Notedi...
182
Note di Fisica Matematica B: Meccanica Analitica 1 Ottobre, 2013
Transcript of Notedi...

Note di
Fisica Matematica B: Meccanica Analitica
1 Ottobre, 2013


Le presenti NOTE di non vogliono in nessun modo essere un testo ma un semplice ausilio perlo studio del corso, per questo motivo la trattazione e succinta. Anzi, e opportuno approfondire estudiare criticamente quanto svolto a lezione avvalendosi di testi veri e propri. Tra i testi piu noti sipossono ricordare i seguenti:
- V.I. Arnold, Metodi Matematici della Meccanica Classica. Editori Riuniti 1986.- G. Dell’Antonio, Elementi di Meccanica. I: Meccanica Classica. Liguori Editore 1996.- G. Gallavotti, Meccanica Elementare, Ed. Boringhieri 1986.- A. Fasano, S. Marmi, Meccanica Analitica, Ed. Boringhieri 1994.
Meno moderni ma sempre ricchi di interessanti spunti ed osservazioni sono i seguenti:
- T. Levi-Civita, Lezioni di Meccanica Razionale, Ed. Zanichelli, Ristampa anastatica 1974 (ed.1929)
- E. Mach, La Meccanica nel suo Sviluppo Storico-Critico, Ed. Boringhieri 1992 (prima edizione del1883)


Sommario
1 Dinamica del punto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Dinamica del punto su traiettoria prestabilita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Equazioni differenziali del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.2 Caso di forze posizionali: soluzione per quadrature . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Oscillatore armonico smorzato e forzato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2.1 Forze di richiamo e forze viscose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2.2 Oscillatore armonico smorzato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2.3 Oscillatore armonico smorzato e forzato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Analisi qualitativa del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3.1 Studio del moto alla Weierstrass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3.2 Diagramma delle fasi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.3.3 Analisi del moto alla Weierstrass per l’oscillatore armonico . . . . . . . . . . . . . . . . . . . 191.3.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.4 Pendolo semplice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.4.1 Equazione differenziale del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.4.2 Piccole oscillazioni del pendolo semplice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.4.3 Analisi del moto alla Weierstrass per il pendolo semplice . . . . . . . . . . . . . . . . . . . . . 221.4.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.5 Moto di un punto soggetto ad una forza centrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.5.1 Integrali primi del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.5.2 Forza centrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.5.3 Integrazione delle equazioni del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.5.4 Stabilita delle orbite circolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271.5.5 Appendice: composizione di moti periodici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291.5.6 Esempio di forza centrale attrattiva direttamente proporzionale alla distanza . . . . 301.5.7 Analisi del moto alla Weierstrass per il problema di Keplero . . . . . . . . . . . . . . . . . . 311.5.8 Orbite chiuse e condizione sul potenziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.6 Moto di un punto su una superficie prestabilita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351.6.1 Considerazioni preliminari. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351.6.2 Moto di un punto pesante sopra una superficie di rotazione ad asse verticale e
priva di attrito. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361.6.3 Pendolo sferico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37

VIII Sommario
1.7 Dinamica relativa del punto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401.7.1 Influenza della rotazione terrestre sul moto dei gravi nel vuoto . . . . . . . . . . . . . . . . 401.7.2 Pendolo di Focault . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431.7.3 Nozioni elementari di meccanica celeste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2 Dinamica dei solidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.1 Angoli di Eulero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.2 Equazioni di Eulero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.2.1 Solidi in rapida rotazione e fenomeni giroscopici elementari . . . . . . . . . . . . . . . . . . . 502.3 Solido pesante con un punto fisso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
2.3.1 Integrali primi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522.3.2 Equazioni differenziali del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.4 Giroscopio pesante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 532.4.1 Terzo integrale primo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.5 Rotazioni uniformi del giroscopio pesante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.5.1 Determinazione dell’angolo di nutazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 572.5.2 Discussione del moto di precessione ψ(t) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.6 Trottola veloce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 622.7 Stabilita del moto del giroscopio pesante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.7.1 Stabilizzazione giroscopica e trottola ”addormentata”. . . . . . . . . . . . . . . . . . . . . . . . 64
3 Equazioni di Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 673.1 Principio del d’Alembert e relazione simbolica della Dinamica . . . . . . . . . . . . . . . . . . . . . . 673.2 Equazioni differenziali del moto di un sistema olonomo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 673.3 Funzione Lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 693.4 Coordinate cicliche e Lagrangiana ridotta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 693.5 Esempio: problema di Keplero. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 713.6 Integrazione per quadrature del giroscopio pesante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4 Equazioni canoniche di Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 774.1 Forma hamiltoniana dei sistemi lagrangiani . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 774.2 Trasformata di Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 794.3 Funzione Hamiltoniana nel caso dinamico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 814.4 Esempi di funzione Hamiltoniana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.4.1 Punto libero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 824.4.2 Solido con punto fisso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.5 Significato fisico dei momenti coniugati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 834.5.1 Significato fisico della costante del moto ph quando la coordinata ciclica qh e
una coordinata cartesiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 844.5.2 Significato fisico della costante del moto ph quando la coordinata ciclica qh e un
angolo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 844.6 Flusso Hamiltoniano e teorema di Liouville . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.6.1 Flusso Hamiltoniano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 854.6.2 Flusso Hamiltoniano per l’oscillatore armonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874.6.3 Teorema di Liouville . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88

Sommario IX
4.7 Coordinate cicliche — formalismo Hamiltoniano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 894.8 Parentesi di Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.8.1 Esempio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 914.8.2 Proprieta principali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 914.8.3 Applicazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.9 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5 Principio variazionale di Hamilton. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 955.1 Premesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 955.2 Principio variazionale di Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 955.3 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.3.1 Moto di un grave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 975.3.2 Oscillatore armonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
5.4 Equazioni di Eulero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 995.5 Esercizi (risolti) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
6 Trasformazioni canoniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1056.1 Struttura canonica delle equazioni di Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
6.1.1 Trasformazioni che conservano la struttura canonica . . . . . . . . . . . . . . . . . . . . . . . . . 1056.1.2 Determinazione della nuova Hamiltoniana per effetto di una trasformazione che
conserva la struttura canonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1066.2 Trasformazioni canoniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1086.3 Generatrice di una trasformazione canonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1086.4 Esempio: trasformazione canonica per l’oscillatore armonico . . . . . . . . . . . . . . . . . . . . . . . 110
7 Equazione di Hamilton-Jacobi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1137.1 Equazione di Hamilton-Jacobi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1137.2 Hamiltoniana indipendente da t ed azione ridotta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1147.3 Esempio: l’oscillatore armonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1157.4 Metodo di separazione delle variabili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1167.5 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
7.5.1 L’equazione di Hamilton-Jacobi per il moto centrale di un punto in un piano . . . . 1187.5.2 Il metodo di Hamilton-Jacobi applicato al problema di Keplero . . . . . . . . . . . . . . . 119
8 Teoria Perturbativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1218.1 Piccole oscillazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
8.1.1 Teorema di Dirichlet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1218.1.2 Moto delle piccole oscillazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1238.1.3 Caso unidimensionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1248.1.4 Coordinate normali e frequenze proprie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1258.1.5 Schema riassuntivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1278.1.6 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1288.1.7 Giustificazione del metodo delle piccole oscillazioni . . . . . . . . . . . . . . . . . . . . . . . . . . 131
8.2 Principio della media . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134

X Sommario
A Complementi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139A.1 Cinematica dei sistemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
A.1.1 Sistemi olonomi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139A.1.2 Sistemi anolonomi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141A.1.3 Spostamenti infinitesimi reali e virtuali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143A.1.4 Sistemi a legami unilaterali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
A.2 Momento di inerzia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146A.2.1 Ellissoide d’inerzia e assi principali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148A.2.2 Matrice d’inerzia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
A.3 Energia Cinetica e quantita di moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151A.3.1 Energia cinetica o forza viva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151A.3.2 Quantita di moto e momento della quantita di moto . . . . . . . . . . . . . . . . . . . . . . . . . 156A.3.3 Quantita di moto e momento delle quantita di moto di un corpo rigido . . . . . . . . . 158
B Serie di Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161B.1 Serie di Fourier in forma trigonometrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161B.2 Serie di Fourier in forma esponenziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
C Teorema di annullamento degli integrali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
D Forma di Poincare-Cartan e dimostrazione del Teorema sulle funzionigeneratrici di tipo F1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167D.1 Elementi sulle forme differenziali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
D.1.1 Forme esterne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167D.1.2 Prodotto esterno tra k-forme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169D.1.3 Forme differenziali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169D.1.4 Proprieta della derivazione esterna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170D.1.5 Lemma di Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171D.1.6 Forma di Poincare-Cartan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
D.2 Forma di Poincare-Cartan e trasformazioni che conservano la forma canonica . . . . . . . . 172D.3 Teorema sulle funzioni generatrici di tipo F1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173

1
Dinamica del punto
1.1 Dinamica del punto su traiettoria prestabilita
1.1.1 Equazioni differenziali del moto
La dinamica di un punto P si fonda sull’equazione che deve essere soddisfatta durante il moto
ma = F+ φ (1.1)
dove m e la massa del punto, F e la risultante di tutte le forze attive agenti sul punto e φ la risultantedi tutte le reazioni vincolari.
Supponendo nota la traiettoria γ del punto P soggetto alla (1.1) allora per caratterizzare il motonon rimane che da determinare la legge oraria. Piu precisamente, se s (ascissa curvilea di P ) e lalunghezza dell’arco γ fra una arbitraria origine e P , misurata positivamente in un prefissato verso,la (1.1) proiettata, in ciascun punto della γ, sulla rispettiva tangente, orientata nel verso delle screscenti, diventa:
ms = Ft + Φt (1.2)
dove la componente tangenziale Φt di Φ e, per lo piu, incognita. Tuttavia vi sono dei casi in cui laΦt e preventivamente assegnabile. In particolare: un punto vincolato a restare su di una curvapriva di attrito si muove su di essa come se fosse esclusivamente soggetto all’azione dellaforza attiva (tangenziale), cioe Φt = 0. In tal caso la (1.2) prende la forma
ms = Ft (1.3)
dove la componente tangenziale Ft della forza totale e una funzione f(s, s; t) nota, quindi la (1.3)assumera la forma
ms = f(s, s; t) (1.4)
e, nell’ipotesi di limitatezza, continuita e derivabilita nei tre argomenti della f , la (1.4) ammette una,ed una sola, soluzione (nel dominio considerato) soddisfacente alle condizioni iniziali assegnate. La(1.3) (piu precisamente nella forma (1.4)) prende il nome di equazione differenziale del moto ed esufficiente per caratterizzare univocamente il moto di un punto vincolato a percorrere una traiettoriaassegnata in assenza di attrito.

2 1 Dinamica del punto
1.1.2 Caso di forze posizionali: soluzione per quadrature
Nel caso di forze posizionali Ft = f(s) la (1.3) assume la forma
ms = f(s) (1.5)
Per mostrare come la (1.5) si riduca con una quadratura ad una equazione del I ordine ricordiamoche l’energia cinetica T del punto e qui definita da 1
2ms2, da cui risulta: dT
dt= mss. Osservando che,
essendo f funzione della sola s, esiste un’altra funzione U della sola s tale che
dU
ds= f(s). (1.6)
In virtu della (1.5) segue che dTdt
= dUdss. Il secondo membro, in quanto si consideri U come funzione
di t tramite s(t), non e altro che la derivata di U = U [s(t)] rispetto a t. Integrando rispetto a t edesignando con E la costante di integrazione, si ricava:
T − U = E. (1.7)
Questa relazione in termini finiti, tra la energia cinetica T del punto P e la sua posizione sulla curva(caratterizzata dalla funzione U(s)), si chiama integrale delle forze vive. Esso fornisce, in ultimaanalisi, una relazione fra s e s.
Nota. Nel caso in cui si suppone prestabilita la traiettoria si perviene alla (1.7) senza bisogno diintrodurre l’ipotesi che la forza totale F sia conservativa, basta infatti che essa sia posizionaleperche la (1.6) valga limitatamente alla mobilita del punto sopra la curva γ.
Nota. Dalla (1.7) deriva che:
T1 − T0 = U1 − U0,
essendo T0 e U0, T1 e U1 i valori di T e di U in due generici istanti t0 e t1. In particolare, consideriamodue punti materiali distinti di egual massa che siano fatti partire con la medesima velocita da unamedesima posizione, oppure da due posizioni appartenenti alla medesima superficie U = cost.. Sequesti due punti si muovono sotto l’azione di una forza derivante dal potenziale U , l’uno libero el’altro costretto a restare sopra una curva priva di attrito, essi attraversano ciascuna superficieequipotenziale con equale velocita. Cosı, ad esempio, se due punti pesanti cadono, a partire dallaquiete, uno liberamente, l’altro sopra un sostegno prestabilito (privo di attrito), dopo essere discesidi una stessa quota, hanno la stessa velocita.
Torniamo al problema dell’integrazione della equazione (1.5) del moto; ponendo
u(s) =2
m[U(s) + E] , (1.8)
l’equazione delle forze vive (1.7) si puo scrivere(ds
dt
)2
= u(s), da cuids
dt= ±
√u(s), (1.9)
dove va preso il segno positivo o negativo secondo che la velocita scalare dsdt
sia positiva o negativa. La(1.9) e una equazione differenziale del I ordine, sostanzialmente equivalente all’originaria equazione(1.5), che puo essere integrata mediante una quadratura e fornisce la cercata relazionein termini finiti tra s e t. Le due costanti arbitrarie da cui essa deve dipendere sono date l’unadalla costante additiva dell’ultima quadratura, l’altra dall’integrale E delle forze vive.

1.2 Oscillatore armonico smorzato e forzato 3
1.2 Oscillatore armonico smorzato e forzato
1.2.1 Forze di richiamo e forze viscose
Fra le forze posizionali meritano speciale attenzione le cosiddette forze di richiamo, verso un’assegnataposizione O della curva γ. La proprieta caratteristica di tali forze e di annullarsi in O, detta po-sizione di richiamo, e di esplicarsi, in ogni altro punto della γ, come attrazioni (tangenziali) versoO, crescenti quanto piu ci si allontana da O lungo la curva. In particolare si ha che sf(s) < 0,
supponendo che O abbia ascissa curvilinea s = 0 e dove f(s) = Ft(s). E questo il comportamentotipico delle forze elastiche. Una espressione tipica di una forza elastica di richiamo e data da:
f(s) = −λs (1.10)
dove λ e una assegnata costante positiva.Le forze viscose dipendono, invece, dalla velocita del punto e tendono, sempre, ad opporsi al
moto del punto. La piu semplice espressione di una forza viscosa ha la forma
F = −bv
dove v e la velocita del punto e b e una assegnata costante positiva.
1.2.2 Oscillatore armonico smorzato
Si usa designare con questo nome un sistema meccanico costituito da un punto materiale di massam soggetto ad una forza elastica e ad una forza viscosa. L’equazione differenziale del moto prendela forma
ms+ bs+ λs = 0.
Ponendo poi h = b2m
e ω =√
λm
allora questa si scrive
s+ 2hs+ ω2s = 0, (1.11)
che e una equazione differenziale del II ordine, lineare, a coefficienti costanti e omogenea. La soluzionegenerale e, tranne un caso particolare (in cui z1 = z2), data da
s(t) = C1ez1t + C2e
z2t
dove
z1,2 = −h±√h2 − ω2
sono le soluzioni, reali o complesse, della equazione di secondo grado
z2 + 2hz + ω2 = 0.
Ai fini della discussione che segue conviene porre la soluzione generale nella forma
s(t) = C1e−β1t + C2e
−β2t, dove β1,2 = −z1,2. (1.12)
Nota. Mettiamo in luce la seguente proprieta: qualunque siano h e ω2, purche sia h > 0, allora

4 1 Dinamica del punto
ℜz1,2 < 0, cioe ℜβ1,2 > 0. (1.13)
Infatti, essendo z1,2 soluzioni dell’equazione di secondo grado, segue che
z1 + z2 = −2h e z1z2 = ω2. (1.14)
Se z1,2 sono numeri reali allora, dalla seconda condizione (1.14), essi hanno segno concorde e questo,dalla prima condizione (1.14), e negativo. Se, invece, z1,2 sono numeri complessi allora, essendo icoefficienti della equazione reali, essi sono tra loro complessi coniugati, cioe z2 = z1, e la condizione(1.14) si traduce in
2ℜz1 = −2h e |z1|2 = ω2 (1.15)
che pone immediatamente al risultato cercato.In virtu della proprieta (1.13) e ricordando che
e−β1,2t = e−ℜβ1,2te−iℑβ1,2t
dove e−iℑβ1,2t ha modulo 1, segue che la soluzione (1.12) s(t) della equazione (1.11), per assegnatecondizioni iniziali, tende asintoticamente a zero, per t crescente, in modo esponenziale.
Premesso questo risultato generale (e di importanza rilevante nello studio della stabilita dei sis-temi) andiamo a discutere in dettaglio la forma della soluzione generale in funzione dei valori deiparametri. Si hanno i seguenti tre casi:
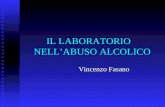
Moto aperiodico smorzato: h2 > ω2.
In questo caso abbiamo che β1,2 ∈ R+ ed il moto ha, al piu, una sola inversione del moto (Figura
1.1).
–0.2
–0.1
0
0.1
0.2
1 2 3 4 5 6
t
Fig. 1.1. Grafico della legge oraria nel caso di moto aperiodico smorzato.

1.2 Oscillatore armonico smorzato e forzato 5
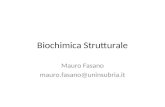
Moto oscillatorio smorzato: h2 < ω2.
In questo caso β1,2 sono complessi coniugati e si possono scrivere come β1,2 = h ± ik dove k =√ω2 − h2; con tale posizione la soluzione generale prende la forma (prendendo le costanti arbitrarie
C1 e C2 complesse coniugate tra loro e facendo un po’ di conti)
s(t) = C1e−hte−ikt + C2e
−hteikt = e−ht(C1e
−ikt + C2eikt)
= Ce−ht cos(kt+ γ).
Risulta quindi essere un moto oscillatorio, di pulsazione k, con ampiezza data da Ce−pt che decresceesponenzialmente. Il numero T = 2π/k prende il nome di pseudo-periodo (Figura 1.2). Osserviamoche nel caso limite di assenza di smorzamento h = 0 allora la soluzione generale prende la ben notaforma s(t) = C cos(kt+ γ) caratteristica delle oscillazioni armoniche di periodo 2π/k.
–1
–0.5
0
0.5
1
1 2 3 4 5 6
t
Fig. 1.2. Grafico della legge oraria nel caso di moto oscillatorio smorzato.
Moto aperiodico smorzato con smorzamento critico: h2 = ω2.
In questo caso z1,2 = −h sono reali e coincidenti; la soluzione generale non ha piu la forma (1.12)bensı
s(t) = C1e−ht + C2te
−ht.
L’andamento della funzione s(t) presenta, sostanzialmente, le stesse caratteristiche del primo caso(Figura 1.1).
1.2.3 Oscillatore armonico smorzato e forzato
Se ammettiamo la presenza di un termine forzante che dipende, in modo periodico, dal tempo t alloral’equazione differenziale da studiare risulta essere la seguente:
ms+ bs+ λs = Q(t) (1.16)

6 1 Dinamica del punto
dove Q(t) e una funzione periodica assegnata e dove b ≥ 0 e λ 6= 0. L’equazione differenziale (1.16)del II ordine, lineare, a coefficienti costanti e completa ha soluzione generale della forma
s(t) = s0(t) + s⋆(t)
dove s0(t) e la soluzione generale della omogenea associata (1.11) e dove s⋆(t) e una soluzione parti-colare della completa.
Nota. In virtu delle osservazioni fatte in precedenza possiamo affermare che, a regime, la funziones(t) e data solamente dalla soluzione particolare; infatti, comunque siano state assegnate le costantiarbitrarie, la funzione so(t) decresce esponenzialmente e quindi, dopo un certo intervallo di tempo(detto transitorio), segue che s(t) ≈ s⋆(t).
Caso di forzante di tipo armonico
Supponendo, al momento, che il termine forzante Q(t) sia una funzione armonica di periodo T1 =2πΩ
data da
Q(t) = q sin(Ωt+ α),
dove q > 0, Ω > 0 e α sono costanti assegnate. Ricerchiamo la soluzione particolare della forma
s⋆(t) = p sin(Ωt+ ϕ) (1.17)
dove p e ϕ sono da determinarsi sostituendo la (1.17) nella equazione completa (1.16) e richiedendoche questa sia identicamente soddisfatta. Operando la sostituzione si ottiene
(ω2 −Ω2)p sin(Ωt+ ϕ) + 2hΩp cos(Ωt+ ϕ) = q sin(Ωt+ α)/m
che, in virtu delle formule trigonometriche di addizione, si trasforma nella
a sin(Ωt+ α) + b cos(Ωt+ α) = 0
dove, ponendo φ = α− ϕ,
a = p[(ω2 −Ω2) cosφ+ 2hΩ sinφ]− q/m
e
b = p[−(ω2 −Ω2) sinφ+ 2hΩ cosφ].
Deve quindi essere verificato il seguente sistemaa = 0b = 0
⇒p[(ω2 −Ω2) cosφ+ 2hΩ sinφ] = q/m−p[(ω2 −Ω2) sinφ+ 2hΩ cosφ] = 0
.
Quadrando e poi sommando si ottiene immediatamente:
p =A(Ω2)q
mdove A(Ω2) =
1√(ω2 −Ω2)2 + 4h2Ω2
(1.18)
mentre dalla seconda si ottiene immediatamente che deve essere

1.2 Oscillatore armonico smorzato e forzato 7
tan(φ) =2hΩ
ω2 −Ω2,
con che l’angolo φ (ritardo di fase) risulta individuato subordinatamente alla condizione −π/2 <φ ≤ π/2. Risulta che tan(φ) e positiva o negativa, e quindi φ e maggiore o minore di 0, secondo cheΩ2 < ω2 o Ω2 > ω2.
Nota. E immediato verificare che
limΩ→0+
A(Ω2) =1
ω2e lim
Ω→+∞A(Ω2) = 0.
Energia fornita al sistema vibrante
Osserviamo che nelle oscillazioni forzate viene fornita energia al sistema vibrante per effetto dellasollecitazione addizionale Q(t). In particolare l’energia e fornita durante un intero periodo T1 = 2π/Ωe data dal lavoro svolto dal termine forzante:
e =∫ t+T1
tQ(t′) · v(t′)dt′ =
∫ t+T1
tQ[s(t′)]s(t′)dt′; (1.19)
e, sostituendo a Q l’equazione del moto (1.16), segue
e =∫ t+T1
t
[mss+ bs2 + λss
]dt′
=m
2
[s2 + ω2s2
]t+T1t
+ 2hm∫ t+T1
ts2dt′.
A regime stabilito si ha che s = s0 + s⋆ ≈ s⋆ e, per la periodicita di s⋆, la parte integrata va a zero eda cio
e ≈ 2hm∫ t+T1
t(s⋆)2dt′.
Questa formula mostra che l’energia fornita e risulta essenzialmente positiva, ossia che, per man-tenere le oscillazioni forzate, bisogna comunicare energia al sistema vibrante. Si puo,infine, aggiungere che a regime stabilito la soluzione e data dalla s⋆(t) (vedi (1.17)) e quindi e nondipende dall’istante t considerato ma, solamente, dal periodo T1 = 2π/Ω. Piu precisamente:
e ≈ 2hm∫ T1
0(s⋆)2dt = 2hm
∫ T1
0p2Ω2[cos(Ωt+ ϕ)]2dt
= 2hmp2Ω∫ 2π−ϕ
−ϕ[cos(θ)]2dθ = 2πhmp2Ω.
Caso ideale di uno smorzamento nullo
Mettiamoci nel caso dell’ipotesi ideale dell’assoluta assenza di ogni resistenza passiva (h = 0) ecerchiamo di determinare per la corrispondente equazione
s+ ω2s = q sin(Ωt)/m (1.20)

8 1 Dinamica del punto
una soluzione periodica della forma (1.17) (e sempre possibile assumere la fase iniziale α nulla invirtu di una opportuna scelta dell’origine dei tempi t → t − α/Ω). Sostituendo e uguagliando siottiene
φ = 0 e p =q
m(ω2 −Ω2)
purche ω 6= Ω.Se poi si ha Ω = ω, cioe se il periodo della forza addizionale e identico a quello delle vibrazioni
spontanee del sistema, si ha una contraddizione nel ricercare una soluzione periodica del tipo (1.17);ma si verifica che la (1.20), per ω = Ω, ammette l’integrale particolare
s⋆(t) =q
2mω2t sin(ωt),
il quale corrisponde ad oscillazioni del medesimo periodo ma che sono di ampiezza indefinitamentecrescente col tempo.
Risonanza
Tenendo fisse le costanti h e ω caratteristiche del sistema vibrante e l’intensita massima q della forzaaddizionale e facendone variare la frequenza Ω vediamo come vari conseguentemente l’ampiezza pdell’oscillazione forzata corrispondente o, equivalentemente, il fattore di amplificazione A(Ω2). Inparticolare la A(Ω2) ammettera un unico massimo raggiunto, se h e piccola, per |Ω| in prossimita di|ω|. Da qui segue la spiegazione del fenomeno della risonanza.
Per studiare il fenomeno della risonanza riprendiamo la (1.18) ponendo
Ω2
ω2= x,
4h2
ω2= ǫ2,
da cui
A(Ω2) =1
ω2f(x), f(x) =
1√(1− x)2 + ǫ2x
. (1.21)
La funzione f(x) ammette punti di stazionarieta x > 0 quando
−2(1− x) + ǫ2 = 0, cioe x = 1− ǫ2/2.
In particolare questo risulta essere un punto di massimo relativo per f(x) (poiche la derivata secondadel radicando al denominatore e positiva e quindi il radicando ha un punto di minimo relativo).Quindi A(Ω2) ammette un unico punto di massimo per Ω2 = ω2 − 2h2 avente valore (Figura 1.3)
Amax = A(ω2 − 2h2) =1√
4h4 + 4h2(ω2 − 2h2)=
1
2h√ω2 − h2
.
Nota. Nel caso di smorzamento lieve (h≪ 1) il punto di massimo relativo si ha in corrispondenzadi Ω2 ≈ ω2, cioe quando la frequenza del termine forzante e prossima alla frequenza naturale delsistema, ed inoltre
Amax ≈ 1
2ωh≫ 1.

1.2 Oscillatore armonico smorzato e forzato 9
2
4
6
8
10
12
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x
=0.4=0.2=0.1=0.08
εεεε
Fig. 1.3. Grafico della funzione (1.21) per diversi valori di ǫ.
Battimenti
Il fenomeno noto con il nome di battimenti si verifica per la sovrapposizione di oscillazioni ar-moniche con frequenze diverse. Tale caso si verifica, ad esempio, quando consideriamo il caso idealedi smorzamento nullo (cioe h = 0) e soggetto ad un termine forzante oscillatorio. In questo frangentenon posiamo piu affermare che s(t) ≈ s⋆(t) perche il termine s0(t) ha ampiezza che rimane costantenel tempo. Piu precisamente, volendo studiare il termine
s(t) = s0(t) + s⋆(t),
dove
s0(t) = A1 cos(ωt+ α1) e s⋆(t) = A2 cos(Ωt+ α2)
dove prendiamo A1 = A2 = A (altrimenti poniamo A1 = A2+A2 e isoliamo il termine con coefficienteA2). Con tale ipotesi allora dalle formule di prostaferesi segue che
s(t) = 2A cos(ǫt+ β) cos(ωt+ α)
dove
ω =Ω + ω
2, ǫ =
Ω − ω
2, α =
α1 + α2
2, β =
α1 − α2
2.
Il fenomeno diventa particolarmente evidente nel caso in cui Ω ≈ ω; infatti si osserva che il fattorecos(ωt+α) produce una oscillazione che ha una frequenza molto vicina a quella dei moto componenti.L’ampiezza di tale oscillazione risulta pero modulata (lentamente) dal fattore cos(ǫt + β) la cuifrequenza e molto minore di quella precedente (Figura 1.4).
Caso di forzante periodica
Ai fini della ricerca della soluzione particolare nel caso generale in cui il termine forzante sia unagenerica funzione periodica, consideriamo inizialmente il caso h(t) = ρeiΩt, dove ρ ∈ C e Ω = 2π
T1. In
tal caso cerchiamo una soluzione (se esiste) della forma s⋆(t) = reiΩt, da cui

10 1 Dinamica del punto
–1
–0.5
0
0.5
1
20 40 60 80 100
t
Fig. 1.4. Battimenti.
s⋆(t) = iΩreiΩt e s⋆(t) = −Ω2reiΩt.
La sostituzione di s⋆ nella equazione differenziale (1.11) porta a
−Ω2reiΩt + i2hΩreiΩt + ω2reiΩt = ρeiΩt/m
che, dovendo essere identicamente soddisfatta per ogni t (affinche s⋆ sia soluzione dell’equazionedifferenziale), implica
r =ρ/m
ω2 −Ω2 + 2ihΩ
da cui
s⋆(t) =1
m
ρ
ω2 −Ω2 + 2ihΩeiΩt.
Prima di passare al caso generale consideriamo il caso in cui la funzione periodica Q(t) ammettasviluppo in serie di Fourier di tipo esponenziale finito:
Q(t) =N∑
n=−Ncne
iΩnt
dove cn = c−n affinche Q(t) sia a valori reali. Una soluzione particolare, periodica di periodo T , equindi data da
s⋆(t) =N∑
n=−Ns⋆n(t), s⋆n(t) =
1
m
cnω2 − n2Ω2 + in2hΩ
eiΩnt
dove s⋆n(t) e soluzione particolare della equazione differenziale
s+ 2hs+ ω2s = cneiΩnt/m
da quanto abbiamo appena dimostrato. La verifica e immediata:

1.2 Oscillatore armonico smorzato e forzato 11
s⋆ + 2hs⋆ + ω2s⋆ =N∑
n=−N
(s⋆n + 2hs⋆n + ω2s⋆n
)
=N∑
n=−Ncne
iΩnt/m = Q(t)/m.
Rimane da trattare il caso in cui Q(t) ammette sviluppo in serie infinita di Fourier
Q(t) =+∞∑
n=−∞cne
iΩnt. (1.22)
Come nel caso precedente prendiamo come possibile soluzione particolare la serie di Fourier (per ilmomento formale):
s⋆(t) =+∞∑
n=−∞s⋆n(t), s
⋆n(t) =
1
m
cneiΩnt
ω2 − n2Ω2 + i2nhΩ(1.23)
e cerchiamo di stabilire se questa serie converge e, nel caso in cui converga, se e una soluzionedella equazione differenziale. Come nel caso precedente si verifica facilmente che questa serie e unasoluzione purche converga abbastanza velocemente in modo da poterne calcolare la derivata primae seconda derivando la serie termine a termine. Ricordiamo che per potere derivare k volte la serietermine a termine, deve convergere la serie
+∞∑
n=−∞
dks⋆n(t)
dtk=
1
m
+∞∑
n=−∞
cn(iΩn)k
ω2 − n2Ω2 + i2nhΩeiΩnt (1.24)
uniformemente rispetto a t; ricordiamo inoltre la seguente stima dei coefficienti della serie di Fourier:|cn| ≤ cn−r quando la funzione Q(t) e di classe Cr. In virtu di queste considerazioni abbiamo che iltermine n—esimo della serie (1.24) puo essere stimato come
∣∣∣∣∣cn(iΩn)
keiΩnt/m
ω2 − n2Ω2 + i2nhΩ
∣∣∣∣∣ ≤cΩknk
nr√(ω2 − n2Ω2)2 + 4n2h2Ω2
≤ Cnk−r−2
per una qualche costante C > 0 indipendente da n. Troviamo quindi che la serie (1.24) convergeuniformemente rispetto a t se r + 2 − k > 1; in particolare si ha che la serie (1.23) e soluzionedell’equazione differenziale (1.16) se r + 2 − 2 > 1 (k = 2), cioe se la funzione Q(t) e, almeno, diclasse C2.
Possiamo riassumere questo risultato nel seguente teorema:
Teorema: Sia data la equazione (1.16) dell’oscillatore armonico smorzato e forzato, sia Q(t) unafunzione periodica, di periodo T1, di classe C
2 e avente sviluppo di Fourier in forma esponenziale(1.22) dove Ω = 2π/T1. Allora la serie di Fourier (1.23) converge uniformemente per ogni t ∈ [0, T1]ed e una soluzione della equazione (1.16).
Nota. Analiziamo ora in cosa si traduce il fenomeno della risonanza nel caso generale in cuiQ(t) ammette uno sviluppo di Fourier del tipo (1.22). Sotto l’ipotesi che Q ∈ C2 si e provato

12 1 Dinamica del punto
che la soluzione particolare ha forma (1.23). Allora si vede subito che, prendendo anche qui h
sufficientemente piccolo, le armoniche di indice n± = ±[ωΩ
], dove [−] denota il numero intero piu
vicino, vengono amplificate, infatti per tali valori di n il denominatore assume valore minimo, mentrele altre armoniche sono smorzate.
1.3 Analisi qualitativa del moto
1.3.1 Studio del moto alla Weierstrass
Consideriamo il caso in cui la forza F applicata al punto libero P e conservativa (o, almeno nelcaso uni-dimensionale, sia posizionale); allora le equazioni (1.1) ammettono l’integrale (primo)delle forze vive
T − U = E,
dove E e l’energia totale costante. Riprendiamo la corrispondente equazione delle forze vive (1.9)
s2 = u(s), (1.25)
dove
u(s) =2
m[U(s) + E] e
du
ds=dU
ds= f(s) = Ft(s). (1.26)
La (1.25) e una conseguenza necessaria della equazione fondamentale (1.5) ms = f(s). Perciol’andamento del moto si puo desumere dalla (1.25) anziche dalla originaria (1.5).
Circa l’equazione (1.25) supponiamo, per fissare le idee, che la funzione u(s), per tutti i valori dis che volta a volta considereremo, sia finita e continua insieme con le sue derivate di tutti gli ordini.Denotiamo con s0 e s0 la ascissa curvilinea e la velocita scalare del punto all’istante iniziale.
Dalla (1.25) distinguamo, in ordine alle condizioni iniziali, due casi:
a) se s0 = 0, ovvero s20 = u(s0) = 0;b) se s0 6= 0, ovvero s20 = u(s0) > 0.
Caso di velocita iniziale nulla: s0 = 0.
Consideriamo inizialmente il caso a) s0 = 0. In questo caso il moto, al suo inizio, non e completamentecaratterizzato dall’equazione delle forze vive (1.25) ed e necessario fare un distinguo:
a1) s0 e radice semplice di u(s), cioe
du(s0)
ds= 2
f(s0)
m6= 0.
In virtu della legge del moto incipiente (in base alla quale, per l’annullarsi della velocita iniziale,il mobile segue il verso della forza attiva Ft =
m2duds
che, per s = s0, e non nulla) si ha che il mobilesi mette in moto e, subito dopo l’istante iniziale, ci troviamo nella condizione b).a2) s0 e una radice multipla di u(s), cioe
du(s0)
ds= 2
f(s0)
m= 0.
In questo caso s ≡ s0 soddisfa l’equazione del II ordine (1.5) con le condizioni iniziali s(t0) = s0e s(t0) = 0. Quindi il mobile rimane in equilibrio nella posizione iniziale s0.

1.3 Analisi qualitativa del moto 13
Caso di velocita iniziale non nulla: s0 6= 0.
Consideriamo ora il caso b) s0 6= 0. In questo caso il moto, al suo inizio, e completamente caratter-izzato dall’equazione delle forze vive (1.25) scritta nella forma
s = ±√u(s) (1.27)
Possiamo sempre assumere, senza perdere in generalita, che sia s0 > 0 (altrimenti e sufficientecambiare orientazione alla traiettoria) e quindi:
s0 = +√u(s0).
Prestabilito questo segno, resta determinato anche quello della equazione differenziale del I ordine(1.27) che caratterizza il moto fino a tanto che la velocita non si annulla, cioe fino a quando s nonraggiunge una radice di u(s). Qui si presentano due sottocasi distinti:
b1) a partire da s0 fino a +∞, nel verso della velocita s0, non si incontra mai una radice di u(s):
u(s) 6= 0, ∀s > s0;
b2) esiste, dalla parte indicata di s0, una prima radice s⋆ di u(s):
∃s⋆ > s0 : (u(s⋆) = 0 ∧ u(s) > 0 ∀s ∈ [s0, s⋆)) .
Nel caso b1) l’equazione e integrabile per separazione di variabili ottenendo
dt =ds√u(s)
, da cui t(s) =∫ s
s0
dξ√u(ξ)
+ t0 (1.28)
funzione continua, monotona crescente al crescere di s e definita per ogni s > s0. Essa rappresentail tempo che il mobile impiega ad arrivare in s > s0. Si ricava che per ogni s > s0 il mobilepassa in s in un tempo finito, in questo caso si parla di moto diretto (o retrogrado ses0 < 0) aperiodico. La funzione inversa s(t), pur essa monotona, fornisce l’equazione oraria delmoto considerato.
Nel caso b2) si ha, come per il caso b1), la scomposizione (1.28) che fornisce t(s) monotonacrescente definita per ogni s0 < s < s⋆. Quindi il mobile, se s⋆ e la prima radice di u(s) nel versoindicato da s0, va, sempre muovendosi in un medesimo senso, dalla posizione iniziale s0 ad ogniposizione s < s⋆ in un tempo finito:
t(s) =∫ s
s0
dξ√u(ξ)
+ t0, s0 ≤ s < s⋆. (1.29)
Analizziamo il tempo impiegato per raggiungere s⋆. Si distinguono due casi:
b21) s⋆ e radice semplice di u(s);b22) s⋆ e radice multipla di u(s).
Nel caso b21) avremo, per il Teorema di Lagrange, che in un intorno (sinistro) di s⋆ e definita unafunzione ξ(s) ∈ (s, s⋆) tale che

14 1 Dinamica del punto
u(s) = (s⋆ − s)u′[ξ(s)] (1.30)
dove u′(s) < 0 per s in un intorno di s⋆ poiche u(s) > 0 per ogni s ∈ (s0, s⋆) e s⋆ e radice semplice
di u(s). L’integrale generalizzato
t⋆ = t(s⋆) =∫ s⋆
s0
ds√u(s)
+ t0 =∫ s⋆
s0
ds√s⋆ − s
√u′[ξ(s)]
+ t0
converge poiche u′[ξ(s)] 6= 0 in un intorno di s⋆. La funzione
t(s) : [s0, s⋆] → [t0, t
⋆]
e monotona crescente (e continua) e quindi essa e invertibile e la sua inversa
s(t) : [t0, t⋆] → [s0, s
⋆]
e la legge del moto del mobile per t nell’intervallo [t0, t⋆]. Per t = t⋆ si ha che s(t⋆) = s⋆ e s(t⋆) =√
u(s⋆) = 0 e quindi nell’istante t⋆ il mobile e nelle condizioni di tipo a). Piu precisamente, essendo
nelle condizioni di tipo a1) poiche u′(s⋆) < 0, allora il mobile si mette in moto per t > t⋆ di motoretrogrado. In conclusione: nel caso in cui s⋆ e una radice semplice allora per ogni s ∈ (s0, s
⋆)il mobile passa in s in un tempo finito, arriva in s⋆ all’istante finito t⋆; in corrispondenzaad s⋆ il mobile ha velocita nulla e si ha una inversione del moto.
Nel caso b22) avremo, per il Teorema di Lagrange, che in un intorno (sinistro) di s⋆ e definita unafunzione ξ(s) ∈ (s, s⋆) tale che
u(s) =1
2(s⋆ − s)2u′′[ξ(s)]
e quindi l’integrale generalizzato
t(s⋆) =∫ s⋆
s0
ds√u(s)
+ t0 =∫ s⋆
s0
√2
u′′[ξ(s)]
ds
s⋆ − s+ t0
non converge. Quindi, se s⋆ e radice multipla il mobile, pur sempre con moto costantementeprogressivo, si avvicina indefinitamente a questa posizione, senza mai raggiungerla (motoa meta asintotica).
Caso di moto periodico
Merita particolare attenzione il caso in cui la posizione iniziale s0 sia compresa fra due radici semplicis+ > s− consecutive di u(s):
u(s±) = 0, s0 ∈ (s−, s+) e u(s) 6= 0 ∀s ∈ (s−, s+).
In tal caso si dimostra la periodicita del moto e si calcola il periodo come:
T = 2∫ s+
s−
ds√u(s)
. (1.31)

1.3 Analisi qualitativa del moto 15
Infatti, una volta arrivato il punto in s+ in un tempo
t+ =∫ s+
s0
ds√u(s)
+ t0
qui si arresta e poi si inverte il moto; quindi il mobile si rimette in moto a partire da s+ nel verso delleascisse decrescenti. Ripetendo l’analisi appena svolta prendendo il segno negativo nella equazione
s = ±√u(s) si ottiene che il mobile arriva in s− all’istante
t− =∫ s−
s+
ds
−√u(s)
+ t+.
Infine in s− il mobile inverte nuovamente il moto ed arriva in s0 all’istante
T + t0 =∫ s0
s−
ds√u(s)
+ t− =∫ s0
s−
ds√u(s)
+∫ s−
s+
ds
−√u(s)
+ t+
=∫ s0
s−
ds√u(s)
+∫ s−
s+
ds
−√u(s)
+∫ s+
s0
ds√u(s)
+ t0
da cui segue l’espressione (1.31) per T . Si osserva che in s0 per t = t0 + T il mobile ha la stessa
velocita iniziale data da s =√u(s0) e quindi, per il Teorema di unicita della soluzione del problema
di Cauchy, il moto si riproduce con le stesse modalita.
1.3.2 Diagramma delle fasi
Ripartiamo dal Teorema di conservazione dell’energia meccanica, piu precisamente si ha che lagrandezza meccanica
1
2ms2 + V (s) = E (1.32)
si conserva durante il moto dove
E =1
2ms20 + V (s0)
e dove
V (s) = −U(s) = −∫f(s)ds
denota l’energia potenziale. Dalla (1.32) segue immediatamente che il moto del punto P su unacurva γ prestabilita avviene nei tratti di γ per i quali vale la condizione V (s) ≤ E; cioe le regioni
s ∈ R : V (s) > E
sono interdette al moto del punto P dovendo essere s2 ≥ 0. Osserviamo inoltre che durante il motot→ s(t) non si puo passare tra due regioni distinte per la proprieta di continuita della legge di moto.

16 1 Dinamica del punto
Fig. 1.5. Il moto del punto P puo avvenire solamente all’interno delle regioni per le quali E ≥ V (s). Nell’esempio in questioneabbiamo associato ad E due moti possibili, uno dei quali e un moto periodico tra s− < s+.
I valori s, per i quali V (s) = E, dividono le diverse regioni e sono cruciali per la discussione sul tipodi moto.
Definiamo spazio delle fasi l’insieme R2 avente elementi (s, s). Ad ogni punto (s, s) nel piano dellefasi si associa, in modo univoco, una posizione ed una velocita del punto materiale sulla traiettoria.Possiamo quindi identificare il moto del punto materiale con la traiettoria del punto (non materiale)nel piano della fasi.
Sia definita ora la funzione nello spazio delle fasi
E(s, s) = 1
2ms2 + V (s).
Per il teorema di conservazione dell’energia meccanica ogni traiettoria (s(t), s(t)) ∈ R2, t ∈ R nel
piano delle fasi (s coincide con il parametro lagrangiano) e contenuta in una curva di livello diequazione
E(s, s) = E
dove E = E(s0, s0) si determina in base alle condizioni iniziali. Lo studio del mobile P su γ vieneeffettuato studiando l’andamento del corrispondente punto (immaginario) sulle curve di livello nellospazio delle fasi. Le curve di livello sono simmetriche rispetto all’asse delle ascisse s ed e importanteindividuare gli eventuali punti critici, cioe le coppie (s, s) in cui non e ben definito il vettore tangentealla curva di livello, cioe tali che
∂E∂s
= 0 e∂E∂s
= 0 ⇒V ′(s) = 0s = 0
, V ′(s) =dV
ds= −f(s)
Si nota quindi che tutti i punti critici sono le coppie del piano delle fasi (s, 0) dove s e un puntodi massimo, di minimo o di flesso dell’energia potenziale V ; questi punti si dicono anche puntistazionari. In corrispondenza a tali punti, poiche v = 0 e Ft = 0, abbiamo traiettorie stazionarieper il mobile. Notiamo che al di fuori di questi punti non esistono traiettorie stazionarie poiche v 6= 0o Ft 6= 0 e quindi la configurazione corrispondente non e di equilibrio.

1.3 Analisi qualitativa del moto 17
Nota. Ogni arco di curva di livello, non contenente punti critici, e percorso dalla evoluzione(s(t), s(t)), t ∈ R. Piu precisamente la curva e percorsa da sinistra verso destra nel semipianosuperiore s > 0, nel semipiano inferiore s < 0 e invece percorsa da destra verso sinistra.
Nota. Se, inoltre, la curva e chiusa allora il moto e periodico ed il periodo del moto e
T = 2∫ s+
s−
dξ√2m[E − V (ξ)]
dove s± sono tali che V (s±) = E (osserviamo che i punti (s±, 0) sono l’intersezione tra la curva chiusae l’asse delle ascisse).
Nota. Se la curva di livello contiene un punto critico (s, 0) con s corrispondente ad un punto diminimo per il potenziale, allora le traiettorie possibili sulla curva di livello (almeno in un intornofinito di (s, 0)) si riducono alla sola traiettoria stazionaria (s, 0).
Nota. Se la curva di livello contiene un punto critico (s, 0) con s corrispondente ad un puntodi massimo o di flesso per il potenziale, allora, essendo tale punto critico, esso stesso sara unatraiettoria stazionaria, ma la curva di livello constera di piu traiettorie: una traiettoria stazionaria ealmeno due asintotiche, cioe tali che
(s±(t), s±(t)) → (s, 0) per t→ ±∞.
Vediamo ora in dettaglio come si dispongono le traiettorie nell’intorno di un punto critico cor-rispondente ad un minimo ed a un massimo.
Caso I: s e un punto di minimo per il potenziale V
Tenendo conto che V ′′(s) > 0 (per comodita facciamo questa ipotesi), allora
E(s, s) = 1
2ms2 + V (s) +
1
2V ′′(s)(s− s)2 +O((s− s)3)
≈ 1
2ms2 + V (s) +
1
2V ′′(s)(s− s)2 (1.33)
dove O((s− s)3) rappresenta il resto ed e un infinitesimo di ordine superiore al secondo per s− s→ 0.Quindi per E = E(s, 0) = V (s) l’equazione E = E si riduce a
1
2ms2 +
1
2V ′′(s)(s− s)2 ≈ 0, V ′′(s) > 0;
quindi abbiamo (s, 0) come unica curva di livello. Mentre per E > V (s) la (1.33) e, a meno diinfinitesimi d’ordine superiore, l’equazione di un ellisse di centro (s, 0):
1
2ms2 +
1
2V ′′(s)(s− s)2 ≈ E − V (s) > 0.
Abbiamo quindi una traiettoria periodica corrispondente alla curva di livello chiusa approssimata daun ellisse (Figura 1.6) e il mobile oscilla tra i due valori s± tali che V (s±) = E, dove V ′(s−) < 0 eV ′(s+) > 0, con periodo
T (E) = 2∫ s+(E)
s−(E)
dξ√2m[E − V (ξ)]
. (1.34)

18 1 Dinamica del punto
Fig. 1.6. Comportamento delle curve di livello in un intorno di un punto di minimo relativo. Per energia E1 minore del minimorelativo V (s) dell’energia potenziale non sono ammessi moti (in un intorno del punto di minimo); per energia E2 coincidentecon il minimo relativo dell’energia potenziale e ammesso solamente il moto stazionario s(t) = s; per energia E3 maggiore delminimo relativo dell’energia potenziale si ha un moto periodico tra s− < s+ attorno alla configurazione di equilibrio s.
Caso II: s e un punto di massimo per il potenziale V
Tenendo conto che V ′′(s) < 0 (per comodita facciamo questa ipotesi), allora
E(s, s) = 1
2ms2 + V (s) +
1
2V ′′(s)(s− s)2 +O((s− s)3)
dove O((s− s)3) rappresenta il resto ed e un infinitesimo di ordine superiore al secondo per s− s→ 0.Quindi la curva di livello per E = E(s, 0) = V (s) contiene 4 traiettorie asintotiche a (s, 0) oltre chea quella stazionaria (s, 0):
E(s, s) = E =⇒ 0 = E2 − V (s) ≈ 1
2m[s2 − c2(s− s)2],
dove
c2 =1
m|V ′′(s)|.
Per E 6= V (s) (e comunque prossima sufficientemente ad V (s)) si tratta di rami di iperbole (a menodi infinitesimi di ordine superiore)
1
2m[s2 − c2(s− s)2
]= E − V (s) 6= 0
corrispondenti a due traiettorie con inversione del moto se E < V (s) e a due traiettorie che superanoil colle se E > V (s) (Figura 1.7).
Nel caso di punto di massimo o di flesso ci si puo rendere conto della presenza di traiettorieasintotiche (s(t), s(t)) → (s, 0) per t→ +∞ o per t→ −∞ poiche l’integrale generallizato
t(s)− t(s0) = ±∫ s
s0
dξ√2m[V (s)− V (ξ)]
,

1.3 Analisi qualitativa del moto 19
che esprime il tempo impiegato dal mobile per andare da s0 a s (supponendo V (s) − V (s) > 0,∀s ∈ [s0, s)), risultera non convergente a causa dell’ordine infinito dell’integrando (ad esempio: diordine almeno 1 per punti di massimo e 3/2 per punti di flesso).
Fig. 1.7. Comportamento delle curve di livello in un intorno di un punto di massimo relativo. Per energia E2 coincidente conil massimo relativo dell’energia potenziale sono ammessi, oltre al moto stazionario s(t) = s, moti asintotici; per energie E1 e E3,rispettivamente, minori e maggiori del massimo relativo dell’energia potenziale si hanno, rispettivamente, due traiettorie con esenza inversione del moto.
1.3.3 Analisi del moto alla Weierstrass per l’oscillatore armonico
Studiamo il moto di un punto vincolato a scorrere senza attrito su una retta e soggetto ad una forzaelastica. L’equazione del moto e mx = −kx, m, k > 0. Dimostriamo, attraverso la formula (1.34)che il periodo del moto e indipendente da E. Sia
V (x) =1
2kx2 + c
l’energia potenziale della forza attiva. L’equazione per determinare i punti critici V ′(x) = 0 hasoluzione x = 0. Scegliendo la costante c tale che V (x) = 0 (cioe c = 0) abbiamo il seguentediagramma delle fasi (Figura 1.8):
- per E = V (x) = 0 abbiamo un minimo e quindi l’unica traiettoria e la traiettoria stazionaria(0, 0);
- per E < 0 tutti i valori di x sono non ammessi al moto poiche si avrebbe E − V (x) < 0 per ognix ∈ R;
- per E > 0 il moto della particella avviene nella regione (classicamente permessa) x−(E) ≤x ≤ x+(E) dove x±(E) sono soluzioni della equazione E = V (x±):
x± = ±√2E/k.

