Micro Application Example - cache.industry.siemens.com · mediante uscite digitali. Si tratta di un...
67
Micro Application Example Posizionamento pilotato con azionamenti standard (asse lineare) Micro Automation Set 22
Transcript of Micro Application Example - cache.industry.siemens.com · mediante uscite digitali. Si tratta di un...

Micro Application Example
Posizionamento pilotato con azionamenti standard (asse lineare)
Micro Automation Set 22
Nota bene
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 2/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
All
right
s re
serv
ed
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Nota bene I Micro Automation Set non sono vincolanti e non pretendono di essere completi per quanto concerne la configurazione, l’equipaggiamento e qualsiasi altra circostanza. I Micro Automation Set non costituiscono soluzioni personalizzate, ma forniscono esclusivamente un supporto per applicazioni tipiche. La responsabilità del corretto funzionamento dei prodotti descritti è a vostro carico. I Micro Automation Set non sollevano dall’obbligo di utilizzare, installare, mettere in funzione ed effettuare interventi di manutenzione sull’apparecchiatura in sicurezza. Utilizzando questi Micro Automation Set accettate il fatto che Siemens non è responsabile di eventuali danni. Ci riserviamo il diritto di apportare modifiche senza preavviso in qualsiasi momento ai Micro Automation Set. In caso di discordanza fra le raccomandazioni riportate nei Micro Automation Set e altre pubblicazioni Siemens, come i cataloghi, ha la priorità il contenuto dell’altra documentazione.
Garanzia, responsabilità e supporto Si declina ogni responsabilità per le informazioni contenute nel presente documento.
La nostra responsabilità, qualunque sia il motivo giuridico, per gli esempi, le indicazioni, i programmi, i dati di progettazione e di prestazione, ecc., descritti nei Micro Automation Set, è esclusa; tale esclusione non trova applicazione, per es., nei casi di dolo, colpa grave, violazione della vita, del corpo o della salute, assunzione di garanzia per lo stato della cosa, reticenza dolosa di un vizio o violazione di obblighi contrattuali fondamentali ai sensi della legge sulla responsabilità dei prodotti. Tuttavia, il risarcimento del danno per violazione degli obblighi contrattuali fondamentali è limitato al danno prevedibile intrinseco nel contratto, tranne in caso di dolo, colpa grave o violazione della vita, del corpo o della salute. Tali disposizioni non implicano una modifica dell'onere della prova a vostro scapito
Copyright© 2006 Siemens A&D. La distribuzione o la duplicazione dei Micro Automation Set o dei relativi estratti non è consentita, salvo esplicito consenso da parte di Siemens A&D.
Per qualsiasi domanda sul presente documento, vi preghiamo di contattarci via e-mail al seguente indirizzo:

Premessa
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 3/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
All
right
s re
serv
ed
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Premessa I Micro Automation Set sono configurazioni di automazione efficienti e testate sulla base di prodotti standard A&D ai fini della realizzazione semplice, rapida e conveniente di piccoli compiti di automazione. Ogni singolo Micro Automation Set si riferisce a un task settoriale ricorrente legato a un tipico problema riscontrato dai clienti nel campo di potenza inferiore.
Per questi task settoriali troverete con l'ausilio dei Set le risposte su quali prodotti sono necessari e su come funzionano.
Per realizzare la funzionalità alla base di questo Set, è possibile impiegare anche, in base alle esigenze dell'impianto, una serie di altri componenti (ad es. altre CPU, alimentatori, ecc.). Per questi componenti consultare i rispettivi cataloghi di SIEMENS A&D. I Micro Automation Set si trovano al seguente link:
http://www.siemens.de/microset
TIndice
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 4/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
All
right
s re
serv
ed
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Indice 1 Campi di impiego e vantaggi..........................................................................6
2 Configurazione ..............................................................................................11
3 Componenti hardware e software................................................................13
4 Principio di funzionamento ..........................................................................14 4.1 Informazioni preliminari sul posizionamento....................................................14 4.1.1 Che cos'è un asse? .........................................................................................14 4.1.2 Caratteristiche del posizionamento pilotato e controllato ................................15 4.1.3 Panoramica dei compiti del comando e del convertitore di frequenza ............17 4.2 Determinazione dei parametri di spostamento necessari per il
posizionamento pilotato...................................................................................18 4.2.1 Determinazione dello spostamento fisico e tecnico ........................................18 4.2.2 Determinazione dell'accelerazione e della velocità .........................................19 4.2.3 Determinazione dei punti di commutazione e di disinserzione........................21 4.3 Applicazione del posizionamento pilotato .......................................................23 4.3.1 Referenziamento .............................................................................................23 4.3.2 Traslazione di un asse in marcia ad impulsi....................................................24 4.3.3 Traslazione di un asse verso una posizione definita .......................................24 4.4 Dettagli sulle funzioni di comando della CPU 221 S7-200 ..............................26 4.4.1 Ingressi di processo ........................................................................................26 4.4.2 Uscite di processo ...........................................................................................27 4.4.3 Uscita di processo alternativa con protocollo USS..........................................27 4.4.4 Programma di comando ..................................................................................28 4.5 Dettagli sul convertitore di frequenza ..............................................................29 4.5.1 Perché viene impiegato un convertitore di frequenza? ...................................29 4.5.2 Funzionamento del convertitore di frequenza .................................................29 4.5.3 Requisiti addizionali per il motore a causa della dinamica del processo di
spostamento e della decelerazione del carico. ...............................................30 4.5.4 Evitare disturbi elettromagnetici ......................................................................31
5 Configurazione del software di startup.......................................................33 5.1 Note preliminari ...............................................................................................33 5.2 Download del codice di startup .......................................................................33 5.3 Configurazione dei componenti .......................................................................33 5.3.1 Montaggio e cablaggio dell'hardware ..............................................................34 5.3.2 Parametrizzazione del convertitore di frequenza ............................................35 5.3.3 Configurazione del codice di startup ...............................................................38 5.3.4 Configurazione di WinCC flexible RT ..............................................................40
6 Demo Live ......................................................................................................42 6.1 Navigazione.....................................................................................................42 6.2 Interfaccia utente.............................................................................................43
TIndice
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 5/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
All
right
s re
serv
ed
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
6.3 Panoramica della demo live ............................................................................48 6.3.1 Controllo della direzione di conteggio del trasduttore .....................................50 6.3.2 Scenario di determinazione della distanza di disinserzione e
di commutazione .............................................................................................51 6.3.3 Scenario ricerca punto di riferimento...............................................................54 6.3.4 Scenario posizionamento ................................................................................56 6.3.5 Scenario spostamento automatico ..................................................................57 6.3.6 Scenario "Causare un errore": la modifica della posizione è inferiore al tragitto
di spostamento minimo ...................................................................................58 6.3.7 Scenario "Causare un errore": la posizione target è al di fuori del campo di
spostamento....................................................................................................60 6.3.8 Scenario "Causare un errore": soglie software................................................62 6.3.9 Scenario "Causare un errore": soglie hardware ..............................................63
7 Dati tecnici .....................................................................................................66
Campi di impiego e vantaggi
Micro Automation Set 22 ID articolo: 24104802
1 Campi di impiego e vantaggi
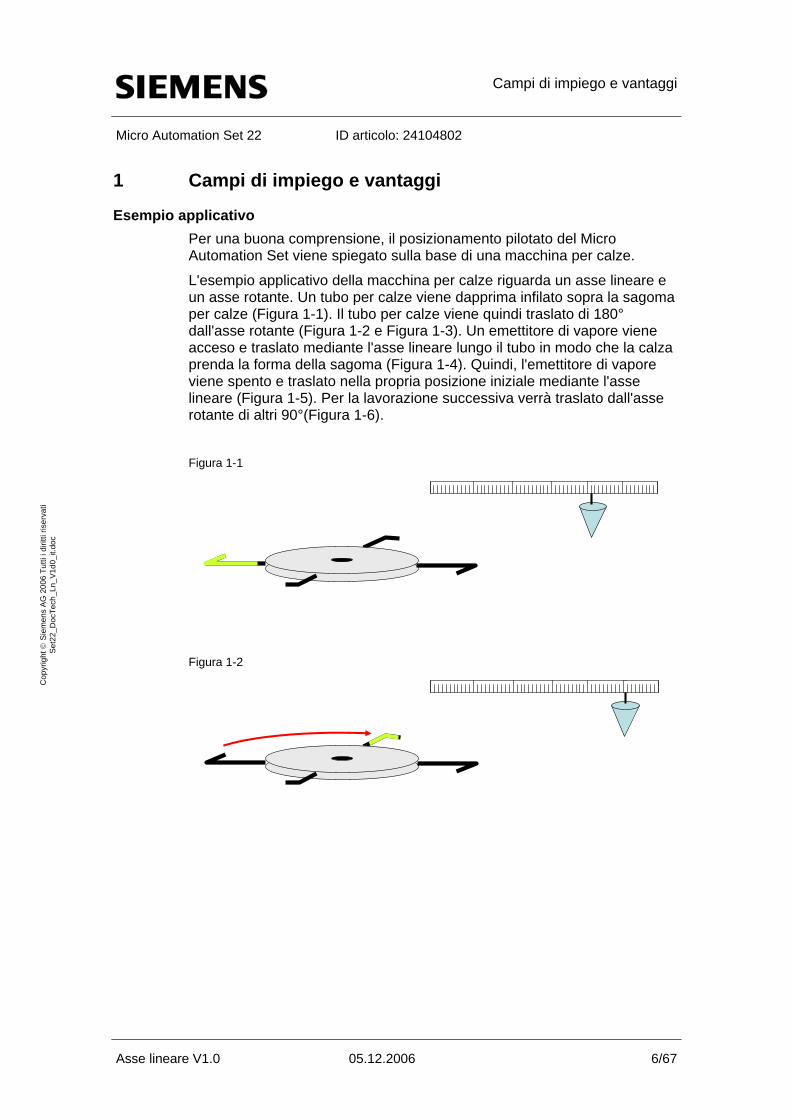
Esempio applicativo Per una buona comprensione, il posizionamento pilotato del Micro Automation Set viene spiegato sulla base di una macchina per calze.
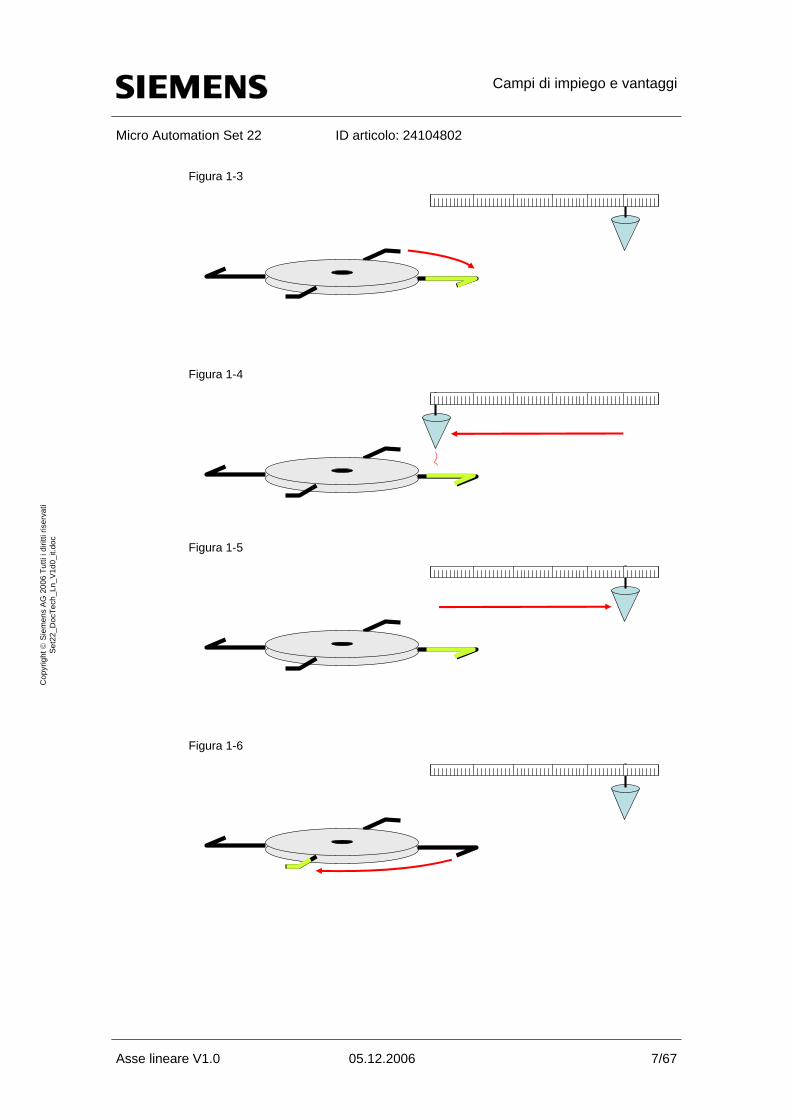
L'esempio applicativo della macchina per calze riguarda un asse lineare e un asse rotante. Un tubo per calze viene dapprima infilato sopra la sagoma per calze (Figura 1-1). Il tubo per calze viene quindi traslato di 180° dall'asse rotante (Figura 1-2 e Figura 1-3). Un emettitore di vapore viene acceso e traslato mediante l'asse lineare lungo il tubo in modo che la calza prenda la forma della sagoma (Figura 1-4). Quindi, l'emettitore di vapore viene spento e traslato nella propria posizione iniziale mediante l'asse lineare (Figura 1-5). Per la lavorazione successiva verrà traslato dall'asse rotante di altri 90°(Figura 1-6).
Figura 1-1
Asse lineare V1.0 05.12.2006 6/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Figura 1-2
Campi di impiego e vantaggi
Micro Automation Set 22 ID articolo: 24104802
Figura 1-3
Figura 1-4
Asse lineare V1.0 05.12.2006 7/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Figura 1-5
Figura 1-6

Campi di impiego e vantaggi
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 8/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Il posizionamento deve soddisfare i seguenti requisiti:
• Una precisione di posizionamento con due velocità è sufficiente
• La configurazione dell'impianto in modalità manuale avviene mediante comando in loco
• Controllo del posizionamento e disinserzione in caso di errore
• Interruttore di arresto per l'arresto (rapido) di tutti i movimenti
Campi di impiego e vantaggi
Micro Automation Set 22 ID articolo: 24104802
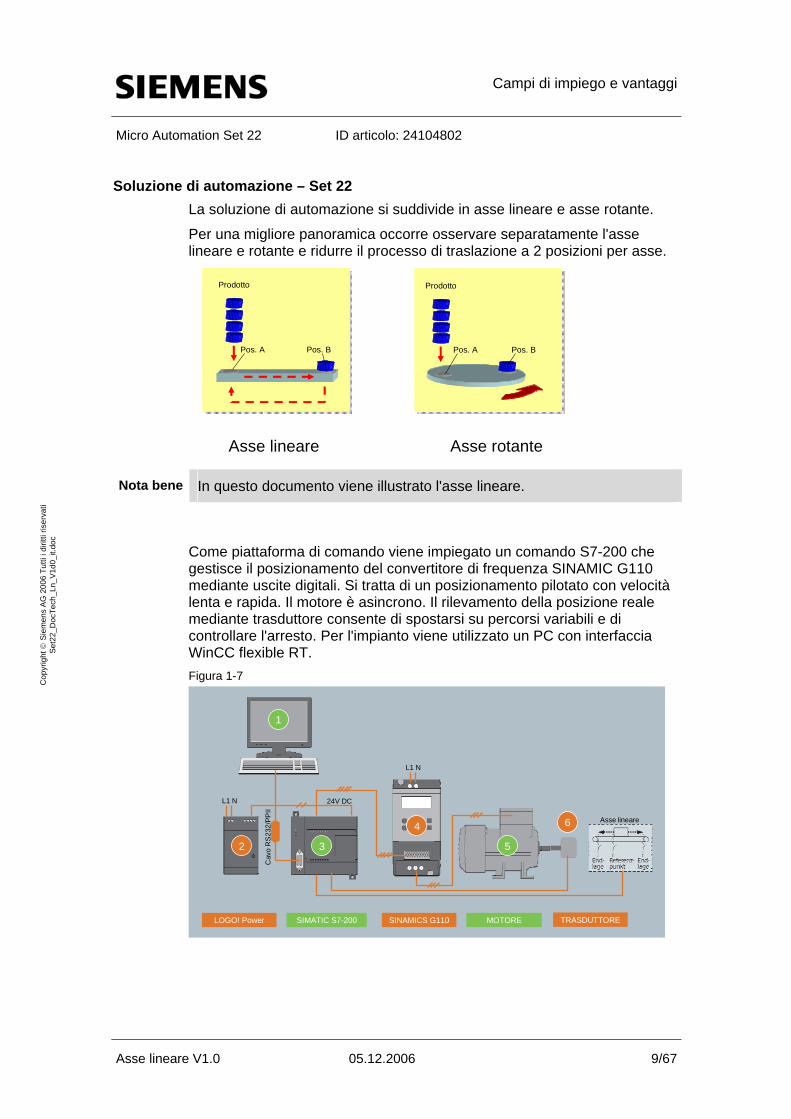
Soluzione di automazione – Set 22 La soluzione di automazione si suddivide in asse lineare e asse rotante.
Per una migliore panoramica occorre osservare separatamente l'asse lineare e rotante e ridurre il processo di traslazione a 2 posizioni per asse.
Pos. A Pos. B
Prodotto
Asse lineare Asse rotante
Prodotto
Pos. A Pos. B
Nota bene
Asse lineare V1.0 05.12.2006 9/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
In questo documento viene illustrato l'asse lineare.
Come piattaforma di comando viene impiegato un comando S7-200 che gestisce il posizionamento del convertitore di frequenza SINAMIC G110 mediante uscite digitali. Si tratta di un posizionamento pilotato con velocità lenta e rapida. Il motore è asincrono. Il rilevamento della posizione reale mediante trasduttore consente di spostarsi su percorsi variabili e di controllare l'arresto. Per l'impianto viene utilizzato un PC con interfaccia WinCC flexible RT. Figura 1-7
LOGO! Power SIMATIC S7-200 SINAMICS G110 MOTORE TRASDUTTORE
L1 N
L1 N
Cav
oR
S23
2/PP
II
24V DC
1
2 3
4
5
6 Asse lineare

Campi di impiego e vantaggi
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 10/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Campi di impiego • Comandi per porte
• Dispositivi di alimentazione
• Trasporto materiale
• Pannelli pubblicitari
• Movimentazione
Vantaggi • Soluzione conveniente per operazioni di posizionamento semplici
• Messa in funzione rapida e semplice in quanto non è necessario ottimizzare alcun regolatore di posizionamento.
• Soluzione stabile grazie alla minor esigenza di parametrizzazione
• Controllo del posizionamento nel comando senza moduli supplementari
Configurazione
Micro Automation Set 22 ID articolo: 24104802
2 Configurazione
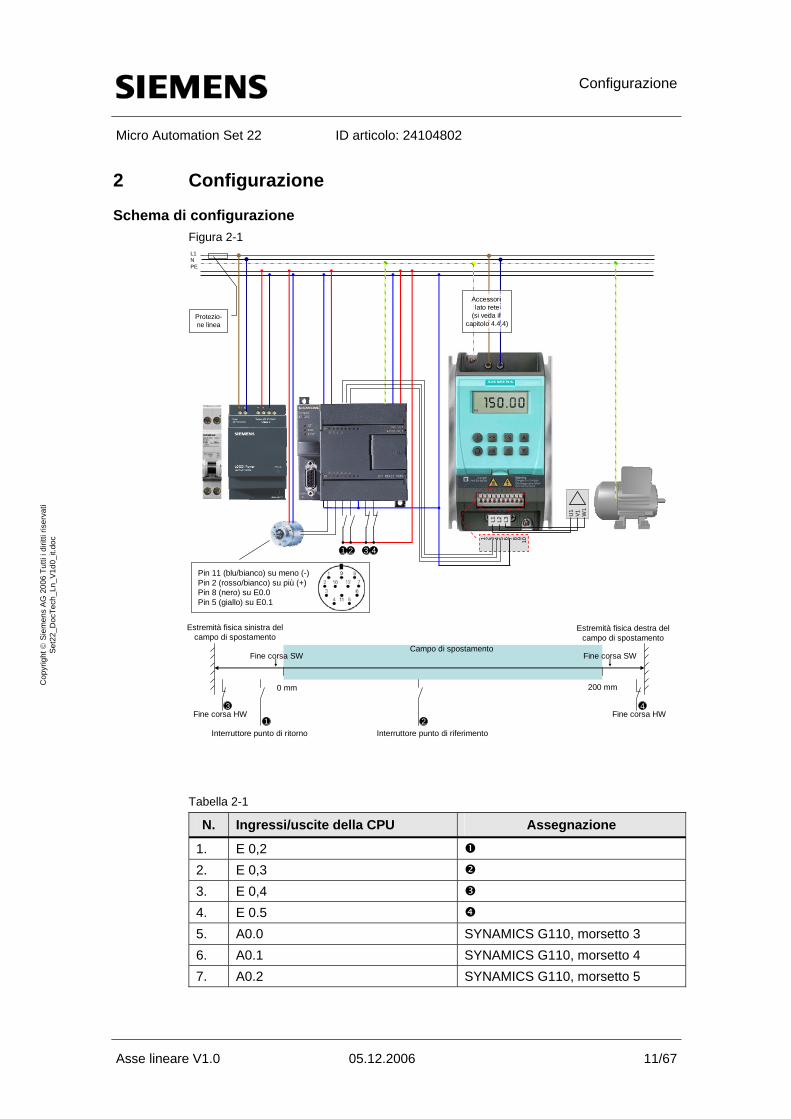
Schema di configurazione Figura 2-1
Asse lineare V1.0 05.12.2006 11/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Estremità fisica sinistra del campo di spostamento
Estremità fisica destra delcampo di spostamento
Fine corsa HW Fine corsa HW
Interruttore punto di ritorno
Campo di spostamento
Interruttore punto di riferimento
0 mm 200 mm
Fine corsa SW Fine corsa SW
1 2 3 4 5 6 7 8 9 10
U1
V1
W1
L1 L2 L3
L1NPE
1 2 3 4
1 2
3 4
Protezio-ne linea
Pin 11 (blu/bianco) su meno (-) Pin 2 (rosso/bianco) su più (+)Pin 8 (nero) su E0.0Pin 5 (giallo) su E0.1
Accessorilato rete
(si veda il capitolo 4.4.4)
Tabella 2-1
N. Ingressi/uscite della CPU Assegnazione
1. E 0,2 2. E 0,3 3. E 0,4 4. E 0.5
5. A0.0 SYNAMICS G110, morsetto 3 6. A0.1 SYNAMICS G110, morsetto 4 7. A0.2 SYNAMICS G110, morsetto 5

Configurazione
Micro Automation Set 22 ID articolo: 24104802
! Attenzione
A seconda del tipo di trasduttore di posizione angolare esistono diverse versioni di cavi di raccordo.
Prima di collegare il trasduttore di posizione angolare controllare l'occupazione del cavo di raccordo.
Asse lineare V1.0 05.12.2006 12/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Componenti hardware e software
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 13/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
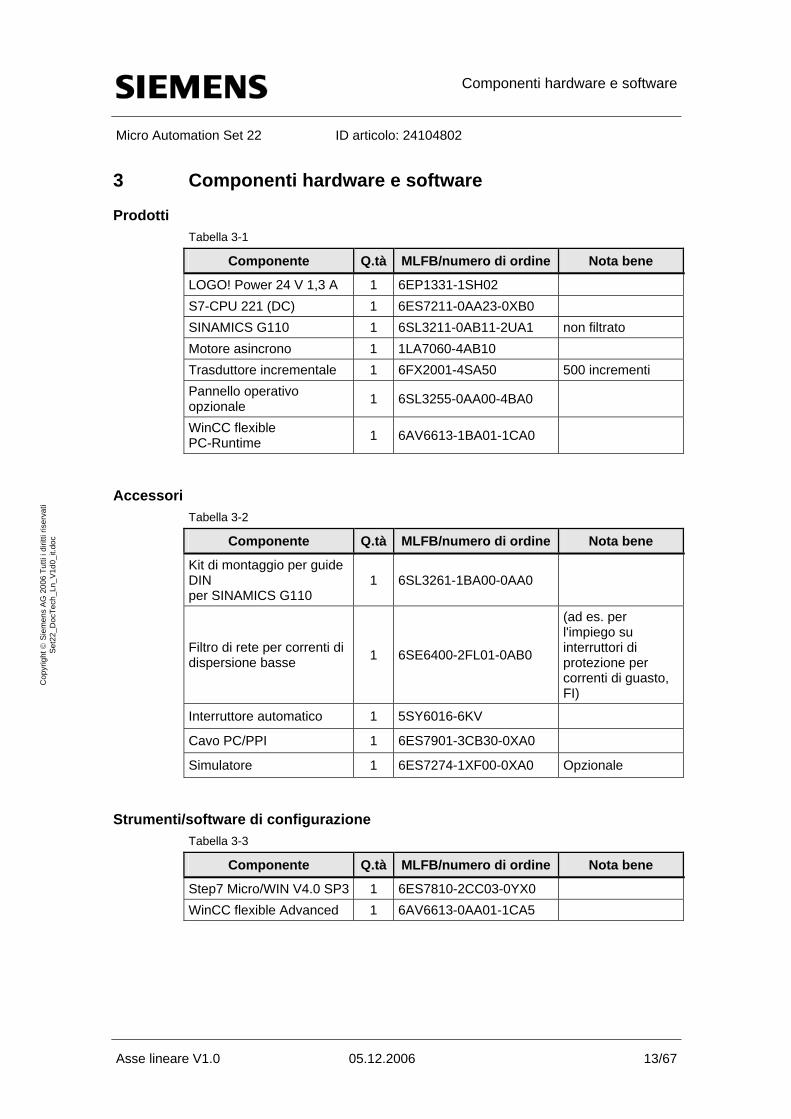
3 Componenti hardware e software
Prodotti Tabella 3-1
Componente Q.tà MLFB/numero di ordine Nota bene
LOGO! Power 24 V 1,3 A 1 6EP1331-1SH02 S7-CPU 221 (DC) 1 6ES7211-0AA23-0XB0 SINAMICS G110 1 6SL3211-0AB11-2UA1 non filtrato Motore asincrono 1 1LA7060-4AB10 Trasduttore incrementale 1 6FX2001-4SA50 500 incrementi Pannello operativo opzionale 1 6SL3255-0AA00-4BA0
WinCC flexible PC-Runtime 1 6AV6613-1BA01-1CA0
Accessori Tabella 3-2
Componente Q.tà MLFB/numero di ordine Nota bene
Kit di montaggio per guide DIN per SINAMICS G110
1 6SL3261-1BA00-0AA0
Filtro di rete per correnti di dispersione basse 1 6SE6400-2FL01-0AB0
(ad es. per l'impiego su interruttori di protezione per correnti di guasto, FI)
Interruttore automatico 1 5SY6016-6KV
Cavo PC/PPI 1 6ES7901-3CB30-0XA0
Simulatore 1 6ES7274-1XF00-0XA0 Opzionale
Strumenti/software di configurazione Tabella 3-3
Componente Q.tà MLFB/numero di ordine Nota bene
Step7 Micro/WIN V4.0 SP3 1 6ES7810-2CC03-0YX0 WinCC flexible Advanced 1 6AV6613-0AA01-1CA5
