULI SPECIFICI
50
Universita’ di Bologna - Presentazione IMA 2006
Grazie per l’attenzione
Ing. Pierantonio Ragazzini
Ricerca & Nuove Tecnologie
I.M.A. S.p.A. Tel 051 6514111
E-MAIL : [email protected]