20 1 Dinamica del punto
Fig. 1.8. Comportamento delle curve di livello dell’oscillatore armonico.
Le traiettorie (s(t), s(t)) nello spazio delle fasi sono ellissi per ogni valore positivo dell’energia;infatti l’equazione per le curve di livello e esattamente
E =1
2ms2 +
1
2ks2,
cioe l’equazione di un ellisse con assi coincidenti con gli assi coordinati e di lunghezza√2E/k e√
2E/m rispettivamente. Quindi per ogni E > 0 abbiamo un moto periodico di periodo
T (E) = 2∫ x+(E)
x−(E)
dx√2m[E − V (x)]
=
√2m
E
∫ +√
2E/k
−√
2E/k
dx√1− kx2/2E
= 2
√m
k
∫ +1
−1
dx√1− x2
= 2
√m
k[ arcsin x]+1
−1 = 2π
√m
k.
1.3.4 Esercizi
1) Studiare qualitativamente il moto uni-dimensionale di equazione mx = −kx3, m, k > 0, e di-mostrare che il periodo T (E) del moto e tale che
limE→minV (x)+0
T (E) = +∞.
2) Studiare qualitativamente il moto uni-dimensionale di equazione mx = −αx − βx2, per (ingrandezze adimensionali) m = 1, α = 2 e β = 3g, g > 0. Piu precisamente, disegnare il dia-gramma delle fasi e, per i diversi possibili livelli di energia, discutere quali sono i moti possibili.
3) Calcolare il periodo del moto di un punto soggetto alla forza peso e vincolato a scorrere, senzaattrito, su un arco di cicloide. Dimostrare il perfetto isocronismo.
4) Discutere il problema dei due corpi introducendo il potenziale efficace e impostando la discussionedel moto alla Weierstrass.

1.4 Pendolo semplice 21
5) Sia dato un corpo puntiforme P di massa m vincolato a scorrere senza attrito lungo una circon-ferenza di centro O e raggio ℓ posta in un piano verticale che ruota attorno all’asse verticale (O; z)
con velocita angolare ω = θk con θ = θ(t) nota. Sia (O1; x1, y1, z1) il sistema di riferimento relativocon O ≡ O1, l’asse (O1; z1) coincidente con l’asse di rotazione e con il piano (O1; x1, z1) contenentela circonferenza; il sistema e ad un grado di liberta ed assumiamo come parametro lagrangianol’angolo formato dal segmento P −O ed il semi-asse verticale discendente. Si domanda:
i) calcolare il potenziale e l’energia cinetica rispetto all’osservatore relativo;ii) calcolare le configurazioni di equilibrio relativo e studiarne la stabilita;iii)disegnare il diagramma delle biforcazioni per le configurazioni di equilibrio relativo in funzione
del parametro positivo adimensionale γ = gω2ℓ
;iv)assegnando, ad esempio, γ = 2.3 disegnare il diagramma delle fasi e per i diversi possibili livelli
di energia, discutere quali sono i moti possibili.
1.4 Pendolo semplice
1.4.1 Equazione differenziale del moto
Trascurando il peso dell’asta possiamo assimilare il pendolo semplice ad un punto pesante vincolatoa restare su una circonferenza (Figura 1.9) non orizzontale. Sia α l’angolo formato tra il pianocontenente la circonferenza ed il piano orizzontale e si fissi sul piano inclinato un sistema di riferimento(O; x, y) dove O coincide con il centro della circonferenza, l’asse x e diretto normale alla verticale el’asse y ha la direzione della massima pendenza.
Il sistema e a un grado di liberta e possiamo assumere come parametro lagrangiano l’angolo θ chel’asta forma con il semiasse delle y negative, orientato verso il basso. L’equazione del moto diventa,
Fig. 1.9. Il pendolo semplice.
essendo s = ℓθ e Ft = −mg sinα sin θ,
θ = −g sinαℓ
sin θ (1.35)

22 1 Dinamica del punto
dove ℓ e la lunghezza dell’asta. Questa e una equazione differenziale del II ordine (non lineare) enon e possibile ottenere in modo semplice una sua soluzione. Si puo procedere studiando il motodelle piccole oscillazioni linearizzando l’equazione (1.35) oppure effettuando l’analisi del moto allaWeierstrass.
1.4.2 Piccole oscillazioni del pendolo semplice
Considerando il moto del pendolo semplice in un intorno della configurazione θ = 0 possiamo, inprima approssimazione, assumere sin θ ≈ θ. Con questa approssimazione (linearizzazione attorno aduna configurazione di equilibrio stabile) l’equazione (1.35) prende la forma lineare
θ = −g sinαℓ
θ (1.36)
che ammette soluzione geneale θ(t) = A cos(ωt + ϕ) dove ω =√
g sinαℓ
e dove A e ϕ dpendono dallecondizioni iniziali. Nel limte di piccole oscillazioni si ottiene quindi un moto periodico con periodoT = 2π/ω indipendente dall’ampiezza delle oscillazioni (isocronismo approssimato del pendolosemplice).
1.4.3 Analisi del moto alla Weierstrass per il pendolo semplice
L’integrale delle forze vive assume la forma T+V = E dove T = 12mℓ2θ2 e V (θ) = −mgℓ sinα cos θ+c,
scegliamo c = mgℓ sinα in modo che sia V (0) = 0. Da cio segue che:
1
2mℓ2θ2 −mgℓ sinα(cos θ − 1) = E
ovvero
θ2 =2g sinα
ℓ(cos θ + e), (1.37)
dove la costante e = E/(mgℓ sinα)− 1 viene determinata in base alle condizioni iniziali. In base aivalori di e abbiamo i diversi moti possibili (Figura 1.10).
Moti rotatori o rivolutivi
Per E > 2mgℓ sinα, ovvero e > 1, sara sempre θ 6= 0. Quindi il punto passa infinite volte perciascun punto della circonferenza con velocita angolare mai nulla. Si tratta di un moto rivolutivo.Essendo la posizione del pendolo definita da θ modulo 2π, risulta pero essere un moto periodico.
Stati di equilibrio
Per E = 2mgℓ sinα (rispettivamente E = 0), ovvero e = 1 (risp. e = −1) il secondo membro della(1.37) ammette l’unica radice doppia θ = 0 (per e = −1) o θ = π (per e = +1). Quindi il punto
P , abbandonato senza velocita iniziale (θ0 = 0) sia nella posizione piu bassa sia nella posizionediametralmente opposta vi permane indefinitamente. Si noti che il valore e = −1 e compatibilesoltanto con l’equilibrio (stabile) nella posizione piu bassa. Invece per e = +1 il moto puo avvenirea partire dalla posizione iniziale P0, sempre nello stesso senso della velocita iniziale, verso il puntocorrispondente a θ = π, meta asintotica cui il mobile tende al crescere indefinito del tempo.

1.4 Pendolo semplice 23
Fig. 1.10. Diagramma delle fasi per il pendolo semplice.
Moti oscillatori
Passiamo ad esaminare il caso in cui si ha 0 < E < 2mgℓ sinα, ovvero −1 < e < 1. L’espressione adestra della (1.37) ammette le due radici semplici θ+ = arccos(−e) e θ− = −θ+. Percio il pendolooscilla periodicamente fra le posizioni estreme P0 e P ′
0 di anomalia, rispettivamente, θ+ e −θ+ conperiodo dato da
T = 2
√2ℓ
g sinα
∫ θ+
0
dθ√cos θ − cos θ+
.
Per calcolare il periodo T si sostituisce sin(θ/2) = u sin(θ+/2) e ponendo k = sin(θ+/2) < 1 si avra
T = 4
√ℓ
g sinα
∫ 1
0
du√(1− u2)(1− k2u2)
si riduce quindi ad un integrale ellittico di prima specie che si risolve sviluppando in seriedi Taylor il termine (1 − k2u2)−1/2 essendo k2u2 < 1 su tutto l’intervallo di integrazione. Piuprecisamente si osservi che
(1− k2u2)−1/2 =∞∑
n=0
cn(ku)2n
dove
c0 = 1, cn =1 · 3 · 5 · · · (2n− 1)
2 · 4 · 6 · · · 2n . (1.38)
Sostituendo questa espressione all’interno dell’integrale e integrando per serie si ottiene:
T = 4
√ℓ
g sinα
∞∑
n=0
cnk2n∫ 1
0
u2ndu√(1− u2)
= 2π
√ℓ
g sinα
∞∑
n=0
c2nk2n = 2π
√ℓ
g sinα
∞∑
n=0
c2n sin2n θ0
2

24 1 Dinamica del punto
essendo∫ 1
0
u2ndu√(1− u2)
= cnπ
2. (1.39)
Se l’anomalia θ+ e piuttosto piccola allora possiamo ottenere con buona approssimazione
T = 2π
√ℓ
g sinα
(1 +
1
4sin2 θ+
2+O(θ4+)
).
Cioe il termine principale dello sviluppo asintotico e dato dal periodo dell’oscillatore armonico ot-tenuto linearizzando la (1.35) attorno alla configurazione di equilibrio stabile θ = 0. Da questorisultato appare chiaro che, in generale, il periodo del pendolo semplice dipende dall’ampiezza delleoscillazioni; solamente nel limite di piccole oscillazioni possiamo sostenere la legge (approssimata)dell’isocronismo del pendolo semplice: il periodo di oscillazione e indipendente dall’ampiezzadi oscillazione.
1.4.4 Esercizi
1) Dimostrare le formule (1.38) e (1.39).
1.5 Moto di un punto soggetto ad una forza centrale
1.5.1 Integrali primi del moto
Designamo con integrale primo ogni equazione della forma
g(x, y, z, x, y, z; t) = costante arbitraria (1.40)
la quale sia conseguenza necessaria della (1.1), cioe risulti identicamente verificata (per un oppor-tuno valore della costante) da ogni terna di funzioni x(t), y(t), z(t) soddisfacenti alle (1.1).
Esempi di integrali primi.
a) Consideriamo il caso di una forza, applicata ad un punto materiale P libero, costantementeperpendicolare ad una retta fissa. Assumendo l’asse z quale retta si ha Fz = 0, da ciomz = 0 e quindi mz = c1 detto integrale della quantita di moto rispetto all’asse z.
b) Consideriamo il caso di una forza, applicata ad un punto materiale P libero, costantementeincidente ad una retta fissa. Quindi il vettore F, pensato applicato nel punto, ha momentonullo rispetto alla retta fissa. In particolare, assumendo z quale retta (avente direzione individuata
dal versore k), si avra
ma× (O − P ) · k = m(xy − yx) = 0, (1.41)
da cui
m(xy − yx) = cost.

1.5 Moto di un punto soggetto ad una forza centrale 25
Questo integrale primo prende il nome di integrale delle aree o del momento della quantitadi moto. In particolare se la forza F e centrale di centro O (una forza centrale e una forzasempre diretta verso un punto fisso detto centro), sara
v × (O − P ) = c = cost. (1.42)
c) Consideriamo il caso in cui la forza F applicata al punto libero P e conservativa; allora leequazioni (1.1) ammettono l’integrale (primo) delle forze vive
T − U = E,
dove E e l’energia totale costante.
1.5.2 Forza centrale
Consideriamo il moto di un punto P , libero di muoversi nello spazio tridimensionale R3, soggetto
unicamente ad una forza centrale (P,F). Ricordiamo che una forza (P,F) si dice centrale se ilvettore F della forza e sempre diretto verso un punto fisso, detto centro della forza, e se inoltrel’intensita della forza dipende solo dalla distanza del punto P dal centro. Quindi, denotando con Oil centro della forza, segue che ogni forza centrale si puo scrivere come
F = f(r)(P −O)
|P −O| , r = |P −O| (1.43)
dove f : R+ → R e una funzione assegnata.Nel caso di un punto libero P soggetto ad una forza centrale, di centro O, sussiste l’integrale
primo vettoriale (1.42). Quindi il moto avviene in un certo piano passante per il centro O dellaforza e ortogonale al vettore c definito nella (1.42), identificato mediante le condizioni iniziali v0 e P0
(e possibile il caso particolare in cui v0 e parallelo a P0 −O, in tale caso c = 0 ed il moto avviene suuna retta). Scegliendo il sistema di riferimento con centro in O in modo opportuno identifichiamotale piano con il piano z = 0 e la (1.42) si riduce alla
xy − yx = c e z ≡ 0 (1.44)
fornendo una effettiva relazione fra le due coordinate incognite di P e le loro derivate.Inoltre ogni forza centrale (1.43) e conservativa definendo, a meno di una costante additiva, il
potenziale U(r) =∫ rr0f(r′)dr′ e da cio segue l’integrale primo delle forze vive
1
2mv2 − U(r) = E. (1.45)
Come vedremo in seguito dalle (1.44) e (1.45) segue l’integrabilita per quadrature del problema(ridotto al piano xy).
Nota. Osserviamo che e stato possibile derivare le (1.44) e (1.45) dalle leggi di Newton; viceversa,escludendo il caso di traiettorie circolari, dalle (1.44) e (1.45) seguono le equazioni differenziali delmoto. Infatti dall’integrale primo delle aree derivato si ottiene che deve essere
xy − xy = 0

26 1 Dinamica del punto
mentre dall’integrale primo dell’energia meccanica derivato si ottiene che deve essere
xx+ yy = u(x, y, x, y)
per una qualche funzione u. Queste due equazioni si possono risolvere rispetto a x e y (cosı dapervenire alle equazioni newtoniane del moto), purche non sia identicamente nullo il determinantedei coefficienti di x e y nelle due equazioni. Questo determinante e dato da
−xx− yy = −1
2
dr2
dt
che risulta diverso da zero ad esclusione del caso r = cost. che corrisponde appunto alle eventualitraiettorie circolari. Da cio si desume che, quando di un punto soggetto ad una forza centrale sivogliono studiare le eventuali orbite circolari, non basta tener conto degli integrali primi dellearee e della energia cinetica, ma bisogna riprendere le originarie equazioni del moto.
Nota. Disponendo della costante additiva possiamo, se U(r) tende ad un limite finito per r → ∞,assumere tale valore 0. Se l’energia totale e negativa, allora dalla (1.45), sara U(r) ≥ −E > 0durante il moto; quindi U non si annulla mai ed r deve ammettere un limite superiore finito. Cioe:se il potenziale U(r) di una forza centrale si mantiene regolare all’infinito (annullandosiall’infinito) e l’energia totale del mobile e negativa, l’orbita si svolge tutta a distanzafinita.
1.5.3 Integrazione delle equazioni del moto
Passiamo ora alla integrazione del sistema (1.44), (1.45) riferendolo a coordinate polari r e θ, aventiil polo in O e l’asse polare secondo l’asse orientato delle x. Queste diventano:
r2θ = c12m(r2 + r2θ2) = U(r) + E
. (1.46)
Si distinguono due casi:
a) c = 0;b) c 6= 0.
Il caso a) corrispondente a c = 0 (costante delle aree nulla) dara luogo a due possibilita:
a1) r ≡ 0 stato di quiete nel punto O;
a2) θ ≡ 0 moto rettilineo (lungo la retta avente inclinazione θ0 = θ(0)) e la determinazione di r(t) siridurra allo studio dell’equazione uni-dimensionale delle forze vive, che assume la forma
r2 =2
m[U(r) + E] .
Nel caso b) corrispondente a c 6= 0 si ha che θ mantiene sempre lo stesso segno, che potremosupporre (senza perdere in generalita) positivo; quindi θ(t) cresce con t. Da cio potremo procurarcil’equazione differenziale della traiettoria eliminando dalle (1.46) il tempo e assumendo comevariabile indipendente, in luogo di t, l’anomalia θ, il che e lecito, in quanto θ e funzionemonotona (crescente) di t. Integrando poi l’equazione differenziale cosı ottenuta, si determina

1.5 Moto di un punto soggetto ad una forza centrale 27
la traiettoria r = r(θ), allora la legge temporale del moto verra infine completamente determinata
risolvendo l’equazione differenziale del primo ordine θ = cr−2 dove r = r(θ).Per dedurre dalle (1.46) l’equazione differenziale che caratterizza l’incognita r = r(θ) dell’orbita
si elimina θ per mezzo dell’equazione delle aree, dove
r = θdr
dθ= −θr2d(1/r)
dθ= −cd(1/r)
dθ,
ottenendo l’equazione differenziale del I ordine
mc2
2
(d1r
dθ
)2
+1
r2
= U(r) + E. (1.47)
Eseguendo il cambiamento di variabile u = r−1 e ponendo
Φ(u) =2
mc2
[U(1
u
)+ E
]− u2, (1.48)
la (1.47) assume la forma
(du
dθ
)2
= Φ(u). (1.49)
Essa e quindi integrabile con una sola quadratura. Pertanto il problema del moto di un puntolibero, sollecitato da una forza centrale, e sempre integrabile con due quadrature.
In particolare, nel caso piu interessante in cui il valore iniziale u0 = r−10 , r0 = r(0), sia compreso
(estremi inclusi) fra due radici semplici u1 < u2 della Φ(u), fra le quali Φ(u) si mantenga regolare epositiva, la funzione u(θ), al crescere di θ, andra indefinitamente oscillando, in modo periodico, fra ivalori estremi u1, u2 e ad ogni passaggio θ si accrescera di
Θ =∫ u2
u1
du√Φ(u)
. (1.50)
L’orbita si svolge quindi tutta nella corona circolare, compresa fra le due circonferenze concentriche inO, di raggi r2 = 1/u2 e r1 = 1/u1 e tocca, alternativamente, l’una o l’altra. Questi punti di contattosi dicono apsidi e l’angolo Θ che li separa si dice angolo apsidale. Quando Θ e commensurabilecon 2π, l’orbita e chiusa (Figura 1.11 a sinistra), mentre, nel caso opposto, si avvolge infinite volteintorno al centro riempiendo densamente la corona circolare (Figura 1.11 a destra).
Nel caso particolare, in cui il valore iniziale u0 di u sia radice multipla della Φ(u), la u conserva,comunque varii θ, il valore u0 e si ha il caso semplice di un’orbita circolare di raggio r0 = 1/u0, laquale, in virtu della legge delle aree, risulta percorsa con velocita angolare costante c/r20, e quindi dimoto circolare uniforme.
1.5.4 Stabilita delle orbite circolari
Scrivendo che l’accelerazione (radiale) per un moto centrale deve essere uguale alla analoga cor-rispondente della forza, cioe a f(r), e applicando la formula del Binet otteniamo l’equazione del II
ordine

28 1 Dinamica del punto
Fig. 1.11. Nel caso in cui l’angolo apsidale e commensurabile con 2π allora l’orbita e chiusa (grafico a sinistra). Nel casoopposto, in cui l’angolo absidale e non commensurabile con 2π, allora l’orbita riempie densamente una regione dello spazio(grafico a destra); cioe ogni introno di ogni punto della corona circolare viene, prima o poi, visitato dalla traiettoria.
−mc2
r2
(d2 1
r
dθ2+
1
r
)= f(r). (1.51)
La (1.51), mediante il cambio di variabili u = 1/r, diventa
d2u
dθ2= Ψ(u), dove Ψ(u) = − 1
mu2c2f(1
u
)− u (1.52)
Perche esista un’orbita circolare soddisfacente a questa equazione, la quale sia un cerchio di raggio r0,occorre e basta che la (1.52) sia soddisfatta dalla soluzione costante u0 = r−1
0 , cioe si abbia Ψ(u0) = 0.Ammessa l’esistenza di una tal radice u0 di Ψ(u) allora questa orbita sara stabile se Ψ ′(u0) < 0 einstabile se Ψ ′(u0) ≥ 0. Infatti, consideriamo una orbita prossima all’orbita circolare:
u(θ) = u0 + ǫ(θ), (1.53)
con ǫ(θ) funzione incognita che possiamo assumere infinitesima. Essendo
Ψ(u) = Ψ(u0) + ǫΨ ′(u0) +O(ǫ2) = ǫΨ ′(u0) +O(ǫ2)
allora l’equazione linearizzata a partire dalla (1.52) ha forma
d2ǫ
dθ2= ǫΨ ′(u0)
che ha soluzione del tipo ǫ = p cos(ωθ+ q) dove abbiamo posto ω2 = −Ψ ′(u0) assumendo Ψ ′(u0) < 0.Osserviamo infine che in tale caso l’orbita (1.53) ha una angolo absidale dato da
Θ =π
ω=
π√−Ψ ′(u0)
. (1.54)
Esempio
Se f(r) = kr−ν , k < 0, allora le orbite circolari sono stabili se, e solo se, ν < 3. La verifica eimmediata: la funzione Ψ(u) prende la forma Ψ(u) = k′uν−2 − u dove k′ e una costante positiva.L’equazione Ψ(u) = 0 ha almeno una soluzione per ν 6= 3, infatti:

1.5 Moto di un punto soggetto ad una forza centrale 29
a) se ν > 3 allora limu→0+ Ψ(u) = 0− e limu→+∞ Ψ(u) = +∞;b) se ν < 3 allora limu→0+ Ψ(u) = 0+ e limu→+∞ Ψ(u) = −∞.
Abbiamo poi che Ψ ′(u) = k′(ν − 2)uν−3 − 1 e quindi Ψ ′(u0) = ν − 3 da cui segue la tesi.
1.5.5 Appendice: composizione di moti periodici
Consideriamo nel piano (O; x, y) la composizione di due moti periodici di periodo T1 e T2. Possiamoricondurci, senza perdere in generalita, al caso del moto di un punto P nel piano (O; x, y) aventeleggi di moto:
x(t) = cos(ω1t), y(t) = cos(ω2t)
dove abbiamo posto ωj =2πTj. Vale il seguente risultato:
Teorema. Il moto del punto P e:
i) periodico se, e solo se, T1 e T2 sono commensurabili, cioe esistono m, n ∈ N primi tra loro taliche T1
T2= m
n; il periodo T del moto vale
T = nT1 = mT2;
ii) aperiodico se, e solo se, T1 e T2 sono incommensurabili e, in tal caso, la traiettoria di P ricopredensamente il quadrato Q = [−1,+1]× [−1,+1]; cioe per ogni P0 = (x0, y0) ∈ Q e per ogni ǫ > 0esiste t ∈ R
+ tale che |P (t)− P0| ≤ ǫ.
Dimostrazione: Dimostriamo la prima parte dove, inizialmente, supponiamo P (t) periodico diperiodo T . Dovra essere
x(t+ T ) = cos(ω1t+ ω1T ) = cos(ω1t) = x(t)
e
y(t+ T ) = cos(ω2t+ ω2T ) = cos(ω2t) = y(t)
per ogni t. Pertanto deve essere ω1T = 2nπ e ω2T = 2mπ per un qualche n, m ∈ N. Valeimmeditamente anche il viceversa. Da cio segue la prima proposizione. Per cio che riguarda laseconda proposizione da quanto detto prima segue che il moto e aperiodico se, e solo se, T1 e T2sono incommensurabili. Per dimostrare che la traiettoria di P riempe densamente il quadrato Qconsideriamo le funzioni
θ(t) = ω1t e φ(t) = ω2t
definite modulo 2π, ovvero sul toro bidimensionale. Fissato P0 in Q esso corrisponde a due angoliθ0 e φ0 andiamo ora a determinare in quale istante t il punto P , individuato dalle due funzioni θ(t) eφ(t), ha θ(t) coincidente con il valore iniziale θ0. Se in tale istante anche φ(t) coincide con φ0 alloraP (t) coincide con P0. Se invece φ e diversa da φ0 ma sufficientemente vicino allora P (t) e prossimoa P0. L’equazione

30 1 Dinamica del punto
θ(t) = θ0(mod2π)
ha infinite soluzioni
tn =θ0ω1
+ nT1 =1
ω1
(θ0 + 2nπ).
Consideriamo ora la dinamica discreta sul toro unidimensionale (che, ricordiamo, e un insieme com-patto) rappresentata dalla successione di punti
φn = φ(tn)(mod2π) =[ω2
ω1
θ0 + 2nπω2
ω1
](mod2π).
Questi punti sono tutti distinti tra loro poiche le due frequenze sono incommensurabili. Poiche iltoro unidimensionale T 1 e un insieme compatto, esistera almeno un punto di accumulazione φ pertale successione e quindi possiamo estrarre da φn una sottosuccessione di Cauchy . Quindi, per ogniǫ > 0 esistono n1 e n2 (n2 > n1) tali che
0 < |φn2−n1| = |φn2
− φn1| = d ≤ ǫ.
Cioe il punto φn2−n1sul toro uni-dimensionale ha distanza minore di ǫ dall’origine del toro (posta in
corrispondenza di φ = 0). Abbiamo cioe effettuato una rotazione sul toro T 1 di apertura angolare
d < ǫ. Ripetendo questa rotazione n =[φ0d
]volte allora il punto φn(n2−n1) distera da φ0 a meno di
d < ǫ e da cio la tesi.
1.5.6 Esempio di forza centrale attrattiva direttamente proporzionale alla distanza
In questo caso f(r) = −kr dove k > 0 e una costante positiva assegnata. L’orbita e un ellisse aventeil centro coincidente con il centro O di forza (o, caso degenere, il moto avviene su due rette passantiper l’origine). La verifica e immediata. Basta risolvere il sistema di equazioni differenziali
x = −ω2x, y = −ω2y, ω2 =k
m,
che ammette soluzione generale
x(t) = A cos(ωt+ α) e y(t) = B cos(ωt+ β)
dove A, B, α e β sono costanti da determinarsi a partire dalle condizioni iniziali.In questo caso si osserva anche che l’angolo apsidale vale
Θ =∫ u2
u1
udu√2Emc2
u2 − k2
mc2− u4
=1
2
∫ ρ2
ρ1
dρ√2Emc2
ρ− k2
mc2− ρ2
=1
2
∫ ρ2
ρ1
dρ√−(ρ− ρ1)(ρ− ρ2)
dove ρ1,2 sono le radici del radicando date da
ρ1,2 =mc2
2k2
2E
mc2±√
4E2
m2c4− 4k2
mc2
.

1.5 Moto di un punto soggetto ad una forza centrale 31
Facendo il cambio di variabili z = 1 + 2 ρ−ρ2ρ2−ρ1 si ottiene
Θ =1
2
∫ 1
−1
dρ√1− z2
=1
2[arcsin(z)]+1
−1 =π
2.
Quindi l’angolo apsidale e commensurabile con 2π ed il moto e periodico. Questo risultato eraevidente sapendo che il moto avviene su ellissi e sull’ellisse si passa dal punto corrispondente al semi-asse maggiore a quello corrispondente sul semi-asse minore dopo un incremento di π/2 dell’anomalia(Figura 1.12).
Fig. 1.12. Nel caso forza centrale attrattiva direttamente proporzionale alla distanza allora l’orbita e sempre un ellisse (tranneil caso degenere in cui si riduce ad un segmento rettilineo) e l’angolo absidale vale sempre 1
2π.
1.5.7 Analisi del moto alla Weierstrass per il problema di Keplero
In questo caso la forza ha intensita che dipende inversamente dal quadrato della distanza del puntoP dal centro: f(r) = − k
r2dove k > 0 e una opportuna costante positiva.
Potenziale efficace
La legge di conservazione dell’energia meccanica puo essere riscritta come
r2 =2
m[E − Veff (r)] dove Veff (r) =
mc2
2r2− mk
r
prende il nome di potenziale efficace. Si verifica immediatamente che il potenziale efficace e taleche
limr→0+
Veff (r) = +∞, limr→+∞
Veff (r) = 0−
ed ha minimo in rmin = c2/k di valore V (rmin) = −m2k2
2c2. Dal grafico del potenziale efficace (Figura
1.13) appare che quando E < 0 il moto del punto avviene con r(t) che oscilla periodicamente tra duevalori r− < r+ finiti e non nulli (detti rispettivamente perelio e afelio) tali che Veff (r±) = E.

32 1 Dinamica del punto
0
V(r)
E
0 rrr r- +
Fig. 1.13. Grafico del potenziale efficace Veff . Nel caso in cui l’energia E e negativa allora il moto avviene all’interno dellacorona circolare di raggio r±.
Orbite circolari
Il caso in cui una orbita e circolare (r = cost.) si esaurisce con considerazioni dirette ed elementari.
In tal caso la legge delle aree implica la costanza della velocita orbitale (θ = costante), cosicchesi tratta di un moto uniforme. In particolare si hanno orbite circolari per E corrispondente alminimo del potenziale efficace: E = V (rmin) = −m2k2
2c2.
Orbite degeneri
Consideriamo come caso particolare quello in cui si annulla la costante c delle aree: c = 0. Esclusoil caso r ≡ 0 si ha θ = 0 e quindi il moto ha luogo lungo una retta passante per il centro di forza S.La legge temporale, secondo cui varia r su tale retta e definita dall’integrale delle forze vive, che quisi riduce a:
1
2mr2 =
mk
r+ E. (1.55)
Distinguiamo due casi:
a) E < 0, il moto si svolge tutto a distanza finita r ≤ −k/Em cadendo, con al piu una inversionedel moto, nel centro di forza S.
b) E ≥ 0, in questa ipotesi il secondo membro della (1.55), per r > 0, non si annulla mai e si mantienesempre positivo, quindi il moto non puo presentare inversioni di senso. Se la velocita iniziale ediretta verso il centro (r0 < 0) il mobile, dopo un tempo finito, andra a cadere nel centro di forzacon la sua velocita intensiva cresce oltre ogni limite (come nel caso a)). Se invece r0 > 0 il mobile,sulla sua traiettoria rettilinea, si allontana indefinitamente dal centro.
Orbite generali
Supponiamo ora c 6= 0 e ricaviamo dall’integrale delle aree che la θ e funzione monotona, e quindi uni-vocamente invertibile, del tempo, e quindi si puo assumere come variabile indipendente. Si pervienecosı all’equazione differenziale

1.5 Moto di un punto soggetto ad una forza centrale 33
(d1r
dθ
)2
=2E
mc2+
2k
c21
r− 1
r2, (1.56)
che caratterizza l’equazione polare r = r(θ) dell’equazione generale del moto essendo
r =dr
dθθ =
dr
dθ
c
r2= −cd1/r
dθ.
Qui e particolarmente comodo porre u = 1r− k
c2(anziche r = 1/u come nella teoria generale), con
che la (1.56) assume la forma(du
dθ
)2
=2E
mc2+k2
c4− u2, (1.57)
ma la costante 2Emc2
+ k2
c4, per la (1.57) stessa, e somma di due quadrati e quindi risulta necessariamente
positiva, salvo quando si annulla identicamente la u, il che si ha solamente nel caso di orbite circolari(caso gia discusso).
Ponendo q2 = 2Emc2
+ k2
c4, con q > 0, si ottiene l’equazione differenziale dell’orbita sotto la forma
definitiva(du
dθ
)2
= q2 − u2.
Il suo integrale generale, come si verifica immediatamente per separazione di variabili, e dato dau = q cos(θ − θ0) dove θ0 e la costante di integrazione; quindi, sostituendo a u la sua espressioneotteniamo per l’orbita l’equazione polare
1
r=
k
c2+ q cos(θ − θ0) ossia r =
c2
k
1 + c2qkcos(θ − θ0)
. (1.58)
Si osservi che ora e possibile determinare con una quadratura la legge oraria θ(t) soluzione dellaequazione di fferenziale del primo ordine
θ =c
r2=
c
p2(1 + e cos θ)2.
L’equazione (1.58) e l’equazione polare di una conica avente un fuoco nel centro di forza,
l’asse inclinato di θ0 sull’asse polare, il parametro p = c2
ke l’eccentricita
e =c2q
k=
√
1 +2Ec2
mk2. (1.59)
Pertanto: nel moto di un punto soggetto ad una forza centrale, inversamente pro-porzionale al quadrato della distanza, (esclusi i casi di moto rettilineo caratterizzati dall’annullarsidella costante delle aree), l’orbita e sempre una conica; e fra le costanti meccaniche di in-tegrazione E e c (energia totale e doppio della velocita areolare) e gli elementi geometricicaratteristici dell’orbita e e p (eccentricita e parametro) intercedono le relazioni sopra de-scritte. Per dimostrare che e una conica passiamo dalle coordinate polari a quelle cartesiane. Dallarelazione (possiamo assumere θ0 = 0 con una opportuna scelta degli assi coordinati)

34 1 Dinamica del punto
x = r cos θy = r sin θ
, r =p
1 + e cos θ
si ottiene
cos θ =x
p− ex, sin θ =
y
p− ex
e quindi, usando la relazione cos2 θ + sin2 θ = 1, si ottiene
y2 + (1− e2)x2 + 2pex = p2
che risulta essere l’equazione di una conica dipendente dal parametro e. Se ci restringiamo al casoe < 1 allora e un ellisse che puo essere scritto nella forma
y2 + (1− e2)(x+
pe
1− e2
)2
=p2
1− e2
ovvero
(x− x0)2
a2+y2
b2= 1, x0 = − pe
1− e2(1.60)
con
a2 =p2
(1− e2)2, b2 =
p2
(1− e2)
La (1.59) mette in luce il risultato fondamentale che la specie della conica descritta dal mobiledipende esclusivamente dal segno della energia totale E. In particolare, essendo c 6= 0, risulta, perla (1.59), e < 1 o e = 1 o e > 1 secondo che E < 0 o E = 0 o E > 0. In altre parole l’orbita eellittica, parabolica o iperbolica secondo che l’energia totale e negativa, nulla o positiva.Si noti che questo criterio risulta applicabile anche nel caso c = 0 inteso come criterio limite c→ 0.
Noi siamo arrivati alla determinazione della traiettoria (1.58) risolvendo una equazione differen-ziale del primo ordine data dall’integrale primo dell’energia (facendo anche uso dell’integrale primodelle aree); e possibile determinare la traiettoria risolvendo una equazione differenziale del secondoordine che deriva dalla equazione di Newton dove facciamo uso delle formule di Binet.
Caso Kepleriano
Fissiamoci sul moto ellittico proprio, caratterizzato da E < 0 e c 6= 0 per cui e < 1. E facilericonoscere che, in questo caso, il moto del punto attratto dal centro P0 e un moto Kepleriano,cioe un moto soddisfacente alle prime due leggi di Keplero. Infatti: il moto e centrale rispetto ad 0,essendo tale la forza; l’orbita e un ellisse avente un fuoco in 0; ed infine sussiste la legge delle aree.Che la conica sia un ellisse segue dalle (1.60) che danno 0 < b < a. Per verificare che P0 sia in uno deifuochi ricordiamo che per un ellisse di equazione (1.60) allora i fuochi sono posti in (x0±
√a2 − b2, 0)
e nel nostro caso si ha x0 +√a2 − b2 = − pe
1−e2 +pe
1−e2 = 0 e quindi 0 coincide con uno dei due fuochi.
Infine, si tratta di un moto periodico di periodo T , dove T = 2π√
a3
k. Infatti, il periodo, per
la legge di conservazione del momento angolare di modulo K = mc (ovvero per la costanza dellavelocita areolare), si ha che 2mA = TK dove A = πab e l’area dell’ellisse e dove e noto che

1.6 Moto di un punto su una superficie prestabilita 35
a =p
1− e2e b =
p√1− e2
=√pa = c
√a
k
e quindi
T =2mπab
K=
2mπca3/2
k1/2K= 2π
a3/2
k1/2.
1.5.8 Orbite chiuse e condizione sul potenziale
Da quanto mostrato segue che anche nel caso di potenziale Newtoniano tutte le orbite (limitate) sonochiuse. Questa proprieta osservata per il potenziale elastico e per il potenziale Newtoniano non everifica da altri tipi di forze centrali. Piu precisamente e possibile dimostrare che:
Teorema. In un campo centrale tutte le orbite limitate sono chiuse se, e solo se, l’energia poten-ziale V (r) ha una delle seguenti forme
V (r) = kr2 o V (r) = −kr
con k costante positiva.
1.6 Moto di un punto su una superficie prestabilita
1.6.1 Considerazioni preliminari.
Consideriamo il moto di un punto materiale P che, sotto la sollecitazione di forze attive di risultanteF, sia costretto a muoversi su di una superficie σ priva di attrito avente equazione
f(x, y, z; t) = 0. (1.61)
L’equazione del moto e data da
ma = F+Φ (1.62)
dove Φ e la reazione vincolare esercitata dalla superficie al punto.Si osserva che se la superficie e fissa e priva di attrito allora vale il teorema delle forze
vive: dT = dL dove dL e il lavoro infinitesimo compiuto dalle sole forze attive (in caso di attrito sidovrebbe tenere conto anche del lavoro infinitesimo compiuto dalle reazioni vincolari). Inoltre, se laforza sollecitante e conservativa ed U e il suo potenziale, segue che dT = dU e, per integrazione:
1
2mv2 − U = E;
cioe l’energia totale del mobile rimane costante durante il moto, ovvero essa e un integraleprimo del moto. In particolare, denotando con v0 e U0 i valori delle velocita e del potenziale in unagenerica posizione P0, l’equazione precedente da:
1
2m(v2 − v20
)= U − U0. (1.63)

36 1 Dinamica del punto
Nota. Dalla (1.63) segue che se si fanno partire due punti materiali dotati di egual massa dauna stessa posizione P0 con la medesima velocita e sotto l’azione di una stessa forza conservativa,anche se uno si suppone libero e l’altro vincolato ad una superficie priva di attrito, essi giungonoin punti, nei quali il potenziale ha lo stesso valore, con la medesima velocita.
Nella ipotesi che σ sia priva di attrito (sia poi σ indipendente o no dal tempo) allora la reazione
Φ = ΦN, incognita, sara ortogonale alla superficie, pertanto avra componenti
Φ = λ∂f
∂xı + λ
∂f
∂y + λ
∂f
∂zk, λ =
Φ
|grad f | ∈ R
dove λ designa un fattore di proporzionalita a priori incognito. Proiettando la (1.62) sugli assi siottengono le tre equazioni
mx = Fx + λ∂f∂x
my = Fy + λ∂f∂y
mz = Fz + λ∂f∂z
F = Fxı + Fy + Fzk (1.64)
che insieme alla (1.61) formano un sistema di quattro equazioni nelle quattro incognite x, y, z (fon-damentali) e λ (ausiliaria).
Moto spontaneo e geodetiche
Se si suppone che le forze attive siano nulle, cioe il moto di P avviene su σ per effetto dellavelocita iniziale v0, ed in assenza di attrito allora la traiettoria del punto e una geodetica,descritta con velocita costante. Infatti dalla (1.63) segue che v e costante e quindi s = 0; da ciosegue che l’accelerazione ha solo componente normale: a‖n. D’altra parte la (1.62) impone che sia
a‖N, essendo F = 0, e quindi deve essere n = N (o n = −N) che e la proprieta caratteristica dellegeodetiche sulle superfici immerse in R
3.
1.6.2 Moto di un punto pesante sopra una superficie di rotazione ad asse verticale e priva di attrito.
Sia data una superficie di rotazione ad asse verticale definita, in coordinate polari, attraverso lafunzione ρ = f(z), con f(z) ≥ 0 assegnata, e sia il punto pesante P mobile su questa superficiesenza attrito. Nel caso in cui sul mobile sia applicata la sola forza peso e possibile studiare il motodel punto attraverso l’uso di integrali primi invece che ricorrere alle equazioni (1.64) che introduconouna incognita λ ausiliaria. Orientando l’asse z verso la verticale ascendente l’integrale delle forzevive assume la forma
1
2mv2 +mgz = E.
D’altra parte, la forza peso e sempre parallela all’asse z, e quindi sussiste sempre l’integrale dellearee relativo al piano z = 0:
xy − yx = c.
Questi due integrali primi, espressi in coordinate cilindriche (θ, ρ, z), assumono la forma

1.6 Moto di un punto su una superficie prestabilita 37
12m[z2(1 + f ′2) + f 2θ2
]+mgz = E
f 2θ = c(1.65)
dove ρ = f(z) definisce la superficie di rotazione ed essendo
v2 = (ρ2 + ρ2θ2 + z2) = (z2f ′2 + f 2θ2 + z2).
Se si suppone c = 0, escludendo gli eventuali stati di equilibrio in punti della superficie situatisull’asse (ρ = 0), si ha θ = cost. e quindi si tratta di un moto su una curva piana di equazione
z2 =2(E/m− gz)
1 + f ′2 ,
che risulta integrabile per quadrature.Sia c 6= 0, in particolare possiamo sempre supporre c > 0, e la legge temporale si deduce con una
quadratura dall’integrale delle aree, non appena si e determinata la traiettoria, per es. esprimendo zin funzione di θ (cosa sempre possibile poiche θ > 0 per ogni t e quindi la funzione θ(t) e monotonacrescente e, in particolare, invertibile) dove
z =dz
dθθ =
dz
dθ
c
f 2.
Per questa funzione z(θ) si trova la equazione differenziale
(dz
dθ
)2
=f 2 [2(E/m− gz)f 2 − c2]
c2(1 + f ′2
) (1.66)
integrabile con una quadratura.
1.6.3 Pendolo sferico.
Il caso particolare in cui f(z) e definita dalla equazione ρ2 = ℓ2 − z2 si denota con pendolo sfericoed e il caso di un punto pesante vincolato (o appoggiato) ad una sfera di raggio ℓ. Ponendo f(z) =√ℓ2 − z2 la (1.65) assume la forma
12m[ℓ2z2
ℓ2−z2 + (ℓ2 − z2)θ2]+mgz = E
(ℓ2 − z2)θ = c. (1.67)
Nell’ipotesi c > 0, assumendo come variabile indipendente la θ in luogo della t, la funzione z(θ), chebasta a determinare sulla sfera la traiettoria del pendolo, e caratterizzata dall’equazione differenzialericavata dalla (1.66), integrabile con una quadratura,
c2ℓ2(dz
dθ
)2
= Φ(z)
dove 1 + f ′2 = ℓ2
ℓ2−z2 e dove
Φ(z) = (ℓ2 − z2)2Φ1(z), Φ1(z) = 2(−gz + E/m)(ℓ2 − z2)− c2.

38 1 Dinamica del punto
Per lo studio quantitativo della soluzione z(θ) giocano un ruolo importante le radici della funzioneΦ1(z). Piu propriamente, studiamo l’equazione
(dz
dt
)2
=
(dz
dθ
)2
θ2 =c2
(ℓ2 − z2)21
c2ℓ2Φ(z) =
1
ℓ2Φ1(z).
Osservando che Φ1(z) e un polinomio in z di grado 3 tale che (Figura 1.14)
Φ1(±ℓ) = −c2 < 0 e limz→+∞
Φ1(z) = +∞
allora esiste z3 > +ℓ tale che Φ1(z3) = 0. Le altre due radici z1 e z2 sono comprese in (−ℓ,+ℓ).Infatti notiamo che deve essere |z0| ≤ ℓ; piu precisamente, poiche si e escluso il caso c = 0, sara|z0| < ℓ, dove z0 e la quota della posizione iniziale. In particolare la condizione di realta del motoΦ(z0) ≥ 0 implica Φ1(z0) ≥ 0. Discutiamo separatamente i due casi Φ1(z0) > 0 e Φ1(z0) = 0.
zz z z1 2 3
-l l
Fig. 1.14. Grafico del polinomio Φ1(z). Le 3 radici sono tali che z3 > +ℓ mentre −ℓ < z1 ≤ z2 < +ℓ.
a) Φ1(z0) > 0, in questa ipotesi la funzione z(θ) oscilla periodicamente tra due paralleli di quote z1e z2 comprese nell’intervallo (−ℓ,+ℓ) dove z1 e z2 sono radici semplici di Φ1(z). Si osserva che ilpiano equidistante dai due paralleli di quote z1 e z2 e sempre al di sotto dell’equatore(di equazione z = 0). Infatti la funzione Φ1 puo essere scritta come
Φ1(z) = 2gz3 − 2Eℓ/mz2 − 2gℓ2z − c2 + 2Eℓ2/m
= 2g(z − z1)(z − z2)(z − z3)
da cui segue che deve essere
z1z2 + z2z3 + z1z3 = −ℓ2 cioe (z1 + z2)z3 = −(ℓ2 + z1z2).
Ricordando che z3 > 0 e che |zj| < ℓ, j = 1, 2, segue z1 + z2 < 0, cioe la tesi.b) Φ1(z0) = 0, in questo caso se la radice e semplice allora rientriamo nel caso a) ed il punto si trova
inizialmente su uno dei due paralleli che limitano la zona entro cui serpeggia la traiettoria. Se,

1.6 Moto di un punto su una superficie prestabilita 39
infine, z0 non e radice semplice (e quindi non puo essere che doppia) allora e ben noto che duranteil moto si conserva z = z0, cioe la traiettoria e il parallelo di quota z0 (situato sotto l’equatore);
in quest’ultimo caso si ha anche θ = cost., cioe si ha un moto rotatorio uniforme. Il fatto che siaz0 < 0 segue dal fatto che Φ1(z) = 2g(z − z3)(z − z0)
2 da cui dovra essere (poiche z0 ≡ z1 = z2)2z0z3 = −(ℓ2z20) < 0 e quindi z0 < 0.
In ultima analisi segue che il moto del punto P avviene, ad esclusione del moto rotatorio uniforme,tra due quote z1 e z2 e la funzione z(θ) e periodica ed impiega un angolo Θ per raggiungere la quotapiu bassa partendo dalla quota piu alta (Figura 1.15
Θ = cℓ∫ z2
z1
dz√Φ(z)
.
Fig. 1.15. Il moto del pendolo sferico avviene, in generale, tra due quote z1 e z2 ruotando sempre nello stesso verso e toccando,in modo periodico, i due paralleli.
Come osservazione finale notiamo che il moto di P sulla superficie sferica e periodico se e solose Θ e π sono commensurabili tra loro.
Calcolo dei periodi
Escludendo il caso particolare di moto rotatorio uniforme si e stabilito che il moto del punto sullasuperficie sferica avviene tra due quote z1 e z2 e la funzione z(t) e una funzione periodica. Percalcolarne il periodo ripartiamo dalla relazione
(dz
dt
)2
= Uc,E(z) dove Uc,E(z) =1
ℓ2Φ1(z);
questa equivale a studiare un moto su una retta con potenziale Uc,E al livello di energia E ′ = 0.
Equivalentemente, poiche ℓ2−z2ℓ2
> 0 ∀z ∈ (−ℓ, ℓ), si puo studiare dal punto di vista qualitativo il
problema con energia potenziale efficace 2gz + c2
ℓ2−z2 al livello di energia 2E/m. In ogni caso lafunzione z(t) risulta essere una funzione periodica di periodo

40 1 Dinamica del punto
T1 ≡ T1(c, E) = 2∫ z2
z1
dz√(2Em
− 2gz − c2
ℓ2−z2)ℓ2−z2ℓ2
= 2∫ z2
z1
dz√Uc,E(z)
.
Supponendo poi nota z(t) si ottiene
θ(t) =∫ t
0
c
ℓ2 − z2(τ)dτ + θ0.
Osserviamo che la funzione cℓ2−z2(t) e una funzione periodica di periodo T1 e quindi ammettera uno
sviluppo in serie di Fourier; quindi, portando la serie fuori dall’integrale, otteniamo
θ(t) = θ0 + c0t+ φ(t).
Ponendo ω1 = 2π/T1 allora la funzione
φ(t) =∑
n 6=0
∫ t
0cne
iω1nτdτ =∑
n 6=0
cnω1
n
[eiω1nt − 1
]
e una funzione periodica di periodo T1. Inoltre la costante c0 vale
c0 =1
T1
∫ T1
0
c
ℓ2 − z2(t)dt
=2
T1
∫ z2
z1
c
ℓ2 − z2
√ℓ2 − z2
ℓ2dz√
2Em
− 2gz − c2
ℓ2−z2
=2
T1
∫ z2
z1
cℓ
(ℓ2 − z2)3/2√
2Em
− 2gz − c2
ℓ2−z2dz.
Quindi θ(t) (definito modulo 2π) e dato dalla composizione di due moti periodici; uno di periodo T1ed uno di periodo T2 = 2π/c0. Di conseguenza il moto del pendolo fisico e periodico se, e solo se, T1e T2 sono commensurabili.
1.7 Dinamica relativa del punto
1.7.1 Influenza della rotazione terrestre sul moto dei gravi nel vuoto
Prescindiamo dalla resistenza dell’aria e degli altri corpi celesti (es. il sole, la luna, etc.) e consideriamoil moto, rispetto alla Terra, di un punto materiale P di massa m in prossimita di essa. Sotto taliipotesi la forza (assoluta) totale agente su P si riduce alla attrazione terrestre che, assumendo m = 1,designeremo con G. Percio rispetto ad un riferimento galileiano l’accelerazione a di P e data da
a = G. (1.68)
Pero a noi normalmente interessa il moto relativo di P rispetto alla Terra, cioe piu precisamentela sua accelerazione relativa a1:

1.7 Dinamica relativa del punto 41
a1 = G− aτ − ac. (1.69)
In −maτ riconosciamo quella forza Fτ chiamata forza di trascinamento, mentre la −mac dicesiforza di Coriolis. Ricordiamo che mG − maτ = mG + Fτ non e altro che il peso del grave P ,cioe la forza mg che si puo definire come direttamente opposta a quella che occorrerebbe applicareal grave (in quiete) per impedirne la caduta.
Per intervalli di tempo piccoli, rispetto ad un anno, possiamo ridurre Fτ alla forza centrifugadovuta al moto diurno, la cui velocita angolare ω e costante e diretta secondo l’asse polare dellaTerra, da Sud a Nord. La forza peso mg = mG+Fτ , come ben sappiamo, e effettivamente variabile,di intensita e di direzione, da luogo a luogo ma, entro un raggio di pochi chilometri, e lecito ritenerlacostante sia in grandezza che in direzione. Piu in dettaglio, consideriamo l’effetto della rotazionedella Terra sugli esperimenti in un laboratorio. Dato che la terra ruota praticamente uniformemente,si puo supporre che ω = 0 dove ω = 2π
24·3600 . Il rapporto tra la forza centrifuga e la forza peso assumeil massimo valore all’equatore, dove vale
Fτ (P )
g=ω2R
g=
(7.3 · 10−5)2 · 6.4 · 1069.8
≈ 3
1000
dove R e la distanza del punto dal centro della terra (cioe R coincide con il raggio della terra).Questo rapporto varia di poco nei limiti di un usuale laboratorio. Piu precisamente si ha che
Fτ (P +∆P )
g=Fτ (P )
g(1 +O(∆P/R)) .
Quindi e lecito, in prima approssimazione, ritenere la forza centrifuga costante e la forza peso aventeintensita costantemente uguale a mg. Concludiamo quindi che all’equazione vettoriale (1.69) delmoto di P rispetto alla Terra si puo dare la forma definitiva
a1 = g − 2ω × v1. (1.70)
Moto dei gravi e deviazione verso oriente
Supponiamo che il moto avvenga nell’emisfero boreale e adottiamo come riferimento terrestre la ternadestra che si ottiene assumendo:
a) L’origine in un punto O solidale con la Terra, in prossimita del luogo dove avviene il moto;b) L’asse z sulla linea di azione della forza peso in O (verticale del luogo) orientata verso l’alto, cioe
la verticale ascendente;c) L’asse x nel piano meridiano di O, orientato verso il Nord.
L’asse y risulta cosı univocamente determinato; proiettando l’equazione vettoriale (1.70) su taliassi abbiamo g = (0, 0, g) e, se γ e l’angolo (acuto) formato da g con il piano equatoriale (latitudinegeodetica), le componenti del vettore ω sono date da
p = ω cos γ, q = 0, r = ω sin γ; (1.71)
cosicche dalla (1.70) risulta
x = 2yω sin γy = 2ω (−x sin γ + z cos γ)z = −g − 2yω cos γ
. (1.72)

42 1 Dinamica del punto
Sono queste, nella schematizzazione appena precisata, le equazioni differenziali del moto di ungrave (di massa qualunque) nel vuoto, ove si tenga conto della rotazione della Terra. Queste equazionisono integrabili elementarmente e, restringendoci al caso piu interessante, assumiamo le condizioniiniziali
x0 = y0 = z0 = 0 e x0 = y0 = z0 = 0.
Sotto queste condizioni dalla prima e dalla terza delle (1.72) si deduce che
x = 2yω sin γ, z = −gt− 2yω cos γ (1.73)
che sostituite nella seconda delle (1.72) segue che
y + 4ω2y = −2gωt cos γ
che e una equazione differenziale lineare completa, a coefficienti costanti, del II ordine il cui integralegenerale vale
y(t) = −g cos γ2ω
t+ r cos(2ωt+ θ0).
Imponendo le condizioni iniziali si determinano infine r e θ0 ottenendo
y(t) = −g cos γ2ω
(t− sin 2ωt
2ω
).
Sostituendo questa nelle (1.73) si perviene infine alle
x(t) = −g sin γ cos γ(1
2t2 − 1− cos 2ωt
4ω2
),
z(t) = −1
2gt2 + g cos2 γ
(1
2t2 − 1− cos 2ωt
4ω2
).
Prendendo intervalli di tempo tali che ωt≪ 1 e sviluppando in serie di Taylor le soluzioni trovate etrascurando i termini di ordine superiore (o uguale) in ωt al primo si trova
x(t) = O(ω2t4), y(t) = O(ωt3), z(t) = −1
2gt2 +O(ω2t4),
cioe si ritrovano le equazioni del moto dei gravi nel vuoto. Se invece si prendono in considerazione itermini d’ordine superiore in ωt si ha che
x(t) = O(ω2t4)
y(t) = −g cos γ4ω2
[(2ωt)3/6 +O(ω5t5)
]= −1
3gωt3 cos γ +O(ω3t5)
z(t) =1
2gt2 +O(ω2t4).
Quindi rimane inalterata la legge per la quota del mobile ma il moto avviene nel piano (O; y, z)secondo la legge
y2 = −8
9
ω2 cos2 γ
gz3.
Si osservi infine che y < 0 per ogni t > 0; si prova quindi la deviazione di un grave verso Est.Quindi, nell’emisfero settentrionale, la forza di Coriolis spinge verso oriente ogni corpo che cade sullaTerra; nell’emisfero meridionale la forza di Coriolis spinge verso la parte opposta.