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
4 Principio di funzionamento
4.1 Informazioni preliminari sul posizionamento
4.1.1 Che cos'è un asse?
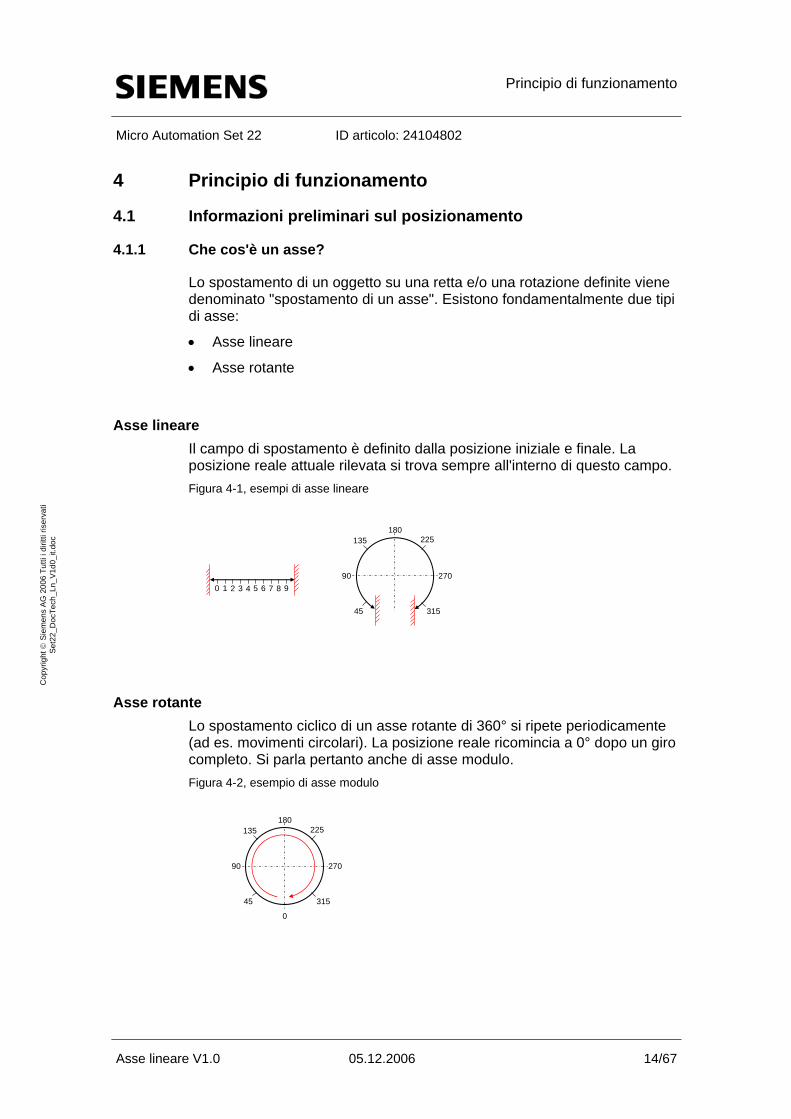
Lo spostamento di un oggetto su una retta e/o una rotazione definite viene denominato "spostamento di un asse". Esistono fondamentalmente due tipi di asse:
• Asse lineare
• Asse rotante
Asse lineare Il campo di spostamento è definito dalla posizione iniziale e finale. La posizione reale attuale rilevata si trova sempre all'interno di questo campo. Figura 4-1, esempi di asse lineare
Asse lineare V1.0 05.12.2006 14/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
0 1 2 3 4 5 6 7 8 990 270
180
45
135 225
315
Asse rotante Lo spostamento ciclico di un asse rotante di 360° si ripete periodicamente (ad es. movimenti circolari). La posizione reale ricomincia a 0° dopo un giro completo. Si parla pertanto anche di asse modulo. Figura 4-2, esempio di asse modulo
90 270
180
45
135 225
315
0
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
4.1.2 Caratteristiche del posizionamento pilotato e controllato
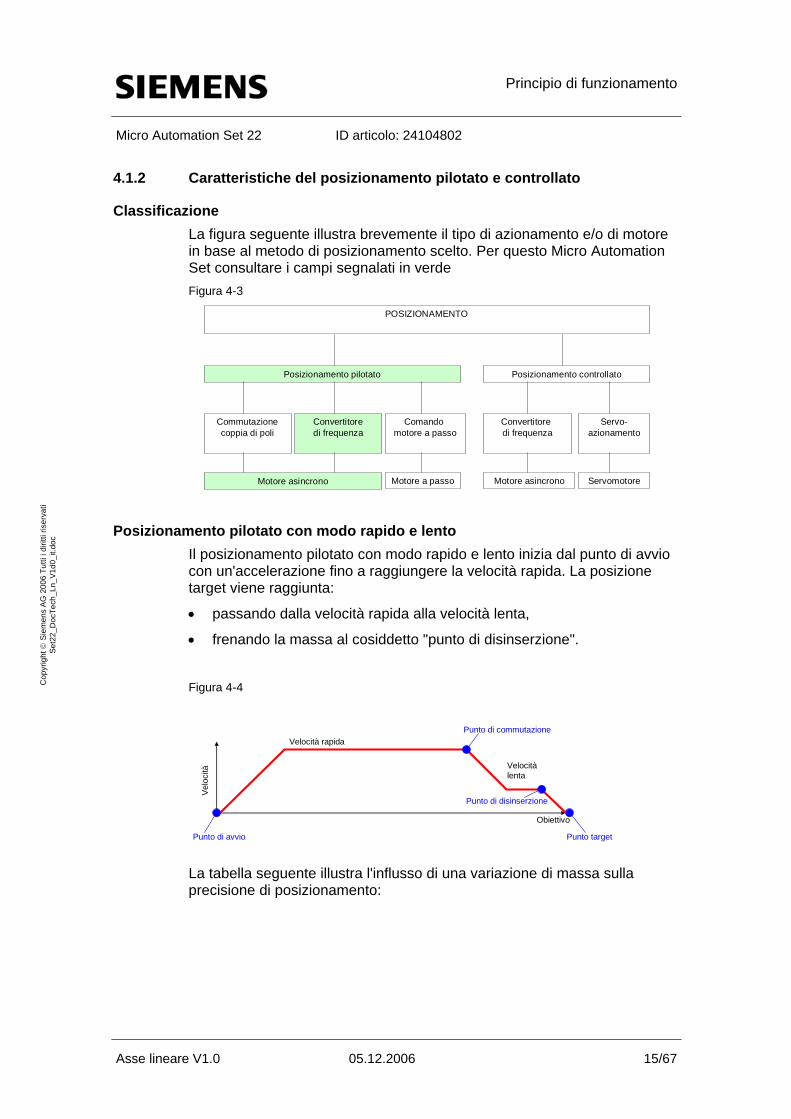
Classificazione La figura seguente illustra brevemente il tipo di azionamento e/o di motore in base al metodo di posizionamento scelto. Per questo Micro Automation Set consultare i campi segnalati in verde Figura 4-3
Asse lineare V1.0 05.12.2006 15/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
POSIZIONAMENTO
Posizionamento pilotato
Convertitoredi frequenza
Motore asincrono
Posizionamento controllato
Convertitore di frequenza
Motore asincronoMotore a passo
Comando motore a passo
Servo-azionamento
Servomotore
Commutazionecoppia di poli
Posizionamento pilotato con modo rapido e lento Il posizionamento pilotato con modo rapido e lento inizia dal punto di avvio con un'accelerazione fino a raggiungere la velocità rapida. La posizione target viene raggiunta:
• passando dalla velocità rapida alla velocità lenta,
• frenando la massa al cosiddetto "punto di disinserzione".
Figura 4-4
Punto di avvio Punto target
Velocità rapida
Velocitàlenta
Velo
cità
Obiettivo
Punto di commutazione
Punto di disinserzione
La tabella seguente illustra l'influsso di una variazione di massa sulla precisione di posizionamento:
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
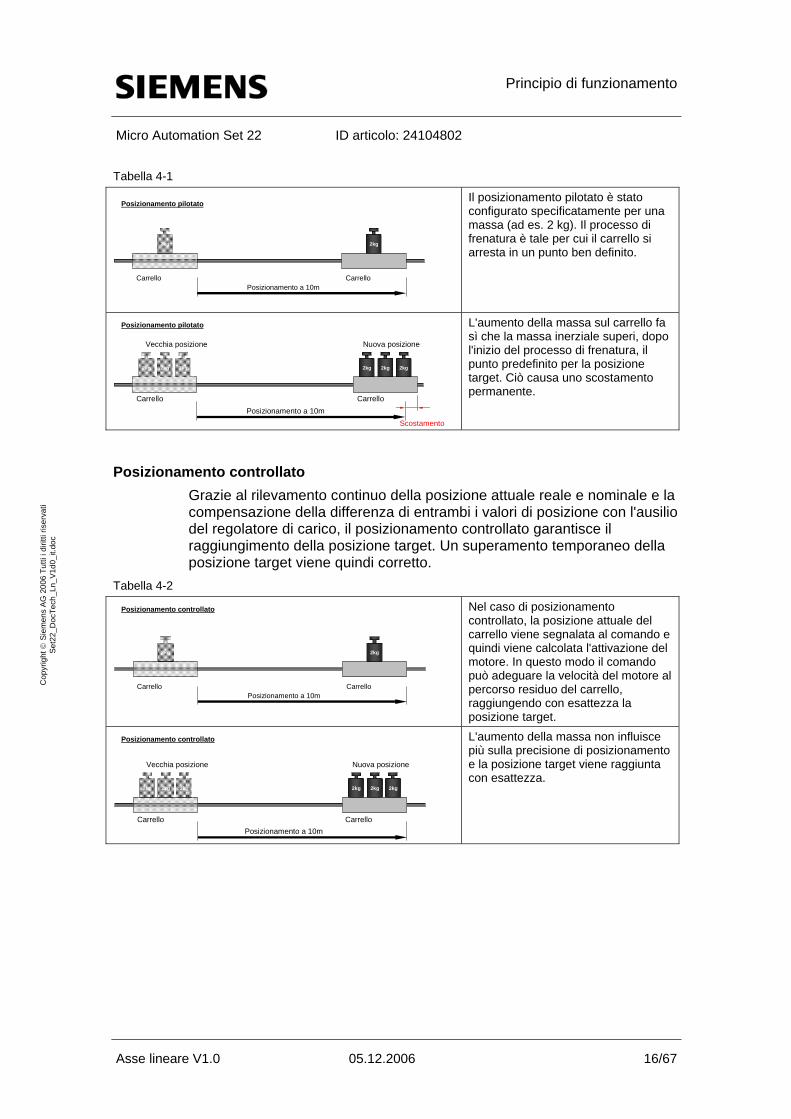
Tabella 4-1
Carrello Carrello
2kg 2kg
Posizionamento a 10m
Posizionamento pilotato
Il posizionamento pilotato è stato configurato specificatamente per una massa (ad es. 2 kg). Il processo di frenatura è tale per cui il carrello si arresta in un punto ben definito.
Carrello Carrello
Vecchia posizione Nuova posizione
2kg
Posizionamento a 10m
2kg 2kg 2kg 2kg 2kg
L'aumento della massa sul carrello fa sì che la massa inerziale superi, dopo l'inizio del processo di frenatura, il punto predefinito per la posizione target. Ciò causa uno scostamento permanente.
Posizionamento pilotato
Scostamento
Posizionamento controllato
Asse lineare V1.0 05.12.2006 16/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Grazie al rilevamento continuo della posizione attuale reale e nominale e la compensazione della differenza di entrambi i valori di posizione con l'ausilio del regolatore di carico, il posizionamento controllato garantisce il raggiungimento della posizione target. Un superamento temporaneo della posizione target viene quindi corretto.
Tabella 4-2
Carrello Carrello
2kg 2kg
Posizionamento a 10m
Posizionamento controllato
Nel caso di posizionamento controllato, la posizione attuale del carrello viene segnalata al comando e quindi viene calcolata l'attivazione del motore. In questo modo il comando può adeguare la velocità del motore al percorso residuo del carrello, raggiungendo con esattezza la posizione target.
Carrello Carrello
Vecchia posizione Nuova posizione
2kg
Posizionamento a 10m
2kg 2kg2kg 2kg 2kg
Posizionamento controllato
L'aumento della massa non influisce più sulla precisione di posizionamento e la posizione target viene raggiunta con esattezza.
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 17/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
4.1.3 Panoramica dei compiti del comando e del convertitore di frequenza
Comando La CPU S7-200 calcola dagli impulsi del trasduttore collegato la posizione attuale (vedi capitolo 4.3.3).
In base a questa posizione viene segnalato al convertitore di frequenza mediante 2 uscite digitali del comando a quale velocità può spostarsi il motore.
Convertitore di frequenza In base allo stato dei segnali di comando della CPU, il convertitore di frequenza accelera e/o decelera il motore alle velocità parametrizzate. L'accelerazione e/o la decelerazione viene salvata come valore temporale sotto forma di rampa.
La frequenza del campo di rotazione del motore non dipende dalla frequenza della rete di corrente.
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
4.2 Determinazione dei parametri di spostamento necessari per il posizionamento pilotato
4.2.1 Determinazione dello spostamento fisico e tecnico
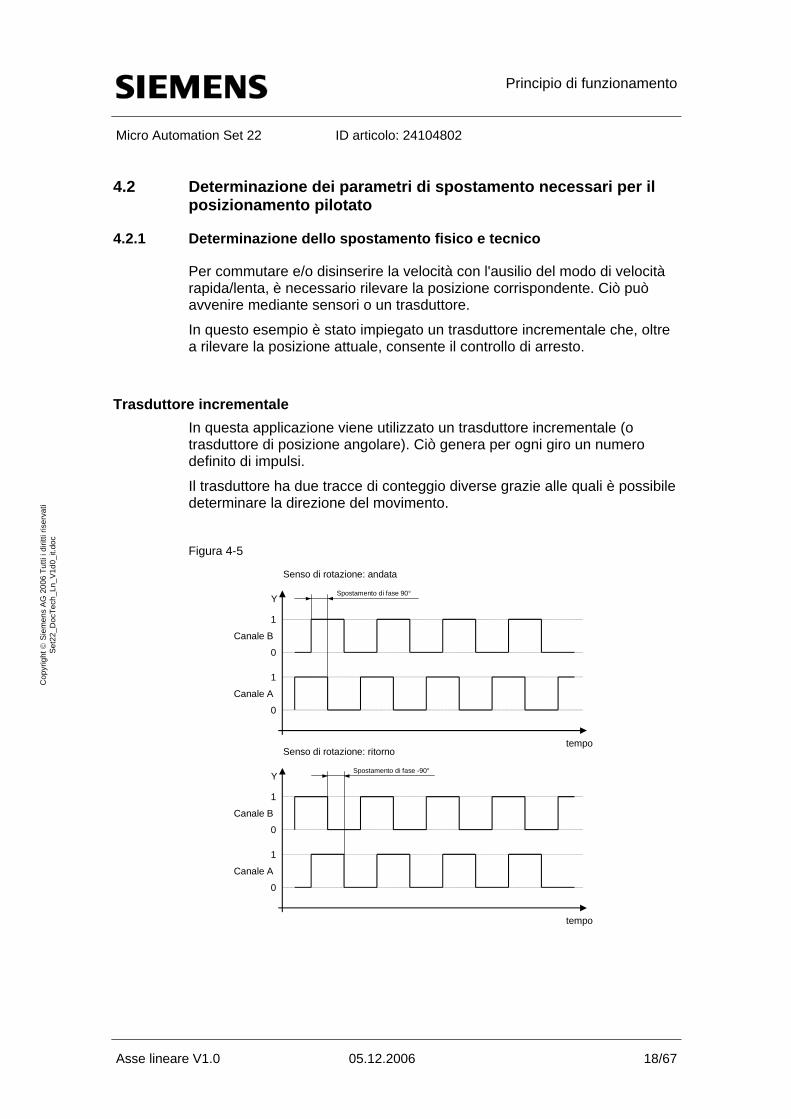
Per commutare e/o disinserire la velocità con l'ausilio del modo di velocità rapida/lenta, è necessario rilevare la posizione corrispondente. Ciò può avvenire mediante sensori o un trasduttore.
In questo esempio è stato impiegato un trasduttore incrementale che, oltre a rilevare la posizione attuale, consente il controllo di arresto.
Trasduttore incrementale In questa applicazione viene utilizzato un trasduttore incrementale (o trasduttore di posizione angolare). Ciò genera per ogni giro un numero definito di impulsi.
Asse lineare V1.0 05.12.2006 18/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Il trasduttore ha due tracce di conteggio diverse grazie alle quali è possibile determinare la direzione del movimento.
Figura 4-5
tempo
Spostamento di fase 90°Y
0
1
0
1
Canale A
Canale B
tempo
Spostamento di fase -90°Y
0
1
0
1
Canale A
Canale B
Senso di rotazione: andata
Senso di rotazione: ritorno
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
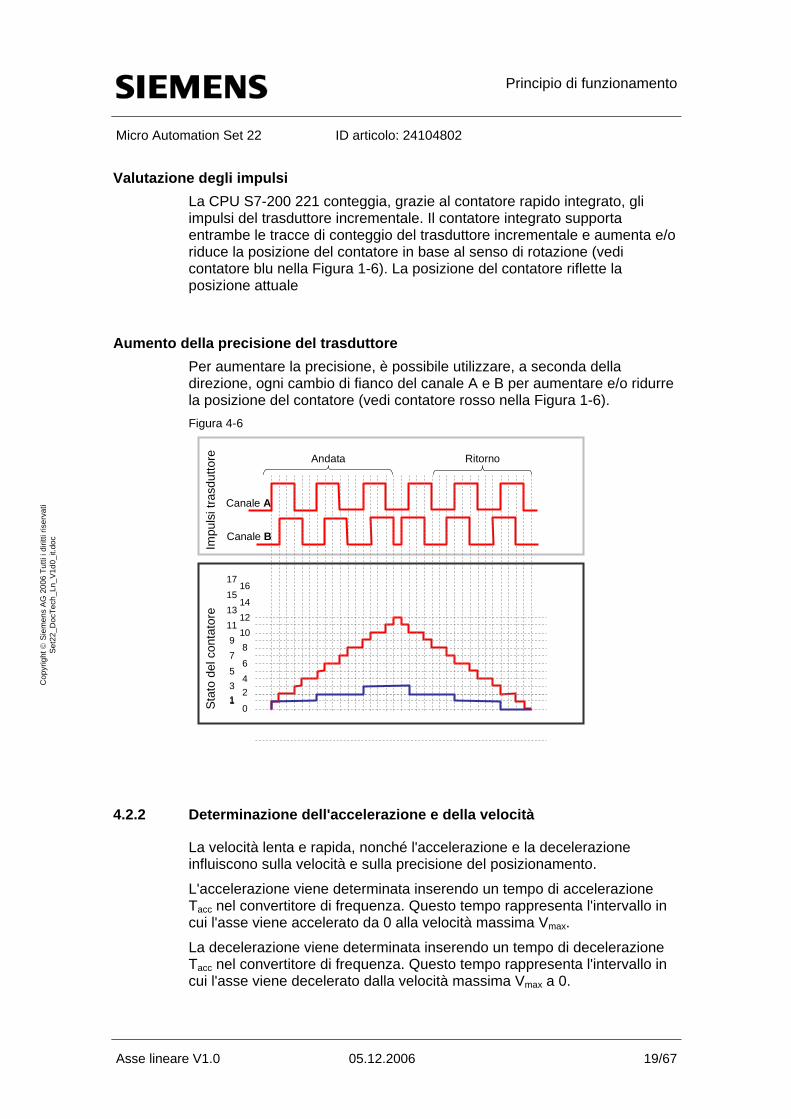
Valutazione degli impulsi La CPU S7-200 221 conteggia, grazie al contatore rapido integrato, gli impulsi del trasduttore incrementale. Il contatore integrato supporta entrambe le tracce di conteggio del trasduttore incrementale e aumenta e/o riduce la posizione del contatore in base al senso di rotazione (vedi contatore blu nella Figura 1-6). La posizione del contatore riflette la posizione attuale
Aumento della precisione del trasduttore Per aumentare la precisione, è possibile utilizzare, a seconda della direzione, ogni cambio di fianco del canale A e B per aumentare e/o ridurre la posizione del contatore (vedi contatore rosso nella Figura 1-6). Figura 4-6
Asse lineare V1.0 05.12.2006 19/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
0
246
8101214
16
13579
11131517
Stat
ode
l con
tato
reIm
puls
itra
sdut
tore
Canale A
Canale B
Andata Ritorno
1
4.2.2 Determinazione dell'accelerazione e della velocità
La velocità lenta e rapida, nonché l'accelerazione e la decelerazione influiscono sulla velocità e sulla precisione del posizionamento.
L'accelerazione viene determinata inserendo un tempo di accelerazione Tacc nel convertitore di frequenza. Questo tempo rappresenta l'intervallo in cui l'asse viene accelerato da 0 alla velocità massima Vmax.
La decelerazione viene determinata inserendo un tempo di decelerazione Tacc nel convertitore di frequenza. Questo tempo rappresenta l'intervallo in cui l'asse viene decelerato dalla velocità massima Vmax a 0.

Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
L'aumento della rampa dipende dai carichi consentiti della meccanica e dalla coppia massima consentita per il convertitore di frequenza.
Figura 4-7
Punto target
Vrapid
Velocità
Tempo
Punto di commutazione
Punto di disinserzione
Vcreep
Vmax
Tdecc
Tdecc
Tacc
Un tempo di decelerazione breve sta a indicare la distanza breve che l'asse percorre dopo lo spegnimento del convertitore di frequenza.
Asse lineare V1.0 05.12.2006 20/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Per determinare il tempo di accelerazione e/o di decelerazione sono disponibili gli strumenti di configurazione e di calcolo
• Sizer“. (http://www.automation.siemens.com/ld/ac-umrichter-low/ld/html_00/sizer.html)
• SGM-Designer (http://ekat1.plan-software.de/easygui/easygui.php?EKSUBMITEVENT=START&APPNAME=SGM6&STARTLANGUAGE=DE)
Per questo Micro Automation Set 22 è stato scelto un tempo di accelerazione e/o decelerazione di risp. un secondo con riferimento ad un numero di giri massimo di 1500 g/min.
Velocità rapida Vrapid
La velocità rapida deve corrispondere, in caso ottimale, al numero di giri nominale del motore. Se la velocità rapida si scosta molto dal numero di giri nominale e il motore funziona per un lungo periodo a questo numero di giri, può verificarsi un surriscaldamento del motore asincrono dovuto all'insufficienza di raffreddamento. In questo caso, raffreddare forzatamente il motore asincrono.
Velocità lenta Vcreep
Per un posizionamento preciso, la velocità lenta deve essere notevolmente inferiore a quella rapida.
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
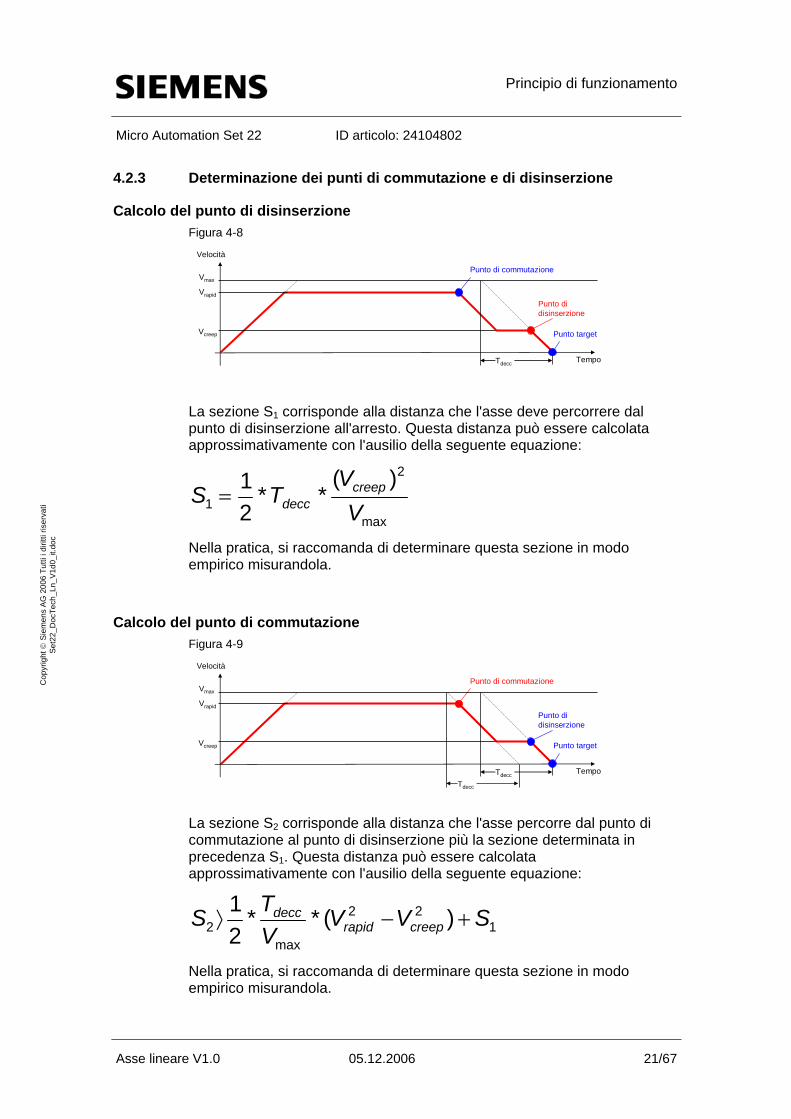
4.2.3 Determinazione dei punti di commutazione e di disinserzione
Calcolo del punto di disinserzione Figura 4-8
Punto target
Vrapid
Velocità
Tempo
Punto di commutazione
Asse lineare V1.0 05.12.2006 21/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Punto di disinserzione
Vcreep
Vmax
Tdecc
La sezione S1 corrisponde alla distanza che l'asse deve percorrere dal punto di disinserzione all'arresto. Questa distanza può essere calcolata approssimativamente con l'ausilio della seguente equazione:
max
2
1
)(**
21
VV
TS creepdecc=
Nella pratica, si raccomanda di determinare questa sezione in modo empirico misurandola.
Calcolo del punto di commutazione Figura 4-9
Punto target
Vrapid
Velocità
Tempo
Punto di commutazione
Punto di disinserzione
Vcreep
Vmax
Tdecc
Tdecc
La sezione S2 corrisponde alla distanza che l'asse percorre dal punto di commutazione al punto di disinserzione più la sezione determinata in precedenza S1. Questa distanza può essere calcolata approssimativamente con l'ausilio della seguente equazione:
122
max2 )(**
21 SVV
VTS creeprapid
decc +−⟩
Nella pratica, si raccomanda di determinare questa sezione in modo empirico misurandola.
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
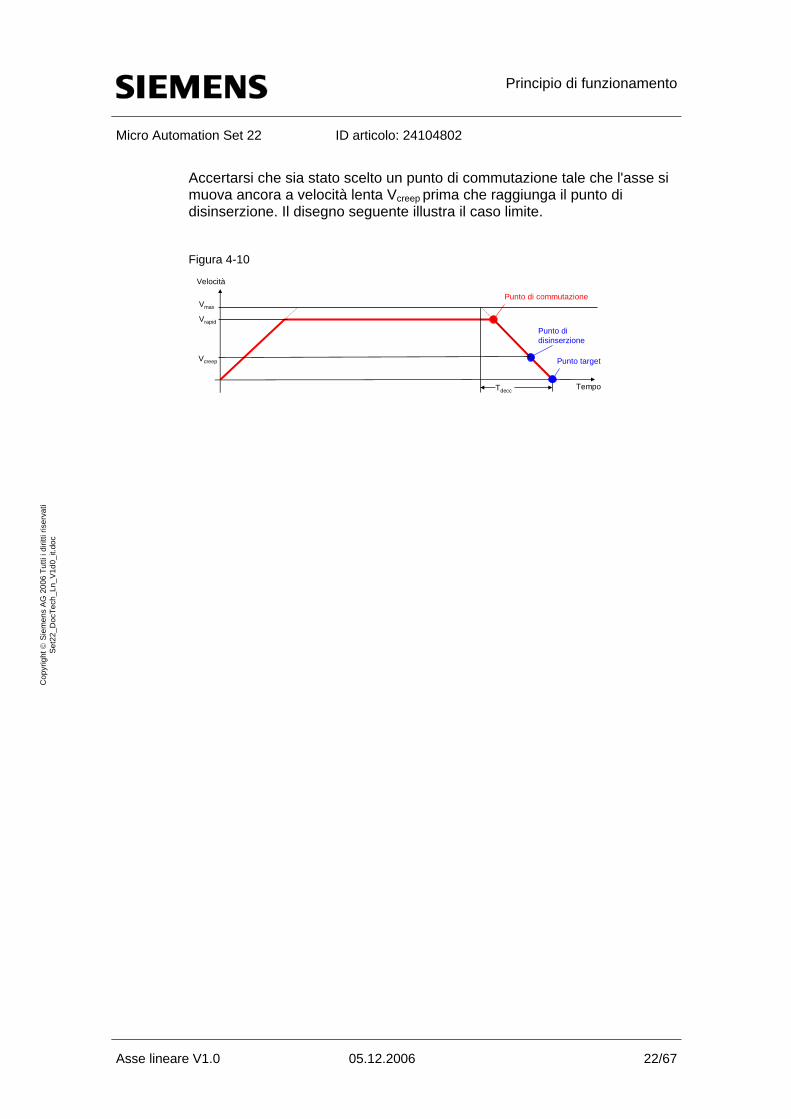
Accertarsi che sia stato scelto un punto di commutazione tale che l'asse si muova ancora a velocità lenta Vcreep prima che raggiunga il punto di disinserzione. Il disegno seguente illustra il caso limite.