1.7 Dinamica relativa del punto 43
Esempio
Un sasso viene gettato (senza velocita iniziale) dalla cima di una torre alta 250 mt. alla latitudine60. Calcoliamo di quanto si allontana dalla verticale:
y =2ω cos γ
3
√2|z|3/g = 7.3 · 10−5
3
√2 · 0.253/9.8 ≈ 0.04345 metri.
Invece, quanto si allontana dalla verticale una secchia viene gettata (senza velocita iniziale) dallacima della torre Ghirlandina di Modena.
1.7.2 Pendolo di Focault
Discutiamo ora il pendolo sferico considerando il contributo della rotazione della terra. In particolare,il punto P , di massa m, si muove come se fosse libero e sollecitato simultaneamente dalla forza pesoe dalla reazione vincolare Φ; quindi, a partire da quanto stabilito in merito al pendolo sferico nelparagrafo 1.6.3 la equazione differenziale del moto assume la forma vettoriale:
ma1 = Φ+mg − 2mω × v1 (1.74)
dove riguardiamo il vettore g come costante in grandezza e direzione e dove assumiamo costante ilcontributo della accelerazione di trascinamento (questa attitudine e giustificata poiche, assumendosolamente il contributo della rotazione terrestre e assunto questo uniforme, allora la variazione dellaforza di trascinamento all’interno di un laboratorio e trascurabile). Proiettando sugli assi aventiorigine nel centro M della sfera (assi scelti come nel caso (1.72) orientando l’asse z diretto come laverticale ascendente) e introducendo per le componenti della reazione il moltiplicatore di Lagrangeλ otteniamo le tre equazioni scalari:
mx = λx+ 2myω sin γmy = λy + 2mω(−x sin γ + z cos γ)mz = λz −mg − 2myω cos γ
(1.75)
dove il punto e obbligato a muoversi sulla sfera di raggio ℓ e centro M = (0, 0, 0) e γ e la latitu-dine geodetica del luogo. Assumendo piccole oscillazioni, quindi z ≈ −ℓ e z ≈ z ≈ 0 e 2yω cos γtrascurabile di fronte a g poiche ω ≪ 1, si ha dalla terza delle (1.75)
−λℓ−mg = 0, λ = −mg/ℓ
dando alle prime due la formax = −gx/ℓ+ 2yω sin γy = −gy/ℓ− 2xω sin γ
. (1.76)
Ponendo ω1 = −ω sin γ si conclude che le piccole oscillazioni del punto P o, meglio, della suaproiezione Q sul piano orizzontale z = 0, son definite dalle due equazioni lineari
x = −gx/ℓ− 2yω1
y = −gy/ℓ+ 2xω1. (1.77)

44 1 Dinamica del punto
Denotando con a = xı + y e v = xı + y l’accelerazione e la velocita (orizzontali) di Q e con k ilversore verticale ascendente, possiamo riassumere la (1.77) nell’unica equazione vettoriale:
a = −g(Q−M)/ℓ+ 2ω1k× v. (1.78)
Si consideri allora, nel piano z = 0, per l’origine M una coppia di assi ortogonali x1y1, congruenteagli assi xy e che ruotino attorno ad M con velocita angolare costante ω1k. L’accelerazione a1,rispetto a x1y1 della proiezione Q di P e legata alla accelerazione a, rispetto a xy della proiezione Qdi P , secondo il teorema di composizione delle accelerazioni:
a1 = a+ (−ω)× [−ω × (Q−M)] + 2(−ω)× v
= a− ω21(Q−M)− 2ω1k× v = −
(g
ℓ+ ω2
1
)(Q−M).
Quindi il moto della proiezione Q di P , nel piano x1y1, e un moto armonico in due dimensioni aventeintegrale generale
x1(t) = a cos(t
√g
l+ ω2
1 + ϕ)≈ a cos
(t
√g
l+ ϕ
)
e
y1(t) = b cos(t
√g
l+ ω2
1 + φ)≈ b cos
(t
√g
l+ φ
).
Imponendo le codizioni iniziali x(0) = y(0) = 0 e x(0) = x0 e y(0) = 0, facendo coincidere gli assix e y con gli assi x1 e y1 all’istante t = 0 si ottiene x1(0) = 0 e y1(0) = −ω1x0 e quindi
x1(t) = x0 cos(t
√g
l
), y1(t) = −ω1x0
√l
gsin
(t
√g
l
).
Cioe la traiettoria del punto Q sul piano orizzontale z = 0 (caso del Pendolo del Focault) e un ellisse
avente i semi-assi a = |x(0)| e b =∣∣∣ω1a
√ℓ/g
∣∣∣ ≪ a; si tratta quindi di un’ellisse molto schiacciata
e quindi assimilabile ad un segmento dell’asse x1. Quindi il moto del punto e sensibilmente quellodi un moto oscillatorio ordinario del piano zx1; ma questo piano non e fisso bensı animato di unavelocita angolare ω1 = ω sin γ variabile con la latitudine che, per quanto piccola, col tempo finisce arendersi manifesta.
Nota. Possiamo giungere alle stesse conclusiosi risolvendo la equazione (1.77) nel seguente modo.Se poniamo w = x+ iy allora il sistema (1.77) prende forma
w − 2iω1w +g
ℓw = 0.
Per determinare la soluzione generale siano
λ1,2 = iω1 ± i√ω21 + g/ℓ ≈ iω1 ± i
√g
l
e la soluzione generale ha forma
w = c1eλ1t + c2e
λ2t ≈ eiω1t(c1e
it√g/ℓ + c2e
−it√g/ℓ).
Quindi, per ω1 = 0 si ottengono le consuete oscillazioni armoniche del pendolo sferico e l’effetto dellaforza di Coriolis consiste in una rotazione uniforme di tutto il sistema con una velocita angolare paria ω1.

1.7 Dinamica relativa del punto 45
1.7.3 Nozioni elementari di meccanica celeste
Le leggi di Keplero
Per i moti dei pianeti intorno al Sole valgono le tre leggi di Keplero determinate sperimentalmente:
1) Le orbite dei pianeti sono degli ellissi e il Sole ne occupa uno dei fuochi.2) Le aree descritte dal raggio vettore, che va dal Sole ad un pianeta, sono proporzionali
ai tempi impiegati a percorrerli.3) I quadrati dei tempi impiegati dai vari pianeti a percorrere le loro orbite (durante le
rivoluzioni) sono proporzionali ai cubi dei semi-assi maggiori (nel senso che la costantedi proporzionalita non dipende dal pianeta).
Problema diretto di Newton
A causa della enorme distanza tra la stella piu vicina e il sistema solare e a causa della propon-deranza della massa solare rispetto agli altri pianeti si puo ritenere che l’attrazione sulla Terra siasostenzialmente quella che proviene dal Sole. Trascurando le altre si riguarda la coppia Terra-Solecome isolata nell’Universo. Per il principio di azione e reazione le accelerazioni del Sole e della Terrasono inversamente proporzionali alle loro masse; si puo pertanto trascurare la piccolissimaaccelerazione solare dovuta alla Terra, il che equivale a considerare, in prima approssimazione, il Solecome fisso. Perveniamo pertanto a schematizzare, in prima approssimazione, il moto della Terraintorno al Sole come quello di un punto materiale P attratto da un centro fisso S con una forza diintensita km0m
r2, dove m0 ed m denotano le masse del Sole e della Terra, r la loro distanza e k e una
costante positiva. Il moto soggetto a questa legge da luogo, nel nostro caso (poiche il moto si svolgetutto a distanza finita dal Sole) ad una traiettoria ellittica avente un fuoco nel Sole. Quindi la leggedi Newton implica la validita delle prime due leggi di Newton. Quanto alla terza risulta
4π2 a3
T 2= km0 (1.79)
da cui si vede che il rapporto a3/T 2 dipende solamente dalla costante k e dalla massa del Sole.
Problema dei due corpi
Piu in generale, consideriamo due corpi P0 e P , di masse m0, m, che noi consideriamo isolatinell’Universo; indichiamo con F il vettore della forza che P0 esercita su P , per il III principio diNewton allora il vettore della forza esercitata da P su P0 sara −F ed entrambi saranno diretti sullacongiungente. L’equazione di Newton sui due punti, rispetto ad un osservatore inerziale, sara datada
m0d2P0
dt2= −F, m
d2P
dt2= F
da cui emerge immediatamente che la quantita di moto (m0 +m)vG si conserva e da cui segue che ilbaricentro dei due punti si muove di moto rettilineo uniforme. Per determinare poi il moto dei duepunti rispetto al loro baricentro o, equivalentemente, il moto di un punto rispetto all’altro (ad esempioil moto di P rispetto a P0), introduciamo un osservatore relativo centrato in P0 e traslante; allora

46 1 Dinamica del punto
la equazione del moto di P rispetto al nuovo osservatore e data da m(d2Pdt2
)P0
= F −maτ (P ).
ricordando che il nuovo osservatore trasla allora aτ (P ) =d2P0
dt2e quindi la equazione prende la forma
mm0
m+m0
(d2P
dt2
)
P0
= F. (1.80)
Questa equazione differenziale del moto relativo di uno dei due corpi rispetto all’altro si identifica,come si vede, con quella che reggerebbe il moto di P , se P0 fosse fisso (o animato di motorettilineo uniforme rispetto ad un osservatore assoluto), e, pur attraendo P secondo la legge F,avesse, anziche la massa effettiva m, la massa ridotta mm0
m+m0. Questo problema rientra, come caso
particolare di moto centrale, in quello generale discusso nella Sezione precedente; quindi abbiamoche si tratta di un moto piano, per il quale sussistono simultaneamente l’integrale delle forzevive e quello delle aree rispetto al centro di forza P0.
Si dimostra che, nel caso in cui la forza di vettore F coincida con la forza di attrazione gravi-tazionale, qualunque sia l’ordine di grandezza di m rispetto a m0 l’orbita (relativa) di P rispetto a P0
e una conica; percio nel caso dell’orbita ellittica valgono per il moto di P rispetto a P0 le prime dueleggi di Keplero. Se poi, in tal caso, si introducono il semi-asse maggiore a dell’orbita e la durata Tdella rivoluzione, sussiste la relazione
4π2 a3
T 2= k(m0 +m); (1.81)
e per un altro corpo P ′ di massa m′, che, come P , descriva, sotto la esclusiva azione di P0, un’orbita(relativa) ellittica, si ha analogamente, con ovvio significato dei simboli,
4π2 a′3
T ′2 = k(m0 +m′). (1.82)
In conclusione, quando nella trattazione newtoniana del moto dei corpi celesti, si spinge la schema-tizzazione fino al problema dei due corpi, si mantengono valide, in generale, soltanto le prime dueleggi di Keplero. La terza puo sussistere solo in via approssimata.

2
Dinamica dei solidi
2.1 Angoli di Eulero
Un sistema rigido S e determinato rispetto ad un sistema di riferimento fisso (O; x, y, z) se e deter-minato il sistema di riferimento solidale (O′; x′, y′, z′) rispetto a quello fisso. Per fare cio e sufficiente
determinare le coordinate di O′ (3 parametri) e i tre versori ı′, ′, k′(9 parametri, di cui solo 3 in-
dipendenti). Supponendo, senza perdere in generalita, che O = O′ si utilizza il seguente metodo dirappresentazione della terna solidale rispetto a quella fissa.
Sia N la retta intersezione tra i piani (O; x, y) e (O; x′, y′) (supposti, per un momento, non com-
planari), perpendicolare a z e z′, passante per O = O′ e orientata in modo che l’angolo zOz′ appaiadestro, detta linea dei nodi. L’angolo zOz′, in (0, π), si dice angolo di nutazione (designato
con θ). Si dice poi angolo di precessione, e si denota con ψ, l’anomalia xON (misurata nel verso
destro rispetto a z). Infine si dice angolo di rotazione propria, e si denota con φ, l’anomalia NOx′
(misurata nel verso destro rispetto a z′). I due angoli ψ e φ sono variabili ciascuno nell’intervallo[0, 2π), cioe sul toro S1. I tre angoli θ, ψ e φ cosı definiti si chiamano angoli di Eulero.
Nel caso, al momento escluso, in cui i piani (O; x, y) e (O; x′, y′) coincidano allora l’angolo dinutazione θ corrisponde a 0 o a π mentre la linea dei nodi N resta indeterminata (e quindi tali
risultano anche gli angoli ψ e φ). In ogni caso resta determinata la somma ψ + φ = xOx′ e questaanomalia, insieme a θ = 0 o θ = π, determina la posizione del sistema di riferimento solidale rispettoa quello assoluto.
Non e inutile esprimere le formule di trasformazione delle coordinate tra i due sistemi in funzionedi questi tre parametri. Se (x, y, z) e (x′, y′, z′) sono le coordinate di un generico punto rispetto aidue sistemi di riferimento allora varranno le formule di trasformazione:
x = α1x′ + β1y
′ + γ1z′
y = α2x′ + β2y
′ + γ2z′
z = α3x′ + β3y
′ + γ3z′
(2.1)
dove
α1 = ı · ı′ β1 = ı · ′ γ1 = ı · k′
α2 = · ı′ β2 = · ′ γ2 = · k′
α3 = k · ı′ β3 = k · ′ γ3 = k · k′
sono i coseni direttori degli assi del sistema (O; x′, y′, z′).

48 2 Dinamica dei solidi
Osserviamo che il modo per passare da un sistema all’altro consiste nell’effettuare, nell’ordine:
i. una rotazione ψ attorno all’asse (O; z) in modo da portare l’asse (O; x) sull’asse nodale (O;N);ii. una rotazione θ attorno all’asse (O;N) in modo da portare l’asse (O; z) sull’asse (O; z′);iii. una rotazione ϕ attorno all’asse (O; z′) in modo da portare l’asse nodale (O;N) sull’asse (O; x′).
Osserviamo che se i due piani (O; x, y) e (O; x′, y′) si sovrappongono allora θ = 0 (o θ = π) e laprima e la terza rotazione sono effettuate attorno allo stesso asse e possono essere sostituire da unarotazione dell’angolo ψ± ϕ. Le formule di trasformazione possono essere scritte in forma matricialecome
xyz
= Eψθϕ
x′
y′
z′
, Eψθϕ = EψEθEϕ (2.2)
dove
i. Eψ definisce una rotazione ψ attorno all’asse (O; z)
Eψ =
cosψ − sinψ 0sinψ cosψ 00 0 1
;
ii. Eθ definisce una rotazione θ attorno all’asse (O;N)
Eθ =
1 0 00 cos θ − sin θ0 sin θ cos θ
;
iii.Eϕ definisce una rotazione ϕ attorno all’asse (O; z′)
Eϕ =
cosϕ − sinϕ 0sinϕ cosϕ 00 0 1
.
Effettuando i prodotti si ottiene infine
Eψθϕ =
α1 β1 γ1α2 β2 γ2α3 β3 γ3
=
(cosψ cosϕ− sinψ cos θ sinϕ) (− cosψ sinϕ− sinψ cos θ cosϕ) (sinψ sin θ)(sinψ cosϕ+ cosψ cos θ sinϕ) (− sinψ sinϕ+ cosψ cos θ cosϕ) (− cosψ sin θ)
(sin θ sinϕ) (sin θ cosϕ) (cos θ)
e, identificando la (2.1) con la (2.2), si ottiene il risultato cercato: cioe una parametrizzazione deicoseni direttori in funzione di tre parametri indipendenti.
Determiniamo infine l’espressione della velocita angolare ω nel moto rigido istantaneo. Per deter-minare ω in funzione dei tre parametri lagrangiani si osserva che il generico stato cinetico di rotazionepuo essere scritto come la composizione di tre stati cinetici di rotazione aventi asse passante per O:

2.2 Equazioni di Eulero 49
ω = ψk + θN + ϕk′.
Proiettando ω sulla terna solidale si ottiene
ω = pı′ + q′ + rk′
dove
N = cos ϕı′ − sinϕ′
k = (k · ı′)ı′ + (k · ′)′ + (k · k′)k′ = α3ı′ + β3
′ + γ3k′
da cui segue
p = θ cosϕ+ ψα3 = θ cosϕ+ ψ sin θ sinϕ
q = −θ sinϕ+ ψβ3 = −θ sinϕ+ ψ sin θ cosϕ
r = ϕ+ ψγ3 = ϕ+ ψ cos θ
(2.3)
2.2 Equazioni di Eulero
Consideriamo un solido avente un suo punto O′ fisso. L’ipotesi su O′ suggerisce di scegliere inesso il centro di riduzione dei momenti e quindi le equazioni cardinali della dinamica, riferite ad unosservatore (O; x, y, z), assumono la loro forma piu semplice.
dQ
dt= Re +Φe, (2.4)
dK(O′)
dt= Ωe(O
′) (2.5)
dove Re ed Ωe(O′) denotano il risultante e il momento risultante, rispetto al punto fisso O′, delle
forze esterne direttamente applicate e dove Φe denota il risultante della reazione in O′, pertale motivo segue che Ψe(O
′) = 0. Q e K(O′) denotano, rispettivamente, la quantita di moto edil momento della quantita di moto (detto anche momento angolare) del corpo rigido.
Poiche il solido con un punto fisso ha tre gradi di liberta l’equazione vettoriale (2.5) corrispondea 3 equazioni scalari e quindi basta da sola a caratterizzare il moto. La (2.4) serve per determinarele reazioni incognite in O′ noto il moto.
L’equazione cardinale dei momenti risulta, talvolta, piu significativa se riferita ad una terna solidale(O′; x′, y′, z′) avente origine in O′:
(dK(O′)
dt
)
O′
+ ω ×K(O′) = Ωe(O′), (2.6)
dove ω designa la velocita angolare della terna solidale, cioe del corpo stesso, rispetto agli assi
(O; x, y, z) e(dK(O′)dt
)O′
la derivata diK(O′) rispetto a t effettuata rispetto all’osservatore (O′; x′, y′, z′).
Ricordiamo che il momento della quantita di moto, con polo O′ punto fisso, si puo scrivere nelseguente modo:

50 2 Dinamica dei solidi
K(O′) = [Ap−A′q − B′r] ı′ + [−A′p+ Bq − C ′r] ′ + [−B′p− Cq + Cr] k′
dove A, B e C denotano i momenti d’inerzia rispetto agli assi del sistema di riferimento solidale, edove A′, B′ e C ′ denotano i momenti di deviazione (detti anche prodotti d’inerzia) rispetto agli assidel sistema di riferimento solidale. La (2.6) diventa particolarmente significativa quando si assumecome terna (O′; x′, y′, z′) quella dei tre assi principali di inerzia del solido nel suo punto O′, in questocaso K(O′) ha componenti
Kx′ = Ap, Ky′ = Bq, Kz′ = Cr. (2.7)
Denotando con Ωx′ , Ωy′ e Ωz′ le componenti secondo gli assi solidali del momento risultante Ωe(O′),
rispetto ad O′, delle forze attive esterne la (2.6) conduce alle equazioni scalari
Ap− (B − C)qr = Ωx′ ,Bq − (C − A)rp = Ωy′ ,Cr − (A− B)pq = Ωz′ .
(2.8)
Le (2.8) si dicono equazioni di Eulero del moto di un solido intorno ad un suo punto fisso. Sinoti che le componenti diΩe(O
′) vanno considerate, nel caso piu generale, come note in funzione, oltreche del tempo, delle velocita dei singoli punti del solido e, in piu, delle loro posizioni nello spazioo, che e lo stesso data l’ipotesi di rigidita, della orientazione del solido intorno ad O′. Tramitela formula fondamentale della cinematica rigida abbiamo che le velocita dei punti dipendono daiparametri di orientazione e dalle p, q, r; inoltre le p, q, r stesse sono legate a questi parametri diorientazione da relazioni di tipo differenziale. Scegliendo, ad esempio, come parametri lagrangianigli angoli di Eulero θ, ϕ, ψ della terna solidale rispetto alla fissa allora aggiungeremo alle (2.8) lenote equazioni, puramente cinematiche
p = θ cosϕ+ ψ sinϕ sin θ
q = −θ sinϕ+ ψ cosϕ sin θ
r = ψ cos θ + ϕ
(2.9)
si ottiene un sistema di equazioni differenziali del primo ordine nelle 6 incognite θ, ϕ, ψ, p, q e r.
Moto di un solido libero intorno al baricentro
E noto che la (2.6) sussiste anche nel caso del moto di un solido libero intorno al baricentro poicheΨe(G) = 0 in quanto non ci sono reazioni vincolari. La (2.6) proiettata sulla terna principale di inerzia(con G = O′) da ancora luogo alla (2.8) ma con una differenza fondamentale: il momento Ωe(G), alpari della sollecitazione attiva, va considerato dipendente non solo dagli argomenti θ, ϕ, ψ, p, q er (e t), tutti inerenti al moto relativo al baricentro, ma anche dalla posizione e dalla velocita(assolute) del baricentro stesso. Inoltre la (2.4) assume la forma dQ
dt= Re e va ad aggiungersi
alle (2.6) per la determinazione del moto.
2.2.1 Solidi in rapida rotazione e fenomeni giroscopici elementari
Consideriamo un solido con punto O′ fisso e dove l’ellissoide d’inerzia rispetto a questo punto erotondo: cioe sia tale che A = B, chiameremo (O′; z′) asse giroscopico.

2.2 Equazioni di Eulero 51
Equazioni di Eulero per un solido a struttura giroscopica
La terza delle (2.8), essendo A = B si riduce a
Cr = Ωz′ (2.10)
mentre le altre due, ove si denoti con Ω1 il componente equatoriale (ortogonale all’asse giroscopico
k′) del momento risultante delle forze esterne rispetto ad O′, si possono unire nell’unica equazione
vettoriale:
Ae− (C − A)rk′ × e = Ω1 (2.11)
dove abbiamo posto e = pı′ + q′. Quindi nel caso in cui Ωz′ = 0, ad esempio quando le forzeesterne sono equivalenti ad una unica forza applicata in un punto dell’asse (O′; z′), allorasi ha che r = r0 = costante.
Fenomeni giroscopici
Si hanno le seguenti proprieta:
a) Principio della permanenza o tenacia degli assi giroscopici: cioe se imprimiamo una rapidarotazione del solido intorno al suo asse giroscopico (O′; z′) allora si vede che per effettuare unospostamento (prefissato) dell’asse giroscopico (O′; z′), in rapida rotazione, l’intensita della sol-lecitazione, applicata all’asse giroscopico, necessaria a tale spostamento e tanto piu grande quantomaggiore e la velocita di rotazione dell’asse giroscopico.
b) Principio della tendenza al parallelismo: cioe se applichiamo un data forza F in un gener-ico punto A dell’asse giroscopico (O′; z′) (riuscendo a vincere la tenacia e farlo deviare), aventemomento Ω(O′) rispetto al punto fisso, allora l’asse tende a disporsi nella direzione e nel versodi Ω(O′) (questa proprieta e verificata non solo nel caso di un solido a struttura giroscopica mabasta supporre che l’asse intorno a cui avviene la rapida rotazione coincida con un asse principaled’inerzia del solido).
Per dimostrare tali proprieta supponiamo, per fissare le idee, che sia (O′; z′) l’asse giroscopicoe che gli assi (O′; x′) e (O′; y′) siano principali di inerzia dove A = B. Quindi possiamo scrivere
ω = e+ rk′dove e = pı′ + q′ e consideriamo uno spostamento che sposti k
′, cioe l’asse giroscopico.
Poiche K(O) = Ae+ Crk′ ≈ Crk′ per r ≫ 1 segue che
dK(O′)
dt= Ade
dt+ C d(rk
′)
dt≈ C d(rk
′)
dtricordando che r e costante nel caso in cui la forza sia applicata in un punto dell’asse,allora, facendo uso della seconda equazione cardinale della dinamica, si ha che
dk′
dt≈ 1
CrdK(O′)
dt=
1
CrΩe(O′).
Da cio appare che quando si vuole effettuare uno spostamento prefissato di un corporuotante intorno all’asse giroscopico bisogna applicare all’asse di riduzione sforzi riducibiliad una coppia tanto piu intensi quanto piu rapida e la rotazione; inoltre si osserva pureche lo spostamento e caratterizzato dal momento Ωe(O
′), cioe se un corpo ruota intorno ad unasse, una coppia giacente nel piano dell’asse tende a spostarlo in direzione normale alpiano stesso.

52 2 Dinamica dei solidi
2.3 Solido pesante con un punto fisso
2.3.1 Integrali primi
Consideriamo il caso di un corpo solido pesante con punto fisso O′ e peso p = pk, p = −mg; perfissare le idee escludiamo il caso particolare in cui G = O′ (che si puo fare rientrere eventualmentenel caso generale).
Integrali primi
Supponendo che nella terna fissa (O; x, y, z) l’asse z sia verticale (di versore k) e orientato verso l’altoe che la terna (O′; x′, y′, z′) solidale con il corpo coincida al solito con la terna principale di inerziaallora si ha
K(O′) = Kx′ ı′ +Ky′
′ +Kz′ k′,
dove
Kx′ = Ap, Ky′ = Bq, Kz′ = Cr. (2.12)
Le forze esterne (e la reazione in O′) hanno momento nullo rispetto alla verticale (O′; z) quindi
Kz = Kz,0 = cost.
in virtu della equazione dei momenti della quantita di moto. Essendo γ1, γ2 e γ3 i coseni direttori
della terna solidale rispetto alla terna fissa, cioe k = γ1ı′ + γ2
′ + γ3k′, si ha
Kz ≡ K(O′) · k ≡ Kx′γ1 +Ky′γ2 +Kz′γ3 = Kz,0 = cost.,
ossia per le (2.12)
Apγ1 + Bqγ2 + Crγ3 = Kz,0. (2.13)
In secondo luogo poiche il peso e una forza conservativa (e i vincoli non dipendono dal tempo),vale l’integrale delle forze vive T − U = E cioe, essendo p = −mg il peso del corpo (m ne denota lamassa) e x′G, y
′G, z
′G le coordinate del baricentro
1
2
(Ap2 + Bq2 + Cr2
)− pzG = E, (2.14)
dove
zG = γ1x′G + γ2y
′G + γ3z
′G.
E da notare che dai teoremi generali sul moto dei sistemi non si possono trarre altri integrali primioltre alla energia meccanica totale ed alla componente verticale del momento della quan-tita di moto (2.13) e (2.14) finche non si introducono ulteriori ipotesi sulla distribuzione delle massee in relazione al punto fisso O′. Poiche si tratta di un problema di tre gradi di liberta, vale a direin tre incognite essenziali, e manifesto che questi due integrali primi non bastano a caratterizzarlocompletamente.

2.4 Giroscopio pesante 53
2.3.2 Equazioni differenziali del moto
Essendo Ωe(O′) = pk× (O′ −G) allora la (2.6) diventa
(dK(O′)
dt
)
O′
+ ω ×K(O′) = pk× (O′ −G). (2.15)
Inoltre, essendo k fisso rispetto agli assi (O; x, y, z) si ha
0 =
(dk
dt
)
O
≡(dk
dt
)
O′
+ ω × k (2.16)
Le equazioni (2.15) e (2.16) proiettate sugli assi principali di inerzia x′, y′, z′ danno luogo alle seiequazioni differenziali scalari
Ap− (B − C)qr = −mg(y′Gγ3 − z′Gγ2)Bq − (C − A)rp = −mg(z′Gγ1 − x′Gγ3)Cr − (A− B)pq = −mg(x′Gγ2 − y′Gγ1)
(2.17)
γ1 = γ2r − γ3qγ2 = γ3p− γ1rγ3 = γ1q − γ2p
(2.18)
di cui le prime tre sono, naturalmente, le equazioni di Eulero relative al nostro caso. Complessiva-mente si ha un sistema di sei equazioni differenziali (2.17), (2.18) del primo ordine fra le sei funzioniincognite del tempo p, q, r, γ1, γ2, γ3 che, unitamente alla condizione γ21 + γ22 + γ23 = 1, dipende dacinque costanti arbitrarie.
Supponendo risolto il sistema (2.17), (2.18) si trovano gli angoli di Eulero ψ, θ, ϕ che risolvonocompletamente il problema. Infatti dalle solite equazioni fondamentali
γ1 = sinϕ sin θ, γ2 = cosϕ sin θ, γ3 = cos θ (2.19)
si traggono le espressioni di θ e ϕ in termini finiti di γ1, γ2, γ3 e quindi del tempo. Dopo di chel’angolo di precessione ψ si ottiene con una quadratura dalla equazione (se γ1 6= 0)
p = γ1ψ + θ cosϕ. (2.20)
La quadratura, che fornisce la ψ, introduce una nuova costante arbitraria che, insieme con le 5dell’integrale generale del sistema, da le sei costanti da cui deve dipendere il piu generale moto delsolido pesante con punto fisso (sistema olonomo a tre gradi di liberta).
2.4 Giroscopio pesante
2.4.1 Terzo integrale primo
Denominiamo giroscopio ogni solido il cui ellissoide baricentrale di inerzia sia rotondo,cioe tale che, ad esempio, A = B e che l’asse giroscopico (O′; z′) contenga il baricentro; intal caso l’ellissoide d’inerzia risulta rotondo anche rispetto ad ogni altro punto dell’asse.

54 2 Dinamica dei solidi
Consideriamo un giroscopio pesante, fissato in un generico punto O′, appartenente all’assegiroscopico e distinto dal baricentro G. Percio, rispetto alla solita terna solidale (O′; x′, y′, z′), in cui(O′; z′) sia l’asse giroscopico, le ipotesi strutturali caratteristiche del problema, si traducono nellecondizioni
A = B, x′G = y′G = 0; (2.21)
dove abbiamo orientato l’asse giroscopico in modo che sia z′G > 0. Il punto della semiretta (O′; z′)che dista una unita da O′ si chiama vertice del giroscopio e si denota con V .
Il momento delle forze attive si riduce alla forma
Ωe(O′) = pz′Gk
′ × k, (2.22)
dove p = −mg denota il peso della trottola, da questa segue immediatamente che Ω′z = 0. Le
equazioni differenziali, prese sotto la forma (2.17) e (2.18), danno l’ulteriore integrale primoKz′,0 che implica
Cr = 0 ⇒ r ≡ r0. (2.23)
Abbiamo dunque, intanto, provato che in ogni moto del giroscopio pesante la velocita angolaregiroscopica si mantiene costante.
Inoltre i due integrali primi del momento verticale delle quantita di moto (2.13) e dell’energiameccanica (2.14) qui, in base alle prime due della (2.21), assumono la forma
A (pγ1 + qγ2) + Crγ3 = Kz,0, (2.24)
1
2A(p2 + q2
)+
1
2Cr2 − Pz′Gγ3 = E, (2.25)
con r costante. Osserviamo che in questo problema abbiamo i 3 integrali primi del motoKz, Kz′ ed E dati dalle (2.23), (2.24) e (2.25) e cio rende possibile l’integrazione perquadrature del problema.
2.5 Rotazioni uniformi del giroscopio pesante
Si noti subito che sotto le ipotesi di simmetria (2.21) qui ammesse abbiamo il seguente risultato:Teorema. Il giroscopio pesante e suscettibile di infinite rotazioni uniformi attorno all’asse
giroscopico nelle quali l’asse giroscopico e verticale e la velocita angolare ω = ωk′, k
′= k,
ha verso ed intensita completamente arbitraria. Ogni altra retta del giroscopio (non necessari-amente coincidente con l’asse giroscopico) passante per O diventa asse di rotazione permanentesoltanto quando sia disposta lungo la verticale in uno, ben definito, dei due versi possibili,dopo di che risulta determinato univocamente il valore assoluto della corrispondente velocita angolare(mai inferiore ad un dato valore critico).
Dimostrazione: Ricordiamo ora che il moto del giroscopio pesante e caratterizzato dall’equazionedinamica (equazione cardinale dei momenti)

2.5 Rotazioni uniformi del giroscopio pesante 55
(dK(O′)
dt
)
O
=
(dK(O′)
dt
)
O′
+ ω ×K(O′)
= Pz′Gk′ × k (2.26)
e dalla equazione cinematica(dk
dt
)
O
=
(dk
dt
)
O′
+ ω × k = 0, (2.27)
subordinatamente alle ipotesi strutturali, specifiche nel nostro caso,
A = B, x′G = y′G = 0, (2.28)
nonche alla condizione convenzionale z′G > 0. Tenendo conto che sussiste l’integrale r = cost. alloraper la velocita angolare ω vale l’espressione vettoriale
ω =1
AK(O′) +A− CA rk
′, (2.29)
con r costante. Le rotazioni uniformi richiedono l’esistenza per la (2.27) di momenti K(O′) per cui laespressione (2.29) della ω risulti costante (indifferentemente riferibile agli assi fissi e solidali). Quindiderivando (rispetto all’osservatore assoluto) rispetto al tempo la (2.29) e tenendo presente le (2.26)
e (2.27) e la formula di Poisson dˆk′
dt= ω × k
′si ottiene
ω = costante ⇔[(A− C)rω − Pz′Gk
]× k
′= 0 (2.30)
dalla quale risulta che il vettore
(A− C)rω − Pz′Gk (2.31)
per ogni eventuale rotazione uniforme del giroscopio pesante, deve risultare parallelo a k′o nullo.
Osserviamo che tale vettore e costante rispetto all’osservatore fisso, poiche per una rotazione uniformesi ha ω costante.
Consideriamo prima il caso in cui questo vettore costante sia parallelo a k′; questo implica che
k′deve essere fisso rispetto allo spazio e quindi ω = rk
′, allora la (2.30) si riduce a k × k
′= 0.
Da cio si conclude che: il giroscopio pesante e suscettibile di infinite rotazioni uniformi (opermanenti) attorno all’asse giroscopico, le quali hanno tutte per asse, nello spazio, laverticale del punto fisso. Se lungo questa verticale si dispone l’asse giroscopico, indifferentementeall’ingiu o all’insu, la velocita angolare e il verso della rotazione restano completamente arbitrari.
Consideriamo ora il caso in cui il vettore (2.31) sia nullo, cioe si abbia
(A− C)rω = Pz′Gk
da cui segue che l’asse di rotazione permanente deve essere disposto verticalmente, cioe ω = ωk edove, denotando al solito con θ l’angolo di nutazione (assunto diverso da 0 e π per non ricadere nelcaso precedente) vale la relazione
r = ω cos θ.

56 2 Dinamica dei solidi
Pertanto si trova che deve valere la condizione
(A− C)ω2 cos θ = Pz′G
e viceversa, tutte le volte che tale relazione e soddisfatta per due valori θ e ω, allora il corrispondentemomento K(O′) sodisfa alla seconda equazione cardinale della Dinamica. Osserviamo ora che, pre-fissata la direzione ed il verso, cioe θ, solo un solo valore di ω e permesso e viceversa. In ogni caso ilvalore assoluto della velocita angolare non puo scendere mai al di sotto di un dato valore critico
√√√√∣∣∣∣∣Pz′GA− C
∣∣∣∣∣.
Inoltre si osserva anche che nelle rotazioni uniformi del giroscopio pesante (quando l’assegiroscopico non e verticale) il baricentro si mantiene sempre al di sotto o sempre al disopra del piano orizzontale del punto fisso, secondo che l’ellissoide rotondo d’inerzia,rispetto ad O e allungato A > C o schiacciato A < C.
Precessioni regolari del giroscopio pesante
Cerchiamo qui le precessioni regolari del giroscopio pesante, aventi per asse di precessione la
verticale del punto fisso e per asse di figura l’asse giroscopico. Poniamo dunque ω = µk′+νk
denotando con µ e ν le componenti costanti di ω secondo l’asse giroscopico e la verticale ascendente(dette rispettivamente velocita angolare propria e velocita angolare di precessione del corpo).Sostituendo nella (2.29) e risolvendo rispetto al momento K(O′), si trova
K(O′) = (Aµ− [A− C]r) k′ +Aνk, (2.32)
quindi tutto si riduce a cercare se sia possibile soddisfare con una tale espressione di K(O′), dove r,µ e ν siano costanti, all’equazione dinamica (2.26) del moto del giroscopio pesante. Sostituendo la(2.32) nella (2.26) e ricordando che
dk
′
dt
O
= ω × k′= νk× k
′
si ottiene
(Aµ− [A− C]r) ν + Pz′G k′ × k = 0
dove in ogni precessione regolare, che non si riduca ad una semplice rotazione intorno all’asse giro-
scopico, deve essere k′ × k 6= 0, si ottiene quindi la seguente equazione scalare
(Aµ− [A− C]r) ν + Pz′G = 0. (2.33)
Esplicitando, oltre che rispetto ai caratteri intrinseci del giroscopio A, C, p e z′G, rispetto aiparametri caratteristici della precessione e in particolare rispetto all’angolo costante θ di nutazione
si ottiene r = ω · k′ = µ+ ν cos θ e la (2.33) diventa
(A− C) ν2 cos θ − Cµν + Pz′G = 0. (2.34)

2.5 Rotazioni uniformi del giroscopio pesante 57
E questa la condizione necessaria e sufficiente perche i parametri µ, ν, θ definiscano peril dato giroscopio pesante una precessione regolare. Notiamo che fissando arbitrariamente(entro certi limiti) due dei tre parametri µ, ν, θ si determina univocamente il terzo.
In particolare si ottiene che risolvendo l’equazione di II grado (2.34) in ν, essendo fissati θ e µcon µ≫ 1, si ottengono le due soluzioni che, trascurando le potenze di µ−1 con esponente maggioredi 1, sono date da:
ν1 ≈Cµ
(A− C) cos θ , ν2 ≈ −Pz′G
C µ−1.
Abbiamo quindi ottenuto il seguente risultato:Teorema. Qualunque sia la semiretta per O′, solidale con il corpo (e diversa dall’asse giroscopico)
che (in un dato istante) si disponga verticalmente (all’ingiu o all’insu), per ogni valore abbastanzagrande della velocita propria µ intorno all’asse giroscopico, sono possibili per il giroscopio due diverseprecessioni regolari, per le quali la rotazione precessionale e rapida nell’una (ν dello stesso ordine diµ), lenta nell’altra (ν dell’ordine di µ−1).
Osserviamo che le precessioni corrispondono, nell’analisi fatta in precedenza, alle soluzioni s =s1 = s2 doppie della equazione f(s) = 0 interne all’intervallo (−1,+1).
2.5.1 Determinazione dell’angolo di nutazione
Tenendo conto degli integrali (2.24) e (2.25) e delle equazioni generali (2.18) (basta la terza), siottiene la equazione differenziale del primo ordine
s2 = Φ(s), dove s = γ3 = cos θ.
In particolare ponendo
CA = c, −2Pz′G
A = ρ2, − E
Pz′G= h,
Kz,0
A = ρk, r = ρλ, (2.35)
dove c e ρ sono due costanti positive dipendenti esclusivamente dalla distribuzione delle masse nelcorpo; mentre h, k, λ (al pari di E, Kz,0 e r da cui differiscono per un coefficiente di omogeneita)sono costanti di integrazione ridotti a numeri puri. Con tali posizioni gli integrali primi (2.24) e(2.25) assumono la forma
pγ1 + qγ2 = ρ(k − cλs), (2.36)
p2 + q2 = ρ2(−s+ h− cλ2); (2.37)
onde sostituendo nella identita
(pγ1 + qγ2)2 + (pγ2 − qγ1)
2 =(p2 + q2
)(1− γ23)
=(p2 + q2
)(1− s2) (2.38)
e tenendo conto della terza delle equazioni (2.18), si ottiene per la s l’equazione preannunciata
s2
ρ2= (1− s2)(−s+ h− cλ2)− (cλs− k)2. (2.39)

58 2 Dinamica dei solidi
Essa costituisce la risolvente del problema del moto del giroscopio pesante perche non appena sie determinata l’espressione s = γ3 dalla (2.39) in funzione del tempo, si trovano (vedremo poi come)con eliminazioni e quadrature le analoghe espressioni degli altri elementi incogniti del moto, cioe diγ1, γ2, p, q (r e costante) o, addirittura, dei due angoli di Eulero ψ, ϕ. Resta cosı stabilita laintegrabilita per quadrature del problema del moto del giroscopio pesante.
Discussione della equazione risolvente
Escludiamo il caso λ = 0 (cioe il caso r = 0 che ci riporterebbe al caso caso di rotazione nulla attornoall’asse giroscopico e quindi al pendolo sferico) e studiamo l’andamento qualitativo delle soluzionidella equazione risolvente (2.39). Tale discussione si fonda sulla indagine delle radici (reali) delpolinomio di terzo grado che compare nella (2.39):
f(s) = f(s;λ, h, k)
= (1− s2)(−s+ h− cλ2)− (cλs− k)2. (2.40)
Anzitutto si osservi che
lims→±∞
f(s) = ±∞.
Inoltre si hanno i seguenti casi:
a) cλ 6= ±k allora f(±1) = −(±λc− k)2 < 0 e quindi f(s) ammette certamente una radice s3 > +1;inoltre, a seconda del valore che f(s0) ≥ 0 assume (s0 e il valore iniziale), si ha che:
a1)f(s0) > 0 allora il trinomio f(s) ammette tre radici reali semplici s1, s2, s3 con s3 > +1 es1, s2 appartenenti all’intervallo (−1,+1);
a2)f(s0) = 0, se s0 e radice doppia s1 = s2 = s0 allora la terza radice s3 e comunque maggiore di+1 e la funzione f(s) si mantiene negativa in tutto l’intervallo (−1,+1)− s0;
a3)se invece f(s0) e semplice allora, come nel caso a1) la funzione f(s) ammette due radici s1 e s2interne all’intervallo (−1,+1) e la terza s3 maggiore di +1.
b) Per cλ = −k, il polinomio f(s) assume valore negativo in +1 ed e nullo in −1, quindi f(s) ammettecertamente una radice s3 > +1; inoltre, si hanno due possibilita:
b1)−1 e radice doppia, s1 = s2 = −1, allora il polinomio f(s) e negativo all’interno dell’intervallo(−1,+1] ed ha una terza radice s3 > +1;
b2)se invece s1 = −1 e radice semplice allora deve essere necessariamente s2 interna all’intervallo(−1,+1).
c) Infine nel caso cλ = +k il polinomio f(s) ammette la radice +1; ma, all’infuori di questa cir-costanza si possono presentare per le altre due radici tutti i casi possibili:
c1)f(s) ha una radice tripla e questa e necessariamente +1;c2)f(s) ha una radice semplice in +1 ed una radice doppia all’interno di (−1,+1);c3)f(s) ha una radice doppia in +1 ed ha una radice semplice esterna all’intervallo (−1,+1);c4)f(s) ha una radice doppia in +1 ed ha una radice semplice interna all’intervallo (−1,+1).

2.5 Rotazioni uniformi del giroscopio pesante 59
Caso delle radici semplici: moti con nutazione dell’asse giroscopico
Nel caso di due radici semplici −1 < s1 < s2 < +1 la funzione s = cos θ, al trascorrere del tempo,oscilla indefinitamente fra i due valori estremi s1 ed s2; il che, nei riguardi del giroscopio, vuol direche l’asse descrive nello spazio una superficie conica sempre compresa fra i due coni di rotazione adasse verticale di semi-apertura cos−1 s1 = θ1 > θ2 = cos−1 s2, e raggiunge alternativamente l’uno el’altro (moto di nutazione dell’asse giroscopico). In particolare la traiettoria (sferica) del puntoV (detta traiettoria del vertice) e tutta compresa fra i due paralleli θ1 e θ2 e va, alternativamentedall’uno all’altro in modo periodico.
Andamento della curva al vertice
Sempre nel caso di due radici semplici −1 < s1 < s2 < +1 siamo interessati ora a studiarel’andamento della curva del vertice V sulla superficie sferica con particolare riguardo al caso incui tocca i paralleli. Si ricerca l’angolo α che la tangente alla curva al vertice, in un suo generico
punto, forma con il meridiano passante per essa di versore u. Questo versore, come ortogonale a k′
e parallelo al piano verticale k, k′, risulta parallelo al componente equatoriale di k, cioe a γ1ı
′ + γ2′,
quindi si puo scrivere
u =γ1ı
′ + γ2′
√1− γ23
=γ1ı
′ + γ2′
√1− s2
. (2.41)
D’altra parte la velocita del vertice V , estremo libero del versore k′applicato in O′, e data da
dk′
dt= ω × k
′ ⇒∣∣∣∣∣∣dk
′
dt
∣∣∣∣∣∣
2
= p2 + q2.
Per la definizione di prodotto scalare si ha
cos2 α =
∣∣∣∣dˆk′
dt· u∣∣∣∣2
∣∣∣∣dˆk′
dt
∣∣∣∣2 =
s2
(1− s2)(p2 + q2). (2.42)
dalle (2.41) e dalla terza delle equazioni (2.18). Quindi nell’istante in cui il vertice va a trovarsisull’uno o sull’altro dei paralleli estremi, essendo s = 0 ed essendo s1,2 6= ±1 si ha cosα = 0(supponendo inoltre che nell’istante considerato p e q non sono entrambi nulli); il che vuol dire chein generale la curva del vertice risulta tangente ai paralleli estremi nei punti, in cuialternativamente, li raggiunge.
Resta il caso eccezionale in cui p = q = 0 quando il vertice raggiunge un parallelo estremo.Dalla (2.42) segue che per s 6= 0 devono essere, necessariamente, p e q non nulli. Poiche poi, incorrispondenza di una delle due radici s = s1 o s = s2 sia p = q = 0 e necessario che per una taleradice sussistano simultaneamente dalle (2.36) e (2.37) le due equazioni
k − cλs = 0, −s+ h− cλ2 = 0.