Figura 4-10
Punto target
Vrapid
Velocità
Tempo
Punto di commutazione
Asse lineare V1.0 05.12.2006 22/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Punto di disinserzione
Vcreep
Vmax
Tdecc
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
4.3 Applicazione del posizionamento pilotato
4.3.1 Referenziamento
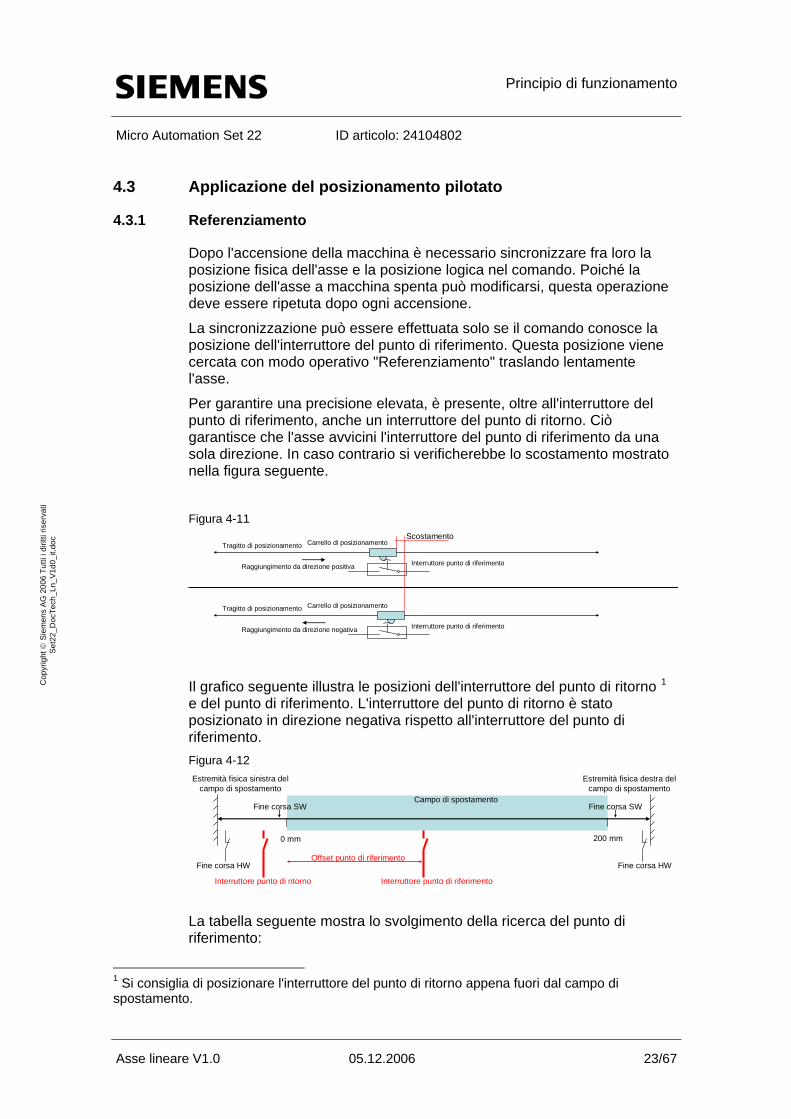
Dopo l'accensione della macchina è necessario sincronizzare fra loro la posizione fisica dell'asse e la posizione logica nel comando. Poiché la posizione dell'asse a macchina spenta può modificarsi, questa operazione deve essere ripetuta dopo ogni accensione.
La sincronizzazione può essere effettuata solo se il comando conosce la posizione dell'interruttore del punto di riferimento. Questa posizione viene cercata con modo operativo "Referenziamento" traslando lentamente l'asse.
Per garantire una precisione elevata, è presente, oltre all'interruttore del punto di riferimento, anche un interruttore del punto di ritorno. Ciò garantisce che l'asse avvicini l'interruttore del punto di riferimento da una sola direzione. In caso contrario si verificherebbe lo scostamento mostrato nella figura seguente.
Asse lineare V1.0 05.12.2006 23/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Figura 4-11
Raggiungimento da direzione negativa
Tragitto di posizionamento Carrello di posizionamento
Interruttore punto di riferimentoRaggiungimento da direzione positiva
Tragitto di posizionamento Carrello di posizionamento
Interruttore punto di riferimento
Scostamento
Il grafico seguente illustra le posizioni dell'interruttore del punto di ritorno 1 e del punto di riferimento. L'interruttore del punto di ritorno è stato posizionato in direzione negativa rispetto all'interruttore del punto di riferimento. Figura 4-12 Estremità fisica sinistra del
campo di spostamentoEstremità fisica destra del
campo di spostamento
Fine corsa HW Fine corsa HW
Campo di spostamento
Interruttore punto di riferimento
Fine corsa SW
200 mm0 mm
Offset punto di riferimento
Interruttore punto di ritorno
Fine corsa SW
La tabella seguente mostra lo svolgimento della ricerca del punto di riferimento:
1 Si consiglia di posizionare l'interruttore del punto di ritorno appena fuori dal campo di spostamento.
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 24/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
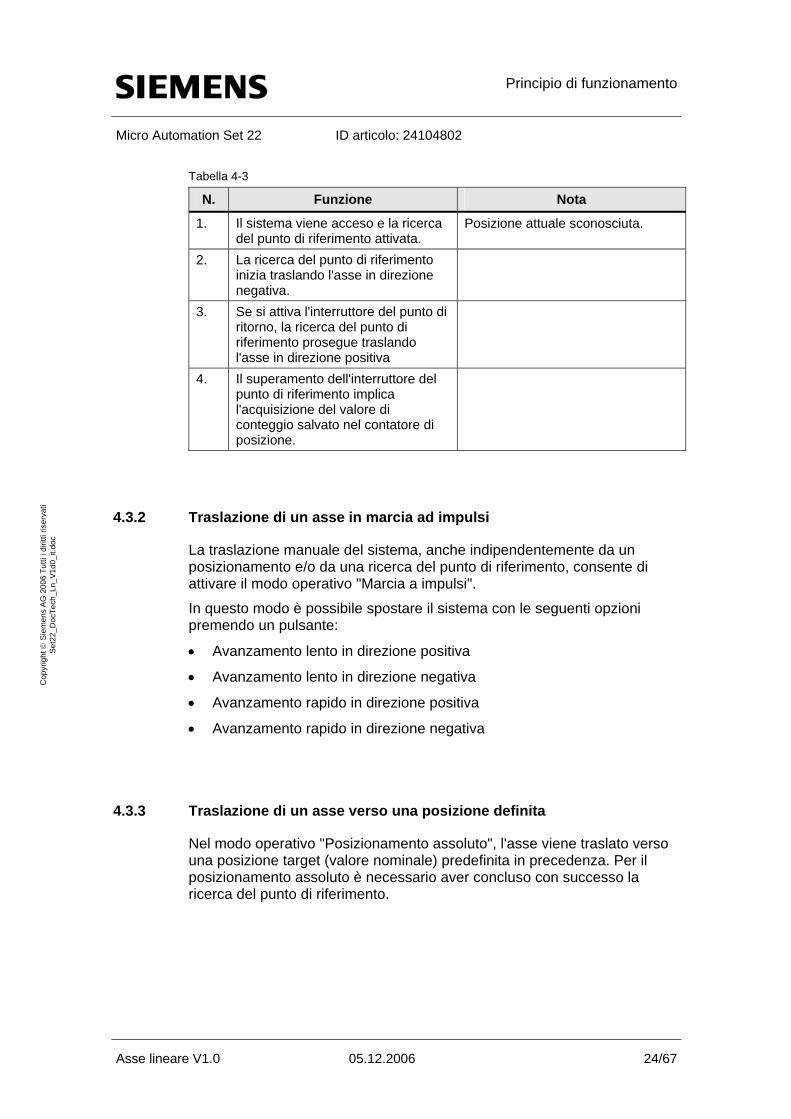
Tabella 4-3
N. Funzione Nota
1. Il sistema viene acceso e la ricerca del punto di riferimento attivata.
Posizione attuale sconosciuta.
2. La ricerca del punto di riferimento inizia traslando l'asse in direzione negativa.
3. Se si attiva l'interruttore del punto di ritorno, la ricerca del punto di riferimento prosegue traslando l'asse in direzione positiva
4. Il superamento dell'interruttore del punto di riferimento implica l'acquisizione del valore di conteggio salvato nel contatore di posizione.
4.3.2 Traslazione di un asse in marcia ad impulsi
La traslazione manuale del sistema, anche indipendentemente da un posizionamento e/o da una ricerca del punto di riferimento, consente di attivare il modo operativo "Marcia a impulsi".
In questo modo è possibile spostare il sistema con le seguenti opzioni premendo un pulsante:
• Avanzamento lento in direzione positiva
• Avanzamento lento in direzione negativa
• Avanzamento rapido in direzione positiva
• Avanzamento rapido in direzione negativa
4.3.3 Traslazione di un asse verso una posizione definita
Nel modo operativo "Posizionamento assoluto", l'asse viene traslato verso una posizione target (valore nominale) predefinita in precedenza. Per il posizionamento assoluto è necessario aver concluso con successo la ricerca del punto di riferimento.
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
Calcolo della posizione attuale Per la conversione del contatore di posizione in una grandezza metrica sono necessarie le seguenti informazioni:
• Quanti impulsi vengono generati per giro del trasduttore?
• Qual'è la dimensione metrica della modifica del tragitto dell'asse per un giro del trasduttore?
Impulsi per giro del trasduttore Questo valore è un dato tecnico del trasduttore impiegato. Viene influenzato dall'attivazione e/o dalla disattivazione della quadruplicazione dell'impulso.
Asse lineare V1.0 05.12.2006 25/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
• Con quadruplicazione dell'impulso:
giroetrasduttorpulsiposizionediContatore K
LLIm*4=
• Senza quadruplicazione dell'impulso:
giroetrasduttorpulsiposizionediContatore L
LLIm
=
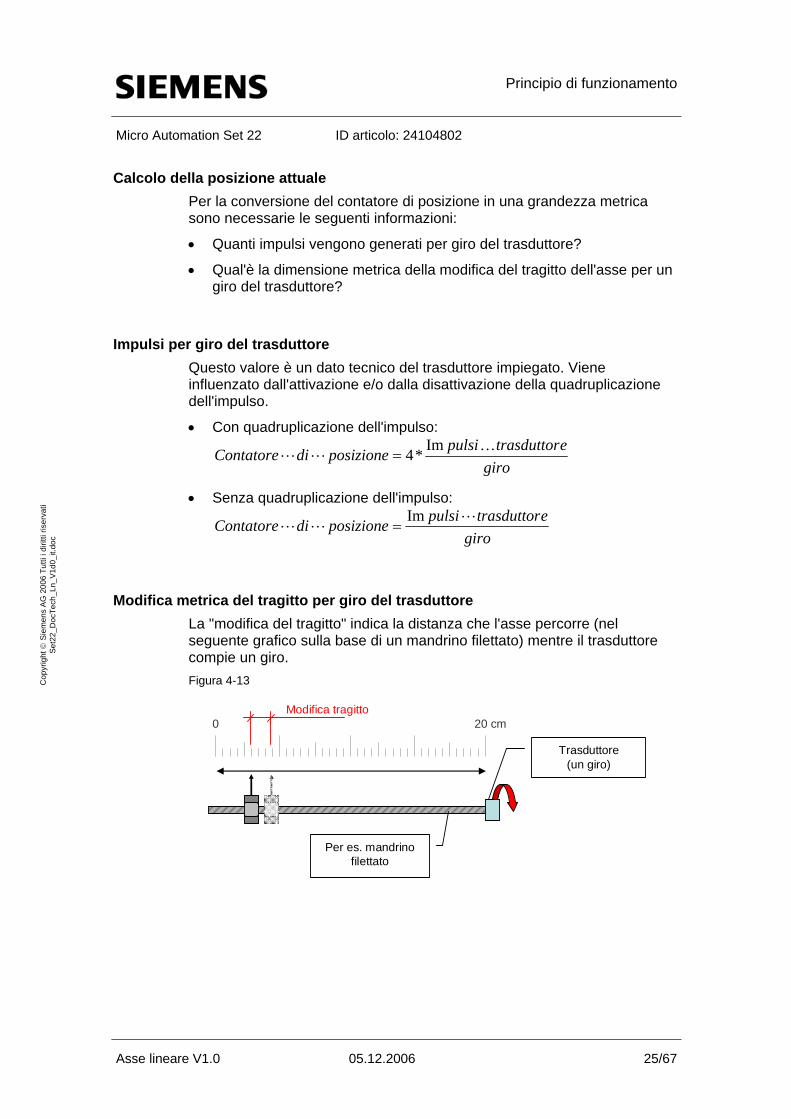
Modifica metrica del tragitto per giro del trasduttore La "modifica del tragitto" indica la distanza che l'asse percorre (nel seguente grafico sulla base di un mandrino filettato) mentre il trasduttore compie un giro. Figura 4-13
0 20 cm
Per es. mandrinofilettato
Trasduttore(un giro)
Modifica tragitto
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
Conversione del contatore di posizione in un tragitto metrico Grazie alla formula seguente, il programma di controllo calcola la posizione attuale dallo stato attuale del contatore di posizione:
re/giro trasduttoimpulsi tragittomodifica*posizione di contatore Posizione =
4.4 Dettagli sulle funzioni di comando della CPU 221 S7-200
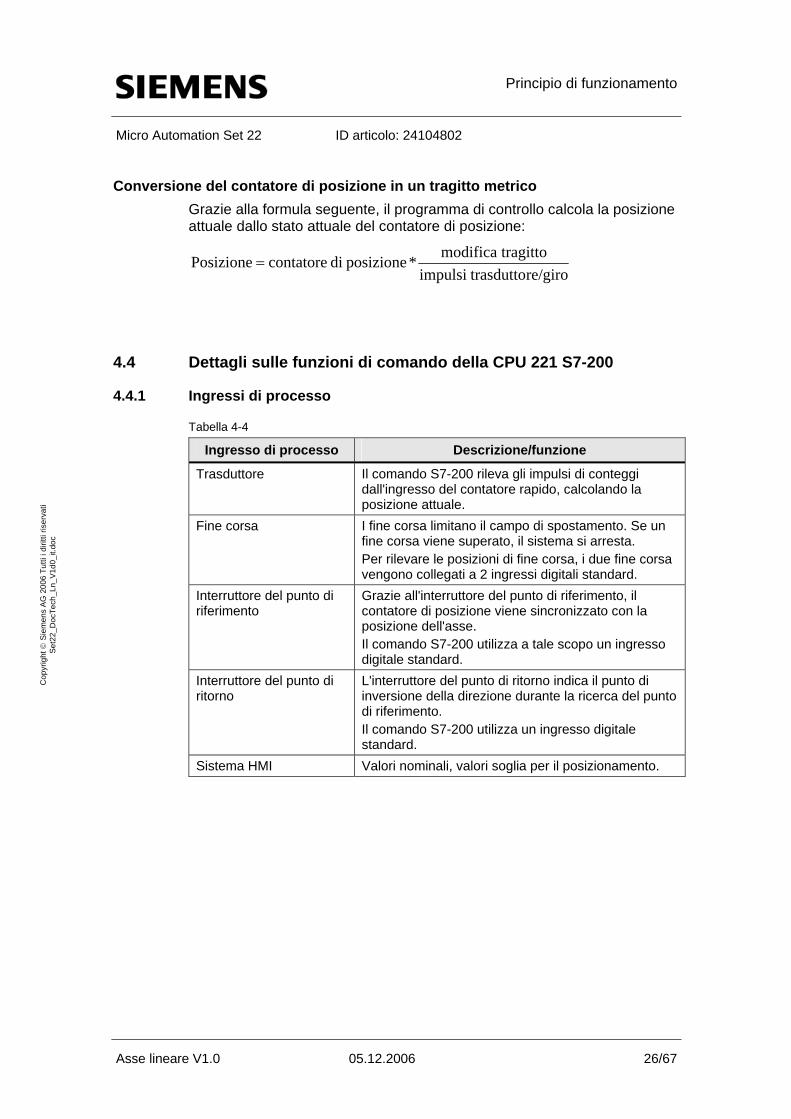
4.4.1 Ingressi di processo
Tabella 4-4
Ingresso di processo Descrizione/funzione
Asse lineare V1.0 05.12.2006 26/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Il comando S7-200 rileva gli impulsi di conteggi dall'ingresso del contatore rapido, calcolando la posizione attuale.
Trasduttore
Fine corsa I fine corsa limitano il campo di spostamento. Se un fine corsa viene superato, il sistema si arresta. Per rilevare le posizioni di fine corsa, i due fine corsa vengono collegati a 2 ingressi digitali standard.
Interruttore del punto di riferimento
Grazie all'interruttore del punto di riferimento, il contatore di posizione viene sincronizzato con la posizione dell'asse. Il comando S7-200 utilizza a tale scopo un ingresso digitale standard.
Interruttore del punto di ritorno
L'interruttore del punto di ritorno indica il punto di inversione della direzione durante la ricerca del punto di riferimento. Il comando S7-200 utilizza un ingresso digitale standard.
Sistema HMI Valori nominali, valori soglia per il posizionamento.
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 27/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
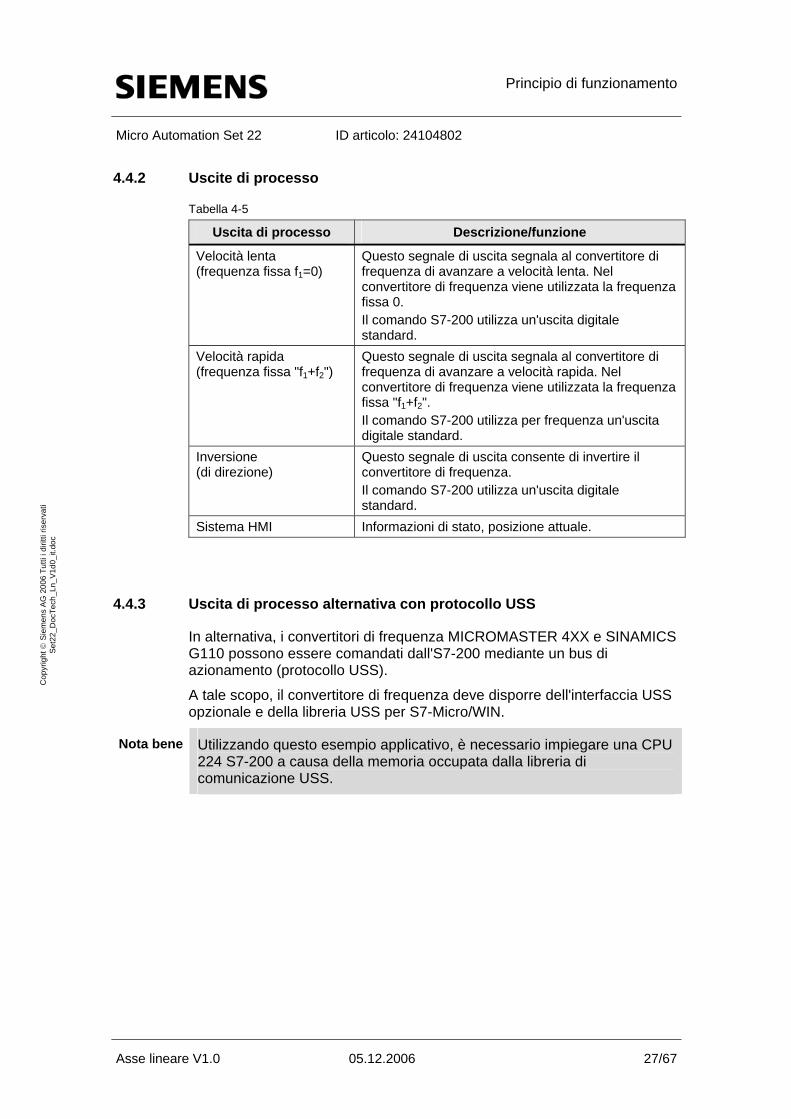
4.4.2 Uscite di processo
Tabella 4-5
Uscita di processo Descrizione/funzione
Velocità lenta (frequenza fissa f1=0)
Questo segnale di uscita segnala al convertitore di frequenza di avanzare a velocità lenta. Nel convertitore di frequenza viene utilizzata la frequenza fissa 0. Il comando S7-200 utilizza un'uscita digitale standard.
Velocità rapida (frequenza fissa "f1+f2")
Questo segnale di uscita segnala al convertitore di frequenza di avanzare a velocità rapida. Nel convertitore di frequenza viene utilizzata la frequenza fissa "f1+f2". Il comando S7-200 utilizza per frequenza un'uscita digitale standard.
Inversione (di direzione)
Questo segnale di uscita consente di invertire il convertitore di frequenza. Il comando S7-200 utilizza un'uscita digitale standard.
Sistema HMI Informazioni di stato, posizione attuale.
4.4.3 Uscita di processo alternativa con protocollo USS
In alternativa, i convertitori di frequenza MICROMASTER 4XX e SINAMICS G110 possono essere comandati dall'S7-200 mediante un bus di azionamento (protocollo USS).
A tale scopo, il convertitore di frequenza deve disporre dell'interfaccia USS opzionale e della libreria USS per S7-Micro/WIN.
Nota bene Utilizzando questo esempio applicativo, è necessario impiegare una CPU 224 S7-200 a causa della memoria occupata dalla libreria di comunicazione USS.
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
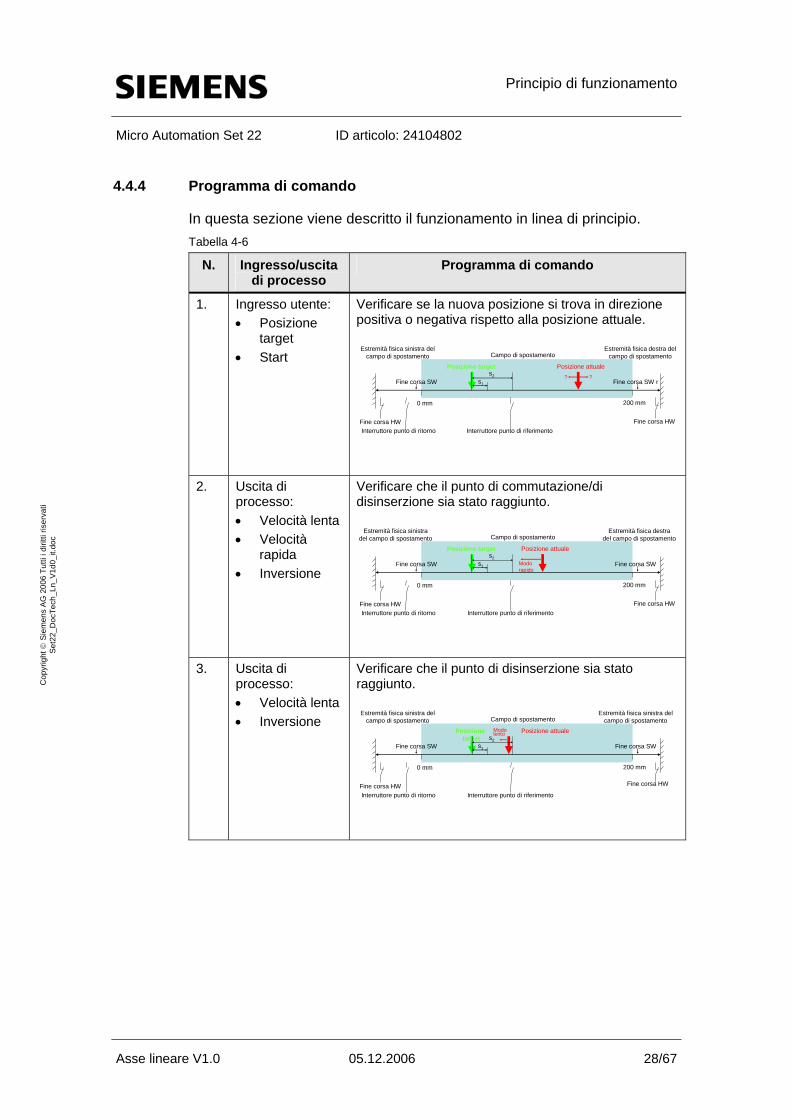
4.4.4 Programma di comando
In questa sezione viene descritto il funzionamento in linea di principio. Tabella 4-6
N. Ingresso/uscita di processo
Programma di comando
1. Ingresso utente: • Posizione
target • Start
Verificare se la nuova posizione si trova in direzione positiva o negativa rispetto alla posizione attuale.
Estremità fisica sinistra delcampo di spostamento
Estremità fisica destra delcampo di spostamento
Fine corsa HW Fine corsa HWInterruttore punto di ritorno
Campo di spostamento
Interruttore punto di riferimento
0 mm 200 mm
Fine corsa SW Fine corsa SW r
Posizione target Posizione attuale
Asse lineare V1.0 05.12.2006 28/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
??s1
s2
2. Uscita di
processo: • Velocità lenta • Velocità
rapida • Inversione
Verificare che il punto di commutazione/di disinserzione sia stato raggiunto.
Estremità fisica sinistradel campo di spostamento
Estremità fisica destradel campo di spostamento
Fine corsa HW Fine corsa HWInterruttore punto di ritorno
Campo di spostamento
Interruttore punto di riferimento
0 mm 200 mm
Fine corsa SW Fine corsa SW
Posizione target Posizione attuale
Modorapido
s1
s2
3. Uscita di
processo: • Velocità lenta • Inversione
Verificare che il punto di disinserzione sia stato raggiunto.
Estremità fisica sinistra delcampo di spostamento
Estremità fisica sinistra delcampo di spostamento
Fine corsa HW Fine corsa HW
Interruttore punto di ritorno
Campo di spostamento
Interruttore punto di riferimento
0 mm 200 mm
Fine corsa SW Fine corsa SW
Modolento Posizione attualePosizione
targets1
s2
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
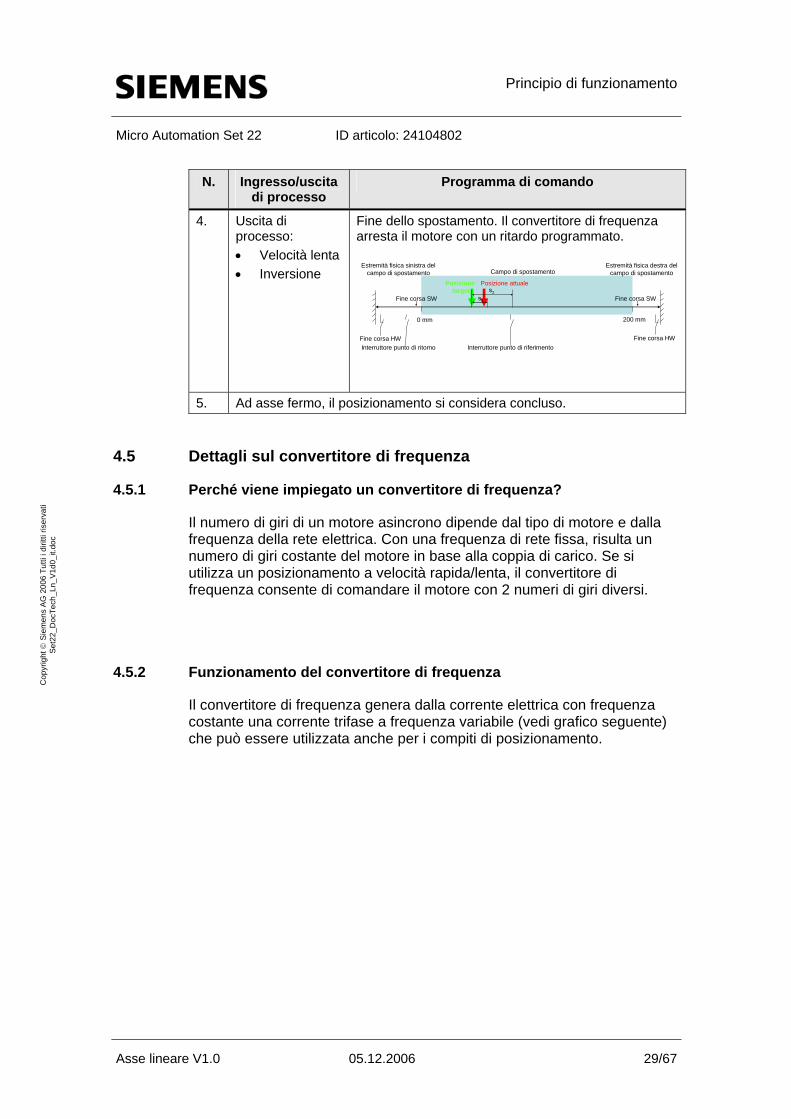
N. Ingresso/uscita Programma di comando di processo
4. Uscita di processo: • Velocità lenta • Inversione
Fine dello spostamento. Il convertitore di frequenza arresta il motore con un ritardo programmato.