60 2 Dinamica dei solidi
Se poniamo s = k/cλ allora la condizione necessaria affinche sia p = q = 0 in corrispondenza as = s1 o s = s2 e che sia
k
cλ= h− cλ2 (2.43)
e che s1 = s o s2 = s. Nel caso sia verificata la condizione (2.43) le (2.37) e (2.39) prendono la forma
p2 + q2 =ρ2
cλ(−cλs+ k)
e
s2 =ρ2
cλ(1− s2)(−csλ+ k)− ρ2(csλ− k)2,
e la (2.42) in questo caso si puo scrivere
cos2 α = 1 + cλcλs− k
(1− s2)
e mostra che, quando s tende al suo valore estremo s = k/cλ, cosα tende a 1; quindi, dato il carattereoscillatorio della s, la curva del vertice, nei punti che ha comuni con il parallelo considerato,presenta una cuspide a tangente meridiana. Si aggiunge, infine, che una tale eventualitapuo presentarsi soltanto sul parallelo superiore. Infatti, la soluzione s1,2 = s = k/cλ e, per ilpolinomio f(s) la maggiore delle due radici semplici comprese tra −1 e +1 poiche
f ′(s = k/cλ) = −ρ2(1− k2/c2λ2) < 0.
Quindi, per −1 < s1 < s2 < +1 e ad esclusione del caso kcλ
= h− cλ2, il vertice tocca i paralleli
minimo e massimo in modo tangente; nel caso particolare kcλ
= h − cλ2 il vertice toccain modo tangente il parallelo minimo e forma una cuspide verticale quando tocca ilparallelo massimo.
2.5.2 Discussione del moto di precessione ψ(t)
Andiamo a studiare l’andamento dell’angolo di precessione ψ durante il moto. Dalla (2.24) e dalfatto che Cr = Kz′,0 e un integrale primo del moto si ottiene che
pγ1 + qγ2 =Kz,0 −Kz′,0 cos θ
A .
D’altra parte le (2.9) e le (2.19) danno
pγ1 + qγ2 = (θ cosϕ+ ψ sinϕ sin θ) sinϕ sin θ +
+(−θ sinϕ+ ψ cosϕ sin θ) cosϕ sin θ
= ψ sin2 θ
ottenendo infine
ψ =Kz,0 −Kz′,0 cos θ
A sin2 θ=a− bs
1− s2= ρ
k − cλs
1− s2

2.5 Rotazioni uniformi del giroscopio pesante 61
dove s = cos θ, a = Kz,0
A = ρk e b =Kz′,0
A = cr = ρcλ.Se s = cλ/k e interno all’intervallo (s1, s2) allora la velocita di precessione sui paralleli, definiti da
θ1 e θ2, e opposta e il vertice V si muove sulla superficie sferica tracciando una curva con dei nodi;se invece e esterno allora il moto di precessione e monotono; infine abbiamo il caso limite in cui unodei due valori s1 o s2 coincide con s, questo caso e gia stato visto in precedenza e la curva presentauna cuspide quando tocca una delle due quote (necessariamente quella corrispondente al parallelomassimo).
Caso delle radici multiple
Esaminiamo il caso in cui il polinomio f(s) ammetta nell’intervallo da −1 a +1 (estremi inclusi) unaradice multipla s0. Esclusa l’eventualita cλ = k, sappiamo che non puo trattarsi se non di una radicedoppia s0, isolata nel senso che il polinomio f(s) in ogni altro punto dell’intervallo risulta negativo.Il moto corrispondente e di necessita un moto merostatico, in cui conserva indefinitamente ilsuo valore iniziale s0. Cio vuol dire che l’asse giroscopico appartiene costantemente al cono dirotazione intorno alla verticale di angolo θ0 = cos−1 s0. E facile verificare che il moto delsolido si riduce ad una precessione regolare:
ω =e√
1− γ23k +
r − eγ3√
1− γ23
k
′,
dove r = r0 e γ3 = s0 sono costanti. Infatti, dalla costanza di γ3 = s0 risulta pure costante lasomma |e|2 = p2+ q2. D’altra parte la costanza di γ3 implica l’ulteriore relazione γ2p− γ1q = 0, cioep/q = γ1/γ2, da cui segue che deve essere
e =e√
1− γ23(γ1ı
′ + γ2′) =
e√1− γ23
(k− γ3k
′)
da cui segue la tesi.
Determinazione completa del moto
Facciamo infine vedere che, una volta determinata γ3 integrando la (2.39), anche gli altri elementi(p, q, γ1 e γ2) si possono calcolare con quadrature. Dalle (2.36) e (2.38) segue che
pγ1 + qγ2 = Θ1(t) e qγ1 − pγ2 = Θ2(t)
dove Θ1 e Θ2 denotano due funzioni note una volta sia noto s = s(t). Denotando ζ = p + iq eµ = γ1 + iγ2 segue che
ζµ = Θ1 + iΘ2 ovvero ζ = µΘ1 + iΘ2
1− γ23. (2.44)
D’altra parte dalle (2.18) risulta
µ = −irµ+ iγ3ζ
che, unitamente alla (2.44) da

62 2 Dinamica dei solidi
d log µ
dt= −ir + iγ3
Θ1 + iΘ2
1− γ23
che, mediante una quadratura, permette di determinare µ = µ(t) e quindi γ1(t) = ℜµ e γ2 = ℑµ.Inoltre, nota µ(t), e possibile determinare poi ζ(t), e quindi p(t) e q(t), dalla (2.44).
2.6 Trottola veloce
Ipotizziamo che la componente costante r della velocita angolare giroscopica sia, durante tutto ilmoto, rilevante non solo di fronte alle altre due componenti p e q, ma anche di fronte alla costantestrutturale ρ definita dalla relazioni (2.35); da quest’ultima ipotesi segue che anche la costante λdefinita dalle (2.35) va ritenuta molto grande. Quindi una trottola si dice ”veloce” se l’energiacinetica di rotazione e molto maggiore dell’energia potenziale, cioe se
1
2Cr2 ≫ mgz′G.
Inoltre dall’integrale primo dell’energia nella forma (2.37) segue che
h = cλ2 + h1, h1 =p2 + q2
ρ2+ s (2.45)
dove h1 e indipendente da λ e molto piccolo rispetto a λ stesso. Analogamente l’integrale primo(2.36) del momento assiale della quantita di moto si puo scrivere
k = cλs+R1, R1 =pγ1 + qγ2
ρ(2.46)
dove il termine R1 e un termine indipendente da λ; cosicche se ne trae
s = γ3,0 −R1
cλ; (2.47)
dove R1/cλ si mantiene trascurabile di fronte alla grandezza costante s = γ3,0 = k/cλ. Riconosciamocosı che, quando il giroscopio e animato di una rotazione rapida intorno al suo asse, questo conservasensibilmente un’inclinazione costante sulla verticale (cos θ = s = k/cλ).
Piccole oscillazioni del moto di nutazione
Porremo quindi come valore approssimato di k
k = cλs; (2.48)
e riterremo s 6= ±1, cioe escluderemo k 6= ±cλ. Per studiare le piccole oscillazioni di s intorno ad s,cioe il moto di nutazione, porremo
s = s+ σ, (2.49)
dove σ = O(λ−1) va trattato come una quantita del primo ordine. Se s ( 6= ±1) e esattamenteradice doppia del polinomio f(s), il moto del giroscopio si riduce ad una precessione regolare e si

2.6 Trottola veloce 63
ha rigorosamente s ≡ s, cioe σ = 0. Esclusa questa eventualita s non si annulla identicamente e,derivando la (2.39) rispetto a t e dividendola per s, si ricava
2s
ρ2= f ′(s),
e basta sostituirvi s + σ ad s e tenere conto che σ va trattato quale una quantita del primo ordineper ottenere, come caratteristica di σ, l’equazione lineare
σ − 1
2ρ2f ′′(s)σ − 1
2ρ2f ′(s) = 0.
Questa equazione differenziale prende la forma
σ + c2r2σ − aρ2 = 0;
dove abbiamo posto
2a = f ′(s) = −2s(−s+ h1)− (1− s2) = −1− 2h1s+ 3s2
e
f ′′(s) = −2c2λ2 − 2h1 + 6s ≈ −2c2λ2.
Ponendo, infine, σ1 = σ − aρ2
c2r2=σ − a
c2λ2assume la forma finale
σ1 + c2r2σ1 = 0,
che e quella caratteristica dei moti armonici e che ha integrale generale
σ1(t) = ǫ0 cos[cr(t− t0)]
dove ǫ0 e t0 sono due costanti. Quindi
s = s+ ǫ0 cos[cr(t− t0)] +a
c2λ2
da cui, essendo s(0) = s+O(λ−1) e s(0) = ˙s si ottiene ǫ0 = O(λ−1). In particolare, essendo s 6= ±1,il divario angolare ǫ = θ − θ si puo porre sotto la forma ǫ = ǫ1 + ǫ2 dove il primo addendo
ǫ1 = − a
c2λ2 sin θ(2.50)
e un numero dipendente dalle costanti iniziali e, in ogni caso piccolo per effetto del denominatorec2λ2; mentre il secondo addendo e dato da:
ǫ2 = − σ1sin θ
= ǫ0 cos[cr(t− t0)], ǫ0 =ǫ0
sin θ= O(λ−1). (2.51)
Si ottiene la formula
θ − θ = ǫ1 + ǫ0 cos [cr(t− t0)] ≈ ǫ0 cos [cr(t− t0)] , (2.52)
la quale fornisce l’espressione approssimata della nutazione, tanto piu attendibile quanto piu e rile-vante λ. La frequenza delle piccole oscillazioni attorno a s e data da
ωnut = cr =CAr.

64 2 Dinamica dei solidi
Moto di precessione e di nutazione nel caso di piccole oscillazioni
Da quanto e noto le espressioni degli altri due angoli di Eulero ψ e ϕ soddisfano alle due equazioni
ψ =ρ(k − cλs)
1− s2, ϕ = r − ψs. (2.53)
Poiche s differisce da s = k/cλ per termini dell’ordine 1/λ e ρλ = r, la ψ assume la forma
ψ = −cr s− s
1− s2≈ − crǫ0
1− s2cos[cr(t− t0)] + ν
dove abbiamo posto ν = ρacλ(1−s2) . Da qui si desume
ψ = νt+ǫ0
1− s2sin [cr(t− t0)] + cost. (2.54)
Come si vede, ψ risulta dalla somma di due termini, di cui il primo, proporzionale al tempo, cor-risponde ad una rotazione uniforme dell’asse di figura, lenta di fronte alla rotazione giroscopica (divelocita angolare r), mentre il secondo, periodico (di periodo 2π/cr), da luogo a piccole oscillazioniintorno a tale moto precessionale.
Resta da valutare ϕ. Sostituendo anche nella espressione (2.53) di ϕ a s il suo valore medio s, siottiene
ϕ ≈ r − ψs;
da cui
ϕ = (r − νs)t− sǫ0sin θ
sin [cr(t− t0)] + cost. (2.55)
che in prima approssimazione si riduce a ϕ ≈ rt.
2.7 Stabilita del moto del giroscopio pesante.
2.7.1 Stabilizzazione giroscopica e trottola ”addormentata”.
Ci proponiamo di discutere la stabilita, ridotta ai parametri p, q, r, s, delle rotazioni permanentidel giroscopio pesante intorno all’asse giroscopico diretto verticalmente all’insu (s = +1, λ arbi-trario) essendo manifesta la stabilita nel caso dell’asse verticale disposto all’ingiu. Faremo vedere cheper velocita abbastanza grandi si ha stabilita (fenomeno di stabilizzazione giroscopica) mentreper velocita inferiori di un certo valore si ha instabilita. Un esempio classico di questo risultato ecostituito dalla trottola. Infatti, mentre per una trottola, appoggiata al suolo con l’asse disposto ver-ticalmente all’insu, e instabile, al pari dello stato di equilibrio, ogni rotazione lenta, basta imprimerleuna velocita angolare rilevante perche essa risulti stabile; questo caso prende il nome di trottolaaddormentata o dormiente; infatti per rotazioni molto veloci essa appare ”ferma” (relativamenteal moto dell’asse giroscopico) e non appena, per effetto dell’attrito, la velocita di rotazione diminuiscesotto una certa soglia la trottola si ”sveglia”, cioe il moto dell’asse giroscopico diventa osservabile.
Per studiare la stabilizzazione giroscopica assumiamo come soluzione (merostatica) campione σuna qualsiasi delle rotazioni uniformi intorno all’asse giroscopico, diretto verticalmente all’insu, cioe

2.7 Stabilita del moto del giroscopio pesante. 65
una σ per cui sia s = +1, p = 0, q = 0 mentre a λ e, quindi, ad r compete un valore costantegenerico. Consideriamo ora una generica σ inizialmente prossima a σ; cioe tale che il valore iniziales0 di s sia prossimo a +1 e i valori iniziali p0 e q0 di p e q siano prossimi a zero (r coincide semprecon r0 e lo prendiamo coincidente con quello di σ). Ora dall’integrale delle forze vive
p2 + q2 = ρ2(−s+ h− cλ2), (2.56)
valida sia per la σ che per ogni altra soluzione, si deduce che la stabilita relativa alle s, p, q (edr) non si diversifica da quella ridotta all’unico parametro s. Infatti, se la s di σ si mantieneprossima al suo valore iniziale s0, allora altrettanto avviene per p2+q2 che inizialmente ha il valore dip20+q
20 che e prossimo a zero e quindi sia p che q si mantengono piccoli. Conseguentemente possiamo
limitarci a controllare il divario tra s e +1.Come sappiamo l’andamento della s(t) corrispondente a tale σ si rileva dalla posizione (e dalla
molteplicita) delle radici che il polinomio
f(s; λ+ λ1, h+ h1, k + k1) (2.57)
eventualmente ammette nell’intervallo da s = −1 ad s = 1. λ1 = h1 = k1 = 0 corrispondono al casoσ e le costanti di integrazione h, k sono date in termini della corrispondente λ dalle
h = cλ2 + 1, k = cλ, (2.58)
poiche p = q = 0 e f(s; λ, h, k) ha per s = 1 soluzione almeno doppia. Quindi la (2.40) si riduce a
f(s; λ, h, k) = (1− s)2(1− c2λ2 + s) (2.59)
che ha radici s1 = s2 = +1 e s3 = c2λ2 − 1. E manifesto che, per ragioni di continuita, per λ1, h1, k1prossimi a zero il polinomio (2.57) avra due radici s1, s2 prossime entrambe a +1 e, in piu, una terzaradice s3 prossima a s3 = c2λ2 − 1. Si prova che:
a) Ogni rotazione permanente σ, la cui velocita angolare renda soddisfatta la disuguaglianza
|λ| >√2
c(2.60)
e stabile; infatti, in tal caso s3 > +1 e quindi il polinomio (2.57) ha due radici s1 e s2 prossime a+1 ed una s3 > +1; quindi il moto avviene con s(t) che oscilla tra s1 e s2, cioe in prossimita di+1;
b) Altrettanto puo dirsi nel caso limite
|λ| =√2
c, (2.61)
in cui s3 = +1, che da luogo alla radice tripla s = +1, giacche qui ancora la piu grande delle treradici corrispondenti ad una generica σ, inizialmente prossima a σ, e di necessita vicina a +1.
c) Se invece la s3 e interna all’intervallo (−1,+1), cioe se |λ| <√2c, quindi la σ ha tre radici
−1 < s3 < s1 ≤ +1 ≤ s2 e quindi la s oscilla indefinitamente tra s1 ed s3 e quindi si scosta da +1per un intervallo finito dando luogo alla instabilita di σ.

66 2 Dinamica dei solidi
Si puo concludere che: delle rotazioni uniformi del giroscopio pesante intorno all’assegiroscopico, disposto verticalmente con il baricentro al di sopra del punto fisso, quelleveloci (c2λ2 ≥ 2) sono stabili. La velocita critica, al di sotto della quale si perde la stabilita edata da
|r| = 2
C√A|p|z′G.
Instabilita delle precessioni regolari del giroscopio pesante
Si assuma come soluzione campione σ una generica precessione regolare per cui la s = cos θ conserva,durante tutto il moto, il suo valore iniziale s0 = cos θ0 dove s0 e una radice doppia del polinomio f(s)interna all’intervallo (−1,+1) (e interna altrimenti si rientrerebbe nel caso precedente). Il polinomiof(s) ammette quindi, per ogni altra soluzione σ prossima a σ, due radici reali prossime a s0 e quindinei riguardi del solo parametro s ogni precessione regolare risulta stabile. Ma questa stabilitaridotta non implica, a differenza del caso precedente, la stabilita globale relativa ai parametri p eq. Infatti in virtu dell’integrale delle forze vive
p2 + q2 = ρ2(−s+ h− cλ2), (2.62)
la somma p2 + q2 si mantiene prossima al suo valore iniziale p20 + q20 e quindi a p20 + q20 (che non earbitrariamente piccolo) ma cio non implica che p e q si mantengano, rispettivamente prossimi a p0e q0.

3
Equazioni di Lagrange
3.1 Principio del d’Alembert e relazione simbolica della Dinamica
Distinguendo tra forze attive e vincolari durante il moto varranno le equazioni fondamentali
mas = Fs + φs, s = 1, . . . , N, (3.1)
che si possono scrivere
Fs −mas = −φs. (3.2)
Per sistemi a vincoli perfetti la relazione
N∑
s=1
φs · δPs ≥ 0 =⇒N∑
s=1
(Fs −msas) · δPs ≤ 0 (3.3)
e da considerarsi valida per tutti e soli gli spostamenti virtuali δPs, a partire dalla configurazioneassunta dal sistema, durante il suo moto, nel generico istante che si considera. La (3.3) prende ilnome di relazione simbolica della Dinamica; nel caso di spostamenti invertibili va sostituita allacorrispondente equazione
N∑
s=1
(Fs −msas) · δPs = 0 (3.4)
detta equazione simbolica della Dinamica.
3.2 Equazioni differenziali del moto di un sistema olonomo
Riferiamo il nostro sistema olonomo ad una n−upla qualsiasi di coordinate lagrangiane indipendentiqh, dove n denota il grado di liberta del sistema. Le relazioni Ps = Ps(q; t) derivate rispetto al tempodanno le velocita
vs =n∑
h=1
∂Ps∂qh
qh +∂Ps∂t
(3.5)
e gli spostamenti virtuali

68 3 Equazioni di Lagrange
δPs =n∑
h=1
∂Ps∂qh
δqh , (3.6)
dove le n componenti δqh sono arbitrarie e indipendenti. Riprendendo la equazione simbolicadella Dinamica, considerata valida per tutti gli spostamenti virtuali invertibili, si ha:
N∑
s=1
msas · δPs =N∑
s=1
Fs · δPs . (3.7)
Il secondo membro e il lavoro virtuale δL delle forze attive e vale l’identita
N∑
s=1
Fs · δPs =n∑
h=1
Qhδqh
dove
Qh =N∑
s=1
Fs ·∂Ps∂qh
(3.8)
e la componente della sollecitazione attiva secondo la coordinata Lagrangiana qh. Quantoal primo membro della (3.7) esso si puo scrivere, dalla (3.6), come
N∑
s=1
msas · δPs =n∑
h=1
τhδqh, dove τh =N∑
s=1
msas ·∂Ps∂qh
. (3.9)
In base alla arbitrarieta dei termini δqh e alle due identita (3.8) e (3.9) l’equazione simbolica dellaDinamica (3.4) equivale alle n equazioni:
τh = Qh, h = 1, 2, . . . , n. (3.10)
Si conclude cosı che per ogni sistema olonomo, a vincoli lisci e bilateri le n equazioni (3.10)equivalgono alla equazione simbolica della Dinamica e devono essere soddisfatte duranteil moto.
Le (3.10) si possono poi scrivere nella seguente forma, dette equazioni di Lagrange:
d
dt
∂T
∂qh− ∂T
∂qh= Qh, h = 1, 2, . . . , n. (3.11)
La dimostrazione e immediata e segue ricordando che
T =1
2
N∑
s=1
msvs · vs
e notando che dalla (3.5) risulta
∂vs∂qh
=∂Ps∂qh
ed
dt
∂Ps∂qh
=∂
∂qh
dPsdt
=∂vs∂qh
,
allora

3.4 Coordinate cicliche e Lagrangiana ridotta 69
∂T
∂qh=
N∑
s=1
msvs ·∂vs∂qh
e
∂T
∂qh=
N∑
s=1
msvs ·∂vs∂qh
=N∑
s=1
msvs ·∂Ps∂qh
.
Derivando quest’ultima rispetto al tempo si ottiene che
d
dt
(∂T
∂qh
)=
N∑
s=1
msas ·∂Ps∂qh
+N∑
s=1
msvs ·∂vs∂qh
= Qh +∂T
∂qh.
Notiamo che, nelle (3.11), tutto cio che dipende dalla sollecitazione attiva e riassunto nelle suecomponenti lagrangiane Qh, tutto quello che attiene alla struttura materiale del sistema e sintetiz-zato nell’unico elemento globale T , cioe nella forza viva. Esse danno la completa impostazione delproblema del moto di un sistema olonomo; sotto l’aspetto analitico, costituiscono un sistemadifferenziabile del II ordine nelle n funzioni incognite qh(t), riducibile a forma normale.
Noti i valori q0h e q0h di qh e qh in un determinato istante, cioe assegnate la configurazione iniziale del
sistema e le velocita iniziali dei singoli punti, allora avremo, per i noti teoremi di esistenza ed unicitadelle equazioni differenziali, una unica soluzione qh = qh(t) delle (3.11) che dara, necessariamente,il moto del sistema. Cioe: assumendo i vincoli perfetti, bilateri e olonomi e le necessariecondizioni di regolarita sulle forze e sulle relazioni che definiscono le configurazioni del sistema apartire dalle coordinate lagrangiane, dai teoremi di esistenza e unicita delle soluzioni delle equazionidifferenziali segue che le soluzioni delle equazioni di Lagrange, assegnate le condizioni iniziali, sonouniche e quindi devono necessariamente coincidere con le leggi del moto; ovvero le soluzioni delleequazioni di Lagrange danno il moto del sistema.
3.3 Funzione Lagrangiana
Supponiamo che le forze attive Fs derivino da un potenziale Us; quindi U = U(q; t) =∑Ns=1 Us(Ps)
e, in coordinate lagrangiane, Qh = ∂U∂qh
. Da cio, e dalla indipendenza di U da qh, le equazioni di
Lagrange assumono la forma
d
dt
∂L∂qh
− ∂L∂qh
= 0, h = 1, 2, . . . , n, (3.12)
dove si e posto
L(q,q; t) = L = T + U = T − V. (3.13)
Alla funzione L si da il nome di funzione Lagrangiana.
3.4 Coordinate cicliche e Lagrangiana ridotta
Assegnata la funzione Lagrangiana L = L(q,q; t), definiamo momenti cinetici le derivate ph =∂L∂qh
.

70 3 Equazioni di Lagrange
Se supponiamo che la funzione Lagrangiana L sia indipendente da una (o piu) delle variabili qh,per esempio dalla q1, allora l’equazione (3.12) di indice h = 1 fornisce immediatamente l’integraleprimo
p1 =∂L∂q1
= Cost.. (3.14)
Gli integrali di questo tipo si dicono integrali primi dei momenti e le coordinate qh, chenon comparendo nella funzione Lagrangiana danno luogo a tali integrali, si chiamano ignorabili ocicliche.
Se nella funzione Lagrangiana L alcune (per fissare le idee le primem) coordinate qk, k = 1, . . . ,m,sono cicliche, cioe
L = L(q1, . . . , qn, qm+1, . . . , qn; t) = L(q,q′; t),q′ = (qm+1, . . . , qn)
allora il corrispondente sistema lagrangiano ammette gli m integrali primi dei momenti
pk =∂L∂qk
= ck = cost., k = 1, 2, . . . ,m. (3.15)
Supponiamo che il sistema delle m equazioni (3.15) sia risolubile rispetto ad m delle q; cio e semprevero quando il rango della matrice Hessiana
(∂2L∂qh∂qk
)
h=1,...,n, k=1,...,m
e uguale a m. Nel caso particolare in cui L = T +U allora l’Hessiano e una matrice definita positivae quindi il minore formato dalle prime m righe e colonne ha determinante non nullo; cosicche leequazioni (3.15) sono risolubili rispetto alle derivate qk delle m coordinate cicliche qk ottenendo
qk = qk(q′,q′; t), q′ = (qm+1, . . . , qn). (3.16)
Le ultime n−m equazioni di Lagrange
d
dt
∂L∂qh
− ∂L∂qh
= 0, h = m+ 1, . . . , n,
che gia per ipotesi non contengono le q1, . . . , qm, si possono quindi rendere indipendenti anche dallecomponenti qk, qk, k = 1, . . . ,m, sostituendo a ciascuna di queste l’espressione in termini delle qh,qh, qh(h > m) e delle ck fornita dalle (3.16). Si perviene cosı ad un sistema differenziale del secondoordine, che coinvolge soltanto le n−m incognite qh (h = m+ 1, . . . , n).
E possibile provare che questo sistema nelle residue n−m coordinate lagrangiane conserva ancorala forma Lagrangiana dove per Lagrangiana si ha la funzione Lagrangiana ridotta data da
L⋆ = L −m∑
k=1
ckqk, (3.17)
dove alle qk vanno sostituite le loro espressioni in termini delle qh, qh, h = m + 1, . . . , n e ck, k =1, . . . ,m, date dalla (3.16). Le verifica e immediata, per fissare le idee assumiamo m = 1 e la solaprima coordinata ciclica in modo che sia (esprimendo la dipendenza)

3.5 Esempio: problema di Keplero. 71
L⋆ = L⋆(q′,q′, c1; t)
= L [q1(q′,q′, c1; t), q
′,q′; t]− c1q1(q′,q′, c1; t)
dove q′ = (q2, . . . , qm) e quindi
∂L⋆∂qh
=∂L∂qh
+∂L∂q1
∂q1∂qh
− c1∂q1∂qh
=∂L∂qh
, h > 1,
in virtu delle (3.15). Analogamente si ottiene
∂L⋆∂qh
=∂L∂qh
+∂L∂q1
∂q1∂qh
− c1∂q1∂qh
=∂L∂qh
, h > 1.
Il caso m > 1 e perfettamente analogo.Una volta risolte le equazioni di Lagrange per la Lagrangiana ridotta e quindi determinate le
n −m funzioni qh(t), h > m, la determinazione delle rimanenti qk(t), k ≤ m, funzioni avviene perquadratura delle equazioni differenziali
qk = −∂L⋆
∂ck.
Infatti, assumendo ancora m = 1,
∂L⋆∂c1
=∂L∂q1
∂q1∂c1
− c1∂q1∂c1
− q1 = −q1
in virtu delle (3.15).
3.5 Esempio: problema di Keplero.
Consideriamo il moto, rispetto ad un osservatore assoluto, di un sistema costituito da 2 punti liberi.Poiche l’energia potenziale d’interazione di due particelle dipende soltanto dalla distanza tra di loroallora la funzione Lagrangiana e data da
L =1
2m1v
21 +
1
2m2v
22 + U(|u|), u = P2 − P1.
Volendo studiare il moto rispetto ad un sistema di riferimento relativo poniamo l’origine del sistemadi riferimento (traslante) nel baricentro dei due punti, questo punto G deve soddisfare la usualerelazione
m1(P1 −G) +m2(P2 −G) = 0
da cui segue che deve essere
(P1 −G) =m2
m1 +m2
u =m
m1
u
e
(P2 −G) = − m1
m1 +m2
u = − m
m2
u

72 3 Equazioni di Lagrange
dove abbiamo introdotto la massa ridotta m = m1m2
m1+m2e dove abbiamo posto u = P2 − P1 il vettore
aventi estremi coincidenti con i due punti. Introducendo, invece che le coordinate dei due punti qualiparametri lagrangiani, la posizione del baricentro ed il vettore u, allora, in virtu del teorema di Konige di quanto detto la Lagrangiana assume la forma
L =1
2(m1 +m2)v
2G +
1
2m1
(d(P1 −G)
dt
)2
+1
2m2
(d(P2 −G)
dt
)2
+ U(u)
=1
2(m1 +m2)v
2G +
1
2m1
m22
(m1 +m2)2u2 +
1
2m2
m21
(m1 +m2)2u2 + U(u)
=1
2(m1 +m2)v
2G +
1
2mu2 + U(u) .
dove u = |u|. Osserviamo che la Lagrangiana e indipendente dalle coordinate (xG, yG, zG) del bari-centro e quindi queste sono coordinate cicliche. Avremo quindi
px =∂L∂xG
= (m1 +m2)xG = costante
py =∂L∂yG
= (m1 +m2)yG = costante
pz =∂L∂zG
= (m1 +m2)zG = costante
da cui segue che il baricentro si muove di moto rettilineo uniforme. La Lagrangiana ridotta diventa
L⋆ = L − pxxG − pyyG − pz zG
= − 1
2(m1 +m2)(p2x + p2y + p2z) +
1
2mu2 + U(u).
In conclusione, essendo il potenziale sempre definito a meno di una costante additiva, si ha che laLagrangiana ridotta diventa
L⋆ = 1
2mu2 + U(u)
che corrisponde al problema del moto di un punto P di massa m in un campo esternodato da U(u) dove u = P −O1 con O1 fisso. Una volta determinata u(t) e possibile determinarepoi il moto dei due punti.
Introducendo poi le coordinate polari sferiche (r, θ, ϕ) la Lagrangiana ridotta assume la forma
L⋆ = 1
2m(r2 + r2θ2 + r2 sin2 θϕ2) + U(r)
da cui segue immediatamente che ϕ e una coordinata ciclica e quindi
pϕ =∂L⋆∂ϕ
= mr2 sin2 θϕ = costante (3.18)
dove questa costante viene calcolata in virtu delle condizioni iniziali. Ora, assegnata la posizioneiniziale e la velocita iniziale di P , possiamo sempre scegliere il sistema di riferimento centrato in O1

3.5 Esempio: problema di Keplero. 73
in modo che sia v(0) incidente sull’asse z e quindi ϕ0 = 0. Con questa scelta e dalla relazione (3.18)segue che deve essere
pϕ = mr2 sin2 θϕ ≡ 0
e quindi ϕ ≡ ϕ0, cioe il moto avviene in un piano fisso contenente O1 (e quindi anche ilbaricentro tra i due punti).
Riducendo ulteriormente la Lagrangiana otteniamo, dove ora θ e r hanno il significato di coordinatepolari su tale piano, che la nuova Lagrangiana (denotata sempre nello stesso modo) diventa
L⋆ = 1
2m(r2 + r2θ2) + U(r) ,
da cui risulta una ulteriore coordinata ciclica (per questa Lagrangiana ridotta) data da θ e avremoche
pθ =∂L⋆∂θ
= mr2θ = costante. (3.19)
Questo integrale primo coincide con l’integrale primo dei momenti e da la costanza della velocita are-olare. E infine possibile ridurre ulteriormente la Lagrangiana ottenendo come (ultima) Lagrangianaridotta la seguente
L⋆ = 1
2m(r2 + r2θ2) + U(r)− pθθ
=1
2m
(r2 + r2
p2θm2r4
)+ U(r)− pθ
pθmr2
=1
2mr2 − 1
2
p2θmr2
+ U(r) =1
2mr2 − Ueff (r),
dove abbiamo introdotto il potenziale efficace
Ueff (r) =1
2
p2θmr2
− U(r).
Per completare lo studio di questo problema non utiliziamo le equazioni di Lagrange ma, facendouso dell’integrale primo della energia meccanica
E =1
2mr2 − Ueff (r)
si ottiene
r =
√2
m[E + Ueff (r)] =
√2
m[E − U(r)] +
p2θm2r2
da cui, per separazione di variabili,
t =∫ dr√
2m[E − U(r)] +
p2θ
m2r2
+ costante,

74 3 Equazioni di Lagrange
che, integrata, da r = r(t). Per la determinazione di θ(t) si integra per quadrature la equazione
θ = −∂L⋆
∂pθ=
pθmr2
cioe θ(t) =∫ pθmr2(t)
dt
che, con il cambio di variabili t→ r per il quale dr = rdt, si ottiene la equazione delle traiettorie
θ(r) =∫ pθmr2(t)
1√2m[E − U(r)] +
p2θ
m2r2
dr.
3.6 Integrazione per quadrature del giroscopio pesante
Studiamo ora il problema facendo uso delle equazioni di Lagrange invece che degli integrali primi delmoto dedotti attraverso le equazioni cardinali della Dinamica.
Calcolo della Lagrangiana e coordinate cicliche
Introduciamo la funzione Lagrangiana che, in virtu delle (2.9) assume la seguente forma:
L = T + U =1
2A(p2 + q2
)+
1
2Cr2 + Pz′G cos θ
=1
2A(θ2 + ψ2 sin2 θ
)+
1
2C(ψ cos θ + ϕ
)2 −mgz′G cos θ.
Appare quindi immediatamente che le coordinate ϕ e ψ sono cicliche e quindi abbiamo i due integraliprimi
pϕ =∂L∂ϕ
= C(ψ cos θ + ϕ) = Cr = Kz′,0 (3.20)
e
pψ =∂L∂ψ
= A sin2 θψ + C cos θ(ψ cos θ + ϕ
)= Kz,0. (3.21)
Osserviamo che tali integrali primi coincidono con le componenti del momento della quantita di motorelativa all’asse (O′; z′) e (O′; z). Come terzo integrale primo abbiamo, al solito, l’energia meccanicatotale (2.14) che scriveremo in coordinate lagrangiane come
A2
(θ2 + ψ2 sin2 θ
)+
C2
(ψ cos θ + ϕ
)2+mgz′G cos θ = E. (3.22)
Dalle (3.20) e (3.21) si ricava immediatamente
ψ =pψ − pϕ cos θ
A sin2 θe ϕ =
pϕC − cos θ
pψ − pϕ cos θ
A sin2 θ(3.23)
che eliminate in (3.22) permettono di ottenere
1
2Aθ2 + Veff (θ) = E ′

3.6 Integrazione per quadrature del giroscopio pesante 75
dove E ′ = E −mgz′G − p2ϕ/2C e
Veff (θ) =(pψ − pϕ cos θ)
2
2A sin2 θ−mgz′G(1− cos θ)
da cui risulta che il problema e solubile mediante 3 quadrature.Escludendo i casi particolari pψ = ±pϕ andiamo a discutere la regione di variazione dell’angolo
di nutazione θ; questa regione sara definita dalla condizione E ′ ≥ Veff (θ). Poich‘e la funzioneVeff (θ) tende a +∞ per i valori θ = 0, π e passa per un minimo nell’intervallo (0, π) alloral’equazione Veff (θ) = E ′ avra due radici θ1 e θ2 (eventualmente coincidenti) che danno gli angolilimite d’inclinazione dell’asse della trotola rispetto alla verticale. La discussione delle due radici θ1e θ2 e gia stata effettuata nel paragrafo precedente.


4
Equazioni canoniche di Hamilton
4.1 Forma hamiltoniana dei sistemi lagrangiani
Sia dato un sistema lagrangiano, cioe un sistema di n equazioni differenziali del II ordine
d
dt
∂L∂qh
− ∂L∂qh
= 0, h = 1, 2, . . . , n, (4.1)
in n funzioni incognite q = q(t) della variabile indipendente t, q = (q1, q2, . . . , qn); dove L =L(q,q, t) = T − V e la funzione Lagrangiana. Sostituiamo ora al sistema (4.1) un sistema di 2nequazioni differenziali del I ordine avente come incognite le n funzioni qh e n funzioni indipendentiph, h = 1, . . . , n. Il nuovo sistema si ottiene sostituendo al sistema (4.1) la relazione che lega le p, q, qe t attraverso la relazione implicita
ph =∂L∂qh
, h = 1, 2, . . . , n. (4.2)
Le ph si dicono variabili coniugate o anche momenti.Quando la funzione Lagrangiana proviene da un problema di moto di un sistema olonomo e a
vincoli ideali (eventualmente dipendenti dal tempo), soggetto a forze conservative , si ha
L = T + U, T = T2 + T1 + T0
con
T2 =1
2
n∑
h,k=1
ah,kqhqk, T1 =n∑
h=1
ahqh, (4.3)
mentre T0 e il potenziale U , al pari dei coefficienti ah,k, ah, dipendono soltanto dalle q ed, eventual-mente, dal tempo t. La (4.2) assume la forma
ph =n∑
k=1
ah,kqk + ah, h = 1, 2, . . . , n, (4.4)
che, risolta rispetto alle q, diventa
qh = uh =n∑
k=1
ah,k(pk − ak), h = 1, 2, . . . , n. (4.5)

78 4 Equazioni canoniche di Hamilton
dove ah,k indica il generico elemento della inversa (ah,k) della matrice (ah,k). Le (4.2), da quantovisto, forniscono n equazioni risolubili rispetto alle q sotto la forma
qh = uh(p,q, t), h = 1, 2, . . . , n; (4.6)
mentre d’altra parte, le (4.1), in base alle (4.2) e alle loro equivalenti (4.6), danno le
ph =
(∂L∂qh
)
q=u(p,q,t)
, h = 1, 2, . . . , n, (4.7)
con che le derivate delle nuove incognite p risultano espresse in termini delle p, q e t. Si perviene cosıal sistema normale del primo ordine nelle 2n funzioni incognite p, q, costituito dalle (4.7) e (4.6).
In particolare si ha che i secondi termini delle (4.6) e (4.7) si possono esprimere nel seguente modo:
ph = − ∂H
∂qh
qh = ∂H∂ph
, h = 1, 2, . . . , n, (4.8)
dove
H =n∑
h=1
∂L∂qh
qh − L (4.9)
va qui considerata espressa in termini delle p, q, t tramite le (4.2) e (4.6):
H(p,q, t) =n∑
h=1
phqh − L(q,q, t), (4.10)
interpretandovi le q come simboli delle corrispondenti funzioni di p, q, t fornite dalle (4.6).Ogni sistema del primo ordine che soddisfa alle (4.8), qualunque sia la funzione H(p,q, t), si
dice canonico o Hamiltoniano e le p e q si chiamano variabili canoniche. Nello studio deisistemi canonici si interpretano le 2n variabili canoniche p, q come coordinate cartesiane ortogonaliin uno spazio lineare a 2n dimensioni chiamato spazio delle fasi. In questo spazio ogni soluzionep = p(t), q = q(t) del sistema canonico e rappresentata da una curva (integrale), che spesso,considerando la t come misura del tempo, si chiama pur essa traiettoria.
Per dimostrare le (4.8) consideriamo le p, q e t come variabili indipendenti e le q come espressein funzione di esse dalle (4.6); effettuando il differenziale di H rispetto alle sole variabili p e q, cioeimmaginando di tenere fissa la t, si ha che
δH =n∑
h=1
[∂H
∂phδph +
∂H
∂qhδqh
].
D’altra parte, in base alle (4.10) questa variazione si puo scrivere
δH =n∑
h=1
[qhδph −
∂L∂qh
δqh +
(ph −
∂L∂qh
)δqh
].
Confrontando queste due espressioni, ricordando le (4.2) e (4.7) e in forza della arbitrarieta di δqh eδph si trova che devono essere verificate le (4.8).

4.2 Trasformata di Legendre 79
Osserviamo anche che differenziando la (4.10) tenendo ora variabile t si ottengono le relazioni
dH =n∑
h=1
[∂H
∂phdph +
∂H
∂qhdqh
]+∂H
∂tdt
e
dH =n∑
h=1
[qhdph −
∂L∂qh
dqh +
(ph −
∂L∂qh
)dqh
]− ∂L∂tdt
che, oltre a dare nuovamente le equazioni canoniche, implicano la relazione
∂H
∂t= −∂L
∂t. (4.11)
4.2 Trasformata di Legendre
La trasformazione (4.9) che fa passare dalla funzione Lagrangiana L alla funzione Hamiltoniana He un caso particolare di trasformazione piu generale che prende il nome di trasformata di Legendre.
Consideriamo, inizialmente, il caso n = 1. Sia f(x) una funzione di classe C2(a, b), dove (a, b) eeventualmente non limitato, e convessa, cioe tale che f ′′(x) > 0 per ogni x. L’equazione f ′(x) = y,per y in un opportuno intervallo (c, d), ammette una unica soluzione x = x(y). Tale funzione x(y)ha una interpretazione geometrica elementare: introduciamo la funzione d(x, y) = xy − f(x) checorrisponde alla distanza (con segno) tra il punto sulla curva di ascissa x ed il punto sulla retta,passante per l’origine e con coefficiente angolare y; il punto x(y) e quello che rende, localmente,massima tale distanza.
Fig. 4.1. Interpretazione geometrica della trasformata di Legendre.

80 4 Equazioni canoniche di Hamilton
Per costruzione il grafico di f(x) e tangente alla retta con coefficiente angolare y in x(y).Definizione. Si chiama trasformata di Legendre di f(x) la funzione
g(y) = d[x(y), y] = x(y)y − f [x(y)].
Si prova ora che:Teorema. La trasformata di Legendre e involutiva; cioe la trasformata di Legendre di g e la f .Dimostrazione: per prima cosa dimostriamo che g′′(y) > 0 per ogni y ∈ (c, d); infatti:
g′(y) = x(y) + yx′(y)− f ′[x(y)]x′(y) = x(y)
e quindi
g′′(y) = x′(y) = f ′′[x(y)]−1 > 0.
La trasformata di Legendre di g(y) sara definita a partire dalla soluzione della equazione g′(y) = xche, essendo g′(y) = x(y), ci dice che y(x) altro non e che l’inversa della funzione x(y). Premesso ciocalcoliamo la trasformata di Legendre h(x) di g(y):
h(x) = xy(x)− g[y(x)] = xy(x)− [xy(x)− f(x)] = f(x).
Le considerazioni precedenti si estendono al caso di una funzione f(x), x = (x1, . . . , xn) di classe
C2(Rn) e tali che la forma quadratica associata alla matrice Hessiana ∂2f∂xh∂xj
sia definita positiva (o
negativa) in modo da invertire il sistema
∂f
∂xh= yh
definendo la funzione vettoriale y = y(x). Si definisce la trasformata di Legendre di f(x) come
g(y) = y · x− f [x(y)].
E immediato verificare che se la funzione f dipende anche da m parametri α = (α1, . . . , αm):
f = f(x, α) = f(x1, . . . , xn;α1, . . . , αm)
allora sara y = y(x;α) e x = x(y;α), inoltre anche g dipende dagli stessi parametri e
∂g
∂αh
∣∣∣∣∣y=y(x)
= − ∂f
∂αh
∣∣∣∣∣x=x
, h = 1, . . . ,m. (4.12)
Infatti si avra che x = x(y, α) e quindi g(y, α) = x(y, α)y − f [x(y, α), α] da cui
∂g
∂αh
∣∣∣∣∣y=y(x)
=n∑
j=1
[∂xj∂αh
yj −∂f
∂xj
∂xj∂αh
]− ∂f
∂αh= − ∂f
∂αh.
Il passaggio tra la Lagrangiana e la Hamiltoniana si ottiene effettuando la trasformata di Legendredella Lagrangiana sulle solo variabili cinetiche qh e lasciando invariate le altre qh. Infatti basta porre

4.3 Funzione Hamiltoniana nel caso dinamico 81
x = q e y = p e prendere come parametri α0 = t e αh = qh, inoltre f(x;α) = L(q,q, t). Latrasformazione x = x(y) e implicitamente definita dalla relazione
yh =∂f
∂xh, ovvero ph =
∂L∂qh
e la trasformazione di Legendre sara definita come
H =n∑
h=1
qh(p,q, t)ph − L[q(p,q, t),q, t].
Se applichiamo poi la relazione (4.12) allora segue ∂H∂qh
= − ∂L∂qh
e ∂H∂t
= −∂L∂t. Da questa relazione,
e tenendo conto che ph = ∂L∂qh
dalle equazioni di Lagrange, segue ph = − ∂H∂qh
. La relazione qh = ∂H∂ph
vale poiche la trasformata di Legendre e involutiva. In questo modo si sono ritrovate le equazionicanoniche di Hamilton.
4.3 Funzione Hamiltoniana nel caso dinamico
Per il Teorema di Eulero applicato alla (4.3) sussiste l’identita
n∑
h=1
∂L∂qh
qh =n∑
h=1
∂T2∂qh
qh +n∑
h=1
∂T1∂qh
qh = 2T2 + T1 = T + T2 − T0,
e quindi la (4.10) assume la forma
H = (T2)− T0 − U, (4.13)
dove
(T2) =1
2
n∑
h,k=1
ah,k(pk − ak)(ph − ah) (4.14)
denota la funzione delle p, q, t che dalla T2 si deduce sostituendovi al posto delle q le loro espressioni(4.5).
Se, in particolare, i vincoli non dipendono dal tempo allora l’energia cinetica si riduce allasua parte quadratica T2 e si ha piu semplicemente
H = (T )− U ; (4.15)
cioe la funzione Hamiltoniana non e altro che l’energia meccanica totale del sistema (espressa nellecoordinate p e q). In particolare si ha che
(T ) =1
2
n∑
h,k=1
ah,kpkph. (4.16)
Se poi T nelle q e di forma diagonale
T =1
2
n∑
h=1
ah,hq2h,

82 4 Equazioni canoniche di Hamilton
tutto si riduce, oltre che alla sostituzione delle variabili, al cambiamento di ciascun coefficiente ah,hnel suo reciproco 1/ah,h:
(T ) =1
2
n∑
h=1
1
ah,hp2h.
Quando i vincoli non dipendono dal tempo, sostituendo la (4.16) nella (4.15) si riconosce che lafunzione Hamiltoniana e una funzione quadratica nelle p definita positiva, omogenea e a coefficientidipendenti dalle q.
4.4 Esempi di funzione Hamiltoniana
4.4.1 Punto libero
1) Punto libero di massa m riferito ad un sistema di coordinate cartesiane (x, y, z). Abbiamo che
T =1
2
(mx2 +my2 +mz2
).
La corrispondente energia cinetica riferita nelle variabili coniugate, vale
(T ) =1
2
(p2xm
+p2ym
+p2zm
).
2) Punto libero di massa m riferito ad un sistema di coordinate polari sferiche (r, θ, ϕ). Abbiamoche
T =1
2
(mr2 +mr2θ2 +mr2 sin2 θϕ2
).
La corrispondente energia cinetica riferita nelle variabili coniugate, vale
(T ) =1
2
(p2rm
+p2θmr2
+p2ϕ
mr2 sin2 θ
).
3) Punto libero di massa m riferito ad un sistema di coordinate polari cilindriche (r, θ, z). Abbiamoche
T =1
2
(mr2 +mr2θ2 +mz2
).
La corrispondente energia cinetica riferita nelle variabili coniugate, vale
(T ) =1
2
(p2rm
+p2θmr2
+p2zm
).

4.5 Significato fisico dei momenti coniugati 83
4.4.2 Solido con punto fisso
Consideriamo un solido fissato in un punto O e assumiamo come parametri lagrangiani gli angolidi Eulero θ, ϕ e ψ. Con una scelta opportuna del sistema di riferimento solidale con origine in Ol’energia cinetica ha la forma
T =1
2
(Ap2 + Bq2 + Cr2
)
dove si ricorda
p = ψ sin θ sinϕ+ θ cosϕ = α3ψ + θ cosϕ
q = ψ sin θ cosϕ− θ sinϕ = β3ψ − θ sinϕ
r = ψ cos θ + ϕ = γ3ψ + ϕ
essendo
α3 = sin θ sinϕβ3 = sin θ cosϕγ3 = cos θ
i coseni direttori dell’asse fisso (O; z) rispetto agli assi solidali. I momenti coniugati valgono
pθ = ∂T∂θ
= Ap cosϕ− Bq sinϕ,
pϕ = ∂T∂ϕ
= Cr,
pψ = ∂T∂ψ
= Apα3 + Bqβ3 + Crγ3
.
Da tale relazione si trae
Ap = pθ cosϕ+ σ sinϕBq = −pθ sinϕ+ σ cosϕCr = pϕ
dove σ =pψ − pϕ cos θ
sin θ
e quindi
(T ) =1
2
[(pθ cosϕ+ σ sinϕ)2
A +(pθ sinϕ− σ cosϕ)2
B +p2ϕC
].
4.5 Significato fisico dei momenti coniugati
Supponiamo che una coordinata qh sia ciclica, cioe L non dipende esplicitamente da qh. In questocaso il momento coniugato ph =
∂L∂qh
si conserva poiche
ph =d
dt
∂L∂qh
=∂L∂qh
= 0
e esse assumono, sotto alcune circostanze, un significato fisico notevole.