Estremità fisica sinistra del campo di spostamento
Estremità fisica destra delcampo di spostamento
Fine corsa HW Fine corsa HWInterruttore punto di ritorno
Campo di spostamento
Interruttore punto di riferimento
0 mm 200 mm
Fine corsa SW Fine corsa SW
Asse lineare V1.0 05.12.2006 29/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Posizione attualePosizionetarget
s1
s2
5. Ad asse fermo, il posizionamento si considera concluso.
4.5 Dettagli sul convertitore di frequenza
4.5.1 Perché viene impiegato un convertitore di frequenza?
Il numero di giri di un motore asincrono dipende dal tipo di motore e dalla frequenza della rete elettrica. Con una frequenza di rete fissa, risulta un numero di giri costante del motore in base alla coppia di carico. Se si utilizza un posizionamento a velocità rapida/lenta, il convertitore di frequenza consente di comandare il motore con 2 numeri di giri diversi.
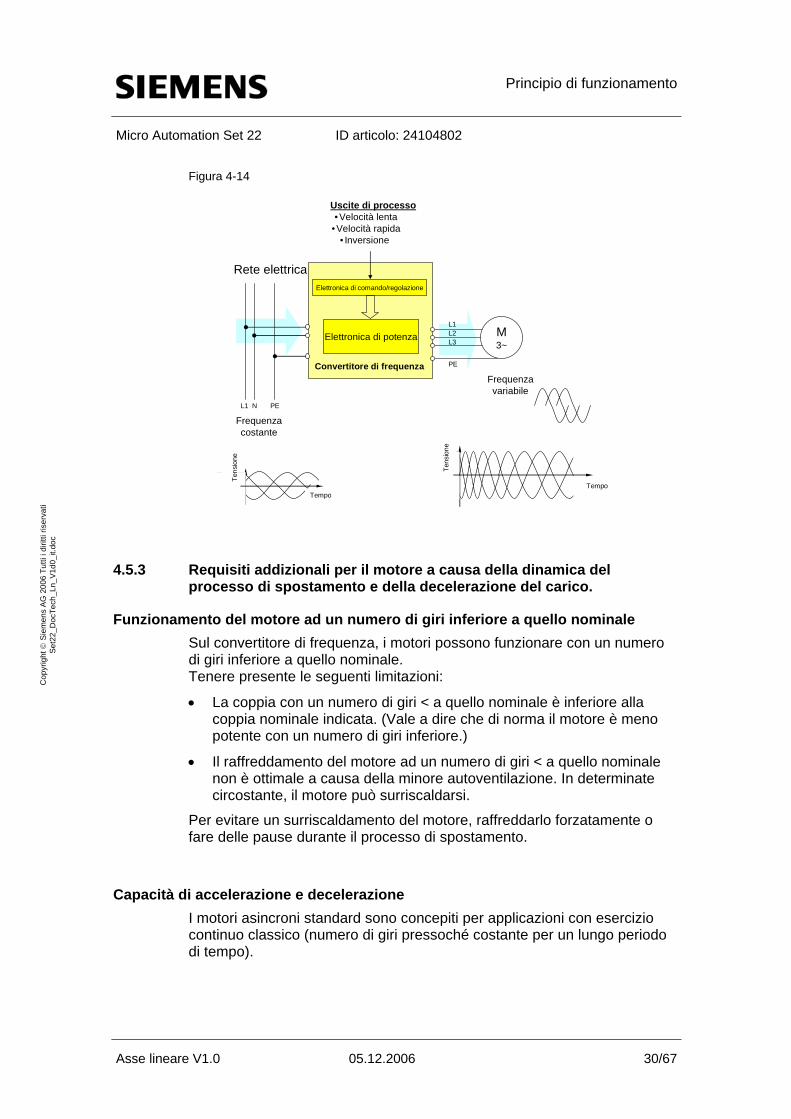
4.5.2 Funzionamento del convertitore di frequenza
Il convertitore di frequenza genera dalla corrente elettrica con frequenza costante una corrente trifase a frequenza variabile (vedi grafico seguente) che può essere utilizzata anche per i compiti di posizionamento.
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
Figura 4-14
Asse lineare V1.0 05.12.2006 30/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Convertitore di frequenza
L1 N PE
M3~
Frequenzacostante
Frequenzavariabile
Elettronica di comando/regolazione
Elettronica di potenzaL1L2L3
PE
Tens
ione
Tempo
Tens
ione
Tempo
Rete elettrica
Uscite di processo• Velocità lenta
• Velocità rapida• Inversione
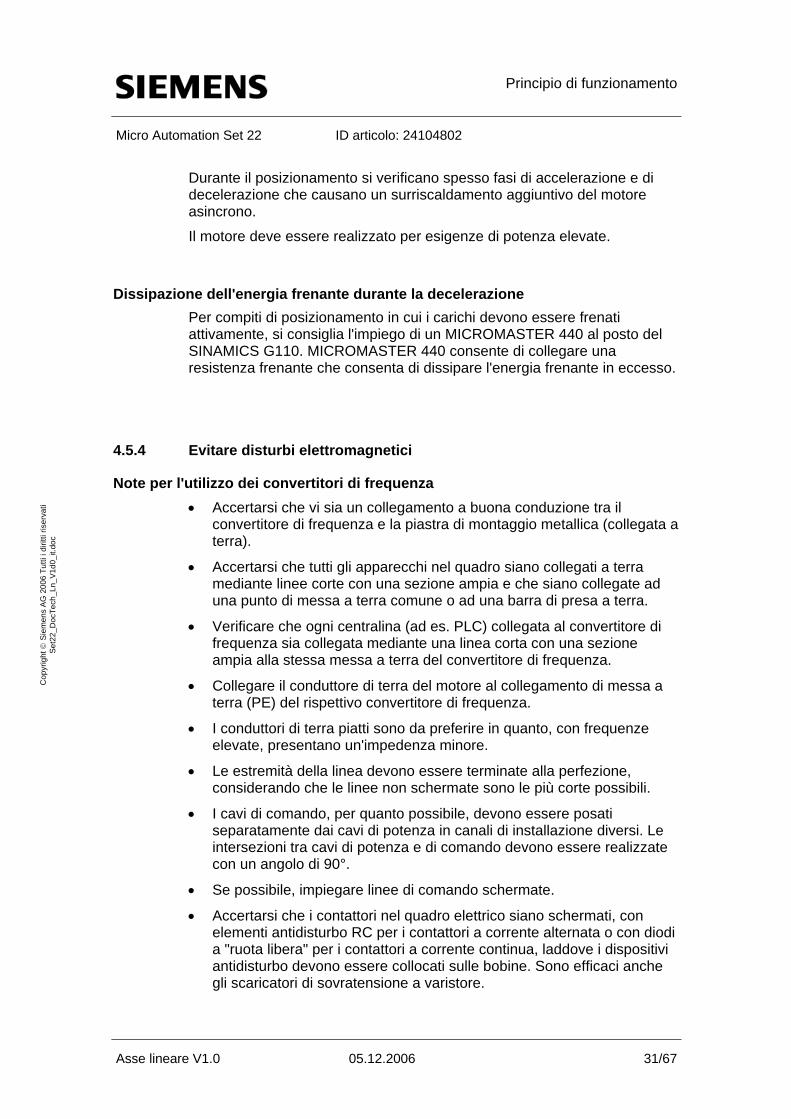
4.5.3 Requisiti addizionali per il motore a causa della dinamica del processo di spostamento e della decelerazione del carico.
Funzionamento del motore ad un numero di giri inferiore a quello nominale Sul convertitore di frequenza, i motori possono funzionare con un numero di giri inferiore a quello nominale. Tenere presente le seguenti limitazioni:
• La coppia con un numero di giri < a quello nominale è inferiore alla coppia nominale indicata. (Vale a dire che di norma il motore è meno potente con un numero di giri inferiore.)
• Il raffreddamento del motore ad un numero di giri < a quello nominale non è ottimale a causa della minore autoventilazione. In determinate circostante, il motore può surriscaldarsi.
Per evitare un surriscaldamento del motore, raffreddarlo forzatamente o fare delle pause durante il processo di spostamento.
Capacità di accelerazione e decelerazione I motori asincroni standard sono concepiti per applicazioni con esercizio continuo classico (numero di giri pressoché costante per un lungo periodo di tempo).
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 31/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Durante il posizionamento si verificano spesso fasi di accelerazione e di decelerazione che causano un surriscaldamento aggiuntivo del motore asincrono.
Il motore deve essere realizzato per esigenze di potenza elevate.
Dissipazione dell'energia frenante durante la decelerazione Per compiti di posizionamento in cui i carichi devono essere frenati attivamente, si consiglia l'impiego di un MICROMASTER 440 al posto del SINAMICS G110. MICROMASTER 440 consente di collegare una resistenza frenante che consenta di dissipare l'energia frenante in eccesso.
4.5.4 Evitare disturbi elettromagnetici
Note per l'utilizzo dei convertitori di frequenza • Accertarsi che vi sia un collegamento a buona conduzione tra il
convertitore di frequenza e la piastra di montaggio metallica (collegata a terra).
• Accertarsi che tutti gli apparecchi nel quadro siano collegati a terra mediante linee corte con una sezione ampia e che siano collegate ad una punto di messa a terra comune o ad una barra di presa a terra.
• Verificare che ogni centralina (ad es. PLC) collegata al convertitore di frequenza sia collegata mediante una linea corta con una sezione ampia alla stessa messa a terra del convertitore di frequenza.
• Collegare il conduttore di terra del motore al collegamento di messa a terra (PE) del rispettivo convertitore di frequenza.
• I conduttori di terra piatti sono da preferire in quanto, con frequenze elevate, presentano un'impedenza minore.
• Le estremità della linea devono essere terminate alla perfezione, considerando che le linee non schermate sono le più corte possibili.
• I cavi di comando, per quanto possibile, devono essere posati separatamente dai cavi di potenza in canali di installazione diversi. Le intersezioni tra cavi di potenza e di comando devono essere realizzate con un angolo di 90°.
• Se possibile, impiegare linee di comando schermate.
• Accertarsi che i contattori nel quadro elettrico siano schermati, con elementi antidisturbo RC per i contattori a corrente alternata o con diodi a "ruota libera" per i contattori a corrente continua, laddove i dispositivi antidisturbo devono essere collocati sulle bobine. Sono efficaci anche gli scaricatori di sovratensione a varistore.
Principio di funzionamento
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 32/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
• Utilizzare linee schermate o armate per i collegamenti del motore. Collegare a terra sia la schermatura sia il convertitore di frequenza utilizzando fascette per cavi, anche sul lato motore.
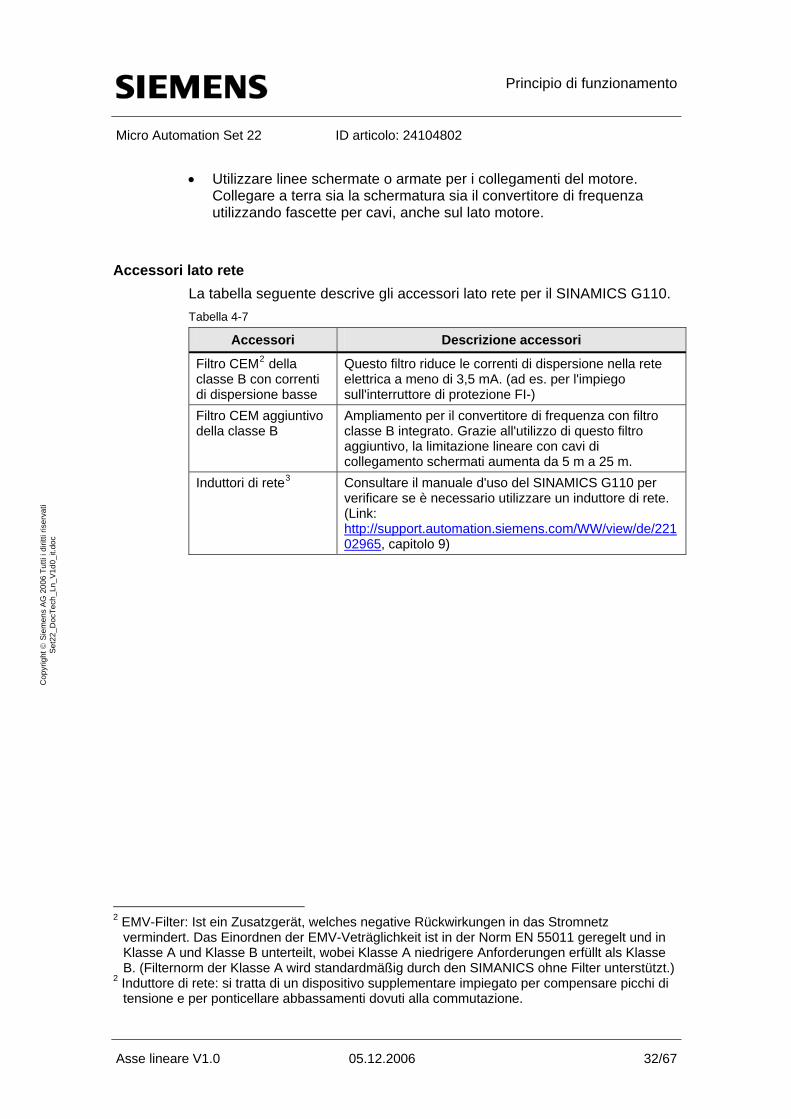
Accessori lato rete La tabella seguente descrive gli accessori lato rete per il SINAMICS G110. Tabella 4-7
Accessori Descrizione accessori
Filtro CEM2 della classe B con correnti di dispersione basse
Questo filtro riduce le correnti di dispersione nella rete elettrica a meno di 3,5 mA. (ad es. per l'impiego sull'interruttore di protezione FI-)
Filtro CEM aggiuntivo della classe B
Ampliamento per il convertitore di frequenza con filtro classe B integrato. Grazie all'utilizzo di questo filtro aggiuntivo, la limitazione lineare con cavi di collegamento schermati aumenta da 5 m a 25 m.
Induttori di rete3 Consultare il manuale d'uso del SINAMICS G110 per verificare se è necessario utilizzare un induttore di rete. (Link: http://support.automation.siemens.com/WW/view/de/22102965, capitolo 9)
2 EMV-Filter: Ist ein Zusatzgerät, welches negative Rückwirkungen in das Stromnetz
vermindert. Das Einordnen der EMV-Veträglichkeit ist in der Norm EN 55011 geregelt und in Klasse A und Klasse B unterteilt, wobei Klasse A niedrigere Anforderungen erfüllt als Klasse B. (Filternorm der Klasse A wird standardmäßig durch den SIMANICS ohne Filter unterstützt.)
2 Induttore di rete: si tratta di un dispositivo supplementare impiegato per compensare picchi di tensione e per ponticellare abbassamenti dovuti alla commutazione.
Configurazione del software di startup
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 33/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
5 Configurazione del software di startup
5.1 Note preliminari
Per lo startup viene offerto come download un esempio software con codice di startup. L'esempio software è di supporto nei primi passi e test con questo Micro Automation Set. Esso consente un rapido test delle interfacce hardware e software tra i prodotti descritti nel Micro Automation Set.
L'esempio software è sempre assegnato al componente utilizzato nel set e illustra l'interazione base. Non rappresenta tuttavia alcuna applicazione reale nel senso di una risoluzione ad un problema tecnico con caratteristiche definibili.
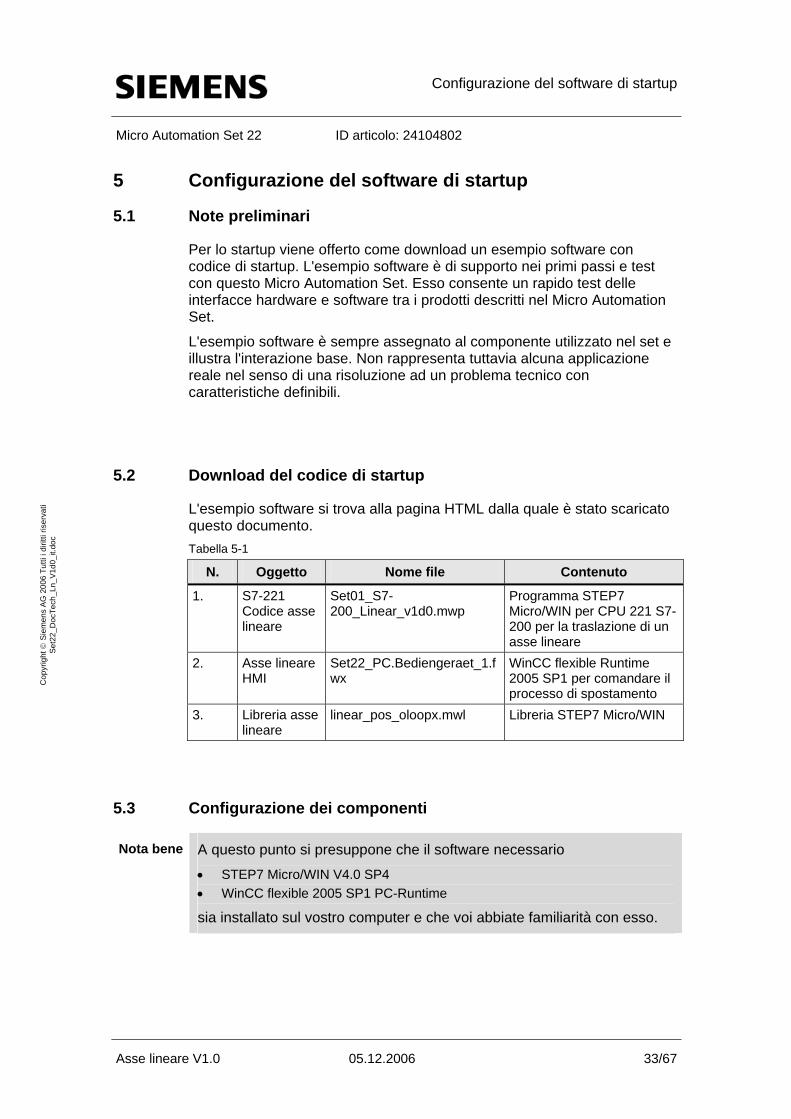
5.2 Download del codice di startup
L'esempio software si trova alla pagina HTML dalla quale è stato scaricato questo documento. Tabella 5-1
N. Oggetto Nome file Contenuto
1. S7-221 Codice asse lineare
Set01_S7-200_Linear_v1d0.mwp
Programma STEP7 Micro/WIN per CPU 221 S7-200 per la traslazione di un asse lineare
2. Asse lineare HMI
Set22_PC.Bediengeraet_1.fwx
WinCC flexible Runtime 2005 SP1 per comandare il processo di spostamento
3. Libreria asse lineare
linear_pos_oloopx.mwl Libreria STEP7 Micro/WIN
5.3 Configurazione dei componenti
Nota bene A questo punto si presuppone che il software necessario
• STEP7 Micro/WIN V4.0 SP4 • WinCC flexible 2005 SP1 PC-Runtime
sia installato sul vostro computer e che voi abbiate familiarità con esso.
Configurazione del software di startup
Micro Automation Set 22 ID articolo: 24104802
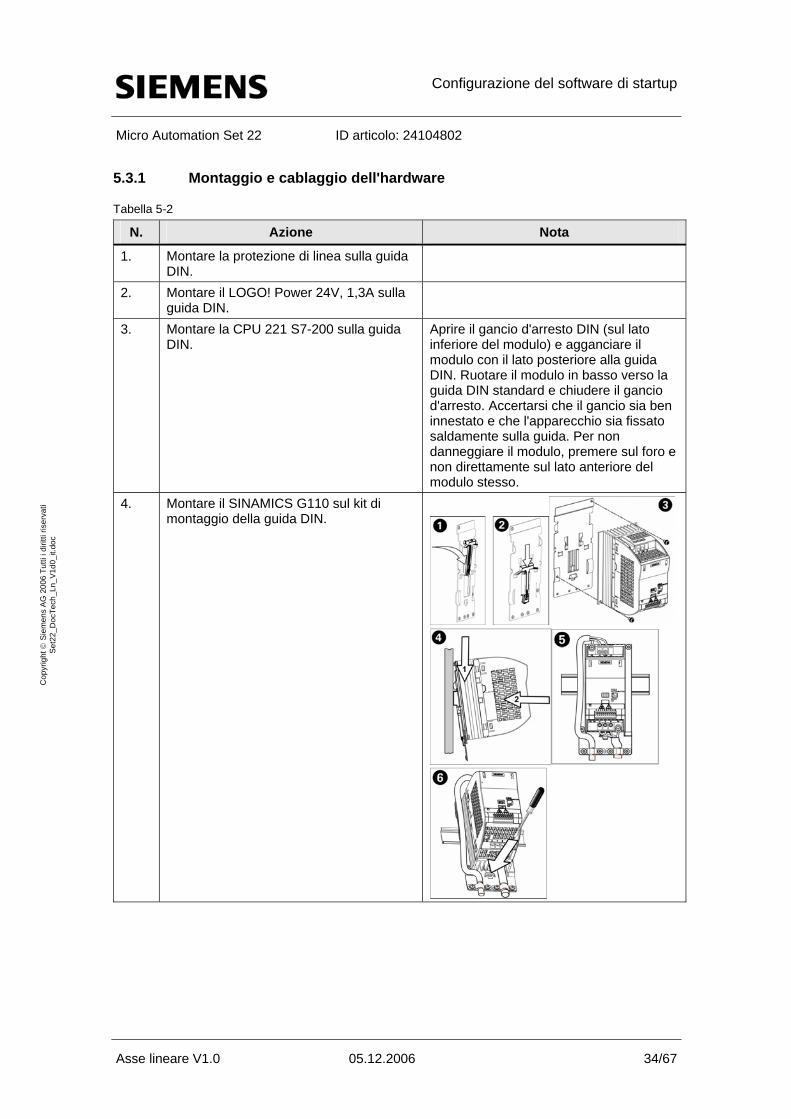
5.3.1 Montaggio e cablaggio dell'hardware
Tabella 5-2
N. Azione Nota
1. Montare la protezione di linea sulla guida DIN.
2. Montare il LOGO! Power 24V, 1,3A sulla guida DIN.
3. Montare la CPU 221 S7-200 sulla guida DIN.
Aprire il gancio d'arresto DIN (sul lato inferiore del modulo) e agganciare il modulo con il lato posteriore alla guida DIN. Ruotare il modulo in basso verso la guida DIN standard e chiudere il gancio d'arresto. Accertarsi che il gancio sia ben innestato e che l'apparecchio sia fissato saldamente sulla guida. Per non danneggiare il modulo, premere sul foro e non direttamente sul lato anteriore del modulo stesso.
Asse lineare V1.0 05.12.2006 34/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
4. Montare il SINAMICS G110 sul kit di montaggio della guida DIN.
Configurazione del software di startup
Micro Automation Set 22 ID articolo: 24104802
N. Azione Nota
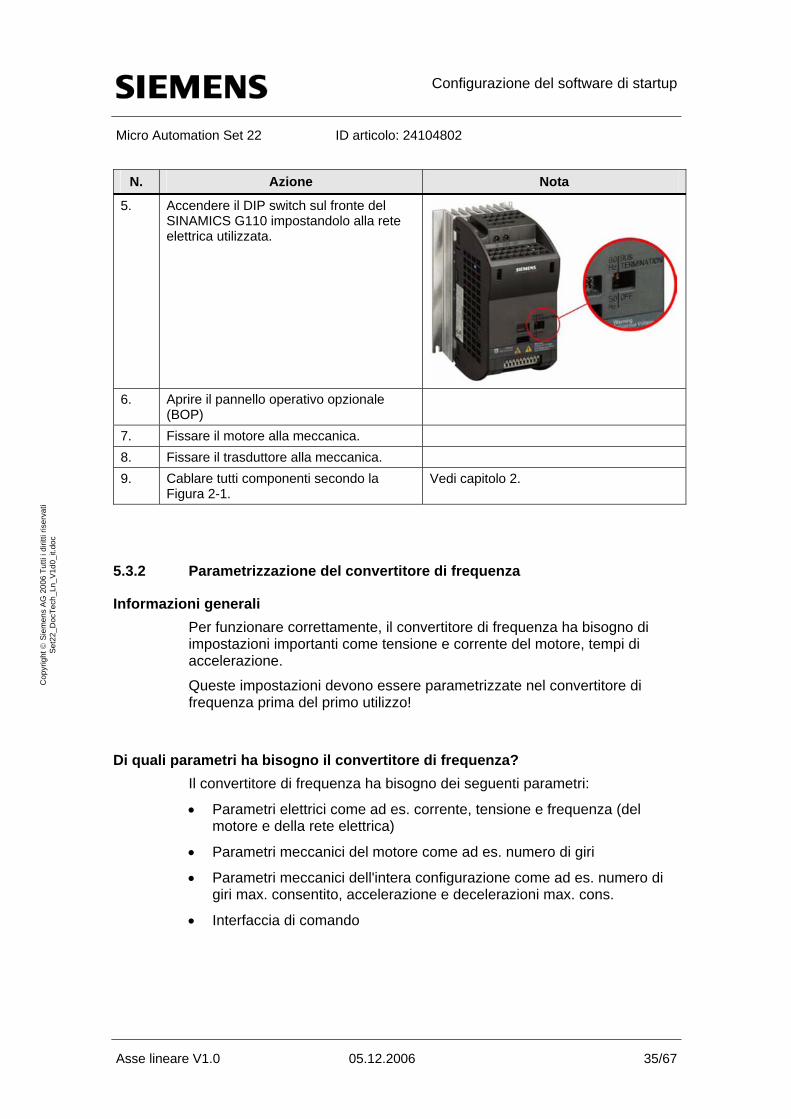
5. Accendere il DIP switch sul fronte del SINAMICS G110 impostandolo alla rete elettrica utilizzata.
6. Aprire il pannello operativo opzionale
(BOP)
7. Fissare il motore alla meccanica. 8. Fissare il trasduttore alla meccanica.
Asse lineare V1.0 05.12.2006 35/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
9. Cablare tutti componenti secondo la Figura 2-1.
Vedi capitolo 2.
5.3.2 Parametrizzazione del convertitore di frequenza
Informazioni generali Per funzionare correttamente, il convertitore di frequenza ha bisogno di impostazioni importanti come tensione e corrente del motore, tempi di accelerazione.
Queste impostazioni devono essere parametrizzate nel convertitore di frequenza prima del primo utilizzo!
Di quali parametri ha bisogno il convertitore di frequenza? Il convertitore di frequenza ha bisogno dei seguenti parametri:
• Parametri elettrici come ad es. corrente, tensione e frequenza (del motore e della rete elettrica)
• Parametri meccanici del motore come ad es. numero di giri
• Parametri meccanici dell'intera configurazione come ad es. numero di giri max. consentito, accelerazione e decelerazioni max. cons.
• Interfaccia di comando
Configurazione del software di startup
Micro Automation Set 22 ID articolo: 24104802
Determinazione dei parametri del convertitore di frequenza • I parametri elettrici e meccanici del motore sono contenuti nella
rispettiva targhetta
• I parametri meccanici dell'intera configurazione devono essere determinati/calcolati. Lo strumento di configurazione "Size"r e/o "GSM-Designer" vi può aiutare in questa operazione (vedi 4.2.2).
Parametrizzazione del convertitore di frequenza SINAMICS G110
! Attenzione
Prima di procedere all'installazione e alla messa in funzione del SINAMICS G110 leggere attentamente tutte le norme di sicurezza e le indicazioni contenute nelle rispettive istruzioni per l'uso, nonché tutti i cartelli di avvertimento posti sull'apparecchio. Tenere presente che i cartelli di avvertimento devono essere mantenuti in uno stato leggibile e non devono essere rimossi.
Asse lineare V1.0 05.12.2006 36/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
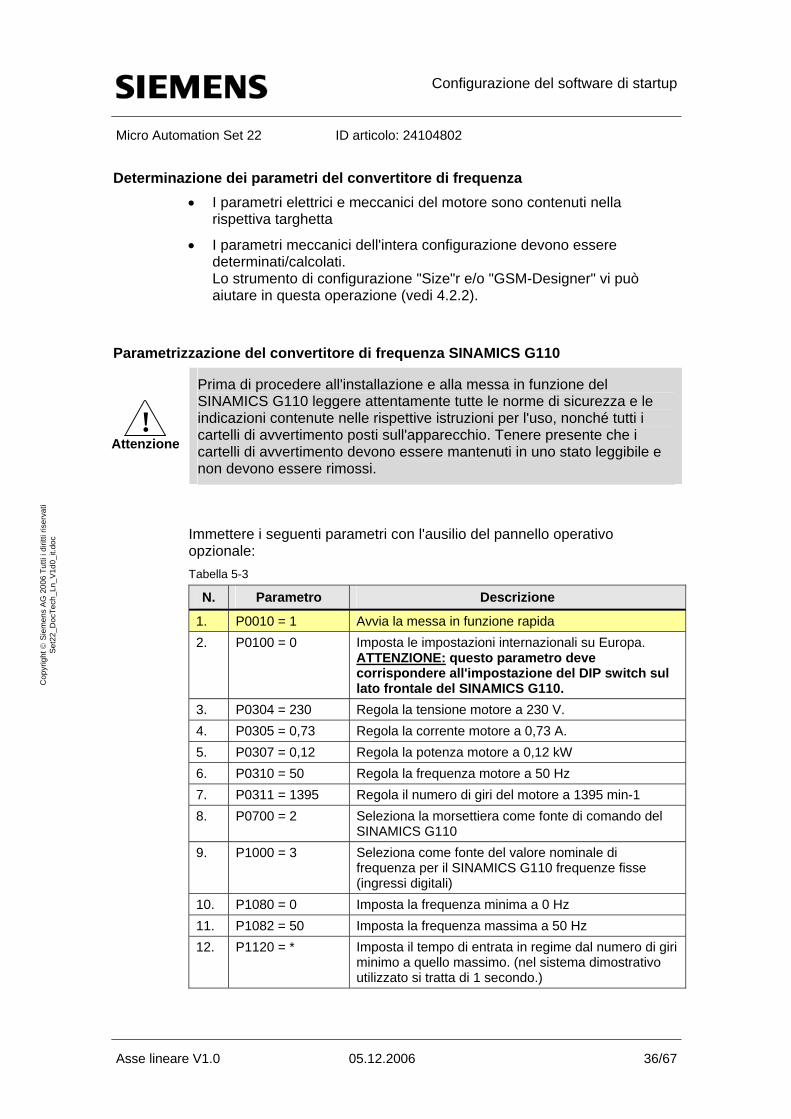
Immettere i seguenti parametri con l'ausilio del pannello operativo opzionale: Tabella 5-3
N. Parametro Descrizione
1. P0010 = 1 Avvia la messa in funzione rapida Imposta le impostazioni internazionali su Europa. ATTENZIONE: questo parametro deve corrispondere all'impostazione del DIP switch sul lato frontale del SINAMICS G110.
2. P0100 = 0
3. P0304 = 230 Regola la tensione motore a 230 V. 4. P0305 = 0,73 Regola la corrente motore a 0,73 A. 5. P0307 = 0,12 Regola la potenza motore a 0,12 kW 6. P0310 = 50 Regola la frequenza motore a 50 Hz 7. P0311 = 1395 Regola il numero di giri del motore a 1395 min-1
Seleziona la morsettiera come fonte di comando del SINAMICS G110
8. P0700 = 2
Seleziona come fonte del valore nominale di frequenza per il SINAMICS G110 frequenze fisse (ingressi digitali)
9. P1000 = 3
10. P1080 = 0 Imposta la frequenza minima a 0 Hz 11. P1082 = 50 Imposta la frequenza massima a 50 Hz 12. P1120 = * Imposta il tempo di entrata in regime dal numero di giri
minimo a quello massimo. (nel sistema dimostrativo utilizzato si tratta di 1 secondo.)
Configurazione del software di startup
Micro Automation Set 22 ID articolo: 24104802
N. Parametro Descrizione
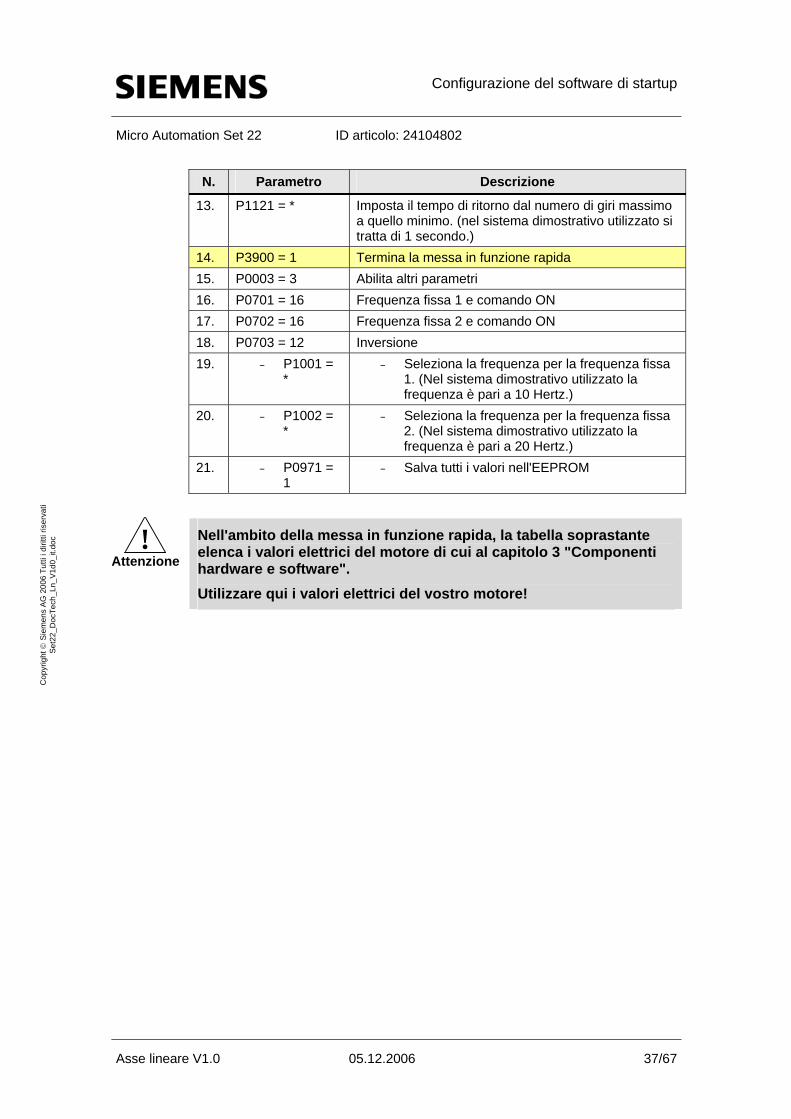
Imposta il tempo di ritorno dal numero di giri massimo a quello minimo. (nel sistema dimostrativo utilizzato si tratta di 1 secondo.)
13. P1121 = *
14. P3900 = 1 Termina la messa in funzione rapida 15. P0003 = 3 Abilita altri parametri 16. P0701 = 16 Frequenza fissa 1 e comando ON 17. P0702 = 16 Frequenza fissa 2 e comando ON 18. P0703 = 12 Inversione 19. – P1001 =
* – Seleziona la frequenza per la frequenza fissa
1. (Nel sistema dimostrativo utilizzato la frequenza è pari a 10 Hertz.)
20. – P1002 = *
– Seleziona la frequenza per la frequenza fissa 2. (Nel sistema dimostrativo utilizzato la frequenza è pari a 20 Hertz.)
21. – P0971 = 1
– Salva tutti i valori nell'EEPROM
Asse lineare V1.0 05.12.2006 37/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
!
Attenzione
Nell'ambito della messa in funzione rapida, la tabella soprastante elenca i valori elettrici del motore di cui al capitolo 3 "Componenti hardware e software". Utilizzare qui i valori elettrici del vostro motore!
Configurazione del software di startup
Micro Automation Set 22 ID articolo: 24104802
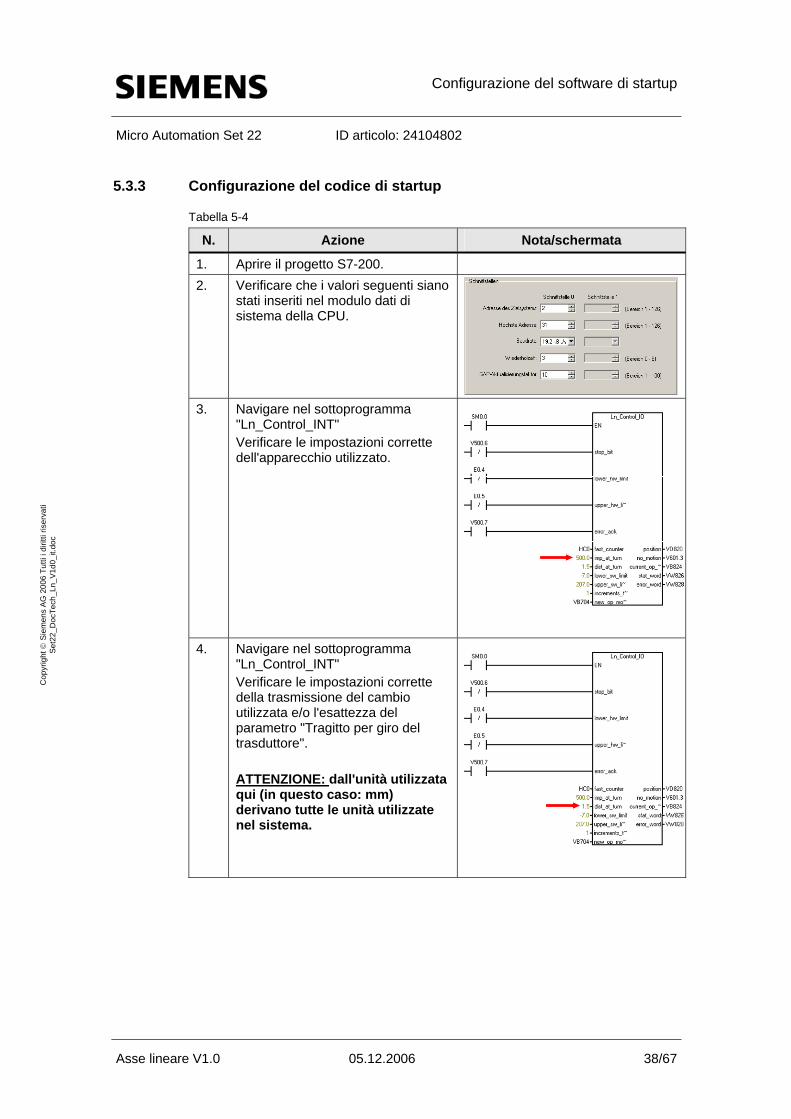
5.3.3 Configurazione del codice di startup
Tabella 5-4
N. Azione Nota/schermata
1. Aprire il progetto S7-200.
Asse lineare V1.0 05.12.2006 38/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
2. Verificare che i valori seguenti siano stati inseriti nel modulo dati di sistema della CPU.
3. Navigare nel sottoprogramma
"Ln_Control_INT" Verificare le impostazioni corrette dell'apparecchio utilizzato.
4. Navigare nel sottoprogramma
"Ln_Control_INT" Verificare le impostazioni corrette della trasmissione del cambio utilizzata e/o l'esattezza del parametro "Tragitto per giro del trasduttore". ATTENZIONE: dall'unità utilizzata qui (in questo caso: mm) derivano tutte le unità utilizzate nel sistema.
Configurazione del software di startup
Micro Automation Set 22 ID articolo: 24104802
N. Azione Nota/schermata
Asse lineare V1.0 05.12.2006 39/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
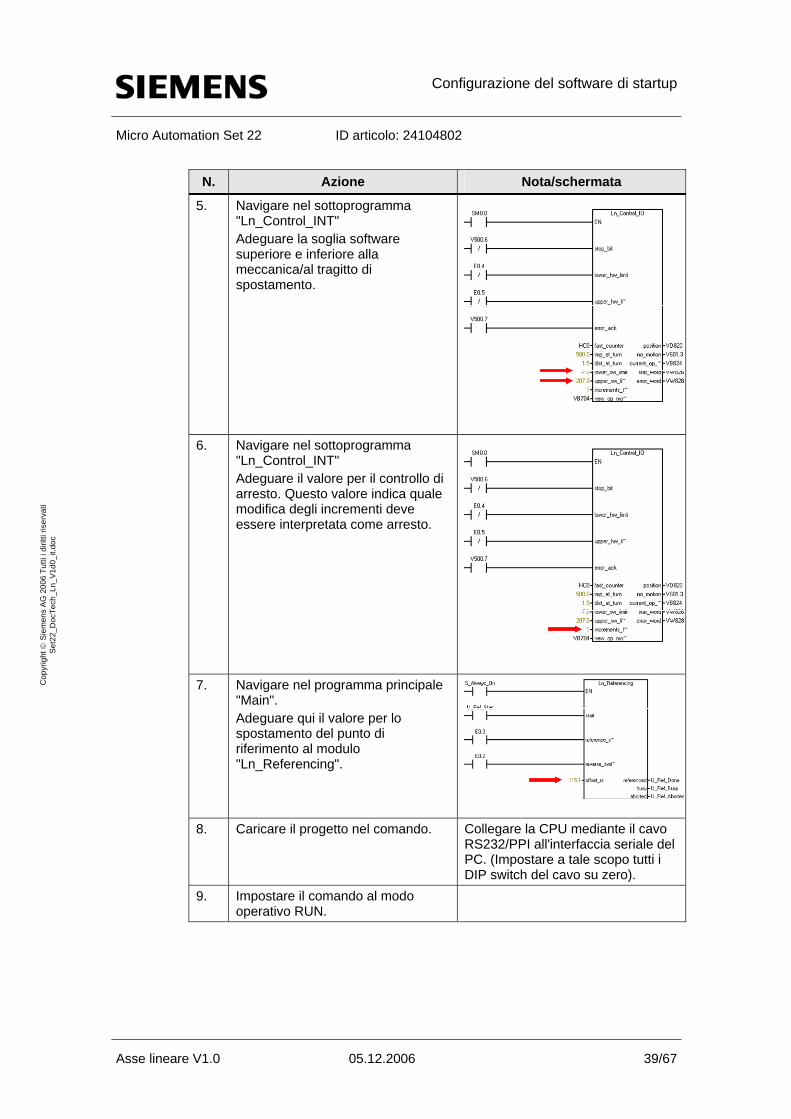
5. Navigare nel sottoprogramma "Ln_Control_INT" Adeguare la soglia software superiore e inferiore alla meccanica/al tragitto di spostamento.
6. Navigare nel sottoprogramma
"Ln_Control_INT" Adeguare il valore per il controllo di arresto. Questo valore indica quale modifica degli incrementi deve essere interpretata come arresto.
7. Navigare nel programma principale
"Main". Adeguare qui il valore per lo spostamento del punto di riferimento al modulo "Ln_Referencing".
Collegare la CPU mediante il cavo RS232/PPI all'interfaccia seriale del PC. (Impostare a tale scopo tutti i DIP switch del cavo su zero).
8. Caricare il progetto nel comando.
9. Impostare il comando al modo operativo RUN.
Configurazione del software di startup
Micro Automation Set 22 ID articolo: 24104802
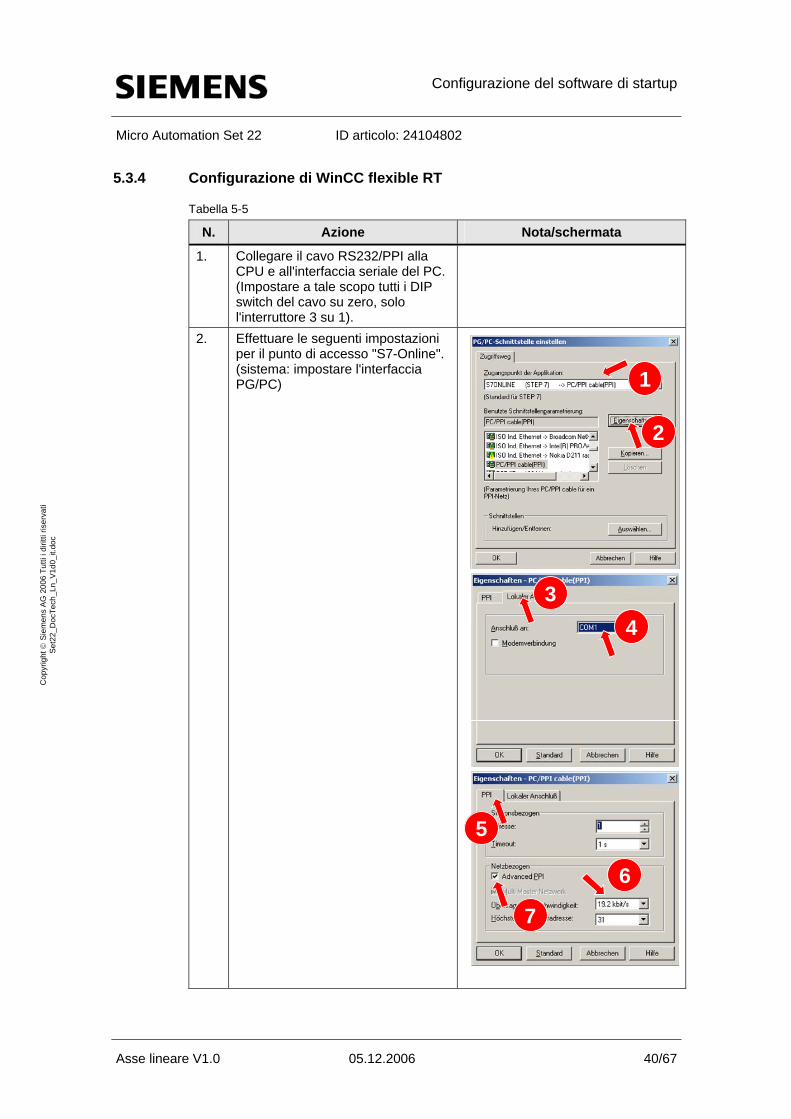
5.3.4 Configurazione di WinCC flexible RT
Tabella 5-5
N. Azione Nota/schermata
Asse lineare V1.0 05.12.2006 40/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
1. Collegare il cavo RS232/PPI alla CPU e all'interfaccia seriale del PC. (Impostare a tale scopo tutti i DIP switch del cavo su zero, solo l'interruttore 3 su 1).
2. Effettuare le seguenti impostazioni per il punto di accesso "S7-Online". (sistema: impostare l'interfaccia PG/PC) 1
2
34
5
6
7

Configurazione del software di startup
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 41/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
N. Azione Nota/schermata
3. Avviare ora WinCC flexible Runtime.
Demo Live
Micro Automation Set 22 ID articolo: 24104802
6 Demo Live
Panoramica delle caratteristiche È possibile dimostrare le seguenti caratteristiche di questo Micro Automation Set:
• Configurazione del posizionamento (ricerca punti di disinserzione)
• Modo manuale/marcia a impulsi
• Ricerca del punto di riferimento
• Posizionamento manuale
• Posizionamento automatico
• Controllo valori limite del campo di spostamento
Asse lineare V1.0 05.12.2006 42/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
6.1 Navigazione
Panoramica L'interfaccia del Micro Automation Set 22 è costituita da schermate di comando:
• Commissioning
• Manual
• Automatic
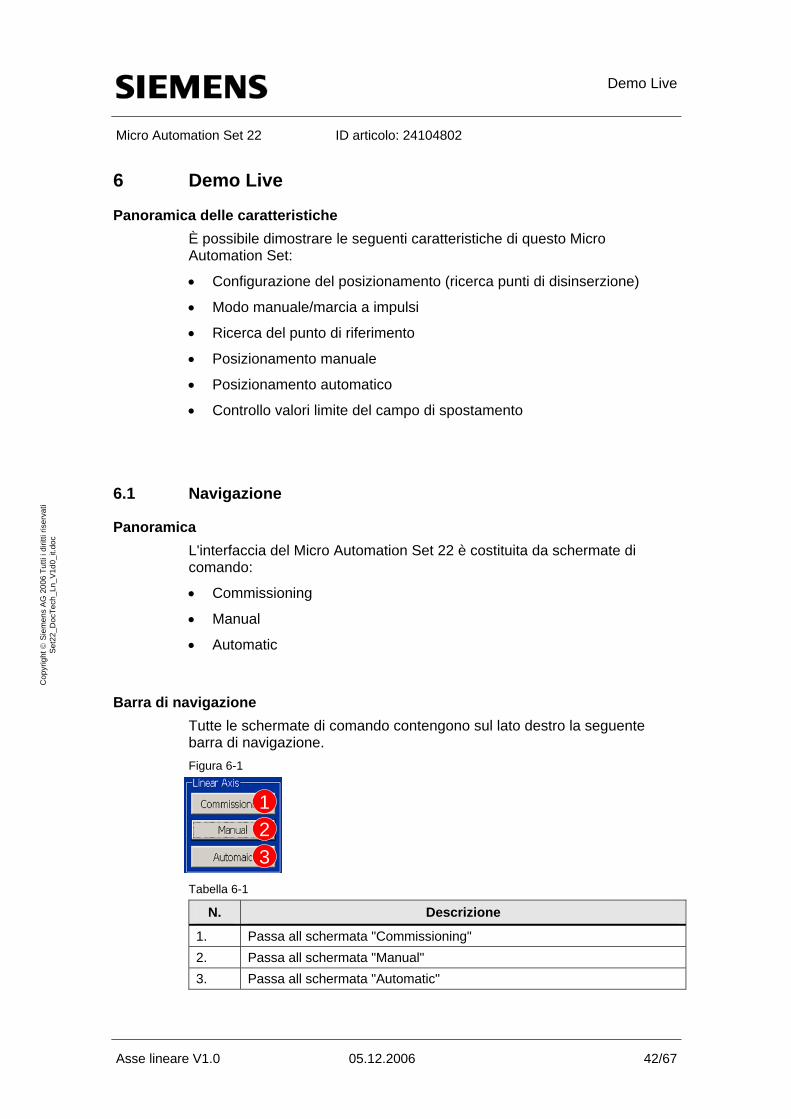
Barra di navigazione Tutte le schermate di comando contengono sul lato destro la seguente barra di navigazione. Figura 6-1
123
Tabella 6-1
N. Descrizione
1. Passa all schermata "Commissioning" 2. Passa all schermata "Manual" 3. Passa all schermata "Automatic"
Demo Live
Micro Automation Set 22 ID articolo: 24104802
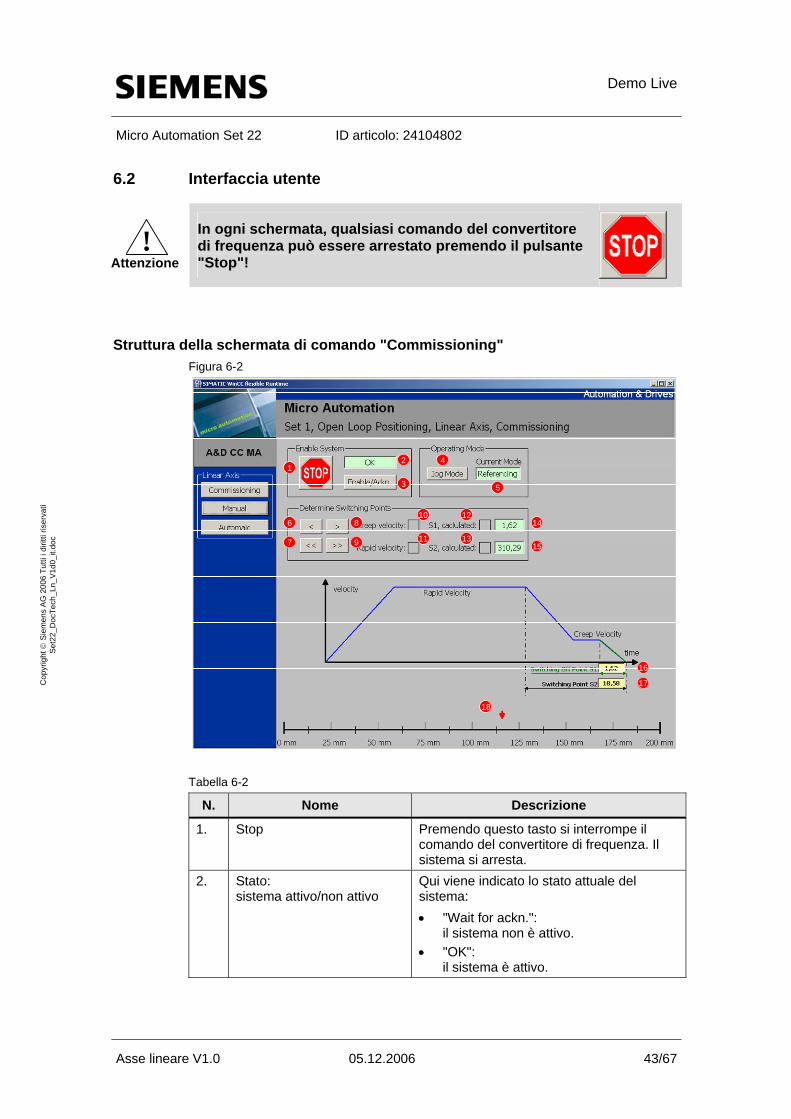
6.2 Interfaccia utente
! Attenzione
In ogni schermata, qualsiasi comando del convertitore di frequenza può essere arrestato premendo il pulsante "Stop"!
Struttura della schermata di comando "Commissioning" Figura 6-2
Asse lineare V1.0 05.12.2006 43/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
Tabella 6-2
N. Nome Descrizione
Premendo questo tasto si interrompe il comando del convertitore di frequenza. Il sistema si arresta.
1. Stop
2. Stato: sistema attivo/non attivo
Qui viene indicato lo stato attuale del sistema: • "Wait for ackn.":
il sistema non è attivo. • "OK":
il sistema è attivo.
Demo Live
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 44/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
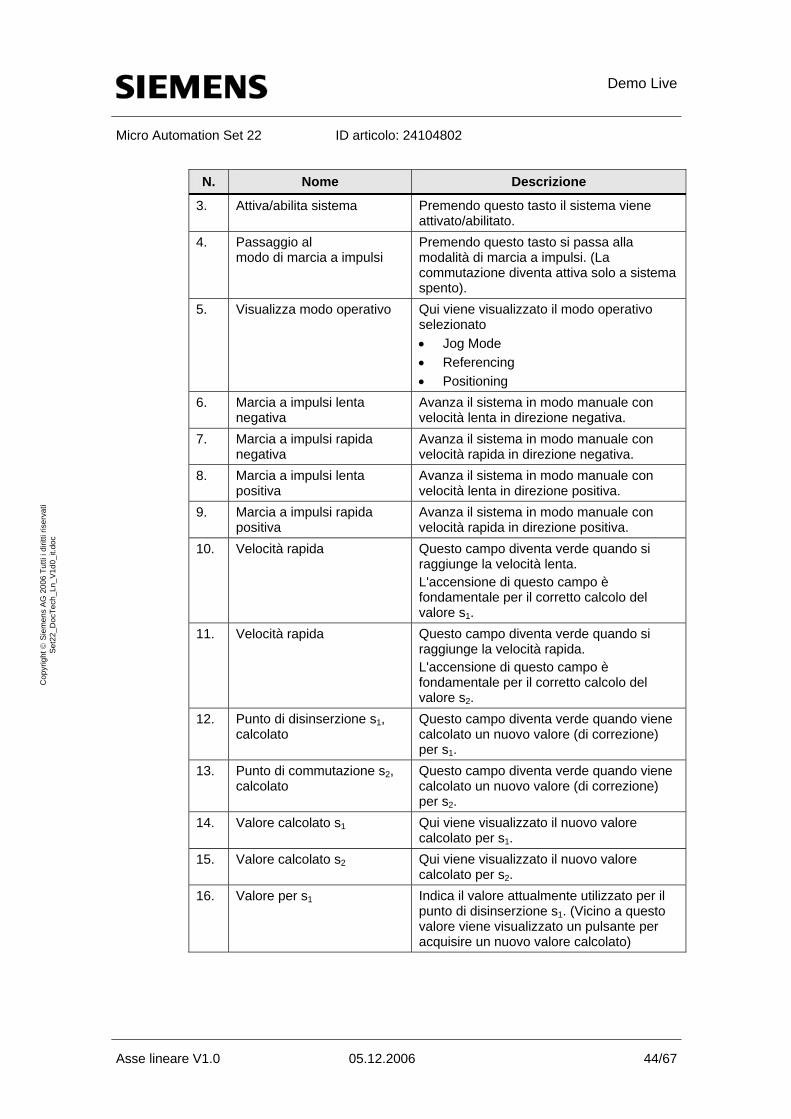
N. Nome Descrizione
3. Attiva/abilita sistema Premendo questo tasto il sistema viene attivato/abilitato.
4. Passaggio al modo di marcia a impulsi
Premendo questo tasto si passa alla modalità di marcia a impulsi. (La commutazione diventa attiva solo a sistema spento).