84 4 Equazioni canoniche di Hamilton
4.5.1 Significato fisico della costante del moto ph quando la coordinata ciclica qh e una coordinatacartesiana
Consideriamo la Hamiltoniana nel caso dinamico. Si prova il seguente risultato:Teorema. Se qh e tale che una sua variazione rappresenti una traslazione rigida del sistema
meccanico in una data direzione a allora ph e proporzionale alla componente della quantitadi moto lungo la direzione a:
ph = cN∑
s=1
msvs · a, (4.17)
dove c e un fattore moltiplicativo.Dimostrazione: Per ipotesi ogni variazione di qh causa una traslazione rigida di ogni punto Ps
lungo la direzione a, cioe si ha: ∂Ps
∂qh= ca, s = 1, . . . , N , dove c e indipendente da s poiche si tratta di
una traslazione rigida. Usiamo cio per trovare il significato di ph:
ph =∂T
∂qh=
N∑
s=1
msvs ·∂vs∂qh
(4.18)
dove
∂vs∂qh
=∂
∂qh
[n∑
i=1
∂Ps∂qi
qi +∂Ps∂t
]=∂Ps∂qh
= ca (4.19)
che sostituita nella precedente ci permette di ottenere la (4.17); ovvero ph e proporzionale alla com-ponente della quantita di moto lungo la direzione di traslazione.
Se il sistema meccanico e invariante per traslazioni in una certa direzione, cioe laLagrangiana (o, in modo equivalente, la Hamiltoniana) resta immutata dopo aver traslato tutti ipunti materiali in tale direzione come se fossero un corpo rigido, allora si conserva la componentedella quantita di moto totale in tale direzione. Infatti, se il sistema meccanico e invariante pertraslazioni in una direzione a, le coordinate si possono scegliere in modo tale che sia ciclica una diesse, qh, quella di traslazione nella direzione a. Allora si conserva il momento coniugato ph e quindila quantita di moto lungo a. Ad esempio: sia L = m
2(x2 + y2) + U(x) invariante per traslazioni
(dell’unico punto) parallele all’asse y, quindi my = costante.
4.5.2 Significato fisico della costante del moto ph quando la coordinata ciclica qh e un angolo
si prova il seguente risultato:Teorema. Se qh e tale che una sua variazione rappresenti una rotazione rigida del sistema
meccanico attorno ad un dato asse (O; a) allora ph e proporzionale alla componente delmomento della quantita di moto lungo la direzione a:
ph = cK(O) · a = ca ·N∑
s=1
msvs × (O − Ps),
dove c e un fattore moltiplicativo.Dimostrazione: Per ipotesi la variazione di qh causa una rotazione rigida di ogni punto Ps attorno a
un asse (O, a). Quindi, dalla cinematica rigida: ∂Ps
∂qh= ca×(Ps−O), s = 1, . . . , N , per una opportuna
costante c indipendente da Ps, da cui segue

4.6 Flusso Hamiltoniano e teorema di Liouville 85
∂vs∂qh
=∂Ps∂qh
= ca× (Ps −O) .
Sostituendo tale relazione nella (4.19) otteniamo
ph = cN∑
s=1
msvs · a× (Ps −O) = cN∑
s=1
msvs × (O − Ps) · a.
Da questo teorema segue che se il sistema meccanico e invariante per rotazioni rigideintorno a un certo asse, allora si conserva la componente del momento angolare totalerispetto a quell’asse. Ad esempio: nel moto per inerzia di un corpo rigido con punto fisso O, siconserva il momento angolare rispetto a un qualunque asse. Infatti, facendo uso degli angolidi Eulero
ω = ψk + θN + ϕk′
si hanno le componenti della velocita angolare rispetto ad assi solidali
p = ψ sin θ sinϕ+ θ cosϕ
q = ψ sin θ cosϕ− θ sinϕ
r = ψ cos θ + ϕ.
(4.20)
Nel moto per inerzia L = T = 12(Ap2 + Bq2 + Cr2) e indipendente da ψ e quindi invariante per
rotazioni intorno all’asse (O; z) poiche l’angolo ψ individua le rotazioni rigide attorno a tale asse.Dunque si conserva il momento angolare rispetto all’asse z. Per l’assenza di forze esterne in realtaz si puo scegliere a piacere, dunque si conserva il momento angolare.
4.6 Flusso Hamiltoniano e teorema di Liouville
4.6.1 Flusso Hamiltoniano
Sara utile nel seguito introdurre una notazione vettoriale per le equazioni canoniche di Hamilton(4.8). Sia
x =
(pq
)e J =
(On −In
In On
)
dove In e On sono, rispettivamente, la matrice identita e la matrice nulla di ordine n; nella notazionematriciale conviene assumere p e q come vettori colonna.
Nota bene: Con abuso di notazione indichiamo indifferentemente x = (p,q), vettore riga, o
x =
(pq
), vettore colonna, a seconda delle circostanze.
Le equazioni canoniche di Hamilton assumono quindi la seguente forma:
x = J grad H(p,q) = J
(∂H∂p∂H∂q
)(4.21)

86 4 Equazioni canoniche di Hamilton
dove il gradiente e effettuato facendo prima le derivate rispetto alle p e poi alle q. L’operatoreJ grad (p,q) viene talvolta chiamato gradiente simplettico.
Osserviamo che questa notazione suggerisce la seguente interpretazione:
J grad (p,q)H =
(−∂H∂q
∂H∂p
)(4.22)
definisce un campo vettoriale sullo spazio delle fasi e le (4.21) sono le equazioni per le linee diflusso di tale campo. Questo campo prende anche il nome di campo Hamiltoniano. Si dimostrache tale campo vettoriale e solenoidale:
Teorema. Se H ammette derivata continua fino al secondo ordine nelle q e p allora
div[J grad (p,q)H
]= 0.
Dimostrazione: La dimostrazione e immediata, infatti
div[J grad (p,q)H
]=
n∑
h=1
[∂2H
∂ph∂qh− ∂2H
∂qh∂ph
]= 0
in virtu delle ipotesi e del Teorema di Schwartz sullo scambio dell’ordine di derivazione.Vale inoltre la seguente proprieta:Teorema. Se H = H(p,q) e indipendente dal tempo, il campo Hamiltoniano (4.22) e tangente
ad ogni punto regolare della superficie di energia costante H(p,q) = E.Dimostrazione: Infatti il gradiente di H e sempre ortogonale al gradiente simplettico di H:
grad (p,q)H · J grad (p,q)H =n∑
h=1
∂H
∂qh
∂H
∂ph− ∂H
∂ph
∂H
∂qh= 0.
Da cui segue la tesi poiche grad (p,q)H e normale alla superficie H(p,q) = costante.
Definizione. Ad ogni punto x0 =
(p0
q0
)∈ R
2n dello spazio delle fasi si puo associare il punto
x(t) =
(p(t)q(t)
), ottenuto integrando le equazioni canoniche di Hamilton con la condizione iniziale
x(0) = x0, per ogni t appartenente ad un dato intervallo (t1, t2) contenente t0 = 0 (e dipendente dax0). Questa trasformazione viene denotata
St : R2n → R2n
x0 7→ x(t) = St(x0)
e prende il nome di flusso nello spazio delle fasi associato alla Hamiltoniana H.L’intervallo (t1, t2) sara il massimo intervallo di definizione della soluzione delle equazioni canoniche
di Hamilton, in alcuni casi esso coincide con l’intero asse reale e, per semplicita, pensiamo di esseresempre in questo caso.
Si puo dimostrare che se la funzione Hamiltoniana e indipendente dal tempo allora St
e un gruppo ad un parametro di trasformazioni dello spazio delle fasi su se stesso, inparticolare si ha che
(St Ss
)(x0) = St [Ss(x0)] = St+s(x0) = Ss
[St(x0)
]
=(Ss St
)(x0).

4.6 Flusso Hamiltoniano e teorema di Liouville 87
4.6.2 Flusso Hamiltoniano per l’oscillatore armonico
Sia n = 1, quindi lo spazio delle fasi e il piano (p, q) ∈ R2, e sia H = H(p, q) = 1
2(p2 + ω2q2) la
funzione Hamiltoniana per l’oscillatore armonico. In ogni punto del piano delle fasi e applicato ilcampo Hamiltoniano
J grad (p,q)H =
(∂H∂p
−∂H∂q
)=
(p
−ω2q
)
che e il secondo membro delle equazioni canoniche:p = −ω2qq = p.
. (4.23)
Per ω = 1 la curva di livello H(p, q) = E e un cerchio. Ebbene: mentre grad (p,q)H =
(pq
)e
ortogonale al cerchio, il campo Hamiltoniano J grad H(p,q) =
(−qp
)e tangente al cerchio, che e
effettivamente la traiettoria dell’oscillatore armonico nel piano delle fasi. Se ω 6= 1, la curva dilivello di H e un’ellisse, alla quale risulta tangente il campo J grad (p,q)H. Per calcolare il flusso
Fig. 4.2. Gradiente e gradiente simplettico per l’oscillatore armonico.
dell’oscillatore armonico conviene derivare la prima delle (4.23) e sostituirvi la seconda ottenendoq = −ω2q. Alla soluzione generale:
q(t) = A cos(ωt) + B sin(ωt)p(t) = −Aω sin(ωt) + Bω cos(ωt)

88 4 Equazioni canoniche di Hamilton
si impone (p(0), q(0)) = (p0, q0) e si ottiene il flusso di fase:
St(p0q0
)→
(p(t)q(t)
)=
(cos(ωt) ω−1 sin(ωt)−ω sin(ωt) cos(ωt)
)(p0q0
). (4.24)
Esso e, per ogni t, una trasformazione lineare. Nel caso speciale ω = 1 e una rotazione di angolo tintorno all’origine. Osserviamo che la St e la mappa di evoluzione al tempo t. Non dipendendo poiesplicitamente H dal tempo, allora anche il campo vettoriale J grad (p,q)H dipende solo dal punto
(p, q). Quindi Ss, applicata al punto St(p0, q0), da risultato uguale a quello della mappa St+s applicataa (p0, q0).
4.6.3 Teorema di Liouville
Il flusso Hamiltoniano (4.24) per l’oscillatore armonico e definito attraverso la trasformazione lineareassociata alla matrice
(cos(ωt) ω−1 sin(ωt)−ω sin(ωt) cos(ωt)
)
Si osserva facilmente che questa matrice ha determinante 1, cio significa che la trasformazione linearedel piano su se stesso lascia inalterate le misure dei volumi. Questa e una notevole proprieta generaledel flusso Hamiltoniano valida per ogni sistema. Infatti, vale il seguente:
Teorema di Liouville: Il flusso Hamiltoniano nello spazio delle fasi conserva i volumi.Dimostrazione: Dobbiamo fare vedere che per ogni t l’immagine Ω(t) = St(Ω) di un qualsiasi
dominio Ω ⊂ R2n di frontiera regolare ha la stessa misura di Ω. A tal fine introduciamo la fun-
zione v(t) = volume[Ω(t)] e consideriamo la funzione v(t). La variazione di volume nell’intervalloinfinitesimo dt e data, a meno di infinitesimi di ordine superiore, da
dv =∫
∂Ω(t)
[J grad (p,q)H
]ndσdt =
∫
Ω(t)div
[J grad (p,q)H
]dV dt
da cui segue
v =∫
Ω(t)div
[J grad (p,q)H
]dV
dove[J grad (p,q)H
]n=[J grad (p,q)H
]· N essendo N la normale esterna; pertanto v(t) e il flusso del
campo uscente attraverso la superficie ∂Ω(t). Da cio, dal teorema della divergenza e dal fatto che
la divergenza del campo vettoriale[J grad (p,q)H
]e nulla segue v = 0.
Da questo Teorema si ha la seguente proprieta: chiamando punti singolari le soluzioni costantidella equazione
x = J grad (p,q)H
allora si dimostra che ogni punto singolare del sistema x = J grad (p,q)H con div[J grad (p,q)H
]=
0 non puo essere asintoticamente stabile. Infatti se x0 fosse asintoticamente stabile allora es-isterebbe una sfera di centro x0 tale che le traiettorie in essa originate tenderebbero asintoticamente

4.7 Coordinate cicliche — formalismo Hamiltoniano 89
Fig. 4.3. Flusso Hamiltoniano e trasformazione del dominio Ω(t).
a x0; il volume dell’immagine della sfera tenderebbe quindi a zero per t → ∞ contraddicendo ilTeorema di Liouville.
Osserviamo che il teorema di Liouville asicura la conservazione dei volumi, non della forma.Infatti si possono presentare situazioni diverse che, per analogia, possono essere simili a quantosuccede quando misceliamo due liquidi diversi. Ad esempio, se versiamo dell’olio in un bicchiered’acqua e mescoliamo il composto (immaginiamo, per analogia, che l’operazione di mescolamentoeequivalga alla trasformazione indotta dal flusso Hamiltoniano nel piano delle fasi) si ha che i dueliquidi rimangono separati e quindi abbiamo sia la conservazione del volume dell’olio (ovvia) che,sostanzialmente, della forma. Se invece misceliamo due vernici di tinta diversa (ad esempio una tintarossa su una base bianca) e mescoliamo il composto abbiamo ancora la conservazione del volume delledue vernici, ma non della forma; infatti le molecole della vernice rossa sono, approssimativamente,uniformemente distribuite all’interno della vernice bianca. Tornando alle trasformazioni nello spaziodelle fasi si denotano come ergodiche o mixing le trasformazioni che soddisfano caratteristiche delsecondo tipo.
4.7 Coordinate cicliche — formalismo Hamiltoniano
Una coordinata qh e detta ciclica o ignorabile quando non figura nella Hamiltoniana. Cio equivalea non figurare nella Lagrangiana, come si vede dal fatto che:
∂H
∂qh= −ph = − d
dt
(∂L∂qh
)= − ∂L
∂qh. (4.25)
Oppure, ricordando che
H =n∑
j=1
pj qj(p,q, t)− L[q(p,q, t),q, t]

90 4 Equazioni canoniche di Hamilton
si ha immediatamente che
∂H
∂qh=
n∑
j=1
pj∂qj∂qh
−n∑
j=1
∂L∂qj
∂qj∂qh
− ∂L∂qh
= − ∂L∂qh
.
In particolare si possono avere i risultati gia noti nella meccanica Lagrangiana nel caso di variabilicicliche; infatti se la funzione L(q,q, t) di un sistema lagrangiano non dipende da una data qh,altrettanto accade nelle (4.2) e nelle (4.6) (che derivano dalle (4.2) risolvendole rispetto alle q).
Si ha il seguente risultato:Teorema. Se vi e una coordinata ciclica qh allora il momento coniugato ph e un integrale primo
del moto; inoltre il problema si riconduce a equazioni di Hamilton di un sistema ad n − 1 gradi diliberta.
Dimostrazione: Supponiamo per semplicita h = 1, cioe sia H indipendente da q1, quindi si ha∂H∂q1
= 0, e risulta dalla corrispondente equazione (4.8) che sussiste l’integrale
p1 = Cost. = α. (4.26)
Se ne consegue che la funzione HamiltonianaH(p,q, t) dipendera dalle 2(n−1) variabili (p2, . . . , pn, q1, . . . , qda t (eventualmente) e dal parametro α. Le equazioni (4.8) si riducono ad un sistema di 2(n − 1)equazioni e, una volta risolto questo, la residua equazione q1 =
∂H∂α
puo essere risolta per quadratureottenendo
q1(t) = q1(t0) +∫ t
t0
∂H[p2(t), . . . , pn(t), q2(t), . . . , qn(t);α, t]
∂αdt.
Osserviamo che nel formalismo lagrangiano il fatto che q1 sia ciclica non diminuisce il numero digradi di liberta: in generale la Lagrangiana resta funzione della velocita generalizzata q1 e restanoda risolvere n equazioni in n incognite (a meno di non introdurre la Lagrangiana ridotta con chesi riduce il sistema di un grado di liberta). Nel formalismo hamiltoniano, invece, la coordinataciclica e davvero ”ignorabile”. Infatti:
q1 ciclica ⇒ p1(t) ≡ α ⇒ H = H(p2, ..., pn, q2, ..., qn, α, t).
Di fatto ora la Hamiltoniana descrive un sistema con n − 1 gradi di liberta: la coordinata ciclica etenuta in considerazione solo tramite la costante α, da determinare in base ai dati iniziali.
4.8 Parentesi di Poisson
Definizione. Una quantita osservabile e una funzione g(p,q, t) delle coordinate, dei momenti gen-eralizzati ed eventualmente del tempo (ad esempio l’energia, il momento angolare rispetto a un asse,etc.). La parentesi di Poisson tra due osservabili f, g e definita come:
f, g :=n∑
h=1
(∂f
∂ph
∂g
∂qh− ∂f
∂qh
∂g
∂ph
). (4.27)

4.8 Parentesi di Poisson 91
4.8.1 Esempio
Consideriamo un punto materiale libero e, denotando con Kj e pj, j = 1, 2, 3, le componenti del suomomento della quantita di moto (rispetto ad un dato polo coincidente con l’origine) e dei momenticoniugati si osserva immediatamente che
p1, K3 = p2, p2, K3 = −p1, p3, K3 = 0
e analogamente per K1 e K2. Infatti, ricordando che per un punto libero pj = mqj, da cui K3 =m(q1q2 − q2q1) = q1p2 − p1q2. Quindi
p1, K3 =n∑
j=1
(∂p1∂pj
∂K3
∂qj− ∂p1∂qj
∂K3
∂pj
)= p2.
Inoltre si prova che
K1, K3 =n∑
j=1
(∂K1
∂pj
∂K3
∂qj− ∂K1
∂qj
∂K3
∂pj
)
=n∑
j=1
(∂(q2p3 − p2q3)
∂pj
∂(q1p2 − p1q2)
∂qj− ∂(q2p3 − p2q3)
∂qj
∂(q1p2 − p1q2)
∂pj
)
=∂(q2p3 − p2q3)
∂p2
∂(q1p2 − p1q2)
∂q2− ∂(q2p3 − p2q3)
∂q2
∂(q1p2 − p1q2)
∂p2= q3p1 − p3q1 = K2
e analogamente si prova che
K1, K2 = −K3 e K2, K3 = −K1.
Infine segue che
Kj, K2 = 0 dove K2 = K2
1 +K22 +K3
2 .
4.8.2 Proprieta principali
E immediato osservare che la parentesi di Poisson e una forma bilineare antisimmetrica:
λ1f1 + λ2f2, g = λ1f1, g+ λ2f2, g, (4.28)
f, g = −g, f, (4.29)
f, f = 0. (4.30)
Inoltre, si controlla facilmente che:
qh, qk = 0, ph, pk = 0, ph, qk = δkh (4.31)
e, assegnata una funzione H = H(p,q, t),
H, qh =∂H
∂ph, H, ph = −∂H
∂qh;

92 4 Equazioni canoniche di Hamilton
quindi le equazioni di Hamilton, dove H rappresenta una funzione Hamiltoniana, si scrivono in modosimmetrico:
ph = H, phqh = H, qh .
Valgono, inoltre le seguenti ulteriori proprieta:
1) Regola di Liebniz: f1f2, g = f1f2, g+ f2f1, g;2) Identita di Jacobi: f, g, h+ h, f, g+ g, h, f = 0;
3) Vale la seguente relazione: ∂f1,f2∂t
=f1,
∂f2∂t
−f2,
∂f1∂t
.
La regola di Liebniz e la proprieta 3) sono una conseguenza immediata della definizione della paran-tesi di Poisson e dell’usuale proprieta relativa alla derivata del prodotto. Per dimostrare l’identitadi Jacobi osserviamo che tale termine e costituito da somme di prodotti tra la derivata (parziale)seconda di un osservabile per le derivate prime delle altre due e svolgiamo poi il calcolo esplicito deltermine
f, g, h =
f,
n∑
j=1
∂g
∂pj
∂h
∂qj− ∂g
∂qj
∂h
∂pj
=
=n∑
j,ℓ=1
[∂f
∂qℓ
∂
∂pℓ
(∂g
∂pj
∂h
∂qj− ∂g
∂qj
∂h
∂pj
)− ∂f
∂pℓ
∂
∂qℓ
(∂g
∂pj
∂h
∂qj− ∂g
∂qj
∂h
∂pj
)].
Se consideriamo il termine che contiene le derivate seconde di g esso e dato da
n∑
j,ℓ=1
[∂f
∂qℓ
∂2g
∂qj∂pℓ
∂h
∂pj− ∂f
∂qℓ
∂2g
∂pj∂pℓ
∂h
∂qj− ∂f
∂pℓ
∂2g
∂qℓ∂qj
∂h
∂pj+∂f
∂pℓ
∂2g
∂qℓ∂pj
∂h
∂qj
]
ed il termine che contiene le derivate seconde di h sara analogo mentre la funzione f compareesclusimante attraverso le sue derivate prime. Le derivate seconde di g compaiono anche nell’altrotermine h, f, g = −h, g, f che e simile a quello appena calcolato a meno del segno e delloscambio tra f e h, piu precisamente si ha che questo contributo e dato da
−n∑
j,ℓ=1
[∂h
∂qℓ
∂2g
∂qj∂pℓ
∂f
∂pj− ∂h
∂qℓ
∂2g
∂pj∂pℓ
∂f
∂qj− ∂h
∂pℓ
∂2g
∂qℓ∂qj
∂f
∂pj+∂h
∂pℓ
∂2g
∂qℓ∂pj
∂f
∂qj
]
cioe e uguale ed opposto al termine precedentemente calcolato (in virtu del Teorema di Schwartzsullo scambio di derivate). Da cio segue che il termine f, g, h + h, f, g + g, h, f noncontiene derivate seconde di g e, in modo analogo, di f e h e quindi deve essere necessariamentenullo.
4.8.3 Applicazioni
Il seguente Teorema riguarda l’evoluzione temporale di una osservabile:Teorema. La parentesi di Poisson tra l’Hamiltoniana H ed un’osservabile arbitraria g = g(p,q, t)
determina la variazione nel tempo dell’osservabile quando essa e calcolata sulle orbite p(t) e q(t)generate da H. Piu precisamente:

4.9 Esercizi 93
dg[p(t),q(t), t]
dt=∂g[p(t),q(t), t]
∂t+ H, g. (4.32)
Dimostrazione: Basta derivare rispetto a t su un’orbita t→ (p(t),q(t)):
dg
dt=∂g
∂t+
n∑
h=1
∂g
∂qhqh +
n∑
h=1
∂g
∂phph
=∂g
∂t+
n∑
h=1
(∂g
∂qh
∂H
∂ph− ∂g
∂ph
∂H
∂qh
)=∂g
∂t+ H, g.
come immediato corollario segue che:Corollario: Se g = g(p,q) allora g = H, g.Segue inoltre che:Teorema di Poisson: Se f1 e f2 sono due integrali primi allora anche la loro parentesi di Poisson
f1, f2 e un integrale primo.Dimostrazione: La dimostrazione del Teorema e, di fatto, una immediata conseguenza dell’identita
di Jacobi. Infatti, essendo f1 e f2 integrali primi segue che durante il moto
0 =df1dt
=∂f1∂t
+ H, f1 e 0 =df2dt
=∂f2∂t
+ H, f2. (4.33)
Si tratta ora di provare che
df1, f2dt
=∂f1, f2
∂t+ H, f1, f2 = 0 (4.34)
Ora, dall’identita di Jacobi, e dalla proprieta 3) segue che la (4.34) prende la formaf1,
∂f2∂t
−f2,
∂f1∂t
+ f1, H, f2 − f2, H, f1
che e nullo per le (4.33).Osserviamo che, in generale, il nuovo integrale primo non e indipendente dai due primitivi, anzi
puo essere costante o nullo.
4.9 Esercizi
1) Sia data un’asta AB rigida omogenea, di lunghezza ℓ e massa m, mobile nel piano (O; x, y), (O; y)verticale ascendente, e vincolata in A a scorrere senza attrito sull’asse (O; x). Sull’asta agisce,oltre che alla forza peso, una forza costante (B,F = F ı), F > 0. Assumendo come parametrilagrangiani la coordinata ascissa di A e l’angolo che l’asta forma con l’asse orizzontale, si domanda:
i) la funzione Lagrangiana;ii) la funzione Hamiltoniana;iii)le equazioni canoniche di Hamilton.

94 4 Equazioni canoniche di Hamilton
3) Consideriamo un oscillatore accoppiato costituito da due punti materiali P1 e P2 di massa m,vincolati a scorrere lungo l’asse x e collegati tra loro mediante 3 molle con la prima e ultima mollaavente estremi fissati in due punti A e B distanti ℓ tra loro:
A − molla − P1 − molla − P2 − molla − B.
Denotando con k la costante di elasticita delle due molle esterne e con K quella della molla internae assumendo quali parametri lagrangiani le distanze tra A e P1 e tra P2 e B si domanda:
i) la funzione Lagrangiana;ii) la funzione Hamiltoniana;iii)le equazioni canoniche di Hamilton.

5
Principio variazionale di Hamilton.
5.1 Premesse
Si e gia visto come tutte le leggi della Meccanica dei sistemi materiali a vincoli privi di attrito sianosostanzialmente sintetizzate nel principio dei lavori virtuali o nella conseguente relazione sim-bolica della Dinamica. E comunque possibile ottenere formulazioni sostanzialmente equivalentiin modo diverso richiedendo che le leggi della Meccanica soddisfino a certe principi variazionali. Inquesto capitolo studieremo il principio di minima azione di Hamilton. In ogni caso supporremoche si tratti di sistemi materiali soggetti esclusivamente a vincoli bilaterali e privi di attrito.
5.2 Principio variazionale di Hamilton
Consideriamo un arbitrario sistema olonomo con coordinate indipendenti q = (q1, q2, . . . , qn) e lafunzione Lagrangiana L(q,q, t). L’integrale
A =∫ t2
t1L[q(t),q(t), t]dt (5.1)
e detto azione (nel senso di Hamilton) durante un intervallo di tempo (t1, t2) prefissato. L’azioneA e un funzionale che dipende dalle funzioni q(t) = (q1(t), q2(t), . . . , qn(t)).
Se specifichiamo arbitrariamente le funzioni qh(t), h = 1, . . . , n, otteniamo un dato moto cine-maticamente possibile (che e un moto compatibile con i vincoli). Nello spazio delle configurazioniq ∈ R
n consideriamo tutte queste possibili curve, o ”traiettorie”, passanti per due determinati puntidello spazio q1 e q2, fissati i tempi iniziale e finale t1 e t2. Diversamente i moti sono arbitrari. Questaclasse di moti viene denominata M(t1,t2,q1,q2) ed e definita come
M(t1,t2,q1,q2) = q ∈ C2([t1, t2],Rn) : q(t1) = q1,q(t2) = q2.
Quindi
A : M(t1,t2,q1,q2) → R
ovvero il funzionale azione A ha M(t1,t2,q1,q2) come dominio e dipende dalla legge q = q(t):A = A(q).

96 5 Principio variazionale di Hamilton.
Fig. 5.1. Esempio di due ”traiettorie” ammissibili, cioe tali che all’istante iniziale e all’istante finale sono in punti prefissati.
Nella impostazione classica si sono determinate le equazioni di Lagrange come conseguenza delleleggi di Newton e del principio dei lavori virtuali. E tuttavia possibile fare derivare le equazioni diLagrange partendo dal seguente postulato:
Postulato (principio variazionale di Hamilton): Sia dato un sistema meccanico olonomoad n gradi di liberta con Lagrangiana L(q,q, t). Ogni legge del moto q(t) nell’intervallo di tempo[t1, t2] con prescritti valori agli estremi q(t1) = q1 = (q11, . . . , q
1n) e q(t2) = q2 = (q21, . . . , q
2n) rende
stazionaria l’azione di Lagrangiana L:
A(q) :=∫ t2
t1L [q(t),q(t), t] dt. (5.2)
Quindi: fra tutte le traiettorie cinematicamente possibili durante [t1, t2] che il sistema potrebbescegliere e che hanno gli stessi valori agli estremi, viene selezionata quella che rende stazionaria (ades. minima) l’azione di Lagrangiana L.
Andiamo a precisare meglio questa osservazione: consideriamo i moti variati sincroni
q(t;α) = q(t) + αη(t)
dove α ∈ R e un parametro reale e η = (η1, . . . , ηn) ∈ M(t1,t2,0,0), cioe
η ∈ C2([t1, t2],Rn) e η(t1) = η(t2) = 0 (5.3)
e si calcola su di essi il funzionale azione:
A[q(·;α)] =∫ t2
t1L[q(t;α),q(t;α), t]dt.
Osserviamo che il nuovo termine che otteniamo dipende dal numero reale α e dalle funzioni q edη; se pensiamo che queste funzioni sono fissate allora abbiamo costruito una funzione

5.3 Esempi 97
I : R → R
α 7→ I(α) = A[q(·;α)]che dipende da q ed η intesi come parametri. In quanto funzione dipendente da una variabile realene possiamo calcolare la derivata ed il differenziale:
dI :=dI
dα
∣∣∣∣∣α=0
dα
che sara dipendente da q e η.Definizione. Si dice che il funzionale A(q) e stazionario per una dato q se
dI = 0, ∀η ∈ M(t1,t2,0,0). (5.4)
Il principio variazionale di Hamilton puo quindi essere formulato nel seguente modo: q = q(t) ela legge del moto se, e solo se, q soddisfa alla (5.4).
In particolare se q risulta un minimo per il funzionale allora il funzionale e stazionario in q equindi q e la legge del moto.
5.3 Esempi
Questa postulato (come tutti i postilati) si basa su osservazioni empiriche. Consideriamo alcuniesempi significativi per i quali si osserva la validita del postulato.
5.3.1 Moto di un grave
Scegliamo il riferimento in modo che il moto naturale abbia equazioni
x0(t) = vxt, y0(t) = 0, z0(t) = −1
2gt2 + vzt
avendo assegnata la velocita iniziale v = (vx, 0, vz). I moti variati sincroni sono definiti da
xα(t) = vxt+ αηx(t), yα(t) = αηy(t), zα(t) = −1
2gt2 + vzt+ αηz(t)
dove η = (ηx, ηy, ηz) ∈ C2([t1, t2],R3) tale che η(t1) = η(t2) = 0 per assegnati t1 e t2. l’azione
Hamiltoniana e data da
A =∫ t2
t1L(q,q, t)dt =
∫ t2
t1
[1
2mv2 −mgz
]dt.
Determiniamo ora la differenza dell’azione tra due moti: quello naturale e quello variato sincrono; eimmediato verificare che risulta
I(α)− I(0) =1
2mα2
∫ t2
t1
[η2x + η2y + η2z
]dt
che da dI = 0 e che risulta positiva per ogni perturbazione non nulla. Quindi, in questo esempio, imoti naturali risultano non solo stazionari per l’azione ma rendono minima l’azione.

98 5 Principio variazionale di Hamilton.
5.3.2 Oscillatore armonico
Scegliamo il riferimento in modo che il moto naturale abbia equazioni
x0(t) = a sin(ωt) e y0(t) = z0(t) = 0
avendo assegnata la velocita iniziale v = (vx, 0, 0) e avendo operato una opportuna scelta dell’originedei tempi, a e una costante reale. I moti variati sincroni sono definiti da
xα(t) = a sinωt+ αηx(t), yα(t) = αηy(t), zα(t) = αηz(t)
dove η = (ηx, ηy, ηz) ∈ C2([0, t0],R3) tale che η(0) = η(t0) = 0 per un assegnato t0. l’azione
Hamiltoniana e data da
A =∫ t2
t1L(q,q, t)dt = 1
2m∫ t0
0
[v2 − ω2(x2 + y2 + z2)
]dt
dove L = 12mv2− 1
2mω2(x2+y2+z2). Determiniamo ora la differenza dell’azione tra due moti: quello
naturale e quello variato sincrono; e immediato verificare che risulta
I(α)− I(0) = I1 + I2
dove
I1 =1
2mα2
∫ t2
t1
[(η2x + η2y + η2z)− ω2(η2x + η2y + η2z)
]dt
e
I2 = mα∫ t2
t1(x0ηx − ω2x0ηx)dt
dove il secondo integrale si annulla essendo, per integrazione per parti,
I2 = mα∫ t2
t1(x0ηx − ω2x0ηx)dt = −mα
∫ t2
t1(x0 + ω2x0)ηxdt = 0.
Si puo quindi concludere che la variazione I(α) − I(0) valutata sul moto naturale e di ordine 2rispetto alla perturbazione, da cui segue la stazionarieta di A. Osserviamo infine che, assumendoper semplicita t1 = 0:
|η(t)| =∣∣∣∣∫ t
0η(t′)dt′
∣∣∣∣ ≤√t
√∫ t
0η2(t′)dt′ ≤
√t
√∫ t2
0η2(t)dt
da cui segue
I(α)− I(0) =1
2mα2
∫ t2
0
(η2 − ω2η2
)dt
≥ 1
2mα2
(1− 1
2ω2t22
) ∫ t2
0η2(t)dt.
Quindi l’azione Hamiltoniana risulta minima sul moto naturale se t2 <√2/ω; per t2 maggiori non e
necessariamente minima l’azione. Ad esempio si consideri la variazione data da ηx = sin2(πt/t2) eηy = ηz = 0; per prima cosa si osservi che

5.4 Equazioni di Eulero 99
I(α)− I(0) =1
2mα2
∫ t2
0
(η2 − ω2η2
)dt
= −1
2mα2
∫ t2
0
(η + ω2η
)ηdt
integrando per parti, sostituendo ora l’espressione di η si ottiene
I(α)− I(0) = −1
2mCα2,
dove
C =∫ t2
0
[2π2
t22cos2
(πt
t2
)+
(ω2 − 2π2
t22
)sin2
(πt
t2
)]sin2
(πt
t2
)dt ,
che risulta necessariamente negativa quando ω2 − 2π2
t22
> 0, ovvero t2 > π/√2ω ed in questo caso la
variazione e negativa.
5.4 Equazioni di Eulero
Teorema (equazioni di Eulero-Lagrange dedotte dal principio variazionale di Hamilton):Condizione necessaria e sufficiente affinche l’azione (5.2) di Lagrangiana L assuma un valore estremoq(t) e che q(t) sia soluzione delle equazioni di Eulero-Lagrange
d
dt
(∂L∂qh
)− ∂L∂qh
= 0, h = 1, ..., n. (5.5)
Dimostrazione: Consideriamo i moti variati sincroni
q(t;α) = q(t) + αη(t) , −1 ≤ α ≤ 1 ,
tali che η(t1) = η(t2) = 0. Se q(t) e estremale allora deve essere
0 = dI ≡ dI(α)
dα
∣∣∣∣∣α=0
dα, ∀η ∈ M(t1,t2,0,0) (5.6)
dove
I(α) =∫ t2
t1L[q(t;α),q(t;α), t]dt.
Derivando questa relazione rispetto a α e portando la derivata sotto il segno di integrale (assumendosiano valide le condizioni di regolarita per potere fare cio) si ottiene
dI(α)
dα
∣∣∣∣∣α=0
=n∑
h=1
∫ t2
t1
[∂L∂qh
∂qh∂α
+∂L∂qh
∂qh∂α
]dt.
Osservando che ∂qh∂α
= ηh, integrando per parti e ricordando che ηh(t) si annulla agli estremi, segueche

100 5 Principio variazionale di Hamilton.
∫ t2
t1
[∂L∂qh
∂qh∂α
+∂L∂qh
∂qh∂α
]dt =
=∫ t2
t1
∂L∂qh
∂qh∂α
dt+
[∂L∂qh
∂qh∂α
]t2
t1
−∫ t2
t1
∂qh∂α
d
dt
(∂L∂qh
)dt
=∫ t2
t1
[∂L∂qh
− d
dt
(∂L∂qh
)]ηh(t)dt.
Da cui segue che
dI(α)
dα
∣∣∣∣∣α=0
=n∑
h=1
∫ t2
t1
[∂L∂qh
− d
dt
(∂L∂qh
)]ηh(t)dt. (5.7)
Ora, dovendo essere valida la (5.6) ed essendo le funzioni ηh(t) indipendenti, otteniamo n integraliuguali a 0 e, essendo ogni ηh(t) arbitraria, per il teorema di annullamento degli integrali (si veda inAppendice C) si annulla identicamente ogni espressione
∂L∂qh
− d
dt
(∂L∂qh
)= 0, ∀t ∈ [t1, t2], h = 1, ..., n, (5.8)
quando L sia calcolata in q(t). Si osservi che l’affermazione inversa e banale: se una q = q(t)soddisfa le equazioni di Eulero-Lagrange, automaticamente la variazione del funzionale (5.7) e nulla.Infatti basta percorrere a ritroso la stessa dimostrazione, ma senza bisogno di applicare il teoremadi annulamento degli integrali.
Dunque, nel caso dinamico, le equazioni di Lagrange si possono riguardare come equazioni diEulero per il calcolo variazionale. Si noti che la proprieta di curva di essere estremale diun funzionale non dipende dal sistema di coordinate.
Poiche dal principio di Hamilton derivano le equazioni di Lagrange in coordinate indipendenti(e viceversa), il principio di Hamilton puo essere posto a fondamento della dinamica deisistemi olonomi. Ad ogni modo c’e una differenza fondamentale tra le equazioni differenziali delmoto e i principi variazionali. Le prime, essendo equazioni differenziali, caratteriazzano localmente ilmoto mentre il principo variazionale, essendo una relazione integrale, caratterizza l’intera traiettorianel suo complesso.
5.5 Esercizi (risolti)
1. Moto di un mobile vincolato su una sfera in assenza di campo di forze (moto inerziale su unasfera).
Soluzione: la Lagrangiana, in coordinate sferiche (dove r e il raggio della sfera), prende la forma
L =1
2mv2 =
1
2mr2(θ2 + sin2 θϕ2).
Le equazioni di Lagrange sono
d
dt
∂L∂θ
− ∂L∂θ
= 0 e∂L∂ϕ
= cost

5.5 Esercizi (risolti) 101
poiche ϕ e una coordinata ciclica; esplicitando (e semplificando per mr2) si ottiene
θ − sin θ cos θϕ2 = 0, sin2 θϕ = sin2 θ0ϕ0 = 0
dove abbiamo assunto ϕ0 = 0 (ipotesi sempre lecita poiche possiamo scegliere il sistema di riferimentoin modo che la velocita iniziale v0 sia diretta lungo un meridiano ϕ = costante). Quindi segue
dalla prima equazione θ = costante e v0 = costante, in particolare quindi la traiettoria equivaleal moto uniforme lungo un arco di circonferenza. Questo risultato si traduce nel dire che l’azioneha un ”punto” di stazionarieta lungo gli archi di circonferenza. Per discutere se questo ”punto” distazionarieta corrisponde, o no, ad un minimo denotiamo con A0 il moto lungo un dato arco γ0 dicirconferenza e con A1 il moto lungo un arco γ1 qualunque sulla superficie sferica avremo
A1 − A0 =1
2m∫ t1
t0(v2 − v20)dt
= mv0
∫ t1
t0(v − v0)dt+
1
2m∫ t1
t0(v − v0)
2dt
≥mv0
∫ t1
t0(v − v0)dt = mv0(ℓ1 − ℓ0)
dove ℓ1 e la lunghezza di γ1 e ℓ0 e la lunghezza di γ0. E immediato osservare che la lunghezza dell’arcodi circonferenza γ0 e minore della lunghezza γ1 di ogni altra curva sulla sfera congiungente due stessipunti vicina (in un certo senso) a γ0; per tale ragione A1 > A0, cioe il moto rende minimo ilfunzionale. Osserviamo che cio e valido solo quando ℓ0 < πr. Se ℓ0 > πr allora ℓ0 non sara sempreminore di ℓ1 e il valore minimo dell’azione A sara ottenuto su un arco ausiliario di circonferenza.
2. Trovare le curve t→ q(t) tali che q(0) = 0, q(π/2) = 1 e che rendono stazionario il funzionaledi lagrangiana L(q, q, t) = q2 − q2.
Soluzione: consideriamo il seguente funzionale
A(q) =∫ π/2
0
[q(t)2 − q(t)2
]dt.
definito sul dominio M0,π/2,0,1 dove
Mt1,t2,x1,x2 =q ∈ C2([t1, t2],R) : q(t1) = q1 e q(t2) = q2
.
L’equazione di Eulero-Lagrange assume la forma
d
dt[2q(t)] = −2q(t), cioe q + q = 0.
La soluzione generale e quindi q(t) = c1 cos t+ c2 sin t; i dati al bordo determinano le costanti:q(0) = 0 quindi c1 = 0q(π/2) = 1 quindi c2 = 1
; pertanto q(t) = sin t.
3. Determinare le curve t → q(t), q ∈ M0,1,0,1, di stazionarieta per il funzionale di LagrangianaL(q, q, t) = q2 + 12tq.
Soluzione: il funzionale risulta essere

102 5 Principio variazionale di Hamilton.
A(q) =∫ 1
0[q(t)2 + 12tq(t)]dt, q ∈ M0,1,0,1.
L’equazione di Eulero-Lagrange ha la forma
d
dt[2q(t)] = 12t, cioe q − 6t = 0.
La soluzione generale e quindi q(t) = t3 + c1t+ c2; i dati al bordo determinano le costanti:q(0) = 0 quindi c2 = 0q(1) = 1 quindi c1 = 0
; pertanto q(t) = t3.
4. Esempio di un problema che non ammette minimo.Soluzione: non e detto che esistano sempre soluzioni del problema variazionale assegnato, come
nel seguente esempio: sia
A =∫ t2
t1q(t)2dt, x ∈ Mt1,t2,q1,q2 .
L’equazione di Eulero-Lagrange assume la seguente forma 2q(t) = 0. Quindi se q1 = q2 = 0 alloraq(t) ≡ 0 e nel dominio Mt1,t2,q1,q2 e minimizza il funzionale. Se, invece, q1 6= 0 o q2 6= 0 allora ilfunzionale non si minimizza con funzioni di classe C2([t1, t2],R). Cio e evidente perche si puo scegliereuna successione qn ∈ Mt1,t2,q1,q2 tale che
limn→∞ qn(t) =
q1, t = t10, t1 < t < t2q2, t = t2
Allora,
infnA(qn) = 0,
ma il funzionale non ammette minimo perche A(q) > 0, ∀q ∈ Mt1,t2,q1,q2 .5. Lunghezza di una arco di curva nel piano.Soluzione: sia data una curva γ nel piano R
2 avente rappresentazione cartesiana x = x(t) (invecedella notazione piu usuale y = y(x)) con t ∈ [t1, t2] e congiungente i punti (t1, x1) e (t2, x2), cioe taleche x(t) ∈ Mt1,t2,x1,x2 . Determiniamo la curva x ∈ Mt1,t2,x1,x2 di lunghezza minima. Il funzionaleda minimizzare (denotato ora L poiche ora indica la lunghezza di una curva) e quello che ad ognicurva t→ x(t) ne associa la lunghezza:
L(x) =∫ t2
t1
√1 + x(t)2dt.
L’equazione di Eulero-Lagrange e:
d
dt
2x
2√1 + x(t)2
= 0 da cuix√
1 + x(t)2= costante
che ha come soluzione generale x(t) = c1t+ c2. Quindi, nel piano, le curve di lunghezza minima sonoi segmenti di retta.

5.5 Esercizi (risolti) 103
6. Superficie di rotazione di area minima.Soluzione: avendo prefissato i due estremi (t1, x1) e (t2, x2) con t2 > t1 e x1, x2 > 0, determinare la
curva t → x(t) la cui rotazione attorno all’asse delle ascisse t genera una superficie di area minima.L’area della superficie di rotazione generata da t→ x(t), x ∈ Mt1,t2,x1,x2 , e
A(x) = 2π∫ t2
t1x(t)
√1 + x(t)2dt. (5.9)
Abbiamo quindi un funzionale di Lagrangiana L(x, x) = x√1 + x2. L’equazione di Eulero-Lagrange
associata e
d
dt
∂L∂x
− ∂L∂x
= 0.
Osserviamo che quando L e indipendente da t l’equazione di Eulero-Lagrange puo essere scritta come
∂2L∂x2
x+∂2L∂x∂x
x− ∂L∂x
= 0,
ossia, moltiplicando per x ambo i membri (riconosciamo la funzione Hamiltoniana):
d
dt
(∂L∂x
x− L)= 0 cioe
∂L∂x
x− L = c1, ∀t.
Nel nostro caso si ha:
c1 =xx2√1 + x2
− x√1 + x2 =
xx2 − x− xx2√1 + x2
e quindi
x = c1√1 + x2.
E facile verificare che una soluzione generale di questa equazione differenziale e data da x(t) =c1 cosh[(t− c2)/c1] dove c1 e c2 sono due costanti da determinare; questa e una famiglia di catenarie,la rotazione delle quali genera una superficie dette catenoidi. Le costanti sono determinate dallecondizioni:
c1 cosh[(t1 − c2)/c1] = x1c2 cosh[(t2 − c2)/c1] = x2
.
A seconda dei valori di (x1, x2) si avranno 1, 2 o 0 soluzioni.7. La Catenaria. Consideriamo il seguente problema: data una catena pesante fissata agli estremi
e di lunghezza L assegnata, determinare la curva della catena.Soluzione: supponiamo la catena omogenea e flessibile, in modo che la curva abbia rappresentazione
x → y(x) regolare con la condizione y(x1) = y1 e y(x2) = y2, cioe y ∈ Mx1,x2,y1,y2 . E immediatoosservare che la curva della catena sara tale da minimizzare il funzionale
y → A(y) = altezza del baricentro,
dove A(y) ha, a meno di una costante moltiplicativa, la seguente espressione simile alla (5.9):

104 5 Principio variazionale di Hamilton.
A(y) =1
m
∫ x2
x1y(x)ρ
√1 + y′(x)2dx,
infatti√1 + y′(x)2dx rappresenta la lunghezza dell’elemento infinitesimo di curva, ρ = m
Le la densita
costante e y(x) l’altezza di tale elemento di catena. Poiche in questo caso A(y + c) = A(y) + c dovec e una costante allora la traiettoria e definita a meno di una costante additiva e quindi la soluzionegenerale e
y(x) = c+ c1 cosh[(x− c2)/c1]
dove c, c1 e c2 si determinano imponendo le condizioni ai bordi e fissando la lunghezza della corda:
L = c1 sinh[(x2 − c2)/c1]− sinh[(x1 − c2)/c1] , x1 < x2.

6
Trasformazioni canoniche
6.1 Struttura canonica delle equazioni di Hamilton
6.1.1 Trasformazioni che conservano la struttura canonica
Un cambio di coordinate X = X(x, t) trasforma un sistema di equazioni differenziali x = f(x, t) in
un altro sistema X = F (X, t) in un modo che e determinato dalla matrice jacobiana Ψ =(∂X∂x
). Nel
caso delle equazioni di Hamilton, con
x =
(pq
)
e campo
J grad (p,q)H =
(−∂H∂q
∂H∂p
), dove J =
(0in −In
In 0in
)
una trasformazione x =
(pq
)→ X =
(PQ
)definita dalla mappa X = X(x, t), con inversa x =
x(X, t), produce un sistema corrispondente
Xk =2n∑
h=1
∂Xk
∂xhxh +
∂Xk
∂t=
2n∑
h=1
Ψk,hxh +∂Xk
∂t(6.1)
ovvero
X = ΨJ gradx H[x(X, t), t] +∂X
∂t(6.2)
che, in generale, non e Hamiltoniano, dove Ψ =(∂X∂x
)e la matrice Jacobiana della trasformazione
X = X(x, t). Tra le trasformazioni di coordinate possibili ne caratteriziamo quelle che conservanola struttura canonica.
Definizione. Una trasformazione
Qh = Qh(p,q, t), Ph = Ph(p,q, t) (6.3)

106 6 Trasformazioni canoniche
diffeomorfa (ovvero biunivoca e bidifferenziabile), in qualche aperto, delle variabili canoniche q =(q1, . . . , qn) e p = (p1, . . . , pn) conserva la struttura canonica delle equazioni di Hamil-ton se, comunque scelta una funzione Hamiltoniana H(p,q, t) esiste una corrispondente funzioneK(P,Q, t), detta nuova Hamiltoniana, tale che il sistema di equazioni di Hamilton per H
ph = − ∂H
∂qh
qh = ∂H∂ph
, (6.4)
equivalga al sistema:Ph = − ∂K
∂Qh
Qh =∂K∂Ph
.
La definizione individua quelle trasformazioni tali che il nuovo campo e Hamiltoniano, cioe esisteuna funzione K(X, t) tale che
ΨJ gradx H[x(X, t), t] +∂X
∂t= J gradX K(X, t). (6.5)
Osserviamo che questa proprieta e intrenseca della trasformazione x → X e non deve dipendereinvece dalla Hamiltoniana H che e arbitraria.
Quando X(x, t) conserva la struttura canonica delle equazioni e dipende esplicitamente da t, ∂X∂t
e un campo Hamiltoniano relativo a una certa funzione K0 tale che:
∂X
∂t= J gradX K0, (6.6)
che dipende solo dalla trasformazione stessa e si puo pensare come la nuova Hamiltoniana corrispon-dente ad H ≡ 0.
6.1.2 Determinazione della nuova Hamiltoniana per effetto di una trasformazione che conserva lastruttura canonica
Osserviamo che, anche quando X = X(x) e una trasformazione indipendente dal tempo che conservala struttura canonica delle equazioni canoniche di Hamilton, non e detto che la nuova HamiltonianaK(X, t) sia uguale alla H vista nelle nuove variabili: H[x(X), t]. Vediamo il seguente esempio: sian qualunque e sia (p,q) → (αp, βq) = (P,Q). A talfine consideriamo si conserva la struttura delleequazioni canoniche, ma con nuova Hamiltoniana K = αβH. Infatti si verifica immediamente cheK(P,Q) = αβH(α−1P, β−1Q) e tale che
Q = ∂K
∂P= αβ ∂H
∂pα−1
P = −∂K∂Q
= −αβ ∂H∂qβ−1 ⇐⇒
βq = β ∂H
∂p
αp = −α∂H∂q
Cosı in questo esempio esiste una costante c = αβ tale che K(X) = cH[x(X)]. Si puo provare chequesta e la situazione usuale in forza del seguente Teorema:
Teorema. Sia X = X(x, t) un diffeomorfismo che conserva la struttura canonica delleequazioni di Hamilton. Allora esiste un fattore c (dipendente al piu da t) tale che la Hamil-toniana K corrispondente ad H e data da

6.1 Struttura canonica delle equazioni di Hamilton 107
K(X, t) = cH[x(X, t), t] +K0(X, t) (6.7)
dove K0 e la Hamiltoniana corrispondente ad H ≡ 0, ossia tale che J gradX K0 =∂X∂t. In particolare
K(X, t) = cH[x(X), t] se la trasformazione e indipendente dal tempo. Il termine c e tale che
−ΨJ ΨT J = ci. (6.8)
dove Ψ =(∂X∂x
)e la matrice Jacobiana della trasformazione.
Dimostrazione: Se X(x, t) conserva la struttura canonica allora la K(X, t) e legata alla H tramitela (6.5). Una volta verificata che vale la (6.8) con c dipendente al piu da t, verifichiamo che la (6.7)soddisfa la (6.5); infatti
J gradX K = ciJ (ΨT )−1gradx H[x(X, t), t] + J gradX K0(X, t)
= ciJ (ΨT )−1gradx H[x(X, t), t] +∂X
∂t
e, dalla (6.5), deve essere
ciJ (ΨT )−1 = ΨJ, cioe ci = −ΨJ ΨT J
poiche J J = −i. Rimane quindi da dimostrare la (6.8), a tal fine introduciamo il seguente Lemma:Lemma: Sia A(x, t), (x, t) ∈ R
2n × R, una funzione regolare a valori nello spazio delle matriciquadrate reali 2n × 2n. Se il campo Agradx f e irrotazionale, cioe il rotore di tale campo e nullo,per ogni funzione f : R2n → R regolare allora esiste una funzione c : R → R tale che A = c(t)i.
Dimostrazione del Lemma: Se Agradx f e irrotazionale allora dovra essere
∂(Agradx f)h∂xj
=∂(Agradx f)j
∂xh, ∀h, j = 1, . . . , 2n, (6.9)
per ogni f . In particolare per f(x) = xj questa relazione implica la seguente relazione sui coefficientidella matrice A:
∂Ah,j∂xj
=∂Aj,j∂xh
, ∀h, j = 1, . . . , 2n;
per f(x) = x2j si ottiene l’ulteriore relazione sui coefficienti della matrice A:
∂Ah,jxj∂xj
=∂Aj,jxj∂xh
, ∀h, j = 1, . . . , 2n.
Da queste due relazioni segue necessariamente che deve essere Ah,j = Aj,jδhj , cioe la matrice A e
diagonale. Pertanto dovra anche essere ∂Aj,j
∂xh= 0 se h 6= j e quindi potremo scrivere Ah,j(x, t) =
ch(xh, t)δhj . Con questa posizione la (6.9) prende la forma
ch∂2f
∂xj∂xh= cj
∂2f
∂xh∂xj, h 6= j,
da cui segue (in virtu del Teorema di Schwartz sull’invertibilita delle derivate) che deve necessaria-mente essere

108 6 Trasformazioni canoniche
ch(xh, t) ≡ cj(xj, t) ⇒ ch(t) ≡ cj(t) ≡ c(t)
da cui segue la dimostrazione del Lemma.Siamo ora in grado di completare la dimostrazione del Teorema. Infatti sottraendo alla (6.5)
quella corrispondente a H ≡ 0 si ottiene la relazione
gradX (K −K0) = −J ΨJ gradx H[x(X, t), t]
= −J ΨJ ΨTgradX H(X, t)
dove abbiamo posto H(X, t) = H[x(X, t), t]. Per l’arbitrarieta di H e poiche il termine gradX (K −K0) e manifestamente irrotazionale allora il Lemma prova la (6.8).
Esempio: Nel caso della trasformazione canonica (p, q) → (αp, βq) considerata in precedenzasegue che
ψ =
( ∂P∂p
∂P∂q
∂Q∂p
∂Q∂q
)=
(α 00 β
)
e quindi
−ψJψT J = −(α 00 β
)(0 −11 0
)(α 00 β
)(0 −11 0
)
= −(0 −αβ 0
)(0 −αβ 0
)
= +
(αβ 00 αβ
)= αβi
da cui si ottiene c = αβ.
6.2 Trasformazioni canoniche
Il Teorema consente di circoscrivere l’interesse al caso c = 1, cioe di trattare le trasformazionicanoniche vere e proprie:
Definizione. Un diffeomorfismo X = X(x, t) che conserva la struttura canonica delle equazionidi Hamilton si dice trasformazione canonica se e solo se l’Hamiltoniana K corrispondente a unarbitraria Hamiltoniana H si scrive
K(X, t) = H[x(X, t), t] +K0(X, t) (6.10)
dove K0 e tale che J gradX K0 = ∂X∂t. Una trasformazione canonica X = X(x) indipendente dal
tempo si dice completamente canonica.
6.3 Generatrice di una trasformazione canonica
In una trasformazione canonica, tra le 4n variabili p,q,P,Q, solo 2n saranno indipendenti proprio acausa di (6.3). Una trasformazione canonica, che per ogni t agisce da un aperto di R2n ad un aperto

6.3 Generatrice di una trasformazione canonica 109
di R2n, e quindi assegnata se sono assegnate 2n funzioni (sotto alcune proprieta) di 2n variabili. Econveniente disporre di una funzione generatrice della trasformazione canonica. Ad esempio:
1. Se, per ogni t, una data funzione F1(q,Q, t) ha det ∂2F1
∂Q∂q6= 0 in un aperto di R2n, allora una
trasformazione e individuata implicitamente dalle 2n equazioni
ph =∂F1
∂qhe Ph = − ∂F1
∂Qh
, h = 1, 2, . . . , n. (6.11)
Infatti, risolvendo la prima rispetto alle Qh (essendo det ∂2F1
∂Q∂q6= 0) si ottiene Qh = Qh(pk, qk, t) che
sostituete nelle seconde da Ph = Ph(pk, qk, t). Nel caso particolare in cui F1(Q,q, t) sia lineare nelleqh allora si trova Q = Q(p, t) e P = P(p,q, t). In questo caso la trasformazione canonica e dettalibera; cioe le Q e q sono indipendenti. Tra le funzioni del primo tipo (F1 e funzione delle vecchiee nuove coordinate) vi e quella che scambia il ruolo tra coordinate e impulsi: F1 =
∑nh=1 qhQh.
2. Se, per ogni t, una data funzione F2(q,P, t) ha det ∂2F2
∂q∂P6= 0 in un aperto di R2n, allora una
trasformazione e individuata implicitamente dalle 2n equazioni
ph =∂F2
∂qhe Qh =
∂F2
∂Ph, h = 1, 2, . . . , n. (6.12)
Infatti, risolvendo la prima rispetto alle Ph (essendo det ∂2F2
∂P∂q6= 0) si ottiene Ph = Ph(pk, qk, t)
che sostituendo nelle seconde da Qh = Qh(pk, qk, t). In questo rientra, come vedremo tra poco, latrasformazione identita Q = q e P = p: l’identita e necessariamente non libera perche Q = q implicache Q e q non sono indipendenti. Le funzioni generatrici del secondo tipo (dove F2 e funzione dellevecchie coordinate e dei nuovi impulsi) comprendono la trasformazione identita; infatti, a partire da
F2(q,P) =n∑
h=1
qhPh
segue che
ph =∂F2
∂qh= Ph, Qh =
∂F2
∂Ph= qh, K = H.
3. Se, per ogni t, una data funzione F3(p,Q, t) ha det ∂2F3
∂p∂Q6= 0 in un aperto di R2n, allora una
trasformazione e individuata implicitamente dalle 2n equazioni
qh = −∂F3
∂phe Ph = − ∂F3
∂Qh
, h = 1, 2, . . . , n. (6.13)
Infatti, risolvendo la prima rispetto alle Qh (essendo det ∂2F3
∂Q∂p6= 0) si ottiene Qh = Qh(pk, qk, t) che
sostituendo nelle seconde da Ph = Ph(pk, qk, t).
4. Se, per ogni t, una data funzione F4(p,P, t) ha det ∂2F4
∂p∂P6= 0 in un aperto di R2n, allora una
trasformazione e individuata implicitamente dalle 2n equazioni
qh = −∂F4
∂phe Qh =
∂F4
∂Ph, h = 1, 2, . . . , n. (6.14)
Infatti, risolvendo la prima rispetto alle Ph (essendo det ∂2F4
∂P∂p6= 0) si ottiene Ph = Ph(pk, qk, t) che
sostituendo nelle seconde da Qh = Qh(pk, qk, t).