5. Visualizza modo operativo Qui viene visualizzato il modo operativo selezionato • Jog Mode • Referencing • Positioning
6. Marcia a impulsi lenta negativa
Avanza il sistema in modo manuale con velocità lenta in direzione negativa.
7. Marcia a impulsi rapida negativa
Avanza il sistema in modo manuale con velocità rapida in direzione negativa.
8. Marcia a impulsi lenta positiva
Avanza il sistema in modo manuale con velocità lenta in direzione positiva.
9. Marcia a impulsi rapida positiva
Avanza il sistema in modo manuale con velocità rapida in direzione positiva.
10. Velocità rapida Questo campo diventa verde quando si raggiunge la velocità lenta. L'accensione di questo campo è fondamentale per il corretto calcolo del valore s1.
11. Velocità rapida Questo campo diventa verde quando si raggiunge la velocità rapida. L'accensione di questo campo è fondamentale per il corretto calcolo del valore s2.
12. Punto di disinserzione s1, calcolato
Questo campo diventa verde quando viene calcolato un nuovo valore (di correzione) per s1.
13. Punto di commutazione s2, calcolato
Questo campo diventa verde quando viene calcolato un nuovo valore (di correzione) per s2.
14. Valore calcolato s1 Qui viene visualizzato il nuovo valore calcolato per s1.
15. Valore calcolato s2 Qui viene visualizzato il nuovo valore calcolato per s2.
16. Valore per s1 Indica il valore attualmente utilizzato per il punto di disinserzione s1. (Vicino a questo valore viene visualizzato un pulsante per acquisire un nuovo valore calcolato)
Demo Live
Micro Automation Set 22 ID articolo: 24104802
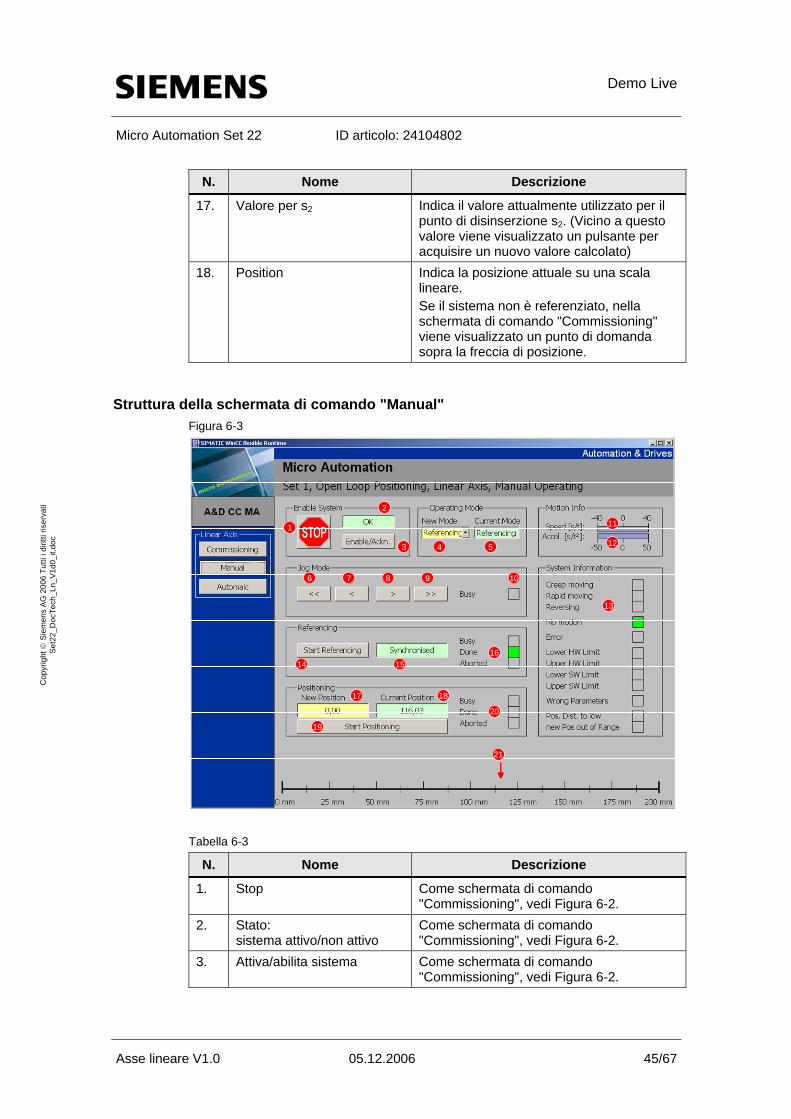
N. Nome Descrizione
Indica il valore attualmente utilizzato per il punto di disinserzione s2. (Vicino a questo valore viene visualizzato un pulsante per acquisire un nuovo valore calcolato)
17. Valore per s2
18. Position Indica la posizione attuale su una scala lineare. Se il sistema non è referenziato, nella schermata di comando "Commissioning" viene visualizzato un punto di domanda sopra la freccia di posizione.
Struttura della schermata di comando "Manual" Figura 6-3
Asse lineare V1.0 05.12.2006 45/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
1
2
3 4 5
11
12
6 7 8 9 10
14 1516
13
17
19
18
20
21
Tabella 6-3
N. Nome Descrizione
Come schermata di comando "Commissioning", vedi Figura 6-2.
1. Stop
2. Stato: sistema attivo/non attivo
Come schermata di comando "Commissioning", vedi Figura 6-2.
3. Attiva/abilita sistema Come schermata di comando "Commissioning", vedi Figura 6-2.
Demo Live
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 46/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
N. Nome Descrizione
4. Commutazione modo operativo
Premendo questo tasto si passa alla modalità di marcia a impulsi. (La commutazione diventa attiva solo a sistema spento).
5. Visualizza modo operativo Come schermata di comando "Commissioning", vedi Figura 6-2.
6. Marcia a impulsi rapida negativa
Avanza il sistema in modo manuale con velocità rapida in direzione negativa.
7. Marcia a impulsi lenta negativa
Avanza il sistema in modo manuale con velocità lenta in direzione negativa.
8. Marcia a impulsi lenta positiva
Avanza il sistema in modo manuale con velocità lenta in direzione positiva.
9. Marcia a impulsi rapida positiva
Avanza il sistema in modo manuale con velocità rapida in direzione positiva.
10. Marcia a impulsi busy Indica (verde), quando il sistema viene avanzato in modo di marcia a impulsi.
11. Velocità Visualizza graficamente la velocità calcolata.
12. Accelerazione Visualizza graficamente l'accelerazione calcolata.
13. Informazioni di sistema/informazioni di errore
Visualizza lo stato / le informazioni di errore del sistema.
14. Avvia il referenziamento Avvia la ricerca del punto di riferimento. (Il modo operativo "Referenziamento" deve essere attivo)
15. Start Referencing (Avvia referenziamento)
Indica lo stato "Synchronised" ("Referenziato") o "Not Synchronised" ("Non referenziato").
16. Busy, Done e Aborted del modulo di ricerca del punto di riferimento.
Indica lo stato del modulo di ricerca del punto di riferimento.
17. Nuova posizione target Inserire qui la nuova posizione target. 18. Posizione attuale Indica la posizione attuale dell'asse. 19. Avvia posizionamento verso
posizione target Avvia il posizionamento verso la posizione target.
20. Busy, Done e Aborted del modulo di posizionamento.
Indica lo stato del modulo di posizionamento.
21. Position Come schermata di comando "Commissioning", vedi Figura 6-2.
Demo Live
Micro Automation Set 22 ID articolo: 24104802
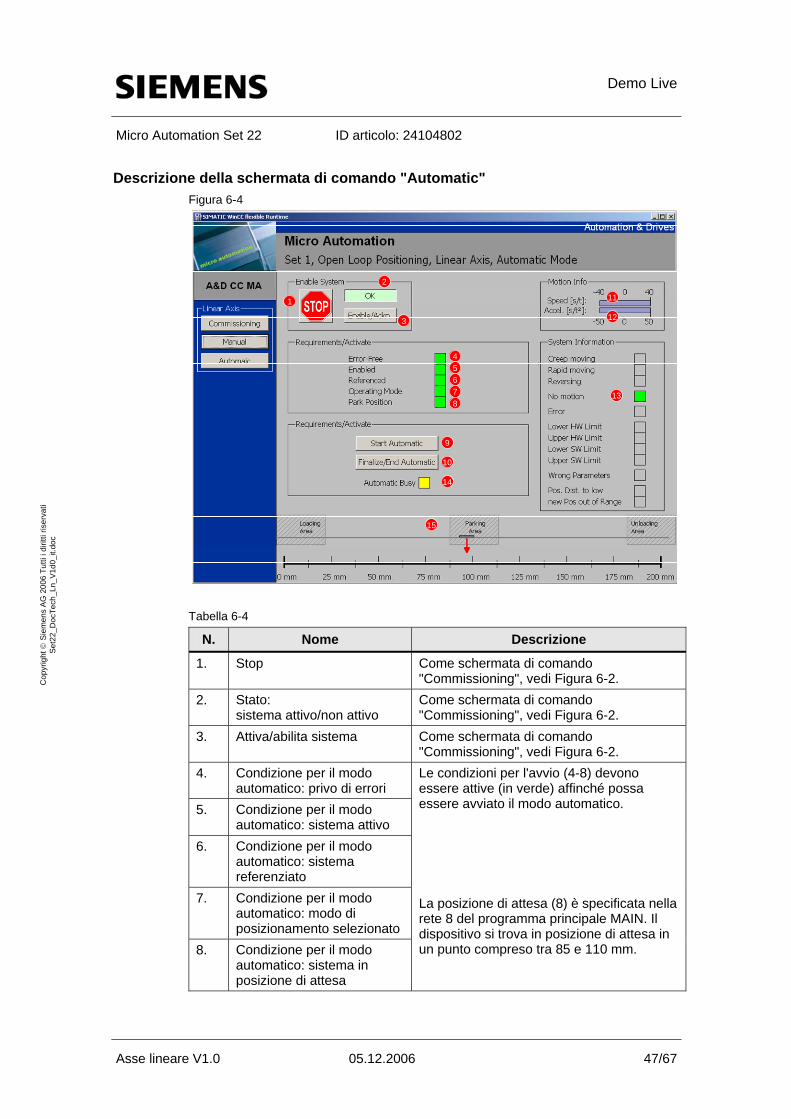
Descrizione della schermata di comando "Automatic" Figura 6-4
Asse lineare V1.0 05.12.2006 47/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
1
2
3
11
12
13
4
9
10
14
5678
15
Tabella 6-4
N. Nome Descrizione
Come schermata di comando "Commissioning", vedi Figura 6-2.
1. Stop
2. Stato: sistema attivo/non attivo
Come schermata di comando "Commissioning", vedi Figura 6-2. Come schermata di comando "Commissioning", vedi Figura 6-2.
3. Attiva/abilita sistema
4. Condizione per il modo automatico: privo di errori
5. Condizione per il modo automatico: sistema attivo
6. Condizione per il modo automatico: sistema referenziato
7. Condizione per il modo automatico: modo di posizionamento selezionato
8. Condizione per il modo automatico: sistema in posizione di attesa
Le condizioni per l'avvio (4-8) devono essere attive (in verde) affinché possa essere avviato il modo automatico.
La posizione di attesa (8) è specificata nella rete 8 del programma principale MAIN. Il dispositivo si trova in posizione di attesa in un punto compreso tra 85 e 110 mm.
Demo Live
Micro Automation Set 22 ID articolo: 24104802
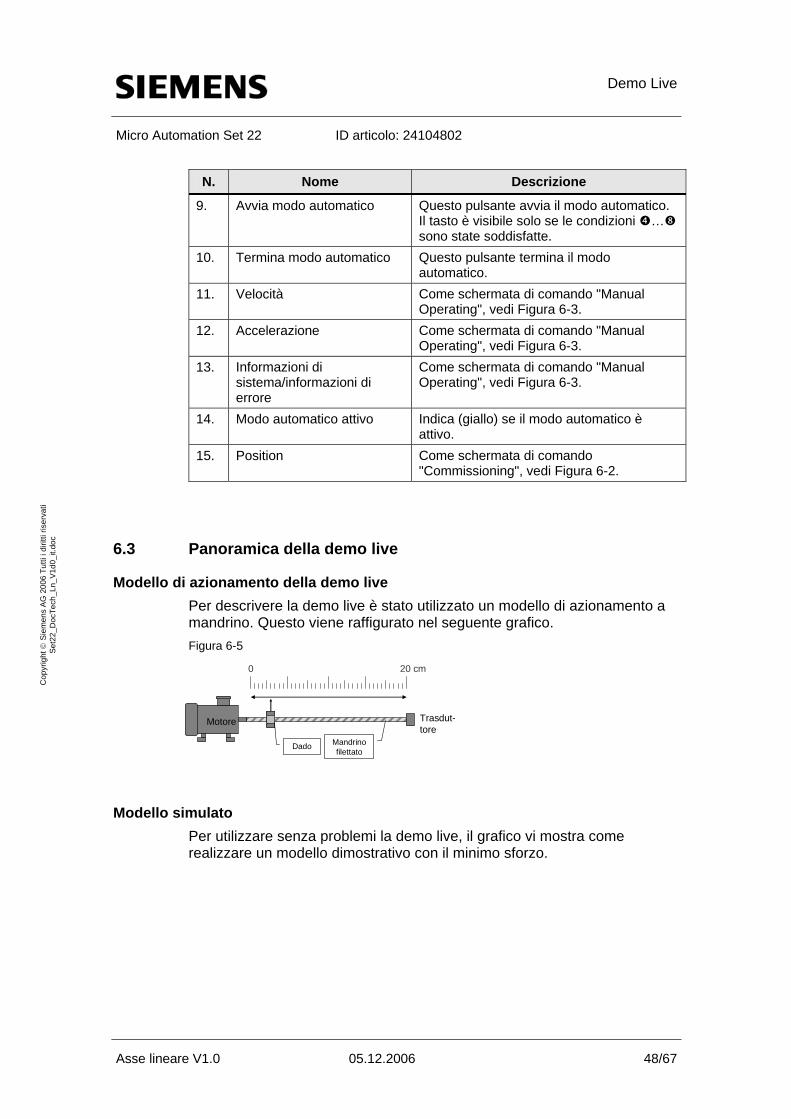
N. Nome Descrizione
Questo pulsante avvia il modo automatico. Il tasto è visibile solo se le condizioni … sono state soddisfatte.
9. Avvia modo automatico
Questo pulsante termina il modo automatico.
10. Termina modo automatico
Come schermata di comando "Manual Operating", vedi Figura 6-3.
11. Velocità
Come schermata di comando "Manual Operating", vedi Figura 6-3.
12. Accelerazione
13. Informazioni di sistema/informazioni di errore
Come schermata di comando "Manual Operating", vedi Figura 6-3.
Indica (giallo) se il modo automatico è attivo.
14. Modo automatico attivo
Come schermata di comando "Commissioning", vedi Figura 6-2.
15. Position
Asse lineare V1.0 05.12.2006 48/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
6.3 Panoramica della demo live
Modello di azionamento della demo live Per descrivere la demo live è stato utilizzato un modello di azionamento a mandrino. Questo viene raffigurato nel seguente grafico. Figura 6-5
0 20 cm
Mandrinofilettato
Motore Trasdut-tore
Dado
Modello simulato Per utilizzare senza problemi la demo live, il grafico vi mostra come realizzare un modello dimostrativo con il minimo sforzo.
Demo Live
Micro Automation Set 22 ID articolo: 24104802
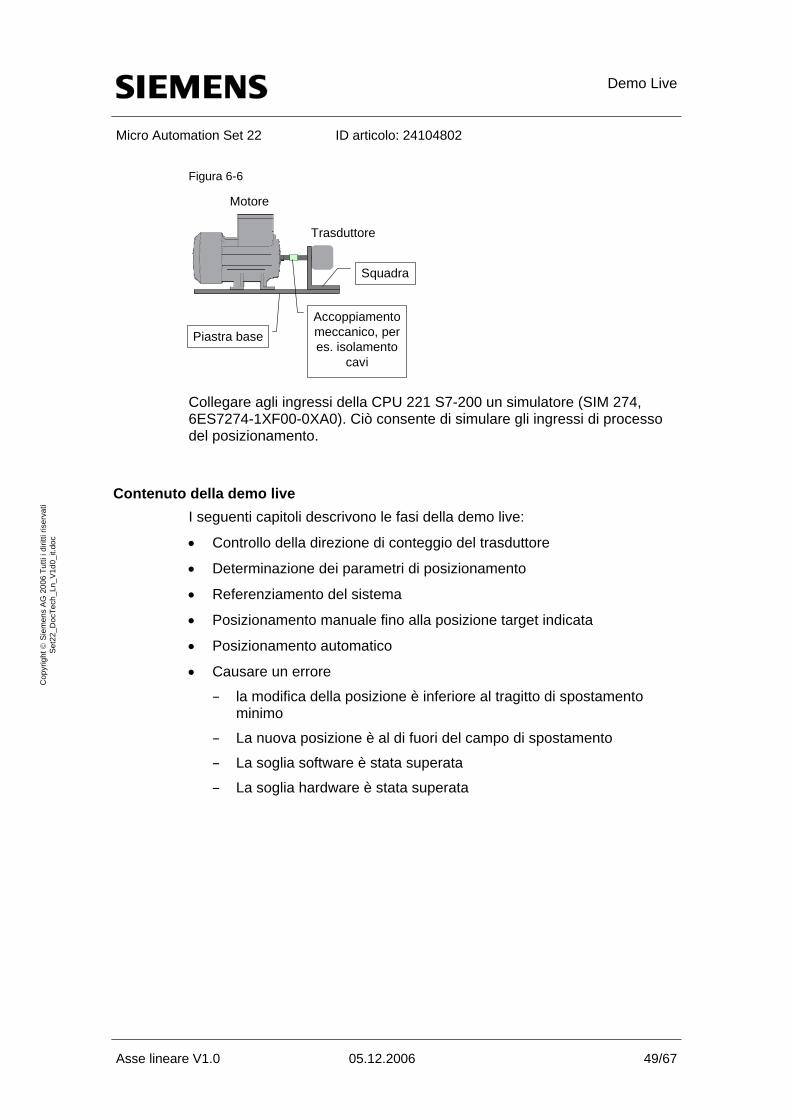
Figura 6-6
Motore
Trasduttore
Piastra baseAccoppiamentomeccanico, per es. isolamento
cavi
Squadra
Collegare agli ingressi della CPU 221 S7-200 un simulatore (SIM 274, 6ES7274-1XF00-0XA0). Ciò consente di simulare gli ingressi di processo del posizionamento.
Asse lineare V1.0 05.12.2006 49/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Contenuto della demo live I seguenti capitoli descrivono le fasi della demo live:
• Controllo della direzione di conteggio del trasduttore
• Determinazione dei parametri di posizionamento
• Referenziamento del sistema
• Posizionamento manuale fino alla posizione target indicata
• Posizionamento automatico
• Causare un errore
– la modifica della posizione è inferiore al tragitto di spostamento minimo
– La nuova posizione è al di fuori del campo di spostamento
– La soglia software è stata superata
– La soglia hardware è stata superata
Demo Live
Micro Automation Set 22 ID articolo: 24104802
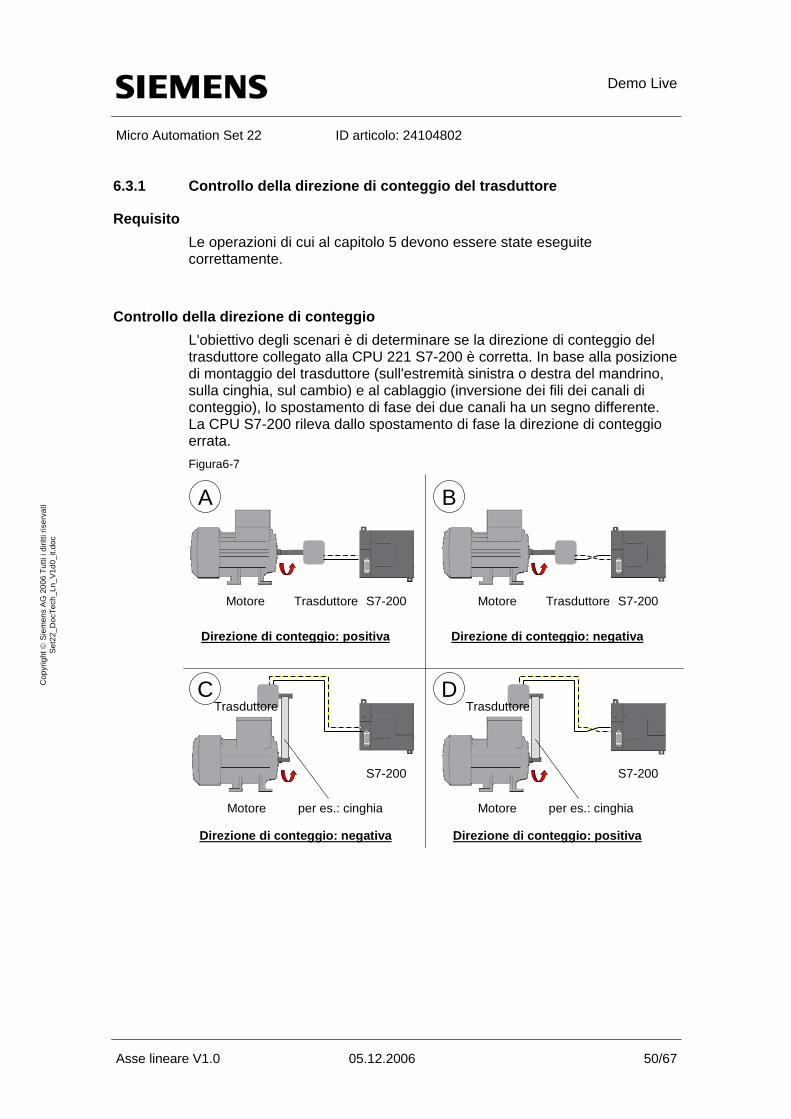
6.3.1 Controllo della direzione di conteggio del trasduttore
Requisito Le operazioni di cui al capitolo 5 devono essere state eseguite correttamente.
Controllo della direzione di conteggio L'obiettivo degli scenari è di determinare se la direzione di conteggio del trasduttore collegato alla CPU 221 S7-200 è corretta. In base alla posizione di montaggio del trasduttore (sull'estremità sinistra o destra del mandrino, sulla cinghia, sul cambio) e al cablaggio (inversione dei fili dei canali di conteggio), lo spostamento di fase dei due canali ha un segno differente. La CPU S7-200 rileva dallo spostamento di fase la direzione di conteggio errata. Figura6-7
Asse lineare V1.0 05.12.2006 50/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Motore Trasduttore S7-200
Direzione di conteggio: positiva
Motore Trasduttore S7-200
Direzione di conteggio: negativa
S7-200
Direzione di conteggio: negativa
Motore
Trasduttore
S7-200
Direzione di conteggio: positiva
per es.: cinghiaMotore
Trasduttore
per es.: cinghia
A B
C D
Demo Live
Micro Automation Set 22 ID articolo: 24104802
Tabella 6-5
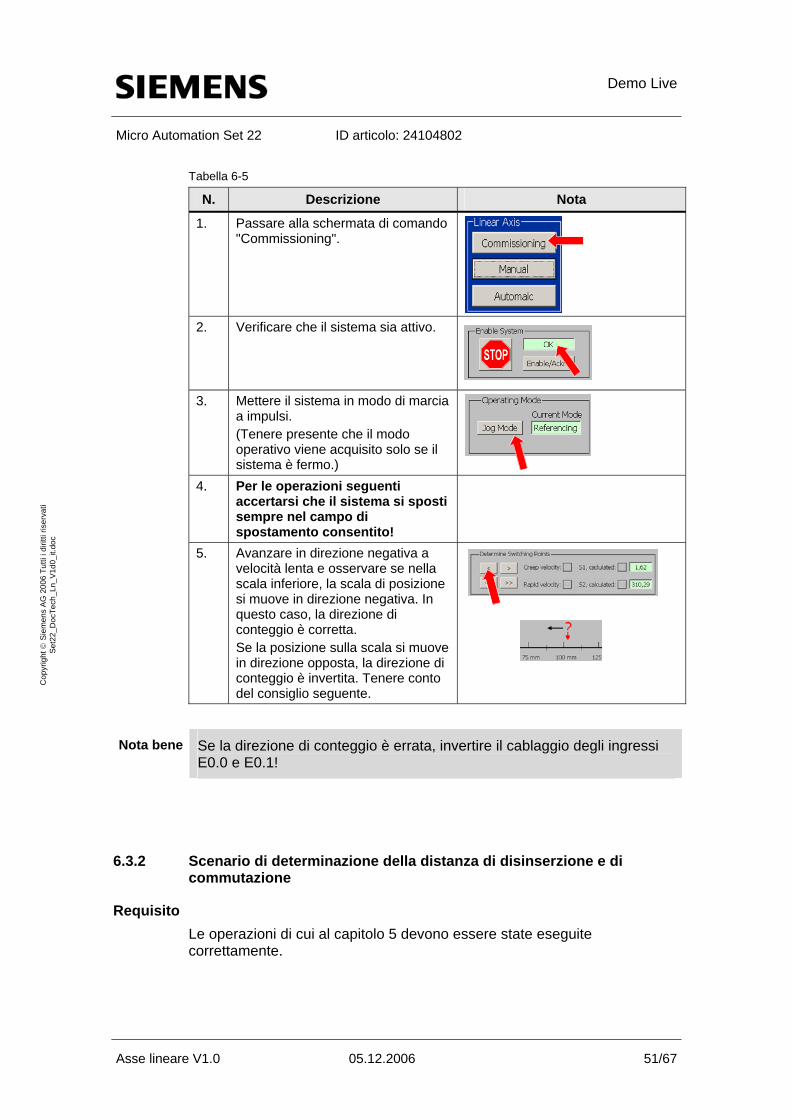
N. Descrizione Nota
1. Passare alla schermata di comando "Commissioning".
2. Verificare che il sistema sia attivo.
3. Mettere il sistema in modo di marcia
a impulsi. (Tenere presente che il modo operativo viene acquisito solo se il sistema è fermo.)
Asse lineare V1.0 05.12.2006 51/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
4. Per le operazioni seguenti accertarsi che il sistema si sposti sempre nel campo di spostamento consentito!
5. Avanzare in direzione negativa a velocità lenta e osservare se nella scala inferiore, la scala di posizione si muove in direzione negativa. In questo caso, la direzione di conteggio è corretta. Se la posizione sulla scala si muove in direzione opposta, la direzione di conteggio è invertita. Tenere conto del consiglio seguente.
Nota bene Se la direzione di conteggio è errata, invertire il cablaggio degli ingressi E0.0 e E0.1!
6.3.2 Scenario di determinazione della distanza di disinserzione e di commutazione
Requisito Le operazioni di cui al capitolo 5 devono essere state eseguite correttamente.