110 6 Trasformazioni canoniche
Il numero di tipi di funzioni generatrici non si riduce a 4, ma e molto maggiore; tante quantesono le collezioni di n nuove coordinate Qi1 , . . . , Qik , Pj1 , . . . , Pjn−k
, in modo tale che, con le vecchiecoordinate p, q si ottengano 2n coordinate indipendenti.
Queste quattro trasformazioni definite implicitamente dalle relazioni (6.11)—(6.14) si dimostranoessere canoniche. A tal fine e stata fatta la scelta del segno negativo nelle (6.11) e (6.13).
Nel seguito, per semplicita, limitiamo la nostra analisi alle trasformazioni con funzione generatricedel tipo F1 anche se il risultato che segue, del quale ne omettiamo la dimostrazione, vale per gli altritipi di trasformazione.
Teorema su funzioni generatrici di tipo F1: Sia F1(q,Q, t) una funzione regolare definita inun aperto Aq ×BQ di R2n, ∀t ∈ R, e tale che
det
(∂2F1
∂q∂Q
)6= 0, ∀(q,Q) ∈ Aq ×BQ, ∀t ∈ R . (6.15)
Allora F1(q,Q, t) e la funzione generatrice di una trasformazione canonica. La trasformazionecanonica si ottiene per esplicitazione dalle 2n equazioni
ph =∂F1
∂qh, Ph = − ∂F1
∂Qh
(6.16)
con nuova Hamiltoniana
K(P,Q, t) = H[p(P,Q, t),q(P,Q, t), t] +∂F1[q(P,Q, t),Q, t]
∂t.
Osserviamo che se F1 e indipendente da t allora la trasformazione e completamente canonica.Osserviamo anche che la funzione generatrice F1 e definita a meno di un termine additivofunzione di t (e per il resto arbitrario). Infatti, questo termine non cambia la trasformazionegenerata da F1.
6.4 Esempio: trasformazione canonica per l’oscillatore armonico
Per l’oscillatore armonico uni-dimensionale, dove assumiamo la massa unitaria, di Hamiltoniana
H(p, q) =1
2[p2 + ω2q2], p, q ∈ R, (6.17)
ecco una trasformazione canonica (p, q) → (P,Q) che rende Q ciclica. La trasformazione e generatadalla funzione di primo tipo:
F1(q,Q) =1
2ωq2 cotQ
da cui segue
p =∂F1
∂q= ωq cotQ, P = −∂F1
∂Q=
1
2
ωq2
sin2Q(6.18)
Ricavando q =√
2PωsinQ e p =
√2ωP cosQ, troveremo H in funzione di Q,P :

6.4 Esempio: trasformazione canonica per l’oscillatore armonico 111
K(P,Q) = H[p(P,Q), q(P,Q)] =1
2
[2ωP cos2Q+ ω22P
ωsin2Q
]
= ωP.
Quindi Q e coordinata ciclica. Le equazioni canoniche di Hamilton nelle nuove coordinate prendonola forma:
P = −∂K∂Q
= 0 ⇒ P = α = cost.
e
Q =∂K
∂P= ω ⇒ Q = ωt+ β.
Riportando alle coordinate originarie:
q(t) =
√2α
ωsin(ωt+ β).
Le costanti di integrazione sono due e hanno il significato atteso: α determina l’ampiezza e β la faseiniziale dell’oscillazione armonica.
Da questo esempio segue che e molto utile trovare una trasformazione canonica che renda una opiu coordinate cicliche. Quando si riescono a rendere cicliche tutte le coordinate, esse sono spessointerpretabili come variabili angolari. Quando H(p,q) ammette una trasformazione canonica taleche i nuovi momenti risultano costanti e le nuove coordinate risultano lineari rispetto al tempo
K = ω ·P =n∑
h=1
ωhPh, Ph = αh, Qh = ωht+ βh
allora, le variabili Ph si dicono azioni e le variabili Qh si dicono angoli.


7
Equazione di Hamilton-Jacobi
7.1 Equazione di Hamilton-Jacobi
Sappiamo che la risoluzione delle equazioni di Hamilton diventa elementare se riusciamo, medianteuna opportuna trasformazione canonica, a rendere cicliche tutte le coordinate. Una situazionespeciale in cui cio avviene si ha quando la nuova Hamiltoniana a seguito di una trasformazionecanonica e identicamente uguale a zero. Quindi, se riusciamo a trovare una trasformazionecanonica (dipendente dal tempo in generale) per effetto della quale la nuova Hamiltoniana siannulla (o e una costante o, eventualmente, funzione della sola variabile t) allora abbiamo risoltoil problema della soluzione delle equazioni di Hamilton. Se la trasformazione canonica e, adesempio, generata a partire da una funzione generatrice (che nel seguito sara denotata con S inveceche F2) del II
tipo dipendente da P, q e t allora cerchiamo, se esiste, una funzione S(P,q, t) taleche
p,q, H(p,q, t) →P,Q, K = H +
∂S
∂t≡ 0
(7.1)
In tal caso nelle nuove coordinate le equazioni canoniche di Hamilton si risolvono banalmente:
P(t) ≡ P0 e Q(t) ≡ Q0.
Applicando la trasformazione inversa (P,Q) → (p,q) si risolve il problema originario. Tutto ciosembra molto semplice; in realta abbiamo spostato la difficolta nella determinazione della generatriceS che rende vera la (7.1).
Entrando in maggiore dettaglio e ricordando le prescrizioni di una funzione generatrice di secondotipo
ph = ∂S
∂qh
Qh =∂S∂Ph
, da cui q = q(P,Q, t),
la (7.1) si traduce nella seguente equazione
H
[∂S
∂q,q, t
]+∂S
∂t= 0 . (7.2)
Questa e chiamata equazione di Hamilton-Jacobi: e un’equazione differenziale alle derivateparziali del primo ordine (che ammette tutta una propria trattazione matematica) nell’incognita

114 7 Equazione di Hamilton-Jacobi
S. Osserviamo ancora che se una tale trasformazione esiste allora le equazioni canoniche nellenuove variabili si integrano immediatamente e danno
Ph = P 0h = αh e Qh = Q0
h = βh costanti
poiche
Ph = − ∂K
∂Qh
= 0 e Qh =∂K
∂Ph= 0.
Quindi la funzione S dipendera da S(α,q, t), cioe da n variabili qh e da n parametri αh piu, even-tualmente, il tempo.
Definizione. Se S = S(α,q, t) e una funzione delle n + 1 variabili q1, . . . , qn, t e di n parametri(costanti) α1, . . . , αn soddisfacente l’equazione (7.2) e alla condizione
det
(∂2S
∂αh∂qk
)6= 0
allora S si dice una soluzione completa dell’equazione di Hamilton-Jacobi La funzioneS(α,q, t) e detta funzione azione.
Essendo K(P,Q, t) ≡ 0 allora segue che anche le nuove coordinate Qh, costanti poiche Qh = 0,sono legate alla S tramite la:
∂S(α,q, t)
∂αh= Qh = βh. (7.3)
La condizione det(
∂2S∂αh∂qk
)6= 0 serve precisamente a garantire che l’equazione (7.3) puo essere
risolta rispetto a q = q(α, β, t) trovando q = q(t). Quindi: trovare una soluzione completaS dell’equazione di Hamilton-Jacobi equivale a risolvere il sistema delle equazioni diHamilton.
Nell’equazione di Hamilton-Jacobi le variabili indipendenti sono il tempo t e i parametri la-grangiani qh. Conseguentemente l’integrale completo di questa equazione dipendera da n + 1costanti arbitrarie. D’altra parte, la funzione S e presente nell’equazione soltanto attraverso lesue derivate e quindi una delle sue costanti arbitrarie appare nell’integrale completo comeuna grandezza additiva, cioe l’integrale completo dell’equazione di Hamilton-Jacobi prende laforma generale S(α,q, t) + c dove α = (α1, . . . , αn) e c sono costanti arbitrarie. Poiche la determi-nazione di c e inessenziale ai fini dello studio del moto (possiamo sempre pensare di inglobarla nelleβh attraverso le relazioni (7.3)), in generale questa costante sara assunta nulla.
7.2 Hamiltoniana indipendente da t ed azione ridotta
Teorema. Se l’Hamiltoniana H non dipende esplicitamente dal tempo, allora il problema si riconduceall’equazione caratteristica di Hamilton-Jacobi
H
(∂W
∂q,q
)= α1 (7.4)

7.3 Esempio: l’oscillatore armonico 115
dove l’incognita W (α,q) e detta azione ridotta. La funzione generatrice e allora data da S =W −Et dove α1 ≡ E (energia, determinata dai dati iniziali). Le soluzioni q = q(α, β, t) si ricavanoin termini delle n costanti Ph = αh e di altre n costanti di integrazione βh tramite le seguenti relazioni:
t+ β1 =∂W (α,q)
∂α1
, βh =∂W (α,q)
∂αh, h = 2, . . . , n, (7.5)
supponendo sempre che sia det(
∂2W∂αh∂qk
)6= 0.
Dimostrazione: Se H = H(p,q) allora esiste l’integrale primo dell’energia meccanica E e, ponendoα1 = E = H[p(t),q(t)], risulta naturale cercare S nella forma
S(P,q, t) = W (P,q)− Et.
Con tale separazione fra variabili spaziali e temporale l’equazione di Hamilton-Jacobi (7.2) prendela forma:
H
(∂W
∂q,q
)− E = 0 (7.6)
da cui risulta la (7.4). Come nel caso precedente risulta Qh = βh e Ph = αh costanti, tra cuiP1 = α1 = E. Ricordando poi che Q = ∂S
∂Psi ottiene
βh = Qh =∂W
∂αh, h = 2, . . . , n, e β1 = Q1 =
∂S
∂α1
=∂W
∂α1
− t
da cui segue la (7.5) completando cosı la dimostrazione.La risoluzione del moto consiste in due passi distinti. Nel primo passo si risolve l’equazione
caratteristica di Hamilton-Jacobi (7.4) costituita da una equazione differenziale alle derivate parzialidel I ordine. Nel secondo passo, una volta determinata la W , si risolvono le n equazioni (7.5) (oranon differenziabili) che determinano il moto del sistema.
Osserviamo che le n− 1 equazioni βh =∂W (α,q)∂αh
, h = 2, . . . , n, nelle n incognite qh permettono dideterminare la ”traiettoria” del sistema nello spazio delle configurazioni, cioe definiscono gli aspettipuramente geometrici del moto. La prima equazione t + β1 = ∂W (α,q)
∂α1e invece l’unica che contiene
il tempo t ed e quella che caratterizza l’aspetto cinematico del moto, cioe determina la legge orariadel punto q sulla traiettoria nello spazio delle configurazioni. Osserviamo anche che il parametro β1e inessenziale in quanto ridefinisce solamente l’origine della scala dei tempi.
7.3 Esempio: l’oscillatore armonico
L’Hamiltoniana dell’oscillatore armonico unidimensionale e
H(p, q) =1
2m
(p2 +m2ω2q2
), ω2 =
k2
m
da cui segue che l’equazione di Hamilton-Jacobi ha la forma
1
2m
(∂S
∂q
)2
+m2ω2q2
+
∂S
∂t= 0.

116 7 Equazione di Hamilton-Jacobi
Ponendo S = W (E, q)− Et allora l’equazione caratteristica di Hamilton-Jacobi (7.4) si riduce a
1
2m
(∂W
∂q
)2
+m2ω2q2
= E
che ha soluzione (definita a meno di una costante additiva che possiamo sempre assumere nulla)
W (E, q) =√2mE
∫ q
q0
√
1− mω2x2
2Edx =
∫ q
q0
√2mE −m2ω2x2dx
=
√mE
2
q
√
1− mω2q2
2E+
√2E
mω2arcsin
√mω2
2Eq
dove abbiamo assunto, per semplicita q0 = 0. Quindi
β = β0 + t =∂W
∂E=
√2m
E
∫ q
q0
dx√1− mω2x2
2E
=1
ωarcsin
√mω2
2Eq
da cui troviamo
q =
√2E
mω2sin(ωt+ β0)
e
p =∂W
∂q=
√2mE
√
1− mω2q2
2E=
√2mE cos(ωt+ β0).
7.4 Metodo di separazione delle variabili
Nel seguito ci limitiamo a considerare solo Hamiltoniane indipendenti dal tempo e mostreremo checi sono casi in cui l’equazione di Hamilton-Jacobi sia risolubile mediante quadrature. E il caso dellevariabili separabili.
Definizione. Sia H(p,q) una Hamiltoniana che non dipende esplicitamente dal tempo e sia
H
(∂W
∂q1, . . . ,
∂W
∂qn, q1, . . . , qn
)= E
la corrispondente equazione caratteristica di Hamilton-Jacobi. Le variabili qh sono separabili seuna funzione del tipo
W (α,q) = W1(α, q1) +W2(α, q2) + . . .+Wn(α, qn) (7.7)
decompone l’equazione di Hamilton-Jacobi in n equazioni della forma

7.4 Metodo di separazione delle variabili 117
Hh
(∂Wh
∂qh, qh, α1, . . . , αn
)= αh, h = 1, . . . , n. (7.8)
In ogni equazione (7.8) figura solo una coordinata qh, con la corrispondente derivata diW rispettoa questa qh. Quindi viene separata l’equazione alle derivate parziali in n equazioni ordinarie. Poichesono equazioni ordinarie del primo ordine, si possono risolvere per quadratura: basta esplicitarerispetto a ∂Wh
∂qhe poi integrare rispetto a qh.
Osserviamo che:Teorema. Se in una Hamiltoniana indipendente dal tempo tutte le coordinate, tranne una, sono
cicliche, allora si puo applicare il metodo di separazione delle variabili, cioe le variabili sonoseparabili.
Dimostrazione: Assumendo che sia la prima coordinata lagrangiana la coordinata non ciclica allorapossiamo scrivere H = H(p1, . . . , pn, q1). Da cio segue, per prima cosa, che W e una soluzione deltipo W (α,q) = W1(α, q1) +
∑nh=2Wh(αh, qh). Infatti, poiche i momenti coniugati ph alle coordinate
cicliche sono costanti, le equazioni di trasformazione ph =∂S∂qh
= ∂W∂qh
per h > 1 possono scriversi
∂Wh
∂qh=∂W
∂qh= ph = αh, h > 1,
da cui Wh = αhqh per h > 1 e quindi
W (α,q) = W1(α, q1) +n∑
h=2
αhqh. (7.9)
Allora l’equazione di Hamilton-Jacobi si riduce a:
H
(∂W1
∂q1, α2, . . . , αn, q1
)= α1 (7.10)
con α1 = E (energia totale). Si e quindi trovata un’equazione ordinaria del primo ordine; ricavando∂W1
∂q1e integrando rispetto a q1 si ottiene W1(α, q1).
Osserviamo che questo non e l’unico caso risolubile mediante separazione di variabili. Consideri-amo ora il caso in cui l’Hamiltoniana H e indipendente dal tempo e si puo scrivere come
H(p,q) =n∑
h=1
Hh(ph, qh). (7.11)
Allora, ponendo
W (α,q) =n∑
h=1
Wh(αh, qh)
l’equazione di Hamilton-Jacobi puo essere decomposta nelle n equazioni
Hh
(∂Wh
∂qh, qh
)= eh(αh)
con eh funzione (regolare) arbitraria tale che∑nh=1 eh(αh) = E. Questo e il caso, da come vedremo
poi, del problema di Keplero.

118 7 Equazione di Hamilton-Jacobi
7.5 Esempi
7.5.1 L’equazione di Hamilton-Jacobi per il moto centrale di un punto in un piano
Applichiamo il metodo di separazione delle variabili ad un caso particolare: al caso del punto mobilenel piano e soggetto ad una forza centrale.
Teorema. Per il moto piano in coordinate polari (r, θ) di un punto sottoposto a forza centrale ilmetodo di Hamilton-Jacobi fornisce direttamente r = r(t) e l’equazione della traiettoria r = r(θ).
Dimostrazione: La funzione Hamiltoniana, in coordinate polari piane, risulta essere
H =1
2m
(p2r +
1
r2p2θ
)+ V (r)
e quindi l’unica coordinata da cui dipende H e q1 = r, cioe q2 = θ e una coordinata ciclica. Perciol’azione ridotta viene ricercata nella forma (7.9)
W (r, θ, α1, αθ) = W1(r, α) + αθθ dove αθ = pθ = mr2θ
e il momento angolare Kz rispetto all’asse ortogonale al piano e passante per il centro della forza(ovvero la velocita areale moltiplicata per 2m). L’equazione caratteristica di Hamilton-Jacobi (7.10)assume la forma:
1
2m
(∂W1
∂r
)2
+α2θ
r2
+ V (r) = α1 ≡ E
da cui
∂W1
∂r=√2m[α1 − V (r)]− α2
θ/r2.
Da cio l’espressione dell’azione ridotta:
W (α1, αθ, r, θ) =∫ √
2m[α1 − V (r)]− α2θ/r
2dr + αθθ.
Senza risolvere tale integrale (d’altra parte non abbiamo ancora definito l’espressione di V (r)) andi-amo a determinare il moto del sistema tramite le
t+ β1 =∂W
∂α1
=∫ mdr√
2m[α1 − V (r)]− α2θ/r
2, (7.12)
e
β2 =∂W
∂αθ= θ −
∫ αθdr
r2√2m[α1 − V (r)]− α2
θ/r2. (7.13)
dove le costanti di integrazione β1, β2 sono determinate dai dati iniziali. Ebbene, la (7.12) da la legger = r(t) e la (7.13) da la traiettoria r = r(θ).
Studiamo in dettaglio la (7.13) nel caso Newtoniano (o Coulombiano) dove il potenziale e datoda V = −k/r dove k e una costante assunta positiva. Sostituendo u = 1/r e pensando β2 comeθ = θ0 all’istante iniziale otteniamo l’equazione di una conica rispetto a uno dei suoi fuochi, infatti:

7.5 Esempi 119
θ = β2 +∫ du√
2mα2θ
(α1 − V )− u2= θ0 +
∫ du√2mα2θ
(α1 − ku)− u2
= θ0 +∫ du√
a+ bu− u2= θ0 + arccos
(u− c
d
)
dove
a =2mα1
α2θ
, b = −2mk
α2θ
, c =b
2e d =
√a+ c2 .
Da qui segue che
1
r= u = c+ d cos(θ − θ0) e quindi r =
p
1 + e cos(θ − θ0)
dove
p =1
ce e =
d
c=
√1 +
a
c2
E immediato osservare che l’eccentricita |e| risulta minore, uguale o maggiore di 1 a seconda chel’energia E = α1 sia minore, uguale o maggiore di 0.
7.5.2 Il metodo di Hamilton-Jacobi applicato al problema di Keplero
La possibilita di separare le variabili nell’equazione di Hamilton-Jacobi non si limita ovviamente alcaso di un’unica coordinata non ciclica. Ad esempio per un punto mobile nello spazio e soggetto aforze centrali allora la funzione Hamiltoniana in coordinate polari sferiche ha la forma
H =1
2m
[p2r +
1
r2p2θ +
1
r2 sin2 θp2ϕ
]+ V (r)
dove solo l’angolo ϕ e coordinata ciclica. Eppure l’equazione caratteristica di Hamilton-Jacobi am-mette facilmente separazione delle variabili. Cerchiamo la soluzione W (r, θ, ϕ, α), α = (α1, α2, α3),dell’equazione (caratteristica) di Hamilton-Jacobi nella forma
W = W1(r, α) +W2(θ, α) +W3(ϕ, α) ;
cioe:
1
2m
(dW1(r)
dr
)2
+1
r2
(dW2(θ)
dθ
)2
+1
r2 sin2 θ
(dW3(ϕ)
dϕ
)2+
+V (r) = α1 ≡ E (7.14)
Notiamo che la (7.14) deve essere identicamente soddisfatta per ogni r, θ e ϕ e che ϕ compare solonella derivata di W3. Quindi la derivata di W3 e una costante α3. Sostituendo tale costante in (7.14)abbiamo di nuovo un’identita rispetto ad r e θ, dove θ compare solo nel blocco (W ′
2)2 +α2
3(sin2 θ)−1.
Quindi anche questo blocco e una costante (che chiameremo α22). Ottenendo infine il sistema

120 7 Equazione di Hamilton-Jacobi
dW3
dϕ= α3,(
dW2
dθ
)2+
α23
sin2 θ= α2
2,(dW1
dr
)2+
α22
r2= 2m [α1 − V (r)]
(7.15)
da cui si ottiene
W3 = W3(ϕ, α3), W2 = W2(θ, α2, α3) e W1 = W1(r, α1, α2)
per quadrature. Si osservi che, dalle tre leggi di conservazione (7.15) si puo ricavare la funzionegeneratrice W = W1(r) +W2(θ) +W3(ϕ), mediante tre integrali indefiniti.
Osserviamo poi che le costanti α1, α2 e α3 hanno un significato fisico notevole:
α1 = E, α22 = K2, α3 = Kz.
Infatti, α1, come sappiamo, e l’energia in quanto e uguale all’Hamiltoniana; α3 = ∂W∂ϕ
e il momento
pϕ = Kz (a causa della prescrizione della funzione generatriceW di secondo tipo) e, poiche ϕ e angolodi rotazione attorno a (O; z), allora α3 e il momento angolare rispetto a tale asse. Osserviamo poi che,scegliendo in modo opportuno gli assi, abbiamo ϕ0 = 0 e quindi α3 = pϕ = Kz = 0, da cui W3 = coste quindi ϕ = ϕ0 = cost, cioe il moto avviene in un piano e r e θ si riducono alle coordinate polariin questo piano. Con questa posizione allora α2
2 = K2 come abbiamo visto nell’esempio precedentee il problema, ora nel piano ed in coordinate polari, puo essere risolto seguendo quanto fatto nellasezione precedente.

8
Teoria Perturbativa
I sistemi esplicitamente solubili sono in minima parte; ad esempio l’oscillatore armonico x+ω2x = 0 eesplicitamente solubile, ma gia una sua semplice estensione, come l’oscillatore quartico, x+ω2x3 = 0o l’equazione del pendolo semplice x + ω2 sin(x) = 0, non ammette soluzione generale (almeno intermine di funzione elementari, in realta sia l’oscillatore quartico che l’equazione del pendolo sempliceammettono soluzione generale in termine delle funzioni ellittiche). Le tecniche perturbative hannol’obiettivo di trovare una soluzione approssimata dell’equazione non esplicitamente solubile. L’ideadi base e abbastanza semplice: supponiamo che il sistema di equazioni differenziali ordianarie
x(t) = X(x), x ∈ Rn, X : Rn → R
n,
con assegnate condizioni iniziali
x(0) = x0
sia esplicitamente solubile. Allora la soluzione xδ del sistema perturbato
xδ(t) = X(xδ) + δY (xδ), Y : Rn → Rn,
con le medesime (o molto prossime) condizioni iniziali, e tale che per ogni 0 < ǫ≪ 1 esiste 0 < δ1 ≪ 1tale che per ogni |δ| < δ1 allora la soluzione del problema perturbato e tale che
|x(t)− xδ(t)| ≤ ǫ , ∀t ∈ Tδ , (8.1)
per un qualche Tδ dipendente da δ.Nel seguito illustreremo alcune tecniche per le quali la condizione (8.1) vale.
8.1 Piccole oscillazioni
8.1.1 Teorema di Dirichlet
Ricordiamo che per un sistema meccanico a n gradi di liberta, con vincoli perfetti, bilateri, olonomi(e nel seguito supporremo anche scleronomi) e soggetto ad un sistema di forze conservative valgonole equazioni di Lagrange
d
dt
∂L∂qk
=∂L∂qk
, k = 1, . . . , n (8.2)

122 8 Teoria Perturbativa
dove L = T+U e la funzione Lagrangiana. Cioe le soluzioni qk = qk(t), k = 1, . . . , n, di tali equazionisoddisfacenti ad assegnate condizioni iniziali sono le equazioni del moto del sistema, e viceversa. Leconfigurazioni di equilibrio sono le soluzioni stazionarie qk(t) ≡ q⋆k del sistema (8.2), dove i valori q⋆ksono le soluzioni del sistema
∂U
∂qk= 0, k = 1, . . . , n.
In generale le equazioni (8.2) costituiscono un sistema di n equazioni differenziali del II ordinenon integrabile; con il metodo delle piccole oscillazioni si propone un approccio che, medi-ante un’approssimazione, vuole determinare le caratteristiche principali del moto prossimo ad unasoluzione stazionaria qk(t) ≡ q⋆k corrispondente ad una configurazione C⋆ ≡ q⋆ = (q⋆1, . . . , q
⋆n) di
equilibrio stabile. Premettiamo il seguente risultato:Teorema di Dirichlet: Sia dato un sistema meccanico a vincoli perfetti, bilateri, olonomi e
scleronomi e soggetto ad un sistema di forze conservative; sia C⋆ = q⋆ un punto di minimo relativoin senso stretto per l’energia potenziale V = −U (supposta regolare a sufficienza), cioe esiste unintorno I di q⋆ tale che
∀q = (q1, . . . , qn) ∈ I,q 6= q⋆ ⇒ V (q) > V (q⋆). (8.3)
Sotto tali ipotesi si ha che
∀ǫ > 0 ∃δ > 0 : |qk(t0)− q⋆k|+ |qk(t0)| ≤ δ (8.4)
allora il moto avviene in un intorno della configurazione di equilibrio:
|qk(t)− q⋆k|+ |qk(t)| ≤ ǫ ∀t , (8.5)
dove t0 e l’istante iniziale e qk(t0) e qk(t0) le condizioni inziali del moto qk(t).Ricordando che un punto di minimo relativo per l’energia potenziale corrisponde ad una config-
urazione di equilibrio stabile allora il significato meccanico della (8.5) e evidente: se inizialmenteprendiamo il sistema prossimo alla configurazione di equilibrio stabile e con velocita sufficientementepiccole allora il moto del sistema a partire da tali configurazione iniziale rimane prossimo indefinita-mente alla configurazione di equilibrio stabile e con velocita che si mantegono piccole.
Una condizione sufficiente affinche l’ipotesi (8.3) sia soddisfatta e che l’energia potenziale abbiatutte le derivate parziali ∂V
∂qknulle in q⋆ = (q⋆1, . . . , q
⋆n) e che la matrice Hessiana di V calcolata
in q⋆ sia definita positiva (cioe abbia tutti gli n autovalori strettamente maggiori di zero). La di-mostrazione generale di questo teorema si basa sul principio di conservazione dell’energia meccanica.Sia E l’energia meccanica del sistema che, in virtu delle condizioni iniziali e per continuita, e prossimaal valore dell’energia potenziale in corrispondenza al punto di minimo relativo: E ≈ V (q⋆) per δ suffi-cientemente piccolo. Se V ha un punto di minimo relativo in q⋆ allora V si puo approssimare, almenolocalmente, con un paraboloide in n dimensioni avente vertice nella configurazione di equilibrio; se ilsistema si allontana troppo dalla configurazione di equilibrio o se le velocita diventano grandi alloral’energia potenziale o l’energia cinetica aumentano e la somma T + V non puo mantenersi uguale aE.
Dimostrazione: Possiamo sempre assumere, senza perdere in generalita, q⋆k = 0 e U(q⋆) = 0.Poiche q⋆ = (q⋆1, . . . , q
⋆n) e un punto di massimo effettivo per U , cioe di minimo relativo effettivo per

8.1 Piccole oscillazioni 123
V = −U , segue che esiste un δ > 0 tale che per ogni q = (q1, . . . , qn) 6= (0, . . . , 0) e tale che |qk| ≤ δallora V (qk) > 0. Se consideriamo poi l’espressione dell’energia totale
E(q1, . . . , qn, q1, . . . , qn) = T + V
e se ricordiamo che T > 0 se almeno una delle qh e non nulla allora segue che E(q1, . . . , qn, q1, . . . , qn) >0 se almeno una delle qk e qk e non nulla (subordinatamente alla condizione |qk| ≤ δ) e cheE(0, . . . , 0) = 0. Cioe l’energia totale E(q1, . . . , qn, q1, . . . , qn) ha un minimo effettivo in M =(0, . . . , 0) ∈ R
2n. Fissato 0 < ǫ0 < δ sufficientemente piccolo e data la sfera B(M, ǫ0) nello spaziodelle fasu R
2n avremo, per quanto detto,
E(q, q) > 0 ∀(q, q) ∈ B(M, ǫ0)− (0, . . . , 0)
e inoltre, essendo ∂B un insieme compatto e E(q, q) una funzione continua, segue che esiste non nulloil minimo
E⋆ = m(ǫ0) = min(q,q)∈∂B(M,ǫ0)
E(q, q) > 0.
Inoltre, sempre per la continuita di E(q, q) esistera 0 < δ0 < ǫ0 tale che
E⋆ > M(δ0) = max(q,q)∈B(M,δ0)
E(q, q) > 0.
Quindi, se all’istante iniziale (q0, q0) ∈ B(M, δ0) allora E(q0, q0) = E0 ≤ M(δ0) < E⋆ e quindi ilmoto (q(t), q(t)) avviene sempre all’interno della sfera B(M, ǫ0) perche, dovendo conservarsi l’energiameccanica totale, non potra mai aversi E(q, q) ≥ E⋆, condizione che si verifica quando il punto (q, q)e sul bordo di B(M, ǫ0).
8.1.2 Moto delle piccole oscillazioni
Nel seguito, per semplicita supporremo, senza perdere in generalita, che sia q⋆k = 0 (altrimentioperiamo la traslazione qk → qk − q⋆k). Ricordando che
T = T2 + T1 + T0 , dove T =1
2
n∑
i,k=1
ai,k(q)qiqk
per sistemi scleronomi, scriviamo la funzione Lagrangiana mettendo in evidenza i termini di secondogrado nelle qk e qk:
L = T + U = L+R, dove L = T + U .
Piu precisamente poniamo
T =1
2
n∑
i,k=1
ai,k(q)qiqk = T +RT ,
dove
T =1
2
n∑
i,k=1
ai,kqiqk, ai,k = ai,k(0)

124 8 Teoria Perturbativa
e ottenuto calcolando lo sviluppo in serie di Taylor delle funzioni ai,k attorno a q⋆ = 0, e
U = U(0) +n∑
k=1
∂U(0)
∂qkqk +
1
2
n∑
i,k=1
∂2U(0)
∂qk∂qiqkqi +RU
= U +RU , U =1
2
n∑
i,k=1
∂2U(0)
∂qk∂qiqkqi +RU
e ottenuto calcolando lo sviluppo in serie di Taylor della funzione U attorno a q⋆ = 0. Ricordiamoche, essendo l’energia potenziale sempre definita a meno di una costante additiva, possiamo assumereU(0) = 0 e che, essendo q⋆ = 0 una configurazione di equilibrio, ∂U(0)
∂qk= 0. Il termine RT e un resto di
ordine 1 nelle qk e di ordine 2 nelle qk, il termine RU e un resto di ordine 3 nelle qk; complessivamente,il resto totale R = RT + RU e di ordine 3 nelle qk e qk. La funzione L(q,q) = T (q) + U(q) prendeil nome di Lagrangiana ridotta.
Definizione: Si chiama moto delle piccole oscillazione del sistema meccanico attorno allaconfigurazione di equilibrio stabile q⋆ un qualunque moto associato alla Lagrangiana linearizzata L.
Si osserva immediatamente che il grande vantaggio di operare con la Lagrangiana linearizzata,invece che con la Lagrangiana iniziale, e che le equazioni di Lagrange risultano essere lineari e acoefficienti costanti, e quindi risolubili con metodi elementari:
d
dt
∂L∂qk
=d
dt
∂T
∂qk=
d
dt
n∑
i=1
Ti,kqi =n∑
i=1
Ti,kqi
e
∂L∂qk
=∂U
∂qk=
n∑
i=1
Ui,kqi
da cui le (8.2) per la Lagrangiana ridotta assumono la forma desiderata:
n∑
i=1
Ti,kqi =n∑
i=1
Ui,kqi, k = 1, . . . , n. (8.6)
Si osserva anche che la validita di questa approssimazione e giustificata dal Teorema di Dirichlet, ilquale garantisce, a priori, che qk(t) e qk(t) rimangono piccole indefinitamente (ricordiamo che abbiamopreso q⋆k = 0 per semplicita) e quindi il contributo del resto R e trascurabile.
8.1.3 Caso unidimensionale
Nel caso unidimensionale (n=1) allora, denotando con q l’unico parametro lagrangiano e supponendoche q⋆ sia una configurazione di equilibrio stabile tale che U ′′(q⋆) < 0, si ha
T =1
2a(q)q2 e U = U(q)
da cui (non facciamo qui la posizione di comodo q⋆ = 0)
T =1
2a(q⋆)q2 e U =
1
2U ′′(q⋆)(q − q⋆)2.

8.1 Piccole oscillazioni 125
Le (8.6) diventano semplicemente
a(q⋆)q = U ′′(q⋆)(q − q⋆) ⇒ z + ω2z = 0
dove si e posto z = q − q⋆ e ω2 = −U ′′(q⋆)a(q⋆)
> 0, e questa si riconosce essere l’equazione dell’oscillatore
armonico che ha soluzione generale data da
z(t) = A cos(ωt+ α) ⇒ q(t) = q⋆ + A cos(ωt+ α)
dove A e α sono costanti che si determinano mediante le condizioni iniziali. T = 2π/ω e ω rapp-resentano il periodo e la pulsazione delle piccole oscillazioni. Riassumendo quanto detto possiamoconcludere che:
Teorema: Per un sistema meccanico (a vincoli perfetti, olonomi, bilateri, scleronomi e soggettoad un sistema di forza conservative) ad un grado di liberta il periodo delle piccole oscillazioni attornoad una configurazione di equilibrio stabile q⋆, in cui si suppone sia U ′′(q⋆) < 0, e dato da
T =2π
Ω= 2π
√√√√− a(q⋆)
U ′′(q⋆).
8.1.4 Coordinate normali e frequenze proprie
Vediamo ora come determinare nella pratica l’integrale generale del sistema (8.6) nel caso in cui essoderivi da una Lagrangiana linearizzata L = T + U rispetto a un punto di equilibrio stabile q⋆ = 0.A tal fine e utile adottare la notazione matriciale:
T =1
2qtAq e U = −1
2qtBq, (8.7)
dove le matrici A = (Ti,k), B =(−∂2U(0)
∂qi∂qk
)sono entrambe simmetriche ed A e definita positiva;
la matrice B, nel caso in cui (come supporremo) q⋆ e di equilibrio stabile, e, in generale, definitapositiva. A differenza delle notazioni adottate in precedenza qui e piu comodo denotare con qil vettore colonna di componenti qk e qt il suo trasposto, cioe qt e il vettore riga con gli stessicomponenti. Con tale notazione la Lagrangiana linearizzata si scrive
L(q, q) = 1
2
[qtAq− qtBq
](8.8)
e le equazioni di Lagrange, lineari per costruzione, si scrivono in modo sintetico come:
Aq+ Bq = 0. (8.9)
Come suggerisce la teoria dei sistemi di equazioni lineari ordinarie a coefficienti costanti, cerchiamouna soluzione della (8.9) della forma
q = [C cos(ωt+ γ)]w, (8.10)
dove w e un vettore (colonna) di Rn da determinarsi e ω ∈ C dipende dalle caratteristiche del sistema,C e γ sono costanti da determinarsi in funzione delle condizioni iniziali. Sostituendo (8.10) in (8.9)questa diventa

126 8 Teoria Perturbativa
[C cos(ωt+ γ)](−ω2A+ B)w = 0
che risulta identicamente soddisfatta se ω e w sono tali che (B − ω2A)w = 0; siamo quindi indotti astudiare il seguente problema generalizzato agli autovalori
det(B − λA) = 0. (8.11)
Richiamiamo il seguente risultato dell’algebra lineare (che per completezza dimostro):Lemma: L’equazione (8.11) definisce gli autovalori di B rispetto ad A ed ammette esattamente
n soluzioni λi, i = 1, . . . , n, reali e positive.Dimostrazione del Lemma: L’esistenza degli autovalori reali di B rispetto ad A (con i corrispon-
denti autovettori w) si ottiene sfruttando il fatto che la matrice A e simmetrica e definita positiva(e una matrice cinetica) e che la matrice B e simmetrica e definita positiva (e la matrice Hessianadi U relativa ad un punto di massimo relativo per U). Essendo la matrice A simmetrica e positiva,esiste un’unica matrice simmetrica e positiva il cui quadrato e uguale ad A e che pertanto puo esserea buon diritto indicata con A
1
2 (la radice quadrata di A). Infatti, poiche A e simmetrica esiste unamatrice ortogonale M (cioe M t =M−1) che diagonalizza A:
MAM−1 =MAM t = α, dove α =
α1 0 . . . 00 α2 . . . 0
0 0. . . 0
0 0 . . . αn
(8.12)
dove appunto α1, α2, . . . , αn sono gli autovalori di A. La positivita di A assicura che gli autovaloriα1, α2, . . . , αn sono tutti strettamente positivi, quindi possiamo definire
A1
2 =M−1α1
2M, dove α1
2 =
√α1 0 . . . 00
√α2 . . . 0
0 0. . . 0
0 0 . . .√αn
. (8.13)
ed e immediato verificare che (A1
2 )2 = A e che A1
2 e simmetrica e positiva. Infatti
(A1
2 )2 = A1
2A1
2 =M−1α1
2MM−1α1
2M =M−1α1
2α1
2M
=M−1αM = A
e
(A1
2 )t =(M−1α
1
2M)t
=(M tα
1
2M)t
=M t(α1
2 )t(M t)t
=M tα1
2M = A1
2
poiche α1
2 e diagonale. Infine, dato un qualunque vettore q si ha che
qtA1
2q = qtM tα1
2Mq = (Mq)tα1
2 (Mq)
da cui segue la positivita di A1
2 come immediata conseguenza della positivita di α1
2 . Mediante ilcambiamento di variabili

8.1 Piccole oscillazioni 127
y = A1
2q ⇔ q = [A1
2 ]−1y (8.14)
la (8.9) prende la forma
A1
2 y+ B[A1
2 ]−1y = 0 ⇔ y+ [A1
2 ]−1B[A1
2 ]−1y = 0 (8.15)
per cui la (8.11) equivale a
det [C − λI] = 0. (8.16)
dove si e posto C = [A1
2 ]−1B[A1
2 ]−1. Essendo C simmetrica e definita positiva (la verifica di cio e,
sostanzialmente, analoga a quell’effettuata per A1
2 ) segue che i suoi autovalori λi sono reali e positividimostrando cosı il Lemma.
In tal modo otteniamo l’esistenza di un sistema fondamentale di soluzioni Qi(t)wi, dove Qi(t) =
Ci cos(ωit + γi), detti modi normali, e la soluzione generale del sistema (8.6) e data da una lorocombinazione lineare.
8.1.5 Schema riassuntivo
Per risolvere le equazioni di Lagrange linearizzate (8.9) intorno a una configurazione di equilibriostabile q⋆ (non poniamo ora la condizione q⋆ = 0), si risolve il problema agli autovalori
(B − λA)w = 0
dove
A = (Ti,k), Ti,k = Ti,k(q⋆), e B =
(−∂
2U(q⋆)
∂qi∂qk
).
Gli autovalori λi, i = 1, . . . , n, di B rispetto ad A sono, nel caso di configurazioni di equilibriostabile, numeri reali positivi; le rispettive radici ωi =
√λi prendono il nome di pulsazioni proprie
o normali del sistema e 2π/ωi prendono il nome di frequenze proprie o normali del sistema.Per avere gli n modi normali si determinano gli autovettori wi, di componenti wik, k = 1, . . . , n,soluzioni di
(B − λiA)wi = 0, i = 1, ..., n. (8.17)
Allora, ad ogni pulsazione normale ωi corrisponde una particolare oscillazione del sistema, dettaoscillazione normale data da Qi(t) = Ci cos(ωit − γi). La n-upla di coordinate originarie q(t)risulta dal sovrapporsi di tutte le oscillazioni proprie:
q(t) = q⋆ +n∑
i=1
Ci cos(ωit+ γi)wi, (8.18)
cioe
qk(t) = q⋆k +n∑
i=1
wikCi cos(ωit+ γi), k = 1, . . . , n. (8.19)
Le 2n costanti Ci e γi vengono determinate a partire dalle condizioni iniziali qk e qk.

128 8 Teoria Perturbativa
8.1.6 Esempi
Pendoli accoppiati: esempio di calcolo di modi normali e battimenti
Due pendoli A e B di massa m e lunghezza ℓ, in un campo di gravita g, hanno i punti di sospensionePA e PB alla stessa quota; la distanza tra PA e PB e d. Una molla di costante elastica k2 e lunghezzaa riposo d, collega le due masse. Come parametri lagrangiani assumiamo i due angoli θ1 e θ2 tra ipendoli e le rispettive verticali. Studiamo i seguenti punti:
a) Trovare una configurazione di equilibrio stabile;b) Calcolare le corrispondenti pulsazioni proprie;c) Determinare i modi normali;d) Nel caso k2 << mg/ℓ, evidenziare il fenomeno dei battimenti ovvero del trasferimento
d’energia.
a) Ponendo un sistema di riferimento avente origine in PA, con l’asse y verticale ascendente e conil punto PB sull’asse x avremo le seguenti relazioni cinematiche:
xA = ℓ sin θ1yA = −ℓ cos θ1 ,
xB = d+ ℓ sin θ2yB = −ℓ cos θ2
da cui
B − A = ℓ(− sin θ1 + sin θ2 + d)ı + ℓ(− cos θ2 + cos θ1).
Segue che l’energia potenziale del sistema e:
V =mgyA +mgyB +1
2k2(|A−B| − d)2 = −mgℓ(cos θ1 + cos θ2) +
+1
2k2(√
d2 + 2dℓ(sin θ2 − sin θ1) + 2ℓ2 − 2ℓ2 cos(θ2 − θ1) − d)2
.
Come ci si aspetta, la funzione V (θ1, θ2) ha un minimo relativo nella configurazione (0, 0) in cor-rispondenza al quale ha il valore V (0, 0) = −2mgℓ.
b) L’approssimazione quadratica di V (θ1, θ2) in un intorno di (0, 0) e:
V = −mgℓ(1− 1
2θ21 + 1− 1
2θ22
)+
1
2k2(√
[d+ ℓθ2 − ℓθ1]2 − d)2
=1
2mgℓ2(θ21 + θ22) +
1
2k2ℓ2(θ2 − θ1)
2 + costante
=1
2
[θ21(mgℓ+ k2ℓ2) + θ22(mgℓ+ k2ℓ2)− 2k2ℓ2θ1θ2
]+ costante.
D’altra parte l’energia cinetica e
T =1
2mℓ2(θ21 + θ22) ≡ T .
Quindi le matrici A e B sono:
A = mℓ2(1 00 1
), B =
(mgℓ+ k2ℓ2 −k2ℓ2
−k2ℓ2 mgℓ+ k2ℓ2
).

8.1 Piccole oscillazioni 129
L’equazione secolare det(B − λA) = 0 assume la forma (mgℓ+ k2ℓ2 −mℓ2λ )2 − k4ℓ4 = 0. Da cio siottengono gli autovalori e le pulsazioni proprie:
λ1 = g/ℓ, λ2 = g/ℓ+ 2k2/m ⇒ ω1 =√g/ℓ, ω2 =
√g/ℓ+ 2k2/m.
c) Per avere i due modi normali determiniamo i due autovettori wj, j = 1, 2, tali che (B−λA)w =0. Avremo il sistema (per semplicita poniamo ℓ = m = g = 1)
(1 + k2 − λ)w1 − k2w2 = 0−k2w1 + (1 + k2 − λ)w2 = 0
.
Sostituendo λ1 = 1 avremo
k2w1 − k2w2 = 0, cioe w1 =
(11
).
Sostituendo λ2 = 1 + 2k2 avremo
−k2w1 − k2w2 = 0, cioe w2 =
(1−1
).
Allora nel primo modo normale si ha(θ1(t)θ2(t)
)=
(11
)Q1(t) =
(11
)C1 cos(ω1t+ γ1)
ovvero
θ1(t) = θ2(t) = C1 cos(ω1t+ γ1)
cioe i pendoli oscillano in fase (la molla non lavora). Nel secondo modo normale:(θ1(t)θ2(t)
)=
(1−1
)Q2(t) =
(1−1
)C2 cos(ω2t+ γ2)
ovvero
θ1(t) = −θ2(t) = C2 cos(ω2t+ γ2)
cioe i pendoli oscillano in opposizione di fase.d) Supponiamo che per t = 0 sia (θ01, θ
02) = (0, 0), θ02 = 0, e che ad uno dei due pendoli sia impressa
una velocita θ01 = v. Proviamo che dopo qualche istante T il primo pendolo e quasi immobilee tutta l’energia passa al secondo. Dalle relazioni precedenti i dati iniziali si traducono come:
Q1(0) = 0, Q2(0) = 0, Q1(0) = Q2(0) =v√2.
Ora, le posizioni iniziali implicano:
Q1(t) = c1 sin t, Q2(t) = c2 sinωt
dove

130 8 Teoria Perturbativa
ω =√1 + 2k2 ∼ 1 + k2 +O(k4) per k2 << 1
e le velocita inziali comportano: c1 =v√2e c2 =
vω√2. Allora la soluzione ha la forma
θ1 =1√2
(v√2sin t+ v
ω√2sinωt
)
θ2 =1√2
(v√2sin t− v
ω√2sinωt
) .
Ora ω ∼ 1 + k2 e quindi ω−1 ∼ 1− k2 e quindi si ottiene
θ1 ≈ v2(sin t+ sinωt) = v cos
(ω−12t)sin
(ω+12t)
θ2 ≈ v2(sin t− sinωt) = −v cos
(ω+12t)sin
(ω−12t) .
con ω−12
∼ k2
2e ω+1
2∼ 1. Quindi θ1 oscilla con pulsazione ω+1
2che e dell’ordine di 1 e con ampiezza
che varia lentamente secondo la legge v cos(k2t/2). L’oscillazione del primo pendolo sara quasi nulladopo un tempo T = π
k2, allorche oscillera praticamente solo il secondo pendolo. Dopo un tempo 2T
oscillera praticamente solo il primo pendolo, e cosı via (battimenti, ovvero trasferimento periodicodell’energia da un pendolo all’altro).
Bipendolo
Consideriamo il sistema meccanico costituito da due aste rigide AB e BC di uguale massa m elunghezza 2ℓ, incernierate in B. Il punto A e fisso e il sistema oscilla in un piano verticale soggettoalla sola forza peso. Andiamo a studiare le piccole oscillazioni di questo sistema, usualmente de-nominato bipendolo, attorno alla sua posizione di equilibrio stabile. Il sistema ha due gradi diliberta e possiamo assumere come parametri lagrangiani gli angoli θ1 e θ2 che formano le due astecon il semiasse verticale discendente. L’energia cinetica ed il potenziale, di cui tralasciamo il calcolodettagliato, sono date da
T =1
2mℓ2
[16
3θ21 + 4 cos(θ1 − θ2)θ1θ2 +
4
3θ22
]
e
U = mgℓ(3 cos θ1 + cos θ2).
E immediato verificare che il sistema ammette le 4 configurazioni di equilibrio (0, 0), (0, π), (π, 0)e (π, π) in cui la sola (θ1 = 0, θ2 = 0) e stabile. Seguendo l’analisi appena esposta scriviamo laLagrangiana linearizzata dove
T =1
2mℓ2
[16
3θ21 + 4θ1θ2 +
4
3θ22
]
e
U = −1
2mgℓ(3θ21 + θ22).
Introducendo le matrici A e B abbiamo che

8.1 Piccole oscillazioni 131
A =
(163mℓ2 2mℓ2
2mℓ2 43mℓ2
), B =
(3mgℓ 00 mgℓ
).
L’equazione che fornisce gli autovalori della matrice B rispetto alla matrice A e data da
det
(3mgℓ− 16
3mℓ2λ
)(−2mℓ2λ)
(−2mℓ2λ)(mgℓ− 4
3mℓ2λ
) = 0,
ossia
28
9λ2 − 28
3ω2λ+ 3ω4 = 0, ω2 = g/ℓ
che ha soluzioni
λ1,2 = ω2[3
14(7± 2
√7)]
da cui le due frequenze proprie sono dunque
ωj =√λj = ω
√√√√3
(1
2± 1√
7
), j = 1, 2.
Denotate con Q1(t) e Q2(t) le coordinate normali, le oscillazioni proprie sono date da
Qj(t) = Cj cos(ωjt+ γj), j = 1, 2
dove le costanti Cj e γj sono da determinarsi attraverso le condizioni iniziali. Volendo infine tornarealle coordinate iniziali θ1 e θ2 siano
w1 =
(7+2
√7
3
−35− 16√7
)e w2 =
(7−2
√7
3
−35 + 16√7
)
gli autovettori associati agli autovalori λ1 e λ2. Allora si ottiene
θ1(t) = C17+2
√7
3cos(ω1t+ γ1) + C2
7−2√7
3cos(ω2t+ γ2);
θ2(t) = C1(−35− 16√7) cos(ω1t+ γ1) + C2(−35 + 16
√7) cos(ω2t+ γ2).
8.1.7 Giustificazione del metodo delle piccole oscillazioni
Per semplicita restringiamo la nostra analisi al solo caso unidimensionale. Denotando con q l’unicoparametro lagrangiano e supponendo che q⋆ = 0 sia una configurazione di equilibrio stabile tale cheU ′′(0) < 0 allora la Lagrangiana prende la forma
L =1
2a(q)q2 + U(q)
e l’equazione di Lagrange diventa
a(q)q +1
2a′(q)q2 = U ′(q) . (8.20)

132 8 Teoria Perturbativa
L’equazione delle piccole oscillazioni ha la forma
Q+ ω2Q = 0 dove ω2 = −U ′′(0)/a(0) . (8.21)
Assumendo che all’istante iniziale le condizioni iniziali siano tali che |q(0)| + |q(0)| ≪ 1 andiamo astimare la differenza |q(t)−Q(t)|.
Anzitutto poniamo
x1(t) = q(t), x2(t) = q(t) = x1(t), y1(t) = Q(t), y2 = Q(t) = y1(t)
ed in tal modo le equazioni (8.20) e (8.21) prendono la forma
x1 = x2x2 =
1a(x1)
[U ′(x1)− 1
2a′(x1)x
22
]
= ω2x1 +R(x1, x2)
e
y1 = y2y2 = ω2y1
(8.22)
e devono soddisfare entrambre alle stesse condizioni iniziali
x1(0) = y1(0) = q(0) e x2(0) = y2(0) = q(0) .
Il termine R rappresenta la perturbazione
R(x1, x2) =1
a(x1)
[U ′(x1)−
1
2a′(x1)x
22
]− ω2x1 = O
(x21 + x22
).
Integrando membro e facendo uso delle condizioni iniziali trasformiamo il sistema (8.22) in un sistemadi equazioni integrali:
x1(t) = x1(0) +
∫ t0 x2(s)ds
x2(t) = x2(0) + ω2∫ t0 x1(s)ds+
∫ t0 R[x1(s), x2(s)]ds
e
y1(t) = y1(0) +
∫ t0 y2(s)ds
y2(t) = y2(0) + ω2∫ t0 y1(s)ds
(8.23)
Ponendo zj(t) = xj(t)− yj(t) per j = 1, 2, osservando che zj(0) = 0, e sottraendo membro a membrootteniamo che la funzione zj deve soddisfare al seguente sistema di equazioni integrali:
z1(t) =∫ t
0z2(s)ds e z2(t) = ω2
∫ t
0z1(s)ds+
∫ t
0R[x1(s), x2(s)]ds . (8.24)
Ricordando ora il Teorema di Dirichlet (formule (8.3) e (8.5)) segue che per ogni ǫ > 0 allora
|x1(t)| ≤ ǫ e |x2(t)| ≤ ǫ, ∀t ∈ R,
se
|x1(0)| ≤ δ e |x2(0)| ≤ δ, (8.25)
per un qualche δ > 0. Quindi possiamo affermare che esiste una costante C > 0 tale che
|R[x1(s), x2(s)]| ≤ Cǫ2, ∀s ∈ R ,
per ogni ǫ arbitrariamente piccolo, purche le condizioni iniziali siano scelte in modo opportuno (8.25).Cio premesso, ponendo

8.1 Piccole oscillazioni 133
Zj(t) = maxs∈[0,t]
|zj(s)| ,
dalla seconda delle (8.24) segue che
|z2(t)| ≤ ω2∫ t
0|z1(s)|ds+
∫ t
0|R[x1(s), x2(s)]|ds
≤ ω2∫ t
0Z1(t)ds+
∫ t
0Cǫ2ds
≤ ω2Z1(t)t+ Ctǫ2 ∀t ∈ R .
Facendo ora uso della prima equazione segue infine che
|z1(t)| ≤∫ t
0|z2(s)|
≤∫ t
0ω2Z1(s)sds+
∫ t
0Csǫ2ds .
Da questa proprieta segue in modo ovvio che
Z1(t) ≤∫ t
0ω2Z1(s)sds+
∫ t
0Csǫ2ds
≤∫ t
0ω2Z1(t)sds+
∫ t
0Csǫ2ds
≤ 1
2(ωt)2Z1(t) +
1
2Ct2ǫ2
da cui segue che
Z1(t) ≤Ct2
2− (ωt)2ǫ2 . (8.26)
In conclusione abbiamo dimostrato il seguente risultato.Teorema: Sia q(t) la soluzione dell’equazione di Lagrange in un ǫ-intorno della configurazione
di equilibrio stabile q⋆ = 0; sia Q(t) la soluzione dell’equazione ottenute con l’approssimazione dellepiccole oscillazioni. Allora per ogni T <
√2/ω si ha che
|q(t)−Q(t)| ≤ Ct2
2− (ωt)2ǫ2 ≤ C1ǫ
2 , ∀t < T,
per una qualche costante C2 > 0.Osserviamo che le soluzioni q(t) e Q(t) sono piccole d’ordine ǫ, mentre la loro differenza e di ordine
ǫ2; quindi possiamo concludere che l’errore relativo e di ordine ǫ. In figura 8.1 disegnamo la differenzatra la soluzione del pendolo semplice e la soluzione dell’approsimazione delle piccole soluzione concondizioni iniziali q0 = 0.1 e q0 = 0.
Nota. L’approssimazione (8.26) e di fatto inutile quando t si avvicina al valore√2/ω; facendo
uso di alcuni risultati tecnici (come il Lemma di Gronwall che sara analizzato in seguito) la stima(8.26) puo essere migliorata ottenendo una stima del tipo
Z1(t) ≤ C2ǫ2[eC3t − 1
]
per opportune costanti positive C2 e C3.

134 8 Teoria Perturbativa
–0.001
–0.0005
0
0.0005
0.001
2 4 6 8 10 12 14 16 18 20
t
Fig. 8.1. Grafico della differenza q(t)−Q(t) dove q(t) e la soluzione esatta del pendolo semplice e Q(t) la soluzione approssimata,con condizioni iniziali q0 = 0.1 e q0 = 0.
8.2 Principio della media
Consideriamo un sistema (non necessariamente) Hamiltoniano in cui le variabili coniugate sono de-notate ϕ e I e dove la prima variabile ϕ ∈ [0, 2π) = T 1 e un angolo (il problema puo essere esteno a nvariabili azione-angolo); queste variabili sono comunemente dette variabili azione-angolo. Il sistemaimperturbato ha Hamiltoniana
H0 = H0(I)
che non dipende da I ma solo dall’azione I. Le equazioni canoniche di Hamilton hanno la formaϕ = ω(I)
I = 0dove ω(I) =
∂H0
∂I,
la cui soluzione e immediatamente data da
I(t) ≡ I0, ϕ(t) = ω(I0)t+ ϕ0
essendo I(0) = I0 e ϕ(0) = ϕ0 le condizioni iniziali.Consideriamo ora il sistema perturbato di Hamiltoniana
H(I, ϕ) = H0(I) + ǫH1(I, ϕ)
dove ǫ≪ 1 e dove
H1(I, ϕ) = H1(I, ϕ+ 2π)
e una funzione (periodica rispetto alla variabile angolo ϕ) assegnata su R × T 1. Le corrispondentiequazioni canoniche di Hamilton prendono la forma
ϕ = ω(I) + ǫf(I, ϕ)
I = ǫg(I, ϕ)(8.27)

8.2 Principio della media 135
dove f = ∂H1
∂Ie g = −∂H1
∂ϕsono due funzioni perioriche rispetto alla variabile ϕ.
Il principio della media per il sistema (8.27) consiste nella sostituzione con il sistema mediato
J = ǫg(J) , J(0) = I0 , (8.28)
dove g e la media di g rispetto alla variabile ”angolo”:
g(J) =1
2π
∫ 2π
0g(J, ϕ)dϕ .
L’idea e che il sistema mediato ”approssima bene” il sistema (8.27); questo principio si incontra gia inGauss per lo studio delle perturbazioni che i pianeti esercitano tra loro, Gauss propone di distribuirela massa di ogni pianeta sulla sua orbita proporzionalmente al tempo e di sostituire l’attrazione deipianeti con l’attrazione degli anelli ottenuti. Questo principio e alla base di tecniche piu evolute,quali le teorie di campo medio.
Teorema della media. Fissiamo un dominio limitato G ⊂ R per la variabile azione I e supponi-amo che:
1. le funzioni ω(I), f(I, ϕ) e g(I, ϕ) siano definite insieme alle loro derivate fino al secondo ordine:
max(I,ϕ)∈G×T 1,n=0,1,2
[|ω(n)(I)|, |f (n)(I, ϕ)|, |g(n)(I, ϕ)|
]≤ C1
per una qualche costante C1 positiva;2. ω(I) non si annulla mai, piu precisamente
ω(I) > C2, ∀I ∈ G ,
per una qualche costante positiva C2;3. Sia J(t) la soluzione dell’equazione mediata (8.28); allora per ogni 0 ≤ t ≤ 1/ǫ e per d > 0
abbastanza piccolo (e indipendente da t e ǫ) deve essere che
Bd[J(t)] ⊂ G
dove Bd[J(t)] e una boccia di centro J(t) e raggio d > 0.
Sotto queste ipotesi si prova che per ogni ǫ > 0 che soddisfa la 3. segue che
|I(t)− J(t)| ≤ C3ǫ, ∀t ∈ [0, 1/ǫ] (8.29)
dove la costante positiva C3 dipende da C1, C2 e d, ma non da ǫ e t.Dimostrazione: Anzitutto introduciamo una trasformazione prossima all’identita
P (I) = I + ǫk(I, ϕ) (8.30)
dove k e, al momento, una funzione qualunque dipendente da I e ϕ e periodica rispetto a ϕ(k(I, ϕ + 2π) = k(I, ϕ)). Premettiamo un risultato di carattere tecnico (del quale ne omettiamola dimostrazione).
Lemma. Sia k limitato, insieme alle sue derivate rispetto a I, fino all’ordine secondo, su tuttoG per ogni ϕ fissato in T 1 e sia ǫ abbastanza piccolo. Allora, per ogni valore di ϕ ∈ T 1 fissato, larestrizione dell’applicazione

136 8 Teoria Perturbativa
I → P = I + ǫk(I, ϕ)
al dominio G− α (cioe dei punti contenuti in G insieme ad un α-intorno) e un diffeomorfismo condiffeomorfismo inverso
P → I = P + ǫh(P, ϕ, ǫ) (8.31)
nel dominio G−2α tale che h e limitata insieme alle sue derivate rispetto a P , fino all’ordine secondo,su tutto G− 2α per ogni ϕ fissato in T 1.
Quindi in virtu del seguente lemma segue che la relazione (8.30) e invertibile con ‖h‖C2(G−2α)
limitata per ogni ϕ.Scegliamo ora la trasformazione (8.30) in modo da semplificare l’equazione di partenza. Derivando
ambo i membri della (8.30) segue che la funzione P = P (t) dovra soddisfare alla seguente equazione
P = I + ǫ∂k
∂II + ǫ
∂k
∂ϕϕ
= ǫ
[g(I, ϕ) +
∂k
∂ϕω(I)
]+ ǫ2
∂k
∂Ig + ǫ2
∂k
∂ϕf
= ǫ
[g(P, ϕ) +
∂k
∂ϕω(P )
]+R (8.32)
dove abbiamo fatto uso della trasformazione inversa (8.31) e dove R e un termine del secondo or-dine rispetto ad ǫ che dipende dalla scelta ella funzione k, al momento non definita. La sceltadi k e tale da semplificare l’equazione per P : piu precisamente scegliamo k in modo che il termine[g(P, ϕ) + ∂k
∂ϕω(P )
]si semplifichi il piu possibile; ovvero, chiedendo che tale termine sia identicamente
nullo, otteniamo per k l’equazione
∂k
∂ϕ= − 1
ωg(P, ϕ) .
Osserviamo che tale equazione non e, in generale, risolubile nella classe di funzioni perioriche; infattiil termine a sinistra ha sempre media nulla, mentre il termine a destra puo avere media non nulla.Dunque non possiamo scegliere k in modo da eliminare completamente il termine in ǫ nella (8.32).Tuttavia, ponendo
k(P, ϕ) = −∫ ϕ
0
g(P, θ)
ω(P )dθ, dove g(P, ϕ) = g(P, ϕ)− g(P ),
e possibile eliminare la parte periodica di g.Con tale scelta di k e sotto le ipotesi su f , g e ω segue infine che
|R(P, ϕ)| ≤ C4ǫ2 , ∀P ∈ G− 2α, ϕ ∈ T 1 ,
per una qualche costante positiva C4.Confrontiamo ora i sistemi di equazioni differenziali per J e per P :
J = ǫg(J) e P = ǫg(P ) +R.

8.2 Principio della media 137
Ponendo z = P − J allora, sottraendo membro a menbro le due equazioni, si trova che z(t) soddisfaall’equazione
z = ǫ [g(P )− g(J)] +R
= ǫ∂g
∂Pz +R′
dove |R′| ≤ C4ǫ2 + C5ǫ|z| per una qualche costante C5 positiva. Possiamo quindi affermare che
|z| ≤ C6ǫ|z|+ C4ǫ2, |z(0)| ≤ C3ǫ
da cui segue che
|z(t)| ≤ (C3ǫ+ C2ǫ2t)eC6ǫt ≤ C7ǫ, ∀t ≤ 1/ǫ,
per opportune costanti positive C6 e C7, in virtu del seguente lemma (Lemma di Gronwall o ”simi-lare”).
Lemma. Se |z| ≤ a|z|+ b, |z(0)| < d, per un qualche a, b, d > 0 e t ≥ 0, allora |z(t)| ≤ (d+ bt)eat.Dimostrazione del Lemma: e sufficiente osservare che |z(t)| non supera la soluzione (positiva e
monotona crescente) y(t) dell’equazione y = ay + b, y(0) = d; poiche1
y(t) = deat +b
a(eat − 1) ≤ deat +
b
a(ateat) = (d+ bt)eat
il Lemma risulta infine dimostrato. La dimostrazione del Teorema della media risulta cosı completa.
1 Esercizio: dimostrare che ex − 1 ≤ xex per ogni x > 0.


A
Complementi
A.1 Cinematica dei sistemi
A.1.1 Sistemi olonomi
Si consideri, in generale, un sistema costituito da un numero N qualsiasi di punti Ps, s = 1, 2, . . . , N ,i quali, anziche liberamente mobili gli uni rispetto agli altri, siano vincolati ad assumere istanteper istante soltanto le posizioni rappresentabili mediante certe determinate funzioni di un numeron ≤ 3N di parametri arbitari q1, q2, . . . , qn ed, eventualmente, del tempo:
Ps = Ps(q1, q2, . . . , qn; t), s = 1, 2, . . . , N. (A.1)
Scalarmente avremo quindi 3N equazioni scalari negli argomenti qh ed, eventualmente, t; che noisupporremo univalenti, finite, continue e derivabili (fino al II ordine almeno) entro un determinatocampo di valori per gli argomenti.
Ad un dato istante t le (A.1), al variare di qh entro il rispettivo campo di valori, forniscono tutte
e sole le possibili configurazioni del sistema nell’istante considerato. E manifesto che, se i vincolidipendono dal tempo, le configurazioni possibili del sistema in un dato istante t1 non coincidono, ingenerale, con quelle relative ad un istante diverso t2.
Se la matrice Jacobiana avente 3N colonne e n righe(∂x1∂qh
,∂y1∂qh
,∂z1∂qh
, . . . ,∂xN∂qh
,∂yN∂qh
,∂zN∂qh
), h = 1, . . . , n, (A.2)
ha rango massimo n per valori generici delle qh allora si dice che la configurazione del sistema variase, e solo se, variano le coordinate lagrangiane (assumendo t fissato) e si dice che n e il grado diliberta del sistema. Quindi il grado di liberta di un sistema olonomo e il numero di parametriessenziali da cui dipendono le sue configurazioni in un generico istante.
Se fra le 3N equazioni scalari, derivanti dalle (A.1), eliminiamo le n coordinate lagrangiane ot-teniamo, nella ipotesi che la (A.2) abbia rango n, 3N − n equazioni indipendenti fra le xs, ys, zs ed,eventualmente, il tempo:
fk(xs, ys, zs; t) = 0, k = 1, 2, . . . , 3N − n, (A.3)
le quali esprimono, analiticamente, le relazioni che, istante per istante, intercedono fra le posizionisimultanee dei singoli punti del sistema. Esse si dicono vincoli o legami.

140 A Complementi
Viceversa, se un sistema di N punti e soggetto a ℓ equazioni indipendenti della forma (A.3) allora,risolvendo le (A.3) rispetto ad ℓ delle 3N coordinate xs, ys, zs e assumendo come parametri lagrangianile rimanenti 3N − ℓ, si ottiene un sistema della forma (A.1).
Definizione A.1. Un sistema soggetto a vincoli della forma (A.3) si dice olonomo. I parametriarbitrari q1, q2, . . . , qn si chiamano coordinate generali o lagrangiane del sistema.
Definizione A.2. Se il tempo t non compare nelle (A.1) o, equivalentemente, nelle (A.3), il sistemaolonomo si dice a vincoli indipendenti dal tempo o scleronomi; altrimenti si dice a vincolidipendenti dal tempo o reonomi.
Vediamo alcuni esempi:
i. Una figura rigida mobile su di un piano e un sistema olonomo con 3 gradi di liberta, in quantooccorrono e bastano 2 parametri per individuare la posizione di un suo punto M nel piano ed unulteriore parametro per fissare la sua orientazione attorno ad M ;
ii. Il sistema di due aste rigide mobili nel piano collegate a cerniera e un sistema olonomo con 4 gradidi liberta, perche la posizione della cerniera dipende da 2 parametri, ed altri 2 ne occorrono ebastano per individuare le orientazioni delle 2 aste;
iii. Una sbarra nello spazio e un sistema olonomo con 5 gradi di liberta. Per fissare infatti laconfigurazione di un tale sistema basta conoscere la posizione di un suo punto P , che dipende datre parametri, e la direzione della sbarra, che dipende da due parametri (ad esempio l’angolo dinutazione e l’angolo di precessione).
iv. Per un sistema rigido nello spazio i gradi di liberta sono 6, cioe tanti quanti quelli di una ternadi assi (solidale con la figura): tre parametri occorrono per fissarne l’origine e tre l’orientazione.Se il sistema ha un punto fisso allora il numero di gradi di liberta si riduce a 3. Se ilsistema ha un asse fisso invece il numero di gradi di liberta si riduce a 1.
Il moto del sistema risultera definito quando le coordinate lagrangiane del sistema sono assegnatein funzione del tempo. Le equazioni
qh = qh(t), h = 1, 2, . . . , n,
cui si da luogo, si diranno le equazioni orarie del moto in coordinate lagrangiane. Per l’atto dimoto del sistema, cioe per le velocita vs = v(Ps) dei suoi punti Ps, si ha, derivando le (A.1):
vs =dPsdt
=∂Ps∂t
+n∑
h=1
∂Ps∂qh
qh s = 1, 2, . . . , N. (A.4)
Coordinate lagrangiane sovrabbondanti
Se ad un sistema olonomo S di coordinate lagrangiane q1, q2, . . . , qn si impongono uno, o piu, vincoliolonomi ulteriori allora questi si traducono in una o piu equazioni nelle qh (ed eventualmente neltempo):
fk(q1, q2, . . . , qn; t) = 0, k = 1, 2, . . . , ℓ′, ℓ′ ≤ n, (A.5)
che potremo supporre fra loro indipendenti rispetto alle qh. Il nuovo sistema che si ottiene e ancoraolonomo e il suo grado di liberta si riduce a n−ℓ′. In particolare per ogni possibile sistema olonomodi N punti si possono assumere come coordinate sovrabbondanti le 3N coordinate cartesiane xs, ys, zsdei suoi N punti, le quali, se n e il grado di liberta del sistema, risulteranno legate fra di loro daℓ = 3N − n equazioni del tipo (A.3).

A.1 Cinematica dei sistemi 141
A.1.2 Sistemi anolonomi
Se ad un sistema olonomo di coordinate lagrangiane indipendenti qh, si impone un ulteriore vincoloolonomo
f(q1, q2, . . . , qn; t) = 0; (A.6)
questo implica una limitazione, non soltanto per le configurazioni del sistema, ma anche per i suoispostamenti possibili. In particolare si ha il seguente vincolo di mobilita:
∑nh=1
∂f∂qhqh +
∂f∂t
= 0,
ottenuto derivando le (A.6).Introduciamo il concetto di vincolo di mobilita espresso mediante una forma differenziale lineare
del tipo:
n∑
h=1
ahdqh + bdt = 0, (A.7)
o equivalentemente, essendo dqh = qhdt,
n∑
h=1
ahqh + b = 0,
dove le ah e b siano funzioni delle coordinate q1, q2, . . . , qn ed, eventualmente di t, comunqueprefissate, anche se la (A.7) non sia deducibile per differenzazione da una relazione in termini finiti(A.6) fra le qh ed, eventualmente, la t.
Definizione A.3. Ogni vincolo di mobilita (A.7) non deducibile per differenzazione da una relazionein termini finiti tra le qh ed, eventualmente, t si dice anolonomo. Si dice omogeneo o no, secondoche la funzione b e o no identicamente nulla. Diremo poi sistema anolonomo ogni sistema soggettoad uno o piu vincoli anolonomi.
La differenza tra i vincoli olonomi e anolonomi risiede nel fatto che questi ultimi non im-pongono alcuna limitazione alle configurazioni del sistema ma implicano soltanto dellerestrizioni per gli spostamenti possibili del sistema, cioe per la sua mobilita.
Interpretazione geometrica dei vincoli olonomi e anolonomi
Come si puo facilmente osservare il sistema meccanico a n gradi di liberta ha vincoli olonomiindipendenti dal tempo se l’insieme delle sue configurazioni e individuato da una sottovarietaregolare Vn, detto spazio delle configurazioni, Vn × R prende il nome di spazio-tempo delleconfigurazioni.
Esempio di vincolo di mobilita integrabile
Consideriamo un disco rigido mobile nel piano (O; x, y) che si mantenga sempre appoggiato all’asse(O; x) e che sia vincolato a scorrere senza strisciare su quest’asse. Si possono assumere qualiparametri lagrangiani la coordinata ascissa x del centro C del disco e l’angolo θ di rotazione. Lacondizione di puro rotolamento implica vτ (K) = 0 dove K e il punto di contatto tra il disco e l’asse;vτ (K) e la velocita di trascinamento. Questa condizione si traduce nella relazione

142 A Complementi
x+Rθ = 0
che rappresenta quindi un vincolo di mobilita omogeneo. Questo e immediatamente integrabilee da la relazione
x = −Rθ + x0
che rappresenta un vincolo olonomo. Osserviamo che se imponiamo al disco di rotolare senzastrisciare su un piano senza prefissare la traiettoria del punto di contatto allora il vincolo dipuro rotolamento si traduce in due vincoli di mobilita non integrabili, cioe anolonomi.
Vincoli propriamente anolonomi
E possibile poi caratterizzare ulteriormente i vincoli anolonomi.
Definizione A.4. Diremo propriamente anolonomo un sistema se i vincoli di mobilita (A.7), cuiesso e soggetto, sono tali che non esista nemmeno una relazione
F (q1, q2, . . . , qn; t) = Cost. (A.8)
il cui differenziale si possa porre sotto forma di una combinazione lineare delle (A.7).
Esempio di sistema propriamente anolonomo
Consideriamo una sfera rigida S costretta a rotolare senza strisciare su di un piano fisso. Si possoscegliere come coordinate lagrangiane del nostro sistema i cinque parametri: x, y (coordinate dellaproiezione del centro C della sfera sul piano) e θ, ψ, φ (angoli di Eulero); ovviamente z = R. Adogni sistema di valori di questi 5 parametri corrisponde una posizione della sfera a contatto con ilpiano z = 0. Se queste 5 coordinate sono funzioni del tempo si ottengono le equazioni di un motodella sfera S a contatto con il piano. Ma questo moto non e, in generale, di puro rotolamento,bensı implica, istante per istante, uno strisciamento della sfera sul piano. La condizione di purorotolamento implica che deve essere costantemente nulla la velocita di trascinamento del punto dicontatto K, il quale, in generale, varia da istante ad istante tanto sul piano fisso quanto sulla sfera.Denotando con v e ω i vettori caratteristici del moto della sfera rispetto al suo centro C, si dovraavere, ad ogni istante, che la velocita di trascinamento di K sia nulla:
vτ (K) = v + ω × (K − C) = 0.
Scalarmente:
x−Rχ = 0, y +Rπ = 0 (A.9)
dove π, χ, ρ sono le componenti di ω rispetto agli assi fissi dove
π = θ cosψ + φ sin θ sinψ, χ = θ sinψ − φ sin θ cosψ (A.10)
da cui seguono, in particolare,
∂π
∂ψ= −χ, ∂χ
∂ψ= π. (A.11)

A.1 Cinematica dei sistemi 143
Le equazioni (A.9) sono le equazioni del vincolo di puro rotolamento ed esse non si possonointegrare. Infatti esse si possono scrivere come
x−R sinψθ +R sin θ cosψφ = 0
y +R cosψθ +R sin θ sinψφ = 0
e la condizione necessaria affinche le (A.9) siano integrabili implica che siano verificate le seguentiidentita:
∂(R sin θ cosψ)
∂θ=∂(−R sinψ)
∂φe
∂(R sin θ sinψ)
∂θ=∂(R cosψ)
∂φ
che risultano manifestamente non verificate identicamente. Inoltre, si puo verificare che nonesiste nessuna relazione (A.8) in termini finiti, fra le coordinate lagrangiane x, y, θ, φ, ψ e il tempo,la quale, derivata rispetto a t, conduca ad una combinazione lineare delle (A.9).
A.1.3 Spostamenti infinitesimi reali e virtuali
Spostamenti infinitesimi reali
Durante il moto del sistema olonomo soggetto alla (A.1) si ha che la velocita del generico punto Psvale
v(Ps) =n∑
h=1
∂Ps∂qh
qh +∂Ps∂t
, s = 1, . . . , N.
Pertanto il differenziale dPs, che rappresenta lo spostamento infinitesimo reale del punto Ps, vale
dPs =n∑
h=1
∂Ps∂qh
dqh +∂Ps∂t
dt, s = 1, . . . , N.
Spostamenti infinitesimi virtuali
Definizione A.5. Diremo spostamenti virtuali di un sistema olonomo gli ipotetici spostamenti(infinitesimi) che sono atti a far passare il sistema da una qualsiasi sua configurazione ad un’altra(infinitamente vicina) relativa al medesimo istante.
Dato un sistema olonomo, lo spostamento subito da un suo punto Ps in uno spostamento virtualedell’intero sistema si indica con δPs e le sue componenti secondo gli assi si denotano con δxs, δys, δzs.Si trova per gli spostamenti virtuali, nel caso di un sistema olonomo riferito a coordinate lagrangianeindipendenti, l’espressione generale
δPs =n∑
h=1
∂Ps∂qh
δqh s = 1, 2, . . . , N (A.12)
che risulta lineare omogenea nelle variazioni elementari (arbitrarie e indipendenti) δqh delle coor-dinate lagrangiane (anche se i vincoli dipendono dal tempo).
Di fatto gli spostamenti (infinitesimi) sono una forma differenziale lineare rispetto alle n variabiliq1, q2, . . . , qn.

144 A Complementi
Componendo, a partire dalla stessa configurazione del sistema, due o piu spostamenti virtuali, siottiene ancora uno spostamento virtuale.
Se i vincoli sono indipendenti dal tempo si ha che gli spostamenti virtuali coincidono con i possibilispostamenti (infinitesimi) reali. In generale questo non e vero; infatti se denotiamo con dP lospostamento infinitesimo reale allora
dP =n∑
h=1
∂P
∂qhdqh +
∂P
∂tdt
che differisce da δP per il termine ∂P∂tdt.
Spostamenti virtuali dei sistemi anolonomi
Se il vincolo anolonomo era definito mediante vincoli di mobilita del tipo (A.7) allora sara consideratocome spostamento virtuale ogni spostamento ipotetico che sia atto a far passare il sistema dauna configurazione C ad un’altra infinitamente vicina C ′, compatibile con lo stato dei vincoli almedesimo istante; con l’ulteriore condizione che anche l’ipotetico spostamento obbediscaa quei medesimi vincoli di mobilita che sono imposti ad ogni moto effettivo del sistema.Cioe la variazione δqh delle coordinate lagrangiane dovra essere tale che:
n∑
h=1
ahδqh = 0. (A.13)
Cioe, per un sistema anolonomo, gli spostamenti virtuali sono dati dalle (A.12) dove i termini δqhnon sono piu arbitari e indipendenti, bensı devono soddisfare i vincoli di mobilita.
Spostamenti invertibili
Dalla (A.12) segue che un sistema olonomo, ad ogni istante e a partire da ogni configurazione,ammette insieme con ogni suo spostamento virtuale δPi anche il suo opposto −δPi; cioe nei sistemiolonomi tutti gli spostamenti virtuali sono invertibili. Infatti se le δqh soddisfano le (A.12)allora anche −δqh le soddisfano.
Spostamenti virtuali di un sistema rigido
I vincoli di rigidita sono espressi da equazioni della forma:
(xi − x)2 + (yi − y)
2 + (zi − z)2 = cost, i, j = 1, . . . , N.
e sono, manifestamente, olonomi e indipendenti dal tempo; quindi in un sistema rigido glispostamenti (infinitesimi) virtuali non differiscono dagli spostamenti (infinitesimi) reali o effettivi.Questi ultimi rientrano nel tipo
dP = dO′ + adθ × (P −O′) (A.14)
dove dO′ rappresenta lo spostamento (infinitesimo) del centro di riduzione e adθ la rotazione (in-finitesima) attorno all’asse istantaneo passante per O′ e, all’istante considerato t, avente verso e

A.1 Cinematica dei sistemi 145
direzione dati da a; completamente arbitrari nel caso di un sistema rigido libero. In tal caso la(A.14) fornisce la rappresentazione di tutti gli spostamenti virtuali di un sistema rigido:
δP = δO′ + ω′ × (P −O′),
dove designamo aδθ con ω′.Se il sistema rigido, invece che essere libero, ha un punto fisso, conviene prendere tale punto come
centro di riduzione O′; quindi il vettore caratteristico δO′ e sempre nullo. Il complesso di tutti glispostamenti virtuali si riduce quindi a
δP = ω′ × (P −O′).
A.1.4 Sistemi a legami unilaterali
Definizione A.6. Un sistema ad n gradi di liberta
Ps = Ps(q1, . . . , qn; t), s = 1, 2, . . . , N, (A.15)
si dice soggetto a vincoli unilateri (di posizione), se le rispettive coordinate lagrangiane debbonosoddisfare ad un certo numero di relazioni (dipendenti o no dal tempo) del tipo:
φj(q1, q2, . . . , qn; t) ≤ 0, j = 1, 2, . . . , r. (A.16)
Viceversa si dicono bilateri i vincoli olonomi considerati precedentemente.
Fra le configurazioni, di cui e suscettibile un sistema (A.15) soggetto a vincoli unilateri, si diconoordinarie quelle in cui le relazioni (A.16) sono soddisfatte tutte come vere disuguaglianze, mentresi dicono configurazioni di confine quelle in cui almeno una delle (A.16) e soddisfatta per uguaglianza.
Un esempio tipico e costituita da due punti P1 e P2 collegati tra loro da un filo inestendibile dilunghezza λ: la relazione (A.16) diventa
(x2 − x1)2 + (y2 − y1)
2 + (z2 − z1)2 − λ2 ≤ 0.
Quando la distanza tra i due punti e minore di λ allora saremo nel caso di configurazioni ordinarie,quando la distanza e invece esattamente λ allora saremo nel caso di configurazioni di confine.
Estendendo ai sistemi a vincoli unilateri la definizione di spostamento virtuale avremo che, per unsistema (A.15), sottoposto ai vincoli (A.16), ogni spostamento virtuale, a partire dalla configurazionedi coordinate lagrangiane q1, q2, . . . , qn, sara dato da δPs =
∑nh=1
∂Pi
∂qhδqh, s = 1, . . . , N ; dove le
variazioni δqh delle coordinate lagrangiane dovranno soddisfare alle relazioni
φj(q1 + δq1, q2 + δq2, . . . , qh + δqh; t) ≤ 0, j = 1, 2, . . . , r;
ossia, a meno di infinitesi di ordine superiore al primo, alle
φj(q1, q2, . . . , qn; t) + δφj = φj(q1, q2, . . . , qn; t) +n∑
h=1
∂φj∂qh
δqh ≤ 0. (A.17)
Da cio segue che, per ragioni di continuita, a partire da una configurazione ordinaria, i vincoliunilaterali non impongono alcuna limitazione di mobilita. Se, invece, si parte da una configurazione di

146 A Complementi
confine, cioe da una configurazione in cui si annulla almeno una delle φj, ad es. φj′ , la corrispondenterelazione (A.17) impone la condizione
δφj′ =n∑
h=1
∂φj′
∂qhδqh ≤ 0. (A.18)
Segue che: i vincoli unilaterali implicano delle condizioni per gli spostamenti virtualisoltanto a partire dalle condizioni di confine. Piu precisamente: purche si parta da una config-urazione ordinaria, per un sistema a vincoli unilateri tutti gli spostamenti virtuali sono invertibili.Non cosı se si muove da una configurazione di confine, in particolare: a partire da una configurazionedi confine, gli spostamenti virtuali sono in generale non invertibili. Sono invertibili tutti e soloquelli che con ogni relazione (A.16) soddisfatta per uguaglianza, soddisfano anche la corrispondenteδφj′ = 0.
Ad esempio: un punto appoggiato al piano (fisso) z = z0 deve soddisfare alla relazione φ(x, y, z) ≤0, dove φ(x, y, z) = z0− z. La (A.18) assume la forma δφ = −δz. Se prendiamo spostamenti virtualiche lasciano il punto nel piano (cioe con δx e δy arbitrari e con δz = 0) allora questi sono invertibilipoiche per questi si ha δφ = 0. Se invece prendiamo spostamenti virtuali che ci spostano il puntodal piano (cioe con δz > 0) allora questi non sono invertibili.
A.2 Momento di inerzia
Definizione A.7. Sia P un punto materiale di massa m, r una retta generica, d la distanza di Pda r. Per momento di inerzia di P rispetto all’asse r, si intende il prodotto md2 della massa diP per il quadrato della sua distanza dall’asse. In generale, dato un sistema S, costituito da N puntimateriali Ps di massa ms, si chiamera momento di inerzia Ir del sistema rispetto all’asse r,la somma dei momenti di inerzia dei singoli suoi punti:
Ir =N∑
s=1
msd2s, (A.19)
dove indichiamo con ms la massa del punto generico Ps del sistema e con ds la sua distanza da r.Nel caso di masse distribuite con continuita nel volume S il momento di inerzia e dato da:
Ir =∫
Sd2µdS
dove d e la distanda dall’asse del generico elemento dS di campo intorno a un punto P e µ denotala densita.
Nel seguito discuteremo le proprieta principali dei momenti di inerzia supponendo di operare conuna distribuzione discreta di corpi puntiformi. I risultati ottenuti valgono anche nel caso piu generaledi distribuzione continua dove, nelle dimostrazioni, basta sostituire alle somme gli integrali.
Momenti di inerzia rispetto ad assi paralleli
Teorema A.8 (Teorema di Huyghens). Il momento di inerzia Ir di un sistema S rispetto ad unasse r e uguale al momento di inerzia Ir0 rispetto all’asse parallelo r0, passante per il baricentro,aumentato del prodotto della massa totale m per il quadrato della distanza d tra questi due assi:

A.2 Momento di inerzia 147
Ir = Ir0 +md2.
Segue che, tra tutti gli assi paralleli a una direzione data, quello per cui il momento di inerzia eminimo passa per il baricentro.
Dimostrazione. Scegliamo un sistema di riferimento (O; x, y, z) in cui O coincide con il baricentro,l’asse (O; z) con l’asse r0 e l’asse r con l’asse di equazioni y = 0 e x = d. Rispetto a questo sistemadi riferimento e assumendo che il sistema sia costituito da un numero discreto di punti avremo che
Ir0 =N∑
s=1
ms(x2s + y2s) e Ir =
N∑
s=1
ms((xs − d)2 + y2s)
che sviluppata da
Ir =N∑
s=1
ms(x2s + y2s + d2 − 2dxs)
=N∑
s=1
ms(x2s + y2s) + d2
N∑
s=1
ms − 2dN∑
s=1
msxs = Ir0 +md2
essendo∑Ns=1msxs = mxG = 0 poiche G = O.
Momenti di inerzia rispetto ad assi concorrenti
Teorema A.9. Sia data una retta r, sia (O; x, y, z) un sistema di riferimento ortogonale destro conO appartenente alla retta r, siano α, β, γ i coseni direttori della retta r (comunque orientata)rispetto agli assi coordinati. Si prova che il momento di inerzia di un dato sistema S rispetto allaretta r vale:
Ir = Aα2 + Bβ2 + Cγ2 − 2A′αβ − 2B′αγ − 2C ′βγ (A.20)
dove si e posto:
A = Ix =∑Ns=1ms(y
2s + z2s)
B = Iy =∑Ns=1ms(x
2s + z2s)
C = Iy =∑Ns=1ms(y
2s + x2s)
e
A′ =∑Ns=1msxsys
B′ =∑Ns=1msxszs
C ′ =∑Ns=1msyszs
(A.21)
Dimostrazione. la dimostrazione si effettua con un calcolo diretto osservando che la distanza ds diun punto Ps da un asse passante per O avente direzione individuata da un versore r = αı + β + γke data da
ds = |(Ps −O)× r| =
∣∣∣∣∣∣∣det
ı kxs ys zsα β γ
∣∣∣∣∣∣∣
=√(ysγ − zsβ)2 + (xsγ − zsα)2 + (xsβ − ysα)2.
Quindi

148 A Complementi
Ir =N∑
s=1
msd2s =
N∑
s=1
ms
[(xsβ − ysα)
2 + (xsγ − zsα)2 + (ysγ − zsβ)
2]
=N∑
s=1
ms
[(x2s + z2s)β
2 + (y2s + z2s)α2 + (x2s + y2s)γ
2+
−2xsy2αβ − 2x2z2γα− 2yszsβγ]
completando cosı la dimostrazione.
La (A.20) determina il momento di inerzia, rispetto ad ogni direzione α, β, γ, passante per O, infunzione delle sei costanti A, B, C, A′, B′ e C ′, che dipendono dalla natura del sistema manon del particolare asse r. Si noti che la (A.20) e una funzione quadratica e omogenea nelleα, β, γ; in particolare rimane inalterata quando invertiamo α, β e γ con −α, −β e −γ.
I coefficienti A, B, C hanno un significato ovvio, sono i momenti di inerzia di S rispettoagli assi coordinati. Gli altri tre coefficienti A′, B′, C ′ si chiamano prodotti di inerzia o anchemomenti di deviazione.
Si noti che il calcolo dei tre momenti d’inerzia si puo effettuare come:
A = s2 + s3, B = s1 + s3, C = s2 + s1, (A.22)
dove s1, s2, s3 sono i momenti di inerzia del sistema S rispetto ai piani coordinati:
s1 =N∑
s=1
msx2s, s2 =
N∑
s=1
msy2s , s3 =
N∑
s=1
msz2s . (A.23)
A.2.1 Ellissoide d’inerzia e assi principali
Immaginiamo di portare su ciascun raggio (determinato da α, β, γ) uscente da O il segmento dilunghezza (perdendone il significato dimensionale)
OL =1√Ir, cioe x = α/
√Ir, y = β/
√Ir e z = γ/
√Ir,
dove Ir e la funzione quadratica di α, β, γ definita dalla (A.20). Escludendo il caso particolareche tutti i punti appartengano ad una medesima retta passante per O, il momento di inerziaIr = Ir(α, β, γ) non puo essere mai nullo. Percio 1√
Ir e, in corrispondenza ad ogni raggio,
un numero finito ed il luogo E dei punti L costituisce una superficie chiusa simmetrica rispetto alpunto O. Designando ora con x, y, z le coordinate di un generico punto L e essendo α = x
√Ir, β =
y√Ir, γ = z
√Ir; la (A.20) diventa:
Ax2 + By2 + Cz2 − 2A′yz − 2B′zx− 2C ′xy = 1; (A.24)
che e l’equazione di una quadrica E che, essendo chiusa, e un ellissoide il cui centro e O.
Definizione A.10. L’ellissoide E di equazione (A.24) si chiama ellissoide d’inerzia relativo alpunto O.

A.2 Momento di inerzia 149
Noto tale ellissoide si ha subito il momento di inerzia rispetto ad ogni retta r passante per O.Infatti, essendo L uno dei due punti in cui r incontra l’ellissoide, sara Ir = 1
OL2 . Da qui risultache, tra tutti gli assi condotti per O, quello che da il piu piccolo momento di inerzia e l’assemaggiore dell’ellissoide, quello che da il piu grande momento di inerzia e l’asse minoredell’ellissoide. Gli assi dell’ellissoide di inerzia si chiamano assi principali di inerzia relativi alpunto considerato e, assumendoli, come assi coordinati, la (A.24) si riduce alla forma particolare
Ax2 + By2 + Cz2 = 1,
in questo caso A, B, C prendono il nome di momenti di inerzia relativi agli assi principali omomenti principali di inerzia.
Calcolo di ellissoidi d’inerzia
Premettiamo le seguenti osservazioni che facilitano il calcolo dell’ellissoide d’inerzia:
i. Se un sistema S ammette un piano di simmetria, ogni perpendicolare a questo piano e asseprincipale di inerzia rispetto al suo piede, cioe rispetto all’ellissoide di inerzia avente centro datodalla intersezione tra l’asse ed il piano. Infatti, sia z = 0 questo piano; quindi ad ogni punto Ps dicoordinate (xs, ys, zs) e massa ms corrisponde attraverso la simmetria un punto Pj di coordinate(xj = xs, yj = ys, zj = −zs) e massa mj = ms. Da cio segue che i momenti di deviazione
B′ =N∑
s=1
msxszs e C ′ =N∑
s=1
msyszs
sono nulli poiche le somme si possono organizzare come una serie di somme di due elementi aventistessa massa, stesse coordinate xs e ys e coordinata zs opposta. Inoltre se un sistema possiededue piani ortogonali di simmetria, questi sono necessariamente piani principali dell’ellissoide diinerzia relativo ad un punto qualsiasi della loro intersezione.
ii. Sia il sistema S appartenente ad un piano e sia il centro O dell’ellissoide appartenente anch’esso alpiano. Scegliamo il sistema di coordinate (O; x, y, z) con z ortogonale al piano. Il piano (O; x, y),in quanto contenente la figura, e manifestamente un piano di simmetria materiale e quindi l’assez e un asse principale d’inerzia: B′ = C ′ = 0. Inoltre vale anche la seguente proprieta, essendozs = 0 per ogni punto Ps allora:
C =∑
s
ms(x2s + y2s) =
∑
s
ms(x2s + z2s) +
∑
s
ms(y2s + z2s) = A+ B.
Vediamo alcuni esempi:
Lamina rettangolare omogenea
Volendo calcolare l’equazione dell’ellissoide d’inerzia di centro O, dove O coincide con uno dei verticidella lamina, sia (O; x, y, z) scelto in modo che la lamina sia contenuta nel piano (O; x, y) e che gli assi(O; x) e (O; y) siano paralleli ai lati del rettangolo in modo che lamina sia tutta nel primo quadrante.Siano i lati di lunghezza a e b. Essendo µ = m/ab si ha che:
A =∫
laminaµy2dxdy =
m
ab
∫ a
0dx∫ b
0y2dy =
1
3mb2.