Demo Live
Micro Automation Set 22 ID articolo: 24104802
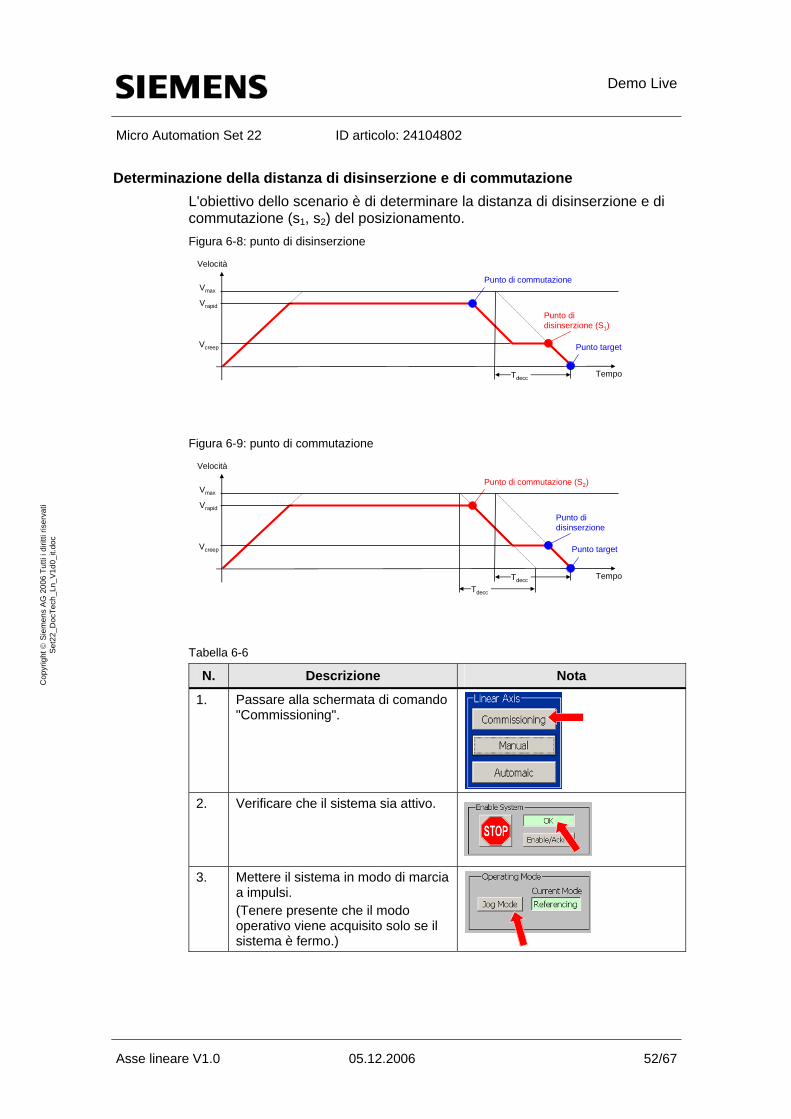
Determinazione della distanza di disinserzione e di commutazione L'obiettivo dello scenario è di determinare la distanza di disinserzione e di commutazione (s1, s2) del posizionamento. Figura 6-8: punto di disinserzione
Punto target
Vrapid
Velocità
Tempo
Punto di commutazione
Asse lineare V1.0 05.12.2006 52/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Punto di disinserzione (S1)
Vcreep
Vmax
Tdecc
Figura 6-9: punto di commutazione
Punto target
Vrapid
Velocità
Tempo
Punto di commutazione (S2)
Punto di disinserzione
Vcreep
Vmax
Tdecc
Tdecc
Tabella 6-6
N. Descrizione Nota
1. Passare alla schermata di comando "Commissioning".
2. Verificare che il sistema sia attivo.
3. Mettere il sistema in modo di marcia
a impulsi. (Tenere presente che il modo operativo viene acquisito solo se il sistema è fermo.)
Demo Live
Micro Automation Set 22 ID articolo: 24104802
N. Descrizione Nota
4. Per le operazioni seguenti accertarsi che il sistema si sposti sempre nel campo di spostamento consentito!
5. Avanzare in direzione positiva o negativa a velocità lenta, finché il campo "Creep velocity" non diventa verde. (Ora è stata raggiunta la velocità lenta. Ciò è fondamentale per un calcolo corretto del punto di disinserzione)
Asse lineare V1.0 05.12.2006 53/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
6. Arrestare lo spostamento dell'asse a velocità lenta. Il campo "s1, calculated" diventa verde. Il valore per s1 è stato calcolato correttamente.
7. Acquisire il valore calcolato con il tasto "Use new" nel programma di posizionamento.
8. Avanzare in direzione positiva o
negativa a velocità rapida, finché il campo "Rapid velocity" non diventa verde. (Ora è stata raggiunta la velocità. Ciò è fondamentale per un calcolo corretto del punto di disinserzione)
9. Arrestare lo spostamento a velocità
lenta. Il campo "s2, calculated" diventa verde. Il valore per s2 è stato calcolato correttamente.
10. Acquisire il valore calcolato con il tasto "Use new" nel programma di posizionamento
I valori così calcolati valgono ugualmente per qualsiasi altro punto target da definire.
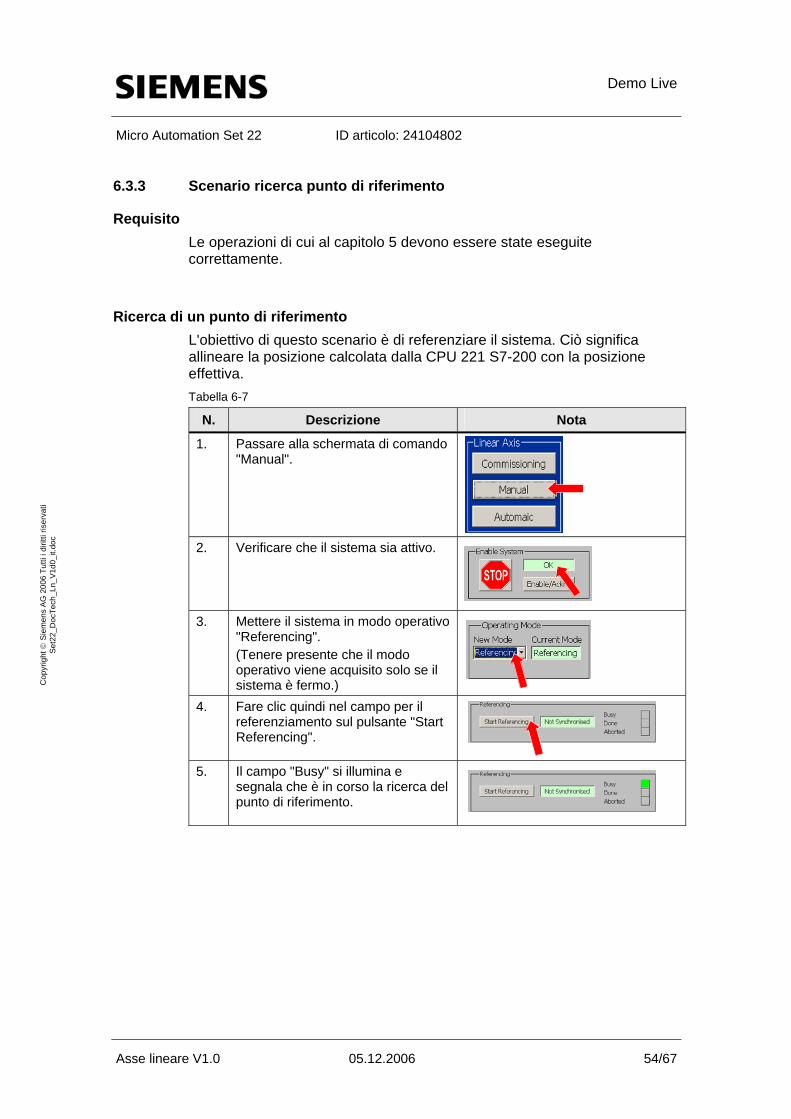
Demo Live
Micro Automation Set 22 ID articolo: 24104802
6.3.3 Scenario ricerca punto di riferimento
Requisito Le operazioni di cui al capitolo 5 devono essere state eseguite correttamente.
Ricerca di un punto di riferimento L'obiettivo di questo scenario è di referenziare il sistema. Ciò significa allineare la posizione calcolata dalla CPU 221 S7-200 con la posizione effettiva. Tabella 6-7
N. Descrizione Nota
1. Passare alla schermata di comando "Manual".
Asse lineare V1.0 05.12.2006 54/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
2. Verificare che il sistema sia attivo.
3. Mettere il sistema in modo operativo
"Referencing". (Tenere presente che il modo operativo viene acquisito solo se il sistema è fermo.)
4. Fare clic quindi nel campo per il referenziamento sul pulsante "Start Referencing".
5. Il campo "Busy" si illumina e
segnala che è in corso la ricerca del punto di riferimento.
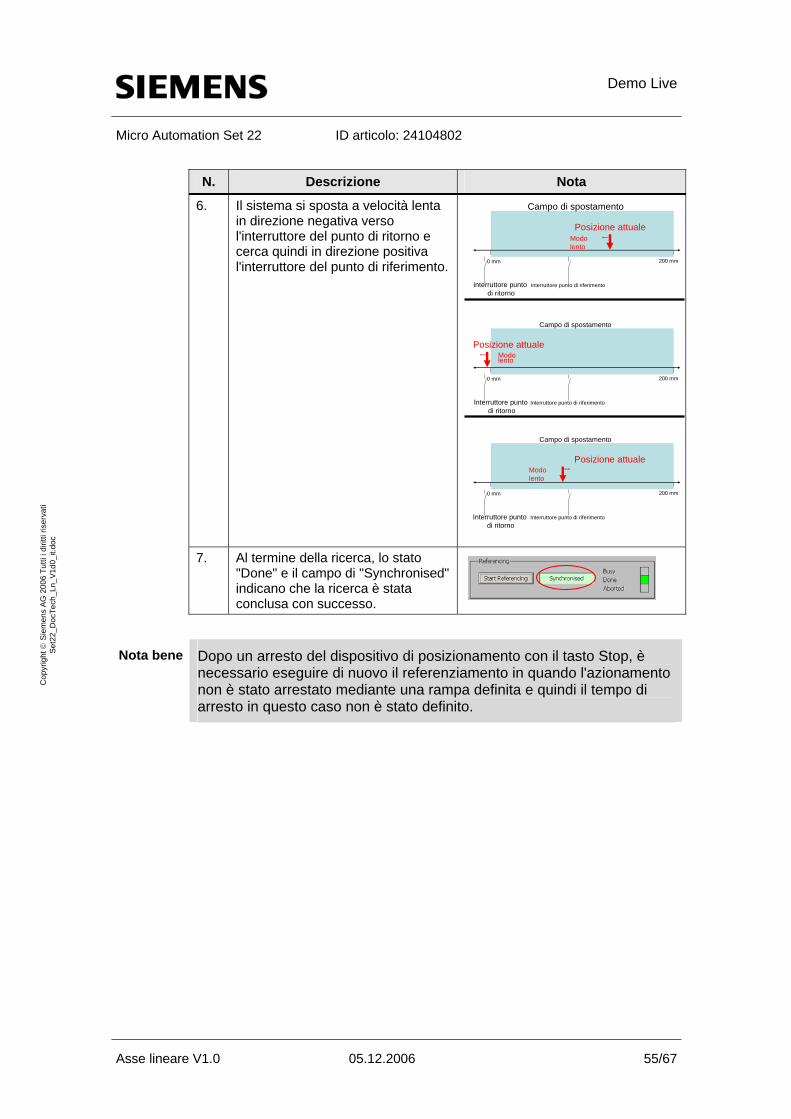
Demo Live
Micro Automation Set 22 ID articolo: 24104802
N. Descrizione Nota
6. Il sistema si sposta a velocità lenta in direzione negativa verso l'interruttore del punto di ritorno e cerca quindi in direzione positiva l'interruttore del punto di riferimento.
Asse lineare V1.0 05.12.2006 55/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
Interruttore puntodi ritorno
Campo di spostamento
Posizione attualeModolento
200 mm
Interruttore punto di riferimento
0 mm
Interruttore puntodi ritorno
Campo di spostamento
Interruttore punto di riferimento
0 mm
Posizione attualeModolento
200 mm
Interruttore puntodi ritorno
Campo di spostamento
Posizione attualeModolento
200 mm
Interruttore punto di riferimento
0 mm
7. Al termine della ricerca, lo stato
"Done" e il campo di "Synchronised" indicano che la ricerca è stata conclusa con successo.
Nota bene Dopo un arresto del dispositivo di posizionamento con il tasto Stop, è necessario eseguire di nuovo il referenziamento in quando l'azionamento non è stato arrestato mediante una rampa definita e quindi il tempo di arresto in questo caso non è stato definito.
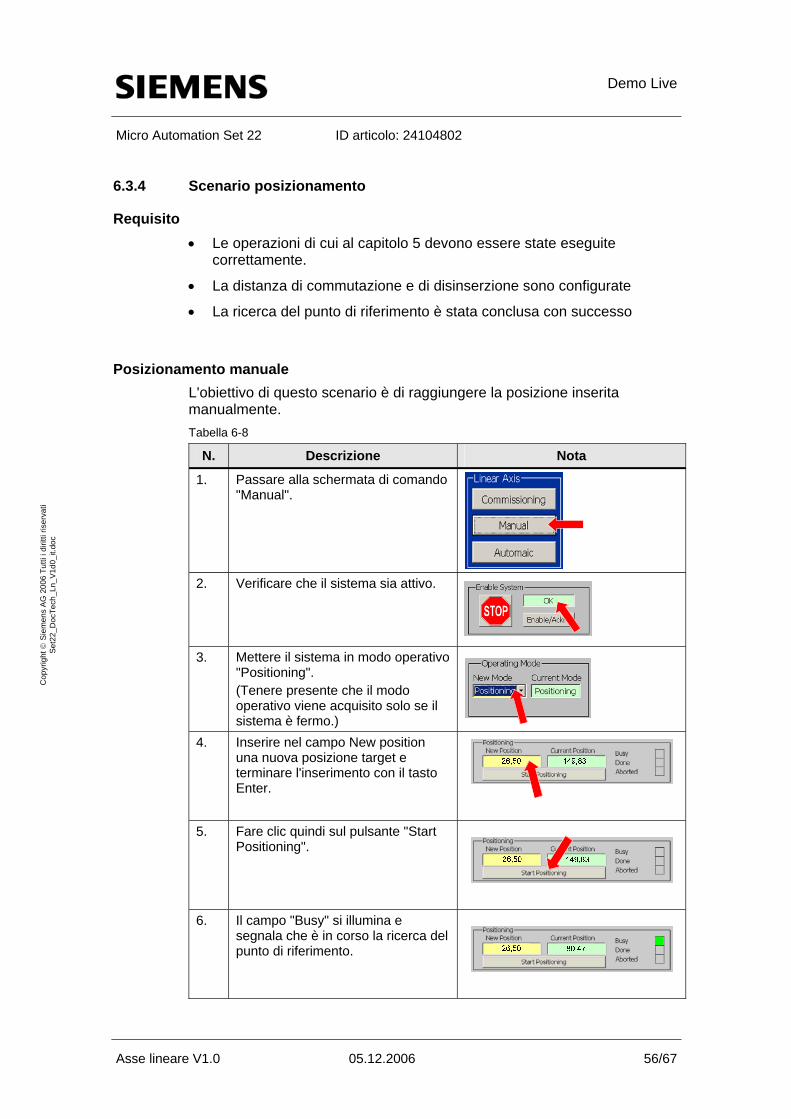
Demo Live
Micro Automation Set 22 ID articolo: 24104802
6.3.4 Scenario posizionamento
Requisito • Le operazioni di cui al capitolo 5 devono essere state eseguite
correttamente.
• La distanza di commutazione e di disinserzione sono configurate
• La ricerca del punto di riferimento è stata conclusa con successo
Posizionamento manuale L'obiettivo di questo scenario è di raggiungere la posizione inserita manualmente. Tabella 6-8
N. Descrizione Nota
Asse lineare V1.0 05.12.2006 56/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
1. Passare alla schermata di comando "Manual".
2. Verificare che il sistema sia attivo.
3. Mettere il sistema in modo operativo
"Positioning". (Tenere presente che il modo operativo viene acquisito solo se il sistema è fermo.)
4. Inserire nel campo New position una nuova posizione target e terminare l'inserimento con il tasto Enter.
5. Fare clic quindi sul pulsante "Start
Positioning".
6. Il campo "Busy" si illumina e
segnala che è in corso la ricerca del punto di riferimento.
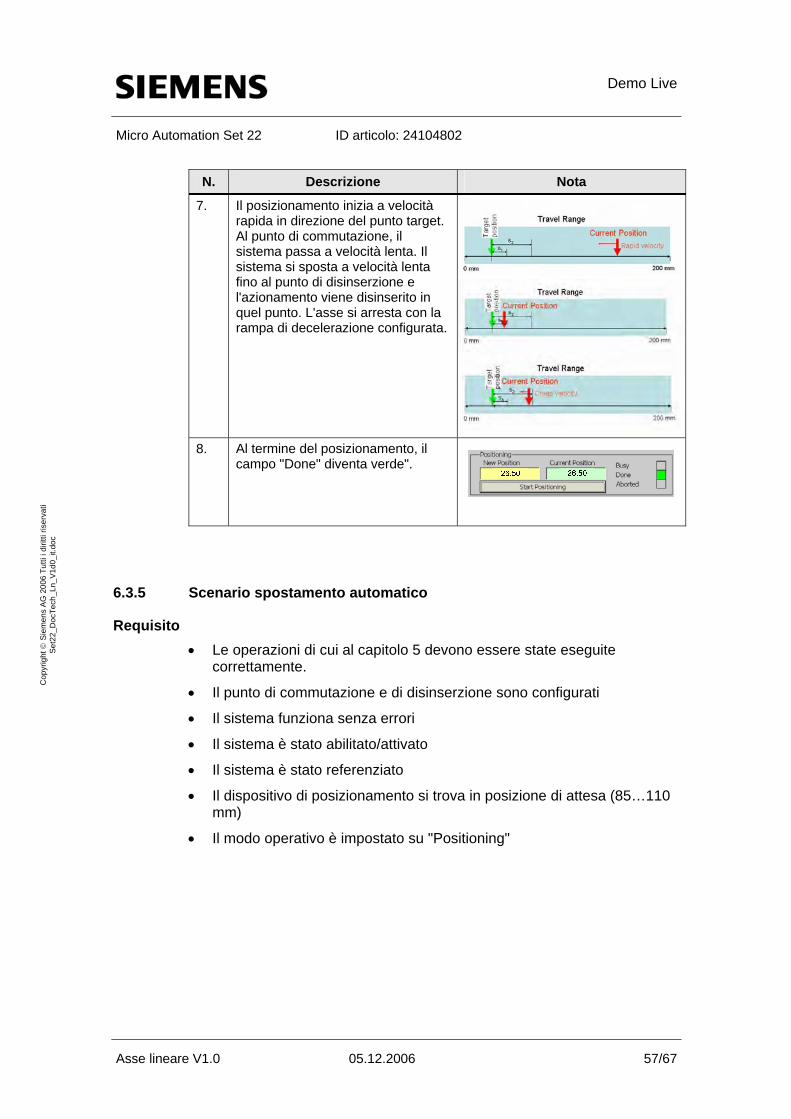
Demo Live
Micro Automation Set 22 ID articolo: 24104802
N. Descrizione Nota
7. Il posizionamento inizia a velocità rapida in direzione del punto target. Al punto di commutazione, il sistema passa a velocità lenta. Il sistema si sposta a velocità lenta fino al punto di disinserzione e l'azionamento viene disinserito in quel punto. L'asse si arresta con la rampa di decelerazione configurata.
8. Al termine del posizionamento, il campo "Done" diventa verde".
Asse lineare V1.0 05.12.2006 57/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
6.3.5 Scenario spostamento automatico
Requisito • Le operazioni di cui al capitolo 5 devono essere state eseguite
correttamente.
• Il punto di commutazione e di disinserzione sono configurati
• Il sistema funziona senza errori
• Il sistema è stato abilitato/attivato
• Il sistema è stato referenziato
• Il dispositivo di posizionamento si trova in posizione di attesa (85…110 mm)
• Il modo operativo è impostato su "Positioning"
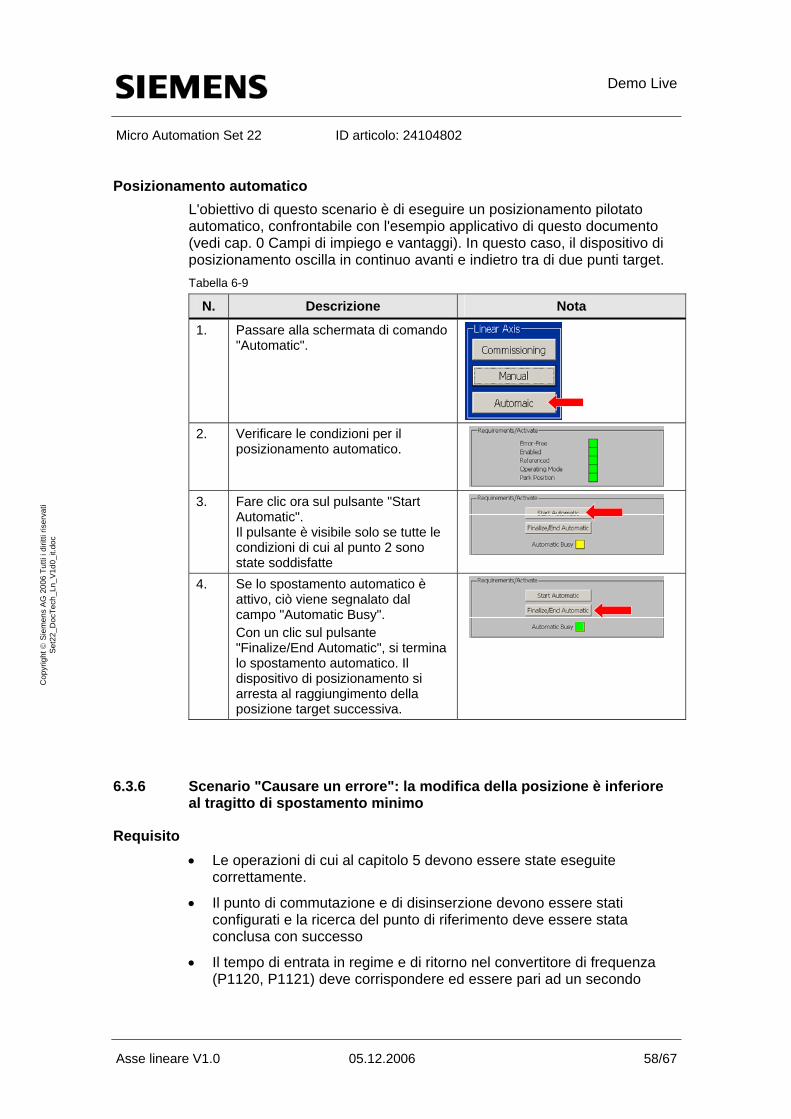
Demo Live
Micro Automation Set 22 ID articolo: 24104802
Posizionamento automatico L'obiettivo di questo scenario è di eseguire un posizionamento pilotato automatico, confrontabile con l'esempio applicativo di questo documento (vedi cap. 0 Campi di impiego e vantaggi). In questo caso, il dispositivo di posizionamento oscilla in continuo avanti e indietro tra di due punti target. Tabella 6-9
N. Descrizione Nota
1. Passare alla schermata di comando "Automatic".
2. Verificare le condizioni per il
posizionamento automatico.
Asse lineare V1.0 05.12.2006 58/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
3. Fare clic ora sul pulsante "Start Automatic". Il pulsante è visibile solo se tutte le condizioni di cui al punto 2 sono state soddisfatte
4. Se lo spostamento automatico è attivo, ciò viene segnalato dal campo "Automatic Busy". Con un clic sul pulsante "Finalize/End Automatic", si termina lo spostamento automatico. Il dispositivo di posizionamento si arresta al raggiungimento della posizione target successiva.
6.3.6 Scenario "Causare un errore": la modifica della posizione è inferiore al tragitto di spostamento minimo
Requisito • Le operazioni di cui al capitolo 5 devono essere state eseguite
correttamente.
• Il punto di commutazione e di disinserzione devono essere stati configurati e la ricerca del punto di riferimento deve essere stata conclusa con successo
• Il tempo di entrata in regime e di ritorno nel convertitore di frequenza (P1120, P1121) deve corrispondere ed essere pari ad un secondo
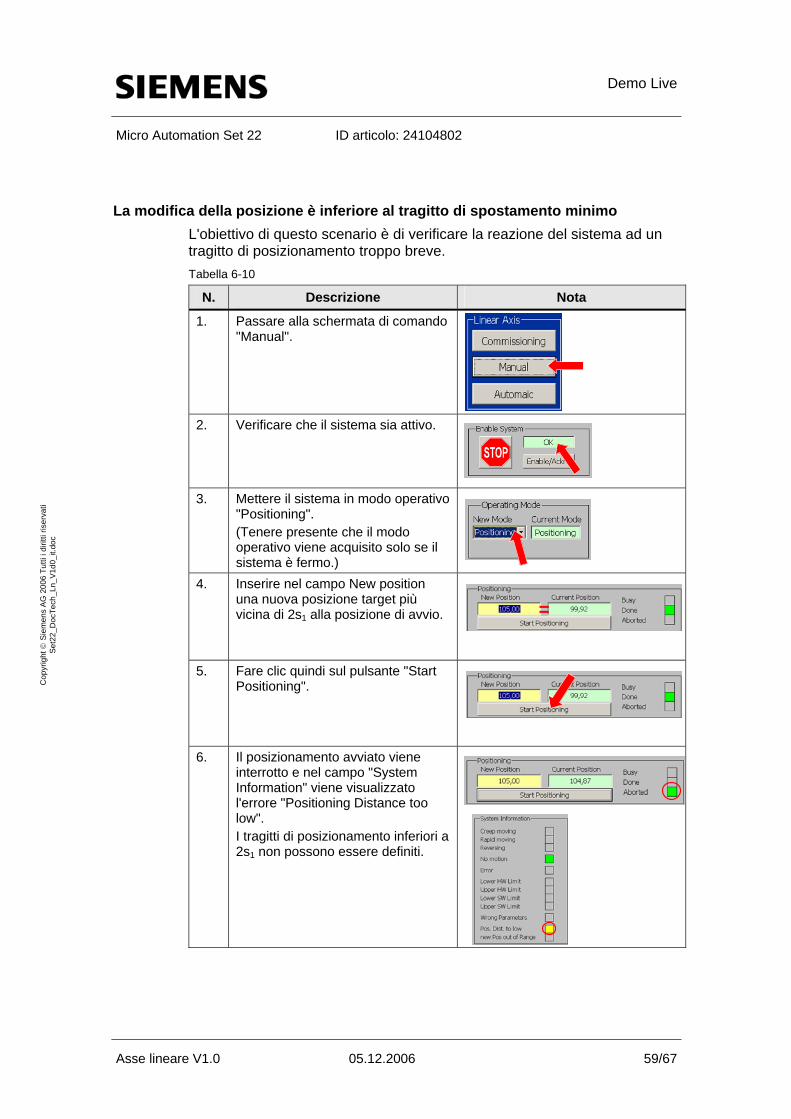
Demo Live
Micro Automation Set 22 ID articolo: 24104802
La modifica della posizione è inferiore al tragitto di spostamento minimo L'obiettivo di questo scenario è di verificare la reazione del sistema ad un tragitto di posizionamento troppo breve. Tabella 6-10
N. Descrizione Nota
1. Passare alla schermata di comando "Manual".
2. Verificare che il sistema sia attivo.
Asse lineare V1.0 05.12.2006 59/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
3. Mettere il sistema in modo operativo "Positioning". (Tenere presente che il modo operativo viene acquisito solo se il sistema è fermo.)
4. Inserire nel campo New position una nuova posizione target più vicina di 2s1 alla posizione di avvio. =
5. Fare clic quindi sul pulsante "Start
Positioning".
6. Il posizionamento avviato viene
interrotto e nel campo "System Information" viene visualizzato l'errore "Positioning Distance too low". I tragitti di posizionamento inferiori a 2s1 non possono essere definiti.
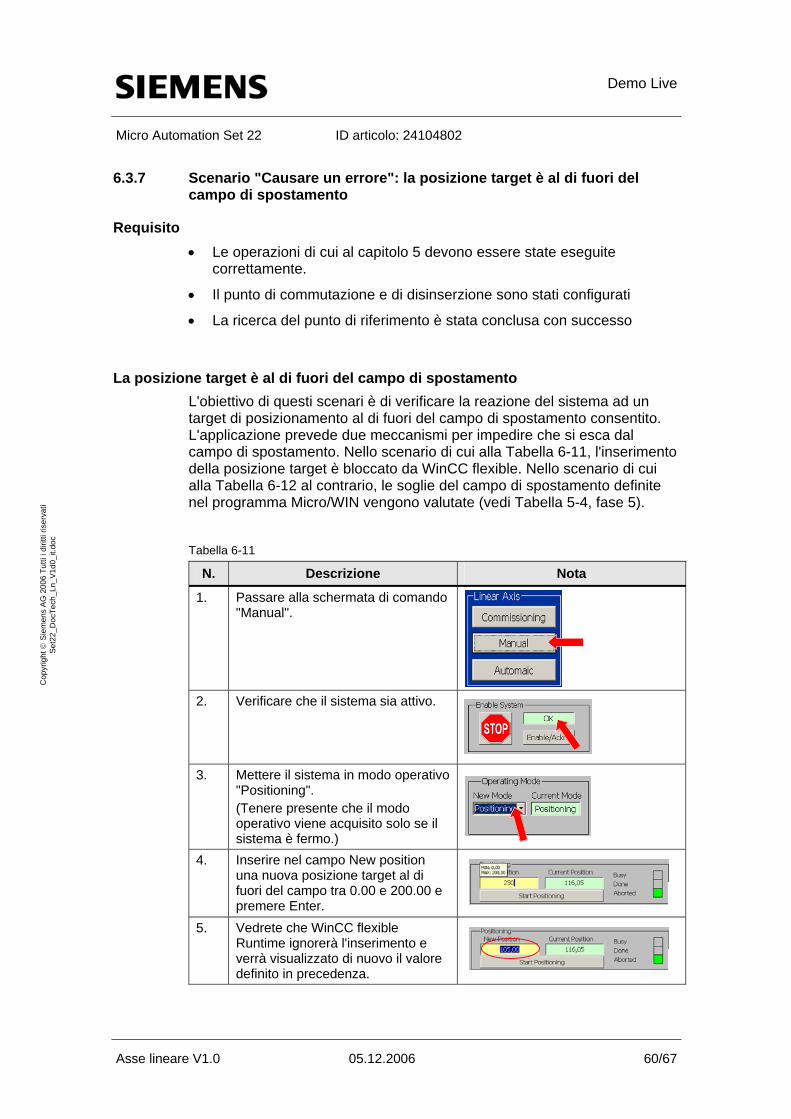
Demo Live
Micro Automation Set 22 ID articolo: 24104802
6.3.7 Scenario "Causare un errore": la posizione target è al di fuori del campo di spostamento
Requisito • Le operazioni di cui al capitolo 5 devono essere state eseguite
correttamente.