150 A Complementi
Analogamente segue che B = 13ma2 e quindi C = A + B = 1
3m(a2 + b2). Per cio che riguarda il
momento di deviazione abbiamo che B′ = C ′ = 0 e che
A′ =∫
laminaµxydxdy =
m
ab
∫ a
0xdx
∫ b
0ydy =
1
4mab.
Disco piano omogeneo
Calcoliamo l’equazione dell’ellissoide d’inerzia di centro O, dove O coincide con il centro del disco.Sia (O; x, y, z) scelto in modo che il disco sia contenuto nel piano (O; x, y). L’asse z e un asseprincipale d’inerzia e inoltre, poiche ogni asse passante per il centro e appartenente al piano (O; x, y)e di simmetria, segue che anche gli assi x e y sono principali di inerzia; infine si osservi che ruotando diπ/2 il disco il sistema materiale si presenta invariato allora segue che A = B e che quindi A = B = 1
2C.
Rimane dunque da calcolare solo C, sia R il raggio del disco e µ = m/πR2, si ha che:
C =∫
discoµ(x2 + y2)dxdy =
m
πR2
∫ 2π
0dθ∫ R
0r2rdr =
1
2mR2.
A.2.2 Matrice d’inerzia
Matrice d’inerzia
Fissata una terna (O; x, y, z) si definisce la matrice d’inerzia
I =
I11 I12 I13I21 I22 I23I31 I32 I33
dove
I11 = A, I22 = B, I33 = Ce
I12 = I21 = −A′, I13 = I31 = −B′, I23 = I32 = −C ′.
Quindi si ha che l’equazione dell’ellissoide di inerzia puo essere anche scritta come
(x, y, z)I
xyz
= 1 o, in modo piu, sintetico vT Iv = 1, v =
xyz
.
Usando le notazioni introdotte nel primo capitolo si ha che, assegnata la base (O; x, y, z) glielementi della matrice d’inerzia sono Iij e cambiando il sistema di riferimento mediante una matriceortogonale A allora la nuova matrice d’inerzia assume la forma
I ′ = AIAT .
Gli assi principali d’inerzia sono gli autospazi della matrice d’inerzia ed i corrispondenti momentidi inerzia ne sono gli autovalori λ1, λ2 e λ3 (supposti distinti). La ricerca delle terne principali diinerzia equivale alla diagonalizzazione della matrice d’inerzia. Nel riferimento principale la matriced’inerzia ha infatti rappresentazione
I =
λ1 0 00 λ2 00 0 λ3

A.3 Energia Cinetica e quantita di moto 151
Determinazione di due assi principali d’inerzia noto il terzo
Scegliamo un sistema di riferimento (O; x, y, z) dove O e il centro dell’ellissoide e (O; z) coincide conl’asse principale d’inerzia noto. La corrispondente matrice d’inerzia ha quindi la forma
I =
I11 I12 0I21 I22 00 0 λ3
dove assumiamo I12 6= 0 (poiche altrimenti il problema e gia risolto). Effettuiamo una rotazionedel piano (O; x, y) su se stesso in modo da lasciare l’asse (O; z) invariato; la matrice ortogonale chedefinisce questa rotazione e data da
A =
cosϕ sinϕ 0− sinϕ cosϕ 00 0 1
dove ϕ denota l’angolo x′Ox. Rispetto al nuovo sistema di riferimento la matrice d’inerzia assumela forma
I ′ = AIAT =
I ′11 I
′12 0
I ′21 I′22 0
0 0 λ3
dove I ′12 = (I22 − I11) sin 2ϕ+ 2I12 cos 2ϕ.
Gli assi principali d’inerzia hanno direzione tale che I ′12(ϕ) = 0, cioe:
i. se I11 = I22 allora deve essere cos 2ϕ = 0, ϕ = ±π/2 e gli assi principali d’inerzia coincidono conle bisettrici del piano (O; x, y);
ii. se I11 6= I22 allora deve essere tan2ϕ = 2 I12I11−I22 ed i due valori che soddisfano questa equazione
danno i due assi principali d’inerzia.
A.3 Energia Cinetica e quantita di moto
A.3.1 Energia cinetica o forza viva
Definizione A.11. Diremo energia cinetica o forza viva di un sistema materiale S di N puntiPs di massa ms la somma
T =1
2
N∑
s=1
msv2s =
1
2
N∑
s=1
msvs · vs. (A.25)
Si tratta di una grandezza scalare, sempre positiva, salvo che negli istanti di arresto di tutti ipunti del sistema, nei quali l’energia cinetica si riduce a zero; e manifesto che essa e di natura relativaal riferimento adottato (in Dinamica quando si parla di energia cinetica, senza ulteriore specificazione,si sottointende che il moto sia riferito ad una terna fissa o, piu generalmente, galileiana).

152 A Complementi
Teorema di Konig
Denotando con (O′; x′, y′, z′) un sistema di riferimento mobile e con (O; x, y, z) il sistema di riferimentofisso, la velocita di un punto Ps rispetto al sistema fisso e data da vs = vτ,s+v′
s; dove vτ,s e la velocitadi trascinamento di Ps e v
′s e la velocita relativa di Ps. Nel caso particolare in cui il sistema mobile
si muova di moto traslatorio allora vτ,s = v(O′) = v0 e l’energia cinetica T assume la forma
T =1
2mv0
2 +1
2
N∑
s=1
msv′s2+ v0 ·
(N∑
s=1
msv′s
), (A.26)
dove m denota la massa totale del sistema. La (A.26) presenta l’energia cinetica del sistema, nel suomoto rispetto a (O; x, y, z), come somma di tre termini, cioe l’energia cinetica che competerebbe alpunto O′ qualora fosse un punto materiale di massa m, l’energia cinetica del sistema nel suo motorelativo ad O′, ed, infine, una quantita che dipende sia dal moto di O′ che dal moto relativo. Laformula (A.26) si semplifica quando si assume come riferimento mobile O′ il baricentro G del sistema.In tal caso, essendo
∑Ns=1ms(Ps −G) = 0, si ha che
∑Ns=1msv
′s = 0.
Pertanto abbiamo il seguente risultato:
Teorema A.12 (Teorema del Konig). L’energia cinetica di un qualsiasi sistema materiale inmoto e, istante per istante, eguale alla somma dell’energia cinetica che competerebbe in quell’istanteal baricentro, qualora fosse un punto materiale in cui si trovasse concentrata tutta la massa delsistema, piu l’energia cinetica nel moto del sistema relativo al baricentro (ovvero all’osservatorecentrato nel baricentro e traslante):
T =1
2mv2G + TG, TG =
1
2
N∑
s=1
msv′s2, m =
N∑
s=1
ms. (A.27)
Energia cinetica di un corpo rigido
Nel caso di un corpo rigido abbiamo vs = v0 + v′s, dove v0 = v(O′), e v′
s = ω × (Ps −O′) con ovviosignificato di tali grandezze vettoriali. In particolare, ponendo m =
∑Ns=1ms e:
T ′ =1
2mv20,
T ′′ =1
2
N∑
s=1
ms ω × (Ps −O′)2 ,
T ′′′ = v0 ·N∑
s=1
msω × (Ps −O′)
allora la (A.26) diventa:
T = T ′ + T ′′ + T ′′′. (A.28)
Qui dobbiamo esprimere T ′, T ′′, T ′′′ in termini delle sei caratteristiche date da v0 = uı + v + wk e
ω = pı′ + q′ + rk′(dove e piu conveniente, ma non necessario, proiettare ω su una terna solidale di
versori ı′, ′ e k′)).

A.3 Energia Cinetica e quantita di moto 153
Il primo addendo T ′, che fornirebbe l’intera energia cinetica del corpo rigido qualora il moto fossepuramente traslatorio, e dato da
T ′ =1
2mv20 =
1
2m(u2 + v2 + w2
)(A.29)
dove si e denotata con m la massa totale del corpo rigido.Per trovare l’espressione esplicita di T ′′, che darebbe la intera energia cinetica se il punto
solidale O′ fosse fisso, considerariamo la distanza ds del generico punto Ps del corpo rigido dall’asseistantaneo di rotazione (O′,ω). Poiche ω × (Ps −O′)2 = ω2d2s allora, raccogliendo ω a fattorcomune, si trova che:
T ′′ =1
2Iω2, dove I =
N∑
s=1
msd2s
rappresenta il momento di inerzia del corpo rigido rispetto all’asse istantaneo di rotazione passanteper O′. In particolare, essendo A, B, C e A′, B′, C ′ i momenti e i prodotti d’inerzia del corpo rigidorispetto alla terna solidale al corpo rigido, si ha:
T ′′ =1
2Iω2
=1
2
Ap2 + Bq2 + Cr2 − 2A′pq − 2B′pr − 2C ′qr
(A.30)
dove i momenti A, B, C e A′, B′, C ′ calcolati rispetto al riferimento solidale sono costanti duranteil moto del corpo rigido. Infatti, il momento di inerzia I rispetto all’asse di istantanea rotazionepassante per O di equazioni (αx, βx, γx), x ∈ R e dove α = p/ω, β = q/ω e γ = r/ω sono i cosenidirettori della retta, e dato da
I = Aα2 + Bβ2 + Cγ2 − 2A′αβ − 2B′αγ − 2Cβγ=
1
ω2
(Ap2 + Bq2 + Cr2 − 2A′pq − 2B′pr − 2Cqr
).
Il terzo addendo, infine, T ′′′ si puo scrivere, per una nota proprieta del prodotto misto:
T ′′′ =N∑
s=1
ms(Ps −O′) · (v0 × ω)
=m(G−O′) · (v0 × ω) . (A.31)
Dalla (A.28) e dalle formule (A.29), (A.30) e (A.31) risulta che in ogni caso la energia cineticadi un corpo rigido e una forma quadratica nelle 6 caratteristiche dell’atto di moto(u, v, w, p, q, r).
Osserviamo che: se il centro di riduzione O′ (che e al tempo stesso origine delle coordinate) sisceglie nel baricentro si annulla (G−O′) = 0 e quindi T ′′′; se poi si scelgono come assi coordinati irispettivi assi principali di inerzia allora si annullano i tre prodotti di inerzia A′ = B′ = C ′ = 0,mentre A, B, C diventano i tre momenti principali di inerzia baricentrali. Per la energia cinetica siottiene l’espressione notevolmente semplice in accordo con il Teorema di Konig:
T =1
2m(u2 + v2 + w2
)+
1
2
(Ap2 + Bq2 + Cr2
)(A.32)

154 A Complementi
Corpo rigido con un punto fisso o un asse fisso
Quando il corpo rigido S sia fissato in un suo punto, basta scegliere questo punto O′ come centro diriduzione del moto rigido (e come origine della terna solidale); allora l’energia cinetica, per un corporigido rotante intorno ad un asse fissato con velocita angolare ω, e data da
T = T ′′ =1
2Iω2,
dove si e scelto il centro di riduzione O′ (origine anche della terna solidale) sull’asse e dove I denotail momento di inerzia del corpo rigido rispetto al suo asse di rotazione. Operando come prima si hala seguente espressione equivalente (con ovvio significato dei termini):
T = T ′′ =1
2
Ap2 + Bq2 + Cr2 − 2A′pq − 2B′pr − 2C ′qr
.
Energia cinetica di un sistema olonomo in coordinate lagrangiane
Dato un sistema olonomo S costituito da N punti Ps, dotato di n gradi di liberta, dove i vincoli sonorappresentati dalle equazioni parametriche (A.1); per cui le velocita (possibili) vs dei singoli puntiPs, in funzione delle coordinate qs e delle velocita lagrangiane qs e del tempo, sono date da
vs =n∑
h=1
∂Ps∂qh
qh +∂Ps∂t
, s = 1, . . . , N. (A.33)
Sostituendole nelle (A.25) si puo scrivere
T = T2 + T1 + T0, (A.34)
designando, rispettivamente, con T2, T1, T0 l’insieme dei termini di II grado nelle q, dei termini diI grado e, infine, dei termini indipendenti dalle q. Piu precisamente si ottiene
T2 =1
2
n∑
h,k=1
ah,kqhqk, ah,k = ah,k(q; t) =N∑
s=1
ms∂Ps∂qh
· ∂Ps∂qk
,
T1 =n∑
k=1
Akqk, Ak = Ak(q; t) =N∑
s=1
ms∂Ps∂qk
· ∂Ps∂t
T0 =1
2
N∑
s=1
ms
(∂Ps∂t
)2
dove i coefficienti ah,k, Ak e T0 dipendono dai parametri lagrangiani e dal tempo. In particolare eimmediato osservare che ah,k = ak,h.
Se i vincoli sono indipendenti dal tempo, le espressioni (A.33) delle velocita si riducono allaloro parte lineare nelle velocita lagrangiane q:
vs =n∑
h=1
∂Ps∂qh
qh. (A.35)
In particolare T1 = T0 = 0 e l’energia cinetica assume la forma

A.3 Energia Cinetica e quantita di moto 155
T =1
2
N∑
h,k=1
ah,kqhqk, ah,k =N∑
s=1
ms∂Ps∂qh
· ∂Ps∂qk
(A.36)
dove i coefficienti ah,k dipendono dalle sole qh. E questa dunque l’espressione generale della energiacinetica di un sistema olonomo a vincoli indipendenti dal tempo e ad n gradi di liberta(di fatto l’ipotesi di olonomia non e necessaria a questo stadio).
Vale il seguente risultato:
Teorema A.13. T2 e una forma quadratica nelle qh definita positiva; cioe T2 ≥ 0 per ogni sceltadelle velocita lagrangiane q1, . . . , qn e T2 = 0 se, e solo se, q1 = . . . = qn = 0.
Dimostrazione. Supponiamo, per un momento, i vincoli indipendenti dal tempo e dimostriamo primail teorema sotto questa ipotesi. Osserviamo che T e per sua natura stessa definita positiva e quindi,essendo T = T2 sara necessariamente T2 ≥ 0. Se poi T2 = 0 allora T = 0 e quindi deve essere vs = 0;resta quindi da fare vedere che
qh = 0, h = 1, 2, . . . , n ⇔ vs = 0, s = 1, 2, . . . , N
ovvere le qh sono tutte nulle sempre e solo quando tali sono tutte le vs. Dalla (A.33), in cui ∂Ps
∂t= 0,
e immediato che vs = 0 quando qh = 0. Per dimostrare il viceversa osserviamo che se tutte le vssono nulle allora abbiamo che deve essere
n∑
h=1
∂xs∂qh
qh = 0,n∑
h=1
∂ys∂qh
qh = 0,n∑
h=1
∂zs∂qh
qh = 0
che implica qh = 0 poiche la matrice Jacobiana delle xs, ys, zs rispetto alle qh, in virtu dellaipotesi della indipendenza delle coordinate lagrangiane, e, per valori generici di esse, di caratteristican. Supponiamo ora i vincoli dipendenti dal tempo; T sara ancora definita positiva ma ora T =T2 + T1 + T0. Mostriamo per prima cosa che T2 ≥ 0. Supponiamo per assurdo che esistano ˙qh nontutte nulle tali che T2 < 0, quindi sara T2 = α2T2 < 0 anche per α ˙qh per qualunque α ∈ R\0 einoltre sara
T = α21
2
n∑
h,k=1
ah,k ˙qh ˙qk + αn∑
h=1
Ah ˙qh + T0 = α2T2 + αT1 + T0.
Poiche abbiamo supposto per assurdo T2 < 0 allora, per α sufficientemente grande, sara T < 0cadendo in assurdo. Mostriamo ora che T2 = 0 implica qh = 0. Supponiamo, per assurdo, cheesistano ˙qh non tutte nulle tali che T2 = 0, quindi sara T2 = α2T2 = 0 anche per α ˙qh per qualunqueα ∈ R\0. Quindi
T = αn∑
h=1
Ah ˙qh + T0 = αT1 + T0.
Se T1 6= 0 allora basta prendere α di segno opposto a T1 e sufficientemente grande per avere T < 0cadendo in assurdo; quindi deve essere anche T1 = 0, ottenendo
T = T0 =N∑
s=1
ms
(∂Ps∂t
)2
.

156 A Complementi
Osserviamo che T0 e indipendente da ˙qh e quindi da α mentre T dipende da α attraverso vs e la(A.33), poiche ˙qh 6= 0 per un qualche h, cadendo ancora in assurdo. Quindi abbiamo provato cheT2 ≥ 0 e che se T2 = 0 allora deve necessariamente essere qh = 0 per ogni h.
Notiamo, infine, che nell’uno e nell’altro caso il determinante ‖ah,k‖ degli n2 coefficienti ah,k,appunto come discriminante di una forma definita (positiva), non puo annullarsi. Per dimostrarequesto risultato indipendentemente dal Teorema precedente si puo procedere come segue: supponiamoi vincoli indipendenti dal tempo (per semplicita) e sia, per assurdo, questo determinante fosse nullo,per una qualche scelta dei parametri lagrangiani qh e t; allora esistono ˙qh non tutte nulle soddisfacential sistema di n equazioni lineari
∂T
∂qh=
n∑
k=1
ah,k ˙qk = 0, h = 1, 2, . . . , n.
Moltiplicando i membri di questa equazione per ˙qh si ottiene che deve essere
0 =n∑
h=1
˙qh∂T
∂qh= 2T
per il teorema di Eulero, cadendo in assurdo.
A.3.2 Quantita di moto e momento della quantita di moto
Definizione A.14. Definiamo quantita di moto di un sistema di punti Ps di massa ms la sommavettoriale
Q =N∑
s=1
msvs. (A.37)
Derivando l’equazione vettoriale m(G−O) =∑Ns=1ms(Ps−O), dove G e il baricentro e vG la sua
velocita, abbiamo
mvG =N∑
s=1
msvs = Q. (A.38)
Abbiamo dunque che:
Teorema A.15. La quantita di moto di un sistema qualsiasi e ad ogni istante eguale alla quantitadi moto che, in quell’istante, spetterebbe al baricentro, qualora fosse un punto materiale, in cui sitrovasse concentrata la massa totale del sistema.
Definizione A.16. Dato un sistema materiale S si dice momento delle quantita di moto rispettoad un qualsiasi punto O il momento risultante rispetto ad O delle quantita di moto dei singoli puntiPs del sistema, cioe la grandezza vettoriale
K(O) =N∑
s=1
(Ps −O)×msvs =N∑
s=1
msvs × (O − Ps). (A.39)

A.3 Energia Cinetica e quantita di moto 157
Il momento della quantita di moto e legato alla scelta del punto O secondo la seguente relazione:
K(O′) = K(O) + (O −O′)×Q
dove Q e la quantita di moto del sistema. Infatti
K(O′) =N∑
s=1
msvs × (O′ − Ps) =N∑
s=1
msvs × [(O − Ps) + (O′ −O)]
=N∑
s=1
msvs × (O − Ps) +N∑
s=1
msvs × (O′ −O)
= K(O) + (O −O′)×Q.
Scegliendo come centro di riduzione dei momenti il baricentro G del sistema ed essendo v′s le
velocita dei punti del sistema nel loro moto relativo a G (cioe rispetto ad un osservatore baricentricotraslante): vs = vG + v′
s si ha che:
K(G) =N∑
s=1
msvs × (G− Ps)
=N∑
s=1
msv′s × (G− Ps) +
N∑
s=1
msvG × (G− Ps)
=N∑
s=1
msv′s × (G− Ps) + vG ×
N∑
s=1
ms(G− Ps)
=N∑
s=1
msv′s × (G− Ps) = K′(G).
Pertanto si conclude che:
Teorema A.17. Comunque si muova un sistema, il momento delle quantita di moto (assoluto)rispetto al baricentro coincide con l’analogo momento delle quantita di moto relativo al baricentrostesso (cioe rispetto all’osservatore baricentrico e traslante):
K(G) = K′(G).
Derivata del momento della quantita di un sistema
Derivando la relazione (A.39) si ottiene
dK(O)
dt=
N∑
s=1
(Ps −O)×msas − v0 ×Q. (A.40)
Se il centro di riduzione O e fisso (v0 = 0), la (A.40) si semplifica nella forma
dK(O)
dt=
N∑
s=1
(Ps −O)×msas. (A.41)
Si noti che tale semplificazione rimane valida anche quando il centro di riduzione O (pur non essendo,in generale, fisso) coincida, istante per istante, con il baricentro del sistema, infatti in talcaso il termine vG × Q e identicamente nullo dalla (A.38), o oppure abbia velocita parallela aquella del baricentro, infatti v0 ×Q = v0 × (mvG) = 0.

158 A Complementi
A.3.3 Quantita di moto e momento delle quantita di moto di un corpo rigido
Quando il sistema S in moto e un corpo rigido, e si assume a centro di riduzione O′ un punto solidalecon il sistema, i due vettori Q e K(O′) si esprimono in modo notevolmente semplice per mezzo dellecaratteristiche u, v, w e p, q, r del moto di S rispetto ad una qualsiasi terna solidale (O′; x′, y′, z′)dove
v0 = uı′ + v′ + wk′, ω = pı′ + q′ + rk
′.
Piu precisamente si ha che:
Teorema A.18. Le componenti di Q e K si identificano con le derivate parziali dell’energia cineticaT del corpo rigido rapporto alle 6 caratteristiche:
Q = ∇(u,v,w)T =∂T
∂uı′ +
∂T
∂v′ +
∂T
∂wk′
e
K(O′) = ∇(p,q,r)T =∂T
∂pı′ +
∂T
∂q′ +
∂T
∂rk′.
Dimostrazione. Infatti, partendo dalla definizione T = 12
∑Ns=1msv
2s , dove
vs = v0 + ω × (Ps −O′) = vs,x′ ı′ + vs,y′
′ + vs,z′ k′, v0 = v(O),
viene proiettata sulla terna solidale e dove
vs,x′ = u+ vs,x′(p, q, r).
L’energia cinetica T sara funzione di u, v, w, p, q, r e, derivandola rispetto ad u si ottiene che solamente
vs,x′ dipende da u e che∂vs,x′
∂u= 1; quindi:
∂T
∂u=
N∑
s=1
msvs,x′ , (A.42)
il cui secondo membro non e altro che la componente Qx′ di Q secondo l’asse delle x′. Analogamenteper y′ e z′ ottenendo:
Qx′ =∂T
∂u, Qy′ =
∂T
∂v, Qz′ =
∂T
∂w. (A.43)
Derivando ora la T rispetto a p si perviene all’identita
∂T
∂p=
N∑
s=1
ms∂vs∂p
· vs =N∑
s=1
ms
[∂ω
∂p× (Ps −O)
]· vs
=N∑
s=1
msı′ × (Ps −O) · vs =
N∑
s=1
msı′ · (Ps −O)× vs = Kx′ .
Analogamente
Ky′ =∂T
∂q, Kz′ =
∂T
∂r(A.44)
completando cosı la dimostrazione.

A.3 Energia Cinetica e quantita di moto 159
In particolare dalle (A.28) e (A.29)–(A.30)–(A.31) si ottengono le espressioni delle componenti diQ e K(O′). In particolare, quando il centro di riduzione O′ coincide con il baricentro o quando O′
sia fissato nello spazio (da cio T ′′′ = 0), allora le (A.44) assumono la forma
Kx′ = Ap− B′r − C ′qKy′ = −C ′p+ Bq −A′rKz′ = −B′p−A′q + Cr
(A.45)
e basta prendere come assi solidali i tre assi principali d’inerzia in O′ (baricentro o punto solidalefisso) per ridurle ulteriormente alla forma canonica
Kx′ = Ap, Ky′ = Bq, Kz′ = Cr (A.46)
dove A, B, C denotano i momenti principali di inerzia.Vale il seguente teorema:
Teorema A.19. L’energia cinetica di un corpo rigido vale
T =1
2v(O′) ·Q+
1
2ω ·K(O′).
Dimostrazione. Il Teorema si dimostra applicando il Teorema di Eulero all’energia cinetica T
2T =∂T
∂uu+
∂T
∂vv +
∂T
∂ww +
∂T
∂pp+
∂T
∂qq +
∂T
∂rr,
considerata come forma quadrattica delle 6 caratteristiche (vedi la nota a seguito della formula(A.31)) e tenendo conto delle (A.43), (A.44).
Se il polo O′ dei momenti si fa coincidere con il baricentro (Q = mvG), allora si puo scrivere (eil Teorema di Konig) T = 1
2mv2G + 1
2ω ·KG. Inoltre, nel caso in cui O′ sia fisso allora abbiamo che
T = 12ω ·K(O′).
Corpo rigido ad asse fisso
Se un corpo rigido S ruota intorno ad una retta fissa a con velocita angolare ω allora, scegliendol’asse a coincidente con uno degli assi di riferimento (ad es. l’asse x′) per cui p = ±ω e q = r = 0, le(A.43) e (A.44) assumono la forma:
Qx′ = 0, Qy′ = −mz0p, Qz′ = my0p;
Kx′ = Ap, Ky′ = −C ′p, Kz′ = −B′p.
Si prova cosı che il momento delle quantita di moto rispetto all’asse di rotazione e datodal prodotto di ±ω per A (momento di inerzia del corpo rispetto allo stesso asse).


B
Serie di Fourier
B.1 Serie di Fourier in forma trigonometrica
Sia data una funzione f(t) periodica di periodo T . Si definisce serie di Fourier associata a f(t) laseguente serie (al momento formale):
f(t) ∼ 1
2a0 +
∞∑
n=1
[an cos
(2nπ
Tt)+ bn sin
(2nπ
Tt)]
(B.1)
in cui i coefficienti di Fourier an e bn sono dati da
an =2
T
∫ T
0f(t) cos
(2nπ
Tt)dt, n = 0, 1, . . . , (B.2)
e
bn =2
T
∫ T
0f(t) sin
(2nπ
Tt)dt, n = 1, 2, . . . . (B.3)
La serie (B.1) associata a f(t) e, al momento, solamente formale e per questo motivo utiliziamo ilsimbolo ∼; infatti non possiamo ancora dire nulla sulla sua convergenza e, nel caso in cui converga,a cosa converge. A tal merito vale il seguente:
Teorema di Dirichlet: Sia data una funzione periodica f(t) di periodo T e continua a trattiinsieme alla sua derivata prima f ′(t). Allora la serie (B.1) associata a f(t) con i coefficienti (B.2)e (B.3) converge a f(t) nei punti in cui f(t) e continua, nei punti t0 in cui la funzione f(t) ediscontinua allora la serie (B.1) converge a
f(t0 + 0) + f(t0 − 0)
2.
Si noti che il termine costante nella (B.1), dato da
1
2a0 =
1
T
∫ T
0f(t)dt,
corrisponde al valore medio di f(t) in un periodo. Osserviamo poi che, a causa della periodicita dellafunzione f(t), possiamo esprimere i valori dei coefficienti di Fourier an e bn scegliendo come estremidi integrazione c e c+ T con c qualunque. Ad esempio, per c = −T/2 segue che

162 B Serie di Fourier
an =1
π
∫ T/2
−T/2f(t) cos (2nπt/T ) dt, n = 0, 1, . . . ,
e
bn =1
π
∫ T/2
−T/2f(t) sin (2nπt/T ) dt, n = 1, 2, . . .
in virtu dell’osservazione precedente.
B.2 Serie di Fourier in forma esponenziale
Facendo uso delle formule di Eulero si puo dare una espressione diversa della serie di Fourier. Infatti,ricordando che
cosα =1
2
(eiα + e−iα
), sinα =
1
2i
(eiα − e−iα
),
e ponendo
a−n = an, b−n = −bn, per n ∈ N, e b0 = 0
allora la serie di Fourier assume la forma
f(t) =1
2a0 +
∞∑
n=1
[an cos
(2nπ
Tt)+ bn sin
(2nπ
Tt)]
=1
2a0 +
∞∑
n=1
[an cos
(2nπ
Tt)+ bn sin
(2nπ
Tt)]
=1
2a0 +
∞∑
n=1
[an − ibn
2ei
2nπTt +
an + ibn2
e−i2nπTt
]
=∞∑
n=−∞
an − ibn2
ei2nπTt =
∞∑
n=−∞cne
i 2nπTt (B.4)
=∞∑
n=−∞cne
i 2nπTt (B.5)
che e detta serie di Fourier in forma esponenziale, dove i coefficienti cn sono dati da
cn =1
2(an − ibn) =
1
T
∫ T
0f(t)e−
i2nπT
tdt, n ∈ Z. (B.6)
Si osserva immediatamente che, se la funzione f(t) e a valori reali, allora cn = c−n.
Stima dei coefficienti cn
Teorema: Sia la funzione periodica f(t) di classe Cr([0, T ]) con r ≥ 1, cioe sia continua insiemealle sue derivate fino all’ordine r. Allora si ha che
|cn| ≤ c|n|−r

B.2 Serie di Fourier in forma esponenziale 163
dove la costante c, indipendente da n, e data da
c =[T
2π
]rmaxt∈[0,T ]
|f (r)(t)|.
Dimostrazione: Ricordando che la derivata di una funzione periodica (e derivabile) e ancora unafunzione periodica si ottiene, integrando per parti r volte, la seguente espressione per cn:
cn =1
T
∫ T
0f(t)e−
i2nπT
tdt
=1
T
[f(t)
T
−i2nπe− i2nπ
Tt]T
0− 1
T
∫ T
0f ′(t)
T
−i2nπe− i2nπ
Ttdt
=1
T
T
i2nπ
∫ T
0f ′(t)e−
i2nπT
tdt =1
T
[T
i2nπ
]r ∫ T
0f (r)(t)e−
i2nπT
tdt.
Quindi
|cn| ≤1
T
[T
2|n|π
]r ∫ T
0|f (r)(t)|
∣∣∣e−i2nπT
t∣∣∣ dt
≤ 1
|n|r1
T
[T
2π
]r ∫ T
0|f (r)(t)|dt ≤ c
|n|r
dove c e la costante indipendente da n che vale
c =[T
2π
]rmaxt∈[0,T ]
|f (r)(t)|.


C
Teorema di annullamento degli integrali
Il teorema di annullamento degli integrali dice che se f e continua e se∫ ba f(x)g(x)dx = 0 per ogni g
continua segue che f(x) ≡ 0. Piu precisamente:Teorema. Una funzione f ∈ C([a, b]) e identicamente nulla sull’intervallo considerato se, e solo
se,∫ b
af(x)g(x)dx = 0, ∀g ∈ C([a, b]). (C.1)
Dimostrazione: in un senso la dimostrazione e ovvia. Assumiamo soddisfatta la (C.1) e supponi-amo, per assurdo che f non sia identicamente nulla. Se f non e identicamente nulla allora esistex0 ∈ (a, b) tale che f(x0) 6= 0, in particolare supponiamo, per fissare le idee e senza perdere ingeneralita, che sia f(x0) > 0. Per continuita esiste ǫ > 0 tale che
(x0 − 2ǫ, x0 + 2ǫ) ⊂ (a, b)
e
f(x) ≥ 0, ∀x ∈ (x0 − 2ǫ, x0 + 2ǫ)
f(x) ≥ 1
2f(x0), ∀x ∈ (x0 − ǫ, x0 + ǫ).
Consideriamo ora una funzione continua 0 ≤ g(x) ≤ 1 tale che
g(x) =
1 se x ∈ (x0 − ǫ, x0 + ǫ)0 se x /∈ (x0 − 2ǫ, x0 + 2ǫ)
Per costruzione si ha∫ b
af(x)g(x)dx =
∫ x0+2ǫ
x0−2ǫf(x)g(x)dx
≥∫ x0+ǫ
x0−ǫf(x)g(x)dx
≥∫ x0+ǫ
x0−ǫ
1
2f(x0)1dx = ǫf(x0) > 0
contraddicendo la (C.1).


D
Forma di Poincare-Cartan e dimostrazione del Teorema sulle funzionigeneratrici di tipo F1
In questo paragrafo, per semplicita, consideriamo funzioni di Hamilton H(p, q, t) dove q e p apparten-gono ad aperti di Rn.
D.1 Elementi sulle forme differenziali
D.1.1 Forme esterne
Consideriamo lo spazio vettoriale Rn e denotiamo con ξ i suoi elementi.
1−forme
Definiamo forma di ordine 1, o anche 1-forma, una funzione lineare ω definita da Rn su R, cioe tale
che
ω(λ1ξ1 + λ2ξ2) = λ1ω(ξ1) + λ2ω(ξ2), ∀λ1, λ2 ∈ R, ∀ξ1, ξ2 ∈ Rn. (D.1)
E immediato riconoscere che l’insieme delle 1-forme e chiuso rispetto alla somma e alla moltiplicazioneper uno scalare. Fissato su R
n un sistema di coordinate xh allora l’applicazione che ad ogni elementoξ ∈ R
n ne associa la componente rispetto ad una direzione assegnata e manifestamente una 1-forma.Piu in generale ogni 1-forma ω si esprime come
ω =n∑
h=1
ahxh (D.2)
dove sono assegnati n numeri scalari ah e dove xh(ξ) rappresenta la componente h-esima del vettoreξ nel sistema di coordinate prescelto.
2-forme
Definiamo forma di ordine 2, o anche 2-forma, una funzione ω2, definita sulle coppie di vettori,definita da R
n × Rn su R, bilineare e antisimmetrica, cioe tale che
ω2(λ1ξ1 + λ2ξ2, ξ3) = λ1ω2(ξ1, ξ3) + λ2ω
2(ξ2, ξ3) (D.3)
e

168 D Forma di Poincare-Cartan e dimostrazione del Teorema sulle funzioni generatrici di tipo F1
ω2(ξ1, ξ2) = −ω2(ξ2, ξ1), ∀λ1, λ2 ∈ R, ∀ξ1, ξ2, ξ3 ∈ Rn. (D.4)
Un esempio di 2-forma e, per n = 3, il prodotto vettoriale tra due vettori ξ1 e ξ2 paralleli al pianox1, x2:
ω2(ξ1, ξ2) = ξ1 × ξ2 · e3 (D.5)
dove e3 e il versore normale al piano x1, x2. Ricordando il significato geometrico del prodottovettoriale segue che un altro esempio di 2-forma e costituito dall’area (con segno) del parallelogrammaavente spigoli definiti dai due vettori ξ1 e ξ2.
Come nel caso precedente, e immediato riconoscere che l’insieme delle 2-forme e chiuso rispettoalla somma e alla moltiplicazione per uno scalare. Inoltre, dalla proprieta di antisimmetria, segueche
ω2(ξ, ξ) = 0. (D.6)
k-forme
Definiamo forma di ordine k, o anche k-forma, una funzione ω definita da [Rn]k su R, bilineare eantisimmetrica, cioe tale che
ω(λ′1ξ′1 + λ′′1ξ
′′1 , ξ2, . . . , ξk) = λ′1ω(ξ
′1, ξ2, . . . , ξk) + λ′′1ω(ξ
′′1 , ξ2, . . . , ξk) (D.7)
e se (1, 2, . . . , k) → (i1, i2, . . . , ik) e una permutazione sui primi k numeri di segno ν allora
ω(ξi1 , . . . , ξik) = (−1)νω(ξ1, . . . , ξk) , (D.8)
dove ricordiamo che ν = 0 se la permutazione e pari e ν = 1 se la permutazione e dispari. Unesempio di 3-forma su R
3 e dato dal prodotto misto:
ξ1 × ξ2 · ξ3 =
∣∣∣∣∣∣∣
ξ1,1 ξ1,2 ξ1,3ξ2,1 ξ2,2 ξ2,3ξ3,1 ξ3,2 ξ3,3
∣∣∣∣∣∣∣, ξj = (ξj,1, ξj,2, ξj,3). (D.9)
Ricordando il significato geometrico del prodotto misto segue che un altro esempio di 3-forma ecostituito dal volume (con segno) del parallelepipedo avente spigoli definiti dai tre vettori ξ1, ξ2 eξ3. Estendo questo risulato al caso generale si ha che un esempio di k-forma su R
k e costituito dalvolume (con segno) del parallelepipedo avente spigoli definiti dai k vettori ξj, j = 1, . . . k, espressodal determinante
ω(ξ1, . . . , ξk) =
∣∣∣∣∣∣∣∣
ξ1,1 · · · ξ1,k...
. . ....
ξk,1 · · · ξk,k
∣∣∣∣∣∣∣∣, ξj = (ξj,1, . . . , ξj,k), j = 1, . . . , k. (D.10)
Come nel caso precedente, e immediato riconoscere che l’insieme delle k-forme e chiuso rispettoalla somma e alla moltiplicazione per uno scalare.

D.1 Elementi sulle forme differenziali 169
D.1.2 Prodotto esterno tra k-forme
Siano date due 1-forme, ω1 e ω2, su Rn. Si definisce prodotto esterno tra le due 1-forme, definito su
una coppia di vettori, la grandezza
(ω1 ∧ ω2)(ξ1, ξ2) =
∣∣∣∣∣ω1(ξ1) ω2(ξ2)ω1(ξ2) ω2(ξ1)
∣∣∣∣∣ = ω1(ξ1)ω2(ξ2)− ω2(ξ1)ω1(ξ2).
Dalla definizione segue immediatamente che
ω1 ∧ ω2 = −ω2 ∧ ω1 e ω ∧ ω = 0
e quindi ω1 ∧ ω2 e una 2-forma. Inoltre, ponendo ωj =∑nh=1 aj,hxh, un calcolo semplice porta a
ω1 ∧ ω2 =n∑
h,k=1
a1,ha2,kxh ∧ xk =n∑
h=1
∑
k>h
(a1,ha2,k − a1,ka2,h)xh ∧ xk.
In particolare, e possibile dimostrare che le n · (n− 1) 2-forme xh ∧ xk risultano essere una base perlo spazio lineare delle 2-forme su R
n.Estendendo questo concetto, date k 1-forme ω1, . . . , ωk, si definisce
(ω1 ∧ . . . ∧ ωk) (ξ1, . . . , ξk) = det(ωj(ξℓ)).
Si dimostra che questo definisce una k-forma. In generale si puo rappresentare una k-forma comeuna combinazione lineare di quelle di base, cioe
ω =∑
1≤i1<...<ik≤nai1,...,inxi1 ∧ . . . ∧ xik . (D.11)
per una opportuna scelta dei coefficienti ai1,...,in .Diamo ora la definizione generale di prodotto esterno tra una qualunque k-forma ω1 ed una
qualunque ℓ-forma ω2, definite entrambe su Rn. Si definisce prodotto esterno ω1 ∧ ω2 l’applicazione
il cui valore sui k + ℓ vettori ξ1, . . . , ξk, ξk+1, . . . , ξk+ℓ ∈ Rn e data da
(ω1 ∧ ω2) (ξ1, . . . , ξk, ξk+1, . . . , ξk+ℓ) =∑
(−1)νω1(ξi1 , . . . , ξik)ω2(ξjk+1, . . . , ξjk+ℓ
)
dove la somma e estesa a tutte le permutazioni i1, . . . , ik, jk+1, . . . , jk+ℓ dei numeri 1, . . . , k + ℓ, disegno ν, e tali che i1 < . . . < ik e jk+1 < . . . < jk+ℓ.
D.1.3 Forme differenziali
Sia data una varietaM , si chiama forma differenziale di ordine 1, o anche 1-forma differenziale, sullavarietaM l’applicazione regolare ω : TM → R del fibrato tangente alla varieta, lineare in ogni spaziotangente TMx. Un esempio classico di 1-forma differenziale e il differenziale di una funzione; infattisia M una varieta assegnata e sia f una funzione definita su M , il differenziale di f calcolato per unpunto x ∈M e una applicazione lineare
dfx : TMx → R.

170 D Forma di Poincare-Cartan e dimostrazione del Teorema sulle funzioni generatrici di tipo F1
Consideriamo, in particolare, come varieta M lo spazio euclideo Rn di coordinate x1, . . . , xn. Sia xh
la funzione che ad ogni punto dello spazio ne associa la coordinata h-esima, allora il suo differenzialedxh e definito sul vettore ξ = (ξ1, . . . , ξn) ∈ R
n = TRnx attraverso la relazione
dxh(ξ) = ξh.
In base a questa osservazione ed in base a quanto visto in precedenza sulle 1-forme su Rn possiamo
concludere che ogni dxh e una 1-forma sullo spazio TRnx e quindi che ogni 1-forma differenzialeω nello spazio R
n, con un prefissato sistema di coordinate, si scrive univocamente come
ω =n∑
h=1
ah(x)dxh
dove i coefficienti ah(x) sono funzioni regolari. A partire dalla (D.11) si puo rappresentare unak-forma differenziale come una combinazione lineare di quelle di base, cioe per ogni x ∈ R
n
ω =∑
1≤i1<...<ik≤nai1,...,ikdxi1 ∧ . . . ∧ dxik
dove ai1,...,ik e una assegnata funzione di x.Si definisce derivata esterna della una k-forma differenziale ω la k + 1-forma
dω =∑
1≤i1<...<ik≤ndai1,...,ik ∧ dxi1 ∧ . . . ∧ dxik .
dove dai1,...,ik e il differenziale della funzione ai1,...,ik che, abbiamo visto, e una 1-forma differenziale.Da quanto visto segue che, data una 1-forma ω su R
n, rappresentata come ω =∑nj=1 ajdxj, la
derivata esterna e la 2-forma definita come
dω =n∑
j=1
daj ∧ dxj =n∑
j,h=1
∂aj∂xh
dxh ∧ dxj =n∑
j,h=1
(∂aj∂xh
− ∂ah∂xj
)dxhdxj.
Osserviamo che la 2-forma dω si puo scrivere che
dω =n∑
j=1
ωjdxj dove ωj =n∑
h=1
(∂aj∂xh
− ∂ah∂xj
)dxh.
Inoltre la 2-forma dω e identicamente nulla se, e solo se, sono identicamente nulle le 1-forme ωj. Ilsistema
ωj = 0, j = 1, 2, . . . , n,
si dira il sistema associato alla 1-forma ω.Si osserva, infine, che, date due 1-forme differenziali ω e ω tali che d(ω − ω) = 0 allora il sistema
associato alle due 1-forme coincide.
D.1.4 Proprieta della derivazione esterna
Abbiamo le seguenti proprieta:

D.1 Elementi sulle forme differenziali 171
1) Se ω e una k-forma allora dω e una k + 1-forma;2) Se ω e ω sono due k-forme allora d(ω + ω) = dω + dω;3) Se ω e ω sono due k-forme allora d(ω ∧ ω) = dω ∧ ω + (−1)kω ∧ dω;4) Se ω e una k-forma allora d(dω) = 0.
Le proprieta 1), 2) e 3) sono evidenti e, almeno in parte, gia discusse; proviamo la 4) e supponiamoper semplicita k = 1 (la dimostrazione si generalizza al caso k qualunque). Sia ω =
∑ni=1 aidxi, allora,
per definizione di derivata esterna, si ha che
d(dω) = dn∑
i,j=1
∂ai∂xj
dxj ∧ dxi =n∑
i,j,k=1
∂2ai∂xj∂xk
dxk ∧ dxj ∧ dxi
=n∑
i=1
∑
j<k
(∂2ai
∂xj∂xk− ∂2ai∂xk∂xj
)dxk ∧ dxj
∧ dxi = 0.
Definizione. Una k-forma differenziale Ω si dice chiusa se dΩ = 0, si dice esatta se esiste una(k − 1)-forma ω tale che Ω = dω.
Si osserva che dalla proprieta 4) segue che ogni forma esatta e anche chiusa; il viceversa, in generalefalso, e vero se la forma e chiusa su un aperto semplicemente connesso di Rn, cioe:
Lemma: Sia A ⊆ Rn un aperto semplicemente connesso e sia Ω una k-forma differenziabile su
A. Se Ω e chiusa allora Ω e esatta.
D.1.5 Lemma di Stokes
Consideriamo una curva chiusa γ qualsiasi e una forma differenziale ω. Le linee di rotore di ω passantiper γ definiscono una superficie di R2n+1 detta tubo di rotore. Si ha il seguente risultato (per unadimostrazione si puo fare riferimento al testo di V.I.Arnold):
Teorema (Lemma di Stokes): Sia ω una forma differenziale non singolare, e siano γ1 e γ2 duecurve chiuse qualsiasi che appartengono ad uno stesso tubo di rotore. Allora
∮
γ1ω =
∮
γ2ω. (D.12)
D.1.6 Forma di Poincare-Cartan
Consideriamo una Hamiltoniana H(p, q, t) definita sullo spazio delle fasi esteso (p, q, t) ∈ R2n+1.
Si ha il seguente teorema:Teorema. La forma differenziale
ω =n∑
h=1
phdqh −H(p, q, t)dt (D.13)
in R2n+1 e non singolare ed e detta forma di Poincare-Cartan. Le sue linee di rotore sono le
curve integrali del sistema di equazioni di Hamilton associato all’Hamiltoniana H.Dimostrazione: Alla forma ω di componenti (0, . . . , 0, p1, . . . , pn,−H) e associata la matrice (di
determinante nullo)

172 D Forma di Poincare-Cartan e dimostrazione del Teorema sulle funzioni generatrici di tipo F1
A(x) =
0 −i gradp Hi 0 gradq H−gradp H −gradq H 0
(D.14)
Poiche il suo minore coincide con la matrice J segue che il rango di tale matrice e 2n per ogni (p, q, t)
e quindi la forma ω e non singolare. Inoltre il vettore v(p, q, t) =(−gradq H, gradp H, 1
)appartiene
al nucleo di A per ogni (p, q, t), e quindi determina le linee di rotore di ω. D’altra parte le curveintegrali di v sono le soluzioni di q = gradp H, p = −gradq H, t = 1 e quindi sono proprio le curveintegrali del sistema di equazioni di Hamilton per H nello spazio delle fasi esteso.
Il Lemma di Stokes applicato alla forma di Poincare-Cartan da luogo al seguente risultato.Corollario (invariante integrale di Poincare-Cartan): Siano γ1 e γ2 due curve chiuse qual-
siasi in R2n+1 che appartengono allo stesso tubo di rotore relativo alla forma (D.13). Allora
∮
γ1
(n∑
h=1
phdqh −H(p, q, t)dt
)=∮
γ2
(n∑
h=1
phdqh −H(p, q, t)dt
). (D.15)
In particolare, se γ0 denota una curva chiusa che appartiene allo stesso tubo di rotore di γ relativoalla forma di Poincare-Cartan e che sia tracciata in un piano t = t0 con t0 fissato allora la(D.15) ha come conseguenza che
∮
γ
(n∑
h=1
phdqh −H(p, q, t)dt
)=∮
γ0
n∑
h=1
phdqh. (D.16)
D.2 Forma di Poincare-Cartan e trasformazioni che conservano la forma canonica
Riprendiamo la seguente 1-forma su R2n+1 di Poincare-Cartan:
ω =n∑
h=1
phdqh −Hdt
e consideriamo la 2-forma dω; e immediato verificare che essa ha forma dω =∑nh,k=1Ah,kdxhdxk dove
A e data dalla (D.14) e quindi
dω = (dp, dq, dt)
0 −i gradp Hi 0 gradq H−gradp H −gradq H 0
dpdqdt
=n∑
h=1
[(−dqh +
∂H
∂phdt
)dph +
(dph +
∂H
∂qhdt
)dqh
]−
n∑
h=1
(∂H
∂phdph +
∂H
∂qhdqh
)dt
=n∑
h=1
[(dph +
∂H
∂qhdt
)dqh −
(dqh −
∂H
∂phdt
)dph
]−(dH − ∂H
∂tdt
)dt
Pertanto il sistema associato alla 1-forma di Poincare-Cartan e dato da
dphdt
= −∂H∂qh
,dqhdt
=∂H
∂ph,dH
dt=∂H
∂t, h = 1, . . . , n

D.3 Teorema sulle funzioni generatrici di tipo F1 173
dove le prime 2n equazioni costituiscono appunto il sistema canonico mentre l’ultime ne e una nec-essaria conseguenza come gia visto.
Consideriamo ora una trasformazione (p, q) → (P,Q) dipendente, eventualmente, da t:
p = p(P,Q, t) e q = q(P,Q, t) (D.17)
e tale che esistono due funzioni K(P,Q, t) e M(p, q, P,Q, t) tali che le due forme di Poincare-Cartanω =
∑nh=1 phdqh−Hdt e Ω =
∑nh=1 PhdQh−Kdt differiscano solamente per dM . L’identita delle due
forme (a meno del differenziale totale che e, ai nostri fini, inessenziale) comporta l’analoga identita deidue sistemi associati, cioe la trasformazione (p, q) → (P,Q) conserva la struttura canonica del sistemacanonico dove ora K e la nuova Hamiltoniana. Segue quindi che dalla conservazione dell’invarianteintegrale di Poincare-Cartan consegue la conservazione della forma canonica.
Teorema. Se la trasformazione (p, q) → (P,Q) e tale che la nuova forma di Poincare-Cartan
Ω =n∑
h=1
PhdQh −K(P,Q, t)dt (D.18)
definita per una qualche funzione K(P,Q, t) coincide con la primitiva a meno di un differenzialetotale, cioe esiste una funzione regolare M(p, q, P,Q, t) tale che
ω −Ω =n∑
h=1
(phdqh − PhdQh) + (K −H)dt = dM (D.19)
cioe la differenza tra due forme di Poincare-Cartan, intesa come 1-forma differenziale su R4n+1, e
esatta, allora la trasformazione conserva la struttura canonica e K e la nuova Hamiltoniana.
D.3 Teorema sulle funzioni generatrici di tipo F1
Diamo la dimostrazione relativa alla funzione generatrice del primo tipo, essendo analoga negli altricasi.
Torema su funzioni generatrici di tipo F1. Sia F1(q,Q, t) una funzione regolare definita inun aperto Aq ×BQ di R2n, ∀t ∈ R. Se
det
(∂2F1
∂q∂Q
)6= 0, ∀(q,Q) ∈ Aq ×BQ, ∀t ∈ R (D.20)
allora F1(q,Q, t) e la funzione generatrice di una trasformazione canonica. La trasformazionecanonica si ottiene per esplicitazione dalle 2n equazioni
ph =∂F1
∂qh, Ph = − ∂F1
∂Qh
. (D.21)
con nuova Hamiltoniana
K(P,Q, t) = H[p(P,Q, t), q(P,Q, t), t] +∂F1[q(P,Q, t), Q, t]
∂t. (D.22)

174 D Forma di Poincare-Cartan e dimostrazione del Teorema sulle funzioni generatrici di tipo F1
Dimostrazione: Facciamo tutti i ragionamenti di esplicitazione a tempo fissato, sapendo che sonovalidi uniformemente in ogni intervallo [t1, t2] (quindi, per semplicita, omettiamo t). Le n equazioniin (D.21)
ph =∂F1(q,Q, t)
∂qh
possono essere risolte rispetto a Q. Infatti per il teorema della funzione implicita, tale sistema erisolubile e determina le 2n funzioni Q = Q(p, q, t) e P = P (p, q, t) in un aperto:
Cp × Aq =
(p, q) =
(∂F1
∂q, q
): (q,Q) ∈ Aq × BQ
.
In effetti, l’ipotesi sul determinante che serve e proprio quello scritto in (D.20) ed esso e per ipotesidiverso da zero. Consideriamo ora la funzione
P (p, q) = − ∂F1(q,Q)
∂Q
∣∣∣∣∣q=q,Q=Q(p,q)
.
Abbiamo costruito l’applicazione locale (eventualmente dipendente dal tempo) X : R2n → R2n cheporta il punto (p, q) in (P,Q). Resta da provare che X e canonica, cioe che mantiene la strutturadelle equazioni canoniche con Hamiltoniana trasformata K = H + ∂F1
∂tdata dalla (D.22). A tal
fine basta mostrare che le due forme differenziali di Poincare-Cartan differiscono per un differenzialeesatto: cioe esiste una funzione M =M(p, q, P,Q, t) tale che
n∑
h=1
phdqh −H(q, p, t)dt =n∑
h=1
PhdQh −K(Q,P, t)dt+ dM(p, q, P,Q, t).
A seguito di cio si ha che la trasformazione preserva la struttura canonica, in particolare la nuovaHamiltoniana e data dalla (D.22) e quindi, essendo, ∂F1
∂t= J gradx K0 per un dato K0 corrispondente
a H = 0, ha la forma (6.10) e allora la trasformazione e canonica. Prendendo M = F1(q,Q, t) e,scrivendo le somme di prodotti in forma compatta, basta garantire
n∑
h=1
phdqh −Hdt =n∑
h=1
PhdQh −Kdt+ dF1,
dove
dF1 =∂F1
∂tdt+
n∑
h=1
(∂F1
∂qhdqh +
∂F1
∂Qh
dQh
),
e questa segue essendo
ph =∂F1
∂qh, Ph = − ∂F1
∂Qh
, K = H +∂F1
∂t
in virtu delle (D.22). Quindi F1 e funzione generatrice di una trasformazione canonica.