• Il punto di commutazione e di disinserzione sono stati configurati
• La ricerca del punto di riferimento è stata conclusa con successo
La posizione target è al di fuori del campo di spostamento
Asse lineare V1.0 05.12.2006 60/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
L'obiettivo di questi scenari è di verificare la reazione del sistema ad un target di posizionamento al di fuori del campo di spostamento consentito. L'applicazione prevede due meccanismi per impedire che si esca dal campo di spostamento. Nello scenario di cui alla Tabella 6-11, l'inserimento della posizione target è bloccato da WinCC flexible. Nello scenario di cui alla Tabella 6-12 al contrario, le soglie del campo di spostamento definite nel programma Micro/WIN vengono valutate (vedi Tabella 5-4, fase 5).
Tabella 6-11
N. Descrizione Nota
1. Passare alla schermata di comando "Manual".
2. Verificare che il sistema sia attivo.
3. Mettere il sistema in modo operativo
"Positioning". (Tenere presente che il modo operativo viene acquisito solo se il sistema è fermo.)
4. Inserire nel campo New position una nuova posizione target al di fuori del campo tra 0.00 e 200.00 e premere Enter.
5. Vedrete che WinCC flexible Runtime ignorerà l'inserimento e verrà visualizzato di nuovo il valore definito in precedenza.
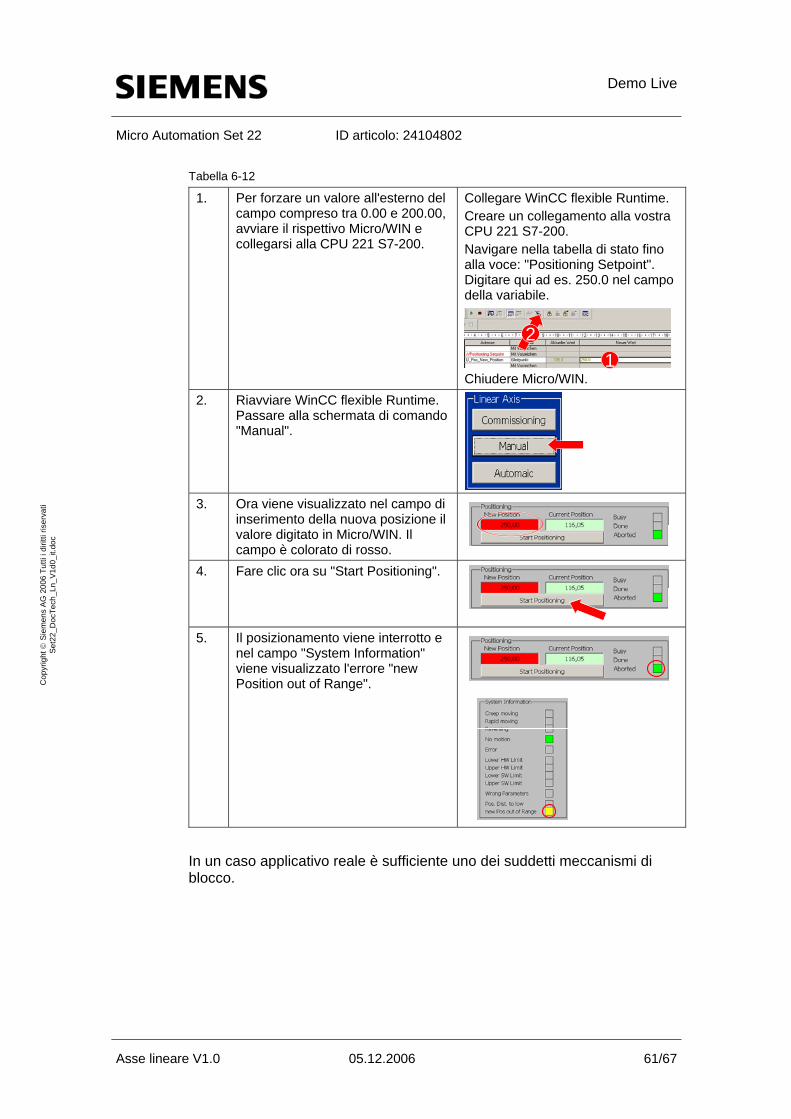
Demo Live
Micro Automation Set 22 ID articolo: 24104802
Tabella 6-12
1. Per forzare un valore all'esterno del campo compreso tra 0.00 e 200.00, avviare il rispettivo Micro/WIN e collegarsi alla CPU 221 S7-200.
Collegare WinCC flexible Runtime. Creare un collegamento alla vostra CPU 221 S7-200. Navigare nella tabella di stato fino alla voce: "Positioning Setpoint". Digitare qui ad es. 250.0 nel campo della variabile.
12
Chiudere Micro/WIN. 2. Riavviare WinCC flexible Runtime.
Passare alla schermata di comando "Manual".
Asse lineare V1.0 05.12.2006 61/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
3. Ora viene visualizzato nel campo di inserimento della nuova posizione il valore digitato in Micro/WIN. Il campo è colorato di rosso.
4. Fare clic ora su "Start Positioning".
5. Il posizionamento viene interrotto e
nel campo "System Information" viene visualizzato l'errore "new Position out of Range".
In un caso applicativo reale è sufficiente uno dei suddetti meccanismi di blocco.
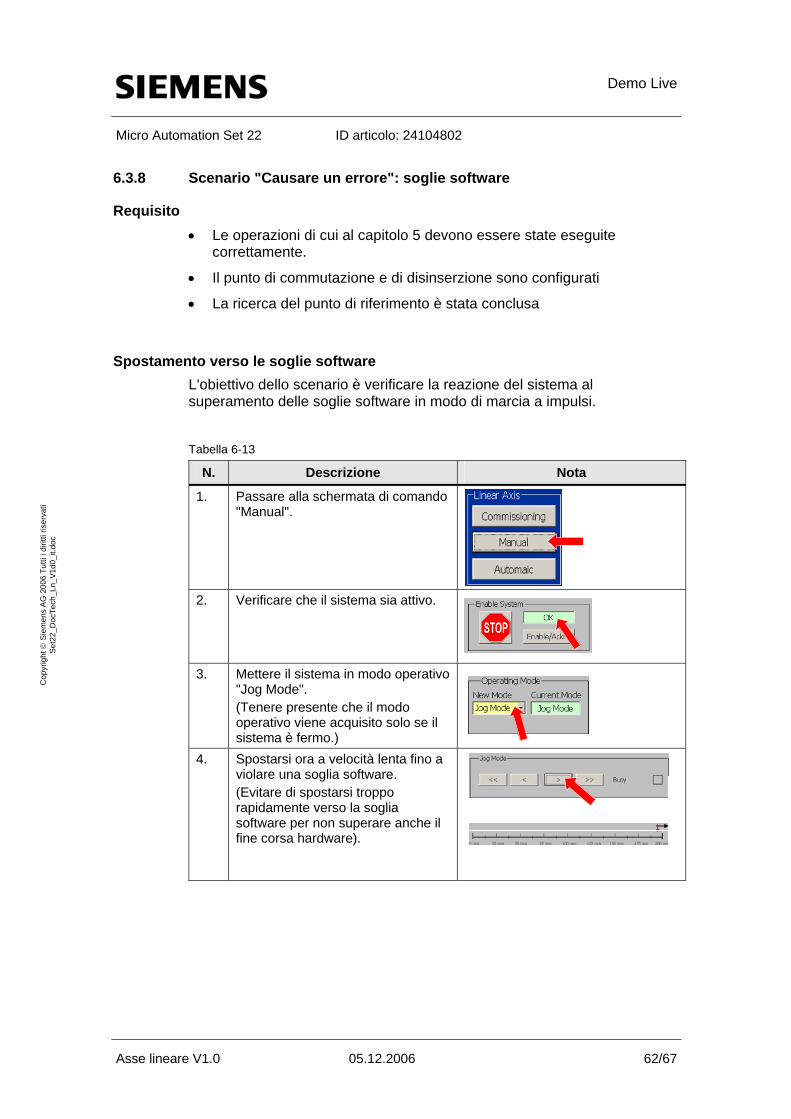
Demo Live
Micro Automation Set 22 ID articolo: 24104802
6.3.8 Scenario "Causare un errore": soglie software
Requisito • Le operazioni di cui al capitolo 5 devono essere state eseguite
correttamente.
• Il punto di commutazione e di disinserzione sono configurati
• La ricerca del punto di riferimento è stata conclusa
Spostamento verso le soglie software L'obiettivo dello scenario è verificare la reazione del sistema al superamento delle soglie software in modo di marcia a impulsi.
Tabella 6-13
N. Descrizione Nota
Asse lineare V1.0 05.12.2006 62/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
1. Passare alla schermata di comando "Manual".
2. Verificare che il sistema sia attivo.
3. Mettere il sistema in modo operativo
"Jog Mode". (Tenere presente che il modo operativo viene acquisito solo se il sistema è fermo.)
4. Spostarsi ora a velocità lenta fino a violare una soglia software. (Evitare di spostarsi troppo rapidamente verso la soglia software per non superare anche il fine corsa hardware).
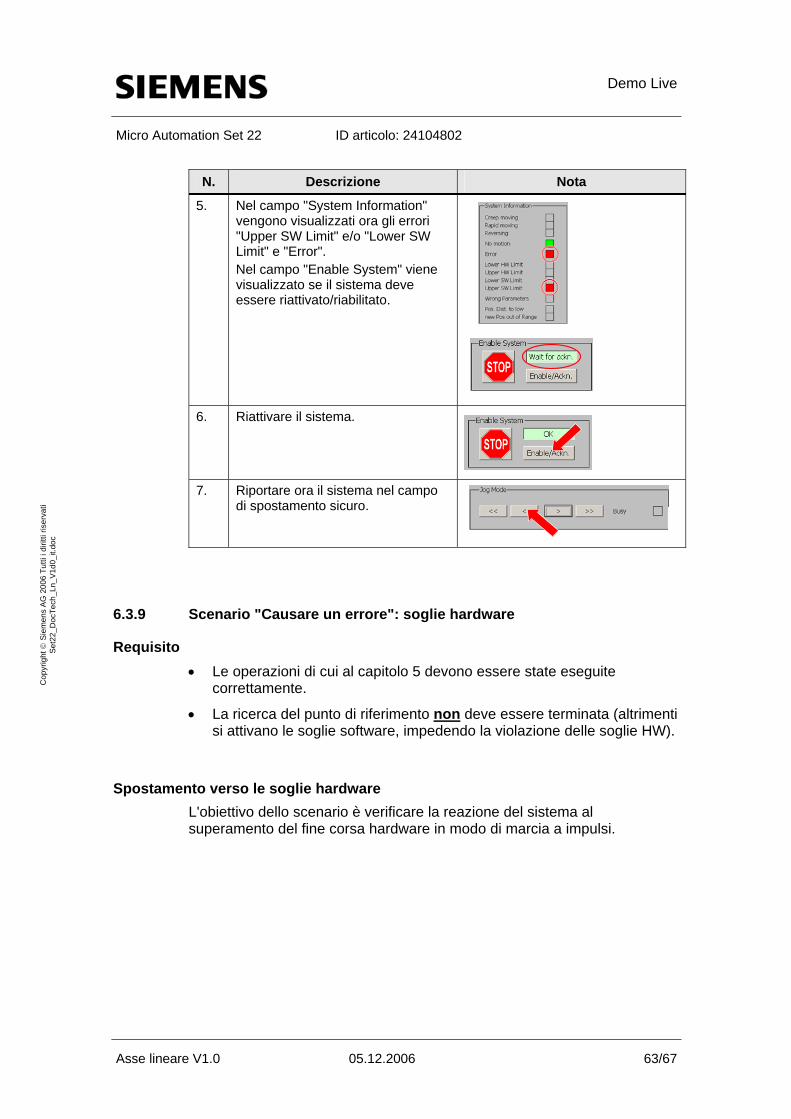
Demo Live
Micro Automation Set 22 ID articolo: 24104802
N. Descrizione Nota
5. Nel campo "System Information" vengono visualizzati ora gli errori "Upper SW Limit" e/o "Lower SW Limit" e "Error". Nel campo "Enable System" viene visualizzato se il sistema deve essere riattivato/riabilitato.
6. Riattivare il sistema.
Asse lineare V1.0 05.12.2006 63/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
7. Riportare ora il sistema nel campo di spostamento sicuro.
6.3.9 Scenario "Causare un errore": soglie hardware
Requisito • Le operazioni di cui al capitolo 5 devono essere state eseguite
correttamente.
• La ricerca del punto di riferimento non deve essere terminata (altrimenti si attivano le soglie software, impedendo la violazione delle soglie HW).
Spostamento verso le soglie hardware L'obiettivo dello scenario è verificare la reazione del sistema al superamento del fine corsa hardware in modo di marcia a impulsi.
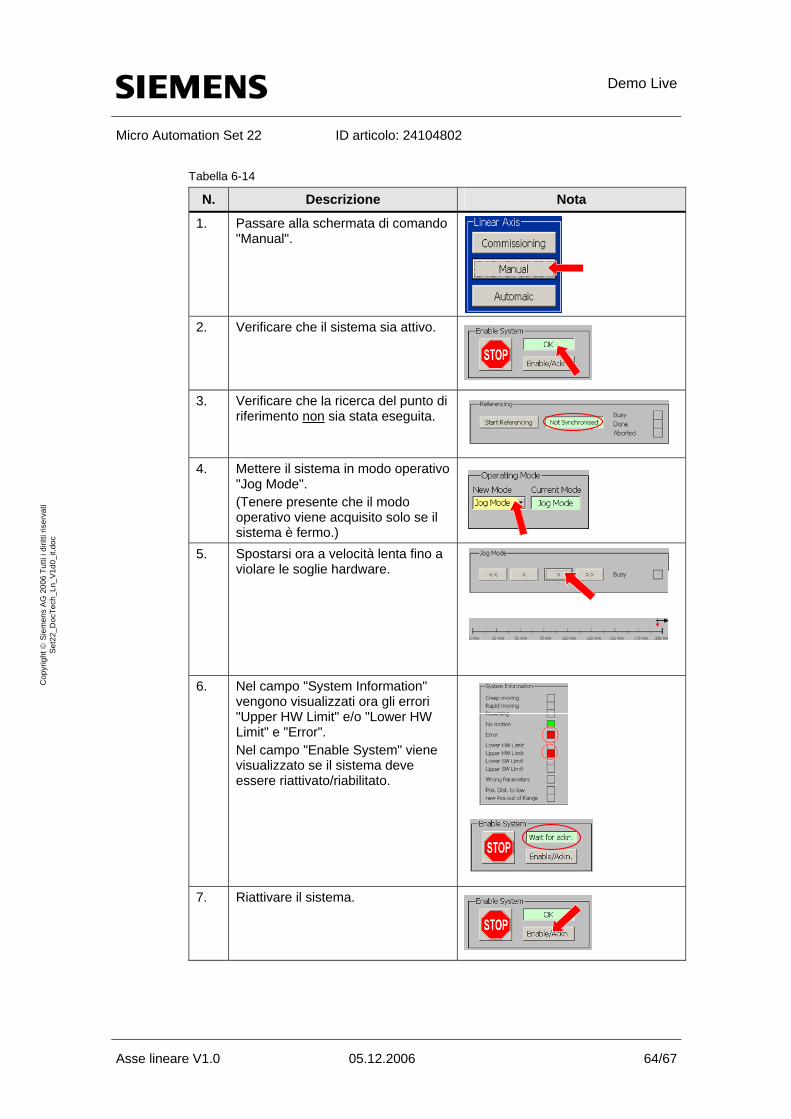
Demo Live
Micro Automation Set 22 ID articolo: 24104802
Tabella 6-14
N. Descrizione Nota
1. Passare alla schermata di comando "Manual".
2. Verificare che il sistema sia attivo.
3. Verificare che la ricerca del punto di
riferimento non sia stata eseguita.
Asse lineare V1.0 05.12.2006 64/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
4. Mettere il sistema in modo operativo "Jog Mode". (Tenere presente che il modo operativo viene acquisito solo se il sistema è fermo.)
5. Spostarsi ora a velocità lenta fino a violare le soglie hardware.
6. Nel campo "System Information"
vengono visualizzati ora gli errori "Upper HW Limit" e/o "Lower HW Limit" e "Error". Nel campo "Enable System" viene visualizzato se il sistema deve essere riattivato/riabilitato.
7. Riattivare il sistema.
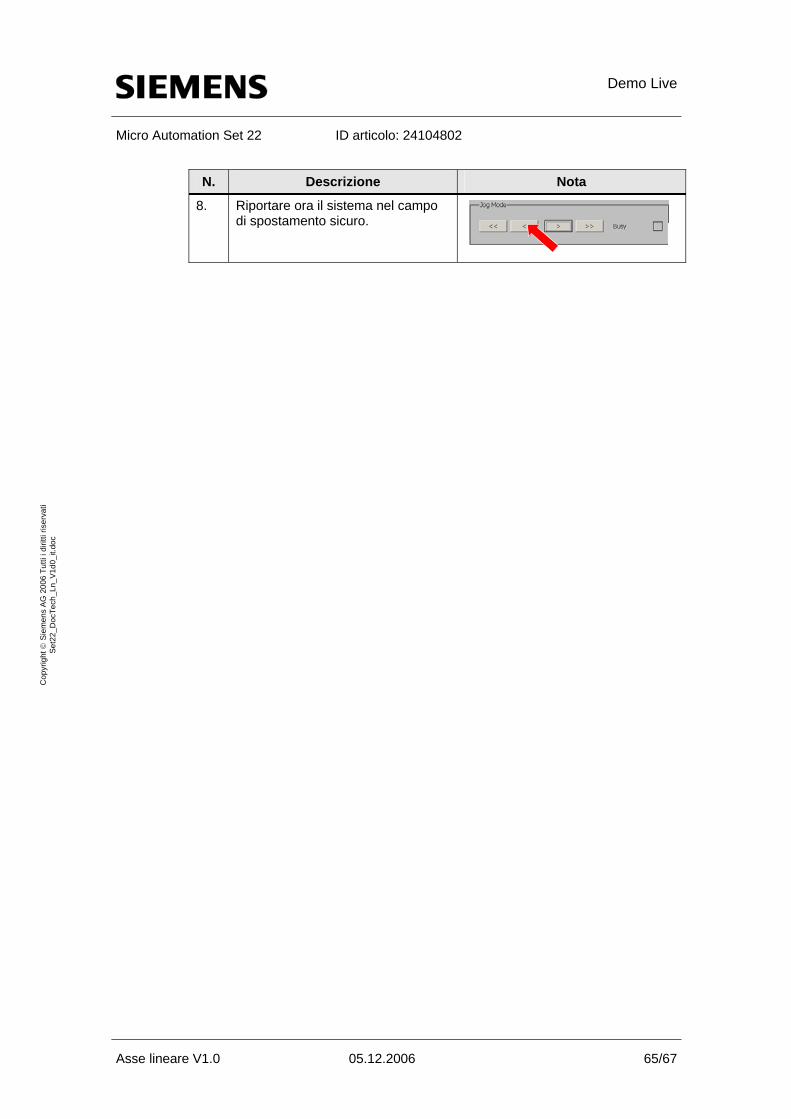
Demo Live
Micro Automation Set 22 ID articolo: 24104802
N. Descrizione Nota
8. Riportare ora il sistema nel campo di spostamento sicuro.
Asse lineare V1.0 05.12.2006 65/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
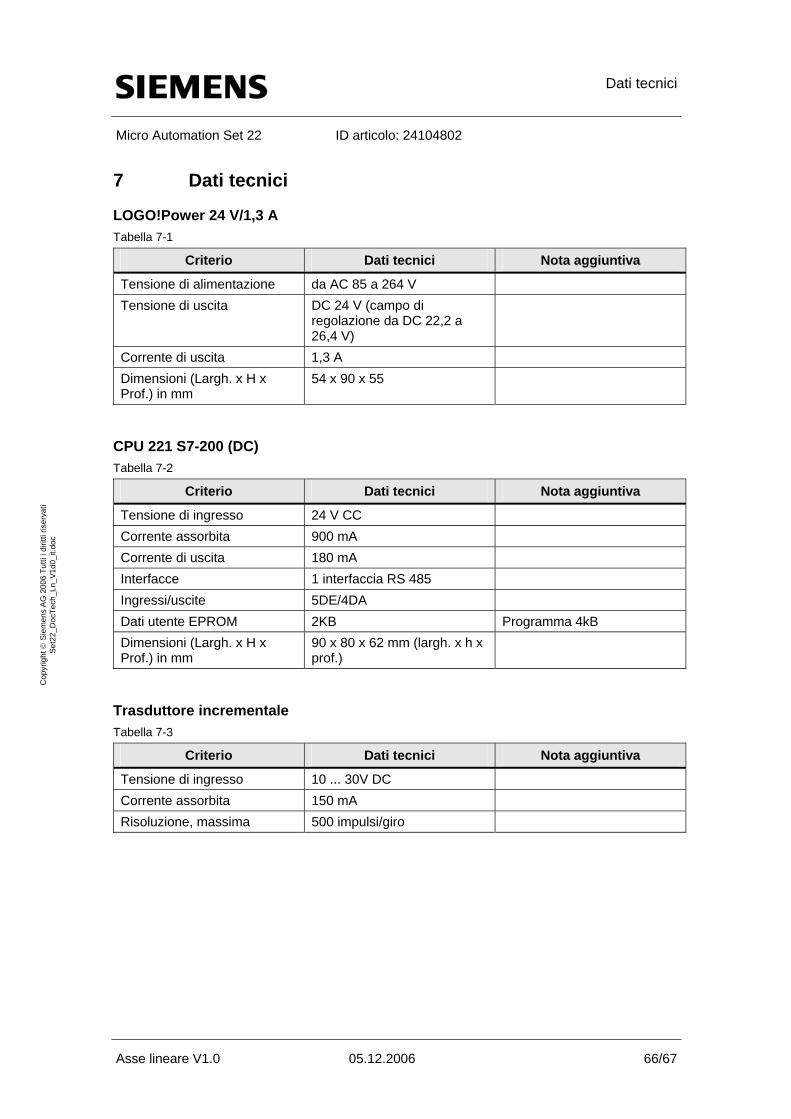
Dati tecnici
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 66/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
7 Dati tecnici
LOGO!Power 24 V/1,3 A Tabella 7-1
Criterio Dati tecnici Nota aggiuntiva
Tensione di alimentazione da AC 85 a 264 V Tensione di uscita DC 24 V (campo di
regolazione da DC 22,2 a 26,4 V)
Corrente di uscita 1,3 A Dimensioni (Largh. x H x Prof.) in mm
54 x 90 x 55
CPU 221 S7-200 (DC) Tabella 7-2
Criterio Dati tecnici Nota aggiuntiva
Tensione di ingresso 24 V CC Corrente assorbita 900 mA Corrente di uscita 180 mA Interfacce 1 interfaccia RS 485 Ingressi/uscite 5DE/4DA Dati utente EPROM 2KB Programma 4kB Dimensioni (Largh. x H x Prof.) in mm
90 x 80 x 62 mm (largh. x h x prof.)
Trasduttore incrementale Tabella 7-3
Criterio Dati tecnici Nota aggiuntiva
Tensione di ingresso 10 ... 30V DC Corrente assorbita 150 mA Risoluzione, massima 500 impulsi/giro
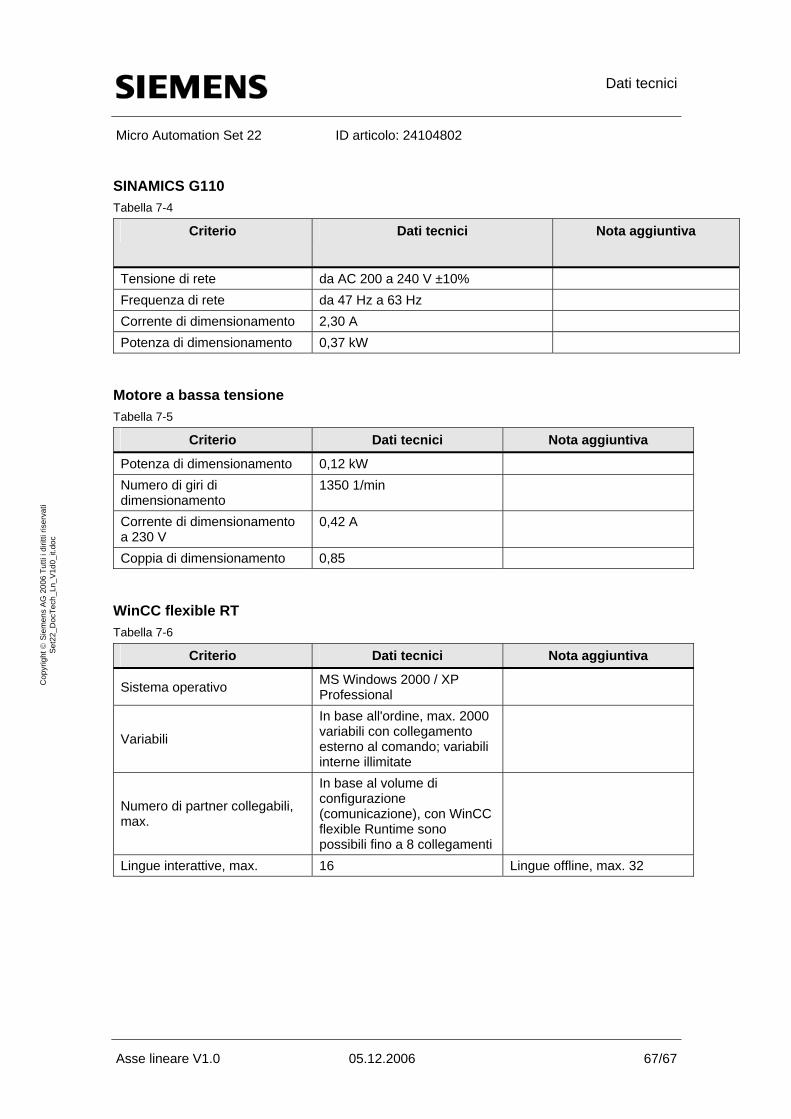
Dati tecnici
Micro Automation Set 22 ID articolo: 24104802
Asse lineare V1.0 05.12.2006 67/67
Cop
yrig
ht ©
Sie
men
s A
G 2
006
Tutti
i di
ritti
riser
vati
Set
22_D
ocTe
ch_L
n_V1
d0_i
t.doc
SINAMICS G110 Tabella 7-4
Criterio Dati tecnici Nota aggiuntiva
Tensione di rete da AC 200 a 240 V ±10% Frequenza di rete da 47 Hz a 63 Hz Corrente di dimensionamento 2,30 A Potenza di dimensionamento 0,37 kW
Motore a bassa tensione Tabella 7-5
Criterio Dati tecnici Nota aggiuntiva
Potenza di dimensionamento 0,12 kW Numero di giri di dimensionamento
1350 1/min
Corrente di dimensionamento a 230 V
0,42 A
Coppia di dimensionamento 0,85
WinCC flexible RT Tabella 7-6
Criterio Dati tecnici Nota aggiuntiva
Sistema operativo MS Windows 2000 / XP Professional
Variabili
In base all'ordine, max. 2000 variabili con collegamento esterno al comando; variabili interne illimitate
Numero di partner collegabili, max.
In base al volume di configurazione (comunicazione), con WinCC flexible Runtime sono possibili fino a 8 collegamenti
Lingue interattive, max. 16 Lingue offline, max. 32